Spontaneous flocking in human groups
9
Behavioural Processes 92 (2013) 6–14 Contents lists available at SciVerse ScienceDirect Behavioural Processes j o ur nal homep age : www.elsevier.com/locate/behavproc Spontaneous flocking in human groups Michael Belz a,∗ , Lennart W. Pyritz b , Margarete Boos a,1 a Courant Research Center “Evolution of Social Behaviour”, Georg-August-University of Göttingen, Germany b Behavioral Ecology & Sociobiology Unit, German Primate Center (DPZ), Kellnerweg 4, D-37077 Göttingen, Germany a r t i c l e i n f o Article history: Received 28 February 2012 Received in revised form 4 September 2012 Accepted 18 September 2012 Keywords: Collective movement Human group Flocking behaviour Self-organising behaviour a b s t r a c t Flocking behaviour, as a type of self-organised collective behaviour, is described as the spatial formation of groups without global control and explicit inter-individual recruitment signals. It can be observed in many animals, such as bird flocks, shoals or herds of ungulates. Spatial attraction between humans as the central component of flocking behaviour has been simulated in a number of seminal models but it has not been detected experimentally in human groups so far. The two other sub-processes of this self-organised collective movement – collision avoidance and alignment – are excluded or held constant respectively in this study. We created a computer-based, multi-agent game where human players, represented as black dots, moved on a virtual playground. The participants were deprived of social cues about each other and could neither communicate verbally nor nonverbally. They played two games: (1) Single Game, where other players were invisible, and (2) Joint Game, where each player could see players’ positions in a local radius around himself/herself. We found that individuals approached their neighbours spontaneously if their positions were visible, leading to less spatial dispersion of the whole group compared to moving alone. We conclude that human groups show the basic component of flocking behaviour without being explicitly instructed or rewarded to do so. © 2012 Elsevier B.V. All rights reserved. 1. Introduction Group living is a universal feature throughout the animal king- dom and its costs and benefits have been investigated in detail (e.g., Alexander, 1974; Krause and Ruxton, 2002; Sumpter, 2010). Costs include intra-group competition over mating opportunities and resources as well as facilitated transmission of parasites and pathogens (Altizer et al., 2003; Bertram, 1978; van Schaik, 1989). The benefits of sociality seem to prevail, including predator confu- sion (Hamilton, 1971; Quinn and Cresswell, 2006), shared vigilance (Ward et al., 2011), superior knowledge of both resource distri- bution and predation risk due to experienced members (Reebs, 2000), collective foraging (Pitcher et al., 1982), cooperative hunting (Benoit-Bird and Au, 2009), joint territory defence (Williams et al., 2004), offspring socialization (Pearson, 2011), cooperative breeding (Meade et al., 2010), and enhanced thermoregulation (Scantlebury et al., 2006). Group members can benefit from sociality only if they maintain cohesion and coordinate individual and often divergent behaviours ∗ Corresponding author at: Georg-August-University of Göttingen, Gosslerstr. 14, D-37073 Göttingen, Germany. Tel.: +49 551 39 4627; fax: +49 551 39 12496. E-mail addresses: [email protected], [email protected] (M. Belz), [email protected] (L.W. Pyritz), [email protected] (M. Boos). 1 Address: Georg-August-University of Göttingen, Gosslerstr. 14, D-37073 Göt- tingen, Germany. (Conradt and Roper, 2005; Rands et al., 2003). In human and other primate groups, coordination of activities is usually achieved via information transfer, which can involve a majority of group mem- bers or be initiated by a single individual or a small subset of the group (Boos et al., 2011; Conradt and List, 2009; Conradt and Roper, 2005, 2009; Fichtel et al., 2011). How information is transferred depends on group size: In small groups, members are usually able to process information globally, i.e., one individual reaches all other group members at the same time (Conradt and Roper, 2005). In large groups of animals such as fish shoals, flocks of birds or herds of ungulates, behavioural coordination can be achieved by self-organisation based on local information transfer. That means individuals follow simple behavioural rules and inter- act with their local environment without the need for global social control, explicit mutual recruitment or signals by a specific indi- vidual (honey bees, Apis mellifera: Seeley and Buhrmann, 2001; overview on vertebrates: Conradt et al., 2009; Couzin and Krause, 2003; Parrish et al., 2002). The most important behavioural regulator to maintain spa- tial group cohesion is to reduce the distance to other individuals (Couzin, 2009; Vine, 1971). This attraction rule is part of several computer simulation models of self-organised collective behaviour like group movements (Couzin et al., 2005; Aoki, 1982; Reynolds, 1987). We argue that attraction towards neighbours is not only the crucial component of flocking behaviour, but represents a basic form of flocking itself. In the case of a non-moving cohesive herd, the majority is protected against predators by using other 0376-6357/$ – see front matter © 2012 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.beproc.2012.09.004
-
Upload
uni-goettingen -
Category
Documents
-
view
0 -
download
0
Transcript of Spontaneous flocking in human groups

S
Ma
b
a
ARRA
KCHFS
1
d(CapTs(b2(2(e
c
D
L
t
0h
Behavioural Processes 92 (2013) 6– 14
Contents lists available at SciVerse ScienceDirect
Behavioural Processes
j o ur nal homep age : www.elsev ier .com/ locate /behavproc
pontaneous flocking in human groups
ichael Belza,∗, Lennart W. Pyritzb, Margarete Boosa,1
Courant Research Center “Evolution of Social Behaviour”, Georg-August-University of Göttingen, GermanyBehavioral Ecology & Sociobiology Unit, German Primate Center (DPZ), Kellnerweg 4, D-37077 Göttingen, Germany
r t i c l e i n f o
rticle history:eceived 28 February 2012eceived in revised form 4 September 2012ccepted 18 September 2012
eywords:ollective movementuman grouplocking behaviour
a b s t r a c t
Flocking behaviour, as a type of self-organised collective behaviour, is described as the spatial formationof groups without global control and explicit inter-individual recruitment signals. It can be observed inmany animals, such as bird flocks, shoals or herds of ungulates. Spatial attraction between humans as thecentral component of flocking behaviour has been simulated in a number of seminal models but it has notbeen detected experimentally in human groups so far. The two other sub-processes of this self-organisedcollective movement – collision avoidance and alignment – are excluded or held constant respectively inthis study. We created a computer-based, multi-agent game where human players, represented as blackdots, moved on a virtual playground. The participants were deprived of social cues about each other and
elf-organising behaviour could neither communicate verbally nor nonverbally. They played two games: (1) Single Game, whereother players were invisible, and (2) Joint Game, where each player could see players’ positions in a localradius around himself/herself. We found that individuals approached their neighbours spontaneously iftheir positions were visible, leading to less spatial dispersion of the whole group compared to movingalone. We conclude that human groups show the basic component of flocking behaviour without being
ward
explicitly instructed or re. Introduction
Group living is a universal feature throughout the animal king-om and its costs and benefits have been investigated in detaile.g., Alexander, 1974; Krause and Ruxton, 2002; Sumpter, 2010).osts include intra-group competition over mating opportunitiesnd resources as well as facilitated transmission of parasites andathogens (Altizer et al., 2003; Bertram, 1978; van Schaik, 1989).he benefits of sociality seem to prevail, including predator confu-ion (Hamilton, 1971; Quinn and Cresswell, 2006), shared vigilanceWard et al., 2011), superior knowledge of both resource distri-ution and predation risk due to experienced members (Reebs,000), collective foraging (Pitcher et al., 1982), cooperative huntingBenoit-Bird and Au, 2009), joint territory defence (Williams et al.,004), offspring socialization (Pearson, 2011), cooperative breedingMeade et al., 2010), and enhanced thermoregulation (Scantlebury
t al., 2006).Group members can benefit from sociality only if they maintainohesion and coordinate individual and often divergent behaviours
∗ Corresponding author at: Georg-August-University of Göttingen, Gosslerstr. 14,-37073 Göttingen, Germany. Tel.: +49 551 39 4627; fax: +49 551 39 12496.
E-mail addresses: [email protected], [email protected] (M. Belz),[email protected] (L.W. Pyritz), [email protected] (M. Boos).1 Address: Georg-August-University of Göttingen, Gosslerstr. 14, D-37073 Göt-
ingen, Germany.
376-6357/$ – see front matter © 2012 Elsevier B.V. All rights reserved.ttp://dx.doi.org/10.1016/j.beproc.2012.09.004
ed to do so.© 2012 Elsevier B.V. All rights reserved.
(Conradt and Roper, 2005; Rands et al., 2003). In human and otherprimate groups, coordination of activities is usually achieved viainformation transfer, which can involve a majority of group mem-bers or be initiated by a single individual or a small subset ofthe group (Boos et al., 2011; Conradt and List, 2009; Conradtand Roper, 2005, 2009; Fichtel et al., 2011). How information istransferred depends on group size: In small groups, members areusually able to process information globally, i.e., one individualreaches all other group members at the same time (Conradt andRoper, 2005). In large groups of animals such as fish shoals, flocksof birds or herds of ungulates, behavioural coordination can beachieved by self-organisation based on local information transfer.That means individuals follow simple behavioural rules and inter-act with their local environment without the need for global socialcontrol, explicit mutual recruitment or signals by a specific indi-vidual (honey bees, Apis mellifera: Seeley and Buhrmann, 2001;overview on vertebrates: Conradt et al., 2009; Couzin and Krause,2003; Parrish et al., 2002).
The most important behavioural regulator to maintain spa-tial group cohesion is to reduce the distance to other individuals(Couzin, 2009; Vine, 1971). This attraction rule is part of severalcomputer simulation models of self-organised collective behaviourlike group movements (Couzin et al., 2005; Aoki, 1982; Reynolds,
1987). We argue that attraction towards neighbours is not onlythe crucial component of flocking behaviour, but represents abasic form of flocking itself. In the case of a non-moving cohesiveherd, the majority is protected against predators by using other
ral Pr
hmwtfc22ofmbebeeomabahwa
gttaKoihneevmwssc
Happoooompw(eptgtttlh2i
M. Belz et al. / Behaviou
erd-members as shields (Hamilton, 1971), or source of ther-al energy (Scantlebury et al., 2006). The question we address ishether spatial attraction is a universal behavioural mechanism
hat also applies to human groups. If this mechanism was alsoound in such groups, this would yield practical implications forrowd management and evacuation scenarios (Aubé and Shield,004). External motivators like attraction points (Helbing et al.,001, p. 373: e.g., posters within a pedestrian zone) or the degreef social affiliation between individuals (King et al., 2011a) can alsoacilitate flocking behaviour. Formal approaches and simulation
odels have been conducted to describe and understand specificehaviour of, for instance, pedestrians in terms of fluid-dynamicquations (Helbing et al., 2001), or to generally describe alignmentehaviour with models of self-driven particles to predict coher-nt motion of groups/subgroups in multiple species (e.g., Vicsekt al., 1995). Here, it is our goal to assess the spontaneous tendencyf humans to reduce their mutual distance without any externalotivators or rewards. The partial effects of collision avoidance and
lignment as separate mechanisms are omitted in our experimentecause here, participants can occupy the same spatial positionnd no (spatial) goals are introduced. The question is whetherumans have the tendency to reduce their distance to each otherhen no other motivations, goals, instructions, information, etc.
re present.By briefing participants with a simple rule ‘remain together as
roup’, Dyer et al. (2008, p. 463) showed that humans are ableo reach a spatial goal cohesively without explicit signalling andhat a minority of informed participants could lead the group to
specific goal (Dyer et al., 2009, q.v. Faria et al., 2009, 2010a).ing et al. (2011b) showed in an experiment with small groupsf humans, that spatial-temporal coordination was significantlymproved by gestural communication when specific spatial goalsad to be reached. These experiments addressed each compo-ent of the seminal model of collective movement by Couzint al. (2005) except for ‘attraction’ because it was either instructedxplicitly or a specific spatial goal existed. Since – even inad-ertent – social cues such as gesticulation, mimics or individualovements may influence group coordination (Faria et al., 2010a),e developed a computer based multi-agent game in which we
tudied if humans flock without being given explicit instructions,patial attraction points and excluding communication and socialues.
We created the computer-based multi-agent gameoneyComb© (Boos et al., 2012) where human players’ positionsre visually represented as black dots on a virtual 97-hexagonlayfield and can move via mouse-clicks. In this study, participantslayed two games in randomised order: Single Game, in whichther players’ positions were invisible, and Joint Game wherether players’ positions could be seen. Participants were instructedn how to move on the playfield but were not given any (spatialr other) goal to reach. Due to (i) our experimental reduction ofovement behaviour as the only possible information source for
layers and (ii) the implementation of a limited perception radius,e expected that the players group into locally coordinating
Conradt and Roper, 2005), self-organising systems (Camazinet al., 2003). We predicted that the spatial distance between thelayers of the Single Game would be higher than in the Joint Gamehroughout the experiment. Furthermore, we investigated eachroups’ overall playing time and movement speed to test whetherhe visibility of other players had a stimulating effect in terms ofhe generalised drive hypothesis (Zajonc, 1965): In well-learnedasks, the pure presence of others can lead to a higher activation
evel within each individual, causing better performance (e.g.,umans: Matlin and Zajonc, 1968; capuchin monkeys: Dindo et al.,009). Thus, we expected faster movements in the Joint Game,ndependently of flocking behaviour.
ocesses 92 (2013) 6– 14 7
2. Material and methods
2.1. Experimental procedure
We conducted two computer games to test spatial attractionbehaviour in humans. Experiments took place in a lecture buildingof a German university in June and July 2010 and in May 2011. Atotal of 400 primarily undergraduate students participated in thestudy and were assigned to 40 groups each comprising 10 individ-uals. The groups were composed of students of 40 different fieldsof study between the ages of 18 and 44 (M = 24.24, SD = 3.16). Of thetotal sample, 43.6% were female. All participants were naive as tothe purpose of the study.
Three assistants randomly recruited participants. As soon as10 participants were gathered, they were led into a separate areawith individual workstations, each equipped with an identical sizelaptop (screen size 13.3 in., 1366 × 768 pixels), a mouse, and apair of earplugs. All participants were then instructed to put ontheir earplugs. The workstations were encased by separation walls,making it impossible to watch or communicate with other play-ers during the experiment. Participants were explicitly told inthe instructions that they could navigate through self-explanatoryinstructions on the screens via ‘forward’ and ‘return’ buttons, andclick on ‘OK’ once they had finished reading the instructions.Both possible game sequences (Single Game–Joint Game vs. JointGame–Single Game) were played by 50% (n = 20) of the groups each.Once the computer games were finished, participants individuallyfilled out a questionnaire to provide demographic data (age, gen-der, field of study, semester). Participants were fully debriefed afterthe experiment.
2.2. Single Game
Each participant controlled a black point on a virtual hexagonplayfield with his/her mouse. In the Single Game variation, therewas only their black dot visible on the playfield; even thoughthey were aware there were other game participants. Playersalways started in the centre of the playfield (Fig. 1, 1a). The blackpoint could be moved to each of six neighbouring fields by left-clicking into the respective small hexagon. Jumping over fields wasimpossible. When participants moved their cursor to a hexagon,a framework appeared during mouse rollover to indicate whichfields could be chosen by left-clicking. To prevent experienced com-puter users from moving considerably faster through the playfield,i.e., to standardise maximal movement speed, a delay was imple-mented in each game: After participants had made a move, thecursor was transformed into an hourglass for 1500 ms. During thistime period, no further moves were possible. After each move, asmall tail was blended in, pointing to the last hexagon he or shehad come from (Fig. 1). This tail was blended out after 4000 msor replaced by the next directional tail if the player had made amove in less than 4000 ms. To avoid influences of colours, e.g.,possible colour blindness of the participants, colour gender associ-ation, etc., all visual components were displayed in grey, black, andwhite.
Before each game, instruction pages were presented on-screencontaining the basic game instructions (see Appendices A andB). Each participant was told that “the game will end once youwill have made at least 10 moves”. Due to the 10-move cri-terion, the Single Game was closed automatically by the gameserver once the 10-move criterion had been reached by the slow-
est player. In other words, players could still move as long as theslowest player had not made his or her 10th move. Other thanthe game-ending 10-move criterion, there was no explicit gamegoal.
8 M. Belz et al. / Behavioural Pro
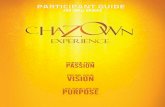
Fig. 1. Two exemplary situations in the Single Game (1a and 1b, other players’ pos-itions are invisible) and the Joint Game (2a and 2b, other players’ positions withinthe individual perception radius are visible) from the perspective of one player. Inthe Single Game, the player starts in the centre of the virtual 97-hexagons playfield(1a). In 1b, the player has already made two moves from the centre. In 2a, all otherplayers have already moved whereas the focused player still remains in the centre.In 2b, three other players are visible from the perspective of the focused player,wo
2
hefhlmoiattoth
2
at
2
vm1‘p
overall moves (t = 0.51, P = 0.612, d = 0.08). Dispersion rate
hereas 6 other players stay out of the focus player’s visual range. Original shadesf grey have been removed to increase clearness of display.
.3. Joint Game
In the Joint Game, the participants moved in the same virtualexagon playfield as in the Single Game, with one essential differ-nce: each individual player could see all other players’ positionsor as long as they remained in his/her perception radius of twoexagon fields’ size (Fig. 1, 2a and 2b). This local perception radius
imited the range of sight of each player (Fig. 1): If players departedore than two fields from each other, they could not see each
ther anymore, but could still see the whole playfield. Also, in thenstructions, players were told that they would see other playerss smaller dots in the playfield. They were informed that direc-ional tails were blended in for other players’ dots as well as forheirs, helping to identify previous movement directions of every-ne. There was, again, no explicit game goal in the Joint Game. As inhe Single Game, players could move as long as the slowest playerad not spent his or her 10 moves.
.4. Data structure
Each player’s position and moves on the playfield were recordeds coordinates in a data file on our server, also containing times-amps with a precision of 1 ms.
.5. Dependent variables
In both the Single and the Joint Game, we measured six variables.The first two variables were defined to investigate whether the
isual presence of other players had influence on the speed ofovement behaviour: ‘overall gaming time’, which was the time
0 players of a group needed to complete each game in seconds;mean latency’, as the mean time between two moves of the playerser group in seconds.
cesses 92 (2013) 6– 14
Variables three to five described below enabled us to investigategeneral differences in movement behaviour between the SingleGame and the Joint Game in terms of spatial dispersion: ‘differentfields’, as the number of different hexagons which were touched bythe respective group for each game; ‘overall moves’ a group madein each game; and ‘dispersion rate’, which was calculated by divid-ing the ‘different fields’ variable by the ‘overall moves’ variable toaccount for the possible bias that more moves increased the proba-bility to touch more fields. The resulting coefficient equals ‘0’ if thegroup did not disperse (touches same fields), and ‘1’ if the groupdisperses at a maximum level (touches different fields).
To provide an in-process measurement of each group’s degreeof flocking, we defined the sixth variable ‘distance over time’: Foreach group, we divided their overall gaming time (ending whenthe last player finished the game) into 10% intervals, e.g., if a groupplayed 60 s, intervals were generated in 6 s-steps. At the end of eachinterval, we calculated the mean number of fields between all groupmembers. For instance, if the ‘distance over time’ variable was ‘4.31’for the 50%-interval, the mean distance between all members was4.31 fields after 50% of the overall time of this group had passed.Thus, each group provided 20 data values (10–100% time intervalsfor the Single Game and the Joint Game).
2.6. Statistical analyses
All statistical analyses were carried out using IBM SPSS Statistics19 (IBM Company, 2011). All dependent variables were normallydistributed (Kolmogorov–Smirnov-Tests; P ranged from 0.054 to0.932). We used standard t-tests for paired samples and calculatedthe empirical effect size dwithin for the variables ‘overall gamingtime’, ‘mean latency’, ‘different fields’, ‘dispersion rate’, and ‘over-all moves’. To analyse differences between the Single Game and theJoint Game with the variable ‘distance over time’, we used a gen-eral linear model for repeated measures (GLM), containing the twowithin-groups factors ‘time interval’ (10–100%) and ‘game’ (Sin-gle Game vs. Joint Game) and the between-groups factor ‘gamingsequence’ (Single Game–Joint Game vs. Joint Game–Single Game).All alphas of pairwise comparisons were corrected using the Bon-ferroni method. Level of significance was set at P < 0.05. Means (M)are always reported with corresponding standard deviations (± SD).All significances are reported two-tailed.
3. Results
3.1. Overall time and movement latency
Neither the time each group needed to complete the SingleGame (M = 70.26 ± 33.78) and the Joint Game (M = 70.41 ± 32.24,t39 = −0.02, P = 0.985; dwithin < 0.01) nor the mean latency (Sin-gle Game: M = 3.29 ± 0.73; Joint Game: M = 3.51 ± 0.93, t39 = −1.01,P = 0.319, dwithin = 0.16) differed significantly between the games.Thus, the mutual visibility or non-visibility of other players did notaffect the overall gaming time and the mean movement latency ofthe groups.
3.2. Different fields, number of moves and dispersion rate
The groups touched significantly more different fields inthe Single Game (M = 77.70 ± 11.92) compared to the JointGame (M = 68.25 ± 10.70, t39 = 4.42, P < .001, dwithin = 0.70).There was no significant difference between the Single Game(M = 202.25 ± 81.51) and the Joint Game (M = 194.48 ± 62.98) in
39 withinwas significantly higher in the Single Game (M = 0.41 ± 0.09)compared to the Joint Game (M = 0.37 ± 0.08, t39 = 2.66, P = 0.011,dwithin = 0.42). Thus, the visibility of group members in the Joint

M. Belz et al. / Behavioural Pr
Fig. 2. Different fields touched during gaming phase, overall moves and disper-sion rate of the groups (from ‘0’ = minimal dispersion to ‘1’ = maximal dispersion)wai
GS
3
3
eSOdgbG
3
tFpbv
F9ipwfl
ith 95% confidence intervals, compared between the Single Game (other playersre invisible) and the Joint Game (other players are visible). Game differences arendicated by t-tests for paired samples. ***P < 0.001; **P < 0.01 and *P < 0.05.
ame led to lower group dispersion on the field compared to theingle Game (Fig. 2).
.3. Distance over time
.3.1. Differences between the Single Game and the Joint GameThe groups’ distance over time (players’ mean distance from
ach other over time) was significantly affected by the type of game,ingle vs. Joint (GLM: F(1,38) = 61.01, P < 0.0001, partial �2 = 0.62).verall, the visibility of group members led to significantly smalleristances between players. This difference was consistent over allaming time intervals, thus we did not find a two-way interactionetween (advanced) gaming time intervals and game type (Fig. 3;LM: F(9,342) = 1.34, P = 0.213, partial �2 = 0.03).
.3.2. Changes in distance over gaming time intervalsWe observed a main effect of gaming time for both games in
erms of significant differences between the 10% intervals (GLM:
(9,342) = 187.88, P < 0.0001, partial �2 = 0.83): Bonferroni-correctedairwise comparisons showed significant increase of distanceetween 10% vs. 20% (P < 0.0001); 20% vs. 30% (P < 0.0001), and 30%s. 40% (P < 0.0001). Thus, after 40% of the gaming time had passed,ig. 3. Distance between group members over time during the gaming phase with5% confidence intervals, compared between the Single Game (other players are
nvisible) and the Joint Game (other players are visible). The 0%-interval is not dis-layed because all group members started in the centre of the playing field (Fig. 1),hich would automatically lead to a distance of ‘0’ fields. Overall, the mean dif-
erence in distance between the Single Game and the Joint Game was 0.523 fields,eading to a Bonferroni-corrected P < 0.0001.
ocesses 92 (2013) 6– 14 9
most groups had reached a stable level of distance – both in theSingle Game, and in the Joint Game.
3.3.3. Effects of game sequencesWe found significant differences within our variable ‘distance
over time’ depending on the order of games (Single Game–JointGame vs. Joint Game–Single Game; GLM: F(1,38) = 15.82, P < 0.001,partial �2 = 0.29). If the Joint Game was played first, group mem-bers generally departed less far from each other than if the SingleGame was played first (mean difference was 0.408 fields, leadingto a Bonferroni-corrected P < 0.001).
4. Discussion
Human players with limited visual perception radius, withoutexternally set goals (Dyer et al., 2008, 2009; Faria et al., 2009,2010a; King et al., 2011b) and without the opportunity of com-municating were attracted to each other. Thus, humans showed acentral component of flocking behaviour by reducing the distanceto their neighbours (e.g., Hamilton, 1971; Scantlebury et al., 2006).The experiments of Dyer et al. (2008, 2009) and Faria et al. (2009,2010a) showed that humans flock when explicitly being instructedto do so (‘remain together as group’ and ‘stay within one arm’slength’). In our experiments, we found that human players remaintogether as a group without being instructed and without havingany obvious incentives or goals to do so. We thus could show inour computer-based multi-agent game that human groups flockspontaneously.
One possible explanation for this inherent flocking tendency isevolutionary legacy. Living together in cohesive groups was crucialfor early human societies that had to defend themselves againstpredators and enemies or hunt cooperatively (Johnson and Earle,2000). The costs and benefits of flocking in today’s human life arestrongly situation-dependent and more research is needed to iden-tify specific benefits or costs in different situations. For instance,Faria et al. (2010b) found that direct neighbours of a personwho crossed a street tended to follow this individual and trav-erse the street earlier than others. Apparently, humans in crowdsrely on social information that they gather from their neighbours,leading them to counterfeit what their neighbours do to main-tain spatial cohesion. Sueur et al. (2009) found that in primates(Macaca tonkeana), the individual probability to follow a sponta-neous collective movement does not only depend on the numberof group members already moving, but is also strongly influencedby networks of social relationships. In our study, we controlledsocial relationships to a maximum level–individuals were not ableto identify their group members on the virtual playground. In theirformal model of collective movements, Sueur and Deneubourg(2011) assume that in anonymous situations all individuals bringthe same weight to the collective decision. The question remainswhether an equal compulsion to lower the spatial distance toneighbours exists, as implied by the results of our study. Withevery individual lowering the distance to fellow group members,the probability for mimetism should rise (Sueur and Deneubourg,2011). Our results could help to understand and improve the fore-casting of crowd behaviour by anticipating implicit and automaticflocking behaviour in mass panic scenarios: crowd managers and/orsecurity forces should be proactively prepared for individuals toapproach their proximate neighbours when the communicationchannels are reduced to the perception of movement of neigh-
bours vs. the entire group. Following our results, a cohesive flightresponse could occur in case of emergencies, especially those wherevisibility is acutely limited, strongly suggesting designing escaperoutes in a way being able to manage large amounts of people. Due
1 ral Pro
tt
wmi1
tetwrstepBiafmaipesaflsrhofabgw
Ffiy
0 M. Belz et al. / Behaviou
o our results, it may be unpredictable to which spatial directionhe group moves, but it will most likely move as a whole.
Interestingly, movement latencies and overall gaming timeere not significantly influenced by the visual presence of groupembers. This suggests that there is no general activation, compet-
tive or otherwise, caused by the visual presence of others (Zajonc,965).
It can be argued that the representation of the human par-icipants in the rather abstract avatars of black dots in a virtualnvironment aggravated the sense of connection between the par-icipants (for an overview see Childs, 2011). However, our avatarsere specifically designed to reduce social meanings and social
oles to a minimum. We intended to avoid influences of e.g., bodyhape, gender or age (Biocca, 1997) by reducing the informa-ion carried by the avatars as radically as possible. Besides, it ismpirically confirmed that non-humanoid avatars can mediate thehysical body in a virtual setting (extended body; Knudsen, 2004).oth anthromorphic as well as polymorphic visual representations
n a virtual environment facilitate feelings of embodiment (Murraynd Sixsmith, 1999). For future studies, we suggest broadening theocus on human collective behaviour in several aspects. First, imple-
enting a movement task which measures individual success (e.g., virtual foraging task; King et al., 2011b) could give additionalnsight concerning effects of visual presence of group members onerformance and be combined with biofeedback measures to findvidence for the generalised drive hypothesis in our experimentaletting (Zajonc, 1965). Additionally, this might enable us to system-tically assess the explanatory power of the addition of the secondocking parameter ‘alignment’, which was excluded in the presenttudy. Second, distances between group members over time did notise linearly in our experiment. Due to a limited playfield size of 97exagons (or a limited area for movements like in the experimentsf Dyer et al., 2008, 2009; Faria et al., 2009, 2010a), it was impossibleor individuals to constantly increase the gap between themselves
nd other group members at some point because of the limitingorder which automatically defined a maximum distance betweenroup members. It would be interesting to see how human groupsould act on an unlimited playfield, and to investigate whetherig. A1. Page 1 of 4. Translation: “Please read the following information thoroughly, then
rst game, you will see a playfield of hexagons. You are represented as the black dot in thour visibility radius”.
cesses 92 (2013) 6– 14
the effect of visible neighbours on flocking behaviour was under-or overestimated by our experiment. Without a limiting border, (a)the explorative behaviour of single individuals (whose group mem-bers are invisible) and thus their spatial distance could increasemore linearly, but (b) the threat of losing (visible) group membersout of sight would also be higher on a larger playfield, making flock-ing behaviour more difficult. In conclusion, an unlimited playfieldcould lead to higher spatial dispersion in both experimental con-ditions but also allow an additional insight into human flockingbehaviour in a more natural, unlimited environment. Third, ‘col-lision avoidance behaviour’ and its relation to flocking behaviourshould be investigated in more detail, because it was not assessedin this study but is a component of the Couzin et al. (2005) andReynolds (1987) models. In our experiment, an arbitrary num-ber of group members could simultaneously move to one place,making collisions or blocking impossible. In the experiments ofDyer et al. (2008, 2009) and Faria et al. (2009, 2010a), humansmanaged to avoid collisions yet still moved as cohesive groups.It would be fascinating to observe if human flocking behaviourpersists if the possibility of collisions was to be implemented inour virtual movement game, i.e., through the instruction to movefast, and, thus, incur costs as described by Reynolds (1987, collidingbirds are injured with a high probability).
Acknowledgements
This research was funded by the Courant Research Centre “Evo-lution of Social Behaviour”, University of Goettingen, Germany.Johannes Pritz programmed the HoneyComb© experiment andgave substantial input to the formation of the experimental designand material. We also thank Peter Kappeler for his comments to anearlier version of the manuscript and Margarita Neff-Heinrich forher native speaker English proofreading.
Appendix A. Instructions “Single Game”
Figs. A1–A4.
click ‘continue’. You can always return to a previous page by clicking ‘return’. In thise middle of the playfield. The black line around the multiple hexagons represents

M. Belz et al. / Behavioural Processes 92 (2013) 6– 14 11
Fig. A2. Page 2 of 4. Translation: “You can move by clicking on a neighbouring field. Skipping fields is not possible”.
Fw
Fst
ig. A3. Page 3 of 4. Translation: “You will notice a short ‘tail’ attached to your dot appearith your last move. This ‘tail’ disappears after a short period of time. You can take as mu
ig. A4. Page 4 of 4. Translation: “You cannot make a move immediately after another.econds, preventing you from continuing until after the hourglass disappears. Game 1 endhe game. If you have any questions now or during the game, please consult the experim
s for a short period of time after each move, indicating the direction you came fromch time as you wish before making your next move”.
Once you have made a move, your cursor transforms into an hourglass for a fews once you have made at least 10 moves. Please click the OK-button below to start
enter”.

1 ral Processes 92 (2013) 6– 14
A
Fc
Fcy
2 M. Belz et al. / Behaviou
ppendix B. Instructions “Joint Game”
Figs. B1–B4.
ig. B1. Page 1 of 4. Translation: “Please read the following information thoroughly, theno-players are the small black dots on the playfield; you are the large dot. The black line a
Fig. B2. Page 2 of 4. Translation: “You can move by clicking o
ig. B3. Page 3 of 4. Translation: “After each move short ‘tails’ attached to your and youo-players came from. These ‘tails’ disappear if you or your co-players do not move afteour visibility radius (within the black line around the multiple hexagons). You can take a
click ‘continue’. You can always return to a previous page by clicking ‘return’. Yourround the multiple hexagons represents your visibility radius”.
n a neighboured field. Skipping fields is not possible”.
r co-players’ dots appear for a short while, illustrating the directions you or yourr a short while. Please remember that you can only see co-players who are withins much time as you wish before making your next move”.

M. Belz et al. / Behavioural Processes 92 (2013) 6– 14 13
Fig. B4. Page 4 of 4. Translation: “You cannot make a move immediately after another. Once you have made a move, your cursor transforms into an hourglass for a fews e 1 ens e exp
R
A
A
A
A
B
B
B
B
B
C
C
C
C
C
C
CC
C
D
D
D
F
F
econds, preventing you from continuing until after the hourglass disappears. Gamtart the game. If you have any questions now or during the game, please consult th
eferences
lexander, R.D., 1974. The evolution of social behavior. Annu. Rev. Ecol. Syst. 5,325–383.
ltizer, S., Nunn, C.L., Thrall, P.H., Gittleman, J.L., Antonovics, J., Cunningham, A.A.,Dobson, A.P., Ezenwa, V., Jones, K.E., Pedersen, A.B., Poss, M., Pulliam, J.R.C.,2003. Social organization and parasite risk in mammals: integrating theory andempirical studies. Annu. Rev. Ecol. Evol. Syst. 34, 517–547.
oki, I., 1982. A simulation study on the schooling mechanism in fish. Nippon SuisanGakkai Shi 48, 1081–1088.
ubé, F., Shield, R., 2004. Modeling the effect of leadership on crowd flow dynamics.Lect. Notes Comput. Sci. 3305, 601–611.
enoit-Bird, K.J., Au, W.W.L., 2009. Cooperative prey herding by the pelagic dolphin,Stenella longirostris. J. Acoust. Soc. Am. 125, 125–137.
ertram, B.C.R., 1978. Living in groups: predators and prey. In: Krebs, J.R., Davies,N.B. (Eds.), Behavioural Ecology: An Evolutionary Approach. Blackwell ScientificPublications, Oxford, pp. 64–96.
iocca, F., 1997. The cyborg’s dilemma: progressive embodiment in vir-tual environments. J. Comput. Mediat. Commun. 3. Retrieved from<http://jcmc.indiana.edu/vol3/issue2/biocca2.html> (03.09.2012).
oos, M., Kolbe, M., Strack, M., 2011. An inclusive model of group coordination. In:Boos, M., Kolbe, M., Kappeler, P.M., Ellwart, T. (Eds.), Coordination in Human andPrimate Groups. Springer, Berlin Heidelberg, pp. 11–35.
oos, M., Pritz, J., Lange, S., Belz, M., 2012. Leadership in moving human groups.Unpublished manuscript, University of Goettingen.
amazine, S., Deneubourg, J.L., Franks, N.R., Sneyd, J., Theraulaz, G., Bonabeau, E.,2003. Self-Organization in Biological Systems, second ed. Princeton UniversityPress, Princeton.
hilds, M., 2011. Identity: a primer. In: Peachey, A., Childs, M. (Eds.), Reinvent-ing Ourselves: Contemporary Concepts of Identity in Virtual Worlds. Springer,London, pp. 13–31.
onradt, L., Krause, J., Couzin, I.D., Roper, T.J., 2009. Leading according to need inself-organizing groups. Am. Nat. 173, 304–312.
onradt, L., List, C., 2009. Group decisions in humans and animals: a survey. Philos.Trans. R. Soc. Lond. B: Biol. Sci. 364, 719–742.
onradt, L., Roper, T.J., 2005. Consensus decision making in animals. Trends Ecol.Evol. 20, 449–456.
onradt, L., Roper, T.J., 2009. Conflicts of interest and the evolution of decision shar-ing. Philos. Trans. R. Soc. Lond. B: Biol. Sci. 364, 807–819.
ouzin, I.D., 2009. Collective cognition in animal groups. Trends Cogn. Sci. 13, 36–43.ouzin, I.D., Krause, J., 2003. Self-organization and collective behavior in vertebrates.
Adv. Study Behav. 32, 1–75.ouzin, I.D., Krause, J., Franks, N.R., Levin, S.A., 2005. Effective leadership and
decision-making in animal groups on the move. Nature 433, 513–516.indo, M., Whiten, A., de Waal, F.B.M., 2009. Social facilitation of exploratory for-
aging behavior in capuchin monkeys (Cebus apella). Am. J. Primatol. 71, 419–426.
yer, J.R.G., Ioannou, C.C., Morrell, L.J., Croft, D.P., Couzin, I.D., Waters, D.A., Krause,J., 2008. Consensus decision making in human crowds. Anim. Behav. 75, 461–470.
yer, J.R.G., Johansson, A., Helbing, D., Couzin, I.D., Krause, J., 2009. Leadership, con-sensus decision making and collective behaviour in humans. Philos. Trans. R.
Soc. Lond. B: Biol. Sci. 364, 781–789.aria, J.J., Codling, E.A., Dyer, J.R.G., Trillmich, F., Krause, J., 2009. Navigation in humancrowds; testing the many-wrongs principle. Anim. Behav. 78, 587–591.
aria, J.J., Dyer, J.R.G., Tosh, C.R., Krause, J., 2010a. Leadership and social informationuse in human crowds. Anim. Behav. 79, 895–901.
ds once you will have made at least 10 moves. Please click the OK-button below toerimenter”.
Faria, J.J., Krause, S., Krause, J., 2010b. Collective behavior in road cross-ing pedestrians: the role of social information. Behav. Ecol. 21, 1236–1242.
Fichtel, C., Pyritz, L., Kappeler, P.M., 2011. Coordination of group movements innon-human primates. In: Boos, M., Kolbe, M., Kappeler, P.M., Ellwart, T. (Eds.),Coordination in Human and Primate Groups. Springer, Berlin/Heidelberg, pp.37–56.
Hamilton, W.D., 1971. Geometry for the selfish herd. J. Theor. Biol. 31, 295–311.Helbing, D., Molnár, P., Farkas, I.J., Bolay, K., 2001. Self-organizing pedestrian move-
ment. Environ. Plann. B: Plann. Des. 28, 361–383.Johnson, A.W., Earle, T., 2000. The Evolution of Human Societies: From Foraging
Group to Agrarian State. Stanford University Press, Stanford.King, A.J., Sueur, C., Huchard, E., Cowlishaw, G., 2011a. A rule-of-thumb based on
social affiliation explains collective movements in desert baboons. Anim. Behav.82, 1337–1345.
King, A.J., Narraway, C., Hodgson, L., Weatherill, A., Sommer, V., Sumner, S., 2011b.Performance of human groups in social foraging: the role of communication inconsensus decision making. Biol. Lett. 7, 237–240.
Knudsen, C.A., 2004. Presence Production. Published doctoral thesis, Royal Instituteof Technology, Stockholm.
Krause, J., Ruxton, G.D., 2002. Living in Groups. Oxford University Press, Oxford.Matlin, M.W., Zajonc, R.B., 1968. Social facilitation of word associations. J. Pers. Soc.
Psychol. 10, 455–460.Meade, J., Nam, K.B., Beckerman, A.P., Hatchwell, B.J., 2010. Consequences of ‘load-
lightening’ for future indirect fitness gains by helpers in a cooperatively breedingbird. J. Anim. Ecol. 79, 529–537.
Murray, C.D., Sixsmith, J., 1999. The corporeal body in virtual reality. Ethos 27,315–343.
Parrish, J.K., Viscido, S.V., Grünbaum, D., 2002. Self-organized fish schools: an exam-ination of emergent properties. Biol. Bull. 202, 296–305.
Pearson, H.C., 2011. Sociability of female bottlenose dolphins (Tursiops spp) andchimpanzees (Pan troglodytes): understanding evolutionary pathways towardsocial convergence. Evol. Anthropol. 20, 85–95.
Pitcher, T.J., Magurran, A.E., Winfield, I.J., 1982. Fish in larger shoals find food faster.Behav. Ecol. Sociobiol. 10, 149–151.
Quinn, J.L., Cresswell, W., 2006. Testing domains of danger in the selfish herd:sparrowhawks target widely spaced redshanks in flocks. Proc. Biol. Sci. 273,2521–2526.
Rands, S.A., Cowlishaw, G., Pettifor, R.A., Rowcliffe, J.M., Johnstone, R.A., 2003. Spon-taneous emergence of leaders and followers in foraging pairs. Nature 423,432–434.
Reebs, S.G., 2000. Can a minority of informed leaders determine the foraging move-ments of a fish shoal? Anim. Behav. 59, 403–409.
Reynolds, C.W., 1987. Flocks herds, and schools: a distributed behavioral model.Comput. Graph. 21, 25–34.
Scantlebury, M., Bennett, N.C., Speakman, J.R., Pillay, N., Schradin, C., 2006. Huddlingin groups leads to daily energy savings in free-living African four-striped grassmice, Rhabdomys pumilio. Funct. Ecol. 20, 166–173.
Seeley, T.D., Buhrmann, S.C., 2001. Nest-site selection in honey bees: how welldo swarms implement the best-of-N decision rule? Behav. Ecol. Sociobiol. 49,416–427.
Sueur, C., Petit, O., Deneubourg, J.L., 2009. Selective mimetism at departure in collec-
tive movements of Macaca tonkeana: an experimental and theoretical approach.Anim. Behav. 78, 1087–1095.Sueur, C., Deneubourg, J.L., 2011. Self-organization in primates: understand-ing the rules underlying collective movements. Int. J. Primatol. 32, 1413–1432.

1 ral Pro
S
v
V
4 M. Belz et al. / Behaviou
umpter, D.J.T., 2010. Collective Animal Behavior. Princeton University Press, Prince-ton.
an Schaik, C.P., 1989. The ecology of social relationships amongst female primates.
In: Standen, V., Foley, R.A. (Eds.), Comparative Socioecology: The BehavioralEcology of Humans and Other Mammals. Blackwell, Oxford, pp. 195–218.icsek, T., Czirók, A., Ben-Jacob, E., Cohen, I., Shochet, O., 1995. Novel type ofphase transition in a system of self-driven particles. Phys. Rev. Lett. 75, 1226–1229.
cesses 92 (2013) 6– 14
Vine, I., 1971. Risk of visual detection and pursuit by a predator and the selectiveadvantage of flocking behaviour. J. Theor. Biol. 30, 405–422.
Ward, A.J.W., Herbert-Read, J.E., Sumpter, D.J.T., Krause, J., 2011. Fast and accurate
decisions through collective vigilance in fish shoals. Proc. Natl. Acad. Sci. U.S.A.108, 2312–2315.Williams, J.M., Oehlert, G.W., Carlis, J.V., Pusey, A.E., 2004. Why do male chimpanzeesdefend a group range? Anim. Behav. 68, 523–532.
Zajonc, R.B., 1965. Social facilitation. Science 149, 269–274.