Trabajos Resueltos del Curso 2003-04.
39
Trabajos Resueltos del Curso 2003-04. Fundamentos Matemáticos de la Ingeniería. Ingeniería Técnica Industrial. Especialidad Mecánica.
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Trabajos Resueltos del Curso 2003-04.

Trabajos Resueltos del Curso 2003-04.
Fundamentos Matemáticos de la Ingeniería.Ingeniería Técnica Industrial. Especialidad Mecánica.

Índice General
Trabajo 6. Curso 2003-04 2
Trabajo 7. Curso 2003-04 6
Trabajo 8. Curso 2003-04 10
Trabajo 9. Curso 2003-04 18
Trabajo 10. Curso 2003-04 31
1

Trabajo 6. Curso 2003-04
Problema 1Encontrar todas las raíces complejas de la ecuación z2 − 8iz − (19− 4i) = 0.Solución:Puesto que la ecuación z2 − 8iz − (19− 4i) = 0 es una ecuacón polinómica de segundo grado, sus
soluciones se obtienen mediante
z =8i±
q(8i)2 + 4(19− 4i)
2=8i±√−64 + 76− 16i
2=8i±√12− 16i
2= (1)
=8i±p4 (3− 4i)
2=8i± 2√3− 4i
2= 4i±√3− 4i.
Ahora, debemos obtener las dos raíces cuadradas del número complejo 3− 4i. Pero, nótese que dichasraíces deben ser opuestas y puesto que en (1) aparece el signo ±, sólo debemos obtener una sola delas raíces cuadradas.
Pongamosp(3− 4i) = a + bi, con a, b ∈ R. Entonces, (a+ bi)2 = 3 − 4i y por tanto, a2 +
(bi)2 + 2abi = 3− 4i, lo que nos lleva, igualando partes reales e imaginarias, al sistema (no lineal) deecuaciones ½
a2 − b2 = 3,2ab = −4. (2)
De la segunda de las ecuaciones se obtiene b = −2/a (obsérvese que a = 0 no puede ser solución delsistema (2)) y la sustitución en la primera nos proporciona la ecuación a2 − (−2/a)2 = 3, que nosconduce a la ecuación bicuadrada
a4 − 3a2 − 4 = 0.
Llamando t = a2, se obtiene t2 − 3t − 4 = 0. Las soluciones de esta ecuación son t = −1 y t = 4.Por consiguiente, a2 = −1, lo que no nos conduce a ninguna solución real para a, y a2 = 4, loque nos permite deducir que las únicas soluciones del sistema (2) son a = 2, b = −2/2 = −1 ya = −2, b = −2/(−2) = 1. Así, las dos raíces cuadradas de 3− 4i, naturalmente opuestas, son 2− i y−2+i. Por tanto, volviendo a (1) tenemos que las dos soluciones de la ecuación z2−8iz−(19−4i) = 0son z = 4i±p(3− 4i) = 4i± (2− i), es decir,
z = 2 + 3i y z = −2 + 5i.
Problema 2Encontrar las raíces cúbicas del número complejo 4
√3 + 4i.
Solución:Para calcular las tres raíces cúbicas del número complejo z = 4
√3 + 4i, escribiremos z en forma
polar. El módulo de z es r = |z| =q¡4√3¢2+ 42 = 8 y su argumento θ satisface tg θ = 4
4√3=
√33 .
2

Trabajo 6. Curso 2003-04 3
Como el afijo del número complejo z = 4√3+ 4i está en el primer cuadrante, resulta que θ = π
6 y portanto, z = 8π
6. Así, las tres raíces cúbicas de z son³
3√8´
π/6+2kπ3
para k = 0, 1, 2.
Es decir, las tres raíces cúbicas de 4√3 + 4i en forma polar son:
3
q4√3 + 4i =
2 π18
2 1318π
2 2518π
Problema 3
Escribir en forma polar y cartesiana el número complejo z =6e−i(π/3)
1− i .
Solución:Comenzaremos por la forma cartesiana (binómica). Puesto quee−i(π/3) = cos(−π/3) + i sen(−π/3) = cos(π/3)− i sen(π/3) = 1
2 − i√32 , resulta que
z =6e−i(π/3)
1− i =3− 3√3i1− i =
¡3− 3√3i¢ (1 + i)(1− i) (1 + i) =
3 + 3√3 +
¡3− 3√3¢ i2
=
=3 + 3
√3
2+
¡3− 3√3¢
2i.
Para la escritura en forma polar, debemos tener en cuenta que 1− i = ¡√2¢−π/4 = √2e−iπ/4. Porconsiguiente, aplicando propiedades de la exponencia compleja, tenemos
z =6e−i(π/3)
1− i =6e−i(π/3)√2e−iπ/4
=6√2ei(−π/3+π/4) =
6√2ei(−π/12) =
µ6√2
¶−π/12
=
=
µ6√2
¶2π−π/12
=³3√2´2312π.
Problema 4Calcular las siguientes integrales indefinidas:
(a)Zeax cos(bx)dx y
Zeax sen(bx)dx, siendo (a, b) 6= (0, 0).
(b)Zlnxdx
(c)Zarctg xdx
(d)Z
Ax+B
(x− α)2 + β2dx, con β 6= 0.
(e)Z
Ax+B
x2 + ax+ bdx, siendo a2 − 4b < 0.
Solución:

Trabajo 6. Curso 2003-04 4
(a) Comezamos suponiendo b 6= 0 y aplicamos el método de integración por partes.Zeax cos(bx)dx =
·u = eax du = aeaxdxdv = cos(bx) v = 1
b sen(bx)
¸= eax
b sen(bx)−Z
aeax
b sen(bx)dx =
= eax
b sen(bx)− ab
Zeax sen(bx)dx =
·u = eax du = aeaxdxdv = sen(bx) v = −1b cos(bx)
¸=
= eax
b sen(bx)− ab
µ−eaxb cos(bx)−
Z−aeaxb cos(bx)dx
¶=
= eax
b sen(bx) +aeax
b2cos(bx)− a2
b2
Zeax cos(bx)dx.
Luego, denominando I =Zeax cos(bx)dx, hemos llegado a la igualdad
I =eax
bsen(bx) +
aeax
b2cos(bx)− a
2
b2I
lo que nos conduce directamente a
I =eax (b sen (bx) + a cos (bx))
a2 + b2
esto es, Zeax cos(bx)dx =
eax (b sin (bx) + a cos (bx))
a2 + b2+ C (3)
Cuando b = 0 la integral se convierte enZeax cos(bx)dx =
Zeaxdx = 1
aeax + C, pues en este
caso, a 6= 0, ya que a y b no pueden ser nulos a la vez (es decir, (a, b) 6= 0).Nótese que la expresión (3) es válida para b = 0.
Razonando de forma análoga podemos probar queZeax sen(bx)dx =
eax (a sen (bx)− b cos (bx))a2 + b2
+C si (a, b) 6= 0.
(b) Integrando por partes tenemosZlnxdx =
·u = lnx du = 1/xdxdv = dx v = x
¸= x lnx−
Zx · 1xdx = x lnx−
Z1dx = x lnx−x+C.
(c) De nuevo, aplicando el método de integración por partes obtenemosZarctg xdx =
·u = arctgx du = 1
1+x2dx
dv = dx v = x
¸= x arctg x−
Zx
1+x2dx = x arctg x−12
Z2x1+x2
dx =
= x arctg x− 12 ln
¡1 + x2
¢+ C.
(d)Z
Ax+B
(x− α)2 + β2dx = 1
2
Z2Ax+ 2B
(x− α)2 + β2dx = 1
2
Z2Ax+ 2B − 2Aα+ 2Aα
(x− α)2 + β2dx =
= 12
ZA · 2(x− α) + 2B + 2Aα
(x− α)2 + β2dx = A
2
Z2(x− α)
(x− α)2 + β2dx+
ZB +Aα
(x− α)2 + β2dx =
= A2 ln
£(x− α)2 + β2
¤+ (B +Aα)
Z1
(x− α)2 + β2dx.

Trabajo 6. Curso 2003-04 5
Seguidamente, resolvemos la integral indefinidaZ
1
(x− α)2 + β2dx teniendo en cuenta que β 6=
0. (Puede suponerse β > 0).Z1
(x− α)2 + β2dx =
Z1/β2
(x−αβ )2 + 1dx = 1
β
Z1/β
(x−αβ )2 + 1dx = 1
β arctg³x−αβ
´.
Por tanto, ZAx+B
(x− α)2 + β2dx =
A
2ln£(x− α)2 + β2
¤+B +Aα
βarctg
µx− α
β
¶.
(e) Completando cuadrados en el denominador, conseguimosZAx+B
x2 + ax+ bdx =
ZAx+B¡
x+ a2
¢2+ b− a2
4
dx =
ZAx+B¡
x+ a2
¢2+ 4b−a2
4
Como a2 − 4b < 0, tenemos que 4b−a24 > 0 y por tanto, este número puede escribirse como el
cuadradro de otro número, pongamos β. Es decir, 4b−a2
4 = β2. Por tanto, si ponemos a2 = −α,aplicando el apartado anterior tenemosZ
Ax+B
x2 + ax+ bdx =
A
2ln
·(x+
a
2)2 +
4b− a24
¸+
B +A¡−a2¢
(4b− a2)1/2 /2arctg
Ãx+ a
2
(4b− a2)1/2 /2
!=
=A
2ln¡x2 + ax+ b
¢+B −Aa√4b− a2 arctg
µ2x+ a√4b− a2
¶.

Trabajo 7. Curso 2003-04
Problema 1Encontrar todas las raíces de la ecuación x6 − 1 = 0.Solución:La ecuación x6 − 1 = 0 puede escribirse también como
¡x3¢2 − 1 = 0. De donde obtenemos que
x3 = 1 o x3 = −1.Resolvemos ahora las ecuaciones x3 = 1 y x3 = −1. Las soluciones de x3 = 1 son las raices cúbicas
de 1. Como el número complejo 1 escrito en forma polar es 10 tenemos que las soluciones de x3 = 1son:
x1 = 10 = 1(cos 0 + i sen 0) = 1;
x2 = 1 2π3= 1
µcos
2π
3+ i sen
2π
3
¶= −1
2+
√3
2i;
x3 = 1 4π3= 1
µcos
4π
3+ i sen
4π
3
¶= −1
2−√3
2i.
Las soluciones de x3 = −1 son las raices cúbicas de −1. Como el número complejo −1 escrito enforma polar es 1π tenemos que las soluciones de x3 = −1 son:
x4 = 1π3= 1
³cos
π
3+ i sen
π
3
´=1
2+
√3
2i;
x5 = 1π = 1(cosπ + i senπ) = −1
x6 = 1 5π3= 1
µcos
5π
3+ i sen
5π
3
¶=1
2−√3
2i
Otra forma: De hecho, podemos resolver la ecuación x6 − 1 = 0 obteniendo las raíces sextas de launidad (x = 6
√1). Éstas vienen dadas por
xk+1 = 12kπ/6 = 1kπ/3 para k = 0, 1, 2, 3, 4, 5,
es decir, las seis raíces sextas de la unidad son:
x1 = 10 = 1
x2 = 1π/3 = cosπ3 + i sen
π3 =
12 +
√32 i
x3 = 12π/3 =¡cos 2π3 + i sen
2π3
¢= −12 +
√32 i
x4 = 1π = −1x5 = 14π/3 = cos
4π3 + i sen
4π3 = −12 −
√32 i
x6 = 15π/3 = cos5π3 + i sen
5π3 =
12 −
√32 i
6

Trabajo 7. Curso 2003-04 7
Problema 2Hallar, con ayuda de la calculadora, (11− 2i)4 y 4
√−12 + i. Dar los resultados en forma binómica.
Solución:Redondeamos a tres cifras decimales.El módulo del numero complejo 11 − 2i es √112 + 22 = 5
√5 = 11.180 y su argumento es θ =
arctan¡− 2
11
¢= arctan (−0.182) = 6.103
Por lo tanto (11− 2i)4 = (11.180)424.412 = 15623.1(cos(24.412) + sen(24.412))i= 15623.1(0.751− i0.660) = 11732.948− 10311.246iEl módulo del número complejo z = −12 + i es r = √122 + 1 = √145 = 12.042 y su argumento es
θ = arctan¡− 1
12
¢= arctan (−0.083) = 3.060. Por lo tanto, las raices cuartas de z son
w0 =¡4√12.042
¢3.0604= 1.8630.765 = 1.863(cos(0.765) + i sen(0.765))
= 1.863(0.721 + 0.693i) = 1.343 + 1.291iw1 =
¡4√12.042
¢3.0604+ 6.283
4= 1.8632.336 = 1.863(cos(2.336) + i sen(2.336))
= 1.863(−0.693 + 0.721i) = −1.291 + 1.343iw2 =
¡4√12.042
¢3.0604+2 6.283
4= 1.8633.907 = 1.863(cos(3.907) + i sen(3.907))
= 1.863(−0.721− 0.693i) = −1.343− 1.291iw3 =
¡4√12.042
¢3.0604+3 6.283
4= 1.8635.478 = 1.863(cos(5.478) + i sen(5.478))
= 1.863(0.693− 0.721i) = 1.291− 1.343i
Problema 3Calcular las siguientes integrales indefinidas:Z √
1 + exdx yZex√1 + e2xdx.
Solución:Para resolver la primera de las integrales utilzamos el método de sustitución realizando el cambio
de variable: u2 = 1+ex, de donde 2udu = exdx =¡u2 − 1¢ dx. sustituyendo en la integral obtenemos:Z √
1 + exdx =
Z2u2
u2 − 1du. Esta última integral es racional. Por tanto. descompondremos lafunción racional en suma de fracciones simples, pero antes buscando que el grado del numerador seamenor que el del denominador. Haciéndo así, obtenemosZ
2u2
u2 − 1du =Z µ
2 +1
u− 1 −1
u+ 1
¶du = 2u+ln
µu− 1u+ 1
¶+C = 2
√1 + ex+ln
µ√1 + ex − 1√1 + ex + 1
¶+
CPara resolver la segunda integral realizamos el cambio u = ex. De esta forma, obtenemos du =
exdx. Sustituyendo en la integral tenemos:
I =
Zex√1 + e2xdx =
Z √1 + u2du. Ahora relizamos el cambio u = tg t, de donde obtenemos :
du = sec2 tdt y√1 + u2 = sec t. Sustituyendo en la integral obtenemos: I =
Zsec3 tdt
Esta integral vamos a hacerla por partes:
½g = u = sec tf 0 = v0 = sec2 t (dv = sec2 tdt) ⇒
½g0 = u0 = sec t tg t (du = sec t tg tdt)f = v = tg t
.
Utilizando la fórmula de integración por partes obtenemos:
I = sec t tg t−Zsec t tg2 tdt = sec t tg t−
Zsec t
¡−1 + sec2 t¢ dt = sec t tg t+Z sec tdt−Zsec3 tdt⇒

Trabajo 7. Curso 2003-04 8
2I = sec t tg t+
Zsec tdt = sec t tg t+ ln |sec t+ tg t|+C ⇒ I = 1
2 (sec t tg t+ ln |sec t+ tg t|) +C.Deshaciendo los cambios, obtenemos: I = 1
2
³u√1 + u2 + ln
¯̄̄u+√1 + u2
¯̄̄´= 1
2
³ex√1 + e2x + ln
¯̄̄ex +
√1 + e2x
¯̄̄´+
C
Nota: El mismo procedimiento que se ha utilizado para obtenerZsec3 tdt puede utilizarse para
obtenerZsec2n+1 tdt siendo n un número natural.
Problema 4Calcular las siguientes integrales indefinidas:Z
dx3√x+√x
yZ
dx3√x2 +
3√x5, en la primera de las integrales realizar el cambio tm = x,
donde m es el mínimo común múltiplo de los indíces de las raíces.
Solución:Para resolver la primera de las integrales realizamos el cambio de variable t6 = x ⇒ 6t5dt = dx.
Este cambio permitirá eliminar las dos raices que aparecen en la integral. Sustituyendo en la integralobtenemos:Z
dx3√x+√x= 6
Zt5dt
t2 + t3= 6
Zt3dt
1 + t= 6
Z µt2 − t+ 1− 1
1 + t
¶dt = 6
µt3
3− t
2
2+ t− ln |t+ 1|
¶+
C.Deshaciendo el cambio (t = 6√x) obtenemos:
Zdx
3√x+√x= 6
Ã6√x3
3−
6√x2
2+ 6√x− ln | 6√x+ 1|
!+
C.Para hacer la segunda de las integrales realizamos el cambio t3 = x ⇒ 3t2dt = dx. Sustituyendo
en la integral obtenemos:Zdx
3√x2 +
3√x5= 3
Zt2dt
t2 + t5= 3
Zdt
t3 + 1=
Zdt
t+ 1+
Z(−t+ 2) dtt2 − t+ 1 =
Zdt
t+ 1−Z(t− 2) dtt2 − t+ 1 =
=
Zdt
t+ 1− 1
2
Z(2t− 1) dtt2 − t+ 1 +
32
Z1dt
t2 − t+ 1 =Z
dt
t+ 1− 1
2
Z(2t− 1) dtt2 − t+ 1 +
32
Z1dt¡
t− 12
¢2+ 34
= ln (|1 + t|)− 12 ln
¡t2 − t+ 1¢+ 3
2 .2√3arctan
Ãt− 1
2√32
!+C =
ln (|1 + t|)− 12 ln
¡t2 − t+ 1¢+√3 arctanµ2t− 1√
3
¶+ C
y deshaciendo el cambio se tiene
Zdx
3√x2 +
3√x5= ln
¡¯̄1 + 3√x¯̄¢− 1
2ln³
3√x2 − 3
√x+ 1
´+√3 arctan
µ2 3√x− 1√3
¶+ C.
Problema 5Demostrar la fórmula :Z
xm lnn xdx =xm+1 lnn x
m+ 1− n
m+ 1
Zxm lnn−1 xdx
donde m y n son enteros positivos. Aplicar dicha fórmula para obtenerZx3 ln2 xdx.
Solución:Usamos la fórmula de integración por partes:

Trabajo 7. Curso 2003-04 9
½u = lnn xv0 = xm (dv = xmdx)
⇒
u0 = n
1
xlnn−1 x (du = n
1
xlnn−1 xdx)
v =xm+1
m+ 1
⇒Zxm lnn xdx =
xm+1 lnn x
m+ 1− n
m+ 1
Zxm lnn−1 xdx.
Usando esta fórmula dos veces obtenemos:Zx3 ln2 xdx =
x4 ln2 x
4− 12
Zx3 lnxdx =
=x4 ln2 x
4− 12
µx4 lnx
4− 14
Zx3dx
¶=x4 ln2 x
4− x
4 lnx
8+x4
32+ C.
Problema 6Demostrar la fórmula :Z
(sen (ax))n dx = −(sen (ax))n−1 cos (ax)an
+n− 1n
Z(sen (ax))n−2 dx
donde n es un entero positivo. Aplicar dicha fórmula para obtenerZsen5 (7x) dx.
Solución:Usamos la fórmula de integración por partes:½u = senn−1 (ax)v0 = sen (ax) (dv = sen (ax) dx)
⇒ u0 = (n− 1) a senn−1 (ax) cos (ax) (du = (n− 1) a senn−1 (ax) cos (ax) dx)v = −cos (ax)
a
⇒
I =
Z(sen (ax))n dx = −sen
n−1 (ax) cos (ax)a
+ (n− 1)Z(sen (ax))n−2 (cos (ax))2 dx =
= −senn−1 (ax) cos (ax)
a+ (n− 1)
Z(sen (ax))n−2 dx− (n− 1)
Z(sen (ax))n dx⇒
I = −senn−1 (ax) cos (ax)
a+ (n− 1)
Z(sen (ax))n−2 dx− (n− 1) I ⇒
nI = −senn−1 (ax) cos (ax)
a+ (n− 1)
Z(sen (ax))n−2 dx⇒
I = −(sen (ax))n−1 cos (ax)an
+n− 1n
Z(sen (ax))n−2 dx.
Para calcularZsen5 (7x) dx usamos dos veces la fórmula anterior, obteniendo:Z
sen5 (7x) dx = −(sen (7x))4 cos (7x)
35− 45
Z(sen (7x))3 dx =
−(sen (7x))4 cos (7x)
35− 45
Ã−(sen (7x))
2 cos (7x)
21− 23
Z(sen (7x)) dx
!=
−(sen (7x))4 cos (7x)
35− 4 (sen (7x))
2 cos (7x)
105+8
15
Z(sen (7x)) dx =
−(sen (7x))4 cos (7x)
35− 4 (sen (7x))
2 cos (7x)
105− 8 cos (7x)
105+ C.

Trabajo 8. Curso 2003-04
Problema 1
a) Sea F (x) = 2x+Z x
0
sen (2t)
1 + t2dt. Determinar F (0), F 0(0) y F 00(0).
b) Hallar los puntos críticos de F (x) =Z x
0
t− 11 + t2
dt y para cada uno de ellos determinar si F tiene
máximo local, mínimo local o ninguna de las dos cosas
Solución
a) F (0) = 2 · 0 +Z 0
0
sen (2t)
1 + t2dt = 0
Para obtener F 0(0), caculamos previamente F 0 (x) utilizando el Teorema Fundamental del Cál-
culo. F 0 (x) = 2 +sen (2x)
1 + x2. Por lo tanto F 0(0) = 2.
Calculamos ahora F 00(x) =2 cos (2x)
¡1 + x2
¢− 2x sen (2x)(1 + x2)2
, de donde obtenemos que F 00(0) = 2.
b) Como la función F (x) es derivable (ya que el integrando es una función continua), los puntoscríticos serán aquellos en los que la derivada primera se anula. Usamos el Teorema Fundamentaldel Cálculo para obtener F 0(x):
F 0(x) =x− 11 + x2
.
Por lo tanto F 0(x) = 0 si y sólo six− 11 + x2
= 0, es decir, si x = 1, que es por tanto el único punto
crítico. Para decidir si es extremo relativo calculamos la derivada segunda de F (x):
F 00(x) =¡1 + x2
¢− 2x (x− 1)(1 + x2)2
=−x2 + 2x+ 1(1 + x2)2
.
Así, F 00(1) =1
2> 0 y obtenemos que en x = 1 la función F (x) tiene un mínimo relativo.
Problema 2
a) Dibujar la región limitada por la gráfica de las funciones y = cosx e y = 4x2 − π2 y calcular elárea de dicha región.
10

Trabajo 8. Curso 2003-04 11
b) Sea f(x) = cosx+ senx definida en el intervalo [−π.π] . Hacer un esbozo de la gráfica de dichafunción, calcular la integral
Z π
−πf(x)dx y el área de la región limitada por la gráfica de f(x),
el eje de las x y las rectas x = −π y x = π.
c) Área de la región limitada por la intersección de las circunferencias x2 + y2 = 4 y (x− 2)2 +(y − 2)2 = 4
Solución
a) Como la región es simétrica respecto al eje OY (ver Figura 1), el área puede calcularse de lasiguiente forma:
A = 2
Z π2
0
¡cosx− 4x2 + π2
¢dx = 2
·senx− 4x
3
3+ π2x
¸π2
0
= 2
µ1− 4π
3
24+
π3
2
¶=6 + 2π3
3.
- π/2
π/2 y=cos x
y=4x2-π2
x
y
Figura 1: Representación gráfica de las funciones y = cosx e y = 4x2 − π2.
b) Podemos hacernos una idea de la gráfica de la función en el intervalo [−π.π] teniendo en cuentasólo unos cuantos datos:
Puntos de corte con los ejes: Observemos que f(−π) = f(π) = −1 y que f(0) = −1. Además lafunción f(x) corta al eje de las X en aquellos puntos en los que cosx = − senx y eso ocurre siy sólo si tg x = −1, es decir, x = −π
4y x =
3π
4.
Por último, derivando f 0(x) = cosx − senx, vemos que los puntos críticos se obtienen cuandox =
π
4y x = −3π
4. Con esta información una gráfica aproximada puede verse en la Figura 2.
Por lo tantoZ π
−π(cosx+ senx) dx = [− cosx+ senx]π−π = −1− (−1) = 0
Mientras que el área encerrada es:
A =
Z −π4
−π(− cosx− senx) dx+
Z 3π4
−π4
(cosx+ senx) dx+
Z π
3π4
(− cosx− senx) dx =
[cosx− senx]−π4−π + [− cosx+ senx]
3π4
−π4+ [cosx− senx]π3π
4=√2 + 1 + 2
√2 +√2− 1 = 4√2

Trabajo 8. Curso 2003-04 12
-π π
x
y
-π/4 π/4 -3π/4
3π/4
Figura 2: Representació gráfica de la función f(x) = cosx+ senx en [−π.π].
c) Si dibujamos las dos circunferencias (véase la Figura 3) se observa que el área encerrada entre
las dos curvas es A =
Z 2
0
µ√4− x2 − 2 +
q4− (x− 2)2
¶dx =
Z 2
0
√4− x2dx − 2
Z 2
0dx +Z 2
0
q4− (x− 2)2dx = I1 − 4 + I2.
y
x
x2+y2=4
(x-2)2+(y-2)2=4
2
2
Figura 3: Representación de las circunferencias x2 + y2 = 4 y (x− 2)2 + (y − 2)2 = 4.Calculamos ahora las integrales I1 e I2. Pero, nótese que puede verse directamente que la integralI1 = π, ya que se trata del área de la cuarta parte de un círculo de radio 2.
Vamos a calcularlas utilizando un cambio de variables.
I1 =
Z 2
0
√4− x2dx⇒
½x = 2 sen tdx = 2cos tdt
; Cuando x = 0⇒ t = 0 y cuando x = 2⇒ t =π
2. Por
lo tanto I1 = 4Z π
2
0cos2 tdt = 2
Z π2
0(1 + cos 2t) dt = 2
·t+
sen 2t
2
¸π2
0
= π

Trabajo 8. Curso 2003-04 13
I2 =
Z 2
0
q4− (x− 2)2dx ⇒
½x− 2 = 2 sen tdx = 2 cos tdt
; Cuando x = 0 ⇒ t = −π2y cuando x = 2 ⇒
t = 0. Por lo tanto I2 = 4Z 0
−π2
cos2 tdt = 2
Z 0
−π2
(1 + cos 2t) dt = 2
·t+
sen 2t
2
¸0−π2
= π.
Por lo tanto, el área pedida es A = 2π − 4.
Problema 3
a) La base de un sólido es la región comprendida entre las parábolas x = y2 e x = 3− 2y2. Hallarel volumen del sólido sabiendo que las secciones perpediculares al eje OY son: (a) triángulosequiláteros, (b) cuadrados.
b) Bosquejar la región del semiplano derecho que es exterior a la parábola y = x2 y está limitadapor las rectas y = x+ 2 e y = 2x− 2. Calcular el volumen de dicha región cuando gira en tornoal eje OY.
c) Sea f(x) =½ √
3x 0 ≤ x ≤ 1√4− x2 1 ≤ x ≤ 2 y sea R la región limitada por la gráfica de f(x) y el eje
de las X. Obtener el volumen del sólido obtenido cuando dicha región gira: entorno del eje OX,entorno del eje OY, entorno de la recta x = 2 y entorno de la recta y =
√3.
Solución
a) Las parábolas x = y2 y x = 3− 2y2 se cortan en los puntos (1,−1) y (1, 1). La distancia de unsegmento paralelo al eje OX y limitado por las dos parábolas es 3− 3y2 (ver Figura 4).
x=3- 2 y2
x
y
x= y2
3- 3 y2
Figura 4: Representación gráfica de las parábolas x = y2 e x = 3− 2y2.
Como el área de un triángulo equilátero de lado l es
√3l2
4, tenemos que el volumen pedido en el
apartado (a) es, utilizando la simetría,
V1 = 2
Z 1
0
√3
4
¡3− 3y2¢2 dy = √3
2
Z 1
0
¡9− 18y2 + 9y4¢ dy = 12
√3
5.

Trabajo 8. Curso 2003-04 14
Como el área de un cuadrado de lado l es l2, tenemos que el volumen pedido en el apartado (b)es, de nuevo utilizando la simetría,
V2 = 2
Z 1
0
¡3− 3y2¢2 dy = 2Z 1
0
¡9− 18y2 + 9y4¢ dy = 48
5.
b) La recta y = x + 2 y la parábola y = x2 se cortan en los puntos (2, 4) y (−1, 1), pero el punto(−1, 1) no pertence al semiplano derecho. Por otro lado, las dos rectas se cortan en el punto(4, 6). Utilizamos el método de las capas para obtener dicho volumen (véase la Figura 5)
x
y
2
4
4
6
-2
x2-2x+2
-x+4
Figura 5: Representación gráfica de la parábola y = x2 y las rectas y = x+ 2 e y = 2x− 2.
V = 2π
Z 2
0x¡x2 − 2x+ 2¢ dx+ 2π Z 4
2x (x+ 2− 2x+ 2) dx =
= 2π
Z 2
0
¡x3 − 2x2 + 2x¢ dx+ 2π Z 4
2
¡−x2 + 4x¢ dx = 16π
3+32π
3= 16π
c) En la Figura 6 puede contemplarse un esbozo de la región R.Calculamos en primer lugar el volumen cuando la región R gira en torno del eje OX. Usare-
mos el método de las capas. V1 = 2π
Z √3
0y
µp4− y2 − 1√
3y
¶dy = 2π
Z √3
0yp4− y2dy −
2π√3
Z √3
0y2dy =
= 2π
−q(4− y2)33
√3
0
− 2π√3
·−y
3
3
¸√30
=8π
3.
A continuación calculamos el volumen cuando dicha región gira en torno del eje OY. En estecaso utilizaremos el método de los discos obteniendo
V2 = π
Z √3
0
¡4− y2¢ dy − π
Z √3
0
y2
3dy = π
·4y − 4y
3
9
¸√30
=7π√3
3
Para calcular el volumen cuando la región gira entorno de la recta x = 2, utilizamos de nuevo elmétodo de las capas, obteniendo:

Trabajo 8. Curso 2003-04 15
y
x
y=31/2x y=(4-x2)1/2
R
1 2
Figura 6: Representación gráfica de la función f(x) definida en el apartado c) del Problema 3.
V3 = 2π
Z 1
0(2− x)√3xdx+ 2π
Z 1
0(2− x)√4− x2dx =
= 4√3π
Z 1
0xdx− 2√3π
Z 1
0x2dx+ 4π
Z 1
0
√4− x2dx− 2π
Z 1
0x√4− x2dx = π
¡3π − 7√3¢6
Por último, para calcular el volumen cuando la región gira entorno de la recta y =√3, utilizamos
de nuevo el método de las capas, obteniendo:
V4 = 2π
Z √3
0
¡√3− y¢µp4− y2 − 1√
3y
¶=
= 2π√3
Z √3
0
µp4− y2 − 1√
3y
¶dy−2π
Z √3
0y
µp4− y2 − 1√
3y
¶dy = 4
3π2√3−8π
3=4π
3
¡π√3− 2¢
Problema 4Calcular las siguientes integrales impropias:Z 1
0x lnxdx,
Z ∞
e
dx
x (lnx)2,
Z ∞
0e−x senxdx
Z ∞
0cos2 xdx.
Solución
a) La función x lnx es continua en el intervalo (0, 1], pero no está definida en el punto x = 0. Ya
que limx→0x lnx = lim
x→0lnx1x
= limx→0
1x
− 1x2= limx→0 (−x) = 0, tenemos que la discontinuidad en el punto
x = 0 es evitable. Por consiguiente, la integral en cuestión no es impropia, aunque su cálculo lollevaremos a cabo utilizando las técnicas de la integración impropia.Z 1
0x lnxdx = lim
a→0+
Z 1
ax lnxdx = lim
a→0+
µx2
2lnx− x
2
4
¶1a
= lima→0+
µ−14− a
2
2ln a+
a2
4
¶= −1
4.
Se ha tenido en cuenta queZx lnxdx =
x2
2lnx− x
2
4+ C y que
lima→0+
µa2
2ln a
¶= lima→0+
Ãln a2a2
!= lima→0+
1a
− 4a3= lima→0+
µ−a
2
4
¶= 0

Trabajo 8. Curso 2003-04 16
b) Calculamos una primitiva utilizando el cambio t = lnx, obteniendo:Zdx
x (lnx)2=
Zdt
t2= −1
t= − 1
lnx+ C.
Entonces: Z ∞
e
dx
x (lnx)2= limb→∞
bZe
dx
x (lnx)2= limb→∞
·− 1
lnx
¸be
= limb→∞
µ− 1
ln b+ 1
¶= 1.
c) Utilizando el método de integración por partes se obtiene queZe−x senxdx = −1
2e−x (senx+ cosx)+
C. (primitiva obtenida en el Trabajo 6).
Por lo tantoZ ∞
0e−x senxdx = lim
b→∞
Z b
0e−x senxdx = lim
b→∞
·−12e−x (senx+ cosx)
¸b0
=
= limb→∞
µ−12e−b (sen b+ cos b) +
1
2
¶=1
2, ya que lim
b→∞
µ−12e−b (sen b+ cos b)
¶= 0 al ser el
producto de una función que tiende a cero por otra que está acotada.
d) Teniendo en cuenta que cos2 x =1 + cos 2x
2, obtenemos que
Zcos2 xdx =
x
2+sen 2x
4+C. Por
lo tanto,Z ∞
0cos2 xdx = lim
b→∞
Z b
0cos2 xdx = lim
b→∞
·x
2+sen 2x
4
¸b0
= limb→∞
µb
2+sen 2b
4
¶= ∞,
luego la integral es divergente.
Problema 5La transformada de Laplace de una función continua f : [0,∞) −→ R es la función F definida por
F (s) =
∞Z0
e−sxf(x)dx,
siendo el dominio de F el conjunto de todos los números reales s donde la integral anterior converge.Hallar la transformada de Laplace de cada una de las siguientes funciones:
f(x) = 1, f(x) = x, f(x) = e3x, f(x) = cosx,
indicando el dominio de existencia.Solución
a) La transformada de Laplace de la función f(x) = 1 es
F (s) =
Z ∞
0e−sxdx = lim
b→∞
Z b
0e−sxdx
Ahora, realizamos la siguientes distinciones:
(i) Si s 6= 0, entonces F (s) =Z ∞
0e−sxdx = lim
b→∞
Z b
0e−sxdx = lim
b→∞
·−e
−sx
s
¸b0
= limb→∞
µ−e
−sb
s+1
s
¶.
Como
limb→∞
e−sb =½0 si s > 0∞ si s < 0

Trabajo 8. Curso 2003-04 17
se tiene que la integral diverge para s < 0 y converge para s > 0, siendo su valor en estecaso,
F (s) = limb→∞
µ−e
−sb
s+1
s
¶=1
s.
(ii) Para s = 0, la integral impropia es divergente, pues
F (0) =
Z ∞
0e0·xdx = lim
b→∞
Z b
01dx = lim
b→∞b =∞.
En resumen, la transformada de Laplace de f(x) = 1 sólo está definida para s > 0 y su valor esF (s) = 1/s.
b) Razonando de forma análoga al apartado anterior, puede probarse que la transformada deLaplace de la función f(x) = x sólo está defnida para s > 0 y su valor es
F (s) =
Z ∞
0e−sxxdx = lim
b→∞
Z b
0e−sxxdx = lim
b→∞
·−xe
−sx
s− e
−sx
s2
¸b0
= limb→∞
·−be
−sb
s− e
−sb
s2+1
s2
¸=1
s2.
c) De forma análoga, la transformada de Laplace de la función f(x) = e3x está definida para s > 3,siendo su valor
F (s) =
Z ∞
0e−sxe3xdx = lim
b→∞
Z b
0e(3−s)xdx = lim
b→∞
"e(3−s)x
3− s
#b0
= limb→∞
"e(3−s)b
3− s −1
3− s
#=
1
s− 3 .
d) Un razonamiento similiar nos permite probar que la transformada de Laplace de la funciónf(x) = cosx sólo está definida para s > 0 y
F (s) =
Z ∞
0e−sx cosxdx = lim
b→∞
Z b
0e−sx cosxdx = lim
b→∞s2
s2 + 1
·−e
−sx cosxs
− e−sx senxs2
¸b0
=
limb→∞
s2
s2 + 1
·−e
−sb cos bs
− e−sb sen bs2
+1
s
¸=
s2
s2 + 1.1
s=
s
s2 + 1.
Previamente se ha calculado la integral indefinida utilizando el método de integración por partesy se ha obtenido:Z
e−sx cosxdx =s2
s2 + 1
·−e
−sx cosxs
− e−sx senxs2
¸+ C (ver Trabajo 6).
Trabajo 9. Curso 2003-04
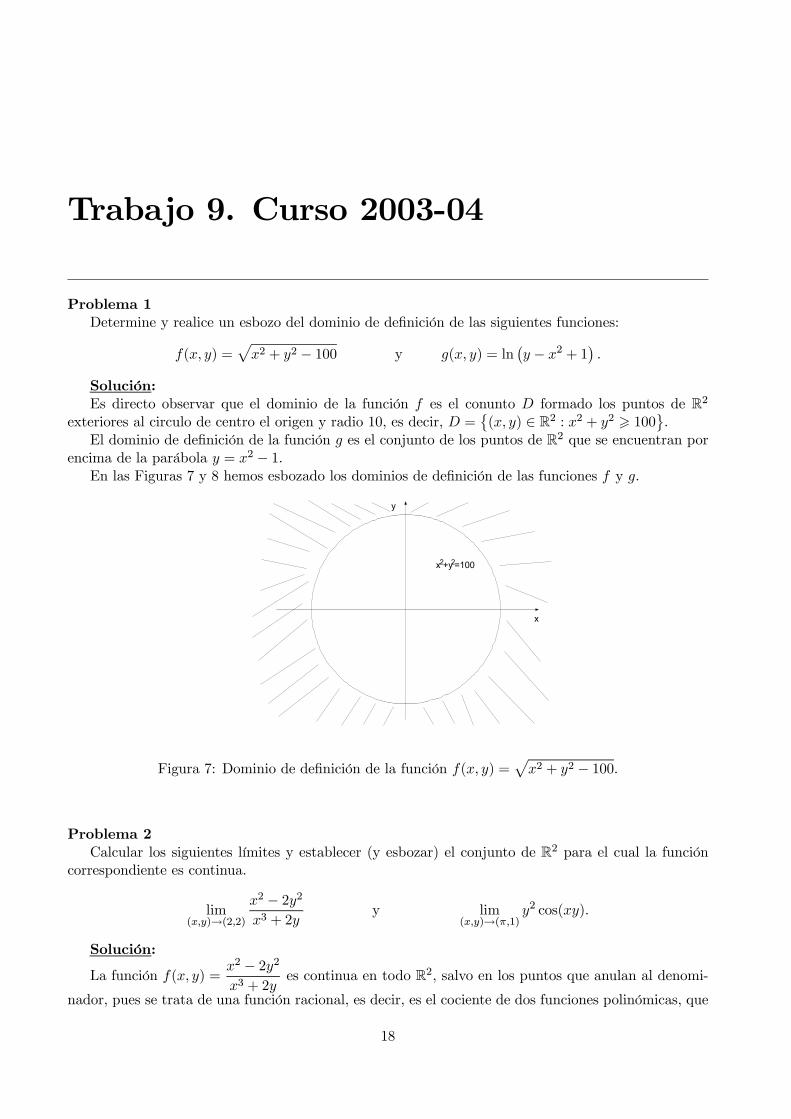
Problema 1Determine y realice un esbozo del dominio de definición de las siguientes funciones:
f(x, y) =px2 + y2 − 100 y g(x, y) = ln
¡y − x2 + 1¢ .
Solución:Es directo observar que el dominio de la función f es el conunto D formado los puntos de R2
exteriores al circulo de centro el origen y radio 10, es decir, D =©(x, y) ∈ R2 : x2 + y2 > 100ª.
El dominio de definición de la función g es el conjunto de los puntos de R2 que se encuentran porencima de la parábola y = x2 − 1.
En las Figuras 7 y 8 hemos esbozado los dominios de definición de las funciones f y g.
x
y
x2+y2=100
Figura 7: Dominio de definición de la función f(x, y) =px2 + y2 − 100.
Problema 2Calcular los siguientes límites y establecer (y esbozar) el conjunto de R2 para el cual la función
correspondiente es continua.
lim(x,y)→(2,2)
x2 − 2y2x3 + 2y
y lim(x,y)→(π,1)
y2 cos(xy).
Solución:
La función f(x, y) =x2 − 2y2x3 + 2y
es continua en todo R2, salvo en los puntos que anulan al denomi-nador, pues se trata de una función racional, es decir, es el cociente de dos funciones polinómicas, que
18

Trabajo 9. Curso 2003-04 19
x
y
y=x2-1
Figura 8: Dominio de definición de la función g(x, y) = ln¡y − x2 + 1¢.
como sabemos son continuas en todo R2. Así, f(x, y) =x2 − 2y2x3 + 2y
es continua en todo su dominio, es
decir, en D =©(x, y) ∈ R2 : x3 + 2y 6= 0ª y, por tanto,
lim(x,y)→(2,2)
x2 − 2y2x3 + 2y
=22 − 2 · 2223 + 2 · 2 = −
1
3,
ya que (2, 2) ∈ D.En la Figura 9 hemos representado el conjunto D donde f es continua.
x
y
y=-x3/2
Figura 9: La función f(x, y) =x2 − 2y2x3 + 2y
es continua en todo R2 excepto en los puntos de la curva
y = −x3/2.
Del mismo modo, la función g(x, y) = y2 cos(xy) es continua en todo R2, ya que puede expresarsecomo el producto de funciones continuas en R2. Por consiguiente,
lim(x,y)→(π,1)
y2 cos(xy) = 12 cos(π · 1) = −1

Trabajo 9. Curso 2003-04 20
Problema 3Obtener las derivadas parciales de primer y segundo orden para las siguientes funciones:
f(x, y) = 3x3y2 + 7x2y, g(x, y) = cos2 x− 2sen y y h(x, y) = e−y tg(xy).
Determinar además, fx(1, 1),∇f(−1, 1) y fxy(1,−1)Solución:Las derivadas parciales de primer y segundo orden de f(x, y) = 3x3y2 + 7x2y son
∂f
∂x(x, y) = fx(x, y) = 9x
2y2 + 14xy∂f
∂y(x, y) = fy(x, y) = 6x
3y + 7x2
∂2f
∂x2(x, y) = fxx(x, y) = 18xy
2 + 14y∂2f
∂x∂y(x, y) = fxy(x, y) = 18x
2y + 14x
∂2f
∂y∂x(x, y) = fyx(x, y) = 18x
2y + 14x∂2f
∂y2(x, y) = fyy(x, y) = 6x
3
Obsérvese la igualdad en las derivadas parciales cruzadas: fxy(x, y) = fyx(x, y) = 18x2y + 14x.Además, fx(1, 1) = 9 · 12 · 12 + 14 · 1 · 1 = 23,∇f(−1, 1) = (fx(−1, 1), fy(−1, 1)) = (−5, 1) y
fxy(1,−1) = −4.Para la función g(x, y) = g = cos2 x− sen2 y tenemos:∂g
∂x(x, y) = gx(x, y) = −2 cosx senx = − sen 2x ∂g
∂y(x, y) = gy(x, y) = −2 sen y cos y = − sen 2y
∂2g
∂x2(x, y) = gxx(x, y) = −2 cos 2x ∂2g
∂x∂y(x, y) = gxy(x, y) = 0
∂2g
∂y∂x(x, y) = gyx(x, y) = 0
∂2g
∂y2(x, y) = gyy(x, y) = −2 cos 2y
Por último, para la función h(x, y) = e−y tg(xy) obtenemos
∂h
∂x(x, y) = hx(x, y) = ye
−y ¡sec2 (xy)¢∂h
∂y(x, y) = hy(x, y) = −e−y tg(xy) + xe−y sec2 (xy)
∂2h
∂x2(x, y) = hxx(x, y) = 2y
2 tg(xy)e−y + 2y2 tg3(xy)e−y
∂2h
∂x∂y(x, y) = hxy(x, y) =
∂2h
∂y∂x(x, y) = hyx(x, y) =
= e−y − ye−y + 2xy tg(xy)e−y + tg2(xy)e−y − y tg2(xy)e−y + 2xy tg3(xy)e−y∂2h
∂y2(x, y) = hyy(x, y) = tg(xy)e
−y − 2xe−y − 2x tg2(xy)e−y + 2x2 tg(xy)e−y + 2x2 tg3(xy)e−y
Problema 4Determinar la pendiente de la recta tangente a la curva intersección de la superficie z = x2 + y2
4con el plano x = 2 en el punto (2, 2, 5).
Solución:En este ejercicio nos están pidiendo la derivada parcial respecto a y de z = x2 + y2
4 en el punto(2, 2). Puesto que zx(x, y) = y/2, la pendiente pedida es m = zy(2, 2) = 2/2 = 1.
Problema 5

Trabajo 9. Curso 2003-04 21
(a) Determinar la derivada direccional de f(x, y) = arctg(3xy) en el punto (4, 2) y en la direccióndel vector u =
√32 i− 1
2 j.
(b) Determinar la pendiente de la recta tangente a la curva intersección de la superficie z = x2+ y2
con el plano “vertical” x−√3y + 2√3− 1 = 0 en el punto (1, 2, 5).(c) ¿En qué dirección crece más rapidamente en el punto (1, 2) la función f(x, y) = 9x4 + 4y2?
(d) Consideremos la función f(x, y) = 2x2+3y2. Calcular la curva de nivel de la superficie z = f(x, y)que pasa por el punto (2, 1). Calcular el vector gradiente de f en el punto (2, 1) (Of(2, 1)) y unvector tangente a la curva de nivel anterior en el punto (2, 1). Comprobar que ambos vectoresson ortogonales.
Solución:
(a) Como la función f(x, y) = arctg(3xy) es diferenciable en el punto (4, 2), la derivada direccionalen la dirección del vector unitario u =
√32 i− 1
2j viene dada por
Du(4, 2) = ∇f(4, 2) · u
Ahora calcularemos el vector gradiente, obteniendo previamente las derivadas parciales:
∂f
∂x(x, y) =
3y
9x2y2 + 1=⇒ ∂f
∂x(4, 2) =
3 · 29 · 42 · 22 + 1 =
6
577∂f
∂y(x, y) =
3x
9x2y2 + 1=⇒ ∂f
∂y(4, 2) =
3 · 49 · 42 · 22 + 1 =
12
577
Así, ∇f(4, 2) =µ∂f
∂x(4, 2),
∂f
∂y(4, 2)
¶=
µ6
577,12
577
¶=
6
577(1, 2) y por tanto,
Du(4, 2) = ∇f(4, 2) · u = 6
577(1, 2) ·
Ã√3
2,− 1
2
!=
3
577
√3− 6
577.
(b) En el plano XY , un vector director de la recta de ecuación x−√3y+2√3−1 = 0 es v = ¡√3, 1¢.Por tanto, la pendiente que se solicita es la derivada direccional de la función g(x, y) = x2 + y2
en el punto (1, 2) y en la dirección del vector unitario u = v/ kvk =³√
32 ,
12
´.
Puesto que gx(x, y) = 2x y gy(x, y) = 2y, el vector gradiente de g en el punto (1, 2) es ∇g(1, 2) =(2, 4) y la pendiente pedida se obtiene mediante
Du(1, 2) = ∇g(1, 2) · u = (2, 4) ·Ã√
3
2,1
2
!=√3 + 2.
Nótese que la pendiente depende del sistema de referencia elegido en el plano vertical.
(c) Puesto que la dirección de máximo crecimiento nos la proporciona el vector gradiente, se deduceque la función f(x, y) = 9x4+4y2 crece más rapidamente en el punto (1, 2) tomando la direccióndel vector
∇f(1, 2) = (fx(1, 2), fy(1, 2)) =¡36 · 13, 8 · 2¢ = (36, 16).

Trabajo 9. Curso 2003-04 22
(d) Para calcular la curva de nivel de la superficie z = f(x, y) = 2x2 + 3y2 que pasa (2, 1) debemosobtener la imagen del punto (2, 1) mediante f : f(2, 1) = 2 · 22 + 3 · 12 = 11. Así, la curva denivel de z = 2x2 + 3y2 que pasa (2, 1) es la elipse de ecuación 2x2 + 3y2 = 11.
Como las derivadas parciales de f son fx(x, y) = 4x y fy(x, y) = 6y, el vector gradiente a f enel punto (2, 1) es Of(2, 1) = (4 · 2, 6 · 1) = (8, 6).Para calcular un vector tangente a la curva (de nivel) 2x2 + 3y2 = 11 en el punto (2, 1), vamosa calcular, mediante derivación implícita, la pendiente de la recta tangente en dicho punto.Derivando implícitamente repecto de x en la identidad 2x2 + 3y2 = 11 se obtiene
4x+ 6yy0 = 0,
de donde y0 = −(2x)/(3y) y por tanto, la pendiente de la recta tangente a 2x2 + 3y2 = 11 en elpunto (2, 1) viene dada por m = −4/3. En consecuencia, la recta tangente tiene de ecuación
y − 1 = −43(x− 2)
y el vector v = (1,−4/3) es un vector tangente tangente a la curva (de nivel) 2x2+3y2 = 11 enel punto (2, 1)
Ahora, es fácil comprobar que el vector gradiente y el vector tangente encontrado son ortogonales:
Of(2, 1) · v = (8, 6) · (1,−4/3) = 0.
Problema 6
(a) Determinar, en los siguientes casos, dwdt mediante la regla.
w = x2y3, x = t3, y = t2 y w = sen¡xyz2
¢, x = t2, y = t, z =
1
t.
(b) Determinar, en los siguientes casos, ∂w∂t y
∂w∂s mediante la regla de la cadena.
w = x2y, x = st, y = s y w =px2 + y2 + z2, x = cos(st), y = sen(st), z = s2t.
(c) Sea f una función real de variable real dos veces derivable. Demuestre que la función de dosvariables
z = g(x, y) =1
2[f(x− cy) + f(x+ cy)] , con c constante
satisface la ecuación de ondas
∂2z
∂y2= c2
∂2z
∂x2.
Solución:
(a) Mediante la regla de la cadena sabemos que
dw
dt=
∂w
∂x· dxdt+
∂w
∂y· dydt

Trabajo 9. Curso 2003-04 23
Por tanto, si w = x2y3, x = t3, y = t2 se tiene que ∂w∂x = 2xy
3, ∂w∂y = 3x2y2, dxdt = 3t
2 y dydt = 2t
2 yen consecuencia,
dw
dt= 2xy3 · 3t2 + 3x2y2 · 2t2¯̄
x=t3,y=t2=
= 2t3¡t2¢3 · 3t2 + 3 ¡t3¢2 ¡t2¢2 · 2t2 = 6t11 + 6t12.
Para w = sen¡xyz2
¢, x = t2, y = t, z = 1
t tenemos que
dw
dt=
∂w
∂x· dxdt+
∂w
∂y· dydt+
∂w
∂z· dzdt=
= yz2 cos¡xyz2
¢ · 2t+ xz2 cos ¡xyz2¢ · 1 + 2xyz cos ¡xyz2¢ ·µ− 1t2
¶¯̄̄̄x=t2,y=t,z=1/t
=
= t
µ1
t2
¶cos
µt2t · 1
t2
¶· 2t+ t2
µ1
t2
¶cos
µt2t · 1
t2
¶· 1 + 2t2t
µ1
t
¶cos
µt2t · 1
t2
¶·µ− 1t2
¶=
= cos t.
(b) Para w = x2y, x = st, y = s, la regla de la cadena nos indica que
∂w
∂t=
∂w
∂x· ∂x∂t+
∂w
∂y· ∂y∂t
∂w
∂s=
∂w
∂x· ∂x∂s+
∂w
∂y· ∂y∂s
Por consiguiente,
∂w
∂t= 2xy · s+ x2 · 0¯̄
x=st,y=s= 2sts · s = 2s3t.
y
∂w
∂s= 2xy · t+ x2 · 1¯̄
x=st,y=s= 2sts · t+ (st)2 · 1 = 3s2t2.
Para el caso w =px2 + y2 + z2, x = cos(st), y = sen(st), z = s2t tenemos que
∂w
∂t=
∂w
∂x· ∂x∂t+
∂w
∂y· ∂y∂t+
∂w
∂z· ∂z∂t
∂w
∂s=
∂w
∂x· ∂x∂s+
∂w
∂y· ∂y∂s+
∂w
∂z· ∂z∂s
y por tanto,
∂w
∂t=
xpx2 + y2 + z2
· (−s sen(st)) + ypx2 + y2 + z2
· (s cos(st)) + zpx2 + y2 + z2
· s2¯̄̄̄¯x=cos(st),y=sen(st),z=
=1q
cos2(st) + sen2(st) + (s2t)2
¡−s cos(st) · sen(st) + s cos(st) · sen(st) + s2t · s2¢ ==
s4t√s4t2 + 1
.

Trabajo 9. Curso 2003-04 24
∂w
∂s=
xpx2 + y2 + z2
· (−t sen(st)) + ypx2 + y2 + z2
· (t cos(st)) + zpx2 + y2 + z2
· 2st¯̄̄̄¯x=cos(st),y=sen(st),z=
=1q
cos2(st) + sen2(st) + (s2t)2
¡−t cos(st) · sen(st) + t cos(st) · sen(st) + s2t · 2st¢ ==
2s3t2√s4t2 + 1
.
(c) Para la resolución de este apartado aplicaremos varias veces la regla de la cadena
∂h
∂x=dh
dt· ∂t∂x
∂h
∂y=dh
dt· ∂t∂y
(4)
que puede ser asociada al grafo de la Figura 10.
∂ t/∂ x
h
t
x y
dh/dt
∂ t/∂ y
Figura 10: Grafo asociado a la regla de la cadena dada en (4).
Si z = 12 [f(x− cy) + f(x+ cy)], entonces tomando
h1 = f(t) con t = x− cyy
h2 = f(t) con t = x+ cy,
podemos escribir z = 12 [h1 + h2]. Utilizando las expresiones dadas en (4) se obtiene
∂z
∂x=1
2
£f 0(x− cy) + f 0(x+ cy)¤
y
∂z
∂y=1
2
£f 0(x− cy) · (−c) + f 0(x+ cy) · c¤
Volviendo a derivar y haciendo uso de nuevo de las identidades de (4) se tiene
∂2z
∂x2=1
2
£f 00(x− cy) + f 00(x+ cy)¤

Trabajo 9. Curso 2003-04 25
y
∂2z
∂y2=1
2
£f 00(x− cy) · (−c) · (−c) + f 00(x+ cy) · c · c¤ = c2 1
2
£f 00(x− cy) + f 00(x+ cy)¤ .
Luego,
∂2z
∂y2= c2
∂2z
∂x2,
como queríamos probar.
Problema 7
La aceleración centrípeta de una partícula que se mueve por una circunferencia es a =v2
r, donde
v es la velocidad y r el radio de la circunferencia. Aproximar el máximo porcentaje de error en lamedida de la aceleración cuando se produce un error del 2% en v y del 1% en r.
Solución:Utilizando la diferencial para aproximar el porcentaje de error, se tiene
∆a
a' da
a=
∂a∂v · dv + ∂a
∂r · dra
=
2vr · dv +
³−v2r2
´· dr
v2
r
=
= 2dv
v− drr= 2(±2%)− (±1%),
luego el máximo porcentaje de error al medir la acelaración es ∆aa ' ±5%.
Problema 8
(a) Determine la ecuación del plano tangente a la superficie de ecuación 9x2 + 4y2 + 9z2 = 34 en elpunto (1, 2− 1).
(b) Demuestre que la recta normal a la superficie esférica x2 + y2 + z2 = r2 en cualquiera de suspuntos siempre pasa por el origen. ¿Cuál es la ecuación del plano tangente?
(c) Demuestre que el plano tangente a la superficie xyz = c (donde c es una constante) en cualquierade sus puntos forma con los planos de coordenadas un tetraedro de volumen fijo y calcule dichovolumen.
Solución:
(a) Tomando F (x, y, z) = 9x2+4y2+9z2−34, la ecuación del plano tangente en el punto (1, 2−1) ala superficie dada por F (x, y, z) = 0 (es decir, dada por 9x2+4y2+9z2 = 34) tiene la expresión
∂F
∂x(1, 2− 1)(x− 1) + ∂F
∂y(1, 2− 1)(y − 2) + ∂F
∂z(1, 2− 1)(z + 1) = 0.
Puesto que∂F∂x (x, y, z) = 18x =⇒ ∂F
∂x (1, 2− 1) = 18,∂F∂y (x, y, z) = 8y =⇒ ∂F
∂y (1, 2− 1) = 16,∂F∂z (x, y, z) = 18z =⇒ ∂F
∂z (1, 2− 1) = −18,la ecuación del plano tangente es
18(x− 1) + 16(y − 2)− 18(z + 1) = 0o equivalentemente,
9x+ 8y − 9z − 34 = 0.

Trabajo 9. Curso 2003-04 26
(b) Sabemos que la recta normal a la superficie dada por F (x, y, z) = 0 en el punto (x0, y0, z0) vienedada por las ecuiones parmétricas
x = x0 + t∂F
∂x(x0, y0, z0),
y = y0 + t∂F
∂y(x0, y0, z0),
z = z0 + t∂F
∂z(x0, y0, z0).
Entonces, escribiendo la superficie esférica x2 + y2 + z2 = r2 en la forma F (x, y, z) = 0, siendoF (x, y, z) = x2 + y2 + z2 − r2, la recta normal a la esfera en uno de sus puntos (x0, y0, z0) tienepor ecuaciones paramétricas
x = x0 + 2tx0,y = y0 + 2ty0,z = z0 + 2tz0,
con t ∈ R,
ya que Fx(x, y, z) = 2x, Fy(x, y, z) = 2y y Fz(x, y, z) = 2z.
Para comprobar que dicha recta pasa por el origen, sólo debemos hacer t = −1/2 y comprobarque para este valor de t se tiene x = 0, y = 0, z = 0.
La ecuación del plano tangente a la esfera x2 + y2 + z2 = r2 en el punto (x0, y0, z0) es
2x0(x− x0) + 2y0(y − y0) + 2z0(z − z0) = 0,
es decir,
x0x+ y0y + z0z − x20 − y20 − z20 = 0
Como el punto (x0, y0, z0) debe estar sobre la superficie esférica, debe verificarse x20+y20+z
20 = r
2
y en consecuencia, la ecuación del plano tangente queda
x0x+ y0y + z0z = r2.
Nótese que la recta normal también puede escribirse en la formax = x0 + sx0,y = y0 + sy0,z = z0 + sz0,
con s ∈ R
y el origen ((x, y, z) = (0, 0, 0)) se obtiene haciendo s = −1.Dicha recta también puede escibirse la forma
x = µx0,y = µy0,z = µz0,
con µ ∈ R
y el origen se “alcanza” para µ = 0.
(c) En primer lugar, debemos observar que para c = 0, la ecuación xyz = c(= 0) proporciona tressuperficies: los planos coordenados x = 0, y = 0 y z = 0. Luego en este caso, nunca podríamosforma un tetraedro con dichos planos.
Por consiguinte, trabajaremos desde ahora con la hipótesis c 6= 0.

Trabajo 9. Curso 2003-04 27
Sea (x0, y0, z0) un punto de la superficie de ecuación xyz = c (así se satisface la igualdadx0y0z0 = c). Entonces, la ecuación del plano tangente a xyz = c en dicho punto es
y0z0(x− x0) + x0z0(y − y0) + x0y0(z − z0) = 0.
Ahora, operando y usando que x0y0z0 = c, la ecuación del plano tangente queda en la forma
x
3x0+
y
3y0+
z
3z0= 1
y por tanto, el plano tangente forma un tetraedro con los planos coordenados, cuyos vérticesestán en (x1, 0, 0), (0, y1, 0) y (0, 0, z1), siendo x1 = 3x0, y1 = 3y0 y z1 = 3z0 (véase la Figura13).
x
y
z
x1
y1
z1
Figura 11: Tetraedro formado por el plano tangente y los planos coordenados.
Para finalizar, el volumen de este tetraedro viene dado por
V =1
6|x1y1z1| = 9
2|x0y0z0| = 9
2|c|
y por consiguiente, permanece constante, es decir, es independiente del punto (x0, y0, z0) elegido.
Problema 9Considérese la función f(x, y) = x2 − 6x+ y2 − 8y + 7.
(a) Determinar y clasificar los puntos críticos de f.
(b) Encontrar el máximo y mínimo de f sobre el círculo {(x, y) ∈ R2 : x2 + y2 6 1}.
Solución:
(a) Puesto que f es diferenciable en todo R2, sus puntos críticos son aquellos que anulan simulténea-mente a sus dos derivadas parciales de primer orden. Es decir, son las soluciones del sistema
∂f
∂x= 2x− 6 = 0.
∂f
∂y= 2y − 8 = 0.
La resolución de este sistema es directa y el único punto crítico de f es el punto (3, 4).

Trabajo 9. Curso 2003-04 28
A continuación, clalisificaremos este punto crítico recurriendo a las derivadas parciales de segundoorden. La matriz hessiana de f es constante, ya que f es una función polinómica de segundogrado. Esta matriz es
H =
µ2 00 2
¶.
Como d = det(H) = 4 > 0 y∂2f
∂x2= 2 > 0, el punto crítico (3, 4) es un mínimo relativo.
De hecho, en este punto la función alcanza su mínimo absoluto, pues, completando cuadrados,es fácil ver que
f(x, y) = (x− 3)2 + (y − 4)2 − 18
y así, el mínimo de f es −18 y éste se alcanza en el punto (3, 4).(b) Obsérvese que el único punto crítico de f ((3, 4)) no está en el interior del circulo unidad, ya
que 32+42 = 25 > 1. Por tanto, tanto el máximo de f como su mínimo restringida esta funciónal círculo unidad D = {(x, y) ∈ R2 : x2 + y2 6 1} deben alcanzarse en la frontera del círculo, esdecir, en la circunferencia de ecuación x2 + y2 = 1.
Dividimos la frontera del círculo D en dos partes:
F1 =n(x, y) ∈ R2 : −1 6 x 6 1, y =
p1− x2
oy
F2 =n(x, y) ∈ R2 : −1 6 x 6 1, y = −
p1− x2
o.
De esta forma, la función f restringida a F1 viene dada por
g(x) = f³x,p1− x2
´= x2 − 6x+
³p1− x2
´2 − 8p1− x2 + 7 = 8− 8p1− x2 − 6x, x ∈ [−1, 1].
Los puntos críticos de g en el intervalo abierto (−1, 1) son los que anulan a su derivada
g0(x) = 8x√1− x2 − 6 = 0.
En este caso, sólo tenemos un punto crítico x =3
5y los puntos a tener en cuenta en la frontera
F1 son: (−1, 0), (1, 0) y35,
s1−
µ3
5
¶2 =
µ3
5,4
5
¶.
A continuación hacemos lo propio con la frontera F2. En este caso, la función f está dada por
h(x) = f³x,−
p1− x2
´= x2 − 6x+
³−p1− x2
´2 − 8³−p1− x2´+ 7 = 8p1− x2 − 6x+ 8, x ∈ [−1,
y los puntos críticos de h en el intervalo (−1, 1) se obtienen resolviendo la ecuación
h0(x) = −8 x√1− x2 − 6 = 0.

Trabajo 9. Curso 2003-04 29
Esto ecuación nos proporciona un único punto crítico x = −35y los puntos a considerar sobre la
semicircunferencia F2 son: (−1, 0), (1, 0) y−3
5,−s1−
µ−35
¶2 =
µ−35,−45
¶.
Sólo nos queda evaluar f en los puntos obtenidos:
f(1, 0) = 2f(−1, 0) = 14f
µ3
5,4
5
¶= −2
f
µ−35,−45
¶= 18
y así, el máximo de f restringida a D = {(x, y) ∈ R2 : x2+y2 6 1} es 18 y su máximo se alcanzaen el punto
¡−35 ,−45¢ y su valor mínimo (también restringida a D) es −2 y éste valor mínimose alcanza en el punto
¡35 ,45
¢.
Otra forma:
Parametrizamos dicha circunferencia en la forma x = cos t, y = sen t, con t ∈ [0, 2π]. Entonces,la función f restingida a dicha circunferencia adopta la expresión
g(t) = f (cos t, sen t) = cos2 t− 6 cos t+ 2sen t− 8 sen t+ 7 = 8− 8 sen t− 6 cos t
para t ∈ [0, 2π].Los puntos críticos de g son los pertenecientes al intervalo abierto (0, 2π) que anulan a su derivadag0(t) = −8 cos t+ 6 sen t.Desde la igualdad −8 cos t+6 sen t = 0, obtenemos tg t = 4/3. Esto puede escribirse en la forma
tg t =4/5
3/5=−4/5−3/5
y los correspondientes puntos a analizar en la circunferencia son el punto (1, 0) (que correspondea las extremos del intervalo t = 0 y t = 2π), y los puntos
¡35 ,45
¢y¡−35 ,−45¢. Evaluando f en
dichos puntos:
f(1, 0) = 2
f
µ3
5,4
5
¶= −2
f
µ−35,−45
¶= 18
se tiene que máximo de f restringida a D = {(x, y) ∈ R2 : x2 + y2 6 1} es 18 y su máximo sealcanza en el punto
¡−35 ,−45¢. Además, su valor mínimo (también restringida a D) es −2 y éstevalor mínimo se alcanza en el punto
¡35 ,45
¢.
En la Figura 12 puede observarse la circunferencia x2+ y2 = 1 en el plano xy y la curva imagende ésta sobre la superficie.
Problema 10Demostrar que un triángluo es equilátero si el producto de los senos de sus ángulos es máximo.Solución:

Trabajo 9. Curso 2003-04 30
Figura 12: Representación de los extremos absolutos de f(x, y) = x2 − 6x+ y2 − 8y + 7 restringida aD = {(x, y) ∈ R2 : x2 + y2 6 1}.
Denominemos α,β y γ a los ángulos del triángluo. Entonces, α + β + γ = π, α,β, γ ∈ (0,π) y elproducto de los senos de dichos ángulos puede espresarse en la forma
senα · senβ · sen γ = senα · senβ · sen (π − α− β) = senα · senβ · sen(α+ β).
Esto nos lleva a considerar la función
F (α,β) = senα · senβ · sen(α+ β)
definida en el triángulo T = {(α,β) : 0 < α < π, 0 < β < π, 0 < α+ β < π}.Nótese que en la frontera de este triángulo (α = 0,β = 0,α+ β = π) la función F es nula y en el
interior de T la función es estrictamente positiva. Además, para los ángulos en la frontera de T nopodemos formar propiamente un triángulo.
Por tanto, el máximo de F debe estar en el interior del triángulo T y como F es diferenciable,dicho máximo debe darse en puntos del interior de T que sean soluciones del sistema
∂F
∂α(α,β) = senβ (cosα · sen (α+ β) + senα · cos (α+ β)) = senβ · sen(2α+ β) = 0,
∂F
∂β(α,β) = senα (cosβ · sen (α+ β) + senβ · cos (α+ β)) = senα · sen(α+ 2β) = 0.
Las soluciones de este sistema en el interior de T debe satisfacer el sistema½2α+ β = πα+ 2β = π
de donde α = 13π,β =
13π. Así, el máximo del producto de los senos de α,β y γ se alcanza para
α = 13π,β =
13π y γ = π − α− β = π − 1
3π − 13π =
13π y por tanto el triángulo es equilátero.

Trabajo 10. Curso 2003-04
Nota: Para la realización de los problemas de este trabajo debe tener en cuenta que algunos de ellospueden requerir un cambio en los órdenes de integración y otros pueden resultar más fácilesmediante coordenadas polares, esféricas o cilíndricas.
Problema 1Calcular las siguientes integrales iteradas:
(a)Z π/2
0
Z 1
0x sen(xy)dydx.
(b)Z ln 3
0
Z ln 2
0ex+ydydx.
(c)Z 3
1
Z 2y
−yxey
3dxdy.
(d)Z 2
0
Z √4−x2
0(x+ y) dydx.
(e)Z 1
0
Z √1−x2
0
1p4− x2 − y2dydx.
(f)Z 2
1
Z √2x−x2
0
1px2 + y2
dydx.
(g)Z 2
0
Z 4−2x
0
Z 4−2x−z
06xydydzdx.
(h)Z 1
−1
Z √1−x2
−√1−x2
Z 2−x2−y2
x2+y2
¡x2 + y2
¢3/2dzdydx.
Solución:
(a)Z π/2
0
Z 1
0x sen(xy)dydx =
Z π/2
0− cos (xy)|y=1y=0 dx =
Z π/2
0(− cos (x) + 1) dx = 1
2π − 1.
(b)Z ln 3
0
Z ln 2
0ex+ydydx =
Z ln 3
0ex+y|y=ln 2y=0 dx =
Z ln 3
0
¡ex+ln 2 − ex¢ dx = Z ln 3
0ex¡eln 2 − 1¢ dx =
=
Z ln 3
0ex (2− 1) dx =
Z ln 3
0exdx = eln 3 − 1 = 2.
31

Trabajo 10. Curso 2003-04 32
(c)Z 3
1
Z 2y
−yxey
3dxdy =
Z 3
1
x2
2
¯̄̄x=2yx=−y
ey3dy =
Z 3
1
32y2ey
3dy = 1
2 ey3¯̄̄y=3y=1
= 12
¡e27 − e¢.
(d)Z 2
0
Z √4−x2
0(x+ y) dydx =
Z 2
0
hxy + y2
2
iy=√4−x2y=0
dx =
Z 2
0
³x√4− x2 + 4−x2
2
´dx = 16
3 .
(e) En este caso, observamos que el recinto de integración es la cuarta parte del circulo unidad quese encuentra en el primer cuadrante y además, la función del integrando depende sólo de ladistancia al origen x2+y2. Por consiguiente, parece razonable realizar un cambio a coordenadaspolares. Así, si denotamos R = {(x, y) ∈ R2 : x2 + y2 6 1, x > 0, y > 0}, entonces R se escribeen coordenadas polares en la forma
R = {(r, θ) : 0 6 θ 6 π/2, 0 6 r 6 1}
y por tanto, la integral viene dada porZ 1
0
Z √1−x2
0
1p4− x2 − y2dydx =
ZZR
1p4− x2 − y2dA =
Z π/2
0
Z 1
0
1√4− r2 rdrdθ =
=
Z π/2
0
h−√4− r2
ir=1r=0
dθ =
Z π/2
0
¡2−√3¢ dθ = ¡2−√3¢ π
2 .
(f) Para realizar la integral de este apartado cambiaremos de nuevo a coordenadas polares. Peroobsérvese que la curva que acota superiormente a la región de integración es la gráfica de lafunción y =
√2x− x2, que se trata de un trozo de la circunferencia (x− 1)2 + y2 = 1; es decir,
de la circunferencia de centro (1, 0) y radio 1.
Cambiando a polares y utilizando que x2 + y2 − 2x = 0, obtenemos r2 − 2r cos θ = 0 y portanto, la circuferencia (x− 1)2 + y2 = 1 se decribe en polares mediante r = 2cos θ. Ahora bien,como 1 6 x 6 2, resulta que el dominio de integración se puede escribir en coordenadas polaresmediante R = {(r, θ) : 0 6 θ 6 π/4, 0 6 r 6 2 cos θ} y asíZ 2
1
Z √2x−x2
0
1px2 + y2
dydx =
Z π/4
0
Z 2 cos θ
0
1
rrdrdθ =
Z π/4
02 cos θdθ =
√2.
(g)Z 2
0
Z 4−2x
0
Z 4−2x−z
06xydydzdx =
Z 2
0
Z 4−2x
03xy2
¯̄y=4−2x−zy=0
dzdx =Z 2
0
Z 4−2x
03x (4− 2x− z)2 dzdx =
Z 2
0−x (4− 2x− z)3
¯̄̄z=4−2xz=0
dx =
=
Z 2
0x (4− 2x)3 dx =
Z 2
0
¡64x− 96x2 + 48x3 − 8x4¢ dx = 64
5 .
(h) Utilizando un cambio a coordenadas cilíndricas, tenemos queZ 1
−1
Z √1−x2
−√1−x2
Z 2−x2−y2
x2+y2
¡x2 + y2
¢3/2dzdydx =
Z 2π
0
Z 1
0
Z 2−r2
r2
¡r2¢3/2
rdzdrdθ =
=
Z 2π
0
Z 1
0
Z 2−r2
r2r4dzdrdθ =
Z 2π
0
Z 1
0r4¡2− 2r2¢ drdθ =
=
Z 2π
0
Z 1
02¡r4 − r6¢ drdθ = 8
35π.
Problema 2Evaluar las siguientes integrales:

Trabajo 10. Curso 2003-04 33
(a)ZZ
Rey
2dA, siendo R =
©(x, y) ∈ R2 : 0 6 x 6 4, x2 6 y 6 2
ª.
(b)ZZ
Rsen(y3)dA, siendo R la región acotada por las curvas y =
√x, y = 2 y x = 0.
(c)ZZ
Rex
2+y2dA, donde R es el círculo de centro el origen y radio a > 0.
(d)ZZ
Rsen
¡x2 + y2
¢dA, siendo R =
©(x, y) ∈ R2 : x2 + y2 6 4, y > 0ª.
(e)ZZZ
Qcosh¡x2 + y2 + z2
¢3/2idV , siendo Q =
©(x, y, z) ∈ R3 : x2 + y2 + z2 6 1ª.
Solución:
(a) Para calcular esta integral debemos describir la región R como una región horizontalmentesimple:
R =©(x, y) ∈ R2 : 0 6 y 6 2, 0 6 x 6 2yª .
Asi, ZZRey
2dA =
Z 2
0
Z 2y
0ey
2dxdy =
Z 2
02yey
2dy = ey
2¯̄̄y=2y=0
= e4 − 1.
(b) La región de integración R puede expresarse en la forma
R =©(x, y) ∈ R2 : 0 6 y 6 2, 0 6 x 6 y2ª ,
luego,ZZRsen(y3)dA =
Z 2
0
Z y2
0sen(y3)dxdy =
Z 2
0y2 sen(y3)dy = −13 cos(y3)
¯̄y=2y=0
= 13 − 1
3 cos 8.
(c) Transformando el circulo R a coordenadas polares, obtenemosZZRex
2+y2dA =
Z 2π
0
Z a
0er
2rdrdθ =
Z 2π
0
er2
2
¯̄̄r=ar=0
dθ =
Z 2π
0
³ea2
2 − 12
´dθ = π
³ea
2 − 1´.
(d) Utilizando de nuevo coordenadas polares, se tieneZZRsen
¡x2 + y2
¢dA =
Z π
0
Z 2
0sen
¡r2¢rdrdθ =
Z π
0−cos(r
2)2
¯̄̄̄r=2r=0
dθ =
Z π
0
1−cos(4)2 dθ =
= 1−cos(4)2 π.
(e) Utilizando coordenadas esféricas, el sólido esférico Q puede escribirse en la forma
Q = {(ρ, θ,φ) : 0 6 θ 6 2π, 0 6 φ 6 π, 0 6 ρ 6 1} .Por tanto,ZZZ
Qcosh¡x2 + y2 + z2
¢3/2idV =
Z 2π
0
Z π
0
Z 1
0cos³¡ρ2¢3/2´
ρ2 senφdρdφdθ =
=
Z 2π
0
Z π
0
Z 1
0cos¡ρ3¢ρ2 senφdρdφdθ =
Z 2π
0
Z π
0
sen(ρ3)3
¯̄̄̄ρ=1ρ=0
senφdφdθ =
=
Z 2π
0
Z π
0
sen(1)3 senφdφdθ = 4
3π sen 1.

Trabajo 10. Curso 2003-04 34
Problema 3Utilizar una integral doble para calcular el volumen del tetraedro de la Figura 13, siendo x1, y1, z1 >
0.
x
y
z
x1
y1
z1
Figura 13: Tetraedro que interseca a las ejes coordenados en los puntos x1, y1 y z1.
SoluciónEs conocido que el plano que pasa por los puntos (x1, 0, 0) , (0, y1, 0) , (0, 0, z1) tiene de ecuación
x
x1+y
y1+z
z1= 1 y que el volumen es
1
6x1y1z1.
Veamos como pueden obtenerse estos resultados utilizando geometría analítica e integración doble.En primer lugar obtenemos la ecuación del plano π, que pasa por el punto (x1, 0, 0) y tiene por vectoresdirectores (−x1, y1, 0) y (−x1, 0, z1) . Sabemos que la ecuación del plano es¯̄̄̄
¯̄ x− x1 y z−x1 y1 0−x1 0 z1
¯̄̄̄¯̄ = 0
Desarrollando este determinante por los adjuntos de la primera fila obtenemos (x− x1) y1z1+yx1z1+zx1y1 = 0 =⇒ y1z1x+ x1z1y + x1y1z = x1y1z1 =⇒ x
x1+y
y1+z
z1= 1.
El volumen del tetraedro es V =
ZZRf(x, y)dA, donde f(x, y) = z1(1 − x
x1− y
y1) (z despejada
de la ecuación del plano π) y R es la región del plano determinada por las rectas x = 0, y = 0 yx
x1+y
y1= 1. (proyección del plano π sobre el plano z = 0). Entonces
V =
ZZRf(x, y)dA = z1
Z x1
0
Z y1
Ã1−x
x1
!0
(1− x
x1− y
y1)dydx
= z1
Z x1
0
·(y − xy
x1− y2
2y1)
¸y1Ã1− xx1
!
0
dx
= z1
Z x1
0
µy12− xy1x1
+x2y12x21
¶dx = z1
·µy1x
2− x
2y12x1
+x3y16x21
¶¸x10
=1
6x1y1z1
Problema 4Calcular el volumen de los siguientes sólidos:
(a) Sólido que se encuentra en el primer octante acotado por la superficie 9x2+4y2 = 36 y el plano9x+ 4y − 6z = 0.

Trabajo 10. Curso 2003-04 35
(b) Sólido acotado por el cilindro parabólico x2 = 4y y los planos z = 0 y 5y + 9z − 45 = 0.(c) Sólido acotado por el paraboloide z = 9− x2 − y2 y el plano z = 0.(d) Sólido dentro del cilindro x2 + y2 = 4, acotado por arriba por la superficie 2x2 + 2y2 + z2 = 18
y por debajo por el plano z = 0.
(e) Sólido interior a la esfera x2 + y2 + z2 = 4 y al cilindro x2 + y2 = 2y.
(f) Sólido interior al cono
Solución
(a) La ecuación del plano 9x+4y− 6z = 0 en coordenadas cilíndricas es 9r cos θ+4r sen θ− 6z = 0.Despejando z obtenemos z =
9r cos θ + 4r sen θ
6. La ecuación del cilindro eliptico 9x2+4y2 = 36
en coordenadas cilíndricas es 9r2 cos2 θ + 4r2 sen2 θ = 36 =⇒ 5r2 cos2 θ + 4 = 36 de donde
despejamos r =3√
5 cos2 θ + 4.
La descripción del sólido en coordenadas cartesianas es
Q =
(x, y, z) ∈ R3 :0 ≤ x ≤ 2
0 ≤ y ≤√36−9x22
0 ≤ z ≤ 16 (9x+ 4y)
y en coordenadas cilíndircas es
Q =
(r, θ, z) ∈ R3 :
0 ≤ θ ≤ π2
0 ≤ r ≤ 3√5 cos2 θ + 4
0 ≤ z ≤ 9r cos θ + 4r sen θ6
En este caso resulta más sencillo trabajar en coordenadas cartesianas.
V =
ZZZQdV =
Z 2
0
Z √36−9x22
0
Z 16(9x+4y)
0dzdydx =
1
6
Z 2
0
Z √36−9x22
0(9x+ 4y) dydx
=1
6
Z 2
0
£9xy + 2y2
¤√36−9x22
0dx =
1
6
Z 2
0
Ã9x√36− 9x22
+36− 9x2
2
!dx
=1
12
Z 2
0
³36− 9x2 + 9x
p36− 9x2
´dx
=1
12
·36x− 3x3 − 1
3
q(36− 9x2)3
¸20
= 10.
(b) La descripción del sólido en coordenadas cartesianas es Q =
(x, y, z) ∈ R3 :−6 ≤ x ≤ 2x2
4 ≤ y ≤ 90 ≤ z ≤ 45−5y
9
.El volumen, calculado en coordendas cartesianas es:
V =
ZZZQdV =
Z 6
−6
Z 9
x2
4
Z 45−5y9
0dzdydx =
Z 6
−6
Z 9
x2
4
45− 5y9
dydx
=1
9
Z 6
−6
·90y − 5y2
2
¸9x2
4
dx =405
18
Z 6
−6dx− 1
9
Z 6
−6
µ45x2
4− 5x
4
32
¶dx
= 270− 19
·15x3
4− x
5
32
¸6−6= 270− 126 = 144.

Trabajo 10. Curso 2003-04 36
(c) La descripción del sólido en coordenadas cartesianas es
Q =
(x, y, z) ∈ R3 :−3 ≤ x ≤ 3
−√9− x2 ≤ y ≤ √9− x20 ≤ z ≤ 9− x2 − y2
. Como la ecuación del paraboloide z = 9 − x2 − y2 en coordenadas cilíndricas es z = 9 − r2tenemos que la descripción del sólido en coordenadas cilíndricas es
Q =
(r, θ, z) ∈ R3 :0 ≤ θ ≤ 2π0 ≤ r ≤ 3
0 ≤ z ≤ 9− r2
En este caso resulta más sencillo trabajar en coordenadas cilíndricas. Su volumen es
V =
ZZZQdV =
Z 2π
0
Z 3
0
Z 9−r2
0rdz dr dθ =
Z 2π
0
Z 3
0
¡9r − r3¢ dr dθ
=
Z 2π
0
·9r2
2− r
4
4
¸30
dθ =81π
2.
(d) La descripción del sólido en coordenadas cartesianas es
Q =
(x, y, z) ∈ R3 :−2 ≤ x ≤ 2
−√4− x2 ≤ y ≤ √4− x20 ≤ z ≤
p18− 2x2 − 2y2
y la descripción del mismo sólido en coordenadas cilíndricas es
Q =
(r, θ, z) ∈ R3 :0 ≤ θ ≤ 2π0 ≤ r ≤ 2
0 ≤ z ≤ √18− 2r2
• El volumen del sólido en coordenadas cartesianas sería (con integrales difíciles de calcular)
V (Q) =
ZZZQdV =
Z 2
−2
Z √4−x2
−√4−x2
Z √18−2x2−2y20
dz dy dx
y en coordenadas cilíndricas
V (Q) =
ZZZQdV =
Z 2π
0
Z 2
0
Z √18−2r2
0rdz dr dθ
=
Z 2π
0
Z 2
0r [z]
√18−2r2
0 dr dθ =
Z 2π
0
Z 2
0rp18− 2r2dr dθ
= −14
Z 2π
0
·2
3
q(18− 2r2)3
¸20
dθ =π
3
³18√18− 10
√10´
(e) La ecuación de la esfera en coordenadas esféricas es ρ = 2 y en coordenadas cilíndricas z2+r2 = 4.
La ecuación del cilindro en coordenadas esféricas es ρ = 2sen θ
senφy en cilíndricas r = 2 sen θ. La
descripción del sólido en coordenadas cartesianas es
Q =
(x, y, z) ∈ R3 :−1 ≤ x ≤ 1
1−√1− x2 ≤ y ≤ 1 +√1− x20 ≤ z ≤
p4− x2 − y2

Trabajo 10. Curso 2003-04 37
y la descripción del mismo sólido en coordenadas cilíndricas es
Q =
(r, θ, z) ∈ R3 :0 ≤ θ ≤ π
0 ≤ r ≤ 2 sen θ0 ≤ z ≤ √4− r2
Calculamos el volumen en coordenadas cilíndricas:
V (Q) =
ZZZQdV =
Z π
0
Z 2 sen θ
0
Z √4−r2
0rdz dr dθ
=
Z π
0
Z 2 sen θ
0rp4− r2dr dθ = −1
3
Z π
0
·q(4− r2)3
¸2 sen θ0
dθ
= −13
Z π
0
µq(4 cos θ)3 − 8
¶dθ
=8
3π − 8
3
ÃZ π2
0(cos θ)3 dθ −
Z π
π2
(cos θ)3 dθ
!
=8
3π − 8
3
÷sen θ − sen
3 θ
3
¸π2
0
−·sen θ − sen
3 θ
3
¸ππ2
!=
8
3π − 32
9.
(f) La ecuación del cono z =px2 + y2 en coordenadas cilíndricas es z = r y en esférica es φ =
π
4. La
ecuación del plano z = 4 en coordenadas cilíndricas z = 4 y en esférica ρ =4
cosφ. La descripción
del sólido en cartesianas es
Q =
(x, y, z) ∈ R3 :−4 ≤ x ≤ 4
−√16− x2 ≤ y ≤ √16− x2px2 + y2 ≤ z ≤ 4
la descripción del mismo sólido en coordenadas cilíndricas es
Q =
(r, θ, z) ∈ R3 :0 ≤ θ ≤ 2π0 ≤ r ≤ 4r ≤ z ≤ 4
y la descripción del mismo sólido en coordenadas esféricas es
Q =
(ρ, θ,φ) ∈ R3 :0 ≤ θ ≤ 2π0 ≤ φ ≤ π
4
0 ≤ z ≤ 4
cosφ
El volumen en coordenadas cilíndricas es
V =
ZZZQdV =
Z 2π
0
Z 4
0
Z 4
rrdz dr dθ =
Z 2π
0
Z 4
0
¡4r − r2¢ dr dθ
=
Z 2π
0
·2r2 − r
3
3
¸40
dθ =64π
3

Trabajo 10. Curso 2003-04 38
y en coordenadas esféricas es:
V =
ZZZQdV =
Z 2π
0
Z π4
0
Z 4cosφ
0ρ2 senφ dρdφdθ =
1
3
Z 2π
0
Z π4
0
43
cos3 φsenφ dφdθ
=64
3
Z 2π
0
·1
2 cos2 φ
¸π4
0
dθ =64
3
µ1− 1
2
¶Z 2π
0dθ =
64π
3.