






Bahasa
Halaman
Hukum


5. SOLVING LINEAR EQUATIONS
• The LU Decomposition Principle
• Gaussian Elimination
• Pivoting: Why and how
• Norms and distances
• Roundoff errors and backward stability
• Overconstrained systems of linear equations
Class web site:
http://www.di.ens.fr/~brette/calculscientifique/index.htm
1

Lower-Triangular Problems: Forward Substitution
L11
L21 L22
L31 L32 L33
. . . . . . . . . . . .
Ln1 Ln2 Ln3 . . . Lnn
x1
x2
x3...
xn
=
b1
b2
b3...
bn
L~x = ~b
• Equation #i can be written as
Li1x1 + Li2x2 + · · · + Liixi = bi
xi =1
Lii(bi − Li1x1 − Li2x2 − · · · − Li,i−1xi−1)
=1
Lii
bi − (Li1, Li2, · · · , Li,i−1)
x1...
xi−1
• Or in SCILAB:
function x=lowtri(L,b)
n=length(b);
x=zeros(n,1);
x(1) = b(1)/L(1,1);
for i=2:n
x(i)=(b(i)-L(i,1:i-1)*x(1:i-1))/L(i,i);
end;
endfunction
2

Upper-Triangular Problems: Backward Substitution
U11 U12 U13
0 U22 U23
0 0 U33
x1
x2
x3
=
b1
b2
b3
→
x3 = b3/U33
x2 =1
U22(b2 − U23x3)
x1 =1
U11(b1 − U12x2 − U13x3)
In general:
U11 U12 · · · U1n
U22 · · · U2n. . .
Unn
x1
x2
· · ·xn
=
b1
b2
· · ·bn
⇐⇒ U~x = ~b
• Equation #i can be written as
Ui,ixi + Ui,i+1xi+1 + · · ·Ui,nxn = bi
xi =1
Uii
bi − (Ui,i+1 · · ·Ui,n)
xi+1...
xn
• Or in SCILAB:
function x=uptri(U,b)
n=length(b);
x=zeros(n,1);
x(n)=b(n)/U(n,n);
for i=n-1:-1:1
x(i)=(b(i)-U(i,i+1:n)*x(i+1:n))/U(i,i);
end;
endfunction
• Cost: O(n2) flops.
3

LU Decomposition Principle
• Problem: Solve A~x = ~b
• Solution:
◦ Construct the factorization A = LU where L is lower-triangular
and U is upper triangular.
◦ Solve the two problems L~y = ~b and U~x = ~y.
• Why?
A~x = (LU)~x = L(U~x) = L~y = ~b
4

Gaussian Elimination: Example
2x− y + 3z = 1
−6x + 4y + 2z = 0
4x + 3y − 2z = 2
(1)
(2)
(3)
⇐⇒
2 −1 3
−6 4 2
4 3 −2
x
y
z
=
1
0
−2
Idea: Iterative reduction to an upper-triangular system
5

Gaussian Elimination: Example
2x− y + 3z = 1
−6x + 4y + 2z = 0
4x + 3y − 2z = 2
(1)
(2)
(3)
⇐⇒
2 −1 3
−6 4 2
4 3 −2
x
y
z
=
1
0
−2
Idea: Iterative reduction to an upper-triangular system
⇓
2x− y + 3z = 1
y + 11z = 3
5y − 8z = −4
(1′) = (1)
(2′) = (2)− −62
(1)
(3′) = (3)− 42(1)
⇐⇒
2 −1 3
0 1 11
0 5 −8
x
y
z
=
1
3
−4
⇓
2x− y + 3z = 1
y + 11z = 3
−63z = −19
(1′′) = (1′)(2′′) = (2′)(3′′) = (3′)− 5
1(2′)
⇐⇒
2 −1 3
0 1 11
0 0 −63
x
y
z
=
1
3
−19
6

Equivalent Matrix Products
2 −1 3
−6 4 2
4 3 −2
x
y
z
=
1
0
−2
(1)
(2)
(3)
⇐⇒ A~x = ~b
Linear Transformation
2 −1 3
0 1 11
0 5 −8
x
y
z
=
1
3
−4
(1′) = (1)
(2′) = (2) + 3(1)
(3′) = (3)− 2(1)
⇐⇒ A′~x = ~b′
A′ = M ′A =
1 0 0
3 1 0
−2 0 1
2 −1 3
−6 4 2
4 3 −2
; ~b′ = M ′~b
Linear Transformation
2 −1 3
0 1 11
0 0 −63
x
y
z
=
1
3
−19
(1′′) = (1′)(2′′) = (2′)(3′′) = (3′)− 5(2′)
⇐⇒ A′′~x = ~b′′
A′′ = M ′′A′ =
1 0 0
0 1 0
0 −5 1
2 −1 3
0 1 11
0 5 −8
; ~b′′ = M ′′~b′
In particular
A′′ = M ′′M ′A~b′′ = M ′′M ′~b
⇐⇒
A = (M ′′M ′)−1A′′ = (M ′−1M ′′−1)A′′
~b = (M ′−1M ′′−1)~b′′
7

Remark:
1 0 0
3 1 0
−2 0 1
1 0 0
−3 1 0
2 0 1
=
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 −5 1
1 0 0
0 1 0
0 5 1
=
1 0 0
0 1 0
0 0 1
1 0 0
−3 1 0
2 0 1
1 0 0
0 1 0
0 5 1
=
1 0 0
−3 1 0
2 5 1
= (M ′′M ′)−1 = M ′−1M ′′−1
So
A =
1 0 0
−3 1 0
2 5 1
2 −1 3
0 1 11
0 0 −63
= LU
8

In General
A =
∗ ∗ ∗ ... ∗ ∗∗ ∗ ∗ ... ∗ ∗∗ ∗ ∗ ... ∗ ∗. . . . . . . .. . . . . . . .
∗ ∗ ∗ . . . ∗ ∗
(1)
(2)(3)
.
.
(n)
−→
∗ ∗ ∗ . . . ∗ ∗∗ ∗ . . . ∗ ∗∗ ∗ . . . ∗ ∗. . . . . . .. . . . . . .
∗ ∗ . . . ∗ ∗
(1)
(22) = (2)− v21(1)(32) = (3)− v31(1)
.
.
(n2) = (n)− vn1(1)
−→
∗ ∗ ∗ . . . ∗ ∗∗ ∗ . . . ∗ ∗∗ . . . ∗ ∗. . . . . .
. . . . . .∗ . . . ∗ ∗
(1)(22)
(33) = (32)− v32(22).
.(n3) = (n2)− vn2(22)
−→ . . .
−→
∗ ∗ ∗ . . . ∗ ∗∗ ∗ . . . ∗ ∗∗ . . . ∗ ∗
. . .. .
∗
(n, n) = (n, n− 1)− vn,n−1(n− 1, n− 1)
• Update rule:
for k=1:n-1
v(k+1:n)=A(k+1:n,k)/A(k,k);
for i=k+1:n
A(i,k+1:n)=A(i,k+1:n)-v(i)*A(k,k+1:n);
end
end
• Note: A is destroyed in the process.
9

In General
A =
∗ ∗ ∗ ... ∗ ∗∗ ∗ ∗ ... ∗ ∗∗ ∗ ∗ ... ∗ ∗. . . . . . . .. . . . . . . .
∗ ∗ ∗ . . . ∗ ∗
(1)
(2)(3)
.
.
(n)
−→
∗ ∗ ∗ . . . ∗ ∗v21 ∗ ∗ . . . ∗ ∗v31 ∗ ∗ . . . ∗ ∗. . . . . . . .. . . . . . . .
vn1 ∗ ∗ . . . ∗ ∗
(1)
(22) = (2)− v21(1)(32) = (3)− v31(1)
.
.
(n2) = (n)− vn1(1)
−→
∗ ∗ ∗ . . . ∗ ∗v21 ∗ ∗ . . . ∗ ∗v31 v32 ∗ . . . ∗ ∗. . . . . . . .
. . . . . . . .vn1 vn2 ∗ . . . ∗ ∗
(1)(22)
(33) = (32)− v32(22).
.(n3) = (n2)− vn2(22)
−→ . . .
−→
∗ ∗ ∗ . . . ∗ ∗v21 ∗ ∗ . . . ∗ ∗v31 v32 ∗ . . . ∗ ∗. . . . . . . .. . . . . . . .
. . . . . . . .vn1 vn2 ∗ . . . vn,n−1 ∗
(n, n) = (n, n− 1)− vn,n−1(n− 1, n− 1)
• Update rule:
for k=1:n-1
v(k+1:n)=A(k+1:n,k)/A(k,k);
for i=k+1:n
A(i,k+1:n)=A(i,k+1:n)-v(i)*A(k,k+1:n);
end
end
• Note: A is destroyed in the process.
10

The LU Decomposition
• Gaussian elimination→ the LU decomposition A = LU with
L =
1
v21 1
v31 v32 1
. . . .
. . . . . . .
vn1 vn2 . . . . . . vn,n−1 1
and
U =
∗ ∗ ∗ . . . ∗ ∗∗ ∗ . . . ∗ ∗∗ . . . ∗ ∗
. . .
. .
∗
• Cost: 2((n− 1)× (n− 1) + . . . + 2× 2 + 1) ≈ 2
3n3.
11

// Returns the LU decomposition of A
function [L,U]=ludec(A);
[n,n]=size(A);
for k=1:n-1
A(k+1:n,k)=A(k+1:n,k)/A(k,k);
A(k+1:n,k+1:n)=A(k+1:n,k+1:n)-A(k+1:n,k)*A(k,k+1:n);
end
L=eye(n,n)+tril(A,-1);
U=triu(A);
endfunction
// Solves the linear system A*x=b via LU decomposition
function x=lusolve(A,b)
[L,U]=ludec(A);
y=lowtri(L,b);
x=uptri(U,y);
endfunction
12
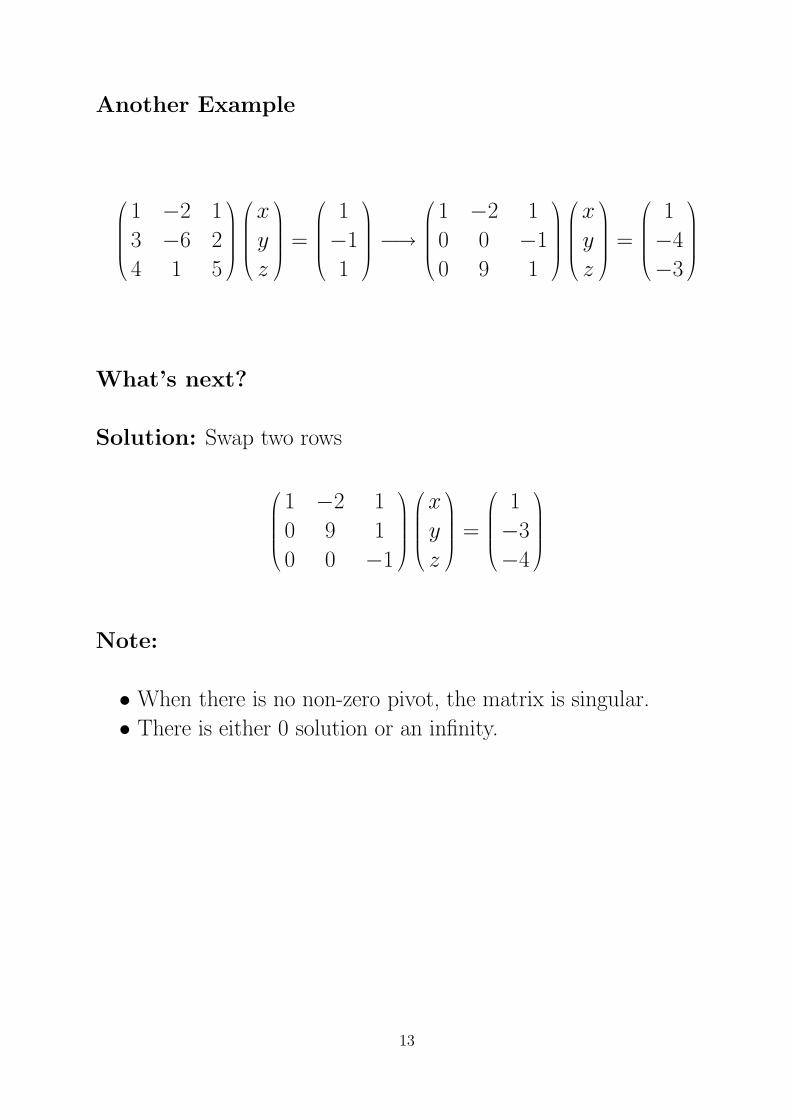
Another Example
1 −2 1
3 −6 2
4 1 5
x
y
z
=
1
−1
1
−→
1 −2 1
0 0 −1
0 9 1
x
y
z
=
1
−4
−3
What’s next?
Solution: Swap two rows
1 −2 1
0 9 1
0 0 −1
x
y
z
=
1
−3
−4
Note:
• When there is no non-zero pivot, the matrix is singular.
• There is either 0 solution or an infinity.
13

When LU fails...
Consider
A =
δ 1
1 1
=
1 01
δ1
δ 1
0 1− 1
δ
=⇒ Factorization is only possible when δ 6= 0.
Even Worse...
• Consider the system A~x =
δ + 1
2
• Its actual solution is ~x =
1
1
even when δ = 0.
• LU solution:
L~y = ~b
U~x = ~y
1 01
δ1
y1
y2
=
δ + 1
2
⇐⇒
y1 = δ + 1 ∼= 1
y2 = 2− y1
δ∼= −1
δ
δ 1
0 1− 1
δ
x1
x2
=
y1
y2
=⇒
x2 =y2
1− 1/δ∼= − 1/δ
− 1/δ= 1
x1 =y1 − x2
δ∼= 1− 1
δ= 0
14
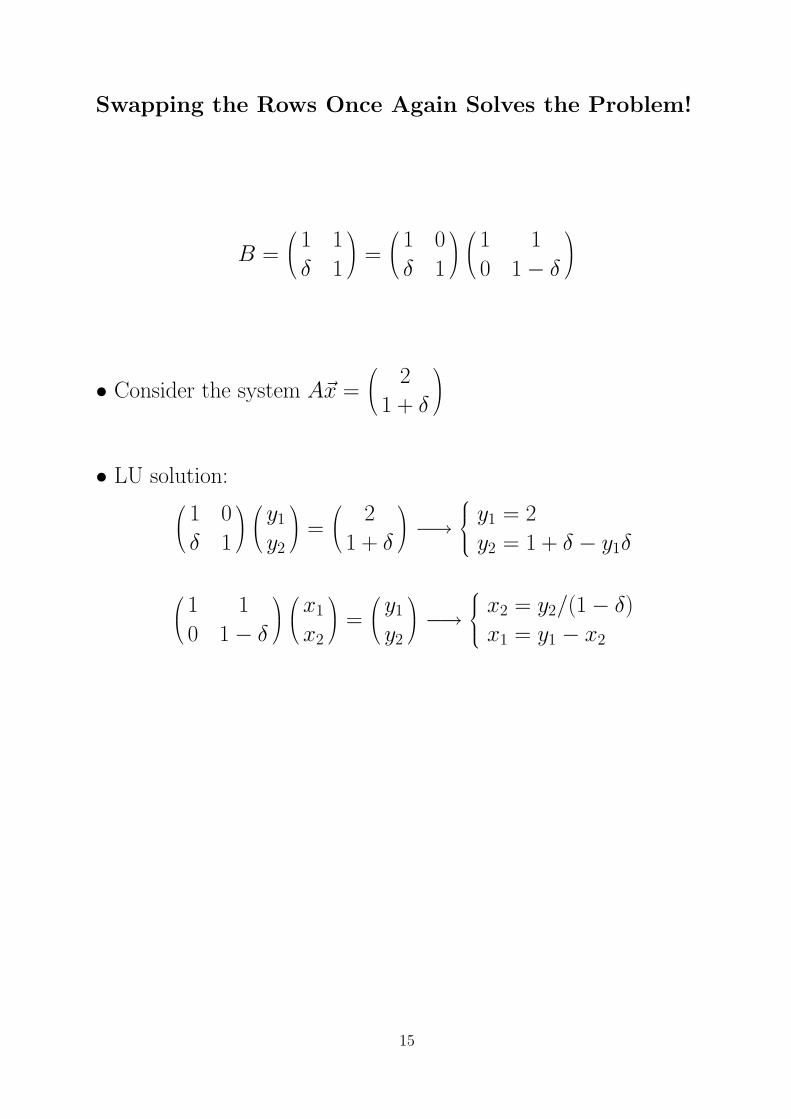
Swapping the Rows Once Again Solves the Problem!
B =
1 1
δ 1
=
1 0
δ 1
1 1
0 1− δ
• Consider the system A~x =
2
1 + δ
• LU solution:
1 0
δ 1
y1
y2
=
2
1 + δ
−→
y1 = 2
y2 = 1 + δ − y1δ
1 1
0 1− δ
x1
x2
=
y1
y2
−→
x2 = y2/(1− δ)
x1 = y1 − x2
15
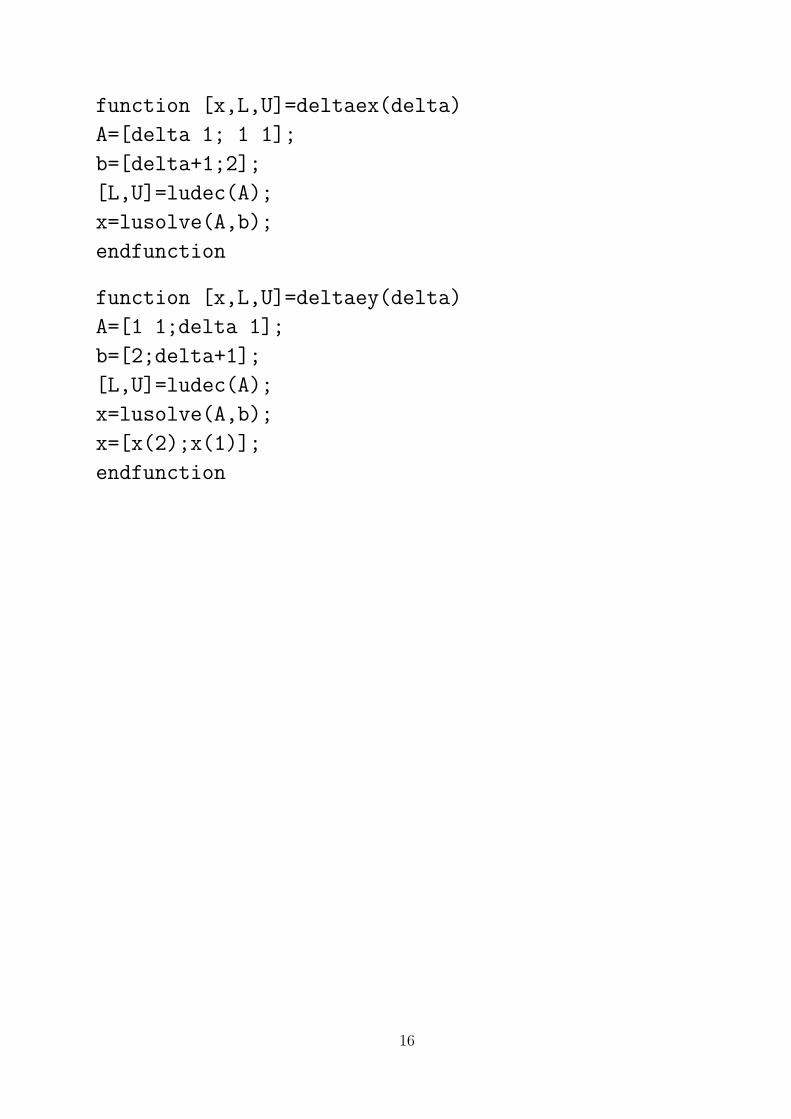
function [x,L,U]=deltaex(delta)
A=[delta 1; 1 1];
b=[delta+1;2];
[L,U]=ludec(A);
x=lusolve(A,b);
endfunction
function [x,L,U]=deltaey(delta)
A=[1 1;delta 1];
b=[2;delta+1];
[L,U]=ludec(A);
x=lusolve(A,b);
x=[x(2);x(1)];
endfunction
16
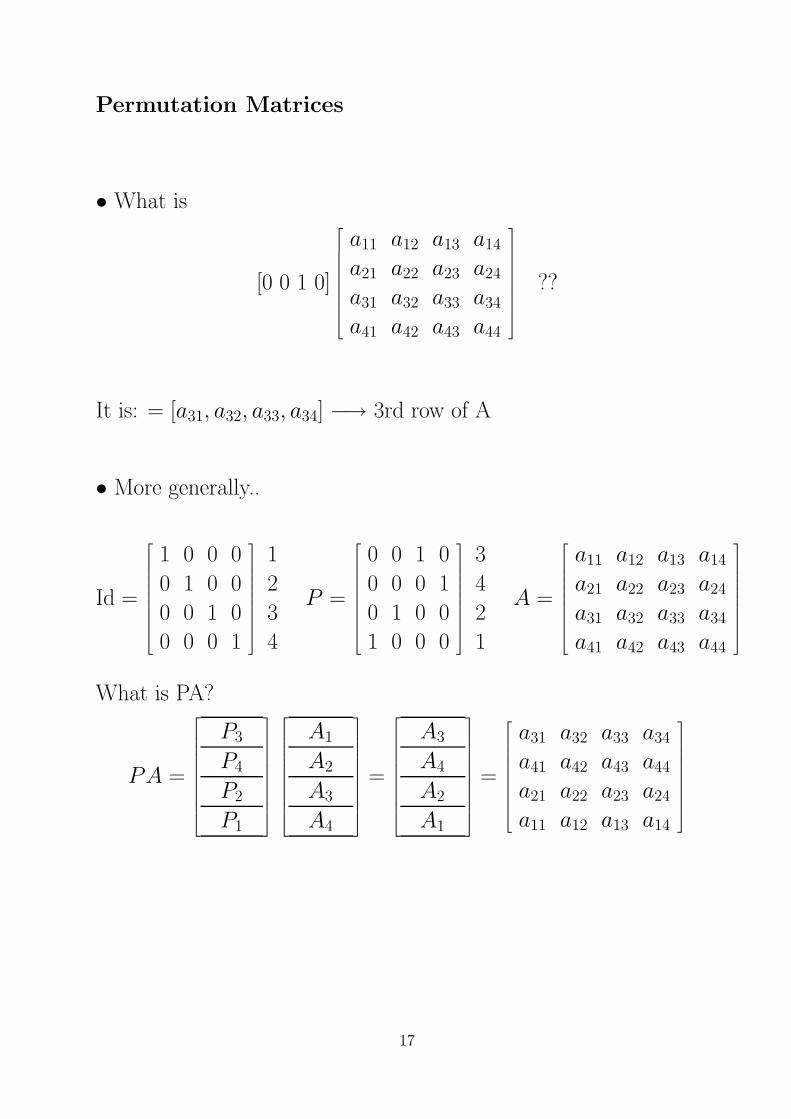
Permutation Matrices
• What is
[0 0 1 0]
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44
??
It is: = [a31, a32, a33, a34] −→ 3rd row of A
• More generally..
Id =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
1
2
3
4
P =
0 0 1 0
0 0 0 1
0 1 0 0
1 0 0 0
3
4
2
1
A =
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44
What is PA?
PA =
P3
P4
P2
P1
A1
A2
A3
A4
=
A3
A4
A2
A1
=
a31 a32 a33 a34
a41 a42 a43 a44
a21 a22 a23 a24
a11 a12 a13 a14
17
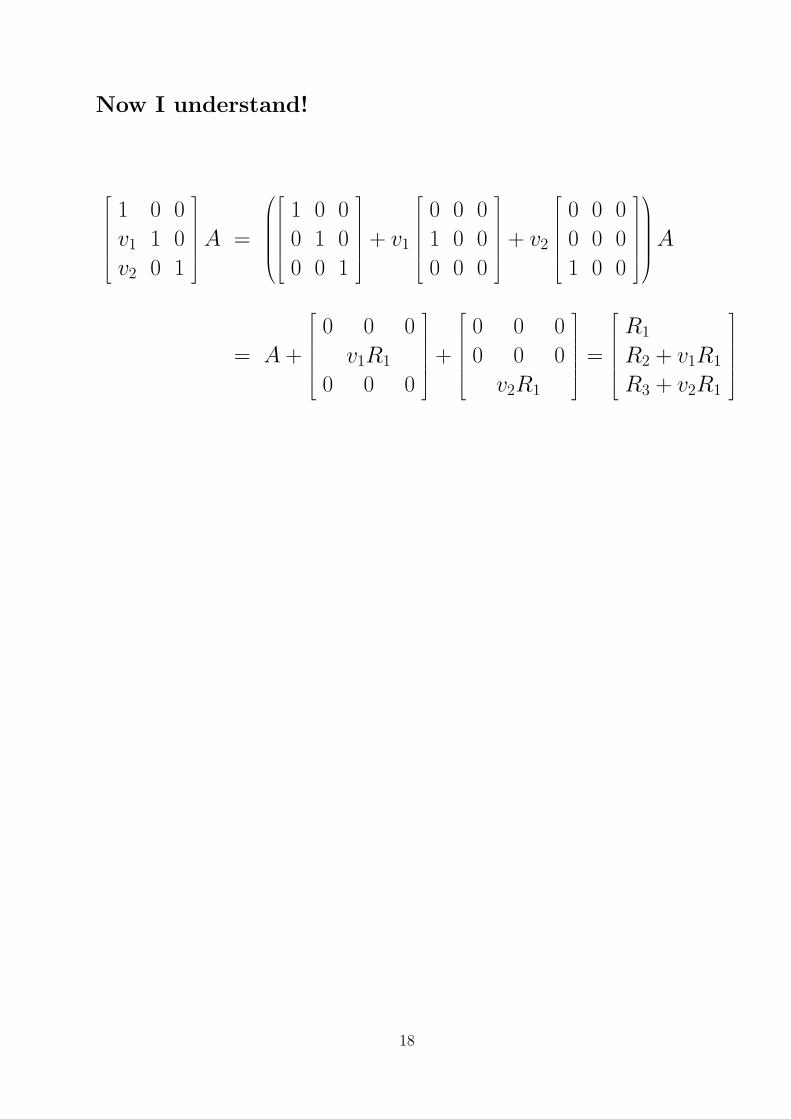
Now I understand!
1 0 0
v1 1 0
v2 0 1
A =
1 0 0
0 1 0
0 0 1
+ v1
0 0 0
1 0 0
0 0 0
+ v2
0 0 0
0 0 0
1 0 0
A
= A +
0 0 0
v1R1
0 0 0
+
0 0 0
0 0 0
v2R1
=
R1
R2 + v1R1
R3 + v2R1
18

Solving A~x = ~b
1. Compute L, U, P such that PA = LU
2. Note that PA~x = (LU)~x = P~b
2.1. Solve L~y = P~b
2.2. Solve U~x = ~y
In MATLAB:
[L,U,piv]=GEpiv(A); ← 2n3/3 flops
y=LTriSol(L,b(piv)); ← n2 flops
x=UTriSol(U,y); ← n2 flops
How much
does solving A~x = ~bi for i = 1 : k cost?
2
3n3 + 0(kn2) flops.
19

// Returns the LU decomposition of A with pivoting
function [L,U,piv]=ludecpiv(A);
[n,n]=size(A);
piv=[1:n];
for k=1:n-1
[mavx,r]=max(abs(A(k:n,k)));
q=r+k-1;
piv([k q])=piv([q k])
A([k q],:)=A([q k],:)
if A(k,k)~=0
A(k+1:n,k)=A(k+1:n,k)/A(k,k);
A(k+1:n,k+1:n)=A(k+1:n,k+1:n)-A(k+1:n,k)*A(k,k+1:n);
end
end
L=eye(n,n)+tril(A,-1);
U=triu(A);
endfunction
// Solves the linear system A*x=b via LU decomposition
// with pivoting
function x=lusolvepiv(A,b)
[L,U,piv]=ludecpiv(A);
y=lowtri(L,b(piv));
x=uptri(U,y);
endfunction
20

Another Example
1.0 0.33
0.33 0.11
x
y
=
−1
0
A
1 13
13
19
• Suppose two different processes give us two different numerical
solutions:
x1 =
−101
300
x2 =
−110
330
• We have
Ax1 =
−2
−0.33
Ax2 ≃
−1.1
0.0
• And the exact solution is x =
−100
300
• Which numerical solution is better?
21

Errors involved in solving linear systems
Let x be the numerical solution of Ax = b.
How good is x ?
Residual error
||b− Ax|| (or||b− Ax||||b|| )
Error in x
||x− x|| (or||x− x||||x|| )
Which one is a better error measure?
It depends, of course
=⇒ Polynomial fitting
=⇒ Pose fitting
22

Quantifying Errors: Norms and Distances
• How big is a vector ~x = (x1, ..., xn) ?
Norms:
||~x||1 = |x1| + · · · + |xn|
||~x||∞ = max{|x1|, · · · , |xn|}
||~x||2 =√
x21 + · · · + x2
n ≡ Euclidean norm
• How far are two points with positions ~x and ~y ?
Distances:
d1(~x, ~y) = ||~x− ~y||1
d∞(~x, ~y) = ||~x− ~y||∞
d2(~x, ~y) = ||~x− ~y||2 ≡ Euclidean distance
• Note: Norms induce distances. You can define distances without
norms.
• What are the level sets of the various norms?
||~x||2 = 1 ||~x||1 = 1 ||~x||∞ = 1
23
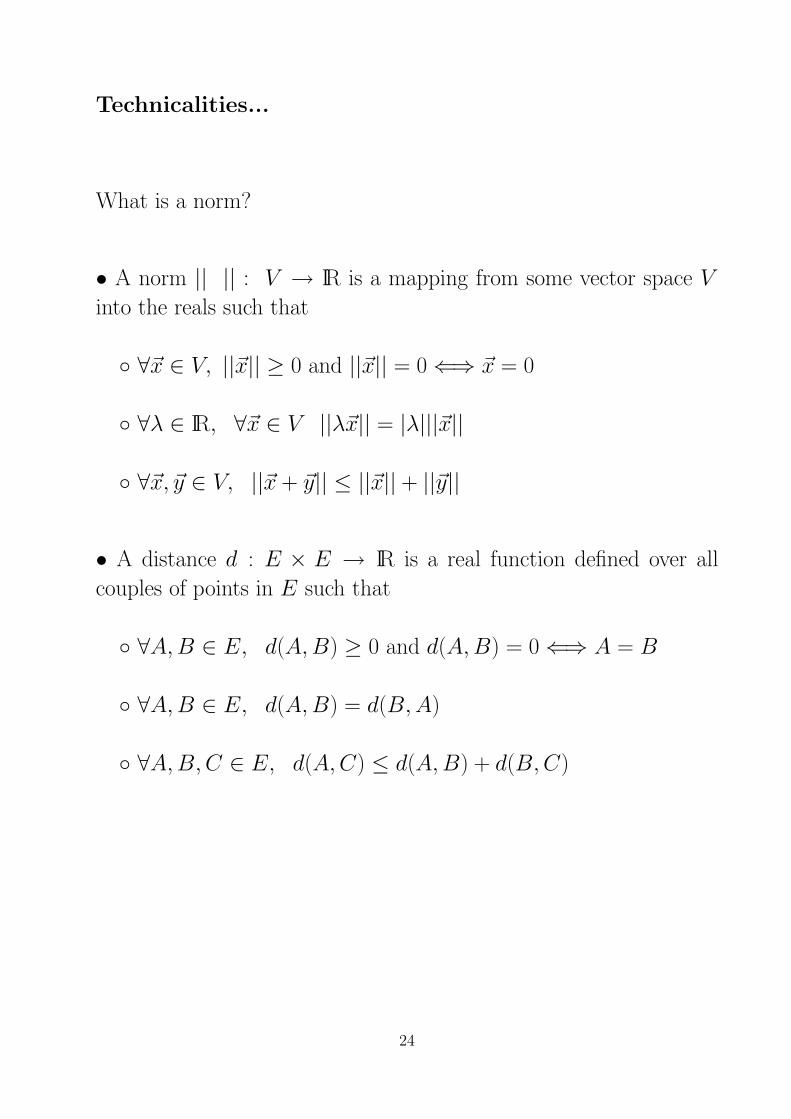
Technicalities...
What is a norm?
• A norm || || : V → IR is a mapping from some vector space V
into the reals such that
◦ ∀~x ∈ V, ||~x|| ≥ 0 and ||~x|| = 0⇐⇒ ~x = 0
◦ ∀λ ∈ IR, ∀~x ∈ V ||λ~x|| = |λ|||~x||
◦ ∀~x, ~y ∈ V, ||~x + ~y|| ≤ ||~x|| + ||~y||
• A distance d : E × E → IR is a real function defined over all
couples of points in E such that
◦ ∀A, B ∈ E, d(A, B) ≥ 0 and d(A, B) = 0⇐⇒ A = B
◦ ∀A, B ∈ E, d(A, B) = d(B, A)
◦ ∀A, B, C ∈ E, d(A, C) ≤ d(A, B) + d(B, C)
24

Theorem:
In IRn, all norms are equivalent, ie, if N1 : IRn → IR+ and N2 : IRn →IR+ are two norms, then there exist constants λ > 0 and µ > 0 such
that
∀~x ∈ IRn λN1(~x) ≤ N2(~x) ≤ µN1(~x)
• In particular
||~x||∞ ≤ ||~x||1 ≤ n||~x||∞
||~x||∞ ≤ ||~x||2 ≤√
n||~x||∞
• In plain English
−→ You can pick whichever norm is more convenient.
−→ Qualitatively, they give similar measures.
25
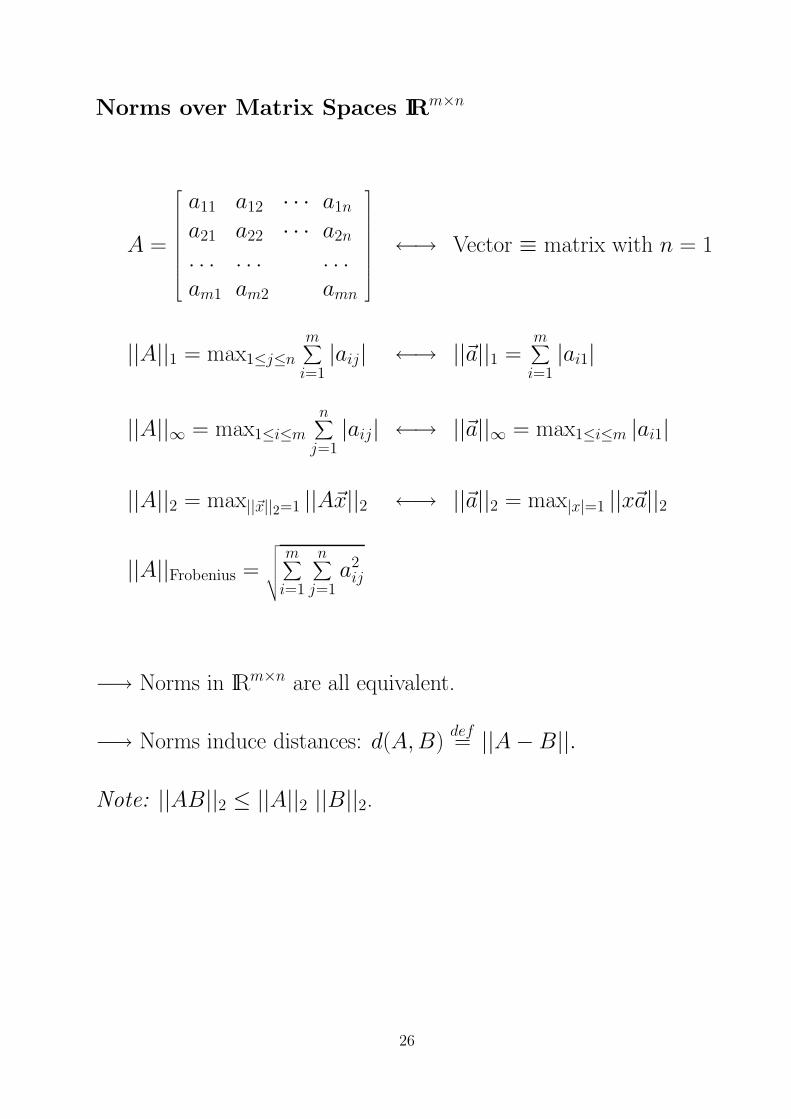
Norms over Matrix Spaces IRm×n
A =
a11 a12 · · · a1n
a21 a22 · · · a2n
. . . . . . . . .
am1 am2 amn
←→ Vector ≡ matrix with n = 1
||A||1 = max1≤j≤n
m∑
i=1|aij| ←→ ||~a||1 =
m∑
i=1|ai1|
||A||∞ = max1≤i≤m
n∑
j=1|aij| ←→ ||~a||∞ = max1≤i≤m |ai1|
||A||2 = max||~x||2=1 ||A~x||2 ←→ ||~a||2 = max|x|=1 ||x~a||2
||A||Frobenius =
√
√
√
√
√
m∑
i=1
n∑
j=1a2
ij
−→ Norms in IRm×n are all equivalent.
−→ Norms induce distances: d(A, B)def= ||A−B||.
Note: ||AB||2 ≤ ||A||2 ||B||2.
26

Floating-Point Errors
Assume floating-point arithmetic with numbers of the form
x = ± . b1b2 . . . br × βe with
L ≤ e ≤ U
0 ≤ bi ≤ β − 1
and define machine precision ε = 12β1−t .
Example: 3 digits, base 10, ε = 1210−2 = 5× 10−3
Theorem (Chap. 1):
|F l(x)− x||x| ≤ ε
Theorem (Chap. 5): For any matrix A ∈ IRm×n
||F l(A)− A||1||A||1
≤ ε.
Corollary: ||F l(A)− A|| ≤ ε||A|| .
Likewise: ||F l(AB)−AB|| ≈ ||A|| ||B|| .
What about errors in solving linear systems?
27

Condition number of a matrix
Define: κ1(A)def= ||A||1 ||A−1||1 is the condition number of A.
We have:
• κ1(A) ≥ 1,
• κ1(λA) = κ1(A),
• The larger κ1(A), the closer A is to being singular.
Theorem: If A ∈ IRn×n is non-singular, A~x = ~b, and εκ1(A) < 1,
then
• F l(A) is non-singular, and
• the solution of F l(A)x = F l(~b) verifies:
||x− ~x||1||~x||1
≤ εκ1(A) (1 +||x||1||~x||1
)
Note:
• This result has nothing to do with any algorithm.
• Similar results hold for the other norms.
28
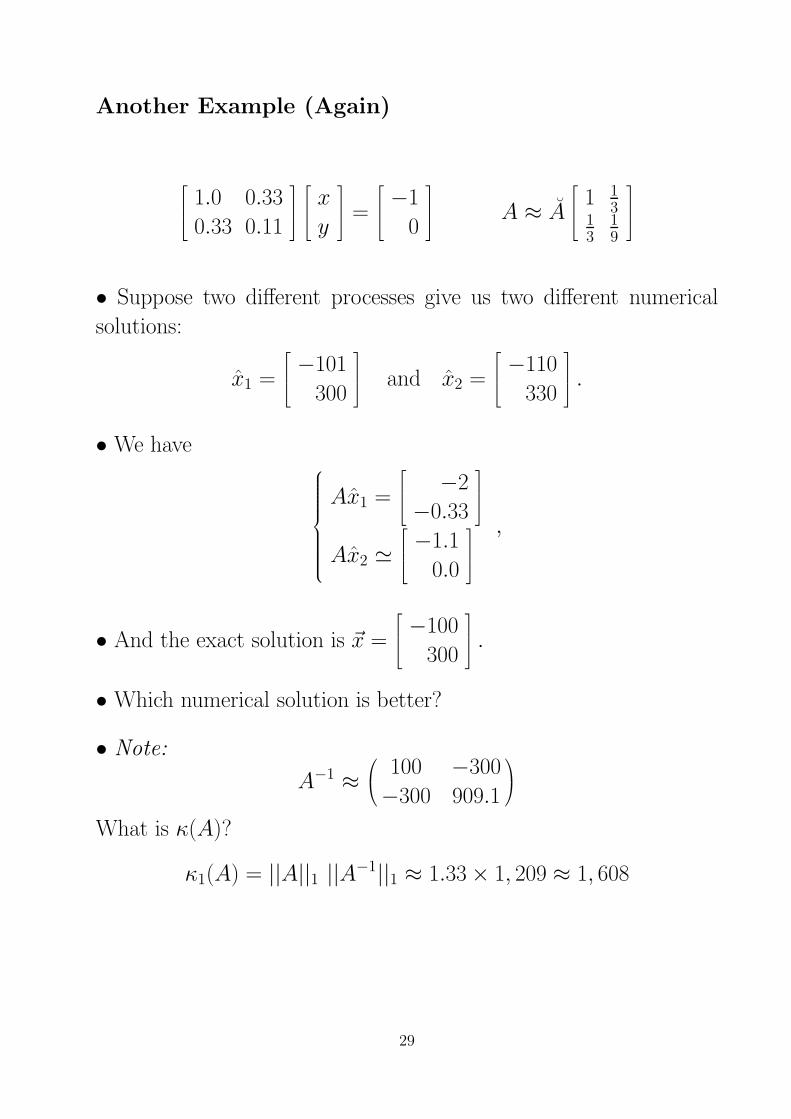
Another Example (Again)
1.0 0.33
0.33 0.11
x
y
=
−1
0
A ≈ A
1 13
13
19
• Suppose two different processes give us two different numerical
solutions:
x1 =
−101
300
and x2 =
−110
330
.
• We have
Ax1 =
−2
−0.33
Ax2 ≃
−1.1
0.0
,
• And the exact solution is ~x =
−100
300
.
• Which numerical solution is better?
• Note:
A−1 ≈
100 −300
−300 909.1
What is κ(A)?
κ1(A) = ||A||1 ||A−1||1 ≈ 1.33× 1, 209 ≈ 1, 608
29

Backward Stability
• If x is the solution to the problem A~x = ~b found by Gaussian
elimination, then
(A + E)x = ~b
for some matrix E such that ||E|| ≈ ε||A|| .
• Note: ||F l(A)− A|| ≈ ε||A||
• Corollary:
||Ax−~b|| ≈ ε||A|| ||x||
||x− ~x||||~x|| ≈ εκ(A)
30
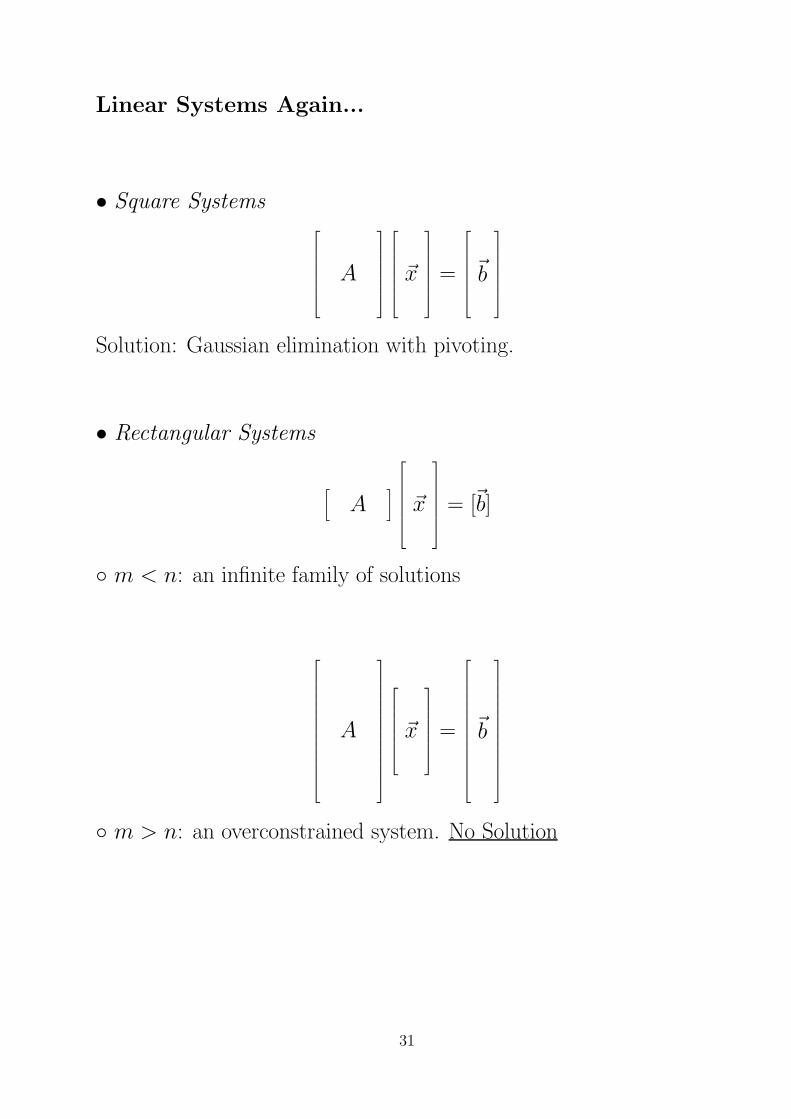
Linear Systems Again...
• Square Systems
A
~x
=
~b
Solution: Gaussian elimination with pivoting.
• Rectangular Systems
[
A]
~x
= [~b]
◦ m < n: an infinite family of solutions
A
~x
=
~b
◦ m > n: an overconstrained system. No Solution
31

Be Pragmatic!
If A~x = ~b is an overconstrained system without an exact solution,
find ~x that minimizes a reasonable error.
• Ex1: Minimize ||A~x−~b||21.
• Ex2: Minimize ||A~x−~b||22 ← LINEAR LEAST SQUARES.
Application: Data analysis: compute the parameters of a model
that best fits the data.
• Ex3:
f(x) = ax + b
• Ex4:
f(x) = anxn + · · · + a1x + a0
• Note: The Euclidean norm yields simple formulas for derivative
computation:
||~x||22 = (x21 + x2
2 + · · · + x2n) = ~x.~x = ~xT~x
32

The PseudoInverse
• Define
~e = A~x−~b =
~c1 ~c2 . . . ~cn
x1...
xn
−~b
= x1~c1 + x2~c2 + · · ·xn~cn −~b
• We want to minimize E = ||~e||22 = ~eT~e.
• At a minimum, we have ∂E∂xi
= 0 for i = 1, ..., n, or
∂E
∂xi=
∂~eT
∂xi~e + ~eT ∂~e
∂xi= 2
∂~eT
∂xi~e = 0.
But
∂~e
∂xi=
∂
∂xi(x1~c1 + · · · + xn~cn) = ~ci,
So
∂~eT
∂xi= ~cT
1 and∂E
∂xi= 2~cT
i (A~x−~b) = 0,
or
0 =
~cTi
...
~cTn
(A~x−~b) = AT (A~x−~b)⇒ ATA~x = AT~b,
or
~x = A†~b whereA† = (ATA)−1AT
is the pseudoinverse of A !
33
Top Related
Copyright © 2022 FDOKUMEN

