The Movement of Sensors within Cluster in WSN is Elliptic in Nature
6
20 12 2nd IEEE International Conference on Parallel,Distributed and Grid Computing The Movement of Sensors within Cluster in WSN is Elliptic in Nature Raju Duttat, Shishir Gupta\ Mukul Kumar Das3 l Dept of Mathematics, Narula Institute of Technology, Kolkata 700109,West Bengal, India rdutta80@gmail,com 2 Dept of Mathematics, Indian School of Mines, Dhanbad 826004, lharkhand,India shishir_ism@yahoo,com 3 Dept of Electronics Engineering, Indian School of Mines, Dhanbad 826004, lharkhand,India mkdasl2@gmail.com Abstract- A wireless sensor network (WSN) has to maintain a desirable sensing area of coverage and periodically report sensed data to the administrative center (i.e., base station, router etc.). Then the coverage area of the movement of sensors and lifetime are two important problems in a WSN due to constraint of limited battery energy. Sensors are usually deployed randomly in coverage area of interest and therefore the sensor tracking become one of the biggest challenge in Wireless Sensor Networks (WSNs). Many works done to track the sensor nodes in WSNs and all previous theoretical analyses on the coverage area and lifetime are primarily focused on the random uniform distribution of sensors. Here is depicting a real analysis in WSNs, In this paper, we try to fmd out the coverage area of sensors and best of our knowledge we rst provide a mathematical and analytical amework for the coverage area of the deployment sensor nodes in a WSN that follows a multivariable normal distribution or Gaussian distribution. The multivariate normal distribution is oſten used to describe correlated real-valued random variables each of which clusters around a mean value which gives the monitored region. We determine the randomly deployed sensor nodes, follows an Elliptic area in wireless sensor network. Keywords- Coverage Area, Elliptical Network, Gaussian Distribution, Lifetime, WSN I. INTRODUCTION A wireless sensor network (WSN) is a collection of wireless sensors that are equipped with wireless radios, deployed in a given domain and the data transmissible information in sensor relationship between nodes and base station is not a factor to be ignored. Recently, a number of efforts om industry and academia have been made for the purpose of effectively deploying the WSN that could satis a variety of applications (e.g., forest re, weather prediction). The power constraint of sensor devices imposes many ndamental design limitations in WSNs, such as coverage and lifetime. The coverage area is to ensure that the collected data om sensors can accurately represent the complete monitored area. The lifetime refer to the ability that the WSN has an effective operating time of collecting data om the entire network domain. For example, the design of a WSN should be targeted to maintain a satisfactory sensing coverage and collect the required sensed data to the base station (BS), with operational period ranging om months to years. Given a network domain, different sensor deployment strategies result in dissimilar network coverage and lifetimes, which are essential design criteria for any WSN. The most effective approach of sensor deployment is to place sensors in a controllable manner so that the maximal network lifetime is achieved. However, this approach may not be technically or practically feasible in terms of deployment efforts, especially for a large WSN. On the other hand, locations of the network domain may not be physically reachable to the network planners because of geographical constraints. Here the result in WSN om random sensor deployment strategy can conform to Gaussian distribution. To be specic, if all sensors are deployed uniformly and randomly, the resulting sensor deployment conforms to Poisson distribution. On the other hand, we determine if all sensors are to be deployed to protect a certain base station the resulting sensor network conforms to Gaussian distribution. The node density is statistically the same everywhere in a WSN following Poisson distribution, however, more sensors are deployed in areas that are closer to the deployment center in a WSN following Gaussian distribution [1]. A few work explores the problem in Gaussian distributed WSNs [1] under certain application scenarios. One solution to address nonunifo dissipation of energy is to deploy more sensors close to the BS so as to combat against excessive load near the BS. Besides random deployment, another promising appoach is to disperse sensors according to Gaussian distribution [2], with BS as the center point 978-1-4673-2925-5/12/$31.00 ©2012 IEEE 521
-
Upload
ismdhanbad -
Category
Documents
-
view
2 -
download
0
Transcript of The Movement of Sensors within Cluster in WSN is Elliptic in Nature

20 12 2nd IEEE International Conference on Parallel, Distributed and Grid Computing
The Movement of Sensors within Cluster in WSN is Elliptic
in Nature
Raju Duttat, Shishir Gupta\ Mukul Kumar Das3
lDept of Mathematics, Narula Institute of Technology, Kolkata 700109,West Bengal, India rdutta80@gmail,com
2Dept of Mathematics, Indian School of Mines, Dhanbad 826004, lharkhand,India shishir _ism@yahoo,com
3Dept of Electronics Engineering, Indian School of Mines, Dhanbad 826004, lharkhand,India [email protected]
Abstract- A wireless sensor network (WSN) has to maintain a desirable sensing area of coverage and periodically report sensed data to the administrative center (i.e., base station, router etc.). Then the coverage area of the movement of sensors and lifetime are two important problems in a WSN due to constraint of limited battery energy. Sensors are usually deployed randomly in coverage area of interest and therefore the sensor tracking become one of the biggest challenge in Wireless Sensor Networks (WSNs). Many works done to track the sensor nodes in WSNs and all previous theoretical analyses on the coverage area and lifetime are primarily focused on the random uniform distribution of sensors. Here is depicting a real analysis in WSNs, In this paper, we try to fmd out the coverage area of sensors and best of our knowledge we fIrst provide a mathematical and analytical framework for the coverage area of the deployment sensor nodes in a WSN that follows a multivariable normal distribution or Gaussian distribution. The multivariate normal distribution is often used to describe correlated real-valued random variables each of which clusters around a mean value which gives the monitored region. We determine the randomly deployed sensor nodes, follows an Elliptic area in wireless sensor network.
Keywords- Coverage Area, Elliptical Network, Gaussian Distribution, Lifetime, WSN
I. INTRODUCTION
A wireless sensor network (WSN) is a collection of wireless sensors that are equipped with wireless radios, deployed in a given domain and the data transmissible information in sensor relationship between nodes and base station is not a factor to be ignored. Recently, a number of efforts from industry and academia have been made for the purpose of effectively deploying the WSN that could satisfy a variety of applications (e.g., forest fIre, weather prediction). The power constraint of sensor devices imposes many fundamental design limitations in WSNs, such as coverage and lifetime. The coverage area is to ensure that the collected data from sensors can accurately represent the complete monitored area. The lifetime refer to the
ability that the WSN has an effective operating time of collecting data from the entire network domain. For example, the design of a WSN should be targeted to maintain a satisfactory sensing coverage and collect the required sensed data to the base station (BS), with operational period ranging from months to years. Given a network domain, different sensor deployment strategies result in dissimilar network coverage and lifetimes, which are essential design criteria for any WSN. The most effective approach of sensor deployment is to place sensors in a controllable manner so that the maximal network lifetime is achieved. However, this approach may not be technically or practically feasible in terms of deployment efforts, especially for a large WSN. On the other hand, locations of the network domain may not be physically reachable to the network planners because of geographical constraints. Here the result in WSN from random sensor deployment strategy can conform to Gaussian distribution. To be specifIc, if all sensors are deployed uniformly and randomly, the resulting sensor deployment conforms to Poisson distribution. On the other hand, we determine if all sensors are to be deployed to protect a certain base station the resulting sensor network conforms to Gaussian distribution. The node density is statistically the same everywhere in a WSN following Poisson distribution, however, more sensors are deployed in areas that are closer to the deployment center in a WSN following Gaussian distribution [1]. A few work explores the problem in Gaussian distributed WSNs [1] under certain application scenarios. One solution to address nonuniform dissipation of energy is to deploy more sensors close to the BS so as to combat against excessive load near the BS. Besides random deployment, another promising appoach is to disperse sensors according to Gaussian distribution [2], with BS as the center point
978-1-4673-2925-5/12/$31.00 ©2012 IEEE 521

20 12 2nd IEEE International Conference on Parallel, Distributed and Grid Computing
II. RELATED WORK
Now a days sensor network has become a most popular research topic because of power constraint of sensor devices imposes many fundamental design limitations in WSNs, such as coverage and lifetime. Many researcher applied different strategies to track the sensor in WSN in different ways. In this paper [3] they applied fuzzy application for tracking heterogeneous sensor node. All other previous theoretical analysis of the WSN coverage and lifetime is focused on uniformly deployed sensors. Considering the application scenario of periodic data collection, it has been shown that the lifetime of a uniformly deployed WSN is limited by the sensors at the first-hop from the BS, which is also known as the "energy hole" problem [4] and is characterized by a mathematical model by Li and Mohapatra [4]. They have also investigated several approaches to mitigate this problem and inferred that simply increasing the node number cannot prolong the system lifetime under uniformly deployed sensor nodes. The network lifetime can be improved by introducing redundant sensors in the area closer to the BS. Some nonuniform sensor deployment strategies have been proposed. Lian et al. [5] focused on increasing the total data capacity by only considering the energy spent on the data transmission. They found that in a uniformly distributed homogenous WSN with a static sink (i.e., BS), after the lifetime of the network is over, up to 90 percent of the total initial energy remains unused. They proposed a nonuniform sensor distribution strategy by adding more nodes to the heavier energy load area. Their simulation showed that the strategy can increase the total data capacity by an order of magnitude. Wu et a1. [6] also addressed the energy hole problem in WSNs with nonuniform node distribution. They assumed that each sensor generates data for each data collection period, which may not be true for highly dense WSNs. They provided a nonuniform node distribution strategy, which makes the number of nodes increase with geometric proportion from the outer parts to the inner parts of the network. Their simulation results show that when the network lifetime ends, the nodes in the network achieve nearly balanced energy depletion. Zou and Chakrabarty [2] suggested the placement of airdropped sensors as 2D Gaussian distribution without giving any specific results. We argue that an appropriate strategy can be employed when deploying sensors from a plane to have the standard deviation of the Gaussian distribution. Therefore, distribution of sensors could satisfy 2D Gaussian distribution and follows a predefined standard deviation with the center point at the drop point of the helicopter. This enables sensors to have a higher probability to be deployed near the drop point than the uniform deployment. The benefit of it is that this relaxes the energy hole problem and increases the WSN lifetime. To date, most of the research work assumes a WSN following Poisson distribution in analyzing object tracking or intrusion detection [7], [8], [9], [lO], [11]. There are well-known batch techniques for anomaly detection in multidimensional data which use Mahalanobis distance for anomaly detection ([11] and [13]). In particular, the authors of [14] proposed a hyperellipsoidal boundary using Mahalanobis
distance called Data Capture Anomaly Detection (DCAD) to compute a local model of the normal data in WSNs. The model describes dissemination and interaction of periodically sensed data, which are distributed by gossiping without increasing the traffic on the network. The model also allows to control data freshness and to define the best sampling frequency within the coverage area. Moreover, the model is a useful tool to explore the effects of network topology and size. In this paper, we are considered a mathematical model with algorithms to find the locus of deploying sensor node . Many cases have been discussed when data has been delivered by the sensor nodes during the deploying in the sensor network field. To the best of our knowledge, there is no published work of coverage area using Gaussian distribution when considering sensors are deploying in WSN.
III. PROBLEM DEFINITION AND SYSTEM MATHEMATICAL MODEL
The multivariate normal distribution or multivariate Gaussian distribution, is a generalization of the one-dimensional (univariate) normal distribution to higher dimensions. Here we are modeling the system in the WSN to fmd the coverage area of sensors in the network.
The Assumption of the Modelng A random sensor vector x = (x, , X , , .. ., X I ) I is said to have the multivariate normal distribution if it satisfies the following equivalent conditions.
1. Every linear combination of its components Y =a,X, +a, Xl + ................. a" XI is univariate normal distribution. That is, for any constant vector a EO Rk, the random variable Y =a/X has a univariate normal distribution.
2. There exists a random f-sensor vector Z, whose components are independent standard normal random variables, a k-sensor vector fl, and a kxf matrix A, such that X = AZ + Il' Here f is the rank of the covariance matrix � = AA<
We consider a WSN with N randomly deployed sensors in a deployment field. The random deployment strategy conforms to Gaussian distribution in WSN. All sensors are assumed to have the same sensing range and their sensing coverage is assumed to be circular and symmetrical.
Derivation of the Nonlinear Model
Our WSN model includes a deployment model, sensing and connectivity models, and an energy consumption model for
522

20 12 2nd IEEE International Conference on Parallel, Distributed and Grid Computing
sensors. We consider a WSN in a nD plane with N sensors. These sensors are deployed by following nD Gaussian distribution (i.e., normal distribution): The univariate normalizing constant 1 must be changed to a more
(J -J2it general constant that makes the volume under the surface of the multivariate density function unity for any "n". In the multivariate case, probabilities are represented by volume under the surface over regions and it is 1 and
" I ( 2 TC ) 2 II: I' consequently, a n-dimensional normal density for the random vector X=(X"X2, .......... ,xn)l Let us consider the density function as
_l(x -Ill / I-I (x-Ill reX) = C e 2 , - 00 < x j < 00
, - 00 < 11 j < 00 for j = I, .......... . n where C is normalizing constant and x =(x"x2, .,xn)' , fl=(flI ,112,······· . ..J.lny and 2:) 0, the covariance matrix of the multivariate normal distribution is symmetric and positive definite. To compute the normalizing constant we have,
.L 2
Therefore the non singular normal probability density function of the randomly distributed sensor nodes within the cluster is given by
for j= I, .... , n (1)
o elsewhere
where IAI is the determinant of A and fl is called the location parameter. The (X-Il)/ I" (X-Il) is the square of the generalized distance from X to /1. If one component has a much larger variance then another, it will contribute less to the squared distance. Moreover two highly correlated random variables will contribute less then two variables that are nearly uncorrelated.
IV. MODELLING OF THE DEPLOYING SENSOR
Covariance Matrix
If a vector of n possibly correlated random variables is following joint normal distribution, then its probability density function can be expressed in terms of the covariance matrix. A covariance matrix or dispersion matrix is a matrix whose element in the i,j position is the covariance between the i th and
j tit elements of a random sensor vector (that is, of a vector of sensors).
In our study the covanance matrix IS given by I" III Il3 ........ I,,, I" I22 I23 · · · · · · · · 2:211
I=
I", I", I,,3 ........ I"" the covariance matrix whose (i, j) entry is the covariance Ii j = COY (x i ' x J= E l( x i - 11 i ) (x j - 11 j )J where
Ili = E (X,) is the expected value of the ith entry in the vector X. The distinct number of covariance 2:;k (i < k) are contained
in the symmetric variance covariance matrix is n (n - 1 ) . 2
V. COVERAGE AREA AND LIFETIME OF THE SYSTEM
From (1) it should be clear that the paths of X values yielding a constant height for the density are ellipsoids. That is, the multivariate normal density is constant on surface where the square of the distance (X _ IlY I" (X - J.I) is constant. These paths are called constant probability density contour = {all X such that (X-j.1)/I"(X-j.1)=c')= Surface of an ellipsoid centered at f.l. The axes of each ellipsoid of constant density are in the direction of the eigenvector of I-' and their lengths are proportional to reciprocals of the square root of the eigenvalue of 2:-'. These ellipsoids are centered at f.l and have axes ± c� ' where (A, e) is an eigenvalue-eigenvector pair for I . By Spectral decomposition we have (X-Il)/ I:" (X-Il)=fZ;' where z=(z"z" ,z'y and z=A(x-lll, where
A _[� � �JTherefore A2:A' =1
- F,' j):;' . , JC We know that x" 2 is defined as the distribution of the sum
Z ,2 + Z 2
2 + .. . .. + Z " 2 where z"z" .......... ... , z" are independent
N(O, 1) random variable. Therefore we conclude that
(X -11)/ I" (X -11) has a Xn 2
distribution with n degrees of freedom. Now pl(X-Il.)/I"(X-Il)S:c'J is the probability assigned to the ellipsoid (X -fl)' 2:" (X -fl):O:c' by the density N n (fl, I), which assigns probability (1- ex) to the solid ellipsoid
i.e. p[cX-llr I:"(X-Il):o:x"'(a)] = I-a, where Xn2
denotes the upper (lOOa) th percentile of the Xn'distribution. The inverse of
• I this matrix, , is the inverse covariance matrix, also known as the concentration matrix or precision matrix. The elements of the precision matrix have an interpretation in terms of partial correlations and partial variances. The use of the inverse of the covariance matrix (i) standardizes all of the variables and (ii) eliminates the effects of correlation.
VI. OPTIMIZATION OF THE SYSTEM MATHEMATICAL MODEL
523

20 12 2nd IEEE International Conference on Parallel, Distributed and Grid Computing
To optimize the modeled function we can use the concept of partial derivatives because the change in the dependent variable due to unit change in one of the independent variables while keeping constant the effect of all other independent variables. The necessary and sufficient condition for local optimum of unconstrained multivariable function may be describes by using Taylor's series expansion. Let f(X) be a real valued continuous and differentiable function of X in En. Let (X +h)be the point in the neighborhood of X such that h=(hl,h2, .............. h"yand
X+h=(XI +h"X2 +h2, ............... ,Xn +hJ where x=(x1,X2> ,xnl'. Then f(X) can be expressed by Taylor's series expansion as f(X + h)=f(X, + h"X, + h" . . . . . . . . . . . . . . . . . . . . . . . . , x" + h,,)
follows
Lemma 2: A sufficient condition for a stationary point X = X 0 to be an extreme point is that the Hessian matrix
H(X) evaluated at X = X 0 is
(i) negative definite when X 0 is a maximum point
(ii) positive definite when X 0 is a minimum point and
Proof: Since X = X 0 is stationary point then from (3)
f(X 0 + h) - f(X 0 ) = � h T H(X 0 ) h , X = X 0 + 9 h and 0 < 9 < 1 21
Now the sign depends on the sign of quadratic expression �hTH(X )hi.e. on h. 21 0
If X =Xo is local maximum then f(Xo+h)-f(Xo)is negative hence =f(X) + I(�J hi +�II( �J hihj+ terms
.=, (JXi 2 . • =, J=' l (JXi(JX j involving higher power of h In n [ a 2 f ) ,hTH(Xo)h=,II ---- h;hj'X=Xo+9h and 0(9(1
(2) 2. 2. 1=1 J=I ax ; ax j Now we define the gradient vector of f(X) by V' f(X) . The n th since (J'f a'f is the neighborhood of 'if i,j= 1 ,2, . . . . . . ,n (JXi(JXj = (JXj(JXi ' gradient vector whose components are the partial derivatives of f(X) and Hessian matrix H(X) of order n evaluated at point X 0 it will have the same sign for all sufficiently small x + 8 h, where (0 (8 0)· The expression (2) can be written f(X+h)-f(X)=Vf(X)h+�hTH(X)h,X=X+9h and 0(9(1
h in neighborhood of X = Xo + 9 h· The quadratic expression as � h T H(X ) h is negative only if H(X) is negative definite at
(3) 21 0
21
where VII. SIMULATION RESULT a2f(X) a2f(X) ----
Vf(X)=[()f(X), df(
X), ............ '�X
xn)l
T
ax� , aX,ax2 , ...
a2f(X) a2f(X)
if(X) 'ax,ax n a2f(X)
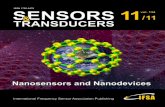
Extensive simulation done by using Matlab for the distribution of sensors in two dimension and higher dimensions. The results of the distribution of sensors are shown in different figures.
and H(X)= Distribu'ion of Sensor in 2D shows Ellip'ic in Nature ax, aX2 u J 3�--�-��--�--�-��-�
Lemma 1: The necessary condition for the continuous function f(X) to have an extreme point at X = Xo is that the gradient
2
V'f(Xo) = 0 � 0 Proof:Putting X = Xo in(3)
f()b+h)-f()b)=Vf()b)h�hTH(4)h, X=Xa+8h and 0(8(1 2! -1
As we know that the term J...- h T H(X 0) h contains the terms of -2 21
order h2 and hence the tenn sign of
_3L-__ L-_�L-__ L-__ L-_�L-_�
_1
_ h T H(X 0 ) h � 0 2 ! as h � 0 thus the -3 -2 -1 o
x1 2 3
f(X 0 + h) - f(X 0 ) depends on h .Hence f(Xo + h) -f(Xo) Fig 1: Distribution of sensors shows elliptic in nature in two
is dimension positive or negative according h is positive or negative, which contradicts our assumption that Xo is an extreme point for V' f(Xo) = 0
524

20 12 2nd IEEE International Conference on Parallel, Distributed and Grid Computing
06
Fig 2: Distribution of sensors shows elliptic in nature in three dimension
0.4
0.3
» 0.2
0.1
o 4
Surlace "ew of Deployment Sensors
-� I I
-- , I
-� I I I -- ,
-- , I I I I_ I - _-I I _ - I
--- :----- : I
2
x2 ·4 -4
I "
·2
x1
Fig 3: Surface view of distribution of sensors
4
·8L---�----�----�----�----�----�--� o 0.02 0.04 0.06 0.08 0.1 0.12 0.14
Fig 4: One sided distribution of sensors shows half elliptic in nature in higher dimension.
CONCLUSION
The problem is mathematically formulated and the detection probability is theoretically derived in the analysis. The coverage area of a non-singular multivariate normal distribution are ellipsoids centered at the mean. The directions of the principal axes of the ellipsoids are given by the eigenvectors of the covariance matrix �. The squared relative lengths of the principal axes are given by the corresponding eigenvalues. The necessary and sufficient condition of extreme point of the coverage area in WSN has been derived which shows Gaussian distribution is an important deployment strategy in WSNs. The lifetime and coverage for Gaussian distribution are two critical problems for such a WSN deployment strategy. In this paper, we have provided theoretical formulations for coverage in a WSN based on Multivariate distribution and numerically shows the coverage area elliptic in nature which shows in figland fig 2. Surface view of sensors are shown in fig 3.We show that the Gaussian distribution can effectively increase the lifetime. The analytical results for higher dimension also shows the nature of distribution is elliptic by fig 4 which could serve as the WSN design guideline. For this purpose, we have developed two algorithms to compute the optimal deployment strategy. From our strategies it can derive w that the optimal deployment strategy can be obtained in a polynomial time complexity. Again the dynamical behavior of the system shows that the system around the mean is locally stable in the monitored region of parametric space and unstable in some other region of parametric space. Our future work includes consideration of a better way of handling of tracking mUltiple elliptical boundaries and comparison the QoS of WSNs following Poisson and Gaussian distributions for object monitoring area. In this work, we are to compare the performance of Gaussian distributed WSNs with Poisson distributed WSNs under various network settings in terms of object tracking.
REFERENCES [1] Wang, Y., Fu, W. and Agrawal, D. P. "Intrusion detection in
Gaussian distributed heterogeneous wireless sensor networks ",
the 6th IEEE International Conference on Mobile Ad Hoc and
Sensor Systems, (2009).
[2] Zou, Y. and Chakrabarty, K., "Uncertainty-Aware and
Coverage-Oriented Deployment for Sensor Networks, " J.
Parallel and Distributed Computing, 64, 788-798, (2004).
[3] Dutta, R., Saha, S., Mukhopadhyay, A.K. "Fuzzy Application for Tracking Heterogeneous Sensor Node to Prolong System lifetime in WSN " Published in the International Journal of Computer Applications, {iRAFIT}(l), 12-18, (2012).
[4] Li, J. and Mohapatra, P. "An Analytical Model for the Energy
Hole Problem in Many-to-One Sensor Networks, " Proc. IEEE
62nd Vehicular Technology Conf. (VTC '05), 4, 2721-2725,
(2005).
525

20 12 2nd IEEE International Conference on Parallel, Distributed and Grid Computing
[5] Lian, J., Naik, K. and Agnew, G.B. "Data Capacity
Improvement of Wireless Sensor Networks Using Non-Uniform
Sensor Distribution, " InCI J. Distributed Sensor Networks, 2(2),
121-145, (2006).
[6] Wu, x., Chen, G. and Das, S.K. "On the Energy Hole Problem
of Nonuniform Node Distribution in Wireless Sensor
Networks, " Proc. Third IEEE InC I Conf. Mobile Ad-hoc and
Sensor Systems (MASS '06), 180-187, (2006).
[7] Dousse, 0., Tavoularis, C. and Thiran, P. "Delay of intrusion
detection in wireless sensor networks, " in Proceedings of the
Seventh ACM International Symposium on Mobile Ad Hoc
Networking and Computing (MobiHoc), (2006).
[8] Ren, S., Li, Q., Wang, H., Chen, X. and Zhang, X. "Design and
analysis of sensing scheduling algorithms under partial coverage
for object detection in sensor networks, " IEEE Transaction on
Parallel and Distributed Systems, 18(3), 334-350, (2007).
[9] Kung, H. and Vlah, D. "Efficient location tracking using sensor
networks, " in IEEE Wireless Communications and Networking
Conference, 3(3), 1954- 1961, (2003).
526
[10] Lin, c.Y., Peng, W.c. and Tseng, Y.C. "Efficient in-network
moving object tracking in wireless sensor networks, " IEEE
Transactions on Mobile Computing, 5(8), 1044-1056, (2006).
[11] Liu, B., Brass, P., Dousse, 0., Nain, P. and Towsley, D.
"Mobility improves coverage of sensor networks, " in
Proceedings of the 6th ACM International Symposium on
Mobile Ad Hoc Networking and Computing (MobiHoc),
(2005).
[12] Hodge, V. and Austin, J. "A survey of outlier detection
methodologies, " Artif. Intel1. Rev., 22(2), 85-126, (2004).
[13] Rajasegarar, S., Leckie, C. and Palaniswami, M. "Anomaly
detection in wireless sensor networks, " IEEE Wireless
Communications, 15(4), 34-40, (2008).
[14] Rajasegarar, S., Bezdek, J. C., Leckie, C. and Palaniswami, M.
"Elliptical anomalies in wireless sensor networks, " ACM
Transactions on Sensor Networks (ACM TOSN), 6(1), (2009).