
UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI
69
UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI Şcoala Doctorală a Facultăţii de Inginerie Electrică, Energetică şi Informatică Aplicată CERCETĂRI PRIVIND CREŞTEREA SIGURANŢEI ȊN TRAFICUL RUTIER PRIN MĂSURAREA ŞI ANALIZA UNOR FACTORI DE RISC REZUMATUL TEZEI DE DOCTORAT Conducător de doctorat: Prof. univ. dr. ing. Cristian FOŞALĂU Doctorand: Ing. Ştefan SILION IAŞI - 2015
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI
UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI
Şcoala Doctorală a Facultăţii de Inginerie Electrică, Energetică şi Informatică Aplicată
CERCETĂRI PRIVIND CREŞTEREA SIGURANŢEI ȊN TRAFICUL RUTIER PRIN
MĂSURAREA ŞI ANALIZA UNOR FACTORI DE RISC
REZUMATUL TEZEI DE DOCTORAT
Conducător de doctorat:
Prof. univ. dr. ing. Cristian FOŞALĂU
Doctorand:
Ing. Ştefan SILION
IAŞI - 2015
Cuprins
Introducere .......................................................................................................................... 5/11 1. Prezentarea şi motivarea temei de cercetare ..................................................................... 5/11 2. Actualitatea temei de cercetare ........................................................................................ 6/12
3. Obiectivele tezei .............................................................................................................. 6/12 4. Diseminarea rezultatelor cercetării................................................................................... 6/12
5. Structura tezei ................................................................................................................. 6/12
Capitolul 1............................................................................................................................ 9/15 Stadiul actual privind tehnicile de măsurare a unor factori de risc în traficul rutier ............. 9/15
1.1. Problema siguranţei în traficul rutier ............................................................................. 9/15
1.2. Factori de risc în traficul rutier ..................................................................................... 9/16 1.3. Sisteme de siguranţă a autovehiculelor ......................................................................... 9/18
1.4. Influeţa condiţiilor meteorologice asupra stării carosabilului ...................................... 10/19 1.5. Sisteme de monitorizare a stării carosabilului ............................................................. 10/22
1.5.1. Senzori montaţi în carosabil ..................................................................................... 10/23 1.5.2. Determinarea caracteristicilor zgomotului produs de pneu ........................................ 11/26
1.5.3. Sistem de senzori pentru detectarea formării gheţii şi calculul punctului de îngheţ ... 11/29 1.5.4. Detecţia carosabilului ud folosind lumina polarizată ................................................. 11/29
1.5.5. Detecţia suprafeţelor acoperite cu gheaţă folosind o cameră în infraroşu .................. 11/31 1.5.6. Senzor de monitorizare a stării drumului cu ajutorul laserului .................................. 11/33
1.6. Sisteme de asistenţă a conducătorului auto.................................................................. 12/34 1.6.1. Sisteme de monitorizare a distanţei până la autovehiculul din faţă ............................ 12/34
1.6.2. Sistem adaptiv al regimului de croazieră .................................................................. 12/35 1.6.3. Sistem de îmbunătăţire a vederii pe timp de noapte .................................................. 12/36
1.6.4. Sisteme de detecţie a pietonilor ................................................................................ 12/37 1.6.5. Sistem de asistenţă la drum îngustat ......................................................................... 13/38
1.6.6. Sistem de asistenţă pentru stabilizare împotriva curenţilor laterali ............................ 13/39 1.7. Concluzii .................................................................................................................... 13/40
Capitolul 2.......................................................................................................................... 14/41 Conceperea, realizarea şi testarea unor traductoare pentru măsurarea fără contact a umidităţii
carosabilului .................................................................................................................... 14/41 2.1. Traductor pentru determinarea fără contact a umiditatăţii carosabilului prin măsurarea
radiaţiei infraroşii reflectate ........................................................................................ 14/41 2.1.1. Prezentatea generală a sistemului ............................................................................. 14/42
2.1.2. Traductorul de radiaţie IR de 850 nm ....................................................................... 15/44 2.1.3. Influenţa radiaţiei solare ........................................................................................... 15/45
2.1.4. Influenţa distanţei dintre traductor şi partea carosabilă ............................................. 16/49 2.1.5. Rezultate experimentale pentru diverse tipuri de suprafeţe ....................................... 18/52
2.1.6. Concluzii asupra traductorului cu radiaţie infraroşie ................................................. 26/66 2.2. Traductor pentru determinarea fără contact a umidităţii carosabilului prin măsurare în două
puncte......................................................................................................................... 27/66 2.2.1. Prezentarea generală a sistemului ............................................................................. 27/66
2.2.2. Rezultate experimentale ........................................................................................... 28/69 2.2.3. Concluzii asupra traductorului cu măsurare în două puncte ...................................... 32/76
2.3. Concluzii asupra capitolului ....................................................................................... 32/76
Capitolul 3.......................................................................................................................... 33/78 Sistem complex de detecţie şi măsurare a unor factori de risc în traficul rutier ................. 33/78
3.1. Prezentarea generală a sistemului ............................................................................... 33/78
3.1.1. Schema bloc a sistemului ......................................................................................... 33/78
3.1.2. Schema electrică a sistemului .................................................................................... --/79 3.1.3. Schema logică a sistemului ...................................................................................... 34/82
3.2. Componentele sistemului............................................................................................ 36/85 3.2.1. Clasificarea răspunsului traductoarelor ..................................................................... 37/85
3.2.1.1. Traductorul de umiditate TUIR ..................................................................... 38/87 3.2.1.2. Traductorul de umiditate TURH ................................................................... 38/87
3.2.1.3. Traductorul de temperatură în infraroşu ........................................................ 38/88 3.2.2. Valorile de prag al traductoarelor ............................................................................. 38/88
3.2.2.1. Traductorul de umiditate TUIR ..................................................................... 39/88 3.2.2.2. Traductorul de umiditate TURH ................................................................... 39/90
3.2.2.3. Traductorul de temperatură în infraroşu ........................................................ 40/92 3.2.3. Viteza, distanţa faţă de vehiculul din faţă, tipul anvelopelor ..................................... 40/93
3.3. Determinarea stării carosabilului în funcţie de răspunsul traductoarelor ........................--/93 3.4. Funcţiile sistemului .................................................................................................... 41/96
3.5. Afişarea rezultatelor ................................................................................................... 41/98 3.6. Exemplu de implementare a aplicaţiei ........................................................................ 42/99
3.7. Erori ......................................................................................................................... 43/103 3.8. Concluzii .................................................................................................................. 44/103
Capitolul 4........................................................................................................................ 45/105 Rezultate experimentale obţinute din testarea sistemului de detecţie a factorilor de risc.. 45/105
4.1. Performanţele sistemului .......................................................................................... 45/105 4.1.1. Nivelul de încredere al traductorului de umiditate TUIR ........................................ 45/105
4.1.2. Nivelul de încredere al traductorului de umiditate TURH ....................................... 47/109 4.1.3. Nivelul de încredere al sistemului pentru detecţia stării carosabilului ..................... 50/112
4.1.4. Timpul de răspuns al sistemului ............................................................................. 54/118 4.2. Concluzii .................................................................................................................. 56/120
Capitolul 5........................................................................................................................ 57/121 Concluzii ....................................................................................................................... 57/121
5.1. Concluzii asupra stadiului actual .............................................................................. 57/121 5.2. Concluzii asupra cercetărilor legate de tema de doctorat ........................................... 57/121
5.3. Contribuţii personale ................................................................................................ 58/122 5.4. Direcţii viitoare de cercetare ..................................................................................... 59/123
5.5. Diseminarea rezultatelor cercetării ............................................................................ 59/123
Bibliografie ...................................................................................................................... 61/125
5
Introducere
1. Prezentarea şi motivarea temei de cercetare
Ȋn ultimele decenii asistăm la o creştere continuă a numărului de vehicule rezultând implicit şi
creşterea numărului de participanţi la trafic. Creşterea numerică a autovehiculelor în ultimii 15
ani, mai ales în ţara noastră a determinat şi creşterea numărului de accidente în trafic, din păcate
peste limita suportabilă. Densitatea tot mai mare a traficului sporeşte solicitarea conducătorilor
auto crescând astfel riscul implicării în evenimente rutiere. Din acest motiv în ultima perioadă s-
au dezvoltat tot mai mult sistemele de asistenţă la condus. Cele mai răspândite sisteme de
asistenţă la condus orientate spre confort sunt: sistemele de control al vitezei de croazieră (67%
în S.U.A., 51% în Germania, 50% în China), senzorii de parcare (55% în China, 50% în
Germania, 19% în S.U.A.), camerele video pentru deplasarea în marşarier (71% în China, 34%
în Japonia, 20% în S.U.A.). Cele mai răspândite sisteme de asistenţă la condus orientate spre
siguranţă sunt: sistemul de asistare la frânare în caz de urgenţă (85% în Japonia, 61% în
Germania, 54% în S.U.A.) şi sistemul electronic de control al stabilităţii (62% în Germania, 32%
în China, 19% în Japonia).
Studiile arată că există trei factori majori cu influenţe directe asupra producerii accidentor
rutiere grave :
- factorul uman
- starea suprafeţei de rulare şi condiţiile meteorologice
- starea tehnică a autovehiculului.
În cercetările legate de tema de doctorat, ale căror rezultate sunt prezentate în lucrarea de
faţă, autorul şi-a propus să realizeze un studiu legat de metodele de determinare a stării
suprafeţei de rulare şi ca noutate, realizarea şi testarea a două traductoare pentru determinarea
fără contact a umidităţii carosabilului, urmând ca aceste două traductoare să fie integrate într-un
sistem complex de avertizare a conducătorului auto cu privire la situaţiile de risc ce pot apărea
datorită nerespectării distanţei de siguranţă corelată cu starea carosabilului. Lucrarea conţine o
analiză a caracteristicilor celor două traductoare de umiditate de concepţie proprie. Acestea
influenţează performanţele microsistemului realizat şi testat.
6
2. Actualitatea temei de cercetare
Industria autovehiculelor este în dezvoltare continuă. Ȋn scopul reducerii numărului de accidente
rutiere din întreaga lume s-au dezvoltat numeroase aplicaţii de asistenţă a conducătorului auto.
Este deosebit de importantă dezvoltarea de sisteme care îmbunătăţesc percepţia mediului exterior
şi avertizează şoferul în situaţiile dificile.
La ora actuală, toate autovehiculele noi sunt dotate cu sisteme de asistenţă pentru creşterea
siguranţei şi confortului, tot mai multe dintre aceste sisteme fiind integrate treptat în dotarea
standard a autovehiculelor. Se tinde astfel tot mai mult spre uşurarea sarcinilor conducătorului
auto. Majoritatea sistemelor de control electromecanice sunt ȋnlocuite cu sisteme electronice. Ȋn
autovehiculele moderne existӑ peste 70 de unitӑţi electronice de control. Dintre acestea
majoritatea sunt sisteme ȋn timp real ce trebuie sӑ acţioneze cât mai rapid.
3. Obiectivele tezei
Cercetările efectuate în cadrul stagiului de doctorat au avut ca obiectiv principal identificarea
unor noi metode de determinare fӑrӑ contact a stӑrii carosabilului. Obiectivele specifice ale
acestor cercetări au fost:
- găsirea unor noi metode de determinare fără contact a umidităţii carosabilului
- realizarea a douӑ traductoare de umiditate de concepţie proprie, fără contact
- realizarea şi testarea unui microsistem utilizând cele douӑ traductoare de concepţie
proprie
4. Diseminarea rezultatelor cercetării
Rezultatele obţinute în urma cercetărilor din cadrul stagiului doctoral au fost diseminate prin
publicarea de către autor a 8 lucrări ştiinţifice în volume ale conferinţelor naţionale şi
internaţionale şi în jurnale ştiinţifice, 5 lucrări fiind indexate în baza de date IEEE Xplore.
5. Structura tezei
Teza de doctorat, intitulată Cercetări cercetări privind creşterea siguranţei ȋn traficul rutier
prin măsurarea şi analiza unor factori de risc, este structurată pe cinci capitole, la care se
adaugă o introducere. Lucrarea conţine 146 pagini, 91 figuri, 22 tabele, 119 referinţe şi 5 anexe.
7
Introducerea punctează motivaţia alegerii temei de cercetare, actualitatea şi importanţa
acesteia, precum şi câteva detalii privind structura.
Capitolul 1 face pentru început o scurtă introducere în problematica siguranţei rutiere
prezentând principalii factori de risc. Aici sunt enumerate principalele cauze ce pot provoca
accidente rutiere precum și ponderea acestora. Coliziunile cu vehiculul din faţă reprezintă
aproximativ 30% din totalul accidentelor rutiere pe drumurile public. Ȋn majoritatea cazurilor,
nerespectarea acestei distanţe poate fi atribuită neatenţiei şoferului şi/sau interpretării greşite a
distanţei care depinde foarte mult de starea carosabilului, aceasta putând crește cu pânӑ la 400%
ȋn cazul carosabilului extrem de alunecos. În continuare sunt prezentate principalele metode de
determinare a stării carosabilului atât cu cât şi fără contact. Printre aceste metode pot fi
enumeraţi senzorii montaţi ȋn carosabil, utilizarea camerelor video ȋn infraroșu, determinarea pe
baza caracteristicilor zgomotului produs de vehicule, metoda de detecţie ce utilizeazӑ lumina
polarizatӑ. În final sunt prezentate unele sisteme de asistenţă a conducătorului auto pentru
reducerea numărului de accidente.
Capitolul 2 prezintă conceperea, realizarea şi testarea a două traductoare de umiditate a
carosabilului de concepţie proprie, prin două metode diferite. Ȋn prima jumătate a capitolului este
prezentat un traductor de umiditate fără contact utilizând nivele de reflexie diferenţiate a undelor
electromagnetice în domeniul infraroşu de lungime de undă egală cu 850 nm. Cu ajutorul acestui
traductor pot fi diferenţiate 3 stӑri ale carosabilului funcţie de gradul de reflexie al radiaţiei
infraroșii. În a doua jumӑtate a capitolului este prezentat un traductor de determinare fӑrӑ contact
a umiditӑţii carosabilului prin extrapolare funcţie de umiditatea aerului mӑsuratӑ ȋn douӑ puncte.
Cu ajutorul acestui traductor pot fi diferenţiate douӑ situaţii respectiv carosabil uscat sau ud.
În capitolul 3 este prezentatӑ realizarea unui sistem complex de detecţie și avertizare din care fac
parte cele douӑ traductoare de umiditate fӑrӑ contact, de concepţie proprie prezentate ȋn capitolul
2 și ȋn plus un traductor de temperaturӑ ȋn infraroșu pentru mӑsurarea de la distanţӑ a
temperaturii carosabilului. Pe baza unor algoritmi, funcţie de rӑspunsul celor trei traductoare,
este determinatӑ starea carosabilului urmând ca apoi sӑ fie calculatӑ distanţa minimӑ de siguranţӑ
ce trebuie menţinutӑ faţӑ de vehiculul din faţӑ. În cazul ȋn care sunt detectate situaţii de pericol,
acestea sunt comunicate conducӑtorului auto. Ȋn finalul capitolului este prezentat un exemplu de
implementare a aplicaţiei în mediul de programare grafică LabVIEW, urmat de justificarea
răspunsului sistemului în funcţie de răspunsurile traductoarelor componente.
Capitolul 4 al tezei prezintӑ caracteristicile sistemului, în special nivelul de încredere şi timpii
de răspuns. Nivelul de încredere este detaliat pentru fiecare traductor fiind prezentate situaţiile ce
influenţează nivelul de încredere al întregului sistem. Timpul de răspuns al sistemului este de

8
asemenea influenţat de caracteristicile traductoarelor utilizate. În urma rezultatelor obţinute s-au
realizat comparaţii între cele două traductoare de concepţie proprie realizare şi s-au tras concluzii
privitoare la performanţele obţinute.
În capitolul 5 sunt prezentate concluziile finale asupra tezei, contribuţiile personale, direcţiile
viitoare de cercetare şi diseminarea rezultatelor cercetării.
9
Capitolul 1
Stadiul actual privind tehnicile de măsurare a unor factori de risc în
traficul rutier
1.1. Problema siguranţei în traficul rutier
Siguranţa rutieră reprezintă o problemă de importanţă majoră. Creşterea continuă a numărului de
autovehicule depăşeşte adeseori capacitatea de proiectare a infrastructurii rutiere, provocând
astfel aglomerări şi crescând riscul producerii de accidente. Pe drumurile Uniunii Europene, în
anul 2009, şi-au pierdut viaţa din cauza accidentelor rutiere peste 35.000 persoane, iar numărul
persoanelor rănite s-a ridicat la peste 1.500.000. Ȋn ultimii ani s-au înregistrat progrese
considerabile în domeniul siguranţei autovehiculelor rutiere.
1.2. Factori de risc în traficul rutier
Ȋncercarea de a optimiza continuu siguranţa şi confortul persoanelor aflate în autovehicule, cât şi
reducerea costurilor în ceea ce priveşte consumul de combustibil şi creşterea performanţelor
autovehiculelor face ca numărul sistemelor electronice de pe autovehicule să crească în mod
continuu. De asemenea, se încearcă prin creşterea siguranţei pasagerilor şi reducerea riscului
implicării autovehiculelor în accidente. Potrivit studiilor, cele mai importante cauze ale
accidentelor rutiere sunt :
- accidente produse prin coliziunea cu vehiculul din faţă cauzate din lipsa de atenţie a
şoferilor
- depăşirea de bandă cu intrare pe contra sens şi accidentele cauzate de ieşirea de pe şosea
- accidentele cauzate de nerespectarea distanţei minime regulamentare
1.3. Sisteme de siguranţă a autovehiculelor
Odată cu producerea primelor evenimente în trafic, după inventarea primelor automobile, s-a
pus problema dezvoltării sistemelor de siguranţă. Sistemele de siguranţă a şoferului şi
pasagerilor pentru prevenirea accidentelor pot fi clasificate în 4 grupe mari de sisteme şi anume :
sisteme de evitare a accidentelor, sisteme de asistenţă a şoferului, sisteme de protecţie în caz de
Capitolul 1
10
impact şi sisteme de protecţie post-impact. Fiecare dintre acestea, pot fi clasificate la rândul lor
ca pasive sau active.
1.4. Influeţa condiţiilor meteorologice asupra stării carosabilului
Prezenţa apei, fie în formă lichidă sau solidă, sau chiar ambele forme, pe suprafaţa de rulare,
modifică foarte mult coeficientul de frecare dintre pneu şi partea carosabilă. Micşorarea
coeficientului de frecare are ca efect creşterea riscului de derapare şi mărirea distanţei de frânare
[Muller,2003]. Depăşirea limitelor legale de viteză şi viteza neadaptată la condiţiile de trafic
reprezintă unele din principalele cauze ale accidentelor rutiere grave produse pe drumurile
publice. Viteza determină creşterea distanţei de frânare necesară opririi autovehiculului în
siguranţă, ducând la agravarea consecinţelor accidentelor rutiere, indiferent de cauză
[Fambro,1997]. Deseori, conducătorii auto întâmpină dificultăţi în ceea ce priveşte recunoaşterea
problemelor de aderenţă, neputând reduce astfel viteza pentru menţinerea riscului la un nivel
considerat acceptabil [Casselgren,2012][Green,2000].
1.5. Sisteme de monitorizare a stării carosabilului
Sistemele de monitorizare a stării carosabilului sunt sisteme de informare a participanţilor la
trafic cu privire la fenomenele meteorologice de pe suprafaţa carosabilului şi din atmosferă,
pentru îmbunătăţirea siguranţei rutiere. Sistemele de detecţie a stării carosabilului se pot încadra
în două mari categorii, după tipul detecţiei, şi anume :
- sisteme de detecţie statice, la care starea carosabilului este monitorizată în anumite puncte
sau anumite zone,
- sisteme de detecţie dinamice, aflate la bordul automobilului.
1.5.1. Senzori montaţi în carosabil
Monitorizarea stării carosabilului se poate face folosind o serie de senzori special concepuţi, care
se montează în asfalt, astfel încât partea sa superioară să fie la nivelul părţii carosabile
[Aanderaa,2010]. Amplasarea acestor senzori se face în special în zonele în care există o
probabilitate destul de mare ca pe carosabil să se depună rouă, sau să se formeze polei.

Capitolul 1
11
1.5.2. Determinarea caracteristicilor zgomotului produs de pneu
O metodă pentru detectarea automată a stării suprafeţei carosabile se bazează pe caracteristicile
zgomotului produs de vehiculele care se deplasează [Kongrattanaprasert,2010]. Ȋn general putem
afirma că există trei categorii principale de surse de zgomot: zgomotul din turbulenţa vântului,
zgomotul părţii de putere, zgomotul pneu/carosabil.
1.5.3. Sistem de senzori pentru detectarea formării gheţii şi calculul punctului
de îngheţ
Ȋngheţarea apei este o reacţie exotermă, adică se eliberează căldură, afectând temperatura
mediului înconjurător. Ȋn timpul fenomenului de îngheţ a suprafeţei carosabile va fi eliberată
pentru scurt timp o cantitate mare de căldură. Prin monitorizarea temperaturii suprafeţei, un
eveniment de îngheţ poate fi detectat adesea fără cunoaşterea apriorică a temperaturii de îngheţ
[Ogura,2002].
1.5.4. Detecţia carosabilului ud folosind lumina polarizată
Un alt tip de monitorizare a stării carosabilului se poate face folosind o cameră video şi lumina
polarizată [Kutila,2009]. Suprafeţele carosabilului în diverse stări reflectă în mod diferit lumina
polarizată [Ciamberlini,1995]. Funcţie de unghiul de polarizare a luminii, s-au constatat diferenţe
de reflexie, în cazul suprafeţelor umede faţă de suprafeţele uscate.
1.5.5. Detecţia suprafeţelor acoperite cu gheaţă folosind o cameră în infraroşu
Detecţia suprafeţelor carosabile acoperite cu gheaţă se poate face folosind o cameră în infraroşu
[Kutila,2009]. Ȋn cazul utilizării camerei video în infraroşu cu filtru de 1600 nm, detecţia gheţii
pe suprafaţa carosabilă este evidentă. Tot în cazul radiaţiei infraroşii cu lungimea de undă de
1600 nm, studiile arată că există diferenţe semnificative între reflexia acestor unde de către
suprafeţele acoperite cu apă şi gheaţă.
1.5.6. Senzor de monitorizare a stării drumului cu ajutorul laserului
Un alt mod de monitorizare a stării carosabilului şi de identificare a suprafeţelor umede sau
acoperite cu gheaţă este cel în care se folosesc diode laser şi fotodetectori [Casselgren,2012].
Capitolul 1
12
Datorită faptului că apa, gheaţa şi zăpada reflectă lumina în mod diferit datorită absorbţiei şi
dispersiei, se pot trage concluzii în ceea ce priveşte condiţiile de drum şi rugozitatea suprafeţei
de rulare.
1.6. Sisteme de asistenţă a conducătorului auto
1.6.1. Sisteme de monitorizare a distanţei până la autovehiculul din faţă
Un factor care duce la numeroase accidente, chiar dacă multe dintre ele sunt doar tamponări
uşoare, îl reprezintă nerespectarea distanţei de siguranţă faţă de vehiculul aflat în faţă, care se
deplasează în acelaşi sens, pe aceeaşi bandă. Deseori, distanţa faţă de maşina din faţă nu este
apreciată corect de către conducătorul auto fie din cauza vitezei, fie din cauza stării carosabilului.
1.6.2. Sistem adaptiv al regimului de croazieră
Menținerea unei viteze constante pentru o perioadă mai îndelungată este obositoare pentru
conducătorul auto. Pentru a minimiza consumul de carburant și a menține viteza constantă, chiar
dacă se urcă o pantă sau bate vântul din față, soluția este utilizarea unui sistem automat de
control în buclă închisă al clapetei de accelerație. Timpul de reacție al sistemului este foarte
important astfel încât viteza să nu aibă creșteri și scăderi neplăcute.
1.6.3. Sistem de îmbunătăţire a vederii pe timp de noapte
Cea mai mare diferenţă dintre condusul pe timp de noapte faţă de condusul pe timp de zi o
reprezintă vizibilitatea. Ȋn scopul îmbunătăţirii vizibilităţii pe timp de noapte au fost dezvoltate
sisteme ce folosesc camere video în infraroşu [Tsuji,2002][Teshima,2006].
1.6.4. Sisteme de detecţie a pietonilor
Pietonii sunt cei mai vulnerabili participanţi la traficul urban. În ultimii ani problema detecției
pietonilor a reprezentat un interes ridicat din partea autorităților naționale și internaționale, a
industriei auto și a comunității științifice, fiind urmărită creșterea siguranței acestora în trafic.
Sistemele de asistare a conducătorului auto care detectează din timp situaţiile potenţial
periculoase cu pietoni măresc siguranţa pietonilor în trafic. Rata de detecţie a acestora trebuie să
Capitolul 1
13
fie ridicată pentru a nu emite alarme false conducătorului auto, dar totodată și pentru a nu avea
situații periculoase cu pietoni nedetectaţi.
1.6.5. Sistem de asistenţă la drum îngustat
Un sistem de asistenţă a conducătorului auto nou apărut, dezvoltat de BMW şi Hyundai este
sistemul de asistenţă la drum îngustat (Narrow Passage Assistant) [BMW,2010]. Aprecierea
corectă a distanţelor laterale poate reprezenta deseori o problemă mai ales atunci când conducem
o maşina mai lată, sau chiar alt model.
1.6.6. Sistem de asistenţă pentru stabilizare împotriva curenţilor laterali
Un sistem de asistenţă dezvoltat recent şi implementat pe modelele Smart, Mercedes Sprinter
este „Sistemul de asistenţă pentru stabilizare împotriva rafalelor de vânt ce vin din lateral”
(Crosswind Assist) [Daimler AG,2013]. Sistemul face parte din Programul Electronic de
Stabilitate. Ȋn situaţii cum ar fi: traversarea unui pod, depăşirea unui camion şi nu numai,
senzorii ESP detectează tendinţa autovehiculului de a părăsi banda de rulare şi sistemul aplică
frânarea controlată a maşinii pentru corectarea traiectoriei.
1.7. Concluzii
Industria autovehiculelor este în dezvoltare continuă. Rata ridicată a accidentelor rutiere din
întreaga lume a motivat în mod deosebit implementarea de aplicații de asistență a conducătorului
auto care să poată face posibilă reducerea numărului acestora. Este deosebit de importantă
dezvoltarea de sisteme care îmbunătăţesc percepţia mediului exterior şi avertizează şoferul în
situaţiile dificile. Un astfel de sistem trebuie să ajute şoferul, dar în acelaşi timp nu trebuie sa
reducă participarea activă a şoferului la condus. Ȋn cazul în care şoferul se bazează prea mult pe
un astfel de sistem, poate să nu reacţioneze la timp în situaţii limită, pentru care sistemul de
asistare nu a fost proiectat.
Ȋn cadrul acestui capitol a fost făcută în prima parte o prezentare a principalilor factori de
risc ce pot apărea în trafic şi gradul de pericol pe care aceşti factori de risc îl reprezintă asupra
creşterii riscului de a provoca un accident. Deoarece starea carosabilului reprezintă un important
factor de risc, în cea de a doua parte au fost prezentate principalele metode de determinare a
stării carosabilului.
14
Capitolul 2
Conceperea, realizarea şi testarea unor traductoare pentru
măsurarea fără contact a umidităţii carosabilului
Umiditatea carosabilului este primul factor ce afectează aderenţa pneurilor la suprafaţa de rulare.
Determinarea corectă a gradului de umiditate a carosabilului este esenţială pentru aprecierea
nivelului de siguranţă a circulaţiei cu autovehiculul pe şosea şi avertizarea conducătorului auto
privitor la apariţia eventualelor condiţii de drum lunecos. Am văzut în capitolul 1 că există
posibilităţi de determinare locală a umidităţii carosabilului prin implantarea unor senzori în zone
predispuse acestui fenomen, însă această metodă se dovedeşte a fi eficientă doar pentru porţiuni
restrânse de drum. Determinarea umidităţii carosabilului printr-o metodă “la purtător”, adică cu
ajutorul unor senzori amplasaţi pe maşină poate aduce un progres semnificativ în aprecierea
corectă şi continuă a condiţiilor nefavorabile de trafic. Dispozitivele prezentate în următoarele
două secţiuni reprezintă doi senzori dezvoltaţi şi testaţi de autor, care sunt capabili să disocieze
de la distanţă (fără contact), cu un grad de încredere ridicat, suprafeţe carosabile umede sau
acoperite cu gheaţă, polei sau zăpadă, de suprafeţele uscate.
2.1. Traductor pentru determinarea fără contact a umiditatăţii carosabilului
prin măsurarea radiaţiei infraroşii reflectate
Suprafaţa carosabilă este iluminată cu ajutorul a două LED-uri de putere 1W ce emit în infraroşu
(850 nm), radiaţia reflectată de şosea fiind recepţionată cu ajutorul unui fototranzistor sensibil la
infraroşu.
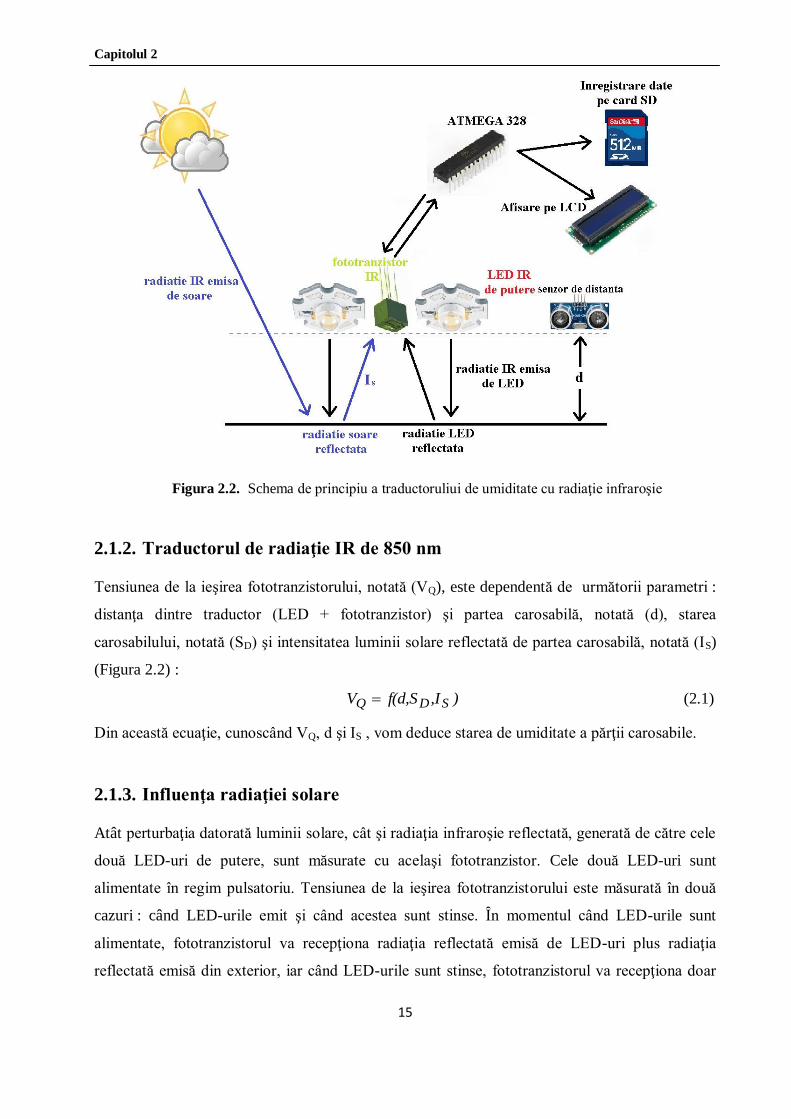
2.1.1. Prezentatea generală a sistemului
Ȋn figura 2.2. este prezentată schema generală a sistemului de măsurare şi înregistrare a datelor.
Fototranzistorul sensibil la radiaţia infraroşie recepţionează radiaţia infraroşie reflectată de
suprafaţa carosabilă, provenită din două surse (radiaţia emisă de soare şi radiaţia emisă de cele
două LED-uri de putere). Senzorul de distanţă determină distanţa dintre ansamblul format din
LED + fototranzistor şi carosabil, deoarece această distanţă influenţează răspunsul
fototranzistorului. Sistemul de achiziţie a datelor a fost construit folosind o placă de dezvoltare
cu microcontroler de tip Atmel ATMEGA328.
Capitolul 2
15
Figura 2.2. Schema de principiu a traductoruliui de umiditate cu radiaţie infraroşie
2.1.2. Traductorul de radiaţie IR de 850 nm
Tensiunea de la ieşirea fototranzistorului, notată (VQ), este dependentă de următorii parametri :
distanţa dintre traductor (LED + fototranzistor) şi partea carosabilă, notată (d), starea
carosabilului, notată (SD) şi intensitatea luminii solare reflectată de partea carosabilă, notată (IS)
(Figura 2.2) :
),If(d,SV SDQ (2.1)
Din această ecuaţie, cunoscând VQ, d şi IS , vom deduce starea de umiditate a părţii carosabile.
2.1.3. Influenţa radiaţiei solare
Atât perturbaţia datorată luminii solare, cât şi radiaţia infraroşie reflectată, generată de către cele
două LED-uri de putere, sunt măsurate cu acelaşi fototranzistor. Cele două LED-uri sunt
alimentate în regim pulsatoriu. Tensiunea de la ieşirea fototranzistorului este măsurată în două
cazuri : când LED-urile emit şi când acestea sunt stinse. Ȋn momentul când LED-urile sunt
alimentate, fototranzistorul va recepţiona radiaţia reflectată emisă de LED-uri plus radiaţia
reflectată emisă din exterior, iar când LED-urile sunt stinse, fototranzistorul va recepţiona doar

Capitolul 2
16
radiaţia reflectată emisă din exterior. Prin diferenţa dintre cele două valori, se obţine informaţia
referitoare la intensitatea radiaţiei reflectate de partea carosabilă, care este emisă de cele două
LED-uri. Pentru a pune în evidenţă influenţa radiaţiei solare asupra răspunsului traductorului, a
fost măsurată tensiunea VQ conform relaţiei (2.1), în care d=10 cm=constantă, SD=suprafaţă din
beton, în stare uscată, singurul parametru variabil fiind intensitatea luminii solare IS. Ȋn figura
2.5. este prezentată variaţia tensiunii de la fototranzistor în momentul în care cele două LED-uri
de putere emit, funcţie de valoarea de referinţă, când LED-urile sunt stinse. Răspunsul
traductorului în momentul când LED-urile IR de putere sunt aprinse este notat VQ ON, iar în
momentul când LED-urile IR de putere sunt stinse este notat VQ OFF.
0
0.5
1
1.5
2
2.5
3
3.5
0 1 2 3 4 5
VQ
O
N [
V]
VQ OFF [V]
VQ ON=f(VQ OFF)
VQ ON=f(VQ OFF)
Figura 2.5. Dependenţa VQON de VQOFF
2.1.4. Influenţa distanţei dintre traductor şi partea carosabilă
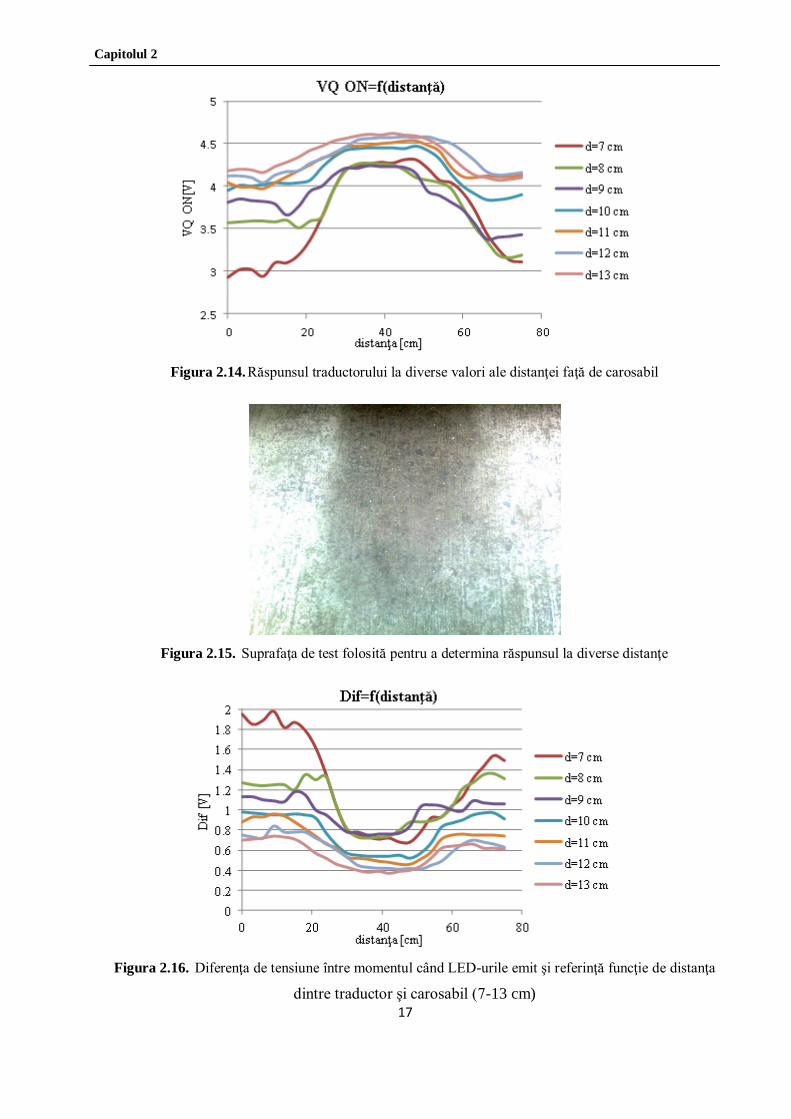
Suprafaţa de test folosită pentru a evidenţia rezultatele de mai jos este cea din figura 2.15, având
o porţiune umedă de aproximativ 35 cm. Traductorul a fost deplasat deasupra porţiunii de test la
distanţă constantă pentru fiecare caz în parte, distanţă având valori cuprinse între 7 şi 13 cm, la o
diferenţă de 1 cm între aceste valori.
După cum se poate observa din figura 2.14, intensitatea radiaţiei reflectate variază invers
proporţional cu distanţa dintre traductor şi partea carosabilă şi are variaţii semnificative funcţie
de distanţă. Distanţa aleasă pentru efectuarea testelor pentru diverse tipuri de suprafeţe a fost de
10 cm. O distanţă prea mare are ca efect o reflexie slabă a radiaţiei infraroşii emise de LED, iar o
distanţă prea mică poate duce la saturarea fototranzistorului.
Capitolul 2
17
Figura 2.14. Răspunsul traductorului la diverse valori ale distanţei faţă de carosabil
Figura 2.15. Suprafaţa de test folosită pentru a determina răspunsul la diverse distanţe
Figura 2.16. Diferenţa de tensiune între momentul când LED-urile emit şi referinţă funcţie de distanţa
dintre traductor şi carosabil (7-13 cm)
Capitolul 2
18
Ȋn figura 2.16. este prezentat modul cum variază intensitatea radiaţiei infraroşii reflectate emisă
de LED-uri în funcţie de distanţa faţă de şosea la care este amplasat traductorul, în cazurile când
suprafaţa carosabilă este uscată şi când este umedă.
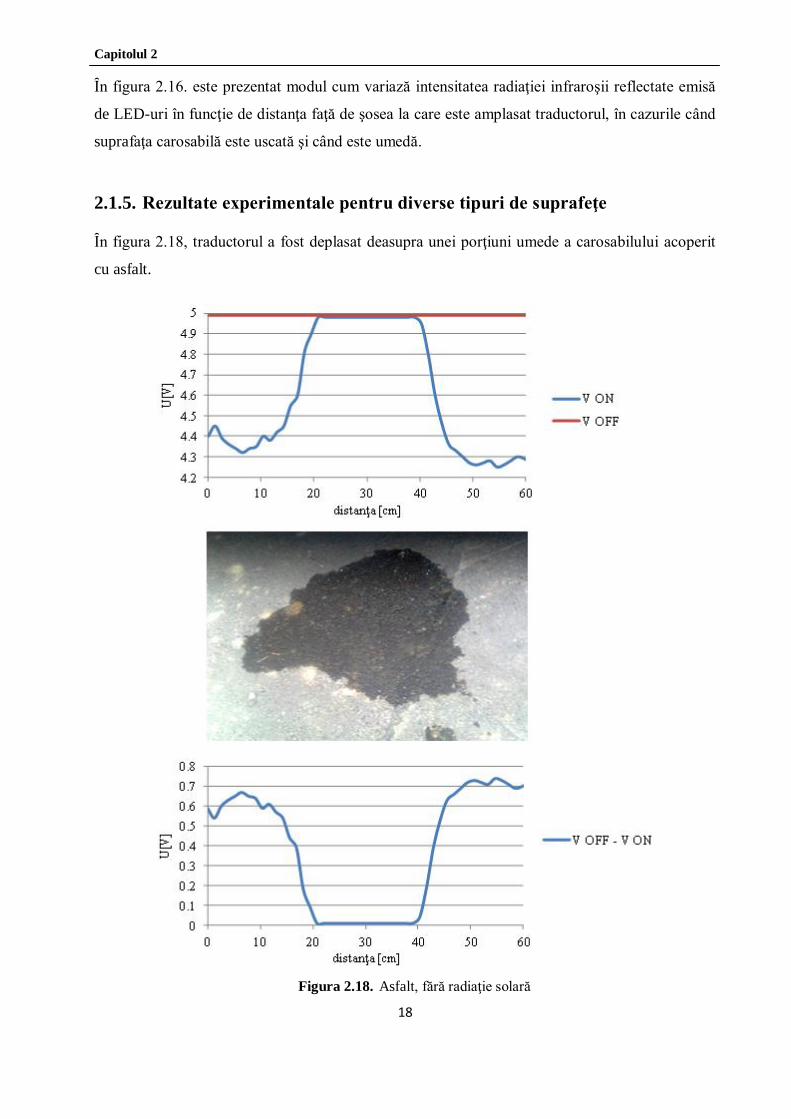
2.1.5. Rezultate experimentale pentru diverse tipuri de suprafeţe
Ȋn figura 2.18, traductorul a fost deplasat deasupra unei porţiuni umede a carosabilului acoperit
cu asfalt.
Figura 2.18. Asfalt, fără radiaţie solară
Capitolul 2
19
Se poate observa cum scade intensitatea radiaţiei reflectate, în timpul trecerii prin dreptul
porţiunii umede, respectiv scăderea diferenţei dintre cele două valori ale tensiunii din colectorul
fototranzistorului. Din acest test rezultă faptul că asfaltul umed reflectă radiaţia infraroşie mai
puţin decât asfaltul uscat atunci când nu este prezentă radiaţie infraroşie provenită din exterior.
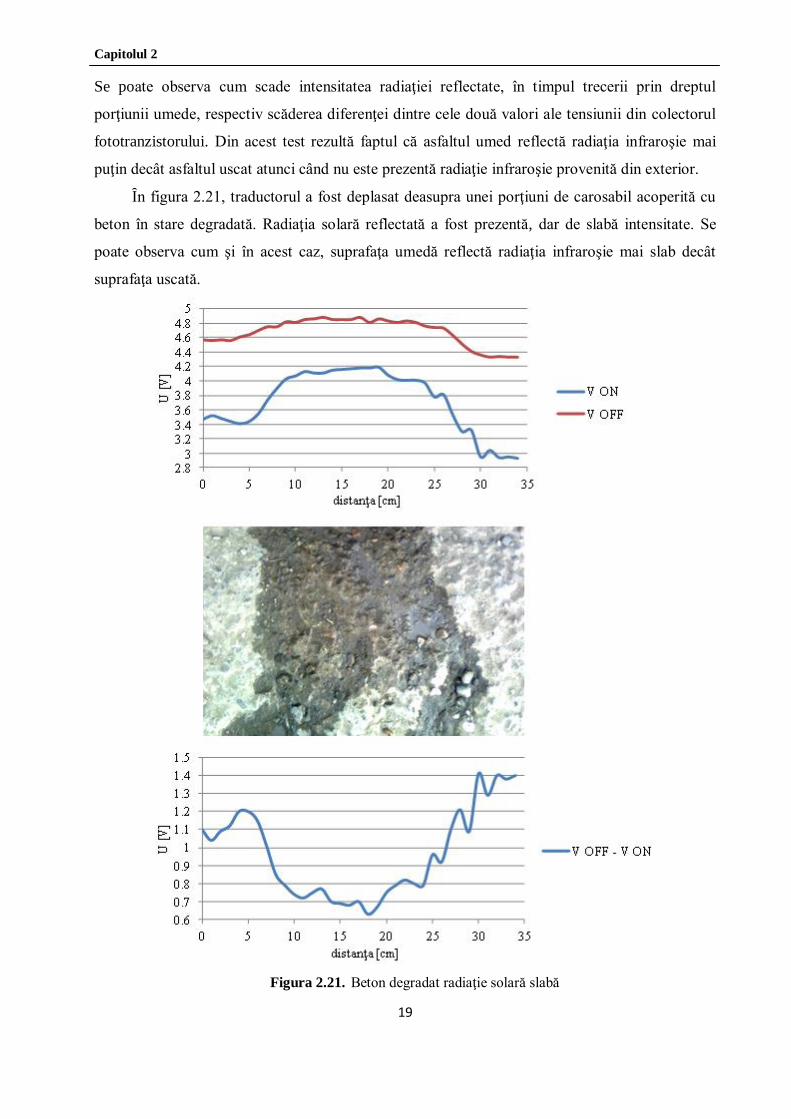
Ȋn figura 2.21, traductorul a fost deplasat deasupra unei porţiuni de carosabil acoperită cu
beton în stare degradată. Radiaţia solară reflectată a fost prezentă, dar de slabă intensitate. Se
poate observa cum şi în acest caz, suprafaţa umedă reflectă radiaţia infraroşie mai slab decât
suprafaţa uscată.
Figura 2.21. Beton degradat radiaţie solară slabă
Capitolul 2
20
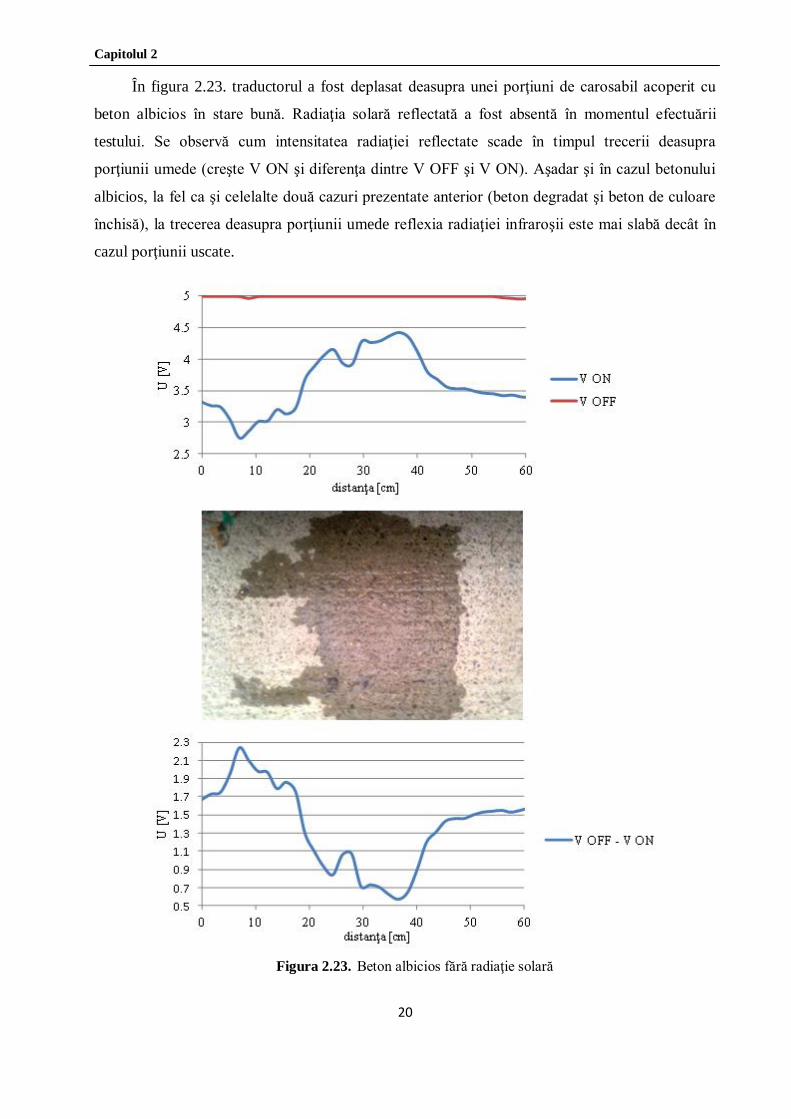
Ȋn figura 2.23. traductorul a fost deplasat deasupra unei porţiuni de carosabil acoperit cu
beton albicios în stare bună. Radiaţia solară reflectată a fost absentă în momentul efectuării
testului. Se observă cum intensitatea radiaţiei reflectate scade în timpul trecerii deasupra
porţiunii umede (creşte V ON şi diferenţa dintre V OFF şi V ON). Aşadar şi în cazul betonului
albicios, la fel ca şi celelalte două cazuri prezentate anterior (beton degradat şi beton de culoare
închisă), la trecerea deasupra porţiunii umede reflexia radiaţiei infraroşii este mai slabă decât în
cazul porţiunii uscate.
Figura 2.23. Beton albicios fără radiaţie solară

Capitolul 2
21
Ȋn figura 2.24. traductorul a fost deplasat deasupra unei porţiuni de carosabil din beton.
Suprafaţa de test în acest caz a fost pentru început uscată, fiind urmată de o porţiune umedă iar
apoi acoperită cu gheaţă. Radiaţia solară reflectată a fost de intensitate slabă, efectul acesteia
fiind vizibil doar în timpul deplasării deasupra porţiunii uscate.
Se observă că betonul umed şi cel acoperit cu gheaţă reflectă radiaţia infraroşie mai slab decât
betonul uscat, în schimb nu există diferenţe semnificative de reflexie între suprafaţa umedă şi cea
acoperită cu gheaţă transparentă.
Figura 2.24. Beton, radiaţie solară slabă acoperit cu apă şi gheaţă transparentă
Capitolul 2
22
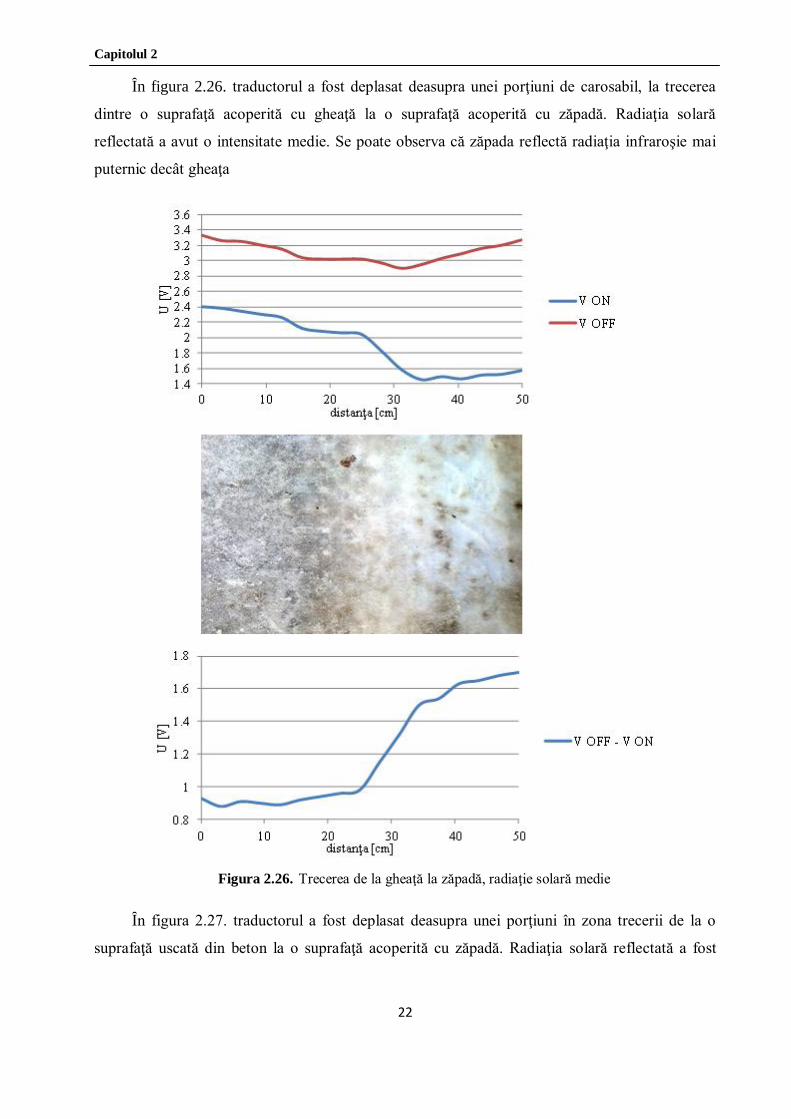
Ȋn figura 2.26. traductorul a fost deplasat deasupra unei porţiuni de carosabil, la trecerea
dintre o suprafaţă acoperită cu gheaţă la o suprafaţă acoperită cu zăpadă. Radiaţia solară
reflectată a avut o intensitate medie. Se poate observa că zăpada reflectă radiaţia infraroşie mai
puternic decât gheaţa
Figura 2.26. Trecerea de la gheaţă la zăpadă, radiaţie solară medie
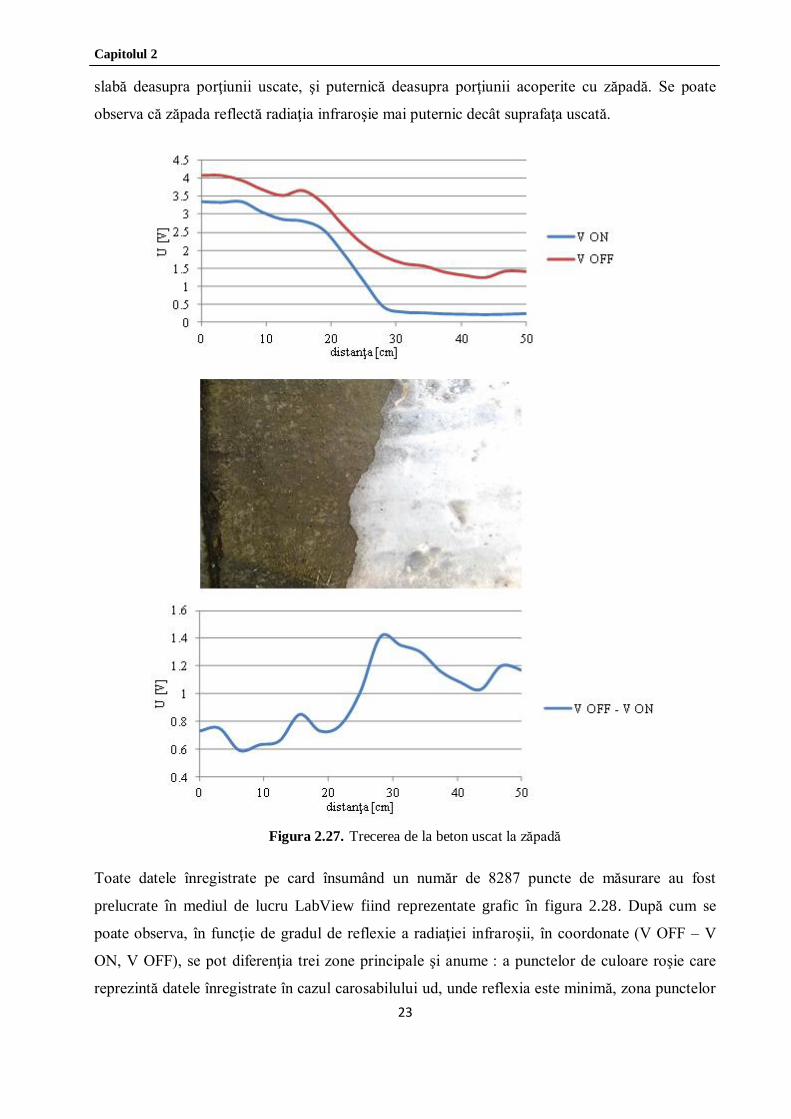
Ȋn figura 2.27. traductorul a fost deplasat deasupra unei porţiuni în zona trecerii de la o
suprafaţă uscată din beton la o suprafaţă acoperită cu zăpadă. Radiaţia solară reflectată a fost
Capitolul 2
23
slabă deasupra porţiunii uscate, şi puternică deasupra porţiunii acoperite cu zăpadă. Se poate
observa că zăpada reflectă radiaţia infraroşie mai puternic decât suprafaţa uscată.
Figura 2.27. Trecerea de la beton uscat la zăpadă
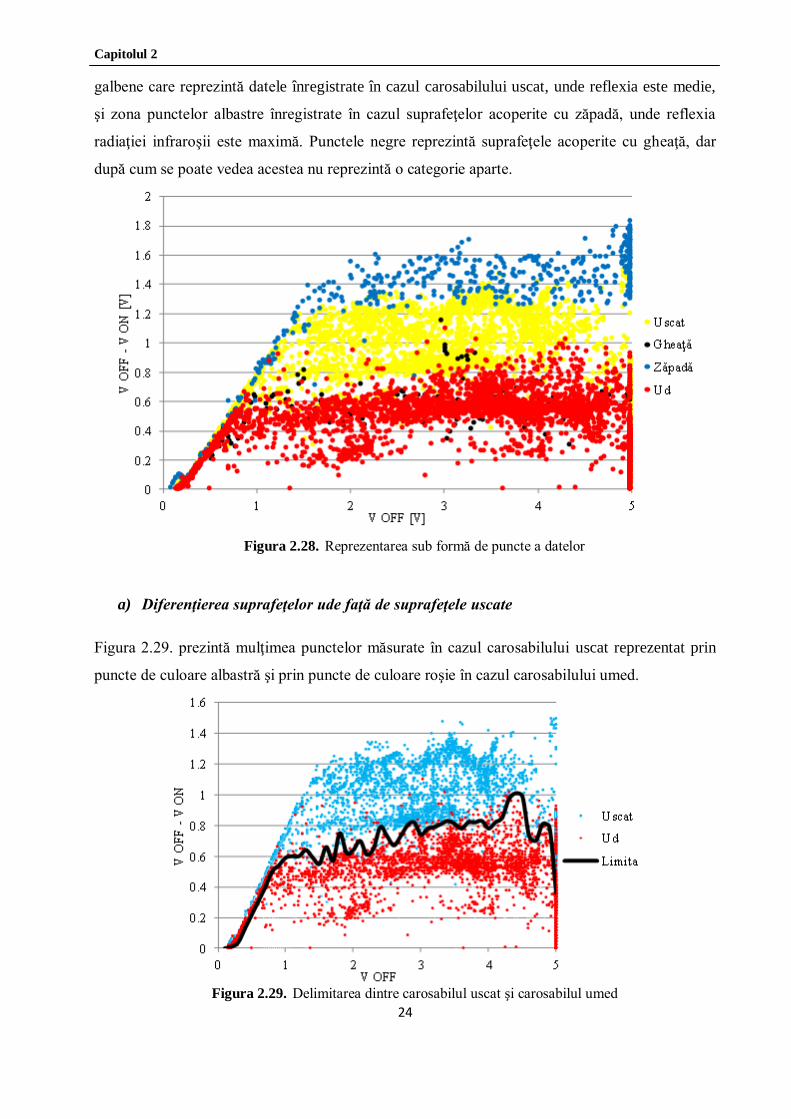
Toate datele înregistrate pe card însumând un număr de 8287 puncte de măsurare au fost
prelucrate în mediul de lucru LabView fiind reprezentate grafic în figura 2.28. După cum se
poate observa, în funcţie de gradul de reflexie a radiaţiei infraroşii, în coordonate (V OFF – V
ON, V OFF), se pot diferenţia trei zone principale şi anume : a punctelor de culoare roşie care
reprezintă datele înregistrate în cazul carosabilului ud, unde reflexia este minimă, zona punctelor
Capitolul 2
24
galbene care reprezintă datele înregistrate în cazul carosabilului uscat, unde reflexia este medie,
şi zona punctelor albastre înregistrate în cazul suprafeţelor acoperite cu zăpadă, unde reflexia
radiaţiei infraroşii este maximă. Punctele negre reprezintă suprafeţele acoperite cu gheaţă, dar
după cum se poate vedea acestea nu reprezintă o categorie aparte.
Figura 2.28. Reprezentarea sub formă de puncte a datelor
a) Diferenţierea suprafeţelor ude faţă de suprafeţele uscate
Figura 2.29. prezintă mulţimea punctelor măsurate în cazul carosabilului uscat reprezentat prin
puncte de culoare albastră şi prin puncte de culoare roşie în cazul carosabilului umed.
Figura 2.29. Delimitarea dintre carosabilul uscat şi carosabilul umed
Capitolul 2
25
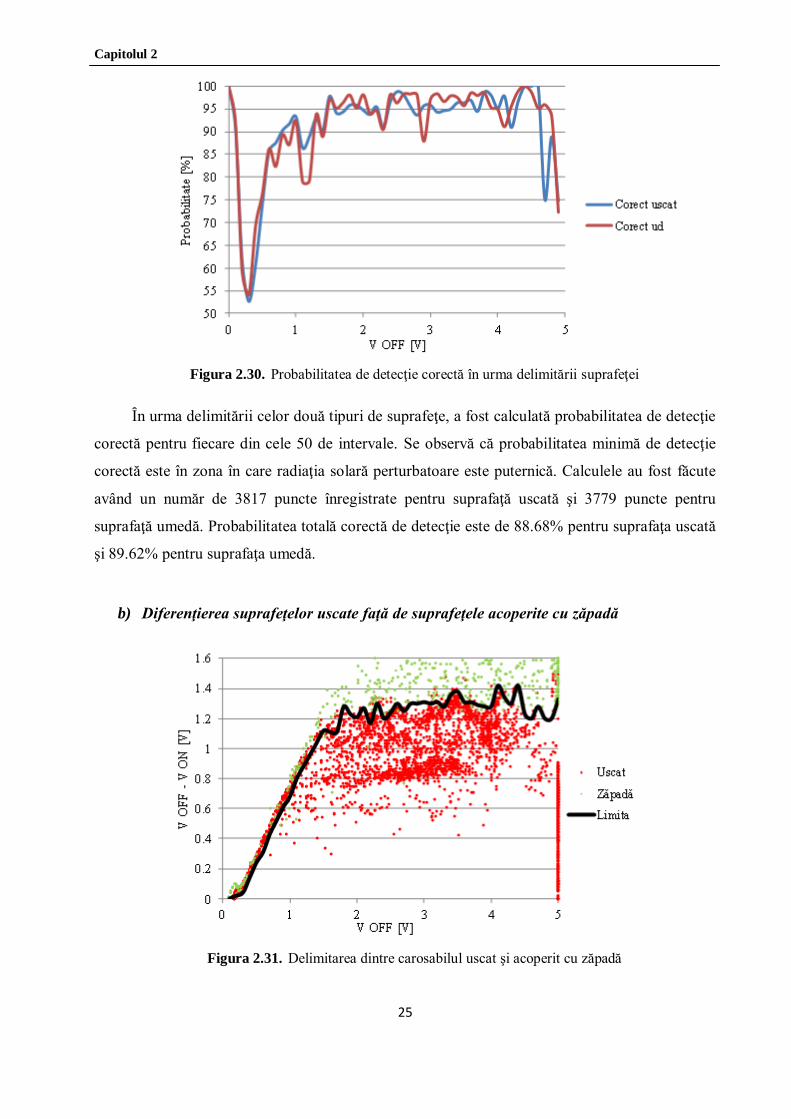
Figura 2.30. Probabilitatea de detecţie corectă în urma delimitării suprafeţei
Ȋn urma delimitării celor două tipuri de suprafeţe, a fost calculată probabilitatea de detecţie
corectă pentru fiecare din cele 50 de intervale. Se observă că probabilitatea minimă de detecţie
corectă este în zona în care radiaţia solară perturbatoare este puternică. Calculele au fost făcute
având un număr de 3817 puncte înregistrate pentru suprafaţă uscată şi 3779 puncte pentru
suprafaţă umedă. Probabilitatea totală corectă de detecţie este de 88.68% pentru suprafaţa uscată
şi 89.62% pentru suprafaţa umedă.
b) Diferenţierea suprafeţelor uscate faţă de suprafeţele acoperite cu zăpadă
Figura 2.31. Delimitarea dintre carosabilul uscat şi acoperit cu zăpadă
Capitolul 2
26
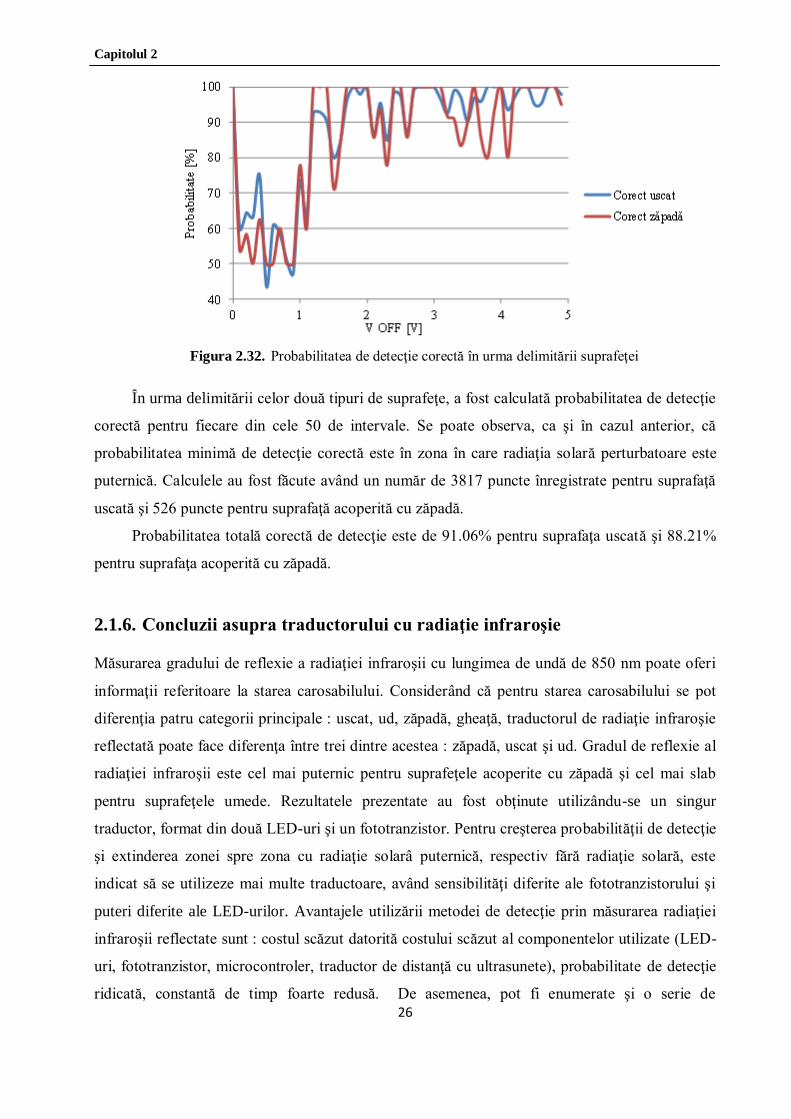
Figura 2.32. Probabilitatea de detecţie corectă în urma delimitării suprafeţei
Ȋn urma delimitării celor două tipuri de suprafeţe, a fost calculată probabilitatea de detecţie
corectă pentru fiecare din cele 50 de intervale. Se poate observa, ca şi în cazul anterior, că
probabilitatea minimă de detecţie corectă este în zona în care radiaţia solară perturbatoare este
puternică. Calculele au fost făcute având un număr de 3817 puncte înregistrate pentru suprafaţă
uscată şi 526 puncte pentru suprafaţă acoperită cu zăpadă.
Probabilitatea totală corectă de detecţie este de 91.06% pentru suprafaţa uscată şi 88.21%
pentru suprafaţa acoperită cu zăpadă.
2.1.6. Concluzii asupra traductorului cu radiaţie infraroşie
Măsurarea gradului de reflexie a radiaţiei infraroşii cu lungimea de undă de 850 nm poate oferi
informaţii referitoare la starea carosabilului. Considerând că pentru starea carosabilului se pot
diferenţia patru categorii principale : uscat, ud, zăpadă, gheaţă, traductorul de radiaţie infraroşie
reflectată poate face diferenţa între trei dintre acestea : zăpadă, uscat şi ud. Gradul de reflexie al
radiaţiei infraroşii este cel mai puternic pentru suprafeţele acoperite cu zăpadă şi cel mai slab
pentru suprafeţele umede. Rezultatele prezentate au fost obţinute utilizându-se un singur
traductor, format din două LED-uri şi un fototranzistor. Pentru creşterea probabilităţii de detecţie
şi extinderea zonei spre zona cu radiaţie solarâ puternică, respectiv fără radiaţie solară, este
indicat să se utilizeze mai multe traductoare, având sensibilităţi diferite ale fototranzistorului şi
puteri diferite ale LED-urilor. Avantajele utilizării metodei de detecţie prin măsurarea radiaţiei
infraroşii reflectate sunt : costul scăzut datorită costului scăzut al componentelor utilizate (LED-
uri, fototranzistor, microcontroler, traductor de distanţă cu ultrasunete), probabilitate de detecţie
ridicată, constantă de timp foarte redusă. De asemenea, pot fi enumerate şi o serie de
Capitolul 2
27
dezavantaje cum ar fi : sensibilitate ridicată la praf, mizerie, apă deoarece traductorul trebuie să
fie montat în partea de jos a autovehiculului la o distanţă relativ mică faţă de carosabil,
posibilitate de apariţie a erorilor în cazul carosabilului cu gropi sau la viteze mari de deplasare,
informaţia obţinută se referă strict la punctul unde este făcută măsurătoarea, fără a oferi o
imagine de ansamblu asupra întregii părţi a carosabilului.
2.2. Traductor pentru determinarea fără contact a umidităţii carosabilului
prin măsurare în două puncte
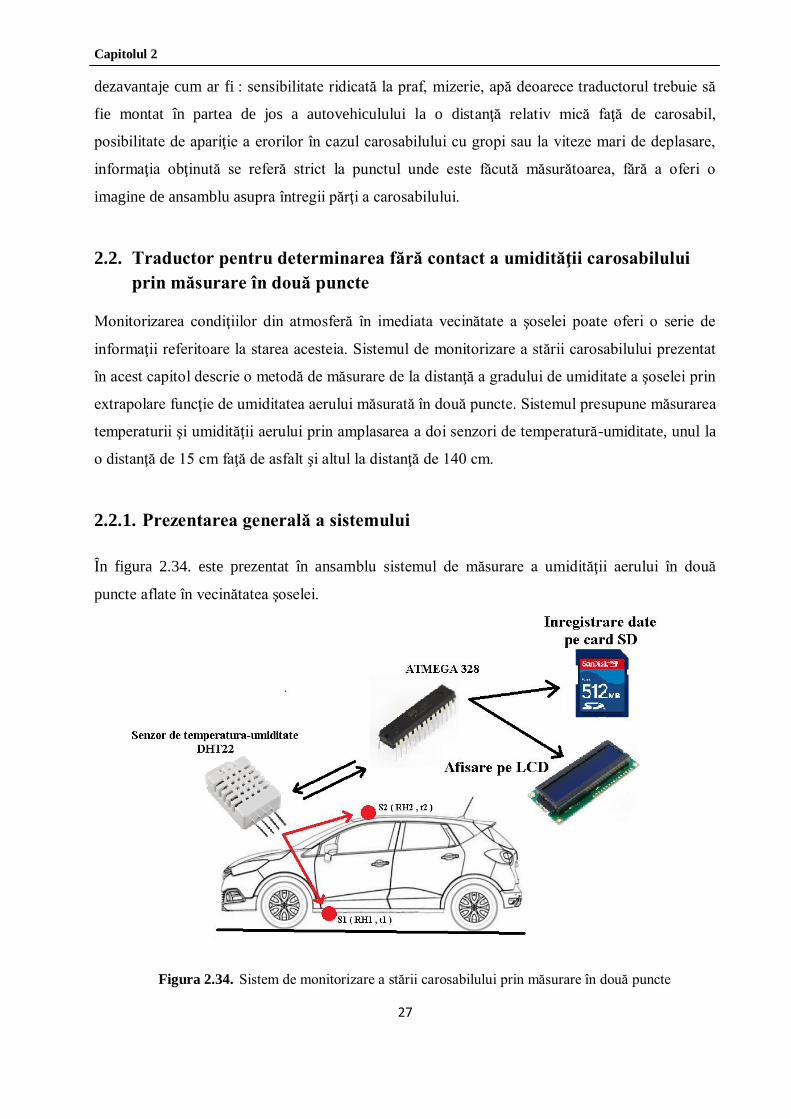
Monitorizarea condiţiilor din atmosferă în imediata vecinătate a şoselei poate oferi o serie de
informaţii referitoare la starea acesteia. Sistemul de monitorizare a stării carosabilului prezentat
în acest capitol descrie o metodă de măsurare de la distanţă a gradului de umiditate a şoselei prin
extrapolare funcţie de umiditatea aerului măsurată în două puncte. Sistemul presupune măsurarea
temperaturii şi umidităţii aerului prin amplasarea a doi senzori de temperatură-umiditate, unul la
o distanţă de 15 cm faţă de asfalt şi altul la distanţă de 140 cm.
2.2.1. Prezentarea generală a sistemului
Ȋn figura 2.34. este prezentat în ansamblu sistemul de măsurare a umidităţii aerului în două
puncte aflate în vecinătatea şoselei.
Figura 2.34. Sistem de monitorizare a stării carosabilului prin măsurare în două puncte
Capitolul 2
28
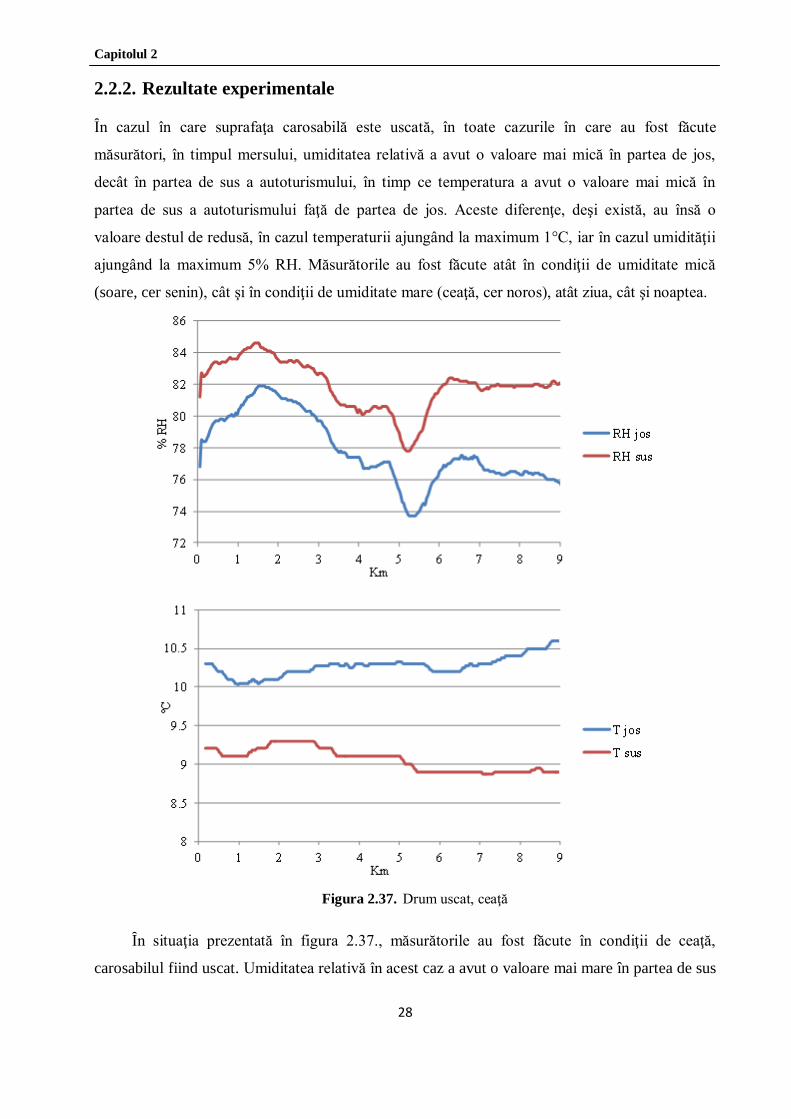
2.2.2. Rezultate experimentale
Ȋn cazul în care suprafaţa carosabilă este uscată, în toate cazurile în care au fost făcute
măsurători, în timpul mersului, umiditatea relativă a avut o valoare mai mică în partea de jos,
decât în partea de sus a autoturismului, în timp ce temperatura a avut o valoare mai mică în
partea de sus a autoturismului faţă de partea de jos. Aceste diferenţe, deşi există, au însă o
valoare destul de redusă, în cazul temperaturii ajungând la maximum 1°C, iar în cazul umidităţii
ajungând la maximum 5% RH. Măsurătorile au fost făcute atât în condiţii de umiditate mică
(soare, cer senin), cât şi în condiţii de umiditate mare (ceaţă, cer noros), atât ziua, cât şi noaptea.
Figura 2.37. Drum uscat, ceaţă
Ȋn situaţia prezentată în figura 2.37., măsurătorile au fost făcute în condiţii de ceaţă,
carosabilul fiind uscat. Umiditatea relativă în acest caz a avut o valoare mai mare în partea de sus
Capitolul 2
29
a autovehiculului, iar temperatura la acest nivel a fost mai scăzută decât în partea de jos. Se poate
spune în acest caz că :
susjos RHRH (2.11)
jossus TT (2.12)
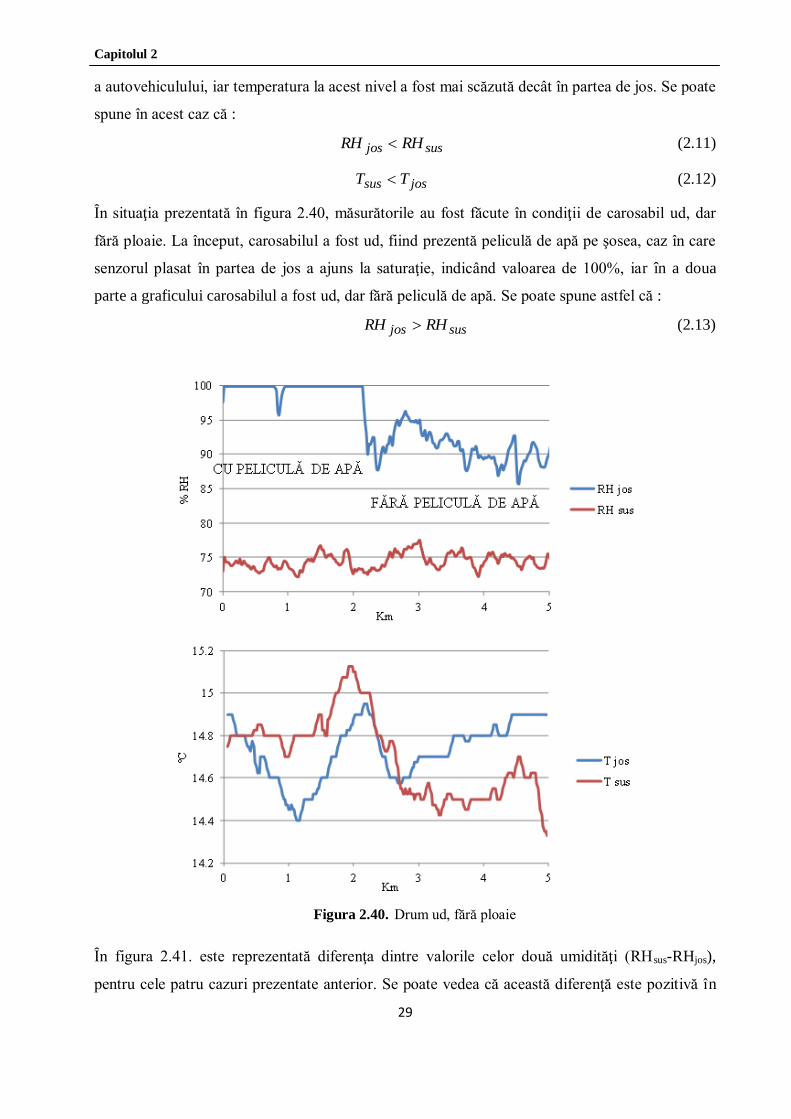
Ȋn situaţia prezentată în figura 2.40, măsurătorile au fost făcute în condiţii de carosabil ud, dar
fără ploaie. La început, carosabilul a fost ud, fiind prezentă peliculă de apă pe şosea, caz în care
senzorul plasat în partea de jos a ajuns la saturaţie, indicând valoarea de 100%, iar în a doua
parte a graficului carosabilul a fost ud, dar fără peliculă de apă. Se poate spune astfel că :
susjos RHRH (2.13)
Figura 2.40. Drum ud, fără ploaie
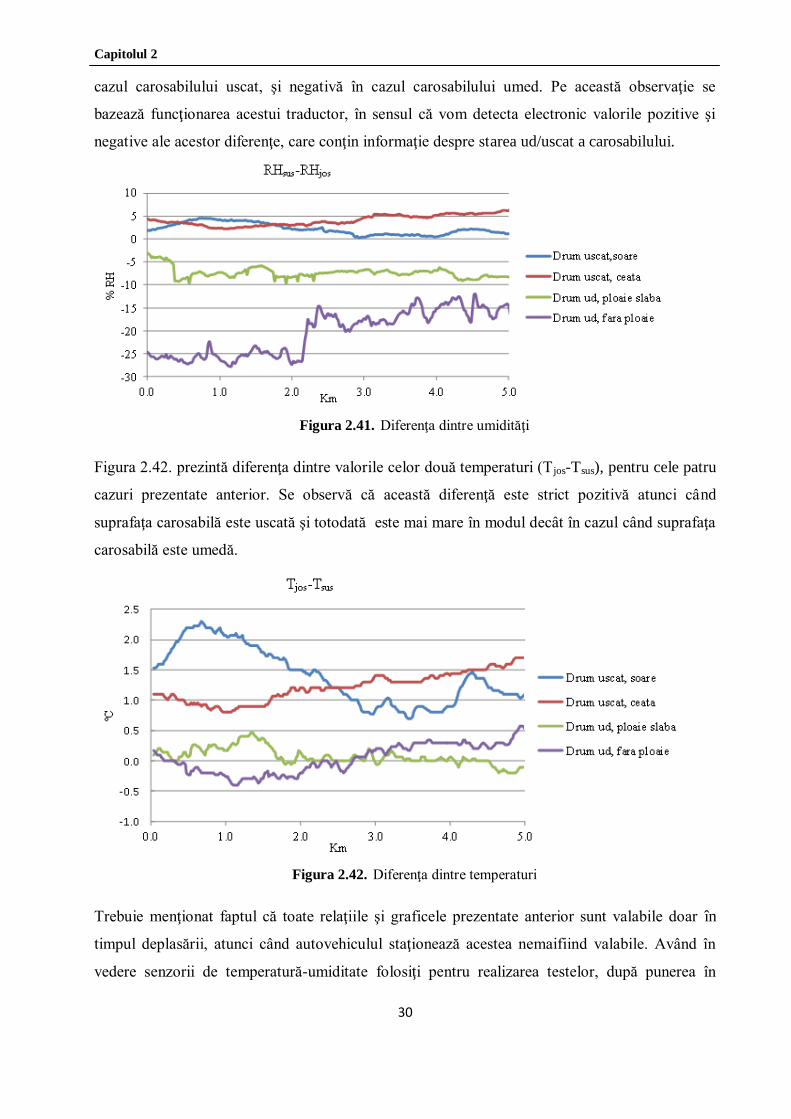
Ȋn figura 2.41. este reprezentată diferenţa dintre valorile celor două umidităţi (RHsus-RHjos),
pentru cele patru cazuri prezentate anterior. Se poate vedea că această diferenţă este pozitivă în
Capitolul 2
30
cazul carosabilului uscat, şi negativă în cazul carosabilului umed. Pe această observaţie se
bazează funcţionarea acestui traductor, în sensul că vom detecta electronic valorile pozitive şi
negative ale acestor diferenţe, care conţin informaţie despre starea ud/uscat a carosabilului.
Figura 2.41. Diferenţa dintre umidităţi
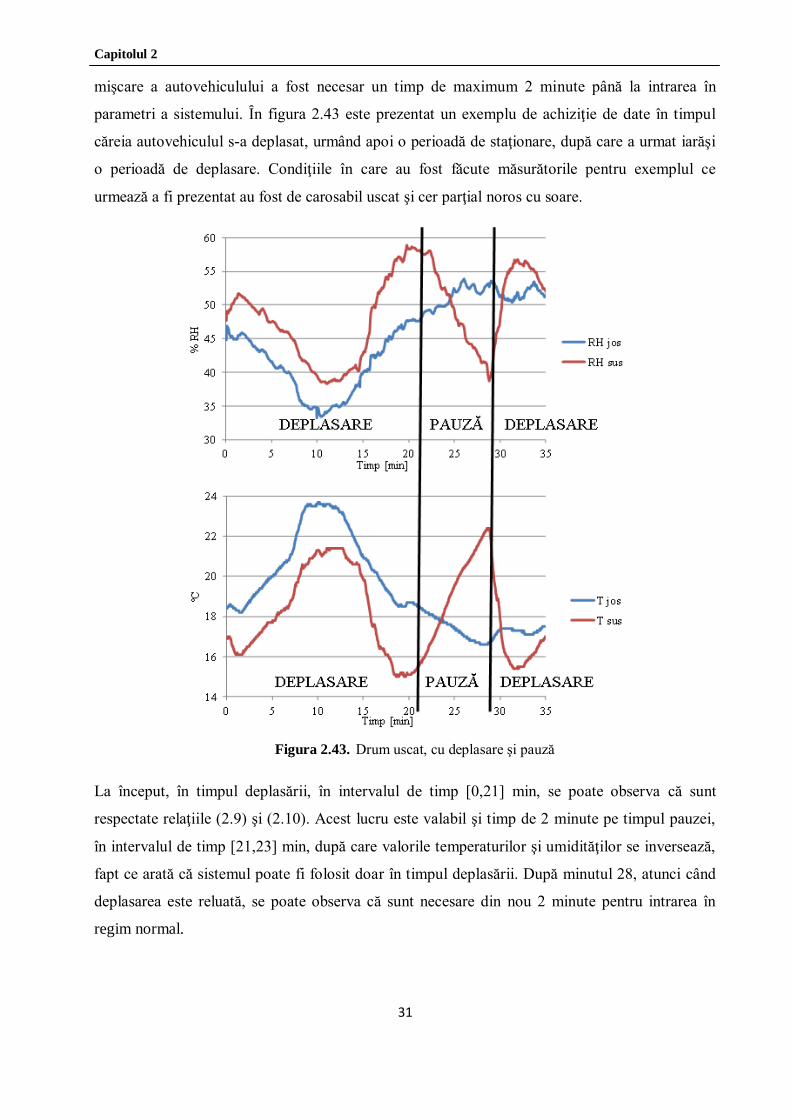
Figura 2.42. prezintă diferenţa dintre valorile celor două temperaturi (Tjos-Tsus), pentru cele patru
cazuri prezentate anterior. Se observă că această diferenţă este strict pozitivă atunci când
suprafaţa carosabilă este uscată şi totodată este mai mare în modul decât în cazul când suprafaţa
carosabilă este umedă.
Figura 2.42. Diferenţa dintre temperaturi
Trebuie menţionat faptul că toate relaţiile şi graficele prezentate anterior sunt valabile doar în
timpul deplasării, atunci când autovehiculul staţionează acestea nemaifiind valabile. Având în
vedere senzorii de temperatură-umiditate folosiţi pentru realizarea testelor, după punerea în
Capitolul 2
31
mişcare a autovehiculului a fost necesar un timp de maximum 2 minute până la intrarea în
parametri a sistemului. Ȋn figura 2.43 este prezentat un exemplu de achiziţie de date în timpul
căreia autovehiculul s-a deplasat, urmând apoi o perioadă de staţionare, după care a urmat iarăşi
o perioadă de deplasare. Condiţiile în care au fost făcute măsurătorile pentru exemplul ce
urmează a fi prezentat au fost de carosabil uscat şi cer parţial noros cu soare.
Figura 2.43. Drum uscat, cu deplasare şi pauză
La început, în timpul deplasării, în intervalul de timp [0,21] min, se poate observa că sunt
respectate relaţiile (2.9) şi (2.10). Acest lucru este valabil şi timp de 2 minute pe timpul pauzei,
în intervalul de timp [21,23] min, după care valorile temperaturilor şi umidităţilor se inversează,
fapt ce arată că sistemul poate fi folosit doar în timpul deplasării. După minutul 28, atunci când
deplasarea este reluată, se poate observa că sunt necesare din nou 2 minute pentru intrarea în
regim normal.
Capitolul 2
32
2.2.3. Concluzii asupra traductorului cu măsurare în două puncte
Metoda de monitorizare a stării carosabilului prin măsurarea umidităţii aerului în două puncte
prezentată în acest capitol face o corelaţie între umidităţile relative ale aerului măsurate în două
puncte aflate unul la 15 cm faţă de şosea şi unul la 140 cm, şi starea carosabilului. Această
metodă prezintă o serie de avantaje cum ar fi : sensibilitate mult mai mică la praf decât în cazul
metodei optice prezentate în capitolul anterior, sensibilitate foarte redusă în cazul variaţiei
distanţei faţă de carosabil la care sunt amplasaţi (în cazul metodei prezentate în capitolul anterior
distanţa influenţa foarte mult răspunsul traductorului), metoda oferă o imagine de ansamblu
asupra întregii porţiuni a carosabilului, precum şi o serie de dezavantaje : sensibilitate în cazul în
care senzorul este stropit cu apă, va indica umiditatea de 100%, constantă de timp relativ mare,
obţinerea de rezultate doar în timpul deplasării. Ȋn ceea ce priveşte costurile acestei metode,
acestea sunt date de preţul senzorilor de temperatură umiditate.
2.3. Concluzii asupra capitolului
Ȋn acest capitol au fost prezentate două metode proprii de detecţie fără contact a stării
carosabilului. O prima metodă constă în măsurarea modificării gradului de reflexie a radiaţiei
infraroşii cu lungimea de undă de 850 nm în funcţie de starea carosabilului, iar a doua metodă
constă în măsurarea temperaturii şi umidităţii relative a aerului în două puncte, unul apropiat şi
unul îndepărtat de şosea, în vederea determinării prin extrapolare a umidităţii şoselei. Cu ajutorul
traductorului de radiaţie infraroşie reflectată se poate obţine un răspuns rapid, determinarea stării
carosabilului fiind pe o suprafaţă restrânsă, în timp ce cu ajutorul traductorului de temperatură-
umiditate se obţine un răspuns global, pe o suprafaţă largă, însă cu timp de răspuns mai mare.
Traductorul de radiaţie infraroşie reflectată poate diferenţia trei tipuri de suprafeţe : acoperită cu
zăpadă, uscată şi umedă, în timp ce traductorul de temperatură-umiditate poate diferenţia doar
două tipuri de suprafeţe : uscată şi umedă. Niciunul dintre traductoare nu diferenţiază gheaţa ca
şi caz separat. Din acest motiv, pentru creşterea nivelului de încredere este indicat să fie utilizate
în tandem cele două sisteme, împreună cu un traductor de temperatură fără contact pentru
măsurarea temperaturii carosabilului. Astfel, în funcţie de răspunsurile celor trei traductoare,
poate fi determinată starea carosabilului chiar şi pentru situaţia în care acesta este acoperit cu
gheaţă.
33
Capitolul 3
Sistem complex de detecţie şi măsurare a unor factori de risc în
traficul rutier
3.1. Prezentarea generală a sistemului
Ȋn acest capitol este prezentat un sistem complex de detecţie şi măsurare a unor factori de risc în
traficul rutier realizat de către autor în cadrul programului de doctorat. Acest sistem determină în
primă fază starea de umiditate a carosabilului (uscat, ud, zăpadă, gheaţă), cu ajutorul a două
traductoare de umiditate a carosabilului fără contact şi a unui traductor de temperatură fără
contact, iar apoi, cu ajutorul informaţiilor legate de viteză, de distanţa faţă de vehiculul aflat în
faţă şi de tipul anvelopelor cu care este echipat autovehiculul, emite avertizări conducătorului
auto asupra unor situaţii de risc în trafic.
Sistemul conţine cele două traductoare de determinare a umidităţii carosabilului (TUIR şi
TURH) realizate şi testate în cadrul programului de doctorat, traductoare ce au fost prezentate în
detaliu în capitolul 2 din teză. Ȋn plus faţă de aceste traductoare, în cadrul sistemului mai sunt
folosite: un traductor de temperatură în infraroşu pentru măsurarea temperaturii carosabilului, o
intrare de selecţie pentru tipul anvelopei (vară sau iarnă), un traductor de viteză al
autovehiculului şi un radar pentru măsurarea distanţei faţă de vehiculul aflat în faţă, care se
deplasează în acelaşi sens, pe aceeaşi bandă.
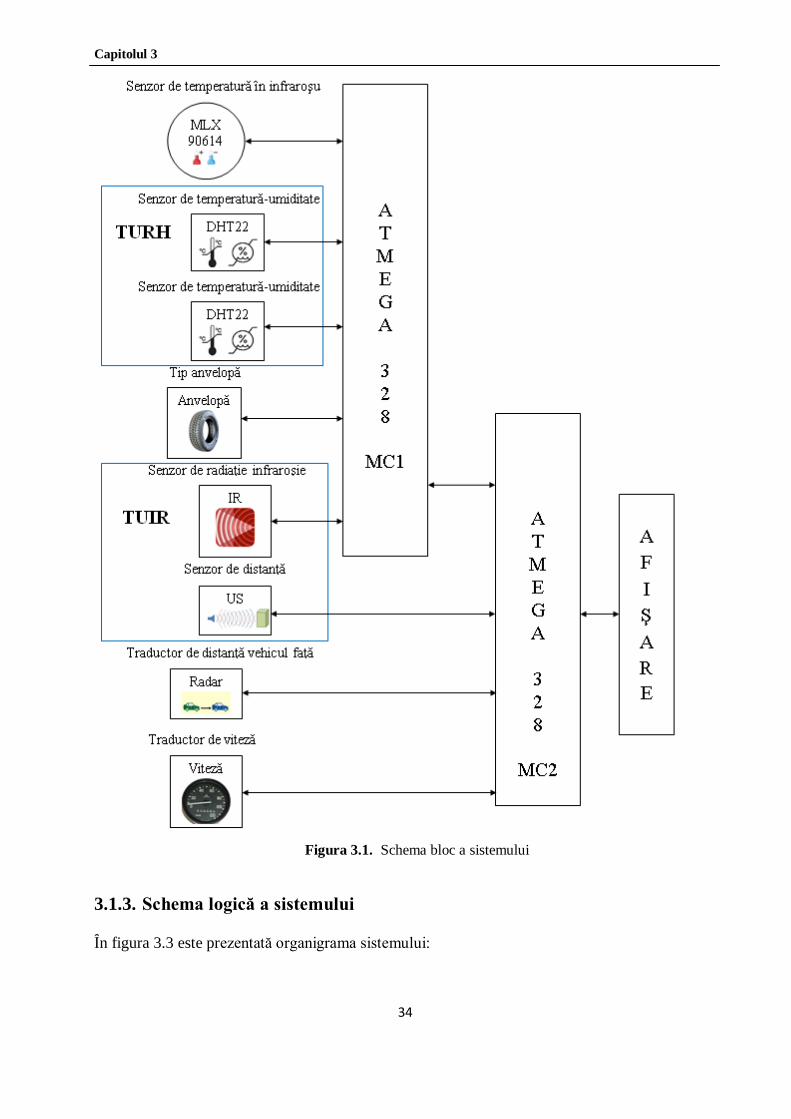
3.1.1. Schema bloc a sistemului
Schema bloc a sistemului este prezentată în figura 3.1. Unitatea centrală a sistemului este
formată din două microcontrolere de tip Atmel ATMEGA 328, notate MC1 şi MC2.
Microcontrolerul MC1 realizează achiziţiile de date de la cei doi senzori de temperatură-
umiditate ce reprezintă traductorul de umiditate a carosabilului prin măsurarea în două puncte
TURH, senzorul de temperatură în infraroşu, traductorul de umiditate a carosabilului bazat pe
reflexia radiaţiei infraroşii TUIR şi tipul anvelopei, iar microcontrolerul MC2 realizează achiziţia
de date de la traductorul de distanţă cu ultrasunete, traductorul de distanţă faţă de vehiculul din
faţă şi traductorul de viteză al autovehiculului. Ȋn plus, MC2 preia datele de la MC1, realizează
prelucrarea lor şi afişează rezultatele.
Capitolul 3
34
Figura 3.1. Schema bloc a sistemului
3.1.3. Schema logică a sistemului
Ȋn figura 3.3 este prezentată organigrama sistemului:

Capitolul 3
35
Figura 3.3. Schema logică a sistemului
Informaţia provenită de la fiecare din cele trei traductoare este împărţită funcţie de
traductor în 3 sau 4 categorii, funcţie de aceste categorii, pe baza unui tabel determinându-se
starea carosabilului. Pentru traductorul de umiditate TUIR şi traductorul de umiditate TURH
există şi câte o categorie pentru datele eronate. Categoria datelor eronate cuprinde valori pentru
Capitolul 3
36
mărimile de intrare care fie nu pot exista în situaţii reale şi apar ca urmare a unor erori, fie pot
exista ca urmare a unor situaţii particulare rar întâlnite.
Clasificarea răspunsului traductoarelor a fost făcută deoarece sunt 8 mărimi de intrare :
- două valori de tensiune din colectorul fototranzistorului sensibil la radiaţia infraroşie
- distanţa faţă de şosea
- două valori de temperatură a aerului
- două valori de umiditate a aerului
- temperatura părţii carosabile
Datorită numărului mare de mărimi de intrare rezultă o complexitate ridicată a relaţiilor
analitice pentru determinarea rezultatului. Limitele dintre categorii au fost determinate
experimental din datele înregistrate în timpul măsurătorilor efectuate. Ȋn urma determinării stării
carosabilului, sistemul citeşte restul parametrilor, în vederea emiterii avertizărilor, dacă acestea
sunt necesare :
- viteza autovehicului
- distanţa faţă de vehiculul aflat în faţă
- tipul anvelopelor
3.2. Componentele sistemului
Sistemul realizat şi descris în acest capitol are în componenţa sa senzori şi traductoare pentru
determinarea stării carosabilului a parametrilor de trafic şi a tipului anvelopelor. Ȋn vederea
determinării stării carosabilului se folosesc trei traductoare :
traductorul de umiditate al şoselei TUIR
traductorul de umiditate al şoselei TURH
traductorul de temperatură în infraroşu
Pentru determinarea parametrilor de trafic necesari avertizărilor din sistem se folosesc date
de la două traductoare pentru:
viteza curentă a autovehiculului
distanţa faţă de autovehiculul aflat în faţă
Pentru tipul anvelopelor se foloseşte o valoare pe un bit în vederea selecţiei tipului
anvelopelor : de vară sau de iarnă.
Capitolul 3
37
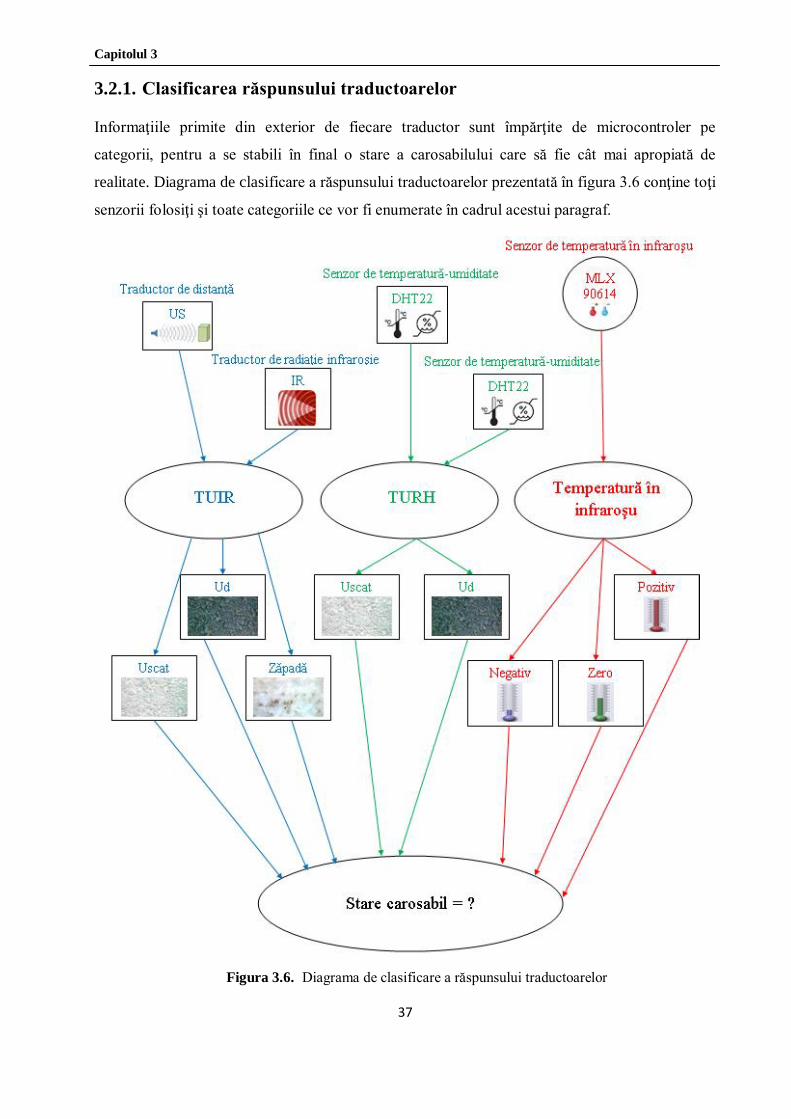
3.2.1. Clasificarea răspunsului traductoarelor
Informaţiile primite din exterior de fiecare traductor sunt împărţite de microcontroler pe
categorii, pentru a se stabili în final o stare a carosabilului care să fie cât mai apropiată de
realitate. Diagrama de clasificare a răspunsului traductoarelor prezentată în figura 3.6 conţine toţi
senzorii folosiţi şi toate categoriile ce vor fi enumerate în cadrul acestui paragraf.
Figura 3.6. Diagrama de clasificare a răspunsului traductoarelor
Capitolul 3
38
3.2.1.1. Traductorul de umiditate TUIR
Funcţie de valoarea celor două tensiuni măsurate şi a distanţei faţă de şosea, se face corecţia
funcţie de distanţă a diferenţei dintre cele două valori. Ȋn urma calculelor rezultate, răspunsul
traductorului poate încadra starea carosabilului în una dintre următoarele trei categorii :
a. Uscat
b. Ud/Gheaţă
c. Zăpadă
d. Eroare
3.2.1.2. Traductorul de umiditate TURH
Funcţie de valorile celor două temperaturi/umidităţi, răspunsul traductorului referitor la starea
carosabilului se poate încadra în una dintre următoarele două categorii :
a. Uscat
b. Ud
c. Eroare
3.2.1.3. Traductorul de temperatură în infraroşu
Traductorul de temperatură al părţii carosabile este un traductor de temperatură în infraroşu.
Funcţie de valoarea acesteia se poate încadra în trei categorii :
a. Ta pozitivă
b. Ta zero
c. Ta negativă
3.2.2. Valorile de prag al traductoarelor
Aşa cum este prezentat în subcapitolul anterior, după achiziţia datelor de la cele trei traductoare,
aceste date sunt împărţite în categorii, numărul acestora variind funcţie de traductor. Zonele de
tranziţie între aceste categorii vor fi prezentate în cele ce urmează.

Capitolul 3
39
3.2.2.1. Traductorul de umiditate TUIR
Traductorul de umiditate TUIR transmite microcontrolerului răspunsul sub forma a două valori
de tensiune, notate VON şi VOFF, care pentru a nu fi considerate eronate, trebuie să îndeplinească
simultan următoarele condiţii :
5V0 ON (3.1)
5V0 OFF (3.2)
0VV ONOFF (3.3)
13distanta7 (3.4)
Ȋn urma achiziţiei datelor necesare (cele două valori de tensiune, precum şi distanţa dintre
traductor şi partea carosabilă), este absolut necesară efectuarea corecţiei cu distanţa a valorii
VOFF-VON.
3.2.2.2. Traductorul de umiditate TURH
a) Suprafaţă uscată
O suprafaţă este considerată de către traductorul de temperatură-umiditate ca fiind uscată dacă
sunt îndeplinite simultan următoarele condiţii :
susjossus RHRH5%RH (3.5)
jossusjos TTC3T (3.6)
Altfel spus, în condiţiile carosabilului uscat, umiditatea de la nivelul superior al vehiculului este
cu până la 5% mai mare decât umiditatea de la nivelul inferior, iar temperatura de la nivelul
superior este cu până la 3°C mai mică decât temperatura de la nivelul inferior.
b) Suprafaţă udă
O suprafaţă este considerată de către traductorul de umiditate TURH ca fiind udă dacă este
îndeplinită următoarea condiţie :
susjos RHRH (3.7)
Altfel spus, în condiţiile carosabilului umed, umiditatea de la nivelul inferior al vehiculului
este mai mare decât umiditatea de la nivelul superior. Ȋn cazul în care pe şosea este prezentă
peliculă de apă, umiditatea de la nivelul inferior al vehiculului poate avea valoarea de 100%.
Capitolul 3
40
3.2.2.3. Traductorul de temperatură în infraroşu
a) Ta pozitivă
Temperatura şoselei se încadrează în această clasă pentru cazurile în care apa poate exista pe
carosabil doar în stare lichidă, fiind îndeplinită următoarea condiţie:
C1Ta (3.8)
b) Ta zero
Temperatura şoselei se încadrează în această clasă pentru cazurile în care apa poate exista pe
carosabil atât în stare lichidă cât şi în stare solidă. Teoretic, această temperatură minimă ar putea
fi de -51°C având în vedere substanţele utilizate pentru dezgheţare. Totuşi, pentru majoritatea
situaţiilor întâlnite pe timpul iernii, relaţia utilizată în sistem este următoarea :
C1TC10 a (3.9)
c) Ta negativă
Temperatura şoselei se încadrează în această clasă pentru cazurile în care apa poate exista pe
carosabil doar în stare solidă, fiind îndeplinită următoarea condiţie :
C10Ta (3.10)
3.2.3. Viteza, distanţa faţă de vehiculul din faţă, tipul anvelopelor
Pe lângă mărimile de intrare în sistem prezentate anterior, care sunt necesare pentru determinarea
stării de umiditate a carosabilului, mai sunt necesare o serie de parametri de trafic şi tehnici ai
autovehiculului : viteza curentă de deplasare, distanţa faţă de vehiculul aflat în faţă care se
deplasează în acelaşi sens, pe aceeaşi bandă şi tipul anvelopelor.
Viteza
Ȋn prezent, determinarea vitezei poate fi facută prin mai multe metode (traductor plasat pe cutia
de viteze, traductor de turaţie plasat pe fiecare roată (pentru sistemul ABS), determinarea cu
ajutorul GPS-ului), astfel încât pentru aceasta nu este nevoie de un traductor special deoarece
aceasta informaţie poate fi regăsită în computerul de bord al autovehiculelor.
Distanţa faţă de vehiculul din faţă
Ȋn prezent, distanţa faţă de vehiculul din faţă este monitorizată la unele autovehicule cu ajutorul
modulelor radar cu rază lungă de acţiune de până la 250 m, pe frecvenţa de 76-77 GHz.
Tipul anvelopelor
Tipul, dimensiunea, uzura şi presiunea anvelopelor sunt factori care influenţează foarte mult
aderenţa, stabilitatea, nivelul de zgomot şi consumul de combustibil al vehiculelor.
Capitolul 3
41
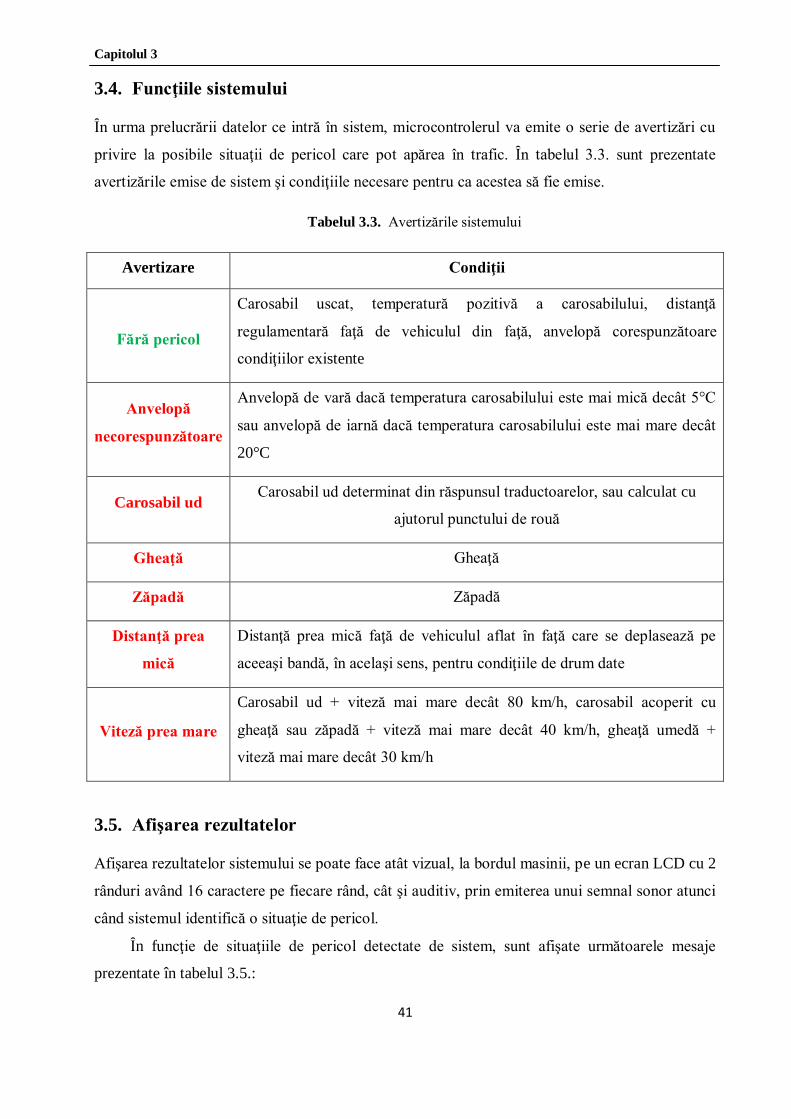
3.4. Funcţiile sistemului
Ȋn urma prelucrării datelor ce intră în sistem, microcontrolerul va emite o serie de avertizări cu
privire la posibile situaţii de pericol care pot apărea în trafic. Ȋn tabelul 3.3. sunt prezentate
avertizările emise de sistem şi condiţiile necesare pentru ca acestea să fie emise.
Tabelul 3.3. Avertizările sistemului
Avertizare Condiţii
Fără pericol
Carosabil uscat, temperatură pozitivă a carosabilului, distanţă
regulamentară faţă de vehiculul din faţă, anvelopă corespunzătoare
condiţiilor existente
Anvelopă
necorespunzătoare
Anvelopă de vară dacă temperatura carosabilului este mai mică decât 5°C
sau anvelopă de iarnă dacă temperatura carosabilului este mai mare decât
20°C
Carosabil ud Carosabil ud determinat din răspunsul traductoarelor, sau calculat cu
ajutorul punctului de rouă
Gheaţă Gheaţă
Zăpadă Zăpadă
Distanţă prea
mică
Distanţă prea mică faţă de vehiculul aflat în faţă care se deplasează pe
aceeaşi bandă, în acelaşi sens, pentru condiţiile de drum date
Viteză prea mare
Carosabil ud + viteză mai mare decât 80 km/h, carosabil acoperit cu
gheaţă sau zăpadă + viteză mai mare decât 40 km/h, gheaţă umedă +
viteză mai mare decât 30 km/h
3.5. Afişarea rezultatelor
Afişarea rezultatelor sistemului se poate face atât vizual, la bordul masinii, pe un ecran LCD cu 2
rânduri având 16 caractere pe fiecare rând, cât şi auditiv, prin emiterea unui semnal sonor atunci
când sistemul identifică o situaţie de pericol.
Ȋn funcţie de situaţiile de pericol detectate de sistem, sunt afişate următoarele mesaje
prezentate în tabelul 3.5.:
Capitolul 3
42
Tabelul 3.5. Mesajele de avertizare afişate de sistem funcţie de avertizări
Avertizare Mesaj
Fără pericol OK !
Carosabil ud ! UD
Gheaţă ! GHEAŢĂ
Gheaţă + ud ! GHEAŢĂ UDĂ
Zăpadă ! ZĂPADĂ
Anvelopă necorespunzătoare Anv
Viteză prea mare ! Viteză
Distanţă prea mică ! DIST
Eroare Eroare !!!
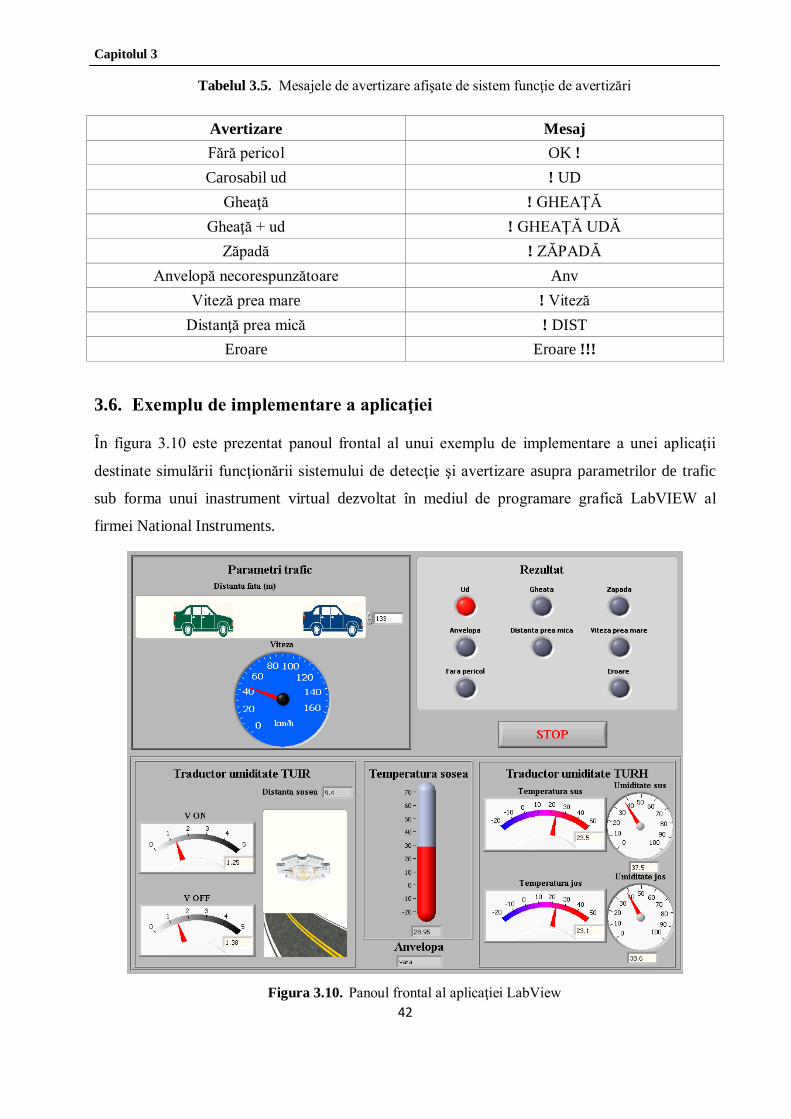
3.6. Exemplu de implementare a aplicaţiei
Ȋn figura 3.10 este prezentat panoul frontal al unui exemplu de implementare a unei aplicaţii
destinate simulării funcţionării sistemului de detecţie şi avertizare asupra parametrilor de trafic
sub forma unui inastrument virtual dezvoltat în mediul de programare grafică LabVIEW al
firmei National Instruments.
Figura 3.10. Panoul frontal al aplicaţiei LabView
Capitolul 3
43
Panoul frontal al aplicaţiei conţine trei secţiuni, respectiv :
- setarea parametrilor viteză şi distanţa faţă de vehiculul din faţă
- afişarea parametrilor recepţionaţi de la microcontroler: VON, VOFF, distanţa faţă de şosea,
temperatura şoselei, temperatura şi umiditatea măsurate de senzorul montat în partea de
sus a autovehiculului, temperatura şi umiditatea măsurate de senzorul montat din partea
de jos a autovehiculului şi tipul anvelopelor
- afişarea rezultatelor (avertizărilor)
3.7. Erori
Ȋn cadrul sistemului prezentat pot apărea două tipuri de erori:
- Erori detectate de sistem
- Erori nedetectate de sistem
Erorile detectate de sistem sunt erorile datorate traductoarelor ce sunt identificate în urma
clasificării răspunsurilor traductoarelor. Ȋn acest caz, aşa cum a fost prezentat în secţiunea 3.2.1 a
acestui capitol, răspunsul traductorului la care a fost sesizată o situaţie eronată este încadrat în
categoria Eroare. După cum este prezentat şi în tabelul 3.2 există cazuri când starea carosabilului
poate fi determinată chiar în cazul prezenţei erorii la unul din traductoare. Exemple de situaţii în
care pot să apară erori ce pot fi detectate de sistem:
- Distanţă prea mare sub traductorul de umiditate TUIR (teren accidentat, canal)
- Distanţă prea mică sub traductorul de umiditate TUIR (mers prin noroi, apă, zăpadă, care
să ajungă în apropierea părţii de jos a autovehiculului)
- Prezenţa apei pe senzorul de umiditate al traductorului de umiditate TURH, ce este plasat
la distanţa de 140 cm faţă de şosea
Erorile nedetectate de sistem sunt erorile ce nu sunt identificate în urma clasificării
răspunsului traductoarelor. Ȋn aceste situaţii răspunsul traductoarelor nu este încadrat în categoria
Eroare, putând rezulta astfel răspunsuri eronate ale sistemului.
Exemple de situaţii în care pot să apară erori ce nu pot fi detectate de sistem:
- Prezenţa apei, prafului sau mizeriei pe lentila LED-ului sau a fototranzistorului
- Surse de radiaţie infraroşie perturbatoare aflate în apropierea traductorului de umiditate
TUIR
- Prezenţa apei pe senzorul de umiditate al traductorului de umiditate TURH, ce este plasat
la distanţa de 15 cm faţă de şosea
Capitolul 3
44
3.8. Concluzii
Ȋn cadrul acestui capitol a fost prezentată realizarea sistemului de detecţie şi avertizare la bordul
autovehiculului asupra unor situaţii de risc din trafic. Acest sistem este capabil să determine
starea carosabilului în urma analizei datelor provenite de la trei traductoare fără contact (două
traductoare pentru determinarea umidităţii carosabilului şi un traductor pentru măsurarea
temperaturii carosabilului). Informaţia extrasă de sistem referitoare la starea carosabilului este
utilizată atât pentru avertizarea conducătorului auto cu privire la situaţii nefavorabile ale
carosabilului, cât şi pentru determinarea situaţiilor de pericol în ceea ce priveşte distanţa de
siguranţă faţă de vehiculul din faţă ce se deplasează în acelaşi sens, pe aceeaşi bandă. Ȋn urma
achiziţiei datelor şi aplicării de către sistem a relaţiilor prezentate în cadrul capitolului sunt
mesaje ce apar pe un display la bord prin care conducătorul auto este avertizat asupra situaţiilor
de astfalt ud, asfalt acoperit cu zăpadă, gheaţă, viteză prea mare pentru condiţiile curente ale
stării carosabilului, distanţa prea mică faţă de vehiculul aflat în faţă (determinată funcţie de
viteză şi funcţie de starea carosabilului), anvelopă necorespunzătoare condiţiilor date.
45
Capitolul 4
Rezultate experimentale obţinute din testarea sistemului de detecţie
a factorilor de risc
Ȋn acest capitol sunt prezentate rezultatele experimentale obţinute în urma testării sistemului în
diverse situaţii practice. Au fost realizate teste specifice fiecăruia dintre cele două traductoare de
umiditate a carosabilului. Datorită faptului că traductoarele de umiditate a carosabilului fără
contact de concepţie proprie funcţionează pe principii diferite, rezultă factori diferiţi ce
influenţează negativ nivelul de încredere al fiecăruia.
4.1. Performanţele sistemului
4.1.1. Nivelul de încredere al traductorului de umiditate TUIR
Nivelul radiaţiei infraroşii din mediul exterior influenţează nivelul de încredere al traductorului
de umiditate TUIR. Pentru determinarea nivelului de încredere am luat în calcul numărul de
puncte de măsură în care detecţia stării carosabilului a fost făcută corect, raportat la numărul
total de puncte de măsură.
Determinarea nivelului de încredere a fost făcută menţinând starea carosabilului constantă,
prin raportul dintre numărul de puncte de înregistrare ce au avut ca rezultat detecţia corectă a
stării carosabilului şi numărul total de puncte înregistrate conform relaţiei :
100[%]N
NN
total
corectincredere (4.1)
unde : Ncorect reprezintă numărul de puncte în care starea carosabilului a fost făcută corect şi Ntotal
reprezintă numărul total al punctelor în care au fost înregistrate datele.
Ȋn figura 4.1 este prezentată variaţia nivelului de încredere al traductorului TUIR funcţie de
radiaţia infraroşie provenită din exterior ( VOFF ), la distanţa de 10 cm faţă de şosea. Aşa cum se
poate observa, nivelul de încredere al traductorului de umiditate TUIR este scăzut atunci când
intensitatea radiaţiei infraroşii provenite din exterior are valoare mare (VOFF → 0). Nivelul de
încredere al traductorului de umiditate TUIR depinde, pe de altă parte şi de distanţa dintre
traductor şi partea carosabilă.

Capitolul 4
46
Figura 4.1. Nivelul de încredere al traductorului TUIR funcţie de radiaţia infraroşie solară
Ȋn figura 4.3 este prezentată sub formă grafică în coordinate 3D variaţia valorilor nivelului de
încredere al traductorului de umiditate TUIR funcţie de radiaţia infraroşie din mediul exterior
VOFF şi de distanţa dintre traductor şi carosabil.
Figura 4.3. Nivelul de încredere al traductorului de umiditate TUIR funcţie de radiaţia infraroşie
solară şi distanţa dintre traductor şi carosabil sub formă grafică
Se poate observa că atunci când radiaţia infraroşie provenită din mediul exterior are valori
mari (atunci când VOFF are valori cuprinse între 0 şi 1 V), nivelul de încredere al traductorului de
Capitolul 4
47
umiditate TUIR este redus, având valori sub 50%. Utilizarea în acest caz a unor LED-uri de
putere mai mare şi a unui fototranzistor cu sensibilitate mai mică la radiaţia infraroşie poate
rezolva această problemă, prin creşterea nivelului de încredere al traductorului de umiditate
TUIR atunci când radiaţia infraroşie provenită din mediul exterior este puternică.
4.1.2. Nivelul de încredere al traductorului de umiditate TURH
Nivelul de încredere al traductorului de umiditate TURH se calculează cu relaţia (4.1) şi depinde
de regimul de mers al vehiculului, mai exact dacă vehiculul se deplasează sau staţionează. Astfel,
nivelul de încredere al traductorului variază între două valori extreme, respectiv nivel de
încredere nul în cazul staţionării continue şi nivel de încredere maxim în cazul deplasării
continue.
Ȋn cele ce urmează vor fi prezentate două situaţii şi anume când autovehiculul staţionează
după o perioadă continuă de deplasare de 5 minute (staţionare după deplasare), şi atunci când
autovehiculul se deplasează după o perioadă continuă de staţionare de 5 minute (deplasare după
staţionare).
Staţionare după deplasare
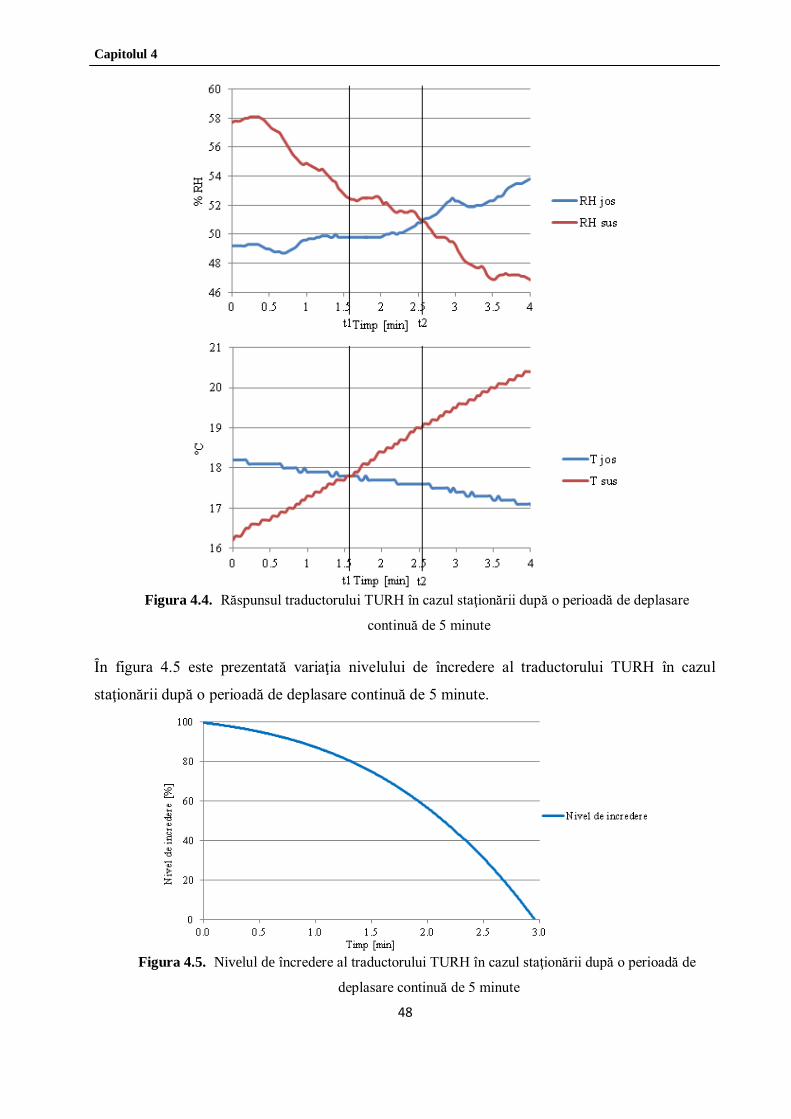
Ȋn figura 4.4 este prezentat răspunsul traductorului TURH în cazul staţionării după o perioadă de
deplasare continuă de 5 minute. Atât deplasarea cât şi staţionarea au fost făcute pe carosabil uscat.
După o deplasare de 5 minute, în momentul de timp t=0 din figura 4.4, autovehiculul s-a oprit. Ȋn
acel moment, valorile celor două temperaturi şi a celor două umidităţi relative corespundeau
stării de carosabil uscat. Se poate observa că la momentul de timp t=t1=1.6 min valorile celor
două temperaturi (Tsus şi Tjos) s-au inversat, iar în momentul de timp t=t2=2.55 min valorile
celor două umidităţi relative (RHsus şi RHjos) s-au inversat, informaţia referitoare la starea
carosabilului din acel moment devenind eronată.
Capitolul 4
48
Figura 4.4. Răspunsul traductorului TURH în cazul staţionării după o perioadă de deplasare
continuă de 5 minute
Ȋn figura 4.5 este prezentată variaţia nivelului de încredere al traductorului TURH în cazul
staţionării după o perioadă de deplasare continuă de 5 minute.
Figura 4.5. Nivelul de încredere al traductorului TURH în cazul staţionării după o perioadă de
deplasare continuă de 5 minute
Capitolul 4
49
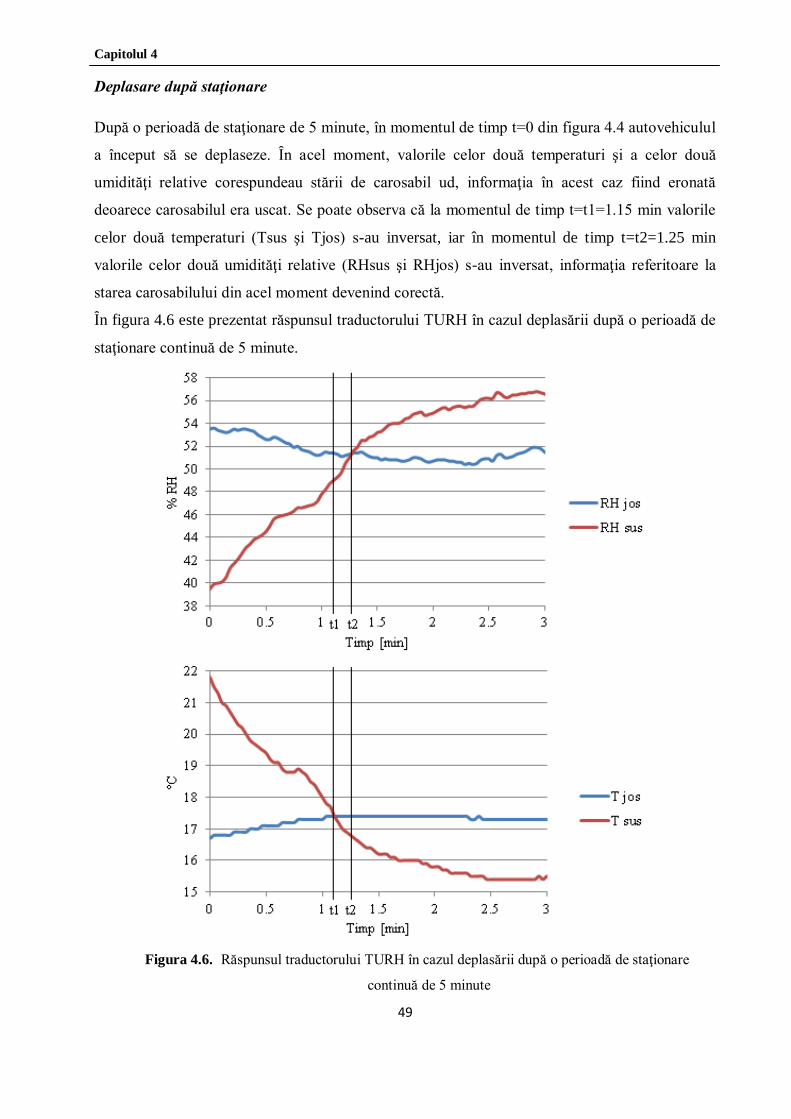
Deplasare după staţionare
După o perioadă de staţionare de 5 minute, în momentul de timp t=0 din figura 4.4 autovehiculul
a început să se deplaseze. Ȋn acel moment, valorile celor două temperaturi şi a celor două
umidităţi relative corespundeau stării de carosabil ud, informaţia în acest caz fiind eronată
deoarece carosabilul era uscat. Se poate observa că la momentul de timp t=t1=1.15 min valorile
celor două temperaturi (Tsus şi Tjos) s-au inversat, iar în momentul de timp t=t2=1.25 min
valorile celor două umidităţi relative (RHsus şi RHjos) s-au inversat, informaţia referitoare la
starea carosabilului din acel moment devenind corectă.
Ȋn figura 4.6 este prezentat răspunsul traductorului TURH în cazul deplasării după o perioadă de
staţionare continuă de 5 minute.
Figura 4.6. Răspunsul traductorului TURH în cazul deplasării după o perioadă de staţionare
continuă de 5 minute
Capitolul 4
50
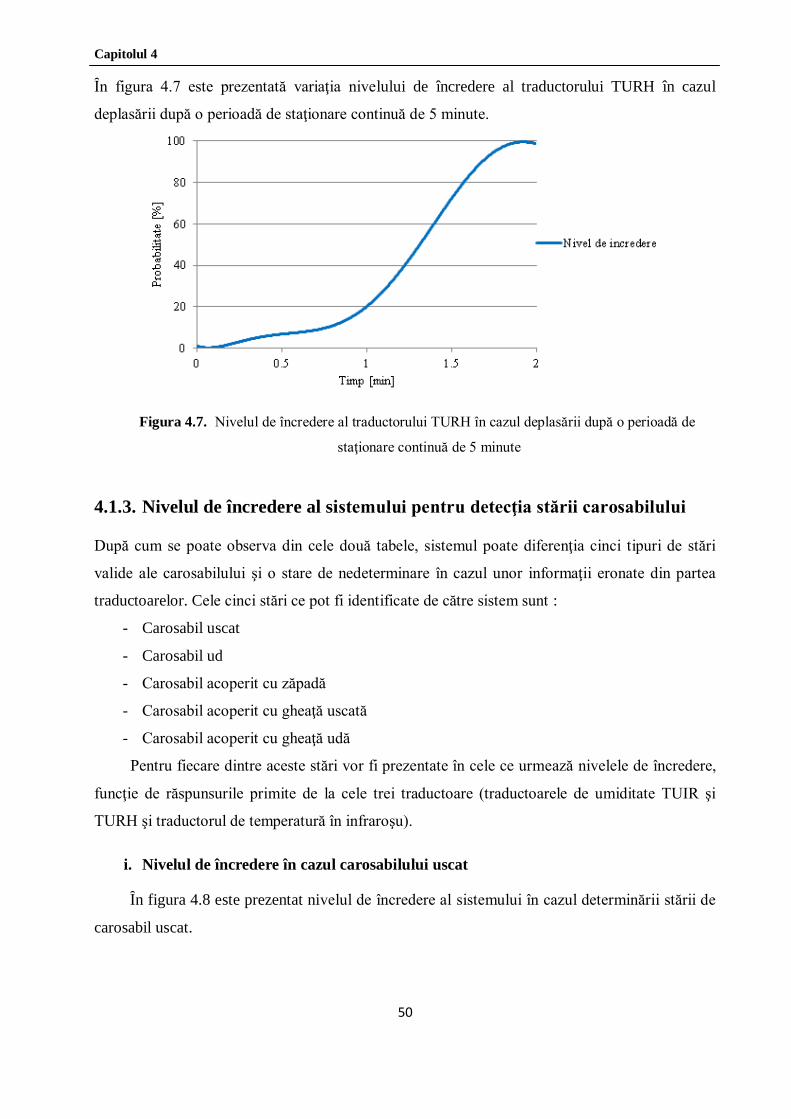
Ȋn figura 4.7 este prezentată variaţia nivelului de încredere al traductorului TURH în cazul
deplasării după o perioadă de staţionare continuă de 5 minute.
Figura 4.7. Nivelul de încredere al traductorului TURH în cazul deplasării după o perioadă de
staţionare continuă de 5 minute
4.1.3. Nivelul de încredere al sistemului pentru detecţia stării carosabilului
După cum se poate observa din cele două tabele, sistemul poate diferenţia cinci tipuri de stări
valide ale carosabilului şi o stare de nedeterminare în cazul unor informaţii eronate din partea
traductoarelor. Cele cinci stări ce pot fi identificate de către sistem sunt :
- Carosabil uscat
- Carosabil ud
- Carosabil acoperit cu zăpadă
- Carosabil acoperit cu gheaţă uscată
- Carosabil acoperit cu gheaţă udă
Pentru fiecare dintre aceste stări vor fi prezentate în cele ce urmează nivelele de încredere,
funcţie de răspunsurile primite de la cele trei traductoare (traductoarele de umiditate TUIR şi
TURH şi traductorul de temperatură în infraroşu).
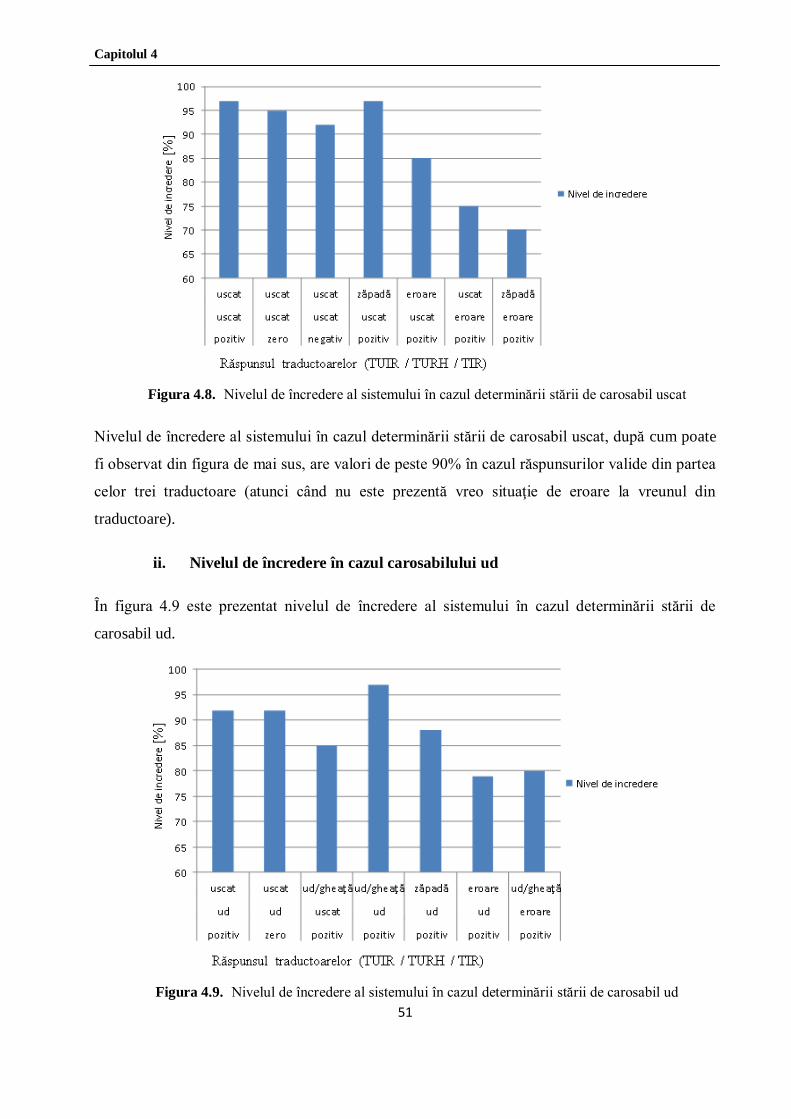
i. Nivelul de încredere în cazul carosabilului uscat
Ȋn figura 4.8 este prezentat nivelul de încredere al sistemului în cazul determinării stării de
carosabil uscat.
Capitolul 4
51
Figura 4.8. Nivelul de încredere al sistemului în cazul determinării stării de carosabil uscat
Nivelul de încredere al sistemului în cazul determinării stării de carosabil uscat, după cum poate
fi observat din figura de mai sus, are valori de peste 90% în cazul răspunsurilor valide din partea
celor trei traductoare (atunci când nu este prezentă vreo situaţie de eroare la vreunul din
traductoare).
ii. Nivelul de încredere în cazul carosabilului ud
Ȋn figura 4.9 este prezentat nivelul de încredere al sistemului în cazul determinării stării de
carosabil ud.
Figura 4.9. Nivelul de încredere al sistemului în cazul determinării stării de carosabil ud
Capitolul 4
52
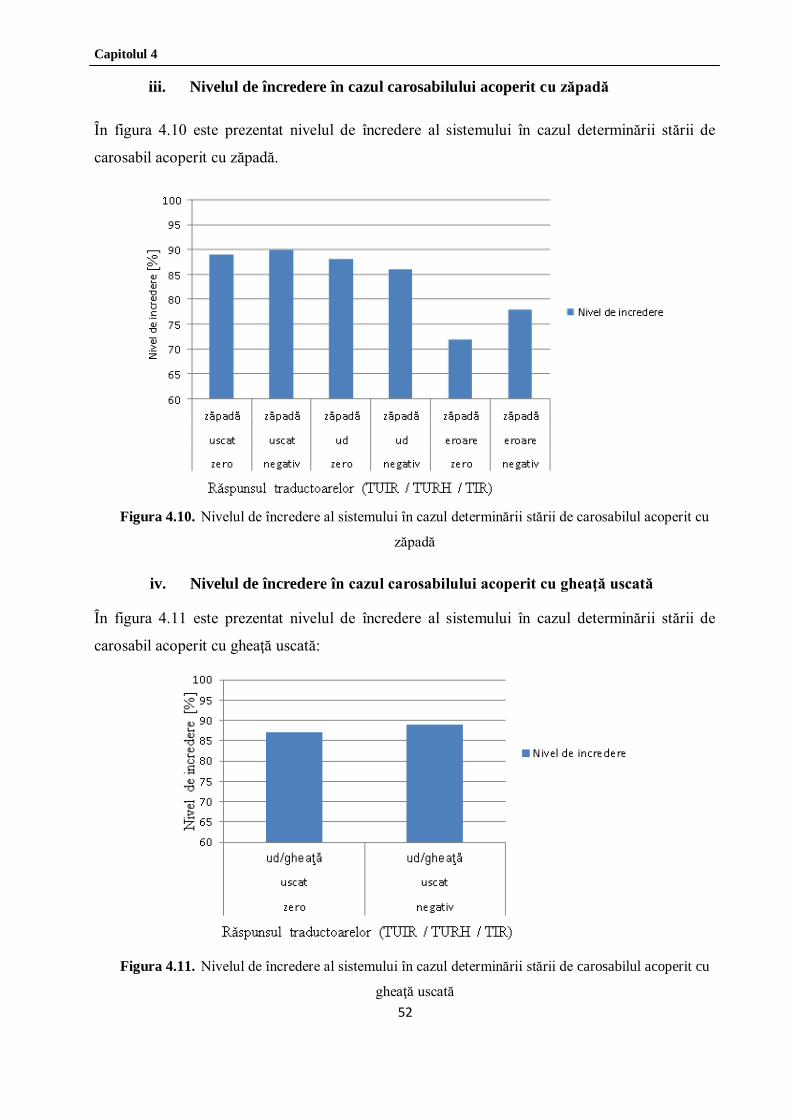
iii. Nivelul de încredere în cazul carosabilului acoperit cu zăpadă
Ȋn figura 4.10 este prezentat nivelul de încredere al sistemului în cazul determinării stării de
carosabil acoperit cu zăpadă.
Figura 4.10. Nivelul de încredere al sistemului în cazul determinării stării de carosabilul acoperit cu
zăpadă
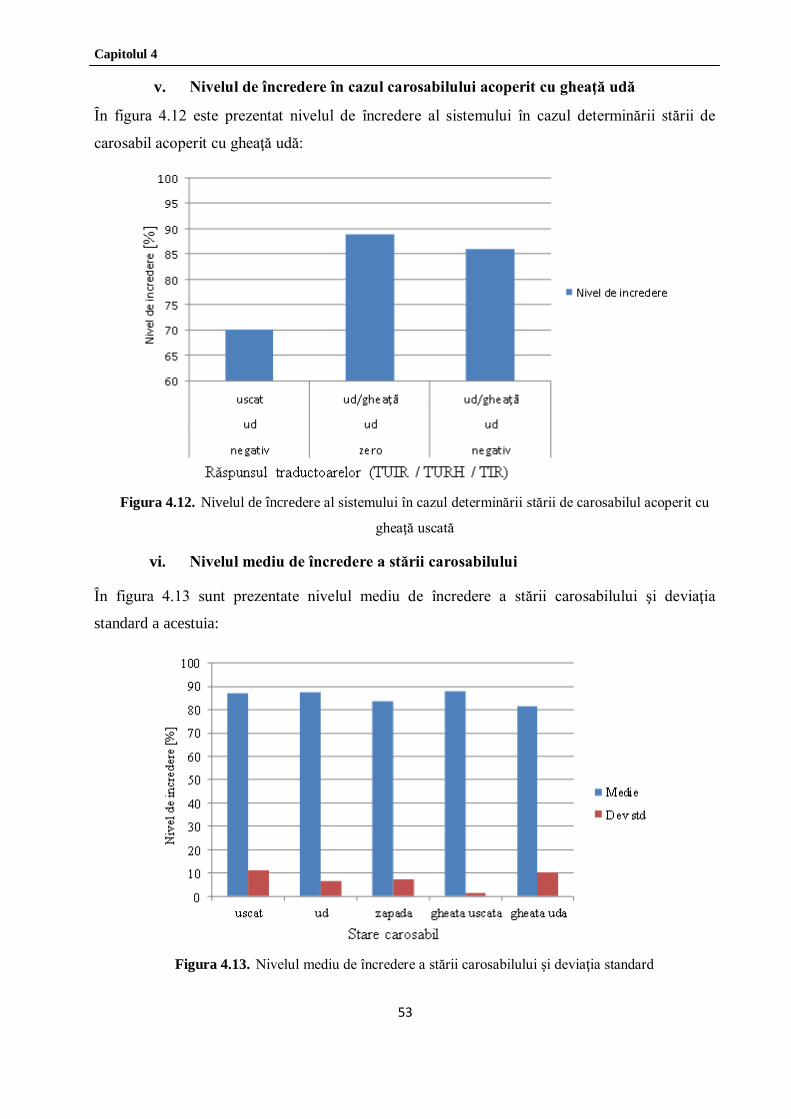
iv. Nivelul de încredere în cazul carosabilului acoperit cu gheaţă uscată
Ȋn figura 4.11 este prezentat nivelul de încredere al sistemului în cazul determinării stării de
carosabil acoperit cu gheaţă uscată:
Figura 4.11. Nivelul de încredere al sistemului în cazul determinării stării de carosabilul acoperit cu
gheaţă uscată
Capitolul 4
53
v. Nivelul de încredere în cazul carosabilului acoperit cu gheaţă udă
Ȋn figura 4.12 este prezentat nivelul de încredere al sistemului în cazul determinării stării de
carosabil acoperit cu gheaţă udă:
Figura 4.12. Nivelul de încredere al sistemului în cazul determinării stării de carosabilul acoperit cu
gheaţă uscată
vi. Nivelul mediu de încredere a stării carosabilului
Ȋn figura 4.13 sunt prezentate nivelul mediu de încredere a stării carosabilului şi deviaţia
standard a acestuia:
Figura 4.13. Nivelul mediu de încredere a stării carosabilului şi deviaţia standard
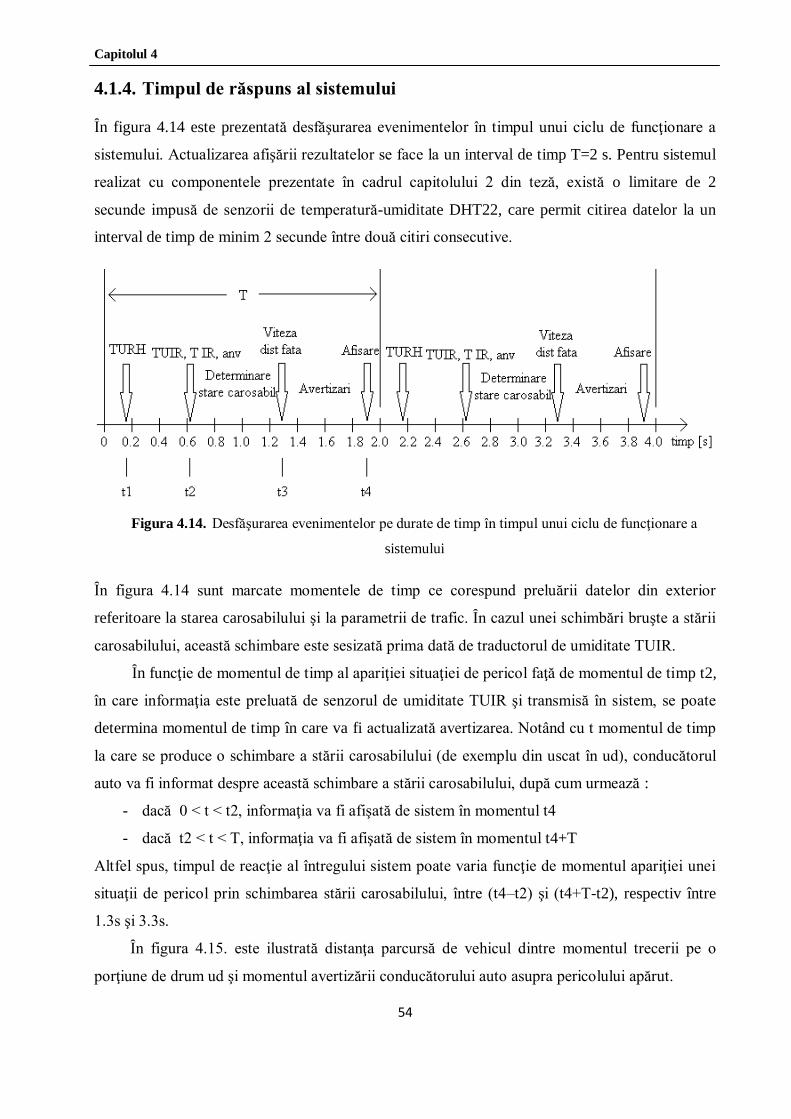
Capitolul 4
54
4.1.4. Timpul de răspuns al sistemului
Ȋn figura 4.14 este prezentată desfăşurarea evenimentelor în timpul unui ciclu de funcţionare a
sistemului. Actualizarea afişării rezultatelor se face la un interval de timp T=2 s. Pentru sistemul
realizat cu componentele prezentate în cadrul capitolului 2 din teză, există o limitare de 2
secunde impusă de senzorii de temperatură-umiditate DHT22, care permit citirea datelor la un
interval de timp de minim 2 secunde între două citiri consecutive.
Figura 4.14. Desfăşurarea evenimentelor pe durate de timp în timpul unui ciclu de funcţionare a
sistemului
Ȋn figura 4.14 sunt marcate momentele de timp ce corespund preluării datelor din exterior
referitoare la starea carosabilului şi la parametrii de trafic. Ȋn cazul unei schimbări bruşte a stării
carosabilului, această schimbare este sesizată prima dată de traductorul de umiditate TUIR.
Ȋn funcţie de momentul de timp al apariţiei situaţiei de pericol faţă de momentul de timp t2,
în care informaţia este preluată de senzorul de umiditate TUIR şi transmisă în sistem, se poate
determina momentul de timp în care va fi actualizată avertizarea. Notând cu t momentul de timp
la care se produce o schimbare a stării carosabilului (de exemplu din uscat în ud), conducătorul
auto va fi informat despre această schimbare a stării carosabilului, după cum urmează :
- dacă 0 < t < t2, informaţia va fi afişată de sistem în momentul t4
- dacă t2 < t < T, informaţia va fi afişată de sistem în momentul t4+T
Altfel spus, timpul de reacţie al întregului sistem poate varia funcţie de momentul apariţiei unei
situaţii de pericol prin schimbarea stării carosabilului, între (t4–t2) şi (t4+T-t2), respectiv între
1.3s şi 3.3s.
Ȋn figura 4.15. este ilustrată distanţa parcursă de vehicul dintre momentul trecerii pe o
porţiune de drum ud şi momentul avertizării conducătorului auto asupra pericolului apărut.
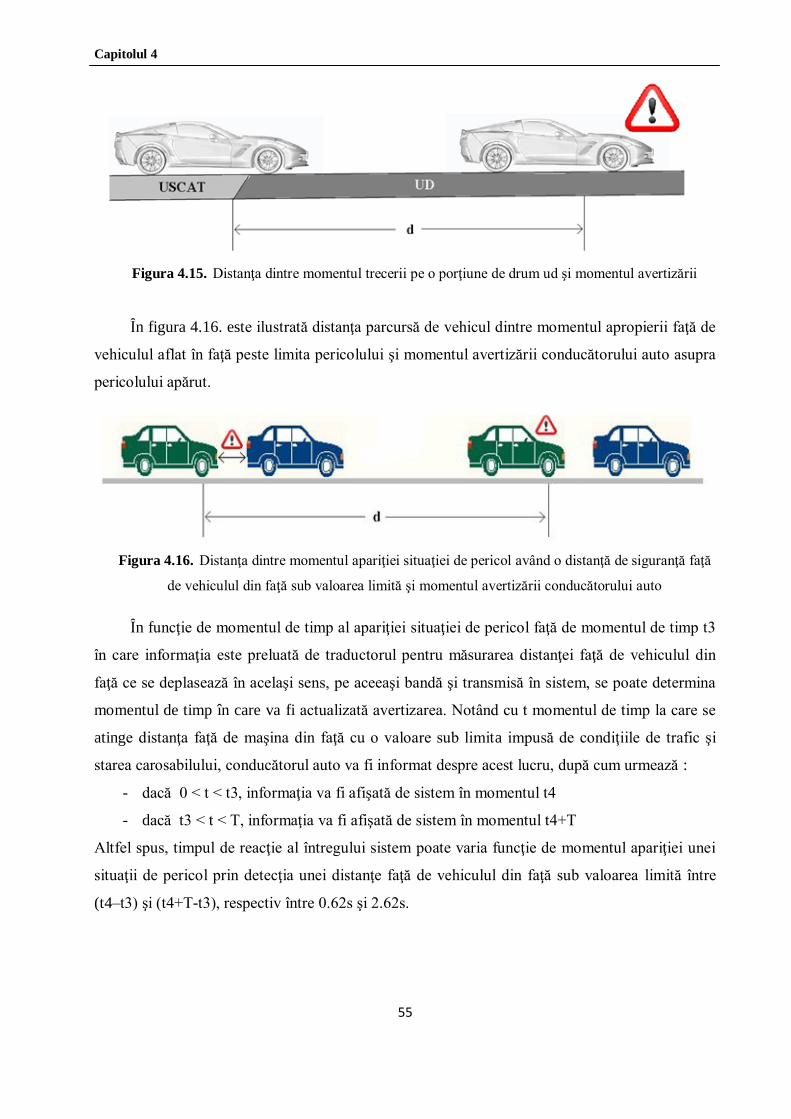
Capitolul 4
55
Figura 4.15. Distanţa dintre momentul trecerii pe o porţiune de drum ud şi momentul avertizării
Ȋn figura 4.16. este ilustrată distanţa parcursă de vehicul dintre momentul apropierii faţă de
vehiculul aflat în faţă peste limita pericolului şi momentul avertizării conducătorului auto asupra
pericolului apărut.
Figura 4.16. Distanţa dintre momentul apariţiei situaţiei de pericol având o distanţă de siguranţă faţă
de vehiculul din faţă sub valoarea limită şi momentul avertizării conducătorului auto
Ȋn funcţie de momentul de timp al apariţiei situaţiei de pericol faţă de momentul de timp t3
în care informaţia este preluată de traductorul pentru măsurarea distanţei faţă de vehiculul din
faţă ce se deplasează în acelaşi sens, pe aceeaşi bandă şi transmisă în sistem, se poate determina
momentul de timp în care va fi actualizată avertizarea. Notând cu t momentul de timp la care se
atinge distanţa faţă de maşina din faţă cu o valoare sub limita impusă de condiţiile de trafic şi
starea carosabilului, conducătorul auto va fi informat despre acest lucru, după cum urmează :
- dacă 0 < t < t3, informaţia va fi afişată de sistem în momentul t4
- dacă t3 < t < T, informaţia va fi afişată de sistem în momentul t4+T
Altfel spus, timpul de reacţie al întregului sistem poate varia funcţie de momentul apariţiei unei
situaţii de pericol prin detecţia unei distanţe faţă de vehiculul din faţă sub valoarea limită între
(t4–t3) şi (t4+T-t3), respectiv între 0.62s şi 2.62s.

Capitolul 4
56
4.2. Concluzii
Ȋn acest capitol au fost prezentate caracteristicile sistemului de detecţie şi avertizare asupra unor
factori de risc în trafic. Pe baza experimentelor efectuate au fost determinate :
- nivelul de încredere al sistemului, atât global, cât şi pentru cele două traductoare de
umiditate de concepţie proprie şi factorii care influenţează nivelul de încredere ;
- timpul de răspuns al sistemului şi factorii ce influenţează timpul de răspuns.
Nivelul mediu de încredere al sistemului pentru detecţia corectă a stării carosabilului este
de 85.67%, acesta variind în funcţie de starea carosabilului şi răspunsurile traductoarelor din care
rezultă starea identificată, aşa cum este prezentat în detaliu în cadrul capitolului.
Timpul mediu de răspuns al sistemului în vederea avertizării asupra apariţiei unei situaţii
de pericol în trafic (schimbarea stării carosabilului, apropierea în afara limitelor de siguranţă faţă
de vehiculul aflat în faţă) este de 1.96 s, variind funcţie de tipul pericolului şi momentul detecţiei
acestuia.
57
Capitolul 5
Concluzii
La momentul actual, numărul autovehiculelor este foarte mare, reprezentând unul dintre cele mai
importante mijloace de transport. Datorită creşterii numărului de autovehicule, a crescut şi
numărul accidentelor rutiere, fapt ce a dus la creşterea cerinţelor privind siguranţa,
funcţionalitatea şi confortul autovehiculelor. Ȋn cadrul acestui capitol vor fi prezentate
concluziile finale, contribuţiile personale şi posibile direcţii viitoare de cercetare identificate în
urma activităţilor întreprinse pentru elaborarea prezentei lucrări.
5.1. Concluzii asupra stadiului actual
Aprecierea corectă a stării carosabilului este un lucru extrem de important. Aceasta poate fi
totuşi uneori destul de dificil de realizat de către conducătorul auto. Primele informaţii
referitoare la starea carosabilului ni le oferă percepţia vizuală a acestuia. Acestea nu reprezintă
însă singura sursă de informaţii. Ȋn anumite situaţii, cum ar fi în sezonul rece, pe timpul nopţii,
când carosabilul poate fi acoperit cu polei, acesta poate fi totuşi uşor de confundat cu carosabilul
ud. Acesta este doar un exemplu de situaţie în care ar putea fi util un sistem pentru detecţia stării
carosabilului. Un alt caz ar putea fi cel când temperatura părţii carosabile este negativă, situaţie
când o porţiune acoperită cu gheaţă poate să apară în orice moment.
Cercetările arată că detecţia stării carosabilului se poate face prin diverse moduri, de la
senzori fixaţi în carosabil până la metode ce folosesc camere video în infraroşu, microfoane
pentru analiza zgomotului produs de pneuri, diode laser, etc.
5.2. Concluzii asupra cercetărilor legate de tema de doctorat
Cercetările legate de teme de doctorat au avut ca rezultat, în urma unui studiu efectuat asupra
posibilităţilor actuale de detecţie a stării carosabilului, realizarea a două traductoare de umiditate
de concepţie proprie, bazate pe determinarea prin două metode diferite a umidităţii şoselei.
Testele realizate au arătat că traductoarele dezvoltate furnizează date cu nivele de încredere
ridicate pentru detecţia suprafeţelor de carosabil ce pot afecta siguranţa traficului.
Cele două traductoare de concepţie proprie au fost integrate într-un microsistem de detecţie
şi avertizare, funcţionând în mod complementar pentru eliminarea neajunsurilor fiecăruia dintre
Capitolul 5
58
acestea. Simularea şi testarea sistemului realizat a arătat că acesta poate diferenţia între 5 stări
diferite, respectiv: uscat, ud, zăpadă, gheaţă uscată, gheaţă udă.
Pe baza stării carosabilului determinată de sistem şi a parametrilor de trafic (viteză şi
distanţa faţă de vehiculul din faţă), sistemul informează şoferul printr-un display la bord asupra
pericolelor (viteză prea mare, distanţă prea mică faţă de vehiculul din faţă, anvelopă
necorespunzătoare condiţiilor de drum existente şi starea curentă a carosabilului).
5.3. Contribuţii personale
- Am realizat un studiu teoretic cu privire la stadiul actual al cercetărilor privind
posibilităţile de determinare a stării carosabilului, cu şi fără contact.
- Am realizat şi testat un traductor de umiditate a carosabilului fără contact, ce
funcţionează prin măsurarea intensităţii radiaţiei infraroşii reflectate (TUIR).
- Am studiat factorii ce influenţează gradul de reflexie a radiaţiei infraroşii în funcţie de
starea carosabilului şi distanţa dintre traductor şi carosabil.
- Am realizat componenta software pentru achiziţia şi înregistrarea datelor prelevate cu
ajutorul traductorului TUIR în vederea determinării caracteristicilor acestuia.
- Am determinat nivelul de încredere a informaţiilor furnizate de traductorului de
umiditate TUIR pentru diferite situaţii de funcţionare.
- Am realizat şi testat un traductor de determinare fără contact a umidităţii carosabilului
prin măsurarea umidităţii aerului la două nivele diferite (TURH).
- Am realizat componenta software pentru achiziţia şi înregistrarea datelor prelevate cu
ajutorul traductorului TURH în vederea determinării caracteristicilor acestuia.
- Am realizat un microsistem complex de detecţie şi avertizare asupra unor factori de risc
în trafic, utilizând cele două traductoare de umiditate a carosabilului fără contact de
concepţie proprie şi alte traductoare existente pe piaţă.
- Am realizat componenta software a sistemului de detecţie şi avertizare.
- Am realizat o aplicaţie şi o interfaţă de tip instrument virtual pentru simularea
microsistemului ce utilizează şi prelucrează datele transmise de senzori, cu ajutorul
căruia am determinat caracteristicile şi performanţele microsistemului proiectat.
Capitolul 5
59
5.4. Direcţii viitoare de cercetare
Cercetările realizate în cadrul tezei de doctorat pot continua după următoarele direcții viitoare de
abordare:
- extinderea gamei lungimilor de undă pentru traductorul TUIR din domeniul ultraviolet
până la domeniul infraroşu, prin utilizarea în paralel a mai multor surse de radiaţie şi
fotodetectori ;
- utilizarea mai multor surse de radiaţie cu puteri diferite şi fotodetectori cu sensibilităţi
diferite pentru traductorul TUIR ;
- conceperea unor traductoare de umiditate cu constantă de timp şi timpi de răspuns mai
reduse.
5.5. Diseminarea rezultatelor cercetării
Rezultatele cercetărilor întreprinse pe parcursul stagiului doctoral au fost diseminate prin
elaborarea și publicarea a 8 lucrări ştiinţifice proprii în reviste şi în volumele unor conferinţe
internaţionale și naţionale de prestigiu, dintre care 5 lucrări ca prim autor.
Silion Ştefan, Lovin Ana-Maria, “Detection of Human Presence in the Car by Measuring
Infrared Temperature Changes”, Acta Electrotehnica - Proceedings of the 5th
International Conference on Modern Power Systems, MPS 2013, 28-31 mai 2013, Cluj-
Napoca, pp. 429-432, (2013) (revistă indexată B+)
Silion Ştefan, Lovin Ana-Maria, “Traffic Light Times Calculation and Simulate
Semaphores Functioning using LabView Environment”, Buletinul AGIR nr. 4/2013,
ISSN 1224-7928, 26-27 sep 2013, Suceava, pp. 99-102, (2013)
Silion Ştefan, Lovin Ana-Maria, “Road Conditions Monitoring. Actual and Undergoing
Research Methods”, Buletinul AGIR nr. 4/2013, ISSN 1224-7928, 26-27 sep 2013,
Suceava, pp. 45-49, (2013)
Silion Ştefan, Foşalău Cristian, “Wet Road Surfaces Detection by Measuring the Air
Humidity in Two Points”, International Conference and Exposition on Electrical and
Power Engineering (EPE), 16-18 oct. 2014, Iaşi, pp. 744-747, (2014) (indexată
IEEExplore)
Capitolul 5
60
Silion Ştefan, Foşalău Cristian, “Wet Road Surfaces Detection by Measuring the Infrared
Reflected Radiation”, International Conference and Exposition on Electrical and Power
Engineering (EPE), 16-18 oct 2014, Iaşi, pp. 738-743, (2014) (indexată IEEExplore)
Lovin Ana-Maria, Silion Ştefan, Nicuţă Ana-Maria, “A Complex Method for Controlling
Temperature on Harsh Environment”, 2012 International Conference and Exposition on
Electrical and Power Engineering (EPE), 25-27 oct 2012, Iaşi, pp. 876-881, (2012)
(indexată ISI Web of Science)
Lovin Ana-Maria, Silion Ştefan, Nicuţă Ana-Maria, “Thermal Comfort Specific
Conditions in Vehicles and Real-time Calculation of PMW and PPD Thermal Comfort
Indices”, Advanced Topics in Electrical Engineering (ATEE), 2013 8th International
Symposium on, 23-25 mai 2013, Bucureşti, pp. 1-4, (2013) (indexată ISI Web of
Science)
Foşalău Cristian, Silion Ştefan, Zet Cristian, “A Low Frecquency Current Transducer
Using Amorphous Materials”, International Conference and Exposition on Electrical and
Power Engineering (EPE), 16-18 oct 2014, Iaşi, pp. 801-804, (2014) (indexată
IEEExplore)
61
Bibliografie
[1] Aanderaa Data Instruments, Road Condition Sensor 3565 Datasheet, January 2010
[2] Al-Masaeid H. R., “Impact of pavement condition on rural road accidents”, Canadian
Journal of Civil Engineering V24, N4, pp.523-531, (1997)
[3] Beaglehole D., Ramanathan B., Rumberg J., “The UV to IR transmittance of Antarctic
snow”, J. Geophys. Res. 103, pp. 8849–8857, (1998)
[4] BMW Forschung und Technik GmbH, (2010)
[5] Bogren J., Gustavsson T. “Nocturnal air and road surface temperature variations in complex
terrain”, Int. J. Climatol., vol. 11: pp.443–455, (1991)
[6] Bogren J., Gustavsson T., Karlsson M., Postgard U., “The impact of screening on road
surface temperature”, Meteorol. Appl. 7: pp. 1–8, (2000)
[7] Bogren J., Gustavsson T., Postgard U., “Local temperature variations in relation to weather
parameters”, Int J. Climatol., vol 20: pp.151–170, (2000)
[8] Boivin L. P., Davidson W. F., Storey R. S., Sinclair D., Earle E. D., “Determination of the
attenuation coefficients of visible and ultraviolet radiation in heavy water”, Appl. Opt.
25,pp. 877–882, (1986)
[9] Bond T. C., Bergstrom R. W., “Light absorption by carbonaceous particles: an investigative
review,” Aerosol Science Technology Vol. 40, pp. 27–67 (2006)
[10] Breuer B., Eichhorn U., Roth J., “Measurement of Tyre/Road Friction Ahead of the Car and
Inside the Tyre”, Proceedings of AVEC’92 (International Symposium on Advanced Vehicle
Control), pp. 347–353 (1992)
[11] Bruzelius F., Casselgren J., “Combining optical road classification with friction
estimation”, Patent application, 2009, Assignee:Volvo
[12] Bruzelius F., Hulten H., Solyom S., Svendenius J., Gafvert M., “Vehicle-to-road contact
estimation”, Patent application, 2008, Assignee: Haldex & Ford
[13] Canudas de Wit C., Tsiotras P., “Dynamic tire friction models for vehicle traction control”,
in IEEE International Conference on Decision and Control, Phoenix, Arizona, USA, pp.
3746-3751, (1999)
[14] Casselgren J., Rosendahl S., Eliasson J., “Road surface information system”, SIRWEC
2012, Helsinki, 23-25 May 2012
[15] Casselgren J., Sjodahl M., “Polarization resolved classification of winter road condition in
the near infrared region”, Applied Optics, Vol. 51, Issue 15, pp. 3036-3045 (2012)
Anexe
62
[16] Casselgren J., Sjodahl M., Sanfridsson M., Woxneryd S. “Classification of road conditions -
to improve safety”, Advanced Microsystems for Automotive Applications 2007, 2007.
Berlin, Germany: Springer
[17] Casselgren J., Sjodahl M., LeBlanc J. “Angular spectral response from covered asphalt”,
Applied Optics, Vol. 46, No. 20, pp. 4277-4288 (2007)
[18] Casselgren J., Sjodahl M., LeBlanc J. “Model based winter road classification”,
International Journal of Vehicle Systems Modelling and testing, Vol. 7, No. 3/2012, pp. 268-
284, (2012)
[19] Ciamberlini. C. et al. “An optoelectronic prototype for the detection of road surface
conditions”, Rev. Sci.Instr. 66(3), pp. 2684-2689 (1995)
[20] Comisia Europeană – Statistici privind siguranța drumurilor - Online:
http://ec.europa.eu/transport/road_safety/specialist/statistics
[21] Daimler AG Smart forfour, Assistance systems&safety http://int.smart.com/en/en/index/
smart-forfour-453/assistance-systems-and-safety.html, (2013)
[22] Dimitriu L., Electronică pentru automobile, Editura Fides, Iaşi, (2008)
[23] Duba G.P., Bock Th., Adaptive Cruise Control for Audi Q5, Special Edition ATZ and MTZ,
June 2008
[24] Fambro D.B., Fitzpatrick K., Koppa R.J., “Determination of stopping sight distance”,
NCHRP Report 400, Transportation Research Board, Washington D.C., (1997)
[25] Farber E., Janoff M.S., Cristinzio S., Bluebaugh J.G., Reisener W., Dunning W.
“Determining pavement skid resistance requirements at intersections and braking sites”,
NCHRp Report No. 154, Transportation Research Board, Washington D.C., (1974)
[26] Foşalău C., Silion Ş., Zet C., “A Low Frecquency Current Transducer Using Amorphous
Materials”, International Conference and Exposition on Electrical and Power Engineering
(EPE), 16-18 oct 2014, Iaşi, pp. 801-804, (2014) (indexată IEEExplore)
[27] Fricke L.B. “Traffic accident reconstruction”, Vol. 2 “The traffic accident investigation
manual”, Northwestern University Traffic Institute, Evanston, Illinois (1990)
[28] Fridthjof J., “Device for detection of surface condition data”, Patent Nr.
US2006/0261975A1. 23 November 2006
[29] Fuchs S., Rass S., Kyamakya K., “A Context Aware Overtaking Assistance System with
Fuzzy-Probabilistic Risk Classification”, The Lakeside Conference Safety in Mobility
(2008)

Anexe
63
[30] Fukushima Y., “Road surface condition detector for automotive vehicle”, Patent Nr.
US25.521.594. 28 May 1996
[31] Gailius D., Jacenas S., “Ice detection on a road by analyzing tire to road friction ultrasonic
noise”, ISSN 1392-2114 Ultragarsas (Ultrasound), Vol. 62, No. 2, 2007
[32] Gnadler R., Fischlein H., Unrau H. J., “The Influence of the Track Surface Structure on the
Frictional Force Behavior of Passenger Car Tyres in Dry and Wet Surface Conditions”, ATZ
Worldwide, 103, pp. 20–24 (2001)
[33] Goodman M. J., Tijerina L., Bents F. D., & Wierwille W. W. (1999). “Using cellular
telephones in vehicles: Safe or unsafe?” Transportation Human Factors, 1(1), pp. 3-42.
[34] Green M., “How Long Does It Take to Stop?”, Methodical Analysis of Driver Perception –
Brake Times, Transportation Human Factors (3), pp. 195-216, (2000)
[35] Grenfell T. C., Warren S. G., “Representation of a nonspherical ice particle by a collection
of independent spheres for scattering and absorption of radiation”, Journal Geophysics
Research. Vol. 104, pp. 31697–31709 (1999)
[36] Grenfell T. C., Warren S. G., Mullen P. C., “Reflection of Solar-Radiation by the Antarctic
Snow Surface at Ultraviolet, Visible, and near-Infrared Wavelengths”, Journal of
Geophysical Research-Atmospheres 99, pp. 18669-18684 (1994)
[37] Gudra T., Najwer L., “Ultrasonic Investigation of Snow and Ice Parameters”, Acta Physica
Polonica A, vol. 120, pp. 625-629, (2011)
[38] Gustafsson F., “Estimation and change detection of tire-road friction using the wheel slip”,
IEEE Control System Magazine, 18(4): pp. 42-49, (1998)
[39] Gustafsson F., “Monitoring tire-road friction using the wheel slip”, IEEE Control Systems
Magazine, vol. 18, pp. 42-49, (1998)
[40] Gustavsson T., Karlsson M., Bogren J., Lindqvist S. “Development of temperature patterns
during clear nights” J. Appl. Meteorol., vol. 37: pp. 559–571, (1998)
[41] Haffner L., Kozek M., Shi J., “Comparison of two Methods for the Estimation of the
Maximum Coefficient of Friction in a Cornering Maneuver of a Passenger Vehicle”,
AVEC’08, Vol. 16, pp. 92-97, (2008)
[42] Hahn J. O., et al., “GPS-based real-time identification of tire-road friction coefficient”, IEEE
Transactions on Control Systems Technology, vol. 10, pp. 331-343, (2002)
[43] Hale, G. M., and M. R. Querry, “Optical constants of water in the 200 nm to 200 μm
wavelength region”, Appl. Opt., 12, pp. 555-563, (1973)
Anexe
64
[44] Halmann M., Platzner I., “Temperature dependence of absorption of liquid water in the far-
ultraviolet region”, J. Phys. Chem. 70, pp. 580–581, (1966)
[45] Hautiere N., Labayrade R., Aubert D.: “Detection of Visibility Conditions through use of
Onboard Camera”, Proceedings of IEEE Inteligent Vehicles Symposium, 2005, pp. 193-198
[46] Hendricks D.L., Fell J.C., Freedman M. , “The Relative Frequency Of Unsafe Driving Acts
In Serious Traffic Crashes”, December 1999
[47] Holzwarth F., Eichhorn U., “Noncontact Sensors for Road Conditions, Sensors and
Actuators” A: Physical 37-8, pp. 121-127 (1993)
[48] Hwang W., Song B., “Road Condition Monitoring System Using Tire-Road Friction
Estimation”, Proceedings of AVEC 2000, Ann Arbor, Michigan, pp. 437–442, (2000)
[49] Ibeo 2009, “Bad weather performance with Ibeo laserscanners”, http://www.ibeo-
as.com/english/technology_d_badweather.asp (28.8.2009)
[50] Jokela M., Kutila M., Le L., « Road Condition Monitoring System Based on a Stereo
Camera”, Proceedings of the 2009 IEEE 5th International Conference on Intelligent
Computer Communication and Processing (IEEE ICCP), pp. 423-428, (2009)
[51] Kämpchen N., “Feature-Level Fusion of Laser Scanner and Video Data for Advanced
Driver Assistance Systems”, Dissertation, Ulm University, (2007)
[52] Kloeden CN, McLean AJ, Moore VM, Ponte G, NHMRC Road Accident Research Unit The
University of Adelaide, November 1997
[53] Knipling R. R., Mironer M., Hendricks D. L., Tijerina L., Everson J., Allen J. C., & Wilson
C. (1993). Assessment of IVHS countermeasures for collision avoidance: rear-end crashes
(DOT HS807 995). Washington, DC: National Highway Traffic Safety Administration.
[54] Kongrattanaprasert W., Nomura H., Kamakura T.and Ueda K., “Detection of Road Surface
Conditions Using Tire Noise from Vehicles” T.IEE Japan Vol.129, No. 7, pp.761-767
(2009)
[55] Kongrattanaprasert W., Nomura H., Kamamura T. and Ueda K., “Automatic Detection of
Road Surface States from Tire Noise Using Neural Network Analysis”, 20th International
Congress on Acoustics, ICA 2010, Sydney, Australia, (2010)
[56] Kuno T., Sugiura H., Yoshida J., “Detection of Road Condition with CCD Cameras
Mounted on a Vehicle”, Trans. Inst. Electron. Inform. Commun. Eng. Japan, Vol.J81-D-II,
No.10, pp. 2301-2310, (1998)

Anexe
65
[57] Kutila M, Pyykönen P., Kauvo K., Eloranta P., “In-vehicle sensor data fusion for road
friction monitoring”, Proceedings of IEEE 7th International Conference on Intelligent
Computer Communication and Processing (2011 IEEE ICCP), (2011)
[58] Kutila M., Jokela M., Road Condition Monitoring, ASSET-Road Conference & Workshop
at Arusha, Tanzania 19-20th March 2009
[59] Lawrence M. G., "The relationship between relative humidity and the dew point temperature
in moist air: A simple conversion and applications", Bull. Am. Meteorol. Soc., 86, pp. 225–
233, (2005)
[60] Lee S. K., Kim Y. G., ”A Non-Contact Road Surface Monitoring System Using a Laser
Diode”, New Physics: Sae Mulli, Vol. 63, No. 3, pp. 280-287, (2013)
[61] Leu M.C., Henry J.J., “Prediction of skid resistance as a function of speed from pavement
texture measurements”, Transportation Research Record 666, Transportation Research
Board, Washington D.C., (1978)
[62] Lin J., Brown C. W., “Near-IR spectroscopic measurement of seawater salinity”, Environ.
Sci. Technol. 27, pp. 1611–1615, (1993)
[63] Löfving S., Road eye – a laser sensor for monitoring road state, Internet, 2009,
http://opticalsensors.se/roadeye.html
[64] Lovin A., Silion Ş., Nicuţă A., “A Complex Method for Controlling Temperature on Harsh
Environment”, 2012 International Conference and Exposition on Electrical and Power
Engineering (EPE), 25-27 oct 2012, Iaşi, pp. 876-881, (2012) (indexată ISI Web of Science)
[65] Lovin A., Silion Ş., Nicuţă A., “Thermal Comfort Specific Conditions in Vehicles and Real-
time Calculation of PMW and PPD Thermal Comfort Indices”, Advanced Topics in
Electrical Engineering (ATEE), 2013 8th International Symposium on, 23-25 mai 2013,
Bucureşti, pp. 1-4, (2013) (indexată ISI Web of Science)
[66] McKnight A. J., & McKnight A. S., “The effect of cellular phone use upon driver attention”,
Accident Analysis and Prevention, 25(3), pp. 259-265, (1993)
[67] Michael L. Whiting, “Measuring surface water in soil with light reflectance”, Proc. of SPIE
Vol. 7454
[68] Miller S. L., Youngberg B., Millie A., Schweizer P., Gerdes J. C., “Calculating Longitudinal
Wheel Slip and Tire Parameters Using GPS Velocity”, Proceedings of the American Control
Conference, Arlington, VA, pp. 1800–1805, (2001)
[69] Minton A., “The far-ultraviolet spectrum of ice”, J. Phys. Chem. 75, pp. 1162–1164, (1971)

Anexe
66
[70] Mobileye - Raport despre prevenirea accidentelor si eficienţa sistemului de prevenire a
accidentelor Mobileye® Technologies Ltd, Sept, 2010
[71] Mobileye 5 - Online: http://www.mobileye.com/all-products/mobileye-5-series/mobilapp/
[72] Muller S., Uchanski M., Hedrik K., “Estimation of the maximum tire-road friction
coefficient”, Journal of Dynamic Systems, Measurement, and Control, Vol. 125, pp.607–
617, (2003)
[73] Ogura T., Kageyama I., Nasukawa K., Miyashita Y., Kitagawa H., Imada Y., “Study on road
surface sensing system for snow and ice road”. ISAE Rev. 23, pp. 333–339, (2002)
[74] Ono E., “Estimation and control of vehicle dynamics for active safety”, R&D Review of
Toyota CRDL, vol. 40, pp. 1-6, (2005)
[75] Otsu N. et al., “A Threshold Selection Method from Gray-level Histograms,” IEEE Trans.
SMC-9, pp. 62-66, (1979)
[76] Pacejka H. B., Sharp R. S., “Shear Force Development by Pneumatic Tyres in Steady State
Conditions: A Review of Modeling Aspects”, Vehicle System Dynamics, Vol. 20, pp. 121-
176, (1991)
[77] Palmer K. F., Williams D., “Optical properties of water in the near-infrared”, J. Opt. Soc.
Am., 64, pp. 1107-1110, (1974)
[78] Pasterkamp W.R., Pacejka H.B., “The tyre as a sensor to estimate friction”, Journal of
Vehicle System Dynamics, Vol. 27, pp.409–422, (1997)
[79] Patterson E. M., Gillette D. A., Stockton B. H., “Complex index of refraction between 300
and 700 nm for Saharan aerosols”, J. Geophys. Res. 82, pp. 3153–3160, (1977)
[80] Perovich D. K., Govoni J. W., “Absorption coefficients of ice from 250 to 400 nm”,
Geophys. Res. Lett. 18, pp. 1233–1235, (1991)
[81] Petersson N., Santesson M., “Experimental Slip-Based Road Condition Estimation”,
Master’s thesis, Lund Institute of Technology Thesis, completed at University of California
at Berkeley. Lund Report No. 5635, (2000)
[82] Pilewskie P., Twomey S., “Discrimination of ice from water in clouds by optical remote
sensing”, Atmos. Res., 21, pp. 113-122, (1987)
[83] Pope R. M., Fry E. S., “Absorption spectrum (380–700 nm) of pure water. II. Integrating
cavity measurements”, Appl. Opt. 36, pp. 8710–8723, (1997)
[84] Price P. B., Bergström L., “Optical properties of deep ice at the South Pole: scattering”,
Appl. Opt. 36, pp. 4181–4194, (1997)
Anexe
67
[85] Riehm M., “Measurements for winter road maintenance” TRITA LWR Phd 1069, 55 pp,
(2012)
[86] Riehm M., Gustavsson T., Bogren J., “BIRDS – Innovative sensor systems for detection of
ice formation and freezing point temperature measurements”, Dep. of Land and Water
Resources Engineering, Royal Institute of Technology (Sweden); Earth Sciences Centre,
University of Gothenburg (Sweden), (2010)
[87] Sarabandi K., Li E.S., Nashashibi A.,”Modeling and Measurements of Scattering from Road
Surfaces at Millimeter-Wave Frequencies”, IEEE Transations On Antennas And
Propagation, Vol. 45, No. 11, pp.1679-1687, (1997)
[88] Sato Y., et al., “Study on recognition method for road friction condition”, JSAE Transaction,
vol. 38, pp. 51-56, (2007)
[89] Shao J., Lister P. J., “The prediction of road surface state and simulation of the shading
effect”, Boundary-Layer Meteorol., vol. 73: pp. 411–419, (1995)
[90] Silion Ş., Foşalău C., “Wet Road Surfaces Detection by Measuring the Air Humidity in Two
Points”, International Conference and Exposition on Electrical and Power Engineering
(EPE), 16-18 oct. 2014, Iaşi, pp. 744-747, (2014) (indexată IEEExplore)
[91] Silion Ş., Foşalău C., “Wet Road Surfaces Detection by Measuring the Infrared Reflected
Radiation”, International Conference and Exposition on Electrical and Power Engineering
(EPE), 16-18 oct 2014, Iaşi, pp. 738-743, (2014) (indexată IEEExplore)
[92] Silion Ş., Lovin A., “Detection of Human Presence in the Car by Measuring Infrared
Temperature Changes”, Acta Electrotehnica - Proceedings of the 5th
International
Conference on Modern Power Systems, MPS 2013, 28-31 mai 2013, Cluj-Napoca, pp. 429-
432, (2013)
[93] Silion Ş., Lovin A., “Road Conditions Monitoring. Actual and Undergoing Research
Methods”, Buletinul AGIR nr. 4/2013, ISSN 1224-7928, 26-27 sep 2013, Suceava, pp. 45-
49, (2013)
[94] Silion Ş., Lovin A., “Traffic Light Times Calculation and Simulate Semaphores Functioning
using LabView Environment”, Buletinul AGIR nr. 4/2013, ISSN 1224-7928, 26-27 sep
2013, Suceava, pp. 99-102, (2013)
[95] Simmons R., “The Curvature-Velocity Method for Local Obstacle Avoidance”, Proceedings
of the IEEE International Conference on Robotics and Automation, pp. 3375-3382,
Minneapolis MN, (1996)
Anexe
68
[96] Smith R. C., Baker K. S., “Optical properties of the clearest natural waters (200–800 nm)”,
Appl. Opt. 20, pp. 177–184, (1981)
[97] Sogandares F. M., Fry E. S., "Absorption spectrum (340–640) nm of pure water. I.
Photothermal measurements", Applied Optics 36(33), pp. 8699-8709, (1997)
[98] Comisia Europeană (CE), “Studiu Ştiinţific Privind Cauzele Accidentelor Camioanelor
Europene (CACE)”, www.untrr.ro, (2004)
[99] Teshima T., Saito H., Ozawa S., Yamamoto K., Ihara T.: “Vehicle Lateral Position
Estimation Method Based on Matching of Top-View Images”, The 18th International
Conference on Pattern Recognition 2006, pp. 626–629, (2006)
[100] Tsuji T., Hattori H., Watanabe M., Nagaoka N., “Development of night-vision system”,
Intelligent Transportation Systems, IEEE Transactions on (Volume:3, Issue:3), ISSN:1524-
9050, pp. 203-209, (2002)
[101] Tuononen A., ”On-board estimation of dynamic tyre forces from optically measured tyre
carcass deflections”, International Journal of Heavy Vehicle Systems, vol. 16, pp. 362-378,
(2009)
[102] Tuononen A., Hartikainen L., “Optical Position Detection Sensor to Measure Tyre Carcass
Deflections in Aquaplaning”, International Journal of Vehicle Systems Modelling and
Testing 2008, Vol. 3, No. 3, pp. 189-197, (2008)
[103] Umeno T., Ono E., Asano K., “Estimation of tire-road friction by tire rotation vibration”,
SAE paper 2002-01-1183, (2002)
[104] Uno, Sakai, Takagi, Yamashita, “Road Surface Recognition Method Using Optical Spatial
Filtering”, Proceedings of AVEC’94, pp. 509–515, (1994)
[105] Viikari V., Varpula T., Kantanen M., “Road condition recognition using 24 GHz
automotive radar”, IEEE Transactions on Intelligent Transportation Systems. In press. Vol.
10 (2009) No: 2, (2009)
[106] Wallman C-G., Astrom H., “Friction measurement methods and the correlation between
road friction and traffic safety”, S.N.R.a.T.R. Institute, Editor. 2001
[107] Warren S. G., “Optical constants of ice from the ultraviolet to the microwave”, Applied
Optics. Vol. 23, pp. 1206-1225, (1984)
[108] Warren S. G., “Optical properties of snow”, Rev. Geophys. Space Phys. 20, pp. 67–89,
(1982)
Anexe
69
[109] Warren S., Brandt R., Grenfell Th., “Visible and near-ultraviolet absorption spectrum of
ice from transmission of solar radiation into snow”, Applied Optics Vol. 45, No. 21, pp.
5320-5334, (2006)
[110] Wood N. L. H., Clark R. T., “The variation of roadsurface temperatures in Devon, UK
during cold and occluded front passage”, Meteorol. Appl., vol. 6: pp. 111–118, (1999)
[111] Woschnagg K., Price P. B., “Temperature dependence of absorption in ice at 532 nm”,
Appl. Opt. 40, pp. 2496–2500, (2001)
[112] Wouter H. Knap, Piet Stammes, and Robert B. A. Koelemeijer, “Discriminating Between
Water And Ice Clouds Using Near-Infrared Aviris Measurements”
[113] Yamada M., et al., “Road surface condition detection technique based on image taken by
camera attached to vehicle rearview mirror”, Review of Automotive Engineering, vol. 26,
pp. 163-168, (2005)
[114] Yamada M., Tanizaki T., Ueda K., Horiba I., Sugie N., “A System of Discrimination of the
Road Condition by means of Image Processing”, Trans. IEEE of Japan, Vol.120-D,
No.8/9, pp. 1053-1060, (2000)
[115] Yamada M., Ueda K., Horiba I., Sugie N., “Discrimination of the Road ConditionToward
Understanding of Vehicle Driving Environments”, IEEE Trans. Intelligent Transportation
Systems, Vol.2, No.1, pp. 26-31, (2001)
[116] Yamada M., Ueda K., Horiba I., Sugie N., “Discrimination of the Road Condition Toward
Understanding of Vehicle Driving Environments”, IEEE Transaction on Intelligent
Transportation Systems. Vol. 2. No. 1 pp. 26-31, (2001)
[117] Yamada M., Ueda K., Horiba I., Yamamoto S., Tsugawa S., “Detection of Wet-Road
Conditions from Images Captured by a Vehicle-Mounted Camera”, Journal of Robotics
and Mechatronics Vol.17 No.3, pp. 269-270, (2005)
[118] Yamada M., Ueda K., Horiba I.,Yamamoto S., and Tsugawa S., “Detection of Wet-Road
Conditions from Images Captured by a Vehicle-Mounted Camera”, Journal of Robotics
and Mechatronics Vol.17 No.3, pp. 269-276, (2005)
[119] Yuesheng L., Higgins-Luthman M., “Black ice detection and warning system”, Patent
application. Application number: US2007948086A, (2007)















![Gheorghe Sarău, The Succes of the Romanian Model in Rroma Education and in Teaching Rromani as a Mother Tongue, in „vol. „Ionuţ Anghel; Cristi Mihai ...] 2002, Tineret - Minorităţi](https://static.fdokumen.com/doc/165x107/6322849e078ed8e56c0a72ef/gheorghe-sarau-the-succes-of-the-romanian-model-in-rroma-education-and-in-teaching.jpg)



