
School of Engineering and Technology - Sandip University
18
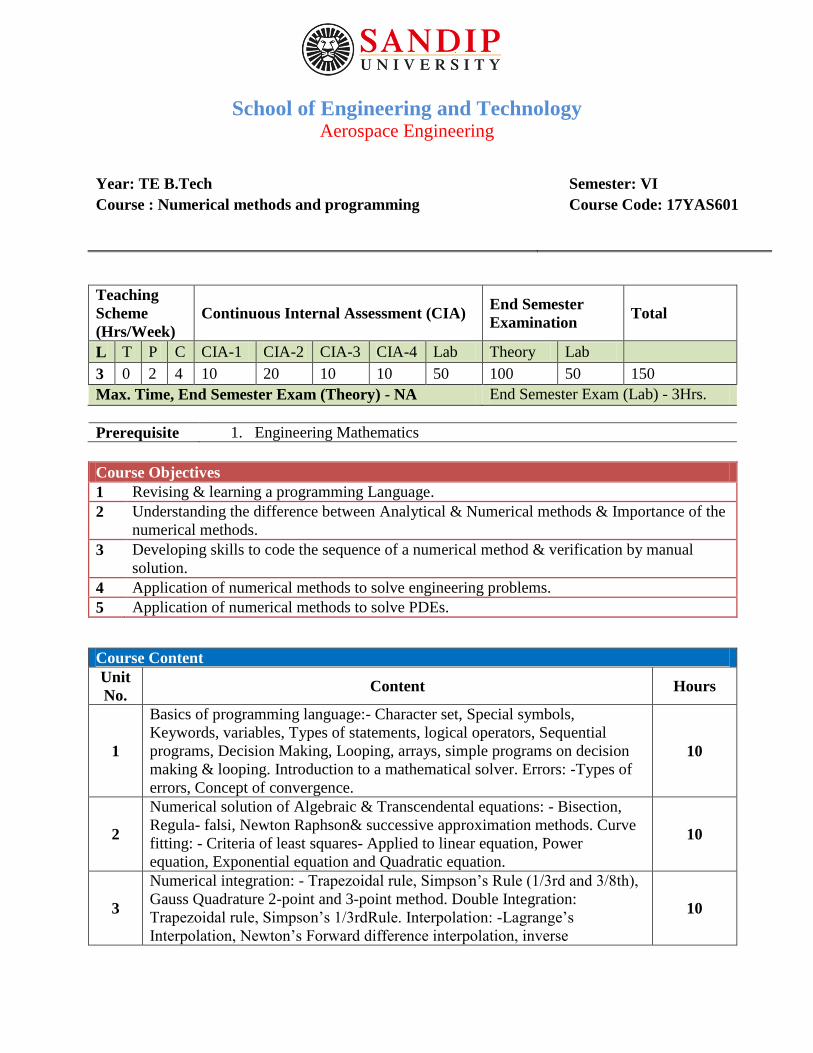
School of Engineering and Technology Aerospace Engineering Year: TE B.Tech Semester: VI Course : Numerical methods and programming Course Code: 17YAS601 Teaching Scheme (Hrs/Week) Continuous Internal Assessment (CIA) End Semester Examination Total L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab 3 0 2 4 10 20 10 10 50 100 50 150 Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs. Prerequisite 1. Engineering Mathematics Course Objectives 1 Revising & learning a programming Language. 2 Understanding the difference between Analytical & Numerical methods & Importance of the numerical methods. 3 Developing skills to code the sequence of a numerical method & verification by manual solution. 4 Application of numerical methods to solve engineering problems. 5 Application of numerical methods to solve PDEs. Course Content Unit No. Content Hours 1 Basics of programming language:- Character set, Special symbols, Keywords, variables, Types of statements, logical operators, Sequential programs, Decision Making, Looping, arrays, simple programs on decision making & looping. Introduction to a mathematical solver. Errors: -Types of errors, Concept of convergence. 10 2 Numerical solution of Algebraic & Transcendental equations: - Bisection, Regula- falsi, Newton Raphson& successive approximation methods. Curve fitting: - Criteria of least squares- Applied to linear equation, Power equation, Exponential equation and Quadratic equation. 10 3 Numerical integration: - Trapezoidal rule, Simpson’s Rule (1/3rd and 3/8th), Gauss Quadrature 2-point and 3-point method. Double Integration: Trapezoidal rule, Simpson’s 1/3rdRule. Interpolation: -Lagrange’s Interpolation, Newton’s Forward difference interpolation, inverse 10
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of School of Engineering and Technology - Sandip University
School of Engineering and Technology Aerospace Engineering
Year: TE B.Tech Semester: VI
Course : Numerical methods and programming Course Code: 17YAS601
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
3 0 2 4 10 20 10 10 50 100 50 150
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite 1. Engineering Mathematics
Course Objectives
1 Revising & learning a programming Language.
2 Understanding the difference between Analytical & Numerical methods & Importance of the
numerical methods.
3 Developing skills to code the sequence of a numerical method & verification by manual
solution.
4 Application of numerical methods to solve engineering problems.
5 Application of numerical methods to solve PDEs.
Course Content
Unit
No. Content Hours
1
Basics of programming language:- Character set, Special symbols,
Keywords, variables, Types of statements, logical operators, Sequential
programs, Decision Making, Looping, arrays, simple programs on decision
making & looping. Introduction to a mathematical solver. Errors: -Types of
errors, Concept of convergence.
10
2
Numerical solution of Algebraic & Transcendental equations: - Bisection,
Regula- falsi, Newton Raphson& successive approximation methods. Curve
fitting: - Criteria of least squares- Applied to linear equation, Power
equation, Exponential equation and Quadratic equation.
10
3
Numerical integration: - Trapezoidal rule, Simpson’s Rule (1/3rd and 3/8th),
Gauss Quadrature 2-point and 3-point method. Double Integration:
Trapezoidal rule, Simpson’s 1/3rdRule. Interpolation: -Lagrange’s
Interpolation, Newton’s Forward difference interpolation, inverse
10
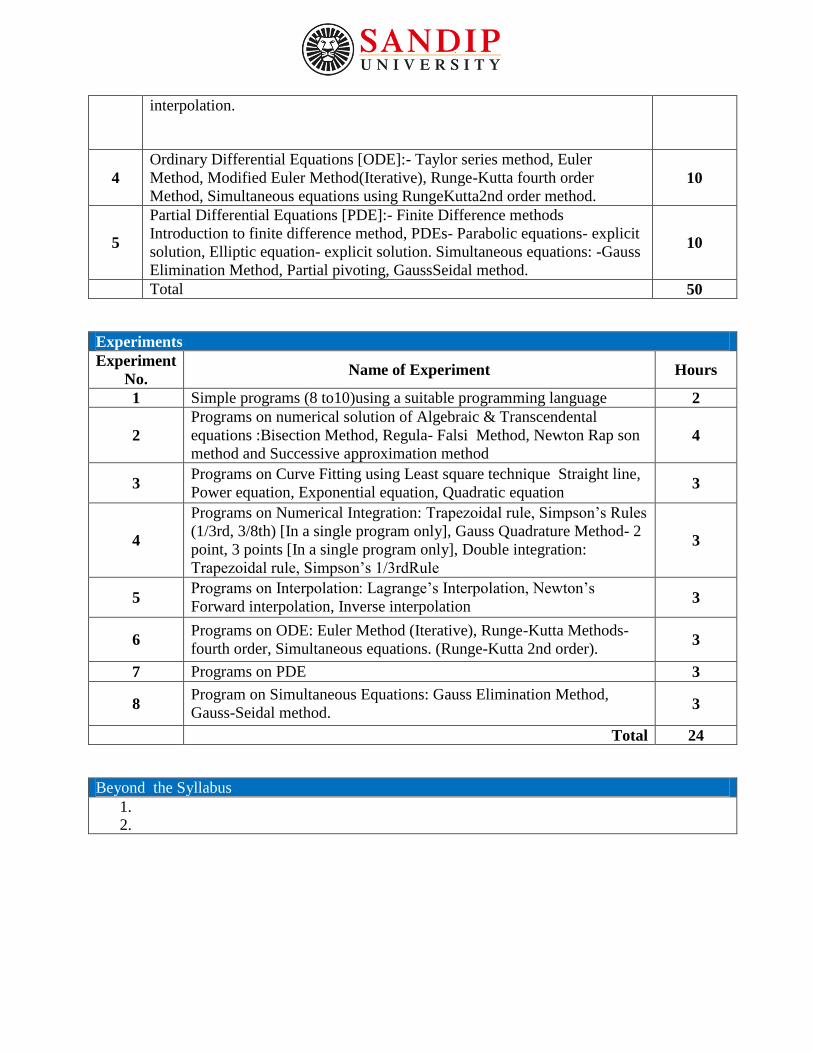
interpolation.
4
Ordinary Differential Equations [ODE]:- Taylor series method, Euler
Method, Modified Euler Method(Iterative), Runge-Kutta fourth order
Method, Simultaneous equations using RungeKutta2nd order method. 10
5
Partial Differential Equations [PDE]:- Finite Difference methods
Introduction to finite difference method, PDEs- Parabolic equations- explicit
solution, Elliptic equation- explicit solution. Simultaneous equations: -Gauss
Elimination Method, Partial pivoting, GaussSeidal method.
10
Total 50
Experiments
Experiment
No. Name of Experiment Hours
1 Simple programs (8 to10)using a suitable programming language 2
2
Programs on numerical solution of Algebraic & Transcendental
equations :Bisection Method, Regula- Falsi Method, Newton Rap son
method and Successive approximation method 4
3 Programs on Curve Fitting using Least square technique Straight line,
Power equation, Exponential equation, Quadratic equation 3
4
Programs on Numerical Integration: Trapezoidal rule, Simpson’s Rules
(1/3rd, 3/8th) [In a single program only], Gauss Quadrature Method- 2
point, 3 points [In a single program only], Double integration:
Trapezoidal rule, Simpson’s 1/3rdRule
3
5 Programs on Interpolation: Lagrange’s Interpolation, Newton’s
Forward interpolation, Inverse interpolation 3
6 Programs on ODE: Euler Method (Iterative), Runge-Kutta Methods-
fourth order, Simultaneous equations. (Runge-Kutta 2nd order). 3
7 Programs on PDE 3
8 Program on Simultaneous Equations: Gauss Elimination Method,
Gauss-Seidal method. 3
Total 24
Beyond the Syllabus
1.
2.
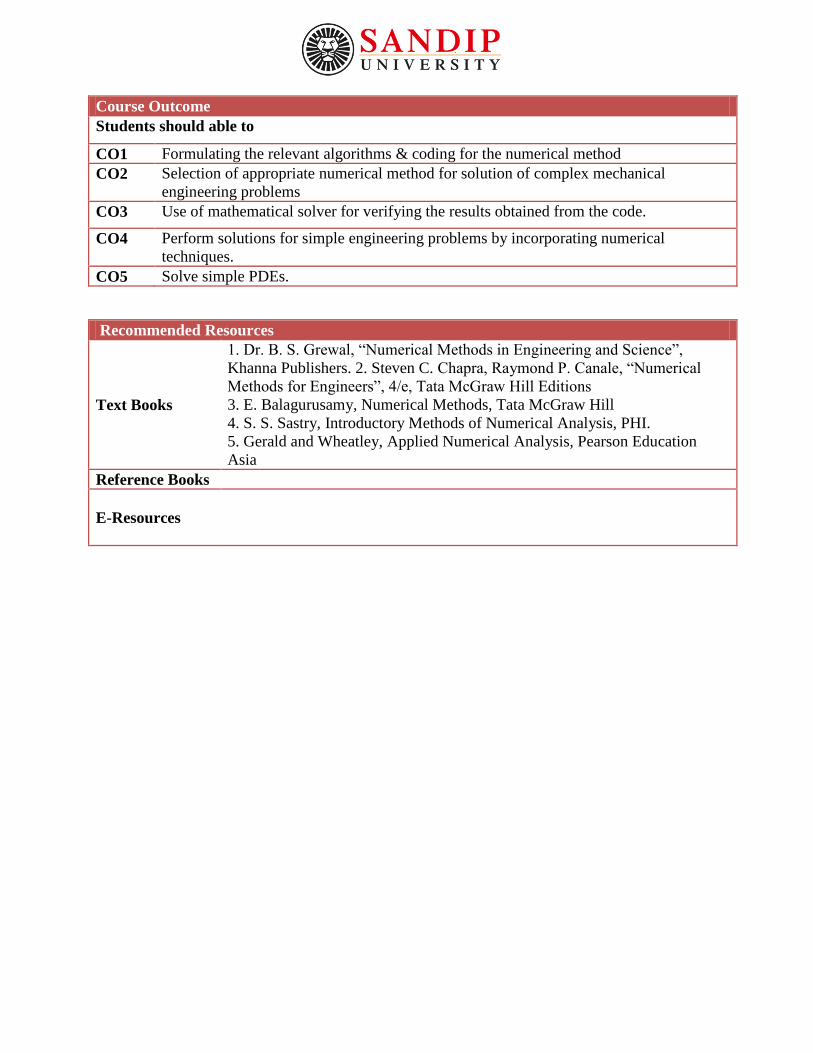
Course Outcome
Students should able to
CO1 Formulating the relevant algorithms & coding for the numerical method
CO2 Selection of appropriate numerical method for solution of complex mechanical
engineering problems
CO3 Use of mathematical solver for verifying the results obtained from the code.
CO4 Perform solutions for simple engineering problems by incorporating numerical
techniques.
CO5 Solve simple PDEs.
Recommended Resources
Text Books
1. Dr. B. S. Grewal, “Numerical Methods in Engineering and Science”,
Khanna Publishers. 2. Steven C. Chapra, Raymond P. Canale, “Numerical
Methods for Engineers”, 4/e, Tata McGraw Hill Editions
3. E. Balagurusamy, Numerical Methods, Tata McGraw Hill
4. S. S. Sastry, Introductory Methods of Numerical Analysis, PHI.
5. Gerald and Wheatley, Applied Numerical Analysis, Pearson Education
Asia
Reference Books
E-Resources
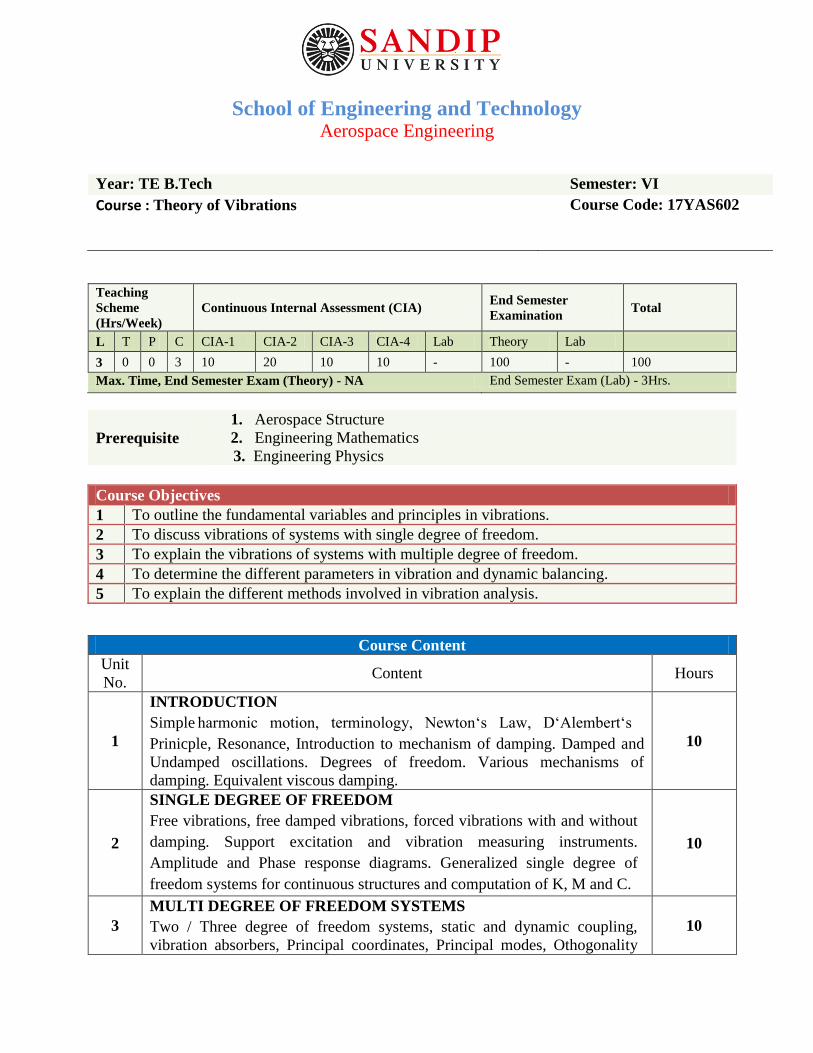
School of Engineering and Technology Aerospace Engineering
Year: TE B.Tech Semester: VI
Course : Theory of Vibrations Course Code: 17YAS602
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
3 0 0 3 10 20 10 10 - 100 - 100
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite
1. Aerospace Structure
2. Engineering Mathematics
3. Engineering Physics
Course Objectives
1 To outline the fundamental variables and principles in vibrations.
2 To discuss vibrations of systems with single degree of freedom.
3 To explain the vibrations of systems with multiple degree of freedom.
4 To determine the different parameters in vibration and dynamic balancing.
5 To explain the different methods involved in vibration analysis.
Course Content
Unit
No. Content Hours
1
INTRODUCTION
Simple harmonic motion, terminology, Newton‘s Law, D‘Alembert‘s
Prinicple, Resonance, Introduction to mechanism of damping. Damped and
Undamped oscillations. Degrees of freedom. Various mechanisms of
damping. Equivalent viscous damping.
10
2
SINGLE DEGREE OF FREEDOM
Free vibrations, free damped vibrations, forced vibrations with and without
damping. Support excitation and vibration measuring instruments.
Amplitude and Phase response diagrams. Generalized single degree of
freedom systems for continuous structures and computation of K, M and C.
10
3
MULTI DEGREE OF FREEDOM SYSTEMS
Two / Three degree of freedom systems, static and dynamic coupling,
vibration absorbers, Principal coordinates, Principal modes, Othogonality
10
conditions. Hamilton‘s Principle, Lagrange‘s equation and application.
Longintudinal vibration, lateral vibration, torsional vibration of shafts,
dynamical equations of equilibria of elastic bodies, natural frequencies and
modeshapes determination.
4
DETERMINATION OF FREQUENCIES
Methods determining natural frequencies and mode shape. Natural
Vibrations of solid continua. Determination of Eigen Values and Eigen
modes. Natural frequency of rotating shafts Whirling of shafts. Dynamic
balancing of rotating shafts. Dynamic dampers.
10
5
METHODS OF ANALYSIS
Introduction to approximate methods for frequency analysis Rayleigh Ritz
method for vibration analysis. Diagonalization of stiffness, mass and
damping matrices using orthogonality conditions. Matrices for dynamic
analysis. Kinematically consistent Load systems and determination of [K],
[M], [C] and [L] matrices. Normalization and formulation of modal
equations. Steady state response, using fourier analysis for decomposing
complex periodie load functions, of modal equations using S,plane
representation. Transient response analysis of modal equations using
Duhamel‘s integrals.
10
Total 50
Beyond the Syllabus
1.
2.
Course Outcome
Students should be able to
CO1 State the fundamental parameters in vibrations.
CO2 Illustrate the vibrations of single degree of freedom systems with examples.
CO3 Discuss the vibrations of multiple degree of freedom systems.
CO4 Estimate the different parameters in vibration and dynamic balancing
CO5 Describe the different methods used in vibration analysis.
Recommended Resources
Text Books
1. Tho mson, W.T., Theory of vibrations with applications, CBS
Publishers, Delhi.
2. Dynamics of Structures. R.W. Clough and Penzien, McGraw Hill
2/e,1993
3. Mechanical Vibrations, Singiresure.S.Rao, Pearson Education LPE-
2004.
4. Theory and practice of Mechanical vibrations, Rao, J.S and Gupta .K.,
Wiley Eastern Ltd., New Delhi, 2002.
Reference Books
1. An Introduction to Theory of Aeroelasticity, Fug, Y.C., John Wiley &
Sons, NewYork, 1984
2. Vibration Problems in Engineering, Timoshenko, S., John Wiley and
Sons, New York, 1987.
3. Shock and Vibrations, Harris & Creed Mc-Graw Hill book company,
third edition.
4. Mechanical Vibrations, V.P.Singh, Dhanapati Rai and Co. 2003
edition.
5. Mechanical Vibrations, S.Grahamkelly- TMH 2004 edition.
6. Mechanical Vibrations, G.K.Groover, Nemchand and Brothers 2001
edition.
7. Vibrations and waves ,CBS Publishers and Distributors MIT series
1987.
8. Introduction to the Study of Aircraft Vibration & Flutter, Scanlon,
R.H., & Rosenbaum, R., John Wiley and Sons, New York, 1982
E-Resources
1.
2.
3.

School of Engineering and Technology Aerospace Engineering
Year: TE B.Tech Semester: VI
Course : Control Theory and Applications of
Flight Control System
Course Code: 17YAS603
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
3 0 2 4 10 20 10 10 - 100 50 150
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite 1.Basic Electronics , Basic Flight Control Systems
Course Objectives
1 To acquaint the student with methods of modeling, performance analysis, and synthesis
of control systems and application to aircraft flight control systems.
2 Study and solve problems on Simple pneumatic, hydraulic and thermal systems, Mechanical
and electrical component analogies.
3 Study and solve problems on Block diagram representation of control systems, Reduction of
block diagrams, Signal flow graph.
4 Study and solve problems on Response of systems to different inputs, Time response of first
and second order systems, steady state errors and error constants of unity feedback circuit.
5 Study and solve problems on Routh - Hurwitz criteria of stability, Root locus and Bode
techniques, Concept and construction, frequency response Study about digital control system,
Digital Controllers and Digital PID Controllers.
Course Content
Unit
No. Content Hours
1
INTRODUCTION
Historical review - Simple pneumatic, hydraulic and thermal systems, Series
and parallel systems, Analogies - Mechanical and electrical components,
Development of flight control systems.
10
2
OPEN AND CLOSED LOOP SYSTEMS
Feedback control systems - Block diagram representation of control systems,
Reduction of block diagrams, Output to input ratios, Signal flow graph. 12
3
CHARACTERISTIC EQUATION AND FUNCTIONS
Laplace transformation, Response of systems to different inputs viz., Step
input, impulse, ramp, parabolic and sinusoidal inputs, Time response of first 12
and second order systems, steady state errors and error constants of unity
feedback circuit.
4
CONCEPT OF STABILITY
Necessary and sufficient conditions, Routh - Hurwitz criteria of stability,
Root locus and Bode techniques, Concept and construction, frequency
response.
SAMPLED DATA SYSTEMS
Introduction to digital control system, Digital Controllers and Digital PID
Controllers.
12
5
Modern Control Theory- State Space Modeling, Analysis: Limitations of
classical methods of control system modeling, analysis and design,
applied to complex, multiple input multiple output systems. 04
Total 50
Experiments
Experiment
No. Name of Experiment Hours
1 To study and perform the PI. 2
2 To study and perform the PD. 4
3 To study and perform the PID. 3
4 To study and perform the Open loop system. 3
5 To study and perform the closed loop system. 3
6 To study and plot the bode plot. 3
7 To study and plot the root locus. 3
8 To study and over view of flight control system. 3
Total 24
Beyond the Syllabus
3.
4.
Course Outcome
Students should able to
CO1 The Simple pneumatic, hydraulic and thermal systems, Mechanical and electrical
component analogies based problems.
CO2 The Block diagram representation of control systems, Reduction of block diagrams,
Signal flow graph and problems based on it.
CO3 The Response of systems to different inputs, Time response of first and second order
systems, steady state errors and error constants of unity feedback circuit and problems
based on it.
CO4 The Routh - Hurwitz criteria of stability, Root locus and Bode techniques, Concept and
construction, frequency response and problems based on it.
CO5 The digital control system, Digital Controllers and Digital PID Controllers.
Recommended Resources
Text Books
1 Kuo, B.C., Automatic Control Systems, Prentice Hall India, 1992,
ISBN 0-87692-133-0.
2 Stevens, B.L. and Lewis, F.L., Aircraft Control and Simulation,
John Wiley, 1992, ISBN0-471-61397-5.
3 Nelson, R.C., Flight Stability and Automatic Control, second
edition, Tata McGraw-Hill, 2007, ISBN: 0-07-066110-3.
4 Yechout, T.R. et al., Introduction to Aircraft Flight Mechanics,
AIAA, 2003, ISBN 1-56347-577-4.
Reference Books
1 Mc Lean, D., Automatic Flight Control Systems, Prentice
Hall, 1990, ISBN: 0-13-154008-0.
2 Bryson, A.E., Control of Aircraft and Spacecraft, Princeton
University Press, 1994, ISBN: 0-691-08782-2.
3 Collinson, R.P.G., Introduction to Avionics Systems, second
edition, Springer, 2003, ISBN: 978-81-8489-795-1.
E-Resources
1.
2.
3.
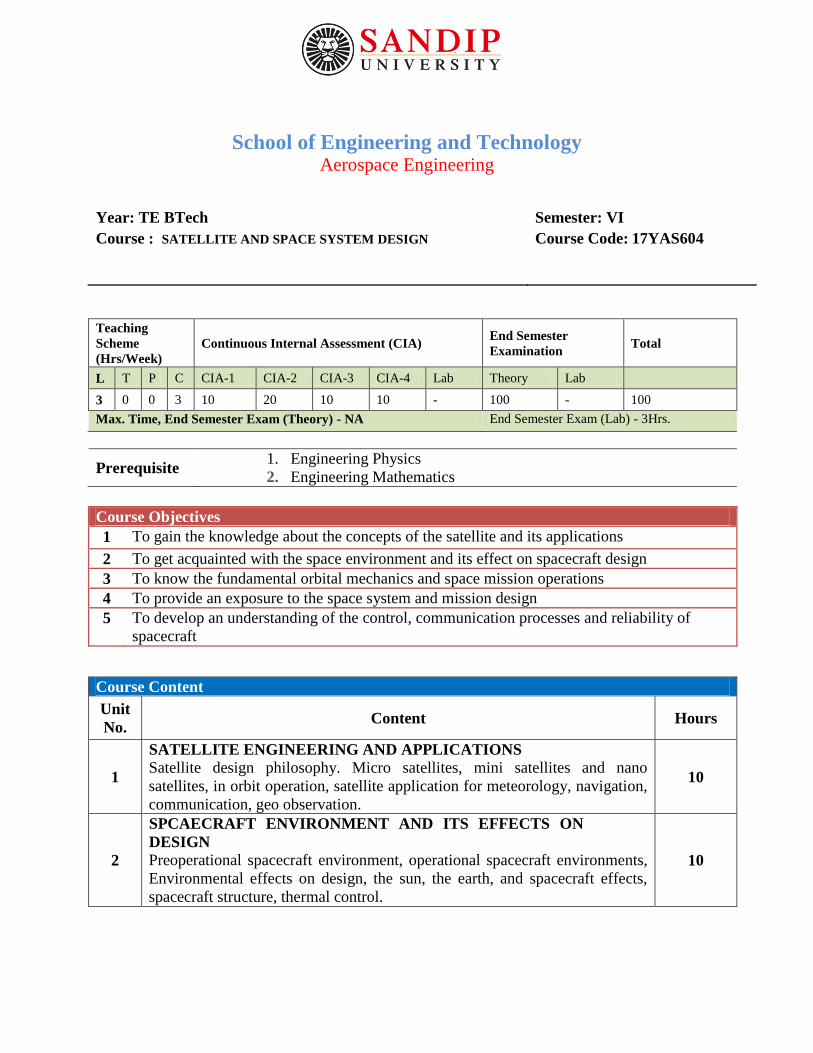
School of Engineering and Technology Aerospace Engineering
Year: TE BTech Semester: VI
Course : SATELLITE AND SPACE SYSTEM DESIGN Course Code: 17YAS604
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
3 0 0 3 10 20 10 10 - 100 - 100
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite 1. Engineering Physics
2. Engineering Mathematics
Course Objectives
1 To gain the knowledge about the concepts of the satellite and its applications
2 To get acquainted with the space environment and its effect on spacecraft design
3 To know the fundamental orbital mechanics and space mission operations
4 To provide an exposure to the space system and mission design
5 To develop an understanding of the control, communication processes and reliability of
spacecraft
Course Content
Unit
No. Content Hours
1
SATELLITE ENGINEERING AND APPLICATIONS
Satellite design philosophy. Micro satellites, mini satellites and nano
satellites, in orbit operation, satellite application for meteorology, navigation,
communication, geo observation.
10
2
SPCAECRAFT ENVIRONMENT AND ITS EFFECTS ON
DESIGN
Preoperational spacecraft environment, operational spacecraft environments,
Environmental effects on design, the sun, the earth, and spacecraft effects,
spacecraft structure, thermal control.
10
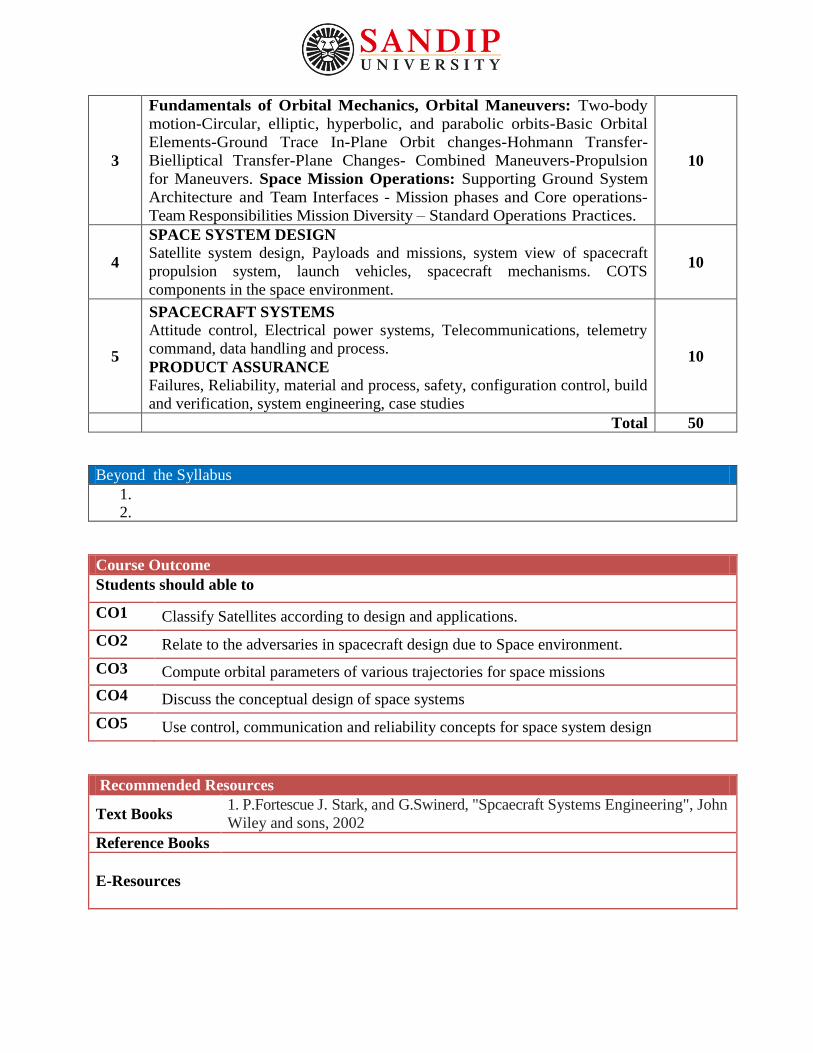
3
Fundamentals of Orbital Mechanics, Orbital Maneuvers: Two-body
motion-Circular, elliptic, hyperbolic, and parabolic orbits-Basic Orbital
Elements-Ground Trace In-Plane Orbit changes-Hohmann Transfer-
Bielliptical Transfer-Plane Changes- Combined Maneuvers-Propulsion
for Maneuvers. Space Mission Operations: Supporting Ground System
Architecture and Team Interfaces - Mission phases and Core operations-
Team Responsibilities Mission Diversity – Standard Operations Practices.
10
4
SPACE SYSTEM DESIGN
Satellite system design, Payloads and missions, system view of spacecraft
propulsion system, launch vehicles, spacecraft mechanisms. COTS
components in the space environment.
10
5
SPACECRAFT SYSTEMS
Attitude control, Electrical power systems, Telecommunications, telemetry
command, data handling and process.
PRODUCT ASSURANCE
Failures, Reliability, material and process, safety, configuration control, build
and verification, system engineering, case studies
10
Total 50
Beyond the Syllabus
1.
2.
Course Outcome
Students should able to
CO1 Classify Satellites according to design and applications.
CO2 Relate to the adversaries in spacecraft design due to Space environment.
CO3 Compute orbital parameters of various trajectories for space missions
CO4 Discuss the conceptual design of space systems
CO5 Use control, communication and reliability concepts for space system design
Recommended Resources
Text Books 1. P.Fortescue J. Stark, and G.Swinerd, "Spcaecraft Systems Engineering", John
Wiley and sons, 2002
Reference Books
E-Resources
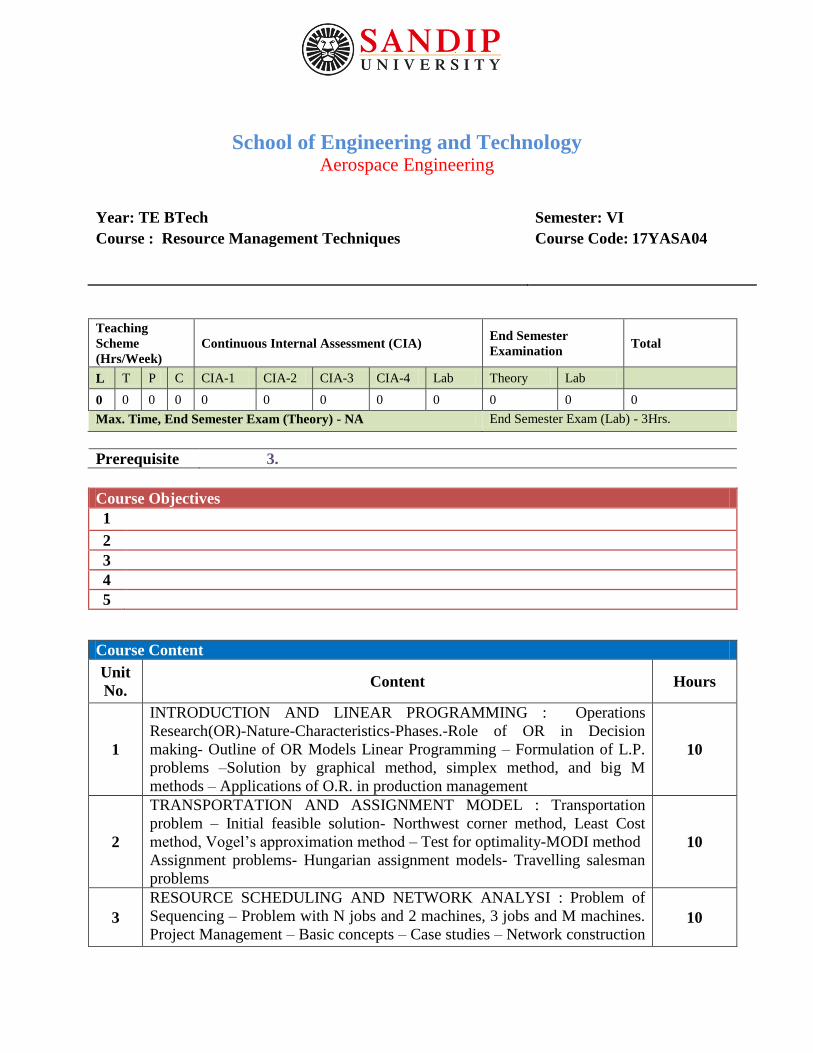
School of Engineering and Technology Aerospace Engineering
Year: TE BTech Semester: VI
Course : Resource Management Techniques Course Code: 17YASA04
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
0 0 0 0 0 0 0 0 0 0 0 0
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite 3.
Course Objectives
1
2
3
4
5
Course Content
Unit
No. Content Hours
1
INTRODUCTION AND LINEAR PROGRAMMING : Operations
Research(OR)-Nature-Characteristics-Phases.-Role of OR in Decision
making- Outline of OR Models Linear Programming – Formulation of L.P.
problems –Solution by graphical method, simplex method, and big M
methods – Applications of O.R. in production management
10
2
TRANSPORTATION AND ASSIGNMENT MODEL : Transportation
problem – Initial feasible solution- Northwest corner method, Least Cost
method, Vogel’s approximation method – Test for optimality-MODI method
Assignment problems- Hungarian assignment models- Travelling salesman
problems
10
3
RESOURCE SCHEDULING AND NETWORK ANALYSI : Problem of
Sequencing – Problem with N jobs and 2 machines, 3 jobs and M machines.
Project Management – Basic concepts – Case studies – Network construction 10
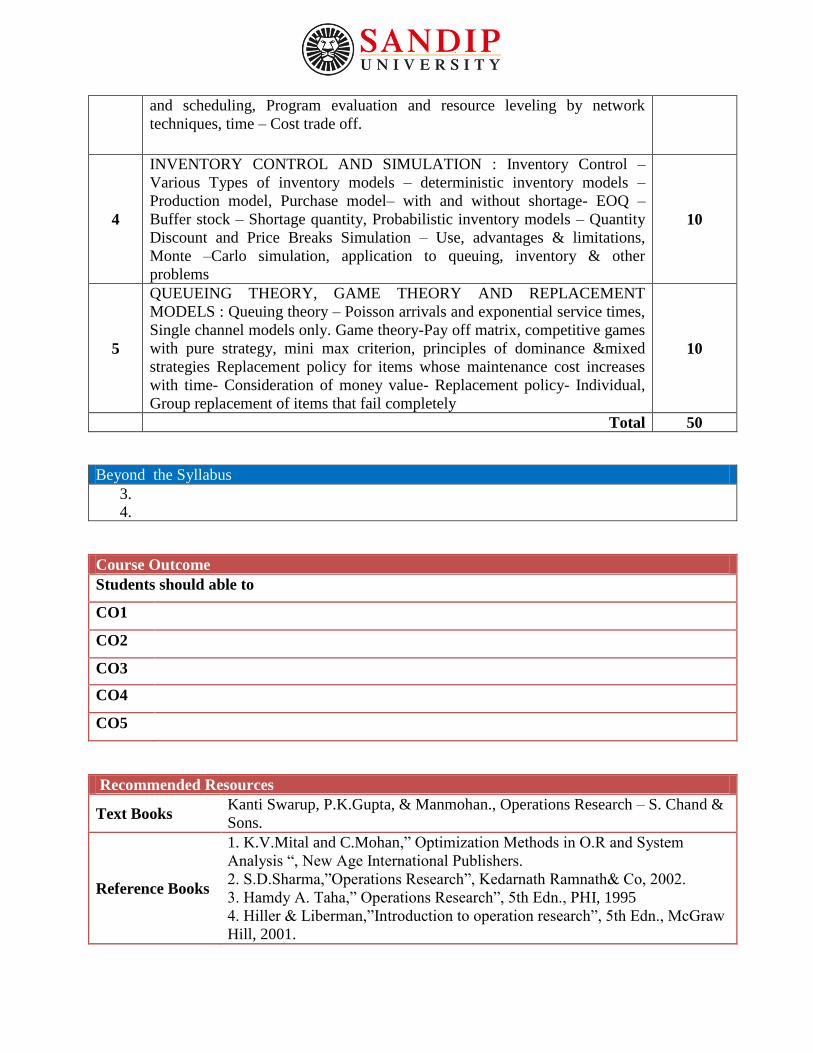
and scheduling, Program evaluation and resource leveling by network
techniques, time – Cost trade off.
4
INVENTORY CONTROL AND SIMULATION : Inventory Control –
Various Types of inventory models – deterministic inventory models –
Production model, Purchase model– with and without shortage- EOQ –
Buffer stock – Shortage quantity, Probabilistic inventory models – Quantity
Discount and Price Breaks Simulation – Use, advantages & limitations,
Monte –Carlo simulation, application to queuing, inventory & other
problems
10
5
QUEUEING THEORY, GAME THEORY AND REPLACEMENT
MODELS : Queuing theory – Poisson arrivals and exponential service times,
Single channel models only. Game theory-Pay off matrix, competitive games
with pure strategy, mini max criterion, principles of dominance &mixed
strategies Replacement policy for items whose maintenance cost increases
with time- Consideration of money value- Replacement policy- Individual,
Group replacement of items that fail completely
10
Total 50
Beyond the Syllabus
3.
4.
Course Outcome
Students should able to
CO1
CO2
CO3
CO4
CO5
Recommended Resources
Text Books Kanti Swarup, P.K.Gupta, & Manmohan., Operations Research – S. Chand &
Sons.
Reference Books
1. K.V.Mital and C.Mohan,” Optimization Methods in O.R and System
Analysis “, New Age International Publishers.
2. S.D.Sharma,”Operations Research”, Kedarnath Ramnath& Co, 2002.
3. Hamdy A. Taha,” Operations Research”, 5th Edn., PHI, 1995
4. Hiller & Liberman,”Introduction to operation research”, 5th Edn., McGraw
Hill, 2001.
5. Ravindran,Phillips&Solberg, “Operations Research: principles and
practice”, 2nd Edn., Wiley India Lts, 2007
E-Resources
School of Engineering and Technology Aerospace Engineering
Year: TE BTech Semester: VI
Course : Theory of Elasticity Course Code: 17YASA05
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
0 0 0 0 0 0 0 0 0 0 0 0
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite 4.
Course Objectives
1 The objective of the course is to provide advance knowledge in theory of elasticity. This will
help students in understanding, modeling and interpreting flight vehicle structure using finite
element method.
2
3
4
5
Course Content
Unit
No. Content Hours
1
Two-Dimensional Problems- I Two dimensional problems in rectangular co-
ordinates-solution by polynomials - Saint-venant’s principle- determination
of displacements-bending of simple beams-application of Fourier series
methods for two dimensional problems - gravity loading.
10
2
Two-Dimensional Problems- II Two dimensional problems in polar
coordinates - stress distribution symmetrical about an axis - pure bending of
curved bars - strain components in polar coordinates – displacements
displacement for symmetrical stress distribution - simple symmetric and
asymmetric problems - general solution of two-dimensional problem in polar
coordinates - application of general solution in polar coordinates
10
3
Three-Dimensional Problems Analysis of stress and strain in three
dimensions - principal stress - stress ellipsoid - director surface
determination of principal stresses - maximum shear stresses - homogeneous
deformation - principal axes of strain rotation. General theorems.
10
4
Torsion Torsion of prismatic bars - torsion of prismatic bars - bars with
elliptical cross sections - other elementary solution - membrane analogy -
torsion of rectangular bars-solution of torsional problems by energy method -
use of soap films in solving torsion problem - hydro dynamical analogies -
torsion of shafts, tubes, bars etc.
10
5
Bending Bending of prismatic Bars: Stress function - bending of cantilever -
circular cross section – elliptical cross section – rectangular cross section -
bending problems by soap film method - displacements 10
Total 50
Beyond the Syllabus
5.
6.
Course Outcome
Students should able to
CO1 At the end of this course, students will be in a position to handle complex problems for
flight structural analysis.
CO2 Sadd, M.H., Elasticity: Theory, Applications, and Numerics, Elsevier Pub, 2009.
CO3
CO4
CO5
Recommended Resources
Text Books Timoshenko, S.P. and Goodier, J.N., Theory of Elasticity, Tata McGraw Hill.
Reference Books
1.Chakrabarty, Theory of Plasticity, McGraw-Hill Publications.
2. Fung, Y.C., An Introduction to the Theory of Aeroelasticity, Dover
Publications.
3. Gurucharan Singh, Theory of Elasticity.
4 Sadhu Singh, Theory of Elasticity, Khanna Publications.
E-Resources
School of Engineering and Technology Aerospace Engineering
Year: TE BTech Semester: VI
Course : Helicopter Engineering Course Code: 17YASA06
Teaching
Scheme
(Hrs/Week)
Continuous Internal Assessment (CIA) End Semester
Examination Total
L T P C CIA-1 CIA-2 CIA-3 CIA-4 Lab Theory Lab
0 0 0 0 0 0 0 0 0 0 0 0
Max. Time, End Semester Exam (Theory) - NA End Semester Exam (Lab) - 3Hrs.
Prerequisite
Course Objectives
1 To familiarize students on the elements of helicopter aerodynamics and ground effect
machines.
2
3
4
5
Course Content
Unit
No. Content Hours
1
Elements of Helicopter Aerodynamics: Configurations based on torque
reaction - Jet rotors and compound helicopters- Methods of control-
Collective and cyclic pitch changes – Lead – Lag and flapping hinges. 10
2
Ideal Rotor Thory: Hovering performances - Momentum and simple blade
element theories - Figures of merit - Profile and induced power estimation
Constant chord and ideal twist rotors. 10
3
Power Estimates, Stability and Trim: Induced, Profile and Parasite power
requirements in forward flight - Performances curves with effects of altitude.
Preliminary ideas on helicopter stability. 10
4
Lift and Control of V/Stol Aircraft: Various configuration - Propeller, Rotor
ducted fan and jet lift - Tilt wing and vectored thrust - Performances of
VTOL and STOL aircraft in hover, Transition and Forward motion. 10
5 Ground Effect Machines: Types - Hover height, Lift augmentation and
power calculations for plenum chamber and peripheral jet machines - Drag 10
of hovercraft on land and water. Applications of hovercraft.
Total 50
Beyond the Syllabus
7.
8.
Course Outcome
Students should able to
CO1 The students will be able to take up design and analysis works relating to helicopter.
CO2
CO3
CO4
CO5
Recommended Resources
Text Books
1. Johnson, W., Helicopter Theory, Princeton University Press,1980.
2. McCormick, B.W., Aerodynamics, Aeronautics & Flight Mechanics, John
Wiley, 1995. 3. Gessow, A., and Myers, G.C., Aerodynamics of Helicopter,
Macmillan & Co., N.Y.1987.
Reference Books 1. McCormick, B.W., Aerodynamics of V/STOL Flight, Academics Press,
1987. 2. Gupta, L Helicopter Engineering, Himalayan books, 1996.
E-Resources




















