







Bahasa
Halaman
Hukum


ME 513 VEHICLE DYNAMICS
Term Project:
ROAD VEHICLE RIDE SIMULATION AND
ANIMATION
Gönenç Gürsoy
Eren Kahraman
Anna Prach
Larasmoyo Nugroho
Middle East Technical University
Ankara, Turkey
June 2012

2
List of Symbols
� - sprung mass
��,�� -unsprung masses
�� - moment of inertia about roll axis
� - moment of inertia about pitch axis
- effective vertical stiffness of a suspension
� - effective damping constant of adamper
� - tire spring coefficient
Subscripts:
� – front left
� – front right
�� – rear left
�� – rear right
3
Table of Contents:
Introduction…………………………………………………………………………….4
1. 7 DOF Vehicle ride model…………………………………………………………..5
1.1. Equations of motion……………………………………………………….6
1.2.Simulation model and parameters………………………………………….9
2. Vibrational characteristics…………………………………………………………11
2.1. Body bounce motion……………………………………………………..11
2.2. Wheel hop (wheel bounce) motion………………………………………11
3. Graphical User Interface (GUI)……………………………………………………14
3.1. GUI features……………………………………………………………...14
3.2. Parameters for the GUI…………………………………………………...15
3.3. Road input generation……………………………………………………15
3.4. Simulation outputs……………………………………………………….16
3.5. 3-D Visualization and Animation………………………………………...16
4. Conclusions………………………………………………………………………...17
References…………………………………………………………………………….18
Appendix A: User Manual…………………………………………………………....19
Appendix B: Expressions for C and K Matrices………...…………………………....29

4
Introduction
This project focuses on development of the MATLAB based Graphical User
Interface (GUI) for a road vehicle ride simulation and animation.
A road vehicle simulation model is one of the important elements to be
developed while designing the GUI. The most simple road vehicle model is
represented by two degrees of freedom quarter car model [Ref. 1]. Half-car models
are developed with four degrees of freedom and, in general, represent vehicle
longitudinal dynamics and vertical dynamics of front and rear wheels, or can be used
to analyze lateral dynamics of a vehicle together with the vertical motion of right and
left wheels [Ref. 2]. Three-dimensional full-vehicle models have at least six degrees of
freedom, which may increase up to hundreds [Ref.3]. The complexity of the vehicle
model depends of the number of components included in the model, fidelity,
assumptions used.
While studying the vehicle ride, another important issue is the excitation
sources, which are the inputs to the simulation model. There are multiple sources of
vehicle ride vibrations excitations, and the most general are classified as road
irregularities and on-board sources. Effect of road roughness on the vehicle motion is
of the scope of this project. Road roughness is described by the elevation profile along
the wheel tracks over which the vehicle passes [Ref. 4]. The GUI developed such that
a user will model the road inputs, enabling to specify the road roughness and bumps
on the road surface.
5
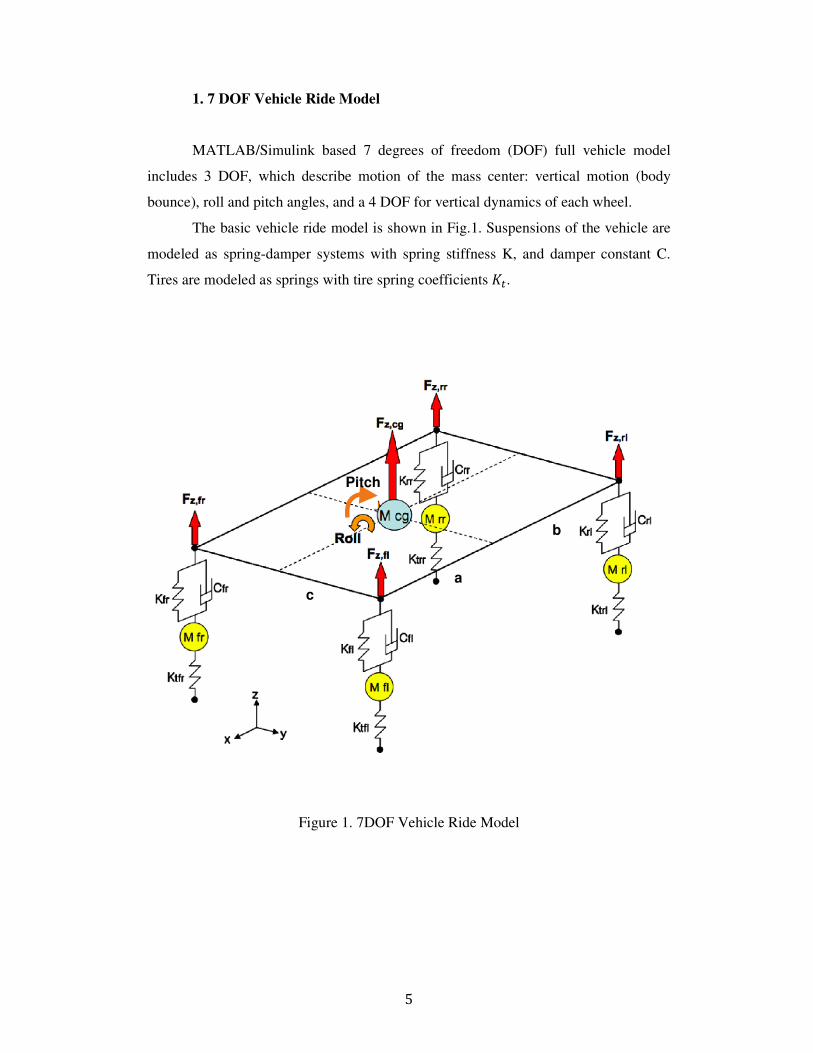
1. 7 DOF Vehicle Ride Model
MATLAB/Simulink based 7 degrees of freedom (DOF) full vehicle model
includes 3 DOF, which describe motion of the mass center: vertical motion (body
bounce), roll and pitch angles, and a 4 DOF for vertical dynamics of each wheel.
The basic vehicle ride model is shown in Fig.1. Suspensions of the vehicle are
modeled as spring-damper systems with spring stiffness K, and damper constant C.
Tires are modeled as springs with tire spring coefficients �.
Figure 1. 7DOF Vehicle Ride Model
Pitch
a
b
c

6
1.1. Equations of Motion
The dynamic vehicle ride model is developed using Newton’s Second Law.
Equations of motion that describe a vehicle 7 DOF ride model are the following.
Force equation along z-axis:
for sprung mass:
��� = ��,�� + ��,�� + ��,�� + ��,��
for unsprung masses:
������� = ��_�,�� ������� = ��_�,��
������� = ��_�,�� ������� = ��_�,��
Moment equations about x and y axis:
���� = ���,�� − ���,�� + ���,�� − ���,��
��� = −���,�� − ���,�� + ��,�� + ��,��
Assuming small pitch and roll angles, and using assumptions !"#� ≈ � ,
!"#� ≈ � expressions for the vertical forces acting on sprung mass can be written as:
��,�� = %−� − �� − �� + ���&�� + %−�' − ��' − ��' + �'��&��� ��,�� = %−� − �� + �� + ���&�� + %−�' − ��' + ��' + �'��&���
��,�� = (−� + � − �� + ���)�� + %−�' + �' − ��' + �'��&��� ��,�� = (−� + � + �� + ���)�� + %−�' + �' + ��' + �'��&���
Forces, acting on unsprung masses are given by following expressions:
��_�,�� = (� + �� + ��)�� + %�' + ��' + ��' − �'��&��� − ���%�� + ���& + *����� ��_�,�� = (� + �� − ��)�� + %�' + ��' − ��' − �'��&��� − ���%�� + ���& + *�����
��_�,�� = (� − � + ��)�� + %�' − �' + ��' − �'��&��� − ���(�� + ���) + *����� ��_�,�� = (� − � − ��)�� + %�' − �' − ��' − �'��&��� − ���(�� + ���) + *�����

7
Where *�� , *�� , *�� , *�� are the road displacement inputs acting on the
corresponding wheels, ��� , ��� , ��� , ��� - tire spring coefficients of the
corresponding wheels, and
��� , ��� , ��� , ��� - wheels vertical displacements (vertical displacements of
unsprung masses).
In the matrix form equations of motion describing the 7 DOF vehicle ride
model can be written as:
+M-.� = +C-.' + +K-. + +F-*
where state vector is defined as follows:
. = 2�, �, �, ���, ���, ��� , ���34
and the input vector is gives as:
* = 2*��, *��, *�� , *��34.
Expressions for matrices in the state space equation above are:
+M- =56666667�0000000�� 0000000�0000000���0000000���0000000��� 0000000���9:
:::::;
� = 2���3<×<
where
�>> = −��� − ��� − ��� − ���
�>? = −�%��� + ���& + �%��� + ���&
�>@ = −�%��� + ���& + (��� + ���) �>A = ��� �>B = ���
�>C = ��� �>< = ���
�?> = −�%��� + ���& + �%��� + ���&
�?? = −�?%��� + ��� + ��� + ���&
�?@ = ��%��� − ���& + � (��� − ���)
�?A = ���� �?B = −����
�?C = ���� �?< = −����
�@> = −�%��� + ���& + (��� + ���) �@? = ��%��� − ���& + � (��� − ���) �@@ = −�?%��� + ���& − ?(��� + ���) �@A = ���� �@B = ����
�@C = − ���

8
�@< = − ���
�A> = ��� �A? = ���� �A@ = ���� �AA = −��� �AB = �AC = �A< = 0
�B> = ���
�B? = −����
�B@ = ����
�BB = −���
�BA = �BC = �B< = 0
�C> = ��� �C? = ���� �C@ = − ��� �CC = −��� �CA = �CB = �C< = 0
�<> = ���
�<? = −����
�<@ = − ���
�<< = −���
�<A = �<B = �<C = 0
+- = +-<×<
where
>> = −�� − �� − �� − ��
>? = −�%�� + ��& + �%�� + ��&
>@ = −�%�� + ��& + (�� + ��) >A = �� >B = ��
>C = �� >< = ��
?> = −�%�� + ��& + �%�� + ��&
?? = −�?%�� + �� +�� +��&
?@ = ��%�� − ��& + � (�� − ��) ?A = ��� ?B = −���
?C = ��� ?< = −���
@> = −�%�� + ��& + (�� + ��) @? = ��%�� − ��& + � (�� − ��) @@ = −�?%�� + ��& − ?(�� + ��) @A = ���
@B = ���
@C = − �� @< = − ��
A> = �� A? = ��� A@ = ��� AA = −(�� + ���) AB = AC = A< = 0
B> = ��
B? = −���
B@ = ���
BB = −(�� + ���) BA = BC = B< = 0
C> = �� C? = ��� C@ = − �� CC = −(�� + ���) CA = CB = C< = 0
<> = ��

9
<? = −���
<@ = − ��
<< = −(�� + ���) <A = <B = <C = 0
+F- =5666667 000000000000���0000���0000���0000���9:
::::;
1.2.Simulation Model and Parameters
The 7 DOF vehicle ride model was developed in MATLAB/Simulink, and its
Simulink block diagram is illustrated in the Fig.2.
Figure 2. MATLAB/Simulink Block Diagram of 7 DOF Model
Vehicle and suspension parameters used for the model were obtained from Ref.
5, and are given in the Tables 1- 3.
Angle convension:
positive pitch is nose up
positive roll is rolling right
positive height is upwards
7DOF Model:Body bounce, roll angle, pitch angle, wheel hop
Road inputs
7
z_rr
6
z_rl
5
z_fr
4
z_fl
3
theta
2
phi
1
BodyBounce
-K-
-K-
b
a
c_fl
c_fr
c_rl
c_rr
k_fl
m
k_tfl
k_tfr
k_trl
k_trr
k_fr
0
0
0
0
Iy
Ix
M
c
k_rl
k_rr
ki
kt
ci
geom
mass
input_v ec
input_dot_v ec
q_v ec
output_v ecfcn
Ride_Model
1
s
Integrator1
1
s
Integrator
4
qFL
3
qFR
2
qRL
1
qRR

10
Table 1.
Mass, Inertia and Geometry Parameters Value
Vehicle body mass sprung mass (M) 1355 kg
Vehicle body inertia about x-axis (Ix) 1920 kg⋅m^2
about y-axis (Iy) 1000 kg⋅m^2
Distance from vehicle C.G to front wheels (a) 1.179 m
rear wheels (b) 1.541 m
Wheel track/2 front (c) 0.7 m
rear (c) 0.7 m
Table 2.
Suspension Parameters Value
Suspension Stiffness
front right (k_fr) 45000 N/m
front left (k_fl) 45000 N/m
rear right (k_rr) 34615 N/m
rear left (k_rl) 34615 N/m
Suspension Damping
front right (c_fr) 4500 N·s/m
front left (c_fl) 4500 N·s/m
rear right (c_rr) 4500 N·s/m
rear left (c_rl) 4500 N·s/m
Table 3.
Wheel Parameters Value
Wheel mass unsprung mass (m) 40 kg
Wheel radius (tire_radius) 0.3 m
Tire spring constant
front right (k_tfr) 200000N/m
front left (k_tfl) 200000N/m
rear right (k_trr) 200000N/m
rear left (k_trl) 200000N/m

11
2. Vibrational Characteristics
Vibrational characteristics of a road vehicle include characteristics of vehicle
vibrations at frequencies from 40 to 400 Hz, which are caused by road irregularities,
and vibrations at frequency range of 1000 - 2000 Hz, caused by machinery whines,
gears, etc.
Effect of road roughness on the vehicle ride is analyzed in this project.
2.1. BodyBounce Motion
Body bounce is the vertical motion of the sprung mass on the suspension
spring. Approximate value of the body bounce frequency can be calculated using the
following formula:
DEE = FGH�
whereGH is the total suspension stiffness, which is equal to the sum of stiffness
coefficients of individual suspensions.
For the given vehicle and suspension parameters, the value of the body bounce
frequency is obtained to be equal to DEE = 1.72M�.
2.2. Wheel Hop (Wheel Bounce) Motion
All individually sprung wheels have a vertical motion (wheel hop) mode,
which is excited by the road inputs. Wheel hop frequencies are much higher than the
body bounce frequencies, so the sprung mass tends to stay stationary during wheel
hop. Approximate value of the wheel hop frequency can be calculated using a quarter
car model:
DNO = FGH + G��
For the given vehicle, suspension stiffness is different for the front and rear
suspensions, therefore, wheel hop frequencies for front and rear wheels are calculated
separately, and are equal to: DNO_��PQ� = 12.46M�, DNO_�TU� = 12.19M�.

12
To show the frequency separation of the body bounce and wheel hop modes,
simulation is performed for the case when vehicle wheels are being excited with the
sinusoidal signal with frequency equal to the wheel hop frequency. The input signal
and vehicle responses in terms of the body bounce and wheel hop motions are
illustrated in Fig.3-6 below. The input magnitude is 0.05m, and input frequency is
equal to the approximate value of the wheel hop frequency.
Figure 3. Road Input
Figure 4. Body Bounce Motion
0 1 2 3 4 5 6 7 8 9 10-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Time, s
Magnitude, m

13
Figure 5. Wheel Hop Motion of Front Wheels
Figure 6. Wheel Hop Motion of Rear Wheels

14
3. Graphical User Interface (GUI)
Graphical User Interface (GUI) for the full vehicle ride model was developed in
MATLAB and is targeted for use on Windows platform. The main interface window is
shown in Fig. 7.
Figure 7. Graphical User Interface for Vehicle Ride Model
3.1. GUI Features
GUI for the full vehicle ride model enables:
• Enter/load/save vehicle parameters;
• Enter vehicle average velocity;
• Enter travel distance;

15
• Specify road input in terms of road roughness and bumps;
• Simulate the 7 DOF full vehicle ride model;
• Plot the variables of interest, zoom and save plots;
• 3-D animation of the ground vehicle motion;
In addition to input data save/load options, Project Load and Project Save
option is available in GUI, which allows user to save the vehicle parameters, road
configuration and simulation responses to a new folder, and loaded again when
needed.
3.2. Parameters for the GUI
GUI uses a 7 DOF vehicle ride model, and therefore, a set of parameters is
needed to be entered/loaded before starting the simulation. These parameters include
mass, inertia and geometric characteristics, suspension parameters and wheels/tires
characteristics. Tables 1- 3 include the list of the parameters required. Default set of
parameters is taken from the Ref. [5]. GUI allows user to enter parameters, save them,
and load the existing data.
3.3. Road Input Generation
Road input generation algorithm enables to specify the road inputs used in the
vehicle ride model simulation. The road input (road surface profile) can be selected as:
• Flat road;
• Sinusoidal input is specified by its magnitude and the wave number (# ).
Excitation frequency is computed taking into account the vehicle speed (V):
= W# [Hz]; the value of excitation frequency is displayed in GUI. The
excitation frequency is the frequency of the sine wave road input to the vehicle;
• Random signal, given by its standard deviation;
• Bumps on the road surface can be set by specifying location with respect to the
travel distance and height for each bump. Bumps can be generated as
symmetric (for both wheels) and asymmetric (for left or right wheel only).

16
Once the road surface profile configuration is being generated, GUI allows user to
save the road configuration, and load it when desired.
3.4. Simulation Outputs
After running the simulation, plots of the following variables are displayed in
the GUI window:
• Body bounce;
• Vertical acceleration;
• Pitch angle;
• Roll angle;
• Vertical displacement for each wheel.
Each plot can be zoomed, edited and saved as a figure file.
3.5. 3-D Animation
The animation of ground vehicle dynamic model in the virtual reality
environment is performed by the Simulink 3D Animation. After starting the
simulation, a virtual world opens in the Simulink 3D Animation viewer by default. A
simulation starts running, and the virtual world is animated using signal data from the
simulation model. The following data are required as an input to the animation block
set: body bounce motion, pitch and roll angles, wheels displacements. User can set
positions and properties of VRML object (camera location, zoom in/out). The snapshot
of the vehicle’s animated motion is shown in Fig.8.

17
Figure 8. 3-D Visualization of the Vehicle Motion
4. Conclusions
A MATLAB based Graphical User Interface is developed for the full vehicle
ride model. The GUI allows simulation of the 7 DOF full vehicle ride model for
specified road inputs, visualization of the vehicle motion, and plots of the output
variables, which include body bounce, pitch and roll angles, and wheels vertical
motion. User is allowed to enter, load and save vehicle parameters, and also select the
desired road inputs by specifying road surface profile (flat road, sinusoidal or random
signal), and bumps in the desired locations on the road surface. GUI allows saving and
loading the generated road input. 3-D animation of the road vehicle motion is provided
by the Simulink 3-D Animation.
Appendix A includes the User Manual for the full vehicle ride simulation and
animation GUI.

18
References
1. Thompson, A.G. The effect of tire damping on the performance of vibration
absorbers in an active suspension. Journal of Sound and Vibration, 1989, 133(3), 457-
465.
2. Campos, J., Davis, L., Lewis, F.L., Ikenaga, S., Scully, S. and Evans, M. Active
SuspensionControl of Ground Vehicle Heave and Pitch Motions. Proceedings of the
7th Mediterranean Conference on Control and Automation (MED99)Haifa, Israel,
1999).
3. Stone, M.R. and Demetriou, M.A. Modeling and Simulation of Vehicle Ride and
Handling Performance. Proceedings of the 15th IEEE International Symposium on
Intelligent Control (ISIC2000)Rio, Patras, Greece, 2000).
4. T. D. Gillespie, Fundamentals of Vehicle Dynamics,Warrendale, PA : Society of
Automotive Engineers, c1992. 01/01/1992 xxii, 495 p.
5. S. Roy and Z. Liu, "Road Vehicle Suspension and Performance Evaluation using a
Two Dimensional Vehicle Model", Int. J. of Vehicle Systems Modeling and Testing,
3(1/2), 68-93, 2008.
6. http://www.mathworks.com/

19
APPENDIX A
User Manual
In this section, “how GUI can be used” is explained step by step by illustrating simple
simulation examples.
Since the GUI is developed using MATLAB, make sure that MATLAB is installed in
the computer. Also, the folder which includes all project files should be chosen as the
“working directory” in MATLAB. In Figure A.1, a picture of Matlab environment is
shown. Here, the folder, GUI_05302012, which includes all project files are chosen as
working directory. Once the working directory is chosen properly, we can start.
Figure A.1

20
Opening the GUI Window:
To open the GUI, the M-file “RideModelSimilator.m” needs to be run. The following
GUI window will appear on the screen.
Figure A.2
Loading Vehicle Parameters:
On the left upper part of the GUI, Figure A.2, vehicle parameters can be seen.
Parameters should be loaded using the “Load Vehicle Parameters” button. When it is
pressed the following window is shown on the screen.
Figure A.3
21
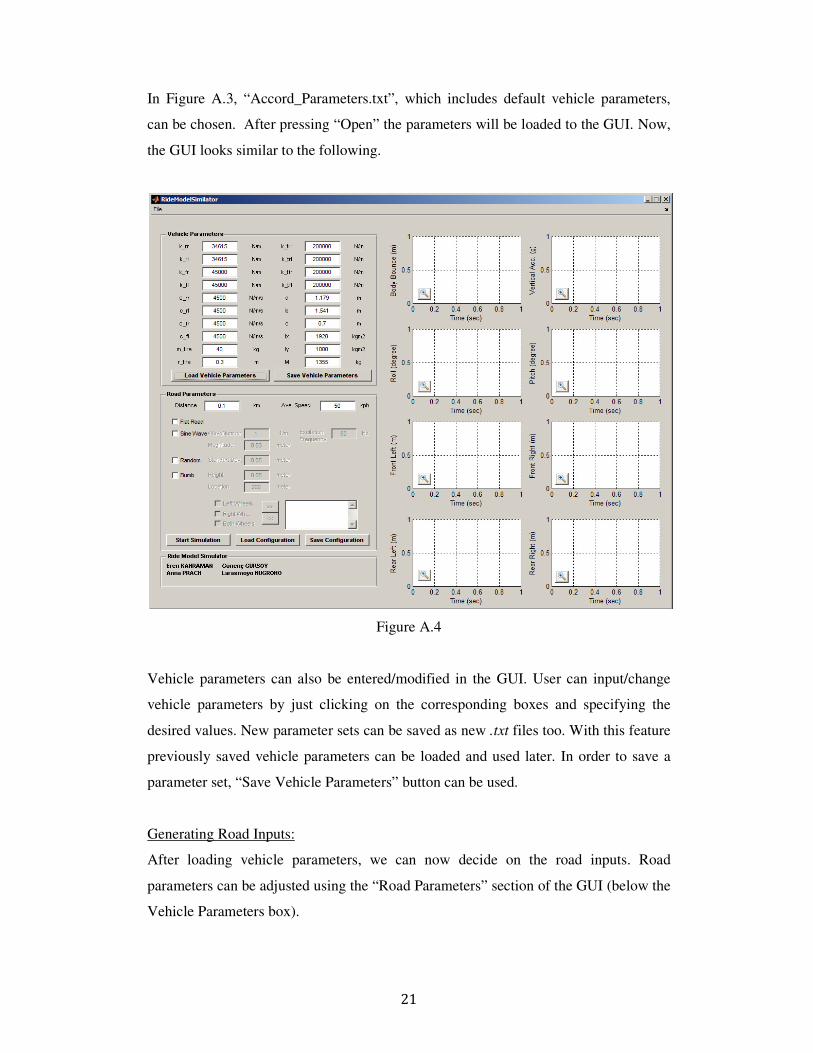
In Figure A.3, “Accord_Parameters.txt”, which includes default vehicle parameters,
can be chosen. After pressing “Open” the parameters will be loaded to the GUI. Now,
the GUI looks similar to the following.
Figure A.4
Vehicle parameters can also be entered/modified in the GUI. User can input/change
vehicle parameters by just clicking on the corresponding boxes and specifying the
desired values. New parameter sets can be saved as new .txt files too. With this feature
previously saved vehicle parameters can be loaded and used later. In order to save a
parameter set, “Save Vehicle Parameters” button can be used.
Generating Road Inputs:
After loading vehicle parameters, we can now decide on the road inputs. Road
parameters can be adjusted using the “Road Parameters” section of the GUI (below the
Vehicle Parameters box).

22
In that section, the distance to be travelled and the average speed of travel should be
entered by the user. Let’s enter these inputs as 0.4 km and 30 kph into the boxes called
“Distance” and “Ave. Speed”. Then choose the “Flat Road” as the road type. And
click on the “Start Simulation” button. A simulation window illustrated in Figure A.5
will appear on the screen.
Figure A.5
When the simulation ends simulation results can be viewed by the corresponding plots
in the right side of the GUI window (Figure A.6). In this example, since the road is
chosen as flat, no input is given to the vehicle during the simulation. Body bounce,
vertical acceleration, roll and pitch angles and deflections of wheels are shown in the
right side of the GUI. All simulation results are zero since no input is given.

23
Figure A.6
Now, let us illustrate how to run simulations for different road inputs.
Simulations Using Sine Wave Input:
Now click on the “Sine Wave” check box in order to give a sine wave input to the
vehicle. When the “Sine Wave” road profile is chosen, “Wave Number”, “Magnitude”
and “Excitation Frequency” boxes will be activated. Here user should enter the wave
number and the magnitude of the sine wave input into the “Wave Number” and
“Magnitude” boxes. After entering these inputs the corresponding excitation frequency
is calculated automatically and its value will appear in the “Excitation Frequency”
box.
Now let us enter wave number and magnitude of the oscillations as 1.5 and 0.03, then
the excitation frequency will automatically appear as 12.5 Hz. Note that this excitation
frequency is the wheel-hop frequency of that car model. GUI window is illustrated in
Figure A.7. Then pressing “Start Simulation” button, simulation will start and the

24
visualization window will appear. When the simulation ends GUI will appear as
shown in Figure A.8.
The Sine wave road input can be deactivated by a single click on a “Sine Wave” check
box.
Figure A.7

25
Figure A.8
Simulations Using Bumps and Random Inputs
Single click on the “Bump” box will activate a bump input option for the road profile
generation. Bumps can be specified by entering their heights and locations (location is
specified with respect to the travel distance) into the boxes “Height” and “Location”.
Let’s enter height as 0.05 (as default) and the location as 20 (which implies that a
bump is given as an input at the 20th
meter of the ride). Note that bump location cannot
be greater than the travel distance. Now, if we want to specify this bump as an input to
the left wheel, a single click on the check box “Left Wheels” followed by pressing the
right arrow button will add the specified bump to the box on the right (Figure A.9).
Now change the location as 50 and make it an input to the right wheels by clicking the
check box called “Right Wheels”, second by pressing the right arrow button to
generate it in the box. We may also use random inputs at the same time. Press
“Random” check box. Press “Start Simulation” button will run the simulation. GUI
window is shown in Figure A.10.

26
Figure A.9
Note that bumps as road input types can be given simultaneously for right and left
wheels. This option is activated by a single click on the “Both Wheels” check box.
A generated road profile can be saved using “Save Configuration” button and a pre-
saved configuration can be loaded using “Load Configuration” button located in the
“Road Parameters” section of the GUI.

27
Figure A.10
About Stopping The Simulations
If the simulation time becomes too long due to a large input of the travel distance or
travel velocity is very slow, the simulation can be stopped. In order to stop the
simulation the following steps should be performed: single click on the “Simulation”
button located in the visualization window, and then click on the “Stop” button will
stop the simulation.
Adjusting Different View Points
User can adjust the view points by using the up/down and left/right arrows on the
keyboard. This way angular view can be adjusted. By using up/down buttons while
holding the “SHIFT” button, it becomes possible to zoom in/out the vehicle. By using
up/down buttons while holding “ALT” button, camera gains altitude or descents. Also
by using left/right buttons while holding “ALT” button, camera is translated to the left
or right. A different views can be seen Figure A.11.

28
Figure A.11

APPENDIX B
C and K Matrices
Top Related
Copyright © 2022 FDOKUMEN

