








Bahasa
Halaman
Hukum


Data-driven Linear Decision Rule for Distributionally Robust Optimization
of On-line Signal Control
a Department of Industrial and Manufacturing Engineering, Penn State b Department of Civil and Environmental Engineering, Imperial College London
c Department of Civil and Environmental Engineering, Penn State
ISTTT 2015, Kobe, Japan
H. Liua, K. Hanb, V. Gayahc, T. Friesza, T. Yaoa

Outline
1. Linear Decision Rule for Responsive Signal Control
2. Distributionally Robust Optimization
3. Numerical Studies

Outline
2. Distributionally Robust Optimization
3. Numerical Studies
1. Linear Decision Rule for Responsive Signal Control
Analytical/ closed-form
transformation
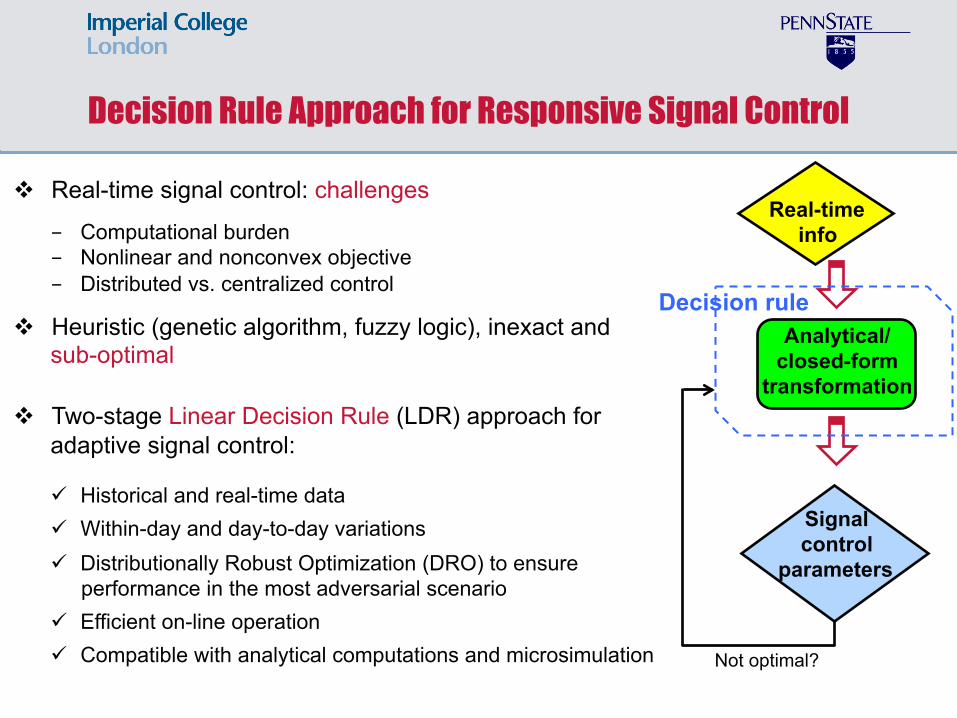
Decision Rule Approach for Responsive Signal Control
v Real-time signal control: challenges
- Computational burden - Nonlinear and nonconvex objective - Distributed vs. centralized control
v Heuristic (genetic algorithm, fuzzy logic), inexact and sub-optimal
v Two-stage Linear Decision Rule (LDR) approach for adaptive signal control:
ü Historical and real-time data ü Within-day and day-to-day variations ü Distributionally Robust Optimization (DRO) to ensure
performance in the most adversarial scenario ü Efficient on-line operation ü Compatible with analytical computations and microsimulation
Real-time info
Signal control
parameters
Not optimal?
Decision rule

-- real-time information (flow, count, speed, queue)
-- Linear transformation
-- Projection onto feasible control set
-- Network performance measure (congestion, emission, fuel consumption)
Real-time Information
q
Signal Control
u
Linear Decision Rule
u = P![Aq+ b]
Network performance
measure
!(q,u)
Aq+ bu = P![Aq+ b]
Linear Decision Rule: Deterministic Formulation
q
Deterministic Formulation
Given real-time information q, find the best linear decision rule

Details of The Linear Decision Rule
Time
Location/ data type
past T observations
OBSERVATION
CONTROL
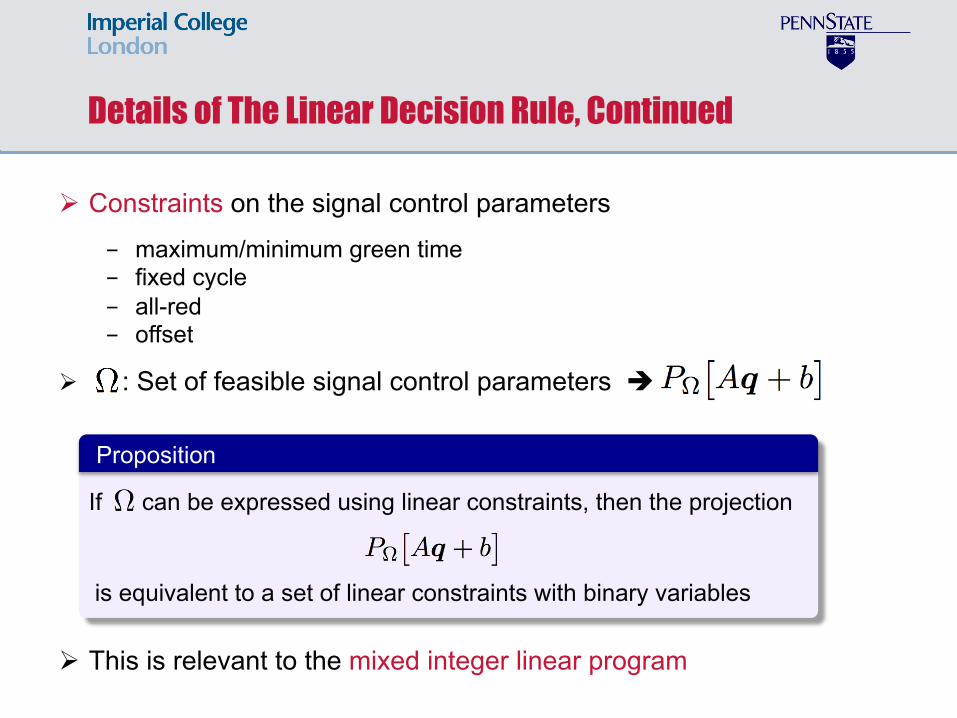
Details of The Linear Decision Rule, Continued
Ø Constraints on the signal control parameters
- maximum/minimum green time - fixed cycle - all-red - offset
Ø : Set of feasible signal control parameters è
Ø This is relevant to the mixed integer linear program
Proposition
If can be expressed using linear constraints, then the projection
is equivalent to a set of linear constraints with binary variables
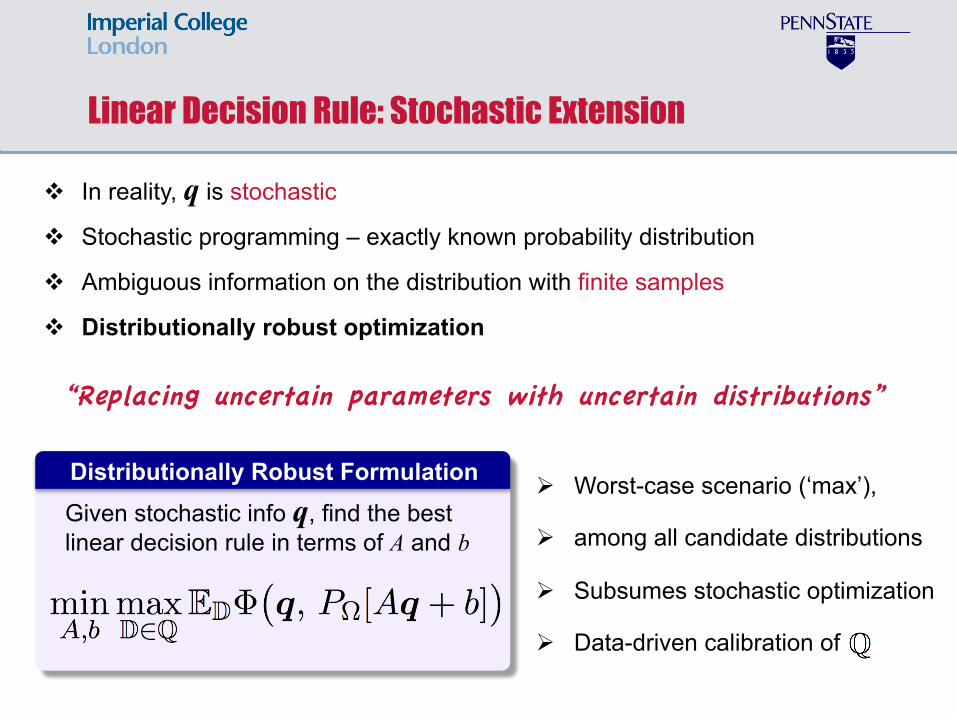
Linear Decision Rule: Stochastic Extension
v In reality, q is stochastic
v Stochastic programming – exactly known probability distribution
v Ambiguous information on the distribution with finite samples
v Distributionally robust optimization
Ø Worst-case scenario (‘max’),
Ø among all candidate distributions
Ø Subsumes stochastic optimization
Ø Data-driven calibration of
Distributionally Robust Formulation Given stochastic info q, find the best linear decision rule in terms of A and b
“Replacing uncertain parameters with uncertain distributions”

Advantages of the Linear Decision Rule Approach
v Finding the best responsive signal strategy è Finding A and b
v Viable and efficient on-line operation
- Off-line: Distributionally robust optimization (expensive) - On-line: Linear transformation and projection (inexpensive)
v Flexible sensor location, data type, and control resolution
v User-defined feasible set for signal control parameters
v Two solution procedures for the off-line problem:
- Mixed integer linear program - Metaheuristic search
Distributionally Robust Optimization
Outline
2. Distributionally Robust Optimization
3. Numerical Studies
1. Linear Decision Rule for Responsive Signal Control

v Kolmogorov-Smirnov (K-S) goodness-of-fit test (Massey, 1951; Bertsimas et al., 2013):
v Sampled data:
v Does a distribution well capture a finite set of sampled data?
v Reject H0 at the level α if
Data-Driven Calibration of the Uncertainty Set
Set of candidate distributions
Uncertainty set
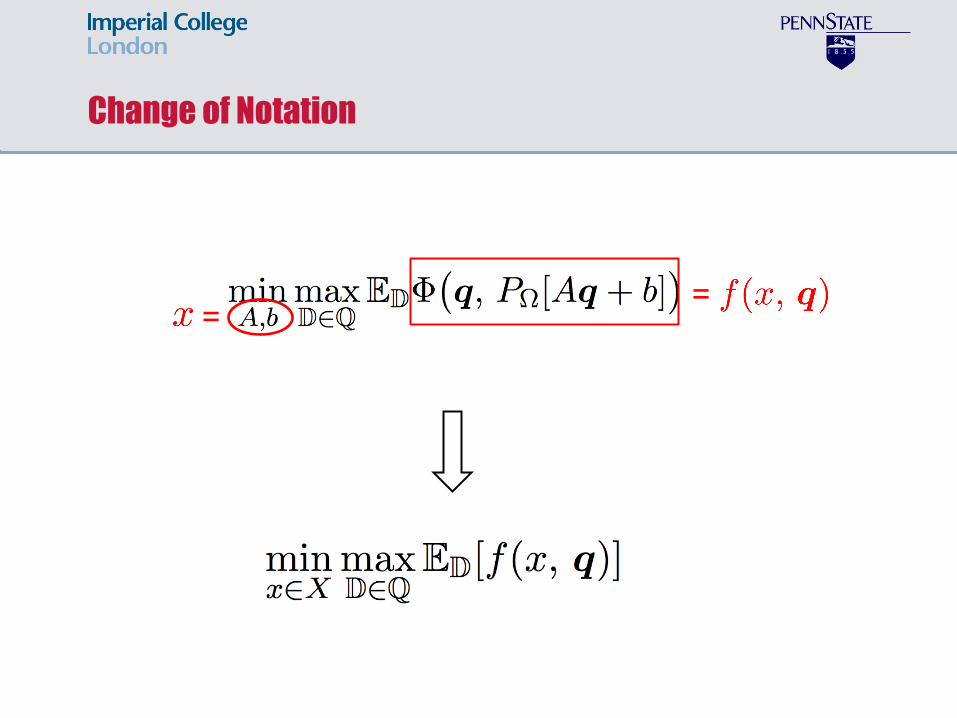
Change of Notation
= =

Off-Line Computation: Mixed Integer Linear Program
Off-Line Problem
Dual Formulation
Finite Formulation
Ø Min-Max (bi-level)
Ø Infinite-dimensional
Ø Single-level
Ø Infinite-dimensional
Ø Finite-dimensional
Ø Solvable
Ziliaskopoulos (2000); Lo (1999); Lin and Wang (2004); Han et al. (2015)
Duality
Finite sampling
Off-Line Computation: Metaheuristic Search
v Limitations of the MILP approach
- Linear signal constraints and objective - Independence assumption: - Computationally intractable
v Heuristic method
- Arbitrary feasible signal control set and objective - Free of the independence assumption - Large-scale and more realistic setting - Zeroth-order information on the objective and constraints - Compatible with analytical and simulation-based traffic models
v Particle Swarm Optimization (Kennedy and Eberhart, 1995; Banks et al., 2007)

Metaheuristic Search: The K-S Test
v Random Variable: , parameterized by
v Uncertainty Set: , parameterized by
v Fix , and consider K samples (historical data)
v K-S test:
Uncertainty set

Metaheuristic Search: Evaluating the Objective Function
v Random Variable (objective): , parameterized by
v Lower and upper bounds of : , partitioned into W intervals
v Fix (control),
g1 Lf Uf g2 gi-1 gi
. . . . . .
K-S test
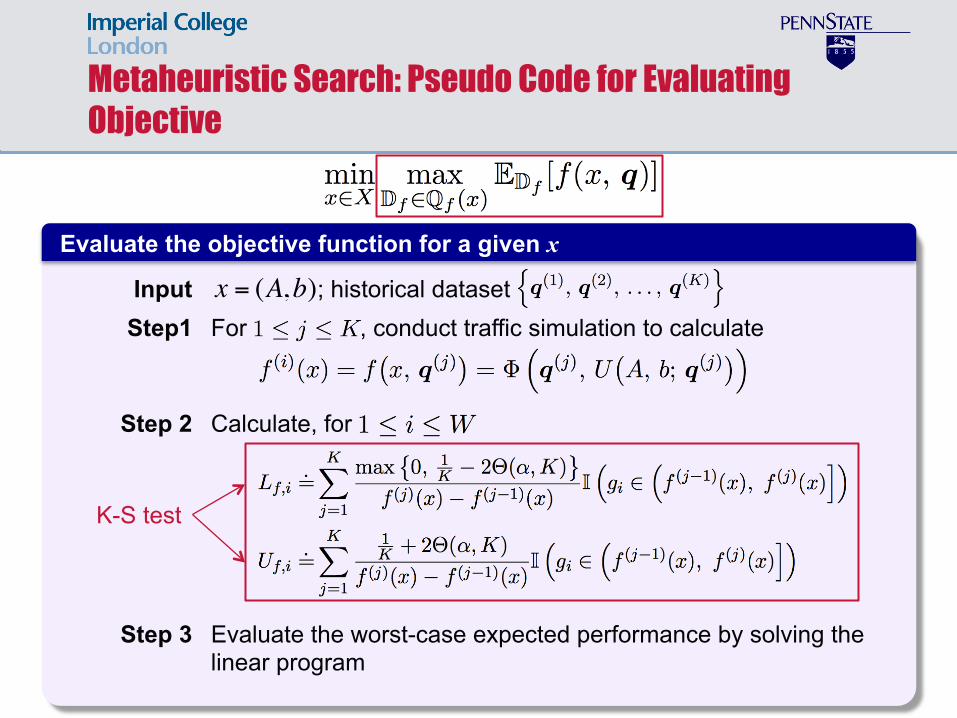
Metaheuristic Search: Pseudo Code for Evaluating Objective
Input ; historical dataset Step1 For , conduct traffic simulation to calculate
Step 2 Calculate, for
Step 3 Evaluate the worst-case expected performance by solving the linear program
Evaluate the objective function for a given x
x = (A,b)
K-S test

Outline
2. Distributionally Robust Optimization
3. Numerical Studies
1. Linear Decision Rule for Responsive Signal Control
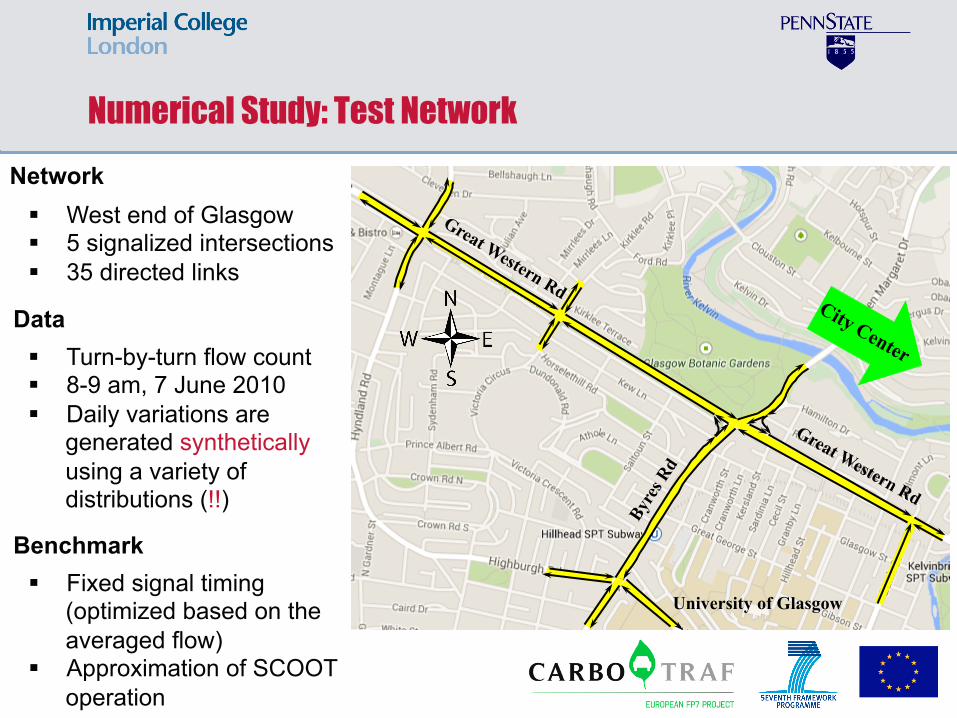
Numerical Study: Test Network
Great Western Rd
Great Western Rd
Byre
s Rd
City Center
University of Glasgow
§ West end of Glasgow § 5 signalized intersections § 35 directed links
Network
Data § Turn-by-turn flow count § 8-9 am, 7 June 2010 § Daily variations are
generated synthetically using a variety of distributions (!!)
Benchmark § Fixed signal timing
(optimized based on the averaged flow)
§ Approximation of SCOOT operation
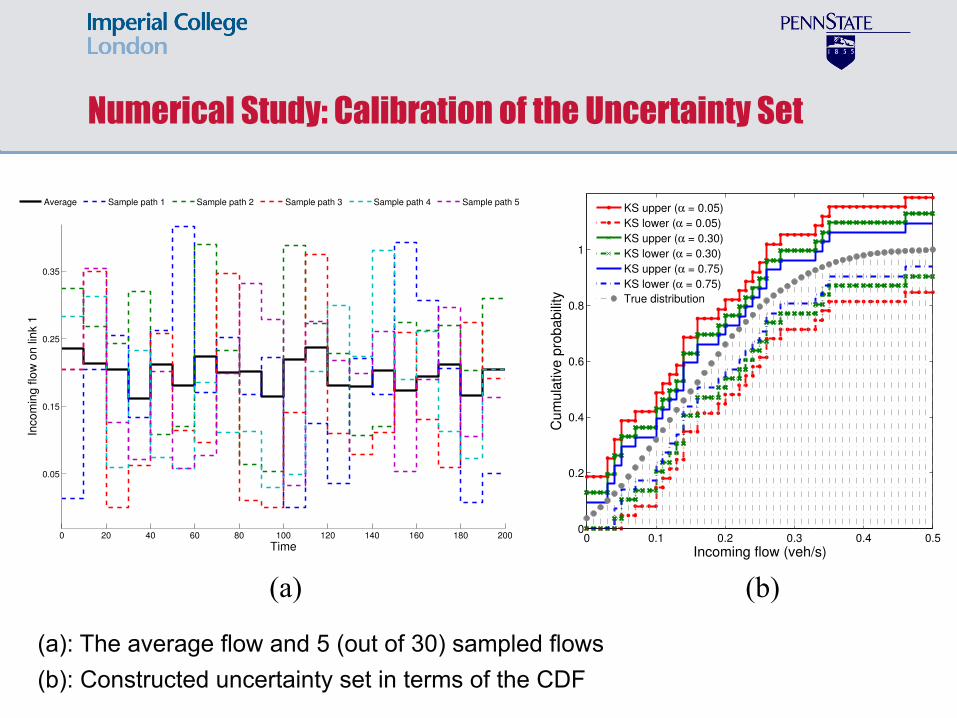
Numerical Study: Calibration of the Uncertainty Set
0 20 40 60 80 100 120 140 160 180 200
0.05
0.15
0.25
0.35
Time
Inco
min
g f
low
on
lin
k 1
Average Sample path 1 Sample path 2 Sample path 3 Sample path 4 Sample path 5
0 0.1 0.2 0.3 0.4 0.50
0.2
0.4
0.6
0.8
1
Incoming flow (veh/s)C
um
ula
tive
pro
ba
bili
ty
KS upper (! = 0.05)
KS lower (! = 0.05)
KS upper (! = 0.30)
KS lower (! = 0.30)
KS upper (! = 0.75)
KS lower (! = 0.75)
True distribution
(a) (b)
(a): The average flow and 5 (out of 30) sampled flows (b): Constructed uncertainty set in terms of the CDF

Great Western Rd
Great Western Rd
Byre
s Rd
City Center
University of Glasgow
1 2 3 4
5
8
6
9
7
10 11
12
inflo
w
inflow inflow inflow
inflow
Great Western Rd
Mixed Integer Linear Program
West Glasgow
Numerical Study: Mixed Integer Linear Program

Numerical Study: Heuristic Search
Particle Swarm Optimization Great Western Rd
Great Western Rd
Byre
s Rd
City Center
University of Glasgow
§ Zeroth-order information on the objective and constraints
§ 10 agents search in parallel (objective evaluation)
§ Flexible trade-off between solution quality and computational cost
§ Off-line computational time: 24h § On-line computational time: negligible

Conclusion and On-going Research
Linear Decision
Rule Deterministic
Problem
Network Info
Daily variations
Stochastic Problem
Uncertainty In
Distribution Distributionally
Robust Optimization
K-S Test
Explicit reformulation 1. Mixed integer linear program 2. Heuristic search method
Conclusion and On-going Research
v Integration with microsimulation (heuristic method)
v Multi-objective responsive signal control (emission, fuel consumption)
v Nonlinear decision rules (neural network)
On-going and future research
v Explicit re-formulation: solve for A and b
v Flexible real-time data input (space & time)
v General signal constraint and objectives (heuristics)
v Efficient on-line operation
v Blend of statistical learning and traffic flow modeling
v Tunable probabilistic guarantee
Top Related
Copyright © 2022 FDOKUMEN

