






Bahasa
Halaman
Hukum


IEEE TAC 1A Characterization of Integral Input to StateStabilityDavid Angeli, Eduardo D. Sontag, Yuan WangAbstract|The notion of input to state stability (iss) is now rec-ognized as a central concept in nonlinear systems analy-sis. It provides a nonlinear generalization of �nite gainswith respect to supremum norms and also of �nite L2 gains.It plays a central role in recursive design, coprime factor-izations, controllers for non-minimum phase systems, andmany other areas. In this paper, a newer notion, that ofintegral input to state stability (iiss), is studied. The notionof iiss generalizes the concept of �nite gain when using anintegral norm on inputs but supremum norms of states, inthat sense generalizing the linear \H2" theory. It allows toquantify sensitivity even in the presence of certain forms ofnonlinear resonance. We obtain here several necessary andsu�cient characterizations of the iiss property, expressed interms of dissipation inequalities and other alternative andnontrivial characterizations. These characterizations serveto show that integral input to state stability is a most natu-ral concept, one which might eventually play a role at leastcomparable to, if not even more important than, iss.Keywords| input to state stability, nonlinear systems, �-nite gain, dissipation inequalities, trackingI. IntroductionOne of the main issues in control design concerns thestudy of closed-loop sensitivity to disturbances, and, moregenerally, of the dependence of state trajectories on ac-tuator and measurement errors, magnitudes of trackingsignals, and the like. In linear systems theory, classicalfrequency-domain measures of performance such as rootloci and gain-phase characteristics have led to the moderntheories of \H1" control and its variants.During the last 10 years or so, the notion of input to statestability (iss) was formulated (in [23]), and quickly becamea foundational concept upon which much of modern non-linear feedback analysis and design rest. As an illustra-tion, let us point out Kokotovic's recent survey paper [10],intended as a summary of current work and future direc-tions on nonlinear design, in which the notion of iss playsa central unifying concept. Several current textbooks andmonographs, including [12], [13], [14], [21], make use of theiss notion and results, sometimes in an essential manner.Applications of input to state stability are nowwidespread. Besides the many applications to recursive de-sign in the above-mentioned books, let us merely cite a fewD. Angeli is with the Dip. Sistemi e Informatica, University of Flo-rence, 50139 Firenze, Italy. E-mail: [email protected]. Sontag is with the Department of Mathematics, Rut-gers University, New Brunswick, NJ 08903, USA. E-mail:[email protected]. Work was supported in part by USAir Force Grant F49620-98-1-0242Y. Wang is with the Department of Mathematics, FloridaAtlantic University, Boca Raton, FL 33431, USA. E-mail:[email protected]. Work was supported in part by NSF GrantDMS-9457826
additional references: singular perturbation analysis [3],powerful global small-gain theorems [11], foundations oftracking design [19], supervisory/switching adaptive con-trol [6], observers [8], almost-disturbance decoupling fornon minimum-phase systems [9], and feedback stabilizationwith bounded controllers [29]. Moreover, this concept hasmany equivalent versions, which indicates that it is math-ematically natural: there are characterizations in terms ofdissipation, robustness margins, and classical Lyapunov-like functions; see e.g. [25], [26].As remarked in [24], input-to-state stability is a non-linear generalization both of �nite gain with respect tosupremum norms and of �nite L2 gain (\nonlinear H1");this property takes account of initial states in a mannerfully compatible with classical Lyapunov stability, and re-places �nite linear gains, which represent far too strong arequirement for general nonlinear operators, with \nonlin-ear gains".A system which is iss exhibits low overshoot and low to-tal energy response when excited by uniformly bounded orenergy-bounded signals respectively. These are highly de-sirable qualitative characteritics. However, it is sometimesthe case that feedback design does not render iss behavior,or that only a weaker property than iss is veri�ed in a stepin recursive design.One such weaker, but still very meaningful, property wasgiven the name of integral input to state stability, iiss forshort, in the recent paper [24]. This property re ects thequalitative property of small overshoot when disturbanceshave �nite energy , and provides a qualitative analog of\�nite H2 norm" for linear systems. This is a propertywith obvious physical signi�cance and relevance. The pa-per [24] showed that iiss is, in general, strictly weaker thaniss, and provided a very conservative Lyapunov-type su�-cient condition. The present paper provides several foun-dational results, showing that the iiss property is a mostnatural one to be expected for well-behaved nonlinear sys-tems, being equivalent to the combination of well-knowndissipation and detectability properties, and admitting el-egant Lyapunov-theoretic characterizations. We are con�-dent that, once that the results in this paper become morewidely known, iiss will play a role at least as prominent asthe one that iss currently has.In fact, the notion of iiss, and the results in this pa-per, which were previously announced in electronic preprintform, have already played a role in several recent controlworks. For example, the iiss property appears in the lat-est approaches to supervisory design in adaptive control.In the paper [7], Hespanha and Morse | citing preprintsof this work | studied the closed-loop system obtained

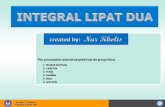
2 IEEE TACwhen a high-level supervisor directs the switching amonga family of candidate controllers for an uncertain plant.Their convergence analysis was based on the assumptionthat each controller stabilizes the respective plant in aniiss sense with respect to an input which is related to ameasure of estimator performance, their motivation beingthat it is natural to de�ne performance signals using inte-grals of output estimation errors. Another example of theuse of the iiss concept can be found in the recent work ofLiberzon [15], who approached the task of achieving distur-bance attenuation in the iiss sense for nonlinear systemsusing bounded controls. He derived a universal formulabased on hysteresis switching, in the context in particularof switched and hybrid systems. The notion of integral in-put to state stability played a key role in this work. Yetanother direct motivation for the study of the iiss propertyis as follows.Tracking ProblemsIn the paper [19], Marino and Tomei proposed the refor-mulation of tracking problems by means of the notion ofinput to state stability. Their goal was to strengthen the ro-bustness properties of tracking designs, and they found thenotion of iss to be instrumental in the precise characteriza-tion of performance. In fact, they emphasized the noveltyof using the iss notion in this role. It turns out, however,that a typical passivity-based tracking design may well notresult in iss behavior, as we illustrate now by means of anexample in robotic control.Consider the manipulator shown in Fig. 1. A simple
θ
r F
τ
m
M
Fig. 1. A Manipulatormodel is obtained considering the arm as a segment withmass M and length L, and the hand as a material pointwith mass m. If we denote with r the position of the handand with � the angle of the arm, the equations for such asystem are:(mr2 +ML2=3) �� + 2mr _r _� = �m�r �mr _�2 = F ; (1)
where F and � indicate external torques. We now studythe closed-loop system which is obtained by choosing � andF as: � = �kd1 _� � kp1(� � �d)F = �kd2 _r � kp2(r � rd) ; (2)with kp1 ; kp2 ; kd1 ; kd2 > 0. (For notational simplicity, wewill also write q = [�; r]T ). This represents a typicalpassivity-based tracking design, when we think of rd and�d as signals to be followed by r and �.Normally, one establishes tracking behavior, as well asthe closed-loop stability of the system when the referencesignal qd = (�d; rd) is constant; for such signals, one obtainsq0 ! 0 and q ! qd as t ! +1. In the spirit of input-to-state stability, however, it is natural to ask what is thesensitivity of the design to additive measurement noise.That is, suppose that the input applied to the system is,instead of (2):� = �kd1( _� + d11)� kp1(� + d12 � �d)F = �kd2( _r + d21)� kp2(r + d22 � rd) ;where the dij(t)'s are observation errors. The closed-loopsystem that results is then as follows:(mr2 +ML2=3)�� + 2mr _r _� = u1 � kd1 _� � kp1�u2m�r �mr _�2 = u2 � kd2 _r � kp2r; (3)or equivalently, in classical �rst-order control system form(denoting _q by z),_q1 = z1;_q2 = z2;_z1 = �2mq2z1z2�kp1q1�kd1z1mq22+ML2=3 + kp1u1mq22+ML2=3 ;_z2 = q2z21 � kp2q2m � kd2z2m + kp2u2m ; (4)where u1 = �kd1d11 � kp1(d12 � �d)and u2 = �kd2d21 � kp2(d22 � rd)can be though of as external inputs to the closed-loop sys-tem.The goal stated earlier is to qualitatively analyze thesensitivity of the full state (q; z) as a function of the mea-surement errors dij . As these errors are potentially arbi-trary functions, this problem amounts to the study of sta-bility properties with respect to arbitary input functionsu = (u1; u2).It is worth pointing out that we are led to exactly thesame mathematical problem if interested, instead, in an-other very obvious question, namely, in the analysis of thebehavior of the state (q; z) in response to attempts to fol-low time-varying tracking signals , even in the absence ofobservation errors. Indeed, in that case the dij 's wouldbe zero, but the di�erent possible tracking functions �dand rd would still give rise to potentially arbitrary inputsu1 and u2. In summary, either of these two basic controlquestions: sensitivity to measurement error, or analysis of

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 3time-varying (instead of merely constant) tracking signals,gives rise to the problem of studying stability of the systemwith respect to the inputs u.As in current nonlinear control studies, and speci�callyas in [19] for tracking problems, one may ask then if the sys-tem (4) is iss when u is taken as an input. (The authorsof [19] required tracking controllers to have an iss prop-erty with respect to disturbances acting on the system. Inthe special case when the disturbances are matched to thecontrol, this amounts to the problem studied here.) In par-ticular, if the system were to be iss, then bounded inputsu should result in bounded trajectories (iss is a strongerproperty than \bounded-input bounded-state" stability).However, there are bounded inputs which produce nonlin-ear resonance behavior, resulting in unbounded state tra-jectories, which implies that this system is not iss. Indeed,the input shown in Figure 2 has the property that, for aθd
0 20 40 60 80 100
0
3
-3 Fig. 2. Input Signalsuitable initial state, the ensuing trajectory is unbounded.Figure 3 shows the \r" component of the state of a certainsolution which corresponds to this input (in Appendix A-C,0 20 40 60 80 100
1
2
3
4
0
r
Fig. 3. Nonlinear Resonancewe explain how this input and trajectory were calculated).In conclusion, the tracking system behavior exhibits un-stable behavior with respect to measurement disturbancesand/or with respect to time-varying reference signals. Onemight hope, however, given the simplicity and common useof these designs, that some sort of robustness property isveri�ed for this system. The study of this question, forthis example, led to the work reported in the present pa-per. The answer turns out to have wide applicability. We
discovered that the weaker but still very useful propertyof iiss is always satis�ed for the passivity controller in ourrobotic example, even though iss is not. This property isde�ned precisely in the next section; after stating the mainresults, we will show why it holds for the example.Outline of PaperIn this paper, we provide a complete, necessary and suf-�cient, Lyapunov-like characterization of the iiss property.Just as the equivalences for iss, which have found wideapplicability and serve to justify the iss concept, are de-rived from its Lyapunov characterization, we expect thatthe current paper will be the �rst step in the understandingof which system properties are equivalent to iiss. In addi-tion, the characterizations allow one to consider \LaSalle"types of dissipation inequalities (semide�nite derivatives),�lling-in a theoretical gap in the iss literature.Section II discusses the main concepts and states themain results. It also explains how the notion presented hererepresents the obvious generalization of \�nite H2 gain"under nonlinear coordinate changes. After that, we return,in Section III, to the robotics example discussed earlier,and we verify, using the characterizations presented in thepaper, why the system indeed satis�es the iiss property.Then, in Section IV, we provide the main proofs of this pa-per. In Section V, we provide a counterexample to the con-jecture (which would seem true at �rst) that iiss might beequivalent to simply forward completeness plus 0-gas. Sec-tion VI discusses several related remarks for dual notionsof observability. Section VII summarizes the conclusions ofthe paper. Finally, the Appendix collects some technicallemmas and the details on the numerical calculations thatled to Figures 2 and 3.II. Definitions and Statements of Main ResultsConsider the system _x = f(x; u) (5)with states x(t) evolving in Euclidean space Rn . Here,controls (or inputs) are measurable and locally essentiallybounded functions u : R�0 ! Rm , and f : Rn � Rm ! Rnis assumed to be locally Lipschitz.Given any control u and any � 2 Rn , there is a uniquemaximal solution of the initial value problem _x = f(x; u),x(0) = �. This solution is de�ned on some maximal openinterval, and it is denoted by x(�; �; u).De�nition II.1: ([24]) System (5) is integral input-to-state stable (iiss) if there exist functions� � 2 K1, � 2 KL,and 2 K, such that, for all � 2 Rn and all u, the solution�We use standard terminology, cf. [5]: K is the class of functions[0;1) ! [0;1) which are zero at zero, strictly increasing, and con-tinuous, K1 is the subset of K functions that are unbounded, L is theset of functions [0;+1)! [0;+1) which are continuous, decreasing,and converging to 0 as their argument tends to +1, KL is the classof functions [0;1)2 ! [0;1) which are class K on the �rst argumentand class L on the second argument. A positive de�nite function[0;1)! [0;1) is one that is zero at 0 and positive otherwise.

4 IEEE TACx(t; �; u) is de�ned for all t � 0, and�(jx(t; �; u)j) � �(j�j ; t) + Z t0 (ju(s)j) ds (6)for all t � 0, where j�j denotes the standard Euclideannorm. 2Observe that a system is iiss if and only if there existfunctions � 2 KL and 1; 2 2 K such thatjx(t; �; u)j � �(j�j ; t) + 1�Z t0 2(ju(s)j) ds� (7)for all t � 0, all � 2 Rn , and all u.Also note that if system (5) is iiss, then it is 0-gas, thatis, the 0-input system _x = f(x; 0)is globally asymptotically stable (gas). (That is, the zerosolution of this system is globally asymptotically stable.)De�nition II.2: A continuously di�erentiable functionV : Rn ! R is called an iiss-Lyapunov function for sys-tem (5) if there exist functions �1, �2 2 K1, � 2 K, and acontinuous positive de�nite function �3, such that�1(j�j) � V (�) � �2(j�j) (8)for all � 2 Rn , andDV (�)f(�; �) � ��3(j�j) + �(j�j) (9)for all � 2 Rn and all � 2 Rm . 2Note that the estimate (8) amounts to the requirementthat V must be positive de�nite (i.e., V (x) > 0 for allx 6= 0 and V (0) = 0), and proper (i.e, radially unbounded,namely, V (x) !1 as jxj ! 1).Notice the di�erence between De�nition II.2 and the dis-sipation characterization of iss (cf. [25], [26]): the iss prop-erty is equivalent to the existence of a V as here but forwhich �3 is required to be unbounded (in fact, class K1).As an example, consider the one dimensional system:_x = � arctanx+ u:Let V (x) = x arctanx. Then, DV (�)f(�; �) equalsarctan � (� arctan � + �) + �1+�2 (� arctan � + �), which is� �(arctan j�j)2+2 j�j, showing that V is an iiss-Lyapunovfunction for the system. But in the estimate (9) we have�3(r) = (arctan r)2, which is not of class K1, so one doesnot have an iss-type estimate. Indeed, this system doesnot admit any iss-Lyapunov function, since the system isnot iss (the trajectory with x(0) = 1 and u(t) � �=2 isunbounded).Our main result will establish that the existence of asmooth iiss-Lyapunov function is necessary as well as suf-�cient for the system to be iiss.This fact will be stated in several essentially equivalentways. One possibility is to relax the positive de�nitenessrequirement on �3 to just nonnegativity, or simply omit it,but to assume explicitly that the system is 0-gas.
Another possibility is to deduce the 0-gas property fromLaSalle's invariance principle. This last variant is of consid-erable interest in applications such as the robotics examplediscussed in Section III, and it may be stated using con-cepts of detectability, as is by now standard in the nonlin-ear dissipation literature (see, e.g. [30], section 3.2). Let ussay that an output for the system (5) is a continuous maph : Rn ! Rp (for some p), with h(0) = 0. For each initialstate � 2 Rn , and each input u, we let y(t; �; u) be the corre-sponding output function, i.e., y(t; �; u) = h(x(t; �; u)) (de-�ned on some maximal interval [0; T�;u)). The system (5)with output h is said to be weakly zero-detectable if, foreach � such that T�;0 =1 and y(t; �; 0) � 0, it must be thecase that x(t; �; 0) ! 0 as t ! 1. Finally, we will say forthe purposes of this paper that the system (5) with outputh is dissipative if there exists a continuously di�erentiable,proper, and positive de�nite function V (a storage functionfor the system), together with a � 2 K and a continuouspositive de�nite function �4, such thatDV (�)f(�; �) � ��4(jh(�)j) + �(j�j) (10)for all � 2 Rn and all � 2 Rm . If this property holds witha V which is also smooth, we say that the system (5) withoutput h is smoothly dissipative. Finally, if (10) holds withh = 0, i.e., if there exists a (smooth) proper and positivede�nite V , and a � 2 K, so thatDV (�)f(�; �) � �(j�j) (11)holds for all � 2 Rn and all � 2 Rm , we say that thesystem (5) is zero-output (smoothly) dissipative.We are now able to state the main conclusions of thispaper.Theorem 1: For any system (5), the following propertiesare equivalent:1. The system is iiss.2. The system admits a smooth iiss-Lyapunov function.3. There is some output which makes the system smoothlydissipative and weakly zero-detectable.4. The system is 0-gas and zero-output smoothly dissipa-tive.The main step of the proof of Theorem 1 is given inSection IV, where we show 1,2 and also we prove Propo-sition II.5 (see below), which characterizes the 0-gas prop-erty. The implication 4)2 will be immediate from Propo-sition II.5. The remaining implications are routine, so wecan dispose of them immediately, as follows. First of all,notice that 2)3. To see this, take the iiss-Lyapunov func-tion V as a storage function, and consider the inequalityin (9). We introduce the output function h(x) := �3(jxj).The system is weakly zero-detectable (in fact, it is even\zero-observable"), because h(x) = 0 implies x = 0, since�3 is positive de�nite. Moreover, with �4 equal to theidentity, we have that �4(jh(�)j) = �3(j�j), so (10) is thesame as (9). Finally, we show that 3)4. Suppose that (10)holds. With � = 0, we take V as a Lyapunov function forthe zero-input system _x = f(x; 0). The zero-detectabilitycondition means that the LaSalle invariance principle, with

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 5the Lyapunov function V , can be applied, and we conclude0-gas. And since ��4(h(�)) � 0, also (11) holds.Remark II.3: We stated Theorem 1 requiring that thecorresponding functions V (iiss-Lyapunov, storage) besmooth, that is, in�nitely di�erentiable. This makes theexistence of such V 's, which is the hardest part to prove,more interesting. The su�ciency parts of the proofs do notrequire smoothness, however. In other words, system (5)is iiss if it admits an iiss-Lyapunov function, or if it hasan output which makes the system dissipative and weaklyzero-detectable or if it is 0-gas and zero-output dissipative.2 Remark II.4: We used the adjective \weak" when de�n-ing zero-detectability in order to distinguish this notionfrom true detectability, or \(zero-input) output to statestability", cf. [27] and also Section VI below, where oneasks that \small output (when u � 0) implies small state",as opposed to merely asking that \zero output implies smallstate" as here. 2A Characterization of 0-GAS Control SystemsIn the proof Theorem 1, we utilize the following charac-terization of 0-gas systems. It is in itself a result of someinterest.We call a positive de�nite function W : Rn ! R�0 semi-proper if there exist a function �(�) of class K and a properpositive de�nite function W0 such that W = � �W0. (Itis easy to see that a continuous positive de�nite V : Rn !R�0 is semiproper if and only if, for each r in the range ofV , the sublevel set fx jV (x) � rg is compact.)Proposition II.5: System (5) is 0-gas if and only if thereexist a smooth semi-proper function W , a � 2 K, and acontinuous positive de�nite function � : R�0 ! R�0 , suchthat DW (�)f(�; �) � ��(j�j) + �(j�j) (12)for all � 2 Rn and all � 2 Rm .The su�ciency part follows from the standard Lyapunovresults for autonomous systems: if (12) holds withW = ��W0, thenW0 is a Lyapunov function for the 0-input system.(This is because (12) implies that DW0(�)f(�; 0) < 0 forall � 6= 0.) The necessity implication will be proved inSection IV.Proof of 4)2 in Theorem 1. Let the functions V and� be so that (11) holds. Since the system is 0-gas, byProposition II.5, there exists a smooth semi-proper, posi-tive de�nite function V0 such thatDV0(�)f(�; �) � ��0(�) + �0(j�j); 8 � 2 Rn ; 8� 2 Rmfor some continuous positive de�nite function �0 and someK-function �0. Let V1(�) = V (�)+V0(�). It then clear thatV1 is an iiss-Lyapunov function: it is proper because V0 is,and D(V + V0)(�)f(�; �) � ��0(�) + �0(j�j) + �(j�j)gives an estimate as in (9).
Motivation: Finite-Gain under Coordinate ChangesAs mentioned in the Introduction, we wish to explainbrie y how the notion of iiss arises in an extremely nat-ural manner when generalizing linear L2 to L1 gains(sometimes called \H2 gains") to nonlinear systems. (Seealso [24], which explains why, when we apply the same rea-soning to \L2 to L2 stability" or to \L1 to L1 stability,"we recover input to state stability, as well as [4] for moreon changes of coordinates and iss.)For linear systems, one de�nes �nite-gain stability, withrespect to square norm on inputs and sup norm on states,by requiring the existence of constants c and �, with � > 0,so that, for each input u(�) and each initial state �, the so-lution x(t) of _x = Ax+Bu, x(0) = �, satis�es the followingestimate:jx(t)j � ce��t j�j + c Z t0 ju(s)j2 ds for all t � 0 : (13)(Actually, most textbooks omit the initial state, but this isthe appropriate estimate if nonzero initial states are takeninto account.) In a nonlinear context, it is natural to re-quire that notions of stability should be invariant under(nonlinear) changes of variables. Let us see what this leadsus to. Suppose that we take an origin-preserving statechange of coordinates x = T (z) and an origin-preservingchange of variables u = S(v). That is, T : Rn ! Rnand S : Rm ! Rm are invertible, and they, as well astheir inverses, are continuous; furthermore, we supposethat T (0) = 0 and S(0) = 0. Then, there are two func-tions �1; �2 2 K1 so that�1(jzj) � jT (z)j � �2(jzj)for all z 2 Rn , and, similarly, we can write jS(v)j2 � (jvj)for each v 2 Rm , for some 2 K1. Therefore, the esti-mate (13) gives us, in terms of z and v:�1(jz(t)j) � ce��t�2(j�j) + c Z t0 (ju(s)j)2 ds 8 t � 0 ;when x(t) = T (z(t)) and u(t) = S(v(t)) for all t, and � =z(0) = T�1(�). In other words,jz(t)j � �(j�j ; t) + ��11 �Z t0 2c (ju(s)j)2 ds� 8 t � 0 ;where we let �(r; t) := ��11 (2c�2(r)e��t). This is preciselyas in the estimate (7), except that � has what appearsto be a very special form. Surprisingly, however, any KLfunction � can be majorized by a function of this specialform, see [24], so indeed one obtains the general notion ofiiss with this reasoning.III. The Robotics Example is iissIn this section we verify the iiss property for the roboticssystem (3) discussed earlier. (The same example was used,for a di�erent purpose | namely, to illustrate a di�erentnonlinear tracking design which produces iss, as opposed to

6 IEEE TACmerely iiss, behavior | in the paper [1].) One interestingfeature of this example, which in fact motivated much ofthe research reported here, is that it illustrates the use ofthe LaSalle-type condition that we obtained.To prove the iiss property, we introduce, as usual formechanical manipulators, the following matrix notation:H(q)=� mr2 +M L23 00 m � ; C(q; _q)=mr � _r _�� _� 0 �where H(q) is the inertia matrix, and C(q; _q) expresses theCoriolis torques. Then (3) can be rewritten asH(q)�q + C(q; _q) _q = �Kp(q � qd)�Kd _q;where Kp = diagfkp1 ; kp2g, Kd = diagfkd1 ; kd2g, and qd =[�d; rd]T . We take the mechanical energy of the system asa candidate Lyapunov function:V (q; z) = zTH(q)z + qTKpq2 = _qTH(q) _q + qTKpq2 :(14)Taking derivatives in (14) with respect to time along tra-jectories of (3) yields the following passivity-type estimatefor ddtV (q(t); z(t)):_q(t)TH(q(t))�q(t) + 12 _q(t)T _z {H(q(t)) _q(t) + q(t)TKp _q(t)= � _q(t)TKd _q(t) + _q(t)TKpqd(t) (15)� �c1j _q(t)j2 + c2jqd(t)j2 = �c1jz(t)j2 + c2ju(t)j2;for some su�ciently small number c1 > 0 and some su�-ciently large number c2 > 0. Inspection of the equationsshows that, when u � 0 and z � 0, necessarily q � 0 aswell. Thus, thinking of z as an output, the system is weaklyzero-detectable and dissipative; applying Theorem 1, oneconcludes that the system is iiss.IV. Main ProofsThe following Lemma will be needed several times duringthe proofs.Lemma IV.1: Let � : R�0 ! R�0 be a continuous pos-itive de�nite function. Then there exist �1 2 K1 and�2 2 L such that: �(r) � �1(r) �2(r): (16)The Lemma will be proved in the appendix; it is used inestablishing the following comparison theorem.Lemma IV.2: Given any continuous positive de�nitefunction � : R�0 ! R�0 , there exists a KL-function � withthe following property. Suppose that for some 0 < ~t � 1,v : [0; ~t)! R�0 and y : [0; ~t)! Rare, respectively, a continuous and a (locally) absolutelycontinuous function with y(0) � 0. Assume further that_y(t) � ���maxfy(t) + v(t); 0g� (17)
holds for almost all t 2 [0; ~t). Then, letting kvtk1 be thesupremum of the restriction of v to the interval [0; t), thefollowing estimate holds:y(t) � max f�(y(0); t); kvtk1g for all t 2 [0; ~t) : (18)Proof: We start by picking �1 2 K, �2 2 L as inLemma IV.1, for the function �. Without loss of general-ity, we may assume that �1 and �2 are locally Lipschitz.Otherwise, we may always pick locally Lipschitz functions~�1 2 K and ~�2 2 L that are majorized by �1 and �2 respec-tively to replace �1 and �2 respectively.A standard comparison principle asserts the existenceof a function � 2 KL having the following property: ifq : [0; T ]! R�0 is any absolutely continuous function thatsatis�es the di�erential inequality _q � ��1(q)�2(2q) almosteverywhere, then it must be the case that q(t) � �(q(0); t)for all t 2 [0; T ]. (See for instance Lemma 4.4 in [16];the statement in that reference applies to q de�ned on allof [0;1), but exactly the same proof works for a �niteinterval. One choice for �(s; t) is �(s; t) = z(t), wherez is the solution of the scalar initial value problem _z =��1(z)�2(2z), z(0) = s.)Let now v and y be as in the statement of the Lemma,and de�ne t0 := minft � 0 j y(t) � kvtk1g(with t0 := ~t if y(t) > kvtk1 for all t 2 [0; ~t)). For all t � t0(if t0 < ~t), y(t) � kvtk1 (because y is nonincreasing, since_y(t) � 0 for all t, and s 7! kvsk1 is nondecreasing), so (18)holds for all t � t0.Pick now any t 2 [0; t0). We have then that y(t) >kvtk1 � v(�) for all � 2 [0; t] (the last inequality by de�-nition of kvtk1). Since y is nonincreasing, this means thatalso y(�) � y(t) > v(�) for all such � . Therefore0 � y(�) � y(�) + v(�) � 2y(�)for all � 2 [0; t]. From (17) and the fact that �1 is nonde-creasing, we conclude that_y � ��1(y) �2(2y) (19)almost everywhere on [0; t]. Since t 2 [0; t0) was arbitrary,(19) holds on [0; t0) a.e. By the choice of �, it follows thaty(t) � �(y(0); t) for all t 2 [0; t0). Thus (18) holds for allsuch t as well.The following is a consequence of Lemma IV.2.Corollary IV.3: Given any continuous positive de�nitefunction � : R�0 ! R�0 , there exists a KL-function � withthe following property. For any 0 < ~t � 1, and for any(locally) absolutely continuous function y : [0; ~t) ! R�0and any measurable, locally essentially bounded functionv : [0; ~t)! R�0 , if_y(t) � ��(y(t)) + v(t) (20)holds for almost all t 2 [0; ~t), then the following estimateholds:y(t) � �(y(0); t) + Z t0 2v(s) ds for all t 2 [0; ~t) : (21)

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 7Proof: First observe that one may always assume thatthe function � is locally Lipschitz, for otherwise one mayreplace � by any such function majorized by �. Take nowany y; v as in the statement, and consider the solution w(t)to the following initial value problem:_w(t) = ��(jw(t)j) + v(t); w(0) = y(0) :It follows from the standard comparison principle that 0 �y(t) � w(t) for all t 2 [0; ~t). In particular, we can write�(w(t)) instead of �(jw(t)j) in the above equation. Nowde�ne v1 and w1 as follows:v1(t) = Z t0 v(s) ds; w1(t) = w(t) � v1(t):Taking the derivative of w1 with respect to t yields_w1(t) = ��(w(t)) = ��(maxfw1(t) + v1(t); 0g)for almost all t 2 [0; ~t), where the last equation holds be-cause w is nonnegative. Let � be a KL-function as inLemma IV.2 for this �. It follows thatw1(t) � max f�(w1(0); t); kv1tk1g 8 t 2 [0; ~t);from which it follows thaty(t) � w(t) � �(w(0); t) + kv1tk1 + Z t0 v(s) ds= �(y(0); t) + Z t0 2v(s) dsfor all t 2 [0; ~t).We also need the following result in our proofs.Let N denote the class of all functions k : R ! R thatare:1. nondecreasing,2. continuous, and3. unbounded below (i.e., infx2Rk(x) = �1).We will prove:Proposition IV.4: Suppose that c : R2 ! R is such thatc(�; y) 2 N for each y 2 R and c(x; �) 2 N for each x 2 R.Then, there exists some function k 2 N such thatc(x; y) � k(x) + k(y)for all (x; y) 2 R2 .This result generalizes the one given in [24], which ap-plied only to functions of the form c(x; y) = g(x+ y) withg 2 N . We will need the \exponential" form of this result,which is as follows:Corollary IV.5: Suppose that : R2�0 ! R is such that (�; s) 2 K for each s 2 R�0 and (r; �) 2 K for eachr 2 R�0 . Then, there exists some function � 2 K suchthat (r; s) � �(r)�(s)for all (x; y) 2 (R�0 )2.Proof: Consider c(x; y) := ln (ex; ey); then c is a classN function with respect to both arguments. Let k 2 N be
as in Proposition IV.4; without loss of generality, we mayassume that k is strictly increasing. Then �(r) := ek(ln r)(and �(0) = 0) establishes the Corollary.The proof of Proposition IV.4 will be given in the ap-pendix.Proof of 2)1 in Theorem 1We �rst prove that existence of a (just continuously dif-ferentiable, cf. Remark II.3) iiss-Lyapunov function V im-plies iiss. So pick V so that (8)-(9) hold. Let �1 2 K1 and�2 2 L be functions as in Lemma IV.1 for �3. We let e�be any positive de�nite function which is locally Lipschitzand satis�es e�(r) � �1 ���12 (r)� �2 ���11 (r)�for all r � 0. By equation (8) we have:DV (�) f(�; �) � ��1(j�j) �2(j�j) + �(j�j)� �e�(V (�)) + �(j�j) (22)for all � and �.Now pick any trajectory x(�) corresponding to a controlu(�). Equation (22) says that_V (x(t)) � �~�(V (x(t))) + �(ju(t)j)for almost all t, We let � be associated to ~� as in Corol-lary IV.3. It then holds thatV (x(t)) � �(V (x(0)); t) + Z t0 2�(ju(s)j) dsfor all t � 0. Hence,�1(jx(t)j) � V (x(t))� �(V (0); t) + Z t0 2�(ju(s)j) ds� �(�2(jx(0)j); t) + Z t0 2�(ju(s)j) dsfor all t � 0, and so the su�ciency proof is complete.Proof of 1)2 in Theorem 1We �rst remark that the proof of Lemma 3.1 in [16] canbe used to show the following:Lemma IV.6: For each given KL-function �, there existsa family of mappings fTrgr>0 with:� for each �xed r > 0, Tr : R>0 onto�! R>0 is continuous andis strictly decreasing;� for each �xed " > 0, Tr(") is (strictly) increasing as rincreases and limr!1 Tr(") =1;such that �(s; t) < "for all s � r, all t � Tr("). 2Assume now that system (5) is iiss with �; �; as inDe�nition II.1. Let ' be any smooth K1-function such

8 IEEE TACthat ('(s)) � �(s) for all s � 0. Consider the followingsystem: _x(t) = f(x(t); d(t)'(jx(t)j)) ; (23)where we restrict the inputs d, thought of here as \dis-turbances", to have values in the closed unit ball: d(�) :[0;1) ! �B, where �B denotes the closed unit ball f� 2Rm : j�j � 1g in Rm . We let M denote the set of allsuch inputs, and we let x'(t; �; d) denote the trajectoryof (23) corresponding to the initial state � and the func-tion d. This is de�ned on some maximal interval [0; T+�;d)with 0 < T+�;d � 1. It then follows from (6) that, for anygiven �, d, and each t 2 [0; T+�;d), and de�ning �0 := �(�; 0):�(jx'(t; �; d)j) � �(j�j ; t)+ Z t0 (jd(s)j'(jx'(s; �; d)j)) ds� �0(j�j) + Z t0 ('(jx'(s; �; d)j)) ds� �0(j�j) + Z t0 �(jx'(s; �; d)j) ds:It thus follows, using Gronwall's inequality, that�(jx'(t; �; d)j) � �0(j�j) etfor all 0 � t < T+�;d. Hence the maximal solution staysin a bounded set (the ball of radius �0(j�j) exp(T+�;d)) ifT+�;d <1. Thus, T+�;d = +1. In conclusion:Lemma IV.7: If system (5) is iiss, then there exists asmooth K1-function ' such that system (23) is forwardcomplete, that is, x'(t; �; d) is de�ned for all t � 0, all� 2 Rn , and all d 2M. 2Because of forward completeness, this follows from [16](c.f. Propositions 5.1 and 5.5 of [16]):Lemma IV.8: Assume system (5) is iiss, and let ' begiven as in Lemma IV.7. For any �xed T > 0 and anycompact K � Rn , there is a compact K1 � Rn such thatx'(t; �; d) 2 K1 for all t 2 [0; T ], all � 2 K and all d 2M. Furthermore, there is a constant C > 0 (which onlydepends on T and the set K) such thatjx'(t; �; d)� x'(t; �; d)j � C j� � �jfor any �; � 2 K, any 0 � t � T , and any d 2M. 2We now continue with the proof of the implication 1) 2of Theorem 1. Without loss of generality, one may assumethat � is a smooth K1-function. Otherwise, one can alwaysreplace � by a smooth K1-function ~� majorized by �. Wewill �rst prove the result under the assumption that is asmooth K1-function, and then we show how to prove theresult without this assumption.De�ne g : Rn ! R�0 byg(�) = supfz(t; �; d) : t � 0; d 2 Mg ; (24)where for each � 2 Rn and d 2 M, z(�; �; d) is de�ned byz(t; �; d) = �(jx'(t; �; u)j)� Z t0 (jd(s)j'(jx'(s; �; d)j)) ds : (25)
Note that this function is well de�ned, and�(j�j) � g(�) � �0(j�j) (26)for all � 2 Rn . In particular, g(0) = 0.Let Tr(") be de�ned as in Lemma IV.6. Then one seesthat if 0 < r1 < j�j < r2, theng(�) = supfz(t; �; d) j 0 � t � Tr2 (� (r1)) ; d 2Mg:Lemma IV.9: The function g is locally Lipschitz on Rn nf0g and continuous everywhere.Proof: Fix any �0 6= 0, and let s0 = j�0j. Let K0 =�B(�0; s0=2), the closed ball centered at �0 and with radiuss0=2. Let T = T2s0 (�(s0=2)). Theng(�) = sup fz(t; �; d) : t 2 [0; T ]; d 2Mgfor all � 2 K0. According to Lemma IV.8, one knows thatthere exists some L > 0 such thatjx'(t; �; d)j � Lfor any � 2 K0, any t 2 [0; T ], and any d 2 M. Since is smooth, and in particular locally Lipschitz, there existsC1 > 0 such thatj (r1)� (r2)j � C1 jr1 � r2jfor all r1; r2 2 [0; L]. Consequently,j (jd(s)j'(jx'(s; �; d)j))� (jd(s)j'(jx'(s; �; d)j))j� C1 j'(jx'(s; �; d)j)� '(jx'(s; �; d)j)jfor all �; � 2 K0, all t 2 [0; T ], and all d 2 M. Since� and ' are smooth, and x'(s; �; d) is locally Lipschitzin � uniformly in t 2 [0; T ] and in d 2 M (this is what isasserted by the last statement in Lemma IV.8), there existssome C2 such thatj�(jx'(t; �; d)j)� �(jx'(t; �; d)j)j � C2 j� � �j ;and j'(jx'(s; �; d)j)� '(jx'(s; �; d)j)j � C2 j� � �jfor all �; � 2 K0, all t 2 [0; T ], and all d 2 M. It thenfollows that the di�erenceZ t0 (jd(s)j'(jx'(s; �; d)j)� (jd(s)j'(jx'(s; �; d)j) dsis upper bounded in absolute value by C3 j� � �j for all�; � 2 K0, all t 2 [0; T ], all d 2 M, where C3 = C1C2T .This implies thatjz(t; �; d)� z(t; �; d)j � C4 j� � �jfor all �; � 2 K0, all t 2 [0; T ], all d 2 M, where C4 =C2 + C3.Pick any " > 0. Then for each � 2 K0, there is somet�;" 2 [0; T ] and d�;" 2M such thatg(�) � z(t�;"; �; d�;") + ":

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 9Let �; � 2 K0. Theng(�)� g(�) � z(t�;"; �; d�;") + "� z(t�;"; �; d�;")� C4 j� � �j+ ": (27)Note that (27) holds for all " > 0, so it follows thatg(�)� g(�) � C4 j� � �j :By symmetry, g(�)� g(�) � C4 j� � �j. This proves thatjg(�)� g(�)j � C4 j� � �jfor all �; � 2 K0. Thus, g is locally Lipschitz on Rn n f0g.To show that g is continuous at � = 0, note that g(0) = 0,and g(�) � �0(�) ! 0 as � ! 0. Thus g is continuouseverywhere.We next show that g cannot increase too fast along tra-jectories. Pick any � 6= 0, h > 0, and j�j � 1. Let d�denote the constant function d(t) � �. Theng(x'(h; �; d�))= supt�0;d2Mn� (jx'(t; x'(h; �; d�); d)j)� Z t0 (jd(s)j'(jx'(s; x'(h; �; d�); d)j)) ds�= supt�0;d2Mn� ����x'(t+ h; �; ~d)����� Z t0 �jd(s)j'����x'(s+ h; �; ~d)����� ds�= sup��h;d2Mn� ����x'(�; �; ~d)����� Z �h �jd(s1 � h)j'����x'(s1; �; ~d)����� ds1�� sup��0;d2Mn�����x'(�; �; ~d)����� Z �0 ���� ~d(s1)���'����x'(s1; �; ~d)����� ds1�+ Z h0 (j�j' (jx'(s1; �; d�)j)) ds1� g(�) + Z h0 (j�j' (jx'(s1; �; d�)j)) ds1;where ~d is the concatenation of d� and d: ~d(t) = � if0 � t � h, and ~d(t) = d(t � h) if t > h. Let f�(�) =f(�; �'(j�j)). Since g is locally Lipschitz on Rn n f0g, it isdi�erentiable almost everywhere on Rn n f0g, and hence,for any j�j � 1,Lf�g(�) = limh!0+ g(x'(h; �; d�))� g(�)h� limh!0+ 1h Z h0 (j�j' (jx'(s1; �; d�)j)) ds1; a.e. :It then follows thatLf�g(�) � (j�j'(j�j))
almost everywhere.Observe that, since an iiss system is necessarily 0-gas,it follows from Proposition II.5 that there exists a smoothsemi-proper function V0 satisfying (12) with some continu-ous positive de�nite function � and some K-function �. LetV1 : Rn ! R be de�ned by V1(�) = V0(�) + g(�). Then V1is locally Lipschitz on Rn nf0g and continuous everywhere.Furthermore, �(j�j) � V1(�) � ��2(j�j)for some ��2 2 K1, and it holds that, for all j�j � 1,DV1(�)f(�; �'(j�j)) � ��(j�j) + 1(j�j'(j�j))almost everywhere, where 1(s) = �(s)+ (s). By TheoremB.1 in [16], one sees that there exists a continuous functionV2, smooth on Rn n f0g, such that�(j�j)2 � V2(�) � 2��2(j�j); 8 � 2 Rn ;and DV2(�)f(�; �'(j�j)) � ��(j�j)2 + 1(j�j'(j�j))for all � 6= 0, all j�j � 1. By Proposition 4.2 in [16], onesees that there exists some smooth K1-function p such thatp0(s) > 0 for all s > 0 and p � V2 is smooth everywhere.Without loss of generality, one may assume that p0(s) �1 for all s > 0. Otherwise, one may replace p by anysmooth K1-function ~p with the property that ~p0(s) = p0(s)in a neighborhood of 0 where p0(s) � 1 and and ~p0(s) �1 everywhere else. Finally, we let V = p � V2. Then Vsatis�es (8) for some �1; �2 2 K1, andDV (�)f(�; �'(j�j))� �p0(V2(�))�(j�j)=2 + p0(V2(�)) 1(j�j'(j�j))� ��3(j�j) + 1(j�j'(j�j))for all � 2 Rn , all j�j � 1, where �3 is any continuouspositive de�nite function with the property that �3(j�j) �p0(V2(�))�(j�j)=2 (e.g., �3(s) = p0(�(s)=2)�(s)=2). It thenfollows thatDV (�) f(�; �) � ��3(j�j) + 1(j�j)for all � 2 Rn , all j�j � '(j�j). To show that V satis�es anestimate of type (9), we let � = '�1, and let�̂(r) := maxj�j��(j�j);j�j�rfDV (�)f(�; �) + �3(j�j)g;and �(r) = maxf�̂(r); 1(r)g:Then � 2 K, and for all � 2 Rn and all � 2 Rm ,DV (�) f(�; �) � ��3(j�j) + �(j�j)(consider the two cases: j�j � �(j�j) and j�j � �(j�j)).This shows that V is indeed an iiss-Lyapunov function forsystem (5).

10 IEEE TACFinally we show how to obtain the result without as-suming that is smooth. First of all, one may alwaysassume that (r) � r for all r. (Otherwise, replace (r)by (r) + r.) Pick any K1-function � such that �(ps) issmooth and �(s) � �1(s) for all s � 0. Consider thesystem_x(t) = f̂(x(t); u(t)) := f(x(t); �(u(t))�(ju(t)j)); (28)where � : Rm ! R is de�ned by �(�) = �j�j if j�j 6= 0, and�(�) = 0 if j�j = 0. Since � is continuously di�erentiableand �(0) = �0(0) = 0, it follows that �(�)�(j�j) is C1, andhence, f̂ is also a locally Lipschitz map. We let x�(t; �; u)denote the trajectory of this system corresponding to theinitial state � and the input u. It then holds that� ���x�(t; �; u)��� � �(j�j ; t) + Z t0 (�(ju(s)j)) ds� �(j�j ; t) + Z t0 ju(s)j dsfor all � and all u. Hence, the system _x = f̂(x; u) is iisswith a smooth \gain"-function (which is the identity func-tion). Applying the above proved result to this system, onesees that there exists a smooth iiss-Lyapunov function VsatisfyingDV (�)f(�; �(�)�(j�j)) � ��3(j�j) + �2(j�j)for some continuous positive de�nite function �3 and someK-function �2. Observe that� = �(�)�(��1(j�j))for all � 2 Rm . Hence,DV (�)f(�; �) � ��3(j�j) + �2(��1(j�j))for all � 2 Rn , all � 2 Rm .Proof of Proposition II.5To prove Proposition II.5, we need the following result:Lemma IV.10: System (5) is 0-gas if and only if thereexist a smooth function V : Rn ! R, K1 functions�1; �2; �3, and K-functions � and �, such that, for all� 2 Rn and � 2 Rm ,�1(j�j) � V (�) � �2(j�j); (29)and DV (�)f(�; �) � ��3(j�j) + �(j�j)�(j�j): (30)Proof: Again, one direction of the implication is easyto prove by the Lyapunov direct method applied to system(5) for u = 0. The reverse is more interesting. Assume(5) is 0-gas. Then we have f(0; 0) = 0, and by a converseLyapunov argument (see e.g. [16]), there exist a smoothV : Rn ! R and functions �1; �2; �3 in K1 such that�1(j�j) � V (�) � �2(j�j) (31)
for all � 2 Rn , andDV (�)f(�; 0) � ��3(j�j): (32)Consider now the following function:~ (r; s) := maxj�j�r;j�j�s jf(�; �)� f(�; 0)� f(0; �)j : (33)Notice that ~ (r; s) is continuous, nondecreasing with re-spect to each argument, and vanishes for r = 0 or s = 0(since f(0; 0) = 0). Hence, it can be majorized by afunction (r; s) separately of class K (e.g., we can take~ (r; s) + r + s). We pick � as in Corollary IV.5. Then, itfollows from (32) and Corollary IV.5 that:DV (�)f(�; �)= DV (�)[f(�; �)� f(�; 0)] +DV (�)f(�; 0)� DV (�)[f(�; �)� f(�; 0)� f(0; �)]+DV (�)f(0; �)� �3(j�j)� jDV (�)j (j�j ; j�j)+ jDV (�)j jf(0; �)j � �3(j�j)� jDV (�)j�(j�j)�(j�j)+ jDV (�)j jf(0; �)j � �3(j�j): (34)It follows from (31) that � = 0 is a global minimum for V (�)and hence DV (0) = 0; so, since V is smooth, continuity ofDV gives that �(r) = r +maxj�j�r jDV (�)j (35)is a class K function. By local Lipschitz continuity of f(�; �),also jf(0; �)j � �(j�j) for some � 2 K. Thus, recallingequations (34) and (35) we have,DV (�)f(�; �)� ��3(j�j) + �(j�j)�(j�j)�(j�j) + �(j�j)�(j�j)� ��3(j�j) + �(j�j)�(j�j) ;with �(r) = �(r)�(r) + �(r) and �(r) = �(r) + �(r).Remark IV.11: The same result can also be obtainedalong di�erent lines, exploiting a result appeared in [22]. Itis shown there that the 0-gas property for system (5) im-plies the existence of an everywhere nonzero smooth func-tion G(x) such that _x = f(x;G(x)v) is iss with respect tov. Then, the result follows from the Lyapunov characteri-zation of input-to-state stability. 2We now can complete the proof of Proposition II.5. De-�ne �(�) of class K as follows:�(r) = Z r0 ds1 + �(s) ; (36)with � a suitable class K function to be de�ned later. Itfollows from 0-GAS that there exists a smooth V (�) as inLemma IV.10. Composing � with V and taking derivativesyields: D[(� � V )(�)] f(�; �) = DV (�)f(�; �)1 + �(V (�))� ��3(j�j)1 + �(V (�)) + �(j�j)�(j�j)1 + �(V (�)) :

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 11Then, letting �(r) = ����11 , W = ��V , and recalling (29)we obtain: DW (�) f(�; �) � ��(j�j) + �(j�j) ; (37)where � is the continuous positive de�nite function de�nedas �3(r)1 + � ���11 (�2(r))� :V. A Counter-ExampleAs already remarked in section 2, iiss implies 0-gas. Theconverse is easily seen to be false, taking any 0-gas sys-tem that exhibits a �nite escape time for some constantinput signal u 6= 0. In fact, it follows by de�nition (6)that iiss implies forward completeness of the control sys-tem (5), viz., for any control u and any � 2 Rn , the uniquemaximal solution of the initial value problem _x = f(x; u),x(0) = �, is de�ned over the interval [0;+1). It is reason-able to conjecture that iiss might be equivalent to simplyforward completeness plus 0-gas. This would make theiiss concept less interesting. In this section, we providea counter-example to this conjecture, exhibiting a systemthat is forward complete and 0-gas, but is not iiss. Inother words, this example shows that, even when restrict-ing attention to forward complete systems, iiss is a strictlystronger property than 0-gas.We begin the construction with a di�erential equation_x = f(x)which evolves in R2 and satis�es:1. it is gas;2. jf(x)j � 1 for all x 2 R2 ; and3. there is a sequence of statesx0; z0; x1; z1; x2; z2; : : :so that x(Tk ; xk) = zk for each k, for some sequence of pos-itive numbers fTkg, (where x(�; p) denotes the trajectory ofthe system with initial value p,) andxk = � 4k� � ; zk = � 4k + 3� �for each k, where \�" is arbitrary.It is easy to construct such di�erential equations. For ex-ample, one may start with a linear system _x = Ax, havingan A matrix which is Hurwitz with non-real eigenvalues,and constructed so that its orbits are clockwise-turningconverging spirals. One then scales the equation so thatsequences of points as claimed exist, and �nally one di-vides Ax by 1+ jAxj2 in order to guarantee that jf(x)j � 1for all x.Let us denote �k := max���xi+1 � zi�� : 0 � i � k, k =0; 1; 2; : : :, and pick any scalar function ' : R ! R whichsatis�es the following properties:1. '(r) = 0 when r 2 [4k+1; 4k+2], for all k = 0; 1; 2; : : :,2. '(r) = 2k�k + 1 when r 2 [4k + 3; 4(k + 1)], for allk = 0; 1; 2; : : :,
3. 0 � '(r) � 2k�k+1 if r � 4(k+1), for all k = 0; 1; 2; : : :,4. '(r) = 0 if r � 0.The hypotheses imply that '(r) � M(r) for all r, whereM is some increasing function which is zero for negative r(all we need, for r > 0, is M(r) � 2k�k +1, where k is theleast positive integer so that r < 4(k + 1)). See Fig. 4 foran illustration of the orbits of f and '. Now we let G(x) =r
ϕ(r)
0
0
1
1
2
23
3
x
x
xx
zz
zz
Fig. 4. Flow f and function ' for example of forward complete,0-gas but not iiss system'(x1)I (that is, G depends only on the �rst coordinate)and consider the two-input system _x = f(x) +G(x)u. Wewill show that this system is complete but is not iiss; it is0-GAS by construction.Claim: This system _x = f(x) +G(x)u is complete.Proof: Let x(�) be a maximal trajectory corresponding toa given control u and initial condition x(0), and supposethat x is de�ned on an interval [0; T ), with T < 1. LetK be an upper bound on the supremum norm of u (con-trols are locally essentially bounded, by de�nition). Wewill show that the trajectory is bounded, thus contradict-ing T <1. We look at the �rst coordinates x1 of the statesalong this trajectory. There are two cases to consider:(i) fx1(t); t 2 [0; T )g is bounded above.Suppose that x1(t) � L for all t. Then, since jG(x)j ='(x1) � M(x1) for all x, the velocities are bounded by1 +M(L)K and so the trajectory stays in the ball aboutx(0) of radius (1 +M(L)K)T .(ii) fx1(t); t 2 [0; T )g is not bounded above.There must be an in�nite number of intervals of the form[4k+1; 4k+2] which are transversed by x1(t). That is, thereare a countable set of disjoint closed intervals J1; J2; : : :included in [0; T ), each Ji = [si; ti], so that x1(si) = 4ki+1

12 IEEE TACand x1(ti) = 4ki + 2, for some ki's. We claim that everyJi has length at least one, which then contradicts T <1.Indeed, take any interval Ji and suppose that ti � si < 1.Observe that, on Ji, ' � 0, so the system equations are_x = f(x). By the Mean Value Theorem,1 � jx(ti)� x(si)j � jf(x(t))j (ti � si) < 1 ;a contradiction. This completes the proof of completeness.Claim: This system is not iiss.Proof: We will show that there is an initial state � and acontrol u so that jx(t; �; u)j ! 1 as t ! 1, where u hasthe following property: there is some increasing sequencetk ! +1 so thatju(t)j � 1 if t 2 �tk; tk + 2�k�and u(t) = 0 otherwise; moreover, the sequence is alsoassumed to satisfy tk+1 � tk > 2�k.The existence of such �; u means that the system cannotbe iiss. To see this, suppose that the system would be iiss.Then, for some �; 2 K1, it holds thatlim supt!1 �(jx(t; �; u)j) � Z 10 (ju(s)j) ds� 1Xk=0 Z[tk;tk+2�k] (1) ds = 2 (1) <1 ;but this contradicts the fact that jx(t; �; u)j ! 1 as t!1.We start with � = x1, and let u � 0 on [0; t1], wheret1 := T1. So, x(t1; �; u) = z1, and t1 � 1 because of theassumption that jf(x)j � 1. Next we continue building thecontrol u and the trajectory x(�) = x(�; �; u), inductivelyon the intervals [tk; tk+1] :We do the construction in such a fashion thatx (tk) = zkand x �tk + 2�k� = xk+1for k = 1; 2; : : :. The idea is to switch between an uncon-trolled motion on every interval of the form [tk+2�k; tk+1]and appropriate control motions on the small intervals. Toclarify the construction, we �rst do separately the casek = 1.The control on the interval [t1; t1 + 1=2] is de�ned asfollows. We wish to forcex(t) = z1 + 2(t� t1) �x2 � z1� ; t 2 [t1; t1 + 1=2]so that we go from x(t1) = z1 to x(t1 + 1=2) = x2 along astraight line. The equation _x = f +Gu along this line is:2(x2 � z1)� f(x(t)) = G(x(t))u(t) = (2�1 + 1)u(t)so we may letu(t) := 2(x2 � z1)� f(z1 + 2(t� t1)(x2 � z1))2�1 + 1 :
Since ��x2 � z1�� � �1 (by de�nition of the �k's) andjf(x(t))j � 1 for all t, we conclude that ju(t)j � 1 on[t1; t1 + 1=2], as was desired. Finally, we let u(t) = 0 fort 2 [t1 + 1=2; t2], where t2 := T2 + (t1 + 1=2), which makesx(t2) = z2.Now we do the case of arbitrary k. We pick the curve:x(t) = zk + 2k(t� tk) �xk+1 � zk� ; t 2 �tk; tk + 2�k�so that we go from x(tk) = zk to x(tk +2�k) = xk+1 alonga line, and the equation along this line becomes:2k �xk+1 � zk�� f(x(t))= G(x(t))u(t) = �2k�k + 1�u(t)so we may let u(t) be as follows2k �xk+1 � zk�� f(zk + 2k(t� tk)(xk+1 � zk))(2k�k + 1) :Since ��xk+1 � zk�� � �k and jf(x(t))j � 1 for all t, we haveju(t)j � 1 for all t in this interval of length 2�k. Finally,we let u(t) = 0 for t 2 �tk + 2�k; tk+1� ;where tk+1 := Tk+1+�tk + 12k �, so that we have x (tk+1) =zk+1, as needed for the induction step.VI. Comments on Related NotionsThe notion of iiss di�ers from iss in its use of \R (juj)"instead of \sup (juj)." The same substitution may be usedto de�ne analogues of input/output stability and of de-tectability notions. We brie y discuss some of these now.Reasons of space preclude a detailed discussion, but proofsof the various claims are not di�cult to obtain by follow-ing steps like those used in the rest of the paper. In thissection, we deal with systems with outputs_x = f(x; u) ; y = h(x) ; (38)where, as earlier, the output map h : Rn ! Rp is assumedto be continuous and h(0) = 0. For each � 2 Rn andeach input u, we let y(t; �; u) be the output function ofthe system, i.e., y(t; �; u) = h(x(t; �; u)) (de�ned on somemaximal interval [0; T�;u)).Consider the following type of estimation:�(jx(t; �; u)j) � �(j�j ; t) (39)+ Z t0 1(jy(s; �; u)j) ds + Z t0 2(ju(s)j) dsfor all t 2 [0; T�;u), where � 2 KL, � 2 K1, and 1; 2 2 K.If (39) holds for every trajectory of (38), then we say thatsystem (38) is integral input-output-to-state stable (iioss).This is a notion of detectability: inputs and outputs are\small" implies that states are also small; see [27] for thecorresponding notion of (sup-norm) ioss. We say that asmooth function V is an iioss-Lyapunov function for sys-tem (38) if there exist functions �1, �2 2 K1, �1; �2 2 K,and a continuous positive de�nite function �3, such that�1(j�j) � V (�) � �2(j�j) (40)

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 13for all � 2 Rn , andDV (�)f(�; �) � ��3(j�j) + �1(jh(�)j) + �2(j�j) (41)for all � 2 Rn and all � 2 Rm . A proof analogous tothat of Theorem 1, by virtue of Corollary IV.3, shows thefollowing: If a system admits an iioss-Lyapunov function,then the system is iioss.The area of input-to-output (as opposed to input-to-state) stability deals with properties which may be de-scribed, informally, as \small inputs produce small out-puts." Such properties appear naturally in regulation prob-lems. In particular, one may de�ne a concept of ios (input-to-output stability), see [23] and [28]. This is yet anotherobvious candidate for the replacement of sup norms by in-tegrals. So let us call system (38) integral input-to-outputstable (iios) if there exist � 2 K1, � 2 KL, and 2 Ksuch that�(jy(t; �; u)j) � �(j�j ; t) + Z t0 (ju(s)j) ds (42)holds on the maximal interval [0; T�;u) for every trajectoryof the system. Correspondingly, we may de�ne a Lyapunovconcept as follows. A smooth function V is called an iios-Lyapunov function for system (38) if there exist functions�1, �2 2 K1, � 2 K, and a continuous positive de�nitefunction �3, such that�1(jh(�)j) � V (�) � �2(j�j) (43)for all � 2 Rn , andDV (�)f(�; �) � ��3(V (�)) + �(j�j) (44)for all � 2 Rn and all � 2 Rm . Again, by virtue of Corol-lary IV.3, one can prove: If a system adimits an iios-Lyapunov function, then the system is iios.Note that the di�erence between (8) and (43) is thatthe function V in (8) is proper (i.e., radially unbounded),while in (43) the function V only majorizes a K1-functionof jyj. It is also interesting to consider the following typeof condition on V :�1(jh(�)j) � V (�) � �2(jh(�)j) (45)for some K1-function �1; �2. It then follows, again ap-pealing to Corollary IV.3, that if system (38) admits a Vsatisying (45) and (44), then the following holds for all tra-jectories of the system:�(jy(t; �; uj)� �(jy0j ; t) + Z t0 (ju(s)j) ds; 8 t 2 [0; T�;u);for some � 2 K1; � 2 KL and 2 K, where y0 = y(0; �; u).VII. ConclusionsThe iiss notion was introduced and motivated both as anatural mathematical concept, generalizing �nite H2 gain,
and through a tracking problem and other applications.We proved a necessary and su�cient Lyapunov-like char-acterization of the iiss property, as well as a characteri-zation based on a LaSalle-type dissipation inequality anddetectability notions. We also provided a counterexampleshowing that iiss is not just the conjunction of forwardcompleteness and 0-gas. We are con�dent that the resultspresented here, besides their intrinsic interest, will motivatemuch further research into the theory and applications ofiiss. AppendixI. AppendicesA. Proof of Lemma IV.1Assume without loss of generality that �(r) ! 0 asr ! +1 (otherwise one can always consider ~�(r) =minf�(r); 1=(1+ r)g). Then the function � admits a globalmaximum over the interval [0;+1). LetM = maxr�0 �(r),and de�ne �̂(r) = �(r)=M . Pick now rM > 0 such that�̂(rM ) = 1. Then, we can de�ne the following functions:�̂1(r) = � min r�s�rM �̂(s) for r � rM1 for r > rM ; (46)�̂2(r) = � 1 for r < rMmin rM�s�r �̂(s) for r � rM :Notice that �̂1, (�̂2) is a non-decreasing (non-increasing)function, and, by equation (46), considering separately thecases r > rM and r � rM ,�̂(r) � �̂1(r) �̂2(r) : (47)Then, we can choose �1 and �2 according to:�1(r) = M�̂1(r)r�2(r) = �̂2(r)=(1 + r) :Notice that �1 2 K1 and �2 2 L. Taking into account (47)we have:�(r) =M�̂(r) �M�̂1(r)�̂2(r) � �1(r)�2(r) (48)for all r � 0.B. Proof of Proposition IV.4Proposition IV.4 will follow from the following result.Lemma A.1: Let c be as in the statement of Proposi-tion IV.4. Then, there exists a function g 2 N such that,for each y 2 R,c(x; y)� g(x) ! �1 as jxj ! 1 : (49)Proof: We will assume without loss of generality thatc(0; 0) > 0. (If c(0; 0) < 0, we simply pick any constanta so that a < c(0; 0), apply the Lemma to c0 := c � a toobtain some function g0, and then let g := g0 + a). Let�x := supx2Rfx j c(x; 0) = 0g :

14 IEEE TAC(Note that, since c(�; 0) is continuous, unbounded below,and achieves the some positive value, there is indeed atleast one x so that c(x; 0) = 0; and by continuity, c(�x; 0) =0). Now introduce the following set:G := �(x; y) 2 R2 j y � 0; c(x; y) + y = 0 :Claim: G is the graph of a continuous, nonincreasing,onto function g0 : (�1; �x]! [0;1) :To establish this claim, we �rst prove that, if x2 � x1and (x1; y1) 2 G, then there is a y2 so that (x2; y2) 2 G, andany such y2 must satisfy y1 � y2. Consider the functionC(y) := c(x2; y) + y. AsC(y1) = c(x2; y1) + y1 � c(x1; y1) + y1 = 0and C(y) ! +1 as y ! +1 (because c(x2; �) is nonde-creasing), we conclude, using continuity of C, that there issome y2 so that C(y2) = 0, as required. And, given any y2so that (x2; y2) 2 G, if it were the case that y1 > y2 thenit would hold that0 = c(x1; y1) + y1 > c(x2; y2) + y2 = 0 ;a contradiction. Thus, as stated, y1 � y2.In particular, it follows that if (x; y1) and (x; y2) are bothin G then necessarily y1 = y2 (apply with x1 = x2 = x), soG is the graph of some function g0, and g0 is nonincreasing.Next, we note that the projection of G on the x coordi-nate (that is, the domain of the function g0) is (�1; �x].Pick any (x; y) 2 G. Suppose that x > �x. Then,c(�x; 0) � c(x; 0) � c(x; y) + y = 0 = c(�x; 0) (using thatc is nondecreasing in each variable, and y � 0). Then,c(x; 0) = 0, so x � �x by maximality of �x, a contradiction.Thus, x � �x. Conversely, given any x � �x, we may applyagain the argument given earlier (now with x2 = x andx1 = �x) to obtain that there is some y so that (x; y) 2 G.The projection of G on the y coordinate is [0;1). Indeed,pick any y � 0; as c(�x; y) + y � c(�x; 0) = 0 and c(�; y) iscontinuous and unbounded below, there is some x so thatc(x; y) + y = 0.To complete the proof of the claim, we need to see thatg0 is continuous. But this is an immediate consequence ofthe fact that g0 is monotonic and onto an interval.Finally, we de�neg(x) := � � 12g0(x) if x � �xc(x; x) � c(�x; �x) + x� �x if x > �x :By construction, g 2 N . We show the desired limit prop-erty. Pick any y 2 R.For x � maxf�x; yg,c(x; y)� g(x) = c(x; y)� c(x; x) � x+ c � c� xwhere c := �x+c(�x; �x), so c(x; y)�g(x)! �1 as x! +1.
On the other hand, for any x � �x such that g0(x) > y,c(x; y)� g(x) = c(x; y) + 12g0(x)� c(x; g0(x)) + g0(x) � 12g0(x) = �12g0(x)and � 12g0(x)! �1 as x! �1.We now complete the proof of Proposition IV.4. Letg be as in Lemma A.1, and de�ne the following functionh : R ! R: h(y) := supx2R [c(x; y)� g(x)] :(As c(�; y) � g is continuous, and is negative for large jxj,the supremum is indeed �nite.)Since h is the sup of a family fc(x; �) � g(x); x 2 Rg ofcontinuous functions, h is itself continuous, and since eachmember of this family is nondecreasing, h is also nonde-creasing. We prove now that h(y) ! �1 when y ! �1,which will then allow us to conclude that h 2 N .Pick any K 2 R. For this K, we pick a � > 0 so thatc(x; 0) � g(x) < K whenever jxj > �. Next we pick anL � 0 so that c(�; L) < K + g(��). (Such an L existsbecause c(�; �) is unbounded below.) We claim thaty < L ) h(y) < K :Take one such y, and any x 2 R; we need to see thatc(x; y)� g(x) < K. Consider �rst the case jxj � �; thenc(x; y)� g(x) � c(�; L)� g(��) < K :If instead jxj > �, then alsoc(x; y)� g(x) � c(x; 0)� g(x) < K(using that y < L � 0).So we have constructed g and h in N such thatc(x+ y) � g(x) + h(y)� maxfg(x); h(x)g+maxfg(y); h(y)g (50)for all x and y. Thus, k := maxfg; hg is as wanted forProposition IV.4.C. Resonance exampleWe explain here how the bounded control and the tra-jectory leading to r(t) in Figures 2 and 3 were generated.To obtain this trajectory, we did as follows. We startedwith the initial state (0; 0:1; 0; 0:1)0, and took the feedbackcontrol u1 = 3tanh(z1) (= 3tanh( _�)) and u2 = 0. Sincejtanh(x)j � 1 for all x 2 R, the input signal, resulting fromthis destabilizing feedback, shown in Fig. 3, is bounded.Note that a sort of \non-linear resonant behavior" is ob-tained. (It is worth pointing out that a similar e�ect is metalso for vanishing references, if the convergence of u1 to 0is su�ciently slow.) The simulation used the parametersvalues shown in the next table, and were obtained using the

ANGELI, SONTAG, AND WANG: INTEGRAL INPUT TO STATE STABILITY 15ode23 MATLAB routine, with tolerance 0:001 and initialcondition [0; 0:1; 0; 0:1]0.Parameter Value Parameter Valuem 1 ML2 3kp1 2 kd1 2kp2 1 kd2 1References[1] Angeli, D., \Input-to-state stability of PD-controlled robotic sys-tems," Automatica, 35 (1999): 1285-1290.[2] Battilotti, S., \Robust stabilization of nonlinear systems withpointwise norm bounded uncertainties: A control Lyapunov ap-proach," IEEE Trans. Autom. Control 44(1999): 3-17.[3] Christo�des, P.D., and A.R. Teel, \Singular perturbationsand input-to-state stability," IEEE Trans. Automat. Control41(1996): 1645-1650.[4] Gr�une, L., E.D. Sontag, and F. Wirth, \Asymptotic stabilityequals exponential stability, and ISS equals �nite energy gain|ifyou twist your eyes," Systems and Control Letters, to appear.[5] Hahn, W., Stability of Motion, Springer-Verlag, Berlin, 1967.[6] Hespanha, J.P, and A.S. Morse, \Certainty equivalence impliesdetectability," Systems and Control Letters 36(1999): 1-13.[7] Hespanha, J.P, and A.S. Morse, \Supervisory control of integral-input-to-state stabilizing controllers," Proc. of the 5th EuropeanControl Conference, Karlsruhe, September 1999.[8] Hu, X.M., \On state observers for nonlinear systems," Systems& Control Letters 17 (1991), pp. 645{473.[9] Isidori, A., \Global almost disturbance decoupling with stabil-ity for non minimum-phase single-input single-output nonlinearsystems," Systems & Control Letters 28 (1996), pp. 115{122.[10] Kokotovic, P. and M. Arcak, \Constructive nonlinear control:progress in the 90's," Invited Plenary Talk, IFAC Congress, inProc. 14th IFAC World Congress, the Plenary and Index Volume,pp. 49{77, Beijing, 1999.[11] Jiang, Z.-P., A. Teel, and L. Praly, \Small-gain theorem for ISSsystems and applications," Mathematics of Control, Signals, andSystems, 7 (1994), pp. 95{120.[12] Khalil, H.K., Nonlinear Systems, Prentice-Hall, Upper SaddleRiver, NJ, second ed., 1996.[13] Krstic, M. and H. Deng, Stabilization of Uncertain NonlinearSystems, Springer-Verlag, London, 1998.[14] Krsti�c, M., I. Kanellakopoulos, and P. V. Kokotovi�c, Nonlinearand Adaptive Control Design, John Wiley & Sons, New York,1995.[15] Liberzon, D., \ISS and integral-ISS disturbance attenuation withbounded controls," IEEE Conf. on Decision and Control, 1999,to appear.[16] Lin, Y., E.D. Sontag and Y. Wang, \A smooth converse Lya-punov theorem for robust stability," SIAM Journal on Controland Optimization 34(1996): 124-160[17] Lu, W.M., A class of globally stabilizing controllers for nonlinearsystems, Systems & Control Letters 25 (1995), pp. 13{19.[18] Lu, W..M., \A state-space approach to parameterization of sta-bilizing controllers for nonlinear systems," IEEE Transactions onAutomatic Control 40 (1995): 1576{1588.[19] Marino, R., and P. Tomei, \Nonlinear output feedback track-ing with almost disturbance decoupling," IEEE Trans. Automat.Control 44(1999): 18{28.[20] Praly, L., and Y. Wang, \Stabilization in spite of matched un-modelled dynamics and an equivalent de�nition of input-to-statestability," Math. of Control, Signals, and Systems 9 (1996): 1-33.[21] Sepulchre, R., M. Jankovic, and P.V. Kokotovic, \Integrator for-warding: a new recursive nonlinear robust design," Automatica33(1997): 979-984.[22] Sontag, E.D., \Further facts about input to state stabilization,"IEEE Trans. on Autom. Control 35(1990): 473-476.[23] Sontag, E.D., `Smooth stabilization implies coprime factoriza-tion", IEEE Trans. Automat. Contr. 34(1989): 435-443.[24] Sontag, E.D,. \Comments on integral variants of ISS," Systemsand Control Letters 34(1998): 93-100.[25] Sontag, E.D., and Y. Wang, \On characterizations of the input-to-state stability property," Systems & Control Letters 24 (1995):351-359.
[26] Sontag, E.D., and Y. Wang, \New characterizations of the inputto state stability property," IEEE Trans. on Autom. Control 41(1996): 1283-1294.[27] Sontag, E.D., and Y. Wang, \Output-to-state stability and de-tectability of nonlinear systems," Systems and Control Letters29(1997): 279-290.[28] Sontag, E.D., and Y. Wang, \A notion of input to output sta-bility," Proc. European Control Conf., Brussels, July 1997, PaperWE-E A2, CD-ROM �le ECC958.pdf, 6 pages.[29] Tsinias, J., \Input to state stability properties of nonlinear sys-tems and applications to bounded feedback stabilization usingsaturation," ESAIM Control Optim. Calc. Var. 2(1997): 57-85.[30] van der Schaft, A,. L2-gain and passivity techniques in nonlinearcontrol (Lecture Notes in Control and Information Sciences, 218),Springer-Verlag, London, 1996.
Copyright © 2022 FDOKUMEN

