Solved University Questions Papers - GL DataScience
34
Solved University Questions Papers B.E/B.Tech Degree Examination Apr/May 2017 Third Semester Electronics and Communication Engineering EC6303 - Signals & Systems (Common to Biomedical Engineering and Medical Electronics Engineering) (Regulation 2013) Answer All Questions. Part - A (10 × 2 = 20 Marks) 1. Find the summation x (n)= ∞ ∑ n=-∞ δ (n - 1) sin 2n. Refer Page No. 1.57, Example 1.30, sum 2 2. Define a linear system. Refer Page No. 1.77, section 1.11.1 3. What is the condition for the existence of fourier series for a signal? Refer Page No. 2.5, section 2.2 4. Give the expression for convolution integral. y (t)= ∞ -∞ x (τ ) h (t - τ ) dτ This equation called convolution integral.
-
Upload
khangminh22 -
Category
Documents
-
view
7 -
download
0
Transcript of Solved University Questions Papers - GL DataScience

Solved University Questions
Papers
B.E/B.Tech Degree Examination Apr/May 2017
Third Semester
Electronics and Communication Engineering
EC6303 - Signals & Systems
(Common to Biomedical Engineering and Medical Electronics Engineering)
(Regulation 2013)
Answer All Questions.
Part - A (10 × 2 = 20 Marks)
1. Find the summation x (n) =∞∑
n=−∞δ (n − 1) sin 2n.
Refer Page No. 1.57, Example 1.30, sum 2
2. Define a linear system.
Refer Page No. 1.77, section 1.11.1
3. What is the condition for the existence of fourier series for a signal?
Refer Page No. 2.5, section 2.2
4. Give the expression for convolution integral.
y (t) =
∞∫
−∞
x (τ)h (t − τ) dτ
This equation called convolution integral.

S.2 Signals and Systems
5. Given h (t) what is the step response of a CT-LTI system.
6. What is the z-transform of a unit step response.
Refer Page No. 2.52, Example 4.4
7. State Parsevals’ theorem for a continuous time aperiodic signal.
Its states that
E =
∞∫
−∞
|x (t)|2 dt
E =1
2π
∞∫
−∞
|X (jω)|2 dω
8. Find x (∞) of the signal for with z-transform is given by
X (z) =z + 1
3 (z − 1) (z + 0.9)
x (∞) = ltz→1
(z − 1
z
)
X (z)
= ltz→1
(z − 1
z
)
×z + 1
3 (z − 1) (z + 0.9)
= ltz→1
(z + 1)
3z (z + 0.9)
=2
3 (1.9)
x (∞) = 0.3508
9. What is the difference between recursive and nonrecursive system?
Refer Page No. 5.59, Section 5.8
10. What is the necessary and sufficient condition on impulse response for sta-
bility of a causal LTI system.
For CT; Condition for stability
∞∫
−∞
h (t) < ∞

Solved University Questions Papers S.3
For DT; Condition for stability
∞∑
k=−∞
h (k) < ∞
Part - B (5 × 13 = 65 Marks)
11. (a) Find out whether the following signals are periodic or not. If periodic
find the period.
(1) x (t) = 2 cos (10t + 1) − sin (4t − 1)Refer Page No. 1.9. Example 1.6, Sum 1
(2) x (n) = cos (0.1πn)
ω = 0.1π
N =2π
ω× m
=2π
0.1π× m
N = 20 × m ∴ m = 1
N = 20 (rational number)
N = 20 samples
So given signal is periodic.
(b) Find out whether the following signals are energy or power signal or
neither power nor energy. Determine power on energy as the case may
be for the signal x (t) = u (t) + 5u (t − 1) − 2u (t − 2).
u(t)
u(t 1)-
5u(t 1)- 5u(t 1)-
1
1 1
1
1
5 5

S.4 Signals and Systems
(Or)
Determine the properties viz linearity, causality, time invariance and
dynamicity of the given systems.
y (t) =d2y (t)
dt2+ 3t
dy (t)
dt+ y (t) = x (t)
Refer page No. 1.86, Example 1.47, sum 1
y1 (n) = x(n2
)+ x (n)
y2 (n) = log10 x (n)
Refer page No. 1.89, Example 1.47, sum 4
12. (a) Obtain the fourier co-efficient and write the quadrature form of a fully
rectified sine wave.
Refer Page No. 1.19, Example 2.9
(Or)
(b) Determine the inverse laplace transform of the following
(i) x (s) =1 − 2s2 − 14s
s (s + 3) (s + 4)
1 − 2s2 − 14s
s (s + 3) (s + 4)=
A
s+
B
(s + 3)+
C
(s + 4)
1 − 2s2 − 14s
s (s + 3) (s + 4)=
A (s + 3) (s + 4) + Bs (s + 4) + Cs (s + 3)
s (s + 3) (s + 4)
1 − 2s2 − 14s = A (s + 3) (s + 4) + Bs (s + 4) + cs (s + 3)
sub s = −3
1 − 2 (−3)2 − 14 (−3) = B (−3) (−3 + 4)
1 − 18 + 42 = B (−3)
25 = B (−3)
B =−25
3
sub s = −4
1 − 2 (−4)2 − 14 (−4) = C (−4) (−4 + 3)
1 − 32 + 56 = C (4)
25 = C (4)
C =25
4

Solved University Questions Papers S.5
sub s = 0
1 = A (3) (4)
A =1
12
X (s) =1
12s+
(−25
3
)1
s + 3+
25
4×
1
(s + 4)
x (t) = L−1X (s)
Applying inverse laplace transform
x (t) =1
12u (t) −
25
3e−3tu (t) +
25
4e−4tu (t)
(ii) x (s) =2s2 + 10s + 7
(s + 1) (s2 + 3s + 2)
2s2 + 10s + 7
(s + 1) (s2 + 3s + 2)=
A
(s + 1)+
B
(s + 1)2+
C
(s + 2)
2s2 + 10s + 7
(s + 1) (s2 + 3s + 2)=
A (s + 2) (s + 1) + B (s + 2) + C (s + 1)2
(s + 1)2 (s + 2)
2s2 + 10s + 7 = A[s2 + s + 2s + 2
]+ Bs + 2B + C
[s2 + 2s + 1
]
= A[s2 + 3s + 2
]+ Bs + 2B + Cs2 + Cs2 + C
= As2 + 3sA + 2A + Bs + 2B + Cs2 + c2s + C
= s2 [A + C] + s [3A + B + 2C] + (2A + 2B + C)
Equating s2
s2 [A + C] = 2
A + C = 2
Equating s
3A + B + 2C = 10
Equating constant
2A + 2B + C = 7

S.6 Signals and Systems
Solving this three equations
A = 7; B = −1; C = −5
X (s) =7
(s + 1)−
1
(s + 1)2−
5
(s + 2)
Taking inverse laplace transform
x (t) = 7e−tu (t) − te−tu (t) − 5e−2tu (t)
13. (a) A causal LTI system having a frequency response H (jΩ) =1
jΩ + 3is producing an output y (t) = e−3tu (t) − e−4tu (t) for a particular
input x (t). Determine x (t).
Solution:
Given
H (jΩ) =1
jΩ + 3
y (t) = e−3tu (t) − e−4tu (t)
Applying fourier transform on both side
H (jΩ) =1
jΩ + 3−
1
jΩ + 4
=jΩ + 4 − jΩ − 3
(jΩ + 3) (jΩ + 4)
=1
(jΩ + 3) (jΩ + 4)
We know that
Y (jΩ) = H (jΩ)X (jΩ)
X (jΩ) =Y (jΩ)
H (jΩ)
=
1(jΩ+4)(jΩ+3)
1(jΩ+3)
=1
(jΩ + 4) (jΩ + 3)× (jΩ + 3)
X (jΩ) =1
(jΩ + 4)

Solved University Questions Papers S.7
Taking inverse fourier transform
x (t) = e−4tu (t)
(Or)
(b) Realize the given system in parallel form
H (s) =s (s + 2)
s2 + 8s2 + 19s + 12
Solution:
H (s) =s (s + 2)
(s + 1) (s2 + 7s + 12)
=s (s + 2)
(s + 1) (s + 4) (s + 3)
H (s) =A
(s + 1)+
B
(s + 4)+
C
(s + 3)
s (s + 2)
(s + 1) (s + 4) (s + 3)=
A (s + 3) (s + 4) + B (s + 1) (s + 3) + C (s + 1) (s + 4)
(s + 1) (s + 4) (s + 3)
s (s + 2) = A (s + 3) (s + 4) + B (s + 1) (s + 3) + C (s + 1) (s + 4)
sub s = −3
C (−3 + 1) (−3 + 4) = 3
C (−2) = 3
C = −3
2
sub s = −4
B (−3) (−1) = 8
B =8
3
sub s = −1
A (2) (3) = −1
A =−1
5
H (s) =−1
5 (s + 1)+
8
3 (s + 4)+
(−3/2)
(s + 3)

S.8 Signals and Systems
H (s) =−0.2
(s + 1)︸ ︷︷ ︸
⇓H1(s)
+2.6
(s + 4)︸ ︷︷ ︸
⇓H2(s)
−1.5
(s + 3)︸ ︷︷ ︸
⇓H3(s)
H1 (s) =−0.2
(s + 1); H2 (s) =
2.6
(s + 4); H3 (s) =
−1.5
(s + 3)
H1 (s) =Y1 (s)
X1 (s)×
W1 (s)
W1 (s)=
−0.2
(s + 1)
Y1 (s)
W1 (s)= −0.2
Y1 (s) = −0.2W1 (s)
W1 (s)
X1 (s)=
1
(s + 1)
W1 (s) s + W1 (s) = X1 (s)
sW1 (s) = X1 (s) − W1 (s)
S1
1Y (S)1
X (S)1
SW (S)1
-0.2
H2 (s) =2.6
s + 4
H2 (s) =Y2 (s)
X2 (s)×
W2 (s)
W2 (s)=
2.6
s + 4
Y2 (s)
W2 (s)= 2.6
Y2 (s) = 2.6W2 (s)
W2 (s)
X2 (s)=
1
(s + 4)
sW2 (s) + 4W2 (s) = X2 (s)
sW2 (s) = X2 (s) − 4W2 (s)
S1
-4Y (S)2
X (S)2
SW (S)2
2.6

Solved University Questions Papers S.9
H3 (s) =−0.2
(s + 1)
H3 (s) =Y3 (s)
X3 (s)×
W3 (s)
W3 (s)=
−0.2
(s + 1)
Y3 (s)
W3 (s)= −0.2
W3 (s)
X3 (s)=
1
(s + 1)
sW3 (s) + W3 (s) = X3 (s)
sW3 (s) = X3 (s) − W3 (s)
S1
Y (S)3
X (S)3
SW (S)3
-0.2
Combine all in parallel form
S1
X(S)
-0.2
S1
-1.5
S1
Y(S)
1
-4
-0.2
14. (a) State and prove sampling theorem.
Refer Page No. 4.1, Section 4.1
(Or)
(b) State and prove the following properties of DTFT

S.10 Signals and Systems
(i) Differentiation in frequency
Refer Page No. 2.50, Section 4.3.8
(ii) Convolution in frequency domain.
Refer Page No. 2.49, Section 4.3.7
15. (a) Perform convolution to find the response of the system h1 (n) and
h2 (n) for the input sequences x1 (n) and x2 (n) respectively.
(i) x1 (n) = 1, −1, 2, 3, h1 (n) = 1, −1, 3, 1
(ii) x2 (n) = 1, 2, 3, 2, h2 (n) = 1, 2, 2
(i) x1 (n) = 1, −1, 2, 3, h1 (n) = 1, −1, 3, 1
Matrix method
1 2 3
1 2 31
3 6 9
1 2 3
-2 -4 -6
-1
-3
2
-1
-1
1
3
-2
y (n) = 1, −3, 7, −3, −1, 11, 3
Linear method
Step 1:-
The total number of output sequence = No. of sequence in x (n)
+ No. of sequence in h (n) − 1
= 4 + 4 − 1
= 7
Step 2:-
x (n) starts at n1 = 0
h (n) starts at n2 = 0
n = n1 + n2
n = 0
n = 0, 1, 2, 3, 4, 5, 6

Solved University Questions Papers S.11
Step 3:-
y1 (n) =∞∑
k=−∞
x (k)h (n − k)
n = 0;
y1 (0) =6∑
k=0
x (k)h (−k)
y1 (0) = 1
n = 1;
y1 (1) =6∑
k=0
x (k)h (1 − k)
y1 (1) = −3
n = 2;
y1 (2) =6∑
k=0
x (k)h (2 − k)
y1 (2) = 7
n = 3;
y1 (3) =6∑
k=0
x (k)h (3 − k)
y1 (3) = −3
n = 4;
y1 (4) =6∑
k=0
x (k)h (4 − k)
y1 (4) = −1
n = 5;
y1 (5) =
6∑
k=0
x (k)h (5 − k)
y1 (5) = 11

S.12 Signals and Systems
n = 6;
y1 (6) =
6∑
k=0
x (k)h (6 − k)
y1 (6) = 3
y1 (n) = 1, −3, 7, −3, −1, 11, 3
(ii) x2 (n) = 1, 2, 3, 2, h2 (n) = 1, 2, 2Matrix method
1 3 2
1 3 41
2 6 4
2 6 4
4
4
2
2
2
2
x (n)2
n (n)2
®
¯
y2 (n) = 1, 4, 9, 14, 10, 4
Linear method:-
Step 1:-
The total number of output sequence = No. of sequence in x (n)
+ No. of sequence in h (n) − 1
= 4 + 3 − 1
= 6
Step 2:-
x (n) starts at n1 = 0
h (n) starts at n2 = 0
n = n1 + n2
n = 0
n = 0, 1, 2, 3, 4, 5
Step 3:-
y2 (n) =∞∑
k=−∞
x (k)h (n − k)

Solved University Questions Papers S.13
n = 0;
y2 (0) =
6∑
k=0
x (k)h (−k)
y2 (0) = 1
n = 1;
y2 (1) =6∑
k=0
x (k)h (1 − k)
y2 (1) = 4
n = 2;
y2 (2) =6∑
k=0
x (k)h (2 − k)
y2 (2) = 9
n = 3;
y2 (3) =6∑
k=0
x (k)h (3 − k)
y2 (3) = 14
n = 4;
y2 (4) =6∑
k=0
x (k)h (4 − k)
y2 (4) = 10
n = 5;
y2 (5) =6∑
k=0
x (k)h (5 − k)
y2 (5) = 4
y2 (n) = 1, 4, 9, 14, 10, 4
(Or)

S.14 Signals and Systems
(b) For a causal LTI system the input x (n) and output y (n) are related
through a difference equation y (n) −1
6y (n − 1) −
1
6y (n − 2) =
x (n).
Determine the frequency response H(ejω
)and impulse response h (n)
of the system.
y (n) −1
6y (n − 1) −
1
6y (n − 2) = x (n)
Taking z-transform
Y (z) −1
6z−1Y (z) −
1
6z−2Y (z) = X (z)
Y (z)
X (z)=
1
1 −1
6z−1 −
1
6z−2
H (z) =1
1 −1
6z−1 −
1
6z−2
Frequency response
Replace z = e−jω
H(ejω
)=
1
1 −1
6e−jω −
1
6e−2jω
B =
(
z +1
3
)
×z
(z − 1
2
) (z + 1
3
)
∣∣∣∣∣sub z=− 1
3
=−1/32 − 5
6
=−1
3×
6
−5
B =2
5H (z)
z=
5/3(
z −1
2
) +2/5
(
z +1
3
)
H (z) =5/3z
(
z −1
2
) +2/5z
(
z +1
3
)

Solved University Questions Papers S.15
Taking inverse z-transform
H (z) =5
3
(1
2
)n
u (n) +2
5
(−1
3
)n
u (n)
Part - C
16. (a) Using laplace transform determine the response of the system de-
scribed by the equation
d2y (t)
dt2+ 5
dy (t)
dt+ 4y (t) =
dx (t)
dt
with initial conditions y (0) = 0;dy (t)
dt
∣∣∣∣t=0
= 1 for
To obtain impulse response
H (z) =z2
z2 −1
6z −
1
6
H (z) =z2
(
z −1
2
)(
z +1
3
)
Y (z)
X (z)=
z2
(
z −1
2
)(
z +1
3
)
Y (z) =z2X (z)
(
z −1
2
)(
z +1
3
)
Y (z)
z=
z(
z −1
2
)(
z +1
3
)
Y (z)
z=
A(
z −1
2
) +B
(
z +1
3
)
A =
(z − 1
2
)× z
(
z −1
2
)(
z +1
3
)
∣∣∣∣∣∣∣∣sub z= 1
2

S.16 Signals and Systems
A =
1
2(1
2+
1
3
) =
1
25
6
A =5
3
the input x (t) = e−2tu (t).
Solution:d2y (t)
dt2+ 5
dy (t)
dt+ 4y (t) =
dx (t)
dtApplying laplace transform[
s2Y (s) − sY(0)−
dy (0)
dt
]
+[5s − Y
(0)]
+ 4Y (s) = sX (s)
Sub y (0) = 0;dy (0)
dt= 1
(s2Y (s) − 1
)+ [5s − 0] + 4Y (s) = sX (s)
s2Y (s) − 15s + 4Y (s) = sX (s)
Y (s)[s2 + 5s + 4
]= sX (s) + 1
Given x (t) = e−2tu (t)
X (s) =1
(s + 1)
Y (s)[s2 + 5s + 4
]=
s
s + 1+ 1
Y (s) =s
(s + 1) (s2 + 5s + 4)+
1
(s2 + 5s + 4)
Y (s) =s + (s + 1)
(s + 1) (s2 + 5s + 4)
Y (s) =2s + 1
(s + 1) (s2 + 4) (s + 1)
Y (s) =2s + 1
(s + 1)2 (s + 4)
2s + 1
(s + 1)2 (s + 4)=
A
(s + 1)+
B
(s + 1)2+
C
(s + 4)
2s + 1 = A (s + 4) (s + 1) + B (s + 4) + C (s + 1)2

Solved University Questions Papers S.17
= A[s2 + 5s + 4
]+ Bs + 4B + Cs2 + 2sC + C
(2s + 1) = As2 + 5sA + 4A + Bs + 4B + Cs2 + 2sC + C
Equating s2
s2 [A + C] = 0
A + C = 0
Equating ss [5A + B + 2C] = 2
Equating constant
4A + 4B + C = 1
Solving
A = 0.7; B = −0.3; C = −0.7
Y (s) =0.7
(s + 1)−
0.3
(s + 1)2+
(−0.7)
(s + 4)
Taking inverse laplace transform
y (t) = 0.7e−tu (t) − 0.3te−tu (t) − 0.7e−4tu (t)
(Or)
(b) Determine the steady state response for the system with impulse re-
sponse h (n) = [j0.5]n for an input x (n) = cos πnu (n).

S.18 Signals and Systems
B.E/B.Tech Degree Examination Nov/Dec 2016
Third Semester
Electronics and Communication Engineering
EC6303 - Signals & Systems
(Common to Biomedical Engineering and Medical Electronics Engineering)
(Regulation 2013)
Answer All Questions.
Part - A (10 × 2 = 20 Marks)
1. Give the mathematical and graphical representation of a continuous time
and discrete time unit impulse functions.
Refer Page No. 1.27; Section 1.4.6
2. State the difference between causal and noncausal system.
Refer Page No. 1.84; Section 1.11.5
3. Find the fourier series representation of the signals x (t) =cos 2πt
3and
determine the fourier series coefficients.
x (t) =ej 2π
3t + e−j 2π
3t
2(1)
x (t) = a0 + a1ejω0t + a−1e
−jω0t (2)
Compare (1) & (2)
a0 = 0
a1 =1
2
a−1 =1
2
4. Find the laplace transform of x (t) = e−atu (t).
Refer Page No. 4.11, Example 2.34
5. Convolve the following signals u (t − 1) and δ (t − 1).

Solved University Questions Papers S.19
6. Given H (s) =s
s2 + 2s + 1. Find the differential equation representation
of the system.
H (s) =Y (s)
X (s)=
s
s2 + 2s + 1
s2Y (s) + 2sY (s) + Y (s) = sX (s)
d2y (t)
dt2+ 2
dy (t)
dt+ y (t) =
dx (t)
dt
7. Find the Nyquist rate of the signal x (t) = sin 200πt − cos 100πt.
x (t) = sin 200πt − cos 100πt
f1 =200 Hz; f2 = 100Hz; (maximum frequency) ; fm = 200 Hz
Nyquist rate = 2W
= 2fm
= 2 × 200
= 400 Hz
Nyquist rate = 400 Hz
8. Find the z-transform of the signal and its associated ROC x (n) = 2, −1, 3, 0, 2.
x (n) =
2, −1, 3
↑n=0
, 0, 2
X (z) =∞∑
n=−∞
x (n) z−n
=2∑
n=−2
x (n) z−n
= x (−2) z2 + x (−1) z1 + x (0) z0 + x (1) z−1 + x (2) z−2
Y (z) = 2z−2 − 1z−1 + 3 + 0z−1 + 2z−2
Y (z) = 2z−2 + z−1 + 3 + 2z−2
9. Convolve the following sequences.
x (n) = 1, 2, 3
h (n) = 1, 1, 2

S.20 Signals and Systems
1 2
1 21
3 6
2 4
3
2
1
1
3
2
h(n)
x(n)
y (n) = 1, 3, 7, 7, 6
10. Given the sequence function H (z) = 2+3z−1 +4z−3 − 5z−4. Determine
the impulse response h (n).
Part - B (5 × 13 = 65 Marks)
11. (a) Determine whether the system is linear, time invariant, causal and
memoryless
y (t) =1
2
t∫
−∞
x (z) dz
Refer Page No. 1.76, Example 1.42
(Or)
(b) Sketch the following signals
(i) u (t − 2)
(ii) r (−t + 3)
(iii) 2δ (n + 2) + δ (n) − 2δ (n − 1) + 3δ (n − 3)
(iv) u (n + 2)u (−n + 3)
where u (t), r (t), δ [n], u [n] represent continuous time unit step, con-
tinuous time ramp, discrete time impulse and discrete time step func-
tions respectively.
Solution:
(i) u (t − 2)u(t 2)-
2
1

Solved University Questions Papers S.21
(ii) r (−t + 3)r( t)-
t t
t
r( t+3)-
(iii) 2δ (n + 2) + δ (n) − 2δ (n − 1) + 3δ (n − 3)
d(n+2)
t
d(n)
n
2 (n+2)+ (n)d d
d -(n 1)
-2
3 (n 3)d -
n
2 (n 1)+3 (n 3)d - d -
2 (n+2)+ (n) 2 (n 1)+3 (n )d d - d - d -3

S.22 Signals and Systems
(iv) u (n + 2)u (−n + 3)
u(-n+3)
u(n+2)u(-n+3)
12. (a) Find the fourier transform of the signal x (t) = cosΩ0tu (t).
(b) State and prove the multiplication and convolution property of fourier
transform.
13. (a) Convolve the following signals
x (t) = e−3tu (t)
h (t) = u (t + 3)
Solution:
y (t) =
∞∫
−∞
x (τ)h (t − τ) dτ
=
∞∫
−∞
e−2τ u (t + 3 − τ) dτ
u (τ)u (t + 3 − τ) = 1
limit from 0 to (t + 3)
=
t+3∫
0
e−3τ · 1 dτ
=
[e−3τ
τ
]t+3
0
=−1
2
e−3(t+3) − e0
⇓1

Solved University Questions Papers S.23
y (t) =1
2
[
1 − e−3(t+3)]
(b) A system is described by the differential equationd2y (t)
dt2+6
dy (t)
dt+
8y (t) =d
dtx (t) + x (t). Find the transfer function and the output
signal y (t) for x (t) = δ (t).
Solution:
d2y (t)
dt2+ 6
dy (t)
dt+ 8y (t) =
d
dtx (t) + x (t)
Applying laplace transform on both side
s2Y (s) + 6sY (s) + 8Y (s) = sX (s) + X (s)
Y (s)
X (s)=
s + 1
s2 + 6s + 8
Transfer function
H (s) =Y (s)
X (s)=
s + 1
s2 + 6s + 8
Y (s) = X (s) ·s + 1
s2 + 6s + 8
x (t) = δ (t)
X (s) = 1
Y (s) =s + 1
s2 + 6s + 8=
s + 1
(s + 4) (s + 2)=
A
s + 4+
B
s + 2
s + 1 = A (s + 2) + B (s + 4)
A =3
2
B =−1
2
Y (s) =3/2
(s + 4)−
1/2
(s + 2)
Applying inverse laplace transform
y (t) =3
2e−4tu (t) −
1
2e−2tu (t)

S.24 Signals and Systems
14. (a) (i) Discuss the effects of undersampling a signal using necessary di-
agrams. (5)
Refer Page No. 5.36
(ii) Find the z-transform of x (n) = anu (n) − bnu (−n − 1) and
specify its ROC. (8)
Ans:
X (z) =z
z − a+
z
z − b
(b) (i) Give the relation between discrete time fourier transform (DTFT)
and z transform. (5)
Both DTFT and x transform are used to analysis aperiodic dis-
crete time signals.
DTFT
x (n)F.T−−→ X
(ejω
)
X(ejω
) I.F.T−−→ x (n)
X(ejω
)=
∞∑
n=−∞
x (n) e−jωn
x (n) =1
2π
∞∫
−∞
X(ejω
)ejωn dω
z-transform
ejω → z
x (n)Z.T−−→ X (z)
X (z)I.Z.T−−→ x (n)
x [n] = δ [n] +1
6δ [n − 1] −
1
6δ [n − 2]
x [n] = δ [n]6 −2
3δ [n − 1]
(ii) Find the response y (t) of a continuous time system using laplace
transform with transfer function H (s) =1
(s + 2) (s + 3)for an
input x (t) = e−tu (t).
H (s) =Y (s)
X (s)=
1
(s + 2) (s + 3)

Solved University Questions Papers S.25
Y (s) = X (s) ·1
(s + 2) (s + 3)∴ x (t) = e−tu (t) =
1
s + 1
=1
(s + 1) (s + 2) (s + 3)
Y (s) =1
(s + 1) (s + 2) (s + 3)
Y (s) =A
(s + 1)+
B
(s + 2)+
C
(s + 3)
A =1
2; B = 1; C = −
1
2
Y (s) =
1
2(s + 1)
+1
(s + 2)+
(
−1
2
)
(s + 3)
Taking inverse laplace transform
y (t) =1
2e−tu (t) + e−2tu (t) −
1
2e−3tu (t)
x (z) =
∞∑
n=−∞
x (n)z−n
x (n) =1
2πj
∮
X (z) zn−1 dn
(iii) State and prove the time shifting property and time reversal prop-
erty of z transform. (8)
Refer Page No. 4.28, Section 4.52, Section 4.5.3
15. (a) Convolve the following signals.
x (n) = u (n) − u (n − 3)
h (n) = (0.5)n u (n)
(b) Determine whether the given system is stable by finding H (z) and
plotting the pole zero diagram.
y (n) = 2y (n − 1) − 0.8y (n − 2) + x (n) + 0.8x (n − 1)
Part - C (1 × 15 = 15 Marks)

S.26 Signals and Systems
16. (a) A causal system has input x (n) and output y (n). Find the
(i) System function (4)
(ii) Impulse response h (n) (6)
(iii) Frequency response H(ejω
)(5)

Solved University Questions Papers S.27
B.E/B.Tech Degree Examination May/June 2016
Third Semester
Electronics and Communication Engineering
EC6303 - Signals & Systems
(Regulation 2013)
Answer All Questions.
Part - A (10 × 2 = 20 Marks)
1. Sketch the following signals
(i) rect
(t + 1
4
)
rect(t)rect(t+1/4)
0.25-0.75
rect(t+1/4)
-3 0.75
(ii) 5 ramp (0.1t)
5
10
15
5 ramp(t)
5
10
15
5 ramp(0.1t)
10 20 30
2. Given g (n) = 2e−2n−3. Write out and simplify the functions
(i) g (2 − n)

S.28 Signals and Systems
(ii) g( n
10+ 4
)
3. What is the inverse fourier transform of
(i) e−j2πft0
(ii) δ (f − f0)
I.F.T of e−j2πft0 = δ (t + t0)
I.F.T of δ (t − t0) = ejf0t
4. Give the laplace transform of x (t) = 3e−2tu (t) − 2e−tu (t) with ROC.
Refer page No. 4.11, Example 2.35.
5. Find whether the following system whose impulse response is causal and
stable.
h (t) = e−2tu (t − 1)
Refer page No. 3.34, Example 3.22.
6. Realize the block diagram representing the system
H (s) =s
s + 1
H (s) =Y (s)
X (s)=
s
s + 1
sY (s) + Y (s) = sX (s)
Y (s) = X (s) −Y (s)
s
S1
-1
X(S) Y(S)
7. Write the conditions for existence of DTFT.
The fourier transform doesnot exist for all periodic function the condition
for x (n) to have fourier transform are

Solved University Questions Papers S.29
(i) x (n) is absolutely integrable over (−∞, ∞) that is
∞∑
n=−∞
|x (n)|dt < ∞
(ii) x (n) has finite number of discontinuous and a finite number of max-
ima and minima in every finite time interval.
8. Find the final value of the given signal
X (z) =1
1 + 2z−1 + 3z−2
9. From discrete convolution sum, find the step response interms of h (n).
10. Define the non recursive system.
Refer page No. 5.59, Section 5.8
Part - B (5 × 16 = 80 Marks)
11. (a) (i) Find whether the following signals are periodic or aperiodic. If
periodic find the fundamental period and fundamental frequency.
x1 (n) = sin 2πt + cos πt
x2 (n) =sin nπ
3·cos nπ
5
Solution:
x1 (n) = sin 2πt + cos πt
T1 =2π
ω=
2π
2π= 1
T2 =2π
ω=
2π
π= 2
T1
T2=
1
2(rational)
∴ Periodic signal.
Fundamental period T = 2T1 (or) T2
T = 2 sec

S.30 Signals and Systems
(ii) Find whether the following signals are power or energy signals.
Determine power and energy of the signals.
g (t) = 5 cos(
17πt +π
4
)
+ 2 sin(
19πt +π
3
)
g (n) = (0.5)n u (n)
E = ltN→∞
N∑
n=−N
|x (n)|2
= ltN→∞
N∑
n=−N
(0.5)2n u (n) u (n) = 1; limit 0 to N
= ltN→∞
N∑
n=0
(0.25)n (1)
= ltN→∞
1
1 − 0.25
= ltN→∞
1
0.75
E =1
0.75
P = ltN→∞
1
(2N + 1)
N∑
n=−N
|x (n)|2
= ltN→∞
1
(2N + 1)×
1
0.75
P = 0
(Or)
(b) Find whether the following systems are time variant or fixed. Also
find whether the systems are linear or nonlinear.
d3y (t)
dt3+ 4
d2y (t)
dt2+ 5
dy
dt+ y2t = x (t) (8)
y (n) = an2X (n) + bnX (n − 2) (8)
12. (a) Obtain the fourier series co-efficient & plot the spectrum for the given
waveform. (16)

Solved University Questions Papers S.31
(Or)
(b) (i) From basic formula, determine the fourier transform of the given
signals obtain the magnitude and phase spectra of the given sig-
nals.
te−atu (t) , a > 0
e−a|t|, a > 0
Refer page No. 2.37, Section 2.19
Refer page No. 2.34, Section 2.16
(ii) State and prove Rayleigh’s energy theorem.
Refer page No. 2.39, Section 2.7.13
13. (a) (i) Using graphical convolution, find the response of the system whose
impulse response is (8)
h (t) = e−2tu (t)
For an input
x (t) =
A for 0 ≤ t ≤ 20 otherwise
.
(ii) Realize the following a indirect form II. (8)
d3y (t)
dt3+4
d2y (t)
dt2+7
dy (t)
dt+8y (t) = 5
d2x (t)
dt2+4
dx (t)
dt+7x (t)
Solution:
Applying laplace transform
s3Y (s) + 4s2Y (s) + 7sY (s) + 8Y (s) = 5s2X (s) + 4sX (s) + 7X (s)
H (s) =Y (s)
X (s)=
5s2 + 4s + 7
s3 + 4s2 + 7s + 8
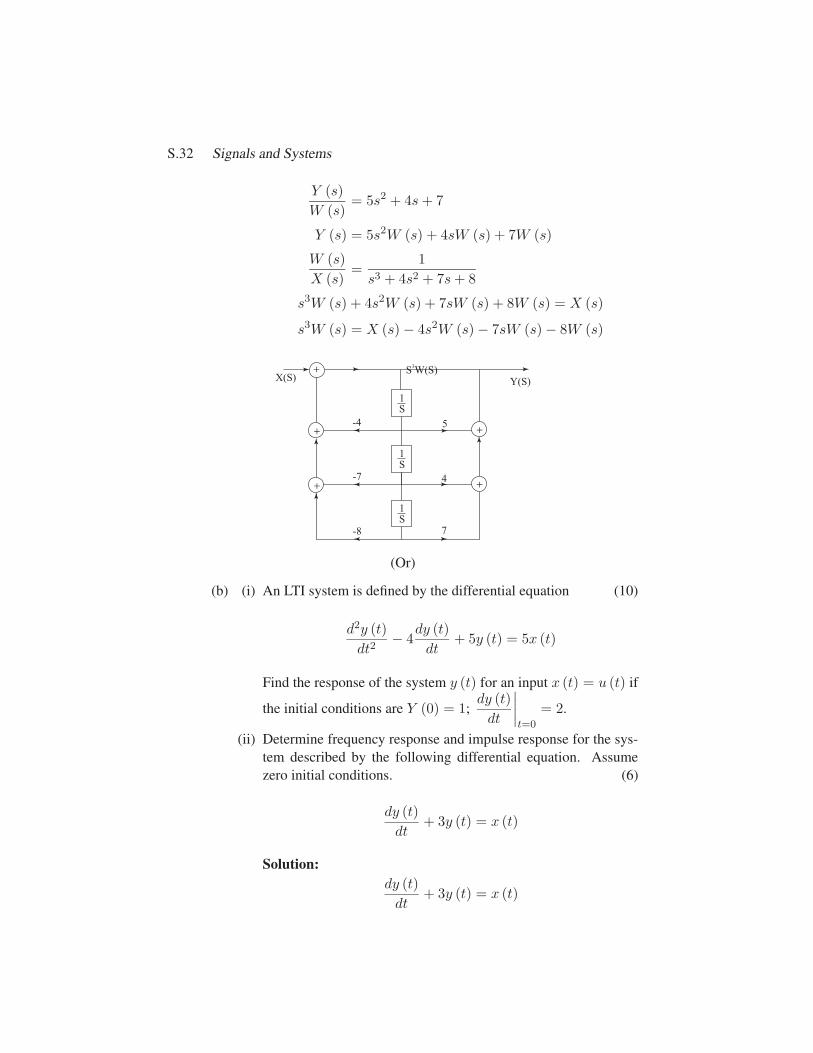
S.32 Signals and Systems
Y (s)
W (s)= 5s2 + 4s + 7
Y (s) = 5s2W (s) + 4sW (s) + 7W (s)
W (s)
X (s)=
1
s3 + 4s2 + 7s + 8
s3W (s) + 4s2W (s) + 7sW (s) + 8W (s) = X (s)
s3W (s) = X (s) − 4s2W (s) − 7sW (s) − 8W (s)
S1
S1
S1
-4
-7
-8
Y(S)X(S)
5
4
7
S W(S)3
(Or)
(b) (i) An LTI system is defined by the differential equation (10)
d2y (t)
dt2− 4
dy (t)
dt+ 5y (t) = 5x (t)
Find the response of the system y (t) for an input x (t) = u (t) if
the initial conditions are Y (0) = 1;dy (t)
dt
∣∣∣∣t=0
= 2.
(ii) Determine frequency response and impulse response for the sys-
tem described by the following differential equation. Assume
zero initial conditions. (6)
dy (t)
dt+ 3y (t) = x (t)
Solution:
dy (t)
dt+ 3y (t) = x (t)

Solved University Questions Papers S.33
Applying Laplace transform
sY (s) + 3Y (s) = X (s)
H (s) =Y (s)
X (s)=
1
(s + 3)
Frequency response
s = jω
H (jω) =1
(jω + 3)
Impulse response
Y (s) =X (s)
(s + 3)
x (t) = δ (t)X (s) = 1
Y (s) =1
(s + 3)
Applying inverse laplace transform
y (t) = e−3tu (t)
14. (a) (i) State and prove sampling theorem. (10)
Refer Page No. 4.1, Section 4.1
(ii) What is aliasing? Explain the steps to be taken to avoid aliasing.
(6)
Refer Page No. 4.5
(Or)
(b) State and prove the following theorems
(i) Convolution theorem of DTFT. (8)
Refer Page No. , Section 4.3.7
(ii) Initial value theorem of z transform. (8)
Refer Page No. , Section 4.5.7
15. (a) (i) Realize the following system in cascade form. (10)
H (z) =1 +
1
5z−1
(
1 −1
2z−1 +
1
3z−2
)(
1 +1
4z−1
)

S.34 Signals and Systems
(ii) Convolve
x (n) =
1, 1, 0↑, 1, 1
h (n) = 1, −2, −3, 4
(Or)
(b) A system os governed by a linear constant coefficient difference equa-
tion
y (n) = 0.7y (n − 1) − 0.1y (n − 3) + 2x (n) − x (n − 2)
Find the output response of the system y (n) for an input x (n) =u (n)
Refer page No. 5.51, Example 5.18.