Slip Power Loss and Fuel Consumption Control in 4x4 Terrain Vehicle Applications
15
Proceedings of the Joint 9 th Asia-Pacific ISTVS Conference and Annual Meeting of Japanese Society for Terramechanics Sapporo, Japan, September 27 to 30, 2010 Slip Power Loss and Fuel Consumption Control in 4x4 Terrain Vehicle Applications Barys Shyrokau Ilmenau University of Technology, Germany Vladimir Vantsevich Lawrence Technological University, USA Klaus Augsburg Ilmenau University of Technology, Germany Valentin Ivanov Ilmenau University of Technology, Germany Abstract. 4x4 terrain vehicle applications widely use positively locked power dividing units (PDU) in the transfer case. Such PDUs considerably improve vehicle mobility by keeping identical rotational velocities of the front and rear wheels and re-distributing the torque between the driving axles as terrain conditions require. The mentioned equality of the angular speeds leads to kinematic discrepancy in linear velocities of the driving axles when a vehicle undertakes turns. The paper presents an analytical method to evaluate this discrepancy and analytically demonstrates its influence on extra power losses on slippage of the front and rear tires and thus on extra fuel consumption. To avoid these extra power losses and fuel consumption, the paper presents a method for controlling the kinematic discrepancy by reducing it to zero values. This was done without negative impacts on vehicle dynamics. The theoretical propositions are illustrated by computer simulations of a 4x4 heavy-duty truck turning in terrain. A comparative analysis is presented with regard to the same truck but without kinematic discrepancy control. The results proved the proposed approach to managing the kinematic discrepancy in 4x4 vehicles with positive engagement of the driving axles to improve vehicle energy efficiency. Keywords. Kinematic discrepancy, power loss, fuel consumption. 1 Introduction The phenomenon of kinematic discrepancy is an inherent property of all-wheel drive (AWD) vehicles with positive engagement of the drive axles (locked up axles). By this effect is meant the difference of theoretical velocities of the front and rear wheels. At that it is considered that wheels roll without slipping. Kinematic discrepancy influences significantly power distribution between the driving axles and wheels and as consequence fuel consumption, mobility, and stability. A methodology for analytical description of kinematic discrepancy of vehicle with any given number of the driving axles and steering system and the influence of kinematic discrepancy on the vehicle operational properties are presented in (Andreev et al., 2010).
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Slip Power Loss and Fuel Consumption Control in 4x4 Terrain Vehicle Applications

Proceedings of the Joint 9th Asia-Pacific ISTVS Conference and
Annual Meeting of Japanese Society for Terramechanics
Sapporo, Japan, September 27 to 30, 2010
Slip Power Loss and Fuel Consumption Control in 4x4 Terrain Vehicle Applications
Barys Shyrokau
Ilmenau University of Technology, Germany
Vladimir Vantsevich
Lawrence Technological University, USA
Klaus Augsburg
Ilmenau University of Technology, Germany
Valentin Ivanov
Ilmenau University of Technology, Germany
Abstract. 4x4 terrain vehicle applications widely use positively locked power dividing units (PDU) in the transfer case. Such PDUs considerably improve vehicle mobility by keeping identical rotational velocities of the front and rear wheels and re-distributing the torque between the driving axles as terrain conditions require. The mentioned equality of the angular speeds leads to kinematic discrepancy in linear velocities of the driving axles when a vehicle undertakes turns. The paper presents an analytical method to evaluate this discrepancy and analytically demonstrates its influence on extra power losses on slippage of the front and rear tires and thus on extra fuel consumption. To avoid these extra power losses and fuel consumption, the paper presents a method for controlling the kinematic discrepancy by reducing it to zero values. This was done without negative impacts on vehicle dynamics. The theoretical propositions are illustrated by computer simulations of a 4x4 heavy-duty truck turning in terrain. A comparative analysis is presented with regard to the same truck but without kinematic discrepancy control. The results proved the proposed approach to managing the kinematic discrepancy in 4x4 vehicles with positive engagement of the driving axles to improve vehicle energy efficiency.
Keywords. Kinematic discrepancy, power loss, fuel consumption.
1 Introduction
The phenomenon of kinematic discrepancy is an inherent property of all-wheel drive (AWD) vehicles with positive engagement of the drive axles (locked up axles). By this effect is meant the difference of theoretical velocities of the front and rear wheels. At that it is considered that wheels roll without slipping. Kinematic discrepancy influences significantly power distribution between the driving axles and wheels and as consequence fuel consumption, mobility, and stability. A methodology for analytical description of kinematic discrepancy of vehicle with any given number of the driving axles and steering system and the influence of kinematic discrepancy on the vehicle operational properties are presented in (Andreev et al., 2010).
Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
2
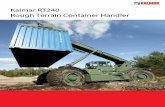
Kinematic discrepancy was investigated in (Dudzinski, 1983, 1986; Wong, 2010). An AWD vehicle can feature the kinematic discrepancy in the case of being equipped with locked up power dividing units, or positively engaged PDUs. As power transfer units in the transfer cases of such vehicles, free running clutches are most commonly installed, Figure 1. It makes possible automatic engagement and disengagement of driving axle. Let us assume that power is transmitted only to the rear wheels. At that the front wheels are still not connected to the drive, but receive their rotation from the road. Then ring 1 (connected to the front wheels) rotates at higher angular velocity than ring 2 (connected to the engine). When the slip of the rear wheels is increased, the vehicle slows down and consequently, the speed of rotation of ring 1 decreases. At the instant when the speeds of rotation of rings 1 and 2 become identical, rollers 3 become wedged in between the rings and torque starts being transmitted to the front axle. Gear-type clutch 4 can be used for positively engaged front axle bypassing the free-running clutch.
Figure 1. Variant of Free-Running Clutch
The integration of the described effect into the circuit of on-demand electro-mechanical systems (Asgari & Hrovat, 1997) allows automatic engagement/disengagement of the front axle of a vehicle when its rear wheels are permanently coupled to the transmission. The general structures of such automatic systems are presented in Table 1. One of the most demanded challenges for the automatic control on 4x4 AWD vehicles with the discussed driveline architecture is the minimization of kinematic discrepancy. A corresponding problem solving can positively influence a number of operational vehicle characteristics like performance, tire wear, or cross-country ability. Control principles related to this minimization as well as their verification with simulation technique will be discussed in the chapters that follow.
2 Procedure of Computing Slip Power Loss and Fuel Consumption with Kinematic Discrepancy Phenomenon
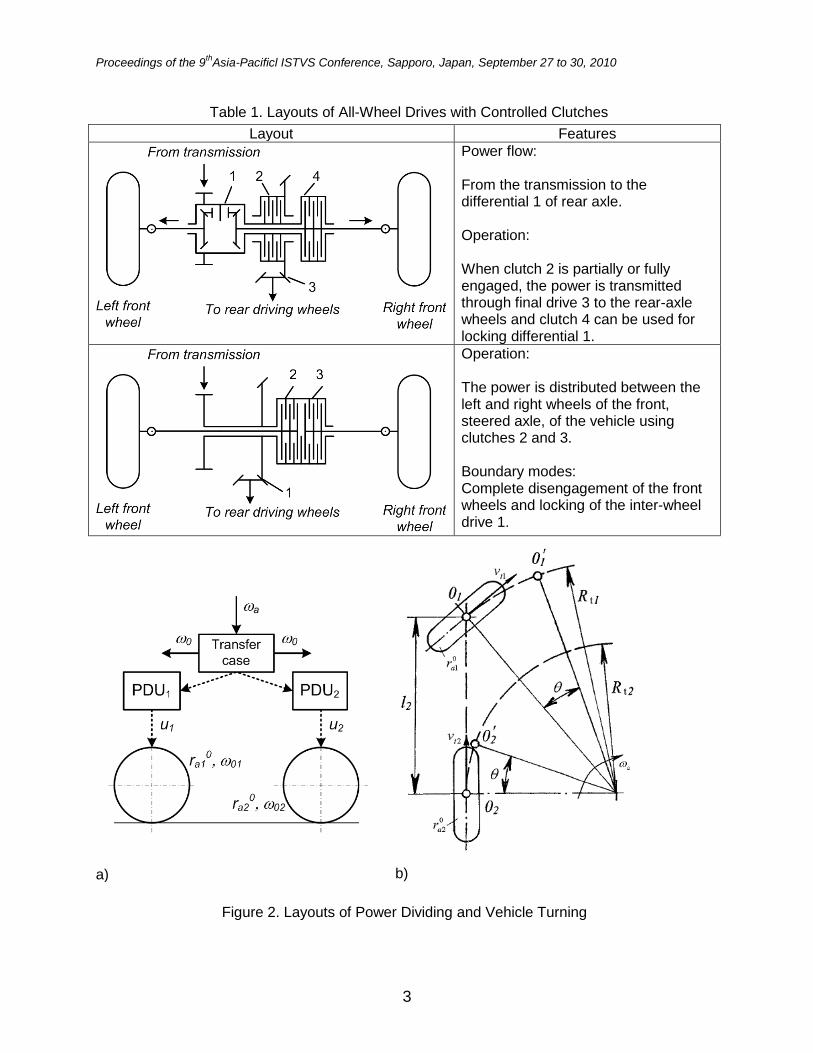
For better understanding the influence of kinematic discrepancy on power losses and fuel consumption, further discussion will be presented in the form of an algorithmic sequence. Figure 2 shows schemes explaining the main parameters used for calculations. Definitions of all parameters used are explained at the end of the paper.
* * *
Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
3
Table 1. Layouts of All-Wheel Drives with Controlled Clutches
Layout Features
Power flow: From the transmission to the differential 1 of rear axle. Operation: When clutch 2 is partially or fully engaged, the power is transmitted through final drive 3 to the rear-axle wheels and clutch 4 can be used for locking differential 1.
Operation: The power is distributed between the left and right wheels of the front, steered axle, of the vehicle using clutches 2 and 3. Boundary modes: Complete disengagement of the front wheels and locking of the inter-wheel drive 1.
a)
b)
Figure 2. Layouts of Power Dividing and Vehicle Turning

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
4
2.1 Step 1: Estimation of Kinematic Discrepancy
The condition of kinematic conformity by straight-line motion of a 4x4 AWD vehicle can be written in accordance with Fig. 2a as:
0 0 0 00 001 1 02 2 1 2
1 2
or (1)a a a ar r r ru u
By turning, Fig. 2b, when only one axle is steered and the centers of axles move over curves of different radii then, conversely, kinematic agreement of the traveled path and angular velocities of the front and rear wheels requires that the linear velocities of the axle centers should not be equal. In such a case the condition of kinematic conformity is as follows:
0 0
2 1 1 2 2 2 (2)a t a tr u R r u R
The situations that the theoretical velocities from conditions (2) are not equal can be described through the kinematic discrepancy factor:
0 0
2 1 1 1 2 2
0
2 1 1
(3)a t a t
a t
r u R r u Rm
r u R
2.2 Step 2: Slippage Factor of Axle with Inter-wheel Open Differential
The generalized rolling radius, Fig 2a, of the axle in the driven mode is:
0' 0 ''0
0 ' 0 ''
2, 1,2 (4)wi wi
ai
wi wi k
r rr i
r r u
Then the generalized slippage factor of the axle that represents the loss of axle velocity and loss of power in wheel slippage, when the slippages of the left and right wheels are different, can be given by the expression:
0' 0 '' '' '
'' 0 ' ' ' 0 '' ''
1 11 , 1,2
1 1 (5)
ti wi wi i i
ai
ti wi i ti wi i
R r r s ss i
R r s R r s
2.3 Step 3: Generalized Slippage Factor by Kinematic Discrepancy
The generalized rolling radius at the vehicle turning in the driven mode takes into account the
longitudinal stiffness factors of axles Kai and turning angle and can be described as
0 00 1 1 1 2 2 2
1 1 2
/ /
sec (6)a a a a
a
a a
K r u K r ur
K K
Then the kinematic discrepancy factors can be expressed both for the front and rear axles:
0 0
1 1 1 2 2 2
0
1 1 2
sec / /1 , 1,2
sec (7)i i a a a a
i
ai a a
u K r u K r um i
r K K
As a consequence, the generalized slippage factor of the vehicle is given by the expression:
1 , 1,2ai i i as m m s i (8)

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
5
2.4 Step 4: Mechanical Efficiency
Consider a vehicle with two driving axles. The flows of power from the transfer case to the driving wheels shall be termed positive. In certain cases there occur negative power flows from the wheels to the transfer case. Negative torque on the front wheels of a 4x4 vehicle that causes power to flow from the front axle to the transfer case can be caused by the effect of kinematic discrepancy.
Let p1 be the number of driving axles with positive power flow and p2 – the number of axles with negative power flow, and
1 2 (9)p p n
For a 4x4 vehicle n=2.
The power fed to the driving axles is designated as
1
(10)n
in in
w wi
i
P P
If PM is the power fed from the transmission to the driveline system then the mechanical power loss in the driveline system Pdrl can be assessed using the overall mechanical efficiency:
1 (11)
nin
wiinM drl w i
M
M M M
PP P P
P P P
The components in the right-hand side of formula shall be determined by writing the coefficient of distribution of power to the axle as:
1
(12)in in
wi wii nin
inwwi
i
P Pq
PP
where Pwiin is the power supplied to the axle.
Power PM in Eq. (11) is defined as:
1 2
1 1
(13)p p
pos neg
M Mi Mi
i i
P P P
where PMipos and PMi
neg are the components of power PM. These components are defined as:
1
1
and (14)
nin
in i wi npos neg in neg in negwi i
Mi Mi wi Mi i wi Mipos posiMi Mi
q PP
P P P q P
where Mipos and Mi
neg are the efficiencies of the branches of the driveline system with positive and negative power flows.
The expression for the total efficiency M from Eq. (11) becomes finally:
1 2
1 1
1 (15)M p p
negii Mipos
i iMi

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
6
2.5 Step 5: Power Balance
The effective power of the engine is dissipated in several energy flows:
(16)out turn
e trm drl fP P P P P P P
The components of Eq. (16) can be presented as follows.
The loss of mechanical power in the driveline:
(1 ) / (17)in
drl w M MP P
The slip power:
1 (18)in
wP P
In Eqs. (17) and (18) the power supplied to the driving wheels is
'('') '('') '('') '('')
1 1
(19)n n
in
w wi wi xi ti
i i
P T F v
Hence Eq. (16) can be transformed to
(1 ) / 1 (20)in in out turn
e trm w M M w fP P P P P P P
2.6 Step 6: Fuel Consumption
The fuel economy of the vehicle can be characterized by the fuel consumption referred to the distance traveled by the vehicle:
, g/km (21)h e es
x x
Q g PQ
V V ,
where Qh is fuel consumption in g/h, Vx is the vehicle velocity in km/h, ge is the specific fuel consumption in g/kWh.
Using Eq. (20) the fuel consumption can be
'('') '('') '('') '('')
1 1
(1 ) / 1 (21)n n
out turnes trm wi wi M M wi i f
i ix
gQ P T T w P P P
V
Important remarks: The second and third terms in the square brackets of Eq. (21) define the direct effect of the vehicle's driveline system on the fuel consumption. In fact, different driveline systems bring about different distributions of power to the driving wheels which, in its turn,
affects the total mechanical efficiency M and the power loss in slipping. This means that the
efficiencies M and should be the objects of attention in assessing the effect of driveline systems on the fuel economy of vehicles. To provide for minimal fuel consumption the driveline system should ensure such distribution of power among the wheels that provide for maximum
values of M and under the given travel conditions. The contribution of each of these efficiencies on the fuel consumption is different. At positive power flows from the transfer case to the driving wheels the effect is commonly commensurable or sometimes the power losses Pdrl
may exceed P in all-wheel drive vehicles. On a deformable surface the effect of P may be more perceptible and depends on the type of the driveline system.

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
7
* * *
The procedures of the calculations of power losses and fuel consumption given above allow to propose the control technique aimed at power balance improvement through the minimization of kinematic discrepancy. This matter is further discussed.
3 Control on Kinematic Discrepancy
Consider a 4x4 AWD vehicle with front steered wheels and positively engaged inter-axle power-dividing unit, which does not have a design kinematic discrepancy (m = 0). When this vehicle takes a turn there arises the kinematic discrepancy that is caused by differences in the turning
radii of the front and rear axles, Rt1 ≠ Rt2 and calculated from Eq. (3).
The numerical value of m is positive and increases with the angle of turn δ of the front wheels.
The increase in m brings about an increase in the tangential force Fx2 of the rear wheels and
reduction in tangential force Fx1 of the front wheels. At large δ, m attains substantial values,
which may cause parasitic power circulation, i.e., negative values of Fx1. This changes the
direction and increases the numerical value of the lateral reaction Fl1 and simultaneously
increases vehicle understeering. If the gear ratios u1 or u2 in the drives of the axles are changed
in the course of the turn, then the kinematic discrepancy m may be reduced to zero and the increase in understeering of the vehicle can be avoided. The changing of gear ratios shall be in accordance with
2 1 cosu u or 1 2 cosu u (22)
Gear ratios u1 and u2 are in general determined by the gear ratios uf1 and uf2 of the final drives
and the gear ratios of the wheel-hub reduction gears uk1 and uk2:
1 1 1f ku u u and 2 2 2f ku u u (23)
By installing power transmitting units with variable gear ratios uPTU1 and uPTU2 , Fig. 2a, in the
axle drives, the equations are:
)/(cos 11221 kfkfPTU uuuuu , (24)
)cos/( 22112 kfkfPTU uuuuu (25)
The use of the additional power-transmitting unit in the drive of either the rear axle or of the front
axle will cause differences in the mechanical power loss in the drives, i.e., ηM1 ≠ ηM2. To provide
for equality of these two efficiencies it is necessary to simultaneously control the values of u1
and u2. The corresponding control formula is as follows:
0/ 112211 ttt RuRuRu (26)
It follows from the turning geometry of a vehicle:
cos12 tt RR and cos21 uu (27)
i.e., when simultaneously controlling the values of u1 and u2 their ratio must be maintained
equal to cos δ. To achieve this, u1 should decrease when the vehicle turns and u2 should
increase. Note that Eq. (27) corresponds to the particular cases when either u1 or u2 are
assumed to be constant.

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
8
Hence conformance to Eqs. (22) and (27) ensures zero kinematic discrepancy in the turning of a 4x4 AWD vehicle.
4 Validation of Kinematic Discrepancy Control and Discussion of Results
To estimate effects that can be achieved by the control on the kinematic discrepancy, several vehicle manoeuvres were simulated in accordance with equations proposed in Chapters 2 and 3. The technical data of the vehicle are given in Table 2.
Table 2. Technical Data of Vehicle
Parameter Value
Vehicle gross weight, kg 25 150
Yaw inertia, kgm2 48 704
Vehicle base, mm 4 900
Distance between the vehicle gravity center and the front axle, mm 3 508
Distance between the vehicle gravity center and the road, mm 1 392
Track, mm 2 032
Final front gear ratio 6.59
Final rear gear ratio 6.59
Moment of wheel inertia, kgm2
front / rear
5.6 / 11.2
Wheel rolling radius, mm 638
Initial velocity, km/h 20
Consider dynamics of 4x4 off-road dump truck with blocked inter-wheel drive. Two test conditions are:
1. Dry soil, thrust: 0.65, initial rolling resistance factor: 0.025;
2. Wet soil, thrust: 0.4, initial rolling resistance factor: 0.05.
In both test modes the vehicle drives on 20 km/h and begins turning with the turn velocity 0.05 rad/s.
In addition the vehicle is controlled in two control modes:
Control Mode 1. Keeping constant velocity through permanent fuel feed control;
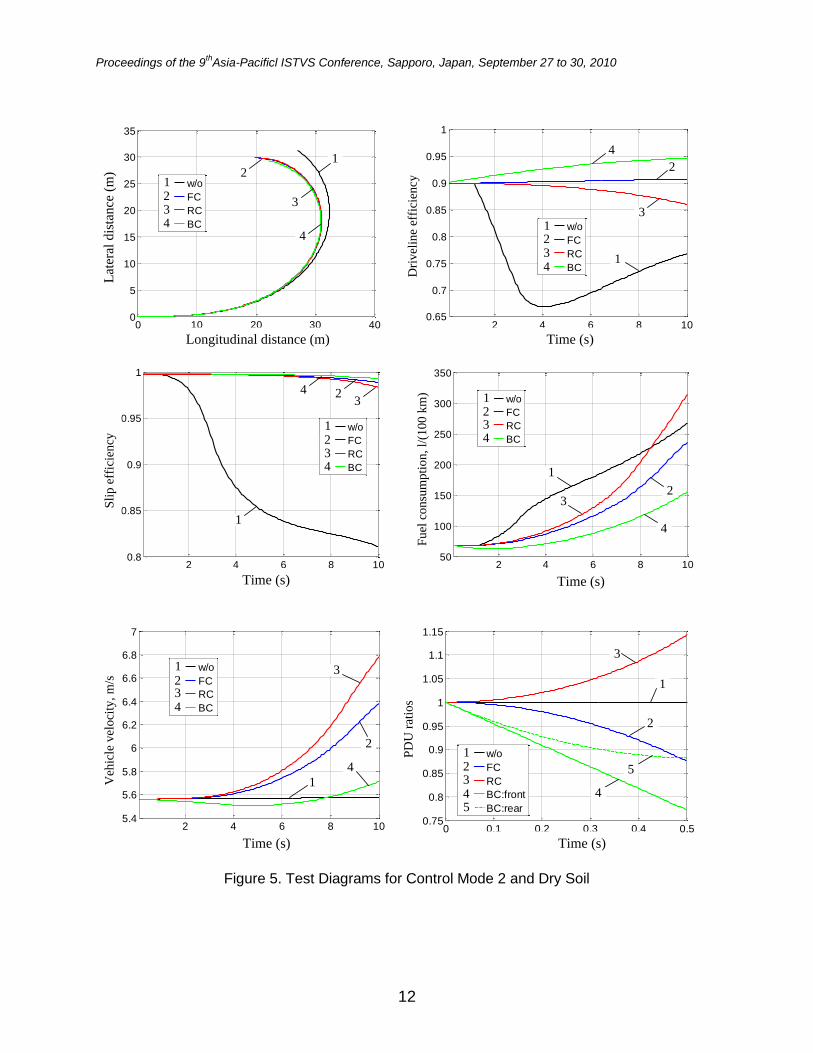
Control Mode 2. Keeping constant velocity without minimization of kinematic discrepancy but with recording of fuel feed level; then all test cases are repeated in accordance with this recorded level.
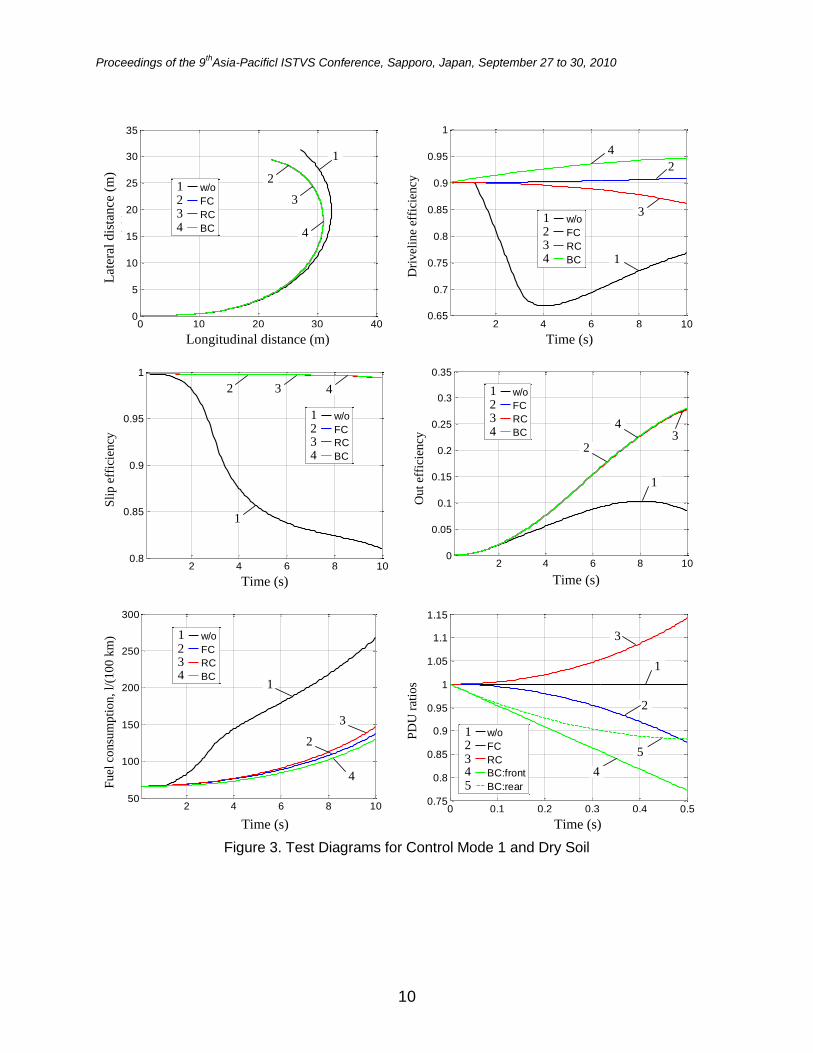
Figure 3 shows computing results for the first control mode on dry soil. The minimization of kinematic discrepancy is being achieved by way of three variants:
1. Control on transfer ratio from PDU to front axis only (FC - front control);
2. Control on transfer ratio from PDU to rear axis only (RC - rear control);
3. Control on both transfer ratios (BC – bi-control).
To reach null value of kinematic discrepancy, in these three cases the system must follow the dependencies:

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
9
2
1
1
cos (28)f
PDU
f
uu
u
1
1
2
1
cos (29)
f
PDU
f
uu
u
Figures 3-6 presents results obtained for both control modes on both types of grounds. The detailed results of power balance, efficiencies, and fuel consumptions are summarized in Tables 3-4.
An analysis of results allows to make a number of observations:
It can be seen from the diagram of vehicle trajectory that the understeering is being decreased due to the minimization of kinematic discrepancy as compared to non-controlled motion.
The highest performance index is obtained for bi-control variant.
The slip efficiency and the driveline efficiency are also kept on high level during the process of kinematic discrepancy minimization.
The lowest fuel consumption has been obtained in bi-control mode.
5 Conclusion
The presented paper discussed an effect of kinematic discrepancy on slip loss and fuel consumption. It was showed that kinematic discrepancy can cause parasitic power by turning of an AWD vehicle. To avoid this negative phenomenon, the control on power dividing units of the AWD driveline system has been proposed. Case study analyzed such control procedures as applied to the individual control on either front or rear axle as well as on simultaneous control on two axles. The obtained results corroborated the proposed control strategy, and it can be used in by designing mechatronic driveline control systems for AWD vehicles.
Acknowledgements
The authors would like to thanks the German Research Foundation for support in framework of the DFG-Program "Initiierung und Intensivierung bilateraler Kooperationen".
References
Andreev, A.F., Kabanau, V., and V. Vantsevich. 2010. Driveline Systems of Ground Vehicles: Theory and Design (Ground Vehicle Engineering), CRC-Press.
Asgari, J., and D. Hrovat. 1997. On-Demand Four Wheel-Drive Transfer Case Modeling, SAE Technical Paper Series, paper No. 970969.
Dudzinski, P.A. 1983. Problems of turning process in articulated terrain vehicles, Journal of Terramechanics, 19(4): 243-256.
Dudzinski, P.A. 1986. The problems of multi-axle vehicle drives, Journal of Terramechanics, 23(2): 85-93.
Wong, J.Y. 2010. Terramechanics and off-road vehicle engineering, Butterworth-Heinemann.
Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
10
2 4 6 8 100.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Time (s)
Effic
iency (
drivelin
e)
w/o
FC
RC
BC
0 10 20 30 400
5
10
15
20
25
30
35
xa (m)
ya (
m)
w/o
FC
RC
BC
Longitudinal distance (m)
Lat
eral
dis
tance
(m
)
Time (s)
Dri
vel
ine
effi
cien
cy
234
12
3
4
1
234
1
2
3
4
1
2 4 6 8 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Time (s)
Effic
iency (
out)
w/o
FC
RC
BC
2 4 6 8 100.8
0.85
0.9
0.95
1
Time (s)
Effic
iency (
slip
)
w/o
FC
RC
BC
Time (s)
Sli
p e
ffic
ien
cy
Time (s)
Ou
t ef
fici
ency
234
1
2
234
1
23
4
1
3 4
1
0 0.1 0.2 0.3 0.4 0.50.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Steer angle (rad)
Gear
ratio
w/o
FC
RC
BC:front
BC:rear
2 4 6 8 1050
100
150
200
250
300
Time (s)
Fule
consum
ptio
n (
l/100km
)
w/o
FC
RC
BC
Time (s)
Fuel
consu
mpti
on
, l/
(10
0 k
m)
Time (s)
PD
U r
atio
s
234
1
2 234
1
2
3
1
3
4
1
54
5
Figure 3. Test Diagrams for Control Mode 1 and Dry Soil

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
11
2 4 6 8 100.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
Time (s)
Effic
iency (
drivelin
e)
w/o
FC
RC
BC
0 10 20 30 400
5
10
15
20
25
30
35
xa (m)
ya (
m)
w/o
FC
RC
BC
Longitudinal distance (m)
Lat
eral
dis
tance
(m
)
Time (s)
Dri
vel
ine
effi
cien
cy
234
12
3
4
1
234
1
2
3
4
1
2 4 6 8 100
0.02
0.04
0.06
0.08
0.1
0.12
Time (s)
Effic
iency (
out)
w/o
FC
RC
BC
2 4 6 8 100.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
Time (s)
Effic
iency (
slip
)
w/o
FC
RC
BC
Time (s)
Sli
p e
ffic
iency
Time (s)
Ou
t ef
fici
ency
234
1
2234
1
23
4
1
34
1
0 0.1 0.2 0.3 0.4 0.50.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Steer angle (rad)
Gear
ratio
w/o
FC
RC
BC:front
BC:rear
2 4 6 8 10120
140
160
180
200
220
240
Time (s)
Fule
consum
ptio
n (
l/100km
)
w/o
FC
RC
BC
Time (s)
Fu
el c
on
sum
pti
on,
l/(1
00
km
)
Time (s)
PD
U r
atio
s
234
1
2
234
1
2
3
1
3
4
1
5
4
5
Figure 4. Test Diagrams for Control Mode 1 and Wet Soil
Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
12
2 4 6 8 100.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Time (s)
Effic
iency (
drivelin
e)
w/o
FC
RC
BC
0 10 20 30 400
5
10
15
20
25
30
35
xa (m)
ya (
m)
w/o
FC
RC
BC
Longitudinal distance (m)
Lat
eral
dis
tance
(m
)
Time (s)
Dri
vel
ine
effi
cien
cy
234
12
3
4
1
234
1
2
3
4
1
2 4 6 8 1050
100
150
200
250
300
350
Time (s)
Fule
consum
ptio
n (
l/100km
)
w/o
FC
RC
BC
2 4 6 8 100.8
0.85
0.9
0.95
1
Time (s)
Effic
iency (
slip
)
w/o
FC
RC
BC
Time (s)
Sli
p e
ffic
iency
Time (s)
Fu
el c
onsu
mpti
on, l/
(10
0 k
m)
234
1
2
234
1
23
4
1
34
1
0 0.1 0.2 0.3 0.4 0.50.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Steer angle (rad)
Gear
ratio
w/o
FC
RC
BC:front
BC:rear
2 4 6 8 105.4
5.6
5.8
6
6.2
6.4
6.6
6.8
7
Time (s)
Ve
locity (
m/s
)
w/o
FC
RC
BC
Time (s)
Veh
icle
vel
oci
ty, m
/s
Time (s)
PD
U r
atio
s
234
1
2
234
1
2
3
13
4
1
54
5
Figure 5. Test Diagrams for Control Mode 2 and Dry Soil

Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
13
2 4 6 8 100.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
Time (s)
Effic
iency (
drivelin
e)
w/o
FC
RC
BC
0 10 20 30 400
5
10
15
20
25
30
35
xa (m)
ya (
m)
w/o
FC
RC
BC
Longitudinal distance (m)
Lat
eral
dis
tance
(m
)
Time (s)
Dri
vel
ine
effi
cien
cy
234
1
2
3
4
1
234
1
2
3
4
1
2 4 6 8 10100
150
200
250
300
350
400
Time (s)
Fule
consum
ptio
n (
l/100km
)
w/o
FC
RC
BC
2 4 6 8 100.88
0.9
0.92
0.94
0.96
0.98
1
Time (s)
Effic
iency (
slip
)
w/o
FC
RC
BC
Time (s)
Sli
p e
ffic
ien
cy
Time (s)
Fu
el c
on
sum
pti
on
, l/
(10
0 k
m)
234
1
2234
1
2
3
4
1
3
4
1
2 4 6 8 10
5
5.2
5.4
5.6
5.8
6
6.2
6.4
Time (s)
Ve
locity (
m/s
)
w/o
FC
RC
BC
0 0.1 0.2 0.3 0.4 0.50.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
Steer angle (rad)
Gear
ratio
w/o
FC
RC
BC:front
BC:rear
Time (s)
Veh
icle
vel
oci
ty, m
/s
Time (s)
PD
U r
atio
s
234
1
2
234
1
2
3
1
3
4
1
54
5
Figure 6. Test Diagrams for Control Mode 2 and Wet Soil
Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
14
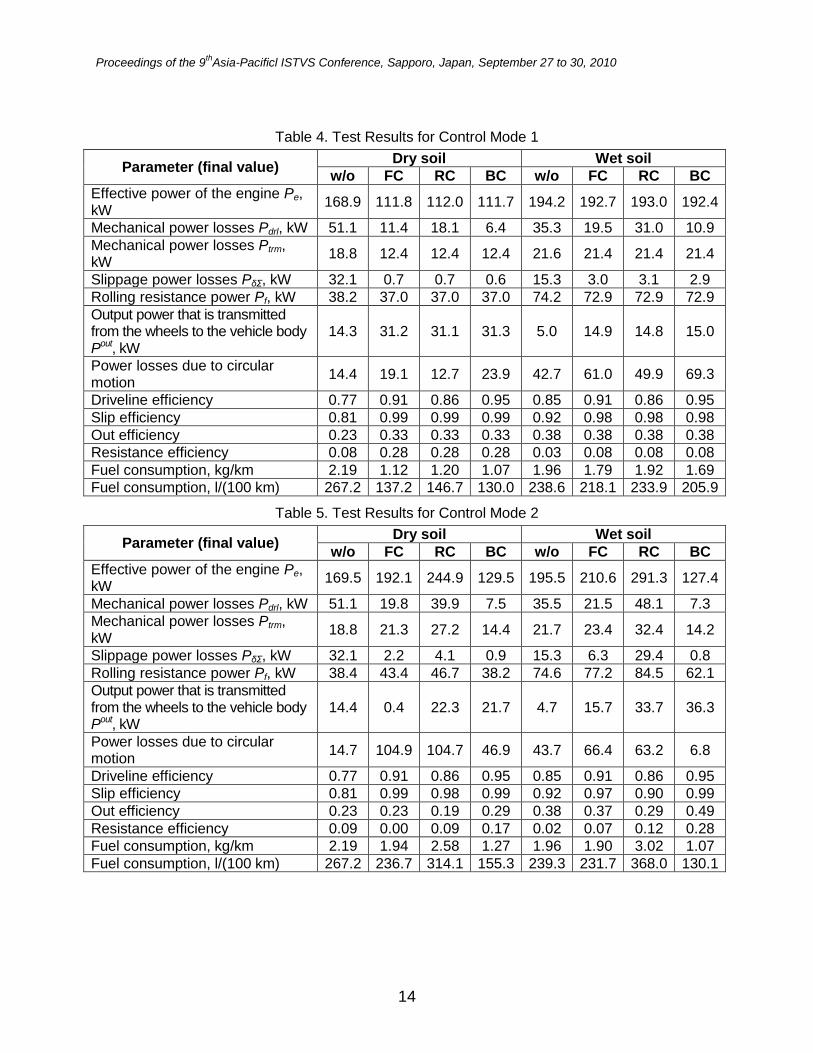
Table 4. Test Results for Control Mode 1
Parameter (final value) Dry soil Wet soil
w/o FC RC BC w/o FC RC BC
Effective power of the engine Pe, kW
168.9 111.8 112.0 111.7 194.2 192.7 193.0 192.4
Mechanical power losses Pdrl, kW 51.1 11.4 18.1 6.4 35.3 19.5 31.0 10.9
Mechanical power losses Ptrm, kW
18.8 12.4 12.4 12.4 21.6 21.4 21.4 21.4
Slippage power losses PδΣ, kW 32.1 0.7 0.7 0.6 15.3 3.0 3.1 2.9
Rolling resistance power Pf, kW 38.2 37.0 37.0 37.0 74.2 72.9 72.9 72.9
Output power that is transmitted from the wheels to the vehicle body Pout, kW
14.3 31.2 31.1 31.3 5.0 14.9 14.8 15.0
Power losses due to circular motion
14.4 19.1 12.7 23.9 42.7 61.0 49.9 69.3
Driveline efficiency 0.77 0.91 0.86 0.95 0.85 0.91 0.86 0.95
Slip efficiency 0.81 0.99 0.99 0.99 0.92 0.98 0.98 0.98
Out efficiency 0.23 0.33 0.33 0.33 0.38 0.38 0.38 0.38
Resistance efficiency 0.08 0.28 0.28 0.28 0.03 0.08 0.08 0.08
Fuel consumption, kg/km 2.19 1.12 1.20 1.07 1.96 1.79 1.92 1.69
Fuel consumption, l/(100 km) 267.2 137.2 146.7 130.0 238.6 218.1 233.9 205.9
Table 5. Test Results for Control Mode 2
Parameter (final value) Dry soil Wet soil
w/o FC RC BC w/o FC RC BC
Effective power of the engine Pe, kW
169.5 192.1 244.9 129.5 195.5 210.6 291.3 127.4
Mechanical power losses Pdrl, kW 51.1 19.8 39.9 7.5 35.5 21.5 48.1 7.3
Mechanical power losses Ptrm, kW
18.8 21.3 27.2 14.4 21.7 23.4 32.4 14.2
Slippage power losses PδΣ, kW 32.1 2.2 4.1 0.9 15.3 6.3 29.4 0.8
Rolling resistance power Pf, kW 38.4 43.4 46.7 38.2 74.6 77.2 84.5 62.1
Output power that is transmitted from the wheels to the vehicle body Pout, kW
14.4 0.4 22.3 21.7 4.7 15.7 33.7 36.3
Power losses due to circular motion
14.7 104.9 104.7 46.9 43.7 66.4 63.2 6.8
Driveline efficiency 0.77 0.91 0.86 0.95 0.85 0.91 0.86 0.95
Slip efficiency 0.81 0.99 0.98 0.99 0.92 0.97 0.90 0.99
Out efficiency 0.23 0.23 0.19 0.29 0.38 0.37 0.29 0.49
Resistance efficiency 0.09 0.00 0.09 0.17 0.02 0.07 0.12 0.28
Fuel consumption, kg/km 2.19 1.94 2.58 1.27 1.96 1.90 3.02 1.07
Fuel consumption, l/(100 km) 267.2 236.7 314.1 155.3 239.3 231.7 368.0 130.1
Proceedings of the 9th
Asia-Pacificl ISTVS Conference, Sapporo, Japan, September 27 to 30, 2010
15
Appendix: Definitions
i=1, 2 axle number;
' and '' signs for the outer and inner wheels
"w/o" "without control" mode
0 angular velocity of the input element of PDU, rad/sec
i'('') angular velocities of the output elements of PDU, rad/sec
Twi'('') wheel drive torque, Nm
ui final drive gear ratio
uk wheel-hub gear ratio
r0i'('') radius of non-loaded tire, m
Kai axle (two tires) longitudinal stiffness factor, N/mm;
rwi0' ('') effective wheel rolling radius in the driven mode, m;
rai0' generalized rolling radius of an axle in the driven mode, m;
ra0 generalized rolling radius of the vehicle in the driven mode, m;
m kinematic discrepancy
turning angle, rad
Rti theoretical turning radius of an axle (no side slip), m
Rti'('') theoretical turning radius of a wheel (no side slip), m
Vx longitudinal velocity of the automobile along the longitudinal axis, m/sec
Fx wheel circumferential force, N