







Bahasa
Halaman
Hukum

P a g e 1 | 15
The University of Manchester MSc. Mechanical Engineering Design
By : MUHAMMAD AQMAL ABU HASSAN (Copyright Reserved)
REVERSE ENGINEERING THE TOP SURFACE OF A COMPUTER MOUSE
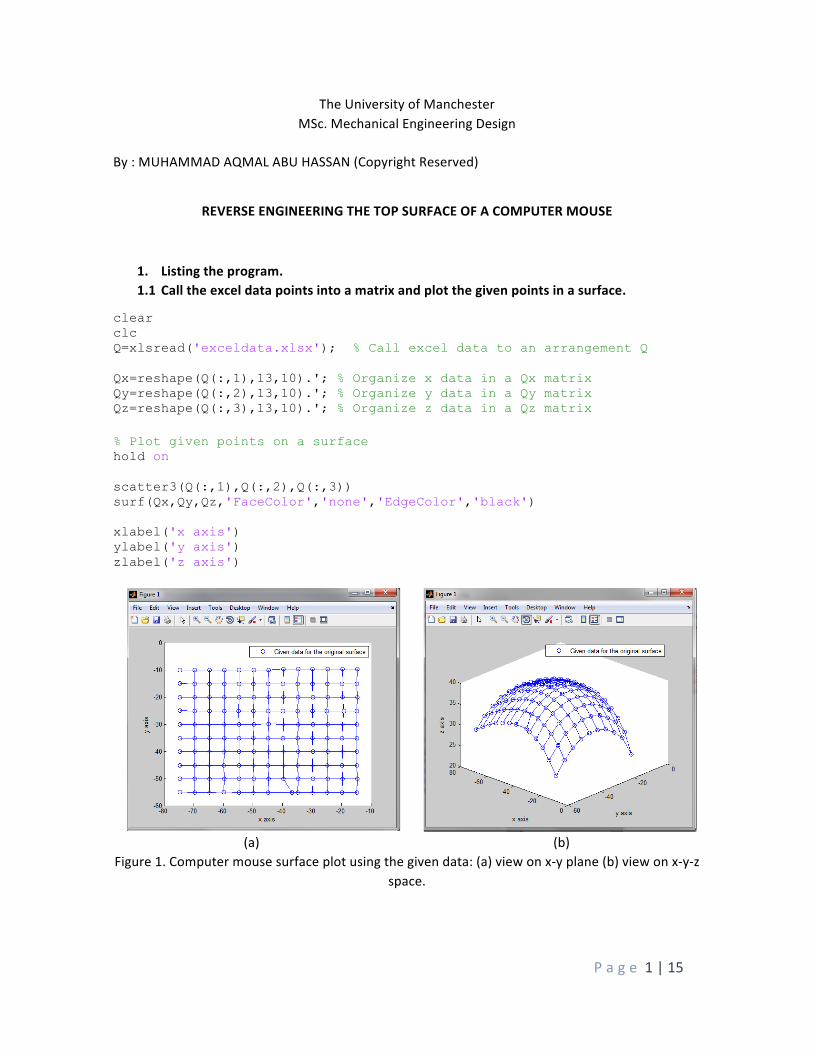
1. Listing the program. 1.1 Call the excel data points into a matrix and plot the given points in a surface.
clear clc Q=xlsread('exceldata.xlsx'); % Call excel data to an arrangement Q Qx=reshape(Q(:,1),13,10).'; % Organize x data in a Qx matrix Qy=reshape(Q(:,2),13,10).'; % Organize y data in a Qy matrix Qz=reshape(Q(:,3),13,10).'; % Organize z data in a Qz matrix % Plot given points on a surface hold on scatter3(Q(:,1),Q(:,2),Q(:,3)) surf(Qx,Qy,Qz,'FaceColor','none','EdgeColor','black') xlabel('x axis') ylabel('y axis') zlabel('z axis')
(a) (b)
Figure 1. Computer mouse surface plot using the given data: (a) view on x-‐y plane (b) view on x-‐y-‐z space.
P a g e 2 | 15
1.2 Determining u and w coordinates of the given points.
% Lu=distance between two points in a row of Q arrangement for i=1:13 if i==1 Lu(:,i)=0*ones(1,10).'; else Lu(:,i)=sqrt((Qx(:,i)-Qx(:,i-1)).^2+(Qy(:,i)-Qy(:,i-1)).^2+(Qz(:,i)-Qz(:,i-1)).^2); end end % matrix U of u coordinates for i=1:10 for j=1:13 U(i,j)=sum(Lu(i,[1:j]))/sum(Lu(i,:)); % u coordinates end end U= 0 0.1103 0.1993 0.2839 0.3649 0.4441 0.5236 0.6023 0.6820 0.7608 0.8401 0.9196 1.0000 0 0.0956 0.1848 0.2688 0.3524 0.4323 0.5134 0.5947 0.6737 0.7542 0.8351 0.9174 1.0000 0 0.0931 0.1822 0.2661 0.3482 0.4310 0.5117 0.5925 0.6735 0.7532 0.8358 0.9176 1.0000 0 0.0837 0.1827 0.2658 0.3476 0.4283 0.5092 0.5909 0.6710 0.7519 0.8335 0.9187 1.0000 0 0.0908 0.1786 0.2627 0.3441 0.4259 0.5067 0.5888 0.6702 0.7505 0.8340 0.9166 1.0000 0 0.0929 0.1815 0.2654 0.3470 0.4285 0.5092 0.5903 0.6709 0.7523 0.8352 0.9174 1.0000 0 0.0913 0.1777 0.2633 0.3460 0.4273 0.5080 0.5879 0.6694 0.7513 0.8343 0.9171 1.0000 0 0.0934 0.1802 0.2649 0.3467 0.4272 0.5093 0.5897 0.6708 0.7527 0.8346 0.9169 1.0000 0 0.0935 0.1810 0.2666 0.3485 0.4290 0.5096 0.5914 0.6717 0.7538 0.8343 0.9183 1.0000 0 0.0970 0.1849 0.2694 0.3512 0.3844 0.5135 0.5931 0.6734 0.7551 0.8359 0.9179 1.0000
% Lw=distance between two points in a column of Q arrangement for i=1:10 if i==1 Lw(i,:)=0*ones(1,13); else Lw(i,:)=sqrt((Qx(i,:)-Qx(i-1,:)).^2+(Qy(i,:)-Qy(i-1,:)).^2+(Qz(i,:)-Qz(i-1,:)).^2); end end % matrix W of w coordinates for j=1:13 for i=1:10 W(i,j)=sum(Lw([1:i],j))/sum(Lw(:,j)); % w coordinates end end W= 0 0 0 0 0 0 0 0 0 0 0 0 0 0.1471 0.1307 0.1288 0.1268 0.1287 0.1233 0.1165 0.1148 0.1149 0.1147 0.1142 0.1138 0.1129 0.2563 0.2419 0.2396 0.2379 0.2376 0.2327 0.2277 0.2262 0.2254 0.2255 0.2243 0.2238 0.2238 0.3624 0.3498 0.3476 0.3457 0.3454 0.3387 0.3363 0.3350 0.3342 0.3341 0.3328 0.3310 0.3308 0.4635 0.4541 0.4518 0.4502 0.4498 0.4414 0.4415 0.4416 0.4413 0.4415 0.4400 0.4401 0.4388 0.5661 0.5591 0.5576 0.5568 0.5570 0.5480 0.5509 0.5500 0.5493 0.5498 0.5483 0.5486 0.5472 0.6669 0.6630 0.6626 0.6620 0.6624 0.6522 0.6578 0.6569 0.6564 0.6572 0.6562 0.6562 0.6552 0.7717 0.7696 0.7702 0.7698 0.7709 0.7595 0.7678 0.7677 0.7676 0.7690 0.7672 0.7672 0.7664 0.8819 0.8815 0.8819 0.8817 0.8821 0.8691 0.8800 0.8803 0.8801 0.8815 0.8792 0.8792 0.8784 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000
% organize all U and W data in only one column of matrix u and w, respectively u=reshape(U.',130,1);% u coordinates organized in one column (130x1) w=reshape(W.',130,1);% w coordinates organized in one column (130x1)
P a g e 3 | 15
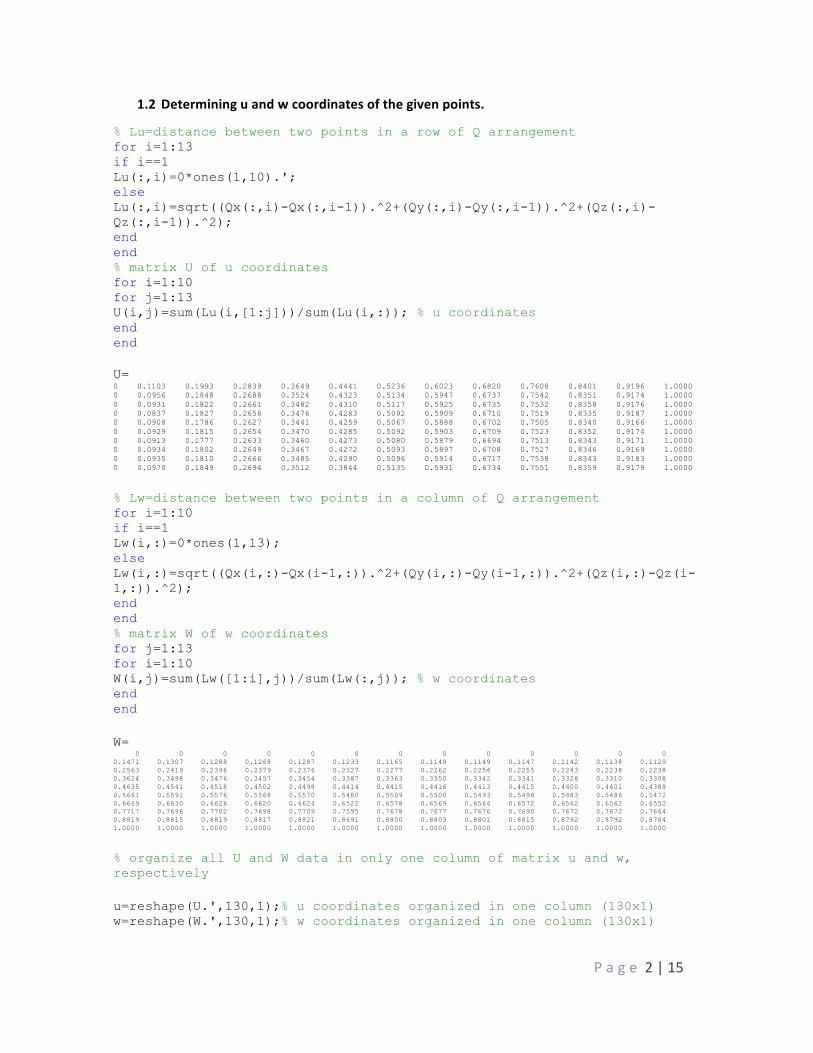
1.3 Select the degree of the Bezier surface. 1.3.1 Bi-‐Quartic Bézier surface
% Functions of u and w for a BI-QUARTIC BÉZIER surface Fu=[((1-u).^4) (4*u.*(1-u).^3) (6*u.^2.*(1-u).^2) (4*u.^3.*(1-u)) (u.^4)]; Fw=[((1-w).^4) (4*w.*(1-w).^3) (6*w.^2.*(1-w).^2) (4*w.^3.*(1-w)) (w.^4)];
% Determining matrix A for i=1:5 A(:,5*(i-1)+1:5*i)=[Fu(:,i).*Fw(:,1) Fu(:,i).*Fw(:,2) Fu(:,i).*Fw(:,3) Fu(:,i).*Fw(:,4) Fu(:,i).*Fw(:,5)]; end
% Determine coordinates x-y-z of control points P X=A.'*A; P=inv(X)*A.'*Q; Px=reshape(P(:,1),5,5).'; % x coordinates of P in (5x5) matrix form Pz=reshape(P(:,3),5,5).'; % y coordinates of P in (5x5) matrix form Pz=reshape(P(:,3),5,5).'; % z coordinates of P in (5x5) matrix form % Plot control points scatter3(P(:,1),P(:,2),P(:,3),'g') % Plot lines to join control points for i=1:5 plot3([Px(i,:)],[Py(i,:)],[Pz(i,:),'g']) plot3([Px(:,i)],[Py(:,i)],[Pz(:,i),'g']) end
(a) (b)
Figure 2. Control points of a predicted bi-‐Quartic Bézier Surface: (a) view on x-‐y plane (b) view on x-‐y-‐z space.
P a g e 4 | 15
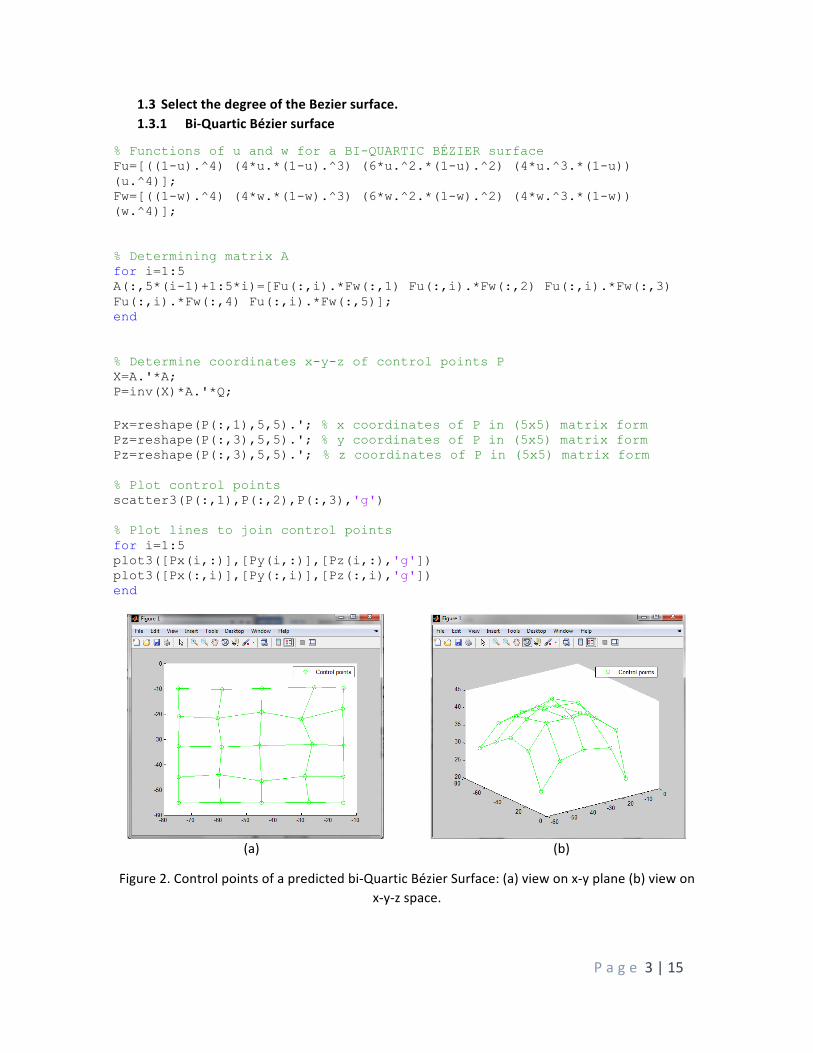
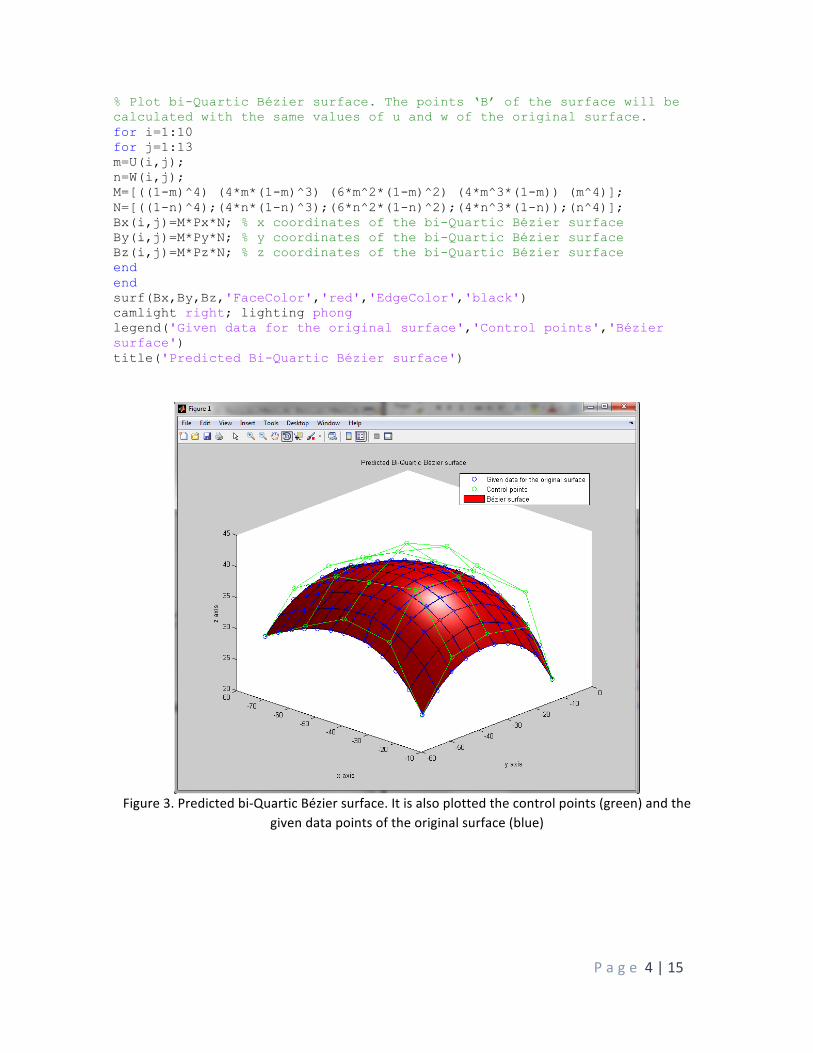
% Plot bi-Quartic Bézier surface. The points ‘B’ of the surface will be calculated with the same values of u and w of the original surface. for i=1:10 for j=1:13 m=U(i,j); n=W(i,j); M=[((1-m)^4) (4*m*(1-m)^3) (6*m^2*(1-m)^2) (4*m^3*(1-m)) (m^4)]; N=[((1-n)^4);(4*n*(1-n)^3);(6*n^2*(1-n)^2);(4*n^3*(1-n));(n^4)]; Bx(i,j)=M*Px*N; % x coordinates of the bi-Quartic Bézier surface By(i,j)=M*Py*N; % y coordinates of the bi-Quartic Bézier surface Bz(i,j)=M*Pz*N; % z coordinates of the bi-Quartic Bézier surface end end surf(Bx,By,Bz,'FaceColor','red','EdgeColor','black') camlight right; lighting phong legend('Given data for the original surface','Control points','Bézier surface') title('Predicted Bi-Quartic Bézier surface')
Figure 3. Predicted bi-‐Quartic Bézier surface. It is also plotted the control points (green) and the
given data points of the original surface (blue)
P a g e 5 | 15
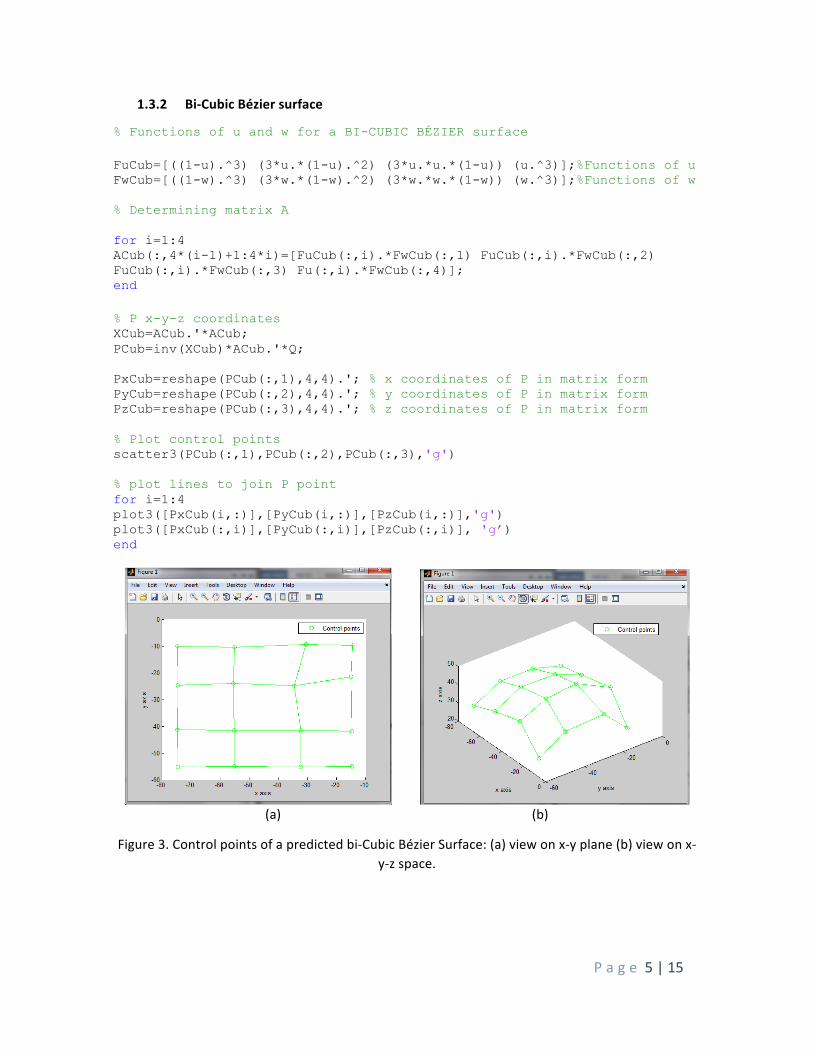
1.3.2 Bi-‐Cubic Bézier surface
% Functions of u and w for a BI-CUBIC BÉZIER surface FuCub=[((1-u).^3) (3*u.*(1-u).^2) (3*u.*u.*(1-u)) (u.^3)];%Functions of u FwCub=[((1-w).^3) (3*w.*(1-w).^2) (3*w.*w.*(1-w)) (w.^3)];%Functions of w % Determining matrix A for i=1:4 ACub(:,4*(i-1)+1:4*i)=[FuCub(:,i).*FwCub(:,1) FuCub(:,i).*FwCub(:,2) FuCub(:,i).*FwCub(:,3) Fu(:,i).*FwCub(:,4)]; end % P x-y-z coordinates XCub=ACub.'*ACub; PCub=inv(XCub)*ACub.'*Q; PxCub=reshape(PCub(:,1),4,4).'; % x coordinates of P in matrix form PyCub=reshape(PCub(:,2),4,4).'; % y coordinates of P in matrix form PzCub=reshape(PCub(:,3),4,4).'; % z coordinates of P in matrix form % Plot control points scatter3(PCub(:,1),PCub(:,2),PCub(:,3),'g') % plot lines to join P point for i=1:4 plot3([PxCub(i,:)],[PyCub(i,:)],[PzCub(i,:)],'g') plot3([PxCub(:,i)],[PyCub(:,i)],[PzCub(:,i)], 'g’) end
(a) (b)
Figure 3. Control points of a predicted bi-‐Cubic Bézier Surface: (a) view on x-‐y plane (b) view on x-‐y-‐z space.
P a g e 6 | 15
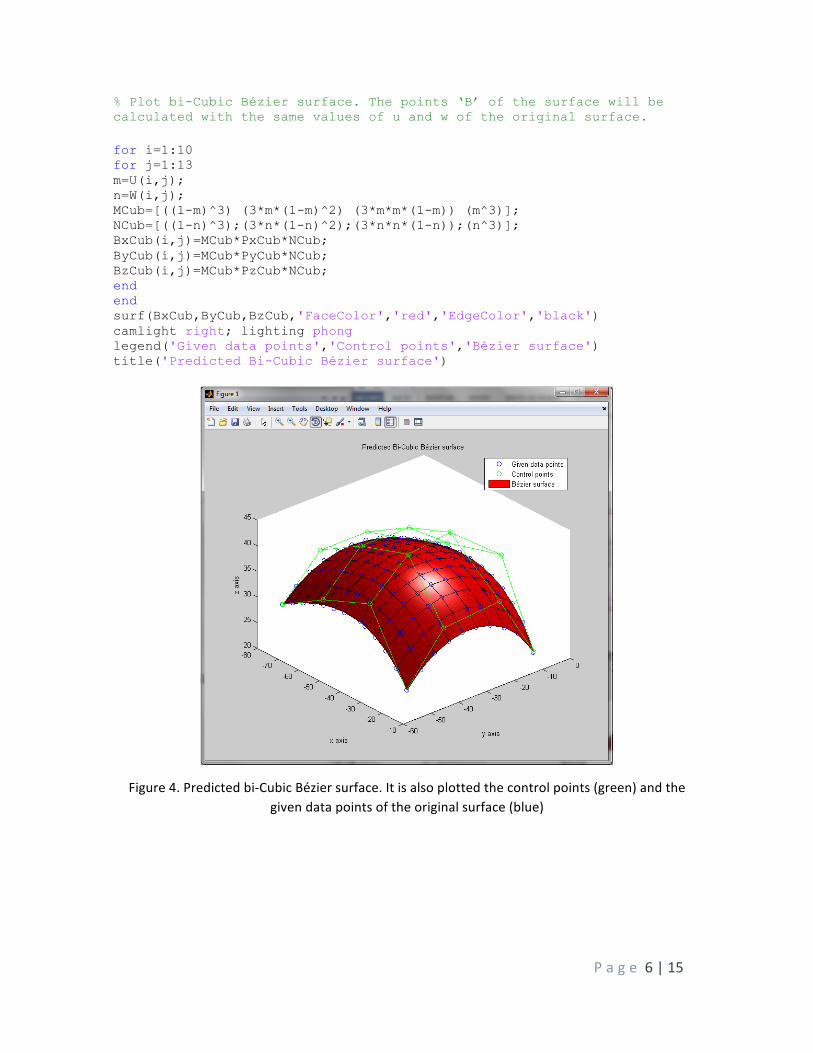
% Plot bi-Cubic Bézier surface. The points ‘B’ of the surface will be calculated with the same values of u and w of the original surface. for i=1:10 for j=1:13 m=U(i,j); n=W(i,j); MCub=[((1-m)^3) (3*m*(1-m)^2) (3*m*m*(1-m)) (m^3)]; NCub=[((1-n)^3);(3*n*(1-n)^2);(3*n*n*(1-n));(n^3)]; BxCub(i,j)=MCub*PxCub*NCub; ByCub(i,j)=MCub*PyCub*NCub; BzCub(i,j)=MCub*PzCub*NCub; end end surf(BxCub,ByCub,BzCub,'FaceColor','red','EdgeColor','black') camlight right; lighting phong legend('Given data points','Control points','Bézier surface') title('Predicted Bi-Cubic Bézier surface')
Figure 4. Predicted bi-‐Cubic Bézier surface. It is also plotted the control points (green) and the given data points of the original surface (blue)

P a g e 7 | 15
1.3.3 Bi-‐Quadratic Bézier surface
% Functions of u and w for a BI-QUADRATIC BÉZIER surface FuQuad=[((1-u).^2) (2*u.*(1-u)) (u.^2)]; % Functions of u FwQuad=[((1-w).^2) (2*w.*(1-w)) (w.^2)]; % Functions of w % Determining matrix A for i=1:3 AQuad(:,3*(i-1)+1:3*i)=[FuQuad(:,i).*FwQuad(:,1) FuQuad(:,i).*FwQuad(:,2) FuQuad(:,i).*FwQuad(:,3)]; end % P x-y-z coordinates XQuad=AQuad.'*AQuad; PQuad=inv(XQuad)*AQuad.'*Q; PxQuad=reshape(PQuad(:,1),3,3).'; % x coordinates of P in matrix form PyQuad=reshape(PQuad(:,2),3,3).'; % y coordinates of P in matrix form PzQuad=reshape(PQuad(:,3),3,3).'; % z coordinates of P in matrix form scatter3(PQuad(:,1),PQuad(:,2),PQuad(:,3)) for i=1:3 % plot lines to join P point plot3([PxQuad(i,:)],[PyQuad(i,:)],[PzQuad(i,:)]) plot3([PxQuad(:,i)],[PyQuad(:,i)],[PzQuad(:,i)])
(a) (b)
Figure 5. Control points of a predicted bi-‐Quadratic Bézier Surface: (a) view on x-‐y plane (b) view on x-‐y-‐z space.

P a g e 8 | 15
% Plot bi-Quadratic Bézier surface. The points ‘B’ of the surface will be calculated with the same values of u and w of the original surface. for i=1:10 for j=1:13 m=U(i,j); n=W(i,j); MQuad=[((1-m)^2) (2*m*(1-m)) (m^2)]; NQuad=[((1-n)^2);(2*n*(1-n));(n^2)]; BxQuad(i,j)=MQuad*PxQuad*NQuad; ByQuad(i,j)=MQuad*PyQuad*NQuad; BzQuad(i,j)=MQuad*PzQuad*NQuad; end end surf(BxQuad,ByQuad,BzQuad,'FaceColor','red','EdgeColor','black') camlight right; lighting phong for i=1:3 % plot lines to join P point plot3([PxQuad(i,:)],[PyQuad(i,:)],[PzQuad(i,:)]) plot3([PxQuad(:,i)],[PyQuad(:,i)],[PzQuad(:,i)]) end legend('Given data points','Control points','Bézier surface') title('Predicted Bi-Quadratic Bézier surface')
Figure 6. Predicted bi-‐Cubic Bézier surface. It is also plotted the control points (green) and the given data points of the original surface (blue)

P a g e 9 | 15
Original surface point at u and w coordinates
Bézier surface point at u and w coordinates
2. The least squares mean error of the predicted surface. From here, a bi-‐Quartic Bézier surface will be used to calculate the error of the predicted surface. The error will be defined as the distance between the given data points and the points of the bi-‐Quartic Bézier surface at each u and w coordinate. The mean squared error will be then the sum of the squares of all distances divided to the number of points:
𝑀𝑆𝐸 =1𝑛
(𝑑!)!!
!!!
Where: MSE= mean squared error n= number of points (130) d=distance between the ith given data point at (ui,wi)and the ith point of the Bézier surface at (ui,wi).
The error can be seen in figure 4.
Figure 7. Zoom to a random point of the surface to show the error between the calculated point of the bi-‐Quartic Bézier surface and the given point in at the same u and w coordinates.
The sub-‐program to calculate the mean squared error is written as follows: for i=1:10 for j=1:13 d(i,j)=sqrt((Bx(i,j)-Qx(i,j))^2+(By(i,j)-Qy(i,j))^2+(Bz(i,j)-Qz(i,j))^2); end end e=d.^2; MSE=sum(sum(e))/130; disp(['mean squared error is: ',num2str(MSE)]) The mean squared error calculated is: mean squared error is: 0.019421

P a g e 10 | 15
3. Cartesian coordinates of the point u=w=0.5 on the original and predicted surfaces. 3.1 Cartesian coordinates of the predicted surface.
Since there is developed a function to calculate the points of the predicted bi-‐Quartic Bézier surface, it is only necessary to define the variables m and n, which represent the u and w coordinates of the predicted surface, to calculate the points of the surface.The sub-‐program to perform this task is written as follows: m1=0.5; n1=0.5; M1=[((1-m1)^4) (4*m1*(1-m1)^3) (6*m1^2*(1-m1)^2) (4*m1^3*(1-m1)) (m1^4)]; N1=[((1-n1)^4);(4*n1*(1-n1)^3);(6*n1^2*(1-n1)^2);(4*n1^3*(1-n1));(n1^4)]; B1x=M1*Px*N1; B1y=M1*Py*N1; B1z=M1*Pz*N1; disp(['x coordinate of Bézier surface at u=w=0.5: ',num2str(B1x)]) disp(['y coordinate of Bézier surface at u=w=0.5: ',num2str(B1y)]) disp(['z coordinate of Bézier surface at u=w=0.5: ',num2str(B1z)])
x coordinate of Bézier surface at u=w=0.5: -‐44.1542 y coordinate of Bézier surface at u=w=0.5: -‐32.7075 z coordinate of Bézier surface at u=w=0.5: 39.2047
3.2 Cartesian coordinates of the original surface. There is no exact values of x-‐y-‐z coordinates of the original surface points at u=w=0.5 because it can not be found an exact value of u an w equal to 0.5 in the matrix of the u and w calculated coordinates. However, it can be interpolated from the values shown in table 1 and 2 which represent the values of u and w in matrix form, respectively.
Table 1. Values of u closest to 0.5 0 0.1103 0.1993 0.2839 0.3649 0.4441 0.5236 0.6023 0.6820 0.7608 0.8401 0.9196 1 0 0.0956 0.1848 0.2688 0.3524 0.4323 0.5134 0.5947 0.6737 0.7542 0.8351 0.9174 1 0 0.0931 0.1822 0.2661 0.3482 0.4310 0.5117 0.5925 0.6735 0.7532 0.8358 0.9176 1 0 0.0837 0.1827 0.2658 0.3476 0.4283 0.5092 0.5909 0.6710 0.7519 0.8335 0.9187 1 0 0.0908 0.1786 0.2627 0.3441 0.4259 0.5067 0.5888 0.6702 0.7505 0.8340 0.9166 1 0 0.0929 0.1815 0.2654 0.3470 0.4285 0.5092 0.5903 0.6709 0.7523 0.8352 0.9174 1 0 0.0913 0.1777 0.2633 0.3460 0.4273 0.5080 0.5879 0.6694 0.7513 0.8343 0.9171 1 0 0.0934 0.1802 0.2649 0.3467 0.4272 0.5093 0.5897 0.6708 0.7527 0.8346 0.9169 1 0 0.0935 0.1810 0.2666 0.3485 0.4290 0.5096 0.5914 0.6717 0.7538 0.8343 0.9183 1 0 0.0970 0.1849 0.2694 0.3512 0.3844 0.5135 0.5931 0.6734 0.7551 0.8359 0.9179 1
Table 2. Values of w closest to 0.5
0 0 0 0 0 0 0 0 0 0 0 0 0 0.1471 0.1307 0.1288 0.1268 0.1287 0.1233 0.1165 0.1148 0.1149 0.1147 0.1142 0.1138 0.1129 0.2563 0.2419 0.2396 0.2379 0.2376 0.2327 0.2277 0.2262 0.2254 0.2255 0.2243 0.2238 0.2238 0.3624 0.3498 0.3476 0.3457 0.3454 0.3387 0.3363 0.3350 0.3342 0.3341 0.3328 0.3310 0.3308 0.4635 0.4541 0.4518 0.4502 0.4498 0.4414 0.4415 0.4416 0.4413 0.4415 0.4400 0.4401 0.4388 0.5661 0.5591 0.5576 0.5568 0.5570 0.5480 0.5509 0.5500 0.5493 0.5498 0.5483 0.5486 0.5472 0.6669 0.6630 0.6626 0.6620 0.6624 0.6522 0.6578 0.6569 0.6564 0.6572 0.6562 0.6562 0.6552 0.7717 0.7696 0.7702 0.7698 0.7709 0.7595 0.7678 0.7677 0.7676 0.7690 0.7672 0.7672 0.7664 0.8819 0.8815 0.8819 0.8817 0.8821 0.8691 0.8800 0.8803 0.8801 0.8815 0.8792 0.8792 0.8784
1 1 1 1 1 1 1 1 1 1 1 1 1
P a g e 11 | 15
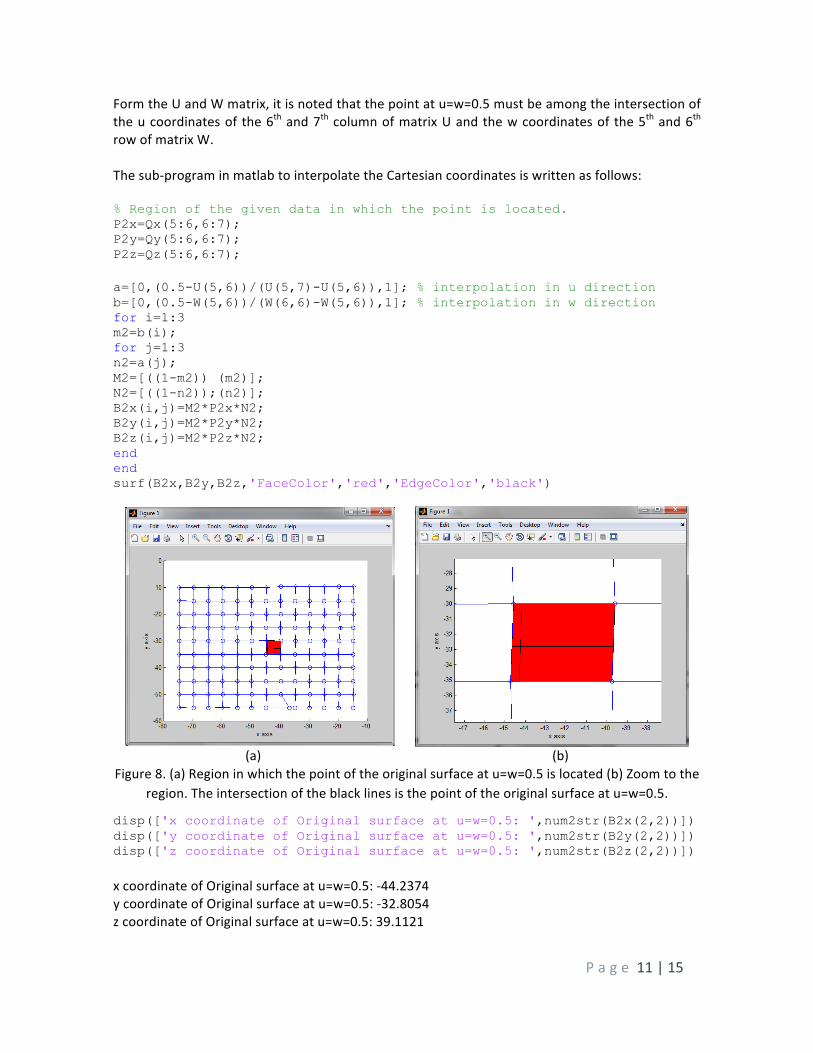
Form the U and W matrix, it is noted that the point at u=w=0.5 must be among the intersection of the u coordinates of the 6th and 7th column of matrix U and the w coordinates of the 5th and 6th row of matrix W. The sub-‐program in matlab to interpolate the Cartesian coordinates is written as follows: % Region of the given data in which the point is located. P2x=Qx(5:6,6:7); P2y=Qy(5:6,6:7); P2z=Qz(5:6,6:7); a=[0,(0.5-U(5,6))/(U(5,7)-U(5,6)),1]; % interpolation in u direction b=[0,(0.5-W(5,6))/(W(6,6)-W(5,6)),1]; % interpolation in w direction for i=1:3 m2=b(i); for j=1:3 n2=a(j); M2=[((1-m2)) (m2)]; N2=[((1-n2));(n2)]; B2x(i,j)=M2*P2x*N2; B2y(i,j)=M2*P2y*N2; B2z(i,j)=M2*P2z*N2; end end surf(B2x,B2y,B2z,'FaceColor','red','EdgeColor','black')
(a) (b)
Figure 8. (a) Region in which the point of the original surface at u=w=0.5 is located (b) Zoom to the region. The intersection of the black lines is the point of the original surface at u=w=0.5.
disp(['x coordinate of Original surface at u=w=0.5: ',num2str(B2x(2,2))]) disp(['y coordinate of Original surface at u=w=0.5: ',num2str(B2y(2,2))]) disp(['z coordinate of Original surface at u=w=0.5: ',num2str(B2z(2,2))]) x coordinate of Original surface at u=w=0.5: -‐44.2374 y coordinate of Original surface at u=w=0.5: -‐32.8054 z coordinate of Original surface at u=w=0.5: 39.1121

P a g e 12 | 15
Table 3. Cartesian coordinates of the points of the Bézier surface and Original surface at u=w=0.5
Bézier Surface Original Surface x coordinate at u=w=0.5 -‐44.1542 -‐44.2374 y coordinate at u=w=0.5 -‐32.7075 -‐32.8054 z coordinate at u=w=0.5 39.2047 39.1121
4. Alternate shapes of the top surface of the mouse.
Several alternate surfaces are suggested by changing the values of the coordinates of the control points of the bi-‐Qurtic Bézier surface. This suggested values are shown in table 4: Table 4. Cartesian coordinates in matrix form of the bi-‐Quartic Bézier surface control points for the
suggested alternate surfaces S1, S2 and S3.
Surface S1 Surface S2 Surface S3
x coordinates
-‐20 -‐15 -‐12 -‐15 -‐20 -‐15 -‐10 -‐8 -‐10 -‐15 -‐15 -‐6 -‐5 -‐8 -‐17 -‐30 -‐30 -‐30 -‐30 -‐30 -‐30 -‐30 -‐30 -‐30 -‐30 -‐30 -‐25 -‐26 -‐28 -‐30
-‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐45 -‐60 -‐60 -‐60 -‐60 -‐60 -‐60 -‐60 -‐60 -‐60 -‐60 -‐63 -‐64 -‐64 -‐65 -‐65
-‐70 -‐75 -‐77 -‐75 -‐70 -‐75 -‐80 -‐83 -‐80 -‐75 -‐77 -‐82 -‐84 -‐82 -‐76
y coordinates
-‐15 -‐20 -‐30 -‐40 -‐45 -‐12 -‐20 -‐30 -‐40 -‐48 -‐15 -‐20 -‐30 -‐40 -‐50 -‐10 -‐20 -‐30 -‐40 -‐50 -‐12 -‐21 -‐30 -‐39 -‐48 -‐13 -‐23 -‐32 -‐42 -‐52
-‐10 -‐20 -‐30 -‐40 -‐50 -‐15 -‐25 -‐30 -‐35 -‐45 -‐15 -‐25 -‐34 -‐43 -‐53 -‐10 -‐20 -‐30 -‐40 -‐50 -‐15 -‐25 -‐30 -‐35 -‐45 -‐17 -‐26 -‐35 -‐44 -‐53
-‐15 -‐20 -‐30 -‐40 -‐45 -‐18 -‐25 -‐30 -‐35 -‐42 -‐19 -‐26 -‐33 -‐42 -‐51
z coordinates
22 32 33 32 22 22 32 33 32 24 22 32 33 32 24 28 40 41 40 28 34 40 41 40 34 34 40 41 40 34
30 41 43 41 30 35 41 43 40 35 35 41 43 40 35
28 38 40 38 28 35 38 40 38 32 35 38 40 38 32 22 34 36 34 22 31 35 36 34 28 31 35 36 34 28
The sub-‐program to calculate the corresponding bi-‐Quartic Bézier surface is written as follows:

P a g e 13 | 15
% ALTERNATE SUGGESTED SURFACE 1 % Suggested control points for alternate surfaces S1Px=[[-20 -15 -12 -15 -20];[-30 -30 -30 -30 -30];[-45 -45 -45 -45 -45];[-60 -60 -60 -60 -60 ];[-70 -75 -77 -75 -70]]; S1Py=[[-15 -20 -30 -40 -45];[-10 -20 -30 -40 -50];[-10 -20 -30 -40 -50];[-10 -20 -30 -40 -50];[-15 -20 -30 -40 -45]]; S1Pz=[[22 32 33 32 22];[28 40 41 40 28];[30 41 43 41 30];[28 38 40 38 28];[22 34 36 34 22]]; % Calculate points of suggested bi-Quartic Bézier surface for i=1:10 for j=1:13 m=U(i,j); n=W(i,j); M=[((1-m)^4) (4*m*(1-m)^3) (6*m^2*(1-m)^2) (4*m^3*(1-m)) (m^4)]; N=[((1-n)^4);(4*n*(1-n)^3);(6*n^2*(1-n)^2);(4*n^3*(1-n));(n^4)]; S1Bx(i,j)=M*S1Px*N; S1By(i,j)=M*S1Py*N; S1Bz(i,j)=M*S1Pz*N; end end figure hold on % Plot control points for i=1:5 scatter3(S1Px(:,i),S1Py(:,i),S1Pz(:,i),'g') plot3([S1Px(i,:)],[S1Py(i,:)],[S1Pz(i,:)],'g') plot3([S1Px(:,i)],[S1Py(: ,i)],[S1Pz(:,i)],'g') end % Plot the suggested surface S1 surf(S1Bx,S1By,S1Bz,'FaceColor','blue','EdgeColor','black') camlight right; lighting phong legend('Control points for the suggested bi-Quartic Bézier Surface 1') title('Suggested bi-Quartic Bézier surface 1') xlabel('x axis') ylabel('y axis') zlabel('z axis')
(a) (b)
Figure 9. Alternate shape bi-‐Quartic Bézier surface S1: (a) view on x-‐y plane (b) view on x-‐y-‐z space.
P a g e 14 | 15
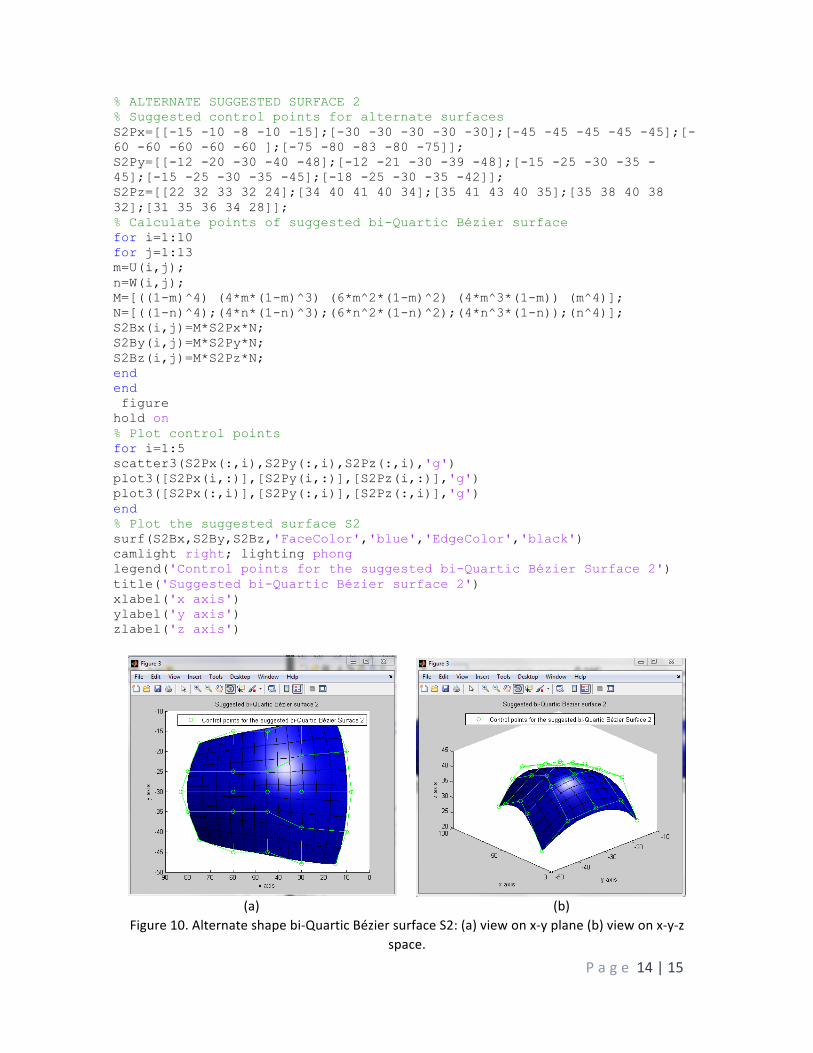
% ALTERNATE SUGGESTED SURFACE 2 % Suggested control points for alternate surfaces S2Px=[[-15 -10 -8 -10 -15];[-30 -30 -30 -30 -30];[-45 -45 -45 -45 -45];[-60 -60 -60 -60 -60 ];[-75 -80 -83 -80 -75]]; S2Py=[[-12 -20 -30 -40 -48];[-12 -21 -30 -39 -48];[-15 -25 -30 -35 -45];[-15 -25 -30 -35 -45];[-18 -25 -30 -35 -42]]; S2Pz=[[22 32 33 32 24];[34 40 41 40 34];[35 41 43 40 35];[35 38 40 38 32];[31 35 36 34 28]]; % Calculate points of suggested bi-Quartic Bézier surface for i=1:10 for j=1:13 m=U(i,j); n=W(i,j); M=[((1-m)^4) (4*m*(1-m)^3) (6*m^2*(1-m)^2) (4*m^3*(1-m)) (m^4)]; N=[((1-n)^4);(4*n*(1-n)^3);(6*n^2*(1-n)^2);(4*n^3*(1-n));(n^4)]; S2Bx(i,j)=M*S2Px*N; S2By(i,j)=M*S2Py*N; S2Bz(i,j)=M*S2Pz*N; end end figure hold on % Plot control points for i=1:5 scatter3(S2Px(:,i),S2Py(:,i),S2Pz(:,i),'g') plot3([S2Px(i,:)],[S2Py(i,:)],[S2Pz(i,:)],'g') plot3([S2Px(:,i)],[S2Py(:,i)],[S2Pz(:,i)],'g') end % Plot the suggested surface S2 surf(S2Bx,S2By,S2Bz,'FaceColor','blue','EdgeColor','black') camlight right; lighting phong legend('Control points for the suggested bi-Quartic Bézier Surface 2') title('Suggested bi-Quartic Bézier surface 2') xlabel('x axis') ylabel('y axis') zlabel('z axis')
(a) (b)
Figure 10. Alternate shape bi-‐Quartic Bézier surface S2: (a) view on x-‐y plane (b) view on x-‐y-‐z space.
P a g e 15 | 15
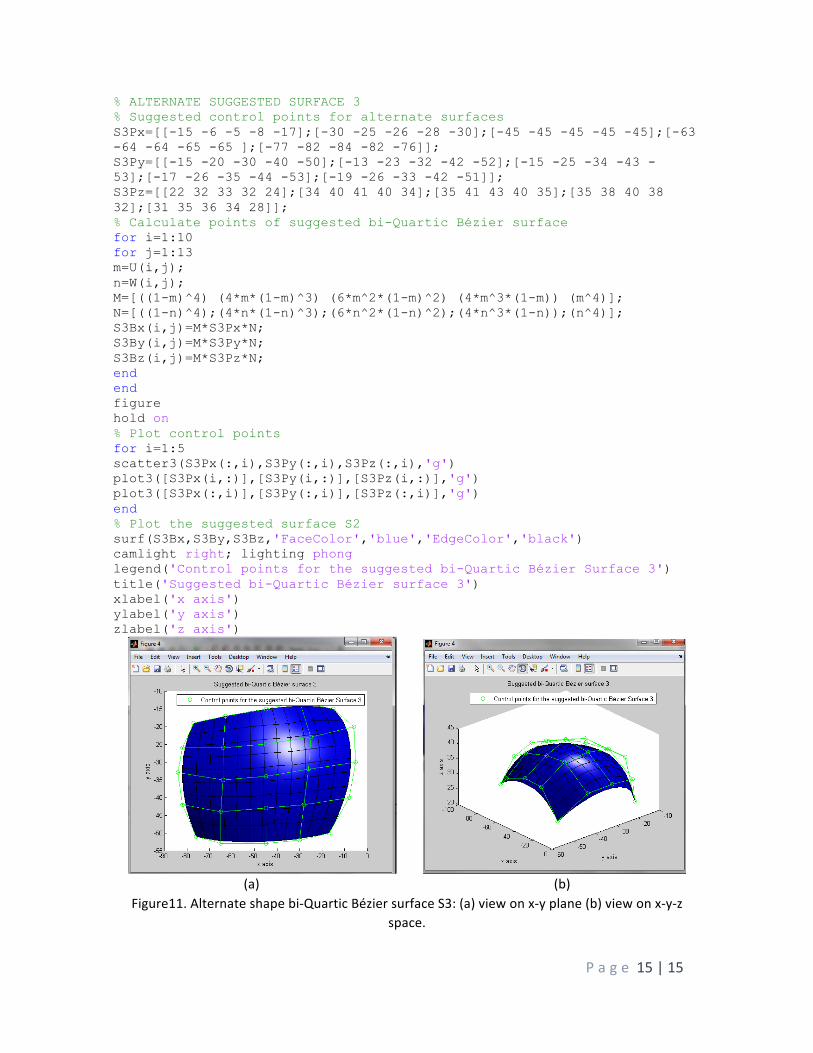
% ALTERNATE SUGGESTED SURFACE 3 % Suggested control points for alternate surfaces S3Px=[[-15 -6 -5 -8 -17];[-30 -25 -26 -28 -30];[-45 -45 -45 -45 -45];[-63 -64 -64 -65 -65 ];[-77 -82 -84 -82 -76]]; S3Py=[[-15 -20 -30 -40 -50];[-13 -23 -32 -42 -52];[-15 -25 -34 -43 -53];[-17 -26 -35 -44 -53];[-19 -26 -33 -42 -51]]; S3Pz=[[22 32 33 32 24];[34 40 41 40 34];[35 41 43 40 35];[35 38 40 38 32];[31 35 36 34 28]]; % Calculate points of suggested bi-Quartic Bézier surface for i=1:10 for j=1:13 m=U(i,j); n=W(i,j); M=[((1-m)^4) (4*m*(1-m)^3) (6*m^2*(1-m)^2) (4*m^3*(1-m)) (m^4)]; N=[((1-n)^4);(4*n*(1-n)^3);(6*n^2*(1-n)^2);(4*n^3*(1-n));(n^4)]; S3Bx(i,j)=M*S3Px*N; S3By(i,j)=M*S3Py*N; S3Bz(i,j)=M*S3Pz*N; end end figure hold on % Plot control points for i=1:5 scatter3(S3Px(:,i),S3Py(:,i),S3Pz(:,i),'g') plot3([S3Px(i,:)],[S3Py(i,:)],[S3Pz(i,:)],'g') plot3([S3Px(:,i)],[S3Py(:,i)],[S3Pz(:,i)],'g') end % Plot the suggested surface S2 surf(S3Bx,S3By,S3Bz,'FaceColor','blue','EdgeColor','black') camlight right; lighting phong legend('Control points for the suggested bi-Quartic Bézier Surface 3') title('Suggested bi-Quartic Bézier surface 3') xlabel('x axis') ylabel('y axis') zlabel('z axis')
(a) (b)
Figure11. Alternate shape bi-‐Quartic Bézier surface S3: (a) view on x-‐y plane (b) view on x-‐y-‐z space.
Top Related
Copyright © 2022 FDOKUMEN

