







Bahasa
Halaman
Hukum


.'
LIVRARIA POPULAR DE FRANCISCO FRANCO
14, Rua Barros Queirós, 18 Tel. 864548 Lisboa
, .
COMPÊNDIO DE FfSICA TOMO I - MECA NICA FU NDAMENTAL

NO PRELO:
ToMO II - FISICA FUNDAMENTAL
Qa..mpo, Vibrações, SóLildos e Fluidos, 'I1ermologia.


Desenhos: J. Ribeiro
Fotografias: Carlos Guimarães
Capa: Autores e desenho de Fernando Cruz
Composição e ottser: Gráfica Imperial, Lda.
Lisboa - 1975 - Tiragem 10 000 ex.

Os primei'roo teleocópi'O'S d€ Gemeu (1609) Breve notícia no verse
Radioteleo5'Cópio Jodrell Bonk, 'em InglCllterre (1957) Breve noticia no verso
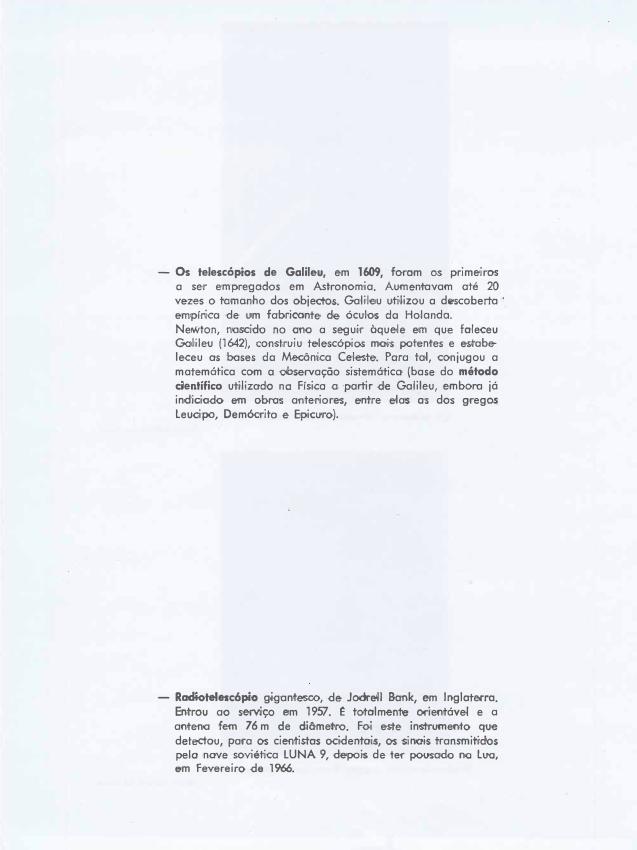
- Os telescópios de Galileu, em 1609, foram os primei ros o ser empregados em Askenomia. Aumentavam até 20 veres c tama.nhe dos objectos. GaJi'leu uti'l.iz'Ou o deosceberta . empfl'ica ,de Ulm fabricante de ócu'los do Helanda .. NelMen, nralSlCid'O nO' on'O a segulilr àquele em que fa·lece·u Ga,/lile'u (1642), censt,wiu telescópios mei's potentes e estabeleceu a's ba·ses do Meoânlica Celeste. Pom tall, con jugeu a matem6tica cem o Qibservaçãe sistemátic a' (base' de método científicO' uti·lizad'O na Físico a 'Pa.rri·r de Ga./ileu, embora já indiciado. em 'Obras ante·rie res, entre elas a's dos g'regos leuápo, DemócritO' e 6picU'ro).
- Radtotelesc:6pio gig'antesoo, de Jodrell Bank, em Inglaterra. En;trou a'O se;viço em 1957. � totolmente oriemável e a antena fem 76 m de diâmeil'ro. Foi este in'Strumenfo que detect'Ou, palfa os cientistas 'Oódentai'S, os siooi'S rrammiti:d'os pela nove soviética LUNA 9, ,depoilS de te'!" poIISodo 00 lvo, em Feve,reiro de 1966.

. . . .
CAPITU L O 1 INTRODUÇÃO .
�Os fí�cos de hoje a"prenderam que nem todas as pel1guntas sobre o movimento de um
electrão ou de um quanto de luz podem te<r resposta, mas aJpeI1as as questões compatíveis com
o principio de ,incerteza de Heisenberg.
Este é U!ffi programa de modéstia, mas, ao mesmo tempo, de esperança confiante. Por
que tudo o que está dentro dos seus limites é cognoscível e tornar-se-á conhecido; é o mundo
da .e:q>erlência, vassto, rico bastan'te de cores matizadas e de regularidades, convidando-nos
a expilom-Io em todas as direcções. O que está para além, o álridOl país da metáfísica, deixamo
-101 d.e boa vontade à fi,lOlsOlfia especulativa.»
MAX BORN, Prémio Nobel de Fisica 1954, pAg. 397 da 3." edição (1971) de Fi8ica At6mica, publicada pela Fundação C. Gulbenkian, trad. de Egídio Namorado.
« ... Pode a filosofia suprir e cOImpletar hipoteticamente a ci'ência e, qUalllto à reflexão conjectural, consi:derar-se como a ciência dos problemas que a ciOO·cia alinda não resolveu .
. .. é de eont�se com que certos progressos científi'cos tenham reper.cussão considerável na
filosofia, e com que certos princípios filosóficos possam OIrientar progressos da ciência .
. .. em investigação científica, . .. as questões deixam de ser porquê e para quê para" serem
questões de como e quê.»
1.1 A Ciência
1.1.1 A palavra ciência deriva de um
termo latino scientia (conhecimento), Este, por sua vez, tem o seu correspondente num vocálbulo grego que significa o conhecimento criticamente fundamentado.
Antes da era cristã, tal saber constituía a Filosofia. Este conceito de Filosofia foi-se diversificando ao longo dos séculos e hoje toma-se a palavra ciência na acepção de Ciência Natural,
G1J.8tavo de Castro, in prefácio de Relatividade para todo8, de James A. COLEMAN;' pAg. 69-60, Livros Pelicano, C. P. 12.
ou seja de conhecimento das cc;isas da Natureza- o Universo a que pertencemos e que nos rodeia. Coisa tem aqui o si'gnificado de tudo aquilo que nos é dado a conhecer por intermédio dos nossos sentidos, directamente ou indirectamente, recorrendo a instrumentos de complexidade variável.
1.1.2 São duas, fundamentalmente, as categorias de coisas observadas pelos sentidos, a saber:
7

1." - Os difer.entes corpos ou objectos, formados por uma ou várias substânciM, gases como, por exemplo, o oxigénio ,e o aÍnoníaco, líquidos como o mercúrIo e a água, sólidos
como o iOdo, a aTeia, a madcir8l, etc., etc.
A13 substâncias são sempre constituidas por
conjuntos de partículas ass'Ü'ciadas e 'ligadas, ma,is 00 menos estavelmente, por forças.
2." - A energia, que acompamha todas as
transformações das substâncias.
Por ,exemplo: verifica:-se, 'com o contador de gá;s, que se gasta ma,is gás a aquecer 1,0 litros
de água do que 1,0 litros de azeite; quando ambos sofrem a mesma 'elev'ação de tempera
tura, o que si'gnífica que se dispendeu mais
energia no primeiro .ca,so, a que por issQ t81m
bém corresponde maior c·usto em dinheiro;
analogamen�e, o contador de ·energIa eléctrica
a,cusa maior consumo de unidades eléctri'cas
qua,ndo um radi'ador está aceso no máximo de intensidade do que qU8llldo está aceso no mí
nimo de intensid8lde, o que implica também
ma,ior custo no primeiro caso.
Os exemplos 8JcaJbados de indicar mostram
que as vaJI'iações de energia - ganhos ou per
das - s'e podem av8lliar com instrumentos de medida 81propriadOiS.
1.1.3 O termo energia deriva de uma palavra grega que significa acto. Por isso, uma das interpretações do conceito de energia é a de ser considerada como tudo o que produz acção, transformação. O terIl!o energia foi introduzido na Física, pela primeira vez, em 1807, por Thomas Young, mas só passou a ter a:ceitação em 1867, com William Rankine, portanto há pouco mais de cem a:nos ...
A energia, como grandeza e como propriedade multiforme, está associada a todas as partículas e a todas as transformações, mas também pode existir livre, pura, desligada d<J,s partículas: é o 'caso da energia luminosa visível (detectável pelos olhos) e invisível (radiações infra-vermelha e ultra-violeta, ondas hertzia:nas de rádio e T.V., radia-
8
ções X e Y, detectá veis, cada um destes tipos, por instrumentos especiais).
'Embora o lConceito de energia se tenha desenvolvido apenas no 3.0 quartel do século passado, é hoje considerado universal e de certo modo, em termos correntes, intuitivo.
O seu sentido preciso, rigoroso, ir-se-á esclarecendo à medida que se for avançando no estudo da Física.
1.2 Que é a Física?
1.2.1 Recordemos alguns conhecimentos adquiridos no Curso Geral.
1. o - Os corpos têm peso, têm volume, são impenetráveis e podem dividir-se em partes menores, têm inércia (isto é, opõem-'se às modificações de velocidade impostas do exterior) e são formados por partículas.
2.0 - As transformações das substâncias podem implicar a modificação da sua estrutura (organização e modo de liga.ção das suas parHculas) e a conversão em outra ou outras substâncias diferentes - trata-se então do fenómeno químico, de que são exemplos as combustões, a oxidação dos metais, o apodrecimento de fruta, etc., etc. Ma.s também pode suceder que a transformação não altere a estrutura da substânCÍ'a - trata-se agora do fenómeno físico, como, p. ex., o a:quecimento de um corpo, a queda de um grave, a ebulição da água, a vibração de uma corda, a electrização, etc., etc.
3.° -Nos fenómenos físicos e nos fenómenos químicos entra sempre em jogo uma quant�dade de energia, sob qualquer das suas modalidades (calorífica, luminosa, eléctrica, mecânica, e muitas outras) ..

1.2.2 O Universo físico que nos rodeia está preenchido por matéria (mais concretamente, pelas partículas que constituem a infinidade de corpos que se encontram na Natureza), matéria que está concentrada em volumes que podemos :considerar pequenos na amplidão do espaço, e por energia, 'preenchendo todo o espaço. Pode assim haver um espaço limitado vazio de partículas - «vazio fisico» - mas não se admite a existência de espaço vazio de energia.
Que ciência procura interpretar, relacionar e até prever os fenómenos que se passam neste Universo físico? É precisamente a Física, palavra que deriva do termo -latino physica, que, por seu turno, resulta de um vocábulo grego que quer dizer Natureza.
Física: Pode entender-se, hoje, como a ciência onde se estudam 08 fenómenos físicos e, consequentemente, as diferentes modalidades de energia que os acompanham e, bem assim, as transformações desta.
1.2.3 O método utilizado na Físiea é o método científico, fixado em bases seguras por Galileu (1564-1642') no século XVI. A traços largos, fundam enta-se este método na observação e na experimentação, induzindo-se a seguir as leis que regem os fenómenos e tentando-se a sua interpretação. Quanto a esta formulam-se hipóteses e criam-se modelos ou teorias, frutos do espírito atento e da imaginação criadora elo cientista, do investigador.
Não se esqueça, entretanto, que o ra.ciocinio científico não se 3ipoia ape-
nas em experiências reais, mas também, e 'muitas vezes, em experiências ideais
ou conceptuais - que são experiências tecnicamente irrealizáveis, porém concebíveis e baseadas em factos concretos. O próprio Galileu utilizou este tipo de experiências.
Por exemplo: é fácil imaginar o movimento rectilíneo e uniforme de um cubo polido a deslizar sem atrito (impossibilidaJde técnica) sobre um plano horizontal e induzir, a seguir, que a não intervenção de forças sobre o cubo, implicaria o movimento interminá vel ou perpétuo do mesmo.
Na base do método científico está a medição de grandezas. Esta é de tal modo indispensável que podemos afirmar não haver estudo de Física sem medições.
. Pelo que toca à aprendizagem do método, é de seguir o ,conselho de Albert Einstein (1879-1956): «Não preste atenção ao que lhe possa dizer um dentista. Observe o que ele faz.»
Convém finalmente ter presente que a Ciência, em geral, origina mais perguntas do que respostas.
1.2.;" Macrofísica e Microfísica
O fenómeno físico, tal como foi definido, refere-se à escala do macroscópico, ou seja da Macrofísica (Física do observável). Na escala da Microfísica, isto é,...uo muito pequeno, do descontínuo, da :partí'cula discreta, do átomo, já o fenómeno físico pode implicar alteração da estrutura da substância. O fenómeno fí..%oo é� 'sobretudo,um fenómeno de movimento e, em situações limite, não há separação nítida entre o fenómeno físico e o fenómeno químico.
9

A Física não é uma ciência independente. Recorre ,constantemente à Matemática e só pode progredir com o auxílio desta. Mas dá, por sua vez, contrihuição a todas as outras ciências, como a Química, a Meteorologia, a Astronomia, a BiofísilCa,a própria Matemática, etc.
Foi ainda a Física que deu origem à Engenharia-,ciência e técnica, de aplicação prática, imediata e útil, dos princípios da Física.
1.2.5 Quanto à informação científica, sabemos que existem hoje dezenas de milhar de revistas científi'cas (a:etualmente mais de 33000), onde se publicam as novas descobertas, e vastíssima bibliografia.. «Um só dia de novas informações :científicas ,pode encher mais de uma grande enciclopédia»!
Neste mar de informação, há que recorrer aos computadores, para a organizar e distribuir de mo�de a torná-la acessível e a evitar que um grupo de cientistas vá repetir o estudo de um tema já devidamente investigado.
1.2.6 O campo das aplicações da Física é muito grande, particularmente no domínio da Técnica, que não é senão a apli'cação das ciências de molde a satis� fazer as necessidades humanas e as crescentes solicitações da ci vilização. Essas aplicações vão desde a multí� moda 'aparelhagem electrodoméstica aos grandes meios d.e comunicação e transporte, das grandes 'centrais de Energia Nuclear à conquista do Universo através do manejo e teleguiamento das astronaves, do transistor ao radar, ao maser e laser, etc., etc.
10
No domínio da ciência pura, as aplicações e 'conquistas não são de menor vulto, pois, graças aos progressos da Física e da Técnica, o homem pode hoje «ver» algo do que ocorre nas longinquas galáxias (utilizando potentíssimos telescópios), pode ouvir os ruídos provenientes de remotas regiões do espaço (servindo-se de radiotelescópios), pode investigar o que se passa nas altas regiões atmosféricas e extra-atmosféricas (recorrendo aos foguetões e aos satélites artificiais), pode visitar a Lua e, porventura, outros planetas, pode analisar os astros e outros 'corpos das regiões mais distantes do Universo recorrendo às radiações que deles emanam (energia pura, desligada de partículas, que se propaga em todas as direcções, no espaço cósmico).
Deste modo a Física parece afirmar-se como a mais fundamental das ciências experimentais.
1.3 Grandezas físicas
1.3.1 Grandeza significa quantidade que pode variar. E diz-se que estàmos em presença de uma grandeza física se podemos estabelecer a comparação entre quantidades diferentes dessa grandeza" isto é, se podemos dizer qual é a 'quantidade maior ou menor, estabe�eC'endo assim uma relação de ordem (> ou <).
Por exemplo, o volume (de que há vários processos de medição) e o módulo de uma força (que se mede com um dinamómetro) são grandezas físicas. Mas já não são grandezas físicas a alegria e a dor, porque não há processo objectivo de saber entre duas

dores ou duas alegrias qual é a maior ou qual é a menor.
Medir uma grandeza física consiste em estabelecer uma relação bem determinada entre duas quaisquer das suas quantidades, de modo a saber exactamente quantas vezes a 'quantidade G1 contém a quantidade G2:
Exemplo:
ldm -- =10 lcm
G1 e G2 são, pois, quantidades diferentes da grandeza G " K exprime o quociente das medidas de G1 e G2, e é independente do sistema de unidades escolhido.
Com efeito, no exemplo apresentado, tem-se invariavelmente:
1dm
1 cm
10 cm
lcm
O,lm
O,Olm
O,OOlhm 10
O,OOOlhm
1.3.2 As grandezas físicas, como ,seres matemáticos correspondentes aos observáveis, podem agrupar-se fundamentalmente em dois grandes tipos:
1.0 - Grandezas esccilares - quando ficam perfeitamente determinadas pelo valor numérico (módulo) da sua medida, ou por este valor numérico seguido da unidade em que vem expresso. São, portanto, definidas por um só número (têm uma só componente).
Exemplo: a grandeza comprimento é escalar, pois se afirmarmos que a lar-
gura de um corredor é de 2,30 m todos ficamos completamente esclarecidos aeerca do signifkado e do valor desta grandeza; também é escalar a grandeza densidade, porque ao dizermos que a densidade do ferro é 7,8 isso significa que um dado volume de ferro, qualquer que seja, 'pesa 7,8 vezes mais do que igual volume de água à temperatura de 4° C (4 graus Celsius).
2.° - Grandezas vectoriais- quando, para ficarem completamente determinadas, é preciso indicar, além do valor numérico e da unidade em que se exprimem, uma direcção e um sentido nesta direcção. São, portanto, definidas por três componentes.
Exemplo: o deslocamento de um ponto é uma grandeza vectorial, pois, se dissermos que um ponto se desloca de 20 cm e não acrescentarmos a direcção e o sentido, nada ficamos a saber sobre a posição final do ponto e, portanto, não ficamos a conhecer a grandeza deslocamento.
Igualmente são vectoriais as grandezas velocidade de um móvel, força aplicada num sistema e peso de um corpo.
1.4 Grandezas directa e inversamente proporcionais
Vamos considerar duas grandezas físicas em correspondência biunívoca (ou correspondência um a um), isto é, tais que a cada valor de uma corresponde um único valor para a outra e reciprocamente.
11

Fig. 1.1 Gráfico da função v=f{t) no movi
mento da qu.eda de um grave.
As variáveis t (tempo decorrido) e v (veloci'<lade adquirida) são directamente propor
v cianais, porque é consta.nJte o quociente - :
t
v = k -> v = k t
t
Esta expressão é a equação de uma recta
que passa pela origem 'das coordenadas; k é a constante de proporcionalidade: o seu valor, no exemplo dado, é k. = 9,8 m/s'.
12
De um modo geral, 8; função (OU a.plfuação) 'II = k:x:, que -éttme. f1inção
Zinear OU do 1.· grau, -traduz uma proporci'Onarlldade directa entre 11 e :t.
O g.ráfico da. prapófuionaJidade "l' directa ·é, portanto, uma recta que passa pela origem..
1.0 Exemplo:
Na observação da queda de um grave registaram-se os seguintes valores das velocidades de queda e dos tempos ao fim dos quais foram adquiridas:
t (tempo de queda em s)
0,0
1,00
2,00 3,00 4,00
v (velocidade adquirida em m/s)
0,00
9,8'1
1'9,710
29,50 39,20
Se calcularmos oquociente dos valores correspondentes dos tempos t 'e das velocidades v, verificaremos que se mantém constante:
9,8i1 m/s -�-� = 9,81 m/s2 � 9,8 m/s2
1,010 s
19,7m/s ---- = 9,85 m/s2 � 9,8 m/s2
2,00 s
29,5mls -�-� = 9,83 m/s2 '---+ 9,8 m/s2
3,00 S
392 m/s , = 9,80 m/s2 � 9,8 m/s2
4,00 s
Diz-se, nestas condições, que a velocida!de e o tempo em que foi adquirida são, no movimento da queda de um grave, grandezas directamente proporcionais (fig. 1.1).
De um modo geral, duas groodezas X e Y, em correspondência biunívoca, são direotamente proporcionais, quando

Fig. 1.2 GrMko da variação do volume e da
pressão numa transformação gasosa
i:sotérnlltca.
.AJs variáv-els -v (volum-e) e p (pressão) são inversanl€lIlte proporcionais, porque é constante o produto p v:
p.v=k
Esta -exp!'e5S'ão é a equação de uma hipér
bole equilátera. Dado, porém, () facto de, neste
caso, as variáveis v e p apenas- tomarem valo
r·eg posttivos, à ref-eTida �ressão corresponde um só dos dois raanos da hipérbole. O que
se traçou no grãfico diz respeito ao vaJor da
constante de proporeionalidade do exemplo
dado e que é o seguinte:
k = l!50 X 10" mm Hg. cm'
Os ,pontos !llSsdnalados referem-se aos pares
de valor-es obtidos experimentalmente e estão
fora do ramo de htpérbole devido, além do
é c<mstante O quociente dos va7nres correspondentes, x e y, dessas grandezas:
y - = k => y = k x x
2.0 Exemplo:
No Laboratório de Física, ao fazer o estudo do comportamento dos gases, quando a temperatura se mantinha invariável, registaram-se as seguintes observações:
p (pressão em mmHg)
8313 7192 7152 7114
683
V (volume em cms)
18,0
19,0
20,0
21,0
22,0
Calculando o produto dos valores -correspondentes da pressão e do volume, verificamos que se ma;ntém constante:
8313 mm Hg X 18om'= -141994 mm Hg. cm'
-+-'100 X 10" mm Hg. cm'
7192 mm Hg X 19 cm' = .15ú148 mm Hg. cm'
-+-150 X 10i'mmHg. cm'
7,52 mm Hg X 20 cm' = 1.5040 mm Hg. cm'
-+-150X IOFrnrnHg. cm' .
714 mm Hg X 21 cm3 = 149194 mm Hg. cm' -+ 150 X 10'mm Hg. cm'
6I8i3 mm Hg X 22 cm' = 15026 mm Hg. cm'
-+-l50X 10�mmHg. cm�
A discordância quanto aos últimos algarismos, como aliás sucedeu no exemplo anterior, deve-se, entre outros factos, às incertezas que, no decorrer das experiências, afectaram as medidas de p e de v. Como o produto é constante, diz-se que a pressão e o volume
13

mais, aos erros cometidos nas medições (ope
rações de medi>r), er.ros que, dado o seu C8;râcber fortuito, têm igual probamlidade de
ser cometidos por defeito ou por excesso.
de um gás, quando a temperatura não varia, são grandezas inversamente proporcionais (lei de Boyle-Mariotte das transformações gasosas isotérmicas) - fig. 1.2.
x'
14
y�=k
já'llão é uma funçãb'inea.r OU 1:10 1.· grau e. define a propar.cionaUdade inversa entre 'JI e �. A .curva represen-4da tem dois ramos (um Do 1.° 1}uad� e outro no 3.'6 qua.dra.nte} e ch:ama...se hipérbole.
De um modo geral, define-se : duas gram.dezas X e Y ,em correspondência biunívoca, são inversamente proporcionais, quando é constante o produto dos valores correspondentes x e y dessas grandezas:
y x = k <=> y =.
Y Y
l?q!! e' R
,�) B 2�q!!
x x'
o Q'
3?q� 4?q�
Y' Y'
. Fig. 1.3 No cÍl'Culo trigonométrico, (b) .toma�ge para unidade o comprimento do raio, pelo que OP = ·r = I., e, 'portanto:
y __ x sen a = - = y = PQ; coa a = - = X = OQ.
r r
x

Na figura w.3', (a), pode verificaT-'Se que os quocientes que permitem defin ir as funções
sen a, COS a 'e tg a são constantes e inde
pendentes da posição do ponto P escolhido.
Comef'eito, os triângulosrectãnguloS1 [OPQ]
e [OP' Q'] são s'emelhantes e, por i-sso, pode
mos escrever:
sen a k,
v P,P' E Ô R
Obtêm-se l'eSJUltados análogos pwa COSa e tga, prurtindo da definição.
Os valores da:s funções soo a, 'cos a e tg a dependem a:ssim 'aopena:s do V-alOl do ãngulo QJ. Desta C'ÍrcunlStânci,a .resultou a designrução de
funções circulares ou goniométricas (termo
derivado de dois vocábulos gregoSl que signi
ficam ângulo e medida, respectivamente').
1.5 Algumas funções circulares ou trigonométricas *
1.5.1 No sistema de eixos cartesianos ortogonais, monométriooo (com a mesma unidade de medida nos dois eixos, o que não sucedeu nos gráficos anteriores e 'que, por isso, se ,chamavam dimétrioos), da figura 1.3(a), está representado o ângulo orientado C!,
de lado origem ÓX e lado extremidade
b R. Marquemos, neste, um ponto P qu,alquer, de coordenadas x e y.
A medida do segmento [OP] designa-se raio vector e representa-se pela letra r. Chama-se seno, co-seno e tangente do ângulo a, simbolicamente representados por sen a, coo a e tg a) às três razões seguintes:
y medida da O'rdenada soo a =-=
r raiO' vector
x medida da abcissa cO's a =-=
r raio vector
y medida da ordenada tg a = - =
X medida da abcissa
y/r sen a = -- = ---
x/r CO'S a
Num círculo em que 'se tome para . unidade de comprimento o comprimento do raio -círculo trigonométrico-fi
gura 1.3 (b), será OP :;::r=l, pelo que
• Nota: Varrnos referi,r-nos apenas às três
funções tri'gonométricas de que ne
cessi,tamos Illest'a Mecânica Funda
mental.
15

Pergunta 1:
Calcular os va:lores do seno, do co-,soeno e
da tangente dO' ã.ngulO' de 46". Sugestão: utilizar O' circU'IO' trigonO'métrico.
Pergunta 2:
Bas-eadO' no. significado. dO' termo., descobrir
a razão por que &'l' fUI!l�ões circula.re.s se cnam,am tam·bém funções trigonométricas.
16
a,s três funções acabadas de definir podem tomar as formas mais simples:
PQ -sen a = -- = PQ = y
r
OQ _
COS a = -- = OQ = X r
PQ tg a = --=
TA = TA,
OQ
porque os triângulos rectângulos
[OPQ] e [OTA) são semelhantes.
1.5.2 Exercícios de Aplicação:
1.0 - Q'Ul1Ii8 são 08 sinai..s das funções circulares nos quatro quadrantes?
Resolução: AtendendO' aO's sinais de x e de y ·em cada
quadrante e a que r, pO'r ser um módulo,
é posiltivo, temos:
sen a-,positivO' no 1,0 e 2.° quadrantes,
negativo no 3.° e 4.° quadrantes;
cos a - pos�tivo nO' 1.° e 4,,° quadrantes,
neg'ativo no 2.° e 3,.° quadrantes;
tg a - positivo no '1.0 e 31,° quadrantes, negativo no '2.° ·e 4.° quadrantea.
2.° - No 1.0 quadrante, entre que limites estão compreendidos os valores das funções circulares?
Resolução:
Perante as I.ndi:cações da fig. l.3(b), pO'de
concluir-se:
a) sen ()o = 0, porque PQ = O ; sen 9()0 = +'1, porque PQ = OB = r = 1;
. :. san a E [O, + 1 ] - funçãO' cres'cen'te no 1.0 quadrante

Resposta à pergunta 1:
"1/2 sen 45° = coo 4'5° = -- ; tg 4& = 1.
2
Resposta à pergunta. 2:
Por s e definkem à custa d 8iS medidas dos
lados de um triângulo (rectângulo).
2
b) cos {)O = + 1, porque OQ = OA = r = 1;
CDS '90° = O, porque OQ = (1 ; • ' .. COS a E [+1,0] - função decrescente
no 1.0 quadrante.
c) tg O" = O, porque TA= O;
tg 90<> = + 00 do lado do 1.0 quadrante,
porque a perpendtcular a OX, AT,
plllSS!lJrá a coincidir com o semi
-eixo das ordenadas, de compri
mento ilimitado . .
A tangente é função crescente no 1.° quadrante e as-sintótica em relação ao eixo
OY:
tg a E [O, + 00] .
3.° - Num triângulo rectângulo, que relações se podem estabelecer entre as
medidas dos lados e as funções circulares?
Resolução:
Voltando à fig. 1.31(a) , onde consideramos
o triángulo rectâ.n.gulo [O P Q], de hipotenusa
r e caJtetos x e y, temos
y 1) sen a = - => y r . sen a
r
igu8lldade onde se pode ler:
«um cateto (y) é igual ao produto da hipotenusa -(r) pelo seno do ângulo oposto
(a opõe-se a y)>>.
x 2) cos a = _. -> X
r
igualdade que traduz:
r . cOS a
«um cateto (x) é igual ao produto da hipotenusa (r) pelo co-seno do ângulo adja
cente (x é um dos lados do ângulo a)'».
y S) tg a = => y = X . tg a
ig-uaildaiCle onde também se pode ler:
«um cateto (y) é igual ao produto do ouiro
cateto (x) pela tangente do ângulo oposto
ao primeiro».
17

I I I I I I I '8 '8 A
-
t1J; V3
iA I 8 -t.-' I
I i-t.- :-t.-I I , I
-,
-t.- 'l{ 8 la' _______
A -t.- Vs ,
A 8
Fig. 1.4 Cinco vectores, com módulos, linh8JS de acção e sentidos diferen.tes:.
A - origem dos vectores.
B - extremidade dos vectores. Recta r - linha de acção dos vectores.
NOTA:
«Direcção de uma recta - é a propriedade qUe ela tem de comum com todas as que lhe são paoralela:s». �
- Recorde�se ainda que um feixe de rectas rparalelas -consUtui urna classe de equivalência
e que [AB] = [BA], mas [A,B] =J= [B,A].
Pergunta S:
As grande-zas vectori'aIs deslocamento e velocidade têm diorecção e sentido comuns ou diferentes? Porquê?
18
1.6 Vectores
1.6.1 Que são 'Vectores?
Vimos já (n.o 1.3) o que distingue as grandezas escalares -das grandezas vectoriais. A velocidade foi um dos exempios apresentados de grandezas vecto
riais. Com efeito, 'ao dizermos que «um 'carro se desloca com a velocidade de 60 km/h», esta afirmação apenas indica
a rapidez ou celeridade do deslocamento do carro e nada nos indica acerca da direcção e do sentido do mesmo des
locamento.
Sendo o deslocamento também uma grandeza vectorial, -a velocidade rela
ciona esta com o tempo de realização.
Como se representam em Física as grandezas vectoriais?
Por uma entidade ou «ser» matemático chamado vector (de uma palavra latina que significa transpCYrtar) ou
segmento orientado (orientado por ter associada a ideia de um sentido de percurso).
Um vector é definido por quatro elementos, 'como se indica na fig. 1.4:
1.° -origem do vector: o ponto A;
2.° -linha de acção - recta r, suporte do segmento [AB];
3.° - sentido - indi,cado pela seta, ou pela notação [A, B]: percurso de A para B;
4.° - módulo ou valor numéricooomprimento do vector numa escala arbitrariamente escolhida.

�posta à pergunta S:
Velocidade e deslocamento têm direcção e
sentido comuns, porque o terrupo de re8Jlização
do deslocamento, que interv.em na definição de velocidade, é uma gr8llldeza escalar po
siti·va.
As notações usadas para o vector e para o seu módulo são, respectivamente:
... -+-vev (v = ! v p .
o vector assim definido é um operador que transporta o ponto A para o ponto B, descrevendo o segmento [A, B).
Ob8erva.ção:
Em Física, ao vector acabado de defi,nir
também se chama vector ligado ou aplicado
e corresponde à definição, em Matemática,
de segmento orientado.
E reserv8J�e o nome de vector livre para
o ser matemático caracterizado só por 3
elemootos - uma dilJ'ecção, um sen·tido e um
módulo: pode, por i&so, ser representado por
qualquer segmento orientado da 'classe de
equivalência a que pertence (o mesmo feixe
de rectas paralelas).
Em Física, é frequente a�nda falar (embora
escusadamente) em vectores equipolentes, que
são aqueles que têm lilllhas de acção paralelas (portanto, a mesma direcção), o mesmo módulo e o mesmo sentido: ·são assim vectol'es
livres pertencentes à mesma classe de equi
valência.
Vejamos algumas grandezas representadas por diferentes tipos de vectores :
a velocidade de uma partícula punctiforme (uma boa aproximação do panto material) representa-se por um vector ligado'; a velocidade de translação de um 'corpo rígido representa-se por um vector <livre ( tendo como suporte uma recta qualquer de uma infinidade de rectas paralelas) ; a força aplicada a um corpo representa-se por um vector livre (tendo como suporte, obrigatoriamente, uma dada recta) .
19

@ -+
Fig. 1.5 Adição geom�tJrica dos vectores v,
20
-+-e v, :
(a) - por desiloca;mento paTal-elO do
-+",ector V,;
(b) - por deslocamento paralelo dos
dois vectores, isto é: por comp084;ão
d6 duas translaçoes - uma relativa -+- -+-
a V, e outra a v, .
1.6.2 Adição de dois vectores livres
Chama-se vector-sarna (ou vector resultante) dos vectores parcelas (ou
-+- � vectores componentes) v1 e v2 o vector
que se dbtém tirando pela extremidade -+-
de um deles, V1 por exemplo, um vector -+
igual ao outro, v2, e unindo a origem do -+-
primeiro vector V1 'com a extremidade -+
do segundo vector v2, como se indica na figura 1.5(a). Este processo de determinar o vector soma constitui a chama;da regra do triângulo.
Outro modo de aplicar esta regra consiste em deslocar estes vectores, paralelamente a si mesmos, e iniciar a construção geométrica num ponto A qualquer, não pertencente a nenhum dos vectores dados, como se exempli
fica na figura 1.5 (b). Isto corresponde à ccnnp08ição de duas translações (uma para cada vector).

A
A ® @ @ -+'
Fig. 1.6 O voctor àiferunça geométrica entre 08 vectore.s V, (aditwo) e
v, (subtractivo) encontra-se: -+- -+
(a) - unindo a extremidade de v, 'com -a extremidade de v,; -+- -+-
(Ib) -8idicionando 810 vector v, o vector simétrico de v,;
(c) -aplica.ção da regra referida em (b) a vectores co-direccionada.
Exercício 1:
Mostrar geometricamente que a regra do
triângulo -contém a regra do paralelogramo,
para dois voctore.s aplicados, estudada na
composição de forças no curso geral, com
base em resuitados experlmellltais.
Exercício 2 :
Mostrar goometricamelllte que a regra do
poUgono, estudada no curso geral para a
composição de mais de du8JS forças" 'é uma
aplicação 8uce.ssiva da regra do trIângulo.
Exercício 8:
Mostrar também que a. regra do triângulo
coIlltém, como caso particular, a adi1ção de
dois vectores com SI mesma linha de acção
e {) mesmo sentido.
1.6.3 Subtracção de dois vectares livres -+-
Dados os vectores V2 (aditivo) e -+-V1 (subtractivo), chama-se vectar dife-rença o vector:
Este vector começa na extremid-a:de do vector subtractivo e termina na extremidade do vector aditivo, quando se tomam os dois vectores com a mesma origem - fig. 1.6 (a).
:m fácil verificar na figura que o -+-
vector subtr8!ctivo (v1) adicionado ao -+-
vector diferença (Vd) dá o vector adi--+-
tivo (v2): -+- -+- -+- -+V1 + (V2-Vl) = V2
21

Fig. 1.7 Vectores que re-:ultam do produto -+-.
do vector v ,pelos escaJa-res 3, - 2 e k > o
, , �:d======�h�9�OO __ -=� ___ '�\� _ _ _
A C' B /� . -+-Ftg. 1 .8 O pTOduto eSC8Jla.-r dos vectores- v, e
-+-v. é o escalar
ÃB . Aã = v, . AC' = V, . V, C08a
Exercicio 4:
-+- -+Mostrar que o produto escalar de V, e v,
é também igual a v, . a, isto é, o produto
-+- -+-de v, pela projecção de v, 80bre V,.
Sugestão:
Na fig. 1.8 utilizar o tr:i4ngulo [ AB B' ] , rectdngulo em B', e a definição de cos a .
Um modo, talvez mais prático, de construir geometricamente o vector diferença consiste em adicionar ao vector -+-aditivo v2 o simétrico do vector sub-+-tractivo v1, pois que :
-+- -+- -+- -+-V2 -- VI = v2 + ( - v1),
de acordo com a fig. 1.6(b). -+- -+-
No caso dos vectores VI e V2 terem a mesma linha de acção, o vector dife-
-+- -+-rença (v2 - VI) terá também esta linha de acção, como resulta da aplicação da regra anterior e se esclarece na fig. 1.6 (c).
1.6.4 Produto de um vector livre por um escalar
-+-O produto de um vector V por um
escalar, 3, - 2, . . . , k, sendo k um número real, é um um novo vector com as seguintes características: -+--+- ( direcção -- a de v
k v módulo -- k.v
sentido -- o de -; para k > o ; -+-
contrário ao v para k < o
Observe-se a figura 1.7, onde estão exemplificados diferentes casos.
1.6.5 Produto escalar (ou interno) de dais vectores -+O produto escalar de dois vectores VI -+-
e V2 é um escalar que se obtém multipli-cando o módulo do primeiro vector (VI) pela projecção do outro sobre ele (AC') -- fig. 1.8.

c
-+Fig. 1.9 O produto vectori,al dos vectores v, e
-+-v, 'é um novo vector de direcção per-
-+pendkU!lar ao plano dos vector.es v,
-+-e v, e de sentido dado pela regra da
mão direita.
Fig. 1 .10 Regra da. mão direita para conhecer
. -+-a direcção e o sentido do vector v
-+(produto vectori·al dos vectores v,
-+ e v,) .
Representa-se o 'produto escalar por -+' -+- -+- -+-v1 I v2 (ler: V1 escalar v2)
ou por
Escreve-se :
+- -+-.f7i t V!i =
W porque 'cos C/ = -
V2
1.6.6 Produto vectorial (ou externo) de dois vectores
o produto vectorial de dois vectores -+- -+-VJ e V2, eujas direcções fazem entre si
. . -+-um ângulo a, é um novo vector v, com
as seguintes 'características (fig. 1.9) :
direcção - perpendicular ao plano -+- -+-
dos vectores V1 e V2 ; sentido -dado peia regra da mão
direita ; módulo -dado pela. expressão :
v = V1 • V2 • sen a
o produto vectorial representa-se pela notação
e lê-se:
A regra da mão direita, exemplificada na fig. 1.10, consiste em colocar os dedos desta mão estendidos e unidos,
23

Exercicio 5 :
Mostrar, recorrendo à fig. 1.9, que o módulo do produto vectorial é igual ao valor numérico da área do paralelogramo conStruido
.. -+ -+ com os vectores v, e v, como lados.
Sugestão :
Notar que, se no paralelogramo [ A BD O ]
tomar o lado A B para base, a altura O O'
pode exprimir-se à custa do lado A O e do sen a .
Exercício 6 :
Indicar 08 valores d o produto escalar e os módulos do produto vectorial quando os vec
� -+ tores v, e v, fazem entre si os seguintes dn-gulos: O', 90' e 180'.
Resposta. ao exercicio 4:
Por definição, é
v, I v, = v, . v, . coo a (fig. 1.8)
Esta expressão pode ler-se de dois modos:
1 ) v, . v, . COS a = v, . (v, cos a) = v, . AO', no tridngulo [A O O'] .
2 ) v, . v, . cos a. = v, . (v, coo a) = v, . AB ', no tridngulo [ABB'] .
Resposta. ao exercicio 6 :
1 ) Valores d o produto escalar para:
O, - v, , v, . cos O' = v, . v,
90' - v, . VI • COS 90' = O .
24
180' - v, . v, . coo .180' = - v, • v,
2 ) MóduZos do produto vectorial para:
O' - v, . v, . sen O' = O
90' - v, . v, . sen 90' = v, . v, 180' - v, . v, . 8fm 180' = O
e:!teepto O polegar que -deve ficar afastado, e adoptar a seguinte orientação :
-+ PolegfN' - direcção e sentido de V1 ;
Dedos estendidos - direcção e sen--+
tido de V2 •
-+-I O vector v será perpendicular à
palma da mão e dirigido no sentido em . que esta teria de se deslocar para dar uma bofetada (-com a palma e não co� as costas da mão) .
Aplicando esta regra, facilmente se verifica que os vectores
-+ -+ -ii- -+ V1 1\ v2 · e V2 1\ V1
são vectores simétricos.
1.7 Leituras recomendadas
1 . A Evolução da Física, A. Einstein e L . . Inf-eld, Ltv. Brasil, Lisboa : p. 1<1 a 22.
2. RelaUvidade para todos, J. A. Coleman, Liv. Pelicano, C P 121: p. 56 a 66.
3. Mecdnica Racional Elementar, Marques
Teixe[,ra, Porto : p. 9 a 19.
4. Oompêndio de Trigonometria, J. Jorge
Calado: cap II e cap. XIII.
5. Oompêndio de Matemática, A. Costa e O. Anjos, 2.· ·ano C. GeraJ. : cap. X, p.
24'1 a 21m:.
6. Física, Physical Science StudU Oommittee, brad., BaJroolona, 1:9612. cap. 6.·.
1.8. Súmula das ideias fundamentais
1 . o fenómeno físico é uma transformação que não altera as propriedades da sub8itdncia nem a sua estrutura (organização e modo de ligação das partículas) .
A Fí'sica tem por objectivo fundamental o estudo e a interpretação dos fenómen08

físicos, e bem assim o estudo das transformações das d�ferentes formas de energm que os acompanham.
Na investigação científica, o método cien
tifico permite procurar a resposta para as questões relativas ao como e ao quê - o que
se verifica, 'como se orgamzam as partículas e ,como decorrem os fenómenos (leis a que obedecem) -, deixando para a Filosofia os problemas relativos ao porquê e para quê.
2. As grandezas físicas es'calar,es ficam completamente determinadas pelo seu valor numérico, seguido (ou não, como p. ex. a densidade) da unidade em que vem expresso.
Mas as grandezas físicas vectoriais, que são as que, além do módulo, têm uma direcção e um sentido como elementos defmidores, representam-se por vectores (já estudados na Matemática) , l ivres e/ou aplicados,.
As operações com vectores são aplicações geométricas e definiram-se as prmcipais: adição e subtracção (pela regra do triângulo ou do paralelogramo) , multiplicação de um vector por um escalar, produto escalar e produto vectorial.
3. Quanto a grandezas em correspondêncm biunívoca, entre as diferentes relações que podem existir entre os 8'eus valores salientam-se:
a proporci'onalidade directa - se é constante o quociente dos valores correspondentes;
a proporcionalidade .inversa - se é constante o produto dos valores correspondentes.
41. O seno, o co-seno e a tangente de um (tngulo são grandezas que não se exprimem em unidades de medida, mas apenas em valor numérico, porque se definem, respectivamente, como quocientes da medida da ordenada pelo raio vector, da medida da abcissa pelo raio vector e da medida da ordenada pela da abcissa, relativas a um ponto qualquer do lado extremidade do (tngulo e tomando o lado origem para semi-eixo po&itivo das abcissas.
1.9 Questionário
1. Indicar algumas propriedades fundamentais das particulas que constituem as substâncias. Com que está preenchido o Universo físico ?
Será natural a existêncm de um espaço exclU8'ivamente geométrico, isto é, vazio, quer de particulas materiais, quer de energm ?
' 2. Porque se estudam em Física as diferentes modalidades de energm ? A Física é uma ciêncm experimental ? 1!; independente ? 1!; auxiliar de outras ciências '!
3. No processo gráfico de registo dos valores de duas grandezas, interdependentes, que típos de curvas nos mdicam' uma relação de proporcionalidade inversa? Estas curvas experimentais são apenas um esboço, mais ou menos aprommado, das curvas geométricas que são imagem das respectivas funções. Dizer porque.
4,. Quando é que o módulo do vector soma de dois vectores é igual à soma aritmética dos módulos dos vectoreS ?
Que ângulo fazem dois vectores cujo módulo do vector soma é igual à diferença aritmética dos módulos dos vectores ?
Responder a estas duas questões considerando-as relativamente ao vector diferença e comparar com as respostas anteriores.
5. Considerar dois vectores de módulos .y e '7:
5.'1 indicar ·os limites de variação do módulo do vector soma;
5..2 idem, quanto ao módulo do vector diferença.
1.10 Problemas
' l. Dois vectores v, e v" de módulos v, = 3 e v, = .y, fazem entre si um dngulo da 90·.
25

1.1 Determinar o módulo do vector Soma. 1.'2 Determinar o módulo do vector dife
rença.
1.2) v. = 5 1 2. Um vector de módulo 15 VT é a soma
de dois vectores, cada um dos quais faz com ele tingulos de 45°. Determinar os módulos dos vectores componentes.
3. Mostrar que o vector soma e o vector diferença de dois vectores de igual módulo, fazendo .entre si um ângulo a :s; 90°, são perpendiculares.
Sugestão :
Utilizar a regra do paralelogramo, verificar que tipo de paralelogramo se obtém e observar a posição relativa das suas diagonais.
4. Três vectores, de módulos 3, 4 e 5, estão aplicados no vértice de um paralelipípedo rectângulo e dirigidos ao lonyo de cada uma das três arestas concorrentes.
26
Determinar o módulo do vector soma dest·es 3 vectores.
-+-5. Em k . v, com k E R, indicar o valor
do operador k para se obter o vector simé-+-
trico de v. (R = conjuntá dos números reais).
-+- . -+- -+-6. Considerar quatro vectores v" v" v,
-+-e v" cujas posições relativas correspondem, respectivamente, aos quatro lados consecutivos de um quadrado percorridos no mesmo
sentido. Sendo
v, = v, = v, = v, = x
calcular:
-+- -+tU I v, + v, 1
� -=,..- � 6.'2 l v, + v, + v, 1
-+- -+- -+- -+-6.3 I v, + v, + v, -I- v, I
-+- -+- -+- -+-6.4 I v, + v, - v, - v, I
6.1 ) V2 x ; 6.20) x ; 6.3 ) O ; 6.4 ) O

Ailhert EINSTEIN em 1954 (um ano antes do su'a morte) Breve notícia no verso
M E C ÂN ICA

- A'l belrt IEINSllEIN, fil'ho de poi's judeu1s, fl'aoce'u na cidade de U'hm, Wurtenberg, em 14 de Março de 1879, e fal'ece'U em �ri.ncetonl, E. U., em 18 dei Abrill de 1955.
Fo:i matemático, fí.si�o teó�i,oo e humemista., e contl"ibviu' com ais suos teorias da Re,lativ+dode Restrita ou espeoial (1905) e da' Re+atiV'idade· Genlera'l izada· (1915) pa'ra o eSlpectacular desen:volvimento da Física Nuclear e palra a intel�prclação da· g ral'.'i'd{jde.
Recebeu o prémio Nobel de Ffsica em 1921, pela lei fotoeléctrica' e pe,la suo obra no dom ínio da Física' teórico', e não pelaiS teorias da ReJotividcde· que· a lguns fí.sicOJ5 coevoiS oliinda não aceitavam . . .
Galileu, Newton e Einstein tiveram papel tão, dedsivo· no. ,desell1'vo:lvimento do estudo da Física que este' nos sUlI"ge hoje l1"itidOlme.nte dividido em três gra·ndes e fundomentais pe'ríod o's, 'a 'sab er :
Antes de Ga·l i leu e de Newton ; de' Newton até Ein�ein; e de'Poliis de Eihste:inl. As «revoluções cielntíHcas» de'stes físiOO'S incidi·ram principol mente sobre 01 Mecânica.

«Na realidade, o Uni'verso é uma continuidade Espaço-Tempo ; espa'Ço e tempo depen
dem um do <lutrQ. Nenhum deles pode ser expresso independentemente. Ambos devem s'er en
carados como aspectos coordenados da nossa concepção matem'áJUca da realidade ..
O mUlIldo não é tridimensiOlllal: cons1.ste nas três dimeIlJSões do espaço e numa -1.' di
mensão adiciOlllail -' o terrupo.»
2.1. Mecânica
A Mecânica é O ramo da Física e da
Engenharia que estuda ·as relações entre as forças e os movimentos que elas produzem e, ' em separado, quer
estes, quer as primeiras.
Tradicionª,lmente, é costume subdivi
dir a Mecânica em três partes :
2.1.1 Cinemática ( de uma palavra
grega que significa movimento) - sec
ção onde se faz o estudo do movimento,
sem entrar em conta com as forças que o originam.
Este estudo foi i!Iliciado por Aristóteles, no século IV A. C.
2.1.2 EstátiJca (de uma palavra grega
que significa em equilíbrio) - secção
onde ,se estudam ,as condições de equilíbrio das forças aplicadas a um 'corpo.
A. Einstein
o primeiro a fazer este estudo foi
Arquimedes, no século III A. C.
2.1.3 Dinâmica ( de uma palavra grega que significa força) - é a parte da Física que estuda as relações entre
as forças e os movimentos por elas produzidos.
Data de 1600 o começo deste estudo, empreendido pelo florentino Galileu (1561-16412) . Teve a seguir grande in
cremento com o holandês Huyghens (1629-1695) e ficou solidamente estru
turado e sistematizado <!om os trabalhos do inglês Isaac Newton (1643--17'217) .
2.2' O carácter relativo do movimento
'Entende-se por movimento de um
corpo a sua mudança de posição em
relação a outro que se escolhe para termo de referência.
29

Nota 1 :
E m Física:, sistema si'gnifica um conjunto escolhido, convenctona:J. e aJpropriado de partículas, ou 'qualquer paNe do Univer8lO que
queremos estudar e que irriaginamos- separada de todo o restoO.
ConcomitanterIl!ente, entende�.Sle por exte
rior tudo o que não pertence ao sistema.
Num :Si\S'tema heterog{ineo, convém considerar -cada fase - parte homogénea do sistema, com propriedades e características uniformes em toda a sua e�ensão.
Nota 2:
A Mecânica que vamos estudar é a M ec12.nica clássica ou newtoniana - que dá resposta aos problemas de movimentos a baixa velo
cidade ( inferiores a la % da velocidade da luz 10
noO vazioO, isto é, a -- X 300 000 km/s =
100 = 30 000! km/s) ..
Para as partículas que se deslocam com altas velocidades ( superioresl ou iguais' a 30 000 km/s') , utili2am-se as fórmulas da Mecânica relativista ou einsteineana - que é uma generalização da anterior, -apoiada em outros . postuladoOs ; segundo um deles-, por exemplo, a velocidade da luz no vazio é o
limite superior da velocidade que pode adqui
ri" qualqu/3T partícula do Universo e o seu
valor é constante em todos os referenciaf.s.
Este postulado foi sugerido pela verificação e�perLmental de que 'a velocidade de propa-gação da luz emitida por uma fonte luminosa, em repouso .ou ean movimento, .tem 'sempr-e .o mesmo valor.
Pergunta. 1:
Escolher para referencial de um movi� mento a Terra ou um ssilStema nela fixo são escolhas equivalentes. Porquê ?
30
o primeiro chama-se móvel,' o segundo, referencial ou sistema de referência, por ser em relação a este que o movimento é examinado (1 ) .
As 'características de um dado movimento variam, para o mesmo móvel, com o sistema de referência escolhido. Assim, um passageiro que se desloca dentro da carruagem de um comboio em movimento tem, em relação à carrua:gem, uma velocidade igual à sua velocidade de deslocamento dentro desta ; tem no entanto, em relação à via férrea (fixa na Terra) , uma velocidade igual à soma vectorial da velocidade de deslocamento do passageiro na carruagem com a velocidade de deslocamento do comboio.
Se o passageiro estiver sentado; estará em repouso em relação ao comboio e em movimento em relação à Terra, com velocidade igual à do comboio.
O repotUSo absoluto, isto é, a invariância de lugar no Universo, não existe : com efeito, todos os corpos e partículas se movem. Admite-se até que o Universo está em expansão. Igualmente não existe o movimenta absoluto, que seria o movimento considerado em relação a um referencial fixo (em repouso absoluto, portanto) .
Uma vez que o movimento de um corpo terá de se referir sempre a um sistema móvel, o movimento desse corpo será um movimento relativo, e 'as características deste movimento dirão sempre respeito ao referencial escolhido e só a esse. (2) .
Para os movimentos à superfície da Terra, o sistema de referência mais frequentemente escolhido é a própria Terra ( ou qualquer sistema nela fixo) .

Pergunta 2:
Um passageiro vai, sentado numa carrua
gem do camboio, voltado pan:-a a frente (para
o lado do ilocal da chegada, portanto) . Olha
para as ârvores ao longo da v�a férrea, atra
vés da jaJll.ela, e «vê-as» deslocarem-.se para
trás; olha para um espelho plano fixado na
sua frente e «vê» as ârvores a deslocarem-'S'e
para a frente; vai 'à jaJll.ela e «vê» as ârvores
em repouso e o comboi'o ai deslocM'-ose para a
frente.
A que referenciais dizem respeito cada
uma das observações ? Porque soão equivalen
tes' as, .três descrições ?
Nota S :
Partícula, que sli.'gnifIca uma parte mmto
pequena, é, em Física, uma parte elem'entar,
discreta, não dividida, de substânci'a, como
o electrão, o 'Protão, o neutrão, o ã.tomo, o
ioo, a molécula, etc. Qu:rulqU'ffi' corpo serâ 31SS'Í1l1 constituído por um número muilto graruie de
partículas, mas também o podemos consi
derar constituído por um número qualquer,
neste caso arbitrã.rio, de pontos materiais, de
acordo eom a definição de ponto material.
Nota 4 :
Alguns a'Uitores ehamam a o inicio da con
tagem dos deslocamentos origem dos espaços
( entendido aqu� espaço, não na a;cetpção cor
rente tridimensional geométrtca, mas. no sen
tido un:idimenSlÍonail de deslocamento UnOOir) .
Por isso, é habitual utilizar a letra - e
para indicar a 'medida do deslocamento, em
bora fosse mais coerente utilizar a let,ra - d
2.3 Trajectória e lei do movimento.
O espaço-tempo
Muitas vezes, ao estudar o movimento de certos corpos relativamente a dados referenciai's, estuda-se, por simplicidade, só o movimento de um dos seus ,pontos, desde que o de todos os outros pontos se possa considerar análogo ou não seja necessário, quando diferente, ser considerado à parte.
Por exemplo, estuda-se o movimento de translação do centro de uma esfera em vez do movimento de translação da esfera, o movimento do centro de gravidade da Terra na sua translação em torno do Sol em vez do movimento da Terra, etc., etc.
Nestes casos, há necessidade de atribuir ao ponto escolhido a massa do corpo que ele passou a representar. Um 'ponto nestas condições chama-se ponto material.
Corresponde assim ao ponto da Geometria, mas ,atribui-se-lhe a massa m e, por isso, as demais propriedades das partículas materiais.
Ao ponto material assim definido, apesar de . ser um ente ideal, também se atribui significado físico : uma certa quantidade de matéria (substância) concentrada num volume muito pequeno. A massa m atribuída é que pode ser qualquer: grande e total (representa todo o corpo) ou pequena e parcial (representa apenas uma das partes do corpo) . (3) .
No estudo que vamos efeduar da Cinemática, apenas consideramos o
. movimento do ponto material. Este, ao deslocar-se, vai ocupando posições su-
31

Resposta à pergunta 1 :
o 'sistema fixo n a Terra está em rerpouso em relação a esta e, por isso, o movimento do móvel em estudo passará a r,eferir�se a dois sistemas idênticos (Terx8I ou si'Srtema nela
fixo) porque estes, mantendo aIS suas posições relativ8ls, têm movimentos' equivaJentes.
Resposta à pergunta 2 :
1.' observação - a 'carruagfflll.
2.' observ,ação - a caJITUagem" mas a imagem
dada pelo espelho, emb()lI"a tenha desloca
mento igullIl ao do objecto, tem per,curso
de sentido. contrário.,.
3." observação - as árv()lI"es. São. :equivalen,tes, porque indi'cam ,as' mesmas posições relativas carruagem-terra e
conduzem ao mesmo ponto de chegada.
Pergunta S :
N a pergunta 2, o conjunto carruagem-terra constitui um par ordenado. r
o
®
cessivas, as quais, no seu conjunto, constituem uma linha a que se chama trajectória.
Nesta, fig. 2.1 (a) , marca-se o início O da contagem dos deslocamentos, o sentido do movimento e as posições sucessivas, A, B, . . . do móvel no decorrer do tempo (4).
Se medirmos os deslocamentos realizados (e) e os tempos de percurso (t) , verificaremos que, para cada tipo de movimento regular, há, entre cada par de valores correspondentes dessas medidas, uma relação bem determinada. EsSa relação, que traduz a lei horária do movimento ou simplesmente lei do movimento, é simbolicamente traduzida por
e = f (t) .
Esta e�pressão, a que se chama equação horária do movimento, significa que a ,variável deslocamento (e)
z
Fig. 2. 1 a) Traje'ctórla do ponto mlllterial M ( móvel) sobre a qual e a plllrtir de O - origem dos deslocamenios - se medem os percurs'Os realizados p()lI" M.
-+-b) A cada d eslocamento e de um ponto material P correspondem, num dado refe-
rencial cartesiano, três dimensões, e., e. e e., que 'são as medidas dos vectores projecção nos eixos coordenados ortog'Onais OX, OY e OZ.
Nota 5:
A letra grega .ó. ( lê-se delta) corresponde no alfabeto 'Português à letra D e usa-se em Física pa,ra significar intervalo de, porção de,
variação de, acréscimo de, etc. Assim:
'
t = 2 h ( referimo�nos ao instamite 2 horas)
.ó.t = 2 h ( referimo.nos ao inteJI'V8!lo de tempo de 2 horas decocrido, ou a de,correr, na rea:lização de um fenómeno).
E�.: 'são 8 horas (t = S horas ) ; trabalhei 8 horas (Â t = S h) .
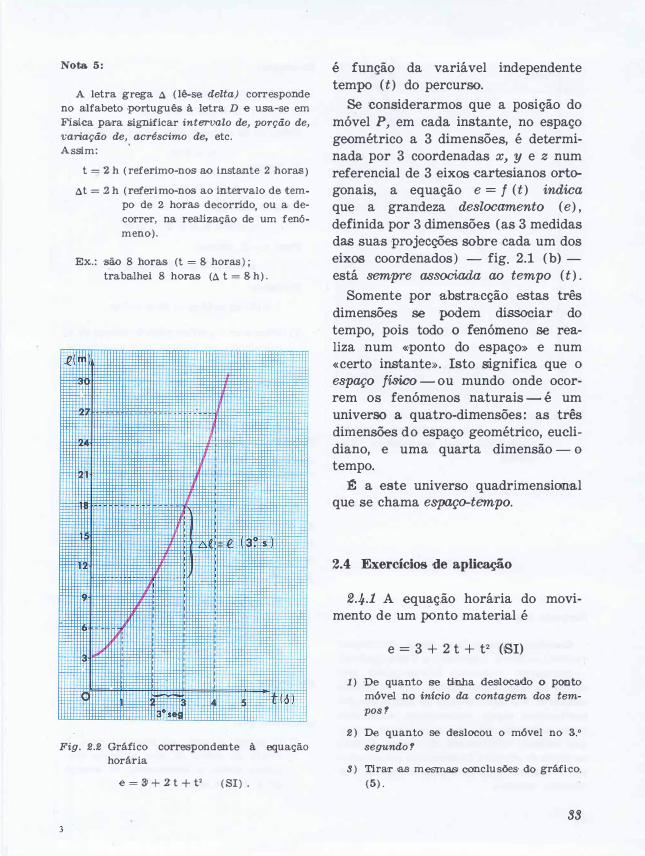
Fig. 2.2 Gráfico correspondente à equação horária
e = 3' + 2' t + t' ( SI) .
é função da variável independente tempo (t) do percurso.
Se considerarmos que a posição do móvel P, em cada instante, no espaço geométrico a 3 dimensões, é determinada por 3 coordenadas x, y e z num referencial de 3 eixos cartesianos ortogonais, a equação e = f (t) indica que a grandeza deslocamento (e) , definida por 3 dimensões (as 3 medidas das suas projecções sobre cada um dos eixos coordenados) - fig. 2.1 ( b) está sem'[YT"e associada ao tempo (t) .
Somente por abstr!licção estas três dimensões se podem dissociar do tempo, pois todo o fenómeno se realiza num «ponto do espaço» e num «certo instante». Isto significa que o espaço físico - ou mundo onde ocorrem os fenómenos naturais - é um universo a quatro-dimensães : as três dimensões do espaço geométrico, euclidiano, e uma quarta dimensão - o tempo.
� a este universo quadrimensional que se chama espaço-tempo.
2.4 Exercícios de aplicação
2.4.1 A equaç,ão horária do movimento de um ponto material é
e = 3 + 2 t + t2 (SI)
1 ) De quanto se tinha deSllooaido o ponto móv'el no inicio da contagem dos tem
pos ?
2 ) De quanto se deslocou o móvel no 3.·
segundo ?
3 ) TiraT .as mesm&lSi oonclusôes' do gráfi'co. (5) .
33

4: , t;if :' � Ük��üWHItffi ��fJ E i" ci_ J:H=, it1
, .r. : ;,;r r;; "; , ij "if ;",: ,
,: iE : , : I ii i ir: ,;11 , I : "
' f;t :: , . . I .. � "
, m F • IHU v: r :: ji lITN / [11 'lf!; : '[,,1 ,
'1', , " iR � ' h,; " :ei; y ,
:
>" ,.iill ml "
fit f�l' :11 7,l:� H'IU m � ! ] �JnLt lí�W
lie : "' = ' �J.l, Fig. 2.3 Gráfico do movimento de dois mó
veis A ,e B, que 'PE�l'COrrem a mesma trajectória com movimentOS! dife,
rentes.
Resposta à pergunta s :
ConsUtui, porque aOS! pares< carruagem
( móvel) ---< Te,rra ( repOUSO) e Terra ( móvel )
- carruag.em ('repouso) ,correspondem percursos de igual comprimento, mas de s'entido contrã,rio. Por Isso, embora as descrições' dos
movimentos sejam equi'valentes, estes dois
pares ordenados não são equi�alentes' - porque indicam movimentos diferentes. Quanto ao ponto de chegada é indiferente um ou outro par - o que ,traduz uma propriedade do mo
vJmento relativo.
Resolução:
1 ) Pare t = o, temos:
e = 3 + 0 + 0 = 3
Como no SI se mede e em 'fi e't .em s, será:
eo = 3 m ,
' 2 ) Temos
e (3.o 's) = e. - 8o
Para :t = 2, vem :
e, = � + '2. '2. + 2' = 1i1 m
Para t = 3, temos:
Ela = 31 + 2. 31 + 3' = 18 m
POI1tanto:
e (3.o s') = 18 m - 1!1 m = 7 m
3 ) IDsboce-se o gráfico pare 5 vaàores de t,
calculando os valores correspondentes
de e :
t l O l JJ I 2 1 3 1 4 e 1 3 1 6 1 11 1 18 1 27
No grMico - fig, 2.2 - podem ler-se diorectalmente:
13o = 3 m ( ordenada na origem )' ;
e (3 .o ,s) = � ,e = '18 m - I1l1 m = 7 m.
2.4.2 Representaram-se graficamente as equações horárias de dois movimentos referentes a dois veículos A e B, tendo ambos pel'lcorrido a mesma trajectória.
1 ) No instante zero, qual dos móveis segue
à frente ? E a que distdncia do outro ?
2 ) Registar o que o gráfico indica acerca
das posições relativas dos dois m6veis.
Resolução:
Do exame directo do gráfico - fig. 2.3 -
conclui-se que:
1 ) O móvel A está, n o instante zero, à
frente do móv:el B, que só n�'s'te mo
mento ilIl:i:ci.a o movimento. O avanço
de A é de 4 km.
B ) No instalIlte: .t = 2,5 S, o móvel B alcan
çou o móvel A ( acabam ambos de per
correr 8 km) e, a seguir, ul trapas'Sa-o.
No mstante t = 6,25 S, é o móvel A que
alcança o móvel B e que, a seguir, o
ultraJpSlSsa.
2.5 Movimento rectilíneo e uniforme
2.5.1 Característica e leis do movimento
Este movimento é ·caracterizado por o móvel percorrer, em trajectória rectilínea, distâncias iguais em intervalos de tempo iguais.
Na figura 2.4, (b) , 6x representa a
trajectória do móvel· M, que percorre as seguintes distâncias: na l.a unidade de tempo, OA ; em 2 unidades (ie tempo, OR = 2. OA ; em 3 unidades de tempo, OC = 3. OA.
Ressalta assim, como consequência imediata da característica do movimento, que a medida dos deslocamentos (e) aumenta proporciona:lmente com o tempo (t) gasto nos percursos. Esta afirmação constitui o enunciado da lei dos deslocamentos (ou dos espaços) e é traduzida pela seguinte expressão :
e - = k t
ou e = k. t
A constante de proporcionalidade k é tanto maior quanto mais rápido for o movimento (maior distância e 'percorrida num mesmo tempo t) : representa, por isso, o módulo v de uma nova grandeza que mede a rapidez do movimento e se ,chama velocidade do móvel.
Neste movimento, o módulo, v, da
velocidade, dado pelo quociente e
t
35

Vç 0---':""'-C -
Fig. 2.4 a) Aos difer.entes desdocameIlltos. do ponto materiall - A - correspondem düerentes vectores deslocamento
-+- � --d" d" d" ,porque, em'bora. cai-ba
a todos a mesma medida do percurso � 4 cm -... diferem, no en
taIlJtQ, na direcção e no sentido.
a) Trajectória rectilínea e vectores
velocidade do ponto material mó
v-el - M -, -3iIlimado de movimento
recUlíneo e uniforme, nos pontos A, B €I O da trajectóri,a ( que se .esoolheu pa.ra eixo dos x x ) .
Nota. 6 :
Estas equações horárias são válidas ainda
no caso de qualquer trajectória não rectLlínea. 'São, pois, a.s equações . de qualquer movi
mento uniforme, definindo-se, este como o movimento em que o mÓViel faz percursos de
igual. comprimento em tempos iguai8.
Pergunta 4 :
Porque se recorre 8)0 movim,ento uniforme para defink as unidades de velocidade ?
36
Red�a, como apUcação:
1 ) ;100 km/h a m/s;
2 ) �() m/51 a km/h (velocidade de propagação do som no ar, II temperatura de
16° C) .
é, pois, numericamente igual à medida do percurso realizado em qualquer unidade de tempo.
Substituindo k por v) a equação horária do movimento toma então a seguinte forma :
6 = v. t
No caso de se ter começado a -contar o tempo depois de o móvel ter passado pela origem dos espaços ( ou deslocamentos) , a equação horária poderá escrever-se:
6 = 60 + v. t
onde eo = distância inicial, ou seja a distância percorrida antes do início da contagem do tempo (6) .
No sistema internacional de unidades ( SI) , a unidade de velocidade define-se a 'partir da equação
se se verificar quando for
teremos :
1 m
e v = ---"' ;
t
e = l m } t = 1 s I
v = -- = m/s = m. g-l . I s
Metro peR segundo é, assim, o valor da velocidade do móvel que, em movimento uniforme, realiza o percurso de comprimento igual a 1 m em cada segundo. ( 7) .

Nota 7 :
Ordem de; grandeza de algumas velocidades:
Corredor a pé - 7,0 a lO m . S-1
Avião ·supersóni·co - superior a 3fW m . S-1 Projéctil de ·arma de fogo - 400 -a
1'200 m . S-1 Satélites artificliaJlJs - k . l()� m . S-1, com
k � 8
Resposta à pergunta 4 :
Porque · é o movimento:
1. o mais simples;
2..0 'em que o. módulo da. 'V'elocidade não varia.
1· km 1 ) l2O! krn/h = 'li2!O' X --
:1 h
l{)OO m = lOO X �-
3000 s
100 = -- -m/s = 33,3 m . s-l
3 -
,r m 2) 3:40 m/a = :MO X -
r s
1 � km '1000
= 3�O X --1
-- h 3l6OO
360.0 = 340 X -- km/h
1000
= 34 X 316 km . h-1
= l224 km.h-l -+- 12a'XI0 km.h-l
2.5.2 Desloca:mento e velocidade como grandezas vectoriais
Um móvel deslocou-se 4 -cm a partir da posição A - fig. 2.4 (oa) . Qual é
a posição final do móvel ? Evidentemente que não saberemos
responder se não conhecermos também a direcção e o 'Sentido do deslocamento. Admitamos que o móvel fez o referido percurso de 4 -cm -em cada uma das
direcções indicadas ÁB, ÁO e ÁD. Qualquer destes deslocamentos rectilíneos é uma grandeza vectorial e pode representar-se por um vector ligado ao ponto material e 'chamado, por isso, vector deslocamento.
No caso indi'cado na figura, podemos representar os 3 vectores deslocamento do modo seguinte:
o deslocamento par unidade de tempo também é grandeza vectori a:l , porque se trata do quociente de um vector por um escalar. Este novo ve'ctor é precisamente o vector velocidade, que se representa :
-+--+- e 1) = -
t
No movimento rectilíneo e uniforme os vectores deslocamento estão assentes na trajectória. Portanto, os vectores velocidade, nas várias posições do móvel, também estão - fig. 2.4 ( b) .
37

Fig. 2.5 GrMico da lei dos espaços ( ou deslocamemtos) no movimento uniforme:-
( 1 ) quando são simultâneas as origens dos espaços e dos tempos : e = v. t, no exemplo e = 00 . t ;
( 21) quando há percurso já realizado anteriormente ·ã ori'gem dos -tempos: e = eo + v t, no exemplo e = 6 + 00 t.
A eo chama�se, na. represellltação cartesiana, ordenada na origem.
38
2.5.3 Exercicios de aplicação
1.° - Dois ,carros, A e B, deslocam-se com movimento uniforme de velocidade igual a 60 km/h. O carro A já levava um -avanço de 6 km quando B partiu instante em que se iniciou a contagem do tempo. Indicam-se no quadro seguinte as medidas dos percursos e os instantes em que os mesmos foram completados:
Tempo t Valor dos percursos
(instantes) Carro A Carro B
Q,()I h ,6 km O km 0,1 h 1:2 km fj km 0,12 h '18 km 12 km 0,3 h '241 km '1'8 km 0,4 h 30 km 24. km 0,5 h 316 km -3'Ü1 km
Escrever as equações ho�árias dos movimentos e esboçar os respectivos gráficos.
Resolução:
Exprimindo o -te'mpo t em horas e a me dida do percurso e em km, temos':
e .. = 6 + 6Q t
eB = 60 t
Os gráficos da lei dos espaços ( ou dos deslocamentos) ,e da velocidade estão indicados nas figuras 2.i5 e 2.f).
2.° - Para um comboio, animado de movimento uniforme, o intervalo de tempo que decorre entre a entrada da frente da máquina num túnel de 1600 m de comprimento e a saída da cauda do comboio do mesmo túnel é de 50 s.
, 1 Alem disso, gasta 3 - s a passar por
3 baixo de um fio telefónico perpendi
- cular à linha do ,comboio. Qual é o comprimento do comboio?

Fig. 2.6 Grãfico da Zei das velocidades : v=k.
No exem,plo, v = 60 km/h.
- No instante zero, a velocidade já é, no grãfi.co, de 6{)1 km/h : isto não -significa que Q móvel arl'lw.cou e que logo nesse instante adquiriu a v·elocidade de 00 km/h, o que é manifest8Jmente impossível. Significa, sim, que, no instante em que se começou a contagem do tempo, o móvel já possuía essa velocidade.
1 6 0 0 m
Fig. 2.7 O comboio A B ( a que s e refere o 2.° problem'8J do texto 2�.3) segue em movim€ll1to uniforme ao longo do túnel. A é um ponto da superfície frontal da máquina e B é um
ponto da superfície posterior da caruda
Exercício 1:
A equação horária do movimento de um
móvel é a seguinte:
e = 6,0 + 14 t (SI)
1) De que movimento se trata ?
2) De quanto se desZocou ao fim de 4
segundos ?
3) De quanto se deslocou no 4.° segundo ?
Resolução:
Desi..gnamos por c o comprimento do comboio e vamos estudar apenas o movimento de um dos seus pontos materiais,: por facilidade, escolhemos um ponto A da superfíde frontal da: má'quina {fig. 2 . 7 } 1. B será um pOIlJto da superfície posterior da caruda do comboio. Então escrevemos :
Como se vê na fi'gura, ·a distânci'a [ comprimento do t(inel + BA] ,cor.respond·e ao tempo de' 50 s. Designando por v o módulo da velocidade do comboio, teremos :
(1;600 + c ) = v X 50 . ( 1 )
Por outro lado, () combóio ( comprim.ento c )
demorou a passa!!" sob o fio teil·efónico 1 10
3 - s = - s, com a referida velocidade;. 3 a
Podemos então ·escrever:
10 c = v X - . ( 2 )
3
Re'S'Olvendo esta equação em ordem a v,
temos : 3 e
v = --10
Substituindo este valor de v na primeira, fica:
L600 + e
Daqui r.eSlULta:
3 c -- X 50
10
c = 114 m
2.5.4 Estudo do gráfico espaço (deslocwmento )-tempo no movimento uniforme
Já vimos que, no caso mais geral, este gráfico é uma linha recta que não passa pela origem.
39

� ( km ) 160,0
120,
40,0
0,100 0,200 0,300 t ( h.,. )-
Fig. 2.8 GrMi'co espaço (deslocamento l -tempo
e declive
Exercício 2 :
Dois carros seguem em movimento uniforme
pela mesma estrada - um com a velocidade
de 60 km/h e outro com a velociliade de
75 km/h. Este partiu 10 mn depois do pri
meiro.
1) Mostrar, pelo cálculo e graficamente, a
que distancia da origem o primeiro é
ultrapassado.
2) As Umhas representativas das equações
horárias serão paralelas r Porquê r
Sug.estão: na parte gráfica, utilizar papel
mtlimétrico.
40
Analisando o gráfico esboçado na fig. 2.8, verificaremos que, entre outras, nos pode dar as seguintes informações :
1,& - A velocidade (módulo) . Com efeito, na La unidade de tempo
(0,100 h) , o móvel percorreu (segundo o gráfico) :
62,9 km - 40,0 km = 22,9 km
Portanto :
22,9 km v = = 2219 km/h. 0,100 h
2.a - O declive da recta representativa da equação horária do movimento uniforme, que indica também o valor numérico da velocidade. (8 ) .
De facto, fig. 2.8, traçando os seg
mentos AB e CB paralelos aos eixos, temos :
AB = t::, e = acréscimo do deslocamento
CB = t::,t = intervalo de tempo em que foi percorrido t::, e
t::,e declive = tg a = -- = v t::,t
120,0 km - 80,0 km
0,350 h - 0,175 h
= 2Q8,57 km/h -+ 229 km/h.
3,.a � O deslocamento realizado pelo móvel num dado intervalo de tempo. Foi esta informação que se utilizou, p. ex., no cálculo do declive e, por isso, do módulo '<ia velocidade.
4.a - O intervalo de tempo que o móvel leva a efectuar um dado percurso, que não é mais do que a leitura inversa, no gráfico, da informação anterior.

Fig. 2.9 O decliv·e da recta r é a r.azão
Nota 8:
!:::,. Y Y.-'Y, -- = -- = tg a !:::,. x x,-x,
Consideremos a recta r e o ângulo a, de
lado origem ÀX, que ela forma com o eixo dos xx: ângulo de inclinação (fig. 2.9) .
Indiquem'os as coordenadas dos pontos P. Q E r ,e tracemos () segmeruto [QR] paralelo -810 eixo doSl xx.
A r8JZão conSltaJIlte e independente MS pon
tos P e Q escolhidos ( independente porquê ? )
PR Y. - Y, !:::"Y -- = -- = -- = tg a QR x. - x, !:::,.x
chama-se declive - da recta r.
2.5.5 Esttulo do gráfico velocidade-tempo
Na fig. 2.10, estão traçados os gráficos velocidade-tempo de dois móveis que se deslocam, em movimento uniforme, com as velocidades de 60 km/h e de 1210 km/h.
A maior utilidade destes gráficos consiste em ,podermos determinar a medida do deslocamento, entre dois instantes determinados, por meio do cálculo de uma área.
Assim, o deslocamento efectuado pelo móvel A entre os instantes t1 = 2,0 h e t2 = '5,0 h é representado pela área do rectângulo [M N P Q ] ,
visto que v = MP, 8,t = MN e portanto:
8, e = v. 8, t = 60 km/hX (5,00-2,00) h = 180 km
2.6 Movimento variado _
2.6.1 Característica e velocidade média
N o movimento variado o móvel efectua, numa trajectória qualquer, rectilínea ou não, percursos de comprimento diferente em intervalos de tempo iguais.
Os movimentos naturais são, na sua grande maioria, variados.
A velocidade, neste movimento, varia de instante para instante, como se infere da própria característica.
Consideremos, por exemplo, o seguinte caso : um automóvel percorreu um troço de estrada de 100 km em 2,00 h, tendo andado 75 km na V hora e 25 km na 2.a hora. Que significará dizer que fez este troço da viagem com a velocidade média de
l00 km= 50 km/h ?
'
2,00 h
41

Respostas ao Ex. 1 :
1 ) MOIV'im. un�forme com de8'locamento de 6,0 m antmior à contagem do tempo.
2) &2 m.
3) De um valor nummica.mente i:guaJ. à
velocida:de, i,ato é: 114 m.
Fig. 2.10 Gráficos velocidade�tempo de dois
móveilS, animados de movimento
uniforme, com 8JS velocidade8' de
60 km/h e de 1'20 km/h, respecti
v,am,ente. O facto de, no instante zero, já ,estanem assinaladas as
velocidades de 'regime constante
significa que 'se iniciou a contagem
dos tempos depois de adquiridas
estas Vle!locidades.
Figura 2.11 e Exercicio S:
Analisando o gráfico espaço-tempo referente ao movimento do automóvel, verificamos - fi.�. 2.12 - que :
a) o automóvel, depois de ter per.corrido 100 km, esteve parado 2 h, após o que retomou a' marcha ;
b) em parte alguma do trajecto o movimento do automóvel foi uniforme, pois no gráfico não se vê nenhum segmento de recta oblíquo (o segmento rectilíneo horizontal significa velocidade nula porque o automóvel esteve parado) .
Que velocidade deveria , ter o automóvel, ' nas duas primeiras horas, para percorrer os mesmos 100 km em movimento uniforme?
Para este movimento, o gráfico espaço-tempo deixa de ser a linha curva � OR e passa a ser o segmento de recta O R, cujo declive nos dá o valor da velocidade pedida :
100 km v", = = 50 km/h
2,00 h
� precisamente a este valor que se chama velocidade média Vtn duratnte o tempo 6. t = 2 h do percurso ; é igual ao valor da velocidade do móvel que, com movimento uniforme, fizesse o mesmo percurso no mesmo intervalo de tempo.
2.6.2 Exercício de aplicação
Um automóvel fez um percurso em 2 h e um quarto. ,Durante os primeiros
. 5,0 mn circulou com a velocidade de

0.9 móveis ( carros) A e B, partiram do
mesmo local, maIS s'eparadamente, e seguliram
a mesma rota 'com movim€lll<to unl!forme. Em face do gráfico, concluir:
1) Quads 'as velocidaJdte'S' dos camros;
2) A que distância do locaJI de partida o car.ro A ultrapassa o carro B;
3) No inlStante zero, qua.m eram as posições
dos dois ca'l'lros;
4) ,Será legitimo prolongar a linha recta para a esquerda do eixo das ordelIladas ?
Respostas ao Ex. 2:
1) 50 km.
2) Não são, porque os movimentos são ambos uniformes, mas têm velocidades diferentes ( compare com a ,teoria ex
posta no texto 2.5.41) .
Fig. 2.12. Gráfi,co espaço-tempo de um mo
vim€lllto variado ( linha ÓABCD . . . ) .
O segmento OB corresponde.ria a um movimento uniforme no inter
valo de tempo .6. t = �()I h - 0,0 h.
120 km/h, após o que passou, vamos supor que instantaneamente, para a velocidade de 80 km/h, que manteve até final do percurso. Determinar a velocidade média.
Resol�:
1.a parte do percurso :
5,0 1 tl = 5,0 mn = -- h = -- h
60 12
1 el = Vl • tl = 120 km/h X -- h
12
= 10,0 km
2.a parte do percurso :
1 1 9 1 t2 = 2 - h - - h = (- - -) h
4 12 4 12
13 = -- h
6
13 e2 = V2 • t2 = 8Q km/h X -- h
6
= 173,3 km/h
Velocidade média:
D,. e el + e2 Vm = -- = ---
t0. t t1 + t2
(10,0 + 173,3) km
13 1 ( - + -) h
6 12
= 81,5 km/h -+ 82 km/h . (9)
43

Nota 9 :
A velocidade média, no exerclclO 2.6.2,
aparece-nos como uma média pesada ( ou
ponderada) das velocidades constantes v" v, . . . , cujos pesos são os intervalos de tempo
t" '1:" • . • , dur8lIlte os quais elas ·se mantêm
cons!:allltes :
v, . t, + v, . t, + . . . vm = --------
t, + t, + . . .
S6 no ocaso paDticular daqueles intervalos
de tempo serem t�s - t, = t, = . . . - é que:
t, ( v, + V2 + . . . ) v, + v, + . . . vm = ----�--
n
coincide com o vador médio das velocidades
(n é o número de intervalos· de ·tempo) .
Assim e, -em geral, a velocidade média não é a média aritmética ou valor médio das velocidades por que passa o móvel.
Exercício 4 :
Dois automóveis partem a o mesmo tempo da mesma localidade, um, A, com a velocidade de 60km/h e outro, B, com a velocidade de 80 km/h.
Seguem ambos com movimento .uniforme, mas o automóvel A parou 15 mn após ter viajado durante 1 % h e o segundo, B, parou 30 mn depois de ter viajado durante lh hora.
1) Traçar, no mesmo sistema de eixos, os gráficos velocidade-tempo para os dois automóveis.
2) Qual <!Os carros atinge primeiro um ponto do percurso à distdncia de l1W km do ponto de partida �
Sugestão :
Utilizar as áreas limitadas pelo eixo dos xx e pelas linhas representativas da função v = v (t) . Construir 12 rectdngulos em papel cuja base corresponda a % h e cuja altura corresponda a 20 km/h.
A área de cada rectdngulo corresponde a lh h X 20 km/h = 10 km. Justapor os rect(lngulos por baixo das linhas representativas da função v = v ( t) ..
44
2.6.3 Velocidade instantânea
Vamos agora procurar responder à seguinte pergunta :
Como conhecer realmente a veloci
dade de um móvel, animado de movi
mento variado, num dado instante ? Para isso vamos analisar o gráfico
espaço-tempo de um movimento variado
indicado na fig. 2.13. �o determinar a velocidade no instante t = 60 mn,
isto é, no ponto B da trajectória, a
15 km do ponto de partida ? Começamos por determinar a velo
.cidade média entre os pontos A e O, no intervalo de tempo
6t = 90 mn - 30 mn :
66 Vm = declive d a secante AO = --
=
87,5 km - 50,0 km
90 mn - 30 mn
= 3·7,5 km/h.
6t 37,5km
= ---60 mn
Evidentemente que só por mera coincidência o valor desta velocidarle média será o valor da velocidade em B.
Em seguida, vamOs encurtar o intervalo de tempo 6 t que contém o instante t = 60 mn. Seja o intervalo
60,5 mn - 59,5 mn = 1 mn, correspondente aos pontos M e N, muito mais próximos de B, como se indica na fig. 2.14.
Suponhamos que o cálculo do valor
da velocidade média, neste intervalo, deu o resultado:
Vm = declive da secante MN = 36 km/h.
De certo que este valor ainda não coincide 'com o va:lor da velocidade no
ponto B, mas não haverá dúvidas de

�:�.:-. . " .. -'� E':.: . :�-':': .. _ :::�. �� ê"'::�L - -:r-�
� :"� ::' ; 3"1E ::::::E:��g � . I:::: . "., : ._:>··;�: . . ,,�;T.,,-= ,,�',::. � : .:C. _
Fig. 2.13 Grãfico do movimento vari'ado e do movimen,to uniforme equivalente no
interv8ilo de tempo
t:,t = 90 mn - 30 mn.
� Fig. 2.14 Troço M B N, ampliado, na vizl:-
nhança do ponto B do gráfico antenor.
que deve estar muito mais próximo. Continuando a encurtar os intervalos de tempo na vizinhança do ponto B, fazendo, sucessivamente, /}, t = 1 5, /}, t = 0,1 5, /}, t = 1 ms, cada vez a velocidade média (velocidade que o móvel teria, '110 intervalo de tempo /}, t, em movimento uniforme) se 'aproximará mais da velocidade instantânea em B (pois, para intervalos eada vez mais pequenos, são também cada vez mais semelhantes os movimentos variados a um movimento uniforme de velocidade VB) '
E para o intervalo de tempo de 2 p. s ( entre 60 mn + 1 J.L s e 60 mn - 1 p. s) já podemos, ,com erro diminuto, tomar o valor da velocidade média para valor da velocidade instantânea. Este erro diminuto vai sendo ainda cada vez menor à medida que /}, t � o (tende ou converge para zero) .
Isto quer dizer que as velocidades médias vão tendendo para a velocidade instantânea à medida que /}, t :--+ 0, o que, no limite, nos permite escrever:
VB = lim v ... t:, t-+-O
/}, e - lim .-
t:, t-+ O /}, t
Para ultrapassar a dificuldade desta operação transcendente - passagem ao limite - vamos utilizar mais uma vez o processo gráfico.
Assim (fig. 2.15) , podemos verificar que as sucessivas velocidades médias podem ser ealculadas pelos declives das secantes correspondentes A' O', A O, M' N', as quais vão tendendo 'para a tangente B T no ponto B do gráfico quando /}, t :--+ o. (10) .
45

Fig. 2.15 As secantes 'sucessivas A'O', A O, M'N', respe1t<a.nt-es a troçOS! da curva que contém o ponto B, vão tendendo para a tan�ente BT à medida que
6 t -+- o . O vMor da velocidade instantânea! em B é; Vs = tg a .
Respostas ao Ex. S :
1 ) VA = 6,0 km;h ; VB = 4.,0 km/h.
2) A 3,6,0 km. 3) Móv�l A : no locad de origem ;
Móvel B: 12,0 km à ft'eIl;te' desse local. 4) 'Sim, po1:s o màvimen,to de B foi sempre
unld'orme mesmo 'antes do Início da contagem dos tempos..
o
Trajectória M A B . . .
F· �
tg. 2.16 Vector VIelocidade média, 1) .. , entre
46
os pontos A e B da trajectória des-crita pelo móvel M, e vector velo-
-+cidade instantânea no ponto A, v ... :
a primeira tem a diTecção da corda
AB e a segunda 'a da tangeme à ,trajectória no ponto A.
B O declive desta tangente RT ( isto é, tg a) que nos dá o valor da velocidade
instantânea no ponto R, ou seja :
2.6.4 Vectares velocidade média e velocidade insiamtânea
Consideremos a trajectória descrita pelo ponto material M - fig. 2.16 - e os pontos A e R, correspondentes aos instarites t e t + b, t.
A velocidade média neste intervalo de tempo b, t e a velocidade no ponto A (ou seja, no instante t ) terão de ser definidas em direcção e sentido, uma vez que já foram definidas em valor numérico.
Se 'Considerarmos R muito próximo de A, de modo que, ,com erro diminuto, se possa substituir 'a trajectória cur-
,.-.... vilínea A B pela trajectória rectilínea - -+-AB, o vector velocidade média, vm, neste intervalo de tempo b, t, terá as características seguintes :
1) linha de acção - secante AB 2) sentido - o do movimento 3) módulo : �
AR
b, t L" t
à medida que b, t ---+ O, 'cada vez se
confundem mais as trajectórias curvilínea e redilínea, o ponto B tende a
,confundir-se com A e a secante A B tende a coincidir ,com a tangente em A :
-+-nestas condições, o vector Vm tende para
-+-o vector VA, que representa o vector velocidade instantânea no ponto A.

Resposta. ao Ex. 4 :
1)
I Fig. 2.1"1 Gráficos velocidade-tempo referen
tes aos móveis .lndicados no exercído 4. O rectângulo [O C D E] é
um dos doze rectângulos a que se !refere a S'Uge.stão.
2) O automóvel B l'eva '2,0 h a efectuar o
percurso e o ·3lUrtoInóvel A leva 2.h 15 mn.
Nota 10:
Recorda-se da MaJtemática que declive de uma curva num ponto é o declive da tangente
à curva nesse ponto.
Por i'sso, na i�g;. 2.1'5, tg a mede o delC'live
da curva e = f (t) no ponto B.
Pergunta. 5:
O 'gráfico espaço-tempo é a imagem geo
métrica da lei horária, e = f (tt) . Poderá con
fundir-se com a trajectória do ponto material
a cujo movimento di'z respeito ?
Pergunta 6 :
Os elemenJtos - valor numéri'CO, di,recção
e sentido - dos vectores velocidade m�dia e
velocidade instantânea poderão ser determina
dos num mesmo gráJfico ?
Este tem, por isso, as seguintes características :
1) linha ,de acÇão - tangente à trajectóri� no pontg Aj
2) �ntido - o do IDC.Wimentq; 3 ) .:fnódul:o:
= 'lim 'V = lim 'V". l::, too+o l::, t�Q b,. í
(11)
Qual será o significado físico desta velocidade instantânea ?
É a veloci4ade que o móvel, animado de movimento variado, possui no instante considerado e que manteria se, a partir daí, o seu movimento se tornasse rectilíneo e uniforme.
.
Recordemos, como exemplo, o caso vulgar da funda ( pedra suspensa de dois fios, ligados à mão do experimentador e posta por este em movimento de rotação) . No instante em que se lavga a pedra da funda, a velocidade que a pedra possui é aquela com que segue no seu movimento rectilíneo e uniforme tangencial à trajectória circular no ponto de largada. (11) .
2.6.5 Vectores aceleração média e aceleração instantânea no m0-vimento curvilíneo e variado
o movimento curvilíneo é, naturalmente, liIquele movime:p.to em que o ponto material móvel descreve uma linha curva ' (circunferência, elipse, parábola, ou outra qualquer) .
Do mesmo modo que se definin a grandeza velocidade para indicador da rapidez (ou celeridade) do movimento, - variação da medida do percurso óu deslocamento por unidade de tempo -,
41

Nota 11:
Em Física, aparecem muitas vezes valores
de grandezas muito próximos de zero, valores
éstes a que se dá o nome de muito pequenos. Os muito pequEmOS da mesma ordem, que
é costume eonsiderar em Física ( correspon
dem' em MatemMi.ea, às variáveis interdependentes cujos valores se vão. aiproximando. de zero eom a mesma rapidez e se chamam
infiniMsimos da mesma ordem), têm valores
correspondentes truis que o seu quociente tem sempre um valor finito -e não nulo.
l:!. e -+-Por isso, o. módUilo. -- do vector v ..
l:!. t ( fig.. 2J16) , no. qUall as grandezas l:!. e e l:!. t vão. diminuindo. e tendendo simultaneamente
pa:ra zero, é €Xipl'eSSO por um quociente de dois muito pequenos da mesma ordem 'e, Po.rtanto., o seu va:lor ll!rn.ite nem é indeterminado.
O a (-) , nem tnfinitanJJente grande (- = 00 ) -,
O O antes tem um valor .sempre bem determinado.. Esse va:lor limite ,é o. módulo. da velocidade instantânea (velocidade no ponto A ou veloci
dade no instan-te t) .
Exemplo.:
Num tubo de iões, v-erifiearam-se, quanto ao. deslocamento do.s iões, as seguintes' me
didas :
{ l:!. t = 1 ms = 0,001 s
l:!. e = OilO cm.
O valor da velocidade média dos iões será
então, durante 1 miUsegundo.:
48
l:!. e 0,'10 cm vm = -- = = 100 em/s
l:!. t 0,001 s
= 1,00 m/s
vai definir-se uma nova grandeza, a aceleração, para medir a variação da velocidade por unidade de tempo.
A a:celeração será, por isso, represen� tada por um vector ligado ao ponto material móvel, tal -como sucedia com a velocidade.
I. Em primeiro lugar vamos determinar os elementos do vectCYr acelerar
-+-ção média jm, no intervalo de tempo, D, t = t2 - tlt entre Os instantes a que
-+- -+-ccrrespondem -as velocidades Vl e V2 (figuras 2.18 e 2.19 ) , isto é, os elementos do vector definido por :
D, t D, t
Para determinar o valor numérico jm da aceleração média, vamos utilizar o gráfico velocidade-tempo (fig. 2 .. 18) . Assim, no instante '1;, a velocidade tem o valor v, e no insta:nte t, tem o valor v.i no intervalo de tempo D, t = t, - t"
o valor da velocidade varia de V2 - Vl ; a razão
-- - --- = jm D, t D, t
depende do intervalo de tempo D, t (pontos A e C do gráfico) e dá o valor da a:celeração média, jm, neste intervalo.
Tal valor também é dado, no gráfico velocidade-tempo, pelo declive da secante A C, isto é, pela tg a.
Se, p. ex., for :
{ tI = 1,0 mn VI = 20 km/h
será :
{ to = 5,0 mn V2 = 60 km/h
60 km/h - 20 km/h j".. = = 10 km/h/mn 5,0 mn - 1,0 mn

v ( ve locidade)
t( tempo)
Fig. Z.18 O valor numérico da aceleração
6 v média jm = ._- é dado pelo de-
6 t l:. v
cHve d a secante A O = tg a = -- , 6 t
no grâfico v,elocidade-tempo.
O valor numérico j da aceleração no ins
tante t (a que corresponde' o ponto B do gráfi(!o) , é dado pelo declive da tang,ente BT,
ou seja:
tg a' !im 6 t-+O 6 t
o A 8 .. . =TRAJ ECTÓRIA B
-+ Fig. Z.19 O v,ector ace!leração média jm tem a
4
.direcção e o sentido do v.ector dife�
6v relIlça � : a sua ,projecção sobre a
6 t tangente à trajectória em A define
-+-o vector AA' que tem o 8entido do
movimento. Isto significa que entre os pontos A e B o movimento é acelerado (o valor numérico da velocidade a'llmen tou) .
. Isto é : a velocidade variou em média
10 km/h em cada minuto.
Finalmente, para determinar a di
recção e o sentido do vector aceleração -+
média jm no intervalo de tempo t:, t,
vamos utilizar a trajectória OAB . . . do
ponto material móvel ( fig. 2.19).
Sejam os pontos A e B corresponden
tes ao intervalo t:, t < 1, onde estão
representados os correspondentes vec-+ -+
tores velocidade VJ e Vz : o vector acele--+
ração média jm obtém-se construindo,
pelas regras da subtracção vectorial, o -+ -+ -+
vector diferença t:, v = vz - V J .
Dividindo, a seguir, o comprimento
deste vector por t:, t < 1, obtém-se -+.
o 'comprimento do vector jm - maior,
portanto, que o comprimento do vector -+
t:, v.
II. Podemos agora determinar o -+
vector aceleração instantânea j. Seja,
por exemplo, a aceleração no instante
t = 3,0 mn. Para isso, tomam-se
(fig. 2.18) intervalos de tempo t:, t cada vez menores, como t:, t = 0,2 s,
t:, t = 2 ms, t:, t = 2 fLS, contendo sem
pre o instante t = 3,0 mn. Deste modo
o valor da (J)(Jeleração média t:, v (valor
t:, t constante que teria a aceleração se a
velocidade variasse uniformemente de
t:, v no tempo D . t) vai sendo cada vez mais próximo do valor da aceleração no instante t = 3,0 mn (pois cada vez se
podem considerar mais análogos o
movimento real e aquele em que a ace
leração fosse constante e igual ao
valor que tem no instante t = 3,0 mn) .

Besp08ta à pergunta 5:
Não, pol'que grM1co de e = f (t) e 'trajec
tória: são entida:des sempre distintas : aquele
é um ente ma:teaná:Uco, esta é um percurso
efectuado ,realmente pelo ponto materiall
(ente físico) ; aquele exprime a lei do ·movimento, nesta m:edem"'8e os <:omprim.eo:tos dQS
percU!I'9os.
Fig. 2.20 e Exercício 5:
o movimento variado diz-se a<:elerado
quando li velocidade aumenta e retardaJdo
q1UIlndo .'a velocidade dimM!.ui. M ostra4" que, no 11,.0 ,caso, a projecção do vector aceleração sobre a tangente à traject6ria define um v,eotor que tem o sentido do movimento e que, no 2.0 caso, taJ projecção define um vector que
tem sentido contrário ao do movimento.
Resolução:
1) A ,resposta à 1.' parte 'encontra-se expli
� citaanenue na fig. 2.,1'9: o ve·ctor AA', compo-
� nente do vector jm nal d1'I'ecção da ,tangente
AT à trajectória no ponto A, ,tem o oontido do movimento.
2) A respoSlta à 2." paJl1te encontra-s-e na
� � figura 2.20: a componente AA' dQ vector jm,
na direcção da tangente AT, tem agora sen
tido ccxntrâriQ ao do movimento.
50
à medida que !:::, t � O a secante AO vai tendendo para a tangente BT.
Por isso, no limite, podemos escrever :
1) quanto ao valar numérico da aceleração instantânea j :
.6 v j =1im -- = declive da tangente BT
.6 t-+ O .6 t
= tg a' (fig. 2.18)
2) quanto à direcção e sentido, será a direcção e o sentido dados pela
� posição limite do vector jm, quan-do !:::, t 1---+ O (fig. 2.19') :
+ � j = 11m jm .6 t+ O
= lim
+ Lw D. t -+< o· .6 t'
2.6.6 Aceleração tangencial e aceleração centripeta
Tanto OS vectores velocidade ,como os vectores aceleração podem somar-se e subtrair-se segundo a regra do triângulo já estuda,da e várias vezes aplicada. 'Estas operações podem envolver dois problemas :
1.0 - a composição de vectares, que consiste simplesmente em determinar o vector soma de dois ou mais vectores componentes ;
2.° - a decomposição de um vectar em dois de que ele se possa considerar a soma vectorial : este problema sÓ fÍ'Ca bem determinado se tarem dadas as duas direcções.
Vamos então decompor o vector ace-�
leração, jA, no ponto A da trajectória - fig. 2.21, ( a ) -, projectando-o sobre a tangente AT e a nOrnlal AO (nota 12) , à curva, no ponto A.

,
® , , , \ C (CENTRO DE CURVATURA)
A
B
-+-Fig. 2.21 a) Decomposição do vector aceleração no ponto A da traj'ectória, jA) nas suas compo-
-+- v' -+--nentes centrípeta j, (de valor numérico j, = -- ) e tangencial j, (de valor
6,v numérico j, = lim -- ) .
6,t-+-o 6,t
r
b) Centros de curvatura ,e raios de curvatura da tra;ject6rioa curvilinea nos
pontos A e B: A { C (A) e B { C (B) rA rB
�posta à pergunta 6:
-Não. - Os valores numéricos são determinados
no gráfico espaço-tempo, I'espectivamente,
pelQ declive da seca;nte correspondente aos
instantes t, e t, + 6, t e pelo declive da tan
gente no ponto do grãfico corr.espondente ao instante t"
- As direcções são indiçadas, na trajectó
ria, respectivamente, pelas direcções da s'eca;nte e da tang,ente à trajeotória, aquelaJ cor
respondente a'os instantes t, e t, + 6, t, esta corr.espondente ao instante t"
- O sentido, em qualquer dos cas'os', é o
do movimento.
Nota 12:
Para determina;r a nOl'ffial a uma curva nos
pontos A, B, etc. - fig. '2.21, (b), substituiu
-se o arco de curva na vI�inhança dos pontos, A, B, . . . , pelos arcos de drcunferência tan
g.entes à curva nesses pontos. Os raios' rA ,
o primeiro vector componente � -+-AA' = jt chama-se aceleração tangen-cial e o segundo vector componente --+ +-AA" = jc chama-se aceleração centrí-peta (por estar dirigido para o centro
de curvatura) ou normal ( por o raio de curvatura ser perpendicular à curva no ponto A).
N o caso da . trajectória ser plana, o valor numérico da aceleração total será :
como se deduz da fig. 2.21 (a) , aplicando o teorema de Pitágoras (da Geometria). Poder-se-ia demonstrar que :
51

rB, . . • , daIS cireU!llferênci>ai\l tangentes nes.sefl
pontos, e os seus centvos, eha:maan-s-e respectivaanente os raios de curvatura e os centr08 de curvatura da; curva nesses pontos.
Perguntas 7, 8, 9 elO:
7. Qual é o sentido da acel�ação tan�en
cial quam.do o movimento variado é acelerado? E quando é retardado?
8. Num movimento de trajectória recti
línea, qual das componentes da aceleração se anula 1
9. No movimento rectilíneo e unifO'T'me há acel�ação?
·IO. No movimento uniforme' e de trajectória curvilínea, qual das componentes da aceleração se anula?
Pergunta 11:
Indicar a semelhança e a diferença entre o
significado corrente de aceleração e .e> valor
da grandeza acel�ação média definida no texto 2.6.5, 1 .
Norte
:
Este
-+- -+-Fig. 2.22 Conhe'cendo os vectores v, e v"
� determinar o v·ector v e o ângulo a .
52
1) O módUlo da aceleração tangencial é dado por
jt = 1im D.t-.O: l::.t
Esta expressão mostra que o
módulo jt mede a variação do
valor numérico do vector velocidade por unidade de tempo;
2) o módulo da aceleração centrípeta é dado por
ic = r
sendo v o valor numérico da velocidade no ponto A da curva e r a medida do raio de curvatura neste ponto.
-+-O vector jc é um indieador da variação do vector velocidade em direcção.
2.6.7 Exercícios sobre a aceleração e a composição e decomposição de velocidades
1.0 - Um carro, que seguia com a velocidade de 90 km/h, travou dura7J,te 3,0 s, baixando a velocidade para 1,5 km/h. Determinar o valor da aceleração média durante a travagem.
Resolução:
1 km 1000m v, = 90 km/h = 9OX � = 9OX ----
1h 3000s
= 25,0 m/a v, = 415 km/h = '1'2,'5 m/s
D.v = v, - v, = ('1:2,5-25,0) m/s·=-1�·,5 m/a
D. t = 3,0 5

Bespostaa às perguntaa 7, 8, 9 elO:
7. A aceLeração tangencillll tem o \Sentido do movimento qUaIlldo ·est<e <é variado e acelerado, tem 'sentido contrário ao
do movimento qU:allldo este é variado e retalrdaido.
8. Anul�se a aceleração centrípelta, visto qu� não há variação da velocidade em
direcção ,(ou ainda porque, sendo, numa trajectória rect:i'linea, r = 00, tem-se:
v' v' j, = - = - = o
r 00
9. Não há, porque a velocidade não varia nem em ,grallldeza, nem em direcção.
10. Anula--se a aceleração taIllg.encillll, uma
vez que a velocidade tem vaJ!o.r numérico .constalllte oe s6 vaa-il8. em direcçãQ.
Resposta à pergunta 11:
Em ,termos correntes há aceleração de um móvel quando há aumento de velocidade.
E qU8Jnto mais se alCeleraT maior será o aumento de v,elocidade por unidade de tempo. E,ste signifi'cado coincide com o
6.v do módulo da aceler8ição média jm = --,
6.rt
visto que este quociente mede a variação de velocidade por unidade de tempo. Isto quanto à semelhalllça.
Pelo que resperta à diferença, notemos 6. v
que o quocie:nte -- é llIlgébrico, podendo, 6.rt
por isso, indi'C8Jr também variações negativas, ou seja diminuição de ve1,ocidade.
Ora, na .r1nguagem corrente, a diminuição de velocidade corresponde a travagem ou desaceleração.
Portanto:
6.v
Lü
V, - v, -12',5 m/a ---=----
6.t 3,Os
= - 4,2 m/e'
A velocidade diminuiu de 4,2 m/s em cada
segundo.
2." - Um navio desloca-se com a velocidade
própria de 25,0 km/h. Encontra uma
corrente marf.tima com a velocidade de
"1,0 km/h na direcção Este-Oeste e diri
gida para Oeste. Como o navio pretende
seguir a rota Sul-Norte, que ângulo
deverá fazer o eixo longitudinal do navio
com esta direcção e qual será então a
sua ve1,ocidade em relação à Terra?
Resolução:
� RepreseDJtamos por v, a velocidade própria
� do navio e por v, a velocidade da corrente - fig. 2.122,
O ângulo a há-de 'ser 1laJ. que a V'elocidade -+-
resultante v terá a direcção Sul�Norte.
1) Como o tri:ângulo [OAB] é rectângulo em A, temos, pelo teorema de Pitágoras:
v,' = v' + v;'
25' = 'Ii' + 7' => v = V 6'26 - 49
= 24
A veloc�dade resultante é, ,pois, de 24,0 kmfh.
2) Na figura ,temos também (por definição de sen a):
v. 7,0 ('1 o sen a = � = 25,0 = 0,280 -> '" =� 16 '4)
53
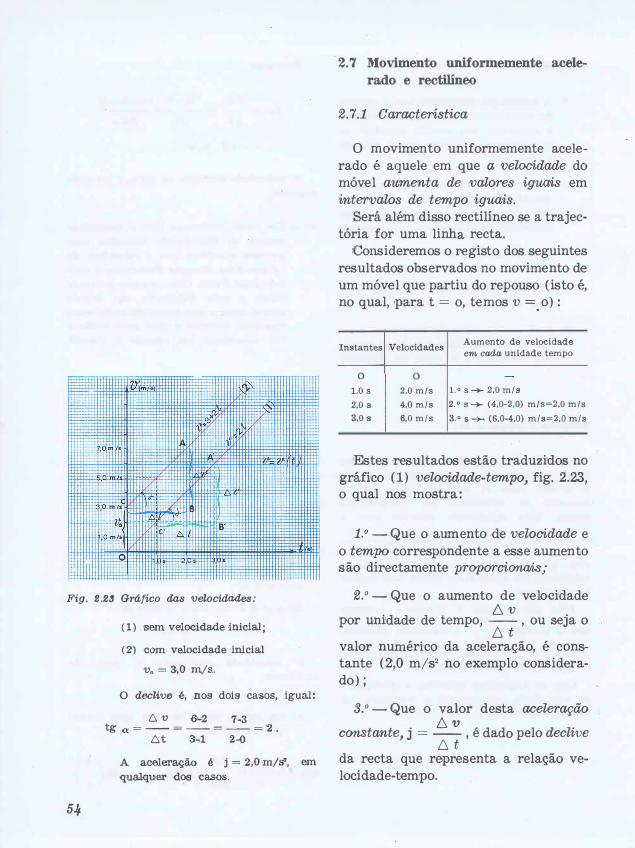
Fig. 2.23 Gráfico das velocidades:
54
(1) sem velocidade inicial;
('2) 'com velocidade inicial
v. = 31,0 rrv's.
o decUve é, nos doi:s ,casos, igual:
6. v 6-'2 7-.3 tg a=--=-- = �-=2.
6.t '31.,1 2-0
A aceleração é j = 2',0 m/s", em qualquer dos ca:sos.
, 2.7 Movimento unifonnemente acele
rado e rectilíneo
2.7.1 Característica
o :movimento uniformemente acelerado é aquele em que a velocidade do móvel aumenta de valores iguais em intervalos de tempo iguais.
Será além disso rectilíneo se a trajectória for uma linha recta.
Consideremos o registo dos seguintes resultados observados no movimento de um móvel que partiu do repouso (isto é, no qual, 'Para t = o, temos v = . a) :
Instantes Velocidades
o O
Aumento de velocidade
em cada unidade tempo
1,0 s 2.0 mi s 1.. s -+- 2,0 mis
2,0 s 4,0 mi s 2,· 3 -+- (4,0-2,0) mi 3=2,0 mi s
3,0 s 6,0 mls 3.· s -+< (�,O-4,O) m/s=2,O m/s
'Estes resultados estão traduzidos na gráfico (1) velocidade-tempo, fig. 2.23, o qual nos mostra :
1.0 � Que o aumento de velocidade e
o tempo correspondente a esse aumento são directamente proparcionaisj
2. ° �Que o aumento de velocidade
·d d d .6. v .
por um a e e tempa, -- , ou seja o .6.t
valor numérico da 8iceleração, é cans-tante (2,0 m/s2 no exemplo ,considerado) ;
3.0 � Que o valor desta aceleração
t t . .6.v'd d
. cons an e, J = -- , e a o pelo declwe
.6.t da recta que representa a relação ve-locidade-tempo.

Fig. 2.24 Gráfico da aceleração no movimento uniformem€iIl!te acelerado. ' A área assinalada iiIldica a vaTi1ação 6. v de v.e1ocidade no intervalo de tempo 6. t = 4,05- 1,0 5, parque:
6. v =j.6.t.
Exercicio 6:
Escrever as equações das rectas representaUvas da velocidade nos dois casos Indicados na fig. 2.23, extraindo do gráfico velocidade-tempo os valores necessários.
Pergunta 12:
As equações
v = 3,0 + 2,0 t
são 'equivalentes em Mrutemática, mas não em Física.
EX!plicar porquê.
Se, no iní-cio da contagem dos tempos, o móvel já viesse animado de uma certa velocidade, p. ex., Vo = 3,0 m/s, que se 'chamá velocidade inicial, só seria necessário, no quadro anterior, alterar os Valores da velocidade (2.a coluna), que passariam a ser, respectivamente: 3,0 m/s, 5,0 m/s, 7,0 m/s, 9,0 m/s. Os aumentos de velocidade por unidade de tempo (3.a coluna) mantinham o seu valor ,constante de 2,0 m/s. O gráfico correspondente a ,este movimento assim registado é traduzido pela recta (2) -
q ue é paralela à recta (1), porque têm o mesmo declive (fig. 2.2'3,) .
Isto significa que a aceleração dos·' dois movimootos é a mesma e que ainda são válidas as conclusões anteriores.
2.7.2 Lei das acelerações e lei das velocidades
I - Lei das acelerações
Resulta das características do movimento uniformemente acelerado e rectilíneo o seguinte:
- a aceleração centrípeta é nula, porque, sendo a trajectória rectilínea, a velocidade não muda de dire'cção;
---' o vector '8Jceleração, reduzido assim à sua componente tangencial, está assente na trajectória e, como o movimento é acelerado, tem o sentido do movimento;
- o valor numérico da aceleração é
,constante:
j = k
55

Resposta à pergunta 12
As equações
v=3+2t
v = 3,0 + 2,Ot
são matemllJticamente .equivllJlentes porque
ambas conduZiem aos mesmos resultados nu
méricos, rpa:ra os meSlmos vaJores, certos, das
variáJvei:s. Não o são em Físka porque os va
lores dllJS variãveis corI"espondem sempre a
valores resuJta:ntes de mediçõesl (i.glto é, a
medidas) e, ·como tal, 81Íectados' de incerteza:
são pois valores aproximados.
Na equação v = 3 + 2t a incerteza das medidas só gara:nte a exactidão de um alga
rismo, ao passo que na equação v = 3,Q.+ 2,0 t
a inceI"teza d!llS medi<las jã é menor e gara:nte
a exa;ctidão de dois ailgarismos.
NllJ teori,a. dllJS medições conside,ra-se que
um llJlgarisrno é exacto qua:ndo a incerteza é
inferior a uma umdllJde da sua ordem decimaL
Por exemrplo: na medição de uma área com
erro inferior ou �guaJ a 0.,2 cm', 'a medida
determinada foi de 18,3 ·cm'.
N este resultado, os algari-smos 1 e 8 são
exactos porque a i:ncerte�a é menor do que
uma dezena e do que uma unidaide, mas o
algall"ismo 3 é aproximado porque a incerteza
é s�erior a uma décima..
Nas medições os termos exacto e verda
deiro não são .equivalentes.
O valor verda:deiro de UInal grandeza deter
minada por meio de medições nUllJ.C8. é conhe
cido (no capítulo dedicado aos sistemas de
unidades voltarem'os a 8Jbordar eslle aJSS'Unto).
56
Tud0' 0' que acaba de dizer-se p0'de ser resumid0' n0' seguinte enunciad0', também <!0'nhecid0' p0'r lei das acelerações:
No m0'vimento unif0'rmemente a.ce·lerad0' e rectilíne0', a aceleraçã0' é constante em direcção, sentido e valor numérico.
O gráfic0' a<!eleraçã0'-tempo (fig. 2.24) é p0'is uma recta paralela a0' eixo d0's temp0's. A área assinalada representa a variaçã0' da velocidade n0' interval0' de temp0' 6. t = 4, 0 s - 1, 0 s. Com efeit0' :
j= 6. v
= >6.v=j. 6.t=2, 0(4, 0-1, 0) = 6.t
=2, OX3, 0=6, 0=área [ABCD]
A variaçã0' de vel0'cidade f0'i 6, 0 m/s, portant0' . Com0' n0' m0'viment0' uniformemente acelerad0' a aceleraçã0' é c0'nstante, este m0'viment0' é ideal para definir a unidade de a:celeraçã0'. Vam0's defini-la n0' sistema internaci0'nal de
. unidades (SI) ltl
6.v j =
.6.t
Se para 6. t = 1 s, se verificar 6. v = 1 m/s, tern0's:
11n/s j = = 1 m/si = 1 m. 8·$
1s
O metr0' p0'r segundo por segund0' 0'U metro por segundo quadrado (m/s2) é, p0'rtanto, a aceleração do móvel, animad0' de m0'viment0' unif0'rnnemente acelerad0', cuja velocidade aumenta de 1 m/s em cada segundo.

Nota 13:
A lei das velocidades também pode ser
deduzida: considerando a definição de acelera
ção. Assim, teremos S'Ucessivamente:
v. - velocidade inicial ou v-elocidade no ins
tante zero
v, = Vo + j (j = acrés-cimo na 1." unidade de
tempo)
v, = Vo <+ j + j = Vo + 2 j (j = acréscimo na 2." UiIlÔ.dade de tempo)
v, = Vo + 2 j + j = Vo + 3 j (j = acréscimo na
3." unidade de tempo)
V,., = Vo + (t�1)
V, = Vo + (,t�1) j + j = V. +.t . j
'Demos, pois, firnalmente
V, = V. + j t
em que V, é .o v8Jlor da v,eIocid8Jde no Instante
t e 'Se costuma 'repres'entar simples-rnente
por v.
Resposta ao Exercício 6:
1) Recta (!1):
Vo = O;
6V (6,0'-2,0) m/s j = -- = -----
6 t (3,0-1,0) s = 2,0 m/s' .
Portanto:
V = 2,0 t (SI)
2) Recta ('2):
Vo = 3,,0 m/s;
6V (7,0-3,0) m/s
j = -- = ------6 t (2,0 -0,0) 'S
2,0 m/s'.
Portanto:
V = 3,0 + 2,0 t ('SI)
II - Lei das velocidades
No gráfico velocidade-tempo (fig. 2.2'3) podemos ler:
1.0 - Que o aumento de velocidade é proporcional ao tempo;
2.0 - Que a constante de proporcionalidade é o valor numérico da aceleração '<lado pelo declive da recta representativa da função v=v (t).
Podemos então escrever:
.611 -- = j < => .6 v = j. 6t
.6t
No caso do intervalo de tempo .6 t ser 'contado a partir do instante zero e ser Vo a velocidade inicial, a equação anterior permite escrever
v - Vo = j. t <-=> v = Vo + jt
Se o móvel parte do repouso é
Vo = O e vem simplesmente
v = j t
Em qualquer dos casos verifica-se uma lei que é geral para o movimento uniformemente acelerado - a lei dluJ velocidades - e que- se pode enunciar do seguinte modo: o aumento de velodade é directamente proporcional ao tempo em que ocorreu. (13).
As duas equações das velocidades acima escritas representam-se graficamente por rectas (fig. 2'.23), as quais passam ou não pela origem dos eixos
57

Fig. 2.25 Gl'MIco v,elocidade-1ernpo no movi
mento uniformemente acele�adO'. estando O' móvel animado da velocida
de Vo = 100 m/mn quandO' se mi'Ciou
18. contag,em dos tempos (>t=o). O de
div.e da recta AD dâ O' vaàor da aceleração:
l:!.v tga = -- = j .
l:!. t
Fig. 2.26 Gráfico velocidade-tempo no movi
mento uniforme. A âroo. tr3Jcejada
indica a medida; do 'Percurso efec
tuado no intervalo de tempo
l:!..t= t,-t".
58
conforme, respectivamente, não existe ou existe velocidade inidal. O valor desta ,correspoIide à ordenada na ori
gem da recta . O valor da aceleração j corresponde ao decli ve da recta porq1,le
� v . tg a = -- = J. � t
2.7.3 Lei dos espaços (ou dos deslocamentos)
Consideremos um móvel a percorrer a trajectória com movimento uniformemente acelerado e animado da velocidade de 100 m/mn no início da contagem dos tempos (instante t = o) . Esta velocidade é a vel ocidade inicial 170, •
A partir dos valores das velocidades verificadas em vários instantes constrói..ge o gráfico velocidade-tempo para este movimento - fig. 2.25. O gráfico mostra-nos uma semi-recta A.D, oblíqua, com ordenada na origem Vo e cujo declive nos dá o valor da a'celeração j, ,como já vimos.
O gráfico velocidade-tempo, no movimento uniforme é uma semi-recta paralela ao eixo dos tempos - fig. 2.26. A área indicada a tracejado dá o valor do percurso no intervalo de tempo
� t = t2-t,
porque e = v. � t
Pergunta-se: no movimento uniformemente variado, o valor do percurso poderá ser também representado pela área limitada pela linha representativa da função velocidade-tempov = v (t ) -, pelas ordenadas extremas e pelo eixo dos tempos, isto é, pela área do trapézio [ADEO], indicado a tracejado na fig. 2.25 ?

Fig. 2.27 Gráficos velocidade-kempo do móvel
real (sem�-recta ÁD) e do móvel
imaginári'O (linha quebrada.) no
mesmo intervalo de tempo. O móvel
imaginário segue sempre a.trás do
móvel real. A distância percorrida
pelo móvell imaginário, 'em 4 mn, é
Irepresentada pelas área.s dos ,rec
tângulos 1, 2, 3 e 4.
Para respondermos à pergunta vamos pensar num móvel imaginário que, passando no mesmo ponto que o móvel real no inSta;nte t = o, com 'a mesma velocidade Vo = 100 m/mn, seguisse depois a mesma trajectória com o seguinte movimento (fig. 2.27) ;
no 1.° minuto - vel. constante de 100m/mn;
no 2. ° minuto - vel. 'constante' de 2 00m/mn;
no 3.° minuto - vel. constante de 300 m/mn;
e assim sucessivamente.
Este móvel imaginário segue sempre atrás do móvel real e, em qualquer intervalo de tempo, percorre menor distância que o móvel real .
O percurso efec�uado, p. ex. , em 3 mn, é representado pelas áreas tracejadas nos rectângulos 1, 2 e 3.
Vamos agora supor que o móvel imaginário mantém a velocidade constante, não em intervalos de tempo de 1 mn, mas em intervalos de tempo menores, p. ex. de 10 s, como se indica na fig. 2. 28. Então, nos primeiros 10 s, a velocidade é de 100 m/mn, após o que passa para a velocidade do móvel real, que mantém nos lOs imediatos. No fim destes, retoma a' velocidade do móvel real, que manterá nos 10 s a seguir. E assim por diante. As áreas tracejadas dos rectângulos sucessivos representam a medida do percurso efectuado pelo móvel imaginário durante t minutos.
Torna-se agora claro que quanto menores forem os intervalos de tempo �m que o móvel imaginário mantém as
59

k U-(WI/nin}
400
li 300
L t20�
60
suas velocidades, tanto mais de perto seguirá o móvel real (mas seguindo sempre atrás). Para intervalos de tempo de, por exemplo, 2 milisegundo (2Xl0-3s = 2ms), os móveis seguem praticamente ,colados e as áreas dos sucessivos rectângulos aproximam-se muito da área do trapézio [AEGO]. Verificamos assim que esta área representa, de fac�o, a medida do percurso efectuado pelo móvel real durdnte o tempo t.
Passemos então -ao cálculo da área do trapézio [AlEGO], 'cujo valor nos vai dar a medida e do percurso efectuado pelo móvel real. Atendendo -a que o acréscimo /':, v de .velocidade, durante o tempo t, é, pela lei das velocidades, /':, v = j . t, podemos escrever, sucessivamente:
. ,; I
. :, 1 ! � !!:' !! '�li-"-".ll1"," ,:;j. i!;,';' lHiiHjIIH'jilIHil ! i;l
Fig. S.B8P<3ll'a i.nterv'Moo de . i1Jemrpo D. t caJdJaJ v;ez
menores, o móvel
imaginári,o Slegu,e
mai's d:e; perto o móvel l1eaft e 8iS áreats t-ra'cI€)jadas
aproxima.Il1J-'se cada, vez maJi\!; da áI'lea do l\Jrapézio [A E G O].
Esta á'!'lea indiC'aJI'á a medida do percurso ,e;foectuadQ pe
lo móveJl MaIl.

Nota 14 :
Os percursos 'a que se r·efere a lei dos
espaços iniciJam-'se sempre na origem dos eS!
paços (para owtros quaisquer a lei não se
aplica)..
A constante de propoIlciQnalid8lde da lei dos
1 espaços >é, como se viu, - j. Daqui 'se conclui
2 .
que a a.celer8iÇão oé numerkamente igual ao
dobro da medida do deslocamento efectuado
na ,primeira unidade de tempo.
Com efeito, para t = '1, é:
1 e, = - j . P => j = ! e, o
2
Area [AEGO] = Area [AFGO] +Area [AEF]
- - 1 - -e = OA X OG + - . EF . AF
2 Portanto, teremos:
1 . e = Vo • t + - . jt . t
2 E. finalmente:
1 e = vo t + - jP
2
Esta é a equação horária dos espaços (ou dos deslocamentos), no movimento uniformemente acelerado e rectilíneo, no casb de se iniciar a contagem do tempo quando o móvel está na origem dos espaços. Se, além disso, o móvel parte sem velocidade inicial, isto é, se para t=o é também vo=o, a equação toma a forma mais simples:
1 . e = - J t2 2
Como a a:celeração j é constante, podemos e::;crever:
e 1 e -=- j ou - = k .
t2 2 t2
Nesta expressão pode ler-se a lei dos espaços do movimento uniformemente acelerado:
A medida do percurso realizado por um móvel em movimento uniformemente acelerado e rectilíneo, que parte do repouso, é proporcional ao quadrado do tempo gasto no percurso. (14).
61

Nota 15:
Quando hã velocidade inicial v., o deslo
canneIllto efectuado resulta da soma de duas
pa,rcel8!9 de natureza cinemãti:ca dif,erente:
uma é o deslocamento de medida v. t que o
móvel efectuaria com a velocidade constante
v., se não houvesse aceleração; outra é o
deslocamento devido à aceleração j ,e de
\1 medida - j t'.
i2 Por isso, teremos:
1 e = Vo ,. t + - . j t'.
2
62
2.7.4 Representação gráfica da lei dos espaços
Em resumo, as equações do movi
mento uniformemente acelerado e rec
tilíneo são as seguintes:
1) Para o móvel partindo do repouso:
j=k
17= j. t
1 . e = - J . t2
2
2) Para o móvel que, no início da contagem do tempo, está na ori
gem dos espaços e tem velocidade
inicial 170 (15).
j=k
17 = 1)0 + jt 1
e = 170 • t + - j t2 2
Falta-nos, por último, fazer a repre
sentação gráfica da lei dos e spaços.
Para isso, consideremos dois móveis
A e B, que percorrem a mesma trajec
tória com a a<:eleração de 4,0 m/s2• O móvel A parte do repouso e o móvel
B tem a velocidade inicial de 4,0 m/s.
As equações horárias são, respecti
vamente: { eA = 2,0 t" eB = 4,0 t + 2,0 P (SI).

: ::;,,== �c_"'r� :��:.0��: =;:.:=�:::o = :��\ ��
Fig. 2.29 Grãfico da ,}.ro dos espaços no movimento uniformemente variado:
('I) sem velocidade Inicial;
,(.2) com velocidade inicial.
,Em ambos os casos, um ramo de parãbola.
Exercício '1 :
Determinar a relação entre a velocidade
num dado instante t e a distância percorrida
até esse instante t, no movimento uniforme
mente acelerado e rectillneo:
1) sem velocidade inicial;
2) com velocidade inicial v • .
As medidas dos percursos efectuados e os tempos correspondentes indicam-se no quadro a seguir :
Intervalos Medidas dos 'Percursos
de tempo Móvel A Móvel B
1,0 s 2,Om 6,Om 2,0: s 8,Om 16,Om 3,0 s I8,Om 3O,Om
Com estes valores podem esboçar-se os 2 gráficos correspondentes-fig. 2.29.
Um e outro são ramos de parábol'a com vértice na origem, porque qualquer equação do tipo e = a t2 e e = a t + b t2, em que a e b são constantes, tem como imagem geométrica uma parábola.
2.7.5 Exercícios de aplicação
1.0 - Um m6ve,l, animado de movimento
uniformemente acelerado, percorreu 45 m du
rante o 5.° segundo.
Que deslocamento efectuará no 10.· se
gundo, supondo que não houve velocidade
inicial?
Resolução: o desloca:mento efectuado no 5.° 5 é a dife
rença entre 05 deslocamentos ef,ectuados em 5 s e em 4 5. Pol'tanto:
e (5.° s) = e,-e,
/1 1
=-j 5',_ -j . 4' 2 / 2 9
4:5m = -j => j = l'Om/s' '2
Conhecido o valor da a:celeração, fa'cilrnente se calcula o valor do deslOCamento no 10.° iii :
e (,lO.o s) = e,o -o. 1 1
=-j . W'-j.9' 2 2J
1 = - .10 (100 - 81)
:.3 = 5 . 19 = 95
e (,10.° s) = 95 m .
63

Resposta ao Ex. 7:
1) Sem velocidade inidal Vo :
Se no sistema { v=j.t
1 .e=-.j t'
2
elimin8lrmos t, tel'eInOSl
(método de substituição):
v t= -
j
v' e·=- =>
2j
2) Com velocidade in.ilciaJ Vo :
64
El!i.!Iniilla:ndo t, como anteriormente, no sistema { V = Vo + j t
te = vo.t + � . j . t', 2
teremos:
v - Vo t= --
j
v - Vo .1 e = Vo . + - j
j 2
de que resuita:
v' vo• + 2. j.e
2.0 - Mostrar que, no movimento uniforme
mente acelerado, sem velocidade inicial, recti
líneo, as distâncias percorridas em unidades
de tempo consecutivas estão entre si cow.o os
números ímpares sucessivoS'.
Resolução:
Temos, sucessivamente, representanao por 1
k a constante - j : 2
1
e, = - . j . P = k . l' = k 2
e,=k.2"=4 k
e3=k.31'=9 k
e. = k . 4: o = 16 k
E, portanto:
.e (1.') = k
e (2.") = e, - e, = 4k - k = 3 k
e (3.a) = e3 - e, = 9k - 4 k = 5 k
e (4<. a ) = e. - e, = 16 k - 9 k = 71 k
Isto mostra que se verifiC81 a proposiçãJo
enunciada.
2.8 Movimento uniformemente retar
dado e rectilíneo
2.8.1 Característica
o movimento uniformemente retardado é aquele em que a vel ocidade di
minui c onstante mente de val ore s i guai s e m inter val os de te mp o i guai s. Por isso, no caso do movimento uniformemente
retardado ser .curvilíneo, a componente -+
tangencial da aceleração, it, é de sen-tido contrário ao da velocidade (ver Ex. 5). No caso de ser rectilíneo, o vector aceleração, que agora coincide

o
SENTIDO DO MOVIMENTO •
x
Fig. 2.30 No movimento uniformemente retardado do ponto material M, de
-+trajectória OX, a ace:leração j tem sentido contrãri'o 8iO da velocidade -+-'VJI (e, por isso, ao do movim.ento) .
Fig. 2.31 Grãfico velocidade-tempo de um movimento uniformemente retardado. O declive da! recta v = v (t)
é nega.tivo, porque o ângulo IX pertence ao '2.0 quadrante. Este declive dã o valor da aceleração, que é o' .g·eguin,te:
s
v, -v, ('6,0-'16,0) m;'s J = -- = -------
t, -t, (4,01-1,0) 'S
= - 3,0 m/s'
com a sua componente tangencial, está assente na trajectória e tem sentido oposto ao da velocidade ( fig. 2.30) .
Consideremos o gráfico velocidade-tempo de um movimento uniformemente retardado e rectilíneo, indicado na figura 2.3l.
Podemos ler neste gráfico:
1. o _ Que a velocidade no início da contagem do tempo-velocidade inicial- tem o valor:
vo = 18,Om/s
2.0 -Que a diminuição de" velocidade
em cada segundo é sempre:
9,Om/s -- - ---- = 3,0 m/s"
3,0 s
3.0 - Que a velocidade se anulou ao fim de 6,Os.
4.° - Que o valor da aceleraç·ão, dado pelo declive do gráfico v = l' (t) , é:
, 6v v, -v, (6,01-'1'5,0) m/s
j 6t t, - t, (4,0-1,0) s
-9,Om/s' - C:lo,{lI m/s'
o valor negativo da a:celeração ( 'correspondente à tangente de um ângulo a
do 2.° quadrante) mostra que a aceleração tem sentido <:ontrário ao do movimento.
2.8.2 Equações do movimento
Podemos ainda ver no gráfico da figura 2.31 que a velocidade, no instante t (correspondente ao ponto A
65

·. '.
Nota 16:
'E&ta .equação horâria só dIfere da que
correspoillde 8iO movimenJto uniformemente
acel<era'Clo rectilinoo no facto de o ,tel'mo que
contém a aceleração ,estar pl'eCedidoo do sin8JI
«- ». Em ambas as equações, o símbolo j representa o valor absoluto da aceleração, em qualquer dos CIlISOS positivo. Como noo movi
mento uniformam,ente acelerado a aceleração
é positiva, 'e no retardado é negativa, está. justificada a diferença.
N o caso da traject6ria ser curvilinea as
equações são idênti'cas, mM em lugar de j aparece j, (valor 8Jbsoluto da aceleração tan
gencial), que é constante, dado que o módulo
da v,elocidade varia (a.umental ou diminui')
sempre do mesmo v,alar em qualquer unidade
de tempo.
Temos 'pois:
1 e v. t + - i, to
2
1 e v. t - - j, t' 2
Exercicio 8 :
Det�nar a relação entre o valor da velocidade num instante t e a distancia percorrida até esse instante t, no movimento uniformemente retardado e rectüÍ1IeO.
66
indicado a verde), é a velocidade inicial Vo menos o decréscimo l:,'v, ou seja:
v = Vo - l:,'v <=>
� esta a equação das velocidades.
Quanto à equação dos espaços (ou
deslocamentos): recorremos à área do
trapézio [OOAB] que representa o va
lor da medida do percurso no tempo t (conforme se deduzia por processo análogo ao usado para o m. u. a.) . Portanto:
Área [ODAB] = Área [OCAS] + Área [ACD] 1
e = v. t + - . t .l:,'v 2
Substituindo nesta equação v por
(vo - jt) e L/v por jt, teremos sucessivamente:
( . ) 1 . e = Vo - Jt . t + - . t . Jt
2
. 1 . e = Vo t - Jt� + - Jt!
2
_ 1 . 2 e - vot - -Jt 2
que é a equação dos espaços. (16).
2.8.3 Tempo que demara a parar e distância percorrida ate parar
Como o movimento uniformemente
retardado tem necessariamente veloci
dade inicial, que vai diminuindo de quantidades iguais em cada unidade de
tempo, é natural perguntar-se:

Re8p08ta ao exerc1clo 8: 1.° - Que tempo leva o móvel a parfEr'/
Ut1Hzando a mesma '1léonica que na res- li: precisamente o tempo necessário posta ao exercido 7, encontramos: para se anular a velocidade.
Representando este intervalo de 1)' = v .. - f j e ' tempo por t1', podemos determiná-lo a
Fig. 2.32 Movimento circular: velocidade li-� �
near nos pontos A e B - v.. e VB - e ângulo ao :centro f:::.a descrito
no intervalo de tempo f:::. t pelo �
vector de posição OA de: compri-
mento r (raio da ci:rcunferênCia).
:m f:::.a = 1 rad se AB = r (ver nota 17),
partir da equação das velocidades e
da condição de que
t = t1' => v = o
Portanto temos:
v = Vo - j t => O = Vo - j t1'
2.0 -Que distância percarrerá O móvel até parar, partindo de uma dada velocidade inicial '/
:m evidentemente a distância pereorrida durante o tempo que demora a parar. Para a ealcular, bastará substituir na equação dos espaços o valor de t1'•
Temos então, designando a referida distância por e1':
_ 1 . 2 e1' - Vo t1' - - • J . t1' 2
Vo 1 v/ e1' = Vo - - - --
j 2 j
V02 1 v02 e1'= -- ----'
j 2 j
V02 1 e1' = -- (1--)
j 2
67

z
o!
z
f f I I I I I I
A
-+-Fig. 2.33 O vector rotação '" tem a direcção
68
do eixo de rotação 2lZ', o sentido
é dado pela regra da mão direita
e o módulo é 81 1.ie'locidade angular �a -+-
'" = -- . O vector rota,ção '" é � t
também perpendicular aos vectore.s velocidade instantânea nos pontos
A, B e quaisquer outros da trajectória circular (O) e aos vectores de
-+- -+posição OA, OB, etc.
2.9 Movimento circular variado e mo
vimento circular uniforme
2.9.1. Movimento circular variadOj ve�8 e aceLBrações
o movimento circular é o movimento de um ponto material que descreve uma circunferência (fig. 2.32). Será, além disso ,variado se o móvel efectuar percursos de medidas diferentes em intervalos de tempo iguais.
A posição do ponto material móvel pode ser referenciada ou pelo compri-
mento do arco ÃB (A é a origem dos espaços), ou pela medida do ângulo ao centro /':c,a varrido pelo vector de pom-
---ção O A (vector de posição porque in-dica a posição do móvel). Em relação ao primeiro caso considera-se a velocidade linear ou efectiva instantânea, -+-v, com as seguintes características:
I direcção - tangente à traje c--+- tória v sentido - o do movimento
módulo: /':c, e
v = lim Vm = lim �t-+-O �t-+--Q/':c,t
o módulo indica, assim, a medida do percurso efectuado por unidade de tempo, medida essa tomada sobre a trajectória. Pode exprimir-se em m/s, km/h, etc.
Quanto ao segundo modo de referenciar a posição do móvel, define-se uma nova grandeza chamada velocidade angular ou de rotação instantâ-

Exerclclo 9:
Um móvel percorreu, em movimento circular variado, um arco de circunferência durante 15,Q mn. Nos primeiros 5,Omn a velocidade manteve-se constante e igual a 20 dm/s. NoS' restantes 10.0 mn, a velocidade manteve-se constantemente igual a � dm/S'.
1) Calcular 8J V'elocldade média dUraJI1te os 15mn..
2) QUalIlto media o areo de cireunferência percorrido?
z t
-W
sentido da rotação
Fig. 2.34 A regra da mão direita: quando? polegar indica a direcção e o sen-
tido do vector rotação (,l, os restantes dedos, curvados, indicam o sentido da rotação.
Pergunta 18:
Por que razão, no movimento circular, há
necessidade de f8l1ar em acelo/ação linear e em aceleração angular 1 .� � .. '
nea, w, que indka a medida do ângulo ao centro descrito, por unidade de tempo, pelo vector de posição:
fi) = lim ót-+ C) II t
1il uma grandeza escalar que se pode
exprimir em rot/s, voltais, rad/s ou outras unidades. .
Para a rotação ficar bem determi
nada, precisamos de conh�er o eixo
de rotação e o sentido de rotação, além da velocidade angular. Por isso se de--+ fine o vootCYr rotaçoo w com as seguintes cara'Cterísticas (fig. 2.33): ( módulo - o valor da velocidade -+ angular w w direcção - a do eixo de rotação
sentido - positivo, se ba é descrito no sentido anti-harário ou directo (contrário ao movimento dos ponteiros do relógio), e negativo, se ba é descrito no
sentido horário ou retrógrado.
Na prática, o sentido determina-se pela seguinte regra da mão direita: curvam-se os dedos (excepto o polegar) e orientam-se no sentido da rotação; o
polegar, perpendi'cular àqueles, dá o -H
sentido do vector rotação w (fig. 2.3r�). A variação de velocidade angular
por unidade de tempo é medida pela
aceleraçoo angular, que se pode exprimir em rad/s2, volta/s2, etc.
69

-t::. Ví = 1/2-1Ji .-
-rv; � = 'iii+ 61t, --�;.:,--
'lfA v- \ ii; A li' � \ v-
Fig. 2.35 Movimento ciTcula;r uniforme.
-+- -+- -+-a) Velocidades lineares, Vá e VB , nos pontos A e B; a;celeração centrípeta j, nos pont�s A e B.
b) Traçado dos vectore.s velocidade em intervalos de tempo regulares e partindo -+- -+-
da mesma origem. As variações de velocidade 6v" 6 v" etc., serão dadas pelas bases dos triângulos isósceles.
Nota 17:
Em Geometria define�s:e arco radiano como o arco de �primento iguaJI ao do
raio da respecti<va circunferência. E define�
(i.ngulo radiano como o ânguao ao centro cor
re&pondente 'ao arco radiano (fig. 2.32i) .
Se, portanto, quisermos exprimir em ra.
diano a medida de um ângulo ao centro 60'.
( figs. 2 ..312 e 2.315) , bootará, e m fa;ce da defi
nição acaooda de dar, dividir o comprimento
do arco ÁB pelo comprimento do raio:
AB 6 e 6 O'. ( rad) = -- => 6 O'. (roo) = --
r r
( 6 e = medida liIlJ68Ir do arco AB) . Multiplicando pelo Í'a;ctor r os dois mem
bros desta igualdade, obtém-se a expressão :
70
6 e = r. 6 a (rad)
-Ã variação da velocidade linear v
-+corresponde a aceleração linear j, já
definida no movimento curvilíneo ; nesta, é costume considerar as comp�
.. nentes aceleração tangencial jt (cujo módulo indica também a variação da velocidade linear em módulo) e acele-
-+-ração centrípeta jc (que é um indicador da variação de velocidade linear em
direcção).
Nestas condições, se a velocidade linear é constante em módulo, variando apenas em direcção, é também constante a velocidade angular e caímos no caso do movimento circuloJr uniforme - fig . 2.35 (a ) .
".-... . Designando por AB = 66 o comprl-
mento do arco de circunferência descrito pelo móvel durante o intervalo

Nota 18:
1!: fácil 'deduzir o valor da aceleração cen-+-
trípeta j, no movimento ci'l"cuJar uniforme. Na fig 2.315, ( bh conatruiram-se os VE!C-
-+- -+-tores velocidade v" v" . . . , ao fim de inteT-
valos de tempo !':.. t iguai8, tomando para origem de todos o ínesmo ponto P, ambitrário. As variaçõelJ corr.espondentes dos vectores velo..
-+- -+-cidade !':.. v" !':.. v, , . . . são ·representadas pe-las bases de triân.gulos isósceles. As vari'ações de velooidade correspondentes a uma rotação completa do vector velocidade formam os lados de um polígono regular : este dá a: ideia de que o veotor v,elocidade varia: por salltos, quando a sua varil3JÇão é continua. A vaTiação
real do v'eetor v'elocidade, durante um período, é o ca.so limite em que O'S intervalos de tempo !':.. t considerados tendem para zero.
1!: evidente, porém, que quanto menores forem os intervalos de .tempo, menores' e em maior número serão os lados do polígono e maios o perímetro do polígono se aproxima do perímetro da circ\lJD.ferênda, cujo raio é o módulo v da velocidade 'linear. Por isso, a soma exacta dos módulos da>s vaTiaçôes !':.. v de velocidade, durante uma volta, e portanto no intervalo de tempo !':.. t = 1 T (um período) , é :
lim ( !':.. v , + !':.. v, + . . . ) = '}) 'Ti' v
!':.. t -+- O
Então 'O valor da acelera:ção será: !':.. v Z,'iTV
j = --. = --
!':.. t T
Por outro lado, é, para: !':.. t = 1 T :
!':.. e 2 'iT r 2 'iT r v = -- = -- => T = --
!':.. t T v
Substituindo este valor de T na expressão anterior, temos:
j = 2 'iT v : 2'iT r p'
v r
Visto que no movimento circuI.aT uniforme só há acel€lI'ação centrípeta, será finalmente :
I. r
de tempo L, t, arco a que corresponde o ângulo ao centro L,a, .podemos escrever simplesmente :
�e e v = -' -
�t �t
Em virtude de v e w serem constantes, a aceleração angular é nula e a aceleração linear reduz-se à compo-
-+-nente centrípeta jc (porque, como vimos, a velocidade linear só varia em
direcção) .
Diremos, em resumo, que no movimento circular uniforme a aceleração é radial (tem a direcção do raio) e centrípeta (está sempre dirigida para o centro) .
2.9.2 Relação entre a velocidade amgular w e o módulo v da velocidade
linear. Aceleração linear
Partindo da definição de ângulo radiano, 'Podemos exprimir o compri-
mento do arco AR = L, e em função da medida do raio e do ângulo ao centro 6a expresso em radiano,
fig. 2.3fj (·a) .A fórmula que traduz esta relação é a seguinte (17) :
6e = r . 6a (rad)
Daqui se deduz, a seguir, a relação entre a velocidade angular w e o módulo v da velocidade linear :
L,e r . L,a ( rad) v = -- <=> v = <=>
L,t D-,f
v = r . w
71

Resolução do Ex. 9:
1) Podíamos resolver o problema oa.l
cul8lIldo os v8llores dos percursos par
cIais, somand()-{}s e di·vidindo o v8ilor do
percurso totaà pelo tempo de 15 fin. Mas também podemos c8llculSlr directa
mente a velocidade média co:q:sli.deran
do-a como média pe.sada das v�ocidades
e 8itri'bui.ndo a cada velocidade um pe.so
numericamente igual a'O tempo em que
cada uma se maJnteve coostante.
Deste modo temos: v, . t, + v, . t.
v .. = ------t, + t.
20 dm/B X 5 + 4a dm/B X ,lO 1) + '10
500 dm/8 100 --- = -- dm/s = 33 dm/8.
15 31
2) O comprimento do aTCO de circunferên
cia ,percorrido é :
Ás = .6 e = V m X 6. t 100
= -- dm/8 X (15 X 60) 8 31
= 100. X 15 X 20 dm
30 X 1<lP dm = 30 X 10' m = 3,0 km .
Resposta à pergunta IS :
Porque no movimeIllto circular' hã a coo
s-ideral' a velocidade l.in.ear e a velocidade
angular, a cujaiSl variações, pOr' unidade de
tempo, correspondem, respectivamente, a
aceI.eração linear e a aceleração angular.
Pergunta 14 :
Partindo da definição de ãngulo :radiano, exprimir o valor do . ângulo giro (3I6()0) em
radiano.
72
Esta fórmula só é válida se e apenas se :
- w vier expressa em radiano por unidade de tempo ;
- a unidade de tempo a que vêm referidas v e w .for a mesma.
O módulo da 'aceleração linear (redu�
zida à 'Componente centrípeta jc ) cal-cula-se pela seguinte expressão (18 ) :
-vz jc= -
r
Substituindo v por wr, a expressão de jc pode tomar outra forma:
(wr) 2 jo = -'--- <=>
r
2.9.3 O movimento circular uniforme como movimento periódico
1. Os movimentos . periódicos ou cícli!cos são de observação corrente e, entre muitos e variados exemplos, recordamos os seguintes: a rotação da Terra, a rotação de um disco, os deslocamentos do êmbolo nos cilindros das máquinas a vapor, o movimento da :pêndula de um relógio de parede, etc.
Em Física define-se movimento pe
riódico 'como o movimento de um ponto material que :
1. O) percorre constantemente a me8'1na
trajectória;
2.0) passa pela me8'1na posição, com a me8'1na 'Velocidade, em instantes separados por um intervalo de tempo constante.

Nota 19:
O signifi'cado g,erall de ciclo é o de qual
quer série de mudanças ,e operações reali
zadas ,sobre um si,stema em que se pal'te de
um dado estado e depol:s se r.egressa a ele
(estado iniciral e estado finall coincidem, portanto, excepto quanto à variáv,el tempo, que
varia num único sentido: passado -+-, fUlturo) .
Este intervalo de tempo constante, que separa dois instantes sucessivos em que as características do movimento periódico (posição e velocidade) se repetem chama-se período e representa-se pela letra T. O período exprime-se, evidentemente, em unidades de tempo: mn, ' s, }-tS (micro-segundo) , etc.
Costuma ainda, em Cinemática, designar-se por ciclo (19) o conjunto das posições, velocidades e acelerações sucessivas que ocorreI1'l durante um período, como, p. ex. , a rotação completa no caso do movimento circular e uniforme, a oscilação completa no caso do movimento pendular, etc. Com base nesta noção, define-se uma outra grandeza chamada frequência (f) do movimento periódico e que indica o número de dclos ocorridos por unidade de tempo.
:€ habitual exprimir a frequência em eiclos por segwndo (eis) ou hertz (Hz) . Nas comunicações pela rádio e T. V. é corrente utilizar OS múltiplos seguintes : quilohertz ou quilociclo/s
(lOS Hz = lOS eis = 1 kHz)
e megahertz ou megaciclos/ s
(lOS Hz = 106 eis = 1 M Hz).
A relação entre a frequência f e o período T tira-se da proporção simples:
( 1 período) T s - 1 ciclo 1 s - f ciclo
Portanto :
1 t = T
ou 1
T = -f
73

Exercício 10:
Traçar uma circunferencia de 20,0 cm de raio. Supondo que um ponto material descreve essa circunferência em movimento uniforme, representar o vector velocidade em
duas posições A e B, tendo o arco As a. amplitude de 90'. Determinar o vector
calculando o seu módulo para ·v = 30 cm/s .
Exercício 11:
o pontciro dos segundos de um relógio tem um comprimento de 30,0 mm. Determinar a veZocidade linear de um ponto da sua extremidade.
Pergunta 15:
o movimento dos ponteiros d� um. relpgio
é r,eguZar e intermitente. M8IS não é constantemente uni.forme.
l{l.di'car porquê. JuSltificar como é possiv,el, no entanto falar em velocidade angular dos
mesmos e relaiCÍonaT as v,elocidades angula
res dos ponteiros dos mÍ'Ilutos e horas com
a do ponteiro dos segundos.
Resposta à pergunta 14:
AB 6. a (rad) = -- =
r
Perímetro da circunferência
r
2 '1T rad r
POl'Itan,to:
360' 6,28 rad
74
II. O movimento circular uniforme é um movimento periódico, porque satisfaz as duas condições da definição, como é fácil verificar.
O período T é, neste caso, o tempo de uma rotação completa e a frequência f é o número de rotações por uni
dade de .tempo ( coincide assim 'com a velocidade angular quando expressa em rotações por unidade de tempo) .
Nestas condições e atendendo a que durante f:.:. t = lT é f:.:. e = 27rr e f:.:.a = 2m- rad, as expressões da velocidade angular, do módulo da velocidade linear e da aceleràção centdpeta podem tomar as seguintes formas :
f:.:.a 2rr w = -- = -- =2'1r . f
f:.:.t T
!:::"e 27rr v = -- = -- = 2rr f · r
f:.:.t T
2.9.4 Exercício de aplicação.
Um disco de 45 r.p.m. (45 rot/mn) tem de diâmetro 17,4 cm. Considerando cir-cular cada uma das espiras que a ponta da agulha tem de percorrer, calcular :
1.' - a velocidade linear da ponta da agulha ao percorrer a 1." espira, que dista ,g mm do bordo do disco;
2.' - idem, ao percorrer a última espira, que dista 3,,g cm do bordo do disco;
3,." - o periodo, a frequência e a aceleração da ponta da agulha em 'cada um d08 casos anteriores.

Resposta. a.os Ex. 10 e 11:
lQ) 6. v = 30 y2 cm/s = � cm/s .
1 volta '1T 11) w = --- = - rad/s ==> v = 3i.H mm/s
60 s , 30 '
Resposta. à pergunta. 15:
o ponteiro dos segundos, como é facH
mente observável, roda aos «sailtos�, porque,
em cada segundo, na roda de lescape, cujo
movimento é tramsmitido ao rponteill'o, se
salta um dente e é travado outro. Em oada intervalo de um seguncj.o, por ,i'sso, a .roda
,arranca ,em movi,mento acelerado e a: seguir
pára - ,trata-se de movimento regular e in
termitente, comandado por um movimento
pendular.
O movimento nunca chega a ser uniforme.
Dada, porém, a regUlaridade das intermitên
cias, ,considera--se, na prática, equivalente a
um movimento uniforme de velocidade igual
à velocidade média.
Os movimentos dos ponteiros dos minutos
e das h ol'as' são an álogos, ·porém mai1s lootos
1 5 'I ( w é - e -- = -- da do pontei'l'O dos se-
60 3600 7120
gundos, respecUva.rnente) .
Resolução:
A velocidade àJD.gula:r é a mesma para qualquer das, espiras:
w = 45 rot/mn = 45 X ---
3 = - '1T rad/s
2
l.° - v = w r
3
= -'1T rad/s X 2
60 s
( 17,4 ) --- - 0,4
2
= 39,l cm/'s -+- 39 cm/IS
2,.0 - v' = w r'
3' 'IT = -- rad/s X
2
( 17,4 ) -- - 3,4
'2
= ·2t4.,9 cm/s -+-, 25 cm/s
cm
cm
3.° - Recorrendo à definição de pe:ríodo e de frequência, temos:
6. t T = = --- = - 8
n.O de roto 415 3
n.O de cidos 45 ciclos 3, f ---- = - cls -+- 0,8 c/a
6. t 60 s 4
A a:celeração va'l'ia com o raio da espiJ'a
e, portanto:
j, = 10' r = 4 '1T f' r
= 4 '1T' ( : )
2 • 8,3 cm/s'
= 185 cm/s' -+-, .18 x 10 cm/s'
-+- 1,8 m/s'
j' c = w2 r' = 4 'ir"! '2 r' ( 3 )2 .. , , ' ." .'
= 4 '1T' 4 . ' 5;i b�/;;
= 118 cm/s' -+-, 1:2 x 10 cm/s"
-+- '42, m/;;'�
15

ARIBT6TELES (séc.. IV a. C . .). Foi dis
cípulo .de 'BLATAO ,em AJtenaJs. De fcltio tímido, r.eve1ou-se ,como um dos maiorea génios e sábios da Antiguidade. Deixou obra notável nlli FiIlosofia., cuja Influênci"a se f�
sent·ir até aos nossos' dias. Já não conseguiu o mesmo na Fisica!, porque, -tendo-se baseado sistemat�camente na intuição., foi: conduzido a alguns erros que perduraram séculos e só começa.ram a ser corrigidos com Gaili1�.
GALILEU GaUlei (:15&b16412) . Nasceu noO ena em que morreu Mbgue1 Angelo e faleceu qU8Ise um ano antes da d8lta em que naJsceu
Newton.
Aos 17 aJno.S ,cursava Medicina e Filosofia em Pis'a e aos 25 anos era prof'eSlSOr nesta UnLversidade. Dos 28 anos aos 46 anos foi professor na Universidaid'e de Pádua, terminando, depoLs, como professor em PISA.
De f.ebtio modesto e espírito esclarecido, teve o mérito singular de introdu2ik na Física
76
L E I T U R A
2.10 Queda dos graves. Aristóteles e Galileu
2.10.1 Notícia histórica; o método científilC'o
Desde sempre o homem se habituou a observar o. fenómeno vulgar da queda de um corpo para a Terra..
A primeira teoria da queda dos corpos de'Ve-se a Aristóteles ( 3184->322, a. C. ) , extraordinári'Ü pensador grego, e pode resumir-se nas segui�tes linhas :
1. o - Os corpos caem para a Terra por esta ser o Centro do Uni'Verso : a queda dos corpos surge 3JSSIim como uma tendênci81 natura'l deles;
2.· - O movimento dlli queda é natural
mente uniforme, caindo os corpos
que ,têm o mesmo peso. com igual velocida:de;
3 .0 - os corpos mais pesados caem com velocidade ma.ior (20) ;
4 .. 0 - o ar acelera o movimento da: queda, pois os' corpos-; a:o cairem, deixam atrás de sii um e.spaço vaa:io de aJr, e este, devido «ao horror que a N8Itur-e:za tem pelo vazio» precipi1a...se paira 'O vaziQ formado atrás do corpo, impetlindo-o.
Estas conclusões moOstram o caráoter especulaitivo, meramente 'intuiti,vo, d�curs,i'Vo e
" sem apoi'o experimental que caracterizava a Física aJristotélica.. Devemos compl1oondê-la, sem a: menosprezrur, à iluz dos conhecimentos da época (120) .
Coube" a Galileu (111564..,00412,) , físdco, astrón omo e professor da Universidade d e Pisa, estabelecer um marco importante na história
da Física. ' PaTtindo da análise dos factos eJCPeri:mentais e sobre eles !I1SS'ootando as de
duções .teóricas, ·iIIltroduZÍ'l1 na Fís-ica o mé
todo verdadeiramente científico. e libertou-a da 'secular e improduti>va autoridade do magwter àixit.

o 'método experimental e o raciocinio cientí
fico, imclando-se -com �e a ciência sistemá
tica.
Quando tratou o problema da C].ueda: dos graves, não procurou a reSiposrtà. nos escritos de Aristóteles, que já datavam de 2000 anos
antes, ma's na· observação e na experiência.
(a ) �.?!!5�� 2.� I�'-A� _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
B
, m · unif. .. _ - - - - - � - - - _ . �
', _ _ _ _ _ _ _ _ _ _ _ _ � �_. _u� � f� __ _
Fig. 2.36 Uma experiência ideal de Galileu.
Este observou -que uma esfera, caindo da posição iniciilil A, tende a subir até à altura primitiva (posição finrul B ) , quaiSlquer que 00-jam os declives dos doi� planos inclin,ados. Se imaginarmos eHmi
nados o atrito e todas 3JS res·i<stências, a esfera só paTará ao ilitingir a altura inicial - cruso ( al-Se o decliv·e do 2.° Illano for nu-lo - ( b ) -, a altura iniei-aI jamais- será atingida, pelo que o movimento no
plano horizontal será perpétuo ( Galileu chamou-lhe «movimento
-eter
no», permrunente, sem variação de velocidade) .
A
Fig. 2.37. AB - linha de maior declive de um plano inclinado com os ângulosde inclinação de 310°, 6()<> -e 90" (vertical )
Fundamentalmente, o método cientifico conSiÍ'ste na utilizrução:
1.0 - do processo experimental;
2. ° - do raciocinio científico, ou seja do pensamento lógico baseado não só na observ!lição das experiências reais,
provocadas, mas também nas experiências ideais. Est!liS s-ão experiências que, embora não possam ser tecnicamente rea:Ji.zad!liS, podem lmagina'I'-se e se apoiam em factos concretos', a:jud!lilldo a compreender as ·experiências real'Í'záveis - fig. 2 .. 36 (a) e ( b) .
Dev,e-s1e trumbém a Galileu o esclarecimento de conceitos ·como força, movimelIJ.to, veloctdade e aceleração, embora a sua definição matemática, preci'sa, só vÍlesse a ser dada por Newton. ( 20) .
No estudo da queda dos graves, Galileu recorreu ao plano inclinado, onde podia .tornar a queda -tão J.enta qurunto fos'S'e necessário ( pa-ra o que bastaJva diminui-r a altura do plano) - fig. 2.371.
Se se verifi·carem as mesmas leis nos casos
( a ) e ( b ) , porque haviam de ser diferentes no caso ( c ) - pl!lillo vertical e, por isso, queda livr.e ?
Para medir os intervalos de tempo, utilizou a cle'Ps!idra de água ( de funcionamento anMogo ao da ampulheta de arcia), medindo as 'porções de água vertidas e considerando os intervalos de tempo proporcionais a essas quantidades de água.
2.10.2; Leis da queda dos graves
A acção atractiva que a Terra exerce sobre os corpos tem o nome de gravidade terrestre. Por isso se chama grave ao corpo que é atraído.
As concluSÕ€s experimentais a que chegou Galileu no estudo da queda dos
17

Nota 20 :
78
- 'Parece que A·ri·stóteles nunca 'chegou a
afirmar que a velocidade é directamoo.
te proporcionaJl ao peso do corpo, pois tal asserção era de fáéil desmootido mesmo na ;é'poc.aJ em que viveu.
- Acerca de Ga:lhleu conta-se que, quando tinha; '119 anos, ao observar as· oscHa
ções do austre da catedral de Pi'sa, . descobriu que o tempo das sucemivas osci'lações, de aJmpUtude decres·coote, era sempre o mesmo (mediu o tempo pela contag.em das SUalS' próprias' pUil
sações no pulso .da mão) . Procedeu a seguir a várias experiênCÍ'as oe chegou à lei do isocronismo.
Pertence já . ao donúnio da 'looda a ·tradição segundo a quad deixou ca;ir da
torre de Pisa, simultaneam.ente, três esferas - umaJ de chumbo, UIlna de cobre e outra d e cera, todas, CQlffi o mesmo volume. Só a esfera de cera chegou um pouoo a;trasada, atraso que
atribuiu à resistência do ar.
graves, e que constituem afinal as leis da queda, são as seguintes :
1 .a - O movimento da queda é uniformemente acelerado;
2.a - A acelerw;ão da queda, num mesmo lugar, é igual para todos 08 corpos, isto é : ,cairiam todos de uma dada altura no mesmo intervalo de tempo, se não houvesse resistência do ar - fig. 2.38, ( a) , (b) e (:c) .
3.a - O ar opõe resistência à queda.
2.10.3 Equações horárias da queda livre
A aceleração com que os graves caem chama-se aceleração da gravidade e representa-se pela letra g. O seu valor varia com o lugar da Terra, dependendo da latitude e da altitude.
Os valores de g, determinados experimentalmente, são os seguintes :
g ( Pólos) = 9,83 m/s2
g (IDquador) = 9,78 m/s2
g ( Portugal) = 9,80 m/s2
Toma-se para valor médio, em todos
os locais ao nível do mar :
g = 9,8 m/s2 •
Nestas condições, as equações horárias da queda livre, no vazio, são as do movimento uniformemente acelerado, substituindo apenas a aceleração j pela aceleração da gravidade g e a medida e
. do per·curso pela altura h. Temos então :
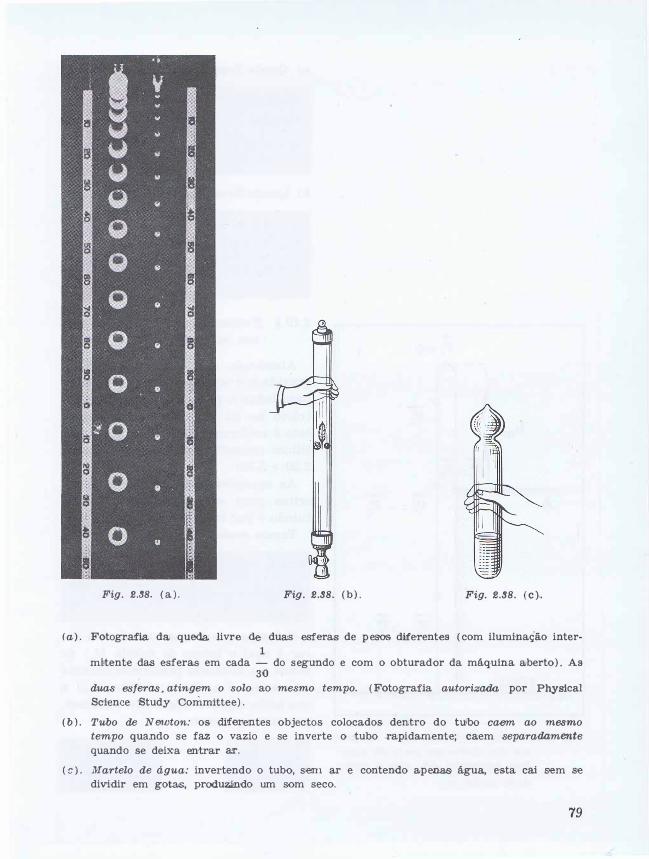
Fig. g.98. ( a ) . Fig. g.38. ( b ) . Fig. g.38. ( c ) .
fa) . FotografiJa da queda; livre de duas esferas de peoos dilferentes ( com iluminação inter-
1 mLtente das esferas em cada - do segundo e com o obturador da máquina a.berto) . As
30
duas esferas . atingem o solo ao mesmo tempo. ( Fotografia autorizada por Physical Science Study CommiUee) .
( b ) . Tubo de N moton: os dirf'wentes objectos colocados dentro do tubo caem ao mesmo
tempo quando se faz o vazio e se inverte o tubo ra.pidamente; caem separadamente
quandü se deix'a entrar aT.
( c ) . Martelo de água: inver.tendo o tubo, sem ar e contendo apenas água, esta cai :rem se dividir em gotas, produzilIldo um som seco.
79

-
1I2 = o
Fig. 2.39 Altura máxima - km - atingida
por um grave que parte da super
fície. horizontal AB, com a veloci�
dade inicial vo •
80
a) Queda livre sem velocidade inicial :
g = 9,8 ms-2 v = g . t
I h = � g . t2 => V2 = 2 gh
b) Queda <livre ,com velocidade inicial :
2.10.4 Movimento asc� dos graves, no vazio
Atendendo a que a aceleração da
gravidade é vertical e dirigida de cima
para baixo e, portanto, de sentido contrário ao do movimento ascensional, este é uniformemente retardado e rectilíneo ( recordar o exercício 5 e figuras
2.20 e 2.30) . As equações horárias são as já es
critas para este movimento, substituindo e por h e j por g.
Temos assim:
v = Vo - gt I h = vo.t _ .-:. gt2 => v2 = vo2 - 2gh
. 2 "
o tempo que demora o móvel a pa
rar é aqui o tempo de subida (t8) do móvel e a distância percorrida durante este tempo é a altura máxima (hm) a
que 'Subiu o grave ( fig. 2.39) . Podemos, por isso, escrever :
e

Pergunta 16:
QUllil é maior, no movimento de um grave
no vazio: o ,tempo de subida ( t, ) ou o tempo
de descida ( td ) ?
Pergunta 17 :
Um grave -é lançado para cima, na direc
ção vertical, pára, e a seguir inicia a queda
livre. Ao descer, com que velocidade passa
no ponto de partida ? ( Fig. 2.:3'9 ) .
Exercício 12 :
Um grave cai no vazio sem velocidade
inicial .. Determinar ' a relação de grandeza
entre as (Ustâncias percorridas durante a 2 ." e a 1." unidades de tempo.
Nota 21:
U m outro proces,s'o d e r,esolução d o Ex. 2." do n.O 2'.10.5 pode s'er o seguinte, s ervindo
de contra-<prova :
Das raízes t, e t" ambas positivas, da
equa�ão escrita, escolhe�se a menor paTa
valor do tem.po que' o grave demo'ra a atingir 1
da al.tura máx]ma na subida. 2
6
2.10.5 Exercícios de aplicação
1.0 - Um corpo sofre uma q��eda livre se'Yl\
velocidade inicial. Que relação de
grandeza há entre os tempos gastos
a percorrer a 1 ." metade e a :8." metade do percurso ?
Resolução :
Seja h a altura de queda, t o tempo de
queda, t, e t, os tempos corresponctoote'S à
L" e à '2." metade do 'percurs'Ü, respectiva
mente. Como a velocidade vai aumentando,
será t, > t, .
Na 1." m'etade do percurso, temos :
h 1 -,;;--; = -; gt/ => t, = V --;;
No percurso total, tem-se :
1 . /� h = -:; 9f' => t = V -
g
-
o tempo correspondente à 2,," parte do
percurs'o é então:
t,
t,
Portanto :
. /
�g V ( y2- 1 )
\12 + 1 = 2,41
1 V2+ 1
2 - 1
2.° - Dois corpos são lançados no 1Jazio,
de baixo para cima, com a mesma
velocidade inicial de 30 m/s.
Que intervalo de tempo deve sepa
rar os dois lançamentos para que
ambos se encontrem a meio da al
tura máxima - um na subida e outro na descida ?
81

o tempo que o grave demorará a atingir
esta posição, na descida, será a soma de
dois intervalos de tempo : .,
Vo 1) o tempo de subida - ts = - ;
9 2) o tempo que demorou a percorrer a
voo distância -- , na deslCida, com movi-
4, 9 mento uniformemente acelerado sem
velocidade inicial e que s-e calcula a
partir da equação :
v.' 1 Vo -- = - gt' => t = --
4.g 2 \1"2g
A soma é, portanto:
v" v" v" \/2 +Vo -- + -- <=> <=>
9 \/2g
2v" + Vo \1 .2 <=> ---- = t,
2g
valor que coincide, a'ssim, com a outra solução
da equação do m. u. -retardado.
Resposta às perguntas 16 e 17 :
16) 'São precisamente iguais.
Com efeito, a di,stância percorrida, na
descida, 'sem v,eloddade inicial, é h m •
Portanto :
1 Vo gt/ => t. = - = t,
2g 2 9
1 7 ) Com v·elocidade igual, em módulo, à velocidade inicial, e sentido contrário.
De facto, como inicia a descida partindo
do repouso ( vo = o ) , a equação das' ve
locidades· permite escrever :
V o v = 9 . trl = 9 . - = Vo •
9
Resposta ao Ex. 12 :
82
1 3 e, = - g , e, = 2g , e, - e, = - 9 2 2
e:! - e] -- = 3
e,
Resolução :
Altura máxima: 2g
Metade da altura máxima : v ' o
4g
Substituindo na equação do movimento ascen
sional :
V 2 1 _0_ = vo . t - _ g . t'<=>
4g 2
<=> 2g' t' - 4.vo gt + vo' = O
As raízes desta equação são :
2vo + Vo \/2 t, = e
2vo -'vo \/2 t, = ------
2g 2g
Como são ambas positivas, uma delas
indica o tempo que demora ao atingir metade
da altura máxima na subida' e a outra o
tt'mpo qUe demora a atingir esta mesma
posição na descida. A dif'erença entre estes .
dois intervalos de tempo indicará o intervalo
que dev'e separar os dois lançamentos·:
Vo • \1 2 3D \/2 6, t = t, - t, = --- = --- = 4,3
9 9
Os graves deverão ser lançados com um
intervalo de tempo de 4,:3 'S'egundos. ( 211 ) .
2.11 Leituras recomendadas
1 . A EVOlução da Física, A. Einstein e L. ·Inre'ld., cap. L
2. Les étapes de la Physique, Pierre Gua,y
dier, Presse Univ. France, cap. I e II.
S. Physique, George Jl':ve, Ed. Magnard, Pa
ris, cap. II e III.
4. Manual de Física Elementar, Landau e
Kitaigorodski, Ed. Stampa, 19,74, vol I,
cap. II.
5. Mécanique, A. Dessart e Jodogne, voI. I,
ca,p. I.
6 . Física, P. S. S. C., ob. cit., cap. 5 e ·cap. 21.
"I . Física Fundamental, Jay Orear, Ed. Li
musa - Wiley, 'S. A. Mtéxi·co, 1970, cap. ;l..

2.12 Súmula das ideias fundamentais
1 . Na Oinemática estuda-se apenas o mo
vimento em si - trajectórias, leis horárias,
Velocidade, aceleração e o modo como estas
duas últimas variam.
2. No Universo não há referenciais fixos e,
por isso, todos os movimentos são relativos.
É corrente, nos movimentos à superfície da
Terra, tomar esta para referencial.
S. O v-edor velocidade instantânea ou velo
cidade num ponto da trajectória tem a direc
ção da tangente à trajectória, o sentido do
movimento e o seu módulo, indicador da celeri
dade ou rapidez do movimento, é igual à dis
tância que o móvel percorreria por unidade
de tempo se o movimento passasse a ser uni
forme.
O vector a'celeração tem a direcção e o
-+- -+- -+-sentido do vector diferença L:,v = v, - v"
-+- -+-referindo-se os vectores v, e v, a pontos
muito próximos; o seu módulo é igual à varia
ção do valor numérico da velocidade por uni
dade de tempo no movimento rectilíneo; no
movimento curvilíneo, o módulo da aceleração
L:, v
é j = V j, ' + j; , sendo j, = -- o módulo L:, t
da acel era·ção tangendal (indicado'r da varia
v' ção de velocidade em grandeza) e j, = - o
r
módulo da aceleração oentrípeta (indicador
da variação de velocidade em direcção) .
4 . N o movimento uniforme e rectilíneo, o
ponto material percorre distâncias iguais em
tempos iguais, sendo as seguintes as equações
do movimento : v = const ; e == v . t .
No movimento variado, a intervalos de
tempo iguais correspondem medidas diferen
tes dos percursos efectuados. A velocidade
L:, e média Vm = -- , no intervalo de tempo L:, t,
L:, t
em que o percurso efectuado foi L:, e, indica
a velocidade constante qUe teria um ponto
material que efectuasse o mesmo percurso
no mesmo tempo, com movimento uniforme.
No moVimento uniformemente vruriado e
rectilíneo, caracterizado por ter aceleração
constante, M equações do movimento sâo as
seguintes :
a ) uniforme�ente acelerado sem velocidade
inicial:
I � : ;7t
I 1 v' = 2 . j . e ; e = 2" . j . t'
b ) uniformemente acelerado com velocidade
inicial:
I j = const
v = j . t + v.
e = v • . t + � . j . t' 2
I ". � v.' + 2 . ; . , ;
c} uniformemente retardado : 1 j = const
v = v. - j . t I 1 v' = v.' - 2 . j . e . e = v • . t - 2" . j . t'
v. t ( até para,r)
j
v.' e ( até prurar)
2j
N o caso do movimento dos graves, apli.
cam-se todas estas equações, substituindo a
aceleração j pela aceleração da gravidade
.rJ = 9,8 m/s'.
5. Galileu (séculos XVI e XVII) iniciou
uma nova era no estudo da Física, introdu
zindo nesta a utilização sistemática do método
ex,perimenta'l e do raciocínio dentífico (que
se apoiava quer nas experiências read's, quer
em experiências ideai'S) .
6. No movim·ento circular variado conside-
-+ ra-se, além da velocidade linear (v), a velo-
cidade angular ou de rotação (w) . Oonsequen
temente, teremos de considerar a aceleração
Ji.n.ear (variação da velocidade linear por uni
dade de tempo) e a aceleração angular (varia
ção da velocidade angular por unidade de
tempo) .
No movimento circul8ir ·e uni.forme são
constantes o módulo da velocidade linear e a
83

t;elocidade angular; em consequência, a acele
ração angular é nula e a aceleração linear
fica reduzida à componente radial centripeta
v' de módulo - como indicador que é da varia
r ção de velocidade unicamente em direcção.
Quando se exprimir w em radiano por uni
dade de tempo, pode utilizar-se a seguinte
relação : v = w . r .
2.13 Questionário
1 . Um ponto maJteri'al está animado de de
terminado movimento regular,. Para e8,te mo
vimento, 'haverá uma só lei horária ou poderá
haver leis horári'as diferentes ? Porquê ?
2. Pode'rá um móvel tea: movimento cir
cul3!r sem sofrer aceleração ? E se o movi
mento for circular 'e uniforme ? Justificar ..
3. Deixaram-se cair dois graves, mas, a
um deles imprim�u-se velocidade inicial. Terão
estes graves aJcelerações diferentes ? Porquê ?
4. Quando um gr3!v'e cai de grande aUu7'a,
à ·medida que aumenta: a v,elocidade, cresce,
com ela, a resistência do ar, a qual pode ohe
gar a: i'gualar o peso do grave. A partir do
instrunte em que isto 'suceqe, a que'da passa
a efe'ctuar-se 'com velocidade constante cha
mada velocidade terminal ( é o caso da gota
de: chuva, do pára-quedas, etc. ) . Que se paJssa
ria se, de um . aJvião voando a grande altura,
s,e lanças,se na vertical um grave com v,eloci
dade ini'ci'al superior à velocidade terminal
referida ?
5. Porque utilizou Gali!.eu o plano incli
nado paTa: o estudo da's leis da queda e' não
utilizou a queda livre ?
6. Qual é a relação entre a aceleração e
a veloctdade, quanto aos vaàores numéricas,
ao fim da 'primeira unidaoe de temp o ? Como
se expli'ca que neste �ntervaàa de tempo a
medioa do percurso seja inferior ao módulo
da v,elocidalde ? Considerar todos os vaJlcwes
numéricos expressos no mesmo @Istema de
unidades.
7. As experiências ideais têm utilidade ?
Porque não podem realizar-se integralmente ?
84
8. A res�tência do ar e o pesa de' um
grave têm o mesmo sentido ou sentidos con
trários quando:
8.1 o grave 'CM ?
8,2 o grav'e 'B,obe ?
O graNe 'que, no ar, sobe até parar e, a
segUlilr, cai', :terá V1elocidade de chegada (no.
nivel 00 ponto oe partida) igual ,em módulo
à velacidade inidaJl ?
9. Que 'padem,as «ler» nas' áreas que s,e po
dem marcar nos ,gráficos:
9.'l! velo cidade-tempa ?
9,.2\ ace,leração�tempo ?
10. Nas cascaJtas naturais, a água ,cai de
grande aàtura e divide-se 'em pequenis-simas
gotas, formando UllIla chuva m'Í.uoinha. Não
se devendo ,este fenómeno à resistência 00 ar
( que tenderi'3J a ,reuni'r as gotaJS umas às
outras), como extplicá�lo ?
Sugestão: cOllIlpaTar as YIt!.lacioades e as di,s
tâIlJcias peroorridas p elas gotas desprendidas
em instantes sucessivos.
1 1 . Porque s·e eIeva a água, nos repuxos
dos jardins e nas bombas de incêndio, em jactos compactos e cai em g,oticulas sepa
radas ?
12. Um móv,el des'loca-se, sem atrito, '8.e
gundo a Jinha .de maior declive de um plaru>
inclinado, de acordo com a seguinte lei ho
rária:
e = '3,ú . t - '2,O ol' ( SI)
O móv,el está a subir ou a des'Oe>r o plano
inc'linado ? Jus,tificar.
13. Um satélite, ao girar em -torno da T,erra,
estavelm'ente, à distânc�a R 6 = R (1'.,ra) +
h ( a l I i I.d, ) do centro, 'está animado de movi,
mento ciil'cular uniforme, oom a'cel-eração
centripeta igual à aoeleraçãa g da griavLdade
na re.gião atmosférica da altituoe h.
Mostrar que a velocidade linear do satéli!te,
nestas condições, é :
v = \1 g . R, .
14. No movimento CiTCU,laJr uniforme de
diferentes pontos materiais, a aceleração pode 'se'!' dir.ecta ·ou inversamente proporcionaJ ao
raio. Justificar 'esta disjunção exclusiva.

2.14 Problemas
1. Um móv,el paJrte do r,epouso, aumentando
a sua v,elocidade uniformemente 'e 8Jtingindo
a velocidade de 20 km/h aI() fim de 1,0 minuto.
1.'1 Dos gráficos a seguir indicados, qua.l
de1es se pode referir ao movimento des
crito ?
Fig. 2.40
1.2 Calcular o valor da. velocidade médila
durante esse 'pri'rneiro minuto oe indi
car 'como o mesm'o p.oderila ser obtido
no gráfico.
1 .3 Se a v·eloci'dade média, durante o 1,.0 mi
nuto, aumentaJSSe uniformemente de
20 km/h para ().(); km/h, qual dos gráfi
cos traduziria este novo movimento ?
Determinar o novo valor da velocidade
média duran'De o 1.0 minuto"
1 .4 Qual dos gráfitcoS' indica que o percurso efectuado aumentou unilformemente no
decor.r.er do tempo ?
1.1 ('c) . 1 .:2 10 km/h ; orden,ada do ponto
médio da linha ( c ) . 1.31 (81) ; 40 km/h .
1.4 ( d ) .
2. Quais dos grMicos ·espaçD-ltempo indi
cados a ,seguiJr podem traduzir os movimen
QOS refertdos no problema anterior, em 1',1 e
l .3 ? Justificar.
Fig. 2.41
1,1 ( e) ; 1.3' (h ) , porque rea:li:lJa o mesmo
percurs'o de medida eA num tempo
t' (A) < t (A) •
3 . Qual dos gráfioos esboçados na fig. 2.412 é representativo da va.riação de velocidade de
uma esfera metáli-ca que é atirad8J ao alr no
instante t = O ,e regressa ao ponto de partida quanto t = t, ? JustificaJI'.
Fig. 2.4B
( c ) . Porque o módulo da vej'ocidade, v,
ala I1egre,ssar o móvel aIO pon.to de paJrtida,
é : v = V • •
4 .. Classificar o movim'ento a que diz res
peito o gráfico da fig. '2.413 e :
Fig. 2.43
85

4.1 Determinar, a partir do gráfico, o
tempo necessário para a velocidade
atingir o valor de 8 unidades.
4 . . 2 Escrever as equações numéricas da ve
locidade e do espaço neste movimento.
Uniformemente acelerado com velocidade
inicial.
4 . 1 t = 2 unido 4 .2 { v = 2 + 3t 3
e = 2t + - t' 2
5. Um movimento rectilíneo tem o seguinte
gráfico v'elocidade-tempo :
V' (m/s) 12 - - - - - - - - - - - - - - - - - - - - - - -
9
I I I 6t--'---(
3
4
, , .
8 16 20 24
Fig. 2.44
5.1 Indicar os tipos de movimento repre
sentados n3JS linhas ('1 ) , (2) e (3,) .
5.2 Indicar o valor da aoeleração dur3Jnte
os primeiros 6,0 S.
5.3 CalculM o V'3Jlür da acelwação nos in-
tervalos [,6"H�] ·s e ( lo8;22] s.
5.4 Qual foi a distância total percorrida ?
86
5.1 ( 1 ) uni·L ( 2 ) U . a . (3,) U . r . 5.2 O ; 5.3 0,5 m/s' ; - 3,0 m/'S" . 5.4 168 m .
6. A aceleração de um movimento é cons
tante ,e de módulo iguaJ a 8,0 m/s'.
Car3Jcterizar o movimento em c3Jda um dos
seguintes casos : -+- -+-
6.1 j tem sempre a direcção de 'I) e o
mesmo sentido ;
-+- -+-6 . 2 j tem sempre a 'direcção de 1) 'e o sen-
tido oposto;
-+-I -+-6.3 j é sempre peI'pendicular a v.
6.4 Imprimiu�se, em qU3Jlquer dos oasos, a
velocidalde inicial de 3:2 ,0 m/s.. Indi,car
as medid3Js dos pe'rcur.s'Os correspon
dentes a calda C8!SO, assim como os' mó
dulos d8!s Vlelocidades', ao fim de 4,0 S.
6,.a. u . a . 6.2 u . .r . 6.3 circo unif.
6.4 1,9'2 m -+- 1'9 X I0 m ; 64 m -+- 6X 10 m ;
1'2'8 m �· 13 X 10 m ; &lo m/s -+- 6 XLLO< m/s;
O ; 32 m/s.
7. ObsenwaT o gI'áfi!co V'elocidadoe�tempo do
movimento de um grave ( fig. 2.45 ) .
7,.::1: Que movimento <:orresponde ao traço
AB ?
7.2 Que sucede 8;0 gI'ave em B ? Que movi
m ento corresponde ao traço BC ?
7.3, QU8!l o valor da velocidade .em C ? Onde está o graVle ?
lf'ig. 2.45

7.4 Escrever as equaçõe's da velocidade e
do espaço correspondentes aos traços
AB e BC.
'l.5 A distânci"a total percorrida em S,O s
serâ a soma área ( 1 ) + área ( 2 ) +
+ área ( 3 ) ? Justificar.
7.1 u . r . 7.2 'Pára; u . a . sem v" .
7,3 3 X 9,8 m/s; no 'ponto de prurUda.
7.4{ v = 3 X 9,8 - 9,8 t { V = 9,8 t
h = \3IX9,8 t -4,9 t' h = 4;9 t' ( S:I ) 7\.5 á:r·ea ( 1 ) + área ( 3 ) . porque corres
pondem a gráficos separados de movi
mentos de s'entido contrário.
8. Observ3Jr o gráfico veloci'Clade-tempo do
movimento de um proj.écti.J no irnterior do
cano de uma arma .. O projéctil abandona a
arma com a velocida'Cle de 136 m/s.
Fig. 2.46
O tempo ,está registado em mili-segundoo
( lms ' = ,:L(}-3 s· ) . Determinar :
8.1 A aceleração ;
8.2 O tempo que demora a abandonar a
arma;
8.3 O comprimento do cano da arma.
8.1 200 X 10' m/s';
8.2 6,75 ms - 6,8 ms ;
8.3 Oi,46 m.
9. O diâmetro externo dos pneus de um
carro 'é 'Cle 60 cm. Quando o carro vai com
a velocidade de 90 km/h , quanto 3JCU&<ria um
V'elocímetI1o gradu3Jdo em rotações do pneu
por s'egundo ? Estando os pneus gastos, as
indicruções fornecidas pelo v·elocimetro vêm
afectadas de erro - este é por defeito ou por
excesso ?
:L3',3 rot;s.
P'Ür excess'Ü I 10. Determinar ·a aJceler3Jção centripeta de
um ponto do Equador terI1estre, cujo raio
é de 6,6 X :10· m..
3,15 =/s'
1 1 . Uma p erdiz em voo, r,ectilíneo ·e hori
zODlt3JI, mantém a veloci'dade média d e 1'5 m/s.
Um caç3Jdor, quando a vê à altura de '50 m
sobre a; sua cabeça, atira cerca de 2,0 m para
a frente da m esma, para que os grãos de
chumbo 3J atinj8Jm. Com que velocidade foram
projectados os grãos de chumbo, â saída do
cano 'Cla 8Jrma ?
3'715 m/s - 318 X 10 m/s
12 .. Um condutor de a:utomóv-eis tem o
tempo de reacção - tempo que decorre 'entr,e
a ;percepção do sin8JI de paragem ·e a aJplica.
ção dos travões - de 'Q, 7 s·. Travou com uma
des3Jceler3Jção de 4,8 m/s', quando segui·a com
a velocidade d'e 6Q km/h.
12.1 Que distânci<a percorreu o automóvel
durante o tempo d,e re3Jcção ?
112.2 Que tempo demorou a parar ?
12.3 Qual foi a di'stância total percorrida ?
1'2.1 111,6 m-+Il:2 m ; 1:2.:2 3,,5 s+ 0,7. s=4,2s.
'12.3 29 m + 12 m = 41 m .
13. O s melhores ,carros despor.tivos podem
8Jce1erar 8Jté atingi'!' a velocidade de '100· km/h
em 10. ·s. Calcular o valor da 3Jceleração e compa
rá-Ia com a da graNidade.
2,8 m/s' 1
- y 4
87

14. Um avião percorreu 600 m antes de «des
colar», no que g8iStou '1'5 S'. Se a aceleração se
manti<vesse constante, com que velocidade
descolaria ?
288 km/h �, 29 X 10 km/h
1.5. Um automóvel utHitário «arranca» e
atin�e a v€llocildade de 60 km/h em 20 s.
D e1lenninaJI':
Ui.ol O v!l!lor da acelemção médIa;
1,5.2 A <Ji.s'tãnda percorI'Í'd'a durante o
avranque ;
1,5.3 Mantendo !l!quela veloci<iade, tra'Vou
em <iado ponto do pe'rcurso, paran<io
'em lO s, Que distância percOirreu <iurante a
travagem, s'U'pondo que manteve cons
tante a desaceleI1ação ?
1 115.1 0,8 m /s' ; 115.2 167 m �I ·1q. X 10 m
]5.3 813, m � 8 X tO m .
16. Um autrunóvru parou num cruzamento
de ruas. Quando apaJI'eceu o sinal verde arran
cou com a .aJcel'aração que se supõe ,constante
e igual a 2,'0 m/s'. Nes'se instante, e no mesmo
senti<io, () a:utomóvel foi ultrapassado por
uma 'cam.�oneta, que seguia com a velocidade
constante de '36 km/h,
1.6J1 A que dtstâncifa, do cruzamento v'eio
a ser ultrap8iSsada a camioneta pelo
automóv€ll ?
'1,6.2 Qual a v'elocidade de..srbe no momento da
u1ltrapassa�m ?
16.3 Pode,rã .o motorista gui!l!r o automóvel
,com essa aceleração durante um mÍ'
nuto ?
16.4 8endo 80 cm a medida do diâmetro
leJ(;iuerno dos pneus do automóv·el, qual
era a v,elocidade angular das ro<ias no
momento da ultrapassagem ?
88
1<6.1 IDO, m � 10 X /lO m ;
116>.2 72; km/h -+' 7 X lO km/h ;
16.31 Não;
�16.4 478 rot/mn �, 15 X · 10? ;rot/mn.
17. Um automóvel chocou com um muro
quando seguia com a velocidade de .1'2,6 km/h.
De que altura se deveria precipitar o carro
para provocar num solo, de dureza igual à do muro, impacto equivalente ?
(g = 9,8 m/s' ) .
h = 62,5 m -+- 62 m .
18. Um automóvel faz um percurso de
10 km com a velocidade de 30 km/h e a seguir
outro percurso i'gu'aJl (<ie '10 km ) com a velo
cidade <ie 90, km/h.
18.1 Determinar a velocidade média no per
curso de 20 km.
1,8.'2 Mostr!l!r que este valor é sempre o mes
mo, quaisquer que sejam as distâncias
p ercorridas, mas iguais, com aquelas
velocidades,
18.'l 415 km/h
18:2 Apli·cando dkectamente a expres
são que permite ·calcular a veloci
dade média, en,contra-se:
2 v, . v,
V.L = v, + v,
indepoodente de �e».
19. 19,1 Mostra·r que, para um ponto maJte
rial animado de m. u. a., partindo do
repouso, se verifica
v
2 e t
sendo v o vaJlor da velocidade no ins·
tante t, depoi.s de percorrida a di's
tância e.
19 .. 2 Mostrar a:inda que, se o ponto material
animado de m. u. a. tiver a v·elocidad,e
inicial v" na origem dos espaços, S'8
verifica :

19.3 Num da,c!o instante ·e num dado ponto,
qual é a r,eloação entre os vailores das
v,elocidades de dois mó",eis - um ani
m81do de m. u. a. s·em velocidade tnicial
e outro 8il1im81do de m. umfonn.e -,
,tendo pal'ltido simultaneamente do mes
mo ponto e seguido a mesma tra.jec
tóri a ?
26 6 1,9:3 v = - 1\ v
' = - => v = 2 v' t t
20. Deixou-s'e cair uma pedr8J e, 1,0 s depois,
lançou-s'e outra, na me'sma, v,e<vtical, com a
v.eIocidade iniciall de ·1'8 m/s. A que distância
do ponto de partida a '2'." pedra encontrou a
1." pedra ?
Pade desprezar-se a res·istênda do ar (g = �,8 m/s2)
'12,5 m -+1 .12 m
21. Um coI'po desloca-se em queda. livre,
no vaz10, duraJIlJte t s'egundo. Nos 3 , 0 seguMos
imediatos percorve 2<JtO m e atinge ·0 solo.
De que a:ltura OOJiu ? (g = 9,8 m/s')
�38 m � 34 X 10 m
22. Um estud8JIlJte deixa cak uma pedra de uma j an,el'a .8; 40,0 m do solo, sem vel'oci,dade inicial. Outro estuda.nte, numa jan,ela
abaJixo 5,0 m da primeira, deixa cair outra
pedra, ,sem v,elocidade i'llici.a;l, no instante em
que a pri'meira pedva passa por ele.
22.,1 Com que velocidade as pedras ating·em
-o solo ?
'22,.2 Que velocidade tinha a 1." pedra quando foi largaida 'a 2.· pedra ?
22.3 Que interval-o de tempo sepaTa os' instantes de chegada da:s pedras ao sala ?
2i2J1) vJ = 2'8,0 m/s, v, = 2'6,2 m/s'
2'2,.:2,) 9,,9 m/s
22 .. 3') /':; t = 0;82 S'.
23. A V'elocidaide de cruze�ro de um aVlao
é de 4'0'0 Uun/h em rela;ção ao ar em repouso.
Efectua 'uma viagem de ida e volta en.tre dois
locai's A ·e B 'que distam 6()1(): km.
23:l! Qua;l é a dur·ação da viagem num dia
com a a:tmosfem ca:lma ?
23.2 Quanto demora a percorr,er o mesmo
trajecto se soprar o vento de B para A
com a velO'cidade de .100 km/h ?
23'.3 E que tempo duvará a: vi:a�em no caso
de o vento sapra;r, com a m'esma velo
,cidade de 100 km/h, perpendicularmente
à linha AB ?
23,.1 3,00 h ; 23.2 3','20 h ; 23.3 3,'liÜ' h
24. O curso de um rio tem a divecção
Este-Oeste. A corr,ente dirige-se para Oeste
com 8J velocidade média de 9,0 km/h. Um barco atr8Jv'essa o rio, pass·ando da margem
Sul para a margem Norte, fazendo o eixo
10ngitudi!l1all do b8JI"cO um ângulo de 3()� com a
di'I1ecção N - S. O v'elocimetro do barco indica
18,0 km/h ( velocidade própria do barco, de
vida 810 seu matar) . Determin,ar :
2'1 :1 A velocidade com que é 'efectua;da a
travessia.
24.2 A direcção e o sentido ,em que é efec
tuaida.
24J1 15,6 km/h
24.2 N - S . P8Jra N .
2 5 . U m p8JI"aquoolsta lança-se <:'.e u m aviã:o,
sofrendo a 8Jceleração de 9,8 m/'s', na sua
queda livre. Admitindo que esta se mantém
constante, verifi.ca-se, 'quando a veIocidade
atinge o valor de 58 m/s, que a resistência do
ar equilibra o pes'Ü do para;quedista e eqtiipagem. Passa desde e'ste instante a ter movi
mento uniforme até ao momento em que abre
o pára-quedas. Este s egundo movimento du
rou 1,5 s.
2.5 .'1 Que tempo levou o paraquedista a
a:tingir a velocidade d e 58 m/s ?
89

2·5 .. 2 Que distância percorreu na desddá du
rante es'te tempo ?
25.3 De que altura s e 1'3Jnçou d o ·avtão, sa
bendo que o pára-qued3Js f.oi aberto a
415 m do solo ?
25.1 5,9 's . 25.2 ·172 m.
25 .. 3 1:72 m + 87 m + 45 m = 30'4 m
26. Um foguetão, após 201{)· km de percurs'O,
atinge a v.elocidade die ll km/s (veloe-'idade de
fuga, <le escape ou segunda velocidade cós
mica, isto é, a veloddade necessária para se
libertar da acção do campo de gravidade da
Terra) .
Qual é a sua aceleração média ? Qual a
relação de grandeza dessa aceleração com a
aceleração g da gra'vidade ?
3Q X 10 m/s'
31 g.
27. Supõe�se que um piloto poderia viajar
comodamente num «superjacto» com uma·
aceleração horizOlIltal de 2> g (g = 9,8 m/s2) .
Suponhamos que era possível construir um
superjacto ca.paz de supo·rtar o aum.ento de
v,elocidade c or!1espondente a 2 g num trajecto
não superior a 150 k m e que o piloto fazia
a vIagem Porto-Lisboa neste avião. Sabendo
que a distância percor6da de�de que levanta
v·oo no Parto até que 'aterra em Lisboa é de
274 km ( informação da TAP ) qual s eria o
tempo mínimo de voo entr.e as duas locali
dades, em condições c onfortáveis, para o refe
rido piloto ? E qual a velocidade máxima
atingida dumnte a viag.em ? (g = 9,8 m/s')
2 X 1118 s = 21316 s = 3 mn 56 5 23J1 X 10 m/s = 8316 km/h -+ 83 X 10· km/h
28. Um foguetão utilizado para colocar um
s3Jtélite em órbiot3J, atingiu a velocidade de
29,0 X 1QJ km/h em 2,0'5 mn.
28.1 D eterminar a aceleração em ( km/h ) /s.
90
28.2 Supondo que a aceleração se manteve
sempre .constante, que velocidade, ex
pressa em km/s, adquiria ao fim de
3 . . ÜlO mn ?
28.3 Supondo que ao fim de um certo tempo
o s!lltéli'te entrou ,em órbilta circu1ar, · à 3Jltitude de 300 km, que pas·sou a per
'correr ·em müvim·ento unJforme, e que a
aceLeração da gravidade a ,essa altitude
é g = 8,9 m/s2, qual a v·elocidade em
órbita do satélite ?
28.1 23'6 ( km/h ) /s . 2'&.2! 111,8 km/s.
2'S.3 v = 7,8 km/s � 8 km/h ( primeira
velocidade cósmica ou circular, isto é,
a velocidade mínima para pôr em
óI'bita um gI"ave lançado horizontal
mente) .
29. O Sputnik I, primeIro satéliote artificia:l
a ser posto em órbita pelo Homem ·em 4 de
Setembro de 1957, de frubric o russo, ,e o Ex
plorer I, pri'meiro ·satéli·te artificial lançado
p elos americanos (-em 19<5&) , eram satélites
terrestres de « baixa altitude», ' isto é, a sua
órbita em tornü da Terra m edia cerca de
4.0 000 km (·perímetro de um arco de me
ridiano tenestr,e ) .�
A sua velocid3Jde .em órbita
era a velocidade circular ou primeira veloci
dade cósmica ( 8, O km/ s ) .
29.1 Que tempo levavam a dar uma volta
à Terra (·períüdo T) ?
29.2 Os saté'Htes que voam mai's a:lto l evarão
mais ou mooos tempo a dar umla vol.ta ?
29,1 50·X lO' s = 83 mn
29.2 O período é maior
30. Suponhamos que um satélite artificial
se move em torno da Lua a uma altitude a
que corresponde uma aceJ.eração da gravidade 1:
lunar igual a - g ( g = 8;celeração média da 1 2 ,
gI'3JV'id3Jde terr·estr.e = 9,8 m/s' ) . Se o raio da 1
órbita do ootélite for - do raio da Terra, qUall 3
a relação entre a velocidade do s!lItéli,te e a

de uma casa situada ao nível do mar e à latitude de 45° ?
v l casa) v ( SJaJtélite ) = ----
6
31. Determinar a aceleração centrípeta da
Lua no seu movimento em torno da Terra,
cons,iderando :
distância 'Terra-Lua = 3160 X lO' km
tempo de uma revolução 1u.n.M" = 27,3 di.as
I 0,0.000 m/s' = 0,2.g cm/s'
32. Um porta-aviões desloca-sle com uma
velocidade cons,tante no instante 'em qu,e, no
sentido da ré 'para a proa, um avião· parte
para ·a descolagem. ·SabelIJ.do que a aceleração
do a:vião é 8,00 m/s' ,e que, ao fim de 5,01 s, a
sua velocidade em relação ao mar é 180> km/h,
calcular a v,elocidade do porta-aviões.
Sugestão:
Cons,iderar dois referenciais :
S - em repouso ou em movimento recti
líneo uniforme.
S'- .em movimento recUlíneo 'e uniforme
com velocidade V,. em relação a S .
Tem-se :
V = v' + V,.
i' = j
sendo:
v'- v'elocidade de um móvel em relação
ao I1eferenCÍ>3JI -8' V - v.elocidade do mesmo móvel ,em relação
a 'S
i' - a'celeração em relação a S'
j - acel'eração em rel8JÇão a S
As fórmu.las de transformação indicadas
só são acettáveis na Física das baixas veloci
dades; fazem parte de um grupo que mais
ta'rde veio a s'er 'substituído por outro cuja,s
fórmulas são aplicáveis em todas as condi
ções. Este grupo permi.tiu o desenvolvimento
da Física Moderna, como se verá no capítulo
seguinte ( pergunta '6 e ·sua resposta; cL tam
bém n." 31..6 ) . Escolher para referencia'! S o mar e refe
renciaI S' .o porta-aviões.
V,. = 36 km/h
33. Uma gota de chuva tem, no trajecto
final da queda, movimento uniforme, tal como
o p3Jra:quedi'sta. Utrlizam.do .o diagrama de vectores veloci
dade, indicar quaJI é a trajectória de uma gota
de chuva, vista por um observador sentado
num comboio em movimento uniforme.
A gota de chuva 'cai obliquamen'te oe dirigida para o lado con trárío ao do
moVim'eIlto do comboio. A inclinação
será t3JTIto m3Ji'Or qUalIlto maior for a
velocidade do com boto.
91


I C A P í T U L O 3
«Na Física experimenta:!, os teorema"s deri'Vados 'por indução dos f.enómenos', s'e não s'e
verirfi'cam hipóteses contráriaS', d ev,em s,er tidos por precisamente, ou muito 'aproximadamente,
ce'l'tos, até apaI'lecerem outros fenómenos graça;s aos quais' aqueles teoremas se tornem maJ,s
precisos ou sujeRos a excepções. E isto ( é assim ) para qu,e a prova indutiva não seja desltruída por hipóteses'.»
Isaac NEWTON
Re,gra quarta para a investigação da Natureza, indicada na sua obra monu
mental, escrita em latim : Philosophiae natu1'alis pr'incipia mathematica, livro III.
Sir Isaac NEWTON (1643 - 1727) - Retrato pintado por Sir Godfrey Kneller em 1702.
Encontra-se na National Portrait Gallery (Londres).
Nasc,eu em Janeko NH.í3 segundo o calen
dário moderno ( segundo o calendário aJIltigo, em DezembI'lo de '164.2 ) .
Era o filho mais novo de um casal d e
pequenos agricultores, na aldeia d e Woolsthorpe, condado de Lincoln. Estudou na Uni-
93

/ veTsidade de Cambridge, onde ficou como
professor.
Aos 31{} amos foi el·eilto membro da Royal
SO'ciety de Londr.es, da qual ve:io a s'er Presi
dente durante 2·3 anos. Protegido de Lord
Ha'Hfax, foi nomeado inspector da Caisa da
Moeda. MeTI\eu solte:iI\O, ·cem 84 anos', no aug·e
da glória, naquele tempO'. Voltaire 3JSsiSltiu ao
funeral. ISuperi,O'rmente dotado ·e autênticO'
géniO', estabeleceu es sólidos fundamentes da
Mecânica clássica, cujos princípios e l eis
enunciou de medo precisQ. Fundador da Física
MatemáUca, 8iprmne:irtaJ os tI\abaolhos de Ke
pler, GaHleu e Huyghens, analisa-os, inter
preta-os e, num rasgo de ímpar intuição,
descobre, enuncia e dá forma matemá!tica à lei da atracçãO' universal - base da Mecânica
Oeleste.
Descobre, em Mwtemática, e «método das
fluxões», fundamento do Cálculo Infiilltesima)} ..
ao mesmO' tempo que Leibniz, embora por
outra via.
PUiblicou 'em 16817 os «PrincípioS' ma:temá
ticos da Filesofia Natural», sua obra de cúpula
que Lagrange classifi.cou do modo 'seguinte' :
«a mais alta produção do ,espírito humano».
De te1TIiperamento frio e traJto humano
difícil, suportava m·a)} que o contradisse's's'em
e chegou a s'er injusto para alguns sál:,lios
seus contempor.âneos.
94
3.1 O método científico aplicado nas
ciências experimentais
o método científico, a que Ja nos
referimos em traços gerais no cap. 1 (n.o 1.2.3 ) , e cujo estabelecimento, como
método seguro de trabalho nas ciências experimentais, por Galileu, assinalámos no cap. 2 (n.o 2.10.1) , teve em Newton o seu mais autorizado sistematizador, no século XVII. De igual modo a axiomática que vamos seguir neste capítulo se deve, principalmente, à contribuição de Newton.
Entretanto, convém salientar que os postulados ou princípios, em Física, se aceitam para ·explicar os fenómenos naturais observados e se mantêm enquanto as consequências que deles se deduzem não contrariam os factos conhecidos : constituem, deste modo, uma axiomática apoiada na observação, sugerida pela experiência e sujeita a modificações e/ou sucessivos aper
feiçoamentos. Estas razões levam-nos a compreender agora porque é que os axiomas da Física não podem ter o carácter de imutabilidade ou de longa permanência dos axiomas da matemática.
Para estabelecer a teoria física (ou modelo interpretativo) de um conjunto de fenómenos, é necessarlO passar pelas seguintes fases :
1.a - Observação - com recolha de elementos, organização desta informação e tentativa de descoberta de regularidades ;
2." - Experimentação ( série orientada de observações de fenómenos que se provocam) ;

Nota 1 :
Educar e trei'nar a obs'ervação e {)' espírito
crítico correcto ,é fundamenta:l paI1a a boa
utilização do método cLe;ntífico. Isto será facH
mente entendido recordando uma passagem
de romance policial.
Sherlock Holmes, célebI1e detective dos ro
mances poli'ciais da autoria de Sir Artur
Conan Doyle, devia ,o êxito ao seu extraordi
náI1i'o condão de observ,ar e de criticar correc
tamente.
O ajudante de SherlO'ck Holmes, Dr. Waitson, -
queixa'-se por não cons'eguir observar as
coisas como Holmes, aipesar de possuir olhos
tão bons como este. Então HolmelS interpela-o:
- Sim, Você vê, maiS não observa. Por
exemplo: quantas veZies viu as escadas que
conduzem do vestíbulo a esta habitação ?
- Centena:s de vezes, reSIPondeu o Dr. Watson.
- Ah ! Quantas escadas s ão ?
--Quantas ? Não s'ei.
- Or81 ai está a diferença: Você não observou, -embora tenha vi'sto. PoOisl eu di'go-lhe que
são 17, porque vi 'e observei.
1!: j'sto o que, de frucOO, -aJoonooce na ma,ioria dos casos com 'a maioria das 'PeslS03.JS : v.er sem observar. _ _
Finailmente, uma dupla recomendaição a ter em conta, quando se observa -e se .expe
rimenta:
1. o - não concl UÍIr de mai's ( erro ) , n-em
concluir de menos ( descuido ) , mas somente o que se observou ( cuidado
e exactidão ) ;
2.° - uma generalização só é válida den
tro dos limites definidos pelas expe
riências que a ela conduziram.
3." - Estabelecimento, por indução, da axiomática, utilizando o raciocínio científico específico ( isto é, a;poiado nos I"esultados das experiências reais 'e na extrapolação das experiências ideais) ; recorre-se também, quando necessário,
a complementares hipóteses de
trabalho;
4.a - Dedução) partindo da axiomática, de conceitos bem definidos, de
hipóteses de trabalho e de leis e respectivos corolários. ( 1 ) .
3.2 Princípio da inércia ou de Kepler
e Galileu
Perguntas como « que é uma força ?» , «qual é a 'causa do movimento ?» afloraram ao espírito dos homens há mais de 2500 anos. As respostas precisas só se obtiveram .a partir de Galileu (1564-1642) e de Newton ( 1643-1727) .
Recordamos, por exemplo, que no esquema aristotélico um dos princípios fundamentais era o seguinte: se nenhuma força actuar sobre um móvel, este acabará por atingir o repouso. Galileu provou que esta proposição está em desacordo com a experiência.
A primeira noção de força vem-nos
da sensação muscular do esforço que é necessário empregar para pôr um corpo em movimento ou para deformar uma mola. O ,conceito mecânico de força, mais preciso, aparece depois.
Assim, nas primeiras tentativas de GaHleu registou-se, como resultado da observação e respectiva análise, a seguinte ,conclusão :
«Toda a matéria ficaria em repCYUSo,
se estivesse completamente isolada» - 'conforme tinha afirmado anterior-
95

Nota 2 :
A prime'ir'a vista, par.ece que este L " prin
cipio contradiz a experiência comum, porqu'e
é da observação vulga:r que se deixamos de
empurrar um objecto num plano horizontal
ele acaba 'por atingi'r o repouso, em vez de
continuar com velocidade constante, Isto deve-se, porém, às forças retardadoras do atrito
nos contactos e à resistência do ar, Outro ponto importante 'é 'este: se bem que
o movimento de rotação não tenha si<io e�pli
citamente mencionado por Newton, no seu
tra>bailho ressalta claramente que ele conhecia
bem as condições a que 'as fo,rças deviam s'a
tisfazler para a rotação s'er nula ou de velo
cidade angular ccnst8lnt,e.
Apare,cem-nos então dois efeitos de inércia :
a) a inércia na translação, qUle mantém
o corpo em m,ovim'ento uniforme e rec
,tilineo, com a velocidade que 'possuia no momento ,em que devxaram de 8Ictuaor ferça:s ·exteriores s'obre e'le ;
b) a inércia na rotação, que mantém o
corpo em movimento circulaT uniforme,
enquanto não actuar nenhuma força
exterior ao sistema formado pelo corpo ou ,pelo 'corpo e ligaições ao ,eixo de
rotação,
96
mente Kepler - e «não pode por si
própria . medifiear o seu mO'l'imento
( velocidade ) >> - conclusão de Galileu.
Resulta daqui, com clareza, o con
ceito mecânico de força: é a causa
imediata da modificaçio do estado de
repouso ou de movimento, ou seja é
a. ca.usa de toda a aceleração. E resulta
também o conceito de inércia, como
propriedade geral 'e inalienável de to
das as partículas materiais do Uni
verso : oposição destas à variação do
seu estado cinético actual ( repouso ou
movimento) . Portanto, sempre que um
móvel mude de v'elocidade, há urna
força responsável pela mudança. Por
exemplo, quando um grave é lançado
em queda livre, a causa da aceleração é
a força de atracção da Terra ; quando uma pedra, presa a um fio, descreve
uma circunferência, é a tensão do fio
que obriga a pedra a deixar a trajec
tória rectilínea, tangencial à circunfe
rên'CÍ'a ( e que a pedra retomaria se o
fio partisse ) .
O princípio da inércia, também cha
mado 1 .a lei de Newton, por este a t€r
formulado com precisão, aparece assim
enunciado na sua obra ,«,princípios ma
temáticos da Filosofia Natural» :
« Todo o corpo continua em es
tado de rep<YU8o ou de movimento
uniforme, em linha recta, a menos que seja compelido a mudar esse
estado por forças a ele aplica
das » , (2) .
3.3 Princípio da independência dos
efeitos das forças (Galileu)
Este princípio pode enunciar-se do
modo seguinte :

Nota 8 :
Est'e princípio ta:mbém � conhecido por
princípio da sobreposição das forças .e ainda
por princípio da sobreposição dos movimentos,
em virtude de ,o efcito final não ser 31lteraJdo
pela sobreposição dos efeitos parciais.
7
Quando várias forças actuam sobre um 'corpo, cada força actua
independentemente das demais;
por outras palavras : o efeito final (posição de chegada) é o mesmo quer essas forças a·ctuem sucessiva
e separadamente, quer actuem si
multaneamente. (3 )
3.4 Lei fundamental do movimento
(ou 2.a lei de Newton)
Os dois princípios anteriores, em particular o primeiro, não são explicitamente quantitativos, pois no seu enunciado nada se diz acerca da relação
entre os valores das forças e os valores das acelerações por elas produzidas. Newton deu forma matemáti,ca a estel:! dois princípios e enunciou a lei correspondente, qu� passou a chamar-se lei
fundamental do movimento ou ainda 2.a lei de Newton:
a mudança de movimento (aceleração) é praporcional à força
aplicada e tem a direcção dessa força, isto é,
� F
- = k -+ j
ou -+ -+ F = k j
Vamos salientar em seguida alguns resultados importantes inerentes a esta lei.
1.0 - Esta lei, onde ressalta a constante de proporcionalidade k, está de acordo com os resultados experimentais obtidos quando se medem os valores F" F2 ' Fs, etc., das forças sucessiva-

Nota 4 : o valor-da aceleI'ação centrípeta - j , - n o
movimento circular uniforme pode' deduzir-se
à custa do principio da independência dos
efeitos das forças.
-+ Fig. 3.1 A acel,eração c entrípeta - j, - faz com
que o móv,el, decorrido o interv!l!lo
de tempo t:, t, não esteja em A, mas
em P.
Consiideremos ( fig. 3.,1 ) o móv€ll na poSlição
inicial P" onde foi deix!l!do sob a '!l!cção d e
uma força impulsiva. S e não estiveSlSle li.gado
ao eentro 0, seguiria na di,re'cção da tangente,
com mavim. uniforme ·e rectilíneo, de veloci
dade constante v. Pass,ado o intervalo de
tempo t:, t, encontrar�s'e-ra na pos·ição A, tendo
percorrido a di.,tãncia :
p. A = v . t:, t
Por outro lado, sab.emos d a Geometria que :
( P. A ) ' = A P X A P' <=> ( P. A ) ' = A P X (A P + 2 r)
Se o intervalo de tempo, t:, t, for \Suficiente
mente pequeno, o segmento PA pode despre
zar-se compaJt'ado com 2 r e, por iSlso, podemos
escrever :
( P. A ) ' = TI . 2 r
Notando qu:e o móv,el não se encontra em
A, maS', 'sim, no ponto P, pela independência
98
mente aplicadas ao mesmo corpo e se medem também os valores das acelera
ções correspondentes j" j2' fh etc. , calculando-se a seguir os quocientes res-
pectivos, .! , que se verifica teI'em j
valor constante:
-- = -- = -- =
j,
-+ --+ 2.o -Esta lei fundamental - F = k j
-contém, como caso particular, o princípio da inércia, pois, se não há
--+ forças a actuar ( F = o ) , também não
-+ --+ há aceleração ( o = k . j => j = o, por-que k =1= o) e o movimento só poderá ser uniforme e rectilíneo.
3.0 - Se actuar sobre o corpo uma fOlrça instantânea ou impulsiva ( força cujo tempo 6 t de actuação é muito pequeno: 0,1 s, 1 m s, 1 !J. s, . . . ) , o movimento correspondente é uniforme 'e rectilíneo, porque, após a actuação da força, a velocidade deixou de variar.
4. o - Se actuar sobre um ' corpo uma força constante ( em módulo, direcção 'e sentido) , a aceleração também será constante e, por isso, o movimento produzido será uniformemente
variado. Se eSSa força for potente, isto é, tiver o sentido do movimento, a aceleração também terá o sentido do movi
mento e este será acelerado. Se essa força for resistente, ou seja, de sentido contrário ao do movimento, a aceleração terá também sentido contrário ao do movimento e este será retardado.

dos movimentos componentes' tudo se passa
como s·e ele pel'coN'esse sucessivamente P" A
( em m. unif. ) e A P ('em m. u. a. com a
aceleração j, ) . Nestas condições, temos :
_ 1 A P = - . j, . 6. t'
2
Substituindo P.A 'e PA pelos seus v8ilores
cinemáticos, vem por fim :
1 v' . 6. t' = - . j, . 6. t' . 2 r
2
e porta.nto :
A p
y
v' j, = r
F B, O, D, X : 2,u.,1 : 3 J.I/ , , , , ,
Fig. 8.2 Posições correspondentes a três unidardes de tempo cons'ecuti'vas de uma
bela actuada em A por uma força impulsiva segundo o eixo horizontal AX.
Indicam-se, na figura, as pos·ições
B;, 0, e D, que teria a bola sob a
ta!cção exclusi'va da força impulsiva
e as posições B" O, e D, qu,e ela teria sob ·a acção exclusiva do seu peso, posições essas ref.erentes a uma, duas
e três unidades de t;empo .
A trajectória real AB é equivalente às traj·ectóri'as suces·sivas AB, + B,B
p ara 6. t = 1 e -o mesmo sucede para qualquer intervalo de tempo.
5." - A lei fundamental contém tam
bém, como caso particular, o princípio
da independência dos ·efeitos das for
ças, porque, quando actuam várias
forças; as aceleraçôes parciais corres
pondentes a estas forças são vectores
cuja soma ( pela regra do triângulo ou
pela sua equivalente do paralelogramo)
é independente do facto dessas acele
rações serem simultâneas ou sucessi
vas.
Consideremos, para melhor com
preensão, a seguinte experiência prá
tica : uma bola é impulsionada horizon
talmente por meio de uma força ins--+-
tantânea F ( fig. 3 .2) n o ponto A .
Sob a acção exclusiva desta força a bola teria movimento uniforme segundo AX e ocuparia as posições B"
e" D" etc. , ao fim de uma, duas, três . . .
unidades de tempo. -
Sob a acçí'í.o exclusiva do seu peso P a bola teria movimento uniformemente
acelerado s'egundo AY e ocuparia as
posições B", e", D2' etc . , ao fim das
mennas unidades de tempo. Os suces
sivos pontos de chegada da bola cor
respondentes às unidades de tempo
consideradas, A) B) e, etc. , sã.o os mes
mos, quer o móvel siga a trajectória
real A B e D . . . , quer siga, separada
mente e sucessivamente, os trajectos
AB, + B,B ou AB! + B!B) Ae, + e l e ou A e ! + e2 e) etc. Esta independência
dos movimentos ccmponentes acabada
de mostrar revela a validade do prin
cípio da independência dos efeitos das
forças ( efeitos, no sentido de pontos
de chegada ) . (4 ) . A figura 3.3 reproduz uma fotogra.
fia de uma experiência que confirma
o que acaba de se expor.
99

Fig. 3 . .'1 Fotogra.fia estroboscópi'ca oe duas
bol&s de golfe largadas ao mesmo
tempo: a da direita sofreu um im
puls'O horizontal por meio de uma
mala. Observa-s:e que ais duas bolas
p ercorrem distâncias igu.ai,s' segundo
a vertical, o que confirma o exemplo
da fig. 3.2 e verifica 'o princípio da
independência dos efeitos das forças
(Autorização de P.S.S.C. ) .
A
B
. + -+-Fig. 3.4 tA é a acção de A sobr,e B e tn é a
Nota 5 :
reacção ( re.sposta) de B sobr,e A .
-+- -+t, = - t"
Esta 3." lei só é vâlida pare torças de con
tacto e quando aplicadaS' a corpolS que estão
em repouso. P'ara as força's cuja acção se
propaga a distância através de modificação
das propriedades do meio ou do espaço, como
as forças electromagnéticas, não se veri.fi.ca esta lei, porque não aparecem forças de
reacção.
100
Isto m ostra ainda que, para determinarmos um ponto de chegada, podemos aplicar o paralelogramo da com
posição de movimentos) estabelecido por Galileu, e com base no qual está construída a figura 3.2.
3.5 Princípio de acção e reacção
Segundo Newton, uma força resulta também da acção recíproca de dois
corpos. Assim, os dois corpos A e B atraem-se mutuamente, de acordo com a propriedade ger8!l da atracção entre partículas materiais (fig. 3.4) .
-+-Podemos admitir que a força fA
é a acção de A sobre B ; então a força -+-fn será a reacção ( ou resposta) de B �obre A .
Não h á nenhuma diferença n a natureza das duas forças - elas apenas estão aplicadas em corpos diferentes.
E podemos até, sem qualquer inconve--+-
niente, trocar os termos : tn é a acção -+-
de B sobre A ; tA é a reacção de A
sobre B.
O terceiro princípio) também chamado 3.a lei de Newton) põe em termos quantitativos esta relação a:cção-reacção. O S'8U enunciado é o seguinte :

Pergunta 1:
Utilizando o paralelogramo da compos-ição
de movimentos, escrever as equações, dos mo
vimentos componentes do movimento real no
C8JSO da bola'
impulsionada segundo AX �
(fig. 3· .. 2') com a v'elocidaKie constante Voo
s
-+-Fig. 3.5 A força F é a acção do corpo (C),
-+-devida ao seu peso PJ sobre a corda
e sobre o soLo. Ê F = P.
-+-F está aplicada num ponto da corda
-+-ou do solo. O peso PJ não repI'ies'en-
tado, considera-sle apItcado no cen
tro de gravidade ,G e é precisamente
-+- -+-iguail a F. A força, R é a reacção da
co'rda 'e ,do solo ,e está apl,i'cada num
ponto do COIlpO que pertença à linha
d� 8Jcção do peso. "-----
Resulta daqui o carácter da reacção como força solicitada e cujo valor, por isso, será somente o necessário para igualar o valor da acção. (5).
<Em linguagem V'ectorial, o enunciado desta lei reduz-se à expressão :
acção e reacçao correspomdente
são directamente opostas e têm (' mesmo módulo.
Na fig. 3.5, indicam-se mais dois exemplos de acção e reacção.
-+- -+-1. o - A acção F ( devida ao peso P
do corpo esférico C) sobre o solo S cor--+-
responde a reacção R do sO'lo sobre o corpo. A acção sobre o solo pode considerar-se aplicada no ponto A ou noutro ponto qualquer do solo e na
-+- -+-linha de acção de P. A reacção R tanto pode considerar-se aplicada no centro de gravidade G do corpo, como em qualquer outro ponto do corpo pertencente à mesma linha de �cção.
-+- -+-2. o - A acção F ( devida ao peso P
do ,corpo ,cúbico 0.) sobre a corda AS , ,- -+-
correspond.e "a ,reacçao R da corda sobre o 'corpo. A acção sobre a corda pode considerar-�e aplicada no ponto A , ' ou noutro ponto'qualqu,er da cordáper-
-+-tencente à linha de acção do peso P.
-+-A reacção R pode aplicar-se num ponto
"qualqüer do corpo pertencente à sua linha de acção. ( 5), (6) 'e (7) .
101

Nota 6 e Fig. 3.6:
p
®
Pode fazer-se uma verifica;ção expe
rimental do principio da acção e
rea;cção no Laboratório ou mesmo na
sala de aula utilizando a s'eguinte
experiência (üg. 3.6):
p'
p'
1 ." fase: equiJi>bram-'se aIS balanças (A)
e (B ) do medo indi'C3!do na figura 3.6', (a).
Em '�iênC'Ía realizada, obtev,e,-'se o equi
líbrio oom:
p = 34,520 gf
p' = H�2,900 gf
2." fase: mergulha-s·e 'o corpo oompleta
mente em 'água, como se assinala na fig. 3.6(b),
e as balalllças desequjIJ�bl'am-se.
O deseq ui.Jíbrio dia balança ( A ) fÍ'ca a de
ver-se à acção da água sobre o corpo (impul
são da á.gua),. O desequilíbrio da ba;lança (B)
deve-se à reacção do corpo sobre a água.
102
3.6 Referenciais de inércia
Convém recordar as noções já estabelecidas de sistema ('cap. 2, nota 1 ) , exterior (idem) , e referencial ou sis
tema de referência ( cap. 2" n.O 2.2).
A estas noções acrescentamos mais a de sistema isolado: é um sistema em que não há acções de força entre ele e o exterior, o que 'equivale a dizer, segundo outro ângulo de visão, que o sistema não troca energia com o exterior. Vel'lemos oportunamente que estes dois conceitos são equivalentes.
Um ref:erencial pressupõe a presença de um observador. Ora, o tipo de movimento e suas propriedades mudam se o observador muda de local. Suponhamos, por exemplo, um barco ancorado num porto onde o mar está agitado. Quando, no barco, os objectos que estão em cima de uma mesa caem, a descrição da queda feita por um passageiro do barco (que supomos participar do movimento deste sem o sentir) e por um observador que está em terra a observar o mesmo fenómeno através das janelas do barco é muito diferente. Enquanto para o primeiro a causa do deslocamento dum corpo de cima da mesa para o chão é um enigma, para o segundo ela é evidente (o movimento é atribuído às forças provenientes dos solavancos e inclinações do barco) . Naturalmente que, neste caso, o melhor referencial para estudar o movimento da queda é a Terra ( o cais) e não o barco.
Tudo isto vem a propósito das condições em que são válidas as três leis fundamentais do movimento: elas só se verificam em referenciais especiais chamados referenciais de inércia.

3." fase: refaz-se o e::)uilibrio retirando pe
sos do prato de (A) e palssando-os pa,re o
prato de (B); na experiência que se realizou
retiraram-se 6. p = 26,6150 gf 310 peso p e
acrescentara,m-se ao peso p', obtendo-se de
novo o equilíbrio. Tal valor representa, pois,
tanto a acção da água scbre o cor,po, como
a rell1cção do corpo sobre a água. Verificou-se,
porta,nto, que a a"cção e a reacção desenvol
vidas têm igual módulo.
Obs: Esta experiência, a,ssim como a per
gunta Z, foram publicadas na Gazeta de Física
de Dezembro de 1971 (voI. V, fasc. 4), por
Eduardo Lage e Jorge Lima, que a efectua
ram no Laboratório de Física da Faculdade
de Ciências do Porto .. Os valores que apresen
tamos foram obtidos numa experiência rea
lizada no Li·ceu de D. J.cão de Castro.
Nota 7:
Qualquer daiS três icis de' Newton acabadas
de apresentar é o fruto da 'll1plioca,ção do mé
todo ci'entífi.co (cf. n." 3,.'1). A'5'sim, numa pri
meira fas,e, OÍ'entistas ,e as'trónomos como
Ticho Brlllhe, KepJ.6I' oe Ga,ltJ.eu observaram os
mcvim·entos dos alSltros 'e es' dos corpos na
sua queda p'ara a Ter.ra, e, bem ass1m, ll1S' for
ças que 'actuam O'S corpos'. Experimentaram a
seguir dif,erentes condições de movimento, em
parti!culaT GalHeu, que tão bem ,soube explorar
o pêndulo e .o :plano inclinado. A partir das
regul:aJridades obs6I'V'adas estabeLeceram por
indução Q'S prinCÍ'pios. E justo realçaT, nesta
fase, a contrtbuição de Newton, a quem se
deve a 'estabelecím'en,ta do princípio da acção
e I'eaJcção. S'eguiu�se a dedução, a partir dos
principi-os, de leis, como a, lei fundamental da
-+- -+-Dinâmica, traduzida. :pela ,expres'São F = mj,
de noções bási,cas como a força ·e a' inércia,
etc. E nesta fase deduUva que é decisivo <J contrrbuto da:do por New.ton. T<Jdas estas con
sequêndas foram confirmadas 'pela experiên
cia quotidiana ·e ·pela,s «batalhas de prova» a
que foram suja,tas.
Newton definiu referencial de inércia como um sistema que não tem movimento acelerado em relação às estrelas fixas.
Nestes termos, podemos tomar para referencial de inércia base aquele que tem o seu centro no centro de gravidade do sistema solar e cujos eixos passam por três estrelas fixas. Será então referencial de inércia qualquer referencial que se desloque em relação a este com movimento uniforme e rectilíneo.
Nos referenciais de inércia nenhum movimento começa sem a acção de uma força, o que os torna simples e cómodos.
Os sistemas ligados à Terra não diferem muito de um referencial de inércia, razão por que podemos estudar as leis do movimento segundo o modo de ver de um observador terrestre.
Finalmente, para generalizar a aplicação das leis do movimento, vamos admi tir como válido o princípio da relatividade de Galileu:
- as leis da Física são válidas para todos os observadores colocados em referenciais que se deslocam com velocidade ccmstante, qualquer que seja a direcção e a grandeza desta.
Isto significa, em resumo, que não há referenciais de inércia privilegiados ( são equivalentes todos os referenciais com movimento uniforme e rectilíneo) e que nos sistemas acelerados (não inerciais) as leis fundamentais do movimento não se verificam.
3.7 Massa inerciai ( ou massa de inér
cia)
Se aplicarmos forças iguais, durante o mesmo tempo, a corpos diferentes,
103
. }' I �/

Resposta à pergunta 1:
Segundo AX-+ { v .. = k
x = v" t
! g = 9,8 m/s'
S'egundo A Y -+ v = 9,8 t
Y = 4,9 t'
Ooordenad3ls do ponto de chegada 310 fim
do tempo t: P (x, y)<=>P (v. t; 4,9 t').
Pergunta 2:
Uma balança ,está equHibr3lda com pesos
num prato e tem no outro um frasco tapado
com uma mosca pousada no fundo. Quando a
mosca levanta ·e voa s'em pois,ar, o prato
desequi'librar-se-á?
Pergunta 3:
Uma força illist'antãnea ou impulsiva pro
duz movimento rectilíneo e uniform,e a partir
do instante em que deixou de 31ctuar" E antes,
no de'eorr.er do muito brev,e intervalo de tempo t:,. (em que actuou?
104
obtêm-se variações diferentes de velocidade. Isto significa que a constante de
força proporcionalidade da relação ---
aceleração
varia com o corpo:
F -=k, j,
etc.
Como os corpos da mesma substância, com maior número de partículas, são acelerados pela mesma força com maior dificuldade (menores valo-
-+ res de j ) , as constantes kJ, k2, . . • , são também maiores. Ê então natural aceitar que os valores destas constantes são uma boa medida da difi'culdade de acelerar um corpo, isto é, são uma boa medida da inércia. Por isso se ,chama a cada uma destas constantes de proporcionalidade massa inercial (ou massa de inércia) do corpo, a qual se representa pela letra m.
Dennida assim, matematicamente, < esta grandeza massa íner�ia16,de � um ,corpo, a lei fundamental ,do mo- '
vimento passará então ver-se :
-+-F j -=m
j
No. 'caso do movi�ent{} ser RX$Ctil!- ! ' � , ,' - #,
neo (não há jc), a relação e transforma-se numa relação.; lares numéricos:
F - = , m j

Resposta à pergunta 2:
Desequilibra-se po.rque a acção (peso.) da
mo.sca exerce-'se no prato e fá-lo descer ..
A reacção do pr8Jto. 'exerce�se na mosca ,e não
afecta o. prato..
Port8Jnto., levantando a mosca, desapal'ece
a acção sobI'e o ,prato, dirigida para baixo, e a
balança de'S1equillibraT-ISe-'á, subindo o prato.
É isto, 'aliâJs, o que sucede semp.re que co
locamos 'Pesos marcados ou outros corpos nos
pratos de uma ,balança, na operação de pesa
gem.
Resposta à pergunta 8:
Durante o. mtervalo. de tempo. 6, t = .0,,1 s,
1 ms, 1 p. s, etc., 'em que a força actua conti
nuamente, vaTi'ando. o.u não. o :seu móduJ.o, o
movimento 'Produzido ·é neces-sari-8Jmente va
ril3:do ( porque tem aceleração).
Pergunta 4:
Sea-OO d'if1erentes o.u análogos o.s processo.s de medi'ção. da massa in.ercial e da mas,sa
gravüatória (ou pesada)?
Pergunta 5 :
Massa inerciaI e massa gravitatória s'ão propriedades diferentes de um 'corpo.
Pavticul8Jriz8Jr 'estas propriedades 'e indicar
a condi,ção que nos leva 8J induzir uma 'equi'
valência completa entr,e estes 'dois tipos de
massa.
As massas inerciais gozam de três propriedades importantes, que convém saHentar:
1.a - São aditivaS. Assim, se juntarmos dois corpos (um de prata e outro de cobre, p. ex. ) , de massas inerciais ml e m2, a massa inerciaI do conjunto será: m = mI + m2•
2.a � A massa inerciaI, para um corpo homogéneo ( cap. 1, nota 1), € proporcional ào seu volume (e, portanto, ao número de partículas).
3.a - Nas rea:cções químicas, a soma das massa's inerciais dos reagentes é igual à soma das massas inerciais dos produtos da reacção, em termos de escala macrofísica ( cap. 1, n." 1.2.4)
- princípio da conservação da massa.
3.8 Massa gravitatória ( ou massa gra
vítica ou massa pesada)
Ê a massa medida com uma balança de dois pratos. Dá-se-lhe este nome porque, quando a balança, suposta exacta, está em equilíbrio, são iguais as forças de atracção gravitatória da Terra sobre os corpos colocados em cada um dos pratos.
A massa gravitatória de um corpo é, portanto, medida por comparação do peso do corpo com um peso padrão, recorrendo-se a uma situação de equilíbrio com ausência de movimento. Quando os pesos de dois corrpos forem iguais diz-se que têm massas gravitatórias iguais.
A massa gravitatória é uma propriedade do corpo que só depende dele próprio. Com efeito, o peso de um corpo
105
Resposta à pergunta 4:
São iln,teimmente dif'erentes, nada tendo de oomum. Assim: a m1l!s'sa inerci:1l!1 é m'edida por um processo dinâmico: medição de f.orças e de acelerações, seguida do cálculo dos respectivos quoci'entes.
A massa gravitaJtória é medi'da por um processo estático directo: pelo equmbrio de forças iguais (pesos) numa balança (suposta eX1l!cta). A esta iguald1l!de de' forças atractivas g'ravitatórias cOI'I'esponde, em consequên
cia, a igualdade de ma'ssas' gravitatórias'.
Resposta à pergunta 5:
A massa inerci,a:l é uma propri'edade I'elaci'onada ·com a inércia do co.rpo, s'erv'e de m,edida da inércia ·e o seu valor dete,rmina-se pela
F expressão m = - . j A massa gravitatória é uma propriedade
r,elacionada com a a:tracção uni'vers'rul entr,e partículas materiais. :E': em virtude dessa propriedade que as partículas se atraerrL A medição da massa gravitatória faz-se por pesagem.
Ha'V'erá ,equivalênda completa ·entre as duas 'massas qurundo 'se tomam para unidade de maSlSa i[)jercioaI e de massa gravi.trutória 8iS massas do mesmo corpo padrão, que é o kg p1l!drão internaci:onal.
106
varia com o local onde se efectua a pesagem, mas a massa gravitatória mantém-se invariável, pois, equilibrados na balança o peso do corpo e o peso padrão, este equilíbrio manter-se-á se transportarmos o conjunto para o Equador, para os Pólos ou mesmo para a Lua ou qualquer outro local, porque os dois pesos variam na mesma prop'orção. É por esta razão que se adoptou para unidade de massa gravitatória a massa gravitatória de um corpo especialmente fabricado, que é o quilograma-padrão internacional, arquivado no museu de Breteuil em Sevres ( cercanias de Paris) . O peso do quilograma-padrão, no paralelo 45° da Terra, e ao nível do mar, chama-se quilograma-força normal (kg!) e a massa gravitatória correspondente chama-se quilograma (kg).
3.9 Relação entre o peso e a acelera
ção da gravidade; equivalência
entre massa gravitatória e massa
inerciai
Utn:gra V'�, de massa inercial m, cai livrerrlente no vazio com a aceleração
� da gravidade g. Esta aceleraç.ão é devida principalmente à força atrac-
--+-tiva da Terra sobre o grave (peso P
do grave) . Pela lei fundamental do movimento teremos :
--+- --+-P=m.g
Mas, em virtude de o movimento ser rectilíneo, escreveremos :

Nota 8:
Massa não é a qUrultidade de matéria.
m, sim, uma propriedade da;s partículas e,
por i·s'so, da matéria.
Como tal, a massa de um corpo homogéneo
é proporcionail ao númer.o dais suas partículas
(se forem todas iguais) ou de grupos de par
ticul1as (se forem de ma'is de uma espécie)
Pergunta 6:
A velocidade de um móvel é uma grandeza
relativa, quer dizer, o s·eu valür depende do
referencial escolhido, mesmo que seja um re
f erenCÍ'al inercia!.
A aceleração de um móvel é uma grandeza absoluta, is,to é, tem sempre o mesmo va;lor
em todos os referendais de inércia.
Mostrar porquê.
Pergunta 7:
Para descrever o movimento, só se consi
dera «imparcia'l» o obs'ervador ligado a um
referencial de inércia, ou seja o observador
cuja velocidade não varia (isto é, não está
animado de movimento rectilíneo y;ariado nem
de movimento curvilíneo). Se, porém, a sua
vele'cidade variar pouco ou, no ca·so de mo
vimento circular, a sua vE'locidade angular
for pequena enquanto estuda o movimento,
já se pede aceita'r como imparcial.
Nestes termos, sabendo que a Terra efectua
uma rotação em 2,4 h e que o Sol gasta 180
milhões de anos a da·r uma volt'a em torno do
centro da galáxi'a a que ppctence, indicar um
modo de avahar:
a) o grau de «imparcia'lidade» do obser
vador terrestre;
b) quantas vezes merece mais confiança
o testemunho de um observador solar
em re]'ação ao testemunho do observa
dor terrestre.
Se, no mesmo local, compararmos os pesos P 'e P' de dois corpos, de massas inerciais m e m', temos :
P = m.g e P' = m'.g
Por divisào ordenada vem :
P m
P' m'
Isto significa que o quociente dos pesos de dois corpos é igual ao quociente das suas massas inerciais.
Por outro lado, por definição de massa gravitatória, também o quociente dos pesos de dois corpos é igual ao quociente das suas massas gravitatórias.
Estas duas coriclusões sugerem a equiva�ência entre maS$a gravitatória
e massa inercial. Ela existe de facto. E esta equivalência tornar-se-á completa se escolhermos, para unidades das duas massas, as massas do mesmO corpo padrão, que é, neste caso, o quilograma-padrão internacional.
Exp2riências e medições de Newton, Bessel e Eotvos mostraram igualmente que havia equivalência entre a massa inercial e a massa gravitatória.
Em face desta equivalência, não se faz a medição directa da massa inercial, mas apenas a da massa gravitatória por pesagem. Como regra geral, utiliza-se indistintamente a palavra «massa» para designar qualquer delas. (8).
Por último, a express3.o
P m P' m'
justifica o uso da balança de pratos para a determinação da massa de um
107

Resposta à pergunta 6:
s, Z Z'
o, y #'
x
Fi.g. 3.7 S, e S, são dois ref.erenciais de inér
cia, de eixcs paralelos. O referencial
S, desloca-se em relação a S, com
-+-a velocidade v, constante 'e de direc-
ção paralela ao eixo O,Y.
S.e o pcnto material P se deslocar com
-+movimento uniforme e rectilíneo, sendo v, a
sua velocidade no referencial S" de direcção
-+-paralela a 0, Y', a sua ve-lccidade v, em rela- .
-+ção ao referencial S, será dife.rente de v. e
dada pela relação:
No c,aso particular da figura, pelo facto dos -+- -+-
vectores v e v, terem a mesma direcção
e sentido, poderá escrever-se também:
Quanto ao vector acelera'ção
-+--+- L', v j =
L',t
a diferença vectorial
108
-+- -+= (v, +v )
-+- -+-= v, - Vi,
-+- -+(v, + v) ,
corpo por comparação do seu peso com um peso padrão (da caixa de pesos) . Efectivamente, considerando a balança' exacta, quando ela se equilibra temos P = P' e, portanto, é também m = m'.
3.10 Forças de inércia
Consideremos uma carruagem e, no seu interior, um corpo pendurado do tecto por um fio - fig. 3.8, ( a ) .
S e a carruagem esti ver parada, ou a deslocar-se com movimento rectilíneo e uniforme, o fio terá a 9irecção da vertical.
Dois observadores A e B, A em repouso na estação e B sentado na carruagem, explicarão o estado cinético do corpo da mesma forma : ·existem duas forças exteriores que actuam o
-+- -+-corpo, o seu peso P e a tensão T do fio, iguais em módulo e de sentidos contrários, cuja resultante é pois nula. Isto justifica, de acordo com as leis de Newton, o estado de movimento uniforme (em relação a A) ou de repouso (em relação a B) . Notemos que os dois observador,es A e B são ambos observadores de inércia por estarem ligados a referenciais de mercia e, como tal, interpretam os fenómenos físicos da mesma forma.
Suponhamos, porém, que a carrua--+-
gem adquire a aceleração j por acção de uma força constante que lhe é aplicada - fig. 3.8, (b ) . Nestas condições, verão o fio a desviar-se da vertical em sentido 'contrário ao da aceleração da carruagem. Estes dois observadores, A e B, interpretam agora de forma diferente o estado cinético do corpo.

-+-em que v é a velocidade de q�alquer sistema
inerciaI, é constamte 'e, por ils,so, a aceleração
é, ao contrário da velocidade, um valor abso
luto, ou seja: mantém o mesmo valor em todos
os sistemas inerciais que se possam imaginar.
Fig. 3.8 Ca) Com 'a carruagem em N!POUSO ou 'em movimento rectilíneo e
,uniform,e, os doi-s ,observadores,
o da gaTe 'e o do comboio, v,erão
� � a ,tens<ão T e o peso P do corpo
com a mesma linha de acção,
cuja direcção é 'a da vertical.
(b) Com a ca.r,ruagem 'em movirn.ento
-+ace'l,epado, ,a ,tensáo T muda de
dipecção devido à inércia do COT-, � -+--+-
po, 'e a resultante R de T e P é agora não nula - intenpretação
do obs'ervador de inércia.
( c) O observador que vai s'entado na carruagem terá de imaginar a
� força FI que 'e�pUca a inclinação
-+-de T, pois «ignora» que viaja
com movimenoo acelerado.
Para o observador da estaç,ão, A, ligado à Terra ( referencial que podemos considerar de inércia) , as forças que continuam a actuar o corpo são
-+- -+-apenas o peso P e a tensão T, cuja
-+- � resultante não nula, R = mj, justifica
� a aceleração j que o ,corpo possui em
� relação a ele ( T mudou de direcção, em virtude da inérda do corpo) .
Para o observador da carruagem, B,
em repouso nesta, que é referencial acelerado, a interpI1etação é diferente. Ele vê o corpo em repouso com o fio inclinado e, ,como tal, imagina a existência de outra força apücada no corpo,
� oposta a R:
-+- -+- -+-Fi = - R = - mj,
como vemos na figura 3.8, ( c ) . Esta força vai permitir-lhe explicar o estado de repouso em que, na 'carruagem, observa o corpo.
-+-Esta força Fi, chamada força de
inércia, não existe, segundo o ponto de vista «raciona!», «imparcia!», do observador de inércia, aquele que, tal como Newton, observando, poderia induzir as leis da Mecânica Clássica ( leis de Newton) .
Trata-se, pois, de uma força fictícia, que existe apenas segundo o modo de ver «parcia!» do observador ligado 'ao referencial :a:celerado, ao pretender interpretar um caso irreal de repouso, não querendo ( ou não podendo) reconhecer o egf;ado de movimento acelerado do corpo. Este simples exemplo ajuda-nos 'a ,compreender o que são as forças da inércia.
109

(S)
-+-
p
Fig. 3.9 O centro de g1raNidade - G - é o
ponto de apJ.icação da result3Jl1te das
forças paralelas que são OS p'esos de
cada um das pontos materiais em que
imagi'll.'amos dividi'do o corpo.
Pergunta 8:
Trav.a;�se um car,ro brus,cam·oote. Que su
cede aos passageiros? Como descrevem o
f,enómeno um passag'eÍlro do carro ,e um obser
v,ador fixo no local onde o ,caT,ro ,travou?
Pergunta 9:
A força de inércia será eqw'V'a:lente, nos
seus efeitos, a um'a aceJ.eração?
110
Trata-se de forças cuja existência é admi tida por observadores ligados a ref.erenciais acelerados e que permitem explicar o estado d e r·epouso ou de movimento dos corpos relativamente a esses referenciais não inerciais. A força de inércia, como vimos, é dada por :
� -+-Fi = - m j
. -+-A aceleração j é a aceleração do re-
ferencial não inerciaI.
L E ITU RA
3.11 Massa e peso de um sistema ma
terial. Centro de gravidade e teo
rema do centro de gravidade
Se um corpo, pelas suas di.mensões ou pela
sua heterogeneidade, não puder ser conside
rado como um ponto material, pode sempre
considerar-se como um conjunto de pontos
materiais. A este conjunto dá-se o nome de
sistema materral. No caso de se manterem sempre constantes as distâncias entre os
pontos materiais, o que constitui um caso
limite, o sistema passa a ter o nome de sis
tema rígido, invruriávcl ou indefOTmáveI,
Oada um dos pontos materiais de um corpo (que é um sistema material) tem
uma certa massa (m" m" . . . ) e um deter-+- -+
minado peso ( Pu P, ... ) - fig. 3.9.
Os pesos dos diferentes pontos materiais
constituem um sistema de forças paralelas, do -+
mesmo sentido, cuJa result3Jl1'te, P, é a soma
desses pesos:
� � -.... � P = P, + P, + . . . + Pn ,
sendo n o número, arbitrário, de pontos
materiais em que se considerou dividido o
corpo. Esta resultante é o ·peso do ·corpo (sistema material) e o seu ponto de aplicação
é o centro de gravidade - G - do corpo.

Resposta à pergunta 7: a) Num segundo a Terra roda, em torno dô
seu eixo, de um ângulo igual a
----- = -- ) = 0,00007 rad 360" (1 \"
2'4 X 60 X 60' 240 / Perante este valor, a TeTra pode cans.j
deraJr-se um si'stema inerciai e o observador terrestre pode aceitar�se, com suficiente «imparcialidade», 'para numerosos fenómenos de curta duraçâo. O mesmo já nâo sucederá para fenómenos de longa duração.
b) Num segundo o Sol roda, em torno do centro da galáxia, de um ângulo igual a
10·l.; rad 180 X 10� X 365 X 24 X 60 X 60
Num segundo a Terra rodou em torno 7 X 10·' ---- rad. do Sol, na sua translação,
3·65
7 X 1O.l.-' 360"
rad
A razão destes ângulos é
7 X 10-'
005 10-"" = 192 X 1(/'
Assim, o erro cometido pelo observador terrestre é CeTca de 190 milhões de vezes superior ao cometido p.el0 obs·ervador solar (atendendo a'penas a:> ângulo de rotação na trans,lação) .
Os astrónomos colocam-se na poSlição dos observadores estelares 'e optam por um l'eferencval ainda: melhor que o Sol: é um sistema de referência que põe em jogo várias galálà'as.
Resposta à pergunta 8:
Os pas'sageiros são projectados para a frente, se não estiverem ligados a cintos de segurança.
a) O passageiro narrador diz que sentiu a actuação de uma força de inércia, de sentido oposto ao da aceleração, negativa, do carro, durante a travagem, iSlto é, sentiu uma força a impeli-lo para a frente.
Apliocando a lei fundamental do movimento a cada um dos pontos materia.j,s, a equação anterior passará a escrever-se:
-+- -)o- -+- --+ P = m, . g -+- m, .. g + -+- m" . g <==>
-->- -->-P = (m, + m, + + m,,) 9 <=�->
-+ --+P=m.g
o escalar m = mi + m, + + m", soma
das massas dos diferentes pontos materiais,
chama-se massa do sistema material, de
acordo com a propriedade aditiva, quer da
massa inerciaI, quer da massa gravitatória.
O centro de gravidade pode não pertencer
ao sistema material, como sucede, por exem
plo, no caso de um anel circular; neste, o
centro de gravidade coincide com o centro
geométrico, onde não existem partículas ma
teriais. O que é importante fixar, no entanto,
é que o peso de um corpo pode ser r,epresentado por um vector cuja linha de acção pa-s'Sa pelo centro de gravidade e cujo ponto de aplicação pode ser um ponto qualquer dessa linha.
O centro de gravidade é um ponto muito
im.portante, porque podemos simplificar o
estudo do movimento de um corpo, reduzin
do-o precisamente ao movimento do seu cen
tro de gravidade. Isto é possível em virtude
do chamado teorema do centro de gravida:de, que é fundamental e que vamos admitir sem
demonstração:
«O movimento do centro de gravidade de
um sistema material é o movimento de um
ponto material livre, de massa igual à massa
do sistema e onde estão aplicadas todas as
forças exteriores que actuam sobre o sis
tema».
O teorema que acabamos de enunciar
foi demonstrado pela primeira vez por NfYW
tono Este, que descobriu aos 24 anos a lei
da atracção universal, só 20 anos ma'is tarde
a publicou na sua já citada obra «Principias
matemáticos de Filosofia Natural». Tão longo
intervalo. de tempo utilizou-o Newton na ela
boração das bases matemáticas (os funda
mentos do Cálculo Diferencial e Integral)
que lhe permitissem resolver os diversos
problemas levantados pela lei da atracção
universal.
111

b) o observador colocado no referencial de
inércia (local da travagem) afirma que,
em virtude do '1.0 pri'ncipi'Ü ou 1." lei
do movimento, o pass'ageiro continuou
em movimento, com a velocidade que
tinha no início da travag,em, até que a
força de r,eacção, desenvolvida no con
tacto oarro�paSlS'ageiro, começa a actuar
e lhe cOffiun.ica uma aceleração com o
mesmo sentido e direcção da força de
travag,em (2.' lei de Newton).
Resposta à pergunta 9:
:m ,equlvaJ.ente, porque o efeito de uma ace
leração, real, mas desconhecida do observador
colccado no sistema acelerado, é interpretado
por este observador como resultante de uma
força de inércia.
Problema 1:
Submeteram�se a forças iguais dois corpos
de massas 3,0 kg ·e 4'50' g. 'Dendo o primeiro
adquirido a ace'loeração de 2,0 m/s', que dis
tância percorreu o s'egundo ·em 10 s, contados
desde o instante em que o móvel partiu do
repouso?
R.esolução do problema 1:
{ Temos:
m, = 3,0 kg
j, = '2,0 m/s' { m, = 0,45 kg
j, = ?
-+ Como a força a,plicada, 11', em cada um dos
corpos, tem o mesmo valor, 'será:
F = m".j, = m, . j, < =>
3,0 kg, 2,0 m/s' = 0',4'5 kg. j, =>
40 j, = - m/s' = 13,;3 m/s'
3
A distância percorrida pelo 2.° móvel, em
m. u. a., sem velocidade inicial, é então:
112
1 1 40 e = -. j" t' = - . - m/s', lO!' s'
2 2 3
= 666,m -+ 7 X 10'm
L E ITURA
3.12 Restrições à lei newtoniana do
movimento
-+ -+-Na lei fundamental do movimento, F = m j,
considerámos que a massa m se' mantinha
invariável.
Ora, esta invariabilidade da massa aceita
-se apenas para baixas velocidades compa
radas com a da luz. Para uma partícula, por
exemplo, um ião ou um electrão, que se des
loque com a velocidade de 100 000 km/s, a -+- -+-
aplicação da fórmula F = mj torna-se impos-
sível, dada a apreciável variação da massa
da partícula a tão altas velocidades.
Segundo a teoria da Relatividade Restrita
ou. especial de Einstein, a massa inerciaI m
de um móvel, deslocando-se com a velocidade v, é maior do que a sua massa mo em ,repouso
(ou mas'sa própria). E: a seguinte a relação entre estas massas.'
mo m = -----
' / l __ V: V c-
c é a velocidade da luz no vazio, cujo valor é
de 300 X lO' km/s.
Para pequenas velocidades (até cerca de
10% da velociaade da luz), a variação de
massa é insignificante e utiliza-se, por isso, com vantagem a lei newtoniana do movi
mento.
Para grandes velocidades já é necessário
ter em conta a variação de massa. O aumento
desta não ,corresponde a aumento de volume,
(pois não aumenta o número de partículas) , mas traduz somente um aumento da inércia
das partículas (quanto maior for a velocidade,
maior será a força requerida para produzir
um dado acréscimo dessa grandeza).
De acordo com a fórmula acabada de apre
sentar verificam-se os seguintes acréscimos.'
0,5 v = 3J() OOOkni/s => 6.m = m - mo = -- . mo
100

1 v = 40 000 km/s => �m = --. m.
10:0
2·0 v = 150 000 km/s => �m = --. mI'
l{)ü 50
v = 225 000 km/s => �m = -- o mo 100
v = 26.2 000 km/s => �m=2 mo
v = '2.91000 km/s = > �m=3 mo
v = '298 000 km/s => �m=9 mIl
v = c => � m = =,
o que significa não existir uma força que
possa, a partir deste limite, v = c, fazer aumentar a velocidade da partícula. Para as
partículas atómicas, nos reactores e aceleradores, só se pode aplicar a mecânica Relati
vista, porque as suas velocidades são bastante
elevadas.
3.13 Leitura suplementar
1. Les étapes de LA PHYSIQ'UE, Que
sais-je, F. P.
2. Manual de Fisica Elementar, Landau e Kita'igorodski, Ed. Stampa, 1974, cap.
le II.
3. Física Fundamental, J. Orear, Ed. Li
musa, 1,970, inici,o cap 3.
4" Física Moderna, Ed. Renes·, R. Jan.o,
1970, vol. 1, Clilp. V. 5. Fisica, P. S. S. C., 1970, voI. 1, cap. 13
n.·' 6" 7 'e 8:.
6. Relatividade para todos, James A. Cole
man, Ed. Ulisseia, cap. III e IV.
3.14 Súmula das ideias fundamentais
1. As leis fundamentais do movimento, e
bem assim os principios fundamentais, devem
-se a Galil'eu e a New.ton, tendo este feito a sua formulação matemática. Para grandes
velocidades (a partir de 10% da velocidade da luz no vazio), as fórmulas newtonianas são substituídas pelas fórmulas mais gerais da
Relatividade, estabelecidas por Einstein, fórmulas que também contemplam a variação da massa inercial com a velocidade.
2. Do princípio da inércia derivam 08 con
ceitos mecânicos de força e de inércia (na
translação e na rotação) e do princípio da
independência do efeito das forças resulta o
paralelogramo da composição de movimentos
(Galileu) .
3. Nas 3 leis formuladas matematicamente
por Newton, é de salientar:
L" - O repouso relativo e o movimento
uniforme e em linha recta de um
corpo ,permanecem enquanto não in
tervier uma força exterior;
a." - (lei fundamental) - a torça aplicada
e a aceleração. dela resultante são
vectores com a mesma direcção e
sentido, além dos seus valores serem "* "*
proporcionais: F = k . j .
3,." - Nas interacções de dois corpos, a
acção e a reacção (ou resposta) são
inversamente iguais e estão aplicadas em corpos diferentes. A reacção é
sempre uma .força solicibada.
4. A m8lSSa inerciaI m é a propriedade de
finida pela lei fundamental, que passa a ter � "*
a forma F = m . j , e a mas's'a graviobliltória é a propriedade definida através da atracção recíproca e universal das partículas e que,
por isso, se mede pelo processo da pesagem.
Há equivalêncir. entre estas massas e, por
este motivo, não é costume distingui-las.
A lei fundamental aplicada ao movimento de um grave, em queda livre, toma a forma -+- "* P = m g.
5. Os .ref,erenciais d e inércia são sistemas
de referência não acelerados em relação às
estrelas fixas e, portanto, ou estão em repouso relativo ou em movimento uniforme e recti
líneo. Todos os referenciais de inércia são eqwivalentes porque em todos eles são válidas as leis da Física. O testemunho mais válido,
113

mais «imparcial», na análise do movimento,
é o do observador ligado a um referencial de
inércia.
6. A f.orça de tnércia, FI = - m j, é uma
força fictícia a que tem necessidade de recorrer
somente o observador ltigado a um referencial
com aceleração (não inercial, portanto). Não -+-
é ela que produz a aceleração j, pois esta é
real e devida a uma força real e aquela é
imaginária.
7,. Para estudar o movimento de um corpo
podemos considerar o movimento do seu cen
tro de gravidade, supondo este afectado de
toda a massa do corpo e supondo que nele
actuam todas as forças exteriores ao corpo.
3.15 Questionário
1. Que papel desem.pe:nhou NewtOill na Fí'SiÍ·ca ClásSiÍcaJ? Com a Relati'Vidade de Einstein ,ber�Sle"á abandonado a mecânica newtomana?
2. Oomo se 'estrutur·a o método dentifi'co na Fí·si·ca Experimental? O que mantém a wlIlidade de um .princípio?
Porque p8!s'S'ar3lm a lei's, depots de Newtan, alguns dos princípios,?
3. Na Natureza, as forças nunca aparecem rsol,adas, Im3lS aos pares. In.terpretar ,este facto à 'luz de um dos princípIos fundamentais.
4. P.oder,se-ão ,e:nCOilltrar referencioai's de inérci'a 8ibsolutos (isto é, em repouso absoluto)? A Terra será sempre um bom referendal de inércia?
5. Quando um carro «arranca» os p3lSsageiros sentem-s'e i,mpelidos para trás, sendo projectados contra o encosto doS' as'S'entos. Imaginar a interpretação física deste fenóme:no, dada por um pasS'ageiro ,e por um amigo que estava no l ocal de ,embarque >a despedir-se.
6. Po'rque não s'e deve saltar de um carro eléctrico em 'andamento? Se for neces·sário f8izê-'lo, que precauções ·se devem tomar?
114
1. Nas viaturas automóveis, o s,j·stema de travões actua sobl'e as quatro rodas, mas t8imbém pode actuar somente s'olbr.e as rodas traseiras. Porque não 'é conveniente actuar apenas sobre as rodas da frente?
8. Uma peça de loiça oai no chão e parte, Sob a acção de que força partiu? Poderia s,er o seu peso?
9. Consideremos o si'stema constituído por um rapaz 'e a bicicleta em que está montado. Que força exterior pode acelerar o sistema? E que força exterior o pade faz'er parar?
Sugestão: notar que a força exer,cida pelo J:'31paz sobre o pedal não é exterior
ao sistema.
10. Um tractor puxa horizontalmente um arado, 'exercendo nele uma força de módulo F.
10.1 A força exercida pela Terra, também numa direcção horizontal, sobl'e'o arado, tem ·sempre, obriogatoriame:nte, o módulo F ?
10.2 A força exercida pelo arado sobre o tractor tem s,empre o módulo F?
10.1 Tem módulo F quando o arado está em repousa ou se desloca cam vela'Cidade constante. Soe '0 arada tiver movimento acelerado, a força ex'ercida pelo tractor é superior à exercida pela Tel'ra.
10.2 Tem, pelo princípio da acção. e reacção.
-+-11. Uma pessoa, de peso P, desce num
-� elevador a velocidade constante.. Seja F a fo.rça com que a pessoa comprime o soalho
-+-do elevador ,e F ' 'a forç.a que o soalho exerce sobre a pessoa.
11.1 Que relação há entre F e F'? Justificar.
11.2 Que relação. há 'entre F' e P? Justificar. -+- -+-
11.3 As fo.rças' F' e P canstituirãa um par ,acção-r.eacção? Porquê?

1 1 .4 Des'oendo o eleva,dor com movimento
uniformemente ace'lerado, as .respostas
às questõe's postas' em 11 .,1 e 11.2 são as
mesmas ?
1 1 .1 A r,esposta à allíne'a, 11-.1 mantém-s,e,
poi's acção e reacção sào sempre
iguats,. A resposlta à alínea 1 1'.2. não
s'e mantém, pois, agora a acção ( 'e
� portanto a reacção F' ) tem módulo
(P - m j ) , logo, diferente do mó
dulo P.
1 2 . Se -a força de atrito se opõe ao movi
mento, como explicar o fa'cto de um carro
«arranoar» m3Jis frucilmente num piso rugoso
do 'que num pi,so Uso ·e m olhado ? Porque se
deiota are'ia numa zona da 'estrada onde se
entornou óleo ou 'quando está coberta de gelo ?
13. Qwando uma locomotiva está em mo
vimento, ·a força resultante do atrito das
' rodas nos contactos com os carris, está diri
gida no sentido do movimento da 'locomotIva.
HaJverá oontradição com a hi'pótes'e aceLte
de que a f'Orça de atrito tem slentido contrário
ao do m oviment o ? Quando a locomotiva trava,
a I1esultrunte das forças de atrito mudará de
sentido ?
11/ . Qual o valor indicado pelo di!!1amómetro
D da figura no cas.Q de estar p·reso à parede
- fig. 3 .110, ( a ) :
Fig. 3.10
Será diferente ,o valor indicado no outro
caso - fig. 3,JlO, ( b ) ? Justificar com
base na analogi·a ou não analogia dos
dois casos.
3.16 Problemas
1 . Doi,s corpos de igual ma'ssa inerciaI des
locam-se com as acelerações de 4 , 0 dm/s' e
3,2 dm/s', respectivamente.
Que força actuou sobre o primeiro, sa
bendo que ao segundo corpo foi aplicada a
força de 1,2 kgf ?
1,5 kgf
2. Aplicam-se forças iguai-s em dois corpos.
O primeiro, de maS,S3 10'01 g, rudquire a acele
ra'ção de 1,0' m/s'. Qual é a massa inerciaI do
s egundo, cuja aceleração foi' apenas de
10 cm/s' ?
l{) X 10' g = 1 , 0 kg
3. O «metropolitano» arranca, atingindo
em 8 s a velocid3Jde de 150 km/h, que mantém
durante 45 s. Lev·a a segui'!' 20' s a parar.
3.1 Construir o gráfico velocidade-tempo.
3.2 !Comparar a força de tracção e 3JS forças res'istentes durante o movimento.
3.3 Determinar a m edi'da do p'ercurso entr'e
,as durus estações.
I 3.3 56 m + 625 m + 11319m =820 m�'8 X 1O'·m I 4. Na tabela transcrita esrtão registados os
dados referentes ao estudo da aceleração
adquirida por um corpo em função do valor
drus forças actuantes :
F (kg/) O 0,5
j (m /s') 0,116
1,0
0,30
1,5 2,0
O,4r4 0',60 2,5
0,75
4. 1 TraçaT o gráfico (F, j) e justificar a
escolha da variável inde'pendente ( que
é habitual marcar em abcis'sas ) à luz
de um dos principias fundamentais.
4.2 Tirar conclusões, cuidadas e ercactas,
destes resultados.
115

5. o.s três blocos indicados na figura 3.B,
encostados, têm a mesma massa inercia! m ->-
p são arrastados. por acção da força F, ao
-
�:L,�,;,l,J;)",,l,,,,\�,,L7'li
Fi.g. 3 . 1 1
longo d a mesa, considerando-se que foi elimi
nado o atrito .
. :; .1 IndicM" o valor da força que adua o bloco A .
. 5 .2 Cakula"r a ace1eração do blo·co C.
5.3 Que fo-rça aplÍ'Ca o bloco A em B ?
116
F 5.1 - ;
3
F 2 5.2 j = -- ; 5.3 -- F 3 m 3

C A P i T U L O 4
«Dai-me um ponto de apoio e moverei o mundo.»
ARQUIMEDES (séc. III a. C. )
Três forças equilibram-se quando podem ser representadas em grandeza e direcção pelos
três lados de um triângulo.»
ARQUIMEDES (287-212 a. C. ) ( Busto do Museu Nacional de Nápoles)
Pa"I'en·te de Hierâo, rei da Sicília, estudou
em Alexandria com Euolides. Ganhou fama
no Egipto, por ter idealizado os diques móveis
que servi<ram pa"ra secar os pântanos. Com
Simão STEVIN ( 1548-1620)
4.1 Notícia histórica
ARQUIMEDES de ,Siracusa, que foi o pri
meiro sábio da a;ntiguida"de a ,empreg-ar o
método experimental, fez o estudo das condi
ções de equi-líbrioo n.as ala:vanca"s', 'antevendo as
suas múltilplas 'e importantes aplioações .. Foi
no desbobinar destas 'que, segundo a l enda,
pronunciou a fras'e oom que ·abrimos este
oapítulo. Estabeleoeu uma teoria do oentro de
graJVi1d8Jde e outra! sobre balanças. Com base
nas leis do -equilíbrio, elaborou um corpo de
doutrina da Mecânica", que sistematizou na
sua obra - Tratado do Equilíbrio dos Planos
ou dos C@tros de Gravidade.
Pode as'sim considerar-se como o fundador
da Estática, a que imprim!u feição geomé
trica, e pode também considerar-..se um dos precursores do método cientifico.
Distingiú-se ainda na Hidrostática, cuja
teoria compendi'ou no seu livro - Tratado dos
Corpos Flutuantes. Há -a re3!lçar aqui o pri!I1-
cípio que descobriu e que tem o 's'eu nome:
o 'pri!I1cípio de Arquimedes., Na Renasoença surge LEONARDO DA
VINCI (14?2-1519) . Espírito independente, de
actividade multifaceta"d3! e desconcert3!!I1te
pela profundidade oam que analdsava e culti-
117

os s'eus inV1entos ajudou Siracusa a resistir' 3 anos aos romanos. Segundo a lenda, montou «espelhos ardentes», que reflectiam e concentravam a luz solar sobre os barcos, inClendiando·os ( o que é inverosímil para os' meios técnicos da época) e montou rolda�as enormes com ganchos, que levantavam as galeras e as precipitavam no mar . .
E,stabeleceu o princípio de equilíbrio da
alavanca e o princípio da hidrostática que tem o seu nome. Calculou o vaIor de 7T 'e estudou li quadratura do cí,rculo. Os seuS' processos de cálculo fazem dele um precursor do CálcuIo Infinitesimal. Morreu às mãos de um soldado romano, qU3indo da tomada de Siracusa, e depres·sa foi 'es'quecido pe'los- s'eus compatriob3is- sirarcusanos.
Simão STEVIN (1548-1620)
Prof,essor na Univel'sidaJde de Leiden. Tomou a iniciativa de escrever em neerlandês e não �m oJatim, -como então ,era hábito. Foi inspector de di'ques na Holanda.
Fez experiências rel!litivas' à queda dos, graves, ainda a.11Jtes de GalHeu. Na Estática
118
vava os diferentes ra:mos do s3iber - e da-g artes (Física, Engenharia, Arquitectura, Matemática, Pintura . . . ) , este florentino foi outro precursor do método dentífj.co.
Em Mecânica, negou a possibilidade do movimento perpétuo., amtecipo.u-se aos -conceito.s de Ga:li'leu acerca do plano- inclinado, sa:IVentou a importância do momento de' uma força, estudou a composição de forças e o equilíbrio nas máquinas simples e imaginou vários aparelhos -entl'e eles, o helicóptero, em1tindo a idei/lJ actual de que as a'sas se apoÍ'3iID no ar.
O 'seu legado ci'entifico não chegou, porém, a contribuilr para o avanço da Ciência, porque os seus manusc,ritos, dispersos, difíceis, de decifra,r por terem sido escritos da direita paraJ a <esquerda, de propósito e facilmente como -esquer-dino que el'a, só foram conh'ecidos cerca de 2 'séculos -após a sua morte e numa altura em que as suas pr-evi'sões já tinham sido ultr8.lparssaJdas. 'Simão ,STEVIN ( ,154'8-'11620) deu maior
contr1buto à Estáti.ca do que Leonardo da Vinci, apesar de per.tencer a duas gerações posteriores, porque publicou os trabadhos que ia realizando.
-Esta:beleoeu o teorema da compos,ição de força:s pela Tegr·a do paraJI,elog,ramo ou do triângulo, cujo enuncia:do transcrev-eIDos na abertura deste capítulC\.
Estudou o momento de uma força e demonstrou 'a ,exactidão do princí'pi'Ü do equilíbrio n8JS aIavam.C3is.
Mai's notáve'l foi -a; sua contribuilção para o estudo da Hidrostáti-ca, 'em particular a explicação do «'Pal'adoxo hidrostática» e a demonstração de que, num corpo flutuante em -equilíbrio, o centro de gravidade do cOO"po 'e o centro de impulsão do líquido estão na mesma verti<cal.
4.2 Forças exteriores e forças interio
res. Forças de ligação
Num sistema material, as forças interiores são as forças que 'actuam �mtre os pontos materiais do ,sistema ; e as forças exteriores são as força's exercidas sobre o sistema por agentes exte-

estabeleceu a regra do paralelogramo para a
composição de forças e na Hidrostática enun
ciou várias 'proposições. Na Matemática fez o
estudo sistemático das fracções decimais e
das potências de 'expoente intei.ro 'e fraccio
nário. Propôs um sistema decim,al de pesos
e medidas.
Nota 1 :
S e tirvermos um fragmento de cortiça a
flutuar na água, em repouso, de um tanque,
fora do 'alcance da nossa mão, para o co.nse
guirmos apanha,r teremos que pro'vocar na
água movimentos adequados ( ondulatórios ) ,
com a mão, por 'exem:plo, de modo a fazer
com que o fragmento 'Se des,llÜque p ara junto
de nós'. Houve �s'sim uma acção de contacto
da nos� mão transmitida através de modifi
cações ou deformações do meio ( neste cas,o,
a água) .
Na tecria do campo d e forças ( que vamos
estudar no capí,tulo 8, Campo Gravítico) con
sidera-se que só existem acções de contacto e que as acções a distância são simplesmente
acções de contacto transmitidas por deforma
ção ou modificação do meio.
Nota 2:
As forças exteriores., quando actuam e
enquanto produzem deslocamentos, {)brigam
a uma troca de energia do sistJema com o
exter,iúr, 'como se comprenderá melhor no ca
pítuLo 7 ( Trabrulho e IEnergi·a ) ..
As forças inter,iores, uma v;ez que, quanto
aos seus efeitos., 'S'e ,compensam duas a duas,
não influenci'am em nada o movim'ento dos
sistemas. Por este motivo, no estudo da E,s'
tátiea não são consideradas.
riores, quer sejam acções de contacto com outros corpos, quer 'sejam acções a distância, como, p. ex. , as forças de atracção gravitacional. ( 1 ) .
As forças interiores são directamente opostas duas a duas e têm o mesmo módulo, de acordo com a lei da acção e reacção. (2 ) .
Analisemos, como exercício, alguns exemplos :
1." - Se considerarmos como sistema um corpo, o seu p eso é uma força extierior, porque é exercida pela Terra.
2." - Se considerarmos como sistema o conjunto corpo-Terra, o peso do corpo já é uma força interior : mas a esta acção corresponde uma reacção que é a. atracção da Terra pelo 'corpo. Neste sistema são forças exteriores a resis- , tência do ar e as forças de atrito.
3. o - ISe ,considerarmos como sistema um corpa sólido, as forças interiores são as forças de. coesão (provenientes das ligações quimicas) 'que garantem a estrutura e se opõem à deformaç.ão do sólido.
Problema importante no movimento de um ponto material ou de um corpo é o que diz respeito às ligações ou vínculOS, que são os condicionalismos r,esponsáveis pelas restrições ao movimento. Assim, o movimento de uma esfera no plano horizontal ou no plano inclinado é um movimento condicionado, não livre ( livre seria a queda do corpo ) , porque o corpo está sujeito não só ao seu peso, mas também às forças resultantes do ccmtacto com o plano. O movimento pendular duma esfera, suspensa de um fio, também é um movimento ligado: efectua-se com
119

�'" I R,'�, M
ii' , � p A :-.-,
'
� ®
Fig. 4.1 A'S' forças de ligação que actuam
na esfera A sáo :
-+-( a ) a tensão T do fio MN; trata-se da
reacção do fiQ à acção exercida nele -+-
pelo peso P do corpo ; é igual à força
que 'será neces's'ário exercer em N, no caso de cortar o no, para que o 'es
tado de I1epouso ( s'e A em repouso) ou
de movimento ('Se A em moviIlllento )
não ,se aLtere;
-+-( b) a reacção R, do plano horizontal, à
-+-acção devida rao pesQ P; admite�se,
no caso de o atrito s'er d esprezável,
que as reacções são p erpendirculares
àJs superfícies de contacto;
-+-( c ) a reacção R' do pl3ino inclin3ido,per-
pendicular ao plano vÍ'sto considerar�s'e
nulo o 8Jtrirto; tem a m€Js,ma linha de
acção e sentido contrário 'ao do vectorr
-+-- R', que sre obtém proJectando o
-+-vector p esQ P sobre a p erpendicula:r
ao plano.
-+-No no MN actua a reacção R(, } à força de
acção que o fio exerce no surpoIlte e que é devida ao peso do corpo 'e ao próp.rio 'peso do
fLo ; constitui uma força de 'ligação do fio.
120
o fio esticado ,e a esfera só pode deslocar-se num superfície esférica de 'centro no ponto de suspensão e de raio igual ao comprimento do fio.
As ligações ou vínculos originam as forças de ligação que se traduzem sempIle por pares acção-reacção. No movimento não livre de um sólido chamam-se forças de ligação as forças que limitam ou impedem um movi-
-+-menta (fig. 4.1 ) : a tensào T do fio, no no ,caso da esfera suspensa ; as r,eacções -+- -+-R e R' dos planos horizontal e incli-nado, IIespectivamente, etc. , etc. Nos exemplos citados, o movimento impedido ré a queda da esfera segundo a vertical. (3 ) .
Podemos, em resumo, esquematizar as forças exteriores, quanto à sua proveniência, do modo seguinte :
F. exteriores
r F. de contacto
F. �plica- ! das Acções a dis-
tância
F. de
ligação
Tensões de fios
e cabos
Reacções de superfícies
4.3 O conceito de equilíbrio em mecâ
nica
Convém, antes de mais, recordar novamente os conceitos básicos de ponto material ( cap. 2, n. o 2.3 ) , sistema e exterior ( cap. 2, n.O 2.2 ) , sistema isolado ( cap. 3, n.O 3.6 ) .
E convém igualmente relembrar o carácter relativo do repouso, visto que

Nota 3 :
o fio MN ( fig,. 4.1) está esti'cwo pois nele
actuam dua.s forças de tracção ou arr8lsta
mento · ( força.s que actuam segundo os -eixos
longitudinais ·e para fora ) : -+-
- em N, a acção devida ao ' peso P da
esfera ; -+-
- em M, a reacção do suporte, R(, ) .
Quando um fio, u m cabo, o u outro corpo,
e'stão sujeitos a tr8lcções nos -seuS' extremos,
diz-se que estão em tensão ou tensos. O fio,
o c8lbo ·e o corpo, perante esta dupla tracção,
-+- -+-rea:gem com 81S forç3iSl T ·e T', -oposta's às tl18lC-
ções, � que se cham·a.m tensões.
No ·caso de 'Ser desprezável o peso do fio,
ou ü do ca.bo, tem-se
T = T' = P = R ( . )
N o caso contrário ·é
T = P e T' = R(, ) = P + p ,
sendo p o valor da peso do fio.
Uma ·cruracterístiloo i.mportante distingue
rus força:s a'Plicad8JS d8JS forças de ligação.
Com ,efeito, 's e vruriar uma da:s forças apli
ead8JS, como esta:s são independentes ·entne si
8JS outr8ls forÇlas rupli-crudas mam.têm-se inalt:e
ráV'ei·s. Nãü a.contece o mes·mOl ·com as fOJ:ças
de -ligação, que variam quando qualquer das
forças 'aplka.da.s Valrirur. A:ssim, 'Por exemplo, 's·e na fi'gura 4.1 ( a)
entrrurmos :em consideração com ·0 pes·o do
ca.bo de suspensão MN e ,cOlll'soider8lrmos cama
sis1Jema o conjunto esfera A +cabo MN, temos
8!S seguintes f·orças exteriore's :
>-+-P - peso da esfera
-+-p � peso do cabo
-+-R, - reacçãü do suporte
-+-Se vari'a.r 'O peso da esfera P, força rupli-
-+' ca,da, o peso p do cabo mantém-,s'e inalterável,
pois também é força aplica.da. Mas a reacção -+-R, - força de li!gação - varia, pois 'O seu módul'O é igual a P + p.
se pode considerar que um corpo está ou não em movimento conforme o referencial escolhido.
Em ,Estática, a noção de equilíbrio diz respeito aos estados de equilíbrio de um corpo e ao equilíbrio de forças. Diremos que um sólido indeformável está em equilíbrio num dado referencial, quando as velocidades dos seus . pontos materiais não variam ·em módulo. (4) .
Esta oondição de equilíbrio de um sólido conjugada com o princípio da inércia ( mais explicitamente, a 1.a lei de Newton relativa ao movimento) leva-nos a considerar os três ·estadO's seguintes de equilíbriO' d o ,corpO' :
1. ° - O repouso ou equilíbrio es-+
tático : a velocidade é nula - v = o -no referencial escolhido.
2.° - O movimento de translaçãu uniforme e rectilíneo - equilíbrio dinâmico de translação:
não há variação de velocidade -+- -+-(v = constante,' �v = o ) . (5, n.O 1 )
3.° - O movimento de rotação uniforme - equilíbrio dinâmico de rotação:
a velocidade angular é constante (fi) = k) e a velocidade linear de cada ponto material do sólido não varia em módulo (v = k', 6. v = o) ( 5, fi.O 2) .
Definidos deste modo os estados de equilíbrio de um corpo, passamos a analisar em s�guida a noção de equilíbrio de um sistema de forças. Em pri-
121

Nota 4 (informação) :
Não valrtar 'a v'eloci'daJde ,em módulo, 1slto 'é,
não mudar o estado cinético do corpo ( d e
,repouso o u de movimento ) , ' , é equivalente
a dizer que, nos, des'locamentos do co'rpo,
é nulo o trabalho realizado pelas forças
exteriores e que, em consequência, não há
variações de ene'rgia no sistema ( corpo + re
ferenciaI );.
Isto será esclarecido no capttulo 7 ( Traba
lho e Energia, n,O 1J14) .
Nota 5 (informação) :
1. Di'l'Jemos que um si'stema material está
antmado de movimento de translação quando
uma recta, determinada por doLs pontos quais
quer do 'sistema, se maIlltém paralela a si
mesma duralllte o deslocamentO',
2. Ainda neste ClliSO, a força centrípeta, calusa permanente do movimento de rotação,
, não realiza trabalho ( cap. 7, n.O 7 . .4) no des
locamento circular, não havendo, por isso,
variação de eneffgia do sistema.
Miás, as força:s centrípetaJs, exteriores em
I1elllição à,s pllirtícul'lliS O'nde a ctuam, passam a
ser forças interiores se cons'tde,rarmos como
'si'stJema O conjunto das paI1tículas que rodam
e do suporte ou eix-o de �otação. Neste ca,so,
são directamente 'opos'ta:s 'e ·com o mesmo
módulo relaJtívamente a outras tantas forças
interiores : as reacções centrífugas no supO'rte
,ou no eixo de �-ota;ção.
Pergunta 1 :
Na fig. 4l1, M é -o pOIlltO de contacto fio
-suporte de suspensão le N é o ponto de con
taJcto fiJO-esrf'etra A.
-+-1 ) As forças· T ( tensão do fio) e a acção
-+-I ( forçai) devida 8;() pes-o P da esfera
poderão ter 'O mesmo ponto de aplica
ção N ? -+- -+-2) E ;a; tens'ão T' e a l'eacção R (8) terã;o o
mesmo pon,to de apUcação M ?
122
meivo lugar, salientamos que se um sólido indeformável for actuado pO!f' uma única forrça nunca estará em equilíbrio, porque, pela 2.a lei de Newton, terá aceleração linear não nula (portanto, 6, v * o) . Se, porém, o sólido indeformável for actuado por um sistema de duas ou mais forças, pode suceder que 'Os efeitos destas se compeng.em de modo 'que o corpo permaneça num daquele.s três estados de equilíbrio, uma vez que neles S!8 encontre antes. Nestas condições, diremos que as forç8Js do sistema se equilibram. Concluiremos as·sim que um sistema de forrças (exteriores) está em equilíbrio quando não modifica o estado cinético (de repouso ou movimento) do corpo a que está aplicado.
4.4 Equilíbrio do ponto material
Num ponto material livre não há quaisquer restrições ao movimento, isto é, nada há que limite as deslocações possíveis do ponto. Sendo assim, as forças exteriores que o actuam, necessariamente concorrentes nele, são, todas elas, forças aplicadas. Se o ponto material estiver sujeito a ligações ou vínculos, passam a actuar nele também forças de ligação. Estas, juntamente com as forças aplicadas, constituem um sistema de forças exteriores, concorrentes no ponto, que é sempre equivalente a uma força única - a soma vectorial de todas as forças, isto é :
-+- -+- -+ -+-R = F, + F2 + . . . +F" (n�n.o de forças
exteriores que actuam o ponto)

Pergunta 2: -+
Na fi:g. 4 .1, ( a) , o vector P é um vecto�
ligado (aplicado) ou 'é um vector li1Jre? E
qurunto ao vector acção da esfera A sobr·e o
-+ fio ? E quanto ao vector tensão T? Admitir
que a es'fe-ra, o fio 'e o suporte são sólidos
indeformá v'ei,s.
A
2 0 0 9 1
2 0 0 s I
Fig. 4.2 Equilíbrio da pequena ,esfera A ma
dç.a ( que se pode considerar uma
apr,oxim1ação do ponto material ) ,
-+ -+ submetida a duas forças F e F',
di'rectamente opostas e com o mesmo
módulo.
40091
Fig. 4.3 Equilíbrio da pequena esf'era A ( ou
de um anel ) submetida a três forças: � F, de módu!oo F, = 300 gf
-+ F, de módulo F, = 40'Ü' gf
-+--F, d e módulo F, = 500 gf
-+ A esta soma vectorial, R, cujo efeito
é o mesmo que o das forças do sistema actuando em 'conjunto, também s-e chama resultante do sistema.
Pela 2.a lei de Newton esta resultante, no 'caso de ser não nula, implicará que o movimento do ponto material tenha aceleraçã,o, sendo ,esta dada por
m onde m indica a massa do ponto material ; então o ponto não poderá estar, nem em repouso, nem em movimento rectilíneo e uniforme. No caso de a resul-
-+ -+ tante R ser nula, então te�emos j = 0,
-+ ou seja 6,v = o, o que significa que o ponto material, ou está em repouso, ou em movimento rectilíneo e uniforme. Se o ponto material 'se encontra em qualquer destes 'estados ( repouso ou movimento rectilíneo e uniforme ) , dizemos que ele está em equi.líbrio.
Em resumo, como consequência da segunda lei do movimento de Newton, podemos afirmar :
Um ponto material e'8í"á em equ4-
líbrf;o (repouso ou movimento I"ecti� -+
líneo e uniforme úv ==1'\01 se for nula a . re8U;ltante de todfts as farças que o aotuam" oU 'saja:
Analisemos, a seguir, duas verificações experimentais deste equilíbrio. '
1.a (fig. 4.2) :
Submete-se a pequena ,esfera A ( ou um pequeno anel ) a duas forças exte-
123

Resposta à pergunta 1: r+ -+-
1 ) As forças T e a acção devida a.o peso P
( não representada na figura ) , consti
tuindo um par acção e reacção, terão
de estar aplicadas em corpos diferen--+-
tes ; T poderá estar aplicada em N, con-
siderando este como ponto do corpo A e a acção em N, também, mas consi
derado agora como ponto da corda ;
N E Corda Í\ Corpo.
-+-2 ) Pelo mesmo motivo, R., poderá estaJr
-� aplicado em M, .ponto da corda e T' em
M, ponto do suporte ;
M E Corda Í\ Suporte.
B ®
A .... _(:-F....:�_ ... __ F.:..2 '--) __ ---" C
A ""\ "'" ,
F;:- (F7+ F;) B
�\ �\ �\ �\ � E
-+- �
C
Fig. 4.4 ( a ) Ais três forças F" F, e Fa , apl -
124
'cadas num ponto material, têm soma
vectorial ( resultante ) nula e, por
isso, equilibram-se. -+- -+
( b ) Analogamente, as forças F" F"
-+- -+- ->4 F" , F. ,e F" , aplicadas no mesmo
ponto material, equilibram-se, porque
constituem os lados de um polígono fechado ( a sorna vectorial é também nula - regra do polígono ) .
-+ -+-dores F e F', directamente opostas e de módulo 200 gf. Verificar-se-á que A fica em repouso em qualquer posição ainda que a· obliquidade do fio varie. Se o atrito nas roldanas fixas B e C for insignificante, um pequeno impulso num dos pesos fará deslocar A com movimento quase uniforme.
Nesta experiência a resultante das forças exteriores é nula :
->- -+- -+- � R = F + F' = F + (
2.00 (fig. 4.3) :
-� F ) = o .
Submete-se agora a esfera A à acçã.o de três forças 'concorrentes, ->- -+- -+-F" F t e F 3. Se os módulos corres-pondentes forem de 300 gf, 400 gf e 500 gL verifi'ca-se que A fica em equilíbrio, na posição indicada na figura.
AnaHsemos o sistema formado pelas -+- -+
duas forças F, + F"J' A sua resultante ........ .......
(F, + FJ , representada a azul, produz o mesmo efeito que as componentes -+- -+-F, e Ft (princípio já estabelecido por Stevin) . Ora, como A está 'em equilíbrio, c�Tlcluímos que
->- -+- -+ F, + F"J = - F" ,
e ficamos reduzidos ao caso anterior de duas forças directamente opostas e com o mesmo módulo.
-+ A força F" chama-se equilibrante do
-+- -+-sistema das duas forças FJ e F� e a sua linha de acção contém a diagonal do paralelogramo cujos lados conse-
-+- -+-cutivos são FJ e Ft• Ê, assim, a força

PerguÍlta 3:
Quando um cempo ,está em movimento, a
resultalIlte das forças que o actuam é sempre
não nula?
Pergunta 4:
1) Quanto vale a equilibrante de um sis
tema de forças ,em equilíbrio ?
2) Como s'e pode determina'r a equilibrante
de um si1stema de f,orças ?
Resposta à pergunta 2:
' Como se verá (n," 4,6 , 1 ) , qualquer força
_que actua num sólido indeformável pode
considerar-se aplicada ,em qualquer ponto do
sólido que pertença à sua linha, de acção
( é repr'8sentável, portanto, por um vector
deslizante )
Nota 6 :
A estática d o ponto material, tal como a
apresentamos, permite mais uma vez com
preender os dois tJempos diferentes do método
científico,
1. o tempo - a observação e a experimentação, seguidills da indução, para estabelecer
as l'eis ou as regrrus e os 'princípios : neste
caso, a regra do triângulo de ' S tevin ( ou a
equivalente regra do ,paralelogramo ) , estabe
lecida por este 'experimentalmente, e o prin
cípio da inércia mais a 2," lei de Newton. in
duzidas da análise das observações"
2." tempo - a teorização, utilizando o mé
todo dedutivo, graçillS' ao qual, partindo dos
princípios 'e/ou das leis, se ,elabora um corpo
de doutrina coerente.
Didacticamente, ora se segue o processo
histórico, ,respeitando a ordem cronológica da
aqui,sição de conhecimentos, or,a se s egue,
quando se pretende economi:a de exposição
e retenção primordiall dills idei'as e conceitos
directamente oposta à resultante e com o mesmo módulo desta.
Analisemos por fim o sistema das -+- -+- -+-
três forças J;,\ , F 2 e F3 - fig. 4.3. A sua soma vectorial ou resultante é nula e as suas 'componentes formam ( quando se representam as suas medidas na mesma escala) os lados consecutivos do triângulo ABC ( triângulo de Stevin) - fig. 4.4, (a) .
Em resumo, as duas experiências anteriores permitem verificar :
1) a regra do triângulo da composição de forças ;
2 ) a condição de equilíbrio d o ponto material e das forças concorrentes que neLe actuam.
Esta condição de equilíbrio de forças concorrentes, como se exemplifka na fig. 4.4, pode também exprimir-se do seguinte modo :
a) Um sistema de três forças concorrentes está em equilíbrio se, na representação vectorial, formarem os três lados de um triângulo (os vectores estão orientados de modo que a origem de um qualquer deles coincide com a extremidade do outro) .
b) Um sistema de n forças 'concorrentes está em equilíbrio se, na representação vectorial, formarem os lados de um polígono fechado ( os vectores orientam-se como no caso anterior) .
Em qualquer dos casos, uma das -+-
oomponentes, F,. ou outra, é equili-brante do sistema formado pelas (n - 1 ) restantes. (6) .
125

actua�s, o processo lnversü : expõe-se pri
meiro o modelo e o princí'pi'o já estabelecidos e em seguida! prooede"se a algumas verificações
experimentais do que se deduziu. Foi o que fizemos neste caso.
Na inv:es,t:igação cientifica é evidente que a ordem cronoló"gica será necesslliriamente a do processo hi'stórico : observalção, experimentação, induçâJo, elaboração do corpo de doutrina e dedução.
Resposta à pergwlta 3 :
-+- -+-Não, porque, para F = 0, pode ser v = cons-
taIl!te e dif:erente de zero .
Resposta à pergunta 4:
a) Ê nul,a, por ser directam,ente opos'ta à
resul,taIl!te e ter móduIo i:gual.
b) COll'struLr ou determinalr, experimental
me'fite ou graficamente, 'a resultante do
y
c"
-+- -+-sisteIT\l3J : :R. A :eo' l,iUbrllinte será : - R.
---- ------- ------ �==.:.:----�" C ,.. - I I
a" /' t ,/ ,
D"
D' C' x
-+-Fig. 4 .5 A projoecção da resultarute R é igual
126
à s'oma da,s projecções das compo--+- -+
nentes F, e F, :
R. ( AG' ) = F". ( AB' ) + F" ( AD' )
R. ( AO" ) = F,. ( AB" ) + F,. (ÃD")
4.5 Expressão analítica da condição
de equilíbrio de um ponto material
no caso de as forças aplicadas
serem complanares
4.5.1 A r-esolução dos problemas de equilíbTio torna-se muito simples, e de modo especial no caso das forças complar,tares) se recorrermos às projecções das forças sobre um par de eixos coordenados) rectangulares e monométricos, com a origem no ponto material ou na partícula actuada ..
Para isso) vamos utilizar o teorema
das projecções, cujo enunciado é o seguinte:
1
A projecção da resultante de um sistema de forças) sobre um eixo) é igual à soma das projecções das componentes sobTe o mesmo eixo.
Gom efeito) na fig. 4.5 temos:
As projecções sobré ox e O Y são:
R", = AG'
1
Ry = AG" F\x = AR' F,y = AR" Fzx = AD' Fzy = AD"
Em relação ao eixo dos xx podemos verificar que :
Rx = AG' = AD' + D'G' =
= AD' + Ã
R' =
porque D'G' = AR' ('são projecções de segmentos, iguais e paralelos, sobre a
mesma recta) .

®
Fig . 4.6 ( a ) O ponto E do no, que pass·a
pela,s roldalIllllS A ·e B, ,está em ·equilí
brio 'Sob ,a 'aJcção das três forças � � -+-F" F, e F, .
( b ) Projecções do sistema
� � -+-( FI ' F" F3) sobre os eixos dos x:x
e dos yy com origem no ponto E.
o que se verifica para este eixo verifka-se igualmente para qualquer outro, pelo que, em relação a O Y, teremos :
A condição de equilíbrio ao ponto material pode entã.O exprimir-se do
modo seguinte :
{ RII ·�. O R� = 0
n .:;;:; n.O
actuam
ou { Ft.t+Fz.r+ . . . +F • ..,= o
F 1/1+ F211 -h. . . . + F,.yf!:;; Q de forças exteriores que
o ponto material. II
1,.5.2 Exercícios de aplicação.
1 . ' - Das roldanas fixas A e B suspende
ram-se os pesos de 10 kgf e 8 kgf , respecti
vamente, ligados pelo mesmo fio que passa
sob o eixo E - fig. 4.6, (aJ . Que peso se
deve s'uspender no ponto do fio colocado debaixo do eixo E, para que o fio não deslize
e para que se possa ret'ilrar o eixo sem alterar
o equilíbrio ? E quanto mede o ângulo da parte AE do fio com a horizontal ?
Resolução :
Recomendação importante: nestes problema.s deve-se escolher i:! isolar o }'J<>nto materieJ em equ!.líbrlo, oe só pa,ra est�
'em esquema à parte, ,representar as for
ças actuantes.
Isolemos o ponto E do fio, maJI'quemo'S a,s -+ � -+
força:s que ,o actuam ( as forças F" F, ,e F3)
e ,escolhamos o pa,r de ei'xos EX 'e EY indi
cados na figura 4:6, ( b ) ,
A condição d e equilíbrio é traduzida pelo
seguinbe 'sistema de equações : { F" + F" + F,z :0 FI, + F," + F,. - o
127

y ® x
y '
y
Fig. �.7 O ponto S de junçãIo dos cabos está -+
em equilíbrIo sob a a'cção da força P,
igual ao peso do candeeiro, e das -+- -+-
tensões T, e T, dos c3!bos.
Exercícios propostos (fig. 4.8) :
Determinar : -+-
( 1 ) A cOffipr,ess-ão T, na viga VS e a trac--+-
ção T, no cabo VB. -+-( 2) A tracção T, no cabo AB e a oom-
-+-pres,são T, no cabo AS.
-+-( 3 ) A força horizontal F que mantém o
ponto A equj.[jlbrado no ,caso de s,er : a = 30", a = 45°, a = 60° .
-+- -+-(4) As tensõe's T, ·e T, nos cabos SA e SB.
128
Substituindo os valores conhecidos, temoR :
--> => { FI + F" + o = o { F,.,. = - F, 0 + F," + F" = o
-- F,," = - F"
{ F" = - ( -8) = 8 F,y = - F"
No triângulo reotângulo ( tracejada ) , temos :
F,' = F,/ + F,,,' =--=> lO" = 8' + F,/ => => F,.,' = 100 - 64 = 36
E portanto :
F", = 6 e F" = - 6 .
Deve suspender-se, no ponto E do fio, um peso de 6 kgf. O ângulo a, que forma 'Ü fi.o AE com a
horizontal, é dado por :
F," 6 sen a = -- = -- = 0',<6=> a = 3·7°.
F, 10
2.0 - Um candeeiro, que pesa 20 kgf, está
suspenso de dois cabos, que fazem com o
tecto ângulos de 30" - fig. �.7, (a) .
1) Determinar as tensões nos cabos.
2) Determinar as tensões nos cabos, para
ângulos de �.50 destes com o tecto.
3) Estudar a solução que convém mais : se
suspender o candeeiro de um cabo só,
se de dois cabos e em que condições.
Resolução :
1 ) De harmonia oom a fig. 4,.7, ( b ) , temos, no equitíbrio do ponto de suspensão S :
Com-o T, = T,=> T,y = T,", temos : { T" = - T, •.
2T. = 20

s
2 00.10 kg!
30 A
1 0 0 kg!
2,00 kg!
1 6 0 kO!
-
CD
®
Fig. 4.8 ( 1 ) Oompressão T, na viga VS e
9
-tr,acção T, no ' cabo VB.
- -(2) Tracção T, e oompr.essáo T,
nos cabos AB ,e AS, reSipectivamente.
- -(3) T,ensáo T em AS e F = ?
E portanto, no triángulo tracejado da figu'ra,
temos :
TII1 T", 10 sen 30· = -- => T, = --- = -- = 20
T, sen 30' 1 2
Ais tensões são, pois :
T, = T2 = 20 kg!
Se pr.etendessemos' calcular a 'componente
TI> da tensão, crecorriamo..� à função tangente :
Tw �" W tg 30· = -- => T,. = --- = -- =
TI< tg 30· 0,58
= 17,'2 _ 17
2) UtilizaJIldo <8iS equações anteriores, pois -
apen'as mudou o ângulo ( T" SX) , vem,
uttlizando o triângulo tracejado da fig. 4.7' ( c ) :
T,. = T,. = 10
Tw 10 10 sen 45· = -- _> T, = --- = -- =
T, sen 45° O,71J.
= 14,2 _ 14
ks ten,sões nos oabos são: T, = T, = 14 kgf
31) As aJiíne81S anteriores permitem con
cluir:
1 . ° - Para um ângulo de 30·, a tensáv é
igual 3:0 peso do oandeeko, não havendo, por
isso, vanta:gem ,em o suspender de dois cabos.
2.' - Para ângulos maiores do que 30·, a
tensão é inferior ao peso do candeeiro : convém, neste caso, suspendê-lo de dois cabos.
3." - Para ângulos menores do que 30", a tensão é superior ao peso do candeeiro: nestas
condições convém suspendê-lo de um só cabo.
129

Notà 7 :
-*" -+ ( 4 ) Tensões T, e T, nos cabos SA
e SB. �
O vector A é a acção devida ao peso -*" P do corpo suspenso.
"," ' O teorema fundamental surge, em muitos
livro's, como princípi'o, ou s'eja · com carácter
axiomático. Ora, recorrendo fi, 2 .. " lei do movi
mento de Newton, ao teorema do centro de
gravidade e a outros conhecimentos é possí
vel demonstrar-se o referido teorema, não
havendo assim razão para o considerarmos
como princípio. Nestas condições, a experiên
eia serve para confirmar as consequência!' .,
deduZidas do t eorema.
130
4.6 Estática do sólido indeformáveJ
(corpo rígido)
i 4.6.1 Teorema fundamental da ' Está-
tica
Este teorema, que a experiência permite estabel€cer faiCilmente é que a teoria justifica, 'enuncia-se do seguint€ modo (7) :
Duas farças directamente opÓ8tas � �
e com o meô'1nO módulo, F e F' /apli-caãàs em pontOs distintos de um s6- ,
lido indejorm4vel 8, equilibrafll-se, isto é, não modificam Q estado 'cinético do sólido - figura 4.9, (a).
-)- -*" � -*" As forças F e F' (F' = - F) ,tenderiam a
3Jfa:star os pontos A e B e a ,aproximar os
pontos A' ,e B', mas a iss'O se opõe a própria
rigidez do sólido, mantendo as distâncias
AB e A'B' invariáveis, por se tratar de um
sólido teo,ricarrnente indeformáveL Se qui,s'er
mos prever 'O movimento ql!'e terá, pór aCQâo
destas forças, o oentro de grav,idacte do corpo,
basta relembrarmos o teorema do. crntro �e
gravidade (n.· &.10) : OOnsiderandO então '
, � � F e F' aplicàdals no centro de gravidade e
apHcando a este p onto materi'al (de !!lassa m
igual à do sólido) a 2," lei do movimento de
Newton, temos:
� � -*" R -*" R = 0 => j = -- = 0 => l',v = o
m
O centro de gralvidalde não sof,re v,ariação
de v'el'ocidaide 'por 'efeito das dua's forças apli
cadas. Por outro lado, quando estudarmos' o
deito das forçaiS apHcadas aos sólidos, sujei
tos a pontos ou eixos fixos, efeitos qUe só
poderão ser rotativos (n.· 4,.7 ) , veremos' que
tais efeitos, ref,e!1entes a duas forçaiS corno 4- 4-
aiS indkadals' F e F' ( isto é, com a mesma linha de acção e módulo, mas sentidos opos-

-+- -+-Fig. 4 .9 ( a ) As forças F e F', directamente
opostas e com o mesmo módulo,
equilibram-se. -+-
( b ) A força F, aplicada em A, pode
deslocar-se para um p onto B, qual
quer, da sua Unha de acçãO'. O v·ec-
-+-tor F é, assim, um vector deslizante.
-I';' O F; �- -- - --- � I " I
I ' \ I I / \ I
/ ,I' F2 \ ,/ " " c·----\s'
I I _ '
,'>' F1 \ 1}í'- - - -: C" \ , !
-+-Fig. 4 .10 A resultante R das forças para.lelas,
-+- -+-F, e F" e do mesmo s·entido, tem as
s eguintes características :
a) M'ódul o : R = F, + F,;
b) Ponto de aplicação ç.-F , X d, = F, X d, .
tos ) , se compensam. Isto quer di:�er que tais
-+- -+- -'r forças F ·e F' = - F não introduzem alteração
na rotação do corpo.
Em conclusão, podemos afirmar que, no
caso de um sólido s-e encontrar em equi'líbrio,
permanecerá ness·e estado s·e actuarem nele
duas forças directamente opostas e com o
m esmO' módulo,
Vamos deduzir algumas consequências importantes deste teorema fundamental :
.-/1 .a - Não se modifica o efeito produzido por uma força sobre um sólido se deslocarmos o ponto de aplicação da força ao longo da sua linha de acção.
-+-Com ef.eito, seja a força F apli'cada
no ponto A do -sólido S, fig. 4.9, (b ) . Apliquemos no ponto B da sua linha
-+- -+-de acção duas forças FI e - FI , de mó-
-+- -+-dulo igual ao de F. Ora, �s forças - F,
-+-. € F equilibram-se, segundo o teorema fundamental. Resta assim o efeito da
-+- -+-força FI = F, aplicada em B, o que
-+-mostra que a força F, aplicada num sólido, se pode representar por um vector deslizante.
2.a - Composição de torças paralelas.
O problema da ,composição de forças concorrentes e complanares é resolvido ccrn a regra do polígono, já estudada ( cf. n.O 4.4 e fig. 4.'4) .
Pelo que respeita à composição de forças paralelas, ,procede-se como se indica na fig. 4.10 e de acordo com o que a seguir se descreve :
131

No,ta 8:
E-sta 'oonclusão tka-se dos triângulos
.6 [ OA'C] � .6 [OA'C" ] onde :
AC OC d, OC --- = -- ou --=-- =>
A'C" OC" F" F,
=> F, . d, = F, . OC ;
e dos triângulos .6 [OBC ] � .6 [OB'C' ] onde:
-- = -- ou --=-- =>
B'C' oc' F, F,
=> F, . d,=F3 · OC
Designando F, . OC por k, fica, finalmente :
F, . d, = F, . d,
-+-Fig. 4 .11 A resultaJIlte R da:s forças paralelas.
Nota 9 :
-+- -+ F, e F" de sentido contráriQ, tem
as seguintes características :
a ) Módulo: R = F, - F,
b ) Ponto de aplicação C :
F , . d , = F, . d,
No caso das forças paralelas serem de
senti.do contrário também se verifica a relação '
F, . d, = F, . d.,
132
Nos pontos A e B do sólido indeformável ( 8 ) onde estão aplicadas as for-
-+- -+-ças FI e Fz) aplicam-se também duas forças oom o mesmo módulo e directa-
-+- -+-mente opostas, F:l e-F3•
Constroem-se a seguir, em A e em B) -+- -�
as resultantes RI e R2' que se transpor-tam ao longo das respectivas linhas de acção (por serem .vectores deslizantes) para o ponto O. Aqui, faz-se a de com-
-). -+ posição de R, e Rz eegundo duas direc-ções, uma paralela às componentes -+ -+-F, e F2 e outra paralela ao segmento de aplicação AB dessas componentes.
-+- -+ Ao fazermos isto, obtemos F:l e - Fa, que se equilibram. Restam então as
-+- -+ cutras componentes FI e F2 ' (ambas aplicadas em O e com a mesma linha
-+-de acção ) e cuja resultante R tem por módulo :
R = FI + F� .
Esta r'esultante pode considerar-se aplicada em qualquer ponto do corpo que pertença à sua linha de acção, ou seja à linha de acção comum das 'com-
-+- -+ ponentes, F, e F2' aplicadas em O. Cos-tuma considerar-se, porém, para seu ponto de aplicação, o ponto C de -encontro dessa linha de acção ,com o segmilnto de aplicação AB. Esse p onto C divide o referido segmento de aplicação AB em dois segmentos aditivos, que são inversamente proporcionais aos mó-
-+- -+-dulos das forças componentes FI e F" :
(8) e (9)

� , Porém, rueste caso - fi.g. 4.1'1 - o
módulo da result3JIlte é igual à di
fer,ença
R =F, - F,
e o sentido é o da maior das com
ponentes.
Ê fácil deduzi'r est:e resultado, seguindo eX3ictamerute os mesmos pas'
sos que no caso das componentes
com o mesmo sentido, Os segmentos d,. e d, são segmentos subtractivos,
porque a sua diferença é iguai aJO
segmento de aJplkação:
AB = d, - d,
Respostas aos exercícios da fig. 4.8 :
(,1 ) Tracção T, = 2100 X 10 kgf;
Compressão T, = 282 X 1() kgf
(2) T, = 200 kgf; T, = 1'713 kgf 1 3'00 -+- F = 1,115 kgf
( 3 ) 4.5° -+- F = Z,DO kgf
6Qo -+- F = 3',46 kgf
( 4 ) T, = 80 kgf; T, = 1138,4 kgf-+iH38 kgf
o ' )
B A
Fig. 4.12 O cOlljunto pesado formado pelas
es.fer�s A e B e pelas r,espectiva'S
barras pode ,rodar, em torno do
ponto fixo - O --, apoiado no su
'porte ( 8 ) , em qual'quer plano (hori
zontal, vertical e oblíquo) , O si,s�
tema fica em eqUilíbrio quando o
'Seu centro de gravidade estive'/' abaixo do ponto de 81poio O.
Ao ponto C, nestas condições, cha
ma-se centro de forças paralelas
4.6.2 Sólido móvel em torno de um ponto fixo ou de um eixo fixo.
I. Algumas experiências
Indicamos a seguir algumas experiências 'com sistemas materiais sujeitos a um ponto fixo ( fig. 4.12') e a um eixo fixo (figs. 4.13 e 4.14) . Registamos algumas das conclusões que delas pode� mos tirar.
1 .a - Descendo as hastes HA e IB (fig. 4.12') de modo que o centro de gravidade fique abaixo do ponto O, fixo no apoio (S) , o sistema fica em equilíbrio estável (pois o equilíbrio é readquirido sempre que 0' sistema se afasta dele ligeiramente) .
2.a - Os efeitos rotativas de sentido contrário (fig. 4.13) podem ser compensados de modo a obter-se o equilíbrio. Esta compensação, obtida na experiência, verificou-se quando a posição dos pesos obedecia à igualdade :
200 gf. 4 u = 100 gf. 3 u + l00 gf. 5 u
(u = unidade de comprimento marcada na barra AB) .
3." - O efeito rotativo das forças depende :
1) do valor da força - fig. 4.13 e fig. 4.14 (c ) ;
2 ) da distância do eixo à linha de acção das forças ( braço de alavanca da força ou simplesmente braço da força) - fig. 4.13 e 4.14, (c ) .
133

20091 10091
N O caso indicado nesta última figura, pode-se obter o mesmo efeito rotativo (velocidade angular) com as forças
-+- -+-F1 e F5' desde que as fo�ças não sejam complanares com o eixo e se verifique a igualdade :
F4 ·• AP = Fr, . BP .
4.a - As forças complanares com o �
Fig. 4 .13 A ba,rra AB mov'e-se em torno do
,eixo - O -, perpendicula,r ao plan'O
da figura. O efieito robativo do peso
de 200 gf é oompensado peLos 'efeitos
ootalUvos dos dois pesos de 100 gf.
eixo - concorrentes como F3, fig 4.14, �
(b ) ; paralelas como Fl ou perpendi--+I
culares 'como F2' fig. 4.14, (a) - não têm efeito rotativo.
134
II. Momento de uma força em relação a um ponto (momento polar)
Compreende-se agora que para medir o efeito rotativo ou giratório de uma
V,.ooe;::=------., V.=:::::-----, V==-----,
V' V' y'
® ® Fig. 4.111 Porta ( 8 ) m6v,el ·em torno do eixo vertical YY'.
-+- -+-( 11 ) Nem a força F, (paJI"al·ela ao e,ixo ) , nem a ' força F, (perpendi·cular
ao eiXO) c'Ontribuem para abrir a porta, Isto é, não têm efeito rotCftivo. -+- -+- -+-( b ) A força F" concor.reme com YY' e l'esultante de F, e F" também
não tem efeito rotativo. -+- -+-( e ) As forças F, e F" perpendiculares ao plano da porta, contribuem
para abrir e f.echar .esta, quer dizer, o seu efeito rotativo ·é não nulo.

B
-+-Fig. 4.15 Momento da força F em relação .
ao ponto P ( pólo ou centro de re
dução ) :
( a ) :m .perpend.i.cular .ao plano a, de
fini,do pelo ponto P e pela -linha -+-
de 8Jcção da força F .
( b ) :m da;do .pelo pr-oduto vectorial
. -+- -+-dos veCOOI'eS' P A e F :
-+- -+- . -+-L = PA /\ F .
o módulo do momento' é :
L = F . b
( b = braço de ·a1av.anca da força ) .
Nota 10 : .
Em termos de Cálculo v,ectorioal, o momento -+-
polar ou momento da força F, em relação ao
ponto P, fig.. 4.1J5, b), é o produto vectorial ---+-
( cf. 1.6.�) do vector PA ( vector com a origem
-+-em P ·e a �tl'emida:de na, origem de F) pelo
-+-vector F :
-+- -+- -+-L = PA I\ F
força se recorra a uma grandeza física que entre em linha de conta com o módulo e com o braço de alavanca da força : trata-se do ,chamado momento estático, momento de rotação ou momento de uma torça, já considerado por Stevin - fig. 4.15 (a) .
-+-Define-se momento da torça F em
relação a um ponto P (pólo ou centro de redução) , 'escolhido arbitrariamente, e escreve-se
-+--+-F Lp
o vector com as seguintes características :
Ponto de aplicação - no pólo P ; Direcção - perpendicular ao plano
a definido por P e pela . linha de acção da força ;
Sentido - positivo (para cima, na figura) , quando a força implica rotação no sentido anti-horário ( di- recto ) ;
- negativo, quando a força implica rotação no sentido horário ( inverso) ;
Módulo - produto · dÓ .módulo da focça pelo seu ;braço :
L = F. b ( 10)
Este momento será nulo e , portanto, a força não produz efeito rotativo. quando :
1 ) F = o (não há força actuante) ;
2 ) b = o (,a linha de acção da força contém o pólo) .
135
�.

o seu módulo é :
L = área do paralelogr8Jmo [PARO]
= AR X PQ ( a.Jtu·ra do paralelogramo
em relação ao lado A B )
= F . b
� (b = braç
'o de alavanca da força F em
relação ao pólo P )
Nota 11 :
E fá;cil demonstrar, nas p.rojecções., que :
«Se o pólo P percorrer uma linha vecta qual-�
quer, o momento pola�' da torça F varia, mas
a sua projecção sobre essa recta permanece
invariável».
Y /. t:
Y Y'.lO<
®
III. Momento axial ou momento dfJ uma força em relação a um eixo
Como o momento de uma força em relação a um ponto varia 'com a posição deste, não podemos definir o momento de uma força em relação a um eixo como sendo o momento de 'uma força em relação a qualquer ponto do eixo. Mas se projectarmos sobre o eixo os diferentes momentos da força em relação aos diferentes pontos do eixo já obtemos vectores-p.rojecção iguais. ( 11 ) . Portanto, é natural que se escolha a seguinte definição de momento axial - fig. 4.16 (a ) :
Y
_F L y y'
� -+ � � p � - p
Fig. 4 .16 ( a ) Eixo YY' e força F não com planares: Lyy. = L' (projeção sobre YY' de Lp ,
136
com P E YY' ) , .
-+- -+- 1>' -+ -+-( b ) Eixo YY' e torça F são complanares : LpE l'l" = L ...l a => L l. yy' e por-
� � tanJto : L' (projecção de L so'bre Y Y' ) = o .
-+- -+-� -+- ]I' -+-- Fa .
( c ) Eixo YY' e força F não complanares : Ln" = Lp

Pergunta 5 :
� Quando a força F desliza ao longo da sua
linha de acção, o módulo do momento polar
variarã ? Porquê ?
Pergunta 6 :
� O valor do momento polar de uma força F
depende do pólo ou centro de redução esco
lhido ? Justificar.
Exercício 6 :
Recordando as quatl'O expe'riências indica
da:s na fig. 4J14, ( a ) , ( b) e ( c ) , determinar :
� 1 ) O valor dos momentos das f.orças Fi ,
� � F, e F, em relação ao eixo de rotação
da 'POO1ta;
Z) A direcção e o sentido dos momentos "'*' �
de qualquer das forças F, e F. em rela-
ção ao eixo de rotação da por,ta;
.3 ) Na alinea anterior, os mom,entos axiai·s
têm o seu valor máximo. P.orquê ?
� O momento de uma força F em
relação a um eixo YY' é a grandeza representada pelo vector projecção, "'*' L', sobre o eixo, do momento da
� força F em relação a qualquer ponto do eixo :
� � F � Lyy' = L' ( proj. sobre YY' de
� Quando o eixo YY' e a força F forem
complanares - fig. 4.16, (b) - o momento é nulo, porque o momento polar
é perpendicular ao plano a (plano que �
contém F e YY') e, portanto, é operpen-�
dicular a YY' : ,logo, o vector L', pro-�
jecção sobre este eixo do vector L, é nulo.
A definição dada de momento axial pode ser substituída por ·esta outra que é equivalente e mais utilizada na prática - fig. 4.106, (c ) :
� O momento da força F em rela-
ção ao eixo Y Y' é igual ao momento "'*'
da sua projecção F , sobre um plano a
a qualquer, perpendi'cular ao eixo, em relação ao ponto P de interse{!'jão do eixo com este plano- :,
� � J.'a Lp = Y \" n a
137

Respostas às perguntas 5 e 6 :
5 ) Não varia, porque o braço d e aJlavam'ca
da força é o mesmo e o módulo da força -*' F também não varia.
6) Depende do 'pólo, porque com a posição
des·be varia o comprimento do braço -+-
de aJ.avaJnca d a forç·a F.
138
-+ Com efeito, decompondo F em duas
-+ forças - F (projecção sobr·e o plano
-+ a <t ) e F' (paraIela 'a YY' e, por isso, complanar com este eixo ) , o momento
-+ de F' em relação ao eixo é nulo ( por serem complanares ) e, por isso, ficamos reduzidos ao momento da projec-
-+-ção F .
a Da 2.a definição deduzem-se facil
mente as seguintes características do -+-
-+ F momento axial LI'\"
Ponto de aplicação - um ponto P qualquer do eixo ;
Direcção - a do eixo ;
Sentido - positivo, se a força impli'ca rotação no sentido anti-horário, e negativo, se a força implica rotação no sentido horário .
. -+F ' MóduZo
'� Ln' = F . b ·
: . a -+-
( b = braço. de a'lavanca de F em a
relação ào ponto escolhido P) .
IV. Equilíbrio de momentos
Quando um sólido está sujeito a um ponto P ou a um ·eixo - E - , como o único movimento possível é o de rotação em torno do ponto ou do eixo, desde que os efeitos rotativas das diversas força;g aplieadas se compensem, temos realizada a condição de equilíbrio ( repouso ou rotação uniforme ) ; esta reduz-se, portanto, a que seja nula
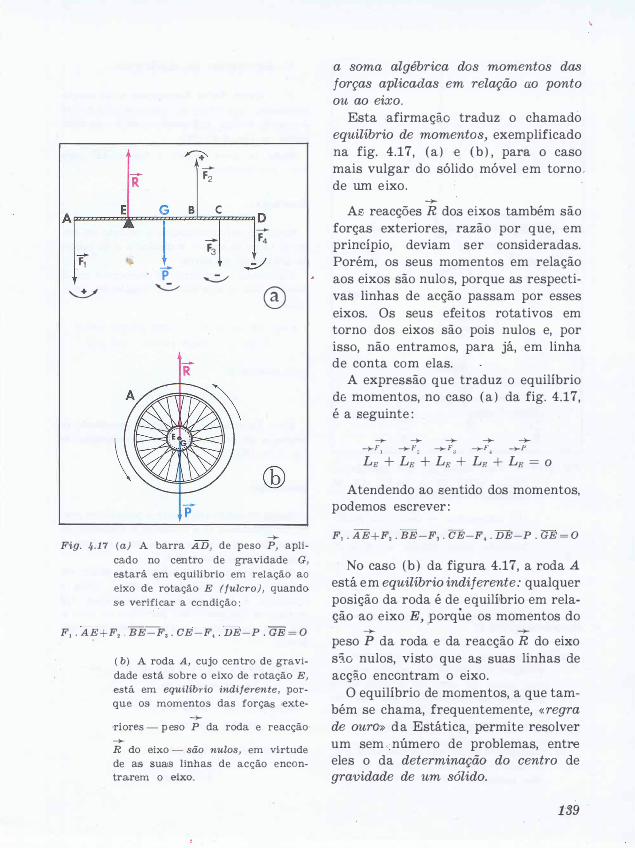
� -R F2
E G B C O A .... I -- F4 - F3 F1 - �
p � '-.V �
®
-+-Fig. 4.11 (a) A barra AD, de peso P, 'apli-
cado no centro de gravidade G,
estará ,em equilíbrio em relação ao.
,eixo de ro.tação E (fulcro), quando
se verificar a condição. :
F, . AE+F, . BE- F, . OE -F, . DE-P . GE = O
( b) A roda A, .cujo centr·o. de gravi
dade está sobre o eixo de rotação. E,
está em equilíbrio indiferente, po.r
que os momentos das forças re�te-
-+-'riores - p es'o P da roda 'e reacção -+-R do eixo - são nulos, em virtude
de as sUaJS linhas de acção encontraJrem o ·eixo ..
a soma algébrica dos momentos das forças aplicadas em relação ao ponto ou ao eixo.
Esta ,afirmaçào traduz o chamado
equilíbrio de momentos, exemplificado na fig. 4.17, (a ) 'e (b ) , para o caso mais vulgar do sólido móvel em torno, de um eixo.
-+-As reacções R dos eixos também são
forças exteriores, razão por que, em princípio, deviam ser consideradas. Porém, os seus momentos em relação aos eixos são nulO's, pO'rque as respectivas linhas de acção passam por esses eixos. Os seus efeitos rO'tativos em torno dO's eixos são pois nulos e, por isso, não entramO's, para já, em linha de conta com elas.
A expressão que traduz o equilíbrio dE: momentos, no caso (a ) da fig. 4.17,
é a seguinte :
-+- -+- -+- -+- -+--.+-Fl -+-P'.! -+-F'j --+-F-4 -")-p LE + LE + LE + LFJ + LE = o
Atendendo ao s,entido dos momentos, podemos escrever :
F, . AE+F, . BE -F, . OE-F, . DE-P . GE = o
No casO' (h) da figura 4.17, a roda A está em equilíbrio indiferente: qualquer posição da roda € de equilíbrio em relação ao eixo E, 'pO'rque os momentos do
-+- -+-peso P da roda e da reacção R do eixo s�o nulos, visto que as suas linhas de acç8.o encontram o eixO'.
O equilíbrio de momentos, a que também se chama, frequentemente, «regra de ouro» da Estática, permite resolver um sem , número de problemas, entre eles o da determinação do centro de gravidade de um sólido.
139

40 em
20em u. .--"--.. ...
D A
R
( 1 1 k91)
(3 kgl)
30em
IJ) ... M
B
(S k91) '0
Fig. 4 .18 ( a ) Determinar em que posição do fulcro ( eixo E ) a barra AB se maJIltém em equilíbrio.
( b ) Determinar o centro de gravidade - G - do conjunto material formado pelos sólidos A, B e C.
Respostas ao Ex. 6 :
1 ) Todos nulos, porque o momento de qualquer das forças em relação a qual
quer pento do eixo, ou é nulo, ou é �erpendicular à porta e, por isso, ao eixo de rotação; como tal, o vector projecção reduz-se a um ponto.
2) DLI1ecção - a do ei'x:o de rotac;ão y y'
Sentido - para baixo ( rota,ção no sentido horário ) .
V. Exercícíos de Aplicação.
1 ." - Numa barra homogénea e de secção
constante, com 80 cm de comprimento e com
o peso de 30 kg!, aplicaram-se as forças indi
cadas na fig'. 4 .18, (a) .
Onde se deve apoiar a barra AB para
ficar em equilíbrio ?
Resolução :
Marca-se arbitra,riamente a posição do fulcro E ( eixo de apoio ) , à distància x do centro de gravidade da barra.
Aplicando o ·equilíbrio de momentos em E
( onde é nulo o momento da reacção do eixo ) , temos :
2 kgf ( 4 0 cm + x) + 1 kgf ( 20 cm + x) +
+ 3 kgf . x - 5 kgf ( 4 Q. cm - x ) =0.,
c.uja solução é :
x = 9:1 c m -+- 9 ·cm
2." - Determinar o centro de gravidade do conjunto de sólidos A, B e C, indicados na
fig. 4 .18, (b) .
Resolução :
Marca-s'e arbitrariamente a posição do centro de gravidade G e aplica-se o equilíbrio de momentos em relação a um ·eixo horizonta:J ima:ginário que passa por G.
Nestes termos, e considerando o sólido em pos·ição tal que AB fique vertical ( pois o equHibrio é indi1erente ) , lescreveremns ( os momentos dos pesos são paralelos ao eixo e, por isso, projectam-se em verdadeira grandeza) :
3 kgf ( 3-0 cm - x) + 3 kgf ( 3Q1 cm - x) -
- 1'2 kgf . x = O <=> 6 ( 30. cm - x ) - 12 x = O <=-o>
180 c m - 18 x = ()
A solução desta equação é :
x = l O. cm.
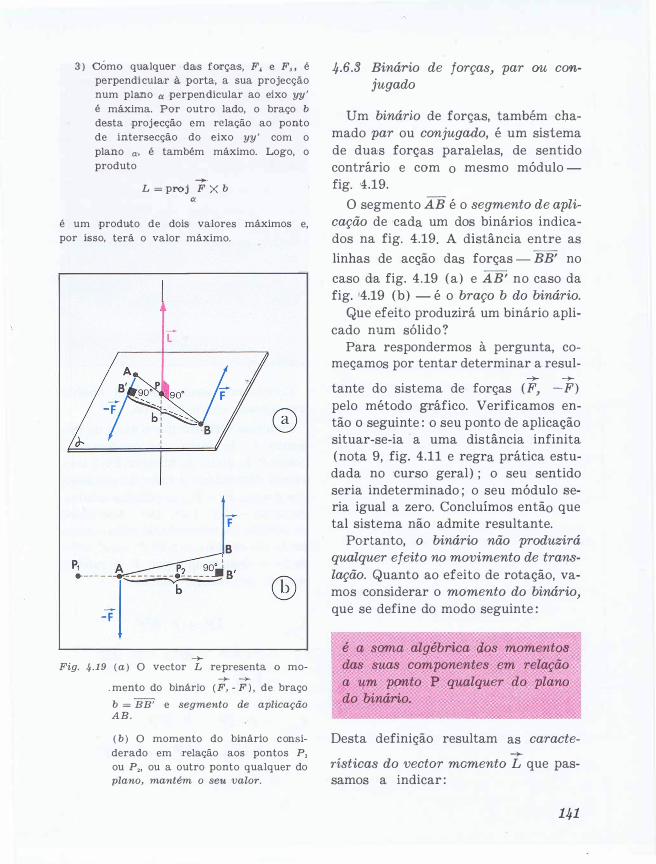
3 ) CÓmo qua:lquer da:s fOlI'ça:s, F, e F" é
perpendi'cular à porta:, a sua projecção
num plano a perpendicular ao eixo yy'
é máxima. Por outro lado, o braço b
desta proj.ecção em relação ao pon.to
de intersecção do eixo yy' com o
plano a, é também máximo. Logo, o
produto
-+-L = proj F X b
ti<
é um ,produto de dois valores máximos e,
por isso, terá o valor máximo.
-F
B P�--- - -� B'
_ 1--- �b �
-F
-+-Fig. 4.19 ( a ) O vector L re'presenta o mo-
-+- -+ . mento do binário ( F, - F ) , de braço
b = BB' e segmento de aplicação AB.
( b ) O momento do binário consi
derado em .relação aos pontos P,
ou P" ou a outro ponto qualquer do
plano, mantém o seu valor.
4.6.3 Binário de forças, par (YU conjugado
Um binário de forças, também clJ.amado par ou conjugado, é um sistema de dU8!s forças para1elas, de sentido contrário e com o mesmo módulo fig. '4 .19.
O segmento AB é o segmento de aplicação de cada um dos binários indicados na fig. 4.19. A distância entre as
linhas de acção das forças - BB' no
caso da fig. 4.19 (a ) 'e AB' no caso da fig. '4.19 (b) - é o braço b do binário.
Que efeito produzirá um binário aplicado num sólido ?
Para respondermos à pergunta, começamos por tentar determinar a resul-
-+- -+-tante do sistema de forças ( F, -F) pelo método gráfico. Verificamos então o seguinte : o seu ponto de aplicação situar-se-ia a uma distância infinita (nota 9, fig. 4.11 e regra prática estudada no curso geral) ; o seu s'entido seria indeterminado ; o seu módulo seria igual a zero. Concluímos então que tal sistema não admite resultante.
Portanto, o binário não produzirá qualquer efeito no movimento de translação. Quanto ao efeito de rotação, vamos ,considerar o momento do binário, que se define do modo seguinte :
é a soma algébrica dos momentoo das suas componentes em relação a um ponto P qualquer do plano do binário.
Desta definição resultam as caracte-+-
rísticas do vector momento L que pas-samos a indicar :
141

Ponto de aplicação - qualquer, ponto do plano do binário (o
-+- -+-plano das forças F e - F) ;
Direcção - 'perpendieular ao plano do binário;
Sentido - positivo, quando está implicada rotação no sentido anti-horário, e negativo, quandÜ' está implicada rotação no senti�o horário ;
Módulo - produto do módulo 'Comum, F, >das forças pelo braço, b) do -binário:
L = F . b
Concluímos assim que um binário tem apenas efeito rotativo.
Podemos v,erifi,car que o v-alor do momento é, de facto, independente do ponto P do plano do binário. Para isso, vamos determinar o valor do momento nos pontos P, e Pz, escolhidos arbitrariamente - fig. 4.19, (b) . Atendendo ao sentido do momento de cada componente em relação ao pólo P, OU P 2 escolhido e designando por F o módulo comum das forças, temos :
L(P'l = - F . AP, + F . B'P,
= F (B'P, - AP, ) = F . AB'
= F . b
L(Ptl = F . AP2 + F . B'Pz
= F (AP2 + B'Pz) = F . AB'
= F . b

l
� FL ® �F @ A' iB'
J- -F'
F'ig. 4 .. 20' Os binários B, e B, equilibram-se,
o que implica que os efeitos rotati
\'os produzidos por el'es no mesmo
sóli:do s·e compensam, desde qUe s'e
veriftque :
F X b ( braço de Bt ) = F' X b' ( bra
ço de B, ) , ou seja
L = L'
4.6.4. Equilíbrio de binários
o binário, como sistema de forças, não tem equilibrante, visto que, como já sabemos, também não tem resultante.
Isto significa que força única capaz de binário.
não há uma equilibrar um
Um binário apenas pode ser equilibrado por outro binário cujo momento tenha o mesmo módulo e a mesma direcção, mas sentido contrário, como se indica na figura 4.20.
4.6.5 Equilíbrio geral de um sólido
I. Caso em que as forças exteriores que actuam o sólido concorrem num dado ponto
Quando as linhas de acção de várias forças concorrem num dado ponto, elas constituem um sistema sempre equivalente, nos seus efeitos, a uma força única - a resultante do sistema. Esta asserção, de carácter experimental, já remonta aos tempos de Stevin e é muitas vezes usada com o nome de princípio de Stevin ou de Ste'Vin-Varignon.
Sempre que as forças concorrentes (componentes do sistema) forem tais que a sua resultante é nula ou, o que é o mesmo, quando ,cada uma das forças 'componentes for a equilibrante do sistema das I"estantes, é evidente que o sistema não introduz qualquer alteração ao estado cinético do corpo, tudo se passando como se o sistema nem existisse. Com efeito, tal sistema pode sempre substituir-se por um outro equivalente, constituído por duas forças directamente opostas e de módulo igual.
143

-+-Fig. 4 .21 A acção da força F, no que se refere
144
ao ponto P, torna-se compreensível -+- -+
aplicando em P du,as forças, FI = F -+-
e -FI ' Para além de um efeito de -+
translação tal como s'e F esti vles's'e
aplicada em P, temos um efeito de
rotação que pode ser medido pelo -+- -+
momento do binário ( - F" F) de
módulo
-� Este é também o momento de F em
em relação a P.
Estas, segundo � teorema fundamental da Estática, equili'bram-se.
Em conclusão, podemos afirmar :
Um sólido, actuado exclusivamente por um sistema de forças exteriores, e cujas linhas de acção são ooncorrentes num ponto, está em equilíbrio, desde que a resultante do sistema seja nula :
-+- -;II- -:Jo- -:t-F, + F2 + . . . + F. = R = o
Um tal sistema de forças diz-se em equilíbrio. No caso das forças serem 'complanares, . as expressões analíUcas 'correspondentes à equação vectorial anterior são :
RJ = o { Fu,+F2"+ ' " + F,,11' = o <=>
Ry = o Fly + F�y+ . . . + F"y=o
onde n indi'ca o número de forças exteriores que actuam o sólido e Fk$
-+-e Fky são as componentes d e Fk segundo os eixos cartesianos escolhidos, respectivamente, para eixo dos xx e dos yy .
Experiências do tipo das efectuadas a propósito do equilíbrio do ponto material (como sejam as relativas às figuras 4.2 e 4.3) confirmam esta condição de equilíbrio.
11. Caso em que as forças exteriores que actuam o sólido não são concorrentes num ponto
Já sabemos que uma força aplicada a um sólido é representada por um vector deslizante. Como tal, o seu efeito é independente do ponto do corpo onde se considera aplicada, desde que este ponto pertença à linha

Nota 12:
Compreende-ose 'que, 'l'elativamente aos pon-
-+-tos da sua linha de acçã:o, a força F só tem
ef eirto de traJllls}8Jçãio pom, J:1e1SSe CaIS'O, é b = o.
Donde
L = F X b = O. Pode acontecer que os efe�tos rotativos de
-+-uma f>orça F, relativamente aos diversüS pon-
ws de um corpo, .se compensem. Se tal acon
tecer ü corpo não roda. Ora isto sucede
. qUaIlldo a linha de acção da força passar pelo
c entro de gravidade do corpo. S·e um corpo
for actu8Jdo por fiorças, todas ·elas com linhas
de acção pas'saJIldo pelo centro de gl'avidade,
8Ipellas ,sofre um deslocamento de translação.
10
de acção da força. Isto não signi
fica que os efeitos- da força não se façam sentir em pontos do sólido que
não pertencem à sua linha de acção. '
Para compreendermos o ef.eito da força -+-F num ponto P não situado na sua linha
de acção (fig. 4.21 ) , começamos por
imaginar aplicadas em P duas forças ->- -+-
dkectamente opostas, FI e , - FI e de
módulo F. Como estas duas forças se
equilibram, não alteramos o efeito da -+-
força F. Ficamos agora com uma força -+- ->-
igual a F, mas aplicada 'em P - FI -, e ->- ->-
o binário (F, - FI ) . Compreendemos -+-
assim que a acção de F no ponto P se traduz por uma translação devida a ->- -+ FI = F, acompanhada de uma rotação, implicada pelo binário referido, em
torno de um eixo perpendicular ao plano definido pela força e pelo ponto. O efeito rotativo deste binário é medido
pelo respectivo momento, de módulo
L = F X b ,
sendo b a distância de P (centro de -+-
redução) à linha de acção de F. Est'e momento é precisamente igual ao mo
-+-menta de F em relação a P . . ( 12) .
Se o sólido for actuado por um sistema de forças, podemos « reduzir»
-cada uma delas ao ponto PJ tal como ->-
procedemos com a força F. O efeito do sistema, no ponto P, é traduzido agora por uma translação devida à resultante
-+ + F"
das forças, consideradas todas elas aplicadas no ponto P, e por uma rota-
1 45
Nota 13:
li: fácil de ver que, sendo aJ resultante nula
quando as componentes s'e consideram apli
cadas num ponto, ela é sempre nula. E? tam
bém se demonstra que, s.endo nuloS! em relação
a um ponto qualquer P do corpo, o valor da
-+, res'llltaJnte dum sis-bema R, e o momento
-+-resuJ.taJl1Jte L, Seirão llllJlos' em relação a qual-
quer outro ponto do coI'!po. Nes·te caso é
-+R = o
_ e diz->se que o s·Lstema é equivalente a zero ou que está em equilíbrio.
Nota 1<l:
Quan'do um sólido está ,em equilíbrio e é
afastado ligeiralmente dessa p osição, a l'esul
tante das torças exteriores, que era nula,
mantém-se nula. O m-esmo não acontece obrigatori-amente com {) momento resultante.
E assim, temos três casos :
1 .· caso - O I)1.omento resultante torna-se
direrente de zero .e .obriga o sólildo .a rodar. de tal maneka que readquire a primitiov.a_ posição
de 'equÍllíbrio, Neste cas,o o equilíbrio do sólido
diz-se estável. . - -2.· caso - O momento resultante torna-se
diferente de zero 'e obriga o ·corpo a rodar de
tall maneira que ele 'S'e afasta da pos-i,ção de
equillíbrio. Neste caso o -equilíbrio diz-se instável.
3.· caso - O momento resultalnbe perma
nece nulo, O que', aJUado ao facto da resultante
do sistema continua-r a ser nula, faz com que
o corpo sólido permaneça em equilíbrio nes-s'a
nova posiçãJo. Neste caso o equilíbrio diz-soe
indiferente.
ção devida ao efeito de n binários correspondentes a um só - o binário resultante - de momento
-++ L"
-+- -+-sendo Lk o momento da força F\ em relação a P.
P,ara que não haja efeitos de translação nem de rotação por parte dum sistema de forças, devetão verificar-se as seguintes condições, relativamente a qualquer ponto P do corpo :
1.a -.:...., Ser nula a - resultante . do sistema ( considérando as suas componentes aplicada:s em P) :
-+- -r -+- -+-FI + F'!. + . . . + F" = R = o
2.a - Ser nula a soma algébrica dos momentos '<ias componentes '<io sistema ( em relação a P) :
-r -+-. -+- -r L1 + L2 + + L;, = L = o
_ .(eq uiJí'prio 'de .:�{o�ent��)"
C6nipreende�se que esta segunda condiç'ão traduz unia compensação dos efeitos rotativos das componentes do sistema. (13).
Quando um sólido indeformável é actuado por um sistema de forças que obedece às duas condições anteriores sistema em equilibr'io, ete ou está em repouso, ou em translação uniforme 'e I'ectilínea, OU em rotação uniforme, isto é : o sólido está em equilíbrio. ( 14) .

4.7 Resolução de alguns problemas de interesse prático
1 ." - Estudo da estabHidade do muro
ABCD, actuado por uma força hori--+-
zontal F (devida à força de pressão
da água de uma barragem, à força do
vento, etc.)} à altura HB = h do solo - fig. 4·22.
-e C ;::::=�+=:::; O
+) H' _ _ _ _ _ _ _ _ _ _ __ �....;.----
H
G F h
-ej2 j A B
--
P
Fig. 1, .22 O momento de estabilidade do muro e
A B G D 'é P X 2
-+ \ Sob a acção da força F, o muro tenderá a
rodar em torno da aresta A. Para que isto não suceda, é preciso que seja nula a soma dos
-+- -+-momentos do peso P e da força F, em relação a A :
ou
e F . h - P . - = o
2
e ( mom. derrubante) F . h = P . - ( mom. esta-
2 cionante)
O muro não cairá enquanto se verificar a condição :
e F . h 5, P .
2
e O produto P . chama--soe momento de
2 estabilidade ·ou estacionante.
Exemplo :
Um muro de betão, c'Om as dimensões de 10 m X 5 m ( altura) X '1,0 m ( espes'sUTa) e o peso vclúmi'co de 2 50'01 kg fim" a que força lateral poderá re.5li'srtiT, s-upondo---a apli'cada a meio da altura ?
O momooto de 'eS'tabiilidade é :
e L = P . - =
2 1<0
= ( 10 m X-5 m X l,ü- m ) X 2500I kgf/m" X-m= 2
=6,25 X lO' kgf . m -+- 62X 1O" kgf . m
O muro não oairá enquanto sle verificar a condição:
ou
5 F X - m 5, 625 X 10" kg f. m
2
625 X 2 F 5, ---- X 10" kgf
5 F 5, 250 tono ( força) -+-- 25 X 10 tono f
2.0 - Estabelecer a condição de equilíbrio
nas alavancas - fig. 4 .23 ( a ) e (b) .
Resolução :
1) Alavanca inter-fixa - fi>g. 4.23, ( a ) .
Af:lbR E bp
B • p
- � R
W R (OU P)
Fig. 4.23 ( a ) Equi.Jíbrio na· alavanca inter-fixa : P X bl' = R X bRoO ( b ) Equilíbrio na alavanca inter-re- -S'iS'tente e inter-potente:
P X bp = R X bR •

Aplicando a condição de equilíbrio de mom entos no fulcro E Ceixo de rotação da alavanca) e aJtendendo ao sentido do,s momentoo
-+- -+-da potência P e da resistência R, temos:
R . AE - P . BE = o <=> R . b" = P . bp ,
que é a já oonhecida condição de equi.líbrio ( adquirida anteri'ormente por via expe-rimental ) e que foi estabelecida pela primei:ra vez por Arqu�medes.
Nessa expressão b" e bp sáo, respectivamente, os braços da resistência e da potência.
Teoricamente, qualquer f.orça P ( por menor -+
que 'seja) pode equiHbrar uma força dada R
( por maior que seja) : para tanto, bastará d�spor de uma alavanca rigida (. indeformá
vel ) , com comprimento suficiente, e de um ponto fixo de apoio - o ponto de que' falava Arquimedes para poder deslocar a Terra, segundo a frase que transcrevemos no início deste 'oapítulo, Esta frase foi apenas um modo enfático de chamar a 'atenção para as pos'S'Í'bilidades e v'aJIltag,ens que advêm da utHização das alavancas.
2) A lavanca inter-resistente ,e inter-potente
- Eg,. 4 .23 ( b ) .
Como a potência pode se'r consi'deorada resó.'stênda e viae-versa, a alavan'ca in;ter-resistente não é distinta da alavanca inter--potentJe.
Em relação ao fulcro E, podemos então es'cl'ever:
p '. BE - R . AlE = .o <_> P . bp = R . bn•
I'esuLtado que, como não podia deIxar de ser, é igual ao anterior ·e traduz a seguinte propriedade da.s alavancas em equilíbrio : o mó-
-+- -+-dulo da força (P ou R ) e o ' comprimento do
respectivo braço são grandezas inversamente
proporcionai.s.
3.' - Estabelecer a condição de equilíbrio nas roldanas fixa e móvel.
148
®
Fig. 4.24 (a) EquiUbrio na roldana fixa : P = R.
(b) EquIlíbrio na roldana móvel :
R P = -
2
1) Roldana fixa ( de eixo E fixo) ,
fig. 4.24 ( a ) .
o fui oro 'é o eioco da prõp'ria roldana e os braços da I'esdstência R e da potênci'a P sáo
iguais e de comprimento igual ao rai o r da roldan·a.
Aplicando o equilíbrio de momentos em E,
temos :
P . r - R . r = o < . > P = R,
que é a ,condi'ção de 'equilíbrioO da roldana fixa e nos indica que não há economia de
-+-esforço despendido P. Há apenas a comodi-dade de utilização.
2) Roldana móvel ( d e eix,o - O - sujeito a translação segundo a vertical) - fig. 4;.124 ( b ) .
o fulcro é o ponto E fixo n o SUipOl1te da suspensão.

-+-o braço da I1esi'stênda R ( di,stância do
fulcro à. sua linha de acção,) é :
EO' = r ( raio d a roldana ) ,
-+-O bra;ço da potência P, qUJe se exerce no
ponto B da roldana de 'eixo móvel O, por -+-
intermédio do peso P susrpens'o da roldana
. fixa C, é :
E . B' = 2r
ApHcando a condição de equil1brio de mo
mentos no fulcro E, temos: R
P . 2ir .,.. R . r=o <=> 2 P = R => P = - , 2
que é a c on<l.i'ção de ,equi'líbrio, onde s'e vê '"*"
que o esforço despendido P ,é metade da resis--+-
tência R a vence,r ou equilibrar ( p esos sus-
pensos + .peso da! roldaJna móvel ) . -+-
Na prMka, os valores da potência P s-ão superiol'es aos que acabamos d e calcula'r, ean virtude dos atritos do fio, da corda ou do cabo na golal, p eriférica, das roldaJllas.
4.8 Leituras recomendadas
1. Les étapes de La Physique, n.O 4'211, Que
swis-je ? F. P.I1ess, cap. II. 2. História da Física, Paul Schunnan, I voI.
3. Physíque, J. Oessalc, C1. de seconde C,
cap . 5, 6 'e 7.
4. Física General, 8'eaJrs y Zeemansky, cap .. II
e III.
5. Curso de Mecânica, Adhemar Fonseca, I, Rio de Janeim, 1967., cap. '2.
6. Elementos de Física, V. Costa, Luís Si,Iva e I. Peixoto, cap. II.
7. Mecânica Racional Elementar, Marques Teixeira, cap. II e III.

4.9 Resumo das ideias fundamentais
1. Os pioneiros do estudo siste'rnático da
Estática foram Arquimedes de Siracusa (287-
-212 a.C.) e Stevin (15q8-1620) - o primeiro
not�bilizou-se, na Estática, com a descoberta
do «principio» das alavancas e o segundo com
o estabelecimento da regra do triângulo para
a composição de forças e com a primeira defi
nição de momento de uma força.
2. As forças interiores de um sistema ma
terial - opostas duas a duas e iguais em mó
dulo - não intervêm no estabelecimento do
equilibrio estático e/ou dinâmico (respectiva
mente, o repouso e o movimento uniforme
rectilíneo e/ou movimento ci.rcular uniforme) do sistema.
As forças exteriJOI'es, são as forças de reacção (devidas às ligações ou vínculos), as for
ças de contacto e as forças de acção a dis
tância.
3. A condição necessária e suficiente de -+-
equilíbrio ( .6 v = o ) de um ponto material é
que seja nula a soma vectorial das forças que
o actuam. Como tal, recorrendo às projecções
nos eixos coordenados para o caso de forças complanares, temos:
{ R. = o
R'I = o <=> { FIx + Ftx + . . . + F"x = o
FIy + F," + . . + F"y = o
4. Do teorema fundamental da Estática
duas forças directamente opostas e com o
mesmo módulo 'equilibrann-s·e .:...:.. deduz-se a
propriedade da grandeza força como vector desJi.zante e a regra da composição de forças
paralelas.
5. O efeito rotativo de uma força em rela
. ção a um ponto fixo e/ou a um eixo fixo é
medido, respectivamente, pelo momento polar
e pelo momento axial, de mód?üos iguais ao
pro.duto do módulo da força (ou da sua projecção nu,m p lano perpendicular ao eixo) pelo
.· braço de alavanca da força (ou da referida
projecção) .
150
6. No equHibrio de momentos, é nula a
soma algébrica dos momentos das forças ex
teriores. Este resultado facilita a ?'esolução
de inúmeros problemas de Estática,
7. Um obináJrio não tem equilibrante, não
produz efeito de translação e só pode ser equi
librado pOr outro binário.
8. As duas condições gemis de equilíbrio
de um sólido são:
1) Quanto à ,translação - ser nula a resul
tante das forças exteriores.
2) Quanto à rot8Jção - ser nula a soma dos
momentos dessas forças em relação a. um ponto do sólido, qualque'l' que seja o ponto.
9, Pela consideração do momento das for
ças exteriores podemos concluir se um estado
de equilibrio ,estátioo é estável, instável ou
indiferente, Se esse momento, para uma posi
ção vizinha da'posição de equilíbrio, tende a
fazer regressar o sólido à posição de equilíbrio, este será estáv·el. Se tende a afastar o
sólido ainda mais da posição de equil'íbrio,
será instáv'el. Se o valor desse momento for
nulo para qualquer posição (que é, por isso,
sempre de equilíbrio) o equilíbrio será indi
dif·wente.
4.10 Questionário
1. Se num ponto material aplicarmos vá
rias forças que, na repI'esentação v.ectorial,
consUtuem os lados de um polígono fechado,
orientados todos no mesmo sentido, a velo
cidade do ponto material (inclusive v = o )
será modific8Jda ?
2. Na filg. 4:25, ( a ) , indica-'se uma régua
que pode ,rod8Jr 'em torno do eixo E (prego
que passa p elo centro de gravi.dade da régua
e está ,espetado no canto da mesa), . A moeda 1 cai na ver,tical quando se dá
uma pancada brusca na eXltnemidade A da
régua e na m;oeda 2 , As moedrus 1 'e 2, na queda, descreve,m, ,resrpectLvarnente, uma traj ectóri,a 'I'ectirlínea e um'a traj.ectória par·aoo
Hca, a:tingindo o solo -em BI e AI.

@
B
2.1 E;XJPlicar 'estaJs traj.ectóri.as, indicando os
'pl'incípi,os que as justificam,
2.2 Se não houv'es'se atrLto qUall seria o mo
vimento da régua? 'Corresponderia 'esse
movLrnento ideal ,a um estado de equi,
líbrio?
2.3 As moedas, ,ao atingirem o solo, produ
zem um só som ou dois sons di'stintos
e s'eparados? Justificar.
3. A régua, na posi/ção A - fig. 4.25, (h)-,
não 'está SlUjeita a um binári,o de forças, mas
já não se pode afirmar 00 mesmo na posição B.
3.1 RepresentaJr, na figu�a, as força,s' que
actuam a régua, mostrando assim quando
há e quando não há binário.
3.2 O momento do bináJrio depende do án
guIo ",: para que valor desbe é máximo?
Justificar.
3.3 Indica� também a"s 'POS,lçoes da régua
corvespondentes 'ao equiaíbrio estável,
ill'stálvel e 1ndifenenbe 'e justificá-las,
4. Jl; vulgar um automobilista estar a pisar
o acelerador e, no entanto, o carro manter
velocidade constante. Que concluir acerca da
resultante das forças que estão a actuar o
automóvel?
-+- -+-5. Um sistema: de forças, F e -F, de linhas
de acção para:lelas, igual módulo e sentido
contrá'rio é ,equivalente a uma força única?
A soma algébrica dos momentos destas f.orças
em rela:ção a 'Pontos diferentes do plano é
constante -au var'táv:el? Qual é o ef'eito de tal
sistema de força:s?
F=300g1
@
Fig. 4.26
6. No guiador de um automóvel- fig. 4.26, (a) - estão aplicadas em A e B duas for-
-+- -+-ças F e F', exercidas pelas mãos' do 'moto-
ri's'ta:.
6.1 Est,e s'1sltema de forças tem equillibrante?
6.2 Indicar aJS camacberisticas do v'ector mo
mento des.te sistema.
'/. Um parafuso � fig. 4.2!&, (b) - está sus
penso de um fio e em ,equilíbrj'o. Onde esta�á
,o ,centro de gra'Vidade do parafuso? As dua:s
parbes,
separa:das pe,la l�nha de contacto do
fi{) berão o mesmo peso? Jus'bificar..
8. Numa ba:lança tipo bás'cula, cujaJ ca,rga
máxima é de 10 tOlIleladas, poder-se-á pesar
um automóvel, apo1ado em do,i,s eixos, de peso
superior a 10 tonelada:s'? 'Com'Ü?
9. V,erificar qu'e ,três força:s, complanares e
concorrentes, com o mesmo módulo, estão em
equi,li'brio se formavem 'entre si ângulos de 60,",
151

P,ara r,esrponder a ,esta que'stão, que tipo de
racicdnio f.oi uti<lizado? Na evolução do pen
samento c�entífico,'.o raciocinio uti'lizado cor
responde ao tempo anterior ou posterior ao
estabelecimento da axiomática? Que ,tipo de
raciocíni'o é fértil no estabelecimento da axio
mática em ciências experimentais ?
-4- -4- -+-10. Considerar as forças F" F, e F, dirigi-
das segun{io as três arestas de um paralelipí
pedo -rectangular conV'ergentes num vértice,
10.1 Poderão estas força's equilibrar-se? Jus-
tificar .
10.2 Este si'stema de força's' terá 'equilibI'ante?
Justificar .
10.1 Não. 10.2 Sim.
4.11 Problemas
� � -+ -+--.1. Quatro forças F" F" F, e F" situadas
no plano hori'zonta'l 'e de módu1os, ,res'pectiva
mente, 6 v-Z-N, 6 v2N, 6,ON e 4,OON,
actuam no mesmo ponto materillil - O - da
s'eguinte forma:
-+- -+-F, de norte 'para sul; F, de ,este para oeste;
-+- -+-F, {ie sudeste para noroeste; F. de sudoeste
para nordeste.
Construir o respectivo diagrama de forças
e deterimnar o valor da resultante .
Sugestão: recorrer às projecções sobre os
eixos coordenados com ori,gem
no ponto material.
-+-2. Decompor a força F de módulo 2',,5 kgf
em duas diJrecções perpendiculares·, sabendo
-+-que as intensidades das três forçaIS ( F e as
duas componentes) estão em progres:sáo
aritmética.
1,5 kg!; 2,0 kg! . I 152
3. Aplicaram-se no mesmo ponto material
cinco forças ccncorrentes e complanares, de
módulo 1,0 kg! e com as seguintes direcçõe;;: a
2.' é perpendicular à 1."; a 31." é perpendicular
à resultanbe das 2 primeiras; a 4." é p erpen
dicular à r,esultante das 3 anteriores; a 5." é
perpendicul,ar à resuLtante {ias 4 anterio,res .
O sentido · ( transporte da ,ori'�em para a extre
midade) é ,o m'esmo para todas. Calcular a
resultante do sistema das cinco forças
4. Nos ombros de dois homens apoiou-se
uma vi'ga homo�énea e de secção constante
de ,1;20 m de comprim1ento e de pesü '12:,5 kgf.
Susipen.deram·'se desta viga três pesos: um
de '25,Okgf a meia da viga; um de l'5,D kgf
a 0,4'0 m do ombro de um dos homen<s e outro
de 35>,0' kgf a 0',130 m do üutro homem.
Que força é ,equilibrada par cada homem?
37,5 kgf -+- 38 kgf;
50 kgf -+- 5 X '10 kgf .
5. Nos V'értic'es consecutivos A, B, C ,e D
de uma placa rectangular aplica,ram�se as
forças, respectivam,entJe, de 1,0 N, 3,0 N, 2,0 N e 4,0 N por meto de fins. Sendo AB = 1,0 m
e BC = 0,8 m, tendo as f.orças as direcções
dÜ's lados e emandü orientadas ,respectiva
mente {ie D para A, de A para B, de B p ara
C e de C paira D, ,ca;lcular o valor da g,ran
deza que mede o efeito rotativo total das
forças em torno:
5.1 do porubo D;
5.2 do c'enbro da 'PI,aca.
5.:1), 414 N . m
5.2) 413, N . m
6. Um dÍ's,co 'estâ colocaido no plano verti
cal de modo a poder rodar em torno de um
eixo hori2iontal 'que pa'Ssa pelo s,eu cerutro.
Su'spende'-'s'e um peso de 4,0 kg! da extremi-

dade de um 'raio que faz u m ângulo de 45·
com a horizont3Jl. Que peso Se deve suspender
da lex tre'ffiIÍdade de outro raio, na posição
horizontal, 'para que o disco não rode?
2,0 y'2kgf = 2,8 kgf
7. Uma me sa quadrada e homogénea, cújo 13Jdo mede 1,2 m, pe sa 21 kg! le está apoi'3Jda sobne q\lJ3Jtro pés, que cons'tiJtuem os vér tices
de um quadrado centrado -com a mes-a e cujo
lado mede 0,9 m . Que f.orça VleI1tiJeal se deve ruplicar num
dos I'llidos da mesa para a levantar deslSe
lado, rodando -em torno dos doi,s pés-apoio do lado oposto? Mostre que o módulo desta' força é o m:esmo qualquer que sej.a o ponto de a:pli
cação, desdie ·que peI1teIllÇ3J a esse )ado da mesa.
9kgf .
8. Debermiruar '() móduIo do momento de
um ·binário, 'Ü1i'j-oo forças de lO. kgf actuam
perpendicurla'rrnente à dia:gonal de um qua
drado de 30 cm de lado e na s ex;tr,emidaJdes
desta.
S,O y'2kgf . m = 4,2 kgf . m
9. QUall é o valor da' potência queequilihra
um peso de 600 g! quando suspenso :
9.1 De uma t3Jlha -com 3 �oldanas móveis e
uma fixa, pesando cada roldana 20,0 g!.
9.2 De um -cadernal de 3- rol<laJnas' móveilS,
pesando o conjunto destoo 60 g! . MostraT por qwe motivo s'e .tem, nelSte
R caso, P = -- , sendo n o núm€lrQ de
2 . n
roldanas mÓve;ils.
Sugestões:
9.1 Ca:lcu l3Jr a potência! paJI"a cada I10ldana isoladamente e sucessivamente.
9.2 Verific3Jr qU3JI é o número de fios de
suspensão das :roldalIlaJS móvei's pelos
quais se repwte a resistência total.
9.1) 92,5 g!-+92 gf
9.2:) 110 gf.
1.0. Dai,s homens puxam um ba-rco ao Iongo -+ -+
de um oanal, 'exercen do nele forças F, '€i F,
que f·aZJem um ângulo de 30· com o eixo lon
gitudinal do harco, paralelo às marge'llS do
canal.
ISuponhamos que FI = 400 N e F, = 500 N .
10.1 Determinar os valores daiS componentes
destas forças de direcção normal às
margens. Para qual das margens se des
viará o har.cü?
1 0 .2 Para evita:r o desvio do b3Jrco, uma ter
ceira pelSsoa exeroe uma força por meio
de uma corda perpendtcul3Jr às margens'.
Determinar o módulo :e o slentido dest3J. força.
10.3 A força ex·ercida pel3J terceira pessoa
irá influir no desl.ocamento do barco ao
longo do ca:nal? Justifiear.
W.1) 200 N; 250 N; maTgem do 'la'lio de -+ F,.
10..2) 50 N; serutido -opOMO ao da compo--+
nente de F, perpendicular à mar-
gem. 10.&) Não.
1 1 . Prura derrubar a parede metálica AB
- fi'g. 4.27, (a) -, de 8 m de altu ra, exer-
® B
C 60· A o
Fig. 4.27
153

-+-ceu-'se a força de tensão F por meio de um
cabo que forma um ânguIo de 60" com a
horizontal.
A parede metáJlica só cairá, rodando em
torno de - A�, para valores do momento
jlguai's ou superiores a 4,0 X 103 N . m.
-+-11 .1 Qual o valor mínimo de F que obriga
a p8irede a tombar?
1 1.2 Haverá vamtJagern, no que respeita a
economia de força, em usar um cabo
mats comprido e que, por is'so, fizes'se
um ângulo menor com a horizont8il?
111>.1/) 10 . 100 N = 1/,0 k N
11.2) Sim, pois F tOlI'Ilava-se menor.
12. Uma barra homogoén'ea, de secção
constante elO m de comprim'ento, pesa 40 kg!
e ,está 'em 'equilíbrio, 'apoi'ada numa parede,
polida e vertical, por uma das :extnemidades
A - fig. 4,:27\, (b) -, a 8 m do solo. A ,'extre
midade B apoia�se no <solo, áspero (portanto,
com atrtto).
12.1 Que .representam a;s forças indka.d8iS
-+- -+- -+-R", R'B BP ?
-+-12.2 A força R. é perpenddJcular â parede e
-+-RB não é perpendIcular ao solo. Porquê?
-+- -+- -+-12.3 Por que razão rus fO'I"ças R'a, P e R'I
devem ter ,rus linhas de acção concorren
te's num ponto P? -+- -+-
12.4 Deterrninrur as vailores de RA '8 R'a.
Sugestão:
Utilizar as projecções e o equilíbrio de mo
mentos.
RA = 1,5 kg!
R'a = 43 kg!
13. Um 'rapazito, <sentado num baloiço,
atinge a posição ,extrema quando a corda de
suspensoão do bruLo-iço f.az um ângulo de 3'0'
154
com a vertical. O rapazito e o baloiço pesam
30 kgf. Que ferça horizontal s!eria necessário
exercer nas costas do rapazito para o manter
em equHíbrio nessa posição?
F = 17,3 kg! -+- 17 kg!
14. Uma barra rigida, de secção uniforme,
homogénea, tem 2,0 m de comprtmento e pesa
30 kg!. .E sustentada po-r dois suporte's que
foram fixados em ,dois pontos A e B, distan
tes 3,0 dm le 6 dm, 'respectivamente, das extre
midades. IDm que ponto da barra se deve
suspender um peso de 150 kg! para que a
compressão no suporte B s/eja duas vezes
superior à compressão no suporte A?
Sugestão:
Aplicar o equilíbrio de momentos em A
e em B.
A distância d e 0,74 m de A
15. Um di,sco de cartão -- fig . 4,.28-, (a)-,
móvel em torno do eixo EE' perpendi'cular ao
c A
Fi.g. 4J�8
dÍ'sco no seu centro - O - , é actuado pelo bi-
-+- -+-nário (F, - F) ,ass,ente no plano do disco.
Sendo AB = 2,OQl m, '" = 45' ,e F = 10,0 N,
r,epres/entar o vector momento do binário e
determinar o seu módulo.
1'0 '1/2 N.m -+- 14,,1 N, m

16. O prego - P -espetado na parede A B
- fig. 4.28, (b) - está a ser puxado pela corda DO, que faz um ângulo de 30" com a ver.tical.,
-+ Sendo 20,0 N o valor da tensão F exercida
pela corda DO, determinar:
16.1 o valor da força que tende a puxaT o pr,ego para fo-ra da parede;
16.2 a força que tende a faz'eI' dobrar o prego;
16.3 para diminuir o efeito anterÍ'or (o dobrar do pr,ego ao s·er arrancado), o ãn
guIo da corda com a vertical deve aumentar ou dimi,nuir? Justificar.
16,1) 10,0 N
1'6 . . 2) 10,0 V3 N -+ 1"/,3 N
16.3) Aument8Jr.
17. Na fig. 4,,29, (a), apresenta-se o esquema de uma balança de dois pratos. Quer devido à não homogeneidade do travessão BO,
-;d:........-m B G: : C m
p -- 12,l cm� 12,5cm P p
A (fiel)
® o�� 5 200 kgf
t F; ,-: Re:? 3,Om , , ® A G
450kgl(F,)
Fig. 4.29
quer devido às assimetrias do fiel e do travessoãe, quer devido ainda aos pequenos deslocamentos do cutelo E (eixo de rotação)
sobre a almofada de apoio, a vertical do centro de gravidade G do si'stema não passa peLo eixo de rotação E. Por i>5so, para manter o travessão na posição' horizontal (fiel A indicando o ponto médio da escala), colocaram-se a" massas cursoras, m, de 1,600 g, nas posições indicadas na figura.
O sj'stema (,excluídas as mas·sas cursoras) pesa 235 gf.
Determinar a distãncia - d -·entre as ve,rticais do centro de gravida,de e do eíxo de rotação E.
d = 0,0127' mm = 2'7 Jim
18. Observar a fi.g. 4.29, (b), e determinar:
18.1 o peso da barra EA, móv·e.l em torno do eixo de rotação E, em equilíbrio estático sob a acção das forças indicadas na fi'gura.
-+ 18.2 o valor da t'le8Jcção RE do eixo, quando
o sistema estiover em equilíbrio estático.
P = 10 X 10 kg! .
R" = 35 X 10 kg! .
19. Um autcmóv·el pesa 1200 kgf. Determinar a força de pressão exercida por cada par de rodas na estrada, sabendo que a vertica,l do centro de gravidade do automóvel divide a distância entre es dois eixos de cada par de rodas em duas partes que 'estão entre si cerno 1 para 2.
Quais das redas devem ter os pneus com ar a maior pressão?
400 kg! e 800 kg!; as de trás ( 800 kg/)
20. A viga AB, que pesa 16 kgf, está suspensa de dois cabos AO e BD e ,encontra-se em equilíbrio estático, nas condições indicadas na fig. 4.3,0.
155

12 kgf
Fig. 4.30
DeterminM":
20.1 As· compon:en bes' ve'l"UC3Ji's das tensões -+- -+-T e T';
20.2 O v8Jlor da tensão T no c8Jbo AO;
20.3 ks tracções hOlri:zontais' na viga AB;
20.4 O vallor da t-ensão T' no cabo BD;
20.5 O v8ilor do ângulo a.
156
Sugestão:
Escolher para centro de redução um ponto
A na extremidade da vi ga, ,onde é nu lo o -+- -+-
momento de T, m8JS não o de T', cujo ângulo a da sua direcção com a ver.tical é desconhe
ddo.
As 3 equações relativas ao equBíbrio do
s�stema e as condilÇões da figu.ra permitem
determinar sucess'Ív8Jmente:
2�H) T' y = 111 kgf, Ty = 17 kgf
20.2) T = 17 V2kgf = 24 kgf
20..31) T, = T', = 17 kgf
20.4) T' = \/ 4:10kgf = 2'O',2'kgf-+- 20kgf
11 20,5) COsa=-= O,'55 => a = 33° 20'
20
- . .
CAPíTULO 5
«Poincaré não teve a audácia juvenil de Einstein e sublinhou expUcitamente que a Mecântca clássÍ'ca deveria permanecer na nossa vida prática e na nossa téonica terrestre. ESlta afirmação afi1gura-..se 'simpJ.es 8;0 evocar-!>e a noção de escala. Gra'ças à imperfeiçãf" dos nos'5!OS 'sentidos, os fenómenos mecânicos macros'cópi:cos parece acomod�uem-sle, normal, mente, a uma teoria que não toma partidü s·obre a estrutura da matéri'a e utiliza a matemática do continuo.
. . . . . . . .. . . . . . . . . . . . . . . . . . . ... " . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . , . . . . . . . . . . .. . , . . . . . . . . . . . . . .
Contrari1amente ao que sugeriam as revoluções do início deslte século, a Mecânica clássica não é actualmente uma di:sciplina .esgo.tada. O destino que Ilhe atribuía Poincaré di·vers,ificou--se _ _ . _ . _ . . . _ . _ . . . . . _ . _ _ . _ . . . e não se submeteu à noção de escala como a uma lei de ferro.
Mas, na sua nova elaboração axiomática, profundamente marcada pela Relatividade Geral, esta Mecânica conserva os .traços ·característicos da M,ecânica clássica: traba'lha sobre os mesmos ,objectos, aprecia a sua estrutura, segue as 'Sugestões da ·experiência, projecta sobre os dados experimentais a luz crua do raciocínio matemático e retira da análise os elementos com que aperfeiIÇoa os conceitos abstractos . . . . _ . . . . . . . . . . . . . . . . . . . ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Não cessou de se desenvolver e de ser, ao mesmo tempo, para 'Outros ramos da Fís·ica, uma encruzilhada e um modelo privilegiado.»
A Oiéncia do século XX, 1.0 vol., 2." parte, cap. III,de René TATON. Difusão Europeia do livro, 1911.
Vamos estud8ir neste capítulo da Dinâmica alguns movimentos de gránde importância prática e que podemos considerar ,como apli-cações directas das leis fundamentais do movimento, em particular da 2.a lei de Newton.
157
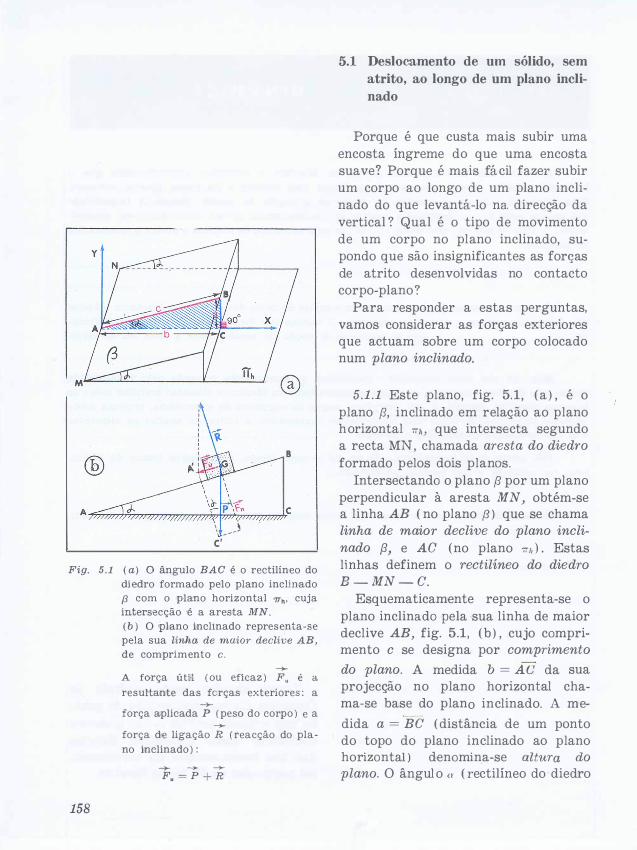
B
A�����������,���C \ __ J c'
Fig. 5.1 ( a) O ângulo BAC é o rectilíneo do
diedro formado pelo plano inclinado
{3 com o plano horizontal 7rh' cuja
intersecção é a aresta MN.
158
( b ) O 'Plano inclinado repr·esenta-se
pela sua linha de maior declive AB, de comprimento c.
-+-A força útill (ou eficaz) F" é a
resulta"nte das ferças exteriores: a -+-
força aplicada P (pes'O do corpo) e a -+-
força de ligação R (reacção do pla-
no inclinado):
-+- -;. ->-F. = P + R
5.1 Deslocamento de um sólido, sem
atrito, ao longo de um plano incli
nado
Porque é que custa mais subir uma encosta íngreme do que uma encosta suave? Porque é mais fácil fazer subir um corpo ao longo de um plano inclinado do que levantá-lo na. direcção da vertical ? Qual é o tipo de movimento de um corpo no plano inclinado, supondo que são insignificantes as forças de atrito desenvolvidas no contacto corpo-plano?
Para responder a estas perguntas, vamos considerar as forças exteriores que actuam sobre um corpo colocado num plano inclinado.
5.1.1 Este plano, fig. 5 .1, (a ) , é o p lano 13, inclinado em relação ao p lano horizontal "h, que intersecta segundo a recta MN, chamada aresta do diedro formado pelos dois p lanos.
Intersectando o plano 13 por um plano perpendicular à aresta MN, obtém-se a linha AB (no plano 13) que se chama linha de maior declive do plano inclinado 13, e AG (no p lano "ii). Estas linhas definem o rectilíneo do diedro B -MN-G.
Esquematicamente repres,enta-se o plano inclinado pela sua linha de maior declive AB, fig. 5.1, (b ) , cujo comprimento c se designa por comprimento
do plano. A medida b = AG da sua projecção no p lano horizontal chama-se base do p lano inclinado. A me-dida a = BG (distância de um ponto do topo do plano inclinado ao p lano horizontal) denomina-se altura do plano. O ângulo <r (rectilíneo do ' diedro

Nota 1:
A inclin3ição do plano, definida por a
- = sen a, não é O declive do planoc
fig. 5.'1, (a).
Em Geometria, o decliv,e da linha AB define-se, como vimos (nota 8, n.O 2.5 . .4 ) , pela tangente de a:
a y(B) dec.]i",e =,tg a = - <=> tg IX = --- ,
. b x (B) tomando A para orilgem dos eixos (X,YJ e sendo x e y as coordenadas do ponto B.
B - MN - C) é O ângulo de inclinação do plano f3 - fig. 5.1, (a).
Ao quociente
a -=sena c
dá-se o nome de inclinação do plano e exprime-se muitas v:ezes 'em percentagem, ·como se vê, p. ex., em tabuletas ao longo de rampas das estradas. (1) . Por exemplo :
1) Se a=o (plano horizontal : 0'=0) , é o
sen a = - = O <=> 0 % •
C
2) Se a = c (plano vertical: 0'= 90°) , é . c 100 sena = - = 1 = -- <= > 100%
c 100
3 ) Se sen 0' = 0,30 <=>30 %, será :
a 3Q 30 - = -- => a = -- . c c 100 100
5.1.2 Que forças o corpo sólido fig. 5.1, ( b ) ?
'exteriores actuam representado na
� � São o peso do corpo, P = mg, apli-
cado no seu centro de gravidade G, e a -�
reacção R do plano, perpendicular a este e que também podemos considerar aplicada em G.
--+-Decompondo o peso P em duas direc-
ções - uma paralela ao plano, que é a direcção do movimento, e outra perpendicular ao plano, que é a direcção
--+-da reacção R - , obtêm-se as compo-nentes :
159

Nota 2:
o movimento do centro de gravddade de
um corpo é o de um ponto maberi'al livre de
massa igual à do corpo e onde actuam toda's .
as f,orças e'xúeriores exercidas no corpo (teo
rema do centro de gravidade, cf" n," 3.10).
No caso do corpo em queda ao kngo do pIano
inclinado (fig. 5.1, b), o rrrovimento do centro
de gravidade de G é uniformemente acelerado
-+-e rectilíneo em vktude da r,esultaID.te Fu ter
módulo e direcção constamtes'. Além disso, as
fürças concorrem no centro de gravidade e o
mov,imento de todos os outros pontos do s6lirdo
é anâlogo. O sólido tem, pois, movimento de
transla:ção rectilíneo e uniformemente acele
rado" Se actuar·em üutra's forças cujas linhas
de acção não passem por G (caso por 'exemplo
do atrH;o) e cuja resuLtante também não passe
por es,te ponto, o corpo ainda apI1es,entará mo
vimento de rotação (é o caso de uma esfera).
160
-+-Fn, oomponente normal, que actua
-+-
sobI"e o plano e O'rigina a reacção deste sobre o corpo, sendo, de acordo com a 3: lei do movimento :
-+- -+-R =-F"
F", oomponente útil (ou eficaz), pa-ralela ao plano e que é, vectorialmente, a resultante das forças
-+- -+-exteriores P e R aplicadas no corpo.
� A relação entre os módulos FlI de FlI
e P de P deduz�se do triângulo [A 'GC' ] , no qual o ângulo A'C'G = a, por ter os lados perpendiculares aos lados do ângulo de inclinação do plano e ser da mesma espécie. No triângulo referido temos:
F" sen a = - => F" =P . sen a
P
Como P e a são 'constantes, será -+-
também constante o módulo de F u'
E como, pO'r outro lado, a linha de -+-
acção de FI< passa pelo centro de gravi-dade G do sólido, produz nest'e um movimento de translação rectilíneo e uniformemente acelerado. (2,).
-+-O módulo da aceleração j no desloca-
mento ao IO'ngo do planO' inclinado, aceleração que tem a direcção e o sen-
-+-tido de F", determina-se a partir da 2.a lei de Newton (ou lei fundamental do movimento) :

Nota 3:
Na expressào j = g . sen a 'Podemos observar que:
11
� 1) O vililor da aceleração j não depende da
massa m do corpo. -+
21) Para um dado plano (a constante), j depende do lugar da Terra, porque g
varia de lugar para lugar.
31) Como sen a < 1, s'erá sempre j < g,
o que 'Permite tornilir a desdda tão lenta (basta diminuir a) quanto se queira. Foi esta 'Precisamente a raz3.o que l'evou Gali'leu a «mventar» o pl3Jllo inclinado para o ·estudo das leis da queda. Por isso se lê, 'em aJlguns livros, «plano
inclinado de Galileu», apesar deste já ter ,sido utilizado 'Pelos antigos (p. ex., pelos egípcios, nos trabalhos de cons'ôrução das Pirâmides).
F. a j a 4) A relação -- = - <=>
P c g c
já foi verificada experimentalmente no curso geral.
. Fu J = - <=>
m
P. sen a j = ---
m
mgsen a <=> j = ---
m
<=
> j =g .sena
� A aceleração j é constante por serem
constantes 9 e a. (3 ) .
5.1.3 As 'equações do movimento no plano inclinado são, portanto, as eqmtções do movimento da queda livre e da ascensão de um grave, substituindo-se a aceleração 9 por 9 . sen a
Temos assim :
i} Na descida ao longo do plano,
sem velocidade inicial (vo = o), no qual a força motora é a com
� ponente útil F,,: 1 j = g. sen a
V = (g. sen a) . t
1 e = - (g . S6n a) . t2
2 1=>
2) De$cida com velocidade inicial
(vo *' o): 1 j=gsen a
v = Vo + (g sen a) t
1 l e = Vo t + 2 (g sen a) t2 =>
2
v2 = vo2 + 2 (g sen a) . e
161

F=100gf
(P=100gt)
Fig. 5.2 Os pesos de S, 'e S" cada um igual a 100 gf, não se equI,libram e o corpo S, sobe 'enquanto o corpo S, desce,
-+ambos com a mesma aceleração j .
O valor d a força motora pa'ra o conjunto ligado S, - tio - S, é:
F", = 100 g f - 100 g f. sen 30°
Exercício 1:
Numa calha metálica, com a inclinação de 10 %, lança-se debaJixo para cima um móvel com a velocidade .de 3,0 m. S-I.
1) Que tempo demorou o móvel a ,regress'ar ao ponto de partida?
2) Que distãnci'a total pe'rcor>reu o móvel?
3) Que tempo demoraria o móvel, em 'queda livre', no vazio, a cair da altura mâxima atingida na subida da calha?
16�
3 ) Subida a o longo do pla no incli --+-
nado ( nestas condi ções F'u é uma força resistente, razão por que o movimento será uniformemente retardado) :
r j = 9 sen a ( j tem sentido oposto 1 ao do movimento ) v = Vo - (g. sen a ) t
I l e = Vo t - � (g sena) t2 => 2
v2 = voz - 2 (g sen a ) . e
Tempo de subida :
t" = -----(g sen a)
Distância máxima percorrida :
e (máx) 2 (g sen a)
5.1.4 Exercício de a plicação
S, e S, são dois sólidos de igual peso,
P = 100 gf, ligados por um fio tenso que passa
pelo gola de uma roldana fixa, colocada no
topo do plano inclinado AB, de comprimento
2,00 m - fig. 5.2.
1) Nas condições da figura, S, sobe e S, desce, ambos com igual a.celeração. Porquê?
2) Qual o valor da força motora que faz
deslocar o conjunto ligado S,-fio-S,?
3) Qual o valor da aceleração desse con
junto ? Que tempo demora S, a subir de A
até B?
4) Qual a tensão no fio de ligação? E qual
a tensão no fio quando se segura S" comprimindo-o contra o plano de forma a ficar em repouso?

Resposta ao Exercício 1:
1) 6,1 s -+- 6s
2) 9,2m -+- 9m
3) 0,30 s
Resolução:
1) Têm a mesma aceleração porque cons
tituem um conjunto único, ligado, em que
os movimentos de todos os seus pontos são
análogos, tendo a mesma aceleração de um
dos pontos do fio que liga S, e S,.
-�. 2 ) O valor da força motora F' '" é, de acordo
com a figura :
Fm = F - Fil
= 10Q gf - P Sim 30" 1
= 100gf - 100 gf 2
F'", = 50gf
3) Força motora:
F' no = F' - F'" = 50 gf
= 0,050 kgf = 0.0150' X 9,8 N = O,4·9N
A massa do sistema é:
m = m ( S, ) + m (S, ) = 2'OOg = Ü',2üOlkg
uma vez que s'e despreza a mass·a do fio.
A aceleração comum é então:
F' 0,49 N F'm = mj => j = - = ---- = 2,45ms--"
m 0,200 kg
Supondo que arrancou de A, temos:
1 e = -jt'
2
1 2,0 m = - X 2,45 m . 8-'-« . t2
2
2 t = -- = 1,288 -+ 1,3.8
1,56
4 ) Reccrdando que a tensão é a força que
se deverá exercer ·em qualquer dos corpos,
no caso de cortar o fio, para que o movimento
continue a ser exactamente o mesmo de antes
do corte, fixemos a nossa atenção apenas no
corpo S"
163

164
--+- --+-A tensão T e F, são forças di,rectamente
opostas e temos:
T - F, = rn ,-'" j
F,,=P 8en 30"=50g/=0,O!5O' kg/=0,O'50X9,8 N
=0,49N
T - 0,49 N = 0,100 kg X '2,46 m . s-c
T = 0,49 N + 0,245 N = 0,73 N
= 0,73/9,8 kg! = 0,074 kg/ --+- 74 g!
Podíamos igualmente considerar apenas S"
e obter-s'e-ica o mesmo resul1:ado:
F - T = m IS" j
. T = F - m ,-'" j
= 0,98 N - a,lQO kg X 2,45 m . 8-2
= 0,98 N - 0,245 N
= (), 73 N ->- 74 g!
Imobilizando S" a tensão no fio é 100 gf.
5.2 Impulso de uma força
Consideremos o móvel de massa m = 2,0 kg a deslocar-se, sem atrito, por e xemplo, numa pista lisa de gelo, plana e horizontal, sob 'a acção de uma
--+-força constante F - fig. 5.3 (a) .
Suponhamos que o móvel foi actuado primeiro por uma força de 40 N e depois por uma força de 20 N e, em ambos os casos, estava inicialmente em repouso.
Que tempo levará, em cada caso, a atingir a velocidade de 20 m . 8-1 ?
Quando actuado pela força d� 40 N, temos :
FI 40N ji = - = =20 ms--"
m 2,0 kg

® 1m =2.0 kg F �=o F[3 � 'rà A B
F (N) "'I F --------
F F.ll.1 I, '� : t (5) O I, 12
F (N) 'C,12
F, ------
O I, t3 t (5)
F
I (e) F".t:l-
-
_
--
..... �""- -'-- -.....,-::;--H·i;::� ,...�· �.·.-.··�··. ·.'""' .. �_. t (5) O to llt t,
�
(zr.=20", .• -1)
®
®
Fig. 5.3 Ca) A força constante F, actuando
no móvel de massa m, fá-lo deslizar
com atrito des'p'rezá v·el de A e. B, provocando uma variação de veloci-
-+- -+- -+-dade 6. v = VB - o = Vil de valor
20 m. Sol.
-+(b) O valor do impu'lso da força F
,constante, durante o intervalo de
tempo 6. t = t, - t, em que actuou,
é dado por F X 6. t e, portanto, pela
área colorida.
Cc) O ValOT totaol do impulso de uma
força, constaonte em diorecção, mas
assumindo dois valores diferentes, o valor F, no intervalo de tempo
6.t, = t, - t, e o valor F, no intervalo
6. t2 = t, - t" é dado pela soma das
áreas dos rectângulos coloridos .
E quando a:ctuado pela força de 20 N: . F2 20 N
h = - = = 10 m S-2 m 2,0 kg
v 20ms-l V=j2 ' Dt2=> Dt2=-=--- =2,Os
j" 10ms-2
Verifica-se assim que : FI . D tI = F2 • D t2 40 NX1,0 s = 20 N X 2,0 s
Isto .significa que um corpo pode a:dquirir a mesma velocidade à custa de forças diferentes desde que seja oonstante o produto do módulo da força pelo tempo de actuação, isto é : quanto menor for a intensidade da força maior terá de ser o seu tempo de actuação 'e reciproeamente. Este resultado conduz à definiçã:o de uma grandeza física que se chama impulso -+- -+-I da força constante F recebido pelo
corpo onde essa força actua duran, �
o intervalo de tempo 6,t.
-+-O impulso I é 1) produto da forçs
-+ F pelo tempo de actuação Dt:
-+- -+' 1 = F X Dt.
:m pois uma grandeza vectorial com as seguintes características:
-+-- dire'Cção: a da força F
-+-- sentido: o da força F -módulo: 1= F X Dt
Na representação gráfica cartesiana (t, F) em que t é o tempo decorrido e F o módulo da força no decurso do tempo, o valor do impulso total é dado pelas áreas tracejadas indicadas na figura 5.3 (b) , (c) e (d) , se a força não variar de direcção.
165

( d ) o va'lor do impulso de uma força,
constante ·em di'recção, mas variável
em módulo de acol'do com a linha
curva (c), durante o intervalo de
tempo t, - to (do instante inicial to
ao instante nnal tr de actuação), é 'dado pela área co'larida da figura
,compreendida entre a curva (C) ·e o
et"o dos tempos. Com :efeito, podemos
decompor o referido inte'rvalo de
tempo tr - t" em intervalos t:" t tão
pequenos que a força se mantenha
praticamente constante em cada um
desses intervalos. Temos assim um
s'Ümatório de impulsos sucessivos
traduzido por um somi\Jtório de áreas
rectangulares, ,somatõri10 este que
tende ,para a área tracejada à me
d�da que es!ses tntervalos de tempo
t:" t vão tendendo para zero e, por
tanto, à medida que a suces,são de
impulS'os vai tendendo para o im
puls'o real.
Nota 4:
Consideremos doi,s pontos materiais P, ,e P"
de mass'as respectivamente m, e m, - figura
5.4, (a). O ponto G, situado às distãncias d,
e d2 de P, e P, tais que s'aUsfazem à condição
d, m, m,. d, = m, . d, <= > - = -.
d, m,
chama-se centro de massas.
No caso de qualquer i!n.teracção entre os
pontos materia�,s, tal IPO'Ilto goza de proprie
dades importantes que interes'sa realçar, e qU'e s'e comprO'Va:m experimentalmente:
1 ." - move·se, antes, dU!rante e após a
interacção, sempre com a mesma velocidade,
-+-a v·elocidade do centro de massas -- VG •
2.° - a quantidade de movimento do siste
ma é a mesma do seu centro de massas,
considerado como um ponto mi\Jterial de massa
i1gual à do sistema:
-)- � -:'J- � --:.op = m, v! + m, v, = ( m, + m,) vG = M ve
16�
No caso da força variar de direcção o impulso total é a soma vectorial dos
-+-impulsos pa-rciais F X 6.t em interva-los de tempo 6.t durante os quais a força se pode 'Considerar constante.
5.3 Quantidade de movimento de um
ponto material e de um sistema
material
Se um automóvel e um camião seguirem ·com a mesma velocidade e chocarem ,com obstá,culos' de igual vesistência, os estragos produzidos pelo segundo são naturalmente maiores. O efeito dos choques depende assim não só da velocidade do móvel, mas também da sua massa inerte. Para avaliar tal efeito considera-se uma grandeza física designada por quantidade de movimento) cuja d efinição foi estabelecida por Newton.
-+-Quarntidade de movimento p de
um ponto material de massa m, no instante em que se deslocar com a
-+-velocidade v, é o produto
-+- -+p =m v.
Ê, portanto, uma grandeza vectorial com as seguintes características:
- direcção: a da velocidade
- sentido: o da velocidade
- módulo: p = m v
A quantidade de movimento de um sistema material formado por n pontos materiais é a soma das quantidades de

3." - a quantidaide de movimento total,
refe,rida ao centro de mas's'as, é nula, isto é, -+- -+-
m, V, + m, V, = O
-+- -+-sendo V, e V, as velocidades de P, e P, rela-
tivamente a G.
Ora, o centro de gravidade é um centro de
massas. No CaJso dos corpos ou sistemas ma
teriais existem forças de interacção perma
nentes entre as suas partí.cuJas materiais.
Mas, cemo consequência delas, a quantidade
de movimento do centro de gravidade não
muda. Muda, sim, se exercermos força's exte
riores ao corpo. Mas 'então (cf. teorema d o
centro d e grav�dade) o oentro de gravidade
move-se como um ponto ma't'eri'al livre de
ma:ssa M ' igual à do corpo e onde actuam as
f.orças exteriores a 'ele. S endo as'sim, a sua
quanti!dade de movimento <é
-+- -+-p = M v" ,
-+-em que M é a massa do corpo e 'Ve a veloci-
dade do c€Illtro de �ravidaide. Este produto
representa a quantidade de movimento do
coI1po ( propriedade 2,,' do c€Illtro de mas'sas).
Em conclusão: as diferentes partes dum corpo
podem mover�se umas em relação às outras;
podem fazê-lo, por exemplo, rodando em
tOrllü do oentro de g·ravidaide. Mas, sejam
quais forem esses movimentos, o centro de
gravidade move-se exactamente como um
ponto materi·al onde estiv-esSle concentrada
toda a massa do COI'po - ver fig. 5.7, ( a ) e ( b) .
movimento dos pontos materiais que ° constituem :
-+- -+- -+P = !'Pi = :i.mivi
-+- -+-= m, V, + mi V2 +
5.4 Teorema da quantidade de movi
mento
Haverá alguma relação 'entre o impulso de uma força que se aplicou a um móvel durante o inte�alo de tempo L"t e a variaçãiÜ da quantidade de movimento do móvel nesse mesmo intervalo de tempo?
Consideremos em primeiro lugar o caso simples de uma força constante -+-F - fig. 5.4, (b) - que intervém no movimento de um 'corpo de massa m no instante t, (posição A) e cessa de intervir no instante t2 (posição B), provocando no intervalo de tempo L" t = t2 - t, a variação de velocidade L"v = V2 - V,.
-+-Como a força F é constante, também
-+-é constante a aceleração j co�espon-dente, coincidindo esta, neste caso, com
. -+-a aceleração média j", . Temos, pois, segundo a lei de Newton :
-+- -+- -+- -+-F = mj <=> F' = mj",
-+--+- L" V
<=> F = m . -L"t
-+- -+-< => F . L"t = m . L"v .
167

@)
Pig. 5.1; (a) O ponto G é o centro de massas
respeitante aos dois pontos materiais
PI e p,. se se verificar a condição:
mi . di = m, . d, .
168
-+-( b ) A força F constante actuou sobre
o móvel de mas'sa m desde a posição
A (instante t,) até à posição B (instante t,) , provocando a variação
-+- -+- -+de velocidade 6 v = v, - v, . (c) e ( d) No choque de A com B desenvolvem-se, durante o choque, as
forças variáveis de sinal contráJrio -+- -+-FA e FJj ( acção e reacção ) : os mó-
du:los são primeiro crescentes, par
tindo do ze'ro ( ramos 1 da curva) e
depois decrescentes até s'e anularem
( ramos 2 da curva) .
Continuando a desenvolver, temos :
� � � F . !':c, t = m (v" - v, )
Portanto :
-+- -+-= mv2 - m'v,
� -+-= P'l. -- P '
� = 6 p
-+- -+- ...... ' ',' ...... ...... F, 6't '.:=;<, m'li;a ....... m�< ,iW> 1 rFWJi14'IP
-+- � A grandeza I = F . 6, t representa o
-+- � -+-impulso da força e 6p = P2 - pJ repre-senta a variação da quantidade de movimento durante o tempo 6 t em que a força actuou.
� N o caso geral, a força F não é 'cons-
tante. Por exempLo, durante o choque de dois corpos A e B - fig. 5.4, (c) e (d) ,
-+desenvolvem-se as forças FA (acção de
-+-A sobre B ) e FB (reacção de B sobre A ) , directamente opostas e que variam da forma seguinbe : aumentam de zero (no instante inicial tJ do choque) até um máx'1mo e diminuem a seguir até zero ( instante final t2 da interacção) .
O intervalo de tempo 6,t =tz - t, é muito pequeno. Os impulsos das forças � -+-F A e F B, representados pelas áreas tra-cejadas, iguais, só diferem no sentido
-+- -+IA = - IB
e as variações das quantidades de movimento dos dois corpos, mostra-o a experiência, também são iguais em mó-
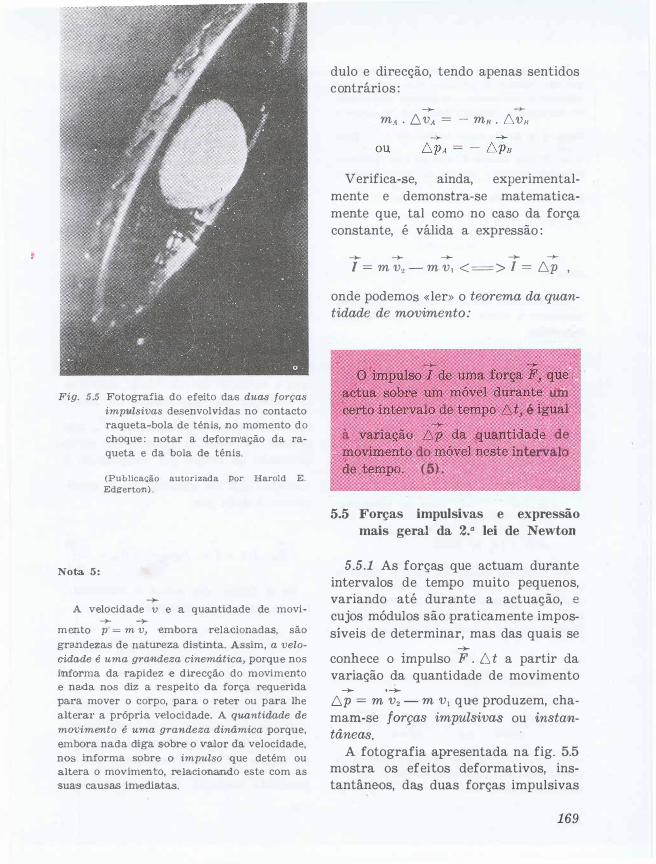
Fig. 5.5 Fotografia do efeito das duas forças
impulsivas desenvolv.i:das no contacto
ra'queta�bola de ténis, no momento do
choque : notar a deformação da ra
queta e da bola de ténis.
Nota 5:
(Pub licação autorizada por Harold E.
Edgerton) .
-+-A velocidade v e a quantidade de movi-
-+- -+-menta p = m v, 'embora 'reIacionadas, são
graJIldeZ'8is de II8itUI16Za di:stinta. Assim, a velo
cidade é uma gratndeza cinemática, porque nos
informa da 'rapidez e direcção do movimento
e nada nos diz a respeito da força ,requerida
p8ira mover o corpo, para o reteT ou para lhe
alter8il" a própria velocidade. A quantidade de
mO'l.!imento é uma gratndeza dinâmica porque,
embora nada diga sobre o v8Jlor da: velocid8ide ,
nos informa ,sobre o impulso que detém ou altera o moV'imento, rel8iCionaJIldo este com as
'SUaIS causas imedi8itas.
dulo e di,recção, tendo apenas sentidos contrários :
-+- -+-mA ' .6.VA = - mH • .6.vH
Verifica-se, ainda, experimentalmente e demonstra-se matematicamente que, tal como no caso da força constante, é válida a expressão :
-+- -+- -+- -+- -+-1 = m v2 - m vt < = > I = .6.p ,
onde podemos « ler» o teorema da quantidade de movimento:
1i-- � �.. >'" o impulso *1 de uma força <F� que' actua sobre ·JUm móvel durante:< um '�oJinOOrvalo de t·empo /::,. t, é igual
� .' � �:� &� à variaÇão 1;>.p d� . qua.ntidade de
, movimeQ.to do mQvel neste intervalo ''\' .. �; de i�NPO. (5) .
5.5 Forças impulsivas e expressão
mais geral da 2. a lei de Newton
5.5.1 As forças que actuam durante intervalos de tempo muito pequenos, variando -até dura:nte a actuação, e cujos módulos são praticamente impossíveis de determinar, mas das quais se
-+-conhece o impulso F . !::, t a partir da variação da quantidade de movimento
-+- . -+-.6.p = m V2 - m Vl que produzem, cha-mam-se forças impulsivas ou instantâneas.
A fotografia apresentada na fig. 5.5 mostra os efeitos deformativos, instantâneos, das duas forças impulsivas
169

No ,entanto, a quantidade de movi1mento, que não depende do processo pelo qual Ú' corpo adquiriu o movi1mento e a própria quantidade do movimento, também nada nos diz sobre a
� fo.rça e o modo como variou de m v, pa'ra
� m v, . É que, forç as diferentes (em módulo) , 3Jctu.aJIlJdo durante tempos dif.erentes, podem
� produzir a mesma variação de 6p :
-+- -+- -+-F . 6 t = F, . 6 t, = F, . 6 t, = . . .
Nota 6 :
-+- -+-= m v, - m v, .
N a Mecânica ,clás'sd'ca, onde s'e considera invao.iante a massa inerciaI de um 'corpo, as expressões
-+-� 6p F = Um e
6 t -+- 0 6 t
são equivalentes, porque:
� -+- 6p F = lim -- = lim
6 t-+-o 6 t 6 t�O
-+- -+-F = m . j
-+-6 ( m v )
6 t
= m . lim (com m constante ) 6 t-+-o 6 t
. -+-= m . j (cf. n.O 2.6.5)
Na 'M'6cânka relativista, onde a massa m
de um corpo em movimento 'é diferente da SiUa massa em repouso ou massa p.rópri'a mo ( cf,
n.o 31.111 ) , as duais ex;pressões da 2." lei de Newton não são equivalentes; 'porque:
-+-�
6 (m v ) F = lim
6 t-+-o 6 t
-+-6v -+- 6m
= m . Um -- + v . lim 6 t-+-o 6 t 6 t-+-o 6 t
onde 6m = m - mo ,é a variação relativa da massa durante o intervalo de tempo 6 t 'em que 'Ü corpo 'se mov'e.
170
que se desenvolvem nas superfícies de contacto bola de ténis-raqueta, no momento do ch'Üque.
As forças desenvolvidas no choque de dois ou mais corpos, as percussões de um taco nas bolas de bilhar, as per-cussões da raqueta numa bola de ping--pong, os pontapés na bola, as f'Ürças produzidas numa explosão, etc. , são outros exemplos de forças impulsivas.
5.5.2 Newton atribuía à palavra movimento o significado aCtual de quwntidade de movimento - grandeza que foi o primeiro a definir e que considérava mais fundamental do que a massa.
Inicialmente, Newton relacionou a força que actua sobre um móvel, não com a variação de velocidade, mas com a variação da quantidade de movi-
-+ment'Ü. Assim, a força média Fm que produz um impulso durante um certo intervalo de tempo L,t, originando a
-+-variaç.âo L,p da quantidade de movi-mento, é dada por :
L,t
Se a força que actua é constante, temos mais simplesmente :
-+--+- -+- -+- L, P F =' Fm => F = --,
L, t
Se a força interveniente é variável, podemos determinar 'O seu valor instantâneo desde que encurtemos o intervalo de tempo L, t e conheçamos a corres-
-+-pondente variação L,p da quantidade

Portanto, finailmente :
-+ � ---)o- 6m F = m . j + v . lim
6 t-+ 0 6t
Esta ex:pres,são é mais geral e coincide com
-+ ...... a eX!pressão F = m . j no caso particular de a
massa não variar :
6m 6m = m - mo = 0 => /Jim -- = 0
6t-+0 6t
-+ -+ -+ -+ -+ => F = m . j + v . 0 = m . j -I- ° = m . j
Exercício 2 :
A percussão d e ttm taco numa bola de -+
bilhar em repouso (VI = O) comunica a esta -+<
uma veLocidade v. Qual foi o impulso recebido pela bola, cuja
,massa tem o valor m ?
Exercício 3:
Um móvel de massa m desloca-se com a -+
velocidade v. Que impulso é necessário apli--+
car-Ihe parrt o fazer parar (v, = o) ?
F 500 kgf B
o 0,020 S
t
...... Fig. 5.6 Gráfico (F, t) da força impulsiva II
que decresce uniformemente durante
0,0'20 s.
Exercícío 4 :
Um automóvel cuja massa é d e 1200 kg
desloca-se com a velocidade de 60 km/h.
Pretende-se fazê-lo parar em 1,0 s. Que força
resistente, suposta constante, se deve aplicar nos freios do automóvel ? Que distancia p'er
correu até para'r ?
de movimento. Temos, portanto, de modo mais geral :
-+ -+ 6p F = lim
6t -+ o 6t
Esta expressão traduz a forma original e mais geral da 2.a lei de
-+ -+ I" Newton e contém a fórmula F=mj,
só p osteriormente estabelecida por este cientista. (6) .
5.6 Exercício de aplicação
Um corpo dom a massa de 5,Okg está sob a acção de uma força impulsiva, durante
0,020 s. A força decresce uniformemente de
500 kgf a zero - fig. 5.6.
1) Determinar a impulsão da força.
2) A velocidade do corpo, antes de receber o impulso, era 'de 10 m . S-I . Que
velocidade passou a ter após o impulso ?
Resolução :
1 ) O v-éIJlor do impulso é dado pela área do
triângulo indicado no gráfico 5-.6 : 1
I = - . OA . OB 2 1
. 0,020 S . 500 kgf 2
= 0,0110 S ( 5'0'0 X 9,8 N )
= 49 N. s 2 ) I = mv2 - mv, <=>
49 N. s = 5 kg . v, - 5 kg . 10 m. S-1 ....... v, = l'9, 8 m s - ' -+ 20 m . S-l
5.7 Lei da conservação da quantidade
de movimento
5.7.1 Comecemos por considerar algumas experiências.
1 .a Quatro esferas iguais, A, B, C e D, de marfim ou aço, estão suspensas
171

B G
A B C O
1{
A O (repouso) if= o B
O (repouso)
-2t'=o B
o
A G �, _ ;;t A - vB
Fig. 5.7 ( a ) A esf,era A, afastada para A e abandonada a seguir, colide com
B; A, B e G ficam em I'epouso e D
afasta-se para D' (posição simétrica
de A', em relação à vertical do ponto
médio do ,segmento PS ) .
172
( b ) A e B são duas esferas iguais.
tendo cada uma a massa de 173 g.
No choque frontal de B com A ( em
repouso ) , trocam-se as velocidades : B
fka em 'repouso e A segue com velo
cidade igual à que tinha B.
e encosta-das nas condições indicadas na fig. 5.7 (a ) .
Se deslocarmos a esfera A para a posição A' ( ângul? a) , abandonando-a em seguida, ela regressa à posição AJ fica em repouso depois de embater na esfera B e a esfera D afasta-se para a posição D ' (ângulo a' = a) . Por sua vez D regressa também à posição inicial, embate em a, pára e A atinge de novo a pos�ção A' .
As esferas intermédias, B e aJ permanecem em repouso nesta sequência de movimentos alternos. Estes fenómenos repetir-se-iam indefinidamente se os choques se dessem frontalmente ( linha de acção das velocidades, nos pontos de contacto, coincidente com a linha que passa pelos centros das esferas) e não houvesse atrito nem resistência do ar.
O impulso de A é comunicado a BJ que o transmite a a e que, por sua vez, o transfere para D ; D parte, a seguir, com velocidade igual à velocidade de chegada de A J visto atingir a mesma altura {a' = a} .
No início do choque temos, para o sistema das quatro esferas :
VA =1= O e VJj = Vc � Vil = O . -+-
A quantidade de movimento p do sis-tema será :
Depois do choque, verifica-se que : -+- -+-
VA = VJj = Vc = O e VD = VA Portanto, a quantidade de movi-
-+-mento p será agora :
-+- -+- -+- -+p = mD . VD = mA . VA = PA

_ -..�
• •
F'ig. 5.8 Fotog,rafia de exposição múltipla (48
exposdçõesj\Segundo ) do choque fron
tal das bolas de bilhaI' A e B, de
igual massa.. A eS1tá em movimento
e B, em repou:so. Depois do choque
trocam as velocidades : A fica ·em
repouso e B segue em movimento
com a velocidade de A .
(Autorizada por P. S. S. C.)
Isto é: a quantidade de movimento do sistema, antes e depois do choque de A com B, manteve-se constante.
2.a As bolas de bilhar A e B, tendo cada uma a massa de 173 g, chOocam frontalmente e sem atrito- fig. 5.7 (b ) . A esta va em repouso e B animada da velocidade de 1,82 m S-l. DepOois do choque trocaram as velocidades : B ficou em repouso ·e A passou a deslocar-se com a velocidade de 1,82, m S-l. A quantidade de movimento total do sistema das duas bOolas, antes e depois dOo choque, também neste caso não sofreu alteração, porque : mA . VA + mu . V8 = o -I- 0,1'[3 . 1,82 kg . m 8-1
= 0,3:15 kg . m S-l
mA . v' A + mn . v' B = 0,173 . 1,82 kg . m S-l + o
= 0,3115 kg . m 5-1
Na fig. 5.8 reproduz-se uma fotografia de exposição múltipla (48 exposições por seg. ) , que documenta o choque frontal das duas bolas de bilhar de igual massa a que diz respeito este exemplo, e na qual se pode observar que a quantidade de movimento da bola incidente se transmite integralmente à bola inicialmente em repouso.
A régua graduada e o intervalo de tempo que separa duas fotografias permite calcular os valores das velocidades.
3.a Consideremos agora um caso simples de choque oblíquo de duas bOolas de bilhar A e B de igual massa fig. 5.9 (a) . A direcção da velocidade
� de A, vA, que choca com B em repouso, não coincide com a direcção da linha dos centros de A e B. Depois do choque as bolas seguem em direcções perpendiculares e com velocidades diferentes.
1'73

Fig . .'i.9 ( a ) A bola A choca obliquamente
com B ( em repous'Ü ) . Dep'Üis do cho
que 'segu1em ··ambas c'Üm velocidades
difererutes e em direcções perpendi
culares. A mas'sa de cada bola é de
1713 g.
( b ) A,s quamtidades de m ovimento,
antes e depois do choque referido em
( a ) . De acordo com os resultados
,expe,riment'ais, temos, vectoriailmen
te: � � � PA = P',. + P' B
Não houve, pois, variação da quan
tidade do movimento total do sistema
forro'ado pelas duas .esferas.
Fig. 5.10 FotogTafi� de expos�çao múltipla
( 3'0 exposiçõesjseg ) do choque oblí
quo das duas bolas A e B, de 17:3 g,
a que 'se ,ref'ere a fig. anterior.
(Foto autorizad'a por P. S. S. C. )
174
o
(P;'=O.25 kg · m/s)

Recorrendo ao processo fotográfico - fig. 5.10 - podem medir-se as velocidades e, em seguida, calcular as quantidades de movimento antes do choque :
� � -+- -+- � Pl = PA + P8 = m VA + O = m VA
(p, = 0,56 kg . m/s)
e depois do choque : -+- -+- -+-Pt = P' A + P' li
( p' A = 0,25 kg . m/s, p' 8 = 0,48 kg . m/s
Pt = Pl = 0,56 kg . m/s)
Verifica-se então - fig. 5.9 , (a) --+-
que a quantidade de movimento Pl do sistema, formado pelas duas bolas, antes do choque, é igual à soma vedo-
-+-rial P2 das quantidades de movimento das duas bolas depois do choque. Não houve, portanto, alteração da quantidade de movimento do sistema antes e depois do choque.
5.7.:2 Fizeram-se variadíssimas experiências do género das indicadas, mesmo com choques de vários 'COI1pOS em movimento e com corpos movendo-se ,conjuntamente depois do choque, tendo�se ,chegado sempre à mesma conclusão :
- Num sistema isolado, constituido por vários corpos que actuam entre si, a quantidade de movimento total M Sistema ma;ntém-se C<m8-tante:
� -+- � Pl + P2 + . . . + p .. = constante
n = número de corpos do sistema entre os quais só actuam forças interiores ( acções e reacções) .
175

Nota 7 :
N os choques entre dois o u mais corpos, a
quantidade de movimento de cada corpo não
se mantém, porque, ·se considerarmos cada
corpo como um sistema, as' forças impulsivas
e�erci:das 'sobre ele por cada um dos 'Outros
corpos são forças exteriores cujos impulsos
determinam uma variação da quantidade de
movimento.
Oonsider3Judo, porém, todos os corpos que
colidem como um único sistema, então as
forças impulsivas ( acções e reacções ) são
forças interioves do sistema e não modificam
a quantidade de mmmento total.
Por ilsso, .também 'Se ,pode tomar para enun
ciado da lei da conservação da quantidade de
movimento o seguinte:
«A quantidade d e m ovimento total de
um sistema só pode variar sob a acção
de f'Orças exteriores aplicadas a ele».
Pergunta 1:
Um r.apaz está sentado no meio duma pista
de gelo, h orizorntal, polida e quase sem atrito.
Tem, portanto, grande dificuldade' em se le
vantar e caminhar. P'retende des,locar-se sain
do d essa p os'ição. Suge·ri'r um proces,so e�pe
dito para o fazer.
Resposta aos Exercícios 2, 3, e 4 :
-+- -+- 4 · --+- -+-2) 1 = F", . [;,t = [;, P = m v, - m v,
-+- -+- -+ -+-,
= m v - o => ! = m v = p,
-+- � -+- -)o- -+-3) 1 = F . [;, t = [;, P = m v, - m .v,
-+- -+- -+- -+-=m X o - m v = > I = - m v = - Pl
50 4) v, = 60 km/h = - m/s
3
1 76
v, = o F = 210 X 10" N ..
j",
25
[;, v
[;' t
50 - m/s"
3
e - m -+- 8 m . 3
Esta afirmação constitui o enunciado da lei da conservação da quantidade
de movimento.
Ê um resultado geral baseado na experiência e surgiu como consequência de uma investigação mandada realizar pela Royal Society de Londres em 1668. Foi verificado primeiramente por John Wallis (matemático inglês ) em 1669 e, depois, por Cristopher Wren (dentista e arquitecto inglês) , por Christian Huyghens (físico holandês) e pelo próprio Newton.
Esta lei é considerada hoje uma lei muito importante e quase «sagrada» da Natureza, constituindo um dos mais sólidos fundamentos da Física Moderna. (7) , '
5.8 Aplicações da lei da conservação
da quantidade de movimento
5.8.1 O recuo das armas de fogo e a ascensão dos foguetes
Poucas serão as pessoas que ainda não observaram na televisão ou no cinema disparos de canhão, vendo a peça recuar bruscamente.
Também serão poucos os que ignoram que, ao dispararmos uma espingarda" a coronha nos dá um ,coice no ombro.
Uma , experiência muito simples indicada na fig. 5.11, (a) - permite-nos observar este fenómeno do recuo : deita-se água no tubo de ensaio A e tapa-se -com uma rolha B ; suspende-se na posição horizontal por meio de dois fios e 'aquece-se a seguir com uma lamparina de álcool.

Fig. 5.11 ( a ) O tubo de ensaio A 'e a rolha
B deslocam-se em sent'ido contrário
quando a força de pressão do vapor de água a ferver ( acção) fizer sal
tar a rolha.
( b ) No momento da explosão da
pólvora, a a.rma recua com veloci--+-
dade v e o projéotil sai da a;rma, em -+
s'entido oposto, com a velocidade V. ( c ) A quantidade de movimento dos
'g8JS'8S expulsos é igual e de sinal
ccmtrário à quantidade de movimen
to do fOgUJete que sobe.
Resposta à pergunta 1 :
Deverá projectar um objecto pesa.do com
a maJÍor V'eilocida;de possível na dj.I'ecção em
que se pretende deslqca:r e, nessa direcção,
escolher como sentido, de projecção, o con
tráJrto àquele para onde se pretende di'rigír.
Quando a água entrar em ebulição e a pressão do seu vapor for suficiente, a rolha sai para um lado e o tubo desloca-se para o lado oposto.
Foi a torça de pressão do vapor que ejectou a rolha e tez deslocar o tubo.
É isto o que também se observa no tiro de uma espingarda e na ascensão de um foguete - fig. 5 .11, (b ) e ( c ) -com a diferença de que, nestes dois casos, as forças de pressão pluridireccionais são devidas aos gases resultantes da combustão da pólvora.
Consideremos, p8ira os três casos da figura 5.11, o sistema material formado por : 1 tubo com água + rolha ;
arma com pólvora + projéctil ; foguete + gases expulsos .
As forças de pressão desenvolvidas pelos gases são directarrnente opostas duas a duas e , 'como são forças interiores ao sistema, não determinam variação da quantidade de movimento total do sistema. Mas, apesar de estas forças serem, em módulo, iguais duas a duas, as velocidades dos corpos a que elas foram aplicadas são diferentes por terem diferentes massas inerciais.
Designemos por M a massa da armn ou do tubo de ensaio e por m a maS�;;l do projéctil ou da rolha do tubo, por 1 a velocidade de saída dos projécteis ' por v a velocidade de recuo da aT'fi , : ' ou do tubo.
Como não intervieram forças f'xt,,'riores, podemos aplicar a lei da (;0 ' " servação da quantidade de movimmll.< l do sistema. Esta, sendo nula tnl k.': da explosão, continuará a ser " " I : , depois da mesma.
f '
Nota 8:
A história d o s foguetões, embora estes só
tenham atingido notori'edade durante a 2.'
Guerra Mundiall ( 119319-'}94i5 ) , tem mais de 700
anos de antiguidade. O primei'ro uso conhe
cido de f.oguetões, como arma, data de 1232,
ano em que os chineses da cidade de Peiping
os utilizaram para ,repelirr os invasores mon
góis. Porém, o ,antepass'ado mais lo ngínquo
da propulsão por jacto pode considerar-se a
turbina a vapor d nventada pelo g,rego Heron
no século II a. C. Co nsistia numa esfera
m etálica, oca', móvel por meio do vapor de
água, aque'cido, que saía por dois tubos <).i.a
m etralmen.te opostos, dobrados em â ngulo
recto, ,como nos conhecidos torniquetes' de
água e de vapor.
Em '1806, a armada inglesa atacou Bou
logne, utilizando 24 navios armados . com fo
guetões. Em '1929, von Opel voa num pl ana
dor-foguetão. ,E m 19311, initCil8;�lS'e na Alemanha
a fase e�erimentaJl do foguetão-postal . E em
119314, por ordem d e Hitler, as aplicações dos
foguetões srão desviadas para as actividades
bélicas : 10 anos após, 'em 1944, cai sobre Lon
dres a primeira bomba V -2. Von Braun, seu
cri,ador, seguiu depois da Guer,ra para a Amé
rica e ai desenvolveu o projecto dos primeiros
foguetões americanos - o Redstone e o Júpiter
C; este pôs 'em órbita o primei,ro s'atéli-te
americaJno : o Explorer I, em 31-1-,19'58. No
ano anterior, em 3 de No v embro de 1957, a
União 'Soviética tinha surpreendido o mundo
ao pôr em órbi.ta o Sputnik II, transportando
o primeirro pas's'ag'eiro qUe ,entrou em 6rbil:;a : uma cadela de 5 kg de peso chamada Kudri
avka, que significa «pequ ena encaracolada»
e que ficou mundialmente conhecida pelo
nome da sua raça - Laika ( foto pág. seg. ) .
Actu3llmente, a utilização dos motores de
reacção de grande potência ( nos foguetões
e nos aviões ) permite não só rápidas' viagens
1IllteJ;continentais, como contactos dir·ectos do
homem com o Universo : as viagens que os
americano s já fizeram à Lua e as que se
prevê que, no futuro, 'po ss'am vi'r a fazer-se
a outros astros.
178
Podemos, por isso, escrever : -+- -+-
O = M v + m V .
Isto implica : -+- -+-
1.0 - M v = - m V -+- m -+-v = - - . V ,
M
o que quer dizer que as velocidades de -+-. -+-
recuo v e do projéctil V são de sentido contrário.
2.° -+- M v = m V, em módulo, o que significa que as velocidades são inversamente proporcionais às massas dos corpos' a que estão 3Jplicadas. o
Estes resultados podem s,er confirmados pela expenencia suspendendo a arma, horizontalmente, por fios resistentes, como se fez para o tubo de ensaio, e tirando fotografias com exposiç·ão múltipla.
5.8.2 Propulsão por jacto - os aviões a jacto e os foguetões. (8 )
o recuo provocado por um jacto de gás ou vapor permite acelerar o movimento de uma nave, quer no ar (avião de propulsão por jacto ) , quer no vazio (foguetões) , onde não há apoio no que quer que seja nem 'resistência ao movimento. Os motores de propulsão por jacto também se chamam motores de reacção, porque às forças desenvolvidas na explosão pelos gases ( acções) correspondem as reacções das 'paredes, que são directamente opostas àquelas, duas a duas, iguais em módulo e interiores ao sistema. Na fig. 5.11, (c ) , estão indicadas, a vermelho, só as acções; as reacções, opostas às acções 1, 2 e 4, expulsam os gases.

A cadeIa «La�kaJ», do Sputnik II, com o seu equipame:nto espaci:al.
Exercício 5 :
Pai e filho são ambos patinadores e pesam,
respectivamente, 70 kgf e 35 kgf. Encontram
-se frente a frente, paraà,os, numa pista de
gelo, lisa e horizontal, onde o atrito se pode desprezar. O filho empurrou o pai, adquirindo
este a velocidade de 0,40 ms-1
1) Que velocidade adquiriu o filho ? Oom
que velocidade se afastaram ?
2) O centro de massa do sistema pai-filho teria mudado de posição quando eles .se afastaram ?
Na fig. 5.1'2 está representado o corte esquemático de um motor de propulsão por jacto, que é constituído fundamenta:lmente por um reservatório de ar comprimido (1 ) , destinado a mant€r, sob alta pressão, o comburente -líquido (2') € o combustíV'el líquido (3) , que são ejectados para uma câmara de combustão (4 ) . o.s gases da combustão são expulsos com grande velocidade, em jactos ; a naV'e desloca-se em sentido contrário ao da saída dos jactos.
N o caso d os aviões a jacto o reservatório (2 ) é substituído por um compressor centrífugo, que capta o ar ( oxidante) da atmosfera, à frente do avião.
Consideremos o sistema formado pelo foguetão e pelos gases expulsos por uma série de jactos. Sejam M a massa total da nave após cada jacto, D,m a massa de cada jacto de gás, Ve o valor da velocidade de escape dos gases e D,v o aumento de velocidade da nave. Pela lei da conservação da quantidade de movimento, teremos em relação ao sistema e a cada jacto de gás expelido :
-+- -+- -+-6.p = O => 6.Pl (aA'BU) + 6.P2 (gases) = O
E, portanto : -+- -+-
O = M . 6.V + 6.m . Ve
-+- 6.m -+-=> 6.v = - -- . Ve
M Deste resultado podemos inferir : 1.0 - Para obter um aumento sufi
ciente de velocidade é preciso grande quantidade de combustível ( uma infinidade d€ porções D, m de gás) e elevada velocidade de escape Ve•
2.° - Para o aumento de velocidade D,v ser cada vez maior importa que M
179

Fi.g. 5.12 Corte longitudinaol de um andar
de um foguetão de comburente e
combustíveeI líqu�dos : ( 1 ) é o reger
vat6rio de ar comprimido qu.e man
tém sob pressão os reservatórios
de comburente ( 2 ) e de combustível
(31) ; ( 4) 'é a câmrura de combustão.
Resposta .ao Ex. 5 : �
1) Antes do choque frontal : .p = o
Depois do choque:
� � o = PI + p,= > 70 kgXO,40. ms·- 1 +3J5 kg. v, = o
180
v, = 0,8 ms-1 .
O filho adquiriu uma v.elocidade
'D, = 0,8 mS-1. A velocidade de afasta
mento tem .o valor seguinte :
� ---+- -1- . t'" - t" -v, = > v. =0,401 m. S - l +0,80 m S-l =
= 1,2 mS-I
Fig. 5.13 Foguetão Saturno V de três andares
para levar li Lua o.s aJS·tronauta-s da
cápsulru Apolo. O 3.° andaT atinge
a velocidade de 40 X 1()13 km/h =
= 1'1 km/s. EJsta é a velocidade
necessária para a nave se liber
tar da acção atractiva da Terra
(2." velocidade cósmica) . A carga
úti-J é de 415 toneladrus, o oxidante é o oxigéni.o líquido ( Lox ) , o com
primento 'é de 110 m e os 4 motores
laterais, que no 1.0 e 2.° andar en
volvem o motor centTal, podem gtrar
prure orientar o foguetão.
se torne cada vez mais pequeno, razão por que convém utilizar na,ves com vários andares - Fig. 5.13 -, desprendendo-se cada andar quando os reservatórios fi'cam vazios, evitando assim um peso morto e prejudicial.

2) Conforme vimos na nata 4 do presente capítulo, a quantidade de movimento do sistema pai-filho é igual à q. de movimen.to do respectivo centro de massa:
-+- --+-p = (m1 + m,) vG '
Corno a q. de movimento totrul é nula -+- -+-(p = o), s,erá va = o, i'sto é : o centro de
massa não mudou de posição.
Nota 9 - LEITURAS :
1 .a - No foguetão de 3J andares Saturno V - fig. 5.13 -, o primeiro andasr produz uma forç3J propulsora de 3,4 X 'lO' .toneladas-força, a combustão dura só 2,5 mill1utos e a velocidade atingida pode i'r a 1D\4 X lO' km/h, quando esgota o combustível - irnst3Jllte em que automaticamente se desprende o andar.
O 2.° andar proporciona uma força propulsora de 450 toneladas-força e pode atingir a velocidade de ,212,,5 X '10' km/h.
O 31.° -aJlldaor fornece uma força propulsora de 91 tonel'!lodaos-fovça ,e permite obter 8J velocLd8Jde de 4,0 X :1O' km/h = 11,1 km/s, que: é
p.recisamente a velocidade d e libertação da nave da atr3lcção terrestre ou 2." velocidade
cósmica. Es,te 3.° andar abandona então a carga útil de 415 toneladas - cápsula Apolo no caminho para a Lua.
2." - O problema das grandes velocidades depende da v-elocid8Jde de escape dos gases. Quando esta não se ,pode aumentar mais, recor,re-se às naves de mai,s de um andar. No exemplo 8Jllterior, só o 3.° aJlldar p ermitiu atingir a velocidade necess'áiri'a para colocar um saotélÍ'te em órbita (8 km/s = 1.0 veloci
dade cósmica, calculada no n.O 5,,9.6 aplicação 3 . ' ) e a 2." velocidade cósmica ( 1'1 km/s) neceS'sáiria palra fazer uma vialgem à Lua, libert8Jlldo a nave da rutracção terrestr,e. Para viagens cósmicas de maior alcance, a esperança reside nos foguetões de propulsão nuclear,
isto é, dos f,ogu'etões que utilizam a energia libel'tada = cisão do urânio pasra aquecer o hidrogéIl!io líquido e 'expulsá-lo a alta velocid3Jde (não haveria assim combustão, nem neces-sidade de oXidante ) .
Mostr,a,m os cáJIculos que p3Jra uma ll8JVe atingir 6 km/s a 8 km/s preci'sa de consumir
3.° - Seria ideal uma nave que desprendesse continuamente a massa tornada inútil, mas ainda não se conseguiu realizar tal processo.
Determinou-se, pelo cálculo, que uma nave de três andares pode beneficiar à -partida de um peso 6 vezes menor do que uma nave de um só andar e que uma nave de desprendimento contínuo de material inútil diminuiria ainda de 15 % o peso exigido para uma nave de três andares. (9) .
5.8.3 Exercícios de aplicação
1." - o primeiro dos 3 andares do foguetão Saturno V tinha 5 reactores que consumiam,
no conjunto, 15 toneladas de mi..stura com
bust'ível e comburente por segundo. Calcular
a velocidade média de escape dos gases em relação à Terra, sabendo que a força propul
sora média, por cada reactor, era de O,68X l0' toneladas-força.
Resolução :
O impulso é igurul à variação da q. de mov., pelo que -temos:
F . !:::. t = !:::. m . Ve
0,68 X l{)' X 9, 8 N X 1 s = 3XIO" kg X Ve =>
Ve = 2,22 X 10i' m/s -+< '2,2 X 10� m/s .
2." - Uma esfera A, com a massa de 1,0 kg, segue com a velocidade de 5,0 m/s e choca
frontalmente com outra esfera B, de massa
2,5 kg, que seguia à sua frente com a velo
cidade de 2,0 m/s. Após o choque, seguem
juntas. Determinar o valor da velocidade posterior ao choque.
Resolução :
P ela lei da conservação da q. de mov., temos :
mA. vA + mn vn = (mA + mn ) . v <= >
1,0 kg. 5,0 m/s+'2,5 kg. 2,01 m/s=3,5 kg. v = >
v = 2,9 m/a
181
19 a maSiSa de combustível .6om = - M (a nave
20 1
só pode, portanto, colocar em órb1ta - da sua 2.0
massa) . E para atingiT a velocidade de 14
km/s, gastaria a massa de combustível
999 1 .6om = -- M ( isto é , só -- da massa da
,!DOO lOOO nav,e se podia conservar) .
3.· - Von Braun, naturalizado amerkano
em 'L9'5'5, oSupemntendeu rra ,construção do pri
meir.o veículo lunar que transportou a cápsula
Apolo - o fogu.etão Saturno V de 3 andares
e cujo peso à partida, 'era de'282'XI10 tonelladas.
A cápsula, quando satelizada 'em volta
'1 da Lua ( cuJa g;raV'idade é - da da Terra) ,
6
largou o <dns'ecto», que er.a a pequena cápsula
que alunou, em :1969, tr.anSipoTtando dois dos
três astronautas ( o teroei,ro ficou na cápsula
Alpolo, a rodar à volta da Lua e a fazer de estação) . Um clima horroroso agu<lirda va os
astronautas: ausência de núvens e de atmos
fera, temperatur.a diurna de "1'0120 C e noc
turna de - 1:2110 C. O som não se propagava,
razão por que, paTa comuni·car.em ,entr.e si, estavam ligados pelo sistema «walkie-talkie»
( transmi-s'sor ra>di:ofónilco portáti!l) .
Uma das per,turbações que os astronautas
têm ,sentido no 'espaço é a angús-tía do isola
mento. Assim, antes da viagem à . Lua e
quando a nave Gemini 7 fez um voo >de 13 dioas
em volta da Terra, foi acompanhada durante um dia pela nave Gemini 6. Ao afastar-se
esta, os astronautas' da Gemini 7 experimen
taram uma forte reacção emocional ( fig. 5:15) .
Pergunta 2 :
Quando um astronauta desliga os motores
do foguetão, 'este de.ixa de acelerar ?
Exercício 6 :
O s gases de um foguetão são ejectados com
a velocidade média, em relação à Terra, de
2,0 X lO' m/s. Os reactores gastam 10 toneladas de carburante por segundo. Qual é a
força propulsora média ?
182
3 .0 - Um projéctil com a massa de 60 g e
a velocidade de 500 m/s penetra 1,00 dm num
pedaço de madeira fina numa parede inde
formável.
Supondo constante a torça resistente da
madeira, calcular,'
1) a aceleração do projéctil na madeira;
2) a força resistente; 3) o tempo de penetração;
4) o impulso do choque e sua comparação
com a q. de movo do projéctil antes de
penetrar na madeira.
Resolução :
1 ) Durante a penetração na madeira o
projéctil tem as velocidades inicial e
final, respectivamente, de Vo = 500 m/s
,e v = o, .e percorreu uma distância de
0,1:0'0 m. Portanto :
v'=vo'-'2 j . e < = > o= 500�-2 .. j . 0', 100 = >
j = 12,5 X 10' m/52
2) O valo.r da força .1'esistEmbe, retardadora,
que pr.ovocou esta aceleração, é dado
'por:
F = m . j < = > F = 0,0160 kg X '12,5'X110" m/s'
= 7'5 X 1.o" N
= W X 1()f' kgf
31) Pelo teorema da q .. de movim., temo�:
F . .6o t = m . 6v < = >
7:5X 10" N . .6o t= 6'O,1O'-3 kgX 50{)l m/s= >
.6o t=O,4,O X 10-3 s = 0,40 ms
4 ) O valor do i'rnpulso é :
1 = F. 6 t
= 715 X '1'03 N . 0,40 X lü-3 's
= 30 N. s
O valor da q. de movo antes do choque é :
p = m . v
= 60 X ,10-3 kg . 500 m/s
= 30 kg . m/s
I e p têm, pois, o mesmo v!IJlor numé
rico, porqu.e, n este caso, é p ,= 6 p,
visto que a veàocidade rinal é nula
(v = o ) .

T6IU DI 0CAf( ___ _
COM,USTlvn
OIIUÇAO
MOTO. , ..... CIPAl
1/IoII'IIU'OWAOOIU A(USoO.1OS Q«II SI SOlTAM ATW MElCUlY IMPUUO: 163.000 KG ATLAS ÂGlHA • IMtULSO: 17,,0)0 KG
Fig. 5.14 Um M ercury-Atlas norte-americano,
cuja força propulsora é de 1'6'3 toneladas-força, do tipo {io que, em
20'-<2-1,00,2, pôs -em órbita, o coronel
John Glenn. Este astronauta, -em
visita efectuada a Portugal, esteve
entve outros locais no Liceu de
D .. João de Castro, em 20' de Outu
bro {ie '1965, onde respondeu a mui
tas e curiosas perguntas que lhe
foram feitas, especialmente pelos
·estudantes. Antes de Glenn, que foi
o segundo homem a tripular uma
astronave (11962!) , descrevendo 3, ór
bita:s, já os russos tinham lançado,
nQ ano aJIlterior, o primei�o v-eí-culo
cósmico tripulado, o qua'l depois foi
Fi:g. 5.15 O foguetão Titão III G, cuja força
propulsora é de 1',3'8 X 11().3 toneladas
-força, colocou em órbita os satélites
Explorer, Telstar 'e Echo, e as cáp
sulas tripuladas Gemini. Tem dois
an{iares.
recupemdo. Esse primeiro veículo
cósmico {iesignou-se por Vo-stok I
e foi ·seu tripulante Yuri Gagarine,
em 12-4-,1'961, . Manteve-se em órbita
durante 89 minutos.
183

184
Fig. 5.16 A cápsula Gemi'lli 7 deslocando-se, como satélite, em volta da Terra. ( Foto Keystone ) .
Fig. 5.17 Na Lua, em 2il d:e Junho' dei lS'6,9: EdWi.n
A ldrin te Neil!. Arm
strcmg foram os primeiros lwmens a pi'S>aT
'o solo des1:Je s;a,téIilte terrelSltTe' . Nest'a fooogr-aiia da
NA!SA .observamos a 'sombra somar de um destes aJstrOU3Jutas 'e a
oexposiçáJo ao «v,entoO so
lar» de uma ,chapa
pr'epaT'oaJda: 'PaT3J recolher
'1))S partículas at6mioas
proveni,erut:eg, da radia
ção solar.
Exercicio 7 :
80% da massa d e um foguetão, n o instante de partida, é formada pela ,mistura de comburente e combustível. Os gases da combustão irão sair com a velocidade média, em relação à Terra, de 1,0 X lO' m/s. Que velocidade terá o foguetão quando esgotar o combustível ?
Resposta à pergunta 2 :
Não ace1era se o foguetão j á atingiu ou
ultraIPalSsou ,a, 2." velocidade cósmica ( 1:1 km/s)'. Se o foguetão 8linda não atingiu a
1." velocidade cósmica ( 8 km/s) ou de sateli-
F. z8IÇão, terá uma aceleração j = - , sendo F.
m o valor da força, a;tractiva <eJreI'cida pela Terra no -local d o espaço onde se encontra e m o
valor da m3issa do foguetão.
Respostas aos Ex. 6 e 7 :
6 ) F = 2,0 X '1{), N = 2,0 X 1()", kgf
= 2,0 X lO· tonel3idas-força
7) Pela lei da cons'ervação da quantidade
de movimento:
0,2 M X lw = 0,8 M X V
6. v = 4,OXl()' m/IS = > v=4,O X lO' mjs
5.9 For�a centrípeta e for�as centrí
fugas
5.9.1 O carácter relativo das descrições do movimento
Para podermos criticar e comparar duas d escrições do movimento de um mesmo móvel, �eitas por dois observadores diferentes, precisamos de conhecer os re�erenciais a que dizem respeito as descrições e a situaçiio dos observadores relativamente a estes referenciais.
Um exemplo corrente, ,colhido na observação diária, vai permitir-nos esclarecer esta questão.
Consideremos uma plataforma drcular, giratória, com ,cavalinhos de madeira fixos, como -aquelas que vulgarmente encontramos nas feiras populares.
Nesta plataforma 'encontra-se um experimentador B, que se pode deslocar sobre ela, e um experimentador A) fixo, preso, sem se poder deslocar ,sobre a mesma. Exteriormente, está um observador E, fixo no plano horizontal - fig. 5.18.
Comparemos, agora, as descrições do movimento do experimentador B feitas pelo observador E, ligado ao referencial de inércia (plano horizontal 7r") , com as descrições do observador A, solidário 'com o sistema rotatório em movimento ,circular uniforme (plataforma giraJtória) .
Resumamos num qua:dro as descrições destes 'Observadores, A e E, referentes a dois dos possíveis movimentos de B) enql).anto a plataform-a rodou de um pequeno ângulo <x, e, bem assim, as suas interpretações das causas dos referidos movimentos.
185

c
Fig. 5 .18 A - observador fixo na plataiorma
giratórra ( referencial em 'rmação,
p ortanto acelerado ) .
Movimentos do
experimentador B
B manteve-se agMTado a A,
passando, ao fim da pequena
rotação a , a ocupar a posi
ção B, (A, entretanto, tam
bém passou paTa a posição
A" arrastado pela plata
forma) .
B, aba:ndooado par A, passou
da posição B a uma posi'ção
B, muito próxima de B, ( dada
a pequenez do ângulo a ) , no
mesmo int€.'rvalo de tempo
em que A, rodando desse
ângulo a, se deslocou para a
posição A, ( como an.teriar
mente, arrastado pela plata
farma. em ·rotação) .
186
B - experimentador colocado sobr,e
a. iplaJtaforma o:nde se pode deslocar
com 'atrito praticamente nulo.
E � observador ex.teri�r à plata
fOI'llla, solidário 'com o plano 7Th em
repous'o ou em translação rectHínea
e unifoI'llle ( referencial' de itnércia ) .
D escrição e interpretação
do obsie'rvador A
B eSitá em repouso em vktu
de da força que lhe apliquei.
Como estar força está dirigida
para o centro da platafoI'llla
C (força oentripeta ) , concluo
que em B actua uma «força
centrífuga» que o levaria a
afastar-.se de mim ao Iongo
do raio.
B deslocou-se radicalmente de
B, 'paJra B, em vLrtude da
«forç'a ·centrífuga» que actua
sobre ele (poi s A não se aper
cebe do movimento tangen
dai BB3 de B, tem, sim, a
sensação de que ele se des-
locou, ao l ongo do raio, p ara
B,) .
Descrição ,e interpretação
do observador E
B des'creveu o arco de cir
cunferência BE, em virtude
de A ter exe·rcido sobr€. B uma força diri1gida s egundo
o raio da respectiva circun
f-erênci"a (,radial ) e para o
centro (força cen!rípeta) .
B, dado que A deixou de
ex-ercer sobre -eIe a força cen
tripeta que o mantinha em
tra;jectória coi,r-cular, passou a deslocaJI'-s'e, por illlércia, com
a velocidade que p.ossuía em
B, portanto slegund o a tan
gente à trajectória., desde a
posição B até à posição B3 '

Nota 10 ( leitura) :
No caso dos astronautas em viagens cós
micas concluímos que eloes não podem distin
guir, quanto aos, seus efeitos, entre uma ace
leração e a acção gravitacional ( força atrac
tiva) .
E, no voo cósmico, enquwnto a aceleração
era real, a acção atractiva, pelo contrário, era
fictída ( equi.valia, portanto, a uma força de
inércia) .
Qual destas descrições e interpretações é a correcta?
Antes de tentarmos responder, consideremo.s mais uma experiência. Imaginemo.s uma nave cósmica a desIocar-se algures no Universo, em zona onde seja praticamente nula qualquer atracção gravitacio.nal.
Tendo-se desligado os mo.to.res, a nave desloca-se 'com movimento rectilíneo e uniforme, os objectos e os astronautas não têm peso e, co.mo tal, flutuam no interio.r da nave (também flutuam no exterior, o. que já foi o.bservado em directo pela T. V. ao transmitir as manobras de um astro.nauta no exterior da cápsula, em pleno. espaço) . Um pêndulo, pendurado do. tecto e co.locado em qualquer posiç,ão oblíqua, nessa posiç,ão permanece. Este estado de imponderabilidade implica, para o.S seres vivo.s, todo um modo de viver diferente e requer muito treino para habi tuação.,
Mas, se 'Os motores forem novamente ligados e regulados po.r forma a que a
-+ nav·e se desloque com a aceleração g, igual em módulo à da gravidade, tudo regressa ao estado normal de ponderabilidade : o.S objectos passam a «cair» em sentido co.ntrário ao do deslo.camento da nave e o pêndulo põe-se a oscilar como. o faz na Terra. Os astlonautas, quanto às s,ensações experimentadas, não poder8.0 distinguir entre as possÍveis ,causas do que observam, e que tanto pode ser uma força atractiva gravitacio.nal (peso) dirigida em sentido contrári'O ao do deslocamento. da nave, co.mo po.de ser efeito da aceleração. Este efeito, aliado à inércia própria dos objectos, também faz com que
187
Em geral, em qualquer referencia-I acele
raodQ, o observador local, solidário com esse
referencial" necessita de recorrer a forças de .0 •• _
inércia
� -� F i ln j ,
graças às quais pode transformar os proble
mas de dinâmica, de movimentos reais, que
não conhece ( isto é, de que não se aperceb e) .
em problemas de equi!líbrio estático, od e re
pouso hipotético, porque :
� � � -+' � � F .real = m j e Fi = - m j => F rea,I +Fi = o
Uma das características importantes das
forças de inércia é a de «comunicarem» aos
corpos acelerações que não ode'pendem das
suas masS'8J.S, pois as forças de inérci'a depen
dem .a:penas dos movimentos dos sistemas de
referência e não daiS proprIedades físicas dos
corpos émde aiS imaginamos aplicadas. ln um
. exemplo disto o facto ode, na nave acelerada,
03 COI1POS «ca'Írem» todos com a mesma acel·e
ração.
Uma v,ez que a aceleração gravitacional
também não depende da massa dos corpos
e que, como vimos, são exactamente os mes
mos os efeitos da aceleração num referencial
acelerado e os de uma força gravitacional de
sentido contrário a essa aceleração no mesmo
referencial em repouso ou em movimento
rectilíneo uniforme, conoluímos que as forças
de gravitação são equivalentes a forças de
inércia. Como tal, ,escolhendo conveniente
mente os referendais, essas forças gravita
ciona'i-s podem ser modificadas e até anuladas,
como aconteceria, por exemplo, numa nave
que se diri-giss'e' para a Terra com aceleração
igual ( em módulo, dir·ecção e sentido ) à da
gravidade : Os corpes no seu interior .passa
riam a ter posições fixas, flutuariam, com
p ortando-se cerno se não tivessem peso. Quer
isto dizer que tudo se -passaria como se as
forças de atr8Jcção gravítica se tivessem anu
lado. Se a nave se dirigisse para a Terra com
aceleração maior que a da gravidade, os cor
pos entravam em «levüação», isto é, desoJo
car-se-iam para cima no interior da na've,
tudo se passando como se o seu peso mudasse
188
eles caiam «para baixo» ( conclusão do observador ligado à nave, referencial acelerado) . O sentido da queda é o sentido oposto ao da aceleração da nave ( conclusão dum observador exterior, observador de inércia) . ( 10) .
Pela análise atenta destes exemplos ( e também pela leitura da nota 10) somos agora levados a concluir que as descrições dos movimentos feitos por um observador ligado a um referencial de inércia ( como é o caso do observador E atrás referido) . e por um 'Observador solidário com um sistema acelerado ( caso do observador A da plataforma) siio igualmente correctas e as suas interpretações são igualmente aceitáveis. Simplesmente, no primeiro caso, temos uma descrição « imparcial» do movimento real, visto de fora : é uma interpretação d o movimento com base nas forças reais que o determinam. Estas forças, estando realmente apHcadas nos corpos, produzem neles as acelerações caracterísücas dos movimentos dos corpos. Em suma, o primeiro ·caso refere-se a sistemas onde as descrições dos movimentos são mais simples, e onde a aplicabilidade das leis de Newton torna as interpretações mais fáceis.
No segundo caso, é apresentada a descrição do movimento de um observador que participa do movimento de um referencial acelerado. Tal observador, para interpretar o efeito da aceleraç§.o desse refer-encial, aceleração que desconhece (dado o seu carácter de participante do prÓ'prio movimento) , recorre a forças fictícias, as chamadas forças de inércia. Com estas, ele explica correctamente o que observa. Mas desde que consideremos de facto
de s'entido. Tudo ocorreria, pois, como se as
forças gravitacionai's tivessem mudado de
sentido e de valor.
Com ba,se nestas considerações', Einstein
esta,beleceu o seguinte prilncípio de equivalên
cia como postulado funda,mental da Relativi
dade Geral:
«Não podemos distinguir o efe!Í.lto da ace
leração e o de uma variação real da grac
vidade».
ISJto significa, em outros termos', que :
1 .° - Não podemos" em absoluto, afirmar
quem se move: se nós, passageiro de um
veículo, se o observador que estã de fora ;
2.° - A geometria do «,espaço», euclidiana,
utilizaoda por Ga:lileu e Newton, terá de ser
substitui da por uma geometria modificada,
que só a,fecta, porém, as experiências em que
estão envolvidas grandes v,elocidades ( em
Física Nuclear e em Astronomia) .
A RelaUvidade Geral obriga as,sim a re
pens'ar a importãncia das força's de inércia
pelo 'que respeita à interpretação dos fenóme
nos ocorridos em referenciais acelerados,. Além
disso, as des'crições ,«não racionais» dos, obser
vadores ligados a sistemas em rotação não são
fúteis, porque nós próprios pertencemos a
um sistema deste tipo - a Terra em rotação
diurna.
A Rela:tividade Geral conduziu a uma
nova mecânica e a uma nova geometria do
espaço onde Os efeitos previstos, quer a
Terra se mova ,em torno do SOIl, quer o Sol
e estrelas se movam em ,torno da Terra, são
os 'mesmos. Por isso, à velha pergunta - «estã
certo Copérnico e errado Ptolomeu ?» - jã
não respondemos com a suficiência e convic
ção de GalHeu, mas de um modo ma�s
humilde :
«Os dots modos de ver podem ser igual
m ente verdadeiros, mas um deles conduz a
uma descrição ma1s s1mples para efeitos prã
ticos e teóricos». Essa descrição mais simples
corresponde sempre à do observador de um
sistema inerciaI, sistema esse onde são apli
cáveis as leis de Newton.
Daqui resulta em grande parte, e de modo
decisivo, a vantagem da teoria de Copérnico
sobre a de Ptolomeu.
a plataforma em movimento de rotação e o plano em repouso, tais forças não estão realmente aplicadas nos corpos, nem são a causa das aeelerações observadas pelos participantes do movimento da plataforma e nela fixos ( caso do observador A).
De -acordo com a teoria da Relatividade Geral (191:6) podemos perfeitamente considerar a plataforma fixa e o plano 7rh a rodar (fig. 5.18 ) . E então tudo se inverte : as forças de inércia, que tínhamos considerado fictícias, passaram a considerar-se realmente aplicadas nos ,corpos. Tal facto e o número 'crescente de vez'es em que o homem tem sido posto na situação de observador consideravelmente acelerado, como sucede nos voos cósmicos, e ainda a circunstância de viver num referencial acelerado - a Terra -, fez com que as descrições do movimento feitas por observadores ligados a referenciais não inerciais readquirissem relevo. Estas descrições são consideradas como um modo de ver «não raciona!», mas útil em muitos casos, como acontece em Física Nuclear e em inúmeros problemas que envolvem altas velocidades.
Seguiremos no presente curso e em todos os casos em que as velocidades envolvidas sejam inferiores a 10 % da velocidade da luz, no vácuo, as descrições «racionais» dos observadores imparciais ligados a referenciais de inércia, porque são mais simples e, além disso, porque tais observadores podem servir-se das leis de Newton para a interpretação dos fenómenos.
Em alguns eXcemplos que se vão seguir tentaremos, no entanto, algumas vezes, as duas leituras do movimento,
189

--� � l4.vl
f
ft o Fc
Fig. 5.19 ( a ) OA é uma fita de borracha
elálsUca, em 'cuja extremidade eS!tá
UIllilJ ,esmera metálica A, que s'e põe
Nota 1 1 :
-+em mOvi1ffileI1Jto circulaJr. A força F"
ex,ercida p.elaJ fita ·eIáS!tica sobre a
esf,era, mantém es'ta na trajectória
·circular.
-+-A força F', I"epI"es'enta a reacção
centrífuga ·e eS1tá aplicada na mão,
ou sejru no corpo ou sis,tema que s·e
opõe aJO movimento recti<líneo da
eS!fera A . ( b ) Representação vectorial da:s ve
locidades � da força centrípeta em
duas posições difeI1entes A ·e A'.
Para um movimento curvilíneo não cir
cular, a força não é centrípeta, mas central,
quer di2íer : é uma força que está s empre
dirigida para: o mesmo ponto. Por exemplo,
numa traJectória elí,pti ca, como é o caso dos
190
apenas para melhor compreensão de alguns factos e noções e para se apreender o sentido da opção mais conveniente em cada caso.
5.9.2 A força centrípeta como causa permanente do movimento circular
Vamos começar por analisar a interpretação do observador E exterior à plataforma rotativa da figura 5.18, que, como já sabemos, é um observador imparcial por estar rora da plataforma e solidário com um referencial de inércia. Admitamos que ele vê o experimentador B em movimento circular uniforme, portanto com uma velocidade variável em direcção, mas de módulo constante v. Concluirá que B está em movimento acelerado, sendo essa aceleraç.ão radial e centrípeta Ccf. 2.6.6) e de módulo
onde :
v2 jc = - ,
r
r -+- raio da trajectória do centro de gravidade de B.
v -+- módulo da velocidade desse centro de gravidade.
Em B deverá pois actuar uma força dirigida para o centro C, a qual, pela 2.a lei de Newton, terá para módulo o valor calculado pela expressão :
m v2 Fc = m je = --
r
Essa força, que actua em B e que está dirigida para o centro, designa-se, por ·este facto, força centrípeta. Ela é a causa permanente da aceleração de B. (11 ) .
planetas, a força central está dirigida para
um dos seus focos.
Se o m ovimento drcular ou o curvilíneo
não forem uniformes, 'além da força centripeta
ou da força central, há uma: componente tan
gencia'l respcnsável pela 8!celeração trungen
cial. Mas as componentes centripeta e oentral
continuam a ser a c'aus'a 'permanente da mu
dança de direcção da veloc1dade.
C0'nsiderem0's ag0'ra a experIencia indicada na figU!ra 5.19, (a ) . Para que a esfera metálica A, presa à mã0' pela fita dupla de b0'rracha elástica OA, se mantenha 'em m0'viment0' circular, será necessári0' que a força elástica da fita se exerça permanentemente S0'bre a esfera A e esteja c0'nstantemente dirigida para 0' centr0' O da circunferência descrita pel0' centr0' de gravidade de A .
Esta força � fig. 5.19, (b) - aplicada em A, é a causa da permanente
-+-mudança de direcçã0' da vel0'cidade, vA, d0' centr0' de gravida,de da esfera. Tra-
-+-ta-se da força centrípeta F" cuj0' mó-dul0' é, p0'rtant0', determinado pela expressã0' :
send0' :
mA VA2 Fc = mA jA = ---=--- ,
r
mA - massa d0' cm'p0' A.
r � rai0' da trajectória ckcular.
Se largássem0's da mão uma das partes da fita dupla, desapa,receria esta f0'rça de acç,ão centrípeta e a esfera metálica seguiria a direcçã0' da tangente à 'CÍlrcunferência, porque é essa a direcçã0' da velocidade:
5.9.3 Força centrífuga de reacção
Ret0'memos a análise da interpretaçã0' d0' 0'hservad0'r E exterior à plataf0'rma (fig. 5.18 ) . Tal observad0'r, c0'nhecend0' a 3.a 1ei d0' moviment0' de Newton, explica a força que 0' observador A sente em si aplicada, a qual tende a puxá-lo para fora a0' l0'ng0' d0' rai0' da respectiva trajectória, da seguinte f0'rma :
191

/
, \
\
,
/
/
o Y
Y'
.6 _ y A Fc I
Fig. 5.20 A ,esf'eira B, rn.ais pes·a;da do que a
esfe;l'Ia A, 'e�erce' 'Sobre esta a ferça
� centrípeta Fc que a mantém em tra-
jectóri'a drcular. Para uma veloci
da;de cocrecta ,da esf.era A, de mó
dulo cc-nstante VA, o sistema das
duas esf,era;s ,e do no que as' liga
fica em equi'líbrío dinâmico de rota
ção. Quando isso sucede a re-a,cção
� centrífuga F' c da esfera A sobre a
esfera B é dire'ctamente oposlta ao
peso do COl'lpO e com o mesmo mó
dul o :
-+- -+- { F'e = - PB e F',_ = Pn
Pergunta 3:
QU3illdo se la;rga a pedra d e uma funda,
animada de movimen-to rápido de rotação, a
p edra -sai, ini'cialmoote, segundo uma trajec
tóriÇ!. rectilínea tang'ente à drcunferência
descrita, antes, pelo centro de gravidade da
pedra. Logo a seguír a ,trajectória passa � ser aproximadamente parabólica, Porquê ?
192
A está exercendo sobre B uma força de acção centrípeta e, dessa forma, está provocando o movimento ,curvilíneo de B. Este exercerá, pois, em A, a correspondente reacção à força centrípeta . Essa força d e reacção, segundo a referida lei de Newton, é do mesmo módulo e da mesma direcção da força centripeta, mas está dirigida para B 'e, portanto, para fora. Designa-se, por isso mesmo, força centrífuga de reacção ( centrífuga quer dizer que se 'afasta do oentro) e está aplicada no agente causador do movimento ,curvilíneo, portanto em A, e não no corpo onde está aplicada a força de acção eerrtrípeta.
Voltemos agora, novamente, à experiência da figura 5.19'. De acordo com a 3.a lei do movimento de Newton, à
-+-força de acção centrípeta, Fc, exercida sobre a esfera A, corresponde a reacção desta sobre a mão, que é neste caso o corpo ou -sistema que se opõe ao deslocamento de A segundo a tangente à trajectória, Trata-se da força de reacção
-+-centrífuga F' c, que não ,está aplicada no móvel A, mas, sim, na mão e é directamente oposta e de módulo igual ao da força centripeta :
-+- -+F'e = - Fc
A reacção oentrífuga nada tem 'a ver com o movimento de A, tem direcção radial e o sentido da mão para a e sfera. Como o experime!1tador que segura o fio - fig. 5.19, ( a) -, sente a sua mão a ser puxada para o exterior, poderia pensar erradamente que na esfera A
está actuando uma força centrífuga e _ que o fio está transmitindo essa força à mão. A realidade é outra. O fio, em estado de tensão, pux:a as duas extre-

Nota 12 :
Vimos na Eetátilca o signiücado de tensão
de um fio ou de um ·cabo (n.o 4.2 e legenda
da fig. 4.;1 ) . JUllgamos útil, no entanto, sa
lientar novrum.ente trul ·signifi·cado à luz da
Dinâmica, como já fizemos no ,Ex. 5:1.4 deste
capítulo. Assim., no ca:so da fig. 5.'19 ( a ) , a tensão do fio no ponto de contacto com a
-+-esf'el'a A ,é a força centrípeta Fc . Repre'senta a força que d ev,eríamos exercer em A, no ·C8.:!SO
de não existl.r o fio, para manter o corpo na
mesma trajeotÓiri,a circular. A tensào do fio
no ponto de 'contacto com a mão é a reacção -+-
centrífuga F' c ' Intercalando dois din8.:!mó-
metros, um entre a mão e <O fio, outro entre' o fio e o corpo, veríamos que ,ele's indicavam o mesmo vlo';lor
F, = F'c = T ( .tens'ão do fio) .
Deste modo s'e ·comprovaria a igualdade modula:r ·entré força .centrípeta e reacção cen
trífuga.
No caso da figura 5.210:
- a tensão do fio no 'Seu ponto de contacto com a ·esfera B é a força que seJria neces'sárío
rupli'ca:r em B para que, cortado o fio, B con
tiIllua:sse em equilíbrio.
-� a 1:en'são do fi'o no ponto de contacto com A é i,gu3il à força que 'seria necessáTio
·aplicar .em A para que, cortado o fio, essa
'Pedr8J 'se mantivess'e na mesma traJectória
drcul'al'.
Oom o s'Í!stem.8J em movimento e em equi
líbrío dinâmico as dUll:s tensões acima indi
cadas têm o mesmo módulo, conforme se
comprovaria com dois dinam6metros interca
lados entre o fio ·e as pedras.
J 3
midades e, com elas, os corpos ligados pelo fio : a mão para fora com a força
-+-centrífuga F' c e a pedra para dentro
-+-cam a força ·centrípeta Fc.
Uma outra experiência simples, indicada na figura 5.20, ajuda a esclarecer a questão. A esfera B é mais pesada que a esfera A. Posto o sistema a rodar, e ·atingindo a pedra A uma certa velocidade de módulo constante VA, o sistema fica em equilíbrio. O fio, em estado de tensão, exerce duas forças iguais em módulo nos pontos das pedras em ·contacto com as suas extremi-
-+-dades: em A, a força centrípeta Fc de módulo
VA2 Fc = mA ' -
r (r -+- raio da trajectória de A em
torno do centro O) ,
e valor suficiente para manter esse corpo em movimento circular ; em B a
-+- -+-reacção F'c de módulo igual à força Fc e ao peso da esfera B e dil'ectamente oposta a esta força. ( 12') .
5.9.4 Força centrífuga de inércia
Vamos agora analisar a descrição e interpretação do observador A ligado à plataforma rotativa da figura 5.18.
Segundo o seu modo de ver, enquanto ele agarra B, este mantém-se em repouso (não esquecer que o estado de repouso é relativo e 'a distância entre A e B não varia) . Dado que ele está
-+-a exercer uma força centrípeta Fc sobre B, para justificar o repouso deste, ele tem de supor 'aplicada em B uma força
-+-capaz de equilibrar Fc. Essa força
-+- -+-Fi = - Fc
193

Resposta à pergunta 3:
Quando cessou de ·aJOtuar a f'Orça oentripeta -+-F, ( iInstante em que foi l8!rgada a pedra) ,
caJus'a permanente do movimento ckcular, a
pedra 'Sleguiu na di'recção da sua vel()cidade
(tangente à circunferência),. A s·eguir, a
trajectória 'parabólica resulta da 'sobre
posição de doTs movimentos - um uniforme
de velocida,de constante (a velocidade de saida
da pedra) e outra uniformemente acelerado
( o da queda da pedra em vi<rtude do seu p es G l .
Recordar () resultado 5.» d o n.O 3.4 e bem
assim 'as figs.. 3 .12' 'e 3�.'3I do capítulo 3 . De notar
ainda que a ,resistência do 8!r modifica a' tra
jectória, que 'só "S'eria lrigorosamente parabó
li·ca no vazio.
é radial e dirigida para fora e, dado tratar-se duma força de inérci'a, é designada por força centrífuga de inércia.
Abandonando B) o observador A vê-o afastar-se radialmente, o que mais uma vez o convence da existência de tal força centrífuga a 'actuar em B.
No caso da fig. 5.19 (a ) , um observador que ry:"odasse solidariamente com a esfera A e observasse um dinamómetro intercalado entre a esfera e o fio indicando o valor de uma força centrí-
-+-peta Fc aplicada em A só poderia -expli-car o 'repouso de A (dado A estar de facto 'em repouso em relaQão a . esse observador) supondo estar aplicada
-+-em A uma outra força Fi tal que
E surgiu assim, mais uma vez, a necessidade da utilização de uma força centrífuga de inércia aplicada no corpo em rotação, de direcção radial e dirigida do ,centro para a periferia.
Este modo de encarar a questão transforma os problemas de movimentos reais (Dinâmica) em problemas de equilíbrio e repouso (,Estática) , repouso esse fictício e só aceitável segundo a maneira de ver do observador ligado ao móvel.
O movimento cÍ'rcular pode assim interpretar-se ou em termos apenas de força 'centrípeta - modo de ver «racional» dos observadores d e inércia, ligados a I'eferenciais onde é aplicável a mecânica newtoniana - ou em termos de força centrípeta e de força centrífuga de inércia - maneira de ver «não I'acional» por ter de recorrer a forças irre'ais.

Nota 18 :
Se o movimento circular não é uniforme,
existe, além da força centripeta, uma força
tangenci'8JI responsável 'pela aoeleração tan
g.encial.
No movimento circular, a ca'<ia valor v da
velocidade corresponde um valor '<ieterminado
da força centrípeta F. dado pela expressão :
m . v'
r
Se, 'porém, se a.plicar ao móvel uma força
centripeta superior à necessária para rr.anter
o móvel na trajectória circular de ra:io r
m . v'
r
o móvel tende a aproximar-se do centro, des
crevendo ,circunferências de raio cada vez
menor. J!.: o caso, por exemplo, de um .satélite
cuja velocidade v vai d1minuindo com o atrHo
( embora muito l'eduzido ) . Deste modo, a força
centri,peta ( força atractiva exercida sobre o
satélite) tornar-se-á maior do que a força
neces'sária para o manter 'em órbita e, por
isso, o satélite acabará por entrar em regiões
cada vez mais densas ,e menos elevadas da
atmosfera, onde s'e desintegrará devido ao
aquecimento prov.Qcado pelo atrito,
Se a força celntrípeta aplicada fOlr ta:l
que é inf,erior à necessária para- se manter o
móvel na sua trajectória circular,
m . v' F, < -- ,
r
o móvel S'e,:juirá uma trajectóri'a rectilínea,
segundo a tangente, até, por exemplo, uma
nova órbita.. 1l: este também o caso dos, saté
lites que ,podem p1l:s.sar de uma órbita para
outra 'por aumento do valor v da velocida.de,
Para um novo valor, constante e superior ao
anterior, da velocidade v, desde que o valor de
m v' r aumente suficientemente, o quoci,ente ---,
r que entretanto diminui, pode tornar-se a
certa altura igual ao valor certo da força
centripeta, entrando assim o satélite em nova
órbita.
5.9.5 Leis da farça centrípeta �
A força centrípeta Fc) como causa permanente do movimento circular, é responsável pela -aceleração centrípeta � jc. Pela lei fundamental do movimento, temos, então :
-.,. � Fc = m je ,
sendo m a massa inerciaI do móvel, cujo centro de gravidade descreve uma circunferência de raio r) com a veloci-
� dade linear v e a velocidade angular w .
N o movimento circular uniforme, podemos escrever esta relação sob a
form'a modular. Teremos a:ssim : m v2
Fc = --- = m wf r. r
Nestas expressões estão sintetizadas as quatro leis da força centrípeta :
angular '
195

Fig. 5.21 C a ) Um ciclista, ao dar a cur,va na
;estrada, inclinou-se de um ângulo
- IX - em ·relaJção à veI1tical. A com-
196
-+ ponente F" do p eso dá origem à
-+ [reacção R e a component:e horizon-
-+ tal é a força centripeta Fc que mantém o ciclista em m ovimento
ci:rcular na curva. Tarrnbém s'e veri
fica na figura que é, vectorialmente :
-... -+ -+ Fe = P + R .
C b ) Se ,a estrada, na curva, pa,s
sasse da ,posição AB p3ir.a a poSli:ção
A' B' - «relevé» - tornava-se hori
zontal para o ciclista, visto que para
este C observador não inerciaI) a
«sua vertical» é a direcção da re--+
sultante F" das forças que sente -+
que lhe estão aplicadas : o peso P -+
e a força centrifuga de inércia F' c •
,
5.9.6 Origens da farça centrípeta
A força centripeta necessária para se manter uma dada velocidade de rotação w pode resultar de vários tipos de forças. Passamos a indicar os mais importan teso
1.0 A coesão entre as partículas de um corpo animado de movimento de rotação.
Por exemplo, num disco que está a rodar são as forças de coesão entre as suas parUculas que mantêm estas em trajectória curviHnea. Numa experiência ' feita com uma roda de titânio; rodando com a V'elocidade de 22'ÜX 102 rotjmn = 367 rot/s, esta desintegrou-se em f�agmentos porque :
-'as forç8Js de coesão eram inferiores à força centrípeta necessária par-a manter esta velocidade, segundo a interpr,etação do observador inerciaI ;
- a força centrífuga de mevCÍa imposta por esta velocidade era superior às forças de coes,ão, segundo 'Ü modo de ver do observador solidário 'com o movimento da roda.
2." A componente radial do peso do móvel.
Um ciclista, para dar uma curva apertada sem derrapar, inclina-se de um ângulo - a - em relação à vertical - fig. 5.21, (a) . Nestas condições, temos :

Nota 14:
o valor do â:ngul.o - a - de i,nclinação a
dar à estI'8ida na curva apertada, tira-se
rurectarnente da fig. 5.:211, ( a ) :
Fc m v'/r tg a = -- = ---
P mg rg
Esta relação é ,independente de m, o que
significa 'que tanto tem de se inclinar o ci
clista pesado como o ciclista leve e que o
«relevé» não depende do peso dos carros.
Se, p .. ex., r = 20 m e v = 36 km/h = 10 m/s,
seria
10" tg a = = 0,151 = > a = 2.7°.
20 X 9,8
Nesta curva e com 'este «reIevé», s,e o carro
cu o ciclista u�trapaS'sarem a velocidade de
3,6 km/h despistam-se 'e saem da 'estrada. He
fizerem a curva com ve'l·ocida:de inferior a
36 km/h, o cicU,sta e os passagekos do carro
sentem�se aJtraídolS para o c entro da curva.
A V1elocidad'e certa é 36 km/h.
Fig. 5.:2:2 «iRelevé» de um au.tódromo. Foto Keystone
1 - Interpretação do observador inercial: � -+-a componente F" do pes'Ü P, segundo 'O plano de simetria AG
do sistema ( ci-clist'a + bicicleta) , �
equilibra a reacção R da estrada ; a ,componente horizontal constitui
� a força centrípeta Fc necessária para o ciclista se manter em movimento circular na curva. ,Esta interpretação é equivalente 'a dizer que a força centrípeta é a resultante das forças a:pHcadas, o peso
-+- -+-P 'e a reacção R, como mostra a fig. 5.21, (a) :
� � � Fc = P + R
2 - Interpretação do ciclista ( observador ligado ao sistema em rotação ) : as forças que sente em si aplica
-+-das, o peso P e a força centrífuga
-+-de inércia F ' c , fig. 5.21, (b) ,
� têm a resultante F n : a direc-ção desta constitui ' ?- «sua vertical» e é segundo esta que tem de se col'Ücar par·a equilibrar a reacção da estrada.
Qualquer destas interpretações conduz ao 'resultado seguinte : para o cicUsta se equilibrar perfeitamente na curv,a e sem qualquer perigo de derrapagem, bastaria que a estrada passasse da posição AB para a posição A' B' -inclinação ou «relevé» - de modo a ficar «horizontal» em relaçã'Ü à «vertical» AG do ciclista.
O que se diz do 'Ciclista diz-se dos carros que se deslocam nas curvas. O
197

Fig. 5 .23 Trajectória de um corpo llilnçado
de uma montan,ha 'alta - V - com
velocidades crescentes, a 'que cor
,r,espandem trajectórias crescentes
também. Desenho da obra de New
ton «Sistema do Mundo» - adita
mento à última edição dos seus
«Princípios de Filosofia Natural».
Pergunta 4:
1 ) Porque tem o motoriosta tendência a
dar uma curva «por dentro», isto é, fora
de mão ?
2 ) Numa 'estrada perfeitamen,te lisa (p. ex.,
,coberta de geada e/ou de gelo fundente )
'O ,abri,to é nulo. Nestas condições é tm
possível fazer uma curva sem « relevé».
Justificar.
198
ângulo de inclinação - a - não depende do peso do ciclista nem do peso do carro, mas apenas da velocidade com que se pretende dar a curva. (14) .
É por isso que o «relevé» nos autódromos - fig. 5.22 - é mais pronunciado do que numa curva apertada da estrada.
3.0 A atracção de outros corpos.
Os satélites mantêm-se em órbita quando a ,atracção da T,erra for igual à força centrípeta
r
sendo r a distância do satélite ao centro da Terra e v o valor da velocidade com que percorre a órbita ( antes de o satéliote atingir o valor v da «velocidade 'certa», a força atractiva era superior à força centripeta) .
Newton já conhecia a possibilidade de lançar um satélite em órbita, mas não dispunha de meios técnicos para obter as velocidades suficientes. Assim, para um coI1po lançado de uma alta montanha V - fig. 5.23, -, as trajectórias crescentes VD, VE, VF e VG correspondem a velocidades de lançamento também 'crescentes.
Que velocidade deverá ter um projéctil para viajar à volta da Terra, a altitude constante e indefinidamente, sem necessidade de motores ligados?
Admitindo que a força contrípeta Fc que mantém o satélite em órbita é precisamente o seu peso (força 'atractiva) , temos :
m g = --R
=> v2 = R . g,

Nota 15:
Com esta velocidade d e 8 km/s, o calor
desenvolvido por atrLto no ar volatilizaria o
sa:télite se este ci'roulasse na baixa atmosfera:.
Isto já não acontece a grandes altitudes', pois
1 a 100 km já o peso volúmico do ar é -- do
lO" peso volúmico normal!.
Os cienUstalS oamerkanoas e russos utHi
zar3im foguetões de vários andares', que foram
levados 'até � altitude de 4801 km, onde quase
não há atrito e onde já é consideravelmente
menor o valor da aceleração da gravidade..
Aqui, a velocidade de circulação em órbita é
um pouco maior do que 7,7 km/s = 27,7 X a.0" km/h, porque a trajectória é elíptica. A esta
corresponde, p ortanto, um maior pel'curso no
mesmo periodo T. A velocidade chega a atin
gir 30,0 X H}" km/h.
Embora muito pequeno, o atrito do ar vai
«travando» os satélites, que, ,ao p erderem ve
locidade, vão descendo pa'ra regiões mais
densas da abnosf'era, onde acabam por se
desintegrar num chuveiro de fragmentos in
cendi'ados pelo fluxo de ooloOr desenvolvido no
atrito.
'"
sendo : R = raio da trajectória
= TT (raio da Terra) + h ( altitude)
9 = valor da acel,eração da gravidade à altitude h .
Se, por exemplo, se pretender colocar um ,satélite em órbita à altitude de 300 km, onde a aceleração da gravidade tem o valor g = 8,9 mf's2, a velocidade que o satélite terá de atingir é :
v2 = (TT + h) X 9
v
(6,4X 106 m + 0,3 X 10G m) X X 8,9 m/s2
V 6,7 X 8,9 X 10" m/s
= 7,7 X 103 m/s = 7,7 km/s -* -+- 8 km/s,
que é a chamada 1.0 veZocidade cósmica. ( 15) .
o terce iro andar acele r a o sal ile, alé 30 000 km/h
- - -
/ / o segundo andor cai /
/
Fig. 5.24 Um foguetão de 3 andares coloca um satélite «S» em órbita, à altitude de 480 km,
199

A
� � ---.. .
� O
Fig. 5.25 'Caminho de ferro aéreo.
�sposta à pergunta 4 :
1 ) Porque, seguindo-se uma trajectória
mais próxima da linha recta, aumenta
o valor do raio de curvatura. Daqui re
sulta que, para o mesmo valor da força
mv' centripeta Fc = -- , se pode avançar
r com mai.or velocidade v (.para a fracção
mv' -- não variar),.
r -)-
2} A reacção R , normal a A'B' - fig,. 5.121,
200
( a ) - s'erá a 'resultante de uma reacção -+-
normal (Rn) à estrada AB e da força
de atrito tangente a esta. De'Saparecen-
. -+-do a força de atrito, a reacção R pas-
'saria a coincidir com a sua componente
-+-normal R", a qual, juntamente com a
-+' componente Fn do 'Peso, produziria um
mom'ento resultante não nulo, logo um
efeito rotativo no ciclista que o con
duziri,a à queda.
Se, porém, a estrada tivesse «relevé»,
já a reacção, normal à estrada A'B',
pOdi'a equiUbrar a componente n ormal
-+-F" par� a «v,elocidade certa» - i,sto é,
'V' correspondente a tg a = - oe daí o
rg ciclista poder manter-se perfeitamente
equIlibrado na curva.
4." Forças de ligação do móvel ao sistema que se opõe ao seu movimento rectilíneo segundo a tangente à trajectória.
Este é o caso do atrito nas curvas sem «relevé».
Ê também o caso da tensão do fio na funda.
Ê ainda o caso da reacção do arco sobre o carro na experiência do «looping» ou do caminho de ferro aéreo fig. 5.25.
Se o 'carro partir de altura suficiente - estação A - atinge a ,com a velocidade necessária 'Para continuar em movimento sem 'cair. O movimento é acel-erado de A a D e retardado de D a a : porquê ?
E de a a D ? E de D a B ? Porque não está a plataforma B ao nível da de A ?
1 - Interpretação deste movimento pelo observador inercial:
m v 2 Se em a se verificar que P < ---.-:.. ,
r ou seja o péso é inferior à forQa centrípeta necessária para descrever o tra-. jecto circular com a velocidade de módulo v, então essa força centrípeta será :
-+- -+- -+-F" = P + R ( rea:cção do arco ) ,
e portanto :
m v2 -- = P + R
r
Isto é o que sucede quando o carrinho cai de altura que lhe permite atingir uma velocidade suficiente v.
Se o carrinho cair de altura insuficiente, não atinge a, pois a certa altura

o A 8
""",,,,,,,,�,,,,i,,�,� ( J
\ �\ �.\
'O)
Fig. 5.26 (a) «Roda infernal» em rotação: A força centrifuga de inércia -+- -+-F' c = - m. jc 'aumenta de A para E, por 'ser F', = m w' r. (b) Para o espectador ligado à roda (-observador do sistema a.cele-
-+-. -+- -+ rado), a resultante R de F', = -m j,
-+- -+-oe de P = m g dá a di�ecção da «'sua V'er:tic'al», muto mais inclinada quanto m.aios ·aia;s·tado estiV'er do centro da .oda. O sentido descen-
-+dente da vertical - que é o de R -dá o sentido da queda.
a sua velocidade é suficientemente pequena para que se verifique
mv2 Pn> -- ,
r
em que P" é o valor da .componente do peso do 'carrinho segundo a perpendicular à trajectória (isto é, segundo o raio) .
Então, como a força 'centrípeta é -+-
agora a 'componente P" do peso do car-rinho (pois não chega a ser solicitada qualquer reacção do trilho), e o valor dessa componente é maior do que a força necessária para manter o carrinho na trajectória, ele cairá.
2 - Interpretação do observador solidário com o carrinho.
Se o 'carrinho atinge C com velocidade suficientemente grande, a força centrífuga de inércia será, em módulo,
mv2 F'e = -- > P
r
-+ -+-e a resultante de F' e e P está dirigida para cima e o carrinho não cai.
Quando o carrinho atingir um 'ponto em que a velocidade é sufidentemente pequena para que se verifique
mv2 F'e = -- < P" ,
r
-+- . -+-a resultante de F' e e Pn está dirigida para o 'centro da trajectória e o carrinho cai.
201

�w I
Fig. 5.�7 A surperfíde livre do líquido con
ltido no vaso cilíndrico que se faz
!'odar em torno do eixo vertical
toma a forma de um parabolóide de
202
-+-revolução. A Força F', resuLtMlte do
-+- -+-peso P = m g 'e da força centrifuga
-+- -+-de inércia 1!', = - m j" tem a di.-
recção MN perpendicular à S1�per
licie do parabolóide.
5.9.7 Algumas exper/,encias e aplicações da força centrípeta
1 .a - A «roda infernal» e a superfície de um parabolóide de revolução em rotação com propriedades de plano inclinado e horizontal, respectivamente.
.
No disco representado na fig. 5.26,
(a) , ·colocam-se os observadores A, B, C, D' e E. Quando este disco se põe em rotação, o observador A 'equilibra-se sem qualquer esforço., mas o.s restantes vão sentindo c'ada vez maiores dificuldades à medida que se afastam do. centro, chegando mesmo a não. se manter de pé nesta «roda infernah das romarias. Porquê?
- Interpretação do observador solidário com a roda :
A velocidade angular w é igual para todos os observadores e, por isso, a força centrifuga de inércia F' c = m . w2r aumenta ,com o raio r, que depende da posição do obser"vador no disco. A re-
-+-sultante R - fig. 5.26, (h) -das for-ças que o observador sente que lhe es-
-+- -+-tão aplicadas, o peso P = m g e a força
-+- -+-centrífuga de inércia F' c = - m . jc, dá a direcção da «vertical do
'obser
vador» : como está inclinada, o observador sente-se impelido a cair para o lado de fora do disco e tem a sensação de que este Se inclina tanto mu,1,s quanto mais afastado do centro e quanto maior for a velocidade de rotação. O sentido descendente da ver-
-+-tical - que é o da resultante R - dá o sentido da queda.
Para os observado.res B, C, D 'e E, o disco em movimento de rotação equi-

A c
B
Fig. 5.28 No 'Soalho A - B - C, com a forma
de parabolóide, um observador qual
quer pode deslocar-se como s,e es
tives'se no plano horizontal, q1.Lando
o parabolóide rodar com a «veloci
dade certa» para ter as 'proprieda
des de superfície horizontal.
Fig . 5.29 (a) Agua e mercúrio em repouso (o m ercúrio está no fundo).
( b) Postção da ágU'a e do m ercúrio
quando em movimento rápido (o
mercúrio, m1óüs denso, está no
«fundo centrifugo» - que é lateral (paralelo ao eixo de rotação).
vale estaticamente a um plano inclinado, de inclinação crescente de A até E.
Poderão os observadores ligados ao disco em rotação equilibrar-se, com facilidade, mantendo-se de pé, sem
. ? caIr. A resposta só é afirmativa para um
«reIevé» perpendicular à «vertÍ'cal de cada observador», como sucede no «relevé» das curvas apertadas, dos autódromos e das pistas de ,ciclismo (nestas, o ciclista pode ter a sensação de se deslocar com a velocidade certa) .
E será possível construir um «relevé» tal que, em cada ponto, a resultante
das duas forças, peso e força centrífuga de inércia - cuja direcçã"o é a da «vertical» de cada observador - ; seja sempre perpendicular à superfície?
Para respondermos a esta pergunta, repitamos a experiência indicada na fig. 5.27: pondo a rodar rapidamente um vaso ,cilíndrico cheio de líquido, observaremos que a superfície livre deste toma a forma de um parabolóide (superfície gerada por uma parábola que roda em torno do seu eixo longitudinal) .
As partículas líquidas c-essam de se deslocar (equilíbrio) quando a resultante das forças aplicadas for perpen· di'Cular à superfície. Ora é isto o que sucede no parabolóide, porque a resul-
-+- -+-tante F' do peso P = mg e da força
-+- -+-c-entrífuga de inércia F' .. = - m j(' tem a direcção MN, perpendicular ao parabolóide em qualquer ponto destefig. 5.27.
A cada velocidade de rotação corresponde em parabolóide: aquela é então a «velocidade certa» para que a super-
203

Fig. 5.30 (a) O «cilindro ou roda do mis
tério».
(b) O «anel ou poço da Morte».
Exercício 8: Interpretar o resultado do «re�evé» em
forma de parabo�6ide em termos do obser
vador inercia�.
Sugestão:
Utilizar a força centri'peta como a soma
v.ectoria� do peso do. corpo com a reacção da
superfície parabo�Óide.
Pergunta 5: Que 'papel desempenham as forças de
a;trito na «roda infernal»?
Pergunta 6: Os ·casos do «cHindro ou ,roda do mistério»
e do «anel 'ou poço da morte», embora. dife
ren'ves, têm a mesma interpretação porque são
fenómenos equiva�entes. Justificar.
204
fície tenha as propriedades de superfície horizontal. Temos assim a resposta para a pergunta formulada: o «relevé» pretendido é um 'Parabolóide de revolução.
Na fig. 5.28 está representado um desses parabolóides A - B - C. Quando parado, o observador somente se equilibra no soalho horizontal B. Quando roda com a «velocidade ,certa», o observador pode deslocar-se em todo o parabolóide, à vontade, 'com a sensação de .estar sempre na posição vertical: de facto, a direcção da «sua vertical»' muda, mas o soalho de apoio é sempre perpendicular a esta «vertical» 'e, 'Portanto, comporta-se, durante o movimento, ,como se fosse uma superfície horizontal. Que aconteoerá se o vaso ·com líquido, referido na experiência representada na fig. 5.27, rodar com velocidade muito grande? A composição de forças indicada nessa figura dá-nos a resposta: a força centrífuga de inércia -+- -+-F",.= - m j, tornar-se-á muito grande
-+- -+-comparada com o peso P = m g, de
-+-modo que a resultante F' ficará quase hcrizontal e a superficie livre do líquido assume a forma cilíndrica e vertical. Este resultado é confirmado na experiência a que se refere a fig. 5.29, facilmente realizável no Laboratório de Física.
Em 'conclusão:
É precisamente o que se verifica no «cilindro ou roda do mistério»-

Fig . 5.31 Tacómetro - indicador da velocida
de de um motor de avião. O mos
trador está graduado em rotjmn.
Resposta ao Ex. 8:
O esquema de forç&s da fig. 5.27 pode
transformar-se faci!lmente, atendendo -a que as
f<orças rea�mente aiplicadas em cada gota de
líquido sião: -+- -+-
O seu ·peso P = m g," a força de reacção
da superfície livre, que é perpendícul&Í' a
esta e, por isso, a SU& linha de acção é MN, -+- -+- -+-
e é directamente oposta a F': R = - F'
Temos assim:
-+- -+- -+- -+- -+- -+-m 9 + R = F, < = > m 9 + ( -F') = F,
-+- -+- -+-< = > m g + (-F' ) = m. j,
m . v· Como F, = --- e, no triângulo da com
r posição de forças, temos
será
ou
F, = "II R' - (mg )',
m v' --- = "11 R'- (mg )"
r
mw' r = "II R' - (mg )' .
fig. 5.30, (a) -, onde os observadores são arrastados pelo 'cilindro, ,como se estivessem em levitação e colados às paredes: estas constituem o «fundo centrífugo» do cilindro. De igual modo se explicam as voltas do motociclista no «anel ou poço da morte» - fig. 5.30,
(oh) •
2.a - Os centrifugadares.
São tambores cilíndricos que podem rodar com altas velocidades, servindo para separar partículas pesadas de partículas leves.
Se a velocidade de rotação for muito elevada, p. ex. 60 X 103 rot/mn = =103 rotjs, ou 'até mais, o «fundo centrífugo» passa a ser 'a parede lateral. As partículas dispor-se-ão então por ordem crescente de densidade a partir da superfície para o fundo, que, ne�te caso, é do centro para a periferia.
São inúmeras 'as aplicações tanto industriais, como técni.cas e científicas.
3.a - O tacómetro dos aviões.
O tacómetro (tacómetro = tachos, rapidez + metro, medida - significa. medida da rapidez) esquematizado na fig. 5.31 é um indicador da velocidade do avião. O motor deste põe em movimento de rotação as massas M, que, ao deslocarem-se para fora, quando aumenta a velocidade, comprimem a mola E. A força elástioa desta fornece a força centrípeta necessária, 0erta. Um sistema de alavancas e engrenagens faz mover o ponteiro do mostrador.
4.a - O bombardeiro de mergulho.
Quando um avião bombardeiro -fig. 5.32 -, no final de um voo picado, volta a subir, exerce .sobre o piloto
205

E'stas tgua:ldades mostram que a cad't
ponto da s'up.erfície, de rai'O r, oorresponde
uma velocidade oerta - v ou w - tal que,
em qualquer ponto do parabolóide, a força
� oentJripeta F,. é ip'eI'pemodicu'lar ao seu eixo
v erti ca;l.
Se a velocidade de r,otação for muito supe--+
rior a esta velacrdaide «Cfe�ta», a reacção R quas.e s,e confunde 'com a força centripeta
e o fu:ndo p3islsra a 'ser Iater3il.
O resultado final é �sim o mesmo, qual
quer que seja a descrição. Apenas esta des
crição racional é mais -aojectiva, porque nela
só intervêm f.arças' veai,s'.
\ \ \
\ \
Fig. 5.32 Ao «vooltar», no final do mergulho,
'O aNião 'eJ<ierce sobre o piloto uma
força centripeta de 60'0 kgf a 8000 kgf.
Exercício 9:
Interpretar o funcionamento das bombas
centrifugas segundo o modo de ver do obser
vador inercial (fig. 5.33).
206
uma força centrípeta de 600 kgf a 800 kgf, que lhe pode fazer descer o sangue do cérebro (este deixaria de ser irrigado) , ficando momentaneamente inconsciente. Prara evitar tal inconveniente, o pUoto destes bombardeiros usa colete 'e meias de borracha cheios de ar 'comprimido, impedindo este a descida do sangue d a cabeça.
5.9.8 Problema de aplicação.
Um sabéH<te roda em torno da Terra i'J. alUtude de 400'0 km, onde a aceleração da
gravidade tem o valor 8,6 m/s'. Tomando para
valar médio do raio da Terra
determinar : R,I' = 6,4 X 10' km,
'1:) A velO'cidade do 'satélite;
2 ) O tempo que o satélite demora a dar
uma volta à Terra (período de revolu
ção).
ReilOlução:
1) No seu movimento circular Em vool,ta da
Terra, o s'3itélite .terá apenas liIceleração
centrirpeta 'e :admitimos que ,a força
centrípeta que 'Ü ma;ntém em órbtta é
precisamente a força atractiva ,exercida
pela 'l1erra (peso do satélite). O raio da
trajectória do s'atélite s'erá:
R=RT+h (alti<tude).
Portanto, como já vimos na apiicação
do n.O 5.9,,6 deste capítu10, temos:
v = V g, (RT + h)
= V 8,6 m/s' . (6,4 + 0,4) X 10' m.
= 7,6 X 10' m/s -+- 8 km/s,
que é a 1." velocidade cósmica.
2) O período de revolução - T - tira-se
de: 2'77'
v=wr<=>v= -- .r => T
2";Tr 2'77' X 6,8 X 10<m T=--=
v 7,6 X 10" m/s
= 1:>,62 X .10" s � 94 mn

®
@)
Tl
Fig. 5.33 Esquema de uma bomb8i centrifuga.
15
(+)IY @ T T = Pc
E p
(-) Y'
Fig. 5.34 A esfera metálica - E - encontra-s'e suspensa do dinamómetro -D- fixo ao tecto de um ascensor. Em (a),
com o as'censor <em repouso ou em movimento uniforme, o índice I do dinamómetro está na divisão 9. Em (b), com {) ascensor a subir em movimento uniformemente acelerado, o índioe 'está na di'Visão 11. Em (c), com o ascensor a descer em movimento uniformemente aoelerado, o índice está na divis-ão 5.
-+-(d) A tensão T da mola do dinamó-
metro (peso aparente da esfera E) -+-
,e o peso P da esfera são as forças aJPlicaidas nesta.
5.10 Aceleração aparente e peso apa
rente num sistema em movimento
variado. A imponderabilidade
5.10.1 Sistema animado de movimento
uniformemente variado e recti
líneo
Consideremos a experiência indicada na fig. 5.34, a qual pode ser confirmada, qualitativamente, por dois 'estudantes no ascensor de um prédio, se dispuserem de uma vulgar balança�dinamómetro. Um deles poderá obser·· var a vari1ação de peso do 'outro durante os arranques oe as :chegada'S.
Suponhamos que, com o ascensor em repouso ou em movimento rectilíneo e uniforme, o índice I do dinamómetro D acusa, por exemplo, a divisão 9-fig. 5.34, (a) .
Se o ascensor acelerar uniformemente na subida, portanto <com a acele
-+-ração j de sentido oposto ao da acele-
-+-ração da gravidade g, o índice I pas-sará a marcar um valor 'superior, por exemplo a divisão 11- fig. 5.34, (b) .
Se o ascensor retardar uniformemente Dia subida, possuindo portanto
-+-uma aceleração j do mesmo sentido da
-+-aceleração da gravidade g, o índiee I passará a marcar um valor inferior ao correspondente ao repouso, por 'exemplo, o valor 5.
Ao a:celeI'lar uniformemente na descida o elevador possuirá uma acelera-
-+-ção j de sentido igual ao da aceleração
-+-da gravidade g e b val'or apontado pelo índice continuará a ser inferior ao apontado em repouso - fig. 5.34, (c).
207

® Fig. 5.3,5 (a) Os QOrpos Ae B, sem peso den
tro do ascensor.
Nota 16:
(b) Viela ,acesa;. «Des'locam-se para
cima as pavtkulas' mais densas
( cera, produtos líquidos e o dióxido de ·carbono resultante da combustão ) ·e «deslocam�se» para baixo ·as· partículas menos densas ( vapo,r de água, 'oxigénio do ar),. Por Iss'o a vela a'Pa'ga�s'e rapidamente, porque fica rodeada de gases incomburenteso
Estes resultados também se podiam obter
inteI'pretando €sta variação <le peso aparente, num sistema acelerado, em termos de acção
e reacção. Assim o ascensor na subida, em movim'ento uniformemente l!J�elevado, ex€rce
. sobre a ,esfera uma acção de módulo F �� mj; a ,esfera €xerce ·sobre 00 as'censor uma reacção,
R = mj, dLrigida para baixo, no s'entido do seu p eso. Portanto, iS obre o ascensor actuam,
no mesmo sentido, a força peso, P = mg, da esfera suspensa mais a reacção, R = mj, .ou seja uma f'Ürça (mg +mj), que ° dinamóm etro acus'a.
208
Finalmente, ao possuir movimento uniformemente retardado na descida,
a que corresponde portanto uma acele--+-
ração j de sentido contrário à da gra--+-
vidade g, o índice estará agora numa ,divisão superior à indicada em repouso.
Ooncluimos desta forma que o peso
aparente (cujo valor, . marcado pelo
dinamómetro, nós lemos) da esfera metálica E, durante o movimento variado, é marior do que o peso real se a
-+-. aceleração j tem sentido CYposto ao da
-+-aceleração da gravidade 9 e é menor
-+-do que o peso real se a a;celeração j tem
-+-o mesmo sentido de g.
Estas variações do peso aparente
são a causa das sensações desagradáveis que sentimos durante as acelerações e desacelerações rápidas dos ascensores.
Passemos agora ao estudo dinâmico deste fenómeno, tomando para referencial a Terra (pratieamente inercia;!).
As forças que estão aplicadas na esfera pesada E - fig. 5.34, (d) - são
-+- -+- -+-o seu 'Peso real P = m . 9 e a tensão T da mola do dinamómetro. Ê o valor desta tensão que o índice do dinamómetro indi'ca. A tensão será, portanto, em módulo, igual ao peso aparente:
T = Pa.
Mas são veotores de sentido contrário:
-+- -+-T = - Pa
Se o ascensor está em equilíbrio
(parado ou 'em movimento uniforme) , é j =0 e portanto:
-+- -+-T + P = O .
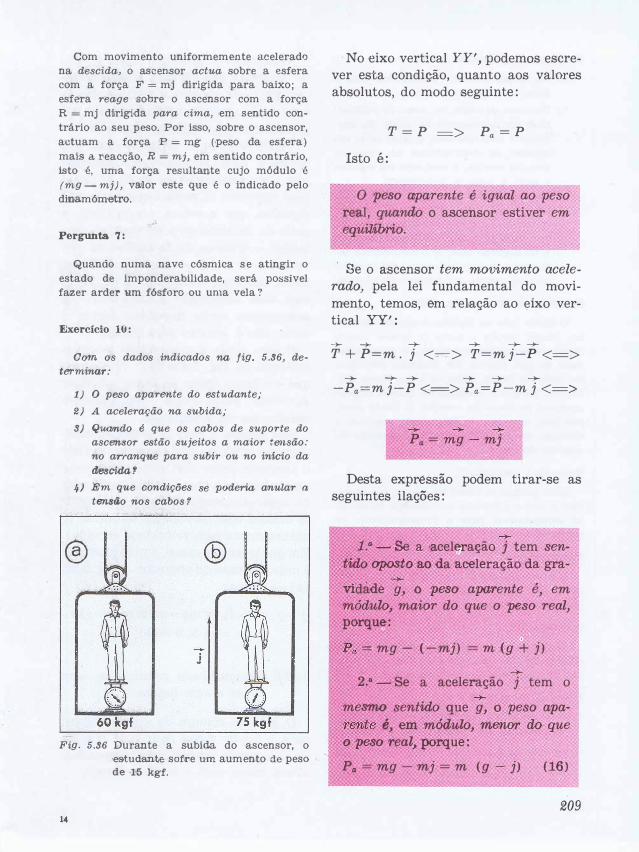
Com movimento uniformemente acelerado
na descida, o as'cerusor actua sobr� a esfera
com a força F = mj dirigida para baixo; a
esfera reag e sobre o ascensor com a força
R = mj dirigida para cima, em sentido con
trário ao seu peso. Por isso, sobre o ascensor,
actuam a força 'P = mg (peso da esfera)
mais a l'eacção, R = mj, em sentido contrário,
isto é, uma força resultante cujo módulo 'é
(mg - mj), v'aJlor 'este que é o indicado pelo
dinamómetro.
Pergunta 7 :
Quanão numa nave cósmica s e atingir o
estado de imponderabilidade, será possível
fazer arder um fósforo ou uma vela?
Exercício 10:
Oom os dados indicados na fig. 5.36, determinar:
1) O peso aparente do estudante;
2) A aceleração na subida;
3) Quamdo é que os cabos de suporte do ascensor es,tão sujeitos a maior tensão: no arranque para subir ou no início da
descida? 4) :Em que condiçõ es se poderria anular a
tensão nos cabos?
®
j
Fig . 5.36 Durante a subida do ascensor, o 'estudante sof.re um aumento de peso de .16 kgf.
14
'No eixo vertical YY', podemos €screver esta condição, quanto aos valores absolutos, do modo .seguinte:
Isto é:
T = P => Pa = P
o peso wparente é igual ao peso real, quando 'O ascensor estiver em equilíbrio.
Se o ascens'Or tem movimento acelerado, pela lei fundamental do movimento, temos, em relação ao eixo vertical YY': -+- -4- � � -+- ---J-T + P=m . j <::-:-:-> T= m j-P <=>
-+- -+- -+- -+- -+- -+--Pa=m j-P <=> Pa =P-m j <=>
-+- -+- -+-Pa = mg - mj
Desta expréssão podem tirar-se as seguintes ilações:
-+-l.a - Se a acel�ração j tem sen-
tido <Yp08toao da 'aceleração da gra-. ' -+- ,
VIdade g, 'O peso aparente e, em módulo, maior do que o peso real, porqu�:
Pa = mg - (-mj) = m (g + j)
-+-2. a - Se a aceleração j tem o
-+-mesmo sentido que g, 'O peso apa-rente é, em módulo, menor do que () peso real, porque:
Pa = mg - mj = m (g - j) (16)
209

Respostas às perguntas 5 e 6:
5) As forças d>e atrito contribuem paTa a força ·centrípeta.
6) Trata�se de mais um oaso de relatividade de movimfmto: na «roda do milS'Mrio» é esta que róda e, nela;, estão em
r.epouso os observadores; no «anel ou
poço da morte», o anel e'stá em repouso
e anda à volta o "motocicli'sta.
Os ,resul-tados seriam os mesmos se,
no prim�iro C8JS'O, Q anel estivesse pa
rado'e os observadores 81ndass'em à volta
com velocidad·e'suficlentemente elevada
e, no segundo oaso, se o motociclista es
tiv,esse parado e rodass'e o anel também
com velocidade sufic�entemente elevada.
Resposta ao Ex. 9 (fig. 5.88) :
O fluido (gás ou líquido) é ,expulso do cen
tro (d"aqui resulta o nome de bomba centrí
fuga). sendo aspirado -e posto .em rotação por
melo de pás curvas·. Na abertura pe·riférica
de saída do fluido, deixa de haver força cen
trípeta, porque a ausência de parede impl1'ca
ausência de força, de 'reacção. O fluQdo sM,rá, .
por i'SiSO, com grande v·elocid3ide, seguindo a
dir.ecção da tangente, que é a di�ecção da
conduta de sMda.
Resposta à pergunta 7: Não, porque os gruses da combustão envol
vem a vela e o fósforo, impedindo o acesso de
8ir in�Hs'Pensá�el para o prosseguimen to da
combustão.
Pergunta 8: Qual é a posição da «vertical» de um passa
geiro que vai' de pé num carro eléctrico,
quando ,este aTr8iDca e quando trava?
Pergunta 9:
Qual 'será a posição da «verti-ca:l» de um
ob&ervador que e'stá sobre um 'disco em rota
ção com velocidade muito elevada?
Resposta às perg. 8 e 9: 8) A «veIltioBil do passageiro, e o seu semiao
descendente são dados �ela direcção e -+
'sentido da resuUante do seu peso P e da -+- -+' -+-
força d e lnérci·a F . = - mj (j é a acelera-
210
Verifica-se o primeiro caso, p. ex., no foguetão' que arranca com aceleração que pode atingir, à partida, 20 . g, e no avião quando, no final de um voo picado, reinicia a -subida ( fig. 5.32) .
Verificar-se-ia o segundo caso por exemplo num ascensor que descesse com um'a aceleração de valor j > g : o peso' apárente Pa seria negativo, o que significa que a esfera comprimiria a mola do dinamómetro em vez de a distender -trata-se do fenómeno da «levitação». É isto 'o que sucede, de facto, numa nave que se 'aproxima da 'ferra com uma aceleração j> 9,8 m/s2 : os passageiros serão impelidos contra o tecto, isto é, «cairão para cima».
É isto ainda o que sucede no caso indicado na fig. 5.3'5, (b) : vela acesa que em breve deixa de arder por ficar envolvida pelos gases incomburentes resultantes da combustão.
Por último, o c aso de imponderabilidade . Verifica-se, por exemplo, quando o ascensor desce com aceleração j = g ou quando uma nave cósmica se liberta da acção atractiva da Terra e a seguir se desloca com movimento uniforme ( e naturalmente com velocidade elevada) . Em qualquer dos casos, o peso aparente é nulo. No caso do ascensor -fig. 5.35, (a) -temos:
j = g => Pa = mg-mj = m(g-j) =
= m XO = O .
5.10.2 O significado relativo de «em cima» e «em bai xo»
o sentido ,comum de «para baixo», para o fundo, é-nos dado pelo sentido em que vemos ·cair os objectos 'pesados. «Para ci,ma» será o sentido oposto.

ção do C3IITO eléctrico). O ângulo que a
p8Jrte superior desta «verti,cal» faz com
o s'emi-eixo horizontal positivo (rp8Jrte po
sitiva do eixo dos x x, orientado no sentido
do deslocamento do ca,rro eléctrico) é,
respectivamente:
1) agudo, no arranque, e, por isso, o pas
sageiro tendoe a cG!�r para trás, pots o
sentido descendente da «vertica'1» e,
por.tanto, o da força resultante estâ
dilrigido p8Jra trá.s';
Z,) obtuso, IlIa travagem, e, portanto, o
passageiro tende a cair para a {rente, visto que o 'sentido do «vertical» e, por
isso, o da força resultante está dirigido
para ar frente.
-+-9) A dir.ecção da resultante do peso P e da
-+- -+-força centrifuga de inércia F', = - m j, faz um ângulo obtuso com o raio corres
pondente do disco, orientado positivamfu'"lte
do centro para oa periferia. 'S'e a velocidade
de rotação for suficientemente grande,
esta «vertical» pode fi'car quase horizontal.
Resposta ao Ex. 10:
1) p. =75 k9t = 73 5 N 74 X 10 N
2) m = 60 kg
p. = mg + mj < = > 75 X 9,8 N =
= 60 kg . j + 60 kg X 9,8 m/s'
15 X 9,8 j = m/s' = 2 ,4 5 m/s' (g/4)
60
31) No arranque a subir, porque:
T = P. = m (g+j) .
-+- -+-4) Quando doesce com j = g , porque:
T = p. = mg - mj = m (g - j) =m . o
= 0
o astronauta, qu�ndo ViaJa numa nave cósmica e atinge o estado de imponderabilidade, perdeu sensorialmente o significado de «para, cima» e «para baixo», porque os objectos nem caem nem sobem e o menor impulso pode, furtá-los do seu alcance. Sentirá uma sensação estranha e só com, treino se poderá adaptar às novas condições. Quando a nave acelera, variando a velocidade, tudo parece regressar à normalidade e os objectos «caem» para o lado 'contrário do deslocamento da nave (esta desloca-se e os objectos, devido à inércia, tendem a permanecer no mesmo lugar) .
Isto significa que, no caso do astronauta, «para cima» é o sentido da aceleração da nave e «para baixo» é o sentido contrário ao da aceleração da nave.
5.11 Leitura complementar
1. Fisica na Escola Secundária, Edit. Fundo
de Cultura, W63.,cap .. 10, 101 e 12.
2 . Manual de Física Elmnentar, Landau e
Kitaiogorodski, 1974, voI. l, pág. 75 a 12'1.
3 . Physique, c!ass'e terminal C, J. Céssoac e G. Tréherne, ]967, pág. 56 a 66.
4 . Física Fundamental, Jay Ovear, 1970, cap.
a e 4. 5 . Física P. S. S. a., ed. 1970. I voI., ca'p. 14
e li6. 6 . Nuftield Physics T eacher's Guide, 1967,
, pág. i]9�24.
7. L'Espace, Hachette, Paris.
8. L'home dans l'espace, n.O 50, hors série,
Sctence e.t Vie.
9. La vie dans l'Espace, LaroU'sse, Pari's,
197'0. 10. Lite «O Homem 'e o Espaço». BibI. Cien
tífica. lJi.v. José Olímpio Editora.
11. A Evolução da Física, A. Einstein e L, Infi-eld,Enc. L. B. L., pág. 11.7-186,.
12. Elmnentos de Física, 6.· Ano - Luís Sltlva, V. Costa ,e I. Peixoto, carpo III, n.O' 70-80.
211

5.12 Síntese das ideias fundamentais
1. o deslocamento de um sólido, sem atrito ao longo de um plano inclinado, é rectilíneo e
unvformemente acelerado, porque a campo--+-
nente útil F. do peso é constante em módulo (F. = P. sen a) e em direcção (paralela à limha de maior declive do plano). A força de reacção do plano não contribui para o movimento porque é perpendicular ao plano. O valor da aceleração deste movimento é j = g . sen a e, por isso, as -equações do movimento são as que se escreveram para o movimento uniformemente variado e rectiUneo. substituindo j pelo valor g . sen a.
-+- -+-2. O impulso I de uma força F que actua
-+-durante o tempo b.t é o produto F. b.t e o seu valor é medido por uma área no gráfico
-+-(F, t), quando F não varia nem em direcção, nem em sentido. A quantidade de movimento -+-p de um móvel de massa m que se desloca
-+- -+-com a velocidade v é o produto m . '1). () im-
-+- -+- -+-pulso I da força F é igual à variação b.p da q. de movim. durante o tempo b.t de actuação
-+- -+-da torça: I=b.p. Este resultados permite não só medir as forças impulsivas, registando as
variações de velocidade que provocam e, consequentem.ente, as variações de q. de mov., mas também permite exprimir de modo mais geral a lei fundamental do movimento de
-+Newton (F = lim
b.t-+-o
-+b.p
-- ). Uma das leis mais b.t
imP0'tantes da Natureza é a da conservação
da quantidade de movimentO: num sistema isolado (onde, portanto, todas as torças actuantes são interiores e, por isso, opostas duas
a duas e iguais em módulo), a quantidade de
movimento total do sistema mantém-se -invariáv;e1. Gomo aplicações mais notórias desta lei citam-se o recuo clãs armas de togo, a ascensão dos foguetes e a propulsão a jacto nos aviões e nos foguetões das. naves cósmicas.
212
3. Nos movimentos circulares, e relativamente aos referenciais de inércia, há a considerar as seguintes torças:
-+- m v' - a força centrípeta, F, (F, = -- = m w'r),
r real, 8Jplicada 8JO móvel, que é a causa per-manente do seu movimento circular;
-+- -+-- a força de reacção centrífuga, F', = - F"
real, aplicada no sistema que se opõe ao deslocamento do móvel segundo a tangente à trajectória;
Relativamente aos referenciais ligados aos corpos com movimento acelerado, há a considerar mais:
-+- -+-� a força cen brí!fuga de inércia, Fi = - F, ,
que se imagina aplicada no móveZ e que s6 é considerada pelo observador não inerciaI solidamente ligado ao corpo em rotação para explicar o repouso do corpo em relação a ele.
Este observador trata o movimento de rotação - de que não dá conta - como se fosse
-lo- -+-um caso de equilíbrio estático (F, + Fi = o), chegando às mesmas conclusões que o observalor inerciaI, que aplica ao mCYl.'imento real de . rotação - que observa - as leis do mo
vimento de Newton.
4,. Para o observador ligado a um sistema acelerado, a sua interpretação <,não racional», embora útil, desde que se taça a transposição correcta para o movimento real, conduz à noção de «v'ertical» como sendo dada pelu direcção da resultante das forças aplicadas e da força de inércia. No caso da rotação a elevada velocidade, esta «vertical» pcde inclinar-se tanto que fique quase horizontal: o fundo «centrifugo» de um vaso nestas condições de rotação passará a ser a parede latereI que é precisamente O' que sucede na gama diversa dos aparelhos centrifugadores.
O «relevé» -ideal para uma determinada velocidade de rotação - ideal no sentido de a
sua superfície ser perpendicular, em todos os
pontos, à «vertical» do observador não iner
ciaI - é a superfície de um parabolóide de revolução - que é a forma que toma a superfície livre dos liqwidos contidos num vaso em rotação.

5,. O pes'O aparente de um corpo - que é o
peso cujo valor é marcado pelo dinamómetro
- num refeh'encilLl em repouso ou em movi
mento uniforme e rectilíneo é igual ao seu
peso real.
Se, porém, o referencial se deslocar com
movimento rectilíneo e variado, o peso apa
rente é maior do que o peso real se a aceleh'a
-+-ção j tiver sentido oposto ao da aceleração da
-+-gravidade g, e é menor do que o pes'o real se
-+ -+-j e g tiverem o mesmo ·sentido. Estas conclu-
sões tiram-se da expressão vectorial:
-+ -+ -+p. = mg - mj.
Quando, no sistema em movimento, é
-+ -+-j = g, e quando uma nave cósmica se liberta
da acção atractiva da Terra, atinge-se o
estado de im'PonderabiUdade no veiculo.
5.13 Questionário
1. Não é possível veríficar, com o plano
inclinado, a lei das velocidades do movimento
uniformemente 3Joolerado. Mostrar porquê.
2. Num plano inclinado, de altura a e
comprimento c, o mesmo g.rave, partindo do
repouso, demora t segundos, ·em queda liv're,
a descer da altura a 'e demora t' segundos a descer ao longo do 'Plano,. Mostrar que se
verifica a relação:
t = t' . sen a
3. Se um ci'Cli'sta, quase sobre o risco da
meta, pudesse arremessar para trá:s, em direc
ção horizontal e com o pé, um peso de 1,0 kgf,
a sua veloddade nesse instan'te s'eria acrescida
ou diminuída? Porquê?
4. Quando uma metraJhooora, instalada na
cauda de um 'aviáo, di<.�para, a velocidade do
aviáo aumenta ou dÍ'lninui? E s'e a metralha
dora estiver instalada no «nariz» do 'avião,
como v,aTÍ'a a velocidade deste?
5. Um hoquista tem os patins calçados e está parado no meio do «,riong». Se arremessar
para a frente um objecto pesado, que lhe su
cede? Justificar.
6. Colocam-'se sobre uma mesa dua's bolas
de ig>UaJ. volume, mas de densidade diferente.
Será possiv.el, sem l'ecorrer a balanças e/ou
dinam15metros, des'cobri>r qual das bolas terá
maior massa?
7. No oamp'O, ao mondar as ervas daninhas,
não convém, a fim de 'economizar esforço e
evitar 'Prernatura fadiga, arrancar as ervas
precipitada e rapidam'ente, mesmo que este
jam fracamente ligadas ao solo por meio de
raízes tenras. 'Explicar, em termos físicos,
a vantagem de arranque mais lento.
8. Os polvos e 'Os chocos chegam a deslo
car-se com a velocidade de 60m/s( !), E'xpul
sando 'Periodicamente a próp:ria águBl que
eles aSipi,ram.
Intlerpreta'l' este ,resU!ltado.
9. Só a 'propulsão 'Por jacto e/o11 a 'Propul
sáo nuclear são possíveis no vazio 'Ou no ar
extremamente rarefeito. Explicar porquê.
10. Se no <<Poço da Morte» - vers'ão do
«anel da morte» com 'esflera metáli.ca -, onde
o motociclista faz o looping, o motor do veí
culo parasse ao aiproximar-se da passagem
superior da abóbada metálica, o 'motociclista
podia correr perigo? Porquê?
11. A que se deve a força centrípeta da
Terra; no 'seu movimento de r.otação?
12 . .ge a veIocidade angular de uma roda
aumentar desmedidamente, ela desagrega-se
em fragmentos que se projectam em dilrec
çõe's ,tangenciars. Interpretar 'a desa;gregação
e a direcção ,tangencial.
13. Qua;l a condição fundamental exigida
para um satélite artificial gravttar «etern'a
mente» em 'volta da Te1'1ra?
14. Porque é que, numa curva a'Pertada da
estrada, o carro derraipa mais quando a estrada 'está molhada do que quando está seca?
Justificar.
213

15. Dois coI'pos de massas desiguais, que estão entI1e si oomo 1 :2, colocam-se um de cado lado do �ixo de rotação de um aparelho de oentrifugação, ligaid-os por um no. A que distância deste ·eixo se deve colocar o corpo de
maiJOr massa, para que 'Os doi's coI'pos se mantenham imóveIs nos seus lugares durante
1 da di:st. a que se deve
2 colocar o covpo de menor massa) .
1'6. Ponha�se a rolar no chão, em linha recta, uma moeda. Por que é que' a mesma, antes de cair, illicia uma 'trajectória ciroular ?
17. Por que é que uma peça metálica, fundida pelo .processo da cootrilfugação, nãO' ce)lltêm nem bolhas 'gasosas, nem impure'zas' não m�Ucas ?
18. Uma secadeira centrifuga contém tecido molhado e Iroda com a velocidade de 1'200 voLt3JS>jmn. As gotas d estacam�se d o tecido quando ·se encontram a 30 cm do eixo de rotação. Nestas condições, a força centripeta quanta:s Ve7les é superior ao peso da gota ? (R: '500 vezes) ..
19. Os foguetões c6smicos são lançados' na di'recção este-oeste. Porquê ? Em que sentido sãO' lançados ? E por que é .que o plano do
Equador é o mals vantajoso para estes lançamentos ?
20. Que tipo de relógio sem razoável utilizar numa viagem c6srrüca: um relógio de pêndulo 'ou um relógio de corda (mola) ? Porquê ?
21. Num sIstema ilsolado e em repouso, quaIsquer que sejam os impulsos devidos àJs acções e l1eacções inte.riores, a posição do
centro de gravidade do sistema mantém-se
invariável.
Mostrar porquê.
(Recor.dar O' EXiercício 5.· deste capítulo) .
22. Um disco de ,cartão, montado na árvore de um motor, qU8JIl.do em rotação Tápida, poda 'Sermr uma tábua de madeira. Explicar porquê ?
214
5.14 Problemas
1. Num plano cujo ângulo de inclinaçã-o e
de 00°, .lança-se um móvel, debaixo para cima, com a velocidade ini!c1'al de 201 m/s.
1'.1' .AJo fim de que intervalo de tempo a velocidade 'se reduz a metade ?
2.2 Que distância percorreu durante este ínterv3ll0 de hempo ?
(g = 9,8 m/8')
1..1 ) 1,2 51 . 0..2) 18 m
2. Um cot1po com a massa de 300 g, col-ocado num 'plano incli:nado, é puxado pelo pes'O dé 10'0 'gf suspell'so de uma ·roldana fixa colocada no topo superior do plano. A incli:nação do pLano ,é de 50 %. Determinar o sentido do movimento do ·corpo e a aceleração.
(g = 9,8 m/8')
,Desce. j = 1,2'2 m/s'
3. AB e BO soo as linhas de maior declive de dois planos, cujos ângill-os de i:nclínação são, l'espectivamente, 4J5i. ·e 3,0". A distância de A ã horizontal � de lO m. Uma 'esfera abandonada em A, sem velocidade ini,cial, desce até B e a 'seguir sobe ao longo de BC.
Com que velocidade passa 'em B ? Calcular a duração do percurso desde A até parar .em a.
( Não se consideram os atriltos e supõe-se que em B não houve travagem ; g=9,8 m/s' ) .
141 m/Si; 4,9 s __ 5 ·s
4. As esferas A e B, com massas iguais ng. 5.37 -, estão
� A :
� Fig. 5 .3 7
j = 2,6 m/s'
ligadas por um fio de peso desprezável. Determinar a aceleração do sistema.
(g = 9,8 m/s' ) .

5. Dois corpos pesados A e B sào abandonados simultaneamente da mesma altura. O corpo A é lan-çado ao .longo dum plano com 20 metros de comprimento -e 50 % de inclinação, onde 'se desloca praticamente sem atrito. A queda de B é livre. Dado q'llIe um dos corpos é abandonado com v;elocidade inicial, eles
embatem no -solo no mesmo instante,
5;:1J Qua:l dos carpas é abandonado com v;elooidade ÍIIl!Í'ciaJl ?
5.12 Com que aoeleração se desloca o
corpo' A ? 5.3 Determinar o tempo de du�a;ção de cada
queda.
5.4: Com que v-elocidade tnida:l foi l,ança;do
o COIl"po a que se l'efere a alínea 5Jl ?
(g = 9,8 m/s')
10 15-.:1) A 5.2) j=40,9 m/s' 5.3') t= - 8'= 1,4;s
7
5.4) v. = 10,5 m/s -+< lO m/s
6. Uma corda, que passa pela gola de uma roldana fixa, ,supoota nas 'Suas extremidades
corpos de massas 400 g -e 600 g.
&.1 Cal-cul-ar a 'aloeloeração do si-stema.
6.2 Qual 'a tensão dai corda ?
6.3 E qual a tensão da corda se agarraJr n()
corpo de massa 40'0 g, mantendo-o fixo ?
6.l) j = 1,916 mjs� 61.Qi) T=4,7;()1 N =480 gf
6.13) T = 60'0 gf
7. Os três corpos da fig:. 5 .. 381, A, B e C
têm, respectiva
mente, m a s s a s
,..-------------, iguais a 300 g,
100 g e 200 g.
ks r.oldanas RI e R, movem-se
com atrito des-
L-__________ --' prezável, e bem
Fig. 5.S8
assim o corpo C sobre a superfi-cie da mesa muito poliida e ltsa. Não é de considerar o peso do fio..
7 J1 Calculai!' a aoeleração do sisbema.
7.2 Qual o valor da força l'e!S'ulbante que aotua -em B ? E lem C ? (Não esquecer que o si'stema es1:â -em movImento) .
7.3 E�rimir o primeiro deS'S'es valores FB
-em função da .tensão T, do fio da egque!'da -e da mas-sa m, oe, til. partir da
expressão obtida, calcular o módulo da
-+tensão T,.
7.4 Qual a força resultante -�ercida no COIlpO C se o mantivéssemos fixo com a
mão ? -E qual era -então o valor da ten
-+-são T, no fi() da esquerda ?
7..5 Lairgando o ooopo C e agasrnaIDdo o co11po
B, de modo a mantê-lo em repouso, qua,l -+- -+-
o valor da .tensão T, ? E de T, ?
7,.1 ) j=3,2.7 mjs' 7.2 FB=O,3J?DN Fc=OI,615N
7,.3) Fo = T, - m,g T, = 1\307- N -+- 1,31 N
7.4 ) O; T, = O,98 N 7,:5) T, = T, = 2-,94 N
8. Na experiência da f�gura 5.3B oortou-s-e
o fio da esquerda e determinou-se a aceleração adquirida pelo corpo C (de valor j ) . Em
'Seguida reUrou�se o COl1pO A -e aplicou-soe na
extermidade li.vre do fio e -com a -nossa mão,
uma força igual ao peso de A ou seja 300 gf.
A -ac-eleração do corpo C, neste segundo caso,
é maior, menor ou igual à aceleração .i ? No primeiro caso, qual a tensão · do fio ? I Maior; T = 1,18 N = 120 gf
9. No início da ascensão, um foguete V,
cuja massa tem o valor 11,4 X 10' kg tem uma aoeleração vertical, p8iI'a cioma, de 12 m/s'.
Calcular, nesse instante_
9-.1 O valor mécli'o da Te5!lllltante dais forÇ81S
que o actu8Iffi.
9.2 O v-alor médio da. farça qUle os gases ex
,pelidos comunicam ao foguete.
9:1 ) 1,7X'1O' kgf . 9.2) 3,'llX:10' kgf
215
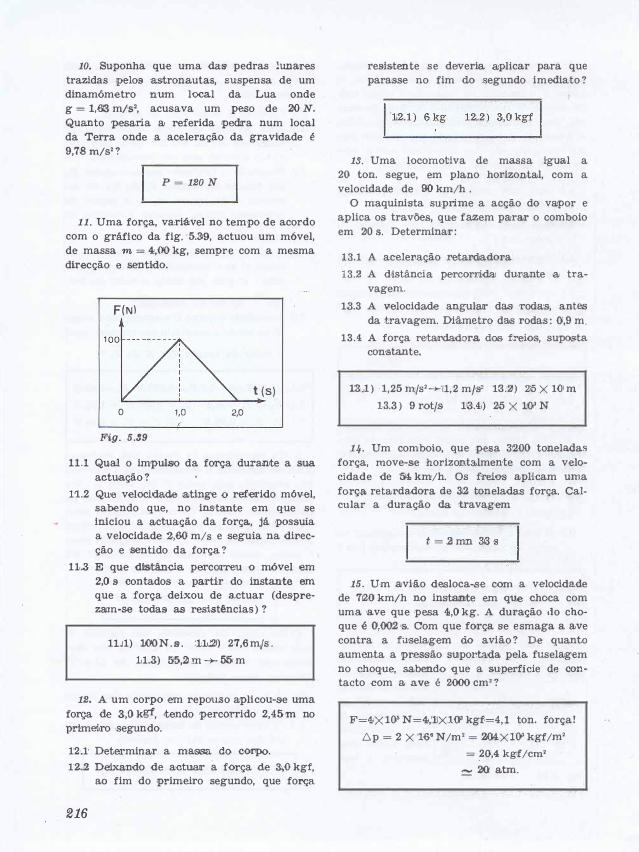
10. Suponha que uma das' pedras !un8lTeS
trazid8ls pelos astronaut8ls, suspensa de um
dinamómetro num local da Lua onde
g = 1,63 m/52, acusava um peso de 2() N.
Qua;nto pesaria 81 referida pedira num local
da Terra onde a aceleração da gravidade é 9',78 m/s' ?
P = 120 N
11. Uma força, v8lriável no tempo de acordo
com o grâfi:co da fig. '5.319, 8Ictuou um móvel,
de massa m = 4,00 kg, sempre com a mesma
direcção e sen'tido.
F(N}
t (s) o 1,0 2,0
Fig. 5.99
11.1 Qual o impulso da fOI'ça dur8llJte a sua
actuação ?
11.2 Que v,elocldalde a.tinge o referido m6V'eI,
sabendo que, no illS'ta;nte em que se
iniciou a actuação da força, jâ possuía
a velocidade 2,00 m/s e seguia na direc
ção e 'sentido da força ?
11.3 E que distância percorreu o móvel em
2,0 s eontados a pa;rtir do instante em
que a força deixou de 8:ctuar (despl'e
zann-se tOO8ls as resistências ) ?
11J1) lOO N . s . :l;:L.I2I) 27,6 mjs .
:L1.3) 55,21 m -+ 00 m
12. A um corpo em repO'U:So apli.cou-se uma
força de 3,0 kgf, ,tendo percorrido 2,45 m no
prlm'eiro ,segundo.
1'2',1: Determinar a massa do cOl'pO. 12..2 Deixando de actUJaJr a força de 310 kgf,
ao fim do primeiro segundo, que força
216
resÍ'stente se deveria 8ipUcar para que
par8lsse no fim do segundo imedi8lto ?
13. Uma locomotiva de massa igual a
20 tono segue, em p]a;no horizontal, com a
velocidade de 90 km/h .
O maquini'sta ·suprime a acção do va;por e
aplica os travões, que fazem parar o comboio
em 20 S. Determinar :
13.1 A acelereção retaroadora,
13.2 A distância percorrúoo d'u·rante as tra
vagem.
13.3 A V!elocida.de anguJoar das rodas, antes
da travagem. Diâmetro d8ls rod8ls : 0,9 m.
13.4 A força retard.aKlora dos fJ'eios, suposta
·constan,te.
13 . .J ) l,25 m,fs' -+'11,f,! mf's� 113.21) 215 X 1()J m
13.3 ) 9 rot/s 113:.41) 25 X lJO' N
14. Um comboio, que pesa 3'200 toneladas
força, move-se horizontaJmente com a velo
cidade de '54, km/h. Os freios aplicam uma
força ret8lrdadora de 312 toneladas força. Calcular a duração da travagem
t = .2 mn 3i3 s
15. Um 8iviáo desloca....se com a velocidade
de 'Ti20 km/h no instante em que ehoca com
uma ave que pesa 4,0 kg. A duração do cho
que é 0,002 's. Com que força se esmaga a ave
contra a fuosel8lgem do avião ? De quanto
aumenta a pl1essão supol1tada pela fuselagem
no choque, sabendo que 'a 'Superfície de contacto com a ave é 2000 cm' ?
F=4IX 10' N=4;lIX.10' kgf=4,l tono força!
6p = 2 X '1'66 N/m' = ·204·X 1'()'! �gf/m2
= ,20,4 kgf/cm'
� 20 'atm.

16. Um foguete, que pesava 0,750 kg
quando pronto para, partir, contém um terço
do seu peso de matéria ·explosiva. Admitindo
que é instantânea a explosão do combustivel
e que a 'saIda <los gases' se ef.ectuou com a
veloci:dade média de 400 m/s, a que altura
subiu ele ..se a resistêncIa do ar diminuiu para
l: a altura máxima possível ?
3
h = 0,68 km
17. A forÇ3J de reacção num reactor de um
avião é '6,0 X lO' N. Sabendo que a velocidade
do ar à ,entrada é 300 m/s e a velocidade mé
dia de escape do& gases é 600 m/s·, calcular a
massa de gás que passa por segundo !la referido reactor.
m = 20 kg
18. Dois corpos têm as mass'as . de 3()'O g e
200 g. Des.Jocam�s·e na mesma recta, mas em
sentido ·contrário .e sobre uma superfi·ci'e hori
zontal, polida e sem atrito, com as velocida
des·, respecti'Vamen.te, de 50 cm/s e 100 cm/s.. Chocam ·e prosseguem jU!ntos'. Qual <O sE'ntido
e o valor da velocidade 'após o choque ?
-Sentido: o da velocid2.de da 2." esfera
antes do cl1oque.
v = 10 cm/s "
19. Um quebra-gelos cuja massa total é saro toneladas avança, com a velocidade cons
tante de '25 m/s, ao encontro de um i ceberg.
Após o choque arrasta-o à sua frente. Sa
ben<lo que a massa do bloco de g,elo é 12 0100
toneladas, determinar a velocidade do quebra
-gelos após o choque. De.<>preza-se a resistên
cia da água.
v = 10 m/s
20. Uma bola de bi1h8ir A, de massa
1,800 kg, des.Joca-se com a velocidé 1e de
4.,8000, m/s e choca ,em cheio com outra bola B que estâ em repouso. A bola A, após o ( hoque,
continua a mov·er-se na 'mesma direcçã D, mas
em sentido contrário e com a velocid lde de
0,210 m/s. A bola B, de massa 4,'50(} kg passa .
a deslocar-se na direcção e no sentido , !m que
vinha a bola A .
10J1 GaJJ.cul8ir a vaTiação da quantidade de
movimento da bola A . 20..2 Calcular o V'alor do impll'llso e:lOercido por
cada uma das bolas sobre a outra ?
Justificar.
20.3 Com que velocidade poos1a a des:locar-se
a bola B após o choque ?
20.1 ) 0,9 kg . rIll/s. 20.12) Iguais por serem
.rela'tivos a forças interiores : O,9 N . s.
2'0..3 ) 0,20 m/s.
21. Um foguetão de dois andares ( fig. 5.40 ) ,
Fig. 5.1,0
cuja massa total é 6,00 toneladas, 8Jtinge a
velocidade de 100 m/s. Nesta 'altura, c 2'.0 an
dar, que -tem a massa de SOO kg, separa-se.
Que velocidade atingi.rá agora este segU!ndo
andar se a velocidade do .primeiro andar
se ·tiver :reduzido a 50 m/s ? As velocidades
dadas referem-se a um observador fixo na
TeI'ra.
v = 8715 m/s � 88 X 10 m/s

22. Uma bola de -bilhar A, de maSSBI 1,250 kg;
move-se com velocidade constante, igual a
8 'm/s ·e choca com outra bola B, . de mas'sa
2,000 kg, inicialmente em repouso. Após o cho
que aiS bol,aIS des�'oo3!m-sle em dkecções per
pendiculares, seguindo a bola A com a vel,o
cidade de 4,'8 m/s. Determinar a velocidade
de B após o -choque.
4,O m/s
23. Na e�losão de uma granaida mal construída, o :engenho dividiu-s'e 'em 3 f.ragmentos'.
Dois deles, de massas 1,0 kg e 2',0 k, foram
pl'oje ctados em di'recçõ'es perpendi.culares, res,
pectivamente com as velocidades 24 m/s ,e
16 m/s. O terceiro f.ragmento partiu com
uma velocidade de 20 m/s.
23,1 M'edi,aIlIte um dÍlaJgrama convenientJe
relacionar 'a velocidade do terceiro f.rag
menta com as v;eloctdades dos dois pri
meiros.
23.2 Determinar a mass'a da granada não
cont8indo 'com o eJqllosivo.
I · 21&.J2 ) m = 5,0 kg -+- õ kg
24. Um canhão está fixo num vagão de
caminho de ferro. A massa total do canhão
e vagão é 10 tonelad'a:s. No momento em que
o vagão, ·por inércia, se d esloca com a veloci
dade constante de 9 km/h, é disparado um
projéctil de massa 20 kg e com a velocidade in1ci8)1 de 800 m/s. Calcular a v.elocid8ide do
vagão imed�atamente após o disparo quando:
24.1 o sentido do tiro caindde com o do
movimento do vagão;
24,2 o -senUdo d o tiro é ,contJrári:o ao do movi
mento do vagão.
218
24 .1') 0,9 m/Sl = 3,2 km/h
( avança mais lentamente)
24,.2) 4)1 m/'s = '.1J5 km/h ('avança mais rapidamente )
25. Um carro, que pes'a 1,6 toneladaiS, faz
uma curva de 310 rn de raio com a velocidade
de 312,4 km/h. Que força centrípeta actua
sobre as rodas ?
413 X 'lO' N = 44 X 10 kgf
26. Um vagão de IS toneladas desloca-se
numa curva de raio igurul a; 00 m, com a velo
cidade de 211,6 km/h. Que força se exerce
sobre o carril externo da linha ?
1'08 X lO' N = 110 X lO kgf
27. Um esquiJ8idor cujo peso é 60 kgf deslo
ca-se numa lomba duma pista de gelo. A sua
velocidade a m,eio da convexidade, ou sej'l no cume da lomba, é 'lQ,O m/s e o raio de
cUlrvatura da .lomba é '15 m. DeterminBlr a
força de pressão que o esquiador exerce em
cada ,esqui.
1'9 X '1'0 N = '19,12 k!gf -+- 19 kgf
28. Um e!.ectrão ( m = 0,90 X 10-30 kg ) mo
ve-s'e, 'sob a acção de um campo magnético,
numa circunferência de 2.,0 cm de ralo com a
v'elocidade de 3,OX1101" m/s. Com que v;elocida
de se desloC3Jria um protão (m=1,6 X 1Q·27 kg )
s'e descI'ffiTleSlSe a mesma ci'l'cunferência sob
a acção da mesma forç,a ,electro-magnéUca ?
Determinar a que força oentripeta est8iva
submetiido o ·electrão.
1.1 kmjs -+< 7 X 10 km/s
4,05 X 10.16 N -+-· 4,0 X '16'·16 N
29. Um avtão de 2,7' tonei adaIS perco11re
200 m na plataforma de um pol'ta-aviões, que
se supõe iJmóvel. A \nelocidad'e do avi-ão, ao
'sair da pista d e des'cola;gem é d e 24Ü' kmjh. Desprezoodo os atritos, 'c8ilcwar:
29.1 A '8Jce1eiraição do avião.
29.2 O valor méd�o da. força propul'sora.

29,,:3 Do a'Vião 'e na diTlecção 'e sentido do seu deslocamento foi lançado um projéctil de 6,0 kg com a velocidade de 450 m/,s. De quanto diminuiu 8i velocidade' do avião ?
29.4 Este avião de.soI'ev,e depois uma curva de 80 X 1Q m de raio, com a ve,locidade de 7,20 km/'h. Determinar o valor da força centriJpeta a qUe ficou submetido.
2�:1 ) 11 ,1 m/so
29;2) 31 X W' N = 3',11 X '1(}' kgf = 3,1 tono f.
29.3\) '1,0 ru/s
219.4 ) 13\5 X 1<1' N = 13,8 X 10� kgf -+ -+' 14 X HJI' kgf
30. O periodo de I'evolução da Lua é 27,3
di8is = 2,'3 X 16' S. A sua distância à Terra ·é 31,8 X ,1(\5 km ( distância entre os respectivos centros ) .
30,11 QU3Jl é a 3Jooler3Jção centripeta da, LU3J ?
3:0.2 Qu:aà é a sua V'elocid3Jde efectiva em relação à Terra ?
3-0..1 ) 0,28 cm/s· W.2') ·1,0 km/s.
3.1 As duas esf,eras A e B (figura 5.4 1 )
Fig. 5.41
, " , , , , , o. \ A \ �
.-� C ' I I '
têm, cada uma, a massa 100 g. Põem-se a rOOa,r em torno do cellltro a ligadas por fios de '20 cm cada um.. Se as esf,eras derem 120
voltas por minuto ,calcular:
31.1 A velocid3Jde li:neJaJr da esfera B 311.QJ A iÍleIlJsão no fio que oHga, A a B 3'1,.3 A tensão IlJO fi.o que liga A a a, d�endo
q'\.l3Jl dos dois fios pa·rtirá primei,ro no caso de as esferas serem postas a rodar com velocidade SlUfi·ci·entemente g.rande.
I 311,.'1) 5,0 m/s 311.:2 ) 6 N :;11.3,) 9 N; o fio AC I 32. Um comboi:o descreve uma curva com
a velocidade «oerta» de ,108 km/h 'para a qual não ·existe qualquer força centripeta ou centrifuga entre as rodas e Os carris. O raio da
curva é ;1',13120 km. 'Se o carrH exterior rs,uver 7,O ,cm mais alto que o interior, determinar a distância entre os carris
l,OO m
33. Um planador descreve uma traj'ectórra circular 'em voo picado com a velocidade ·ie 144 km/h. 'Se o raio da curva f.or 120 m, determinar o oogulo de inclinação do aparelho.
219


Antigos padrõe's de' m edi'das de capacidade para l íquidos do Conce'lh o 'Oe Moncorvo
(agu'a're,l a ba'se'ada em fotogrofi,a destes padrões a'ct ua,lmente depo'sita1do's no Mu'seu d e Bragança).
(Notícia no verso)

No re-inad o de D. Afonso IV, e m ' Portuga( era tal a con,fusão e va'riedade de medida's e, pe'sos que a lgumas popu1laçõe's se q ue'ixa'ram na's cortes d e Lisboa ( 1 352), q u er porq u e se sentiam lesadas no pa-gamento d o s d i reitolS reais, que'r na's rendas q ue pagavam "O pa rtiwlares (fidalgos e oIérigos). D. Pedro I, o J ustic·e·iTo, mandou u n'ifo'rmizar todos os pesos e medidas do Reino, m as . . . sem glrande-s resultados.
D. Afo,nso V, no parágra,fo 3.°, -ri�. 5.° d o Liv. I d a's Ordenações, ten�ou pôr a l g u m cobro nos abusos. A seguir, D. João II, o mais q u e pôde fazer fo,i reduzir a dois o número de -padrões d e- medida : um pa'ra o NO'rte· e Alga'rve, outro para a Estrema'du'ra ·e Alentejo.
D. Manuel I man'do u uniformizar os pesos, €>stabel ece'n d o padrões novos. Seu bisneto D. Sebastião uniformizou os
padrões de medidas (de capacidade), cujo n ú mero reduziu. Estes só podiam ser fabricados em Lisboa e daqu.i se'ria m env·iado's para todas as Câmara's do Re,ino. Nem a's's im, porém, se evitaram as fra'u des ,dos aferid o'res e dos desobedientes . . _
De D. Sebastião (1 554 - 1 578) até às p rimeira's década's d elste sécu l o não se fize>ra m inovaçõe-s g e rais i mportantes. Podemos mesmo dize'r que as u n'i'dades de capaci dade· q u e hoje nos g overnam sãO' a in'da d o tempo d a q u e l e Reli, q u e e,st-eve 10ll'lge d e conseg u i r o intento d e então as igua,la-r em todo o Reino.
«Tenho dito muitas vezes que, quando podemos medi,r aquMo sobre que f8Jlamos e o
podemos exprimir em números, então conhecemos 8Jlgo 8Joerca do assunto. Qu.a.ndo, porém, não
o podemos exprimir em números, o nos·so conhecimento é pouco 'saltisí18Jtório e infrUJtifero. Pode
ser tão somente um -começo de 'conhecimento, mas dificilmente o nosso pensamento se pode considerar como tendo atingido o estãgio ci'entífi!co, qualquer que seja o assunto».
Lord KELVIN (William Thomson. tisico britânicú, 1824-1907)
6.1 Grandezas físicas e sua medi�o
6.1.1 Grandeza fwvca
Estabelecida a noção de grandeza física, fundamentalmente como entidade susceptível de ser medida ( cf. n. °1.3.) , podemos nesta altura do nosso curso generalizá-la. Esta generalização consiste em considerar a grandeza física ,como uma propriedade de um corpo (volume, por exemplo) , ou como uma característica fundamental de um fenómeno ( velocid8Jde de um ponto material, força de interacção de dois corpos, etc.) , uma e outra passíveis das operações de medição.
223

Nota 1 :
Quando falamos em grwndezas da 111 esma
espécie referimo�nGs, :pa:- e�emplo, a dois
comprimentos, a áoios volumes, a dU3!s acele
rações, etc. E ass-im, U:ffi comprimento ,e um volume, uma aceleração e uma força, um
comprimento e uma velocidade, etc., s'ão
grandezas de espécie diferente.
Notemos, entretanto, que a uma propriedade pode estar associada só uma grandeza física ou mais. Citemos alguns exemplos.
1.0 - Todos os acontecimentos do Universo se 8"wcedem uns após outros, A esta 'Propriedade está -associada a grandeza tempo.
2.° - Um corpo pode deslocar-se. A esta propriedade estão associadas as g�andezas quantidade de movimento iW cO'rpo, energia do corpo em movimento e, se o movimento é acelerado, a força actuante.
3.° - Dois corpos, submetidos à mesma força, adquirem acelerações diferent€s. A esta propriedade está associada a grandeza massa inercial.
4.° - Dois corpos (os maus ,condutores) , friccionados, podem atrair-se ou repelir-se. A esta propriedade está associada a grandeza carga eléctrica.
6.1.2 �edições e unidades
A medição de grandezas constitui um problema preponderante em Física e pod-e ser feita pelos seguintes processos :
A medição efectiva consiste em comparar, directa ou indirectamente, a grendeza a medir -com outra da mesma espécie. (1 ) .

Nota 2 :
Entende-se por unidade d e uma oerta grande2la uma grandeza particular da mesma es
pécie, que se eS'colhe para t,ermo de compa
ração e que serv,e paJrnJ medi'I" todias as gran
dezas dessa espéci,e: Deste modo temos· o metro CO'ffiO unidade para o comprimento, o m/s como unidade para as velocidades', e
tantas outras. O valor numérico da grandeza, ou seja o
número k igual à ,ra2lão 'entl1e 'a .grandeza e a unidade é inversamente proporcional ao tamanho da unidade que 'Se escolheu. Por .exem
pIo, um ·certo comprimento c, tomando o
metro ( m ) <e o 'centímetro ( cm ) para unida
des, terá, Tespectivamente, as se'g;uintes me
didas e valores numéricos :
c = 2,30 m v. num. = 2',30
c = 2C3lO cm v. num. = 230
A uma unidade 100 vezes menor (cm)
corresponde um valor numérico 100 vezes maior :
230 = 100 X 2,30
Na medição directa, como é o caso da medição de um comprimento, a comparação é imediata :
Vê-se quantas vezes uma grandeza (G1) cabe na outra (G2) :
G1 -- = k , com k E IR . G2
Na medição indirecta, como é por exemplo a medição vulgar de uma área, a ·comparação não é imediata : medem-se os comprimentos relacionados com a área e depois aplica-se a expressão matemática correspondente. Assim, temos S = a X b para a área S de um rectângulo de comprimento a e largura b,
S 1 b ' S ' A = - X h para a area de um trlan-
2 guIo de base b e altura h. Etc.
A medição efectiva acabada de indicar só é possível se as grandezas
. a
medir 'satisfizerem as duas condições seguintes :
l,a _ Ser possível estabelecer entre as duas grandezas G1 e G2, da mesma espécie, uma relação de ordem e/ou de igualdade:
G1 � G2 ou G1 = k X G2 •
2.a - Ser possível adicionar as duas grandez1lis G1 ' e G2, obtendo-se uma terceira grandeza G, ainda da mesma espécie, que é a soma das duas :
o resultado da operação de medição chama-se medida da grandeza e 'exprime-se por um número (k) que indica 'a razão 'entre a grand�za medida e a
225

Nota S - Noticia histórica sobre os sistemas
de unidades
1 . Evolução geral
Até fins do séc. xvm cada povo tinha as suas unidades de medida'!. Eram padrões primitivos, díspaves, regionais.. Na Inglaterra,
por exemplo, usavam-se as seguintes unidades
de comprimento:
a jarda (distância entI1e 00 nariz do rei Henrique I e a ex�remidade do seu
polegar, eqmvaJlente a 92 ,cm) ; o pé ( 'comprimento doO pé do re:t'erido l'ei,
equivalente a 30,418 cm) ;
a polegada (- largura do polegar, equivalente
a 2,,54 cm ) ; a milha (maritima = 18õ3',2 m; terrestre =
= 1609,3 m ),.
Outros povos usavam o passo) o côvado
(66 cm ) , a vara (1)1 m) o tiro de pedra) a
jornada) ,etc.
Como unidad'e5 de mas.sa. usavam-se o
arrátel (4!59 g ) , a libra inglesa (453,õ92 g ) , a arroba ( � 15 kg) e outras.
Durante a Idade Média, com o desenvol
vimento das nações europeias' e o cres'cer dos
circuUos de comercialização a 'nível mundial,
muIUpUcavam...s'e .os padrões ao mesmo tempo
que, 'contraditoriamente, mai's urgente 'se tor
nava um ,sistema universal de medidas.
A contradição resultava umas vezes da
i'gnorância, outras de regionali-smos chauvi·
nistas, ailIlda 'outras da falta de reflexão sobre a ,escolha de unidades adequadas, mas' .a maioria das vezes era devida a razões de ordem económica � a malícia comercial noO
sentido de auferição de maiores lucros 'na
venda de prodUJtos.
O impu1so decisivo no sentido da uniformI
zaçáo foi dad,o pela RevoOlução Francesa: o
decreto da Obn venção, de � de Agosto de 172\3,
estabe1ecia o novoO sistema de Pesos e Medidas
fundado na medição do meridiano da Terra
e na divisão decimal. Em 1795, a Comis'São
encarregada pelo Governo de criar um 'siste
ma racional de medidas estabelece a unidade fundarrnental do sistema m'étrico - 00 metro
(de uma palavra grega que sIgnifica medida) ,
226
unidade escolhida, número esse seguido do nome (ou do símbolo) da unidade, escrito no singular. (2) . Isto é :
Gratnileza física = k X unidade
+ + (a medida) (valor numérico)
Exemplos :
c = lO,2 m
j = 3,0 m/s2 ou j = 3,0 ms-2
Quando a grandeza física não satisfizer a uma das dU3is condições estabelecidas para .a medição efectiva, terá de ser avaliada em termos de escala e 'segundo convenções previas. É a chamada medição escalar, na qual predomina .a rel'ação de ordem.
É o caso da densidade : não é possível adicionar as densidades de dois líquidos quando se juntam. É também o ,caso da temperatura : não é possível adicionar as temperaturas, diferentes ou iguais, de dois líquidos que se misturam, p. ex., porque a temperatura da mistura é superior à menor e inferior à maior das duas temperaturas ou igual a qualquer delas se forem ambas iguais.
6.1.3 A escolha de unidades no devir histórico. (3) .
Desde a Antiguidade os diferentes povos adoptaram as mais diversas unid3ides, que foram mantendo 'através dos tempos. Muitas dest'as unidades estavam relacionadas com o corpo humano ou 'com a Terra, o que se explica por estes serem os referenciais mais acessíveis e directos.

1 então definido como de um quarto
10 000 0'0'0 do meridiano terrestre.
Este padrão ·era pO'Uco .preciso porque os arcos de meridiano não são i'guais em virtude da forma da Terra não 'ser, senão aproximadamente, esféri'ca oe porque não é fádl medir comprimentos num meridiano.
Em 1875 foi assinada a Convenção internacional do metro, que definiu o metro-padrão
como a distância, a {)o C ,e à pressão normal, entre dois traços com incrustações a ouro, marcadcs perto das 'extremidades' de uma barra de platina iridiada (90% de platina e 10% de iridio) com a ·secção em X.
Este padrão ,está guardado no Pavilhão de BreteuH, em Sêvres, perto de Paris, tem um valor próximo do do metro anterior e foi sancionado pela Conferência Geral de Pesos e Medidas de 1889, -em Paris.
A cada pais que aderiu à Convenção do Metro foi distribuída uma c6p�a do metro-padrão e uma .cópia do quilograma-padrão
( este r.epresentado pela massa de um cilindro de platina iridiada, com 39 mm de aJ1tura e 319 mm de diâmetro) , também guardado no Pavillhão de Breteuil.
Na 1'1." Conferência Internacional de Pesos e Medidas, realizada em Outubro de 1960, foi substituida, por acordo unânim·e dos d elegados dos '312 países nela representados, a defInição anterior de metro p ela de metro óptico :
«O metro é um compri:mento igual a 1 6J50 71613;T3 V1e2leS o comprimento de onda, n.o vazio, da radia.ção laranja do gás cripto 86».
Fundamentalmente, trata-..s·e de preservar o metro�padrão clássico pOi's que o comprimento de "Onda indicado foi medido em 'relação a ele. Garante-se, deste modo, a sua indestrutibiHdade e a sua. invariabilidade - ·esta. na hipótese de a frequência das vibrações dos Momos não va:riar com a idade do Universo.
A unidade de tempo, o segundo, foi definida inicia1mente a partir do movimento de rota.ção da Terra. E assim, o segundo era precisa-
1 1 mente a fracção = --- d.o
24 X 60 X i10 816 400 dia solar médio (intervalo de .tempo entre duas passagens consecuUvas do S-ol pelo meridiano dum mesmo lugar ) . Dada a Irregularidade do movimento de rotação e o facto
Para o convívio internacional, porém, seja nos domínios económico, industtial e técnico, seja no domínio científico, impunha-se a necessidade de criar um sistema universal, único e coerente de unidades, com padrões indestrutíveis. Um passo decisivo neste sentido foi dado pela Revolução Fran-
. . cesa. A partir de então passou a haver em Paris conferências internacionais de Pesos e Medidas. A estas foram aderindo várias nações.
A 11.8 Conferência, realizada em Paris em Outubro de 1960, decidiu designar por Sistema Internacional de Unidades (SI) o sistema coerente 3Jdoptado na .10.8 Conferência, também efectuada em Paris, em Outubro de 1954, e est8!beleceu a definição de metro óptico. Depois, na 13.a Conferência Intern3Jcional de Pesos e Medidas, aberta em 10 de Outubro de 1967, decidiu-se adoptar um padrão atómico para unidade de tempo, definiu-se explicitamente ° kelvin como unidade termodinâmica de temperatura e redefiniu-se a unidade de intensidade luminosa.
A batalha da «metrificação», porém, não acabou : será ainda longa e promete interessantes discussões e algumas novidades n3JS conferências internacionais. (3) .
6.2 Sistemas coerentes de unidades
6.2.1 Grandezas fundamentais e grandezas derivadas. Equações de de
finiçãJo. Escolha de um sistema de unidades
Se reunirmos as unidades das várias grandezas físic"as, uma de cada grandeza, obtemos o que se chama um sistema de unidades.

1 do dia ,uerre's,tre aumentar - s por século,
16 passou a escolher-se o movimento de trans
lação, considerando-'se então o ano trópico, ou
sej'a o tempo decorrido �mtI"e duas pa:ssa�s
consecutivas, pelo mesmo equinócio, da Terra
ao ,longo da 'sua órbita em torno do Sol. Rigo
'rosamente, o periodo de, um ano trópico cor
respondeu, em 119'00, a 3165,24!2119878 dia solar
médi.o e tem vindo a sofrer, por século, um
decréscimo de Q,Ü'Q!()iOO6!t4. dia so'Lar médio. Por
tal motivo, foi presente à 1Q.· Conferência
Internacional de Pesos e Medidas e aprovada
na s egui!Ilte esta definição de s egundo: 1 ....
«.o segundo ,é a fracção ' (.ou 311 5'56 912'5\ 974 7
1 seja ) do ano ,trópico
3165,2412 '1 . . X'214X 6Q1X 6iO ' •
para li900 J'aneLro O às 11'2 h de tempo das
ef emérides·» .
Na ;13." Conferência Internacional de Pesos
e Medidas, 'realizada em Paris em Outubro de
1 967, vkia ai ser fixada a actual defini'ção da
unidade de tempo do Sistema Internacion"al de
Unidades (SI) ,' «O s'egundo é a duração de
9 1'92 6'3'1 no períodos da radiação corJ'espon
dente à transição entre os doi,s níveis· hiper
finos do estado funda:mental do átomo de césio
1,3'31» . É, pms, uma definição atómica.
Resumindo.'
Exactamente 73 a:nos após a Convenção
do M etro, 'assinada em Outubro de 1875 por
19 delegados de 19 na:ções partidpantes, o
'sistema métrico converteu-se no sistema In
ternacional de Medidas (SI) por recomenda
ção da 9.' Conferência GeraJI de Pesos e
Med'idas de 1948. Actualmente, ou seja lüO' anos passados sobre a data daquela -conven
ção, este sistema foi quas'e universalmente
aceite. De facto, a Grã�Breta:nha decidiu, em
1 9615, adoptá-Ia, estabelecendo um· prazo de
lO' ,anos pa;ra adaptação e entrada em vigor.
E tem cumprido : por exemplo, o novo Rol,ls
-Ro:yce já utiUza unidades métricas.
E também os Estados Unidos, um dos últi
mos países refractários, a esta adopção a nivel
uniV'ersa:l, está já em V'i,as de 'aceita;r e adoptar
o SI, como o fizeram 110 dos s eus Estados, que
além disso preconiza:m a sua utilização no
ensino..
228
Um pequeno número destas constitui as unidades fundamentais e dizem respeito às grandezas fundamentais, que são ,aquelas grandezas de que se tem uma noção intuitiva e simples e que devem ser independentes entre si. Na mecânica estas grandezas são três : o tempo, o comprimento e a força (ou a massa) ,
As restantes unidades chamam-se unidades derivadas e correspondem às grandezas derivadas (volume, veloci-' dade, etc. ) , que são 'as grandezas que se podem definir a partir das fundamentais por meio de relações matemáticas, que exprimem muitas vezes leis físicas, relações a que chamamos equações de definição ou fórmulas.
Por exemplo :
L,e L,v F 8 = a X b, vm = --, jm = --, m=-
L,t L,t j
são as equações de definição da área (8) de um rectângulo, da velocidade média vm, da 8Jceleração média jm e da massa inerciaI m de um corpo.
A escolha de um sistema de unidades, embora arbitrária, deve satisfazer . aos seguintes critérios :
1.0 - Critério científico - escolha de unidades, de definição . simples e precis'a, sendo a..s unidades 'fundamentais independentes entre si.
2.° - Crítério técnico - escolha de padrões invariáveis, de fácil reprodução e/ou verificação e de valor adequado (unidades cómodas).
É por esta razão que, não sendo possível realizar um padrão de força, em virtude da variação do peso de um

2" Evolução em Portugal
(Ci. noticia ins611id81 no verso da agua.rela
apresentada no inic.io des,te capitulo) .
Data de -1812 a nomeação de uma Oomissão
de Forais, que incluía membros da A'cademia
Real de Oiências e estava encarregada de
estabelecer «um plano para a igualdade de
pesos e medidas próprio dos grandes conheci'
mentos e lu2Jes do ·século» .
Foi também no reinado de D . João VI, em
181.18, que' foram ,adoptaJdos os' segUJintes padrões antes dispersos: a mão travessa ( � 1.;1 dm), a vara ( _ 10 mãos-travessa)" a canada
( 1 litro) , o alqueire ( lO.. oona:d3Js) , a tanga
( HYO CaIDl!lJdJaJSI) , a libra ( � 1 kg ) , a arroba
(10 libras,) , o quintal (1IO,Ü' lib[,3Js ) , a tonelada
( 10'0'0 libI18ls ) ,. Iniciou-se ass'im o verdade'iiro combate 8JQs
sistemas de unidades dispersos e S!em ba:s'e
cientifica. Em 113 de Dezembro d e 1852 sai um
decreto qU!e torna obrigatória a adopção do
sistema métrico decimal, fixando um praw
de lO. anos para a sua entrada em pleno vigor
( em França a adopção do si-s,tema métri'co
tornou-se defini,ti,va 'em 183r7 e na Bélgica
tomou-se i-gual decisão 'em 1855)·.
Portuga:l participou na Conferência Inter
nacional de 118819, onde aprovou os protótipos
do metro e o quilograma. Em 1'890. recebe as
c6pias n.· 10 destes protótipos - fig. 6.1.
Fig. 6.1 A cópia n.· 1i{) do quHograma padrão
gU3Jrdado na Reparti,ção de Pesos e
Medidas. Fotograft.:aJ obtida do nega�
Uvo -pTiestimosaJInente dispensado pOl!' esta mesma Rep3Jrtição.
corpo com o lugar da Terra, e sendo fá'cil realizar um padrão de massa (a massa correspondente ao quilograma-padrão internacional guardada no Pavilhão de Breteuil, em Sevres) , se escolheu para unidade fundamental a unidade de massa em vez da unidade de força. Nestas condições, a fórmula
F F = mj < = > m = -
j
será a equação de definição da grandeza força, que se aceita como grandeza derivada, embora o conceito de força seja mais intuitivo, mais simples e mais directo do que o conceito de massa inerdal.
Daqui também podemos concluir que a unidade fundamental num sistema pode ser unidade derivada noutro (p. ex., o quilograma-força continua a ser unidade fundamental no sistema métrico gravitacional) .
6.2.2 Sistemas absolutos e sistemas gravitacio-nais
Os sistemas cujas unidades fundamentais são as unidades de comprimento ('símbolo : L) , massa (símbolo : M) e tempo (símbolo : T) chamam-se sistemas absolutos ou físicos. Tais unidades são invariáveis de lugar para lugar da Terra.
Os sistemas que têm por unidades fundamentais as unidades de comprimento (L) , tempo ( T) e força (F) dizem-se sistemas técnicos ou gravita
cionais. Nestes, uma das suas unidades, a de força, varia com o lug.ar da Terra.
O sistema absoluto que vamos estudar é o sistema internacional de uni-
229

o qulJograma-padrão encontra-se na R'e
partição de Pesos e Medidas da Direcção Ge
ral de Indústria e o metro no Instituto Geo
gráfico e Cadastral.
A reaferição d!estes padrões foi feita em
1935 na Repal"mção Internacional, em Sêvres.
Em 1911 foi promulgada nova legwlação
metrológica.
Actualmente, sobre as diferentes questêles
de metrologia, devem consultar-se as Normas
Portuguesas, cuja organização e compilação
está a cargo da Repartição de Normalização,
Av. de Berna, 1 - Lisboa.
Pergunta 1:
Pode escolher�se, em Mecânka, um sistema
de unidades cuja:s unidades fundamentai's
sejam as de comprimento, de tempo e de
velocidade ?
Nota 4:
Em Quími'ca define-'se a mole como
a quantidade de substânCÍoa que contém um
número de partículas igual ao número de
ãtomos contidos em 1'2 g de carbono 112 puro.
Este número, também chamado nú-mero
de Avogadro, tem o valor :
No = 60,2 X 1()i'2.
Das 7 unidades fundamentais do SI, toda:s
definidas com grande preci,são, só o quilo
grama (kg) se reff7T'e ainda ao padrão de
platina depositado em Sêvres. As {> unidades
restantes sáo definidas a par.tir de fenómenos
físic·os de absoluta estabilidade.
Nota 5:
o quilograma-força normal (kgf) é o peso
do quillograma padrão ( kg) ao nível do mar e
à latítude de 45<>. Na 3.' Conf·erência Geral de
P esos e Medidas de 1901, em Pa:ris, !estabele
ceu-se que a:s cond�ções normais de gravidade
( a:o nível do mar e à latitude de 46° ) corres
pondiam à aceleração da gravidade normal:
g = 9,806 65 m/s'
230
dades (S1) , cuja adopção se tornou definitiva a partir de 1960. Este sistema, na Mecâni'ca, coincide com o antigo sistema MKS) que tem como unidades fundamentais :
o metro (m) - unidade de comprimento ;
o segundo (s) - unidade de tempo ;
o quilograma ( kg) - unidade de massa.
A estas 3 unidades foram a'crescentadas mais quatro para tornar o SI aplicável a toda a Fí'ska. São elas :
o ampere (A) - unidade de intensidade de corrente ;
o kelvin (K) - unidade de temperatura termodinâmica ;
a candeIa (cd) - unidade de intensidade luminosa ;
a mole (mol) - unidade de quantidade de substância (4) .
Far-se-á ainda referência ao sistema métrico gravitacional (M Kp S) ,
. cujas unidades fundamentais são o metro (m) , o segundo (8) e o quilograma-força (kg/) . (5) .
6.2.3 Sistemas coerentes de unidades
Estes sistemas, além de satisfazerem as duas condições indicadas em 6.2.1, têm mais uma particularidade notáv'el que vamos mostrar.
Se escolhermos para unidades de um sistema as seguintes
uno fundam. -.,.- cm, kg, s
uno derivo - hm2, m3, m/s, ' "
tal sistema não é coerente. Vejamos porquê.

Embora determinações recentes ,tenham indicado outro v8Jlor
g = 9,8{)6, 17 m/s'
ainda continua a adoptar-se aquele. Em PortugaZ, onde o valor mMiIO da acele
ração da 'gravidade é g = 9,8D'Ü! m/52 (LitSb<>a<) , o quilograma-força difere muito .pouco do kgf normal, como se 'Pode verificar aplicando a fórmula P = m g .
Resposta à pergunta 1:
Não pode, porque as grandezas fundamentais de�m ser independentes entre si e a velocidade é definida a partir de um comprimento e de um tempo,
Suponhamos que temos um rectângulo cujas dimensões são 6 cm e 3 cm. A sua área (medida da superficie) será
-
S = 6 cm X 3 'cm = 18 cm 2•
Mas isto só é verdade se escolhermos para unidade de área o cm2• Como se escolheu o hm2, a área do referido rectângulo será
18 S = -. - hm2
108
porque 1 hm2 = 100 000 000 cm2 e, portanto, a fórmula da área é, em tal sistema :
1 S = -- a X b .
108
De um modo geral tem-se, no rectângulo,
S = a X b ,
se tomarmos para unidade de área a área de um quadrado de lado igual à unidade de comprimento. Se, porém, tomarmos para unidade a área dum quadrado cujo lado tem comprimento diferente do da unidade de comprimento 'adoptada, será
S = k X a X b, com k =F 1 J
o que ,complica o cálculo das áreas. Mais complicado seria se, por exemplo, tomássemos para unidade de área a área de um círculo de raio = 1 cm, pois então teríamos :
S (círculo) = 7r cm2 a X b 18
S (rectângulo) = = - cm2
1 com k = - neste -caso.
7/'
o que se' diz para a grandeza área
diz-se para outra qualquer.
231
232
Em suma, se escolhermos convenientemente as unidades, podemos conseguir que o produto ou o quociente de duas unidades respeitantes a quaisquer grandezas do sistema conduza a uma outra unidade do mesmo sistema. Consequentemente, as fórmulas não apresentam factores numéricos desnecessários e que só complicam.
Por exemplo :
1 m X 1 m = 1 m2 (que é unidade do SI)
1 kgf k fi ( , 'd d
. --- = g m2 que e um ade o SlS-1 m2 tema gravita'Cional) .
Só é coerente o si,stema que satisfaz estas ,condições e, por isso, o sistema com que iniciamos esta rubrica não é coerente.
Concluímos então que :
Um sistema coerente de unidades é um conjunto de unidades escolhidas e definidas de modo tal que as relações entre as vári<as grandezas resultem tão simples qUlJlnto possível e que as unidades derivadas resultem das fundamentais apenas -por operações de multiplicação e divisão cSem intervenção de coeficientes numéricos ::f= 1.
Deve-se a Gauss ( 1775-18'55) a primeira tentativ'a para estabelecer um sistema coerente (em 183,2) .
O sistema internacional (SI) é u� sistema coerente.
6.3 O sistema internacional
de unidades (SI)
Vamos :apenas considerar as suas unidades mecânicas, ,como é natural.

Nota 6 :
Os mÚ'ltiiplos d o segundo são: 1 mtnuto =
= 00 '8; a. h = 60 minutos.
A pa:lavra minuto 'Signifioa fracção d'iMI-
1 NUTA da hora ( - da hora) . Como o minuto
60 ainda era demasiado grande para medir a
duração de muitos fen6mJeiO.'Oi!'l fiSlicos, paJSS10U
1 a utili2JaJI"-'se a fraJcção - do minuto a que se
60 chamou minuto SEGUNDO, isto é, minuto do
minuto.
Por ,comodidade de linguagem, suprimiu�S'e
a prulavra «minuto», permanecendo a 'palavra
«segundo», que assim entrou no vocabulário
cientifico.
6.3.1. Unidades fundamentais
Comprimento (L) - o metro (m) . Definição da Con
ferência Geral de Pesos e Medidas em 19,60 (coincide praticamente 'com o metro-padrão guardado em Sevres : 'cf. Nota 3, metro óptico) .
Massa (M) - a massa do quüograma-padrão
interna:cional (kg) , guarda:do no Pavilhão de Breteuil, em Sevres (d. Nota 4) .
Tempo (T) - o segundo (s) , definido em ter
mos atómicos, em 1967 (d. Nota 6 e Nota 3) .
6.3.2 Unidades derivadas
La Unidade de' superfície:
Equação de definição : S = a X b . Para a = b = 1 m, vem :
S = 1 m X 1 m = 1 m2
A unidade de superfície é, portanto, o metro quadrado (m2) :. área de um quadrado com 1 m de lado.
2.a Unidade de volume:
Equação de definição : V = a X b X c Para a = b = c = 1 m, temos :
V = 1 m X 1 m X 1 m = 1 m3
A unidade de volume é o metro 'cúbico (m3) : valup.1e de um cubo com 1 m de aresta.
3.a Unidade de velocidade: 6" e
Equação de definição : v = -- . 6"t
Para 6"e = 1 m e 6"t = 1 s, temos :
1 m v = -- = 1 m/8 ou m . g-l
1 8
233

Nota 7 :
Os múltiplos e submúltiplos de qualquer
unidade - necessários para exprimir de ma
neilra cómoda os valor.es de grandezas muito
grandes ou .mu�to peqU!enas - designam-se
pela unidade antecedida de um prefixo 'Corres
pondente ao factor numérico que relaciona o múltiplo ou 51lbmúitiplo com a unidade..
Estes múltiplos 'e 'Submúltiplos, de acordo
com as regras do sistema métrico, serão
potências de 10 e, de acordo com a regra 3 n,
de e�ente múltiplo de 3>, isto 'é :
l()3n ou 1(J-3n, com n E lN..
Tolera�se ainda o uso de
102" lO, 10-1 e 1()-2
Na Tabela indi'cada a seguir para consulta
u tiliza'I'8Jlll-se estas regraiS.
Exemplos :
1 micrometro = 1 p. m = liO-� m
11 1laIIlosegundo = 1 n s = 10-9 S
1 ano-'luz (distânda percor.rida, no vazio,
pela luz, em ·1 ano) = 9,416 p.etametto � 1016 m
234
A unidade de velocidade é o metro por segundo (m/s ou m g-1 ) : valor da velocidade de um móvel que, em movimento uniforme, faz o percurso de 1 m em cada segundo.
4.a Unidade de aceler(U}ão:
6V Equação de definição : j = --
D"t Para L,v = 1 m/s e D"t = l s, vem :
l m/8 j = = 1 m/ S2 ou m g-2
l s
A unidade de 8Jceleração é o metro por segundo quadrado (m/s2 <=> m g-2) ou metro por segundo em cada segundo : valor da aceleração de um móvel, em movimento rectilíneo e uniformemente a'celerado, cuja velocidade varia de 1 m/s em cada segundo.
5.a Unidade de torça:
Equação de definição : F = m j
Para m = 1 kg e j = 1 m/s2, temos :
F = 1 kg X l m/s2 = 1 kg X m/s2 = = newton (N)
A unidade de força é o newton (N) : é a intensidade da força constante que imprime a um corpo com a massa de 1 kg a aceleração de 1 m/s2 •
6.a Unidade de pressão:
F Equação de definição : p = -
S Para F = l N e S = 1 m2, temos :
l N p = -- = 1 N/m2 = 1 pascal (Pa)
1 m2

TABELA 1
Prefixo Simbolo do Factor numérico múltiplo
Exa E u 10 18 u
Peta P u 10 15 u
'" Tera T u 10 12 u C
� Giga G u 10 9 u ....
Mega M u 10 6 � U
�. KiJlo k u 10 3 u
Hecto h u 1(l 2 u
Deca da u HJ u
I u I = unidade (m, kg, s, N, g, kgf, etc. )
Deci d u 10 -1 u
Centi c u 10 - 2 U '" � Mili m u HJ -3 u .� Micro LO -6 .... J1. U U � � Nano n u 1t() -9 U ,Q � Pico P u 10 -12 U i7.l
Fento f u 10 -15 U
Ato a u 10 -18 U
TABELA 2
Algumas distâncias (apenas ordens de gran
deza; portanto, não d evem ser utilizadas
como dados em cãlculos numérrcos )
- Di:âmetro do Universo � lOs Em = 10 26 m
- Distância ao objecto mais afastado e foto-
grafado na galãxia � 10 7 Em = 10: 25 m - Distância à Estrela Polar _ 10 Em =
= 10 19 m
- 100 anos-luz _ 1 Em = 10 18 m
- Distância Terra-Sol _ 10 2 Gm = 10 11 m
- Raio do Sol _ 1 Gm = 10 9 m
- Distância Terra-Lua _ 1 0 2 M m = 108 m
- Raio da Terra _ 10 M m = 107 m
- Raio da Lua _ 1 M m = 106 m - Raio de um ãtomo � 102 pm = 10-10 m
- - Raio de um dos maiores núcleos ató-, micos _ 10 fm = 10-14 m
- Diâmetro do protão � 1 fm = 1O-1� m
A unidade de pressão é o pascal (Pa) :
pressão exercida pela força de 1 N quando actua perpendicuJ.armente e uniformemente na superfítCie de área igual a 1 m2•
7.a Unidade de massa volúmica:
m Equação de definição : /L = -
V
Para m = 1 kg e V = 1 m9, temos :
1 kg /L = -- = = 1 kg/m3 •
1 m3
A unidade de massa volúmica é o quilograma pCY!' metro cúbico,' massa volúmica de uma substância homogénea que tem a massa inerciaI de 1 kg por cada metro cúbico de volume da substância. ( 7) .
6.3.3 Unidades incoerentes em relação ao SI
Os sistemas coerentes exigidos pelos cientistas estão adaptados à Ciência, mas não podem estar adaptados a todas as grandezas utilizadas na técnica
'e, sobretudo, na vida corrente. Daqui resulta o imper:ativo de termos de recorrer muitas vezes a unidades incoerentes.
Vamos citar alguns exemplos.
1.0 - O angstrom (A) , unidade de comprimento usada a nível atómico :
1 Ã = 10-10 m .
2.0 - A atmosfera normal (atm) :
1 atm = 1,013 X 105 Pa
235

TABELA 3
Alguns tempos (ordens de grandeza)
Idade do Universo � 1 E s = 1018 s
Tempo decorrido desde os primeiros homens
� lO Ta = '1013 s
Tempo decorrido desde o 1.0 documento es
crito e a primeira agricultura � 102 Gs =
= 1011 S
1 ano ( � '7r X 10'7 s) - lO' Ms = 107 S
1 dia '1102 ks = a.05 s
Tempo que a luz demora a atravessar o vidro
da janela � 10 ps = 10-11 s
Tempo que uma molécula de gás leva a dar
1 volta em torno de si mesma � 1 ps =
= 10 -12 s
Tempo de 1 volta do electrão em torno do
núcleo no átomo de hidrogénio � 1 fs =
= 10-15 s
Tempo que a luz demora a atravessar um
átomo � 1 as = 10-18 s
Tempo que a luz demora a atravessar um
núcleo _ 10 -5 as = 10 -23 S
Nota. 8 :
1') O termo quilate também in<lica a per
centagem de ouro fino em 24 partes
das ligas de ouro. Por eX!emplo, ouro de
dezoito quilates corresponde a
18 3 7'5 - = - = -- = 715 % 24 4 100
de ouro na Uga.
2) O quNograma'-'Padrão é equMibrado na
bal'ança por 11,000 0'28 dm' de água
a 4° C.
236
Definindo o 1Í'1lro como o volume de
água de massa igual a 1 kg, será :
1 l = 1,000 O �8 àm' .
3.0 - O quilograma-força por cm2 (kgf 10m2) , unidade de pressão,
embora não racional, mas prática :
1 kgflom2 = 9,80 X lO' Pa 1 atm = 1,.034 kgflom2
4.° - O bar, antiga unidade de pressão :
1 bar = 1,02 kgflom2 1 bar = 105 Pa .
5. ° - O carate ou quilate, unidade de massa na pesagem de pedras preciosas :
1 quilate = 0,2 X 10-3 kg = 0,2 mg (8) .
6.° - O lítro.
1 l = 1,000 028 X 10-3 m3 = 1,000 028 dm3
7.° - Unidade de massa atómica (u m a) :
1 u m a = 1,660 X 10-27 kg
6.3.4 Unidades suplementares SI
(8) .
São as duas unidades asSociadas às medidas de ângulo plano e de ângulo sólido. Não têm dimensões.
1 .a - A unidade SI de ângulo plano é o radiano (rad), que tem a seguinte definição:
ângulo ao centro cujo arco compreendido entre os seus lados tem comprimento igual ao do raio correspondente - fig. 6.2, ta) .
Esta unidade é pouco prática e foi substituída pelo grau sexagesimal (cf. Nota 9) .
2.a - A unidade SI de ângulo sólido é o esterradiano (sr) , cuja definição é a seguinte :

o
---------Fig. 6.2 (a) O arco AB de comprimento
6. e = r é o aJI1CO ,rodtano., O ângulo ao centro ,correspondente é o ânguJo radiano (rad) .
( b ) A B a D é uma ã"rea da 'Superfície esférica equivalente à área de um quadrado de lado igual ao raio r.
O ângulo sólido correspondente, com véI1tice no cen.tro - O - da esfera, é o esterradiano (8 r) .
u m = m ... + l kg
1,o m
kg -padrão
Fig. 6.3 O corpo A é arrastado, sem atrito, pelo qui'lograma-padrão B ('e, portanto, a força de tracção é F=lkgf),
des'locando-se ambos com a aceI.eração de 1 m/s'. NeSltas condições, a massa do ,corpo A maios a do quilograma-padrão perfaz 1 u m m.
ângulo sólido com vértice no centro de uma esfera e que intersecta na superfície desta uma área equivalente à de um quadrado de lado igual ao raio da esfera - fig. 6.2, (b) .
A palavra 'esterradiano significa radiano sólido [esterradiano = estereo ( sólido) + ra;diano] .
6.4 Referência ao sistema métrico
gravitacional
Este sistema é usado em Engenharia e tem como unidades fundamentais o metro (m) , o segundo (s) e o quilograma-força (.kg!) .
Tem uma unidade básica - o kg! que varia de lugar para lugar da Terra ( cf. Nota 5) .
Entre ,as unidades derivadas 'conta-se a unidade de massa, denomina;da unidade métrica de massa (u m m) , que passamos a definir com a ajuda da fig. 6.3.
F Equação de definição : m = -
j Para F 1 kg! e j = 1 m/s2, temos :
1 kg! m = = l u m m .
l m/s2
A u m m é, pois, a massa inerciaI de um sistema que, 'Submetido à força de 1 kg!, a;dquire a a;celeração de 1 m/s2•
6.5 Exercícios sobre conversão
de unidades
Convém ter presentes as seguintes recomendações :
1.a - As unidades são grandezas, representam-'se por letras minúsculas ( excepto quando têm nome de cientistas, escrevendo-se então
237

Nota 9 :
A unidade legal e natural d e arco, que é
o radiano (rad) , ,sobrepôsJse o grau de arco, que é uma unidade mais prática.
Foram os antigos astrólogos da Babilónia
que convencion3lra:m a medida
1 volta = 3160 graus
por suporem que o ano ,tinha 360 dias e u,u
lizarem um sIst!ema numérico de base 60".
(cl. Science et Vie. Maio de 1975)
Nota 10 :
Em certos casos, empregam-se as 'chama
das fórmulas preparadas, nas quais en.tram
um conjunto arbitrário de grandezas 'expres
sas em determinadas unidooes e coeficientes
numéricos de correcção. Por exempJo, na
fórmu�a
( () 4 P = 100 ) exp,rime-se P ,em 31tmosfel'a e IJ '( temperatUlra
de ebulição da água) em graus Celsius ( d e
signação oficial e actual que veio substituir
a antiga designação grau centesimal ) . Fór
mulas deste tipo utilizam-se frequentemente
em Engenharia.
238
com letra maiúscula) e são passíveis das operações algébricas como os vailores numéricos. Exemplos : metro - m
newton - N 15 m = 15 X 1 m
10 N = 10 X l N
metro quadrado - m� :
2 m X 3 m = 2 X 3 X m X m =
= 6 X m2 = 6 m2 •
2." - As unidades não se escrevem no plural e o símbolo correspondente não tem ponto, porque não se trata de abreviaturas. Exemplos : { Dois metros = 2 ms -+ errado
Dois metros = 2 m -+' certo
2 m deve ler-se : dois metro, porque equivale a indicar a operação dois vezes 1 m. { 3 kgs -+- errado
3 kg -+- certo { 8 m. -+- errado 8 m -+- 'certo
3.a - Para fazer a conversão de uma unidade de um sistema em unidade da mesma grandeza de outro sistema, proeede-se do modo seguinte :
1) Parte-se da €quação de definição da unidade primitiva ;
2) Nesta equação, exprimem-se todas ·as unidades em unidad€s do novo sistema ;
3) Relaciona-se a nova equação, depois de simplifi,cada, com a equação · d€ definição da primitiva unidade. (10) .

Exercício 1 :
As unidades d e velocidade e d e aceleração
são i'guais nos si,srtema'S métrico gravitaci'Ünal
e 'SI:
u. = m/s e Ui = m/s' .
Mas já não sucede o mesmo com as uni
dades de força e de massa, porque:
1 kg!
1 u m m
9,8 N
9,8 kg
E�p.ucar porquê e deduzi'r as relações de
grandeza escritas.
6.5.1 Exprimir 90 km/h em m/s e 340 m/ s (velocidade do som no ar a 20° C) em km/h.
Resolução :
1 km 1000 m 1) 90 km/h = 90 X -- = 90 X ---
1 h 3600 s
100 = -- m/s = 25,0 m/s .
4
1
1 m 1000 km
2) 340 m/s = 340 X -- = 340 X ---1 s 1
= 340 X 3,6 km/h
-- h 3600
= 1224 km/h -+ 122 X 10 km/h
6.5.2 Exprimir em newton a força de valor igual a 20,0 kgf num local onde é g = 9,81 m/s2 •
Resolução :
Comparando as unidades de força:
F=mj = > 1 N = 1 kg X 1 m/s' = kg X m/s'
F =mj = > 1 kg!=1 kgX9,81 m/s' (de!. de kgIJ
= 9,81 X kg X m/s' = 9,81 N
E portanto :
1 kg! - 9,81 N
20,0 kg! - x
x 20,0 X 9,81 N
x 196,2 N -+ 196 N
239

240
6.5.3 Exprimir 200 N em dine (unidade de força no '�istema CGS, isto é, num sistema L-M-T cujas unidades fundamentais são : cm � g - 8) .
ReS()lução :
Comparação das unidades :
F = m j = > 1 dine = 1 g X 1 cm/s'=gX cm/s'
F = m j = > 1 N = 1 kg X 1 m/s'
E por is-so:
= 10 ' g X 10 ' cm/s '
= l O ' X g X cm/s'
= 1.0 ' dine
1 N - l O ' dine
200 N - x
x = 200 X l O ' dime
6:5.J,. A massa inerciaI de um corpo é 30 kg . Exprimir este valor em u m m .
Resolução :
Comparação das unidades:
F = m j = > 1 kgf = 1 u m m X 1 m/s'
(def. de u m m)
F = m j = > kgf = 1 kg X 9,8 m/s'
(def. de kgf)
Portanto:
1 u m m X 1 m/s' = 1 kg X 9,8 m/s' <=> 1 u m m = 9,8 kg
E finalmente :
1 u m m - 9,8 kg
x - 80 kg
80 x = -- u m m
9,8
= 3,1 u m m

Exercício 2 :
Determinar a O'rdem de grandeza da di.s
tância percorrida pela cápsula Apolo 8 na sua
viagem de ida e volta Terra-Lua, sabendo· que
efectuou 10 voltas em torno da Lua.
Di.stânoia Terra-Lua = 384 X 10 ' km
Diâmetro da Lua = 3,5 X 1 0 ' km
(Of. Tabela :2 da Nota 7) .
Pergunta 2 :
Porque será ,corrente utilizar como unidade de pressão o kgf/cm' em vez do pascal ?
Resposta ao Exercício 1 :
1 ) Uv e U I d ep.endem exclusivamente das unidades de comp.rimento ,e de tempo, que 'são as m esmas nos dois 'sistemas: por isso t3JIllbém são as mesmas 'aS unidades de velocidade e de aceleração nos ref.eridos sistemas.
2) As U'Ilidades de massa e de força já não são igllaJis nos doi.s sistemas porque : No SI é fundamental a unidade de mass'a 'e ·é derivada a unidade de força ;
N o sistema métrico gra vitaciona1 é fundamental a unidade de força 'e é derivada a unidade de mass:a,
F = m j = > 1 N = 1 kg X 1 m/s'= kgX m/s'
(defin. de N)
F = m j = > l k9f =1 kgX 9,8 m/s' (def. de kgf)
=9,8 kg m/s' = 9,8 N;
portanto :
1 kgf = 9,8 N
F = m j = > l k9f = 1 u m m X l m/s'
(def. de u m m)
F = m j = > 1 kg! = 1 kg X 9,8 m/s'
(def· de kgf)
1>/i
Comparando :
1 u m m X 1 m/s' = 1 kg X 9,8 m/s' =
= 9,8 kg X m/s';
logo: 1 u m m = 9,8 kg
6.5.5 Exprimir 2',5 kgf/cm2 em pascal e em milibar .
1 bar= 106 bária (dine/cm2) .
Resolução:
F 1) De p = - resulta:
S
1 kgf 9,8 N 1 kgf/cm' = --- = ---
1 cm' 1(}-4 m'
Portanto :
= 9,8 X 1()1' N/m'
= 98 X 10' Pa
1 kgf/ cm' -� '98 X 10" P a
2,5 kgf/cm' -- x
x = 2,5 X 98 X :10· Pa
= 2'45 X 10· P a
2 ) 1 mb = '10.-3 b
= 10-8 X 106 bá'I'iai 1 dine
= 100'3 dine/cm' = 10,;) X --
l cm'
1Ql-5 N = 10:" X ---- = 1CT Pa
1{J-4 m'
E portanto :
1 mb -- 1{)1' Pa
y -- 2-15 X 10'3 Pa
24'5 X 103 y = ----
102 Y = 24'5 X 10 mb .
6.5.6 Na fig. 6.3, admitamos que o COI1pO A tem a massa inerciaI de 540 g e o ,corpo B de 250 g. Se o sistema partisse do repouso, com que velocidade chegaria A à 'extremidade da mesa ?

Pergunta 3 :
Definiu-se uma unidade de ângulo - o ra
diano - não obstante o ângulo ser uma gran
de2la 'adimen'S·ton!aJI, cm:rfQI'me 'se mostra no exercício 3. Too:taJr umru '�pH'cação paTa o facto de ·se ,ter escolhido essa unidade.
(Ler primeiro 6.,6,.J. )
Pergunta 4 :
A definição d e radi'ano é apenas apUcável
no 'SI ou é também aceitável em qualquer
outro sistema de unidades ? Porquê ?
Resposta ao Ex. 2 :
3,500 km d = 2 X 384 0QO km + 2?r X X lO
2
d = 877 900 km -+- 8'718 X lQ;3 km
ResoluçiW :
Sistema = cOI1po A + ·corpo B + no de liga
ção.
Massa do sistema = 5410 g + 2'50 g = 790 g
= 0,7/9 kg .
Força exterior aplicada ao sistema :
F = 250 gf = 0,250 kgf
= 0,25 X 9,8 N
De F = m j resulta :
F 0,25 X 9,8 N J = - = = 3,10 m/s2
m 0,79 kg
'E o valor da velocidade de ·chegada será :
v2 = 2 j e
= 2 X 3,10 m/s2 X 1,0 .fi
= 6,2 m2/s2
v = y6,2 m2/s2 = 2,!49 m/s -+ 2,5 m/s
6.6 Equação das dimensões. Homoge
neidade das fórmulas físicas.
6.6.1 Dimensões de uma grandeza física e equação das dimensões
A partir da equação de definição de uma grande�a física G) e não considerando os ·coeficioentes numéricos ( quando existam) que nela figuram, é possível estabelecer-se uma expressão simbólica, qualitativa, que relacione essa grandeza G apenas ,com as grandezas fundamentais. Estas, no caso da Mecânica, são : o comprimento (L) , o tempo (T) e a massa inerciaI (M) .

Resposta à pergunta 2 :
o pasca:l, sendo uma unidade p erfettamente coerente no SI, não é, p orém, prática, ,porque o seu valor é muito pequeno.
Aprovettando os resuLtados do exercício resolvido 6.5.5., escrever,emos:
1 kgf/cm' -- 98 X 1:0" Pa
x --- 1
1 x = kgf/cm'
98X'10'
x � 10-5 kgf/cm'
X _ 10-5 atm
x < O,Ol mm Hg
Pa
Essa relação simbólica e não quantitativa chama-se equação das dimensões da gramdeza G. Na Mecânica, tem a seguinte forma :
r G] = La
Mf3
TY
com a, (3, y E I R .
Os expoentes a , (3 e y são as dimensões da grandeza G em relação ao comprimento, à massa e ao tempo, respectivamente.
Segundo esta definição, cada grandeza fundamental terá a dimensão 1 em relação a si 'Própria, uma vez que é independente das restantes. Isto é :
[L] = U , [M] = M\ [ T] = Tl
Se a = (3 = y = 0, diz-se que a grandeza G é uma grandeza sem dimensões: isto sucede sempre que uma grandeza é definida 'pelo quociente de duas grandezas da mesma espécie. Quando rulgum dos expoentes a, (3, ou y é nulo, suprime-se o correspondente símbolo L, M ou T .
A título de exemplo, vamos escrever a equação das dimensões de algumas grandezas derivadas.
1 .u _ Ãrea:
S = a X b => [S] = L X L = V
A área tem a dimensão 2 relativamente ao comprimento (quer dizer, é um produto de dois comprimentos) e zero em :relação à massa e ao tempo (isto é, não depende destas grandezas) .
2.a - Volume:
V = a X b X c => [V] =LXLXL=V (Fazer a leitura nos termos 'anteriores)
243

Exercício 3 :
Partindo da definição de radiano e de
esterradiano, mostrar que o d-ngulo sólido e
o ângulo plano não têm dimensões.
3. a - Velocidade:
6,e L V = -- => [v] = - = L T-l
6,t T
A velocidade tem a dimensão 1 em relação -ao comprimento e a dimensão - 1 em relação -ao tempo ( isto é, qualquer dos seus valores é dado pelo quociente de um comprimento por um interv3!lo de tempo) .
4.a - Aceleração:
6,v j = - => [j]
6,t
LT-l -__ = LT-2
l'
A aceleração tem a dimensão 1 para o 'comprimento e a dimensão -2 para o tempo ( o que significa que qualquer dos seus valores é dado pelo quociente de um comprimento pelo quadrado de um intervalo de tempo) .
5.a - Farça:
F = mj => [F] = M X LT-2 = LMT-2
A força tem as dimensões 1 para o comprimento, 1 para a massa e - 2 para o tempo (quer dizer, qualquer dos seus valores obtém-se multiplicando um certo comprimento por uma certa massa e dividindo este produto pelo quadrado de um intervalo de tempo) .
6.a - Densidade de uma substância-d:
d = m (s)
m (p) , sendo
m (s) e m (p) , respectivamente, as massas do mesmo volume V da substância

Resposta ao Ex. 3 :
1 ) Angulo plaina :
PeIa definição de radiano, para saber quan
to mede, -em 'radianos, um dado ãnguJo, basta
dividir' (li compri'Ill'ento do arco compreendido
entre os -seus lados pelo comprimento do raio correspondente.
Portanto:
6 6 tI (rad) =
r
Djmensrionalmente, teremos :
L [ tI (rad) ] = - = Lo L
2) Angulo sólido
P'tlla definição de esterradiano, a medida
de um ângulo sólido será dada pelo quocien,te
( ftg. 6..21) :
[ O - A B C D ] (sr)
Dimensionalmente., teremos :
L' [ O - A B C D (s rJ ] = -L'
s
r
s e da substância p escolhida para termo de comparação - a água 'a 4° C para as substâncias no estado sólido e líquido ; o ar para gases e vapores, à mesma pressão e temperatura destes.
Portanto, a equação das dimensões será
M [d] = - = Mo
M
Pela convenção estabelecida, MO não tem o significado matemático MO = 1, porque M é símbolo qualitativo da grandeza massa e não representa, por isso, um valor det.erminado da massa ao qual se poderiam aplicar as operações ari tméUca;s.
MO significa, simplesmente, que a densidade é uma grandeza sem dimensões, porque resulta do quociente de duas gra;ndezas da mesma espécie (neste caso, dua;s massas) .
Para estas grandezas adimensionais não se definem nem unidades fundamentais, nem unidades derivadas. O seu valor t:r:a:duz uma medição escalar e não unia medição efectiva. E este valor é sempre o mesmo, qualquer que seja o sistema de unidades em que se efectuem as medições.
6.6.2 Homogenei;dade dimensional das fórmulas físicas
Dizemos que uma fórmula física (equação que rela'ciona van ave is físicas) é dimensionalmente homogénea quando as dimensões de todos os seus termos forem as mesmas.
A condição necessária, mas não suficiente, para que · uma fórmula esteja correctamente escrita, é que seja di-
245

Respostas às perguntas S e 4:
3. H á necessidade de escolher u m termo de comparação para a medição de ângu}()8, como houve também para a medição d e denSlidades. Para esta grandeza, s'em dimensões, es-colheu-se como termo de comparação a densid8Jde da água ou do ar, em condições bem definidas, a que se 8Jtrihuiu o valor 1.
Parece n8Jtural escolher, p8Jra unid8Jde de
ângulo, um ângu'10 rem que a margem de arbitrari'edade esteja reduzida ao mínimo: nestas condições leva vantagem o ângu�o ao centro cujo arco compreendido ,entre os s'eus lados tenha comprimento ·exactamente igual ao do raio correspondente. D8Jqui o considerar-se o radiano como uma unidade natu,ral.
4. A definição de radiano e o seu v3ilor é independente de qualquer sistema de unida� des, ·como aUás a d efinição e o v3Jlor d e toda a grandez8J sem dimensões ( por exemplo, a densidade do f.erro em relação à áigua é 7,8 em ,todos os sistemas de unidades) . Isto re
sulta de a medida, em radiano, dum dado ângulo, ser dada 'pelo quociente de duas grandezas da mesma espécie ( dois comprimentos, neste ,caso) . Es'se quociente é pois s'empre o mesmo, qualquer que seja a unidade de compri,mento, uma vez que a fracção não se aItera quando numerador ,e denominador são multiplicados pelo mesmo valor não nulo. Não é pois uma definição 8Ó válida no SI. Por ·convenção, cons'idera-s'e o radiano uma unidade suplementar no SI.
Exercicio 4:
Mostrar que a m8Jss'a vOlúmi,ca, exp'r€lslSa na unidade cas (g/cm") , tem valor numérico i'gua:l ao da densidade no caso d e subs,tâncias no estado sólido e no .estado liquido e que, no caso de gases e vapores, densidade e mas'sa
volúmica têm valores numé,ricos diferentes. Massa volúmica da água a 4° C: /L ( água) =
= '1 g/'cm'. Massa volúmica média do ar a 0° C e 1 atm :
/Lo (ar ) = 1,293 X 10-3 g/cm"
246
mensionalmente homogénea. Não é sufidente porque a equação das dimensões só diz respeito às grandezas e operações a efectuar com elas, mas é omissa - dado o seu carácter simbólico e quaIitativo - quanto aos valores das grandeza:s e aos coeficientes numéricos.
Vamos analisar alguns exemplos.
2 1 . ' - A expressão V = - Ao X h utilizada
3 para calcular o volume de um cone, onde Ab = área da base e h = altura do cone,
estará correcta ?
Resolução :
Quanto a dimensões" temos';
1.0 membl10 -+- [v] = L"
2.° m embro -+- [A,] X [h] = L' X L = L'
A fórmula dada é dimensionalmente homogénea 'porque os d oi,s membros' da ,equação têm as mesmas dimensões. Está, portanto, certa quanto às grandezas' fís1cas que relaciona - diremos que está fisicamente correcta.
Mas não está correcta matematicamente, 2
porque o coeficiente - está errado, pois a 3
expressão não conduz a valo'res numérLcos iguais para ambos os membros quando se substituem os va,lores correspondentes das várias grandezas. Com efeito, um cone cuja âJrea da bas'e seja igual a 'lü cm' e a alture i'gua'l a 9 cm tem o volume de 30 cm'.
Ora 2
3'0 *' - X 10 X 9 3
A fórmula não está, portanto, correcta.
2.' - Será correcta a expressão
m = v X d ?

Resposta ao Ex. 4 :
1 . Substâncias no estado sólido ou líquido.
A substância escolhida para termo de comparação ( padrão) é a água a 4.0 C . Temos, sucessh'amente :
m ( s )
m ( s ) V d = ----- =
m ( água ) m ( água )
V
ILC água)
Portanto :
( V é o volume da substância )
f.L (s )
1 g/cmJ
f.L ( s ) = d X 1 g/cm' => f.L ( S ) = d em valor numérico .
2. Gases e vapores.
o termo de comparação é o ar à pressão e temperatura do gás ou vapor. A ()<> C e
1 atm, temos', ·cümo no caso anterior:
f.L ( gás ) f.L (gás ) d = -- = =>
f.L ( ar) 1,'29B X IO'-3 g/cm3
f.L (gás ) = d X �,O'Üll 200, g/cm3
Pürtanto, o valor numérico de f.L ( gás ) é :
d X O,{)Q:1 2.93 '=1= d .
Resolução :
Quanto a dimensões temos :
1.0 membro -+- Em] = M
2.° membro -+- [v] X [ d] = U X L� = V A fórmula não está fisicamente correcta. Mas está matematicamente certa, 'porque,
por exemplo, um COI'pO de fer·J:1o com o vülume di! 1'01 cm' tem a massa de 7'8 g.
Como a densidade do ferro é 7,8' -temos :
78 = 10 X 7,8
Esta fórmula m = v X d também não está correcta. A expressáo correcta é m = V X f.L '
m proveniente da equação de definição f.L = - .
v
Em resumo, estes dois exemplos permitem-nos concluir :
"ó devemos usar fórmulas fisicamente correctas (dimensionalmente homogéneas) e matematicamente certas.
Para evitar as incorrecções físicas e em muitos casos também as numéricas, devemos, na aplicação das fórmulas, substituir as letras pelos valores numéricos das grandezas seguidos das respectivas unidades_ Estas também são grandezas e, por isso, podemos efectuar operações algébricas com os seus símbolos. como se fossem números.
Assim, a incorrecção verificada no 2.° exemplo seria logo detectada por este processo. Com efeito, para v = 10 cm3 e d = 7,8, teríamos
m = 10 cm3 X 7,8 = 78 cmS ,
o que é manifestamente falso. Utilizando, porém, ·a massa volúmica do

ferro, que, quando expressa em g/-cms, tem valor numérico igual ao da densidade, teremos :
fL = 7,8 g/cms
m = V . fL = lO cm3 X 7,8 g/cms
= 78 g ,
que é o resultado correcto.
6.6.3 Aplicações
1.a - Verificar se as fórmulas
I v' = 2 j e
e = v. t + : jt'
são dimensionalmente homogéneas.
1 ) Temos, sucess,ivamente :
[v2] = (LT-l ) 2 = L2 T-2
[je] = LT-2 X L = L2 T-'
v' = 2 je é, portanto, dimensionalmente
homogénea.
2 ) Analogamente, temos :
[e] = L
1 [vo t] + [ - jt2 ] = LT-l X T + LT-2 X T2
2
= L + L
= L,
porque
comprimo + comprimo
Por,tanto:
1 e = Vo t + - jt2
2
comprimento.
é também dimenS'Í'onalmente homogénea..

Exercício 5:
As equações das dimensões t3imbém per
mitem a previsão de fórmulas uma vez des
contados os factores numérIcos, obtendo�se
depois estes a partir dos dados �perimentajs.
Por ·exemplo, verifIca-se experimentalmente
que o periado «T» das oscilações, de um pên
dulo v3iri,a com a aceleração local «g» da gra
vidade e com o compri,mento «l» do pêndulo.
Qual serã o tipo de fórmula que permite
calcular o período T do pêndulo ?
2 ." - Relacionar duas unidades da mesma grandeza derivada, em 'sisbe<ma:s diferentes, mflJs que têm 3iS mesmas grandeUl:s funda
mentais.
Por exemplo, relacionar pascal com a bária
(unidade de pressão no sistema O G 8, cujas unidades fundamentais são: cm - g - s) .
Resolução :
1.0 Processo - par.tindo da equação das di
mensões.
F [F] LMT-' p = - -> [pJ = - = --
C::. 8 [8] L'
= L-I M T-2
Por isso :
pascal
bária
(�)-� ( l kg) X (�)- 2
1 cm 'l g 'I s
= ('1Q2 ) -1 X ,103 X l
= 10 = > ,1 pas'cal = J.O bãria
2_° Processo - partindo da ,equação de de
finição (jã explicado e exe!lllplWcado no
número 6.5) .
F l N P = -- = > '1 Pa = --
C::. 8 1 m'
105 dine ( unid. CGS)
lO" cm'
= 1'0 dine/cm'
= 1'0 bãria .
Ê indiferente a opção por qualquer dos processos - ela dependerá 'apenas da preferência de 'Cada um.
249

Resolução do Ex. 5:
Uma v,ez que T só depende de l ,e de g, a
f.órmula será do tipo :
ex 13 T = k l g ,
sendo k um coeficiente numérico.
Como esta fórmula deve ser dimensional
mente homogénea, temos, sucessivamente :
ex f3 T = [l ] X [,9 ]
ex 11 T = L X (LT-Z ) '
A homogeneidade dos dois membros con
duz ao ,si-stema das duas equações seguintes :
cuja solução é :
{ 1
13 = -2
{ 1 ex = -
2
A fórmula é .então do Upo:
T = k X (2" X g Z <=>
250
6.7 Cálculo numérico aproximado
6.7.1 Erros cometidos nas medições
Os órgãos dos sentidos e os instrumentos de medida são as fontes d e informação que nos conduzem aos valores das grandezas físicas. Estes resultam, portanto, de medições. É natural surgir então a pergunta : d e que factores dependerá uma medição ?
A resposta não será -sempre fácil. Se a medição é directa, intervêm pelo menos : -a grandeza a medir, o padrão de m edida, o instrumento que compara aquela com este, o observador, determinados acontecimentos fortuitos, desde um simples sopro de vento até ao atrito com que se move um ponteiro.
Todos -estes elementos limitam, uns mais outros menos, a precisão das avaliações e das leituras, seja pela impossibilidade d e obter escalas correctas, seja ,pela dificuldade de ajustamento dos zeros das escalas aos extremos de comprimentos a medir, seja ainda pelas irregularidades das grandezas, seja também pela maior ou menor capacidade de atenção e/ou habilidade de
, manipulação do experimentador. Chegam estas restrições, e há mais
e variadas, para concluirmos que toda a medida de uma grandeza vem afectada de uma certa incerteza.
Sendo impossível, por meio da medição, conhecer o valCYr verdadeiro de uma grandeza, ficamos reduzidos ao problema de minimizar o mais possível as incertezas. É por -esta razão que interessa determiná-las a fim de ficarmos a saber o grau de confia-nça que nos pode merecer o resultado de uma medição (medida) .

Nota 11:
Os erros sistemáticos podem ser elimina
dos, uma vez que se detectem as respectivas
causas.
Não acontece o mesmo com os ,erros for
tuitos dado não nos apercebermos das suas
causas. Os seus ·efeitos podem, porém, ser
atenuados desde que se tra.ba1he com o maior
cuidado possível, se façam várias medições
da mesma grandeza e nunca uma só e se
calcule a média das medidas' Esta média é
utilizada., por fim,como valor mais provável da grandeza, pela� razões que vamos indicar.
Oom efeito, se o trabalho for escrupuloso,
o que implicará boa precisão ,e exactidão
(brevemente vepemos o significado destes
termos - n.O 6.7.3'), os· valores' obtidos distri
buir�se..;ão para um e outro lado do verdadeiro valor ou do valor aceite, de acordo com
a curv'a da figura 6J4, conhecida por curva
de Gauss.
p
Fig. 6.4 A curva que traduz a variação da
probabilidade dos erros mostra que
grandes erros apr,esentam .pequena
probabillidade de ocorrerem. O des
prezar 'erPOS g.randes como e, equi
vale a considerar nulas as ,respecti
vas probabilidades p,. :E:: igual a pro
ba.bilidade de cometermos erros do
mesmo valor absolu.to por defeito
e por excesso.
Os erros cometidos, no que respeita às suas causas, são fundamentalmente de duas naturezas, a saber:
1.a - Os erros sistemáticos, que se verificam sempre no mesmo sentido e provêm de causas permanentes; a influência destes erros pode ser eliminada ou até calculada. De entre esses erros, contam-se:
- os devidos a deficiências do método utilizado, por exemplo aproximações introduzidas;
- os ocasionados por deficiências dos aparelhos de medida, por exemplo má regulação, uma divisão da escala ter valor diferente do das restantes, um mau ajuste do zero;
- os motivados por defidências do observador;
- os originados por deficiências das condições em que a medição é realizada, por exemplo, efeitos de de temperatura, .pressão, etc.
2.& - o.s erros fortuitos ou acidentais, devidos a causas ocasionais e imprevisíveis, variam, em grandeza e sentido, perfeitamente ao acaso. Podem ser devidos a flutuações da atenção do experimentador, a má colocação dele na' leitura de escalas (erros de paralaxe) , a ajustamentos diferentes em medições sucessivas, à estimativa na avaliação de fracções de divisão, a correntes de ar, à agitação da mesa de trabalho, etc.
São 'estes erros que nos interessa considerar prindpalmente, visto não ser possível eliminá-los (11).
251

Temos eIl!tão:
x. = x + e.
X, = X + e,
Xn = X + en
Xi � valor obtido na me-
dição de ordem i .
e, � erro que afecta -o va-
lor Xi' ou seja a dife
rença -en tre esse valor
e o verdadeill'o valor.
Somando e di,vidirndo peLo número n de
medições:
X,+X,+_,,+Xn (x+e.) + (x+e,) + ... +(x+en)
n n
nx+e.+e,+ ... +en �ei ---- =x + --
n n
Quantas mais medições -efectuarmos, mai,or
é a probabiHdade de os valol"es se distribuírem
pa:ra um e outro lado do valor verdadei,ro se
apeiD.8iS com-atermos eI1rOS' fortuitos (poiIs O'S
erros sistemáticos são sempre -por defetto ou
sempre 'por excesso), fazendo então com que
�e. seja cada vez maios próximo de zero e,
pOl1tanto, mai·s próxímo será o verdadeiro
... ·alor X da média ar.itmética
X, + X, + .. + Xn
n
Está assim justificada a escolha da média
:lritmética para valor mais provável (v. m. p.)
da grandeza.
252
6.7.2 Definições e convenções fundamentais
Antes do mais convém definir, com a precisão possível, alguns termos fund3!mentais, de modo a uniformizarmos a linguagem e podermos compreender a leitura de várias regras.
1.a definição - Algarismo exacto de uma medida: é um algarismo escrito no resultado de uma medição a que corresponde erro inferior a uma unidade da sua ordem decimal.
2.a definição - Algarismos aproximados ou incertos: são os algarismos não exados.
3.a definição - Algarismos significativos de uma medida: são todos os algarismos exactos mais o primeiro aproximado.
Exemp'lo:
Mediu-se um comprimento AB com uma régua de miHmetro, sem nomo, tendo-se registado o seguinte resultado:
AB = 30,7 mm
- Algarismos exactos: 3 e O
- Algarismo aproximado: 7
Este último algarismo 7 foi obtido por estimativa e esta não garante erro inferior a 0,1 mm, isto é, à unidade que corresponde à ordem decimal desse algarismo. Com efeito, a olho desarmado podemos avaliar, mesmo bem
1 treinados, apenas da menor divisão
4 da régua.
Se porém usássemos um nomo de décimos, já nos era permitido distin-
Nota 12:
o número de llilgarismos si'gnificllitivos do
resultado de uma medição, directa ou indi
�ecta, ,está depenõente da natureza do instru
mento de mooida.
A natureza dum instrumento de medida
é a menor quantidade que ele permite medir
com exactidão. Por outras palavras, é o menor
valor lido com esse instrumento que ainda é
exa'cto, entendido este termo exa-cto não no
sentido õe 'llibsolutamente certo ou .rigoroso,
mas sim como estando af.ectado dum erro
inferior a uma unidade da orõem de'cimal
do seu último 8i1g'aT'1smQ.
guir perfeitamente entre 30,7 mm e 30,6 mm ou 30,8 mm, pelo que já podíamos garantir erro inferior a 0,1 mm. O algarismo 7 seria então um algarismo exa-cto.
Na leitura efectuada sem o nónio não podemos escrever
AB = 30,72 mm
pois o algarismo 2 já não tem qualquer significado físi'co 'Porque é totalmente incerto ou duvidoso. De forma alguma pode ter sido avaliado com o instrumento usado.
Ccmvmu;ão:
Em Físi'ca, as medidas e�primem-se de dois modos - ou apenas com algarismos exactos ou com os algarismos significativos.
Designando por erro absoluto a diferença entre o valor determinado ou proposto e o valor verdadeiro (desconhecido) e por majorante do erro absoluto ou incerteza absoluta um valor tão vizinho do erro absoluto quanto possível, mas superior a este, é costume, no segundo modo acima indicado de exprimir a medida, acrescentar também esse majorante do erro.
Assim, no exemplo dado, podíamos escrever :
AB = 3 1 mm, no 1 .0 caso ;
AB = (3 0,7 -+- 0,2 ) mm, no 2.0 caso, admitindo como incerteza a bsoluta ou majorante do erro o valor 0,2 mm. (12) .
6.7.3 Precisão e exactidão das medições
Como o resultado de uma medição nunca ind1ca o valor verdadeiro da
253
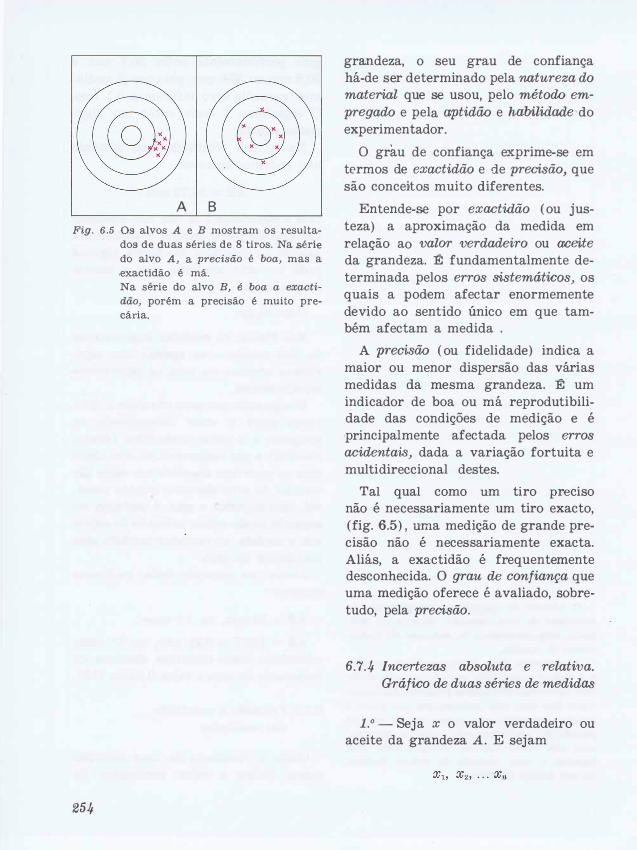
A B
Fig. 6.5 Os alvos A e B mostram os resulta
dos de duas séries de 8 tiros'. Na séri€
do alvo A, a precisão é boa, mas a
,exactidão é má.
254
Na série do alv,o B, é boa a exacti
dão, porém a precisão é muito pre
cária.
grandeza, o seu grau de confiança há-de ser determinado pela natureza do material que se usou, pelo método empregado e pela aptidiio e habilidade'do experimen tador.
O grau de confiança exprime-se em termos de exactidão e de precisão, que são conceitos muito diferentes.
Entende-se por exactidão ( ou justeza) a aproximação da medida em relação ao val(Yf' verdadeiro ou aceite da grandeza. É fundamentalmente determinada pelos erros sistemáticos, os quais a podem afectar enormemente devido ao sentido único em que também afectam a medida .
A precisão ( ou fidelidade) indica a maior ou menor dispersão das várias medidas da mesma grandeza. É um indicador de boa ou má reprodutibilidade das condições de medição e é 'principalmente afectada pelos erros acidentais, dada a variação fortuita e multi direccional destes.
Tal qual como um tiro preciso não é necessariamente um tiro exacto, (fig. 6.5 ), uma medição de grande precisão não é necessariamente exacta. Aliás, a exa:ctidão é frequentemente desconhecida. O grau de confiança que uma medição oferece é avaliado, sobretudo, pela precisão.
6.7.4 Incertezas absoluta e relativa. Gráfico de duas séries de medidas
1.0 - Seja x o valor verdadeiro ou aceite da grandeza A. E sejam

as medidas resultantes de n medições realizadas com o mesmo instrumento, pelo mesmo observador e utilizando o mesmo método.
Toma-se para valor mais provável da série das n medidas o valor médio :
Xl + X2 + .. . + Xn Xm = -------------- ( cf. nota 11)
n
Chamam-se desvios as diferenças algébricas:
Um majorante 6x do erro absoluto será o maior dos módulos dos desvios
6xl = I Xl - Xm I , 6x2 = I X2 - Xm I ... ,
6xn = I X" - Xm I
não sendo aconselhável tomar um valor inferior dado o número restrito de medições normalmente efectuadas. Esse majorante 6x do erro absoluto é designado por incerteza absoluta (6 .7 .2 ) .
Toma-se para majorante do erro relativo ou incerteza relativa o valor
6x
Xm
2.° -- No caso do registo gráfico de duas séries de medidas relativas aos valores de duas grandezas físicas em correspondência biunívoca,
cada uma das medidas Xi e Yi vem afectada da respectiva incerteza 6Xi e 6Yi.
255

256
Por isso, fig. 6 .6, cada ponto (Xi, Yi) será o centro de um rectângulo de incertezas cujos lados consecutivos têm por medida L,Xi e L,Yi, respectivamente.
A linha representativa da variação de Y com X pode não passar pelos referidos pontos (Xi, Yi), mas terá que interseptar os rectângulos. Se o número de pontos for grande, devem repartir-se, sensivelmente por igual, pelos dois lados da linha.
Fixemos, finalmente, que:
A precisão de uma medida é avaliada pelo majorante do erro relativo ou incerteza relativa e a sua ordem de grandeza é indicada pelo número .de algarismos significati-vos do resultado. (13.).
Incerteza :relativa e grau de precisão são inversamente proporcionais.
YI1-· -------------------- ---- ---- - - ---t:. ys_ _ _ _ _ ____ _ _ __ __ _ _ _____ _ _ _ _____ _ _ _ _ _
I '
y=f (xl
x
Fig. 6.6 O gráfico da vruriação da grandeza Y com a grandeza X não é forçoso que passe pelos pontos (x" y,), afectados de incerteza de medida: basta que intersepte os rectângulos d.e incertezas 'cujos lados ,conBecutivos têm por medidas /:'x, e /:'y" respectivamente.

Nota 18:
Mediu-se com uma fita métrica de mm o
comprimento de uma mesa rectangular 'e o
comprimento de uma sala também vectan
gular. Pode ace�tar�se para majorante do erro
absoluto S mm (as difi'culdades de ajusta
mento podem levar a cometer um 'erro má
ximo de '1,5 mm em cada e",tremidade).
Os valores médios provenientes de,10 leLtu
ras (a dispersão dos valores - diferença entre
o maior e o menor - não ultrapassou de facto
os S mm) foram Tespectivamente 1,027 m e
6,155 m, pelo que podemos 'escrever:
l, (mesa) = 1,0217 m ± 0,()i(),3 m
l., (sala) = �,'1� m ± 0,003 m
Os primeiros três algarismos são exactos,
mas o último (o dos mm) já é aproximado.
Embora ambas as medidas estejam afectadas
da mesma incerteza absoluta, a precisão da
segunda é cerca de 6 vezes maior do que a
da primeira, porque a sua incerteza relativa
é cerca de 6 vezes menor.
Com .efeito, temos:
6l, 0,003 m
l, 1,OO7m
3 3 0,3 - -- = --
1027
= 0,3%
6l, Q,003m
l, 6,165m
3
100<0
= -- = O,(JOO 49 6155
49 49
'100
= ---- =, ----100000
0,049
100
= 0,049 %
E portanto:
17
0,3 300
0,049 49
lOOX1000
6.7.5 Oálculo numérico aproximailo
Vamos indicar as regras da escrita dos resultados só relativas aos algarism08 8ignificativos e sem a indicação' d08 majorantes d08 erros. (14).
1.a - Regra da SOMA
Arredonda-se o resultado para a última unidade decimal correspondente
'
ao dailo que tem menos algarismos
decimais.
Exemplo:
27,8 h
3,23 h
0,68 h
31,71 h -+ 31,7 h
2.a - Regra da DIFERENÇA
Utiliza-se a regra anterior salvo no caso seguinte:
Quando diminuendo e diminuidor são da mesma ordem de grandeza, não há precisão, devendo medir-se directamente a diferença e não os valores das grandezas.
Exemplo:
1,5 7 'cm - 1 ,55 cm = 0,02 cm
Se o erro absoluto fosse 0,02 cm, o resultado anterior tanto pode ser 0,00 cm como 0,04, cm, como outro valor intermédio.
Tal resultado não oferece, pois, confiança.
257

Nota 14:
N{)s trabalhos práticos, no Laboratório de Física, é conveniente treinar a escrita dos resultados não só cem algarismos significativos, mas .também ,com a indicaçã{) dos majorantes, para 'o que o estudante terá de reflectir >sobre as condições reais das medições que está a efectuar ..
Para 'trabalhos de maior precisão d evem estudar-se as regras de d eterminação dos majorantes dos erros absoluto e relativo para medrções indirectas, assim como a determinação de médias pesadas (ou ponderadas ) relati'vas a séries de medidas, quando a cada série corresponde predsão diferente.
Essas regras de dEterminação dos' majorantes 'serão expostas no número 6.7.7. Sobre este assunto os estudantes poderão ainda consultar:
- Oák:ulo de Valores Aproximados, texto piloto do professor '8�bastião e Silva.
258
3.a - Regra do PRODUTO e do QUOCIENTE
o número de algarismos significativos do resultado não deve ser superiar ao do dado que tenha menos algarismos significativos.
Exemplo:
2 ,002 m X 1 ,15 X 10-:-2 m =
= 2,3023X1o-2 m2 � 2,30Xl0-2 m2
Este número tem 3 algarismos significativos, tantos como o segundo factor.
Notemos que esta regra só se aplica a números que hajam resultado de medições. Assim,
9 ,57 m X 2 = 19,14 m .
Escrevem-se 4 algarismos significatievos e não um, porque 2 é um factor numédco que não resultou de medições e o algarismo nove conta como dois algarismos (cf. 5 .a Regra).
4.a - Regra referente aos cálculos intermédios
Nos cálculos intermédios deve utilizar-se mais um algarismo significativo do que o número de algarismos correspondente ao resultado final.
A razão é a de se obter uma margem de segurança nos arredondamentos (d. 6.a Regra ) .
5.a - Regra referente à ccmtagem dos algarismos significativos
Na contagem dos algarismos significativos, quando o primeiro algaris�o

Nota 15:
A 5.· regra é uma convenção seguida na
maioria dos livros de Físi'ca, mas não se pode
considerar ·como uma regra matemática de
monstrada com rigor lógico.
No entanto, como estas regras que enun
c�amos não nos dão mais do 'que uma primei'ra
aproximação do.s :resultados numéricos, ape
nas interessa nesta fa·se inicial a ordem de
grandeza da precisão, que é avaliada pelo
majorante do erro relativo ou incerteza :rela
tiva e pode ser dada, grosso modo, pelo nú
mero de algarismos ·significativos.
Para compreendermos isto e podermos
acei,tar a regra sem o ,carácter de imposição
dogmática, vamos recorrer a dois exemplos.
L' -Medimos um cer.to comprimento 'com
uma fita métrica de cm (,tomamos, 'por isso,
como majorante do erro absoluto ou incer-
1 teza absoluta, 0,25 cm, o que representa - de
4 uma divis'ão de cm) e ·com uma régua de
mm (tomamos agora como majornnte do erro
absoluto ou incerteza absoluta 0,5 mm, o que 1
representa - de uma divisão dez vezes mais 2
pequena que a anteri'Or).
Os resultados das medições, escrevendo
apenas os algarismo.s eX!actos',' foram:
I, = 25 cm
I, = 25,2' cm Os majorantes dos erros l1elativos (incerte
zas relativas) serã:o, respectivamente:
L::.I, 0,25 cm 2,:5 1 =-- =--=1 %
l, 25 cm 250 100 L::.Z' 1 0,5 mm 2 0.2
� -- =--=O,2'% l', 25.2 mm 1000 '100
Temos assim:
25 cm - 2 a'lg. sÍ'gnif" - precisão de 1 % 2:5,2 - 3 algo signif. - precisão de 0,2 %
Esta última precisão é 5 vezes maior qu·e a
primeira, porque varia na r·azão inversa da
incerteza relativa e
5 X 0,2 = 1,0 O número de algarismos significativos está
assim de acordo com a ordem de grandeza da
precisão (e não, repaTe-se, com o val-or da
precisão).
significativo, a partir da esquerda, 1M 5 ou maiM do que 5, 'Conta por dois algarismos. (15) .
Ex:emplos:
4'5 - 2 algo significativos;
54 - 3 algo significativos;
61 - 3 algo significativos.
6.a - Regra do par
Nos arredondamentos, quando o primeiro algarismo a eliminar é 5, arredonda-se para algarismo par.
Exemplos:
7,5L......78
8,5L......78
7.a - Regra das potências de 10
Utilizam-se as potências de 10 para substituir OS algCN'ÍSmos eliminados de modo que não se altere a ordem de grandeza da medida.
Exemplo para apHcação das regras 4.a e 7.&:
23,2 m X 12,4m X 2,3 m =
= 287, 68 m2 X 2,3 m (3 alg.)
= 288 m2 X 2,3 m (3 alg.)
= 002,4 m3
= 66 X 10 mS (3 alg.)-+-7Xl0f m3,
porque o resultado final só comporta 2 algarismos (tantos quantos os do factor 2,3 m) e nos cálculos intermediários devem utilizar-se, portanto, 2 + 1 = 3 algarismos.
259

2.0 - Retomemos o exemplo referido na
nota 1:3. Os comprimentos medidos foram:
l, (mesa) = 1,()I2'7\ m
l, (sala) = 6,15.5 m
A incerteza absoluta era igual para as
duas medidas � O,O'Ü'3 m.
As precisões correspondentes, calculadas,
tinhaTIl os valores:
6l, -- =0,3%
l,
6l, -- = 0,048 %, ·esta cerca de 6 vezes
l, maior, porque a incerteza .relativa é 6 vezes
menor:
Ora:
6 X 0,04.8 = 0,'288-+ 0,3
l, = 1,027 m tem 4 algo signif,.
l, = 6,'1515 m devia .ter mais um algarismo
significativo, porque a precisão é 6 vezes 'superior.
Isto .só se pode verificar se convencionarmos contar o algarismo 6 (1.0 algarismo signi
ficativo a par.tiT da esquerda) por dois alga
rismos, pois é I> facto desse algari'smo ser
maior que 5 que vaà, "afectar a ordem de gran
deza. da respectiva incerteza relativa.
Esta regra traduz assim uma 'espécie de
sentido prático e uma pri·meLra aproximação
dos resultados do Cálculo numéri'co apTo
ximado.
Nota 16:
Zero, à le5querda do primei,ro alga:rismo
dum número proveniente de um cálculo, não
conta, pois pode resultar apenas de uma
mudança de unidade.
Exemplo:
2,0 m = 0,0020 km
,Só se contam 2 3Jlg. sLgnificativos em qual
quer dos casos: oS! alga.rismos dois e o zero à d1reita do dois.
260
6.7.6 Orítica das regras indicadas
As regras dos algarismos significativos têm vantagens e também algumas desvantagens.
Entre as primeiras, citamos o modo fácil e acessível de apreciação da ordem de grandeza dos erros '€ a base simples de iniciação do cálculo aproximado.
Entre as desvantagens, apontamos:
1.a - Só permite uma apreciação grosseira do erro. Por exemplo:
[:.,x x = 0,50 -+- 0,01 => -- = 2 %
x
[:.,y y = 1,10 -+- 0,07 => -- = 6 %
y
Pelas regras dos algarismos significativos escreveríamos apenas:
x = 0,50
y = 1,10
cada um com 3 algarismos, o que nos levaria a concluir por precisão, se não igual, pelo menos pouco diferenteconclusão falsa, como mostrou o cálculo :los erros' relativos. (16).
2.a - Os algarismos significativos não indicam a acumulação das incertezas absolutas.
Exemplo:
x=14-+-1
y=l'5±1
s=x+y=29-+-2

Pela regra dos algarismos significati vos teríamos 8Jpenas:
8 = x + y = 1<4 + 15 = 29
Apesar destas limitações, a utilização das regras dos algarismos significativos constitui um bom. hábito para o estudante, porque o obriga a uma atitude crítica e 'a disciplina intelectual perante os problemas científicos .
6.7.7 Incertezas nas medições indirectas
Ao efectua:rmos ·a medição indirecta de uma grandeza G, começamos por medir direotamente outras grandezas X, Y, 'etc. , para depois aplicarmos a expressão que as relaciona:
G=f ( X,Y ... )
Sendo .. x, y, .. . os valores mais pro-váveis de X, Y, ... expressos em termos de algarismos significativos , as medidas obtidas serão
X -t- .6. x , y -t- .6. y
Vamos ver como depende a incerteza absoluta !::,g, que afecta o v. m. p. de G, das incertezas absolutas .6.x , .6.y . . .
respeitantes às medidas obtidas directamente.
Para isso, 'comecemos por considerar alguns casos particulares separadamente:
1.° - Soma
G = X+Y
o menor e o maior valor possível de G obtêm-se somando os menores e os maiores valores possíveis de X e Y, respectivamente:
g - .6.g = (x -!::,x) + (y - .6.y)
= (x + y) -(!::,x + .6.y)
= g - (!::'x + !::, y)
g + !::,g = (x + !::,x) + (y + by) =
= (x + y) + (,6,x + !::,y)
= g + (!::,x + !::,y)
Conclusão: a incerteza absoluta da soma de duas (ou mais ) medidas é a soma das incertezas absolutas que afectam essas medidas
!::,g = !::,x + !::,y
2.0 - Diferença
G = X -Y
o menor valor possível de G obtém-se com o menor valor possível de X e o maior de Y:
g - !::,g = (x - !::,x) .-( y + .6.y)
= (x -y ) - (!::,x + .6.y)
= g - (,6,x + .6.y )
o maior valor possível de G obtém-se com o maior valor possível de X e o menor de Y:
g + ,6,g = (x + .6.x) -(y -.6.y)
= (x - y) + (.6.x + .6.y)
= g + (!::,x + .6.y)
Conclusão: a incerteza absoluta da diferença entre duas medidas é a soma das incertezas absolutas que afectam essas medidas.
!::,g = t::"x + t::"y
261

3.° - Produto
G = XY
o maior valor possível de G será:
g + 6g = (x + 6x) X (y + 6 y) =
=xy+ yt'::,x+xt'::,y+ 6x.t'::,y.
Desprezando, porém, a parcela 6x . 6Y por ser muito pequena 'comparada com as outras, vem:
g + 6g = x y + (y t'::,x + x 6Y)
= g + ( y t'::,x + x 6y)
o menor valor possível de G daria, analogamente:
g -6g = x y - (y 6x + x 6 y)
= g - (y t'::,x + x t'::,y)
Concluímos que a incerteza absoluta que afecta o v. m. p. de g ainda depende, ao contrário do que sucedia na soma e na diferença, dos valores mais prováveis x e y
t'::,g = y t'::,x + x t'::,y
Vejamos a incerteza relativa da medida de G
6g _ y 6x + x 6y _
6x 6y --- --- +--g xy x y
Conclusão: a incerteza relativa do produto de duas medidas é a soma das incertezas relativas que afectam essas medidas
6g 6x l::,.y --=-- +--
g x Y
4.° - Quociente
x G=
y
o maior valor possível de G é:
x+ 6x x x 6Y + Y 6x g + 6g = = - + ---- -
y-6y y y (y -6y)
o menor valor possível de G é:
x - 6x x x 6Y + Y 6x g - t'::,g' = --_.=- - -----
y + t'::,y Y Y (y + 6y)
Desprezando nos denominadores a incerteza 6Y, insignificante em face de y, vem
x 6y + Y 6x l::,.g = t'::,g' = ----
y2
A incerteza relativa do quociente é, portanto:
6g
g
x t'::,y + Y 6x
y2 X t'::,y + Y 6x
x
y
6Y 6x =-- + -
y x
Conclusão: a incerteza r�lativa do quociente de duas medidas é a soma das incertezas relativas que afectam essas medidas
6g 6x l::,.y -- = --+ --
g x y
5. - Potência
G=X"
Dado tratar-se dum caso particular do produto
g=x. x.x .... x
n fadores iguais
a incerteza relativa f::,g é:
f::, g f::, x f::, x f::, x --= -- + -- + -- +
g x ;xi x
n parcelas
f::,x =n. -
x
CO'Y/,(j)lusão: a incerteza relativa da potência de uma medida é o produto do expoente pela incerteza relativa que -afecta essa medida.
f::,g --- n .
g x
Para um qualquer tipo de fórmula relacionando a gramdeza G com grandezas X, Y, etc., o ·cálculo da incert'eza absoluta f::,g pode considerar-se uma generalização das regras apresentadas. Assim, por exemplo, no caso da expressão
v2 e= --
2j
o cálculo da incerteza absoluta do deslocamento, f::,e, é como se Segue:
f::,e f::,v f::,j -- =2 -- + --
e v j
Conhecidos os valores mais prováveis da velocidade, da a:celeração e do deslocamento, e as incertezas absolutas f::, v e f::,j, respectivamente, da velocidade e da aceleraç.ão, é fá,cH obter a incerteza absoluta do deslocamento.
6.8 Leitura adicional
1. Oours de Physique, tomo l, Mesure d es
grandeurs et Thermodynamique, Dun<><l,
Paris, 1970.
2. El manejo de datos experimentales, Uni
dade E, The Open University, 1970.
3. Oálculo de Valores Aproximados, texto
piloto do Prof,. 'S ebastiã:o e Silva.
4. Sistemas de Unidades, Dimensões, Pi,res
de Carvalho, 1967.
5. Anuário de Pesos e Medidas, R epartição
de P es os e Medidas, Dk.ecção-G eral de
Indústri'a, 1940.
6. Science et Vie, artigo «0 Sl:stema métrico
é perfeito, Maio de 1975.
6.9 Resumo das ideias fundamentais.
1. O desenvolvimento da Oiênl,;ia e o crescimento económico e industrial contribuiram para o desaparecimento sucessivo de sistemas de unidades regionais, díspares e sem bases científicas, e estabelecimento de um sistema internacional de unidades, racional e coerente.
Portugal participou nas Oonferências internacionais de Pesos e Medidas desde 1889. A partir da 11.' Oonferência Geral de Pesos e Medidas, efectuada em 1960 em Paris, tornou-se definitiva , por unanimidade dos representantes de 32 países presentes, a adopção do sistema internacional de unidades' (SI), a que já aderiu a Inglaterra e estão em ·vias de aderir os Estados Unidos.
S. No SI as unidades fundamentais, na parte de Meco,nica, são o metro (m), o quilograma (kg) e o segundo (s). :2 um sistema absoluto e coerente, porque, além de· satisfa-
263
zer Os critérios cienUfico e técnico, as unida
des derivadas resultam das unidades funda
mentais apenas por operações de multiplica
ção e divisão sem intervenção de factores
numéricos diferentes da unidade.
s. As equações de definição relacionam
uma grandeza com outras. As grandezas fun
damentais não têm equação de definição por
que são independentes entre si. Partindo das equações de definição, podemos chegar a
equações simbólicas que relacionam uma
grandeza somente com as grandezas funda
mentais: são as equações das dimensões,
do tipo
Os expoentes a, f3 e y são as dimerusôes da
grandeza G relativamente ao conprimento, à massa e ao tempo, respectivamente.
4. Uma f6rmwla 86 es,tá correcta se estiver
f1sicamente correcta (tem as mesmas dimen
sões em todos os termos) e matem81ticamente
certa (no tocante a coeficientes numéricos).
Nos problemas de conver�ão de unidades
deve-se partir das equações de definição ou
das equações das dimensões, sendo indife
rente a opção.
5. Nos resultados das medições s6 se de
vem utilizar algarismos significativos, apli
cando a seguir as regras de Cálculo aproxi
mado e dos arredondamentos.
6. A .precisão das medidas é principalmente
afectada pelos erros fortuitos, mede-se pela
incerteza retativa (esta e o grau de precisão
são inversamente proporcionais) e a sua
ordem de grandeza é dada pelo número de
algarismos significativos.
A exactidã;o é afectada sobretudo pelos
erros sistemáticos e em geral não se conhece.
1!J o grau de precisão que indica a maior
ou menor confiança que nos deve merecer
um resultado.
6.10 Questionário
1. O metro internacional e o segundo internacional são, hoje, padrões indestrutíveis e
invariáveis? P<JTquê?
264
2. Quais são as dimensões das grandezalS
fundamentai\!>? Justifi'car.
S. 'Em geral não se definem unidades para
as grandezas adimensionais. POl'quê? Qual é
o tipo de mediÇão que <se usa pa'ra ,elas?
4. Será coerente um sistema de unidades
no qual as equações de definição de algumas
dess81S unidades têm coefidentes numéricos
diferentes de 1?
5. Ao di2lermos que a massa �nercial de
um ·corpo ,é igual a 2() kg ·e que o mesmo corpo
pesa 20 kgf, est8lffios a· utiliZÇl.r um ou dois
sistemas de unidades,?
F=mj
s'erã legitimo escrever-se
20 kgf =20 kg X j ?
Justifrcar.
6. Quais são as grandezas que têm as mes
mas dimensões nos ·sistemas absolutos e gra
vLt8lCiooa.is?
7. A u m m (unidade de massa do ststema
métr�co g·ravitacional) é uma unidade de valor
constant.e ou ligeiramente variável? Porquê?
8. Como se procede em geral no laborató,rio
para atenuar o efeito dos ·erros fortuitos?
9. Quando se 'efectua a multitpli.oação de
três números com 3, 4 e 6 ailgariS'ffios signifi
cati'Vos, respectivamente, q�tJos algarismos
siginifioativos ,tem o produto?
1'0. No número Q,4000, resultado final de
uma série de cálculos, todos os zeros são alga
rismos signifiocativos? E se o número resultar de uma leitura directa no instrumento
dp- medida, todas os 2leros serão significativos?
11. Determinou-se o peISO volúmico de um
corpo com o 'volume de 8,0 cm', tendo-se en
contrado o valor 2,80 g/cm3• Quanto pesa o
corpo?
Porque é que o resuItaoo devia ter três algarÍ'smos significativos e não doi:s?

6.11 Problemas
1. Converter:
1.!1 80 km/h em m/S e 7,2 mjs em km/h.
1.2, 1'2,0 rot/min em rad/s .
1.3' 2'0 X 1QP N em kgf ,.
1..4 51"6 X 10 mb em Pa .
1.1) '22,2 m/oS; 2I5,9kmJh 1..2') Q,4''7Tradjs=
= 1,26 rad/s
1.3) 2()4 kgf-* 20X 10 kgf 1.4) 51J6 X 1JO' !Pa
2. O siSttema coerente estabel.ecido por Gauss, em 18312, tinha como unidades fundameIlitais:
L-mm M-mg T-s
2.1 ROOuziT 8,0 N a unidades de força do sistema de Gauss.
2.2 DefiniT a unidade de pI"e.ssão neste S'ist,tema e I"eduzi-Ia a pa.s-cal.
I 2.'1) 8,OX1()i9 mg X mmjs2 12..2),l()1·s Pa I 3. Uma força de 5,0 kgf que aceleração
imprime a um -corpo com a massa de 'lO kg?
I 4,9 m/s'
4. IDra adoptado em França o sistema absoluto M. T. '8. (metro-tonelada massa-segundo). A unidade de força neste sIstema chama-se esteno.
4.1' Ded'miT o 'estJe!nQ.
4.'2 Reilac!oDl3Ao com o newton (N).
4..1) 1 '€!Steno='l' ton X lJ m/sO
4,.2') ,1, ,esteno= 10' N = l 'k N
5. Um camhão, mantado num avião que pesa '15,0 'toneladas, lança um projéctil de massa 7,5 kg e com a velocidade .lnicial de 580 m/s.
5.t1. De qwanto dimilnuf a v'eIocidlade do avÍ'ão quando o projéctill é disparado na diI"ecção e no sentido em que o avião voa.
5.2 Explrimi'r o resulTaKio 6v, em km/h.
5Jl) 6v = 0,:29 m/s
5:2) 6v = :1,04 km/h
6. Efectuar os 'seguintes cãlculos:
6.1 3,28'
6.2 1,3 X 3, 114 XlJ6,2 X 32,4 X 0,1017
P 61.3 d = ----- , com:
ao (2b - a)
I P = 58,9
a = : 1,61
b = 8,63 c = 0,3'20
6A '" = V c" - h', com:
{C = 20,2
h = 18,62
6.1 ) 315,3; 6..2) 1213, X 1.0
6.3) 7,7; 6.4) 7,,8 ..
7.:l Qual é o peso' de um cOO'lpO oom a m.assa de 1,QIOO'kg:
DOS pólos (g = 9,83 m/s') ?
no equooor (g = 9,7181 m/s') ?
à latitude média da Europa <lcidental. (g = 9,.81 m/s') ?
7.2 Determln'8ll' a. c�te varltação de peso entI'e o Equàdor e os Pólos e bem assim, a variação :relativa.
7.1) 9,83 N; 9,78N ;'9,81'N
7,,�) 0,05 N; O,<ml0 = 0,611.0 %
265

8. Pesou-se um corpo de massa m pelo processo da tara. PaT3I tal equilibrou-se a t3lra:
1.' operação -+ m, = 27,� mg (junta-
mente com O' corpo)
2.' operação -+ m, = 7'5,6 g (sem o
corpo).
A incerteza de l>eitura que afecta cada
uma das operações da pesagem é 0,1 mg .
Sabendo que as !llaBsas marcadas estão afe
rid3ls com uma lncerteza relativa de
0,:1 10-3 = -- = 0,1 %, determinar:
tOO
266
8.1: a incerteza proVJelD..iJelnte dJaJs leiJtu�&9 e
que afeotam a massa do corpo;
8..2 a incerteza pI'ovenireIllte dos desvios na
aferição das massa:s marcadas e que
afecta a massa. do corpo;
8,3 a massa do -oOO'po re a 1'8spectiva inOelI'
teza absoluta.
8U) l1m = 0,2 mg
8,2) l1m = Oj:L mg
8.3') m = (4'8,3 ± 0,2) mg

MA�RIA - MASSA - ENERGIA
(Cf. 1.1, 1.2 e 1.3)
MATSRIA (de uma paJlavra latina que signifi.ca madeira ou material de construção),
no sentido da .linguagem corrente, é aquHo de que uma coisa é feita ,e que pode impI"eISSionaor
os nosSOS' 'sentidos, é um 'ente corpóreo; no sentido filosófico, é· um conceito transcendente;
no sentido cioentífiJeo, sobr:etudo na Físi'ca Moderna, podemos dizer que a massa e a energia - equivalentes porque transformávei's, em determinadas condições, uma na outra - são propriedades da matéria. Ã energia pura, não associada a partículas, ·corresponde a matéria onde
não se verifica a prop.riooade da mass'a inerciaI em repo\.LSo.
«A energia mecc1nica oontida num corpo é a medida, em unidades mecãni'cas, de todos
os 'efeitos exteriores ao 'corpo e que \Se produzem quando este passa do estado em que se
encontra a outro fixado convencionalmente como origem.»
Lard KELVIN, 1856
«Energia e massa não são mais do que dois nomes diferentes de uma mesma coisa.».
Max BORN, 1935
« ... o conceito de matéria é puramente quaHtativo e, por Isso, a matéria não é uma
grandeza físiJea, como são a energia e a ma.'3sa .
... a antiga expressão quantidade de matéria carece de sentido .
... Enquanto se oonsidera a matéria como «essência das cois·as», encara-se a energia
como a «essência da 'acção». Quando me dão uma pancada é a matéria que me atinge, mas é
a -energia que me magoa.
A energia pode exprimk-soe por duas escal'as diferentes: a escala tradicional de trabalho e a nova escala de massas. A relação quantitativa entre as duas escalas é c' (w/m = c',
com c2 = 9x 1016 m2/s').
'" Na Física actual os corpos materiais são conside·rados como r:egiões do espaço
nas quais a energia se encontra fortemente concentrada e as suas m8Jssas em repouso
não são mails do que a expressão, na escala de massas, dessa enorme energia interna que
possuem.»
Miguel A. CATALÁN
Univ. de Madrid. in Gazeta. de Física, Outubro, 1947
267

Nota. 1 :
Durante o século XIX, o termo força foi
muitas vezes empregado em sentido duplo,
não preciso, designando tanto o conceito
actual de força como o qUe hoje entendemos
por energia.
Nota. 2:
Em 1842, Mayer definiu pela primeira vez,
com clareza, o .termo �erg�a. Mas este termo
só veio a fixar-se na linguagem cientifica
uma década depoi:s, com Rankine. Este, na
sua interpretação mecani'Cista, considera a
energia como «matéria imponderável» e a
«matéria pond·erável» como o suporte da
energia. Pretende assim reduzir as coliSas· da
Natureza ao dualIsmo ma:téria e energia.
F'0i ainda Rankine quem introduziu {) US'0
das expressões energia actual, que Kelvin mais tarde designou por energia cinética
268
7.1 Que é a energia?
7.1.1 Como e quando surgiu o conceito de energia
A partir de Galileu (1564-164�), no início do século XVII, quando ainda
eram imprecisas as noções de força e
de velocidade, surgiram as primeiras
tentativas de medição dos efeitos das forças e, em particular, do movimento. Descartes (1596-1650) definiu quantidade de movimento, definição que foi
depois seguida e estabelecida definiti
vamente por Newton (1643-1727);
Leibniz (164!6-1'7'16) definiu força viva de um corpo, de massa m e animado da velocidade v ,como o ilroduto m v2•
Estas duas «medidas do movimento»
dividiram os físicos entre seguidores
de Descartes e seguidores de Leibniz. Só no primeiro quartel do século XIX foi dirimida a questão, quando Poncelet, em 1826, definiu trabalho de uma força e depois se demonstrou que este podia ser medido através da força viva
(cf. adiante n.O 7.15), enquanto que a
quantidade de movimento permitia medir uma outra grandeza reladonada
-+com a força - o seu im�o I (cf. n.OS 5.2, 5.3 e 5.4).
Tratava-se, pois, de efeitos diferen
tes da força, medidos, por isso, por
grandezas físicas diferentes.
O conceito de força viva, pouco pre
ciso, antropomórfico, dizendo respeito
às acções das forças e consequentes transformações nos COI"pOS materiais,
pareceu a Tomás Y oung que devia ser traduzido por um termo mais adequado do que força viva e, por isso, em 1807,

\ ou energia do movimento) , e energia potencial (QU latente)" idenUücada esta, nos siste
mas mecânicos, com a chamada função de
forças de Hamilton ( em 1'834) ..
Em 1897, Chwols·on, no seu «tratado de
Física», enuncia como formas de energia cinética: a energia do movimento dos corpos,
a ,en·ergia calorifi,ca, a energia da corrente
eléctrica e a ,energia radian,te; e como formas
de energia potencial: a energia gravi,tica
( energi'a associada à awa,cção -entre as· par
tículas materí<ais) , a .energia -elástica dos cor
pos deformáveis, a 'en-ergia química, a energia
electrostática oe a energia magnética.
Ostwaw, ( 1853'�19312') concebeu um ,tipo
fundamental de energia - a energia absoluta, como 'Substância dinâmica do Universo e de
cujas tran&form'ações r,esultam todos os fe
nómenos.
Foi ainda no século XIX que oS' físicos se
dividiram em duas correntes : a dos Energe
listas, com Mach, Ostwald e Duhem, que
pretendiam .explicar todos os' fenómenos em t-ermoo de energia, considerada como o único
d1l!do directamente observável (e, por isso,
não aceitavam a ,es,trutura atómico-mole
cular) ; e ,a dos Atomistas meCanicistaS, que
s·eguiam o mecanicismo cartesiano e defeID.d'iam
a concepção atómica ( estabelecida por Dalton) e molecular (concebida por Avogadro)
da matéria, interpretando os fenómenos físi
cos e químicos em termos das propriedades
das pa;rtículas di-s'oretas ( de que é um exem
plo a teoria cinética dos gases ) .
Esta polémica, por vezes muito viva, entre
as duas COl'rentes, perdeu oompletamente o
sentido na primeira década do século 'actual,
quando ficaram estabelecidas-, s-eguramente,
por via 'experimental (com as -J,eIi'S e�erimen
tais de Dalton e Gay�Lussac, a's d-escargas
nos gases rarefeitos, os fenómenos' da radio
actividade oe os f,enómenos de e,Iectróli'se) , as
noções de átomo, molécula oe electrão. 'E com Max Planck ( l8I5SJ1&4 7 ) , em 1900,
Einstein em 1'005 'e Bohr em '1911'3', ficou também estabelecido o carácter descontinuo, discreto, corpuscular, da energia - que, segundo
a teoria 'quàntica, devida a Planck, é absor
vida ou emitida por quantidades' mínimas,
indivisíveis, dis'cretas, chamadas- quantos ( em
latim quanta) de ,energi'a.
substituiu este termo pela palavra energia, que vem de um vocábulo grego que significa (UJto Ccf. 1.1.3).
Como tal, uma das interpretações dadas à palavra energia foi a de significar tudo o que produz acção, transformação. Este conceito ainda hoje é aceite, porque sabemos que todas 8$ transformações físicas ou químicas das substâncias são acompanhadas da absorção ou de libertação de e!lergia. (1) .
No entanto, só quase meio século mais tarde, em 1853, o vocábulo passou a ter aceitaç,ão, quando William Rankine definiu energia em termos mecanidstas: «energia é a capacidade de realizar trabalho». Na s1,la memória « sobre energética», publieada em 18'55,
enunciou o princípio da canservação da energia do modo seguinte : «a soma da energia actmal e da energia potencial do Universo é constante». (2:) .
O considerar a energia sob várias fonnas é um conceito que surge depois, naturalmente, com o desenvolvimento dos outros capitulos da Física e após se ter verificado que é possível obter movimento sem ser por intermédio das acções mecânicas. É o caso, por exemplo, da luz, forma de energia que se pode transfonnar em energia mecânica de movimento, . conforme podemos observar no radiómetro de Crookes - fig. 7.1 .
7.1.2 CO'I1W apreender o conceito de energia? Poder-se-á defini-lo em term08 inequívoc08?
No estado actual dos nossos conhecimentos, talvez não seja exagerado afirmar que fwça e energia são, para os
269

Fig. 7.1 O molinete, formado por quatro .pa
lhetas de mica, enegrecidas' de um
lado, roda, quase sem a:trito, quando se expõem à luz solar ou à luz de uma lâmpada as faces' oobertas de
negro de fumo, Estas absorvem a
energia luminosa e o molinete entra em movi.mento se o grau de rarefacção for adequado : nem muito re
duzido para qUe a resistência do ar
não trave a rotação, nem muito
grande porque também soâo neces·
sáirias algumas partícu'las de ar para
se ini·ciar o movimento.
270
Quanto maior for a intensidade
da luz maior será a velocidade de rotação.
que estudam Física, c onceitos clar os e distintos, no sentido da terminologia
rac ionalista c artes iana. Não se c onfunde a energia interna
armazenada, por exemplo, num explo
sivo c om as forças desenvolvidas du
rante a expansão dos gases resultant es
da explosão, mais ou menos violenta.
C ontudo, embora sej a nítida a separa
ção dos 'Conce itos força e energia (con
tando este pouco mais de cem anos) ,
não é possível ainda dar uma definição
inequívoca q uer de f orça, quer de
energia.
Vamos em seguida considerar alguns
exemplos que nos ajudam a captar" obj ectivament e, o conceito de energia.
l.° -A 'energia armazenada nos c om
bustíveis, sob a f orma de ligações
químicas, e libertada quando da combustão, faz mover motores e maquinarias q ue substituem o esforço muscular. P or exemplo, no mo tor a gas oil que faz
funcionar um guindaste, parte da ener
gi a que o 'combustível l iberta é transferida, s.ucessivamente, p ara o motor (que entra em movimento e aquece) ,
deste para o siste ma de alavancas,
roldanas, sarilh os e engr enagens, e deste sistema para o cabo que suporta
a .carga e a eleva. Um processo de avaliar a energia transferida p odia ser
o de c onsiderar a quantidade de com
bustível queimado.
2.° - Qu ando empurramos um automóvel c ujo motor n ão «p ega», transferimos parte da nossa energia para o
automóvel a ponto de, no final, nos sentirmos cansados e dizermos que
fic amos s em energia. No c orpo h umano, a energi a despen
dida neste trabalh o, c omo noutros e

Nota S :
Como toda a expres,são é definida por meio
de outras, é claro que a ciência humana deve sempre admitir alguns termos sem Ü'S definir de maneira a dispor d e um ponto de partida
para as 'Suas definições,
Não é evidente que deva haver termos
insusceptiveis de s'er definidos; é .pos'sível que,
por longe que vam'Ü's no caminho das defini
ções" possamos ir ainda mais longe,
sendo 'limitado o poder humano, as' d efinições
que nós conhecemos devem s'empre começar
em algum ponto, com alguns termos sem definição, de momento, mas não pa:l'a 'Sempre,
p oss:i'V'elm ente,}}
Bertrand Russel, em lntroduction a la philosophie mathématique
nos actos vitais, provém dos alimentos.
A energia 'que estes po ssuem vai, no
decurso das 'combustões a n ível c elular,
converter- sé na energia de que o ser
h umano dispõe para realizar os tra:ba
lhos intelec tuais ou físi,cos do dia a dia.
3.° - Q uan do le vantamos um corpo
do solo até uma c erta altura h, trans
ferimos uma c erta energia para este
corpo , que é precisamente aquela que
n ós despendemo s. Esta energia pode
depois ser aproveitada no levantamento
de um outro corpo. Basta, para taJ,
ligar este o utro 'corpo ao primeiro atra
vés dum fio que passe p ela gola de uma
roldan a fixa. 'E assim se tr.an sfere a
energia do primeiro p ara o segundo
corpo.
Actualmen te, a maior parte da ener
gia q ue se consome provém dos com
b ustíveis. A no ssa socieda,de pode con
siderar-se uma socied ade de consumo
de energia de tal forma que um bom
índice do desenvo lvimen to tecnológico
e do ní vel de vida de um país é a quantidade média de energia consu
mida por ca�a habitan te durante um
ano, caloo la,da a partir dos combus
tíveis.
P elo que fica exposto, facilmente se co mpreende como o conceito de energia
se tornou intuitivo e familiar, embora, como os ,conceito s de comprimento,
espaço e tempo, n ão se possa definir
de modo inequívoco. Trata- se de conc eito s de partida, prim itivo s, empíricos,
n ec essários 'para o estabelecimento de
uma teoria. E porque sã:o dados da
experiência, podemos associar- lhe s processos objectivos de medição e con venc ionar padrões de medida. (3).
211

Nota 4 :
A energia luminosa propaga-se sob a forma
de ondas electromagnéti:cas (Maxwell) e a energia graví.tica 'Sob a forma de ondas �ravitacionais ( 'cuja detecção experimental ' já foi tentada, mas ainda não ,está ,confirmada) , A energia nuclear, quando libertada, também
sob a forma de ondas el,ectrornagnéticas de
pequeníssimo comprimento de onda (radiações y ) , constitui igualmente energia ra
diante.
Os quantos de energia luminosa chamam-s1e fotões. O fotão de energia luminosa visível
tem menos energia do que <O fotão de energia
luminosa ultravioleta e ,este tem menos ener
gia do que o fotão y da;s radi·aJçÕ'e.s nucllerures
emi,tidas pelo núcleo de um átomo instã:v,el,
radioactivo. O fotão é, es·sencialmente, um quanto de energia que só pode existir em
movimento.
272
7.1.3 A energia manifesta-se sob várias
formas
A energia está associada a todas as partículas e a todos os 'corpos, constituindo assim uma prapriedade dos corpos. Mas a energia também pode existir pura, livre, desligada das partículas materiais : é o caso da energia radiante, que é a energia que se propaga em todas as direcções que partem do corpo emissor, propagação que se efectua quer no espaço vazio de partículas, quer num espaço preenchido por partículas materiais.
São exemplos de energia radiante a energia luminosa ( a visível e invisível) emitida . por uma fonte, ·como por exemplo, uma lâmpada, um emissor de rádio, etc., a energia emitida pelos núcleos dos átomos sob a
· forma de
radiação e a energia gravítica que parte de um corpo e está associada às forças atractivas que este exerce sobre os outros. ( 4) .
A energia manifesta-se sob as mais variadas formas e a cada uma destas dá-se o nome 'correspondente ao efeito ou transformação produzida. Assim, temos a energia radiante ou pura, a energia química (corresponde às ligações entre as partículas e é posta em jogo nas reacções químicas) , a energia térmica ( associada à temperatura) , a energia eléctrica ( ligada às 'cargas eléctricas) , a energ'ia mecânica ( relacionada com OS efeitos mecânicos como deslocamento, velocidade, etc. ) , a ener
gia interna de um corpo (toda a reserva ou « capital energético» associado ao corpo) , a energia atómica (energia nuclear e energia associada aos diferentes

Nota 5:
A energia as'Sodada às partículas maJt:e
riai's constitui uma propri'edade dos corpos.
Mas a energia também se pode manifestar
como um fenómeno de franteira de um sis
tema ( energia que atrav,essa a fronteira, isto
é, a superlícj.e que 'separa <O s,istema do ex
terioor) . Estâ nes,te caso a energia calorifica,
que, por esta razão, não 'é uma propriedade
dos corpos. Podemos, portanto, falar CONectamente em «,energia interna de um COTPO», «energia térmica de um corpo», e não em
«energia calorífica de -um corpo», mas sim, e 'apelIl3lS, em fluxo de energia calorífica oedido ao corpo, ou fom'eddo p'elo carpo ao
extertor.
Nota 6 :
A energia potencial só é uti.lizável se pos
sibili<tarmos a ,sua libertação. Esta exige um mecanismo auxiliar que, com um mínimo de energia, desencadeie o processo, como, por exemplo, soltar uma mola comprimida, abrir uma .comporta de uma albufetra, fa�er saltar
uma faísca eléctrica, acender um fósforo,
etc., etc.
18
níve is electrón icos do á tomo) , etc, eic. (5) .
De um modo mais genérico, a -ener
gia pode assumir dois estados funda
me ntais, a s aber :
Energia oinética ( o u energia de movime nto ) � Ec : é a e ne rgia
do mo vime nto das partículas e a e nergia radiante ; correspo nde,
em qualquer destes casos, a uma
actividade que se está a realizar,
�nergia pote'YlJCial - U: é a e ne rgia
armaze nada nos corpos e po de
ser transfe rida para o exterior
.sob qualquer forma; corresponde a uma actividade que pode vir a realizar-se. (6) .
Como, por ú ltimo, sa:bemos que um sistema só pode produzir tr abalho se possuir energia, pode mos, resumindo
tudo o que foi dito, afirmar que :
e m se ntido lato, a e ne rgia e nte nde· -se como ente fundamental qUé ocupa todo o Universo e parti'Cipa indispensavelmente em todos os fe nómenos físicos e quí
micos ;
em sentido restr ito e mecanicista,
a ,energia e nte nde-se co mo a ca'pacidade de realizar trabalho.
7.2 O princípio geral da conservação da energia
Os trabalhos de J. R . MGl!Jer ( 1814-
-1878) , J. P. Joule ( 1818-1889) e Helmoltz ( 1821-189'4) contribuíram para
o estabelecimento de um princ ípio de
273

Nota 7 :
Sistema isolado pode agOTa definir-se como
aquele que não troca energ�l\. com o exterior.
Isto quer dizer que não há entl'ada nem saída
de energia através da sua fronteira.
Pergunta 1:
S·em o trabalho mecânico uma proprie'
dade dos c orpos ? E o fluxo calorifico ?
214
conservação re lativamente à energia. Fo i, porém, M ax Pla;nck7 e m 1887, o
prime iro físico que expôs com rigor e
clareza 'O conce ito de energia e o prin
cípio da 'conservação, este em termos
mais ge rais do que os do e nunciado
estabelecido por Rankine em 1855
( cf. 7.1.1 ) . Foi-lhe conferido por este
trabalho ° p ré mio da Faculdade de
Filosofia de Gotinga. Na Físíca actual admite-se que o
princípio da cCYY/,8ervação da energia se apli ca a todos os fenómenos da Natu
reza. Podemos fixar, entre vários, os seguintes enunciados :
a ene rgia não se des tro. ne m se 'cr ia, apenas se transforma de umas
formas noutras e se transfere de
uns sis temas para 'Outros.
O u o e nunciado e quivalente:
a energia total de um sistema isolado mantém-se constante. ( 7) .
Significa isto que, num s iste ma isolado, a energia é um invariante matemático e uma grandeza física multiforme.
Vá rios exemplos nos levam a supor
isto mesmo, embora só com medições '
se possa confi rmar o p rincípio - o que até hoje te m acontecido.
Considerando ,como sistema o Universo - isolado e onde não há, por
tanto, fenómenos de fro nte ira, por de fi
nição de Universo - concluímos que a sua ene rgia total se conserva invariável desde 'O início dos tempos.

Nota 8 :
o indivíduo que está a .tr,avar com a mão,
numa des'cida, o seu motodclo, impedindo que
ele se desloque, ou a que está a s'egurar halteres p esados, estando estes em repouso e
acima da sua cabeç;a, ou ainda o que ex;erce
uma força perpendicular 'à porta dum auto
móve� puxado por vários outvos individuos,
está de facto a Tle3JJ.i>zaJr trabalho, está a des
pendeT 'esforço e, por isso, 8! gastaT energia,
m8Js não está a realizar trabalho físico (ou
mecânico ) .
Não realiz'a trllibal'ho mecânico porque, n<llS
dois primeiros cas'os, não há deslocamento do
corpo actua'Clo e, no ,terceiro caso, ·é nula a
componente da força apli,cada segun'Clo a di'
r,ecção em que o automóvel se d esloca ( a pro
jecção da força sobre a direcção do des'loca
menta é nula) ,
Resposta à pergunta 1 :
o trabalho mecânico vealizado por uma
força exterior que actua subre um sistema
constitui uma das formas' de transf'erir ,ene'r
gia através da sua fronteira, quer diQ exterior
para o interior quando as forças são potentes, quer no 'sentido contrário no caso das forças
resistentes. Assim, por ,exemplo, quando se
el,eva um corpo -ou se ·comprime uma mola,
transfere�s.e energia para ,eles, a qual fica na
forma 'potencial.
Também o :f:1luxo calorifico, como processo
em que a energia se trllinsmite de Ufi'llJS' pllir
tículas a outras' por meio dos, choques' e com
base nos seus movimentos incess'antes, é um
fenómeno d.e transferência de energia dum
sistema para o exterior ou vice-v,ers'a, através
da ·sua fronteira,
Oomo tal, tanto o trabalho realiza.do sobr,e
um corpo, ·como ,o fluxo calorífico que o atin
ge, não podem ser consider8Jdos prop:riedades
desse corpo, poi,s trata-se de fenómenos de
fronteira, resultantes da interacção do corpo
com o exteri.or.. Daí o �er incorrecto falar�s.e em « trabalho de um COI'po» ou «fluxo calori
fico de um corpo»>.
7.3 O trabalho como medida da energia transferida
Q ual é o ,conc eito de trabalho na vida
c orrente?
Em traços largos, entende-se por
trabalho toda a actividade que se está
a realizar, q uer e la sej a h umana e de
natureza muscular ou intelectual, quer
sej a produzida por uma má quina ou
qualquer sistem a fís ico- quím ico.
O ,c onceito físico é d e algum m od o
d iferente, visto considerar-se que o
age nte que exerce um a d ad a força só produz trabalho físico ou mecânico d esde que:
1.0 - o p onto de aplicação da força se desloque;
2.° - A força tenha componente (proj ecção não nula ) na direcção do deslocamento.
A esta 'com ponente da força que actua sobre o corpo dá-se o n om e de
-+-cornponente útil (F',,) ou eficaz. ( 8 ) .
Para que h aj a produção de trabalh o mecânico terá d e h aver transferência
de energia de um sistema para outro. N o caso de a ene rgia transferid a provir
de um ,combustível, pod em os avaliá-l a pela quantid ade de c om bustível queim ado.
Se a energia transfe rid a for e léctrica
( um elevad or 'a subir, um aspirador do
pó a func ionar, um a má quina de lavar ligada, etc . ) , podemos ler, no contador, em unidades eléctricas, a ene rgia con
sumida.
275

Nota 9 :
Vamos reCOTI1er a uma imagem que ajuda
a compreender a medição de uma grandeza
em unidades de outra grandeza restritamente equivalente. Restritamente equival'ente, porque
o trabalho I1esulta sempre <de 'energia trans
ferida, mas a energia transferida nem sempre
produz só tI'abalho: por !exemplo, numa com
bustão, a energia potencial quími-ca trans'
fere-se para o exterior transformando-se em
energia luminosa, em fluxo calorífico e em
energia m ecânioo de expansão dos gas-es re
sultantes da combus,tão.
Voltemos à imagem : do mesmo modo que
o dinheiro mede ou indioa <O valor do capiot8JI
transferido de uma forma (casa, por exem
plo) para outra (acções adquirid8JS numa
empTeg,a) também o trabalho pode medir a
energia transferida. Mas como o dinhciro
( moeda ) não 'é, nem -se confunde com os bens
( casa e/ou co-propri,edade na empresa ) , tam
bém o trabalho não é nem se confunde com
a en,ergia.
A. escolha da escala de trabalho m ecânico
paI1a medir a energia transferida e/ou trans-
formada dev'e�se ao papel de grande relevo
que a Mecânica tem no quadro das· ciên-CÍ'as
físicas. Em princí'pio, nada obstava a que
a ,energia se m edisse ,em unidades calorimé
tricas anbitrâri:as como a calori-a ou mesmo
oom a m8JSsa de g1el'o, <ao ()<> G, que 6SSia en�I'gia
permite' fundir, etc.
276
Mas também pod emo s medir a en er
gia tran sferida n as un idade s de tr aba
lhü que indic am 'O trabalho realizado.
É a util ização d a ch amada escala de
trabalho mecânico para a med id a da
energia, que foi a e sc ala escolh ida
pelos físrcos. (9) .
V amos tentar estabelecer um a pri
meira d efin ição de trabalho mecânico,
que r epresentaremos pela letra W (do
vocá bul o inglê s Work = trabalho) .
Con sideremos um prédio de 1 2 an da
res apetr ech ado com 2 elevadores
iguais - A e B - e im agin emos as
seguintes experiências :
1) O ascensor A faz 3 0 ascensões d esd e
o rés-do-ch ão ao último and ar . Leia
-se n o contad or eléctrico a energia
gasta e m quilowatt-hora (kwh) e
seja a o valor l ido, ,co m incerteza
de 0,2 kwh ('O tambor d o 'contador
p ermite ler 0)1 kwh, mas há q ue
contar com 'Os erro s de paralax e e
de :e stimativa) . Admitamo s in tuiti
vamente que a tarefa ou trabalho
realizado correspo nde à energia
gasta (a kwh), ou melh or, à energia
tran sferida p ar a o elevador.
2) A seguir, os dois ascensores - A e
B - efectuam ao me smo tempo as
30 ascensões do rés-d o-ch ão ao
úl timo andar . O ,c ontador e léctrico
d everá acusar agora um valor muito
próximo d e 2 a kwh. Isto significa
que a energia elé ctrica tran sfer ida
e, p ortanto, o trabalho mecânico
realizado, é proporcional ao peso -+<
do corp o deslocado ( força F que
foi equilibrada) . Com e feito, a dis
tância pe rcorrida foi a mesm a, o
p eso do corp o ou força duplicou e,
como se vê, o trabalh o também
duplicou, p orque duplicou a energia
transferida.
3 ) P or últ�mo, os 2 elevadores - A e
B - efectuam mais 30 ascensões,
mas ap enas do rés-do-chão p ara o
6.° andar (metade do percurso ante
rior) . O contador voltará a acusar
aproximadamente a kwh . Isto quer
dizer que a energia eléctrica trans
ferida e, p or isso, o trabalho mecâ
nico realizado é proporcional ao des
locamento d ( a metade do percurso
e ao mesmo p eso corresponde me
tade do trabalh o) .
4) Quando os elevador'es param num
andar qualquer, a corrente desliga
e deixa de haver consumo de ener
gia, embora a força exercida p elo
cabo de sustentação continue a
actuar. Não há, p orém, desl oca
mento do corp o onde a força actua
e, p ortanto, não há produção de tra
brulho nem, e m conse quência, trans
ferência de energia.
Estas exp eriências que idealizamos,
que p odem ser ve rificadas e que estão
de acordo com muitas exp eriências rea-
277

-+Fig. 7.2 O trabalho realizado pela força F,
278
-+- -+-durante o deslocamento d = AB do
seu ponto de aplicação, é dado por
W = F X d X CDS a
lizadas pelos físicos sobre trabalho, permitem-nos concluir :
1.° - Que o trabalho realizado pode . medir -a -energia transferida
(do sistema que exerce a força para aquele onde ela adua) ;
2.° � Que o trabalho, no 'caso de a --
força F ser constante e de o --
deslocamento d ter a direcção --
e o sentido da força F, é pro-porcional aos valores numéri'cos da força (F) e do deslocamento (d) e, portanto, ao -produto F X d .
;}. ° - Que, pela condiçã@ de coerência dos sistemas de unidades ( coeficiente de proporcionalidade igual à unidade na equação de definição) , se pode escrever :
W = F X d .
�sta definição de trabalho coincide com a estabelecida por Poncelet (1 788-- 1867) , em 1826.
7.4 Estudo da grandeza trabalho
7.1,.1 Trabalho de uma força constante •
No caso mais geral em que a força -+-F', 'constante, e o vector deslocamento
-+-do seu ponto de aplicação, d, fazem um ângulo a - fig. 7.2 -, decompõe-se
-+-a força em duas: a componente F", nor-mal ao deslocamento, não contribui para o deslocamento do sólido ( 8 ) , pois

Nota. 10:
De um modo maUs g;errul e mai>s simp'�es podemos di:z;er que o <trabalho W é o produto
es-oalar ( ou inteTIlo) - cf. 1.61.5 - do vector -+- -+-
força F peJ,o vector deslooamento d ,'
� ---+- -+- ---}-W = F l d = F . d
= F X d X cos a .
apenas o poderia 'levanta·r ; a campo--+-
nente útil F u é que faz deslocar o corpo sólido (8) .
-+ Portanto, o trabalho da força F, no
-+-deslocamento d do seu ponto de apli-cação, será dado por :
W = Fu X d
Como ( fig. 7.2) :
Fu .C08 a = - => F" = F X C08 a
F
temos :
W = F X COS a X d
Ou:
W = F X d X C08 a ( 10) .
Reparemos agora que esta expressão pode ser lida, na fig. 7.2, de dois modos diferentes.
-+-1.0 - Projecta,ndo a força F na direc-
-+-ção do deslocamento d, temos (triângulo ADe) :
-+-F X cos a = F u = proj F
Portanto : -+-
W = proj F X d -+d
-+-d
-+-2.° - Projectando o deslocamento d
-+-sobre a direcção da força F, temos (triângulo ARR') :
-- -+-d X cos a = AR' = proj d
-+ F
E por isso : -+-
W = proj d X F -+ F
279

A
Este segundo modo de leitura é útil
_---, B para o caso de o deslocamento do ponto
I I I I I I _ I I I F I I I __ L _ _ _ ....J _ _ _ _ _ L. __ _ _ J.. _ _ _ _ :..... __ _
/J[, /J[2 /J[3 /J[4 B'
-+-de aplicação da força F) constante, ser
uma linha não rectilínea AR qualquer - fig. 7.3.
Consideremos então diversos pontos intermédios A" A2' A3' A1' . . . , suficientemente próximos para que os deslo
".-." ".-." ".-." camentos AA" A,A2' A2A3' . . . , se pos-
-+ -sam considerar rectilíneos AA" AlA., --Fig. 7 .3 No deslocamento não l'ecUlíneo AR
280
-+do ponto de apHcação da força F,
o trwbalho rea;lizado é dado por:
W = F X AB' .
A2A3' . . . , e apliquemos a última expres-são escrita.
Temos então :
W=FXAA', +F XA',A'2 + FX A'tA'3 + ' "
W=F (AA'1 + A',A'2 +A',A'3 + " ')
W=FXAB'
Isto significa que, qualq'Uer que seja o deslocamento) o trabalho de uma força constante pode ser calculado multiplicando a intensidade F da força pela projecção do deslocamento sobre a sua linha de acç,ão.
7.4.2 Trabalho de uma força variável
-+-Se a força F é de intensi:dade variá-
-+vel, divide-se o deslocamentO' total d em sucessivos deslocamentos parciais
-+- -+- -+-L dI, l::, d2, l::, da, . . . , tão pequenos que, em cada um deles) se possam considerar
-+- -+- -+constantes os valO'res F" F2' F3' . . . , da
-+-força variável F. O trabalho total será a ,soma dos trabalhos parciais e a sua

, , _ M ! FI l\ l\ 1\ 1\ 1\ t , --j \l \J \J \J \J , , , , �Xl ""'"
[ [ [ x=o X=Xl
F (9*) F - - - - - - - - - -� - -
F2 kx F,
A X (mm) O X l X2 X COMPRESSÃO
Fig. 7 .4 ( a ) A mola M passa da posd'ção de
repouso ( x = O) à posição de compri
mida (X = XI) por acção duma força
,compres'sora variável, em módulo, de
Ziero a FI'
( b ) O trabalho reaIi,zado pela força �
compres'soTa, F, de módulo variável
(F = k x ) , é dado pela á:rea do tr�ân
guIo [O A B] :
1 W = - . O A X A B <=>
'2
1 <=> W = - k x' ,.
2
expressão mais simples, em termos de produto escalar (ver nota 10) , será :
� � � � � � W = F I I D.d, + F 2 I D.d2 + F 3 I D.d3 + . . .
Na maioria dos casos, a aplicação desta fórmula exige um nível de conhecimentos matemáticos que ultrapassa o deste curso. Vamos, no entanto, aplicá-la a um caso muito particular e corrente.
Seja a mola M - fig. 7.4, (a) -, que consideramos perfeitamente elástica e que vamos comprimir lentamente à custa de uma força aplicada na extremidade.
Quando a mola passou da posição de repouso (x = O) para a posição x = X" o valor da força aplicada foi 'crescendo de O a F" Quando a mola foi deslocada para uma 2 .a posição x = X2 > x" o valor da força foi crescendo de F, para F2 > F, . E assim sucessivamente.
Em virtude da mola ser perfeitamente elástka, há proporcionalidade directa entre os valores das forças
-� � compressoras F" F2' . . . , próximos, e os encurtamentos ou compressões Xl, x2,. •• , também muito próximos, devido à lentidão que impusemos à e�periência. Em consequência disto, temos :
F, F2 F - = - = . . . <=> - = k -> F = kx
x
o gráfico (F, x) é, pois, uma linha recta - fig. 7.4, (b) .
O 'cálculo do trabalho total realizado, correspondente à compressão final x devida a uma força de módulo variável e valor final F = k x, é matematica-
281

Nota 11:
Este trabalho, como veremos adiante
( cf. n.O 7;12.1 ) , mede a 'energi'a pertencial com
que fica. a mola comprimida, energia que a
mola a seguir transfere· integralmente para
um corpo que seja por ela empurrado. O corpo
poderá transformar esta energia em energia
cinética próprta.
- - -ri
, , , d 1 - -, J, ( p , d )= o· I I , I
I I ®
d
®
� Fig. 7.5 Os ângulos ex dos desIooamentos d
-+-de um COl'pO com {) s.eu -peso P são :
(a) Queda livre - ex = O . ( b) Ascenção -- ex = 11180°
( c ) Descida no plano inoli!llaJdo -- ex < 90° (d) Deslocam. no plano horizontal - '" = 90°
( e) SuMda no plano 'inclinado -- ex > 90°
282
mente equivalente a'O cálculo da distância e percorrida por um móvel em moviment'O uniformemente acelerado, cuja velocidade crescente v = j t corresponde a F = k x e .cujo tempo t corresponde ao encurtamento x ( d.
n.0 2.7.3) .
Por isso, a soma
é dada pela área do triângulo [OABJ , ou seja :
1 - � W =- . OA X AB
2
1 W =- . xX k x
2
1 W = - k x2
2 ( 11) .
7.4.3 Trabalho realizado pelo peso de um carpo
� O peso P de um 'corpo é uma força
que 'Se considera 8iplicada no seu -centro de gravidade e que ora actua como força potente, produzindo um trabalho motor (algebricamente positivo) sobre o cOI1po, 'Ora actua como força resis- I
tente, produzindo um trabalho resistente ( 8ilgebdcamente negativo) sobre o corpo - fig. 7.5.
No primeiro caso, o trabalho realizado transforma-se num aumento de energia de movimento do corpo (energia dnéti'ca) e no 2.° caso o trabalho é 'acompanhado de uma diminuição de energia. de movimento do ·corpo.

Considera;ndo os casos indicados na figura 7.5, temos :
(a) Queda livre (trabalho motor) :
W = P X d X cos 0° = P X d
( b) Ascensão (trabalho resistente) :
W = P X d X cos 1800 = - P X d .
(c) Descida no plano inclinado ( traba
lho motor) :
W = P X dX coo a > O, porque coo a > O.
( d) No plano horizontal (trabalho nulo) :
w = P X d X COs 900 = P X d X O= O .
(e) Subida no plano inclinado (trabalho resistente) :
W = P X d X cos a<O, porque COS a < O.
7.5 Análise dimensional do trabalho
mecânico e unidade SI de trabalho
Partindo da equação d e definição : .
W = F X d X COS a
temos, num sistema absoluto de unidades :
[ W] = [F] X [d] X Ecos a]
L [ W] = L MT-2 X L X -
L
[ W] = V MT-2 .
283
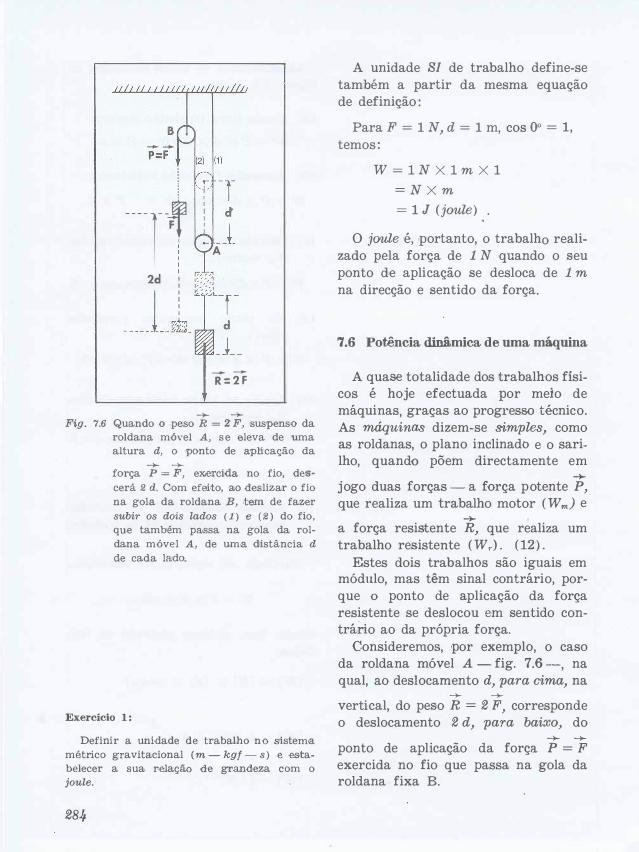
- - -T� I 2d :
I ! rr:""'7I
- - - - - - - - - fy�-- -R = 2 F
� � Fig. 7.6 Quando o ,peso R = Z F, 'suspenso da
roldana móvel A, s e eleva de uma
altura d, o ponto de apUcação da
� � força P = F, exercida no fio, des-
cerá :2 d. Oom efeito, 'a;o deslizar o fio
na gola da roldana B, ,tem de faljer
subir os dois lados ( 1 ) e ( :2 ) do fio,
que também passa na gola da rol
dan-a móvel A, de uma distância d de cada laJdo.
Exercício 1:
Defini'r a unidade de trabalho no si-stema
métrico gravitacional ( m - kg! -:- s) e esta
belecer a sua relação de g>randeza com o
joule.
281,
A unidade SI de trabalho define-se também a partir da mesma equação de definição :
Para F = 1 N, d = 1 m, cos 0° = 1,
temos :
W = l N X l m X 1
= N X m
= 1 J (joule)
o joule é, portanto, o trabalho realizado pela força de 1 N quando o seu ponto de aplicação se desloca de 1 m na direcção e sentido da força.
7.6 Potência dinâmica de uma máquina
A quase totalidade dos trabalhos físicos é hoje efectuada por meio de máquinas, graças ao progresso técnico. As máquinas dizem-se simples, como as roldanas, o plano inclinado e o sarilho, quando põem directamente em
� jogo duas forças - a força potente P, que realiza um trabalho motor ( W m) e
� a força resistente R, que realiza um trabalho resistente ( Wr) . ( 12') .
Estes dois trabalhos são iguais em módulo, mas têm sinal contrário, porque o ponto de ,aplicação da força resistente se deslocou em sentido contrário ao da própria força.
Consideremos, por exemplo, o caso da roldana móvel A - fig. 7.6 --, na qual, ao deslocamento d, para cima, na
� � vertical, do peso R = 2 F, corresponde o deslocamento 2 d, para baixo, do
� � ponto de aplicação da força P = F exercida no fio que passa na gola da roldana fixa B.

Nota. 12:
No sentido mais geral, máquina é todo o
sistema que transforma e transf-ere energia.
A'ssim, uma lâmpada eléctrica, que trans
forma energia ,eléctrka em energia calorifica
e luminosa, um animal, que transforma a energia ,potenci'al quimica dos alimentos em vã:rias forma,s de ,energia, uma pilha eléctrica,
que transforma energia química em energia eléctrka, etc., 'são máquinas'.
Em sentido mais restrito, máquina é ° sis
tema que transforma e transfere emergia sob
a forma utilizável. lt o caso da 'Pilha, porque
a ell'ergia eléctrica obtida na transformação
é utilizável.
Em sentido restritamente mecânico, má
quina é um sistema que ,se destina a realizar trabalho. :m o caso do motor eléctrico e do
monta�crurgas" de um cadernal 'e de um sari
lho por exemplo,
Resolução do Ex. 1 :
De W = F X d X coo a
vem
W = 1 kg! X 1 m X cos O· = '1 kg; X m
= 1 kgm (quilogrâmetro) .
Como 1 kgf = 9,8 N, temos :
1 kgm = 1 kg! X '1 m
1 kgm = 9,8 N X '1 m
1 kgm = 9,8 J
Os trabalhos realizados são :
W", = F X '&. d = 2 d X F Wr = 2 F ( - d) = - 2 d X F
W fi> + Wr = O <=> W m = - W.,.
Este resultado tJ3m o seguinte significado físico : a máquina não economiza
trabalho, porque o que se ganha ao diminuir a intensidade da força perde-se no aumento da distância percorrida e ,reciprocamente. O trabalho tornawse, porém, mais facilmente realizável por se poderem utilizar menores forças potentes.
O significado físico de W.,. é o seguinte : soma do trabalho resistente útil ( Wu) com o trabalho resistente passivo ou perdido ( Wp) . O primeiro diz respeito às forças resistentes vencidas com utilidade ou proveito (por
� exemplo, a subida do peso R no caso da roldana móvel A, fig. 7.6) ; o segundo refere-se à;s forças resistentes que são vencidas sem aproveitamento imediato (o trabalho das forças de atrito, a subida da roldana móvel A, indicada na mesma figura, etc . ) .
Em termos de tIlansferênda de energia, a igualdade Wm + W" = O significa que a máquína se limita a transferir a energia W m IIecebida do exterior do modo seguinte : para um sistema (corpo que ela f.az deslocar) , a fracção útil W u ; para o exterior (devolução sob a forma do fluxo calorífico proveniente das forças de atrito) e para ela própria (aumento da sua energia cinétiüa ou potencial) , a fracção desperdiçada Wp•
Esta interpretação constitui o chamado princípio da conservação do trabalho nas máquinas.
285

Exercício 2 :
Definir a unidade de 'potênci'a n o sistema
métrico gravitacional (m - kg! - s) e rela
cioná-la com o W!litt.
286
Põe-se agora um outro problema : como relacionar o trabalho com o tempo em que o mesmo é realizado ? Se, por ex<emplo, um monta-cargas eleva um fardo que pesa 100 kgf à altura de 12,0 m, realiza o trabalho
W = F X d = 100 kg! X 12,0 m
= 100 X 9,8 N X 12,O m
= 11 760 J 1----7- 118 X 102 J .
Mas este trabalho pode ser realizado em mais ou menos tempo e isto é importanto. Diz-se, naturalmente, que é mais potente a máquina que realiza o mesmo trabalho em menos tempo.
Há, portanto, necessidade de definir uma grandeza física que relacione o trabalho com o tempo de execução do mesmo. A esta grandeza chama-se potência di.nâmica P da máquina e define-se pela equação :
W p = --
6.t
A potência P indica, portanto, o trabalho realizado por unidade de tempo
7.7 Análise dimensional da potência . dinâmica e unidade SI de potência
Partindo da equação de definiç,ão de potência, temos, no SI:
L2 MT-2 [PJ = ---- = U MT- 3
T
A unidade SI de potência será :
{ W = l J 1 J t:,t = 1 s => P= -I s
= 1 W (watt)

Nota 13 :
Unidades industriais de potência
e de trabalho
São unidades mebroJ.ogicamente incoerentes
no SI, mas práticas 'e apropriada's para as
aplicações industri,ais.
1 ) . Cavalo-vapor ( Cv ) .
Conta-se que James Watt ( 17316'-18119) , quando quis mostrar aos' mineiros o valor
da sua má!quina a vapor, verificou que
um cavalo bem tr.atado eTa capaz de
elevar em 1 s, até 1 m de altura, um peso
de 7'5 kg!. Designou então a potência
correspondente' por cavalo-vapor ( símbo
lo: Cv).
Em unidades' SI temos :
75 kgl- X .l m 75X ·9,8 N X l m 1 Cv = ------
� s
= 7135 W
2 ) . Quilowatt.
1 kW = IW' W.
Ls
3 ) . Quilowatt-hora (ou 'quilovátio-hora ) .
Símbolo: kWh.
:m a unidade de trrubalho e de energia us'ada nos contadores ·eléctricos..
W De P = v'em :
6 t
W = P X 6 t
PortaiIlto, em unidades SI, temos':
1 kWh = 10f' W X /1\ h
= loP J /s X 3 6<l:Q s = 3,6 X 10" J = 3,6 MJ
4) . Cavalo-vapor hora (Cvh) .
Em unidades SI, temos:
1 Cvh = 11 Cv X 1J h
J = 735 - X 31600 s
s
= 2,6 X lO' J = 2,6 MJ
o watt é, portanto, a potência dinâmica de uma máquina que realiza o trabalho de 1 J em cada segundo. ( 13) .
N o caso do monta-cargas do exemplo .anterior demorar 7 s a elevar o referido fardo, a sua potência dinâmica será :
1176X 10 J P = = 16,8 X 102 W
7 s
= 17 X 102 W = 1,7 k W
7.8 Rendimento de uma máquina
À energia recebida 'Por uma máquina ,chamamos energia motora ( W", ) , quer porque põe a máquina em movimento, quer porque pode ser calculada a partir do trabalho re31lizado 'Pelas forças potentes ou motoras. Desta energia, uma parte é cedida pela máquina sob a forma de energia útil ( ou utilizável) W" e é medida directamente pelo trabalho que a máquina realiza vencendo as forças resistentes úteis ( cargas por exemplo ) ; outra parte é convertida
pela máquina em formas de energia não aproveitáveis, perdidas, em particular energia calorífi-ca, e é medida pelo trabalho ( Wp) necessário para vencer as forças resistentes passivas, como a resistência do ar e as forças de atrito (cf. n.O 7.6) .
Podemos então escrever quanto aos módulos :
Como não se podem eliminar totalmente as resistências passivas, será
e portanto :
287

Resolução do Ex. 2:
W 1 kgm 9,8 J p 9,8 W
lc, t l s I s
1 kgm/s = 9,8 W
Nota 14 :
Alguns autor.es também chamam à energia
utilizável energia-riqueza e à energia dissi
pada em vencer as ,resistências passdvas
energia sem valor ou degradada.
Exercício 3 :
Reduzirv 2'0 kWh e 2 Gvh a unidade'S do sistema gravitacional (m - kg! - s ),.
Pergunta 2 :
Poderá definir�se a unidade de rendimento
( '1 ) em algum sistema de unidades ou com
parar o rendimento com algum rendimento
�padrão ? Porquê ?
288
Define-se então :
Rendimento ou eficácia de uma má'quina -é o quociente da energia útil (medida em trabalho útil W,,) pela energia motora (moo.ida em tra:balho motor W m) , referidas ao mesmo intervalo de tempo :
( 14) .
Como S� trata de uma grandeza sem dimensões, pois
. L2 MT-2 [ T}] = = Lo Mo To ,
L2 MT-2
é costume exprimi-'la em percentagem.
Assim, para Wm =j::. O e Wu = O (é o caso da máquina que não «arranca» e que, por isso, não realiza trabalho útil : p. ex., não levanta uma carga, 'O motor não entra em rotação, etc. ) , temos :
o T} = �- = O = 0 % .
Wm
Para Wp = O <=> W", = W" (máquina ideal a funcionar no vazio e sem atritos) , temos :
Wm 100 T} = -- = 1 = -- = 100 %
Wm 100 '
Este é um caso-limite inatingível.
Resumindo, os valores de T} pertencem ao intervalo semi-aberto seguinte :
T} E [O, 1 [
Se dividirmos os dois termos do quociente W,jW m pelo intervalo de tempo !::"t durante o qU8i1 a máquina esteve

Resposta ao Ex. 3 :
1 ) 2IÜ kWh = 20 X :lO' W X ;1 h
1J = 20 X 110' X - X 3600 s
Is
7:2 X.11Ü" = 72 X 10' J = --- kgm
9,8
= 7,8 X 10' kgm
2) 2 Cvh = 2 Cv X 'l' h
'115 kgf X II m = 2 X X 3600 s
,1 oS
= 75 X 7� X 10' kgm
= 54 X 10' kgm .
Resposta à pergunta 2:
Não se pode definir a uniuooe de 1] em um
sis,tema de unidades, porque 1] é uma gran
deza adimensionaI, ·como a de!ll�idade por
exemplQ.
E também não se pode escolh� uma máquina cujo rendimento possa ser <tomado 'Para
padrão, porque a máquina ideal ( que funciona
sem atrito 'e no vazio) é iTrealizável.
Exercício 4:
Mostrar que na alav8inca inter-fixa ,e no plano
incIinllido também se verifica o princípio da
con.servação do trabalho nlliS máquinas :
19
em funcionamento, obtemos uma nova expressão para o rendimento, mas equivalente à primeira :
sendo :
W,jM Pu � = ------- - ----
W",/.M Prn
Pu = potência útil (energia útil por unida.de de tempo)
P m = potência motora (energia motora por unidade de tempo) .
7.9 Exercícios de revisão
7.9.1 Calcular a potência, expressa em Cv,
necessária para arrastar um com,boio de peso
igual a 200 toneladas-força por uma rampa
com a inclinação de 1 %, mantendo a veloci
dade constante de 48 km/h.
Resolução.:
Para manter o comboio em movimento uru
forme ( equilíbrio dinâmiCO) , a resultante das
forças aplica,das deve s·er nula. Não 'conside
rando as força,s de atrito nem a resistência �
do ar, a força tl'actora ou útil Fu deve \S'eT oposta ·e ter módulo igU8il ao da componente
� � I1esistente F. 0.0 peso P na direcção do des'lQ-
camento, como ·se verifica na fig. 7.7. Temos, portanto:
P = 200 ,ton.-força
= 2.00 X 10f' kgf = 200 X 'l.0í' X 9,8 N
F. = Fd = PXsen a
= '200X110"X 9,8 NXO,Ol
= 19,6X IO' N
10DO m v = 48 km/h = 48X ---
3600 s
40 = - m/s
3
o trabalho realizado pela máquina é da,do por:
W = Fu X d = F. X v . At
289

� Fig. 7.7 A força tractora ou útil F. deve ,ser
oposta e ter valor igual ao da com-
� � ponenlle F d do 'Peso P IlJ8i di:recçãO' dO' deslO'camento, para que nãO' haja va
riação de velocidade, mantendo-se,
por isso, O' . comboio em movimento
'uniforme.. Considera-se desprezável O'
atritO' na via foér.r.ea, assim como a resistência dO' ar. Na .realidade, teria
de ser
Resposta parcial ao Ex. 4 :
1 . Alavamca. Sugestões :
1." - Considerar um des·locamentO' .angu,lar
a, a que correspondem deslocamentos curvilineos dos pontos de apli,cação
� � das forças potência P e resistênda R .
2." - Calcular os trabalhos moto.r e resistente a partir das projecções daqueles
deslocamentos curvilineos sobre as reotas paraleLas às linhas de acção da.s ref,eridas forças €i que pa,ssam pe
los novos pontos de aplicação.
3.° - Relacionar a condição de equilíbrio
na alavanoa 'com a proporção entre O'S
ladO's homólogos dos dois triângulO's s'em.elhantes O'btidos, considenmdo a seguir 'as expressões dos trabalhos
motor e resistente.
290
A pO'tênci'a desenvolvida é :
W F.xv . .A,t P = -- = ---
.A.t ó.t 40
= F. X v = :119,6 X l{)P N X - m/s 3
X ,1O' W
Em Ov, teremO's :
1 Ov - 715 X .9,8 W 19,6 X 4
x - --- X 10" W 3
2X4 XIW' X = Ov = 36 X 'lO Ov
3 X 75
7.9.2 .Se, em plwno horizontal, o comboio seguisse com a velocidade anterior, desenvolvendo a mesma potência, qual era o valor da força resistente resultante da resistência do ar (neste caso,a mais importante) e cW atrito na via férrea ?
Resolução :
De P = F. X v, cO'mo deduzimos no pro
blema anterior, conclui-se que, mantendo--se
P ·e v, a resultante das forças· resistentes é
de valor igual â força '1lractora ou útil F., ou seja
F = 119,16 X 10" N,
para hav·er equilíbrio dinâmico.
7.9,3 Mantendo-se estas resistências, que potência deverá desenvolver o comboio na
subida da rampa com a velocidade referida de 48 km/h '!
Resolução :
Agora, à componente resistente do p eso �
do corpo F., há que ·acres·cenrtar as resistên-cias do ar e do atrito. Por isso, a potência

2. Plano incUnado. Sugestões :
La - ConsIderar as p.rojecções dp e dR do
deslocamento do ponto de aplicação
-+- -+-da potência P e da resisiênci'a R sobre as linha,s de acção diessa,s forças
e verificar que
dR = dp X sen a ( sen a = inclinação do plano)
2." - Oalcular os trebalhos motor e 'l"e.sis
tente.
3." - Relacionar estes ,tvabalhos com a con
dição de 'equilíbrio no plano incllnaido.
PerglUlta 3 :
Ao verificar,-se o princípio da oonservação do 1Jro.brulho num,a máquIna simples, no caso
em que as resistênci�s P8iSISlÍvaJs se podem
considerrur nulaJS, ,ela ,está em equ:hlíbrl0 di
nânu.oo. Most= porquê.
PerglUlta 4 :
Quando h á atrito e outras Tes'ÍstêncÍ'as
paslSav'a,s, a máqutna não devolve aJO exteri:or sob a forma uti'Ji.zável toda, a energia dele
recebida. MostJraJI' porquê.
A�!'----
Fig. 7.8 O móvel de massa - m - prur,te do repouso (v=v) e peroorre a di'stância d sob a. acção da força útil e cons
-+-tante F . A energia transferida pa,ra o corpo é :
1 F X d = - m . v' (en. cinética adqui-
2 rida) .
Nota. 15:
O trabalho que é neoes,s·â;rio realizar pelas
forças apliC8idas a um corpo para que a sua
energia cinética passe de zero a um dado
desenvolvida terá de ser maior. E para haver
equilíbrio dinâmioo teremos, em módulo,:
F. = F. + F (resistências) = 1'9,,6 X 1'0" N + 1'9,'6 X 10" N
= 2 X '19,6 X !10' N
Portanto :
P = F X v 40
",; 2 X 119,6 X lO' N X - mls 3
= 7,1 X ,H)" Cv -+' 7 X 10' Ov .
7.10 Energia mecânica
A energia mecânica é a energia que pode ser medida em função apenas de grandezas mecânicas.
Vamos estudar especialmente a energia mecânica cinética, que é a energia devida ao movimento actual de um corpo ; a energia mecânica potencial elástica, que é a energia armazenada numa mola elástica e que se pode converter em trabalho, soltando a mola ; e a energia mecânica potencial gravítica, que é a energia que um sistema corpo-Terra possui pelo. facto do ·corpo estar a uma certa altura em relação a uma superfície de referência na Terra e que 'se pode converter em trabalho,
se o .corpo regressar a esta superfície (d. 7.1.3) .
7.11 Energia cinética - Ec
7.11.1 Energia cinética comunicada a um carpo
Suponhamos um corpo de massa m em repauso (posição A ) numa mesa horizontal, onde se pode deslocar sem atrito - fig. 7.8. A sua energia cinética
291

valor é sempre o mesmo desde que não haja é nula, porque não está em movimento, qualquer variação õe outra. forma de 8-'lergia mas se lhe aplicarmos uma força exte-do corpo além ãa cinética, nem qualquer des- � '-+, perdido de ener�ia. ISe, po� exiemplo, dU'P(' - rior F, constante, útil (direcção para-carmos a força (:2 F) e consIderarmos ,apen s leIa ao plano da mesa) , o corpo passará
d t " f metade da di'stância ( - ) , o trabalho é o a er mOVlmento um ormemente ace-
2 Ierado. mesmo (F X d) e a energia cinética adqui-
m v' rida é também 'a mesma ( ---) .
2
Resposta à pergunta 3:
Na 8Jusência de l1esilstências P8lss'Íva:s, ve--+- -+
rifttca�se que W m = - W, I'Iesulta de P ,e R
satisfazel'em à condição de equilíbrio estático na respectiva máquina simples e de hav·er um deslocamento que 'só pode 'ser uniforme: a máquina ,está assim no ,estado de eqwilíbrio dinâmico.
Por outro '!oado, o principio da conservação do trabalho impõe que seja
Wm :t W, = O < => Wm = - W, .
Isto quer dizer que a verificação do princípio da eonservação do trabalho e o ·estado de equilíbrio dinâm:iJco .são ,equÍ'valentes no caso de não hav,er I1esilsltênci'a;g pMlSivas, porque conduZiem aJO m,€!S!l1JO ·I"e3ll'ltailo VI .. = - W, .
�posta à pergunta 4:
Quando há atrito, teremos':
W .. = - W, - vV {forças de atrito) Sendo assim W m =1= - W" 'a máquina absorveu a energia, medida ,pelo tJraJbaJl.ho COl'l'espondente às fOlI1çrus. de atrito, que transfarmou em ·en'wgia térmioa (aqu€<cimerlto) , prur:te da qu8il, durante .o fundar.·amento, l'eteve, 'e outra parte devolveu a;o exteríor sob a forma de fluxo calorifi1co. p.ortanto, a máquina não devolv'e;u integmlmem:te a ·energia que I1eoebeu do exterior, como sucedia quamdo não havia
atI"i<to oe não v-aI1iava a sua en·ergia mecâni.·ca.
Pergunta 5: 1
A 'eXipressão E, = -m v', que ind�ca a 2
energia cinéti·ca que o móv,el tem qU8llldo ooquiriu a velocidade v, foi estabelecida a
292
Por este processo mecânico foi assim comunicada energia ao corpo e admite-se que esta energia fica nele exclusivamente sob a forma de energia cinética adquirida - Ec.
A medida desta energia será então o -+
trabalho realizado pela força F no des-
locamento d = AR, ou seja o trabalho que foi necessário .para acelerar o corpo de massa m a partir do repouso (cf.7.3) .
'remos portanto : 1
Ec = W = F X d = m j X - j t2 2
1 . 1 Ec = - m t t2 <= > Ec = - m v2
2 2
Podemos então concluir :
7.11.2 Energia oinética de um pendo material
Considerando, por abstracção, um só ponto material de massa mi, em movi-

par.tiT da actuação de uma força constante e, portanto, quando o movimento resultante era uniformemente acelerado. No entanto, esta eX!pressáo também é válida .para o movimento
uniforme. Moslrax porquê.
Pergunta 6 :
A <ellerg�a cinéti'ca :será uma propriedade característica de um corpo, isto é, dependente
só do corpo quando sob III Blcção de uma -+
força F ?
m, V; G m2 r---- . - - - .x- - - ,- - - - - - - - - - -� fa\ '. d .. I 2 V
F (força)
d (distância)
F Iforça)
d (di stância) ---"---
Fig. 7.9 ( a ) Os pontos materiais de m8lssas m, le m, 'estão a uma distância. d' in
ferior à distância limite d a que se
inicia 'a itnteracção.
( b ) A pamte colorida repvesenta a
vlllriação da energia cinética do sistema m, + m, no intervalo de ,tempo em que a distância entre BIS par,ticulas varia 6d . ( c) A paxte colorida mede, neiSt'e
grâfico, quer a energi·a cinética per
'<l,i{la pelo silStem8J 00 m, ·e m, 's'e deslQcam, aproximando-se de d paxa dm, qUler a ,eIlllergia ·clnética ganha pelo
mesmo Sii.'stJerTl'1lI Sle Tl1., e m, se desloCllJIll, atastando-se de dm paxa d.
t
mento com a velocidade de valor Vi, a sua energia -cinética, como partícula material que é, será também dada por :
7.11.3 Energia cinética de um sistema material
Como um sistema material é constituído por uma infinidade de ,pontos materiais de massas m1! m2, m3, • . • , pertencentes ao mesmo corpo ou a corpos diferentes, é evidente que a energia cinética total do sistema é igual à soma das energias cinéticas de cada um dos seus pontos materiais :
Vamos particularizar com um sistema material constituído por dois corpos que actuam entre si : essa interacção pode ser o choque dos dois corpos.
Vamos ainda, neste eX'emplo, tirar partido das propriedades do centro de massas (rever n.O 5.3, 5.7 e Nota 4 do cap. 5) .
'Suponhamos então que estes dois corpos têm as massas m, e m2 e se deslocam ·com as velocidades de valores v, e V2, respectivamente.
A energia cinética do sistema formado pelos dois corpos será :
293

Nota 16 :
Análise das interacções elásticas :
Para melhor compreendermos este vel'\e
dicto da -experiência, consideremos o caso ideal
das interacções elásticas, que são aque1a:s em
que a energia ,cinética é a mesma antes e de
pO'i..s da interacção.
Seja o si,s'tema formado pelos pontos mate
rLais de mass'as m, ,e m, pertencentes a corpos
diferentes - fig;. 7.9 (a),. O ponto m, desIoca-
-+ -soe com a velocidade V, enquanto m, está em
repouso. Quando a distânda entre os pontos
atLng;e um valor d inicia-soe a interacção (d cO'r:rcsponde assim a o limiar d a acção recí
proca dos :pontos materiais ) . As forças' repul
sivas de 8Jcção e reacção, interiores- ao sis'
tema, só dependem da distância entre as
partículas. Admitamos inkialmente que a
força de acção de m, 'sobve m, e, por issO', também a reacção de m, sobre m, (igual em mó
dulo) varia de acordo com o gráfico -da
fig. 7.,9 ( b ) . Começa por ser nula quando os
p ontos estão a uma distânci'a superior a d e, depois-, tem módulo constante para qualquer
distância entre os pontos inferior a d. -+-
De iní cio, a velocidade V, de m, começa a
diminuir de valor; o 'ponto m, passa a ter uma
-+-v,elocidade V, de v.alor cada vez maiO'r. A
certa altura a distância d atinge um valor
mínimo dm como consequência: da intel'\pene
tração dos corpos que chocam e a que per
tencem os pontos materiais . Nesse instante
tem�se v, = V, pai's 'se continuass'e a verifícar
�se v, > v, a aproximaçãO' dos pontos prosse'
gui.ria e a distância pa'ssaria a ser infe,rior a
d",. Ap6s esse instante passa a v,erificar-s'e v, > v, e a distância entr-e os pontos aumenta
até atingir novamente o valor d. Podemos
portanto ,considerar duas fa:ses na interacção:
:L." fase - diminuição da di'stância entre os
pontos, verificandü-s,e, em cada
instante, v, > V, ;
2." f'ase - aumento da di'stância entl'\e os
pontos, verificando-se, em cada
insta..'1!te, v, > V".
294
Antes, durante e após o choque, a quantidade de movimento total do sistema mantém-se ,constante, visto que não há intervenção de forças exteriores. O princípio da conservação da quantidade de movimento não é violado - cf. n.O 5.7.
Acontecerá o mesmo com a energia cinética ? A experiência mostra que não. ( 16) .
Só no choque elástico) ideal, é que há também conservação da energia cinética.
Consideremos o centro de massas G do sistema formado por dois pontos materiais de massas m1 e mz - fig. 7.9, (a) .
Sejam VI e Vz os módulos das velocidades de mI e m2 em relação a G. Já sabemos que antes, durante e depois da interacção de mI e mz a velocidade + Va do centro de massas se mantém constante (cf. nota 4, cap. 5) . Por outro lado, os módulos VI e Vz das velocidades dos dois pontos materiais em relação a um referencial ligado à Terra sio dados, em fllnção do módulo Vr;J pelas expressões (considerando as fórmulas de transformaçã,o relativas a referenciais, es'critas na resposta à pergunta 6 do cap. 3 ) :
-+- --+ Notemos que VI e Vz são as veloci-
dades observadas pelo experimentador -+" -+-
ligado a G) e que VI e V2 são as velocida-

Suponhamos que, num certo intervalo d e
tempo, m, percorre uma diS'tância e, e m. uma
distância e" sendo ambas as' distâncias per
co.rvidas no mesmo sentido. V erifica-s,e que na
1.a fase é
e, < eJ •
Como tal, nes's'e intervrulo de tempo a dis
tânda entre m, -e m, varia de
f:::,d = e, - e, < O
PeIo contrário, na 2.' fase, verifica-soe
e, > e"
v,8Jriando a diJStância entre m, e m, de
f:::,d = e, - e, > O .
Como a força de módulo F é repulsiva, a ener
gia cinética tra.nsmitida a m, oé medida pelo
trabailho reaJli2ado na 'Sua aceleração, ou seja:
F X e, . A -energia cinética perdid a por m, é medida pelO ,trabalho realizado na sua desa
celeração, ou 'seja: F X 6,. A variação da �mergia cinéti'ca total do
sIstema oé ,então :
t.E, (sistema) = F . e,-F . e,= F ( e, - e,) =F A d,
sendo f:::, d a variação da distância e:ntJr'e as
particulas. Na figura 7,9 ( b ) es'sa variação
da ,energia cinética do sistema é rep'resenta<la
pelI8J áI1ea cO'lmÍda.
Como na 1." fase é f:::,d < O, v-erifica-se
uma diminuição da energia cinética do sis
tema:
f:::,d < O => f:::, E, = F f:::, d < O
Na 2." fase, uma v-ez que é f:::,d > 01, V'erifica-se um aumento da energia cinética do
sistema:
f:::, d > 0 => f:::, E, = F f:::,d > O
No final da interacção elástica, dado que
a d�stãncia entre as partículas é a mesma que
de início, tem-se :
f:::, d = 0 => f:::, E, = F f:::, d = O
Resumindo :
Na 1.a fase, enquanto se processa uma
3Jproximação das partículas', a energia cinética do sistema diminwi para depois aumentar na 2." fase, quando as partículas se afastam .
Convém realçar que esta última conclusão
é geI1al, isto é, ;é válida qualquer que seja a
forma como a força de interacção de módulo
F varia com a distância entr,e as partículas
des registadas no nosso referencial
ligado à Terra. 'Escolhemos o caso sim--+- -+- -+
pIes em que VI' V z e VI; são colineares e do mesmo sentido.
Calculemos então a energia cinética do sistema. Temos :
1 1 Ec = - ml V12 + - m2 V22
2 2
Associando, escrevemos :
Como,
mI + m2 = M (massa total do sistema)
mt VI + m2 Vz =O (propriedade do cen-, tro de massas : é nula a soma algébrica das
quantidades de mo., vimento dos pontos materia:is relati vamente ao centro de massas)
295

desde que dependa exclusivamente dessa distancia. AsSlim, no caso da fig. 7í.9 ( c ) , durante a aproximação ( d - dm ) dos pontos mate
riais, a energia cinética tio sistema formado pelos mesmos dimtinui. 'Essa diminuição é me
dida no gráfico ( F, d) pela ãrea coloridJai.
A segui'I', dU'I'ante {) afastamento de dm para d hã aumento de :en:ergi-a cinética do s[s'Í)erna,
sendo ess'e aJUmen,to igualmente medido pela
área oolorida.
Uma outra caracteri'stica das interacções
perfeitamente el�ticas <é o facto da velocidade relativa das parti cu las mudar de sentido sem se alterar em grandeza. Assim, no
caso da interacção descrita verifica-se que,
no final, a parUcula m, fi'ca em repouso oe a partícula m, atinge velocidade igual à da partícula m, no iní,cio. A característica acima indicada d emonstra-se considerando, por um
lado, a conservação da quantidade de movi
mento e, por outro lado, a conserv1ação da en,ergioa cmética. Dividem-se membro a membro as equações que assim se obtêm.
A grandeza definida por
, velocidade relativa após o choque e = -------------------------------
velocidade rel'ativa antes do choque
considerando sempre 'as velocida:des de uma
das partículas 'em 'relação à outra, chama-se coeficiente de restituição. Varia desde o valor 1, nos choques perfeitamente elásticos, até 0, nos choques perfeitamente inelásticos ( aqueles em que 'as partículas, após o choque,
se mov'em em conjunto h O conhecim,ento do coefidente de :restituição 'é imp.ortante por
representar uma propri,edade conjunta dos
corpos que chocam.
'Existem intel'acções reai,s que muito se aproximam do caso ideal das colisões perfei
tamente eláisti.'cas..
Tal é o caso dos choques entre bolas de bi:lhar e, principalmente, entTe particulas atómi'cas 'e subatómicas de energias não muito
elevadas.
296
temos apenas:
� E'e
Verifica-se assim que a energia cinética de um sistema material formada por duas -parcelas :
l.a - A parcela E' c representa a emergia cinética do centro de massas G, considerado este como um ponto material livre a que se atribui a massa total d o sistema ;
2.a - A parcela Ui representa a soma das energias cinéticas dos pontOs ma.teriais do sistema em relação ao centro de massas e chama-se �gia cinétjpa interna ilQ 8Í8-tema.
Este resultado, aqui estabelecido num caso muito particular, aplica-se a um sistema formado por qualquer número de pontos materiai-s, movendo-se em qualquer direcção.
O veredicto da experiência -- não conservação da energia cinética dos sistemas durante as interacções ou choques - ,compreende-se agora facilmente, se atendermos a que as variaçõ'es da energia cinética interna não são detectadas.
Igualmente se 'compreende a conservação da energia cinética no início e no final dum choque elástico e a sua variação durante o mesmo. Com efeito, enquanto a paIlcela E' c se mantém constante, antes, durante e após a interac-
� ção {pois não varia a velocidade VG do

Nota 17 :
Foi com base no estudo das interacções
elá:sticas que J·ames Chadwick de's'cobriu, em
1932, o neutrão. Com efeito, 00 ,choques entre
as particuloas' elementares a:tómicas são prati
camente elâJsti'co.s. Como tal, é�lhes apliJcáv,el o
princípio da conservação da quantidade de movimento-válido em todas as interacções
e o princípio da conservação da energia - vá
lido 8ipenaJS nas interacções elá!sticas..
Compreende-ose o primeilro porque a diminui
ção da quantidade de movimento de uma par
ticU'la é compensaida pelo aumento da quan
tidade de movimento da outra, tal que:
-+- -+-t:,p, + t:,p, = o.
E também se entende a v·erificação do
segundo porque, <como vimos, a diminuição de
energia ci'Il!ética de uma particula é compen
sada pelo aumento da energia cinética da
outra, de modo que:
Quando no choque se desenvolv,em forças de atrito - forçalS de contacto entre os' coI1pos
e que não dependem 'exclusivamente da dis
tância entro eloes, ou seJa não são s'empre
iguais para cada valor da distância 'entre doiJS
corpos - o choque é inelástico. Como as for
ças de atrito se opõem sempre ao movim'ento,
diminuem a energia cinética dos corpos. A
en,ergia que, 'em virtude do atrito, desaparece
da forma cinétilca vai reaparecer sob outras
form8!S. A lrra:di·ação de energia sob a forma
d'l filuxo 'calorifi:co é notória nos sistemas in
teTactuantes em que os atritos são COIl!side
ráv'eis.
centro de massas) , a energia cinética interna Ui vai variando gradualmente : decresce desde um valor máximo até se anular no instante em que a separação entre as partículas se torna mínima, altura em que se tem
para depois aumentar até atingir de novo o valor máximo inicial. ( 17) .
7.11.4 Exercícios de ap,licação
1.° - o motor de um barco tem a potência útil de 30 X 10' W quando navega com a velocidade constante de 90 km/h. Que força resistente se opõe ao movimento do barco ?
Resolução:
Pu = 30 X 10' W
1100.0. m v = 90. km/h = 90 X = 25 m/s
36Qo. s
A energia cedida pelo motor do barco é
-+medi'da pelo trabalho da força -resi,sten:te F . T.emos, portanto:
Wu F X d Pu = - <= > Pu = --
t:, t t:, t
Como a velocidade se mantém conSJt8lllte,
d é v = -
t:, t
e , portanto :
p. = F X v
3<00.0. W = F X '25 m/s =>
F = 1J20 N � ;]2; X llO N
2.° - Uma máquina do caminho de ferro pesa 30 toneladas e desloca-se num troço horizontal até chocar e Ugar-se com um vagão que pesa 25 toneladas e está em repouso'. A velocidade da máquina antes do choque era
297

Respostas às pergunt9,s 5 e 6:
1 5) A ,expressão E, = - m v' também é vã,-
'2 lida no movimento uniforme, porque este mo-
vimento -é o movimento que o ,corpo passa a ter no momento 'em que de1'xa de -actuar a
� força F . A pal1tiJr de então mantém-se a velo-
cidade e, por.tanto, TILalltém-se a energia cimé
tioa, que deixou de aumentar. O movimento
uniforme 'corresponde aSis,jm a uma en·ergia
cinéUca adqui,-ida e 'cujo valor não varia
durante o movimernto. O corpo .não ganha nem
pea:'de ,enffl'gia, porque mão há alcluação de
forças exteriores.
6) A ·energi'a cimética de um cOI"po é uma
propr�edade conjwnta do 'corpo e do reDer:en
cial em que se mede' a ·sua v,elocidade.
Assim, um passageiro que 'segue, 'Sentado,
no autocarro tem, 'em .l1elação a este, <energia
cilnética '!lula, mas, em relação à 'Derra, já
tem a ene:rgia cinética
1 E, = - m v' ,
2
onde 'V é o vllilor da velocidade do autocarro
e m a 'massa do passag,eiro.
Quando o autocarro pára, E, já é nula em
!'elação à Terra, mas não ,é nula em relação
a um as'tronauta colocado na Lua, 'porque o
passagelro restá. ligado ao movimento da
'Derra.
298
de 2,0 m/s. Não considerando as forças de atrito, calcular:
1) A quantidade de movimento do sistema formado pela máquina e pelo vagão antes do choque;
2) A velocidade da composição após o
choque;
3) A energia cinética total antes e depois
do choque. O choque teria sido elástico ?
Resolução:
1) Antes do choque, ,temos :
{ mI = 30 ton.. = 3'Ü' X lO' kg
VI = 2,O m/s
{ m, = 25 tono =- 2'5 X 10" kg
'l', = O
Portanto :
p = m, . VI + m, V,
= 30 X 10" kg X 2,0 m/s + {}
= 6<J X '10" kg X m/s
-+ 6X 10' kg X m/s .
2) Pelo princípio da conservação da quanti
dl!idJe de movimento, sem'pre 'rupli:cável, e
atendendo a que 'l!J máquina 'e vagão !Se
guem juntos depois do choque, temos:
6 X 10' kg X m/s = m, V + m, V
6 X 10' kg X m/s = ('3tO + 25) X 1J(),' kgxv
6 X lO' v = ---- m/s
5,5 X '10'
V == 1,1 m/s .

Exercício 5 :
Como vari:a a energia cinética d e u m carro
quando duplica a sua velocidade ?
Exercício 6 :
Uma força de 20,0 N actua sobre u m patim
d'e .rodas que pes·a 2,5'0 kgf ·e está inicialmente
em repouso. O patim desloca-se 3\80 m na
pista horizontal enquaJIlto actua a força.
1) Qual foi o trabalho realilZado e a ·en·ergia
transmi tida ao patim ?
2 ) Que veloci&de tinha o patim quando a
força d,ei,'xou de actuar ?
3) Antes do choqu e :
1 E, = - m, v,' + O
2
. 1-= - X 3JO X 10" kg X 2' m'/s'
2
=6 X 10" J .
Depois do ohoque:
1 E', = - (mt + m,) v'
2
1 = - X '515 X 10;: kg X 1,'1' m'/s'
2
E', = 3,3 X 10' J .
O choque não foi elástico, porque não se
verifica o princíp:,o da conservação da ener
gia quanto à ·energra detectável, como �ra
de esp.erar.
7.12 Energia potencial - U
Na inter�cção elástica entre dois pontos materiais e/ou dois corpos, verificou-se que :
1.0 - Havia .conservação da quantidade de movimento antes, durante e após o choque :
-1'- -+-Âpl + Âp2 = O
2.° - Havia conservação da energia cinética antes e após a colisão
mas não havia cou,servação da energia cinética durante o choque.
Durante a primeira fase da interacção (aproximação) - ver a fotografia
299

I I I I I r xm -----.J
Fig. 7.1'0 Fases do choque do corpo ( O ) com
a mola - M - fixa a uma parede indeformável.
Resposta. aos Exs. 5 e 6 :
5. QuadrupUca, porque v,=2 v.=> E,=4 E,
6.1 W = 76 J, Ec = 716 J .
6.2 v = 7,8 m/s· .
300
da fig. 5.5 : deformação da raqueta e da bola de ténis - a energia cinétioa total do sistema diminui até um valor mínimo. Durante a segunda fase da interacção ( afastamento) , a energia cinétioa total aumenta desde o valor mínimo até ao valor inidal.
Aconteoe, portanto, de início um desa'parecimento de energia . cinética que a seguir reaparece a ponto de, no final da interacção, se haver recuperado toda a energia perdida, Ipantendo o sistema a sua energia cinética totaL
É, portanto, natural concluirmos que
a energia cinética se foi « armazenando» de algum modo no sistema durante a primeira fase. A esta energia armazenada 'ohamamos energia; potencial - U.
Esta energia, que 'YIifu está a produzir actividades ou transformações detectáveis do sistema, pode depois reconverter-se em energia cinética a.ctual, de acordo com o que sucede na segunda fase da interacção elástica. Em resumo podemos esquematizar :
Ec -+- U -- Ec (L" fase) (:2." fase)
1.12.1 Energia potencial elástica
Consideremos o sistema isolado formado por um corpo - C - e uma mola elástioa - M - fig. 7.10.
o corpo, de massa m, desloca-se, com atrito que supomos desprezável, de encontro à mola e com a velocidade
-.-constante VOo Consideremos as seguin-tes fases :

u En.potencial
U, ---- ----
compressão
x, x
Fig. 7.11 Grãfico da variação da energi1a potencial <com a compressão. l!: um ramo de parãbola, de acordo 'com
1 a ,expressão: U = - k x' .
2
1.a - Enquanto não encontra a mola, o corpo desloca-se com energia cinética constante, dada por:
2.a - Ao entrar em contacto com a mola, esta passa a ser comprimida por uma força crescente de módulo F, proporcional ao encurtamento ou compressão x:
F=kx .
A força de re8icção - força elástica recuperadora da mola -, de módulo também igual a F, realiza um trabalho resistente, que mede a energia cinética perdida pelo corpo (pois vai diminuindo de velocidade) e, como tal, ' armazenada sob a forma potencial pela mola. Este trabalho é:
1 W = -kx2
2
(cf. n.O 7.4.2).
Temos então: r aE, = -=-m (v' - vo') '2
-aE; = a U, s'endo 1 aU=-kx'
2
e /'::,Ec < 0, porque v < Vo •
3.a-Quando se atinge a compressão máxima - encurtamento xm - o 'corpo pára, o que significa que toda a sua energia cinética foi transferida para a mola e nesta foi acumulada Bob a forma potencial. Temos assim:
E'c=O
-aE, = a U, sendo
1 aE, = E, = --mvo'
2 1
aU=U=-k x",' 2
301

Nota 18 :
o que a se'guior se prussa é a r ecuperação,
pel() corpo -0-, da sua ,energi'a: cinética, pOlI'
que a energia potenci,rul da mola se reconverte
em eneTgla cinética do corpo, impelindo-o.
Quando, depois, a mola .recupera a posição
inicial ( compr,eooão nUlllil: x=O). o corpo -O-�
seplilra�se 'e afasta-s·e com a velocidade - Vo ,
de s'entldo contrário à inicial, :e, p ortrunto, com
a mesma energia
302
Se esta transformação for gradual e lenta, podemos 8iceitar que há ·conservação da energia mecânica total no sistema mola-corpo, isto é, em módulo:
( ) l1.u fase
"*(-----_.� 2.u flilse
Ou seja, em qualquer instante da transformação:
( 18) .
No caso dos choques elásticos entre corpos , não temos molas. Mas temos forças de inter8icção entre os átomos dos corpos que se chocam. Quando se inidam essas interacçÕés, ·a energia cinética vai-se convertendo em energia potencial armazen8ida pelos «campos de forças interatómicas», como veremos no capítulo s,eguinte. O gráfico da variação desta energia potencial- fig. 7.11 - é um ramo de parábola.
7. 12.2 Energia potencial gravítica em locais próximos da superfície da Terra
Consideremos a interacção de um grave, de massa m, com a Terra, de massa M, no sistema grave+Terra - fig. 7.12, (a) .

(com vel. �)
, ,
Uo=O : B (corn ve!.;Z;;) 1//111/1:;1//77/ -+o -+-
®
Fig. 7.12 ( a) Intel'8Jcção (F, - F) da. Terre de massa M, com um grave, õe massa m. (b) Queda de um grave. Õe massa
m, da altura h: a sua energia potoo
doaI diminui de um va:lor
/:,U = m gh .'
Arbitrando U = ()o para a superfíci'e
de cont8Jcto solo-grave'. isto é, Uo={)!. teremos:
Uh=mgh .
-+-A Terra atrai o grav€ (forQa F) e o
grave atrai a Terra com uma força que tem a mesma linha de a'cção e mó-
-+-dulo, . mas sentido contrário ( - F), ca-minha.ndo os dois corpos um para o outro. Se este sistema estivesse isolado, só haveria interacção entre as suas massas. Entã;o, pelo princípio da quantidade de movimento, escreveríamos, em relação a cada instante:
m V + M v = O => v = V . M
A velocidade v de aproximação da Terra é imperceptível e indetectável
(v � O) , porque a fracção m � O, pois M
o valor de m é na maioria dos casos diminuto, desprezável, perante o valor de M.
Da interacção resulta um aumento da energia cinética do grave e da Terra (este despTezável por ser v:::::: O) , isto é, do S'istema. Este aumento, no sistema isolado, só pode provir de uma diminuição da sua energia potencial, uma vez que, sendo
Á Ec + Á U = O ,
a Á Ec > O 'corresponderá Á U < O.
N a realidade este sistema é um sistema impossível de isolar. Podemos no entanto aceitar. as conclusões como muito próximas das condições reais dado que, na vizinhança da Terra, se pode considerar nuLa a influência dos outros astros sobre o grave.
303

Nota 19:
Observemos que o produto mgh é () -traba
lho 'I'eaJlizado pela força peso do grave durante
a queda. Com ,efeito, temos \Sucessivamente:
W = F X d = P X h = m 9 h = t:..U
Mais uma vez verifioamos que o trabalho
mede a -energia que -se transforma de uma
forma noutra.
Ne'ste caso, é o trabalho do peso do grave,
,força r-esultante da interacção grav-e-Terra,
que 'mede a 'energia que passa da forma poten
cial à forma cinética.
Esta fórmula - não esqueçamos - só é vá
lida para quedas de pequena altura de modo
que possamos, sem erro s'ensív,el, -consideraT
constante o valor de g .
304
Que podemos concluir, afinal ?
Que, no sistema grave+Terra, é desprezável o aumento de energia 'cinética da Terra e a diminuição �. energia pott!jnoi(il do S'i.:stema se tra.. duz 'JYI'aticamente no aumento de �gia oinétroa do grave.
Ora este aumento de energia cinética do grave é fácH de calcular. Consideremos que o grave de massa m cai da altura h - fig. 7.12 , (b) . Tendo em A
..-+-o a velocidade Vo e em B, após a descida
�-h, a velocidade v, o seu aumento de energia ,cinética é:
6Ec = Ec (B) - Ec (A) 1
= -m (v2 - V02) 2
Como no movimento uniformemente acelerado é
v� = vo2 + 2gh => V2 -vo2 = 2 gh,
podemos finalmente escrever:
1 !l Ec = - m . 2 9 h
2 !l Ec = m 9 h
E, portanto, a diminuição de energia potencial gra víUca 'será:
(19') .
Finalmente observemos que a energia potencial de um sistema não é conhecida. Nos problemas físicos só tratamos de transformações 'e das correspondentes variações de energia. Por esta razão podemos convencionar um

Nota 20:
Não deV'emos esqueoer que:
1.° - Os va:loI'es obtidos para a ,energia
potencial do sistema grave+Terra são sempre
convencionais, p-orque dependem do valor arbi
trariamente atribuído a uma superfíc>i:e de
referência 'e que, no caJSO geral do ca:mpo que
envolv'e a Terra, é a superfície 'l ivre das
água:s do maJI'.
2.0-A en ,ergia p otencial também não é
uma característica ou propriedade de 'Um c orpo, p-orque depende dos: outros cO'I1pos do
sistema.
:Se, por exemplo, o corpo fosse 'elevado à aLtura h da ,superfí'0ite .lunar, a :energi,a poten
cia:l ,transformáVõel ,em outras forma.s de 'ener
gia ( e com ela o trabaJho produzido) seria dij)evente.
U ,representa, sim, uma propriedade do sis
tema.
3.° - A energia potencial gravítica refere-'se ao 'sistema g;rav,e - Terra ,e não apenas
ao grav,e:. De facto, na expressão
U=p.h ,
o factor p dep.ende não s6 do grave m&s\ -e principalmente, da 'I1erra.
Pergunta 7:
Energia <potendal Ue 'energia c ínética E,
são propriedades de um sistema e não pro
priedad'es ÍJndividuais de uma particula.. No
e ntaJIlto ,é fI'equente falar 'em energia cméti<ca
de um p-onto material 'e já não é frequente
falaT em 'energia potencial de um ponto mate
rial. Tenta:r uma expl1:cação.
20
valor Vo para ponto de partida da mediçào das energias potenciais num referencial à nossa escolha. E como trabalhamos prox'/,mos da superfície da Terra, 'convencionou-se atribuir a valor Vo = O quando os graves estão assentes na superfície fixa (fixa para nós, observadores tel'Testres) da Terra.
De acordo 'com esta convenção, cujo estudo retomaremos' no 8.0 ·capítulo (1.0 do tomo fi), quando elevamos um grave à altura h, temos:
Vh = Vo + aumento  V = O+m g h
:mm resumo:
a ' energia potencial do sistema grave+Terra, 'quando o grave de massa m está à altura h da superfície da Terra e se convenciona, à superfície desta, corrsidemr Vo = O, é: ' Uh == m g h ou Uh = P . h
(20)
7.13 O princípio da conservação da energia mecânica, nUl}I sistema não isolado
7. 13.1 Deslocamento com atrito
o princípio geral da conservação da energia, enunciado no n.O 7.2 deste ,capítulo, foi aplicado já no problema do choque elástico e no da energia potencial, ao considerarmos sistemas isolados.
Ora o caso mais real e frequente é aquele em que o sistema troca energia com o exterior - portanto, é um sistema não isolado.
305

Fig. 7;13 O coI'po, de m8issa m, deslooa-<s,e
'sobl'e a ,rampa rugosa (8) com
atrito. Actuam sobre o corpo as -se
guintes forças:
.-+o 1) a força exterior F, directamente
'aplicada. por um agente 'exterior ao silst�ma gravoe+Terra;
.-+\ 2) a reacção R da superfíci-e ;
3) a força de atrito no contacto ""*'
com a 3uperfíde - F.;
-+-4) -o 'peso P .
As 3 últilITl8is são forças interiore.� 'e
-+-v é a velocidade do oentro de gravi-
dade do ·COl1pO.
Resposta à pergunta 7:
Pode-se individualizar ·e medir ou determi
nall' a velocIdade de uma partícula, com-o por
exemplo, a v.elocidade de uma partícula ele
mentar atómica, num .I\eferenci� ·escolhido.
Não oferece depo1s dificuldade o cálculo de
J E, = -mv'
2
Outro tanto já não !Suoede com a energia
poten-cial U, porque, dependendo das interac
ções entre as diferentes partícU!las do ,sistema,
não parece fác�l, por 'eX!emplo, in'<lividualizar
uma partícula numa molaelásUoa e aplilC3ir-
1 -lhe a 'expl'essão U = - k x' (como determi.-
2 nar k p8il'a uma só partícula?).
Também não ,é fácil, numa col'isão, imagin8ir uma PaJI'tícU!la desligada das restantes
partículas do .wstema. Etc.
306
Vamos, pois, tratar este caso com o auxílio do princípio geral da conservação da energia - princípio que até hoje, na Física, se tem aplicado com êxito aos mais diversos fenómenos da Natureza.
Consideremos um corpo, de massa m, ,a subir uma rampa rugosa (8) - fig. 7.13. Sobre o corpo, no 'sistema grave-Terra, estão directamente aplicadas as seguintes forças:
-+-interiores - a reacção R da rampa,
-+-a força de atrito Fa e o peso do
-+' corpo P ;
-+-exterior - a força F devida à inter-
venção de um agente exterior.
o sistema não está isolado, porque, -+-
além da força exterior F, o trabalho das forças de atrito provoca um fluxo calorífico pam o exterior.
Durante a subida do grave na rampa
houve variação de energia cinética e potencial, 6. Ec e 6. U, e houve trabalho, Wa, realizado pelas forças de atrito ( este trabalho é trabalho resistente,
porque a força de atrito é uma força que está sempre em oposição ao movimento) . Temos, portanto, as parcelas seguintes na v;ariação total de ene,rgia do sistema:
Como Wa é uma parcela de energia restituída ao exterior sob a forma de fluxo calorífico, os incrementos 6. Ec + 6. U da energia do sistema,
admitindo o princípio da conservação

Nota 21:
Esta igu8Jldade, que resuUa da aceitação
do princípio geral da ,coD'S'ervação da energia,
é verificável experimentalmente e deduz-se
matematioamente partindo da 2.' lei funda
mental d o movimento de Newton. :m '8Jplicâ
v� às t;re,rusJform8ições dum sistema corpo +
+ T'erra em que apenas se vterifi� vaJria
ções da ellJelrgi� cinétioo ejou potenciail do
sistema ('e não QUIUraJS vaJriações como, por
exemplo, de 'energ;ia interna),.
Fig. 7.14 O C<lT'po I'eSV'8Jla, com aJtrito, no
plano inclinado, 'Sob a acção do l;>eu
peso. Como não hã qua:lquer força
exterior ao sisooma (corpo+Terra),
temos:
da energia, hão-de estar relacionados com a energia, Wp' fornecida ao sistema
� pela resultante F das força,s exteriores, do modo seguinte:
en. recebida do exterior
pelo sistema
en. devolvida .ao exterior
pelo sistema
incremento de en. do
sistema
(21) Esta é uma expressão para fixar,
porque torna simples a resolução de muitos problemas.
7.1$.'2 Exercício de, aplicação
Um c orpo c om a massa de 400 kg resvala
por um plano inclina do, de inclinação 10,0 %, partindo do repouso - posição (1), fig. 7.14.
Passa dos 6,0 s de pe'rcu rso', a sua velocidade
é de 2,00 m /s. Calcular a energia dissipada
por atrito.
ResoluçãQ:
Este problema, resOlI\'e-s'e com simplicidade
e rigor, aplicando a 'expreSisáo que tTaduz o
prineíopio da conservação da energia. A<ssim,
como no sistema grave+Terra não 'actuam
forças exterio.res, temos:
Assín8Jlando por (11) 'e (2) as posições iniJ..
ciaJ. ,e final- fig. 71.114 -, podemos -cal'cula:r
a:s variações (diferença entI'e os valoTes finais
e os valores iniciais) de ,energia cinética e de
energia po.tenCÍ'al do modo seguin te:
1 1 !:::,E, = -mv,' - -mv,'
2 2 1
= - X 400 kg X Z"m'/s' - O 2
= SOO J
!:::, U = U, - U, = mgh, - mgh
= - mgh,
307

Fig. 7.15 Um modelo ,escolar de mini-central
hidrâulica em funci'Onam·ento num
Laboratório de Física.
308
Cãlculo de h, (no triângulo A B' G') :
h, = c X sena
De v = 2,00 m/s e t = 6,0 s, resulta:
v=jt<= >2m/s=jX6s
1
Portanto:
1 c=-jt'
2
1 1
j = -m/s' 3
= - X -m/s' X 6' s'
Donde:
2 3
= 6,Om
h, = c X sena 10
= 6,Om X --= O,SOm 100
Fin8Jlmenbe :
6U= -mgh, = - 400 kg X 9,8 m!s' X 0,60 m
= -.24!OX9,8 J = - 236� J -+- -2315Xl0 J
A energia dissipada por atrito 'calcula.-se a pallti<r de:
Wp - W. = t.E, + t.U O - W. = 800 J + (- 2352 J)
- W. = - ,1552 J -+- - 15.5 X lO J
W. = 1,55 X '10" J
W = 1,55 kJ .
7.14 O princípio da conservação da energia mecânica num sistema isolado
7.1"-.1 Estabelecimento do princípio
Se considera:rmos um sistema isolado (W F = 0, porque não actuam forças exteriores), onde apenas haja trans
formações de energi.a cinética em ener-

Nota 22:
Estamos, 'como é 'evidente, a tratar um
caso paJrbi'cu}aJr, 'como, por ex., o do sistema
grav,e+'I1erra, eem condiçõeis: idcires, pOlis só cons'Í�'elraJIIlO\S for9as irnterior.es, -como é o
caso do peso do graJVle.
N o caso maIis COI'l'en te e geral de termos
de considerar as forQas' de atrito oe a l'es'l:s
tênci'a do ar, a energia devolvida pelo si'stema
ao vencer as forças resistentes é a parcela
W. do princípio g;eral da conservação da ener
gia traduzido na expressão:
w .. - W. = Il.E, + Il.U .
Fig. 7.16 Um aspecto da barragem do Alto
R8ibagãQ.
Fig. 7.17 Alto Rabagão - central subterrâ
nea com duas turbinas.
gia potencial e reciprocamente ( é nulo também o trabalho das forças resi'stentes como as de atrito: Wa = O) , a expressão que traduz o princípio da conservação da energia fica reduzida aos termos seguintes:
0= ilEc + il U
Isto signifi.ca que não há variação de energia mecânica. Esta deverá, pois, manter-se constante, ou seja:
Ec + U = constante
Esta expressão traduz o princípio geral da 'Conservação da energia aplicada a um sistema isolado onde apenas se verificam transformações de energia cinética em potencial e vice-versa. A esta restrição do princípio geral chama-se princípio da canservação da energia mecânica e enuncia-se:
«Num sistema isolado, onde apenas se verificam transformações de energia mecâlnica, a um aumento dE! energia cinética corresponde uma. diminuição de energia potencial e reciprocamente, de modo a manter-se constante a soma Ec. + U .»
(2'2).
1.14.2 Utilização da energia potencial gravítica de úma barragem
As grandes reservas de energia potencial das águas de um rio, quando acumuladas numa albufeira e sustidas por um muro alto e forte·- a barragem -, podem ser utilizadas para, ao
309

Fig. 7.18 Fotografia da roda d e M3;Xw,el, em repouso.
Fig. 7.19 F-otogI1afi1a da ·roda de Maxwel, em
movimento.
Nota 23:
80e desligarmos a lâmpada, aumenta v'tS�
velment e a velocidade ·e o caudal de saída da
água ·e dtminui a velocidade de rotação da
turbina . Porquê ? A energia .ctnéti:ca da água à entTada da
turbina é OOIl1'Sltante. A energi,a da água à
saída daJ turbin'a é a dif'erençaentl'e a runterior e a despendida no circuito de utiUza'ção.
80e ·esta última di(tninuir (caso da lâmpada
desli,gada) , diminui a sIlJetrgi:a de ro1:;a;çã:o da
tUl'bina e aumetnba a energta cinéti'ca de
saída.
310
caírem de grande altura, através de condutas, porem em movimento turbinas. Nestas há tmnsformação de energia potencial em cinética e a água entra na turbina com a velocidade VI e sai com a velocidade V2 < VI. Sendo M a massa de água que passa, em cada segundo, na turbina, a energia cinética recebida por esta - neste caso, potência motora - é:
Esta turbina, a seguir, põe em movimento grandes alternadores, que transformam a energia cinética em energia eléctrica. IEsta é depois enviada para as povoações e ,oentros industriais por meio de cabos de alta tensão.
Na fig. 7.15 está a fotografia de um modelo escolar de mini-central: a água da torneira é conduzida por um tubo de borracha pa.ra a turbina e sai, a segul'r, desta para a bacia de escoamento. A turbina põe em movimento um dínamo, que transforma a energia cinética em energia eléctrica sob a for.ma de 'corrente. Esta faz tocar uma campainha e aoende uma lâmpada. ( 23) .
Nas figuras 7.16 e 7.17 mostram-se alguns aspectos da barragem do Alto Rabagão.
7.14.3 A roda de Maxwell
Ê um dispositivo - fotos das figs. 7.18 e 7.19 - utilizado para verificar, com alguma aproximação, o princípio da conservação da energia mecânica.
Na alavanca inter-fixa equilibram-se o peso da roda e o peso de uma massa cursora. A roda está suspensa de dois

Nota. 24:
Quando em repouso, os pesos da massa
cursora e da roda !equilibram-se, mas durante
o movimento des-equilibram-se porque a roda
fica mais l ev e (fig. 7)119). Lsto deve-se à força d e inér cia ( - m j) diTilgida p'aJI'a cima.
p Fig. 7.20 Há cons,erv.ação de energia mecâ
nica na descida em queda 11'Vl1e e
no p'lano inclinado. E m ambos os
casos, ,tem-'se:
U+ E, = mgh
Exercício 7:
V'erificar o princIpIo da cons1ervação da
energia mecânica na ascens,ão de um grave
segundo a v,ertical 'e no plano inclinado.
Sugestão: seguiT os pass'os de 7 .. 1'4..4.
fios enrolados no seu eixo. Queimando um 3.° fio, que segura a roda, esta vai descendo e desenrolando os fios, ,adquirindo energia cinética de translação e de rotação - conversão de energia potencial em energia cinética.
Na subida não regressa ao nível inicial devido ao atrito dos fios a enrolarem-se e à resistência do ar, (24),
7.14.4 Verificação do princípio da conservaçãC! da energia mecânica na queda livre e na descida no plano inclinado, partindo do repouso - fig, 7.20, (a) e (b).
Temos: h = h, + h, e c = c, + c, "
1) Posições A do grave:
Queda !livre
U,,=mgh
Plano inclinado
U,,= F.Xc= P sen aXC
= mgsen aXC
E,=O
2) Posições B do grave:
Queda 'livre·
U,,= mg h,
1 Ec = - mvlt2
2 1
= - m .. 2g h, 2
= mg h,
Plano inclinado
U B= mgc, . sen a
1 E,=- mv n'
2 1
=- m . 2'(g sen a)C, 2
= mgc, . sen a
U,,+E,= mg( h,+h,) U,,+E,= mg sen,,(c,+c,) = m g h = mgcxsen a
3) Posições C do grav e:
Queda Uvre
Uc=O
1 Er=·- mv (.:!
2
Plano inclinado
Uc=O
1 E,=- m,vc'
2 1 1
=- m. 2gh 2
=- mX2 (g sen a) C 2
=m gh = mg c X sena
311

o s -
s • G G
A B
®
• @) G
s c
Fig. 7.21 (a) , (b) , (C) . G = oentro de gravi
dade.
312
1) E quilíbrio indiferente - posições
A: ao energia potencial é 'cons
tante (U = k, G a altura cons
tante) ..
Z) E quilíbrio estável - 'pos'ições B:
a energia ·poten.cial é mínima
(U m' •. ' G o mais baixo possív,el ) .
3) E quilíbrio instável -posições O: a en·ergia potencial 'é máxima
(U moo. , G O mai·s -alto poss.ív.el) ..
No plano incHnado, cuja altura é h, temos h = c X sen a. Portanto, quer na queda livre, quer no plano inclinado, é:
m g h = m g c. sen a = 'k _
E, por isso, em ambos os casos:
v + Ec = k <=> AV + A E·c = O .
7.15 O conceito de equilíbrio em termos de energia potencial
7.15. 1 O equilíbrio em geral
o conceito de equilíbrio de um corpo num dado referencial foi definido em Estática (cf. n.O 4.3) como o estado do covpo em que as velocidades dos seus pontos materiais não variam em módulo. Esta definição compreende-se agora melhor à luz do princípio da conservação da energia.
Com efeito, se as velocidades não vati·am em módulo, ou não há intervenção de forças exteriores ao corpo ou essas forças exteriores se equilibram. O trabalho das forças exteriores é, pois, nulo.
Como tal, sendo W F = O e também Wa = O ( não há trabalho resistente, porque o corpo está isolado) , temos:
0= AEc + AV <=>V + Ec = k .
Em conclusão, um corpo está em equilíbrio, num dado referencial, quando k nulo o trabalho das forças ea:terWre8, ou, o que é equivalente, quando a energia mecânica do corpo é constante.

Nota 25:
Esta conclusão verirfioo.-se nos 3 ,equilíbrios
definidos na EstáJti-ca.
1) No 'equHíbrio .estáJtico (repous o ) , a v'eloCli.
dade do c orpo é nula e, portanto, E,=OI e
U = k. Não ,há forÇ8JS exteriores ou elas
se equilibraan. O ,tmb!lJlho realizado pelas
forças exterio res é nulo ,e, por is'so, não há transferência de energia .
2) No equilíbrio dinâm i c o de translação,
v = k' -> E, = k .
Também não há' intervenção de forças
exteriores ou elas !Se 'equilibram. Ê nulo
o trabalho das forças 'exteriores ,e, por isso,
não há tr!lJll'smrssão de energia.
3) No eqwilíbri o dinâm i c o de rotação, é v = k
>-+e w = k'. Actua a f.orça centripeta F,.
Mas .esta é rperpendkula:r à trajectória e,
portanto, o s eu trabalho é nulo:
W = F, X d X cos90"
= 0 .
Não havendo trabalho, não há transferên
cia de energia 'entre o si!Stema e o exterior:.
Pergunta: 8
Numa curva, dada em movimento circul!lJr
uniforme, há equ ilíbrio dinâmico.
Mostrar porquê, em termos de 'energia.
o estado de equilíbrio é, pois, um estado em que o sistema se mantém sem dispêndio' de energia. (25) .
7.15.2 Os três tipos de equilíbrio estático
Definimo-los na Estática em termos de momentos de forças ( cf. n.O 4.6.5 e respectiva Nota 14). Vamos interpretá-los agora em termos de energia potencial.
Consideremos uma esfera, um cone e uma régua, nas posições A in�icadas na fig. 7.21, ( oa) , ( b) e (c) .
'S,ão, como se pode observar, posições de equilíbrio indiferente. Os centros de gravidade estão a altura fixa, qualquer que seja o deslocamento de cada um dos sólidos na sua base de apoio ou em torno do eixo de suspensão S. A energia U = m g h é então constante: U= k.
Nas posições B, que são de equilíbrio estável, o <!entro de gravidade está o mais baixo possível. A energia potencial é, por isso, mínima - U mino - em relação aos valores que pode tomar na vizinhança.
Finalmente, nas posições C, que correspondem ao equilíbrio instável, os centros de gravidade estão o mais alto possível e, portanto, a energia potencial é máxima - Uma". - em relação aos valores que pode tomar nos pontos vizinhos ..
Resumindo:
EquiUbrio estável - U = Umin. em relação a'OS pontos da vizinhança
Equilíbrio instável:"- U = Umal/). em relação aos pontos da vizinhança
Equilibriú indiferente - U = k .
313

Fig. 7.22 Aplicando a um corpo de massa m -+-
,a força exterior con stante F, o tra-
ba,Lho desta" no deslocamento de va
lor d, é igual à variação de energi'a
cirnética do móv,el dumnte a 'actua
ção da força:
mv,' mv,'
Wp = c.E, <=>FXd= -- ---
Nota 26:
2 2
Este teorema também aparece com o nome
de teoIlema das «forças vivas», porque Leibniz
chamou força viva, no séc. XVI, ao produto
m v', quando ainda não estavam clarific8ldos
os oonceitos de força e de energia. O termo
«força viva» perdeu sentido e actualidade,
não tendo senão importância histórica (cf.
7.1..1).
314
7.16 O teorema da energia cinética
Consideremos o móvel, de massa m, a deslocar-se, sem atrito, no plano horizontal- fig. 7.22. O sistema é: móvel+Terra.
Em A, quando o móvel tinha a velo-+-
cidade v" foi-lhe apli>cada a força exte---+-<
rior e constante F, desde A até B, onde -*
a velocidade passou a ser V2 •
Durante o deslocamento de valor d = AB, ,como não há atrito, nem variação da energia potencial, o trabalho
-*. da força exterior F mede precisamente a variação de energia cinética entre A e B.
Temos, portanto: W/" *- O, Wa = O e t:,.U = O
(o deslocamento é no plano horizontal) . Por isso, aplicando o princípio da
conservação da energia, teremos:
,Wp-O = t:,.Ec + O Ou seja:
Wp=t:,.Ec<=> 1 1 F X d = -mv22 - -mv/ 2 �
A primeira das ex:pressões anteriores, que se pode generalizar ao caso de uma ou mais forças variáveis, traduz o teorema da energia cinética, 'cujo enundado é o se!2Uinte:
«0 trabalho resultante das forças exteriores que actuam um corpo durante um certo intervalo de tempo é igual à variação da energia cinética do corpo nesse intervalo (],é tempo, na ausência de atrito e de variação da energia potencial.»
(26)

Nota 27:
1t d� notar o paral elismo formal entre este teorema e o teorema da quantidade de movi
mento (cf. n.O 5.4,):
-+ -+- -+F X tlt = m v, - m VI
1 1 F X d = -m v,' - -'ln VI'
2 2
Os I'Iespectivos enUlnciados são quase decaI-+
cáveis desde que se substitua: impulso (FXtlt)
por trabalho (F X d); quantidade de mQVÍ-
-+ m v' mento (m v) por energia cinética (--)
2
Resposta à pergunta 8:
Como não hã v,ariação de velocidade em módulo, a força actuante, centrípeta, terã de
ser .perpendiculoar \i curva. Sendo assim, não há trabalho vealizado 'e, 'portanto, {) movimento
curvilíneo, ,efectuado nestas condições, não exige ,consumo de ,energia (salvo a nlec,es,sária para. V'euoer atritos e ,resistência do ,arr)l. Este resultado deve ser tido em conta por 'Um auto
mobilista qwe queira fazer um consumo mí
nimo de combustível.
Nota 28:
Forças dissipativas e forças conservativas.
Analisemos três proces,sos de actuação de uma força exterior sobre um corpo, com produção de tr.abalho. .
1) ,L evantemos, com v,elocidade constante,
um . corpo à altura h. O -trabalho �ealizado
contra a força resistente (o peso do corpo) mede a 'energia transferida para o COl'po 'e
acumulada nele sob a forma potencial t:;.U = mgh. Esta energia pode s'er recuperada
integralmente pelo -exterior quando o corpo
r.egI'lessa à posição iillcial 'sob a acção do seu
próprio peso.
2) Compri'Inmnos uma mola (€Ill,curtamento x) . O trabalho reali�do contra a força de recuperação elástica da mola (forçoa resi\Sl-
Se v2 > V1, é F X d > O : o trabalho é motor, potente ou positivo, a força é força motora e a energia cinética aumenta.
Se V2 < V1 , é F X d < O : o trabalho é resistente ou negativo, a força é força resistente e a energia cinética diminui. (27) .
Se a força que actua o corpo varia durante o movimento ou mesmo se actuam varlas forças, o resultado obtido mantém-se desde que só haja variação da energia 'Cinética do corpo. Neste caso, o trabalho total é o trabalho resultante de várias forças ou é a soma dos-trabalhos elementares no caso da força variá veI. Em qualquer dos casos, o trabalho total é medido pela variação da energia cinética. (28) .
7.17 Massa e energia. Princípio da conserv�ão da massa-energia
Para uma boa compreensão desta rubrica lembram-se as seguintes revisões:
l_a - Princípio fundamental da Relatividade Restrita ou especial (d. n.O 2.1 e respectiva Nota 2).
2.a - Restrições às leis newtonianas do movimento (cf. 3.11).
3.a - Expressão mais geral da 2.a lei de Newton (cf. 5.5 e respectiva Nota 6).
4.a - Forças de inércia e equivalência entre forças de inércia e de gravitação. Princípio fundamental da Relatividade Geral (cf. 5.9.1 e resp'ectiva Nota 10) .
-7.17.1 Massa e energia
Recordemos que a massa de um corpo em repouso (também chamada
315

tente) mede a 'energia tran.sferida para ela.
Esta é armazenada sob a forma de energia
1 potendad tiU = - kx'. 'l1aIInbém esta 'ell'ergi'a
12 pode ser devolvida na integra ao exterior
quando a mola regressa à poslição iniciaJl.
3) Desloquemos um corpo num solo hori
zontal, rugoso ·e, portanto, com atrito.
Hij. .nrabaJho das forças 'exteriores oe, por
tan�o, energia transd'erida para o corpo, eom
a quaJ são vencidas as forças de atrito (for
ças resi:stentes); mas agora a energia poten
cial U não aum enta. A en'ergia coIl'sumirda
para vencer as força:s de atrito jamais será
recuperada integralmente. Com efeito, na
tentativa de fazer .r.egressar o sistema às con
di!ções ini'ci,ais (neste easo ao deslocar o corpo
em sentido contrá:rIo), ele contirnua ·a 'oonsu
mir 'energia, dado que a força de atrLto muda
de sentido e continua a 'opor-rse ao movimento.
Qual o destino da energia cedida ao sds
tema? Acaba por !Ser dissipada sob a forma
de fluxo calorífico a par.tir das 'Superfícies de
oontacto, que aquecem.
As duas primeiras forç.a;s (peso e força de
l'ecupemção eJlãlStiOOl) di2leffi-se conservativas
e a última ( atrito) diz-se dissipativa.
Em resumo, podemOSl di:rer que:
Quando é fornecida energia a um sis
tema pam vencer apenas forças CCYn8er
vativll8:
1.0 _ Verifica.-se no sistema um annaze
namento dessa. en-ergia sob � forma
potencial;
$.0 -'Essa ,energia potencial pode depois
transformar-se em energia recupe
râvel integralmente.
Quando é fom;ec;ida, e'DIefl'gLa a um
sistema pa;ra V1eIIl� só, ou também,
forças dissipativll8:
316
1.0 Não se v:erifica total armazen.a...
mento dessa. energia sob a forma
,potencial ;
B. o Essa en-ergia jamaie pode vir a
ser recuperada integ.ralment-e devido à lSUa dissipação sob a
forma de :fluxo <calorifico.
massa própria), mo, aumenta quando o ,corpo se desloca com uma velocidade v ( sem aumento de volume, porque o número de particuIas é o mesmo) , segundo a relação:
mo m = -;===;= (cf. n.O 3.11) vi V2 1-
�
A constante c = 300 X 106 m/s é a velocida;de de propagação da luz no vazio. Esta fórmula, prevista por. Loren�z ( 18'531-19'28) e Einstein ( 1879-
-191)5) , foi confirmada experimentalmente nos Laboratórios de energia nuclear com partículas elementares animadas de altas velocidades.
Estes ,resultados induzem-nos a 'Concluir que:
1.0 - Quando aumenta a velocidade das partículas, aumenta também a sua inércia, porque se verifica o aumento de massa D.m = m - mo.
2.° - Ao aumento de energia cinética corresponde um aumento relativista de massa 6. m, o que leva a supor que entre estas duas grandezas deve haver uma relação muito estreita.
Ora Einstein demonstrou que massa em repouso e energia poderiam transformar-se uma na outra e estabeleceu a seguinte relação de transformaç.ão:
ti E = ti m . c2 •
Nesta relação D. m representa o aumento da massa em repouso resultante do acréscimo de energia D.E; reciprocamente, a massa em repouso diminui de D. m em consequência da emissão da energia D. E .

Poder-se-Ia objectar que o fluxo calorifico
poderia ser recuperado totalmente sob a for
ma de tJrabalho mecânioo. Sabe�se, porém,
da Termodinâmica, que a reconversão energia
calorífica-trabalho é apenas parcial e que
o rendimento das mãquinas que fazem esta
transformação é muito baixo (de 9 % em
cel1tas máquinas a vapor a 35 % nos malho
ires motores D�esel e a 4'5 % nas actuais tUTbinas a gãs ) .
Pergunta 9 :
Indica;r qual das afirm,ações seguintes ,é
rigorosamente correcta:
1) «A massa pode ser transformada em
energia».
Z) «A uma certa energia de qualquer tipo
corresponde sempre o mesmo valor de
massa».
Exercicio 8 :
Um corpo d e massa 2,0 kg, inicialmente
em repouso, desliza num plano horizontal
sob a acção de uma força de 101,0 N, paralela
8iO 'Plano. Ao fim de '6,0 s tem a velocidade
de zo.O m/s. Calcular a energia dissipada pelo
atrito naquele intervalo de ,tempo.
A este resultado, obtido na teoria da Relatividade Restrita, Einstein acrescentou mais tarde a seguinte proposta : a energia total referente a uma massa m é o produto dessa massa pelo quadrado da velocidade da luz no vácuo
Segundo esta relação, um só grama de qualquer substância deve conter
10-3 kg X (3,0 X 108 m/s) 2 = 9 X 1013 J
de energia! Mas esta enorme energia, que alguns autores designam por energia de massa, não é utilizável.
Baseando-nos na última relaç,ão acima indicada, não podemos, em rigar, afirmar que a massa é convertível em . energia ou a energia em massa. Com efeito, segundo essa relaç�o, a energia cinética E possui a massa m. O que é lícito afirmar-se é que a massa em repouso pode sofrer acréscimos ou decréscimos, se receber ou ,ceder energia. Assim, por exemplo, como se estuda em Química, a massa própria do núcleo do átomo de hélio é inferior à soma das massas próprias dos seus nucleões (dois protões e dois neutrões) . A diferença, a que se cha:ma defeito de massa do núcleo, é igual a 0,0293 u m a .
Como interpretar este defeito de massa, à luz dos últimos conhecimentos adquiridos ? Quando o sistema 2 protões + 2 neutrões passa do estado em que as particulas estão separadas ( estado disperso) ao estado em que os constituintes estão ligados (estado de
. ligação ) , há emissão de energia, a qual corresponde ao decréscimo de massa própria, ilm, de acordo com a equação
il E = ilm . c2 •
317

318
Reciprocamente, para que o núdeo do átomo de hélio se separe nos seus nucleões, há que absorver uma energia t1E que, de acordo 'com a expressão anterior, corresponde ao acréscimo de massa t1 m que se verifica. Essa energia t1 E, a que se chama energia de coesão nuclear, é extraordinariamente elevada.
Nueleões separo � Núcleo + Energia
Sabe-se que o defeito de massa representa, no caso do núcleo do átomo de hélio, ,cerca de 0,7 % da sua massa.
No 'caso da-formação de uma mole de núcleos de átomos de hélio, a partir dos seus nucleões, há uma libertação de energia ( que é também a energia de coesão nuclear glohal de uma mole de hélio) de 25 X 101 1 J.
Com efeito,
0,7 D.m = 4 g X -- = 0,028 g =
100
= 28 X 1(}-6 kg
t:,E = t:,m . c2 = (28 X 10-6 kg) X
X (3X 108 m/s) 2 = 252 X 1010 J -+ 2'5 X 10" J
Esta emissão de energia, correspondente ao decréscimo da massa em repouso ( ou massa própria) verificada nas reacções nucleares, toma aspecto relevante no caso das bombas atómicas, das pilhas atómicas e dos reactores nucleares.
7. 17.2 O principio da Ccm8fffVação da massa-enfffgia
Perante a equivalência massa-energia temos de concluir que, quando
numa transformação se liberta ener-

Nota 28:
Na,
combustão do caTv:1o, que é das ,rea-cções químicas mais exoenergéticas
C (s )" + 01, (g) -+- CO, (g) + 9:6 X lO' cal/mole , a perda de ma-ssa própria co.rrespondente à
energia Ubert8lda na ,combustão de '1'2 g de
carbono (aproximadamente 1 mole) é :
1 cal = 4,19 J (um dado ) 96 X lO" cal = 916 X HlI' X 4,19 J
= 4.02 X H)� J
Temos, portanto :
E 402 X 10' J
4:5 X 101-13 kg !
Como vemos, é uma perda de massa excessivamente pequena para ser detectada com a balança.
Exercício 9 :
E m face da equação da combustão do
hidrogénio
1 H2 (g) + - O, (g) -+- H20(g) + 289 X 103 J
2
determinar a dhi1i.nurção de massa na formação de duas mOléculas-g,rama de água.
gia ( transformaçio exoenergética) , a massa em repouso dos produtos da transformação é inferior à massa em repouso dos produtos que se transformaram. Ora, esta conclusão invalida o princípio da conservação da massa ( Lavoisier) nas reacções químicas. No entanto, em todas as reacções químicas exo€nergéticas estudadas até hoje tem-se verificado a lei de Lavoisier.
Como se explica esta aparente contradição ?
, É que, por mais rigorosas que sejam as pesagens, não é possível detectar as ,pequenas variações de massa nas reacç.ães químicas vulgares. (28).
Nas reacções de cisão e de fusão nucleares, onde há enormes energias em jogo, é já sensível a variação de massa aos meios de detecção usados.
Em resumo, no estado actuai! dos conhecimentos científicos, os princípios da conservação da massa e da conservação da energia não podem existir em separado, mas, sim, em conjunto, constituindo o 'chamado princípio da conservação da massa-energia, que se pode enunciar do modo seguinte:
«'Em qualquer üii.n.:>forn1stção �isica e/ou química mantém-se constante a soma das massas em repouso e da energia que riela tomam
" parte.»
Na M3icrofísica, por motivo de os erros cometidos nas determinações experimentais excederem, largamente, as variações relativistas de massa, continuamos a considerar em separado o princípio da conservação da massa e o da ' conservação da energia.
319

Resposta à pergunta 9 :
A afirmação 1 ) não é rigorosamente verdadeira, pois só a massa em repouso é transformável em energia.
A afirmação 2) é verdadeira, pois à ener
E gia E corresponde sempre a massa m = - .
c2
Resposta aos Exs. 8 e 9:
8 ) W. = 200 J
9) ilm = 2 X 3'2,1 X 10-13 kg
= 64 X '10-13 kg
, = 6,4 X 1Q.-12 kg
= 6,4 pkg .
320
7.18 Análise dimensional da energia e unidades de energia
1.18. 1 Na escala de trabalho
Vimos, neste capítulo, que a energia transferida se pode medir pelo trabalho produzido. Portanto, na escala de tra.balho e no SI, as dimensões da energia são as da grandeza trabalho :
[E] = [W] = [F] X [d] = U MT-2
A unidade de energia é a unidade de trabalho, ou seja o joule :
Um joule ( energia) é a energia que, por transformação ou transferência integral, produz o trabalho de 1 joule.
7. 18.2 Na escala de massas
Nesta escala, que só reveste interesse quando estão em jogo as energ,ias libertadas nas reacções nucleares, quer as que ocorrem nas estrelas, quer as que se verifi'cam nos reactores e nas bombas atómicas e de hidrogénio, a relação de transformação é a relação de Einstein. Portanto :
E = m c2 = > [E] = M . (LT-1) 2 = L2 MT-2 .
Este resultado é igual ao anterior e mostra a homogeneidade dimensional da fórmula de transformaçãD. A unidade a estabelecer seria incoerente no SI, porque o factor
c2 = (300 X 10G)m2/82 =1= 1
Não se define, porém, esta unidade. Quando muito, poder-se-á estabelecer a equivalência :
1 kg (massa) <=> 90 X I015 J ( energia) 1 kg ( massa) <=> 90 P J (energia) .

7.19 Leitura complementar
1. História da Física, Paul Schurman, II vo
lume..
2. Science et Vie, L'energi:e, n:o 5.5 (-extra
série ) . 3. Relatividade para todos, James COloeman,
ed. Ulisseia, caps. 4 ·e 5.
4 .. Física na Esc. Secundária, ed. Fundo de
Cultura, 11953, cps. 2 € 3 .
5 . Física P . S. S. a., ed. Reverté, ed. 196'2,
caps. 24 e 2I5i. 6. Física General, Sears e Zeemansky,
cap. VIT.
7. Fisica Fundamental, Jay OI1ear, ed. IA� musa Wi:ley, '1970, ,crup. 5.
8. Manual de Física Elementar, Landau €
K:itai:gorodsiki, 11'9714, VQl. IT, cap, I; V101. IV, C8ip. XVI,197�5.
9. Matéria, Electricidade e Energia, A. · Bou
taric, Colo Saber Actual, Cap . X.
7�20 Súmula de ideias fWldamentais
1. o termo 'energia, usado pela primeira vez em 1807, ·só a partir de 1853, com Ran
kine, entrou na linguagem. da Física, já expurgado de conce�tos imprecisos como o de força
viva e já entendido como a capacidade de realizar trabalho. O tlmbadho físi'co tinha sido definido em 1826 por Poncelet.
2. A energia está associada a todas as partículas e constitui uma propriedade dos corpos. Mas também pode existir livre, desligada das partkulas: é a energia radiante (energia l'lfminosa, energia gravítica, parte
da energia nuclear) . As formas fufidamentais da energia são a
en·ergia cinética (Ee ) , relativa ao movimento, e a energia potencial ( U ) , armazenada nos sistemas.
O princípio da cons'ervação da energia - a energia é incriável e indestruttvel e a sua totalidade é invariável - aplica-se aos fenómenos naturais conhecidos.
3. O trabalho tísico ou mecânico de uma força, definido comó produto da componente útil da força pelo deslocamento do seu pcm.to de aplicação, mede a energia transf(;rida e que o proporcicm.ou. Por isso, as unidades de trabalho 6 de energia são as mesmas - o joule
no SI.
21
4.. A energia cinética de uma partícula de massa m, num referencial cm.de se desloca
1 com a velocidade v, é Ee = - m v' .
2 A energia 'pot€lIlcial elásUoa armazenada
numa mola e a energia potencial gravítica atribuída a um ' sistema corpo+Terra calculam-se pelas expressões
1 U = - k x' e U" =mgh,
2 sendo x o encurtamento da mola e h a altura do corpo em relação a uma superfície arbitrariamente escolhida na Terra.
O trabalho de uma força v.ariá'VeI, como no caso de uma mola elástica, pode ser determinado à custa de uma área no diagrama (F, d ) .
5. A energia cinética de '/km sistema material, num dado referencial, é formada por duas parcelas - a energi'a cinética do centro de
mass'as e a ,energia cinéMca interna referida às velocidades medidas em relação ao centro
de massú.s. 6. Num sistema não isolooo que apenas
sofre variações de energia cinética e p otencial o principio da conservação da energia é traduzido pela expressão
WF - W. = 6:Ee + a U .
W. é a energia devolvida pelo sistema ao exterior sob a forma de fluxo calorifico. Quando não há atrito ( W. = O), nem variação
de energia p otencial (aU = ()I pois o corpo desloca-se num plano horizontal), a expressão anterior toma a forma
1 1 WF = �Ee <= > FXd = - mv,' - - mv,'
2 2 no caso de uma força F constante que des-loca o seu pcm.to de aplicação na sua própria
direcção e sentido, traduz directamente o teorema da energia cinética.
7. A equivalência entre massa e energia, proposta por Einstein e traduzida pela relação
l:;E = l:;m . c' mostra que a energia pode ser medida em
duas escalas - a 'escala de trabalho e a 'escala de massas - e invalida a existência, em 00-
prurado, dos princípíos da conservação t::a massa e da conservação da energia. O invariante nos fenómenos naturais é a soma massa em repouso+' energIa.
321

7.21 Questionário
1>. Indicar a propriedade fundamental da
energia radiante e, bem c,ssim. algumas for
mas de energia radiante.
-+ -+ 2. Quando IX ( F, d ) = 90", há dispêndio de
-+-energia no deslocamento d do ponto de apli-
....... -+ cação da força F, supondo F a resultante das
forças actuantes exteriores ? Qual é então a
variação de energia cinética ?
3. Que significa tmbalho resistente no prin
cípio da conservação do trabalho nas má
quinas ?
Poderá haver trabalho resistente, entendido
este no sentido geral, num sistema isolado ?
Porqui! ?
4. Um carro de 150 Cv pode desenvolver
maior velocidade que .outro de 200 Cv. Em
que condições ?
5. Uma vassoura, no acto de varrer uma
su.la, funciona como alavanca ? De que tipo ?
Ju,stificar. Qual a relação (muito aproxima
damente verificada) entre o trabalho reali
zado por quem varre e o trabalho das forças
de atrito ?
6.. Mostrar que a diminuição de carga dos
vagões de uma compos�çao provoca um
aumento de velocidade desde que se mamtenha
a potência despendida pela máquina.
7. Qual é a forma de energia utilizada para
abrir e fechar automaticamente as portas do
«metropolitano» ? E quais as formas de ener
gia que intervêm no abrir das portas de en
trada de um Banco quando apa1'ecemos frente
às mesmas ? E qual a forma de energia que
mantém um pêndulo em movimento ? E a
que faz mover um disco ?
8. Comparar as energias cinéticas de du.as
viaturas de massas !TI 13 3 m quando seguem
com a mesma velocidade, e de massas iguais
-� ....... quando seguem com as velocidades v e 3 v.
9. Se uma partícula A de massa m, com
-+-a velocidade v, se fraccionasse em duas outras
....... B e C, de igual massa e velocidade dupla 2 v,
que relação haveria entre a energia cinética
322
de cada uma destas pa1·tículas e a energia
cinética da partícula primitiva ?
10. Um grave de massa 1,0 kg, em queda
livre durante 5,0 s. parte do repouso. Traçar
os gráficos :
1) ( e, t ) 2) (E" t ) ; 3) ( v, t ) .
Comparar os dois primeiros e interpretar.
Em que caso o terceiro substitui, com muita
van tagem, o primeiro ? Porquê ?
11. Do topo de um plano inclinado largam
-se, sem velocidade inicial, dois graves A e B
- A ao longo do p lano, onde escorrega sem
atrito, B em queda lim·e.
Chegarão ao solo com a mesma velocidade ?
Porquê ?
Para chegarem ao solo ao mesmo tempo,
um deles teve de ser impulsionado. Terão
então a mesma energia cinética no momento
em que atingem o solo ?
12. Mostrar que a distância percorrida du
rante a travagem, por um veículo, até paTar,
em terreno plano e hori.zontal, é pToporcional
ao quadTado da velocidade deste no início da
travagem, se se mantiver constante o atrito
de travagem e não actuaTem quaisquer outras
forças exteriores ao veículo.
131. Uma esfera está suspensa de um fio
de comprimento I . Que velocidade horizontal
mínima se lhe deve comunicar paTa que se
afaste até atingir o nível do seu ponto de
suspensão ?
14 . O perfil longitudinal de um dos túneis
do metropolitano de LeninegTado tem a fOTma
--
Fig. 7.23
indicada na fig. 7.23. A e B são as estações.
Explicar uma. das Tazões da escolha deste
perfil .
1:5. Porque é que as molas dos automóveis
e dos vagões amortecem os solavancos durante
o movimento ?
16. Porque se utiliza na embalagem dos
objectos frágeis palha cortada ou algodão ?
17. Escrever as expressões da energia
potencial gravítica armazenada no grave dum
sistema grave+ Terra, em junção do tempo,
quando sobe e quando a seguir cai. Esboçar
os gráficos correspondentes a cada um dos
casos.
1'8. Um pequeno automóvel e um camião
deslocam-se com igual energia cinética.
J.8.1 O trabalho a realizar para fazer parar
o camião é maior, menor ou igual ao
necessário para fazer parar o auto
móvel ?
18 .. 2 Se a força desenvolvida pelos freios for
a mesma em ambos os veículos, a dis
tância percorrida pelo automóvel até
parar será maior, igual ou menor do que a percorrida pelo camião até parar ?
Justifica?'.
1'9. Porque é que não podemos calcular
o trabalho realizado por uma força que actua
sobre uma mola, usando a expressão
W = F X d X cos "
e considerando d o deslocamento da extremi
dade da mola ?
20. A energia potencial de um corpo é
igual ao trabalho realizado sobre o corpo por
uma força conservativa ou em oposição a uma força conservativa ? Quando o objecto é mo
vido na direcção e sentido da força conserva
tiva, a energia potencial aumenta ou diminui ?
21. Realizando trabalho sobre um corpo, a
sua energia cinética aumenta necessariamente ?
22. Na ausência de atrito, a soma da ener
gia cinética e potencial mantém-se necessa
riamente constante ?
23. O trabalho das forças que aplicamos
a ' um corpo (exteriores, portanto, ao sistema
corpo + Terra) é sempre igual à variação da
energia cinética do corpo ?
24. Um murro ou uma martelada é tanto
mais violenta quanto maior for o desloca
mento do punho da mão ou do martelo antes do impacto. Interpretar o tacto à luz do principio da conservação do trabalho .
7 .�2 Problelllils
1. Uma força de intensidade constante,
aplicada num corpo, fê-lo percorrer, sem atrito
e numa superfície horizontal, 10,0 m em 8,0 s .
O trabalho realizado foi 56 X 10 J.
Determinar a inten,�idade da força e a
massa do corpo.
56 N 17,9 kg
2. Em 1834, o académico B. Yakobi inven
tou o motor eléctrico, que elevt;',va, com movi
mento uniforme, um peso de 5,0 kgf à altura
de 0,60 m em 2,0 s . Qual era a potência desse
primeiro motor eléctrico ?
15 W
3. Nas corridas de Mónaco, em Maio de
1972, apareceram carros com a potência de
470 Cv (e o peso de 600 kgf) . Que força
potente desenvolvia o motor quando seguia
com a velocidade de 200 km/h, em movimento
uniforme, em pista horizontal e com atrito
desprezável ?
6,2 X 1(}' N
4. Um Boeing 7I'J7 dos 'l'AP, quando car
regado, pesa 70 toneladas. A pressão e tem
p eratura habituais, pode «descolar» com a
velocidade de 250 km/h. Numa descolagem
atingiu a velocidade de 185 km/h em 26,5 s .
4.1' Que distância percorreu na pista, até
descolar, se manteve constante a acele
ração ?
4,.2 Quando segue na pista com a velocidade
de 92,5 km/h, precisa de 2300 m de pista
para parar, se houver avaria. Qual é o valor
médio da força de travagem ?
I 4.,1 ) 124 X 1I.0 m -+"1" Q4 km 4.2) W,()1 k N I 5. Qual será a velocidade alcançada por
um automóvel em estrada horizontal (com
atrito desprezável) se o seu motor reaZ;"''lr.

desde a partida, o trabalho útil de 72 J por
cada kgf do seu peso total ?
431,2 km/h
6. Um vagão de 28 toneladas desloca-se
com a velocidade de 72 km/h .
6.11 Largado no início de uma rampa, que
altura atingiria na mesma ?
·6.2 A dm�tindo que não chegou ao cimo da
rampa, com que velocidade regressou
ao ponto de partida ?
6.3 Se lhe aplicarem os travões com uma
força média de 850 kgf, quando regres
sar ao fundo da rampa, que distância
percorrerá, em plano horizontal, até
parar ?
6.1,) 210 m 6.2 ) 712 km/h 6.31) 67\2 m
7,. Um comboio de 100 toneladas sobe uma
rampa com a inclinação de 1 % e velocidade constante de 32 km/h .
Que potência desenvolve, sem considerar
o atrito ?
12 X 101 Cv
8. O motor de um guindaste eleva à altura
de 15 m jkma carga de ,to toneladas em cada
20 mn . O rendimento do motor é 80 % .
8:1 Qual é a p otência transferida para o
motor ?
8.2 Qual é a energia fornecida ao motor
em 1 h ?
8.3 Qual foi a energia dissipada em 1 h ?
8.1 ) '1 ,5 kW 8.21) 11,15 kWh 8.3 ) O,GO kWh I 9. Um automóvel pesa 100 Xl0 kg e sobe
uma rampa, de inclinação 10 %, com a veloci
dade constante de 40 km/h . 60 % da energia
motora é gasta em vencer os atritos e a resistência do ar.
9,]: Que potência desenvolve o motor ?
9.2 Qual é o valor médio da força desenvol
vida pelo motor ? E qual é o valor mé
dio da resultante das forças de atrito
e da resistência do ar ?
9J11) 317 ev 9.21) QI5 X 101 kg! 15 X m kgf
-+ 10. A força constante F, apUcada a um
corpo de massa m" fê-lo percorrer, sem atrito
e na própria direcção, a distância 'e, no inter
valo de tempo .t, . Aplicada nas mesmas con
dições a um corpo de massa m" obrigou-o a
percorrer a distância e, no intervalo de
tempo t, .
Determinar a relação entre as massas m, e m, .
m, e, 1:,'
111. Um corpo de 20 kg foi lançado de baixo
para cima segundo a linha de maior declive
de um plano inclinado, que 'faz um ângulo de 30' com o plano horizontal.
A velocidade inicial foi de 10,2 m/s .
O corpo percorreu 6,4 m até parar, após o
que regressou ao ponto de partida.
111.1 Calcular o valor da força de atrito (única força exterior) .
1'11.,2 Com que velocidade regressou o corpo
ao ponto de partida ?
:r:t.1I) S X 110 N ; 111.21) 4,6 mjs
!l2;. Um corpo de massa 4,4,0 kg, em repouso
na superfície horizontal de uma mesa, é
actuado pela força constante de 40;0 N, de
direcção paralela ' ao plano da mesa. Ao fim
de 3,00 s adquiriu a velocidade de 15,0 m/s.
Qual foi a energia dissipada por atrito neste
intervalo de tempo '
4IQ5 J
13,. Um comboio de .100,0 toneladas sobe
uma rampa com a inclinação de 1,0 /'� e com a

velocidade cans-tante de 36,0 km/h. , Canside
Ta-se desprezável o atrito.
1&J1 Calcul&r a potência desenvol'lJida pela
máquina.
13.2 Calcular o cansumo da máquilna em
kg de carvão por hora. O rendimento da máqwma é 10 % . O poder energético
do carvão é de 25 k J /g.
113:1 ) 98 kW -+<'lOIX1lOkW 13!.2) 14X lOIkg
14. Uma esfera de 1'00 g parte do repouso
e desce uma rampa com inclinação canstante
e atrito desprezável. A esfera percorreu
12,20 m durante o 3.· segundo 'do movimento.
Calcular:
14.1 O ngulo de inclinação da rampa.
14.2 A diminuição de energia potencial gra
vitica no trajecto entre dois pontos A e B da rampa distanciados 20,0 m.
14.3 O aumento de energia cinética da esfera
entre os referidos pontos.
14.11) 30· 1402,) -9,8 J 'l'4l,el) 9',8 J
15. Cansiderar o problema anterior supondo
que há atrito apreciável. Em virtude deste, a energia cinética da
esfera, entre A e B, aumenta apenas 5,0 J, em
vez de 9,8 J. Calcular a energia dissipada por
atrito.
,W. = 4,8 J
:1J6. Uma queda de água, com 10 m de
altura e o débito de 50 m' /mn, alimenta uma
pequena central hidroeléctrica.
16.1 Calcular a potência eléctrica forne(;i(U], pela central, sabendo que o rendimento
do aproveitamento da energia mecânica
da queda é 36 % . lS.2 Quanto renderia a energia eléctrica da
central, saída durante 10 h e paga a
1$00 cada kWh '
'16;1') 29 kW; 16.2) 2'94$00
Fig. 7.24 �
1'/>. Exerce-se sobre um corpo a força F
(fig. 7.24) de m6dulo F = �,O N, inclinada de 60· sobre a horizontal.
A força de atrito cinético entre o , corpo e
a superficie é igual a 6,5 N . O deslocamento
do corpo sobre li mesa é de 5,0 m. Calcular
o trabalho realizado:
� 17.1 Pela força F; 17Jz, Pelo peso do corpo;
117.3 Pela força de atrito; 17.4 Pela resultante das forças exteriores,
ou seja o trabalho total realizado sobre
o corpo.
'1'71:1') '1160 J; 1,7,,2') <Y;
1/71.3,) - 302,'El J; 171.4) 1'28 J ..
Fig. 7.25 18. Esticou-se, lentamente, uma mola, apli
cando-lhe uma força de tracção (dirigida
segundo o eixo d-a mola e para fora) de módulo variável. A relação entre a intensidade da força aplicada e o alongamento produzido
constam do gráfico da fig. 7.25.
325

18,1 Calcular o valor da constante elástica
da mola.
18.2 Calcular o trabalho realizado para alon
gar a mola de 12,0 cm.
18.3 Qual a energia potencial armazenada
na mola distendida ?
18.:1 ) 2;5 N/,cm 1]8.:2) 180 J 1:8.3 ) 1180'J
�. 19. Por meio da força F de módulo F=112,O
kgf, exercida numa das extremidades da
corda XY que passa na gola da roldana R,
faz-se subir um corpo de 100 cm, partindo do
repouso. O corpo pesa 8,5 kgf - fig. 7.26.
Calcular: �
19:1' O trabalho realizado pela força F .
19.2 O aumento da energia potencial do
corpo.
19.3 A energia cinética que passa a ter o corpo C, sabendo que a energia dissi
pada por atrito na roldana R é igual
a 12,.q J .
19,.4 A velocidade do corpo C na nova posi
ção.
19.:1:) U8 J 19.3') 2121,31 J
'1�;2) 8'3 J lJ9.4) 2,2'9 mjs
�----------------.-----
,, ,
T
C-
1 0 0 e m
Fig. 7.26
326
c
Fig. 7.27
'2'0. Um corpo de massa m, isolado, passa
na posição 1 da pista indicada na fig. 7.27,
com a velocidade vo o Continua depois até às posições sucessivas
2, 3 e .q, praticamente sem atrito.
20.1: Escrever a expressão da energia total . na posição 1 .
20.2 Exprimir, em fwnção de Vo e de h, os
valores da velocidade nas posições 2,
3 e .q .
1 20:1') Ec + U = - m Vo 2 + mgh
2
Fig. 7.28
21. O gráfico da fig. 7.28 mostra a variação
da energia potencial de uma partícula material, isolada, móvel, sem atrito, em função da distância percorrida sobre a trajectória; Ao

passar no ponto correspondente a 20 cm de
p67'curso, a energia cinética da partícula era
30 J . Calcular:
21;1 A energia mecânica total da partícula,
ao fim de 40 cm de percurso.
211 .2 A velocidade da partícula ao fim de
60 cm de percurso.
21>.3 A velocidade da partícula ao fim de
40 cm e 80 cm de percurso.
21.4 A velocidade da partícula ao fim de
.20 cm de percurso.
21.1) 70 J . 21.2) Ec = 0. => v = o.
2'1.3,) v =, vi 1.: . 21.4 ) v = vi : :22. Com que força média é cravado com
pletamente um prego de 3,0 cm, por meio de
um martelo que pesa 3,0 kgf, manejado com a
velocidade de 70'm/s ao bater.
25 X 10 kgf
'2'3. Um comboio de 100 toneladas sobe
uma rampa, inclinada de 10 %, com a veloci
dade constwnte de 72 km/h. Os atritos absor
vem 12 % da energia desenvolvida pela má
quina. O rendimento desta é 10 %. Calcular:
2311 O trabalho realizado pela máquina em
5,O mn.
23.2 A potência motora (ou motriz) da má
quina.
23.1,) fIl X 'l'Ü'T J 213.'21) 22 X 1()� W I 24.. Um engenho explosivo desloca-se com a
velocidade constante de 10 m/s. Em dado
momento explode e divide-se em duas partes
de igual massa. 8e a velocidade de uma destas partes se anular logo após a explosão,
qual será a razão entre a energia cinética do
engenho, logo após a explosão, e a energia
cinética do mesmo antes da explosão.
Ec ( depois)
Ec (antes) 2
B
Fig. 7.29
25. Uma esfera pesa 100 gf e desce, sem
atrito, segundo a linha de maior declive, no
plano inclinado AB (figura 7.29) . A inclina
ção do plano é 20 % e a esfera percorre a
seguir o aro B C D E, continuando depois no
plano horizontal FG (também sem atrito) .
25J1 8endo AB = 98 cm e partindo a esfera
do topo do plano, sem velocidade inicial,
determinar o valor da velocidade com
que a esfera passa em B (g = 9,8 :m/SZ) .
25,..2 8e for h < 2 R, a esfera atingirá o
ponto B ? Justificar.
25.3') 8e for h = 2 R, com que velocidade é
atingido o ponto D ? 25.4 Sendo R = 8,0 cm, determinar os valo
res das energias cinéticas em B e em D,
nas condições da figura.
2150.'1) VB = 1,96 m/s
25.:2) Não, 'porque VA < Vn
215..3 ) UA = Un => VD = O 215 .4.) Ec(B) 192 mJ
Ec(D) Ec (B) - U (D )
3,1) m J
26. Um automóvel de 800 kg avariou e foi
abandonado, sem velocidade inicial, no cume
A de uma lomba da estrada.
Com a embalagem adquirida na descida,
ele alcança,.
na subida que se lhe segue, um
ponto de cota '10. m abaixo de A, tendo feito
um percurso de '12iO'0 m, contado a partir do
referido cume.
Determinar o valor médio da força de
atrito que actuou sobre as rodas do automóvel entre os dois pontos.
F. = 615 N -+ tl X 'lO N
327


A P Ê N D I C E - T A B E L A S
TABELA 1 - Constantes Físicas Factores de Conversão
Núme'OO de AvogBJdro: No = 60,2, X '10'''' mo� -]
Veloc1daJde da luz no v,a:zio:
c = '2,9197 93 . lOS m 81-1
( c :::::. 3ÚO _ lO' iklJ'n/,s -+i 3 alg. signif. ;
6 C
- < 0,07 % ) c
ConSltam,te de gravil1la.çã;o:
G = '6,67 . :10 -11 N • m '/kg'
M.assa em' rap'ouso do ieh!ictráJo:
me = 9/100 . il()i-31 kg
M8lS'Sa €!Ill l'epOU'so do protão,:
mp = lJ,67t2 . 110 -27 kg
M8ISiSa em I'epouso do nemrw:
mo = ;1,.617151 . 'lJO-27 kg
UIlIidade de maJSSIa 'rutómj'c>a:
u m a = '.1,000 . '10 -27 kg
Acel€lMição nOI'mal dai ��l8Jde:
g = 9,80!6, 65 m 81-2
PreslSão I8itmosMI1iJc>a normail : ,aJ t m = 1,011131 X !l.05 N/m '
IDleotão-volt : 1 e V = ,li,,6OI2 : 10-19 J
TABELA 2 - Alfabeto Grego
A a Alfa
B f3 Beta
r y Gamma
Il o Delta
E E Épsilon
Z � Zeta
H .'YJ Eta
® f) Theta
I lota
K K Kappa
A À. Lambda
M }J. Miu
N v Niu
:e: � Ji
O o Ômicrom
II 71' Pi
p P Rho
� a Sigma
T 'T Tau
y u Ypsilon
<I> cp Fi
X X Chi '-Ir '" Psi
n <ti Ômega
329

TABELA 3 - Funções Trigonométricas
Ângulos Radianos Seno Tangente Cotangente Co-seno
00 (li (li (li CY.J 1 1 ,5'1'08 90"
1 0,0175 0,'0'175 0,'01175 5,7,29'OQ '0\91998 1,5633 89
2' 0'349 0049 0'349 2g,6'3�3 ge94 1,51315,9 88
3 '0524 '0003 '015,24 19,'0811 9986 1, 5:1'84 87
4 '0698 '0698 '069·9 1140,3 00'06 99'76 1,5'0:10' 86
5 0,'0'873 01'0872 0,'0875 111,41:WIl 0,9,96,2 I 1,4835 85
6 1()147 lQi45 1015'1 9',5.144 9945 1,46131 84 7 1i2t2i2 1'219 12�218 8,1443 9925 1,448.6 83 8 11896 1392 14015 7,11'154 909'013 1,4311'2 82
9 157'1 115164 1584 6.,31138 98-77 1,4113'7 8'1
10 '0\,1745 '01,1173'6 '0:,11763 5.6713 '0,91848 1,3968 80
10. 192'0 1908 1944 5,'1446, 9811.16 1 ,3788 79
12 20194 2'017:9 2'1'2'6 4,7046 978t1 1,36114 78
113 2'269 21250 23'09 4,,313 15 9744 [1,3413'9 77
14 211143 2'4119 21493 4,'Ollt08 9170i:! 1,32615 76 1'5 0,126118 '0,2588 '0',2.6,7'9 3,,71321 0.,9659 11, 3090 75
16 2793 2'756 28167 3,,4874 9613 1,2911'5 74
17 29167 2924 3'0'57 3, 27''09 9M3 1,21'7141 13 18 13114:2 SD190 31249 3,0777 95:11 1,2566 7�
19 3316 3�56 3443 2,90'42 9455 1.,2392 7:1
20 '0,3419'1 '0,34200 0,31640 2,7417'5 0,9397 1,2217 70
2il. 3'616'5 3:5184 38139 2,6'01511 93136 1,2043 69
22 31840 3�6 4014'0 2,47511 92m2 1,1868 68
23 4'0'14 319'07 4:245 2,3559 92'05 1,'1'694. 87
24 4'189 40167 4452 2;246'0 9,1:35 1 ,1009 66 2'5 0,436'3 D,4!226 0',4003 2,144!5 0',90163 1,,1345 65
26 463.8 4384 4877 t21, OI5013 8988 1,1:17'0 64 2,7 471112 41540 5'095 3-,916'2'6 891l() 1\'01996 63
128 48187 46,9'5 53'17 3.,88'017 8'81219 1 ,0.82'1 62 219 5'06il 48148 5543 1,,8'040 8·746 1,01647 61
3Q 0,52136 'O\5QOO 0,5774 1 ,7:3',2'1 0,86>60 '1, '04:27 60
3'1 - 54,1;1 51.50 6ü<09 1,6643 8512 1,'0:29'7 59
32 5585 5;21S9 61249 1,6'ÜDI3 8480 1,'01123 58
33 51760 51446 64\94 1,5300 8387 Ü'.99148 57
34 5S134 55192 6745 1,482'6 8290 '0,,91774 56
35 0',6'1'09 00,5713'6 0I,7'Oi()12 1,41281 0, 8119Q 0,959·9 55
36 61283 5878 72\&5
I 1 ,31764 809'0 94'2,5 54
317 64.58 6'0118 7'5136 1,31270 71986 9'2500 53
38 6613Q 61157 78:13 1,2799 788-0 9\'01'76 52
3 9 68'0,7 6'293 8'0'98 1',2e49 7771 89'011 61
40 0, 698il O,641Z3 0,8391 J. ,'1918 0",7660 '0,8727 50
41 71156 &561 8600 1, 15-01<1 71547 8-5152 49
42 73130 &}9Il 90104 1, 1110:6 743'1 83.78 48
43 75'05 68:20 913'25 1,'O172� 713114 82''03 47
44 7679 6947 9&57 1, '013515 7'193 80129 46 45 7854 70'71 1,'0000 1,0.0''000 7'07'1 7854 45
Co-seno Cotangente Tangente Seno I Radianos Angulos I

n
1 2 3 4 5 6 7 8 9
10 11 12 13 H 1.:5 16 17 18 19 20 21 22 23 2'4 215 26 27 28 29 30 3'1 3'2 313 34 35 36 37 38 3,9 40' 4'1 42 43 44 45 416 47 48 49 50
TABELA 4'- Quadrados, raízes quadradas, números inversos,
conversão de graus em radianos
I \/'-;;-1 '1m
n' - --n 180
1 1,,0'00 11,.0000 Q,0I175 4 1',4114 0,5000! 0,01349 9 ],7.3i2 0,3'313B 0\0151211
11� 2,0'00 0,:260'0 0,0:698 215 2,:2136 0;200.0 01,08713 36 2',449 0',,116,67 Q,1'04:7 49 2,64S 0,J.4'29 01,1112;2,2 64 21;8i218 a,Jl2150 01,11300 81 3,000 0".1111 O,lõ711
l'Ü() 3,162 0,,1000 01,1,745 112'1 -3,3:17 OLOOO9 0i,'1t9120 144 3,464 0',018133 01,,20194 100 3",6'06 0,07169 0,2:2619 196 3, 742 O,0f714 Ü\i2l:i4i3 225 3,873 0',0161617 0,21611.18' l256 4,0001 O,0S,25 0,:2793 289 4,,:12.3' 01,01588 0,29167 3i!H 4,,243 O,OI5!516 0,13114:2 3161 4,3159 0,0006 0,313016 400 4,47:2 0,0'500 01,31491 44:1 4,5813 0,0'476 0,3665 484 �,69{)1 0,0455 Q,3'8'4{)1 529 41,7100 0,00015 0',4014 576 4,89,9 0,0417 0,411189 l,25 5,000 OI,OI4<lO 0,4'300, 676 5,0'99 OI,OG8õ 0,4\538 7.2'9 5,196 Q,03-70 0I,41l!21 784 5,.292 0:,0057 0,48817
841 5,3185 0,00415 0,5061; 000 6,477 0',0G:3i3 0,52136 96:1 5,568 0,0(:ll23 0(151411:1
1()i24 6,657 0,01:31113 0;5585' 1089 5,714>5 0,0;3.013 0,'57601 1'1.56 5,8131 0,0129'4 01,59134 1:2:25 5,911i6 01,012'86 0,.611109 LZ9t6 �,OOO 0,01278 0;16283 f3'619 -
6,O&'!, 0,01270 0;6458 14.44 6,t164 O ,OI2IS3 01,&>-32 lJ5t2'1' 6;245 O,0I251l 01,6807 1600 6,3126 0,0:250 ()J,6M1 ffiB1 &,4OG 0,02144 0,7156 11764 &,48J1 0,0238 01, 73130 1'849 6,65'7 01,02133 01,7506 1936 61,6'33 ();,OI2�7' 0,7619 2025 6,7081 O,02l2i2 017854 2116 6, 7821 0,0.217 0,80129 2209 6,856 O,O2l113 O,8i200' 2\304 6,928 O,02Q8 0,813178 2401 7,()i()()I 0,0204 0I,815J52 2500 7,071 0,01200 O,8t7'2!l
331

v� 1 '7T"1!
n n' - --n 1801
51 2001 7.,.141 0,{)/196 0,8001 512 2704 7,211'1 0,01'92 0,9076 53 28019 7,2'80 01,Üil:&9 0,.9250 54 2,916 7,3148 01,01185 0,94215 '56 3025 7,41H, 0\01182 0,915199 5'6· 3im16 7,48<3 0,011179 01,9;77.4 57 312'49 7,,5510 0,OJI7f> 0,99'48 58 3\'31614 7,6i16 0,0117.2 1,0112\'3 59 \'3i4�U 7,681 0,01100 1,0\2,97 60 316'00 7.,.7416, 0i,{)i16r7 1\04712 SI 37:2il 7,810 OI,úIH,14 1\016'5 6i2 3844 7,874- 0',01116:1 1,,082 63 3900 7,93·7 Q,Ol159 1),100 64 4Q96 8,0001 o,OII'5B 1,1i17 65 412'25 8,0162 O,,{)I115!4 '1.;13'4 56 4366 8,124 O,OJ.152 1,11512 67 414S9 8,�1&'5 {)1,0I14i9 1,,16.9 68 40014 8,246 0,01147 JJ,l8r7 69 417tH 8,307 O,DI14i5 1,20:4 70 4900 8,3'57 O,OIlJ4l3 1,2:22 7'1 50:4.1 8,412'6 a,014!1. l,23So 7'2 5fll84. 8,418'5 0,0139 1,257 73' 5312i9 8,õ144 0,0'137 1,274 71i. 54.76 8,602 0:,013'5 1,2<92 75 561215 8,600 0,{)I1'3Bi 1T,-309 76 5776 8,7118- 0\,0113'2 1,3,26 77 5009 8, 7rrõ 0,01130 1',344 78 60814 8,83'2 {)I,01lJ28 1,3&1 79 621411 8,888 D,0I127 1:,3719 �O MOO 8,944 0I,0I1i215 1,396 ln 656il 9,000 0;,0112\'3 1,4114 812 67:24 9,0:55 Úl,on�12 '1,431 8C3 6 818:9 9,1l0 0',0/12'0 1,414;9 84 7.ü156 91,165 O,01i19 1',4i66 &5 7'.2:2'5 9,2201 01,011)18 li,4J8i4 86
7131916 9,274 0,01!16 11,001
87 7'56(9 9,3127 0',0111'5 1,5l8 88 7741 9\381 01,01014 '1;,5;36 89 7921 9,4134 O,Oi1:112 1,:553 90 · 81100 9,487 a,OtlJl1 1',571 91 8I2'8l1i 9,5'319 0,011110 1,58'8 QZ 8464 9,5912 OI,onOO 1,600 93 864,9 9,644 0,0:100 1,,623 94 818136 9,695 0;,01100 1,6411 95 900'5 9,747 OI,OI1{)õ 1,6158 96 - 9i2l16 9,7:9'8 Q,0104 .1',:6,76 97 9400 9,849 0,01103 1;619i3 98 9604 9,800 0,000'2 1,7'H 99 9801 9;95:0 O,OIloo 1:,7128
100 10000 10,000 01,01100 1,745

í N D I C E
CAPíTULO 1 - Introdução
1.1 A Ciência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Que é a Física ? . . . . . . . . . . . . . . . . . . . . . . . .
1.4
1.5
1.6
1.7
1.8
Grandezas directa e inversamente
p roporcionais
Algumas funções circulares . . . . . . . . .
V'ectoI1es. Op.al18içÕeIS com vectoI'e's
Leituras
Resumo
1.9 Questionário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.10 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CAPITULO 3 - Cinemática
2.1
2.2
2.3
2,4
2.5
2.6
2.7
, Mecânica
o ca.rá'cter nelativo do movimento
Trajectória e lei do movimento.
O espaço-tempo . . . . . . . . . . . . . . . . . . . . . . . .
Exercícios de aplicação . . . . . . . . . . . . . . .
Movimento rectilíneo e uniforme
Movimento variado
Veloci<l!ade rnédiJa Velocidade instantânea . . . . . . . . . . . . . . .
Aceleração média e aceleração ins-tantânea
Movimento uniformemente acele-
rado e rectilíneo . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Movimento uniformemente retar-
7
8
10
11
15
1'8
2'4
2'4
25
25
47
54
dado e rectilíneo . . . . . . . . . . . . . . . . . . . . . . . . 64
2.9 Movimento circular variado e mo-vimento circular uniforme . . . . . . . . .
2.10 Queda dos graves. Aristóteles e
Galileu. O método científico . . . . . . . . .
Exercícios de aplicação . . . . . . . . . . . .
2.11 Leituras
2.12 Súmula
2.13 Questionário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.14 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
76
81
812 83
84
85
CAPíTULO 3 - Princípios fundamentais e
leis do movimento
3.1 O método científico aplicado nas
ciências experimentais . . . . . . . . . . . . . . .
3.2 Princípio da inércia ou de Kepler e Galileu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Princípio da independência dos
efeitos das forças ( Galileu) . . . . . . . . .
3.4 Lei fundamental do movimento (ou
2,." lei de Newton )
94
95
96
3.5 Princípio de acção e reacção . . . . . . 100
3.6 Referenciais de inércia . . . . . . . . . . . . . . . 102
3.7 Massa inerciaI (ou massa de inér-
Cia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
3.8 Massa gravitatória ( gravítica ou pesada) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9 Relação entre peso e aceleração da
gravidade. Equivalência entre massa gravitatória e massa inerciaI . . . . . .
3 .1'0 Forças de inércia . . . . . . . . . . . . . . . . . . . . .
3.11 Centro de gravidade e teorema do
centro de g>ravrdaide ( Lei,tura) . . . . . . 3.12 Restrições à lei newtoniana do mo-
vimento (Leitura) . . . . . . . . . . . . . . . . . . . . . 3.13 Leituras
S.M Súmula
3 . :lJ5 Questionálfto
1015
106 j\ 108 lt
=..-.l
MO
111!3
3.16 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
CAPITULO 4 - Estática
4.1 Notícia histórica . . . . . . . . . . . . . . . . . . . . . . . . 1'17
4.2 Forças exteriores e forças interio-
res. Forças de ligação . . . . . . . . . . . . . . . 11'8
4.3 O conceito de equilíbrio em mecâ-nica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . l�O
4.4 Equilíbrio do ponto material . . . . . . . . . 1�

4.5
4.6
Expressão analítica da condição de
equilíbrio do ponto material no
caso de as forças aplicadas serem
complanares. Exercícios de aplica-
ção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Estática do sólido indeformável
( corpo rigido ) . . . . . . . . . . . . . . . . . . . . . . . . . . .
Momento polar de uma força
Momento 'a.xilaJI de uma força
126
130
134
laS Equilíbrio de momentos . . . . . . . . . . . . 138
Binário de forças . . . . . . . . . . . . . . . . . . . . . . . . 14'1
Equilíbrio de binários . . . . . . . . . . . . . . . . . . 143
Equihlíhri'O gernJ! de um sólido ;
no {l3!S'O de aiS fOlI'çaJS exteriores
\lAS n'O oaso de ·3!S f.QII'Ç;a;s ,exterior,es não CQ[l'COI1I1�em num ponto . . . :L44
4 .7 Resolução de problemas teóricos
e práticos . . . . . . . . . . . . . . . . , . . . . . . . . . . . . . . . . 14'7
4.8
4.9
Leituras
Resumo
4,10 Questionário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
149 150
150
4.11 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15,2
CAPíTULO 5 - Dinâmica
5 . 1 Deslocamento de um sólido, sem
atrito, ao longo de um plano incli-
nado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Exercidos de .alpli'CaJção . . . . . . . '1612 5.2 Impulso de uma força . . . . . . . . . . . . . . . 1614-
5.3 Quantidade de movimento de um
ponto maJteriJal 81 dia um sdsotema
maJteri'al
5.4 Teorema da quantidade de movi-
166
mento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
5.5 Forças impulsivas e expressão mais
geral da 2.· lei de Newton . . . . . . . . . 169
5.6 Exercicio 17'1
5.7 Lei da conservação da quantidade
de movirmeillJto . . . . . . . . . . . . . . . . . . . . . . . . . . . i171 5.8 .AJpli,c3içõe's da lJei da cons'€ll'V'8Jção 00
quantidade de movimento . . . . . . . . . . . . 176
Propulsão por jacto - os aVlOes a jacto e os foguetões . . . . . . . . . . . . . . . . . . 1718 Exercicios 181
5.9 Força centripeta e forças centrifu-
gas ( de reacção e de inércia ) . . . . . .
Leis da força centripeta . . . . . . . . . . . .
Orig,e11S da fo['ça CeII10tripeta . . . . . . . . . 1.. velocidade cósmica . . . . . . . . . . . . . . .
Expe'l"iêncil8Js e aJplica:ções . . . . . . . . . . . .
O parabolóide de revolução com
propriedades de plano horizontal
1'85
195
1096
199
20!2
203
5.10 Aoeleração aip3lrenteo e peSlO· arp,arenbe
num sistema em movimento va
riado. A imponderabilidade . . . . . . . . . 207 O significado relativo de «em cima»
e «em baixo»
5.]1 Lei'tur3ls 210
2H
5.12 Síntese . . . . . . . . . . . . . . . . . . . . . . . . . . . 21/2
5.13 Questionário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2'13
5.14 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
CAPíTULO 6 - SisteInas de unidades. Cál
culo nwnérico aproximado
6.1 Grandezas físicas e sua medição �3 Noticia histórica . . . . . . . . . . . . . . . . . . . . . . . . 226
6.2 Sistemas coerentes de unidades . . . 22·7
Equação de definição . . . . . . . . . . . . . . . 228
Sistemas absolutos e gravitatórios 229
Definição de sistema coerente . . . . . . 2:32
6 , 3 O sistema internacional de unidades
(S I )
Unidades incoerentes . . . . . . . . .. . . . . . . . .
Unidades suplementares
232
235
236
6.4 Referéncia ao sistema métrico gra-
vitacional 237 6.5 Exercícios sobre conversão de uni-
dades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23i7 6.6 Equação das dimensões e homoge-
neidade das fórmulas . . . . . . . . . . . . . . . . . 2:42
6.7 Cálculo numérico aproximado . . . . . . 250
Os tipos de erros . . . . . . . . . . . . . . . . . . . . . 251
Algarismos exactos, aproximados
e significativos . . . . . . . . . . . . . . . . . . . . . . . . 25Q
Precisão e exactidão . . . . . . . . . . . . . . . . . . 253
Regras de cálculo numérico apro-
ximado
6 ,.8 Le'ituraJS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263

6.9 Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.10 Questionário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.11 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CAPITULO 7 - Traballho e Energia
Matéria - Massa - Energia
7.1 Que é a energia
Energia cinética e energia poten-
cial . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
267
268
7.2 O princípio geral da conservação
da 'eII1I€lrgia . . . . . . . . . . . . . . . . . .
7.3 O trabalho como medida da energia
transferida 27'5
7.4 Estudo da g.I'rutlideza. trabalho . . . . . . 217,8 Trabalho realizado por uma força elástica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2'81 Trabalho realizado pelo peso de um
corpo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282 7.5 Análise dimensional do trabalho . . . 283 7.6 Potência dinâmica de uma máquina 284 7.7 Análise dimensional da potência
dinâmica
7.8 R!en.dimento de uma máquimlJ . . . . .
286
287 7.9 Exercícios de revisão (resolvidos ) 289
7.1,0 Ener,gia mecând'ca . . . . . . . . . . . . . . . . . . . . . 2\00. 7.1 ;1 Energia d!I1éti·ca, . . . . . . . . . . . . . . . . . . . . . . .
En'ergia cinétIca de um ponto ma,-
terial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2192
Energia cinética de um sistema
maJterial (00. 'c:i:nléUca 0.10 ,centJro de
malSsas le :€Ill. dnéti·C8; interna) . . . . . . 096 Exercícios de aplicação . . . . . . . . . . . . 297
7.12 Energia potencial
Energia potencial elástica
Energia potencial gravítica
7,:1'3 A cOIllServação d:aJ energia ffiecâ!li'ca
299
300 300
num sistem·a não isolado . . . . . . . . . . . . 3015 7.lA A conservação da 'energira, mecâ)nica
num sistema isolado . . . . . . . . . . . . . . . . . . 308 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
7.15 O conceito de equiUbrio em terl1los de energia potencial . . . . . . . . . . . . . . . . . . 312
7.16 O teorema da energia cinética . . . . . . 3tH 7.17 Massa e· energia. Princípio da con
servação da massa-energia . . . . . . . . . 3'15 7.18 Análise dimensional da energia e
unidades de energia . . . . . . . . . . . . . . . . . .
7.1'9 uei:turas
7'.20 Súmula
7.21 Questionário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.22 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A P � N D I C E S
32,0 mIl 32.1 322 3123
Tabela li - Constantes físicas . . . . . . . . . . . . 329
»
»
»
2 - Alfabeto grego
3 - Funções trigonométricas e
conversão em radianos . . . . . . 3�O 4 - Quadrados, raízes quadra
das e inversos dos números naturais até 10.,0; conversão em radianos . . . . . . . . . . . . . . . . . . . . . 331
Aprovado pelo Ministério da Educação e I nvestigação Científica

Página
22
48
48
48
48
49
49
4 9
49
49
4.9
50
50
72
87
93
100
185
2013
Coluna
DiT,eita
Diveita
Direita
Esquerda
IDsquerda
DiT-ei,ta
D�r,edta
D ivetta
Fig. :2.46
única
Fig. 3.4
Fi'g. 5.'18
llil"eita
Linha
23
17�18
25-26
29
última
Legenda fi.�. 2.18
Legenda fi�. 2.18
2
28
3'2
6
7
3'õ
Eixo das ordenadas
C O R R I G E N D A
Onde está
ao v
numél"i:oo jm
00 !lJceleração médi'8I, jm
da aJoeleração médiJa
6v jm = --
6 t
j da 'acelera:ção
minuto.
da aceLeração média 6v
6 t
vai
da aceleração
aceleração inlSItantânea j
j = mesma velocidade
m s
em '1'7{)i2
F
em parabolóide
Corrigir para
numéri'oo dia. oompoIlJeonte --
tlangenciaJI. AA' (fig. 2;19)
da 'componente tang.enciall -+
da acel'eração média, jm, 6v
6 t
da ·componen:te ,tangencial __ o AA' ( fig. 2,,19) da acele-
6 v .ração média jm é � ;
6 t
j, da componente tangendoal da aceleração
minuto. Esta variação é medida sobre a linha de acção do voe'ctar v:eloddade e, por isso, indi·ca ,também o valOll' <Ia componente tang,encia;l da
aoel'eração médi'a.
da componente tang1encioal 6v
da aceleração médm, --
6 t
J vai
dia! oomponente ,tangoocii8ll 00 aceleração
-compon. tangendal AA' dai aoel eração ins1:Jall1 tâ
nea, j, : j , =
mesma velocidade e aceleração
m/s'
em data desoonhecitda
E
um parabolóide
Copyright © 2022 FDOKUMEN

