Romanità and Grazia: Giulio Clovio’s Pauline Frontispieces for Cardinal Marino Grimani
Upload
independentCategory
view
0download
0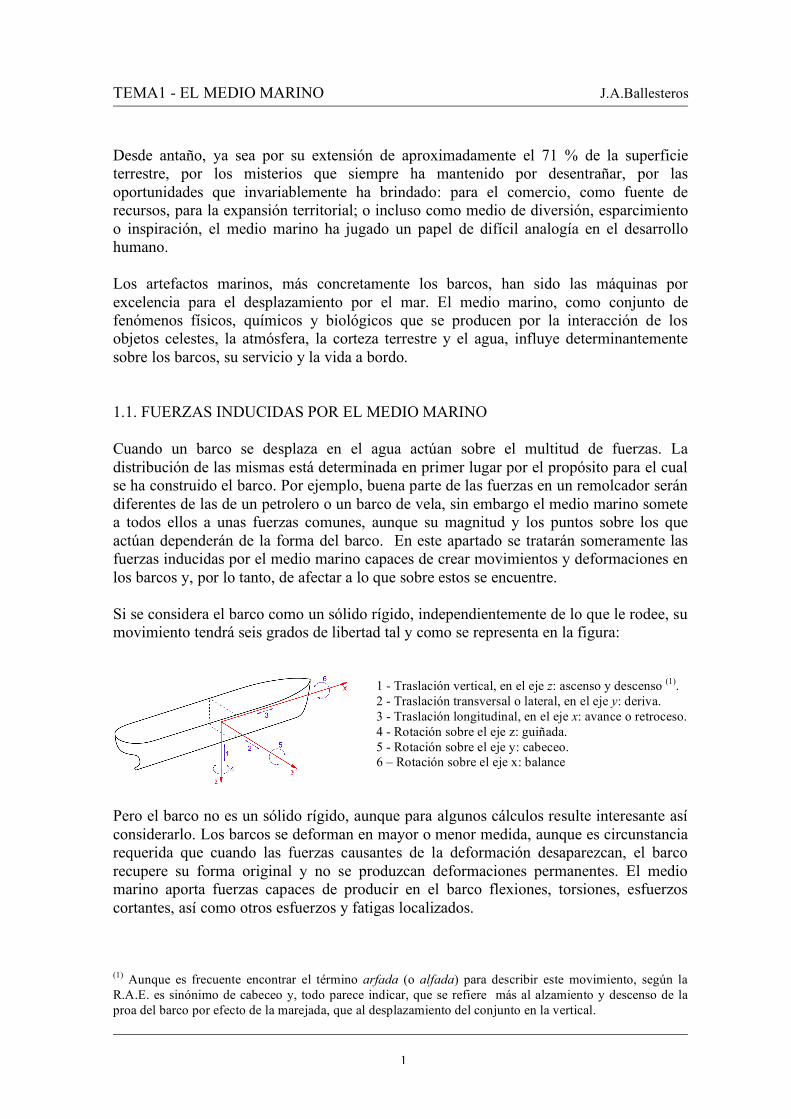
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
1
Desde antaño, ya sea por su extensión de aproximadamente el 71 % de la superficie terrestre, por los misterios que siempre ha mantenido por desentrañar, por las oportunidades que invariablemente ha brindado: para el comercio, como fuente de recursos, para la expansión territorial; o incluso como medio de diversión, esparcimiento o inspiración, el medio marino ha jugado un papel de difícil analogía en el desarrollo humano. Los artefactos marinos, más concretamente los barcos, han sido las máquinas por excelencia para el desplazamiento por el mar. El medio marino, como conjunto de fenómenos físicos, químicos y biológicos que se producen por la interacción de los objetos celestes, la atmósfera, la corteza terrestre y el agua, influye determinantemente sobre los barcos, su servicio y la vida a bordo. 1.1. FUERZAS INDUCIDAS POR EL MEDIO MARINO Cuando un barco se desplaza en el agua actúan sobre el multitud de fuerzas. La distribución de las mismas está determinada en primer lugar por el propósito para el cual se ha construido el barco. Por ejemplo, buena parte de las fuerzas en un remolcador serán diferentes de las de un petrolero o un barco de vela, sin embargo el medio marino somete a todos ellos a unas fuerzas comunes, aunque su magnitud y los puntos sobre los que actúan dependerán de la forma del barco. En este apartado se tratarán someramente las fuerzas inducidas por el medio marino capaces de crear movimientos y deformaciones en los barcos y, por lo tanto, de afectar a lo que sobre estos se encuentre. Si se considera el barco como un sólido rígido, independientemente de lo que le rodee, su movimiento tendrá seis grados de libertad tal y como se representa en la figura:
1 - Traslación vertical, en el eje z: ascenso y descenso (1). 2 - Traslación transversal o lateral, en el eje y: deriva. 3 - Traslación longitudinal, en el eje x: avance o retroceso. 4 - Rotación sobre el eje z: guiñada. 5 - Rotación sobre el eje y: cabeceo. 6 – Rotación sobre el eje x: balance
Pero el barco no es un sólido rígido, aunque para algunos cálculos resulte interesante así considerarlo. Los barcos se deforman en mayor o menor medida, aunque es circunstancia requerida que cuando las fuerzas causantes de la deformación desaparezcan, el barco recupere su forma original y no se produzcan deformaciones permanentes. El medio marino aporta fuerzas capaces de producir en el barco flexiones, torsiones, esfuerzos cortantes, así como otros esfuerzos y fatigas localizados. (1) Aunque es frecuente encontrar el término arfada (o alfada) para describir este movimiento, según la R.A.E. es sinónimo de cabeceo y, todo parece indicar, que se refiere más al alzamiento y descenso de la proa del barco por efecto de la marejada, que al desplazamiento del conjunto en la vertical.

TEMA1 - EL MEDIO MARINO J.A.Ballesteros
2
Interfieran en el movimiento propio del barco o lo provoquen, produzcan una deformación o ambas cosas, los inductores de estas fuerzas en el medio marino serán el viento y la mar; pudiendo este último estar en reposo o perturbado por oleaje y/o corrientes. 1.1.1. EL VIENTO Se entiende por viento el desplazamiento de gases a cierta escala. En la tierra y en el medio marino es el movimiento de un masa de aire en la atmósfera. Aunque podemos considerar que el viento esta originado por gradientes térmicos y de presión(2) (en ambos casos, a mayor gradiente más elevada será la velocidad del viento generado), a nivel geofísico resultan determinantes la rotación de la tierra (fuerza centrífugas) y el consiguiente efecto Coriolis, así como las fuerzas de fricción y la configuración del relieve. En el ámbito marino, tradicionalmente la velocidad del viento es medida en la escala de Beaufort (1805-6). En 1923 se estandarizó, distribuyéndose en 12 niveles o grados los valores máximo y mínimos para la velocidad media del viento horizontal en el mar a una altura de 6 m. (Tabla 1.1.). Posteriormente, en 1944 se añadieron niveles superiores al 12 para los huracanes y tornados. A cada una de las fuerzas o grados del viento en la escala de Beaufort se le asocia un estado de la mar.
La velocidad del viento se reduce conforme la distancia vertical a la superficie del mar se hace menor, debido a la fricción entre ambos fluidos. Así, la velocidad del viento a z0 = 10 m sobre la superficie del mar se ha utilizado como referencia o velocidad característica del viento, van Koten (1976):
El exponente α es 0,12 para el viento en la superficie del mar.
(2) Se entiende que la diferencia de densidad entre las distintas masas de aire es consecuencia de su temperatura y presión.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
3
Un parámetro interesante es la presión dinámica del viento, definida como la presión unitaria producida por el viento en aquellos puntos donde su velocidad se anula. Se considera que la presión dinámica actúa perpendicular a la superficie y vendría expresada por la siguiente fórmula: Siendo: q: Presión dinámica del viento [Pascales o N/m2, en el S.I.] ρ: Densidad del aire [kg/m3]. Su valor es función de la temperatura, presión y humedad.
De forma simplificada se puede considerar 1,225 kg/m3. Si el viento arrastra lluvia o agua producto del oleaje, se consideran aumentos en la densidad correspondiente al fluido equivalente de hasta 15 kg/m3.
V: Velocidad del viento [m/s] Los efectos directos del viento en el buque son varios y dependen de la velocidad del viento y de su variación en el tiempo, así como de la superficie del barco expuesta al mismo y del ángulo de incidencia. Si se trata de un viento racheado, es decir, con cambios bruscos en su velocidad, y dependiendo del ángulo de incidencia, puede tener un efecto sobre la estabilidad, tanto de rumbo como del propio buque (especialmente en barcos de poco porte y veleros); se puede tratar por lo tanto como un fenómeno de excitación que provoca una respuesta dinámica del buque. Un viento establecido, sin grandes variaciones en su velocidad, tiene la posibilidad de provocar una escora permanente y, en mayor o menor medida, un abatimiento (una de las causas de divergencia entre el rumbo del buque sobre la superficie y el rumbo verdadero). 1.1.2. EL MAR El barco como elemento flotante en un fluido, hace del mar el principal generador de fuerzas externas sobre si mismo, determinando entre otras cosas su flotabilidad y estabilidad. Así, se valorarán en primer lugar las fuerzas hidrostáticas, que junto con el peso del barco son las únicas fuerzas que actuarían estando el mar y el barco en reposo, realizándose a continuación un acercamiento a las fuerzas hidrodinámicas inducidas por el medio. Siendo el mar un fluido en estado líquido y considerándolo en primer lugar como un sistema hidrostático, es decir, en estado de equilibrio sin que existan fuerzas que alteren su posición, cualquier elemento o estructura que introduzcamos en el va a verse sometido a una presión externa y a un empuje. Como es bien sabido, para una densidad y aceleración de la gravedad dadas, el primero de estos parámetros será proporcional a la profundidad a la que se encuentre el elemento o estructura y el segundo al volumen del fluido desalojado por este. Se intuye que ambos conceptos están absolutamente relacionados, ya que conforme al Principio de Pascal la presión se transmite por igual en todas las direcciones y la componente de presión vertical hacia arriba ejercida sobre la superficie de nuestro artefacto sumergido, si este no se deforma, crea una fuerza

TEMA1 - EL MEDIO MARINO J.A.Ballesteros
4
ascendente que se compensa con el peso del volumen de agua desalojado por el elemento sumergido: sin duda se trata del empuje hidrostático o de Arquímedes. Del equilibrio entre las fuerzas hidrostáticas que se establecen sobre el elemento o estructura que hemos introducido en ese líquido ideal y del peso del mismo, depende la flotabilidad de aquel en reposo. Así, la formulación matemática del equilibrio hidrostático para un cuerpo sumergido podría ser (3): Siendo: P: presión del fluido [Pascales o N/m2, en el S.I.] z: la coordenada vertical [m] ρe: la densidad equivalente del elemento sumergido [kg/m3] g: la aceleración de la gravedad [m/s2] O más sencillamente, podemos decir que se alcanza el equilibrio hidrostático del barco a flote cuando el empuje, o fuerza igual al peso del volumen de agua desalojado por el casco, se iguala con el peso del barco. Desde el punto de vista de la construcción naval, tan importante es la flotabilidad como la estabilidad. En barcos de formas convencionales, es decir, en los que la eslora supera en
varias veces a la manga, la estabilidad transversal es la más comprometida. La estabilidad estática transversal va a estar determinada por el brazo (GZ) del par de fuerzas que devuelven el barco a la posición de equilibrio inicial: empuje (E), ejercido en el centro de carena, y peso o desplazamiento (D), ejercido en el centro de gravedad. Comos se puede entender la altura metacéntrica (GM), está íntimamente ligada al brazo adrizante (GZ=GM⋅senϕ). Los criterios de estabilidad aplicados son muy variados y dependen del tipo y tamaño del barco, pero deben garantizar su seguridad y, evidentemente, no solo
con la mar en reposo. Las pautas que conforman esos criterios pueden ser función de la altura metacéntrica, de la estabilidad estática (par de fuerzas de adrizamiento), de la estabilidad dinámica (trabajo realizado por las fuerza de adrizamiento), del brazo de adrizamiento dinámico [m/radián], de los periodos de oscilación y de otros parámetros. (3) Esta en una hipótesis propia por la incorporación de la densidad equivalente del elemento sumergido, por lo que sin duda requiere demostración.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
5
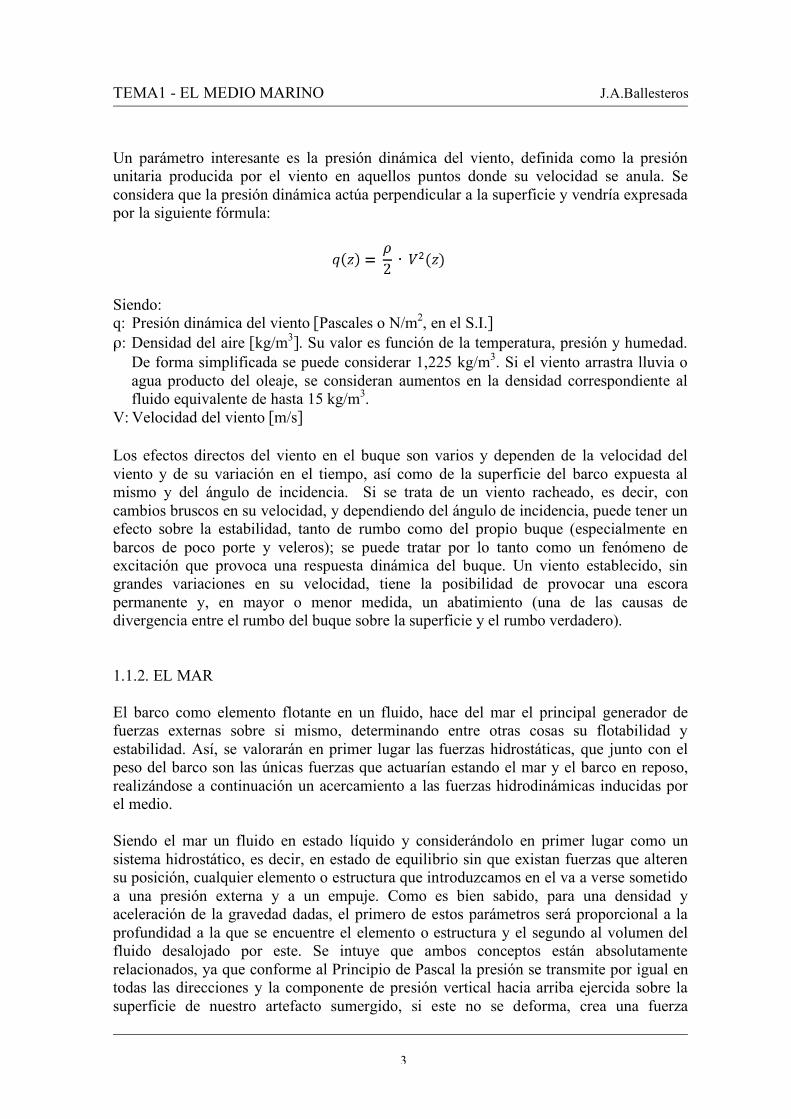
Existen multitud de circunstancias que alteran la posición relativa de las partículas de agua en el mar, provocando el movimiento del mismo y, por ende, la aportación de energía a los elementos que en él se encuentren. Si consideramos el medio marino en su conjunto, deberemos tener presente que en mayor o menor medida, la fase líquida del mismo se ve afectada por cambios de temperatura, salinidad, densidad, etc. y, en general, por fenómenos excitatrices que se producen en las fases sólidas y gaseosas que lo circunscriben y actúan sobre él: procesos en el subsuelo marino, en la costa, movimientos propios del planeta tierra y de los objetos astronómicos (sol y la luna, básicamente); así como procesos atmosféricos, principalmente los que se producen en la troposfera. De todos estos fenómenos que rompen el equilibrio hidrostático, se desprenden dos consecuencias que requieren primordial atención como inductoras de fuerzas en el barco: las olas y las corrientes marinas. 1.1.2.1. LAS OLAS Llamamos ola a la elevación y descenso cíclico del agua del mar. Aunque puede haber otras causas eventuales para su formación (seísmos, erupciones volcánicas, etc.), es el viento actuando sobre la superficie del agua el principal protagonista. El movimiento del aire en las zonas bajas de la troposfera, como fase gaseosa, en contacto con la superficie de agua, como fase liquida, crea una capa límite en ambos fluidos. Suponiendo inicialmente la superficie de agua en reposo y un viento de velocidad constante, como consecuencia de la fricción entre viento y agua, el primero pierde velocidad en la zona próxima a la superficie de contacto generándose en esta zona pequeñas turbulencias y, por lo tanto una distribución de presiones irregular en dicha superficie. Esta fluctuación de presiones provoca fuerzas normales y tangenciales en las partículas de agua, produciéndose una incipiente ondulación en la superficie del mar. Pasando a una escala ligeramente mayor, es decir, por encima de la capa límite del aire, la velocidad de circulación de este fluido es superior sobre la parte alta de la ondulación del
agua o cresta a la que lleva sobre la parte baja, seno o valle . Dejando a un lado otros aspectos, el principio de Bernoulli nos hace pensar que se producirá una disminución de presión en el aire sobre la cresta y un incremento de esta sobre el seno de la ondulación; lo que provocará un
incremento de la altura de la ola (distancia entre cresta y seno). Este proceso sufre una realimentación positiva, ya que a mayor altura de ola, mayor diferencia de velocidad y, por lo tanto, de presión del aire entre las zonas sobre la cresta y el seno. La fuerza de la gravedad y la tensión superficial del agua (cantidad de energía necesaria para aumentar su superficie por unidad de área) que tenderá a reducir la curvatura de su superficie para disminuir su estado de energía a nivel molecular, establecerán los límites del incremento de la altura de ola. Por otro lado, la distribución de fuerzas tangenciales sobre las partículas de agua a la que nos referíamos más arriba, perecen ser origen de un
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
6
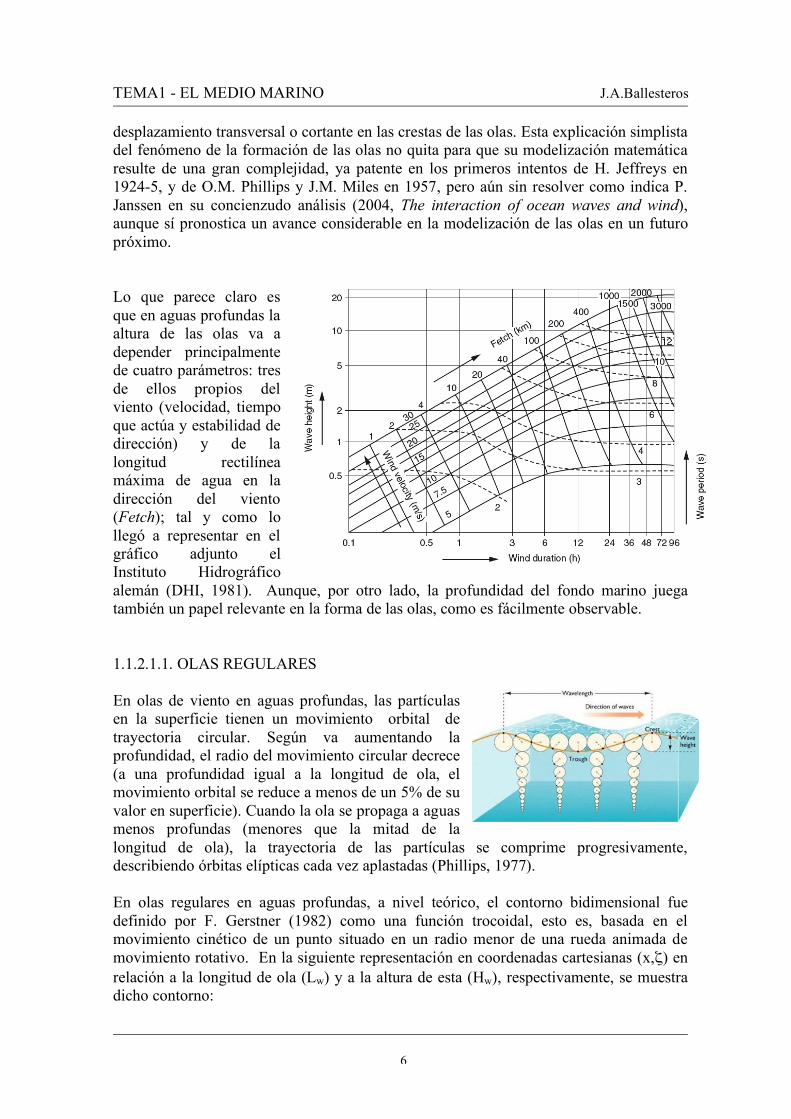
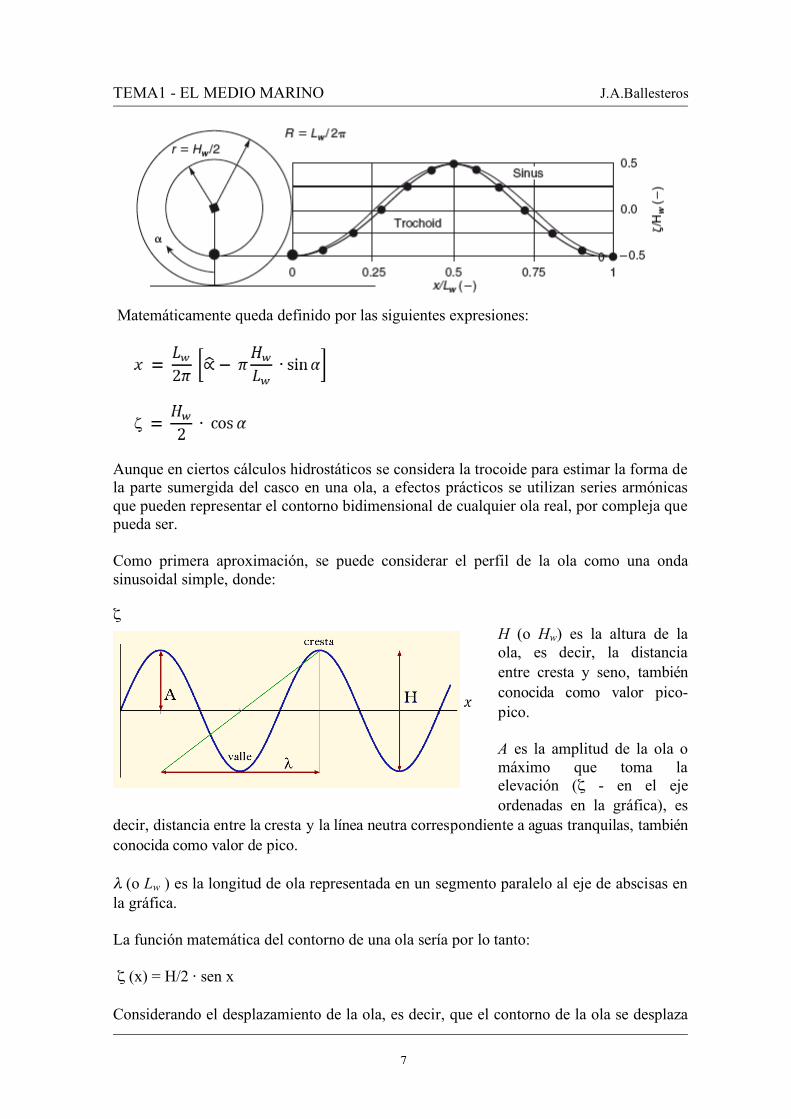
desplazamiento transversal o cortante en las crestas de las olas. Esta explicación simplista del fenómeno de la formación de las olas no quita para que su modelización matemática resulte de una gran complejidad, ya patente en los primeros intentos de H. Jeffreys en 1924-5, y de O.M. Phillips y J.M. Miles en 1957, pero aún sin resolver como indica P. Janssen en su concienzudo análisis (2004, The interaction of ocean waves and wind), aunque sí pronostica un avance considerable en la modelización de las olas en un futuro próximo. Lo que parece claro es que en aguas profundas la altura de las olas va a depender principalmente de cuatro parámetros: tres de ellos propios del viento (velocidad, tiempo que actúa y estabilidad de dirección) y de la longitud rectilínea máxima de agua en la dirección del viento (Fetch); tal y como lo llegó a representar en el gráfico adjunto el Instituto Hidrográfico alemán (DHI, 1981). Aunque, por otro lado, la profundidad del fondo marino juega también un papel relevante en la forma de las olas, como es fácilmente observable. 1.1.2.1.1. OLAS REGULARES En olas de viento en aguas profundas, las partículas en la superficie tienen un movimiento orbital de trayectoria circular. Según va aumentando la profundidad, el radio del movimiento circular decrece (a una profundidad igual a la longitud de ola, el movimiento orbital se reduce a menos de un 5% de su valor en superficie). Cuando la ola se propaga a aguas menos profundas (menores que la mitad de la longitud de ola), la trayectoria de las partículas se comprime progresivamente, describiendo órbitas elípticas cada vez aplastadas (Phillips, 1977). En olas regulares en aguas profundas, a nivel teórico, el contorno bidimensional fue definido por F. Gerstner (1982) como una función trocoidal, esto es, basada en el movimiento cinético de un punto situado en un radio menor de una rueda animada de movimiento rotativo. En la siguiente representación en coordenadas cartesianas (x,ζ) en relación a la longitud de ola (Lw) y a la altura de esta (Hw), respectivamente, se muestra dicho contorno:
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
7
Matemáticamente queda definido por las siguientes expresiones:
Aunque en ciertos cálculos hidrostáticos se considera la trocoide para estimar la forma de la parte sumergida del casco en una ola, a efectos prácticos se utilizan series armónicas que pueden representar el contorno bidimensional de cualquier ola real, por compleja que pueda ser. Como primera aproximación, se puede considerar el perfil de la ola como una onda sinusoidal simple, donde: ζ
H (o Hw) es la altura de la ola, es decir, la distancia entre cresta y seno, también conocida como valor pico-pico. A es la amplitud de la ola o máximo que toma la elevación (ζ - en el eje ordenadas en la gráfica), es
decir, distancia entre la cresta y la línea neutra correspondiente a aguas tranquilas, también conocida como valor de pico. λ (o Lw ) es la longitud de ola representada en un segmento paralelo al eje de abscisas en la gráfica. La función matemática del contorno de una ola sería por lo tanto: ζ (x) = H/2 ⋅ sen x Considerando el desplazamiento de la ola, es decir, que el contorno de la ola se desplaza
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
8
en un tiempo t un ciclo completo, o lo que es igual, que un punto sobre la superficie de la ola está animado por un movimiento armónico equivalente, la función representativa sería: ζ (x,t) = H/2 ⋅ cos (k ⋅ x − ω ⋅ t) o bien, ζ (x,t) = H/2 ⋅ cos (k ⋅ x − 2π/T ⋅ t), ya que ω = 2π/T donde, T, periodo o tiempo que transcurre entre el paso de dos crestas o senos, o bien, el tiempo empleado por una cresta o un seno en recorrer una distancia igual a la longitud de ola. Su inversa sería la frecuencia (f), o número de crestas por unidad de tiempo; y k, el número de ondas e igual a 2π/ Lw Un parámetro interesante es la velocidad de ola (también llamada velocidad de fase o celeridad), es decir, la velocidad de propagación, que se calcula dividiendo la longitud de onda por el período (Airy, 1845):
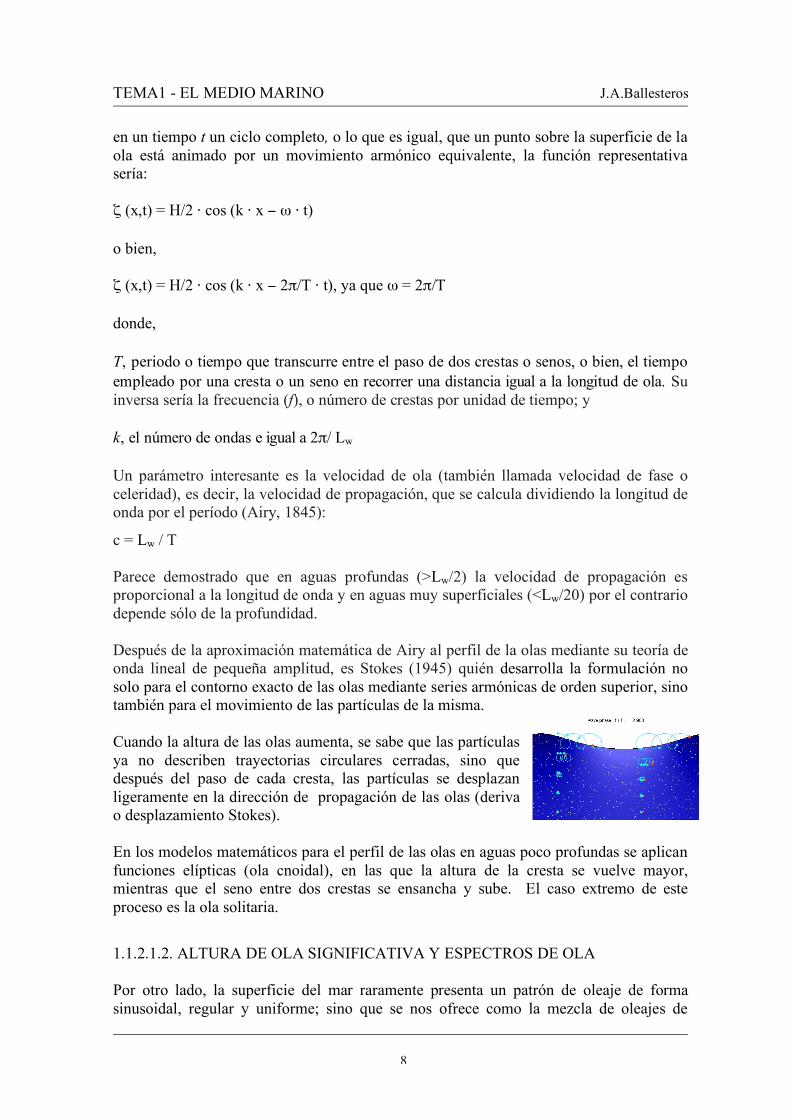
c = Lw / T Parece demostrado que en aguas profundas (>Lw/2) la velocidad de propagación es proporcional a la longitud de onda y en aguas muy superficiales (<Lw/20) por el contrario depende sólo de la profundidad. Después de la aproximación matemática de Airy al perfil de la olas mediante su teoría de onda lineal de pequeña amplitud, es Stokes (1945) quién desarrolla la formulación no solo para el contorno exacto de las olas mediante series armónicas de orden superior, sino también para el movimiento de las partículas de la misma. Cuando la altura de las olas aumenta, se sabe que las partículas ya no describen trayectorias circulares cerradas, sino que después del paso de cada cresta, las partículas se desplazan ligeramente en la dirección de propagación de las olas (deriva o desplazamiento Stokes). En los modelos matemáticos para el perfil de las olas en aguas poco profundas se aplican funciones elípticas (ola cnoidal), en las que la altura de la cresta se vuelve mayor, mientras que el seno entre dos crestas se ensancha y sube. El caso extremo de este proceso es la ola solitaria. 1.1.2.1.2. ALTURA DE OLA SIGNIFICATIVA Y ESPECTROS DE OLA Por otro lado, la superficie del mar raramente presenta un patrón de oleaje de forma sinusoidal, regular y uniforme; sino que se nos ofrece como la mezcla de oleajes de

TEMA1 - EL MEDIO MARINO J.A.Ballesteros
9
diferentes alturas, longitudes y direcciones. A este espectro irregular se le puede realizar un acercamiento matemático mediante la transformada de Fourier y descomponerlo en la suma de ondas sinusoidales de distintas amplitudes, frecuencias y direcciones parciales, con un desfase aleatorio entre ellas de probabilidad uniforme para todos los casos (Modelos de Pierson y de Longuet-Higgins). Resulta evidente que aunque el estado del sistema pueda estar determinado en parte por acciones predecibles, otra parte son procesos aleatorios (al menos al día de hoy), es decir, que podemos calificar el estado de la mar como un proceso estocástico y analizarlo en términos estadísticos, lo que sin lugar a dudas será muy útil para algunas cuestiones prácticas. Así por ejemplo, la altura significativa del oleaje o altura de ola significante (Hs o H1/3) es uno de los parámetros estadísticos más utilizados y cuantifica la altura media del tercio de olas más altas; habiendo sido registrada la altura de las olas, ya sea por un observador experimentado, mediante registro instrumental en balizas flotantes o equipos sumergidos,
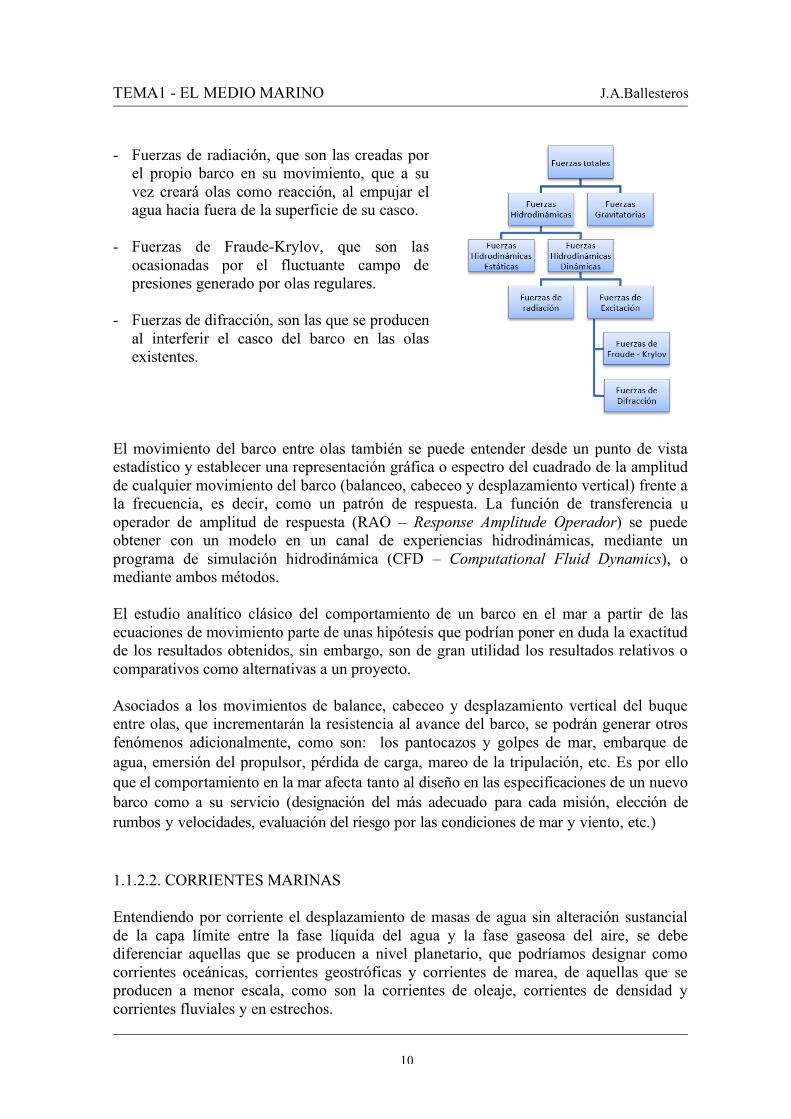
o mediante sistemas de radares terrestres o de telemetría satelital. En menor grado también se utilizan otros valores estadísticos: altura de la ola media de la 1/n mayores (además de H1/3, es frecuente H1/10 y H1/20), altura de ola media (Hm), altura de ola media cuadrática (Hrms), etc. Estos valores estadísticos tienen un papel decisivo, por ejemplo, para establecer las zonas de navegación que requieren un mayor francobordo o reserva de flotabilidad. La instrumentación actual permiten obtener espectros en frecuencia de densidad de energía a partir de mediciones discretas (distribución de Rayleigh), permitiendo la estima de parámetro de altura y periodo de oleaje. Ante el desconocimiento del espectro de ola real de un mar en particular, se puede recurrir a un espectro idealizado, por ejemplo, mediante el dato de la ola significativa (o el viento asociado) con el modelo Bretschneider o ITTC; con la velocidad del viento a 10 m y el fetch con el modelo JONSWAP, para aguas costeras y fetch limitada; con el viento a19,5 m con modelo de Pierson-Moskowitz; con el espectro DNV, etc. 1.1.2.1.3. FUERZAS SOBRE EL BARCO Y MOVIMIENTOS DE ESTE Antes de analizar el comportamiento del barco navegando en el oleaje, resulta conveniente observar las fuerzas teóricas que actúan sobre el mismo. Así, prescindiendo de la viscosidad del agua, podemos distinguir: - Fuerzas hidrodinámicas estáticas (o hidrostáticas), que son las generadas por el empuje
hidrostático sobre el casco y que se van a encargar de devolver el barco a su posición de equilibrio (o no).
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
10
- Fuerzas de radiación, que son las creadas por
el propio barco en su movimiento, que a su vez creará olas como reacción, al empujar el agua hacia fuera de la superficie de su casco.
- Fuerzas de Fraude-Krylov, que son las
ocasionadas por el fluctuante campo de presiones generado por olas regulares.
- Fuerzas de difracción, son las que se producen
al interferir el casco del barco en las olas existentes.
El movimiento del barco entre olas también se puede entender desde un punto de vista estadístico y establecer una representación gráfica o espectro del cuadrado de la amplitud de cualquier movimiento del barco (balanceo, cabeceo y desplazamiento vertical) frente a la frecuencia, es decir, como un patrón de respuesta. La función de transferencia u operador de amplitud de respuesta (RAO – Response Amplitude Operador) se puede obtener con un modelo en un canal de experiencias hidrodinámicas, mediante un programa de simulación hidrodinámica (CFD – Computational Fluid Dynamics), o mediante ambos métodos. El estudio analítico clásico del comportamiento de un barco en el mar a partir de las ecuaciones de movimiento parte de unas hipótesis que podrían poner en duda la exactitud de los resultados obtenidos, sin embargo, son de gran utilidad los resultados relativos o comparativos como alternativas a un proyecto. Asociados a los movimientos de balance, cabeceo y desplazamiento vertical del buque entre olas, que incrementarán la resistencia al avance del barco, se podrán generar otros fenómenos adicionalmente, como son: los pantocazos y golpes de mar, embarque de agua, emersión del propulsor, pérdida de carga, mareo de la tripulación, etc. Es por ello que el comportamiento en la mar afecta tanto al diseño en las especificaciones de un nuevo barco como a su servicio (designación del más adecuado para cada misión, elección de rumbos y velocidades, evaluación del riesgo por las condiciones de mar y viento, etc.) 1.1.2.2. CORRIENTES MARINAS Entendiendo por corriente el desplazamiento de masas de agua sin alteración sustancial de la capa límite entre la fase líquida del agua y la fase gaseosa del aire, se debe diferenciar aquellas que se producen a nivel planetario, que podríamos designar como corrientes oceánicas, corrientes geostróficas y corrientes de marea, de aquellas que se producen a menor escala, como son la corrientes de oleaje, corrientes de densidad y corrientes fluviales y en estrechos.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
11
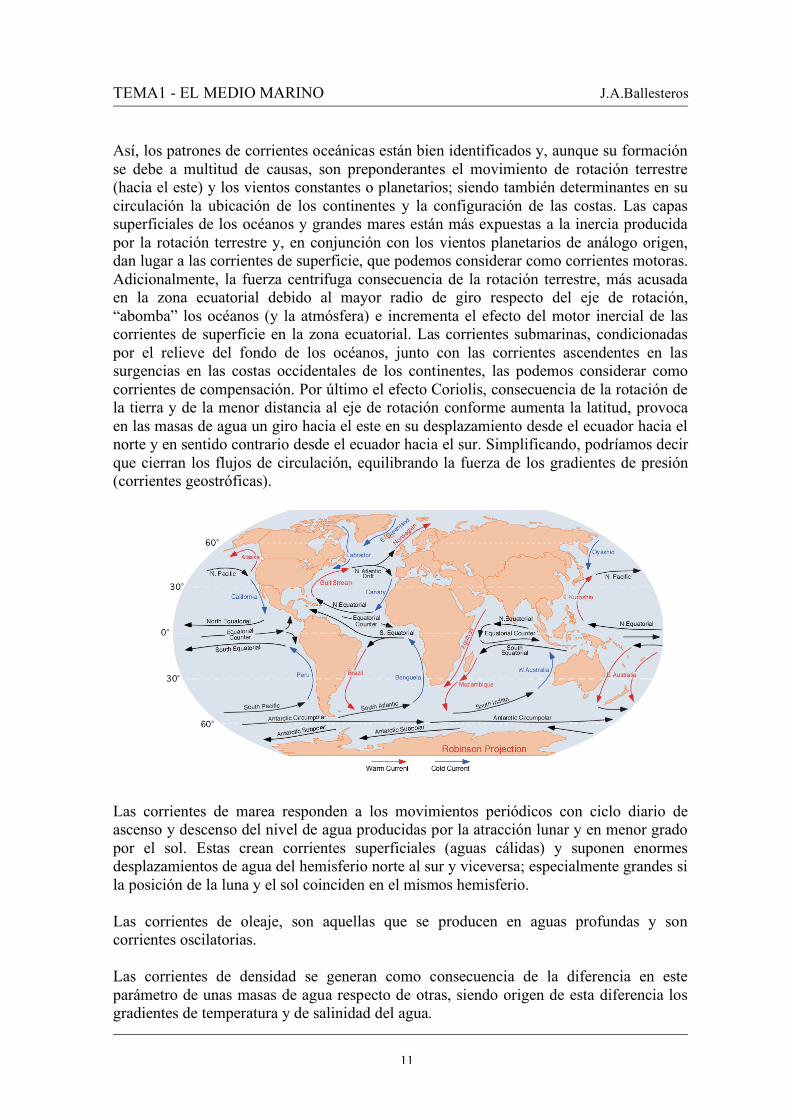
Así, los patrones de corrientes oceánicas están bien identificados y, aunque su formación se debe a multitud de causas, son preponderantes el movimiento de rotación terrestre (hacia el este) y los vientos constantes o planetarios; siendo también determinantes en su circulación la ubicación de los continentes y la configuración de las costas. Las capas superficiales de los océanos y grandes mares están más expuestas a la inercia producida por la rotación terrestre y, en conjunción con los vientos planetarios de análogo origen, dan lugar a las corrientes de superficie, que podemos considerar como corrientes motoras. Adicionalmente, la fuerza centrifuga consecuencia de la rotación terrestre, más acusada en la zona ecuatorial debido al mayor radio de giro respecto del eje de rotación, “abomba” los océanos (y la atmósfera) e incrementa el efecto del motor inercial de las corrientes de superficie en la zona ecuatorial. Las corrientes submarinas, condicionadas por el relieve del fondo de los océanos, junto con las corrientes ascendentes en las surgencias en las costas occidentales de los continentes, las podemos considerar como corrientes de compensación. Por último el efecto Coriolis, consecuencia de la rotación de la tierra y de la menor distancia al eje de rotación conforme aumenta la latitud, provoca en las masas de agua un giro hacia el este en su desplazamiento desde el ecuador hacia el norte y en sentido contrario desde el ecuador hacia el sur. Simplificando, podríamos decir que cierran los flujos de circulación, equilibrando la fuerza de los gradientes de presión (corrientes geostróficas). Las corrientes de marea responden a los movimientos periódicos con ciclo diario de ascenso y descenso del nivel de agua producidas por la atracción lunar y en menor grado por el sol. Estas crean corrientes superficiales (aguas cálidas) y suponen enormes desplazamientos de agua del hemisferio norte al sur y viceversa; especialmente grandes si la posición de la luna y el sol coinciden en el mismos hemisferio. Las corrientes de oleaje, son aquellas que se producen en aguas profundas y son corrientes oscilatorias. Las corrientes de densidad se generan como consecuencia de la diferencia en este parámetro de unas masas de agua respecto de otras, siendo origen de esta diferencia los gradientes de temperatura y de salinidad del agua.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
12
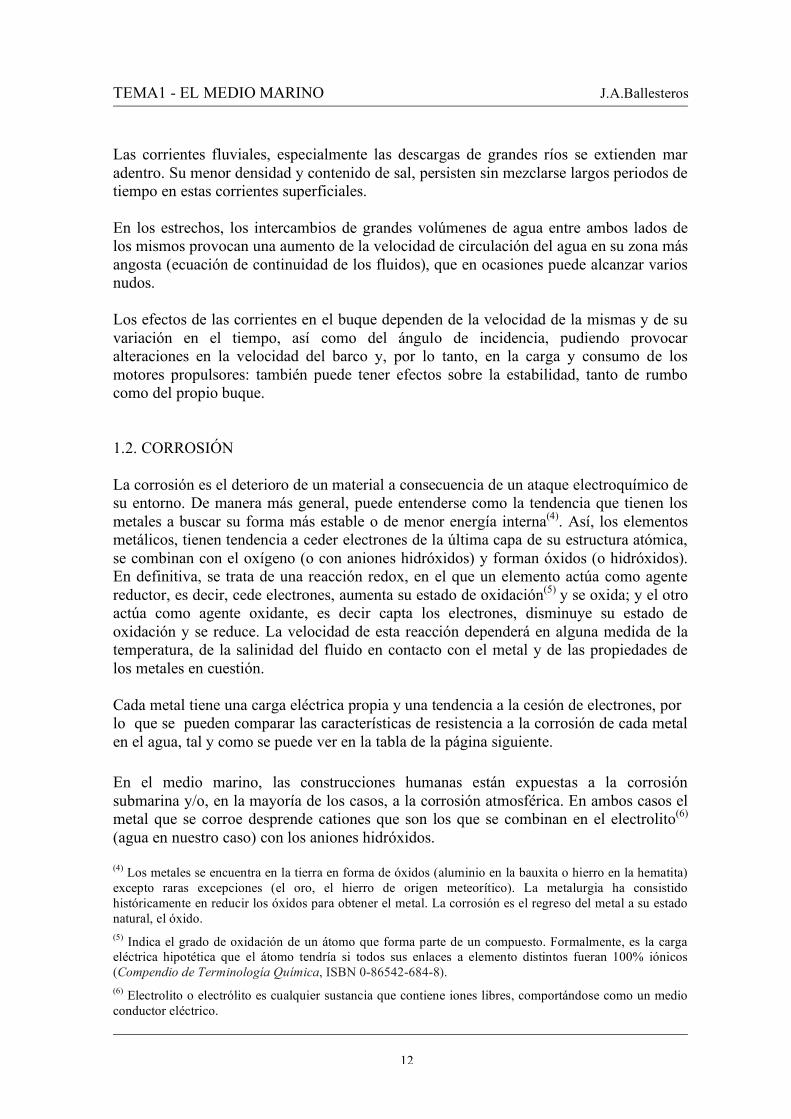
Las corrientes fluviales, especialmente las descargas de grandes ríos se extienden mar adentro. Su menor densidad y contenido de sal, persisten sin mezclarse largos periodos de tiempo en estas corrientes superficiales. En los estrechos, los intercambios de grandes volúmenes de agua entre ambos lados de los mismos provocan una aumento de la velocidad de circulación del agua en su zona más angosta (ecuación de continuidad de los fluidos), que en ocasiones puede alcanzar varios nudos. Los efectos de las corrientes en el buque dependen de la velocidad de la mismas y de su variación en el tiempo, así como del ángulo de incidencia, pudiendo provocar alteraciones en la velocidad del barco y, por lo tanto, en la carga y consumo de los motores propulsores: también puede tener efectos sobre la estabilidad, tanto de rumbo como del propio buque. 1.2. CORROSIÓN La corrosión es el deterioro de un material a consecuencia de un ataque electroquímico de su entorno. De manera más general, puede entenderse como la tendencia que tienen los metales a buscar su forma más estable o de menor energía interna(4). Así, los elementos metálicos, tienen tendencia a ceder electrones de la última capa de su estructura atómica, se combinan con el oxígeno (o con aniones hidróxidos) y forman óxidos (o hidróxidos). En definitiva, se trata de una reacción redox, en el que un elemento actúa como agente reductor, es decir, cede electrones, aumenta su estado de oxidación(5) y se oxida; y el otro actúa como agente oxidante, es decir capta los electrones, disminuye su estado de oxidación y se reduce. La velocidad de esta reacción dependerá en alguna medida de la temperatura, de la salinidad del fluido en contacto con el metal y de las propiedades de los metales en cuestión. Cada metal tiene una carga eléctrica propia y una tendencia a la cesión de electrones, por lo que se pueden comparar las características de resistencia a la corrosión de cada metal en el agua, tal y como se puede ver en la tabla de la página siguiente. En el medio marino, las construcciones humanas están expuestas a la corrosión submarina y/o, en la mayoría de los casos, a la corrosión atmosférica. En ambos casos el metal que se corroe desprende cationes que son los que se combinan en el electrolito(6) (agua en nuestro caso) con los aniones hidróxidos. (4) Los metales se encuentra en la tierra en forma de óxidos (aluminio en la bauxita o hierro en la hematita) excepto raras excepciones (el oro, el hierro de origen meteorítico). La metalurgia ha consistido históricamente en reducir los óxidos para obtener el metal. La corrosión es el regreso del metal a su estado natural, el óxido. (5) Indica el grado de oxidación de un átomo que forma parte de un compuesto. Formalmente, es la carga eléctrica hipotética que el átomo tendría si todos sus enlaces a elemento distintos fueran 100% iónicos (Compendio de Terminología Química, ISBN 0-86542-684-8). (6) Electrolito o electrólito es cualquier sustancia que contiene iones libres, comportándose como un medio conductor eléctrico.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
13
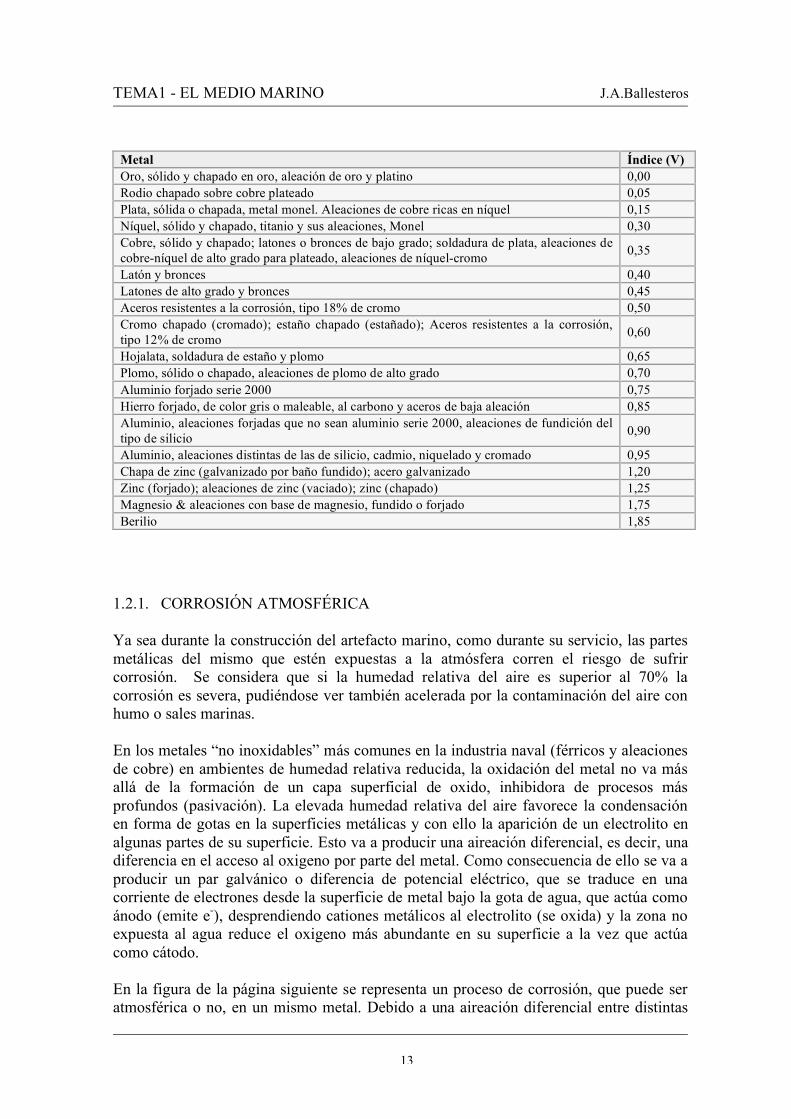
1.2.1. CORROSIÓN ATMOSFÉRICA Ya sea durante la construcción del artefacto marino, como durante su servicio, las partes metálicas del mismo que estén expuestas a la atmósfera corren el riesgo de sufrir corrosión. Se considera que si la humedad relativa del aire es superior al 70% la corrosión es severa, pudiéndose ver también acelerada por la contaminación del aire con humo o sales marinas. En los metales “no inoxidables” más comunes en la industria naval (férricos y aleaciones de cobre) en ambientes de humedad relativa reducida, la oxidación del metal no va más allá de la formación de un capa superficial de oxido, inhibidora de procesos más profundos (pasivación). La elevada humedad relativa del aire favorece la condensación en forma de gotas en la superficies metálicas y con ello la aparición de un electrolito en algunas partes de su superficie. Esto va a producir una aireación diferencial, es decir, una diferencia en el acceso al oxigeno por parte del metal. Como consecuencia de ello se va a producir un par galvánico o diferencia de potencial eléctrico, que se traduce en una corriente de electrones desde la superficie de metal bajo la gota de agua, que actúa como ánodo (emite e-), desprendiendo cationes metálicos al electrolito (se oxida) y la zona no expuesta al agua reduce el oxigeno más abundante en su superficie a la vez que actúa como cátodo. En la figura de la página siguiente se representa un proceso de corrosión, que puede ser atmosférica o no, en un mismo metal. Debido a una aireación diferencial entre distintas
Metal Índice (V) Oro, sólido y chapado en oro, aleación de oro y platino 0,00 Rodio chapado sobre cobre plateado 0,05 Plata, sólida o chapada, metal monel. Aleaciones de cobre ricas en níquel 0,15 Níquel, sólido y chapado, titanio y sus aleaciones, Monel 0,30 Cobre, sólido y chapado; latones o bronces de bajo grado; soldadura de plata, aleaciones de cobre-níquel de alto grado para plateado, aleaciones de níquel-cromo 0,35
Latón y bronces 0,40 Latones de alto grado y bronces 0,45 Aceros resistentes a la corrosión, tipo 18% de cromo 0,50 Cromo chapado (cromado); estaño chapado (estañado); Aceros resistentes a la corrosión, tipo 12% de cromo 0,60
Hojalata, soldadura de estaño y plomo 0,65 Plomo, sólido o chapado, aleaciones de plomo de alto grado 0,70 Aluminio forjado serie 2000 0,75 Hierro forjado, de color gris o maleable, al carbono y aceros de baja aleación 0,85 Aluminio, aleaciones forjadas que no sean aluminio serie 2000, aleaciones de fundición del tipo de silicio 0,90
Aluminio, aleaciones distintas de las de silicio, cadmio, niquelado y cromado 0,95 Chapa de zinc (galvanizado por baño fundido); acero galvanizado 1,20 Zinc (forjado); aleaciones de zinc (vaciado); zinc (chapado) 1,25 Magnesio & aleaciones con base de magnesio, fundido o forjado 1,75 Berilio 1,85
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
14
zonas de la superficie, ya sea por gotas de agua u otra circunstancia, por ejemplo, pérdida de revestimiento, se crea un proceso de corrosión electroquímica. Cuando dos metales diferentes están en contacto eléctrico, uno de ellos tendrá una mayor tendencia a ceder electrones (menor electronegatividad), se producirá un par galvánico, es decir, una diferencia de potencial
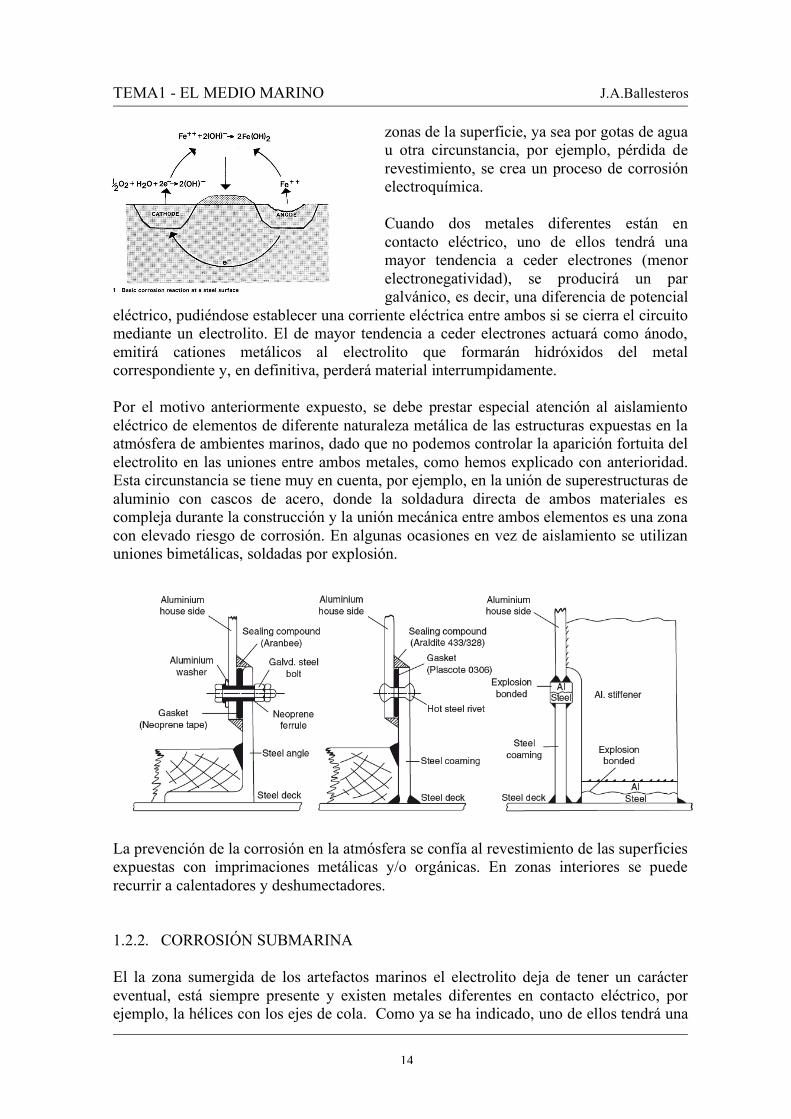
eléctrico, pudiéndose establecer una corriente eléctrica entre ambos si se cierra el circuito mediante un electrolito. El de mayor tendencia a ceder electrones actuará como ánodo, emitirá cationes metálicos al electrolito que formarán hidróxidos del metal correspondiente y, en definitiva, perderá material interrumpidamente. Por el motivo anteriormente expuesto, se debe prestar especial atención al aislamiento eléctrico de elementos de diferente naturaleza metálica de las estructuras expuestas en la atmósfera de ambientes marinos, dado que no podemos controlar la aparición fortuita del electrolito en las uniones entre ambos metales, como hemos explicado con anterioridad. Esta circunstancia se tiene muy en cuenta, por ejemplo, en la unión de superestructuras de aluminio con cascos de acero, donde la soldadura directa de ambos materiales es compleja durante la construcción y la unión mecánica entre ambos elementos es una zona con elevado riesgo de corrosión. En algunas ocasiones en vez de aislamiento se utilizan uniones bimetálicas, soldadas por explosión.
La prevención de la corrosión en la atmósfera se confía al revestimiento de las superficies expuestas con imprimaciones metálicas y/o orgánicas. En zonas interiores se puede recurrir a calentadores y deshumectadores. 1.2.2. CORROSIÓN SUBMARINA El la zona sumergida de los artefactos marinos el electrolito deja de tener un carácter eventual, está siempre presente y existen metales diferentes en contacto eléctrico, por ejemplo, la hélices con los ejes de cola. Como ya se ha indicado, uno de ellos tendrá una
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
15
mayor tendencia a ceder electrones que el otro, se producirá un par galvánico, por la diferencia de potencial eléctrico de cada metal respecto del agua, y se establecerá imperiosamente una corriente eléctrica entre ambos, con cesión de cationes metálicos que formarán hidróxidos ininterrumpidamente y el consiguiente deterioro del material. Este proceso se verá acentuado por: la concentración de sales en el agua, la temperatura de esta, eventualmente por otros elementos ajenos al propio artefacto y por el movimiento de la masa de agua respecto a los elementos sumergidos, que la experiencia demuestra es un factor de primer orden. De forma contraria se ve atenuada por el revestimiento de las superficies sumergidas con imprimaciones metálicas y/o orgánicas. La prevención de la corrosión galvánica consiste en reducir el potencial eléctrico relativo del elemento a proteger (más negativo), por debajo de un valor definido para cada metal, en el cual el proceso electroquímico se invierte, es decir, se transforma en cátodo. Así, se utilizan habitualmente dos técnicas para la protección catódica: ánodos de sacrificio y corrientes impresas. 1.2.2.1. ÁNODOS DE SACRIFICIO Se trata de incorporan metales negativos, llamados ánodos de sacrificio por el desgaste del material que actúa como ánodo, que suelen ser de metal o de aleaciones de cinc, magnesio o de aluminio. Estos de diluyen en el mar y hay que cambiarlos cada cierto tiempo. Resulta imprescindible que estén conectados eléctricamente a los elementos a proteger y, claro está, resultaría absolutamente contraproducente el pintado de los mismos. En las obras vivas de los barcos los ánodos se pueden considerar como pequeños apéndices que, dada la posibilidad de que existan en gran número, pueden aumentar la resistencia al avance de forma no despreciable, con las consecuencias que esto conlleva. 1.2.2.2. CORRIENTE IMPRESA
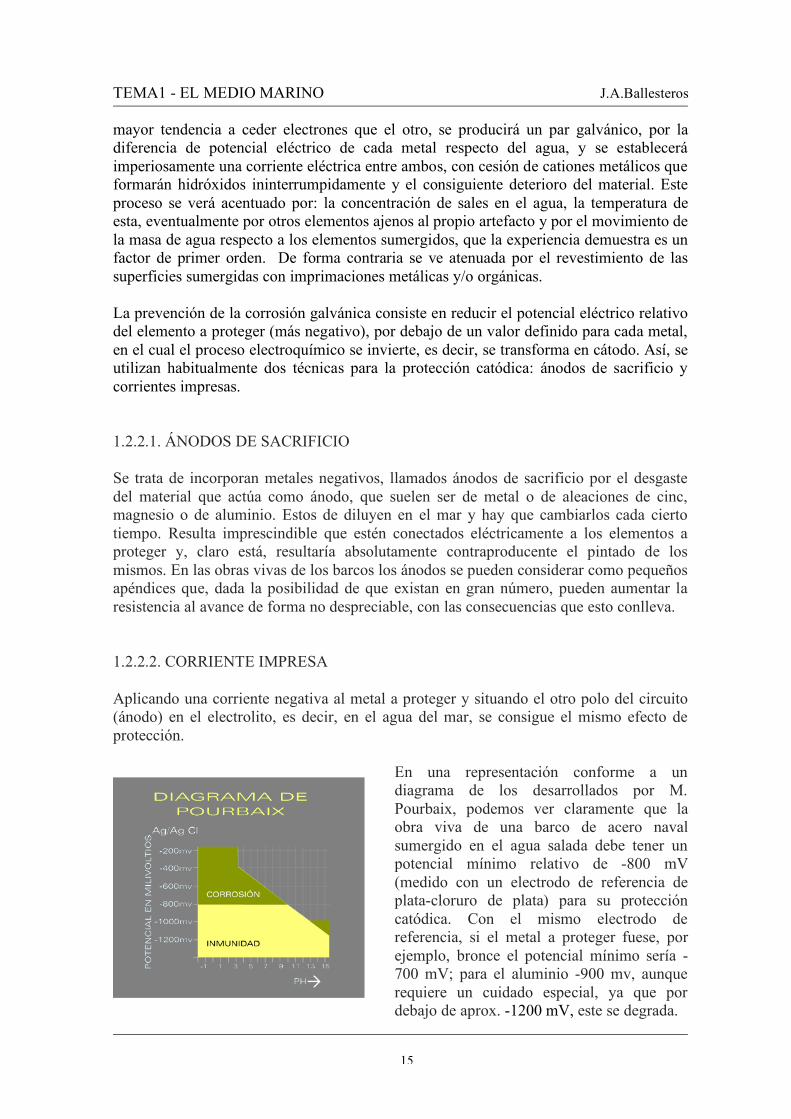
Aplicando una corriente negativa al metal a proteger y situando el otro polo del circuito (ánodo) en el electrolito, es decir, en el agua del mar, se consigue el mismo efecto de protección.
En una representación conforme a un diagrama de los desarrollados por M. Pourbaix, podemos ver claramente que la obra viva de una barco de acero naval sumergido en el agua salada debe tener un potencial mínimo relativo de -800 mV (medido con un electrodo de referencia de plata-cloruro de plata) para su protección catódica. Con el mismo electrodo de referencia, si el metal a proteger fuese, por ejemplo, bronce el potencial mínimo sería -700 mV; para el aluminio -900 mv, aunque requiere un cuidado especial, ya que por debajo de aprox. -1200 mV, este se degrada.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
16
En los equipos de protección catódica por corriente impresa se utiliza una fuente de alimentación de corriente continua autorregulada para suministrar la corriente de protección. Para el ánodo ha sido habitual utilizar plomo-plata, platino-aleaciones de platino y, en la actualidad, se tiende a emplear titanio activado con platino y otros metales nobles. El punto de regulación (set point) se puede establecer de forma manual, aunque lo habitual es que se realice a través de un electrodo de referencia, de plata-cloruro de plata o, más recientemente, de cinc aislado. Es especialmente importante que todos los elementos sumergidos a proteger estén unidos mediante el correspondiente conductor eléctrico que, debido a la bajas tensiones de trabajo (mV), deberán tener la sección adecuada. 1.2.3. CORROSIÓN POR TENSIONES En ambiente corrosivo, un fenómeno también digno de consideración es aquel que se produce en elementos sometidos a tensiones mecánicas, ya sea en zonas de concentración de esfuerzos o por tensiones residuales de fabricación que no han sido eliminadas con el correspondiente tratamiento térmico; lo que puede provocar una corrosión intergranular y grietas, no detectables a simple vista por su tamaño microscópico, pero de consecuencias previsibles. 1.2.4. CORROSIÓN / EROSIÓN Un trato especial requiere la corrosión en conducciones, enfriadores y otros elementos por cuyo interior circula un fluido electrolítico. Si bien la erosión del material es un proceso puramente mecánico, se produce muchas veces asociado a un proceso electro-químico de corrosión, dañando conjuntamente el material. Una de las posibilidades es que las burbujas de aire que puede arrastrar el fluido dentro de la conducción choquen contra el metal, erosionándolo, y se le suele llamar “ataque por impacto”. Esta erosión elimina la capa de protección que el metal pueda tener en esa zona, que empieza a actuar como ánodo, iniciándose un corrosión localizada. Otra posibilidad es que el proceso se inicie por cavitación. Debido a un incremento localizado de la velocidad de circulación del fluido, a menudo asociada a una disminución de la sección, la presión del líquido en esa zona puede caer por debajo de la presión de vapor del fluido, formándose burbujas que implosionaran cuando la presión circundante así lo provoque. Asociado a este fenómeno de implosión se desprende una considerable cantidad de energía y si esto ocurre en la zona adyacente a la superficie del metal este resultará erosionado. Aunque se trata de un proceso mecánico, al igual que en el caso anterior en la zona dañada se puede iniciar un proceso de corrosión electroquímica. Es norma habitual la protección de estos equipos susceptibles de corrosión mediante la instalación de ánodos de sacrificio, especialmente en las zonas cuyos elementos están fabricados en metales más sensibles (aluminio, aleaciones ligeras…), también porque el fabricante de un cierto equipo puede no tener control sobre los metales que se instalarán
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
17
próximos al suyo, o bien por su configuración especial y/o precio elevado. En los últimos años existe la tendencia a la instalación de ánodos en las tomas de mar activados mediante el correspondiente regulador de corriente que, con un funcionamiento análogo a los equipos de protección catódica (pero sin serlo realmente), producen óxidos y sales metálicas que crean películas protectoras en el interior de las conducciones. 1.3. DEGRADACIÓN DEL AISLAMIENTO ELÉCTRICO En la industria naval se utilizan multitud de equipos eléctricos y electrónicos que, dependiendo de su aplicación y naturaleza van a estar provistos de diferente tipo de aislamiento eléctrico. En cualquier caso, se trate de los bobinados de un motor o generador, de un transformador, de una conducción eléctrica entre dos puntos, de un interruptor, de un equipo electrónico, etc., con toda probabilidad dispondrá de uno o varios tipos de aislamiento eléctrico; ya sea con la finalidad de asegurar la función del elemento y preservarla a lo largo del tiempo, es decir, evitar el contacto o paso de corriente entre las diferentes partes conductoras (aislamiento de la instalación), o bien para la protección de las personas y de los medios (aislamiento protector); cumpliéndose en algunos casos ambos propósitos de forma conjunta. Así, la característica esencial que define a un aislante eléctrico es su capacidad para no conducir la electricidad, manteniendo la corriente dentro del elemento que alberga, es decir, evitando que fluya a otro conductor eléctrico de diferente potencial eléctrico que se encuentre próximo. Lamentablemente, esto no se consigue de forma íntegra: los materiales aislantes presentan elevada resistencia al desplazamiento de las cargas eléctricas pero esta resistencia no es infinita. En contacto con un conductor eléctrico que transporta una corriente, una parte fluye por la superficie del aislamiento (corriente de fuga superficial) y otra a través de él (corriente de conducción); aunque es frecuente que a la combinación de ambas se le denomine de forma genérica corriente de fuga. Desde un punto de vista eléctrico para un material aislante se pueden cuantificar, entre otros, los siguientes parámetros eléctricos: - Resistencia de aislamiento o de prueba (kΩ, MΩ y TΩ,). Es la medida de la resistencia obtenida mediante la prueba de aislamiento, ya sea entre un conductor y la parte externa de su aislamiento, entre un conductor y tierra, etc. - Resistencia superficial de aislamiento (Ω). Es la medida de la resistencia que ofrece un material al paso de la corriente cuando se aplica sobre dos puntos de su superficie una diferencia de potencial eléctrico. Se realiza en laboratorio mediante procedimientos normalizados. La resistividad superficial en materiales plásticos toma habitualmente valores entre 1010 y 1016 Ω. La suciedad (grasa, polvo, etc.) y la rugosidad, al favorecer esta la primera, hacen disminuir el valor que toma este parámetro. - Resistividad de aislamiento transversal o volumétrica (Ωcm). Es la medida de la resistencia que ofrece el material al paso de la corriente cuando es aplicada una diferencia de potencial entre dos caras opuestas del material. En los aislantes plásticos de uso común varía entre 1010 y 1016 Ωcm.
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
18
- Rigidez dieléctrica o rigidez electrostática (V/m en SI). Que mide el valor de la tensión para el cual se produce una descarga disruptiva entre dos puntos, es decir, para el cual el material deja de comportarse como aislante y pasa a ser conductor. - Permitividad absoluta (F/m en SI) y permitividad relativa (adimensional, referida a la permitividad en el vacio). Cuantifica la tendencia del material a polarizarse ante una campo eléctrico y debe tener una valor reducido en los aislantes eléctricos. El aislante eléctrico dependiendo de la aplicación y ubicación deberá reunir adicionalmente otra propiedades, como son resistencia térmica y mecánica, así como estabilidad química en dicho medio.. Dependiendo de la aplicación se utilizan como aislantes eléctricos industriales diferentes materiales, como pueden ser el caucho natural y otros polímeros sintéticos, tales como estireno-butadieno (SBR), etileno-propileno (EPR), resinas epoxi o poliepóxidos, isobutileno-isopreno (IIR) o butilo, policloropreno o neopreno, melamina-formaldehido (MF), poliuretano (PUR), polietileno (PE), policlorobifenilos (PCB) o bifenilos policlorados, etc.; así como productos cerámicos. Sin embargo, a pesar de la buena selección de un aislamiento eléctrico, el deterioro del mismo comenzará con toda probabilidad desde el primer día de uso, pudiéndose considerar cuatro causas básicas para su degradación, aunque en la práctica suelen interactuar entre ellas mermando de forma progresiva su función. Estas son: - Fatiga mecánica. Dejando a un lado los posibles daños mecánicos directos por golpes, rozaduras, roedores etc., la fatiga mecánica de los asilamientos pude sobrevenir por vibraciones de la máquina eléctrica en su funcionamiento: máquinas rotativas desequilibradas, paradas y arranques frecuentes que hacen que la máquina pase por frecuencias críticas de vibración, etc. - Fatiga térmica. El funcionamiento de la máquina eléctrica en ambientes excesivamente cálidos o fríos, puede ocasionar expansiones y contracciones del aislamiento que den lugar a grietas y al deterioro prematuro de este. De igual forma el deterioro se puede producir, por el elevado número de ciclos de arranque y parada, con periodos asociados de calentamiento y enfriamientos quizá no previstos en el diseño de la máquina. - Fatiga eléctrica. El diseño de una máquina eléctrica y la elección del aislamiento se hace para unos parámetros eléctricos concretos, a veces muy ajustados. La desviación respecto de estos valores de diseño en las tensiones y las intensidades de corriente pueden ocasionar una fatiga anormal con la aparición de grietas y deslaminaciones del aislamiento (aunque puedan estar asociados en buena medida al efecto Joule, esta componente térmica es consecuencia de una deficiencia de origen eléctrico). - Ataque químico o ambiental. Vapores corrosivos, suciedad, aceites, óxidos y sales de diversa índole; sin olvidarnos de la humedad y del ambiente salino propios del medio marino, así como de la humedad adicional que pueden aportar otros procesos en las proximidades la máquina eléctrica, degradarán o reducirán la efectividad de los aislamientos en mayor o menor medida dependiendo de si esos factores se han tenido en
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
19
cuenta en las fases de diseño o de selección del equipo. Como consecuencia de la degradación de los aislamientos eléctricos se pueden producir daños permanentes y muy costosos en las máquinas y sistemas eléctricos y, lo que es más grave, lesiones personales e incluso la muerte. A la vista de las causas básicas de su deterioro, queda claro que la prevención de una avería por fallo de aislamiento empieza en el momento del diseño o selección de la máquina eléctrica. Así por ejemplo, un alternador marino requerirá un revestimiento especial de sus bobinados, con resina epoxi o similar; resistencias de caldeo para reducir la fatiga térmica y la condensación interior debido a la previsible elevada humedad ambiental, etc. De igual forma se deberá poner atención en su montaje y en su funcionamiento, para atenuar también los riesgos de origen mecánico y eléctrico. Asimismo, convendrá realizar las labores de mantenimiento adecuadas, en ocasiones relegadas en lo que a los elementos eléctricos se refiere, incluyendo entre esas la medición periódica de aislamientos; con el consiguiente carácter preventivo y predictivo. Salvo en ocasiones fortuitas, la pérdida de resistencia del aislamiento se produce gradualmente, por lo que la medición periódica de la misma permite la planificación de las acciones correctoras. La medición de aislamientos requiere de un megóhmetro, vulgarmente llamado Megger por la marca comercial que introdujo el primer instrumento portátil en 1889. Con ayuda de este instrumento se aplica un tensión de prueba (E) a través del elemento aislante y, con la medida de la intensidad (I) por parte del aparato, conforme a la Ley de Ohm (R = E / I), este indica la resistencia de prueba de aislamiento. Las tensiones de prueba son elevadas, pudiendo llegar a varios kV, y producidas por un generador de corriente continua de tipo magneto-eléctrico (manual o electrónico), siendo el valor de la tensión de prueba función de la resistencia a medir. En las mediciones de aislamiento, al aplicar la tensión de prueba se generan varias corrientes transitorias además de la de fuga superficial y de la de conducción nombradas más arriba; estas son: la corriente de carga capacitiva del aislamiento, que cae exponencialmente a un valor próximo a cero una vez cargado el aislante (en pocos segundos), y la corriente de absorción o polarización, formada por hasta tres componentes (deriva de electrones libres, distorsión molecular por circulación de electrones alrededor del núcleo y alineación de moléculas polarizadas), que tenderá a cero en unos minutos. Dependiendo de la naturaleza del material aislante y de su estado (humedad, despolimerización, etc.), la corriente de absorción se presentará en mayor o menor medida. 1.4. ADHERENCIAS BIOLÓGICAS Los elementos sumergidos en un fluido cualquiera tienen tendencia en muchos casos a sufrir adherencias en forma de depósitos que pueden tener consecuencias no deseadas. Refiriéndonos concretamente al ámbito marino, el agua de mar está llena de organismos vivos, algunos de los cuales pueden encontrar un hábitat adecuado para su existencia en la superficie mojada de los artefactos o equipos fabricados por el hombre en contacto con
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
20
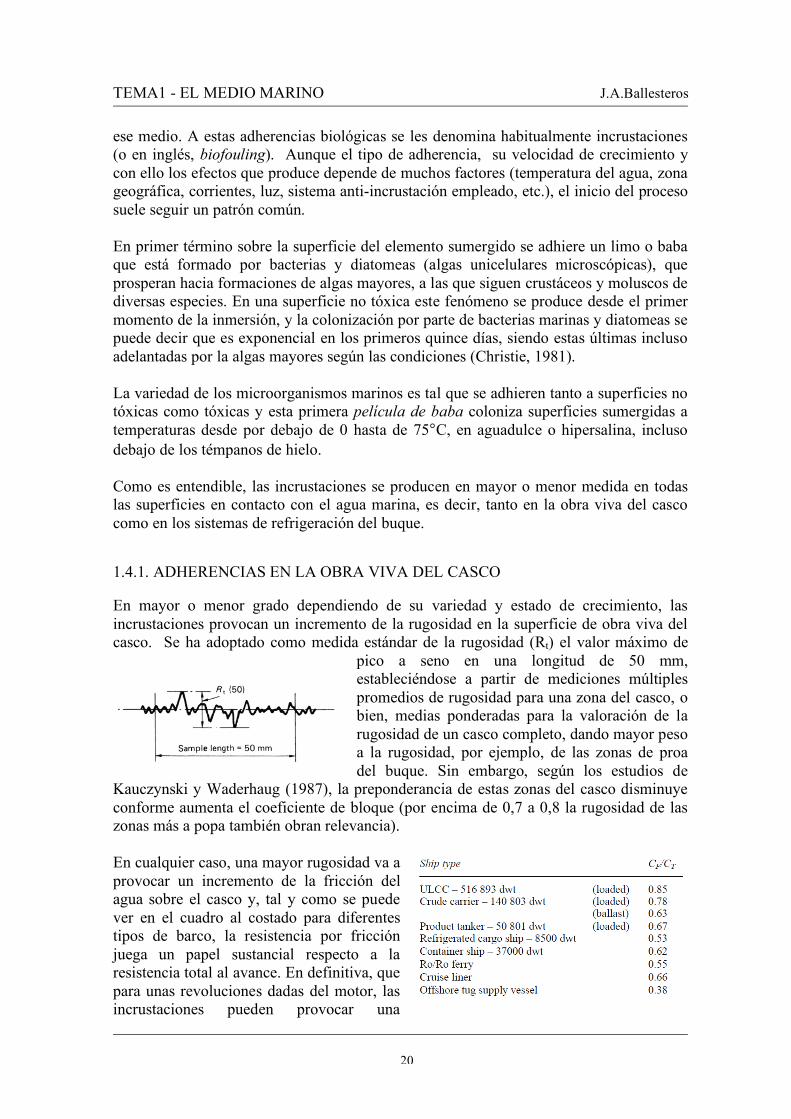
ese medio. A estas adherencias biológicas se les denomina habitualmente incrustaciones (o en inglés, biofouling). Aunque el tipo de adherencia, su velocidad de crecimiento y con ello los efectos que produce depende de muchos factores (temperatura del agua, zona geográfica, corrientes, luz, sistema anti-incrustación empleado, etc.), el inicio del proceso suele seguir un patrón común. En primer término sobre la superficie del elemento sumergido se adhiere un limo o baba que está formado por bacterias y diatomeas (algas unicelulares microscópicas), que prosperan hacia formaciones de algas mayores, a las que siguen crustáceos y moluscos de diversas especies. En una superficie no tóxica este fenómeno se produce desde el primer momento de la inmersión, y la colonización por parte de bacterias marinas y diatomeas se puede decir que es exponencial en los primeros quince días, siendo estas últimas incluso adelantadas por la algas mayores según las condiciones (Christie, 1981). La variedad de los microorganismos marinos es tal que se adhieren tanto a superficies no tóxicas como tóxicas y esta primera película de baba coloniza superficies sumergidas a temperaturas desde por debajo de 0 hasta de 75°C, en aguadulce o hipersalina, incluso debajo de los témpanos de hielo. Como es entendible, las incrustaciones se producen en mayor o menor medida en todas las superficies en contacto con el agua marina, es decir, tanto en la obra viva del casco como en los sistemas de refrigeración del buque. 1.4.1. ADHERENCIAS EN LA OBRA VIVA DEL CASCO En mayor o menor grado dependiendo de su variedad y estado de crecimiento, las incrustaciones provocan un incremento de la rugosidad en la superficie de obra viva del casco. Se ha adoptado como medida estándar de la rugosidad (Rt) el valor máximo de
pico a seno en una longitud de 50 mm, estableciéndose a partir de mediciones múltiples promedios de rugosidad para una zona del casco, o bien, medias ponderadas para la valoración de la rugosidad de un casco completo, dando mayor peso a la rugosidad, por ejemplo, de las zonas de proa del buque. Sin embargo, según los estudios de
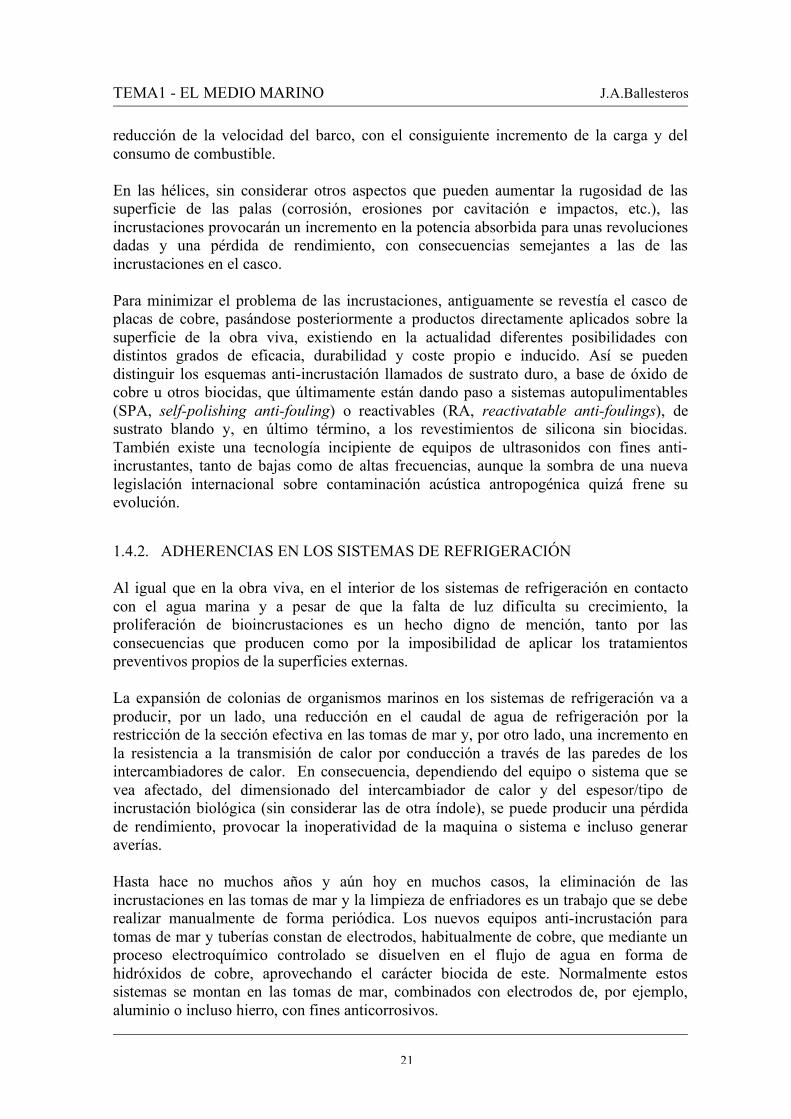
Kauczynski y Waderhaug (1987), la preponderancia de estas zonas del casco disminuye conforme aumenta el coeficiente de bloque (por encima de 0,7 a 0,8 la rugosidad de las zonas más a popa también obran relevancia). En cualquier caso, una mayor rugosidad va a provocar un incremento de la fricción del agua sobre el casco y, tal y como se puede ver en el cuadro al costado para diferentes tipos de barco, la resistencia por fricción juega un papel sustancial respecto a la resistencia total al avance. En definitiva, que para unas revoluciones dadas del motor, las incrustaciones pueden provocar una
TEMA1 - EL MEDIO MARINO J.A.Ballesteros
21
reducción de la velocidad del barco, con el consiguiente incremento de la carga y del consumo de combustible. En las hélices, sin considerar otros aspectos que pueden aumentar la rugosidad de las superficie de las palas (corrosión, erosiones por cavitación e impactos, etc.), las incrustaciones provocarán un incremento en la potencia absorbida para unas revoluciones dadas y una pérdida de rendimiento, con consecuencias semejantes a las de las incrustaciones en el casco. Para minimizar el problema de las incrustaciones, antiguamente se revestía el casco de placas de cobre, pasándose posteriormente a productos directamente aplicados sobre la superficie de la obra viva, existiendo en la actualidad diferentes posibilidades con distintos grados de eficacia, durabilidad y coste propio e inducido. Así se pueden distinguir los esquemas anti-incrustación llamados de sustrato duro, a base de óxido de cobre u otros biocidas, que últimamente están dando paso a sistemas autopulimentables (SPA, self-polishing anti-fouling) o reactivables (RA, reactivatable anti-foulings), de sustrato blando y, en último término, a los revestimientos de silicona sin biocidas. También existe una tecnología incipiente de equipos de ultrasonidos con fines anti-incrustantes, tanto de bajas como de altas frecuencias, aunque la sombra de una nueva legislación internacional sobre contaminación acústica antropogénica quizá frene su evolución. 1.4.2. ADHERENCIAS EN LOS SISTEMAS DE REFRIGERACIÓN Al igual que en la obra viva, en el interior de los sistemas de refrigeración en contacto con el agua marina y a pesar de que la falta de luz dificulta su crecimiento, la proliferación de bioincrustaciones es un hecho digno de mención, tanto por las consecuencias que producen como por la imposibilidad de aplicar los tratamientos preventivos propios de la superficies externas. La expansión de colonias de organismos marinos en los sistemas de refrigeración va a producir, por un lado, una reducción en el caudal de agua de refrigeración por la restricción de la sección efectiva en las tomas de mar y, por otro lado, una incremento en la resistencia a la transmisión de calor por conducción a través de las paredes de los intercambiadores de calor. En consecuencia, dependiendo del equipo o sistema que se vea afectado, del dimensionado del intercambiador de calor y del espesor/tipo de incrustación biológica (sin considerar las de otra índole), se puede producir una pérdida de rendimiento, provocar la inoperatividad de la maquina o sistema e incluso generar averías. Hasta hace no muchos años y aún hoy en muchos casos, la eliminación de las incrustaciones en las tomas de mar y la limpieza de enfriadores es un trabajo que se debe realizar manualmente de forma periódica. Los nuevos equipos anti-incrustación para tomas de mar y tuberías constan de electrodos, habitualmente de cobre, que mediante un proceso electroquímico controlado se disuelven en el flujo de agua en forma de hidróxidos de cobre, aprovechando el carácter biocida de este. Normalmente estos sistemas se montan en las tomas de mar, combinados con electrodos de, por ejemplo, aluminio o incluso hierro, con fines anticorrosivos.
Copyright © 2022 FDOKUMEN