
Sistemas Mecánicos de Traslación Variables Aceleración, Velocidad y Desplazamiento Amortiguador...
11
1 Ing. Gabriela Ortiz L. 1 Sistemas Físicos Dependiendo de los elementos del sistema, los podemos clasificar en: Sistemas eléctricos Sistemas mecánicos Sistemas electromecánicos Sistemas de fluídos Sistemas termodinámicos Ing. Gabriela Ortiz L. 2 Sistemas Físicos En general tenemos 3 tipos de elementos: De almacenamiento de energía cinética De almacenamiento de energía potencial Disipadores de energía Ecuaciones diferenciales describen el funcionamiento dinámico de estos sistemas Ing. Gabriela Ortiz L. 3 Sistemas Eléctricos Tenemos ecuaciones diferenciales que relacionan elementos eléctricos pasivos Elementos los asumimos lineales R: Disipa energía L: Almacena energía a través de un campo magnético C: Almacena energía por medio de un campo eléctrico Ing. Gabriela Ortiz L. 4 Sistemas Eléctricos ∫ = = dt t v L t i dt t di L t v ) ( 1 ) ( ) ( ) ( dt t dv C t i dt t i C t v ) ( ) ( ) ( 1 ) ( = = ∫ R + - V(t) i(t) R G t Gv t i R t i t v 1 ) ( ) ( ) ( ) ( = = =
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Sistemas Mecánicos de Traslación Variables Aceleración, Velocidad y Desplazamiento Amortiguador...

1
Ing. Gabriela Ortiz L. 1
Sistemas Físicos
Dependiendo de los elementos del
sistema, los podemos clasificar en:
Sistemas eléctricos
Sistemas mecánicos
Sistemas electromecánicos
Sistemas de fluídos
Sistemas termodinámicos
Ing. Gabriela Ortiz L. 2
Sistemas Físicos
En general tenemos 3 tipos de elementos:
De almacenamiento de energía cinética
De almacenamiento de energía potencial
Disipadores de energía
Ecuaciones diferenciales describen el funcionamiento dinámico de estos sistemas
Ing. Gabriela Ortiz L. 3
Sistemas Eléctricos
Tenemos ecuaciones diferenciales que relacionan elementos eléctricos pasivos
Elementos los asumimos lineales
R: Disipa energía
L: Almacena energía a través de un campo magnético
C: Almacena energía por medio de un campo eléctrico
Ing. Gabriela Ortiz L. 4
Sistemas Eléctricos
∫=
=
dttvL
ti
dt
tdiLtv
)(1
)(
)()(
dt
tdvCti
dttiC
tv
)()(
)(1
)(
=
= ∫
R
+
-
V(t)
i(t)
RG
tGvti
Rtitv
1
)()(
)()(
=
=
=

2
Ing. Gabriela Ortiz L. 5
Ejemplo 1: Circuito eléctrico
LCR VVVte ++=)(
∫ ++=dt
tdiLdtti
CRtite
)()(
1)()(
2
2
)(
)(
dt
VdLCV
dt
dVRCte
dt
dVCtiAdemás
cc
c
c
++=
=
Encontrar la función de transferencia del sistema
Representar el sistema por medio de un diagrama de bloques
Representar el sistema utilizando variables de
estadoIng. Gabriela Ortiz L. 6
Ejemplo 1 (continuación)
Función de transferencia
1
1
)(
)()(
2 ++==
sRCLCssE
sVsG c
Diagrama de Bloques
Ing. Gabriela Ortiz L. 7
Ejemplo 1 (continuación)
Representación en variables de estado
)()(
)(1
0
)(
)(
1
10
)(
)(
1
2
1
2
1
txty
teLtx
tx
LRL
C
tx
tx
=
+
−−=
&
&
Ing. Gabriela Ortiz L. 8
Ejemplo 1 (continuación)
Diagrama de Bloques (a partir de
diagrama de flujo de señal)

3
Ing. Gabriela Ortiz L. 9
Sistemas Mecánicos
Se dividen en: Sistemas de traslación Sistemas de rotación
Sistemas Mecánicos de Traslación Variables
Aceleración, Velocidad y Desplazamiento
Elementos básicos Amortiguador Viscoso Masa Resortes lineales
Ing. Gabriela Ortiz L. 10
Sistemas Mecánicos lineales
2
2 )()(
)()(
dt
tydMtf
dt
tdvMtf
=
=
∫=
=
dttvKtf
tKytf
)()(
)()(
dt
tdyBtf
tBvtf
)()(
)()(
=
=
Am
ort
igua
dor
Masa
Resort
e L
inea
l
Ing. Gabriela Ortiz L. 11
Otros tipos de fricción
Fuerzas de fricción dependen de: Composición de las superficies
Presión entre superficies
Velocidad relativa, etc…
Fricción viscosa Relación lineal
Fricción Estática Representa una fuerza que tiende a prevenir el
movimiento
0)()( =±= ysFtf& Ing. Gabriela Ortiz L. 12
Otros tipos de fricción
Fricción de Coulomb
Fuerza de amplitud constante con respecto al cambio de velocidad
dtdy
dtdyFtf c=)(
4
Ing. Gabriela Ortiz L. 13
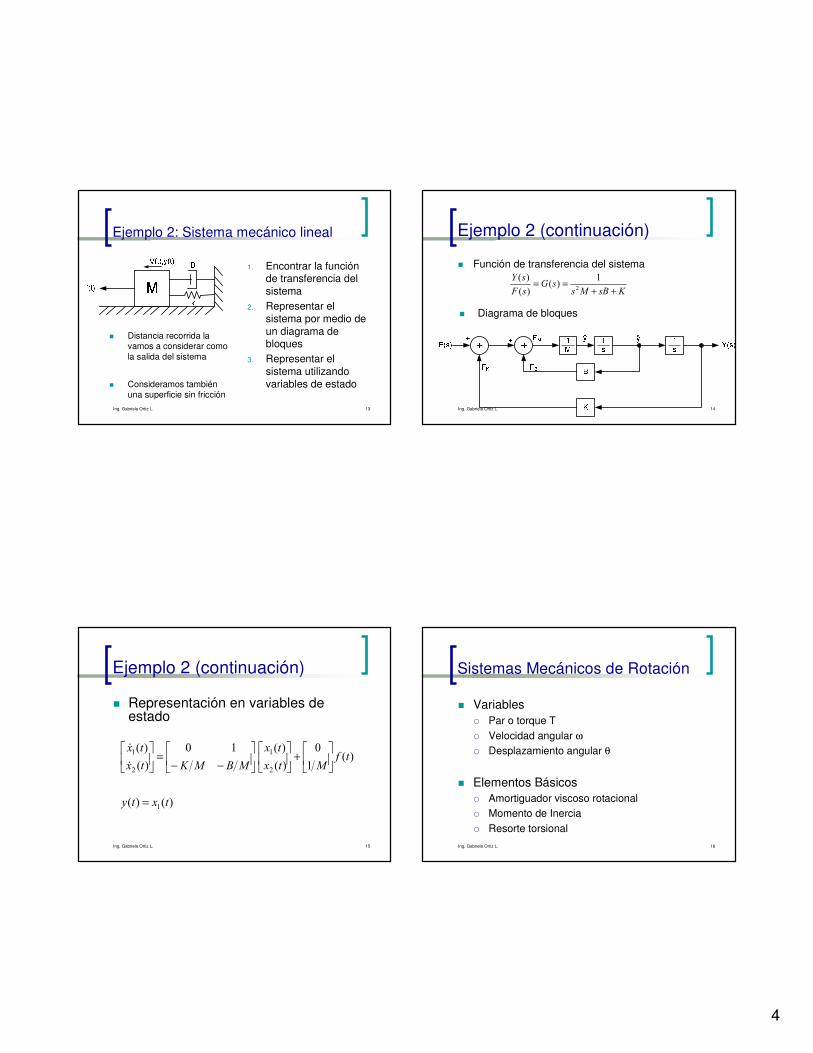
Ejemplo 2: Sistema mecánico lineal
1. Encontrar la función de transferencia del sistema
2. Representar el sistema por medio de un diagrama de bloques
3. Representar el sistema utilizando variables de estado
Distancia recorrida la vamos a considerar como la salida del sistema
Consideramos también una superficie sin fricción
Ing. Gabriela Ortiz L. 14
Ejemplo 2 (continuación)
Función de transferencia del sistema
KsBMssG
sF
sY
++==
2
1)(
)(
)(
Diagrama de bloques
Ing. Gabriela Ortiz L. 15
Ejemplo 2 (continuación)
Representación en variables de estado
)()(
)(1
0
)(
)(10
)(
)(
1
2
1
2
1
txty
tfMtx
tx
MBMKtx
tx
=
+
−−=
&
&
Ing. Gabriela Ortiz L. 16
Sistemas Mecánicos de Rotación
Variables
Par o torque T
Velocidad angular ω
Desplazamiento angular θ
Elementos Básicos
Amortiguador viscoso rotacional
Momento de Inercia
Resorte torsional

5
Ing. Gabriela Ortiz L. 17
Ley de Movimiento
Ley de movimiento de Newton para movimiento de rotación
J=Inercia
α=acelaración angular
∑ = αJFuerzas
Ing. Gabriela Ortiz L. 18
Sistemas Mecánicos de Rotación
Inercia La inercia de un elemento depende de la
composición geométrica alrededor del eje de rotación y de su densidad
Para un disco circular
M=Masar=radio
2
2
1MrJ =
Ing. Gabriela Ortiz L. 19
Sistemas Mecánicos rotacionales
)()(
)()(
tKtT
dttKtT
r
r
θ
ω
=
= ∫
dt
tdBtT
tBtT
r
r
)()(
)()(
θ
ω
=
=
2
2 )()(
)()(
)()(
dt
tdJtT
dt
tdJtT
tJtT
θ
ω
α
=
=
=
Momento de inercia
Resorte Torsional
Amortiguador Viscoso
Rotacional
Ing. Gabriela Ortiz L. 20
Otros tipos de fricción
Son válidos los tipos de fricción
descritos en el movimiento traslacional
Fricción estática
Fricción de Coulomb
0)()(
=±=
θ&sFtT
dtd
dtdFtT c
θ
θ=)(

6
Ing. Gabriela Ortiz L. 21
Ejemplo 3: Sistema mecánico
rotacional
Al disco se le aplica un par T(t) y se desea:
1. Encontrar la función de transferencia del sistema
2. Representar el sistema por medio de un diagrama de bloques
3. Representar el sistema utilizando variables de estado
Considere:
J: momento de inercia alrededor del eje de rotación.
BR: Coeficiente de fricción viscosa para simular la fricción de la superficie cercana al disco
La inercia del eje es despreciable pero se considera la constante del resorte torsional
Ing. Gabriela Ortiz L. 22
Ejemplo 3 (continuación)
Función de transferencia
Diagrama de bloques
rr KsBJssT
s
++=
Θ2
1
)(
)(
Ing. Gabriela Ortiz L. 23
Ejemplo 3 (continuación)
Ecuaciones de estado
)()(
)(1
0
)(
)(10
)(
)(
1
2
1
2
1
txty
tTJtx
tx
JBJKtx
tx
rr
=
+
−−=
&
&
Ing. Gabriela Ortiz L. 24
Conversión entre movimientos de
traslación y rotación
Cremallera y piñon
Banda y polea
)()( trtx θ=
Distancia que viaja la masapor cada revolución del piñón o la polea es 2πr
Distancia que viaja la masaes:
Inercia equivalente vista porel motor:
22 rg
WMrJ ==

7
Ing. Gabriela Ortiz L. 25
Conversión entre movimientos de
traslación y rotación
Anillo sin finDistancia lineal que viaja la masapor cada revolución del tornillo es L=2πr
Inercia equivalente vista porel motor:
2
2
2
==
π
L
g
WMrJ
Ing. Gabriela Ortiz L. 26
Trenes de engranes
Sirven como dispositivos de acople
1
2
1
2
2
1
2
1
2
1
θ
θ
ω
ω====
N
N
r
r
T
T
http://es.wikipedia.org/wiki/Engranaje
Ing. Gabriela Ortiz L. 27
Tren de Engranes considerando
pérdidas
T: Par aplicado
T1, T
2: pares de
torsión transmitidos
Ejemplo
Incluimos inercia, fricción viscosa, y fricción de Coulomb
Ing. Gabriela Ortiz L. 28
Zona Muerta
Se presenta en sistemas mecánicos
de transmisión cuando el
acoplamiento no es perfecto

8
Ing. Gabriela Ortiz L. 29
Ejemplo 4: Circuito de 2 entradas-2
salidas
Señales de entrada: Vi1(t) y Vi2(t)
Señales de salida: VC1(t) y VC2(t)
Ing. Gabriela Ortiz L. 30
Ejemplo 4 (continuación)
Diagrama de bloques
Ing. Gabriela Ortiz L. 31
Ejemplo 5: Dos masas
Obtener la representación en el espacio de estados de este sistema
Entrada: u(t)
Salida: y1(t), y2(t)
Ing. Gabriela Ortiz L. 32
Analogías Mecánico-Eléctricas
Sistemas Análogos
Sistemas que se pueden representar mediante el mismo modelo matemático pero son diferentes físicamente
Sirven, por ejemplo, para estudiar sistemas que no son fáciles de manejar experimentalmente

9
Ing. Gabriela Ortiz L. 33
Analogía Fuerza-Tensión
ResistenciaCoeficiente de fricción viscosa
InductanciaMasa o Momento de inercia
CorrienteVelocidad
CargaDesplazamiento
1/CapacitanciaConstante de Resorte
TensiónFuerza o Par
Sistema EléctricoSistema Mecánico
Ing. Gabriela Ortiz L. 34
Analogía Fuerza-Corriente
1/ResistenciaCoeficiente de fricción viscosa
CapacitanciaMasa o Momento de inercia
VoltajeVelocidad
Acoplamiento por flujo magnético
Desplazamiento
1/InductanciaConstante de Resorte
CorrienteFuerza o Par
Sistema EléctricoSistema Mecánico
Ing. Gabriela Ortiz L. 35
Sistemas Electromecánicos
Principios Básicos Tm=Km Φ ia
Tm Par motor [Nm]
Km Constante de proporcionalidad
Φ Flujo magnético [webers]
ia Corriente de Armadura [A]
eb=Km Φ ωm
eb Fuerza contraelectromotriz [volts]
Φ Flujo
ωm Velocidad del eje [rad/s]
Ing. Gabriela Ortiz L. 36
Motores C.D. de imán permanente
Controlado por inducido
La operación de un motor C.D. con control de armadura proporciona una relación prácticamente lineal entre velocidad de estado permanente y la tensión de entrada
La dirección de rotación depende de la polaridad de la tensión de entrada (en condiciones estables)

10
Ing. Gabriela Ortiz L. 37
Motor C.D de imán permanente
)()(
)()(
)()(
)()(
ttTmecánicaPotencia
titveléctricaPotencia
tktkv
tiktT
mm
ab
mbmmb
aim
ω
ωφω
=
=
==
=
Ing. Gabriela Ortiz L. 38
Ejemplo 6
Considere una carga acoplada a un
motor de imán permanente y TL(t)
como el par de dicha carga
Ecuaciones causa-efecto para el circuito del motor
Defina las variables de estado del sistema y dibuje un diagrama de estados
Ing. Gabriela Ortiz L. 39
Ejemplo 7
Se conocen los siguientes datos de un motor c.d.: Ra=2Ω
La=0,02H Kb=0,11 V/rad/s Ki=|Kb| J=0,02 kgm2
Encontrar un diagrama de bloques para simulación con Simulink la velocidad angular del motor con una entrada v(t)=20u(t) V
Considere además B=B0=0.01 [Nms] para 0 ≤ t < 1500 B0 J/Kb
2
B=0.5 B0 para t≥ 1500 B0 J/Kb2
Ing. Gabriela Ortiz L. 40
Diagrama de bloques del modelo de
un motor c.d. de imán permanente
Diagrama Simplificado

11
Ing. Gabriela Ortiz L. 41
Funciones de transferencia de otros
motores
))(()(
)(
ff
m
f RsLbsJs
K
sV
s
++=
θMotor C.D. controlado por campo,Actuador rotacional
)(
)1()(
)(
mB
Jdonde
ss
K
sV
s m
C
−=
+=
τ
τ
θMotor C.A., Control de campo bifásicoActuador rotacional
m: Pendiente de la curvapar-velocidad linealizada(normalmente negativa)
Ing. Gabriela Ortiz L. 42
Sistemas Neumático
presióntp
skgflujotqDonde
tqRtp f
:)(
]/[:)(
)()( =∆
dt
tdpKtq
dttqK
tp
)()(
)(1
)(
=
= ∫
Resistenciadel fluído Rf
Capacitanciadel fluído K
Ejemplo
Ing. Gabriela Ortiz L. 43
Referencias
[1] Dorf, Richard, Bishop Robert. „Sistemas de control moderno“, 10ª Ed., Prentice Hall, 2005, España.
[2] Ogata, Katsuhiko. „Ingeniería de Control Moderna“, Pearson, Prentice Hall, 2003, 4ª Ed., Madrid.
[3] Kuo, Benjamin C.. „Sistemas de Control Automático“, Ed. 7, Prentice Hall, 1996, México.




















