Yohanes Tri Prianto 2412106004
16
TUGAS SISTEM PENGENDALIAN OTOMATIS “ MENDESAIN ROOT LOCUS ” Disusun Oleh : Yohanes Tri Prianto NRP : 2412 106 004 PROGRAM STUDI S-1 JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Yohanes Tri Prianto 2412106004

TUGAS SISTEM PENGENDALIAN OTOMATIS
“ MENDESAIN ROOT LOCUS ”
Disusun Oleh :
Yohanes Tri Prianto
NRP : 2412 106 004
PROGRAM STUDI S-1JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRIINSTITUT TEKNOLOGI SEPULUH NOPEMBER

SURABAYA2013
BAB I
PENDAHULUAN
1.1 Latar Belakang
Root locus adalah sebuah grafik yang menunjukkan pole darisuatu sistem loop tertutup dengan parameter yang dirubah. Rootlocus dapat digunakan untuk mendeskripsikan syarat performasidari sistem dengan parameter yang dirubah. Contohnya, pengaruhdari perubahan nilai K (gain) jika ditambah dalah sistem looptertutup. Maka metode sederhana untuk menentukan akar daripersamaan karakteristik yang ditemukan oleh W.R. Evans danmasih digunakan sampai sekarang dalam sistem kontrol. Denganmenggunakan metode Root locus perancang dapat memprediksi letakpole pada sistem loop tertutup dari perubahan nilai K (gain)atau penambahan pole sistem loop terbuka dan atau zero padasistem loop terbuka.[1]
Pada respon transien, Root locus juga memberikan sebuahgrafik yang menunjukkan kestabilan sistem. Grafik Root locus yangmudah dilihat range dari kestabilan sistem dan kondisi yangmenyebabkan sebuah sistem patah(break) dalam osilasi. [2] Padamakalah ini, akan menjelaskan tentang penyelesaian sebuahsistem loop tertutup yang memiliki nilai pole, zero, gain (K),dan/atau feedback (H(s)). Masalah atau problem set untuk menghitungdan menggambar dengan metode Root locus diambil dari buku “moderncontrol engineering – K, Ogata”.
Langkah – langkah penyelesaian metode Root locus akanmengikuti teori yang diajarkan di kuliah sistem pengendalianotomatis dan juga memberikan solusi dengan menggunakan softwareMATLAB agar bisa meilihat perbandingan dari hasil perhitunganmanual dan simulasi di komputer.
1.2 Permasalah

Adapun masalah yang ada diantaranya adalah sebagaiberikut :
1. Bagaimana membuat dan/atau merancang root locus dari sistemloop tertutup?
2. Bagaimana langkah-langkah membuat desaian root locus?3. Bagaimana merancang desain root locus pada sistem orde 2
atau lebih tinggi?
1.3 TujuanTujuan dari tugas mendesain root locus ini adalah sebagai
berikut :
1. Dapat merancang desain root locus baik secara manual dansimulasi di MATLAB.2. Dapat mencari pole dan zero dari sistem loop tertutup.
1.4 Sistematika Penulisan
Pada makalah ini tersusun dari lima bab yang terdiri dariBab I Pendahuluan yang berisi latar belakang, permasalahan,tujuan dan sistematika laporan. Bab II berisi dasar teoriyaitu paparan teori yang dapat digunakan untuk merancangdesain root locus, bab III Langkah – langkah merancang root locus,Bab IV Pembahasan dan BAB V Kesimpulan dari perancangan rootlocus yang dilakukan.
BAB II
DASAR TEORI
2.1 Root Locus – Plot

Gambar 2.1 Sistem Loop Tertutup
Menentukan root locus dari sistem loop tertutup diperlukan
tahapan dalam merancang dan/atau menghitung baik secara manual
maupun pada simulasi di MATLAB. Gambar 2.1 adalah sistem loop
tertutup yang memiliki G(s) dimana terdapat transfer function yang
memiliki pole dan zero. Persamaan karakteristik untuk sistem loop
tertutup dapat dituliskan dengan persamaan berikut ini :
C(s) = G(s) E(s)E(s) = R(s) – C(s)H(s)
C(s) =G(s) [R(s) – C(s) H(s)]
C(s) = G(s) R(s) – G(s)H(s) C(s)
Pindahkan C(s) ke ruas kiri untuk dijumlahkan
C(s) + G(s)H(s)C(s) = G(s) R(s)
[1 + G(s) H(s)] C(s) = G(s) R(s)
=
.............................................................
..(2.1)
Sehinggan yang digunakan untuk merancang root locus adalah
persamaan GH(s) pada persamaan karakteristik diatas.
1 + G(s) H(s) = 0
G(s) H(s) = -1
|GH(s)| =
1.............................................................
................(2.2)

Persamaan 2.2 untuk menentukan magnitude saat merancang root locus,
karena dalam root locus dapat dianalogikan sebuah vektor yang
memiliki besaran (magnitude) dan arah (sudut). Untuk sudut
dapat dituliskan persamaan berikut :
..................
.................(2.3
Untuk penjelasan dan/atau penyelesaian lengkap dapat dilihat
pada BAB III dan BAB IV.
2.2 Jenis – Jenis Root Locus
Dibawah ini adalah gambar – gambar dari root locus dengan
konfigurasi pole-zero pada sistem tertutup.

BAB III
LANGKAH – LANGKAH MEMBUAT ROOT LOCUS
3.1 Perhitungan Manual
Dalam membuat root locus ada langkah – langkah yang harusdilakukan yaitu :
1. Menentukan persamaan karakteristik dari sistem looptertutup [C(s)/R(s)].

2. Menentukan zero dan pole dari persamaan GH(s).3. Menentukan magnitude dan arah.4. Menetukan jumlah sudut (angles) dan asymptotes.5. Menentukan titik sumbu real pada pole menuju zero.6. Menetukan dan menggambarkan sudut keberangkatan.7. Menentukan titik potong pada sumbu imajiner dengan tabel
Routh-Hurwitz.
3.2 Menggambar Simulasi Pada MATLAB
Setelah mendapatkan hasil perhitungan manual maka akandicoba menggambar root locus pada MATLAB dengan listing program danpenjelasan sebagai berikut :
num = [0 0 0 1 6]; ----------- koefisien dari numerator (pembilang)den = [1 11 45 75 0]; ----------- koefisien dari dumerator (penyebut)rlocus(num,den)---------------------- fungsi MATLAB untukmenggambarkan root locusv = [-25 25 -25 25]; axis(v);axis('square')---- batasan darisumbu imajiner dan real yang
akan di plot pada MATLABgrid
title('Root-Locus Plot ')------------------- judul dalam plotMATLAB
BAB IV
PEMBAHASAN
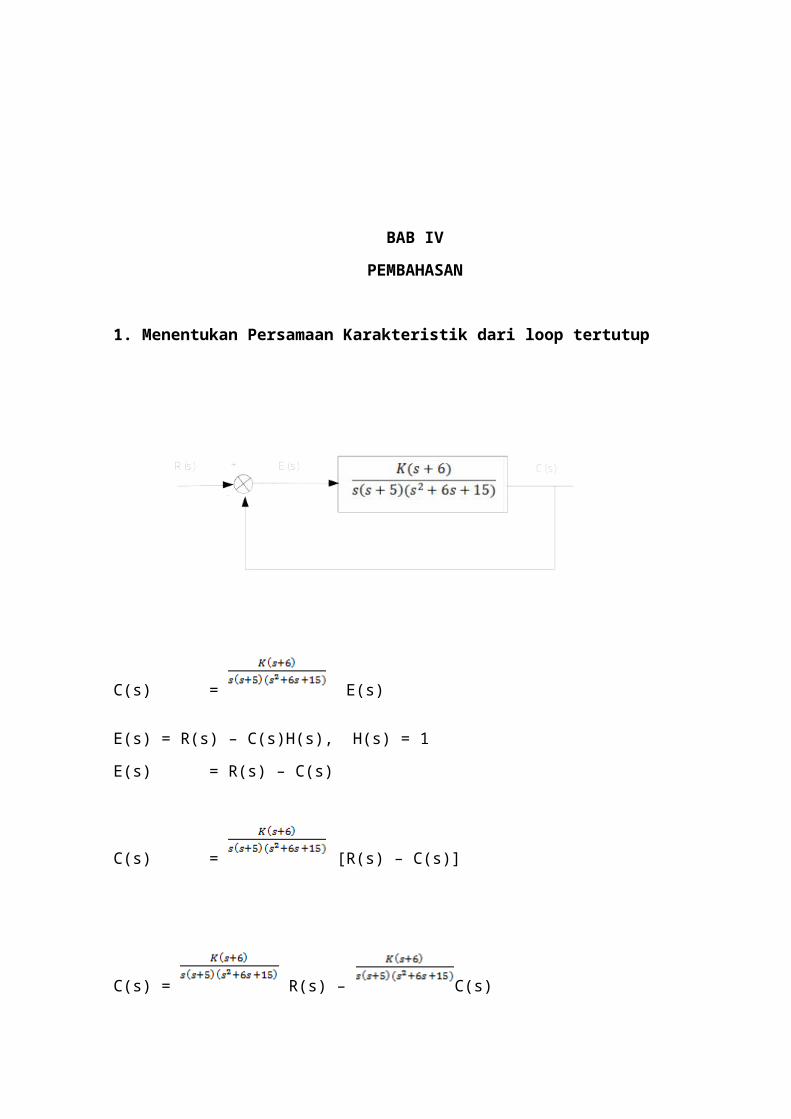
1. Menentukan Persamaan Karakteristik dari loop tertutup
C(s) = E(s)
E(s) = R(s) – C(s)H(s), H(s) = 1
E(s) = R(s) – C(s)
C(s) = [R(s) – C(s)]
C(s) = R(s) – C(s)

Pindahkan C(s) ke ruas kiri untuk dijumlahkan
C(s) + C(s) = R(s)
[1 + ] C(s) = R(s)
[ ] C(s) = R(s)
=
=
................................................(1)
Jadi Persamaan karakterisiknya adalah : s(s+5)(s2+6s+15)+K(s+6)

2. Menentukan pole-zero dari GH(s)
Karena H(s) = 1, maka
GH(s) = G(s) =
Zero :
Z1 =-6
Pole :
P1 =0
P2 = -5
P3 = -3 + 2,4j
P4 = -3 – 2,4j
3. Menentukan magnitude dan arah
Magnitude :
GH(s) =
= 1
Arah :
< (s+6) – (<s + <(s+5) + <(s2+6s+15)) = (2k+1)π
4. Menetukan Jumlah Sudut (angles) dan asymptotes

Angles = = π, π, π, 3π
Asymptotes =
= = - 1,667
5. Menentukan Sudut Keberangkatan (Departure)
ϴz1 = tan-1(2,4/3) = 38,60
ϴp2 = tan-1(2,4/2) = 50,10
ϴp1 = tan-1(-2,4/3) = 141,30
Maka,
38,60 – (50,10 + 141,30 + ϴp3) = 1800
ϴp3 = +27,20
Gambar untuk menentukan sudut keberangkatan :

6. Menentukan titik potong pada sumbu imajiner dengan tabel
Routh-Hurwitz
Pada persamaan 1 didapat persamaan karakteristik adalah :
s(s+5)(s2+6s+15)+K(s+6) = 0
s4 + 11s3 +40s2 + (75+k)s + 6k =0
S4 1 40 6KS3 11 75 + K 0S2 b1 b2 0S1 c1 0 0S0 d1 0 0
b1 = =
b2 = 6K

c1 =
d1 = 6K
kondisi Stabil :
> 0
K<365
Auxiliary equation :
11 s3+440s = 0
11s(s2+40) =0
s = ± 2 = ± 6,32 j
7. Gambar root locus dari persamaan G(s) =

Dengan Grid
Tanpa Grid
BAB V
KESIMPULAN
5.1 Kesimpulan

Dari hasil perancangan desain root locus dapat disimpulkansebagai berikut :
1. Dalam merancang root locus harus dilakukan dengan mengikutilangkah –langkah perhitungan dan/atau menggambar.
2. Menentukan nilai pole dan zero dari persamaan karakteristikGH(s) pada sistem loop tertutup, dan GH(s) juga menjadiacuan untuk menentukan parameter lain seperti jumlahsudut, asymptote, sudut keberangkatan dan menentukantitik potong sumbu imajiner.
3. Simualasi MATLAB digunakan untuk membuktikan hasilrancang root locus yang dibuat secara perhitungan manual.

DAFTAR PUSTAKA
[1] K,Ogata. 1997. “Modern Control Engineering 3th edition”.Printice-Hall,
Englewood.[2] S.Nise, Norman. 2004.” Control System Engineering 4th edition”.Willey
Internasitional.[3] Materi Kuliah Sistem pengendalian otomatis Smester 2Lintas jalur Teknik Fisika ITS.