Thiet ke he thong dieu khien dung plc1
195
Auto books Thiết kế hệ thống điều khiển PLC No1 Copyright 2007 by AUTOMANVNpage 1 / 195 Tutorial Status: 18/08 Version 2.2 Tài liệu này được xây dựng để hỗ trợ sinh vi ên học tập, nghi ên cứu. Ngoài đối tượng sinh vi ên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị li ên hệ : [email protected] hoặc số điện thoại 0953.124.068 . MỤC LỤC Phương pháp sử dụng t ài liệu. TỔNG QUAN VỀ HỆ THỐNG ĐIỀU KHIỂN SỬ DỤNG PLC.[ ] I. Tổng quan về hệ thống điều khiển sử dụng PLC.[] 1. Giới thiệu một số khái niệm về hệ thống điều kh iển [] 2. Một số các chuẩn sử dụng trong PLC[] 3. Dữ liệu sử dụng tron g PLC.[] 4. Câu hỏi và bài tập.[] 5. Tài liệu tham khảo [] II. Phần cứng PLC v à cách kết nối.[] 1. Cảm biến và cách kết nối với PLC.[] 2. Thiết bị chấp h ành và cách k ết nối với PLC.[] 3. Thiết bị ngõ vào ra thông minh[] 4. Màn hình giao ti ếp và phần mềm lập tr ình HMI. [] 5. Thiết bị lập tr ình và phần mềm lập tr ình PLC. [] 6. Thiết bị mạng.[] 7. Thiết bị điều khiển PLC.[] 8. Lựa chọn phần cứng [] 9. Câu hỏi và bài tập.[] 10. Tài liệu tham khảo [] III. Phần mềm[] 1. Ngôn ngữ lập tr ình và t ập lệnh.[] 2. Phân tích và thi ết kế phần mềm PLC[] 3. Phần mềm dựa tr ên hệ thống relay cũ.[] 4. Phần mềm có y êu cầu tổ hợp [] 5. Phần mềm có y êu cầu tuần tự.[] 6. Bit tuần tự. [] 7. Sơ đồ trạng thái. [] 8. Khối logic.[] 9. Phương tr ình trạng thái.[] 10. Biểu đồ tuyến thời gian. [] 11. GRAPCET 12. Sơ đồ khối chức năng - SFC.[] 13. Câu hỏi và Bài t ập. [] 14. Tài liệu tham khảo [] IV.Lập tài liệu hệ thống v à bảo trì hệ thống điều khiển sử dụng PLC [] 1. Bản tóm tắt .[] 2. Cấu hình của hệ thống [] 3. Sơ đồ kết nối ng õ vào/ra [] 4. Gán các ngõ vào/ra[] 5. Khai bao các địa chỉ nội [] 6. Khai báo các thanh ghi.[] 7. Khai báo bi ến. [] 8. Bản in của chương tr ình điều khiển[] 9. Bản lưu chương tr ình điều khiển.[]
-
Upload
biahaiphong -
Category
Documents
-
view
5 -
download
0
Transcript of Thiet ke he thong dieu khien dung plc1

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 1 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
MỤC LỤCPhương pháp sử dụng tài liệu.TỔNG QUAN VỀ HỆ THỐNG ĐIỀU KHIỂN SỬ DỤNG PLC.[ ]
I. Tổng quan về hệ thống điều khiển sử dụng PLC.[]1. Giới thiệu một số khái niệm về hệ thống điều kh iển []2. Một số các chuẩn sử dụng trong PLC[]3. Dữ liệu sử dụng trong PLC.[]4. Câu hỏi và bài tập.[]5. Tài liệu tham khảo []
II. Phần cứng PLC và cách kết nối.[]1. Cảm biến và cách kết nối với PLC.[]2. Thiết bị chấp hành và cách kết nối với PLC.[]3. Thiết bị ngõ vào ra thông minh[]4. Màn hình giao tiếp và phần mềm lập trình HMI. []5. Thiết bị lập trình và phần mềm lập trình PLC. []6. Thiết bị mạng.[]7. Thiết bị điều khiển PLC.[]8. Lựa chọn phần cứng []9. Câu hỏi và bài tập.[]10. Tài liệu tham khảo []
III. Phần mềm[]1. Ngôn ngữ lập trình và tập lệnh.[]2. Phân tích và thiết kế phần mềm PLC[]3. Phần mềm dựa trên hệ thống relay cũ.[]4. Phần mềm có yêu cầu tổ hợp []5. Phần mềm có yêu cầu tuần tự.[]6. Bit tuần tự. []7. Sơ đồ trạng thái. []8. Khối logic.[]9. Phương trình trạng thái.[]10. Biểu đồ tuyến thời gian. []11. GRAPCET12. Sơ đồ khối chức năng - SFC.[]13. Câu hỏi và Bài tập. []14. Tài liệu tham khảo []
IV.Lập tài liệu hệ thống và bảo trì hệ thống điều khiển sử dụng PLC []1. Bản tóm tắt.[]2. Cấu hình của hệ thống[]3. Sơ đồ kết nối ngõ vào/ra []4. Gán các ngõ vào/ra[]5. Khai bao các địa chỉ nội []6. Khai báo các thanh ghi.[]7. Khai báo biến.[]8. Bản in của chương trình điều khiển[]9. Bản lưu chương trình điều khiển.[]

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 2 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
TỔNG QUAN VỀ HỆ THỐNG ĐIỀU KHIỂN SỬ DỤNG PLC.[ ]I. Tổng quan về hệ thống đ iều khiển sử dụng PLC.[]I.1. Giới thiệu một số khái niệm về hệ thống điều khiển []Ví dụ về hệ thống điều khiển.Mục đích : Phân tích một số hệ thống điều khiển th ường gặp để rút ra được cấu trúcchung của một hệ thống điều khiển.Yêu cầu : Sau khi đọc, người học có khả năng nhìn nhận các thành phần trong hệthống.
Hệ thống đóng gói kẹo.(1) Thiết bị cắt và hàn (Actuator)(2) Cảm biến xác định vạch (Sensor)(3) Động cơ kéo cơ cấu tạo gói (Actuator)(4) Giao tiếp người dùng và máy (HMI)(5) Động cơ kéo căng tấm nylon (Actuator)(6) Hai thiết bị điều khiển được kết nối mạng.
Tủ điều khiển : Đóng vai trò bảo vệ và che chở cho thiết bị liên quan tới điều khiểntrước sự xâm nhập của con ng ười và những tác động khác của môi tr ường xungquanh. Việc bố trí trong tủ điều khiển phải đ ược nghiên cứu và bố trí hợp lý để đảmbảo an toàn và tiện lợi cho người sử dụng.
Hình dưới trình bày việc bố trí trong tủ điều khiển cánh tay Robot – Một hệ thốngđiều khiển nhỏ và độc lập.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 3 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Thành phần cơ khí (Mechanical Structure)Cánh tay cơ khí (Robot Arm)Các nút nhất và chuyển mạch lựa chọn (pushbutton & Selector Switch)Đèn báo trạng thái (Revolving Light)Đèn (Indicator)Công tắc (Switches)Thiết bị điều khiển PLC.Relay.Khối đầu cuối (Terminal Blog)Khởi động từ (Magnetic Contactor)Cảm biến (Sensors)
Hình dưới là Tủ điều khiển của một nhà máy lớn do Hãng Mitsubishi sản xuất. Chúngta dễ dàng thấy chúng được chia nhỏ thành các thành phần nhỏ hơn để dễ quản lý.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 4 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Hệ thống điều khiển dùng PLC cơ bản. Hình vẽ được thể hiện dưới dạng khối.
Thường các thành phần như nguồn, khởi động từ, PLC, thiết bị lập tr ình, Giao tiếpngười dùng, đèn được đặt trong tủ. Những qui định n ày chỉ có tính chất tương đối, phụthuộc chủ yếu vào người thiết kế và bố trí hệ thống sao cho phù hợp và thẩm mỹ.
Nhiệm vụ của các thành phần trong hệ thống được mô tả như sau :PLC nhận các tín hiệu (logic, analog) từ các ngõ vào (inputs), tín hiệu được xử lý bởiphần mềm do người sử dụng viết (user software) nạp ở bộ nhớ của PLC bằng thiết bịlập trình (programming device), sau khi xử lý xong, tín hiệu được xuất ra ngõ ra(outputs) dưới dạng điện (logic, analog) để điều khiển thiết bị. M àn hình giao tiếp(HMI) được kết nối với thiết bị qua cổng truyền thông để hiển thị giao diện giữangười và máy. Để viết chương trình điều khiển cho PLC, đối với từng loại PLC cómột hoặc nhiều phần mềm chuyên biệt để lập trình.
Hệ thống điều khiển sử dụng PLC :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 5 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Nhận xét :Qua việc khảo sát một số hệ thống điều khiển tr ên, ta thấy :
1. Phần cứng hệ thống điều khiển sử dụng PLC c ơ bản gồm 3 thành phần : Thiếtbị điều khiển (PLC), cảm biến (Sensor) v à thiết bị chấp hành (Actuator).
2. Phần mềm bao gồm : Phần mềm lập tr ình cho PLC, phần mềm của người dùngnạp cho PLC để điều khiển thiết bị, phần mềm tạo giao tiếp giữa PLC v à conngười và phần mềm cho các module đặc biệt khác.
Ngoài ra, toàn bộ công tắc điện, thiết bị điều khiển, relay điều khiển, ….. đ ược đặttrong tủ điều khiển và đặt tại vị trí dễ quan sát và thoáng mát.
Đối với những hệ thống điều khiển lớn, t ương đương với việc sử dụng các ngõ vào ranhiều, độ phức tạp của hệ thống cao h ơn, sử dụng các chuẩn mạng để truyền thông,chương trình điều khiển được thiết kế quy mô hơn,….
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 6 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
PLC hiện nay có một số hãng sau : Siemens, Omron, Mitshubishi, Allend Bradley,….Trong mỗi hãng lại có nhiều loại PLC khác nhau phù hợp với từng yêu cầu phức tạpcủa hệ thống điều khiển. Phần mềm lập tr ình cho từng loại cũng có những điểm giốngnhau và khác nhau, sẽ được nói rõ trong từng phần.
Các thành phần trong hệ thống điều khiển có thể thay đổi, có thể có p hần này hoặckhông có phần kia. Hiện nay, các thành phần trong hệ thống đã được chuẩn hóa, vì thếta có thể thay thế tương đương từng thành phần của các công ty khác nhau m à vẫn duytrì hoạt động của hệ thống.
Cảm biến, thiết bị chấp hành, màn hình giao tiếp,… hiện nay được sản xuất bởi rấtnhiều các nhà sản xuất, mỗi nhà sản xuất có những ưu điểm khác nhau nhưng cácdòng sản phẩm vẫn có những chuẩn chung để các thiết bị có thể thay thế giữa các sảnphẩm của các công ty khác nhau cho nhau.
Yêu cầu thiết kế ngôn ngữ lập trình :Việc thiết kế ngôn ngữ lập tr ình được định hướng bởi yêu cầu của người sử dụng vàkhả năng thiết kế của người thiết kế. Người thiết kế phải có khả năng phân tích y êucầu của người sử dụng, sử dụng các loại thiết bị hỗ trợ m à người thiết kế biết, nhữngthiết bị có sẳn theo chuẩn để lắp ghép nó phục vụ cho mục đích điều khiển của ng ườithiết kế. Những thiết bị này thường được cập nhật thường xuyên và được tư vấn bởinhà sản xuất, các công ty tư vấn.
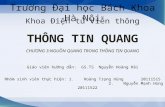
Để dễ dàng cho việc thiết kế hệ thống, người ta phân tích vấn đề điều khiển th ành sơđồ hình cây sau :
Control : Vấn đề điều khiển.Continuous : Vấn đề điều khiển mang tính liên tục.Logical : Vấn đề điều khiển mang tính logic.
Những tín hiệu điều khiển mang tính liên tục (Continuous) bao gồm tín hiệu tuyếntính (Linear) và tín hiệu phi tuyến (Non_Linear). Đối với tín hiệu tuyến tính ta sửdụng những công cụ như PID. Đối với tín hiệu phi tuyến (non_linear), người ta sửdụng những công cụ như MRAC hay Fuzzy Logic.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 7 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Những tín hiệu mang tính logic có thể chia làm tín hiệu có điều kiện tổ hợp(Conditional) và tín hiệu mang tính tuần tự (Sequential). Đối với loại điều kiện tổhợp, ta sử dụng các công cụ như phép toán Boolean, Expert Systems . Đối với tínhiệu loại tuần tự, ta dựa trên việc sử dụng các sự kiện kết hợp với trạng thái trướcđó của hệ thống.
Những phân tích của hệ thống mang tính t ương đối rất lớn, chủ yếu phụ thuộc v ào chủquan người thiết kế và khả năng của người thiết kế. Người học cần đọc nhiều để t ìm ramột cách tối ưu nhất cho mình.
HỆ THỐNG ĐIỀU KHIỂN THEO QUY TR ÌNHChọn một bộ điều khiển phù hợp cho một thiết bị hay một quy tr ình bao gồm tính toánkhông chỉ cần hiện tại bao nhiêu mà phải tính toán được sự cần thiết ở tương lai. Nếuhiện tại và tương lai không được đưa vào tính toán, hệ thống điều khiển có thể nhanhchóng trở nên không phù hợp và lỗi thời.Giữ những ý định về tương lai khi chọn thiết bị điều khiển sẽ giảm thiểu đ ược giá tiềncủa sự thay đổi và mở rộng hệ thống. Ví dụ, với việc l ên kế hoạch phù hợp, việc mởrộng những thiết bị ngoại biên có thể dễ dàng kết nối với thiết bị thông qua cổngtruyền thông. Một mạng cục bộ có thể dễ d àng tích hợp nếu bộ điều khiển có chứcnăng truyền thông mờ rộng.
Mỗi khi ứng dụng điều khiển cơ bản được thiết kế, người dùng phải bắt đầu tính toánnhững yêu cầu của bộ điều khiển, bao gồm :
Ngõ vào/ra Loại điều khiển. Bộ nhớ. Phần mềm. Truyền thông. Cấu trúc vật lý và môi trường.
ĐỀ CẬP ĐẾN NGÕ VÀO/RAXác định số lượng I/O cần thiết cơ bản ở bước đầu tiên chọn bộ điều khiển. Mỗi khisự quyết định được đưa ra cho việc tự động hóa một thiết bị hay một quy tr ình, việcxác định số I/O chỉ đơn giản là số lượng thiết bị số và thiết bị analog mà được giámsát hay điều khiển. Số lượng này sẽ giúp ta xác định được kích thước nhỏ nhất phùhợp cho bộ điều khiển. Nhớ rằng bộ điều khiển phải cho phép mở rộng v à dự phòngtrong tương lai (thường từ 10 đến 20%), mặc dù việc dự phòng không ảnh hưởng đếnviệc chọn kích thước PLC.
NGÕ VÀO/RA SỐ.Giao tiếp ngõ vào/ra số với khoảng hoạt động chuẩn ph ù hợp để nhận được tín hiệu từcảm biến và chuyển mạch (chẳng hạn như nút nhấn, công tắc hành trình,…), cũng nhưnhững thiết bị điều khiển ON/OFF (chẳng hạn nh ư đèn tín hiệu, chuông, bộ khởi độngđộng cơ,…). Nếu những thiết bị ngõ vào/ra này nhận nguồn từ những nguồn khácnhau, thì mạch giao tiếp số phải được cách ly với nhau. Thiết bị ng õ vào ra số nằmtrong khoảng từ 24 đến 240V, và khoảng điện áp chuẩn ở ngõ ra DC nằm trongkhoảng từ 5 đến 240V.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 8 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mạch ngõ vào đối với từng nhà sản xuất có đôi chút khác nhau. Tuy nhiên, đặc trưngcủa những mạch hoàn toàn giống nhau, là bảo vệ mạch chống lại những tín hiệu lỗi,bảo vệ qua áp, quá dòng thường xảy ra trong các mạch. Một loại mạch ng õ vào kháccó chất lượng là bộ cách ly quang hay biến áp cách ly giữa ng õ vào công suất cao vàmạch giao tiếp điều khiển logic ở phía b ên trong.
Khi tính toán ngõ ra số, những đặc trưng sau quan trọng : cầu chì, bảo vệ quá áp, cáchly giữa phần công suất và mạch logic bên trong. Mạch cầu chì tốn nhiều ban đầu,nhưng khi bổ sung chúng không tốn kém nhiều, vì thế khi thay thế cầu ch ì không cầntắt nhiều thiết bị trong một khoảng thời gian. Ngo ài ra, mạch cầu chì phải hoạt độngđúng, tức là khi dòng vượt quá dòng định mức hoặc nhiệt độ hoạt động v ượt quá nhiệtđộ cho phép (thường là 60F) vừa vặn với ứng dụng bảo vệ thiết bị.
NGÕ VÀO/RA ANALOG.Ngõ vào/ra analog giao tiếp với tín hiệu chuẩn được bộ chuyển đổi. Những mạch giaotiếp này đo giá trị thực tế, chẳng hạn như lưu lượng, nhiệt độ và áp suất, và được dùngđể điều khiển thiết bị ở ngõ ra bằng áp hay dòng thay đổi. Những khoảng giao tiếpthiết bị này bao gồm : -10 đến +10, 0 đến +10, 4 đến 20mA, v à 10 đến 50mA.Một vài nhà sản xuất cung cấp mạch giao tiếp tín hiệu analog đặc biệt cho phép nhậnnhững tín hiệu có mức tín hiệu thấp (chẳng hạn như RTD, thermocouple), tiêu bi ểu,những module giao tiếp này chấp nhận một sự khác nhau giữa cặp ngẫu nhiệt v à điệntrở nhiệt trên cùng một module. Người dùng phải liên hệ với nhà cung cấp để biếtnhững thông số kỹ thuật mà quan tâm.
NHỮNG MODULE CHỨC NĂNG NGÕ VÀO/RA ĐẶC BIỆT.Một vài ứng dụng cần những ngõ vào/ra đặc biệt (chẳng hạn như định vị, ngõ vào/ratốc độ nhanh, tần số,..) mà không thể có được ở những module có ngõ vào ra chuẩn.Những module I/O có chức năng đặc biệt v à những module thông minh, một loạimạch giao tiếp đặc biệt có thể thực hiện những tác nhiệm n ày. Tiêu biểu, những mạchgiao tiếp này thực hiện tất cả những trường dữ liệu này trong chính module, bằng cáchđó hỗ trợ CPU thực hiện bổ sung chức năng của nó. Ví dụ, mạch PID, định vị 3 trục,module động cơ bước là những module ngõ vào/ra có chức năng đặc biệt hỗ trợ choviệc điều khiển dễ dàng hơn. Những loại module này giảm thời gian lập trình và thiếtlập chúng.
NGÕ VÀO/RA ĐƯỢC ĐIỀU KHIỂN TỪ XA.Module ngõ vào ra điều khiển từ xa tiện lợi, mang lại hiệu quả cho những thiết bị điềukhiển quy trình, đặc biệt trong những hệ thống lớn. Những hệ thống con I/O điềukhiển từ xa, được đặt ở xa CPU và được kết nối với CPU bằng cáp xoắn hai dây, cóthể làm giảm chi phí kết nối, cả từ trong tr ong nhân công cũng như thiết bị. Ưu điểmkhác của hệ thống con I/O điều khiển từ xa l à ngõ vào và ngõ ra có thể nhóm lại theomục đích để điều khiển những thiết bị ri êng lẽ hay từng phần của một thiết bị hay củamột quy trình. Việc nhóm lại này làm cho việc bảo dưỡng và cho phép khởi động hệthống mà không gây ảnh hưởng đến toàn thể hệ thống.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 9 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Hầu hết các bộ điều khiển có những I/O điều khiển từ xa, có I/O điều khiển từ xa số.Tuy nhiên, người dùng cần những I/O điều khiển từ xa Analog phải kiểm tra xemnhững chức năng ấy có trong sản phẩm đ ã được đề cập đến không.Mạng I/O dùng bus.Mạng I/O dùng bus, bao gồm cả mạng thiết bị và những bus mạng điều khiển, phảiđược đề cập đến trong những ứng dụng cần điều khiển phân tán trong hệ thống PLC.Mạng I/O dùng bus cung cấp một một cấu trúc mạng cho phép kết nối trực tiếp từ mộttrường thiết bị vào mạng bus, vì thế làm giảm việc kết nối mạng. Tương tự như vậy,mạng giúp PLC nhận tín hiệu trực tiếp từ thông tin tr ường thiết bị I/O về những trạngthái của thiết bị. Tuy nhiên, những trường thiết bị I/O của hệ thống phải đ ược so sánhvới Mạng I/O dùng bus để có những ưu điểm của những chức năng truyền thông.
CẤU TẠO HỆ THỐNG ĐIỀU KHIỂN.Với sự trông đợi những PLC mới, thông minh h ơn, sự quyết định về loại điều khiểntrở nên là một vấn đề rất quan trọng được đề cập.Những câu hỏi như, loại điều khiển nào tôi phải dùng? Hiện nay được hỏi thườngxuyên khi tự động hóa quá tr ình. Sự hiểu biết về quá tr ình ứng dụng và chức năng tựđộng hóa mong muốn sẽ giúp cho ng ười dùng quyết định loại bộ điều khiển PLC n àođược sử dụng. Cấu hình điều khiển phù hợp bao gồm điều khiển riêng lẽ, điều khiểntập trung và điều khiển phân tán. H ình dưới minh họa những cấu hình này.
ĐIỀU KHIỂN ĐỘC LẬP .Điều khiển riêng lẽ, hay điều khiển độc lập, được dùng khi một PLC điều khiển mộtthiết bị với chi những ngõ I/O cục bộ hay với những I/O cục bộ v à một vài I/O điềukhiển từ xa. Loại điều khiển này không yêu cầu thông tin bình thường với bất kì bộđiều khiển nào khác hay máy tính. Điều khiển độc lập được ứng dụng căn bản vớiOEM và những thiết bị đầu cuối, chẳng hạn nh ư thiết bị phun thuốc, những máy công

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 10 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
cụ nhỏ, và những quy trình chuyên dụng xử lý theo khối, nhỏ. Khi xác định dựa tr ênphương pháp này, người dùng phải đề cập đến việc truyền thông cần thiết ở tương lai.Nếu như thế, người dùng có thể chọn bộ điều khiển thích hợp cho thiết lập ban đầu đểngăn ngừa hao phí trong thiết kế sau n ày.
ĐIỀU KHIỂN TẬP TRUNG .Điều khiển tập trung được sử dụng khi một PLC điều khiển một v ài thiết bị hay nhiềuquy trình. Loại điều khiển này có thể có nhiều hệ thống con trãi rộng khắp công ty.Mỗi những hệ thống con này có thể giao tiếp với những thiết bị I/O ri êng biệt mà cóthể hoặc không thể liên quan với nhau trong cùng một điều khiển. Bộ điều khiển tậptrung chỉ truyền thông với hệ thống con của nó v à/hoặc những thiết bị ngoại vi; nókhông truyền dữ liệu đến những PLC khác.Những ưu điểm về khả năng và linh hoạt của một ứng dụng điều khiển trung tâm t ùythuộc vào PLC được dùng và triết lý sống của những người thiết kế hệ thống. Ví dụ,điều khiển tập trung có thể được thực thi rất lớn, điều khiển ri êng lẽ của một quy trìnhlớn hay vấn đề điều khiển được tập trung bởi một số những quy tr ình nhỏ, độ phức tạpcao.Một trong những nhược điểm khác của điều khiển tập trung là nếu PLC chính bị lỗi,toàn bộ hệ thống sẽ dừng. Những hệ thống bổ sung có thể đ ược dùng đến để khắcphục vấn đề này trong những điều khiển tập trung, quyết định v à lớn mà cần phải saolưu. Một vài nhà sản xuất hỗ trợ chức năng bổ sung n ày.
ĐIỀU KHIỂN PHÂN TÁN .Cần có một vài PLC chính truyền thông với những PLC khác l à hình ảnh của điềukhiển phân tán. Loại điều khiển n ày sử dụng mạng truyền thông cục bộ (LAN), chophép một vài PLC để điều khiển những trạng thái hay những quy tr ình có tính cục bộtrong môi trường thông tin nội bộ về quy tr ình ở một tốc độ không thay đổi. Truyềnthông giữa các PLC được thực hiện ở tốc độ cao (tr ên 1megabaud) sử dụng cáp đồngtrục hay cáp quang.Mặc dù cấu hình lớn này, truyền thông giữa những hệ thống mạng L AN của các côngty lớn khác nhau có thể khác nhau. V ì thế, người dùng phải xác định những chức năngcủa ứng dụng cần ngay từ khi bắt đầu.
BỘ NHỚ CỦA PLC.Hai thông số chính được đề cập đến khi chọn bộ nhớ l à loại và dung lượng bộ nhớ.Một ứng dụng có thể cần hai loại bộ nhớ là : bộ nhớ không linh động và bộ nhớ linhđộng với một pin duy tr ì. Một bộ nhớ không linh động, chẳng hạn nh ư EPROM có thểcung cấp một nơi lưu trữ chắc chắn, lâu dài mỗi khi chương trình được tạo và gỡ rối.Nếu ứng dụng cần thay đổi khi hoạt động, nó phải được lưu trữ bộ nhớ có thể ghi/đọcđược được hỗ trợ bởi một nguồn pin. Một v ài bộ điều khiển hỗ trợ tất cả những chứcnăng này, mà có thể được dùng riêng lẽ hoặc hoạt động kết hợp với nhau.Một PLC nhỏ thường có một bộ nhớ không thể t hay đổi (không thể mở rộng) với dunglượng khoảng 1/2K đến 2k word. V ì thế, dung lượng bộ nhớ không là phần quan tâmchính khi chọn một bộ điều khiển nhỏ. Đối với bộ điều khiển trung b ình và lớn, việcmở rộng bộ nhớ có thể tăng theo từng đ ơn vị như 1K, aK, 4K,… Mặc dù không cómột luật lệ cụ thể nào để xác định dung lượng bộ nhớ cần dùng, tuy nhiên tài liệuhướng dẫn có thể cung cấp một sự ước lượng về dung lượng bộ nhớ cần dùng cho ứngdụng.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 11 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Dung lượng của bộ nhớ cần cho một ứng dụng đ ược cho là một hàm của tổng số ngõvào ra được điều khiển và độ phức tạp của chương trình điều khiển. Độ phức tạp củachương trình diều khiển đề cập đến số và loại các hành toàn học và hàm xử lý dữ liệumà PLC thực hiện. Đối với mỗi sản phẩm của từng công ty, họ có một luật để giúptính chính xác dung lượng bộ nhớ cần dùng. Công thức này bao gồm việc nhân tổngsố lượng I/O với một hằng số (th ường là một số giữa 3 và 8). Nếu chương trình baogồm việc tính toán và xử lý dữ liệu, bộ nhớ chính xác phải đ ược tăng từ 25 đến 50%.Mặc dù công thức tính bộ nhớ thực hiện việc tính toán bộ nhớ cần d ùng, tuy nhiêncách tốt nhất để có được bộ nhớ là tạo chương trình và đếm số dung lượng cần dùng.Sự hiểu biết về dung lượng bộ nhớ words cần dùng cần thiết để lưu trữ mỗi lệnh sẽcho phép người dùng xác định chính xác dung lượng bộ nhớ cần dùng.
PHẦN MỀM.Khi hệ thống vận hành, người sử dụng phải lập tr ình PLC. Do chương trình quá quantrọng, người dùng phải có kiến thức về khả năng của phần mềm của sản phẩm họchọn. Nói chung, khả năng phần mề m của một hệ thống thích hợp để điều khiển phầncứng của hệ thống đi cùng với bộ điều khiển. Tuy nhiên, một vài ứng dụng cần nhữngchức năng phần mềm đặc biệt v ượt ngoài khả năng của phần cứng. Thí dụ, một ứngdụng có thể bao gồm những hàm điều khiển đặc biệt hay hàm xử lý dữ liệu cần thiếtcho tính toán những số phức tạp xử lý dữ liệu phức tạp.Tập lệnh được chọn với việc xác định việc không r àng buộc với những việc màchương trình ứng dụng được thực hiện. Nó đồng thời ảnh h ưởng trực tiếp đến thờigian cần thiết để thực thi chương trình điều khiển.
THIẾT BỊ NGOẠI VIThiết bị lập trình là một thiết bị ngoại vi quan trọng trong một hệ thống PLC. Nó l àmột trong những thành phần quan trọng bởi nó cung cấp tất cả những khả năng cầnthiết để đưa chính xác và dễ dàng chương trình điều khiển và hệ thống. Hai loại thiếtbị lập trình thông dụng nhất là thiết bị lập trình bằng tay và máy tính. Thiết bị lập trìnhbằng ta thì nhỏ và có giá thấp được sử dụng phần lớn cho những ch ương trình điềukhiển nhỏ trong PLC nhỏ. Số thông tin có thể hiển thị tr ên một thiết bị lập trình bằngtay thường là một chương trình đơn hay trong một vài trường hợp chỉ là một dòngchương trình.Máy tính cá nhân cung cấp một cách tốt nhất để lập tr ình một hệ thống nếu chươngtrình điều khiển lớn. Nhiều nhà sản xuất PLC cung cấp phần mềm cho phép PLC củahọ được lập trình dùng một PC chuẩn. Tuy nhiên, những mạch mở rộng hau nhữngcáp giao tiếp đặc biệt được dùng để liên kết máy tính với PLC. Việc dùng một PC nhưmột thiết bị lập trình trở nên thuận lợi hơn khi chương trình ta dùng cùng một chươngtrình cho nhiều loại PLC ở cùng một loại PLC hay nhiều loại PLC khác nhau trong họ.Máy tính xách tay được lập trình với chương trình và tài liệu phần mềm cung cấpkhông chỉ khả năng lập trình linh hoạt bởi sự thoải mái của việc lập tr ình máy tính sovới sự gò bó của thiết bị lập trình bằng tay.Mở rộng đối với thiết bị lập tr ình, một hệ thống có thể cần những loại thiết bị ngoại vikhác nhau đối với từng trạm để cung cấp một giao tiếp giữa bộ điều khiển và ngườidùng. Thiết bị giao tiếp ngoại vi thông dụng nhất l à cáp máy in, được dùng để copychương trình và gởi và nhận thông tin từ quy tr ình đang hoạt động. Những cổng ngoạivi khác bao gồm hiển thị màu và kí tự được dùng để gởi tin nhắn và báo hiệu về quytrình cũng như đĩa mềm có thể dùng để lưu báo cáo sản phẩm hàng giờ hay lưu hàng
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 12 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
tháng lên đĩa mềm. Nếu một máy tính đ ược dùng như một giao tiếp màu với một hệthống PLC, cả hai hệ thống phải t ương hợp driver DDE (truyền thông dữ liệu tĩnh) đểcó thể giao tiếp với cổng truyền thông.Cổng truyền thông cần thiết phải đ ược tính toán phù hợp với CPU, bởi CPU sẽ xácđịnh loại và số cổng giao tiếp có thể giao tiếp với hệ thống. CPU đồng thời ảnh h ưởngđến phương pháp giao tiếp cũng như khoảng cách đến thiết bị ngoại vi.
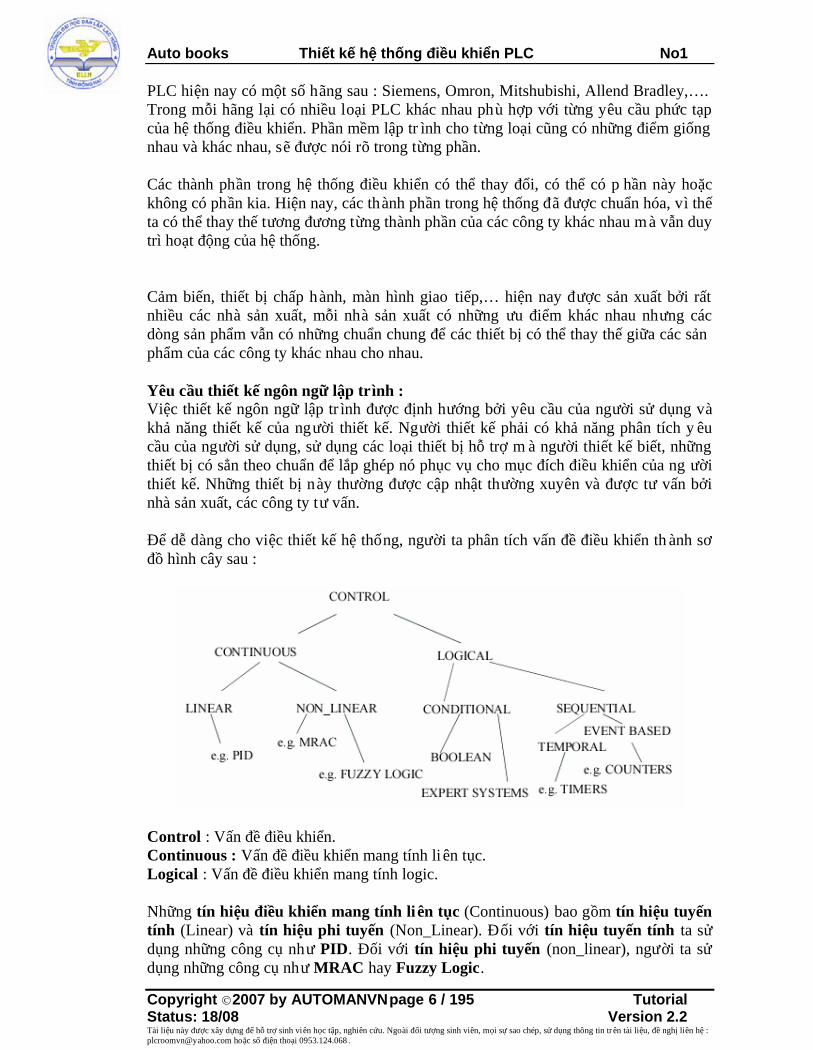
ĐẶC TRƯNG VẬT LÝ VÀ MÔI TRƯỜNGĐặc trưng môi trường và vật lý của những thành phần điều khiển khác nhau sẽ tácđộng đáng kể đến sự tin cậy, việc bảo d ưỡng của toàn thể hệ thống. Điều kiện xungquanh, chẳng hạn như nhiệt độ, độ ẩm, mức độ bụi, sự ăn mòn có thể ảnh hưởng đếnkhả năng các thuộc tính của bộ điều khiển. Ng ười dùng phải xác dinh điều kiện hoạtđộng (chẳng hạn như nhiệt độ, độ rung, EMI/RFI,…) v à yêu cầu đóng gói (chẳng hạnnhư : khả năng kháng bụi, khả năng kháng n ước, loại kết nối,…) trước khi chọn bộđiều khiển và hệ thống I/O của nó. Hầu hết nh à sản xuất các bộ điều khiển cung cấpsản phẩm phải trải qua một quá trịnh kiểm tra sản phẩm trong môi tr ường thực tế(chẳng hạn như nhiệt độ, EMI/RFI, rung động,….). Ng ười dùng phải có kiến thức vềviệc thực hiện kiểm tra và so sánh với môi trường hoạt động dự định trang bị hệthống.Bảng 21-6 cung cấp một danh sách các khả năng ng ười dùng phải kiểm tra khi tínhtoán sử dụng PLC. Bảng sau đồng thời cung các thông số kỹ thuật c ơ bản đối với cáckhả năng này. Chú ý rằng danh sách liệt kê toàn thể các khoảng sản phẩm, từ loại nhỏđến loại to nhất. V ì thế, một vài loại PLC có thể không có những khả năng n ày tùythuộc vào khoảng đặc trưng của chúng.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 13 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 14 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 15 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 16 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 17 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
NHỮNG YÊU CẦU KHÁC.Một sự ước lượng của sự thảo luận về nhu cầu phần cứng v à phần mềm với giới hạnviệc chọn PLC xuống còn một vài loại phù hợp với yêu cầu. Nhiều khả năng, hai haynhiều sản phẩm sẽ có những yêu cầu của hệ thống chuẩn bị thiết kế, nghĩa rằng sựquyết định cuối cùng vẫn còn bỏ ngõ. Với lý do này, người dùng phải tính toán thêm

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 18 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
một vài hệ số mà có thể lựa chọn ra sản phẩm phù hợp nhất với các yêu cầu và cácthông số kỹ thuật của hệ thống. Người dùng phải thảo luận những hệ số này với ngườicung cấp sản phẩm.
ĐỘ TIN CẬY SẢN PHẨM ĐÃ ĐƯỢC KIỂM CHỨNG.Độ tin cậy của bộ điều khiển đóng một vai tr ò quan trọng trong toàn thể hoạt động củahệ thống. Sự thiếu tin cậy thường làm giảm thời gian sử dụng, chất lượng sản phẩm vàlàm tăng mức độ hư hỏng của sản phẩm. Người dùng có thể kiểm chứng một vài hệ sốđể xác định độ tin cậy của việc kiểm chứng của một sản phẩm ri êng biệt. Nhữngnghiên cứu thời gian trung b ình giữa các lần lỗi – Mean time between failures(MTBF) có thể có ích nếu người dùng biết cách xử lý dữ liệu đó. Những nghiên cứunày cung cấp thông tin về thời gian trung b ình giữa những sự cố thiết bị và bao lâuthiết bị bị lỗi một lần. Sự hiểu biết về mức độ hoạt động tin cậy của sản phẩm trongmột hệ thống tương đương cũng làm một thông tin bổ ích.Bộ phận bán hàng có thể cung cấp thông tin này và thậm chí nếu có điều kiện còn liệtkê những điểm trùng hợp. Hơn nữa, người dùng phải chắc chắn rằng người bán hàngcó thể đưa ra những bằng chứng xác thực hay các thông số kỹ thuật khác (chẳng hạnEMI và yêu cầu về sự rung động). Cuối cùng, người dùng phải nghiên cứu cẩn thậnviệc thử nóng đối với thiết bị (chẳng hạn việc thử nóng to àn phần và thử nóng bánphần hệ thống)Quá trình thử nóng cung cấp hoạt động của sản phẩm tại một nhiệt độ để giả lập hoạtđộng nhằm kiểm chững hoạt động của board mạch điện tử xem có lỗi không. Nếu mộtphần nào đó trải qua cuộc thử nghiệm này, nó sẽ có khả năng hoạt động tốt không lỗi.Thường, người bán hàng có thể cung cấp MTBF và thông tin thử nghiệm nếu có yêucầu.
TIÊU CHUẨN HÓA THIẾT BỊ PLC .Vấn đề cuối cùng cần đề cập đến khi có quyết định cuối c ùng về một PLC là khả năngdự kiến tương lai để chuẩn hóa các cơ cấu, đó là chỉ dùng chỉ một sản phẩm từ mộtnhà máy định trước và dòng sản phẩm. Nhiều công ty đang chấp nhận thực tiển n ày.Nhiều nhà cung cấp tạo những họ các sản phẩm PLC ho àn chỉnh bao gồm toàn bộnhững khoảng khả năng, để việc thực hiện ti êu chuẩn hóa tốt hơn. Một phương hướngkhác được cung cấp bởi những nhà sản xuất để xây dựng những họ sản phẩm t ươnghợp với nhũng họ sản phẩm từ loại PLC nhỏ nhất đến loại PLC lớn nhất. Những họnày chia sẽ cùng một cấu trúc I/O, thiết bị lập tr ình bà tập lệnh cơ bản. Chúng đồngthời có cùng một tổ chức và cấu trúc bộ nhớ. Bởi sự giống nhau của chúng, những họsản phẩm này có thể liên kết với nháu trong một cấu hình mạng. Những họ PLC đồngthời cung cấp những lợi ích quan trọng sau :Việc đào tạo trên một họ PLC thành viên mới là một chuỗi những hiểu biết hiện tại,đúng hơn là hơn sự phát triển một tập các lệnh mới.Những sản phẩm được chuẩn hóa có thể tạo ra sự bảo dưỡng hệ thống tốt hơn trongtrường hợp khẩn cấp.Những I/O dự phòng có thể được dùng cho tất cả những sản phẩm trong cùng một họ,điều này làm ít hao tốn không gian sản xuất.Một sản phẩm phát triển nhanh h ơn có thể được thay thế bằng một sản phẩm khác lớnhơn bằng cách đơn giản bỏ CPU nhỏ hơn, lắp đặt CPU lớn hơn và nạp lại chươngtrình cũ.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 19 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mạch điều khiển bằng Relay .
Mạch điều khiển sử dụng trong PLC

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 20 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 21 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Quan sát từng nhóm riêng biệt
Các khái niệm khác :
Các kí hiệu thường dùng trong PLC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 22 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Dữ liệu từ ngõ vào được ánh xạ vào thanh ghi xử lý ảnh ngõ vào tương ứng bên trong.Bằng cách này, ta đưa được tín hiệu tác động ở cảm biến v ào ngõ vào thiết bị.Dữ liệu từ thanh ghi xử lý ảnh ở ng õ ra được ánh xạ ra ngõ ra. Bằng cách này ta có thểxuất tín hiệu điều khiển cho các thiết bị logic hoặc analog.
I.2. Một số các chuẩn sử dụng trong PLC[]I.3. Dữ liệu sử dụng trong PLC.[]Dữ liệu trong ngôn ngữ PLC được phân loại và thiết kế dưới các dạng : Boolean, byte,word, doubleword, string, constant, integer, real…

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 23 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Hệ thống số sử dụng trong PLC :Số thập phân : Hai vấn đề cần quan tâm là vị trí và trọng số.
Vị trí số.
Trọng số.Giá trị của một số thập phân được phân tích như dưới đây :
Tổng quan, ta có :
Số nhị phân (Binary number)Vị trí số tương ứng :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 24 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Thành phần nhỏ nhất : bit.Nhóm 4 bit : nibble.Nhóm 8 bit : byte.Nhóm là bội số của 8 bit : word.
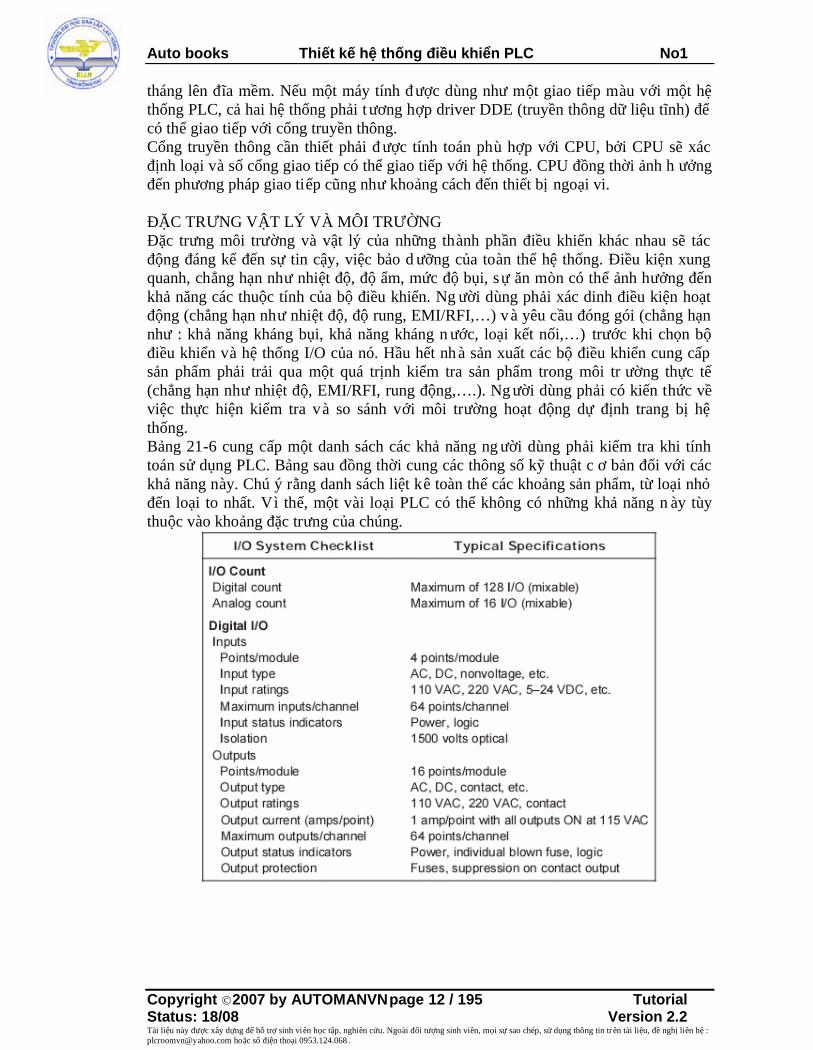
Số bát phân (octal decimal)
Trong số nhị phân là nhóm 3 bit :
Bảng chuyển đổi :
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 25 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
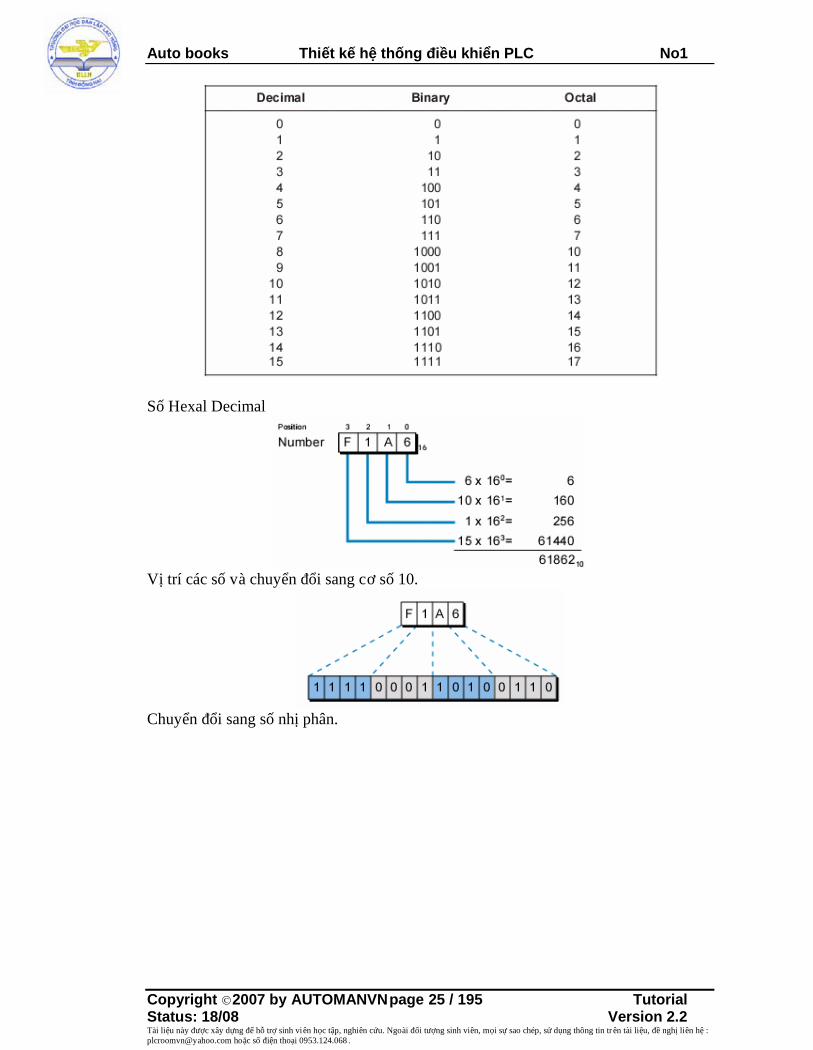
Số Hexal Decimal
Vị trí các số và chuyển đổi sang cơ số 10.
Chuyển đổi sang số nhị phân.
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 26 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
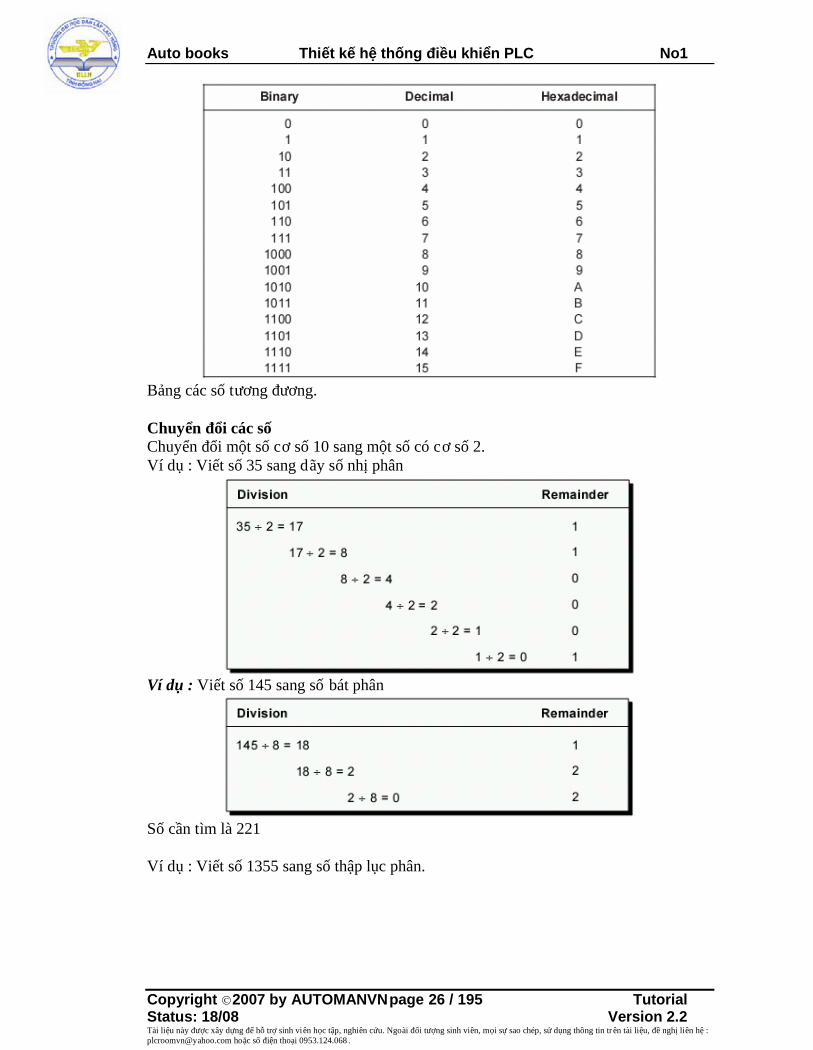
Bảng các số tương đương.
Chuyển đổi các sốChuyển đổi một số cơ số 10 sang một số có cơ số 2.Ví dụ : Viết số 35 sang dãy số nhị phân
Ví dụ : Viết số 145 sang số bát phân
Số cần tìm là 221
Ví dụ : Viết số 1355 sang số thập lục phân.
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 27 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
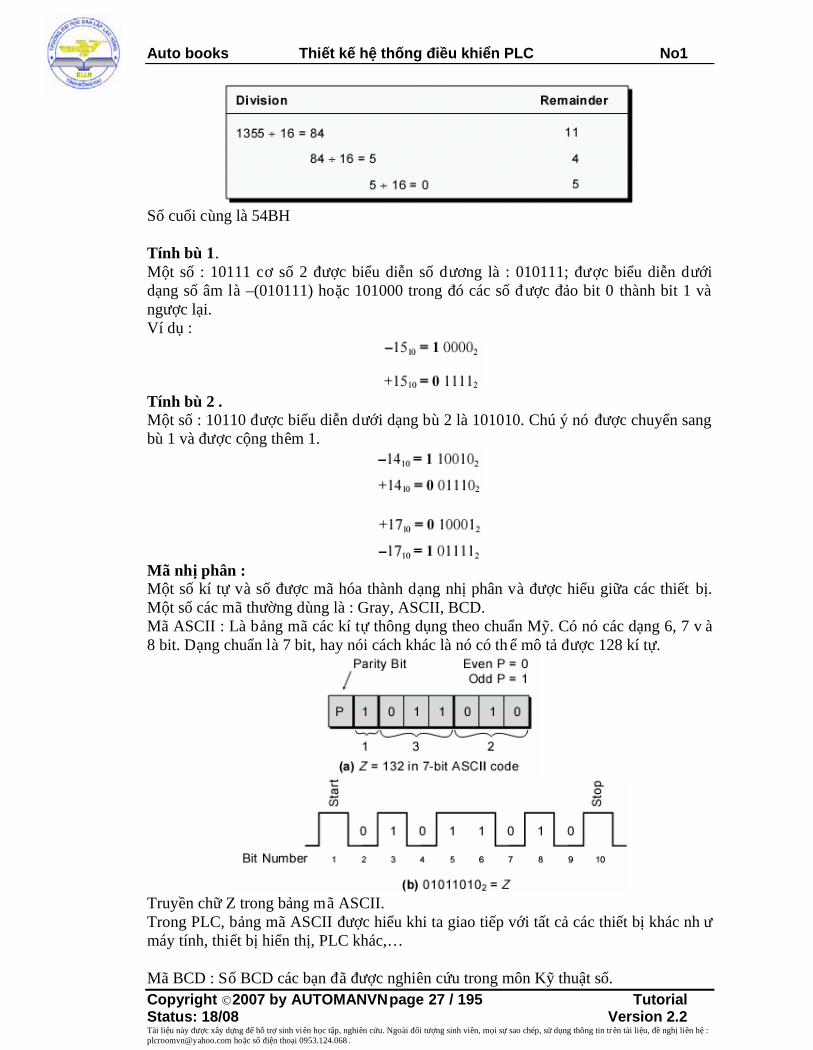
Số cuối cùng là 54BH
Tính bù 1.Một số : 10111 cơ số 2 được biểu diễn số dương là : 010111; được biểu diễn dướidạng số âm là –(010111) hoặc 101000 trong đó các số đ ược đảo bit 0 thành bit 1 vàngược lại.Ví dụ :
Tính bù 2 .Một số : 10110 được biểu diễn dưới dạng bù 2 là 101010. Chú ý nó được chuyển sangbù 1 và được cộng thêm 1.
Mã nhị phân :Một số kí tự và số được mã hóa thành dạng nhị phân và được hiểu giữa các thiết bị.Một số các mã thường dùng là : Gray, ASCII, BCD.Mã ASCII : Là bảng mã các kí tự thông dụng theo chuẩn Mỹ. Có nó các dạng 6, 7 v à8 bit. Dạng chuẩn là 7 bit, hay nói cách khác là nó có th ể mô tả được 128 kí tự.
Truyền chữ Z trong bảng mã ASCII.Trong PLC, bảng mã ASCII được hiểu khi ta giao tiếp với tất cả các thiết bị khác nh ưmáy tính, thiết bị hiển thị, PLC khác,…
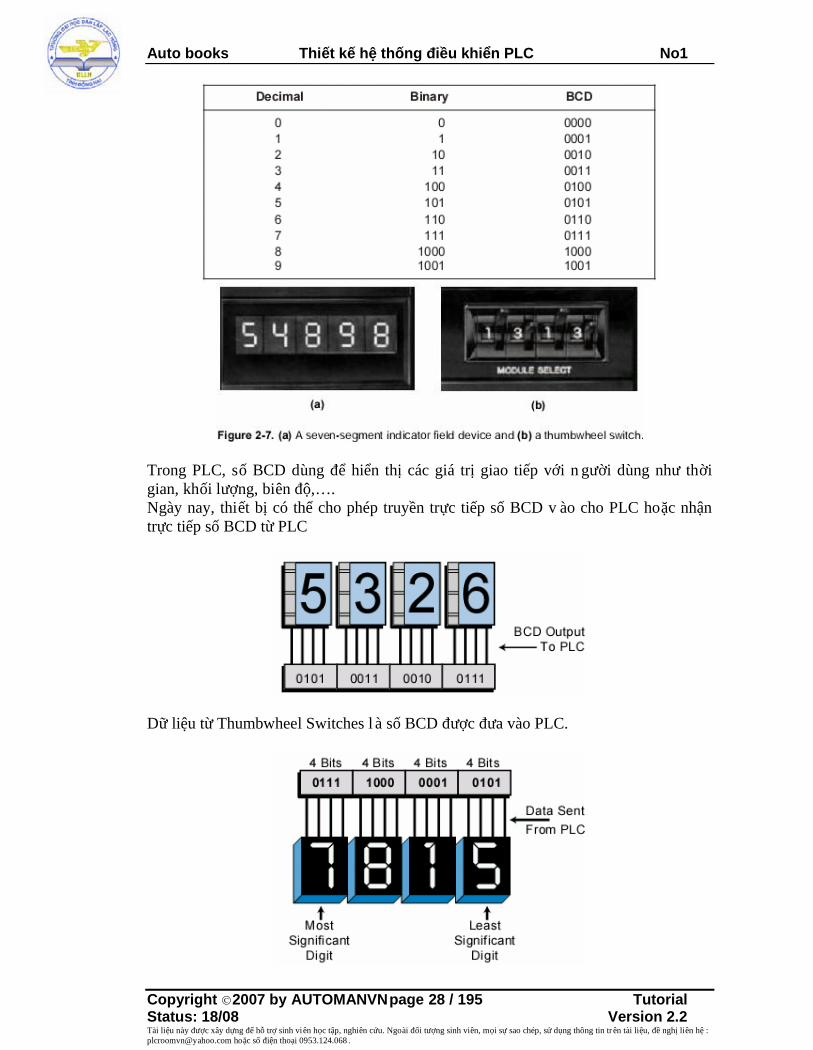
Mã BCD : Số BCD các bạn đã được nghiên cứu trong môn Kỹ thuật số.
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 28 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Trong PLC, số BCD dùng để hiển thị các giá trị giao tiếp với n gười dùng như thờigian, khối lượng, biên độ,….Ngày nay, thiết bị có thể cho phép truyền trực tiếp số BCD v ào cho PLC hoặc nhậntrực tiếp số BCD từ PLC
Dữ liệu từ Thumbwheel Switches l à số BCD được đưa vào PLC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 29 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Dữ liệu từ PLC được đưa ra thiết bị hiển thị số.
Mã Gray :PLC sẽ làm việc trực tiếp với việc xuất nhập, xử lý m ã Gray chẳng hạn thông qua việcnhận dữ liệu từ Encoder tuyệt đối. Việc nắm bắt đ ược nó giúp ta xử lý được giá trịnày.
Ta có thể nhận trực tiếp dữ liệu này bằng mã Gray hoặc thông qua bộ chuyển đổi từmã Gray sang số BCD.
I.4. Câu hỏi và bài tập.[]I.5. Tài liệu tham khảo []II. Phần cứng PLC và cách kết nối.[]II.1. Cảm biến và cách kết nối với PLC.[]Cảm biến theo quan điểm điều khiển là thiết bị chuyển tín hiệu vật lý nh ư quang,điện, cơ, nhiệt, áp suất,…. thành tín hiệu điện, đối với điều khiển PLC những tín hiệunày đã được chuẩn hóa.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 30 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Cảm biến có rất nhiều cách phân loại : theo tín hiệu ng õ vào, theo chức năng điềukhiển, theo tín hiệu ngõ ra,….. Ở đây, dưới quan điểm lập trình PLC là xử lý các tínhiệu ngõ vào của PLC nên cảm biến được trình bày theo quan điểm xem xét tín hiệungõ ra của cảm biến dựa trên phân loại ngõ vào.
Dễ dàng nhận thấy trong ứng dụng thực tế có hai khả năng xảy ra : Nếu ta chỉ cần xácđịnh việc có mặt hay không một tác nhân vật lý, tức là lúc này ta đang bàn đến mộtcảm biến có tín hiệu ngõ ra logic. Nếu ta cần xác định một sự biến thi ên về khoảngcách, khối lượng, nhiệt độ,… điều này có nghĩa là ta đang đề cập đến cảm biến có đạilượng điện biến thiên ở ngõ ra, hay nói cách khác là cảm biến có tín hiệu tương tự.Như vậy, dưới cái nhìn xử lý tín hiệu, tín hiệu ngõ ra của cảm biến bao gồm ba dạng :logic 1/0 (áp AC và DC), dạng thanh ghi dịch (áp DC) và analog (áp DC và dòng DC).
Để xử lý hai loại tín hiệu ngõ ra của cảm biến, ngõ vào PLC cũng được thiết kế tươngứng để thực hiện việc nhận tín hiệu, phục vụ cho mục đích điều khiển của thiết bị.Ứng với loại ngõ ra cảm biến dạng logic, ta có những mạch ng õ vào PLC dạng logic,ứng với ngõ ra cảm biến dạng tương tự ta cũng có ngõ vào PLC dạng tương tự. Việclắp đặt ngõ ra cảm biến và ngõ vào PLC cũng phải được chú ý đế việc truyền tín hiệuđảm bảo không bị mất tín hiệu, ngo ài ra còn đảm bảo không phá hủy mạch giao tiếpgiữa hai thiết bị.
Để tham khảo thêm về cảm biến, các bạn đọc thêm cuốn “Một số loại cảm biến côngnghiệp thường gặp và ứng dụng” của cùng tác giả.
Ở tài liệu này, cảm biến được đề cập đến dưới dạng quan tâm đến tín hiệu ng õ ra cungcấp cho cảm biến. Về góc độ n ày, ta dễ dàng thấy rằng cảm biến có các loại ngõ rathường gặp là logic và analog. Một số loại có ngõ ra khác, thường được mắc thêm bộchuyển đổi để chuyển các tín hiệu dạng khác đó về dạng số hoặc analog.
Các loại cảm biến thường được kết nối và cung cấp tín hiệu cho PLC qua việc kết nốithường hoặc qua việc kết nối mạng. Ở đây, ta thảo luận việc kết nối th ường, dạng kếtnối thông dụng nhất. Dạng kết nối qua mạng CAN, DeviceNet,….ta sẽ tham khảo ởtừng loại PLC.Sau đây, chúng ta thảo luận về tín hiệu và cấu trúc ngõ ra.
CẢM BIẾN CÓ NGÕ RA DẠNG LOGIC (LOGIC SENSOR)Dạng tín hiệu :Việc đóng mở ngõ ra của cảm biến logic tùy thuộc vào việc xuất hiện/không xuấthiện, đủ/không đủ, có/không, sáng/tối,…. ở đầu v ào cảm biến. Đây là những đốitượng mà theo định nghĩa có hình dạng như sau :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 31 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngõ ra cảm biến dạng logic :Đề cập đến ngõ ra cảm biến cấp tín hiệu dạng logic, ta thấy được thể hiện dưới cácdạng : ngõ ra cảm biến loại sử dụng điện áp AC hoặc sử dụng điện áp DC.
Loại được cấp nguồn và điều khiển điện áp AC, bao gồm các loại ng õ ra như sau :Triac, SCR, tiếp điểm bán dẫn và relay (tiếp điểm cơ khí).
Loại được cấp nguồn và điều khiển điện áp DC, bao gồm các loại ng õ ra như sau :Transistor (NPN, PNP), tiếp điểm bán dẫn, relay.
Dạng tiếp điểm, có thể điều khiển đóng mở khi có tín hiệu vật lý. Dạn g tiếpđiểm thường có hai loại : Thường đóng (NC) và thường hở (NO). Dạng này sửdụng cho cả điện áp AC (120 -240VAC) hoặc điện áp DC (24VC/12VDC).
Cảm biến logic có hai dây :
Điện áp cung cấp cho cảm biến n ày tùy theo loại cảm biến có thể là DC hoặcAC. Tùy theo việc ta có loại PLC có ngõ vào như thế nào để tìm loại cảm biếncho phù hợp.
Việc lắp đặt từng loại cảm biến cần tham khảo ở t ài liệu đi kèm từng cảm biến.Trừ những người làm việc lâu năm, những người mới học phải nghiên cứu kỹcách lắp đặt cảm biến trước khi lắp đặt chúng vào hệ thống để tránh những sai,hư không đáng xảy ra.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 32 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Các tiếp điểm hai dây :Dạng transistor, sử dụng cho tải DC 2 -wire.
Dạng SCR, sử dụng cho tải AC 2 -wire.
Dạng NPN và PNP (được gọi trên quan điểm người hay sử dụng Transistor)hay còn gọi là dạng mắc kiểu sink hay kiểu source (một số ng ười khác sử dụngkhái niệm con thuận và con nghịch) . Loại có ngõ ra dạng này chỉ được sử dụngvới điện áp 24VDC.
Dạng Transistor, có 3 dây ngõ ra (dạng NPN, cực thu để hở): Dây nguồn (nâu -Brown), dây tải (đen - Black, một đầu tải nối lên nguồn, đầu còn lại nối vàongõ ra cảm biến) và dây đất (xanh - Blue).
Dạng Transistor, có 3 dây ngõ ra (dạng PNP): Dây nguồn (nâu - Brown), dâytải (đen - Black, một đầu tải nối xuống đất, đầu còn lại nối vào ngõ ra cảmbiến) và dây đất (nâu hoặc xanh - Blue).Dễ dàng phân biệt được cấu trúc ngõ ra qua việc lưu ý đến loại transistor ở ngõra.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 33 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Một số loại thiết bị cung cấp tín hiệu ng õ vào logic :Relay :Relay bảo vệ :Mục đích : Relay được sử dụng nhằm mục đích bảo vệ thiết bị quá tải, quá d òng. Cócác loại sau : Relay cường độ, relay điện thế, Relay nhiệt.
Realy tốc độ : Relay này lợi dụng lực ly tâm để đóng hay mở tiếp điểm nhằm ổn địnhtốc độ quay.
CẢM BIẾN CÓ TÍN HIỆU ĐIỆN NGÕ BIẾN THIÊN LIÊN TỤC.(Analog Sensors hoặc Continuous Sensors)
Khái niệm : Với những đại lượng vật lý thay đổi, nếu ta muốn sử dụng những đạilượng vật lý thay đổi ấy vào trong chương trình, ta dùng cảm biến biến đổi liên tục đểbiến đổi những đại lượng vật lý ấy thành một trong những thông số điện c ơ bản áphoặc dòng. Đại lượng điện này phải biến thiên trong một khoảng cho phép nào đó.
Ở đây ta chỉ bàn đến những cảm biến sử dụng trong công nghiệp đ ã được chuẩn hóangõ ra. Lúc này tín hiệu ngõ ra là tín hiệu điện áp DC hoặc tín hiệu dòng DC.
Một số loại cảm biến có ngõ ra analog thường gặp :Cảm biến nhiệt (Temperature Sensor):Cảm biến áp suất (Pressure Sensor) :Cảm biến lưu lượng (Flow Sensors).Cảm biến tốc độ (Speed Sensors).Cảm biến đo khối lượng (Loadcell).Cảm biến mức (Level Sensors)Cảm biến vị trí (Position Sensors)………Những loại cảm biến này các bạn nên tham khảo thêm ở bộ môn : Đo lường và cảmbiến trong công nghiệp.
Một số thông số của ngõ ra dạng analog thường gặp:

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 34 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Điện áp : Tín hiệu ngõ ra áp được thể hiện dưới hai dạng : đơn cực hoặc lưỡng cực.Những tín hiệu này tồn tại dưới các đại lượng sau.
Đơn cực : 0 to 10 V, 0 to 5 V, 0 to 1 V, 0 to 500 mV, 0 to 100 mV, 0 to 50 mV Lưỡng cực : ±10 V, ±5 V, ±2.5 V, ±1 V,±500 mV, ±250 mV, ±100 mV, ±50
mV, ±25 mV
Dòng : Tín hiệu ngõ ra dòng thường được thể hiện dưới các giá trị 4-20mA, 0–20mA.
II.2. Thiết bị chấp hành và cách kết nối với PLC.[]a. Khái quát :Thiết bị chấp hành (Actuator) : là thiết bị chuyển tín hiệu điện điều khiển th ành tínhiệu vật lý (các loại chuyển động, chuông k êu, ánh sáng,………….)
Dạng điều khiển của thiết bị chấp h ành có thể chia làm các dạng thông dụng sau :Điều khiển đóng mở logic dùng điện áp DC hoặc điện áp AC : Chẳng hạn như bậttắt đèn, bật tắt động cơ, chuyển đổi,….. Dạng điều khiển này cần ngõ ra dạng logic(AC/DC) kết nối trực tiếp (hoặc gián tiếp qua tầng khuếch đại công suất) để điềukhiển thiết bị.
Điều khiển bằng tần số : điều khiển định vị, điều khiển tốc độ (động c ơ bước, độngcơ servo). Tín hiệu điều khiển từ PLC là một chuỗi tần số. Loại điều khiển n ày cầnngõ ra dạng logic (Transistor), kết hợp với module chuyên dụng để điều khiển thiếtbị.
Điều khiển bằng giá trị analog : Điều khiển nhiệt độ, điều khiển tốc độ động c ơAC,…. Tín hiệu điều khiển từ PLC là tín hiệu analog dạng dòng hoặc dạng áp. Thôngqua module chuyên dụng để chuyển đổi thành tín hiệu điều khiển thiết bị.
Ứng với các loại điều khiển nh ư vậy, cấu trúc ngõ ra PLC cũng có dạng tương ứng, cụthể có ngõ ra dạng logic (AC/DC), ngõ ra dạng analog (dòng/áp) và một số modulengõ ra chuyên dụng khác, nhưng tín hiệu cũng được đưa về dạng logic hoặc analog.
Sau đây giới thiệu một số cơ cấu chấp hành và chức năng của nó. Nguyên lý hoạtđộng các bạn cần tham khảo ở t ài liệu Sensor and Actuator để b iết thêm chi tiết..
b. Relay điện từ (Khởi động từ):Mục đích : Điều khiển việc cấp điện cho cuộn dây, gián tiếp đóng mở tiếp điểm củacuộn dây dùng giao tiếp với phần công suất, đóng mở các tiếp điểm cấp nguồn hoặctín hiệu để điều khiển các thiết bị có công suất lớn hơn hay chỉ để cách ly thiết bị.Yêu cầu điều khiển : Điều khiển đóng/mở.Tín hiệu điều khiển : tín hiệu logic 1/0 mức áp (5VDC, 12VDC, 24VDC; 120AC,240VAC)
c. Relay trung gian :Mục đích : Giao tiếp công suất.Yêu cầu điều khiển : Đóng mở tiếp điểm.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 35 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Tín hiệu điều khiển : Tùy theo loại, tín hiệu logic 1/0 mức áp (5VDC, 12VDC,24VDC; 120AC, 240VAC)
d. Relay thời gian :Mục đích : Được sử dụng làm chậm việc đóng mở các tiếp điểm.Tín hiệu điều khiển : Tùy theo loại, tín hiệu logic 1/0 mức áp (5VDC, 12VDC,24VDC; 120AC, 240VAC)
e. Solenoid :Mục đích : Dùng cơ cấu lõi và cuộn dây để chuyển tín hiệu điện (logic) th ành chuyểnđộng thẳng.Yêu cầu điều khiển : Đóng mở.Tín hiệu điều khiển : Tùy theo loại, tín hiệu logic 1/0 mức áp (5VDC, 12VDC ,24VDC; 120AC, 240VAC)
Động cơ DCMục đích : Chuyển điện áp DC để chuyển th ành chuyển động quay. Tốc độ quay t ùytheo điện áp trung bình đặt vào cuộn dây.Yêu cầu điều khiển : Đảo chiều (thay đổi cực tính), thay đổi tốc độ động c ơ (thay đổiáp hoặc thay đổi tốc độ điều khiển).Tín hiệu điều khiển : Là chuỗi xung DC, trong đó độ rộng từng xung đ ược điều chỉnhđể thay đổi tốc độ động cơ.
Động cơ BRUSHLESS DC MOTORSMục đích : Chuyển tín hiệu điện thành chuyển động quay.Yêu cầu điểu khiển : Định vị, quay thuận nghịch, đảo chiều.Tín hiệu điều khiển : Tín hiệu điều khiển là một chuỗi xung DC.
Động cơ bước (STEP MOTOR) :Mục đích : Điều khiển các loại động cơ bước.Yêu cầu điều khiển : Định vị, quay thuận nghịch sử dụng driver.Tín hiệu điều khiển : Sử dụng phương pháp lập trình xuất một chuỗi xung từ ngõ ralogic dạng DC.
Động cơ Servo (Servo motor)Mục đích : Điều khiển các loại động cơ Servo sử dụng driver.Yêu cầu điều khiển : Định vị, quay đảo chiều, thay đổi tốc độ động c ơ.Tín hiệu điều khiển : Tín hiệu điều khiển là tín hiệu DC có điều chỉnh độ rộng xung.
Động cơ AC 1 pha.Mục đích : Chuyển tín hiệu điện thành chuyển động quay. Thường được ứng dụngrộng rãi trong công nghiệp.Điều khiển : Điều khiển đảo chiều, điều khiển khởi động không tải, có tải nặng, điềukhiển thay đổi tốc độ.PLC thường điều khiển động cơ AC thông qua việc đóng mở (tín hiệu logic )Relay,Starter để khởi động, đảo chiều quay v à thay đổi tốc độ cứng. Nếu điều khiển tốc độ

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 36 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
kết hợp với inverter dùng đảo chiều, thay đổi tốc độ mềm phải sử dụng tín hiệuanalog.
Động cơ AC không đồng bộ 3 pha.Mục đích : Chuyển tín hiệu điện thành chuyển động quay (công suất lớn h ơn động cơAC một pha). Được sử dụng rộng rãi do đơn giản, bền, dễ sử dụng, công suất lớn.Yêu cầu điều khiển : Điều khiển khởi động, có tải nặng, đảo chiều quay, điều khiểntốc độ.Yêu cầu nắm vững :
1. Cách kết nối các cuộn dây tương ứng với điện áp trên ghi trên máy và điện áptrên mạng.
2. Cách kết nối khởi động ∆-Y, khởi động biến trở hoặc cuộn cảm kháng, khởiđộng bằng biến áp tự ngẫu 3 pha,….
3. Sử dụng chung với inverter, Stater, relay để khởi động v ào điều khiển thiết bị.
Bộ chuyển động XY :
Mục đích : Chuyển đổi tín hiệu điều khiển thành tọa độ X, Y tương ứng.Yêu cầu điều khiển : Điều khiển đảo chiều, nhanh chậm, địn h vị.Tín hiệu điều khiển : Xung điện áp DC. Sử dụng encoder để hồi tiếp vị trí.
Van thủy lực :Mục đích : Điều khiển đóng mở van; Điều khiển l ưu lượng thủy lực bằng van tuyếntính.Yêu cầu điều khiển : Đóng mở nhanh, đóng mở từ từ.Tín hiệu điều khiển : Đóng mở (logic), Điều chỉnh (analog)
Van khí nén :Mục đích : Điều khiển đóng mở van khí nén (logic). Các mức áp điều khiển valve :12V dc, 24V dc, 24V 50/60 Hz, 48V 50/60 Hz, 110/120V, 50/60 Hz, 220/240V 50/60Hz.Yêu cầu điều khiển : Đóng mở nhanh, đóng mở từ từ.Tín hiệu điều khiển : Đóng mở (logic), Điều chỉnh (analog)
II.3. Thiết bị ngõ vào ra thông minh[]

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 37 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module ngõ vào ra đặc biệt (Special I/O module)Những module I/O ngõ vào ra là những modules được kết nối trực tiếp với các thiết bịngõ vào ra. Những module này xử lý tín hiệu ngõ vào và ra và cung cấp thông tin xửlý này thẳng vào bộ điều khiển PLC (xem h ình trên). Tất cả ngõ vào/ra số và analogthảo luận trong chương này cũng như nhiều module ngõ vào/ra nằm trong loại này.Những module I/O đặc biệt là những module tiền xử lý những tín hiệu mức điện ápthấp hoặc tín hiệu ngõ vào nhạn, những tín hiệu mà những module I/O chuẩn b ìnhthường không có khả năng đọc.
Những module chức năng I/O thông minh có tích hợp những bộ vi điều khiển để xử lýthông minh những tín hiệu ngõ vào. Những module thông minh này có thể thực hiệnhoàn chỉnh những tác vụ quy tr ình tùy thuộc vào bộ điều khiển của PLC và vòng quétchương trình. Chúng đồng thời có ngõ vào số cũng như ngõ vào analog, điều khiểnngõ vào, ngõ ra. Hình sau minh họa mông ứng dụng của ngõ vào ra thông minh.Phương pháp phân phối những tác nhiệm điều khiển khác nhau cho giao tiếp thôngminh được gọi là xử lý điều khiển ngõ vào ra phân tán (distributed I/O processing )
Ứng dụng giao tiếp I/O trực tiếp

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 38 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ứng dụng giao tiếp ngõ vào/ra thông minh
GIAO TIẾP SỐ ĐẶC BIỆT (SPECIAL DISCRETE INTERFACES)Ngõ vào bộ đếm tốc độ cao (High Speed Counter)Tốc độ tín hiệu số đưa vào ngõ vào bình thường của PLC thường giới hạn ở 10Hz,một câu hỏi đặt ra là làm thế nào xử lý tín hiệu ngõ vào tốc độ lớn hơn ? Câu trả lờigiành cho câu hỏi này là PLC có những module ngõ vào được thiết kế giành riêng đểnhận biết được tín hiệu tốc độ cao lên đến 50kHz.
Fast-input interfaces : Ngõ vào tốc độ cao.Fast-response interfaces : Là một dạng khác của ngõ vào tốc độ cao.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 39 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giản đồ thời gian.
Kết nối dây.
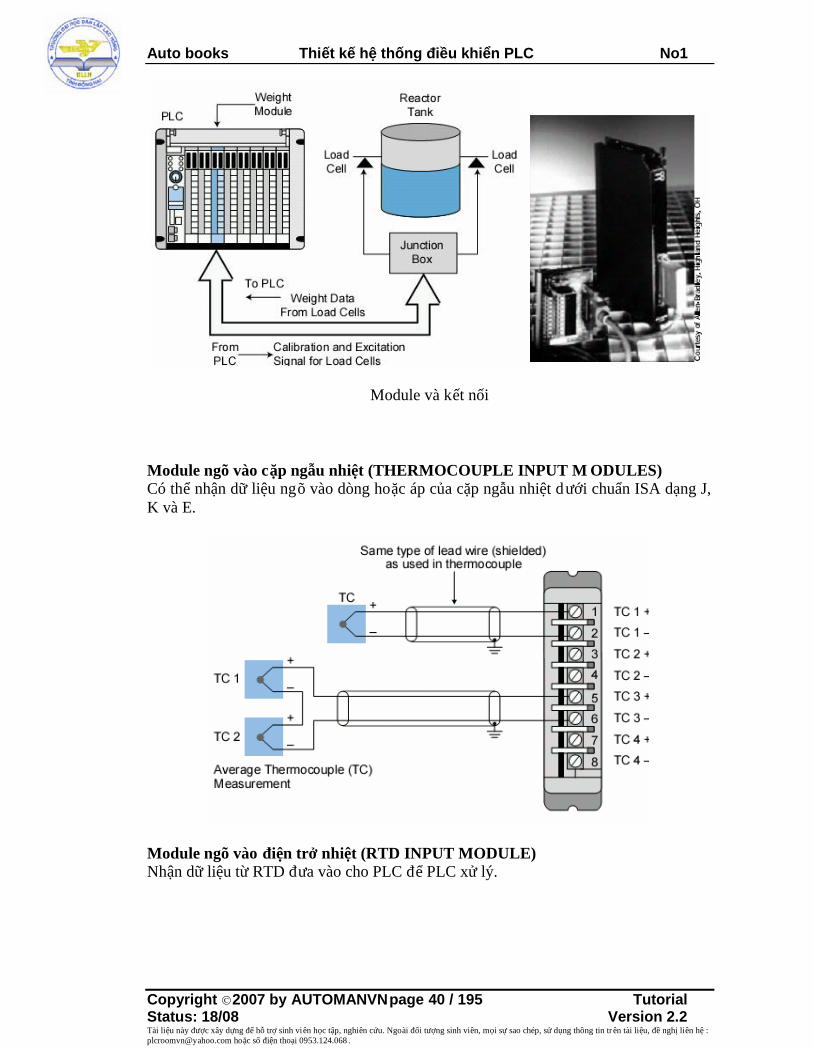
Module ngõ vào khối lượng (WEIGHT INPUT MODULES)Được thiết kế đặc biệt để đọc dữ liệu từ Loadcell
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 40 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module và kết nối
Module ngõ vào cặp ngẫu nhiệt (THERMOCOUPLE INPUT M ODULES)Có thể nhận dữ liệu ngõ vào dòng hoặc áp của cặp ngẫu nhiệt dưới chuẩn ISA dạng J,K và E.
Module ngõ vào điện trở nhiệt (RTD INPUT MODULE)Nhận dữ liệu từ RTD đưa vào cho PLC để PLC xử lý.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 41 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Kết nối dây :
PID MODULESModule PID (Proportional-integral-derivative) được dùng trong ứng dụng quy trìnhcần vòng lặp kín. Module này cung cấp điều khiển proportional, integral, andderivative với những thông số thay đổi như nhiệt độ, lưu lượng, áp suất,…
Sơ đồ khối của điều khiển quy tr ình.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 42 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Minh họa về điều khiển quy tr ình PID.
Minh họa về điều khiển quy tr ình vòng lặp kín.
Kết nối dây cho module PID trong Allend Bradley

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 43 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
POSITIONING INTERFACESPOSITIONING INTERFACE INSTRUCTIONSModule cho phép điều khiển định vị
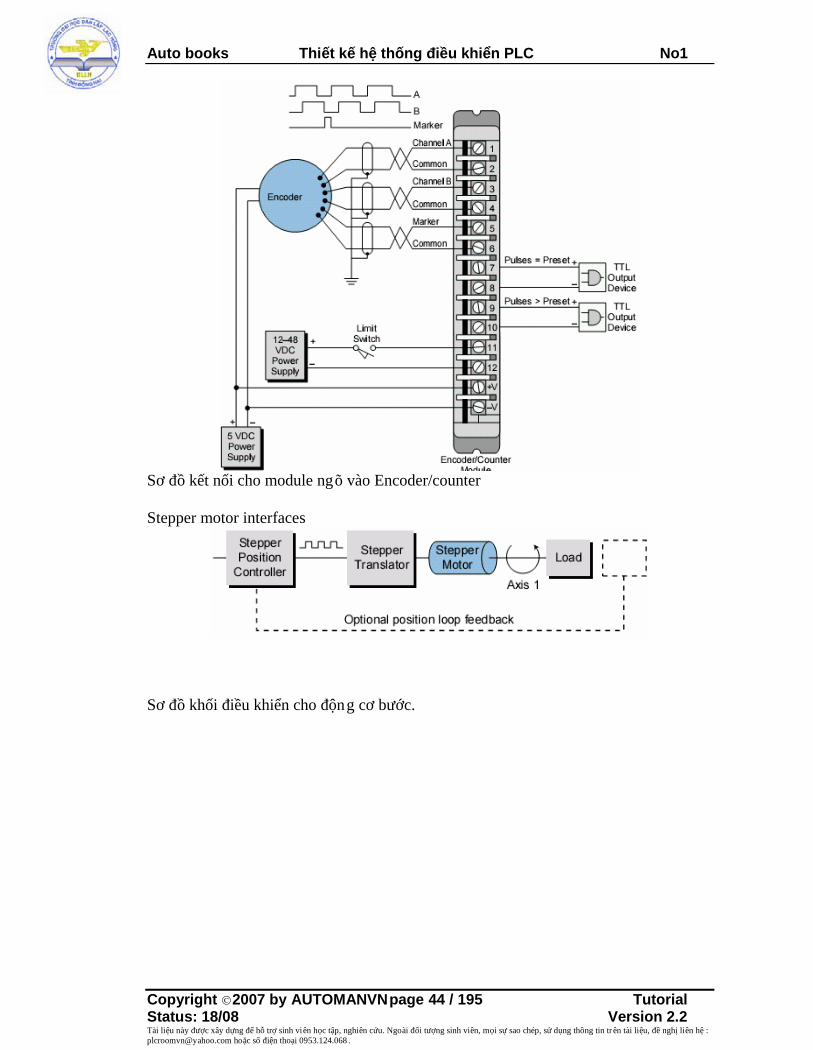
ENCODER/COUNTER INTERFACESModule giao tiếp encoder, counter : các module n ày dựa trên giao tiếp ngõ vào tốc độcao ( lên đến 50kHz) để đưa thông tin ngõ vào cho PLC.
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 44 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ kết nối cho module ngõ vào Encoder/counter
Stepper motor interfaces
Sơ đồ khối điều khiển cho động cơ bước.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 45 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module điều khiển 3 trục động cơ bước

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 46 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
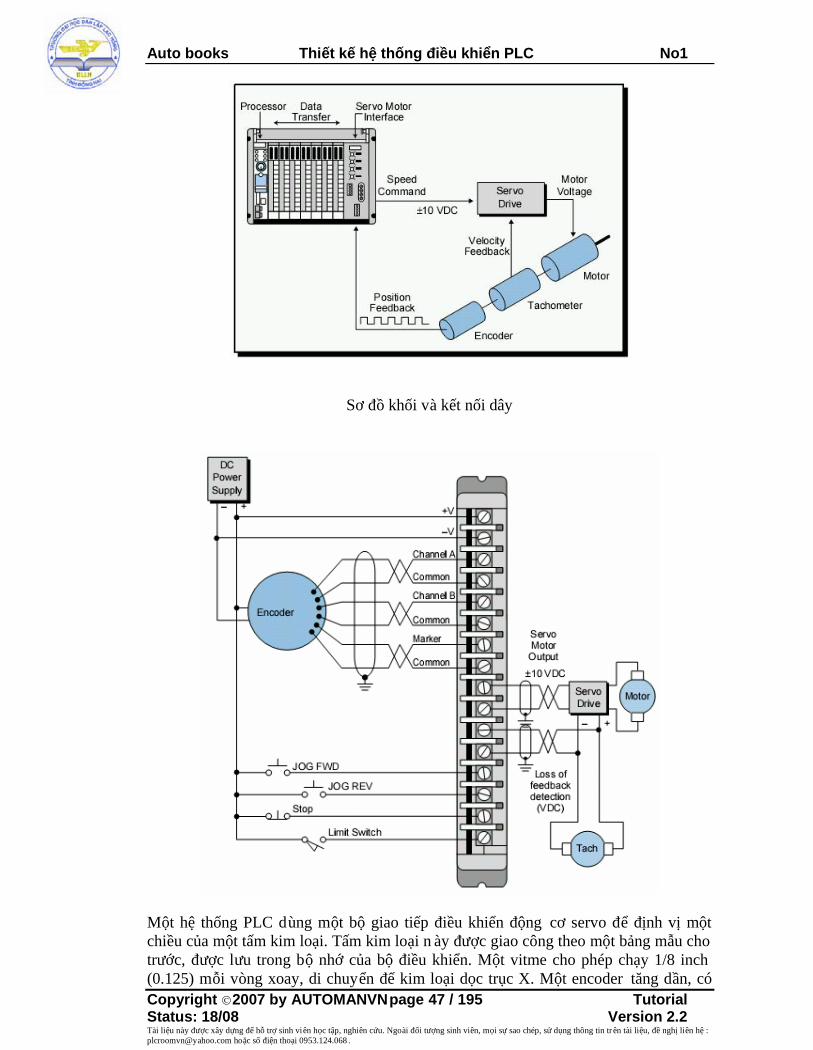
SERVO MOTOR INTERFACESModule điều khiển động cơ servo
Ứng dụng điều khiển động cơ servo
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 47 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ khối và kết nối dây
Một hệ thống PLC dùng một bộ giao tiếp điều khiển động cơ servo để định vị mộtchiều của một tấm kim loại. Tấm kim loại n ày được giao công theo một bảng mẫu chotrước, được lưu trong bộ nhớ của bộ điều khiển. Một vitme cho phép chạy 1/8 inch(0.125) mỗi vòng xoay, di chuyển đế kim loại dọc trục X. Một encoder tăng dần, có
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 48 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
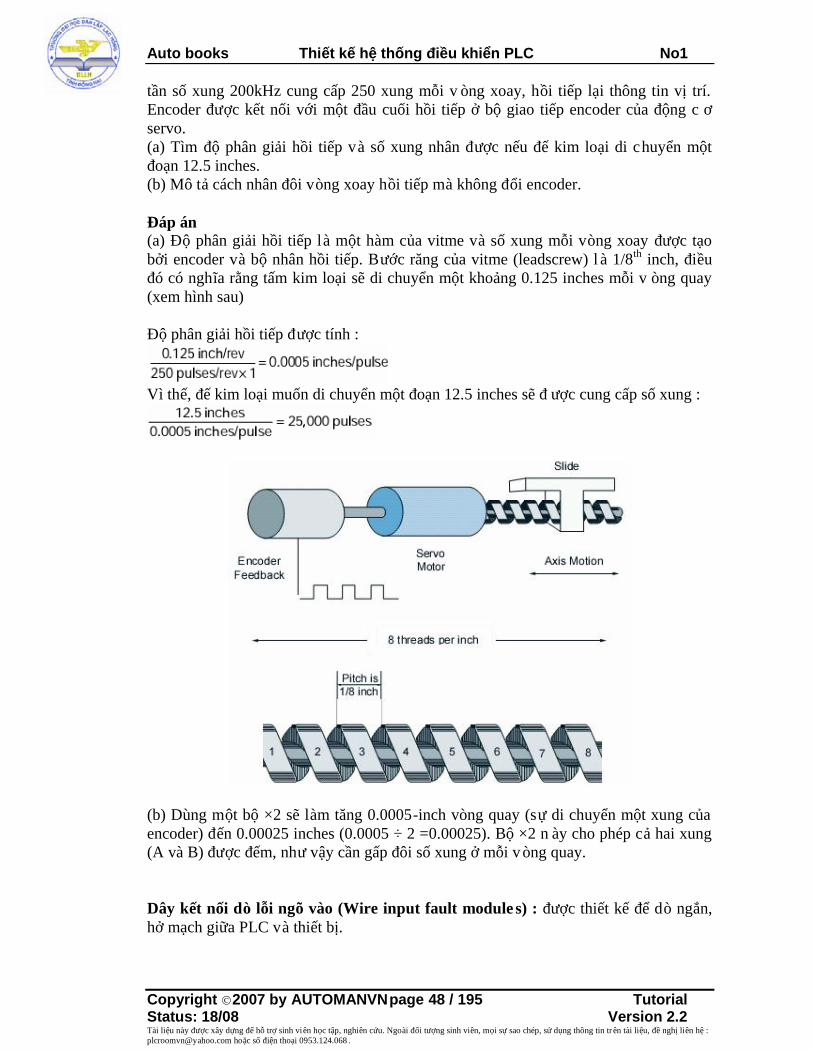
tần số xung 200kHz cung cấp 250 xung mỗi v òng xoay, hồi tiếp lại thông tin vị trí.Encoder được kết nối với một đầu cuối hồi tiếp ở bộ giao tiếp encoder của động c ơservo.(a) Tìm độ phân giải hồi tiếp và số xung nhân được nếu đế kim loại di chuyển mộtđoạn 12.5 inches.(b) Mô tả cách nhân đôi vòng xoay hồi tiếp mà không đổi encoder.
Đáp án(a) Độ phân giải hồi tiếp là một hàm của vitme và số xung mỗi vòng xoay được tạobởi encoder và bộ nhân hồi tiếp. Bước răng của vitme (leadscrew) l à 1/8th inch, điềuđó có nghĩa rằng tấm kim loại sẽ di chuyển một khoảng 0.125 inches mỗi v òng quay(xem hình sau)
Độ phân giải hồi tiếp được tính :
Vì thế, đế kim loại muốn di chuyển một đoạn 12.5 inches sẽ đ ược cung cấp số xung :
(b) Dùng một bộ ×2 sẽ làm tăng 0.0005-inch vòng quay (sự di chuyển một xung củaencoder) đến 0.00025 inches (0.0005 ÷ 2 =0.00025). Bộ ×2 n ày cho phép cả hai xung(A và B) được đếm, như vậy cần gấp đôi số xung ở mỗi v òng quay.
Dây kết nối dò lỗi ngõ vào (Wire input fault module s) : được thiết kế để dò ngắn,hở mạch giữa PLC và thiết bị.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 49 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ kết nối dây.Việc dò này được thực hiện nhờ kiểm tra dòng thay đổi trong hệ thống.
Module giao tiếp ngõ vào ra (ASCII input/output interfaces)Module này cho phép gởi và nhận dữ liệu giữa các thiết bị ngoại vi như máy in, mànhình video và bộ hiển thị với PLC. Dữ liệu th ường được truyền qua lại giữa các thiếtbị dùng chuẩn RS-232, RS-442 và RS-485

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 50 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module Fuzzy logic (Fuzzy logic interfaces)
Module Fuzzy cung cấp phương tiện để giải quyết thuật giải Fuzzy
Tổng quan về sử dụng module Fuzzy

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 51 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module Fuzzy của PLC Omron
Truyền nhận dữ liệu giữa Module I/O v à Module Fuzzy(Tài liệu sử dụng thông tin ở PLC Theory Books)
II.4. Màn hình giao tiếp và phần mềm lập trình HMI. []
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 52 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
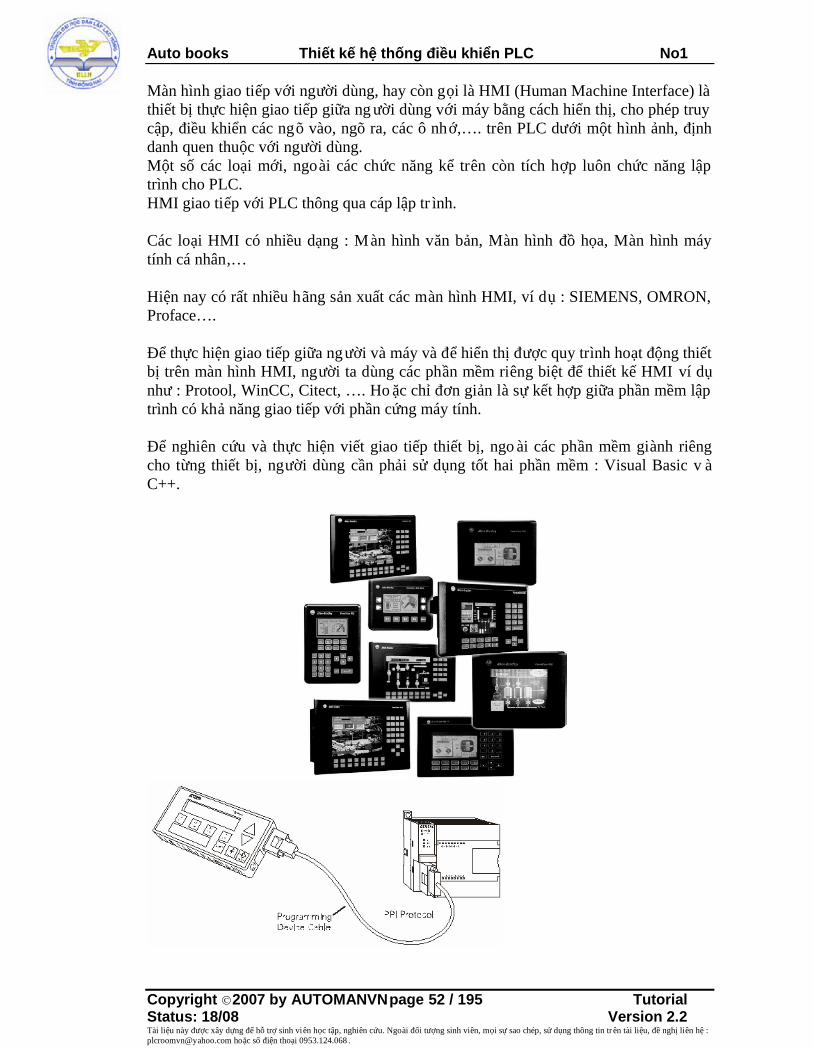
Màn hình giao tiếp với người dùng, hay còn gọi là HMI (Human Machine Interface) làthiết bị thực hiện giao tiếp giữa ng ười dùng với máy bằng cách hiển thị, cho phép truycập, điều khiển các ngõ vào, ngõ ra, các ô nhớ,…. trên PLC dưới một hình ảnh, địnhdanh quen thuộc với người dùng.Một số các loại mới, ngoài các chức năng kể trên còn tích hợp luôn chức năng lậptrình cho PLC.HMI giao tiếp với PLC thông qua cáp lập tr ình.
Các loại HMI có nhiều dạng : Màn hình văn bản, Màn hình đồ họa, Màn hình máytính cá nhân,…
Hiện nay có rất nhiều hãng sản xuất các màn hình HMI, ví dụ : SIEMENS, OMRON,Proface….
Để thực hiện giao tiếp giữa người và máy và để hiển thị được quy trình hoạt động thiếtbị trên màn hình HMI, người ta dùng các phần mềm riêng biệt để thiết kế HMI ví dụnhư : Protool, WinCC, Citect, …. Ho ặc chỉ đơn giản là sự kết hợp giữa phần mềm lậptrình có khả năng giao tiếp với phần cứng máy tính.
Để nghiên cứu và thực hiện viết giao tiếp thiết bị, ngo ài các phần mềm giành riêngcho từng thiết bị, người dùng cần phải sử dụng tốt hai phần mềm : Visual Basic v àC++.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 53 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
II.5. Thiết bị lập trình và phần mềm lập trình PLC. []Định nghĩa : Là thiết bị dùng soạn thảo và nạp chương trình cho PLC.Để phù hợp cho từng môi trường sử dụng, các nhà sản xuất cung cấp một số loại nhưsau :
Bộ lập trình bằng tay.
Thiết bị lập trình chuyên dụng.
Lập trình bằng máy tính sử dụng phần mềm chuy ên dụng.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 54 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Thường mỗi nhà cung cấp thiết bị PLC đều cung cấp gói phần mềm lập tr ình chuyêndụng cho PLC của riêng họ (Siemens, OMRON, Mitshubishi, LG,…..). Các gói ph ầnmềm này được thiết kế theo từng họ của PLC (Siemens : Logo, Step 7 MicroWin,Step 7; Mitshubishi : FX-Programmer, GX– Deverloper, ..)
II.6. Thiết bị mạng.[]Module mạng (Network interface modules) : Module mạng cho phép kết nối PLCvà các thiết bị thông minh khác thông qua một mạng cục bộ có tốc độ cao. Hiện có cácmạng phổ biến sau :• Mạng cấp độ thiết bị (device -level bus networks (e.g., CANbus, Seriplex, etc.)),được dùng cho thiết bị số rời rạc.• Mạng trường quy trình (process field networks (e.g., Fieldbus and Profibus)), đượcdùng cho thiết bị analog.• Mạng Ethernet/IEEE 802.3, được dùng cho CPU PLC và các thành ph ần của nó.• Mạng độc quyền (proprietary networks), đ ược dùng rộng rãi bởi một số các côngtyPLC.
Module mạng CAN của Mitsu và Allen Bradley
Mô hình mạng LAN

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 55 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mô hình mạng LAN dùng CANbus (device bus) và Field bus (process bus)
Mạng cục bộ (Local Area Network)Khoảng cách dùng mạng :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 56 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ứng dụng mạng LAN vào PLC• communication between program mable controllersTruyền thông với bộ điều khiển,• upload capability to a host computer from any PLCCó khả năng đưa dữ liệu lên máy tính chủ từ bất kì PLC nào.• download capability from a host computer to any PLCCó khả năng nhận dữ liệu từ máy tính chủ từ bất kì PLC nào.• reading/writing of I/O values and registers to any PLCĐọc và viết các giá trị ngõ vào ra và thanh ghi từ bất kì PLC nào.• monitoring of PLC status and control of PLC operationGiám sát trạng thái của PLC và điều khiển hoạt động của PLC.
Giao thức mạng. (Topologies Network)
Một mạng lớn sử dụng nhiều giao thức mạng

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 57 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giao thức mạng hình sao :
Không thể thích ứng với quá tr ình phân phối tùy thuộc vào sự phụ thuộc của nó vàonút trung tâm.Giá còn cao đối với việc lắp đặt.Truyền tin giữa hai node phải thông qua node trung tâm, dẫn đến kết quả truyền thấp.Không có mode broadcast, đã làm cho tốc độ truyền thấp hơnLỗi của node trung tâm sẽ sụp đổ mạng.
Giao thức mạng bus chung (Common bus topology)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 58 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Một cấu hình khác của định dạng này là giao thức Master/Slaver
Giao thức vòng (Ring Topology)
Giao thức (Star-shaped ring topology)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 59 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Kỹ thuật truyền số liệu : Dựa trên các kỹ thuật.• Manchester encoding
• frequency shift keying (FSK)
• nonreturn to zero invert on ones (NRZ I)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 60 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
CÁC PHƯƠNG PHÁP XỬ LÝ MẠNGMột phương pháp xử lý là cách thể hiện trong đó một PLC xử lý mạng để truyềnthông tin. Nói một cách khác, nó xác định ph ương pháp dùng bởi các node để truyềnthông qua mạng. Như lưu ý ở phần trước, một giao thức mạng cần mà các node sửdụng truyền qua các bộ phận trung gian. Quy tr ình cần thiết này mà mỗi node có thểthoát khỏi việc truyền của nó không ảnh h ưởng đến hoạt động của mạng. Điều n ày cóthể thực hiện theo một trong những cách sau :Với một modem mà có thể tắt khả năng truyền của nó.Với một thiết bị truyền có thể đ ược thiết lập trở thành một thiết bị đọc lập.Với một bộ phát dòng lặp, được kết nối nối tiếp với bộ phát khác m à được loại bỏ khikhông hoạt động.Cho dù có nhiều phương pháp xử lý, nhưng phương pháp xử lý thông dụng nhất là hỏivòng, dò xung đột và truyền dấu hiệu.
PHƯƠNG PHÁP HỎI VÒNGPhương pháp này được sử dụng ở giáo thức master/slaver. Trong giao thức hỏi v òng,thiết bị chủ hỏi từng trạm, máy con theo tuần tự xem chúng có dữ liệu để truyềnkhông. Thiết bị chủ gởi một thông tin đến một thiết bị con v à chờ một khoảng thờigian định trước để thiết bị con trả lời. Thiết bị con phải trả lời bằng cách gởi dữ liệuhay một thông báo ngăn nói rằng chúng không có dữ liệu để gởi. Nếu thiết bị conkhông trả lời trong khoảng thời gian định tr ước, thiết bị chủ cho là thiết bị con đã bịchết và tiếp tục hỏi vòng đến thiết bị khác.Những thiết bị con ảnh hưởng lẫn nhau truyền thông với cấu h ình master/slaver thìkhông có hiệu quả, khi mạng hỏi vòng yêu cầu dữ liệu trước tiên phải được gởi chomaster và sau đó được nhận ở slaver. Khi cấu h ình master/slaver dùng kỹ thuật này,việc hỏi vòng thường được đề cập đến như là một phương pháp truy cập master/slaver
PHƯƠNG PHÁP DÒ XUNG ĐỘTPhương pháp dò xung đột được đề cập đến với cái tên CSMA/CD (). Trong phươngpháp xử lý này, mỗi điểm với một thông báo gởi đi sẽ chờ đợi cho đến khi không cótín hiệu trên mạng mà sau đó truyền dữ liệu. Trong khi một điểm đ ược truyền, nókiểm tra vòng quanh dò xung đột đối với sự tồn tại của các thiết bị truyền khác. Nếumạch dò được sự xung đột (Hai điểm đang truyền c ùng một thời điểm), điểm sẽ hủyviệc truyền của nó và chờ đọi một khoảng thời gian ngẫu nhi ên trước khi thử lại.Phương pháp này làm việc tốt trong môi trường mạng không có nhiều việc truyền dữliệu.Mỗi xung đột và thử dùng thời gian mà không thể được dùng cho việc truyền dữ liệu;vì thế thông lượng mạng sẽ giảm và thời gian truy cập tăng khi tín hiệu l ưu thôngmạch tăng. Vì lý do này, phương pháp dò xung đột không được phổ biến trong mạng

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 61 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
điều khiển nhưng lại phổ biến trong nhưng ứng dụng kinh doanh. Trong ứng dụngcông nghiệp, phương pháp dò xung đột có thể được sử dụng cho việc lấy lại dữ liệu v àsao lưu dữ liệu trong những hệ thống lớn v à trong ứng điều khiển phân tán thời gianthực với một số nhỏ các điểm liên kết với nhau.
PHƯƠNG PHÁP TRUYỀN CỜ HIỆUPhương pháp truyền cờ hiệu là một kỹ thuật truy cập mà có thể loại trừ sự tranh chấpgiữa các trạm của PLC khi cố gắng truy cập mạng. Trong kỹ thuật n ày, PLC truyềnmột cờ là một thông báo bổ sung một trạm đ ược thăm dò dành riêng, tạm thời, cóquyền điều khiển mạng (chẳng hạn thông tin truyền). Trạm v ơi có hiệu có quyềngiành riêng để điều khiển trên mạng, tuy nhiên nó phải từ bỏ quyền này cho điểmđược thiết kế kế tiếp khi bị ngắt truyền. Theo cách đó, việc truyền cờ hiệu tr ên thực tếlà một dạng phân tán của cờ hiệu. Ph ương pháp xử lý truyền cờ hiệu được đề cậptrong ứng dụng điều khiển mở rộng phân tán có nhiều điểm hay cần thời gian đáp ứngnghiêm ngặt.
Trong cấu hình một mạng thường gặp dùng kỹ thuật truyền cờ hiệu, mỗi trạm đ ượcđịnh nghĩa bởi một địa chỉ. Trong quá tr ình hoạt động, cơ hiệu được truyền từ mộttrạm sang trạm kế tiếp một cách tuần tự. Nh ưng điểm truyền cờ hiệu đồng thời đ ượcbiết địa chỉ của trạm kế tiếp mà sẽ nhận cờ hiệu.Mạng truyền dữ liệu được truyền trên một hay nhiều gói thông tin chứa nguồn, đíchvà dữ liệu điều khiển. Mỗi điểm nhận thông tin n ày và dùng nó nếu cần. Nếu điểm cóthông tin để truyền, nó truyền nó trong một gói mới.
Trong việc truyền dữ liệu sử dụng cờ hiệu trong h ình sau, trạm 10 truyền cờ hiệu đếntrạm 15 (trạm kế tiếp) mà thực hiện truyền cờ hiệu đến trạm 18 (địa chỉ trạm kế tiếpsau trạm 15). Nếu trạm kế tiếp không truyền c ơ hiệu cho người thừa kế trong mộtkhoảng thời gian cho phép (ngoài thời gian truyền cờ hiệu), th ì trạm truyền cờ hiệuxác nhận rằng trạm nhận bị lỗi. Trong tr ường hợp này, trạm khởi đầu bắt đầu kiểm tracác địa chỉ cho đến khi tìm thấy trạm không có đáp ứng, nếu chúng không tồn tại tr ênmạng, và sau đó thăm dò trạm 18 mà sẽ trả lời cho cờ hiệu. Trạm nhận n ày sẽ trởthành người thừa kế kế tiếp và trạm lỗi sẽ bị loại trừ ra khỏi mạng, (chẳng hạn trạm 18sẽ trờ thành địa chỉ kế kế tiếp của trạm thứ 10). Thời gian cần để truyền cờ hiệu v òngquanh mạng tùy thuộc vào số điểm trên mạng. Thời gian này có thể xấp xỉ bằng tíchcủa thời gian duy trì ở từng trạm nhân với số điểm của mạng (tất nhi ên loại trừ lúc bịmất hoặc thêm một địa chỉ mạng)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 62 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ về truyền cờ hiệu.
PHƯƠNG TIỆN TRUYỀN THÔNGPhần này mô tả phương tiện truyền thông (chẳng hạn cáp) được dùng trong mạng cụcbộ. nếu được thiết lập phù hợp, hầu hết các mạng truyền thông cục bộ có thể giao tiếpdùng bất cứ phương tiện nào. Những cách thiết lập phù hợp bao gồm những cấu trúcvật lý chính xác và điện áp thiết bị đầu cuối chính xác. Phương tiện truyền thôngthường dùng trong mạng PLC bao gồm cáp hai dây, cáp đồng trục v à cáp quang. Loạithiết bị truyền thông được dùng và số các điểm sẽ ảnh hưởng đến chất lượng củamạng (chẳng hạn tốc độ và khoảng cách)Hình sau trình bày sự so sánh những phương pháp truyền thông khác nhau dùng vớinhững phương tiện truyền thông tương ứng.
Hình trên so sánh tốc độ truyền dữ liệu và khoảng cách của những phương pháptruyền thông khác nhau .
DÂN XOẮNDây điện xoắn hai dây được dùng rộng rãi trong công nghiệp giành cho những ứngdụng điểm – điểm với khoảng cách đến 4000 feet v à với tốc độ truyền lên đến 250kilobaud. Các xoắn hai dây tương đối không quá đắt và có sự miễn nhiễu hợp lý, đượccải thiện thêm khả năng miễn nhiễu nếu được bọc. Việc thực hiện, được thực hiệnnhanh chóng khi kết nối các điên với cáp. Hơn nữa, sự không đồng nhất về tính chấtđồng thời làm tổn thương việc thực hiện của những loại dây điện n ày.Trở kháng đặc trưng thay đổi tùy thuộc vào loại cáp, làm cho phản xạ ít suy giảm dotrở kháng đầu cuối không phù hợp.
CÁP ĐỒNG TRỤC VỚI DÃI TẦN CƠ SỞ

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 63 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Cáp đồng trục với dãi tần cơ sở, có thể truyền một tín hiệu tại một thời điểm tại tần sốnguyên thủy, có thể truyền dữ liệu trong mạng cục bộ với tốc độ l ên tới 2Megabaud vàkhoảng cách có thể lên đến 18.000 feet. Không giống nh ư cáp xoắn, cáp đồng trục cócùng quy cách nên giới hạn được những hạn chế của sóng phản xạ.Hệ số giới hạn của loại cáo này là suy hao dung kháng và trở kháng.Loại cáp này thường có đường kính 3/8 inch.
CÁP ĐỒNG TRỤC VỚI DÃI TẦN RỘNGCáp đồng trục dãi tần băng rộng dày hơn so với cáp đồng trục dãi tần cơ sở, đườngkính nằm trong khoảng từ ½ đến 1 inch. Cáp đồng trục băng thông rộng đ ược dùng từlâu để truyền tín hiệu truyền h ình, có thể hổ trợ tốc độ truyền lên đến 150Megabaud.Cho dù loại này của cáp đồng trục có thể dùng để tăng khoảng cách trong mạng d ãitần cơ sở, nó được dự định dùng trong mạng băng thông rộng. Mạng dãi tần cơ sởdùng truyền ở nhiều tần số khác nhau để thực hiện truyền nhiều k ênh dữ liệu đồngthời, mỗi kênh với mỗi tần số sóng mang RF khác nhau.Mạng dãi tần băng thông rộng, ở một cách khác d ùng chỉ một của những kênh này vàmột phương pháp đã được thảo luận trước kia. Vận tốc truyền cơ bản thường là 1, 5hoặc 10 megabaud. Mạng cục bộ băng thông rộng có thể hỗ trợ h àng ngàn điểm và làcó khả năng kéo dài nhiều dặm (miles) thông qua việc d ùng những bộ lặp hai chiều.Một ưu điểm của việc sử dụng cáp băng thông rộng l à mạng truyền thông có thể đượcthực hiện với chỉ một kênh băng thông rộng. Những kênh khác có thể được dùng chovideo, truy cập máy tính và những chức năng điều khiển giám sát khác.Mỗi kênh băng thông rộng chứa hai kênh tần số cao : một tần số cao để truyền đi v àmôt tần số thấp nhận về. Nếu chỉ có hai điểm cần truyền thông, một có thể truyền trênkênh truyền đi và trạm kia có thể truyền trên kênh nhận về. Trong một mạng nhiềuđiểm, một modem đầu cuối thực hiện việc truyền lại tín hiệu dữ liệu k ênh quay vềtheo chiều ngược lại. Hình sau mô tả ví dụ của một mạng dãi tần băng thông rộng vớimột mạng con dãi tần cơ sở.
CÁP QUANGCáp quang chứa một sợi quang mỏng bằng thủy tinh hoặc nhựa đ ược bọc quanh bằngmột vật liệu có độ khúc xạ kém. Loại cáp n ày truyền tín hiệu thông qua xung của ánhsáng phản xạ. Việc khiếm khuyết chính của sợi cáp quang là suy hao trên đầu kết nốithường gọi là đầu tap hay đầu T. Hiện nay, đầu cuối T trong cáp quang chỉ đ ược lấyđược một phần nhỏ phần trăm tín hiệu của năng l ượng ánh sáng dùng truyền thông tinthông qua cáp. Việc này làm cho cáp quang được sử dụng trong những mạng lớn,nhưng không dùng trong mạng hình sao hay mạng vòng. Ngoài ra, cáp quang còn đắtgấp mấy lần cáp đồng trục và bộ chuyển đổi từ tín hiệu quang sang tín hiệu điện c ònmắc hơn.Sợi quang ngoài ra còn có một vài ưu điểm khác. Đầu tiên, nó loại trừ được các nhiễuđiện từ trên đường truyền. Thứ hai, nó nhỏ và nhẹ. Cuối cùng nó có thể truyền với tốcđộ lên đến 800 megabaud và khoảng cách lên đến 30.000 feet. Tương lai, việc sử dụngcáp quang trong công nghiệp ngày càng phổ biến hơn.
HIỂU NHỮNG THÔNG SỐ KỸ THUẬT CỦA MẠNGChương này giải thích cách xác định các loại mạng có thể hỗ trợ trong ứng dụng.Người thiết kế phải khảo sát tất cả các ảnh h ưởng của mạng, bao gồm cả những thông
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 64 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
số kỹ thuật của thiết bị, thời gian đáp ứng, độ dài lớn nhất, thông lượng, và giao tiếpkhi chọn một mạng cho ứng dụng.
CÁC THÔNG SỐ KỸ THUẬT CỦA THIẾT BỊKhi chọn một mạng, người thiết kế hệ thống phải phân tích ứng dụng để xác định cầnbao nhiêu điểm và dùng loại PLC nào, người lập trình, nguồn cung cấp, người lậptrình mạng, máy tính chủ, hay những thiết bị đầu cuối thông minh đ ược dùng ở mỗiđiểm. Người thiết kế phải xác định những mạng n ào hổ trợ cho loại thiết bị nào vàcung cấp thông tin về thiết bị giao tiếp với mạng nh ư thế nào về phần cứng cũng nhưphần mềm. Đối với mạng PKC, ng ười thiết kế phải đồng thời chọn loại, bởi một v àiloại PLC không có khả năng giao tiếp với mạng. Mạng phải có khả năng v à hỗ trợ sốđiểm cần cho ứng dụng hiện tại v à có khả năng mở rộng thêm số một số điểm ở tươnglai.
ĐỘ DÀI TỐI ĐA MẠNGĐộ dài tối đa của một mạng bao gồm hai phần : Độ d ài lớn nhất của cáp chính và độdài lớn nhất của mỗi nhánh giữa từng điểm v à cáp chính. Độ dài cáp nhánh thường dàitrong khoảng từ 30 feet đến 100 feet, tuy nhi ên, độ dài cáp nhánh càng ngắn càngtốt,….. Trường hợp lý tưởng là chạy đường cáp chính thẳng đến thiết bị v à quayngược lại, cho dù khả năng này làm tăng giá lắp đặt mạng.Một phần không kém phần quan trọng khác l à người thiết kế phải tuân theo ý kiến củanhà cung cấp về các loại cáp được dùng để thỏa mãn được các thông số kỹ thuật. Nếuhệ thống cần khoảng cách truyền mạng lớn nhất, ng ười thiết kế phải giảm chi phí bằngcách dùng những loại cáp ít mắc tiền hơn.
THỜI GIAN ĐÁP ỨNGThời gian đáp ứng (RT), như đã được sử dụng trong cuốn sách này, là thời gian giữalúc tín hiệu đưa vào mạng ở một điểm cho đến khi tín hiệu ra ở một điểm khác.Thời gian đáp ứng, là tổng thời gian cần thiết để dò một chuyển trạng thái ở ngõ vào,truyền thông tin đến điểm đến, và hoạt động ở ngõ ra.Nó được mô tả như sau :RT = IT+2ST1+PT1+AT+TT+PT2+2ST2+OTTrong đó :IT : là thời gian delay ở ngõ vào (thời gian delay ngõ vào do điện liên quan trong việcdò chuyển trạng thái ngõ vào)ST1 : thời gian quét để tìm điểm truyền.ST2 : thời gian quét để tìm điểm nhận.PT1 = thời gian xử lý của điểm truyền (thời gian của ch ương trình logic liên quan đểchuẩn bị truyền dữ liệu)
PT2 = Thời gian xử lý ở điểm nhận (Thời gian giữa việc bắt đầu nhận dữ liệu cho đếnkhi hoàn tất việc nhận dữ liệu.)AT = Thời gian xử lý (thời gian cần thiết để truyền dữ liệu, đây l à chỉ là thời giantương ứng với tốc độ truyền)OT = Thời gian delay ở ngõ ra (thời gian delay của tín hiệu điện đ ược bao gồm trongviệc tạp lên chuyển mạch ở ngõ ra)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 65 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Thời gian vòng quét bao gồm thời gian cập nhật ngõ vào/ra và những thời gian liênquan khác, cũng như thời gian thực thi chương trình logic. Nó được coi như thời giangiữa những thời điểm cập nhật I/O. Trong tr ường hợp này, mạng đầu tiên thực thi lệnhvới thông tin cũ, sau đó thực thi cập nhật I/O, và cuối cùng thực thi lệnh với thông tinmới. Đây là nguyên nhận có hai vòng quét delay.
Lần delay I/O và lần quét được đã có sẵn dữ liệu. Thời gian truyền có thể đ ược xácđịnh khi ta biết tốc độ truyền v à độ dài khung truyền.Tốc độ dữ liệu thỉnh thoảng bằng với tốc độ truyền, nhưng thường nó thấp hơn.Hệ thống truyền đồng bộ, dùng mã Manchester, có tốc độ truyền dữ liệu bằng một nữacủa tốc độ truyền. Hệ thống này sử dụng một phương pháp truyền trong đó dữ liệu kítự và những bít được truyền ở một tốc độ không thay đổi với thiết bị truyền và thiết bịnhận được đồng bộ hóa với nhau. Tốc độ truyền dữ liệu của hệ thống bất đồng bộ l à80% tốc độ truyền do bởi bit start v à bit stop được truyền cùng với mỗi 8 bit dữ liệu.Trong những hệ thống này, khoảng thời gian giữa các kí tự không bằng nhau trong độdài. Việc truyền trong một hệ thống bất đồng bộ đ ược điều khiển bởi tín hiệu start v àstop tại bắt đầu và kết thúc của mỗi kí tự.Thời gian truy cập và hai lần xử lý phụ thuộc vào thời gian thiết lập riêng biệt vàchung và tuân theo yêu cầu của nhà sản xuất. Nếu có thiết bị, nó dễ d àng và chính xáchợn trong việc xác định toàn thể thời gian đáp ứng thông qua việc đo thực tế h ơn sovới tài liệu kỹ thuật. Phần 18-8 một tả quy trình để thực hiện việc đo này.
Các tham số mà phải xác định bằng phương trình thời gian đáp ứng không là thời gianđáp ứng trung bình, nhưng ít hơn thời gian đáp ứng lớn nhất. V ì thế, người thiết kếphải theo từng bước để thiết lập một môi trường trường hợp tệ nhất trong việc đo thờigian đáp ứng của hệ thống. Việc tạo ra đ ược trường hợp này bao gồm thực hiện nhiệmvụ chẳng hạn như download chương tr ình và giám sát các điểm trong khi thực hiệnnhiệm vụ đo, bởi loại thực hiện n ày làm tăng thời gian vòng quét của PLC và thời gianxử lý mạng.
THÔNG LƯỢNGMột vài nhà sản xuất định rõ giá trị thông lượng của mạng LAN. Giá trị này mô tả sốđiểm I/O có thể được cập nhất trên mỗi giây thông qua mạng. Giá trị thông l ươngkhông được cung cấp đủ thông tin từ giá trị thực tế đối với thời gian truy cập v à tốc độtruyền dữ liệu, mặc dù nó cung cấp cho người thiết kế hệ thống một vài ý tưởng từ giátrị thực tế. Thêm nữa, thông lượng biến đổi với việc gọi hệ thống đ ược coi như thờigian xử lý từng điểm. Vì thế, để đạt được một giá trị chính xác cho thông l ượng, ngườithiết kế phải biết điều kiện dưới được biết qua việc đo.
NHỮNG THIẾT BỊ ĐƯỢC HỖ TRỢ.Khi để cập đến từng thiết bị trong hệ thống, ng ười thiết kế phải hỏi không chỉ l à :Mạng cục bộ có hỗ trợ thiết bị n ày? Mà còn là : Những phức tạp nào xảy ra trong việckết nối thiết bị với mạng ? Đối với những thiết bị đ ược cấp nguồn riêng lẽ, nhà thiếtkế phải đồng thời xác định phần mềm n ào có thể hỗ trợ.Bộ điều khiển có thể lập tr ình.Tất cả những mạng chuẩn có thể hỗ trợ ít nhất một v ài loại PLC. Một thiết bị giao tiếpđược mua riêng dùng kết nối PLC với mạng. Thiết bị giao tiếp đ ược kết nói với PLCthông qua hoặc là một bus song song tốc độ ca hoặc l à thông qua cỗng lập trình nối

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 66 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
tiếp của PLC. Trong trường hợp sau, hai phần bổ sung phải đ ược thêm vào phươngtrình thời gian đáp ứng : Thời gian cổng truyền thông qua cổng v à thời gian xử lý củacổng lập trình.
THIẾT BỊ LẬP TRÌNHHầu hết các nhà sản xuất đề nghị một vài loại máy tính như là một thiết bị lập trình cóthể kết nối với mạng. Một máy tính kết nối với m ột mạng cung cấp một thiết bị lậptrình tập trung cho bất kì PLC nào trên mạng, cũng như với việc giám sát và điềukhiển các chức năng nếu cần. Nếu một thiết bị lập tr ình mạng tương hợp không có, tấtcả các thiết bị lập tr ình phải được thực hiện thông qua cổng lập trình cho từng PLCriêng biệt.
MÁY CHỦHỗ trợ máy chủ nghĩa là một người dùng được cấp quyền máy tính chủ để có thể thựchiện những chức năng đã được lập trình, cung cấp những những lệnh đã được lập trìnhlàm cho nó phù hợp với giao thức mạng của nhà sản xuất. Máy chủ thường được kếtnối với mạng thông qua một thiết bị đ ược gọi là cổng nối. Cổng nối chứa một cổngmạng và một cổng khác (thường là RS-232), được kết nôi với một máy chủ. Một cổngnối làm đơn giản hóa chương trình mà người dùng phải viết cho máy chủ, bởi mộtmáy chủ kết nối với cổng cần chỉ một giao thức điểm đến điểm đ ơn giản đúng hơn làmột giao thức nhiều điểm không thể khống chế, nh ư được yêu cầu bởi mạng. Mộtcổng đồng thời cung cấp giao thức điện t ương ứng đối với mạng. Từ khi hầu hết cácmáy tính có một cổng RS-232, ít khi nó cần bổ sung phần cứng.
NHỮNG THIẾT BỊ ĐẦU CUỐI THÔNG MINHNhững loại đầu cuối thông minh đề cập đến ở đây thực tế l à một máy tính chủ nhỏhoàn chỉnh với một hệ thống hoạt động v à một khối lưu trữ. Nó có thể giao tiếp vớimột mạng theo chính xác cách nh ư một máy tính chủ. Bất k ì ai đề cập đến việc dùngmột trong những đầu cuối này trên một mạng phải kiểm tra phần mềm cần để xác địnhxem hoạt động của hệ thống đầu cuối sẽ hỗ trợ mạng y êu cầu. Một vài hoạt động củahệ thống, ngay lập tức, cung cấp việc truyền dữ liệu chỉ dữ liệu ASCII, không truyềndữ liệu nhị phân.
CỔNG DỮ LIỆUƯu điểm của cổng máy chủ đề cập đến tr ước đây, một vài công ty cung cấp nhữngcổng cho những mạng nhiều điểm khác. Chúng đồng thời cung cấp những loại cổngkhác của máy chủ, ví dụ, một giao thức máy chủ tốc độ cao, RS -422, đồng bộ. Trongtrường hợp này, cổng sẽ dùng một giao thức được thiết kế cho ứng dụng đồng bộ,chẳng hạn như HDLC.
ỨNG DỤNG GIAO TIẾPKhi phát minh một giao tiếp ứng dụng, người thiết kế phải xác định làm thế nào mỗichương trình ứng dụng của PLC cho phép nó chia sẽ thông tin với những loại PLCkhác. Hầu hết các nhà sản xuất cung cấp ít nhất một trong những ph ương pháp sau :Đọc thanh ghi của PLC khác.Viết lên thanh ghi của PLC khác.Đọc và viết những điểm mạng hay các thanh ghi.
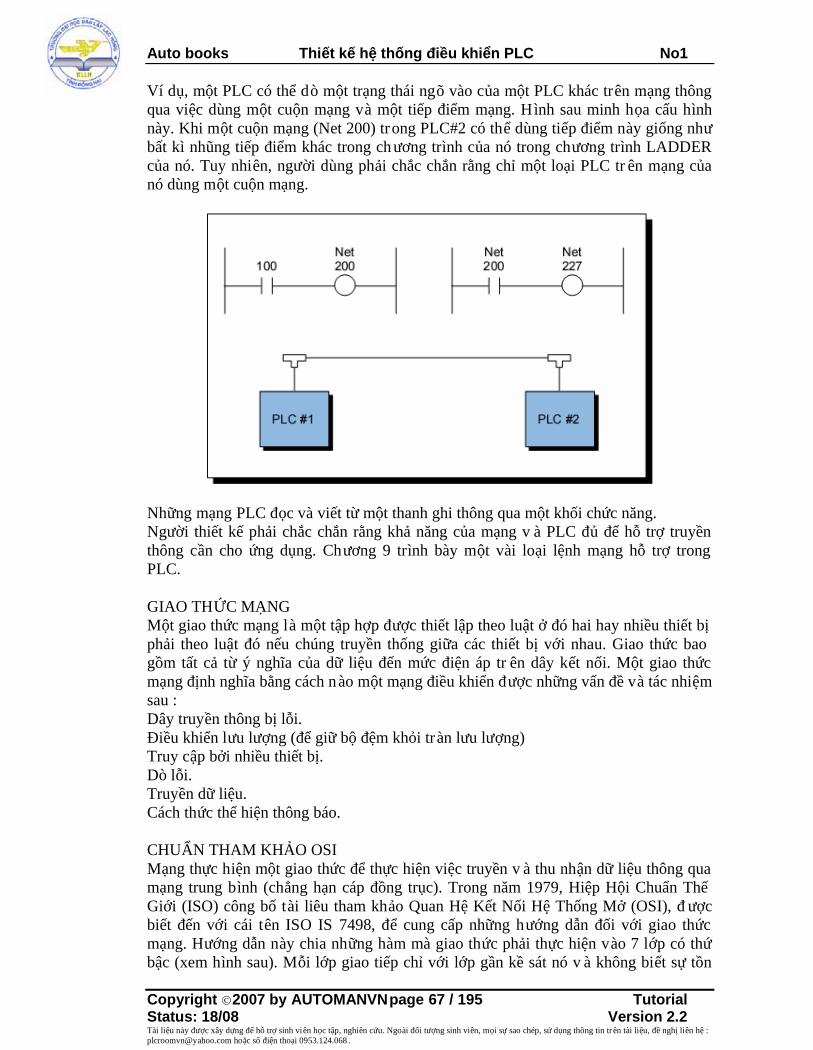
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 67 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ, một PLC có thể dò một trạng thái ngõ vào của một PLC khác trên mạng thôngqua việc dùng một cuộn mạng và một tiếp điểm mạng. H ình sau minh họa cấu hìnhnày. Khi một cuộn mạng (Net 200) trong PLC#2 có thể dùng tiếp điểm này giống nhưbất kì nhũng tiếp điểm khác trong ch ương trình của nó trong chương trình LADDERcủa nó. Tuy nhiên, người dùng phải chắc chắn rằng chỉ một loại PLC tr ên mạng củanó dùng một cuộn mạng.
Những mạng PLC đọc và viết từ một thanh ghi thông qua một khối chức năng.Người thiết kế phải chắc chắn rằng khả năng của mạng v à PLC đủ để hỗ trợ truyềnthông cần cho ứng dụng. Chương 9 trình bày một vài loại lệnh mạng hỗ trợ trongPLC.
GIAO THỨC MẠNGMột giao thức mạng là một tập hợp được thiết lập theo luật ở đó hai hay nhiều thiết bịphải theo luật đó nếu chúng truyền thống giữa các thiết bị với nhau. Giao thức baogồm tất cả từ ý nghĩa của dữ liệu đến mức điện áp tr ên dây kết nối. Một giao thứcmạng định nghĩa bằng cách nào một mạng điều khiển được những vấn đề và tác nhiệmsau :Dây truyền thông bị lỗi.Điều khiển lưu lượng (để giữ bộ đệm khỏi tràn lưu lượng)Truy cập bởi nhiều thiết bị.Dò lỗi.Truyền dữ liệu.Cách thức thể hiện thông báo.
CHUẨN THAM KHẢO OSIMạng thực hiện một giao thức để thực hiện việc truyền v à thu nhận dữ liệu thông quamạng trung bình (chẳng hạn cáp đồng trục). Trong năm 1979, Hiệp Hội Chuẩn ThếGiới (ISO) công bố tài liêu tham khảo Quan Hệ Kết Nối Hệ Thống Mở (OSI), đ ượcbiết đến với cái tên ISO IS 7498, để cung cấp những hướng dẫn đối với giao thứcmạng. Hướng dẫn này chia những hàm mà giao thức phải thực hiện vào 7 lớp có thứbậc (xem hình sau). Mỗi lớp giao tiếp chỉ với lớp gần kề sát nó v à không biết sự tồn
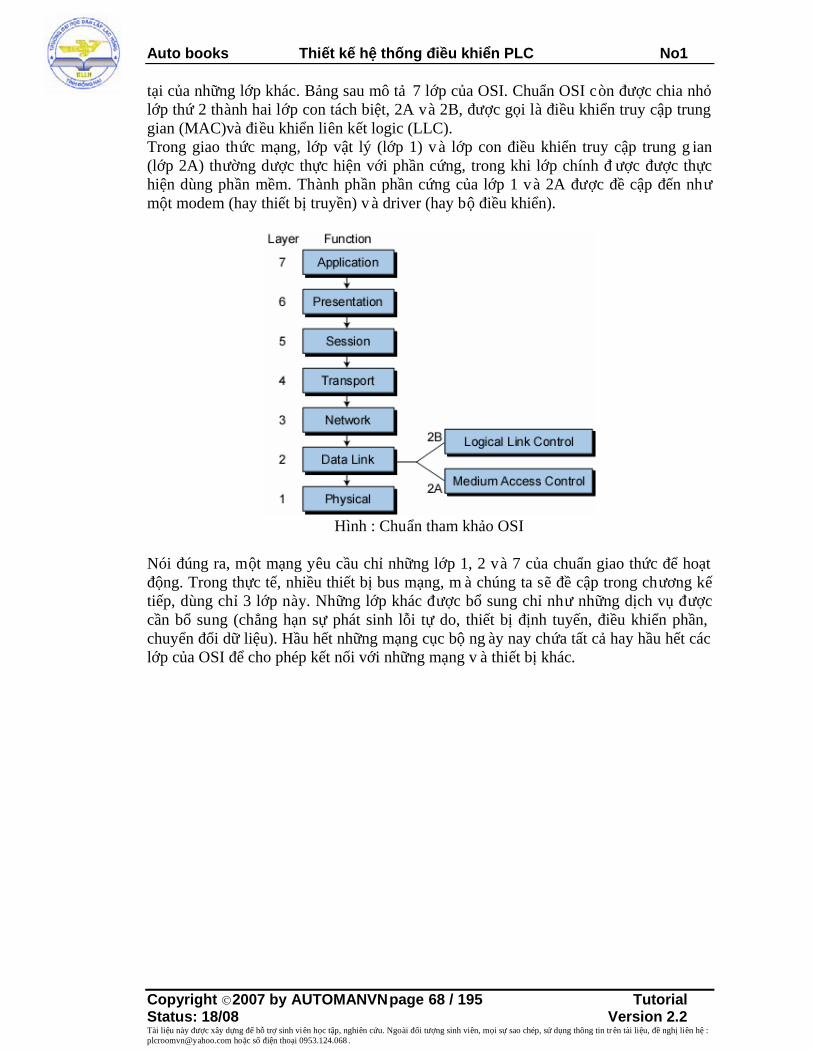
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 68 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
tại của những lớp khác. Bảng sau mô tả 7 lớp của OSI. Chuẩn OSI còn được chia nhỏlớp thứ 2 thành hai lớp con tách biệt, 2A và 2B, được gọi là điều khiển truy cập trunggian (MAC)và điều khiển liên kết logic (LLC).Trong giao thức mạng, lớp vật lý (lớp 1) v à lớp con điều khiển truy cập trung g ian(lớp 2A) thường dược thực hiện với phần cứng, trong khi lớp chính đ ược được thựchiện dùng phần mềm. Thành phần phần cứng của lớp 1 và 2A được đề cập đến nhưmột modem (hay thiết bị truyền) v à driver (hay bộ điều khiển).
Hình : Chuẩn tham khảo OSI
Nói đúng ra, một mạng yêu cầu chỉ những lớp 1, 2 và 7 của chuẩn giao thức để hoạtđộng. Trong thực tế, nhiều thiết bị bus mạng, m à chúng ta sẽ đề cập trong chương kếtiếp, dùng chỉ 3 lớp này. Những lớp khác được bổ sung chỉ như những dịch vụ đượccần bổ sung (chẳng hạn sự phát sinh lỗi tự do, thiết bị định tuyến, điều khiển phần,chuyển đổi dữ liệu). Hầu hết những mạng cục bộ ng ày nay chứa tất cả hay hầu hết cáclớp của OSI để cho phép kết nối với những mạng v à thiết bị khác.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 69 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Bảng 18-1. Bảy lớp của chuẩn tham khảo OSI
Để hiểu cấu trúc 7 lớp này, hãy xem xét ví dụ thường ngày quen thuộc, một bức côngvăn nội bộ (xem hình 18-15). Tưởng tượng rằng hai văn phòng là hai điểm mạng tạihai điểm khác nhau. Nếu người chủ của một văn phòng muốn gởi một bức công vănđến một người chủ của văn phòng khác, anh ta phải viết bức công văn ấy lên giấydùng bút chì. Sau đó khi công văn được viết, người chủ đưa nó cho thư kí để đánh lại,viết địa chỉ, dán tem và gởi đi. Bút chì và giấy tương ứng với lớp thứ 7 (lớp ứngdụng), là mức chứa nội dung của người chủ (chẳng hạn người dùng của mạng). Anh ta“dùng” bút chì và giấy để soạn nội dung công văn.
Sau đó, nó không còn thuộc về trách nhiệm của anh ta nữa, mặc d ù công văn vẫn còntrong hệ thống, điều đó có nghĩa rằng công văn v ẫn còn trong văn phòng của anh ta,đang được chuyển sang bước kế tiếp phải xảy ra trước khi nó được đưa vào hệ thốngphát hành mail.Những bước này nằm trong lớp kết tiếp thứ 6 của chuẩn OSI :Người thư kí đánh máy lại bức công văn và đặt cả địa chỉ người viết và người nhậntrên bì thư (lớp 6 – mã hóa và chuyển đổi).Người thư kí đặt công văn vào một phong thư, thêm vào phần bưu phí, và đưa chúngđến thùng thư (tương ứng với lớp 5, 4 và 3)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 70 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Hình : Cấu trúc 7 lớp.
Người đưa thư 1 nhận công văn, chắc chắn rằng nó đã được trả bưu phí đủ và ghiđúng địa chỉ và đặt nó và trong hộp mail được gởi đi với những lá thư khác (lớp 2).Người đưa thư 2 sau đó nhặt công văn (lớp 1) và gởi chúng thông qua hệ thống mail,hay nói cách khác thông qua hệ thống mạng.Sau một vài ngày, văn phòng khác nhận được công văn và một quy trình giống nhưvậy được thực hiện nhưng ở phần người nhận. Người đưa thư 2’ đưa công văn, ngườiđưa thư 1 kiểm tra để biết địa chỉ người nhận xem nằm ở đâu. Sau đó, ng ười đưa thư 1gởi công văn vào hệ thống phân phối mail của văn ph òng 2 và nó được chuyển chongười thư kí của ông chủ 2. Người thư kí chuyển công văn đến ông chủ, người đọc vàhiểu nội dung công văn đó. Phương pháp 7 lớp này đảm bảo việc tạo ra, thực hiện v àphân phát luồng tin, từ một giao thức có thứ tự được thực hiện.
Chuẩn OSI của Hiệp hội tiêu chuẩn thế giới ISO bao gồm một cấu trúc đ ược tuân theobởi hầu hết các chuẩn giao thức. Mỗi chuẩn đ ược được thiết kế mở để những thiết bịmạng từ những nhà sản xuất khác có thể kết nối đ ược với nhau. Những tổ chức ứngdụng kỹ thuật riêng lẽ tương phản với chuẩn của Hiệp hội chẳng hạn nh ư ISO, đã hìnhthành nên ảnh hưởng lớn nhất đến sự tiêu chuẩn hóa của giao thức mạng. Chuẩn ISOtuy vậy, sẽ được chấp nhận và phê chuẩn một chuẩn mạng cho đến khi nó tuân theocấu trúc giao thức được định nghĩa bởi chuẩn OSI
CHUẨN IEEEHội Kỹ Sư Điện và Điện Tử (IEEE) Hội Máy tính đã thành lập Chuẩn Dự Án 802 vàonăm 1980 với ý định tìm ra một chuẩn mạng cục bộ cho phép thiết bị từ một nh à sảnxuất khác truyền thông với nhau thông qua mạng. Sau khi nghi ên cứu tất cả nhữngyêu cầu của người dùng, yêu cầu của nhà sản xuất , Hiệp hội đề ra chuẩn v à địnhnghĩa một vài lại chuẩn mạng.IEEE 802.2.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 71 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Chuẩn IEEE, để phù hợp với ISO, đã đồng ý chịu trách nhiệm về các thông số kỹthuật của mạng cụ bộ truyền dữ liệu trong khoảng 1 đến 20 MB (megabits/sec). ChuẩnIEEE 802.3, được ISO đồng ý như chuẩn của ISO (ISO 8802), điều chỉnh lớp 1 v à lớp2A của chuẩn OSI. Hình 18-16 minh họa các phần khác nhau của chuẩn IEEE 802 v ànhững mối liên hệ của nói với chuẩn OSI.
Chuẩn IEEE 802
Chuẩn IEEE 802.3 quy định rằng mạng truy cập phải xảy ra thông qua CSMA/CDdùng một bus cấu trúc liên kết mạng ở tốc độ 1 đến 20Mbaud (băng thông gốc) hay10Mbaund (băng thông rộng). Hầu hết các mạng sử dụng mạng Elthernet đều sử dụngchuẩn IEEE 802.3. Thực tế, khi Ethernet đ ược phát minh lần đầu vào đầu thập nên1980s thông qua một một nỗ lực chung của tổ chức Digital Equipmeent Corporation(DEC). Ứng dụng nó, với Intel chuẩn IEEE đ ược đưa vào ứng dụng với chỉ một vàithay đổi nhỏ để làm cho nó phù hợp với 802.3 (bus CSMA/CD). Elthernet trong ISOcó một chuẩn với cái tên ISO 8802.3. Trong hệ thống điều khiển, mạng Elthernet(802.3) đầu tiên được xây dựng cho ứng dụng không quan trọng, chẳng hạn nh ư quảnlý việc kiểm tra và giám sát chương tr ình PLC.
Chuẩn IEEE 802.4 và 802.5.Chuẩn IEEE 802.4 cung cấp một mạng báo hiệu tại những tốc độ truyền băng thônggốc và băng thông rộng hơn chuẩn IEEE 802.3. Chuẩn 802.4 đ ược sử dụng ở nhiềucông ty PLC như một cấu trúc giao thức của lớp dưới của mạng thiết bị cục bộ của họ.Ngoài ra, những chuẩn IEEE khác, IEEE 802.5, cung cấp một mạng báo hiệu v òng vớitốc độ truyền thấp hơn cho cáp băng thông gốc (1.4 Mbaud).

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 72 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
IBM chấp nhận chuẩn 802.5 cho giao thức truyền cờ hiệu củ a họ với cấu trúc mạngvòng. Các hình dưới minh họa cho những đặc trưng kỹ thuật chung của chuẩn IEEE802.3 802.4 và 802.5
Đặc trưng của chuẩn IEEE 802.3 (Ethernet).
Đặc trưng của chuẩn IEEE 802.4 (token bus).

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 73 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Đặc trưng của chuẩn IEEE 802.5 (token ring network).
GIAO THỨC TCP/IPHầu hết các công ty đều hỗ trợ chuẩn Elthernet để thực hiện chức năng giám sát thiếtbị thông qua chức năng < > d ùng một giao thức TCP/IP đối với lớp 3 v à lớp 4 củaISO. Giao thức điều khiển truyền – transmission control protocol/giao thức internet –internet protocol (TCP/IP) đư ợc Arpanet phát minh đầu ti ên – một mạng máy tínhđược sản xuất vào đầu thập kỹ 1970 ở Mỹ. Bộ quốc ph òng dùng giao thức này đểtruyền thông thông tin trong mạng từ máy tính n ày đến máy tính kia trong mạngArpanet. Ngày nay, giao thức TCP/IP được sử dụng rộng rãi trong mạng dữ liệuinternet.Trong giao thức TCP/IP, TCP đảm bảo cho việc điều khiển của kết nối hai đầu cuối.TCP hỗ trợ một và dịch vụ cho người dùng, chẳng hạn như thiết lập kết nối và ngắtkết nối mạng, đảm bảo dữ liệu sắp xếp tuần tự, chống việc mất tuần tự, điều khiển thờigian kết nối, việc truyền dữ liệu đa dạng v à rõ ràng? Việc thực hiện IP bổ sung nhữngchức năng chẳng hạn như định địa chỉ mạng, phân phối các gói dữ liệu, định tuyế n dữliệu trong hệ thống nhiều mạng.
Bộ điều khiển Allen-Bradley’s PLC-5 tích hợp giao thức Elthernet TCP/IP
Một vài nhà sản xuất hỗ trợ PLC với TCP/IP thông qua giao thức Elthernet đ ược tíchhợp bên trong bộ điều khiển PLC (H ình dưới). Điều này cho phép PLC kết nối trựctiếp với một mạng Elthernet (H ình dưới). Chú ý rằng PLC trong h ình dưới có đồngthời một bộ điều khiển mạng với những PLC khác. Đôi lúc, phần TCP/IP trong mạngphân tán được thay thế bằng một giao thức khác, giao thức MMS (một giao thứctruyền thông các thông tin kỹ thuật của nh à sản xuất), được dùng bởi những thiết bị <plant floor devices > để truyền thông thông qua mạng 902.3 (H ình 10-20). Trong cấuhình này, một PLC truyền thông với những hệ thống khác, chẳng hạn nh ư robot vàmáy công cụ số CNC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 74 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
PLC kết nối trực tiếp với mạng Ethernet .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 75 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giao thức MMS.
KIỂM TRA MẠNG VÀ NHỮNG VẤN ĐỀ XẢY RA .Trước khi một mạng cục bộ được thiết lập, người thiết kế phải kiểm tra nó để chắcchắn rằng nó không chi thực hiện đ ược chức năng mong muốn mà còn cung cấp thờigian đáp ứng cần thiết. Chương trình ứng dụng phải được giám sát liên tục thời gianđáp ứng và có những phản ứng phù hợp nếu nó vượt đến gần thời gian lớn nhất m àquy trình quy định. Một mạch chuông được lập trình dùng chuyển một tiếp điểm kếtthúc đến nhứng điểm có lỗi trên mạng, trước khi nó được đưa trở lại nhằm kiểm trathời gian đáp ứng đã tốn bao nhiêu.Những lỗi mạng có thể rất khác nhau ngoại trừ cả nh à sản xuất và người dùng cùngthực hiện các bước để làm đơn giản tác vụ. Nhà sản xuất có thể cung cấp những giá trịlỗi và chương trình tự kiểm tra đối với từng node tr ên mạng, trong khi người dùng cóthể cung cấp những chương trình ứng dụng để xác định lỗi của một node.
MẠNG BUS I/OƯu điểm là sử dụng thiết bị sử dụng công ngh ệ bề mặt và mạch tích hợp, kết nối vớixu hướng điều khiển không tập trung v à sự phân bổ thông minh đối với tr ường thiếtbị, đã tạo nên sự cần thiết đối với loại có tác động mạnh của mạng v à Mạng I/O dùngbus. Mạng mới này làm cho những bộ điều khiển truyền thông tốt hơn với trường thiếtbị I/O, để có được những ưu điểm của sự thông minh. Trong ch ương này, ta sẽ đượcgiới thiệu về nội dung I/O và mô tả hai loại mạng bus network - device-level bus vàprocess bus. Trong việc thảo luận này, ta sẽ giải thích nhưng chức năng và chuẩn củamạng.Chúng ta đồng thời liệt kê những thông số kỹ thuật của Mạng I/O dùng bus và sự tổngkết những ứng dụng của nó trong ứng dụng điều khiển. Khi ta ho àn thành chương này ,ta sẽ nghiên cứu về tất cả những ảnh hưởng của hệ thống điều khiển PLC – phần cứng,phần mềm và phương pháp truyền thông và ta có thể sẵn sàng để đưa những ứng dụngnày vào việc xây dựng và bảo trì hệ thống PLC.
GIỚI THIỆU VỀ HỆ THỐNG MẠNG I/O D ÙNG BUSMạng I/O bus cho phép PLC truyền thông với thiết bị I/O the o hướng làm thế nào đểmạng LAN giám sát PLC truyền thông với những PLC ri êng lẽ (xem hình). Cấu hìnhđiều khiển phân tán này trong hệ thống PLC, có thể phù hợp với những hệ thống điềukhiển lớn hơn, nhanh hơn. Cấu trúc liên kết mạng hay cấu trúc vật lý củ a một MạngI/O dùng bus theo kiểu cấu hình bus hay cấu hình cây bus, cho phép trường điều khiển(chẳng hạn như công tắc hành trình, cảm biến quang, cảm biến tiệm cận) kết nối trựctiếp với hoặc là một PLC hay là một bus mạng cục bộ. Nhớ rằng một bus đơn giản làmột tập các dây dùng truyền dữ liệu hay/hoặc nguồn. H ình sau minh họa kết nối giữamột PLC, một LAN và một Mạng I/O dùng bus.
Chức năng cơ bản của một Mạng I/O dùng bus là truyền thông tin cũng như truyềnnguồn đến những thiết bị được kết nối với mạng.(xem hình sau). Trong một Mạng I/Odùng bus, thiết bị PLC điều khiển những tr ường thiết bị một cách trực tiếp, khôngthông qua module I/O; vì thế kết nối PLC với và truyền thông đén các trường thiết bịI/O phụ thuộc vào giao thức mạng. Trong bản chất, P LC kết nối với Mạng I/O dùngbus theo hướng tương tự như chúng kết nối với thiết bị I/O điều khiển từ xa, ngoại trừrằng những PLC trong một bus I/O dùng một thiết bị quét Mạng I/O dùng bus. Một

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 76 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
máy quét Mạng I/O dùng bus đọc và ghi lên từng địa chỉ của từng trường thiết bị cũngnhư giải mã thông tun chứa trong gói thông tin mạng. Một cấu trúc mạng bus h ình câylớn (chẳng hạn như một mạng với nhiều rẽ nhánh) có thể kết nối l ên đến 2048 haynhiều hơn thiết bị số.Những trường thiết bị kết nối với Mạng I/O dùng bus chứa một bộ xử lý thông minhnhư vi điều khiển hay những dạng mạch khác. Những thiết bị n ày truyền thông vớikhông chỉ trạng thái ON/OFF của ngõ vào và điều khiển ngõ ra mà còn những thôngtin về trạng thái hoạt động của chúng. Ví dụ, một cảm biến q uang (chuyển mạch) cóthể báo cáo khi độ lợi bên trong của nó bắt đầu giảm do bẩn thấu kính, hay một côngtắc hành trình có thể báo cáo số lần giám sát mà nó đã thực thi. Loại thông tin này cóthể ngăn ngừa những hoạt động sai chức năng của thiết bị I/O v à có thể hiển thị khimột cảm biến đã đến lúc hỏng và cần phải thay thế.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 77 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ khối Mạng I/O dùng bus
Kết nối giữa một PLC, một mạng LAN v à một Mạng I/O dùng bus
Kết nối của một Mạng I/O dùng bus

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 78 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Thiết bị thông minh
NHỮNG LOẠI MẠNG BUS I/OMạng I/O dùng bus có thể tách ra thành hai họ khác nhau – một tương ứng với nhữngthiết bị có thông tin bậc thấp, loại tiêu biểu là tín hiệu số và loại thứ hai tương ứng vớinhững thiết bị có thông tin bậc cao, mô tả những biến thiên trong những quy trìnhcông nghiệp. Đó là :Mạng thiết bị số dùng bus (Devices bus network) .Mạng quá trình dùng bus (Process bus network) .Mạng thiết bị số dùng bus (Devices bus network) giao tiếp với những thiết bị có thôngtin bậc thấp (chẳng hạn như nút nhấn, công tắc hành trình,..) dùng để truyền dữ liệuliên quan đến trạng thái của thiết bị (ON/OFF) v à trạng thái hoạt động của nó (chẳnghạn như hoạt động OK). Những mạng này thường dùng một vài bit đến một vài bytedữ liệu tại một thời điểm. Mạng quá trình dùng bus (Process bus network) thì kết nốivới những thiết bị có thông tin bậc cao (chẳng hạn như van tuyến tính thông minh,đồng hồ đo lưu lượng, …) thường được ứng dụng trong những ứng dụng điều khiểntuyến tính. Mạng quá trình dùng bus (Process bus network) điều khiển một số lượnglớn dữ liệu (khoảng vài trăm byte), chứa thông tin về dữ liệu biến thi ên cũng nhưchính trường thiết bị đó. H ình 19-5 minh họa sơ đồ phân loại của hai loại mạng I/Odùng bus.Phần lớn thiết bị được dùng trong Mạng quá trình dùng bus (Process bus network) làthiết bị analog, trong khi hầu hết các thiết bị đ ược dùng trong Mạng thiết bị số dùngbus (Devices bus network) là thiết bị số. Tuy nhiên, Mạng thiết bị số dùng bus(Devices bus network) thỉnh thoảng bao gồm luôn cả thiết bị analog, chẳng hạ n nhưcặp ngẫu nhiệt và lái biến tốc độ trong đó chỉ truyền một v ài byte thông tin. Mạngthiết bị số dùng bus (Devices bus network) bao g ồm cả thiết bị số cũng như nhữngthiết bị analog nhỏ được gọi là mạng có độ rộng byte dùng bus (byte-wide busnetwork). Những mạng này có thể truyền từ một đến 50 hay nhiều byte dữ liệu h ơn tạicùng một thời điểm. Mạng thiết bị số d ùng bus (Devices bus network) ch ỉ giao tiếpđược với thiết bị số được gọi là mạng có độ rộng bit dùng bus (bit-wide bus network).Mạng có độ rộng bit dùng bus (bit-wide bus network) truyền dữ liệu có độ lớn nhỏhơn 8 bit từ những thiết bị số đơn giản thông qua một khoảng cách ngắn.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 79 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ phân loại Mạng I/O dùng bus.
Lý do đầu tiên tại sao Mạng thiết bị số dùng bus (Devices bus network) giao tiếpchính với thiết bị số và Mạng quá trình dùng bus (Process bus network) giao tiếpchính với thiết bị analog là việc dữ liệu yêu cầu được truyền khác nhau của nhữngthiết bị này. Kích thước của những gói thông tin có một ảnh h ưởng ngược lại tốc độtruyền dữ liệu trên mạng. Vì thế, đối với mạng thiết bị số dùng bus (Devices busnetwork) chỉ truyền một số lượng nhở dữ liệu tại một thời điểm, n ên tốc độ truyền dữliệu của chúng cao. Ngược lại, mạng quá trình dùng bus (Process bus network) truy ềnnhững gói dữ liệu lớn nên tốc độ chậm, vì thế chúng có khả năng ứng dụng cho điềukhiển những thiết bị I/O analog, những thiết bị không cần đáp ứng nhanh. Tốc độtruyền dữ liệu của cả hai loại mạng d ùng bus có thể lên đến 1 hoặc 2.5 megabit mỗigiây. Tuy nhiên, một mạng thiết bị số dùng bus (device bus network) có th ể truyềnnhiều gói thông tin từ nhiều tr ường thiết bị bằng với thời gian một mạng quá tr ìnhdùng bus (process bus network) th ực hiện đối với một thiết bị.
Do mạng quá trình dùng bus (process bus network) có thể truyền vài trăm byte dữ liệumột lúc, chúng phù hợp với những ứng dụng truyền dữ liệu phức tạp.Ví dụ, một thiết bị cảm biến áp suất, truyền qua mạng quá trình dùng bus (process busnetwwork), thông minh có thể cung cấp cho bộ điều khiển nhiều thông tin hơn là chỉáp suất, nó đồng thời truyền thông tin về nhiệt độ d òng chảy và những hoạt động bêntrong. Vì thế,loại thiết bị cảm biến áp suất n ày cần một gói dữ liệu lớn để truyền tất cảthông tin liên quan đến việc xử lý của nó, và đó là lý do tại sao mạng quá trình dùngbus (process bus network) được sử dụng riêng cho ứng dụng này. Lượng thông tin nàykhông phù hợp với mạng thiết bị số dùng bus (device bus netwwork)
NHỮNG GIAO THỨC CHUẨNCả hai mạng I/O dùng bus đã được thiết lập giao thức chuẩn, tuy nhiên, nhiều tổ chứcđang làm việc theo hướng phát minh các thông số kỹ thuật của cả mạng thiết bị sốdùng bus và mạng quá trình dùng bus. Trong mãng bus quá trình, hai t ổ chức chính,Tổ chức Fieldbus (Fieldbus Foundation) (l à sự kết hợp giữa Interoperable SystemsProject, ISP, Foundation và tập đoàn World FIP North American) và Tổ chức thươngmại Profibus (Process Field Bus) (Profibus Trade Organization) đang l àm việc đểthành lập các giao thức chuẩn và mạng. Những tổ chức khác như Hiệp hội các thiết bị

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 80 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
đo của Mỹ (Instrument Society of America – ISA) và Hiệp hội điện tử quốc tế ChâuÂu (European International Electronics Committee – IEC) cùng tham gia tìm ra nh ữngchuẩn này. Đây là lý do tài sao một vài công ty chỉ rỏ rằng những sản phẩm analogcủa họ thích hợp với Profibus, Field bus hay các loại giao thức truyền thông khác.Hình 19-6 minh họa một sơ đồ khối của một mạng và giao thức chuẩn của nó.
Mạng và những giao thức chuẩn.
Mặc dù không có một công bố công khai nào về những ứng dụng mạng thiết bị s ố,một vài de facto chuẩn đang xuất hiện tùy thuộc vào hiệu lực của các thông số giaothức đặc biệt đi kém từ những nh à sản xuất mạng thiết bị số dùng bus (device busnetwork)Những nhà sản xuất mạng này hay những công ty cung cấp những thiết bị trường I/Ovới những thông số kỹ thuật được đặt trước để tìm ra một cấu trúc mạng mở (chẳnghạn một mạng có thể giao tiếp với nhiều loại thiết bị tr ường). Bằng cách này, mỗicông ty hy vọng thực hiện được chuẩn giao thức công nghiệp của ri êng họ. Một trongnhững chuẩn de facto này của mạng thiết bị số dùng bus có độ rộng byte làDeviceNet, một sáng tạo của nhà sản xuất PLC Allen-Bradley và đã được cung cấpbởi một hiệp hội lợi ích phụ độc lập đ ược gọi là Hiệp hội các nhà cung cấp thiết bịDeviceNet mở (Open DeviceNet Vendor Association). Một cái khác là SDS (Hệ thốngphân tán thông minh - Smart Distributed System) của Honeywell. Cả hai giao thứcchuẩn thiết bị số dùng bus này đều dựa trên mạng bus điều khiển cục bộ (Control areanetwork bus – CANbus) được phát minh cho công nghiệp ô tô, dùng những chip cógiao thức chuẩn CAN thương mại. InterBus-S được phát minh bởi Phoenix Contact l àmột chuẩn de facto khác đối với mạng thiết bị số d ùng bus có độ rộng byte.Chuẩn de facto đối với mạng thiết bị số d ùng bus có độ rộng bit, low-end bao gồmSeriplex, được pháp minh bởi Square D, v à ASI (Giao tiếp thiết bị chấp hành và cảmbiến - Actuator Sensor Interface), một chuẩn được phát minh bởi một consortium củanhững công ty châu Âu. Ngoài ra, đây là lý do tại sao mạng I/O dùng bus và nhữngnhà sản xuất thiết bị trường sẽ chỉ định tính tương hợp với một giao thức riêng biệt(chẳng hạn ASI, Seriplex , InterBus-SDS hay DeviceNet) thậm chí cho dù không cómột văn phòng nào về các chuẩn giao thức này tồn tại.
NHỮNG ƯU ĐIỂM CỦA MẠNG I/O DÙNG BUS

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 81 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mặc dù mạng thiết bị số dùng bus giao tiếp tốt với những thiết bị số v à mạng quátrình dùng bus giao tiếp tốt với những thiết bị analog phức tạp, v à cùng truyền thôngthông tin giống nhau – tín hiệu số. Thực tế, việc cần thiết truyền thông số l à một trongnhững lý do chính của việc thiết lập mạng I/O d ùng bus. Truyền thông số cho phépnhiều trường thiết bị được kết nối với một dây bằng khả năng định địa chỉ v à khả năngcủa thiết bị về xử lý dữ liệu. Trong truyền thông số, một chuỗi các số 1 v à 0 đượctruyền nối tiếp nhau thông qua một bus, với điều kiện l à quy trình quan trọng, máymóc và thông tin về trường thiết bị trong định dạng số. Những tín hiệu số n ày ít bị ảnhhưởng hơn những loại tín hiệu khác trong việc suy hao do sự giao thoa tr ường (EMI)và tần số sóng vô tuyến được tạo bởi một thiết bị analog điện tử trong môi tr ườngđang hoạt động. Ngoài ra, những PLC dùng bus I/O thực hiện một số nhỏ các việcbiến đổi ADC và DAC, vì thế những thiết bị này truyền dữ liệu số của nó thông quabus đến CPU. Điều này lần lượt loại bỏ những lỗi nhỏ nhưng dễ tích lũy được tạo bởibộ chuyển đổi A/D và D/A.
(a) Một liên kết truyền thông CANbus và (b) một cáp 4 dây CANbus.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 82 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Bảng tốc độ truyền và độ dài tương ứng của từng loại cáp cho (a) DeviceNet và (b)mạng SDS CANbus.
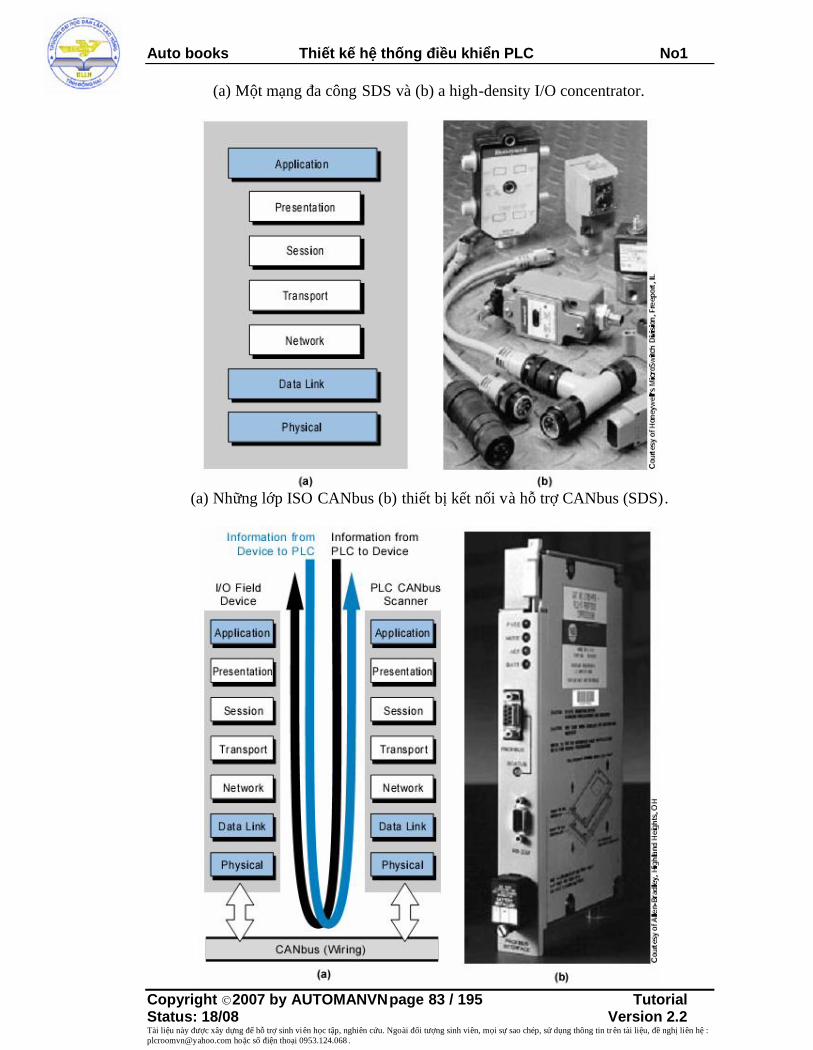
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 83 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
(a) Một mạng đa công SDS và (b) a high-density I/O concentrator.
(a) Những lớp ISO CANbus (b) thiết bị kết nối và hỗ trợ CANbus (SDS) .
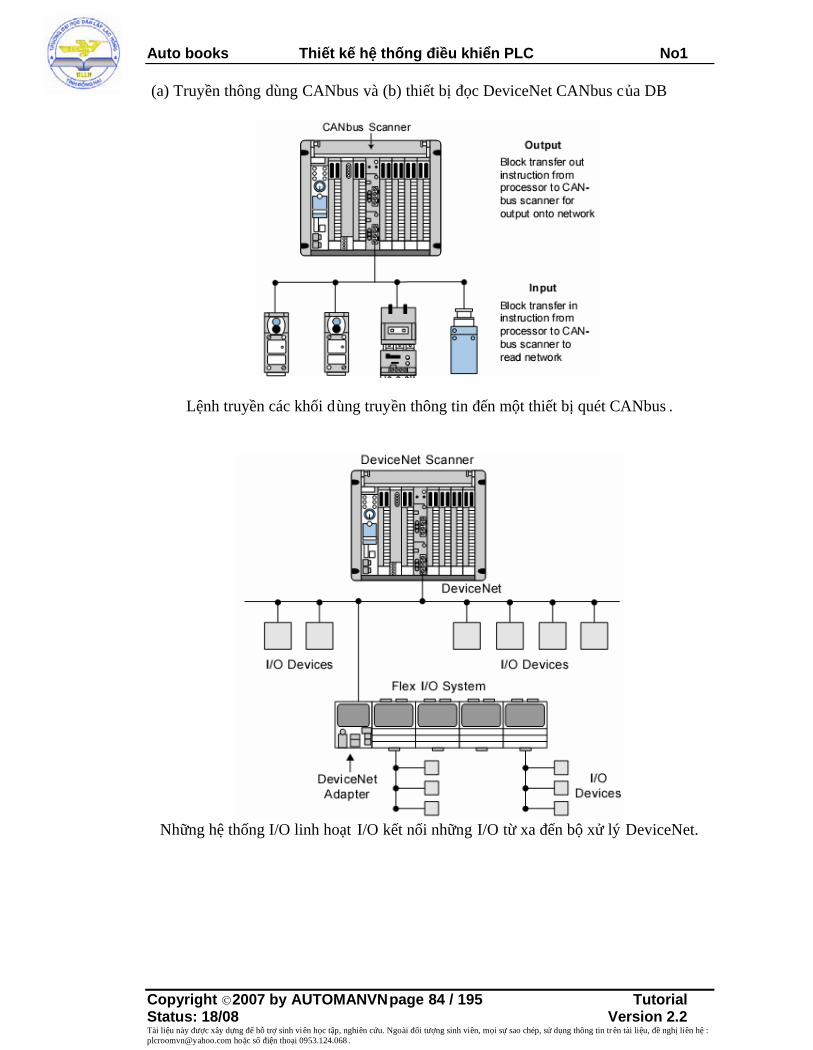
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 84 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
(a) Truyền thông dùng CANbus và (b) thiết bị đọc DeviceNet CANbus của DB
Lệnh truyền các khối dùng truyền thông tin đến một thiết bị quét CANbus .
Những hệ thống I/O linh hoạt I/O kết nối những I/O từ xa đến bộ xử lý DeviceNet.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 85 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mạng thiết bị số dùng bus có độ rộng bit ASI.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 86 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mạng I/O dùng bus sử dụng CANbus và ASI networks.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 87 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
InterBus Loop và mạng InterBus-S liên kết bởi một module đầu cuối InterBus Loop.
Mạng seriplex dùng bus với một bộ điều khiển.
MẠNG QUÁ TRÌNH DÙNG BUS
Cấu hình mạng quá trình dùng bus.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 88 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Hệ thông van thông minh tương thức với giao thức FieldBus.
MẠNG QUÁ TRÌNH DÙNG BUS FIELDBUSMạng quá trình dùng bus Fieldbus do tổ chức Filedbus Foundation là một hệ thống sốtruyền thông hai chiều, nhiều port, nối tiếp chẳng hạn nh ư cảm biến và thiết bị chấphành thông minh với bộ điều khiển chẳng hạn như PLC. Mạng quá trình dùng buscung cấp những giá trị mong muốn vốn có trong hệ thống analog 4 -20mA, chẳng hạnnhư :
Mạch giao tiếp chuẩn. Thiết bị cấp nguồn bởi bus trên một cặp dây đơn. Chức năng an toàn bên trong. Tuy nhiên, công nghệ mạng Fieldbus có những ưu điểm ưu điểm sau : Giảm việc kết nối dây đến nhiều thiết bị. Khả năng tương thích với những thiết bị Fieldbus. Giảm không gian chứa các thành phần điều khiển. Sự tin cậy trong truyền thông số.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 89 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giao thức Fieldbus
Cầu kết nối mạng Fieldbus tốc độ thấp và tốc độ cao.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 90 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
MẠNG QUÁ TRÌNH DÙNG BUS PROFIBUSProfibus là một mạng quá trình dùng bus sử dụng số có khả năng truyền thông tin giữabộ điều khiển chính (hay máy chủ) v à một trường thiết bị quá trình con, thông minh,cũng như từ một máy chủ đến thiết bị khác. Profibus thực tế bao gồm 3 mạng t ươngthích với nhau với giao thức khác nhau đ ược thiết kế để hỗ trợ cho những y êu cầu ứngdụng đặc biệt. Ba loại mạng Profibus l à :
Profibus-FMS. Profibus-DP. Profibus-PA

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 91 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Các thứ bậc trong mạng Profibus.
Mạng Profibus-DP là một phiên bản thực hiện là một phiên bản được thực hiện tối ưucủa mạng Profibus. Nó được thiết kế để điều khiển truyền thông giữa những thiết bịtrong hệ thống tự động của nhà máy. Profibus-DP là một sự thay thế phù hợp cho giaotiếp 24V song song và 4-20mA.
Mạng Profibus-PA là phiên bản tự động quá trình của mạng Profibus. Nó cung cấpnhững trạm được cấp năng lượng bằng bus (bus-powered station) và bản chất an toàntheo các thông số truyền của chuẩn IEC 1158 -2. Mạng Profibus-PA có mô tả thiết bịvà khả năng thực hiện các hàm dưới dạng khối, tùy thuộc vào thao tác giữa các phầntrường thiết bị
Không cần bộ lặp, độ dài tối đa của bus là 100m ở tốc độ 12Mbaud. Với quy ước dâyđồng loại A, khoảng cách tối đa l à 100m với tốc độ 1.5Mbaud. Khoảng cách n ày cóthể tăng lên đến 1.2km nếu tốc độ của mạng đ ược giảm xuống còn 93.95kbaud. Vớidây đồng loại B, khoảng cách tối đa là 200m với tốc độ 500kbaud và khi khoảng cáchlên đến 1.2km thì tốc độ giảm xuống còn 93.75kbaud. Đầu kết nối dùng dạng cổngCOM, 9 chân.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 92 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Cấu tạo các chân của Profibus
CÀI ĐẶT BUS I/O VÀ HƯỚNG DẪN KẾT NỐI DÂY.Một trong những ảnh hưởng lớn nhất lên việc cài đặt mạng I/O dùng bus là việc dùngđúng loại cáp, số lượng dây, và loại đầu kết nối cho mạng. Trong mạng thiết bị sốdùng bus, số lượng dây và loại chuẩn truyền thông (chẳng hạn nh ư RS-485, RS-422,..)thay đổi phụ thuộc vào đặc trưng của mạng (chẳng hạn như DeviceNet, Seriplex, ASI,Profibus, Fieldbus,…) Đầu kết nối (hình trên), dùng kết nối trường thiết bị I/O vàomạng bus I/O, có thể được thực hiện theo cấu h ình mở hoặc đóng. Hình dưới minhhọa cổng kết nối đối với một mạng DeviceNet cho I/O d ùng bus.
Kết nối port của một mạng DeviceNet d ùng bus (bên trái : đóng, bên ph ải : mở)
Kết nối đầu cáp của mạng DeviceNet

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 93 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Nói chung, một cấu hình đóng (enclosed connector) có thể kết nối từ 4 đến 8 trườngthiết bị I/O trên một bộ, trong khi cấu h ình mở có thể cung cấp chỉ 2 hay 4 thiết bị I/O.Những đầu kết nối khối được dùng khi một mạng cần được bảo vệ đối với môi trường,giống như trong loại hình khối hộp NEMA 4. Cổng mở được dùng khi thay thế đầukết nối I/O trong hệ thống vốn đ ã có thanh ray DIN do cổng mở có thể dễ dàng đượcgắn lên trên thanh ray.
HƯỚNG DẪN KẾT NỐI MẠNG THIẾT BỊ SỐHình trên minh họa sơ đồ kết nối cơ bản của một mạng CANbus DeviceNet. Chú ýrằng trên hai trục chính kết nối cấu thành cáp chính của mạch, trong đó có 5 sợi cungcấp tín hiệu, nguồn và lớp bọc ngoài. Một board mạch in dùng kết nối chúng lại vớinhau. Hầu hết các nhà sản xuất mạng thiết bị số dùng bus cung cấp các đầu kết nối“cắm và chạy” và dây kết nối hệ thống, điều này cho việc thuận tiện cho việc lắp đặtvà thay đổi hệ thống.
Sơ đồ kết nối của mạng CANbus theo chuẩn DeviceNet đối với loại nhiều cổng

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 94 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
(a) Đầu kết nối sẵn và (b) cách lắp đặt.
Phần lớn mạng thiết bị số dùng bus cần một điện trở giới hạn nằm ở cuối đ ường dâyđể phù hợp với hoạt động và truyền của dữ liệu mạng. Mỗi mạng có thể định r õ số cácđiểm có thể kết nối với mạng, tốc độ của việc truyền dữ liệu phụ thuộc vào độ dài củamạng, và độ dài lớn nhất mà thiết bị có thể được kết nối.Mạng đồng thời giới hạn độ dài của đến từng thiết bị, có nghĩa rằng tổng độ d ài đếntất cả các thiết bị không thể vượt quá giá trị được quy định trong thông số kỹ thuật.
Bảng sau cho thấy các thông số kỹ thuật của mạng truyền thông DeviceNet của Allen -Bradley
Bảng các thông số kỹ thuật của DeviceNet
HƯỚNG DẪN KẾT NỐI MẠNG QUÁ TR ÌNH DÙNG BUSTiêu chuẩn cáp giống như mạng thiết bị số dùng bus được ứng dụng đối với mạng quátrình dùng bus.Tùy thuộc vào thông số giao thức mạng, những đặc trưng đó của lớp 1 (vật lý) củachuẩn OSI, dây có thể dùng loại cáp xoắn hay loại đồng trục, có thể hoạt động tạinhững tốc độ truyền trên mạng khác nhau. Bảng sau cho thấy đặc trưng cách kết nốidây và tốc độ mạng của mạng Fieldbus Foundation (giao thức Fieldbus).

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 95 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Đặc trưng kỹ thuật của mạng Fieldbus
(a) Bộ giao tiếp Profibus của AB và (b) kết nối dây của mạng Fieldbus
Hình trên cho thấy giao thức quá tr ình dùng bus đối với họ PLC của Allen-Bradley,tương hợp với giao thức Profibus. Giao tiếp Profibus n ày có thể làm việc với mạngvới những tốc độ 9.6, 19.2, 93.75, 187.5 v à 500kbit/s. Việc nối dây bus quá tr ình cầnmột khối đầu cuối. Đầu nối T l à đầu kết nối giữa những thiết bị I/ O khác nhau (Xemhình dưới)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 96 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mạng Fieldbus dùng đầu kết nối T
ĐỊNH ĐỊA CHỈ MẠNG I/O DÙNG BUSĐịnh địa chỉ cho những thiết bị I/O trong một mạng I/O d ùng bus được thực hiện khithiết lập hay lập trình của thiết bị trong hệ thống. T ùy thuộc vào PLC, việc định địachỉ này có thể được thực hiện trực tiếp trên mạng bus thông qua một máy tính v à mộtcổng hay thông qua một máy tính kết n ối trực tiếp với giao tiếp mạng . Ta cũng có thểthực hiện bằng cách thông qua cổng RS232 của PLC (xem h ình dưới). Một vài mạngI/O dùng bus có chuyển mạch có thể được dùng để định nghĩa địa chỉ thiết bị trongkhi những thiết bị khác có một địa chỉ đ ược xác định trước liên quan đến từng thiết bị.
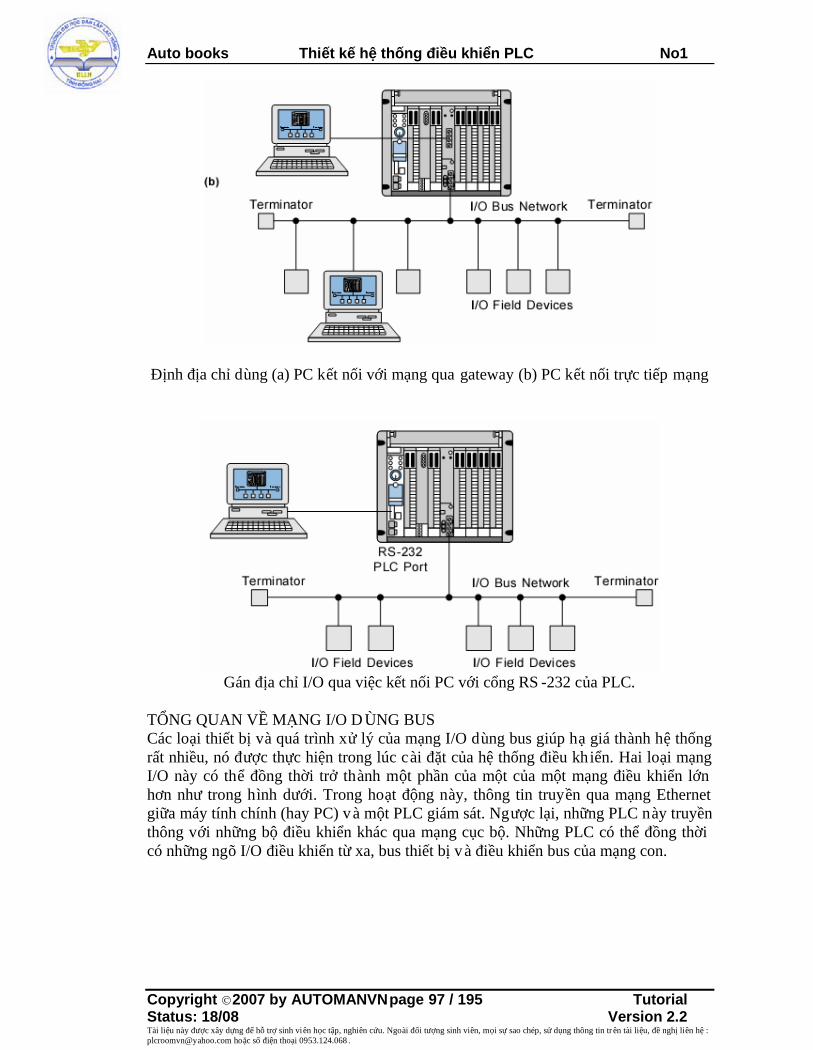
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 97 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Định địa chỉ dùng (a) PC kết nối với mạng qua gateway (b) PC kết nối trực tiếp mạng
Gán địa chỉ I/O qua việc kết nối PC với cổng RS -232 của PLC.
TỔNG QUAN VỀ MẠNG I/O D ÙNG BUSCác loại thiết bị và quá trình xử lý của mạng I/O dùng bus giúp hạ giá thành hệ thốngrất nhiều, nó được thực hiện trong lúc cài đặt của hệ thống điều kh iển. Hai loại mạngI/O này có thể đồng thời trở thành một phần của một của một mạng điều khiển lớnhơn như trong hình dưới. Trong hoạt động này, thông tin truyền qua mạng Ethernetgiữa máy tính chính (hay PC) và một PLC giám sát. Ngược lại, những PLC này truyềnthông với những bộ điều khiển khác qua mạng cục bộ. Những PLC có thể đồng thờicó những ngõ I/O điều khiển từ xa, bus thiết bị và điều khiển bus của mạng con.
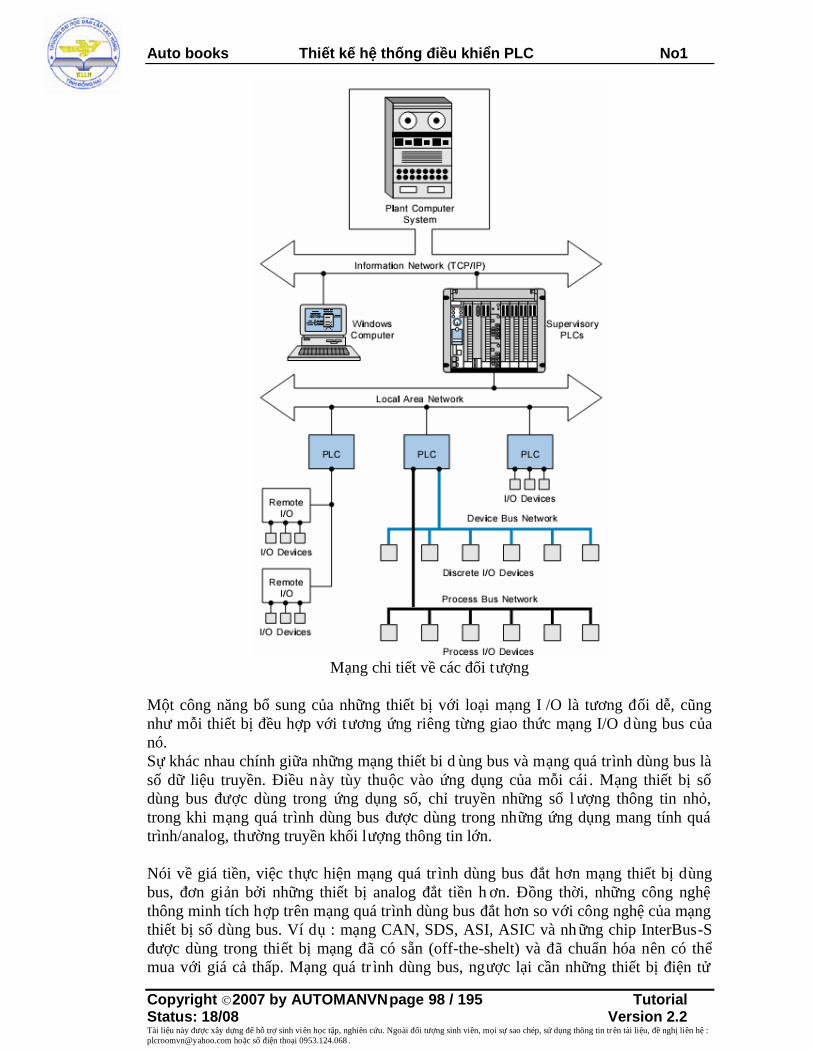
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 98 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mạng chi tiết về các đối tượng
Một công năng bổ sung của những thiết bị với loại mạng I /O là tương đối dễ, cũngnhư mỗi thiết bị đều hợp với tương ứng riêng từng giao thức mạng I/O dùng bus củanó.Sự khác nhau chính giữa những mạng thiết bi d ùng bus và mạng quá trình dùng bus làsố dữ liệu truyền. Điều này tùy thuộc vào ứng dụng của mỗi cái . Mạng thiết bị sốdùng bus được dùng trong ứng dụng số, chỉ truyền những số l ượng thông tin nhỏ,trong khi mạng quá trình dùng bus được dùng trong những ứng dụng mang tính quátrình/analog, thường truyền khối lượng thông tin lớn.
Nói về giá tiền, việc thực hiện mạng quá tr ình dùng bus đắt hơn mạng thiết bị dùngbus, đơn giản bởi những thiết bị analog đắt tiền h ơn. Đồng thời, những công nghệthông minh tích hợp trên mạng quá trình dùng bus đắt hơn so với công nghệ của mạngthiết bị số dùng bus. Ví dụ : mạng CAN, SDS, ASI, ASIC và nh ững chip InterBus-Sđược dùng trong thiết bị mạng đã có sẵn (off-the-shelt) và đã chuẩn hóa nên có thểmua với giá cả thấp. Mạng quá tr ình dùng bus, ngược lại cần những thiết bị điện tử

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 99 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
phức tạp hơn, chẳng hạn như vi điều khiển, chip nhớ và những mạch điện tử hỗ trợkhác nữa điều này làm cho thiết bị I/O đắt hơn nhiều. Sự tiêu tốn này tuy nhiều hơnđược bù lại bởi việc lắp đặt và kết nối hệ thống, đặc biệt l à đối với việc hiện đại sẽgiúp tiết kiệm việc đi dây nhiều hơn.
KIỂM TRA VÀ XỬ LÝ LỖI TRONG PLC (ERROR CHECKING)Bộ xử lý dùng kỹ thuật xử lý lỗi để giám sát h àm trạng thái của cả bộ nhớ và liên kếttruyền thông giữa các hệ thống con (subsystems) v à cổng truyền thông (peripherals)cũng như hoạt động của nó. Những kỹ thuật kiểm tra lỗi thường bao gồm kiểm tra cờchẳn lẽ và checksum.Cờ chẵn lẽ (Parity) . Là một kỹ thuật kiểm tra lỗi thông dụng nhất. Nó đ ược dùng cơbản trong truyền thông liên kết các ứng dụng để dò lỗi trong chuỗi được truyền dữ liệudài. Truyền thông giữa CPU và hệ thống con là một ví dụ hoàn hảo về ứng dụng củanó. Kiểm tra cờ chẳn lẽ được gọi dưới cái tên (vertical redundancy check (VRC)).
Cờ chẵn lẽ dùng số các số 1 trong một chuỗi word nhị phân để kiểm tra tính hợp lệcủa dữ liệu truyền. Có hai loạ i kiểm tra cờ chẵn lẻ : cờ chẵn – dùng kiểm tra số bit 1chẵn hay không; và cờ lẽ - dùng kiểm tra số bit 1 lẽ hay không?Khi dữ liệu được truyền qua PLC, nó được truyền dưới dạng số nhị phân, dùng các bit0 và các bit 1. Số bit 1 có thể hoặc là chẵn, hoặc là lẽ tùy thuộc vào số ký tự và dữ liệuđược truyền (Xem hình sau). Trong truyền dữ liệu cờ chẵn lẽ, một bit bổ sung đ ượcthêm vào chuỗi word nhị phân thường ở vị trí bit có trọng số cao nhất hoặc thấp nhất.Bit bổ sung này đượ gọi là bit cờ (P), được dùng để xác định số bit 1 là chẵn hay lẽtùy thuộc vào loại cờ được dùng.
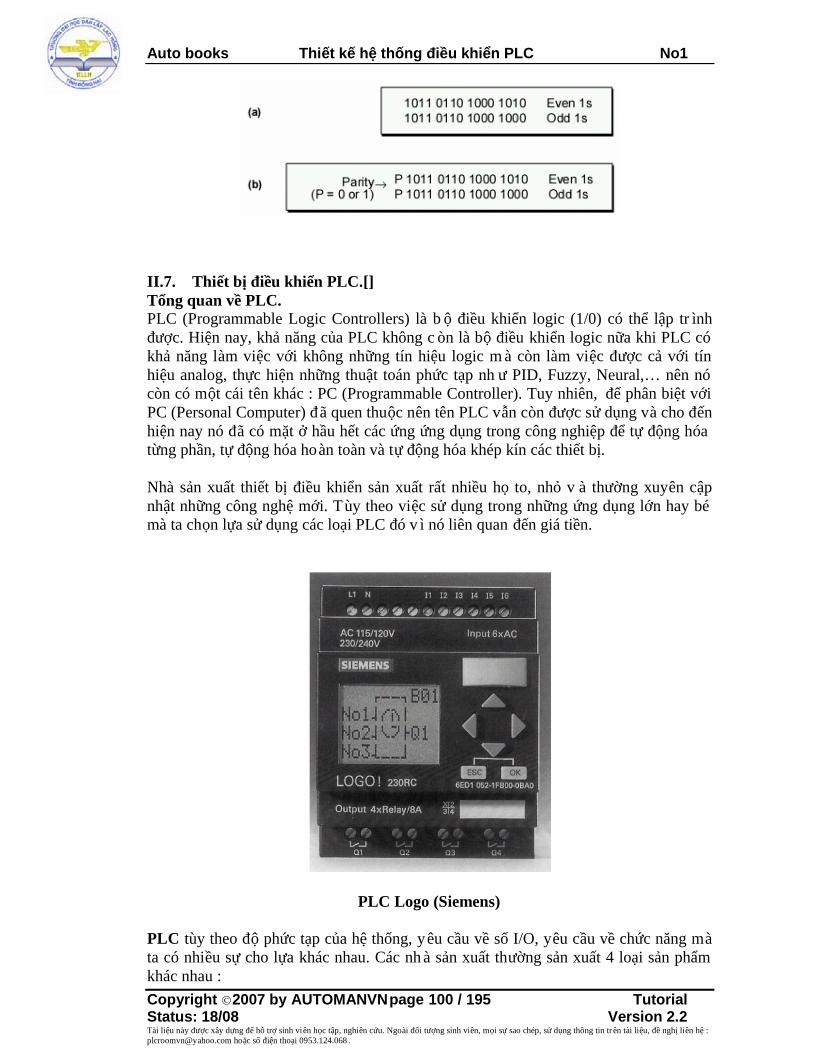
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 100 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
II.7. Thiết bị điều khiển PLC.[]Tổng quan về PLC.PLC (Programmable Logic Controllers) là b ộ điều khiển logic (1/0) có thể lập tr ìnhđược. Hiện nay, khả năng của PLC không c òn là bộ điều khiển logic nữa khi PLC cókhả năng làm việc với không những tín hiệu logic m à còn làm việc được cả với tínhiệu analog, thực hiện những thuật toán phức tạp nh ư PID, Fuzzy, Neural,… nên nócòn có một cái tên khác : PC (Programmable Controller). Tuy nhiên, để phân biệt vớiPC (Personal Computer) đã quen thuộc nên tên PLC vẫn còn được sử dụng và cho đếnhiện nay nó đã có mặt ở hầu hết các ứng ứng dụng trong công nghiệp để tự động hóatừng phần, tự động hóa hoàn toàn và tự động hóa khép kín các thiết bị.
Nhà sản xuất thiết bị điều khiển sản xuất rất nhiều họ to, nhỏ v à thường xuyên cậpnhật những công nghệ mới. Tùy theo việc sử dụng trong những ứng dụng lớn hay bémà ta chọn lựa sử dụng các loại PLC đó v ì nó liên quan đến giá tiền.
PLC Logo (Siemens)
PLC tùy theo độ phức tạp của hệ thống, yêu cầu về số I/O, yêu cầu về chức năng màta có nhiều sự cho lựa khác nhau. Các nh à sản xuất thường sản xuất 4 loại sản phẩmkhác nhau :
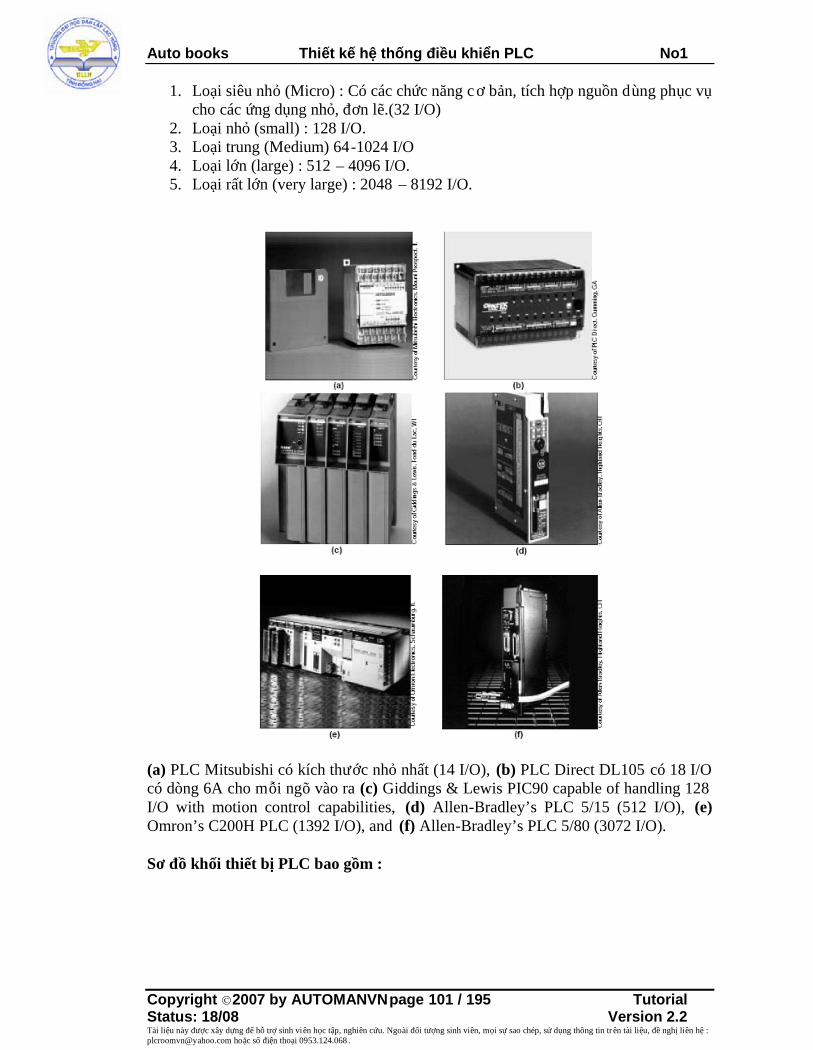
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 101 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
1. Loại siêu nhỏ (Micro) : Có các chức năng c ơ bản, tích hợp nguồn dùng phục vụcho các ứng dụng nhỏ, đơn lẽ.(32 I/O)
2. Loại nhỏ (small) : 128 I/O.3. Loại trung (Medium) 64-1024 I/O4. Loại lớn (large) : 512 – 4096 I/O.5. Loại rất lớn (very large) : 2048 – 8192 I/O.
(a) PLC Mitsubishi có kích thước nhỏ nhất (14 I/O), (b) PLC Direct DL105 có 18 I/Ocó dòng 6A cho mỗi ngõ vào ra (c) Giddings & Lewis PIC90 capable of handling 128I/O with motion control capabilities, (d) Allen-Bradley’s PLC 5/15 (512 I/O), (e)Omron’s C200H PLC (1392 I/O), and (f) Allen-Bradley’s PLC 5/80 (3072 I/O).
Sơ đồ khối thiết bị PLC bao gồm :
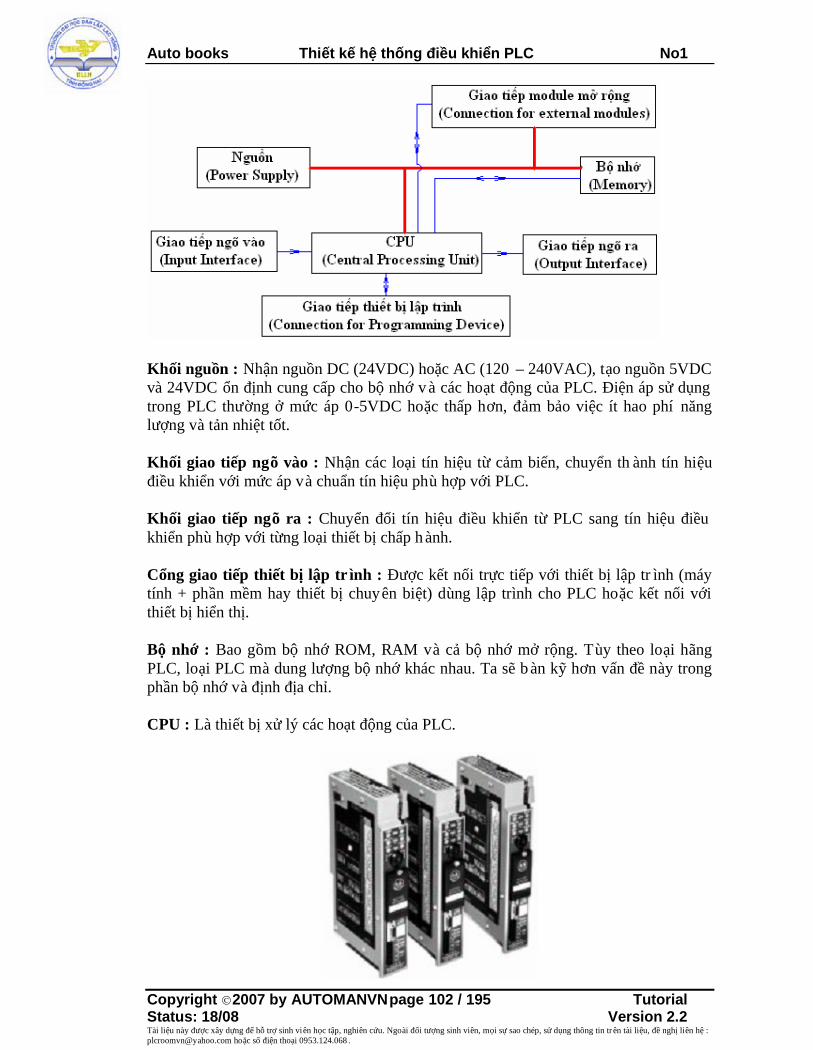
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 102 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Khối nguồn : Nhận nguồn DC (24VDC) hoặc AC (120 – 240VAC), tạo nguồn 5VDCvà 24VDC ổn định cung cấp cho bộ nhớ v à các hoạt động của PLC. Điện áp sử dụngtrong PLC thường ở mức áp 0-5VDC hoặc thấp hơn, đảm bảo việc ít hao phí nănglượng và tản nhiệt tốt.
Khối giao tiếp ngõ vào : Nhận các loại tín hiệu từ cảm biến, chuyển th ành tín hiệuđiều khiển với mức áp và chuẩn tín hiệu phù hợp với PLC.
Khối giao tiếp ngõ ra : Chuyển đổi tín hiệu điều khiển từ PLC sang tín hiệu điềukhiển phù hợp với từng loại thiết bị chấp h ành.
Cổng giao tiếp thiết bị lập tr ình : Được kết nối trực tiếp với thiết bị lập tr ình (máytính + phần mềm hay thiết bị chuyên biệt) dùng lập trình cho PLC hoặc kết nối vớithiết bị hiển thị.
Bộ nhớ : Bao gồm bộ nhớ ROM, RAM và cả bộ nhớ mở rộng. Tùy theo loại hãngPLC, loại PLC mà dung lượng bộ nhớ khác nhau. Ta sẽ b àn kỹ hơn vấn đề này trongphần bộ nhớ và định địa chỉ.
CPU : Là thiết bị xử lý các hoạt động của PLC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 103 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Khối xử lý của Allend Bradley
Khối xử lý của PLC có thể chứa nhiều hơn một bộ xử lý để xử lý các hoạt động b êntrong của PLC.
Mỗi PLC có một Main CPU.
Vòng quét PLC : Là các bước để thực thi nhiệm vụ điều khiển của PLC.
B1 : Đọc giá trị ngõ vào.B2 : Thực thi chương trình PLC.B3 : Xử lý các yêu cầu truyền thông.B4 : Thực thi việc tự chẩn đoán, tự kiểm tra.B5 : Xuất tín hiệu điều khiển.
Các module mở rộng : Bao gồm các module I/O hoặc các module chức năng.Module I/O là module dùng mở rộng số ngõ vào/ra logic hoặc analog của PLC.Module chức năng là module bổ sung các chức năng cho PLC nh ư truyền thông, PID,… Cáp mở rộng là nơi cắm cáp giao tiếp với các module mở rộng.
Phần mềm lập trình (Software): Là phần mềm do nhà sản xuất viết, dựa trên đóngười thiết kế có thể soạn thảo ra ch ương trình điều khiển nạp cho hệ thống điều khiểnPLC.
Phần mềm PLC (User Software) : Là phần mềm do người thiết kế viết để điều khiểnhệ thống PLC theo mục tiêu đã được đặt ra.
KHỐI GIAO TIẾP NGÕ VÀO :Do cảm biến cấp ba dạng tín hiệu điều khiển (logic, tha nh ghi và analog) nên khốigiao tiếp ngõ vào PLC cũng có các module tương ứng. Ngoài ra còn có những moduleđặc biệt để nhận tín hiệu điều khiển ng õ vào, tuy nhiên do không thông d ụng nên tàiliệu này không đề cập. Các bạn nên kết hợp tham khảo thêm ở các tài liệu kỹ thuật củariêng từng loại PLC.
Trên những loại PLC nhỏ, các ngõ vào số và analog thường được tích hợp sẵn trênCPU. Tuy nhiên, đối với các họ PLC lớn những khối ng õ vào này được lắp vào CPUdưới dạng các module.
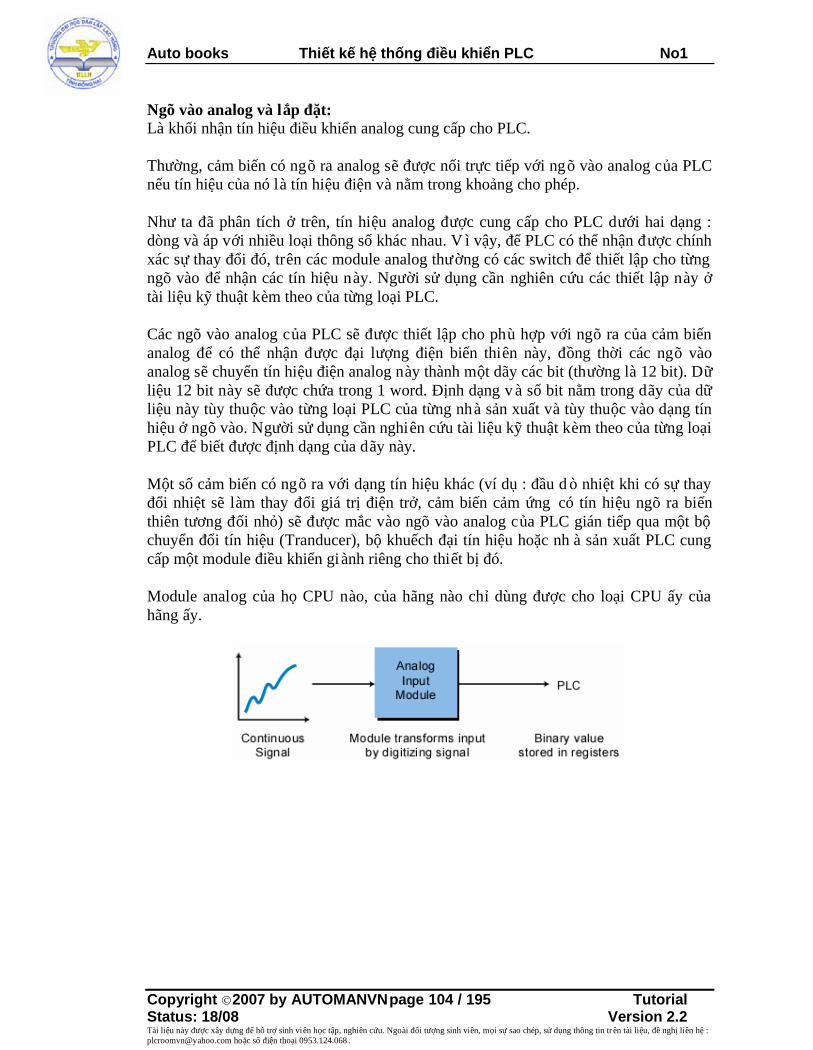
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 104 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngõ vào analog và lắp đặt:Là khối nhận tín hiệu điều khiển analog cung cấp cho PLC.
Thường, cảm biến có ngõ ra analog sẽ được nối trực tiếp với ngõ vào analog của PLCnếu tín hiệu của nó là tín hiệu điện và nằm trong khoảng cho phép.
Như ta đã phân tích ở trên, tín hiệu analog được cung cấp cho PLC dưới hai dạng :dòng và áp với nhiều loại thông số khác nhau. V ì vậy, để PLC có thể nhận được chínhxác sự thay đổi đó, trên các module analog thường có các switch để thiết lập cho từngngõ vào để nhận các tín hiệu này. Người sử dụng cần nghiên cứu các thiết lập này ởtài liệu kỹ thuật kèm theo của từng loại PLC.
Các ngõ vào analog của PLC sẽ được thiết lập cho phù hợp với ngõ ra của cảm biếnanalog để có thể nhận được đại lượng điện biến thiên này, đồng thời các ngõ vàoanalog sẽ chuyển tín hiệu điện analog này thành một dãy các bit (thường là 12 bit). Dữliệu 12 bit này sẽ được chứa trong 1 word. Định dạng v à số bit nằm trong dãy của dữliệu này tùy thuộc vào từng loại PLC của từng nhà sản xuất và tùy thuộc vào dạng tínhiệu ở ngõ vào. Người sử dụng cần nghiên cứu tài liệu kỹ thuật kèm theo của từng loạiPLC để biết được định dạng của dãy này.
Một số cảm biến có ngõ ra với dạng tín hiệu khác (ví dụ : đầu d ò nhiệt khi có sự thayđổi nhiệt sẽ làm thay đổi giá trị điện trở, cảm biến cảm ứng có tín hiệu ngõ ra biếnthiên tương đối nhỏ) sẽ được mắc vào ngõ vào analog của PLC gián tiếp qua một bộchuyển đổi tín hiệu (Tranducer), bộ khuếch đại tín hiệu hoặc nh à sản xuất PLC cungcấp một module điều khiển giành riêng cho thiết bị đó.
Module analog của họ CPU nào, của hãng nào chỉ dùng được cho loại CPU ấy củahãng ấy.
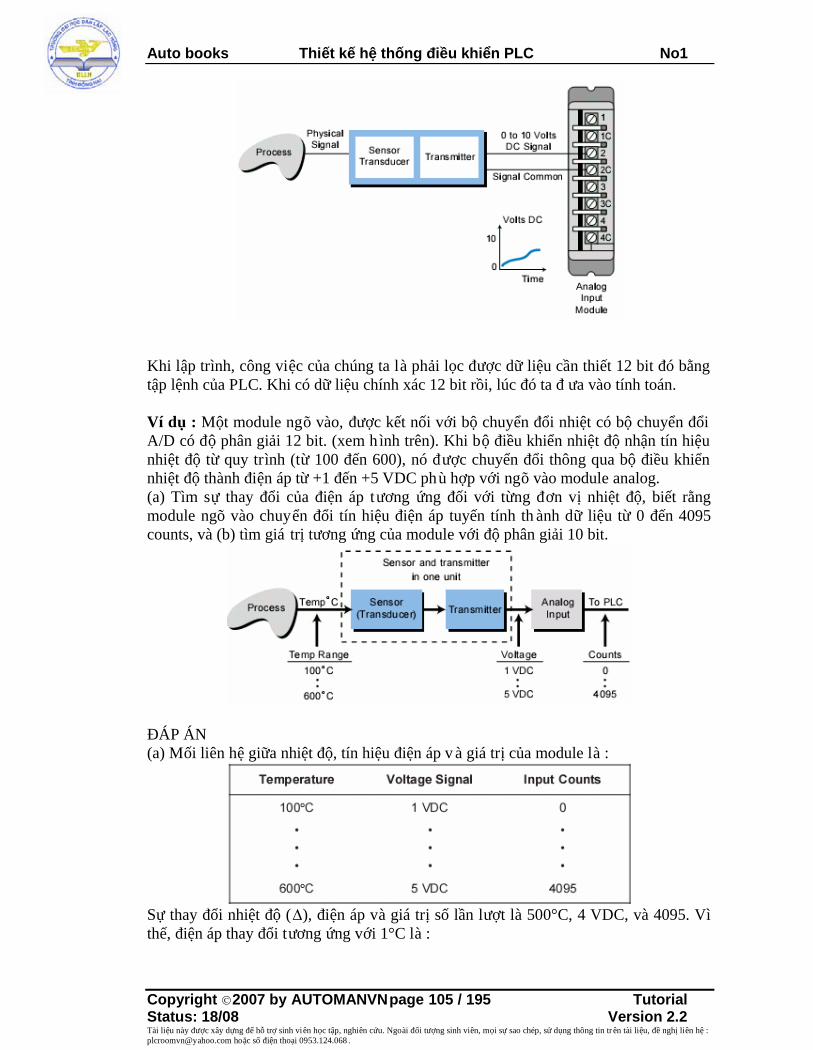
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 105 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Khi lập trình, công việc của chúng ta là phải lọc được dữ liệu cần thiết 12 bit đó bằngtập lệnh của PLC. Khi có dữ liệu chính xác 12 bit rồi, lúc đó ta đ ưa vào tính toán.
Ví dụ : Một module ngõ vào, được kết nối với bộ chuyển đổi nhiệt có bộ chuyển đổiA/D có độ phân giải 12 bit. (xem h ình trên). Khi bộ điều khiển nhiệt độ nhận tín hiệunhiệt độ từ quy trình (từ 100 đến 600), nó được chuyển đổi thông qua bộ điều khiểnnhiệt độ thành điện áp từ +1 đến +5 VDC phù hợp với ngõ vào module analog.(a) Tìm sự thay đổi của điện áp tương ứng đối với từng đơn vị nhiệt độ, biết rằngmodule ngõ vào chuyển đổi tín hiệu điện áp tuyến tính th ành dữ liệu từ 0 đến 4095counts, và (b) tìm giá trị tương ứng của module với độ phân giải 10 bit.
ĐÁP ÁN(a) Mối liên hệ giữa nhiệt độ, tín hiệu điện áp v à giá trị của module là :
Sự thay đổi nhiệt độ (), điện áp và giá trị số lần lượt là 500°C, 4 VDC, và 4095. Vìthế, điện áp thay đổi tương ứng với 1°C là :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 106 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sự thay đổi của điện áp đối với mỗi giá trị ng õ vào là :
Vì thế, giá trị số tương ứng với một độ Celsius là :
(b) Một bộ chuyển đổi A/D có độ phân giải 10 -bit sẽ số hóa giá trị ngõ vào đơn cựcthành giá trị tương ứng 1024 (chẳng hạn 210 = 1024, nằm trong khoảng từ 0000 đến1023). Mối liên hệ giữa nhiệt độ, điện áp và số tương ứng là :
Sự thay đổi điện áp trên một độ giống như trên phần (a) và :
Sự thay đổi điện áp trên mỗi số tương ứng là :
Thus, the corresponding number of counts p er degree Celsius is:

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 107 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module ngõ vào analog 8 kênh :
Module 4 kênh ngõ vào Analog c ủa PLC S7-200.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 108 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Cách xử lý lấy dữ liệu bên trong của module analog
Kết nối ngõ vào cho module analog

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 109 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
MỘT SỐ MODULE XỬ LÝ TÍN HIỆU ANALOG.Module ngõ vào/ra analog EM235 của họ S7-200, Siemens.
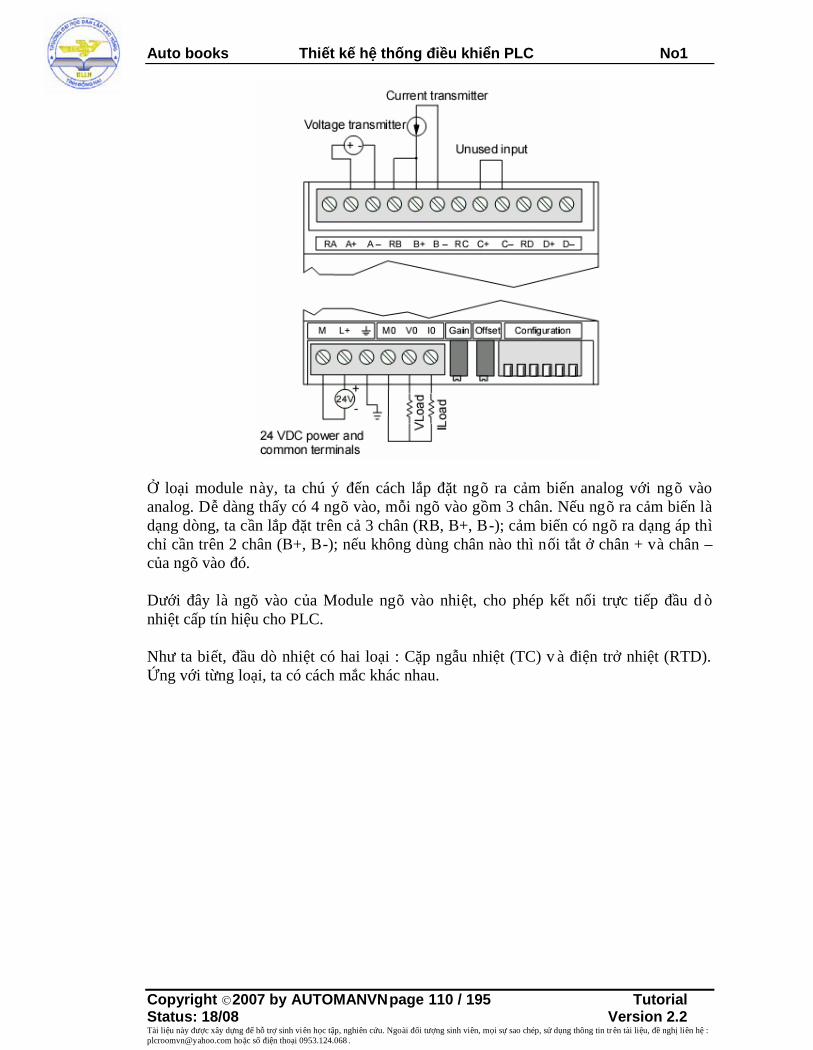
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 110 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ở loại module này, ta chú ý đến cách lắp đặt ngõ ra cảm biến analog với ngõ vàoanalog. Dễ dàng thấy có 4 ngõ vào, mỗi ngõ vào gồm 3 chân. Nếu ngõ ra cảm biến làdạng dòng, ta cần lắp đặt trên cả 3 chân (RB, B+, B-); cảm biến có ngõ ra dạng áp thìchỉ cần trên 2 chân (B+, B-); nếu không dùng chân nào thì nối tắt ở chân + và chân –của ngõ vào đó.
Dưới đây là ngõ vào của Module ngõ vào nhiệt, cho phép kết nối trực tiếp đầu d ònhiệt cấp tín hiệu cho PLC.
Như ta biết, đầu dò nhiệt có hai loại : Cặp ngẫu nhiệt (TC) v à điện trở nhiệt (RTD).Ứng với từng loại, ta có cách mắc khác nhau.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 111 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Công việc của người thiết kế là :1. Chọn loại cảm biến thỏa yêu cầu.2. Chọn loại PLC có ngõ vào analog chấp nhận được tín hiệu ngõ ra của cảm
biến.3. Tiến hành lắp đặt và thiết lập cấu hình.4. Tiến hành cân chỉnh dữ liệu.5. Lập trình xử lý dữ liệu.
Dữ liệu ngõ vào analog :Như chúng ta đã nói ở trên, dữ liệu ngõ vào analog được chuyển thành dữ liệu số 12bit và chứa trong 1 word. Định dạng của nó của khác nhau đối với từng hãng, từ họ.Trong S7-200, đối với dữ liệu ngõ vào có định dạng như sau :
Dễ dàng thấy dữ liệu ở Unipolar có bit có trọng số cao nhất v à 3 bit có trọng số thấpnhất không sử dụng. Muốn lấy được dữ liệu thực tế, ta phải dịc h trái một bit để xóa dữliệu ở bit có trọng số cao nhất, khi đó dữ liệu không có nghĩa sẽ l à 4 bit có trọng sốthấp nhất. Để loại bỏ, ta phải dịch phải 4 bit để loại bỏ dữ liệu không cần thiết n ày.Khi đó 4 bit có trọng số cao nhất

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 112 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Các khối căn bảnCó 3 khối rack cơ bản :Master rack : Chứa khối xử lý, nguồn, module truyền thông v à có thể là một sốmodule I/O.Local rack : Chứa bộ xử lý I/O và I/O ngõ vào ra.Remote rack : Chứa bộ xử lý I/O điều khiển từ xa v à I/O ngõ vào ra.
Ngõ vào số và lắp đặt.Ngõ vào số, về cấu trúc chung có hai loại : đ ược thiết kế trực tiếp lên PLC (loại microPLC và mini PLC), được thiết kế thành các module rack độc lập với nhau có thể tháora và gắn vào tùy mục đích người sử dụng.
Các rack I/O được thiết kế có 2 loại.Loại local bao gồm các rack được gắn trực tiếp lên Dưới đây là hình ảnh một sốmodule I/O.
Rack Master (a) không có module I/O và (b) có module I/O.
Cấu hình các rack cục bộ

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 113 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Cấu hình các rack từ xa
Dữ liệu ngõ vào số được cung cấp bởi ngõ vào số. Tín hiệu điện được ánh xạ vàothành tín hiệu mức 1/0 tương ứng với việc có hay không có tác động ở ng õ vào.
Lắp đặt cảm biến cho PLC.Để biết cách lắp đặt cảm biến với PLC, ta phải hiểu chi tiết cấu trúc ng õ vào của PLC,hiểu chi tiết các loại ngõ ra của cảm biến, từ đó mới biết cách lắp đặt, mức áp,… choPLC.
Như ta đã biết, tín hiệu cảm biến có hai loại số v à analog. Ở phần này, ta cùng thảoluận việc lắp đặt thiết bị cho ng õ vào số.
Như ta đã biết, tín hiệu ngõ vào số có hai loại : DC và AC.
Ngõ vào giành cho tín hiệu DCĐể cách ly điện áp giữa các tầng, ng ười ta sử dụng Opto.Nếu chân COM (common) được nối mass, điều này có nghĩa là tín hiệu tích cực ở ngõvào là mức 1. Với kiểu mắc này, người ta gọi là mắc với ngõ vào sink.
Nếu chân COM (common) được nối nguồn, điều này có nghĩa là tín hiệu tích cực ởngõ vào là mức 0. Kiểu mắc này, người ta gọi là mắc với ngõ vào source.
Một số các loại PLC còn có chân chung cho phép mắc hoặc lên nguồn, hoặc xuốngmass. Để làm được điều này, bản thân mỗi opto ở được cấp trúc hai chiều hoặc có mộtdiode cầu để chỉnh lưu dòng điện trước khi đưa tín hiệu qua opto vào bên trong choPLC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 114 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Dưới đây là hình ảnh của một số ngõ vào số.
Ngõ vào DC có chân chung (Common) là chân mass.
Ngõ vào DC có chân chung (Common) là chân nguồn

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 115 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngõ vào DC cho loại chân chung mass/nguồn.
Ngõ vào tín hiệu logic DC :
Mạch chuyển đổi từ dạng NPN sang PNP
Mắc cảm biến có ngõ ra dạng NPN vào ngõ vào tín hiệu DC
Mắc cảm biến có ngõ ra PNP vào ngõ vào tín hiệu DC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 116 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Mắc cảm biến có ngõ ra dạng tiếp điểm vào ngõ vào tín hiệu DC :Tùy theo việc lấy tín hiệu ở tiếp điểm th ường đóng (NC) hay thường hở (NO) mà mắcvào những dây khác nhau. Ví dụ, ta lấy tín hiệu ở NO :
Ngõ vào số giành cho tín hiệu AC :Như ta đã biết, tín hiệu sử dụng cho các linh kiện bên trong PLC đều hoạt động ở mứcđiện áp thấp DC. Chính v ì vậy, để đưa tín hiệu điều khiển vào PLC, ta phải có mạchchuyển đổi phù hợp.
Mắc cảm biến với PLC

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 117 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Dữ liệu số BCD qua bộ thumbwheels đ ược đưa vào PLC :
Khối giao tiếp ngõ ra :Thiết bị chấp hành được điều khiển dưới 2 dạng tín hiệu (logic và analog) nên khốigiao tiếp ngõ ra cũng có hai phần (giao tiếp số v à giao tiếp analog)Như ta đã biết, dạng điều khiển của thiết bị chấp h ành có thể chia làm các dạng sau :Điều khiển đóng mở logic dùng điện áp DC, điều khiển đóng mở d ùng điện áp AC,điều khiển bằng tần số AC, điều khiển bằng độ rộng xung tín hiệu DC, điều khiểnbằng chuỗi xung DC, điều khiển bằng tín hiệu analog. T ương ứng với các loại điềukhiển như thế ta có các dạng ngõ ra khác nhau từ PLC, tương ứng với chúng là nhữngmodule ngõ ra riêng biệt.
Tín hiệu ra analog.Một ví dụ về điều khiển độ mở của van

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 118 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Một số ngõ ra analog :
Dữ liệu được điều chế để xuất ra ngõ ra analog
Các bước thực hiện
Bài tập : Một bộ chuyển đổi (transducer) kết nối một ng õ ra analog với một van lưulượng có khả năng điều khiển (flow control valve) từ 0 đến 100% l ưu lượng dòng
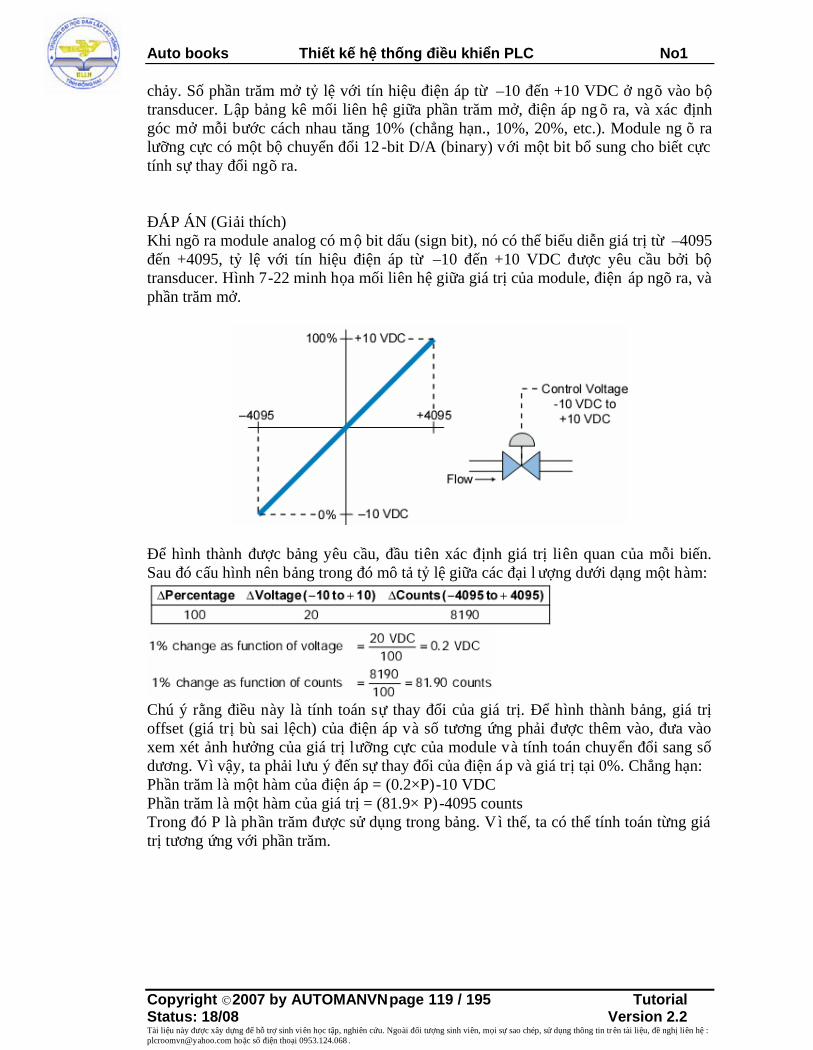
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 119 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
chảy. Số phần trăm mở tỷ lệ với tín hiệu điện áp từ –10 đến +10 VDC ở ngõ vào bộtransducer. Lập bảng kê mối liên hệ giữa phần trăm mở, điện áp ng õ ra, và xác địnhgóc mở mỗi bước cách nhau tăng 10% (chẳng hạn., 10%, 20%, etc.). Module ng õ ralưỡng cực có một bộ chuyển đổi 12 -bit D/A (binary) với một bit bổ sung cho biết cựctính sự thay đổi ngõ ra.
ĐÁP ÁN (Giải thích)Khi ngõ ra module analog có mộ bit dấu (sign bit), nó có thể biểu diễn giá trị từ –4095đến +4095, tỷ lệ với tín hiệu điện áp từ –10 đến +10 VDC được yêu cầu bởi bộtransducer. Hình 7-22 minh họa mối liên hệ giữa giá trị của module, điện áp ngõ ra, vàphần trăm mở.
Để hình thành được bảng yêu cầu, đầu tiên xác định giá trị liên quan của mỗi biến.Sau đó cấu hình nên bảng trong đó mô tả tỷ lệ giữa các đại l ượng dưới dạng một hàm:
Chú ý rằng điều này là tính toán sự thay đổi của giá trị. Để hình thành bảng, giá trịoffset (giá trị bù sai lệch) của điện áp và số tương ứng phải được thêm vào, đưa vàoxem xét ảnh hưởng của giá trị lưỡng cực của module và tính toán chuyển đổi sang sốdương. Vì vậy, ta phải lưu ý đến sự thay đổi của điện áp và giá trị tại 0%. Chẳng hạn:Phần trăm là một hàm của điện áp = (0.2×P)-10 VDCPhần trăm là một hàm của giá trị = (81.9× P)-4095 countsTrong đó P là phần trăm được sử dụng trong bảng. V ì thế, ta có thể tính toán từng giátrị tương ứng với phần trăm.
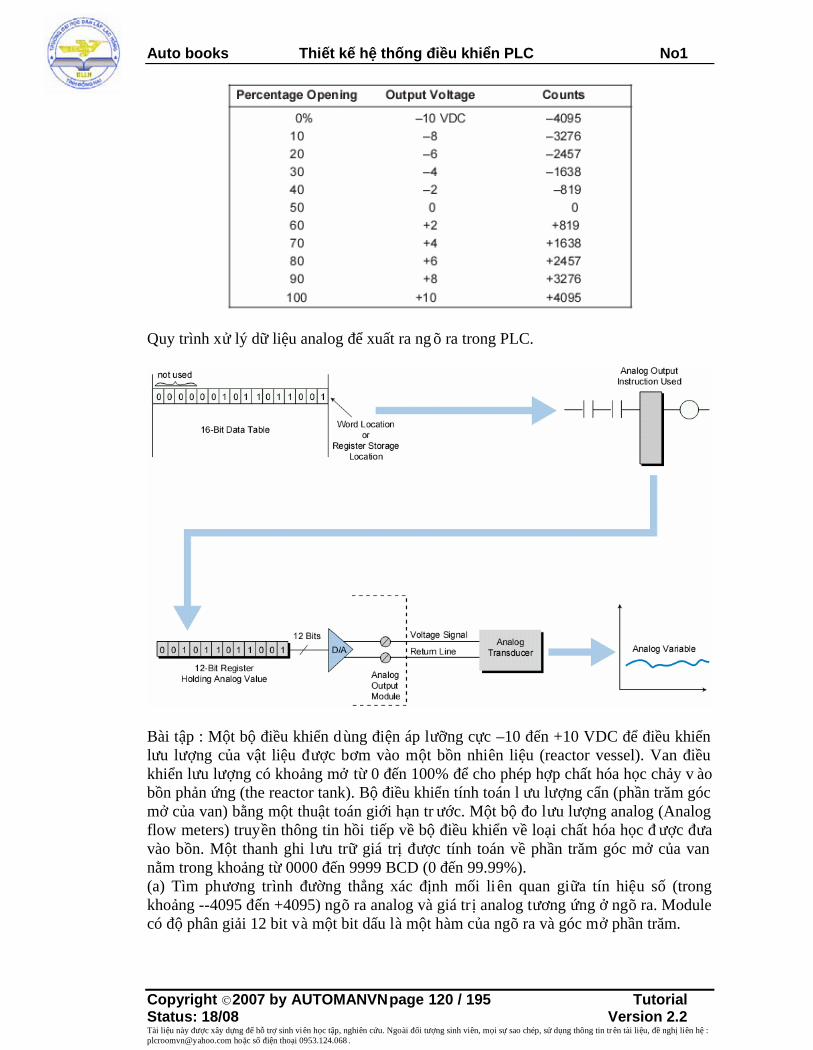
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 120 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Quy trình xử lý dữ liệu analog để xuất ra ng õ ra trong PLC.
Bài tập : Một bộ điều khiển dùng điện áp lưỡng cực –10 đến +10 VDC để điều khiểnlưu lượng của vật liệu được bơm vào một bồn nhiên liệu (reactor vessel). Van điềukhiển lưu lượng có khoảng mở từ 0 đến 100% để cho phép hợp chất hóa học chảy v àobồn phản ứng (the reactor tank). Bộ điều khiển tính toán l ưu lượng cẩn (phần trăm gócmở của van) bằng một thuật toán giới hạn tr ước. Một bộ đo lưu lượng analog (Analogflow meters) truyền thông tin hồi tiếp về bộ điều khiển về loại chất hóa học đ ược đưavào bồn. Một thanh ghi lưu trữ giá trị được tính toán về phần trăm góc mở của vannằm trong khoảng từ 0000 đến 9999 BCD (0 đến 99.99%).(a) Tìm phương trình đường thẳng xác định mối liên quan giữa tín hiệu số (trongkhoảng --4095 đến +4095) ngõ ra analog và giá trị analog tương ứng ở ngõ ra. Modulecó độ phân giải 12 bit và một bit dấu là một hàm của ngõ ra và góc mở phần trăm.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 121 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
(b) Minh họa mối liên hệ dưới dạng số để tính toán phần trăm góc mở đ ược lưu trongthanh ghi PLC (0000 đến 9999). Đồng thời, t ìm phương trình mô tả mối liên hệ giữasố cần đếm và giá trị tính toán được lưu trong thanh ghi.
ĐÁP ÁN(a) Hình cho thấy đường thẳng Y, mô tả mối liên hệ giữa điện áp và góc mở. Đườngthẳng có dạng Y = mX + b, trong đó m=tg là góc nghiêng của đường thẳng và b làgiá trị của Y khi X bằng 0.
Trục X mô tả điện áp ngõ ra hoặc phần trăm góc mở tùy thuộc vào phương trình. TrụcY mô tả giá trị số tương ứng với ngõ ra dùng điều khiển module phù hợp với giá trị X(% hay VDC). Phương tr ình sau mô tả hàm liên quan giữa giá trị số và điện áp:
Để tính toán b, thay thế Y với giá trị của nó khi X có giá trị bằng 0, Y đồng thời bằng0:
Vì thế, phương trình Y có dạng :
Phương trình này cho phép giá tr ị của Y tương ứng với bất lì điện áp nào của X.Phương trình của đường Y là một hàm của phần trăm được tính toán phụ thuộc chínhvào:
Để tính toán b, thay thế giá trị tính Y khi X bằng 0%; giá trị n ày là –4095 . Vì thế :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 122 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Phương trình này của Y cho giá trị ở ngõ ra tương ứng với bất kì phần trăm giá trị ngõvào của X.
(b) Hình 7-27 cho thấy mối liên hệ giữa giá trị ngõ ra và giá trị tương ứng trong thanhghi được mô tả từ 0000 đến 9999. H ình vẽ này tương tự như hình trước đây, tuy nhiênphương trình ngõ ra mô tả dưới dạng một hàm của thanh ghi giá trị được dùng.
Phương trình của đường thẳng Y cho thấy mối liên hệ giữa giá trị ngõ ra và giá trị củathanh ghi là :
Giá trị của Y khi X bằng 0 là -4095, vì thế
Vì thế :
Giá trị của Y là giá trị ngõ ra tương ứng với từng giá trị X (phần trăm) trãi dài từ 0000đến 9999. Nếu giá trị này của phương trình được thực hiện trong PLC sử dung lệnh sốhọc thập phân và một thanh ghi từ 0000 đến 9999 giá trị đ ược giải mã thành số BCD,phần mềm PLC phải chuyển đổi giá trị từ số BCD sang số thập phân.
Kết nối với module analog ngõ ra
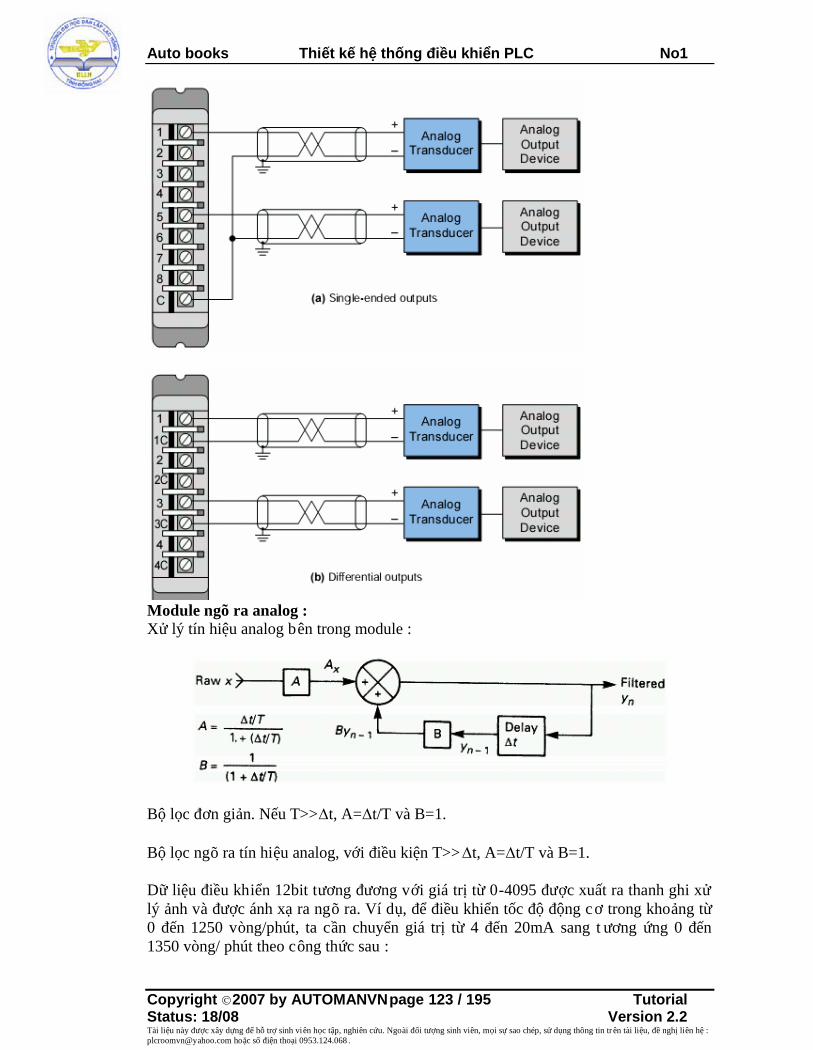
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 123 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Module ngõ ra analog :Xử lý tín hiệu analog bên trong module :
Bộ lọc đơn giản. Nếu T>>t, A=t/T và B=1.
Bộ lọc ngõ ra tín hiệu analog, với điều kiện T>>t, A=t/T và B=1.
Dữ liệu điều khiển 12bit tương đương với giá trị từ 0-4095 được xuất ra thanh ghi xửlý ảnh và được ánh xạ ra ngõ ra. Ví dụ, để điều khiển tốc độ động c ơ trong khoảng từ0 đến 1250 vòng/phút, ta cần chuyển giá trị từ 4 đến 20mA sang t ương ứng 0 đến1350 vòng/ phút theo công thức sau :

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 124 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Trong đó :VADC là giá trị ở ngõ ra bộ DAC (nằm trong khoảng 0 -4095), N là số ngõ ra trongthiết bị, HR/HL là giá trị mức cao hoặc mức thấp.
Module ngõ ra analog chuyển tín hiệu 12 bit thành tín hiệu điều khiển thiết bị chấphành dưới dạng dòng (4-20mA) hoặc áp (0-5V; 0-10VDC). Format word điều khiểnnày khác nhau giữa việc xuất tín hiệu điều khiển dạng d òng hoặc tín hiệu điều khiểndạng áp hoặc giữa hãng sản xuất này và hang sản xuất khác. (…..)
Tín hiệu ngõ ra số.Kết nối ngõ ra AC

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 125 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Kết nối ngõ ra DC dạng Sink/source
Giao tiếp với thiết bị BCD

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 126 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngõ ra dạng PNP, NPN : Chỉ dùng cho tải DC.Hình dưới cho thấy cấu trúc ngõ ra dạng PNP. Ta thấy rằng loại ngõ ra dạng PNP cóchân chung là chân nguồn dương (Vcc).
Hình dưới cho thấy cấu trúc ngõ ra dạng NPN. Ta thấy rằng loại ngõ ra dạng NPN cóchân chung là chân đất (mass)
Mắc tải :Có các dạng tải như tải trở, tải kháng, tải dung.Các tải được kết nối với ngõ ra dạng PNP, một đầu sẽ được kết nối với ngõ ra, mộtđầu kết nối với đất.Các tải được kết nối với ngõ ra dạng NPN, một đầu sẽ được kết nối với ngõ ra, mộtđầu kết nối với nguồn.
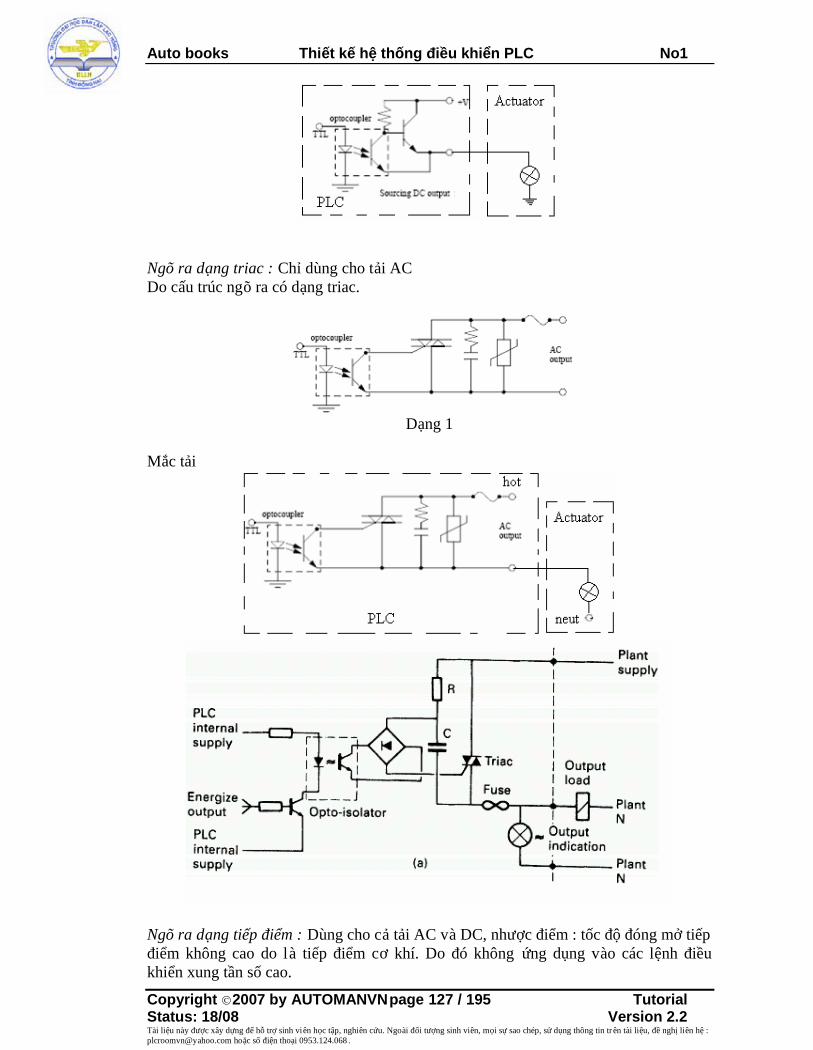
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 127 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngõ ra dạng triac : Chỉ dùng cho tải ACDo cấu trúc ngõ ra có dạng triac.
Dạng 1
Mắc tải
Ngõ ra dạng tiếp điểm : Dùng cho cả tải AC và DC, nhược điểm : tốc độ đóng mở tiếpđiểm không cao do là tiếp điểm cơ khí. Do đó không ứng dụng vào các lệnh điềukhiển xung tần số cao.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 128 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Kết nối với tải :
Output Card
II.8. Lựa chọn phần cứng []Giới thiệu việc lựa chọn hệ thống PLC.Như ta thấy trong sách này, PLC có rất nhiều chức năng và kích thước. Ở mức đầutiên, nó đóng vai trò thay thế hệ thống relay với số lượng I/O và khả năng bộ nhớ giớihạn. Ở mức độ cao hơn là hệ thống điều khiển giám sát có thứ bậc dựa tr ên những yêucầu điều khiển thay đổi và dữ liệu thu được. Ở giữa hai mức độ điều khiển n ày là rấtnhiều bộ điều khiển với cả hai khả năng truyền thông cho phép ta tích hợp nhiềutruyền thông khác nhau và khả năng mở rộng cho phép PLC thay đổi ph ù hợp vớitừng loại ứng dụng.
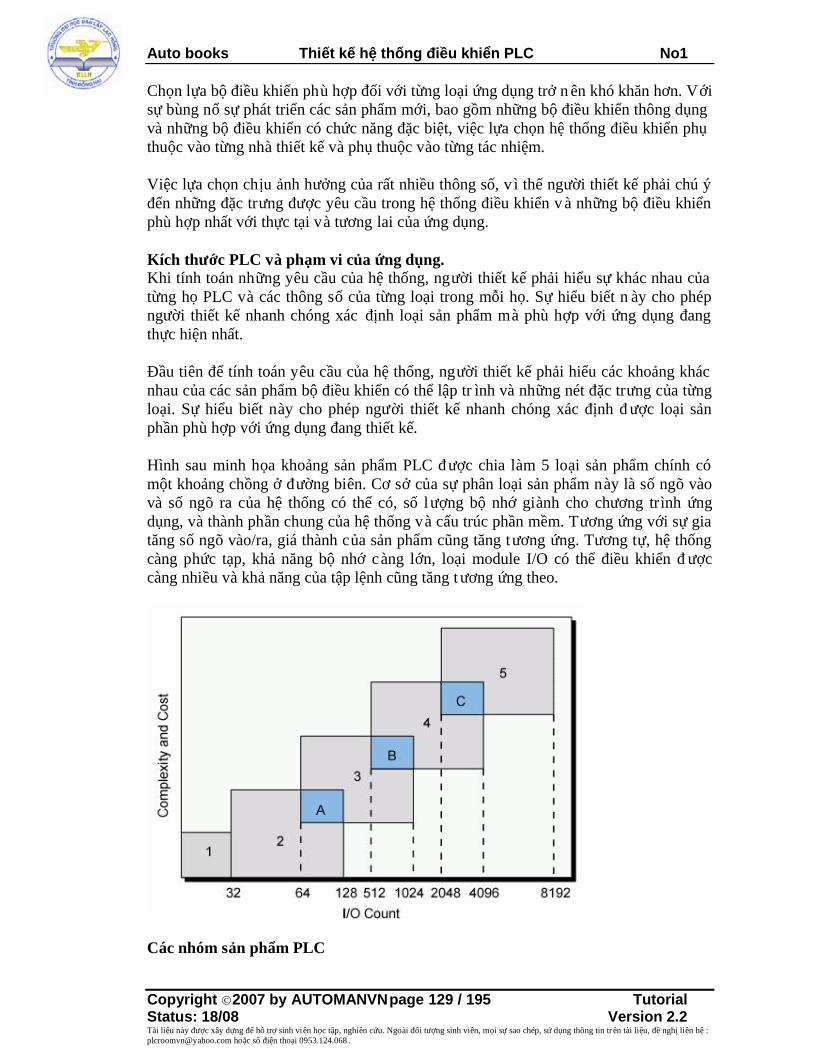
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 129 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Chọn lựa bộ điều khiển phù hợp đối với từng loại ứng dụng trở n ên khó khăn hơn. Vớisự bùng nổ sự phát triển các sản phẩm mới, bao gồm những bộ điều khiển thông dụngvà những bộ điều khiển có chức năng đặc biệt, việc lựa chọn hệ thống điều khiển phụthuộc vào từng nhà thiết kế và phụ thuộc vào từng tác nhiệm.
Việc lựa chọn chịu ảnh hưởng của rất nhiều thông số, v ì thế người thiết kế phải chú ýđến những đặc trưng được yêu cầu trong hệ thống điều khiển v à những bộ điều khiểnphù hợp nhất với thực tại và tương lai của ứng dụng.
Kích thước PLC và phạm vi của ứng dụng.Khi tính toán những yêu cầu của hệ thống, người thiết kế phải hiểu sự khác nhau củatừng họ PLC và các thông số của từng loại trong mỗi họ. Sự hiểu biết n ày cho phépngười thiết kế nhanh chóng xác định loại sản phẩm mà phù hợp với ứng dụng đangthực hiện nhất.
Đầu tiên để tính toán yêu cầu của hệ thống, người thiết kế phải hiểu các khoảng khácnhau của các sản phẩm bộ điều khiển có thể lập tr ình và những nét đặc trưng của từngloại. Sự hiểu biết này cho phép người thiết kế nhanh chóng xác định đ ược loại sảnphần phù hợp với ứng dụng đang thiết kế.
Hình sau minh họa khoảng sản phẩm PLC đ ược chia làm 5 loại sản phẩm chính cómột khoảng chồng ở đường biên. Cơ sở của sự phân loại sản phẩm này là số ngõ vàovà số ngõ ra của hệ thống có thể có, số lượng bộ nhớ giành cho chương trình ứngdụng, và thành phần chung của hệ thống và cấu trúc phần mềm. Tương ứng với sự giatăng số ngõ vào/ra, giá thành của sản phẩm cũng tăng tương ứng. Tương tự, hệ thốngcàng phức tạp, khả năng bộ nhớ càng lớn, loại module I/O có thể điều khiển đ ượccàng nhiều và khả năng của tập lệnh cũng tăng t ương ứng theo.
Các nhóm sản phẩm PLC

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 130 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Vùng giao trong hình trên, được đánh dấu lần lượt A, B, C phản ánh được mức độnâng cao (không thuộc chuẩn) khả năng của từng nhóm. V ùng này cũng nằm trongkhoảng khả năng của nhóm trên.Khả năng của từng nhóm sản phẩm đ ược đánh dấu màu xám, phần màu xanh là phầngiao nhau giữa khả năng của nhóm dưới và nhóm trên.Những sản phẩm phù hợp với ứng dụng nằm trong khoảng lặp của hai nhóm sản phẩmta có thể chọn ở bất kì ở nhóm nào, có thể chọn ở nhóm thấp nếu xét thấy sự mở rộnghệ thống là không cần thiết. Thông tin dưới mô tả rõ ràng 5 nhóm sản phẩm của PLC.
Nhóm 1 : Micro PLCNhóm này được dùng trong ứng dụng cần điều khiển một v ài ngõ ra số, chẳng hạnđiều khiển một dây chuyền nhỏ. Một v ào PLC loại này có thể thực hiện với một sốngõ vào ra analog với chức năng giám sát (chẳng hạn giám sát nhiệt độ hay điều khiểnmột ngõ ra). Hình sau trình bày một loại PLC thuộc nhóm.
PLC Direct’s micro PLC DL105.
Những khả năng của Micro PLC
Nhóm 2 : Những PLC nhỏ.Nhóm PLC nhỏ hầu hết được sử dụng trong ứng dụng cần điều khiển ON/OFF chologic tuần tự và chức năng định thời. Những PLC n ày, là sự phát triển của họ MicroPLC được mở rộng dùng cho những điều khiển riêng lẽ của những thiết bị nhỏ.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 131 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Thường những sản phẩm này là bộ điều khiển độc lập. Bảng sau liệt kê những chứcnăng chuẩn cho loại PLC nhỏ.
Vùng A. Vùng A bao gồm bộ điều khiển có khả năng có đế n 64 hay 128 I/O, dòngsản phẩm này có những khả năng bình thường thường được tìm thấy ở loại bộ điềukhiển có kích thước trung bình. Tăng khả năng của những bộ diều khiển nhỏ cho phépchúng được dùng hiệu quả trong ứng dụng chỉ cần một số nhỏ I/O, ch ưa cần điềukhiển tín hiệu analog, những phép toán c ơ bản, giao tiếp mạng I/O, mạng LAN, điềukhiển các ngõ I/O từ xa và hoặc giới hạn khả năng truy cập dữ liệu . Một ứng dụng tiêubiểu cho loại này là dây chuyền vận chuyển sản phẩm trong đó có một v ài máy nhỏdưới những điều khiển riêng lẽ, được khóa chéo thông qua một mạng LAN.
Nhóm A (SLC500) Bộ điều khiển có khả năng điều khiển l ên đến 72 ngõ vào ra số và4 ngõ vào ra analog.
Nhóm 3 : Nhóm PLC trung bình.Nhóm PLC trung bình được dùng trong những ứng dụng cần nhiều hơn 128 I/O, cũngnhư điều khiển analog, xử lý dữ liệu, v à khả năng toán học. Nói chung bộ điều khiển ởnhóm 3 có nhiều chức năng phần cứng và phần mềm phức tạp hơn những bộ điềukhiển trước.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 132 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Những chức năng cơ bản của PLC trung bình
Vùng B. Vùng B chứa những PLC trung b ình có nhiều bộ nhớ hơn, có khả năng xử lýbảng, PID, xử lý chương trình con, có tập lệnh xử lý phép toán và xử lý dữ liệu. Hìnhsau mô tả một PLC thuộc loại này.
PLC kích thước trung bình 5/11 (trên) và PLC 5/20 (phải) có khả năng xử lý lên đến512 I/O
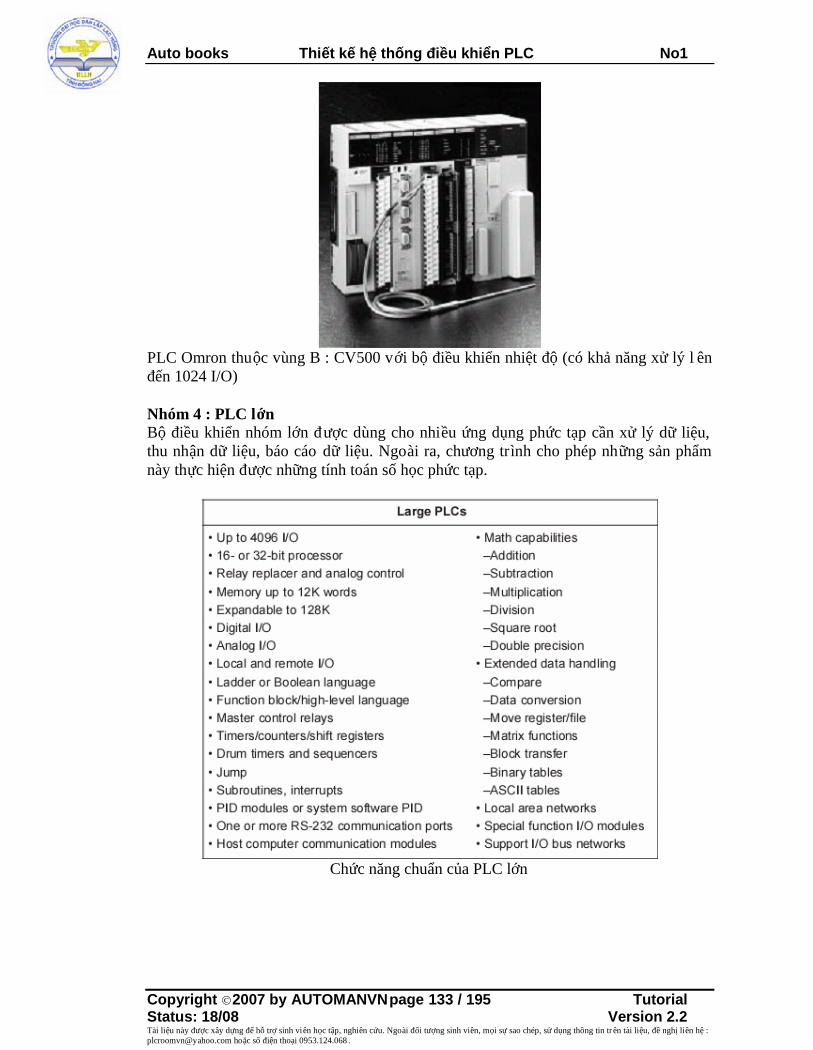
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 133 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
PLC Omron thuộc vùng B : CV500 với bộ điều khiển nhiệt độ (có khả năng xử lý l ênđến 1024 I/O)
Nhóm 4 : PLC lớnBộ điều khiển nhóm lớn được dùng cho nhiều ứng dụng phức tạp cần xử lý dữ liệu,thu nhận dữ liệu, báo cáo dữ liệu. Ngoài ra, chương trình cho phép những sản phẩmnày thực hiện được những tính toán số học phức tạp.
Chức năng chuẩn của PLC lớn

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 134 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
PLC lớn Mitsubishi A3NCPU với 2048 I/O
Vùng C. Vùng C bao gồm nhóm 4 PLC có một bộ nhớ ứng dụng lớn v à số I/O lớn.Những PLC trong vùng này có khả năng tính toán toán học và xử lý dữ liệu tốt hơnvùng dưới. Hình sau trình bày một ví dụ của bộ điều khiển loại n ày
PLC Giddings & Lewis’s thuộc vùng C : PIC900 có đến 3168 ngõ vào ra và giám sátI/O, có khả năng lập trình theo chuẩn IEC và tính toán số học dấu chấm động.
NHÓM 5 : PLC cực lớnNhóm PLC cực lớn được dùng trong điều khiển phức tạp và ứng dụng thu nhận dữliệu cần bộ nhớ và khả năng I/O lớn .Giao tiếp I/O từ xa và I/O đặc biệt là chuẩn yêu cầu cho loại bộ điều khiển này.Những ứng dụng tiêu biểu cho những loại PLC lớn này bao gồm nhà máy luyện cánthép. Những loại PLC này thường phục vụ cho những ứng dụng có chức n àng điềukhiển giám sát lớn, phân tán.
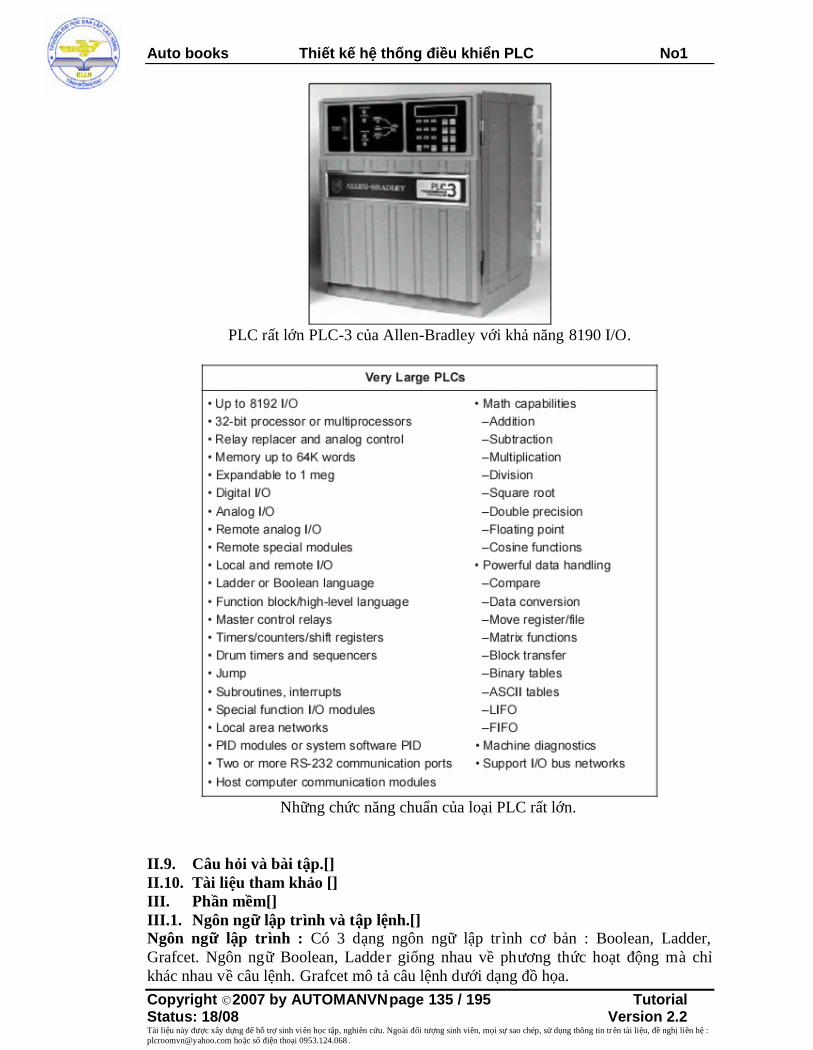
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 135 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
PLC rất lớn PLC-3 của Allen-Bradley với khả năng 8190 I/O.
Những chức năng chuẩn của loại PLC rất lớn.
II.9. Câu hỏi và bài tập.[]II.10. Tài liệu tham khảo []III. Phần mềm[]III.1. Ngôn ngữ lập trình và tập lệnh.[]Ngôn ngữ lập trình : Có 3 dạng ngôn ngữ lập tr ình cơ bản : Boolean, Ladder,Grafcet. Ngôn ngữ Boolean, Ladder giống nhau về phương thức hoạt động mà chỉkhác nhau về câu lệnh. Grafcet mô tả câu lệnh dưới dạng đồ họa.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 136 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngôn ngữ Ladder
Ngôn ngữ boolean
Ngôn ngữ Grafcet
Dưới đây là 5 ngôn ngữ được đăng kí trong chuẩn IEC 1131

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 137 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ladder Rung (LAD) Language
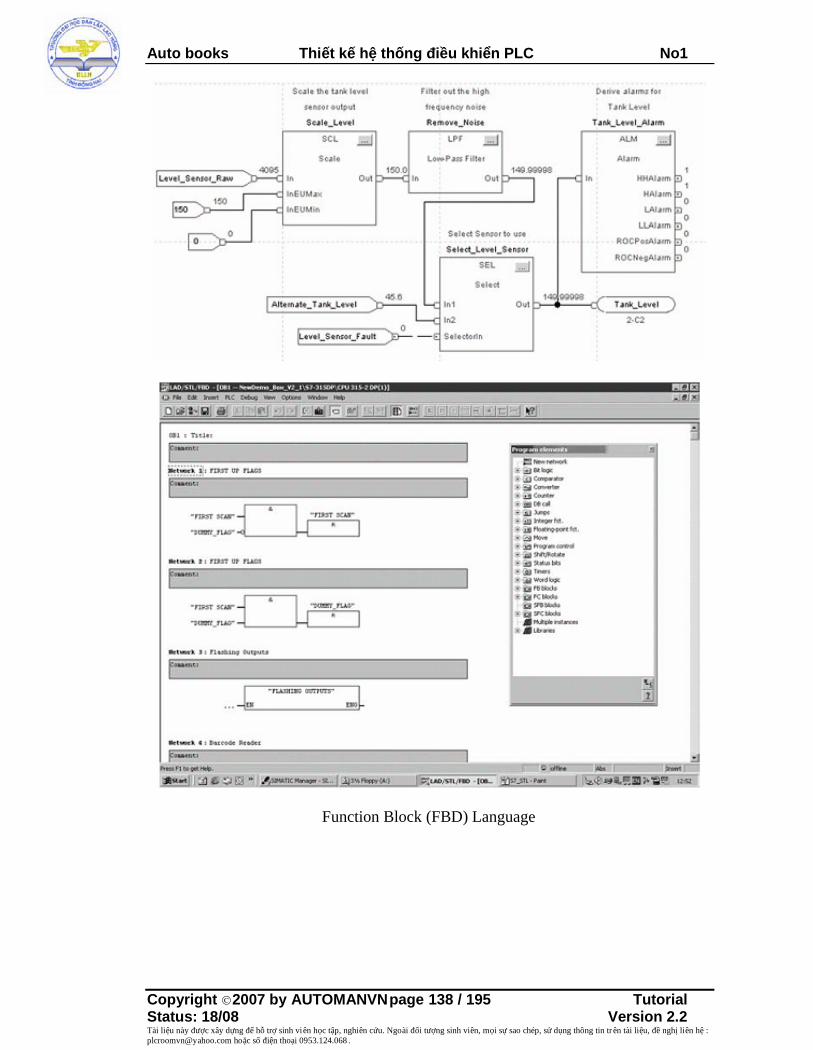
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 138 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Function Block (FBD) Language

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 139 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Structured Text (Text) Language

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 140 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ngôn ngữ danh sách lệnh-Instruction List (IL) Language.
Ngôn ngữ sơ đồ hàm chức năng tuần tự -Secquential Function Chart (SFC)Language.
III.2. Phân tích và thiết kế phần mềm PLC[]Thiết kế chương trình có cấu trúc rất quan trọng trong kỹ thuật, nh ưng nhiều kỹ sư sẽviết chương trình mà không để dành thời gian hay nỗ lực để thiết kế nó. Điều n àythường phụ thuộc vào kinh nghiệm với chương trình đã được viết và gỡ rối. Phươngpháp này không thể chấp nhận được trong những tác nhiệm nh ư hệ thống điều khiểncông nghiệp. Thời gian yêu cầu cho một chương trình thiết kế không tốt là 10% chothiết kế, 30% để viết chương trình, 50% để gỡ rối và kiểm tra, 10% để lập tài liệu.Thời gian để thiết kế một chương trình có chất lượng cao là 30% thiết kế, 20% để viếtchương trình, 10% để gỡ rối và kiểm tra, 10% để lập tài liệu. Như vậy, ta thấy rằngmột thiết kế tốt tốn ít thời gian thực hiện v à bảo trì.
Kết luận : Dùng càng nhiều thời gian để thiết kế càng tốt.
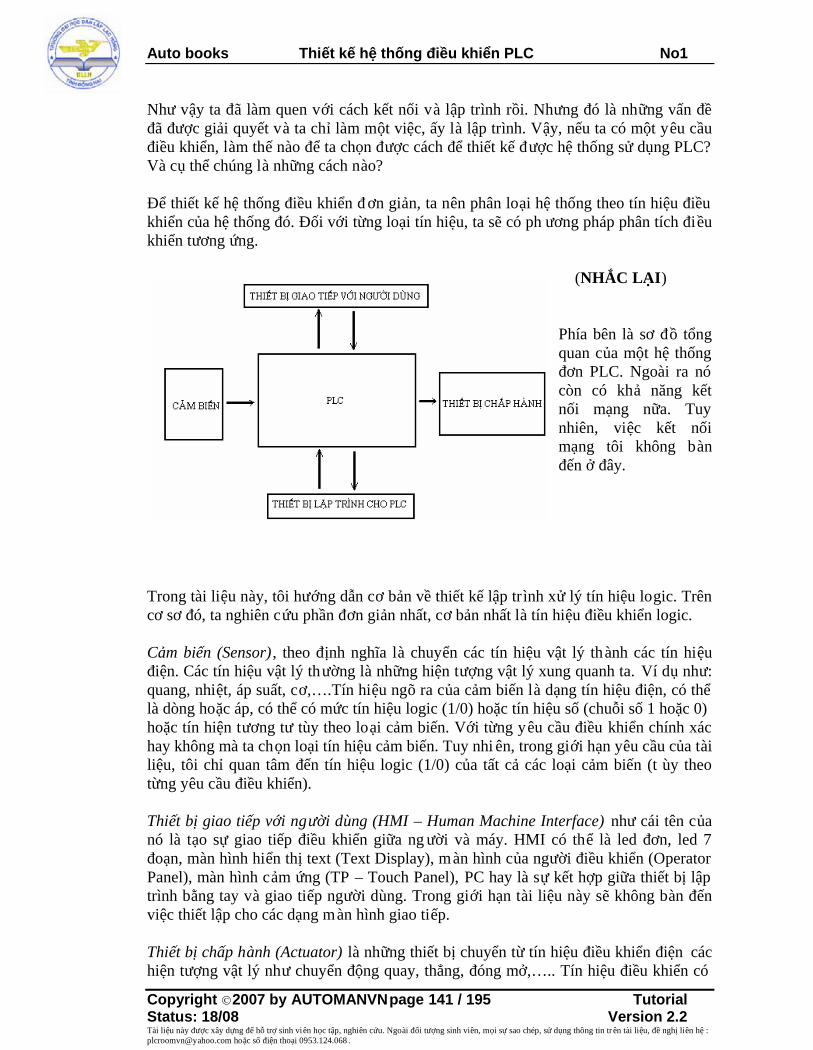
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 141 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Như vậy ta đã làm quen với cách kết nối và lập trình rồi. Nhưng đó là những vấn đềđã được giải quyết và ta chỉ làm một việc, ấy là lập trình. Vậy, nếu ta có một yêu cầuđiều khiển, làm thế nào để ta chọn được cách để thiết kế được hệ thống sử dụng PLC?Và cụ thể chúng là những cách nào?
Để thiết kế hệ thống điều khiển đ ơn giản, ta nên phân loại hệ thống theo tín hiệu điềukhiển của hệ thống đó. Đối với từng loại tín hiệu, ta sẽ có ph ương pháp phân tích điềukhiển tương ứng.
(NHẮC LẠI)
Phía bên là sơ đồ tổngquan của một hệ thốngđơn PLC. Ngoài ra nócòn có khả năng kếtnối mạng nữa. Tuynhiên, việc kết nốimạng tôi không bànđến ở đây.
Trong tài liệu này, tôi hướng dẫn cơ bản về thiết kế lập trình xử lý tín hiệu logic. Trêncơ sơ đó, ta nghiên cứu phần đơn giản nhất, cơ bản nhất là tín hiệu điều khiển logic.
Cảm biến (Sensor), theo định nghĩa là chuyển các tín hiệu vật lý thành các tín hiệuđiện. Các tín hiệu vật lý thường là những hiện tượng vật lý xung quanh ta. Ví dụ như:quang, nhiệt, áp suất, cơ,….Tín hiệu ngõ ra của cảm biến là dạng tín hiệu điện, có thểlà dòng hoặc áp, có thể có mức tín hiệu logic (1/0) hoặc tín hiệu số (chuỗi số 1 hoặc 0)hoặc tín hiện tương tư tùy theo loại cảm biến. Với từng yêu cầu điều khiển chính xáchay không mà ta chọn loại tín hiệu cảm biến. Tuy nhi ên, trong giới hạn yêu cầu của tàiliệu, tôi chỉ quan tâm đến tín hiệu logic (1/0) của tất cả các loại cảm biến (t ùy theotừng yêu cầu điều khiển).
Thiết bị giao tiếp với người dùng (HMI – Human Machine Interface) như cái tên củanó là tạo sự giao tiếp điều khiển giữa ng ười và máy. HMI có thể là led đơn, led 7đoạn, màn hình hiển thị text (Text Display), màn hình của người điều khiển (OperatorPanel), màn hình cảm ứng (TP – Touch Panel), PC hay là sự kết hợp giữa thiết bị lậptrình bằng tay và giao tiếp người dùng. Trong giới hạn tài liệu này sẽ không bàn đếnviệc thiết lập cho các dạng màn hình giao tiếp.
Thiết bị chấp hành (Actuator) là những thiết bị chuyển từ tín hiệu điều khiển điện cáchiện tượng vật lý như chuyển động quay, thẳng, đóng mở,….. Tín hiệu điều khiển có
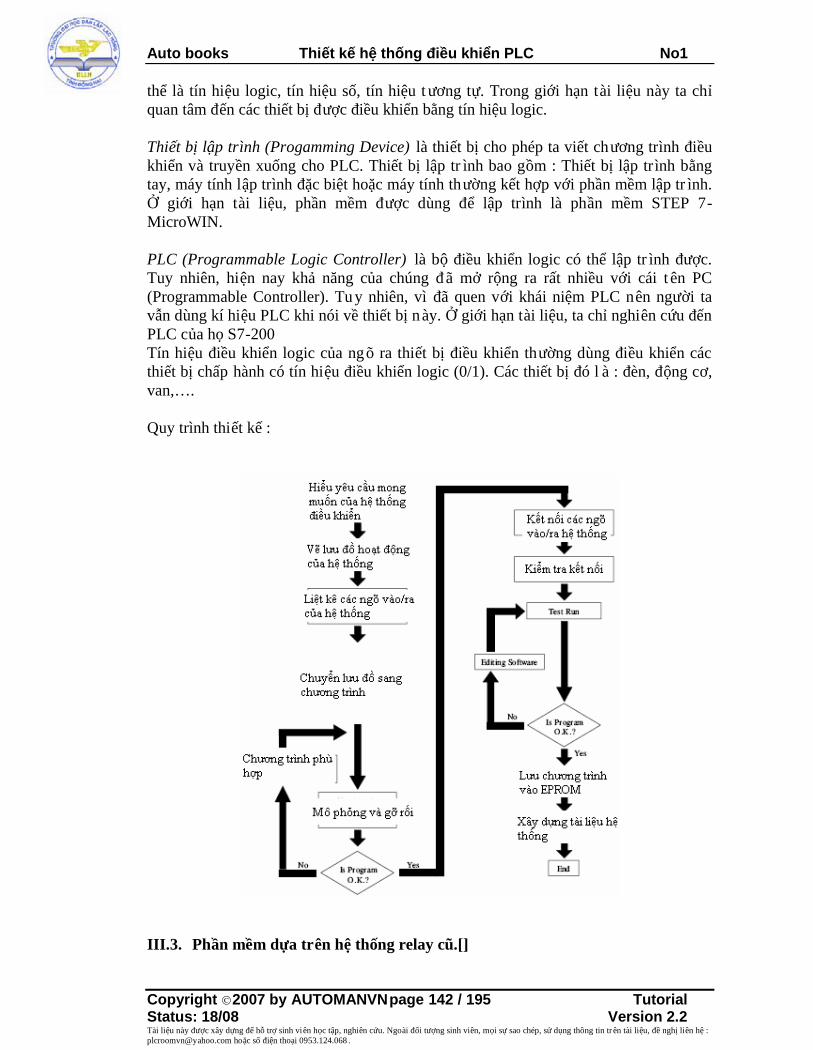
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 142 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
thể là tín hiệu logic, tín hiệu số, tín hiệu t ương tự. Trong giới hạn tài liệu này ta chỉquan tâm đến các thiết bị được điều khiển bằng tín hiệu logic.
Thiết bị lập trình (Progamming Device) là thiết bị cho phép ta viết chương trình điềukhiển và truyền xuống cho PLC. Thiết bị lập tr ình bao gồm : Thiết bị lập tr ình bằngtay, máy tính lập trình đặc biệt hoặc máy tính thường kết hợp với phần mềm lập tr ình.Ở giới hạn tài liệu, phần mềm được dùng để lập trình là phần mềm STEP 7-MicroWIN.
PLC (Programmable Logic Controller) là bộ điều khiển logic có thể lập tr ình được.Tuy nhiên, hiện nay khả năng của chúng đ ã mở rộng ra rất nhiều với cái t ên PC(Programmable Controller). Tuy nhiên, vì đã quen với khái niệm PLC nên người tavẫn dùng kí hiệu PLC khi nói về thiết bị này. Ở giới hạn tài liệu, ta chỉ nghiên cứu đếnPLC của họ S7-200Tín hiệu điều khiển logic của ngõ ra thiết bị điều khiển thường dùng điều khiển cácthiết bị chấp hành có tín hiệu điều khiển logic (0/1). Các thiết bị đó l à : đèn, động cơ,van,….
Quy trình thiết kế :
III.3. Phần mềm dựa trên hệ thống relay cũ.[]

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 143 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Trong ví dụ đầu tiên, một PLC được dùng để điều khiển việc đảo chiều động c ơ, trongđó S0 là nút Start và S1 là nút Stop. A0 được nối với Relay cấp nguồn cho động c ơ,A1 được nối với Relay đảo chiều động c ơ. Sơ đồ relay được kết nối như sau :
Chuyển từ sơ đồ relay sang chương trình PLC :
Phương pháp thực hiện : Ta xoay bản vẽ một góc 90 về bên trái và viết từ dưới lên.Chú ý : Nếu phần cứng giữ nguyên thì những vị trí có nút nhấn thường đóng thìchương trình được thay thế bằng tiếp điểm th ường hở. Những vị trí có nút nhấn v à cáctiếp điểm thường đóng và thường hở thì giữ nguyên
.
Các nút nhấn, thay vì được kếtnối trên mạch thì được kết nốivào ngõ vào của PLC. Cácthiết bị, thay vì được kết nốicứng trên mạch thì được kếtnối với ngõ ra của PLC. Cáctiếp điểm, cuộn dây của Relayđược thay thế bằng các tiếpđiểm, cuộn dây của PLC.
Sau khi thực hiện xong, chương trình được viết chính là chương trình điều khiển độngcơ ta đã thực hiện ở đầu tài liệu.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 144 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
MỘT SỐ MẠCH ĐẶC BIỆT TRONG S Ơ ĐỒ RELAY.
Nếu ta chuyển từ hệ thống điều khiển bằng relay sang ch ương trình PLC sẽ hầu nhưchắc chắn gặp những mạch điều khiển tiếp điểm mà gần như không chuyển trực tiếpsang chương trình LAD như hướng dẫn trên. Những mạch đó gọi chung là mạch cầu.Giải thích ngắn gọn sau là bản tóm tắt cách giải quyết cho cả dạng mạch cầu đ ơn vàmạch cầu phức mà ta thường gặp.
1)Mạch cầu đơn.
Ta có thể phân tích dòng chảy của dòng điện trong mạch theo từng tải khác nhau.Cụ thể là đối với tải E, ta sẽ có dòng để đển được với E phải qua a; b; c và d. Dòngđể đến được với F phải qua (a, d); (b, d); c. Nh ư thế mạch cầu đơn được phân tíchthành 2 network. Và lúc này ta có th ể tách theo ngõ ra để được sơ đồ LAD tươngtứng.
2.Mạch cầu phứcTa phải xét hết các trường hợp dòng chạy từ dây nóng, qua các tiếp điểm để đếnđược tải F, qua dây nguội. Cụ thể trong tr ường hợp này, ta có các đường dòngchảy như sau : (a, d); (b, c, c); (a, c, e); (b, e) và như th ế, ta có thể nhóm theo cáctrường hợp : (a hoặc b c)d và (a c hoặc b)e và như thế, ta có thể viếtchương trình LAD như hình dưới.
3.Mạch điều khiển diode.
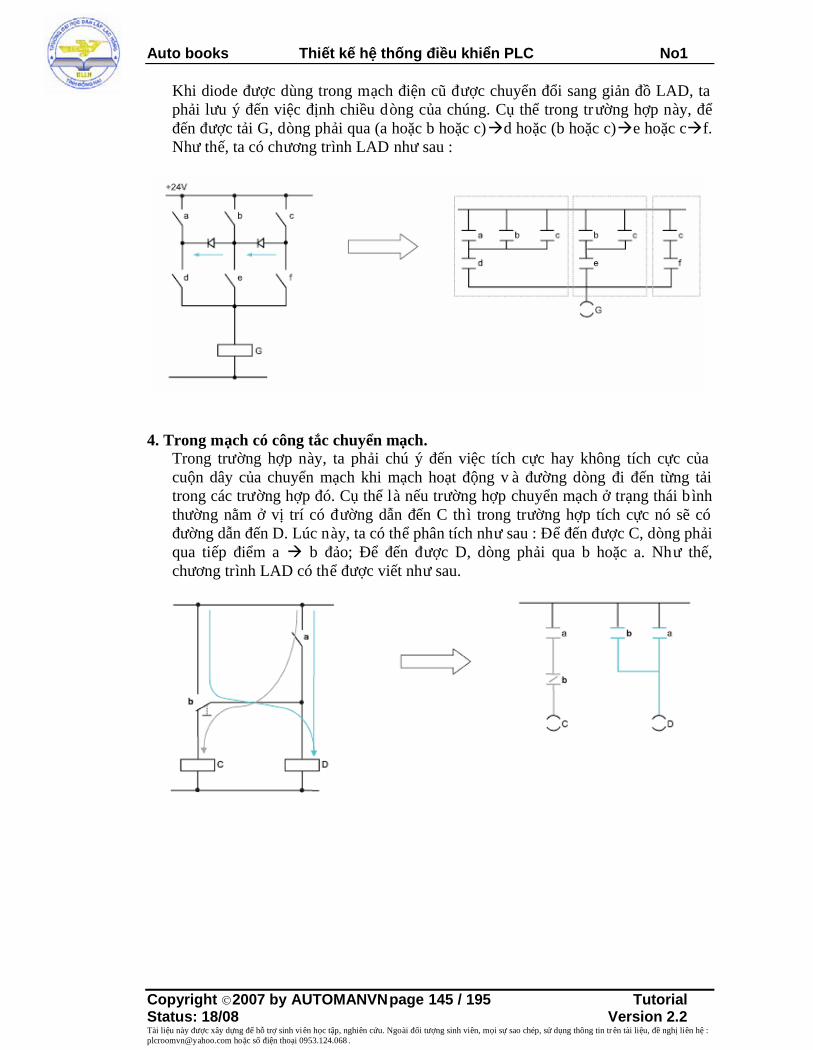
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 145 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Khi diode được dùng trong mạch điện cũ được chuyển đổi sang giản đồ LAD, taphải lưu ý đến việc định chiều dòng của chúng. Cụ thể trong trường hợp này, đểđến được tải G, dòng phải qua (a hoặc b hoặc c)d hoặc (b hoặc c)e hoặc cf.Như thế, ta có chương trình LAD như sau :
4. Trong mạch có công tắc chuyển mạch.Trong trường hợp này, ta phải chú ý đến việc tích cực hay không tích cực củacuộn dây của chuyển mạch khi mạch hoạt động v à đường dòng đi đến từng tảitrong các trường hợp đó. Cụ thể là nếu trường hợp chuyển mạch ở trạng thái b ìnhthường nằm ở vị trí có đường dẫn đến C thì trong trường hợp tích cực nó sẽ cóđường dẫn đến D. Lúc này, ta có thể phân tích như sau : Để đến được C, dòng phảiqua tiếp điểm a b đảo; Để đến được D, dòng phải qua b hoặc a. Như thế,chương trình LAD có thể được viết như sau.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 146 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 147 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ relay
Các phần tử của hệ thống thay thế

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 148 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Gán địa chỉ I/O.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 149 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Gán địa chỉ nội.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 150 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ mắc và chương trình trong LAD
III.4. Phần mềm có yêu cầu tổ hợp []Tầm quan trọng của bộ môn kỹ thuật số trong thiết kế hệ thống điều khiển PLCđiều khiển tín hiệu logic.Trong kỹ thuật số, các bạn đã được nghiên cứu về hệ thống tổ hợp và hệ thống tuần tự.Trên cơ sở đó, ta có thể áp dụng trực tiếp v ào việc thiết kế điều khiển trong PLC bởichúng không khác gì nhau. Điểm khác cơ bản nhất ở đây là ngôn ngữ lập trình, vàthiết bị. Tuy nhiên, đây cũng chính là hạn chế đối với những người chưa học qua Kỹthuật số. Chính vì vậy trong giới hạn của tài liệu tôi sẽ nhắc lại một chút về vấn đềnày.Trong phân loại tín hiệu điều khiển logic, ta thấy có phần tổ hợp. Điều n ày nhắc tanhớ lại các phân tích hệ thống trong bộ môn Kỹ thuật số. Do vậy, để nắm tốt đ ượcphần này, các bạn phải xem lại các cách phân tích hệ thống bằng bảng sự thật , bằngtín hiệu ngõ vào và ngõ ra số của hệ thống, xem lại việc rút gọn h àm bằng phép toánbool, bằng bìa karnaugh,…
Một hệ thống là hệ tổ hợp là hệ thống có một hay nhiều ngõ ra phụ thuộc vào hàm củamột hay nhiều ngõ vào nào đó. Hệ thống tổ hợp thường có một hay nhiều hàm biểudiễn liên hệ giữa ngõ vào và ngõ ra của hệ thống.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 151 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
CÁC BƯỚC THỰC HIỆNDưới đây, trong phần rèn luyện thường diễn tả hệ thống có một ng õ ra phụ thuộc vàomột số ngõ vào. Trên thực tế ta ít gặp những hệ thống đ ơn giản như thế này.Để thực hiện dạng bài toán này, ta thực hiện theo các bước sau :Bước 1 : Xác định yêu cầu điều khiển là dạng tổ hợp.Bước 2 : Phân tích sự phụ thuộc của các ngõ ra vào các ngõ vào dưới dạng bảng sựthật, hàm boolean, phương tr ình trạng thái hoặc bìa Karnaugh.Bước 3 : Rút gọn bảng sự thật sử dụng đại số Boolean hoặc b ìa Karnaugh.Bước 4 : Chuyển phương trình đã rút gọn sang chương trình dạng LAD.
Bước đầu thực tập, ta rèn luyện 2 bước : bước 3 và bước 4. Sau khi thành thục với cácdạng, ta sẽ thực tập với hai bước còn lại.
Dạng 1 (Bước 4) : Nếu bài toán cho dưới dạng một phương trình đã được rút gọn. Tasử dụng các chương trình LAD cơ bản tương ứng với các phương trình cơ bản.
Dạng 2 (Bước 3, bước 4) : Nếu bài toán được cho dưới dạng một phương trình chưađược rút gọn. Ta sử dụng phép toán Boolean hoặc bìa Karnaugh để rút gọn phươngtrình về phương trình đã được rút gọn.
a. . . . .X C A A B C A B C
X C A Chương trình dạng LAD là :
b. . . .X A B A C C A B C D
. . .X A B A C C A B C D
c. .X A B A C D E C
d. . . . .X A B B A C B C B C
Dạng 3 : (Bước 2, Bước 3, Bước 4) : Nếu bài toán cho với dạng một yêu cầu điềukhiển tổ hợp dưới dạng mô tả bằng lời hay mô tả bằng bảng sự thật. Ta phải phân tíchhệ thống thành bảng sự thật bao gồm mô tả ngõ ra tùy thuộc vào tổ hợp các ngõ vào.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 152 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sau đó dùng phép toán Boolean ho ặc Bìa Karnaugh để rút gọn phương trình vềphương trình đã được rút gọn
Ví dụ 1: Một lò hấp nhiệt với 2 hộc có thể làm nóng từng thỏi trong mỗi hộc. Khi lònhiệt được bật, chúng tạo ra đủ nhiệt cho hai thỏi. Nh ưng, nếu chỉ có một thỏi, lò cóthể trở nên quá nóng, vì vậy ta dùng một quạt để làm lạnh lò khi nó vượt qua điểmnhiệt được thiết lập.Yêu cầu điều khiển : Nếu lò quá nóng và chỉ một thỏi trong một hộc th ì bật quạt.
Định nghĩa các ngõ vào/ra:B1 = Có thỏi trong lò 1.B2 = Có thỏi trong lò 2F = quạtT = Cảm biết nhiệt.
Một số phép toán cơ bản và chương trình tương ứng trong PLC.
Dạng 4 (Tất cả các bước): Chuông báo trộmThiết kế một chuông báo trộm cho một tòa nhà. Khi bị tác động, một chuông và mộtđèn sẽ được bật để đuổi những khác không mời rời khỏi hiện tr ường. Chuông nàyđược tích cực nếu một người xâm nhập bất hợp pháp được dò thấy bằng một cảm biếncửa sổ và một cảm biến dò sự di chuyển. Cảm biến cửa số là một vòng dây kim loạikín, mảnh bao quanh cửa sổ. Nếu cửa sổ bị bể, lá kim loại bị đứt l àm cho dây bị ngắt.Điều này giống như một chuyển mạch thường đóng. Cảm biến dò sự di chuyển đượcthiết kế để khi một một người được dò thấy thì ngõ ra được bật. Hoạt động cơ bản củahệ thống chuông, và ngõ vào ra của bộ điều khiển được chia thành từng nhóm nhưtrong hình sau :
Ngõ vào ra được chọn làA = Công tắc chuông và đèn (1 = on)W = Cảm biến cửa số/cửa (1 = OK)M = Cảm biến dò sự di chuyển (0 = OK)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 153 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
S = Chuyển mạch tích cực chuông (1 = on)
Cho A, W, M, S là cảm biếnQ = Chuông (0 = im lặng)
Bước 1: Tạo bảng sự thật.
A B C D X0 0 0 0 00 0 0 1 00 0 1 0 00 0 1 1 00 1 0 0 00 1 0 1 00 1 1 0 00 1 1 1 01 0 0 0 01 0 0 1 11 0 1 0 01 0 1 1 01 1 0 0 01 1 0 1 11 1 1 0 01 1 1 1 1
Bước 2: Chia ngõ ra theo nhóm SM và WQBước 3: Vẽ bìa Karnaugh dựa trên các biến ngõ vào.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 154 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Bước 4 : Đơn giản bìa Karnaugh.
.W. WY S Q SMQ SQ M
Bước 5: Chuyển nó sang chương trình dạng LAD.
III.5. Phần mềm có yêu cầu tuần tự.[]
Qua sơ đồ trên, dễ dàng thấy rằng một hệ thống điều khiển t ùy theo mức độ phức tạpmà có thể có những cách phân tích thiết kế khác nhau.Đối với hệ thống đơn giản/nhỏ, ta có thể phân tích mô tả d ưới dạng Flowchart haySequence Bits.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 155 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Flow Chart : Trong bộ môn Kỹ thuật lập tr ình, các bạn đã được giới thiệu về cách sửdụng lưu đồ trong thiết kế, ở h ình vẽ trên các bạn đã thấy vị trí của nó trong việc thiếtkế một hệ thống. Tài liệu này sẽ không nhắc lại vấn đề này.Sequence bits : Hệ thống được mô tả dưới dạng các bước được mô tả bằng các bittuần tự. Tài liệu sẽ giới thiệu về cách thiết kế n ày.
Đối với những hệ thống phức tạp/lớn, ta có thể sử dụng các ph ương pháp sau để phântích :Block Logic : Theo trạng thái, các hoạt động trong trạng thái sẽ đ ược chia thành cáckhối logic. Tài liệu này sẽ giới thiệu về cách thiết kế n ày.Equations : Theo trạng thái, các hoạt động trong trạng thái đ ược mô tả dưới dạng cácphương trình. Tài liệu này sẽ giới thiệu về cách thiết kế này.SFC/GRAFSET : Theo nhóm hoạt động, các hoạt động sẽ được mô tả dưới dạng cáckhối hàm chuẩn. Tài liệu này không đi sau nghiên cứu hướng này. Thông tin chi tiếtvề chuẩn cũng như phương pháp lập trình, các bạn có thể liên hệ với tác giả.Petrinet : đang nghiên cứu.
GIẢN ĐỒ THỜI GIAN.Giản đồ thời gian có thể đánh giá đ ược khi thiết kế LAD cho quy tr ình mà chỉ phụthuộc vào thời gian. Giản đồ thời gian được vẽ với khoảng thời gian khởi động v àdừng rõ ràng. LAD được xây dựng với bộ định thờ i được dùng để bật ngõ ra on hoặcoff tại khoảng thời gian thích hợp. Ph ương pháp cơ bản đó là :
1) Hiểu quy trình.2) Xác định ngõ ra phụ thuộc vào thời gian.3) Vẽ giản đồ thời gian cho ngõ ra.4) Chia khoảng thời gian cho mỗi thời gian khi một ng õ ra bật on hay off.5) Viết LAD để khảo sát giá trị thời gian v à bật ngõ ra on hay off
Đề cập đến một handicap door opener thiết kế m à bắt đầu với một mô tả bằng lời. Môtả bằng lời sau đó được chuyển đổi sang một giản đồ thời gian, với t=0 l à khi nút nhấnmở cửa được nhấn. Trên giản đồ thời gian, điều kiện thời gian l à 2s, 10s, 14s. Chươngtrình LAD được xây dựng trên một thứ tự cẩn thận. Thành phần thứ nhất là mạch duytrì để seal-in nút mở, nhưng tắt sau khi cửa cuối cùng được đóng. Auto được sử dụngđể bật 3 lần đối với thờ i gian tới hạn. Mức logic của cửa mở l à sau đó được viết đểdùng những bộ timer.
Mô tả : Một handicap door opener có một nút m à sẽ mở hai cánh cửa. Khi nút đ ượcnhấn, (ngay lập tức) cánh cửa thứ nhất sẽ bắt đầu mở ngay lập tức, cánh cửa thứ hai sẽmở sau 2 giây sau đó. Cửa thứ nhất sẽ ở trong trạng thái mở trong v òng 10s, và cửathứ 2 sẽ mở trong vòng 14s. Sử dụng giản đồ thời gian để thiết kế ch ương trình LAD.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 156 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
III.6. Bit tuần tự. []Một thiết bị tiêu biểu sẽ dùng tuần tự các bước lặp lại mà có thể rõ ràng. Chương trìnhLAD có thể được viết theo sự tuần tự này. Những bước cho phương thức thiết kế nàylà :1. Hiểu quy trình.2. Viết những bước hoạt động tuần tự và gán cho mỗi bước một số.3. Mỗi bước gán một bit.4. Viết LAD để chuyển bit on/off nh ư quy trình chuyển qua trạng thái của nó.5. Viết LAD để thực hiện các chức năng cho mỗi b ước.6. Nếu quy trình có đặc trưng lặp lại, có bước cuối cùng quay ngược trở lại bước đầu.
III.7. Sơ đồ trạng thái. []Một trạng thái là một trường hợp hoạt động. Đề cập đến một cái máy rút tiền sẽ hoạtđộng qua các trạng thái đã được lựa chọn. Đoạn chung của trạng thái l à trạng thái rối,quét card, lấy số bảo mật, chọn yêu cầu thực hiện, hỏi số lượng tiền muốn rút, đếmtiền, trả lại card, sau đó trở về trạng thái rỗi.Một hệ thống trên cơ sở trạng thái có thể được mô tả với hệ thống trạng thái, v à sựchuyển trạng thái giữa những trạng thái đó.
Xét hệ thống đèn tiết kiệm năng lượng. Giản đồ này có thể mô tả hoạt động của đèntiết kiệm năng lượng trong một phòng được điều khiển hoạt động bởi 2 nút nh ấn.Trạng thái 1 là đèn tắt, trạng thái 2 là đèn sáng. Mũi tên giữa hai trạng thái được gọi làđường chuyển trạng thái, được chú thích bởi điều kiện chuyển trạng thái v à được đitheo khi điều kiện chuyển trạng thái l à đúng. Trong trường hợp này, nếu chúng ta ởtrạng thái 1 và A xảy ra chúng ta sẽ chuyển đến trạng thái 2. V òng ngược lại xác địnhrằng trạng thái sẽ được tích cực nếu điêu kiện chuyển của một trạng thái không đ ượcthực hiện.
Thành phần quan trọng nhất trong việc tạo giản đồ trạng thái là mô tả trạng thái. Mộtvài câu hỏi được hỏi là :1. Hệ thống thường làm gì?Hệ thống có thường thay đổi không?Những thành phầnnào hay thay dổi khi hệ thống thay đổi?Có phân đoạn n ào được thực hiện không?

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 157 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
2. Danh sách các lựa chọn khi hệ thống hoạt động mỗi khi nhận ra một tác động mà sẽkhởi động hoặc kết thúc. Để trong t ư tưởng một vài hoạt động có thể chỉ là chờ.
Xét một máy bán café tự động. Bước đầu tiên yêu cầu xác định các trạng thái nh ưtrình bày trong hình kế. Trạng thái chính là trạng thái rỗi. Một trạng thái đưa tiền vàoở đó tổng số tiển được hiển thị. Khi đưa đủ số tiền được đưa vào, cho phép ngườidùng được lựa chọn thức uống. Sau đó, trạng thái l àm café được được hoạt động đócafé được pha chế. Nếu một lỗi được dò thấy, trạng thái cần được hỗ trợ kỹ thuật đượccho phép hoạt động.
Các trạng thái. Trạng thái rỗi – Máy không có tiền và không thực hiện gì cả. Đưa tiền vào – Tiền được đưa vào và tổng số tiền được hiển thị. Lựa chọn của người dùng – Nếu đưa đủ tiền vào và cho phép người dùng chọn
việc làm café. Làm café – Làm loại được chọn. Hỗ trợ kỹ thuật – Thiết bị hết café, cốc, hay có bất kỳ lỗi n ào khác xảy ra.
Chú ý : Những trạng thái này do chủ quan người thiết kế, và người thiết kế khác có thể
thiết kế theo cách khác. Những trạng thái có tính rõ ràng. Những trạng thái trước đó và kế tiếp không là một phần của những trạng thái Có một sự khác nhau rõ ràng giữa các trạng thái.
Các trạng thái sau đó được vẽ dưới dạng các giản đồ trạng thái nh ư được trình bàydưới đây. Mũi tên chỉ chiều trạng thái chuyển, điều kiện chuyển trạng thái đ ược đặtgiữa mũi tên. Ở đây, ta có thể thấy rằng khi nguồn đ ược cấp, thiết bị sẽ khởi động v àomột trạng thái rỗi. Điều kiện chuyển ở đây dựa tr ên ngõ vào và cảm biến trong máy.Giản đồ trạng thái phụ thuộc vào quan điểm cá nhân, và giản đổ phức sẽ không giốnggiữa các thiết kế. Những giãn đổ này đồng thời thể hiện đáp ứng của hệ thống.
Xét hệ thống đèn giao thông ở hình sau. Sự tuần tự của đèn giao thông là đèn xanh ởmột chiều xảy ra trong khoảng 10s hoặc hơn 10s. Sau dó là đèn vàng, kho ảng 4s. Sau

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 158 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
đó ở chiều kia hoạt động tương tự xảy ra. Trong khi đèn xanh hay và ng xảy ra ở chiềunày thì đèn đỏ xảy ra ở chiều kia. Một nút nhấn đ ược cung cấp để khi người đi bộmuốn băng ngang qua đường, một đèn qua đường sẽ được bật sáng và đồng thời tăngkhoảng thời gian đèn xanh ở chiều kia.
Bước 1: Mô tả các biến hệ thống, đặt chúng theo thứ tự tuần tự.
Bước 2 : Xác định điềukiện chuyển trạng thái vàđưa chúng vaò danh sáchcác trạng thái.
Bước 3 : Vẽ giản đồ chuyểntrạng thái.
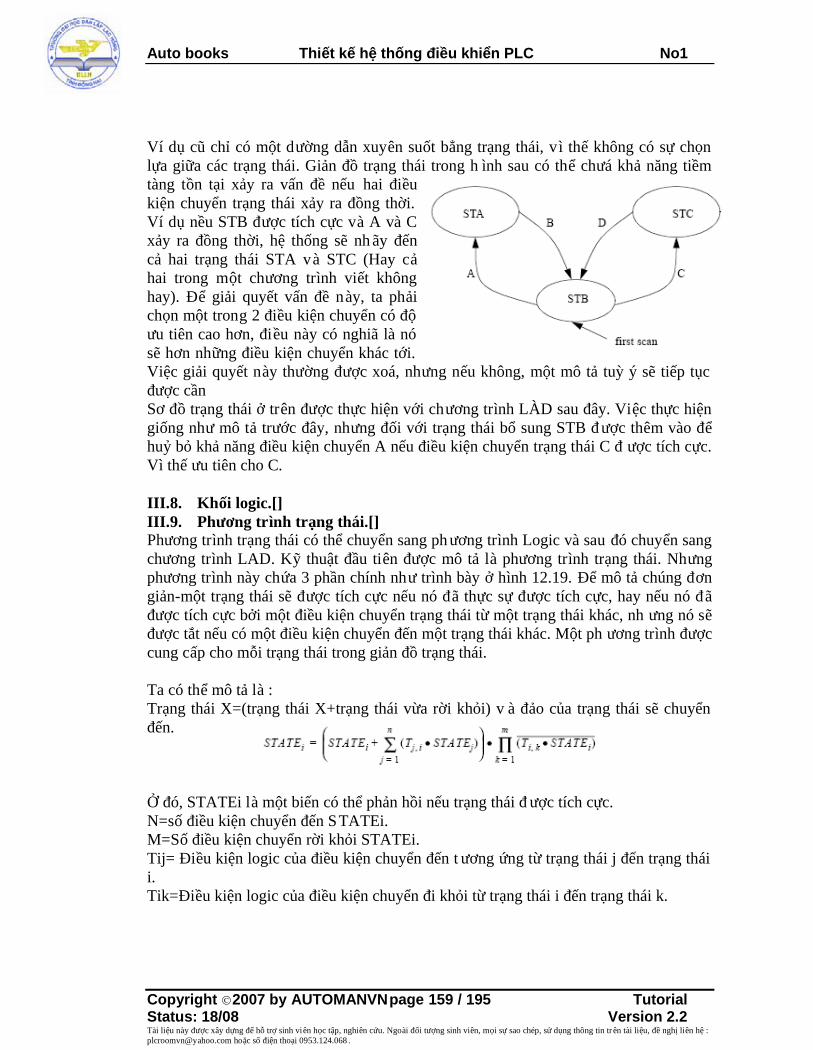
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 159 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ cũ chỉ có một dường dẫn xuyên suốt bẳng trạng thái, v ì thế không có sự chọnlựa giữa các trạng thái. Giản đồ trạng thái trong h ình sau có thể chưá khả năng tiềmtàng tồn tại xảy ra vấn đề nếu hai điềukiện chuyển trạng thái xảy ra đồng thời.Ví dụ nều STB được tích cực và A và Cxảy ra đồng thời, hệ thống sẽ nh ãy đếncả hai trạng thái STA và STC (Hay cảhai trong một chương trình viết khônghay). Để giải quyết vấn đề này, ta phảichọn một trong 2 điều kiện chuyển có độưu tiên cao hơn, điều này có nghiã là nósẽ hơn những điều kiện chuyển khác tới.Việc giải quyết này thường được xoá, nhưng nếu không, một mô tả tuỳ ý sẽ tiếp tụcđược cầnSơ đồ trạng thái ở trên được thực hiện với chương trình LÀD sau đây. Việc thực hiệngiống như mô tả trước đây, nhưng đối với trạng thái bổ sung STB đ ược thêm vào đểhuỷ bỏ khả năng điều kiện chuyển A nếu điều kiện chuyển trạng thái C đ ược tích cực.Vì thế ưu tiên cho C.
III.8. Khối logic.[]III.9. Phương trình trạng thái.[]Phương trình trạng thái có thể chuyển sang ph ương trình Logic và sau đó chuyển sangchương trình LAD. Kỹ thuật đầu tiên được mô tả là phương trình trạng thái. Nhưngphương trình này chứa 3 phần chính như trình bày ở hình 12.19. Để mô tả chúng đơngiản-một trạng thái sẽ được tích cực nếu nó đã thực sự được tích cực, hay nếu nó đãđược tích cực bởi một điều kiện chuyển trạng thái từ một trạng thái khác, nh ưng nó sẽđược tắt nếu có một điều kiện chuyển đến một trạng thái khác. Một ph ương trình đượccung cấp cho mỗi trạng thái trong giản đồ trạng thái.
Ta có thể mô tả là :Trạng thái X=(trạng thái X+trạng thái vừa rời khỏi) v à đảo của trạng thái sẽ chuyểnđến.
Ở đó, STATEi là một biến có thể phản hồi nếu trạng thái đ ược tích cực.N=số điều kiện chuyển đến STATEi.M=Số điều kiện chuyển rời khỏi STATEi.Tij= Điều kiện logic của điều kiện chuyển đến t ương ứng từ trạng thái j đến trạng tháii.Tik=Điều kiện logic của điều kiện chuyển đi khỏi từ trạng thái i đến trạng thái k.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 160 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ : Phương trình trạng tháiđược đưa vào ứng dụng trongchương trình đèn giao thông.Bưóc đầu tiên trong quy trình làxác định tên biến (hay vị trí nhớtrong bộ nhớ PLC) để xác địnhtrạng thái nào được bật hay tắt.Kế tiếp, giản đồ trạng thái đ ượcthực thi, mỗi thời điểm mộttrạng thái. Phương trình đầu tiêncho ST1, hay state1-green NS.Bắt đầu của phương trình có thể mô tả là ST1 sẽ ON nếu nó đang ON, hay nếu ST4ON, và nó sẽ ON trong vòng 4s, hay nếu nó là vòng quét đầu tiên của PLC. Cuốiphương trình là ST1, sẽ tắt khi nó được tích cực, khi S1 được nhấn và S2 tắt. Như đãthảo luận trước đây, phần đầu của phương trình sẽ làm cho trạng thái ON, phần thứhai sẽ làm cho nó OFF. Vòng quét đầu tiên đồng thời được dùng để bật ST1 khi PLCkhởi động. Nó được đặt bên ngoài nhóm gán cho ST1 ON, thậm chí ngay cả nếu tồntaị điều kiện.Mô tả các biến trạng thái :ST1 trạng thái 1-green NS.ST2 = trạng thái 2-yellow NS.ST3 = trạng thái 3- green EW.ST4 = trạng thái 4-green EW.
Phương trình trạng thái tương ứng
Chú ý rằng : Bộ định thời được mô tả trong phương trình này dưới dạngTONi(A,delay). TON được mô tả là dạng ON-Delay Timer. A là ngõ vào cho phép b ộđịnh thời, delay là giá trị định thời, giá trị I dùng để phân biệt các bộ định thời khácnhau.Phương trình trạng thái được mô tả dưới dạng phương trình LAD.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 161 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Phương pháp này được cung cấp cách lập tr ình cho hầu hết các kĩ thuật, nhưng có mộtvấn đề tiềm tàng. Để cập đến ví dụ ở trên. Nếu nút nhấn S1 được nhấn, nguồn cungcấp cho St1 được bật và nguồn cung cấp cho ST2 cũng được bật. Nhưng nguồn choST2 trong lúc phụ thuộc vào vào giá trị ST1 vừa được tắt. Điều này là lý do của vấnđề nếu giá trị của St1 tắt lập tức sau khi nguồn của của LAD đ ược quét đến. Trongtrường hợp này, PLC sẽ mất quyền điều khiển và không một trạng thái nào được tíchcực. Vấn đề này xuất hiện vì phương trình thường được tính toán song song, và sau đótất cả các giá trị được cập nhật đồng thời. Để vượt qua vấn đề này, chương trình LADphải được thay đổi theo dạng tr ình bày sau. Ở đây, một vào biến tạm được dùng đểgiữ giá trị trạng thái mới. Sau khi tất cả ph ương trình được thực thi, trạng thái đượccập nhật với giá trị mới của chúng.
FSSSSTSTTONSTSTSTX )211)).(4,4(.41(1 2
))4,2(2).(2.1.12(2 1 STTONSTSSSTSTSTX
)213)).(4,2(.23(3 1 SSSTSTTONSTSTSTX
))4,4(4).(2.1.14(4 2 STTONSTSSSTSTSTX 11 STXST 22 STXST 33 STXST 44 STXST
Khi nhiều điều kiện chuyển ra khỏi một trạng thái tồn taị, ta phải cẩn thận th êm vàoquyền ưu tiên. Mỗi điều kiện chuyển ra khỏi trạng thái đ ược ưu tiên một mức độquyền từ cao cho đến thấp. Phương trình trạng thái có thể sau đó được viết để ngăncản điều kiện chuyển có quyền ưu tiên thấp khi một hay nhiều điều kiện chuyển xảy rađồng thời. Phương trình được viết để ưu tiên A quyền ưu tiên lớn hơn. Khi A xảy ra,nó sẽ ngăn cản C trong phương trình có STC. Nhưng phương tr ình này được chuyểnsang chương trình LAD trong phương trình kế tiếp.
Phương trình chuyển trạng thái.Một sơ đồ trạng thái có thể được chuyển sang phương trình bằng cách viết mộtphương trình cho mỗi trạng thái và mỗi điều kiện chuyển. Một nhóm ví dụ mẫu về

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 162 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
phương trình được tìm thấy trong ví dụ đèn giao thông. Mỗi trạng thái và điều kiệnchuyển cần được gán một tên biến có thứ tự (Chú ý : Nên ghi chú những điều này trêngiản đồ). Những điều này sau đó được dùng để viết phương trình cho giản đồ. Phươngtrình chuyển được viết bằng cách nh ìn vào mỗi trạng thái, và sau đó xác định điềukiện chuyển nào sẽ làm cho trạng thái đó kết thúc. Ví dụ, nếu ST1 đúng, v à nút nhấnqua đường S1 được nhấn, và S2 không được nhấn thì khi đó điều kiện chuyển T1 sẽđúng. Phương trình trạng thái giống như phương trình trạng thái trong phương phápphương trình trạng thái, ngoaị trừ bây giờ chúng chỉ đề cập đến điều kiện chuyển. Nhớlại, dạng cơ bản củnhững phương trình trạng thái là trạng thái sẽ được tích cực nếu nóđã ON hay nó đã được bật lên bằng một điều kiện chuyển. Trạng thái sẽ đ ược tắt khinếu tồn taị một điều kiện chuyển thoát xảy ra. Trong ví dụ n ày, vòng quét đầu chochúng ta một điều kiện chuyển, nhưng nó đồng thời được đặt trong phương trình choT4.
Xác định biến trạng thái và điều kiện chuyển trạng thái.ST1 = trạng thái 1 – green NS.ST2 = trạng thái 2 – yellow NS.ST3 = trạng thái 3 – green EW.ST4 = trạng thái 4 – yellow EW.T1 = điều kiện chuyển trạng thái từ ST1 san g ST2.T2 = điều kiện chuyển trạng thái từ ST2 sang ST3.T3 = điều kiện chuyển trạng thái từ ST3 sang ST4.T4 = điều kiện chuyển trạng thái từ ST4 sang ST1.T5 = điều kiện chuyển đến ST1 trong v òng quét đầu tiên.Trạng thái và phương trình chuyển trạng thái.
Những phương trình có thể chuyển đổi trực tiếp đến ch ương trình LAD trong phần kếtiếp. Tất cả phương trình điều kiện chuyển xảy ra trước phương trình trạng thái. Bằngcách cập nhật phương trình chuyển trạng thái trưóc và sau đó cập nhật việc thay đổiphương trình trạng thái, các vấn đề giá trị của biến trạng thái đ ược thay đổi thụ động.Nhắc laị vấn đề này đã được thảo luận trong phần Phương trình trạng thái.Vấn đề của sự ưu tiên đồng thời xảy ra với phương trình chuyển trạng thái. Phươngtrình được viết cho giản đồ trạng thái được trình bày ở phần kế. Vấn đề sẽ xảy ra nếuđiều kiện chuyển A và C xảy ra đồng thời. Trong ví dụ điều kiện chuyển trạng thái T2được gán cho một quyền ưu tiên cao hơn, và nếu nó đúng, khi đó điều kiện chuyển T3sẽ được triệt khi tính toán STC. Trong ví dụ điều kiện chuyển trạng thái n ày đã đề cậptrong trạng thái cập nhật phương trình, nhưng chúng có thể đồng thời được dùng trongphương trình điều kiện chuyển.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 163 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
III.10. Biểu đồ tuyến thời gian. []
III.11. GRAPCETIII.12. Sơ đồ khối chức năng - SFC.[]Ghi chú : Sau khi dùng khối chức năng phân tích, ta có thể viết ch ương trình dướidạng khối logic, bit tuần tự hay ph ương trình chuyển trạng thái tùy theo khả năng củatừng người về việc dùng quen loại nào.
Hướng đi – kết nối các bước và điều kiện chuyển các trạng thái (Những b ước cơ bảnnày xác định việc tuần tự)Điều kiện chuyển trạng thái – là nguyên nhân của sự chuyển dịch giữa các bước, hoạtđộng như một điểm của sự phối hợp (coordination phối hợp)Cho phép điều khiển để di chuyển đến bước kế khi điều kiện được thỏa (dạng cơ bảnlà một lệnh if hay một lệnh chờ)

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 164 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Bước khời đầu – bước đầu tiên
Bước – thành phần cơ bản là một trạng thái của hoạt động. Một trạng thái th ường cómột mối liên kết hoạt động.
macrostep – Một tập hợp các bước (Dạng cơ bản là một chương trình con)
Lựa chọn rẽ nhánh – một lệnh OR – chỉ một theo một nhánh.
simultaneous branch (Nhánh đ ồng thời) – một lệnh AND – cả hai hay nhiều nhánhcùng hoạt động.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 165 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Một sơ đồ SFCVí dụ : Nếu điều kiện Part_Present_LS đ ược thỏa mãn (công tắc hành trình đóng lại),ngõ ra Advance_Solenoid sẽ được bật (ON). Mỗi khi Part_In_Position_LS đ ược tíchcực (ON), ngõ ra Clamp_Solenoid sẽ được tích cực. Sau đó, khi điều kiệnAt_Depth_LS thỏa mãn (True), ngõ ra Drill_Motor s ẽ được bật (ON trong vòng 10giây). Chú ý rằng ngõ ra Clamp_Solenoid đồng thời được tích cực khi Drill_Motorhoạt động. Khi hết thời gian định tr ước, giản đồ thời gian xác định rằng ng õ raClamp_Solenoid và Drill_Motor đ ều tắt (OFF) và duy trì, trong khi ngõ raReturn_Solenoid được bật (ON). Không một hoạt động n ào được thực hiện nữa chođến khi At_Top_LS thỏa mãn, lúc này quy trình sẽ dừng và ngõ ra Return_Solenoid sẽđược reset cho quá trình khác.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 166 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Một Macristep SFC nằm trong Main SFC.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 167 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Một số khả năng xảy ra của SFC
Ví dụ về mạch chuông báo

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 168 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ về rẽ nhánh AND

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 169 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ về chương trình conVí dụ :Dùng hoạt động nhị phân SFC, thực hiện một giản đồ mô tả việc bật ON v à OFF haibóng đèn tùy thuộc vào giản đồ thời gian trình bày trong hình 10-66. Trong giản đồthời gian, PLight_1 được ON trong 1s trong khi PLight_2 OFF, sau đó PLight_1 OFFtrong 1s trong khi PLight_2 ON. Cho r ằng một nút nhấn thường hở Start dùng khởiđộng quy trình và một nút nhấn thường hở Reset dùng reset quy trình trong suốt quytrình hoạt động. Khi reset, cả hai đèn đều tắt. Một đèn Light_EN sáng khi quy trìnhđang hoạt động và tắt khi nút Reset được nhấn.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 170 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giản đồ thời gian về điều khiển hai bóng tín hiệu .
ĐÁP ÁNHình 10-67 minh họa giản đồ thời gian mong muốn của hai ng õ vào (Start and Reset)và 3 ngõ ra (PLight_1, PLight_2, and Light_EN). Hình 10 -68 mô tả hoạt động SFCcủa giản đồ thời gian này, khi bước khởi động thiết lập cả hai đ èn PLight_1 vàPLight_2 ở trạng thái tắt. Khi nút nhấn Start đ ược nhấn, cờ hiệu được chuyển sangstep 2, ở đó không có hoạt động n ào và tiếp tục đến rẽ nhánh OR. Tại rẽ nhánh ORđiều khiển nhảy đến step 10 (ON1_OFF2) nếu nút nhấn Reset không đ ược nhấn(Not_Reset), bằng cách ấy bật PLight_2 OFF (trạng thái ng ược lại của trạng thái tíchcực), và bật Light_EN dùng lệnh set. Điều kiện chuyện trạng thái thời gian Y10 đ ượctích cực sau khi bước X10 được tích cực 1s, chuyển quyền điều khiển sang b ước X11,cho phép chuyển trạng thái của đèn sử dụng lệnh Boolean. Giống nh ư điều kiệnchuyển trạng thái Y10, điều kiện chuyển trạng thái Y11 đồng thời cho phép duy tr ìtrạng thái 1s trước khi chuyển trạng thái và chuyển cờ điều khiển về step2 và việc tuầntự bắt đầu lặp lại.
Ngược lại, nếu nút nhấn Reset đ ược nhấn, chương trình tích cực step3, cho phép resetđèn cho phép ở ngõ ra và chuyển quyền điều khiển về step1 v à chương trình sẽ chờcho đến khi nút nhấn Start được nhấn. Chú ý rằng chương trình SFC này cần ngườiđiều khiển nhấn nút reset ở điều kiện chuyển trạng thái 2 trong v òng 2s để reset đèn vềtrạng thái OFF. Lý do cho điều này là chương trình có thể đang ở nhánh còn lại (điềukiện chuyển trạng thái 4) mà sẽ dừng sau 2s trước khi tín hiệu reset có thể được quétthấy ở điều kiện chuyển trạng thái 2.
Sơ đồ thời gian

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 171 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giải thuật SFC
Ví dụ : Ví dụ trình bày một SFC cho điều khiển 2 hệ thống cửa an to àn.(two doorsecurity system.)Một cửa cần nhập 2 mã số, cửa thứ hai cần nhập 3 mã số. Việc thực thi của hệ thốngbắt đầu tại đỉnh của giải thuật tại khối Start khi nguồn được bật. Một hoạt động khácđược hoạt động đồng thời với khối Start cho phép khóa cánh cửa. (Chú ý: trong hoạtđộng SFC dùng ladder logic cho ngõ vào và ngõ ra, nh ưng nó không được thể hiệntrong giải thuật) Sau khi khởi động khối, giản đồ ngay lập tức chia hoạt động th ànhhai quy trình và cả hai bước 1 và 6 được tích cực. Những bước giống nhau ở các trạngthái trong giản đồ trạng thái. Điều kiện chuyển trạng thái giống nhau ở các điều kiệnchuyển trạng thái trong giản đồ trạng thái, nh ưng chúng được vẽ với dạng đậm và cómột gạch ngang. Khi điều kiện logic được thỏa mãn, điều kiện chuyển trạng thái sẽdừng một bước và khởi động bước kế tiếp. Trong khi bước 1 được tích cực, có 2 điềukiện chuyển trạng thái có thể xảy ra. Nếu nhóm số thức nhất đ ược thỏa mãn thì bước 1sẽ không được tích cực và bước 2 được tích cực. Nếu số không đúng th ì điều khiểnchuyển trạng thái sẽ được tích cực để chờ đợi điều kiện chuyển sau 5s, v à sau đó bước5 sẽ được tích cực. Bước 1 không được cho phép hoạt động, v ì thế không một việcnào được thực hiện trong khi chờ cho đến đi ều kiện chuyển trạng thái kế tiếp. Mứclogic cho cả hai cánh cửa sẽ được lặp lại mỗi khi quy tr ình trên hoàn tất.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 172 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Ví dụ : Một SFC đơn giản để điều khiển đóng tem đ ược trình bày sau đây (Chú ý : Bộđiều khiển này chỉ có một mạch điều khiển đơn, vì thế nó có thể đồng thời được thựchiện với giản đồ trạng thái, lưu đồ hay một phương pháp khác) Trong sơ đồ, máy đượckhởi động vào trạng thái rổi. Khi một nút nhấn automatic được nhấn máy sẽ được bậtvà cấp nguồn cho máy và đèn.Khi một tem được dò, đầu đóng dấu được cho phép đưa xuống cho đến khi chạm côngtắc hành trình dưới. Đầu đóng dấu sẽ được lùi lại cho đến khi chạm công tắc h ànhtrình phía trên, hệ thống sẽ được dừng lại. Một nút nhấn stop có thể l àm dừng hệthống chỉ khi nó đang chuyển động. (Chú ý rằn g thiết kế bình thường cần việc dừngtất cả mọi thời điểm). Khi hệ thống đ ược dừng, một nút reset phải đ ược nhấn trước khinút nhấn automatic có thể được nhấn lại. Sau khi bước 6 hệ thống sẽ chờ cho đến khitem không còn được dò trước khi chọn miếng tem kế tiếp. Không cần mức logic này,hệ thống sẽ tiếp tục hoạt động.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 173 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Lưu đồ tuần tự (SFC-Sequential function charts)Nếu chúng ta cần để mô tả sự tuần tự của đ èn giao thông, một trường hợp ta có thểlàm đó là mô tả dưới dạng tuần tự của các hàm hay trạng thái, chẳng hạn như trạngthái đèn đỏ hay trạng thái đèn xanh và ngõ vào và ngõ ra đến mỗi trạng thái. H ình sauminh họa điều này. Trạng thái 0 có một ngõ vào mà được tích cực sau khi đèn xanhđược bật xanh trong vòng một phút và một ngõ ra đèn đỏ được tích cực. Trạng thái 1có một ngõ vào được tích cực sau khi đèn đỏ được bật trong vòng 1 phút và một ngõra của đèn xanh được bật.
Sự tuần tự của đèn giao thông.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 174 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Giới hạn sơ đồ chức năng tuần tự (SFC) được dùng cho việc diễn đạt mô tả bằng h ìnhảnh của một hoạt động của hoạt động một hệ thống để tr ình bày sự tuần tự của các sựkiện liên quan trong hoạt động của nó. Sơ đồ tuần tự SFC có những phần tử sau :1 Hoạt động được mô tả bởi một số các việc tuần tự kết nối các trạng thái hay cácbước được mô tả bằng các khối hình chữ nhật, mỗi khối mô tả một trạng thái ri êng lẽcủa hệ thống được điều khiển.Bước khởi đầu trong một chương trình được mô tả khác nhau trong những b ước khácnhau. Hình sau trình bày mô tả của nó.
Một trạng thái và chuyển trạng thái của nó.
2.Mỗi sợi dây kết nối giữa các trạng thái có một gạch ngang mô tả điều kiện chuyểntrạng thái phải được thỏa mãn trước khi hệ thống có thể chuyển từ trạng thái n ày sangtrạng thái kế tiếp. Hai bước có thể không bao giờ kết nối trực tiếp, chúng phải lu ônluôn được tách ra bởi một điều kiện chuyển trạng thái. Hai điều kiện chuyển trạng tháicó thể không bao giờ được đặt kế tiếp nhau, chúng phải luôn luôn đ ược tách ra bởimột bước.3.Khi một điều kiện chuyển trạng thái đến b ước kế tiếp được thực hiện thì sau đótrạng thái kế tiếp hay bước kế tiếp của chương trình được xảy ra.4.Quy trình chuyển từ một trạng thái đến trạng thái kế cho đến khi v òng quét máyhoàn tất.5.Ngõ ra/hoạt động tại bất kì trạng thái nào được mô tả bằng hộp liên kết và xảy ra khitrạng thái được kích hoạt.Như được minh họa, Hình sau trình bày các phần của một SFC và giản đồ LAD tươngđương.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 175 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
SFC và giản đồ LAD tương đương.
Như một minh họa của nguyên lý của SFC, đề cập đến vị trí, ý nghĩa, phần của v òngquét máy của một máy giặt trong nhà nơi mà lòng máy giặt được đổ đầy nước và sauđó khi đầy, một bộ sưởi được bật lên và duy trì cho đến khi nhiệt độ đạt nhiệt độ mongmuốn. Sau đó, trống giặt quay trong một khoảng thời gian đặt tr ước. Chúng ta có mộtsố tuần tự các trạng thái có thể được mô tả dưới dạng được trình bày ở hình sau.
Máy giặt
Rẽ nhánh và hội nhánh.Nhánh được chọn được minh họa ở hình sau và cho phép một số trạng thái khác nhauđược hoạt động phụ thuộc vào điều kiện xảy ra.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 176 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Rẽ nhánh : Trạng thái theo sau trạng th ái 0 tùy thuộc vào điều kiện chuyển trạng tháiIN1, IN2 hay IN3 xảy ra.
Rẽ nhánh song song (H ình sau), được mô tả bởi một cặp đường thẳng nằm ngang. Chophép cho phép hai hay nhiều trạng thái khác nhau được hoạt động xử lý đồng thời.
Rẽ nhánh song song các trạng thái 1, 2 và 3 xảy ra đồng thời khi điều kiện chuyểntrạng thái IN 1 xảy ra.
Các hình sau trình bày cách hội nhánh bằng một SFC.
Hội nhánh: trạng thái 4 được tích cực khi có điều kiện IN 4 hay IN5 xảy ra.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 177 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Hình trên, sự tuần tự chuyển từ trạng thái 2 sang trạng thái 4 nếu có IN 4 xảy ra hay từtrạng thái 3 sang trạng thái 4 nếu có IN 5 xảy ra.
Hội nhánh đồng thời : Khi điều kiện IN 4 xảy ra trạng thái 4 đ ược tích cực từ trạngthái 2 hay trạng thái 3. Trong đó, sự tuần tự có thể xảy ra đồng thời từ trạng thái 2 vàtrạng thái 3 đến trạng thái 4 nếu đều kiện IN 4 xảy ra.
Như đã minh họa việc sử dụng ở trên. Hình 6.19 trình bày các phần của một chươngtrình được mô tả dưới dạng SFC và chương trình dưới dạng LAD.
Các phần của một SFC và các thành phần của chương trình LAD của nó.
Hoạt động

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 178 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Với những trạng thái, có một hoạt động hay nhiều hoạt động m à đã được cho phép.Chẳng hạn như những hoạt động như xuất ngõ ra trong ví dụ trên được mô tả dướidạng các hộp thoại gắn với các trạng thái. Hoạ t động của nó có thể được xuất dùng cáckiểu xuất lệnh của PLC. Chẳng hạn, khi một giản đồ LAD đ ược dùng, đáp ứng củahoạt động được thể hiện bởi giản đồ LAD đ ược thực hiện kèm theo nằm trong hộpthoại hoạt động. Hoạt động sau đó đ ược thực hiện khi có một luồng năng lượng đưavào hộp thoại action. Hình sau minh hoạ điều này
Hoạt động được mô tả bởi giản đồ LAD.
Hộp thoại action box thường được thực hiện trước hết bởi bộ chỉ định (Qualifier) đểchỉ định rõ điều kiện tồn tại của hoạt động. Trong tr ường hợp không có bộ chỉ địnhhay chỉ định N, hoạt động không đ ược lưu trữ và thực thi liên tục trong khi trạng tháiliên quan được tích cực. Bộ chỉ định P được dùng để mô tả việc xuất xung khi trạngthái được tích cực. Chỉ định D được dùng để delay một khoảng thời gian trước khithực hiện. Chỉ định (qualifier) L đ ược dùng để giới hạn hoạt động xảy ra trong mộtkhoảng thời gian (hình dưới)
Minh họa một bộ chỉ định dùng một hoạt động, đây là một thời gian giới hạn cho hoạtđộng.
Điều khiển động cơ AC bằng Driver :
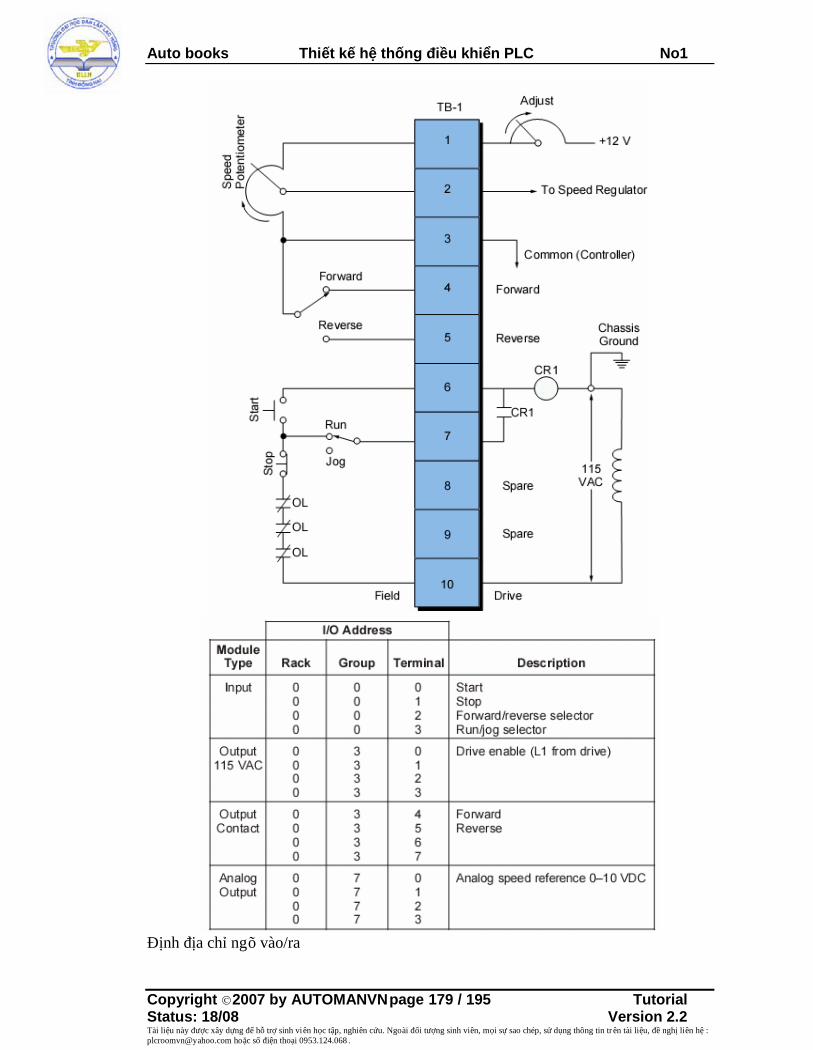
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 179 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Định địa chỉ ngõ vào/ra

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 180 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 181 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Điều khiển tự động/bằng tay
Hệ thống đổ đong chai

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 182 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Gán địa chỉ I/O (I/O address assignment)
(Gán địa chỉ nội ngõ ra)
Gán các thanh ghi
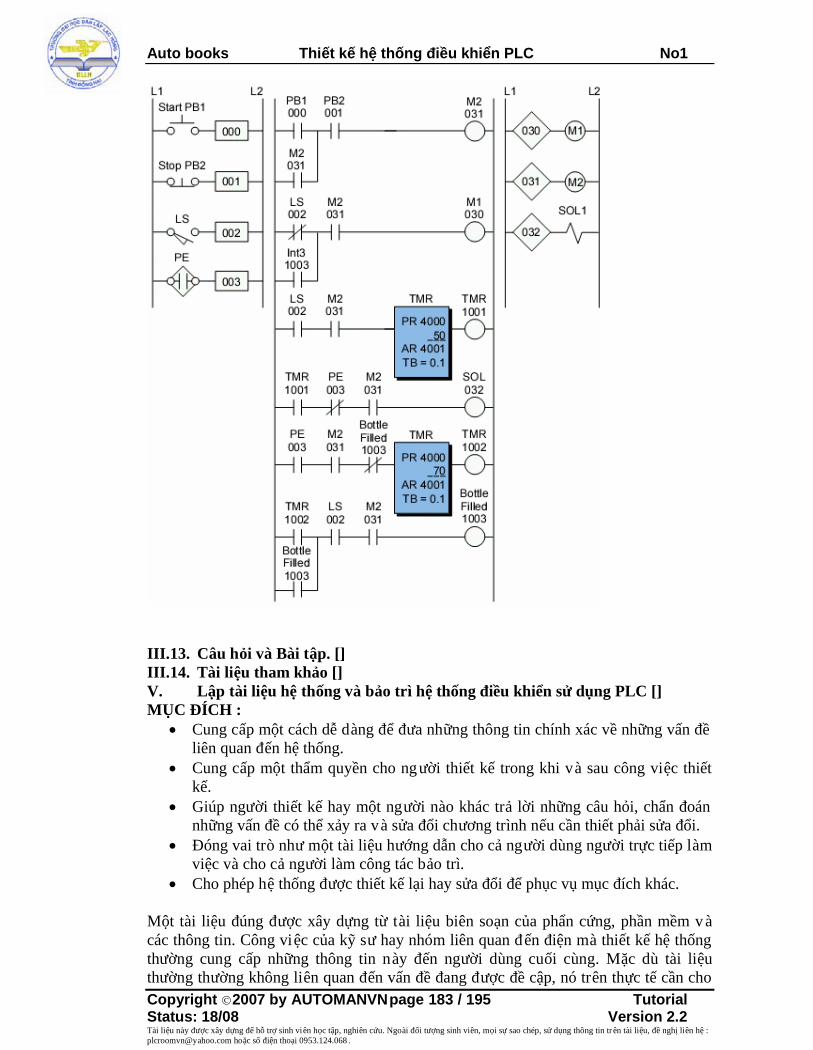
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 183 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
III.13. Câu hỏi và Bài tập. []III.14. Tài liệu tham khảo []V. Lập tài liệu hệ thống và bảo trì hệ thống điều khiển sử dụng PLC []MỤC ĐÍCH :
Cung cấp một cách dễ dàng để đưa những thông tin chính xác về những vấn đềliên quan đến hệ thống.
Cung cấp một thẩm quyền cho người thiết kế trong khi và sau công việc thiếtkế.
Giúp người thiết kế hay một người nào khác trả lời những câu hỏi, chẩn đoánnhững vấn đề có thể xảy ra và sửa đổi chương trình nếu cần thiết phải sửa đổi.
Đóng vai trò như một tài liệu hướng dẫn cho cả người dùng người trực tiếp làmviệc và cho cả người làm công tác bảo trì.
Cho phép hệ thống được thiết kế lại hay sửa đổi để phục vụ mục đích khác.
Một tài liệu đúng được xây dựng từ tài liệu biên soạn của phẩn cứng, phần mềm v àcác thông tin. Công việc của kỹ sư hay nhóm liên quan đến điện mà thiết kế hệ thốngthường cung cấp những thông tin này đến người dùng cuối cùng. Mặc dù tài liệuthường thường không liên quan đến vấn đề đang được đề cập, nó trên thực tế cần cho
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 184 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
sự sống còn của thiết bị và việc thực hiện công việc của ng ười kỹ sư được tốt. Trongchương này, ta sẽ xem xét đến những vấn đề cần xây dựng một bộ t ài liệu hệ thống đểlàm cho thuận tiện để hiểu một hệ thống điều khiển. Bảng sau liệt k ê một danh sáchcác thành phần cần thiết trong một bộ tài liệu hệ thống.
1. Bản tóm tắt hệ thống.2. Cấu hình hệ thống.3. Sơ đồ kết nối ngõ vào ra.4. Gán địa chỉ ngõ vào/ra5. Khai báo các địa chỉ nội.6. Khai báo các thanh ghi lưu trữ.7. Bảng danh sách các biến.8. Bản in của chương trình điều khiển.9. Bản lưu của chương trình điều khiển.
V.1. BẢN TÓM TẮT HỆ THỐNG. []Một hệ thống được thiết kế tốt bắt đầu với việc hiểu thông suốt vấn đề v à mô tả tốtquy trình được điều khiển. Hành động này là kết quả của việc tiếp cận có hệ thống dẫnđầu cho việc thực hiện hệ thống điều khiển. Mỗi khi hệ thống đ ược hoàn thành, ngườiliên quan trong hệ thống phải cung cấp một mô tả tổng quan hay tóm tắt s ơ đồ và thủtục dùng điều khiển quy trình.
Một bản tóm tắt hệ thống phải cung cấp những thông tin sau : Mô tả rỏ ràng về vấn đề điều khiển hay tác nhiệm. Mô tả chiến lược thiết kế hay triết lý dùng để thực hiện việc giải quyết vấn đề,
điều này xác định chức nàng chính của phần cứng và các thành phần của phầnmềm hệ thống cũng như lý do tại sao chúng được chọn.
Mô tả về những vấn đề đã được thực hiện.
Lấy ví dụ về hệ thống điều khiển một v ài dây chuyền. Mô tả tác nhiệm xác định rằngPLC sẽ điều khiển các dây chuyển để cho các th ành phần hàng được sắp xếp đúng(Hình sau). Triết lý thiết kế sẽ xác định rằng chỉ một PLC, đ ược đặt trong trung tâmcủa kho điều khiển hai dây chuyền sản phẩm.
Nó xác định rằng một hệ thống con đ ược điều khiển từ xa, đặt trong ph òng 4 và 5,điều khiển máy sắp xếp cho những v ùng này. Ngoài ra, chúng còn xác định được rằngBộ điều khiển sẽ tập hợp dữ liệu của to àn bộ sản phẩm từ cả hai line và báo cáo dướidạng bản in tại cuối mỗi quy tr ình. Cuối cùng, mô tả của mục tiêu (chẳng hạn sắpchính xác 99% mục tiêu cần sắp xếp) sẽ cho phép người dùng kiểm tra được việc thựchiện điều khiển. Bản mô tả hệ thống n ày sẽ chuyển thông tin thiết kế chung đến ng ườidùng cuối hay những người khác cần hiểu các nhiệm của hệ thống điều khiển.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 185 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
V.2. CẤU HÌNH HỆ THỐNG :[]Như tên đã được mô tả, cấu hình hệ thống là sơ đồ liệt kê hệ thống. Trong thực tế, nólà một sự diễn đạt bằn h ình của các phần tử phần cứng đ ược định nghĩa trong tóm tắthệ thống. Nó trình bày vị trí, kết nối đơn giản và nói sơ về chi tiết của phần cứngchính của thành phần hệ thống (chẳng hạn CPU, hệ thống con, thiết bị ngoại vi, …)Hình sau mô tả một cấu hình hệ thống tiêu biểu.
Cấu hình hệ thống không chỉ xác định vị trí vật lý của hệ thống con, m à còn xác địnhđịa chỉ của các ngõ vào ra.Địa chỉ các rack cho phép xác định nhanh các địa chỉ thiết bị ng õ vào/ra. Ví dụ, khibắt đầu, người dùng dể dàng xác định được địa chỉ I/O 0200 (LS, PB,…) nằm ở hệthống con 02, được đặt trong phòng số 24.
Nếu hệ thống điều khiển bao gồm cả một khung mạng với những thiết bị khác, cấuhình hệ thống phải trình bày sơ đồ khối chung của toàn bộ hệ thống (tất cả các điểm)và các thiết bị chính được kết nối lên nó. Ví dụ, hình sau mô tả một hệ thống cơ bảnPLC được kết nối mạng giao tiếp với hai mạng khác, một mạng quy tr ình và mộtmạng thiết bị. Sơ đồ hệ thống ngay lập tức cung cấp một bức tranh tổng thể của to ànbộ hệ thống.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 186 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ sắp xếp hệ thống
V.3. SƠ ĐỒ KẾT NỐI NGÕ VÀO/RA[]Sơ đồ kết nối ngõ vào/ra cho thấy việc kết nối thực của trường thiết bị ngõ vào/ra vớiPLC. Hình vẽ này thường nguồn cung cấp và kết nối của hệ thóng con với PLC. H ìnhsau trình bày một ví dụ về sơ đồ kết nối ngõ vào/ra. Hình này trình bày v ị trí của cácrack, các nhóm và những module của mỗi trường thiết bị để minh họa cho việc kết nốicủa mỗi địa chỉ ngõ vào/ra. Nếu trường thiết bị không được kết nối trực tiếp vớimodule I/O, thì sơ đồ phải cung cấp số kí hiệu của khối (xem h ình sau). Trường hợpnày, bất kì vấn đề gì xảy ra hệ thống PLC sẽ biết được cần kiểm tra ở đâu trong trườngthiết bị. Tài liệu kết nối ngõ vào/ra tốt rất có giá trị khi kết nối thực tế cũng nh ư trongviệc tham khảo sau này.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 187 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ cấu hình PLC kết nối với mạng thiết bị logic v à mạng thiết bị analog.
Sơ đồ kết nối ngõ vào/ra
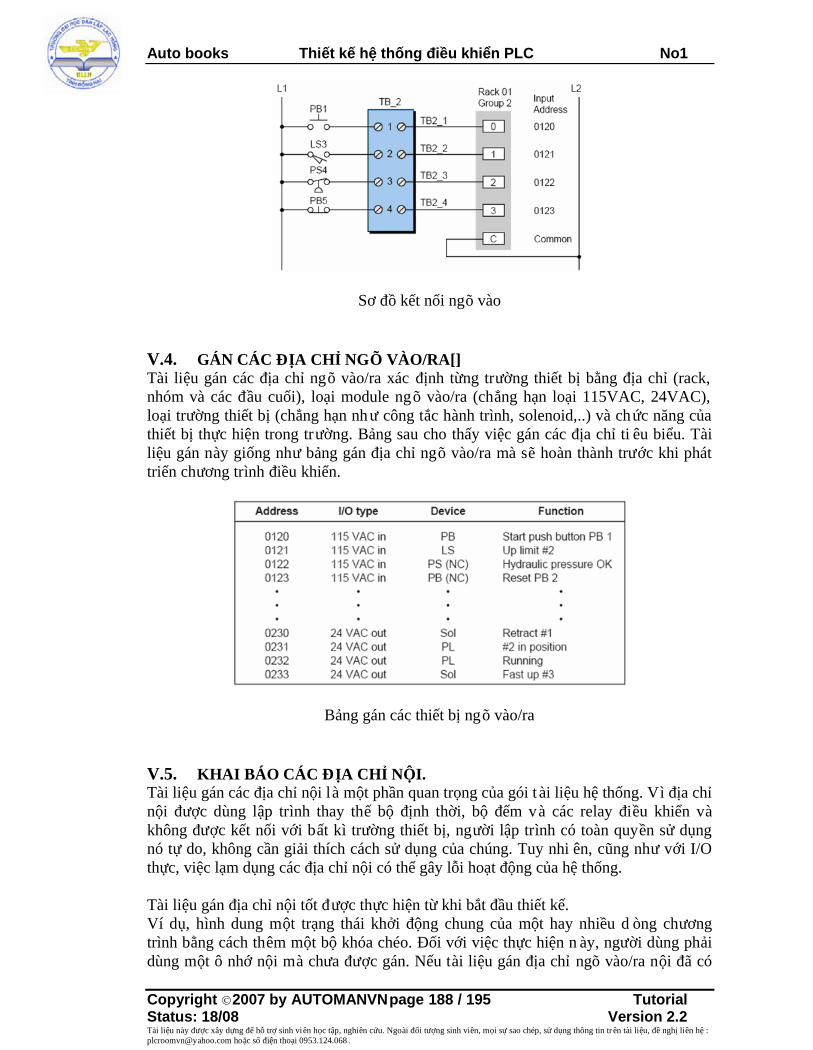
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 188 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Sơ đồ kết nối ngõ vào
V.4. GÁN CÁC ĐỊA CHỈ NGÕ VÀO/RA[]Tài liệu gán các địa chỉ ngõ vào/ra xác định từng trường thiết bị bằng địa chỉ (rack,nhóm và các đầu cuối), loại module ngõ vào/ra (chẳng hạn loại 115VAC, 24VAC),loại trường thiết bị (chẳng hạn như công tắc hành trình, solenoid,..) và chức năng củathiết bị thực hiện trong trường. Bảng sau cho thấy việc gán các địa chỉ ti êu biểu. Tàiliệu gán này giống như bảng gán địa chỉ ngõ vào/ra mà sẽ hoàn thành trước khi pháttriển chương trình điều khiển.
Bảng gán các thiết bị ngõ vào/ra
V.5. KHAI BÁO CÁC ĐỊA CHỈ NỘI.Tài liệu gán các địa chỉ nội là một phần quan trọng của gói t ài liệu hệ thống. Vì địa chỉnội được dùng lập trình thay thế bộ định thời, bộ đếm và các relay điều khiển vàkhông được kết nối với bất kì trường thiết bị, người lập trình có toàn quyền sử dụngnó tự do, không cần giải thích cách sử dụng của chúng. Tuy nhi ên, cũng như với I/Othực, việc lạm dụng các địa chỉ nội có thể gây lỗi hoạt động của hệ thống.
Tài liệu gán địa chỉ nội tốt được thực hiện từ khi bắt đầu thiết kế.Ví dụ, hình dung một trạng thái khởi động chung của một hay nhiều d òng chươngtrình bằng cách thêm một bộ khóa chéo. Đối với việc thực hiện n ày, người dùng phảidùng một ô nhớ nội mà chưa được gán. Nếu tài liệu gán địa chỉ ngõ vào/ra nội đã có

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 189 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
và chính xác, trình bày cả những địa chỉ đã sử dụng và chưa sử dụng, người dùngngay lập tức xác định địa chỉ cần dùng. Điều này làm tiết kiệm thời gian và tránh đượcsự lộn xộn. Tài liệu gán địa chỉ nội xác định địa chỉ, loại, chức nă ng của mỗi địa chỉnội trong chương trình. Hình sau trình bảy một tài liệu gán các địa chỉ nội tiêu biểu.
Bảng gán các địa chỉ nội dùng trong chương trình
V.6. KHAI BÁO CÁC THANH GHI LƯU TR Ữ.Mỗi thanh ghi hệ thống tồn tại, m à người dùng dùng như thanh ghi lưu trử hay thanhghi ngõ vào/ra phải được xác định cho phù hợp với tên của nó. Hầu hết các ứng dụngdùng thanh ghi để lưu hay giữ thông tin cho bộ định thời, bộ đếm hay so sánh. Việc sửdụng mà không gán cho chúng một tên thay thế ở những thanh ghi này sẽ làm chúngkhó có thể được theo dõi.Cũng như với tài liệu xác định ngõ vào/ra, tài liệu thanh ghi lưu trữ sẽ cho thấy thanhghi nào được hay không được sử dụng. Bảng sau tr ình bày một dạng cơ bản về xácđịnh thanh ghi lưu trữ.
Bảng khai báo cáo thanh ghi lưu trữ.
V.7. KHAI BÁO BIẾNTrong môi trường lập trình IEC 1131-3 (mô tả ở phần trước), tài liệu của các địa chỉngõ vào/ra vật lý, địa chỉ các thanh ghi nội, v à xác định địa chỉ lưu trữ cần mà thiết bịđược kết nối với PLC thông qua các ng õ vào ra được công bố hay xác định dưới dạngbiến. Hình sau trình bày khai bào biết tiêu biểu. Một bảng khai báo biến đúng, bao
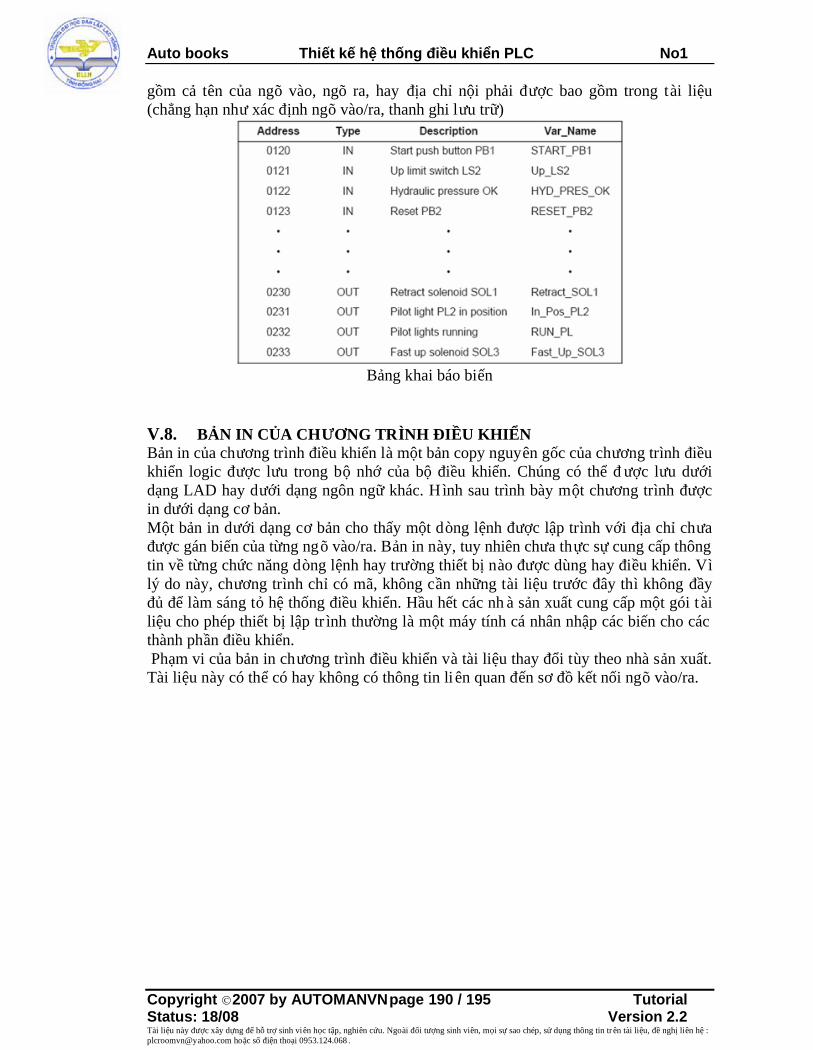
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 190 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
gồm cả tên của ngõ vào, ngõ ra, hay địa chỉ nội phải được bao gồm trong tài liệu(chẳng hạn như xác định ngõ vào/ra, thanh ghi lưu trữ)
Bảng khai báo biến
V.8. BẢN IN CỦA CHƯƠNG TRÌNH ĐIỀU KHIỂNBản in của chương trình điều khiển là một bản copy nguyên gốc của chương trình điềukhiển logic được lưu trong bộ nhớ của bộ điều khiển. Chúng có thể đ ược lưu dướidạng LAD hay dưới dạng ngôn ngữ khác. H ình sau trình bày một chương trình đượcin dưới dạng cơ bản.Một bản in dưới dạng cơ bản cho thấy một dòng lệnh được lập trình với địa chỉ chưađược gán biến của từng ngõ vào/ra. Bản in này, tuy nhiên chưa thực sự cung cấp thôngtin về từng chức năng dòng lệnh hay trường thiết bị nào được dùng hay điều khiển. Vìlý do này, chương trình chỉ có mã, không cần những tài liệu trước đây thì không đầyđủ để làm sáng tỏ hệ thống điều khiển. Hầu hết các nh à sản xuất cung cấp một gói tàiliệu cho phép thiết bị lập tr ình thường là một máy tính cá nhân nhập các biến cho cácthành phần điều khiển. Phạm vi của bản in chương trình điều khiển và tài liệu thay đổi tùy theo nhà sản xuất.Tài liệu này có thể có hay không có thông tin li ên quan đến sơ đồ kết nối ngõ vào/ra.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 191 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Bản in của chương trình
Hình trên trình bày một chương trình điều khiển LAD với các thành phần biến nhớ đãđược gán các biến tương ứng trong dòng lệnh. Thỉnh thoảng, chỉ có địa chỉ ng õ vào/ramiêu tả các phần tử LAD này. Hầu hết các tài liệu của các nhà sản xuất PLC cho phépngười dùng thiết lập các biến toàn cục hay mô tả biến nhớ và sau đó gán tương ứngcác ngõ vào/ra (thực và nội) được dùng trong hệ thống.
Hầu hết hệ thống phần mềm IEC 1131 bao gồm gói t ài liệu được dùng định nghĩa cácbiến như những nhãn đối với các phần tử điều khiển đ ã được lập trình.
Những hệ thống đồng thời cung cấp một khái quát các định nghĩa biến v à loại biến đãđược khaii báo. Hình sau trình bày một lưu đồ bản in mức 1 loại IEC 1131 ti êu biểu.Bộ nhớ thiết bị điều khiển luôn giữ phần mềm cuối cùng đã được sửa lại của chươngtrình, bởi vậy người dùng phải lưu giữ lại khi nghiên cứu hệ thống. Sự thay đổithường xuyên được thực hiện cho chương trình khi khởi động, vì thế những thay đổinày phải ngay lập tức sao lưu, thậm chí cho dù tốn nhiều thời gian. Một cách thực hiệntốt khác là sao lưu những bản copy gốc của chương trình sau khi bất kì trường nàothay đổi.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 192 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Bản in của sơ đồ IEC 1131-3 mức 1.
V.9. BẢN LƯU CỦA CHƯƠNG TRÌNH ĐIỀU KHIỂN.Là một thành phần quan trọng nhất, chương trình PLC sẽ được cài đặt cuối cùng lênhệ thống. Vì lý do này, người sử dụng phải lưu chương trình điều khiển lên một thiếtbị lưu trữ, chẳng hạn như băng cassette, đĩa mềm hay một thiết bị lưu trữ điện tử. Việcthực hiện này cho phép người dùng gởi hay mang chương trình lưu trữ đến nơi cài đặtvà tái cài đặt chúng lên bộ nhớ thiết bị điều khiển một cách nhanh chóng.Chương trình điều khiển có thể lưu trữ, nhân bản giống như những tài liệu khác phảiđược luôn lưu giữ chính xác. Việc thực hiện tốt vấn đề n ày là luôn có hai bản copytránh trường hợp một bản bị hỏng hay bị mất. Đồng thời chắc chắn rằng ch ương trìnhlưu trữ trên thiết bị phù hợp với phần cứng của bộ điều khiển.
V.10. HỆ THỐNG TÀI LIỆU PLCTài liệu đóng một vai trò quan trọng trong việc thiết kế bất k ì hệ thống điều khiển nào.Tài liệu này có thể là một công việc chán ngắt, buồn tẻ v à tiêu tốn cần đến một vàingười để thực hiện ở nhiều công đoạn (chẳng hạn nh ư : thiết kế, chuẩn bị các bảngbiểu và việc xác định các I/O). V ì thế, để có thêm một sự lựa chọn trong việc tạo ranó, giảm việc tốn thời gian khi thiết kế bằng tay, một v ài nhà sản xuất PLC hỗ trợcông nghiệp đã phát triển công cụ phức tạp, chưa đơn giản để xây dựng tài liệu cho hệthống PLC. Những hệ thống này làm tăng tốc độ tạo nên tài liệu hệ thống và giảmnhân công cho công việc này. Chúng làm tăng khả năng phát triển tổng quan của sảnphẩm bằng cách giảm lỗi chương trình và tăng lượng thông tin đưa vào tài liệu.
Mở rộng với loại chuẩn tài liệu hệ thống được cung cấp trước đây đã được thảo luận,tài liệu hệ thống thậm chí còn được cung cấp hỗ trợ một số tài liệu bổ ích khác.

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 193 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Tài liệu hệ thống có tác động lớn v à có ích như được trình bày ở hình sau có nhiều ưuđiểm và ít tốn kém hơn so với phương pháp thực hiện tài liệu bằng tay. Những ưuđiểm này là :
Tài liệu hệ thống cung cấp khả năng cắt dán, các macro, copy, phân nhóm địa chỉ v àthay đổi địa chỉ.
Chúng cung cấp nhiều kí tự, khả năng gán nh ãn mở rộng cho tiếp điểm và các phần tử.Mở rộng với việc gán nhãn cho chương trình hình thang, những hệ thống này đồngthời cho phép đặt các lời giải thích không giới hạn đ ược đặt bất kì nơi nào trên mànhình viết chương trình.
Hệ thống này cung cấp khả năng cho toàn bộ các thành phần ngõ vào/ra và việc vẽ kếtnối cứng ngõ vào/ra với việc phân tích, tự động gán của chương trình logic.Tài liệu hệ thống có thể upload và download chương tr ình cho hầu hết các hệ thốngPLC.
Hệ thống tài liệu PLC cho họ A1S
Bên cạnh chương trình được in ra, tài liêu hệ thống dồng thời cung cấp bản báo cáoviệc sử dụng các ngõ vào/ra. Bảng báo cáo này liệt kê địa chỉ các ngõ vào/ra của bộđiều khiển, giải thích lý do sử dụng từng ng õ. Những hệ thống tài liệu này đồng thờitạo nên tài liệu các thiết bị ngõ vào/ra (chẳng hạn như tiếp điểm, công tắc hànhtrình,…) cũng như việc báo cáo các lệnh được sử dụng trong PLC. Hơn nữa, việc báocáo gán biến đầy đủ cung cấp thông tin trực tiếp về nội dung tất cả các thanh ghi v ànơi từng thành phần được dùng trong chương trình. Một ưu điểm quan trọng việc liệtkê chương trình bằng tài liệu hệ thống là chúng cho thấy, trên một tài liệu duy nhất tấtcả thông tin cho chương trình điều khiển.Hệ thống tài liệu có khả năng upload, kiểm tra v à lưu trữ chương trình điều khiển trựctiếp từ bộ điều khiển hay từ các ph ương tiện lưu trữ khác. Thậm chí từ tài liệu và

Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 194 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
chương trình điều khiển của nhà cung cấp thứ 3 đang tồn tại, nhiều nh à sản xuất có thểkết hợp khả năng này trong hệ thống của họ. Ngoài ra để thực hiện khả năng lập tr ìnhvà xây dựng tài liệu, một vài hệ thống này cung cấp giao tiếp đồ họa với người dùng,hay GUIs, làm cho người dùng thân thiện với môi trường đồ họa mô tả ảo quy tr ìnhđiều khiển.
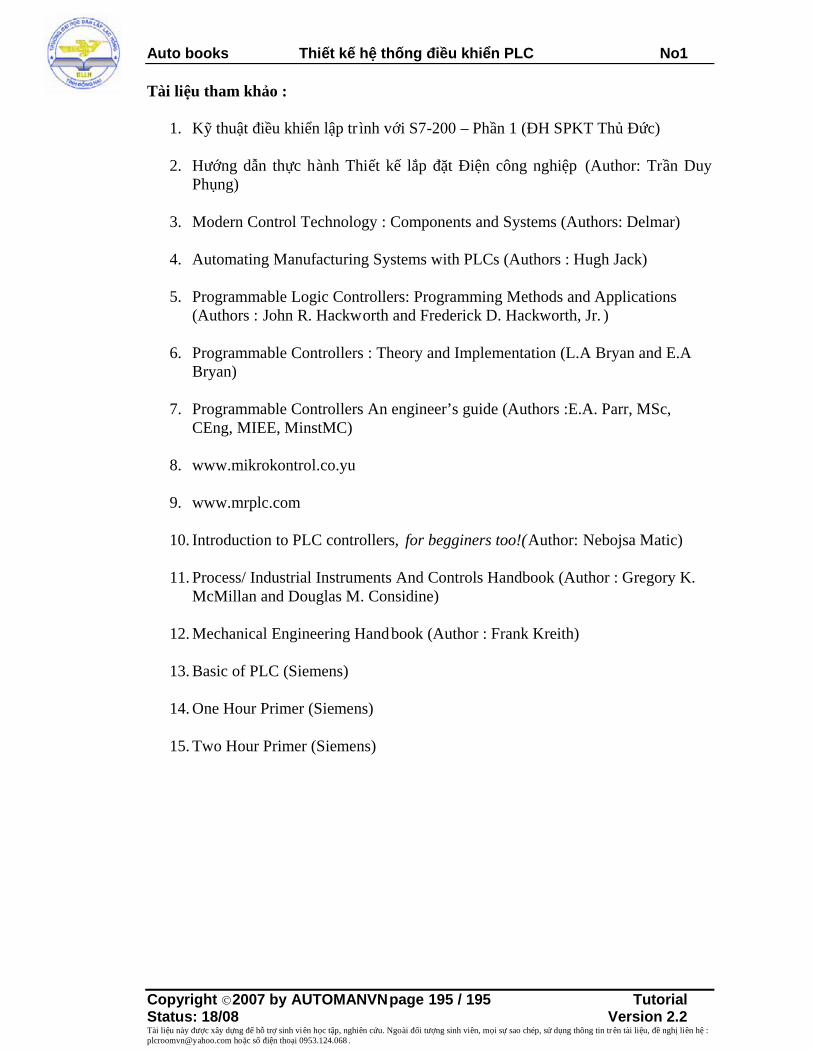
Auto books Thiết kế hệ thống điều khiển PLC No1
Copyright 2007 by AUTOMANVNpage 195 / 195 TutorialStatus: 18/08 Version 2.2Tài liệu này được xây dựng để hỗ trợ sinh viên học tập, nghiên cứu. Ngoài đối tượng sinh viên, mọi sự sao chép, sử dụng thông tin tr ên tài liệu, đề nghị liên hệ :[email protected] hoặc số điện thoại 0953.124.068 .
Tài liệu tham khảo :
1. Kỹ thuật điều khiển lập tr ình với S7-200 – Phần 1 (ĐH SPKT Thủ Đức)
2. Hướng dẫn thực hành Thiết kế lắp đặt Điện công nghiệp (Author: Trần DuyPhụng)
3. Modern Control Technology : Components and Systems (Authors: Delmar)
4. Automating Manufacturing Systems with PLCs (Authors : Hugh Jack)
5. Programmable Logic Controllers: Programming Methods and Applications(Authors : John R. Hackworth and Frederick D. Hackworth, Jr. )
6. Programmable Controllers : Theory and Implementation (L.A Bryan and E.ABryan)
7. Programmable Controllers An engineer’s guide (Authors :E.A. Parr, MSc,CEng, MIEE, MinstMC)
8. www.mikrokontrol.co.yu
9. www.mrplc.com
10. Introduction to PLC controllers, for begginers too!(Author: Nebojsa Matic)
11. Process/ Industrial Instruments And Controls Handbook (Author : Gregory K.McMillan and Douglas M. Considine)
12. Mechanical Engineering Handbook (Author : Frank Kreith)
13. Basic of PLC (Siemens)
14. One Hour Primer (Siemens)
15. Two Hour Primer (Siemens)