T2 Transformada de Laplace - OCW-UC3M
29
TRANSFORMADAS OBJETIVOS Revisión de las herramientas matemáticas que se utilizan para la obtención del modelo matemático en forma de función de transferencia. Revisión de la Transformada de Laplace y sus propiedades. Aplicar la transformada de Laplace para la resolución de ecuaciones diferenciales. Universidad Carlos III de Madrid Señales y Sistemas Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of T2 Transformada de Laplace - OCW-UC3M
TRANSFORMADAS
OBJETIVOS� Revisión de las herramientas matemáticas que se
utilizan para la obtención del modelo matemático en forma de función de transferencia.
� Revisión de la Transformada de Laplace y sus propiedades.
� Aplicar la transformada de Laplace para la resolución de ecuaciones diferenciales.
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

� Estudiar los problemas de convergencia de la transformada de Fourier.
� Estudiar la Transformada de Laplace, y su relación con la transformada de Fourier, comentando sus ventajas y problemas.
� Propiedades de dicha transformada y su utilidad.
Objetivos
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADAS
Introducción al concepto matemático de transformada. Transformada de Laplace
1. Formas de representar una señal.2. Transformadas.3. Transformada de Laplace.4. Propiedades de la T. de Laplace.5. Utilidad de la T. de Laplace.6. Tabla de transformadas de Laplace.
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

Bibliografía
� Ogata, K., "Ingeniería de control moderna", Ed. Prentice-Hall.� Capítulo 2
� Dorf, R.C., "Sistemas modernos de control", Ed. Addison-Wesley.� Capítulo
� Kuo, B.C.,"Sistemas de control automático", Ed. Prentice Hall.� Capítulo 2
� F. Matía y A. Jiménez, “Teoría de Sistemas”, Sección de Publicaciones Universidad Politécnica de Madrid� Capítulo 2
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

Una señal puede representarse de varias maneras� Como función del tiempo
� Ejemplo: Velocidad de un coche al arrancar
Aparentemente es la representación más natural
FORMAS DE REPRESENTARSEÑALES
t
v
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

� Como función de la frecuencia� Ejemplo: Sonido
� Harían falta dos gráficas (ej. amplitud & fase)
FORMAS DE REPRESENTARSEÑALES
f
intensidad
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

FORMAS DE REPRESENTARSEÑALES
0 10 20 30 40 50 60 70 80 90 100-5
-4
-3
-2
-1
0
1
2
3
4
5
( )( ) 5 s i n 0 .1 / 4y t t π= ⋅ + ( )( ) 5 s i n 0 . 1 / 2y t t π= ⋅ +
0 10 20 30 40 50 60 70 80 90 100-5
-4
-3
-2
-1
0
1
2
3
4
5
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

FORMAS DE REPRESENTAR SEÑALES
� Al tiempo/frecuencia se le denomina variable independiente
� Es posible pasar de una representación a otra
� Dependiendo de la información que se pretenda obtener de la señal, es mejor una representación u otra
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADAS
� Permiten pasar de un tipo de representación de señales a otro.
� Ejemplo: T(f(tiempo))=F(frecuencia)
T(f(t))
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADAS
� Se busca simplificar el estudio de las señales y los sistemas
� Las transformaciones no siempre tienen un sentido físico y pueden ser tan solo representaciones matemáticas
� Señales continuas
� Transformada de Fourier , s=jω� Transformada de Laplace, s=σ+jω
( ) ( , ) ( )
( , )
b
a
t s
F s K t s f t d t
K t s e −
=
=
∫
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

SERIES DE FOURIER
� Solo sirven para señales periódicas� Definición
es la frecuencia de la señal f(t)
Posibilitan un estudio de señales temporales (audio) en sus componentes frecuenciales.
0
0
0
( )
1( )
kjk t
k
k
Tjk t
k
f t a e
a f t e dtT
ω
ω
=∞
=−∞
−
=
=
∑
∫
T
πω 20 =
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

SERIES DE FOURIER
� Una forma equivalente de representación como una suma de señales senoidales:
Dado que: cos sinje jθ θ θ= +
0
0 0cos( arg( )) sin( arg( ))jk t
k k k k ka e a k t a j a k t aω ω ω= + + +
0 0( ) cos( arg( )) sin( arg( ))k k
k k k k
k k
f t a k t a j a k t aω ω=∞ =∞
=−∞ =−∞
= + + +∑ ∑
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

SERIES DE FOURIER
� Las series de Fourier es una transformación discreta, que solo toma valores para frecuencias múltiplo de la frecuencia de la señal f(t)
k ω0 → armónicos
� En caso de señales reales:con lo que se anula la parte imaginaria correspondiente a la frecuencia kω0 con la de -kω0
F k F k[ ] [ ]*ω ω0 0= −
0 0
1
( ) 2 cos( arg( ))k
k k
k
f t a a k t aω=∞
=
= + +∑
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

SERIES DE FOURIER
� Ejemplo1
-0.5
0 0 0( ) c o s s e n
1 1
1 3( ) s e n ( ( 2 1) )
4 ( 2 1)0
k kf t a a k t b k t
k k
f t k tkk
ϖ ϖ
π
∞ ∞= + +∑ ∑
= =
∞= + +∑
+=
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

SERIES DE FOURIER
...)9
9
7
7
5
5
3
3(
3
4
1)( ++++++= tsentsentsentsen
senttfπ
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

SERIES DE FOURIER
+++=
+++=31
31...
3
4
1)(
15
25...
3
4
1)(
tsensenttf
tsensenttf
ππ
++==3
33
4
1)(
4
1)(
tsensenttftf
π
+++=5
5...
3
4
1)(
tsensenttf
π
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

� Relación con las series de Fourier
TRANSFORMADA DE FOURIER
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADA DE FOURIER
� Definición
� Condición de convergencia
( ) ( )
( ) ( )
F f t e dt
f t F e d
j t
j t
ω ω
πω ω
ω
ω
= ∈ ℜ
=
−∞
∞ −
−∞
∞
∫
∫1
2
( ) ∞<∫∞
∞−dttf
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADA DE LAPLACE
� Problemas de convergencia de la transformada de Fourier
� Muchas funciones de las utilizadas en control no cumplen la condición de convergencia.
� Para solventar el problema: Se introduce el término siendo
� Con el factor se garantiza la convergencia de la integral:
( ) ∞<∫∞
∞−dttf
( )( ) ( ) ( ) ( )
ˆ ( )
ˆˆ ,
t
j t j t
f t f t e
F f t e dt f t e dt
σ
ω σ ωσ ω
−
∞ ∞− − +
−∞ −∞
=
= =∫ ∫
( ) ( ) dtetfF tjωω −∞
∞−∫=
te σ−
ℜ∈σ
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADA DE LAPLACE
� Transformada de Laplace
� Convergencia
� Relación con la transformada de Fourier
( ) ∫
∫∞+
∞−
∞
∞−
−
=
∈=
+=
j
j
ts
ts
dsesFj
tf
CssFtdetfsF
js
σ
σπ
ωσ
)(2
1
),()()(
a b< <σ
s j= ω
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs
TRANSFORMADA DE LAPLACE
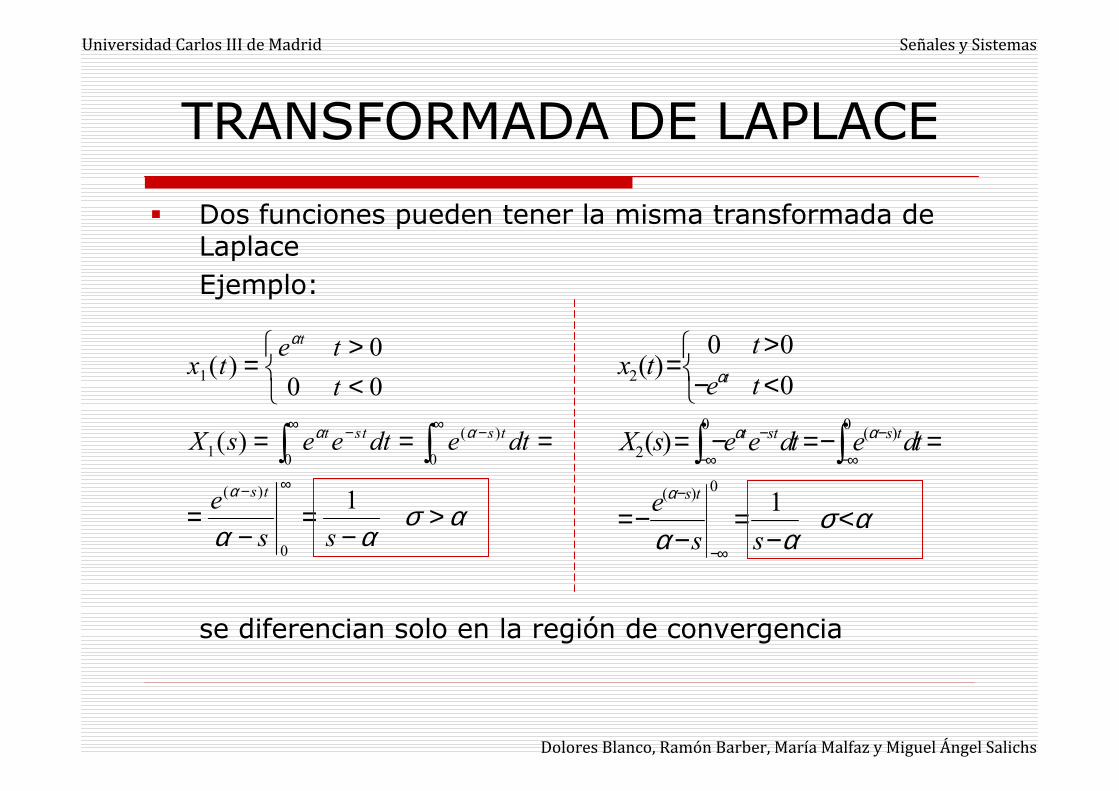
� Dos funciones pueden tener la misma transformada de LaplaceEjemplo:
se diferencian solo en la región de convergencia
x te t
t
X s e e dt e dt
e
s s
t
t st s t
s t
1
10 0
0
0
0 0
1
( )
( ) ( )
( )
=><
= = =
=−
=−
>
∞ − −∞
− ∞
∫ ∫
α
α α
α
α ασ α
x tt
e t
X s e e dt e dt
e
s s
t
t st s t
s t
2
2
0 0
0
0 0
0
1
( )
( ) ( )
( )
=>
− <
= − =− =
=−−
=−
<
−∞
− −
−∞
−
−∞
∫ ∫
α
α α
α
α ασ α
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TRANSFORMADA DE LAPLACE UNILATERAL
� En general, trabajaremos con funciones en las que f(t)=0 para t<0, en las que la transformada de Laplace quedará definida como
Transf. de Laplace unilateral
que converge para
� Es la que usaremos habitualmente
F s f t e dtst( ) ( )=∞ −∫0
a < σ
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs
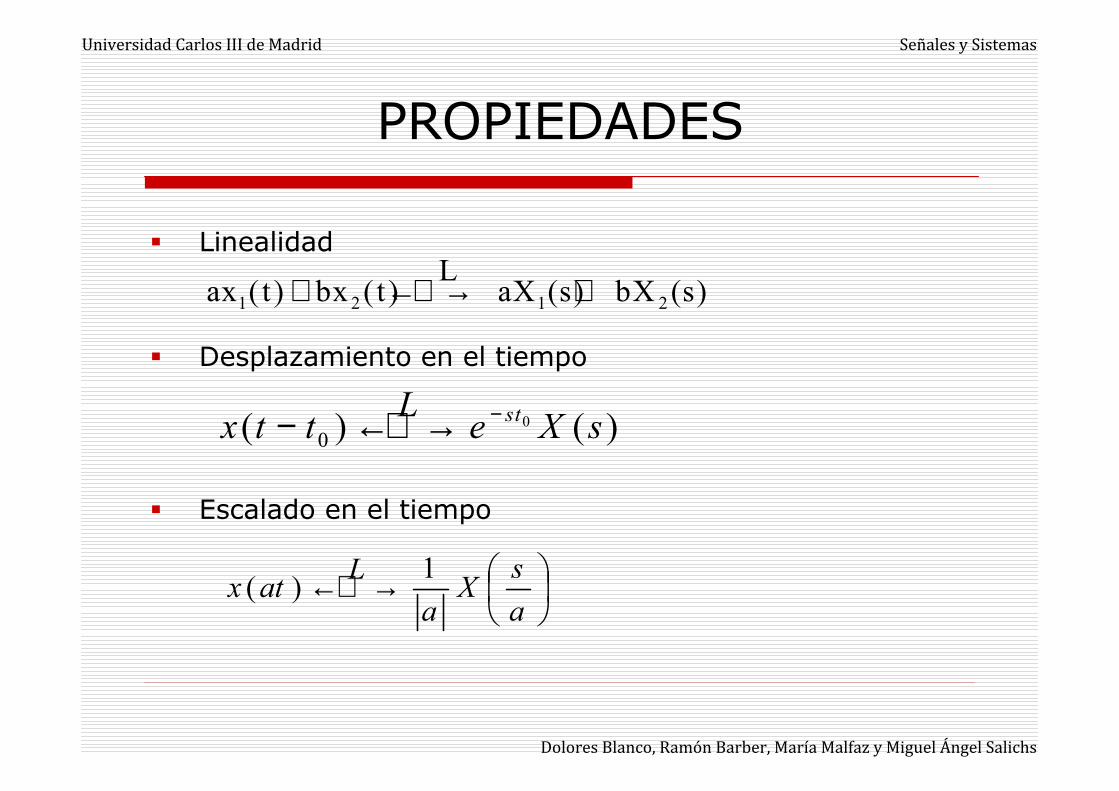
� Linealidad
� Desplazamiento en el tiempo
� Escalado en el tiempo
PROPIEDADES
ax t bx tL
aX s bX s1 2 1 2( ) ( ) ( ) ( )+ ← → +
)()( 0
0 sXeL
ttxts−→←−
→←a
sX
a
Latx
1)(
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

� Desplazamiento en S
� Teorema del valor inicial
� Teorema del valor final
PROPIEDADES
x o lim sX ss
( ) ( )+ → ∞=
lim ( ) lim ( )t sx t sX s
→∞ →=
0
e x tL
X st− ← → +α α( ) ( )
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

PROPIEDADES DE LA T. L.
� Derivación
� Integración en el tiempo
...)(1
)(0
+→←∫ sXs
Ldx
t
ττ
)0(...)0()()(
)0()()(
11 −−−−
−
−−−→←
−→←
nnn
n
n
xxssXsL
dt
txd
xssXL
dt
tdx
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

PROPIEDADES DE LA T. L.
� Diferenciación en s
� Convolución
ds
sdXLttx
)()( →←−
)()()()( sYsXL
tytx →←∗
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

TABLA DE TRANSFORMADAS
δ
α
αω ω
ωω ω
ω ωα ω
ω
α
α
α
α
( )
( )
( )
( ) !
( )
( ) !( )
s e n ( ) ( )( )
c o s ( ) ( )( )
s e n ( ) ( )( ( ) )
c o s ( ) ( )
t
u tt
t s
t u ts
t u t ns
e u ts
t e u t ns
t u ts
t u t ss
e t u ts
e t u t
nn
t
n tn
t
t
← →
=><
← →
← →
← →
← → +← → +
← → +
← → +
← → + +
← →
+
−
−+
−
−
1
1 0
0 01
1
1
0
0 2
0 1
0
0 1
0 2 2
0 2 2
0 2 2
0 ++ +
( )( ( ) )
ss
αα ω2 2
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

UTILIDAD
� La propiedad de diferenciación en el tiempo nos convierte las ecuaciones diferenciales en polinomios en el dominio s.
� La integral de convolución (respuesta de un sistema ante una señal) de dos señales en el tiempo se transforma en un producto de señales en el dominio s.
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs

RESOLUCIÓN DE ECS. DIFERENCIALES
1)0(;2)0(;5)(2)(3)( −===++ xxtxtxtx ɺɺɺɺ
2
23
1
525
)2)(1(
5
)23(
5)(
5)1()()23(
5)(2]1)([3]2)([
5)(2)]0()([3)]0()0()([
2
2
2
2
2
2
++
+−=
+++−−=
+++−−=
=++++
=+++−+
=+−+−−
ssssss
ss
sss
sssX
sssXss
ssXssXssXs
ssXxssXxsxsXs ɺ
tt eetx 2
2
35
2
5)( −− +−=
Universidad Carlos III de Madrid Señales y Sistemas
Dolores Blanco, Ramón Barber, María Malfaz y Miguel Ángel Salichs