The control of discrete and reciprocal target-aiming responses: Evidence for the exploitation of...
12
Human hlo\cmrnt Scwnce I2 (IYY)i) ;5:-?6-I North Holland The control of discrete and reciprocal target-aiming responses: Evidence for the exploitation of mechanics ” Introduction Recently. Chamberlm and Mng~ll (1989) reported that ‘I movement toward a single target has n shorter movement time I e IS ewcuted
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of The control of discrete and reciprocal target-aiming responses: Evidence for the exploitation of...
Human hlo\cmrnt Scwnce I2 (IYY)i) ;5:-?6-I North Holland
The control of discrete and reciprocal target-aiming responses: Evidence for the exploitation of mechanics ”
Introduction
Recently. Chamberlm and Mng~ll (1989) reported that ‘I movement toward a single target has n shorter movement time I e IS ewcuted

t,l\tt‘r. th,w the Fame movement \\hen It IS tollwed t-q ;I wzond rno\ement twxd d wcond taget Chaniberlrn and M;lgrll (IYSY)
rnterpreted thl\ otwtot,qtv rrtirwltrzge phenomenon a e\wlrnce tor on-lme programm~np 111 \t hlch some ot the progr,m~mtng fog the
second movement occurs durmg ewcutron of the trrst movement Ftschman and Reese (1903) proposed an altern,ltn’r e~pl,lnatwn tar
the one-target ad\,mt,lg? The\. argued that mcnement time to a tttrt target (hIT1) Is lengthened because the addltmndl requirement ot ewcutlng ‘I wcond movement plxes cowtranth on the ewcutlon ot the tlrbt movement Sprc~trc;ill~. thti) rewxwd that M hen cublects ‘Ire tnlng to mo\tz through ‘1 multr-segment responw as raprdly AS pow- Me. the! must conwan the Irmb (or shluc) ‘IF rt completes the Inrtlnl wgment at the tlrbt target III order to moothly aid qu~chly ewcute the nelt mwement wgment (p 133) kxordtng to Fwhman and Rtwe f lYY7). thl\ ,iddrtlon,ll denw~d for control could be entrrel! ~~rt~progr animed
Flschmdn ad Ree\e I lYY2) tested the on-ltne progr,~mmtng h\,- puthesls by dtxgntng n procedure which mJwmlzed the opportunlo
tar complete programming pt Ior to response rnrtl,ttlon The) xcom- pltbhed this b> ;Illo\rrn_g subyxts dn unlmirted amount of respone pl,mnmg ttmt: betore response Inltldtlon and by srrnpllt\lng the second movement Thus. the\ ,lrhsd subwt5 to t&e rhelr time ,ind plan the entire respone before Inltl,ltrng It. the response D;IS to \trlhe the tlr\t target and then slrnpl), lrtt the shlus ott and rno\e rt c)\er the xcond target \rtthout rtrrhlny It E\en though this procedure mlnlmrzed the need tar on-line progr:~mmrng the rewltb shw’ed ‘1 robust one-tLllrget ahCmtagr Flschmnn aid Rer\e (lYY2I Interpreted this tlndlng ,I\
r~ltlence that the longer MT1 rn t\fo-element responws I\ prob,ibll not due to on-line progranmlng Insteal the) Lnored ,I wnwalnt conceptron M hlch clarms that subtectb tmng ‘1 hio-ekment ta-get
amIng re~p~~nrs adopt ;I crtateg> ot ~e~tr~unlng the limb <I\ It up- proaches the tlrst tltrget
We agree filth Flwhrmn md Rtmr that the experlmentnl e~ldencr
stkxm to ta\or &i constraint csplamtion mer dn on-lrntz progrmmnin~
r\plm,ltwn Hwe\er Flcchrnm ;Ind Reoe \ comtr,ilnt explancttwn 14
not cornpletelv mlsblng It IS e\prrrsed In cery gent’rdl r‘lther ~c~gut‘
term ,ind does not ~peclflc‘all~ dddresr the questIon, ot N~/z\ cmf Irm
wbJect3 ccmtrain their first mwerncnt rn a trio-element strrhlng
xtlon The gwl nt thrs study \ias to shed some Irght on thrs ISSW

Many studies (Adam 1992. Te;lsdale 1087. Teasdale ,md Schmidt
1991. Waters and Strlch. 1981. Zelaznlk et aI lc)86) hae pointed to
the Importance of the 7t77pocr trifle f/w rnrger a\ an essentlA contrlbu-
tor to movement deceleratwn That IS. at the tak ~rnpows some
Impact constramts. part ot the deceleration ot the mo\srnent rnq be
xcompllshed pnss~vsly or mechanlcall) t-q txget rmpxt thl\ IS slmph
a consequence ot prlnclplec of Ne\vtonl;ln mechanics (TeardAe and
Schmidt 1991) For Instance. Te,lsd;lle ( 1087. cited 111 Tensdale ,jnd
Schmidt 1991) reported that the pe,lk Impact force ot td5t clngle
aiming movements (mean movement duration 1hO ms) b;ls 205”~
larger than that ot slower movements (mean rno\‘ement duration 2-M
ms) This recult strongly suggests th,lt pawve Impxt tortes contribute
to movement decelerntlon
The Insight that the Impxt \ilth ;I target surtxe c;111 pro\lde
movement decelerdtron might help eMorate the constr,llnt s\pl,m,l-
tlon ot the one-target ad\ant,lge That I$. the trrst mwwnent rn a
wo-element response rn,l! rely to a lesser twent on paswe deceler,l-
tlon through txget Impact th,m d one-element movement Thl\ mrght
he $0 because hitting target 1 \tlth ‘1 large Impact may hinder quick
rel?asr trom this target and theretore delq Inltldtlon ,lnd cmooth
ewcutlon ot the cecond movement When t,lced \\lth J ti\o-t,lrgst
response. theretore. sulqsctc might choose to progr,im mixfement 1
such th,lt It I\ charactcrlzed tx ‘1 rel,ltlvel> Ixge portlon ot uct1lv’
deceleration In order to ensure that Impxt torte ;Ind Impxt time
mirth target 1 ~111 not Intertere Mlth qu~ch ,tnd wwoth Inltl,ltlon ot
mo\femsnt 3 For the same re<tson. wblects mai choose to progr,lm
smaller peal\ \elocltw tar the brst nwement In d hio-element response than tar a one-element response
In sum xcordlng to the Impxt con,tl,llnt e\pl,ln,ltlon. the one-
target ,idLnnt‘lge results tram ‘1 motor control str,~teg! In \ihlch
one-target movements xe characterized tg rel,~tnel> shorter decelera-
tion phase ;Ind larger peak velocltles th,tn the colre5pondlng moie-
ment in d trio-target response
In this stud\ ue tested the Impxt conw;llnt h!pothesls ot the
one-target ad\ant,ye t-q studying the hlnematlcs of one-element ,lnd
t\\o-element target nlmlng rerponws Hoiie\‘t:r. Inste,ld ot employing
target srnhg mwements \LLZ asked sublects to m;tke ~l~l~rzg mo\e-
ments tward targets orw r/w wrtc7ccP of 17 cirg7rr~tv Also we dwgned the hto-element response such that movement 1 M~S a right-lett

movement. and movement 2 a lett-right mwement. that 15. (I re\ers;ll
of the tlrst movement Thus. the one-element movement HIS a d~s-
crew. rrght-left moi’ement and the t\\o-element maement a recrpro-
cdl. &-left. Iett-right responw
The ratlon;lle tar employmg drscrete and teclprocA slldlng mo\w
mats \\a that It created the poss~b~l~~ to stud\ the control ot
one-element and hfo-element movements in the &wnce ,ind pro-
encr ot target Impact constrnlnts That IS. 4rdlng movementr MZ
rl~twzsel~~t~r call kx- ~ctll’e control ot the \i hole deceleration phase since
there IS no opportunity for pestle deceleration through target Impact
Hcwee\vr. by Introducmg n mechanIcal stop. I e A btooden barrier ,tt
txget 1. subjects could. at leait pxth. under thew circumsLlnces
nchws deceleration ot the mwement pawvely or mechanIcally lx
w-get Impact
The ~mpxt conwant hypothew ot the one-target ;id\ant,lge pre-
dicts that. for sliding ma’ements wrth a mech,lnlcA stop ,~t target I.
MT1 IS shorter for the one-element (I e discrete) movement thm for
the hto-element (I e reclpiocA) mw’ement Moreover. these shorter
movement times die xcomp~imed by larger pe,ih velocitie and shorter
decelerntlon phases For slldlng mwements \ilthout mechdnvxl stop
dt target 1. the Impact constrant hypotherls would predict no dotter-
ences III MTI. pedk ~eloc~tv. and duration ot the deceleration phase
toI discrete and reaproc;ll mo\emrnts since both type ot movements
rely completely on actne. deceleratne control
Since target SIX ha been sho\fn to Influence mwtmenn time, peak
velocrty and the rel,ltne duration ot the acceler;ltlon dnd deceleration
phases (Adam 1992 hlacKenzle et <II lY87. Mnrtemuk et aI 1987
hIlIner and IJ~Z lYYO1 \fr: JIW rnanlpuldted target SIZC m this study h!,
employing 5niCill and large targets
hlet hod
NIneteen students (1-I female and 5 malet) ot the Unr\el\In ot
Lunburg partlclpated In this study (mean ‘lge. 22 2 years. range 20 to
31) The) \iere nil rght-hnnded nnd volunteered to partlclpdte None

ot them had any e\perlence \ilth the eupermxntal task or the loge
behmd the study
A 61 x 91 cm X-Y dlgltlzmg tablet (Scrlptel Corporation), mounted
on a 80 cm high table. was used In conynctmn i\lth a MS-DOS AT computer to record time-X data paws Sampling rate ~a?s 135 Hz. and
spatial accuracy ot the dygtlzmg tablet was set at 0 1 mm
T\\o target sheets ivere constructed. each consisting of hvo equally
sized circular targets horlzontallly separated by 10 cm The diameter of the two targets was either 3 mm or 24 mm Target sheets uere placed on top of the dlgltlzer and coxred by a pvxe of clear glas Subjects were asked to execute one-element (I e discrete) and two-
element (reciprocal) target almmg responses The discrete amilng
response required subjects to moie the stylus from the right target to
the left target The reciprocal aiming response required subjects to
move trom the right target to the lett target and then back to the right
target SubJects had to produce the amimg movements either In the
absence or presence ot a mechanical stop This mechanlcal stop
conswed ot a \\ooden barrier idImensIons. 32 x 9 x 9 cm. Height 606
gr) covering the left side of the left target Subjects had to keep this
wooden barrier m place by pressrng It l\lth their left hand In total.
three Independent variables \\ere orthogonally combined - Type of
Response (dlscrete/reclprocal). Target Size (3/2-l mm). and Mechan-
real Stop (wlth/wthout) - resulting In 8 movement conditions
Subjects stood taclng a table on which the X-Y dlgltlzlng tablet was
mounted They L\ere Instructed to powon themsehes such that their
body midline wac biased toward the center ot the left target They
were ashed to hold a stylus m a pen-grip fashion and to slide the stylus
smoothly and as quickly as possible toward the target(c) It was
emphasized that the) had to stop (for discrete movements) or to
reverse (for reciprocal movements) the movement wthln the bound-
aries of the left target In order to ensure optlmal response prepara-
tion. response rnitratron \%as under subJect control Subjects per-

Movements here dncil>zed otf-line using n nomnterxti~e computei program The follw! ing dependent mesuw \\ere cnlcul,~ted tar both mwenient 1 and 2 nio\ement time. pr,A ielocrty. ncceletdtion time (time tram initi‘ition ot a mo\sment to that ot peak ~~IocIQ). deceler-
dtwn time (time tram pe,lk \eloat> to zero \eloclt> ‘It the end ot the
movement). normalized nccelerat~on (percentage ot mo~enient time spent In acceleration). awl normalized deceleration (percentage ot
mo~ernent time spent in deceleration) In dddition tar the reciproccil aiming recponw d~iell time was calculated the period ot tmw the
<peed of the stylus \{a zero during the re\erwl ot the rno\wiient on
the hrrt target These dependent \xl;lbles l\erts termed tram the
~~\er,tge ot the subyxt’s 10 tot trials
Results and Discussion
The means ot the hlTI5 tar the discrete and reclproc;il dlmlng
rwxements to\\;ird the sm,~ll tdrget(s) <IS a functwn ot the mechwlcnl
<top condltlon (\ilthout,‘\\lth) drr: depicted In tlg 1~ A 1 x 3. (me-
chwvxl stop Y opt: ot response) ivlthln-suhwct nn,llvsls ot \nrlance (,ANOF A) sho\\ed ‘1 5;lgnlflcnnt mdln eftect tar the mech,mlcal stop
condltron. Fc I IS) = 67 1 p < 0 001. Indwxtlng much Lister responws
for the condltlon \\lth mech,inlcdl stop (Jf = 323 rns) th,ln tar the
condltlon without mechCmlcnl 5top (,\I = 5-N ms) The signiticant interxtion bet\\een mech;lnml stop ,md t!pr ot response. F( 1. 18) = 4 52. !J < 0 05. Indicated that \ilth mechanic‘4 stop MT1 ot discrete
response5 (,\I = 305 msb MI?S shorter than th,lt ot rtwprocal reponses
( .\I = 31-I 111s). hut that Mlthout mechanIcA stop hIT1 ns about the
wne tar both type ot responses The wme pattern ot rewlts \\a eildent tar the \arlabla norm,ll-
lzed decelrratlon and peak \~~OCI~J (see tigs lb and lc. re\pectnel!,) Thnt IC. mwemrnts In the condrtlon wth mech,inlcA <top \iere

MOVEMENT TIME
MT (ms) 600,
550 5
500
450 I-
\\
RECIPROCAL
% DECELERATION
I RECIPROCU
400 - PEAK VELOCITY
DISCRETE ,ooP” ILnb.,
350 - s k w I , DISCRETE ’
300 - b 80
10. I ’
250i WITHOUT WITH
MECHANICAL STOP
chnracterlzed by smaller portlons of normJlze:d decelerCltwn. F( 1. 120
= 103. p < 0 001. ;Ind larger peak \!elocltles. F( 1. 18) = 136. /I < 0 001.
than movements m the condltlon iblthout mechanlcal stop (37 vs YE.
;Ind 81 is 56 cm/s. respectnely) In addition. slgnlflcant Interactions
lndlcated that nlthout mechdnlcal stop. the first movement of the
reclprocdl response \\a~ not dlfterent trom that of the discrete re-
sponse m term5 of normalized deceler;ltron and pe& \eloclty. how-
e\er. \\lth mechanIcal stop dwrete mowments had shorter normA-
lzed deceleration phases and Idrger peak \elocltles (F( 1. 18) = 6 31.
p < 0 025. and F( 1. 18) = 8 33. p < 0 01. for normalized deceler&lon
and peak \elocq. respectnely)
Thrs pattern of result IS consistent wth the predlctlons dernred
from the Impact ccmstralnt hypothesis of the one-target ;Id\,mtage
\\hrln the physlcal constraints ot the task allow paswe deceleratron of the movement through target Impact. MT1 of a discrete rno\ement IS

shorter than MT1 ot d reciprocal movement ,md. moraxer. has d
Ixger ped \eloc~t~ ,Ind a shorter normalized deceleration phase
HoweLet-. ashen the t,lsk constrants do not permit passive decekra-
twn through txget Irnpxt there IS no one-target aivantage T&en
together. thee results \trongll wggest that passne Impact force
contrlhute to mwernent deceler~tlon and that Impact with target IS dn
important control parameter of movement programming and organi-
zation
The means of the MTlr tar the discrete ,md reaprocA wnmg
mwements toward the large t,lrgt:t(~) as a tunctlon of the mechanlcxl
stop condltlon (wthout/wth) are shwn In fig 2a A 2 x 2 (mechanl-
cdl stop X t)pe of response) \tithin-subject an;ll!sis of idridnce
(ANOVA) shwed ‘1 slgnltrclmt maIn ettect tar the mrchanvxl stop
MOVEMENT TIME
MT (ms) 350 I-
250
200
l-8
+ F
RECIPROCAL
PEAK VELOCITY
J” Ic”3.l
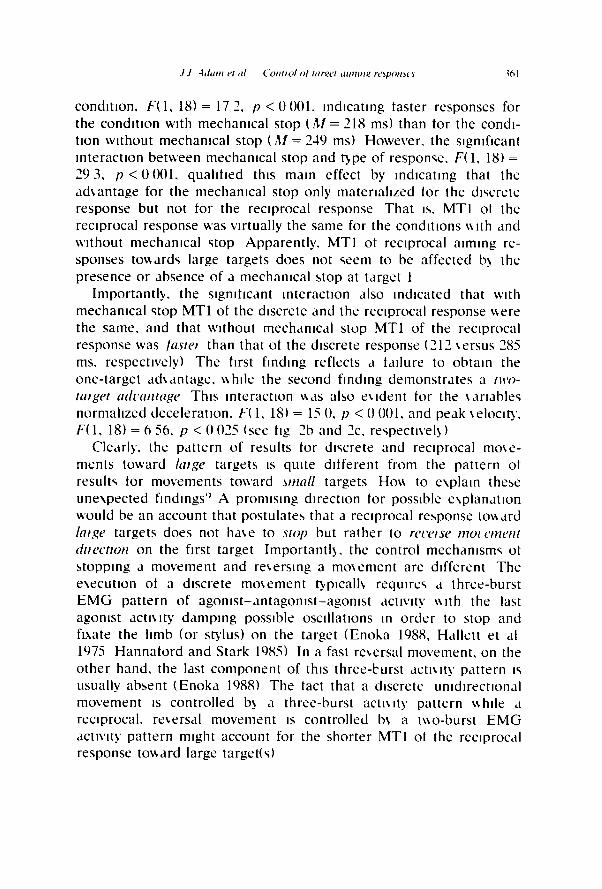
condltlon. F( 1. 18) = 17 1. p < 0 001. lndlcatlng taster responses for
the condltlon wth mechanlcal stop (M = 218 rns) than tor the condl-
tlon wthout mechanical stop (A1 = 2-W ms) Howe\vr. the slgnlflcant
InteractIon between mechanical stop and ape of response. F( 1. 18) =
29 3. p < 0 001. quaIltIed this maln effect by lndlcatrng that the
ddiantage for the mechanical stop only materlallzed tor the discrete
response but not for the recrproc;il response That IS. MT1 ot the
reciprocal response was virtually the same for the condltlons ~lth ,md
\vlthout mechanical stop Apparently. MT1 ot reciprocal almrng re-
sponses toH;Irds large targets does not seem to be affected b) the
presence or Axence of a mechanlcal stop at txget 1
Importantly. the slgnltlcant mteractlon ;~lso Indicated that wth
mechanlcal 5top MT1 ot the discrete and the reciprocal response \iere
the same. and that wthout mechanlcJ stop MT1 of the reciprocal
response was fl7swl than that ot the discrete response (313 versus 285
ms. respectrvely) The tlrst flndrng reflects d Lulure to obtain the
one-target ad\;lntage. ithilt: the second flndlnp demonstrates a fnw
tnrger ~7~11~712~~7g:~~ This InteractIon WAS also eLIdent tor the \;lr~Ales
normalized deceleration. F( 1. 18) = 13 0. P < 0 001. and peak \eloclb.
F( 1. 18) = h 36. ~1 < 0 03 (see fig 2b and ?c. respectIveI!)
Clearly. the pattern of results tor discrete and reciprocal moie-
ments toward lc7rge targets IS quite different from the pattern ot
result\ tor movements toward snznll targets HON to e\plam these
unexpected fIndIngs” A promrslng dIrectIon tor possible elplanatlon
would be an account that postulates that a reciprocal response toi\xd
k7rg~ targets does not ha\e to stop but rather to rt’lvvse twl twtwt tlumwt~ on the first target ImportantI!. the control mechnnrsmg ot
stopping a movement and re\erslng a movement are different The
e’recutlon of a discrete movement typ~call\ require\ d three-burst
EMG pattern of agonlst-Clntagonlst-agonlst xtlvrty \\lth the last
agonist actl\lty dnmpmg possible osclllatlons In order to stop and
faate the limb (or s@lus) on the target (Enoha 198X. Hallett et al
1975 Hannatord and Stark 19X5) In a fast reversal movement. on the
other hand. the last component of this three-burst xtnlty pattern IS
usually absent (Enoka 1988) The fact that a discrete unldlrectlon;il
movement IS controlled bl J three-burst actlk~ty pattern Mhlle d
reciprocal. wersal movement IS controlled b\ a wo-burst EMG xtwlty pattern might account for the shorter MT1 ot the reclproc;ll
response touxd large target($)

For recqxwxl mwemrntc tward vmll rcrtgerr ( Z I~WZ L hwe\el.
the dlstlnctlon brt\ieeen jtoppmg and re\erslng a mwement might
not be tele\‘lnt This IS so. bsc;luse wiall target\ lequlre that both
dwrete and reclprocA moiementz ~rcy~ on the tlrst txget so that
subwts can evaluate their mwement 5 endpoint accurxy. that IS.
they ha\e to cornplus Intended dnd xhleved endpoint accurxv In
other words. reciprocal almrng mcnernentr toward small target< mai
be thought of 2s two dlscrrte mwemrntc sepx,lted by ‘1 dlstlnct
period ot stCmdstlll’ The ~n~lgses ot d\tell time on t,u-get I support5
this suggectmn dwell tlme on the small w-get \fds much longer th,in
diiell time on the large txget ( 130 iersub 15 m\. respectnel)) Accord-
rng to the llns ot re;lsonlng. reclprocJ ‘lnd dwrete movements
twxd small targets In the Jxence ot target Impact constrdlnts are
h.mctlon;lllg the wme. datd concerning hlT1. nornwllzed deceler~~tlon
and peak \eloclt) support this InterpretCltmn (see top I)
The dxence ot the one-txget ‘id\ant;lge tar Ixge targets In the
presence ot A mech~inlc~il stop mght ref-kct <I celling eftect’ Th,\t IS. ‘3
one-txpet ad\,tnt;igt: tar large w-get5 would require ‘1 dwxete re-
sponw that hit, the mechanlcA stop i\lth d Ltrger Impact than the
reclprocA responw \~ould do Hweer. since the mechanIcA stop was
CI rrlatl\ely small ;Ind Ight-iieelghted Mooden bxrler Mi 111 phc-e h\
r/w dwtr /rrt~~//ztvst~l~ (that IF. i\lth the I&t hand, SubJects might
h,l\e shied awa\ tram hrttlnp the b,irrlsr Mlth such ‘I Large Irnpxt th‘lt
iiould c‘\usz it to be dl\plxed
At this point. it should be noted that Mhlle the prewnt t,lsl\
constraints rsqurred subwx to reverse mwement dlrrctlon dfter
hrttlng txget 1. previous studies regarding the one-t,lrget ad\ant;tge
required wblects to continue the second mwement In the dlrectlon ot
the tlrst movement Possibly. the klnematlc protrle of <t trrst rtwement
tollwed b> A second mcnement In the same dIrectIon 15 dltterent tram
th,lt tollowed b! J mwement In the opposite dlrectwn This obsew,l-
tlon warrant5 cdutlon III gener;lllzlng the present tIndIng ,md Inter-
pret‘itmns to multwlement rmxements ewcuted In the sxntl dlrec-
tICIt
The lmplwxtmns ot the present result5 tar motor control theon drt:
twotold FII~;~. because the txget Impxt constr,ilnt~ dr;lmatlcall\
affected the reldtwe durdtwn ot the acceler~itlon ;Ind deceler‘itlon
ph,ws the notion ot simrnetq or bell-shaped lelocltv-time protlles IS
not suppo~ t?d This outcome IS not compatible wth the aswmptwn ot

rmnrlance ot relatwe tune. and theretore questwns the \1ab111ty ot
theories of motor control In l\hich a general motor program produces
sptw~ic movements by adJustlng d sckibie pa-ameter in the trme
dom,un (e g . Meyer et al 1982. Munh,lll et ‘11 19S5) Rather. the
results support a VKN of motor control that 15 fund;lment,llly prag-
matIc and spec~hc to the oblectlves ot the pertormer and the con-
straints ot the task (Adam 1W2. A-bib 1985. Cole and Abbs 1986.
Marteniuh et al 1087)
Second. the one-target ad\,mtdge belongs to <I gentzral class ot
phenomen;l alled cotItc’\f effrcfs movements embedded In A se-
quence are not Independent ot each other but mnq mutuAli Inf’luenct:
exh other Studies ot h‘md\irltlng. tar Instance. have shwn th,tt the
shape and tlmlng ot a letter depends on \i hdt letter precedec It and on
wh,it letter tollous It (Rosenbaum 1991) Conkit eftew A;0 hnw
been described In the stud! of bpwrltlng (Terzuolo ,md VnICmr
1080) The present research points to the Importwce of mechCmlcdl
constraints (I e Impact l\lth txget) In producing contekt ettects. a
point corrobor‘ited b! Gentner et al (1988l \vho shwed that contekt
etkcts In tqpewrltlng can be centr,illy based but also mech,mlcall)
Importantly the rele\~nce ot mechanIcal constralnt5 In the control ot
mo\‘ements has been emphasrzed b> Rosenbnum ( 1991) M ho drpued
that rel)Ing on mechanics’ cdn smipll~ the degrees-of-freedom prob-
lem (see also. BIZZI and Muss,l-I\xldl 1989)
In conclwnn The one-target ;Idvantnge m;lterlnllzes when t;lrk
constrdlntc rtqurre d mwernent 5top and Jlo\.\ tar target Impact. It 5
underlyng mechdnlsm IS the e\ploltatlon of paw\e. mech,mlcal decel-
eration through target Impact The t\\o-target advantage IS tound
ithen task constrarnts do not require a mcxement \top but ctllo~ a tart
mwemrnt re\erwl In the absence of target Imp;lct constraints. It s
underhung mechamsm IS prob;lblv d txo-burst pattern ot ;Igonlst-
ant;lgonlst actlilt\ Future rewxch should Imestlg;lte the one- and
tuo-target ‘idvantage more directly by monltorlng rmpxt tortes ,md
reysterlng EhlG xtnlty pattterns
References