
the neural correlates of reinforcement feedback during motor ...
118
University of Mississippi University of Mississippi eGrove eGrove Electronic Theses and Dissertations Graduate School 1-1-2019 Reward and punishment: the neural correlates of reinforcement Reward and punishment: the neural correlates of reinforcement feedback during motor learning feedback during motor learning Christopher Mark Hill Follow this and additional works at: https://egrove.olemiss.edu/etd Part of the Experimental Analysis of Behavior Commons, and the Neurosciences Commons Recommended Citation Recommended Citation Hill, Christopher Mark, "Reward and punishment: the neural correlates of reinforcement feedback during motor learning" (2019). Electronic Theses and Dissertations. 1762. https://egrove.olemiss.edu/etd/1762 This Dissertation is brought to you for free and open access by the Graduate School at eGrove. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of eGrove. For more information, please contact [email protected].
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of the neural correlates of reinforcement feedback during motor ...

University of Mississippi University of Mississippi
eGrove eGrove
Electronic Theses and Dissertations Graduate School
1-1-2019
Reward and punishment: the neural correlates of reinforcement Reward and punishment: the neural correlates of reinforcement
feedback during motor learning feedback during motor learning
Christopher Mark Hill
Follow this and additional works at: https://egrove.olemiss.edu/etd
Part of the Experimental Analysis of Behavior Commons, and the Neurosciences Commons
Recommended Citation Recommended Citation Hill, Christopher Mark, "Reward and punishment: the neural correlates of reinforcement feedback during motor learning" (2019). Electronic Theses and Dissertations. 1762. https://egrove.olemiss.edu/etd/1762
This Dissertation is brought to you for free and open access by the Graduate School at eGrove. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of eGrove. For more information, please contact [email protected].

REWARD AND PUNISHMENT: THE NEURAL CORRELATES OF
REINFORCEMENT FEEDBACK DURING MOTOR LEARNING
A Dissertation
Presented in partial fulfillment of requirements
For a degree of Doctor of Philosophy
In the Department of Health, Exercise Science
and Recreation Management
The University of Mississippi
By
Christopher Mark Hill
August 2019

iii
Copyright © 2019 by Christopher Mark Hill
All rights reserved

ii
ABSTRACT
‘By the carrot or the stick,’ reward or punishment, has been contemplated by instructors to
motivate their pupils to learn a new motor skill. The reinforcements of reward and punishment
have demonstrated dissociable effects on motor learning, with punishment enhancing the
learning rate and reward increasing retention of the motor task. However, it is still unclear how
the brain processes reward and punishment during motor learning. This study sought to
investigate the role of reinforcement feedback in cortical neural activity associated with motor
learning. A novel visuomotor rotation task was employed with reward, punishment, or null
feedback as the participants adapted their movement to a 30-degree counter-clockwise rotation.
We measured movement time and task accuracy throughout the task. Surface
electroencephalography was utilized to record cortical neural activity throughout the learning
and retention of the motor task. Event-related potentials (ERPs) were calculated to assess how
the brain processes the reinforcement feedback and prepares for movement. Repeated measures
ANOVAs were utilized to detect differences in the movement parameters and ERP amplitudes.
This study found that reward and punishment feedback did not produce different effects on the
rate of task learning. However, punishment feedback impaired the retention (memory) of the
motor task. These behavioral effects were accompanied by changes in the amplitude of ERPs
during feedback presentation and movement preparation. These results suggest that punishment
feedback alters brain processes involved in memory formation during motor learning.

iii
DEDICATION
This dissertation is dedicated to my wife Elizabeth, and my mother and father. Thank you for
your sacrifices that have allowed me to pursue my education to the fullest extent. Without all of
you, none of this would have been possible. Thank you.

iv
ACKNOWLEDGEMENTS
I would like to acknowledge my research advisior, Alberto Del Arco, for his contribution to my
development as scientist.

v
TABLE OF CONTENTS
ABSTRACT……………………………………………………………………………….. ii
DEDICATION…………………………………………………………………………….. iii
ACKNOWLEDGEMENTS……………………………………………………………….. iv
LIST OF TABLES………………………………………………………………………… vi
LIST OF FIGURES………………………………………………………………………. vii
CHAPTER I………………………………………………………………………………..1
CHAPTER II……………………………………………………………………………….6
CHAPTER III………………………………………………………………………………33
CHAPTER IV………………………………………………………………………………43
CHAPTER V……………………………………………………………………………….62
CHAPTER VI……………………………………………………………………………….81
REFERENCES………………………………………………………………………………84
CURRICULUM VITAE……………………………………………………………………101

vi
LIST OF TABLES
Table 1: Fitts And Posner Stages Of Motor Learning
Table 2: Bas/Bis Scale Descriptive Data
Table 3: Movement Time And Reach Angle Descriptive Data
Table 4: Movement Readiness Potential Descriptive Data

vii
LIST OF FIGURES
Figure 1: Outline Of Specific Aims And Hypotheses
Figure 2: Brain Areas Involved In Motor Learning
Figure 3: Image Of An Event-Related Potential
Figure 4: Image Of Motor Task Experimental Setup
Figure 5: Image Of Motor Learning Task Conditions
Figure 6: Timeline Of A Single Trial In Adaptation And No Vision Figure 7: Data Processing Flow Chart Figure 8: Scalp Map Of Electrodes Figure 9: Reach Angle Across Learning And Task Conditions Figure 10: Fcz Learning Feedback-Related Event-Related Potentials Figure 11: Fcz Adaptation Feedback-Related Event-Related Potentials
Figure 12: Fcz Feedback-Related Event-Related Potentials Amplitude With Individual Responses
Figure 13: Punishment Feedback-Related Event-Related Potentials Of Multiple Electrodes Figure 14: Endpoint Task Error For All Groups Figure 15: Cz Learning Movement Readiness Potential Amplitude Figure 16: Cz Movement Readiness Potentials During Late Learning And No Vision Figure 17: Pz Error Positivity For All Groups During Adaptation And No Vision

1
CHAPTER 1
INTRODUCTION
Motor skills underlie most of how humans interact with their environment. From playing musical
instruments, riding a bike, to typing on a computer, all are the result of prior performed
movements that have been executed and refined over time. Each skill is made up of novel actions
that are organized efficiently and can be produced multiple times over to achieve a sole goal.
Human motor skill performance is highly influenced by feedback, both intrinsic and extrinsic.
Task-intrinsic feedback, such as seeing a ball entering a goal or knowing the position of one’s
arm after a basketball shot, is ever present to the performer and can be used to facilitate new
learning on its own. Task-extrinsic feedback (augmented feedback), such as motivational
reinforcement, from external sources, provide incentives to change motor behavior. This
accelerates task learning by providing additional guidance to learn and retain desired motor
behaviors.
Motivational reinforcements of reward and punishment have been used to modify motor
behaviors. Interestingly, during the learning of a novel motor skill, reward and punishment have
dissociable effects during different phases of learning (Galea et al., 2015; Steel et al., 2016; Abe
et al., 2011). Punishment induced faster learning during acquisition but reward created better
retention of the motor task (Galea et al., 2015). Additionally, reward and punishment feedback
differ in brain pathways utilized during motor learning. According to previous fMRI, studies
reward feedback activates cortical-striatal pathways, while punishment feedback employs

2
cortico-cerebellar pathways (Wächter et al., 2009; Steel et al., 2019). Importantly, these two
pathways are involved in the control of voluntary movements.
Surface electroencephalography (EEG) has become one of the most important non-invasive
methods to investigate the neural mechanism of human behavior. EEG provides insight into the
underlying neural activity that occurs in response to external stimuli or executed actions (Cohen,
2017). Recently, EEG has become commonly used in the assessment of the neural correlates of
motor learning. Common dependent variables of EEG such as event-related potentials (ERPs)
changes in cortical neural activity in response to specific sensory (i.e. feedback-related ERPs)
or motor (i.e. movement-related ERPs) events, have been shown to change in response to new
motor skill learning (Anguera et al., 2009; MacLean et al., 2015).
Previous studies have shown changes in cortical neural activity during motor execution and
intrinsic feedback. However, within the current body of literature, the effects of reward and
punishment on motor learning have been primarily explored at the level of behavior, and no
study has presented the neural correlates. Thus the purpose of this study was to determine the
effects of reward and punishment on cortical neural activity during a motor adaptation task. Our
findings demonstrate dissociable effects of reward and punishment on task retention, with
punishment impairing motor memory. Additionally, these changes in behavior were also
demonstrated in the ERPs, suggesting that punishment changes how reinforcement feedback is
processed during motor learning and how the brain prepares for movement.
3
Specific Aims and Hypotheses
This study utilizes EEG to investigate changes in feedback-related and movement-related ERPs,
as a measure of cortical neural activity, under reward, punishment, or null feedback conditions
during a visuomotor task. In particular, this study examines how both performance and ERPs
change during the adaptation (learning) and the retention (memory) of the motor skill after
receiving reward, punishment, or null feedback. The specific aims of this study are as follows
(Figure 1):
Aim 1: To examine the effects of reward and punishment feedback on motor skill learning.
Previous studies using a visuomotor rotation task have shown that punishment enhances motor
task adaptation and reward enhances retention (Galea et al., 2015). However, contrasting
findings have presented no differences between reward and punishment on motor task retention
(Song and Smiley-Owen, 2017; Steel et al., 2016). This study investigates whether reward and
punishment feedback changes motor performance by using a visuomotor rotation task in which
subjects would have to adapt to a novel 30-degree counter-clockwise rotation. Accuracy (reach
angle and endpoint error) and movement time are assessed during the task.
Aim 1: Behavior: It is hypothesized that punishment feedback produces significantly greater task
accuracy compared to reward or null feedbacks. Additionally, it is hypothesized that reward
increases task retention compared to punishment. Other parameters, such as movement time will
not differ between feedback conditions.

4
Aim 2: To examine the effects of reward and punishment feedback on feedback-related
ERPs during motor skill learning.
Previous studies have related changes in the amplitude of feedback-related ERPs to error
processing by cortical areas (van der Helden, Bokesem and Blom, 2010; Beaulieu et al., 2014).
This study investigates whether reward and punishment modulate error processing by monitoring
feedback-related ERPs during the visuomotor rotation task.
Aim 2: Feedback-Related ERPs: It is hypothesized that early learning trials elicit greater
amplitudes of feedback-related ERPs than late learning trials for all groups, which would be
associated with learning of the motor skill through practice and decrease in task novelty.
Additionally, the amplitude of the feedback-related ERPs will change during learning when the
feedback is punishment, and during retention when the feedback is reward.
Aim 3: To examine the effects of reward and punishment feedback on movement-related
ERPs during motor skill learning.
Previous studies have demonstrated an increase in amplitude of the movement-related ERPs
(movement preparation) as participants learn a new motor skill (Wright et al., 2012a; 2012b).
This study investigates whether reward and punishment feedback modulates movement
processing by assessing movement-related ERPs during the visuomotor rotation task.
Aim 3: Movement-Related ERPs: It is hypothesized that the amplitude of the movement-related
ERPs during early learning is lower than the amplitude of the movement-related ERPs during
late learning as the result of the visuomotor adaptation task being learned by the participants.

5
Lastly, the amplitude of movement-related ERPs for those in the Reward group will increase
during the retention testing of the motor task compared to the Punishment group as a result of
reward enhancing motor skill retention.
Figure 1. A summary of the specific aims and the dependent variables of interest.
The results of this study are presented in two independent chapters, chapter 4 and 5, which focus
on feedback-related ERPs (Aim 2) and movement-related ERPs (Aim 3), respectively, together
with behavior (Aim 1). Both chapters are intended as independent manuscripts.
Aim 1: Behavior
- Movement Time
- Reach Angle
- Endpoint Error
Aim 2: Feedback-
related ERPs
ERP amplitude
Aim 3: Movement-
Related ERPs
ERP amplitude

6
CHAPTER 2:
REVIEW OF LITERATURE:
MOTOR LEARNING
Humans possess an outstanding capability to learn new motor skills throughout their lives.
Hallmarks of a learned skill include decreased movement time and increased task accuracy. In
order to achieve these, it requires experience and practice that seek to limit errors and enhance
future performance. Additionally, learning a new skill produces relatively permanent changes to
the capabilities of the individual, which can manifest similarly after long periods of not
performing the skill (Schmidt and Lee, 1988).
Even with these well-established characteristics, the definition of motor learning has taken many
different forms across the literature. A common definition describes the underlying neural
circuits becoming more efficient and faster in their transmission of task-related information
(Dayon and Cohen, 2011). Others have referred to the establishment of more precise internal
models, that limits the discrepancy between the sensory information obtained from the
environment and motor output (Wolpert et al., 1995). A more recent definition suggested that
skill learning is the result of changes in two distinct processes that underlie motor function:
Action selection, which is derived primarily from the cognitive processes associated with the
task, and action execution which refers to the spatiotemporal modification to sub-movements
within a skill (Diedrichsen and Kornysheva et al., 2015).

7
The early work by Fitts and Posner (1967) proposed that motor learning could be categorized
into three phases, that are distinguished based on the types feedback and sensory inputs
facilitating the performance, and the degree of attention guiding the subject’s actions (Table 1).
The first stage encountered when learning a new motor skill is the cognitive stage, where a high
degree of attention is needed from the subject to perform the task, irrespective of accuracy. The
overall performance of task consists of large amounts of variability and errors. It is at this stage
the learner is discovering the “what to do” of the skill and attempting to minimize irrelevant
information that does not pertain to performance (Wolpert and Flanagan et al., 2010). The
associate stage of motor learning is characterized by extracting key features of the environment-
movement relationship. It is here, where sensory input from the proprioceptors began to detect
errors in movement execution, which then update the subsequent movement preparation.
Movement patterns become more consistent, and errors are reduced. The last stage defined by
Fitts and Posner (1967) is the autonomous stage where performance requires little to no feedback
or verbal instructions, and errors are infrequent.
Stages of Motor
Learning Attentional Demand Feedback System
Primary Sensory
System
1. Cognitive Stage High Closed Loop Visual
2. Associative Stage Moderate Closed Loop Somatosensory
3.Automatous Stage Low Open Loop -
Table 1. Fitts and Posner’s Stages of motor learning with descriptions of the attentional demands, feedback system utilized during each stage, and the primary sensory system is being utilized by the learner during the stage.

8
A key aspect of motor learning is the ability to apply the skill into a variety of contexts and under
different task parameters. This refers to a specific type of motor learning known as motor
adaptation. In order for a skill to be performed under new circumstances and constraints, the
motor control system must adapt and modify movement based on the error magnitude from trial
to trial (Bastian, 2008). Motor adaptation does not change the overall characteristics associated
with a particular type of skill, but it changes one or more parameters within that skill (i.e., force
or direction). These modifications do not occur over just a single trial in the new condition but
are the result of many trials that decrease the error magnitude similar to that of the baseline
performance. This new pattern of movement can be unlearned, and the performance can return to
an unadapted state (Bastian, 2008).
NEURAL BASIS OF MOTOR LEARNING
The ability to acquire and retain a motor skill requires the interaction of multiple cortical and
subcortical areas within the central nervous system (Figure 2). Each structure provides distinct
inputs through dense neural interconnections that maintain the stability and memory of
previously performed actions. However, the changes in these areas are not uniform but can vary
depending on the type of task and the time course of engagement.
The cortical structures include the primary motor cortex, pre-motor cortex, and supplementary
motor area. The primary motor cortex (M1) controls movement execution and encodes the force
and direction of the force in voluntary movements. Pre-motor and supplementary motor area
coordinates and plans upcoming movements. Specifically, the pre-motor cortex (PMc) processes
incoming sensory information to modify outgoing motor signals (sensory-motor transformation).

9
The supplementary motor area (SMA) coordinates the sequence of motor actions and controls
bilateral movements (Kandal et al., 2012).
The basal ganglia and cerebellum are the two primary subcortical structures involved in
movement control during learning. Though certain nuclei within the basal ganglia provide
unique input to control motor output, the overall function of these nuclei is to assist in choosing
the correct motor program to be performed (Kandel et al., 2012). The cerebellum provides online
correction to motor movements and stores the pattern of descending output so it can be employed
in future performance (internal model) (Kandel et al., 2012). Together, cortical and subcortical
structures provide distinctive control mechanisms of movement and are uniquely changed with
skill learning
Figure 2. Cortical and subcortical brain structures and their contribution to motor skill learning.
Cortical Structures and Motor Learning

10
M1 generates movements of individual joints and digits through direct projections to the
corticospinal tract. Alterations have been noted as a result of skill practice and learning, to neural
pathways originating from M1, and M1 itself. Interestingly, the described role of the M1,
uncoupled from other structures and pathways in motor skill learning, seems quite dynamic
within the current body literature. One widely described phenomena are the increased cortical
representation of the utilized body part in the “somatotopic map” (motor homunculus). One
study showed after five days of piano practice, an increase in excitability in the portion of M1
associated with the five fingers utilized during the task (Pascual-Leone et al., 1995). A similar
result was reported in a serial reaction time task (SRTT) (Pascual-Leone et al., 1994). The
increases in motor cortex representation and excitability are stated to be the result of synaptic
changes of the pyramidal neurons residing in M1 (Rioult-Pedotti et al., 2000; Makino et al.,
2016).
In addition, functional magnetic resonance imaging (fMRI) studies have focused on the blood
oxygenation level-dependent activity (BOLD) of M1 during initial and late stages of learning,
and the results are not conclusive. One study found decreased activity in M1 as the skill is being
learned, suggesting a decrease in its involvement in late learning (Taubert et al., 2011).
Conversely, M1 has demonstrated increases in BOLD during progressive task learning,
suggesting increased involvement (Ries et al., 2009).
A recent study in rodents attempted to provide clarity of the role the motor cortex in skill
learning (Kawai et al., 2015). This study had animals perform a motor learning task that
required two lever presses within 700ms between each. After the task was learned, the motor
cortex of the rats were lesioned and found no deficits in the animal’s ability to perform the task.
The results suggested that the motor cortex was not needed to perform the learned skill. Instead,

11
the researchers suggest the motor cortex may “tutor” subcortical regions associated with skill
learning, by mediating the consolidation of the skill in these areas. The authors confirmed these
findings by performing a subsequent experiment by lesioning the motor cortex before task
learning, which yielded no learning in the animals. These findings are interesting given the
findings in humans, specifically the research by Galea et al., (2011). This study utilized a
visuomotor rotation task as participants received either transcranial magnetic stimulation (TMS)
to the motor cortex or to the cerebellum. This study found that stimulation of M1 during the
adaptation produced better retention of the task but did not increase the acquisition rate. Taking
these findings together suggests that the motor cortex modulates subcortical structures to form
strong motor memories that are retained over time (Galea et al., 2011).
Increases in PMc activity has typically been associated with the early stages of skill learning.
Increased BOLD was noted in the dorsal portion of the PMc during the early phases of learning a
finger tapping task (Steele and Penhune, 2010). Other studies have noted similar findings
(Seidler and Noll, 2008; Tomassini et al., 2011). The consensus between these studies is that the
dorsal PMc is responsible for the creation of associative relationships between external or
behavioral cues and corresponding movement. Additionally, the dorsal PMc upregulates its
activity when the task is difficult. Cross, Schmitt, and Grafton (2007) had participants perform
an easy and difficult version of a go/no go task. The easy tasked featured a discernable sequence
of key presses based on symbols on the screen, while the difficult task was random and forced a
new button press with each trial. The difficult task increased dorsal PMc activity signifying a
relationship between motor preparation and decision-making (Cross et al., 2007).
The ventral PMc has also demonstrated a role in task learning. Particularly, the ventral PMc has
been indicated to be involved in the selection of movements. Mitz, Godschalk, and Wise (1991)

12
had rhesus monkeys perform a version of a go/no go task, which the monkeys were required to
move a cursor in one of three directions. A distinct pattern of ventral PMc neural activity was
found for each reach direction of the task (Mitz, Godschalk, and Wise, 1991). Additionally, this
portion of the PMc is highly involved in learning from the actions of others through observations
(Kandal et al., 2012).
As with the above-mentioned motor associated areas, SMA provides significant contributions to
skill learning. The pre-SMA has demonstrated decreased activity in monkeys while performing a
learned button sequence compared to performing a new sequence (Nakamura, Sakai, and
Hikosaka, 1998). These findings suggest the pre-SMA works as a novelty detector and a short-
term memory encoder during motor performances, and its activity decreases when the skill has
been learned (Nakamura, Sakai, and Hikosaka, 1998).
In summary, during the course of new motor skill learning, different cortical areas seem to
decrease activity as the skill is learned. Decreasing the involvement of cortical areas in already
learned skill, in turn, allows for flexibility of the motor control system to detect novelty and
assist in the adaptation of the skill to contexts. Thus implicating cortical areas as only
facilitators of new learning and allowing other brain structures to generate and correct motor
output during the performance of an already learned skill.
Subcortical Structures and Motor Learning
The basal ganglia consist of different nuclei interconnected to each other (i.e., putamen, caudate,
globus pallidus, subthalamic nucleus, and substantria nigra). Though specific nuclei have distinct
contributions, their functional connections to other motor-related areas are vital to motor learning
(Dayan and Cohen, 2011). Most of these loops are termed the cortico-basal ganglia-thalamic

13
loops because of their projections to the primary motor cortex, premotor cortex, and
supplementary motor cortex (Dayan and Cohen, 2011).
The anterior portion of the putamen has demonstrated a role in movement planning. Elsinger et
al., (2006) found that in participants that were cued before execution of a learned motor sequence
task, the anterior putamen along with the premotor and supplementary areas demonstrated
significantly higher activation than during the actual movement. These results suggest that the
basal ganglia are involved in cognitive premotor processes that guide the dynamics of upcoming
movements (Elsinger et al., 2006).
The activation of the basal ganglia varies during the new motor skill learning. Brovelli et al.,
(2011) demonstrated distinct activation patterns between the caudate nucleus and the putamen
when learning a novel visuomotor task. Their results demonstrated dissociable roles between
these two structures. The caudate nucleus tracks online performance, which is the result of its
afferent connections to higher cognitive processing centers. The putamen’s activation was
associated with cues that lead to correct responses. The researchers suggested that these types
of dissociable activation patterns contributed to the development of a habit during learning
(Brovelli et al., 2011).
The basal ganglia are not only involved in the acquisition of the motor skill, but they also play a
role in task consolidation. Debas and fellow researchers (2010) compared the effects of sleep
when learning a novel sequence task and motor adaptation. Both increased ventral striatal
activation and motor performance in the sequence learning was noted after a night of sleep
compared to those awake over the same time period (Debas et al., 2010). However, this same
activation pattern was not found in the motor adaption task, suggesting this type of learning is

14
mediated elsewhere (Debas et al., 2010). Animal models have also been used to explore motor
skill consolidation in the striatum. Anisomycin, a protein synthesis inhibitor, injected into the
dorsal striatum of rats have shown to limit the acquisition of a forelimb reaching task, suggesting
protein synthesis in the dorsal striatum is necessary for consolidation of motor skills (Wätcher et
al., 2010). Lehéricy et al., (2005) assessed BOLD activity while participants performed a dual
task of sequence reaction time task and a verbal reading task. This study found increased activity
in the sensorimotor portion of the putamen and motor-related areas of the cortex (Lehéricy et al.,
2005). These results demonstrate the distinct relation of these pathways with motor acquisition
and learning consolidation (Lehéricy et al., 2005).
Classically, the cerebellum is thought to house the internal models for all of our movements, but
a large body of evidence implicates the cerebellum as being an error detection center for motor
actions. More specifically, the cerebellum compares the predicted errors to the actual errors that
occurred in the movement. The difference between these two is termed sensory predicted error.
Particularly this is demonstrated in adaptive learning paradigms where corrections must be made
online, to increase performance outcomes in the subsequent trials. A comparison of cerebellar
ataxia patients and age-matched controls on a reaching adaptation task revealed that ataxia
patients were unable to adapt their movements even when online feedback was provided during
the task (Tseng et al., 2007). These findings advocate that the development of motor adaption is
mediated by sensory predicted error. A similar study noted analogous findings during a
visuomotor rotation task (Therrien et al., 2016)
The cerebellum adjustments to the internal model may depend on the magnitude of the sensory
predicted error (Seidler, Kwak, Fling, and Bernard, 2013). Grafton et al., (2008) found that
cerebellar activity scaled with error magnitude during a visuomotor tracking task. Criscimanga-

15
Hemminger et al., (2010) further teased out the role of error magnitude by testing patients with
ataxia on a reaching task that either provided a larger perturbation or gradually introduced
smaller perturbations over time. They found that when the errors were small, ataxia patients
could adapt their movements to meet task demands (Criscimanga-Hemminger, Bastian, and
Shadmeher, 2010). However, they were unable to provide sufficient adaptation when the
perturbation was large, thus having a poor performance. The authors speculated, that
performance increases seen with the smaller perturbations were being mediated by other brain
areas besides the cerebellum, whereas compensations for large errors would primarily be
mediated by the cerebellum (Criscimanga-Hemminger, Bastian, and Shadmeher, 2010).
Additionally, the cerebellum has demonstrated strong dissociations with other different
characteristics of motor learning. Galea et al., 2012 provided TMS to either M1 or the
cerebellum, as participants learned a visuomotor rotation task at a 30 degree counterclockwise
rotation. When the TMS stimulus was provided only to M1, retention of the task improved with
no discernable differences in acquisition. Conversely, when the TMS was applied to the
cerebellum, amount of errors decreased more quickly but had no effect of retention. It was
suggested by the researchers that the cerebellum predominantly modifies the acquisition portion
of the skill learning, leaving other cortical areas, such as M1, to store a representation of the skill
(Galea et al., 2012).
In summary, the previous studies suggest that the cerebellum adjusts motor behavior in response
to previous performances but is not involved in task consolidation. Whereas, the basal ganglia
consolidates the task and its associated contingencies so that future premotor processes are more
efficient. Thus these subcortical areas contribute to the development of and are significantly
modified by motor skill learning alongside the higher centers of the brain.

16
SURFACE ELECTROENCEPHALOGRAPHY
Surface electroencephalography (EEG) has provided a non-invasive method to assess underlying
neural activity of the human cortex. Individual electrodes are placed on distinct areas of the scalp
to record electrical signals. Each electrode corresponds with unique areas of the human cortex,
providing assorted temporal EEG features that are distinctive to their area of origin (Cohen,
2017). Signals recorded from EEG electrodes are the results of many neurons simultaneously
passing electrochemical signals to one another, creating an electrical field, which is so powerful
it can be measured from outside of the human head (Cohen, 2017).
Distinct time-dependent responses to events can be evaluated with surface EEG. This refers to
event related potentials (ERPs) (Figure 3), which are discrete positive, and negative electrical
deflections associated with specific environmental stimuli or motor/cognitive events. The
polarities of the potentials are dependent on factors such as neuron orientation and whether the
signals are excitatory or inhibitory (Luck, 2012). The nomenclature of ERPs is based on both
polarity and peak waveform latency (Luck, 2012).
ERPs include different components (Kappenman and Luck, 2012) that are associated with
different brain processes related to error detection, movement preparation, and stimuli
representation:
• Feedback-related negativity
A distinctive sensory ERP can be found when an incorrect response is made on a task. This
particular signal is known as feedback-related negativity (FRN) (or error-related negativity), and
its peaks occur 200 to 400ms after the feedback occurred. Holroyd and Coles (2002), advocate
that FRN amplitude represents the engagement of high-level error processing by the frontal lobe.

17
These researchers suggest further that the anterior cingulate cortex is the primary generator for
this signal (Holroyd and Coles, 2002).
• Movement-readiness potential (MRP)
Before a voluntary movement occurs, a gradual negative shift in electrical activity can be seen in
motor and sensorimotor cortices, which has been termed the Bereitschaftspotential or the
readiness potential (RP). Though other potentials have been noted before movement execution,
RP has been the only potential to be consistently implicated as being clinically meaningful
(Shibasaki and Hallett, 2006). RP starts two seconds before the beginning of a movement and
can be subdivided into two distinct subcomponents. Early-RP occurs between 2000-1500ms
before movement execution. Current evidence suggests that Early-RP reflect the selection of the
appropriate movement strategy (Glazer et al., 2018). The most prominent location for Early-RP
has been documented around the midline coinciding with its proposed generator, the pre-
supplementary motor area (Glazer et al., 2018; Shibaski and Hallett, 2008). The large negative
shift in polarity demonstrated 500ms before movement is termed as the Late-RP, which is
generated from M1 and PMc (Glazer et al., 2018).
• P300 and Error Positivity
One of the most common sensory ERPs and has been documented across numerous types of
tasks. The current body of evidence suggests the P300 represents an update to a stimuli cortical
representation and the amount of attentional resources engaged in a task (Polich, 2007). The
three sites proposed to generate the P300 are the frontal lobe, hippocampus, and the medial
temporal lobe (Polich, 2007). Error positivity (Pe) is a sensory-related ERP that reflects

18
performance monitoring and is sensitive to reinforcement feedback (Overbeek, Niewuwenhuis,
and Ridderinkhoff, 2005; Boksem et al., 2006).
Figure 3. Depiction of components event related potentials, post stimuli presentation. P and N refer to positive and negative deflections, respectively.
EEG Correlates of Motor Learning
EEG has been utilized to assess changes in neural activity in relation to motor learning. The
variables assessed are similar to that seen in the cognitive domain, but the bulk of the literature
regarding EEG and motor learning has focused on the event related potentials.
Event Related Potentials and Motor Learning
Several types of ERPs have demonstrated changes when learning a new motor skill. An event
related potential that has been of high interest in motor learning studies has been the FRN. This

19
particular ERP in characterized by a negative deflection in the signal roughly 250ms after an
error in a movement occurs or when the results of a preceding trial are presented (Holroyd and
Coles, 2002). FRN also displays different amplitudes depending on the size of the error that
occurs and the experience with the new motor skill. Anguera and colleagues (2009) had
participants perform a visuomotor rotation task with either a 30 or 45-degree counter-clockwise
rotation angle. During all stages of learning, FRN for large errors was significantly larger
compared to small errors (Anguera et al., 2009). When comparing the early stages of learning,
with the later stages, FRN for both large and small errors decreased as the participants became
more accustom to the motor task (Anguera et al., 2009).
Similarly, van der Helden and colleagues (2010) also studied error monitoring during sequence
learning task. Participants were instructed to press one of four button choices in order to
determine which button press would move them to the next item, with a goal of ten consecutive
presses. However, certain items in the sequence would not allow the participant to move on
without multiple attempts, and with each incorrect response, participants were forced to restart at
the first item in the sequence. FRN was monitored when errors were made on an item. They
found the higher the FRN amplitude, the more likely the participant was to make the correct
choice upon encountering that item again (van der Helden, Boksem, and Blom., 2010). The
author suggested this finding is indicative of updating the action-outcome relationship between
motor performance and augmented feedback. Once updated, future performance could be
properly adjusted to the environment (van der Helden, Boksem, and Blom., 2010).
MacLean and colleagues (2015) performed a prism adaptation task in which participants wore
visual distortion goggles as they reached toward a target displayed on a touchscreen as they
assessed FRN and P300 ERPs. A difference wave was calculated for hit and missed trials to

20
determine the differences in FRN, which revealed that successful trials delayed the onset of
FRN, but during the missed trials FRN onset was between 50-100ms after trial conclusion. This
indicated that the early onset of FRN during missed trials was the result of the participant seeing
their arm position while nearing the end of the trial (MacLean et al., 2015). The P300
component displayed significant reductions during task learning. As the participants gradually
learned the prism adaptation, attentional demands of the task seem to decrease; thus they do not
donate as many cognitive resources toward the task performance (MacLean et al., 2015).
Additionally, the researchers suggest the reduction in P300 is a result of an update to the internal
model for the motor movement (MacLean et al., 2015).
Similar findings were noted by Beaulie et al., (2014), while subjects were required to learning
sequential and random forms of an SRTT. Throughout the task, reaction time decreased after
each block of trials during both sequential and random blocks. FRN demonstrated different
amplitudes depending on when in task learning the error occurred. Late learning elicited higher
FRN amplitudes compared to early learning, suggesting an increased ability of the cortex to
evaluate responses during online task acquisition (Beaulie et al., 2014).
MRP have been extensively examined during motor learning. One of the earliest studies was
conducted by Taylor (1978) observed an increase in MRP with a decrease in response times
when learning a sequenced button-pressing task (Taylor, 1978). Smith and Staines (2006) noted
similar findings during a post-training bimanual visuomotor rotation task after participants
trained with a unimanual visuomotor rotation task. Subsequent studies by the same group noted
an increase in MRP when movements were externally cued in different skill learning paradigms
(Smith and Staines, 2010; 2012).

21
Though MRPs differ before and after learning, the time course in which this occurs has been a
topic of discussion within the literature. Jochumsen et al., (2014) also monitored MRP during a
force grip task before and after practicing with a surgical training simulator. This study found
that a single session of training decreases the negative slope and motor potential subcomponents
of MRP in the contralateral channel (C3 or C4) to the participant’s dominant hand and increase
the readiness potential of the ipsilateral electrode. The researchers suggested the increase in
ipsilateral activity was due to increase cortical excitability (Jochumsen et al., 2014). The
contralateral findings were attributed to bilateral activation patterns that are associated with early
stages of motor learning (Jochumsen et al., 2014). When comparing the multiple session training
group with the control group, both negative slope and motor potential subcomponents were
significantly higher in amplitude for the control group. The decrease in MRP amplitude in the
training group represented a shift toward task automaticity (Jochumsen et al., 2014). These
results demonstrate that the modifications made by single and multiple sessions of training differ
in their effects on cortical activity.
Additional studies have explored the effects of different expertise on MRPs. Typically, experts
reduce the amplitude and delayed onset of MRP, representing a reduction of effort required to
perform a learned task. A common paradigm to determine expertise differences is to compare
experts with non-experts as they perform a related task to the motor skill, but still novel for both
groups. Wright and colleagues (2012) found that when comparing MRPs of expert guitar players
with naive players, the negative slope and motor potentials for the experts were significantly
smaller in amplitude and appeared closer to when the movement occurred. A follow-up study by
the same group also demonstrated a similar finding with prolonged practice in a group of novice
guitar players (Wright et al., 2012b). Such findings taken together indicate that learning of a

22
motor skill affects cortical activity associated with preparation of a movement by making it more
efficient and discounting the cost of effort for the brain (Wright et al., 2012a; 2012b).
REINFORCEMENT AND MOTOR CIRCUITS: SYSTEMS INTERTWINED
Motivation drives previously performed behaviors or incentivizes the exploration of new
behaviors. Outcomes that maximize reward and avoid punishment are the most desired by
complex organisms. Both of these reinforcement factors are mediated by the reward system,
which consists of brain areas in the prefrontal cortex, basal ganglia, and midbrain (dopamine
projections) (Chikara et al., 2018; Schulz et al., 2011; Kennerley and Wallis, 2008; Wagner et
al., 2017). Much of the current research has focused on the effects of reinforcement on cognitive
behaviors. Importantly, the brain areas involved in the reward system are also implicated in
motor control and learning, resulting in a deep interconnection between reward processing and
movement control.
Cortical Structures and Reinforcement Learning
The medial prefrontal cortex (MPFC) is implicated in establishing reward contingencies. Neural
recordings in non-human primates during the learning of a GO/NO-GO task revealed discrete
patterns of activation in the MPFC for each of the eight different movement-reward
contingencies featured during the task (Matsumoto and Tanka, 2003). The researchers
interpreted these findings as the MPFC encoding the memory of each action-outcome
relationship, so that future performance can achieve maximal reward. Not only is the MPFC
active during the establishment of reward contingencies, but the lateral prefrontal cortex (LPFC)
also contributes to their formations. A similar study to Matsumoto and Tanka, (2003) was

23
conducted by Kobayashi et al., (2002) and revealed that LPFC was instrumental in encoding the
appropriate expectation of the upcoming reward and inhibiting improper motor responses.
An area that is highly connected with LPFC, the anterior cingulate cortex (ACC), is also
prominent in reward processing (Paus, 2001). Moreover, ACC is considered to be where
environmental context is linked to motor actions (Williams et al., 2004; Paus, 2001). Particularly
the dorsal portion of the ACC is associated with altering decision making in response to the
magnitude of both reward and error (Williams et al., 2004). Single neurons recordings in a group
of cingulotomy patients revealed increased dorsal ACC activity as they performed a cued
movement task when reward magnitude was low. Likewise, dorsal ACC activity was predictive
of future motor responses within the low reward magnitude condition (Williams et al., 2004).
Higher centers of motor control are also sensitive to reward. Neurons in M1 and PMc modulate
their firing rates in response to reward expectation and delivery (Marsh et al., 2015; Ramkumar
et al., 2016; Ramakrishanan et al., 2017). When monkeys did not receive a reward after an
unsuccessful reaching trial, a 25% increase in dorsal pre-motor neuronal firing was seen when
compared to a trial that was rewarded. However, M1 firing rate changed very little (12%
increase) between successful and unsuccessful trials (Ramkumar et al., 2016). The increased in
firing rate reflected the reward processing by the ventral striatum being projected to the motor
cortices (Ramkumar et al., 2016). A similar study conducted by Ramakrishanan and colleagues
(2017), sought to determine the role of both M1 and the somatosensory areas (S1) in reward
anticipation and response to changes in reward delivery. Increases in M1 and S1 firing rate were
found when reward was not provided, which is comparable to the findings in Ramkumar et al.,
2016. Moreover, the firing rate increased when the reward was higher than expected, suggesting
the influence of DA neurons from the midbrain (Ramakrishanan et al., 2017).
24
Subcortical Structures and Reinforcement Learning
The striatum features dense connections to many areas of the cortex, making this structure highly
involved in shaping behavior and the formation habits. The ventral striatum (nucleus accubmens)
is one of the primary processers of rewarding feedback and is considered a motivation-motor
interface (Mogenson, Jones, and Yim, 1980). This structure receives afferent input from the
thalamus, prefrontal, and brainstem, in turn, giving it access to numerous modalities of
rewarding stimuli (Haber and Knuston, 2010). Many studies have provided credence to the claim
that the ventral striatum is the reward center of the brain. One study conducted by Apicella,
Ljungberg, Scarnatie, and Schultz (1991) recorded individual neuron activity from dorsal and
ventral striatum of an awake monkey. They found that when a reward was provided for a correct
performance, neuron firing in the ventral striatum was twice that of the dorsal striatum (Apicella
et al., 1991). Similar findings have been noted in humans (O’Doherty et al., 2004) and rodents
(Cador, Robbins, and Everitt, 1989)
Palminteri and colleagues (2012) focused on the effects of punishment compared BOLD activity
in a sample of healthy controls on a go-no go task to a set of cancer and Huntington’s disease
patients, whom both had suffered damage to their dorsal striatum. All participants were punished
after an incorrect response to the presented stimuli. This study found the dorsal striatal activity
was more associated with avoidance behavior, which implicates this structure in executive
decision-making processes (Palminteri et al., 2012).
Another area that has recently been shown to have connections with the striatum is the
cerebellum (Bostan and Strick, 2010). Therrien et al., (2015) explored how cerebellar damage
affected the ability to learn a motor adaptation task with error-based and reinforcement feedback.

25
As expected, during error-based learning, those with ataxia were unable to retain the
performance during the retention testing. However, they adapted to the rotation comparably to
their age-matched controls, suggesting that learning was being mediated by other cortical
structures that are not cerebellar in origin (Therrien, Wolpert, and Bastian (2015). Interestingly,
during the closed loop reinforcement adaptation, ataxia patients performed comparably with the
controls on both acquisition and retention. However, when the researchers modeled the
variability of each performance, it was found that those in the cerebellar group experienced more
performance variability and learned less than the control subjects under the reinforcement
condition. Overall, these results demonstrated that the cerebellum helps mediate reinforcement-
based learning of motor skills (Therrien et al., 2015).
Dopamine Projections
The reward system is primarily driven by dopamine (DA) and its projections arising from the
midbrain. The dopamine neurons in the midbrain are mostly homogenous and are stimulated by
rewarding or appetitive stimuli (about 75% of neurons). While, a small number of these
dopamine neurons (14%) are active in response to aversive stimuli (Schutlz, 2002). DA inputs
from the midbrain (i.e., ventral tegmental area (VTA) and substantia nigra) are widespread
throughout many areas of the brain. Both areas feature inputs into the striatum, which is
instrumental in both reward processing and motor behavior formation, but each structures
projects to different regions within the striatum. The VTA projects to the nucleus accumbens
making up the mesolimbic pathway (Kandel et al., 2012). While the substantia nigra projects to
the dorsal striatum and the globus pallidus, making up the nigrostriatal pathway (Kandel et al.,
2012).

26
Both the mesolimbic and nigro-striatial pathways generate dopamine signals regarding both
movement and reward. Hosp and researchers (2011) found that after lesioning the VTA in
rodents resulted in an inability to learn a reaching task, while overtrained animals maintained
their performances despite the lesion of the VTA. These results suggest DA input from the VTA
to M1 is required for skill learning and does not affect motor execution (Hosp et al., 2011).
Cognitive and motor deficits seen in Parkinson’s disease is the result of cellular death along the
nigrostriatal pathway. Importantly, this type of pathology has been linked to an insensitivity to
reward. Kapogiannis et al., 2011 found that risk-taking behaviors increased during an Iowa
Gambling Task while Parkinson’s patients were on dopamine agonist or precursors than when
off these medications.
EFFECTS OF REWARD AND PUNISHMENT ON MOTOR LEARNING
Learning a new motor skill involves the minimization of error, coordination of multiple joints,
and enough variability to discover an optimal solution that can be repeated with some level of
certainty. The provision of feedback has been of utilized to enhance and improve each of these
aspects associated with learning. Means of providing feedback range sensory task-intrinsic
feedback within the task and augment feedback (i.e., reinforcement feedback) from an external
source. Through internal receptors, errors are detected during a performance and update the
internal model for the movement, which decreases the possibility of error in future behavior.
Similar alterations to behavior can be found with presentation of augmented feedback,
particularly when providing reinforcement. The usage of reinforcement to guide behavior has
been widely used to guide cognitive and social behavior (Thorndike, 1927; Strain et al., 1979).

27
However, this has been studied to a much lesser extent in the motor domain. Even more so, the
effects of reinforcement on the neural correlates of motor learning have very little experimental
representation.
The first study to examine motor behavior and neural changes with reinforcement was Wrase et
al., (2007). In this study, healthy participants performed a monetary incentive delay task in three
task conditions, which they were not incentivized, rewarded, or lost different amounts of money
depending on their reaction times. The magnitude of the reward, potential loss, or no incentive
was presented trial by trial via a pre-cue. Reward and punishing trials also featured different pre-
cues. Reward trials were pre-cued with either “gain” (GG) or “nonloss” (LN). While punishment
featured “loss” (LL) or “nongain” (NG) as pre-cues, BOLD was assessed with functional
magnetic imaging (fMRI) throughout the performance. Reaction times decreased similarly for
both reward and potential loss trials compared to the trials with no incentives. This study also
assessed participant’s probability of performance improvement to determine if previous reaction
times affected succeeding trials and found that punishing trials induced a greater probability of
improvement than previous trials of reward (Wrase et al., 2007).
Different cortical activation was also noted between incentive conditions and pre-cues (Wrase et
al., 2007). Rewarding trials produced activation of ventral and dorsal striatum, insula, and
thalamus, but the ventral and dorsal striatal activity differed depending on the pre-cue. The
ventral striatum was only activated with the pre-cue of LN, while dorsal striatum was stimulated
during GG. The ventral striatum is also activated during the NG pre-cue. This indicates that the
ventral striatum is sensitive to the consequences of performed actions, which may be the result of
the projections from the midbrain to the ventral striatum. The orbitofrontal cortex (OFC) was
exclusively active in punishing trials. The OFC has demonstrated a role in complex task

28
performance and decision-making. The researchers suggested the OFC upregulated activation to
increase decision-making processing to find an optimal strategy to avoid punishment (Wrase et
al., 2007).
Wächter et al., (2009) also observed BOLD on human participants as they performed a serial
reaction time task (SRTT) under three feedback conditions (reward, punishment, no feedback).
The error rate was similar between both reward and punishment groups. However, the overall
learning was higher in the reward than punishment. The cortical areas activated also differed
between reward and punishment. The inferior frontal gyrus and the insula were more active
during punishing feedback, while reward increased activity in the ventral and dorsal striatum.
The authors suggest that punishment utilizes the serotonergic pathways while reward stimulates
dopaminergic pathways (Wächter et al., 2009).
Abe et al., (2011) utilized a force-tracking task (FTT) in which participants were asked to pinch a
force transducer to match the position of a target while moving their own cursor. Participants
were rewarded or punished based on their mean error within trials. Retention of the motor task
was assessed at three different time points: immediately after the task, 24 hours, and 30 days
after the training. All three groups exhibited less mean error during the training but were not
significantly different from one another. The primary findings of this study were that the reward
group displayed lower error in the subsequent retention tests. The proposed mechanism for this
difference in retention is that reward is inducing dopamine-dependent long-term potentiation in
the corticostriatal loop, which is involved in the formation of new motor skills (Abe et al., 2011).
Utilizing both tasks and the retention probes described in Wachter et al., (2009) and Abe et al.,
(2011), Steel and colleagues (2016) suggested that the effects of reward and punishment are

29
entirely task dependent. In their comparison study, those in the punishment group performing
the FTT displayed an increased squared error in the immediate retention assessment compared to
reward and control groups. While performing the SRTT, punishment decreased reaction time to a
greater extent than those in the other groups. The researchers suggested that the performance
decrements in the punishment group during the FTT was the result of increased motor noise
through strategy exploration to avoid punishment (Steel et al., 2016). Retention probes at the 1
hour, 24 hours, or 30 days did not differ between groups in either task, which contrasts with
previous studies (Abe et al., 2011).
In order to address the question of why retention was not affected by either reward or
punishment, Steel and colleagues (2019) performed a follow-up study that assessed the same two
tasks while observing premotor cortex functional connectivity (fMRI) during the same retention
periods. This study found that during retention in both tasks, both reward and punishment
increased connectivity between premotor cortex and cerebellum but the regions of the
cerebellum differed between groups. Those in the reward group recruited the dorsal medial
cerebellum (dmC), an area associated with storage of the internal model. Punishment also
increased connectivity between dmC and the premotor cortex, but it also increased connectivity
with the ventral medial cerebellum and dorsal lateral cerebellum, which are areas associated with
executive functions. While reward only increased connectivity in the dmC, left caudate, and
anterior insula. Overall, these results suggest that reward and punishment are activating different
pathways. Punishment is activating areas of the brain associated with cognitive tasks to derive
the correct strategy to minimize potential punishment in future trials. While the reward is
activating exclusively cortical areas associated with motor control (Steel et al., 2019).
30
In parallel, Galea and colleagues (2015) observed the effects of reward and punishment while
performing a motor adaptation task. Similar to previous studies, participants were divided into
groups in which they would be rewarded or punished based on their performance. Each
participant performed a version of a visuomotor rotation task, in which they adapted their
reaching movements under a perturbed condition to hit a desired target. During the adaptation
phase, visual feedback of the cursor and a point value that represented the distance from the
target was provided to the participant. The punishment group was given negative points when
they were farther from the target, while the reward group was presented with positive points
when they were closer to the target. Those in the control group were given two upright bars as
feedback no matter their endpoint target distance. After the adaptation, the feedback of the cursor
was then removed, and point feedback was replaced with the two vertical lines. This provided an
online retention assessment of the rotation task. This study found that punishment induced faster
learning during the adaptation phase, but a fast decay in adaptation was observed when cursor
feedback was removed, resulting in a performance that was similar to baseline. While reward did
not adapt as quickly during the adaptation, the decay rate was not as drastic as those observed in
the punishment group, suggesting that reward enhanced learning of the task. The researchers
suggested the online adaptation with cursor feedback was being mediated by the cerebellum as a
method to rapidly correct the error present in their movements (Galea et al., 2015). The increased
retention was thought to be the result of increased reward dependent dopaminergic neuron output
in M1 (Galea et al., 2015).
One study sought to determine the role of DA in motor adaptation while feedback was either
rewarding or punishing (Quattrocchi et al., 2018). A similar visuomotor rotation task as Galea et
al., (2015) and Quattrocchi et al., (2017) was employed for this study, but with a larger

31
perturbation angle (40 degrees opposed to 30 degrees). Participants were assigned to one of six
groups, with each receiving a DA precursor, DA antagonist, or placebo as they performed a
motor adaption task under rewarding or punishing conditions. As expected, those with reward
feedback had better retention of the motor task than the punishment groups. Contrary to previous
studies, both reward and punishment demonstrated similar levels of adaptation during the
perturbed phases of the experiment. These findings were attributed to the increase in perturbation
angle. Additionally, there was no drug effect found across all groups or phases of the motor
adaptation. The researchers suggested the increased retention of the reward group was not
dopamine-dependent, and the retention of the motor task was being mediated by other pathways
in the frontal lobe (Quattrocchi et al., 2018).
Another similar study was conducted Song and Smiley-Oyen, (2017), but this study manipulated
the probability of reward or punishment. Four groups featured four different feedback
probabilities (50% reward, 100% reward, 50% punishment, 100% punishment) as they
performed a rotation task that was similar to Galea et al., (2015). Reaction and movement time
did not differ across groups. During adaptation phase, 100%-punishment adapted quicker and
with less variability than the other groups. When cursor feedback was removed, the decay in
punishment groups’ performance was not observed, contrasting the results seen in Galea et al.,
(2015). This may be the result of the increase rotation angle, which has demonstrated greater
retention (Song and Smiley-Oyen, 2017). Differences in probabilities were found between both
reward and punishment groups. 100% reward resulted in greater offline consolidation compared
to the 50% reward group. 50% punishment induced greater retention during the no cursor
feedback stage than the 100% punishment, suggesting a difference in sensitivity to the
probability of different outcomes (Song and Smiley-Oyen, 2017).

32
A more recent study by Hamel et al., (2018) observed the effects of reward and punishment on
post-feedback neural oscillations while learning a goal-directed reaching task in three conditions
(Neutral, Gain, Loss), with variations in target hit probabilities (Low, High). They found that
beta-band oscillatory power increased when the outcome of the trial was positive (punishment
avoidance or reward achievement) over motor associated areas, suggesting that these areas are
affected by the reward system (Hamel et al., 2018). During neutral trials, theta-band power
increased in the fronto-central recording regions, when the target was missed. Similar findings
were noted for the theta band power when reward was not obtained during Gain trials (Hamel et
al., 2018). The researchers suggested the increase was related to neural adjustments made by
participants to update motor planning to increase future performance (Hamel et al., 2018).
In summary, the behavioral effects of reward and punishment during task learning are mostly
consistent across the literature, which demonstrate increased retention with reward and
accelerated learning with punishment. The brain areas recruited also differ with reward and
punishment during task learning. However, the exact neural mechanisms underlying these
different pathways are unclear. A recent study suggests that the increase in retention with reward
feedback is not dopaminergic in origin and is mediated by other pathways (Quattrocchi et al.,
2018), but future studies are needed to clarify this claim.

33
CHAPTER 3
METHODOLOGY
Participants
Forty-two healthy, right-handed, adults (age range: 19-32 years, mean age ± SD: 21.91 ± 2.1
years, males: 18, females: 24) participated in this study. Participants were classified as right-
handed using the Edinburgh Handedness Scale (handedness score ± SD: 91.75 ± 9.93) (Oldfield,
1971). The Behavioral Avoidance/Inhibition scales (BAS/BIS) were used to score sensitivity to
reinforcement, which is divided into four subcomponents (BAS FUN, BAS DRIVE, BAS
REWARD RESPONSIVNESS, BIS). Further detail on these scales can be found elsewhere
(Carver and White, 1994). Each participant was randomly assigned to one of three feedback
groups: Reward, Punishment, or Control. All procedures of this study were approved by the
University of Mississippi Institutional Review Board, and all participants provided informed
consent before data collection.
Visuomotor Rotation Task
The visuomotor task procedures followed those outlined in Galea et al., (2015) and Song and
Smiley-Oyen., (2017). Participants were seated in front of a 114.3cm television screen, at a
distance of 61 cm, with a Wacom tablet and pen (sampling rate: 100Hz) displaying two different
circles (small red, large blue) (Figure 4). Clicking on the small red starting circle initiated the
trial, in which a line followed the movement of the cursor. The blue target circle was displayed

34
eight centimeters from the starting circle in eight different positions, pseudo-randomly so that
every set of eight consecutive trials would include one of each of the target positions (Figure 4).
Participants were instructed to move quickly and accurately from the starting circle to the target
with the Wacom pen. Each participant’s arm was visually occluded to eliminate visual feedback
of the arm during task performance. A duration criterion of 500ms was placed on each trial. If
the trial was not completed within 500ms, the trial was restarted with a message informing the
participant to perform quicker.
Figure 4. An illustration of the motor learning task to be performed by the participants. An illustration of the arrangement of target circles (blue) in relation to the starting circle (red).
Participants performed a total of 680 trials consisting of five testing conditions: Baseline (80
trials), Adaptation (200 trials), No Vision (200 trials), Washout (100 trials), and Readaptation
(100 trials) (Figure 5). During the Baseline and Washout conditions, target and cursor movement

35
were congruent. Adaptation, No Vision, and Readaptation featured an incongruent position of
the cursor and the target, with the cursor trajectory rotated 30-degrees counterclockwise to the
target, requiring the participant to adapt their movement to hit the target. During Adaptation,
feedback was presented 1.5 seconds after each trial, displaying points in accordance with the
magnitude of the error and their assigned group (Figure 6). Null feedback was presented at the
same latency in all other conditions. The magnitude of feedback was dependent on the amount of
angular error that occurred in the trial performance and followed these criteria:
Reward: 4 points: hit the target; 3 points: <10° error; 2 points: <20° error; 1 point: <30° error; 0
points: ≥30° error.
Punishment: 0 points: hit the target; −1 point: <10° error; −2 points: <20° error; −3 points: <30°
error; −4 points: ≥30° error.
Null: Points will be replaced by two uninformative vertical lines.

36
Figure 5. Illustration of the conditions of the motor task. The solid arrow represents the visible cursor trajectory that can be viewed by the participant. The dashed arrow represents cursor trajectory that is not visible to the participant. The dashed line represents the direction of the cursor moved by the participant.

37
Figure 6. Timeline of events for a single trial of the visuomotor rotation task. [Starting circle (Red), Target circle (Blue), Solid arrow (Visible cursor), Dashed arrow (Invisible cursor)]

38
All groups started with a total of zero points. Those in the Reward group earned positive points,
while those in the Punishment group accrued negative points. Each point was equal to $0.02
USD, a rule in which participants were not be made explicitly aware of. The Reward group
began with $0.00 USD and earned money based on their performance during the Adaptation
condition. The Punishment group began with $10.00 USD and lost money during the Adaptation
trials. To control for payment and time of payment, participants in the Control group were
randomly selected to receive $10.00 USD before the experiment and end the experiment with
$6.00 USD or begin with $0.00 USD and end with $6.00 USD. All participants were informed of
the task goals by being read aloud a script prior to the start of the experiment. Additionally,
participants in the Control group were given the instructions of either the Reward or Punishment
groups, in order to control for the effects of the script.
Visuomotor Rotation Task Analysis
Movement time was defined as the time from the first movement of the cursor outside of the
starting circle to the termination of the movement in the direction of the target circle. Angular
end-point error was defined as the maximum angular deviation of the drawn line to the center of
the target circle. Reach angle was calculated as the difference between the angular endpoint
error of the cursor and the rotation of the cursor (0 or 30 degrees). During Baseline and Washout
conditions, the goal was for a reach angle of 0 degrees. Whereas, the goal for the Adaptation, No
Vision, and Readaptation conditions was for a reach-angle of +30-degrees clockwise to counter
the perturbation of -30-degree counter clockwise. Endpoint error and reach-angles exceeding 80
degrees were excluded from the analysis. Additionally, the Adaptation condition was divided
into two learning stages: Early Learning was defined as the first 100 trials, and Late Learning
39
was defined as the last 100 trials. In order to best assess task retention, we compared Adaptation
(Late Learning) to No Vision for both reach angle. Late Learning was considered when
participants had learned the task and would be the best representation of behavior and neural
activity carried over into the No Vision (retention) condition.
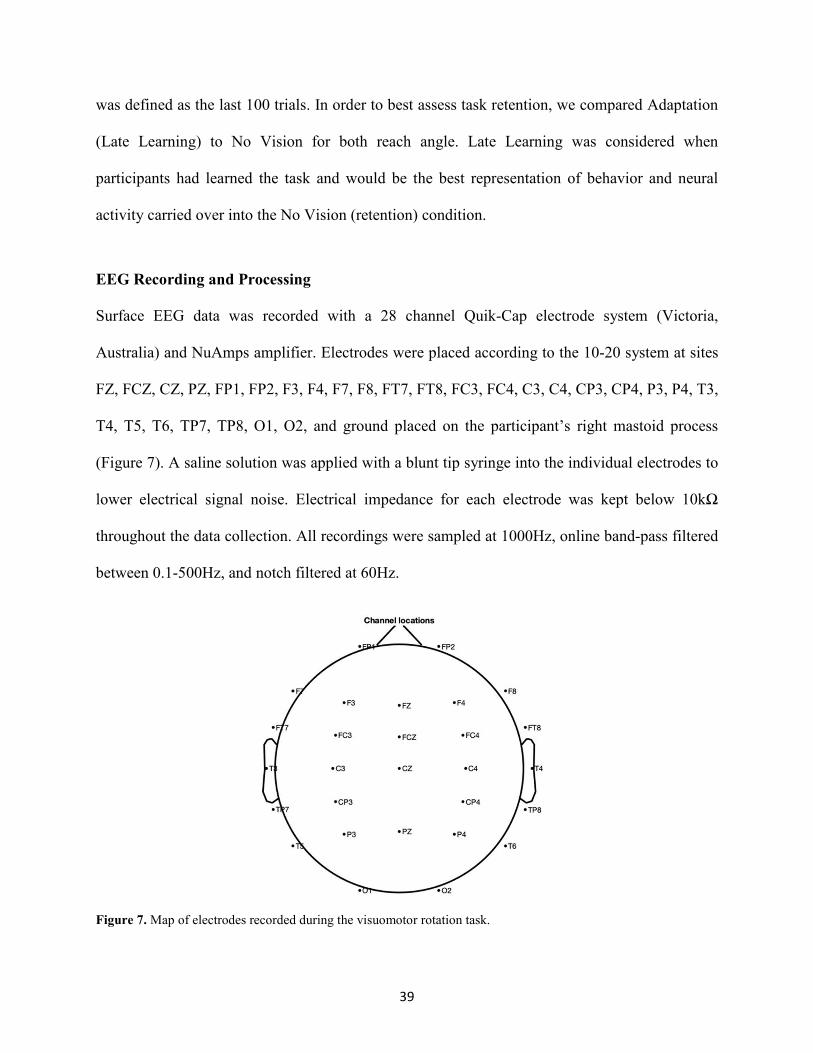
EEG Recording and Processing
Surface EEG data was recorded with a 28 channel Quik-Cap electrode system (Victoria,
Australia) and NuAmps amplifier. Electrodes were placed according to the 10-20 system at sites
FZ, FCZ, CZ, PZ, FP1, FP2, F3, F4, F7, F8, FT7, FT8, FC3, FC4, C3, C4, CP3, CP4, P3, P4, T3,
T4, T5, T6, TP7, TP8, O1, O2, and ground placed on the participant’s right mastoid process
(Figure 7). A saline solution was applied with a blunt tip syringe into the individual electrodes to
lower electrical signal noise. Electrical impedance for each electrode was kept below 10kΩ
throughout the data collection. All recordings were sampled at 1000Hz, online band-pass filtered
between 0.1-500Hz, and notch filtered at 60Hz.
Figure 7. Map of electrodes recorded during the visuomotor rotation task.
40
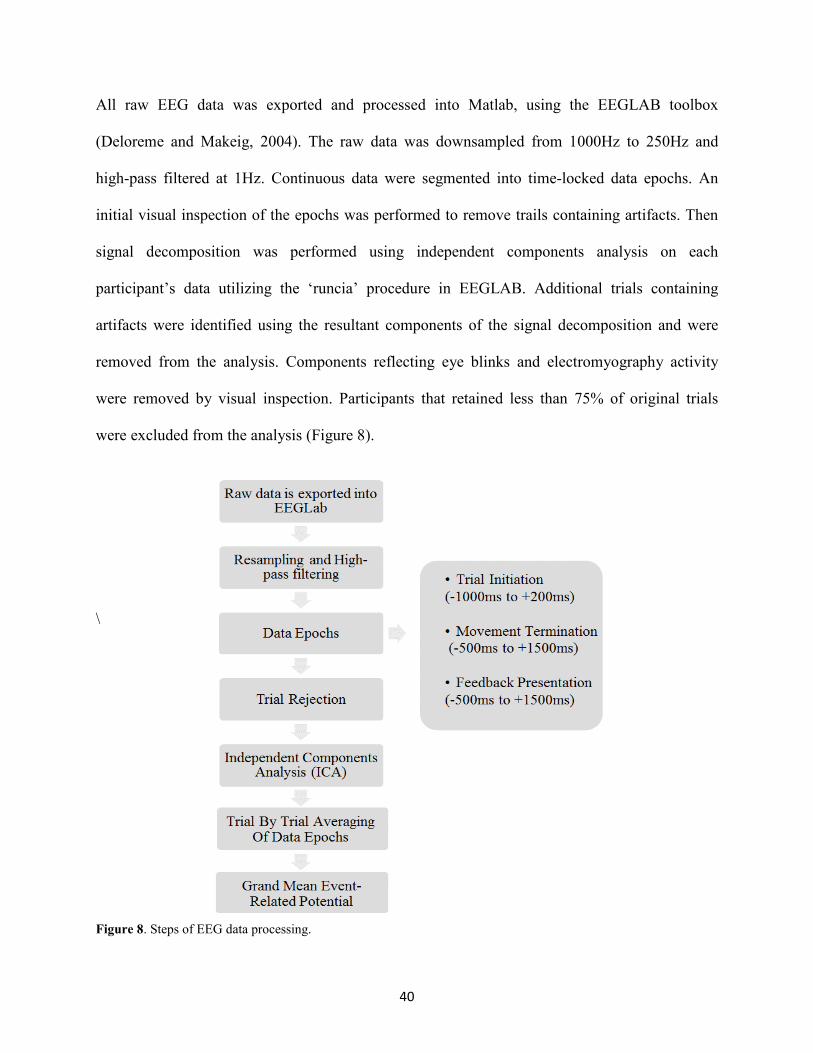
All raw EEG data was exported and processed into Matlab, using the EEGLAB toolbox
(Deloreme and Makeig, 2004). The raw data was downsampled from 1000Hz to 250Hz and
high-pass filtered at 1Hz. Continuous data were segmented into time-locked data epochs. An
initial visual inspection of the epochs was performed to remove trails containing artifacts. Then
signal decomposition was performed using independent components analysis on each
participant’s data utilizing the ‘runcia’ procedure in EEGLAB. Additional trials containing
artifacts were identified using the resultant components of the signal decomposition and were
removed from the analysis. Components reflecting eye blinks and electromyography activity
were removed by visual inspection. Participants that retained less than 75% of original trials
were excluded from the analysis (Figure 8).
\
Figure 8. Steps of EEG data processing.

41
Feedback-Related ERPs Computation and Analysis
To analysis feedback-related ERPs, continuous EEG data were segmented into 2-second epochs
(-500ms to +1500ms), time-locked to the presentation of the feedback at 0ms. After signal
cleaning, feedback-related ERPs were computed by averaging trials for each participant
separately for the Adaptation and No Vision conditions. All ERPs were baseline corrected by
subtracting the baseline activity 500ms before feedback onset. Our analysis of feedback-related
ERPs primarily focused on the recording from channels FZ and FCZ, which is in line with
previous research that investigated reward and punishment feedback (Sturmer, Nibur, Schacht
and Sommer, 2011; Wischnewski, Bekkering, and Schutter, 2018). The peak-to-peak amplitude
of the feedback-related ERPs was calculated for each participant in Adaptation and No Vision
conditions. Peak-to-peak amplitude was defined as the difference between the minimum peak
100ms after the feedback onset and the maximal positive peak occurring between 250-600ms
after the feedback presentation (Palidis, Cashback, and Gribble, 2019).
Movement-Related ERPs Computation and Analysis
Continuous EEG data were epoched into 1200ms (-1000ms to +200ms) windows time locked to
trial onset at 0ms. Movement readiness potentials (MRPs) were subdivided into Negative Slope
(NS) and Motor Potentials (MP). Previous research has noted neurobiological differences
between these two subcomponents. NS represents the contributions of the primary motor and
supplementary motor cortices to the forthcoming movement (Shaibaski and Hallett, 2006;
Jochumsen et al., 2017). The MP is the result of the descending pyramidal neurons from the
motor cortex (Shaibaski and Hallett, 2006). NS was defined as the mean amplitude of the
preceding negative decline in amplitude between -300ms and -200ms prior to movement onset.
MP was identified as the most negative peak between -200ms to 0ms. MP peak-to-peak

42
amplitude was calculated by subtracting the most negative peak value from -200ms to 0ms from
the positive peak during -600ms to -300ms. NS mean amplitude and MP peak-to-peak from the
FC3, FCZ, C3, and CZ electrodes were submitted for statistical analysis. These electrodes have
been previously utilized to examine MRPs (Jo et al., 2014, Jochumsen et al., 2017)
Error Positivity Computation and Analysis
To analysis error positivity at the end of movement termination, we segmented the EEG data into
two-second epochs, -500ms before and +1500ms after movement termination. Peak-to-peak
amplitude (-200ms to +300ms) from the CP3, CP4, PZ, P3, and P4 electrodes were calculated
and submitted for statistical analysis.
Statistical Analysis
A Kruskal-Wasllis H test was used to test for differences between groups on each BIS/BAS
subcomponents [BAS FUN, BAS DRIVE, BAS REWARD RESPONSIVENESS, BIS].
Repeated measures ANOVAs were utilized to analyze behavioral and EEG variables. Separate
repeated measures ANOVAs were used to access for differences in movement time, reach angle,
and endpoint error. Specifically, a 3 [Feedback Group] x 2 [Task Condition (Late Learning, No
Vision)] and 3[Feedback Group] x 2[Learning Stage (Early Learning, Late Learning)] were also
utilized to test for differences in mean endpoint-error and mean reach angle.
A 3 [Feedback Group] x 2 [Learning Stage] and a 3 [Feedback Group] x 2 [Task Condition (Late
Learning, No Vision)] was utilized to test for differences in peak-to-peak amplitude of feedback-
related ERPs. A 3 [Feedback Group] x 2 [Task Condition] and 3[Feedback Group] x 2[Learning

43
Stage] was utilized to test for differences in NS mean amplitude and MP peak-to-peak amplitude.
A 3 [Feedback Group] x 2 [Task Condition (Adaptation, No Vision] was used to analyze Pe
peak-to-peak amplitude. All statistical analysis was conducted with SPSS® version 25 and set an
a priori alpha level of 0.05.

44
CHAPTER 4:
PUNISHMENT, BUT NOT REWARD, CHANGES MOTOR RETENTION AND
CORTICAL FEEDBACK-RELATED POTENTIALS DURING MOTOR LEARNING
INTRODUCTION
Learning motor skills relies mostly on sensory feedback (i.e., visual, proprioception). However,
reinforcement feedback (i.e., reward and punishment) can also modulate motor learning (Abe et
al., 2011; Watcher et al., 2009; Song and Smiley-Oyen, 2017). In fact, by using a visuomotor
rotation task, a recent study has demonstrated that these reinforcers produce dissociable effects
on motor learning, with punishment enhancing the learning rate (adaptation) and reward
increasing the retention (memory) of the motor task (Galea et al., 2015). These behavioral effects
suggest that reward and punishment feedbacks are processed differently by the brain and involve
distinct neural pathways (Hester et al., 2010; Galea et al., 2011; Wrase et al., 2007). Yet, the
effects of these motivational reinforces on motor learning have been primarily explored at the
level of behavior, and no study has investigated their neural correlates. By using
electroencephalography (EEG), the present study determines whether reward and punishment
feedbacks produce different effects on feedback-related neural activity during a visuomotor
rotation task.
The visuomotor rotation is an error-based motor task commonly used to investigate how sensory
and reinforcement feedback contribute to motor learning (Shadmehr et al., 2010; Izawa and

45
Shaddmehr, 2011; Scheen and Hegele, 2017). In this task, subjects are required to adapt their
reaching direction, trial by trial, to compensate for the environmental perturbation (visuomotor
rotation). According to the proposed model, subject’s movement errors (i.e., sensory prediction
errors) after each trial are used by the brain to update an internal model that predicts the sensory
consequences of motor commands (Shadmehr et al., 2010). Updating (or re-mapping) the
internal model relies on the cerebellum and promotes motor adaptation during the task
(Shadmehr et al., 2010). Reinforcement feedback also facilitates motor learning during the
visuomotor rotation task. However, reinforcement feedback is computed by the brain as a
different source of error (i.e. reward-prediction errors) that promotes motor adaptation by
maximizing reward value without re-mapping the internal model (Izawa and Shaddmehr, 2011;
Torrecillos et al., 2014). The prefrontal cortex, in particular the anterior cingulate cortex (ACC),
plays an important role to process reinforcement feedback (Walsh and Anderson, 2012;
Ullsperger et al., 2014).
EEG and event-related potentials (ERPs) are used to assess how the brain processes
reinforcement feedback and how it relates to learning. Specifically, reward and punishment
feedback produce ERPs that peak between 200 and 450 ms after feedback presentation and
reflect different aspects of performance monitoring (i.e. error/correct, gain/loss, saliency)
contained in the feedback (Nieuwenhuis et al., 2004; Walsh and Anderson, 2012; Ullsperger et
al., 2014). Previous studies have shown that changes in the amplitude of ERPs after reward and
punishment feedback can predict learning (Nieuwenhuis et al., 2004; Holroyd et al., 2004;
Gehring and Willoughby, 2002; Stumer et al., 2011). However, most of these studies focused on
cognitive tasks such as stimulus-response or decision-making (i.e., gambling tasks), and,

46
therefore do not provide evidence on whether reward and punishment change feedback-related
neural activity during motor tasks. Importantly, behavior studies suggest that reward and
punishment feedback produce specific effects on the adaptation (learning) and the retention
(memory) of a motor task (Song and Smiley-Oyen, 2017; Galea et al., 2015). Moreover,
adaptation and retention seem to involve different neural mechanisms (Hadipour-Niktarash et al.,
2007; Huang et al., 2011). According to these studies, it can be hypothesized that different
changes in the amplitude of ERPs after reward and punishment feedback will be associated with
different behavioral effects (i.e., better or worse adaptation/retention) during motor learning.
To test this hypothesis, the present study evaluates the amplitudes of feedback-related ERPs after
reward and punishment feedback during a visuomotor rotation task. Based on previous studies
(Galea et al., 2015; Song and Smiley-Oyen, 2017), the visuomotor rotation task consisted of
different conditions in order to assess both the learning and the retention of the task. Motor
learning was evaluated during the Adaptation condition, which was divided into Early Learning
and Late Learning. During this condition, subjects were required to adapt their performance to a
30-degree rotation while being provided with concurrent visual feedback (they saw the trajectory
of the movement on the monitor) (Hinder et al., 2010; Schween et al., 2014). The retention was
evaluated during the No Vision condition. During this condition, subjects did not receive
concurrent visual feedback, or reinforcement feedback, and therefore their performance did
depend on the retention of the motor skills learned. Subjects were divided in three groups:
Punishment, Reward and Control. The reinforcement feedback was presented as points that
corresponded to monetary gain (reward) or loss (punishment) during the Adaptation condition.
Two neutral vertical lines instead of points were presented to the Control group.
47
RESULTS
BAS/BIS
A Kruskal-Wallis H test revealed no significant differences between groups on the BAS DRIVE
(H(2)=4.029, p=0.133), BAS FUN (H(2)=1.239, p=0.538), BAS REWARD
RESPONSIVENESS (H(2)=2.323, p=0.313), and BIS (H(2)=1.426, p=0.490) of the BAS/BIS
scale (Table 2). Thus all groups demonstrated a similar sensitivity to reinforcement feedback.
Movement Time and Reach Angle
All groups performed and learned the task, which improved progressively with practice. Data of
movement time and reach angle are depicted in Table 3 and Figure 9A. No significant
differences were detected for movement time in the Adaptation and No Vision conditions
(F(1,39)=0.001, p=0.992, η2p= 0.001) and all groups demonstrated similar movement times
(F(2,39)=0.303, p=0.740, η2p= 0.014). This finding indicates that all participants took similar
times to move throughout each task condition regardless of the feedback group. A significant
main effect for Learning Stage (F(1,39)=80.465, p>0.001, η2p= 0.674) indicated that Late
Learning had a greater reach angle compared to Early Learning (Figure 9B). No significant
differences were noted between groups (F(1,39)=0.647, p=0.529, η2p= 0.032).
Our findings indicate that all groups learned at same rate during the Adaptation condition, but the
Punishment group demonstrated a decrease in retention of the visuomotor rotation task (Figure
9C). A significant Group x Task Condition interaction (F(2,39)=3.594, p=0.037, η2p= 0.156) was
found for reach angle. A test of simple effects for condition revealed that the Punishment group

48
had a significantly lower reach angle during the No Vision condition compared to the Adaptation
(Late Learning) condition (F(2,39)=8.011, p=0.007, η2p= 0.156). The Punishment group had a
significantly lower reach during the No Vision condition (F(2,39)=3.317, p=0.047, η2p= 0.145)
compared to Reward (F(2,39)=5.175, p=0.029, η2p= 0.152) and Control (F(2,39)=4.771,
p=0.035, η2p= 0.129) groups. No significant differences were found between groups during the
Adaptation (Late Learning) condition (F(2,39)=0.177, p=0.839, η2p= 0.009).
Feedback-related ERPs
Four participants did not meet the trial inclusion criteria, leaving the sample size of 38 for ERP
analysis [Reward=13 (7 female, 6 male), Punishment=13 (7 female, 6 male), Control= 12 (6
female, 6 male)].
Figure 10 shows that learning the visuomotor rotation task did not impact the amplitude of
feedback-related ERPs in any of the feedback groups. No significant differences were detected
for feedback-related ERP peak-to-peak amplitude between Early and Late Learning
(F(2,35)=0.773, p=0.385, η2p=0.022) or between groups (F(2,35)=1.816, p=0.178, η2
p=0.094) for
the FZ electrode. Similar findings were noted for the FCZ electrode with no significant
differences between groups (F(2,35)=0.357, p=0.702, η2p=0.021) or learning stages
(F(2,35)=0.791, p=0.380, η2p=0.022) (Figure 10).
A significant Group x Task Condition interaction (F(2,35)=3.622, p=0.037, η2p=0.171) was
found for feedback-related ERP peak-to-peak amplitude at the FZ electrode. A test of simple
effects revealed peak-to-peak amplitude for the Punishment group decreased from Adaptation

49
(Late Learning) compared to No Vision (F(2,35)=11.921, p=0.001, η2p=0.254). No differences
were detected for Reward (F(2,35)=0.137, p=0.714, η2p=0.004) and Control (F(2,35)=0.005,
p=0.944 η2p>0.001) groups. No significant differences were detected between groups within the
Adaptation (Late Learning) (F(2,35)=1.058, p=0.358, η2p=0.057) or No Vision condition
(F(2,35)=0.893, p=0.419, η2p=0.049). A significant Group x Task Condition interaction
(F(2,35)=3.361, p=0.046, η2p=0.161) was found for feedback-related ERP peak-to-peak
amplitude at the FCZ electrode. No significant differences were detected between groups within
Adaptation (Late Learning) (F(2,35)=1.078, p=0.351, η2p=0.058) (Figure 11) or No Vision
condition (F(2,35)=1.468, p=0.244, η2p=0.078). A test of simple effects revealed peak-to-peak
amplitude for the Punishment group decreased from Adaptation (Late Learning) to No Vision
(F(2,35)=7.687, p=0.009, η2p=0.180). No significant differences were noted for Reward
(F(2,35)=0.179, p=0.675, η2p=0.005) or Control (F(2,35)=0.167, p=0.686, η2
p=0.005) groups
(Figure 12). These findings correspond with the behavioral effects of punishment feedback with
the amplitude of the feedback-related ERPs decrease in the Punishment group during the No
Vision condition. A depiction of multiple electrodes for the Punishment group is depicted on
Figure 13.

50
Table 2. BAS/BIS scores for each reinforcement group. Represented as mean ± standard error.
Table 3. Movement time and reach angle represented for each reinforcement groups. Represented as mean ± standard error. *- Significant condition difference. #- Significant group difference.

51
Figure 9. (Top) Line graph represents the average reach angle across task conditions for each of the groups. (Middle) Bars represent average reach angle for all groups during Early, and Late Learning (Bottom) Bars represent reach angle for all groups during Late Learning and No Vision conditions. All graphs are represented as mean ± standard error. *- Significant learning difference #- Significant group difference.

52
Figure 10. Line graphs represent grand average feedback-related ERPs at the FCZ electrode during Early Learning (dashed line) and Late Learning (solid line) with zero representing feedback onset. Bar graph represents Early and Late Learning feedback-related potentials peak-to-peak amplitude for each group. Bars represent mean ± standard error

53
Figure 11. The line graph represents grand average feedback-related ERPs for all groups at the FCZ electrode during Adaptation (Late Learning) with zero representing feedback onset. Bar graph represents feedback-related ERP peak-to-peak amplitude for all groups during Late Learning. Bars represent mean ± standard error.

54
Figure 12. The line graph represents grand average feedback-related ERPs for Punishment at the FCZ electrode during Adaptation (Late Learning) (solid line) and No Vision (dashed line) with zero representing feedback onset. Bar graphs represent the average peak-to-peak ERP amplitude at the FCZ electrode for each group. Horizontal lines represent individual responses. Bars represent mean ± standard error.

55
Figure 13. Line graphs represent grand average feedback-related ERPs for the Punishment group during Adaptation (Late Learning) (solid line) and No Vision (dashed line) with zero representing feedback onset.

56
DISCUSSION
The present study shows that punishment, but not reward, feedback modulates motor learning
and feedback-related ERPs during the visuomotor rotation task. Subjects in the Punishment
group showed a decrease in performance during the No Vision (retention) condition compared to
the Adaptation (learning) condition. This effect, not observed in the Reward or Control groups,
suggests that punishment feedback impairs motor memory. In line with this behavioral result,
subjects in the Punishment group, but not Reward or Control, showed a change in the amplitude
of feedback-related ERPs. Feedback-related ERPs were not modulated by the rate of motor
learning in any of the groups. These results suggest that punishment feedback alters the neural
mechanisms required to form motor memory without affecting the rate of adaptation.
Recent studies have shown that reward, and punishment feedback produces different effects on
adaptation and retention of a motor task (Galea et al., 2015; Song and Smily-Owen, 2017;
Quoattrocchi et al., 2018). Our results agree, in part, with these studies and show that punishment
feedback leads to worse retention of the motor task compared to reward and control feedbacks.
Importantly, punishment feedback reduces the retention of the motor task without modifying
motor adaptation which supports the idea that the brain mechanisms contributing to motor
memory and learning are in part, independent (Galea et al., 2015; Huang et al., 2011; Haith et al.,
2015; McDougle et al., 2015; Shadmeher and Krakauer, 2008). In fact, motor memory and
learning seem to involve different neural pathways. Thus, by using transcranial magnetic
stimulation (TMS), studies show that the activation (Galea et al., 2011; Spampinato et al., 2019)
and inhibition (Hadipour-Niktarash et al., 2007) of the motor cortex (M1) enhances and

57
decreases, respectively, motor memory, while the stimulation of the cerebellum enhances the rate
of motor adaptation (Galea et al., 2011).
In contrast to the effects of punishment, reward feedback did not alter retention compared to null
(Control) feedback. This finding contrast that of Galea et al., 2015, in which Control group
retention decayed at a similar rate to the Punishment group. Our results are more similar to a
recent TMS study that demonstrated null and reward feedbacks have similar retentions of a
visuomotor task, and that only the combination reward and TMS to M1 improved retention
(Spampinato et al., 2019). These authors suggested M1 stimulation and reward feedback work on
similar synaptic plasticity mechanisms that promote motor retention (Spampinato et al., 2019).
Previous studies have noted that both reward and punishment feedback increase the rate of
learning of a novel motor skill (Nikooyan and Ahmed, 2014; Galea et al., 2015; Song and Smily-
Owen, 2017). Our study did not provide evidence of reward and punishment feedback
modulating motor learning by changing the rate of adaptation during the task. However, the
effects of reinforcement feedback on the rate of motor learning are controversial and seem to be
dependent on the adaptation paradigm used (Quoattrocchi et al., 2018; Song and Smily-Owen,
2017).
Our behavioral results indicated that punishment feedback alters the neural processing during the
Adaptation condition in a way that impairs the formation of motor memory. We evaluated the
amplitude of feedback-related ERPs to understand better how punishment and reward feedbacks
are processed by the brain during motor learning. As shown, the amplitude of the feedback-

58
related ERPs during Adaptation (Late Learning) was higher in the Punishment group compared
to Reward and Control groups, although this effect did not reach statistical significance. Outside
of motor learning, other studies have demonstrated increased feedback-related ERPs in response
to punishment feedback (Wischnewski, Bekkering, and Schutter, 2018; Hajack et al., 2006). In
our results, increased feedback-related ERPs during Adaptation points to changes in the way the
brain processes feedback during the motor task, which could be associated with motor retention
impairments.
To further evaluate feedback processing during motor adaptation and retention, we compared the
amplitude of feedback-related ERPs during the Adaptation condition, when subjects received
reinforcement feedback, and in the No Vision condition (retention), when no reinforcement or
visual feedback was provided, only two neutral vertical lines at the end of each trial. Control and
Reward groups showed similar feedback-related ERPs amplitude during both adaptation and
retention. In contrast, subjects in the Punishment group showed a significantly lower feedback-
related ERP amplitude during the No Vision condition compared to the Adaptation condition.
This effect paralleled our behavioral effects in which subjects of the Punishment group showed a
lower performance during the retention phase (poor retention) of the visuomotor task and
supports the idea that punishment feedback is altering brain processing involved in the retention
of the motor task. Of note, the fact that the amplitude of feedback-related ERPs was very similar
after reward and control feedbacks during both the Adaptation and No Vision conditions suggest
that the same brain processing takes place during the learning and the retention of the motor task.

59
Studies in animals and humans suggest that punishment feedback is a very salient stimulus and
that changes in feedback-related ERPs reflect the stronger salience of punishment as
motivational feedback (Jean-Richard-Dit-Bressel, Killcross, and McNally, 2018; Walsh and
Anderson, 2012). Punishment feedback is, in part, processed by the anterior cingulate cortex
(ACC) and feedback-related ERPs have been associated with the activity of the ACC (De
Martino et al., 2010; Walsh and Anderson, 2012; Holroyd and Coles, 2002). According to these
studies, it can be expected that the activity of ACC will increase when punishment feedback is
provided during the Adaptation condition. Wenderoth et al., (2005) suggests the ACC provides
direct input to M1 during motor tasks. Thus the increased activity of the ACC may signify
increased input to the M1 during task learning. Importantly, the activation of M1 plays a key role
in facilitating the retention of the motor memory (Bostan and Strick, 2018; Galea et al., 2011).
Overall, this evidence points toward the increased input of the ACC to M1 during task learning
as being responsible for the decrement in motor memory seen in the Punishment group.
As an alternative, ACC activation by punishment feedback could also alter the re-mapping of the
internal model by changing the activity of the cerebellum. In this case, punishment feedback may
disrupt the processing of sensory prediction error through increased activity in the ACC-
cerebellum inputs. One neuroimaging study found that increased ACC activity was inversely
related to cerebellar activity (Margulies et al., 2007). However, this possibility seems unlikely
since sensorimotor memory relies more on explicit mechanism independent of the cerebellum
(McDougle et al., 2015). The cerebellum is more involved in calibrating the internal model for
adaptation but not for memory (Haith et al., 2015; Galea et al., 2011).

60
As shown, Early and Late learning conditions exhibited the same amplitude in feedback-related
ERPs. This contrasts previous studies that have presented changes in feedback-related ERPs
associated with learning, which showed both increases and decreases of feedback-related ERPs.
MacLean and colleagues (2015) found decreases in feedback-related ERPs as participants
progressively learned a prism adaptation task. Similar findings were noted by Anguera, Seidler,
and Gehring (200), who examined feedback-related ERPs during a visuomotor rotation task. van
der Helden et al., (2009) demonstrated that increased feedback-related ERPs was related to better
learning. However, whether feedback-related ERPs are associated with motor learning is
controversial. In fact, a recent study found no correlation between feedback-related ERPs and
visuomotor task learning (Palidis, Cashback, and Gribble, 2019). Our study, in which no
relationship between feedback-related ERPs and learning was found, suggests similar task
engagement and brain processing during Early and Late Learning (Balconi and Crivelli, 2010).

61
SUMMARY
This study shows that punishment feedback impairs motor retention and changes feedback-
related ERPs. Neither punishment nor reward feedback change motor performance or modify
ERPs during motor learning. These results indicate that punishment feedback alters the neural
processing involved in the formation of motor memory without changing the rate of motor
learning. These results support the idea that motor learning and memory are, in part, independent
processes that can be modulated differently by reinforcement feedback. Based on ours and
previous studies, we propose that punishment is salient motivational feedback that impairs motor
memory by activating ACC and interfering with M1 activity. This speculation will need to be
substantiated by future neurophysiological studies. Our results are relevant in the context of
rehabilitation and training by discouraging the use of punishment feedback to improve motor
learning.

62
CHAPTER 5:
MOVEMENT-RELATED POTENTIALS REFLECT POOR MOTOR RETENTION
AFTER PUNISHMENT FEEDBACK DURING MOTOR LEARNING
INTRODUCTION
Successful sensorimotor learning requires the processes of action preparation and execution to be
corrected by sensory feedback derived from visual and proprioceptive receptors. These
corrective inputs are used by the brain to update (or re-map) an internal model that relies on the
function of the cerebellum and prepares future motor commands (Shabbott and Sainburg, 2010;
de Xivry et al., 2005). Reinforcement feedback (i.e., reward, punishment) can also promote
successful motor learning. However, in this case, motor learning is promoted through the
optimization of reward value, without changing or re-mapping the internal model. Yet, how
reinforcement learning modulates the brain processes involved in motor preparation during
motor learning is still uncertain.
Previous behavior studies show that reinforcement feedback alters how humans learn and retain
visuomotor adaptation, a goal-directed task that features incongruent hand and cursor trajectories
that require the participant to adapt their movement to guide a cursor towards a desired target.
Reward feedback has demonstrated positive effects on multiple aspects of visuomotor
performance, such as increased movement vigor, smaller reaction times, and improved motor
memory (Nikooyan and Ahmed, 2014; Galea et al., 2015). Punishment feedback enables a faster

63
rate of visuomotor learning but impairs retention of the skill (Galea et al., 2015; Quattrocchi et
al., 2018). Furthermore, evidence has been presented that reward and punishment recruit
different brain areas during motor learning. A particular distinction has been noted in the area of
the cerebellum that is recruited. Punishment recruits portions of the cerebellum that are
associated with cognitive processes, while reward recruits areas associated with the storage of
the internal model (Steel et al., 2019). Collectively, the current body of research suggests that
reward and punishment feedback are processed differently by the brain, and the effects of
reinforcement feedback on motor performance are distinct.
In recent years, the usage of electroencephalography (EEG) has become an important tool in the
assessment of neural activity associated with motor learning. Particularly event-related potentials
(ERPs) associated with motor preparation have been the primary focus of the motor learning
literature. Specifically, movement readiness potentials (MRPs), a negative pre-movement
potential, are sensitive to task learning. Typically after learning a skill, the MRP amplitude
decreases (more positive), signifying a more efficient motor preparation process and shift toward
automaticity (Wright et al., 2012; Jochumsen et al., 2014). Previous research has also
demonstrated MRPs are also sensitive to motivational reinforcers resulting from movement
outcomes. For instance, it was found that MRPs increased in amplitude (more negative) when the
outcome of an action was rewarded (Pornpattananangkul and Nusslock, 2015). These findings
also point to a greater engagement of cortical motor areas involved in movement planning in an
effort to maximize the potential rewards (Pornpattananangkul and Nusslock, 2015). These
studies suggest that reward and punishment feedback modulate the amplitude of MRPs as well as

64
motor learning. However, they do not provide evidence about how changes in MRPs relate to
different aspects of motor learning.
In Chapter 4, we demonstrated that punishment feedback, but not reward feedback, changes
cortical feedback-related ERPs as well as motor retention during a visuomotor rotation task. Our
results suggest that punishment feedback impairs motor memory, in part, by altering the activity
of M1, an area that contributes to the planning and execution of motor commands. In this
context, we hypothesize that punishment also changes the amplitude of MRPs during motor
learning. By using the visuomotor rotation task, the present study tests this possibility. In
addition, we also assess the neural processing associated with movement termination. Previous
studies have shown that movement termination produces sensory-related ERPs [i.e., error
positivity (Pe)] that reflect performance monitoring and are sensitive to reinforcement feedback
(Overbeek, Niewuwenhuis and Ridderinkhoff, 2005; Boksem et al., 2006).
The purpose of this research is to determine the effects of reward and punishment on the MRP
and Pe during adaptation and retention, thus providing further clarity to the role of reinforcement
feedback in motor learning. As in the previous chapter, the visuomotor rotation task consisted of
a 30-degree counter-clockwise rotation during the Adaptation condition, that provided both
sensory feedback (visual cursor) and reinforcement feedback (reward, punishment, or null), and
the No Vision condition to test retention of the learned adaptive movement without the presence
of any feedback (see Methodology in Chapter 3).

65
RESULTS
Visuomotor Rotation Task Error
Figure 14 shows the task error across all conditions of the visuomotor task. A significant
feedback Group x Task condition interaction (F(2,39)=3.349, p=0.045, η2p=0.147) was noted for
endpoint error. A test of simple effects reveal that Punishment demonstrated a significant
increase in error from Late Learning to No Vision (F(2,39)=7.624, p=0.009, η2p=0.164), while no
differences were found for Reward (F(2,39)=0.285, p=0.596, η2p=0.007) or Control
(F(2,39)=0.071, p=0.792, η2p=0.002) groups. Additionally, Punishment demonstrated a
significant increase in error compared to Reward (F(2,39)=4.93, p=0.032, η2p=0.151) and
Control (F(2,39)=4.93, p=0.042, η2p=0.119) groups during the No Vision condition (Figure 14).
Movement-Related ERPs
Table 4 shows the MRP data for all electrodes analyzed. Figures 15 and 16 represent the relevant
findings for electrode CZ.
Learning Stage
Negative Slope Mean Amplitude
Figure 15 shows mean negative slope for all groups at the CZ electrode. A significant group
difference (F(2,35)=3.387, p=0.045, η2p=0.162) was noted at the FC3 electrode. Reward
demonstrated higher mean amplitude compared Control (F(2,35)=4.266, p=0.040, η2p=0.149)
and Punishment (F(2,35)=5.433, p=0.025, η2p=0.168) groups. A significant group difference
(F(2,35)=3.886, p=0.031, η2p=0.181) was noted at the FCZ electrode. Reward demonstrated
higher mean amplitude compared Control (F(2,35)= 5.511, p=0.027, η2p=0.168) and Punishment
(F(2,35)=6.184, p=0.018, η2p= 0.168) groups. A significant group difference (F(2,35)=6.186,
p=0.012, η2p=0.234) was noted at the CZ electrode. Reward demonstrated higher mean

66
amplitude compared to Control (F(2,35)=7.742, p=0.009, η2p= 0.229) and Punishment
(F(2,35)=8.075, p=0.007, η2p= 0.239) groups (Figure 14). No significant differences were
detected between groups (F(1,35)=2.504, p=0.096, η2p= 0.125) or learning conditions
(F(1,35)=6.453, p=0.775, η2p= 0.002) at the C3 electrode.
Motor Potential Peak-to-Peak Amplitude
Figure 15 shows mean peak-to-peak motor potential for all groups at the CZ electrode. A
significant group difference (F(2,35)=6.453, p=0.004, η2p=0.269) was found at the FC3
electrode. Reward demonstrated higher peak-to-peak amplitude compared Punishment
(F(2,35)=6.453, p=0.001, η2p=0.328) but not Control (F(2,35)=2.552, p=0.275, η2
p=0.0926).
Control demonstrated higher peak-to-peak amplitude compared to Punishment (F(2,35)=2.552,
p=0.025, η2p=0.182). A significant group difference (F(2,35)=4.047, p=0.026, η2
p=0.188) was
found at the FCZ electrode. Reward demonstrated higher peak-to-peak amplitude compared to
Punishment (F(2,35)=5.174, p=0.029, η2p=0.165) but not Control (F(2,35)=5.174, p=0.863,
η2p=0.005). Control demonstrated higher peak-to-peak amplitude compared to Punishment
((F(2,35)=6.780, p=0.019, η2p=0.206). A significant group difference (F(2,35)=4.791, p=0.014,
η2p=0.215) was found at the C3 electrode. Reward demonstrated higher peak-to-peak amplitude
compared to Punishment (F(2,35)=5.922, p=0.02, η2p= 0.184) but not Control (F(2,35)=0.226,
p=0.637, η2p=0.008). Control demonstrated higher peak-to-peak amplitude compared to
Punishment (F(2,35)=8.185, p=0.007, η2p=0.240). A significant group difference (F(2,35)=4.279,
p=0.022, η2p=0.196) was found at the CZ electrode (Figure 15). Reward demonstrated higher
peak-to-peak amplitude compared Punishment (F(2,35)=11.834, p=0.023, η2p=0.385) but not

67
Control (F(2,35)=0.051, p=0.824, η2p=0.001). Control demonstrated higher peak-to-peak
amplitude compared to Punishment (F(2,35)=6.799, p=0.013, η2p=0.207).
Task Condition
Negative Slope Mean Amplitude
Table 4 shows negative slope mean amplitude for all groups at each analyzed electrode. A
significant group difference (F(2,35)=5.170, p=0.011, η2p=0.232) was noted at the FC3 electrode.
Reward demonstrated higher mean amplitude compared to Control (F(2,35)=7.736, p=0.009,
η2p=0.227) and Punishment (F(2,35)=7.672, p=0.009, η2
p=0.229). No significant differences
were detected between Control and Punishment (F(2,35)=0.141, p=0.868, η2p=0.011). A
significant group difference (F(2,35)=5.364, p=0.009, η2p=0.235) was noted was at the FCZ
electrode. Reward demonstrated higher mean amplitude compared to Control (F(2,35)=7.811,
p=0.007, η2p=0.235) and Punishment (F(2,35)=8.164, p=0.008, η2
p=0.231). No significant
differences were detected between Control and Punishment (F(2,35)=0.015, p=0.905, η2p=
0.001). A significant group difference (F(2,35)=5.633, p=0.008, η2p=0.243) was noted at the CZ
electrode. Reward demonstrated higher mean amplitude compared Control (F(2,35)=8.944,
p=0.008, η2p=0.229) and Punishment (F(2,35)=7.789, p=0.005, η2
p=0.255). No significant
differences were detected between Control and Punishment (F(2,35)=3.279, p=0.889,
η2p>0.001). No significant differences were detected at the C3 electrode between groups
(F(2,35)=3.279, p=0.051, η2p=0.158) or task conditions (F(2,35)=0.833, p=0.368, η2
p=0.023).
68
Motor Potential Peak-to-Peak Amplitude
Figure 16 represents the MRPs at the CZ electrode for each group in the Adaptation and No
Vision conditions. A significant group difference (F(2,35)=3.429, p=0.044, η2p=0.164) was
found at the FC3 electrode. Reward demonstrated higher peak-to-peak amplitude compared to
Punishment (F(2,35)=6.833, p=0.013, η2p=0.723) but not Control (F(2,35)=1.312, p=0.260,
η2p=0.031). No significant differences were detected between Control and Punishment
(F(2,35)=2.006, p=0.166, η2p=0.049). A significant group difference (F(2,35)=3.594, p=0.038,
η2p=0.170) was noted at the FCZ electrode Reward demonstrated higher peak-to-peak amplitude
compared to Punishment (F(2,35)=5.143, p=0.032, η2p=0.162) but not Control (F(2,35)=0.016,
p=0.886, η2p=0.056). Control demonstrated higher peak-to-peak amplitude compared to
Punishment (F(2,35)=5.571, p=0.024, η2p=0.177). A significant group difference (F(2,35)=3.328,
p=0.048, η2p=0.160) was noted at the CZ electrode Reward demonstrated higher peak-to-peak
amplitude compared to Punishment (F(2,35)=6.629, p=0.014, η2p=0.207) but not Control
(F(2,35)=0.004, p=0.949, η2p=0.135). Control demonstrated higher peak-to-peak amplitude
compared to Punishment (F(2,35)=4.14, p=0.049, η2p=0.138) (Figure 16). No significant
differences were detected at the C3 electrode between groups (F(2,35)=1.908, p=0.163,
η2p=0.098) or task conditions (F(2,35)=1.361, p=0.270, η2
p=0.072).
Error Positivity Potential
Learning Stage
A significant group difference (F(2,35)=3.605, p=0.038, η2p=0.171) was found at the P4
electrode. Reward demonstrated higher peak-to-peak amplitude compared Punishment
(F(2,35)=5.844, p=0.021, η2p=0.183) but not Control (F(2,35)=0.028, p=0.869 η2
p=0.001).
Control demonstrated higher amplitude compared to Punishment (F(2,35)=5.055, p=0.034,

69
η2p=0.156). No significant differences were detected between learning conditions
(F(2,35)=0.215, p=0.645, η2p=0.006). No significant differences were detected at the CP3
electrode between groups (F(2,35)=1.827, p=0.176, η2p=0.085) or learning conditions
(F(2,35)=1.861, p=0.181, η2p=0.051). No significant differences were detected at the CP4
electrode between groups (F(2,35)=2.338, p=0.111, η2p=0.118) or learning stages
(F(2,35)=1.051, p=0.313, η2p=0.029). No significant differences were detected at the PZ
electrode between groups (F(2,35)=2.939, p=0.066, η2p=0.144) or learning conditions
(F(2,35)=0.482, p=0.492, η2p=0.014). No significant differences were detected at the P3
electrode between groups (F(2,35)=2.101, p=0.138, η2p=0.107) or learning stages
(F(2,35)=1.725, p=0.198, η2p=0.047).
Task Condition
Figure 17 displays the Pe during the Adaptation and No Vision conditions for each group. A
significant condition effect (F(2,35)=16.697, p>0.001, η2p= 0.323) was detected at the CP3
electrode with the Adaptation condition displaying higher peak-to-peak amplitude than No
Vision. No significant differences were detected between groups (F(2,35)=3.025, p=0.061, η2p=
0.147). A significant condition effect (F(2,35)=16.852, p>0.001, η2p= 0.325) was detected at the
CP4 electrode with the Adaptation condition displaying higher peak-to-peak amplitude than No
Vision. No significant differences were detected between groups (F(2,35)=2.271, p=0.118, η2p=
0.115).
A significant condition effect (F(2,35) = 12.481, p=0.005, η2p= 0.201) was detected at the PZ
electrode with the Adaptation condition displaying higher peak-to-peak amplitude than No

70
Vision (Figure 18). A significant group difference (F(2,35)=3.909, p=0.029, η2p= 0.183) was
also noted. Reward demonstrated higher peak-to-peak amplitude compared Punishment
(F(2,35)=7.819, p=0.009, η2p= 1.092) but not Control (F(2,35)=1.421, p=0.252, η2
p= 0.049). No
significant differences were detected between Control and Punishment (F(2,35)=2.455, p=0.126,
η2p= 0.0939). A significant condition effect (F(2,35)=13.152, p=0.001, η2
p= 0.273) was detected
at the P3 electrode with the Adaptation condition displaying a higher peak-to-peak amplitude
than No Vision. No significant differences were detected between groups (F(2,35)=2.742,
p=0.078, η2p= 0.135). A significant condition effect (F(2,35)=21.206, p>0.001, η2
p=0.377) was
detected at the P4 electrode with the Adaptation displaying higher peak-to-peak amplitude than
No Vision. No significant differences were detected between groups (F(2,35)=3.204, p=0.053,
η2p=0.155).

71
Figure 14. Line graphs represent trial by trial mean task error across the five conditions for each group. Bar graphs represent average task error during Late Learning and No Vision conditions. All graphs depict mean ± standard error. *- Significant group difference. #-Significant condition difference.

72

73
Figure 15. Bars represent (top) negative slope and (bottom) motor potential amplitude during Early (White) and Late Learning (Grey) for all groups at the CZ electrode. All graphs depict as mean ± standard error. *- Significant group difference

74
Figure 16. Line graphs represent grand average movement readiness potential at the CZ electrode in the Adaptation (Late Learning) (solid line) and No Vision (dashed line) conditions with zero representing trial initiation.

75
Figure 17. Line graphs represent grand average error positivity (Pe) at the PZ electrode with zero denoting termination of the movement. Bars represent peak-to-peak amplitude as mean ± standard error *- Significant group difference. #- Significant condition difference.

76
DISCUSSION
The purpose of the study was to determine the effects of motivational reinforcement on
movement error and the neural correlates of motor preparation and movement termination during
learning and retention of a visuomotor adaptation task. This study demonstrated differences in
behavior and neural activity across reinforcement groups, with the primary finding being that
punishment feedback displays a significant impairment in motor retention and a decrease of the
MRPs and Pe during the task. More specifically, subjects in the Punishment group exhibited
greater error during the No Vision condition and reduced MRP amplitude during both the
Adaptation and No Vision conditions compared to Reward and Control groups.
Though all groups adapted their movement and reduced error comparably during learning, a
decay in the performance was found during retention, but only after receiving punishment
feedback. While the Reward and Control groups maintained a similar rate of error during
retention testing, this confirms the detrimental effect of punishment feedback on motor retention
noted in the previous chapter (Chapter 4). As previously discussed, this could be related to
changes in how the brain processes punishment feedback, which may affect the retention process
(Chapter 4).
We examined MRPs during the retention of a novel visuomotor rotation task, in which learning
was monitored with reinforcement feedback (Reward, Punishment, or Control feedback).
Discernable group differences were noted in the MRP, with the Punishment group demonstrating
decreases in motor potential amplitude compared to the two other groups, regardless of the task
condition. Together with our behavioral results, the changes in MRP suggest punishment

77
feedback alters movement preparation in a way that is detrimental to task retention but not
performance. In the previous chapter, we hypothesized that increased anterior cingulate (ACC)
activity and its output to motor areas might be responsible for the poorer task retention in the
Punishment group. The decreased motor potential adds credence to this claim. The decrease in
motor potential for punishment indicates less involvement of cortical motor areas (M1 and
supplementary motor area (SMA)) (Krigoslon et al., 2012). Interestingly, the Punishment group
still performed similarly to Reward and Control groups during the Adaptation condition, which
suggests that the involvement of M1 and SMA does not impair performance where sensory
information is available to the participants. However, once sensory feedback was stripped from
the environmental context (No Vision), and performance becomes error-less, the lack of
involvement of M1 and SMA during the Adaptation condition becomes apparent, and the
Punishment group declines in task performance (less retention). Indeed, studies have noted that
M1 and SMA are important for planning of future movements and motor memory (Tanji and
Shima 1994; Paz et al., 2005; Kawai et al., 2015).
To impair motor retention, punishment feedback may also alter the function of the cerebellum
and therefore disrupts the internal task representation. Processes of movement preparation are
highly influenced by cerebellar input. Decrements in the MRPs have been found in clinical
studies of patients with lesions to the cerebellum (Kitamura et al., 1999; Ikeda et al., 1994).
Interestingly, there is a growing body of literature suggesting the cerebellum mediates aspects of
reinforcement based motor learning. For instance, Therrien, Wolpert, and Bastian (2015) found
that ataxia patients were able to adapt their movement through reinforcement but learned less due
to an inability to form a proper prediction of action outcome (cerebellum mediated) and reward

78
prediction (basal ganglia mediated) contingency (Maiall and Galea, 2016). Additionally, it has
been found that ACC activity is inversely related to cerebellum activity (Marguies et al., 2007).
In the case of our present study, punishment feedback may have created a deficit in building the
action outcome-reward prediction contingency through increased ACC activity, thus resulting in
impaired movement preparation and motor retention. However, as we note in the previous
chapter, this requires further research, considering the fundamental role of the cerebellum is to
promote online adaptation, not memory (Chapter 4; Galea et al., 2010).
Previous studies have noted both reductions and increases in MRP amplitude in response to task
learning. For the current study, we found no differences in the negative slope or motor potential
during the Early and Late Learning stages of the Adaptation condition, even though changes in
behavior occurred. Most studies examining task learning and MRPs have weeks of training and
feature long retention periods (Wright et al., 2012; Jochumsen et al., 2014). Additionally,
complete adaptation to the 30-degree perturbation was not obtained by any of the three groups.
With more trials, we may have seen changes in MRPs similar to those found in other studies.
As also shown here, punishment feedback reduces the amplitude of sensory-related ERPs (Pe)
during the visuomotor task. Our results suggest that punishment feedback alters how the brain
processes sensory feedback at the end of a motor action. Furthermore, when visual feedback of
the cursor was removed, Pe amplitude decreased across all groups indicating that this signal is
driven in part by sensory information from the visual system. Pe has been related to conscious
recognition of error and salience of error (Overbeeke et al., 2005; Endrass et al., 2010). Our
results suggest diminished attention toward visual feedback error when an aversive

79
reinforcement is provided at the end of the performance. Batcho and colleagues (2016) found
visuomotor task retention was diminished when subjects learned through endpoint error
feedback, in comparison to subjects that learned with continuous visual feedback. Therefore the
attentional shift away from visual sensory errors by the Punishment group may be a contributing
factor to the poorer retention demonstrated in the No Vision condition.
Similar to the MRPs, we found Pe amplitude was consistent through Early and Late Learning
Stages. This indicates brain processes associated with movement termination are not sensitive to
learning. Instead, Pe found in the current study seems to be more associated with general
monitoring of task performance through visual information provided by the task. Concurrent
visual and proprioceptive feedback is the most optimal for changing motor commands to counter
perturbations (Hinder et al., 2008; Shabbott and Sainburg, 2010). Our Pe findings may provide
some indication of how the brain utilizes visual information over the course of motor learning to
adjust motor output.

80
SUMMARY
This study suggests that punishment feedback not only impairs retention of visuomotor learning
but also alters the neural processes associated with motor preparation and performance
monitoring. Our results indicate punishment feedback alters how M1 prepares for movement and
how the brain processes post-movement visual feedback. As a result, punishment feedback limits
the ability of the brain to form a memory of the motor task, resulting in impaired performance
under memory-guided conditions.

81
CHAPTER 6:
CONCLUSIONS
The goal of this study was to determine the effects of reinforcement feedback on motor behavior
and the neural correlates of learning and retention of a visuomotor rotation task. More
specifically, we examined how reward and punishment feedback affects movement performance
and event-related potentials (ERPs). This study demonstrated that motor performance is not
altered by reinforcement during task adaptation (learning). However, the reinforcement type does
alter how the visuomotor task is retained. Performing the motor task with punishment feedback
impairs motor memory, while performing the task with either reward or null feedback, does not
affect motor memory. Accompanying these alterations in motor behavior, are changes in the
ERPs that are associated with motor learning. Punishment feedback altered how both the brain
processes feedback during task learning and preparation for upcoming movement. In
comparison, reward and control feedback did not change the observed ERPs during learning or
retention of the visuomotor task.
During task learning, reinforcement feedback had no effect on the ability of the participants to
adapt their movement to the perturbation and reduce task error. However, when performing the
movement in memory-guided conditions (No Vision), those provided with punishment feedback
during the leaning, demonstrated impaired retention. This was not found with either reward or
null feedbacks, which maintained the learned movement throughout retention testing. Thus

82
indicating punishment feedback does not support the formation of a motor memory, which might
be related to an enhanced allocation of brain resources to avoid aversive outcomes.
Punishment altered how the brain processes feedback during motor learning. In our examination
of feedback-related ERPs, punishment increased their amplitude during the Adaptation condition
but decreased during the No Vision condition, a result not found in either of the other
reinforcement groups. This change in neural activity during learning points toward increased
input from the anterior cingulate cortex (ACC), a structure that directly connects to the motor
cortex of the brain. Our results advocate that the increased activation of the ACC during task
learning is detrimental toward retention of motor skill and results from punishment feedback.
ERPs associated with movement preparation were also altered by punishment feedback. The
movement readiness potential (MRP) amplitude found in this study was reduced by punishment
feedback. MRPs are reflective of the activity of motor associated areas of the brain that are
involved in movement preparation. Though decreased input from these structures did not affect
the motor output during the Adaptation condition for the Punishment group, their involvement is
necessary to develop an adequate motor plan for future movements. As a result, when recall of
the visuomotor task was needed, those who performed with punishment feedback had an
impaired performance, stemming from an underdeveloped movement plan.
Overall, this study demonstrated the multifaceted effects of reinforcement feedback on motor
learning and retention. Furthermore, we add to the current body of literature that presents the
dissociable effects of reward and punishment on motor learning. We demonstrated that
punishment feedback impairs motor retention and alters the neural correlates of feedback
processing and movement preparation. We advocate that punishment feedback does not benefit

83
task learning but impairs task retention and changes cortical processes associated with motor
control. Thus we conclude that reward, sensory feedback, or both is most optimal for motor task
learning and retention while aversive feedback should be avoided.
These results are relevant in the context of rehabilitation, in which skill learning/relearning may
be necessary for patients with neurological disorders. Patients may perform functional tasks in a
rehabilitative setting with relative ease, but based on the findings of this study, it may not mean
that the performance will be stored for long-term use. Therefore, it seems that tests of motor
retention should be implemented to ensure the quality of task learning. If patients are poor
performers in memory-guided conditions, an external reward, but not punishment, concurrent to
visual feedback could be applied to promote motor memory of the task. Our study did not
provide evidence of the benefits produced by reward feedback. However, other studies using
different motor learning paradigms have reported positive effects of reward with and without
sensory feedback. Therefore the implementation of reward reinforcement in this manner could
increase the quality of care and decrease time in rehabilitation.

84
List of References

85
Abe, M., Schambra, H., Wassermann, E. M., Luckenbaugh, D., Schweighofer, N., & Cohen, L.
G. (2011). Reward improves long-term retention of a motor memory through induction of
offline memory gains. Current Biology, 21(7), 557-562.
Anguera, J. A., Seidler, R. D., & Gehring, W. J. (2009). Changes in performance monitoring
during sensorimotor adaptation. Journal of Neurophysiology, 102(3), 1868-1879.
Apicella, P., Ljungberg, T., Scarnati, E., & Schultz, W. (1991). Responses to reward in monkey
dorsal and ventral striatum. Experimental Brain Research, 85(3), 491-500.
Balconi, M., & Crivelli, D. (2010). FRN and P300 ERP effect modulation in response to
feedback sensitivity: the contribution of punishment-reward system (BIS/BAS) and
behavior identification of action. Neuroscience Research, 66(2), 162-172.
Bastian, A. J. (2008). Understanding sensorimotor adaptation and learning for rehabilitation.
Current Opinion in Neurology, 21(6), 628-633.
Batcho, C. S., Gagné, M., Bouyer, L. J., Roy, J. S., & Mercier, C. (2016). Impact of online visual
feedback on motor acquisition and retention when learning to reach in a force field.
Neuroscience, 337(11), 267-275.
Beaulieu, C., Bourassa, M. È., Brisson, B., Jolicoeur, P., & De Beaumont, L. (2014).
Electrophysiological correlates of motor sequence learning. BMC Neuroscience, 15(102),
1-10.

86
Boksem, M. A., Tops, M., Wester, A. E., Meijman, T. F., & Lorist, M. M. (2006). Error-related
ERP components and individual differences in punishment and reward sensitivity. Brain
Research, 1101(1), 92-101.
Bostan, A. C., & Strick, P. L. (2010). The cerebellum and basal ganglia are interconnected.
Neuropsychology Review, 20(3), 261-270.
Bostan, A. C., & Strick, P. L. (2018). The basal ganglia and the cerebellum: nodes in an
integrated network. Nature Reviews Neuroscience, 19(6), 338-350.
Brovelli, A., Nazarian, B., Meunier, M., & Boussaoud, D. (2011). Differential roles of caudate
nucleus and putamen during instrumental learning. Neuroimage, 57(4), 1580-1590.
Cador, M., Robbins, T. W., & Everitt, B. J. (1989). Involvement of the amygdala in stimulus-
reward associations: interaction with the ventral striatum. Neuroscience, 30(1), 77-86.
Carver, C. S., & White, T. L. (1994). Behavioral inhibition, behavioral activation, and affective
responses to impending reward and punishment: The BIS/BAS scales. Journal of
Personality and Social Psychology, 67(2), 319-333.
Chikara, R. K., Chang, E. C., Lu, Y. C., Lin, D. S., Lin, C. T., & Ko, L. W. (2018). Monetary
Reward and Punishment to Response Inhibition Modulate Activation and
Synchronization Within the Inhibitory Brain Network. Frontiers in Human Neuroscience,
12(3), 1-16.
Cohen, M. X. (2017). Where does EEG come from and what does it mean? Trends in
Neurosciences, 40(4), 208-218.
Criscimanga-Hemminger SE, Bastian AJ, Shadmehr R. (2010) Size of error affects cerebellar
contributions to motor learning. Journal of Neurophysiology, 103(4), 2275–2284.

87
Cross, E. S., Schmitt, P. J., & Grafton, S. T. (2007). Neural substrates of contextual interference
during motor learning support a model of active preparation. Journal of Cognitive
Neuroscience, 19(11), 1854-1871.
Dayan, E., & Cohen, L. G. (2011). Neuroplasticity subserving motor skill learning. Neuron,
72(3), 443-454.
de Xivry, J. J. O., & Ethier, V. (2008). Neural correlates of internal models. Journal of
Neuroscience, 28(32), 7931-7932.
Delorme, A., & Makeig, S. (2004). EEGLAB: an open source toolbox for analysis of single-trial
EEG dynamics including independent component analysis. Journal of Neuroscience
Methods, 134(1), 9-21.
Debas, K., Carrier, J., Orban, P., Barakat, M., Lungu, O., Vandewalle, G., & Benali, H. (2010).
Brain plasticity related to the consolidation of motor sequence learning and motor
adaptation. Proceedings of the National Academy of Sciences, 107(41), 17839-17844.
De Martino, B., Camerer, C. F., & Adolphs, R. (2010). Amygdala damage eliminates monetary
loss aversion. Proceedings of the National Academy of Sciences, 107(8), 3788-3792.
Diedrichsen, J., & Kornysheva, K. (2015). Motor skill learning between selection and execution.
Trends in Cognitive Sciences, 19(4), 227-233.
Elsinger, C. L., Harrington, D. L., & Rao, S. M. (2006). From preparation to online control:
reappraisal of neural circuitry mediating internally generated and externally guided
actions. Neuroimage, 31(3), 1177-1187.
Endrass, T., Schuermann, B., Kaufmann, C., Spielberg, R., Kniesche, R., & Kathmann, N.
(2010). Performance monitoring and error significance in patients with obsessive-
compulsive disorder. Biological Psychology, 84(2), 257-263.

88
Fitts, P. M., & Posner, M. I. (1967). Human performance. Oxford, England: Brooks/Cole.
Galea, J. M., Mallia, E., Rothwell, J., & Diedrichsen, J. (2015). The dissociable effects of
punishment and reward on motor learning. Nature Neuroscience, 18(4), 597-602.
Galea, J. M., Vazquez, A., Pasricha, N., Orban de Xivry, J. J., & Celnik, P. (2010). Dissociating
the roles of the cerebellum and motor cortex during adaptive learning: the motor cortex
retains what the cerebellum learns. Cerebral Cortex, 21(8), 1761-1770.
Glazer, J. E., Kelley, N. J., Pornpattananangkul, N., Mittal, V. A., & Nusslock, R. (2018).
Beyond the FRN: Broadening the time-course of EEG and ERP components implicated
in reward processing. International Journal of Psychophysiology, 132(B), 184-202.
Grafton, S. T., Schmitt, P., Van Horn, J., & Diedrichsen, J. (2008). Neural substrates of
visuomotor learning based on improved feedback control and prediction. Neuroimage,
39(3), 1383-1395.
Gehring, W. J., & Willoughby, A. R. (2002). The medial frontal cortex and the rapid processing
of monetary gains and losses. Science, 295(5563), 2279-2282.
Haber, S. N., & Knutson, B. (2010). The reward circuit: linking primate anatomy and human
imaging. Neuropsychopharmacology, 35(1), 4-26.
Hadipour-Niktarash, A., Lee, C. K., Desmond, J. E., & Shadmehr, R. (2007). Impairment of
retention but not acquisition of a visuomotor skill through time-dependent disruption of
primary motor cortex. Journal of Neuroscience, 27(49), 13413-13419.
Haith, A. M., Huberdeau, D. M., & Krakauer, J. W. (2015). The influence of movement
preparation time on the expression of visuomotor learning and savings. Journal of
Neuroscience, 35(13), 5109-5117.

89
Hamel, R., Savoie, F. A., Lacroix, A., Whittingstall, K., Trempe, M., & Bernier, P. M. (2018).
Added value of money on motor performance feedback: Increased left central beta-band
power for rewards and fronto-central theta-band power for punishments. NeuroImage,
179(1), 63-78.
Hajcak, G., Moser, J., Holroyd, C. B., & Simons, R. F. (2006). The feedback-related negativity
reflects the binary evaluation of good versus bad outcomes. Biological Psychology, 71(2),
148-154.
Hester, R., Murphy, K., Brown, F. L., & Skilleter, A. J. (2010). Punishing an error improves
learning: the influence of punishment magnitude on error-related neural activity and
subsequent learning. Journal of Neuroscience, 30(46), 15600-15607.
Hinder, M. R., Riek, S., Tresilian, J. R., de Rugy, A., & Carson, R. G. (2010). Real-time error
detection but not error correction drives automatic visuomotor adaptation. Experimental
Brain Research, 201(2), 191-207.
Holroyd, C. B., & Coles, M. G. (2002). The neural basis of human error processing:
reinforcement learning, dopamine, and the error-related negativity. Psychological
Review, 109(4), 679-709.
Holroyd, C. B., Larsen, J. T., & Cohen, J. D. (2004). Context dependence of the event-related
brain potential associated with reward and punishment. Psychophysiology, 41(2), 245-
253.
Hosp, J. A., & Luft, A. R. (2011). Cortical plasticity during motor learning and recovery after
ischemic stroke. Neural Plasticity, 2011(871296), 2-9.

90
Huang, V. S., Haith, A., Mazzoni, P., & Krakauer, J. W. (2011). Rethinking motor learning and
savings in adaptation paradigms: model-free memory for successful actions combines
with internal models. Neuron, 70(4), 787-801.
Ikeda, A., Shibasaki, H., Nagamine, T., Terada, K., Kaji, R., Fukuyama, H., & Kimura, J. (1994).
Dissociation between contingent negative variation and Bereitschaftspotential in a patient
with cerebellar efferent lesion. Electroencephalography and Clinical Neurophysiology,
90(5), 359-364.
Izawa, J., & Shadmehr, R. (2011). Learning from sensory and reward prediction errors during
motor adaptation. PLoS Computational Biology, 7(3), 1-11.
Jean-Richard-Dit-Bressel, P., Killcross, S., & McNally, G. P. (2018). Behavioral and
neurobiological mechanisms of punishment: implications for psychiatric disorders.
Neuropsychopharmacology, 43(8), 1639-1650.
Jo, H. G., Wittmann, M., Hinterberger, T., & Schmidt, S. (2014). The readiness potential reflects
intentional binding. Frontiers in Human Neuroscience, 8(6), 1–9.
Jochumsen, M., Rovsing, C., Rovsing, H., Cremoux, S., Signal, N., Allen, K., & Niazi, I. K.
(2017). Quantification of Movement-Related EEG Correlates Associated with Motor
Training: A Study on Movement-Related Cortical Potentials and Sensorimotor Rhythms.
Frontiers in Human Neuroscience, 11(12), 1-12.
Kandel, E. R., Schwartz, J. H., Jessell, T. M. & Hudspeth, A.J. (2012). Principles of neural
science (5th ed.). New York: McGraw-Hill, Health Professions Division
Kapogiannis, D., Mooshagian, E., Campion, P., Grafman, J., Zimmermann, T. J., Ladt, K. C., &
Wassermann, E. M. (2011). Reward processing abnormalities in Parkinson's disease.
Movement Disorders, 26(8), 1451-1457.

91
Kawai, R., Markman, T., Poddar, R., Ko, R., Fantana, A. L., Dhawale, A. K., & Ölveczky, B. P.
(2015). Motor cortex is required for learning but not for executing a motor skill. Neuron,
86(3), 800-812.
Kennerley, S. W., & Wallis, J. D. (2009). Encoding of reward and space during a working
memory task in the orbitofrontal cortex and anterior cingulate sulcus. Journal of
Neurophysiology, 102(6), 3352-3364.
Kitamura, J. I., Shabasaki, H., Terashi, A., & Tashima, K. (1999). Cortical potentials preceding
voluntary finger movement in patients with focal cerebellar lesion. Clinical
Neurophysiology, 110(1), 126-132.
Kobayashi, S., Lauwereyns, J., Koizumi, M., Sakagami, M., & Hikosaka, O. (2002). Influence of
reward expectation on visuospatial processing in macaque lateral prefrontal cortex.
Journal of Neurophysiology, 87(3), 1488-1498.
Krigolson, O., Bell, J., Kent, C. M., Heath, M., & Holroyd, C. B. (2012). Reduced cortical motor
potentials underlie reductions in memory-guided reaching performance. Motor Control,
16(3), 353-370.
Lehéricy, S., Benali, H., Van de Moortele, P. F., Pélégrini-Issac, M., Waechter, T., Ugurbil, K.,
& Doyon, J. (2005). Distinct basal ganglia territories are engaged in early and advanced
motor sequence learning. Proceedings of the National Academy of Sciences of the United
States of America, 102(35), 12566-12571.
Luck, S. J. (2012). Event-related potentials. In H. Cooper, P. M. Camic, D. L. Long, A. T.
Panter, D. Rindskopf, & K. J. Sher (Eds.), APA handbook of research methods in
psychology, Vol. 1. Foundations, planning, measures, and psychometrics (p. 523-546).
Washington, DC, US: American Psychological Association.

92
MacLean, S. J., Hassall, C. D., Ishigami, Y., Krigolson, O. E., & Eskes, G. A. (2015). Using
brain potentials to understand prism adaptation: the error-related negativity and the P300.
Frontiers in Human Neuroscience, 9(6), 1-14.
Margulies, D. S., Kelly, A. C., Uddin, L. Q., Biswal, B. B., Castellanos, F. X., & Milham, M. P.
(2007). Mapping the functional connectivity of anterior cingulate cortex. Neuroimage,
37(2), 579-588.
Makino, H., Hwang, E. J., Hedrick, N. G., & Komiyama, T. (2016). Circuit mechanisms of
sensorimotor learning. Neuron, 92(4), 705-721.
Marsh, B. T., Tarigoppula, V. S. A., Chen, C., & Francis, J. T. (2015). Toward an autonomous
brain machine interface: integrating sensorimotor reward modulation and reinforcement
learning. Journal of Neuroscience, 35(19), 7374-7387.
Matsumoto, K., Suzuki, W., & Tanaka, K. (2003). Neuronal correlates of goal-based motor
selection in the prefrontal cortex. Science, 301(5630), 229-232.
McDougle, S. D., Bond, K. M., & Taylor, J. A. (2015). Explicit and implicit processes constitute
the fast and slow processes of sensorimotor learning. Journal of Neuroscience, 35(26),
9568-9579.
Mogenson, G. J., Jones, D. L., & Yim, C. Y. (1980). From motivation to action: functional
interface between the limbic system and the motor system. Progress in Neurobiology,
14(2-3), 69-97.
Miall, R. C., & Galea, J. (2015). Cerebellar damage limits reinforcement learning. Brain, 139(1),
4-7.

93
Mitz, A. R., Godschalk, M., & Wise, S. P. (1991). Learning-dependent neuronal activity in the
premotor cortex: activity during the acquisition of conditional motor associations.
Journal of Neuroscience, 11(6), 1855-1872.
Nakamura, K., Sakai, K., & Hikosaka, O. (1998). Neuronal activity in medial frontal cortex
during learning of sequential procedures. Journal of Neurophysiology, 80(5), 2671-2687.
Nieuwenhuis, S., Holroyd, C. B., Mol, N., & Coles, M. G. (2004). Reinforcement-related brain
potentials from medial frontal cortex: origins and functional significance. Neuroscience
& Biobehavioral Reviews, 28(4), 441-448.
Nikooyan, A. A., & Ahmed, A. A. (2014). Reward feedback accelerates motor learning. Journal
of Neurophysiology, 113(2), 633-646.
Rioult-Pedotti, M. S., Friedman, D., & Donoghue, J. P. (2000). Learning-induced LTP in
neocortex. Science, 290(5491), 533–536.
O'Doherty, J. P., Buchanan, T. W., Seymour, B., & Dolan, R. J. (2006). Predictive neural coding
of reward preference involves dissociable responses in human ventral midbrain and
ventral striatum. Neuron, 49(1), 157-166.
Oldfield, R. C. (1971). The assessment and analysis of handedness: the Edinburgh inventory.
Neuropsychologia, 9(1), 97-113.
Overbeek, T. J., Nieuwenhuis, S., & Ridderinkhof, K. R. (2005). Dissociable components of
error processing: On the functional significance of the Pe vis-à-vis the ERN/Ne. Journal
of Psychophysiology, 19(4), 319-329.
Palidis, D. J., Cashaback, J. G., & Gribble, P. L. (2019). Neural signatures of reward and sensory
error feedback processing in motor learning. Journal of Neurophysiology, 121(4), 1561-
1574.

94
Palminteri, S., Justo, D., Jauffret, C., Pavlicek, B., Dauta, A., Delmaire, C., & Pessiglione, M.
(2012). Critical roles for anterior insula and dorsal striatum in punishment-based
avoidance learning. Neuron, 76(5), 998-1009.
Paus, T. (2001). Primate anterior cingulate cortex: where motor control, drive and cognition
interface. Nature Reviews Neuroscience, 2(6), 417-424.
Pascual-Leone, A., Nguyet, D., Cohen, L. G., Brasil-Neto, J. P., Cammarota, A., & Hallett, M.
(1995). Modulation of muscle responses evoked by transcranial magnetic stimulation
during the acquisition of new fine motor skills. Journal of Neurophysiology, 74(3), 1037-
1045.
Pascual-Leone, A., Valls-Solé, J., Wassermann, E. M., & Hallett, M. (1994). Responses to rapid-
rate transcranial magnetic stimulation of the human motor cortex. Brain, 117(4), 847-
858.
Paz, R., Natan, C., Boraud, T., Bergman, H., & Vaadia, E. (2005). Emerging patterns of neuronal
responses in supplementary and primary motor areas during sensorimotor adaptation.
Journal of Neuroscience, 25(47), 10941-10951.
Polich, J. (2007). Updating P300: an integrative theory of P3a and P3b. Clinical
Neurophysiology, 118(10), 2128-2148.
Pornpattananangkul, N., & Nusslock, R. (2015). Motivated to win: Relationship between
anticipatory and outcome reward-related neural activity. Brain and Cognition, 100(11),
21-40.
Quattrocchi, G., Greenwood, R., Rothwell, J. C., Galea, J. M., & Bestmann, S. (2017). Reward
and punishment enhance motor adaptation in stroke. Journal of Neurology Neurosurgery
and Psychiatry, 88(9), 730-736.

95
Quattrocchi, G., Monaco, J., Ho, A., Irmen, F., Strube, W., Ruge, D., & Galea, J. M. (2018).
Pharmacological Dopamine Manipulation Does Not Alter Reward-Based Improvements
in Memory Retention during a Visuomotor Adaptation Task. eNeruo, 5(3), 1-12.
Ramakrishnan, A., Byun, Y. W., Rand, K., Pedersen, C. E., Lebedev, M. A., & Nicolelis, M. A.
(2017). Cortical neurons multiplex reward-related signals along with sensory and motor
information. Proceedings of the National Academy of Sciences, 114(24), 4841-4850.
Ramkumar, P., Dekleva, B., Cooler, S., Miller, L., & Kording, K. (2016). Premotor and motor
cortices encode reward. PloS ONE, 11(8), 1-13.
Reis, J., Schambra, H. M., Cohen, L. G., Buch, E. R., Fritsch, B., Zarahn, E., & Krakauer, J. W.
(2009). Noninvasive cortical stimulation enhances motor skill acquisition over multiple
days through an effect on consolidation. Proceedings of the National Academy of
Sciences, 106(5), 1590-1595.
Rioult-Pedotti, M-S., Friedman, D. & Donoghue, J.P. (2000). Learning-induced LTP in
neocortex. Science, 290(5491), 533-536.
Schmidt, R. A., & Lee, T. D. (2013). Motor learning and performance: from principles to
application. Human Kinetics.
Schween, R., & Hegele, M. (2017). Feedback delay attenuates implicit but facilitates explicit
adjustments to a visuomotor rotation. Neurobiology of Learning and Memory, 140(5),
124-133.
Schultz, W. (2002). Getting formal with dopamine and reward. Neuron, 36(2), 241-263.
Schulz, K., A. Be´dard, R. Czarnecki, and J. Fan. (2011). Preparatory activity and connectivity in
dorsal anterior cingulate cortex for cognitive control. Neuroimage, 57(1), 242– 250.

96
Seidler, R. D., & Noll, D. C. (2008). Neuroanatomical correlates of motor acquisition and motor
transfer. Journal of Neurophysiology, 99(4), 1836-1845.
Seidler, R. D., Kwak, Y., Fling, B. W., & Bernard, J. A. (2013). Neurocognitive mechanisms of
error-based motor learning. In Progress in Motor Control (pp. 39-60). Springer, New
York, NY.
Shabbott, B. A., & Sainburg, R. L. (2010). Learning a visuomotor rotation: simultaneous visual
and proprioceptive information is crucial for visuomotor remapping. Experimental Brain
Research, 203(1), 75-87.
Shadmehr, R., & Krakauer, J. W. (2008). A computational neuroanatomy for motor control.
Experimental Brain Research, 185(3), 359-381.
Shadmehr, R., De Xivry, J. J. O., Xu-Wilson, M., & Shih, T. Y. (2010). Temporal discounting of
reward and the cost of time in motor control. Journal of Neuroscience, 30(31), 10507-
10516.
Shibasaki, H., & Hallett, M. (2006). What is the Bereitschaftspotential?. Clinical
Neurophysiology, 117(11), 2341-2356.
Smith, A. L., & Staines, W. R. (2006). Cortical adaptations and motor performance
improvements associated with short-term bimanual training. Brain Research, 1071(1),
165-174.
Smith, A. L., & Staines, W. R. (2010). Cortical and behavioral adaptations in response to short-
term inphase versus antiphase bimanual movement training. Experimental Brain
Research, 205(4), 465-477.
Smith, A. L., & Staines, W. R. (2012). Externally cued inphase bimanual training enhances
preparatory premotor activity. Clinical Neurophysiology, 123(9), 1846-1857.

97
Song, Y., & Smiley-Oyen, A. L. (2017). Probability differently modulating the effects of reward
and punishment on visuomotor adaptation. Experimental Brain Research, 235(12), 3605-
3618.
Spampinato, D., Satar, Z., & Rothwell, J. (2019). Combining reward and M1 transcranial direct
current stimulation enhances the retention of newly learnt sensorimotor mappings. Brain
Stimulation, 0(0),1-8.
Spiegler, B.J. and Mishkin, M. (1981) Evidence for the sequential participation of inferior
temporal cortex and amygdala in the acquisition of stimulus-reward associations.
Behavior and Brain Research, 3(3), 303–317.
Steel, A., Silson, E. H., Stagg, C. J., & Baker, C. I. (2016). The impact of reward and punishment
on skill learning depends on task demands. Scientific Reports, 6(36056), 1-9.
Steel, A., Silson, E. H., Stagg, C. J., & Baker, C. I. (2019). Differential impact of reward and
punishment on functional connectivity after skill learning. NeuroImage, 189(4), 95-105.
Steele, C. J., & Penhune, V. B. (2010). Specific increases within global decreases: a functional
magnetic resonance imaging investigation of five days of motor sequence learning.
Journal of Neuroscience, 30(24), 8332-8341.
Strain, P. S., Kerr, M. M., & Ragland, E. U. (1979). Effects of peer-mediated social initiations
and prompting/reinforcement procedures on the social behavior of autistic children.
Journal of Autism and Developmental Disorders, 9(1), 41-54.
Stürmer, B. (2011). Reward and punishment effects on error processing and conflict control.
Frontiers in Psychology, 2(11), 1-9.
Tanji, J., & Shima, K. (1994). Role for supplementary motor area cells in planning several
movements ahead. Nature, 371(6496), 413-416.

98
Taubert, M., Lohmann, G., Margulies, D. S., Villringer, A., & Ragert, P. (2011). Long-term
effects of motor training on resting-state networks and underlying brain structure.
Neuroimage, 57(4), 1492-1498.
Taylor, M. J. (1978). Bereitschaftspotential during the acquisition of a skilled motor task.
Electroencephalography and Clinical Neurophysiology, 45(5), 568-576.
Therrien, A. S., Wolpert, D. M., & Bastian, A. J. (2015). Effective reinforcement learning
following cerebellar damage requires a balance between exploration and motor noise.
Brain, 139(1), 101-114.
Thorndike, E. L. (1927). The law of effect. The American Journal of Psychology, 39(1), 212-
222.
Tomassini, V., Jbabdi, S., Kincses, Z. T., Bosnell, R., Douaud, G., Pozzilli, C., Matthews, P., &
Johansen‐Berg, H. (2011). Structural and functional bases for individual differences in
motor learning. Human Brain Mapping, 32(3), 494-508.
Torrecillos, F., Albouy, P., Brochier, T., & Malfait, N. (2014). Does the processing of sensory
and reward-prediction errors involve common neural resources? Evidence from a
frontocentral negative potential modulated by movement execution errors. Journal of
Neuroscience, 34(14), 4845-4856.
Tseng, Y. W., Diedrichsen, J., Krakauer, J. W., Shadmehr, R., & Bastian, A. J. (2007). Sensory
prediction errors drive cerebellum-dependent adaptation of reaching. Journal of
Neurophysiology, 98(1), 54-62.
Ullsperger, M., Danielmeier, C., & Jocham, G. (2014). Neurophysiology of performance
monitoring and adaptive behavior. Physiological Reviews, 94(1), 35-79.

99
van der Helden, J., Boksem, M. A., & Blom, J. H. (2009). The importance of failure: feedback-
related negativity predicts motor learning efficiency. Cerebral Cortex, 20(7), 1596-1603.
Wächter, T., Lungu, O. V., Liu, T., Willingham, D. T., & Ashe, J. (2009). Differential effect of
reward and punishment on procedural learning. Journal of Neuroscience, 29(2), 436-443.
Wächter, T., Röhrich, S., Frank, A., Molina-Luna, K., Pekanovic, A., Hertler, B., Schubring-
Giese, M. & Luft, A. R. (2010). Motor skill learning depends on protein synthesis in the
dorsal striatum after training. Experimental Brain Research, 200(3-4), 319-323.
Wagner, M. J., Kim, T. H., Savall, J., Schnitzer, M. J., & Luo, L. (2017). Cerebellar granule cells
encode the expectation of reward. Nature, 544(7648), 96-100.
Walsh, M. M., & Anderson, J. R. (2012). Learning from experience: event-related potential
correlates of reward processing, neural adaptation, and behavioral choice. Neuroscience
& Biobehavioral Reviews, 36(8), 1870-1884.
Wenderoth, N., Debaere, F., Sunaert, S., & Swinnen, S. P. (2005). The role of anterior cingulate
cortex and precuneus in the coordination of motor behavior. European Journal of
Neuroscience, 22(1), 235-246.
Williams, Z. M., Bush, G., Rauch, S. L., Cosgrove, G. R., & Eskandar, E. N. (2004). Human
anterior cingulate neurons and the integration of monetary reward with motor responses.
Nature Neuroscience, 7(12), 1370-1375.
Wischnewski, M., Bekkering, H., & Schutter, D. J. (2018). Frontal cortex electrophysiology in
reward-and punishment-related feedback processing during advice-guided decision
making: An interleaved EEG-DC stimulation study. Cognitive, Affective, & Behavioral
Neuroscience, 18(2), 249-262.
Wolpert, D. M., & Flanagan, J. R. (2010). Motor learning. Current Biology, 20(11), 467-472.

100
Wolpert, D. M., Ghahramani, Z., & Jordan, M. I. (1995). An internal model for sensorimotor
integration. Science, 269(5232), 1880-1882.
Wrase, J., Kahnt, T., Schlagenhauf, F., Beck, A., Cohen, M. X., Knutson, B., & Heinz, A.
(2007). Different neural systems adjust motor behavior in response to reward and
punishment. Neuroimage, 36(4), 1253-1262.
Wright, D. J., Holmes, P. S., Di Russo, F., Loporto, M., & Smith, D. (2012b). Differences in
cortical activity related to motor planning between experienced guitarists and non-
musicians during guitar playing. Human Movement Science, 31(3), 567-577.
Wright, D. J., Holmes, P., Di Russo, F., Loporto, M., and Smith, D. (2012a). Reduced motor
cortex activity during movement preparation following a period of motor skill practice.
PLoS ONE, 13(1), 1–17.

101
Christopher Mark Hill, PhD Department of Health, Exercise Science, and Recreation Management
School of Applied Sciences University of Mississippi
ACADEMIC RECORD
Ph.D. Kinesiology University of Mississippi Expected 2019
Research Emphasis: Motor Behavior Academic Minor: Applied Statistics Dissertation: Reward and Punishment: Neural Correlates of Reinforcement Feedback during Motor
Learning
M.S. Kinesiology Mississippi State University 2016 Research Emphasis: Neuromechanics Thesis: Influence of Military Workload on Muscle Exertion in Two Types of Military Footwear B.S. Exercise Science University of Mississippi 2014 Minor: Psychology PROFESSIONAL EXPERIENCE
Graduate Teaching Assistant 2016-Present
Department of Health, Exercise Science, and Recreation Management, University of Mississippi
Graduate Teaching Assistant 2014-2016
Department of Kinesiology, Mississippi State University
COBRE Research Fellow 2013-2014
Center for Research Excellence in Natural Products Neuroscience, University of Mississippi
RESEARCH INTERESTS
Motor learning Reinforcement learning Augmented feedback Human gait Human balance Movement disorders Aging Rehabilitation

102
LABORATORY COMPETENCIES
1. Surface Electromyography 2. Surface Electroencephalography 3. Vicon Motion Capture Testing 4. Neurocom Equitest Balance Testing 5. Force Plate Testing 6. EEGLab Toolbox
7. Graphic State 4 Protocol Design 8. Data entry/statistical analysis (SPSS) 9. Systematic Review and Meta-analysis (Comprehensive Meta-Analysis) 10. Matlab programming 11.
RESEARCH EXPERIENCE
Cognition and Neuromechanics Laboratory, University of Mississippi
• Neural Correlates of Reward and Punishment: The Implications for Motor Learning
Neurophysiology and Behavior Laboratory, University of Mississippi • Neural of Correlates of Social and Acute Stress on Cognitive Flexibility
Applied Biomechanics and Ergonomics Laboratory, University of Mississippi
• The Slippery Slope: Sensory Contribution to Neural Control of Movement During Slip Event
• Swing Kinematics Among Collegiate Baseball and Softball Athletes in Different Strike Zones
• The Effect of Repeated Motor Control Testing on Reaction Time During Balance Perturbations
• Biomechanics of Slips in Alternative Footwear
Neuromechanics Laboratory, Mississippi State University • Cognition, Standing Surface, and Fatigue Effects on Balance
• Biomechanics of Slips in Military Footwear Funding: National Institute for Occupational Safety and Health (NIOSH)
• Impact of Military Footwear on Balance and Ankle Stability
Funding: Mississippi State Cross College Grant
Center for Biomedical Research Excellence in Natural Products Neuroscience, University of Mississippi
• Isolation and Comparison of Active Nelumbo nucifera Constituents Among Different Flowers for the Study of Opioid-like Effects
•
RESEARCH COLLBRATIONS
• Department of Biomedical Engineering, University of Mississippi • Department of Kinesiology, Mississippi State University • Department of Kinesiology and Health Promotion, Troy University • Department of Health Sciences and Kinesiology, Georgia Southern University • Halo Neuroscience • Muse

103
TEACHING CURRICULUM
University of Mississippi
ES 446- Biomechanics of Human Movement (Fall 2018, Summer 2019) ES 447- Biomechanics of Human Movement Laboratory (Spring 2017, 2018,2019; Fall 2017, 2018) ES 394- Therapeutic Exercise and Fitness (Fall 2017; Spring 2019) ES 338- Motor Learning and Control (Summer 2017, 2018) HP 203- CPR and First Aid (Summer 2017) EL 105- Self Defense (Spring 2017; Fall 2017) EL 124- Racquetball (Fall 2016) EL 151- Weight Lifting (Fall 2016) Mississippi State University EP 3304- Exercise Physiology Laboratory (Fall 2014, 2015; Spring 2015, 2016; Summer 2015) PE 1151- Strength Training (Fall 2014) PE 1061- Walking and Jogging (Spring 2015) PE 1051- Beginning Karate (Spring 2015, 2016) INVITED GRADUTE LECTURES
1. University of Mississippi, EDRS 701, Educational Statistics II “One-Way ANOVA” September 6th, 2018
2. University of Mississippi, EDRS 701, Educational Statistics II “Repeated Measures ANOVA” March 21st, 2019
INVITED UNDERGRADUTE LECTURES
1. University of Mississippi, ES 344 Aging in the 21st Century “Aging Effects on Motor and Sensory Systems” March 5th – April 3rd, 2018
2. University of Mississippi, ES 344 Aging in the 21st Century
“Aging Effects on the Visual System” October 17th -19th, 2017
3. Mississippi State, EP 4703 Neural Control of Human Movement
“Cerebral Cortex” October 12th -14th, 2015
4. Mississippi State, EP 4703 Neural Control of Human Movement
“Introduction to Surface Electromyography” May 14th, 2015
5. Mississippi State, PE 3313 Sport Physiology
“Neural Anatomy and Physiology” May 13th, 2015

104
PROFESSIONAL AWARDS AND RECOGNTIONS
1. 1st Place Poster Presentation, Neuroscience Showcase, University of Mississippi (2019) 2. Honorable Mention, Poster Presentation, Neuroscience Showcase, University of
Mississippi (2018) 3. 3rd Place Podium Competition, Graduate Research Symposium, University of Mississippi
(2018) 4. Graduate Student Research Award, Mississippi State University (2016) 5. 3rd Place Poster Presentation - Annual College of Education Research Forum,
Mississippi State (2016)
CURRENT PROFESSIONAL AFFLATIONS
1. Society for Neuroscience- Student member 2. American Society of Biomechanics- Student Member 3. Southeastern American College of Sports Medicine Chapter- Student Member 4. National Strength and Conditioning Association- Student Member 5. American Red Cross
PROFESSIONAL SERVICE
1. Honor Student Mentorship • Rosemary Marquez (2018)
2. Manuscript Reviewer • Footwear Science • BMC Military Medical Research
3. Mid-South Biomechanics Conference Session Moderator (2018) 4. Graduate Student Council Senator (UM: 2017, 2018) 5. Neuroscience Journal and Blog Club Contributor (UM)
• https://brainstorm267.wordpress.com/ 6. Undergraduate Academic Advisor (UM) (Summer 2017; Fall 2017, 2018;Spring 2018) 7. Brain Awareness Week Organizer (UM) (2017, 2018) 8. National Biomechanics Day Organizer (UM) (2017) 9. 3-Minute Thesis Participant (MSSTATE, UM) (2015, 2017) 10. Graduate School Research Symposium Participant (MSSTATE, UM) 2014-2018
PEER-REVIEWED JOURNAL PUBLICATIONS
1. Hill CM, DeBusk H, Simpson JD, Garner, JC, Knight AC, Wade C Chander H. The Interaction of Cognitive Interference, Standing Surface, and Fatigue on Lower Extremity Muscle Activity. Saftey and Health at Work. (In-Press)
2. Sullivan N., Schaffer H., Hill CM, Del Arco A. Time-Dependent Changes In Cognitive Flexibility Performance During Intermittent Social Stress: Relevance For Motivation And Reward-Seeking Behavior. Brain and Behavioral Research. (In-Press)

105
3. Donahue, PT, Beiser, E, Wilson, SJ, Hill, CM, Garner, JC. The relationship between measures of lower body power and baseball pitching velocity in professional baseball pitchers. Journal of Trainology. (In-Press).
4. Hill CM, Wilson SJ, Mouser JG, Chander, Donahue PT, Chander H., (2018). Motor Adaptation during Repeated Motor Control Testing: Attenuated Muscle Activation Without Changes in Response Latencies. Journal of Electromyography and Kinesiology.
41, 96-102. 5. DeBusk H, Chander H, Hill CM, Knight AC. (2018) Impact of High Top Military Type
Boots on Static and Dynamic Balance. International Journal of Ergonomics. 64, 51-58. 6. Chander H, Knight AC, Garner JC, Wade C, Carruth D, DeBusk H & Hill CM. (2018)
Impact Of Military Type Footwear And Workload On Heel Contact Dynamics During Slip Events. International Journal of Ergonomics, 66, 18-25.
7. Hill CM, Chander H, DeBusk H, Knight AC. (2017) Influence of Military Type Workload and Footwear on Muscle Exertion During Static Standing. Footwear Science. 9(3), 169-180.
8. Simpson JD, DeBusk H, Hill CM, Knight AC, & Chander H. (2017) The Role of Military Footwear and Workload on Ground Reaction Forces during a Simulated Lateral Ankle Sprain Mechanism. The Foot. 34, 53-57.
9. Wilson SJ, Williams CC, Gdovin JR, Eason JD, Hill CM, Luginsland LL, Chander H, Wade C, Garner JC. (2017) The Influence of an Acute Bout of Whole Body Vibration on Human Postural Control Responses. Journal of Motor Behavior. 1-8.
10. Kumarihamy M, León F, Pettaway S, Wilson L, Lambert JA, Wang M, Hill CM,
McCurdy CR, ElSohly MA, Cutler SJ, Muhammad I. (2015) In Vitro Opioid Receptor Affinity And In Vivo Behavioral Studies Of Nelumbo Nucifera Flower. Journal of
Ethnopharmacology, 174, 57-65.
Manuscripts in Review
1. Wilson SJ, Donahue PT, Williams CC, Hill CM, Waddell DE, Loenneke JP, Wade C, & Garner JC. Lower Extremity Corrective Events During The Slip Recovery Response Between Slip-Induced Falls and Recoveries. Journal of Biomechanics. (In-Review).
2. Wilson SJ, Donahue PT, Williams CC, Hill CM, Waddell DE, Bentley JP, Bass MA, & Garner JC. Postural Control Measures May Provide Insight Into the Importance of Sensory Integration and Motor Control Strategies Used During Slip Recovery. Gait &
Posture. (In-Review). 3. Wilson SJ, Donahue PT, Williams CC, Hill CM, Chander H, Garner JC, & Waddell DE.
Is it all in your Head? The Possible Role of Corticospinal Demand in Slip Recovery Responses. Journal of Neurophysiology. (In-Review).
4. Williams CC, Wilson SJ, Donahue PT, Hill CM, Luginsland LL, Gdovin JR Wade C, & Garner JC. Examining Changes In Bat Swing Kinematics In Different Areas Of The Strike Zone In Collegiate Baseball Players. Journal of Strength and Conditioning
Research. (In-Review)

106
PEER-REVIEWED CONFERCENCE PRECEDINGS
1. Wilson SJ, Donahue PT, Hill CM, Williams CC, Simpson JD, Chander H, Wade C, Wilhoite SV, Neitz K, Haynes, A, Pascal J, Lewis K, Crawford A, Munkasy B, Li L, Garner JC, & Waddell DE. Novel Evidence of Cortical Control in Severe Slip Responses. American College of Sports Medicine (ACSM) Annual Meeting, Orlando, FL. May 28 – June 1, 2019.
2. Crawford A, Donahue PT, Hill CM, Williams CC, Simpson JD, Chander H, Wade C, Wilhoite SV, Neitz K, Pascal J, Haynes A, Lewis K, Johnson A, Munkasy B, Li L, Garner JC, Waddell DE & Wilson SJ. Examination of the Influence of Lead Leg Recovery Mechanics on Slip Induced Outcomes. American College of Sports Medicine (ACSM) Annual Meeting, Orlando, FL. May 28 – June 1, 2019.
3. Haynes A, Donahue PT, Hill CM, Williams CC, Simpson JD, Chander H, Wade C, Johnson A, Wilsoite SV, Neitz K, Lewis K, Pascal J, Crawford, Munkasy B, Li L, Garner JC, Waddell DE, & Wilson SJ. The Effects of Postural Control Measures on Induced Slip Outcomes. American College of Sports Medicine (ACSM) Annual Meeting, Orlando, FL. May 28 – June 1, 2019.
4. Pascal J Donahue PT, Hill CM, Williams CC, Simpson JD, Chander H, Wade C, Lewis K, Wilhoite SV, Neitz K, Haynes A, Johnson A, Crawford A, Munkasy B, Li L, Garner JC, Waddell DE & Wilson SJ. Lead Leg Corrective Responses to Varying Slip Severity. American College of Sports Medicine (ACSM) Annual Meeting, Orlando, FL. May 28 – June 1, 2019.
5. Donahue PT, Hill CM, Walker K, Wilson SJ, Wade C., Variations in Kinematics During Lumbar Flexion/Extension Bending: A Comparison of Bending Techniques. Congress of Neurological Surgeons 2018 Annual Meeting, Houston, TX, USA. October 6-10, 2018.
6. Hill CM, Wilson SJ, Mouser JG, Donahue PT, Williams CC, Chander H. Repeated Motor Control Testing Decreases Co-Contraction Index in Healthy Young Adults. 42nd American Society of Biomechanics (ASB) Annual Meeting, Rochester, MN, USA. August 8-11 2018.
7. Wilson SJ, Garner JC, Donahue PT, Williams CC, Hill CM, Waddell DE. The Possible Role of Corticospinal Pathway Demand in Slip Recovery Responses. 50th Biomedical Engineering Society (BMES), Atlanta, GA, USA. October 17-20, 2018.
8. Wilson SJ, Donahue PT, Williams CC, Hill CM, Luginsland LA, Waddell DE, Chander H, Garner JC. Lead Leg Recovery Responses Between Individuals Who Fall and Recover After an Unexpected Slip. 42nd American Society of Biomechanics (ASB) Annual Meeting, Rochester, MN, USA. August 8-11 2018.
9. Garner JC, Donahue PT, Williams CC, Hill CM, Luginsland LA, Waddell DE, Chander H, Wilson SJ. Postural Control Measures Between Individuals Who Fall and Recover After an Unexpected Slip. 42ndAmerican Society of Biomechanics (ASB) Annual Meeting, Rochester, MN, USA. August 8-11 2018.
10. Hill CM, DeBusk H, Wilson SJ, Gdovin JR, Williams CC, Luginsland LA, Knight AC, Chander H. Influence of Military Type Footwear and Workload on Co-Contraction Index in Unilateral Static Balance. Abstracted: American Society of Biomechanics (ASB) Annual Meeting, Boulder, CO. August 8-11 2017.
11. Wilson SJ, Chander H, Knight AC, Garner JC, Wade C, Luginsland L, Hill CM, Gdovin J, DeBusk H & Carruth D. Lower extremity kinematics in military footwear during slip events. Proceedings of the American Society of Biomechanics Annual Conference, Boulder CO, August 8-11, 2017.
107
12. Chander H, Knight AC, Garner JC, Wade C, DeBusk H, Wilson SJ, Gdovin JR, Hill CM,
& Carruth D. Muscle Activity During Postural Stability Tasks: Role Of Military Footwear And Workload. Abstracted: American Society of Biomechanics (ASB) Annual Meeting, Boulder, CO. August 8-11 2017.
13. Simpson JD, DeBusk H, Hill CM, Miller B, Knight AC,& Chander H. Effect of Military Footwear Type on Ankle Stability Following a Simulate Military Workload. Abstracted: American Society of Biomechanics (ASB) Annual Meeting, Boulder, CO. August 8-11 2017.
14. Luginsland LA, Chander H, Wade C, Garner JC, Eason JD, Wilson SJ, Gdovin JR, Hill
CM, Knight AC, Carruth D. Influence of Occupational Footwear on Muscle Activity during a Simulated Extended Time-Duration. American Society of Biomechanics (ASB) Annual Meeting, Boulder, CO. August 8-11 2017.
15. Hill CM, DeBusk H, Stewart T, Miller B, Simpson JD, Knight AC,& Chander H. Impact of Military Type Footwear and Workload on Co-Contraction Index in Static Balance. Abstracted: Proceedings of the American Society of Biomechanics Annual Meeting, Raleigh, NC, Aug 2-5,2016
16. DeBusk H, Chander H, Hill CM, Simpson JD, Miller BL. Impact of Cognitive Interference, Standing Surface and Fatigue on Balance. Proceedings of the American
Society of Biomechanics, Raleigh, NC Aug 2-5 2016 17. Hill CM, Chander H, Morris CE, Wilson SJ, Knight AC, Holmes ME, DeBusk H, Wade
C, & Garner JC. Impact of Low Intensity Workload on Muscle Exertion in Alternative Footwear. ACSM 62nd Annual Meeting, San Diego, CA, May 26-30, 2015.
18. DeBusk H, Chander H, Morris CE, Wilson SJ, Knight AC, Holmes ME, Hill CM, Wade C & Garner JC. The Effect of Commonly Used Alternative Footwear on Balance. ACSM 62nd Annual Meeting, San Diego, CA, May 26-30, 2015.
PEER-REVIEWED CONFERCENCE PRESENTATIONS
1. Hill CM, Wilson SJ, Mouser JG, Williams CC, Luginsland LA, Donahue PT, Chander H. Impact Of Repeated Balance Perturbations On Lower Extremity Mean Muscle Activity. Mid-south Biomechanics Conference, Memphis TN. February 22-23 2018. (ORAL)
2. Hill CM, Wilson SJ, Mouser JG, Williams CC, Luginsland LA, Donahue PT, Chander H. Impact Of Repeated Balance Perturbations On Lower Extremity Mean Muscle Activity. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, TN. February 15-17 2018. (ORAL)
3. Wilson SJ, Hill CM, Mouser JG, Williams CC, Luginsland LA, Donahue PT, Garner JC, Chander H. Can Postural Responses Be Learned? Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, TN. February 15-17 2018.
4. Garner JC, Hill CM, Wilson SJ, Mouser JG, Williams CC, Luginsland LA, Donahue PT, Chander H. Influence of Repeated Motor Control Tests on Proximal Lower Extremity Musculature Activation. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, TN. February 15-17 2018.

108
5. Donahue PT, Wilson SJ, Williams CC, Hill CM, Luginsland LA, and Garner JC. Positional Differences In Peak Power During Countermovement Vertical Jump In Professional Baseball Pitchers. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, TN. February 15-17 2018.
6. Luginsland LA, Williams CC, Gdovin JR, Wilson SJ, Donahue PT, Hill CM, Eason JD, Yarbrough AL, Wade C, Garner JC. Changes in Bat Angle at Maximal Velocity in Collegiate Softball Players. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, TN. February 15-17 2018.
7. Turner AJ, Hill CM, DeBusk H, Chander H, Knight AC, Wilson SJ, Williams CC & Luginsland LL. Impact of military type footwear and workload on percent muscle activation in unilateral static balance. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, TN. February 15-17 2018.
8. Williams, CC; Gdovin JR; Wilson SJ; Hill CM; Donahue, PT; Luginsland LA; Eason JD; Yarbrough AL; Wade C; Garner JC. Examining changes in bat angle at ball contact in collegiate softball players over a fall softball season. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Chattanooga, Tennessee February 15-17th
9. Hill CM, DeBusk H, Stewart T, Simpson JD, Miller BL, Knight AC, Chander H. Influence of Military type footwear and workload on percent muscle activation in static balance. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18, 2017.
10. Luginsland LA, Wilson SJ, Gdovin JR, Williams CC, Eason JD, Hoke E, Hill CM, Donahue PT, Chander H, Wade C, Garner JC. The acute influence of golf specific footwear on balance equilibrium scores. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18, 2017.
11. Hoke EL, Wilson SJ, Gdovin JR, Williams CC, Eason JD, Luginsland LA, Hill CM, Donahue PT, Chander H, Wade C, Garner JC. Acute effects of golf specific footwear on bilateral balance. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18, 2017.
12. Eason JD, Wilson SJ, Gdovin JR, Williams CC, Hoke EL, Luginsland LA, Hill CM, Donahue PT, Chander H, Wade C, Garner JC. The effects of golf shoe type on balance equilibrium scores. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18, 2017.
13. Williams CC, Wilson SJ, Gdovin JR, Eason JD, Hoke EL, Luginsland LA, Hill CM, Donahue PT, Davis RE, Chander H, Wade C, Garner JC. The influence of golf specific footwear on whole body reaction times. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18 2017.
14. Gdovin JR, Wilson SJ, Williams CC, Eason JD, Hoke EL, Luginsland LA, Hill CM, Donahue PT, Davis RE, Chander H, Wade C, Garner JC. The acute effects of golf specific footwear on reaction time latencies. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18 2017.
15. Turner A, Debusk H, Lowell R, Hill CM, Miller BL, Simpson JD, Knight AC, Chander H. Effects of Military Type Footwear and Workload on Unilateral Static Balance. Southeast Chapter of the American College of Sports Medicine (SEACSM) Annual Meeting, Greenville, SC. February 16-18 2017.

109
16. Hill CM, DeBusk H, Stewart T, Simpson JD, Miller BL, Knight AC, Chander H. Impact Of Military Type Footwear And Workload On Muscle Activity In Static Balance. SEASCM Annual Meeting, Greenville, SC February 18-20, 2016.
17. Simpson JD, Hill CM, DeBusk H, Stewart T, Miller BL, Knight AC, & Chander H. Influence Of Military Boot Types And Physiological Workload On Lower Extremity Muscle Activation. SEASCM Annual Meeting, Greenville, SC February 18-20, 2016.
18. DeBusk H, Hill CM, Stewart T, Miller BL, Simpson JD, Knight AC, & Chander H. Effects Of Military Type Footwear And Workload On Static Balance, SEASCM Annual Meeting, Greenville, SC February 18-20, 2016.
19. Miller BL, DeBusk H, Hill CM, Stewart T, Simpson JD, Knight AC, Chander H. Impact Of Military Boot Type And Physical Work Load On Dynamic Balance, SEASCM Annual Meeting, Greenville, SC February 18-20, 2016.
20. Chander H , Garner JC, Wade C, Knight AC, DeBusk H, & Hill CM. Lower Extermity Muscle Activity in Alternative Footwear During Slip Events: A Preliminary Analysis. SEASCM Annual Meeting, Greenville, SC February 18-20, 2016.
21. Hill CM, Chander H, Morris CE, Wilson SJ, Knight AC, Holmes ME, DeBusk H, Wade C, & Garner JC. Impact of Low Intensity Workload on Muscle Exertion in Alternative Footwear. SEACSM Annual Meeting, Jacksonville, FL, February 12-14, 2015.
22. DeBusk H, Chander H, Morris CE, Wilson SJ, Knight AC, Holmes ME, Hill CM, Wade C & Garner JC. The Effect of Commonly Used Alternative Footwear on Balance. SEACSM Annual Meeting, Jacksonville, FL, February 12-14, 2015.




















