Variable step-size techniques in continuous Runge-Kutta methods for isospectral dynamical systems
Upload
independentCategory
view
0download
0
BIT 0006-3835/01/4105-0912 $16.002001, Vol. 41, No. 5, pp. 912–923 c© Swets & Zeitlinger
RUNGE–KUTTA TYPE METHODS BASED ONGEODESICS FOR SYSTEMS OF ODES ON THE
STIEFEL MANIFOLD ∗
N. DEL BUONO and L. LOPEZ†
Dipartimento Interuniversitario di Matematica, Universita degli Studi di Bari
, Via E. Orabona 4, I-70125 Bari, Italy. email: [email protected]
Abstract.
In this paper we propose numerical methods for solving ODEs on the Stiefel manifoldbased on the use of the embedded geodesics. Numerical tests are also provided in orderto show the features of our methods.
AMS subject classification: 65F, 65L.
Key words: Stiefel manifold, geodesics, parallel transport, Runge–Kutta schemes.
1 Introduction.
In recent years there has been a growing interest in constructing numerical meth-ods for solving matrix differential systems whose solutions remain on smooth man-ifolds [3, 11, 12, 13]. Here we shall look at matrix differential systems evolving onthe Stiefel manifold of n-by-p “tall-skinny” orthogonal matrices
Vn,p(R) = {Y ∈ Rn×p | Y TY = Ip}, 1 ≤ p < n,
where Ip is the p-by-p identity matrix. This manifold represents a special con-straint that arises in such areas as the symmetric eigenvalue problem, the computa-tion of a few Lyapunov exponents for dynamical systems, the Procrustes problem,and the computation of electronic structures.A systems of ODEs on the Stiefel manifold Vn,p(R) can be written in the form
Y (t) = F (Y (t))Y (t), t > 0, Y (0) = Y0 ∈ Vn,p(R),(1.1)
where F : Vn,p(R) → Rn×n is a Lipschitz bounded matrix function and satisfies
the weak skew-symmetric condition
∀Y ∈ Vn,p(R) : Y T [FT (Y ) + F (Y )]Y = 0.(1.2)
Numerical methods preserving the structure of the solution may be derived by theorthogonal extension of the rectangular system (1.1) to a square orthogonal one(see [9]). Nevertheless this approach allows us to employ all the well-known frame-work of the numerical methods for orthogonal flows (Gauss-Legendre Runge–Kutta
∗Received October 2000. Revised September 2001.†This work was partially supported by CNR contract nr. 99.01704.CT01.

RUNGE–KUTTA TYPE METHODS BASED ON GEODESICS 913
methods, Lie-group-type and Cayley methods) it has the drawback of requiring acomputational cost O(n3) per step which is not an optimum result when p is muchsmaller than n. Recently in [4] numerical methods reducing the computationalcost per step and based on elementary Householder and Givens transformationshas been proposed. In this paper we suggest a different approach based on theapproximation of the flow Y (t) on Vn,p(R) by geodesic curves on this manifoldwhich may be computed by numerical algorithms of complexity O(np2). In Sec-tion 2 we begin by briefly introducing some necessary geometrical framework onthe Stiefel manifold. In Section 3 we present the first order method based ongeodesics and from it we derive second order schemes constructed using explicitRunge–Kutta formulas. Then we analyze the special case p = 1, when the Stiefelmanifold reduces to the unit sphere Sn. In this case the numerical algorithms maybe simplified and high order methods may be derived. Finally, we report numericaltests.
2 Stiefel manifold and geodesics.
This section is essentially concerned with a brief recall of the geometric conceptson the Stiefel manifold (see [6]). For any A ∈ R
p×p, we denote by
sym(A) = (A+AT )/2 and skew(A) = (A−AT )/2
the symmetric and skew-symmetric part of the matrix A respectively. Let Y ∈Vn,p(R), then the tangent space at Y is the set
TY = {∆ ∈ Rn×p | Y T∆+∆TY = 0 }.
Thus, a matrix ∆ is a tangent vector at Y ∈ Vn,p(R) if Y T∆ is skew-symmetric.Moreover, let 〈·, ·〉 be an inner product on the Stiefel manifold, the normal spaceat the point Y is the orthogonal complement of the tangent space TY , that is theset
NY = {N ∈ Rn×p |〈∆, N〉 = 0, ∀∆ ∈ TY }.
Hence a point N ∈ NY has the form N = Y S, where S is a symmetric p-by-p matrix. Let Z ∈ R
n×p, then the projection of Z onto the normal space atY ∈ Vn,p(R) is given by πNY (Z) = Y sym(Y T Z). Analogously the projection ofZ ∈ R
n×p onto the tangent space at Y is
πTY (Z) = Y skew(Y TZ) + (In − Y Y T )Z.
The latter equation suggests a form for a tangent vector ∆ in TY , that is ∆ =Y B + (In − Y Y T )C, where B is a skew-symmetric p-by-p matrix and C ∈ R
n×p.Observe that the Stiefel manifold Vn,p(R) may be seen as an embedded submanifoldof the np-dimensional Euclidean space of n-by-p matrices and therefore endowedwith the Euclidean metric 〈A,B〉e = tr(AT B), for any A,B ∈ R
n×p, derived fromthe Frobenius inner-product. However, this metric is not natural for the Stiefelmanifold because it weighs the degrees of freedom of a tangent vector ∆ at Y un-equally. Thus a different metric, the canonical metric, should be chosen for which

914 N. DEL BUONO AND L. LOPEZ
〈∆,∆〉c = tr∆T (In − 12Y Y T )∆, for any ∆ ∈ TY .
A crucial concept for the construction and understanding of the numerical meth-ods we shall describe is that of embedded geodesic G(t). A geodesic curve G(t)generalizes the concept of a “straight line” to a general manifold and it could bedefined as the curve of shortest length between two points on the manifold. It fol-lows immediately from the definition of a geodesic that the acceleration vector isnormal to the manifold and that its velocity vector is constant along the curve. Us-ing the property of the geodesic to be a curve minimizing the path length betweentwo point on the Stiefel manifold, it can be proved that the geodesic equation inthe Euclidean metric is G+G
(GT G
)= 0, while in the canonical metric it becomes
G+ GGT G+G((GT G)2 + GT G
)= 0.(2.1)
We now show a useful tool for the construction of our numerical methods whichis essentially inspired by the results in [6].
Theorem 2.1. Let Y0 ∈ Vn,p(R), H ∈ TY0 and consider the following matrixfunction:
G(t) = Y0 M(t) + (In − Y0YT
0 )H N(t), t > 0,(2.2)
where M(t), N(t) ∈ Rp×p are the solutions to the linear differential system
M(t) = BM(t) + CN(t), M(0) = Ip,
N(t) =M(t), N(0) = 0.(2.3)
with B = Y T0 H and C = −HT (In − Y0Y
T0 )H. Then G(0) = Y0, G(0) = H, and
G(t) evolves on Vn,p(R) for any t > 0. Moreover, if Y (t) is the solution of thedifferential system (1) and we assume Y0 = Y (0) and H = Y (0), then G(t) is afirst order approximation of Y (t), that is G(t)− Y (t) = O(t2).
Proof. By construction it follows that G(0) = Y0, and since
G(t) = Y0M(t) + (In − Y0YT
0 )HM(t), t > 0,(2.4)
we obtain G(0) = H . Now, G(t) evolves on Vn,p(R) if and only if
d
dtGT (t)G(t) = GT (t)G(t) +GT (t)G(t) = 0, t > 0,
that is when GT (t)G(t) is skew-symmetric. We observe that
GT (t)G(t) = [MT (t)Y T0 +MT (t)HT (In − Y0Y
T0 )][Y0M(t) + (In − Y0Y
T0 )HN(t)]
= MT (t)M(t) +MT (t)HT (In − Y0YT
0 )HN(t)=MT (t)BT M(t) +NT (t)CT M(t) +MT (t)HT (In − Y0Y
T0 )HN(t).
Since BT = −B, and the matrix C = −HT (I − Y0YT
0 )H is symmetric, then itfollows that
GT (t)G(t) =MT (t)BT M(t) +NT (t)CM(t)−MT (t)CN(t),

RUNGE–KUTTA TYPE METHODS BASED ON GEODESICS 915
that is GT (t)G(t) is skew-symmetric for each t > 0. Now, using the Taylor expan-sion of M(t) and N(t) and the initial conditions, from (2.2) it follows that
G(t) = Y0[M(0) + tM(0) +t2
2M(0)]
+ (In − Y0YT0 )H [N(0) + tN(0) +
t2
2N(0)] +O(t3)
= Y0 + tY0B +t2
2Y0(B2 + C) + t(In − Y0Y
T0 )H(2.5)
+t2
2(In − Y0Y
T0 )HB + O(t3)
= Y0 + tH +t2
2(Y0C +HB) +O(t3).
Thus, if H = Y (0) then G(t)− Y (t) = O(t2).Observe that the matrix function G(t) defined in (2.2) is the unique geodesic on
Vn,p(R) with initial position Y0 ∈ Vn,p(R) and direction H ∈ TY0 . In order to makethe numerical methods more readable that we describe in the following section,we denote by G(t, Y0, H) the geodesic with initial position Y0 and direction H inTheorem 2.1. In the special case p = 1 since the Euclidean and the canonicalmetric are the same, the unique geodesic with initial position Y0 ∈ Sn and initialdirection H ∈ TY0 may be given in an explicit form (see [10]), that is
G(t, Y0, H) = cos(‖H‖t)Y0 + sin(‖H‖t) H
‖H‖ , t > 0.(2.6)
Finally, we recall the notion of parallel transport on a manifold. If a tangent vector∆(t) moves parallel on another point of the manifold it is generally not a tangentvector. So in order to transport a tangent vector along a path G(t) on the manifoldone has to remove the component of the transported vector in the normal spaceby solving the parallel transport equation which, for the Stiefel manifold, is givenby
∆ = −12Γ(∆, G, G), ∆(0) = K ∈ TY0 ,(2.7)
with
Γ(∆, G, G) = (∆GT + G∆T )G(2.8)
+G(GT (In −GGT )∆ +∆T (In −GGT )G
).
Unfortunately, there is no closed expression for the solution ∆(t) of the differentialequation (2.7) along geodesics except for p = 1 (see [6]). In this case, if H and Kare tangent vectors to the unit sphere at the point Y0, the parallel translation ofK along the geodesic G(t, Y0, H) is given by
∆(t) =(In + (cos(‖H‖t)− 1)HHT
‖H‖2− sin(‖H‖t)Y0H
T
‖H‖
)K.(2.9)
Henceforth we denote by ∆(K, t, Y0, H), the parallel transported tangent vectorof K along the geodesic G(t, Y0, H) evaluated at the time t.

916 N. DEL BUONO AND L. LOPEZ
3 Numerical methods on geodesics.
The straight line property of geodesics makes them a helpful concept in thegeneralization of standard numerical methods to the Stiefel manifold. Let usconsider a partition of the time interval given by tk+1 = tk + h, for k ≥ 0, wheret0 = 0 and h > 0 is the time step and suppose that Yk is an approximation ofthe solution Y (tk) of equation (1.1) at tk, for k ≥ 0. Then we can approximatethe solution Y (t) by the geodesic curve G(t) with initial position Yk and directiongiven by the vector field F (Yk)Yk. Because of the one-step nature of the proposedmethods we shall provide only the numerical approximation of Y (t) at h, that isY1. From Theorem 2.1 it follows that a numerical method of first order of accuracymay be derived by a computational expression of the geodesic form (2.2) (or (2.6)when p = 1), that is
K1 = F (Y0)Y0,Y1 = G(h, Y0,K1).
(3.1)
When p = 1, the computation of the geodesic by (2.6) does not require particularnumerical efforts. In the case of 1 < p � n, the computation of (2.2) needs thenumerical solution of a linear differential system of size 2p-by-p, which for instance,may be performed by the Gauss–Legendre Runge–Kutta method of order 2. Usu-ally to increase the order of accuracy of a one-step method one has to performa linear combination of different directions. On the Stiefel manifold however, anadditional difficulty appears since the different directions have to be all tangentat the initial point Y0 otherwise the orthogonality feature is lost. Starting fromthe first order method (3.1) we can try to construct high order algorithms makinga linear combination of different directions (tangent vectors) at the same initialpoint Y0. Before giving the explicit form of these schemes we describe the ideathey are based on. As an example, suppose to start by integrating (1.1) fromthe initial position p and with the direction of the vector field v(p) given at p.Then we proceed a small distance h along the geodesic thought p with directionv(p) obtaining a new point q on the manifold. We calculate the new direction ofthe vector field v(q) at q that will be transported backward at the initial point pby solving the parallel transport equation (2.7). Finally, we move again forwardalong the geodesic thought p with a new direction v(p) given by a particular linearcombination of the directions we have.
3.1 Runge–Kutta type methods of order 2
Let us consider the class of 2-stage explicit Runge–Kutta methods defined bythe Butcher tableau
c1 0c2 a21 0
b1 b2
(3.2)
We can derive numerical schemes based on these methods simply moving tangentvectors at the initial point by means of the parallel transport equation. Par-ticularly, a class of Runge–Kutta type methods on the Stiefel manifold may be

RUNGE–KUTTA TYPE METHODS BASED ON GEODESICS 917
obtained as follows:
1. K1 = F (Y0)Y0;2. Y01 = G(a21h, Y0,K1);3. K2 = F (Y01)Y01;4. Y01 = G(a21h, Y0,K1);(3.3)5. S2 = K2 + a21
12hΓ(K2, Y01, Y01);
6. K2 = πTY0(S2);
7. K = b1K1 + b2K2;8. Y1 = G(h, Y0,K).
We observe that in algorithm (3.1) the geodesic and its derivative are computedusing (2.2) and (2.4) respectively, and the steps 4−6 give an approximation of firstorder for ∆(−a21h, K2, Y01, Y01), which is the parallel transported vector at Y0 ofthe tangent vector K2 along the geodesic G(t, Y01, Y01). The projection performedat step 6 is needed since we are solving equation (2.7) by a numerical method whichdoes not guarantee that S2 belongs to TY0 . As regards the order of accuracy ofthe method, the following result may be obtained.
Theorem 3.1. The Runge–Kutta type methods (3.1) applied to system (1), with1 < p � n, is of second order of accuracy if b1 + b2 = 1 and a21b2 = 1/2.
Proof. By Taylor expansion, the solution ∆(t, K2, Y01, Y01) of the transportequation (2.7) at t = 0, may be written as
∆(0) = K2 + a21h
2Γ(K2, Y01, Y01) +O(h2) = S2 +O(h2).
Since ∆(0) ∈ TY0 then ∆(0) = πY0 [∆(0)] and ∆(0) = K2 +O(h2), thus
K = b1K1 + b2K2 = b1K1 + b2∆(0) +O(h2)(3.4)
= b1K1 + b2F (Y01)Y01 + b2a21h
2Γ(K2, Y01, Y01) +O(h2).
Let S(Y ) = F (Y )Y , since Y01 = Y0 + a21hK1 +O(h2), then we can write
S(Y01) = S(Y0) + a21hSY (K1) +h2
2a2
21SY Y (K1) + · · ·(3.5)
with
SY (K1) =n∑
i=1
p∑j=1
∂S(Y0)∂yij
(K1)ij , SY Y (K1) =n∑
i=1,k
p∑j,e=1
∂2S(Y0)∂yij∂yke
(K1)ij(K1)ke.
Furthermore, we suppose
Γ(K2, Y01, Y01) = Γ(K1, Y0, Y0) +O(h),
hence, by (2.8) we have
Γ(K1, Y0, Y0) = 2K1KT1 Y0 + 2Y0K
T1 (In − Y0Y
T0 )K1.(3.6)

918 N. DEL BUONO AND L. LOPEZ
Then by (3.5) and (3.6), it follows from (3.4) that
K = (b1 + b2)K1 + b2a21hSY (K1)(3.7)+ b2ha21[K1K
T1 Y0 + 2Y0K
T1 (In − Y0Y
T0 )K1] +O(h2).
Now, by (2.5), it follows that
Y1 = G(h, Y0,K) = Y0 + hK +h2
2(Y0K
TY0YT0 K +KY T
0 K − Y0KTK) +O(h3),
and since K = (b1 + b2)K1 +O(h) we have
Y1 = Y0 + hK +h2
2(b1 + b2)[Y0K
T1 Y0Y
T0 K1 +K1Y
T0 K1 − Y0K
T1 K1] +O(h3).
Hence, by (3.7) it follows that
Y1 = Y0 + h(b1 + b2)K1 + b2a21h2SY (K1)
+ b2a21h2[K1K
T1 Y0 + Y0K
T1 (In − Y0Y
T0 )K1]
+h2
2(b1 + b2)[Y0K
T1 Y0Y
T0 K1 +K1Y
T0 K1 − Y0K
T1 K1] +O(h3)
= Y0 + h(b1 + b2)K1 + b2a21h2SY (K1)
+h2
2[(b1 + b2 − 2b2a21)Y0K
T1 Y0Y
T0 K1 + (2b2a21 − b1 − b2)Y0K
T1 K1
+K1YT
0 (2b2a21FT (Y0) + (b1 + b2)F (Y0))Y0] +O(h3).
Thus, since F (Y ) satisfies the weak skew-symmetric condition (1.2) we have Y (h) =Y0 + hY0 + h2
2 SY (Y0) + O(h3). Thus if b1 + b2 = 1 and 2b2a21 = 1 the statementfollows.Unfortunately, it seems that this idea cannot be generalized to obtain methods
of order higher than 2. In fact from several numerical tests, both the RK typemethods based on the third order Heun scheme and on the classical fourth orderRK scheme seem to give second order of accuracy. This loss of accuracy seemsto be due to the approximation of the exact solution of the parallel transportequation. Nevertheless, when p = 1, methods of high order may be derived.
3.2 Methods on the unit sphere
In this section we consider numerical methods for ODEs on the unit sphere Sn.Since some differential problems on the np-dimensional Stiefel manifold may bereduced to solve a sequence of ODEs on the unit sphere (see for instance [4]), thiscase is also interesting. When p = 1 both the geodesic G(t, Y0, H) and the solution∆(K, t, Y0, H) of the parallel transport equation are given explicitly by (2.6) and(2.9) respectively and no numerical approximation is needed. So let us considerthe class of s-stage explicit Runge–Kutta methods defined by the Butcher tableau
c Ab

RUNGE–KUTTA TYPE METHODS BASED ON GEODESICS 919
where c = (ci), b = (bi) and the coefficient matrixA = (aij) has all elements equalzero except those of place (i+1, i), for any i = 1, . . . , s−1. Hence a Runge–Kuttatype algorithm on the unit sphere Sn based on the previous class of explicit RKschemes is:
K1 = F (Y0)Y0;for i = 1, . . . , s− 1,
Y0i = G(ai+1,ih, Y0,Ki);
Ki+1 = F (Y0i)Y0i;Y0i = G(ai+1,ih, Y0,Ki);(3.8)
Ki+1 = ∆(Ki+1,−ai+1,ih, Y0i, Y0i);end
K =s∑
i=1
biKi;
Y1 = G(h, Y0,K).(3.9)
where we recall that the geodesic and the parallel transport are computed by theexplicit form (2.6) and (2.9) respectively.
Theorem 3.2. The Runge–Kutta type method (3.8) applied to (1.1) with p = 1preserves the order of accuracy of the basic Runge–Kutta scheme.
Proof. Using the same notations of Theorem 3.1, the Taylor expansion of a2-stage RK type method (3.8) is
Y1 = Y0 + h(b1 + b2)K1 + h2b2a21SY (K1) + h2(b2a21 − 1/2)‖K1‖2Y0 +O(h3).
By the order condition of a 2-stage second order RK scheme it follows that Y1 −Y (h) = O(h3). Using the symmetry property of the inner product on Sn, theTaylor expansion of the numerical solution of a 3-stage RK type method (3.8) isgiven by
Y1 = Y0 + (∑3
i=1bi)K1 + h2(b2a21 + b3a32)SY (K1)
+ h2[b2a21 + b3a32 −12(∑3
i=1 bi)2]‖K1‖2Y0
+h3
2(b2a
221 + b3a
232)SY Y (K1) +
h3
2[b2a
221 + b3a
232 −
13(∑3
i=1 bi)3]‖K1‖2K1
+ h3[b2a221 + b3a
232 + b3a32a21 − (
∑3i=1 bi)(b2a21 + b3a32)]SY (K1)T K1Y0
+O(h4).
Again by the order condition for a 3-stage, third order RK method (see [1, p. 173]),we obtain that Y1 − Y (h) = O(h4). A similar technique can be used to prove theorder of the algorithm based on an arbitrary s-stage explicit p order method.Note that if the coefficient matrix A is lower triangular, we can write again a
Runge–Kutta type method like (3.8) scheme, however in this case its structure ismore complicated since we need to parallel transport the tangent vectors severaltimes on different geodesic paths.

920 N. DEL BUONO AND L. LOPEZ
0 2 4 6 8 101.5
2
2.5
3
3.5
com
pute
d or
der
(a)
0 2 4 6 8 102.5
3
3.5
4
4.5(b)
0 2 4 6 8 102.5
3
3.5
4
4.5
5
5.5
6
6.5
i
com
pute
d or
der
(c)
0 2 4 6 8 103.5
4
4.5
5
5.5
6
6.5
7
7.5
i
(d)
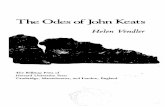
Figure 4.1: Computed order for geodesic methods based on GMEul (a), GHeun3 (b),GRK4 (c) and GRK5 (d).
4 Numerical tests.
All the numerical results have been obtained by Matlab codes implemented ona sequential computer Alpha 200 5/433 with 512 Mb RAM. Comparisons aredone in terms of accuracy, deviation of the numerical solution from orthogonalstructure, CPU time and floating point operations (flops). The deviation from theStiefel manifold is measured by ‖Ip − Y T
k Yk‖F , the accuracy by ‖Y (tk) − Yk‖∞,where ‖ · ‖F and ‖ · ‖∞ denote respectively the Frobenius and the infinity norm onmatrices. The theoretical solution Y (tk), if unknown, has been estimated applyingthe numerical method with the step-size halved. We consider the geodesic methodsGMEul, GHeun3, GRK4, GRK5 based on the second order improved Euler scheme(MEul), the third order Heun scheme (Heun3), the classical fourth order RKmethod and a fifth order RK scheme respectively. We also tested the classical one-stage Gauss–Legendre Runge–Kutta scheme (GL1), the Cayley methods appliedto the orthogonal extension equation as proposed in [9] and based on MEul andHeun3 schemes (denoted by Cay2 and Cay3 respectively) and projected methodsbased on the previous explicit RK methods (denoted by PMEul, PHeun3, etc.).
Example 4.1. (p = 1) As first problem test we have considered the systemq(t) = Aq(t), for t > 0, where the initial condition at t = 0 is q0 = 1√
n[1, . . . , 1]T ,
and A = diag[a1, . . . , an] ∈ Rn×n, with ai = (−1)iα, i = 1, . . . , n, and α > 0. The

RUNGE–KUTTA TYPE METHODS BASED ON GEODESICS 921
10−9
10−8
10−7
10−6
10−5
10−4
10−3
104
105
106
107
Flops
Glo
bal E
rror
Figure 4.2: Global Error against flops for second and third order schemes.
theoretical solution is
q(t) =1√n[exp(a1t), . . . , exp(ant)]T
and orthogonalizing q(t) to get Y (t) = q(t)/‖q‖ ∈ Rn×1, it follows that Y (t)
satisfies the following weak skew-symmetric system on Sn:
Y = F (Y )Y = (In − Y Y T )AY, t > 0, Y (0) = q0.(4.1)
In order to obtain a sequence of approximations to the order of the methods wehave computed pi = [log ei/ei+1]/[log hi/hi+1], where ei is the error between theexact solution and the numerical approximation computed with step size hi =h0/2i, for i = 0, . . . , 10 and h0 = 2 (see [11]). We have solved equation (4.1)with α = 0.9 and different dimension n. Figure 4.1 shows the computed order ofthe geodesic based methods. The x-axis denotes the step size i and the y-axis thecomputed order pi. The approximations show that the methods are asymptoticallyof order two, three, four and five respectively. Figure 4.2 plots the global erroragainst the number of flops for second and third order methods applied to theExample 4.1 with n = 10. The symbol “∗” has been used for denoting GMEulscheme and GHeun3 respectively, the symbol “×” for Cayley methods, the circlesfor GL1 and the “+” for the projected schemes. The solid and dotted lines areused for second and third order methods respectively. Table 4.1 summarizes thebehavior of the methods applied at the problem with dimension n = 100. Allthe errors have been estimated at the final point of the integration. We canobserve that the behavior of the global error is similar for the methods of thesame order, while the geodesic based methods save CPU times and present abetter conservation of the orthogonal structure.

922 N. DEL BUONO AND L. LOPEZ
Table 4.1: Example 4.1 with n = 100, T = 5 and h = 0.1.
Method Global Error Orthogonal Error CPU timeGMEul 8.5321e-07 4.4409e-16 3.020Cay2 8.5534e-07 1.5099e-14 127.1GL1 4.1557e-07 4.9246e-07 6.980PMEul 8.2241e-07 2.2204e-16 3.180GHeun3 3.6210e-08 4.4409e-16 5.440Cay3 3.6437e-08 7.3275e-15 187.3PHeun3 3.4030e-08 1.1102e-15 5.720GRK4 1.4644e-09 3.3307e-16 5.880PRK4 1.3960e-09 2.2204e-16 5.990GL2 1.7453e-08 1.2651e-10 23.730
106
107
108
109
10−3
10−2
10−1
100
101
Flops
Glo
bal E
rror
10−2
10−1
100
10−20
10−18
10−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
Step−size
Ort
hogo
nal E
rror
Figure 4.3: Performance of second order methods applied to Example 4.2 with n = 15,p = 3, T = 50.
Example 4.2. (1 < p < n) In this example we solved the systems (1.1) for dif-ferent values of n and p. In particular, we consider a weak skew-symmetric matrixfunction of the form F (Y ) = Y AY T +(In−Y Y T )CY T , with A = skew(magic(p)),C an arbitrary n-by-n matrix and initial matrix given by the first p columns ofthe factor Q of the QR factorization of a Z = rand(n). Figure 4.3 plots the globalerror against the number of flops and the orthogonal error against the step-sizefor second order methods applied to the Example 4.2 with n = 15 and p = 3.The symbols “∗” have been used for GMEul, the symbol “×” for Cay2 and the“+” for GL1 while the dotted line with “∗” denotes the PMEul. Figure 4.4 showsthe computed order for the geodesic method GMeul and GHeun3. The approxi-mations show that both methods are asymptotically of order two for problems onVn,p. From these tests we can conclude that the proposed geodesic based methodsprovide explicit schemes which preserve the orthogonality as desired, save CPUtimes and are such that the global error behavior agrees with their theoreticalorder.

RUNGE–KUTTA TYPE METHODS BASED ON GEODESICS 923
0 1 2 3 4 5 6 7 8 9 10 111.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
i
com
pute
d or
der
Figure 4.4: Computed order for geodesic methods based on GMEul (circles) and GHeun3(stars). The x-axis denotes the step-size and the y-axis the computed order pi.
Acknowledgements.
We wish to thank Brynjulf Owren and Elena Celledoni for the useful discussionson this subject.
REFERENCES
1. J. C. Butcher, The Numerical Analysis of Ordinary Differential Equations, JohnWiley, New York, 1987.
2. M. P. Calvo, A. Iserles, and A. Zanna, Numerical solution of isospectral flows, Math.Comp., 66 (1997), pp. 1461–1486.
3. L. Dieci, D. Russell, and E. S. Van Vleck, Unitary integration and applications tocontinuous orthonormalization techniques, SIAM J. Numer. Anal. 31 (1994), pp. 261–281.
4. L. Dieci and E. S. Van Vleck, Computation of orthonormal factors for fundamentalmatrices, Numer. Math., 83 (1999), pp. 599–620.
5. F. Diele, L. Lopez, and R. Peluso, The Cayley transform in the numerical solution ofunitary differential systems, Adv. Comput. Math., 8 (1998), pp. 317–334.
6. A. Edelman, T. A. Arias, and S. T. Smith, The geometry of algorithms with orthog-onality constraints, SIAM J. Matrix Anal. Appl., 20 (1998), pp. 303-353.
7. E. Hairer, S. P. Nørsett, and G. Wanner, Solving Ordinary Differential Equations I,Nonstiff Problems, 2nd. ed., Springer-Verlag, New York, 1993.
8. A. Iserles, H. Munthe-Kaas, S. P. Nørsett, and A. Zanna, Lie group methods, ActaNumerica, 9 (2000), pp. 215–365.
9. L. Lopez and T. Politi, Applications of the Cayley approach in the numerical solutionof matrix differential systems on quadratic groups, Appl. Numer. Math., 36 (2001),pp. 35–55.
10. B. O’Neill, Elementary Differential Geometry, Academic Press, New York, 1966.
11. A. Marthinsen, H. Munthe-Kaas, and B. Owren, Simulation of ordinary differentialequations on manifolds—some numerical experiments and verifications, Modeling,Identification and Control, 18 (1997), pp. 75–88.
12. H. Munthe-Kaas, Runge–Kutta methods on Lie groups, BIT, 38 (1998), pp. 92–111.
13. B. Owren and A. Marthinsen, Runge–Kutta methods adapted to manifolds and basedon rigid frames, BIT, 39 (1999), pp. 116–142.
Copyright © 2022 FDOKUMEN