The development of robotic system for the nuclear power plants
224
KAER I/CM-018/95 sMi A|^a 7im The Development of Robotic System for the Nuclear Power Plants ol#xHR^ SfiMS o|S$l oj^Al^aj 551011 ^Ifl 04^1 A Study on the Manipulation of Teleoperation System Using Redundant Robot ■ay-71* # ^ € 4 ^
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of The development of robotic system for the nuclear power plants
KAER I/CM-018/95
sMi A|^a 7imThe Development of Robotic System for the Nuclear Power Plants
ol#xHR^ SfiMS o|S$loj^Al^aj 551011 ^Ifl 04^1
A Study on the Manipulation of Teleoperation System Using Redundant Robot
■ay-71*
# ^ € 4 ^
DISCLAIMER
Portions of this document may be illegible electronic image products. Images are produced from the best available original document.

4
SIS 7W 44 ^ (4444 "4-n-4-n-^ 5.
lit 4-Hb ^44 44 a4”4) 4^-245. 4 #44 4
1 9 9 6. 7. 2 0.
a4^r*37] 44 : 444471#4
a 4 4 a 4: a a 4
a 4 a : 3z a a
a 4 € : 4 a $
a 4 € : a a a
a 4 € : 4 4 a
a 4 4 : a 4
a 4 4 : 4 a #
a 4 a : 4 a e
a 4 4:4 ■§■ 4
a 4 a : a t§" 4
a 4 € : 4 4 a
a 4 a = a a 2.
-l-

I. *
M- jzMHH^ 4w4 #^T 4 7M 4W4*
D -iH-y- ^7is) 7m
: y-g-y y-y Ais. yyAiiy A]^4|A^
4^1 Tiiy^yiy
2) y-g- y yyy -sy yf: $-§- U^E] ## o]^ Xj-i- ^^3j-y A]^0{| Cfle> y^
3) 4-A-^f-s saLE S47|y &M *)]<>H y-y. y^-
: 8 4t^§ KAEROTy 3%#^ ^y^y# y#
4-3-4-R-s yy^y
4) s.s.WA>-g-A> yyy]o]^# <#-§. yyyx}y #yy ^31
: sai- yjyyy y# yy-yyy 7tj#
II. @?7g#2| =*{ % §2S
37 h0>-a>7 y ysf it°llAi 0170^^7 ^]ti> xj-y o. tij-
A^ jiyy yy^y a)^^ ^ ^y-o] #7{-y%
-3-
4. 5€4 #7] #544 (Nozzle-Dam) 545 444 €
4 SS.E. 4^4 554 45#22 554-Tll 2f42 $15 55
0)4. o]Ei4 €4 45^5 ^^451 4^4^ 553}-s}545 444
4 544 4#7im4 25454 a 7}&n fi£7l- 54 5454
5 4M3. 445 rf^ 44 7] (manipulator) 4 7)14 4 ^44 &
S-E. 7)] 5454 2444, aft €4441 444 &47M4 44M
4 42# 4€455 4 #4 7M°1 €244-.
4*44 5 44445 4 7>4 414#4|# #4 447} 444
4i, 4 4154414 44 # 4444 444 44-
1) 45-4] 54 45714 €4 2# 4^44 5.54 45424 45
3:4-44 '4^922 4542. $14. 244 5# 4545 544 4
55 # 44 44 454 2 414554 44444 5444 441
4445 455 7}x]2 $14. 444 455 454-7] 4^1145 45
44 7l# 4-54 444 544 455 4 5#4 45 45555
244# 5 45 7)144-44 45 557} €544. 44 455 54
4&4^4 447)1445 44, 42 2E]zl 7}^2# 7114:45 34
4 7114414717} #5 554 44442 €44 44. 4^ 7)144471
* 5544 #5 45^4 454 54 4 §11715 #5 444 #45
454| 54 5^194 45 45544 5444 454 4^ 45,
414 -4# 54 545 5454 554-4 7)144 5544 454. 4
44 444 554 45445 #€5 7fl€# €27} $14.
5 454 544 54 4544 45454 4442 44 7}4
455554 4445 545544 414554 55445 414#^
& 5i#4 *5# ##115* 7>i * #* ** #* 45^1#
7lt«ffe 144.
2) 11 41* 5 *44 5114 444 44 4444 55 4144
44. 4 1* 4444 44 #4# 44 5* 14* 44 5.444
444 44 #4* 57] 41*4 44 #4444 444 44# 1#
4 #4 &4. 444 4h# 44# 444# 4# 414. 44 4#
4 #445 #4 44 44# #444 4*11 44 #4 15#
4## 47f4554 4444 44 444 #14 * &* 444 5
4* 54# * #4. #, 54* 44 4444 #444 444 #*
#554 45#4 54* #1 *7> #* 444. * ##1 *4#
44 44 44 454 7]*# 4* #4 555 4*11 #44 4
* 444# *5.4#* 7]] #4# 44 4. 44 *5.1** 44 44 #4444 44 71-4 4* 44* 14 414 4*4*45 4*4 4 #7> #7] 4*4 #54 1544
3) 141 1154 #7l#/g7]# 4,#4 *1 4-1* 15114*5557} 44#, 1144, 4##4 *41 ## #144 44 #4* **44 *5*45 14# 141 44* #« 14 5#14.
44# jl**5* 1414I4* 4*4*5 5551 4-*4 *41
44. 44# 4*4*5 555* 54155 4*44 144* #1
1 4*4*5 4*41# #5 44 &#!* 414 #54 #4 41 144*1. 341544* 241544 7fl#l #54#! 4*# 7lj 145 7^1*544 84*55 #11 5## 41* 555
KAEROTCKorea Atomic Energy Research Institute Robot) 1 4*4
*5* **# #*44 5#1 *#* 1# #11 15* #5 44
-5-

4###* sss4 #4#4 44 4514## 4#6)| 4*^4 31
Ml- ###* 444.4) #4* ifiE 4^# 7M°1] 444* **M 4444 #444 *
#4 ^4* M#4. 4*4ss* *# s#*sss 1 4
*4* #44 44-4-8- 4##4 #4#4 1* ^^4^ #44
*#, *M 1* #s#44 *44 4-S. 4-444 Ml- 4**s
4 **€ * 44. 4 4*44* €44 #4*44 44# *4*
44-4 ***4- 41447} 45. 4-7144 isj-t 41-4 M
4^- 444(Corporate Image)* %4# * 4*# 444 4# 4*
#4** #4. 4* 4414 4*34444 4*4#4 444 14s
144 444 44(guidelines)* *#*s 444 4##* ;!)## 4 4s# #4.
in. ti^TlSSI MIS g B?|
1) 44 4*7} 444 ## 441S, 3 44 4# 7)144(3 state feedback
controUer)# 4*-# *4 IS 4444 4MM4 44#4 >114,4* Til4,7}*s 7114*4 444 4-4-4 *-4*4o) 4^^ 44^ 7}
* 4-4-4-51 1*4 4 (#14 4- #*4)44-4 4# *-#*44 44-*4##4s 44***4 37}x) 7)14* *44* 44* 44#**
414 444-. 444#* *4*4 **# 44* *#** *4 44 41 4 * (knowledge base)* 7)14*4 (gain tuning)* €#
44 7)14 *17)( fuzzy gain tuner)* 47)1*44. 44# 44 7)14
— 6-
54 7) 4 4** 4847) 44 41# *4484. 14 Tjjol ^7]
* 37]} *7)-4 7]## #445# 44484- 44 7)** #H45444 4* 4## 4 3*3 5\ 3 *4 44 54 3*3Q Aj-EfloflA) 3 44 *4 4441 7)) 8 4 (gain set)-#- 2)2) 7)18455 #
54 *4 414 yy-4 y-g-sH 44 8S4 *4* 8* * 8*
44418* *44* -^^0 7]-o. it^xi ^ ym4A#
7))8* # ^4-0]] 4*JfE) ##* ## ^:J7 iq-S. -rl # °1] A) 0]D| tf
*8 #45 *4 fee ##4 3 y-w 4* 447)18#
184. 3)7)4101 7)0) 0) y*H 4*4 Aj^g- 4 8 #7) 448 4
7)7)) 88 o>y 844 4)0] XJ14- #31 44 4)0] /jio^ #ls}) 7}*
44* 182)0.5 584. * 84) 4*4 1## 54 448 88 4*4 444* 4# 44* A)^0)1 <#^0.5. ^37 31 444442)7)7)14#- 4-47)-^ 4-4* 44444-.
2) #44a 4-4 *41 44 AjiA-)5.ti.Ei 884* 4a* 4*44 4-
*7)4 A)Z| ^]A) 3)cm 7)*# 7>4* 44 SIS #^84 4*
4)44* 4-jie)** 7M444-. 4 4584 4)4 las)#* 5#
4)4, *# 4)4, ## 4)45. 4*444. 4#* 44 *44 44*
*44 4-*# * 84 as) a 7))#4 44 555 458* 4*44 *4* 4858, 3 141- *4#55# 488 las) #4 44#
7)5. 8H4-84. 88*45*e) 7)#4 4*4 4* 4*44 54#
* §1* 48# *4# 5.1# * 4** 1*484.
3) 84-*55 444 KAER0T4 4*4*5-* 5## 7)444 #4*
44- 2445°)) 4144 154#o))A) working set* ## 44* 4)7)1 445 7}*4i- as)* * 85# 7))444. as)a o)# o)^A) a
-7-
#1 #44 #4 #4 MM# #444 3#4## 44W# #
143# #%4. 44 #444 443 #-#44 4 #4## SIM#
4% 44444 4#%# 14# #41 n#^# #-<tiW.
4) 4 4#1 3711 S11.4 4# 444 7%##- 4 4 7] 44-0] 7lj#al
#7>4 4#33 #44^4-. &# 44-4 4## 144, #4 ^ &
#, ##44- 1# 4#4 444- 144, 4*14 #4 444 #44 44% 3# jz.4%4 4#4#34, 4% 3334- 4444 #44 444 41# #14. 3334 444 ;H#44# 444 3l#4 44, 34 4444 4# 44, 44444 #444, 4#4 44 #
44444 44, 344 33 7%# ^ 4444 44# 444 4#4 44. 444 444# 444 1#, 44444 #4, 44444 4 7fl, 44444 4 443 44444. 3 443 #3^in. #4% 3 1# 4# #441 s^#7> 434 'A'44 44444 434# 4 # ’B‘44 4#4434, 'A'44 ##44433 44, 4#4 444.
IV. S^TIH M
1) 44 44444# 1#% #4 43 4444 431# #444 43 1#44 #3 ##4 #4 43134 4% 4344434- 44:44 444 #44 ## ##%%3 13#4 #4# 1 4## #4#4 444 %## 4% ##1# #4# # 444.
#44 144444 4 44 #4 «7> 431 -g-44 44# 4#
#44 7>4 #1# 444 4#443 4# #44 431 #4# 3
-8-
-Q. 37>x] 44 ## #44# #£-7} 44# ## # ##4.
4#444(##4,244)# #44# 4444 ##44 4#444
444 4471140] n}## # ^ ##2 44 t)]# 2# 44 44#
4##144 44# 2## # ## 4## ^-7}# 12## 4444
4. 4-714 ##7} 44# #4-4 ^^4 444-4 444 #24 #4
7}^27)1## #### 44 7)14 244# #4442 #44 44
44 2444 44-4#4 44 ### #44 2 ### ### 44
4## 44 444423.4 #4### ## #7} 444.
2) 44 44# 2 ### # 4444 #444 2444 444
4#4# 22 4-444 44 44 4-44 444 44A<M1 444#
4# #44 24# 4444 4 # #4. 4 #444# #44 #2
4 4# 44# 44 #4* 4 #44 4#47} 444414 44# 4
## 24* 244# 42^4 2 44 ### 7))#-4#4.
3) 84-#2 KAER0T4 2 4#4-#2* 4#*114 2#4 ##4 44 #4
###4# #444 244## 4444# ##42# f#4. 24
2 ADAMS 2#4/4444# 2f# 4 #6114 4^#4# 251)4#
23. #442, 0)144144# #4, 222 424 #44# ##4#
4. 4 4444 24#2oiH 44-1 #24## 7))#S4. ##),
working set# #4# #4# 7))#44 #4 #2B)#4 #44# #
#4. #< 7}#4# 24# # #2# #4«D4, 4 ##444 #4
##4 #4# 4114-2 44 ##4 #44# 24 ##4t)1 4# 4
o) 7}##14. 44 #444 4142 44-414 44414# 44 #4
41 444# 444-7} 7}## #24## 4# 344-2 2#4 #4-5}
# ### #41 4#4 #2B]#°1 2444# 4#3&4.
-9-
4) # 3444# #443 #rfc4■3413?! -8-^ 444 &#* 4&
s. #4 44 4 #3. ##3# 444 #44 ## iiLEf 443#
$!#, ^147] 44344 si^^l 434* ##44 Ms ####
s.4, sss^f 44444 ##44 44444# S4434. 444
44# #4 4-8-44 #444 4b^]o]^ 444 #4444. #4
4## 444 #4#4# 4444# #44 4444 3e#4 #4
4## #$!#, 5.S.E4 4711 a# 4-444 44# 4-##4 %# #
44#& 4444 444# 444 #44 4#4## 444.
V. ti=F7|g #3*2| ##%#!
1) #4 44 444#^4 7M4 4444# 4#44 444 7>4# 4
444# 4#4#& #&H##g. 4444 €4 4 4 4 #^#3.4 ^
4 #3# 4#44 44t)1 o] #& 4#4 $144 4## 44
7)144## #t)1 9-4# # 44. 4#44 3#3 ####714 44-
#44 4##4 4 4444 sensitivity# 44 4444# 7>4 tr
#4 #4# 4 #44 ## 444## 44\M 4 4## 4#
711443# 4#44 €444 44 7}# ##43# #4# 4 $1#
#3"4#3# 4W 4 $14.
2) t)!## 414 4#4## 44 44 W444 44 7]-4 4# €4#
4#4#fc 4#44 #7> $14. #, 43471- 44 44 #4# 3-
4 #4# 44# ## 43# aH44# 4#4 #44# 44 7>4
-to-
#7)i#* °i #34#* # #*## silt * $14.
3) 437)14 *JlEl#* 0)444, A>#o) ZLBi)4£41- 0)44 4
3* ##o) 44#4 4°H 44 440) 44 #43, 2)4## 43*
44# 4 #4. 3.43 4 #4* ## ADAMSofl4 44# TiEfls)/
44444 #4 kaerot* #4 3## #/## 444 4444
#oj) 4^5.4 n #44■§• 44# 4 #4 #4 34# # 4 91
4. 5# 7))#4 a))o) #jl5)** #4#A33 #-§-7>444.
4) ‘B'#33 711444# 333 #4#* ##4M 34# 414-41# 44
#4 44# 7)4^1 333* 4 4# #4 71 7))#* #*#* ##4
4 #*4 3#S#.
-11-


SUMMARY
I . Project Title
A Study on the Manipulation of Remote System Using Redundant Robot
In this project the following 4 sub-projects are studied.
1) Development of Precision Control Method for the Hydraulic
and Pneumatic- Actuators
: Design of the fuzzy gain tuner for the pneumatic servo position
control system with the state feedback controller
2) Development of an Universal Master Arm and Force Reflecting
Teleoperation System
: A Study on the Autonomous Teleoperation System
using a Universal Master Arm
3) A Study on the Analysis and Control of the Redundant Robot
: Path Planning of 8-DOF Redundant KAEROT for the Nozzle Dam
Task and Experimental Study of Dynamic Control Algorithm for the
Redundant Robot
4) A Study on the Robot/User Interface Design
: Emphasis on the Development the final design solution for the
Robot and the Console Design
-13-

II. Objectives and Importance of the Project
For all sorts of tasks under extreme situation such as high
radioactivity territory, the manipulation using remote system is inevitable
because of radioactive contamination. In particular, nozzle dam task of
steam generator urgently requires the application of remote robot system.
In order to design, construct, and practically use the remote system,
technology development in the broad fields is required. Among these,
the following fields are of great importance.
- development of manipulator performing task
- precise robot control technology
- effective communication technology of task environment
information to operator far apart
This study is devided into 4 sub-projects : The purpose and
importance of each sub-project are as follows.
1) In recent years, pneumatic actuators have been regarded as valuable
and economic systems for driving low power robot manipulators or
remote operating systems. However because of the frictional effects
of pneumatic actuators and compressibility of air, precise controlled
actuator velocities or precise positioning control with pneumatic
systems are not easily obtainable. In order to improve control
performance, it is needed to investigate frictional characteristics of
pneumatic actuators and to develop appropriate controllers which
14-
compensate the nonlinearity due to actuator friction effects and
compressibility of air. In this study a three state feedback controller
with position, velocity and acceleration feedback which is especially
feasible for linear motion pneumatic position control systems is
used. Because high nonlinearties of pneumatic systems make manual
gain tuning of the controllers fairly difficult. It is necessary to
develope automatic gain tuner. Objectives of this project are to
understand the basic characteristics of pneumatic actuator and to
develop pneumatic position control system using a control scheme
^ which improves control performance and repeatability.
2) The objective of this study is to enhance the teleoperation
performance using visual force feedback. The implementation of
visual information feedback may effectively accomplish precise
telemanipulation. In this regard, three control methods are
presenteed, namely traded control, hybrid control and shared control.
These control methods are implemented as a human command
controller and a visual force controller.
3) For the various tasks such as radiation decontamination, failure
overcome, and nozzle dam task in the nuclear power plant, accurate
control of robot is needed without damage to other equipments. For
these high dexterous manipulation the use of redundant robot is
required. In order to use the redundant robot effectively, optimal use
of redundancy and efficient path-planning and control algorithm
have to be developed. The purpose of the 3rd-year study is to
-15-
improve the algorithm proposed in the 2nd-year study and to find
the optimal joint path for 8-DOF KAEROT(Korea Atomic Energy
Research Institute Robot) whcih had 7-DOF in the 2nd-year study.
It is also another purpose to verify the effectiveness of the propsed
dynamic control algorithm by using experimental study applied to
planar 3-DOF redundant robot.
4) It is important to consider deliberately the harmony of the Robot and
its Console table in order to enhance the usability of the system.
The design of equipments which harmonize form with function can
be created by considering the hardware attributes (performance,
function and others) as well as the software attributes (interface,
usability, and others). This study aims to design a multipurpose
Robot and its Console table which can be used at a nuclear power
plant.
III. Scope and Contents of the Projects
1) For the learning stage of expert knowledge, in the pneumatic servo
position control system with a state feedback controller, the change
of response characteristics of the system was investigated as
gains(Kp, Kv, Ka) and operating positions are varied and
experimental method of gain tuning was found. The Knowledge
base which is based on the learned knowledge was established by
—16—
means of the fuzzy theory, and a fuzzy gain tuner was designed for
gain tuning. Experiments were made to verify the performance of
the designed fuzzy gain tuner. The fuzzy gain tuner was designed
for 2 functions. The first function is to maintain the optimal
gain-set which obtains satisfactory response for slow changes of
system parameters. The second function is to find the optimal
games by inference from learned results when the position control is
executed at an unlearned position. In order to confirm the first
function of the proposed Fuzzy-gain tuner, experimental trajectories
of the gains starting from arbitrary points in the Kv, Ka plane are
shown, which converge to optimal gains. It was also shown for the
second function that the Fuzzy-gain tuner finds the optimal gains
when the positioning of the system is controlled at arbitrary
unlearned positions.
2) In this study, a telerobotic system is configured as a 3 DOF
articulated type force reflective master arm and a 6 DOF vertical
articulated type slave arm. For the force reflective control of the
telerobotic system working under the uncertain environments, a
shared control algorithm is implemented. To optimize the force
reflection characteristics, the compliance gain and the force reflective
gain are autoselected using neural networks and fuzzy logic. Also,
to accomplish added autonomy and precise manipulation, three
different control algorithms are developed for visual information
feedback into the force control loop. The performance of the
—17—

developed system is verified through a series of experiments.
3) 8-DOF KAEROT is analyzed kinematically. The algorithm proposed
in the 2nd-yaer study is improved in the following 2 ways'- how to
find working set exactly and how to consider weight-value of
joints. When carrying the nozzle dam, an optimal joint path is found
to avoid obstacles and joint limits and to optimize the given
performance measure while performing the main task by using 2
degrees of redundancy. In addition, dynamic control algorithm is
applied to experiment of planar 3-DOF redundant robot and thus its
effectiveness is verified.
4) The scope of this study is developing a set of final design of the
Robot and its Console table. All design activities have to be based
on maximizing the instrumental view such as stability, maintenance,
usability, and etc. It also has to be considered the cognizant value
i.e. as aesthetics , symbolization, and etc. A Robot design has been
developed through following processes. ; Analyzing design criteria,
Generating design ideas, Developing design alternatives, Selecting
final design solution and detail design, and Developing graphic
elements and color scheme. Processes for Designing Console table
comprise Conceptual approaches, Idea generations, Development of
design alternatives, Detail designs., and others. Two different design
concepts, i.e. aerodynamic concept (alternative 'A'), geometric
concept (alternative 'B'), have been developed. After careful
evaluation, alternative 'A' has been selected and finalized.
—18-
IV. Results
1) A pneumatic servo linear position control system with 3-state
feedback controller is constructed, and the servo valve
characteristics regarding the repeatability in time domain and the
hyteresis are measured. The effects of variation of each system
gain on the system response are studied thorough extensive
experiments, from which professional knowledge tuning for 3 gains
are obtained. It is found in the experiment that optimal gains are
changed as operating positions are varied, so that the Fuzzy-gain
tuner should have a function to compensate the variation of
operating positions. In this study a Fuzzy-gain tuner which tunes
velocity gains and acceleration gains for pneumatic position control
system is designed applying the professional knowledge tuning . It
is shown that the proposed Fuzzy-gain tuner works satisfactorily in
finding optimal gains.
2) Due to the low visibility, precise telemanipulation in unstructured
environment is difficult. To complement on such difficulty, we have
developed an autonomous telerobot system with a vision based force
reflection capability. To effectively implement visual force feedback,
three different control methods are developed.
3) By using 2 degrees of redundancy of 8-DOF KAEROT, an optimal
joint path has been obtained, which can avoid obstacles and joint
limits while carrying nozzle dam in the steam generator. The task
-19-
environments including KAEROT, nozzle dam, and steam generator
have been constructed graphically in the workstation computer by
using ADAMS modelling/animation Software tool. The animation
results using this tool have verified the safety of the joint path.
The path-planning algorithm proposed in the 2nd-year study has
been improved in the following 2 ways: firstly, the method to find
working set is improved so that the stability of the whole algorithm
increases; secondly, through considering weight-values of joints, the
metric unit problem is remedied and it becomes possible to move
specific joint more efficiently. In addition, dynamic control algorithm
for redundant robot has been applied to the experiment of planar
3-DOF redundant robot and has been verified to be effective.
4) As a result of such efforts, a set of Robot and its Console table
design which has a distinctive corporate product identity has been
accomplished. The Robot is designed to be emphasized the
aerodynamic shape and clean color combination of silver grey and
some accent colors including bright blue. Similar considerations and
color combination have been applied to the designing of console
table so that a metaphorical identity of the system can be achieved.
-20-
V . Proposal for Applications
1) In the application of pneumatic position control systems to a remote
operating system in an atomic reactor, we may obtain good control
performance. Because optimal gains may be obtained applying the
fuzzy gain tuner proposed in this study to pneumatic servo
positioning systems. The results of this study on friction
characteristics of pneumatic actuators, parameter sensitivity, and the
proposed fuzzy-gain-tuner compensating nonlinearties of the
pneumatic systems could be applied to the design of remote
operating systems in atomic reactors.
2) These proposed algorithms may proven to be an effective operator aid
in enhancing teleoperation performance under uncertain environment.
3) The proposed path-planning algorithm can generate optimal joint path
with less time than human operator using graphic tool. In addition,
the graphic/animation tool constructed in the 3rd year-study can be
a good tool to confirm the safety of joint path before applying to
the real task for nozzle dam installation/detachment. It is also
possible to use the proposed control algorithm as a real-time control
algorithm.
4) For the next research, a geometrical form, which has been classified
as 'B' concept, can be apply to the Robot system which will be
developed in the future. A study mock-up has been developed to
identify the possibility in a clear form.
-21-
1
3
13
23
[4 1 4^4-4] 25
-a-^4- f^44 ?m: ^-444-447]* ^ *\£. 4444 A]^o)]^
44 44^444 *4
[4 2 4^-4-4] 85
g-& 4^4 4 44-4 €4 2^ 4^4: 44- 4-^4 4# 4-#-^ 4-i- 4444 4^4 4#
[4 3 4^44] 133
4-n-7HKE 5.S.E. S444 44 93 444
: 8-4432* 44 KAER0T4 ^#4 4#444 4#
4^444- 4-B-4~n-£ &&m4 4444 4M
[4 4 4444] 177
5.s.e/a>4x> oiE]4o]^* 4^ a.44 *4
: S.S.S- 44714 4# 471-44:4 7H#
4
-23-
: ^-g-e ^ <% X]40] A]^o)]A\
3jA] 7)1?]^ 71^1 -i^l


4 *1-
1 4 #.................................................................................................... .....29
1.1 .29
1.2 ##.............................................................................................31
1.3 y^VH-g-............................................. ................................................33
2 .34
2.1 34
2.1.1 . 36
2.7.2 ## f ^..................................................................................... 40
2.1.3 -^rrr............................................................................ 40
2.2 7]^^................................................... ....................... 43
3 ##1 53
3.1 4^7)M4 7HrS7lM ^#44#-0-^-4^^ 58
3.2 ^#44#f31#................................ 63
3.3 4&4M1 ^if........................................ 67
4 S)Xj Tfly 2:^711- A]S. A]>:^o) ^ 5i|^H......... 70
-27-

5 81
5.1 ........................................................................................................................ 81
5.2 ............................................ .................................................................. 82
% 3L^ 83
-28-

1 *1 #
1.1 -§91 £ 4^
#744 #7#7 774(actuator )7 #7#4 ##4 44#, 74#,
7## 7@-#4.
#7# 7]#o] #444 444 4s. 4^7 444 #444(Position Control)# 4444(Tracking control)4 ### 477 5L##.
4-44 4-S- #7#(Large Power)# 44 4 ^^4 ###51 ##
7 #4 4# 7## 44# -8-4444 4-444.#-#4 #444 4^7 ?^Ai# 7}## 4-44^5. #4-4 4 4^EJ
4 44 #44-8-4 4-# 4#44 4? 4 4-8-# #7} 751 #7# 4^#4 #4 -2-7 4 7 #4 777 #4 74# 7 SI^le-S ##714#- =4^44 #
7## Loading, Clamping, Unloading#- #7 #4# 7}##4 ^4 4-8-##.
#7i# 7#7] 4 #4 ##-# 7747 ## 74# #44 ait 7}## # 7 744 #4#J% 47 #5i(i m/s44)# ^ 7# $£#. 4#4 74# 7
747 #7 #47717} A7#7 #74 #4##. m# #4 777 74#
#74 #####* A}7#^&# 44JL## #4777 #4 7773, #7
7 #4# ##4 7}7#4 #h# 444 72=# #4 7747* 44# 7
7} #7# 7}## oi# 74-4 747 #77 ##447 77 #447 7#
4#.
7## 7744 #4 7## 7747 74 # 12.77} 444-51 ^774 # 474-5.S. #4# ##### -2.747 74 #### 7## 7##7 # 4 #7# 15E5. 47# 777 #4 7 7}##.
51## 7# 4^#7 4# 4#44 7s, 2 #444# 74444 #7
-29-

44 4^# 4s4 **45. 4# 44 44444. 44* 44 4* *4 4^34 444 4*45 ##45 444 *\il 4^44. 4-4-4 a-)j£_ A]^ 34 444 444 #s 545 3** 444471- *4455. 444 4144
4.44441s. ^4# a>^-4-uS ^-7)4 4445.5. 444 M444 44
44 55}5 4^.444 4-bH ^44 44#3 444 4444 4444 4 ^445.5. 444 4444# 444 # 4#4 #7>4 ##4 44^(gain set>5-5.# 444 4444# #3447} 4#4. 5E4 *3**44*44 44 4#4 # #44 4#### #4 #44# ^4-*3(stick - si ip)444 4# 4434s 44# 434 4# *4*4 4444.
# 44# 3 44 44 4471(3 state feedback controller)# 4*4#
#34 #5. 4444 4#34 44^44 4*7} 44# 4#44 A4 4454* 4-*445 #44 ## 444 #5. 444 #44 44
4*4 4= 4# Til4^1# 4## t 4s# 455.4 f 3 a15. 4^4 4444 4444* #3# * 3s# 4^4 44.
— 30—

1.2
#1 4^1# 4## 4444# 1959k! Shearer4 444 4 =
445-4 n# #4-4 ^4 «@^4 #g#g
#44 S-f^# #£#4 44# #££4 ^4 4 #14 *V#
4 ?445&4-.^^ 4# Burrows^]- Shearer4 2_^& 444 2:7] <$-*]
*\7\ &4# 7H4J1 43 4 444 4 #4 # 4£# 4444
4.[9] 4 # 1# #44 5.1# 44 #^0.4 4# #14 cfl^
4## a#4.80444 454 1#4# 444 4#44 444 #4 #4-4 a-]^. x\ +
44 444 44-4 4 #7} 44471 44444.
Mannetje# H4 44 4 (Pressure Feedback Control )5L Aj ^3)-^
4 4 (Bandwidth)# 4441 2 4## 144 44# #44 5.514.™
Moore4 Weston# #4 4-5 4^14 444 Stir 4-§-44 !4,#£,
7V#£4 3 44# 4#44 4444# 4^54 4^1# 44445 144
4#44# 4-§-4-5171 n^o\] 4#44 444 447V 1444.[n,[12]
H.S.Cho, C.W.Lee# PM147!# 4-§-45 dead band, pulse band# 5-14
4 modified on-off controller# 4#44 44^(14# #44515. pulse
modulated valve ^ pulse band ratio7} stability^" rising time°ll 44# 4
4# 5#45l5Cl3] S.G Lee# PI 4444 #44 PWM# 4-§-4-4 on-off 1
ti# #4445-5.4 4444 ^ 44444 4# 4?# 4554.[14]
T.N.Huu# 45-15# 4#4# #4- 4^1# #444 4444# #4
4535[1S] Virvaio# 444 5.15. #4 444 4-4 444 4#4## 4
444 444# 44# £7}) 455 #4 44# #44 £14 ^ 4^1 444
47V 5-#44.[16]
-31-
Pu# Wes tone #*9M* 4444 l#* 44495[171 Manabe
4 Miyazaki* *955.5* # 414 #(quasi linearization)# 514 4#9|
4* 4-8-494.^
0. Ohligschlaeger* 14.9* 5## *9 4—14 4## 44495
partially polytropic mode Hr 919494.[191
M.J.Karie y#)# 15* 4*# *9##4# #4444 3 #9) 91# 4
44* 4*45 ** 91# 4*#* ##44* *44 544* m#**
Til##& *44 #4-2.4 1# ±0.lmm#°fl #44^4 45 447-14
400mm4 44 9*49: o.45a 44444 l.Oa 444 44* 99#.[1]
J.J.Hong* M.j.Kari4 44# 4^4## 43:4444 4* *7114 on-
off^* 4-8-4# 4^4 9*45 15* 711914# #155 VCBCValve
Changing Band)* 4444 449)4# *1495# 44 45:9)# 444#
*9494.^
Y.w.Jeon# 3* #44 4*4# *9#n 71)914 *4-15* 4-8-44 24
# #44444 449)4* *#494.[3] S.H.Choi* 7)19)4 *915*
4-8-4* *9 #4414 4^g# *4#^ 3 491 ^|# 9)444 *541##
7>*5 7)144 4# 44 7)1# 544# 9-8-494.f4]
Yuan.Lu[20]e *9 on-off 15* 4*44 *94^14 949)9* 49
5 A.Klein* 3 #9) 91# 9)44* 4*4 9*9 4^14 #49)44 44
41# 544* 4-8-44 37M 919# 4*544 ## 94* 495# #4 #44 4# jl#* 44 9r94.[211
-32

1.3 #9- ^-8-
44 4*7> 4#4 ** 4412, 3 #31 31# 3144(3 state feedback controller)* #*# *# 4^- 44314 42444 4424- 3l3l,*£ 31 y,7>^£ 3131 #4 4§H 444 44444 4^31 44* 7>* 4-4-42 4*44 (##44- *£4)44-4 4# -§-4444 #4£ ##4^a 442 2 44 37>4 t1]44 244* 444 4442i2 4#4 444.
**# 444 44—S. 44 4#4 £444 7]4 3) <3 >i(knowledge base)* 444:2. 711444(gain tuning)4 44 44 7114 547l( fuzzy gain tuner)* 44143*4.
4414 44 7114 £444 444 4444 44 444 t4444.44 7114 244# a7i] *71-4 44-* ^44£4 44444. 4*1 4
44 #444 £444 44 44#4 2442 *4 44 £4 244 44
44 3 44 44 4444 3l3l#(gain set)* 44 31313122 tlAl?J 4 £4 ^4 444 444 4*44 4-4 #3:# *## 4# * 4* 4444# #44-* 444 *44 4** 4*44 &* 44444 44* # 4* 4 4**4 **# 44 #2 4# 4444 44 4*4 44-2 *4 ### *4-4 2 *#4 #* 444131# #44* 444.
44 4131 2444 444 4*4 4*# 4444 444 4471144 44 444 71144!# *2 44 31314122 *44) 7>* 44# 44422 £44.
*44 4*4 4*# £4 444 44 4*4 444* 4# 44* 42 ^o)l 4422 *2 a 44444 447)131# #4-4-* 44# #314-534-.
-33-

2 -MW*1 716- -MS
2.1 -MSS-j#
Pressure DirectionalServo ServoValve Valve
GAS LA85Pneumatic cylinder
iimiiiinniiiiiiiiiiiinimiiiiiiiHiiimiiiiiiiiiniiiiiiiiiiiiiiiimiSensor 2 Linear scale Sensor 1
Voltage to Current
Converter Fluid Power j _ = |KAIST I *.......-I
Timer/countermodule
D/Amodule
A/Dmodule
=1%2.1 94 4^- 49944 94s
^92.19 9 99# 4)44 944 94 4a. 4^94 7l)4£44 aXI
94 9M #4 99, as)a 42:44 99as. 9444 44.
3 way/2 position 494 94 4^ 4)4 4—Ea4 9444 494"
49 37|-44 is. 3:44 7>^44.[5]
(1) 4944 4^-4^ + 9444 4^4a
(2) 4444 4^.#& + 4444 4J14^-
(3) 4444 4&#^- + 9944 49.#^.
-34-
44 ** S33433 -0^44—Eas: *444 ^14# 4 444 4*4
S144 *4* 4-B-4 44.
(1) 4444 *1313 + 4444 4313
14433 44 44 4-8-*# 134 3444. 4 4^14 *4* 4
4^34 <g-^oil 44 4# 43.7]- &7] 1*4 *44*4 44 ^44
44 44 *314 44 44 447} 44# 444. * 4-44^4^ €■ *
444 44:44 444 14444 ^#7] 4 4= n 144 **44 14
444 434 #44 444 444-3 4# 4^14 44444 4444
44=* #4. 44 4-4 4t4 44 *# #3 3444# state Feedback
Controller4 44-4 It#0]* Robust Controller4 44-4 4-4 444.
(2) 4444 A] 313 + 4444 A] 313
4 S34 34ir 4-8-44 *** 443 4s4 4# 44 Si4. 4^1
4 *4* 13 4-1°)] 44334 444 44 44 #37]- 44 4-4 4#4
44J-S t 44# 44 4^14 4**1 447} 4It 44# 444. 4
?44^S44 44 444 4*714 <# 33 44 4 44 444 4^4 #
7]4 *433 44 444# 44& 1344 44# 314 44334 34-I
# t7]- 44. 44 *4 4]#4 4 13 3444 State Feedback Controller
4 4-8-# # 4444 * 4*41 44* °)7] 444. 344 44 1# a]
314 TDC4 4* Robust Controller* A}*41 4444 44# #4 t 4
3 3* 13 344 44 44 # 44 *44 Robust Control ler4 4*4
44 44 T a# a]314 *444* 43 44*4.(3) 4-444 4 313 + *414 A} 313
4 1334-4 *4* (1).(2)13 344 *4:44 *4* 7]43 443
*1 t Si*. * State Feedback Controller0)] 4 S3 34"* A]~g-4: a] 3
1* 44- #1 444 4314 *44 #<*]*] *44* *4* ** f *
-35-
#. 434 5314 ##4- ## 3## 3# T 3#. * TDC4 3* Robust
Controller# 4*3 4314* *3#*7l4 4 55! #34 3414 4
515# 4444 4^14 4444 *7> 442. 4^ 44 4=71 ## 444
1 0)144 444 4444 444 4#444 4# 54#:#.
5.4 State Feedback Controller # 4444 #5H# 44^14 4515
4 44*114 4545# 4444 4344 4^14 4444 4444 44#4# 45# # # 44. 4 3*14* 3 State Feedback Controller#
4444555 154 545 53 2.1144 44 (3) 4414 4515 +
44144515# 4#454.
2.1.1 ^ ^
444 44444# GAS LA85 44 4 444# 444 544(linear scale)# 4414 4515(532.3), 4414 4515(532.4) 54 5 5 14a# 514a# on-off!5# 43-45 4# 4344. # 3*14* 514 a# 4##4 33#.
*3**45 4444 7>3 §4 4-##* 455 434# 44# #44 1 45#4 #5444 45# 554 444# #4# 44 !#! 4344 **44 434 *4* 4#55 4144# 4-44. 444 14* #1# 15 444 #444 *44 #al 4444 *44 515 4,#44 4* » #5 144 34.
4# 4544 GAS LA85 134# 55l*i(rodless) 134455 134 ^555 (cylinder stroke)! 144# 443# 44#3# #1 *7} $%545##44 444 444 4344 #*44 434 *4* 4#55 14 4# 7>#55 4444 514 3344 334- #34 *33 *4* 53#
— 36—
^ 7>x]3L o^4.
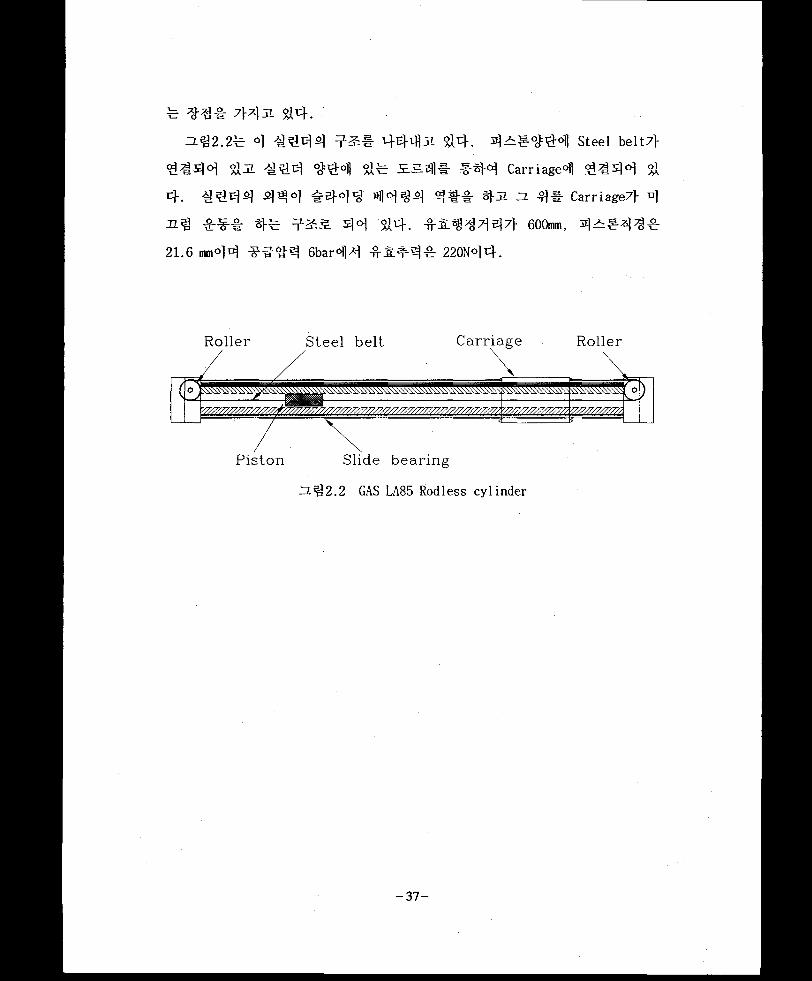
4 1444 7^# 444AL $14. 4^#444 Steel belt?} 4144 %U 144 444 4fe £S?l|t #44 Carriage^ 4144 %1
4. 1444 444 #444 44^4 4#& 4^ ^ 4* Carriage?} 4 n4 ir#i: 4# ^21 44 44. 4&^l?i4?} 600mm, 4^5-111: 21.6 mm44 ##44 6bar44 4^r 220N44.
Carriage RollerRoller Steel belt
Piston Slide bearing
:%42.2 GAS LA85 Rod less cylinder
-37-

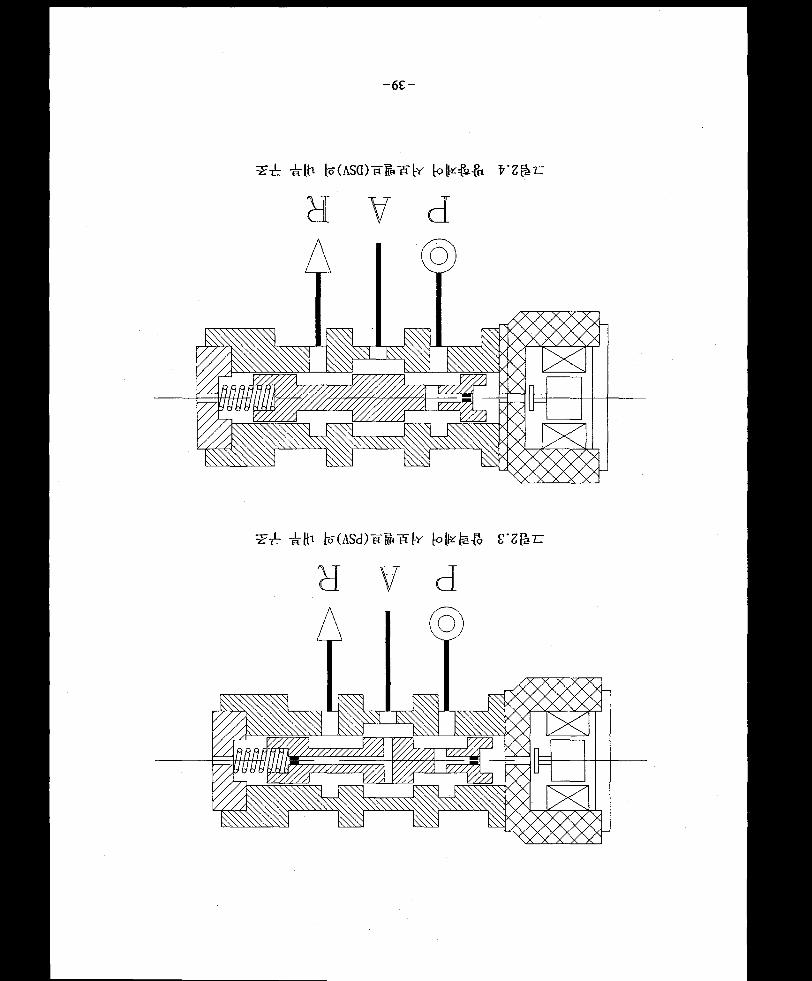
n^2.34 ^€2.4# 44 #.£#.9. (Pressure Servo Valve : PSV)4 #4=4] 4 ^"j-S-’S^-CDirectional Servo Valve : DSV)4 -p-SIr 4-4# #44.
# ##4 #5.# nozzle-flapper# First staged Valve housing,spool4
Second staged #444 $1# 2 stage type<44.
n€2.3# y-ej^M #4^47>4# ### #4^5. 4#
44 ^#4 4-##4(i# #4)# #444 44
(24 44)4 #44 4h#44 ^#4 #^M1 ^#4^ 14 44
4 h]h444 €4# 444 ^#€ 444 ^=#4 ?M* 4444 #444
€444.rz42.4€ 4*9=414 45.10.# 3 way/2 position H444 ##4(44
1.5W)# #7144 0>4s.n 4445:4 4^144 7B4I44 nominal
power7} 4= 1 KW444 #4-4^4# 44 ### 4= 44. #444 44#
nozzle-flapper4| 444 1# €4-5-3. 441# 444 44 44- ^
# #44 ^244# 4#44 ^#4 €4# €4# 44& 444# €44
4.4 f ##4 Waa# #7]# #€444 44 ###€# 4 #4- 44
444 444 4#4 #444 4^4 44 ### 0 mA 4# 44 100 mA## 4## 44 4#)### 500 l/min44.
-38-
~6£~
T-& iklh to(ASa)-nB"Sk tolkMn vz^n
H V d
-kth k(ASd)w#wk Mkh-R> s'Z&tz
d V d

2.1.2 4^ ti U
#4-8-i4 #4444 444 ^1-9(linear scale)44. 444
4 #4## 0.005mm»]JL GAS LA85 41444 4444 214". 4"4#4^
FESTO 4 SDE-10-5V/20mA ( Piezo-resistive element as relative pressure
sensor)44 0-lObar42 #4444- Obar 44 IV, lObar44 5V
431 4##^# 100Hz, #444£(Accuracy)# +0.5 % Full scale44.
2.1.3
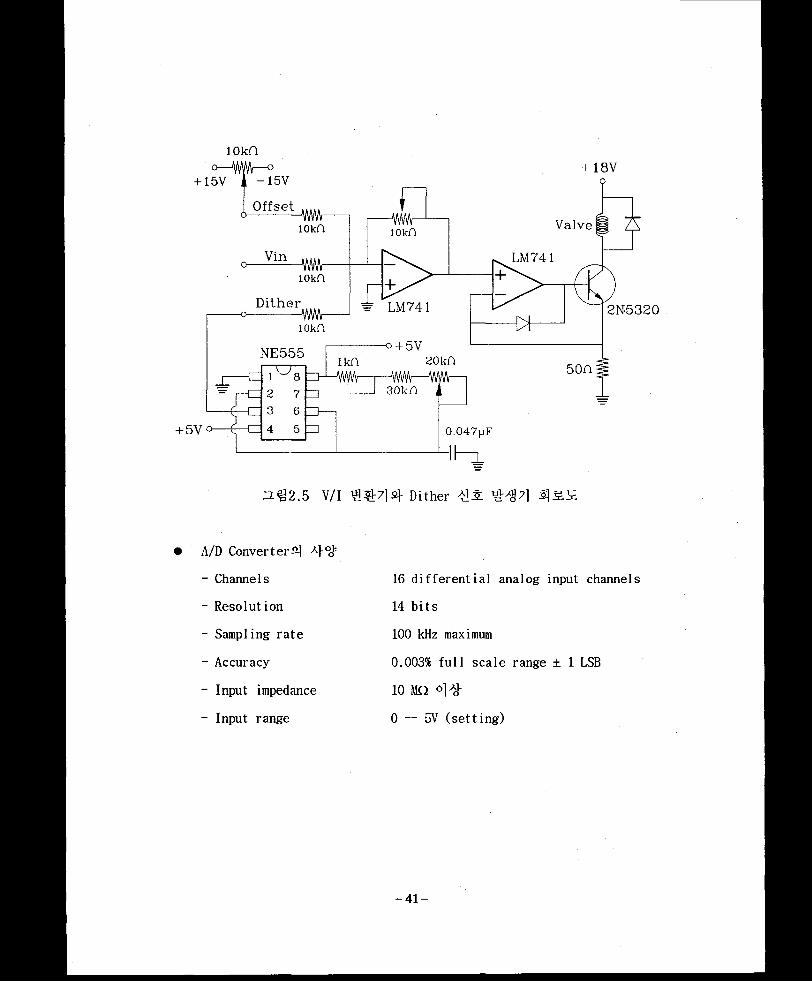
4 5144 ##-4 ‘til 2.4 #7]5)51, Voltage to Current Converter(V/I
Converter), Data aqusition card, Controller44.
v/i Converter# 44(o-5V)As. 4444 em#44 4444# 23MI
444-4 4#5. 4%#4 ## 4^1^-4 44^5. #4 300Hz + 1.25V4
Dither #51# #^444 444^4 #4 #44. v/l Converter4 44 4
4# 444 3144 4&S4 3.42.54 #4.
Data aqusition card4 PCL-814# 4#4%—4 A/D Converter# 44431
2131 Timer /Count er 4 H (PCL-814-TC-1)4 D/A Convet er(PCL-814-DA-1)#
option-2.3. 444214.
-40-
lOkflo—vwv\—°
-15V+ 15V
OffsetValvelOkA 10kA
LM741
Dither LM741 2N5320
o + 5V20kA
—VWW—Wh—30kA
NE555
3^2.5 V/I Dither $.$. ^^7]
• A/D Converter^] 7.}^
- Channels
- Resolution
- Sampling rate
- Accuracy
- Input impedance
- Input range
16 differential analog input channels
14 bits
100 kHz maximum
0.003% full scale range ± 1 LSB
10 MO °ltf
0 — 5V (setting)
-41-
• D/A Conveter(PCL-814-DA-1)4 Aj-<$
- channels 2
- Resolution 12 bits
- Voltage output range 0 - SV(setting)
- Settling time 0.005 sec
- Accuracy ± 0.012% full range
- Linearity ± 1/2 LSB
• Timer/Counter?} = (PCL-814-TC-1)4 a}<£
- Channels Five 16 bit up/down counters
- Device Am9513A
- Input frequency 6.8Mhz (max)
- I/O level TTL compatible
- Time base On-board 1 Mhz crystal
-g-<a-4ji 44 §Efe^ 486PC(i486DX2-66)t- 444
4 444*5—4 Sampling frequency4 200Hz3. 4^45514.
— 42 -

2.2 7]^^
zi#2.64 ^2.7# 44# #44 #444 45154 4^444^ #
4# 74 444. ^#2.6# 444 44# #44 4# #4^44 4
±0.5 %454 4^444^# 544 n#2.7# #44 44# 54 4444
4# 44# zi4 444 4^4 4=^4 444 44 ht-s, saja 5.4-1- 4
4 44. 300Hz +1.25V4 Dither signal# 4444^ 0V44 5V44 #44
4# 4 30021, 4^44# 4 300a# 4#44 444S4. 44 444
2.0 V 4 4 4 2.8bar4 444 #442-5. 44# 4444 45.*4-54 #4
42.5. 4-5 ### 444.
The hysteresis curve of PSV ( 1 time )
Supply-pressure
Down : 5V —> 0V
2 3Voltage ( V )
n#2.6 4444 45-154 4^444^= #45
(Dither Signal:300Hz±1.25V)
— 43-
The hysteresis curve of PSV ( 5 times )
0 ...........................1-------1-------1-------1------- 1-------1-------0 1 2 3 4 5
Voltage ( V )
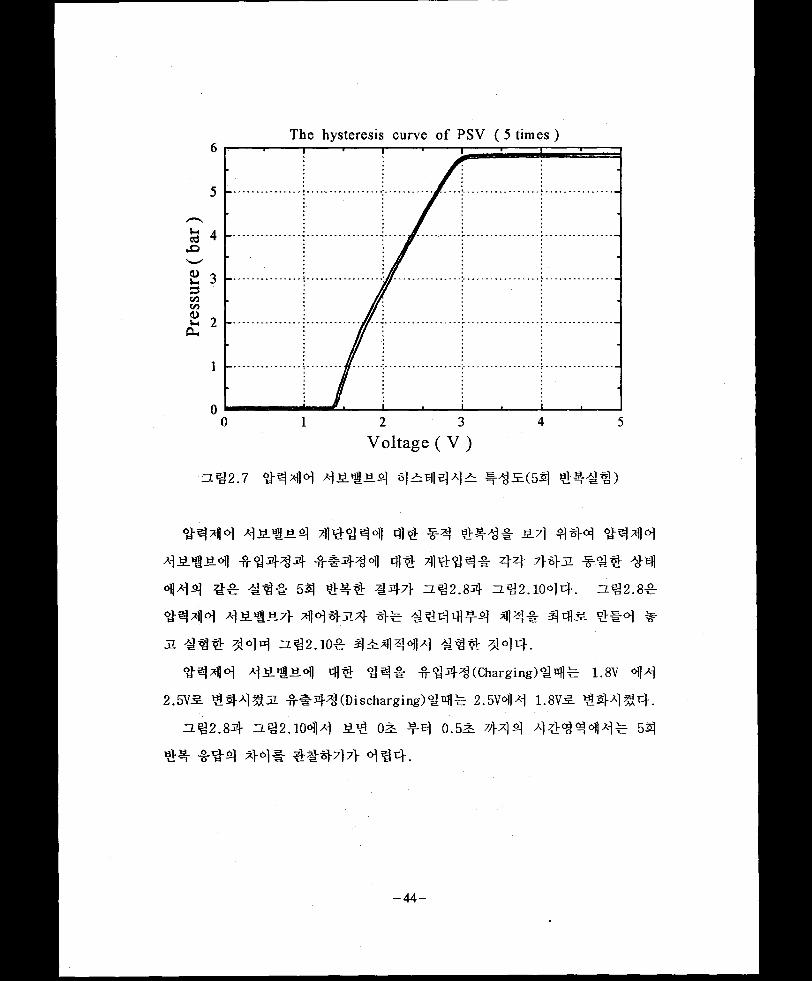
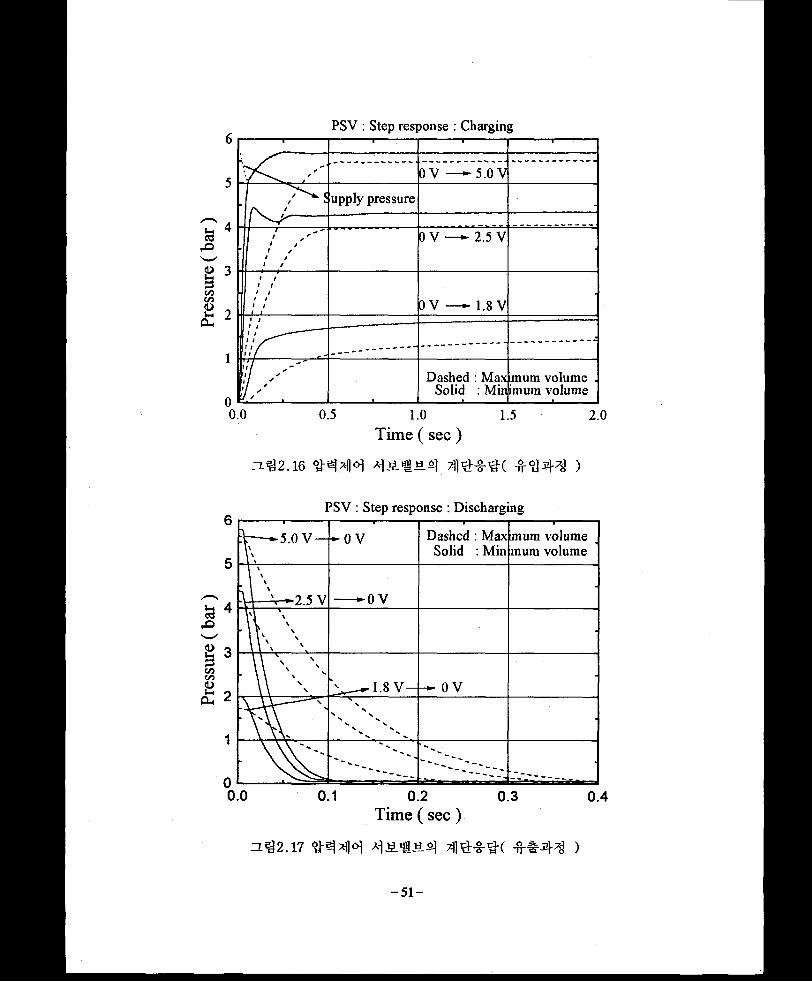
382.7 8-8314 822.S.04 siatfleHa s.a^(55| 8:4^8)
88314 832.134 48 48 848# ^8 844 8844
48484 ##484 48 31888# 44 443 #88 44
444 44 88# 54 848 444 382.84 382.1044. 382.84
8-8314 432-434 314834 84 884448 318# 843 8#4 ¥
3 888 444 382.104 4331848 888 844.
8-8314 412310-31 48 88# #848(Charging)844 1.8V 48
2.5V5. 8885(3 ##48 (Discharging)8314 2.5V3I8 1.8V3 848^4.
382.84 382.1044 22-4 Oa 44 o.5a 484 8848484 54 84 #84 44* 88844 484.
-44-
PSV : Maximum volume: 5 times
1.8 V -—> 2.5 V
(Charging)'
3.0
2.5 V ■> 1.8 V^ 2.0
( Discharging )
) I I I I I------1— J------1------1------» ---10.0 0.1 0.2 0.3 0.4 0.5
Time ( sec )
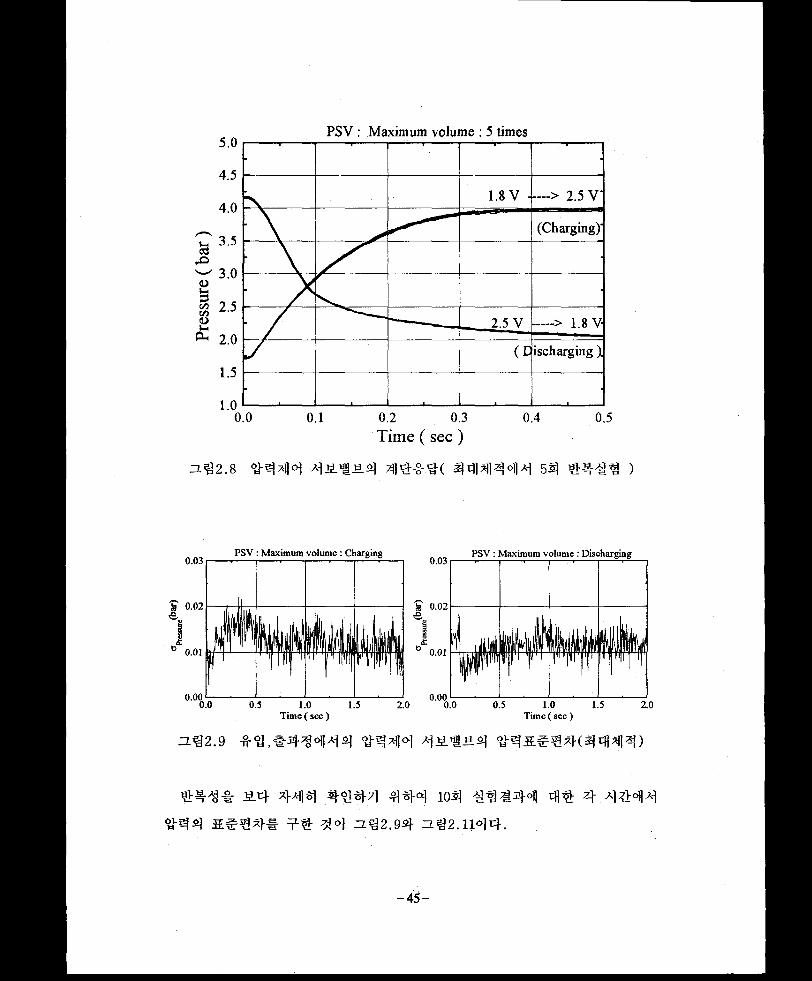
n^2.8 5s) )
0.0 0.5 1.0 1.5Time ( sec )
2.0Time ( sec )
^4 zz.^2.94 =l%2.lHc}-.
-45-
PSV : Minimum volume : 5 times
>-2.5 V(Charging)
a 2.5 2.5 V •> 1.8 V
Bh charging )
Time ( sec)
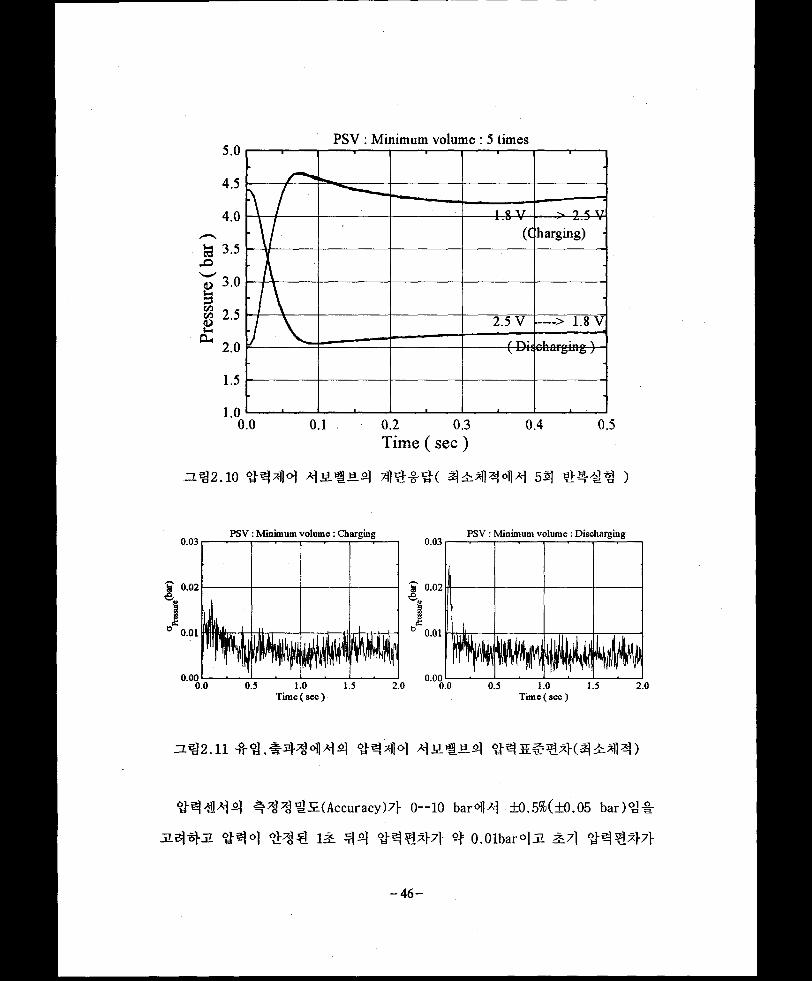
=L%2.10 5^ )
J3i82.il -R-^.
^^^^£(Accuracy)7> 0—10 bar^^ +0.5%(±0.05 bar)<8&
<&%<>] <(H€ 1& 4 O.Olbar0!jl 3L7] <g-^4g*>7>
— 46—
4 0.02—O.OSbar^Ma 4^5.5. 4^44 4MM 444# 44
4 ###4a 44#4.
4444 4MM ^ 4444- M 43)4# ^14 4444 4#4
^#4 #4# 444as #4 IM #44°fl 44# 44444 ^#4 #44# 4### 4444 4444 M# #4## #444 # 4# 4##S#.
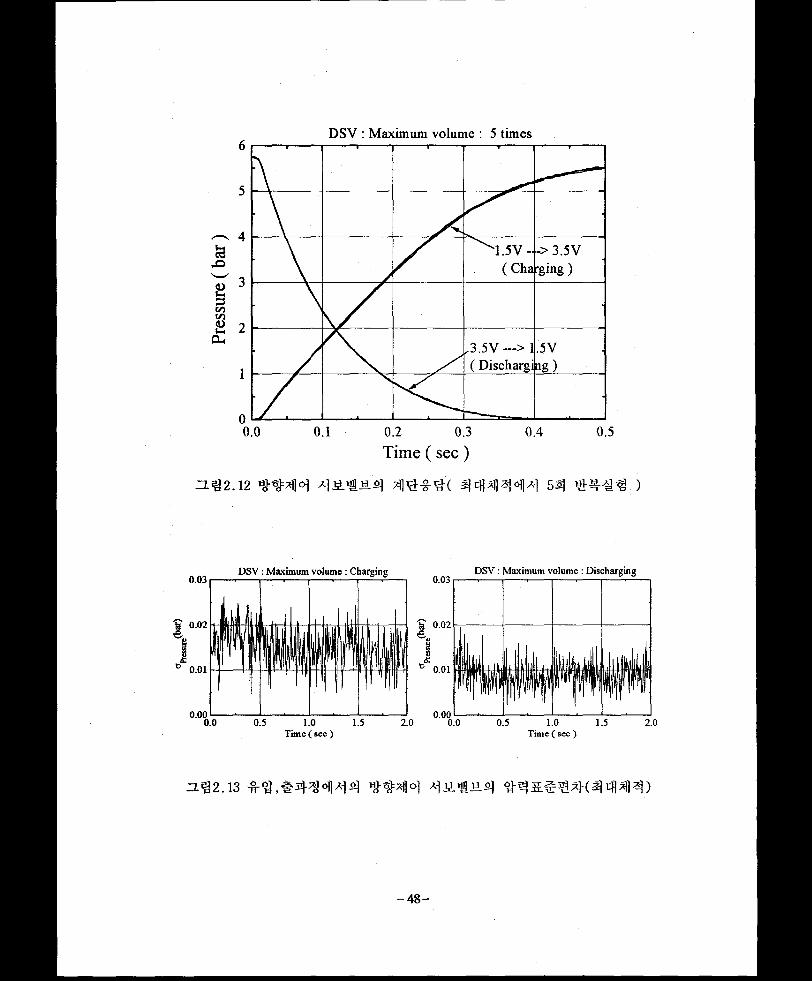
4-Ml 4 ysisyy^ #4 #M14 ysisy ^i#444 4# ¥4
444# M 444 CM 44444 ##444 44 4444# 44 4
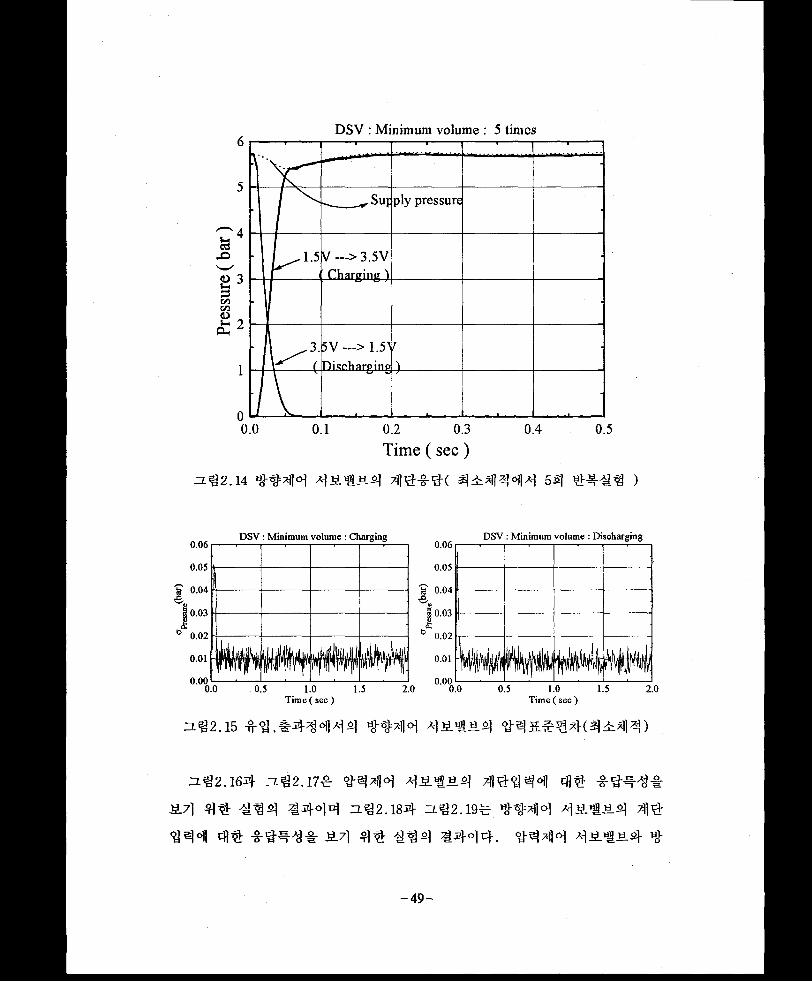
#a #44 43M144 4# 44# 54 444 444 M2.124- M2.14
44. M2.12# 4444 4MM- 444-a# 4# 444 444 44
# 44s. 4#4 #a 444 444 M2.14# 4# 4444 444 44
4.
44MI4 4MM 44 44# #44^4 (Charging) #41# 1.5V 44 3.5VS 44-4^a ##44(Discharging)#^# 3.5V44 1.5VS 444^4.
M2.124 ^42.1444 o# #4 0.5& 4-44 444444# 54 #4
4 #4# ###44- 444. 444# 444 4444 444 104 44#
44 4# 4 44444 M14-S- #4 44 M2.134 M2.1544.
zi^2.i544 MM14-4 0.05bar4as 4# 444 4M4 s# a
4 4444. 4# 44# #4 4444 #4 Mas. 4444 4MM
#44# 4#3M 4M 4M444 44# 41 a #44 44 4 444
444 4M 44# 444a 4444 4444 4 a is 4 #44 a 4 a
4 44# 4# ##4 4a 44#4.
-47
(bar
)
DSV : Maximum volume : 5 times
1.5V -■-> 3.5V( Charging )
3.5 V —> 1.5V ( Discharging )
0.0 0.1 0.2 0.3 0.4 0.5Time (sec)
zz.^2.12 1MMIM 3]#-§-#( 3M3M4H 5^ )
Time ( sec ) Time ( sec )
^.^2.13 ti<WM
48-
DSV : Minimum volume : 5 times
ply pressure
1.5 V--> 3.5 VCharging)
5V - > 1.5VDischarging.
0.0 0.1 0.2 0.3 0.4 0.5Time (sec)
zz*g2.14 4-£-€-9-4 ?l)4-g-4( ^iAflaZoflA) 55) 4444 )
o.o . 0.5 1.0Time ( see)
1.5 2.0 0.0 0.5 1.0Time ( sec )
1.5 2.0
Ziig2.i5 44,#44444 451-1-9-4
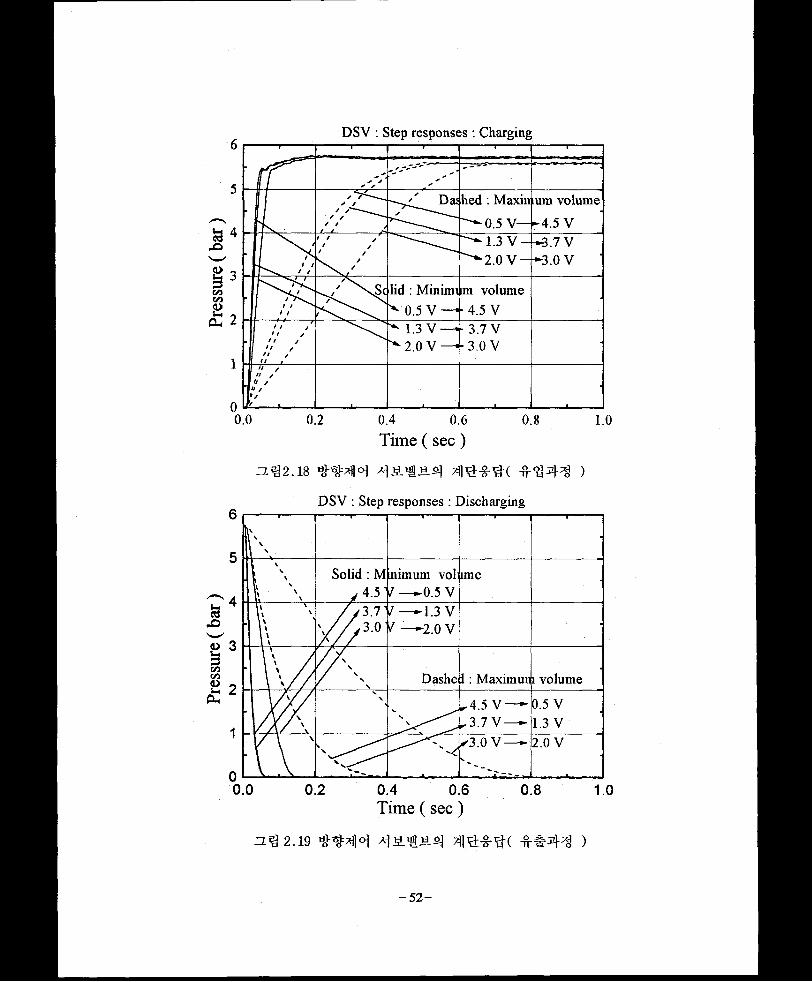
zz.^2.164 h^2. 17-8- 4-444 4-£-1-9-4 41-4 4 4 4# #144#
s.7] 41 ^4 44-44 H42.184 zl42.19# 1144 4 ^-1^-4 44 444 44 -3-444& ti-7] 4^ ^4 4444. a) ^4:04- «0v
— 49-
'kkkkkk lbkk#k tQfli* "Sk MkMt kkkkkk k?Bwk kk#k #k tbkkkk^8i z^c Trkkkkk #lh IbkkSk ka&wk ktkk-Fo ^lvz&t:
•-b
kkk ir-tak-^lb kkkk ^?k #k lb jo kk^k-k kk# kkk# k k-S- -khio kk k4rk klkk-k kaF^k klkk-k ^kk tb^K •k^k # lok -#-kk%o kkk kta-k ^rklb-kk kirk^S k klbfb-ik
kkkk 3-kMrz^TT k
"nB"S"k klk#& #kB. kkk "kkkk kk-k kkk klb#& kklbk k?k kkkkk #&# kkkir kk# ^-h-k-h kkk kkkfkk k n'li'S'k kkk-k #k Ibkkkk #9i‘z^ir kk^k^io o k ^kk kk kkk kkkk k^#k-k #kkk klbk's "sBi^k klk#
Pres
sure
(bar
) Pr
essu
re (b
ar)
6PSV : Step response : Charging
yC, yOV —5.0 V
upply pressure-----------------
i // / t /
0 V — 2.5 V■
t /i t > >
/ / i t f i
OV — 1.8 V•
/ i.
Dashed : Max Solid : Min
mum volume . imum volume
Time ( sec )
n^2.16 44-§-4( -if “94^ )
6
5
4
3
2
1
00.0 0.1 0.2 0.3 0.4
Time (sec)
H^2.17 4#4^ )
-51-
PSV : Step response : Discharging
iV~—*-5.0 V —— " "T—— |*0 V Dashed : Max
Solid : Minmum volume mum volume
; 1 \\4—-V-^2.5 V -----►O V■
TT T---------
■\K\ ■
■\\ V''^I.8V- — OV
■
■
\
Pres
sure
(bar
) Pr
essu
re (b
ar)
DSV : Step responses : Charging
Dai hed : Maxin ium volume
4.5 V0.5 V-1.3 V -3.7 V2.0 V -3.0 V
Sc lid : Minimum volume
Time ( sec)
n^2.i8 )
DSV : Step responses : Discharging
Solid : M inimum volume v 4.5 V —0.5 V
3.0 V
Dashed : Maximum volume
0.5 V
3.0 V 2.0 V
J .. -■ li J. - - .1 — ■ - ,-L. — i , k,„, .....0.0 0.2 0.4 0.6 0.8 1.0
Time ( sec)
^ 2.19 )
-52-
Time ( see)
Time ( sec)
Velocity (m/s)ov> O in o
Velocity (m/s )
Position (m)
Position (m)
X> 4*- Li_S, JD- Ml§ M -S,' °\° dmoM tip.J2, fk 44
m£
41 CL 4^ rir414> r£ Hi A
A ^H- &Li J2,
n|o-H -|>
&riA
JHS
m|o
4>M\o
4>
HiK>J5,X>
NcLLJ2,01.N
X>
4> -L, Hi l> (o aS i -S'x>
\ir-S
4> &
MH>
X> m|»
<LL J2
41
4>Hio|o
&
Hi
4LN#
Ml
Ml&o|oap,rL,HiU□aCO
m H>a js.
rs,
o|l±LiH>
x>
4>Hi
H>-S'x>
4>
HiH>-S,x>m|o
J2,
4tLi
d2
JL41
udffi,03I—1r|<>n*ra-U
Jfl.LiMl
rs,
oLLiMl
d£J2.|oHi
ojoid,rir.a,MLN
llJ2
CO
0>L
d2*1A
-2,
Him
JhLoja
oldn£
Jc,
fit
it!>
r@s
J2,
54-
rir JL Bft (iU aSt o|oa. iu|o nth A A A
a|U|o A (51 A a
A A 4)1 A ulU|U«4>St. r£ A
4%*'ctjni
A1°Lril
oBCOh-*-M s Ja fftt puS-A r>»'
V 4HnrAo
AAo
Aja|U|o
CO,o|r|U|o
oCdaco
AJfiL=4o|>
s-4
AJimr?tA
HiAiu|o
A
A
rift
A
#A
r|onisi
4V
4>A 4>
AA,A
AJlH|U$iHi A 41 A
A 41 JE rir A|0Hu oft
4>AA Hfl
AAA
Aj|m
A A A A Al> oft HI U
aB (* iu|o□sA JS
Anfi|ir
cooo A
l>HiA
nfi A § nT aS Ido& c rir Ja HuIs Bft
JflL JEA Ja 4H
A A Ja A-V 4j 4)i Xj A
0|D_ov °1> J|H' Ja A A
id. A °H oE
#
^944 ®
l*l 5:^71* A
>-g-^H 943A4 ^
7l]»ll:^ K
p :
1500V/B
1, K
v :
76.3V/(m
/s), K
a :
1.806 V/(m
/s2) 4^3. 0 m
, 0.3m
^^3.2(a) (c) (d)#
41^1 ^A
-§-ih
7j-^A
B|oS U
tiBA CO
|u i>oA nroftM-
CO
r$i Ao|o Atip,iu|o41 A41 A& infraiu|o AA <*>A oatuboSt
A°H
mU B?41 AA Hi41 j*
o. l>aS
CtbL iu|o4^ Ajgj AA A> A-P
<*> #
A
M1r?tda
A
AAo&wm?.#4>A41
i%A Ada AA cfltH> j£A 4d4> A4> AHi A)° AAX> A
A41 A4> AHi i*i
K> 4>A a>1> 4tA AN iU|o4n AoA Mo|o dEcoup. h-4m|o J2<(n sAA (DA»4 i—sA
UaB
o|o#A /- Hi o A ^
daAH>A>0>>hiK>a>i>
4>HiK>A>i>JaoMJa
Acceleration ( mW )
Acceleration (m/s2 )
o
Posit
ion
(mm
) Po
sitio
n (m
)
( V/m ) (V/(m/s))
Ka= 1.806 (V/(m/s2) Xs = 0.0 m:, Xe = 0.3 i
Kv = 76.3
Time (sec)
( a )
Time (sec)
( b )
-55-

Time ( sec )
Acceleration (m / s2)i— i—* i h—Vi O Vi O Vi O
Velocity (m/s)O O O O OO ^ On bo O
57-
controli: 44 ^4 444
4^4.
4 4 & IdJL ±, 41 (flj
44
IVoS£>
rlr4mb
0?
ikrlu 4 2
&m|»
dpr$iCo
mEit4
iuE|ttJr-
U□B ^
•“ Cb4 CO 41 *9 todpoh
)&\i
Ha&
6)
!Dn>fD&D)S'O§■-1O
4
JE
d,
Xi
4
UnBco
4 Hio|offp, J2,oE JE
it
(2.
Jffl,mb
f
8<s'-£
VEr°.
°H
jbl>i.£lt£
3 grlr 44, ({115 *■* |
4. i
4 JE6 o&
o-ti,_£-
N,
0(J
4(a;
l>o£JEJEitik4±o|o4&Hi
Pressure (bar )
Command Signal (V)
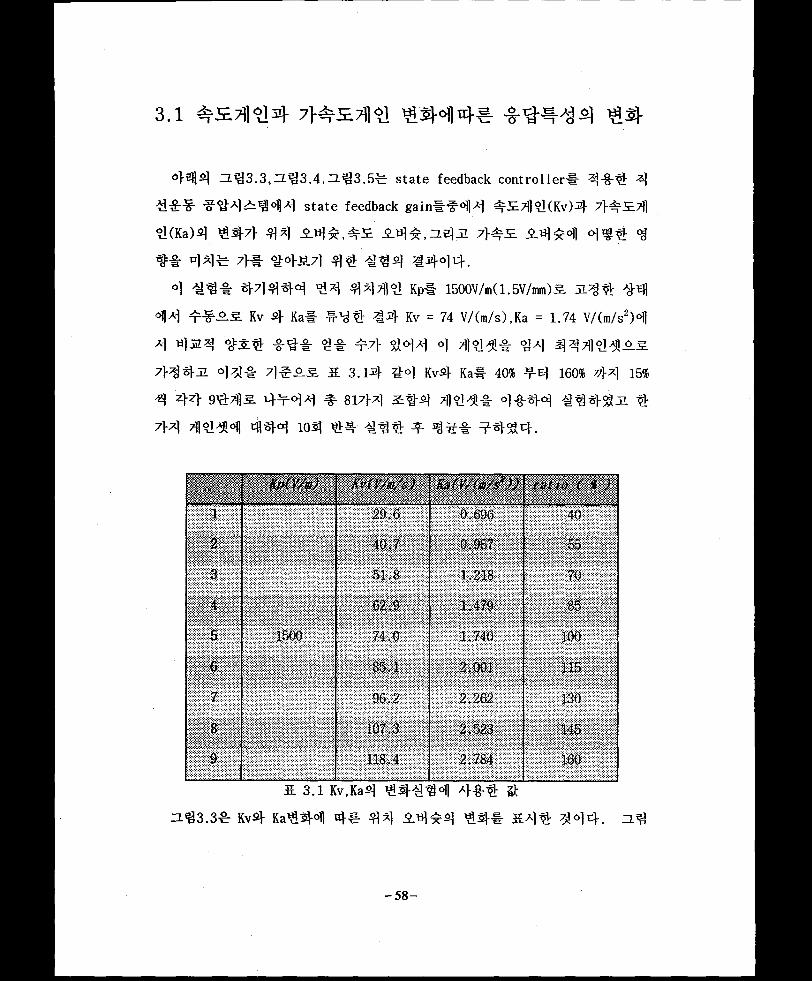
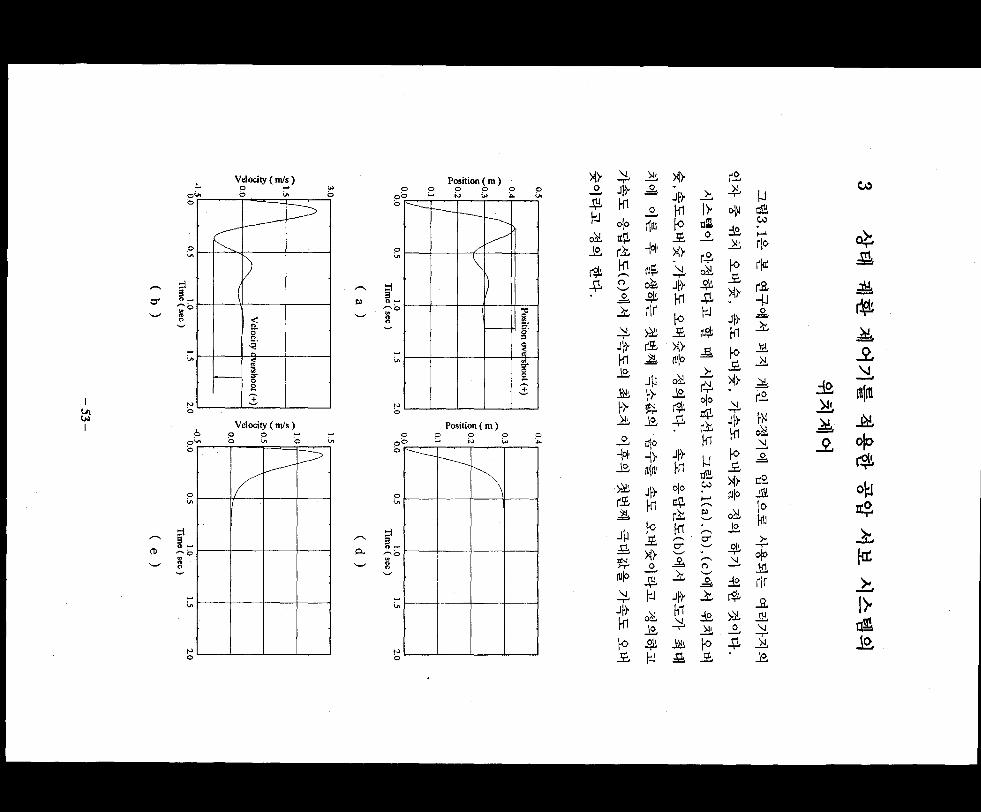
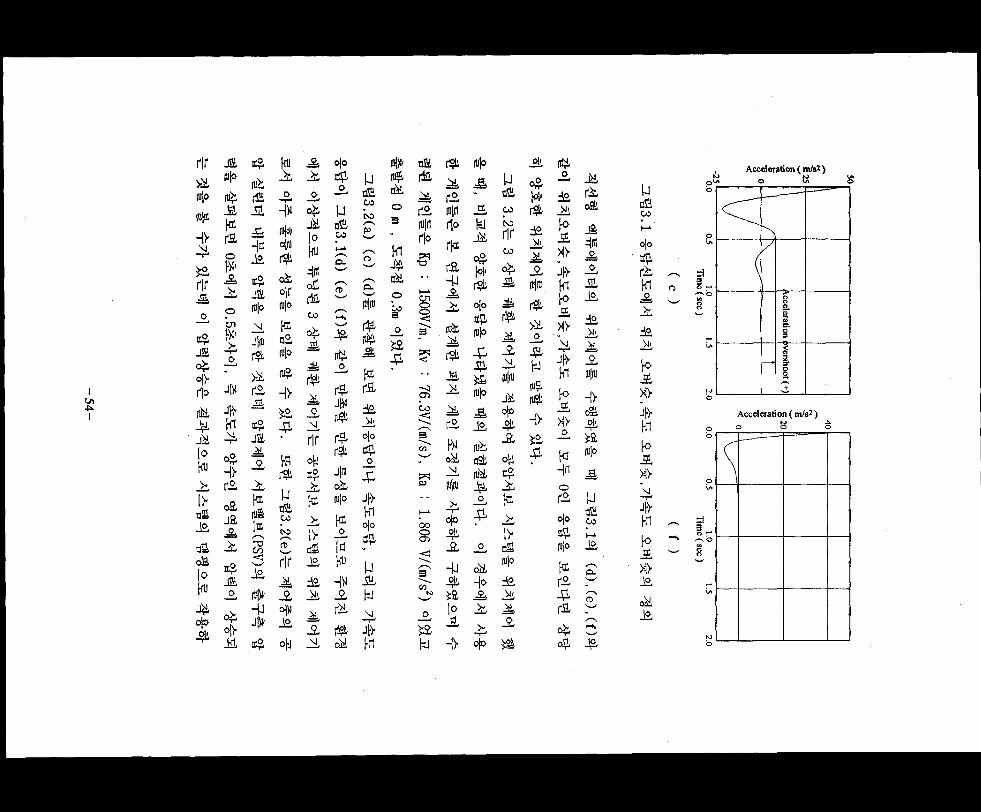
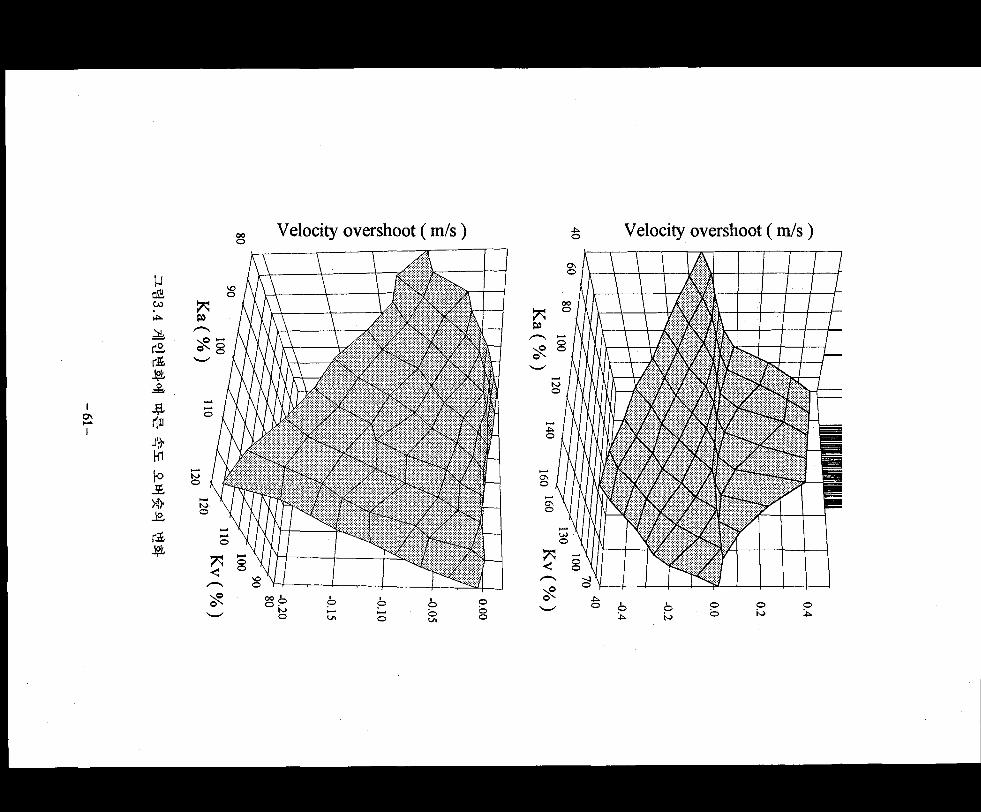
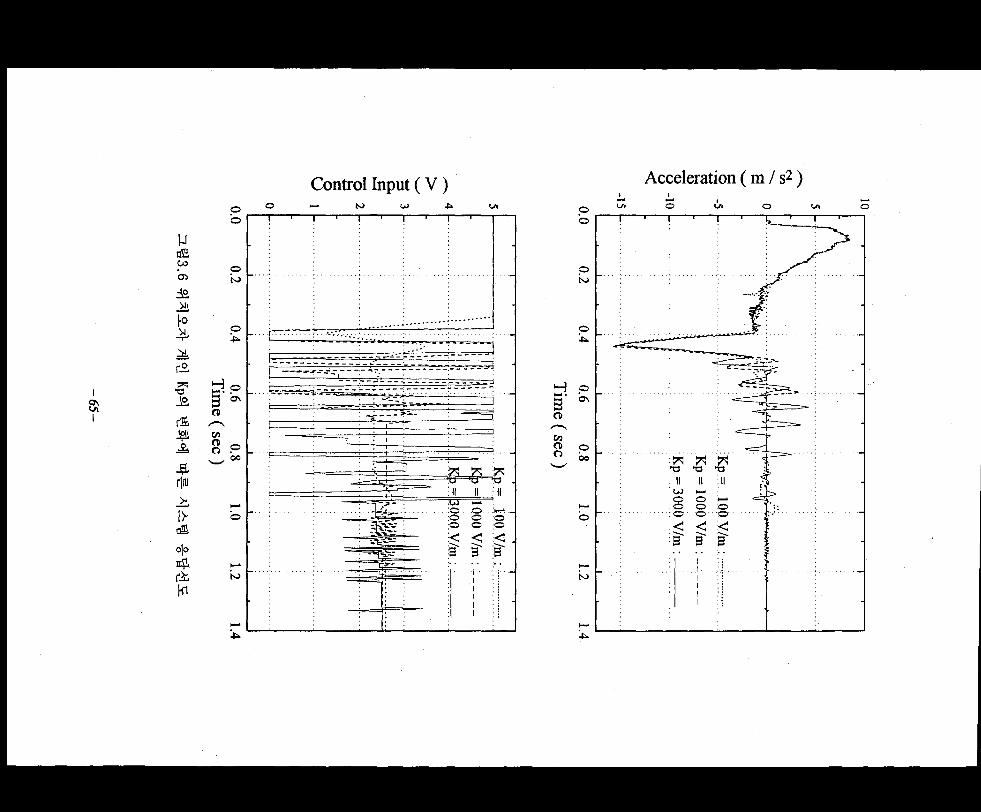
4## zz.^3.3,zt^3.4,zz.^3.5# state feedback controller# 4## #
44## "S'##—*9 4 4 state feedback gain## 4 4 #£.7ll?](Kv)# 7}-#;E7)l
tiCKa)# ^#7} ## 3# ^,#3 £M\£,=L2\5L 7>#.E 3# ^4 4^# ^
## 44# 7}# <£°}1L7} 4# ^## 4444.O] *3^# 4444-4 44 4444 Kp# 1500V/m(1.5V/mm)3. 3.44 4-41
44 ##^.5. Kv 4 Ka# #44 44 Kv = 74 V/(m/s),Ka = 1.74 V/(m/s2)4
4 4^4 4±4 #4# 4# #7> ^44 4 443!# 44 34443!^
7>443 44# 7l#33 1 3.14 #4 Kv# Ka# 40% ## 160% 44 15%
4 44- 944& #t44 # 817>4 344 444# 4#4-4 4M4#3 #
7>4 414314 44-4 104 4# ####*§## #444.
3.1 7>^5.7liy ^#414* ■*-’3-^4
MW AhI/aA; Aja'tUB'c'V ratt.i t $ )
1 29.6 0.696 40
2 40.7 0.957 55
3 51.8 1.218 70
4 62.9 1.479 85
^0# 1500 7-1.0 1.710 100
6 85.1 2.001 t—A
7 96.2 2.262 130
8 107.3 2,523 145
9 118.4 2.784 160
# 3.1 Kv,Ka4 44-4^4 4-## 5t
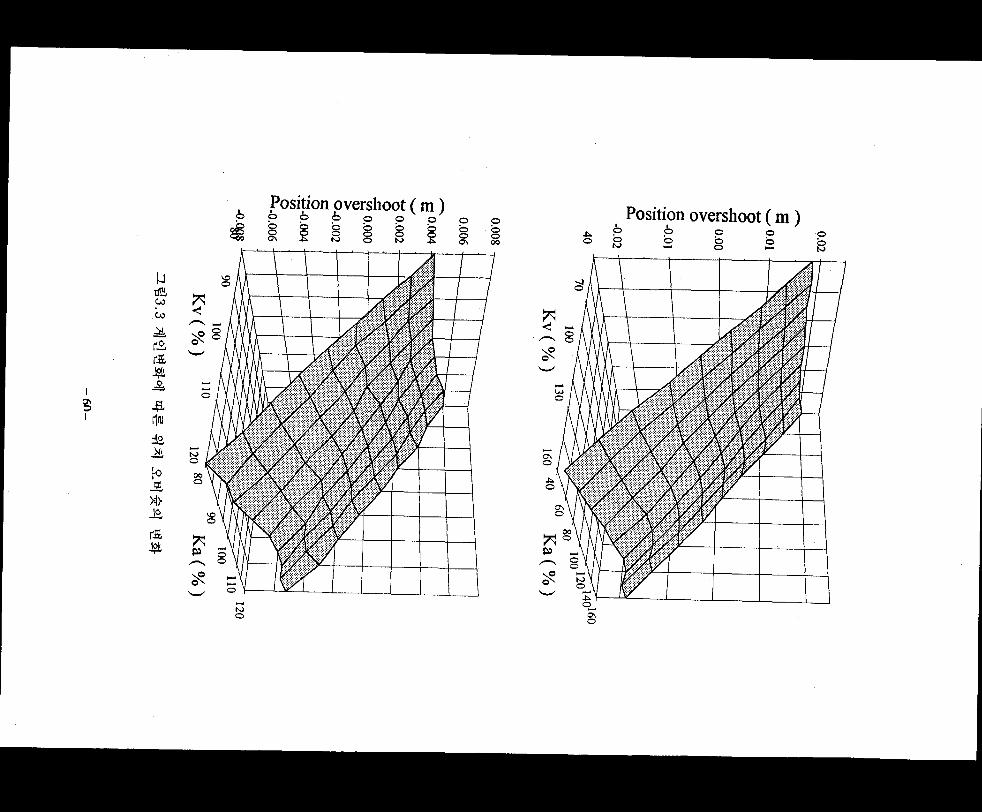
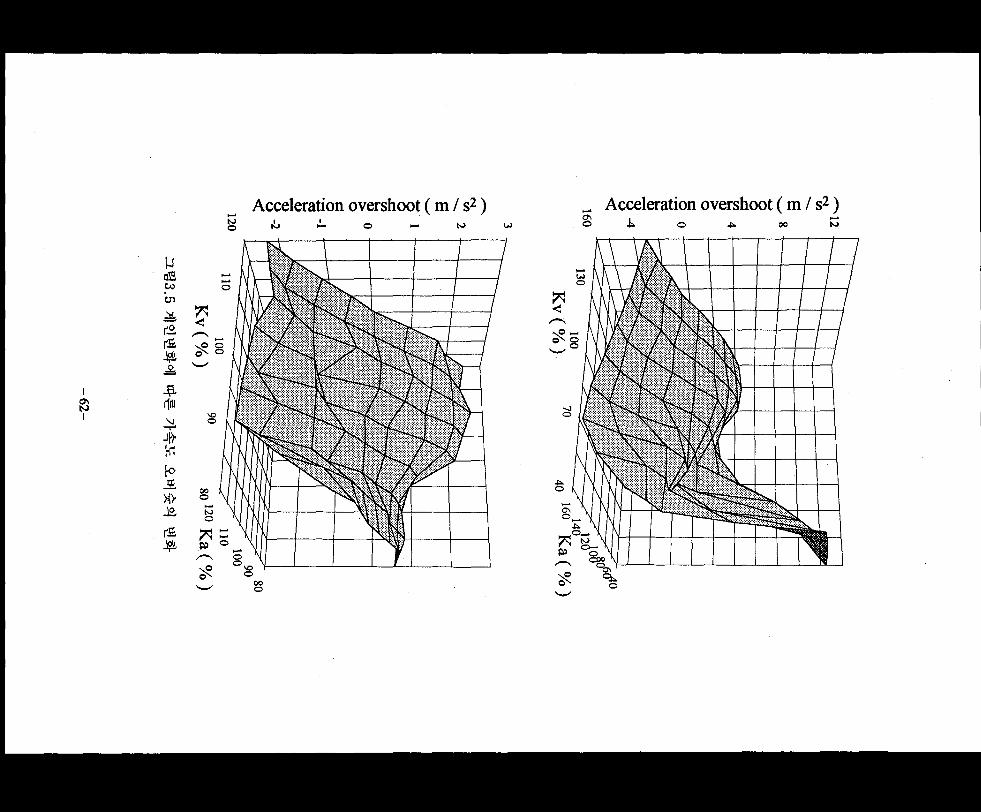
3^3.3# Kv# Ka4#4 #€- ## #4#4 4## #44 44#. ZL^
-58-

3.3# 32.4 44 34*# Kv4 44433 44# 43 44# 4# # *7} 44. Kv4 #44 5E.4 <ti (40%-i60% )oj] 7444 44 34*# 7] 4 44
*M# # *7} 43 Ka4 44=# 4* 435.3. 44 #47} 7}#44
4 4^1 Tliy &^7l #7)14^ Ka4 <g<8=& 34444. 4433. #4 Kv4
#y# 44 34*# 4 #44 4* #tii #44 7>^44s ^#4# *7}
44. 343.4* 32.4 #3 34## 44 34*4# #4 Kv4 Ka 3*4 Til
#444# # *7} 44. Kv7> 444 444 *3 i.4x£ 4*11433 4
34# 44# 32-44 Ka7> 444 44^13 44 #3 34*4 434# 4
4# 32.44.
n44 £4 n^s.344 # #7} &4*4 Kv# 44 34*33. 4# 4
44 #44 7}*45.3 #3 34*4 4^-* Ka4 #44 4## * 7> &4
# 4# # *7} 44.
3.43.5# 4444-7} 7}#3 34*4 44# 44# 33-4#4. 4714#
44 # 344# 44 71144 444 444 7} #3 #4$# 411433 4
444 43 4## # 4=7} ^4. 344 #371)44 4^4 4=^441 #44
44S}# **(Kv=ioo%)# 32,4 7}#3 4144 444 444 7}#3 344#
4#4# #4* 344 444 #37)144447}# #334#4 4^1 7}#3
34#4 43* 7}#3 Til4#44 4#4 # 443 4444.
-59-
Kv(%
) 160
40 K
a(%)
® 8
^ Position overshoot (m)Ois 1 I
is In
"5
" "b
in Ito
iSifi
iolt
f C
^IT
6 Velocity overshoot (m/s)
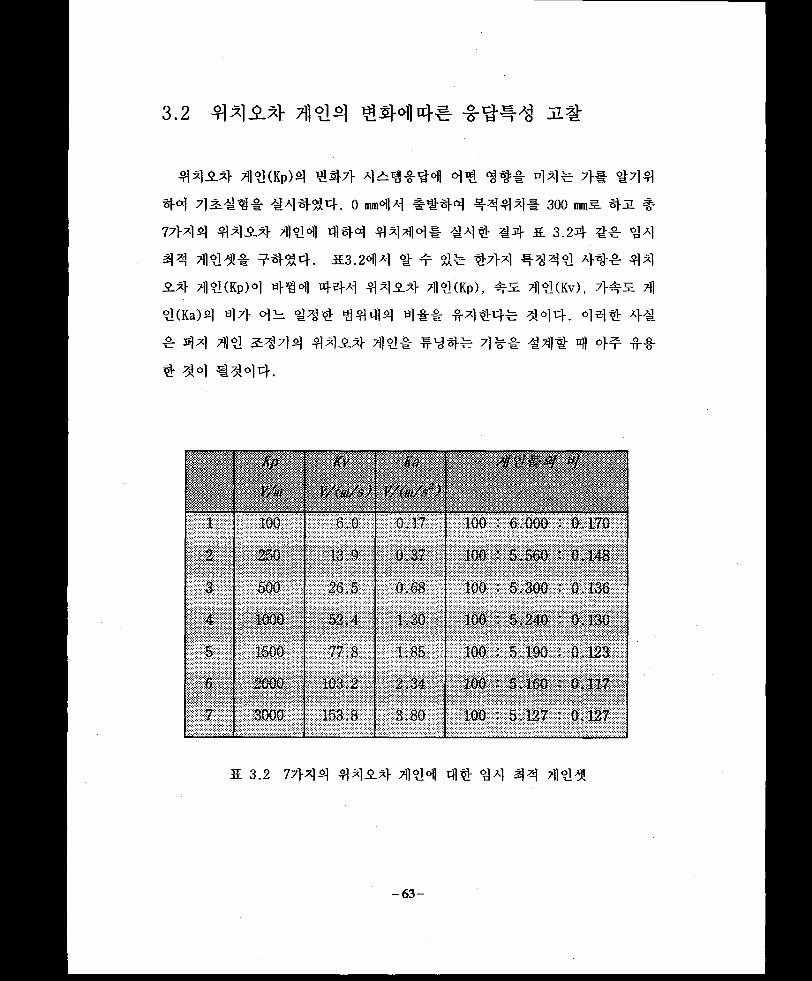
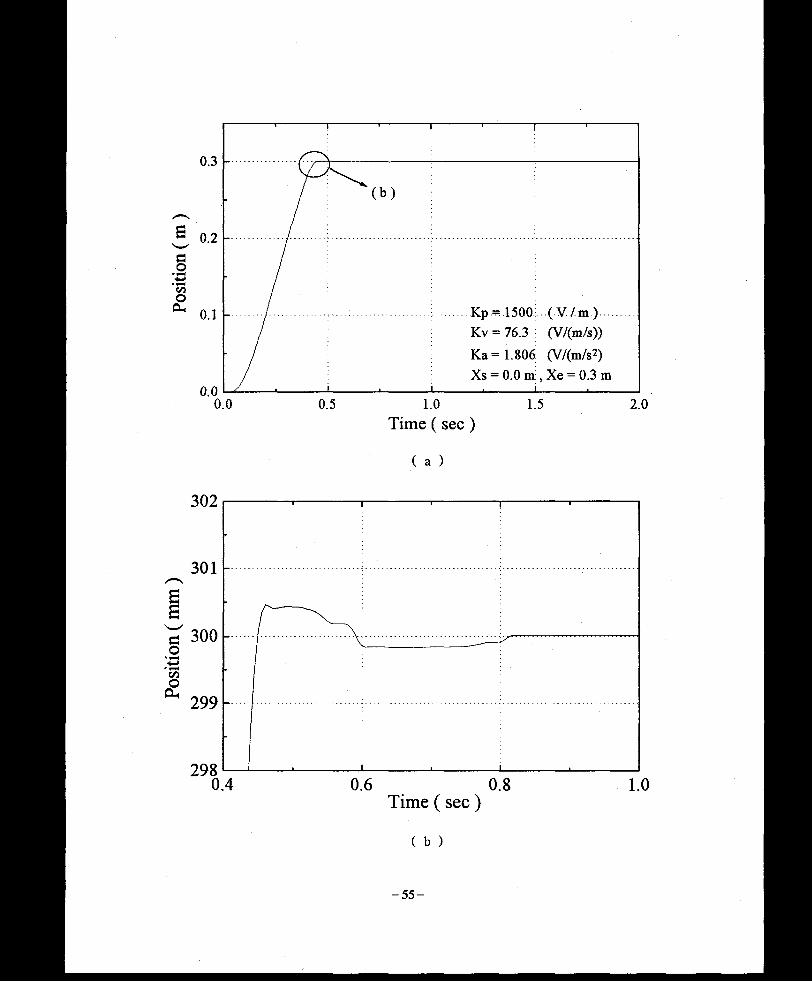
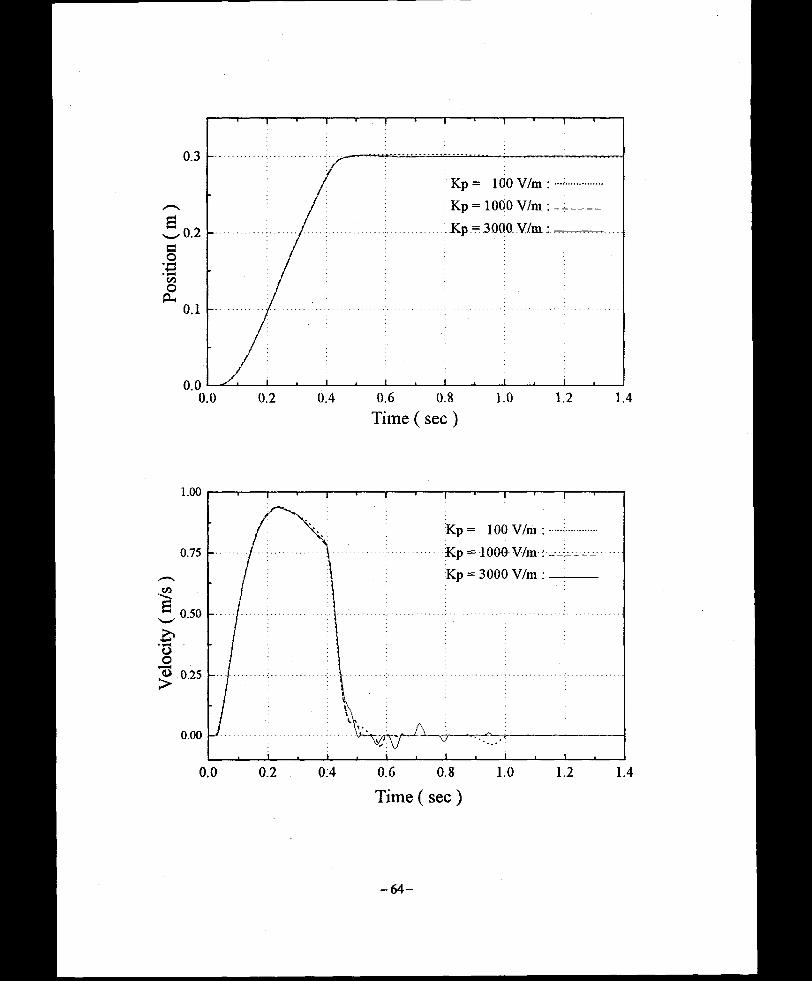
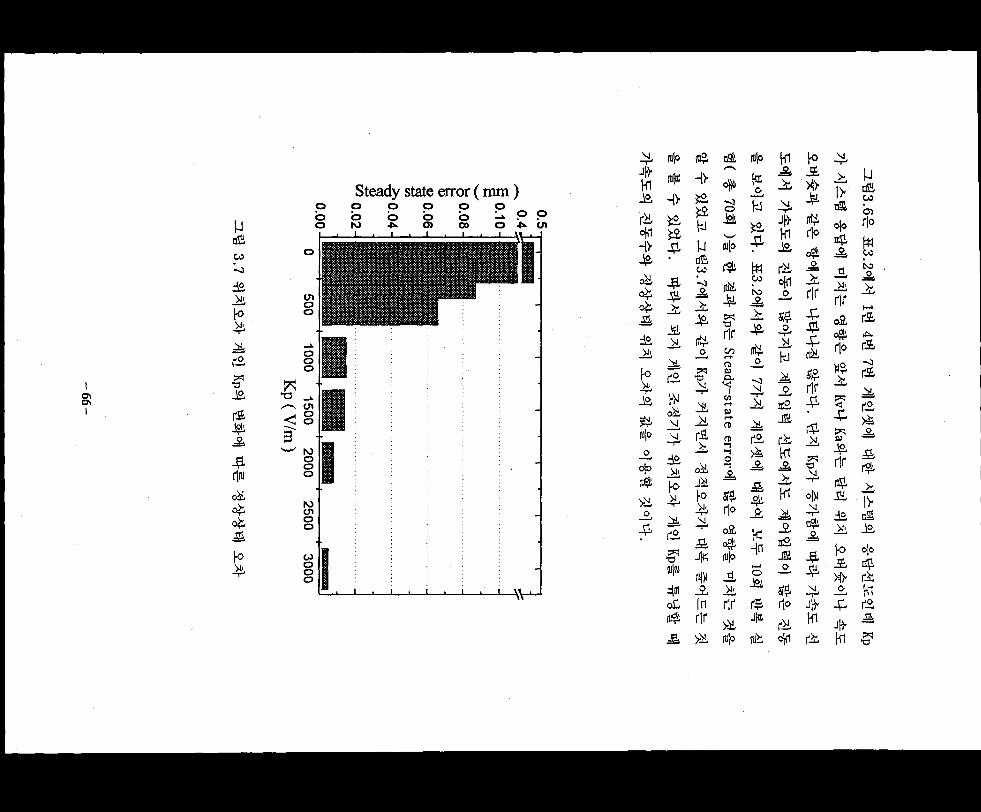
##11# 4|#(Kp)4 #$-7} 0.^-6,! 44 44fe 7>lr #7)4
#4 4&##& ####4. o mm^l# ###4 4444# 300 mmS #22. # 77H# #4^-4 4) 4 4 444 444)4* #a]# 4# 5. 3.24 #4 44 44 4 4 4* 4444. 5.3.2*1]4 # f 4te #7>4 4444 A>ej-o. 4*]-£4 #4(Kp)4 4^4 44# 44^.4 4)4(Kp), ^5 4)4(Kv), 7>45 41
4(Ka)4 471- 4^ #4# 4444 4^4 #444* 444. 44# 4#
* 44 4)4 &444 44^4 #4& *4#* 4## 44)# 4 4f *-§-
# 44 #444.
A/;
l/*i
fr
Y/(u/9)
A./
Y/(mff)
#}
1 100 0.0 0.17 100 : 6.000 : 0.170
2 250 13.9 0.37 100 : 5.560 : 0.148
3 500 26.5 0.68 100 : 5.300 : 0.136
4 1000 52.4 1.30 100 : 5.240 : 0.130
5 1500 77.8 1.85 100 : 5.190 : 0.123
6 2000 103.2 2.34 100 : 5.160 : 0.117
7 3000 153.8 3.80 100 : 5.127 : 0.127
5 3.2 77>#4 44.S.4- 4144 4# 4# 44 4144
-63-
Vel
ocity
( m
/s)
Posit
ion
(m)
Kp = 100 V/m
Kp = lOOOV/m
Kp = 3000 V/m
Time ( sec)
Kp = 100 V/m :
Kp = 3000 V/m :
Time (sec)
— 64-
‘S'tY
-ta-o
' Sa-iT
lv ■s'
-(n [to
Sla
IMk {Y
"o"[
y(&
9 S^
CControl Input (V) Acceleration (m/S2)
*0*0 13
o o oO • O • -O'o..
tb&
&&
## lb-
tea b
ds IM
k -fe
Tfey
r L’z
Steady state error (mm) o o o o o o _o o o b b 1>.PPo k) *. o) oo o *. cn
4>HiJ2,rdo)rt
-&od
AdaidK>-ft
J2
«|o
4>(ft>d
41
iu|o (ft(ft Hv
ja)&Hi
41 UaBCO
A "<]A Ad-A
d,A
A (4dir£ IHiod JL_N 4LXI f£-r- dda od4aH>x
jdH>-r' 4a
4k 4Lrd s
jH1* mlH4irt .2,oh In(ft rirA >d
aft
oJft(U|oiftnid
5*rirvos?coPCD
3O
se-r|ooiLoftHl|o_d
4anr>dBjo
flljo(a_2
41
NCOCOAV.
(ft
$x
4kr3
ASk■ft
AHi-in
Arft
(ft
Hi H> 41 JS,
>• M>4i
.h l>
41 ^ nSw % •»
Ja ^AJc, rir
rdo
1°41
S£o.41 41
41 -f (d (ft
_2 nS Jffl
rdHi£v
rir41
(41x
A4arircfi,°ftr|o
4:
41S’JftrirI „
Hi o|)j SM
_2
nSJfflo
aft
41
da4aH>A>4o($. :
r|o 4> 41rd ^ 4>ojfi rd Hi 3 lb
Lo
tY-p
-o- to
lla-
lY is
tb llo i
k io
Ik tflZ
jfit' to
l lYllo
2"£l
f •o'9
’£^'C
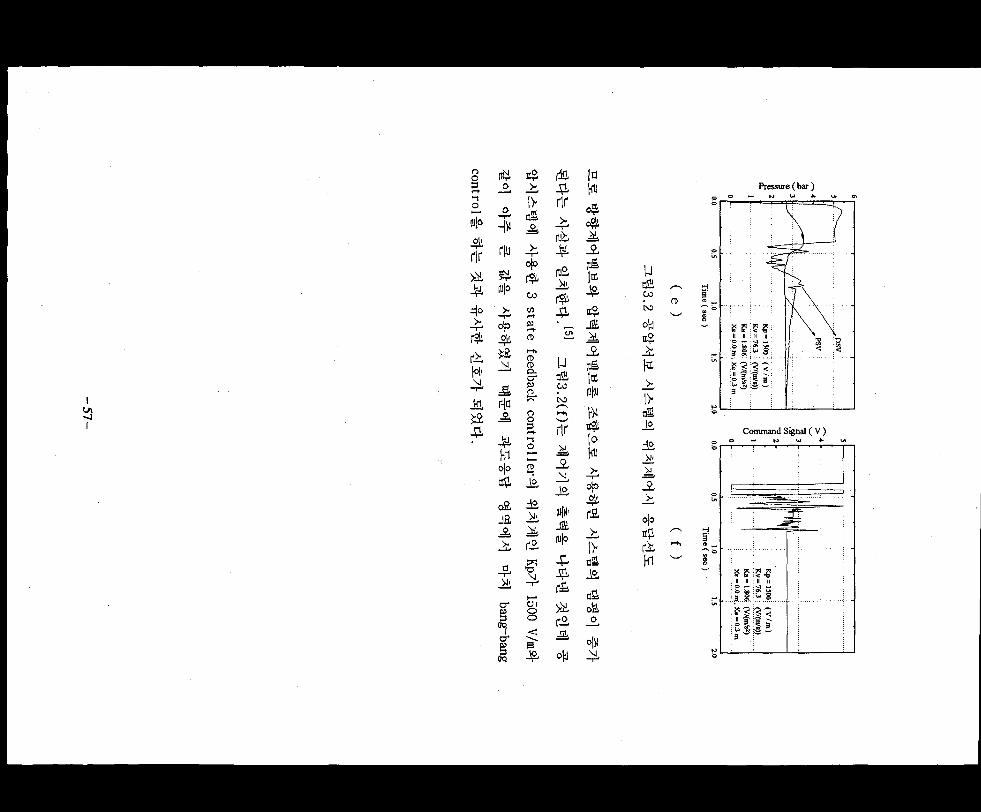
3.3 JL&fM ^#44# -§-iM JLg
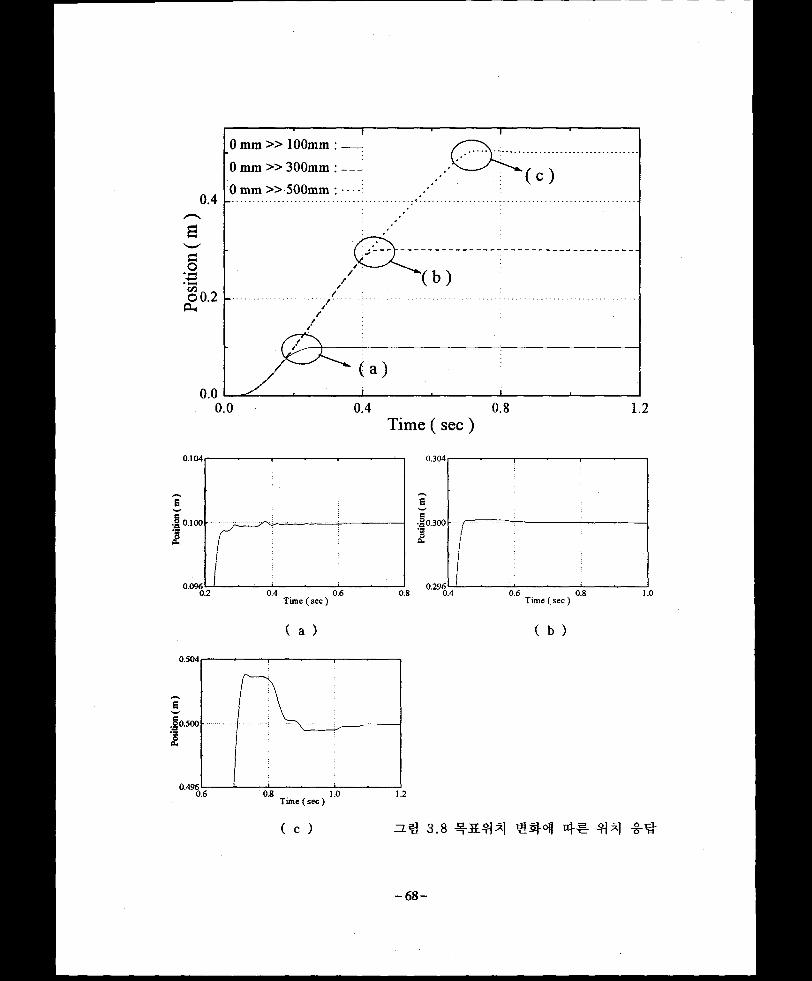
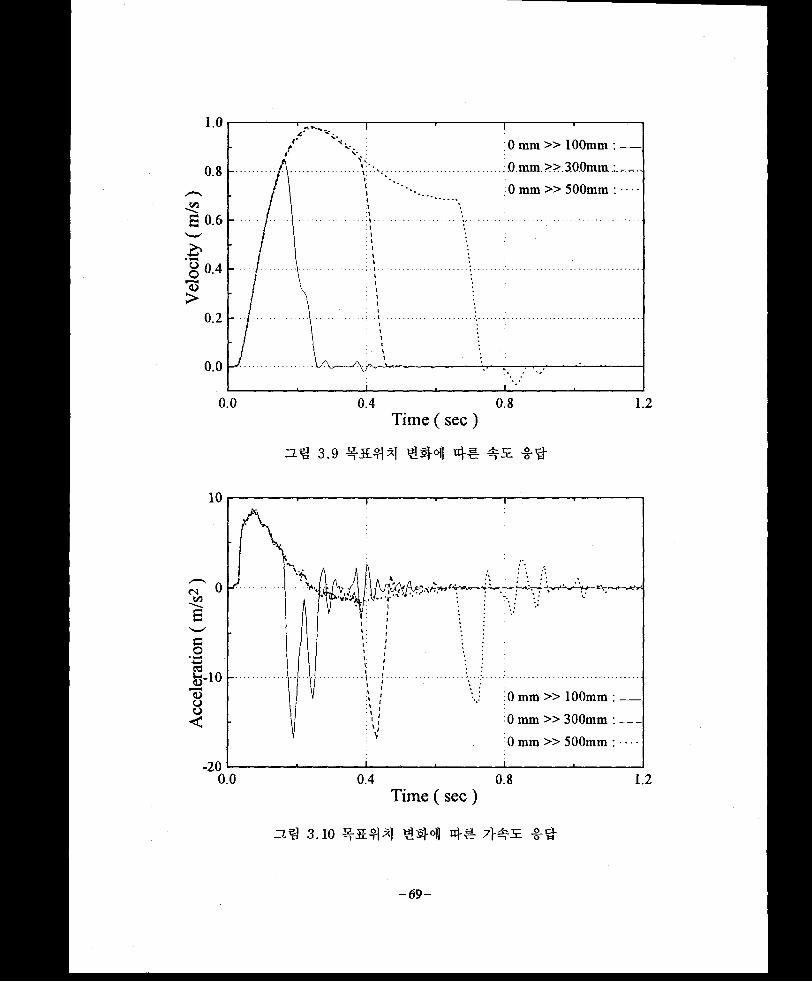
3#3.8, 3#3.9, 343.10# 45447} 44## 4 #44 ##* ti.7]
4# ## #444. ##4 4-0-# 7)1 #31# Kp = 1500(V/m), Kv =
78(V/(m/s)),Ka = 1.8( V/(m/s2))?!fll 4## Omm4|# ##44 300mm4 5#
# 414 ##44 44€ 7)14444. 4544# 100mm44 500mm44 100mm
^ #71-4444 5445. 4444 44445.4 100mm, 300mm, 500mm4 44
44 44444.3#3.8# 4444 #5# 4 settling## 444 44# 44 (a), (b),
(c)44. rL^3.8(a),(b),(c)o)14 45447} W44 #5445-4 444 4
44 44 5.4#4 #7}#3. 44-4# 44#4 4## 4 #7} #4. 3.1#
444 #4* 445.5 4##4# #5444 444 445-4 44t11 44
Kv# #4 #?!-# 444.
#143.9# #5#4 #544 #5 #Jl444 #44 #4 1 4 44#
#4-71- ^#45.5 #444.343.10# 7##e #4- #544 #5447} #44 45445.4 4# 4
#4 7>#5 #4#4 5.45 5# 7>45 #3:o)l 4# 44# # #7} 44.
#54471- 4# 4#4# 444# 444# #4# 7}#5 5.4x4 4#=# 543 44 7}#5 #3.011 144 4of#4. 7>#5 #3.4 #45 # XI## 4 # #4 4#4 4##ir #44# #3# #4-7} 44. 44# 3.1#444 #4# 4435 #4#44 454#7f 444 445.4 444 444 Ka# S-4 #7}# 444.
— 67—
Time ( sec )
0.104 0.304
0.100 •
0.096 0.296
Time (sec)Time (sec )
( a ) ( b )
0.504
Time (sec)
( c ) 3.8 Ssh 41*1 M
— 68—
0 mm » 100mm
0 mm >> 300mm0 mm » 500mm
Time (sec)
^#4 4
0 mm » 100mm
0 mm » 300mm
0 mm » 500mm
Time ( sec)
3.10 ^44 4# -§-#
-69-

4 bM Tflti 2^7]* ^-g-% 5-9- -Ma 9
A]7flO)
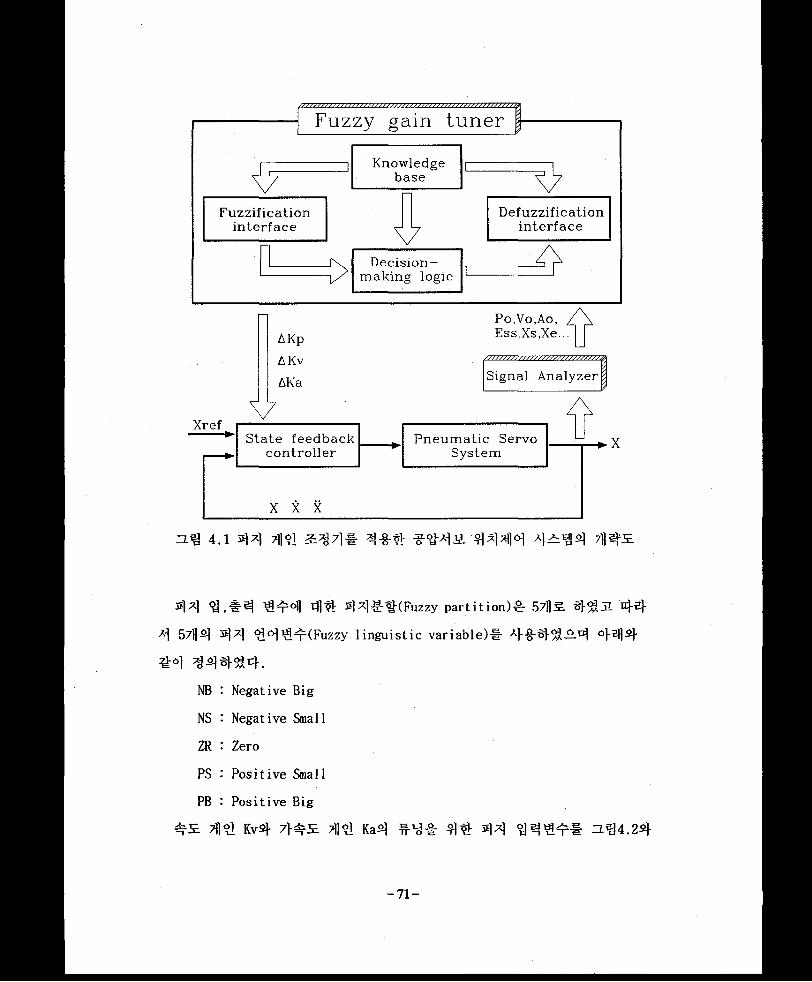
244.1# 44 Tliy 2^7)f 4## #1 x]iL 4444 Aj^Efloj 7])^= =
44. 3 #41 ?n^ 4444 feed back gain##- ^^44 4# 44 7)14 2
44# 2Til t7>x] 7]## 7>X]3I ojcj-.
4*fl# ##444 24447} .2.4 4 #-%°)]4 feedback gain#4 444
# #2 ^4 #44 2# 4#<A]2 4## # Si2# 447)14# #44-^ 7l
#44.
#4# ##44 Six] &# ##444. 2444444 7)] 47} ^2# nfl
44 ### 44# 4#2S. feedback gain## ###4 zl ^9-444 44tIIsM] e4# 27] 7)144!# f 4#23.4 4#7)1 #e# ## 441 ti]#4
24 #3.7)1 ##7)1441 #e# # 42# 4#4 44.
2^4.14]xj -g-443. 5fl47](Signal Analyzer)# 42^4 a]4 #4# =11
444 #4 24 #4 #2 24£, 7}#2 24x, 7}#2 4##, 4424
#4 ## 44## ?42 ##44, 24444 #41 44 7)14 2444] 4
4St23. #4. 44 7)14 247]# 44# Hilt# 4 4 4(Fuzz i f i cat ion)
442 444]42(Knowledge base)4] 4444 Si# 4#7> 44# 4#44
44 ##(Fuzzy inference)# 44 37>x] feedback gain# 144# 444#
4 Si 7}# 44 4#(Linguistic variable)^ 4444. 44# 44 4444
(Defuzzification)a]44 4#423. Kp, Kv, Ka4 4#4# Crisp valued 4
4% f 3 #4 4% 4444 feedback gain## 4#4 #4.
-70
Po,Vo,Ao,Ess.Xs.Xe...
Signal Analyzer
Knowledgebase
Decisionmaking logic
State feedback controller
Defuzzificationinterface
Fuzzificationinterface
Fuzzy gain tuner
Pneumatic Servo System
4.1 2M
rfl^ 3M##(Puzzy partition)^ 57])5. #^31 #4
57fl^ 5t]7] y<>lt£m(Fuzzy linguistic variable)#
#4 ^44534.NB Negative Big
NS Negative Smal 1
ZR Zero
PS Positive Smal 1
PB Positive Big
Tllti KvSj- 7^S Tflti Ka^ W 5)^1 °J3n^4.2^
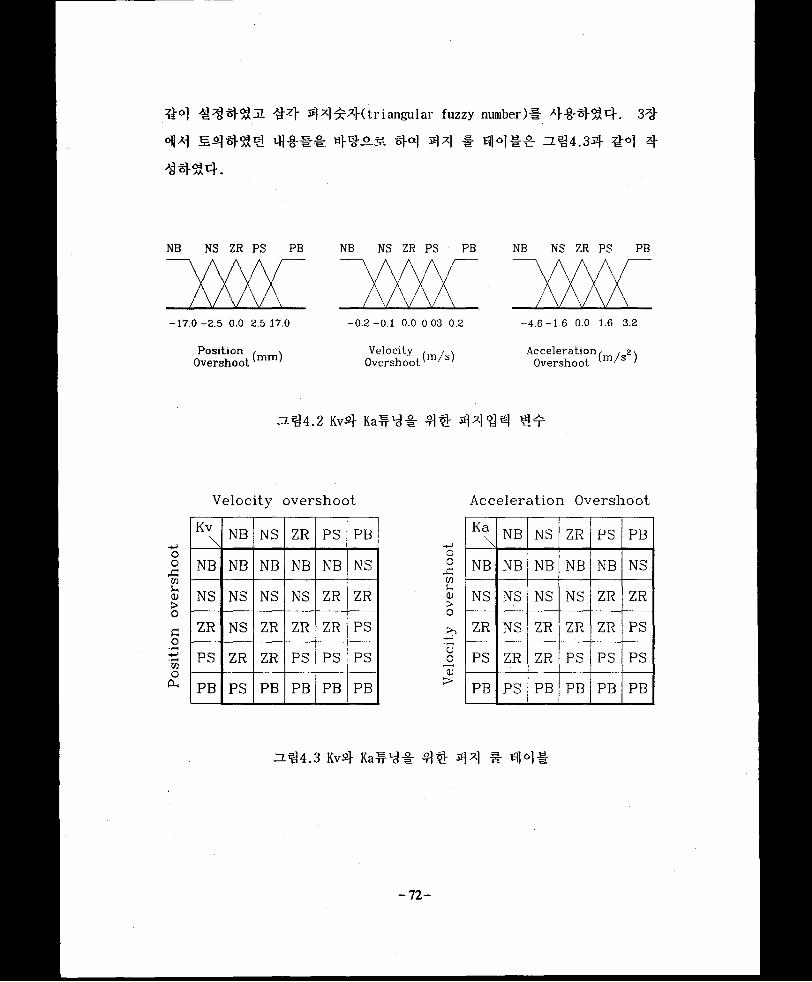
go] #4458^2. #4 S] 4 triangular fuzzy number)# 3444 m44^4 H]-§-!#- 4^-o.s 44 44 # 44## H44.34- #4 4 44584.
NB NS ZR PS NB NS ZR PS NB NS ZR PS
-17.0 -2.5 0.0 2.5 17.0 -0.2 -0.1 0.0 0.03 0.2 -4.6-1.6 0.0 1.6 3.2
PositionOvershoot (mm) Velocity
Overshoot (m/s) AccelerationOvershoot (m/s2)
H44.2 Kv4 Ka#4# 44 4444
Velocity overshoot Acceleration Overshoot
Kv\ NB NS ZR PS PB
NB NB NB NB NB NS
NS NS NS NS ZR ZR
ZR NS ZR ZR ZR PS
PS ZR ZR PS PS PS
PB PS PB PB PB PB
Ka\ NB NS ZR PS PB
NB NB NB NB NB NS
NS NS NS NS ZR ZR
ZR NS ZR ZR ZR PS
PS ZR ZR PS PS PS
PB PS PB PB PB PB
H44.3 Kv4 Ka#4# 4# 44 # 414#
-72-
7)1# &## 41# 3x3 , 5x5 , 7x7 4# #4#(Fuzzy rule table)#
44 4444 444 4 44 s# s# 41^1<^1 4 4 Til# As #44# #4
# ##4#A4 3x3# 4## 7i|## ^4 tfl# #444 3i##4#
#4#S# «>5.4 ### ###51 7x7# 44# 49711# ##(Tuning
rule)# 444# s## 444 447V #1# 444# ##4. 444 4
##44# 5x54# 4#4# ##4#a #4# #4 ## ###£# #
#S4 4##4£ 4a# #5:4#4.
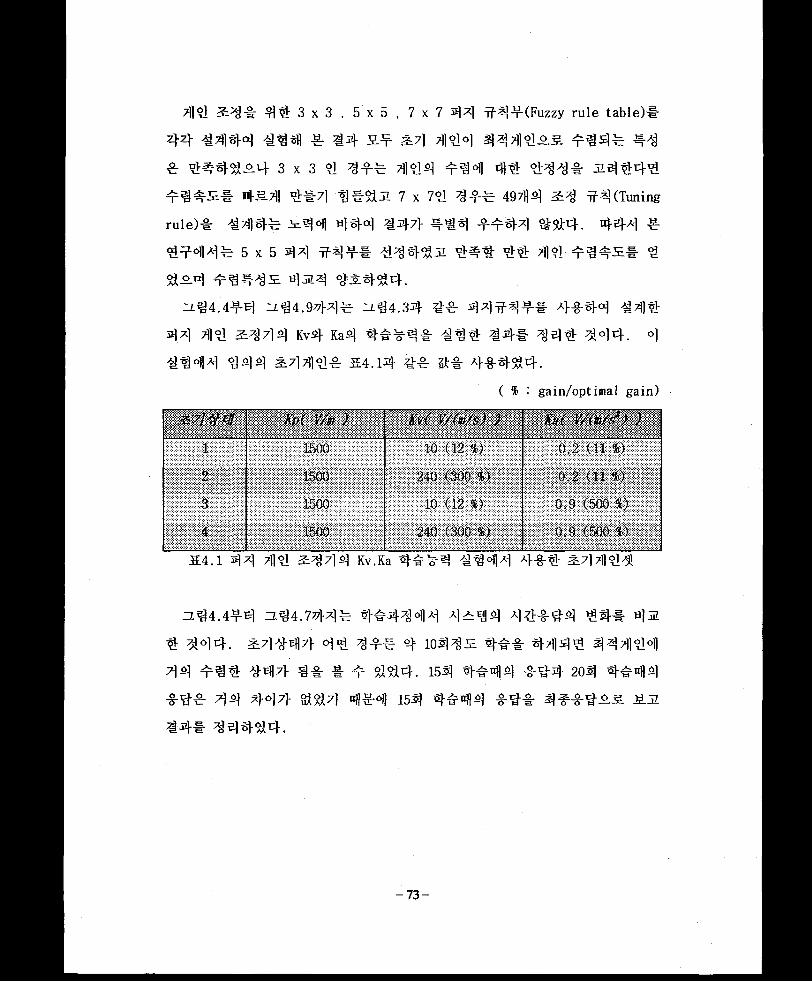
n#4.44# rz#4.9#-## n#4.34 44 4#444# 4#44 444
4# 4# s##4 kv4 Ka# 4##4# #44 44# 444 444. #
4444 #44 A#### S4.14 4# 4# 4#4#4.
( % : gain/optimal gain)
A>r %&; Kv( V/(m/s) ) Ks< VAm/s3) )
1 1500 10 (12 %) 0.2 (11 %)
2 1500 210 (300 %) 0.2 (11 %)
3 1500 10 (12 <k) 0.9 (500 <i)
4 1500 210 (300 '*) 0.9 (500 1)
£4.1 4# ## S### Kv.Ka 4##4 44#4 4#4 a###^
zz.44.4## zz.44.744^ 4#4444 4^44 44#44 44# 4a
4 4#4. &71447V 4# 4## 4 1044s 4## 47114# 44###
#4 #44 4317} 4# # # ##4. 154 4#414 #44- 204 4#44
#4# #4 4#7} ### 4## 154 4#44 ### 4###ss o
44-# #4444.
-73-
74-
l
unfi
J2,
-»a|>&ohL
J2,±,&o|o*5-&K1<?
Velocity ( m/s )O O O —V) O Vi O
Acceleration (m/#)
.5 1.0
1.5 0.40
0.44 0.48
0.52Tim
e (sec) Tim
e ( sec )
Position (m)O O O O0© k> W
p p Position (m )o 0.34
75-
i
unfi#-in
S’Ja
II|>&ohL
±,o|ott\LriHi
E?%S’w
Velocity ( m/s )
, Acceleration (m/s2)
Vi C> vt o v>
.5 1.0
1.5 0.40
0.45 0.50
0.55Tim
e ( sec ) Tim
e ( sec )
Position (m)
Position(m)O © © O OtO tO tO tO U»to ON 00 O
0.35

76-
0.0 0.5
1.0 1.5
0.40 0.44
0.48 0.52
Time (sec)
Time(sec)
Position (m)p P P p P© *» Is) U>
Position (m)poop
9- \
(aSa
e^B
H
to
to^M
L'V&
t:
Velocity (m/s)p P p P p r© *•» -fr. ON 00 ©
Acceleration (m/s 2)0 UN O Vl O Vi o
1.0 1.5
0.40 0.45
0.50 0.55
Time (sec)
Time (sec)
Position (m)
2 -
Position (m)p p p p

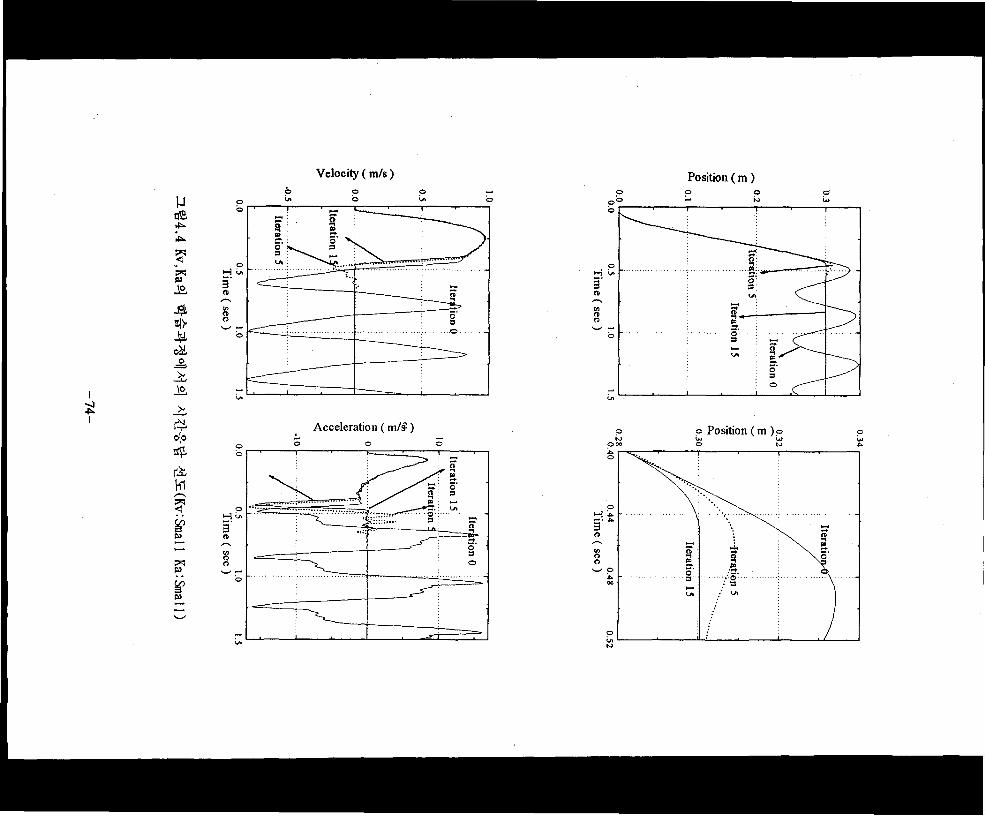
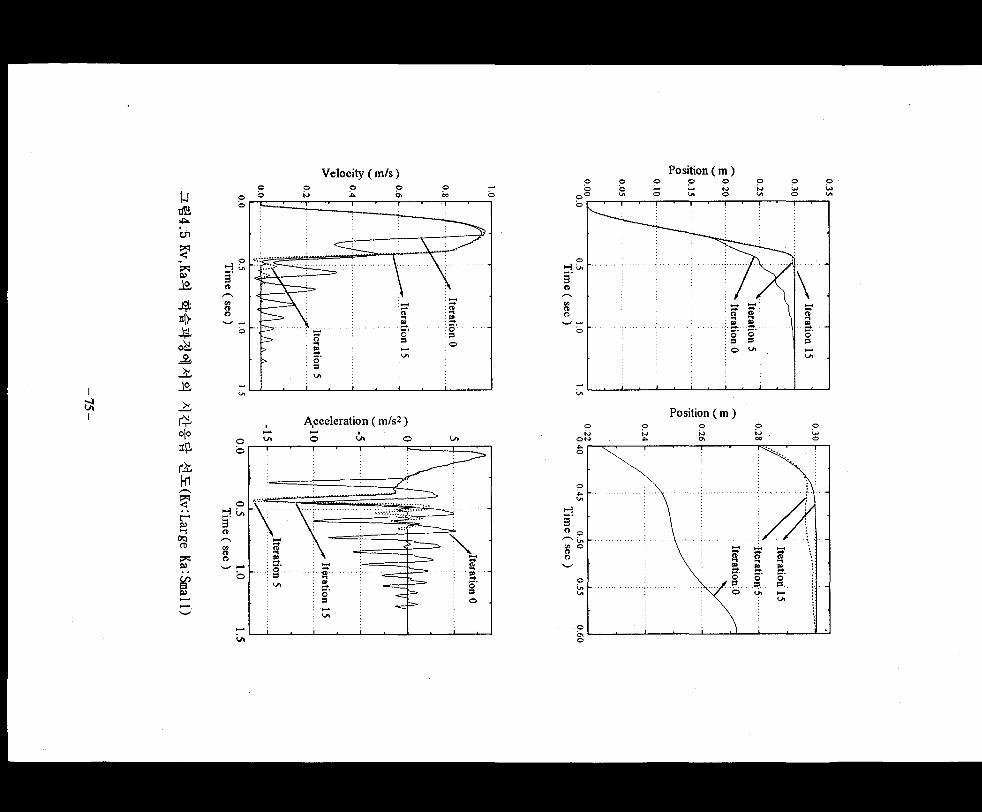
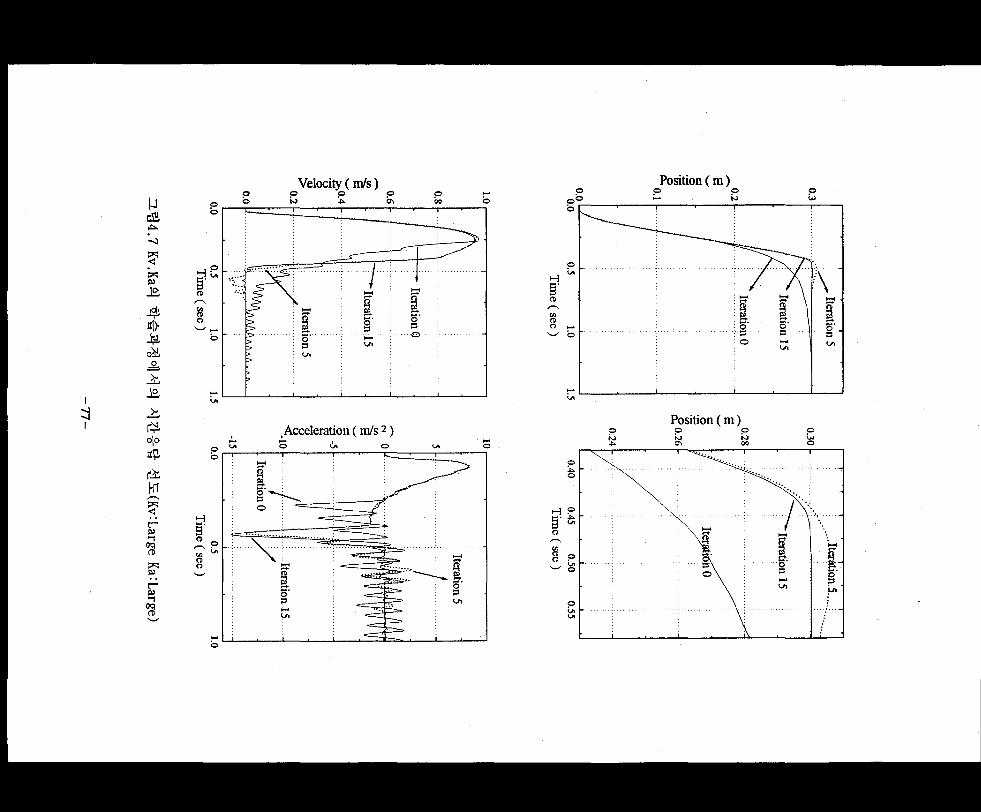
344.4* 2:7] 7)1 <?!-§- Al^Eflo) Xj£o) ** 31-0.3 *3 4*X)^* 4*4 xl^c§«6|lAl 4*4.4* 34*3 $14. 4w ^(Iteration 0)4
-5-441x1 o}* * 0)434*0! 30)3 *3 34x4 7>*3 5.4x4 ^T 37)1 444-3 $14.
344.5,344.6,344.74 7l*3 -§-4^341x1 Kv7> 4347)1 444 7>*371 <g* x)4* ttc #7143 Ka7> 4347)1 444 71*34 xl**7l #7>4ir # * $14. #7)144 3# 7)47)1 44 7)434 4**4 44* 44# %* 3#7> #7144. 444 X144 5)4 t)14 344* #4# 4 °1* #44 430)4 S°))7l #44 44 4-°) 4434x4 43 34* 3
43 7143 344433 T))$)#& 441 34# * $l%7l 41#o)l * 4*471 xMlfl 47I 7)14 347)0)1* xi-g-4^1 ^4:4.
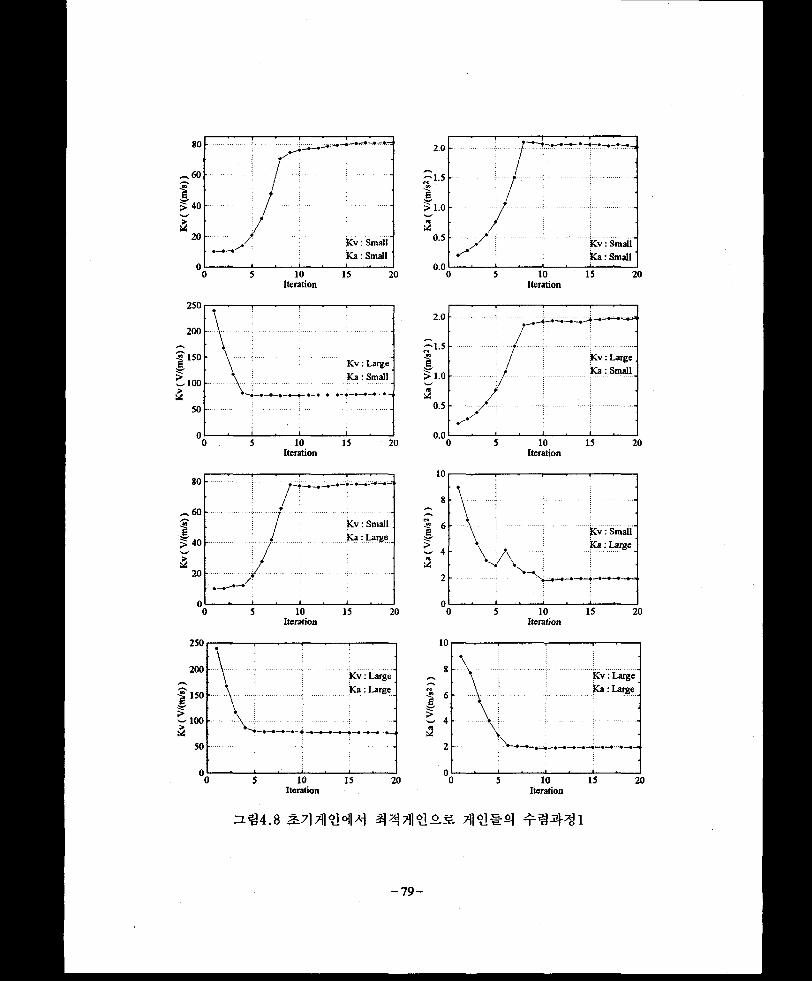
344.8* 444 34Tlloiol 447)1433 *44)71* 44& 4 4w S*0)1 444 44# 40)3 344.9* 2x14 7)1 o) 5§4(x# : Kv , y* : Ka)
4-°flx14 4w44& 44^ 4°14. 344,94 4434ix) 34 4 4)4# ol 4433 *444 %3 44 4433 *44* * *7l $14. °)*. *$1# Til01* *3 44^ #^55* 4)0)13 4)44 *4o)l 3*4 40)7l $14* 4* 34434 34 *4* 71*3 3 0144.
— 78—
Kv: Small Ka: Small
10Iteration
■3 150 Kv: LargeKa: Small
...:
Iteration
0.5 ..... Kv: Small Ka: Small
10Iteration
iv: LargeKa: Small
0 5 10 15 20Iteration
Kv: Small
Iteration
Kv: Large
Ka : Lar8e
Iteration
Kv: Small
10Iteration
. \ .........■ \ : . Kv: Large
ka :Lal*e.. \i................
: : :____ ____ i____ _____ i____ _____ i___ i____
0 5 10 15 20Iteration
n^4.8 f ^4^1
79-

</3 6-
Kv(V/(m/s))
Kv (V/(m/s))
— 80—
5 ## ^ ^ 4^1
5.1
• 3 3l%aM7]# 41# ** 42 4444 42#1 9444 42#
944 92 *1# 1* 42124 4# 4244424 4##4444
#441* ##4#2 #2*4 *4* 4 49* 94#4 #44 44#
4# 9*4* 44# 9 444.
• 444 ##4-4°ll4 4 4# *4 ##7} a]a0j 14-011 94^ 9^1 4
#7}4 #** *44 4*442. 41 144 42#l4_l 22 37}4 ?\]
#** *44* 4*7} 44* 4* 9 444.
• 4144(#44,244)1 4444 4444 *#44 41444 444
44444 44* # 9 ##2 44 44 244°)1 444 41444 4
41 2## 9 4* 4ii 1?}# #2*1 44444.
• 44# 4*7} 441 i#4^#4 4444 #44 92444 7}9^4
4* *44* 44 414 2441 #4444.
• #4# 44 44 2444 #*4141 4# #** *44 2 411 ## # #4 #9# ## 4444224 94*4* 4* 97} ##4.
— 81—
5.2
• #4 €4 444^94 4444# 4-8-44 4447}4# 4444# 4#4^3. €444 €4444 i ^0.3.4 ^<£4^# 4-8-44 €444 ##4 #4 $144 €## €# 444## €4 #€# 4" $14.
• xl^-4x| <9^€ ####4€ 71^-^j o] n}#m^ ^ 5|-5}-
44 sensitivity^ 44 44^=14# 7}€ ##4—€# 4# 44 #4 444## 44# 4 $1^4 4# 4#€ 4471 4# 4-8-44 €444 44 7>4 4-8-44# #44 4 $1 4 #44^€# 444 # $14.
-82-
% ul & ^
[1] 44e, 5-44444 444144 44 45”,
^5447] e 4 i!4544 4444 fc-g, 1991
[2] 54#, “4/M #4414 4^E5 544 =l 444144 44 45”,
^5447] #4 ^4#44 4444 Wg, 1992
[3] 4-8-4, “#434 4N#4]444 44444 44 44”,
4544444#44 4444 fe5, 1994
[4] 443:, “#44 4M. 4^4 4444 ^ 414144 4 M W”,
#5444#4 44#44 4444 Wg, 1995
[5] 444, “TDC 4#& 4-8-4 4#4 4^4 44414 ^ 44 4^ 4 444 *04". 44444#4 444-44 4444 8r5, 1995
[6] 444,^-44, “44 44 ^ 8-8- 1,2”, 5#44#44, 1991
[7] J.L.Shearer, “Continuous Control of Motion with Compressed
Air,1,2”, Trans, of ASME, Feb, 1959, pp233~249
[8] Blaine W.Andersen, “The Analysis and Design of Pneumatic
Systems”,JOHN WILEY & SONS,INC, 1967
[9] C.R.Burrows, “Effect of Position on the Stability of Pnematic Servo
Mechanism”, Research Notes in J. Mech. Eng. Sci. Vo I 11 No.6 1969,
pp615-616
[10] J.J.Mannetje, “Pneumatic Servo Design Method Improves System Band
width Twenty-fold” Control Eng, Jun, 1981, pp79~83
[11] R.H.Weston, P.R.Moore, T.W.Thatcher.“Computer controlled Pneumatic
Servo Drives”, Proc. Inst. Mech. Engrs. Vol 198B, No 14, 1984,
PP225-231
[12] R.H.Weston, P.R.Moore, T.W.Thatcher, “Compensation in Pneumatically
-83
Actuated Servomechnisms”, Trans, of Inst. M.C, VoI 7, No 5, 1985,
pp238-244
[13] H.S.Cho.C.W.Lee, “Performance of a modified on-off controller with
PD action for Pneumatic Servomechanism”, KAIST
[14] H.S.Cho.S.G.Lee “On the Development of a PWM Control-based
Pneumatic Servomechanism”, Int. Symp. on Fluid Control and
Measurement, Tokyo, Sept. 1985, pp37-46
[15] Tri Nguyen Huu, “Verbalten servopnematischer Zylinderrantriebe im
Lageregelkreis”, dissertation, RWTH-Aachen, 1987
[16] T.Virvalo, “Designing a Pneumatic Position Servo System” , Power
International, Jun, 1989, pp141-147
[17] J.Pu, R.H.Weston, “A New Generation of Pneumatic Servo for
Industrial Robots”, Robotica, Vol 7 , 1989, pp17-23
[18] T.Manabe, F.Miyazaki, “Tearing Control Based on Function Iteration
Method”, Japan-USA Symposium on Flexible Automation - A Pacific Rim
Conference, Japan, 1990, pp631-634
[19] 01af 01igschlaeger, “Pnematische Zy1inder ant riebe-1hermodynamische
Grundlagen und digitale Simulation”, dissertation, RWTH-Aachen,
1990
[20] Yuan Lu, “Elektropnematischer Positionierantriebe mit schnellen
Schaltventilen”, dissertation, RWTH-Aachen, 1992
[21] Andreas Klein, “Einsatz der Fuzzy-Logik zur Adaption der
Positionsregelung fluidtechnischer Zylinderantriebe”, dissertation,
RWTH-Aachen, 1993
-84-

: .^-g- v}^b\ <£& <>]-§-1!: x>i- 4^4 W
1. -4# 891.1 99-*% 3 ^ #4..........................................................................891.2 €9##............................................................................... 901.3 €94#............................................................................... 91
2. 44€4 4^4 719# 49 €45.512= 4^€# 94 943. 4-954 314## °1## 444114 4H9fl 5.1 97
3.1 7fi..........................................................................................973.2 44444 444 #4.................................................... 973.3 44#.................................................................................. 983.4 44 # till4^............................................................... 983.5 449# ^ 444#.............................................................983.6 44# 4-954 #2.4#................................................. 99
4. 44 # 4^-4# 4## €444 1044-1 4-S..................................................................................... 1044.2 1044.3 S#44.................................................................................1064.4 ##44.................................................................................107
5. ## 1145.1 ##5# # #4............................................................... 1145.2 4-34-4 €45#........................................................ 1155.3 44 € 4h«J! 44€# 4## #44## 414 ... . 1155.4 h#4I4............................................................................ 1155.5 ##44............................................................................ 1165.6 ##44............................................................................ 1165.7 4 #4 #€44 4 m................................................... m
6. 1# # 9944 130#3.## 131
-87-
1.1 ## i #4
7}41#3l4 ^#3# 444 #144 7>^o]#444. 4 44 #4 11 if4 1 344 44 4# ^4 4 3# 41# #1344) 5)^1), 1437)- ^§HM1 44 #1 44## 444 137} 4147)) 44 44& #^4# 4444 4 3441 4## &444 44. 44
#xfll# 61)147) ^14 4-133 3.444 4## 35)144 4# 444 #^# 4#4 4-#4 44 4 3333 4443 44. 344 44 44 #4 #4tl4 44444 3#^ 44 4 44444 4 44 4444 4^1) 44443 44(34 i). 444 44 44444 444 44444 444 #43 4)2) 4# 41# # 4)34 ## 44# 4444.
4#°))# #4 #44 34 4 #4 44 #44 4 #35.44 44 4# 33.44 44# 4#4 #3, #4 4#4# 4444 4# 34 4%& #4 444, 3441 4#4 44 4144 443 4444. 444 443 444#4444 #liD4°)M4 444# 3441 4444 ^4)43 4# 4#
444 4#4-7f 144 345)3 44. 444 14# 444 44 333 4^^irA>^.5>7) 41)4 4# 447)- 4D 5]ji 44[i].
#4 44443 14-4 1432] 44, 3# 4 4All 444 Aj-481-7] 444 44 333 4344 41 447)- l%i #44. 444 44 333 431# 4447)- 44 43 444# 4)3444 4 4)3442) 4444 44 11]
44# #«# #5)143433 #15)14, 4# 444# 44# 4#4 44
341 4 44)3 4# # 44.14# 44 47} 4)35) 4# 3444 #443 4# 444 37) 4444 #4 44 444) 44# 4444 4441 143, #4#
44 #414-1444 #4) 44# #14# 4444. 14 44)414# 444-4 144 §1333 1444 #144 &4, 34 44 134)4 4#44 41#
-89-
sM-. zlbH, #4 4tiM4# !#44 #144 41# 4 44 12 #4 444 4 425 ##4til Af-g-f- ^ 44. 44 44 M44 #4 44
#44 414 # 4#444 #4 41# #4444 #444. 44 41 #444 44 4# 44 4a## 2a til 2! 4# 2144 #442 4#
#444 44 #4##444 4#4, 4 4#ti]#til4 #4# 44 24 ^zl, 44# #44 27] nfl^-ofl Tie]011 4# 444 ### ^-4 444 44# 44444 444 44# 444 44# #144 44# 4#4 #44 4444 #444.
4#4# 41 44## 2.444 44 444# #4 4# # 4# 144 #4 414# 41## 4# 44 ## 14 144 2.4 # # 4# 414 1#7]-
444l3i[2], be I! 4^1oj] o)51) ^at- 4441 #442. 44 #^oj]
l-d-4 42.# ##4# 4#4 !f 1!4[3],## #444 444 t!2 #4A] 44# ### 44 #14 14#
2.5L 4144 41# 44 44 41 #4 4^4 44 2422 #442. 4# 444 14# 14^ #444# 414. ###44# 44 #4M 14| 14# 14# 144 144 4##til 44 44 14# 5144 44 1 4^4 44# #44 11 241 4144 444# #43i44.
1.2 4# 14
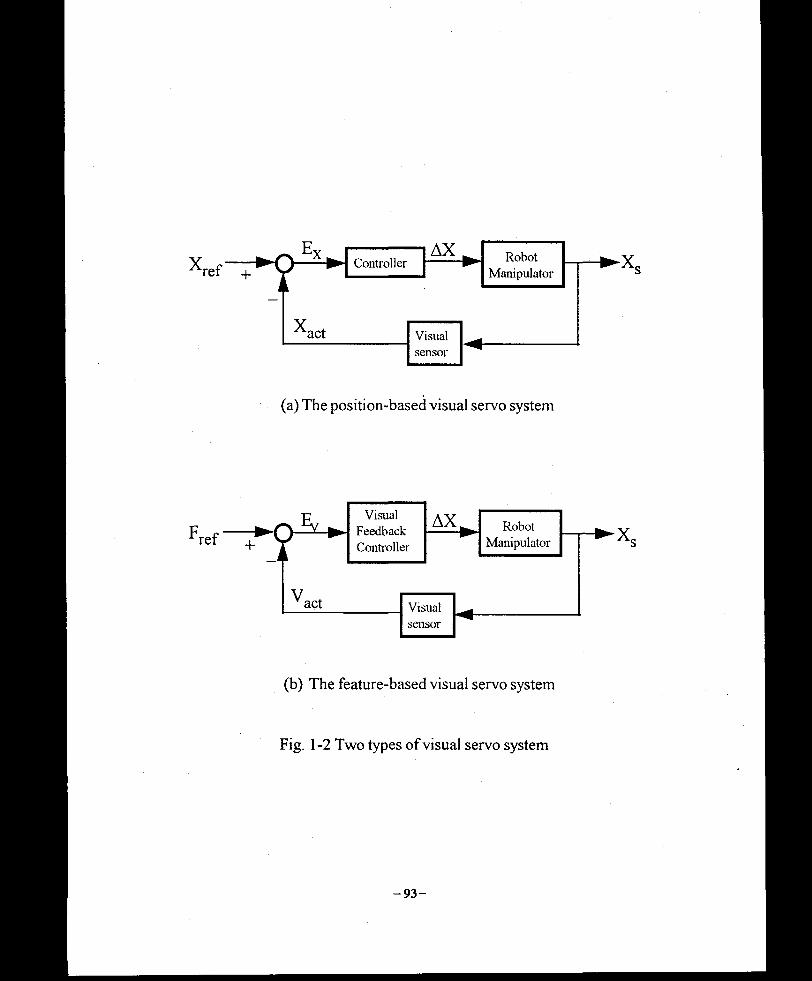
44 #4# 4#4 3-#! ## 11# a4 4#4 44 # 7>42 4#4 44. 2 # #7M1# al i-2(a)4 44 #111 44# 444-711 #444 a144 #4 45-# 4 #44 2## ## A] 7] # 4 (position-based visualservoing)4a, 4# 44# a4 i-2(b)4 44 14 1## 14^ 144 til#44 a 4 A] 7] e] # #4=22 24# ## A] 7] 4 4(feature-base visual servoing)4 4.
44 141- 4#4 454! !# a>s)1^ Sanderson #4 #2 5# 4# till 4 (model reference adaptive control) 14# 41144 A14 z] 50]) 4 #! !#[4],
-90-
49 #4IS) 94# CAD s.l5.jfE-i 94 b 9b 45# 49 #455 #4 44
45 4 — 9& b## bb[5][6], #7}# 44" b9( Augmented Image Space)#
b##b 94"[7], 2444 44 49 9(uncalibrated camera)# 44# 44" 459
-4# 9 4[8], 44# #4 4 9(normalized feature matrix)# 44b 9 4[9], 4 4"
445.2:7) #49# #4b9 4-4# 94[10] 44 94.
1.3 9441#
# 94b 44" 9 4^4 4b# A9 94 555 4^44. 0} 4^99 44 92.4## 49#94. 944 44" 9 4244# 4947}- 424 94 9# 9944 4^4 9# #449 #44^ 44 4# 44 #44#4 #31145. 94 #9# 44" #444 9# 95.# 4#44 44 44471- 9# 44 #445. ## S9##4 #445. 9# #44b 9# 9#4. 44 9 #24# 4## 44 92.4b# 2.9 44. ## 44, #9 445 4b4 94. 4 44 99## 49 #94 9444 9b 4445#4 9# 49# 52 494-7} 454 9# 54#4 #31145 99 99# bb #4 5# #94 44 9 42455 #445 9# 555 4#44b #955 #9#4. 49# 414 99# 44 944 #4#4, 44 94 #9 444 4# 49 44# #4# #4 45995 #41 4##4 444# 94 b## 994# b 94. 419# 414 994 #9# 99571 #94 94994 414# 44 555 429# ### 994 99# 9#94. 4# 449 4# 4# #5, 99 #4 544 #5, 2#2 #9 49# 42955# 5 ^g-44 419# 414 994 #9# 94 59#.
91-
steam generate
tubesheettop level of refueling pool .. 3 manway
U (D
closure head removed \instal1
dams
;7-...nozzle dam
reactor-vessel core support barre
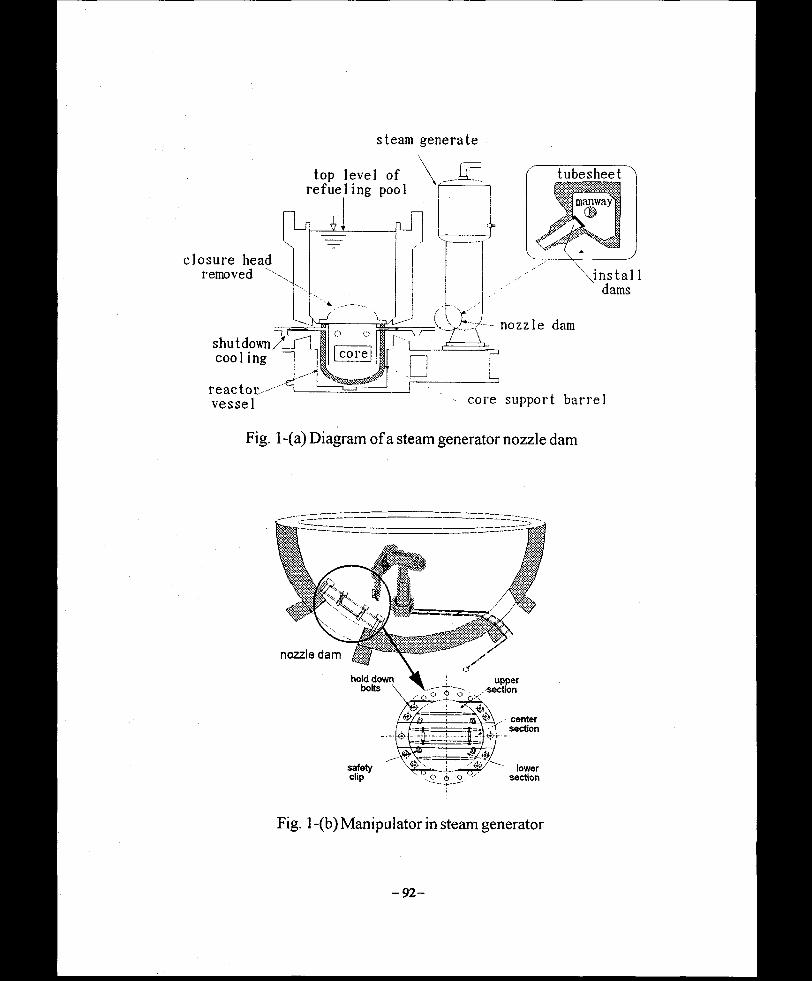
Fig. 1 -(a) Diagram of a steam generator nozzle dam
nozzle dam ,
hold down bolts '
uppersection
centersection
lowersectiono o o
Fig. 1 -(b) Manipulator in steam generator
— 92—
Xref
Visualsensor
Controller RobotManipulator
(a) The position-based visual servo system
ref
(b) The feature-based visual servo system
Fig. 1-2 Two types of visual servo system
-93-
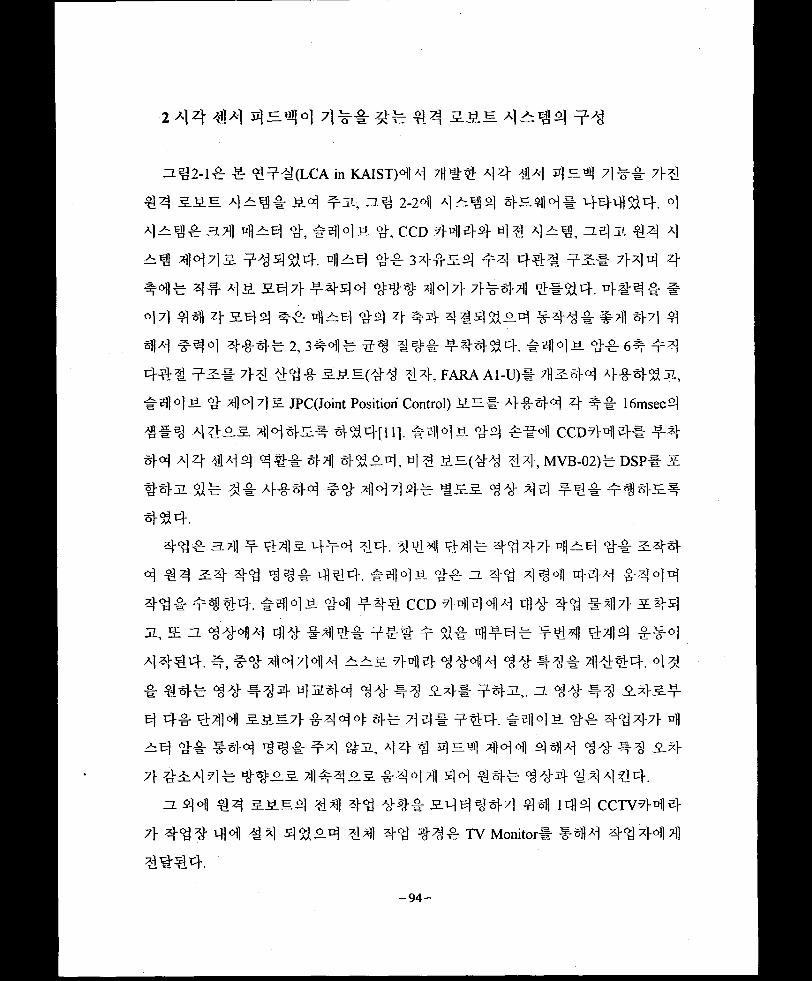
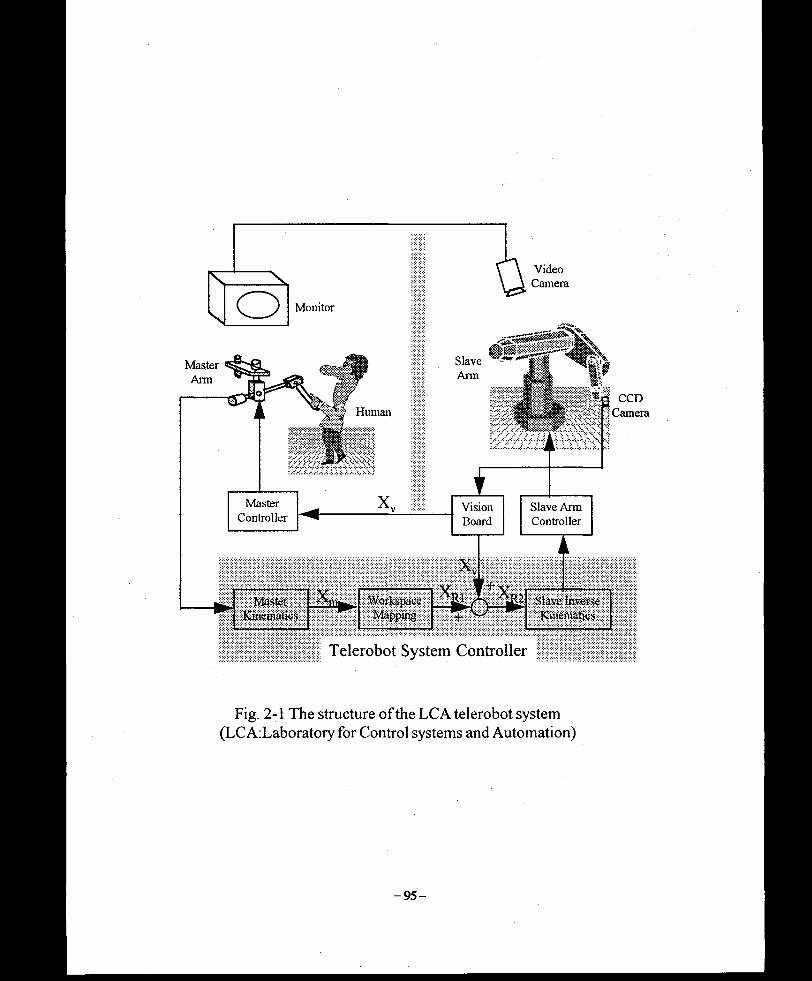
2 44 44 4^44 441 41 44 5.45 4^44 T4
2^2-11 1 SH(LCA in KAIST)°HS 4t^: 44 44 #5# 4H 71-4
44 5.55 42^1 54 #2, 2S 2-24 42«i# #244# 44444. °1
4^S1 24 42# #-, #5i]oiti ccd 4444 44 #2^, 2#2 44 4
2^ 444& 14S%4. 4^4 41 3415# IS 441 fit 7}## 4
444 44 4a. 5.44 4444 444 447} 7}i#s] 41-44. 4#S! #
44 44 4 5.44 41 4^4 44 4 14 #^#42# ##-41 ^ ^7] ^
44 144 4141 2,3141 IS 14114444.144a. 416l 14
441 #5# 7]-4 #4# 555(4# 14, FARAA1-U)# 4^44 114%2,
#442 4 4445 JPC(Joint Position Control) 5.2# 4144 4 11 16msec4
111 4125- 4445# 444[ii]. 1445 14 1#4 CCD444# 14
44 44 444 4#144 45324, til 1 52(44 14, mvb-02)1 DSP# 5
442 41 414144 #4-44441155 44 44 #4114945#
4534.
Ill 3.7]} # 47(]5 414 14.114 441 4447} 425-] <4# 544
4 44 54 44 441 414. 1445 4# 2 #<y 414 444 1444
441 IS44.1445 14 144 CCD -7}4#44 44 44 147} 544
2, 5 2 <8444 44 1441 #1# 1 $11 4141144 444 114 4444. #, #444444 255 ?M 4-<8444 44 #S 131444. 44 1 ^41 44 #S4 4^44 44 #4 24# 142,. 2 <84 #4 245#4 4# 444 5557} 1444 41 4el# #44.1445 41 4447} 4
24 41 #44 SSI #4 #2, 44 S 424 444 #si# #4 #s 24
7} 454 7) # 4425 Tills 251# # 7]] #4 441 # 44 14 4 44.
2 44 44 555# 44 44 441 54444-71 #4 14# CCTV7}4e}
7} 4*94 44 IS ##24 SSI 41 441 tv Monitor# #44 4444SI
4M4.
-94-
VideoCamera
Monitor
MasterAnn
2 CCD : CameraHuman
MasterController
VisionBoard
Slave Arm Controller
Ma-iktKmcmulikS
Telerobot System Controller
Fig. 2-1 The structure of the LCA telerobot system (LCA:Laboratory for Control systems and Automation)
Fig. 2-2 The hardware of the LCA telerobot system (LCA:Laboratory for Control systems and Automation)
-96-

3.4# &4 44 #* 4-8-# 44 44 *3^ 2-1
3.1
34 3-12) (a)4 HA]n)j<2] 44# 44# 444^3, (b)4 44 4444 #41
444 #4# 44-t- 444 & 4. 44 4:4 43^4 #4* 3.4 3-i4 (b)44 444 4# * 44- #41# #444# 444. 4# 4414 ^#4 *34 *4 # ^ 43# n# 3-24 #4. 444 4# 4423 44# 44 #4 44(cre/)# #
31, 47)14 4444 CCD 444# INI 4# 4*23*4 #4 #4 #4 #4(coc,)4 43.44 3 #4#4 44# *44 44. 44 44 #4# 444 #3)143 4# 4444 4a: A)*# 44 44# 444 #4 44 44.
(3-1)
44 44 #41-4 44344 43 4#t)H144 #443 44 44 444 (aa»4- 444 4a))a) 45. ^44# 4 4 ## 44444.
3.2 44 4144 444-#4
# #44 4# 34 44 444# 4444 444 44 4 4444 4*4##4414#4. 44* #4# **#3 4443M4 44#4 444 4434
(3-2)
33 44 #*44.
44 41444 *4* *44 4*4 **371- m4 #51143 4-4 47)1 444
4 4*443*444*4444 4*4 #4 44 44.AXv - [ Axjj/ , Ar2y . • • •. Axwjr )r (3-3)
-97-
nel jl, 44# rflsM 44 #55 3J? 44 #55 #jl, 444 44#4# #54 444 77H5.4^3#, 224 3-24 44# OT.
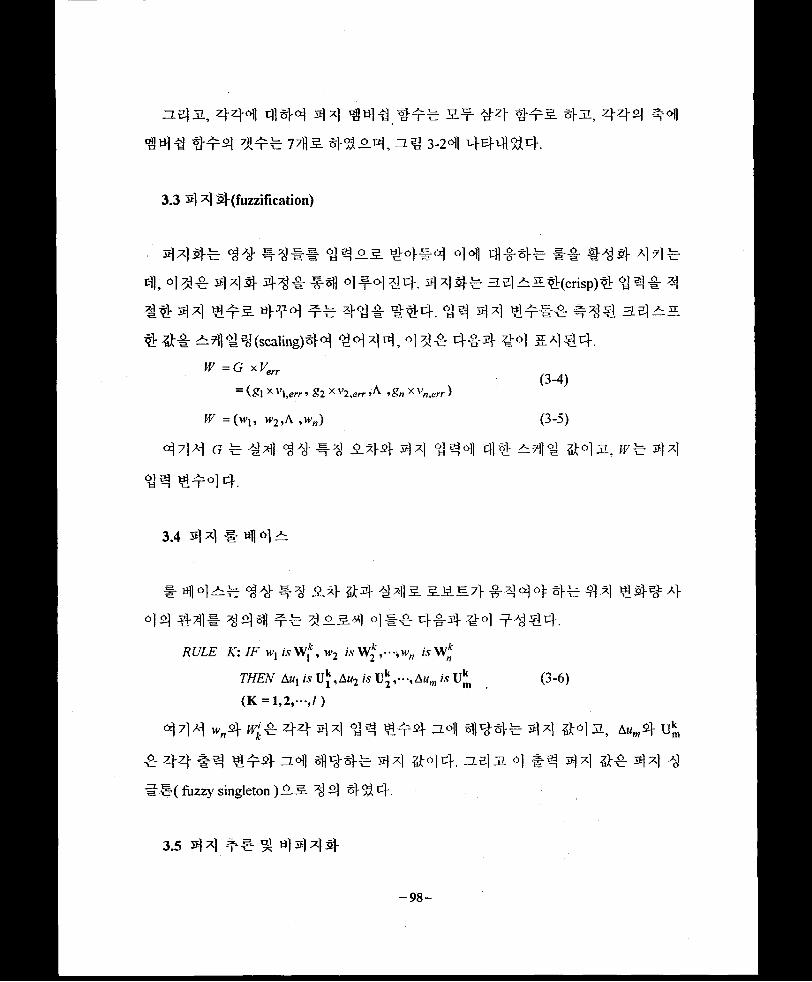
3.3 4 x] ^-(fuzzification)
44#4 4# 44## 4443 4444 44 4444 #4 #44 444 #, 4 4£ 4 4 # 44 # ## 4 54 #4. 4 4 #5 ^4 3=#(crisp)# 444-4 44 44 #45. 444 44 444 #44. 44 44 #5#5 44# a# 3 =4 #4 — 4]4#(scaling)44 44 44,4 44 444 44 &4#4.
W -G xVerr (3^)= (ft X v\,err, ft x v2,err 5 ,ft x \'„,err )
fF =(Wj, W2,A ,W„) (3-5)
444 g 5 44 44 44 444 44 444 41# 44 2i, >f5 44
4# #444.
3.4 44 #414^
# #4^5 4# 44 54 44 #45 3337} #444 4# 44 #44 444 #4# 44# 55 453.4 4#5 4-B-4 #4 54#4.
ALA£ A': 7/7 w, toWf, w2 «• W2A',--,wn is W*r/ZATV At/, /s U^,Am2 /> U^v,A«m « U* (3-6)
(K = 1,2,"-,/)
444 w„4- r-5 4# 44^ #54 3# #44# 44 443, a«w4 u*
5 44 #4 #54- 21# #44# 44 444. 22.43. 4 #4 44 4# 44 4##( fuzzy singleton )53 44 444-
3.5 44 5# ^ 444#
98-

41 44# product SUIT! 44# 4441 -a 1 1 44 A] 2\ *|£L7}- 7|-#44 414[12][13], Ill: 6] uoVtf 4- 1411 #n :f#4# #4 4#111411 4#14. H] 4 x| 5}-^ #^4# 444% #1, e>] 1-f 41 ##4" 1
4444 14 Ax# 4-8-4 1°) 4^14.
z(^V2........^)Av - Asi_______________ ri_7\
4 11 f* 4 41 ta 1 °1 tt’„ a tifl 1 43-(the degree of fitness)# 441 112.
(Zt^3-4#^X 4-8-4 11 &414.
(3-8)
1 l#s# ## #44 144# ##44 ol Ivi 1# 7^)7)) 44, 2 ##4o_a^44.#44#4 4-8-44.
3.6 41 # 4# 3:1 12.4#
# 4#4 44 4(3.6)41 4114^ #44 #41# 3:14# 11
4. #4 3:14# 4# 44 4 (steepest gradient)# °l4444. °1# a 14714 4 1 14 #14 3-4# 1-8-41 4-0-4-11 7| 4 44(cost function) J# 14 44.
"A 2 (®I' ''l.err "^"®2 '^2,err " *n,err ) (3-9)
-99-
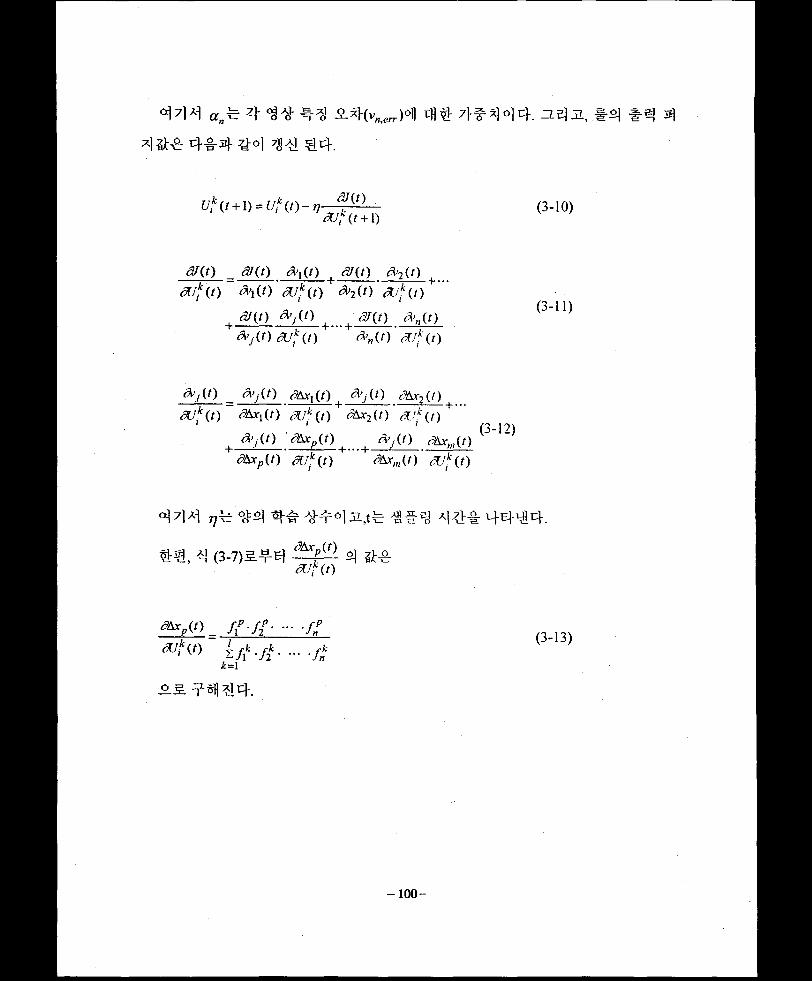
444 «n-b 4 49 44 -2-4(vM,errH 41 9 7I-9494. ae]i, #2] #4 4
4 44 444 44 44 44.
(3-10)
4^(0 _ #(0 ^i(0 | #(0 ^2(0 ,<5£/*(0 A (4 ^/*(0 *2(0 <*/*(/)
(3, #(') ^;(0 , , #(0 c\(t)
^(0 ^//(f)
(bjit) _ (\’j(t) ab-;(o a>j(t) (?ax2(t)<£/*(0 dbxi(t) <£/*(/) Ar2(0 cU*(t)+
| <9(0 clbxp(t) | ^ 9(0 Ax,„(Q ^ 12^
ftopiO dUf{t) + Ax„,(0
444 7/xr 44 44 4443L,t4 494 4444.
9^, 4 (3-7)3.94 4 ^(0
(3-13)
^.3.9^94.
-100-

Fig. 3-1 (a) Image to be acquired at the teach mode
01Visual Servoing
Actualimage
Desiredimage
Fig. 3-1 (b) Desired Image to be acquired in actual mode
Human operator command (Fh)
Active slave
, Visual force i feedback 1
FeatureExtractor(G)
Slave Arm Manipulator
(PID)
Master Arm (PID)
Human hand
Auto-tunning Fuzzy Inverse Kinematice
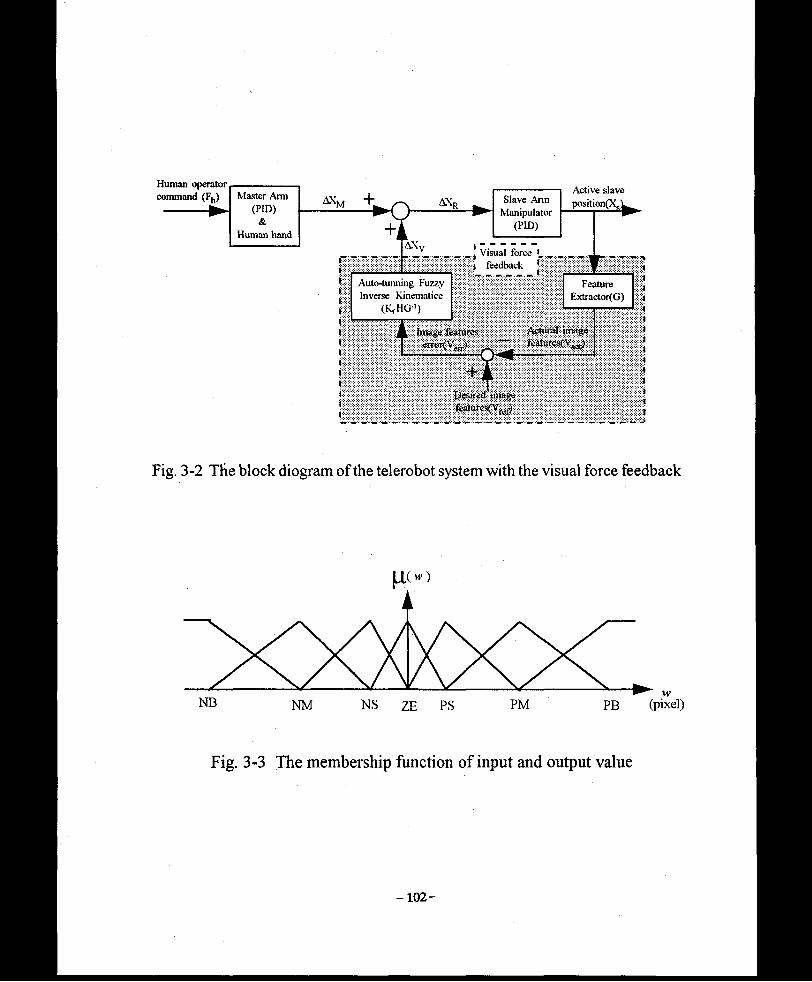
Fig. 3-2 The block diogram of the telerobot system with the visual force feedback
Fig. 3-3 The membership function of input and output value
-102
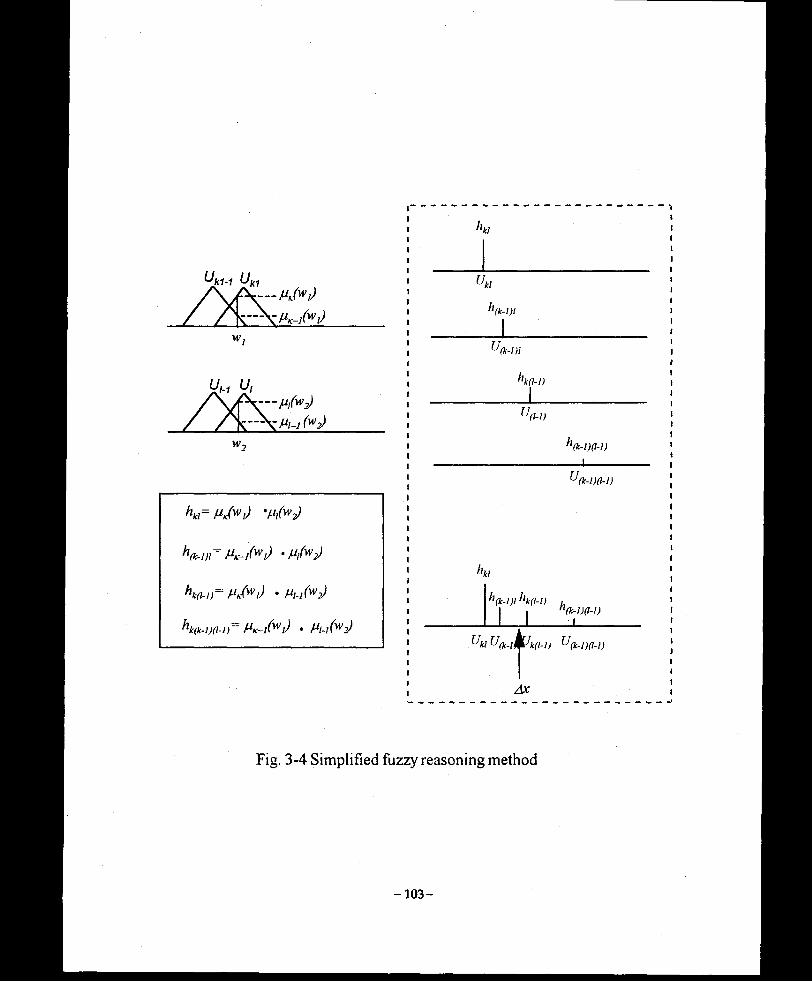
Uk1-1 Uk1z— Mtfa i)
V Mk~/wi)w,
U,1 u,
/XS£AW-/W
W,
hki= M/w,) "AW
h<k-nr MkJ™,) "AW
V/)= A/w'J • A-/W
\(k-l)(l-l) = Mk~i(Wl) • Ml-l(w2)
Ukl
h(k-l)l
1U(k-l)l
hk(l-l)
U(l-1)
h(k-l)(l-l)
1U(k-l)fl-l)
l‘kl
I'(k-l)I flk(l-l)h(k-i)fl-i)
JUklU(k-im/k(l-l) U(k-l)(l-l)f
/lxr
Fig. 3-4 Simplified fuzzy reasoning method
—103 —
4. 4 Z) # 4*-^* 4-g-s) 4)4
4.1 7))*
A14 % 4*4* 7|^ir 7)4 3)4 25 4^44 4)34 *2) 31^e4 4-44, a]4 4 4*4* #4442 *3145. 4* 24# ** Si* 4*^* W4. 4 42^)2) 44 4^* 2# 3)4,54 44, *t 445.44 4 44.
444 4^4 444 4444 44 a?} 444 5# 444 #*# 44# 44* 44 44 44 44* 4*4 *4 4 4 €4.
VTE ~ }j(vl,err2 +V2,err2+A +vn,err2) (4*1)
4 4* 444 44 *^#4 4*4 44 4**4 4444, 44 *3 -2.4 *444 €4(%4* ^4 5L4)4 44 44(^^2) 44 4.4)4444* 4444. * 4 44 3.7}?} 34 44* 4 44 7)5)7) 43, 43.4
4*5* 44* 4444 447) 7)44 44* 444. * 4 44 0* 44 447) 44* 44 *4* 4Til 43 n 447) 44* 4 44.
44) 44 *4 4.4* 2# 41444 444 44 4444 44 44344 44 445. 447)) 4* 4*4 43, 5# 4444* 4# *7)4 71)47) *51)45- 44 444 44* 44* 444* 44 3)* 244* 7)*4 44.
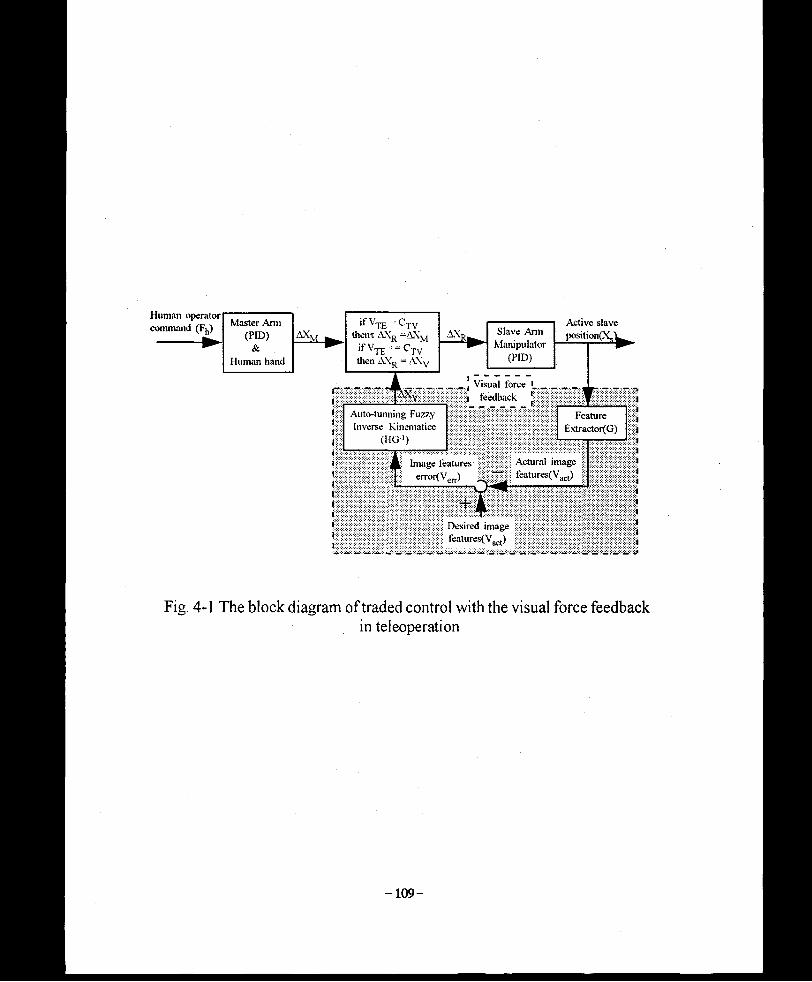
4.2 2-5) 4] 4 (traded control)
2# »14 444 4 444 44# 44] 44 *4 *7)7) 44 44# 47})4(threshold value)* 4 3# 4^=4 * 244 4*1)4 *445- *4 44 44* *t)1 5)3, 4414M 47)4- 4*4 44 4 4*4 444 4414 #5))43 *4) 44 44***44 4444.
-104-
a# 4-Ml a# 44 #14 #4 la# 444 #4. 4 44 444 4* 4#4 #4.
if Vje >Cjy then AXr = &XM else if^YE — ^-tv AA % — AA y
444, vTE±t #44 4444 3# 44 44" #4 -2.44 a44 37, Qy #
4^4 4-4 3144, 44 4 4^4# 4-8-# #44a #4 41-2.3 444 4# 4 44(threshold value)4 a, AXR, &XM, M>xr 44 -&## #443 444# 44, 4 as) ## #4 4# 444 11, as) 2. 44 # 4a4 11# 4414.
4 444 4444 4444 44 334! 144 4*144 444# a4
44 -2-4-4 la# e #44-5) 44 # 44# 44 #33# 44 44# 44 #44 444, 4444 4444 4s)44 # 4 4a, 3 4444 444 4#44 4#4# 444# 44 44 44# 44 4 44 44# 44# 4444 4as) ## ## 44# 4M # #4 44 44 a 4 a# #444 # ##2,41413 #####44 4144.
444 #44 4# 4# (444)# 4#4 444#4 #4, #
#444# 4#4(414-> 444# 4^4 4# 5:444 50# 44 1## 4 # 44)7)- 4^4 #4 3l#4 4## 20# # 4-4 #14 14 1# 7}## 4444 44 !##?) 4# 44# ##44 4 14144 4# #4 44 44 .2.4# cw 3 44444. a# 4-24 20# #4 14# 444#4. 4 1# 1444 14) 44 #1 .2.44 441# 22.11414a, 4±^# 5.38414a, 4## 16.67544. a 143.44 3# 1# 3## Cjy #23413 1444.
444 44# 4144 a#4 ## A344# 4a# 444 444# 33l(-> 444# 45:# ## 3144 5#44 1#4 34 44)7)- 44 1# 3144 20#4 1#& # 14 44 1# 24. 20414a, 43 1:# 16.21414a, 1## 18.764#4. 444 ## 144 4a# 44
244151 44# 514. 41 1t4c Cjy c S-E 4# S#1 254 #5
14c 14 #4.4 f7^]S] 14541 4444 #!!! 4## Qy c 4# 4# #4
4"^# ## $14.
4.3 ^Erl 4 4 (hybrid control)
nl 4-34 ril 4-4rr 11 44 44 4 1-4 #s# 444 145., 4444
44 114 44 4 4^4 44 114 45 144. 4455444 444 4s. 1^455 4144# ^^44. % 444^ % W Sc 44 4#4 4^44 54 5.4 lll#3i, 44 4 444 54 511 44 4 4^44 1&H4 4#4 4c 44 4444.
a! 4-34 1-44Sc 4444 44 114 z444 41 44-8: #a, x, y
41c 441 is! 444 44 ll##ci#44 1444. #445. 44
141c 4 4#4 44.XR ~ XV
yR ~ yv (4-3)ZR - ZM
4 14c 44 1 is 155 445 444 c 41 #414 14(Sc 1 #)# lia., 4444 44 114 41 #145 1& 4 4-15 14414 44# 4c 444. 14 4444 4#5 114c 41 #41 11 si 1141 144 14, 44 44 44 11# #4 #445 11 1444 41 #44 14444c 114 414. 4 414 41 4444 44 1 4s«g 444 1@M #3)45 14 44 4544 4444 14 514414 41455 41 #411 144 1441 1 ll 444. all 444# 4 1414 #41# 3.444 44# 1114c 144 14.
-106
5 4 4-42] -g-^45# 44 x, y44 4% 44
4=?!# 44 4 45.44 444 44# ## #4 44 4444. 4 44 444 4##445 42] 4^44# 444 44.
XR=XM
yR = y\i (4-4)Zr = Zy
4 44# 44 4 45455. #4# #^44 #4 4 -7] jl, 4#4#2] #44# 444 44 444 2]44 44444# 4444.
4.4 ## 44 (shared control)
5.4 4-54 4# 442] #4 45# 444%4. 4 #544# h4 # 7>4 #455 4# # %4. 44# 4#34 44 4 45.4 44 4444. 4?J# 4442] 44 54 444 %45 #445 44 444 44 4444 4# 4453. 44# 4 444 44 4 45«fi /]-## 4%44. 25]z 44 44# 4444 454 4# #44 44 544# 44 #444.
## 442] 44 44# 4442] 44 44 444 44 4 454 444 #444 41:444,4#4 44 44.
AX % = cc • AXm + /?• AAV
444 a4 pb 44 €4 54 444 44 4 454 444 44# 4454 4# 44 444 # 44 44 444 #M4.
4 ## 44 44# 444 #4# 5# 444 #4 444-# #4 4444 444# #44 444 44 54 444 44 4 45«fl 444 5# 44# #%7] 4#4 44 444 444 4 # 7M ^]o] 4^4# ^ ga] ### # %4.
44# # 414 44 44 #44 #3145 44 447f 4 4#4# 444 44 #44 4# #47]- %4 %# 4# 44 #4# #7] 44#^4 444 44 445 #4 #44. 44 4# 44 4 454 447]- 4 £#4 4 4. 5, 44 44 #44 444-7]- 44# 4#4- 44 4442] ^o]# 44 5## %4 4%44
-107-

#4 a44 -§-444. 44 ##4# 44 # 42«» 444 7}#4 4# #42.,
#4 #4 444 4^4# 44 t4 44# 44 tt^iii 44# # 4 44.24 ji, rfl# #44 444 44444 #4# 4 44 #442 44 #4
44# 444 44 44# 444 44 444 44 4444. 44 44 4444# 2-444 44 444 4444 2.4-4 #444 #14 # §144 2 4444 44 #44 #1# #2 44 44 4 4-2 44 444 44 4 424
44# 4442. 44 54 44# #444. 44 4444# 4444 44 3=4 444 7}#4# #42., 44 4 423M 7}# 4* ^4 f ^ *& 44#
##44.244 444 #4# #71-44 #4 4 444# 444 44 a4 #44 44
4 42«fl 4#4 4## 7}#4# #4 4444 44 #4 444 44 4 42^ 447} 4a. 22# ##4 44# #4 #a # # 44.
4444 #44 4442 7}# 4# 424 #44 #4. 4447}- 44444 #4 3=4 444 7}#4# #44 42, sti_44 a]z\ -y 424 7]-#x)^- #4
444# 44 #4.
2 44 44 444 2 44 #4# 2# 424 444 44 444 4427} 447} 4# #4 444 444 a4 #42 #444 4#4 44 444 444#9-4 ##7}#4(a,p) 4# 4 444 #444444 44.
— 108-
Human operator command (Fh) Active slave
Visual force feedback 1
Actural image :i features(Vacl) s
Image features error(Ve|T)
FeatureExtractor(G)
Slave Ann Manipulator
(P1D)
Master Ann (PID)
Human hand
Auto-tunning Fuzzy Inverse Kinematice
(HO-')
them AX„ =AX,
then AXR = AX
Fig. 4-1 The block diagram of traded control with the visual force feedbackin teleoperation
-109-

25
%
w
I
20
15
10
5 -
0
n
_L _L0 5 10 15 20 25
The number of experiment (number)
Fig. 4-2 The total feature error values in using the master arm without visual force feedback
-110-
Visual force ___feedback ]
Actural image features(Vact)
Image features error(Verr)
FeatureExtractor(G)
Slave Arm Manipulator
(PID)
Human operator command (Fh)
Human hand
Master Arm (PID)
Auto-tunning Fuzzy Inverse Kinematice
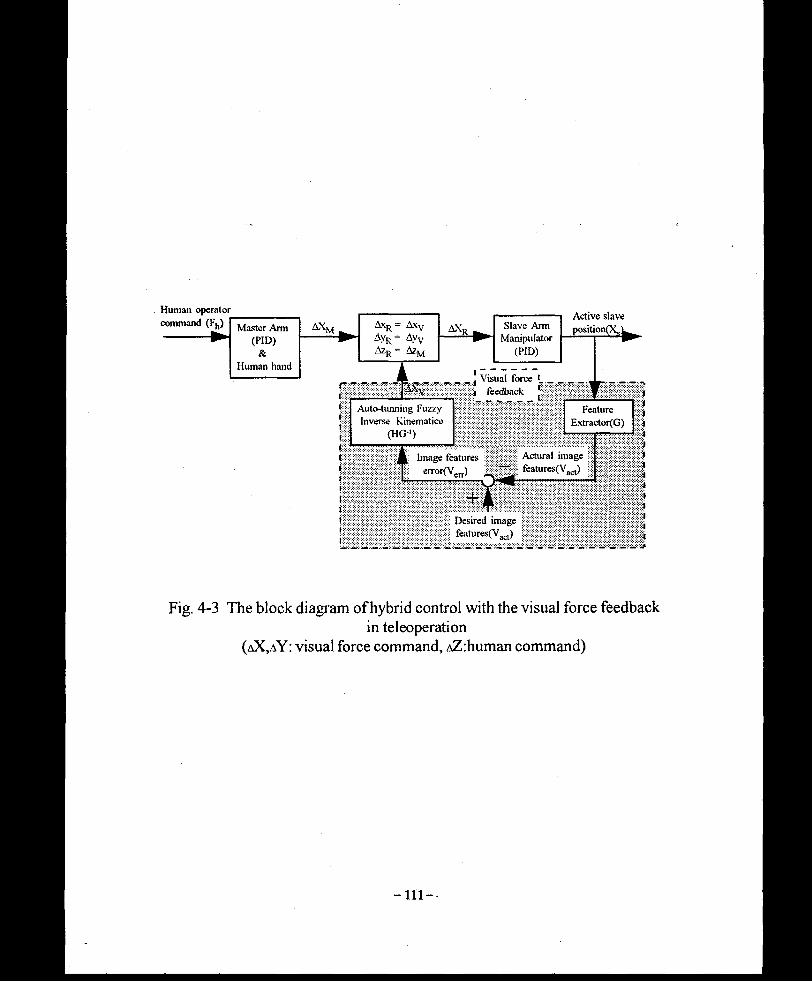
Fig. 4-3 The block diagram of hybrid control with the visual force feedbackin teleoperation
(aX,aY : visual force command, AZ:human command)
-111-

Human operator command (Fj,) Slave Arm
Manipulator (PID)
Master Arm (PID)
Human handVisual froce ___
feedback 1
Auto-tuiming Fuzzy Inverse Kmematice
(MG')
Actural image features(Vacl)
Image features errorCVgrr)
Desired image features(Vac()
Fig. 4-4 The block diagram of hybrid control with the visual force feedbackin teleoperation
(aX, aY: human command, aZ: visual force command)
Human operator command (Fh) Active slave
Visual force feedback
Image features error(verr)
Desired image features(Vact)
FeatureExtractor(G)
Slave Arm Manipulator
(PID)Human hand
Auto-tunning Fuzzy Inverse Kinematice
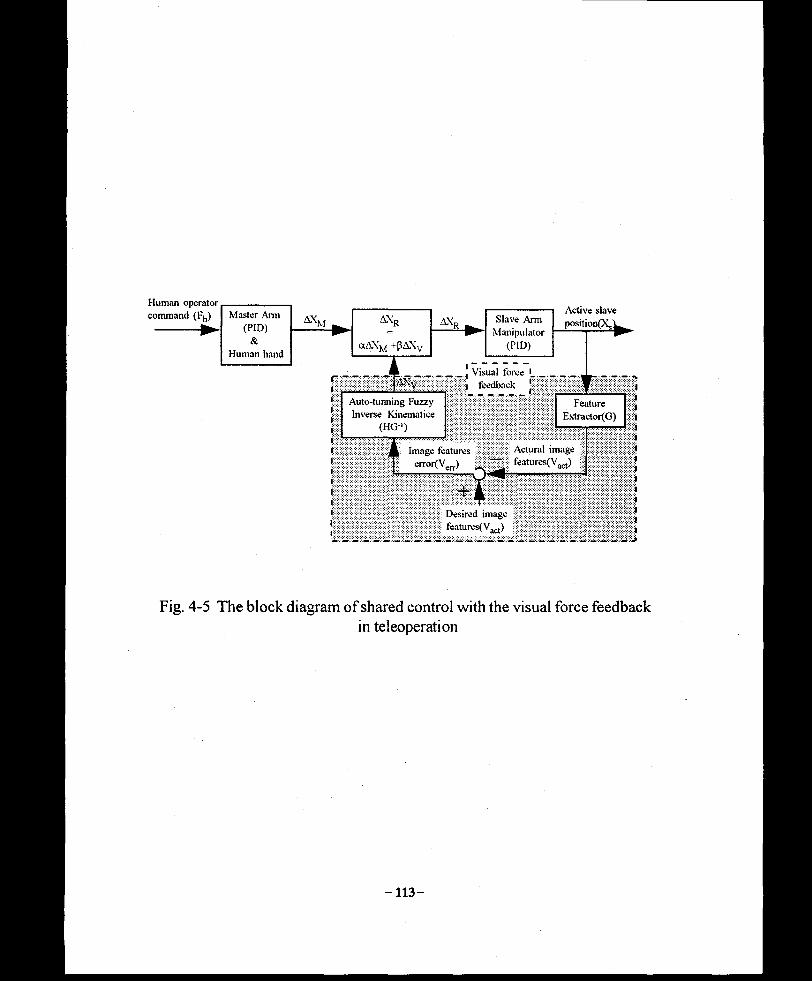
Fig. 4-5 The block diagram of shared control with the visual force feedbackin teleoperation
-113-

5.43
s.i #3 £4 ^ €3
4M44 7)^0] 44 3&4], 2:7] €33 534 3# €44 534 2%i5-
14 33433. 4 £4 44 4445- 42] £34 44 44 444 4 334
5344(x, y, z)€4 #4. 232 44 1-42] €34 44 444 444^
334 43 €344 33.43 4 #3# 444*- 43 3&4 444s. 43 34 5.44 433
€23 44 £45. 4# 342, 4# 443 434 4344 43-4 43 443 34 433 434 4342, 43 443 34 434 3334 33 4335-34353.2 33 33 £44 ill 33453.
433,334 43 3443 43 3432, 433 34£ 443 34 3 3# 343 434 t£4 3443 £4 37} 43 433 44 43 434 344
354 4 54 33# 433 43 443 #34 334 344 43 ££
333.232,43 334 343 33 -8-34 4 33.
- €34 334 444 34 3 34 43 44# #2 €34 334 443.- €34 534 34%4 34 £# 37]] 533 4534 4 4 34 5.444
43 44 (Overlay) 3 7J 3.
- 5.34 334 5.33 4£4 34 £434 €42] 533 €34 534
343.
- #7]]2] 534 €34 53(desired feature)3 334332 3343 334
tvl3.
344 33 44 33 34£5 3434 €3 £3 443, 43 € 4£4 7)143, £3 44, 43 34, 4 43 344 347] 33 334 353. 252, 4444 71 £ h]h333.
-114-

5.2 7377 47 27
=L% 5-2-8: 717^} 427 <9-8: 2774 4744 7# #442 74 4
71# 117# 477 47 »)44 72-B 474 144. 4 #4 127 441 7)14 44 S3. 44 1 4 ## 17 # 4 714.
2# 5-3# 44 3444 7)144 47 74444 3334 #44 744
43# 44-4 44s, 2^ 5-44 47 741:4 47# 4773 44444. 4 f 2144 744 4774 470] 2^7} 44# 4144 277 #4441
#44# 2 4747 3771- #4 #4 #2 #4423 271-4:4 #74
474 44. #, 434 #444 4#4# 1# # # #44 4# 27# #44 444 #74 77 #44 #7%, 7# 27# 243 74## # 7 44.
447 474 #23 7444 444 27# 71# 7 §14 44447 7474 41744. 744 747# #4 7# 2774 #1 77 4# 444.
5.3 47 4 42«n 44 4# 477 #01142 #44
24 5-5# 47 4 427# 477 #742 7 444 47 #4 7342, 4
144# 4 #7 124 44 17# 4714.27 5-6# #442 74 #74 72# 4742,2! 5-74 47 #4 274
4### 44414. 4 # 2144 #44 42# 714 7747 77 47 #27 4# 274 t7 #744 #72, 4# 447 #71# # # 74. 7#
27# 474 474 474 11 7 7742, 7177 47 2774 #7s
4# 714 7# 44 71 #4 44# #4 144# 414 74.
5.4 24 44
-115-
=l% 5-84 ## #44 44 47}- #14 15# 44444. 3:7)4^ 3]-yx)-7>#1 #455 #445 ## 4447] 4^4 444 155 7j-x] e^Ji 4447}
## 4 44 444 -5-444. ^-444 4# 544 45# # 4 44.
44 44 #14 17444 4444 x}^## 44 4 454 444 444
#445 44 4444. 4, 4444 44 n# 44 4# 44# 444, 14
44 45^4 44 145 #444 4#4 #14# #57} 2^1#-g-# 44.
54 5-94 44 444 4s'Hl 4# 4# #4 54-1:4 4## 4##5 44-4%4. 4 ^^44 1.4 544# 4f #4441 4# #4 541:4 45# 44-. 44# 4-44-4 44 544 #444-. ^45 i,45 4#4# 4# 444 #44# 4# # # 4#4, 4 4# 44 4 454 444 #444-. 5 44 44 #4 34 547}- 44455 #44# #4# 54# 4## 4# #4 #4# #44# 44 44 #4 547} 4-7] 41444-.
5.5 #4 114
X, y# 444 7)144# 44x1-4 44 1155, z# 44=4 44# 44 ^
45# 4155 #4°]5 ## ## 44# 4) #14 15# ay 5-104]
4-4-4145, ny 5-1141# 4441 Ell# 44 #1 54#4 44# 4##5
444^4. 4# ^141 44 1#4# #4155 x, y# 444 #11#
4144] 4# 11 144 ###. z# 444 #11# 14 1 45^4 #1#
4444.
5.6 ##44
4 4444# ## 444 7}#4# 5f a=i, p=i5 #44 4. 4#
1#4# #1 51444 #14 141 454 444 #1# 5# 4#4 44.
-116-
2l 5-124 #445 ## b4# 45# 444 $14. °1 2444 44 444 5# 4 4444 #444 44b 444 44 444 44# -9 4 41# b 44 44 54 444 444 #445 4# 54# #4 444 #4 a# 4444b &b 44 1 4 = 4 44 #^4 #4 444 44b 4 444 44 4# bb# ## # t 44. ## 44b 444 444444 444b b55#444 444 .2-4# 41# 4 Si# 4b4 #4 54 41# 44 ##% 2
4444b 44 1 #5# 414 444 414 54# 5444 #4. #4 a# 44b 44444# 4444 44 44# 4-2 2 4444b 44 # #54 444 444# 44# #4. 4, 4444 444# lb4b 4142 4# #4
2:44 7>b#°n£ #b42 44 1 4 = 44 #44# 44# 44 #4. 2&14
b# 44b 447>7j- 5544## 444444 #444 #1 t Sib -2.444# #4 44-2.5. #5 44# 44 #2, n 4b4b 44 # #5«« 444 #44 #5 44# #4 44. 2^4 444# bib bb4 #?]# 5
#4. b# 444 #4 44 1 #-=-44 ### 4444 #44 4447} #4
5444 4b #444.2! 5-134 4 44 4# #4 #1 44## ### 4b#5 44444. 4
2144 -2.4# 454b #22 452 #44 7}## 414 #4 444#44 #1 b Sib -2.4# 44 1 #514 #4 4# 02.5 ### b b #4. 4 5144b 254 4# 547fbl#55#b#4. 4 4ba=i,p=i5b44 4447} ##44 54# 52 #4 54 445 #2 44 1 # = !# 445 #4 4b4 ## m# 444 b# 444 #44 45# 547} 45#2 ## 545 4b 4# 7j-# 4 #4.
5.77]^# #14 #2.
-117-

#44 57M 44 #1, # 44 # #34#& 4-8-# 44, #4 54#33#
44, a# 44, ## 44, ## 444 444 444 144 444 #44 #####4. z%43i, 444 4#44#4#&24 44 1144 444#4.
4 3.44 44 44# ## 444 4^4 ##5.5.4 344 44, 4.673,3.4935.44 4## ###3, 44# #34#33# #445. #444 31# 4471- 44 13.213,7.25435. 44 4 44 #4 444. 4 4 145.44 4^4 ## 344## #!4 #sll45. ## 444# 45# 7}# 454# 14 # 4 #4. ZL#2., 4# 34# h# 44, ## 44, 44 4 434#35.44471- 44 1.41(41), 2.00(41). 2.83(41)3 4# j$.4# 71-44, 434
##334 444 13.74413 434 e 34# 3## # 4 #4.43# ##& 4-8-# 44 ### 4447} 44 4444 43 441 4#
44 4# 14# 1 4 #14# 4414 444 444 4441 44# 414 4144# 414 ##%, 5 33471- 41# 4# 144 4# 34# a4 #1
4 ## #14 #4. 44 # 4^4 44# 41471- #4 444 44# #4 44 34# 4# 433 ## 4# #4#, 14 44 414 44 14 41 444 #4 14# #14 ##. #1 3# 7)]#, 5# 414 # ## 414 #1# 4144 411# 34 414##1 #44 13 4144 #45 #4 41471 -8-443,5 41 44 4#5 431 441 14# 434 #4.
5. 34 14 444 4# 347) 13# 43471 #114 3# 41# 4444 3.00637} 1 44 44# 9-4#4. #4# #44 3.0063 44 4444 44# 44 a# 44, 4# 414, ## 444 (-1.39,1.39, -0.12), (-2.68,2.08, -0.10), (0.42, -0.23, -o.ii)44. zi%4#, 14 # #34#4 7)11# 414# #1t)H^ 44
(6.36, -24.78, 0.13), (2.22, 2.08, -0.48)4 34# 7}# 41 #4. 4 14-344 3 #344 41## 11 7fl t)H #1# #1 54 11434 4147} 41443 -8-44-3, S 14# 4 = 4 #4 4434# 344 43 #5# 4511 #41#414 ####414.
-118
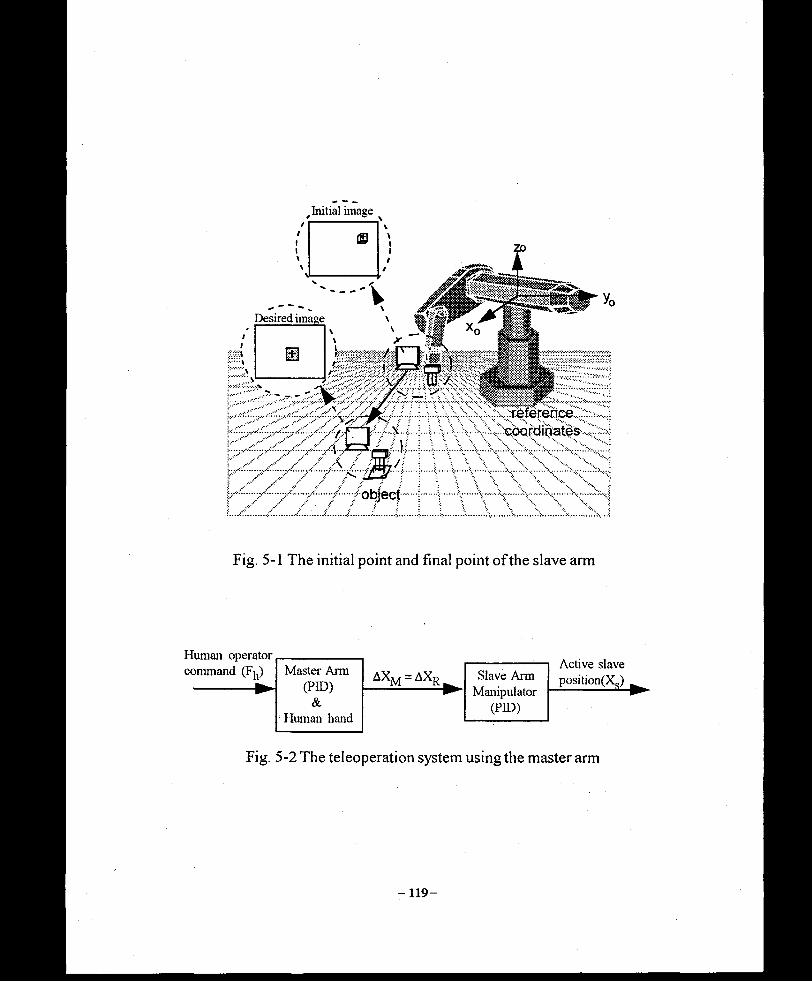
.Initial image
Fig. 5-1 The initial point and final point of the slave arm
Fig. 5-2 The teleoperation system using the master arm
-119-

0.005
0.000
-0.005
1 -0.010-Bf
N -0.015
-0.020
-0.025
0.39 -0.08
Fig. 5-3 The change of x, y, z path in using the master arm without visual force feedback
Time(second)
Fig. 5-4 The percent change of image feature errors(PCIFE)in using the master arm without visual force feedback
—120-
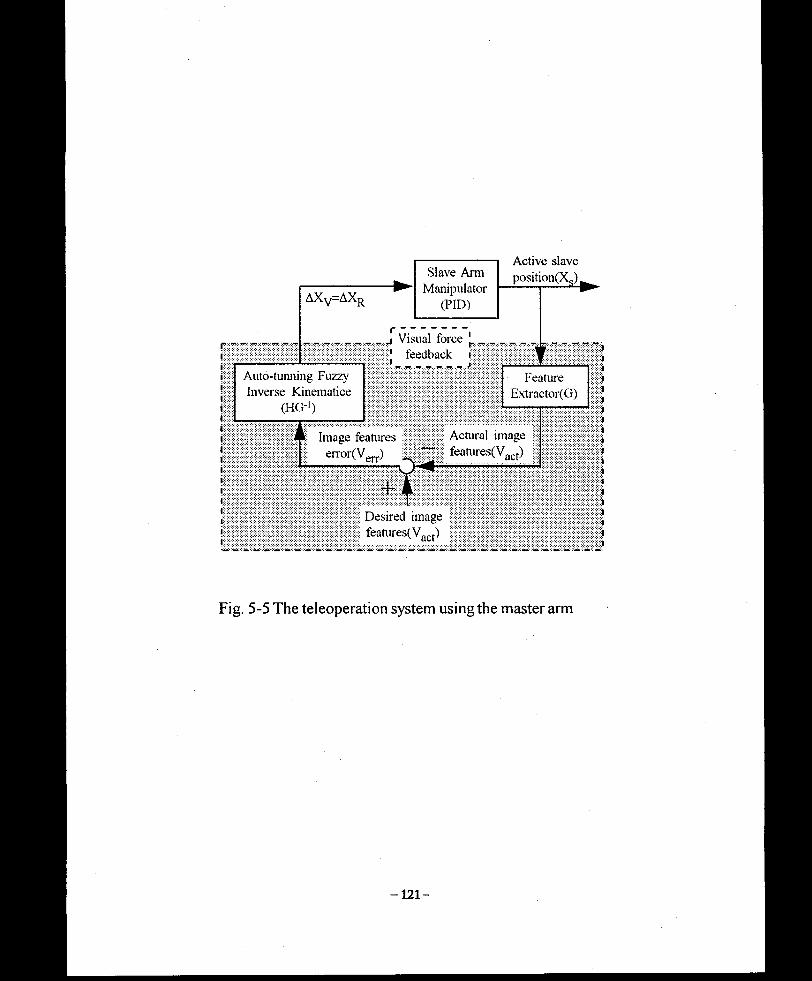
Visual force J. feedback t
Actural image features(Vact)
linage features error(Verr)
Desired image features(Vact)
Feature Extractor G)
Slave Arm Manipulator
(PID)
Auto-tunning Fuzzy Inverse Kinematice
(HG-1)
Fig. 5-5 The teleoperation system using the master arm
-121-
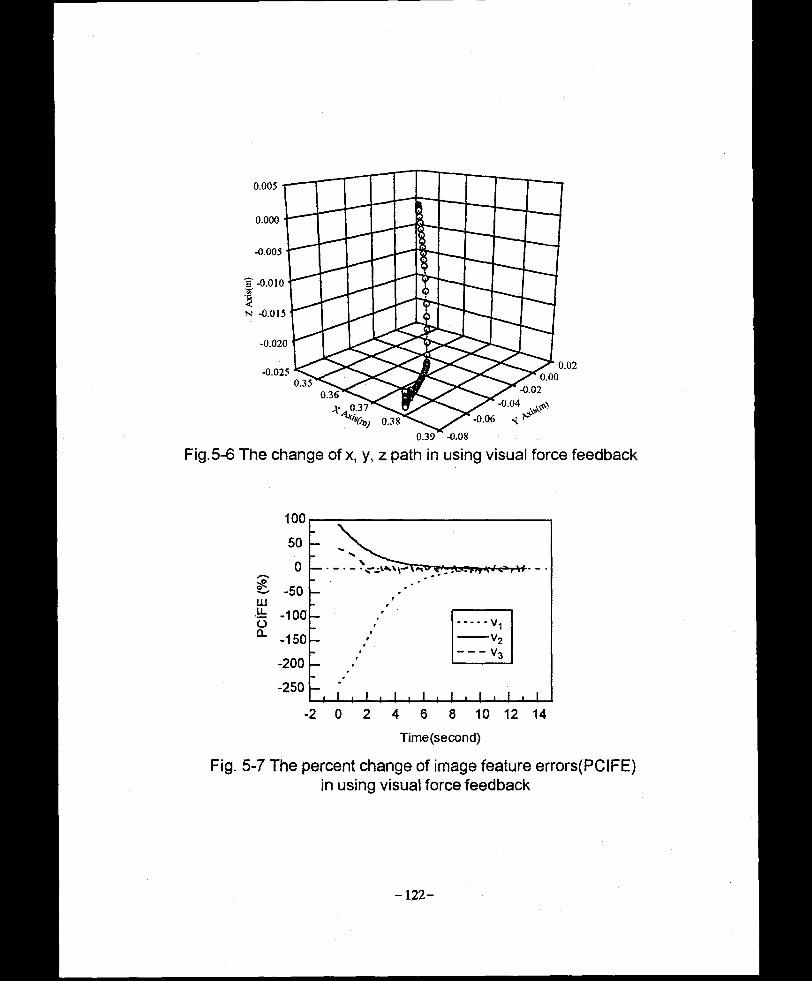
-0.005
'E -0.010
n -0.015
-0.020
-0.025
0.380.39 -0.08
Fig.5-6 The change of x, y, z path in using visual force feedback
-50 -
-100-
- - V;-200 —
-2 0 8 10 12 14
Time(second)
Fig. 5-7 The percent change of image feature errors(PCIFE) in using visual force feedback
-122-
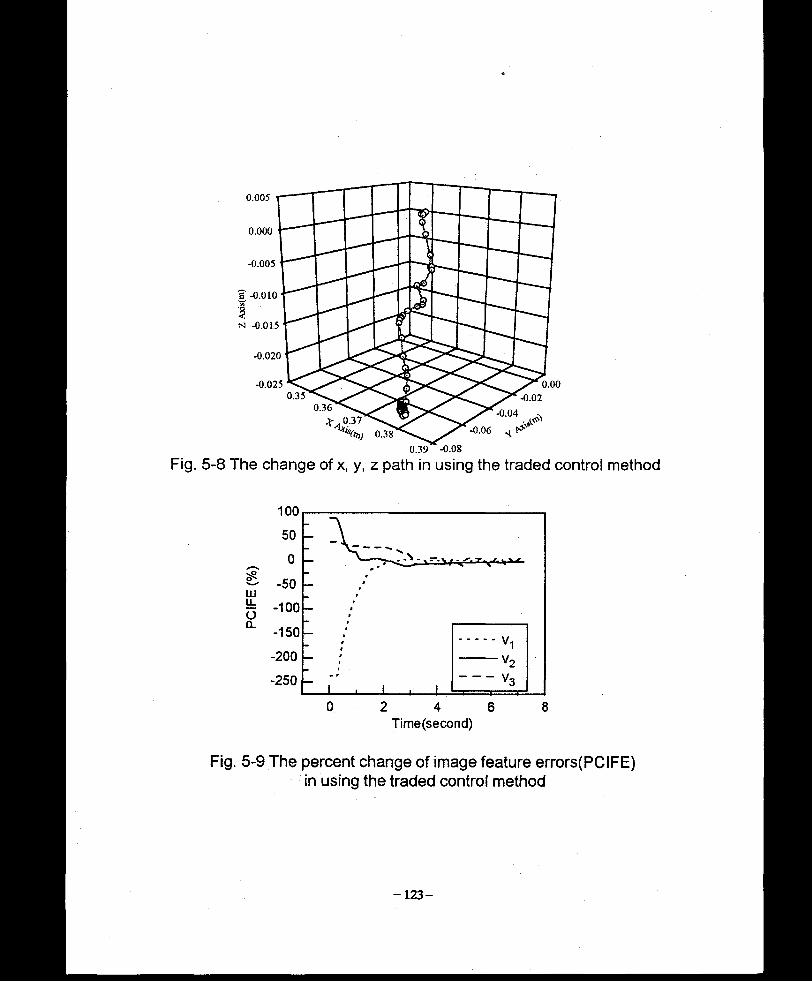
0.005
0.000
-0.005
S' -0.010
N -0.015
-0.020
-0.025
0.380.39 -0.08
Fig. 5-8 The change of x, y, z path in using the traded control method
— V--250 -
Time(second)
Fig. 5-9 The percent change of image feature errors(PCIFE)in using the traded control method
-123-
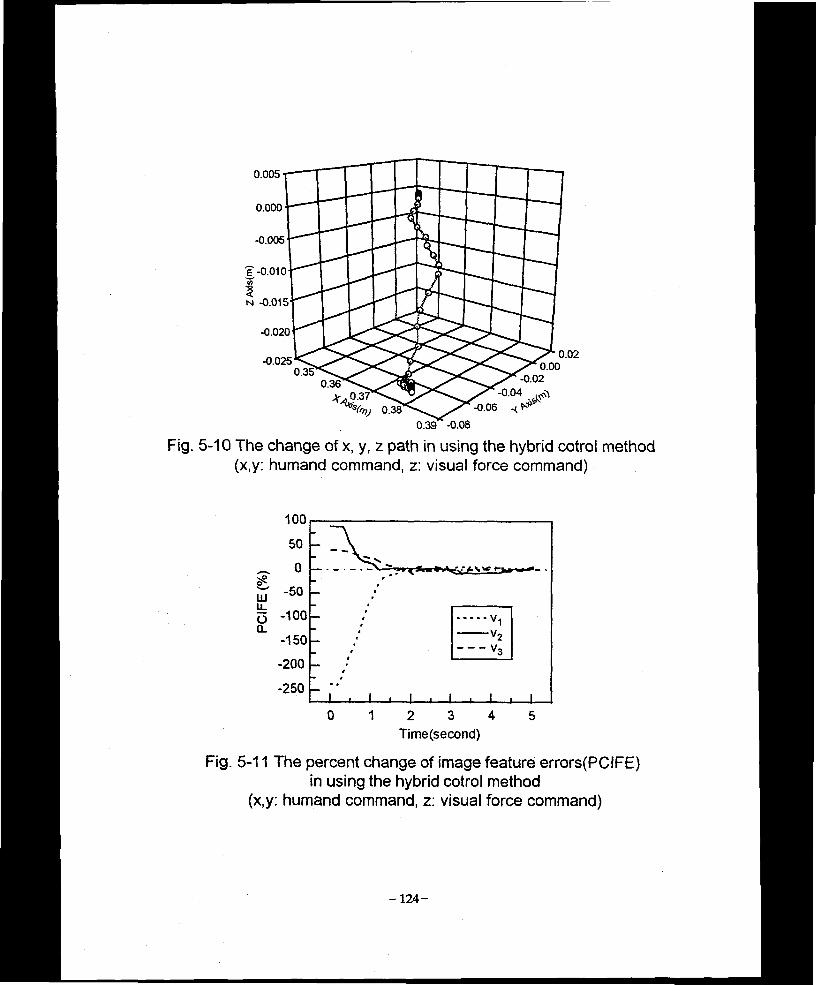
0.020.00
' -0.02 ‘ "0 04
*s(rn) -0.06 h ^0.39-0.08
Fig. 5-10 The change of x, y, z path in using the hybrid cotrol method (x,y: humand command, z: visual force command)
Fig. 5-11 The percent change of image feature errors(PCIFE) in using the hybrid cotrol method
(x,y: humand command, z: visual force command)
-124-
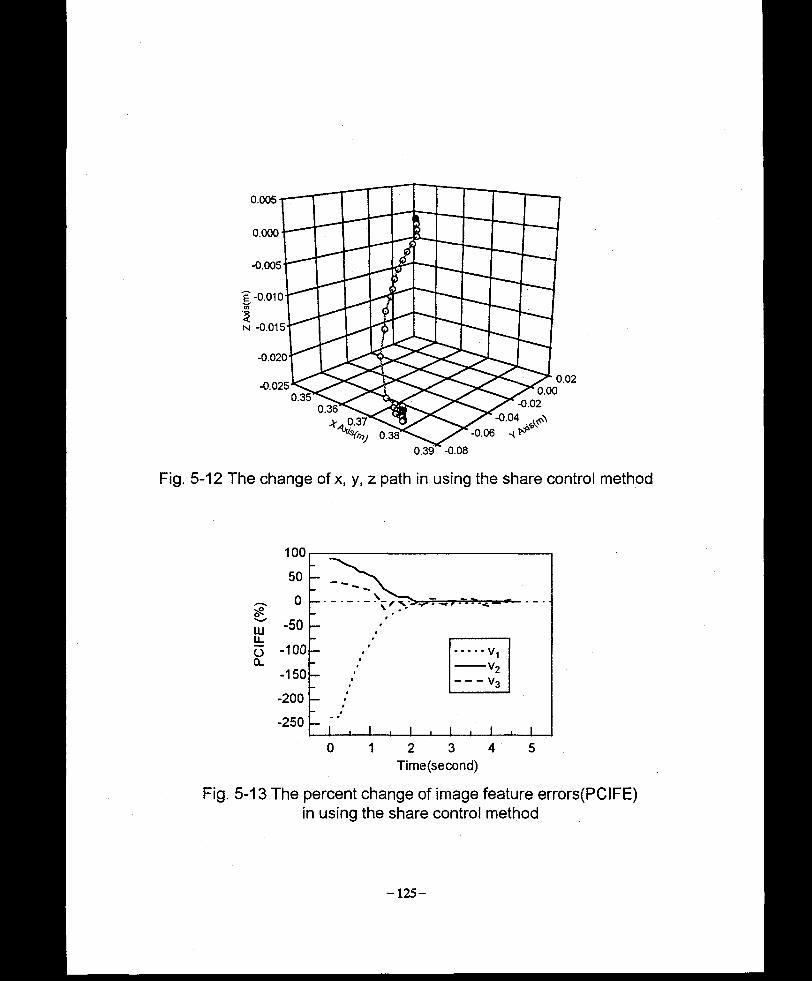
0.005
-0.005
N -0.015
-0.020
-0.025
W37 -0.06 40.380.39 -0.08
Fig. 5-12 The change of x, y, z path in using the share control method
— — V
Time(second)
Fig. 5-13 The percent change of image feature errors(PCIFE)in using the share control method

Visual feedback command only
Human command only
Shared control
Hybrid control
Traded control
I I" I l""| I "ITotal featnire errors (pixel)
Fig. 5-14 Total feature errors of serveral control methods (t = 3.006 second)
Visual feedback command only
Human command only
Shared control
Hybrid control
Traded control
2.83 (t= 13.21)
13.74 (t=3.49)
2.00 (t=4.67)
4.79 (t=5.05)
1.41 (t=7.25)
Total featrure errors (pixel)
Fig. 5-15 Total feature errors of serveral control methods (t = final time(second) )
—126—

Table 1. The conditions of experiments
items ValueArea of target object
(unit: mm2)640
Focal length (unit: mm)
12
-127-

Table 2. The results of experiments1 items Visual
sensorfeedbackcommand
Humancommand(usingmasterarm)
TradedControl:
HybridControl(z.visualfeedbackcommandx.y.human)
SharedControl
Initial point (unit: mm)
(350. 0. 0)
Desired points (unit: mm)
(377.33, -73.43. -2.45)
Desired feature (unit: pixel)
(0. 0, 80)
Final time (unit: second)
13.21 3.49 7.254 5.05 4.67
Final points (unit: :mm)
(377.35,-73.97,-2.41)
(377.13,-73.52,-1.97)
(377.7674.39
-23.21)
(376.11,-74.67,-2.31)
(377.17,-73.72,-2.36)
Initial featureerrors
(unit: pixel)
(-190.00,72.00,32.40)
(-190.00,72.00.32.59)
(-190.0072.00
31.64.)
(-190.00,72.00,31.76)
(-190.00,72.00,32.36)
Initialpercentage error
(unit: %)
(-237.50,90.00,40.50)
(-237.50,90.00,40.74)
(-237.50,90.00.39 33)
(-237.50,90.00,39.71)
(-237.50,90.00,40.45)
Initial total feature errors (unit: pixel)
205.75 205.78 205.63 205 65 205.75
Initial toatl percentage
errors (unit: %)
257.23 257.23 257.01 257.07 257.18
Final featureerrors
(unit: pixel)
(0.00,0.00,2.83)
(-2.00,1.00.
13.56)
(0.00 - 1.00 1.00)
(1.00,2.00,4.24)
(-1.00,0.00,-1.73)
Final percentage errors
(unit: %)
(0.00,0.00,5.59)
(-2.50,1.25,
16.68)
(0.00,1.25.1.98)
(1-25,2.50,5.30)
(-1.25,0.00,-2.17)
Fianl total feature errors (unit: pixel)
2.83 13.74 1.41 4.79 2.00
Fianl toatl percentage
errors (unit: %)
5.73 16.91 2.34 5.99 2.50
-128-
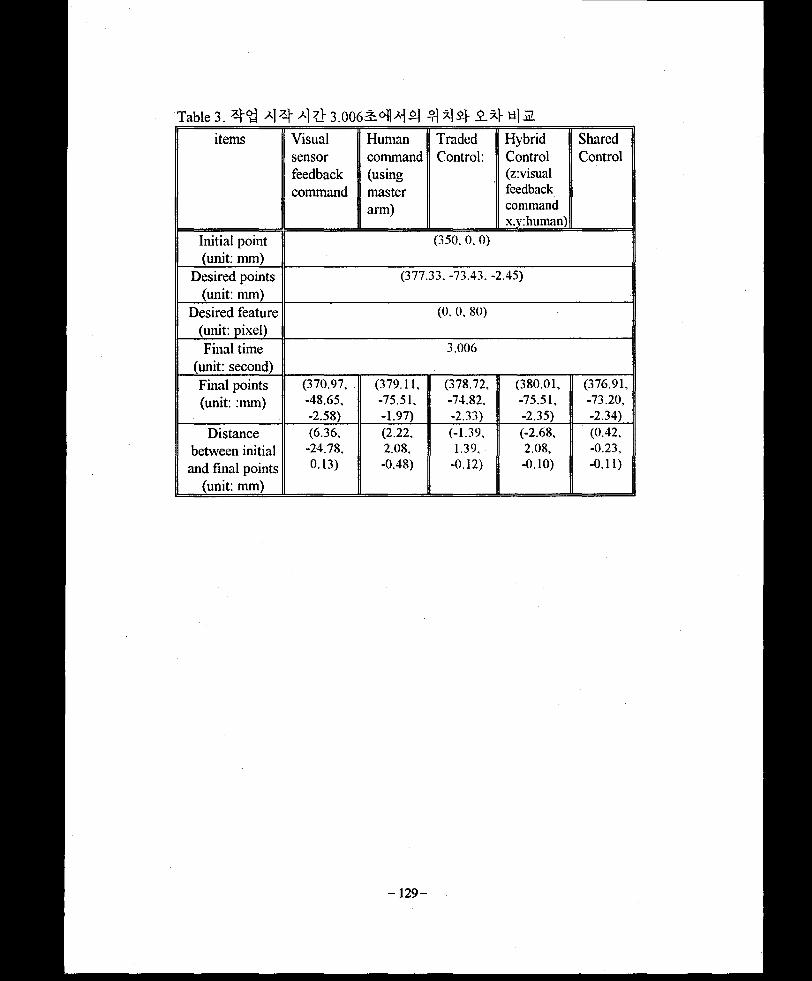
Table 3. 4444 3.006&44 4 4] 4 4 5.4 ti] iitems Visual
sensorfeedbackcommand
Humancommand(usingmasterarm)
TradedControl:
HybridControl(z:visualfeedbackcommandx.v:human)
SharedControl
Initial point (unit: mm)
(350. 0. 0)
Desired points (unit: mm)
(377.33. -73.43. -2.45)
Desired feature (unit: pixel)
(0. 0, 80)
Final time (unit: second)
3.006
Final points (unit: :mm)
(370.97,-48.65,-2.58)
(379.11,-75.51,-1.97)
(378.72,-74.82.-2.33)
(380.01,-75.51,-2.35)
(376.91,-73.20,-2.34)
Distance between initial and final points
(unit: mm)
(6.36,-24.78,0.13)
(2.22,2.08,-0.48)
(-1.39,1.39,
-0.12)
(-2.68,2.08,-0.10)
(0.42,-0.23,-0.11)
-129-
6. 44
11 11# 4344 11# 5.14 4^1 1# 11 si#4 #4 4 s 1#
44## 444. €4 1144 1144 s#ll 4444 444 44 S4#
4 #11:4 #4 4 #4 #4 4 s 44 ## 44 #44 #434 141#, #1
4444 4-4 44 #44#4 #4 #4# 4444-,s# 444 #4444#
44444# 4-4 444. # 4444# 44 44## 4144 444 44 1
4h4 4## 1# 11 4^1# 444#3., n 4^34 44 11S5. s#
44, ## 44 3l;n. ## 44# 44##4. #4 ## 44 #1# 4^4
1# #111 si- 44441 4 4 = 4 44# #4#4 11 14# #4##
44 11S5. 1# #44 1144 114 4#1# 1 4111 411 ###
#4 #111441 44 1444.1^11441:
5.31444 441 144 4#4 #1# 14###4, 4 #4 14# 45.
#jz#4 4# 141 44 #4# #4 si#. 4# #44 #144 14# 11
51^55 #41 41# 11# #1# #1 4 ## #1 411111# #7)-
14# 44 ## 11^ 15.1 #7i 4#4 14#44£. 1# 44 145-1
#4#1# 114 11#. # !#44 5.1 ## 11# 14 144# 4^=1
11 11 si 441 41 4 1^1 44# 14 s#4 144 1 #1444
#3, #1 41 414 1# 4# #s 441 4is IS##. 1# 411
44# 144# 1# 41 44 14# #1## 114 41 l#s is##.
mi 114# #4 #3. 11# 11 #4 #4 144 4# 44#44 1# 45.# 11444 114 ## l#s is##. 41 11# 141 111# #44s ### 1 ##.
-130-
#3 M
[1] Pennington, J. E„ “Space telerobotics: a few more hurdles”, Proc. IEEE Int. Conf. Robotics and
Automation, pp813-816, 1986,
[2] Sukhan Lee, 11 Intelligent Sensing and Control for Advanced Teleoperation ", Proc. IEEE Int.
Sym. on Intelligent Control, pp 19-28, June, 1993.
[3] Iiasegawa, Suehiro, Ogasawara, " An Integrated Tele-Robotics System With a Geometric
Environment Model and Manipulation Skills ", IEEE Intematinal Workshop on Intelligent Robots
and Systems, pp335-341,1990.
[4] Lee E. Weiss, Arthur C. Sanderson and Charles P. Merman, " Dynamic Sensor-Based Control
of Robot with Visual Feedback", IEEE Journal of Robotics and Automation, vol, RA-3, NO.5, pp.
404-417, Oct. 1987.
[5] Feddema, John T., C. S. G. Lee, and 0. R. Mitchell, " Automatic Selection of Image Features
for Visual Servoing of a Robot Manipulator," IEEE Int. Conf. Robotics and Automation, pp. 832-
837, May. 1989.
[6] Feddema, John T. and O. R. Mitchell, "Vision-Guided Servoing with Feature-Based Trajectory
Generation," IEEE Tr. on Robotics and Automation, vol, no.5, pp. 691-700. Oct. 1989.
[7] Jang, W., K. J. Kim, M. J. Chung, Z. Bien, "Concepts of Augmented Image Space and
Transformed Feature Space for Efficient Visual Servoing of an Eye-In-Hand robot," accepted for
publication in ROBOTICA.
[8] B. H. Yoshimi and P. K. Allen. "Active. Uncalibrated Visual Servoing". Proc. 1994 IEEE Int
[9] # 5.^1 4 9"# #3", Ph. D dissertation, KAIST, 1991.
[10] Bradley J. Nelson, J. Daniel Morrow, and Pradeep K. Khosla, “Improved Force Control
Through Visual Servoing”, Proceedings of the American Control Conference, Seattle, Washington
June, 1995.
[11] Kim, S. K., and Hwang, C. Y., "Robot controller with 32-bit DSP chip". Korean Automatic
Control Conference, pp292-298,1991.
[12] M. Mizumoto, “Realization of PID Controls by Fuzzy Control Methods”, Proc. of IEEE, pp.
709-715, 1992
[13] ^ t-S, "*Hf 3^ oj-o] a]4 7]*] ",
1995.-131-
<*|-fj-*KKE 2:^7}2) eM ^ 444
: 8-4^# KAER0T4 ^1L>
3341^4 4-n-^te sai5] ^444
Contents
1 4# 137
1.1 39-3-71 ^43........................................................................................... 137
1.2 393# .................................................................................................... 141
1.3 3993 ^ 49................................... 143
2 #39 8# 35.3-9 7)9993 319 144
2.1 97)999 ....................................................................... 144
2.2 X>s9 3^3 .............................................................................................. 146
2.3 97)994 ..................................................................................................... 148
2.4 39 9-7)1 150
3 8-x}#3 KAEROT# 999 3#9 999 *9 152
3.1 2x>3E°ll 7)133 934 #9 d:7H................................................... 152
3.2 7}#xl #3149 934 #4 7)19..................... 153
3.3 99 4 9* 499 924 94 9 4#.................................................... 154
3.4 Working Set# 999 S4-4 9 994#............................. 156
3.5 41:449..................................................................................................... 158
4 49995. 3.5.5.# 999 419 419 99 168
4.1 49395 5.33# 49 9394 7|]4 934# ............................ 168
4.2 169
5 3# 9 999-7)1 174
#5 #9 175
-135-

1
1.1 3^4 ^
343 34&4 #444 #7]#4!7] 7DM sq5.# 344 3-9-3.4, 3^3 34-3.44 4443 33s. 433 4 4# 34
434 33!44 ^4 3-^4 43 33/3.3444 4=<@& 7}^4442 3^M
#3&4 -443.343# 4444 #344 7}=-&& &o]^ 4345. 4
4- Figure 14 44 433.4 33# 444 343 3-4-8-4 444 ## 443
^4#344 4444-7} 3444 ^4#34 333 33434 343 3 3
7i] 34- 3:34 3-3-8-444 ##434 34 ^#3# #443 #4 #^44
33# #4 # 3 3434-
STEAM GENERATOR
TUBESHEET
TOP LEVEL OF REFUELING POOL INSTALL LA
DAMS
CLOSURE HEAD REMOVED
NOZZLE DAM
SHUTDOWNCOOLING CORE
REACTORVESSEL
CORE SUPPORT BARREL
Figure 1: 344 #334 #434
-137-
felo-k fe-te-tu kaW^# •
1 IkiB BB to a"S^4 •
1 BBB #B is- jo BcT B B"o~ I? ifc-B •
'&& ktkB/BthBB BBIkn# •
to ifo lb Bis to-k B4&-3hB- '#totk9 BlHBk isV# Ho ‘IbBB B BBB "Soil: # Bk^r tkktbaW^B kkkB (q BS ‘£ Bktk tak (^6 43 kk k? aws
'ia B tkis ### Bis a Ik #rn# tv Bis kk #& BBk kWk ‘fia Bkkk ts-tek lb&#^ -kin BktfeBk4r ‘kBo"#kis## -kk# B4r ‘irk ###^ Bs'-ir -E-klkB 4135
'iak nkB -Elolkia isk-o kk-kk nkB# BBk#k# ^crk k &BB Bkk 4i klbs 9-mSM B-kth B4^ k##k^ QkkB km
"ia [ok BBBB# klbiais B^BB k & "## i/151 ^BBB k B# #3BB8 # Biskn kB-BB^klk‘kkB4? k -his kBB IbS ka WB B# k ktb3 BBs^klbBB ?BBe B "BBB 4^ #^B nil Hki Bis tan f IB#BB k is B #BS ^k tk Ibkk ‘IbBB kkBB 3135 Biz ##Bk to k9 5ok4k Bill Bkir kKsBizz tkk -tkk -k#/# B#B
iaR zrkfeB kB BBB Bis# to tillH'o'kBEs B tfc lbk "ia-Bia k'o'kk BB =Ilb"S-te kkk-k -k#/#^ kisTo "g-oBtk kBBBk kB B T?f kBk-k kkk^o"BisBir il3'iaisBB Bib Bis-a- kk^B k-BB to B-k "5H"o" to tbk-B BBB "53B BBBB kk lhB4r B s ia to kB B"=? BB BH to-k BB k lb## Bis ## BB BBB k kBBB BB# BBBBk B# kk 'BBtkisB #&k BB# kB BBB BBk-k k lb BB k B k h h" k k k BB#n BB Ih BB 'ia# BBB k# "S-r IhB^ kisjr #ktkB BBBB -B k Es to kiskB ^kefB nkks'k tkk tbkBB Bn kB BkB kEz#

139-
H>Hu
ml®4>
.2,o"TT'
f
d|Xm|®mhost|oHu
r-2Ar|ra4JXI
itAA®$-jd1
>HIisitAA,2.Aos!;AJ2
AHu(6ohFidAm|m41ito
'TT#
r£41
|J 4iN
mHrtAA
(Ariaoj{1
j£-$1Jh
_®t4103>,AHnAAr|f
HJllU
A®tW
>L4°HnAAoo414*HnHu#AA
Aa
aNa
g
IH.12
h>A,12W
Ai2
41r|mAIt
rJN-Aml®ojdAA41rajmAA(A,12
rlraJhAW
[ifi1»
*
Hi A M 41 A
* i
<& Hu ®|r -|X'
A r|® HnAAA[it |c Ag s rlnJ 41 m|®4LniXr|®S
OT%
XJ,Afit41
JEL4°*fiidHu®KiA,2.
-W®tr|rAA,2.Hi41oh#Aoff,cS,
ojo
A°|rAInHuto41AHns,a
jh a r-2 ASS
ml® 4° HnHu He |m .2
WA41
A Ax on
AAAHu>|ocAl>0&r|®A_2l>HnAm|®isAjhA4®®M
AA®tl41AS£NA-2m|dj>41Jim,2.ohJ°tJ=Lojd
N141
414°HnHuHi|mr|r4X.2.Artv,12iSitAAA4nA_st&r|®Atth>4
AAi2InHu
AAAN‘41jhr-2a[titM1°Hur#r-£4uAJhr|fA4°414°Hnmlmo
ojoA41
A4°
4> ®£ Hn A^2 A 41 r?t• i2
No>AAAAin?;NAd|XAA*$2
jhtihAAAdhHumlm4-iAA>|d(1$;
A °|n A A
r-jdis A A A A -2A %2rh A■st «A AA 4® A nn rir a^ Hu M°; Hi A im A A r.2 "1° dp H-i
w.AAAxlX.
A41A4X
A -2 4® nil Hu rl>A A e2 A®W A A A -2 A<A ^

Figure 2: #7] #^7] ^
-140-

1.2 3 9-%#
44224* *#9 4*4*3 2234 4 % 9*5 44445 *#44 #4. 494 *444 H7>4 #47} 44*4-
Seraji[l]* 4#7}#9 1 44^4 holonomic #4# 444 4949 744-9 3224 4 S)) Configuration Control* 4*9 4 9 4- 4 A]2.tgS] 4 44499 24 7} 4El 9414 944 9 49* *#* * #4. 9#4 944993. *4 49414 99 ##44 99*, *94 944993.9 #!%#4 4444 99 #^•494 4 # 4 #S8 4- 9# Seraji[2]5 non-holonomic A] 29 93.4a] 444 A], 94 (rover) 4 2 4] 4 949 5.3.3. A] 29 & 4 4449 A] 29 33 49494.
Yamamoto4 Yun[3]3 34-4 4 #4 4 4 A] 29 & 499 44 #4 4 # 4 4 3# 4 (potential) #4# 49^4-
44 9[4]9 *44 4439 2#9 494 6*4 39494 44 443 2. 9* 4*9*3 **44 74 KAEROT*49 444 9493# #449 4 1-5]] 44# #61] 4]43344 24~& 499 4 94.
4444-3 3337} #49 44 #43 9 4 99 #4933 #4 9 44, 944 99, 9432 444, 242 94# 9 9994 44 94- # 4 94- 94 991-4 4 49 #4-4 499 444 o]## 9#4#3 399 44 4 94 ##244 445 9-34 #5 4] 94 94- 24 4 4 #4 a] 94 #4 4 9994 #4 44# 4445 2 #99 4494 #599434# 4#45 44 34 3*444-
Seraji 4 [5, 6, 7, 8]5 4 *4*2 323* 4 9 #94 9 44 99 23 Configuration Control* 4 442 ##4 9*24# 4*94- ##4**344 4*9 449* 45 4# *4447}, *9449*415 #9#*342324944 *4949 4*5 9444- #4 2* 449 2444 *#* * 95 44 3(chattering)*94444,24 9444 44 9 4*4444 #24* 34944*443# #4. 244 Sung[9]4 449 4 99* *9 49 *#4***4 4 #4#*2923 499 #45 41* #4**2423 9494 42344
54 9 4*4945 *444 94-
—141 —
Sung[9]5- 4 *4*2 222# #7]*#*4j# *4/4*44 4*44= 444 *4]2 #442, 4 #4|4| 4% ^4# #224# Kuhn- Tucker 2#[io]# #*@H4 4 44 #44* #434. ^2 4144 &*# 44 ##7l*#& 4-§-44 *4*2**444 4# #34- 4 #3* 4# 444244 1A244 44 #4/4 #4 #4 4" 344*41, SMI4 **#Configuration Control4 #4] 4*44 44 #34-
-L44Sung4 #3 [9]* 447114 **4**271*4# 24 4-4-44 #4 44* 4-44# 4*22, 2711 44-4 4 #4#2# 44 22241 4# «H 4 #44 441 * 4|## #41 #4. 2sl2 4 #3# (n + i) x (n + i)4 #4# 4 s4t> 4 441 4# 444# #4*4*41, 4#441 4# 41444 (n + i)34 4*2 f7|slE£ zl44 2#4 4 4 44* #4- 2# 4 #3* #22*## 4# 4422 #24 #4 #43 44- 71-443 ##4 41# #4 ##444 # # 44-# 241# # 34. #4# **2## 2*4* 412, **42*2*1:5 #44 ## 4 44-41 4# ### #42#, Chang[n]4 44# #22444] 4M Cho[i2]7l- ##24# 414# 4### 34.
4# #4 4[4]# #414 #4# #414###44# #3# 41 #434. * *4/4*4 #42444 444 #4)# 4# #2/^424#41442,2711 *}
#4 #*4*2# 7># 2## #44 #*4*231 4 #4# *#4 2*42#24# *43) #1## 2 3# #2### 7% #4#4. 343. 41### 244 2*4# 41# #24**41###4 24# 42### nxn 4#2 #3# 41 #4 2## 4* 44# 34.
#44 Cheng#[14]# #4#4]^-# #44 #4*2#414 ##2H#4l * 4 424# 4# #417} 3* 4* # #4*2 2## 444*411- Compact Quadratic Programming(QP) ##44 4## 4 34- Pin[15]* Full Space Parameterization (ESP) #3 * # *44 nr*4 4*24# 4S4-
##4*2 2** *4 4422 4)#4* #2 * *41 ## ##3| 4*# 4* #4 ##. # *414 Seraji[5]# #*# # 2 3*4, PUMA 560 2*#
7ll244 4=4 4# 34*231 4# *4# 434. #*4*2 41 # #4=2* * *44=7} ** 2*4 #-*4 (4+62+63)#441 #4 #44 Y* 44 (/1sin(01)+
-142-
8
°hAtilrirr#A4iJ2[tinrtuml©A44HJd>+i'4iAmlm
Mm41
AA41AAinkJct[thoh-HArh
A
Hr°hItlloAaHoo
miniAojor°k
t
Jh|oKu
HiA
tt£r°kojflAJ$ljhA
mhHJ44mixml©[AAmha&AJho|d
&rirmhaskml©d>oSH
41
Hi
m|dA_o
tiLAtiinaatiltil4142oh©iry&rhtilohml©J$r3r°k41
l-J44HitthA
n2©4©$;41
M©©hoijt
[til©HrAdNriruA.M
44A
°h
tilrir
4*rh
tiLHi4-i
tt$©L
tilHItljooo414©HiR>
HA©Kml>iAM©rh
m2AjhojoArirtiiiddA_otiLml©d>0&rhA
r4ldaMdAAninml©darh
©l)i
AojoArir°hmi
©inml©41dinW
AA
ArhAmhHi44#.lach©irmi©Arh©v,44daAI
Ǥ'
Iml©ohJ?4bA
A 4-1 rh ©k rh r)r[tl°t 0®,Hi mi 44 44
XI
4JJ$!JhA444ijotJh
d©tiito<41
tiirirooX
3Hiarh©inmj©4©Hirh41
U44MCOohAtilrirto4bmHitil
4©Hng
HAArhXI,
d-lj°kjhrtiAjhml©daAJh18Aoh
d© xn Hi aHu f
Ja[uhaskm|©
ti44HJ
ojmA Hi_m tia rti ^ °k ^ Hr rh A rh*2 ©H A J&
J°kjhAAin©w44#Atil©irml©ohrfl.co->4
jhojoAHJl-iAjh
AAAtiL
HidJ
iAAA
naArh&nHuArhtilohml©AAArir
on HuohtiiAAAAHJAd|Hmj©Atiirhd°t
00Xd©Hig1
HAAmjaAotiLA
Hu>HAAw>
oH
ml©Ar°kd>mKiJ°kAxh©ird>ohml©HiAAtoArhHi
AArhrh
rHra4-iAj|djhrl©rh41Amhtii14AArir©1HArh
AdmAAKmlH0&JhaS.
Arir
tSL4i4djhxa
Aojo
•-bi
slo-g
- fe-E
ln {z
lzisj
olk B
Bln
ln
[oR
,-fe
lo-h
kir
+

i «i-i Ctj l di Si1 0° 0.0 mm 0.0 mm 0i2 90° 279.5 mm 0.0 mm 023 0° 689.3 mm 0.0 mm 034 0° 482.6 mm 0.0 mm 045
Ooot1 133.6 mm 0.0 mm 056 -90° 0.0 mm 375.0 mm 067 90° 0.0 mm 0.0 mm 07
Table 1: tffl 4 Zz# 7)) 6] t> 7# KAEROTS) D/H notation
2 4^^ 8#
KAEROT# 7l^AS 6 5455 4144 &)#cl), 4)4^# 445455 5 541 7 545# 5-71) 14. 25154)1# 41 7545# 44 4 4545
5## 4-8-% 14# 5D# 4 14- 4% 351541# KAEROT4 44^ 545# 14455 74# 45.4 11414. 4 444 444 5^5 44 #441 55# 4444 5)4414 57)-4 444. 441^.5 KAEROT# 5 4°1) 7}f-71-^4 414 # 8711 s, 441 244-444455. 4# 554 114- Figure 344# 444 KAEROTS) 7)) 4e4 111 4&1# 5454- 51 4 4 5 4451- 444 7154 4 7 445 5554) 4 4 D-H (Denavit-Hatenberg) 4544 # 541 5.14 44-
24554144 447>x)s. 4]4^4 1155415 144 81# 41 N&
455, 45544 7]55&4I4 y-4^5 11%4- 4554 17)4414 4 241^1 242 44445 5554 454 mi- 5# 5 14. 455. 4
14# 151 (symbolic) 414 7>51 MACSYMA[16]4# 15544# 45
41 1414.
2.1 14441
• 5.M 54 4444P=[Px P, P,]T (1)
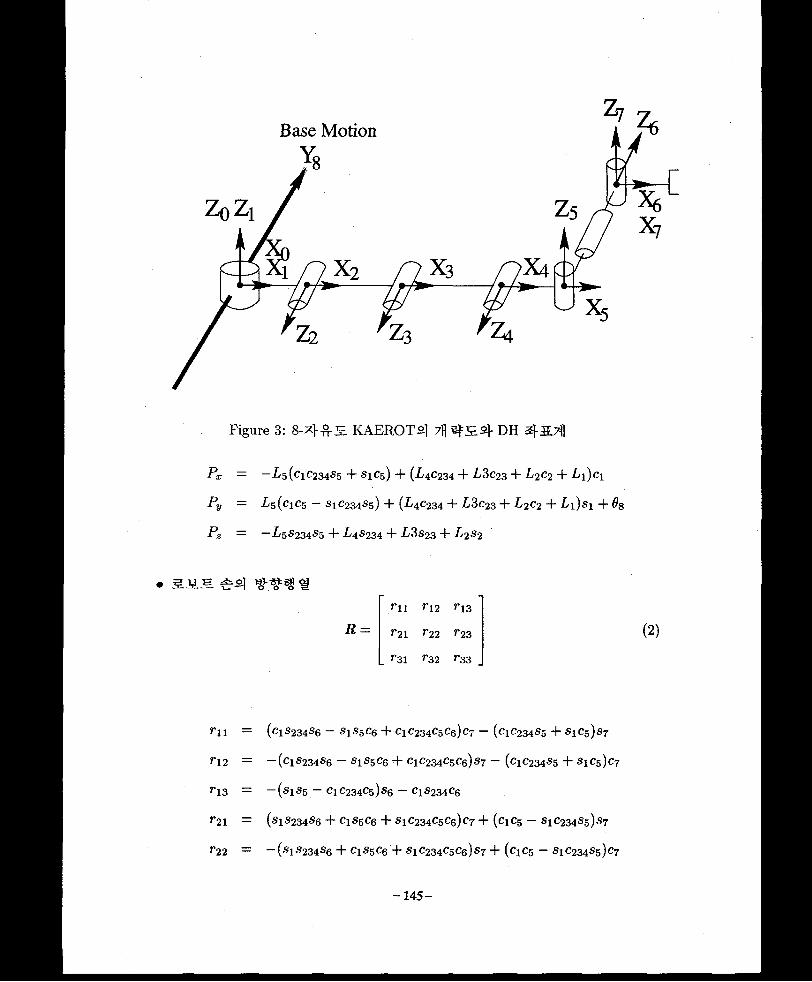
Base Motion
Figure 3: M-R-S KAEROT-2] 7fl 6*= <4 DH
Px — —-E's(c1c234s5 + S1C5) + (L4C234 + Z/3c23 + -t-2c2 + ^l)cl
Py = -^5 (clc5 — S1C234S5) + (L4C234 + L3C23 + L2C2 + Li)si + #8
P? = —jt'5s234s5 + 2/43234 + LZS23 + 2/232
rn ri2 ri3
r2i 022 7*23
rsi *"32 033
(2)
rll = (C1S234S6 — SXS5C6 + Ci C234C5C6) C7 — (C1C234S5 + SiCs)s7
f*12 = —(Cl3234«6 — S1S5C6 + 0402340503)37 — (C1C234S5 + 8105)07
f 13 = — (sl35 — ClC234c5)s6 — cls234c6
r21 = (S1S234S6 + C1S5C6 + SiC234C5Ce)c7 + (C1C5 — 31023485)37
r22 — — (sls234s6 + C1S5C6 + ^1^234^5^3)37 + (O1C5 — 81023485)07
-145-
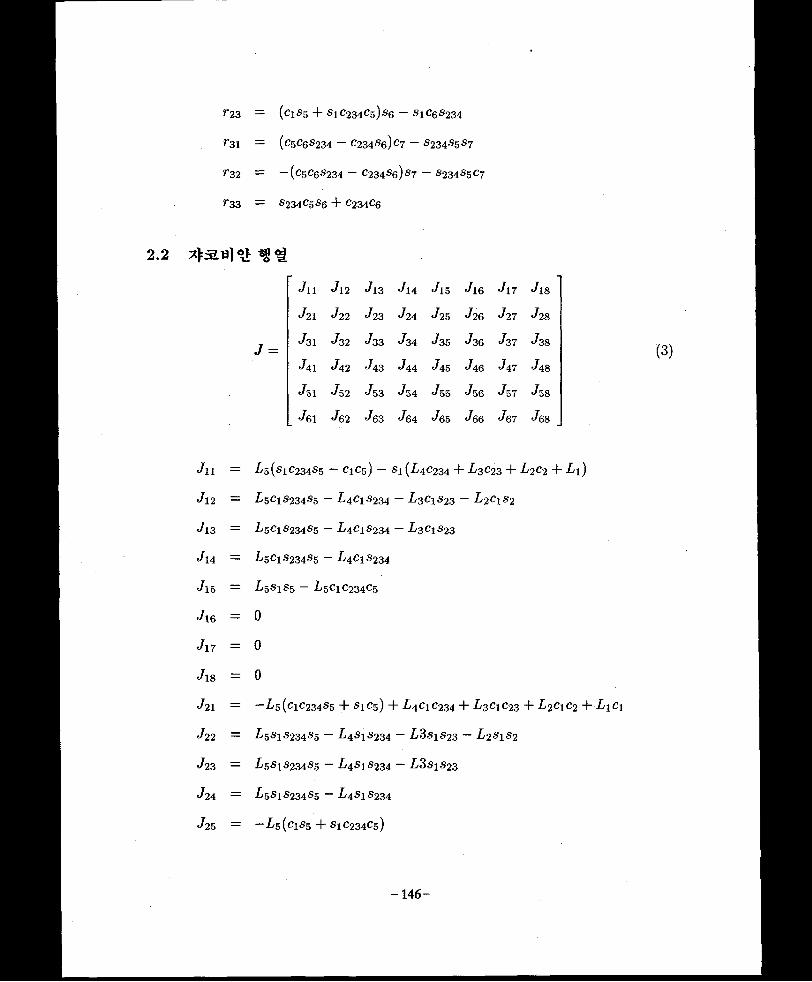
7*23 = (ciSs + SiC234Cs)S6 ~ SiCqS234
^31 = (C5C6S234 ~ C234«6)c7 — S234S5S?
^32 = ~ (C5C6S234 — C234Sg)s7 — S234S5C7
r33 = S234C5S6 + C234C6
2.2 ^>SHl% fg#
Ju Jl2 J13 J\4 J\Q J\7 JisJ21 J22 J23 J24 J25 J26 J27 J28
J31 J32 J33 J34 J35 J36 J37 J38
J41 J42 J43 J44 J45 J46 J47 J48
J'ol ■J52 J53 J54 J$6 J57 £58
J§\ J&2 J&3 J&4 J&3 J&& J&7 J&8
J\l = I'5(sl<:234s5 ~ clcs) — sl(^4C234 + 1>3C23 + -^2C2 + L\)
J\2 — j&5clS234s5 — L4C1S234 ~ L3C1S23 ~ £>2C\S2
J13 = ^5C1 s234s5 — £>4048234 ~ £>3cls23
Jl4 — ^5^1^23455 ~ -&4C1S234
J\3 — £58485 — £5c1c234c5
Ji6 - 0
Jl7 = 0
J18 = 0
J2I — ~"-^,5(clc234s5 + S1C5) + L4C4C234 + L3C1C23 + L2C1C2 + L4C4
J22 = -£’5s1s234s5 — ■^’4S1S234 — LZS4S23 — L2S4S2
J23 = ^5^1^234^5 — -^4^1*234 ~ L3SiS23
J24 = L5S1S234S5 ~ L4S1S234
J25 = —-C'5((?ls5 + S1C234C5)
-146-
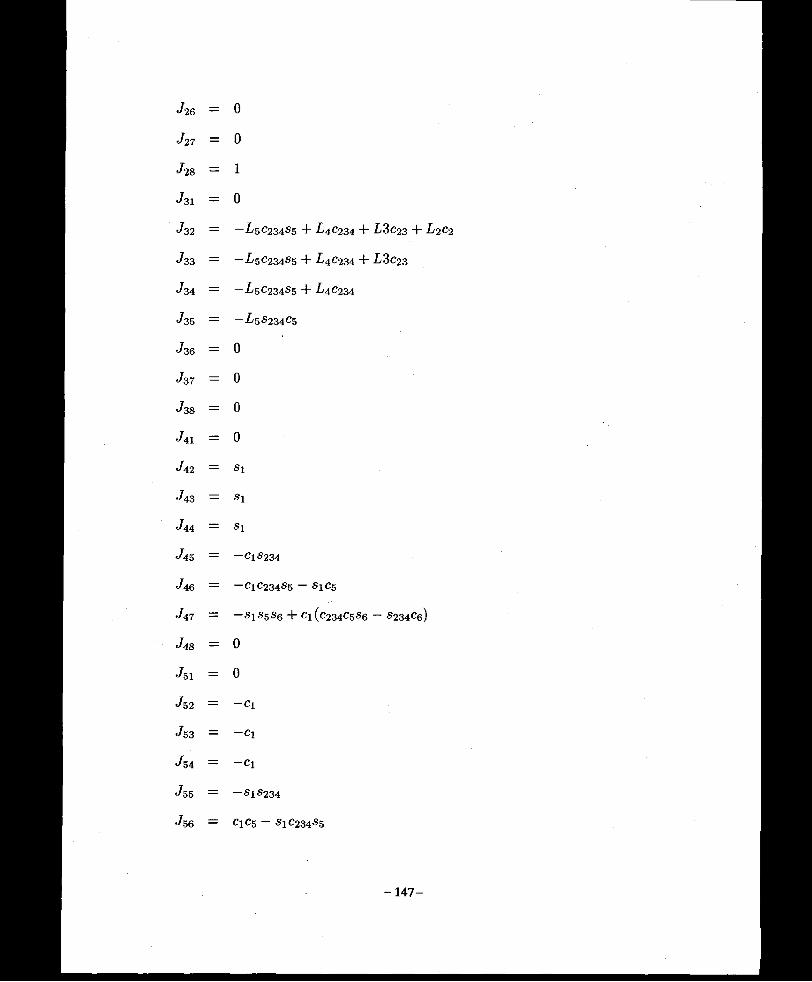
he =
hr =
J2 8 =
hi =
J32 =
J33 =
J34 =
^35 =
^36 =
J37 =
•J38 =
J4l =
J42 -
J43 =
«^44 —
«^45 —
J46 =
J47 =
■ha = •/51 =J32 —
J53 =
J54 —
he =
^56 =
0
1
0
— £sc234s5 + L4C234 + L3C‘23 + Z/2C2
~-£'5c234s5 + L4C234 + L3C23
— 5c234s5 + L4C234
—^5^234^5
0
0
0
0
si
si
si
—cls234
— C1C234S5 — S1C5
— S1S5S6 + Cl (C234C5S6 — S234C6)
0
0
-ci
-ci
-ci
—S1S234
C1C5 — S1C234S5
0
-147-

J$7 = CiS5S6 + Si (C234C5S6 - S234Ce)
J58 = 0
J&l = 1
2 = 0
■hz = 0
J&4 = 0
«7g5 = C234
«^66 = S234S5
«/67 = S234C5S6 + C234C6
-768 = 0
2.3
s*e4 444 4## 4#4 44 ^444-
p* Pyftf
(4)
rn ri2 ris
r2i T22 7*23 (5)
^31 r32 r33
4444s# %44 4 444,414^4 44 M f?}4 4444 4 07# 444 4^5. 7>444. 441 444 644 4 4 #4# #444.
6P = 8P (6)
gP = Xfi = ^P to™1 (7)
-148-

444
tR =
aR =
C7 —s? 0
0 0 -1
S7 c7 0
rtii ”12 ”13
”21 ”22 ”23
”31 ”32 ”33
O] 5} 44-.
l. C5* -i 4 +i #41 445 4444-
Cl =C5(-Pg — L^riis)”23-Px ~ n\zPy
Si = c5(Py - L5n23)n23Px ~ n13Py
6\ = otan2(si, ci)
2. ss# -1 4 +1 #41 445. 44 44.
(8)
(9)
(10)
(11)
(12)
C6 =Cl ”21 — Sinn
(13)S5
S6 = sl”l2 — Cl7l22S5 (14)
II atan2(se, c@) (15)
C.5 = Cl ”23 — Si 7713 (16)sl”l2 — Cl 7722 (17)S5 =
Sg
3. cs4 s54 #571- SMI 4 44 44#53 44 (l) £4 (2)5 44-4571- 45^ 45. 44.
4. 4## 4 444 5.# 4 7l #44 # #44 44-
cl”l3 + Si 7123(18)C234 —
SB
—149—

$234
#234
A
B
u
H
04
02
#33$5
o£cm2(s234, C234)
clc234^a; + $lc234p/ + $234-9 ~ 9C234 + Z/5S5 — Z4
Cl $234-Pa; + $l$234p/ ~ c234p; — 9 $234
(A2 + f?2-T|-X2)2L2L3
atan2(±\/1 - u2, u)
atan2(B, A) — atan2^L2s3, L3 + L2cz)
0234 — 03 — 04
(19)
(20)
(21)
(22)
(23)
(24)
(25)
(26)
2.4 91 %4|
944 49^5-4 4 #44.5: 55-9 5994 sll 99444s 44# l 441 9 &# #95.14 7>^S>4. o) e] 4 !-2l4# 9%9 44#944 4 4 #s# 949#4, 4# #95l44#^4s 44. S#S4 3) <y #444 #4, 44% #951444#x}#c 5.5-4 44## 4# 4
4#4 4s4 4# 4#5. 4-S-7>#44- n#4 41 %47} 41 19, 4 4 % # 95.1 4 4 #jel# £#5.4 44o)| a] 444 44# 1-55-14. %1%449# #4S&%4 %%1# 44 4 #4 4- S% 4 #4 94 #s 4## 9s $)4. 9 4444 4-9# 8-44S KAER0T4 %1%4% Table 24 #4-
444 9 7f|4 notation# 49# 4tt# 494 #4- 49444 #4# 4#4 9 49414 19% 41# s 5-94944 4 111 S3. 499# DHnotation #4# 499##, KAEROT# #xM# 49.447} 44 4=44#
44. 9 5.S444# 1499, 4494, 4a#4<@4 #9 DH 4±44# 4=9, 41194 #% 14# KAER0T9 44# 4sl:4.
-150-

KAEROT Notation DH Notationmin. max. min. max.
1 -135.00 ° 135.00 0 -135.00° 135.00 02 -147.180 122.82 0 -156.68 ° 113.32 °3 -167.82 0 102.18 0 -158.32 0 111.68°4 -90.00 ° 90.00 0 -90.00 ° 90.00 °5 -90.00 ° 90.00 0 -180.00 0 0.00 °6 -90.00 ° 90.00 ° -180.00 0 0.00 °7 -90.00 0 90.00 0 0.00" 180.00 08 0 mm 500 mm 0 mm 500 mm
Table 2: W-R-S KAEROT^ ^ tMl
-151-

toI
A A r|r a4L*2 6** H r|r ft <JO oo£ F
SIA A
A H4 r°k n°fcB rMg H: ^
o& H t& 4> A [)iA rh
* _o,w;*
rir
U aW1#
61A H 1°o|n HuA AH Ha 4> A
B*IIo
7nasT131e
e1
mas
'"S3
IIH
7nas
Aminimisri41tijoAftrloit
Jhjot
[lti.
ftAm|oHftH>
41
u A#Hi
•it
Ar|r4L
A A 4> A tilow A W J?t 4tjas % rh ot &
m o|r rl°1 "-s A wam £q 3 H> &
m II A%
H 5 r£3 H
^ % m 3^ IA ~ o<Ti
%
oh
ft
xa ft
IsA H A 4>jo ftit -S- Jh 4° jot ftit
A A
Mft41
xa»|r4>(&0$Am|<>daft<&
ftAH>1*Aojo(11$
AAJEJajaa_i 1
ftA
1°HuitjhJotftohftAH>j53minNA
8
H> ftH
f ft ftAmlmdaAAAJimo
ohJ?tJB.
1
3IAo
'rn
%
5=3IAo
da %
to00
ft ft 41 A• ft
Axa<4LAmidJetJcLmlmdaAArir41tijo41ftrhdmoldJ>Hi4>HMrhml<>o
ojo1$!
H
A Ja1 t w i% j[>m ^^ rh
|oHu
3rirft ^ ft ft ft rAH> ft
41t
rir
AAAH
M r(rAAmittAAA
A
ft UAft
4>r|r a1> 3 ft A A mlmflOji H
t f* S
3IIN
'mas
to
A4°A4°ftAAmittAAAAAHiJ°iAr|<>
tofttiLftAAftft
ftJSLd|HJat>
CO
00I-a
M
£§H
0^0
&K($d&
=2,
23°11 43 42.34696
liw = -S(JewJeW) 1Jewh < 0, (30)
44. 444 S = [0u;Xm:/tuXlu] 7} 5]51, *1 #4#3 96496234 4294
(31)Hi = 0 /or * ^ W
44- 444 #3-236 2rto(V2L)Z£>l negative definiteo] 43 34 4.
4 #2.1 44# 32/6623* 4644 449# 9246* 3# 6 $14. 43 #3 6, 4699#4 44-9^9* 4646 936 464 34-
(32)
4 44 j+w = jL(^JL)_144. 235 964 96234 4% 4294 6
6# 946 336 3444 34-
3.2 7>#41- 3.4% 39-464 43
4 944 9-43 394 #6 4946 394 dimension (metric unit) 4 -g-9446 9436 39- 34. 46 64, Pseudo-Inverse 336 93 33694 6 (norm) 4 2446 33 4 4 4 64 34- 934 KAEROT4 39,3 33 4 prismatic joint 4 25 [mm/s]4 34 # 7V4 9L, 444 6 S-9 [rad/s]4 34 * 7}34- 34 norm6 944 4 3, [rad2/s2 + mm2/s2]4 ^4 7} 4 4 93325. 363 34-7} 464-
4*4344 44 7>94 *8 9* 4634- 6 fww]4 W* 46314 9 49 6(dimensionless norm)6 3# 9 34- 29 4 7)°)) 94) 7]-#4* # 9294. 46444 *24*6 W* 39*893. 46349: #9 94- 6 949 6* 43 7>#x]4 33) 444 7>#4 ^9* 63) 3449* 36 44 34-
w = ttw2 = i (33)
-153-

444 # 4 #44 4#4 40] ^-4144.
)* 4 ^twW^ewW)h (34)
0)714JLw = w-1 /T** ew (j«uTy-VL)-' (35)
0)4. 4^7)x|s. 4#9 44244 4% 4ZZ-44 44# 44# 4D# 4#444.
t*w = -S(JewW_1JLr'JevW-'h < 0 (36)
0)714 7}#4* .ZB) % 444 4Z1 44 #4# 4#4 #4 425)94.
k + J etyAy, = 0 (37)
j=«,^(A + JL^) = 0 (38)
JevjW~x h + JewW xjJw Ay - 0 (39)
(tlgy 1«^etu)Atu - —JewW 1 h (40)
= -{JewW-XJTew)-XJeWW-Xh (41)
Pw = -S(JewW-xjJw)-xJewW~xh (42)
244 #4 ^(manipulability measure) £. 9 A) metric units)- 7)-^x] # EB) # ^
514- 9# #4 ^ES)#44 (Je^-VD^la) 4^##4#47) 4 #4 4-
3.3 JS.^44# 6l^-^r 4SH]y:44 6]#-
4^(orientation)-§- EB) % -f x>su] o}a}s}- 0)7] f 446 9442 E 4#4#9 9.44.
v = Jv0 (43)
-154-
444
(44)
(45)
44, Jv^ symbolic formas. f 4 9"444- 2®t41 w# H 4 #44 o}^% # 44 4 44# 44 #44 444 $14 4-§-S}7M1 #^44- <yo>3]55. 5.#44%=# 5 <8 44(euler angle) 0.5. 44-4 4^4 <?>i- °] -§*4# 4 #7]9-45 5H444 4 #4# 4 #4# 44 44^4- 4^4 5##4 444 44°1 iM44 #4441 4# 9^44 4, -£.11444 2 4#4# 44
V =
9 = J+v+(J-J+Jy)VH
r — N, r=r<f> w
(46)
4 44- 4 54444- 4 #44 424 444 4 4 9-44 -t 4&4 44-
r = Jr9
9 = J+r + (I-J+Jr)VH (47)
4 44 Jr — T~lJvo\ 4-. 5.4 4 4€- 4 4 7>4 ig-ig 0.5. XS7prt!41, 4 7l 4 # z-Y-x 54444# 41-4- 4## z-Y-x 5-84441 4% 4#^ #4 4-
1 0 0 0 0 00 1 0 0 0 00 0 1 0 0 00 0 0 0 — sin (a) cos (a) cos(/3)0 0 0 0 cos(a) sin (a) cos(/3)0 0 0 1 0 - sin(/3)
(48)
4, 44 #4# 44 4 44 544444 ^s(rank)7l- #
-155-
4 #4# 44 4- 4# #4, z-Y-x 2644# 4#16 41#sin(/3) = (HlAl o]y 164 4614- #21 3 £ 42# ^>S0] 6H 6 4 43. 4 61^ 64 4# 6414# 4 °1 4- 4 6 # singularity?} 44 4#3), 4 # kinematic singularity4 4^44 representational singularity5}3. 14-
3.4 Working Set4 #4# 5l#4 4 424 #
2412414 41 44 446 44# 4424# 42^2 643.2(Safetyfactor)#7>4 423. 314431 44 4&4 44 #4444# 441 444# #^162
3 42# 444# #3151#o'!44- 4 4# 44# 4#24 # 4 # 4###4314 4# #24## 4#5S1 444-
• #41 441# 4#24 : Ri < 30
• #315] #414 3144 4°H #4#24 : Ri < 25
4 4#, 4-# #44, 4# #2, 37431 sampling rate #4 4## 44 #24# #*§### 44 ##24# 44444 #4# 4 #7} 444 # 44- #, Ai = 264 #7fl4 42 441 4# 444. 3144- 44 444 442241 44
#711 44 #4# ##44 471144- 242 Working Set4 44# Active Set41 244 44#24 #414 #24#41 °1#4#244 44244-442^44.
Active set4 44 : A — > 0}
244 6422# 24 44 ), Active set4| ill 44#24# 4 4 44# 444 4## 44422 # f 6225., A}## Active set41 5#4#44#24# 644 64-
• 3462 64414# 4°H#44 #4# A = {}22 4464- 44# 2# 42414 active47114# ##4##24»1 64, 4 44###24# 444 6
#464# 4# 44#4- 4# 6 24# 44144 44 44 #6 4-%# ##4
4 442 active4Til 1 24# 4 4 working seto)l 2644224 7}#S}t11 44. 44 Working set# “#24 #414 24 44 624 Active47fl 4 # 4o|j ^-214144 642 46”22 7112 4444-
-156-

4*4 4# 44 S^e]#* 4 7]-4 ^4 7j-4* 44#24*% 44 44*1 f 7}s| 414. #4444 444. 44 44 44*4 ^f7} 44 4# 4" 44- W(t)* ^44 0(044 0(& +1)* 9-% 4 #j8L% Working Set4 4. W4 0^ 44 W(fc)4 e(& + l)<4| 4% ^4 &o] 4.START :
1. k = 0, 57)44 5(0) 9! 27l Working Set 1^(0)* *44.
2. W — W(0)
BASIC :
1. i(fc), 5(4, w&*4 4*441 0# *44.
2. 041^2*4 m4 A# *%4.
• W = {}°J 44 :
(a) A = {}4 44:- 0(k + 1) = 0, 1^(0 = TF, {i(k+l)={i, A(k + 1) = A
- k = k + 1
- goto BASIC(b) A 9 04 44:
- W = A- goto BASIC
•W^0444:
(a) A = 04 44:i. fij < 0 (for all j G W )4 4 4 :
- 0(k + 1) = 0, W(k) = W, fi(k + 1) = /x, A(k + 1) = A
- k = k + 1
- goto BASIC
ii. Mi = 0(j'€W)4 44:
-157-

A. j£W(fc-l)4 34:(23 j7j- Working Setofl 4334 34)
— #(& + 1) = 9, W(k) = W, fi(k + 1) - fi, A(k + 1) = A
— k = k + 1
— goto BASICB. jeW(&-l)4 34:
(23. j7|- Working Set'll] A) #344 3 4)— 8(k + 1) = 0, W(k) = W, fi(k + 1) = fi, A(k + 1) = A
— E = {j\nj = 0}, W = W(fc -1)-E
— fc = A; + 1
— goto BASICC. r, >o(je w(&))% 34 =
(23 j 7> Working Set'll 3 #344 3 4")— E = > 0}, W = W(A: — 1) — S
— goto BASIC iii. A3{}3 34:
A. ffii<»-mo|^(^ 44427} #0} 5^4 34)— W = W(k- 1) + A
— goto BASICB. wk = n - m *] 3, (#4%^. 4 43427}
— E — {j\Rj C Ri, j 6 W(Ar), i € A}
— W = W(k-l)-E+A
— goto BASIC
3.5
433 # ail 43 2#^# 3313243 2#^ 33 44 44 4-2.3. 34323. 334 3433.# 43M4- 4333 444 #3433 3)4
-158-
#3414 #3% 4-#### 24# 3.A 4#4 ## 5 7>4s ##4 4=$A4.
1. 2#^4#7l ##7l 4=# 4f# ##
2. 21^4 5.S.H #1/## *s.
3. Sil #/4#4#4##7l 4=#4## >#
4. SiS5] ##44 #-# ##
5. 49-44 ##44# ##
#44 4 #4 ##6 2#^# 44 % 222 e#.#2# 4#4 9# 4425.
# 7)1 #1# #&4- aii-eiioiTl # 444### ## #=## ##4# ^2#-## 2, 3, 4 ^# 9|7M #%-## # 4" &(%4.
4## 4 #5)1 # #41 4 Jiel % 41 ##] 4 41- 4 4 f## #42### 4-
i?2i_l = @i,min ~ &i < 0(i = 1, 2, • • •, 8)
#2i = 9i - ^',mar < 0(i = 1,2, • ■ •, 8) (49)
2# 2 # 4 4# ##4#2# 4# 4 #4 2# 24##4## 4# #4 ##4 4^(manipulability measure)# #4# 4°1] #4# #"## 4 # # # 7) # #-#=#4 SX 4. 4## 4 #511 # #414 24 4# 4 24# 4 4 # #4 4=# 4-
H1.0 M
+ £l.Oe—6
y/det(JJT) j=0 (4 Pnozzle dam)2(50)
#714 2## 4 #4 4# 24# #4 4=4 #4# ##42, 4 #4 4# 2# #4 2##a 4## ### ##471## 4#4- Pi(* = i,---,M)# 2## a# e#7}#4 9191 #4# 44#4- 2#2 ##44= #44# #4 ###Kh = -1.0e822 ##422 ##$14.
24A}#1 # 4## ### 2S# ##2 ##%##!, 44#& #4 ##44= #44 #22## #44# 4= ##4#l7l-§)#7l 4##4- #4 ##4#27l-
-159-
24#£l-E.S ##!##23#2l# #A)ol] 711 Oil- # 3134- JZB]S 43 1 4384# #3! ## 4!#£ 141 ##41 33.SS 44! $7)1 21 & #14# 4oi #344.
3.H ii-io]ioni 311 14# mu i #411! 31##4 3 44# 431 41# #47} 14. # 1411# 1 #41 ADAMS[20]4# 7144 4 #44-31# l#sl] oil (software)#! 411 £#3 41 44#4414- 44117l 1 # ZL1 # 14111# 444# 411 111# 14 44- # 1411# 3 #4 14111 £45.4 1#5813, 44 #4441 111 1334, &4135. 1#1 4 1# 411 14-
Figures 4, 5, 6# 11 #4 4#41 #4444 4111 #14# 4144# KAEROT4 si# g@14 14 4314, 133 314/14111 £4# 1 #41, 5-1 #4- 11 #14 11411 ##44 #3 £#!# #143 4 44# £## # 4 14- Figure 71 # 1 43 #11 411 £££ #4 4 4 4 341 nil 1 44434- 1 11 # 314 £4# #1 41 411114-
431 #14# #14 1111# Figure 81 4414- 434114 411 111 m 3131#l£ #114 1# 14# 1# # 4 34. 1# Figure 9(a),(c)l 4 £ 3" 4 3#1 working set£S 444 3#(wi = 8)# 441# 4 14- #, 2114 a}a)]5. #114 431 44 11 #13:14 ##41 4#1
, 335]#141 41314 444 t]b]# #3 3 114# 447}# #14- Figure 8(h)# 1 o] #3)3# Si ^# 1,4 4 500mm #4141 #7] 1 #1 Figure! # 4 4441 3#4- —1 4 Figure 9(b),(d)# S3, 3sl A] 4S.A}o] 1] 1 working set! 444347}6A#H1 444# 1# 3 # 34- 344# 1 ## 414 414 41 £ 7}# 441 ## 41 a} ##413# 343 # 4 341 #4# #1 34587M#14. working set! 4143 334# 4-1# (0,0) =» (8, 0) =7 (8,16) =7 (8,o)£s #14 1 #4#£# 111 ##43 3##
5-1 #4-344 44 11££41 43 #11 #43# 41 #3# 3 # 34- #,
500mm 4 41 Si A] 1 #o}c #4 #4 7} 3 34- 7# KAEROT1 H #13 243£ 3411 # 113£4# #143 31 #4 47} 7}#331 3,343£
-160-
•-bi&ttik
is t2o"to #-&# # "EH"iy cfv lo||fl ‘£tl]xk>-^ i<? Ri-N: ^"S"Hy t1 Isir 'in [p-attnkB"S-k tefci Ito^-t* log:££ £ i?liy

Figure 4: a]^>o)] KAEROTS} %M|-1
-162-
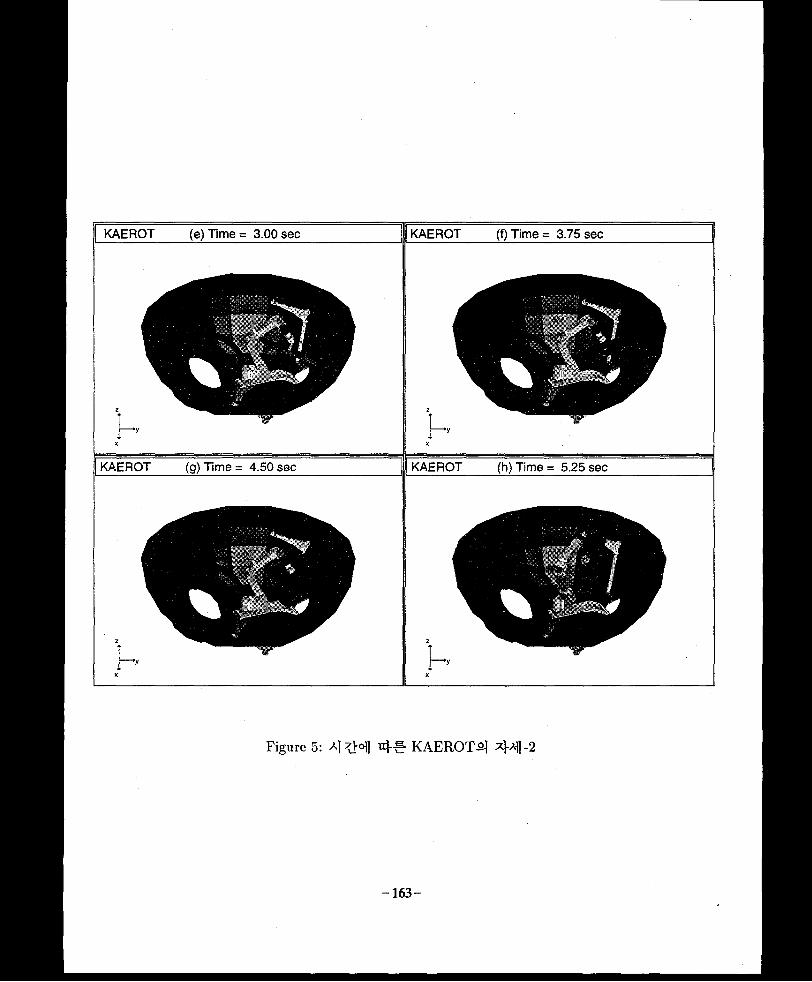
Figure 5: M KAER0T4 *Ml-2
—163—
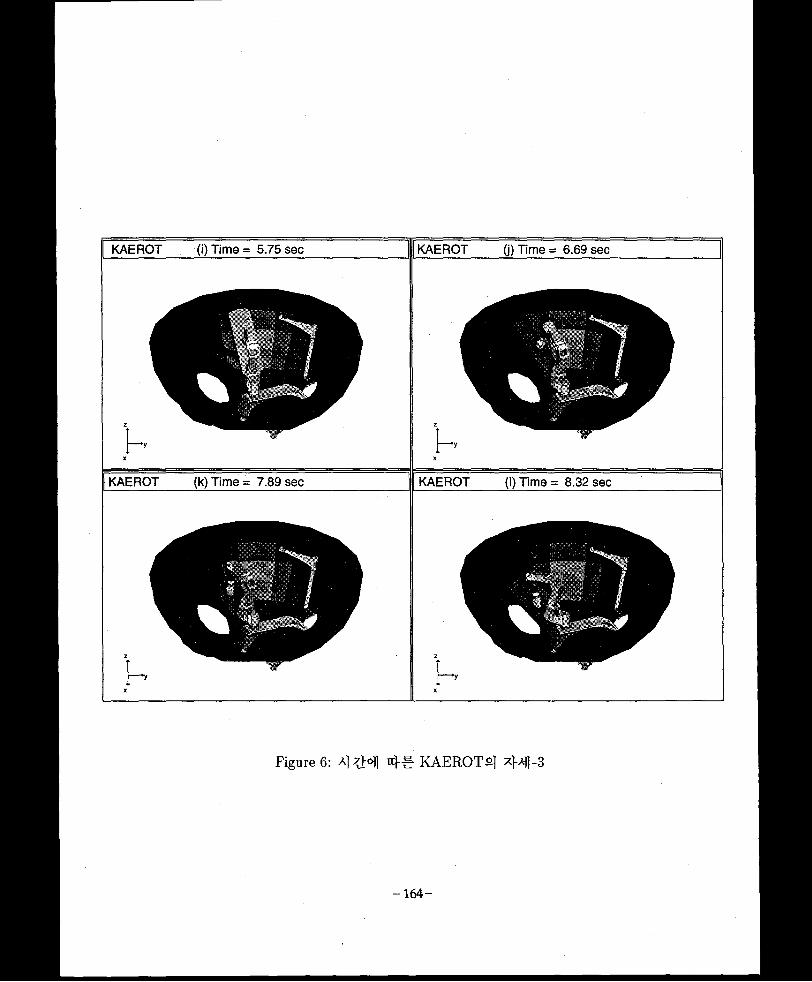
Figure 6: A] 7}o\} rcj-g. KAEROTS] x>a)]-3
-164-

Z [m
m]
Y [m
m]
X [m
m]
(a)
Time [sec]
(b)
Time [sec](c)
Time [sec]
(d)
Time [sec]
(e)
Time [sec](f)
Time [sec]
Figure 7: T# 5.
-165-

Figure 8:—
166-
Theta-7 [deg] Theta-5 [deg]
Theta-8 [deg]O 8 § 8 I 8
3<D 4k
1
Theta-6 [deg]
(e) (-90:90) (f) (-90:90)
Theta-3 [deg]
CD ^
Theta-4 [deg]
CD
Theta-1 [deg]
Theta-2 [deg]
(a) (-135:135) (b) (-147:122)
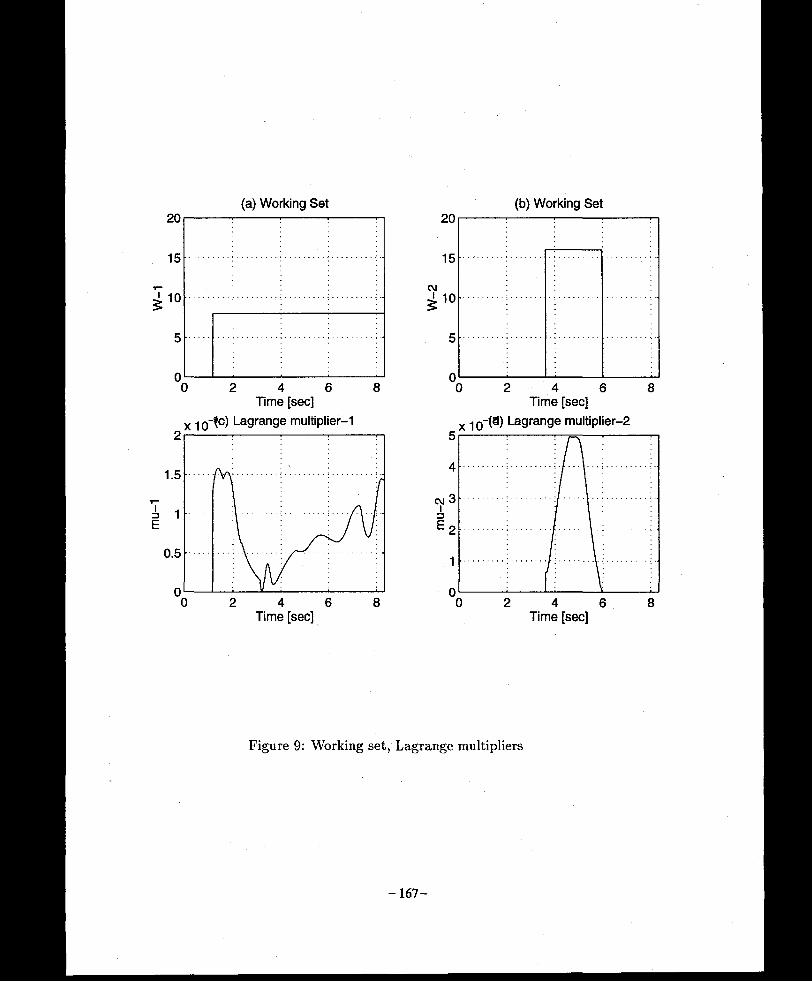
mu-
1 vV
-1
(a) Working Set
Time [sec]x 1 Q-fc) Lagrange multiplier-1
Time [sec]
(b) Working Set
Time [sec]x 1 q-(8) Lagrange multiplier-2
Time [sec]
Figure 9: Working set, Lagrange multipliers
—167—

4 6]^ 41^1 414
4.1 44943 Silt 49 ^444 44 ^4#
<^93 3-5 5^9 94449
T = M<?(5)fl + iV5(e, 0)+rdist (51)
35 ^Ma-g-tt44 5994- 4 7] A] M0€RnXn9 99D943., iVg E r*9994, 94, 3-43. 494 94 49 o) 3L, Tdist^ 4 9^ 9 Pl 94-
1495 534M44 991894 4444 9 4496 494994)4 5. 94 4 994, 4 4 49#4 M# #4, 9444 49)41 4993# 44 4443. 59 4 9 44#& 3:443.5 4)444 4449 99 99944 94 49 S9449 937} %4- 2944 4999# 44 949 499 99 42.4 9& 4 949
•F e = MXexe + NXe + Fdist (52)
3,5 5949 49999 94449 9# 4 94- 4 94 MXE = J^MgJ-^e
®nxn)4 51, jV*B = J~T(Ne - MeJ-'jJ)(€ »")4 4-94 Computed Torque Control(CTC)9 9944 44 93.5) ## 9 4 49
49-4 94-
T = JteTe
Te = MXexe + NXe. (53)
44 949 49 499 7}4s9
Xd + Kve + Kpe *n d + K^e^s
(54)
444 e = xd - X e 3?TO 9 499 44 34 4 4 4 2, eN ee iNd - iN E 3?r 9
-168-
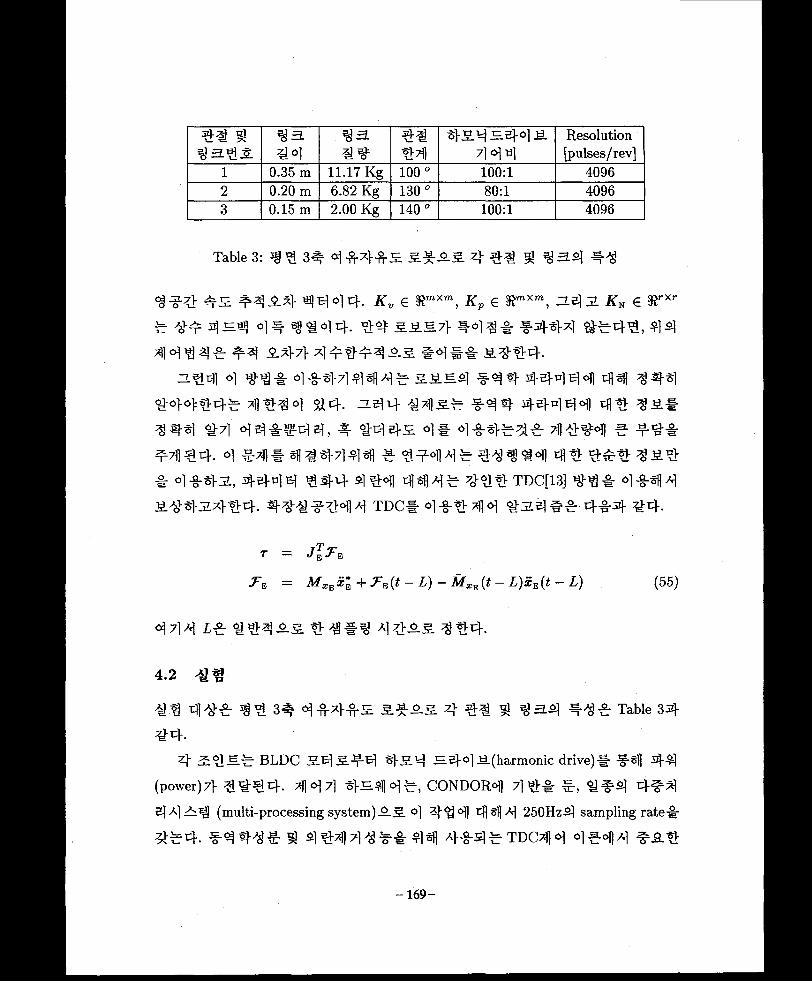
33 5 3a 3a #3 4s.4s.44 a Resolution32»!I 34 33= #41 444 [pulses/rev]
l 0.35 m 11.17 Kg 100° 100:1 40962 0.20 m 6.82 Kg 130° 80:1 40963 0.15 m 2.00 Kg 140° 100:1 4096
Table 3: 33 3# 4 #4#S a#S5. 4 #3 3 3 32] a/g
3 #3 #s #4S4 444 4- Kv e ftmxm, Kp e Emxm, ae] a kn e 3?rxr
# #4= 4^4 4 # 3 3 4 4- 44 SiLS7} 44 ^ 4- 4444 4^44, 4 2)4 4 3 4 # #3 -5-47} 4 ###3 aa #4 ## a3#4.
34^1 4 444- 4-1-4714*1144 1IS2) 4^4 44444 4*fl 444
34444# 41444 44- 35)4 #4 a# #44 444441 44 3a#3 44 44 4 4 ##4 3, 4 44 4s 4# 4 #4434 4143=41 e 44# ^7)144. 4 #41# 434444 # 4444# 43434 44 4## 3a## 4#43, 4444 444 4 44 444# 444 TDC[13] 43# 4#44 a44ax}%4. 43-##44 4 TDC# 4 #4 4 4 #as]## 4#4 34-
T =
3~b — MXe + J- s(t — L) — MXe (t — L)xb (t — L) (55)
444 T# 343as 4 41-3 4335. 344.
4.2 34
34 43# 33 34 4#4#s a#aa. 4 33 91 332) 43# Table 34
34-4 a4 a# BLDC S4a#4 45.4 340] ti_ (harmonic drive) 1- #4 44
(power)7} 3#34- 444 4=44#, CONDOR41 4 3# #, 3 #4 4#44 A] (multi-processing system)2£ 4 444 4)4 4 250Hz2] sampling rate#
3#4. #443# ^ 434143## 44 4#4#TDC4|4 4#44 #&4
-169-
#4=3. M<t\ ### # 4= $14- 6 #1446 # #-54# 7]64#°J 46# (coupling)#### 4##-3 4446 ##0.5. TDC4 # 64 4 ##6 616 3#$4. 4664##44-
MXe = JZTM(0)J~l (56)
44# M(0)6 44### $16 #-65! 6 4 4. 34344 4 4# 464 44-
" 40 0 ' " 400 0Kv =
0 40
II
0 400(57)
#16 6 #4# #4 4#4 #3### ## 3443 35-4 #-§-#44 € 33# ##4 4#44 #66 #1334-714!: 444- 44 444436## #4 # #4# 7]-## -6- 4 i3s}£4 JRA(Joint Range Availibility) measure#
4 4$S 4- 4 4443 35-4 444 4 ! 46 4 7} manipulability measure#- #
4 #4# 44 #6#6# 44464,4 35-4 #66 #4#4 3#44#4
44 ###4# #44 433, 34 46 3##66 4446 JRA #6467}
##44% #!4$14. JRA #644=6 464 #4 44# 4= #4-
20j (@i,max "H Qi,min)
Qi.max ~ @i,min(58)
Figure 106 4 64 EXOS 6#4 4 #3# #[17]# self-motion^ #4^6 44 #1## 44# 3464. 44 #646 464# 44 Kh = -53 ##514. 35-64 4#6 2=444# 343 4446 6# 444#4 4# ## 441 (64# #646# ##46 4-41)3 4646 46 # 6 $14. ##441 4% #66 (d)# ###-467}033 6#46 46 64 6 6 $14. 46 (c)4 #6 #63347}44414# 033 6146#)4 45-# 444- 444 #16 44 ##4 64# 444 ### #33#4 ##6 44443 354143 4## 6 $1$14.
-170-
_>wifl 0A TonkFjg [AA A_o ni[ji -4l o|(i!
tub j- □4 K5A A A rHKi Ki$5
JbL A |o A Hu A _o h
(+) om& ™
Ur4
N1&
AA
A
41
A
ti[il JMA J°0 ft1 i44 r$i A 41 A r|rMr ^rif ia|o^ HrA _&^ -tx 4k r|rXJ
41 A 41
!$
A >!rtr j.
r|r
A nilml»
4HN -H 0.A mlm Fa# H£ alH rinl—iJN r.4 A Ah-t00 41 14 A
A rJ£s A n>0-^ A mlm
4°Fn
A A1 ** ttS ojdt4l #A j|>-\> Fd ^ rjf [o >1* O A Meru 4fA A A AA & min A%% Af 44
A0- o
FR A r$ J4r3 ^jja; H% JM -tt
o-rr'
A riroj)lft #Jimoi, o
* £ ^
S S
m£ 41 Fj N 44 A
Jot-
(ArAoldmjo
rir
41oar-5-J|t£
>4 A Jo AHu rT44- 4% n2 j^j,
A U °fc 44a NHU A >K ojrrF> A 14 4> A m^ F>A Jojl
A mlmofc 40nrri2
joti
d2o
jfl
^ fO,JM
<>$ jk mlo r_o^ j^l A a2 m$i ml»4> 11$:
41 4»r|r *A lA A A A Jhl
Mmlott^L
to
£ *"Aohl&41
091=
OV,
aA*W4 A JE Srl» £ r-5. 14
A d2k
-4 [i^j, <$ Jji rjo A
1to4
Rw
o4^
CoB*'oto
OICO
41djomhd2km)oAaHu>KrF>AAJk
ri2AJiLl»Huinko>£r$;41

(a) End-Effector Trajectory [m]
0.1 —
Time [sec](c) Null Space Velocity Error
Time [sec]
(b) Joint Trajectory [deg]
Time [sec](d) Optimization Criteria
-0.01
-0.02
-0.03
-0.04
Time [sec]
Figure 10: EXOS ^^3} 3] 4 <>]-§-H: (a)x(solid), y(dashed), (b) &i(solid), 02(dashed), ^(dotted), (c) eN, (d) ZVH
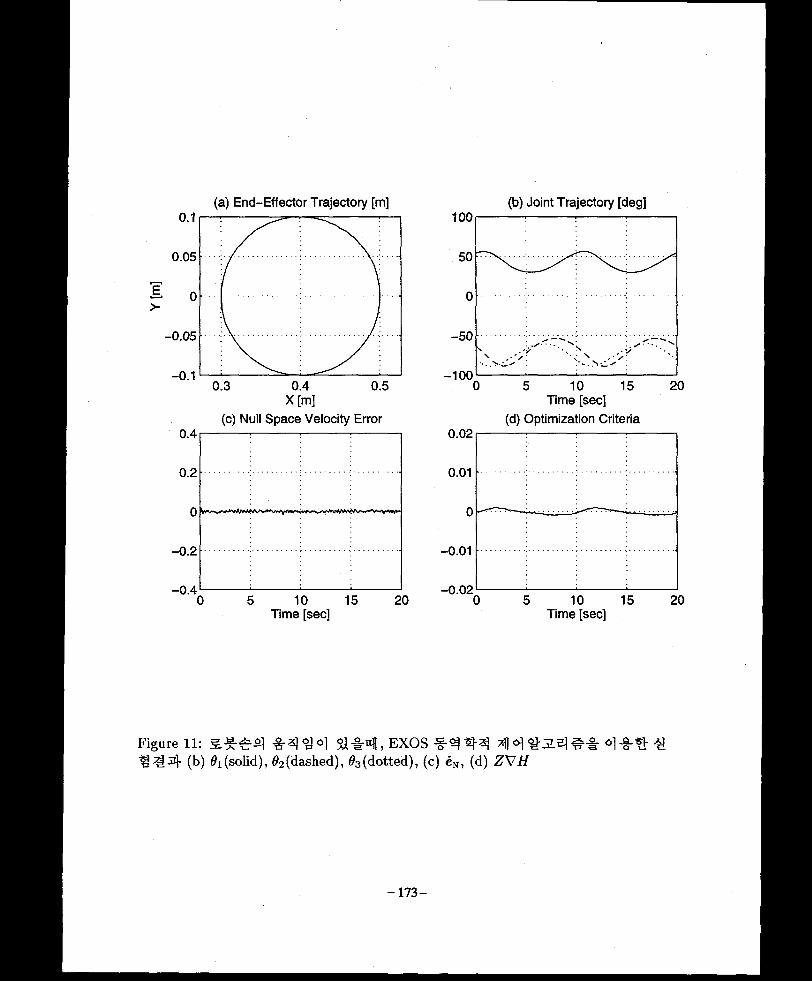
Y [m
]
(a) End-Effector Trajectory [m]
-0.05
(c) Null Space Velocity Error
Time [sec]
(b) Joint Trajectory [deg]
-100
Time [sec](d) Optimization Criteria
-0.01
-0.02
Time [sec]
Figure 11: %&4,EXOS ^3.2]o]-§-^ ^^(b) 6i(solid), 02(dashed), ^(dotted), (c) eN, (d) ZVH
-173-
5 ^
# 1444# #1& #1 KAEROT# ###14 ###5.#11 #31, lx>v4£o)] *])## ###1 Tflo] #3L5]#S] 1^# 11155 ##%
4.#1 2#!H4 7]]## #!/##! ##5##444 #1# #5 11 1
4 4 #55]## #?M #144 41SK4- 94, working set# ## 94% 1
1# 4 #514. #4, 4 #14-44 7}f7lf JLS1 #0.3.4 44#14 #7)]#
41## #44 #1 #14 #11# 54 ##44 * # #4- 41# #315]
#1 8-##5 KAER0T4 1#44 #1444 #4## 14431 51-1##
111-4# #1157} #414.
35]3i #4# ###5.4 1## #-#47] #44 14 #4#14 1# 1## 3141 0.5 4443141441# #4= #1 £## 7fl #4#4. 444 4#
4#41, 14 1 #47] #4, ls.1 #-#1# #4 ### # #4. 4 ^41
£4# 4 #4# 4541 #141# t] #ie #4 44# #44-
4-x]#0.5.14#54 7fl## EXOS #5### 1444 341-5# 14 4
#4#5 5.44 1#4# 14444 11# 4=!#4. 114 #5 JRA41#
4#44 155144414444 5^ 11## 4-41# 54 # 4# ### 4-
414 ### ## 4## ### 1 #15514 44 4 #4-155 4 4#
44 55 4-## 11 $M 14 ##! (local)4 4-14444# #155 44 #
444, #41 (global)# 11# 1^# 4#44 5# 4444 11# #115# 11 # # #4- 14 global stochastic search algorithm 55 ##4-#-55] ##
44114 4 4 11# #44 #11 4#s]5 #4- 44 4# 4## #41 511 #4 4 4 # 1#7> el #4 4.
-174-

References
[1] H. Seraji, 1994, “A Real-Time Control System for A Mobile Dexterous 7 DOF ARM,” Proc. IEEE Int. Conf. Robotics and Automation, pp. 1188-1195.
[2] H. Seraji, 1995, “Configuration Control of Rover-Mounted Manipulators,” Proc. IEEE Int. Conf. Robotics and Automation, pp. 2261-2266.
[3] Y. Yamamoto, “Coordinated Obstacle Avoidance of A Mobile Manipulator,” Proc. IEEE Int. Conf. Robotics and Automation, pp. 2255-2260.
[4] 341, *3£, 1995, “9-4-3 3341 3 43435143#3 434 49-33 344333Md:#33 5:#!3343 33,” 334334345143 £3, pp.1162-1165.
[5] H. Seraji, 1989, “Configuration Control of Redundant Manipulators: Theory and Implementation,” IEEE Trans. Robotics and Automation, Vol.5, No.4, pp. 472-490.
[6] R. Colbaugh, H. Seraji and K.L. Glass, 1989, “Obstacle Avoidance for Redundant Robots Using Configuration Control,” J. Robotic Systems, Vol.6, No.6, pp.721- 744.
[7] H. Seraji and R. Colbaugh, 1990, “Improved Configuration Control for Redundant Robots,” J. Robotic Systems, Vol.7, No.6, pp.897-928.
[8] H. Seraji, 1992, “Task-Based Configuration Control of Redundant Manipulators,” J. Robotic Systems, Vol.9, No.3, pp.411-451.
[9] Y.W. Sung, 1995, Control of Redundant Manipulators with Multiple Criteria, KAIST, Ph.D. Thesis Proposal.
[10] D.G. Luenberger, 1984, Linear and Nonlinear Programming, 2nd ed. Addison- Wesley Publishing Company.
-175-

[11] P.H. Chang, 1987, “A Closed-Form Solution for Inverse Kinematics of Robot Manipulators with Redundancy,” IEEE J. Robotics and Automation, Vol.RA-3, No. 5, pp. 393-403.
[12] D.K. Cho, B.W. Choi and M.J. Chung, 1995, “Optimal Conditions for Inverse Kinematics of A Robot Manipulator with Redundancy,” Robotica, Vol. 13, pp.
95-101.
[13] P.H. Chang, D.S. Kim and K.C. Park, 1995, “Robust Force/Position Control of A Robot Manipulator Using Time-Delay Control,” J. Control Engineering Practice.
[14] F.-T. Cheng, T.-H. Chen, and Y.-Y. Sun, 1994, “Resolving Manipulator Redundancy Under Inequality Constraints,” IEEE Trans. Robotics and Automation, pp.65-71.
[15] F.G. Pin and F.A. Tulloch, 1996, “Resolving Kinematic Redundancy with Constraints Using the FSP (Full Space Parameterization) Approach,” Proc. IEEE Int. Conf. Robotics and Automation, pp.468-473.
[16] Symbolics, inc. 1988, MACSYMA User’s Guide.
[17] #3*, 47]a, 445, 1994, 5-5-4 7]9-4, 5-44 9)44 4444444444444,184, 12a, PP.3253-3269.
[18] 44447] #4, 1993, 44445 5.5.M# 444 444^^441 4444, 44-S- 4 4 55.5 7] #7i] 4,1445 44^3-4.
[19] 44447]#4, 1993, 44445 5551 444 444^^44 44 44, 44^ 444 44 5.5.5. 7]#7114,2445 445.54-
[20] ADAMS (Automatic Dynamic Analysis of Mechanical Systems), USER’S Reference Manual, Mechanical Dynamics, Inc., U.S.A.
-176-

#(k loiotokb #tr to kb Ik -aw? :
tk& toRi# R>-kbbiv *?btkkb k-0-ty/aW^
4 #
l. 49 181
1. 9949 ^ 9*9 ............................................................................................. 181
2. 4949.................................. 182
n. 5.S.JE tqx>y ?H9 49 1821. 444 a4 99 441.................................. ....................,..................................183
2. an 4444 9# 941...........................................................................................183
3. 44444 #4 441.................................................................................................187
3.1 A 4 : 4444 an 4......................................................................... 1873.2 B 4 : 44444 9a4...............................................................................190
4. 4944 44 ^ 49 44-4 44..............................................................1925. 3.44 aa 9 44 44 44........... 193
5.1 3.1±E t^lS} 3.JL 7flf......................................................... 193
5.2 444 49a 43 ^ aas) 4-g-..................................................................193
5.3 4^ 4144 443 44 49............................................................................194
m. 444(Console Table) 444 44 195
1. 494 4444a# 44 4N4 99 ........................................................... 195
1.1 94 a*|44 49 49 44..................................................................... 197
1.2 # a^4 44* #4 49 an...................................................................198
2. 4444 #4................................................................................................................200
2.1 7]a 444 94............................................................ .. ............................ 200
2.2 4414 a4191- 99 4444 4 49.......................................................................... 201
2.3 14 444 9# 49........................................................... 202
3. 14 4444 44!......................................................................................................202
3.1 A 99 4444 94................................................................................... 203
-179-
3.2 B ## 4444 ^....................................................................... 205
3.3 24 444 4# 4=M.............................................................................207
4. 24 4444 207
4.1 A-a 4 . . . .............................................................. 207
4.2 B4 4................................................................................................... 209
IV. 211
1 4444 211
1.1 71^4 3H9..............................................................................................2111.2 ................................................................................................. ... 211
2 4444 2162.1 7] s.Aj........................................................................................ 216
22 2^4 ^..........:........................................................................... 216
3 44 44.......................................................................................... 219
#Ji 5-^ 220
-180-
1.4#
433as. 4 *-337, 7>337 73 #7 743 77447 744444 7 74 3447 aXI 4774-7 774 74 74447. a37 7747 aaa # 7 77 747 4X1 744 444 744444 474 3a3a 47 47 74 474 447. #, 44747 734S77 744 47347 773 74 443 7374 773-5-3. a.43 47 7M334 4744 47a # * 47. a33 4747 744 474 47 73747 474 4X174* &777 7774 77 43 7447434 374 3 #377 434 474a 47. 4X134 77433 3434 34, XI4334 743, 433 3433, 3334 73a* 74 7443 744744 #74 333-5-3. 4*43a 4* *347.
33 3.3.m7 37 747 4X1344 7113334 747744 343as.3 7 373as. 443 34* 3*a, 3734 443a 43 443 34* XliBl-74 7434 S3* * 3 47. aa3 343, 3334 a*33 743*4 7M# 43 347743 3434a 4X134 *eas., 3474 *43-343 a*# 7 *3 3434 3734 347a, 433 33* a* 41 73 4* 7 43 a37 4 a*4 43 7a# 34# * 47.
347 aaa 71)34 4433 aaa7 4474 3434 a#X) 43 3 44* 4437. 473as.7 *3 a*3as.a 3 4*43 344 7743 3734 3437 37 a=J=4M3 #43 *3, 333 37 3a#43 *44 *s 3434 a## 4*as_3 *@3 7 47. 4 4*433 473 33*43 743 34* *33 773 aaa3 31447 3a 7434 a#* 4*4 a4 4a 444(Corporate Image)* 333 * 4a# 774 33 3* 33 aa 37. 4* 343 3347X13 4*444 4*7 33a *33 333 33(guidelines) * 33aa 333 *3** 71)43 * 4a# 37.
1. ^
-181-
2
1 1## 3.7\) SiES] 47>1 733 14 7flo]7l E)x}<y 733 14 #7)-x3 ifl-g-
#1414. S# 47>1 #1# HI, -B-Xl 1 S#, Aj.^4- ^-O. 7}^l^ #14 141, 111 #4 03423 m 134% a# s444 1#13&S1, #4 sss.4. 411734 #11 ^111 41# ##4.
14s sm 4x3-1 7)3141# 47}! al#l 141,. a! 41403 1#
ni,. 473-114 1114], 4#4 11 1 11 #473-1 141,. sill 44 7331 1
4^33414 4:41# 444 i#!#!. i*i|s 414 47}!# 73344 n„ 4141 4 #4,. 473-144 4733,. 11 #4 71-4 4 411s 1#114.
n. -AiL£ qx>y 4R# 3M
sss4 441 733 4# 141, 144, 44114 37>4 1# #$s 143 4-11 lf-114-. 14, 141# ss4 H14- 41# 1#4SS4
114# iss, sis?!- HI 1441 444s 11:4733 41# #14# 1 # 4444-. 141 114]A3 4x3-1# a3-#x^4- 37^*b 14411## #14-#, s £S 111 71114 ##173- ssf-# 1# 1111 144# ##4SS4 73473 #1 4# 141# #1# 1# 1SS 4444. 1-4), m# #4 n-g- 443
114 1144 1# #114. €4 4:1# 14# 7373m 14# #733 4# 1 #7> @-4 43#14. 4m ie44 11# 1-1 AM4 1111 #4# 1411 1# a3-#4 111 1 # 1# 414-. 471-1-& #4-1 4114s ##4 144# Is l#lAi 4#4-733 #41# 1## 4SS4 lei# II-A34 4: ^4-. 4341,
141# #411 4#ss im # is# 47}1 #1434 S4411# 441 4. 1# 4-S43111 #14- SHsillll #1# 114 s#Ai^4, #1S4
14i#s %l# 1111 7131 4#4 1## 4-8-SS4 111 # 14.4# 47>1 41# 141 #5## ##4 #44s s41 7)-#4 1#114.
—182—
1. *4 44
o] 94* 941 94*44 4*9 294 49 *4* £tfls *9994. =l
29# 919 9444 9449 924 42# 944 4449 444 49444 2^(Full Scale Mock-up)# 44994. (492-1) 4 e4& 44 2349 44# 4#44 44 449 494 9;lj494.
44 n-l : 4444 23
2. ^ »>°14°1 9#9r4l
94 949 42-4 #24 94494 949 234 44# 9a. 99 Mssj
449 9# 9#44 49 4444 *44 444 49444. 4 94449 44
4949 494 4# 44* 4922 24 4 ;H99* 944 9*4 4444 9
a4# 994. a 4944 949 *44* 4*4 94. (a^n-2) 444 4*9
4 €- 4444# 4194 1444 4499 9*5. 19444 99 4494 2
344 494 4*494.
-183-

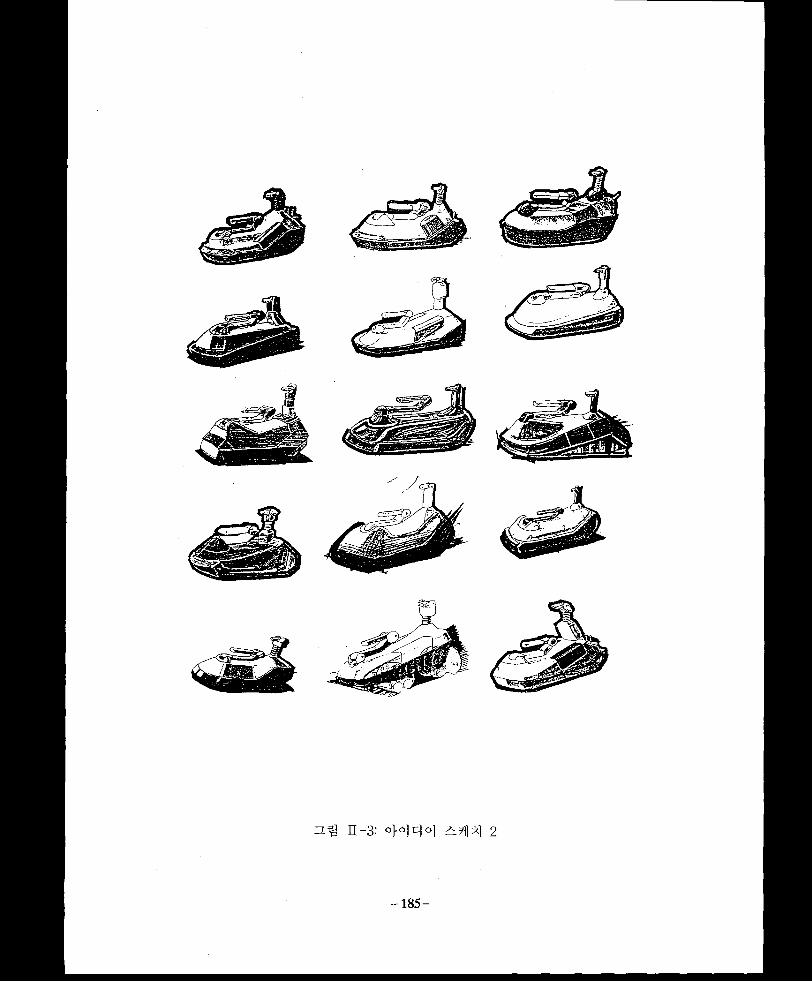


- - £
n-4 a|S 4^ 2
3. ^
5^ 4444 *# 44* #4 444 4-* 4 444 4* ##4) 4- 14, 4-*4 4#4& s-m^. m^-g. 44^ *?M4 4^& ^4444-.
3.1 A4 : *444
A4* *4444 *7]44(Organic) 444* *4 **5.5 431 44-. 4 4* ^4) 4^43. 44 ***#(4*41, d:4-4m *)4 424 $1 ^44-Ji # 4" 44 44& 444-4 44-4-6- 7)4-5.5 4-ji 44-. 4*4 **5* £iiir 4*55 44*5-5. 44 4**4- *4 5.* *s34 *444 *7)4-4 4#4 4 *4** 5. **44 4* 4444, *44 4 4-4* 4)-g-*5.54 5554 ^#*44 *- ^4*4- #4) 4*^ 444* 4)*# * $14-. S4 5554 *^*4. 4
a# 4 ^4 §jl *47)- *4"4 *46- 445 $15.5.5. 445. 4-44-4 ^4-46-
-187-

-881-
V iob : 9-n 15: {y
(S-E kk ) hk irhk #k& kk kh
kir "Skhh to "his kkk H""5"kto-a h "gr-his lok kir k# -kkk~h-ta [o
-§- -kk"ff ‘Ix-q- to & ki?"o ts-k 5 -ho" lo irh k #kh k-hT» k kwth-k'k "S
o kkk tlo-irk kk-B^ "S"o-s-^o k-§r k"nk & kkZT -& ^"5"olo irkk #&
kkS ■& ah-y- Sr h-h-k ‘hkPS %rhk Bk& ^-h!$ k #&-& kkkfe %s
k tok^rk kkk ksTWg kk#^T tto-R h S^tbir #a hk & to k#' kk to
'-hlo k 3-k## k# k-ks"? B^-k -kk jMskB

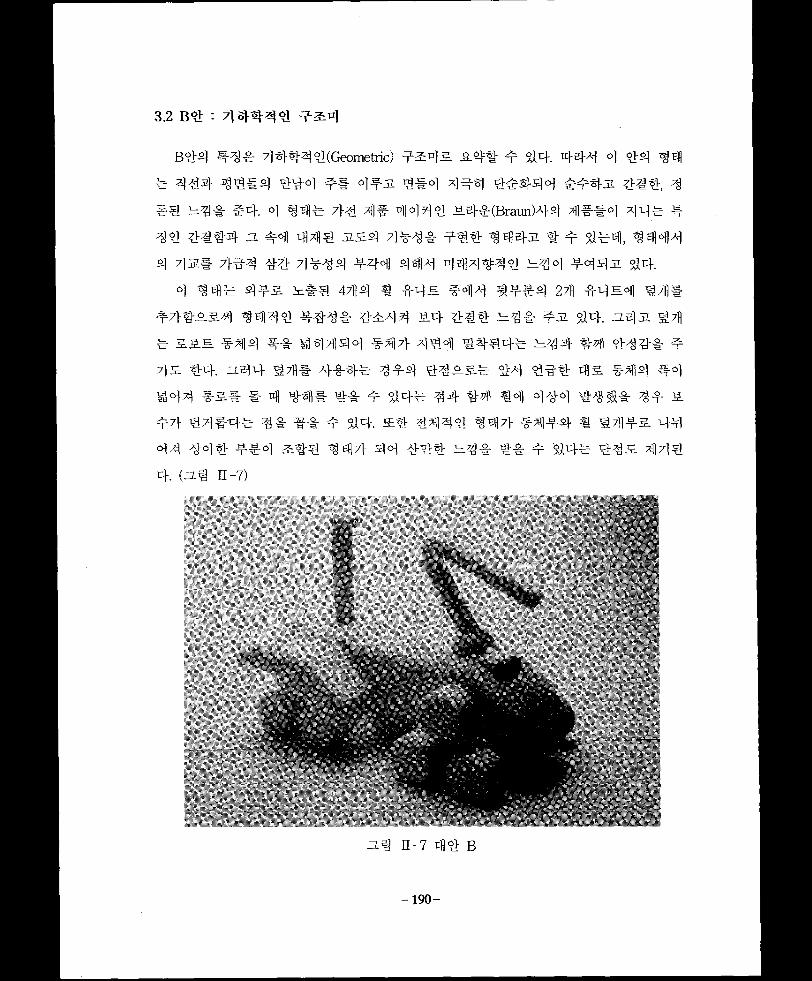
3.2 B4 : 7} 443 4 1&4
B44 431 71443 4 (Geometric) 1&44 S4# 1 44 444 4 44 IN 1 444 441-4 444 4# 41s 414 414 414-44 Ills 444, 3 14 s4# #4. o] 7>1 ^1# 4444 Ji4-!(Braun)4-4 4114 441 144 44#4 s 44 444 ss4 414# 143 1N4s # 1 414, 3^41^1 4 4 s# 71-4-4 #4 4144 #44 4414 4 414 #4 4 S3 4 ^442 44.
4 3411 41& i#4 47H4 1 Ns 144 4114 2;H #4^4 S/H#17}4ss4 1444 1441 4444 3.4 444 141 is 44. selJi 441 5.3LS 144 11 44444 1471- 444 44441 s34 IN 4441 1 4s 44. s44 44# 4141 414 44ssi 44 414 4& 144 14444 1&# 1 4 3N# 41 1 441 34 #41 34 444 33%1 31 3. 17} 44341 31 11 1 44. S3 3^34 347} #414 3 47H#& 4444 344 114 144 347} 44 343 s31 41 1 441 43s 4444. (s3 n-7)
s3 n-7 44 B
-190-
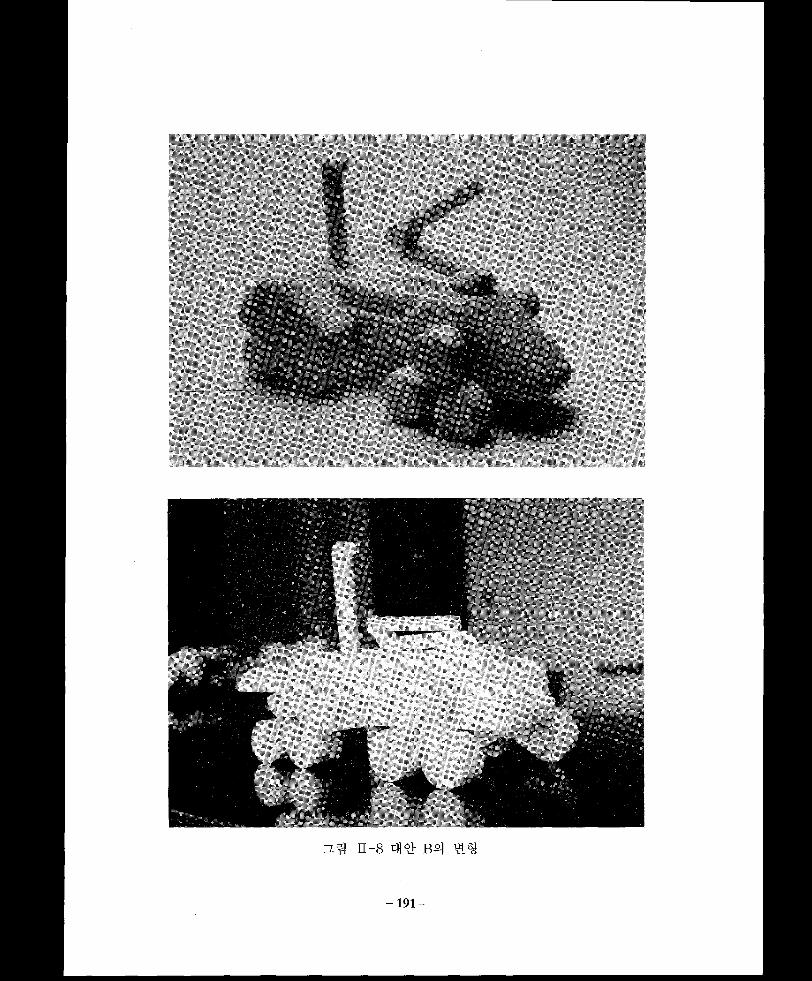
^ H-8 cfloj Ba] 'SS
-191-

'A'4:4 "B'4:4 7]4 4#4^}4 o]-o_g_ 'A' 4:4 4444^4.’A'4:4 44444 4^-f#4 444-44- ^J:#^4 444-4 *S.% 4#^-44- 4=444 ^4# 4^4-. ^4: 44-444 ^44 #4 ^414 2.4& 444 4, 444 44444 4 44^.4## &444 ^4#4 4?-4^4. (3^ n-9)
4. ^ ^
3.4 n-9 &4^4 444 2.4
5. ncflyi 7H# ^
/M 9449 949 ¥94 9 ¥ 994 9¥944 9494 944 4 (A 9)# 9994 4l¥ 499# 49 ¥ sies] 99(KAER0T)4 5.3.4 9 4
4 44# 9*3994-.
5.1 S5.S Aj^ei 4^14 Logo Type 7fl9
5.5.E A]>:tii ig^o] (gg s.3 49# 4^4 4999 999, 4494 3.
94 99# ¥9 7119499. ¥9 W# 99# 4#94 949 #44 94 9# 44 444# H499A4, 99441- 4-B-94 994 9944 99# ¥ 9¥ 4 44949 4¥9# 4449-9-4, ## 44 449#5. 9994 49 99# 994as 994-494. (34 n-l)
KAEROT392-1. 4¥ 999 Logo Type
5.2 994 4¥9 4a ^ s.34 4-B-
999 4a¥ 99 4¥4t11 992.7} #ahs 949 99# 444 9494
-193-
4* #^4a 4444 44S £414 ^ 44| 7)14 31 £44£ 4#
4*4* *#as ^e)414. 4a* 4^41 a 314 4e]4 #££45.s
44 #14* #447] 44 sa4!4 1* 4#1 Black# 4*414.
5.3 444144 7>o]h 4-1 #4
4#4 SIS 4*^4 7>4* 444431 4# 444* 444* 4*451 # as)* 444* #447] 4# #4S7> #* 4 4* #4, 4a asiM, 44s zl
51144 *44 ## « **31 4*414. 4* *4 444 as 444 s4* %
# 4*44 *431 44 3:4* #*414.*24* s**4 #4* 444 4*4* *4as4, 7)44431 7]#444^
*44 #4 ^44 444 4*44 *-§-44 4*4 *4# 4* * 44.
f#4as 4*4 42:4(4444 #*=DIC 184, #e) rz4:DIC 174)4 4444 3:44 7)444 s*s3) 44 *44# #44. #4 314* 44*5)1444 44 ##4s 4*4443], 3x4 3114 4* 44# 144* 4as 4*4a las s 4 4*31* sss4 444# 444414* 44* 4*4* 44.
-194-
HI. °17] (Console Table)
4~§-4- yysM# 44-yy #^4)4 39-4# y4-#44 4-si-i- 3##33
4 44^1 4444 7|it 4^4-7] 4# 4447]- 44444.
44 44444 444 4^4 441 4^44 4 4441# 4^4 a# "9444
44 444 #44 ^4fe4, 444 44 4444. 4444 3.44 444 ^44
44 44# ^44 4# 4 44 44# 444 #3 4444 &54 4-ji . 44## 44-4^44 4& ## #444. a 444 %# #444' 44# #44 4# 447f 444# #4# 44# 437} 44.
(1) 444 44 44444 44 44# 44 #44444 44 44 #433 444. 44# 4##
7>44 4444 #43 444# 444 4444 #4 44f41 4# 44# 444,44# 44# g# 4^44 #4 7}*#4 ## igf]* #44.(2) 444 44 <94
## 44 4445. 444# 44 344# 44# #44, 44# 4# #44 44 444 #4f4# #4# 44 #344.(3) #4 4# <94
94 4<g ^^4 3 444 $1444 9^ 4# <94# 44^ 44 4-4 "94444. #4 44 444 4«fl#£ #4 °J4 44 444 44 44 44 4433 4#3 44. a 444 ##433 43, 43* 17] 4414# 4444 447} 4444
#3# 444.
(4) €3 #4
44 44# t 4 #44 41444 44# t 9 &# 4# 4444, 4-47} #4 44 41 #4 4y°l 4444 #444 #3 444 34# 344. 3B]4 o]^&4 44 4*5(1# #4# 4^### 44444 43* ^494. 44 ^4 4! #
-195-

#4 49 #9# 4# #944a 44.
49^4 94 €4
4^44 *MM1 49|7l# 444is 444 44 44#4 a444 44.
1. 4#=M4 44# #144.
2. 9499 ##4 44444 4444 a#€ 4 Sla# #4# 44.3. 44 4-8-
4444 444 444 4€- 444 444 44.
1. 471 : 97}4# ^tflzi- 5" ;§e, 444 929 #114 4444.
2. 449 : 71-44 #94 4444 224 44.
3. 444 444 : 44 #94 ##44 2a, 44 444 &44#-&
4^44 a]4o] 4-y 544 44# 0^4 444 4444.
4. 47>y : 444 471-4# 44414 3-4° 924 #27} 4444.
5. 4 2* 4^444 4 921 *11944.6. 4471-a# 9244 4 9.21 471-444.
4944 44414 a49!4 # it!
(1) 44 -94# 9#1. #292 fas 4 44414 ‘944 44.
2. 444 44®s 9# #444 92# 444 #49 4 9# #94 4444 44.
3. 44 #4 4443 #44# 9## 42.444 ^9 $4444 44.
4. 499 44 22## 4444 #444 &a2 4#4 # # 941 *11944.
5. $94014 4 4 a} 9 i-E 4499 7>4 944011 44444 44.
(2) %a, 44 94# 4#
1. 4471-1- 44 444 947} 44 4#414 44.
2. 2.4444 4# 44 $4### 91 2-47} 999 ## 94s. 49414 44.
3. 4# &9 2## 4-8-414 4# 9#4# 4=117} 44 9# 444 *11992#
44.
(3) gK4 94# 9#l. 9-47H4 #49 9# 4#4#4 494 9944# 41#^ 4 44.
-196
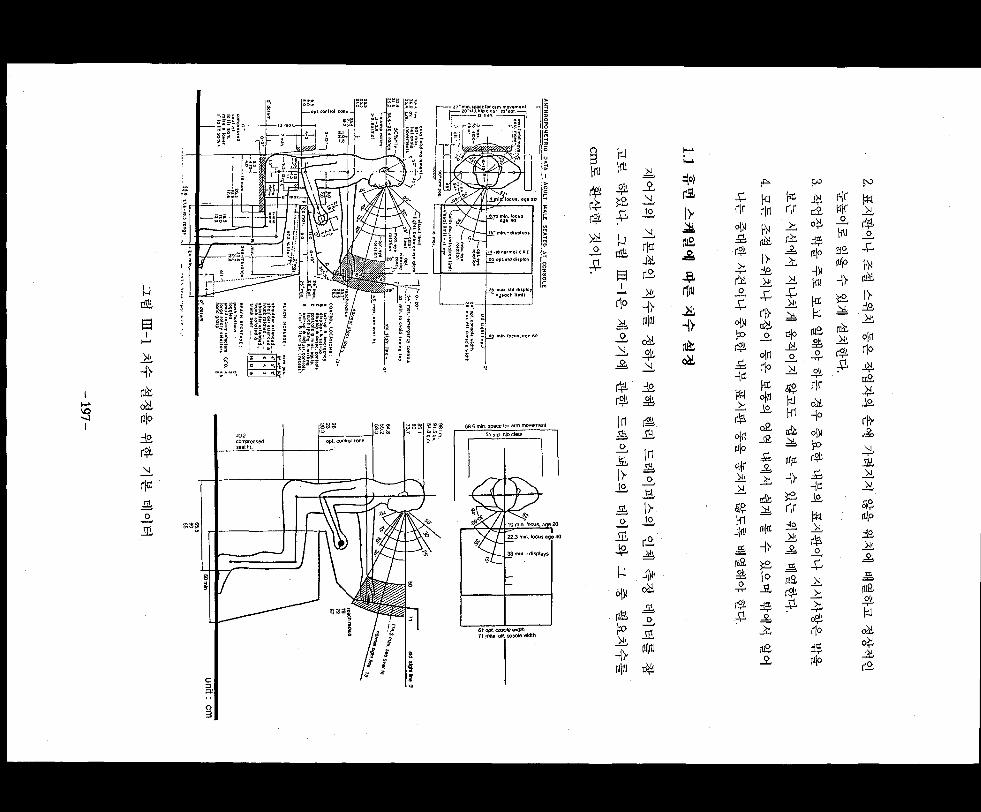
ra-i ^4=
68-6 min, space lQ« arm movement
locus age 40
Hu A & & ± I | s
^ W-2- dS,
rlo
22r#&
r3224>
=*tr£l>
N2A
-ar|m22
M, (“I™-2* oM — ov, A N
4>n&oZL
& dB($ a
in2
32l>.12,
o
jy,inA2,
-SIl>J2,
i sw #
. iHnti T
* ri£
4^ 00 CC-P [-d dr r|nol»Ar°k
rM_oA4Wl»
A4*ttt2d.
o|{1Itljo
*2!>228?Mj|di
m3
l>3222-ar|>t^,_2o(nrlo
ofrrt.12q2j£Aak,AAmjm
A 4>m2ao
Jfi1°ja.
r$A A
k.tiE_2
fanr
rk,A
22A22AojojHo
22
#WMu2AmM4>
nr3222A
m2r$A
An2
3$mlo4^fafafam2A
Anrd24° ojH I» r$A4c32l«22A,2
22k,
r|o3$mlo
$ £1 t32 A mlo4> ^2 £—' 22nk ,rf22 olrl r°2 rlof 2l
m22232
Ifr
22JSbL22228?mlo3222A
m202fa
<22<&A22
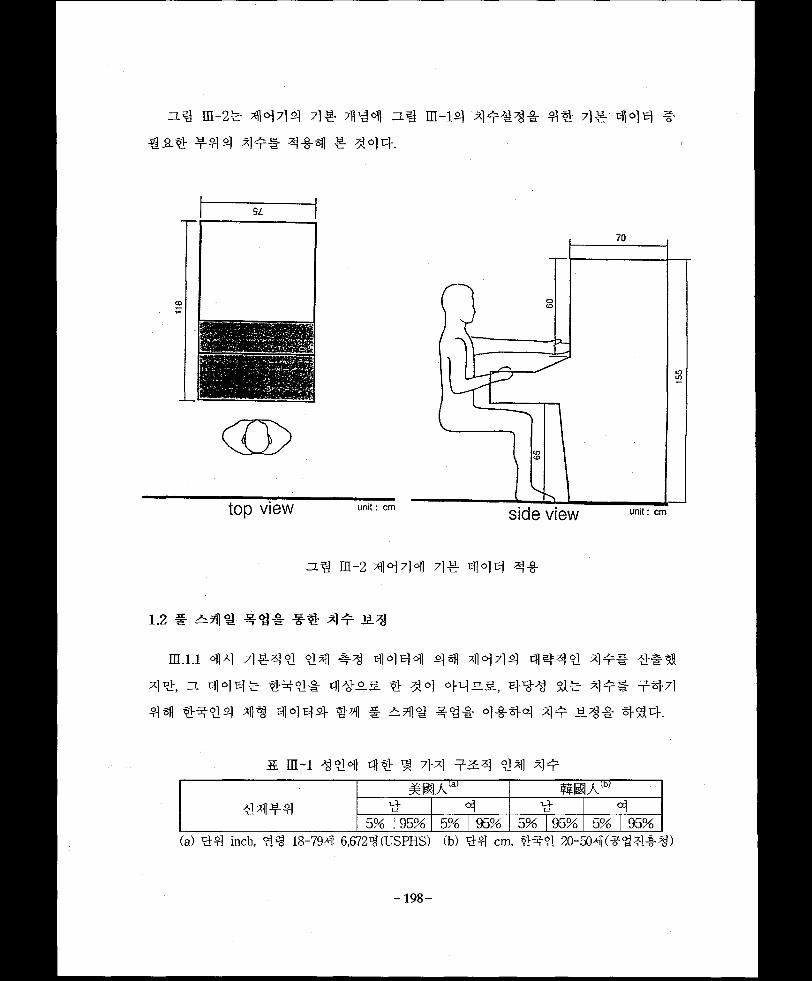
m-2* 44- 7H^6|1 31^ m-14 44=446- 44 4^ 4144 *X4 *44 4*1- a|-g.au 4 ^o]4.
zz.4 m-2 447)4 7)* 4o]e) 4*
1.2 # ^44 *4* #4 44= H4
ffl.1.1 44 714-49 tl4 #4 4444 44 4444 44=44 44=* 4## 44, n 4 444 44-4-6- 44^-S. 4 44 44hs., 4-44 44 44"* *4/] 44 44-44 m 4444- #4 # 7-Ml 9 #4* 4*44 44= 444-.
X m-l 444 44 ^ 71-4 *24 44 44=A%u Stl! Aw
441*4 4 4 4 45% 95% 5% 95% 5% 95% 5% 95%
(a) 44 inch, 4^ 18-794 6,6724(USPHS) (b) 44 cm, 4*4 20-504(^99*4)
-198-
155
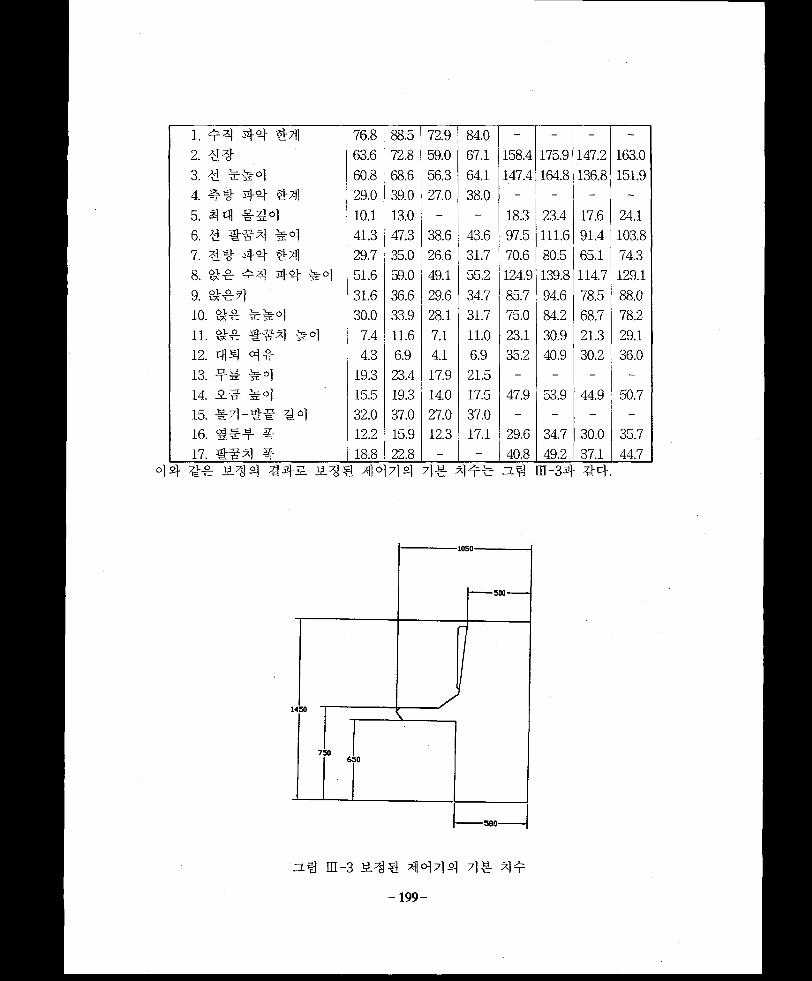
1. 44 44 44 76.8 88.5 72.9 84.0 - - - -2. 44 63.6 72.8 59.0 67.1 158.4 175.9 147.2 163.03. 4 ##4 60.8 68.6 56,3 64.1 147.4 164.8 136.8 15194. #4 44 44 29.0 39.0 27.0 38.0 - - - -5. 441 #34 10.1 13.0 - _ 18.3 23.4 17.6 24.16. 4 #^4 #4 41.3 47.3 38.6 43.6 97.5 111.6 91.4 103.87. 44 44 44 29.7 35.0 26.6 31.7 70.6 80.5 65.1 74.38. 4# 44 44 #4 51.6 59.0 49.1 55.2 124.9 139.8 114.7 12919. 4#4 31.6 36.6 29.6 34.7 85.7 94.6 78.5 88.010. 44 4#4 30.0 33.9 28.1 31.7 75.0 84.2 68.7 78.2ii. ## e#4 i%4 7.4 11.6 7.1 11.0 23.1 30.9 21.3 29112. 44 44 4.3 6.9 4.1 6.9 35.2 40.9 30.2 36.013. 4# #4 19.3 23.4 17.9 21.5 - - - -14. 54 #4 15.5 19.3 14.0 17.5 47.9 53.9 44.9 50.715. #4-## 44 32.0 37.0 27.0 37.0 - - - -16. 4## # 12.2 15.9 12.3 17.1 29.6 34.7 30.0 35.717. 444 4 18.8 22.8 - - 40.8 49.2 37.1 44.7
4 44 544 445. 544 4°- 44 4# 4*r# ^4 □1-34 44.
m-3 544 4444 4# 44"
-199-

2 <>McM
2.1 713:
444# 44-4 4# 4 444 7\% 7]37]- 4# 4##€- 4w4 44.1. 47}#4-4 4°M%M(identity)* ^444 7H-4#47l| A^g.^-4 4^4^444, 7]-§-44 A}4 . ojn|^ #44 a.4 #44 #4 # ^&E# 444 #4.
2. 344 144 #44 44# 44# a444 4a}-##4.3. A}# #d=* 2444 #379, 4f4, #^#4 #oj ^
°M 7}^)#2. ^}o] 7] 440)4- 4# 7)37>S A)-4#Ol 4
4-4 ffl-1 4-5 a>44
-200-

2.2 4M4 2= MM* #4 4444 *8 44
444 44 e/M44 a?) 4 4£ a^, 4* #41 4# 7H% ^4, 44 44 441 #4 42}€4. 444 4 444# 4 4414 #414*#44 42; 444 444 44 44 44# 44444. a4 m-4# 4& 444 7114# 44^-S 4 4414 #44#& 444 ^44.
214 ffl-4 4414 #MM Dl
-201-
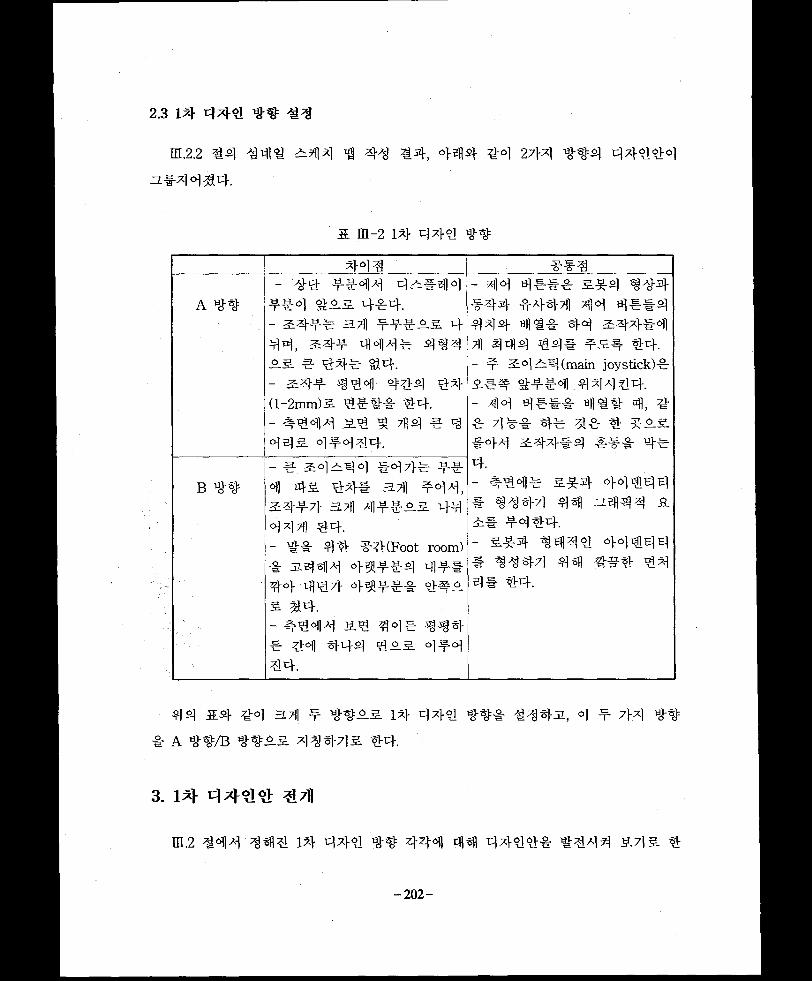
2.3 14 44# #4 14
m.2.2 44 4 Ml# 341*1 *3 4"# 14, 444- 44 2?M ##4 44444
3*4444.
5 ffl-2 14 44# 4#
444 554
A 44- 44 55M14 43*5114
4*4 gos 4*4.- 3455 3Ml 4**55. 4 44, &45 MH45 444 55 * 445 #4.- 345 444 444 44 (l-2mm)5 #54! 44.- #444 54 4 7B4 5 4 445 #5444.
-414 4511 354 #44 144 144Ml Ml4 4514 444 4#! 44 344141 Ml 444 44# 53# 44.- 5 34 34 (main joystick)!5*1 #554 44444.- Ml4 451! 414 4, 4 ! 45! 45 4! 4 155 144 34414 551 45 4.- 4# Ml 5 354 44 #44# #444 44 3444 5 3# 5444.- 5*4 #44# 44444# #444 43) #14 #44# 44.
B 44- 5 34344 1-445 55 Ml 45 44# 3Ml 544, 3454 3Ml 415555 444 4 Ml 44.- 41 44 54(Foot room) 1 34414 4^554 45# 44 444 4^551 ##53 ^4.- 54M14 54 445 4445 4M1 444 #55 454 #4.
44 54 1# 341 5 4455 14 44# 44! 4143, 4 * yj-x] 4#: ! A 44/B 4453 414451 44.
3. 14- 44^##: ^41
ffl.2 144 4*114 14 44# 4# 444 4*0 44##! 4444 54& 4
202-
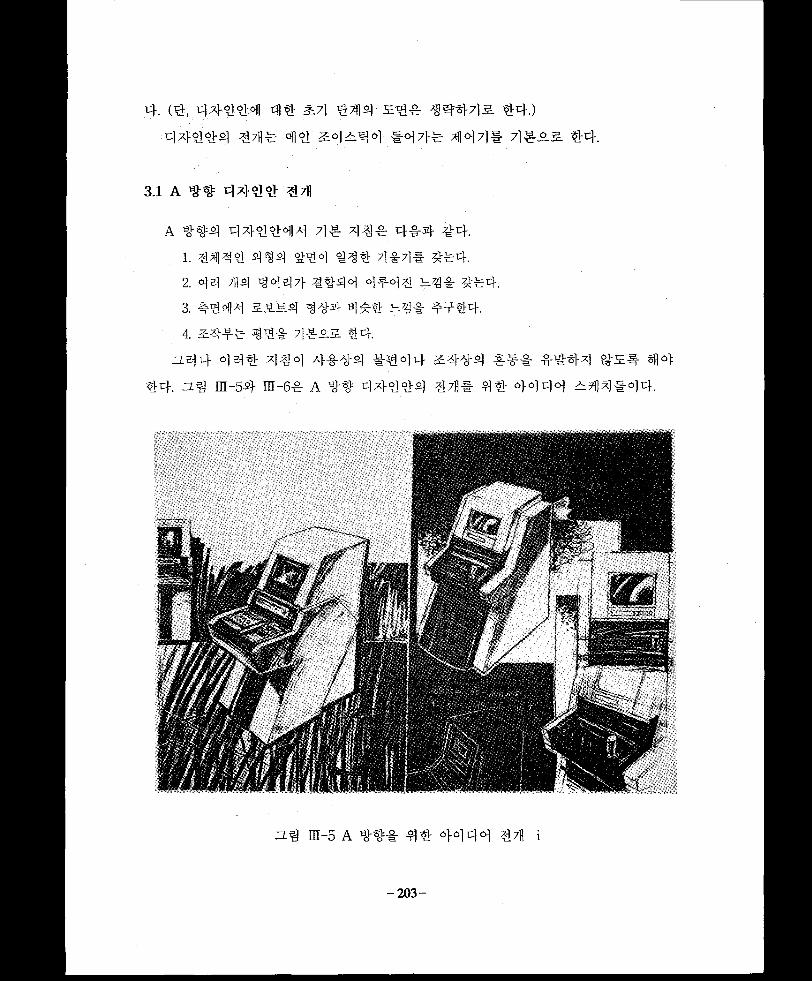
4. (4, 44 1 444 ^444& 44.)4444a) 471)4 44 &4^44 #44^ 444# 7)4^5. 44.
3.1 A 4# 4444 47))
A 444 444444 41- 44^ 4-#-4 44.
1. 4444 4^4 S4°l 444 7)&4* 4^4.2. o)b) 7is) 4447)- 445)4 4t44 514.
3. #447) £SE2) 444 4*4 H44 4444.
4. 4 ^#4* 41 AS 44.
zz.h)4 4 a) 4 4 ^4 A}^-4i-o) 1-444 S44-2) 11--& -a-444 *5# 4)4
44. m-54 m-64 A 4# 44-444 47)11- 44 4-444 ^44#44.
=l^ m-5 A 44-8: 44 <>M44 471 i
-203-
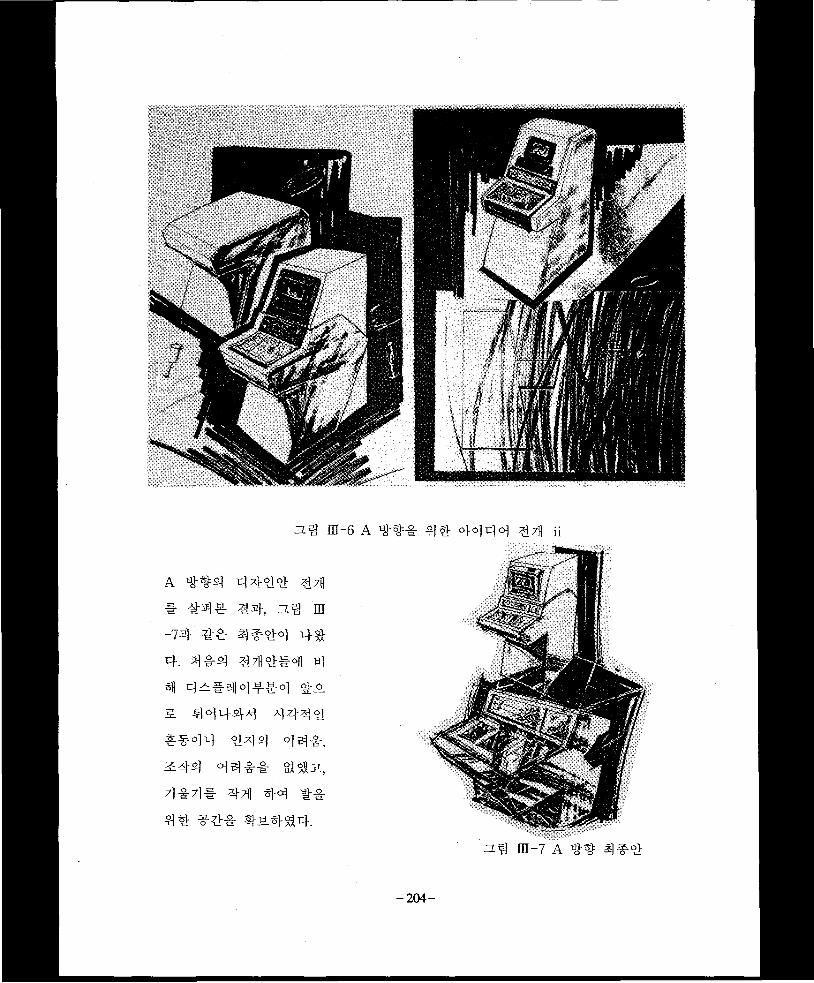
m-7 A 1}%=
-204-
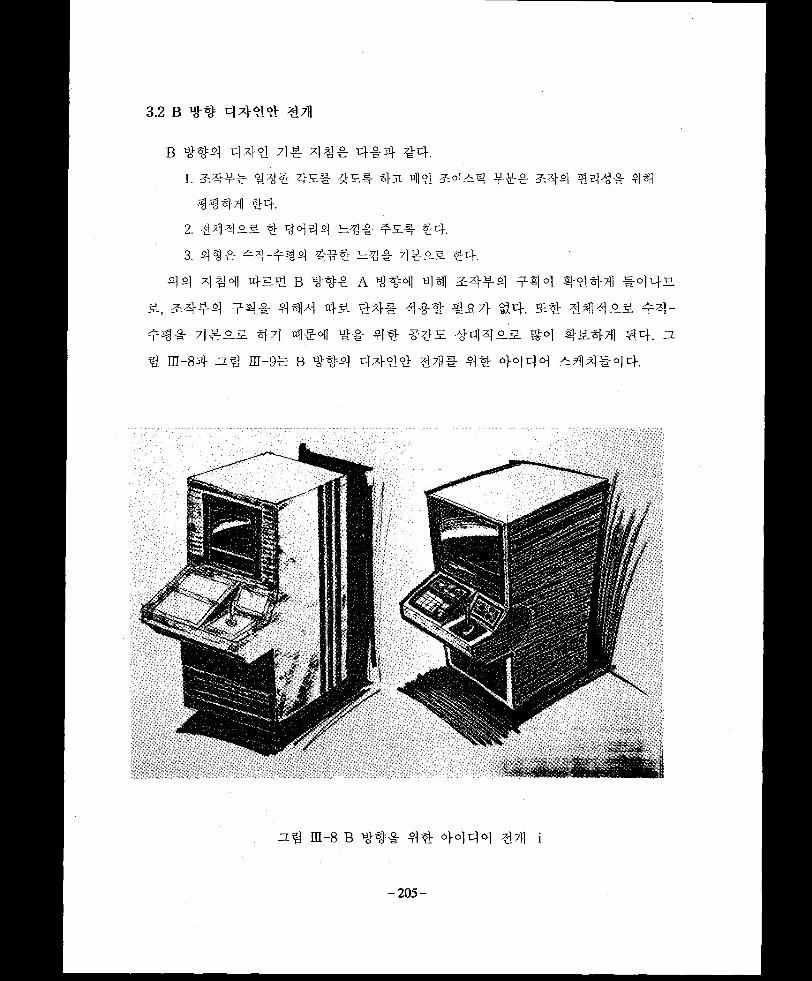
3.2 B ## 4444
B 4*4 444 7}S- **4 #c}.1. 5*** 4^* 45.* 45* #5 44 545* *** 544 444* 4#
4444 *4.2. *4455 * 4444 54* *5* *4.3. 4%* 44-4^44 ##* 54* 4*55 *4.
44 4*4] #5* b *** A *** 441 54*4 *4 4 4-4*4 #44-55, 54*4 *4* 4414 43. 44# 4## %I54 &4. 5* 441453. f4-*4* 4*55 *7] 41*41 ## 44 *45 44455 #4 45*4] 4*. 5
4 ffl-84 54 m-9* B 4*4 4444 4;H# 4* 4444 54**44.
54 ra-8 B **# 4* 4444 44 i
-205-
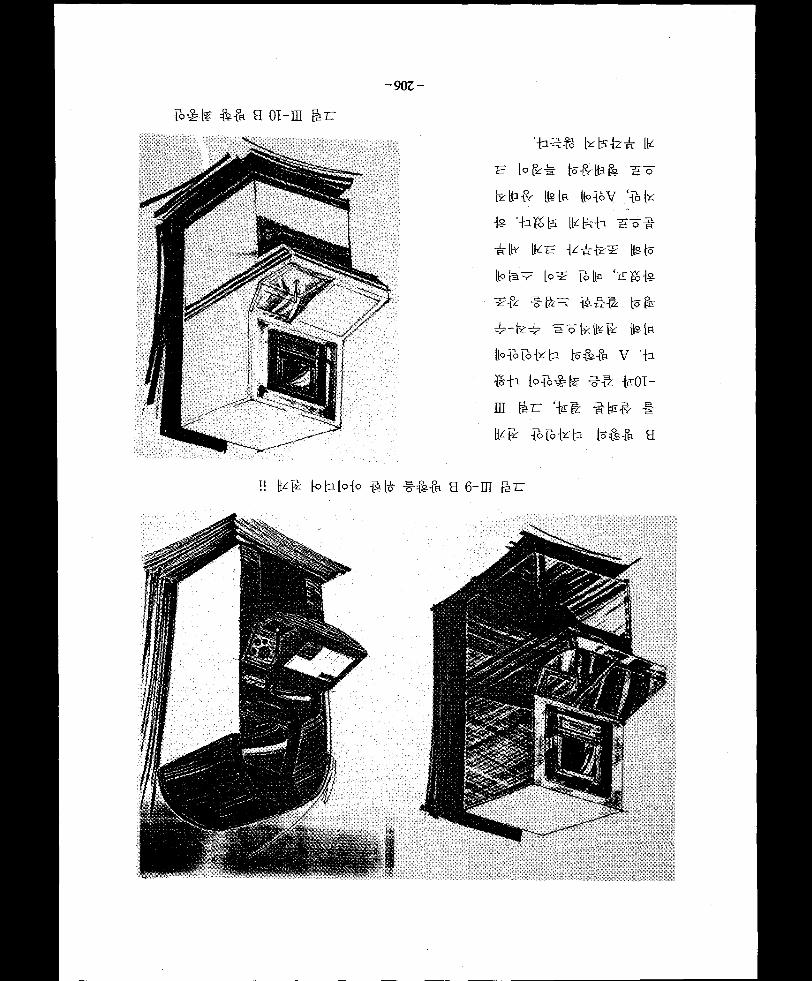
-903-
b-fk 9 OT-m fell
H kk k b kb is. to
'-b^ kkbb k H k kb b-kk& WT kk-k kb kbV >b is 'bibb kbb "g"o# bib Ikn bb-k^ kb
kb? k^ kk '%rk is ^-k kk# b&r
b-kb ^vkkk kb kkkkb b&b v 'b bb kbbt? bb bOT- ffl b%r 'b# bk# * kb iokbb b&b 9
9-Mh a 6-ffl fen
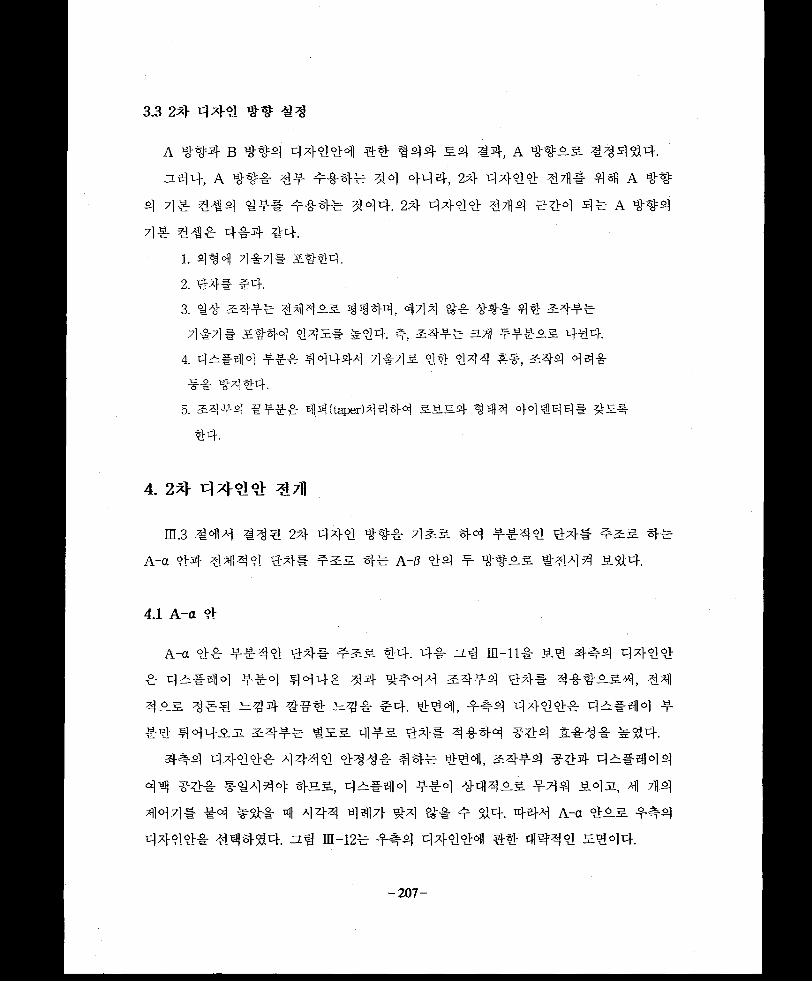
3.3 2# 444 4# €4
A 4*4 B 444 14-yoMi %*t la]21- m2] 44, a 44*3 4^444. 3£]4, A 44* 44 T-§-^fe 44 444, 24 4444 44* 44 A 44
2] y]s- 4^2] 4f# 4*44 444. 24 4444 444 *44 4* A 4*4 44- 4** 4*4 44.
1. 41M1 4*4* 3.4*4.2. 44* *4.3. 44 &4** *1135 4^44, 444 #* 44* 4* 34**4*4* 3444 443* *44. *, 34** hi ***35 444.
4. 43*14 *** 14444 4*43 44 444 *¥, 344 44*** 44*4.
5. 34*4 #*** 14 (taper)! 4 44 5354 S14 44144* 43*
44.
4. 2*} iMSl# ^7H
ra.3 *11 444 24 444 44* 435. 44 **44 44* *35. 4* A-a 44 44144 44* *35 4* A-iS 44 * 4435 4444 544.
4.1 A-a 4
A-a 4* **44 44* *35 44. 4* ffl-ll* 54 444 4444 * 43*14 Jff-o] 144* 44 4*44 34*4 44* 4*4554, 44 455 4*4 344 4*4 34* #4. 444, *4! 4444* 43#44 * *4 444*3 34** 135 4*& 44* 4*44 *44 5*4* *44.
444 4444* 4444 444* 44* 441, 34*4 *44 4**144 41 *4* *4444 435, 43*14 **4 *1455 *44 343, 1 7]]2] 144* *4 ¥4* 1 444 414 #4 #* * 44. 444 A-a 455 **2] 4444* 41444. 34 m-12* **4 44441 44 1444 3444.
-207-
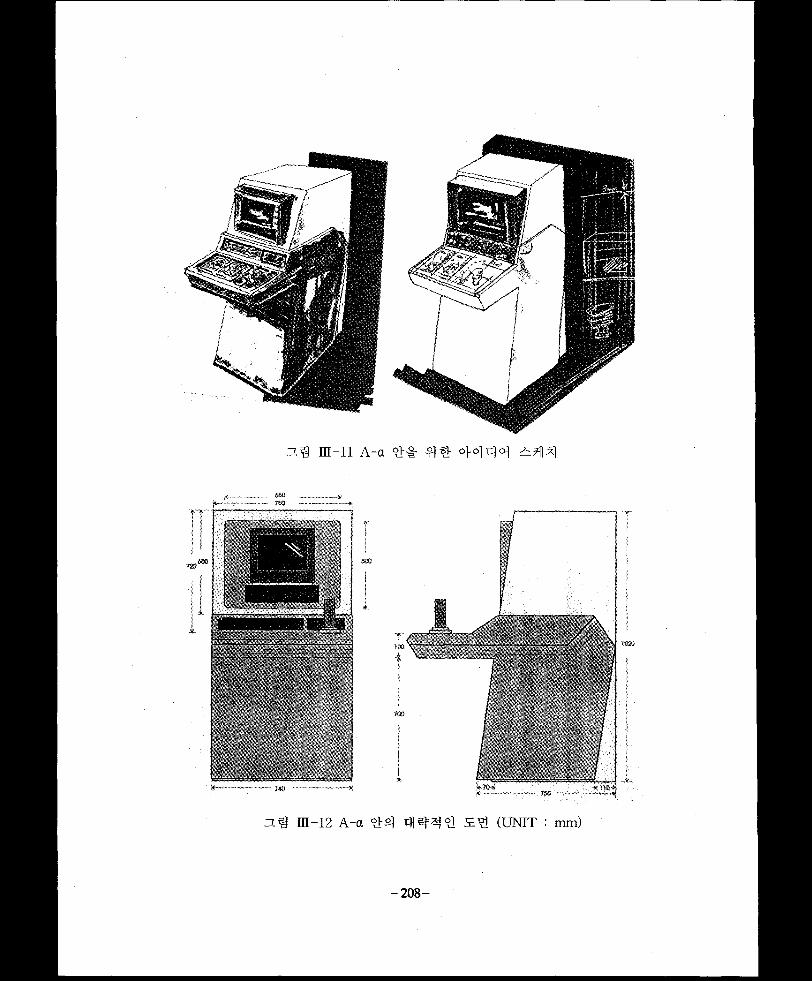
zz.2) rn-11 A-a 4& 4# 4444 ^44
— 208—
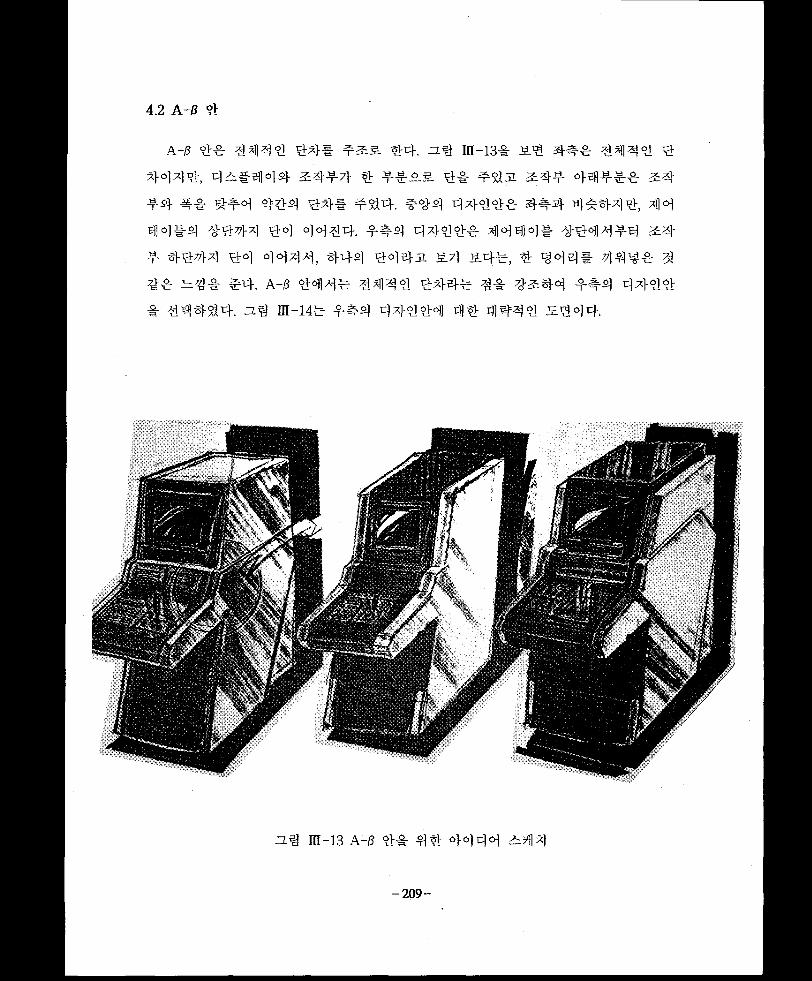
4.2 A-0 <?>
a-/? y-e- y*nyy yy* yy. m-13* ay yyy yyyy y yyyy, ya*si]yy y y* ^ya ayy yetiyyy ay yy #--& yyy yyy yy* ^yy. eyy yyyy* y*y y*yyy, yy Ei]y#y yyyy yy yyyy. yyy yyyyy yyyy# yyyyyy &y y yyyy yy yyyy, yyy yyya ay ay*, y yyy# yyy* y yy ay# ey. a-b yyyy yyyy yyy* y* yayy yyy yyyy
* y^yyy. ay m-i4y yyy yyyyy 4# ^yyy syyy
ay ra-13 A-0 y# yy yyyy amiy
-209-
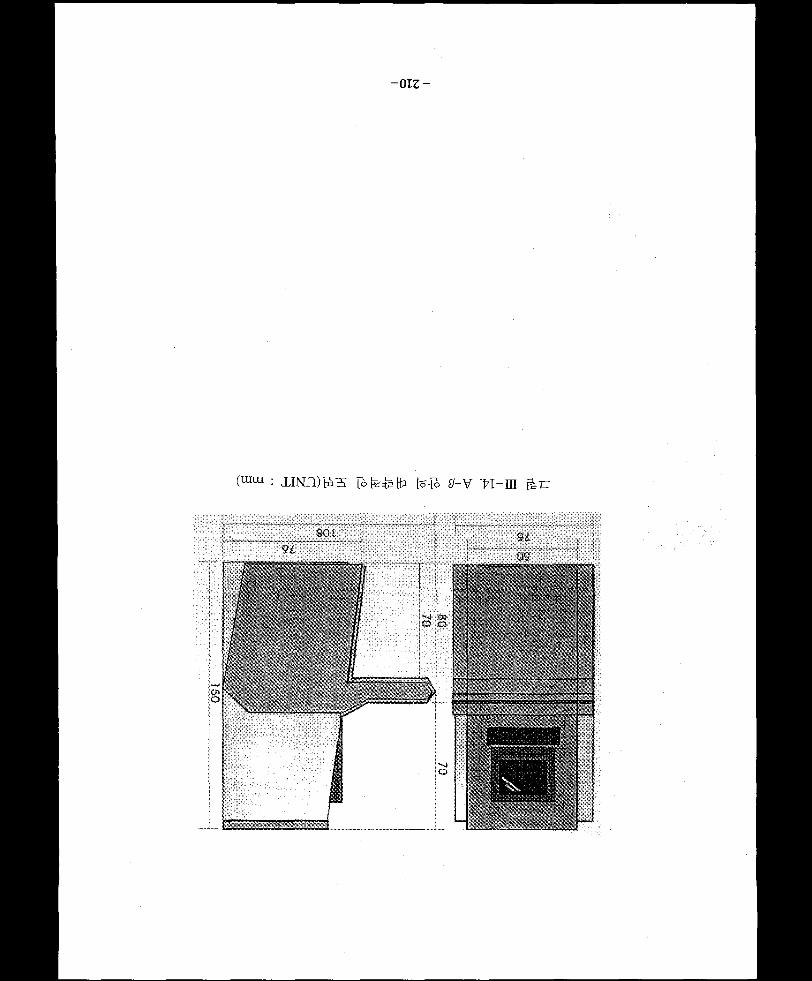
-013-
: XINfl){ofejatb (pHo £/-V ^TT
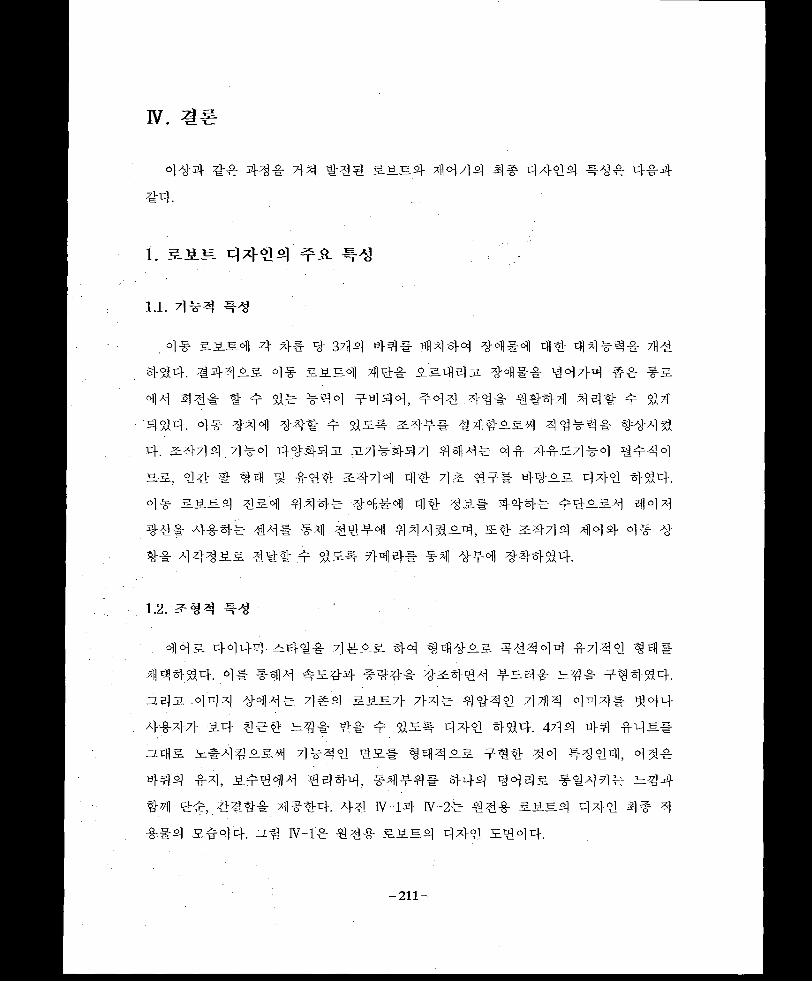
iv.
434 3* 43# 43 334 2224 ^1444 4# 4444 #3# 4*4
#4.
l. j,ua.H ^x]ys] ^-aj
1.1. 4*3 *3
. 4* 2224 zi- 4# 4 37% 4 44* 4444 34*4 4# 44*3# 7% 3
##4. 14322 4# iie6| 43* *244:2 44## 4444 #* #2 44 44# # * 4# #44 #444, #44 44# 4*44 44# * $14
4$14. 4# 444 44# * ^2# &3** *7)13224 34*3# 333^4. 2444.4#4 4-444 jl a.7]#444 444# 4* 44-24#4 ##4 4
22, 44 # 44 4 #4# 2444 44 4# 4#* 4322 444 444.
4# 2224 424 444# 44#4 44 42# 444# 44224 ^44
44# 4### 44* #4 44*4 443^24, 23 2444 444 4* 3
3# 44322 3## * 42# 444* *4 3*4 333^4.
1.2. 234 *3
442 4444 24** 4#22 44 34322 #44 44 #44 4 34* 44444. 4*. #44 *244 *44* 32444 *24# #4# *4444. 242 -444 344# 4*4 2227}- 7>4# 4344 444 444* 444 4*4-4 24 4*3 23# 4* * 32# 444 444. 47%4 *4 *42# 242 2*44224 4*44 42# 34422 *33 44 *344, 44* 444 *4, 2*444 4444, #41*4# 444 4442 #444# *34 341 4*, 313* 4*34. 43 IV-14 IV-2# 43* 2224 444 4* 4 *#4 2*44. 24 iv-l* 43* 2224 444 2344.
-211-
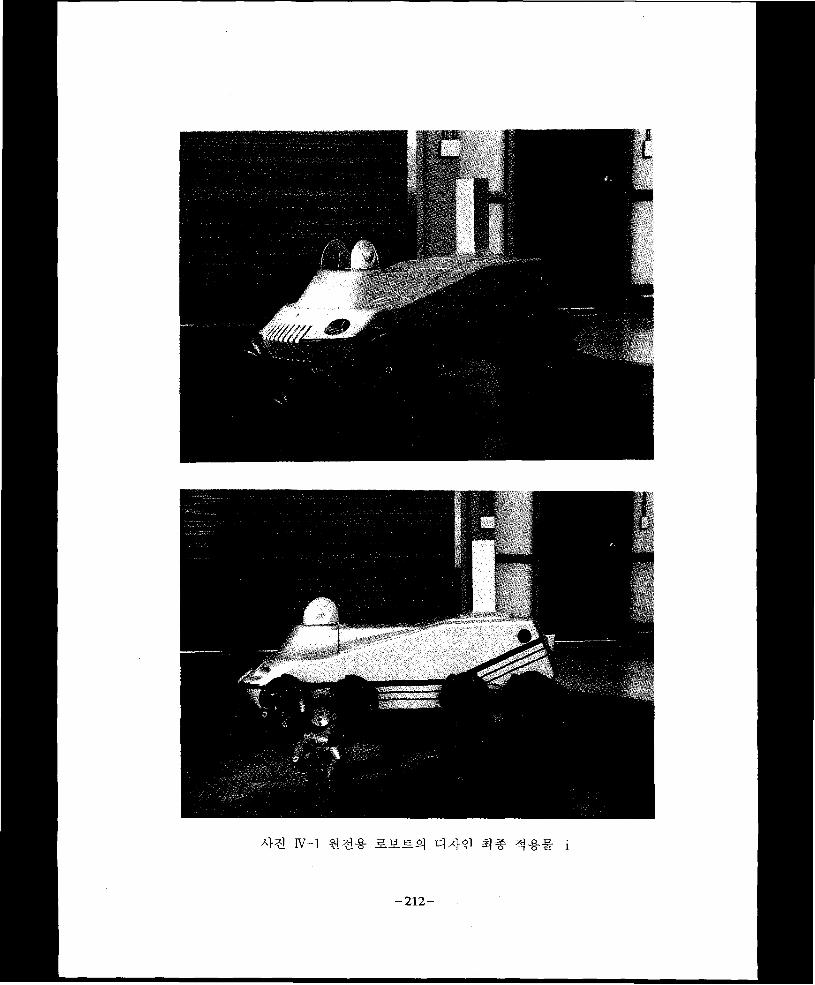
43 IV-2 3^-# ^
-213-
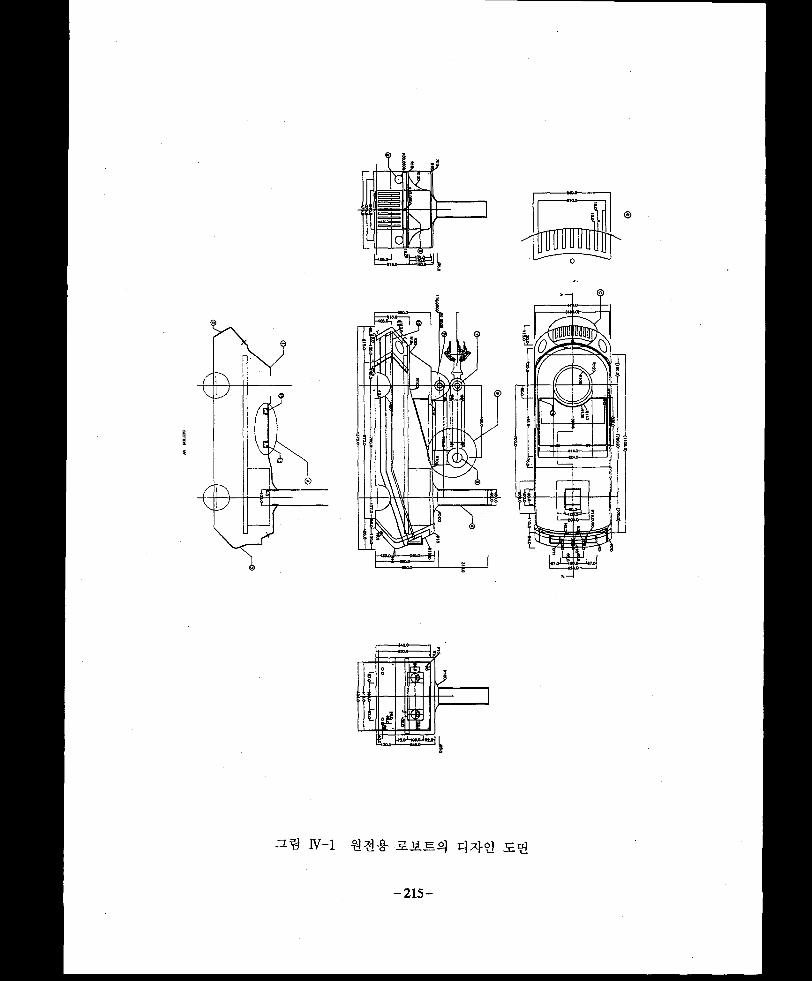
11 ^ IV—1
-215-
2. #41
2.1 4 #4 #4
447]# 4##444 >11^7), S££ o]^- Ail 0^7], ^#4 ^47] 4 4 7fl S #
444. 444 44-fr £4#AS4 H44 -444. 4#44 4#4 4-S-4-4144 44 44^4^* 7H##A&4 7}^ 44# # 4^ 4_§-7M #4 A#s 44 e
7}31* 444 44# 4 44.£1^ 414714 44444# #44-AS4 4444 #44# 4#£#44,
7>#4-447l 444 ^44# #4 4 431, 5:444 4444£# #4# # 91 £4, 4#44 4s44 #4 44444 4^(Concept)## 4# 4^S# 4## #
44.4#4 44444 114# 444# 4#3i 4# #4 414 4#4 471441 #
4#4, 444 7>4* 4# 7>##t11 44. 4471 oj-oj^EiE] ^4# sse-a^I # 4#4# 4*4|41 71.4^4 4## #^441#, a}##*} a>s] . 444 #y, 41
44 #4 #4a1 #4# 44 # t Si# 7f4 a#444 4# 44 44.
2.2 &44 #4
m.4 44 24 471-44471 A-a 4# 4# AS 44 44 44 £44 44# %
41 4#44 4444 47>44# 44444. A-a 44 4#4 444 ##44 4 4# 4# AS 4431, ##4(foot room)# 44 £4# 4### #4AS 4444. 3144- A] #4# 7l#7j* #44431, 41 7%4 4147171- #44 #4 4# 4#
S.47> 444 #4 444, 114#4 # 44 7>4 #Aii7l- 4?| %H#4 #44 44
## 444. 4A#447j- 444# #4 £444 ## 4## 444, 4as 44 4- 444# 44 44-4 #5^# 4#4471 &4#4 ## 4S494. #444 444 444 ^# 444 444# ##4 7]#7^4 44714 #44 sss H
44 444144# #44^4. IV-2# 4#44 €4^4a, 3^1 IV-3# 4#
44 47>4 £444.
-216
IV-2 *H7lS}
-217-

%2^-r
Top View
990 490
Front View
<B
Tee vw*
<D CONSOLE MAIN BODY
Front ViewASSEMBLY DRAWING
y
Side View
A PART
Front View
TABLE
2Z# IV-3 447)4 44# 32#(UNIT : mm)
-218-
s. yi 44
#- 41441 i#i4 m 4444 -2.^1- 144 &#i4 asi 42s.
sail 4 44442, 1224 4414 sill 4444 444411 114
4 1141 44444# 44444.
324 4, 714144 1141 54H 41 B44 iaia 44444 4a#
7j-l4 #4 4144 4-4-4 44#4 44 444#44 241 14. 24 IV-41 44# 444-4 12:41- lUl 44441 nm4 444 14 44.
714 IV-4 444-44 114 7f 4i4 sas 4 44 s-4
414 71144 iist 444 # 41, 44 14 444444 24! 11 4
444 ##4 444! 1141 42 4#41 m 144. 44# 4 #22 &
1S4 444# 444441 44, 14# 32.24 4!1 4442 41# #45- 1
## 1 41 415. 4444.
-219-

■1. 1995, 7]^# ##€ #^14# ^214-", <Y
####€ 4% #€ 253:, pp. 26-27
2. 44 #4m 4# 44, 4#, 44^44, 1998, p. 1165
3. 4^, 1995, 2144 4^, PP. 58-60
4. 4444 44-21#, 1994, Tank Image 4^-6- -?/8f 44$7 44 44, p. 41
5. #4444#€ #€4421% 1992, ^#4 44# 4# TV 44$/, pp. 99-100
6. €44, 1995, 44LS 4444 ^74M, 44##, pp. 17-19
7.4^4 #4^.s. 4I#4, 44# 4, 1992, 44274 #4, 444 #4A p. 317
S.Takesi, Sunaga et al., 1991, "Human Interface 444 44 43"-7]ir--l 44
4-4 &^^(l)-(3)", Bu/Zerfn qf/SSD, Vol. 87, pp. 49-51
9. Canfield, Smith D. & Eric, Harslem, "Designing the Star User Interface", in
Human Computer Interaction, ed. by Jenny Preece & Laurie Keller,
Prentice-Hall Inc., New Jersey, p. 241
10. Norman, Donald A., 1988, The Psychology of Everyday Things, Basic Books
Inc., New York, pp. 187-210
11. Yutaka, Yosii, 1993, "AVism - # 4 457] #uJjz.j <=f- ^ njy] # ?!]", Mono,
Vol. 243, pp. 186-189
12. Akira, Harada and Akira, Kawasaki, 1992, "4-7]4 #Sj7]a] krtl 21444A
#44 ## €4(2)", BuZZgtin qf/SSB, Vol. 98, p. 43
13. Miki, Namatama and Akira, Harada, 1991, "44 4*3 S VTR 4, 214
44 A 4#444", Bulletin ^ JSSB, Vol. 87, p. 56
-220-

4 4 # 2 #: 44^714227)13: ##-7)4227-113: 5422 a)1 2 INIS *#)22
KAERI/CM-018/95
44 / 44 #*7}*2 SiLSt o]*% 24# 44 #4
#439 #7} * 44# # # 2 (714^-4-4-)
#47} * 4Ai#
&14(7l#|444),#-#$("),*7l#("),444("),444("),###("), 44^("),444r),*#4(4##7}#4#),#4#("),##2r)
4 SS 7] 44 4«|7l4 4447}# 442 4^4 1996. 7. 20.
4 °1 4 220P 24 *( ) 4( ) 27) cm
#2A}1
4##4 47H( ),4##(0), 44# 224*4 #*#444-714 44*471*4 #1*42 950077
34
4 #4444 47}^44444 *#& 44 424 47}* 44444 44 4 4#4. 1) 44# 444# *4#l#7ll 4#: #44#4#7l* #*4 4# 7)2 ##44 7)7^0]^ #*7} 44# #44 #4 4#l# 4 #14##.# 4#7M& #44# 444 4#4#4 7}*o.sl 4# 4 #4-8- 444 4 4 4# 4##. 2) #4 *2# * 14# #4 24 4^ #4: #4 #2e) #4 #4# 7}& #44-# 4^^- #51], #4# *;&# 44- #44 44417-1* #44# 4#7}7} ##4#7i 4-4# 4= #4 -£.4-4 2#4tt 4^#4 2 4##-#4 7)144##. 3) #4*42 222 &44# 414 4 4## 44 #4: 87}-f}S# 44 KAEROT* 2*# 4#4#4 #4 #2* #442. 2 e])4/4#41## 24-E #44)7i #444 4#4##. 242 #47}42 22 2# 4#44 #1# #2##* 444# 4## #4414 2 &## ##4# 4. 4) 222/a}**} 44311#2il- #4 #4#7}4 44# *#|: 222-*# 4# 444# ##4444- 4-44-# ##44 244 4# #7}#** 7)144 2 21* #1414.
44##8)2
444471, #7l7ll#2#7l, 14# ##24-472#, #7-4 ##1#2 ## 7}*#!#, 44#7] #2#, #*7}*2 222, 2###-#, 222-*! # 7) #7}#, 222-A}** ##5)1 #2
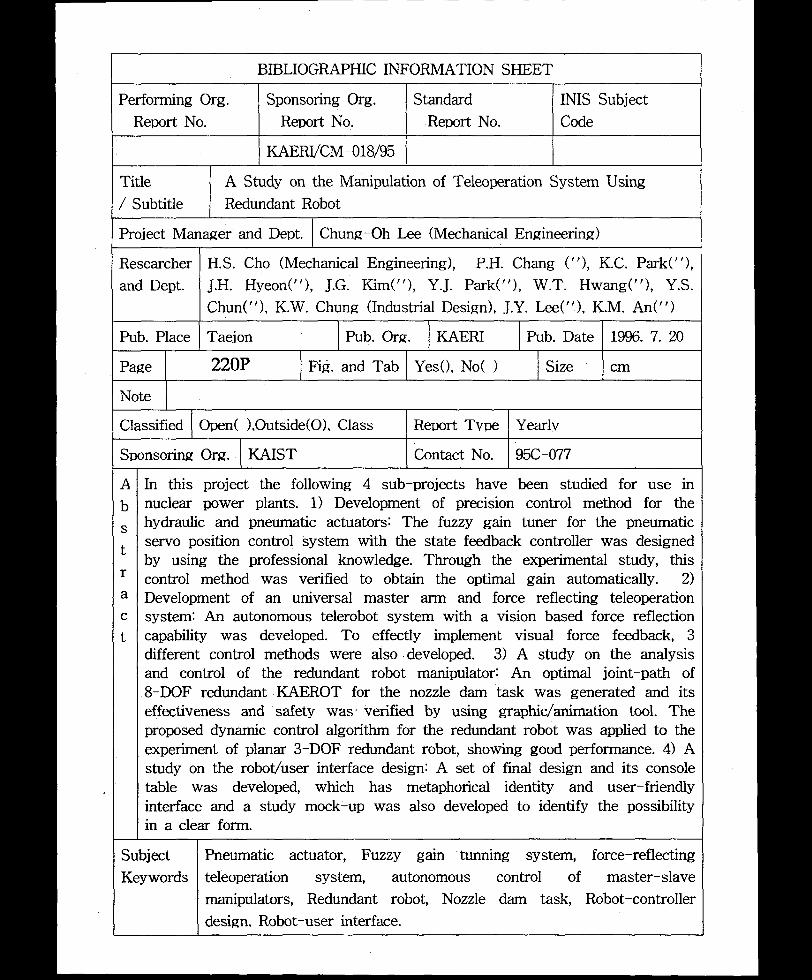
BIBLIOGRAPHIC INFORMATION SHEET
Performing Org. Report No.
Sponsoring Org. Report No.
Standard Report No.
INIS Subject Code
KAERI/CM -018/95
Title/ Subtitle
A Study on the Manipulation of Teleoperation System Using Redundant Robot
Project Manager and Dept. Chung-Oh Lee (Mechanical Engineering)
Researcher and Dept.
H.S. Cho (Mechanical Engineering), P.H. Chang ("), K.C. Park("), J.H. Hyeon("), J.G. Kim("), Y.J. Park("), W.T. Hwang("), Y.S. Chun("), K.W. Chung (Industrial Design), J.Y. Lee("), K.M. An(")
Pub. Place Taejon Pub. Org. KAERI Pub. Date 1996. 7. 20
Page 220P Fig. and Tab YesO, No( ) Size cm
Note
Classified Open( ),0utside(0). Class Report Type Yearly
Sponsoring Org. KAIST Contact No. 95C-077
In this project the following 4 sub-projects have been studied for use in nuclear power plants. 1) Development of precision control method for the hydraulic and pneumatic actuators: The fuzzy gain tuner for the pneumatic servo position control system with the state feedback controller was designed by using the professional knowledge. Through the experimental study, this control method was verified to obtain the optimal gain automatically. 2) Development of an universal master arm and force reflecting teleoperation system: An autonomous telerobot system with a vision based force reflection capability was developed. To effectly implement visual force feedback, 3 different control methods were also developed. 3) A study on the analysis and control of the redundant robot manipulator: An optimal joint-path of 8-DOF redundant KAEROT for the nozzle dam task was generated and its effectiveness and safety was verified by using graphic/animation tool. The proposed dynamic control algorithm for the redundant robot was applied to the experiment of planar 3-DOF redundant robot, showing good performance. 4) A study on the robot/user interface design: A set of final design and its console table was developed, which has metaphorical identity and user-friendly interface and a study mock-up was also developed to identify the possibility in a clear form.
SubjectKeywords
Pneumatic actuator, Fuzzy gain tunning system, force-reflecting teleoperation system, autonomous control of master-slave manipulators, Redundant robot, Nozzle dam task, Robot-controller design. Robot-user interface.