Multivariate optimization of fecal bioindicator inactivation by coupling UV-A and UV-C LEDs
Upload
khangminh22Category
view
1download
0
UNIVERSIDADE FEDERAL DO PARANÁ
SETOR DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
SISTEMA AUTÔNOMO DE ALIMENTAÇÃO DE LEDS DE
POTÊNCIA COM GERAÇÃO FOTOVOLTAICA E
ACUMULAÇÃO EM BATERIAS
CURITIBA
2015
2
ANDERSON DIETRICH
LUISE DORED
SISTEMA AUTÔNOMO DE ALIMENTAÇÃO DE LEDS DE
POTÊNCIA COM GERAÇÃO FOTOVOLTAICA E ACUMULAÇÃO
EM BATERIAS
Trabalho de conclusão de curso apresentado à disciplina de Trabalho de Conclusão de Curso II do Curso de Graduação em Engenharia Elétrica Noturno, Setor de Tecnologia, da Universidade Federal do Paraná. Orientador: Prof. Dr. João Américo Vilela Junior.
CURITIBA
2015
3
TERMO DE APROVAÇÃO
ANDERSON ALTAIR DIETRICH
LUISE DORED
SISTEMA AUTÔNOMO DE ALIMENTAÇÃO DE LEDS DE POTÊNCIA COM GERAÇÃO
FOTOVOLTAICA E ACUMULAÇÃO EM BATERIAS
Monografia aprovada como requisito parcial para a obtenção do grau de Bacharel no
Curso de Engenharia Elétrica, Setor de Tecnologia da Universidade Federal do Paraná,
pela seguinte banca examinadora:
Orientador __________________________________________
Prof. Dr. João Américo Vilela Junior
Departamento de Engenharia Elétrica, UFPR
__________________________________________
Prof. M. Sc. Vilson Roiz Gonçalves Rebelo da Silva
Departamento de Engenharia Elétrica, UFPR
__________________________________________
Prof. Dr. Rogers Demonti
Departamento de Engenharia Elétrica, UFPR
Curitiba, 10 de julho de 2015.
4
AGRADECIMENTOS
Agradeço primeiramente minha família e amigos pelo apoio, principalmente nessa
etapa final em que os desafios são enormes e o sucesso parece não estar ao alcance.
Agradeço também a nosso professor orientador, Dr. João Américo Vilela Junior,
que teve a paciência de nos explicar inúmeras vezes sobre a topologia dos conversores e
também nos ajudar com as mais diversas dificuldades.
- Anderson Altair Dietrich
Agradeço primeiramente aos meus pais, Hilda e Paulo, pela paciência, suporte e
incentivo durante todos esses anos, e as minhas irmãs pela alegria que me proporcionam.
Agradeço aos colegas de curso de engenharia elétrica noturno, em especial aos
meus amigos Anderson e Wagner, que sempre estiveram comigo durante essa longa
jornada.
Agradeço também ao professor e orientador Dr. João Américo Vilela Junior, que
esteve presente nos últimos semestres nos auxiliando e orientando em diversos trabalhos
e projetos. Agradeço também a banca avaliadora, professores M. Sc. Vilson Roiz
Gonçalves Rebelo da Silva e Dr. Rogers Demonti por interesse no tema.
- Luise Dored
5
RESUMO Este trabalho consiste no projeto de um sistema autônomo de alimentação de LED’s de potência com geração fotovoltaica e acumulação em bateria desde a sua concepção até a sua implementação física. O foco neste projeto se dá em extrair a potência máxima disponível no painel fotovoltaico para carregar uma bateria 12V, que será responsável por alimentar uma carga de LED’s, cuja corrente é controlada através de um conversor Buck. O painel fotovoltaico também foi utilizado como um sensor de luminosidade, afim de que sinalize os LED’s quanto a sua ativação em momentos de penumbra e noite, e desligamento enquanto dia, caracterizando por ser, portanto, um sistema automatizado. Para isso, o painel foi ligado a um conversor CC-CC e através de uma lógica de controle, a qual varia o tempo de chaveamento do MOSFET desse conversor, atuou da forma necessária. O painel forneceu a sua potência máxima mesmo com variações de temperatura e radiação solar. Foram apresentadas as vantagens e desvantagens da topologia Sepic de conversores CC-CC e a técnica de controle P&O (perturba e observa). Os resultados finais comprovaram o controle da corrente nos LED’s em 700mA, e o correto funcionamento do PWM e do compensador do conversor Buck. Palavras-chave: Placas fotovoltaicas, Conversor Sepic, MPPT, baterias, energia renovável, P&O.

6
ABSTRACT This work consists of the design of a stand-alone LED power system with photovoltaic generation and battery accumulation from its conception to its physical implementation. The focus in this project is given to extract the maximum power available from the PV array to charge a 12V battery, which will be responsible for feeding an LED load, whose current is controlled through a Buck converter. The photovoltaic panel is also used as a brightness sensor, so that the signals LEDs as their activation in times of darkness and night and shutdown when it’s day, characterized by being therefore an automated system. For this, the panel was connected to a DC-DC converter and through a control logic, which varies the MOSFET switching time of this converter, which worked as expected. The panel provided its maximum power even with temperature variations and solar radiation. The advantages and disadvantages of Sepic topology dc-dc converters and P&O control technique were presented (disturbs and notes). The final results showed the control current in the LED's at 700mA, and the correct operation of the PWM and the compensator Buck converter. Wordkeys: Photovoltaic panels, Sepic converter, MPPT, batteries, renewable energy, P&O.
7
LISTA DE SIGLAS
MME - Ministério das Minas e Energia
SPE - Secretaria de Planejamento e Desenvolvimento Energético
LED - Light Emitting Diode (Diodo Emissor de Luz)
MPPT - Maximum Power Point Tracking (Rastreio do Ponto de máxima Potência)
CC - Corrente Contínua
SEPIC - Single-Ended Primary Inductance Converter
PWM - Pulse-Width Modulation (Modulação por Largura de Pulso)
P&O - Perturba e Observa
PV - Painel Fotovoltaico
8
LISTA DE FIGURAS
FIGURA 1: RANKING DE POTÊNCIA INSTALADA DE ENERGIAS RENOVÁVEIS NO
MUNDO. ............................................................................................................................ 12
FIGURA 2: DIAGRAMA DE BLOCOS DO SISTEMA PROPOSTO ................................... 14
FIGURA 3: SISTEMA FOTOVOLTAICO DE RASTREAMENTO DE MÁXIMA POTÊNCIA.
........................................................................................................................................... 16
FIGURA 4: CURVAS I-V (a) E P-V (b) DE UM MODULO KC130TM PV, PARA
DIFERENTES NÍVEIS DE IRRADIAÇÃO E PONTOS NOTÁVEIS DE PMP (VMP, IMP) E
(VMP, PMP). ...................................................................................................................... 18
FIGURA 5: PAINEL SOLAR FOTOVOLTAICO MONOCRISTALINO DE 20W SOLAR
LEADING. .......................................................................................................................... 19
FIGURA 6: PONTOS DE MÁXIMA POTÊNCIA LEVANDO EM CONSIDERAÇÃO
RADIAÇÕES DIFERENTES. ............................................................................................. 20
FIGURA 7: GANHO ESTÁTICO DE CONVERSORES CC-CC EM MODO DE OPERAÇÃO
CONTÍNUO ........................................................................................................................ 20
FIGURA 8: REGIÕES DE RASTREAMENTO PARA OS PRINCIPAIS CONVERSORES
CC-CC. .............................................................................................................................. 21
FIGURA 9: CONVERSOR SEPIC OPERANDO COMO MPPT. ........................................ 22
FIGURA 10: CIRCUITO EQUIVALENTE DO SEPIC VISTO DO LADO PRIMÁRIO. ....... 23
FIGURA 11: 1ª ETAPA DE FUNCIONAMENTO DO SEPIC .............................................. 23
FIGURA 12: 2ª ETAPA DE FUNCIONAMENTO DO SEPIC .............................................. 24
FIGURA 13: SINAL PWM. ................................................................................................. 25
FIGURA 14: LÓGICA DO ALGORITMO P&O. .................................................................. 26
FIGURA 15: CLASSIFICAÇÃO DE DISPOSITIVOS DE CARGA ELÉTRICA. .................. 28
FIGURA 16: COMPORTAMENTO DA JUNÇÃO P-N COM POLARIZAÇÃO DIRETA ..... 30
FIGURA 17: FUNÇÃO DE TRANSFERÊNCIA TENSÃO DE SAÍDA. ................................ 32
FIGURA 18: CONVERSOR BUCK. ................................................................................... 32
FIGURA 19: RECURSOS DISPONÍVEIS NO CIRCUITO INTEGRADO. .......................... 34
FIGURA 20: ESQUEMÁTICO DO PROJETO. ................................................................... 35
FIGURA 21: ARRANJO FOTOVOLTAICO CONECTADO DIRETAMENTE A UMA CARGA
RESISTIVA. ....................................................................................................................... 36
9
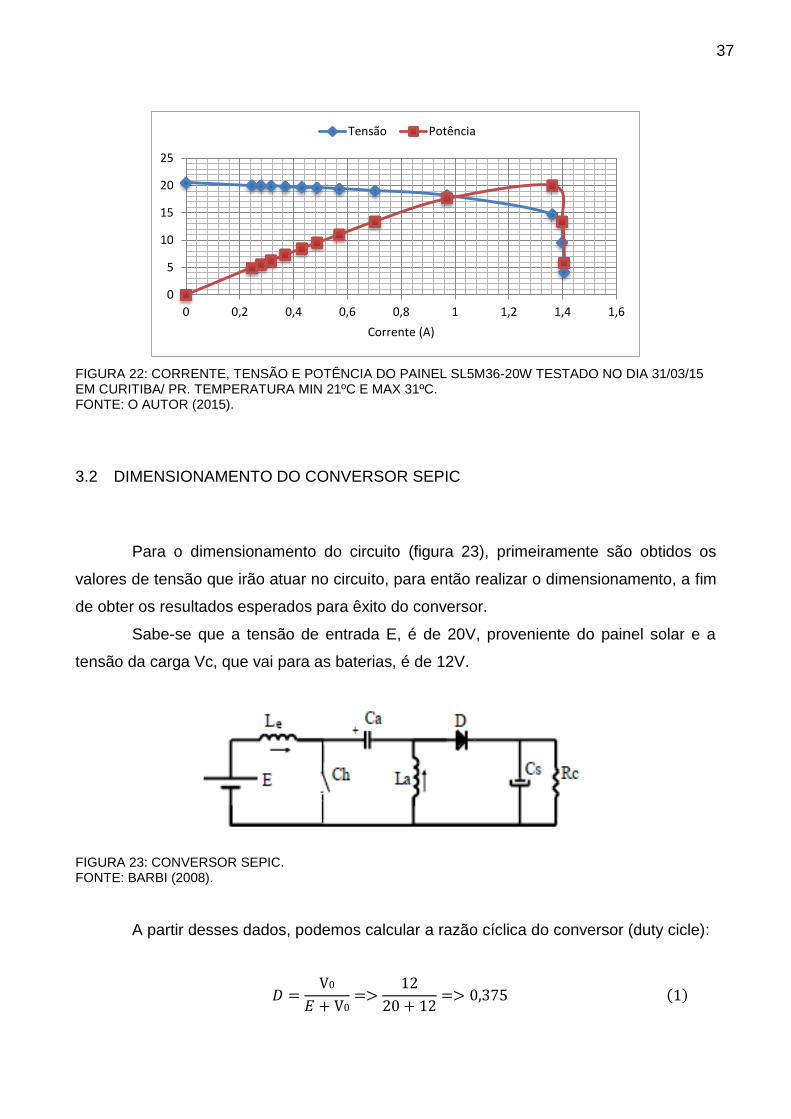
FIGURA 22: CORRENTE, TENSÃO E POTÊNCIA DO PAINEL SL5M36-20W TESTADO
NO DIA 31/03/15 EM CURITIBA/ PR. TEMPERATURA MIN 21ºC E MAX 31ºC. ............. 37
FIGURA 23: CONVERSOR SEPIC.................................................................................... 37
FIGURA 24: CONVERSOR SEPIC PROJETADO. ............................................................ 38
FIGURA 25: NÚCLEO E CARRETEL DE UM INDUTOR. ................................................. 39
FIGURA 26: DADOS PARA O PROJETO DO INDUTOR. ................................................. 39
FIGURA 27: BATERIA 12V UTILIZADA NO PROJETO. ................................................... 41
FIGURA 28: CONVERSOR BUCK. ................................................................................... 42
FIGURA 29: CONVERSOR SEPIC PROJETADO. ............................................................ 43
FIGURA 30: DADOS PARA O PROJETO DO INDUTOR. ................................................. 43
FIGURA 31: LED DE POTÊNCIA UTILIZADO NO PROJETO. ......................................... 44
FIGURA 32: CONTROLE AUTÔNOMO DE ACIONAMENTO DOS LED’S. ...................... 45
FIGURA 33: ESQUEMÁTICO DO TIVA C E REGULADOR 5V RESPECTIVAMENTE. ... 46
FIGURA 34: CIRCUITO PWM PARA O MOSFET DO SEPIC E DO BUCK. ..................... 47
FIGURA 35: SENSORES DE TENSÃO E CORRENTE DO PROJETO. ........................... 47
FIGURA 36: ALGORITMO PERTURBA E OBSERVA. ...................................................... 48
FIGURA 37: TRECHO DE CÓDIGO PARA CÁLCULO DO MPPT. ................................... 49
FIGURA 38: PLACA DO PROJETO. ................................................................................. 50
FIGURA 39: PROTÓTIPO. ................................................................................................ 51
FIGURA 40: DIFERENTES PONTOS DE OPERAÇÃO DO PWM PARA SITUAÇÕES
DISTINTAS DE INSOLAÇÃO. ........................................................................................... 52
FIGURA 41: SUBIDA DO CONTROLE DA CORRENTE. .................................................. 53
FIGURA 42: MÉDIA DO CONTROLE DA CORRENTE. .................................................... 53
FIGURA 43: EXTRAÇÃO DE MÁXIMA POTÊNCIA. ......................................................... 54
FIGURA 44: PWM E TENSÃO SEPIC. .............................................................................. 54
10
SUMÁRIO 1 INTRODUÇÃO ..................................................................................................... 12
1.1 OBJETIVOS ....................................................................................................... 14
1.1.1 Objetivo Geral ................................................................................................ 14
1.1.2 Objetivos Específicos ..................................................................................... 14
1.2 JUSTIFICATIVA ................................................................................................. 15
1.3 ESTRUTURA DO TRABALHO ........................................................................... 15
2 FUNDAMENTAÇÃO TEÓRICA ........................................................................... 16
2.1 SISTEMAS FOTOVOLTAICOS .......................................................................... 16
2.1.1 Painéis Fotovoltaicos ..................................................................................... 17
2.1.1.1 Curva Característica de um Painel Fotovoltaico .......................................... 17
2.1.1.2 Painéis de Silício Monocristalinos ................................................................ 18
2.1.2 Estágio de Potência ....................................................................................... 19
2.1.2.1 Conversor SEPIC ......................................................................................... 22
2.1.2.2 Modulação PWM .......................................................................................... 24
2.1.3 Rastreamento do Ponto Máximo de Potência do Sistema ............................. 25
2.1.3.1 Método Perturba e Observa (P&O) .............................................................. 26
2.2 ACUMULADOR DE ENERGIA ........................................................................... 27
2.2.1 Características de Carga da Bateria .............................................................. 28
2.3 CARGA CONECTADA AO SISTEMA ................................................................ 29
2.3.1 Princípio de Funcionamento dos LED’s ......................................................... 29
2.3.2 Características elétricas do LED alta potência ............................................... 30
2.3.3 Circuito de Controle do LED de Potência ....................................................... 31
2.3.3.1 Conversor Buck ............................................................................................ 32
2.4 CONTROLE ....................................................................................................... 33
3 DESENVOLVIMENTO.......................................................................................... 35
3.1 PAINEL FOTOVOLTAICO CONECTADO A UMA CARGA RESISTIVA ............ 36
3.2 DIMENSIONAMENTO DO CONVERSOR SEPIC .............................................. 37
3.2.1 Projeto do Indutor para o SEPIC .................................................................... 38
3.3 ESPECIFICAÇÃO DA BATERIA ........................................................................ 41
3.4 DIMENSIONAMENTO DO CONVERSOR BUCK............................................... 41
3.4.1 Projeto do Indutor para o Buck ....................................................................... 43
11
3.5 ESPECIFICAÇÃO DOS LED’S DE POTÊNCIA E OPERAÇÃO COMO SISTEMA
AUTÔNOMO ............................................................................................................. 44
3.6 MICROCONTROLADOR TIVA C ....................................................................... 45
3.6.1 Geração de Sinal PWM .................................................................................. 46
3.6.2 Sensores de Corrente e Tensão .................................................................... 47
4 RESULTADO E DISCUSSÕES ........................................................................... 50
5 CONSIDERAÇÕES FINAIS ................................................................................. 55
5.1 TRABALHOS FUTUROS ................................................................................... 55
REFERÊNCIAS ........................................................................................................ 56
12
1 INTRODUÇÃO
A utilização de fontes de energia renováveis vem crescendo muito nos últimos
anos, devido à crescente preocupação com o meio-ambiente e com o aquecimento global.
Além disso, é importante o aumento da diversidade da matriz energética, assim como a
cogeração de energia, para aumentar a segurança do abastecimento energético. As
energias renováveis, praticamente inesgotáveis no mundo, contribuem para a
manutenção do meio ambiente pelo fato de ter emissão nula (no caso da energia solar) ou
reduzida de gases de efeito estufa. Tem também benefícios para a população, pois
podem ser aproveitadas tanto como combustíveis alternativos como na geração de calor e
eletricidade (Pacheco, 2006). No contexto atual, o Brasil é o quarto país no mundo em
produção de energia por fontes renováveis, atrás apenas da China, Índia e dos Estados
Unidos, aponta o boletim “Ranking Mundial de Energia e Socioeconomia (anos 2011 /12
/13)”, publicação anual da Secretaria de Planejamento e Desenvolvimento Energético
(SPE) do Ministério de Minas e Energia (MME), sendo que cerca de 42,6% da matriz
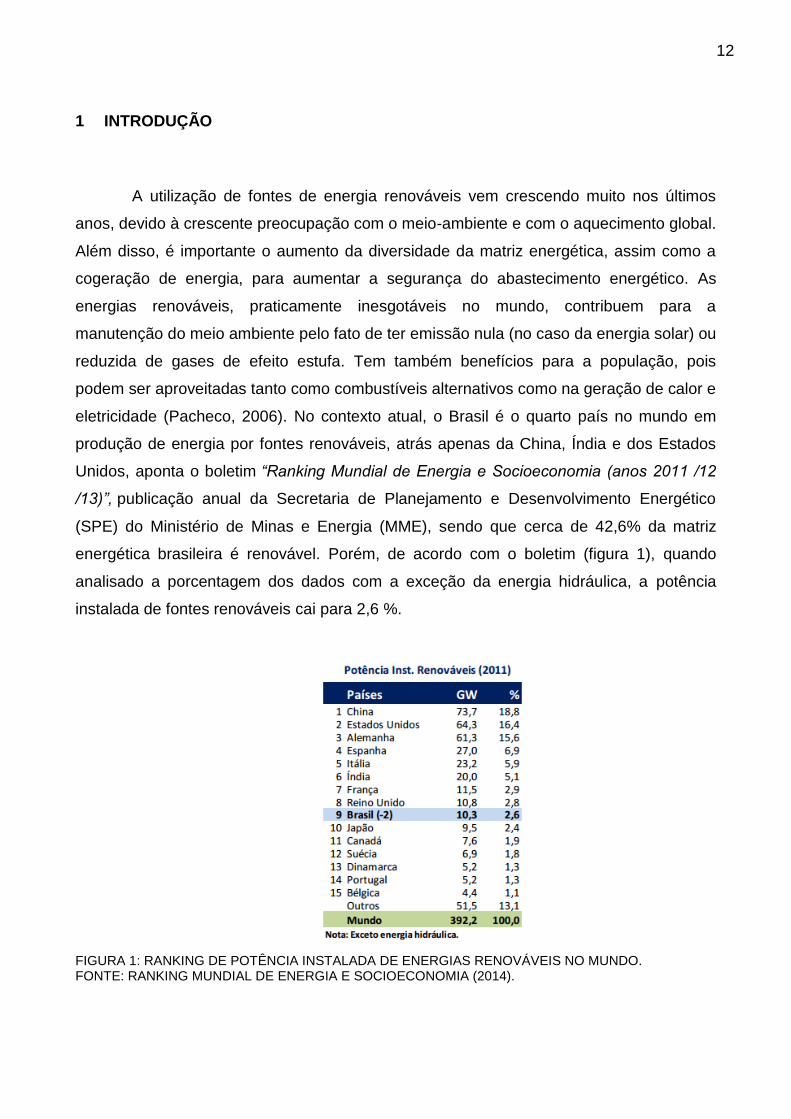
energética brasileira é renovável. Porém, de acordo com o boletim (figura 1), quando
analisado a porcentagem dos dados com a exceção da energia hidráulica, a potência
instalada de fontes renováveis cai para 2,6 %.
FIGURA 1: RANKING DE POTÊNCIA INSTALADA DE ENERGIAS RENOVÁVEIS NO MUNDO. FONTE: RANKING MUNDIAL DE ENERGIA E SOCIOECONOMIA (2014).
13
Dentre as energias renováveis, a energia solar vem ganhando espaço nos
últimos anos, pois vem superando suas limitações em relação à eficiência energética e
alto custo. As principais vantagens que a tornam atraente como fonte de energia são suas
características de baixíssimo impacto ambiental e sua fonte inesgotável de energia, já que
o sol é a fonte de energia primária. A energia pode ser usada para o aquecimento de
água e produção de eletricidade. Além disso, a radiação solar pode ser utilizada
diretamente como fonte de energia térmica, para aquecimento de fluidos e ambientes e
para geração de potência mecânica ou elétrica. Pode ainda ser convertida diretamente
em energia elétrica, por meio de efeitos sobre determinados materiais, entre os quais se
destacam o termoelétrico e o fotovoltaico. No Brasil, o MME desenvolve vários projetos
para o aproveitamento da energia solar, particularmente por meio de sistemas
fotovoltaicos de geração de eletricidade, visando ao atendimento de comunidades rurais
e/ou isoladas da rede de energia elétrica e ao desenvolvimento regional.
Esses projetos atuam basicamente com quatro tipos de sistemas: i)
bombeamento de água, para abastecimento doméstico, irrigação e piscicultura; ii)
iluminação pública; iii) sistemas de uso coletivo, tais como eletrificação de escolas, postos
de saúde e centros comunitários; e iv) atendimento domiciliar.
Hoje, o uso de sistemas fotovoltaicos para geração de eletricidade é bastante
conhecido, porém, está bastante restrito devido ao alto valor de investimento e retorno em
períodos muito longos. Contudo o potencial desse tipo de sistema é enorme, e existe
grande expectativa na redução de seu valor e período de retorno.
No início da década de 1990, com os avanços adicionais da tecnologia e a
significativa redução nos seus custos, além das urgências de ordem ambiental, a
conversão fotovoltaica teve as suas aplicações ampliadas e inseriu-se crescentemente no
mercado mundial. Em virtude disso, o objetivo do projeto será a utilização de um sistema
fotovoltaico para extração de energia e armazenamento em baterias que será utilizado
para alimentação de LED’s de potência. Para compor um sistema autônomo, tomando
como base a linha de projetos já desenvolvida pelo MME, utilizaremos a placa fotovoltaica
também atuando como um sensor de luminosidade.
14
1.1 OBJETIVOS
A seguir são apresentados os objetivos (geral e específico) relacionados com a
realização deste projeto de pesquisa.
1.1.1 Objetivo Geral
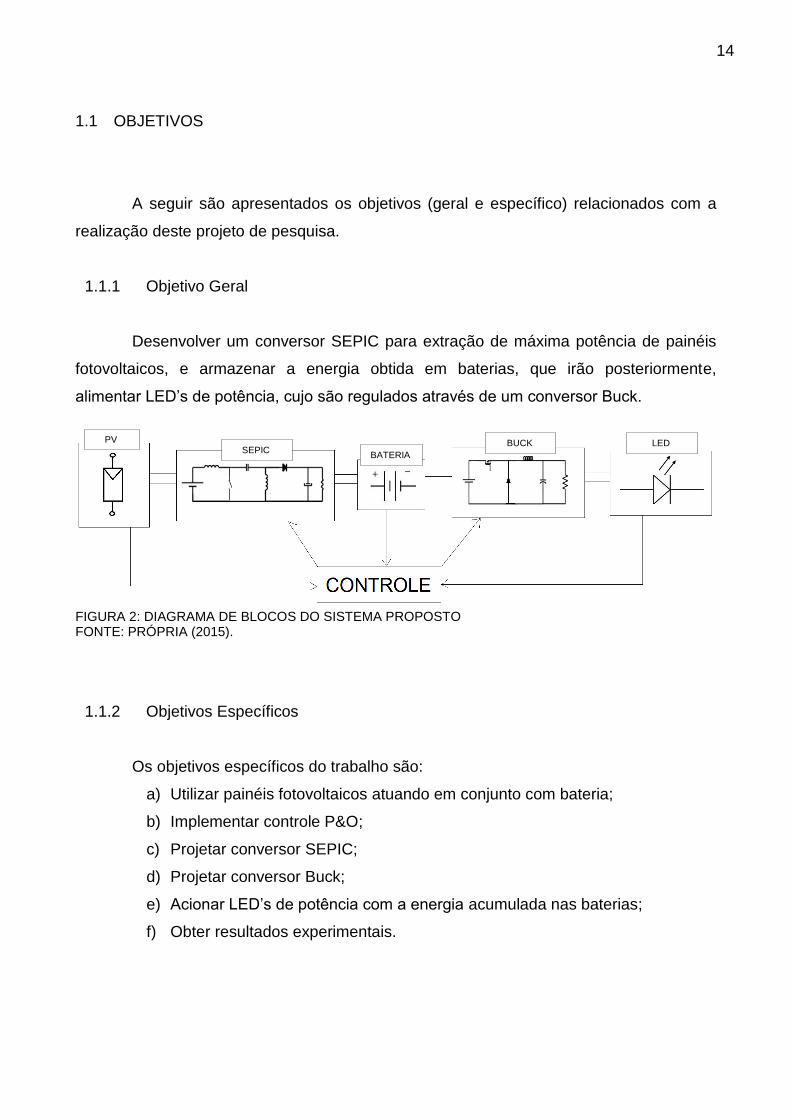
Desenvolver um conversor SEPIC para extração de máxima potência de painéis
fotovoltaicos, e armazenar a energia obtida em baterias, que irão posteriormente,
alimentar LED’s de potência, cujo são regulados através de um conversor Buck.
FIGURA 2: DIAGRAMA DE BLOCOS DO SISTEMA PROPOSTO FONTE: PRÓPRIA (2015).
1.1.2 Objetivos Específicos
Os objetivos específicos do trabalho são:
a) Utilizar painéis fotovoltaicos atuando em conjunto com bateria;
b) Implementar controle P&O;
c) Projetar conversor SEPIC;
d) Projetar conversor Buck;
e) Acionar LED’s de potência com a energia acumulada nas baterias;
f) Obter resultados experimentais.
SEPIC BUCK LED
BATERIA
PV
15
1.2 JUSTIFICATIVA
Desenvolver topologias que representam o estado da arte da tecnologia sempre
representa uma oportunidade de aprendizado e de crescimento para o ambiente
científico. A geração de energia renovável solar está em voga, principalmente pela grande
demanda atual de energia e preocupação com o meio ambiente. Atualmente, em grandes
centros urbanos, a colocação de painéis solares e utilização de LED’s para iluminação
publica não se justificam devido ao alto custo tanto do LED como o painel solar. Embora
as tecnologias estejam barateando ao longo dos anos, ainda são equipamentos caros de
serem utilizados em larga escala, ate porque não existe ainda a real necessidade desse
tipo de energia para sistemas de iluminação pública. Entretanto, em áreas remotas aonde
a rede elétrica não chega, são utilizadas energias alternativas a rede, como os geradores
por exemplo. Dentre as energias renováveis, a energia solar se faz bastante presente nas
comunidades e localidades mais isoladas. Justifica-se, portanto a realização deste estudo
como forma de projetar um equipamento autônomo de iluminação, com um painel
fotovoltaico funcionando tanto na obtenção de energia como um sensor de luminosidade,
para que com o auxílio da carga da bateria, acione os LED’s em momento oportuno. O
projeto não considera a viabilidade econômica, e sim a viabilidade técnica, uma vez que o
sistema demanda de necessidades reais de implantação em áreas remotas e de difícil
acesso a rede elétrica.
1.3 ESTRUTURA DO TRABALHO
A presente monografia é organizada da seguinte maneira: o capítulo 2 tem como
foco introduzir uma fundamentação teórica sobre os painéis fotovoltaicos, baterias,
conversores SEPIC e Buck e o controle do sistema; o capítulo 3 aborda o projeto do
sistema e o desenvolvimento da placa dos conversores; o capítulo 4 apresenta os
resultados obtidos dos testes desenvolvidos, bem como estudos de autonomia do sistema
e o capítulo 5 apresenta as conclusões.
16
2 FUNDAMENTAÇÃO TEÓRICA
Por meio de revisão bibliográfica, pôde ser realizada uma síntese justificando a
escolha das topologias e equipamentos utilizados no projeto proposto, sendo eles:
Sistema fotovoltaico, subdividido em painel fotovoltaico, algoritmo de
rastreamento e conversor SEPIC;
Sistema acumulador de carga proveniente dos painéis fotovoltaicos,
caracterizado por baterias chumbo ácido 12V;
LED’s que serão a carga a ser alimentada, através de um conversor Buck.
2.1 SISTEMAS FOTOVOLTAICOS
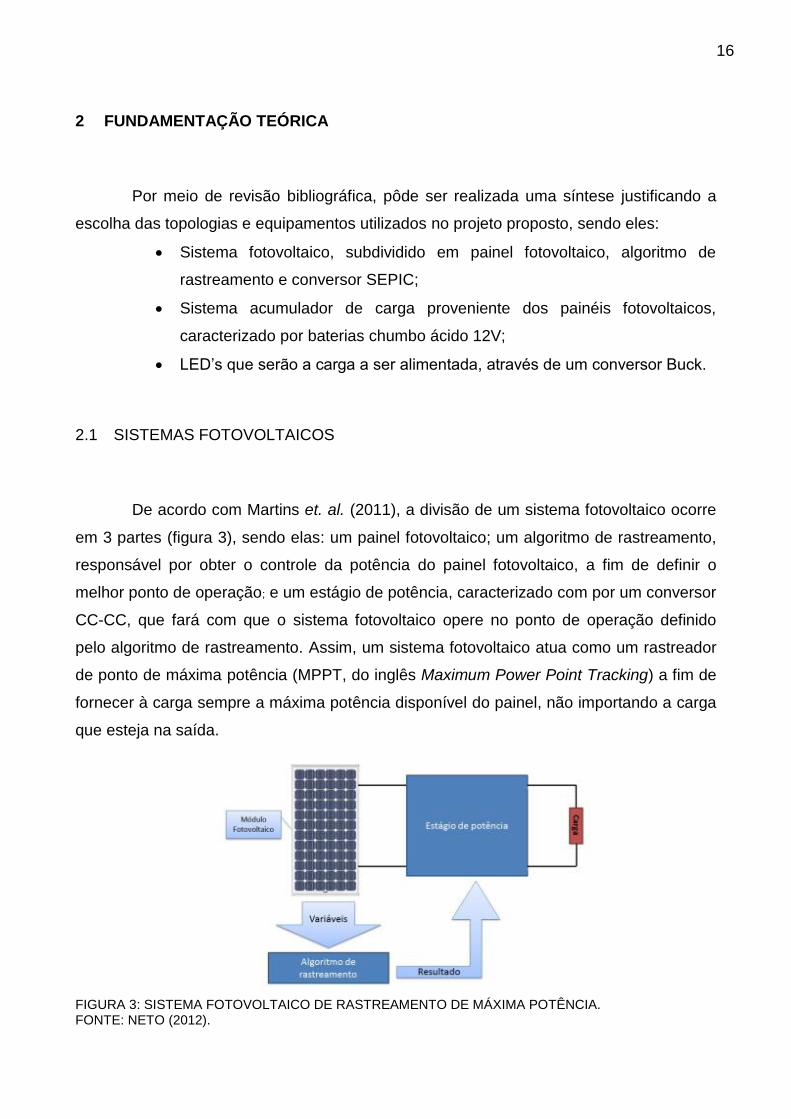
De acordo com Martins et. al. (2011), a divisão de um sistema fotovoltaico ocorre
em 3 partes (figura 3), sendo elas: um painel fotovoltaico; um algoritmo de rastreamento,
responsável por obter o controle da potência do painel fotovoltaico, a fim de definir o
melhor ponto de operação; e um estágio de potência, caracterizado com por um conversor
CC-CC, que fará com que o sistema fotovoltaico opere no ponto de operação definido
pelo algoritmo de rastreamento. Assim, um sistema fotovoltaico atua como um rastreador
de ponto de máxima potência (MPPT, do inglês Maximum Power Point Tracking) a fim de
fornecer à carga sempre a máxima potência disponível do painel, não importando a carga
que esteja na saída.
FIGURA 3: SISTEMA FOTOVOLTAICO DE RASTREAMENTO DE MÁXIMA POTÊNCIA. FONTE: NETO (2012).
17
2.1.1 Painéis Fotovoltaicos
Os painéis fotovoltaicos são constituídos por diversas células fotovoltaicas tanto
em série como em paralelo para proporcionar um ganho e compor sua corrente e tensão
nominal (Serrão, 2010). As células por sua vez são compostas por elementos
semicondutores, sendo o silício o mais utilizado.
O silício puro obtido por processos industriais é isolante e precisa da dopagem
para apresentar a sua característica de semicondutor. Essa dopagem consiste na
inserção de Boro e Fósforo, criando assim dois tipos de cristais de silício um tipo N e o
outro do tipo P respectivamente. Na junção desses cristais forma-se um campo elétrico
constante chamado junção PN (Ribeiro, 2012).
2.1.1.1 Curva Característica de um Painel Fotovoltaico
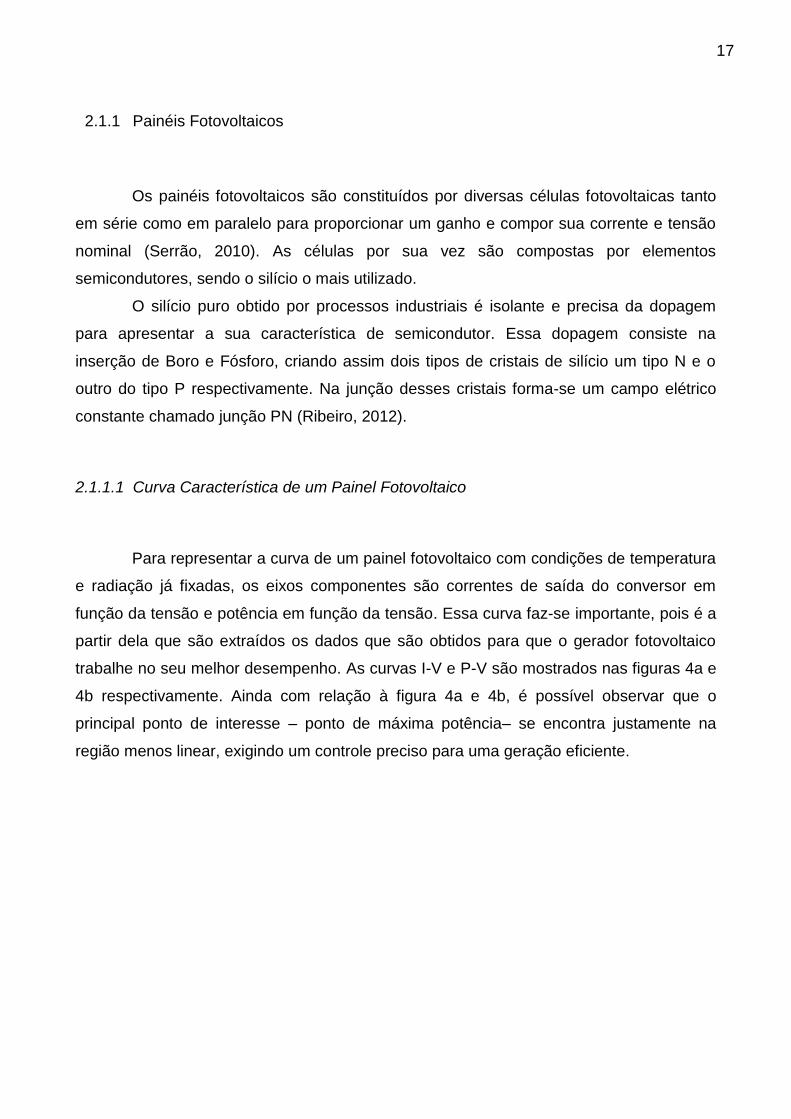
Para representar a curva de um painel fotovoltaico com condições de temperatura
e radiação já fixadas, os eixos componentes são correntes de saída do conversor em
função da tensão e potência em função da tensão. Essa curva faz-se importante, pois é a
partir dela que são extraídos os dados que são obtidos para que o gerador fotovoltaico
trabalhe no seu melhor desempenho. As curvas I-V e P-V são mostrados nas figuras 4a e
4b respectivamente. Ainda com relação à figura 4a e 4b, é possível observar que o
principal ponto de interesse – ponto de máxima potência– se encontra justamente na
região menos linear, exigindo um controle preciso para uma geração eficiente.
18
FIGURA 4: CURVAS I-V (a) E P-V (b) DE UM MODULO KC130TM PV, PARA DIFERENTES NÍVEIS DE IRRADIAÇÃO E PONTOS NOTÁVEIS DE PMP (VMP, IMP) E (VMP, PMP). FONTE: NILTON (2012).
2.1.1.2 Painéis de Silício Monocristalinos
O painel de silício monocristalino é apenas um tipo de painel comercializado para
sistemas de geração de energia.
Existem também dois outros tipos de painéis bastante comercializados, os de
silício policristalino e os de filme fino. Os painéis de silício monocristalino apresentam a
maior eficiência, estando geralmente entre 12-15% mas chegando a valores máximos de
22,7% e em laboratórios até 24%. Já os de silício policristalino têm uma eficiência de 11-
14% e os de filme fino de 6-7% (Morri, 2007).
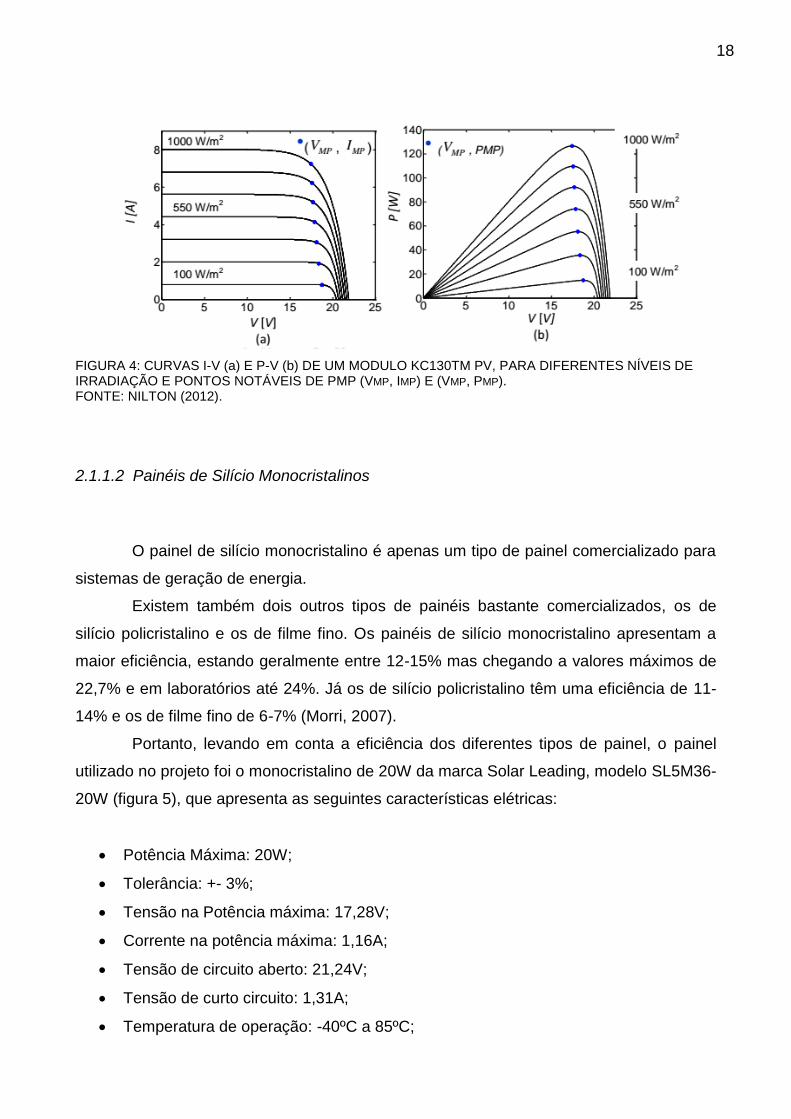
Portanto, levando em conta a eficiência dos diferentes tipos de painel, o painel
utilizado no projeto foi o monocristalino de 20W da marca Solar Leading, modelo SL5M36-
20W (figura 5), que apresenta as seguintes características elétricas:
Potência Máxima: 20W;
Tolerância: +- 3%;
Tensão na Potência máxima: 17,28V;
Corrente na potência máxima: 1,16A;
Tensão de circuito aberto: 21,24V;
Tensão de curto circuito: 1,31A;
Temperatura de operação: -40ºC a 85ºC;
19
Tecnologia da célula: Monossilício
Peso: 2,4 Kg
Dimensão: 630x290x25mm.
FIGURA 5: PAINEL SOLAR FOTOVOLTAICO MONOCRISTALINO DE 20W SOLAR LEADING. FONTE: O AUTOR (2015).
2.1.2 Estágio de Potência
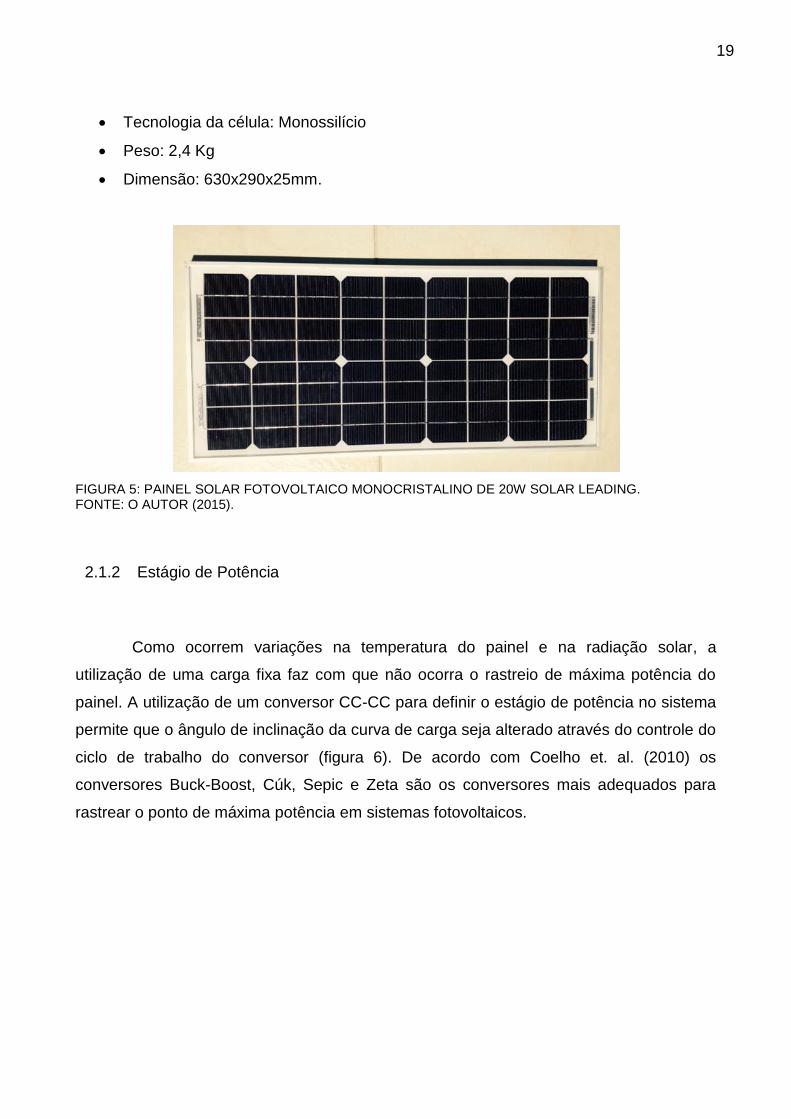
Como ocorrem variações na temperatura do painel e na radiação solar, a
utilização de uma carga fixa faz com que não ocorra o rastreio de máxima potência do
painel. A utilização de um conversor CC-CC para definir o estágio de potência no sistema
permite que o ângulo de inclinação da curva de carga seja alterado através do controle do
ciclo de trabalho do conversor (figura 6). De acordo com Coelho et. al. (2010) os
conversores Buck-Boost, Cúk, Sepic e Zeta são os conversores mais adequados para
rastrear o ponto de máxima potência em sistemas fotovoltaicos.
20
FIGURA 6: PONTOS DE MÁXIMA POTÊNCIA LEVANDO EM CONSIDERAÇÃO RADIAÇÕES DIFERENTES. FONTE: NETO (2012).
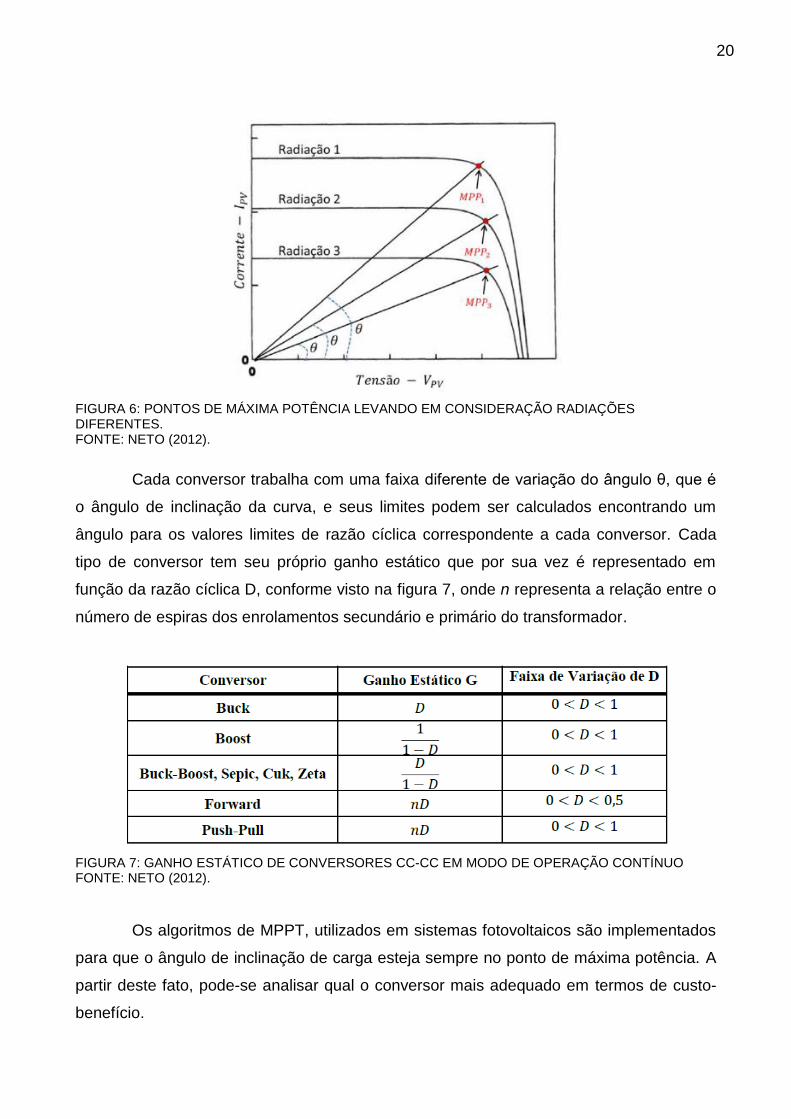
Cada conversor trabalha com uma faixa diferente de variação do ângulo θ, que é
o ângulo de inclinação da curva, e seus limites podem ser calculados encontrando um
ângulo para os valores limites de razão cíclica correspondente a cada conversor. Cada
tipo de conversor tem seu próprio ganho estático que por sua vez é representado em
função da razão cíclica D, conforme visto na figura 7, onde n representa a relação entre o
número de espiras dos enrolamentos secundário e primário do transformador.
FIGURA 7: GANHO ESTÁTICO DE CONVERSORES CC-CC EM MODO DE OPERAÇÃO CONTÍNUO FONTE: NETO (2012).
Os algoritmos de MPPT, utilizados em sistemas fotovoltaicos são implementados
para que o ângulo de inclinação de carga esteja sempre no ponto de máxima potência. A
partir deste fato, pode-se analisar qual o conversor mais adequado em termos de custo-
benefício.
21
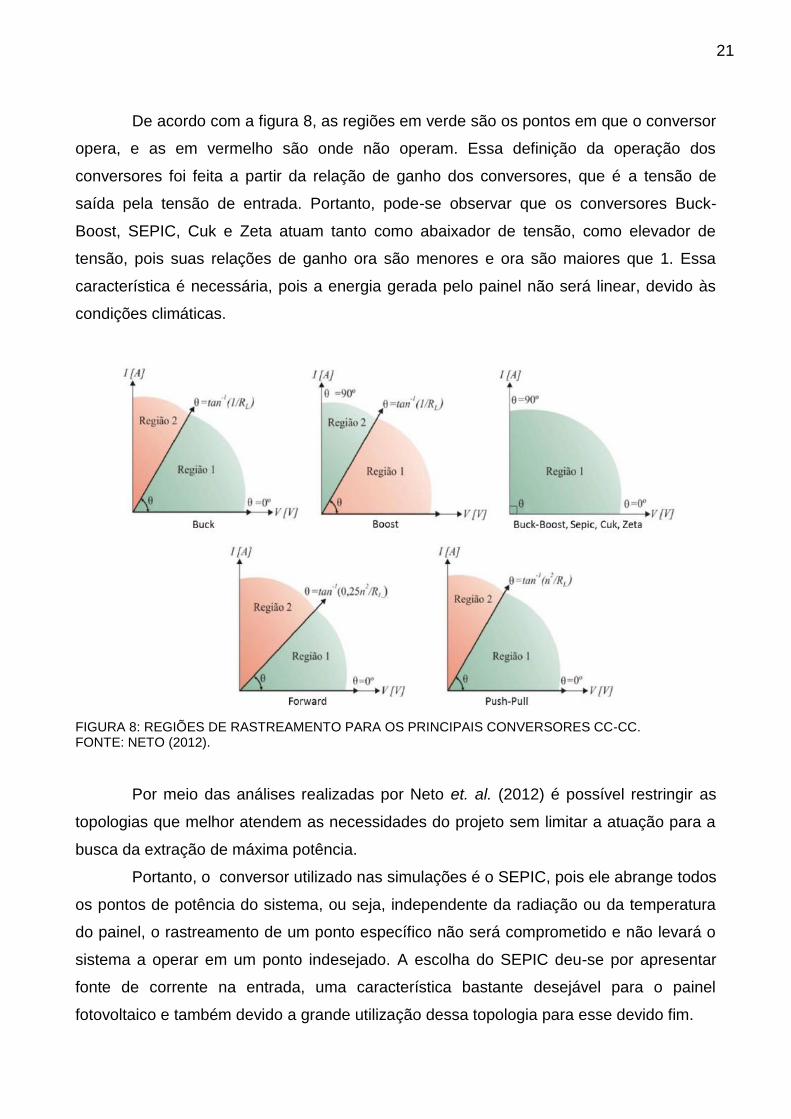
De acordo com a figura 8, as regiões em verde são os pontos em que o conversor
opera, e as em vermelho são onde não operam. Essa definição da operação dos
conversores foi feita a partir da relação de ganho dos conversores, que é a tensão de
saída pela tensão de entrada. Portanto, pode-se observar que os conversores Buck-
Boost, SEPIC, Cuk e Zeta atuam tanto como abaixador de tensão, como elevador de
tensão, pois suas relações de ganho ora são menores e ora são maiores que 1. Essa
característica é necessária, pois a energia gerada pelo painel não será linear, devido às
condições climáticas.
FIGURA 8: REGIÕES DE RASTREAMENTO PARA OS PRINCIPAIS CONVERSORES CC-CC. FONTE: NETO (2012).
Por meio das análises realizadas por Neto et. al. (2012) é possível restringir as
topologias que melhor atendem as necessidades do projeto sem limitar a atuação para a
busca da extração de máxima potência.
Portanto, o conversor utilizado nas simulações é o SEPIC, pois ele abrange todos
os pontos de potência do sistema, ou seja, independente da radiação ou da temperatura
do painel, o rastreamento de um ponto específico não será comprometido e não levará o
sistema a operar em um ponto indesejado. A escolha do SEPIC deu-se por apresentar
fonte de corrente na entrada, uma característica bastante desejável para o painel
fotovoltaico e também devido a grande utilização dessa topologia para esse devido fim.
22
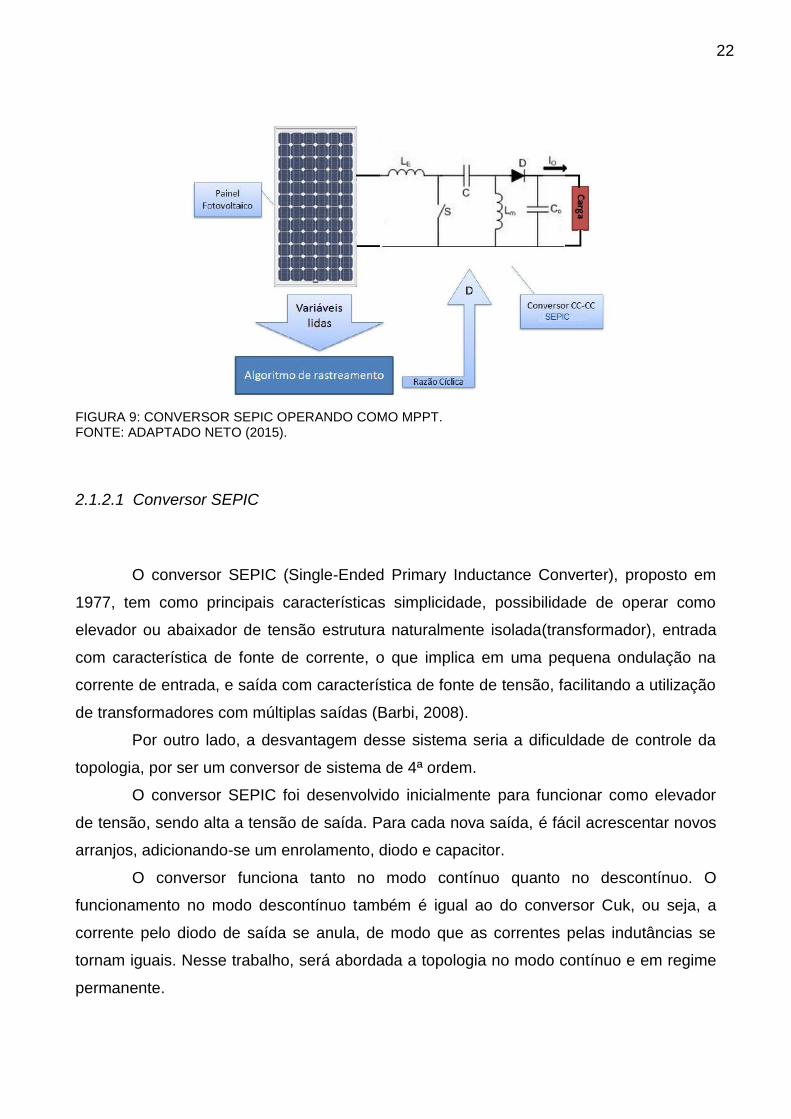
FIGURA 9: CONVERSOR SEPIC OPERANDO COMO MPPT. FONTE: ADAPTADO NETO (2015).
2.1.2.1 Conversor SEPIC
O conversor SEPIC (Single-Ended Primary Inductance Converter), proposto em
1977, tem como principais características simplicidade, possibilidade de operar como
elevador ou abaixador de tensão estrutura naturalmente isolada(transformador), entrada
com característica de fonte de corrente, o que implica em uma pequena ondulação na
corrente de entrada, e saída com característica de fonte de tensão, facilitando a utilização
de transformadores com múltiplas saídas (Barbi, 2008).
Por outro lado, a desvantagem desse sistema seria a dificuldade de controle da
topologia, por ser um conversor de sistema de 4ª ordem.
O conversor SEPIC foi desenvolvido inicialmente para funcionar como elevador
de tensão, sendo alta a tensão de saída. Para cada nova saída, é fácil acrescentar novos
arranjos, adicionando-se um enrolamento, diodo e capacitor.
O conversor funciona tanto no modo contínuo quanto no descontínuo. O
funcionamento no modo descontínuo também é igual ao do conversor Cuk, ou seja, a
corrente pelo diodo de saída se anula, de modo que as correntes pelas indutâncias se
tornam iguais. Nesse trabalho, será abordada a topologia no modo contínuo e em regime
permanente.

23
Vista do lado primário (figura 10), as tensões médias nos capacitores C e C0 são,
respectivamente, E e V0.
FIGURA 10: CIRCUITO EQUIVALENTE DO SEPIC VISTO DO LADO PRIMÁRIO. FONTE: BARBI (2008).
No modo em que utilizaremos o conversor no projeto, ele vai funcionar em duas
etapas. Na 1ª etapa (Figura 11), num intervalo de t0 e t1, a chave S está conduzindo e o
diodo D está bloqueado. As tensões Vc e Vc0 são, respectivamente, E e V0. O indutor Le
armazena energia proveniente da fonte E. Durante essa etapa o capacitor C0 alimenta a
carga.
FIGURA 11: 1ª ETAPA DE FUNCIONAMENTO DO SEPIC FONTE: BARBI (2008).
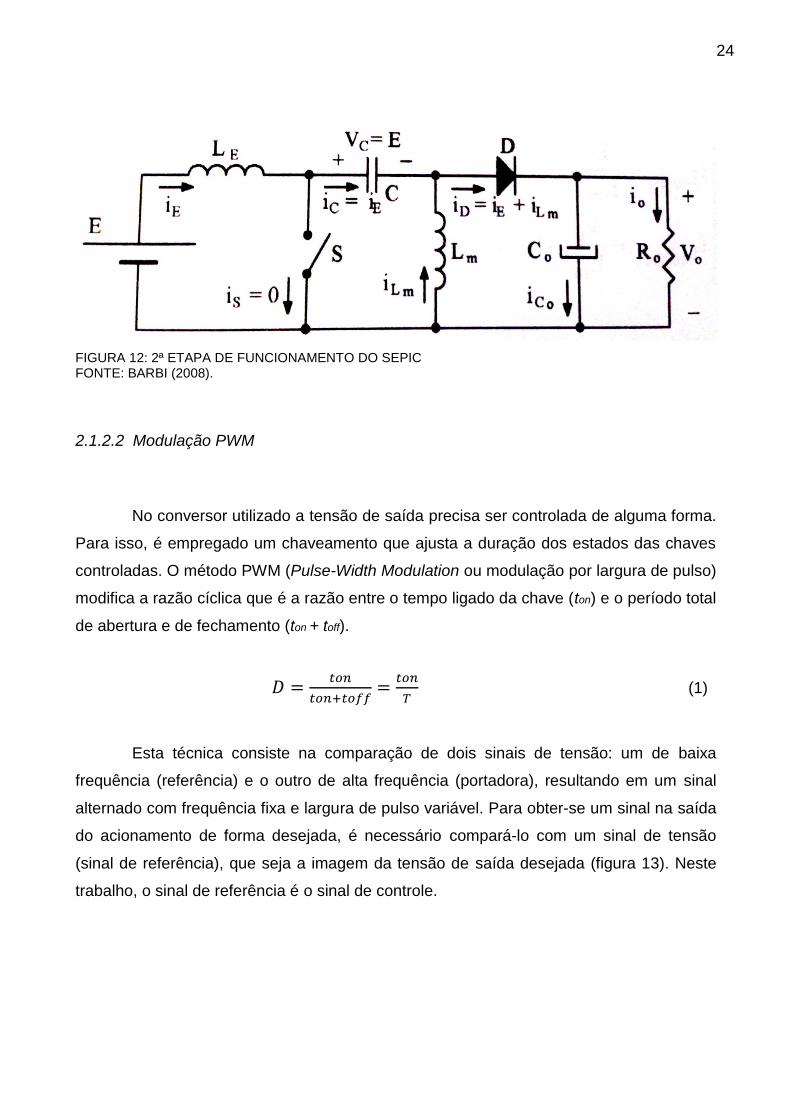
Na 2ª etapa (Figura 12) t1 e t2, em t1 a chave S é aberta e o diodo D entra em
condução. As tensões Le e Lm assumem o valor V0, e há transferência de energia nos
indutores Le e Lm para o capacitor C0 e para a carga R0. Em t=t2 a chave S é novamente
colocada em condução, retornando a 1ª etapa reiniciando um novo ciclo de operação.
24
FIGURA 12: 2ª ETAPA DE FUNCIONAMENTO DO SEPIC FONTE: BARBI (2008).
2.1.2.2 Modulação PWM
No conversor utilizado a tensão de saída precisa ser controlada de alguma forma.
Para isso, é empregado um chaveamento que ajusta a duração dos estados das chaves
controladas. O método PWM (Pulse-Width Modulation ou modulação por largura de pulso)
modifica a razão cíclica que é a razão entre o tempo ligado da chave (ton) e o período total
de abertura e de fechamento (ton + toff).
(1)
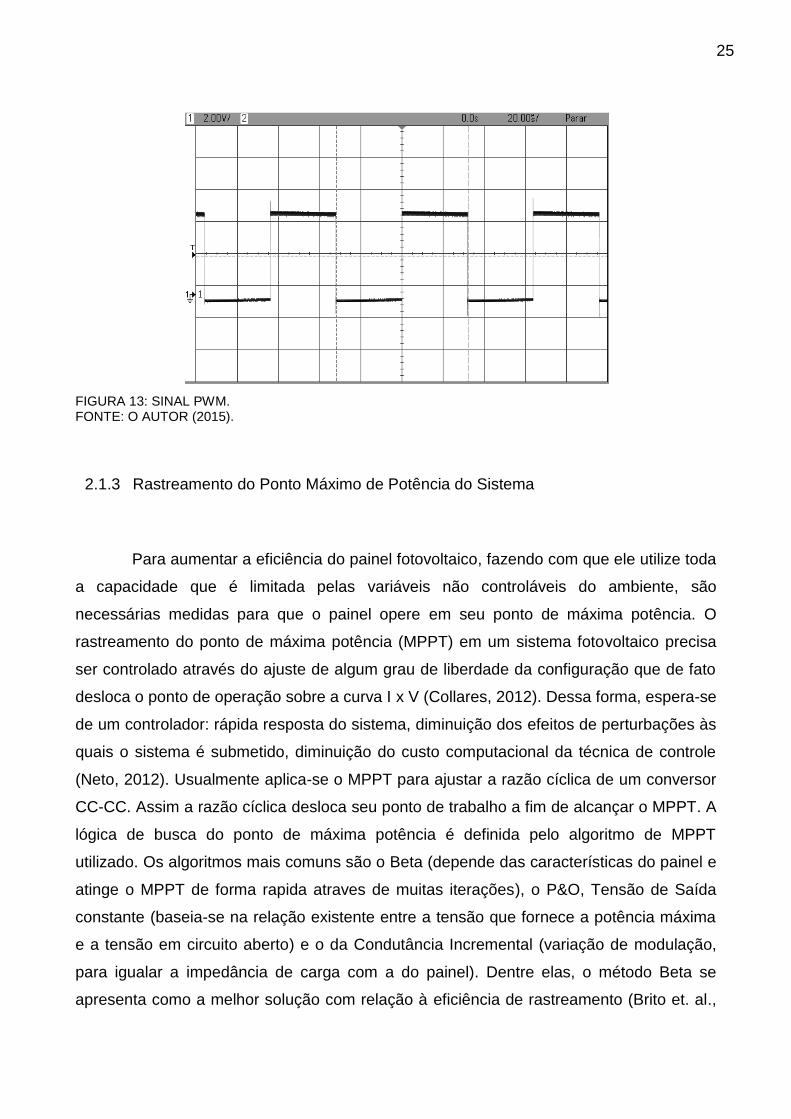
Esta técnica consiste na comparação de dois sinais de tensão: um de baixa
frequência (referência) e o outro de alta frequência (portadora), resultando em um sinal
alternado com frequência fixa e largura de pulso variável. Para obter-se um sinal na saída
do acionamento de forma desejada, é necessário compará-lo com um sinal de tensão
(sinal de referência), que seja a imagem da tensão de saída desejada (figura 13). Neste
trabalho, o sinal de referência é o sinal de controle.
25
FIGURA 13: SINAL PWM. FONTE: O AUTOR (2015).
2.1.3 Rastreamento do Ponto Máximo de Potência do Sistema
Para aumentar a eficiência do painel fotovoltaico, fazendo com que ele utilize toda
a capacidade que é limitada pelas variáveis não controláveis do ambiente, são
necessárias medidas para que o painel opere em seu ponto de máxima potência. O
rastreamento do ponto de máxima potência (MPPT) em um sistema fotovoltaico precisa
ser controlado através do ajuste de algum grau de liberdade da configuração que de fato
desloca o ponto de operação sobre a curva I x V (Collares, 2012). Dessa forma, espera-se
de um controlador: rápida resposta do sistema, diminuição dos efeitos de perturbações às
quais o sistema é submetido, diminuição do custo computacional da técnica de controle
(Neto, 2012). Usualmente aplica-se o MPPT para ajustar a razão cíclica de um conversor
CC-CC. Assim a razão cíclica desloca seu ponto de trabalho a fim de alcançar o MPPT. A
lógica de busca do ponto de máxima potência é definida pelo algoritmo de MPPT
utilizado. Os algoritmos mais comuns são o Beta (depende das características do painel e
atinge o MPPT de forma rapida atraves de muitas iterações), o P&O, Tensão de Saída
constante (baseia-se na relação existente entre a tensão que fornece a potência máxima
e a tensão em circuito aberto) e o da Condutância Incremental (variação de modulação,
para igualar a impedância de carga com a do painel). Dentre elas, o método Beta se
apresenta como a melhor solução com relação à eficiência de rastreamento (Brito et. al.,
26
2010). Porém, a técnica mais utilizada ainda é o método Perturba e Observa (P&O), por
ser robusta e fácil de ser implementada (Carvalho et. al., 2013).
2.1.3.1 Método Perturba e Observa (P&O)
Para o controle do conversor SEPIC foi utilizado o método P&O. Esse método
consiste em analisar os valores de corrente e tensão extraídos do módulo fotovoltaico
(Santos, 2010).
O algoritmo do método P&O realiza a leitura dos valores instantâneos da tensão e
da corrente e em seguida calcula a potência instantânea (figura 14). Com isso o algoritmo
compara a potência medida anteriormente com a potência atual, e após essa comparação
ele toma decisões para rastrear a máxima potência (Carvalho et. al., 2013).
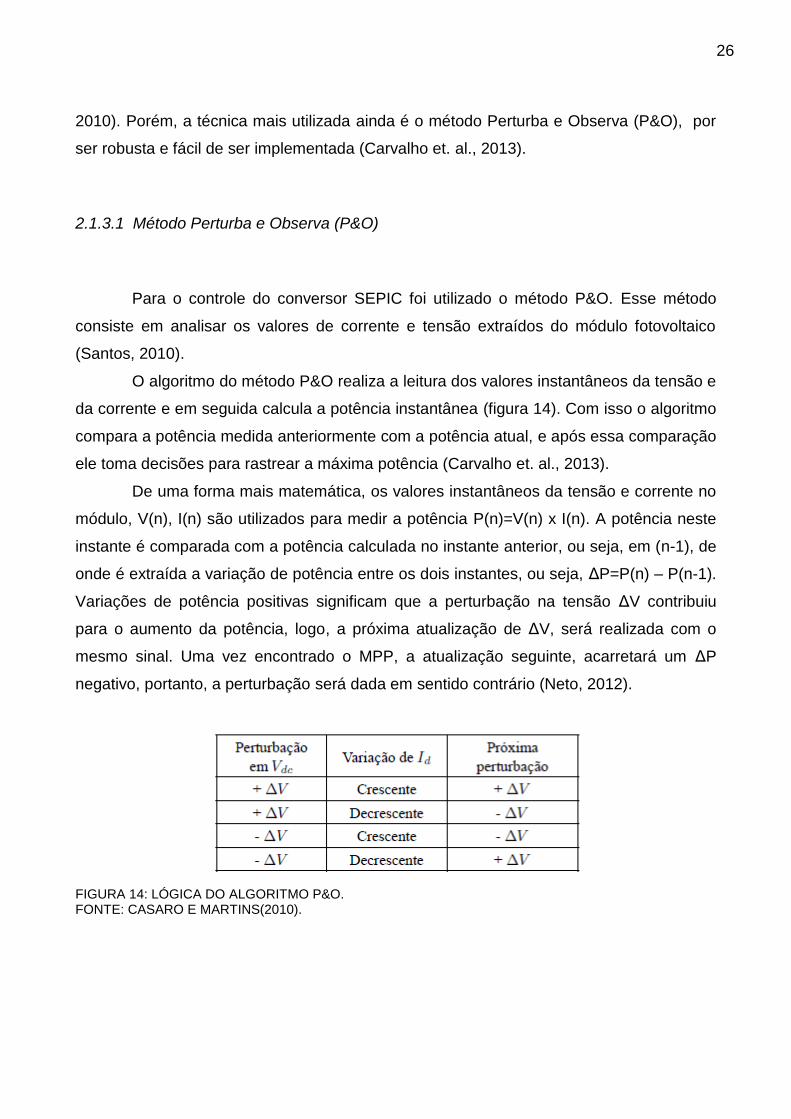
De uma forma mais matemática, os valores instantâneos da tensão e corrente no
módulo, V(n), I(n) são utilizados para medir a potência P(n)=V(n) x I(n). A potência neste
instante é comparada com a potência calculada no instante anterior, ou seja, em (n-1), de
onde é extraída a variação de potência entre os dois instantes, ou seja, ΔP=P(n) – P(n-1).
Variações de potência positivas significam que a perturbação na tensão ΔV contribuiu
para o aumento da potência, logo, a próxima atualização de ΔV, será realizada com o
mesmo sinal. Uma vez encontrado o MPP, a atualização seguinte, acarretará um ΔP
negativo, portanto, a perturbação será dada em sentido contrário (Neto, 2012).
FIGURA 14: LÓGICA DO ALGORITMO P&O. FONTE: CASARO E MARTINS(2010).
27
2.2 ACUMULADOR DE ENERGIA
Para o armazenamento da energia proveniente do painel fotovoltaico, foi
necessário um elemento acumulador, que será responsável por fornecer essa energia à
carga conectada ao sistema autônomo proposto. Sabe-se que as baterias são o coração
dos sistemas solares autônomos e a sua escolha e dimensionamento determinam a
qualidade do seu funcionamento. As baterias de chumbo-ácido são as mais utilizadas nos
sistemas de produção de energia renovável, geralmente fotovoltaica (Bastos, 2013).
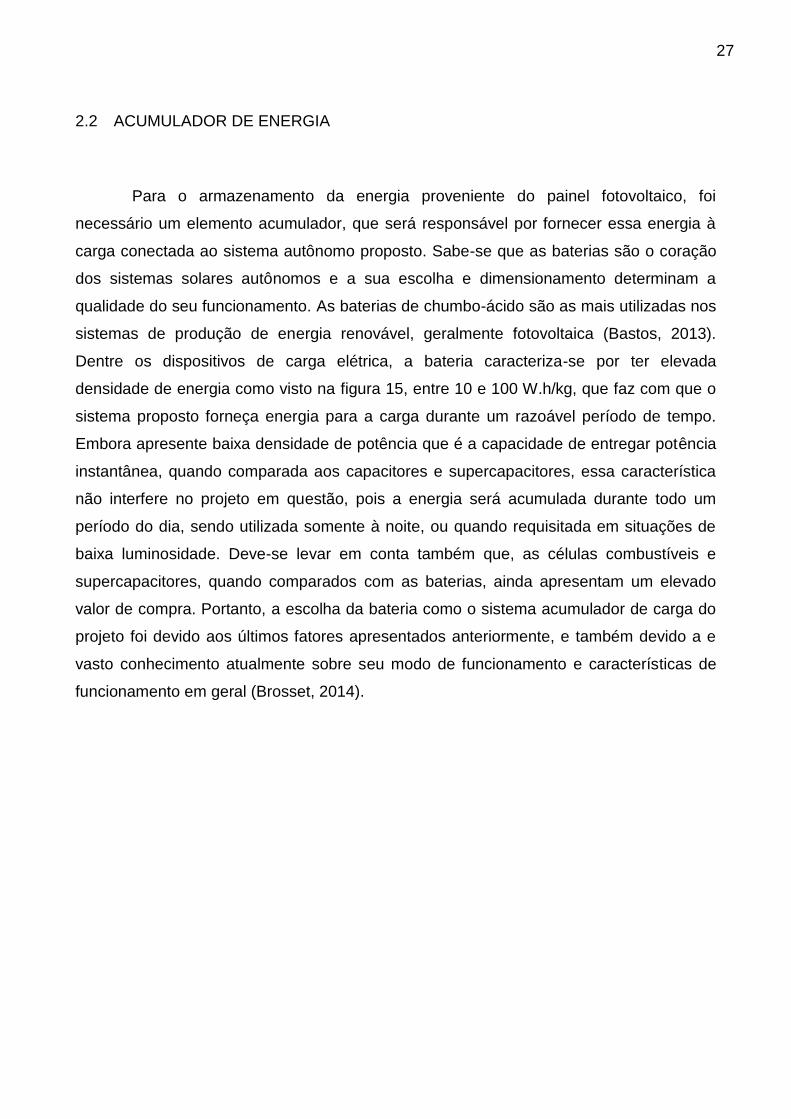
Dentre os dispositivos de carga elétrica, a bateria caracteriza-se por ter elevada
densidade de energia como visto na figura 15, entre 10 e 100 W.h/kg, que faz com que o
sistema proposto forneça energia para a carga durante um razoável período de tempo.
Embora apresente baixa densidade de potência que é a capacidade de entregar potência
instantânea, quando comparada aos capacitores e supercapacitores, essa característica
não interfere no projeto em questão, pois a energia será acumulada durante todo um
período do dia, sendo utilizada somente à noite, ou quando requisitada em situações de
baixa luminosidade. Deve-se levar em conta também que, as células combustíveis e
supercapacitores, quando comparados com as baterias, ainda apresentam um elevado
valor de compra. Portanto, a escolha da bateria como o sistema acumulador de carga do
projeto foi devido aos últimos fatores apresentados anteriormente, e também devido a e
vasto conhecimento atualmente sobre seu modo de funcionamento e características de
funcionamento em geral (Brosset, 2014).
28
FIGURA 15: CLASSIFICAÇÃO DE DISPOSITIVOS DE CARGA ELÉTRICA. FONTE: ADAPTADO DA LOWCARBONFUTURES (2015).
2.2.1 Características de Carga da Bateria
Nesse projeto, será utilizada a característica de carga cíclica, pois a bateria irá
carregar durante o dia, e descarregar durante a noite. Na carga cíclica, quando no modo
de carga, a corrente flui para a bateria pelo terminal positivo, e é também conhecido que a
tensão da bateria aumenta lentamente enquanto a carga armazenada aumenta.
Comportamento contrário ocorre no modo de descarga, a corrente flui para fora do
terminal positivo e a tensão da bateria diminui, assim como a carga da bateria diminui
enquanto estiver alimentando uma carga. Em adição a esses dois modos principais de
operação, o comportamento complexo da bateria será mais bem modelado se dois modos
adicionais de operação forem considerados: Sub-carga e sobrecarga. Quando a carga da
bateria está próxima do mínimo valor recomendado e as condições de circuito requerem
uma situação de além-descarga, o estado de sub carga é alcançado, caracterizado por
uma diminuição acentuada da densidade interna eletrolítica, causando a sedimentação no
fundo dos elementos da bateria. Este processo reduz significativamente a capacidade
total da bateria e se permanecer nesse modo por um período longo, danos irreversíveis
serão causados. O último modo de operação, ou modo de sobrecarga, é alcançado
quando a carga da bateria excede o valor máximo recomendado. Neste ponto, dois
29
efeitos diferentes aparecem: Produção de gás venenoso e corrosão do material do
eletrodo positivo (Fraga, 2009).
2.3 CARGA CONECTADA AO SISTEMA
Para a utilização como carga no sistema proposto, por apresentar uma tecnologia
mais eficiente que a das lâmpadas tradicionais, a escolha dos LED’s foi a mais
apropriada, também por crescer muito como forma de iluminação nos últimos anos. Outra
vantagem dos LED’s é o fato de não utilizarem gases tóxicos em sua composição, como
os presentes nas lâmpadas de descarga (fluorescentes), o que faz com que sejam menos
agressivos ao meio ambiente. Também tem vida útil elevada – 35 mil horas comparadas
as 8 mil da LFC e 750 horas da incandescente (Mankower, 2009) contribuindo desta
forma para a redução dos gastos com manutenção em grande parte das aplicações em
que forem empregados (Sá et al., 2007).
2.3.1 Princípio de Funcionamento dos LED’s
O diodo emissor de luz também é conhecido pela sigla em inglês LED (Light
Emitting Diode). O LED é um diodo semicondutor (junção P-N) que quando é energizado
emite luz (Braga, 2008). A luz não é monocromática, mas consiste de uma banda
espectral relativamente estreita e é produzida pelas interações energéticas de elétrons. O
processo de emissão de luz pela aplicação de uma fonte elétrica de energia é chamado
eletroluminescência.
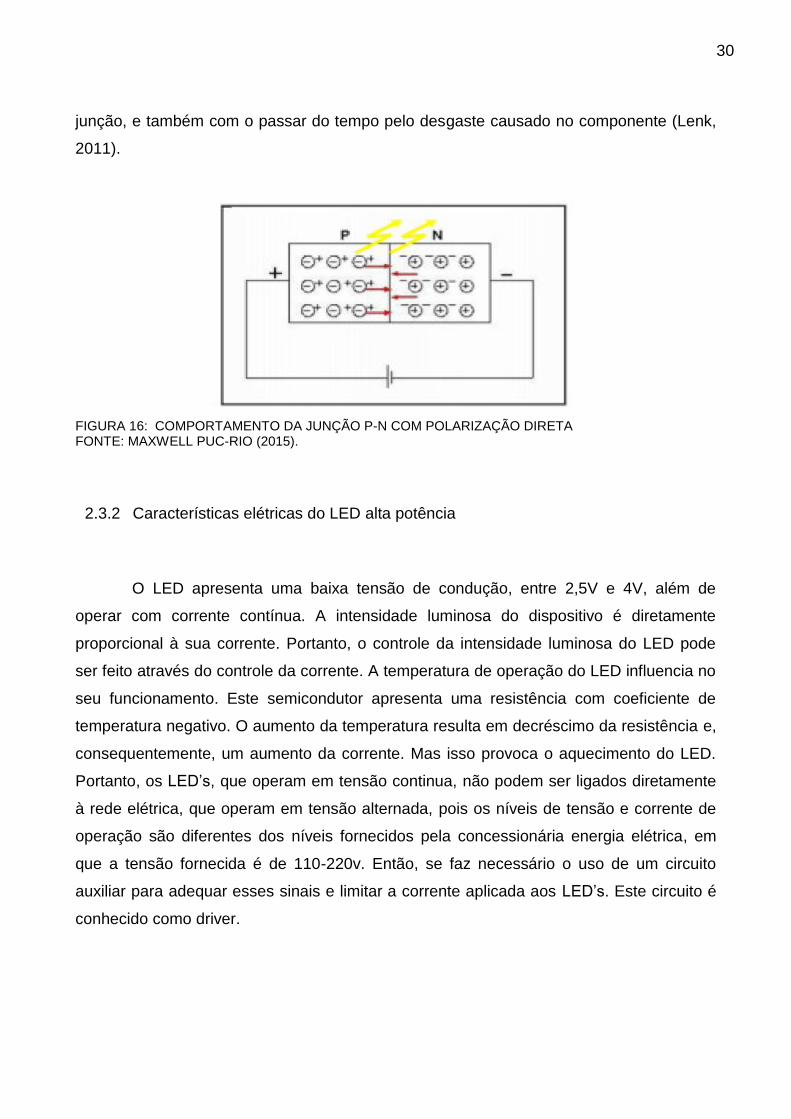
Em qualquer junção P-N (figura 16) polarizada diretamente, dentro da estrutura,
próximo à junção, ocorrem recombinações de lacunas e elétrons. Essa recombinação
exige que a energia possua elétrons, que até então era livre, seja liberada, o que ocorre
na forma de calor ou fótons de luz.
A cor é dependente do material semicondutor e da impureza de dopagem com
que o componente é fabricado.
É importante lembrar que a cor emitida pelos LED’s brancos sofre mudanças. Ela
se altera com variações na corrente que circula pelo dispositivo, pela temperatura da
30
junção, e também com o passar do tempo pelo desgaste causado no componente (Lenk,
2011).
FIGURA 16: COMPORTAMENTO DA JUNÇÃO P-N COM POLARIZAÇÃO DIRETA FONTE: MAXWELL PUC-RIO (2015).
2.3.2 Características elétricas do LED alta potência
O LED apresenta uma baixa tensão de condução, entre 2,5V e 4V, além de
operar com corrente contínua. A intensidade luminosa do dispositivo é diretamente
proporcional à sua corrente. Portanto, o controle da intensidade luminosa do LED pode
ser feito através do controle da corrente. A temperatura de operação do LED influencia no
seu funcionamento. Este semicondutor apresenta uma resistência com coeficiente de
temperatura negativo. O aumento da temperatura resulta em decréscimo da resistência e,
consequentemente, um aumento da corrente. Mas isso provoca o aquecimento do LED.
Portanto, os LED’s, que operam em tensão continua, não podem ser ligados diretamente
à rede elétrica, que operam em tensão alternada, pois os níveis de tensão e corrente de
operação são diferentes dos níveis fornecidos pela concessionária energia elétrica, em
que a tensão fornecida é de 110-220v. Então, se faz necessário o uso de um circuito
auxiliar para adequar esses sinais e limitar a corrente aplicada aos LED’s. Este circuito é
conhecido como driver.
31
2.3.3 Circuito de Controle do LED de Potência
Cada fonte de luz necessita de um circuito específico para seu correto
funcionamento, no caso dos LED’s o ideal é um circuito que faça a corrente que passa
neles seja sempre constante. Os conversores têm por objetivo adequar os níveis de
tensão e controlar a corrente na saída, podendo ser circuitos redutores ou elevadores de
tensão, com ou sem isolação. Estes conversores são controlados através da modulação
por largura de pulso(PWM), sendo a razão cíclica a principal característica que controla o
valor da tensão na saída. Para aplicação em sistemas de iluminação empregando LED’s é
necessário que se tenha o controle da corrente de saída, e não da tensão. Uma
alternativa simples é utilizar um resistor em série (chamado shunt) com a carga. Então, a
corrente nos LED’s pode ser controlada através da tensão aplicada a este resistor. Uma
alternativa um pouco mais complexa, porém sem perdas pelo efeito joule são os sensores
de corrente, que fazem a aquisição do valor da corrente por meio de efeitos magnéticos.
Pode ser citado um sensor de corrente por efeito Hall o ACS712, que tem na saída um
sinal analógico que varia linearmente com a corrente. Esse sensor requer 5vcc para o seu
funcionamento. O circuito de controle deverá monitorar a corrente e comparar com uma
referência. De acordo com a figura 17, levando em consideração os parâmetros do projeto
proposto, pode ser analisado a relação de ganho das topologias, tendo como o circuito
que mais se adapta as necessidades é o conversor Buck, pois possui características de
ganho próximas ao desejado. O ganho do conversor é medido através da divisão da
tensão de saída pela tensão de entrada. A tensão de saída (Vo) é a tensão necessária ao
funcionamento dos LED’s e a tensão de entrada (Vb) é a proveniente da bateria. Como a
tensão de alimentação dos LED’s é menor ou igual a tensão de entrada o ganho precisa
ser menor ou igual a um.

32
FIGURA 17: FUNÇÃO DE TRANSFERÊNCIA TENSÃO DE SAÍDA. FONTE: ALONSO (2011).
2.3.3.1 Conversor Buck
O conversor ou regulador Buck (figura 18) é a topologia mais básica para
reguladores chaveados (BATES; MALVINO, 2007) é um circuito simples, pequeno e de
baixo custo devido ao número reduzido de componentes empregados para seu
funcionamento.
FIGURA 18: CONVERSOR BUCK. FONTE: ELMANO(2011).
33
A característica principal deste circuito é alimentar a carga com uma tensão de
saída inferior à tensão de entrada, sem isolação entre elas, ou seja, é sempre um
abaixador de tensão (BATES; MALVINO, 2007). O conjunto L-C (indutor-capacitor) é
usado como um filtro passa-baixos. O indutor limita a ondulação de corrente e o capacitor
reduz a ondulação de tensão na carga. Se o valor da indutância for elevado, a ondulação
da corrente será reduzida, e o capacitor de saída poderá ser retirado. Esta configuração
apresenta a vantagem de reduzir ainda mais o número de componentes do circuito.
2.4 CONTROLE
Para gerar sinal PWM para os Mosfet’s dos conversores é necessário um
microcontrolador que faça a aquisição dos dados e o calculo para o controle. Assim como
o monitoramento dos níveis de corrente e tensão dos elementos do circuito. Contudo, são
necessárias características específicas que fazem com que a escolha do mesmo seja a
mais adequada ao projeto. Para o enrolamento do indutor, por exemplo, temos que
quanto maior a frequência, menor é o numero de enrolamento na bobina.
Dentre os vários microcontroladores existentes no mercado, um dos que
apresentam maior frequência de operação para a faixa na qual é necessária (clock de
80MHz) é o TM4C123GH6PM implementado através da placa de desenvolvimento Tiva™
C Series LaunchPad Evaluation Kit.
O microcontrolador TM4C123GH6PM é voltado para aplicações industriais,
incluindo o monitoramento remoto, máquinas eletrônicas de ponto de venda, teste e
medição, aparelhos e comutadores de rede, automação industrial, HVAC, equipamento de
jogos, controle de movimento, transporte, e segurança. A figura 19 resume os recursos
encontrados no circuito integrado.

34
FIGURA 19: RECURSOS DISPONÍVEIS NO CIRCUITO INTEGRADO. FONTE: TEXAS INSTRUMENTS (2015).
35
3 DESENVOLVIMENTO
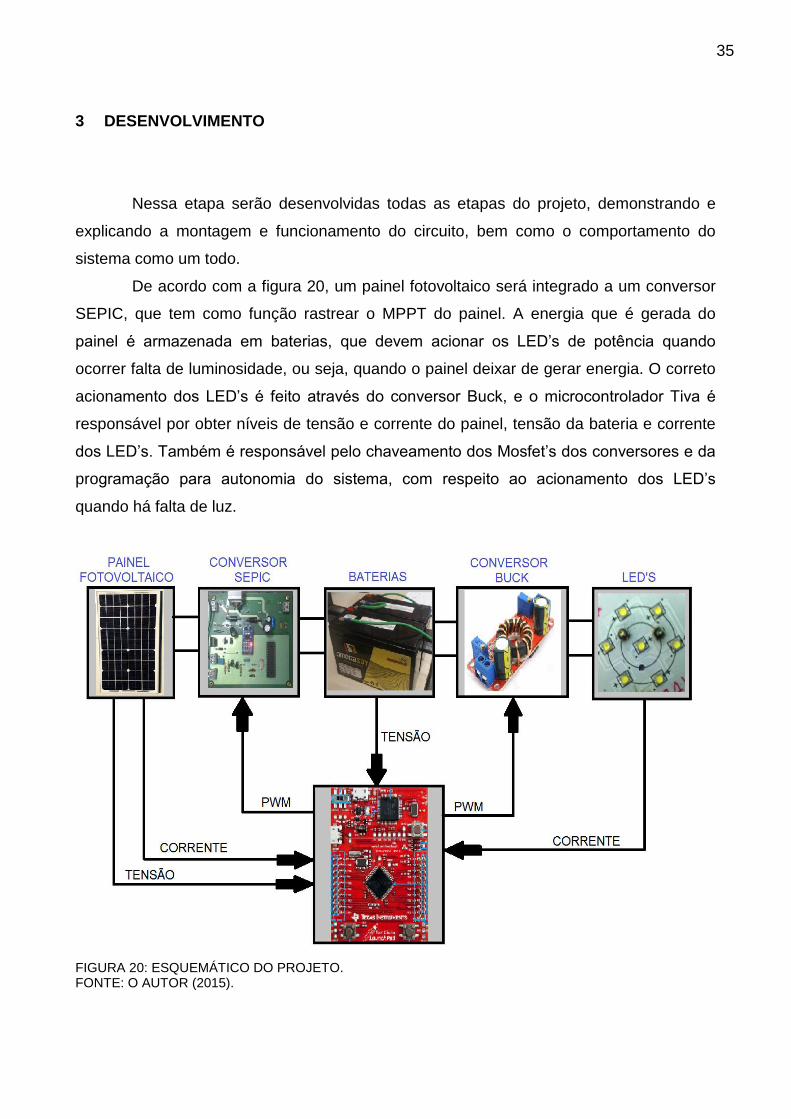
Nessa etapa serão desenvolvidas todas as etapas do projeto, demonstrando e
explicando a montagem e funcionamento do circuito, bem como o comportamento do
sistema como um todo.
De acordo com a figura 20, um painel fotovoltaico será integrado a um conversor
SEPIC, que tem como função rastrear o MPPT do painel. A energia que é gerada do
painel é armazenada em baterias, que devem acionar os LED’s de potência quando
ocorrer falta de luminosidade, ou seja, quando o painel deixar de gerar energia. O correto
acionamento dos LED’s é feito através do conversor Buck, e o microcontrolador Tiva é
responsável por obter níveis de tensão e corrente do painel, tensão da bateria e corrente
dos LED’s. Também é responsável pelo chaveamento dos Mosfet’s dos conversores e da
programação para autonomia do sistema, com respeito ao acionamento dos LED’s
quando há falta de luz.
FIGURA 20: ESQUEMÁTICO DO PROJETO. FONTE: O AUTOR (2015).

36
3.1 PAINEL FOTOVOLTAICO CONECTADO A UMA CARGA RESISTIVA
Para entender como um painel fotovoltaico fornece energia ao sistema, e como
um conversor CC-CC desempenha a função de rastreador de máxima potência,
primeiramente será explicado como funciona um painel conectado a uma carga resistiva.
De acordo com o modelo apresentado na figura 21 para analisar qual o máximo
ponto de potência que um componente pode fornecer, é necessário analisar o gráfico
corrente versus tensão (I-V) à qual ele pode ser submetido. A análise da curva I-V é de
extrema importância na caracterização de um gerador fotovoltaico, pois é a partir dela que
os principais parâmetros que determinam a qualidade e desempenho do mesmo são
estabelecidos.
FIGURA 21: ARRANJO FOTOVOLTAICO CONECTADO DIRETAMENTE A UMA CARGA RESISTIVA. FONTE: NETO (2012).
Considerando a radiação solar e a temperatura do painel ambos constantes,
percebe-se que à medida que a tensão aumenta, a corrente permanece praticamente
constante, decrescendo aos poucos, entretanto em determinado momento do crescimento
da tensão, a corrente cai bruscamente. De acordo com a lei de Ohm a curva I-V de um
resistor é linear, dessa forma, temos as seguintes curvas características vistas na figura
22:
37
FIGURA 22: CORRENTE, TENSÃO E POTÊNCIA DO PAINEL SL5M36-20W TESTADO NO DIA 31/03/15 EM CURITIBA/ PR. TEMPERATURA MIN 21ºC E MAX 31ºC. FONTE: O AUTOR (2015).
3.2 DIMENSIONAMENTO DO CONVERSOR SEPIC
Para o dimensionamento do circuito (figura 23), primeiramente são obtidos os
valores de tensão que irão atuar no circuito, para então realizar o dimensionamento, a fim
de obter os resultados esperados para êxito do conversor.
Sabe-se que a tensão de entrada E, é de 20V, proveniente do painel solar e a
tensão da carga Vc, que vai para as baterias, é de 12V.
FIGURA 23: CONVERSOR SEPIC. FONTE: BARBI (2008).
A partir desses dados, podemos calcular a razão cíclica do conversor (duty cicle):
( )
0
5
10
15
20
25
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6
Corrente (A)
Tensão Potência

38
Tem-se que a carga RC pode ser encontrada a partir da tensão de saída V0 pela
corrente i:
( )
Já o ganho do sistema pode ser calculado como a razão da tensão de saída Vo
pela tensão de entrada Vi:
( )
Tem-se para o capacitor, o valor de 330uF, escolhido arbitrariamente,
responsável por armazenar a tensão do circuito e fornecer energia para a carga quando a
chave estiver fechada.
FIGURA 24: CONVERSOR SEPIC PROJETADO. FONTE: PRÓPRIA (2015).
3.2.1 Projeto do Indutor para o SEPIC
Para dimensionar um indutor, é necessário projetá-lo a partir das características
do núcleo, carretel, fio, entre outros aspectos.

39
Algumas características para o projeto do indutor são mostradas na figura 25,
necessárias para o dimensionamento do valor da indutância requerida.
FIGURA 25: NÚCLEO E CARRETEL DE UM INDUTOR. FONTE: BARBI (2008).
Parte-se da indutância em que se deseja trabalhar, portanto temos que:
( )
( )
( )
Onde, L é a indutância, D é a razão cíclica, Rc é a carga e F a frequência.
Nesse cálculo, considera-se que o indutor Le e La serão iguais, portanto:
( )
Indutância do indutor Lo= 25 uH
Frequência de operação Fs= 75 kHz
Corrente de pico ILop= 1,4 A
Corrente eficaz ILoef= 1,3 A
Ondulação de corrente AILo= 0,99 A
Fator de enrolamento k= 0,7 %
Bitola do fio (área) AWG24 S= 0,00205 cm²
Densidade de corrente J=ILoef/S 633,89 A/cm²
Permeabilidade no vácuo uo= 1,26E-06 Wb/A/m
Área ferrite E-30/14 Ae= 0,00012 m2
Entreferro lg= 0,0016 m
FIGURA 26: DADOS PARA O PROJETO DO INDUTOR. FONTE: PRÓPRIA (2015).
40
A partir dos dados obtidos na figura 26, pode-se calcular o numero de espiras do
indutor:
√
( )
Deve-se então calcular a densidade de fluxo máximo do indutor, sendo que este
valor deve ficar abaixo de 0,35T para não saturar:
( )
Feito isso, obtém o Delta do efeito Skin:
[ ] ( )
Onde Dfiomax=0,0548cm (diâmetro máximo para bitola do condutor) e
Dfioawg24=0,0511cm (diâmetro da bitola do condutor A.W.G. 24, o condutor utilizado no
projeto).
Deve-se então calcular o numero de fios a partir da equação:
( ) ( )
( ) ( )
Dessa forma, foram calculados os parâmetros necessários para o projeto do
indutor do SEPIC.

41
3.3 ESPECIFICAÇÃO DA BATERIA
Tendo em vista o modo de funcionamento da bateria, optou-se, por melhor
adaptação ao projeto e também por disponibilidade da mesma, bateria da marca Planet
Battery (figura 27), que possui as seguintes características à temperatura de 25°C:
Tensão: 12V;
Stand By (carga de flutuação): 13.5V/13.8V;
Ciclo de Uso (carga cíclica): 14.5V/15V;
Corrente Inicial de carga máxima: 2.16A.
FIGURA 27: BATERIA 12V UTILIZADA NO PROJETO. FONTE: O AUTOR (2015).
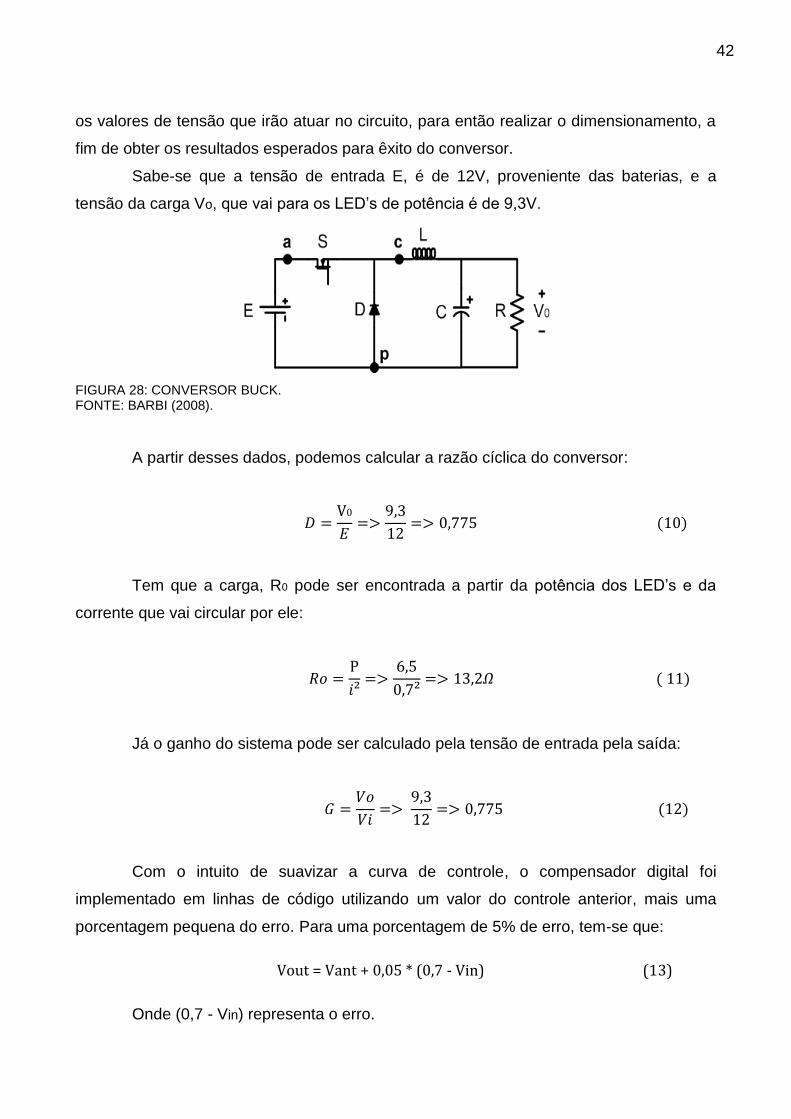
3.4 DIMENSIONAMENTO DO CONVERSOR BUCK
Para o acionamento dos LED’s, como discutido anteriormente, foi utilizado um
conversor Buck (Figura 28). No dimensionamento do circuito, primeiramente são obtidos
42
os valores de tensão que irão atuar no circuito, para então realizar o dimensionamento, a
fim de obter os resultados esperados para êxito do conversor.
Sabe-se que a tensão de entrada E, é de 12V, proveniente das baterias, e a
tensão da carga Vo, que vai para os LED’s de potência é de 9,3V.
FIGURA 28: CONVERSOR BUCK. FONTE: BARBI (2008).
A partir desses dados, podemos calcular a razão cíclica do conversor:
( )
Tem que a carga, R0 pode ser encontrada a partir da potência dos LED’s e da
corrente que vai circular por ele:
( )
Já o ganho do sistema pode ser calculado pela tensão de entrada pela saída:
( )
Com o intuito de suavizar a curva de controle, o compensador digital foi
implementado em linhas de código utilizando um valor do controle anterior, mais uma
porcentagem pequena do erro. Para uma porcentagem de 5% de erro, tem-se que:
Vout = Vant + 0,05 * (0,7 - Vin) (13)
Onde (0,7 - Vin) representa o erro.

43
FIGURA 29: CONVERSOR SEPIC PROJETADO. FONTE: PRÓPRIA (2015).
3.4.1 Projeto do Indutor para o Buck
É realizado o calculo do indutor L, escolhendo uma frequência de operação na
qual se deseja trabalhar. É admitida uma oscilação na corrente do indutor ΔIL de 6% e na
tensão do capacitor 0,1%. Portanto:
( )
( )
Para a especificação do indutor do conversor Buck são apresentados os
seguintes dados de acordo com a figura 30.
Indutância do indutor Lo= 600 uH
Frequência de operação Fs= 75 kHz
Corrente de pico ILop= 0,7 A
Corrente eficaz ILoef= 0,7 A
Ondulação de corrente AILo= 0,49 A
Fator de enrolamento k= 0,7 %
Bitola do fio (área) AWG24 S= 0,00205 cm²
Densidade de corrente J=I/S 341,32 A/cm²
Permeabilidade no vácuo uo= 1,26E-06 Wb/A/m
Área ferrite E-30/14 Ae= 0,000490874 m2
Entreferro lg= 0,001 m FIGURA 30: DADOS PARA O PROJETO DO INDUTOR. FONTE: PRÓPRIA (2015).
44
De acordo com a figura 25, e utilizando as equações 6, 7, 8 e 9 tem-se que:
Numero de espiras = 31,19;
Densidade de Fluxo Maximo = 0,027434 T;
Efeito Skin = 0,0274;
Numero de fios = 0,870.
Dessa forma, foram calculados os parâmetros necessários para a construção do
conversor Buck.
3.5 ESPECIFICAÇÃO DOS LED’S DE POTÊNCIA E OPERAÇÃO COMO SISTEMA
AUTÔNOMO
Utilizado como carga, na qual vai funcionar a partir da energia da bateria, os
LED’s de potência utilizados no projeto (figura 31) possuem as seguintes características:
Potência Unitária: 2,16W;
Potência Total (3 LED’s): 6,5W;
Tensão Unitária: 3,1V;
Tensão Total: 9,3V;
Corrente: 700mA;
Fluxo Luminoso: Em torno de 200 lumens.
FIGURA 31: LED DE POTÊNCIA UTILIZADO NO PROJETO. FONTE: PRÓPRIA (2015).
45
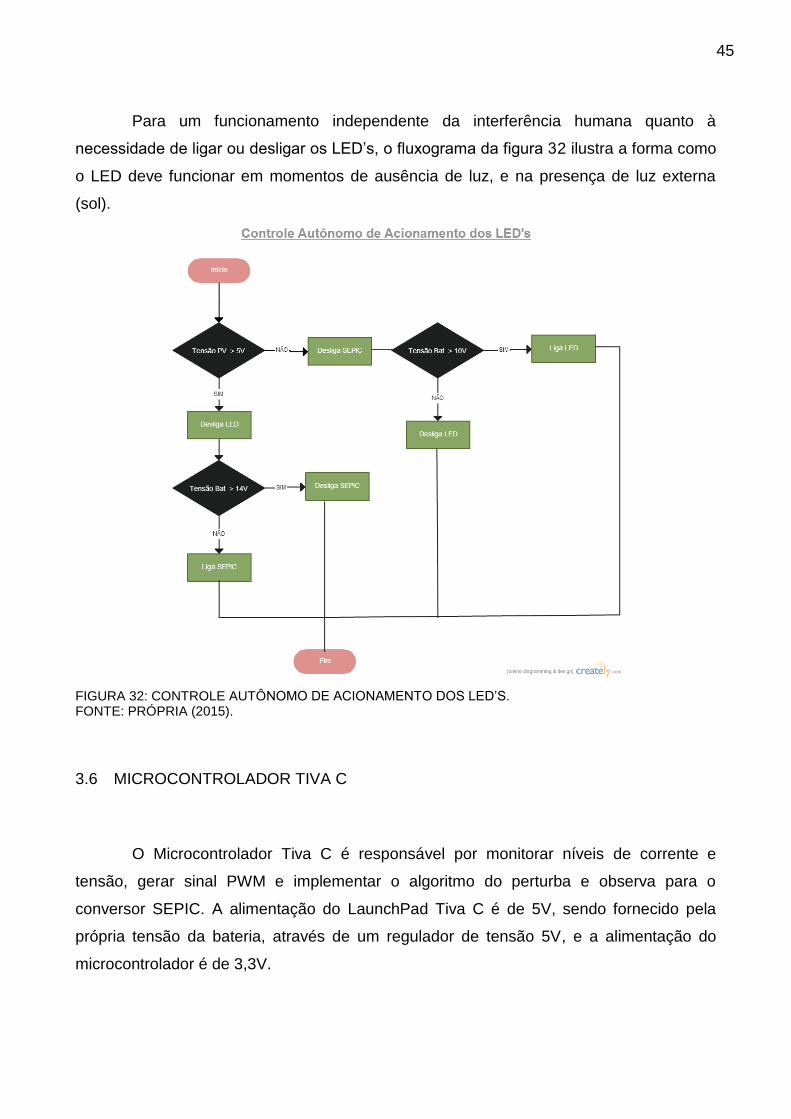
Para um funcionamento independente da interferência humana quanto à
necessidade de ligar ou desligar os LED’s, o fluxograma da figura 32 ilustra a forma como
o LED deve funcionar em momentos de ausência de luz, e na presença de luz externa
(sol).
FIGURA 32: CONTROLE AUTÔNOMO DE ACIONAMENTO DOS LED’S. FONTE: PRÓPRIA (2015).
3.6 MICROCONTROLADOR TIVA C
O Microcontrolador Tiva C é responsável por monitorar níveis de corrente e
tensão, gerar sinal PWM e implementar o algoritmo do perturba e observa para o
conversor SEPIC. A alimentação do LaunchPad Tiva C é de 5V, sendo fornecido pela
própria tensão da bateria, através de um regulador de tensão 5V, e a alimentação do
microcontrolador é de 3,3V.
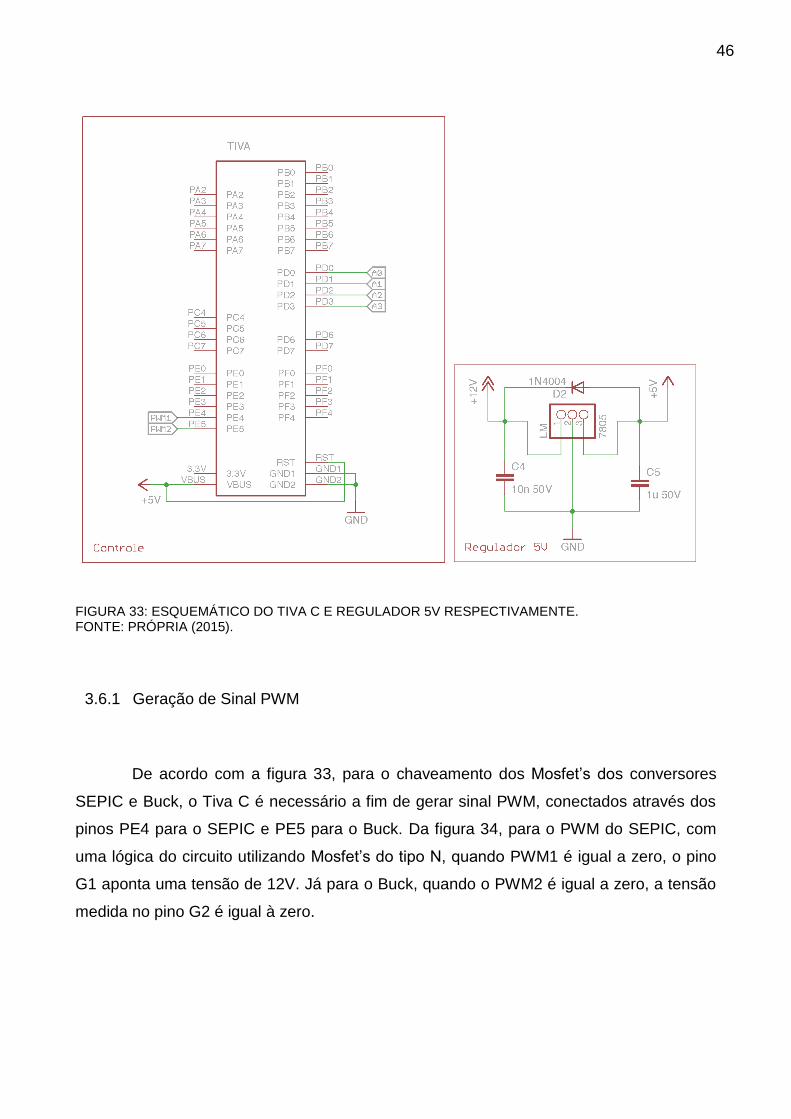
46
FIGURA 33: ESQUEMÁTICO DO TIVA C E REGULADOR 5V RESPECTIVAMENTE. FONTE: PRÓPRIA (2015).
3.6.1 Geração de Sinal PWM
De acordo com a figura 33, para o chaveamento dos Mosfet’s dos conversores
SEPIC e Buck, o Tiva C é necessário a fim de gerar sinal PWM, conectados através dos
pinos PE4 para o SEPIC e PE5 para o Buck. Da figura 34, para o PWM do SEPIC, com
uma lógica do circuito utilizando Mosfet’s do tipo N, quando PWM1 é igual a zero, o pino
G1 aponta uma tensão de 12V. Já para o Buck, quando o PWM2 é igual a zero, a tensão
medida no pino G2 é igual à zero.
47
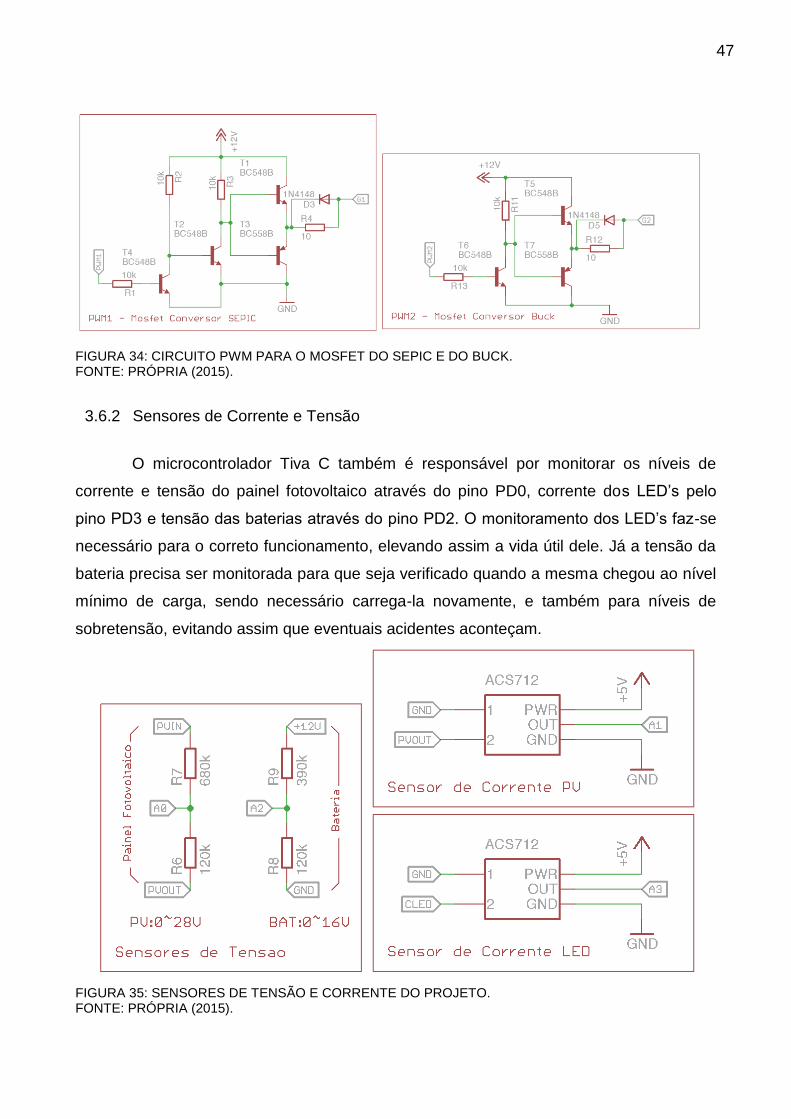
FIGURA 34: CIRCUITO PWM PARA O MOSFET DO SEPIC E DO BUCK. FONTE: PRÓPRIA (2015).
3.6.2 Sensores de Corrente e Tensão
O microcontrolador Tiva C também é responsável por monitorar os níveis de
corrente e tensão do painel fotovoltaico através do pino PD0, corrente dos LED’s pelo
pino PD3 e tensão das baterias através do pino PD2. O monitoramento dos LED’s faz-se
necessário para o correto funcionamento, elevando assim a vida útil dele. Já a tensão da
bateria precisa ser monitorada para que seja verificado quando a mesma chegou ao nível
mínimo de carga, sendo necessário carrega-la novamente, e também para níveis de
sobretensão, evitando assim que eventuais acidentes aconteçam.
FIGURA 35: SENSORES DE TENSÃO E CORRENTE DO PROJETO. FONTE: PRÓPRIA (2015).
48
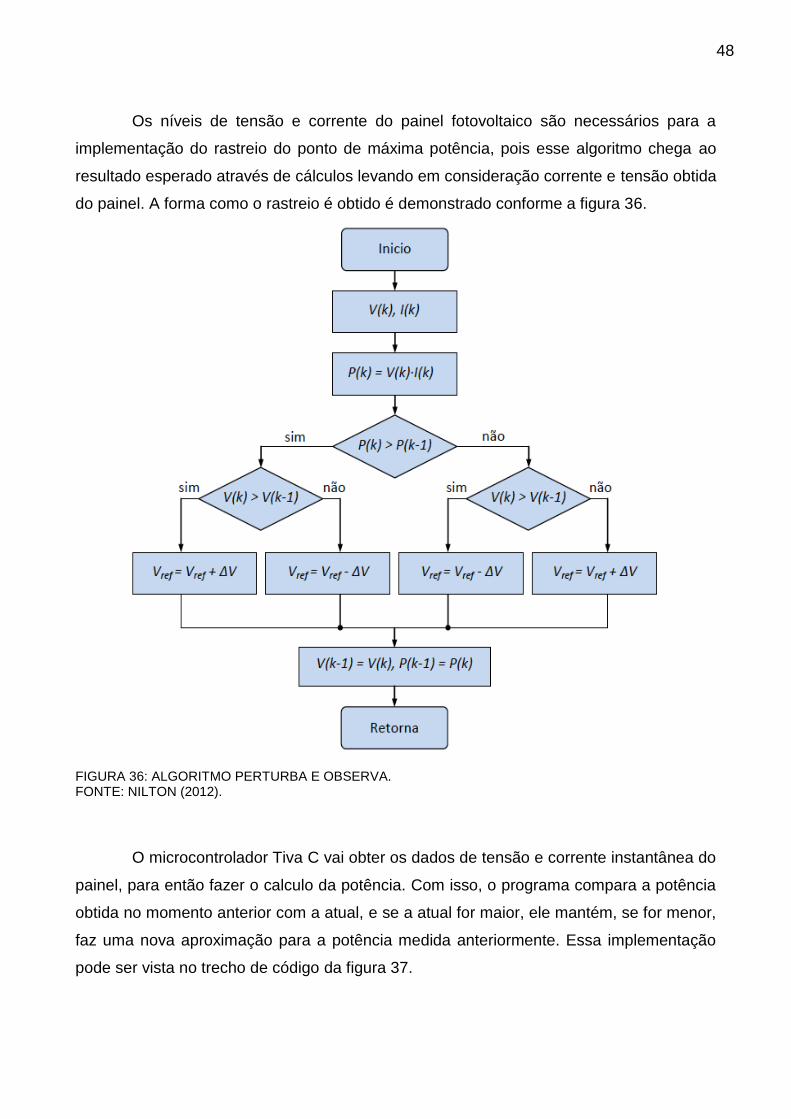
Os níveis de tensão e corrente do painel fotovoltaico são necessários para a
implementação do rastreio do ponto de máxima potência, pois esse algoritmo chega ao
resultado esperado através de cálculos levando em consideração corrente e tensão obtida
do painel. A forma como o rastreio é obtido é demonstrado conforme a figura 36.
FIGURA 36: ALGORITMO PERTURBA E OBSERVA. FONTE: NILTON (2012).
O microcontrolador Tiva C vai obter os dados de tensão e corrente instantânea do
painel, para então fazer o calculo da potência. Com isso, o programa compara a potência
obtida no momento anterior com a atual, e se a atual for maior, ele mantém, se for menor,
faz uma nova aproximação para a potência medida anteriormente. Essa implementação
pode ser vista no trecho de código da figura 37.
49
FIGURA 37: TRECHO DE CÓDIGO PARA CÁLCULO DO MPPT. FONTE: PRÓPRIA (2015).
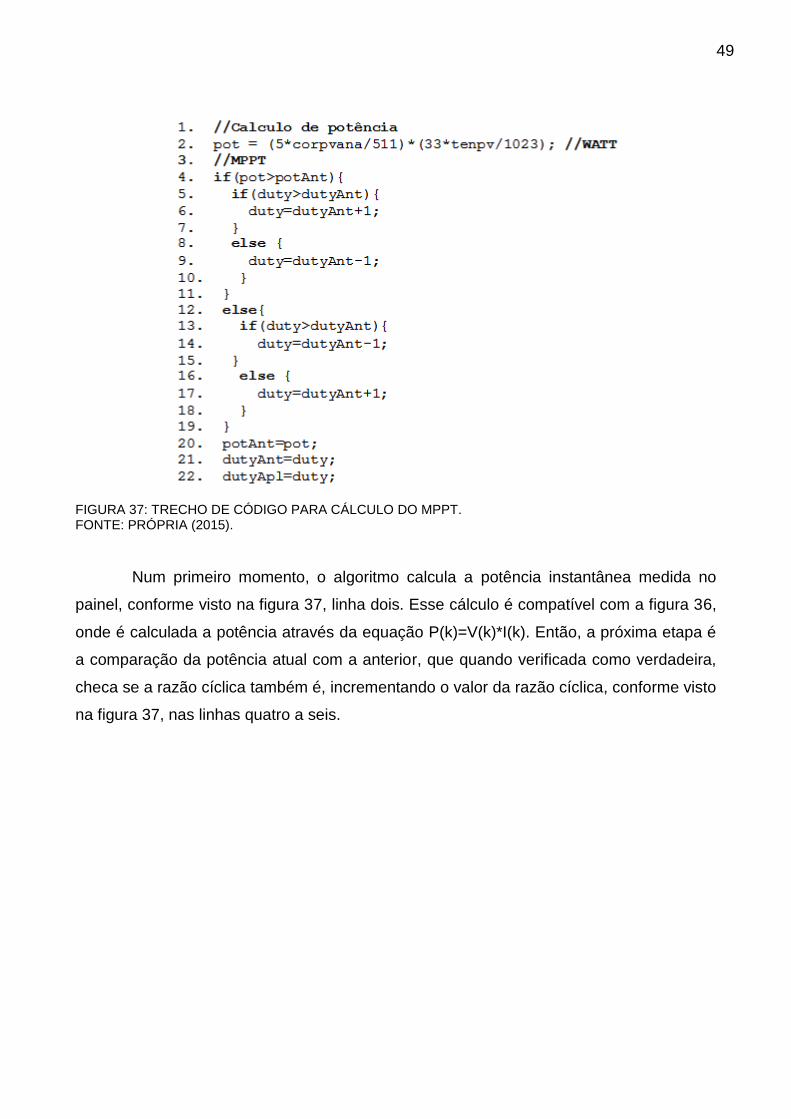
Num primeiro momento, o algoritmo calcula a potência instantânea medida no
painel, conforme visto na figura 37, linha dois. Esse cálculo é compatível com a figura 36,
onde é calculada a potência através da equação P(k)=V(k)*I(k). Então, a próxima etapa é
a comparação da potência atual com a anterior, que quando verificada como verdadeira,
checa se a razão cíclica também é, incrementando o valor da razão cíclica, conforme visto
na figura 37, nas linhas quatro a seis.

50
4 RESULTADO E DISCUSSÕES
A placa final do projeto, na figura 38 mostra todo o estagio de potência,
conversores SEPIC e Buck, o Launchpad Tiva C, e os sensores de corrente e tensão.
FIGURA 38: PLACA DO PROJETO. FONTE: PRÓPRIA (2015).
O funcionamento da topologia do conversor Buck foi testado pela medição da
corrente com um multímetro e demostrou o seu funcionamento conforme era o objetivo,
mantendo a corrente controlada em 700mA.
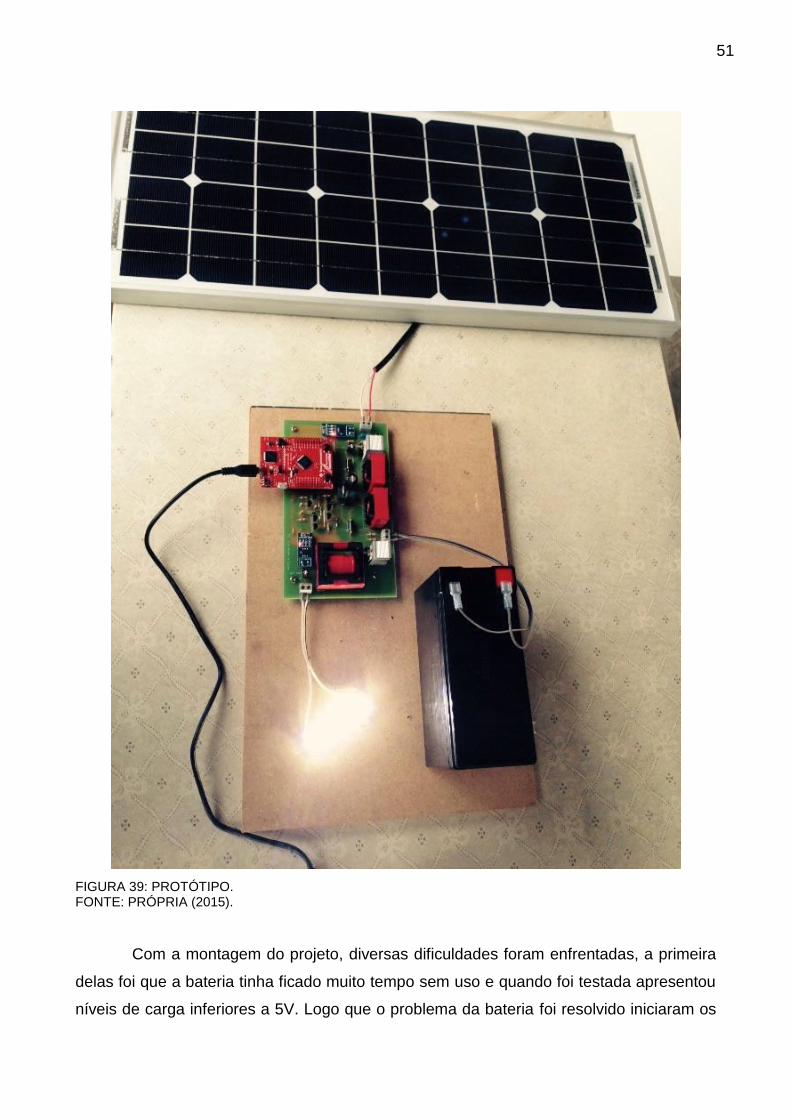
O projeto completo é mostrado na figura 39, com a placa, painel fotovoltaico e
bateria interconectada. Os testes realizados no painel foram feitos no osciloscópio para
visualizar o sinal de pwm sendo alterado para buscar o MPPT e por meio de multímetro
para verificar a tensão e corrente no painel fotovoltaico.
51
FIGURA 39: PROTÓTIPO. FONTE: PRÓPRIA (2015).
Com a montagem do projeto, diversas dificuldades foram enfrentadas, a primeira
delas foi que a bateria tinha ficado muito tempo sem uso e quando foi testada apresentou
níveis de carga inferiores a 5V. Logo que o problema da bateria foi resolvido iniciaram os
52
testes de funcionamento do conversor Buck, que nos mostrou uma imprecisão do sensor
de corrente. A faixa do sensor de corrente não estava operando conforme os cálculos
feitos inicialmente o que obrigou a utilização de um fator multiplicativo diferente, mas que
corrigiu o problema encontrado.
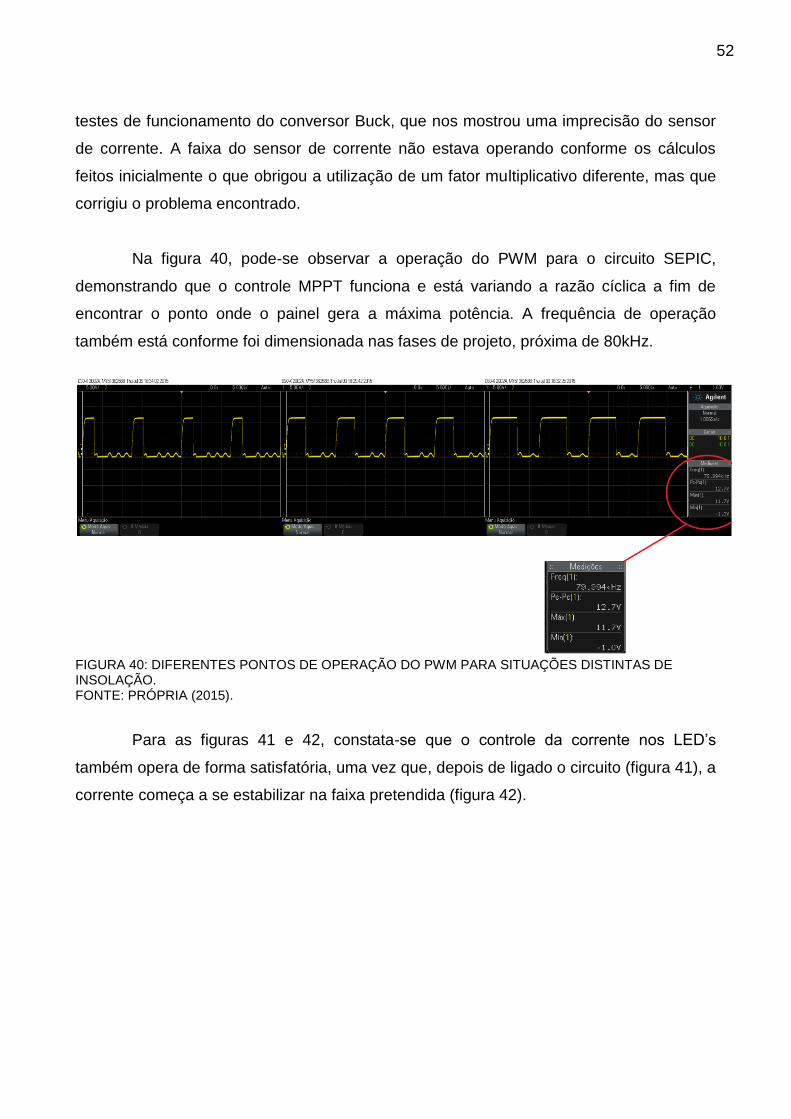
Na figura 40, pode-se observar a operação do PWM para o circuito SEPIC,
demonstrando que o controle MPPT funciona e está variando a razão cíclica a fim de
encontrar o ponto onde o painel gera a máxima potência. A frequência de operação
também está conforme foi dimensionada nas fases de projeto, próxima de 80kHz.
FIGURA 40: DIFERENTES PONTOS DE OPERAÇÃO DO PWM PARA SITUAÇÕES DISTINTAS DE INSOLAÇÃO. FONTE: PRÓPRIA (2015).
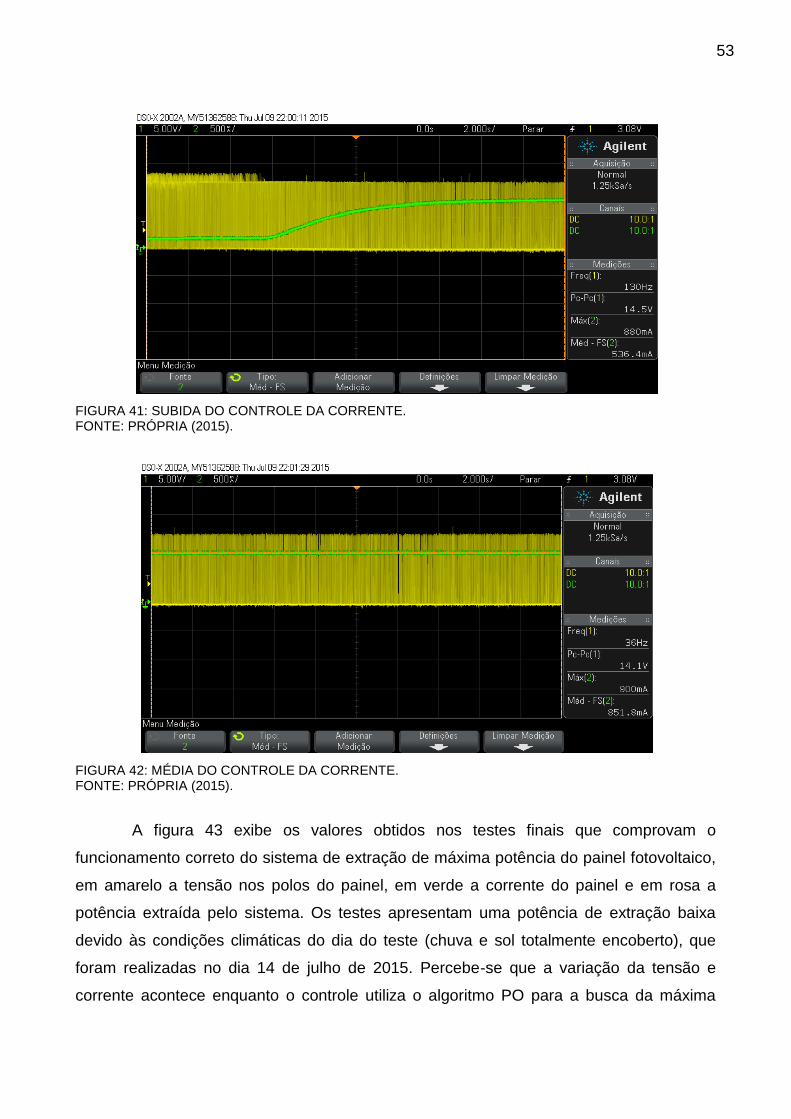
Para as figuras 41 e 42, constata-se que o controle da corrente nos LED’s
também opera de forma satisfatória, uma vez que, depois de ligado o circuito (figura 41), a
corrente começa a se estabilizar na faixa pretendida (figura 42).
53
FIGURA 41: SUBIDA DO CONTROLE DA CORRENTE. FONTE: PRÓPRIA (2015).
FIGURA 42: MÉDIA DO CONTROLE DA CORRENTE. FONTE: PRÓPRIA (2015).
A figura 43 exibe os valores obtidos nos testes finais que comprovam o
funcionamento correto do sistema de extração de máxima potência do painel fotovoltaico,
em amarelo a tensão nos polos do painel, em verde a corrente do painel e em rosa a
potência extraída pelo sistema. Os testes apresentam uma potência de extração baixa
devido às condições climáticas do dia do teste (chuva e sol totalmente encoberto), que
foram realizadas no dia 14 de julho de 2015. Percebe-se que a variação da tensão e
corrente acontece enquanto o controle utiliza o algoritmo PO para a busca da máxima
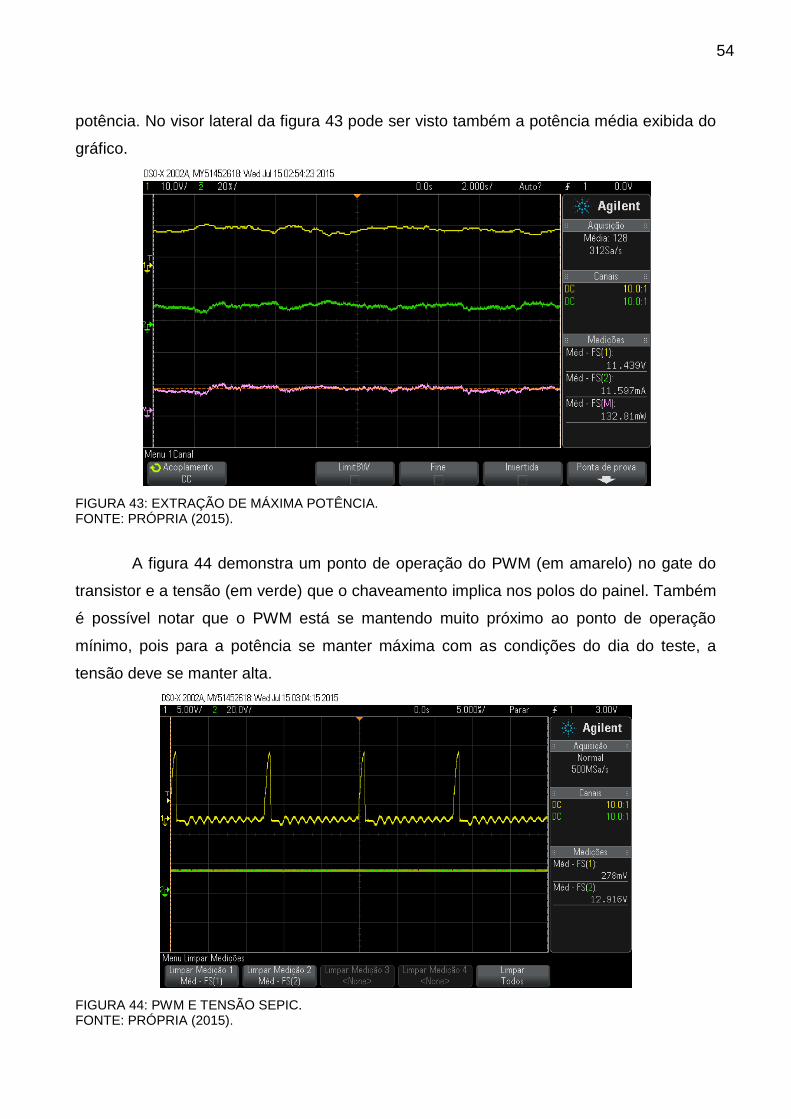
54
potência. No visor lateral da figura 43 pode ser visto também a potência média exibida do
gráfico.
FIGURA 43: EXTRAÇÃO DE MÁXIMA POTÊNCIA. FONTE: PRÓPRIA (2015).
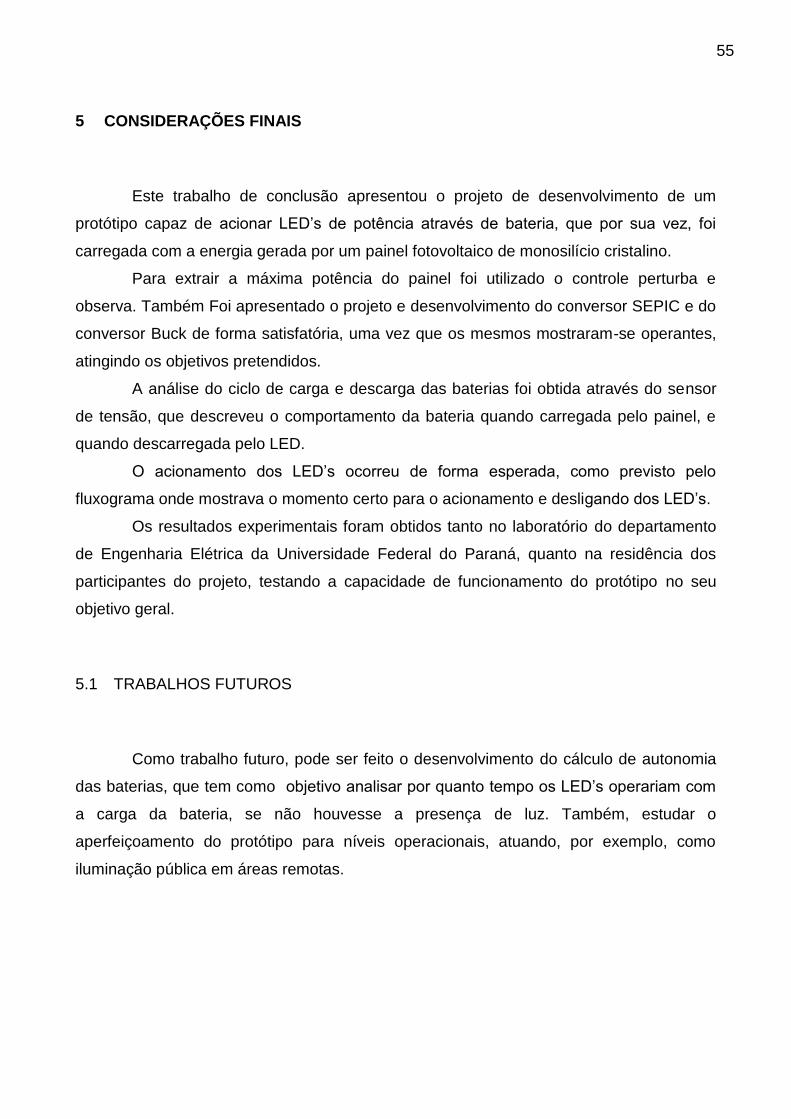
A figura 44 demonstra um ponto de operação do PWM (em amarelo) no gate do
transistor e a tensão (em verde) que o chaveamento implica nos polos do painel. Também
é possível notar que o PWM está se mantendo muito próximo ao ponto de operação
mínimo, pois para a potência se manter máxima com as condições do dia do teste, a
tensão deve se manter alta.
FIGURA 44: PWM E TENSÃO SEPIC. FONTE: PRÓPRIA (2015).
55
5 CONSIDERAÇÕES FINAIS
Este trabalho de conclusão apresentou o projeto de desenvolvimento de um
protótipo capaz de acionar LED’s de potência através de bateria, que por sua vez, foi
carregada com a energia gerada por um painel fotovoltaico de monosilício cristalino.
Para extrair a máxima potência do painel foi utilizado o controle perturba e
observa. Também Foi apresentado o projeto e desenvolvimento do conversor SEPIC e do
conversor Buck de forma satisfatória, uma vez que os mesmos mostraram-se operantes,
atingindo os objetivos pretendidos.
A análise do ciclo de carga e descarga das baterias foi obtida através do sensor
de tensão, que descreveu o comportamento da bateria quando carregada pelo painel, e
quando descarregada pelo LED.
O acionamento dos LED’s ocorreu de forma esperada, como previsto pelo
fluxograma onde mostrava o momento certo para o acionamento e desligando dos LED’s.
Os resultados experimentais foram obtidos tanto no laboratório do departamento
de Engenharia Elétrica da Universidade Federal do Paraná, quanto na residência dos
participantes do projeto, testando a capacidade de funcionamento do protótipo no seu
objetivo geral.
5.1 TRABALHOS FUTUROS
Como trabalho futuro, pode ser feito o desenvolvimento do cálculo de autonomia
das baterias, que tem como objetivo analisar por quanto tempo os LED’s operariam com
a carga da bateria, se não houvesse a presença de luz. Também, estudar o
aperfeiçoamento do protótipo para níveis operacionais, atuando, por exemplo, como
iluminação pública em áreas remotas.
56
REFERÊNCIAS
Pacheco, F. Energias Renováveis: Breves Conceitos – Conjuntura e Planejamento, Salvador, Outubro/2006.
Martins D. C., Coelho R. F., Santos W. M. (2011), Técnicas de Rastreamento de Máxima Potência para Sistemas Fotovoltaicos: Revisão e Novas Propostas, Apostila de Minicurso – XI Congresso Brasileiro de Eletrônica de Potência, 2011.
Neto, J. C. Controle Robusto Aplicado a Conversor Buck-Boost em Sistemas Fotovoltaicos. UFRN, Natal, RN, 2012.
Brosset, M. G. E; Bodereau, G. C. Conhecendo as Baterias, Junho/2014.
Casaro M. M., Martins D. C. (2010), Processamento Eletrônico da energia Solar Fotovoltaica em Sistemas Conectados a Rede Elétrica, Revista Controle & Automação/vol.21 no.2, 2010.
BARBI, Ivo; MARTINS, Denizar Cruz. Conversores CC-CC Básicos não Isolados. 3ª Edição. Florianópolis: Edição do Autor, 2008.
Santos, Walbermark et. al. Proposta de MPPT para Painéis Fotovoltaicos Utilizando Apenas Sensor de Tensão e Aproveitando a Impedância Característica do SEPIC. XVIII Congresso Brasileiro de Automática, 2010.
Serrão, M. A. S. Dimensionamento de um Sistema Fotovoltaico para uma casa de Veraneio em Pouso da Cajaíba-Paraty. UFRJ, Rio de Janeiro, RJ, 2010.
Minha Casa Solar. Produtos Solares. Disponível em: < http://www.inventhar.com.br/casasolar/saiba-painel. php>. Acesso em: 25 nov. 2014. MPPT Solar. Qual Controlador de Carga Escolher. Disponível em: < http://www.mpptsolar.com/pt/controlador-de-carga-solar-qual-escolher.html>. Acesso em: 25 nov. 2014. Física Experimental III. Exp I. Disponível em: < http://disciplinas.stoa.usp.br/mod/page/view. php?id=121619>. Acesso em: 25 nov. 2014. CBBS. Células Fotovoltaicas. Disponível em: < http://www.ccbs-energia.pt/formacao-tecnica/solar-fotovoltaico/celulas-fotovoltaicas>. Acesso em: 25 nov. 2014. Rasatronic. Noções de manutenção e Carga de Baterias Automotivas. Disponível em: < http://www.rasatronic.com.br/produtos/download/manual_cargas_bateria.pdf>. Acesso em: 25 nov. 2014. ABNT. Associação Brasileira de Normas Técnicas. Disponível em: < http://www.abnt.org.br/>. Acesso em: 20 nov. 2014.

57
Prof. Dr. João Américo Vilela Júnior. Projeto de Conversores CC/CC e inversores. Disponível em: < http://vilela-eletrica.weebly.com/projeto-de-conversores-cccc-e-inversores.html>. Acesso em: 15 abr. 2015. LENK, Ron; LENK, Carol. Practical Lighting Design with LEDs. 1ª Edição. Hoboken, New Jersey: Wiley-IEEE Press, 2011. 272p.
ELMANO, Carlos. Conversores CC-CC. Universidade Federal do Ceará - UFC. Ceará: 2011. Disponível em: <http://www.ec.ufc.br/professores/elmano/disciplinas/sis telet/Aula07.pdf>. Acesso em: 05 mai. 2013. Lowcarbonfutures. Supercapacitor (electrochemical double-layer capacitor). Disponível em: < http://www.lowcarbonfutures.org/sites/default/files/supercapacitator.pdf >. Acesso em: 15 abr. 2015.
MANKOWER, Joel. A economia Verde: descubra as oportunidades e os desafios de uma nova era dos negócios. Editora Gente, 2009.
BATES, David J.; MALVINO, Albert. Eletrônica. 7 Edição. Volume 2. MCGRAWHILL. 2007.
DIAS, M. P; PINTO, D. P.; BRAGA, H. A. C. A Simplified Technique of Lighting Performance evaluation Applied to LED-based modern luminaries. 10th. Bonito, MS, 2009. SÁ JUNIOR, E. M.; ANTUNES, F. L. M.; PERIN, A. J. LED’s Para Iluminação: Características e Normas. II CBEE. Vitória, ES, 2007.
58
APÊNDICES
APÊNDICE 1 - CONTROLE MPPT, SENSOR E PWM ..................................................60
APÊNDICE 2 - ESQUEMÁTICO DA PLACA ..................................................................67
APÊNDICE 3 – LAYOUT DA PLACA .............................................................................68
APÊNDICE 4 – LISTA DE COMPONENTES .................................................................69
59
APÊNDICE 1 - CONTROLE MPPT, SENSOR E PWM // Programação sensores, mppt e pwm #include <stdint.h> #include <stdbool.h> #include "inc/hw_gpio.h" #include "inc/hw_ints.h" #include "inc/hw_memmap.h" #include "inc/hw_types.h" #include "inc/hw_nvic.h" #include "inc/hw_timer.h" #include "driverlib/debug.h" #include "driverlib/fpu.h" #include "driverlib/fpu.c" #include "driverlib/gpio.h" #include "driverlib/gpio.c" #include "driverlib/interrupt.h" #include "driverlib/interrupt.c" #include "driverlib/pin_map.h" #include "driverlib/rom.h" #include "driverlib/sysctl.h" #include "driverlib/sysctl.c" #include "driverlib/systick.h" //#include "driverlib/systick.c" #include "driverlib/cpu.h" #include "driverlib/cpu.c" #include "driverlib/adc.h" #include "driverlib/adc.c" #include "driverlib/timer.h" #include "driverlib/pwm.h" #include "driverlib/pwm.c" #include "driverlib/uart.h" #include "driverlib/uart.c" #include "utils/uartstdio.h" #include "utils/uartstdio.c" #include "math.h" //***************************************************************************** // // The error routine that is called if the driver library encounters an error. // //***************************************************************************** #ifdef DEBUG void __error__(char *pcFilename, uint32_t ui32Line) { while(1) {
60
} } #endif void ConfigureUART(void) // Função retirada do exemplo hello.c { SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA); SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0); GPIOPinConfigure(GPIO_PA0_U0RX); GPIOPinConfigure(GPIO_PA1_U0TX); GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1); UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC); UARTStdioConfig(0, 9600, 16000000); } int main(void) { //************************************** //Declaracao das variaveis //************************************** uint32_t ui32ADC0Value[4]; //declaração da variável utilizadas no AD uint32_t tenPV; //Tensao de leitura do PV uint32_t corPV; //Corrente de leitura do PV uint32_t tenBAT; //Tensao de leitura do PV uint32_t corLED; //Corrente de leitura do PV float potAnt = 0.0; //Potencia calculada anterior float potAtu = 0.1; //Potencia calculada atual float corPVcal; float corLEDcal; float tenPVcal; float tenBATcal; float conv = 0.002268; //fator de conversão dos sensores ACS float corLEDapl = 0; float corLEDant = 0; //Dutycicle: 0 ~ 1000 uint32_t dutyAntSEPIC = 10; //Duty cicle anterior uint32_t dutyAtuSEPIC = 15; //Duty cilce atual uint32_t dutyAplSEPIC = 10; //Duty cicle aplicado
61
uint32_t dutyAplBUCK = 10; //Duty cicle aplicado //************************************** // Configuração do ponto flutuante //************************************** FPULazyStackingEnable(); FPUEnable(); //************************************** // Configuração do oscilador //************************************** //Oscilador configurado para operar em 80MHz
SysCtlClockSet(SYSCTL_SYSDIV_2_5 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ);
//************************************** // Configuração do PWM //************************************** //******* //Configuração do PWM da porta PE4 //******* //Habilitando o PWM1 SysCtlPeripheralEnable(SYSCTL_PERIPH_PWM1); //Habilitando as portas E na qual a saida PE4 será utilizada pelo PWM SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOE); //O pino PE4 é definido como saída PWM GPIOPinTypePWM(GPIO_PORTE_BASE, GPIO_PIN_4);
//Esse pino tem duas opções de PWM M1PWM2 ou M0PWM4 é necessário definir qual PWM será utilizado
GPIOPinConfigure(GPIO_PE4_M1PWM2); //Determina o tipo de contagem que será utilizada PWMGenConfigure(PWM1_BASE, PWM_GEN_1, PWM_GEN_MODE_DOWN); //Seta o valor máximo da razão cíclica
//A frequência do PWM e definida: (1/80MHz)*Resolução_do_PWM(PWMGenPeriodSet)=(1/80MHz)*1000=80kHz
PWMGenPeriodSet(PWM1_BASE, PWM_GEN_1, 1000); //Define a razão cíclica PWMPulseWidthSet(PWM1_BASE, PWM_OUT_2, 1000); //******* //Configuração do PWM da porta PE5 //******* //Habilitando o PWM1 SysCtlPeripheralEnable(SYSCTL_PERIPH_PWM1);
62
//Habilitando as portas E na qual a saída PE5 será utilizada pelo PWM SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOE); //O pino PE5 é definido como saída PWM GPIOPinTypePWM(GPIO_PORTE_BASE, GPIO_PIN_5);
//Esse pino tem duas opções de PWM M1PWM2 ou M0PWM4 é necessário definir qual PWM será utilizado
GPIOPinConfigure(GPIO_PE5_M1PWM3); //Determina o tipo de contagem que será utilizada PWMGenConfigure(PWM1_BASE, PWM_GEN_1, PWM_GEN_MODE_DOWN); //Seta o valor máximo da razão cíclica = 80kHz PWMGenPeriodSet(PWM1_BASE, PWM_GEN_1, 1000); //Define a razão ciclica PWMPulseWidthSet(PWM1_BASE, PWM_OUT_3, 1000); //******* //O PWM1 é habilitado como saída PWMOutputState(PWM1_BASE, PWM_OUT_2_BIT, true); //Esse comando faz com que o PWM1 comece a operar PWMGenEnable(PWM1_BASE, PWM_GEN_1); //O PWM1 é habilitado como saída PWMOutputState(PWM1_BASE, PWM_OUT_3_BIT, true); //Esse comando faz com que o PWM1 comece a operar PWMGenEnable(PWM1_BASE, PWM_GEN_1); //************************************** // Configuração da sequência do A/D //************************************** // Habilitar o conversor ADC0 SysCtlPeripheralEnable(SYSCTL_PERIPH_ADC0); //Cada amostragem é a média de um numero de amostras definida aqui ADCHardwareOversampleConfigure(ADC0_BASE, 64);
//Define a sequencia de amostragem ADC0, definida como sequencia 1 com prioridade 0
ADCSequenceConfigure(ADC0_BASE, 1, ADC_TRIGGER_PROCESSOR, 0); //Ler o PD0 - item 0 ADCSequenceStepConfigure(ADC0_BASE, 1, 0, ADC_CTL_CH7);
63
//Ler o PD1 - item 1 ADCSequenceStepConfigure(ADC0_BASE, 1, 1, ADC_CTL_CH6); //Ler o PD2 - item 2 ADCSequenceStepConfigure(ADC0_BASE, 1, 2, ADC_CTL_CH5); //Ler o PD3 - item 3
ADCSequenceStepConfigure(ADC0_BASE, 1, 3, ADC_CTL_CH4 | ADC_CTL_IE | ADC_CTL_END);
//Habilita a sequência de amostragem 1 ADCSequenceEnable(ADC0_BASE, 1); //************************************** // Configuração do pino para habilitar os drives (shutdown) //************************************** //Habilitando a portas B na qual será utilizada como saída a porta PB3 SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB); //Defini o pino PB3 como saída GPIOPinTypeGPIOOutput(GPIO_PORTB_BASE, GPIO_PIN_3); //Configurar Serial ConfigureUART(); //************************************** //LOOP //************************************** while(1){ ADCIntClear(ADC0_BASE, 1); //limpa o flag da interrupção do ADC0 ADCProcessorTrigger(ADC0_BASE, 1); //trigger do ADC0
while (!ADCIntStatus(ADC0_BASE, 1, false)){} //Aguarda o ADC0 terminar a conversão ADCSequenceDataGet(ADC0_BASE, 1, ui32ADC0Value); //Faz a aquisição para o vetor ADC0
//Atribuição dos valores de aquisição tenPV = ui32ADC0Value[0]; corPV = ui32ADC0Value[1]; tenBAT = ui32ADC0Value[2]; corLED = ui32ADC0Value[3]; //*********** //Conversão dos sensores
64
if (corPV >= 3233) corPVcal = (corPV - 3233)*conv; else corPVcal = (3103 - corPV)*conv; if (corLED >= 3233) corLEDcal = (corLED - 3233)*conv; else corLEDcal = (3233 - corLED)*conv; tenPVcal = tenBAT*0.0053; tenBATcal = tenBAT*0.0034; //Calculo de potência potAtu = corPVcal*tenPVcal; //WATT //MPPT if(potAtu>potAnt){ if(dutyAtuSEPIC>=dutyAntSEPIC){ dutyAtuSEPIC=dutyAntSEPIC+0.1; } else { dutyAtuSEPIC=dutyAntSEPIC-0.1; } } else{ if(dutyAtuSEPIC>=dutyAntSEPIC){ dutyAtuSEPIC=dutyAntSEPIC-0.1; } else { dutyAtuSEPIC=dutyAntSEPIC+0.1; } } potAnt=potAtu; dutyAntSEPIC=dutyAtuSEPIC; dutyAplSEPIC=dutyAtuSEPIC; //Proteção de dutycicle if(dutyAplSEPIC<10) dutyAplSEPIC = 30; else if(dutyAplSEPIC>990) dutyAplSEPIC = 970; //Compensador PI do Buck corLEDapl = corLEDant + 0.05*(0.7-corLEDcal); corLEDant = corLEDapl; dutyAplBUCK = corLEDapl*1; //Proteção de dutycicle if(dutyAplBUCK<10) dutyAplBUCK = 10; else if(dutyAplBUCK>990) dutyAplBUCK = 990; //Impressão serial dos valores
UARTprintf("tenPV: %d\tcorPV: %d\ttenBAT: %d\tcorLED: %d\n",tenPV,corPV,tenBAT,corLED);
//Verificação de geração, niveis de tensão e atuação
65
if(tenPV<=5){ dutyAplSEPIC = 0; if(tenBAT>=10) dutyAplBUCK = dutyAplBUCK; else dutyAplBUCK = 0; }else{ dutyAplBUCK = 0; if(tenBAT>=14) dutyAplSEPIC = 0; else dutyAplSEPIC = dutyAplSEPIC; } PWMPulseWidthSet(PWM1_BASE, PWM_OUT_2, dutyAplSEPIC); PWMPulseWidthSet(PWM1_BASE, PWM_OUT_3, dutyAplBUCK); } //************************************** }
66
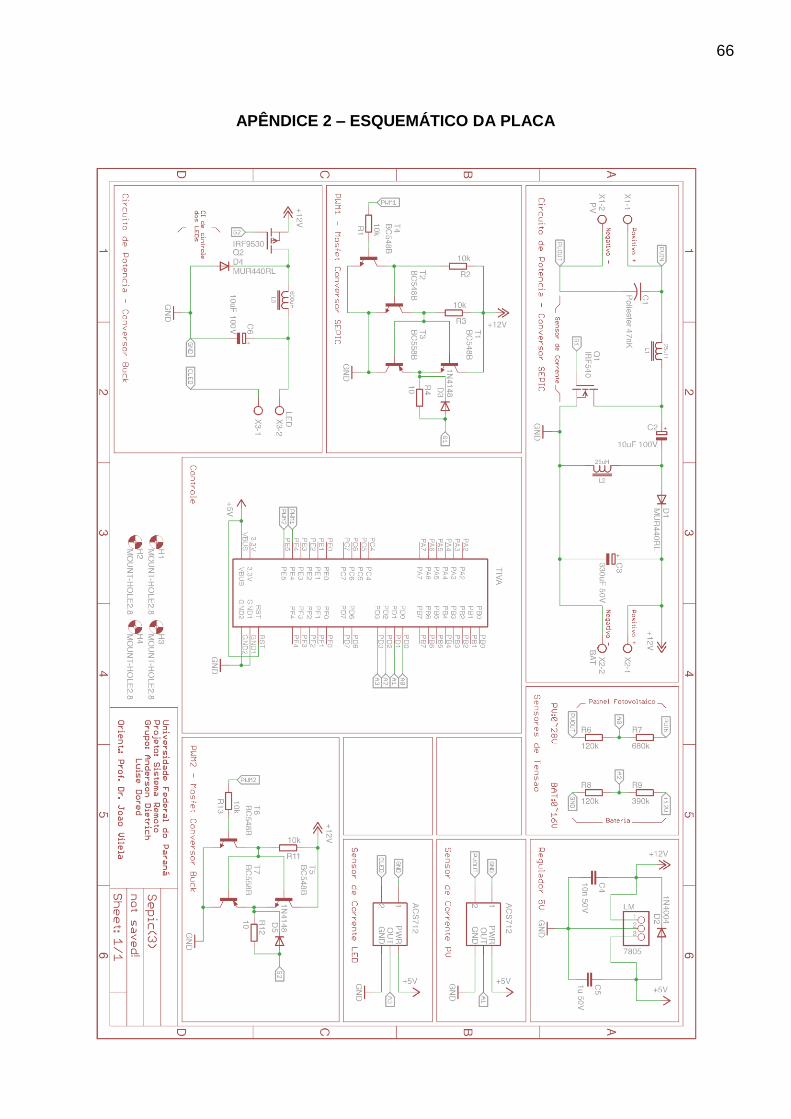
APÊNDICE 2 – ESQUEMÁTICO DA PLACA
67
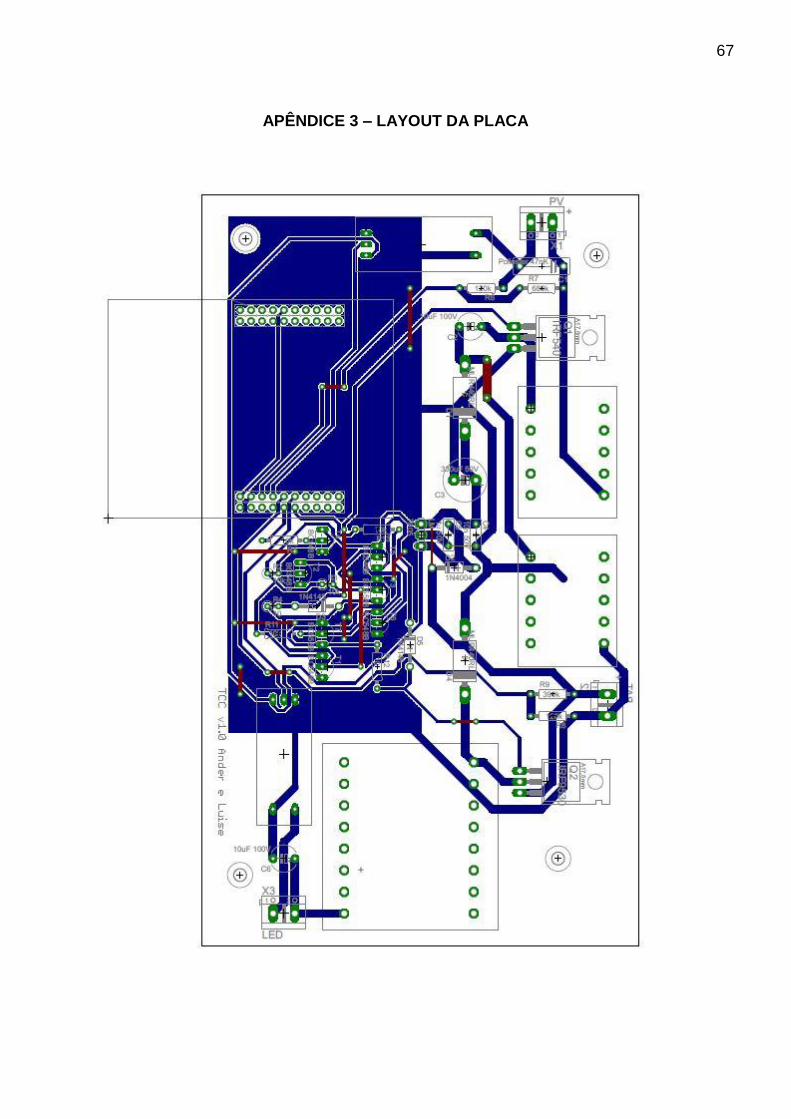
APÊNDICE 3 – LAYOUT DA PLACA
68
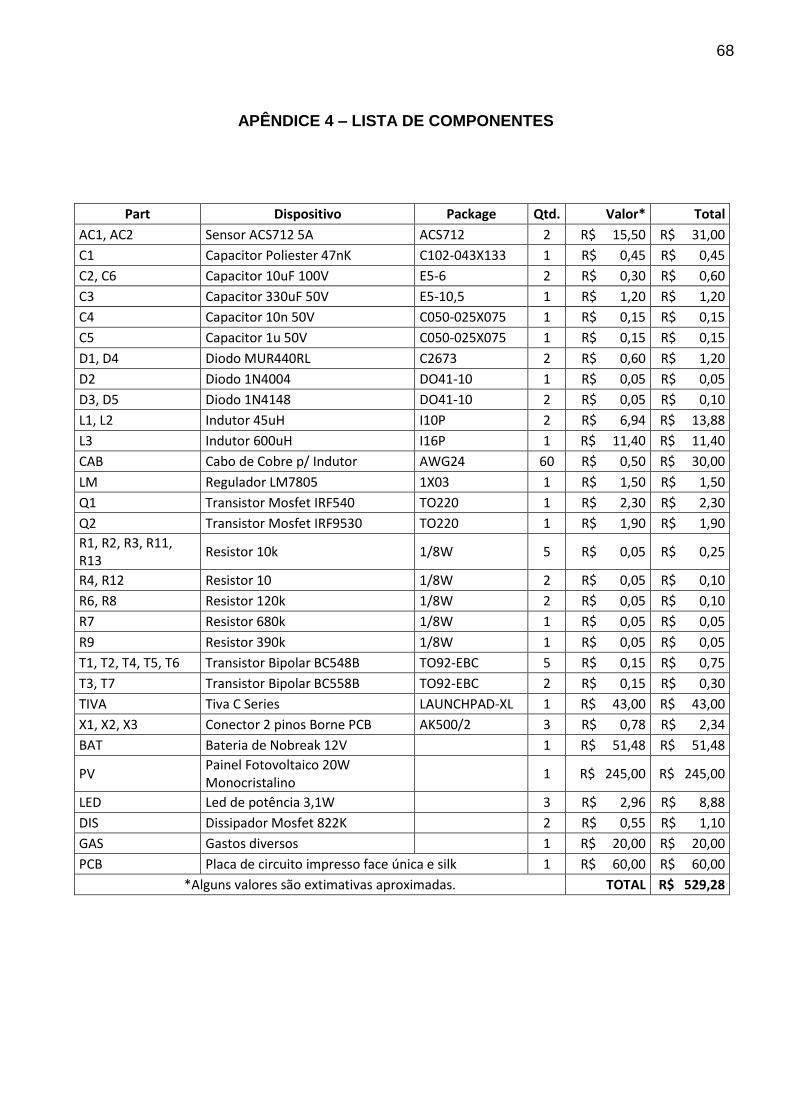
APÊNDICE 4 – LISTA DE COMPONENTES
Part Dispositivo Package Qtd. Valor* Total
AC1, AC2 Sensor ACS712 5A ACS712 2 R$ 15,50 R$ 31,00
C1 Capacitor Poliester 47nK C102-043X133 1 R$ 0,45 R$ 0,45
C2, C6 Capacitor 10uF 100V E5-6 2 R$ 0,30 R$ 0,60
C3 Capacitor 330uF 50V E5-10,5 1 R$ 1,20 R$ 1,20
C4 Capacitor 10n 50V C050-025X075 1 R$ 0,15 R$ 0,15
C5 Capacitor 1u 50V C050-025X075 1 R$ 0,15 R$ 0,15
D1, D4 Diodo MUR440RL C2673 2 R$ 0,60 R$ 1,20
D2 Diodo 1N4004 DO41-10 1 R$ 0,05 R$ 0,05
D3, D5 Diodo 1N4148 DO41-10 2 R$ 0,05 R$ 0,10
L1, L2 Indutor 45uH I10P 2 R$ 6,94 R$ 13,88
L3 Indutor 600uH I16P 1 R$ 11,40 R$ 11,40
CAB Cabo de Cobre p/ Indutor AWG24 60 R$ 0,50 R$ 30,00
LM Regulador LM7805 1X03 1 R$ 1,50 R$ 1,50
Q1 Transistor Mosfet IRF540 TO220 1 R$ 2,30 R$ 2,30
Q2 Transistor Mosfet IRF9530 TO220 1 R$ 1,90 R$ 1,90
R1, R2, R3, R11, R13
Resistor 10k 1/8W 5 R$ 0,05 R$ 0,25
R4, R12 Resistor 10 1/8W 2 R$ 0,05 R$ 0,10
R6, R8 Resistor 120k 1/8W 2 R$ 0,05 R$ 0,10
R7 Resistor 680k 1/8W 1 R$ 0,05 R$ 0,05
R9 Resistor 390k 1/8W 1 R$ 0,05 R$ 0,05
T1, T2, T4, T5, T6 Transistor Bipolar BC548B TO92-EBC 5 R$ 0,15 R$ 0,75
T3, T7 Transistor Bipolar BC558B TO92-EBC 2 R$ 0,15 R$ 0,30
TIVA Tiva C Series LAUNCHPAD-XL 1 R$ 43,00 R$ 43,00
X1, X2, X3 Conector 2 pinos Borne PCB AK500/2 3 R$ 0,78 R$ 2,34
BAT Bateria de Nobreak 12V 1 R$ 51,48 R$ 51,48
PV Painel Fotovoltaico 20W Monocristalino
1 R$ 245,00 R$ 245,00
LED Led de potência 3,1W 3 R$ 2,96 R$ 8,88
DIS Dissipador Mosfet 822K 2 R$ 0,55 R$ 1,10
GAS Gastos diversos 1 R$ 20,00 R$ 20,00
PCB Placa de circuito impresso face única e silk 1 R$ 60,00 R$ 60,00
*Alguns valores são extimativas aproximadas. TOTAL R$ 529,28
Copyright © 2022 FDOKUMEN