Traffic and Crowd Dynamics: The Physics of the City
19
Uncorrected Proof 2008-09-08 ✐ ✐ Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 1 — le-tex ✐ ✐ ✐ ✐ ✐ ✐ Traffic and Crowd Dynamics: The Physics of the City 1 Traffic and Crowd Dynamics: The Physics of the City ARMANDO BAZZANI,BRUNO GIORGINI, 1 SANDRO RAMBALDI 2 “Fisica della Città” Laboratory, Center L. Galvani 3 for Biocomplexity, Physics Department and INFN 4 Sezione di Bologna, Bologna, Italy 5 Article Outline 6 Glossary 7 Definition of the Subject 8 Introduction 9 Automata Gas and Crowd Behavior 10 Automata Gas and Traffic Behavior 11 Simulation Results and Empirical Observations 12 Future Directions 13 Bibliography 14 15 TS2 Glossary 16 Automaton A physical particle with internal cognitive 17 dynamics able to process information and to make de- 18 cisions in order to achieve an aim. 19 Cognitive dynamics A dynamical system that mimics the 20 individual decision mechanisms pointed out by neuro- 21 science and behavioral studies. 22 Emergent properties Macroscopic properties of a statis- 23 tical systems that are not the result of the superposition 24 of the microscopic states of individual particles. 25 Global positioning system A system to detect the geo- 26 graphical coordinates of a receiver on the earth using 27 a satellite network. 28 Mean field theory a technique introduced in statistical 29 physics that studies the macroscopic dynamics using 30 the dynamics of averaged quantities. 31 Self-organized dynamics Stationary macroscopic states 32 that are the result of collective interactions among the 33 microscopic components. 34 Utility function A function that measures the expected 35 advantages or the disadvantages of future decisions. 36 Definition of the Subject 37 The physics of the city CE3 has been proposed as an in- 38 terdisciplinary research field that applies the techniques 39 of exact sciences to describe and understand the dynam- 40 ical states of the new metropolis. The continuous growth 41 and the social changes outlined by urban planners and 42 sociologists give to the actual cities a complex structure 43 whose study requires a new generation of dynamical mod- 44 els. From this point of view, the traffic and crowd dynam- 45 ics have a fundamental importance due to their impact on 46 individual freedom and of life quality. The study of the ob- 47 served macroscopic phenomena using a complex systems 48 approach, the search for the control parameters and the 49 understanding of the individual mobility demand are key 50 points for future contributions of the complexity science 51 to real society problems. 52 Introduction 53 Crowd and traffic dynamics are a crucial issue for model- 54 ing the complex urban mobility [5,8,11]. The idea that the 55 city itself can be considered a whole laboratory to under- 56 stand the mobility is at the base of a new research field: 57 the physics of the city [13]. “Aggregate of beings that hold 58 their biological history into its borders and model it within 59 all their intentions proper to thinking creatures, the city 60 results at the same time by the biological generation, the 61 organic evolution, and the aesthetics creativity. The city is 62 a contemporary a natural object and a subject of culture”. 63 From these words of Claude Levi Strauss clearly emerges 64 the complex nature of every urban system that today it is 65 generally accepted and considered in order to study the 66 city, its development and evolution [8]. The city shows 67 itself to be polymorphous, polysemic and polyglot [22], 68 stratified in time and crossed by actors and objects whose 69 dynamics are extremely different and can be conflictive to 70 the point to engendering a feeling of chaos, i. e., one can 71 say that cities live at the edge of chaos and the problem is 72 exactly to govern the system emerging complexity, and not 73 real chaos situations. To try to express the quality of this 74 complexity in quantitative terms, using the instruments of 75 the exact sciences, without losing its texture, one has to re- 76 duce the semantic, logical, syntactic and phenomenologi- 77 cal field in which to articulate the possibilities of construct- 78 ing models able to be descriptive, explanatory and, at least 79 to some extent, predictive [78]. These models will never be 80 completely isomorphic to reality but can simulate some of 81 its aspects and characteristics considered salient by the ob- 82 server, thus playing a fundamental role in the choice of the 83 significant observables and control parameters, which ob- 84 viously depend from what one wants to control and gov- 85 ern. CE4 A simple consideration can help us in the reduc- 86 tion process: regardless of the variety and complexity of 87 flows, forms and information, an urban system exists in- 88 sofar as it is inhabited. Therefore our physics of the city 89 will be essentially physics of an inhabited city, and given 90 Please note that the pagination is not final; in the print version an entry will in general not start on a new page. TS2 Your Section “Article Outline” was deleted. In this encyclopedia abstracts are not allowed, please confirm. CE3 Please confirm change. CE4 Please confirm change. CE5 Please confirm change. Editor’s or typesetter’s annotations (will be removed before the final T E X run)
Transcript of Traffic and Crowd Dynamics: The Physics of the City

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 1 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 1
Traffic and Crowd Dynamics:The Physics of the CityARMANDO BAZZANI, BRUNO GIORGINI,1
SANDRO RAMBALDI2
“Fisica della Città” Laboratory, Center L. Galvani3
for Biocomplexity, Physics Department and INFN4
Sezione di Bologna, Bologna, Italy5
Article Outline6
Glossary7
Definition of the Subject8
Introduction9
Automata Gas and Crowd Behavior10
Automata Gas and Traffic Behavior11
Simulation Results and Empirical Observations12
Future Directions13
Bibliography14
15
TS2
Glossary16
Automaton A physical particle with internal cognitive17
dynamics able to process information and to make de-18
cisions in order to achieve an aim.19
Cognitive dynamics A dynamical system that mimics the20
individual decisionmechanisms pointed out by neuro-21
science and behavioral studies.22
Emergent properties Macroscopic properties of a statis-23
tical systems that are not the result of the superposition24
of the microscopic states of individual particles.25
Global positioning system A system to detect the geo-26
graphical coordinates of a receiver on the earth using27
a satellite network.28
Mean field theory a technique introduced in statistical29
physics that studies the macroscopic dynamics using30
the dynamics of averaged quantities.31
Self-organized dynamics Stationary macroscopic states32
that are the result of collective interactions among the33
microscopic components.34
Utility function A function that measures the expected35
advantages or the disadvantages of future decisions.36
Definition of the Subject37
The physics of the city CE3 has been proposed as an in-38
terdisciplinary research field that applies the techniques39
of exact sciences to describe and understand the dynam-40
ical states of the new metropolis. The continuous growth41
and the social changes outlined by urban planners and 42
sociologists give to the actual cities a complex structure 43
whose study requires a new generation of dynamical mod- 44
els. From this point of view, the traffic and crowd dynam- 45
ics have a fundamental importance due to their impact on 46
individual freedom and of life quality. The study of the ob- 47
served macroscopic phenomena using a complex systems 48
approach, the search for the control parameters and the 49
understanding of the individual mobility demand are key 50
points for future contributions of the complexity science 51
to real society problems. 52
Introduction 53
Crowd and traffic dynamics are a crucial issue for model- 54
ing the complex urban mobility [5,8,11]. The idea that the 55
city itself can be considered a whole laboratory to under- 56
stand the mobility is at the base of a new research field: 57
the physics of the city [13]. “Aggregate of beings that hold 58
their biological history into its borders andmodel it within 59
all their intentions proper to thinking creatures, the city 60
results at the same time by the biological generation, the 61
organic evolution, and the aesthetics creativity. The city is 62
a contemporary a natural object and a subject of culture”. 63
From these words of Claude Levi Strauss clearly emerges 64
the complex nature of every urban system that today it is 65
generally accepted and considered in order to study the 66
city, its development and evolution [8]. The city shows 67
itself to be polymorphous, polysemic and polyglot [22], 68
stratified in time and crossed by actors and objects whose 69
dynamics are extremely different and can be conflictive to 70
the point to engendering a feeling of chaos, i. e., one can 71
say that cities live at the edge of chaos and the problem is 72
exactly to govern the system emerging complexity, and not 73
real chaos situations. To try to express the quality of this 74
complexity in quantitative terms, using the instruments of 75
the exact sciences, without losing its texture, one has to re- 76
duce the semantic, logical, syntactic and phenomenologi- 77
cal field in which to articulate the possibilities of construct- 78
ing models able to be descriptive, explanatory and, at least 79
to some extent, predictive [78]. These models will never be 80
completely isomorphic to reality but can simulate some of 81
its aspects and characteristics considered salient by the ob- 82
server, thus playing a fundamental role in the choice of the 83
significant observables and control parameters, which ob- 84
viously depend from what one wants to control and gov- 85
ern. CE4 A simple consideration can help us in the reduc- 86
tion process: regardless of the variety and complexity of 87
flows, forms and information, an urban system exists in- 88
sofar as it is inhabited. Therefore our physics of the city 89
will be essentially physics of an inhabited city, and given 90
Please note that the pagination is not final; in the print version an entry will in general not start on a new page.TS2 Your Section “Article Outline” was deleted. In this encyclopedia abstracts are not allowed, please confirm.CE3 Please confirm change.CE4 Please confirm change.CE5 Please confirm change.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 2 — le-tex��
�� ��
2 Traffic and Crowd Dynamics: The Physics of the City
the large number of elementary components, this means91
non-equilibrium statistical physics [61,77], because a town92
is an open system. Moreover, given that the elementary93
components move in urban space-time, this also means94
the physics of dynamical systems, and since the individ-95
uals in the system have free will, probabilistic physics has96
to be considered (Pascal firstly modeled the human free97
will by the probability function, using the game of chance98
as paradigm). To finish, since the elementary components99
have memory and are capable of drawing information100
from the environment, processing it according to inten-101
tions, choices and decisions, the physics of the city must102
also be intentional, cognitive and decisional. As everyone103
knows, another basic ingredient of physics, besides the el-104
ementary components, is a space-time where the dynam-105
ics can develop (ubi materia, ibi geometria – Kepler). So106
one can ask if it is possible to identify a space-time struc-107
ture proper to a generic urban system. Obviously we can108
describe the street network, and the different morpholo-109
gies with a spatial metric that usually is not Euclidean,110
but is not sufficient to develop an urban dynamics. One111
needs also of a clock, a time structure scale invariant. CE5112
This structure can be modeled by the chronotopoi (liter-113
ally, places of time), the primal agents of urban tempo-114
ral dynamics able to generate time correlations that would115
not exist without them [10]. In the city planning language,116
they are defined as areas where are implanted, temporal117
scheduled activities, for example a hospital, the univer-118
sity, a shopping center and so on, that generates/attract119
mobility. Urban topology thus becomes chronotopic120
and the interaction of the individual’s agenda with the121
pulsation of the chronotopos produces complex urban122
mobility [36].123
Assuming the mobility as a property of the individu-124
als able to process information, the microscopic dynam-125
ics one generates both by properly physical interactions126
and by some decisional/cognitive mechanism [1]. More-127
over a mesoscopic dynamics for individuals aggregate has128
been developed to study self-organization behaviors in the129
context of a non-equilibrium and non-linear evolution130
of the system (being the urban mobility a complex phe-131
nomenon that develops itself in an open complex system,132
the city) [39,45]. Using a computer different mobility sit-133
uations one simulates and analyzes, in order to study the134
control parameters, phase transitions and shift from or-135
der to chaos, criticalities and the whole range of possible136
orbits, also those that are very difficult to reach in mate-137
rial experiments [24,25]. Obviously there is the problem138
of realism, because the simulations can be consistent and139
reasonable but far, sometime very far, from the effective140
mobility.141
In general social systems, like urban traffic and crowd 142
dynamics, consist of many autonomous intelligent enti- 143
ties, which are distributed over a structured space and in- 144
teract each other to achieve certain goals [33,68]. A power- 145
ful method to study such systems are multi-agent models, 146
which allow one introduce a cognitive behavior in the dy- 147
namics of individual entities. The concept of “agent” has 148
been introduced in many research areas [17,67,87], from 149
computer science and artificial life research to economy 150
and sociology, so that its definition is quite generic: agent 151
is anything able to act in a given environment. To intro- 152
duce a more specific agent definition in the simulation 153
of traffic and crowd dynamics [6,7,94], the crucial issue 154
concerning the meaning and the utility of a social system 155
model has to be first discussed [19,20,33]. Complexity sci- 156
ence faces the problem of studying systems whose dynam- 157
ics cannot be reduced to physical fundamental principles. 158
The different scales of description turn out to be intercon- 159
nected not only by a bottom-up interaction structure typ- 160
ical of physical systems (the dynamics at microscopic lev- 161
els determines the evolution of macroscopic variables), but 162
also by top-down interactions so that the microscopic be- 163
havior is influenced by the macroscopic states of the sys- 164
tem [30]. A classical statistical physics approach is ques- 165
tionable in such a case. A further difficulty is that even the 166
interactions among the elementary components of a com- 167
plex system are unknown, and they can only be described 168
in a qualitative way according to some hypotheses, con- 169
sequences of direct observations of real phenomena [78]. 170
Usually a model is a simplified representation of the re- 171
ality, but not too simple in order to describe the inter- 172
ested phenomenon; moreover any model should have suf- 173
ficiently generic features to be able to describe analogous 174
phenomena observed in different systems from social to 175
physical or biological ones [76,90]. In complexity science 176
the role of the models is modified becoming not a specific 177
realization of a general theory (think for example to dif- 178
ferent cosmological models which correspond to different 179
boundary conditions and solutions for the Einstein equa- 180
tions), but rather an instrument of knowledge to perform 181
in silico experiments that allows one to verify the consis- 182
tency of the assumptions with the considered phenom- 183
ena. In other words the models realize a “virtual reality” 184
where the simulations point out the relevance of different 185
hypotheses on the appearance and evolution of emergent 186
properties identifying the control parameters. These mod- 187
els cannot be validated in the usual Galilean sense, since 188
the models are themselves experiments. Moreover there is 189
an intrinsic difficulty in defining Galilean experiments on 190
complex systems due to the great information needed for 191
the reproducibility [9,34]. From a physical point of view, 192
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 3 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 3
one has to look for statistical laws that consider the min-193
imal conditions for the existence of phase transitions to-194
ward particular self-organized states.195
In our opinion, a paradigmatic physical model for196
complex systems can be the “automata gas” [95]: a statis-197
tical system whose elementary components perform both198
a physical dynamics and a cognitive behavior based on in-199
formation exchanges [35,92]. In the sequel an automata200
gas model to describe the crowd and traffic dynamics is201
described. As a general convention the capital letters will202
denote scalar variables, whereas the lower letters will indi-203
cate vectors.204
Automata Gas and Crowd Behavior205
The pedestrian mobility is a basic human activity strictly206
linked with the detailed structure of urban environment207
and the social life [14,32,81]. Indeed due to the human be-208
ing social nature, the pedestrian mobility will continue to209
play a fundamental role for the life quality of metropo-210
lis. The development of fast and comfortable transporta-211
tion has reduced the spatial scale of walking activity to212
an average dimension of '500m. The direct observations213
on video films turns out to be the most useful tool to ex-214
tract detailed information on pedestrian dynamics [50,99].215
Various research group have pointed out the following216
items [39]:217
I Pedestrians tend to walk at a desired velocity toward218
a local destination. The desired walking speed depends219
both on social characters (for example age, sex, job, . . . )220
and on the cognitive internal state.Moreover individu-221
als develop strategies in order to walk in themore com-222
fortable way (for example avoiding collisions and least223
energy consuming), and following a best path accord-224
ing to their propensities and knowledge of the urban225
space.226
II Pedestrians like to keep a certain distance from other227
pedestrians and borders as walls or obstacles. This dis-228
tance can be interpreted as a social space preserving229
individuality and it depends on various factors like230
crowding conditions, individual hurry and space ge-231
ometry. Usually individuals don’t want CE6 their pace232
violated by extraneous people. Moreover individu-233
als who know each other, tend to form clusters that234
move as single entities performing a flocking dynam-235
ics [24,25].236
III To avoid physical contact, individuals reduce the walk-237
ing velocity and take local detours, but they feel aver-238
sion to move in opposite to their desired direction. In239
case of physical collisions, the incompressible nature240
of bodies play an important role and pedestrians move241
their body, so that they can slide on each other (if it is 242
possible). 243
IV The best pedestrian paths usually are not the mini- 244
mal time or space geodetic, becausemany other factors 245
contribute to the choice of the trajectory, so a minimal 246
action principle cannot model dynamics [15,54]. 247
V The pedestrian paths seem to optimize some utility 248
functions time or energy consuming [64], but depend 249
on the information level of the individual on the urban 250
space and single’s propensities. They may be dynami- 251
cally modified by decision mechanisms [40,46] in the 252
presence of multiple choices, particular chronotopoi 253
and geometrical or crowding conditions [11]. In nor- 254
mal crowding condition, there are strategies automat- 255
ically applied at particular points, like at a bottleneck, 256
where the priority convention avoid criticalities. The 257
decision mechanism reflects the individual free will, 258
which is an unpredictable relevant character of pedes- 259
trian dynamics, but there are also some average behav- 260
iors, such as the herding effect or habit [40,49]. 261
VI When panic phenomena occur, pedestrians lose their 262
rationality and the dynamics are dominated by hard 263
physical interactions [39]. People try to move consid- 264
erably faster than normal and start pushing. As a con- 265
sequence the pressure become extremely dangerous in 266
jammed crowds, arching and clogging are observed at 267
the exits so that even escape become very difficult or 268
impossible [37]. 269
In order to define an automata gas model for pedes- 270
trian dynamics that takes into account the previous obser- 271
vations, physical and information-based interactions are 272
treated separately. Let us consider the following axioms, 273
that define a common framework for several pedestrian 274
dynamical models: 275
A1) each automaton i has an inertial mass mi, an incom- 276
pressible body-space of fixed radius Rb and a social 277
space of radius Rs around its center ri. 278
A2) Each automaton i has a desired velocity vi , and it con- 279
tinuously modifies its actual velocity vi according to 280
vi D ��1(vi � vi) (1) 281
A3) When two automata i; j have distance Di j D kr j � 282
rik D 2R and their velocities satisfy the condition 283
(v j � vi ) � (r j � ri ) < 0, then a physical collision and 284
the change of momenta pi D mivi are computed ac- 285
cording to 286
p0i D ˛
�pi � (R(�) � I)�(v j � vi)
�
p0j D ˛
�p j C (R(�) � I)�(v j � vi )
� (2) 287
CE6 Please confirm change.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 4 — le-tex��
�� ��
4 Traffic and Crowd Dynamics: The Physics of the City
Traffic and Crowd Dynamics: The Physics of the City, Figure 1Sketch of automata collision in the center of a mass system:p D �(vj � vi) is the center of mass momentum and � the col-lision angle with respect to the normal to the collision directionrj � ri
where � D mimj/(mi C mj) is the reduced mass,288
˛ � 1 the dissipation coefficient andR(�) is a coun-289
terclockwise rotation of an angle � > � (see Fig. 1),290
whereas I is the identity transformation.291
A4) Each automaton has a local visual space given by292
a semicircle of radius Rv, symmetric with respect to293
the desired velocity direction. At a given time inter-294
val�t, the automaton obtains information on the po-295
sitions and the velocities of any other automaton or296
obstacle in its visual space.297
A5) Each automaton i rotates and reduces its velocity298
vi D ˙! � vi � ˇvi ˇ > 0 (3)299
when it realizes that another automaton or an obsta-300
cle will enter into its social space, within a reaction301
time interval � .302
The axiom A1 concerns the physical properties of the au-303
tomata gas: the incompressible body is usually considered304
by models for simulation of crowd dynamics and pedes-305
trian panic [44]. In principle one has to consider differ-306
ent body radius for different automata to take into ac-307
count the diversity among individuals in a crowd; this can308
be relevant studying the dynamics at bottlenecks [43,52].309
The “inertial mass” m is also introduced to differentiate310
the automata behavior during collisions or interactions:311
an automaton with a great mass behaves more aggres-312
sively by forcing other automata to deviate from its tra-313
jectory. The existence of a social space has been proposed314
by sociologists who related this space with the distance be-315
tween two individuals shaking hands with each other (in316
the West CE7 ). However this is not a fixed space, and it317
depends on the single characteristics (for example philan-318
thropic or misanthropic one), and on crowding conditions319
and presence of attractive points in the space where peo- 320
ple accept to be closer. One should also consider the pos- 321
sibility that individuals form compact group when there is 322
empathy among them. 323
The existence of a desired velocity (axiom A2) is al- 324
most obvious, but of course its determination is the result 325
of a cognitive process where both determinism and indi- 326
vidual free will have an important role. Eq. (1) is the most 327
simple dynamics to simulate the automaton tendency to 328
move at the desired velocity and the same choice has been 329
proposed by other models, where the only relevant param- 330
eter is � : i. e., the “relaxation time scale” [45]. 331
The collision dynamics defined by axiom A3 is in- 332
spired by granular flows interactions [18,38], and it allows 333
one to simulate both the body repulsion and a sliding ef- 334
fect that mimics the real effect due to the possibility of 335
rotating the body when two pedestrians collide. The rel- 336
evant parameters are the rotation angle � and the dissipa- 337
tion parameter ˛ 2 [0; 1]: when � D 2� (see Fig. 1) and 338
˛ D 1 one has a perfect elastic collision, whereas � D � 339
and ˛ D cos � gives an anelastic collision between two 340
spheres. The direct observation of video films suggests the 341
existence of a ˛ dependence on � , which has a maximal 342
value at � D �/2 (i. e., two pedestrians tend to reduce sud- 343
denly their velocity in a head on collision). Conversely the 344
choice of the � within the interval [�; 2�] seems to be suit- 345
able for the simulations. 346
The physical automata dynamics, which is the combi- 347
nation of Eqs. (1) and (2), can be defined in an equiva- 348
lent way by using the social force model, where a second- 349
order dynamics is used to simulate pedestrian movements 350
with interaction “social forces”, which depend both on the 351
distance and on the reciprocal orientation of pedestrians 352
(non-Newtonian character) [41]. The collisional approach 353
used in the automata gas model gives an advantage us- 354
ing essentially a first-order dynamics in the simulations, 355
so that the numerical instability due to high force gradi- 356
ents are automatically solved and a longer integration time 357
step can be used. Conversely the cellular automata mod- 358
els [3,48,70] solve the collisions problem by discretizing 359
the space and are extremely convenient from a compu- 360
tational point of view, but they can introduce some bias 361
in the microscopic dynamics whose macroscopic effect 362
should be carefully considered [60]. 363
The axioms A4 and A5 introduce a local vision mech- 364
anism: each automaton sees the others in front of it whose 365
actual position is inside its visual space. For each of them, 366
it computes the forecast position (according to the actual 367
velocity) after a time � . Then it selects the automata whose 368
forecast positions are inside its social space, and it rotates 369
and reduces its velocity, in order to avoid future collisions 370
CE7 Please confirm change.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 5 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 5
choosing the suitable sign in Eq. (3). The vision has some371
typical features of an information based interactions [84]:372
a) It depends on the forecast positions of other automata373
according to the available information;374
b) It has a dichotomic nature since only the automata375
that will eventually enter the social space are consid-376
ered;377
c) The sign choice of the rotation velocity is the result of378
an utility function evaluation.379
Finally the interval �t defines the decision timescale,380
when new information is achieved; by assumption, the fol-381
lowing inequality holds382
�tvi � Rb � �vi ' Rv : (4)383
Therefore the automaton dynamics is the result of many384
decision processes, and the vision mechanism determines385
a collective interaction dynamics in the automata model,386
which is an essential feature for the appearance of emer-387
gent properties. According to the inequality (4), the aver-388
age effect of local vision is to rotate the velocity in the di-389
rection where the “density” of counteracting automata is390
minimal and to reduce the velocity proportionally to the391
surrounding automata density. From this point of view,392
the local vision is equivalent to a non-Newtonian repul-393
sive long-range force with a spatial decaying scale ' Rv,394
as proposed in the social force model. Indeed both the395
approaches give rise to the same macroscopical states in396
many cases of study. But the individual character of in-397
formation-based interactions allows one to introduce the398
free will in the model, using the concept of cognitive state,399
without the artifact of external random perturbations in400
the dynamics. Using the idea of cognitive state to define401
the automata desired velocity and the choice among mul-402
tiple possibilities permits one to state two other axioms:403
A6) Each automaton has a cognitive network representa-404
tion of the physical surrounding space dependent on405
its knowledge level. Each network node is related to406
a possible decision, whereas the arcs introduce con-407
nections between successive decisions (see for exam-408
ple Fig. 2a).409
A7) The decision mechanism is defined by a subjective410
probability evaluation [27] based on the existence of411
an utility function and an internal cognitive dynam-412
ics [16,28]; the probability are computed taking into413
account the available information and the previous414
history.415
The axiom A6 implies an internal dynamical structure for416
the particle automaton, which acquires a knowledge capa-417
bility of urban space. The nodes are identified with partic- 418
ular regions of interest in the urban space (for example in 419
Fig. 2 the nodes correspond to doors neighborhoods). The 420
decision process is discontinuous, since the automaton 421
gets new information at the node points. One can compare 422
the cognitive network structure with a best paths origin- 423
destination algorithm, based on the deterministic mini- 424
mal action principle, which has been proposed to study 425
the accessibility of urban spaces [15,54]. However, this ap- 426
proach gives a global and rigid description of the space that 427
turns out to be unrealistic and, sometimes, useless, when 428
one studies crowd dynamics where the automata paths are 429
the results of a continuously evolving process dominated 430
by the collective interactions and the individual free-will. 431
On the contrary, the space representation using a cognitive 432
network that focuses the attention only on some particu- 433
lar points, it is both robust and flexible to allow a single 434
automaton to creat its own individual path with optimiza- 435
tion criteria based on local information. 436
The axiom A7 establishes a relation between an in- 437
ternal cognitive dynamics [93] and a probabilistic choice 438
among different possibilities [62]. Let us consider the ele- 439
mentary dichotomic decision between the choicesA and B, 440
by associatingA or B to the values of the variable xi (for ex- 441
ample A when xi > 0) that defines the “cognitive state” of 442
the i automaton. One assumes the existence of a stochas- 443
tic dynamical system that represents the neuronal activi- 444
ties [83] 445
xi D @U@x
(xi ; I) Cp2Ti�t (5) 446
where U(x; I) is an utility function with two local max- 447
imaUA andUB. The “utility concept”, introduced in econ- 448
omy [31,96], is a measure of the perceived advantages of 449
a certain decision with respect to the automaton CE8 final 450
purpose, whereas the information I is any external variable 451
that may influence the decision. Under the very general 452
regularity hypotheses on U CE9 , the dynamics (5) evolves 453
towards one of the local maxima in a stochastic way, due to 454
the presence of the white noise � t (unpredictable factors in 455
the decision mechanism) and the “social temperature” Ti, 456
which is a measure of the “irrational behavior” of the au- 457
tomaton. As a consequence even if all the automata have 458
the same decisionmechanism, the effective decision is sub- 459
jective due to the different information I and the different 460
temperature Ti. According to the Arrhenius’ law, the tran- 461
sition probabilities from the choice A to B and vice versa 462
read 463
PAB / exp�
�UA(I)Ti
�PBA / exp
��UB(I)
Ti
�(6) 464
CE8 Please confirm change.CE9 Please check sentence.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 6 — le-tex��
�� ��
6 Traffic and Crowd Dynamics: The Physics of the City
Traffic and Crowd Dynamics: The Physics of the City, Figure 2a Cognitive network representation of a space with two parallel walls and four connecting doors; the automata enter from the leftside and have to reach the exit on the right. The squares are the decision nodewhere automata obtain new information and changethe desired velocity. b Snapshot of the automata dynamics in the space shown in left picture. The cognitive network causes a fluxorganization along the shortest paths, but the subjective probabilistic decision implies the existence of “irrational” automata whichfollow longer paths
By introducing an average balance equation for the sta-465
tionary probabilities to choose A or B466
PAPAB � PBPBA D 0467
one obtains [16,46]468
PA Dexp
�UATi
�
exp�UATi
�C exp
�UBTi
�
PB Dexp
�UBTi
�
exp�UATi
�C exp
�UBTi
�
(7)469
The non-linear relation between utility and probability has470
two limit behaviors: for low temperature values, Eq. (7) de-471
fines a sigmoidal like function with a sharp transition be-472
tween the two choices, whereas for high temperature val-473
ues the relation is almost linear. These two regimes corre-474
spond to two different social behaviors of the automaton:475
in the first case there is a sudden change in the decision476
as utility overcomes a certain threshold (rational automa-477
ton), in the second case, the automaton choice becomes478
insensitive to utility changes (irrational behavior).479
Automata Gas and Traffic Behavior480
The traffic behavior in a urban network is the consequence481
of citizens mobility demand driven by the chronotopic482
activity of modern cities [21]. The application of physics483
to traffic modeling dates back more than 40 years [80].484
From one hand the microscopic traffic dynamics is forced485
on a one-dimensional space (the road), from the other 486
hand its spatial scale is extended to the whole city. For 487
this reason various researches have proposed to simplify 488
the microscopic physical dynamics and to focus the atten- 489
tion on the cognitive behavior at the base of the individ- 490
ual mobility agenda and on the fluxes optimization in the 491
road network [2,42,86,94]. Nevertheless the microscopic 492
drivers behavior is responsible of local congestions forma- 493
tion that may propagate in the road network and cause 494
a macroscopic phase transition of the whole system. The 495
proposed models are divided in two main classes: the cel- 496
lular automata models which discretize the road dynam- 497
ics using discrete stochastic maps [63,75] and the continu- 498
ous models based on stochastic differential equations [39]. 499
The auto-mobilis model [12] is based on a simple micro- 500
scopic continuous dynamics, but able to describe different 501
driving styles and behaviors at the crossing points (traffic 502
lights, roundabouts and stop signals at insertions). The au- 503
tomata in the models move on a road using alternatively 504
the two main behaviors that has been proposed by vari- 505
ous researchers [51]: the so called “car-following” [4] and 506
the “optimal velocity” behavior [74]. In the first case each 507
driver adjusts his velocity to the velocity of the successive 508
vehicle; in the second case each driver chooses his velocity 509
according to the safety distance with the successive vehicle. 510
Both models can be described by the differential equation 511
s j D v jv j D a(s j�1 � s j ; v j; v j�1(t � �);)
(8) 512
where (s j; v j) are the position and the velocity of the j-au- 513
tomaton on a road (by convention the j-driver follows the 514
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 7 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 7
j � 1-driver), is the parameters set that characterizes515
the individual behavior, � is a reaction time to the velocity516
changes of the successive vehicle. The effect of line changes517
can be neglected since they are not frequent along a urban518
street (of course this is not true at the intersections points519
that will be consider separately). To specify the accelera-520
tion in Eq. (8), the main ideas at the base of variousmodels521
are summarized, by means of the following assumptions:522
B1) An automaton-driver has a finite dimension d0, it523
keeps a minimal distance dmin from the preceding524
automaton, it has a reaction time � to the velocity525
changes of the other vehicles and it has a desired526
velocity vmax (usually the maximal allowed velocity527
along the considered road, assuming that people re-528
spect the traffic rules)529
v j D ˛(v j � vmax) (9)530
where ˛ is the acceleration capacity in a comfortable531
driving.532
By measuring sj at the center position the distance be-533
tween two successive drivers is �s j D s j�1 � s j � d0.534
B2) Each automaton has a safety distance Ds and an atten-535
tion distance Datt (i. e., a distance at which the driver536
considers the presence of the other drivers)537
Ds D dmin C 2�v j Datt D dmin C 2:5�vmax (10)538
Each time �s j � Ds it reduces the velocity according539
to540
v j D �ˇ(v j � vs) (11)541
where ˇ is the breaking capacity.542
Eq. (10) TS10 established a linear relation between543
reaction time � and the safety distance Ds; this is544
with direct observations for the typical urban velocity545
ranges. But to avoid accidents one requires a condi-546
tion on the breaking capacity ˇ� � 1/2.547
B3) When the distance �s j is less than the attention dis-548
tance Datt, the automaton adjusts its CE11 velocity to549
the velocity of the preceding vehicle550
v j D �˛(v j � v j�1(t � �) � � ) (12)551
where the parameter � � 0 simulates the behavior of552
impatient drivers.553
To be more realistic one takes also into account that the554
automata cannot correctly evaluate small velocities so that555
when v j�1 � vmin one set v j�1 D 0 in Eq. (12).556
The Eqs. (9), (11), (12) define the microscopic dynam-557
ics along a road. All the parameters are individual charac-558
ters and have a random distribution among the automata559
populations. Indeed the driver behavior can be correlated 560
to citizens social characters (sex, age, birth place etc.), so 561
that several classes of drivers can be identified. In some re- 562
alistic situations the presence of different driver classes is 563
crucial to understand urban traffic. The model can simu- 564
late different traffic regimes: at low density the free flow 565
(Eq. (9)) is described, when the density increases the au- 566
tomata perform a synchronized flow, which becomes un- 567
stable when the local density overcome 1/Ds and gives rise 568
to congestion effects. Indeed the model has infinite equi- 569
libria with automata moving at the same velocity v � vs. 570
However a linear stability analysis using the Fourier trans- 571
form shows that the dynamics (12) is always stable with 572
a relaxation time 573
T ' 2(1 C ˛�)3
˛(2�/�)2(13) 574
in the limit � � 1 where is the density and � the wave- 575
length of the perturbation, whereas the dynamics (11) be- 576
come unstable when ˇ� < 1 [37,69]. Therefore when the 577
local density satisfies � 1/Ds, a congestion regime may 578
rise; the instability can be driven by small percentage of 579
“bad drivers” in the automata population, as shown in 580
Fig. 3. This reflects the possibility that the different driv- 581
ing styles may cause local instability due to microscopic 582
interactions, as suggested by direct observations [91]. 583
To complete the dynamical model the urban traffic 584
model, one has to set the behavior at the crossing points 585
considering different situations: 586
B4) At a traffic light in case of yellow colors, the automata 587
compute the time tc required to pass through the 588
cross at the actual velocity: if tc is longer than the yel- 589
low time-interval, they stop. 590
B5) At a connection of two streets with priority rules, the 591
vehicles in the secondary street are forced to reduce 592
their velocity at a given value vc (vc D 0 in case of 593
a stop signal), and they compute both the distance D 594
from the crossing point and the velocity v of the in- 595
coming vehicle in the main street: if the distance D 596
is greater than (v � vc)/ˇ, the other vehicles can en- 597
ter in the main street; otherwise it has to stop. In 598
Fig. 4 a snapshot of a simulation in a crossing point 599
with priority rules is shown. As a matter of fact, the 600
emergent global properties of urban traffic cannot be 601
understood, described, and eventually predicted, only 602
using the automata micro-dynamics on the road net- 603
work [86,94]. A global cognitive time-dependent field 604
interacting with individuals is needed: 605
TS10 Please check equation labels and references. There were some discrepancies in the input.CE11 Please note that automaton is neither masculine nor feminine: thus its pronouns are "it" and "its".
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 8 — le-tex��
�� ��
8 Traffic and Crowd Dynamics: The Physics of the City
Traffic and Crowd Dynamics: The Physics of the City, Figure 3a Stability study of the urban traffic micro-dynamics for an homogeneous automata population in a periodic road: the four curves(in the order: black, red, green blues) give the vehicle velocity (m/s) as a function of the position (m) on the road at different timeseparated by 5 minutes. The model uses “realistic” parameters: d0 D 4m, dmin D 1m, vmax D 16m/s, vmin D 1m/s, ˇ D 1:1 s�1,� D :75 s and˛:5 s�1. The initial equilibriumdensity 1/16m�1 is locally increased by a 10%.b the same as picture a, but the simula-tion considers a 20%of “bad drivers” randomly distributed on the road with reduced breaking capabilityˇ D :9 s�1; the blue curveshows as a stop-and-go instability has been developed by the microscopic dynamics
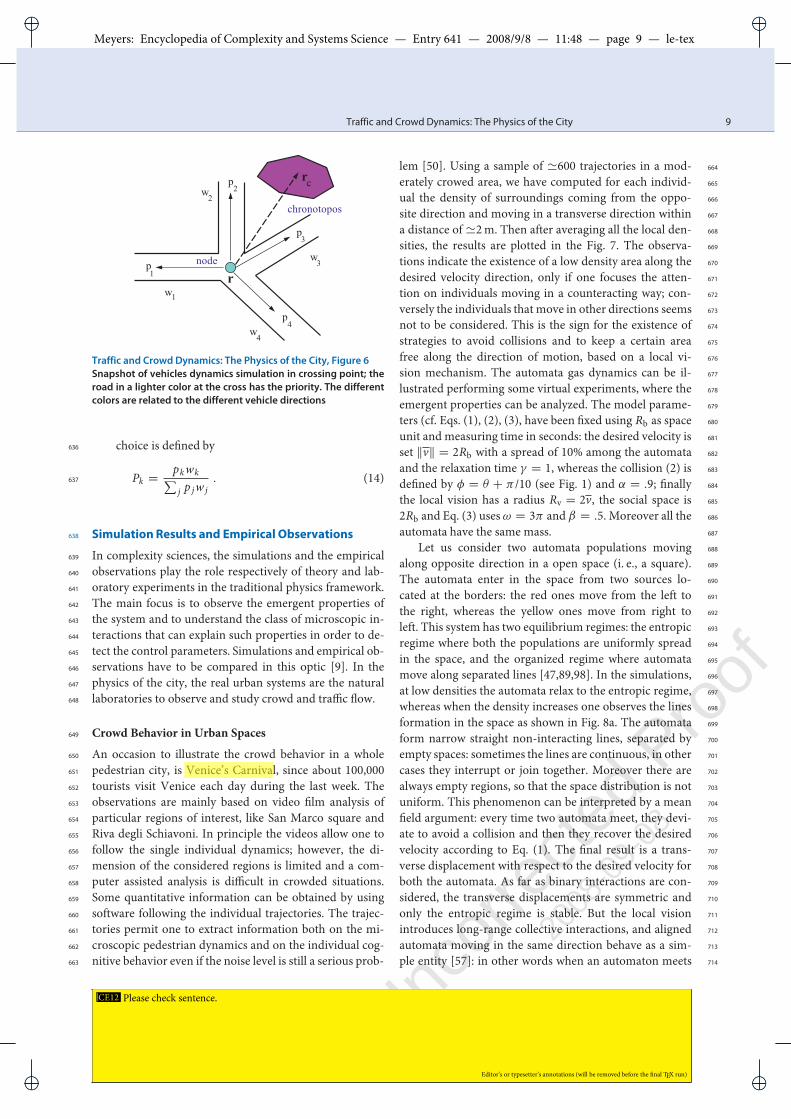
Traffic and Crowd Dynamics: The Physics of the City, Figure 4Snapshot of vehicles dynamics simulation in crossing point; theroad in a lighter color at the cross has the priority. The differentcolors are related to the different vehicle directions
B6) In the urban space-time there exist the “chronotopoi”,606
which are adaptive agents generating the individual607
mobility demand.608
Examples of chronotopoi are historical centers, shop-609
ping centers, university campus, great social events610
as concerts or football matches etc.; in our sense611
a chronotopos is not a geometrical or morphological612
property, but an entity that introduces timing correla-613
tions between the city macroscopic level (social time)614
and the automata microscopic dynamics (individual615
time). The chronotopoi provide a cognitive map [79]616
to the automata by means of cognitive fields. A sketch617
of chronotopic cognitive fields overlapped to a Man-618
Traffic and Crowd Dynamics: The Physics of the City, Figure 5Landscape of a abstract cognitive field superimposed to a roadnetwork
hattan-like road network is plotted in Fig. 5, where 619
the intensity of the attraction is measured by the well 620
amplitudes. 621
B7) Every automaton constructs a daily mobility agenda 622
based on its propensities and the available chrono- 623
topic information. 624
The decision mechanism is modeled by de Finetti 625
subjective probability [27], taking free will into ac- 626
count. 627
B8) The automaton trajectory is a path realization on 628
probabilistic a network, where the choice probabili- 629
ties at the nodes depend on chronotopic attraction. 630
The decision mechanism at a crossing point is out- 631
lined in Fig. 6, where the probabilities pj depend on 632
a best path algorithms to reach the chronotopos and 633
the weightswj measure the street quality (typically ac- 634
cessibility, safety and appealing). The final probability 635
utente
Evidenziato
Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 9 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 9
Traffic and Crowd Dynamics: The Physics of the City, Figure 6Snapshot of vehicles dynamics simulation in crossing point; theroad in a lighter color at the cross has the priority. The differentcolors are related to the different vehicle directions
choice is defined by636
Pk D pkwkPj p jw j
: (14)637
Simulation Results and Empirical Observations638
In complexity sciences, the simulations and the empirical639
observations play the role respectively of theory and lab-640
oratory experiments in the traditional physics framework.641
The main focus is to observe the emergent properties of642
the system and to understand the class of microscopic in-643
teractions that can explain such properties in order to de-644
tect the control parameters. Simulations and empirical ob-645
servations have to be compared in this optic [9]. In the646
physics of the city, the real urban systems are the natural647
laboratories to observe and study crowd and traffic flow.648
Crowd Behavior in Urban Spaces649
An occasion to illustrate the crowd behavior in a whole650
pedestrian city, is Venice’s Carnival, since about 100,000651
tourists visit Venice each day during the last week. The652
observations are mainly based on video film analysis of653
particular regions of interest, like San Marco square and654
Riva degli Schiavoni. In principle the videos allow one to655
follow the single individual dynamics; however, the di-656
mension of the considered regions is limited and a com-657
puter assisted analysis is difficult in crowded situations.658
Some quantitative information can be obtained by using659
software following the individual trajectories. The trajec-660
tories permit one to extract information both on the mi-661
croscopic pedestrian dynamics and on the individual cog-662
nitive behavior even if the noise level is still a serious prob-663
lem [50]. Using a sample of '600 trajectories in a mod- 664
erately crowed area, we have computed for each individ- 665
ual the density of surroundings coming from the oppo- 666
site direction and moving in a transverse direction within 667
a distance of '2m. Then after averaging all the local den- 668
sities, the results are plotted in the Fig. 7. The observa- 669
tions indicate the existence of a low density area along the 670
desired velocity direction, only if one focuses the atten- 671
tion on individuals moving in a counteracting way; con- 672
versely the individuals that move in other directions seems 673
not to be considered. This is the sign for the existence of 674
strategies to avoid collisions and to keep a certain area 675
free along the direction of motion, based on a local vi- 676
sion mechanism. The automata gas dynamics can be il- 677
lustrated performing some virtual experiments, where the 678
emergent properties can be analyzed. The model parame- 679
ters (cf. Eqs. (1), (2), (3), have been fixed using Rb as space 680
unit and measuring time in seconds: the desired velocity is 681
set kvk D 2Rb with a spread of 10% among the automata 682
and the relaxation time � D 1, whereas the collision (2) is 683
defined by � D � C �/10 (see Fig. 1) and ˛ D :9; finally 684
the local vision has a radius Rv D 2v, the social space is 685
2Rb and Eq. (3) uses! D 3� and ˇ D :5. Moreover all the 686
automata have the same mass. 687
Let us consider two automata populations moving 688
along opposite direction in a open space (i. e., a square). 689
The automata enter in the space from two sources lo- 690
cated at the borders: the red ones move from the left to 691
the right, whereas the yellow ones move from right to 692
left. This system has two equilibrium regimes: the entropic 693
regime where both the populations are uniformly spread 694
in the space, and the organized regime where automata 695
move along separated lines [47,89,98]. In the simulations, 696
at low densities the automata relax to the entropic regime, 697
whereas when the density increases one observes the lines 698
formation in the space as shown in Fig. 8a. The automata 699
form narrow straight non-interacting lines, separated by 700
empty spaces: sometimes the lines are continuous, in other 701
cases they interrupt or join together. Moreover there are 702
always empty regions, so that the space distribution is not 703
uniform. This phenomenon can be interpreted by a mean 704
field argument: every time two automata meet, they devi- 705
ate to avoid a collision and then they recover the desired 706
velocity according to Eq. (1). The final result is a trans- 707
verse displacement with respect to the desired velocity for 708
both the automata. As far as binary interactions are con- 709
sidered, the transverse displacements are symmetric and 710
only the entropic regime is stable. But the local vision 711
introduces long-range collective interactions, and aligned 712
automata moving in the same direction behave as a sim- 713
ple entity [57]: in other words when an automaton meets 714
CE12 Please check sentence.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 10 — le-tex��
�� ��
10 Traffic and Crowd Dynamics: The Physics of the City
Traffic and Crowd Dynamics: The Physics of the City, Figure 7The scale color from red to yellow defines the average local density arounda pedestrian thatmove in the vertical up direction asmea-sured from the film video data during the Venice’s Carnival. The pedestrians where moving in San Marco’s Square in a moderatelycrowded condition. The considered radius around the pedestrian is 2m. The picture a refers to the density of peoplemoving into theopposite direction with respect to the considered individual. The picture b refers to the density of people moving into a transversedirection
Traffic and Crowd Dynamics: The Physics of the City, Figure 8a Simulation of two automata populations moving into opposite direction in a square. The parameters used in the model are (cf.previous section): Rb D 1 (the space unit), kvk D 2, � D 1, � D � C �/10, Rv D 4, ! D 3� and ˇ D :5. The square dimensions are120 � 120 and the automata enter from two sources located at the left border (redautomata) and the right border (yellowautomata).The appearance of an organized regimewith automatamoving along lines is clear.b the same as the picture a, but the incoming fluxfrom the sources has been increased by a factor of 2. The lines of people start to interact and a turbulent regime appears
a line of people moving in the opposite direction, it per-715
forms a larger transverse displacement than the automata716
in the line as sketched in Fig. 9. Therefore the line struc-717
ture becomes stable and the system relaxes towards an or-718
ganized regime. This behavior has been observed by var-719
ious research groups in real situations [47,55,65]: an ac-720
celerated video film in the crowding conditions shown 721
in Fig. 10, points out clearly the existence of stable lines 722
of people moving in opposite directions, and a non-ho- 723
mogenous distribution of pedestrians in the space. The 724
lines survive also when the density increases due proba- 725
bly to the slow down of the pedestrian desired velocity 726

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 11 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 11
and the reduction of the social space. The simulations con-727
firm this parametric dependence, and they also point out728
as to maintain the organized regime stability (for a fixed729
desired velocity and social space) it is essential to have730
some space among the automata lines, otherwise the in-731
teraction among the lines themselves will destroy the lami-732
nar character of the dynamics, and a new turbulent regime733
appears [45,71,72]. This implies the existence of a critical734
density value as it is shown in Fig. 8, where the simulation735
are repeated with a twice flux from the external sources.736
This turbulent regime has been observed in critical situa-737
tions (like crowd stampede)when under effect of panic, in-738
dividuals behave irrationally, the velocity is increasing and739
the dynamics is mainly physical [50,59]. This was not the740
case during the Venetian Carnival and in the absence of741
panic, pedestrians take strategies that prevent critical situ-742
ations. The automata gas model allows the study of the dy-743
namics at a bottleneck, reducing the desired velocity when744
the density overcomes 1/R2b (i. e., when automata have to745
share the social space). A bottleneck is a narrow passage746
at which pedestrian interactions do not allow the laminar747
flow formation. The dynamics at bottlenecks is a crucial748
task for understanding the crowd behavior in urban spaces749
and it has been studied by various researchers [43,52,88].750
The simulation of the passage of two counteracting flows751
at a bottleneck is shown in Fig. 11a: the automata reduce752
the desired velocity when they see a counteracting flux in-753
side the bottleneck area. As a consequence there appears754
a self-organized oscillatory regime for the flux across the755
bottleneck (see Fig. 11b), as it has been observed in other756
models and in laboratory experiments [66]. A mean field757
theory approach suggests a possible interpretation of the758
oscillating fluxes regime. Let nr and ng the density of au-759
tomata moving in opposite directions in the bottleneck760
area; each automaton can be in two states: waiting state761
Pw and crossing state Pc. The balance equations according762
to the following transition probabilities read763
Prc;w / ngPg
c�1 C c
�nrPr
c � ngPgc��
Prw;c / �
1 � c�nrPr
c � ngPgc�� (15)764
based on the hypothesis that the probability to cross the765
bottleneck in the positive direction (red automata) in-766
creases if the flux nrPrc � ngPg
c in the bottleneck is pos-767
itive, and, on the contrary, the probability of returning in768
the waiting state increases when the flux is negative.More-769
over if the flux is positive, be the density nr is decreased770
by a quantity �n(nr Prc � ngPg
c )), due to people passing771
trough the bottleneck772
nr D �n(nr Prc � ngPg
c ) if (nrPrc � ngPg
c ) > 0 (16)773
Traffic and Crowd Dynamics: The Physics of the City, Figure 9Sketch of automata interaction: the difference between the bi-nary interaction dynamics and a collective interaction dynamicsis outlined
Traffic and Crowd Dynamics: The Physics of the City, Figure 10Snapshot of a video film of San Marco’s square during the Vene-tian Carnival 2007: the video analysis shows the existence oflines of people moving in opposite directions
The balance equations (analogous equations hold for the 774
yellow automata) read 775
Prw D �Pr
w;cPrw C Pr
c;wPrc
Prc D Pr
w;cPrw � Pr
c;wPrc
(17) 776
and the solution is plotted in Fig. 12 for a suitable set of pa- 777
rameters (the time unit is arbitrary), where the existence of 778
a stationary oscillation regime in the crossing probability 779
is evident. The parameter c (cf. Eq. (15)), which weights 780
the flux effect on the transition probabilities, is a control 781
parameter for the dynamics: if c is below a critical value, 782
no oscillation is observed and the stationary solution is 783
constant. Finally another interesting situation is illustrated 784
CE13 Please check sentence.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 12 — le-tex��
�� ��
12 Traffic and Crowd Dynamics: The Physics of the City
Traffic and Crowd Dynamics: The Physics of the City, Figure 11aDynamics of two counteracting flows at a bottleneck in automata gas simulation; the transverse bottleneck dimension is 2 time Rband the incoming fluxes are one automaton each three times CE12 units.bNumber of “red” automata that reach the right destinationafter crossing the bottleneck versus time: it is clear the appearance of an oscillating regime at the bottleneck
Traffic and Crowd Dynamics: The Physics of the City, Figure 12Solution of the balance Eqs. (17) showing an oscillating behaviorfor the crossing probabilities at a bottleneck under the hypothe-ses (15); the parameter c is the control parameter and the oscil-lations disappear below a critical value
by Fig. 13, where people had to cross a narrow bridge785
during the Carnival: in the movie the people stop nearby786
the bridge forming a funnel-like queue, whereas the flux787
across the bridge is constant. As a result in the queue the788
people move in a discontinuous way (stop and go), using789
the empty spaces left by individuals that enter the bridge;790
in such a situation there are waves back-propagating along791
the queue [50]. The measure of the flux across a given area792
can be performed by simulating the situation plotted in793
Fig. 14a; the results (see Fig. 14b) show a periodic struc-794
ture that can be interpreted as short length back-propa-795
gating velocity waves. The finite automaton dimension has796
an essential role in the queue dynamics. As discussed pre-797
viously, a quantitative comparison between empirical ob-798
Traffic and Crowd Dynamics: The Physics of the City, Figure 13Snapshot of a video film of high density crowd crossing a narrowbridge during the Carnival; there is a long queue in front of thebridge whereas the flux across the bridge is constant
servations and virtual simulations have to face the intrinsic 799
difficulty of reproducing the complexity of crowd behav- 800
ior. However current computers can be used virtual simu- 801
lators that can study the crowd behavior in various realistic 802
situations CE13 , becoming a helpful instrument for mobil- 803
ity planning [56]. Fig. 15 shows an example of crowd be- 804
havior in a real environment and in a virtual experiment 805
by using the “Campus software” developed at the Physics 806
of the City Laboratory of Bologna [99]. 807
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 13 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 13
Traffic and Crowd Dynamics: The Physics of the City, Figure 14a scheme of the bridge crossing geometry used in the gas automata simulation.b automata flux in across small area inside the queue('10 automata are considered simultaneously): fast periodic oscillations are detected due to short length back-propagatingvelocitywaves
Traffic and Crowd Dynamics: The Physics of the City, Figure 15aMobility at the entrance of San Marco’s square (snapshot from video movie). b Automata virtual experiment to study the mobilityin a virtual space reproducing the urban space of the left picture
Cognitive Behavior and Experimental Laws808
in Traffic Dynamics809
As discussed in the previous sections, the cognitive behav-810
ior of individuals due to information-based interactions811
plays a fundamental role to determine the emergent prop-812
erties of urban traffic and crowd dynamics [100]. A cru-813
cial theoretical issue is to understand when it is possible814
to apply a statistical physics approach to derive the evo-815
lution of macroscopic variables from the single automata816
behavior [23]. The main difficulty is that from a cognitive817
point of view, the automata are all “different particles” and818
the information-based interaction introduces long-range819
correlation among the automata dynamics, so that it is820
very hard to justify a mean field approach. To illustrate821
a heuristic mean field approach, one can use the simple822
example of a dichotomic choice A and B for an automata 823
gas, where two counteracting populations (red and yellow) 824
share the same spatial environment [40,62]. An automa- 825
ton i has an utility function U(Nr ; Ny) in the decision 826
mechanisms, depending on the number of automata of the 827
two populations that have made the same choice. Accord- 828
ing to Eq. (7), the probability of the choice A is given by 829
Pi;rA D 1
1 C exp��U(Nr
B ; NyB) � U(Nr
A; NyA�/Ti )
�
if i is red
Pi;yA D 1
1 C exp��U(Ny
B ; NrB) � U(Nr
A; NyA)
�/Ti
�
if i is yellow :
(18) 830

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 14 — le-tex��
�� ��
14 Traffic and Crowd Dynamics: The Physics of the City
By using a statistical approach, one set NrA D NrhPi
Air and831
NyA D NyhPi
Aiy where h ir;y indicates the the average832
value on the population. Then the Eqs. (18) give a self-con-833
sistent system834
NrA D
rX
i
11 C exp
��U(Nr � Nr
A; Ny � NyA) � U(Nr
A; NyA)
�/Ti
�
NyA D
yX
i
11 C exp
��U(Ny � Ny
A; Nr � NrA) � U(Nr
A; NyA)
�/Ti
�
(19)835
wherePr;y indicates that the sum consider only the red or836
yellow population. In a symmetric condition between the837
two populations, the solutions of (19) have the property838
NrA D Ny
B ; therefore one reduces to the single equation839
NA DX
i
11 C exp
�(U(N � NA; NA) � U(NA; N � NA))/Ti
� :
(20)840
The obvious solution NA D NB D N/2 exists, but if the841
following condition holds842
14T
@V@NA
ˇˇˇNADN/2
(P) > 1 (21)843
where V(NA) D U(N � NA; NA) � U(NA; N � NA) and844
T is the harmonic mean social temperature of the au-845
tomata population, the symmetry is broken and two new846
solutions appear where the two populations make oppo-847
site choices. Eq. (21) defines a critical temperature T� un-848
der which the phase transition occurs. This phenomenon849
allows one to simulate the herding cooperative effect, ob-850
served in crowd dynamics. In the Fig. 16, Eq. (20) is solved851
graphically for an utility function U(P) D P. The simu-852
lation results show that the statistical self-consistent ap-853
proach (20), allowing one to compute the correct value of854
critical temperature T�. In the simulation the automata855
use a utility function856
U D�M C � � v
N C 1
�; (22)857
where M is a variable depending on the previous choice858
(M D 0 if there is not a previous choice), � � v the flux at859
the door in the direction v of the desired velocity and N860
is the number of automata in a neighborhood of the door, 861
and the social temperature is uniformly spread in the same 862
interval for both the population. The memory M is intro- 863
duced to enforce the choice of two successive doors along 864
the same horizontal line. It is remarkable that there are al- 865
ways automata that move according to a minority choice, 866
simulating the existence of free-will. The effect of a finite 867
population size gives a critical value for N, that has to be 868
overcome for the formation of a self-organized dynamics. 869
An experimental observation of statistical laws in 870
crowd dynamics is very difficult due to the limited space 871
extension of the video movie, whereas most of the data for 872
traffic dynamics are on the road fluxes and not on the in- 873
dividual vehicles trajectories [53,58]. Recently a GPS sys- 874
tem has been set up on '1% of the vehicle population 875
in Italy for insurance reasons, measuring position, veloc- 876
ity and signal quality. The data registration starts every 877
time the engine is switched on, and ends when the en- 878
gine is switched off. The GPS system repetition rate is one 879
second, but the data are recorded each time a vehicle has 880
covered '2 km. The accuracy of GPS data has a standard 881
uncertainty in the position of '10m. The GPS data al- 882
low a reconstruction of the individual dynamics so that 883
it is possible to look for the existence of statistical macro- 884
scopic laws [82]. Different size cities have been considered: 885
a small town, (Senigallia, '5 � 104 inhabitants, near the 886
Adriatic see), a medium city (Bologna, '4 � 105 inhab- 887
itants) and a metropolis (Rome, '3 � 106 inhabitants). 888
The three cities have a very different topology: the Senigal- 889
lia topology is substantially a strip of 2 � 12 km2 bounded 890
by the sea, with few accesses, whereas Bologna has a radial 891
configuration around an historical center with a radius of 892
'6 km. The urban area of Rome is one order of magni- 893
tude larger. To understand the mobility demand [16,29], 894
the distribution of inner vehicle trajectories has been stud- 895
ied: i. e., the trajectories fully contained in the considered 896
urban area. The area of the considered regions are 130 km2897
for Senigallia, 160 km2 for Bologna and 400 km2 (the area 898
containing the “Grande Raccordo Anulare”) for Rome. In 899
Fig. 17 the plot the recorded data in the Bologna urban 900
area for the whole month June 2006 is shown. In Fig. 18 901
the trajectories length distribution (s) is plotted for one 902
month of data recording: the lengths are computed using 903
the polygonal metric in the three considered cases: Rome 904
(February 2007), Bologna (June 2006) and Senigallia (June 905
2006). Even if there are almost two orders of magnitude 906
between Senigallia and Rome’s statistical samples, the path 907
lengths distribution has the same behavior in the three 908
cases. Moreover, it is really remarkable that the same ex- 909
ponential decay for the “long distance” trajectories is de- 910
tected in all the considered cases, indicating a possible uni- 911
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 15 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 15
Traffic and Crowd Dynamics: The Physics of the City, Figure 16a Graphical solution of the self-consistent Eq. (20) using an utility function U D NA/N for both choices and a temperature below thecritical threshold 0.5. The solutions are indicated by red circles; beyond the trivial solution P D NA/N D 1/2, two further solutionsexist that breaks the system symmetry. b Self-organized dynamics by simulating two populations moving into opposite direction inthe space sketched in Fig. 2
Traffic and Crowd Dynamics: The Physics of the City, Figure 17The dots are the GPS recorded data in the Bologna urban area during the month of June 2006; the dots correspond to more than1:5 � 106 data. The colors label the recorded velocity: red means v < 30km/h, yellow 30 < v < 60km/h, green 60 < v < 90 andblue 90 < v km/h
versal character at least in the class of Italian (or European)912
cities [82]. The exponential distribution law for individual913
trajectories has a statistical mechanics interpretation as the914
most probable distribution if each citizen has an indepen-915
dent mobility demand and there exists an average length916
for the urban trajectories. This means that the system be- 917
haves statistically as the citizens choose among randomly 918
distributed destinations in the urban space according to an 919
“utility function” (proximity function) that increases lin- 920
early as a function of the trip length [16,29]. Let flkg be 921

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 16 — le-tex��
�� ��
16 Traffic and Crowd Dynamics: The Physics of the City
Traffic and Crowd Dynamics: The Physics of the City, Figure 18Monthly length distribution of inner trajectories for the city ofRome (top) during February 2007, and for the cities of Bologna(center) and Senigallia (bottom) during June 2006. The verticalscale is logarithmic, and a polygonal metric for the lengths isused. The total number of trajectories is 1,176,763 for Rome,79,154 for Bologna and 13,838 for Senigallia
the set of all possible lengths of origin-destination trajec-922
tories in the city, and let us suppose that N citizens choose923
randomly the trajectories with the constraint that the total924
covered length is finite925
L DX
k
nk lk ;X
k
nk D N ; (23)926
where nk is the number of citizens choosing a trajectory of927
length lk. A simple combinatorial argument show that the928
statistical weight of the distribution fnkg is929
P(fnkg) / 1n1! � � � � � nk ! � : : :
: (24)930
In the limit nk � 1 using the Stirling’s approximation,931
one obtains932
log P(fnkg) D �X
k
(nk log nk � nk) C const : (25)933
The maximum of the logarithm (25) is computed using934
the Lagrangian multipliers method to take into account935
the constraints:936
@
@nj
"X
k
(nk log nk � nk) C ˛nk C ˇnk lk
#
D 0 (26)937
which implies938
nj D exp(�˛ � ˇ l j) (27)939
where the parameters ˛ and ˇ are determined by the con- 940
ditions (23). In the continuous limit, a statistical distribu- 941
tion (s) / exp(�ˇs) is achieved, consistently with exper- 942
imental data. It is really remarkable that ˇ�1 (i.e the aver- 943
age length of urban trajectories) is the same for very dif- 944
ferent cities (see Fig. 18) [73]; this can be an indication for 945
the existence of an individual mobility demand that can be 946
related to a universal energy law in human travel behavior, 947
according to the law proposed by D. Helbing and R. Kölbl 948
in [64], based on the data of the UK National Travel Sur- 949
veys during the years 1972–1998. Moreover it allows the 950
conjecture that the universal behavior of the length distri- 951
bution Fig. 18 can be explained as the result of a specific 952
cognitive behavior of the populations. In other words, the 953
spatial distance is the norm for the individual driving car 954
decision and the “activities sprawling” inmodern cities ob- 955
served by urban planners [7], introducing a decorrelation 956
in the system, allowing to apply the statistical physics tech- 957
niques. 958
In the case of Rome, the lengths distribution has been 959
also computed using the arc-length metric. The experi- 960
mental results are plotted in Fig. 9 confirming the expo- 961
nential behavior shown in Fig. 18, even if the decay slope 962
is slightly different. This is a remarkable fact since one ex- 963
pects a decreasing of the path-lengths distribution when 964
the length approaches to zero: it should be not convenient 965
to use the car for short travels (<1 km). A possible ex- 966
planation is the presence of a relevant stochastic compo- 967
nents in urban mobility (the so-called “asystematic mobil- 968
ity”), so that the individual mobility becomes the realiza- 969
tion of a sequence of local destinations spread in the ur- 970
ban space. The experimental data in Fig. 9 suggests that 971
the citizens use apparently two linear proximity functions, 972
for the short and for the long length paths. Then the length 973
distribution can be interpreted as an overlap of two expo- 974
nential distributions 975
(s) D A (exp(�ˇls) C c exp(�ˇss)) : (28) 976
The continuous curve in Fig. 9 shows the interpolation re- 977
sults using the parameters: ˇl D :15 km�1, ˇs D :6 km�1978
and c D :7. 979
However the existence of two exponentials curves for 980
the length distribution should be studied more carefully, 981
since the very short trajectories can be interpreted in var- 982
ious ways and the GPS signals have a low quality in such 983
a case. 984
Future Directions 985
From a theoretical point of view, we think that the gas of 986
automata can be a good paradigmatic framework to inves- 987
utente
Evidenziato
utente
Evidenziato
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 17 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 17
Traffic and Crowd Dynamics: The Physics of the City, Figure 19Squares: length distribution of the inner trajectories in Romeduring February 2007, computed using the arc-length metric.Continuous curve: interpolation of the experimental data withthe analytical distribution (28). The interpolated formula hasthe following parameters: ˇl D :15 km�1, ˇs D :6 km�1, andc D :7. The vertical scale is logarithmic
tigate complexity in a general sense. For crowd and traf-988
fic flow, the previous model simulation and empirical re-989
sults permit one to tackle as a non-utopian the problem of990
predictability and governance of the mobility system [26].991
Last but not least the prediction, even if partial or prob-992
abilistic, is relevant not only for the pleasure knowledge,993
but also for the application in order to minimize the im-994
pact of provisional city users on the town and in particular995
on the mobility of local populations; to prevent critical and996
potentially dangerous crowding phenomena; to prefigure997
and plan safety and security saving trajectories.998
Bibliography999
1. Ball P (2003) The PhysicalModelling of Human Social Systems.1000
Complexus 1:1901001
2. Balmer M, Nagel K, Raney B (2004) Large-scale multi-agent1002
simulations for transportation applications. J Intell Transp1003
Syst 8(4):2051004
3. Bandini S, Manzoni S, Vizzari G (2006) Crowd Modeling and1005
Simulation. The role of multi-agent simulation in design sup-1006
port systems. In: Van Leeuwen JP, Timmermans HJP (eds) In-1007
novations in Design & Decision Support Systems in Architec-1008
ture and Urban Planning. Springer, Netherlands, pp 1611009
4. Bando M et al (1995) Dynamical model of traffic congestion1010
and numerical simulation. Phys Rev E 51(2):10351011
5. Batty M (1971) Modelling Cities as Dynamic Systems. Nature1012
231:425–4281013
6. Batty M (2003) Agent-Based Pedestrian Modeling. In: Longley1014
PA, Batty M (eds) Advanced Spatial Analysis. ESRI Press, Red-1015
lands, pp 81–1051016
7. BattyM (2005) Agents, Cells and Cities: New Representational 1017
Models for Simulating Multi-Scale Urban Dynamics. Environ 1018
Plan A 37(8):1373–1394 1019
8. Batty M (2005) Cities and Complexity. Understanding Cities 1020
with Cellular Automata, Agent-Based Models, and Fractals. 1021
MIT Press, Cambridge 1022
9. Batty M, Torrens P (2001) Modeling Complexity: The Limits to 1023
Prediction CASA. Working Paper Series, vol 36. Available on- 1024
line at www.casa.ucl.ac.uk 1025
10. Bazzani A et al (2003) A Chronotopic Model of Mobility in Ur- 1026
ban Spaces. Physica A 325:517–530 1027
11. Bazzani A et al (2007) A Model for Asystematic Mobility in Ur- 1028
ban Space. In: Albeverio S, Andrey D, Giordano P, Vancheri A 1029
(eds) The Dynamics of Complex Urban Systems: An Interdis- 1030
ciplinary Approach, vol 59. Physica, Heidelberg 1031
12. Bazzani A, Rambaldi S, Giorgini B, Turchetti G (2007) Complex- 1032
city: modeling urbanmobility. Adv Complex Syst 10(2):255 1033
13. Bazzani A, Giorgini B, Rambaldi S (eds) (2008) Physics and the 1034
City. Adv Complex Syst 10(2) TS14 1035
14. Bechtel R (1970) Human movement in architecture. In: 1036
Proshansky HM et al (eds) Environmental Psychology. Rine- 1037
hart andWinston, New York 1038
15. Bellman R (1957) Dynamics Programming. Princeton Uni- 1039
vesity Press, Princeton 1040
16. Ben-Akiva M, Lerman SR (1985) Discrete choice analysis the- 1041
ory and application to travel demand. The MIT University 1042
Press, Cambridge 1043
17. Benenson I, Torrens PM (2004) Geosimulation: Automata- 1044
based modeling of urban phenomena. Wiley, London 1045
18. Biroli G (2007) Jamming: A new kind of phase transition? Nat 1046
Phys 3:222 1047
19. Brian WA, Durlauf NS, Lane AD (eds) (1997) The Economy as 1048
an Evolving Complex System II, Proceedings, vol XXVII. Addi- 1049
son-Wesley, Reading 1050
20. Byrne DS (1998) Complexity Theory and the Social Sciences: 1051
An Introduction. Routledge, London 1052
21. Cascetta E (2001) Transportation Systems Engineering: The- 1053
ory and Methods. Kluwer, Boston 1054
22. Chomsky N (2000) New Horizons in the Study of Language 1055
and Mind. Cambridge University Press, Cambridge 1056
23. Chowdhury D, Santen L, Schadschneider A (2000) Statistical 1057
physics of vehicular traffic and some related systems. Phys 1058
Rep 329:199 1059
24. ChowdhuryD, Nishinari K, Schadschneider K (2004) Self-orga- 1060
nized patterns and traffic flow in colonies of organisms. Phase 1061
Transit 77:601624 1062
25. Cuckeqr F, Smale S (2005) Emergent Behavior in Flocks http:// 1063
ttic.uchicago.edu/smale/papers.html 1064
26. Daganzo FC (2007) Urban gridlock: Macroscopic modeling 1065
and mitigation approaches. Transp Res B 41:49 1066
27. de Finetti B (1972) Probability, Induction and Statistics. Wiley, 1067
New York 1068
28. De Martino B et al (2006) Frames, biases and rational decision 1069
making in the human being. Science 313:684–687 1070
29. Domencich TA, Domencich VD (1975) Urban Travel Demand. 1071
A Behavioral Analysis. North Holland, Amsterdam 1072
30. Ellis GRF (2006) Physics and the real world. Found Phys 36– 1073
2:227 1074
31. Fishburn PC (1983) Transitive Measurable Utility. J Econ The- 1075
ory 31:293 1076
32. Fruin JJ (1971) Pedestrian planning and design. Metropolitan 1077
TS14 Please provide page range.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
utente
Evidenziato

Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 18 — le-tex��
�� ��
18 Traffic and Crowd Dynamics: The Physics of the City
Association of Urban Designers and Environmental Planners,1078
New York1079
33. Garnsey E, McGlade J (eds) (2006) Complexity and Co-evolu-1080
tion Continuity and Change in Socio-Economic Systems. Ed-1081
ward Elgard, Cheetenham1082
34. Giorgini B (2007) Philosophie naturelle de la causalité et du1083
hasard dans un modèle de mobilité urbaine. In: Franceschelli1084
S, Paty M, Roque T (eds) Chaos et systèmes dynamiques. Col-1085
lection Visions des Sciences, vol 259. Editions Hermann, Paris1086
35. Giorgini B, Turchetti G (2005) From Newton-Boltzmann1087
paradigms to complexity: a bridge to biosystems. In: The Sci-1088
ence of Complexity: chimera or reality? Milan Research Cen-1089
tre for Industrial and AppliedMathematics, Esculapio Editore,1090
Bologna, p 181091
36. Giorgini B et al (2008) The Physics of the City: Modeling Com-1092
plex Mobility. Proceedings of the workshop: Urban civiliza-1093
tion: from yesterday to the next day, Milano 24 September1094
2004 (in publication) TS151095
37. Hayakawa H, Nakanishi K (1998) Universal behaviors in gran-1096
ular flows and traffic flows. Prog Theor Phys Suppl 130:571097
38. Heinrich MJ, Nagel RS, Behringer RP (1996) Granular solids,1098
liquids, and gases. Rev Mod Phys 68:12591099
39. Helbing D (2001) Traffic and Related Self-Driven Many-Parti-1100
cle Systems. Rev Mod Phys 73:10671101
40. Helbing D (2004) Dynamic decision behavior and optimal1102
guidance through information services. In: SchreckenbergM,1103
Selten R (eds) Models and experiments in Human Behaviour1104
and Traffic Networks. Springer, Berlin, p 471105
41. Helbing D, Molnár P (1995) Social force model for pedestrian1106
dynamics. Phys Rev E 51:42821107
42. Helbing D, Nagel K (2004) The physica of Traffic and Regional1108
Development TS161109
43. Helbing D et al (2006) Analytical approach to continuous and1110
intermittent bottleneck flows. Phys Rev Lett 97:1680011111
44. Helbing D, Farkas I, Vicsek T (2000) Simulating dynamical fea-1112
tures of escape panic. Nature 407:4871113
45. Helbing D, Farkas IJ, Vicsek T (2000) Freezing by Heating in1114
a Driven Mesoscopic System. Phys Rev Lett 84:12401115
46. Helbing D, Schönhof M, Kern D (2002) Volatile decision dy-1116
namics: experiments, stochastic description, intermittency1117
control and traffic optimization. New J Phys 4:331118
47. Helbing D, Molnár P, Farkas I, Bolay K (2003) Self-organizing1119
pedestrian movement. Environ Plan B 28:3611120
48. Helbing D, IsobeM, Nagatani T, Takimoto K (2003) Lattice gas1121
simulation of experimentally studied evacuation dynamics.1122
Phys Rev E 67:0671011123
49. Helbing D, Buzna L, Johansson A, Werner T (2005) Self-orga-1124
nized pedestrian crowd dynamics: Experiments, simulations,1125
and design solutions. Transp Sci 39–1:11126
50. Helbing D, Johansson A, Al-Abideen HZ (2007) Dynamics of1127
crowd disasters: an empirical study. Phys Rev E 75:0461091128
51. Hoogendoorn SP, Bovy PHL (2001) State-of-the-art of vehicu-1129
lar traffic flow modeling. In: Proceedings of the: Institution of1130
Mechanical Engineers. Part I. J Syst Control Eng 215–4:2831131
52. Hoogendoorn SP, Daamen W (2005) Pedestrian Behavior at1132
Bottlenecks. Transp Sci 39(2):1471133
53. Hoogendoorn SP et al (2003) Microscopic Traffic Data Collec-1134
tion by Remote Sensing. In: Transportation Research Board1135
(TRB) 82nd Annual Meeting. Mira Digital Publishing, St. Louis,1136
p 111137
54. Hoogendoorn SP, Bovy PHL, Daamen W (2002) Microscopic1138
Pedestrian Wayfinding and Dynamics Modelling. In: Schreck- 1139
enberg M, Sharma SD (eds) Pedestrian and Evacuation Dy- 1140
namics. Springer, Berlin, p 123 1141
55. Isobe M, Adachi T, Nagatani T (2004) Experiment and simula- 1142
tion of pedestrian counter flow. Physica A 336:638 1143
56. Jiang B (1998) SimPed: Simulating Pedestrian Flows in a Vir- 1144
tual Urban Environment. J Geogr Inf Decis Anal 3–1:21 1145
57. John A, Schadschneider A, Chowdhury D, Nishinari K (2004) 1146
Collective effects in traffic on bi-directional ant trails. J Theor 1147
Biol 231:279 1148
58. Kerner BS, Klenov SL (2006) Deterministic microscopic three- 1149
phase traffic flow models. J Phys A: Math Gen 39:1775 1150
59. Kirchner A, Nishinari K, Schadschneider A (2003) Friction Ef- 1151
fects and Clogging in a Cellular Automaton Model for Pedes- 1152
trian Dynamics. Phys Rev E 67:056122 1153
60. Kirchner A, Klüpfel H, Nishinari K, Schadschneider A, Schreck- 1154
enberg M (2004) Discretization Effects and the Influence of 1155
Walking Speed in Cellular Automata Models for Pedestrian 1156
Dynamics. J Stat Mech TS17 P10011 1157
61. Klimontovich YL (1999) Entropy, information, and criteria of 1158
order in open systems. Nonlinear Phenom Complex Syst 2– 1159
4:1 1160
62. Kluegl F, Bazzan ALC (2004) Route Decision Behaviour in 1161
a Commuting Scenario: Simple Heuristics Adaptation. In: 1162
SchreckenbergM, Selten R (eds) Human Behaviour and Traffic 1163
Networks. Springer, Berlin, p 285 1164
63. Knospe W et al (2000) CA Models for traffic flow: Comparison 1165
with empirical single-vehicle data. In: Helbing D, Herrmann 1166
HJ, SchreckenbergM,Wolf DE (eds) Traffic andGranular 1999: 1167
Social, Traffic, and Granular Dynamics. Springer, Berlin 1168
64. Kölbl RR, Helbing D (2003) Energy laws in human travel be- 1169
havior. New J Phys 5:48.1 1170
65. Kretz T et al (2006) Experimental study of pedestrian counter- 1171
flow in a corridor. J Stat Mech TS17 P10001 1172
66. Kretz T, Wölki M, Schreckenberg M (2006) Characterizing cor- 1173
relations of flow oscillations at bottlenecks. J Stat Mech The- 1174
ory Exp TS17 P02005 1175
67. Miller JH, Page SE (2007) Complex Adaptive Systems. Prince- 1176
ton Studies in Complexity TS16 1177
68. Millonas MM (1994) Swarms, phase transitions, and collec- 1178
tive intelligence. In: Langton CG (ed) Artificial Life III. Addison 1179
Wesley, Reading, p 418 1180
69. Mitarai N, Nakanishi H (1999) Stability Analysis of Optimal Ve- 1181
locityModel for Traffic andGranular Flowunder Open Bound- 1182
ary Condition. J Phys Soc Jpn 68–8:2475 1183
70. Mizar LF (2007) Agent-Based Modelling and Micro-Simula- 1184
tions of Pedestrian Dynamics and Crowd Phenomena in Pub- 1185
lic Enviroments. PHD Thesis, Università degli Studi, Milano 1186
Bicocca 1187
71. Muramatsu M, Nagatani T (2000) Jamming transition in two- 1188
dimensional pedestrian traffic. Phys A: Statist Mech Appl 1189
275:281 1190
72. Muramatsu M, Irie T, Nagatani T (1999) Jamming transition in 1191
pedestrian counter flow. Physica A 267:487 1192
73. Naess P (2006) Are short daily trips compensated by higher 1193
leisure mobility? Environ Plan B: Plan Des 33:197 1194
74. Nagatami T (2002) The physics of traffic jams. Report Prog 1195
Phys 65:1331 1196
75. Nagel K, SchreckenbergM (1992) A cellular automatonmodel 1197
for freeway traffic. J Phys I 2:2221 1198
TS15 Please update if possible.TS16 Please provide more details.TS17 Please provide volume number.
Editor’s or typesetter’s annotations (will be removed before the final TEX run)
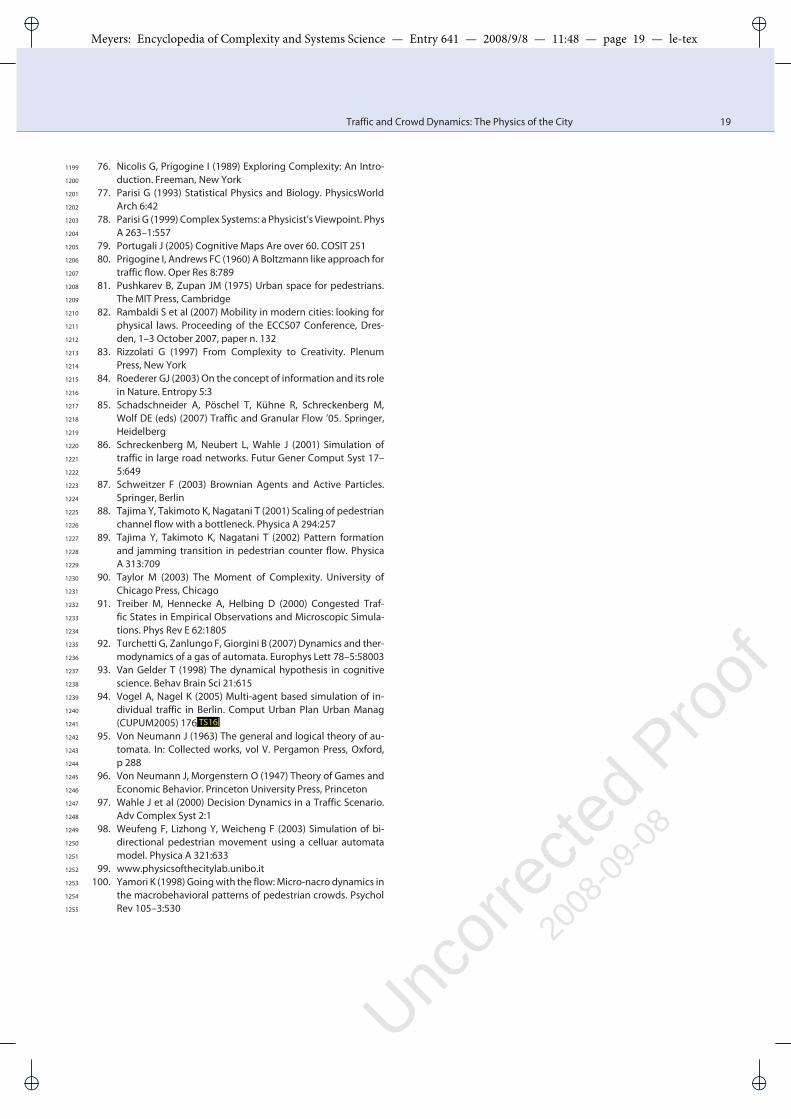
Uncor
recte
d Pro
of
2008
-09-
08
��
Meyers: Encyclopedia of Complexity and Systems Science — Entry 641 — 2008/9/8 — 11:48 — page 19 — le-tex��
�� ��
Traffic and Crowd Dynamics: The Physics of the City 19
76. Nicolis G, Prigogine I (1989) Exploring Complexity: An Intro-1199
duction. Freeman, New York1200
77. Parisi G (1993) Statistical Physics and Biology. PhysicsWorld1201
Arch 6:421202
78. Parisi G (1999) Complex Systems: a Physicist’s Viewpoint. Phys1203
A 263–1:5571204
79. Portugali J (2005) Cognitive Maps Are over 60. COSIT 2511205
80. Prigogine I, Andrews FC (1960) A Boltzmann like approach for1206
traffic flow. Oper Res 8:7891207
81. Pushkarev B, Zupan JM (1975) Urban space for pedestrians.1208
The MIT Press, Cambridge1209
82. Rambaldi S et al (2007) Mobility in modern cities: looking for1210
physical laws. Proceeding of the ECCS07 Conference, Dres-1211
den, 1–3 October 2007, paper n. 1321212
83. Rizzolati G (1997) From Complexity to Creativity. Plenum1213
Press, New York1214
84. Roederer GJ (2003) On the concept of information and its role1215
in Nature. Entropy 5:31216
85. Schadschneider A, Pöschel T, Kühne R, Schreckenberg M,1217
Wolf DE (eds) (2007) Traffic and Granular Flow ’05. Springer,1218
Heidelberg1219
86. Schreckenberg M, Neubert L, Wahle J (2001) Simulation of1220
traffic in large road networks. Futur Gener Comput Syst 17–1221
5:6491222
87. Schweitzer F (2003) Brownian Agents and Active Particles.1223
Springer, Berlin1224
88. Tajima Y, Takimoto K, Nagatani T (2001) Scaling of pedestrian1225
channel flow with a bottleneck. Physica A 294:2571226
89. Tajima Y, Takimoto K, Nagatani T (2002) Pattern formation1227
and jamming transition in pedestrian counter flow. Physica1228
A 313:7091229
90. Taylor M (2003) The Moment of Complexity. University of1230
Chicago Press, Chicago1231
91. Treiber M, Hennecke A, Helbing D (2000) Congested Traf-1232
fic States in Empirical Observations and Microscopic Simula-1233
tions. Phys Rev E 62:18051234
92. Turchetti G, Zanlungo F, Giorgini B (2007) Dynamics and ther-1235
modynamics of a gas of automata. Europhys Lett 78–5:580031236
93. Van Gelder T (1998) The dynamical hypothesis in cognitive1237
science. Behav Brain Sci 21:6151238
94. Vogel A, Nagel K (2005) Multi-agent based simulation of in-1239
dividual traffic in Berlin. Comput Urban Plan Urban Manag1240
(CUPUM2005) 176 TS161241
95. Von Neumann J (1963) The general and logical theory of au-1242
tomata. In: Collected works, vol V. Pergamon Press, Oxford,1243
p 2881244
96. Von Neumann J, Morgenstern O (1947) Theory of Games and1245
Economic Behavior. Princeton University Press, Princeton1246
97. Wahle J et al (2000) Decision Dynamics in a Traffic Scenario.1247
Adv Complex Syst 2:11248
98. Weufeng F, Lizhong Y, Weicheng F (2003) Simulation of bi-1249
directional pedestrian movement using a celluar automata1250
model. Physica A 321:6331251
99. www.physicsofthecitylab.unibo.it1252
100. Yamori K (1998) Goingwith the flow:Micro-nacro dynamics in1253
the macrobehavioral patterns of pedestrian crowds. Psychol1254
Rev 105–3:5301255