






Bahasa
Halaman
Hukum


1
ENGINEERING ANALYSIS OF CRACKED BODIES USING J-INTEGRAL METHODS
by
MUSTAFA DAGBASI B.Sc., M.Sc.
A thesis submitted for the degree of Doctor of Philosophy in the Faculty of Engineering, University of London, and the Diploma of
Imperial College.
Department of Mechanical Engineering, Imperial College of Science and Technology,
London SW7 2BX,United Kingdom.
February 1988
2
ABSTRACTThe overall intent is to improve the procedures for estimating and
using J-Integral methods for fracture safe design. Stress analysis
solutions to crack problems are reviewed under two headings;
elastic, elastic-plastic. Simple geom etrical models representing
cracked structural com ponents are studied using analytical,
numerical and experimental procedures to examine some particular
problem s. These are; quasi-2D states, evaluation of J from
load-deflection equations, combined bending and tension loadings,
regions of stress concentrations and tearing resistance curves.
A 2-D elastic-plastic FE code is modified to deal with problems
which are neither in plane stress nor in plane strain. The method
gives satisfactory results and offers considerable savings compared
to 3-D analysis, both in data preparation and computer effort.
Practical methods of estimating the degree of plane strain to be
incorporated are suggested.
Mathematical representation of elastic plastic load-deflection, Q-q,
relations for single edge notched, (SEN) geometries subjected to
tensile or bending loadings are studied. Two separate forms of
equation are considered to represent the FE solutions for
e las tic -rig id p lastic m ateria l p roperties . J -In te g ra l is then
estimated from the rate of change of work done due to crack
extension and compared with those from FE contour solutions. It is
found that very accurate representation of the Q-q relations is
necessary for reasonably accurate estimates of J-Integral.
SEN geometry with rigid plastic material properties, subjected to
tensile type of loading eccentric to the uncracked ligament, is
studied to examine the effect of geometry and eccentricity on the
plastic tj factor (which relates J to work done) and on the limit load.

3
Comparisons between analytical and FE solutions are favourable at
least for deep notch cases when bending stresses are dominant.
Difficulties in FE studies and definition of 'pure tension' loading are
discussed and a possible method suitable for shallow notch cases is
suggested.
Cracks in regions of stress concentration of various geometries with
elastic-work hardening plastic material properties are studied using
FE methods. Numerical results are presented and compared with
those from the LEFM solutions and the 'EnJ estimation method'. In
the LEFM regime the well known division into 'short' and 'long' crack
is used. In the EPFM regime the method is found to be useful for
either case provided the estimates for short cracks are carried out
with reference to local strain rather than local stress.
Tearing toughness of metals is generally studied using J-Integral
definitions, and recently attention has been focussed on behaviour of
non-standard test geometries. Reduction in the geometric dependence
of data, when scaled with original ligament, thickness or a material
factor has been reported in literature. Bending geometry using HY130
steel is experimentally studied with the emphasis being laid on the
effect of ligament on toughness. Large crack growth is considered
and toughness is related to various work terms. A useful form of
predicting the behaviour of one geometry from another is stated.
It is concluded that improved J-Integral estimations, some simple
some computed, can be made for a number factors; degree of plane
strain, combined bending and tension, effect of stress concentration
and tearing toughness, so that J-based design methods can be used
more confidently.

to my wife,
YONCA

5
ACKNOWLEDGEMENTS
I wish to express my sincere gratitude to Professor C.E. Turner for
his constant guidance, encourangement and supervision throughout
the course of this work.
I would also like to thank my colleagues; Dr. M.R. Etemad, Dr. S. John
and Dr. K. O leyede for their valuable discussions, to Mr. H.
MacGillivray for his assistance in the laboratory and to Dr. F. Nadiri
for her invaluable general advice. Thanks are also due to Mr. C. Noad
and Mr. P. Pathak for their help.
I am indebted to my family for their unrelenting moral support and
encouragement.
Finally, I am most grateful to Eastern Mediterranean University,
Turkish Republic of Northern Cyprus, and The British Council for
their financial support during the course of this work.

6
NOTATION
The definitions given below generally hold true throughout the text,unless otherwise stated for particular cases.
a, a , a Crack length, original, current
a« Total crack length including the feature of stress
concentration
{a} Flow vector
A Area
b, b0, bc,b{ Uncracked ligament, original, current, final
B Thickness
C Geometric constant
D measure of K or J dominat region, gauge length for tensile specimens
[D] elastic stiffness matrix
e, e’ strain, deviatoric strain
{e} strain vector
E, E' Young's Modulus of elasticity, effective
f yield function
G, Gy elastic energy release rate, evaluated at a stress level
equal to yield stress
Ga Crack separation energy

7
H' local slope of stress-plastic strain relations of a material
I Second moment of area, Elastic strain energy release rate for an EPE system
J J-Integral
Second stress invariant in terms of deviatoric stress
componenets.
k yield stress in shear
kt Elastic stress concentration factor based on remote
stress level
K stress intensity factor
KIC critical stress intensity factor for opening mode under
plane strain constraint
L constraint factor
m stress intensification factor
m , m l bending moment, limit bending moment
N work hardening exponent
q , q l Load, limit load
Q Plastic potential
q Load point displacement
R Resistance to crack extension. Size feature of a stress concentration
r Rotational factor
rp’ rpo’ rpe Plastic zone size, under plane stress conditions, under
plane strain conditions

Span in three point bending
Length of path in a contour. Size of shear lip
Tearing modulus. Temperature
Traction vector, component along x-axis.
Work or energy
displacement vector, componet along x-axis
Potential energy
Internal energy
Specimen width
LEFM shape factor, for short crack treatment, for long
crack treatment
Strain energy density
GREEK SYMBOLS
coefficient of thermal expansion, constant
constant
contour path around a carck tip
surface enfgy per unit thickness
crack opening displacement, at original crack tip, at
current crack tip
Kronecker delta( 8 =1 when i=j, 8- =0 when i*j)

9
e eccentricity of applied tensile load measured from the centre of uncracked ligament
Am crack mouth opening
*n numerical factor relating work done to J-Integral,
K work hardening parameter
X Lame's constant
<P> <P0 compliance of specimen, compliance of unnotched
specimen
P shear modulus of elasticity
X shear stress
c averaging factor between plane stress and plane strain conditions
<X> non dimensional COD
CO defined as (b/J)(dJ/da)
a, o', {a} stress, deviatoric stress, stress vector
V Poisson's ratio
SUFFIXES
av average
app applied
c critical

10
d
e (el)
ef
i,i+1
i
m
mat
o
P (PO
pe, pa
prR
r,0
re
s
TP
th
u
x,y,z
ys
deformation theory
elastic
effective
Ith, (i+1)th increment
Initial, initiation
mechanical, modified
material
flow, overall
plastic
plane strain, plane stress
previous
resistance
polar coordinates
residual
surface, system
test piece
thermal
work
directions of mutually perpendicular axes
yield stress

11
ABREVIATIONS
ASTM American Society for Testing and Material
ASTM STP ASTM's Special Technical Publication
BS British Standard
CCE Compliance correction equation
CCP Centre cracked panel
CG Clip gauge
COA Crack opening angle
CCD Crack opening displacement
CT Compact tension
CTO A Crack tip opening angle
CTOD Crack tip opening displacement
DECP Double edge cracked panel
ECP Edge cracked panel
EPE Elastic-plastic-elastic
EPFM Elastic-plastic fracture mechanics
FE Finite elements
FEM Finite elements method
FPB Four point bend
HCCTR High constraint crack tip region
HRR Hutchinson* Rice and Rosengren stres-strain field

12
J J-Integral
J-R J resistance
LEFM Linear elstic fracture mechanics
LVDT Linear voltage displacement transducer
NLE Non-linear elastic
OR Load ratio defined as Q/Q. used in curve fitting as the
range of data considered for determining curve fitting constants
SCF stress concentration factor
SEN Single edge notched
TPB Three point bend
TPT Three parameter technique

13
CONTENTS
ABSTRACT 2
ACKNOWLEDGEMENTS 4
NOTATION 6
GREEK SYMBOLS 9
SUFFIXES 10
ABBREVIATIONS 11
CONTENTS 13
LIST OF FIGURES 19
LIST OF TABLES 29
LIST OF PLATES 29
CHAPTER-1: INTRODUCTION 30
LITERATURE REVIEW
CHAPTER-2: LINEAR ELASTIC FRACTURE MECHANICS 35
2.1 INTRODUCTION 35
2.2 THE ENERGY BALANCE APPROACH 35
2.2.1 The Griffith Theory 35
2.2.2 Modifications To The Original Griffith Theory 37
2.2.3 Griffith Theory For General Boundary
Conditions 38
2.3 STRESS INTENSITY APPROACH 39
2.3.1 Irwin's Stress Intensity Factors 39
2.3.2 Stress Intensity Factors for Finite
Geometries 42
2.4 CRACK TIP PLASTIC ZONE: SIZE AND SHAPE 43
2.4.1 Introduction 43
2.4.2 Irwin's Plastic Zone Model 43
2.4.3 Dugdale's Plastic Zone Model 44
2.4.4 Plastic Zone According to Yield Criterion 45

14
2.4.5 Crack Tip Opening Displacement (COD) 46
2.5 PLANES OF PLASTIC DEFORMATION AT THE
CRACK TIP 47
2.6 EFFECT OF THICKNESS ON TOUGHNESS 48
2.7 THE K DOMINANT CRACK TIP FIELD 48
2.8 K,c TESTING 49
2.9 LEFM RESISTANCE CURVE 50
CHAPTER-3: ELASTIC-PLASTIC FRACTURE MECHANICS 60
3.1 INTRODUCTION 60
3.2 CRACK OPENING DISPLACEMENT, COD ( 5 ) 60
3.2.1 Introduction 60
3.2.2 Determination of COD 61
3.2.3 Basis of COD Design Curve 62
3.3 J-INTEGRAL 63
3.2.1 Introduction 63
3.3.2 HRR Stress and Strain Field Equations 66
3.3.3 The T\.Factor For J-Integral Estimation 68
3.3.4 The J-Dominant Crack Tip Field 70
3.3.5 J iq Testing 71
3.3.6 J Controlled Crack Growth 72
3.4 RESISTANCE CURVES 73
3.4.1 Introduction 73
3.4.2 Methods of Experimental Crack Length
Predictions 74
3.4.3 COD From Crack Mouth Displacement
Measurements 75
3.4.4 J Formulations for Growing Cracks 76
3.5 DUCTILE TEARING INSTABILITY THEORIES 81
3.5.1 The T THEORY' 81
3.5.2 The ’I THEORY' 82

15
CHAPTER-4: FINITE ELEMENT METHODS IN THE STUDY OF
FRACTURE MECHANICS PROBLEMS 894.1 INTRODUCTION TO THE FINITE ELEMENT METHOD 89
4.2 APPLICATION OF FEM TO FRACTURE MECHANICS
PROBLEMS 92
4.3 DETERMINATION OF STRESS INTENSITY FACTORS 93
4.3.1 Direct Methods 93
4.3.2 Indirect Methods 95
4.4 STUDY OF POST YIELD FRACTURE MECHANICS
PROBLEMS 96
4.4.1 Introduction 96
4.4.2 Evaluation of EPFM Parameters, J and COD 97
4.5 ANALYSIS OF STATIONARY CRACKS 99
4.6 ANALYSIS OF STABLE CRACK GROWTH 101
4.6.1 Introduction 101
4.6.2 Methods for Crack Growth Modelling 102
4.6.3 Criterion for Crack Extension 103
RESULTS and CONCLUSIONS
CHAPTER-5: 2-D ELASTIC-PLASTIC ANALYSIS WITH CONTROLLEDOUT OF PLANE STRESSES 107
5.1 INTRODUCTION 107
5.2 MODIFIED 2-D ELASTICITY EQUATIONS FOR
ISOTROPIC MATERIALS 108
5.3 MODIFYING THE PLASTICITY EQUATIONS 111
5.4 INITIAL TEST OF THE NEW APPROACH 113
5.5 NUMERICAL STUDY OF COMPACT TENSION and
THREE POINT BEND GEOMETRIES 115
5.6 DISCUSSIONS 116
16
CHAPTER-6: ELASTIC-PLASTIC LOAD-DISPLACEMENT
EQUATIONS FOR ESTIMATING J. 126
6.1 INTRODUCTION 126
6.2 FORMULATION OF LOAD-LOAD POINT DISPLACEMENT
RELATION 127
6.3 EVALUATION OF J FROM LOAD-LOAD POINT
DISPLACEMENT EQUATION 128
6.4 NUMERICAL STUDY of SINGLE EDGE CRACKED
GEOMETRY 130
6.5 CURVE FITTING TO NUMERICAL
LOAD-DISPLACEMENT DATA 130
6.6 J ESTIMATES FROM CURVE FITTED
LOAD-DISPLACEMENT EQUATIONS 132
6.7 DISCUSSIONS 133
CHAPTER-7: J ESTIMATION FOR SINGLE EDGE CRACKGEOMETRIES SUBJECTED TO ECCENTRIC
TENSILE LOADING 1487.1 INTRODUCTION 148
7.2 FORMULATION OF GOVERNING EQUATIONS 150
7.3 EVALUATION OF J FOR A GIVEN LOADING SYSTEM 151
7.4 A SIMPLE CASE WITHOUT THE HCCTR 152
7.5 PURE BENDING CASE WITH HCCTR 153
7.6 COMBINED TENSION and BENDING WITH HCCTR 154
7.6.1 Assumptions for a possible solution 154
7.6.2 Solution of The Governing Equations 155
7.7 THE ANALYTICAL AND NUMERICAL STUDY OF DEEP
NOTCHES 157
7.7.1 Analytical Results 157
7.7.2 Numerical Results 157
7.8 DISCUSSIONS 159
7.9 A METHOD SUGGESTED FOR SHORT CRACKS 162

17
CHAPTER-8: SCALING OF TEARING RESISTANCE CURVES
FOR HY-130 STEEL 1818.1 INTRODUCTION 181
8.2 MATERIAL and TEST GEOMETRY DETAILS 182
8.3 THE COMPUTER INTERACTIVE UNLOADING
COMPLIANCE TEST METHOD 182
8.3.1 Introduction 182
8.3.2 Essentials of The On-Line Interactive
Computation of Test Data 183
8.4 COMPLIANCE EQUATIONS FOR BENDING TEST
SPECIMENS 184
8.5 STUDY OF CRACK FRONT CURVATURE 185
8.6 SIZE EFFECTS ON CRACK LENGTH PREDICTIONS 186
8.6.1 Thickness Effects 186
8.6.2 Effects of Uncracked Initial Ligament Size 187
8.7 ROLLER INDENTATION 187
8.8 EFFECT OF LARGE DEFORMATIONS ON LOAD IN TPB
AND FPB CONFIGURATIONS 188
8.8.1 Kinematics of Three point and Four Point
Bendings 188
8.8.2 Force Analysis 191
8.8.3 Axial Stress in the Central Part of the Beam 191
8.8.4 Experimental Investigation Using Unnotched Beams 193
8.9 EFFECT OF DEFORMATION ON THE LIMIT LOAD OF
NOTCHED BEND SPECIMENS 193
8.10 RESULTS ON RESISTANCE CURVES 194
8.11 DISCUSSIONS 196
CHAPTER-9: CONCLUSIONS and RECOMMENDATIONS 234

18
APPENDICES
APPENDIX-1: EVALUATION OF 2-D CONTOUR INTEGRALS 222
APPENDIX-2: ELASTICITY EQUATIONS FOR ISOTROPIC
MATERIALS 222
APPENDIX-3: INTRODUCTION TO FLOW THEORY OF
PLASTICITY 224
APPENDIX-4: ESTIMATES OF THE J-INTEGRAL FOR
CRACKS AT REGIONS OF STRESS
CONCENTRATION 225
REFERENCES 264

52
52
53
53
54
55
56
56
56
57
57
58
58
LIST OF FIGURES
Crack in an infinite plate under biaxial loading
Elastic load-displacement diagram for a cracked body
Modes of fracture
Three dimensional crack tip coordinate system
Plastic zone size and notional crack increment
a) First estimate of plastic zone
b) lrwin's plane stress plastic zone
c) lrwin's plane strain plastic zone
Dugdale model of crack tip plastic zone
Plastic zone shape according to Von-Mises yield criteria
a) Two dimensional
b) Three dimensional
a) Displacement of crack flanks when loaded in opening mode
b) Definition of COD for the notional crack at the original crack
tip
Planes of maximum shear stress
a) Plane stress
b) Plane strain
a) Variation of Kc with thickness
b) Slant and flat fracture
The concept of 'K-Dominant Region'
R-Curve for plane strain behaviour

20
FIG.2.13.a Krafft's original rising R-Curve 59
FIG.2.13.b Use of the unique R-Curve to examine fracture conditions
for different initial crack lengths 59
FIG.3.1 Position from where assesment of COD is made 85
a) Somewhat arbitrarily defined position in infiltration studies
b) Relationship between the plastic components of COD, 8p
and the mouth opening, Am p with the assumed hinge rotation
at 'O', a fraction of the ligament away from the crack tip
FIG.3.2 a) Crack in a large plate with gauge points at 2D apart 86
b) Diagrammatic non-dimensional COD, (O) against
strain ratio for different crack to gauge length ratios
FIG.3.3 Contour path around crack tip for proving the path
independency of J-Integral 86
FIG.3.4 Load displacement diagram for a cracked body, and
associated changes due to crack extension 87
FIG.3.5 Schematic of crack tip conditions for J-controlled growth 87
FIG.3.6 Garwood's fictitious NLE curve matching the three
parameters: load, displacement and crack length 88
FIG.3.7 Energy interchange due to crack extension at constant
overall displacement for an elastic-plastic material with
linear elastic unloading (dotted lines indicate relative
position when crack extension occurs under constant load) 88

21
FIG.4.1 Isoparametric singularity elements 105
a) Quarter point quadrilateral with 1/Vr singularity at node-1
b) Quarter point triangular with 1/Vr singularity at node-1
c) Collapsed 8-noded quadrilateral with 1/r singularity at node-1
FIG.4.2 Some common methods of assessing COD in finite
element studies from deformed crack flanks 105
a) Elastic-plastic interface method
b) 90° intercept method
c) Extrapolation method
FIG.4.3 A definition of COD and related parameters in Finite
Element studies 106
FIG.4.4 Crack growth modelling by the Node Shifting Method 106
FIG.5.1 Comparison of elastic stress relations of the two methods
for the general 2-D problems as a function of £ 118
a) Out of-plane stress as a ratio of in-plane stresses
b,c) First and second elements of stiffness matrix (equ.5.4, 5.8)
FIG.5.2 Comparison of numerical and theoretical tensile
stress ratios for the tensile test specimen, when
non-work hardening elastic material is considered 119
a) At the beginning of plasticity
b) At extensive plasticity (Eeyy=3oys)
FIG.5.3 Stresses in the tensile test specimen for different
values of £ for an elastic-non linear plastic material 120
a) Tensile stress in the direction of loading
b) Out of plane tensile stress

121
FIG.5.4 Stress-plastic strain relation of the A533-B pressure
vessel steel
22
FIG.5.5 Load-load point displacement relations for standard
compact tension geometry (a/W=0.56) for different
values of the out of-plane constraint factor, 122
FIG.5.6 Load-load point displacement relations for standard three
point bend geometry (a/W=0.5, S/W=4) for different
values of the out of-plane constraint factor, 123
FIG.5.7 J-Integral - Load point displacement relations for
compact tension geometry (a/W=0.56) for different
values of the out of plane constraint factor, 124
FIG.5.8 J-Integral - Load point displacement relations for three
point bend geometry (a/W=0.5, S/W=4) for different
values of the out of plane constraint factor, 125
FIG.6.1 Edge crack geometry 136
a) Under tensile loading (SENT)
b) Under three point bending (TPB)
FIG.6.2 The constants A2 and A3 of selected load-displacement
equations as a function of crack length 137
a,b) For SENT geometry
c,d) For TPB geometry
FIG.6.3 Numerical and estimated (logarithmic) load-displacement
relations for SENT geometry 138
a) QR=0.85
b) QR=0.98
23
FIG.6.4 Numerical and estimated (trigonometric) load-displacement
relations for SENT geometry 139
a) QR=0.85
b) QR=0.975
FIG.6.5 Numerical and estimated (logarithmic) load-displacement
relations for TPB geometry 140
a) QR=0.85
b) QR=0.95
FIG.6.6 Numerical and estimated (trigonometric) load-displacement
relations for TPB geometry 141
a) QR=0.85
b) QR=0.95
FIG.6.7 Variation of constraint factor, as obtained from numerical
results, with crack length for SENT and TPB geometries 142
FIG.6.8 Comparison of J-Integral values estimated from
load- displacement equation (logarithmic, QR=0.98)
with numerical values from FE study for SENT geometry 143
FIG.6.9 Comparison of J-Integral values estimated from
load-displacement equation (trigonometric, QR=0.975)
with numerical values from FE study for SENT geometry 144
FIG.6.10 Comparison of J-Integral values estimated from
load-displacement equation (logarithmic, QR=0.90)
with numerical values from FE study for TPB geometry 145
FIG.6.11 Comparison of J-Integral values estimated from
load-displacement equation (trigonometric, QR=0.95)
with numerical values from FE study for TPB geometry 146

24
FIG.7.1 Edge cracked geometry subjected to tensile load
eccentrically applied to the uncracked ligament 163
FIG.7.2 Idealised stress distribution across the ligament 163
FIG.7.3 a) The applied system of forces 163
b) Equivalent system of forces 163
c) Idealised general displacements 163
FIG.7.4 Relations among load, load point eccentricity and moment
in the absence of the High Constraint Crack Tip Region 164
FIG.7.5 Variation of r|p| with eccentricity of the applied load in the
absence of the High Constraint Crack Tip Region 165
FIG.7.6 Eccentric tensile loading of SEN geometry resulting in a
central deflection v. 166
FIG.7.7 Analytical results for deep notch case when the High
Constraint Crack Tip Region is assume to vary linearly
from pure bending to pure tension 167
a) Load moment relation
b) r|pj as a function of applied load eccentricity
FIG.7.8 Analytical results for deep notches when ripI is taken as
unity for pure tension 168
a) Variation of applied load and moment with loadpoint
eccentricity
b) Variation of *np, as a function of applied load eccentricity

25
FIG.7.9 Analytical results for deep notches when t|p| is taken as
unity for pure tension 169
a) Load-moment relation
b) t|p| as a function of applied load eccentricity
FIG.7.10 Analytical results for deep notches when ripl is taken as
unity for pure tension 170
a) Load-moment relation
b) ripl as a function of applied load eccentricity
FIG.7.11 SEN geometry considered in the finite element study
showing the rigid end pieces attached to the main body 171
FIG.7.12 Numerical results for SEN geometry with a/W=0.3 172
FIG.7.13 Numerical results for SEN geometry with a/W=0.5 173
FIG.7.14.a Comparison of numerical and analytical results for deep
notch geometry ( ripl =0.0 assumed for pure tension) 174
FIG.7.14.b Comparison of numerical and analytical results for deep
notch geometry ( rip| =0.25 assumed for pure tension) 175
FIG.7.14.c Comparison of numerical and analytical results for deep
notch geometry ( r|p| =0.50 assumed for pure tension) 176
FIG.7.14.d Comparison of numerical and analytical results for deep
notch geometry ( rip| =0.75 assumed for pure tension) 177

26
FIG.7.15.a Variation of r|pl with eccentricity of applied load for SEN
geometry for small crack lengths (assuming = 1.0
for pure tension and m=(1 +rc/2) for pure bending) 178
FIG.7.15.b Variation of applied load with eccentricity for SEN
geometry for small crack lengths (assuming rip| =1.0
for pure tension and m=(1 +n/2) for pure bending) 179
FIG.7.15.C Variation of applied moment with eccentricity of applied
load for SEN geometry for small crack lengths (assuming
T|pl =1.0 for pure tension and m=(1 +n/2) for pure bending) 180
FIG.8.1 Stress strain relations for HY-130 steel 200
FIG.8.2 Plate dimensions and relative orientation of specimens 201
FIG.8.3 Four point bend test geometry 201
FIG.8.4 Schematic set-up of equipment for the unloading
compliance test technique 202
FIG.8.5 Flowchart outline of the computer program for unloading
compliance testing 203
FIG.8.6 Ratio of corrected compliance to measured compliance
as a function of total crack extension (estimated using the
measured compliance) to width ratio forTPB specimens
(B=20mm, W=50mm, S/W=4) 204
FIG.8.7 Comparison of measured and estimated crack extensions
to width ratios for TPB specimens
(B=20, W=50, S/W=4.0) 204
27
FIG.8.8 Variation of shear lip size with initial uncracked ligament size 205
FIG.8.9.a Kinematic analysis of a loaded TPB geometry by assuming
two symmetric rigid halves rotating about a hinge point 206
FIG.8.9.b Kinematic analysis of loaded FPB geometry by assuming two
symmetric rigid portions between upper and lower rollers 207
FIG.8.10 Applied system of forces in bend type loadings of beams 208
a) On the rollers supporting the beam
b) On the beam under FPB loading
c) On the beam under TPB loading
FIG.8.11 a) Slip line field solution for an indentation problem 209
b) Axial stress distribution in an unnotched beam with
rigid plastic material properties under FPB loading 209
c) Axial stress distribution in an unnotched beam with
rigid plastic material properties under TPB loading 209
FIG.8.12.a Load-load line displacement relations for the unnotched
TPB configuration 210
FIG.8.12.b Load-load line displacement relations for the unnotched
FPB configuration 211
FIG.8.13 Variation of constraint factor with load point displacement 212
FIG.8.14 Variation of constraint factor with crack extension 213
FIG.8.15.a Representation of resistance in terms of JQ 214
FIG.8.15.b Effect of normalised abscissa on J0 resistance curves 215
FIG.8.16.a Representation of resistance in terms of Jj+1 216216

FIG.8.16.b Effect of normalised abscissa on Jl+1 resistance curves 217
FIG.8.17.a Representation of resistance in terms of J jp j 218
FIG.8.17.b Effect of normalised abscissa on JTPT resistance curves 219
FIG.8.18.a Representation of resistance in terms of Jy 220
FIG.8.18.b Effect of normalised abscissa on Jy resistance curves 221
FIG.8.19 Total work and work rate as a function of crack extension 222
FIG.8.20.a Total plastic work (dissipated energy) as a function of crack
extension 223
FIG.8.20.b Dissipated energy rate as a function of crack extension 224
FIG.8.21 Variation of elastic energy (recoverable) with crack extension 225
FIG.8.22.a COD resistance curves 226
FIG.8.22.b COD resistance curves with normalised abscissa 227
FIG.8.23.a Variation of normalised load line displacement with crack
extension 228
FIG.8.23.b Variation of normalised load line displacement
rate with crack extension 229
FIG.A1.1 a) Contour for J-Integral evaluation 240
b) Contour defined by points for J-Integral evaluation in
FE studies 240
28

29
LIST OF TABLES
TABLE 6.1 Generalised constants for representing the load
displacement relations for the edge cracked geometry 147
TABLE 8.1 Geometrical and loading variations of specimens studied 230
TABLE 8.2 Crack length, crack extension and compliance data
of the six specimens (B=20, W=50, S/W=4) used
to study crack front curvature 231
LIST OF PLATES
PLATE 8.1 Crack surfaces of broken calibration specimens
showing different amount of crack extensions 232
PLATE 8.2 Crack surfaces of various broken specimens showing
different size of shear lips and crack extensions. 232
PLATE 8.3 Crack surfaces of various broken specimens showing
different size of shear lips and crack extensions. 233
PLATE 8.4 Crack surfaces of various broken specimens showing
different size of shear lips and crack extensions. 233

30
CHAPTER 1
INTRODUCTION
Structural components, however well built, will always have some
kind of m etallurgical or m anufacturing defect. Under service
conditions, eg. cyclic loading, a crack may originate from such
defects. Development of a crack in a structural component may also
be the result of various other factors, such as accidental
overloadings, environm ental conditions and regions of stress
concentrations.
Fracture mechanics is an extremely useful tool for assessing the
integrity of cracked components. For example, it may be used for
estimating the critical load or crack length of a component when
subjected to static loadings. For this type of analysis a material
related fracture mechanics parameter such as initiation toughness
is essential.
In this study static mechanical loadings of cracked components are
considered and fracture analysis is carried out assuming a
continuous and homogeneous material with isotropic properties.
Furthermore, the cracked geometry and applied loadings are generally
represented by simplified models.
The fracture of structural steels may be broadly classified into
brittle (c leavage) and ductile types. M icroscopically, cleavage
fracture occurs by direct separation along crystallographic planes

31
and is usually associated with negligible plastic deform ation,
although post-yield cleavage, i.e. crystal separation after general
plastic flow is also found. Ductile fracture, however, is by
micro-void coalescence, M VC, and is usually associated with
relatively large plastic deformations, although these might be so
localised that an overall elastic theory is still adequate. From the
continuum mechanics point of view, the behaviour of a cracked
component is either, essentially elastic or elastic-plastic. While an
elastic stress analysis technique may be applied effectively for the
analysis of the former type, the extent of yielding in the latter type
requires an elastic-plastic analysis.
In the Linear Elastic Fracture Mechanics (LEFM) regime cracked
geometries are characterised by the stress intensity factor 'K' (or
equivalently by the elastic energy release rate 'G'). In Elastic Plastic
Fracture Mechanics (EPFM) regime, the K concept ceases to be useful,
and this has led to the development of the two leading post yield
fracture m echanics param eters, J -In tegra l and C O D (5 ). The
m athem atically rigorous J-Integral is only strictly valid for 2-D
plane problem s (p lane stress/strain ) with non-linear elastic
material characteristics. However, it is widely used as a toughness
param eter for elastic-plastic materials in practical situations.
Finite element, FE, methods are readily applied to cracked geometries
for the evaluation of the crack tip severity. Often two-dimensional
analysis, corresponding to the plane stress and plane strain
extrem es, are applied to determine the bounds of the solution.
Alternatively, for 3-D FE studies modified versions of the J-Integral
can be applied.

32
Generally accepted standard methods for fracture toughness testing,
provide critical K values under plane strain conditions for the LEFM
regime and initiation values of J and COD in the EPFM regime.
Recently, characterisation of material's toughness properties in the
form of resistance to crack extension, R-curves, has proved to be
useful. It was generally anticipated that R-curve could be expressed
as a material characteristic independent of geom etry other than
thickness. This, however does not seem to be so particularly for the
EPFM ones. The scaling of J R-curves has been studied by
T u rn e r (1 9 8 6 ) , and s iz e -re la te d va ria tio n s in toughness
characteristics have been reduced significantly for some cases, by
various normalisation schemes.
The main aim of this thesis is to estimate the applied crack tip
severity for various models of components using J-Integral methods
taking account of several features not normally considered. In
particular the role of stress concentartion factors (SCF), degree of
plane strain, combined tension-bending loading, large ductile crack
growth, and estim ations from load displacem ent equations are
examined. Analytical, numerical and experimental methods utilising
various definitions of J-Integral have been used. The EnJ estimation
method, which essentially provides guidance for the prediction of
applied severity, has been applied to cracks in regions of stress
concentrations.
The organisation of this thesis is outlined below.
Directly relevant and related topics have been reviewed under two
separate headings; linear elastic fracture mechanics (Chapter 2), and

33
elastic plastic fracture mechanics (Chapter 3). This is followed by
the review of finite elem ent methods in fracture mechanics in
Chapter 4.
The modification of a 2-D finite element code, thus making it
suitable for semi-plane strain problems, is outlined in Chapter 5.
M ath em atica l deve lopm en ts for e lastic and e las tic -p las tic
conditions are followed by the application to standard test piece
geometries and discussion of results.
The estimation of J-Integral from load displacement equations of
cracked geometries are considered in Chapter-6 where two separate
forms have been considered to represent numerically obtained data.
Comparisons of J-Integral estim ates from these equations with
those from FE studies are provided. An extensive discussion of the
method and results is also given.
The relation between J-Integral and external work done is studied
analytically and num erically in C hapter 7 for edge cracked
geom etries. Specifically the effect of eccentricity of the applied
load on plastic r[ factor (which relates J to work done) is examined.
Comparison and discussion of analytical and numerical results for
deep notch cases is followed by a method suggested for shallow
notch cases.
In Chapter 8 , J resistance curves for H Y-130 steel are studied
experimentally using bend type specimens and the effects of the size
of the specimen's uncracked ligament on resistance curves are
investigated. An apparent rise in the limit load due to crack

34
extension, especially for specimens with small initial uncracked
ligament, has been found and explained. Results are presented using
J-Integral and work component definitions. A useful form to relate
size-dependent R-curves is provided and the applicability is
discussed.
The application of EnJ estimation method to cracks emanating from
regions of stress concentrations is given in Appendix-4 (also in
EC F6(1986)). Typical models of structural components, with various
geometrical discontinuities and crack sizes, subjected to bending or
tensile loadings have been considered. Comparison of numerical
results with those from the EnJ estimation method is provided. In
the LEFM regime, cracks are divided into the well known 'short crack'
and 'long crack' categories. A relationship is stated to establish the
category of a given crack geometry. The method has been extended
into the EPFM regime where the EnJ estimation method is also found
to be useful.
A better understanding of approximate treatm ents of all these
factors has emerged. In principle such improved or more rational
treatments could be inserted in any of the EPFM design methods, EnJ
as used here or the better known R-6 or COD methods. That step has
not been attempted and remains for the future.

3 5
CHAPTER 2
LINEAR ELASTIC FRACTURE MECHANICS
2.1 INTRODUCTION
Linear Elastic Fracture Mechanics (LEFM) evolved from early studies
of stress analysis around material discontinuities, namely cracks. In
recent years this has proved itself to be a useful tool in assessing
the integrity of structures containing crack like defects. The
applicability of LEFM is restricted to those structures which, either
remain or behave essentially elastically w here the plasticity is
confined to a small region around the crack tip.
LEFM is well established. With its simple formula supported by vast
am ount of inform ation provided in handbooks for various
configurations, it can be used to evaluate the applied crack tip
severity almost under any loading condition.
2.2 THE ENERGY BALANCE APPROACH
2.2.1 The Griffith Theory
Griffith(1924) used lnglis(1913) solution for the stresses around an
elliptical hole in an infinite plate in tension, to calculate the change
in the stored elastic energy in the plate due to the introduction of a
through thickness crack. For a thin, biaxially loaded plate (see
F ig .2 .1 ) having fixed boundary conditions (i.e . at constant
displacem ent) Griffith presented the following equation for the
evaluation of this change of elastic strain energy content.

3 6
(2.1)
w here wr = total released strain energy due to the introduction of the crack
c=uniform stress at infinity
a=half crack length
E=Young's modulus of elasticity
B= Thickness of plate
Griffith argued that this released elastic strain energy due the
introduction of the crack is expended to form the new crack surfaces.
Hence writing the surface energy of the crack as;
w h ere ye is surface energy per unit area, Griffith further argued that
instability would occur when the released elastic strain energy due
to an incremental crack extension, Aa, exceeds the energy required to
form that incremental crack surface. Therefore, for instability,
Since fixed displacement conditions are imposed, the amount of
strain energy released is equal to the decrease in the strain energy
content of the body. Instability condition is therefore expressed as
the decrease of strain energy rate (at constant displacement) being
bigger than the increase in surface energy rate (equ.2.4.a). The
critical values of stress and crack length at the Instant of instability
is then found from the equality of these energy rates (equ.2.4.b).
U = 4 B a vS *8 (2 .2 )
A w .> AU s (2 .3)
(2.4.a)

3 7
CTc (2.4.b)
Subscript (c) in Equ.2.4. refers to critical values of stress and crack
length and q refers to the displacement of load point.
The elastic strain energy release rate per unit thickness due to crack
extension at constant displacement is denoted by G after Griffith,
there fo re ,
The elastic loading lines of a body containing different crack lengths
are schematically shown in Fig.2.2. Referring to this figure and
equ.2.5 the area OAB may be identified as B.G.Aa.
2.2.2 Modifications To The Griffith Original Theory
Original Griffith's theory was based on materials exhibiting no
plasticity, and were suitable for plane stress conditions. For plane
strain cases it is appropriate to modify the Young's Modulus only to
an effective value as;
where v = Poisson's ratio.
For m etals the G riffith theory is m odified as suggested
independently by lrwin(1947) and Orowan(1949). This modified form
includes the plastic work done in the vicinity of the crack tip as an
additional energy term to surface energy term required for the
formation of new crack surfaces. Therefore, a more general,
modified Griffith relation is given as follows:-
G =1 / dw \ ic a2 a B ' da '3 ~ E1 / dw (2.5)
(2.6)

38
2 E* yn a.
w here E'=E for plane stress conditions
=E/(1-v>2)
(2-7)
Y = Y 9+Yp
yp represents work done due to plastic deformation in the crack tip
region.
Although Griffith's theory is based on unit thickness of the material,
lrw in(1947) argued that, crack extension under elastic conditions
would be expected when the elastic energy released due to an
incremental crack area exceeds the total energy required (surface
energy and work of plastic deformation around crack tip) for that
incremental crack surface area. Later Irwin and Kies(1952) restated
this argument by changing the incremental crack area to incremental
crack length and per unit thickness. This latter argument assumes
that the crack front shape remains constant during any crack
extension.
2.2.3 Griffith Theory for General Boundary Conditions
Griffith theory, based on unit thickness, was expressed for fixed
boundary conditions, where there is no external work input to the
body during any crack extension. Under these conditions, since the
extending crack causes the compliance of the body to increase, a drop
in the applied load is observed.
Under fixed load boundary conditions, the increase in the compliance
due to crack extension causes an increase in the displacement of the
load point, hence allowing energy input to the system (see Fig.2.2).
Referring to Fig.2.2, the strain en^gy terms before and after the

3 9
crack extension Aa, and the work input during crack extension Aa is
related as:-
w (a) + AU - w(a+Aa) + area(OACB) (2.8)
w here AU = Q.Aq (area ACEDB)
w (a) = strain energy of the body having a crack of length (a)
(area OABD)
From equ.2.8 it can be seen that the in internal energy of the body
increases during a small crack extension at constant load. This
increase is represented by the area (OACB) and since the area (ABC) %is a second order term,
OACB-OAB = B.G.Aa
Q
(2.9)
(2.10)
Under fixed load crack extension, the energy required for both,
creating new surfaces and increasing the strain energy content of
the body comes from the work increment (or loss of external
potential energy).
2.3 STRESS INTENSITY APPROACH
2.3.1 Irw in's Stress Intensity Factors
Irwin (1957) used the mathematical procedures of W estergaard
(1939) to develop a series of equations for the elastic crack tip
stress field. Irwin showed that the stress field at the tip of a crack
is characterised by a singularity of stress which decreases in
proportion to the inverse square root of the distance from the crack
tip. Irwin (1958) later generalised the crack tip stress field, which
is dominated by the singularity, as the sum of three distinct stress
patterns, taken in proportions, depending on load, dimensions and
shape factors. The three stress patterns which are generated by the

4 0
three "modes of fracture". These modes, shown in Fig.2.3, are:-
Mode I:- The opening mode: The crack surfaces are forced to move
away from each other in opposite directions normal to the
crack plane.
Mode II:- The sliding mode: The crack surfaces are forced to move,
in opposite directions, in the plane of the crack and normal
to the crack front line.
Mode III:- The tearing mode: The crack surfaces are forced to move,
in opposite directions, in the plane of the crack and
parallel to the crack front line.
Among these modes, the opening mode; Mode I, is considered to be the
most severe, hence received most attention by engineers and
scientists. In this thesis, unless otherwise stated, discussions will
be limited to the opening mode (M ode I). The stresses and
displacem ents equations in cartesian coordinate system , as
generated by Irwin, for the near crack tip region under Mode I
loading, are given below in tensor form (refer to Fig.2. 4. for
coordinate system).
w here K, = Stress intensity factor
(2.11.a)
(2.11 .b)
r,0= polar coordinates
|i=shear modulus
f(0), g(0) = functions of polar angle
41
The out of plane stress and displacement equations for plane stress
and plane strain cases should be added to those above for
completeness. The stress intensity param eter (K,) describes the
magnitude of the inverse square root stress singularity at the crack
tip. Expressions similar in form to those of Equ.2.11 were also
developed for Mode II and for Mode III loadings, incorporating K|(and
K,,, as stress intensity factors respectively. These stress intensity
factors can be expressed as a function of the geometry and loading as
fo llo w s;
o = remotely applied stress level for Mode I
= remotely applied shear stress (in plane for Mode II, and
out of plane for Mode III)
S ince stress intensity factor, K, provides a one param eter
description of the crack tip environment, the material resistance to
fracture can now be characterised as by a critical value of stress
intensity factor, Kc. Therefore the critical value of applied stress at
infinity for a given geometry and material can be expressed as;
K|| =C 2o J n a
K||| = C3 ° (2.12)
w here C= relevant geometric factor
Kca (2.13)

4 2
2 .3 .2 S tress In te n s ity F acto rs fo r F in ite G eo m etries
The solution for stress intensity factor in the previous section is
strictly valid for the infinite plate containing a small crack of
length 2a. For finite geometries the expression for stress intensity
factor needs further modifications as the finite size will influence
the crack tip stress field. A general form of the modified expression
where C 1 and /(a /w ) have to be determined by stress analysis. But
the complexity of the problem limited the closed form solutions to a
few special cases only. In general practice the stress intensity
factors are obtained by approximate methods, where equ.2.14 is
simplified as;
where Y is referred to as the shape factor of the geometry under the
given type of loading. The values of Y for a vast number of
geometries can be found in various handbooks, such as Rooke and
Cartwright(1976) and Tada et al (1973).
For an infinite plate containing a small through thickness crack the
shape factor Y is unity. Comparison of Equ.2.15 with Equ.2.5 indicates
a relationship between K, and G, for the infinite plate case under
plane stress condition. This can be generalised to cover both plane
stress and plane strain conditions.
is;
(2.14)
(2.15)
(2.16)
where E'= E for plane stress, = E/(1-d 2) for plane strain

4 3
The equivalence of energy release rate, G, and stress intensity
factor, K was shown above in a simplified form. A rigorous proof of
this equivalence is given by Garwood(1977 ).
2.4 CRACK TIP PLASTIC ZONE; SIZE AND SHAPE
2.4.1 Introduction
Irwin's crack tip stress equations result in infinite stresses at the
tip of a sharp crack. But, because structural m aterials deform
plastically when subjected to stress levels above some effective
yield stress value, a plastic zone instead of the stress singularity,
will exist at the crack tip region of a loaded crack (see Fig.2.5). The
shape of this plastic zone is complex and difficult to describe. For
this reason, models of this plastic zone attempt either to describe
the size by assuming a selected shape or describe the shape and
retain the size to a first order approxim ation. As a first
approximation to the the plastic zone size in plane stress, (r ), yield
stress value may be substituted in Equ.2.11 for the case of 0= 0 ,
giving,
= 1 ( K| )2 rpa 2n 'ey *
ys(2.17)
2.4.2 Irwin's Plastic Zone Model
lrw in(1960) considered an elastic-perfectly plastic material and
assumed that the plastic zone ahead of the real crack has a circular
shape of radius rpo, given by Equ.2.17 for plane stress cases (see
Fig.2.5). Further, Irwin argued that this plastic zone makes the real

44
crack behave as if it was longer than its physical size by rpo. This
notional crack is assumed to have the elastic stress field outside the
plastic zone.
For plane strain conditions, the triaxiality of the stresses causes the
stress level in the plastic zone to increase by a factor of three.
Substituting the yield stress in Equ.2.17 by this high value of stress
(3 a y) present in the plastic zone gives a plastic zone size for planeof
strain cases which is smaller than that for plane stress by a
factor of nine. Irwin argued that this factor of nine is too severe,
since the stress in the plastic zone is not uniform and plane stress
conditions prevail at open surfaces, and suggested the following
equation as more appropriate.
rpe=_L(Jiy
671 Vrr 'ys
(2.18)
The stress intensity factor for this notional crack is based on the
effective crack length which includes the contribution from plastic
zone size.
Kl = a Y >/ 7t(ae()' (2.19)
ae ( = a + rp (2.20)
2.4.3 Dugdale's Plastic Zone Model
Dugdale (1960) also considered an elastic-perfectly plastic material
and assumed that the plastic zone ahead of the real crack is in a
form of narrow strip along x-axis (see Fig.2.6). Dugdale, as in Irwin's
analysis also argued that a notional crack increment must be added
to the real crack size to account for plastic zone. However, Dugdale's

4 5
model assumes that this notional crack increment extends right
through the plastic zone, and carries a uniform stress. Although the
model is based on elastic-rigid plastic material behaviour under
plane stress conditions, the stress in the plastic zone may beof
assumed to be higher than the yield stressvmaterial . This extends
the applicability of the model to materials with work hardening
characteristics. Under plane stress conditions and referring to the
yield stress of the material, the plastic zone size in this model is
calculated by;
aa+r
pa
rpa when a « cr and r « ays pa
(2.21.a)
(2.21.b)
Although the size of the plastic zone for plane stress cases obtained
by Dugdale's model is comparable to that obtained from Irwin's model
(Dugdale's model predicting 23% bigger compared to Irwin's model),
the notional crack increment for Dugdale's model is bigger than that
of Irwin's by a factor of approximately 2.5.
2.4.4 Plastic Zone According to Yield Criterion
The two yield criteria, von-Mises and Tresca, can be employed to
find the shape and size of the plastic zone at the crack tip. Equations
2.22.a and 2.22.b, given below, are obtained by using Irwin's elastic
crack stress field equations and Von-Mises yield criteria for plane
stress and plane strain conditions. Similar equations may be obtained
by em ploying Tresca's yield criterion (see B ro ek (1982) for
mathematical details). The plastic zone defined by Equ.2.22 is shown
in Fig.2.7.a.

4 6
«2r (0) = — ( l + - S i n 20 + Cos0) p° 47taJ 2
(2.22.a)ys
r (0) = -— — ( Sin20 + (1 -2 d )2( 1+ CosG)) pe 4jca?_ 2
(2.22. b)
Plane strain conditions prevail at the interior parts of a relatively
thick material containing a through thickness crack. But the through
thickness stress, a 2Z gradually decreases from that of plane strain
value at mid-planes to zero at outer surfaces. As a consequence of
this decrease o fo zz the plastic zone size gradually increases to plane
stress values at outer surfaces (see Fig.2 .7 .b)
2.4.5 Crack Tip Opening Displacement (COD)
Irwin's elastic crack displacement equations may be modified, by
changing the reference coordinate system, see Fig.2 .8 .a, to give
displacements of crack flanks as given by Equ.2.23 . It is to be
emphasised here that this equation is derived from Irwin's elastic
crack field equations which are valid for the immediate vicinity of
the crack tip. Further, this equation has no significance for x>a and
x<-a.
4a / , 2 17Uy = -gTV (a - x ) (2.23)
Equ.2.23 predicts zero displacements at the very crack. If the
notional crack is considered, see Fig.2 .8 .b, the displacement of the
physical crack tip can be estimated by substituting (a+rp) and (a) for
(a) and (x) respectively in Equ.2.23. Hence,

4 7
8 =2 2
(a+rp) -a
5 =
w here 8= COD
(2.24)
m=1 for plane stress, 3 for plane strain
Similarly for the Dugdale Model, Burdekin and Stone(1966) derived an
expression for COD given by Equations 2.25 and 2.26. Although these
equations are given with reference to yield stress, sometimes a
weighted avarage between yield and flow stresses is used in
practice.
8 a8 =
ys%E a Ln S e c ( - ^ - )
2a ys(2.25)
when the applied remote stress is much smaller than the yield stress, equ.2.25
simplifies to that given by equ.2.26.
8 =JS
Ea.when « 1.
a.(2.26)
ys ~ys
The COD calculated from Dugdale's model is slightly less that that
calculated from Irwin’s analysis.
2.5 PLANES OF PLASTIC DEFORM ATION AT THE CRACK TIP
The state of stress in the vicinity of the crack tip will determine the
planes of maximum shear stress, along which deformation will occur.
Using Mohr's circle and Irwin's elastic crack stress field equations,
these planes are determ ined. For cracks under plane stress
conditions, the maximum shear stress planes are found to contain the
4 8
x-axis and be at 45° from y-axis (see Fig.2 .9 .a). For plane strain
conditions, and assuming constant volume plastic deformation, the
maximum shear stress planes are found to contain the z-axis and be
at 45° from y-axis (see Fig.2.9.b).
2.6 EFFECT OF THICKNESS ON FRACTURE TOUGHNESS
For fracture to occur, the applied crack stress intensity must be
equal to a value, Kc. It is found that this critical value of stress
intensity factor is highly affected by the thickness of the material.
The general shape of the Kc as a function of thickness (constant
width) is shown in Fig.2.10. For relatively thick plates the critical
value of toughness approaches to a constant, known as "plane strain
fracture toughness value, K|C", which is taken to be the material
property. Although various models have been proposed to explain the
thickness dependence of fracture toughness, (eg; Hartranft(1973) )
none of these are considered satisfactory. It is generally accepted
that planes of maximum shear stress, discussed in previous section,
have an effect on fracture, causing slant fracture under plane stress
and flat fracture under plane strain conditions. G enerally the
increase in fracture toughness is attributed to the increasing
proportion of the slant fracture (shear lips) to flat fracture.
2.7 THE K DOMINANT CRACK TIP FIELD
In LEFM the field solutions in a small region D, surrounding the crack
tip are determined by K. The presence of a plastic zone at the crack
tip, of which the size rp is also determined by K, disturbs the strict

4 9
K based field solutions. Whilst LEFM requires this plastic zone size
to be small compared to the crack length, it should also be small
compared to the K dominant region D, to have negligible influence on
the field solutions (Fig.2.11).
rp « D < a (2 .27)
Under these restrictions, the K dominant region D, determines the
stresses and strains at the plastic boundary and controls all
occurrences within it. This implies equal crack tip field state for
equal K irrespective of geometry and loading conditions.
2.8 K|C TESTING
This is aimed at determining the lower bound fracture toughness
which may be considered as a material property. Strict guidelines as
to the size requirements and testing procedure are given in ASTM
E-399(1981) and B.S.5447(1977). While the minimumm thickness of a
specimen for a plane strain dominant crack tip is related to the plane
strain plastic zone size ( B > 50 rpe), other size requirements are
specified to guarantee fracture condition which will be determined
by the K field ( as discussed in previous section). All the test piece
size requirements may be simply expressed as:-
B.b.a > 2.5 (K|C/a ys)2 (2 .28 )
Specimen types are recommended on the basis of achieving fracture
conditions at relatively lower loads. These include C-shaped, TPB and
CT specimens where in all of them the uncracked ligament is
primarily subjected to bending stresses.

50
2.9 THE LEFM RESISTANCE CURVE
G riffith 's(1924) energy balance criterion for crack extension, as
modified by lrw in(1947) and O row an(1949) requires the elastic
energy released (or change of potential energy) due to an incremental
crack extension to be equal to the energy required to form the
incremental crack. This energy required for an incremental crack
extension, when expressed as a rate is referred to as the material's
resistance to crack extension, R (Equ.2.29). The criterion for crack
extension in terms of resistance (Equ.2.30) is the equality of 'G' to
the materials resistance, R.
G = R
(2.29)
(2.30)
w here U p= crack tip plastic deformation work related to crack
extension.
Except for the cases of plane strain, the material resistance to crack
extension varies with crack extension. This variation of resistance
to fracture with crack extension is presented as a resistance curve
(R-curve). The constancy of R for a growing crack under plane strain
conditions, ( « B ), results in a constant critical value of value ofpe
G c, denoted by G |C (see Fig.2 .12). For those cracks which are not
under plane strain conditions ( rp is not small compared to B), the
varying resistance to fracture due to crack growth requires a varying
value of G for continued crack extension.
Krafft et all(1961) observed the variation of fracture toughness with
size of the specimen and proposed the rising R-curve with crack
growth. The rise of R with crack growth was attributed to the energy
absorbed by the increasing size of shear lips as crack growth

51
progresses. Krafft stated that instability will only occur when the
elastic energy release rate is elevated, by raising the applied load,
to a position of tangency with the rising R-curve (see Fig.2 .13 .a).
Therefore at the point of instability;
G c= R
0G _0R 3a “ 3a
(2.29.a)
(2.29.b)
Krafft also suggested that the R-curve is invariant, implying that the
fracture conditions for other cracks having different initial crack
lengths but same thickness, can be examined by this 'unique R-curve'
(Fig.2 .13 .b). The tangency condition for different initial crack lengths
will then dictate the corresponding critical value of G c and total
stable crack extension.

a♦ ♦♦ ♦
FIG. 2.1 Crack in an infinite plate under biaxial loading
FIG. 2.2 Elastic load-displacement diagram for a cracked body

53
*
Opening Mode Sliding Mode Tearing Mode
FIG. 2.3 . Modes of fracture
FIG. 2.4 Three dimensional crack tip coordinate system

54
(a)
(b)
(c)
FIG. 2.5 Plastic zone size and notional crack increment(a) First estimate of plastic zone(b) Irwin's plane stress plastic zone(c) Irwin's plane strain plastic zone

55
FIG 2.6 Dugdale Model of Crack Tip Plastic Zone

56
(b)
#*•
FIG. 2.7 Plastic zone shape according to Von-Mises yield criteria(a) Two dimensional(b) Three dimensional
FIG. 2.8 a) Displacement of Crack flanks when loaded in opening modeb) Definition of COD for the notional crack at the original crack tip.

57
(a)
FIG. 2.9 Planes of maximum shear stressa) Plane stressb) plane strain
Slant
(a) (b)
FIG. 2.10 a) Variation of Kc with thickness b) Slant and fiat fracture

58
FIG. 2.11 The concept of 'K-Dominated Region'
FIG.2.12 R-curve for plane strain behaviour

59
FIG. 2.13.a Krafft's original rising R-Curve.
a
FIG. 2.13.b. Use of the Unique R-curve to examine fracture conditions for different initial crack lengths..

6 0
CHAPTER 3
ELASTIC-PLASTIC FRACTURE MECHANICS
3.1 INTRODUCTION
W here LEFM param eters cease to apply as crack characterising
parameters because of the assumptions made are no longer valid,
some other parameters are to be used. Among those proposed COD(8)
and J-Integral have emerged as the two popular single parameter
methods to measure the severity of crack tip loadings beyond the
reach of LEFM. Both of these methods degenerate to LEFM parameters
when those conditions of LEFM are satisfied, hence they are referred
to as Elastic-Plastic Fracture Mechanics (EPFM ) parameters. As
discussed by Turner(1984), there is some doubt about the adequacy
of single parameter EPFM methods in some cases. For example
McClintock(1965) has pointed out the deficiency of these methods
for non-hardening materials. On the other hand expressions, based on
J-Integral, uniquely describing the stress and strain intensities at
the crack tip for power law hardening materials were derived by
Hutchinson(1968) and Rice and Rosengren(1968). Although some
restrictions are present, the use of these EPFM parameters, at least
for certain types of material behaviour and constraint have proved
worthwhile, both in testing and design.
3.2 CRACK OPENING DISPLACEM ENT, COD (5)
3.2.1 Introduction
This is a strain based EPFM crack characterisation parameter,
introduced by W ells(1961). The method is based on the assumption
that fracture process is controlled by the intense deformation rather

61
than the stress level at the crack tip region after significant
plasticity occurs. The method also assumes that COD (6) is a measure
of this intense deformation, and a critical value of COD, 8„ exists at
which crack extension begins.
W ells(1963) considered non-work hardening material and suggested
that the energy balance under plane stress conditions for an
incremental crack extension can be written as follows.
G = 8.ays (3.1)
This suggestion is in agreement with the results obtained by Stone
and Burdekin(1966) from Dugdale model of plastic zone. For plane
strain conditions Equ.3.1 can be modified by using a constrained yield
stress value. Therefore a more general equation relating COD to
elastic energy release rate is:-
G= m .ays. 8 (3.2)
where m is factor accounting for the constraint available. According
to LEFM the value of m is V3 for plane strain conditions, but can go
as high as * 2 .9 8 if the Prandtl type slip line field solutions are
considered for contained yielding. However, for most cases m cannot
remain at such high values throughout the yielded zone, especially if
net section yielding occurs, otherwise the stresses in the ligament
will require loads larger than the collapse load.
3.2.2 Determination of COD.
Analytical prediction of COD was introduced in the previous chapter,
where the predictions were kept simple and suitable for LEFM. Both
of the methods considered are based on the size of the plastic zone

62
ahead of the tip of a loaded crack. The equation for COD obtained
from Dugdale model of plastic zone is also suitable for cases beyond
LEFM.
Experim ental and com putational determ ination of COD poses
difficulties and uncertainties depending on the technique used
(F ig.3.1). Experimentally direct measurement of COD at the very
crack tip is impossible, hence various techniques/methods suggested
rely on m easurem ents made elsew here. For exam ple in the
in filtration studies, (eg. G ib so n (1986) ), apart from other
uncertainties in the method, the position of COD measurement is
somewhat arbitrarily selected. B .S .5762(1979) assumes a two
component definition of COD. W hile the elastic component is
determined from K as given by Equ.2.24, the plastic component is
extrapolated from crack mouth displacem ent m easurem ents by
assuming a hinge rotation somewhere beyond the crack tip (Fig.3.1).
COD determination from finite elements, FE, studies of cracked
geometries also presents difficulties in deciding the position from
where the assessment is to be made. Several methods, basically
describing how and from where, with respect to crack tip, the
assessment of COD is to be made have been proposed, a summary of
which is given by Turner(1984) (more details in section 4). There is
no agreed number for the value of (m) in equ.3.2. Subject to geometry,
loadings and method used to determine COD, values ranging from 1.0
to 2.14 have been reported in literature.
3.2.3 Basis of the COD Design Curve.
Using Dugdale's strip model of plasticity Burdekin and Stone(1966)
evaluated the overall strain over a gauge length D, for a centre
cracked geom etry in the axial direction (F ig .3 .2 .a) and plotted

63
non-dim ensional CO D values, O , against strain ratio, e /e forys
different crack to gauge length ratios (Fig.3 .2 .b). The intention was
to provide a family of curves suitable for design.
<x>=2n a e ys
eys =ysE
(3 .3 .a )
(3.3.b)
Experimental work by Burdekin and Stone(1966) carried out on wide
plates proved that the analytical estimates of the COD are too
conservative for strain ratios over 0.5. The COD design code
PD6493(1980) takes Equ.3.4 given below, which represents an upper
bound curve to the experimental data, as the basis for design
purposes.
® = ( — )e. 'ys
e
eys
for — < 0 .5 e
(3 .4 .a )ys
0 .25 for — > 0 .5 e ys
(3.4 .b )
w here
0>=2 % e ays
I = Yn
(3.4.C)
(3.4.d)
3.3 J-INTEGRAL
3.3.1 Introduction.
The J-Integral concept, introduced by R ice(1968) using one of
Eshelby's(1956) two dimensional path independent contour integrals,
is an energy balance approach. The form of J-Integral as proposed by

64
Rice(1968)is given below (Equ.3.5). The path independency of the
J-Integral can be proved by using the property of J which is equal to
zero for a closed path as shown in Fig.3.3. And the path independency
of J-Integral may be utilised for its evaluation, by using such
contours passing through areas of known stress/strain states away
from the crack tip zone.
J = j ( Zdy -T .|j± d s ) (3.5)r
w here Z= strain energy density
r = path surrounding crack tip, traversed in anticlockwise
direction
T=Traction vector, normal to the path in outward direction
u * displacement vector
ds= an elemental length of the path
R ice(1968) assumed non-linear elastic m aterial behaviour, and
showed that J-Integral is equivalent to the change of potential
energy for a virtual crack extension, da, that is:-
J4 <£>o-4 <£)B x 0a 'q
w here V= Potential energy
(3.6)
W hen this is reduced to linear-elastic cases this potential energy
change is identified as the elastic energy release rate, G. Therefore
for linear elastic cases:-
Jel = G (3.7)

65
Similar to linear elastic cases, the potential energy change due to
crack extension for a non-linear elastic material can be represented
graphically as shown in Fig.3.4. Therefore, referring to this figure, J
can be written as follows.
(3.8.a)
(3.8.b)
If J, analogues to G, is considered as an elastic-plastic energy
release rate, though strictly based on non-linear elastic (NLE)
m aterial behaviour, it will have a critical value, Jc to predict
fracture conditions.
Plasticity problems can be dealt with by treating the stress-strain
relations as non-linear elastic through the deformation theory of
plasticity. The restrictions imposed on J-Integral when applied to
problems with real elastic-plastic m aterial properties originates
from the NLE material assumption in the formulation. Although
non-linear elasticity satisfies path independency requirement of
J-Integral, it restricts any part of the m aterial from unloading
during any stage of loading, because the physical unloading path will
be different from that predicted by deformation theory of plasticity.
The latter implies that any crack extension is to prohibited for
J-Integral to be applicable as an energy release rate, as newly
created crack surfaces will indicate unloading there. Nevertheless,
the J-Integral has been proposed and used as a general EPFM
parameter for cases associated with appreciable plasticity and crack
growth.

6 6
J-Integral, similar to its elastic equivalent, G, is related to COD
through an equation similar to Equ.3.2. Depending on various
definitions used for the assessment of COD and in plane constraint,
the constant m in Equ.3.9 may have values in the range of 1.0-2.4.
J - m cys8 (3.9)
However, for contained yield problems, Dugdale model may be
utilised to estimate COD, hence J using equ.3.9 where the value of m
is then fixed.
3.3.2 HRR Stress and Strain Field Equations.
Hutchinson(1968) and Rice and Rosengren(1968) demonstrated that
J-Integral characterises the stress and strain singularity around the
crack tip. For their analysis, they considered a non-linear elastic
material obeying the stress-strain relation given by Equ.3.10. It is to
be noticed that the second term of this equation gives the plastic
component of strain while the first gives the elastic component.
— = - 2 - + a ( - 5 - ) N evg a ays ys ys
(3.10)
w here N = Hardening exponent, 1 for linear elastic, ©o for perfect
plastic material
a = constant
In the analysis, both Hutchinson, and Rice and Rosengren, considered
such remotely applied stress levels causing a crack tip plastic zone
size small compared to the size of the crack. Their results indicate
the power of the stress singularity as r'l1/(1+NM and that of strain as

6 7
r -[N /(N +i)] obviously for the linear elastic case, (N =1), powers of
singularities are identical to those of Irwin’s (E qu .2 .11). These
solutions, referred to as 'HRR stress and strain field solutions',
were later written in terms of J by McClintock(1971) in the form
given below.
JEcr r*,©) = oys
Ioccyys a
1N+1 1
( r )
1N+1
fij W (3 .1 1 .a)
e y (r,0) = a e ysJE
l a a ysa
NN+1
TT ^j(0)
( r )N+1
(3 .1 1.b)
u. (r,0) = a aJE
1<x°ys a
NN+1
Nf1/ r( - ) hj(e) (3 .1 1.c)
w h e r e 1= I ( n )
The HRR solutions give support to the use of J-Integral as a crack
characterising param eter for m aterials obeying the 'deformation
theory' of plasticity. On the other hand the path independency of
J-Integral was dem onstrated, in numerical studies, by various
workers. Hayes(1970) and Sumpter(1974) considered 'flow theory' of
plasticity with von-M ises criterion of yield and verified the path
independency subject to a numerical accuracy of about 5%. Further to
these, others, e.g. Shih et al (1979), obtained the J-Integral,
considering both flow and deformation theory, and reported identical
result, even with the presence of small crack growth.
6 8
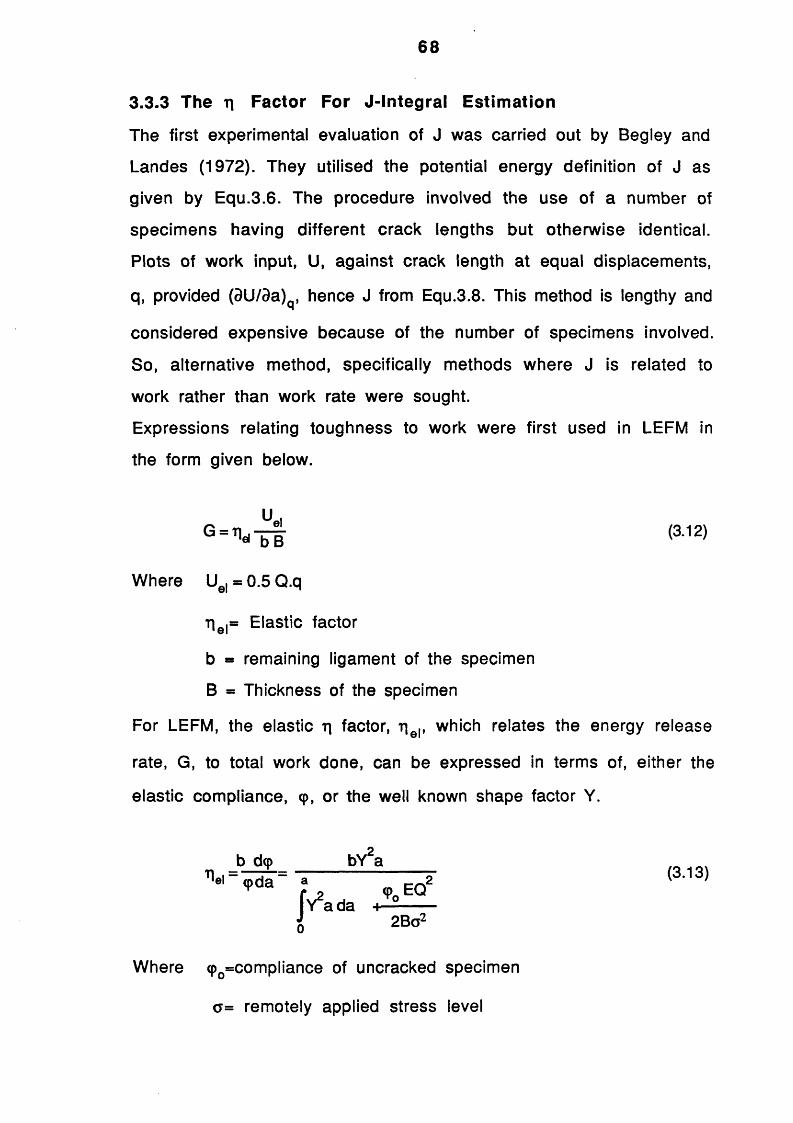
3.3.3 The i \ Factor For J-Integral Estimation
The first experimental evaluation of J was carried out by Begley and
Landes (1972). They utilised the potential energy definition of J as
given by Equ.3.6. The procedure involved the use of a number of
specimens having different crack lengths but otherwise identical.
Plots of work input, U, against crack length at equal displacements,
q, provided (3U /3a)q, hence J from Equ.3.8. This method is lengthy and
considered expensive because of the number of specimens involved.
So, alternative method, specifically methods where J is related to
work rather than work rate were sought.
Expressions relating toughness to work were first used in LEFM in
the form given below.
Where Ue| - 0.5 Q.q
*ne|= Elastic factor
b = remaining ligament of the specimen
B ■ Thickness of the specimen
For LEFM, the elastic t\ factor, r|e|, which relates the energy release
rate, G, to total work done, can be expressed in terms of, either the
elastic compliance, <p, or the well known shape factor Y.
(3.12)
b dcp(3.13)
+■
r _^2<p0 EQ
2Bg20
Where <p0=compliance of uncracked specimen
c= remotely applied stress level

69
For yielding fracture mechanics, Rice et al (1973) related plastic
component of J, to plastic component of work done and Sumpter and
Turner(1976) proposed a two component evaluation of J using elastic
and plastic work components separately (Equ.3.14).
J = ^ Uel + T1plUplBb
(3.14)
Using limit load expressions, as given by Equ.3.15, and variables
separable arguments, Turner (1984) developed expressions for
plastic tj factors, for TPB and tension specimens (Equ.3.16).
q l =L B b a.ys
DN-1
M b d LT | = N - — — •p* L da
w here N *= 1 for tension, 2 for TPB
L = Plastic constraint factor
D - Span in TPB, gauge length in tension
(3.15)
(3.16)
The t| factor is extremely useful in experimental evaluation of J,
especially for cases where Tie| and rip| are equal. For TPB cases with
D/W =4 and 0.4<a/w<0.7, t|e|=*npl=2.0. Merkle and Corten (1974) studied
compact tension geometry and later Clarke and Landes (1979) showed
that for a/w >0.45 'nel=<np|=f(a/w). In these cases, where T|e|—ri p J is
evaluated using the total work done.
J =_ \ UTBb
(3.17)
This latter form of usage of x\ eliminates the need of separating work
into elastic and plastic components and related arguments.

7 0
3.3.4 The J-Dominant Crack Tip Field.
HRR solutions show that J, apart from being an energy term, also
characterises the crack tip stress and strain field. According to
Equ.3.11, equal J will indicate equal crack tip field for the same
material irrespective of crack length and geometry, and therefore
everything happening at the crack tip should be determined by
J-integral. A material property to indicate a critical value of J, J ,
for the onset of crack extension can then be expected.
However, as real materials do not follow deformation theory of
plasticity, some limitations as to the use of J as a crack field
characteris ing param eter exist. U nder small scale yielding
conditions M cM eeking(1977) showed that there exists a small,
extensively deformed region around a blunt crack tip in which
J-Integral is path dependent. In a larger region surrounding this
small region path, independency of J is maintained. McMeeking also
showed that this extensively deformed crack tip region is still
controlled by the path independent J-Integral so long as its size is
small compared to the surrounding region. This small region is
quantified by McMeeking as roughly a circle of radius equal to 5
times the crack opening displacement centered at the crack tip.
Similar work by McMeeking and Parks(1978) was carried on deeply
cracked specimens in fully plastic state. Their findings indicate
that, under fully plastic conditions the crack tip field is closely
similar to that under small scale yielding conditions subject to
absolute size restrictions expressed as:-
b >= a J /aQ (3 .18)
where a is taken as 25 for bend geometries and 200 for ieasion
geom etries.

71
3.3.5. JiC Testing
Standard test method of ASTM E 813-81 (1981) imposes strict
requirements as to the size and geometry of the test pieces to
guarantee J-Dom inant crack tip conditions under plane strain
constraint and confine plasticity to the uncracked ligament area.
Further, as the test will involve some crack extension, this must be
limited to be very small compared to any dimension of the specimen
(see also subsection 3.3.6).
In this respect deep notch specimens where the ligament is
subjected to primarily bending stresses are preferred, due to lower
absolute size restrictions, expressed as:-
b, B >=25 JjC/o 0
0 .5<a /w <0 .75
where a 0=flow stress
In the method J, evaluated from the work input, is obtained as a
function of apparent crack growth, Aa, and then extrapolated to zero
actual crack growth for J,c . The blunted shape of the deformed crack
tip, before any real crack extension occurs, is assumed to be a
semi-circle centred at the initial crack tip with a diameter equal to
COD. The radius of this semicircle, which is expressed as 6 /2
(= J /2 .a ys ) is then subtracted from the apparent crack extension for
the actual crack extension.
Although in strict LEFM J|c and K)C are equivalent, this test is not
aimed to obtain K,c , but obtain J jC for those materials with high
toughness which cannot be treated with LEFM in convenient sizes.
(3 .19 .a)
(3.19.b)

7 2
Logston and Begley(1977) demonstrated that J,c equivalent K|C may
be an underestimate of real the K|C value for materials having high
toughness values.
3.3.6 J Controlled Crack Growth.
Crack growth invariably involves some local elastic unloadings in
real materials, which is not modelled by the deformation theory
based J-Integral. The conditions of J-Controlled crack growth,
discussed here, are imposed to assure essentially identical results
from deformation and flow theories of plasticity.
Hutchinson and Paris(1979) considered crack extension under large
scale yielding conditions. They argued that a small crack extension,
Aa, in a large region D where J field is dominant, will have negligible
effect on the J dominancy of the field values (see Fig.3.5). Hence the
first restriction of J-Controlled crack grow is expressed as:-
Aa « D (3.20)
A second restriction, concerning the proportionality of the changes
within the region D, is also imposed. Hutchinson and Paris expressed
this restriction in a non dimensionalised form as:-
0) = ^ M > > 1. (3 .21 )J da
The magnitude of J-Controlled crack growth was quantified by Shih
et al (1979). Their numerical work on CT geom etry specimens
exam ines 'near field' and 'far field' values of J evaluated along
different contours surrounding the crack tip. The qualification of
J-Controlled crack growth was then based on the close agreement of

7 3
these J-Integral values. Their findings indicate that J-Controlled
crack growth occurs for a total extension of about 6% of the original
ligament. Beyond this range 'near field' J-Integral values are lower
than 'far field' values, with an increasing difference as crack growth
increases. Furthermore, experimentally obtained J values are shown
to be in agreement with the far field values for the range of crack
extension considered there. A numerical test using the deformation
theory was carried out, and this shows complete agreement between
'near field' and 'far field' J-Integral values for the entire range of
crack extension. In this study A533-B pressure vessel steel was
used which gives ©«40 for the J-Controlled crack growth.
3.4 RESISTANCE CURVES
3.4.1 Introduction
The variation of toughness, based on J or 8 , with crack extension is
called J or 8 resistance curve respectively. In recent years this
subject has received considerable attention, and several workers
have highlighted some properties. Krafft et al (1961) had concluded
that resistance of a material to crack extension should increase due
to the formation of shear lips. However, several authors challenged
this conclusion by producing resistance curves which cannot be
explained with the formation of shear lips. Etem ad(1983) reported
increase in toughness in terms of J even with adequately
side-grooved specimens where the formation of shear lips were
suppressed. On the other hand infiltration studies by Gibson(1986)
supported the earlier claim by Garwood(1977) that COD measured at
the advancing crack tip, CTOD, is constant with crack extension even
in the presence of shear lips. Although different J formulations and

7 4
CTOD interpretations have been proposed in the representation of
R-Curves, there are still uncertainties as to its meaning. Generally J
based R-Curves are considered to be a measure of the overall
resistance, whereas CTOD based R-Curves are considered as a
measure of the local resistance to fracture.
Experimental determination of R-curves requires toughness to be
evaluated as a function of crack growth. The assessed toughness
values, J or 8 , as well as determined crack lengths depend on the
techniques used. The absence of a standard R-curve test procedure is
an indication of the lack of complete understanding of the subject.
The experim ental techniques related to the determ ination of
R-curves has been recently reviewed by Etemad(1983), Gibson(1986)
and John(1986). In the following subsections some of these methods
to evaluate J and 8 in the presence of crack growth will be
introduced, while techniques related to the crack length predictions
will be named only.
3.4.2 Methods of Experimental Crack Length Predictions
The lengthy and expensive way of producing an R-curve involves the
use of the multi-specimen test technique. In this method a number of
identical test pieces are loaded to a d ifferent point on the
load-disp lacem ent curve to cause different am ount of crack
extensions. Crack extension is then measured by breaking open the
specimen after heat tinting to mark the end of stable tearing. Single
specimen R-curve determination rely on accurate prediction of crack
length at various points along the loading path, and only initial and
final crack length can be checked at the end of the test. Some of the
crack monitoring methods are;

7 5
i) Optical method
ii) Strain gauge method
iii) Electric potential method
iv) Unloading compliance method.
The unloading compliance method will be discussed in detail in
section 8 .
3.4.3 COD From Crack Mouth Displacement Measurements
This method simply relates crack mouth opening to COD by a simple
geom etric construction, and appears to be attractive as direct
involvement with the crack tip is not required. In the analysis 8 is
considered to have elastic and plastic components.
5 - 5e + 5p ( 3.22 )
The elastic component is obtained using its relation to the LEFM
parameters as proposed by W ELLS(1963), viz;
K
m ays E'(3.23)
The plastic component 8p is obtain* by linearly extrapolating the
plastic component of crack mouth opening displacement A m p to the
crack tip by assuming a hinge rotation beyond the crack tip. For bend
geometries this hinge point is within the boundaries of the specimen
(see Fig. 3.1) and 8rt is related to A_ n as:-p 'I IjP
5 = A -------- -----------p mp ( W - b ) + r.b
(3-24)

7 6
The BS 5762(1979) assumes values for m and r as 2.0 and 0.4
respectively. Although these numbers may be justifiable by
experim ental evidences , the use of double clip gauges will
eliminate the need of assuming the position of the hinge point.
3.4.4 J Formulations For Growing Cracks
In experimental work J is invariably evaluated from the area under
load-displacement record, U, through the use of t\ factors.
J = i r g ^ (3 .25)
Strictly speaking, this formulation is true for stationary cracks or
for the so called J-Controlled crack extension regime. Over the past
years numerous procedures evolved to evaluate J for growing cracks
where the effects of crack extension is somehow accounted for.
However, close agreement among J values obtained through these
various procedures is only evident for small crack extensions. For
large crack extensions J is dependent on both the procedure and the
interpretation of the term U.
Early studies of the J-resistance curves used,
t\ ( U +AU) R" Bb
w here U= total work done up to initiation
AU= total work done after initiation
(3 .26 )
Equation 3 .26 is justified for small crack extension and where the
variation of rj is negligible as can be seen from the differential of
equ. 3.25, given below.

7 7
(3.27)
This equation can be evaluated numerically by representing the
differentials dJ, da, dr| in terms of increments AJ, Aa, and A ti with
the variables J, b and r| taking values corresponding to a particular
point along that step. For larger crack extensions ( eg, outside the
J-controlled regime), Turner(1986) used a simple form for TPB
specimens, which is stated as:-
where bc is current ligament and Uj j+1 is work increment from step
(i) to (i+1).
Garwood et al (1975) introduced a modified method to evaluate J for
initiation. The technique implies a fictitious NLE curve matching the
load, displacement and crack length (F ig.3.6) at any stage after
initiation. Step by step evaluation corresponding to successive crack
lengths is carried out where current value of J is related to previous
one. The most general equation is given by equation 3 .29 .a, while
3.29.b is for TPB specimens where r|=2 for 0.4<a/w<0.7. The subscript
TPT stands for 'three parameter technique'.
(3.28)
growing cracks, hence overcorrP the objection to the use of J after
JtptW-Jjpi-O-1) ( 3.29.a)

7 8
’ W -a j * 2 Ui,M+ B ( W - aM ) ( 3.29.b)
AJ “ TPT ® " ^TPT^ )2 Ui,MB bi-1
#TP*r ( f - i ) (3.29.C)
Hutchinson and Paris(1979) assumed load to be separable functions
of displacement and crack length for deeply notched bend specimens.
Interpreting J as path independent, they used:-
_ f M f J“ 2 J B b d0c J b da
Where 0c=displacement due to presence of crack only
M = Applied bending moment
(3.30)
Equation 3 .30 can be numerically integrated which gives an
incremental form for deep notch bend specimens as given by equ.3.31.
The terms b and J may take any value corresponding to that step
while AU is the work increment during that step.
AJ =2 eAUBb
J—Aa b (3.31.a)
J — J. + £ AJ e i (3.31 .b)
The formulation by Ernst et al (1981), which is the accepted form by
the ASTM, E813(1981) J,c testing guide follows deformation theory
interpretation of J (path independent). Ernst et al also assumed load
to be separable function of crack length, a, and load line
displacem ent, q. Incremental evaluation of J after initiation is

7 9
carried out for small crack extension increments, where current
value is related to previous value by equation 3.32
where y = 1.0 for bend specimens
= 1.0 + 0.76 b/w for compact tension specimen
A second formulation by Ernst(1983) aims at satisfying the condition
that rate of change of J should not be a function of rate of crack
growth for non work hardening materials. The proposed form of this J
is
W here Jd is deformation theory based J. For deep notch TPB and CT
specimens with non work hardening material, this can be written in
incremental form as;
It is to be noted that in this formulation Jp| is defined as the
difference between J and G.
Turner(1984) suggested an adjusted J formulation, which is an
interpolation between LEFM and rigid plastic cases.
o
(3.33)
AJ = AJ. + 7-77- Aa m o ' d(3.34)

8 0
( 3.35.a)
( 3.35.b)
where subscript (o) and (f) refers to original and final values
respectively, N is work hardening exponent (equ. 3.30) and U is the
total work done. This adjusted J also satisfies the requirement of J
as was stated for Jm.
As can be seen from the difference equations of these various J
formulations, a negative increment of J, -AJ is possible. This is
associated with those formulations where the deformation theory
was invoked during the derivation. Etemad and Turner(1985,a)
reported drooping J based resistance curves for large crack
extensions. An analytical approach to identify the necessary
conditions for drooping was based on internal energy ( as defined by
3.36 but not necessarily recoverable ) interpretation of U in
equations 3.25 and 3.27, viz;
Aw = AU - B J Aa (3.36.a)
T\WBb ( 3.36.b)
(3.36.C)
Therefore, for drooping R-curves ( (dJ/da) < 0 )
(3.36.d)

81
3.5 DUCTILE TEARING IN S TA B ILITY THEO RIES
The two well known theories, T and T \ approach the subject from
different considerations. The 'tearing modulus', T, is a displacement
based theory while I theory is based on the balance of energy.
3.5.1 The T THEO RY'
This approach, proposed by Paris et al (1979) was limited to the
J-controlled growth regim e. The theory considers limit load
behaviour and utilises the elastic shortening and plastic lengthening
due to a small crack extension at constant overall displacement. The
instability condition is then identified with the former exceeding the
la tte r.
(dqel + dqp|) <0 ( 3.37)
For centre cracked tension geometries, Paris et al related the elastic
shortening to the drop in limit load while plastic lengthening was
visualised as an extension of COD. For the latter relation between
COD and J (Equ.3.9) was utilised, as J based R-curves are more
readily available then the COD based ones. The instability condition
for this geometry was found as:-
^ > - ^ = T W 0.2 da (3.38)
The RHS of Equ.3.38 is considered as a material property while LHS is
treated as the applied tearing modulus. The instability condition is
therefore expressed as;
( T >aPP > ( T >m.t (3.39)
The theory requires the evaluation of T for different geometries®rr
while T mat is calculated from a relevant R-curve.

8 2
Paris et al applied a similar principle to bend geometries, but now in
terms of limit moment, ML, and angle of bend 0. Contrary to tension
case the relation between J and work (equ. 3.17) was utilised and
central deflection was considered as the overall displacement. The
T „ was found to be:-app
2 b2S e E
app= W3 ‘ Oy( 3.40.a)
2Q.S
0 = - 3 g r <3-40-b)
w here S= span of the specimen
I = Second moment of area of uncracked body
In the above derivations rigid end conditions (fixed boundary) were
considered. This means that the overall displacement considered is
related to the specimen alone. In real life situations, where the
cracked body is part of a structure, the constant displacement
generally refers to points away from the cracked body. To account
for this point, Paris et al considered an effective length, Sef defined
as:-
9S ef = S ( 1 + ■— )
9,(3 .4 1 )
w here <pm=effective compliance of the cracked component and the
surrounding structure
<p0=compliance of the uncracked specimen
John(1986) took it <pm as the sum of machine and notched specimen
compliances in his instability analysis.
The formulation by Hutchinson and Paris(1979) for bend geometry is
considered more accurate as they used J defined by equ.3.30 which is

83
more suitable for growing cracks than equ.3.17. The applied tearing
modulus is given as:-
2 2L b Se, _JE_
W3 bc^s(3-42)
where L is the constraint factor for rigid plastic bending (as used in
equ.3.15)
Some other formulations for exists in the literature, but as theapp
main trend is the same, they will not be discussed here.
3.5.2 The T TH E O R Y1
Turner (1979) introduced this energy based theory w here the
instability is identified with the elastic energy release rate being in
excess of the energy absorption rate. The elastic energy release
rate, I, is derived considering elastic-plastic materials with linear
elastic unloading (Fig.3.7). Originally the total drop in load due to a
small crack extension was related to the drop in limit load. Clearly
this restricts the application of the theory to load levels which are
at or near limit load. This range was broadened by Turner(1984)
where t |pl in the original formulation was replaced with an overall
term, r j0 which degenerates to ti6, for LEFM and Tip) for rigid plastic
cases (see Equs 3.14, 3.17).
I= G ( 2^0
^el(3.43)
A further modification to Equ.3.43 was made to include the effects
of machine compliance (or compliance of the surrounding structure)
in r je| and t |0. To this effect a system related r |e| factor, r ie| s w as

8 4
obtained by adding machine compliance to specimen compliance in
equ.3.13. For a system related ti0 factor, r|os equs 3.14 and 3.17 were
used with elastic component of work term including the elastic
energy of the machine.
V s =V
l + <t>
0 =<jjTT_
%>
( i + f r ) n e|Ue|-Mip|UPi
( 1 + * ) U el + Up|
(3.44.a)
(3.44.b)
(3.44.C)
The energy balance for an EPE material is stated as the equality of
energy for fracture to the difference of work input and elastic
energy released (equ. 3 .45 .a) Turner then argued that this energy for
fracture should be identical to that used for obtaining a deformation
theory based J for growing cracks (eg: Equ. 3 .36 ). Hence, the
instability at constant displacement ( ie AU ■ 0 ) is related to the
resistance curve as given by Equ.3.44.b.
Aw = AU - B I Aa
j> J_ dw__jD dJ_ J / b dn B da da ^ da
(3.44.a)
(3.44. b)
Turner(1984) draws attention to the equality of the two methods for
those materials where J truely represents the energy release rate. A
recent comparison of the two methods was done by John(1986). His
findings indicate that I theory predicts instability with greater
certainty than the T theory.

85
(a)
Fig. 3.1 Positon from where assessment of COD is made.a) Somewhat arbitrarily defined position in infiltration
studiesb) Relationship between the plastic components of COD and
the mouth opening A ,„fp with the assumed hinge rotation at O, a fraction of the ligament away from the crack tip.

86
(a) (b)
Fig. 3.2 a) Crack in a large plate with gauge points at 2D apartb) Diagrammatic non-dimensional COD (o ) against strain
ratio for different crack length to gauge length ratios.
T
► x
Fig. 3.3 Contour paths around crack tip for proving path independency of the J-Integral.

87
Fig. 3.4 Diagrammatic Load displacement diagram for a cracked body, and associated changes due to crack extension
Fig. 3.5 Schematic of crack tip conditions for J-controlled crack growth.

8 8
Fig. 3.6 Garwood's fictitious NLE curve matching the three parameters: load, displacement and crack length.
i
FIG. 3.7 Energy interchange due to crack extension at constantoverall displacement for an elastic-plastic material with
linear elastic unloading (dotted lines indicate relative positions when crack extension occurs under constant load).

8 9
CHAPTER 4
FINITE ELEMENT METHODS IN THE STUDY OF
FRACTURE MECHANICS PROBLEMS
4.1 INTRODUCTION TO THE FINITE ELEMENT METHOD
In any continuum, the actual number of degrees of freedom is
infinite. For an exact analysis, a closed form solution is necessary
which, if exists usually involves some assumptions. For a numerical
solution, such as in the finite element method (FEM), the behaviour of
the continuum is represented by a finite number of freedoms.
For the FE analysis, the continuum is divided into small regions,
elem ents, and elements are connected with neighbouring ones
through nodal points. In each element the behaviour of basic field
variables are prescribed using an assumed function. The continuity of
variables over adjacent elements is applied through nodal points.
Any basic geometrical shape can be formulated to be a finite element
which gives great flexibility to the method in handling complex
shapes. Different types of elements, suitable for various geometries
including one, two and three dimensional types are available. These
elements are further classified according to the complexity of the
assumed field variations within it, usually by polynomials of various
orders. Different types of boundary conditions and loadings can be
readily incorporated.
The method is well developed and fully documented (eg;Zienkiewicz
(1977). Linear as well as non-linear problems can be handled with
the latter being more costly. Accuracy of solutions is directly
related to the modelling of the structure and the number and type of
90
elements used. Generally use of smaller elements improve accuracy
but at a higher computational cost. The higher the order of elements
used, the lower the number of elements required for a comparable
accuracy.
A typical FE mesh consists of a number of elements and nodal points,
each separately and sequentially numbered. The total number of
degrees of freedom for the system in a FE study is a multiple of
number of nodes. The data of the FE mesh representing the geometry
under study must be supplied to the computer. This includes data for
nodal point coordinates, elem ent definition by nodal numbers,
material properties and boundary conditions. Supplying all these may
be time consuming, but automatic data generation by the computer is
possible at least if simple elements are selected.
For stress analysis problems, the basic field variable within an
element may be selected to be force, displacement or both, defining
force method, displacement method or hybrid method respectively.
Below, the method for elastic and then for elastic-plastic problems
will be briefly introduced.
For each element, the assumed displacement variation together with
material properties and elasticity equations are utilised to relate
nodal displacem ents to nodal forces. These relations are then
assembled to yield an overall relation between applied loads and
nodal displacements, which is numerically solved. Stresses and
strains at any point may then be obtained from calculated nodal
displacements and forces.
The assumed displacem ent variation within the elem ent also
controls the stress and strain variation. It is therefore necessary to
use smaller elem ents in those areas where high stress/strain
variations are expected. This is absolutely necessary for constant

91
stress elements and to a lesser degree, for higher order elements.
For e lastic-p lastic analysis the basic elastic equations are
supplemented with extra equations which controls the stress-strain
behaviour in plasticity (see Appendix-3). The solution process is
iterative and requires non-linear stress strain data as well as
controlling parameters for step size, tolerances and convergence
criteria. For this type of problem basically two solution procedures
are available, initial stress and tangential stiffness. In the former,
the elastic stiffness matrix is maintained throughout the solution,
while in the latter, it is continuously updated with non-linear
effects. This updating requires more computing time, but generally
results in a quicker convergence.
FE methods are further classified as 'small geometry change' and
'large geometry change' formulations. For the former formulation, the
stiffness of an element, deformed or undeformed, is always referred
to the corresponding initial undeformed shape. For the 'large
geometry change' formulation however, the elem ent shapes are
continuously updated, hence the elem ent stiffnesses. For most
fracture mechanics problems 'small geometry change' formulations
are suitable and can be used up to limit load levels without
significant loss of accuracy.
For each applied load increment, displacem ent increments are
evaluated. From these, the strain increments are obtained and related
to stress increments through yield criteria and plasticity laws (see
Appendix-3). This process is repeated within each step until the so
called residual force vector is tolerably small.

92
4.2 APPLICATION OF FEM TO FRACTURE M ECHANICS PROBLEMS
Although analytical solutions to some fracture mechanics problems
do exist, these are generally limited to a few special cases. In most
cases the complexity of the structure coupled with the presence of a
crack makes an analytical solution impossible. The finite element
method, FEM, provides a general stress analysis technique, which is
also applicable to any structural body containing a crack. The
structure can be considered as being a three dimensional body, 3-D,
or where appropriate, can be idealised as a two dimensional, 2-D,
body in plane stress or plane strain. The reduction in the dimensional
consideration of the body reduces computational effort for a
solution, but usually at a cost of accuracy.
In the linear elastic range, FE techniques and associated numerical
procedures are well established and developed. A careful modelling
of the structure will give accurate and reliable results. For the
solution of e lastic-p lastic problems however, an increm ental
approach both to loading and to solutions is necessary, which may
result in large accumulated errors. Careful mesh design and smaller
loading steps may be employed to reduce those errors which
undoubtly result in higher computer costs. Element selection as well
as solution technique employed in solving the non-linear equations
influence results, especially when large plastic strains result.
Commonly used elem ents in the study of fracture mechanics
problems are constant strain elements (triangular or rectangular)
and the isoparam etric family of elem ents (quadrilaterals and
triangular), the latter type having the advantage of requiring
relatively coarse mesh design. Three dimensional FE studies are
generally done with brick or wedge shaped isoparametric elements.
Special elements incorporating a known form of stress and/or strain

93
singularity are also available both for two and three dimensional
studies, and these can be used to model the singular crack tip.
Generally, the use of such elements require specialist knowledge and
subroutines.
Recent developm ent in digital computers and readily available
general and special package FE programs resulted in large usage of FE
methods in various areas, including fracture mechanics problems. In
the remainder of this section a brief review of some of th a t work,
which highlight main areas of fracture mechanics in which the FEM
was used will given. Application in LEFM and EPFM regimes as well as
growing crack studies will be considered.
4.3 DETERMINATION OF STRESS INTENSITY FACTORS
Two different methods are employed to determine stress intensity
factor, K, by using FEM. These are classified as
i) direct methods
ii) indirect methods.
4.3.1 Direct Methods
These methods utilise the analytical solution to the near crack tip
area , either in term s of stress or displacem ent. Stress and
displacement solutions for a crack under Mode-I type of loading is
given by equ.2.11 (and repeated below). The field solutions for a
particular point near the crack tip can be used to calculate K, by
using either of those equations.
0i i= v ^ r v e> (4.1.a)

94
Ujj = c K, y? gsj (0) (4.1.b)
W atwood(1969) applied this principle to centre crack panels, CCP,
and edge crack panels, ECP, under tensile loading and determined K
from different stress components from various locations around the
crack tip. Results proved to be inconsistent and unreliable with no
apparent trend. Chan et al(1970) recognising the the poor accuracy of
field solution in the near crack tip field used a different approach.
They calculated apparent K along the crack face, which was then
plotted as a function of distance from the crack tip, and extrapolated
to the tip for the real K. Resulting K for an infinite plate with a
central crack differs from the analytical solution by about 5%.
This procedure was improved by the introduction of special crack tip
elements. Such an element was used by Byskov(1970) for modelling
crack tip in cracked plates and obtained K values with accuracies
sufficient for practical purposes. T racey(1971) introduced an
alternative type of singularity elem ent. He used quadrilateral
isoparametric elements which were made triangular at the crack tip
requiring two nodes to coincide. The K was calculated from
displacements and a maximum error of less than 4% was reported
even though relatively coarser meshes were used.
Henshell and Shaw (1975) modified ordinary 8-node isoparametric
elements to obtain the required singularity at the crack tip. Contrary
to other special crack tip elements this technique does not require
the addition of any special subroutine to the existing FE code. They
proved that by shifting the mid-side nodes on two adjacent edges to
quarter position from their common node (Fig. 4 .1 ), the required
singularity is achieved at that node. In application, all mid-side
nodes on those edges having the crack tip node as a corner node are

95
shifted to quarter position from the crack tip node. Henshell and
Shaw calculated apparent K from the displacements of the crack
faces and extrapolated to the crack tip for K. They noted, however,
that the local solutions in this modified element are still poor and
therefore should be excluded from the analysis to calculate K. The
results compares favorably with those obtained using other special
crack tip elements.
4.3.2 Indirect Methods
All indirect methods rely on the relationship between K and G (=Je()
and therefore utilise the identity given below.
2 2 K / 5w \ / 9w \ P 9<pE' " ^ " ' d a 'q " ' da ~ 2 da~
(4.2)
Mowbray(1970) applied the compliance technique to ECP subjected to
tensile loadings for a range of a/W ratios. W atwood(1969) used the
internal energy based definition of G to calculate K for CCP and ECP.
The internal energy of the cracked body can be calculated as a sum of
internal energy of individual elements or can be taken as the work
done by external loads. In these two indirect methods, a numerical
differentiation is necessary to obtain 9<p/3a or 3 U /9 a , therefore
requiring more than one computer run. Watwood noted that for
consistency of results the same FE mesh should be used for any two
computer runs required for numerical differentiation.
The drawback to these two indirect methods is the requirement of
numerical differentiation which necessitates two runs. The crack
closure energy method, introduced by Kfouri and M iller(1974)
eliminates this need and hence associated errors. In this method, the
reaction force at the crack tip node is balanced by an externally

96
added force. The constraint of that node is then relaxed which
simulates a crack extension, Aa, equal to the distance from the
relaxed node to the next constrained node along the crack plane. The
work done by this external force in moving the crack tip node to a
distance away from the crack line is taken as the change in potential
energy due to crack extension Aa. Kfouri and Miller applied this
technique to CCP geometries and reported K values to within less
than 2% of the accepted values.
The above methods rely on the changes in energy or compliance,
occurring due to crack extension modelling and therefore calculated
values are generally taken as for the average crack length. Further,
some degree of mesh refinement near the crack tip is required for
the crack closure energy method as well as for the other two,
following the comment of W atwood. On the other hand, use of
J-integral allows the calculation of energy release rate without the
need of neither m odelling crack extension nor numerical
differentiation. Furthermore, no special mesh refinem ent in the
crack tip area is required as the path independency of J-integral
allows the use of such contours away from the crack tip area. This
method was first suggested by Chan et al(1970).
4.4 STUDY OF POST YIELD FRACTURE MECHANICS PROBLEMS
4.4 .1 In tro d u c tio n
The numerical results from an elastic-plastic FE analysis depends, in
general, strongly on the theoretical basis of the computer code.
Subjective factors, like mesh design, loading increment steps,
convergence tolerance also play an important role. Generally for,
cracked geom etries the effect of the above factors are more

9 7
significant. For some simple cases the solution can be compared to
known analytical solutions to assess the accuracy of the FEM. For
this purpose, for example, if applicable limit load analysis can be
employed otherwise experimental verification is sought. It is to be
emphasised that such comparisons only indicate the accuracy of the
overall solution rather than the local solutions.
In FE studies of EPFM problems, a special crack tip element
incorporating a r' 1,0 singularity [ r('N/N+1) if NLE material behaviour ]
in strain is more appropriate than r'0 5 as the stresses at the crack
tip area are bounded. Such* a singularity element was introduced by
Barsum(1977), where an 8-node isoparametric quadrilateral element
is converted into an 8 -node triangular e lem ent with three
independent nodes at the crack tip (Fig.4.1).
For a particular geometry and loading the EPFM parameters can be
calculated using various methods. Numerically obtained data is
usually quoted as normalised to aid comparison and understanding.
The importance of normalisation is more pronounced in EPFM range,
due to the absence of a shape factor like term (which is independent
of load level in LEFM) and lack of a simple mathematical relation
between stress and strain in plastic range. For normalisation of data,
parameters related to material properties (eg; a ,E), to geometry
(eg; a ,W ,B ,S ,D ) or to LEFM (eg; Y ,G ,G y) are used in various
com binations. A detailed description of various normalisation
schemes are given by Turner(1984).
4.4.2 Evaluation of EPFM Parameters, J and COD
a) Methods to extract COD
Various methods to extract COD from a FE solution to an EPFM
problem were suggested. Each method listed below is suitable to one
9 8
or more geometries. It is not intended here to discuss relevant
merits of each method or to compare them, but merely to describe
them. Each method essentially defines two points on the crack faces
(since the COD at the current crack tip node is zero) , where the
distance between them is taken as COD at the corresponding
remotely applied load or displacement (see Fig.4.2)
i ) Elastic-plastic interface on the crack face.
ii) 90° intercept method
iii) At a specified node or distance from crack tip node
iv) Extrapolation of crack face displacement to the tip
Crack opening displacement definitons for growing cracks, at the
original and advancing crack tips, will be referred to as COD ( 80) and
crack tip opening displacement, CTOD ( 8a) respectively. Two other
closely related parameters, namely crack opening angle, COA, and
crack tip opening angle, CTOA, will be mentioned for completeness
(see Fig. 4.3).
b Methods to extract J-integral
Extraction of J-integral from FE studies is relatively simple as a
rigorous mathematical definition exists. Some commonly applied
methods for evaluation of J-Integral in FE studies include;
i) contour integral
ii) potential energy definition
iii) work done
iv) crack separation energy
v) virtual crack extension
The first two methods are based on the definition of the J-Integral
and its relation to potential energy changes while the third method
relates work input to the J-Integral (ch.3). Virtual crack extension

9 9
method (Parks, 1977) and crack separation energy methods (Kfouri
and Miller, 1974) require modelling of a small crack extension, hence
some degree of mesh refinement near the crack tip. Mesh refinement
near the crack tip area may also be applicable to the potential energy
difference method, to enable the use of the same FE mesh for the two
runs required.
As J-Integral can be evaluated from any contour surrounding the
crack tip, generally more than one J from different paths are
obtained. This may be used to check path independency. In FE studies
each path is defined as a series of convenient points, either nodal
points or gauss points, (see Appendix-1), where field solutions are
readily available.
4.5 ANALYSIS OF STATIONARY CRACKS
Collaborative bench work tests have been conducted testing various
FE techniques in EPFM. One such work was reported by Wilson and
O as is (1978). Comparison of various param eters from different
contributors shows that whilst results agrees in linear elastic
range, differences in the plastic range are large and increasing with
increase in plasticity. The problem for this study was selected to be
a TPB specimen geometry under plane strain constraint with a/W =0.5
and S/W =4. The large differences in results were attributed to one or
more of the followings:-
i) Theoretical basis of the FE code
ii) Modelling of concentrated loads
iii) Element types and mesh design.
iv) Use of crack tip elements.
v) Method of evaluation of the fracture mechanics
parameters.

1 0 0
DeLorenzi and Shih(1977) carried comparative FE tests on the
suitability of different elements for extensive plasticity cases. They
acknowledged the problems with constant strain elements and used
8-node isoparametric elements. Four point bend geometries, with and
without a crack w ere studied under plane strain constraint.
Assessment of element suitability was based on the comparison of
limit load and elastic crack face displacem ent with theoretical
values. They concluded that 8 -node isoparametric elements with
straight edges coupled with collapsed crack tip elements are best
suited for extensive plasticity analysis. They did not, however,
confirm their conclusions neither with other FE codes nor with other
geom etries.
Bleackley and Luxm oore(1983) reported comparison of numerical
results for load, displacement, and J-Integral (Q ,q,J), from various
contributors with experimental data. For compact tension geometry,
CT, generally numerical Q-q results agree with experimental result,
more closely at low applied load levels. At high load levels, some
discrepancy among numerical results were observed. For TPB
geometry, larger discrepancies among numerical results compare to
those for CT were reported. The poor correlation with experimental
data for the TPB study, even in the elastic range for some cases were
again attributed partly to the modelling of concentrated loads.
Bleackley and Luxmoore also provided a comparison of J obtained by
different methods described in subsection 4.3.2. For CT study, close
agreem ent among results and with experimental data was reported.
Report also highlights that J from one contour should not always be
considered as a reliable result, and in general mid-side nodes of
elements should not be used to represent crack tip.
Shiratori and Miyoshi(1980) reported a round robin analysis of CT

101
specim ens w here solutions from d ifferent contributors were
compared. Two sets of comparisons were made, one for a standard
mesh supplied by the organiser and the other for a mesh freely
designed by the individual contributor. The agreement among results
for the standard mesh case were excellent and expectedly better
than for the non standard mesh.
Lam ain(1981) carried out comparative studies on TPB geometry
where the emphasis of study were on virtual crack extension method
and special crack tip elements. He concluded that J from contour
integral and from virtual crack extension method are in close
agreement. Further, findings reveal that although use of crack tip
elements have negligible effects on J and overall behaviour of the
structure, the effect on CTOD is considerably larger.
4.6 ANALYSIS OF STABLE CRACK GROWTH
4.6.1 Introduction
Modelling crack growth in numerical studies requires a criteria to
decide, at each loading step, on the amount of crack extension and a
method to simulate this crack extension. The criteria is usually
based either on the crack characterising parameters or on physical
and micromechanical behaviour of the material, although sometimes
a numerical criteria such as a critical crack tip nodal force is used.
Among the proposed parameters only those which are directly related
to COD and J-integral, will be considered here. Specifically some
uses of J-Integral, crack separation energy, GA and COD and COD
related parameters ( CTO D, COA, CTOA (Fig.4.3)) will be briefly
reviewed.
Each crack growth param eter can be assessed on the basis of

1 0 2
satisfying those requirements, given by Shih et al(1979), which are
repeated below.
i) measure of crack tip stress-strain state
ii) Geometry independence
iii) preferably constant during crack growth
iv) Obtainable from local, (preferably global), measurements
v) Insensitivity to mesh design, loading step size
vi) Suitability in instability analysis
vll) Applicability to 3-D cracks geometries
vlll) Possibility of extension to mixed mode fracture.
4.6.2 Methods for Crack Growth Modelling
The first way to model a crack extension is to relax the crack tip
node when some criteri is achieved. The drawback to this is the
step increment of each crack extension, which is equal to the size of
the elem ent involved. For a smaller or smoother crack growth
simulation a high degree of mesh refinement in the crack tip region
is required.
Shih et all (1976) introduced a node shifting technique coupled by
node release method to model a continuous crack extension (Fig. 4.4).
In this method the current crack tip node is shifted as long as crack
growth criterion is satisfied. For crack growth longer than the size of
the current element, the nodes of this elem ent is released and
shifting is continued with the next element. Some degree of mesh
refinement along the path of crack extension is required.
Crack growth involves local unloading, hence the FE code used must
be able to handle nonreversible unloadings. Usually relaxation of
nodes in the plastic range are carried out in a number of steps, both
to avoid divergence and to obtain better accuracy.

1 0 3
4.6.3 Criterion for Crack Extension
Anderson(1973) used a two parameter approach to stable crack
growth problem where he considered the CTOA as the criterion for
growth. Anderson assum ed that critical CTOA is continuously
decreasing from an initiation value to a propagation value. He also
argued that most of the change in CTOA in decreasing to the
propagation value takes place at the beginning of growth, he
infiltration studies by Garwood(1976) on TPB steel specimens also
support the constancy of CTOA during crack extension. In the FE
representation he, therefore, considered a higher critical value for
the first crack extension, and a lower critical value for subsequent
extensions. It is suggested that initiation and propagation values of
critical CTOA should be determined from other crack parameters,
such as J.
DeKonning(1977) demonstrated the constancy of CTO A by using
experimentally obtained Load-crack growth, (Q-Aa) data, to control
crack extension in the numerical study of CCP specimens. However,
infiltration studies by Gibson(1986) indicates that the CTOA is notbe
well defined, hence its constancy may notvjustifiable. Experimental
and numerical studies of Luxmoore et al (1977) on CCP and DECP
specimens verified the constancy of CTOA during crack extension,
but with some mild geometry dependence.
The crack separation energy, GA, proposed by Kfouri and Miller (1974)
can also be employed in stable crack growth studies. Light et al
(1975, 1976) determined a critical value of this parameter, CG A, by
releasing the crack tip node corresponding to the experimentally
observed initiation load/displacement. At subsequent loading steps,
the crack separation energy corresponding to the next crack
extension is calculated. Crack extension was then allowed if the
1 0 4
criteria was satisfied . R easonably good correlation between
experimental and numerical Q-Aa curves support the use of GA as a
criterion for crack growth, at least for those cases considered.oat
Shih et al (1979) carried 'extensive comparative numerical analysis
on various crack growth criteria using CT and CCP geometries under
plane strain constraint. They considered J and COD based resistance
curves as well as CTOD, COA and CTOA as criteria for crack growth.
Good correlation between experimental data, obtained from side
grooved specimens, and numerical results were reported. The
findings relating to CTO A criteria supports the two param eter
method of Anderson (1973) , but this parameter was classified as
sensitive to elem ent and loading step sizes. Two param eter
characterisation of stable growth (an initiation followed by a
propagation value), in terms of J (Jj and dJ/da) and in terms of COD
(8 j and d8/da) were also examined. The findings indicate that while
the former can only be used within the so called J-controlled regime,
the latter can be used over the entire range of crack growth
considered in the study. However, the experim ental work of
G ibson(1986) shows that J is linear with crack extension for
considerably larger growths, which suggests that stable crack
growth can also be characterised by J outside the J-Controlled
regime.

1 0 5
Fig. 4.1 Isoparametric Singularity elements
a) Quarter point quadrilateral with singularity at node 1b) Quarter point triangular with jL singularity at node 1
c) Collapsed 8-noded quarilateral with -L singularity at node 1
Fig. 4.2 Some Common methods of assessing COD in Finite Element Studies from deformed crack flanks
a) Elastic-plastic interface methodb) 90° Intercept methodc) Extrapolation method

1 0 6
Fig. 4.3 A Definition of COD and Related Parameters in Finite Element studies
Fig. 4.4: Crack Growth Modelling by The Node Shifting Method

CHAPTER 5
2-D ELA STIC -PLA STIC , SEM I-PLANE
STRAIN ANALYSIS FOR J ESTIMATION
5.1 IN TR O D U C TIO N
Three dimensional FE programs are generally expensive to run, and
data preparation, unless automatic generation is available, is a very
tedious and time consuming process. A large number of degrees of
freedom is involved in modelling, which may affect the accuracy of
solution, especially for elastic-plastic cases.
Two dimensional idealisation as plane stress or plane strain
significantly reduces both data preparation and computing times. The
resulting numerical solution is relatively more accurate within the
assumptions made. Plane stress conditions are assumed for thin
sheets, and plane strain conditions are assumed for thick ones. Other
than this, there is no mathematical rule as to the decision on plane
stress or plane strain. Plane stress and plane strain solutions
represent lower and upper bound solutions respectively, at least for
plate-like structural problems.
Mathematical formulations for elastic behaviour of isotropic solids
under plane stress or plane strain conditions are similar and are
given in Appendix-2. Furthermore, the same formulation is used for
both plane stress and plane strain solutions, with modified material
properties for the latter. For e lastic plastic analysis, the
differences between plane stress and plane strain field solutions are
significantly larger than that for elastic analysis.

1 0 8
In the following sections, a new approach to 2 -D idealisation of 3-D
problems, with isotropic material properties will be introduced.
First elastic problems, including thermal effects will be considered
and extension to elastic-plastic problems will then be given. This
new approach may be considered as a weighted average of plane
stress and plane strain solutions and the degree of plane strain may
be specified by a user selected constant. The aim of this study may
be simply stated as obtaining more realistic solutions to physical
problems of plate-like nature. This may be achieved by varying the
degree of plane strain in the numerical analysis so that it matches
with the experimental data, eg. load-displacement relation.
5.2 MODIFIED 2-D ELASTICITY EQUATIONS FOR ISOTROPIC
MATERIALS
Plane stress/strain formulations assume zero values for the shear
stress component involving the thickness direction (o xz, oyz) and for
either direct stress (o zz) or direct strain (ezz) in the thickness
direction (A ppendix-2 ). The assum ptions regarding the shear
stresses are retained in this new analysis. The direct stress or
strain in thickness direction is redefined with plane stress or plane
strain conditions representing the two extreme ends.
Two basic methods, which are described below, have been employed
to define the magnitude of direct strain in thickness direction (ezz).
In the first method, ezz is defined in terms of in-plane direct
stresses, a YY and while in the second it is defined in terms of
in-plane direct strains, e YY and evu. It is to be noted that the firstxx yy

1 0 9
method is effectively the same as defining a zz in terms of cjxx> a yy.
For plane stress and plane strain conditions the stress and strain in
the thickness direction are given (Appendix-2) as;
azz(po)= 0 (5.1.3)
ezz(pa)= a AT-v ((oxx+ a yy)/E ) (5.1 .b)
ezz(pe)= 0 (5.2.3)
ozz(pe)=- a AT+v ((<?xx+ oyy)/E (5.2.b)
where (po) indicates plane stress conditions and (pe) indicates plane
strain conditions. For other conditions which are neither plane stress
nor plane strain, a thickness averaged value of ezz will be assumed to
exist. Furthermore as this strain will have a value somewhere
between that of plane stress and of plane strain, it may be taken as a
weighted average of these two extremes. Undoubtedly the weighting
factor will also be a function of thickness, but this will not be
considered here.
a) Method-1
For a general case, ezz is assumed to be defined as;
e zz= ( K ) ezz(P°) (5-3)
£ is the weighting factor, £ =0 represents plane stress and £ =1
represents plane strain conditions. No specific assumptions on
stress a zz is required.
Substitution of equations 5.3 and 5.1 into constitutive equations
(given in Appendix-2) results in:-

1 1 0
°xx ' D„ D12 0 ' eXX a AT
ayyE
P2I ^22 0 eyy
o"lLUI a AT
1+v V
Gxy 0 0 0.5 [ e*y] o
0zz = ^ V ( axx + <Iy y ) - E ? « AT
where,
D<< = D00 = 1-Ev:11 22 l-v -2ty 1
D =d =v n±£yj 12 21 l-v-2Cv2
(5.4)
(5.5)
As mentioned before, equ.5.5 also represent a weighted average of
plane stress and plane strain values. Equations 5.3-5 degenerate to
plane stress and plane strain solutions for £=0 and £ =1 respectively.
b) M ethod-2
In this case, the direct strain for plane stress conditions in
thickness direction is written in terms of in plane direct strains.
ezzM = [ a A T - - ^ ( e xx+eyy)] (5.6)
A weighted averaging technique, similar to 'M ethod-1', gives the
following relations for semi-plane strain cases.
zz = (C- i ) [ o A T - 1^ ( exx+ e y y ) ]V - t
(5.7)
axx Fn F12
ayyE
~ 1+vF21 F22
o 0 0xy
e rXX a AT
Feyy - E - l i a AT
Ve 0L *y.
(5.8)
111
C ( l - v ) v , E a A T C ( l - v )z z l - v - 2 v 2 ( 1 - 0 xx yy 1—v - 2 v 2 ( 1 - 0
(5.9)
w here,
P _ P l - 2 v + lv2 p _ p _ v ( l - 2 v + E v )11 22 " l - 3 v + 2 v 2 12 2 1 “ j _ 3 v + 2 v 2
The two methods give very similar results, and a comparison of
coefficients as a function of (£) is given in Fig.5.1. As can be seen,
'Method-1' yields a linearly varying coefficient for o22, and 'Method-2 '
yields linearly varying coefficients for a and c t . In the followingxx yy
subsections, only 'Method-1' will be considered.
5.3 M O DIFYING THE PLASTIC ITY EQUATIONS.
An introduction to the flow theory of plasticity is given in
Appendix-3, where stress and strain increments are related through
an elastic-plastic stiffness matrix, [D ep]. This stiffness matrix is
related to the elastic stiffness matrix, [D ], work hardening
parameter, H ' and flow vector, {a}. In two dimensional problems, [D]
is defined to have (3x3) elements while {a} has 4 elements. It is
therefore necessary, for the purpose of evaluating {dD}=[D]{a}, to use
an expanded form of the elastic stiffness matrix, [D s] having (4x4)
elements. The extra terms introduced into [D] should correspond to
out of plane stress and strain. The method of obtaining [D s] from [D]
is given below.
Suppose the plane stress-strain relation, including out of plane
stress and strain components is written as given by equ.5.10 where
D 14, D24, D41, D42 and D44 are unknown quantities.

1 1 2
aXX V 0 ^14 eXX
°yy LU
v 1 0 D24
(D 5
axy 1-V 2 o o o CD X
°zz ^41 ^42 3 ^44
CD H
To satisfy plane stress conditions, it is required that:-
(5.10)
D 14= D24 =0 D41- D42 (1 -v )D 42- v D44 (5.11)
Further, because ozz=0, a 'zz= -(o 'xx+ a 'yy), (a 'xx being the deviatoric
component of stress, as defined in Appendix-3) it is equally correct
to use D42=D41=0 and D44=1.
Ds(po)=E
1—v2
1 V 0 0
V 1 0 0
1 -v0 0
20
0 0 0 1
(5.12)
Similar arguments can be carried for plane strain and for the general
2-D cases. In fact, the existence of out of plane strain enables the
use of 4x4 elastic stiffness matrix for plane strain case (equ.5.13) .
And for the general 2-D case (Method-1) equ. 5.14 were used.
Ds(pe) E (1—v) ( l+ v )( l-2v)
1 $ 0 $
$ 1 0 $
0 0 1—2v 2( l-v )
0
$ $ 0 1
(5.13)
( 1-v )w here $ = v/.

1 1 3
D.K) -
l - £ v 2 v + ^ v 2 0 0
LLI
v + £ v 2 1 - £ v 2 0 0
( l + v ) ( l - v - 2 £ v2) 0 01—v —£v2
2 ( l - v )0
v + £ v 2 V + t v 2 0 1—V —£v2
(5 .1 4 )
It is to be noted here that the lower row in equation 5.14 may be
replaced by (0 0 0 1) since a '+ o '+ c ' =0x y z
The original elastic-plastic 2-D FE code, which is fully described by
Hinton and Owen (1979) and Owen and Hinton (1980) was modified to
be suitable for general 2 -D problems. The changes described above
were coded into all the relevant subroutines of the program
including those which are indirectly affected. Running of the program
requires the weighting factor, £, as the only extra input data.
Apart from these obvious changes the subroutine of the FE code used
dealing with residual forces in plastic state, "SUBROUTINE RESIDUE",
was also modified. This modification essentially imposes an upper
limit on the out of plane direct stress, c 2Z as:-
o < 0.5 L (a +a )zz b ' xx yy'
where 0.5 stands for plastic equivalent of Poisson's ratio.
(5.15)
5.4 IN ITIAL TEST OF THE NEW APPROACH
Uniaxial tension of a narrow rectangular strip with length to width
ratio, L/W , of 4 w as modelled with 8 square isoparametric
elements. Loading was introduced by parallel end displacement and
non-work hardening elastic-plastic m aterial with E =210kN /m m 2,
v=0.3 was used. The out of plane constraint has been varied from

1 1 4
plane stress to plane strain by supplying different values for the
weighting factor £.
For this simple case, materials yield stress may be related to the
applied axial stress after yielding through the definition of effective
stress, a ef (Appendix-3). Identifying y and z as the loading and the
thickness directions respectively,
2 2 2 o , = a +o - a aef yy zz yy zz
Using the relation between a zz and a yy
effective stress with yield stress,
(5.16)
(equ.5.5) and identifying the
°yS = ay y (1’ £V + £2v2) (5-17)
Equation 5.17 was used to check the accuracy of numerically
obtained values of oyy at the beginning of plasticity with v=0.3 and at
extensive plasticity with v=0.5 as shown in Fig.5.2 where extensive
plasticity refers to eyy * 3 o ys/ £
A second test on a similar geometry with L/W=2.5, but modelled with
40 isoparam etric e lem ents w ere carried out. In this case,
elastic-non linear plastic material, representative of a pressure
vessel steel, with v=0.3 a ys= 0 .57364 kN /m m 2 and E=210 kN/mm2
were used (nb: the material's stress-plastic strain relations used in
this part of the study may be identified from Fig.5.3, when £=0.). The
resulting in-plane and out-of plane stresses for different values of
the weighting factor, £ are shown in Fig.5 .3 .

1 1 5
5.5 NUM ERICAL STUDY OF COMPACT TENSION and THREE POINT
BEND GEOMETRIES
Standard compact tension, (CT) geometry with a/W =0.56 and three
point bend, (TPB) geometry with a/W =0.5, S/W =4 were modelled with
2 -D isoparam etric e lem ents. The m ateria l in the study is
represen ta tive of the pressure vessel steel A 53 3 -B , with
E = 21 4 .8 k N /m m 2, a ys= 0 .5 2 5 k N /m m 2 , and stress-plastic strain
relations are shown in Fig.5.4. Loading was introduced by successive
displacement increments of a node point representing the pin loading
of the geometry. Eight contours were used to calculate an average
value for J-Integral where appropriate and different values of the
weighting factor £ were used, ranging from plane stress (£=0 .0) to
plane strain (£=1 .0 ).
Load displacement relations for two selected geometries are shown
in Fig.5.5 and Fig.5 .6 for different values of £. It is to be noticed that
the non-linear effects of £ on in-plane stresses (F ig.5.3) is also
reflected on the load.
J-integral is not expected to be path independent for those cases
which are neither plane stress nor plane strain. This is due to the
original definition of J which is strictly true for 2 -D cases; plane
stress or plane strain. For those cases where £ *0 and £*1 the out of
plane stress, c zz, contributes to the total work done which upsets the
energy terms involved in J-integral. It is easy to show that this work
is proportional to ( £ - £ 2). Nevertheless path independency of
J-Integral was within an acceptable limit for the TPB geometry (max
=5% deviation from the average) but not for the CT geometry (up to
= 12% deviations from average).

1 1 6
Under such conditions, that is when the J-Integral is path dependent,
ri factor offers a method to determine J-Integral for the state of
load. For the chosen CT geometry, Clarke and Landes (1979) gives
rj =2 .234. From plane stress and plane strain solutions where path
independency of J exists, a slightly lower value of r| ( 2.12 for plane
strain, 2.04 for plane stress) was computed. For this geometry ti= 2 .0 8
were used to determine J-Integral from work considerations for only
those cases which are neither plane stress nor plane strain. As
expected £ also has non-linear effects on J-Integral (Fig 5.7-8).
A lthough various m odified J -In te g ra l de fin ition s for 3 -D
applications have been proposed by various workers, suitability of
these equations to this modified 2-D analysis has not been explored.
5.6 D ISC USSIO N
The method provides both load and J-Integral variations with respect
to the load point displacem ent (or any other variable) for any
selected value of the averaging factor between plane stress and
plane strain. The decision regarding the value of £ must be related to
the m aterial properties and geom etry of the specimen under
consideration. In this respect limited experim ental work may be
undertaken to find the effect of thickness on elastic compliance of a
particular geometry. Hence, £ may be determined as a function of
thickness for that particular geometry by matching experimental and
numerical compliances.
Another way of estimating £ is to proportionate shear lip size to the
total thickness of the specimen. In this respect, Irwin's plastic zone
size estimation method may be utilised by taking a particular value

1 1 7
of J, such as the initiation value, Jr
rpa
B- 2 r_____P2.
B
w here B=Thickness of specimen.
(5.18a)
(5.18b)
The accuracy of the method may be judged by comparing results
obtained from this method with those obtained from a 3-D FE work.
Although this point (3-D FE work) was not pursued here, favourable
limited comparison was possible. For example, Wellman et al (1985)
compare 2-D plane stress/plane strain FE solutions for TPB geometry
with 3-D FE and experimental work. Although their comparison is in
terms of load-clip gauge displacem ent, the 3-D FE solution is
approximately a weighted average between plane stress and plane
strain solutions.
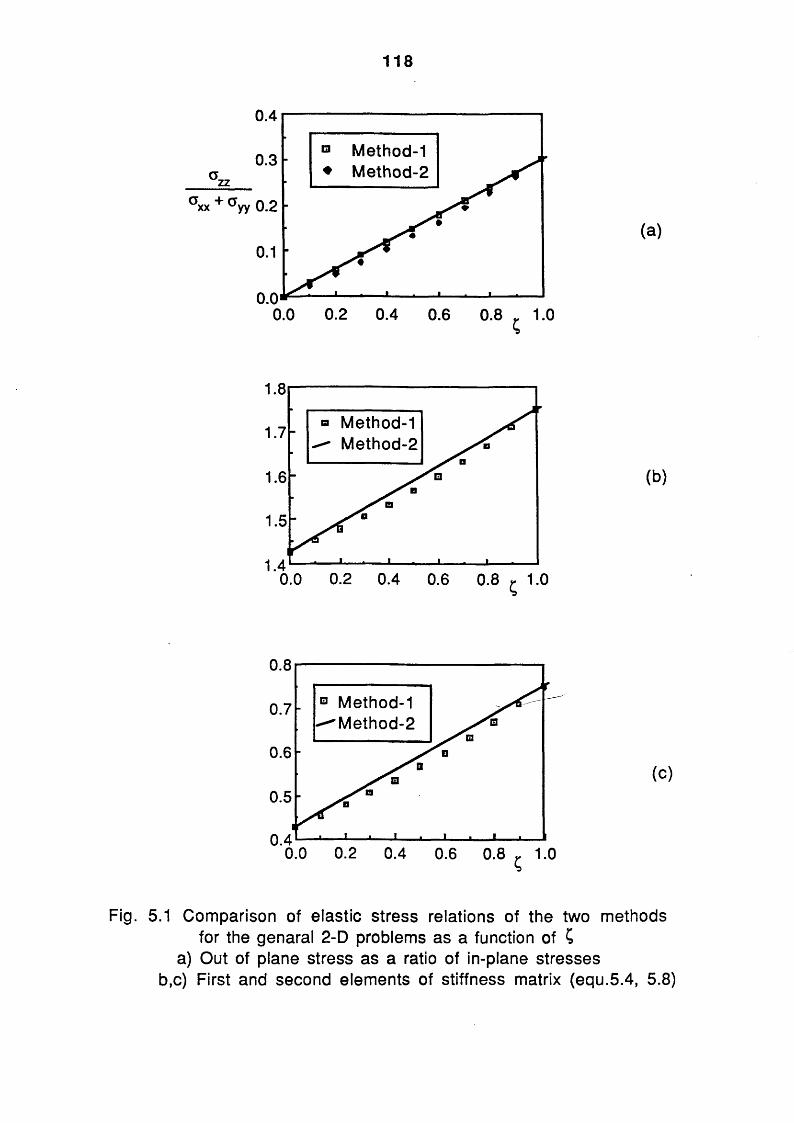
118
(b)
(c)
Fig. 5.1 Comparison of elastic stress relations of the two methods for the genaral 2-D problems as a function of £
a) Out of plane stress as a ratio of in-plane stresses b,c) First and second elements of stiffness matrix (equ.5.4, 5.8)

119
Fig. 5.2. Comparison of numerical and theoretical tensile stress ratios for the tensile test specimen, when non-work hardening elastic-plastic material Is considered,
a) At the beginning of plasticityb) at extensive plasticity (Ee « 3 o ys)

120
(a)®yy ( p la s t ic )
© yy (P,astlc)
(b )
Fig.5.3 Stresses in the tensile test specimen for different values of C for an elastic-non linear plastic material.
a) Tensile stress in the direction of loading.b) Out of plane tensile stress

121
% plastic strain
Fig.5.4 Stress-piastic strain relation of the A533-B pressure vessel steel.

1 2 2
Fig.5.5 Load-Load point displacement relations for standard compact tensiongeometry (a/W=0.56) for different values of the out-of plane constraintfactor,

123
0.12Q
BWi ys
0.10
0.08
0.06
0.04
0.02
0.00
$
♦ X* - +
X
+
♦ 5=1.0 plane strain
O £=0.75
x £=0.5
• £=0.25+ £=0.0 plane stress
0.0 2.0 4.0 6.0 8.0 10.0 12.0q E
W a ys
Fig.5.6 Load-Load point displacement relations for standard Three Point BendGeometry (a/W=0.5, S/W=4) for different values of the out-of planeconstraint factor,
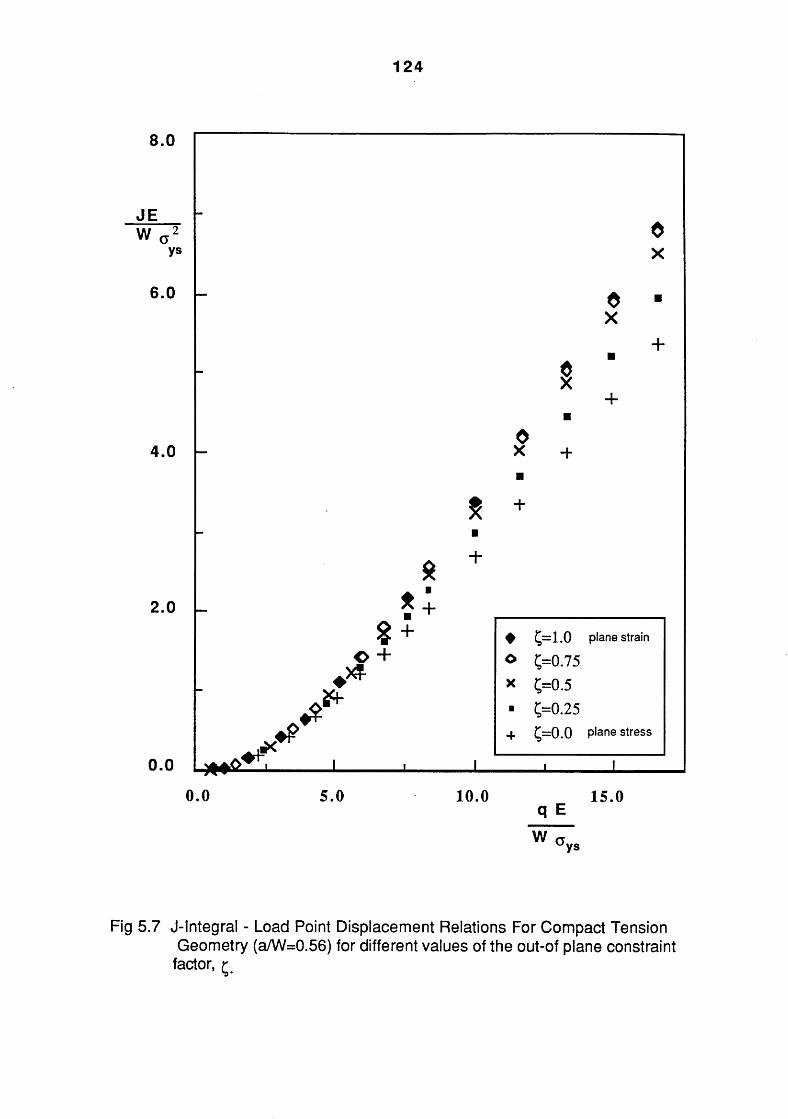
124
0 .0 5 .0 1 0 .0 1 5 .0q E
Fig 5.7 J-Integral - Load Point Displacement Relations For Compact TensionGeometry (a/W=0.56) for different values of the out-of plane constraint
factor, £

125
3.0
JEv T ^
ys
2.0
sx
$ +X
♦oX
+
♦o
X
+
1.0
0.0
f
$
*m+
£+
+
♦ £=1.0 plane straino £=0.75X £=0.51 £=0.25
+ £=0.0 Plane stress
8q E
W
10 12
ys
Fig. 5.8 J-Integral - Load Point Displacement Relations for Three Point Bend Geometry (a/W=0.5, S/W=4.0) for different values of the out-of plane constraint factor £•

126
CHAPTER 6
ELASTIC-PLASTIC LOAD-DISPLACEMENT
EQUATIONS FOR ESTIMATING J
6.1 INTRODUCTION
Representing an actual load-displacem ent, (Q -q), relation of a
cracked body by a mathematical equation is a complicated task,
especially if extensive plasticity is considered. Even for simple
geometries, an accurate yet simple equation can not be obtained
except for LEFM. Bucci et al(1972) presented a method to obtain the
com pliance of a geom etry using LEFM param eters where an
approximate procedure to account for the plastic zone size is also
provided.
For EPFM cases, an equation relating displacement to load, material
and geometry is bound to be complex. The absence of a shape factor
like term, and varying material properties with extent of plasticity
further complicates the task.
Load point displacem ent, q, of an elastic-plastic body can be
considered as a sum of elastic and plastic components. The elastic
component can be obtained from the elastic compliance of the body,
which is a function of geometry and elastic material properties,
Young's modulus of elasticity E, and Poisson's ratio v, and can be
easily determined using Bucci et al (1972) type analysis. The plastic
com ponent however, in addition to those influencing elastic
component, will also be a function of load level and material work
hardening characteristics. Although the precise form of relations
among these are not known, any selected form of equation is required

127
to give unbounded displacem ents at collapse load. This latter
statement raises the question of defining the collapse load for work
hardening materials.
In the following sub-sections, empirical equations to represent
displacem ent-load , (q -Q ), relations will be considered. Only
non-work hardening materials will be studied where the limit load is
taken as the collapse load.
As for the equations to represent (q-Q) relations, the elastic part
will always be related to the elastic compliance of the geometry,
while the plastic component will be approximated by either a
logarithmic or trigonometric function. Numerical solutions will be
used to determine and rationalise those constants involved in the
formulations. These equations will be integrated to evaluate the
complementary energy, C, or work input, U. J will then be calculated
from the change of this energy due to crack growth. In fact this J
estimation process is similar to the method originally used by
Begley and Landes (1972) in their experimental work.
6 .2 FO R M U LA TIO N O F LO A D -LO A D P O IN T D IS P L A C E M E N T
R ELA TIO N .
The load point displacement, q, of a cracked geometry is split into
elastic and plastic components, i.e.,
q=qei + qPi (6 -1)
The elastic component can always be obtained using LEFM concepts
and may be written as;

128
Qei- AtQ (6.2)
W here A1 is the elastic compliance of the cracked geometry
The plastic part of the displacement will be approximated by either a
logarithmic or trigonometric function which has been selected as;
qpl= A2Q tan2(,tQ /2 Q L) (6.3.a)
qp|=-A3Q Log( 1- Q /Q L) (6.3b)
W here Q L is the limit load of the geometry as defined by equ.3.15.
Both of these equations satisfies the requirement of unbounded
displacements at limit loads. A2 (and A3), is assumed to be a function
of geometry only, while the rest of the term; tan( ) or Log( ), includes
the effects of both geometry and load. In this study, single edge
notched geometry, (SEN), subjected to tensile loading, SENT, by
parallel end displacements or three point bending, (TPB), will be
considered. Furthermore, in each configuration only crack length will
be varied and A2 (and A3 ) will be assumed to be separable functions
of crack length and gauge length of that geometry.
6.3 EVALUATION OF J FROM LOAD-LOAD POINT DISPLACEMENT
EQUATIONS
Following the work of Begley and Landes (1972), J may be evaluated
as the change of either complementary energy or work done with
respect to crack length.r dC -I _ [ dll I1 3a JQ B l 3a Jq (6.4)
where, and
129
The form of equations selected in previous subsection makes it
easier to evaluate J from the complementary definition. These energy
terms for each of the selected forms of q-Q relation is given below.
Where x=(rcQ)/(2QL)
(T) and (L) stand for trigonometric and logarithmic forms of q-Q
relations respectively.
J is then obtained by substituting the com plem entary energy
equations, equ.6.5, into equ.6.4, which reduces to:
(6.5.a)
(6.5.b)
J (T) = G + —q2 tan x | Log (cos x) Q ^
- 0.5 9A2
2 AjQ tan x Log (cos x)
(6.6.b)

130
6.4 NUMERICAL STUDY OF THE SEN GEOMETRY
The SEN geometry (Fig.6.1) was numerically studied using a small
geometry change, elastic-plastic 2-D FE code. Due to symmetry, only
half of the geom etry has been m odelled with eight node
isoparam etric elem ents. Two different loading modes of the
geometry, namely TPB and parallel end tension, were considered. The
gauge length (span for the TPB) to width ratio was fixed at 4, while
crack length was varied as 0 .0 5 < a /W < 0 .3 . Non-work hardening
elastic-plastic material with plane strain constraint was assumed
and loading was implemented by successive displacement increments
of the loading points. For the TPB configuration, the central load was
distributed over a small region to avoid plastic instability at that
point. J integral for the cracked body has been evaluated as a contour
integral over 8 different paths, and average was taken as the
representative value.
6.5 CURVE FITTING TO NUM ERICAL LO AD-DISPLACEM ENT DATA
When fitting any of the selected curves to the numerical data, A1 of
equ.6.3, was always taken as the elastic compliance of the geometry
as determined from the numerical results. Least square curve fitting
techniques were then used to find best fit to the plastic component
of displacem ent hence determining A2 (or A3). In this latter case
those data points corresponding to load levels nearing or at the limit
load were excluded from the curve fitting analysis (excluded if (
Q/Ql )> QR).
A series of crack lengths was considered to enable the
determination of a functional relationship between A2 (or A3) and

131
crack length. Furthermore, as the derivative of limit load with
respect to crack length appears in J formulations, (Equ.6.6), a
functional relationship between constraint factor, L, and crack
length will also be determined.
The values of constants A2 and A3 are shown in Fig.6.2 as a function
of crack length for the two different loading configurations
considered. It is to be noticed that the range of load ratios
considered in the regression analysis (0 < Q /Q L<Q R) influences the
values of these constants, hence the accuracy of the q-Q equation in
representing the numerical data. Both constants, A2 and A3, suggest a
functional relation (except A3 for QR=95 for TPB) to crack length as;
<jB
(6.7)
where d,p=constant depending on QR
B=Thickness of plate
Table 6.1 presents the constants d and p for different values of QR
for both SENT and TPB loadings.
Typical comparison of m athem atically obtained load-load point
displacement relations with those from the FE method are given in
Fig.6.3-6. Both of the selected equation proves to be good in the near
linear region of the curve. The advantage of the trigonometric form
is evident at high load levels and for larger crack sizes. The value of
QR (as described above) is only important if more accurate
representation of q-Q relations for longer cracks or for short cracks
at higher load levels are required. However, with the selected forms
of equations this higher accuracy is achieved at the expense of
accuracy in the near linear range.

132
The constraint factor, L, as determined from numerical results, is
shown in Fig.6 .7 as a function of crack length, which can be
represented by the following equations for the loading modes
considered.
t a »0.3731^=1.0 + 0.1183 (.$> (6.8.a)
a \0-2686Lg = 1.0+ 0.6348 I (6.8.b)
where subscripts T and B stands for tension and bending cases
respectively.
6.6 J ESTIM ATES FROM LO AD-DISPLACEM ENT EQUATIONS
Once the constants related to q-Q equations, namely Ar A2 and A3,
and the constraint factor, L, has been determined as a function of
crack length, J for a given load level (Q /Q L) may be estimated.
Substitution of relevant form of L, Q L and A2 ( or A3 ) in equ.6.6
results;
£ (l) = 1 + ( ^ ) P 2 ( P [ 025 + ^ + 0.5 -1) log(1-z) ]
- T V )['0 5 + 7 + T ' ° 9 ( 1’2 )] } (6-9-a>z z2
OC T X
|2/aL’ N a u tan(x) | log[cos(x)] Q 5 tan (x)j 1 (6gb)
x 9X

133
w here N=1 for tension, 2 for TPB
Y= LEFM shape factor of the geometry
a = 1 for tension, (1.5 S/W) for TPB
z= Q/Q l and x=tcQ /2Q l
E'= E for plane stress, E/(1-v2) for plane strain
L'= 3L /a(a /W )
Comparison of numerical and estimated J values are given in
Fig .6.8-11. It is to be noted that, the J estimates from the q-Q
equations are based on load, and where reference is made to
displacement, it refers to those from the FE analysis.
6.7 D ISC U SSIO N S
Comparison of numerical and estimated q-Q relations for a given load
level, (Figs.6.3-6), indicates relatively large differences in the near
limit load range. Conversely from displacement point of view, the
differences in load between numerical and estimated values are
significantly smaller. However, displacement has been selected as
the dependent variable of q-Q equations, and such differences
mentioned above will reflect on J estimates.
Accurate estimates of J from such simple equations representing
q-Q relations should not be expected for the near limit load levels.
The deficiencies of the 'selected equations' are evident in Fig.6.3-6.
While low values of QR (range of loads considered for regression
analysis) provide good correlation only in the near linear range, high
values of QR provide better correlation in the near limit load range
but at the expense of accuracy in the near linear range. This is due to
the fixed form of the selected functions (trigonom etric or

134
logarithmic), which is being forced to correlate with a relatively
arbitrary curve. Generally speaking, the trigonometric function has
better ability in representing q-Q relations in the near limit load
range.
Differences between numerical and estimated q-Q relations resulted
in unacceptably high differences between numerical and estimated
values of J. Evaluation of J using the rate of change in energy at
constant displacement will reduce such high differences in the near
limit load range, but not in the near linear range. Due to the
complicated form of complementary energy equation (equ.6.5), this
point was not taken up.
The differences in J at low load levels must be related to the
selected functions, particularly to their deficiency in accurately
representing q-Q relations simultaneously in the near linear range
and in the near limit load range. The differences in J, between
numerical and estim ated values, in the near linear range may
therefore be reduced by restricting the q-Q equation to that range,
i.e. by using lower values of QR.
A different method of estimating J from q-Q equations, namely by
relating work done to J through the *n factor, may be sought. The
estimation of work done, U, from the q-Q equation will not pose any
difficulties, however large errors in U, hence in J, in the near limit
load levels may result as displacement is the dependent variable in
the q-Q equations. Nevertheless, better accuracy, especially at low
load levels may be expected if an accurate t| factor for the geometry
is known.
G enerally, the logarithmic form used overestim ates numerically
obtained J values in the near linear range and underestimates in the

135
near limit load levels. The trigonometric form, however, does the
opposite of the logarithmic form.
The general form of q-Q relations require some very complex
equations for accurate representation. For such complex forms
separation of variab les will be extrem ely d ifficult, if not
impossible. If simple forms, such as those used here, are selected,
they should be retained as representing the q-Q relations in a coarse
m anner. Further, any information obtained by processing such
equations should also be treated as coarse, and their use must be
properly justified.

1 3 6
.D ►
Q
T
L J J
(a)
Fig.6.1 Edge crack geometrya) Under tensile loading (SENT)b) Under three point bending (TPB)

137
(a)W
w(b )
( «* )
Fig.6.2 The constants a 2 and a 3 of selected load-displacement equations as a function of crack length. a,b) For SENT geometry c,d) For TPB geometry

138
BWa.
4 * ------------
• /
p
Ax * 's ' V K '
A > "x
< «|»<t .♦♦ - -
* .30 0.90
O COMPUTED (fl/W=0-05) A FITTED lfl/W=0.05 ) + COMPUTED Cfl/Hr0.14) X FITTED (fl/W=0.14) ❖ COMPUTED (fl/H=0 .25) A FITTED (R/H=0.25)
1 .50 2 .10 2-70 3.30 3.90 4 .50
qE5.10
(a)wcr
.>$-------------
Q
BWO„
AX>'*/ / -
Jk'j*
*A'*
yp
as ia a ------►“
________
,^.30
A
0.90 1 .50 2.10 2.70 3.30
(b)
O COMPUTED A FITTED + COMPUTED X FITTED 4> COMPUTED ♦ FITTED-------- 1--------------
3.90
fl/W=0.05) fl/W=0.05 ) R/H=0.14J R/H=0.14) A/W=0.25) fl/H=0.25)4.50 5.10
q e
w av
Fig.6.3 Numerical and Estimated (Logarithmic) load-displacement relationsfor SENT geometry a) QR=0.85 , b) QR=0.98

139
O--------- >--------- 1---------------------1--------- 1 ___________1 -----1_______________1_______________
oo✓
> ______ _A Xs ' Y
oCDS '
S ' * s’ 4.
o'
Q S sSs *
DO $ 0.6(
____
__1__
A 'S '
A'*'o
o"
oCVJwe*o / O COMPUTED (R/W=0.05)s A FITTED (A/W = 0 .05 )
+ COMPUTED (R/W=0.14J X FITTED (R/W=0.!4)
o O COMPUTED (R/W=0.25)o 4“ FITTED (fl/Wr0.25)|U-30 o'.90 l'.50 Z. 10 2‘.70 3‘.30 3'.90 4 '.50 5.
(a)
Q
B WO,
,6t K ? '
p>
- A- -Ok
------------*
r mM'' *K
A*A'«
O COMPUTED A FITTED + COMPUTED X FITTED $ COMPUTED ♦ FITTED
( A/W: ( R/W: (R/W: (fl/W: (fl/W: (fl/W:
=0.05 I :0.05) =0.14) = 0.14) =0.25) =0.25)
^b.30 0.90 l .50 2 .10 2-70 3.30 3-90 4 .50qEwa,
(b)
Fig.6.4 Numerical and Estimated (trigonometric) load-displacement relationsfor SENT geometry a) QR=0.85 , b) QR=0.975

140
Q
BWOy *
_ _____ o
X X
XX '
4 ✓ / /-x4 // /
4 */ /
/.X' /
*X A * ¥
X 'X A X ¥J¥
^•00 1 .50 3.00
O C0MPUTE0 (A/W=0.05) 4 FITTED (fl/W=0.05) + COMPUTED 1fl/W=0.15) X FITTED (R/H=0.15J O COMPUTED (fl/W=0.30) ♦ FITTED (fl/H=0.30J
4.50 6.00 7.50 9.00 10.50q E
12
(a)w o ,
A * ___ OA*
x _ X X x _ x _ _
Q
B W O y ® ' ✓ * / // a /- / A X / a//a/x +' ' >♦
t t t i - ’- ----- a-------------
/
/* rf* a'X a x ¥¥
O COMPUTED (fl/H=0•05) A FITTED (R/W=0.05)+ COMPUTED 1fl/W=0.15) X FITTED (A/W=0.15) <!> COMPUTED ( A/W=0 • 30 ) ♦ FITTED (fl/W=0.30 )
^ .00 l .50 3.00 4.50 6 .0 0 7.50 9.00
(b)
10.50
qEw av
12
Fig.6.5 Numerical and Estimated (logarithmic) load-displacement relationsfor TPB geometry a) QR=0.85 , b) QR=0.95

141
Q
BWOy 2
__ ____o
// x/ X'
/ ✓ d s
/ * d /
/ / ,>■4 / * '
• d // r
^.oo
/4 dd/ y** *4* d
d ' d *X d
/
1 .50
O COMPUTED (fl/W=0.05) A FITTED t fl/W=0 • 05 ) + COMPUTED (R/W=0.15) X FITTED IR/W=0.15) O COMPUTED (fl/W=0 • 30) + FITTED I fl/W=0.30 )
3.00 4.50 6 . 00 7.SO 9.00 10.50q e
wau
12
(a)
Q
BWO
' y UJ
^ — X__ _ _____
X/ y X '
' y d // *-d y ♦
/ 7 ^/ '
4 / t*■ d y
'd »y d/ ,Jd *4* d
d + ' d **ds
1 .00
O COMPUTED A FITTED + COMPUTED X FITTED O COMPUTED ♦ FITTED
(R/Hr0.05J (fi/W=0.05) [R/W=0.15) (R/W=0.15) (R/W=0.30 ) (R/W=0.30 )
1 .50 3.00 4 .50 6 .0 0 7.50 9.00
(b)
10.50qEw a
12
Fig.6.6 Numerical and Estimated (trigonometric) load-displacement relationsfor TPB geometry a) QR=0.85 , b) QR=0.95
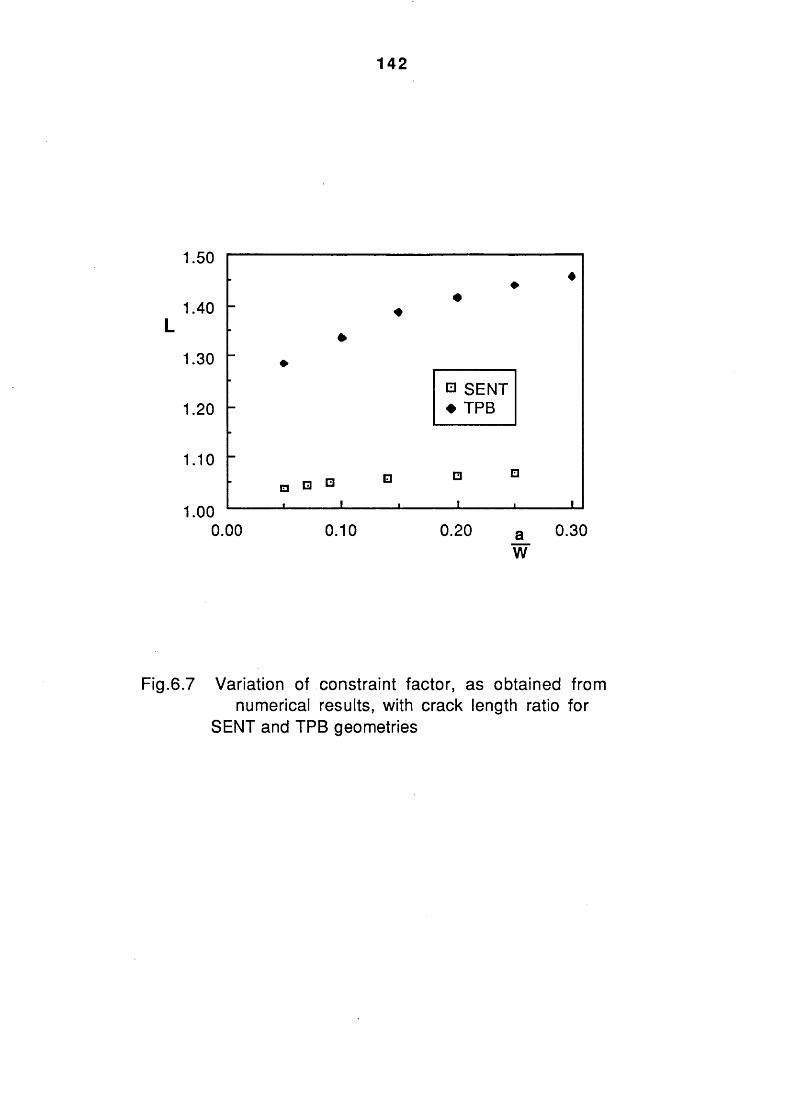
142
1.50
1.40L
1.30
1.20
1.10
1.000.00 0.10 0.20 a 0.30
B SENT ♦ TPB
□ □ n__________ I__________ i__________ L
w
Fig.6.7 Variation of constraint factor, as obtained from numerical results, with crack length ratio for
SENT and TPB geometries

.80
1-20
1.
60
2-00
2.
40
2-80
'• oo ; cm"5 CO
II.1
I
O COMPUTED (fl/H=.05) a ESTIMATED IA/W=.0S) + COMPUTED (R/W= .14) X ESTIMATED (A/Wr.14) <!> COMPUTED IA/W=.2S) * ESTIMATED (fi/W= .25)
%
♦ ^
^.00 Q1.20 0-40 0.60 0.80 1 .0 Q_Ql
oii <\jo cn-
I
o03
OO
OUD
Or\j
I
© C O M P U T E D (A/W=.05) A ESTIMATED (A/W=.05) + COMPUTED lA/W= . 14 ) X ESTIMATED (fl/W=.14) <!> COMPUTED ( A/W= .25 1 * ESTIMATED (A/W=.25)
1 I 1 I 'w
ai U A+ iif
A ll,tf
If
+ ¥ * t.- -
X 4.X ♦ * ♦
A ">/|X
X ^X ♦/'
X + V+ S fS
/ ' *v /
X♦
ooo(^ .00 i‘.oo 2'.00 3 .0 0 4*. 00 5.0^
qEway
Fig.6.8 Comparison of J-Integral values estimated from Load-displacement equation(logarithmic, QR=0.98) with Numerical values from FE study for SENT geometry.
143

.20
1.60
2
.00
2
.40
2
.80
3-20 <*>
Xl
I
4
O COMPUTED (A/M=.05) A ESTIMATED (A/W=.05) + COMPUTED (R/W= .14 1 X ESTIMATED (R/W=.14) O COMPUTED (A/W= .25) * ESTIMATED (A/W=.25)
{Ii
iIIHft//
* a
—. ■ .’15' A $♦-Mh-Xf-X i f * » *►
i o I CM
O i <n""3
oOO
CM
OOCM
O COMPUTED (R/W=.05) A ESTIMATED (A/W=.05) + COMPUTED (A/W= .14) X ESTIMATED (A/W=.14) O C0MPUTE0 (A/W= .25 ) * ESTIMATED (A/W=.25)
x
Ii II I ' /' / ' ' / '' / /
x(/f"/'/
-oD CD
Hn
nU
S 1
0
<*r O '• ♦ **
^.00 0.20 0.40 0.60 o'. 80
oCD
.00 i '.oo 2*.00 3'. 00 4f.00 5 .0qE
Q l w a y
Fig.6.9 Comparison of J-Integral values estimated from Load-displacement equation(trigonometric, QR=0.975) with Numerical values from FE study for SENT geometry.
14 4

.80
1 .20
1.60
2.
00
2.40
2.
00oCM
^ «“ ”3
IIIIIfl»I I* I I I I I fI i I 2
© C O M P U T E D (A/W=.05) A ESTIMATED (A/W=.05) + COMPUTED (A/W= .151 X ESTIMATED (A/W=.15) <!> COMPUTED (A/W=.25) * ESTIMATED (A/W= .25J
I aI I I
/k//
I I I* II I
/' * / I X
' /▲ / / ‘A ✓ / *A / /K x .JO x ' *
_’ * ♦
t !/ f x/ X
♦♦
oCM
O «"“O
o00CM
OCM
OOCM
OID
OCM
//
//
/' /
//
© C O M P U T E D (fl/W=.05) A ESTIMATED (A/W=.05) + COMPUTED (A/W= .15) X ESTIMATED IA/W= .15) ❖ C O M P U T E D (A/W=.25) ♦ ESTIMATED lA/W= .25)
/
P/
/ A
/7 /V/A / /7 // / , /
f / /
/
*
/ 4 /X
♦
/
X
♦
^.00 0-20 o'. 40 O'. 60 o'. 80 7.00QQ l
ooo^.00 2.00 4 .00 6.00 8.00
qEWGy
Fig.6.10 Comparison of J-Integral values estimated from Load-displacement equation(logarithmic, QR=0.90) with Numerical values from FE study for TPB geometry.
145
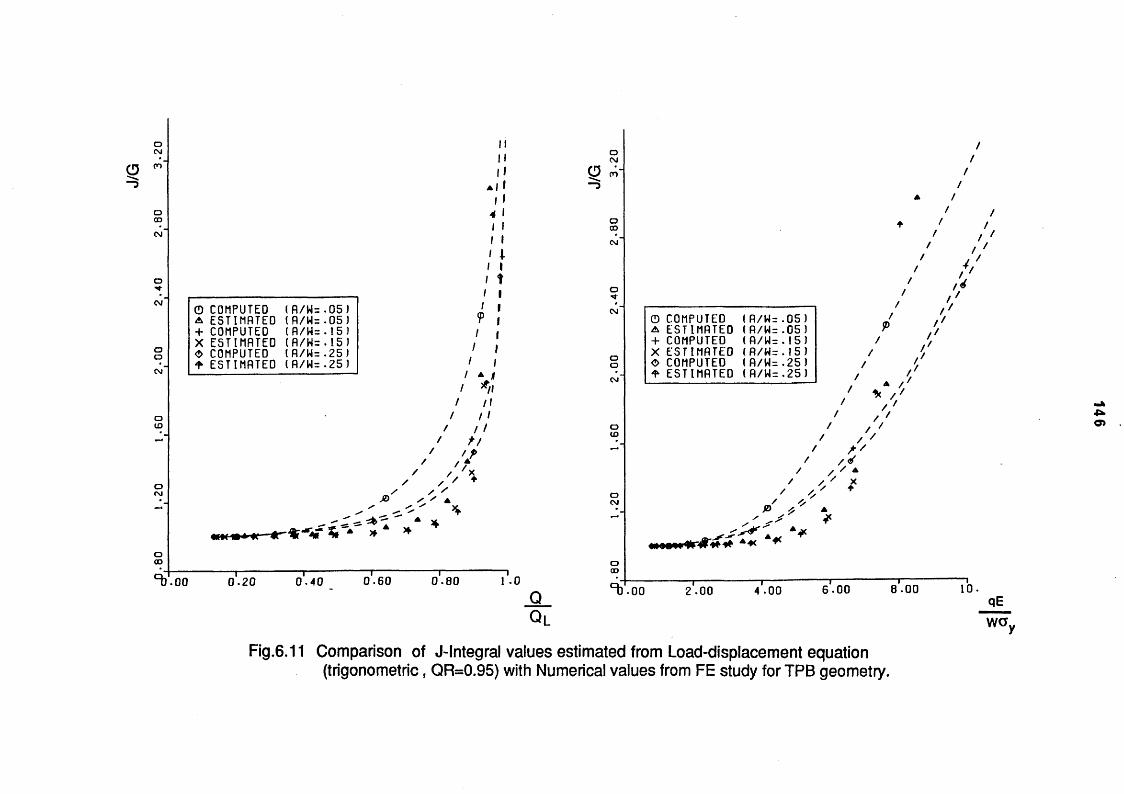
.80
1.20
1.
60
2.00
2.
40
2.80
oCsleg "
oCM
//
O COMPUTED (fl/W= .05 1 A ESTIMATED ( A/W= .05) + COMPUTED (A/W=.15) X ESTIMATED (fl/H=.15) 0 COMPUTED (A/W=.25) ♦ ESTIMATED (A/W= .25)
ll eg cn~
A | 1 . |—s
4 1 o1 1 CO
1 1 cm"
1 11 1/ tI I f IV ii Ii I
iit n
/ // / ‘
/ / '
JD/ / '
/ ' A•X’ *
"■ A
*4
f/1
/ / / /
t/
'x♦
//
A /
/♦
//
©COMPUTED (A/W= . 05 ) A ESTIMATED (A/W=.05) + COMPUTED (A/W= .15) X ESTIMATED (A/W=.l5) O COMPUTED (A/W= .25 ) * ESTIMATED (A/W= .25)
//
//
' */*
/ * v / / //
/
/ AxV ♦
//
^.00 T0.20 0*. 4 0 0*. 60 o '. 80
i1 .0Q_Q l
ooocb .00 2.00 4.00 6.00 8.00 10.
qEway
Fig.6.11 Comparison of J-Integral values estimated from Load-displacement equation(trigonometric, QR=0.95) with Numerical values from FE study for TPB geometry,
146

147
QR i 0.85 i 0.925 i 0.975. j ____ _____d ! 9.11e-4 ! 4.36e-6
. 1 1i«0.404e-6
p ! 2.0571 ! 1.966 1 j 1.373
TENSION ( T )
QR I 0.80 ! 0.90 | 0.95
d j 34.16e-4 j 18.85e-4 | 6.88e-4 BENDING(T)
p
ir—LOOI___I
0.4 | 0.27
QR , 0.85 , 0.90_i i_
' 0.98i
d ! 2.87e-3 ! 4.392e-3 i 3.559e-3i_4___________TENSION (L )
pT1 1.9 ■ 1.928 1 1.422
QR ii 0.80 i 0.90 '
L___ j
diii 18.45e-3 ! 14.03e-3 i
piii
0.643 1 0.2542 T
BENDING ( L)
(L) Logarithmic form (T) Trigonometric form
TABLE 6.1 Generalised constants for representing the load-displacement relations for the edge crack geometry.
148
CHAPTER 7
J ESTIMATION FOR SINGLE EDGE CRACK
GEOMETRIES SUBJECTED TO ECCENTRIC
TENSILE LOADING
7.1 IN TR O D U C TIO N .
Structural components with cracks are seldom subjected to pure
tension or bending types of loading. Estimates of the crack tip
severity for such components in the EPFM range are difficult.
N um erical studies may provide answ ers but require the
consideration of different ratios of tension to bending loads.
Use of r| factors to estimate J in experimental work has proved
successful for deep notch bend and compact tension (CT) type
specimens. Merkle and Corten(1974) have studied the CT specimen to
determine the plastic component of i\ factor. They simply considered
rigid plastic material and idealised stress distribution across the
ligament to obtain t |p| as a function of crack length to width ratio,
a /W . As will be shown later the validity of these results are
restricted to deep notch geometry cases subjected to primarily
bending loads. Clarke and Landes (1979) have demonstrated that for
the standard CT specimen, tigj and r ip| are identical, which is
extremely convenient in experimental work.
Ernst(1983) has studied single edge notched specimen with load
applied eccentrically to the centre of the ligament in tension, with
bending effects. His work covered the entire range, from pure bending

149
to tension. Estimates of Tip| were provided in a tabular form as a
function of eccentricity of applied load. It is to be stressed here that
the work by Ernst was also limited to deep notch geometries.
It is generally accepted that high stress levels in the vicinity of
crack tip region may result due to plastic deformation coupled with
plane strain constraint effects. Slip line field theory has been
employed to show that, stresses in a region near the crack tip may be
as high as ~3cr for deep notch bending cases. The same study for
single edge crack geometries subjected to 'pure tension' shows the
absence of such a high constraint region. It is to be noted here that
a rigorous definition for pure tension of single edge cracked
geometries does not exist, as it does for pure bending. This point
will be discussed later in subsection 7 .8 . In the following
subsections unless otherwise stated, the term 'pure tension' will be
used to indicate such loading types which produces uniform tensile
stress across the entire ligament for rigid plastic materials (e=0 in
Fig.7.1).
In this section, edged cracked geometries subjected to eccentric
tensile loading, hence producing bending effects, will be studied.
Rigid plastic m aterials will be considered and the effect of
eccentricity on the applied load will be investigated. Contrary to
previous workers, ie. Clarke and Landes(1979), where appropriate, a
high constraint crack tip region, (HCCTR), will be included in the
analysis. The study is aimed at obtaining loads and r |p| factor, for
determining J, as a function of eccentricity. Known solutions, namely
'pure tension' and 'pure bending' cases will be utilised for
comparative analysis. The analytical work here is formulated in
general so as to allow extension to shallow notch geometries.

150
7.2 FORM ULATION OF GOVERNING EQUATIONS
Consider a 2-D cracked body of unit thickness subjected to an axial
load (perpendicular to the ligament in the plane of the body) with an
eccentricity of (e) from the centre of the ligament (Fig,7.1). For a
rigid plastic material the stress distribution across the ligament
may be idealised as shown in Fig.7.2 . Note that the HCCTR is
represented by a uniform stress level of (m^>1) over a region of
y. Consideration of force and moment equilibrium leads to;
Q = [ ( m 1- 1 ) y + 2 x j (,c
M = Qe =
w here c 0= a ys
( — ( t y- y2 ) + ( ~ x 2 )
for Tresca yield criterion
4 \ 0-5c0 = c ( — ) for Von-Mises yield criterion7 u
(7.1)
(7.2)
b= remaining uncracked ligament.
For pure tension (e=0) and bending (e-»°°), the limiting values of load
and moment are;
QL= o 0 b (7.3)
m l = L 0 oT (74>
where L is the constraint factor for the cracked geometry when
subjected to bending loads and accounts for the HCCTR. It is to be
noted that while Q (and hence M) represents the load (and moment)
for a given eccentricity of applied load, limiting values under 'pure
tension' and 'pure bending' types of loading are represented,

151
respectively by Q L and by M L.
Equations 7.1-4 may be combined to give:-
M Q ML = a QL
(7.5)
Q , j i y 2x o [ = < mi - 1> b + T
(7.6)
2 2 , Q ^ / y y \ , 4 x
a L ^ - = 2 ( m i - 1 ) ( ^ - ^ ) + 1- —L D D
(7.7)
4ea " Lb
(7.8)
7.3 EVALUATION OF J FOR A GIVEN LOADING SYSTEM .
J integral for a cracked body may be evaluated from the work done by
the applied forces, either as the rate of change with respect to crack
length, or through the use of rj factors.
duda
r\ U bB (7.9)
The work done for the system shown in Fig.7.1 can also be calculated
from the equivalent system, shown in Fig.7.3. For a rigid plastic
material, the work, U, which is given by equ.7.10 is combined with
equ.7.9 to give rjpl (equ.7.11).
U = Q.q = Q.s +M.0 (7.10)
_ __b_ 3Q “ - Q da
q(7.11)

152
7.4 A SIM PLE CASE W ITHO UT THE HCCTR
When the HCCTR is neglected (eg; m ^ l and L=1) simple mathematical
equations emerge and this may be solved analytically. Using
equ.7.1-9, the following basic equations may be obtained.
Q__ 2e b
X = 8
(7.12)
(7.13)
(7.14)
The relationship between load and moment and their variation with
respect to eccentricity of the applied load are shown in Fig.7.4. The
ripl factor for this case can be evaluated by substituting equ.7.13 into
equ.7.11, and noting that both e and QL change with respect to crack
length (da=2 de).
Tv«=
b2e
7 f - i .
(7.15)
w here
As expected, equ.7.15 gives identical results to those given by Merkle
and Corten (1974) analysis, hence correct Tip| for deep notch
geometries with e=1.5(b) or larger (Fig.7.5). The effect of changing
(e) with respect to crack growth is also shown in Fig.7.5 where a

153
second T jpl factor has been plotted by treating e as a constant.
Although this consideration is unrealistic from the modelling point
of view, its plausibility for practical problems can be demonstrated.
W hen a cracked component is loaded eccentrically the effect of
bending moment (Q.e ) causes a central deflection v (« 0 .D), as shown
in Fig.7 .6 . An increase in crack length causes an increase in
eccentricity (de=0.5da) and hence the ratio of moment to load, which
in turn increases the central deflection, v. This increase in v
effectively reduces the eccentricity, e. Therefore, although the
increase in crack length increases the eccentricity, for practical
problems this increase is somewhat reduced by the increase in
central deflection due to the increased bending effects.
7.5 PURE BENDING CASE WITH HCCTR.
The 'Pure tension' case, which does not have a HCCTR, has already
been addressed in the previous subsection. For pure bending cases
an analytical solution is possible as values of (L ) and (m - j ) are
known, at least for deep notch cases. From equations 7.5 -8 the
following are deduced.
(7.17)
(7.16)
zb
or m+1(7.18)

154
where m and z are, respectively the corresponding values of m-j and
y for the pure bending case. Substitution of deep notch bend values of
m [= 1 + 0 .5 (ti)], and L [=1.261 (M ille r(1982))] gives numerical
estimates of the size of the HCCTR and the position of the neutral
axis (where stress reversal occurs). As it is generally accepted that
the neutral axis is about 0.4(b) from the crack tip (BS.5762, (1979)),
only the -ve sign in equ.7.18 is taken to be correct. This also gives
the size of HCCTR as *0 .1 (b).
E qu .7 .18 also provides a functional relationship between the
intensity of stress (m) within the HCCTR and its size (z) for shallow
notch cases. Although neither the size (z), nor the stress within the
HCCTR are known, either of these is sufficient when assumed, eg. to
be the same as that for deep notch cases, for a possible solution.
This point will be further explored in subsection 7.9.
7.6 COMBINED TENSION and BENDING WITH HCCTR.
7.6.1 Assumptions for a possible solution
Generally, for cases with HCCTR, solution of the governing equations
require an assumption to be made as there are 4 unknowns (Q, y, x,
for the three basic governing equations (equ .7 .5 -7 ). These
formulations make it easier to have assumptions for HCCTR, either
on its size, y, or on the magnitude of stress, mr within it. The
limiting values of both y and m1 are considered to be known (m ^ m ,
y=z for bending, and m ^ l or y=0 for ’pure tension'). Any assumption
made in this respect is therefore required to satisfy these limiting
conditions. A summary of different assumptions considered are listed

155
below;
a) m1 = my = z ( 1 ’ q [ )
(7.19.a)
b) m1 =my = Z ( “ - Q [ )
(7.19.b)
c) y = z (m, - 1 ) = ( m -1 ) ( 1 ~ ) (7.19.C)
d) y = z (7.19.d)
e ) m1 = m/ -na\p
y = z ( 1 - e ) (7.19.e)
f) y=z (m1- 1 ) = (m -1 ) (1 - e 'n“ )P (7.19.f)
These assumptions are formulated as to have variable power
coefficients, (n) for the first four and (n) and (p) for the last two and
these will be varied to satisfy certain requirements, eg. t |p|=1 for
'pure tension' cases.
7.6.2 Solution of The Governing Equations.
For a particular geometry, (a, W ), when subjected to pure bending,
the constraint factor, L, and the magnitude of stress within the
HCCTR are supposed to be known. Using one of the assumptions
listed in the previous subsection together with equations 7.5, 7.6 and
7.18, equ.7.7 can be reduced to;
X c , ( § - ) ' =00i=1 U L
(7.20)
w here C p CjfL.m .s.b^.n.p)
r,- r,(n,p)

156
Generally an analytical solution to equ.7.20 is not possible except
for some special values of n (or n, p). Therefore, a numerical
technique is employed to obtain a solution for Q /Q L corresponding to
a particular set of values of e, n, etc.
The evaluation of r ipl, from equ.7.11, requires the rate of change of
load w .r.t crack length. For this purpose, equ.7 .20 has been
differentiated algebraically, and then arranged in the following
general form:
where (») indicates derivative w.r.t (a/W).
Once a solution to (Q/QL) is obtained, a solution to equ.7.21 may
follow for (Q /Q l )» .
When expressed in terms of load ratios, equ.7.11 becomes:
A computer program has been written to solve equations 7.20 and
7.21 and also calculate *np). This program requires user supplied
values for a, W, m, L, L' (derivative w.r.t a/W ), desired value of rjp|
for 'pure tension' (i.e. e=0), and a selected value of power index p in
the case of assumptions e,f (equ.7.19). An iterative procedure is then
followed for e /b = (1 0 "6) to determine the power index, (n), until the
selected value of r|p, is achieved. Once (n) is fixed the calculations
s s r. -1(7.21)
q.(7.22)
for other values of e/b follow.

157
7.7 THE ANALYTICAL AND NUMERICAL STUDY OF DEEP
NOTCHES
The formulation of the problem has been carried out in general sense,
and it can be applied to any crack size, provided 'L' and 'm' for pure
bending are known. In general, though 'L' is known as a function of
a/W , eg. Miller(1982), the value of 'm' or 'z' are not known. For this
reason this part of the study is restricted to deep notches. Strictly
speaking, as long as the deep notch cases are adhered to (a/W >=0.296
according to M ille r(19 8 2 ) ,^ > = 0 .1 8 according to G reen andw
Hundy(1956)), for which 'L' is a constant, the actual value of a/W is
not important for the analytical model.
7.7.1 Analytical Results
Results of solution to equ.7.20 and calculated r|pI factor for various
assumptions considered (equ.7.19) are shown in Fig.7.7-10. In all
cases shown, except Fig.7.7, the power index n (Equ.7.19) has been
determined to give rip| =1 for 'pure tension' (e=0). The advantage of
assumptions e,f over the others (a,b,c,d) is the ability of altering
load and ripl for e/b«<2, hence having better chances of matching the
data obtained by other methods. For e /b >= 2 all assumptions give
practically identical results to the Merkle and Corten(1974) analysis
and tipi=2.0 for Pure bending.
7.7.2 Numerical Results
A single edge notched geometry with a/W =0.5 (or =0.3), and D/W=2
was modelled for a finite element study of the problem (Fig.7.11). A
small geometry change elastic-plastic 2-D FE code with 8 noded

158
isoparametric elements were used and plane strain conditions were
assumed. The material was considered to be elastic-rigid plastic
with E=210.KN/m m 2, v=0.3 and c ys=0.57364 KN/mm2 . The loading of
the geometry has been achieved by successive displacements of a
nodal point to simulate pin loading. To avoid plasticity at the loading
point, a different material, as welded to the ends of the actual
geometry, was also modelled. This added part was considered to have
considerably higher Young’s modulus of elasticity and yield stress ( 5
and 10 times higher, respectively ) compared to the main body.
J-Integral for the loaded geometry has been evaluated along 8
different contours, hence checking path independency, and average of
all was taken as the representative value. While G, the elastic energy
release rate, has been taken as the elastic part of J, the plastic
components of J and work done by the applied load have been used to
evaluate np, (equ.7.24).
J = G + JPiAJ
TV l - B b AUPi
Pi
(7.23)
(7.24)
where A Jp| and A U p| are corresponding changes, respectively in Jpl
and Up| for a finite change in overall the displacement. This equation
is assumed to be applicable in the extensive plasticity regime, that
is when plasticity spreads across the entire ligament. Numerical
results which are shown in F ig .7 .12 -13 , are com pared with
analytical results (assumption e and f of equ.7.19) in Fig.7.14.

159
7.8 D ISC USSIO N S
Numerical results indicate that for rip| to be unity, the applied load is
required to have an eccentricity, e /b «0 .07 . This means that the
ligament is subjected to a small amount of bending moment. For
smaller eccentricities, (e/b<0.07), though an elastic solution to the
problem does exist, in the extensive plasticity regime, the crack
flanks interfere each other, suggesting a -ve applied bending
moment. Furthermore, while for e/b=0 theoretical tensile limit load,
Q l , is numerically matched, for some small values of ( e/b) a load, Q,
higher than Q L was obtained. These indicate the presence of HCCTR
even when the geometry is subjected to such tensile loadings giving
V 1-0 -
For (e /b)>=0.4, good agreem ent between analytical and numerical
results for rip| is observed for (a/W )=0.5 case, but a rather poor one
for (a/W )=0.3. For (e/b)<0.4 the correlation between numerical and
analytical results is poor for all a/W values considered here. This
may suggest that for (e/b)<0.4, either the assumed variation of the
size of HCCTR ( or the stress within it ) is poor, or the numerical
results are effected, so far by unaccounted factors. Furthermore,
according to numerical results, the measure of eccentricity should
not be referred to the centre of the ligament but to a point away
from the centre, nearer to the crack tip.
The definition of 'pure tension', which in this work was taken as
load applied along the centre of the ligament and producing uniform
stress across the entire ligament, is suspicious. The other types of
tensile loadings of SEN geometries does not either offer an answer
to the meaning of 'pure tension' in practical applications. Other

160
commonly used tensile tensile type of loading of SEN geometries are
listed here.
a) Applied uniform tensile stress across the entire width
b) Applied uniform displacement across the entire width
c) Pin loading along the centre of the specimen width
In all cases, the point of applied loading is implied to be at distances
far from the the crack plane. Miller(1982) gives the assumed form of
tensile limit load, (equ.7.3), for SEN geometries loaded by uniform
displacement across the width (i.e. as case (b) above). For uniform
stress or pin type of loadings a rather lower limit load was given.
The former type of loading may be idealised as the pin loading type,
which has an applied load eccentricity of e=0.5a. While uniform end
displacement type of loading will result in a -ve applied bending
moment, the other two will result in a +ve rotation of the ends.
However, the numerical model used here in representing the pin type
of eccentric tensile loading, further imposes a different kind of
restriction to the ends of the specimen. This is due to the rather
stiff properties of the end piece , which restricts the contraction of
the ends. Nevertheless, different effects are to be expected from
each type of loading, especially with short gauge lengths.
The numerical results are also affected by the gauge length,
especially for loadings with small eccentricity. Part of the effect
may be attributed to the central deflection, as discussed in
subsection 7 .4 ., which may be reduced by choosing shorter gauge
lengths. On the other hand, short gauge lengths may interfere with
slip lines, which for the pure tension case extend from the crack tip,
at 45° to the loading line, to the back face of the specimen. For the

161
bending case, the maximum size of the plastic region in the direction
of loading is less than that of tension. Therefore, for the numerical
model, the gauge length was selected as D =2W to avoid this
interference. However, in the numerical study, plasticity was found
to spread beyond the bounds determined by slip lines, though more
pronounced for the a/W =0.3 case. For predominantly tensile loading
cases ( e/b<0.4), the plasticity was found to extend up to (near to for
a/W =0.5) the loading line. For the a/W =0.3, though deep notch case is
assumed, plasticity was even found to break back to the front face of
the specimen, indicating loss of crack tip constraint. This latter
point may account for the rather low value, (compared to the
analytical estimates), of r ipl factor.
This spread of plasticity introduces considerable errors in results,
especially on r iP| as the plastic work will include such terms which
are not accounted for in the analytical model, i.e. plastic work done
outside the slip line field pattern. Better agreem ent between
analytical and numerical results are observed when the plasticity is
confined to within and immediate vicinity of the area bounded by slip
lines ( eg; a/W =0.5 e/b>=0.4). A rather crude solution to this problem
of plasticity spread may be to disregard the plastic work outside the
bounds of slip lines, at least for r|p| calculations.
Limit loads of cases with combined tension and bending were given
by Miller(1982). The problem considered there was different; a single
edge notched geometry subjected to pin type of tensile load combined
with pure bending type of load. A direct comparison is, therefore
only possible for cases, what is called there as tension, which
corresponds to e=0.5a here. For both cases, a /W =0.5 and a/W =0.3,

162
relatively good agreem ent is observed, considering the range of
values due to different power indices (Fig.7.9-10).
7,9 A METHOD SUGGESTED FOR SHALLOW NOTCH CASES
The constraint factor, L, for shallow notch geometries, (a /W <=0 .3 ),
subjected to pure bending type of loadings w ere given by
M iller(1982). Although the magnitude of the constraint factor
indicates the presence of a H CCTR, neither its size nor the
magnitude of stresses within it are known. Therefore, to apply the
analytical model to shallow notch geometries, a further assumption
regarding the HCCTR is required. Given 'L' and assuming a typical
value for 'm' (or for 'z'), equ.7.17 may then be used to determine 'z'
(or 'm'). Similar to deep notch cases, the HCCTR may be varied from
pure bending to pure tension according to one of the forms given by
Equ.7.19.
Perhaps the most simple assumption is to take the size of HCCTR (or
the magnitude of stress within it) identical to the deep notch
bending case. One such result using m=(1+0.57c) and assuming the
variation of HCCTR to be according to equ.7.19.f is given in Fig.7.15,
where for 'pure tension ( e/b=0 ) ti ,«1.0 was assumed. As expected,
Tip| values for pure bending case converge to those which may be
calculated by equ.3.16.

163
Fig.7.1 Edge cracked geometry subjected Fig.7.2 Idealised stressto tensile load eccentrically distribution across
applied to the uncracked ligament the ligament.
(a) (b) (c)
Fig. 7.3 a) The applied system of forces b) Equivalent system of forces,
c) Idealised general displacements

164
b
(a)
Fig 7.4 Relations among Load, Load point eccentricity and Moment in the absence of the High Constraint Crack Tip Region
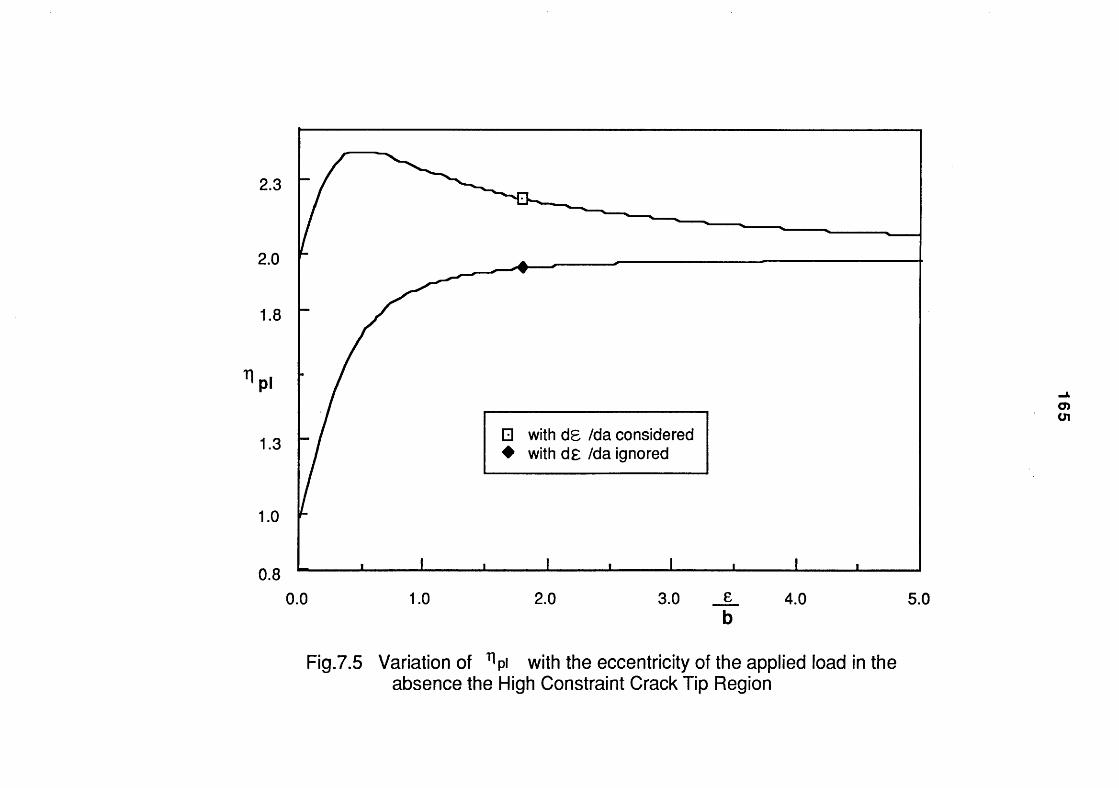
0.0 1.0 2.0 3.0 _e_ 4.0 5.0b
Fig.7.5 Variation of pi with the eccentricity of the applied load in the absence the High Constraint Crack Tip Region
165

166
Fig.7.6 Eccentric tensile loading of SEN geometry resulting in a central deflection v.

16 7
o
(a )
o
Fig.7.7 Analytical results for deep notch case when the High Constraint Crack Tip Region is assumed to vary linearly from pure bending to pure tensiona) Load-Moment relationb) rj as a function of applied load eccentricity.

.00
1.30
1.60
1.90
2.20
2.50
n.OO
0-20
0-40
0.60
0-80
m*-
S- %\xV
\x/
X
t V' i.\ /
V
i \*/
,/ \\xA
II
3.00 0.50 l'.OO
Cx-
t--- x- —
LOAD
0 m,- m / , Q v“MOMENT
O
A m,- rn / Q x 0.963y-z(®ojO *
+ y-z X
X y-z (mr1Hm-1)( a^-)° 6 Z
____-- *- —
r.so 2*. 00 2.50 3.00 3.50
(a)e/b
A> - ----- • - _ A
/ */a1 0 m,- m / . Q »“
111
A m,- m / Q \ 0.SS3
+ y-z (mt-1Wm-1)(l— ■)'
X y-z
"b.oo o'. 50 1 .00 1 .50 2 '. 00 2.50 3.00 3.50
(b)
7 .0 0
e/b
Fig.7.8 Analytical results for deep notches when i\p\ is taken as unity for pure tension
a) Variation of applied Load and Moment with load point eccentricityb) Variation of npj as a function of applied load eccentricity.

1 6 9
O
(a)
o
R9'7'9 fo T S e n T o !3 f° rdeeP n°,CheS Wh8n ^ p iis taken as unity a) Load-Moment relation ^)^pi ss a function of applied load eccentricity.
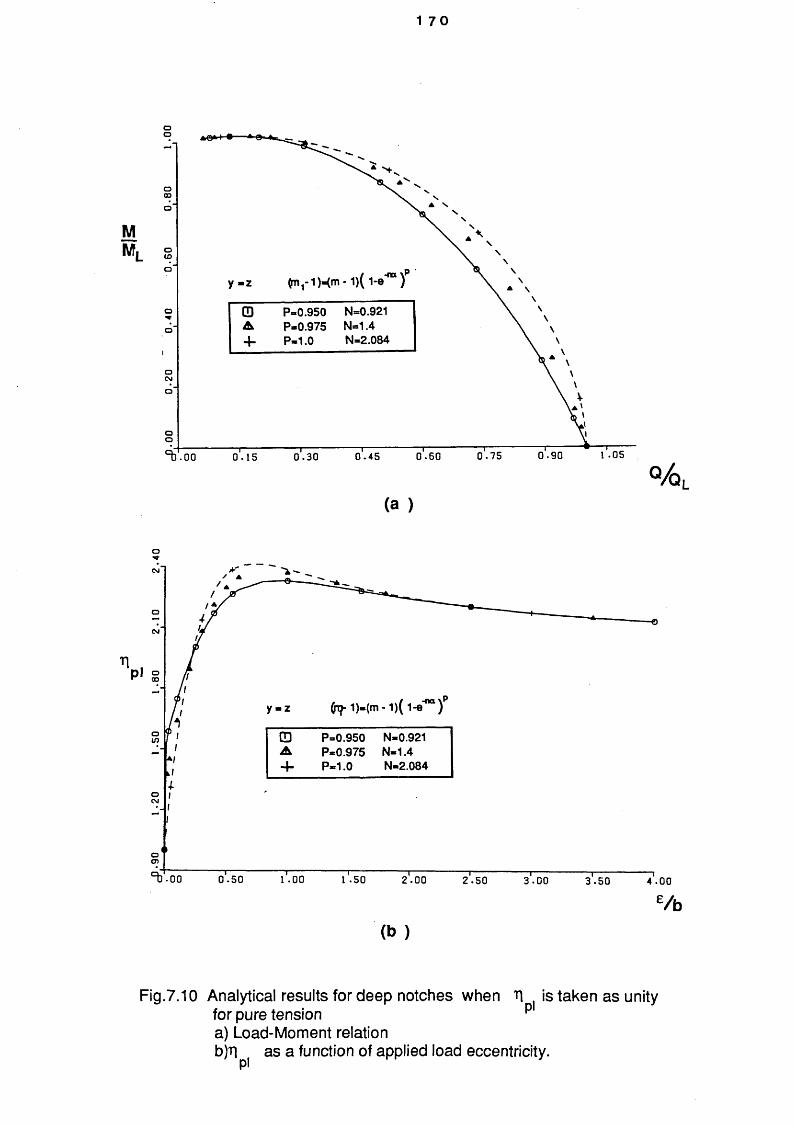
1 7 0
Fig.7.10 Analytical results for deep notches when is taken as unity for pure tension pa) Load-Moment relationb) ri as a function of applied load eccentricity.

171
i !
. . . . . ■ .
8 , b 1 2
D ^
Rigid added portion
" T
t D_10
D2
y i
12
y f
i
D_10
Fig.7.11 SEN geometry considered in the Finite Element study showing the rigid end pieces attached to the main body.

(pla
stic
)
172
FIG.7.12 Numerical results for SEN geometry (a/W=0.3)

M/M
L
(pla
stic
)
173
1.2
1.0 0.8
0.6
0.4
0.2
0.00.2 0.4 0.6 0.8 1.0 1.2
q/q l
FIG.7.13 Numerical results for SEN geometry (a/W=0.5)

174
Cj
O +
Fig.7.l4.a Comparison of Numerical and Analytical results for deep notchgeometry (n p| =0.0 assumed for pure tension )

OS-3 00*2
OS* I 00*1
0S*0 00* CT
00*'l 08*0
Og.'o
0*-'o Q2*'o
00*
1 75
(01,-1 )-(m-1)(l-e‘na)F
O N=2 .485 P=0 .975A N=4 .229 P=1 .010+ NUMERICAL A/W=0 • 3X NUMERICAL A/W=0.5
D .00 0-20 0-40 0.60 0.80 1 .00 l -20 1 .40 1 .60
e/ b
X XX
+X
+ X
Fig.7.14.b Comparison of Numerical and Analytical results for deep notchgeometry ( np( =0.25 assumed for pure tension )

176
^Pl
O
o N=2.121 P = 0 .975N=3 .631 P=1 .010
+ NUMERICAL A/W=0 *3X NUMERICAL A/W=0 .5
1 .60
e/b
1-40^ • 0 0 0.20 0.40 0.60 o'. 80 1 .00 1 .20
x x X
+X
+ X
Fig.7.14.c Comparison of Numerical and Analytical results for deep notchgeometry ( r \p] =0.50 assumed for pure tension )

177
“Hpi
OLO
^.00 0.20 0.40 0-60
y«z (m1-1)«(nvl)(i-e'nB)F
0 N=1 .760 P=0.975A N=3.031 P=1 .010+ NUMERICRL R/W=0.3X NUMERICAL R/W=0.5
0.80 1 .00 l'. 20 1 .40 1 .60
e/b
x x X
+X
+ X
Fig.7.14.d. Comparison of Numerical and Analytical results for deep notchgeometry ( np| =0.75 assumed for pure tension )

oLO
%
Fig.7.15.a Variation of ^pi with eccentricity of applied load for SEN geometry for smallcrack lengths ( assum ing r| , = 1 .0 for pure tension and m=(1+7c/2) for pure bending)
178

.00
0.2
0
0.4
0
0.6
0
0.8
0
1.00
' V .\x*n
A\NX \ x \\^\ x
\ \ 'Hv \ NM
N x
\ \ N \ \ v N
\ \
\ V\
N'N s N X ^ V. N \ \ N S
>0 ^ ^ ^ s
s n v. ">+
y=z (ml -l)= (m -1 )( i-e 'n“)
o fl /H = 0 .01 N = 2 9 .701A R/W = 0 • 05 N = 6 .889+ n/w=o.io N = 3 .889X f l / w = 0 . 15 N=2 • 866o fl/W = 0 .20 N = 2 i 373* n / W=0 . 25 N = 2 • 154
-*JCO
^ .0 0 0 . 2 5 0 . 5 0 0 . 7 5 1 .00 1 .25 1 .50 1 .75 2.00
E/b
Fig.7.15.b Variation of applied load with eccentricity for SEN geometry for smallcrack lengths ( assuming r ip) =1.0 for pure tension and m=(1 +tc/2) for pure bending)

• 00
0.2
0
0.4
0
0.6
0
0-80
1.
00
/ft*
-TV
y=z (m1-1)a(m -1) ( i - e ’no)
o fl/W=0.01 N = 29 -701A n/w=o.oi N = 6 .889+ R / W = 0 .10 N = 3 • 889X n / w = o . i s N = 2 .866<!> fl/W = 0 .20 N = 2 .373
fl/W = 0 .25 N = 2 .154
^ .0 0 0V25 0 .50 0*. 75 l'.OO r .25 1'. 50“i----1 .75 2.00
Fig.7.15.c Variation of Moment with eccentricity of applied load for SEN geometry for smallcrack lengths ( assuming ^ =1.0 for pure tension and m=(1 +k/2) for pure bending)
r
18
0

181
CHAPTER 8
SCALING OF TEARING RESISTANCE CURVES
FOR HY130 STEEL
8.1 INTR O D U C TIO N
Ductile tearing resistance of most engineering materials is studied
using resistance curves expressed as toughness versus crack
extension. The existing guidelines for testing aims at determining
the initiation value for plane strain conditions. For large amounts of
growth neither an agreed method of testing, nor a unique way of
representing data exists. Recently, normalisation of J-Resistance
curve have been examined by Etemad and Turner (1985a, 1985b,
1986), John(1986), Turner(1986) and Gibson and D ruce(1986).
Various factors have been suggested in so far as reducing variation
in data due to size effects are considered. Although the existence of
a unique resistance curve, independent of geometry, is questioned
some apparent success has been reported.
In this section, tearing resistance curve of HY130 steel, with large
amounts of crack extension, will be studied using bending specimens
and unloading compliance techniques. Basically the effect of initial
ligament size on tearing resistance will be examined using various
definitions of toughness including normalised work increment, ,
and dissipative work rate, Rms. Further to these, the representation of
resistance characterises in terms of load line displacement will be
explored.

1 8 2
8.2 MATERIAL and TEST GEOMETRY DETAILS
The HY130 is a high strength low work-hardening alloy steel. The
tensile test result in longitudinal direction is shown in fig.8.1 and
related material properties are given below.
0.2% yield stress (kN/mm2) ..................................................... 0 .93
ultimate tensile strength (kN/mm2) .................................... 1.00
Young’s modulus of elasticity (kN/mm2)............................ 200
All bending specimens have been prepared in the LT orientation from
one 300x600x50m m plate (see Fig.8.2). The specimens have been
fatigue precracked to a /W ~0.52 and tested under bending loadings
according to ASTM E813 (1981) guidelines using the unloading
compliance test method. The test geom etry sizes and loading
variations which were investigated are given in Table 8.1.
8.3 THE COMPUTER INTERACTIVE UNLOADING COMPLIANCE
TEST METHOD
8.3.1 Introduction
The unloading compliance method of producing resistance curves is a
major contender to multi-specimen and other methods. The technique
essentially utilises the compliance of the specimen, as obtained
from partial unloadings at any stage, to estimate the corresponding
crack length. The interactive computation of test data is an
attractive feature of the method.
The subject has recently been reviewed and compared with other test
methods by John(1986). The associated equipment, related computer
programs and test procedure, which are fully described there, is
adopted here with minor changes. A schematic set-up of equipment
used is given in Fig.8.4, and in the next subsection, essentials of the
computer program is outlined and the changes made are explained.

1 8 3
8.3.2 Essentials of the on-line interactive computation of
test data
The computer program developed by John(1986), required minor
modifications to deal with problems associated with large crack
extensions planned in this study. It must be emphasised that these
modifications which are described below (see also Fig.8 .5 ), are
related only to the equipment used.
i) Handling of large number of acquired and generated data.
The micro-computer used here for on-line data acquisition and
subsequent processing had a relatively small capacity for data
handling. A subroutine was introduced to the existing program, to
store data corresponding to each loading-unloading stage on disc. The
stored data also allows further analysis if and when required.
ii) Large movements of displacement transducers.
The combination of digitiser-am plifier-transducers used in the
set-up limits the voltage handling capacity to 2 volts (-1 to +1) for
the CG and to 14 volts (-7 to +7) for the LVDT. To keep the high
sensitivity of the displacement transducers a 'shifting' technique has
been devised which enables high amplifier gains to be used. At the
end of each unloading, this shifting technique allows the voltage
outputs from the displacement transducers to be reduced to or near
starting values. The shifting has been achieved through an 'off-set'
device for the CG output and through physical movement of the
transducer itself for the LVD T output. The reductions are
automatically recorded and added to subsequently acquired data.
Further to these, a subroutine to generate COD resistance curve has
been added to the main program.

1 8 4
8.4 COM PLIANCE EQUATIONS FOR BENDING TEST SPECIMENS
Compliance of test piece geometries as a function of crack length
ratio are given with reference to crack mouth opening or load line
displacem ent. The inverse of these equations may be used to
estim ate crack length from the compliance information. In this
study, compliance and inverse compliance equations given by Kapp et
al (1985) for TPB (equ.8.1) and FPB (Equ.8.2) geometries have been
used.
( w ) f PB= -° -9 8 **4 + 5 -15 ^ Z ' 4 -2 8 ( V 3 + 1 -1 1 C*4>4 (8 -1-a )
J ________1.975 S Q1 B E W A mm
(8.1.b)
(J ) ™ = - 1-03 (*8> + 6-°(V Z - 6'37( ^ )3 + 2-73('1J3)4 -
0.321 (4/3)5 (8.2.a)
¥ =
1 +
1
3.95 S Q 1 E’ B W Amm
(8.2.b)
E’ B W W 3.95 S a
(8.2.C)
where A m/Q is the mouth opening compliance of the specimen and
subscripts FPB ( and 4) and TPB (and 3) refers to four point and three
point bend loading configurations respectively.

1 8 5
8.5 STUDY OF CRACK FRONT CURVATURE
During stable tearing crack tunnelling occurs if specimens are
inadequately sidegrooved. Under such conditions an effective
com pliance is m easured and crack length predictions usually
underestimate the physical crack length measured in accordance
with A STM -E813(1981). The object of this part of the study is to
find an empirical equation to correct the measured compliance for
accurate crack length predictions.
Six identical TPB specimens, a /W =0.52, s/W =4, B=20mm, W=50mm,
has been deformed to different exten ts of crack extensions, heat
tinted and broken open in two halves. The measured crack length,
both initial and final, are then compared with those estimated
(uncorrected) from the unloading compliance method (Table 8.2 ). For
each specimen the compliance corresponding to the measured final
crack length have been calculated (Equ. 8.2.c) and normalised with
the corresponding measured ones (Fig. 8.6) . These data points are
then used, through curve fitting techniques, to generate the
emperical relationship given by equ.8.3.
<PC [ Aal r Aal2 [ A a l 3- £ • - 1 .0 + 1.3661 + 41.191 [ y ^ J - 115.058 [ "w J (8 3 >
w here cpc= corrected compliance
(pm= measured compliance
[Aa/W ]= predicted crack extension ratio based on measured
compliance.
The compliance correction equation, CCE, (Equ.8 .3 ) has a local
maximum at [A a /W ]= 0 .2 54 1 , therefore, for crack extension ratios
larger than this, the local maximum value of compliance ratio
1 8 6
((pcApm^2 -119) assumed. Fig.8.7 compares predicted crack
extensions with those measured in accordance with the '9 point
average method' for the six specimens used for the calibration.
The use of the CCE for other specimens having different initial
uncracked ligament sizes or thicknesses will be discussed in the
next subsection.
8.6 SIZE EFFECTS ON CRACK LENGTH PREDICTIONS
8.6 .1 T h ick n es s E ffec ts
The plane stress or plane strain behaviour of a specimen is largely
controlled by its thickness. Therefore, the use of Young's modulus of
elasticity (if necessary adjusted for plane strain) may not be
justified for all thicknesses. This is especially true in unloading
com pliance tests, since the accuracy of predictions are also
depending on correct values for E'. Gordon(1986) suggests the
determination of an effective Young's modulus, Eef ((EB)ef for side
grooved specim ens) for the geom etry using initial compliance
measurements on the cracked specimen itself. Here, the effective
Young's modulus was determined by using the principle suggested by
Gordon and trial-error methods.
Each R-Curve test was performed using an assumed value for the Eef
(= 2 0 0 K N /m m 2). At the end of each test, the initial crack length was
determined from the measurements on the broken specimen halves.
The data was then re-analysed and predicted initial crack length was
matched with the corresponding measured one by varying the value of
E ef. This value of Eef was then used throughout the analysis for that
specimen.

1 8 7
8.6.2 Effects of Uncracked Initial Ligament Size
The em pirical compliance correction equation, CCE (Equ.8.3), was
determ ined from those specim ens given in TABLE 8.2 , and
corresponding shear lip sizes as a function of crack extension can be
seen in PLATE 8.1. However, shear lip size is largely determined by
the size of the initial uncracked ligament (see PLATE 8.2-4, and
F IG .8.8). Therefore, use of Equ.8.3 for other geometries having
different initial uncracked ligament sizes will result in incorrect
crack length predictions. A correction procedure based on the
comparison of measured and predicted final crack lengths, which is
described below, was used to account for this factor.
The validity of CCE, as determined in subsection 8.5, was limited to
crack growths (uncorrected) to width ratios, A a/W , of less than
0.2541. For crack growth ratios larger than this, the value of CCE
corresponding to [A a/W ]=0.2541 was suggested. However, the
limiting value of [A a/W ], which is « 0 .2 for the calibration
specimens, will be different for other specimens having different
initial uncracked ligament sizes. This principle was used in the
re-analysis of data. Predicted and measured final crack lengths were
matched by varying the limiting value of [Aa/W], as described above.
8.7 ROLLER INDENTATION
Roller indentation tests were performed using broken specimen
halves. This is basically a TPB set up where the span is reduced to a
possible minimum using the same rollers as used in the actual
R-Curve test. The small span effectively eliminates any deflection
due to bending of the specimen, hence load-load point displacement
trace represents indentation as a function of load. The slope of the
1 8 8
linear portion of this trace may then be used in correcting for the
extraneous energy, Ur
U,= 0.5 q>j Q2 (8 .4)
where <Pj = Inverse slope (compliance) as obtained from the
indentation test.
An indentation test was performed using broken TA specimen (see
TABLE 8.2) and the indentation compliance, q>j , was determined to be
1 .6 *1 0 '3mm/KN. This value of <pj was used in all subsequent tests.
8.8 EFFECT OF LARGE DEFORMATIONS ON LOAD IN TPB AND
FPB CONFIGURATIONS
As will be discussed in subsection 8.9 the constraint factor, L, for
notched bending specimens was found to increase with crack
extension and deform ation. TPB and FPB tests of unnotched
rectangular bars were considred here to investigate the effect of
deform ation on limit load. The following analysis, therefore
considers the kinematics of TPB and FPB configurations and explains
the rise in limit load by the change in the effective moment arm,
friction forces at contacting surface and slip line field solutions.
8.8.1 Kinematics of Three Point and Four Point Bendings
Kinematics of TPB and FPB configurations are diagrammatically
explained, respectively in Fig.8 .9 .a and in F ig .8 .9 .b. For both
configurations, the motion of the beam is idealised and the rollers
are assumed to rotate without slipping. Furthermore, for simplicity
the deform ed configuration is assum ed to be the result of
consecutive motions.

1 8 9
a) TPB CONFIGURATION
The beam is assumed to rotate as two rigid halves about a hinge
point directly under the central roller, which is assumed to move in
vertical direction, ( y-direction) only. The deformed configuration
(Fig.8 .9 .a) is achieved by two separate motions of the specimen's
halve. First, it is translated in horizontal direction by an amount 'u'
which also causes the roller to rotate. This is then followed by a
rotation about the roller by an angle '0 ' while the roller is restrained
from any motion. The position of the hinge point, which is assumed to
travel in the vertical direction only, dictates a relationship between
'0 ', 'u' and dimensions of the configuration.
Basic dimensions of the deformed configuration may now be related
to the dimensions of the the undeformed configuration through
central deflection, q, and angle of bend, 0 .
/ D1 \q = ( — + h ) (1 - Cos©) + B3. Sin©
-■ Sef = B3. Cos© + h. Sin©
t^ =W . Cos© - B3. Sin©
D 1 D 1S - 0 — ( -t“ + h ) Sin©B 2 2 7
3 1 + Cos©
Similar results are also given by Steenkamp(1985)
b) FPB CONFIGURATION
In this case the analysis is focussed on to the outer portions of the
beam, which is assumed to be rigid, and the deformed configuration
is achieved by three separate motions. First the beam, together with
(8.5.a)
(8.5.b)
(8.5.c)
(8.5.d)
1 9 0
the upper roller and forcing bar, is rotated about the lower roller,
which is now restrained from any motion, by an angle 0 . The forcing
bar is then translated by 'u \ along the inclined plane, which also
causes the upper roller to rotate. Finally, the forcing bar is rotated
about the upper roller, which is now restrained from any motion,
back to horizontal position. The position of the forcing bar, which is
assum ed to travel in the vertical direction only, dictates a
relationship between 'u \ ' 0 ' and dimensions of the configuration.
It is to be noted that, in practice, the deformation of the beams is
expected to cause the lower rollers to move. This can be incorporated
into the above analysis by a translation of the beam in the horizontal
direction before the motions described above, while only the forcing
bar is kept stationary. It may easily be shown that this latter motion
does not influence the analysis concerned here.
Basic dimensions of the deformed configuration is related to those
of the undeformed configuration through the angle of bend, © , and
displacement, q, of the forcing bar.
q = q - B4. Sin© (8.6.a)
(8.6.b)
(8.6.c)
w here
(8.6.d)
(8.6.e)2 ( 1 + Cos©)
B4 = B5 (1+Cos6 ) (8.6. f)

8.8.2 Force Analysis
The free-body-diagram of a loaded roller and of the loaded beam are
shown in Fig.8.10. The static equilibrium of the roller requires:-
= Q Sine = Q 2 1 + Cos© " 2
(8.7)
It must be emphasised here that the magnitudes and directions of
friction forces under the upper roller(s) are specifically selected to
have the extensively deformed part of the beam free from axial
loads.
Maximum bending moment applied to the beam should include the
effectsvdeformation, ie. change in moment arm and friction forces.
Referring to Fig.8 .9 -10 the maximum applied bending moment is
expressed as:
8.8.3 Axial Stress in the central part of the beam
The stress-strain relation of the HY-130 steel (F ig .8.1) can be
approxim ated as an elastic, non work hardening plastic with
a ue=1 . O k N / m m 2. For large deformations it is also reasonable toys
assume rigid-plastic material behaviour. Hence, the bending stresses
in the centre part of the beam is taken as that shown in Fig.8-t\.b. The
moment required to produce this stress distribution is given as:-
of
(8.8.a)
(8.8.b)

1 9 2
(8.9)
w here2
ao = - 7 ^^ 3 ys
However, the above mentioned stress distribution is strictly valid
for pure bend cases (FPB). For the TPB cases, the presence of the
upper roller is very likely to influence this stress distribution. Slip
line field solution to an indentation problem, given by Hill(1950) (see
Fig.11 .a), has been utilised to modify the axial stress distribution
given in F ig .H .b to that given in F ig .U .c . This slip line field solution
is also used to determine the width, c, of indentation of the central
roller (Equ.8.10.a) and the size of the high constraint region, d,
(Equ.8.10.b).
2c = -------------------- (8.10.a)
0 - + f K B
d = c ^ 2 (8.10.b)
The neutral axis, where the stress reversal occurs, is determined by
assuming the net section to be free from any axial load.
w here m = 1 + %/2
The modified stress distribution for TPB requires an applied moment
as given by equ.8.12.
x = d ( m - 2)/2 (8 .11)
2
(8.12)

1 9 3
8.8.4 Experimental investigation using unnotched beams
Two rectangular cross section beams of HY-130 steel were tested
under TPB and FPB configurations and the resulting Load-Load point
displacem ent relations are shown, respectively in Fig.8 .1 2 .a and
Fig.12.b. As can be seen, the measured load continues to increase
beyond the theoretical limit load (based on the dimensions of the
undeformed configuration), with increasing deformation. For both
configurations at deformations levels of © ~ 1 1 ° ( 0 = 2 q /S for TPB,
and «4q /S for FPB) slipping of outer rollers were observed. At this
deform ation level ( 0 * 1 1 ° ) the effective coefficient of friction
(eq u .8 .7 ), ^ ef, is 0 .096, which is a reasonable number for such
contacting problems.
The measured applied loads corresponding to the beginning of roller
slipping, ( 0 * 1 1 ° ) , can now be estimated with an accuracy of about
2.0% by using equations 8.5-12 as appropriate.
8.9 EFFECT OF DEFORMATION ON THE LIMIT LOAD OF NOTCHED
BEND SPECIMENS
The constraint factor for deep notch bend geometries is given by
Alexander and Komoly(1962) and Green and Hundy(1956) as 1.261 for
pure bend cases and 1.32 for TPB (S/W =4) cases respectively. These
values are based on slip line field solutions, and the higher value for
TPB cases reflects the effect of back face loading.
Experimental findings here indicate that the constraint factor L,
which is based on initial dimensions of the configuration and current
uncracked ligament size, increases with both, deformation level and
crack extension (see Fig.8.13-14). For some cases this rise is as
high as 90%, and friction type forces and change in effective moment

1 9 4
arm due to deformation (see previous subsection) may only account
for about 5-7% of it. Such high values for L were also found by
Gordon(1988). Furthermore, reanalysis of the original data of Etemad
and Turner(1985,a) has resulted in an average constraint factor of
about 2.5.
Since the material considered here is effectively non-work hardening
the rise in L should be the result of extensive plastic deformation.
Plastic deformation causes material to flow from the tension side to
the compression side of the specimen, which causes a decrease and
an increase in thickness respectively.
The flow of the material also causes bulging on the back face along
the crack plane, especially for the FPB configuration. Presence of the
back face roller in the TPB case may prevent this, but provides
resistance to the flow of the material. The nature of the steel used
here coupled with the uncertainties of the testing method resulted in
high scatter, nevertheless, roughly linear rise of L with deformation
and crack extension is evident (F ig .8.13-14). For small specimens
crack extension begins at or near limit loads, while for large
specimens it begins at load levels below the limit load ( L < ~ *-3 ).
However, rise in L is still evident with crack extension.
8.10 RESULTS ON RESISTANCE CURVES
The unloading compliance method, as described in this section, was
used to generate resistance curves to crack extensions by using
those specimens given in TABLE 8.1. Practically same results were
obtained from the two specimens tested for each size, in spite of
different configurations for some cases. Therefore, throughout the
remainder of this section, usually discussions and comments will be

1 9 5
referred to one of the specimen in each size group.
All tests were carried at room temperature and loading rate was
kept constant at 0.5mm/min for all specimens. The resistance to
crack extension is presented using J, work and work rate , COD and
displacement and displacement rate definitions as the characterising
parameter. Normalisation of data, using initial uncracked ligamanet
size and thickness were considered.
A brief description of the param eters used to characterise
resistance to crack extension are given below,
a) J Resistance ,fcuLves
Four different definitions of J, namely J0 (Equ.3.26), Jy (Equ.3.28),
J TPT (Equ.3.29), and Jj+1 (Equ.3.32) were used and results are
presented in Fig.8.15.a through Fig.8.18.b.
b?Work and Work Rate Resistance Curves.
Total work and total work rate characterisation of resistance curves
are presented in Figs 8.19. Furthermore, the total work has been
separated into e lastic (recoverab le , E q u .8 .1 5 ) and plastic
(dissipated) terms by using the measured load line unloading
compliance and plastic work and plastic work rate have been also
used to represent resistance characteristics (Fig.8 .20). Variation of
elastic energy and elastic energy rate with crack extension are given
in Fig.8.21.
Ue . 4 ° \
U pl = U. - U e,
au piR<is = B 9a
(8.15.a)
(8.15.b)
(8.16)

1 9 6
It is to be noted here that equ.8.16, when defined in terms of 0 t
is equivalent to the 2yef.
c) COD Resistance Curves
Elastic and plastic components of COD were assessed according to
the method outlined in BS.5762(1979) ( given by Equ.3.23 and 3.24) at
each unloading stage. The plastic component of crack mouth opening
was separated from the total one by using the measured crack mouth
compliance. COD resistance curves are presented in Figs 8.22.a-b.
d) Displacement and Displacement Rate Resistance Curves
The deformation level of the test piece is identified with the
normalised load line deflection, 2q/S for TPB and 4q/S for FPB.
Resistance to crack extension is represented in F ig.8.23.a-b using
normalised load line displacement and displacement rates.
8.11 D IS C U S S IO N S
The tests w ere carried out for large crack extension, and no
particular attention was given, neither to the initiation value of
various parameters used to represent toughness nor to the so called
'J-Controlled regime'. Nevertheless, initiation value in terms of J, J.,
may be approximately taken as 0.2 KN/mm. Based on this assumed
value of Jj it is clear that all specimens satisfy the ASTM
E 813(1981) requirement for J jC testing. However, for K|c testing
(B S .5 4 4 7 (1 9 7 7 )), B ,bo >*100m m is required when based on the Jj
equivalent K {.

1 9 7
The degree of plane strain for a particular geom etry can be
estimated by comparing the thickness (B) with the plastic zone
d iam eter 2 rpa and the required thickness for K,c testing. The
maximum shear lip size measured from the broken specimen halves
was about 9mm (see Fig.8.8). This is about 2mm bigger than the plane
stress plastic zone size when based on the above assumed value of J|.
Clearly, all those specimens with B«20mm have very low degree of
plane strain if not in plane stress.
According to the dimensions of the initial uncracked ligament area
the specimens can be divided into three groups, as:
i) B>b0 ( specimens: 20B, 27B, 37B )
ii) B<b0 ( specimens: 64B, 95B )
iii) B=b0 ( specimens: 53A, 95AA )
Considering the nature of the material tested and the uncertainties
in the testing method, the J-R curves from all those specimens with
B«20m m can be assumed to be within a scatter band, hence not
requiring any normalisation (e.g. Fig.8 .15 .a). The higher degree of
plane strain in the thicker specimen is clearly reflected on J-R
curves, hence normalisation of data with thickness B, is appropriate
(e.g. Fig.8 .1 5 .b). However a somewhat minor influence of initial
ligament size within each of the groups mentioned above, has been
observed (e.g. Fig.15.b). For data normalised with B, non of the
various J definitions used here has any marked advantage over the
others when crack extensions Aa/B<0.4 are considered. However, J j
seems to have a disadvantage when large crack extensions (Aa/B>0.4)
are considered.
Data from John(1986) on titanium and from Etemad and Turner(1986)
on HY130 steel indicate that when higher degree of plane strain

1 9 8
conditions prevail, normalisation by b0 is appropriate for a given
thickness. The linearity of shear lip size with bQ and its use in
normalisations clearly indicates its effect on degree of plane strain
of a given specimen. On the other hand, when normalising with
thickness, specimens with thicknesses less than about 2rpa should be
excluded.
Characterisation of resistance using work and work rate are
considered in Fig.8.19-20. Work and work rate, be it total or plastic,
characterisations result in the rising and decreasing resistance
curves respectively. The scatter in the data, which is further
am plified by num erical d iffe ren tia tio n , prohib its any firm
conclusions on the work rate characterisation. However, a clear
trend for all data, which decreases to a near constant value for crack
extensions larger than 0.2bo is evident. This value of crack extension
(0 .2 b o) corresponding to the transition from the decreasing to the
near constant value of resistance is not surprising as it corresponds
to the measured shear lip size. Some further reduction in the scatter
is possible if the ordinate is also scaled with b0 (F ig.8 .2 0 .b).
COD resistance curves for the geometries considered are given in
Fig.8 .22 .a and scaling of the abscissa with specimen thickness is
considered in Fig.8.22.b.
Norm alised load line displacem ent and displacem ent rate is
considered for characterisation of resistance to crack extension
(F ig .8 .2 3 .a,b .). In the former, normalisation of the abscissa with
initial ligam ent size b0 results in different curves with similar
slopes. Normalised displacement rate as a function of normalised
crack extension, (Fig.8.23.b), can then be considered as a unique curveCO
for representing resistance to crack extension. Similar to work rate
see foo tno te on p a g e 199

1 9 9
representation, the sharp drop in resistance to a near constant value
for crack extensions larger than 0.2bo is evident which, in this case,
is followed by a rise for crack extensions larger than 0.6bQ.
Normalised load line displacement is a measure of the angle of bend,
hence the intensity of deformation at the ligament area. Further, the
crack opening angle, COA (the angle formed by the flanks of the
crack) can also be approximated by the angle of bend of the specimen.
The evidence then suggests that, although COA is a function of both
crack extension and specimen's dimensions, its rate of change is
constant at least for a range of crack extensions. After all, this may
be considered to be in line with the suggestion of Anderson(1973),
which states that, CTOA decreases from its initiation value to a
steady state propagation value soon after crack extension starts.
This is strictly valid for the main series of test pieces considered ( i.e. except 95AA and 95BB). A thickness dependence is suspected, therefore this should be interpreted as a "uniqiue curve for a given thickness

Str
ess
(kN
/mm
?)
FIG. 8.1 Stress-strain relations for HY130 steel
200

201
450mm▼
FIG.8.2 Plate dimension and relative orientation of specimen
FIG.8.3 Four point bend test geometry

202
FIG .8.4 Schematic set-up of equipment for The Unloading C om pliance Test techn ique

2 0 3
FIG. 8.5 Flowchart Outline of The Computer Program for interactive Unloading Compliance testing technique.

204
Estimated (uncorrected) crack extension ratio Aa/W
FIG. 8.6 Ratio of corrected compliance to measured compliance as a function of total crack extension (estimated using the measured compliance) to width ratio forTPB specimens (B=20mm, W=50mm, s/w=4).
measured A a /W
FIG. 8.7 Comparison of measured and estimated crack extensions to width ratios forTPB Specimens (B=20mm, W=50mm, S/W=4)
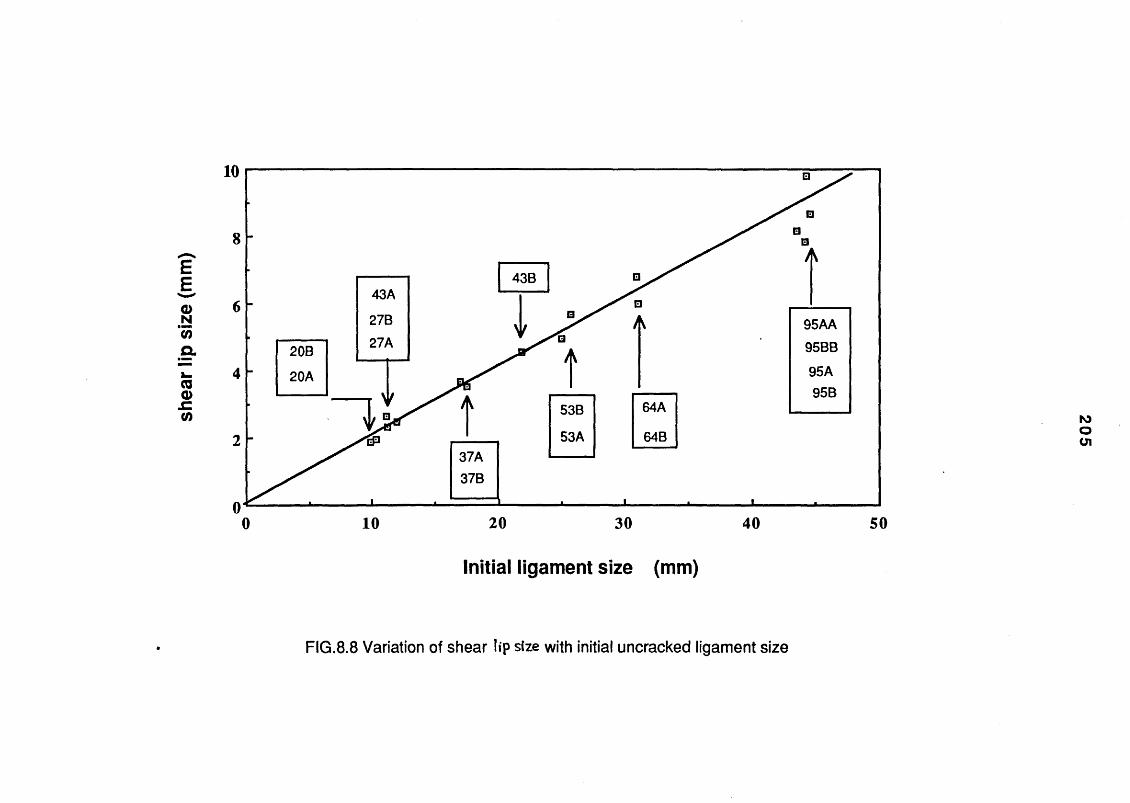
Initial ligament size (mm)
FIG.8.8 Variation of shear lip size with initial uncracked ligament size
20
5

206
assumed hinge point
FIG.8.9.a Kinematic analysis of a loaded TPB geometry by assuming two symmetric rigid halves rotating about a hinge point.

207
i
FIG.8.9.b Kinematic analysis of loaded FPB geometry by assuming twosymmetric rigid portions between upper and lower rollers

208
(a)
FIG.8.10 Applied system of forces in bend type loadings of beams a) On the roller supporting the beam
b) On the beam under FPB loading c) On the beam under TPB loading

2 0 9
W A
(- )
(+)
(b)
FIG .8.11 a) Slip line field solution for an indentation problemb) Axial stress distribution in an unnotched beam, with
rigid plastic material properties, under FPB loading c) Axial stress distribution in an unnotched beam,with
rigid plastic material properties, under TPB loading
ro| a

2 1 0
FIG.8.12.a Load-load point displacement relations for the unnotched TPB configuration.

Loa
d.Q
(kn
)
211
FIG.8.12.b Load-load point displacement relations for the unnotched FPB configuration.

Con
stra
int F
acto
r L
Con
stra
int F
acto
r L
2 1 2
Normalised load point displacement 2q/s
2.5 ■
2.0 ■
„ H □□ ■ □ Q c* O
I □1.5 A A % a A A A
* “ i ^ □ * 4u * ■ ■ r ■ 37A1.0 A A 1 □
aa □ 64A□ A 95A
AA ■ A 95AA
0.5 ■ H 43B
‘ A
0.0 >1------------------ ------------------- 1---------------— '------------------1--------------- *0 .00 0 .0 5 0 .1 0 0 .15
Noramlised load point displacement 2q/S (4q/S for FPB)
FIG.8.13 Variation of constraint factor with load point displacement

Con
stra
int F
acto
r L
213
Normalised crack extension Aa/bo
2.5 -
s 2.0o(0LL*-»S 1.5 co0)coO 1.0
■ 37A□ 64AA 95AA 95AA■ 43B
i □ A 4 A
■ Ds *
1 ■ A■ DAAA ^ A A
a A a A A
0.50.0 0.2 0.4 0.6 0.8Normalised crack extension Aa/b Ao
FIG.8.14 Variation of constraint factor with crack extension

(KN
/mm
)
2.0
1.0
0.0
“ AB
A AB A
A AB A
♦ A• A
B O A1 A
» i *♦ " A
■ A + 20B+X * > X 27B
+ A ■ 37B
■+ X ■ ► ♦ 5 3 A
+ ^ • B 64B
+ b * * A 9 5A•+ X®9 4 A 9 5A A
t A*
i A______________ ______________ 1---------------------- ■---------------------- 1---------------------- •------__________1_____________
0 10 20 30
Crack extension Aa (mm)
FIG.8.15.a Representation of resistance in terms of JQ
214

(KN
/mm
) J0
(K
N/m
m)
215
Normalised crack extension, Aa/B
2.0 -
+ 20BX 27B■ 37Bo 53AB 64BA 95AA 95 AA
1.0 -
■ A
kB&
0.0 0.00
x
4 oB A ° ^
* / * A _
+ X4X
A 4- ^ y
+ * *
0.20 0.40 0.60
Normalised crack extension, Aa/bQ
FIG.8.15.b Effect of normalised abscissa on JQ Resistance curves

(KN
/mm
)
"3
+ 1FIG.8.16.a Representation of resistance in terms of J.
216

(KN
/mm
)
217
EEz*
+"3
2.0
1.5
1.0
0.5
0.00 .0 0 .2 0 .4 0 .6 0 .8 1 .0
H n
•A
+ "X ^I + g A A-+ W O*
■ X
IPK
i ±
m 4
AS
■ * A ♦
■ A* "+ 20BX 27B■ 37B♦ 53A■ 64BA 95AA 95AA
Normalise crack extension, Aa/B
2.0 -
^ 1.0 -
Normalised crack extension Aa/b
FIG.8.16.b Effect of normalised abscisa on J. resistance curvesi+i

(KN
/mm
)
2.00
1.50
1.00
0.50
0.00
*
L I
HA
a a o «
■ • . A
A A O
++ 8
f+ x°"A .
" •* +
^ °
° X■ xv * x
A A
+ 20BX 27B■ 37B♦ 53A■ 64BA 95AA 95AA
0.0 10.0 20.0 30.0
Crack extension Aa (mm)
FIG.8.17.a. Representation of resistance in terms of JJpT
218

(KN
/mm
) J
(KN
/mm
)
219
Normalised crack extension Aa/B
Normalised crack extension Aa/bQ
FIG.8.17.b Effect of normalised abscissa on JTPT
resistance curves

4
EE
• + 20BX 27B■ 37BA 53AHi 64B
■ A 95AA 95AA
2 -
HAHI A
* A ♦ A
0
+ x. x ■+X ■ 0
+ ■+ X*
A++ J A *
+ AA A■*A
________ .-----------o
A AA A
A A
10 20 30
Crack extension Aa (mm)
FIG.18.a Representation of resistance in terms of Jy
220

221
Normalised crack extension Aa/B
EE
' BB■ + 20B B *
X 27B AB A
■ 37B A " a♦ 53A * B AB 64B ■
AB<
A 95A A O- A 95 AA A " » •A A A
■ " ■ X+- A A ° X
■ A ♦ . X +A - *X
AB A . + 4 X
■ B £A X
; A
0.00 0.20 0.40 0.60Normalised crack extension Aa/bo
FIG.8.18.b Effect of normalised abscissa on resistance curves

dU/B
da (
KN
/mm
) U
/B
(KN
)
2 2 2
50
40 h
30
20
10
■ Am *
ft■ A
J ■ "ft ■ \ ^ x
0
+ 20BX 27B■ 37Bo 53AH 64BA 95AA 95AA
0 10 20 30
Crack extension Aa (mm)
+4
10
4Fk
+ 20BX 27B■ 37Bo 53AB 64BA 95AA 95AA
-fcB*♦
0
0.0
; Ax* V______ i_____
0.2
A 4k -X
XA
+♦*
0.4
i « * *♦« / /* , y .
0.6 0.8Normalised crack extension Aa/bQ
FIG.8.19 Total work and work rate as a function of crack extension

0 10 20 30
Crack extension Aa (mm)
FI68*20.a Total plastic work (dissipated energy) as a function crack extension
223
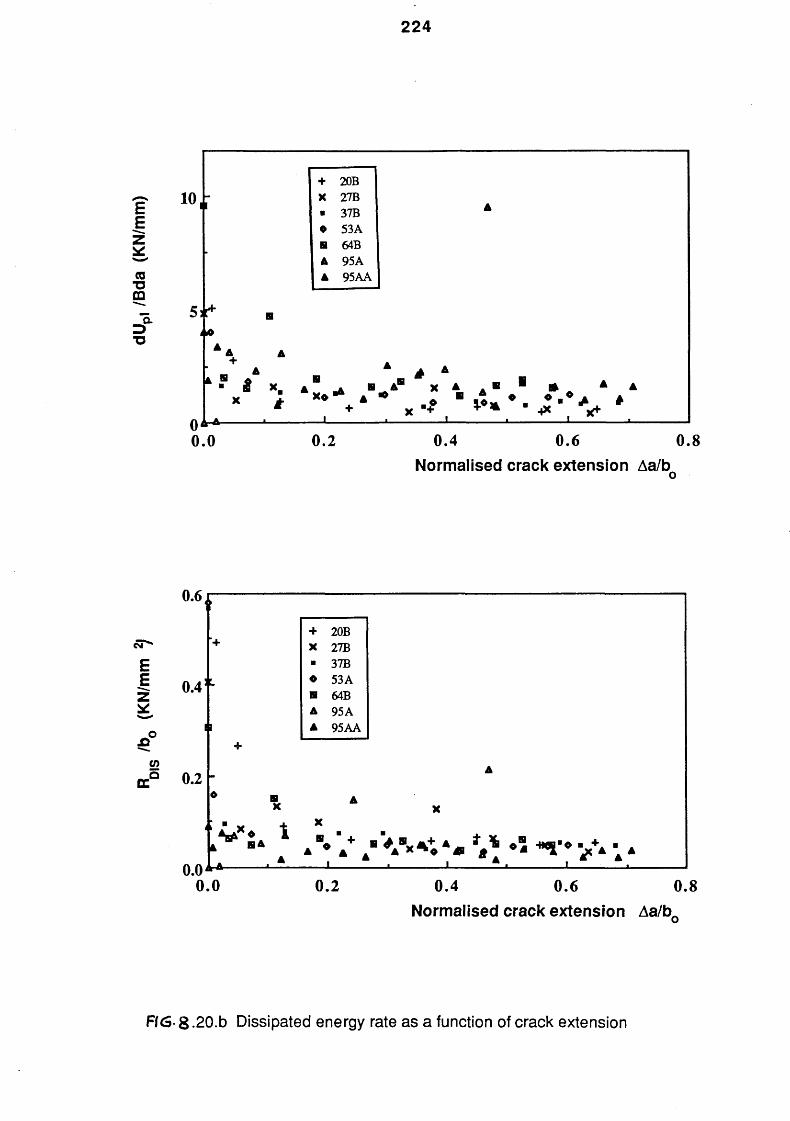
/b0
(KN
/mm
2j
dUp,
/B
da (
KN
/mm
)
224
10
5:&
+ 20BX 27B■ 37B0 53An 64BA 95AA 95 AA
A+
£ x. a " + ■ *B x A A rn ■ AX t + A „ **» ■ J * *
A A #
0
0.0
0.2 0 . 4 0.6 0.8Normalised crack extension Aa/b
0.6
0.4
tLa 0.2
0.00 . 0 0 . 2 0 . 4 0 . 6 0 . 8
Normalised crack extension Aa/bQ
+ 20BX 27B■ 37B♦ 53A■ 64BA 95AA 95AA
* a “ * a + * g \ • “ ■ / * ; A
Ff6g.20.b Dissipated energy rate as a function of crack extension

/Bb0
(K
N/m
m)
U0|
/B (
KN
)
225
6
5
4
3
2
1
00 10 20 30
Crack extension Aa(mm)
AA A
A A
■. A H
+ 20BX 27B■ 37BA 53AH 64BA 95AA 95 AA
» A
A "A ■
I- A ■■ A■ -X X w " . A
X * ■ . ♦ ♦+ + X w * • .
■» + * * _____ ,___ ■________
_a>
0.15 ■ + 20BA X 27B
■ 37BA * A 53A
0.101 ,* A * A H 64B* ♦ H A 95A
■ B * 4 AA _ .
A 95AA
0.05!x
<»+ +
0.000.00 0.20
• A■ x • r* m
X+
0.40
A
X+ ** V
0.60
X . * A
Normalised crack extension Aa/b0
FIG.8.21 Variation of elastic energy (recoverable) with crack extension

CO
D(to
t) (m
m)
226
20 30Crack extension Aa (mm)
EE
Q.aoo
1.2A
1.0 -f t A
AA A
AH A A
0.8 »■ a * *
■ ♦ ° A
0.6 ♦ . • ■ ♦ A
+ 20BX 27B■■ * 4_ ■ ■ ■ 37B
0.4 H _ ■+ t x a
♦ 53A
0.2
+J- *
* * * ■A
64B95A
*sr A A 95AAi 6*
0.0' ____ i__________1__________i__________1__________i. ______ 1___0 10 20 30
Crack extension Aa (mm)
Fl6-&.22.a COD Resistance curves

CO
D(t
ot)
(mm
)
2 27
1.5
1.0
0.5
0.0
+ 20BX 27B A
. ■ 37B A A♦ 53A A A * A HH 64B 4 “ * ■ '■ A 95A A * B * B
■ A 95 AA A H *A A a ♦ °■ * A • ♦ °
A •
H A ° ■ ■ ■ ■ ■B
. * i + x X
' k VBl
X
ifSci ih—
i- I ------------- 1------------- 1________1________1________1________1________ 1_______
0.0 0.2 0.4 0.6 0.8 1.0Normalised crack extension Aa/B
1.2
1.0
EE 0.8
£ 0.6Oo
0.4
0.2
0.00.00 0.25 0.50 0.75 1.00
Normalised crack extension Aa/B
. A
AA A A B A
• A A A B
► ► B
A A H AA
" A ° °■ A ♦ a * + 20B
♦A B ■ "X 27B
■ _ B■ ■ 37B
+ + > * + * X A 53 AA:
<
*■ *
+JU. B 64B
+ “ A 9 5AA ' 95 A A
L-A----------- ,----------------- 1-----------------1._________ 1__________ 1__________ 1___ .
Fie.S.22.b COD resistance curves with normalised abscissa

Nor
mal
ised
dis
plac
emen
t 2q/
S
22 8
0.15
0.10
0.05
+ *
+ X
+ x
o• ■
• ■• ■
+ 20BX 27B■ 37Bo 53As 64BA 95AA 95 AA
l* * - • ■ ■x ■ 4 *
x ■ ■ * A
A * AA
0.00 x0 10 20 30
Crack extension Aa (mm)
0.00 0.20 0.40 0.60Normalised crack extension Aa/bo
FIG.8.23.a Variation of normalised load line displacementwith crack extension.

(2bo
/s)(5
q/3a
)
229
Crack extension Aa (mm)
1.0
0.8
0.6
0.4
0.2
0.0
- 0.20.00 0.20 0.40 0.60
Normalised crack extension Aa/bo
■+
+ 20BA X 27B A
O ■ 37B- O 53A
S 64B+ A 95A A
A 95 AA. A * A
hA X H B ■ A
A X m A + m A 4 * * "H A V ■ A _ ^ j . A * a * ™ " K * A T * ■ + ■ Aa
A A « a A * * a
___________________
FIG.8.23.b Variation of normalised load line displacement rate
with crack extension

230
Code Thickness B (mm)
W idth w (mm)
Crack ratio a/w
Loadingtype
20A20B
20.7 20 .8 0 .5160.520 TPB (S /W -4)
27A27B
20.7 27 .2 0 .5930.561 TPB (S/W=4)
37A37B
20.7 36.80 .5260.536
FPB (S/W =6.3) TPB (S/W=4)
53A53B *
20.7 53 .20.5340.517
TPB (S/W=4) FPB(S/W =4.36)
64A64B
20.9 64 .00 .5250.513
TPB (S/W=4) FPB (S/W=4)
95A95B
21.3 93.90 .5260.529 TPB (S /W -4)
95AA95BB
49.8 94 .2 0 .5320.539
TPB (S /W -4)
4 3 A * *4 3 B ** 21.3 42 .8
43 .90.740.503
TPB (S /W -6)
* The upper rollers were restraint from any kind of motion ** These were not considered in R-Curve studies.
TABLE.8.1 Geometrical and loading variations of specimens studied

231
Specimencode
Initial Crack Ratio
Total Crack Extension (mm)
Specimen Compliance
mm/kN ( x 1 0 '3 )
(a0/w)e ( V w)9 (Aa)e (A3)9 cpT m q>
TA 0.525 0 .528 0.660 0.53 10.449 10.280
TB 0.524 0.521 0.732 1.211 10.449 11 .075
TC 0.534 0.536 1.608 2.44 12 .406 13.78
TD 0.519 0.518 4.09 5.93 15 .453 19.823
TE 0.529 0.529 7.14 10.47 25 .447 43 .82 8
TF 0.515 0 .514 10.204 13.89 36.846 74 .10 4
NOTES ON SUBSCRIPTS:
e for estimated based on measured compliance 9 for measured according to ASTM E813 m for measured c for corrected
TABLE 8.2 Crack length, crack extension and compliance data of the six TPB specimens (B=20mm, W=50mm, S/W =4 ) used to study crack front curvature.

232
PLATE 8.1 Crack surfaces of broken calibration specimens showing different amount of crack extensions
PLATE 8.2 Crack surfaces of various broken specimens showing different size of shear lips and crack extensions

233
PLATE 8.3 Crack surfaces of various broken specimens showing different size of shear lips and crack extensions
PLATE 8.4 Crack surfaces of various broken different size of shear lips and crack
specimens showing extensions

234
CHAPTER 9
CONCLUSIONS and RECOMMENDATIONS
A 2-D finite element method was developed to deal with plane problems which
are neither in plane stress nor in plane strain conditions. This method, which has
the advantageous of the 2-D idealisations, has been used for EPFM analysis of
test piece geometries. For plane stress or plane strain conditions J has been
evaluated from the contour integral definition. The average value of r| factor as
determined from the latter analysis has then been used to evaluate J from work
input for the semi-plane strain conditions. A modified J integral definition, which
will account for the energy input due to the stresses and strains in the thickness
direction, may be sought as a better way of evaluating the applied crack tip
severity.
Two forms of equations to represent load-displacement, (Q-q), relations for edge
cracked geometries have been formulated and rationalised using numerical
solutions. The study, which had been limited to materials with non-work
hardening properties, utilises work rate at constant load to estimate J. Naturally,
the accuracy of estimates rely on the accuracy of the Q-q equations in
representing the numerical data. In the LEFM regime, good correlation between
the estimated and numerically evaluated J values has been achieved. In the
EPFM regime, especially at near limit load levels, the poor correlation between
estimated and numerically obtained Q-q relations has resulted in large
differences between the corresponding values of J. It is believed that use of work
rate at constant displacement to evaluate J in the EPFM regime, will reduce
differences between estimated and numerical values. Further, the method is
likely to give better results for materials with work hardening characteristics.
Other forms of equations, easier to handle mathematically and with improved
accuracy, may also be sought.
Single edge notched geometries subjected to the tensile type of pin loadings
have been studied, both analytically and numerically. Useful relations for limit

235
load and plastic component of ri factor, Tip|, as a function of applied load
eccentricity has been obtained. For cases where the net section area is primarily
subjected to bending stresses (large eccentricity), good correlation between
analytical and numerical results has been achieved.
For cases with small eccentricities (primarily tensile stresses in the net section
area) the analytical results depend on the the selected form of variation of
HCCTR, and the numerical results are appreciably affected by the model used
for the study. However, for large eccentricity cases the inclusion of the HCCTR in
the analytical studies hardly matters, hence the form of solutions for plane stress
or plane strain are practically identical.
The constraint factor, L, has been found to increase with both deformation level
and crack extension. Experiments on unnotched bend specimens have been
considered and the rise of load with deformation has been successfully
explained by the change in effective span, friction forces and slip line field
theory.
Normalisation of J based resistance curves with thickness has reduced the
variations in data due to different thicknesses of test pieces. For thinner
specimens, where the size is comparable to the plane stress plastic zone
diameter, 2rpo, no normalisation is required. When normalising data with
thickness, a minimum reference thickness, corresponding to about 2 ^ seems to
be necessary. However, when normalising with initial ligament size, if required,
no such limits are apparent.
The shear lip size is found to be linearly proportional to the initial uncracked
ligament size, at least for those geometries and sizes studied here. Although its
effect on out of plane constraint here is negligible, on thicker specimens, it may
explain the normalisation of data with initial ligament size for a given thickness.
When geometrically similar specimens are considered, normalising by thickness
or initial ligament size expectedly have equal effects.
Total and plastic component of work and their rate with crack extension has
been considered to characterise the resistance to crack extension. Especially
the work rate, be it total or plastic only, is found to decrease to a near constant
value after some crack extension. This could be a measure of the material's

236
basic resistance since scaling of the ordinate by initial ligament size has little
effect on the data.
The normalised displacement rate as a function of normalised crack extension
resulted in a unique curve, which has been proposed as a measure of
resistance to crack extension^
The EnJ method for estimating the applied crack tip severity has been applied to
short cracks emanating from regions of stress concentrations and compared with
2-D numerical results. The well known ’short crack' and 'long crack' division has
been applied and a relationship has been established to determine whether a
given crack is to be treated as 'long' or 'short'. This relationship is strictly based
on LEFM parameters and a size feature of the stress concentration, where for
'long' cracks, the latter is considered to be part of the real crack.
In the LEFM regime, the estimation process is based on the remote stress level
for the 'long' cracks and on the local stress level for 'short' cracks. In the EPFM
regime 'short' cracks require the EnJ estimation to be based on the local strain
rather then the local stress for better estimates. Local strain can be estimated
using the Neuber's rule.
The EnJ method is based on the upper bound representation of numerical data
for shallow cracks. Therefore, the estimations are expectedly better for shallower
cracks irrespective of the 'short' or 'long' crack treatment.
The range of work considered here, which is aimed at improving J estimation
methods for numerical, analytical and experimental studies of fracture
mechanics problems, has produced fairly useful results. Although some further
improvements may be required in some cases, the finding*can be incorporated
in design methods.
see foo tno te on p a g e 199
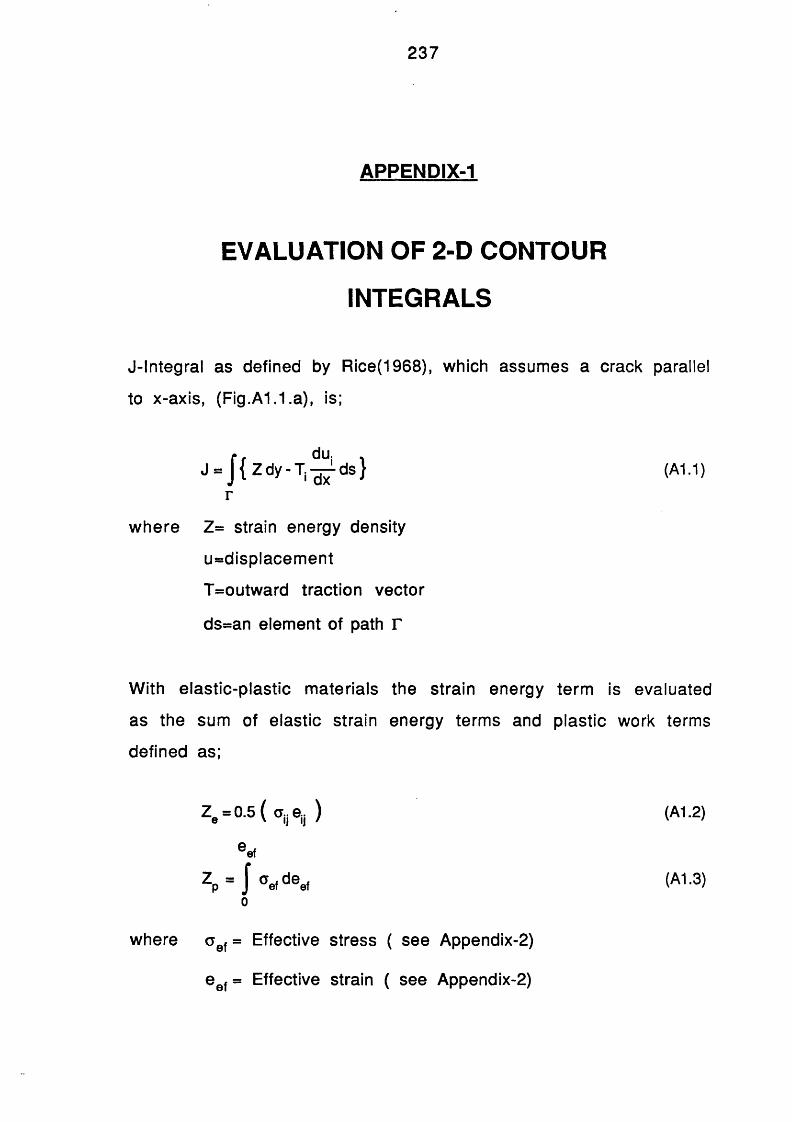
237
APPENDIX-1
EVALUATION OF 2-D CONTOUR
INTEGRALS
J-Integral as defined by Rice(1968), which assumes a crack parallel
to x-axis, (Fig.A1.1.a), is;
J = | { z d y - T . ^ d s } (A1.1)r
w here Z= strain energy density
u=displacem ent
T=outward traction vector
ds=an element of path r
With elastic-plastic materials the strain energy term is evaluated
as the sum of elastic strain energy terms and plastic work terms
defined as;
Ze = ° -5 ( V , j ) <A1-2>
e ef
Z p = J CTef d eef <A1-3 )0
where a e f= Effective stress ( see Appendix-2)
e e f= Effective strain ( see Appendix-2)

238
The relation of traction vector com ponents to local stress
components are;
where (a-90) is the angle between outward normal and +ve x-axis.
To evaluate J-Integral in a FE analysis, a subroutine to an existing
program may be added to process already evaluated stress and
strains. When defining a path to evaluate J, such points where
stresses and strains are readily available, e.g. node points (or gauss
points for isoparametric elements), are chosen. J is then evaluated
for each of these segments between two adjacent chosen points, and
then summed to give the J-integral for the path. For calculations
purpose it is easier to consider each term of J-Integral separately.
Furthermore, plastic work term for each segment at the end of a
loading step is recorded and utilised in the next loading step.
Considering two adjacent points defining a segm ent of a path,
Fig.A1.1.b, J-Integral is evaluated as:
Tx = °xxsina - % ° o s a
Ty = -Oyy cosa + 0xy sina (A1.4)
i+1
(A1.5)
H-1
(A1.6)

239
du. duXX dx + ° x y - d r ) a v sln«
du du,xy dx /av" (°yy 1 ? + axv"^r).- cosa } As (A1.7)
i=n-1
pathi«=1
(1) + j (2) + j (3) )ij+1 J i.H-1 + J i,i+1 / (A1.8)
w here As = Length of segment
8e0f * Plastic strain increment during current loading step.
n = total number of points defining the path.
Subscripts (av) and (pr) stands for average values between two
adjacent points and calculated value for the previous loading step
respectively.
*
References:
RICE, J.R. (1968). Journal of Applied Mechanics, 35, pp.379-386.
H E LLE N , T .K . (1984 ). H Post Yield Fracture Mechanics", Applied
Science Publishers, London, Ed. Latzko, D.G.H.

240
Fig.A I .1 a) Contour for J-Integral evaluation
b) Contour defined by points for J-Integral evaluation in FE. studies.

241
APPENDIX-2
ELASTICITY EQUATIONS FOR ISOTROPIC
MATERIALS
Strain-displacem ent relations are;f 3us 9u:
e:1 . 3u. 9u. v_ j _ / j _ _ i_ \
'•i “ 2 ' 3Xj + 3x. ' (A2.1)
strains may be caused by mechanical, thermal or residual effects.
e - e m + e th + e re ( A 2 -2 )
Constitutive equations relate mechanical stresses to mechanical
strains which may be given as;
a ij= x 5ijekk+ 2 ^ eij
(1 + v ) ( l - 2 v )
(A2.3.a)
(A2.3.b)
E= ----------
2 (1+v)
Where E is Young's modulus of elasticity, v is Poisson's
(A2.3.C)
ratio, and 8
is the cronecker delta ( 5^=1 if i=j and 5^=0 if i* j), and summation
over repeated indices are implied in Equ.A2.3.a.
For plane problems, the two shear stress components involving the
thickness direction (z direction for convenience) are assumed to have
zero values together with, either a zz=0 for plane stress or ezz=0 for
plane strain conditions.
Constitutive equations including thermal strains may be written in
matrix form and the same equations may be used for either case by
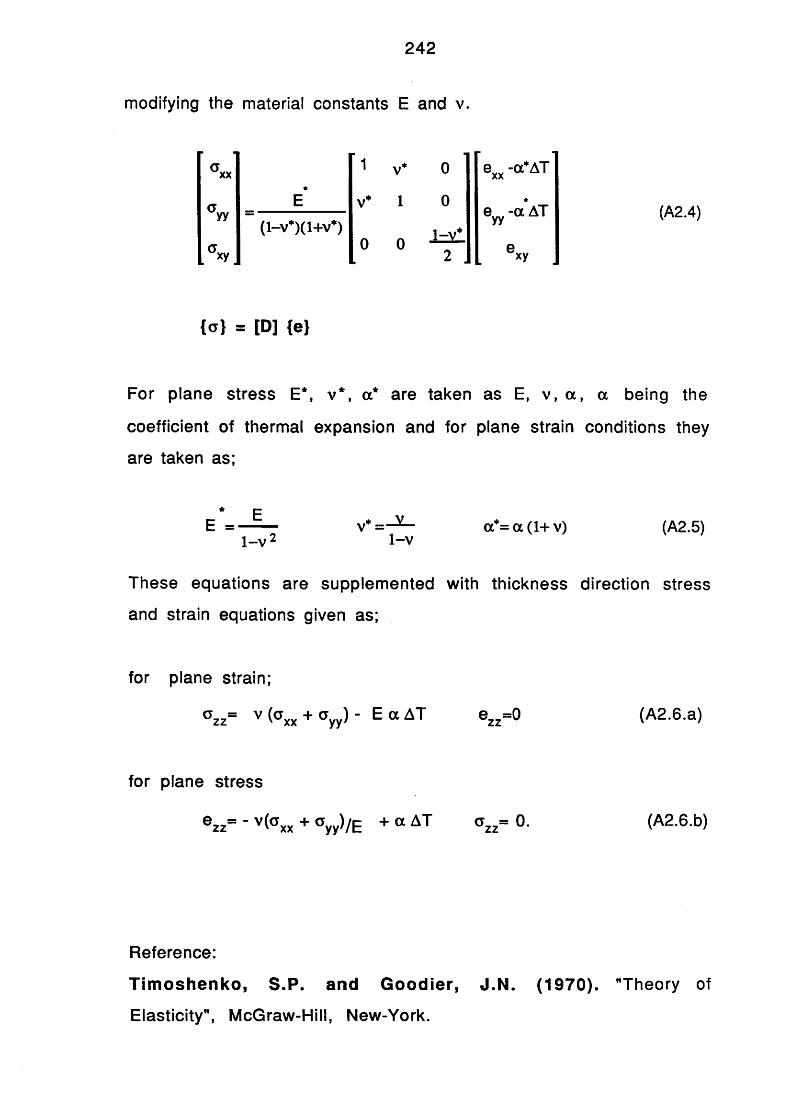
242
modifying the material constants E and v.
G _XX
a. Eyy
(l-v*)(l+v*)axy
0
0
i = £2
exx -a ‘ A T
eyy -a AT (A2.4)
M = [D] {e}
For plane stress E*, v * , a* are taken as E, v , a , a being the
coefficient of thermal expansion and for plane strain conditions they
are taken as;
* EE -------- v* = -^ — a*= a (1+ v) (A2.5)
l - v 2 1—v
These equations are supplemented with thickness direction stress
and strain equations given as;
for plane strain;
°zz= v K x + a y y )' E a AT ezz=0 (A2.6.a)
for plane stress
ezz= - v(oxx + oyy) /E + a AT azz= 0. (A2.6.b)
Reference:
T im o s h e n k o , S .P . and G o o d ie r , J .N . (1 9 7 0 ). "Theory of
Elasticity", McGraw-Hill, New-York.

243
APPENDIX-3
INTRODUCTION TO FLOW THEORY OF
PLASTICITY
The yield criterion determines the stress level in a material at
which plastic flow begins and can be stated in a general form as;
F= F(g ,k) = / (a ) - k(ic)=0 (A3.1)
where k(ic) is material property to be determined experimentally and
k is the hardening parameter.
Von-Mises criterion of yielding is well supported by experimental
evidence and states that the plastic flow will occur when the
equivalent stress, a ef, reaches a critical value. This may be
expressed as;
F = K x - °y y )2+ ( °y y - ^ z z ^ x x)2
+6( a xy2+ c yz2+ a zx2) -2 a ef2=0 (A3.2)
or in terms of deviatoric stress components
F= — o|. a,’, - of, = 02 >j y 3 ef
a!. = a . - — a ,. &. y ij kk ij
(A3. 3)
(A3. 4)
where 8y is kronecker delta and summation over repeated indices are
im plied.
For elastic conditions deviatoric strains (defined below) are related
directly to deviatoric stresses.

244
(e!.) « -JL v |J ye 2G
(e ij )e = (e jj)e * 3 (ekk)e ij
(A3. 5)
(A3. 6)
Plastic strains are assumed to occur at constant volume, hence;
(0 ii>P = ° <deii )P =0 (e ij)P= (e ?P (A 3*7 )
An effective plastic strain, (eef)pis defined, (similar to effective
stress), as a function of plastic strain components, (equ.A3.8), where
the constant 2/9 was introduced to satisfy uniaxial tension
conditions. A sim ilar definition also exist for plastic strain
increments, (equ.A3.9).
e ef = { J [ ( e r e2) 2+ (e2- e 3) 2+ ( e ^ ) 2 ] } °'5 A3.8
where e ^ e g ^ are principal strains
<d 0ef )p = ( | ( deij)p (d e ij>p ) ° 5 (A3-9 )
Strain and strain increments can be written as a sum of elastic and
plastic components.
®ij = (®ij)e + (®ij)p (A 3 ' 1° )
deij= (d 6 ij)e + (d^j)p (A3. 11)
For continued plastic flow, F=0 together with dF=0 is required as
dF<0 will indicate elastic unloading.
... 9F . 3F , . 2 ^ „dF------- do;, + -------daef = 0jj do, - - O j (de„)B =0ef
da.ij
daef
daef
<d e ef)|= H '
(A3.12)
(A3.13)
where H' is the local slope of stress-plastic strain curve.

245
The potential theory of plasticity assumes that the plastic strain
increments are proportional to the stress gradient of Q, which
term ed as the 'plastic potential'. Further, Q is assumed to be
identical with the yield function / of equ .A I.
(de )p = P ^ - (A3.14)J P d Cf . ..
The differential of equ.A3.1 can be written as;
{a}T{do} - Ap=0
w hereT j>F_ 3F_ dF_ _3F_ J F _ dF
V ^a2,^ aXy, t o * ' d° yz
A —p 3 k
{a} is termed as the flow vector.
(A3.15)
(A3.16)
(A3.17)
Using A3.14 and A2.4 the total strain increment (equ.A3.11) is now
written as;
{de}= [D]'1{dc} + p{a} (A3.18)
pre-multiplying equ.A3.18 with {a}T[D] and using equ.A3.15 gives p as;
P= (a}T [D]
A + {a}T [D] {a}{de} (A3.19)
Substitution of equ.A3.19 into equ.A3.18 and solving for stresses
gives.
{da}= [Dep] {de}
w here
[Dep] = [D ]-(dD } « U T
A + {cyT {a}
(A3.20)
(A3.21)

246
{dD} = [ D ] {a } (A3.22)
The constants A and p are determined by referring to uniaxial tensile
test data and postulating the degree of work hardening ( k ) to be a
function of total plastic work done. Therefore,
•<(«)- t f y ( * ) (A3.23)
K = W p = J a ij.(dejj)p (A3.24)
dK = a|j.(deij)p=p {a}T{a } (A3.25)
and the hardening param eter, k , is assumed to be equal to the
effective plastic strain, (e0f)p.
For uniaxial case, there Is only one applied stress component, which
can be identified with the yield stress a ys, and strain components are
defined by the effective value e0f (equ.A3.9). The flow vector has one
term, and p is obtained from equ.A3.23 by using Euler's theorem
applicable to homogeneous functions.
d /(c JdK = P ay = Pay = ay.(deef)p (A3.26)
P = (d e ef)p (A3.27)
The constant A is found by substituting equ.A3.27 and equ.A3.23 into
equ.A3.17 to give;
daA = Y = H' (A3.28)
<d e ef)p
This method is quite suitable for numerical work with the added
advantage of requiring no inversion of matrices. Using von-Mises
yield criterion, the function ( / ) is identified with the second stress

247
invariant in terms of deviatoric stress components.
/(o „ ) = ( 3 J '2)0-5
where J '2 = 0.5 (o'# ) (a'„)
and the flow vector {a} becomes
- { o ' }
(A3.29)
(A3.30)
references:
H i 11, R . (1 9 5 0 ) . 'M athem atica l Theory of P lastic ity ', Oxford
University Press.
O w en , D .J .R . and H in to n , E. (1 9 8 0 ). 'F inite Elem ents in
Plasticity; Theory and Practice', Pineridge press.

248
APPENDIX-4
ESTIMATES OF THE J-INTEGRAL FOR CRACKS AT REGIONS OF STRESS'omzwrmm— ~ — ---------------------------------------------------------------------------------------------------------------------------------------------------------------—
*ETEMAD, M .R., DAGBASI, M ., and TURNER, C .E .
Numerical results for cracks in regions of stress concentration of various geometries are presented and compared with estimates by several methods. In the LEFM regime the well known division into 'short' or 'long' crack is used. Short cracks are treated by the local stress, (kta) and a shape factor for a small crack size ratio such as Vrc, and large cracks are treated by the remote stress (c)and a shape factor, Y, related to the size of the crack plus concentration feature. A relationship is stated to establish whether a given crack should be treated as 'long' or 'short'. In the EPFM regime the EnJ estimation method is found useful for either case provided that for cracks that are short EnJ is entered according to the local strain at the stress concentration rather than the local stress.
INTRODUCTION
L in e ar e la s t ic f ra c tu re mechanics, LEFM, has prooved an in v a lu a b le to o l , in both design and assessment o f s tru c tu ra l in t e g r i t y . I t uses the crack s iz e , a , the nominal remote s t r e s s ,e r , and a geometr ic shape fu n c tio n , Y , to d e fin e the s tre s s in te n s ity fa c to r , K, which g ives the magnitude o f the crack t ip s e v e r ity .
K=Yav a (1)
To account fo r small sca le p la s t ic i t y , an es tim ate o f the p la s t ic zone developing ahead o f the crack t ip is made in con junction w ith Eqn.l to g iv e ,
r p= (l/$ 7 T )(K /a y ) 2 ( * )
where 3 is a numerical co n stan t; 2 fo r plane s tress (upper bound) and 6 fo r plane s tra in (lo w e r bound). K is then increased by
♦Research A s s is ta n t, Research Student and Professor o f M a te r ia ls • re s p e c tiv e ly ; Mechanical Engineering Peoartm ent, Im o eria l C o lleg e , London SW7, UK. '
92-1

249
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
re p la c in g the crack s iz e (a ) in Eqn.l by (a + r ) . Some users update Y c o rres o n d in g ly , w h ils t some do n o t. An ex ten sive d iscussion on
'va rio u s p la s t ic zone s iz e es tim a tio n and c o rre c tio n procedures can be found in R e f . l . For more ex ten s ive p la s t ic i t y , severa l e la s t ic - p la s t ic design methods have been proposed, C 0D (2 ), R -6 (3 ) , EPRI(4 ) and E n J (5 ). These methods have been described and compared fo r severa l case s tu d ies in R e f .5 .
Although most eng in eerin g s tru c tu re s are designed and operated w ith in t h e ir e la s t ic l i m i t , they may experience y ie ld le v e l stresses lo c a l ly a t geom etric d is c o n t in u it ie s . In LEFM i t s e l f , a crack a r is in g in a reg ion o f s tress co n centra tion is a llow ed fo r by the choice o f ap p ro p ria te Y fa c to r where known, eg. R e f .5 , where the Y fa c to r is not known an approxim ate express io n , sometimes used fo r sh o rt cracks is given by,
K=kt a/fra (3 )
Eqn.3 im p lies a small crack o f len g th (a ) in a rem otely ap p lied uniform s tress f i e ld o f magnitude k t a where k t i s the conventional e la s t ic s tress co n cen tra tio n fa c to r eva luated here using the gross cross s e c tio n a l a re a . In many in s ta n c e s , such a crack a t a s tress co n cen tra tio n is b e t te r m odelled as an edge crack in a wide p la te , g iv in g ,
K =1.12kt a^?a (4 )
In some o f the EFPM ( e la s t ic - p la s t ic f ra c tu re mechanics) methods the procedure fo r e s tim a tin g the a p p lie d crack t ip s e v e r ity is by using an e f fe c t iv e s tre s s le v e l , which a t le a s t in R e f .2 is taken as (Kt o).
For the LEFM regime th is paper presents and compares the s e v e r ity o f cracks in s tress co n cen tra tio n areas as published ( 6 ) , as estim ated by E qn .3 , Eqn.4 and by Smith and M i l le r (7 ) and as obta ined n u m e ric a lly . S p e c if ic a l ly cracks emanating from e l l i p t ic a l holes in wide p la te s subjected to te n s ile load ing w ith p a r a l le l ends are f i r s t s tu d ie d , see F ig . l and Table 1 . The geom etries modelled fo r the numerical s tu d ies gave r is e to nominal s tress co n cen tra tio n fa c to rs , SCF, o f 2 , 3 and 5 . The study is then expanded to o th e r geom etries where standard s o lu tio n s are not a v a i la b le , and the on ly comparison made is th e re fo re between estim ated and n u m e ric a lly obta ined v a lu e s . Analyses beyond LEFM regime is then d e ta ile d by comparing computed J - in te g r a l values w ith those p red ic ted by EnJ, fo r both sh o rt crack and long crack cases. The lo ca l p la s t ic s t ra in in the notch , as found by f i n i t e elem ent study o f the uncracked body, was a lso used in the EnJ es tim a tio n procedure.
92-2

250
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
T.ABLE 1 - D e ta ils o f Geometries S tu d ied .
(a ) E l l ip t i c a l cen tre notch ( F i g . l . a )
Case W . mm
D .mm
R. , mm
Hmm
SCFNominal True
M212 100 100 5 10 2 2 .04
M202 . 50 200 5 10 2 2.041
M203 50 200 10 10 3 3.153
M205 50 200 10 5 5 5.183
(b ) Edge notch ten s io n ( F i g . l .b )
CaseWmm
Dmm
Rmm
Hmm
Type o f Notch SCF
M202T 50 200 5 10 Semi-e T l ip t ic a l
2 .124
M205T 50 200 10 5 Semi - e l l i p t i c a l
5 .869
M99RT 10 40 1 .8 0 .5 u-notch 7 .8
(c ) Edge notch bending ( F i g . l . c )
Case W(mm) D(mm) R(mm) H(mm) Type o f Notch
SCF
M202B 50 200 5 10 Semi -e l l i p t i c a l
1.627
M205B 50 200 10 5 Semi - e l l i p t i c a l
4 .475
M99RA 10 40 1 .8 0 .5 u-notch 5 .5M99R 10 40 2 0 .5 u-notch 5 .8
92-3

251
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
(d ) The s tru c tu re ( F i g . l . d , l . e )
Case W(mm) D(mm) R (mm) H (mm) Loading SCF
Ml 21B 50 200 5 10 Bending 1 .4 6 5 (1 .1 8 7 )
M121T ii n it n Tension 1 .5 5 (1 .4 0 0 )*
*F ig u res in paren thes is are based on reduced sectio n a re a .
THE FINITE ELEMENT PROGRAM
A tw o -d im ension al, sm all geometry change FE code w ith 8 noded is o p aram etric elements was used to model various s tru c tu re s fo r nume r ic a l s tudy. The m a te r ia l m odelled was a pressure vessel s te e l w ith m ild work hardening w ith y ie ld s tress a =573.64 MN/m2 .Young's modulus E=210xl03MN/M2 , and Poisson's r a t io v = 0 .3 .
A ll goem etries s tud ied were constra ined to plane s t r a in , and the J - in te g r a l was evaluated along 10 d i f fe r e n t contours around the crack t i p , to prove path independence o f the method. W h ils t e la s t ic , these values were converted to K and Y using
K = /(J /E ')= Y av /a t
where E '= E / ( l - v 2,) and
a^=a+R
where R is th e notch s iz e (see F ig .1 ) .
STRESS CONCENTRATION CASES IN LEFM
(5)
(6a )
(6b)
In f in i t e Geometry Cases
Estim ates o f the s tress in te n s ity fa c to r K by Eqns 3 and 4 and those obta ined using the equations given by Smith and M i l le r ( 7 ) , are compared w ith FE re s u lts obta ined here and those presented in R e f.6 , fo r cracks a t e l l i p t i c a l holes in th ree cases o f nominal SCF, 2 , 3 and 5 , in F ig .2 . Note th a t the geom etries s tud ied by the FE method were o f f i n i t e s iz e , see F ig . la and Tab le l a , so th a t a c o rre c tio n to i n f i n i t e s ize was made using /sec(7rat /w due to Fedderson ( 8 ) . The FE re s u lts agree w ith those given in R e f . (6 ) being 2% h ig h e r, but p re d ic tio n s by Eqn.3 are always low er fo r low SCF cases. For h ig h er SCF cases p re d ic tio n s by Eqn.3 are lower fo r sm all cracks and h ig h er fo r lo nger cracks than those given by R e f.6 . On the o th e r hand Eqn.4 p re d ic ts exact o r h ig h er i< values fo r a l l those cases presented in F ig .2 . The amount o f over-estim ate by Eqn.4 depends upon both the crack s iz e (a ) and the SCF. For
93-4

252
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
sh o rt cracks the p re d ic tio n by Eqn.4 approaches to the exact so lu t io n . F ig .2 fu r th e r shows th a t the s tress in te n s ity fa c to r fo r these geom etries increases w ith the increase o f crack s iz e , approaching to the cen tre crack panel s o lu tio n a f t e r s l ig h t ly overshooting i t . T h e re fo re , the s tress in te n s ity fa c to r p re d ic te d by the long crack (a t ) approach, th a t is the cen tre crack panel w ith a crack s iz e ( 2 a . ) , using E qn .7 , which is e s s e n t ia lly Eqn.5 w ith Y = /tt, w h ile being reasonably accurate fo r long c rac k s , w i l l be p erhaps too con serva tive fo r short c racks.
K = a v/TTra^. = a / { 7 r ( a + R ) ( 7 )
Furtherm ore use o f Eqn.4 fo r sh o rt cracks proves to be a good or s l ig h t ly co nservative es tim ate o f the tru e s tress in te n s ity fa c to r . A sim ple c r i t e r io n to d is tin g u is h those cracks in a region o f s tress co n cen tra tio n where a sh o rt crack approach w i l l be b e tte r than the long crack approach and v ic e versa can be obtained by equating the two s o lu tio n s fo r K, i . e , Eqns.4 and 7 , fo r a p a r t ic u l a r crack length a ' .
K=k^.al. 12i/rra1 = a/rra^ = o/ir(a+R) (8 )
to g iv e ,
a '= R /| (1 .1 2 k t ) 2-- | | (9 )
i f a<a' a sh o rt crack trea tm e n t (Eqn .4) is p re fe rre d
a>a' a long crack trea tm en t (Eqn .7) is p re fe rre d .
F in ite geom etries
The idea o f a 'short crack' in an e le v a te d te n s ile s tre s s f i e l d (k .a ) o r lo n g c ra c k 'in the s tre s s f i e ld (cr) can be extended to cover edge notch cases in geom etries o f f i n i t e s iz e s , such as p a r a l le l end tens ion and bending. To apply to such cases, Eqns.4 and 7 are m odified fo r f i n i t e s iz e s , re s p e c t iv e ly , as fo llo w s .
K = k^aYgt^a
K = aYL/(a + R )
Equating th e s e , fo r a p a r t ic u la r crack le n g th , g iv e s ,
“ I V | j V s/YL) * - l ] (11)
(10a)
(10b)
where
Y = Y „(a ,V L ,D ) as is taken in tension s s ' n 7Y| = Y . (a f ,W,D) as is taken fo r the ac tu a l geometry (see
L L z F i g . l . a , b , c , d , e ) .
92-5

253
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
Use o f Eqn.11 enables a d ec is io n to be made on the 's h o rt crack ' o r Hong crack* trea tm en t o f a crack problem in a s tress co ncentra tion a re a . Again when a<a' the short crack trea tm en t is p re fe rre d and fo r a>a* the long crack trea tm en t is p re fe rre d .
A summary is given in Table 2 , comparing long o r sh o rt crack treatm ents fo r those geom etries s tu d ie d , see Table 1 and F i g . l , to support the c r i t e r i a s ta te d above. Where re le v a n t estim ates using the equations given by Smith and M i l le r (R e f .7) are a lso given
TABLE 2 - Comparison o f Estim ated and N um erica lly obta ined S tress In te n s ity Factors
(a ) Cases favo u rin g s h o rt crack approach
Case SCF a ' +(mm)
a(mm)
K/a+Computed Eqn.10a Eqn.10b
M202T 2 .1 2 1 .7 1 (1 .3 ) + 0 .5 2 .8 3 2 .9 3 (2 .7 5 ) 4 .9 9II n 1 .7 1 (1 .3 ) 1 .0 3 .8 4 .2 5 (3 .9 0 ) 5 .17ii it 1 .7 1 (1 .3 ) 1 .5 4 .47 5 .16 5 .43
M202B 1.63 2 .035 0 .5 2 .32 2 .2 8 4 .0 7
Ml 21T 1.55 4 .5 2 2 .5 4 .2 7 5 .0 4 5 .92Ml 21T ( * ) 1 .4 5.21 2 .5 3 .92 4.71 3 .36Ml 21T (* ) 1 .4 5.21 5 .0 5.41 6 .6 0 4 .7 2Ml 21B{ * ) 1 .19 4 .2 7 2 .5 3 .12 3 .86 2 .85
(b ) Cases favo u rin g long crack approach
Case SCF a '(mm)
a(mm)
K/o+
Computed Eqn.10a Eqn.10b
M205T 5 .87 0 .3 9 (0 .6 5 ) 0 .5 5 .98 8 .2 4 (5 .0 7 ) 7 .35M205B 4 .4 8 0 .4 0 .5 4 .5 8 6 .2 8 5 .65M99RA 5 .5 0 .0 5 0 .2 2 .44 3 .67 2 .45M99R 5 .8 0 .0 5 0.1 2 .33 3 .6 4 2 .53
ii ii it 0 .2 2 .58 5 .15 2 .6 0it ii ii 0 .2 5 2 .66 5 .76 2 .63
M99RT 7 .8 0 .0 4 0 .2 3.16 7 .42 3 .18
Ml 21T 1.55 4 .5 2 5 .0 6.01 7.31 7 .12Ml 21B 1.47 2 .4 3 2 .5 3.91 4 .76 4 .7 2Ml 21B ii ii 5 .0 5 .0 8 6 .9 7 5 .50Ml 21B (*) 1 .19 4 .2 7 5 .0 4.11 5 .65 3 .92
+ Figures in paren thes is are obta ined using^fcef.7 .* S tress is based on the reduced sec tio n area i e . R=0 in Eqn. 10b.
92-6
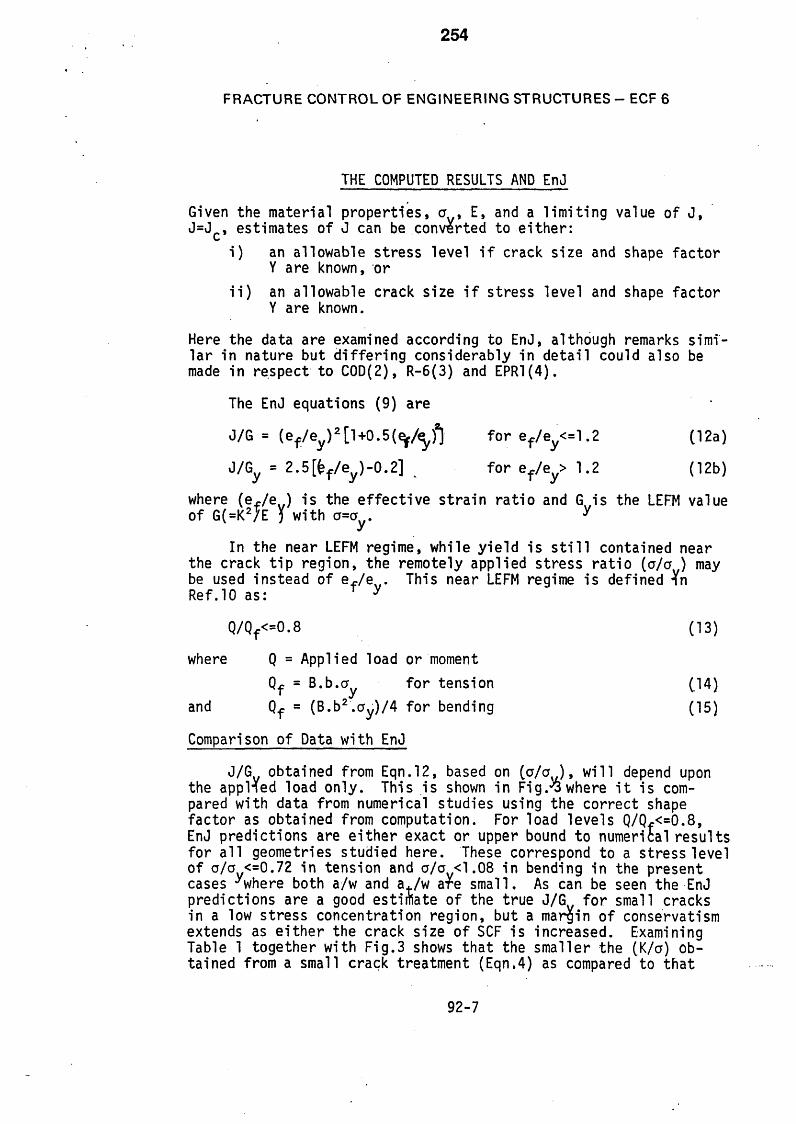
254
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
THE COMPUTED RESULTS AND EnJ
Given the m a te r ia l p ro p e r t ie s , a , E, and a l im i t in g value o f J , J=JC, estim ates o f J can be converted to e ith e r :
i ) an a llo w a b le s tress le v e l i f crack s iz e and shape fa c to rY are known, or
i i ) an a llo w a b le crack s iz e i f s tress le v e l and shape fa c to rY are known.
Here the data are examined according to EnJ, although remarks s im ila r in nature but d i f fe r in g cons id erab ly in d e ta i l could a lso be made in resp ect to C 0D (2 ), R -6 (3 ) and EPR1(4).
The EnJ equations (9 ) are
J/G = (e f /e y ) 2 [ l + 0 . 5 ( y y * l fo r ef /e y <=l .2 (12a)
0/G = 2 .5 [fe f /e y ) - 0 .2 ] fo r e f /e > 1 .2 (12b)
where ( e Je ) is the e f fe c t iv e s t ra in r a t io and G is the LEFM value o f G(=K2/E J w ith o=o . y
J'In the near LEFM regim e, w h ile y ie ld is s t i l l contained near
the crack t ip re g io n , the rem otely ap p lied s tress r a t io {a/a ) may be used in s tead o f e J e . This near LEFM regime is defined ¥n R e f .10 as: T y
Q/Qf <=0.8 0 3 )
where Q = A pplied load o r moment
Qf = B .b .a fo r tension 0 4 )
and = ( B . b z . O y ) / 4 fo r bending (1 5 )
Comparison o f Data w ith EnJ
J/G obta ined from Eqn.12, based on (a /a ) , w i l l depend upon the a p p lie d load o n ly . Th is is shown in F ig .'G w here i t is compared w ith data from num erical s tud ies using the c o rre c t shape fa c to r as obta ined from com putation. For load le v e ls Q/Qf < = 0 .8 ,EnJ p re d ic tio n s are e ith e r e x ac t or upper bound to n u m eriia l re s u lts fo r a l l geom etries s tud ied h ere . These correspond to a s tress le v e l o f o/a <=0.72 in tens ion and a/a < 1 .08 in bending in the present cases ywhere both a/w and at /w are s m a ll. As can be seen the EnJ p re d ic tio n s are a good es tim ate o f the tru e J/G fo r small cracks in a low s tress co n cen tra tio n re g io n , but a margin o f conservatism extends as e ith e r the crack s iz e o f SCF is in creased . Examining Table 1 to g e th e r w ith F ig .3 shows th a t the s m a lle r the (K/a) obta in e d from a small crack trea tm en t (E qn .4) as compared to th a t
92-7

255
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
obtained from a la rg e crack tre a tm e n t, E qn .7 , the c lo s e r the es tim ate by EnJ is to the num erical r e s u lt .
E stim ation by EnJ
In the EnJ es tim a tio n method, "the sh o rt crack" approach is implemented by e n te r in g Eqn.12 a t (k .o /a ) and using the ac tu a l crack s iz e (a ) to g e th e r w ith a shape Tacxor Y=Y (a ,w ) , see F i g . l . On the o th e r hand "th e long crack" approach is implemented by e n te r in g Eqn.12 a t remote s tre s s le v e ls (cr/cr ) , and using (a .=a+R ) fo r the crack s iz e to g e th e r w ith a shape fa c to r Y=Y, a p p ro p ria te fo r the geometry and ( a . /w ) . Note th a t fo r the geom etries s tud ied in the s h o rt crack trea tm e n t the shape fa c to r Y is approxim ated to 1 .1 2 / tn s ince a/w < = 0 .1 , and in the "long crack" tre a tm e n t, since a ./w < = 0 .2 8 , the shape fa c to r Y, is approxim ated to / it fo r cen te r tra c k and 1 .1 2 /ir fo r edge c rack .
In F ig .4 , the s h o rte s t cracks fo r a l l cases s tu d ied here are shown as tre a te d by the sh o rt crack approx im atio n , ir re s p e c t iv e o f 'lo n g ' o r 's h o rt c rack ' a n a ly s is req u ired according to E q n . l l . C le a r ly the EnJ e s tim a tio n f o r those cases re q u ir in g long crack a n a ly s is becomes too c o n s e rv a tiv e , e .g . M205 and M99R. In F ig .5 , the data is shown again tre a te d by the 'lo n ^ c rac k ' crack a n a ly s is . Here the EnJ es tim a tio n procedure fo r cases re q u ir in g sh o rt crack a n a ly s is becomes too c o n s e rv a tiv e , e .g . M202B. M oreover, i f a llo w ab le crack s izes ( in th is case a.=a+R) are to be eva lu a ted fo r a given ap p lied lo a d , i t is very T ik e ly th a t one w i l l end up w ith a crack s iz e a. which is a c tu a lly s h o rte r than the notch s ize R. I t is th e re fo re x o n c lu d e d th a t the d iv is io n between the long and sh o rt crack treatm ents in the LEFM regime must be c a rr ie d over in to conta ined y ie ld in g .
Contained Y ie ld in g and beyond
A b e t te r approach, a lso co n s is te n t w ith the EnJ d e r iv a t io n , is to use the e f fe c t iv e s t ra in r a t io (e f /e y ) . For sh o rt cracks the notch t ip s t r a in , NTS, r a t io (e ^ /e v ) Tir r the absence o f any c ra c k , may be used in EnJ eq u a tio n s . F o rr ig o ro u s LEFM (e -r/e )=k. (a /a ) , but w ith any degree o f y ie ld in g these terms d i f f e r . Estim ates y from EnJ by using the NTS r a t io (e-r/e ) ob ta ined by com putation, are compared w ith the num erical re iu lx s in F ig .6 . The agreement o f EnJ fo r s h o rt cracks ob ta ined in th is way appears to have improved fo r those cases s tro n g ly favo u rin g sh o rt crack tre a tm e n t. T h e re fo re , tru e notch t ip s t r a in r a t io en tered in to EnJ gives a good e s tim a te , both in LEFM and in contained y ie ld in g , fo r cracks in s tre s s co n cen tra tio n a re a , favo u rin g 's h o r t c rack ' tre a tm e n t. Hence fu tu re work in c ludes e s tim a tin g the NTS in a s tress concent r a t io n area in the absence o f any c rack . Neuber (11 ) type a n a ly s is as suggested by Begley e t a l (12 ) is favoured fo r th is study and exten sion to y e t more e x ten s ive y ie ld in g is envisaged.
92-8.

256
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
CONCLUSIONS
A sim ple fo rm u la tio n has been proposed d iv id in g a "sh o rt crack" from a "long crack" trea tm e n t fo r cracks a t regions o f s tre s s conc e n tra t io n . Comparison o f computed data a l l w ith SCF<=5 and w ith at /W <=0.28, w ith exact s o lu tio n support the a n a ly s is which is then c a rr ie d over in to o th e r c o n fig u ra tio n s fo r which exact so lu tio n s do no t e x is t . This same concept is ap p lied to cases w ith some degree o f y ie ld in g and good agreement found w ith e s tim a tio n by EnJ when en tered a t the lo c a l s t ra in e^ /e^ in the uncracked body.
REFERENCES
(1 ) T u rn e r, C .E ., Methods fo r post y ie ld f ra c tu re m echanics,"Post Y ie ld F ra c tu re M echanics", Ed. D .G .H .L a tzko , App.Science P ub ., 1979, C h.2.
(2 ) Guidance o f Some Methods fo r The D e riv a tio n o f Acceptance Levels o f Defects in Fusion Welded J o in ts , B r i t is h Standards In s t i t u t io n , PD6493, 1980.
(3 ) H a rr is o n , R .P ., Loosemore, K . , and M iln e , I . , Assessment o f the in t e g r i t y o f s tru c tu re s c o n ta in in g d e fe c ts , CEGB Report R /H /R 6, 1976 and supplements 1979, 1981.
(4 ) EPRI D u c tile F rac tu re Research Review Document, Ed. O .M .N orris e t a l . , LPRI, (P a lo A l t o ) , D ec .1980.
(5 ) T u rn e r, C .E ., ASTM STP 803 , V o l . I I , 1983, p p .8 0 -1 0 2 .
(6 ) Rooke, D .P ., and C a r tw r ig h t, D .J . , "Compendium o f S tress In te n s ity F a c to rs " , Her M a je s ty 's S ta tio n e ry O f f ic e , London, 1974.
(7 ) Sm ith , R .A ., M i l l e r , K .J . , In t .J .M e c h .S c i. , V o l.2 0 , y e a r ,p p .201-206 .
(8 ) Fedderson, C .E ., D iscussion , ASTM STP 410 , 1967, p p .7 7 -7 9 .
(9 ) T u rn e r, C .E ., The J-Based F rac tu re Assessment Method, EnJ, and A p p lic a tio n to Two S tru c tu ra l D e ta i ls , IC F6, V o l .2 , pp .1053 - 1061.
(10 ) T u rn e r, C .E ., A J-Based Engineering procedure (EnJ) fo r f r a c tu re s a fe ty assessment. Seminar sponsored by 'H .M . N uclear In s t a l la t io n In s p e c to ra te ', M .P.A . S tu t tg a r t , O c t .1982.
92-9

257
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
(11) Neuber, H . , Transactions o f ASME, 1961, p p .544-550.
(12) Begley, J . A . , Landes, J . D . , and W ilson, W .K ., ASTM STP 560, p p .155-169.
92-10

258
FRACTURE CONTROL OF ENGINEERING STRUCTURES - ECF 6
D/2 ,, , D/2
p-*- £ # "1L A ± _(b)
D/2 t | | D/2 , ,
1s r
(<o
pD/2 - D/2 * 1
£
<i Si __
— r f I^ ^ — r. * t
(«)(a ) Center notch tension(b ,c ) Edge notch tension and bending(d ,e ) S tru c tu re in tension and bending
Figure 1 , D e ta i ls o f geometries studied
92-11

92-12
F igure 2 , Comparison o f s tress in te n s i ty fa c to rs fo r i n f i n i t e p la tes
FRA
CTU
RE
CO
NTR
OL O
F EN
GIN
EE
RIN
G S
TRU
CTU
RE
S -
ECF 6

3 0-
2-5
2*0
>.
1-5-1
1-0
0-5-
+ Based on narrow end dimensions
M 2 0 2 T -------------------------p,MQODT _________ _____ 1 0M205T
i f B iM101T +M \C\ IM191T fs>\xI I j p j
'liW/
lYl \Cm 1 1
M205------------------- j|
1
mJ2JBM121B+
0 0 015 030 0-45 0-60 0-75 0.90 1.05 120 1-35 1-50070y
Figure 3, Comparison o f numerical re s u lts (using tne computed shape fa c to r ) w ith EnJ
260

roo>
Figure a , 'Sho r t Crack1, (a ) treatm ent o f numcerial data using Y = 1 .1 2 ^ 'a n d comoarison w ith End entered a t (k^.q/qy)

262
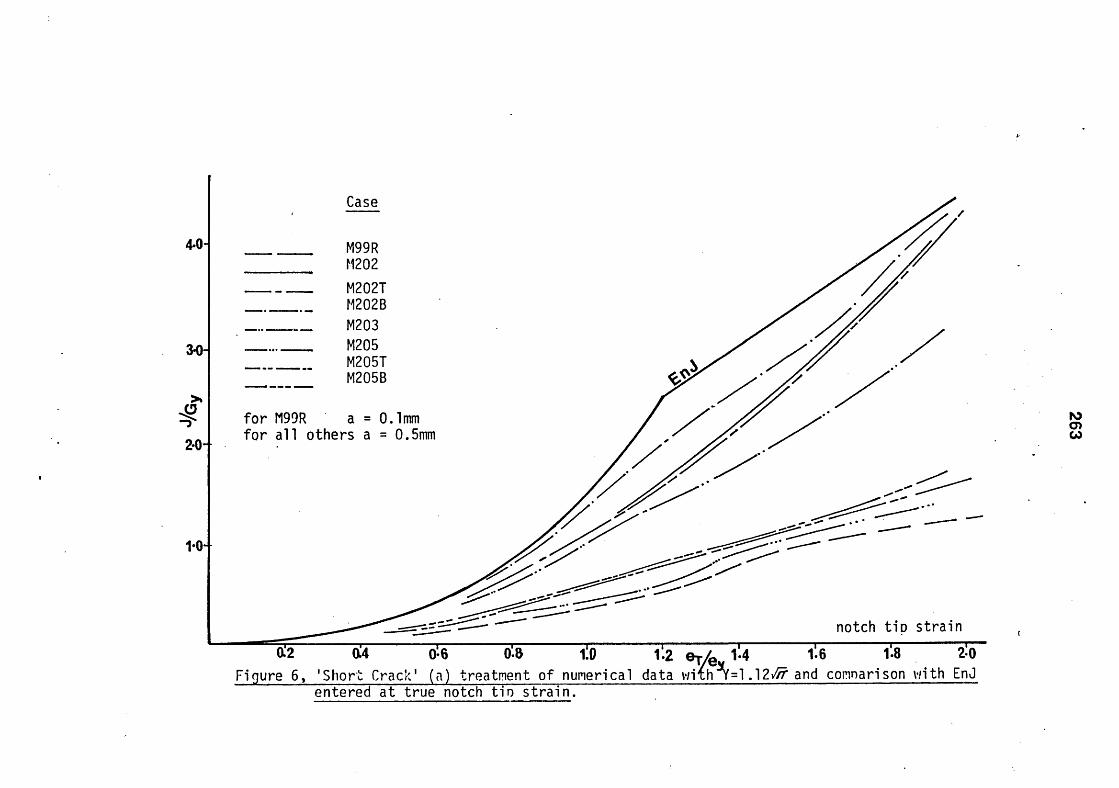
263

2 6 4
REFERENCES
ALEXANDER, J.M. and KOMOLY, T.J.(1962) Journal of The Mechanics
and Physics of Solids, 10, 265-75.
ANDERSSON, H. (1973) Journal of The Mechanics and Physics of Solids,
21,337-356.
ASTM E-399 (1981) "Standard Test Method for Plane Strain Fracture
Toughness of Metallic Materials"
ASTM E813 (1981) "Standard Test for JjC, A Measure of Fracture Toughness"
BARSOUM, R.S. (1977) International Journal of Numerical Methods In
Engineering, 11,85-98.
BEGLEY, J.A. and LANDES, J.D. (1972) ASTM STP 514, pp. 1-20.
BLEACKLEY, M.H. and LUXMOORE, A.R. (1983) International Journal of
Fracture, 22,15-39.
BROEK, D.(1982) "Elementary Fracture Mechanics", 3rd Ed., Martinus Nijhoff
Publishers.
BS 5447 (1977) "Methods of Test for Plane Strain Toughness (K|c) of
Metallic Materials".
BS 5762 (1979) "Methods for crack opening displacement (COD) testing,
British Standard Institution", London.

2 6 5
BUCCI, R.J., PARIS, P.C., LANDES, J.D. and RICE, J.R. (1972)
ASTM STP 514, PP. 40-69.
BURDEKIN, F.M. and STONE, D.E.W.(1966) Journal of Strain
Analysis.1,145.
BYSKOV, E. (1970) International Journal of Fracture Mechanics, 6,159-167.
CHAN, S.K., TUBA,I.S. and WILSON, W.K. (1970) Engineering Fracture
Mechanics, 2,1-17.
CLARKE, G.A. and LANDES, J.G. (1979) Journal of Testing and
Evaluation, Vol.7, No:5, 264-269.
DeKONNING, A.U. (1977) Fracture 1977, ICF-4, 3, 25-33.
DeLORENZI, H.G. and SHIH, C.F. (1977) International Journal of
Fracture, 13, 507-511.
DUGDALE, D.S.(1960) Journal of The Mech. and Physics of Solids, 8,100.
ERNST, H.A. (1983) ASTM STP 803, pp 191-213.
ERNST, H.A., PARIS, P.C. and LANDES, J.D. (1981) ASTM STP 743,
pp. 476-502.
ESHELBY, J.D. (1956) Solid State Physics, 3, p.79.
ETEMAD, M.R. (1983) "Ph.D Thesis", Imperial college of Science and
Technology, University of London.
ETEMAD, M.R. and TURNER, C.E. (1985,a) International Journal of
Pressure Vessels and Piping, 21, pp. 81-88.

2 6 6
ETEMAD, M.R. and TURNER, C.E. (1985,b) International Journal of
Pressure Vessels and Piping, 20, pp.1-5.
ETEMAD, M.R. and TURNER, C.E. (1985,c) Journal of Strain Analysis,
20,4, pp.201-208.
ETEMAD, M.R. and TURNER, C.E. (1986) International Journal of
Pressure Vessels and Piping, 26, pp.79-86.
GARWOOD, S.J.(1977) "Ph.D Thesis”, Imperial College of Science and
Technology, University of London.
GARWOOD, S.J., ROBINSON, J.N. and TURNER, C.E. (1975)
International Journal of Fracture, 11, pp.528-530.
GIBSON, G.P.,(1986) "Ph.D Thesis" Imperial College of Science and
Technology, University of London.
GIBSON, G.P. and DRUCE, S.G.(1986)"Size effects in Fracture", The
Institution of Mechanical Engineers.
GREEN, A.P. and HUNDY, B.B. (1956) Journal of Mechanics and Physics
of Solids, 4, pp. 128-144.
GRIFFITH, A.A.(1924) The theory of rupture, Proc. of first Int. Cong, for
Applied Mechanics, Delft.
GORDON, J.R.(1986) "An assessment of the accuracy of the unloading
compliance method for measuring crack growth resistance curves", Welding
Institute Research Report 325/1986.
GORDON, J.R. (1988) Private communication.
2 6 7
HARTRANFT, R.J.(1973) International Journal of Fracture, 9, pp.75-82.
HAYES, J.D. (1970) "Ph.D. Thesis", Imperial College of Science and
Technology, University of London.
HENSHEL, R.D. AND SHAW, K.G. (1975) International Journal for
Numerical Methods in Engineering, 9, 495-507.
HILL, R. (1950) "The Mathematical Theory of Plasticity", Oxford University
Press.
HINTON, E. and OWEN, D.J.R. (1979) ’Finite Element Programing’, 2nd
Ed., Academic press.
HUTCHINSON, J.W. (1968) Journal of The Mechanics and Physics of
Solids, 16, pp. 13-31.
HUTCHINSON, J.W. and PARIS, P.C. (1979) ASTM STP 668, pp.37-64.
INGLIS, C.E. (1913) Trans. Inst. Naval Archit., LV 1,219.
IRWIN, G.R. (1947) Fracture Dynamics, ASM seminar on The Fracturing of
Metals, 29th National Metal Congress and Exposition, Chicago.
IRWIN, G.R. (1957) Journal of Applied Mechanics, 24, p.361.
IRWIN, G.R. (1958) Fracture; In Handbuch der Physik, Vol.6, p.551. Berlin,
Springe r-Verlag.
IRWIN, G.R. (1960) Plastic zone near a crack and fracture toughness. Proc.
7th Sagamore Ordinance Material Research Conf., Report Nfi M&TE 661-611/F.,
Syracuse University Research Institute.
<\AajK
S . ( i i u )
Teclvvxoiojtj
Ph-ft T W psvj", l^vvp^rV^I
U. </j I— »
m.V/7

2 6 8
IRWIN, G.R., and KIES, J.A. (1952) Fracturing and Fracture Dynamics,
Welding research supplement, 17, 95s.
KAPP, J.A, LEGER, G.S. and GROSS, B. (1985) ASTM STP 868,
pp.27-44
KFOURI, A.P. and MILLER, K.J. (1974) The Int. Journal of Pressure Vessel
and Piping, 2, pp.495-507.
KRAFFT, J.M., SULLIVAN, A.M. and BOYLE, R.W.(1961) Effects of
dimensions on fast fracture instability in notched sheets, "Symp. on Crack
Propagation", paper A1, Cranfield.
LAMAIN, L.G. (1981) Int. Conference on Structural Mechanics In Reactor
Technology, Paris-France, paper M1/6
LIGHT, M.F., LUXMOORE, A. and EVANS, W.T. (1975) International
Journal of Fracture, 11, pp.1045-46.
LIGHT, M.F., LUXMOORE, A. and EVANS, W.T. (1976) International
Journal of Fracture, 12, pp.503-506.
LOGSTON, W.A. and BEGLEY, J.A.(11977) Engineering Fracture
Mechanics, 9, pp.4611-70.
LUXMOORE, A., LIGHT, M.F. and EVANS, W.T.(1977) Int .Journal of
Fracture, 13, pp.257-258.
McCLINTOCK, F.A. (1965) "Effects of root radius, stress, crack growth and
rate on fracture instability". Proc.Royal Soc.(London), Ser.A, 285, pp.58-72.
McCLINTOCK, F.A. (1971) "Fracture, An Advanced Treatise",
Ed.Leibowitz.H., Vol.3, pp.47-225, Academic Press.

2 6 9
McMEEKING, R.M. (1977) Journal of The Mechanics and Physics of Solids,
1977, 25, pp.357-381.
McMEEKING, R.M. and PARKS, D.M. (1978) ASTM STP 668,
pp.175-194.
MERKLE, J.G. and CORTEN,H.T. (1974) "Journal of Pressure Vessel
Technology", Transaction of ASME Vol.96, pp.286-292.
MILLER, A.G.(1982) Review of Limit Loads of Structures Containing Defects,
CEGB report No:TPRD/B/0093/N82
MOWBRAY, D.F. (1970) Engineering Fracture Mechanics, 2,173-176.
OROWAN, E. (1949) Fracture and Strength of Solids, Reports of Progress in
Physics, Vol.12, p.185, Physical Society, London.
OWEN, D.J.R. and HINTON, E. (1980)' Finite Elements in Plasticity;
Theory and Practice', Pineridge press.
PARIS, P.C., TADA, H., ZAHOOR, A. and ERNST, H.A. (1979) ASTM
STP 668, pp.5-36.
PARKS, D.M. (1977) Computer Methods in Applied Mechanics and
Engineering, 12.
PD 6493 (1980) "Guidance on Some Methods for the Derivation of
Acceptance Levels for Defects in Fusion Welded Joints"
RICE, J.R. (1968) Journal of Applied Mechanics, 35, pp.379-386.
RICE, J.R., PARIS, P.C. and MERKLE, J.G. (1973) ASTM STP 536,
pp.231-245.

2 7 0
RICE, J.R. and ROSENGREN, G.F.(1968) Journal of The Mechanics and
Physics of Solids, 16, pp. 1 -12.
ROOKE, D.P. AND CARTWRIGHT, D.J. (1976) "Compendium of stress
intensity factors", H.M.S.O., London.
SHIH, C.F., deLORENZI,H.G. and ANDREWS, W.R. (1979) ASTM STP
668, pp.65-120.
SHIH, C.F., deLORENZI, H.G. and GERMAN, M.D. (1976) International
Journal of Fracture, 12, pp.647-651.
SHIRATORI, M. and MIYOSHI, T. (1980) Proc. Second Int. Conference
on Numerical Methods in Fracture Mechanics, Swansea-UK, 417-431.
SIH, G.C. (1973) "Handbook of stress intensity factors", Institute of Fracture
and Solids Mechanics, Lehigh University, Bethlehem, Pennsylvania.
STEENKAMP, P.A.J.M. (1985) "J R-Curve testing of three point bend
specimens by the unloading compliance method". Presented at 18th National
Symposium on Fracture Mechanics, Colorado, USA.
SUMPTER, J.D.G. (1974) "Ph.D. Thesis", Imperial College of Science and
Technology, University of London.
SUMPTER, J.D.G. and TURNER, C.E. (1976) ASTM STP 601, pp. 3-18.
TAD A, H., PARIS, P. and IRWIN,G.R. (1973) "The stress analysis of
cracks handbook", Del Research Corporation, Hellertown, Pennsylvania.
TRACEY, D.M. (1971) Engineering Fracture Mechanics, 3, 255-265.
TURNER, C.E. (1979) ASTM STP 677, pp 614-628.

2 7 1
TURNER, C.E. (1984) "Post Yield Fracture Mechanics", Applied Science
Publishers, London, Ed.Latzko, D.G.H., pp.25-221.
TURNER, C.E. (1986) "Size effects in Fracture", The Institution of Mechanical
Engineers.
WATWOOD Jr., V.B. (1969) Nuclear Engineering and Design, 11,323-332.
WELLMAN, G.W., ROLFE, S.T. and DODDS, R.H. (1985) ASTM, STP
668, pp.214-237.
WELLS, A.A. (1961) "Unstable crack propagation in metals;cleavage and
fast fracture." Paper B4,Symp.Crack Propagation, Cranfield.
WELLS, A.A. (1963) "Application of fracture mechanics at and beyond
yielding", Brit.Weld.J., 10, pp.563-70.
WESTERGAARD, H.M. (1939) "Bearing pressures and cracks",
J.Appl.Mech., 60, A49.
WILSON, W.K. and OSIAS, J.R. (1978) International Journal of Fracture,
14, pp.R98-109.
ZEINKIEWICZ, O.C. (1977) "The Finite Element Method", McGraw-Hill Book
Co. Ltd, London.
Top Related
Copyright © 2022 FDOKUMEN

