Robust sliding mode control and flux observer for induction motor using singular perturbation
11
Electrical Engineering (2007) 89:193–203 DOI 10.1007/s00202-005-0331-1 ORIGINAL PAPER A. Mezouar · M. K. Fellah · S. Hadjeri Robust sliding mode control and flux observer for induction motor using singular perturbation Received: 18 July 2005 / Accepted: 20 September 2005 / Published online: 24 February 2006 © Springer-Verlag 2006 Abstract This paper proposes a sequential methodology for designing a robust adaptive sliding mode observer for an induction motor drive using a two-time-scale approach. This approach is based on the singular perturbation theory. The two-time-scale decomposition of the original system of the observer error dynamics into separate slow and fast subsys- tems permits a simple design and sequential determination of the observer gains. In the proposed method, the stator cur- rents and rotor flux are observed on the stationary reference frame using the sliding mode concept. The control algorithm is based on the indirect field oriented sliding mode control with an on-line adaptation of the rotor resistance to keep the machine field oriented. The control–observer scheme seeks to provide an asymptotic tracking of speed and rotor flux in spite of the presence of an uncertain load torque and an unknown value of rotor resistance. The validity for practical implementation has been verified through computer simula- tions. Keywords Induction motor drives · Singular perturbation theory · Sliding mode control · Sliding mode observer List of Symbols ω,ω ∗ Electrical rotor and reference speeds v sd ,v sq Stator voltages in the synchronously rotating reference frame i sd ,i sq Stator currents in the synchronously rotating reference frame φ rd ,φ rq Rotor fluxes in the synchronously rotating reference frame A. Mezouar (B ) · M. K. Fellah · S. Hadjeri Intelligent Control and Electrical Power Systems Laboratory, Department of Electrical Engineering, Faculty of Sciences Engineering, Djillali Liabes University, 22 000 Sidi Bel Abb` es, Algeria Tel.: +213-72-320609 Fax: +213-48-474262 E-mail: a [email protected] E-mail: [email protected] E-mail: [email protected] v sα ,v sβ Stator voltages in the stationary reference frame i sα ,i sβ Stator currents in the stationary reference frame φ rα ,φ rβ Rotor fluxes in the stationary reference frame ω s ,ω sl Synchronous frequency, slip frequency ω sl = ω s − ω L s ,L r Stator and rotor inductances R s ,R r Stator and rotor resistances T s ,T r Stator and rotor time-constants α r Rotor inverse time-constant α r = R r /L r M,σ Mutual inductance and leakage factor J,p Moment of inertia of the rotor and numbers of pole pairs f Coefficient of viscous friction T e ,T L Electromagnetic and load torques S c Control sliding surface S Observer sliding surface ∧ (.), (.) ∗ Estimated and reference value of (.) • (.) t time-derivative of (.) (d(.)/dt ) 1 Introduction The control of the induction motor has attracted much atten- tion in the past few decades. One of the most significant developments in this area was the field oriented control. The orientation of the flux made it possible to act independently on the rotor flux and the electromagnetic torque through the intermediary of the components of the stator voltage [1,2]. Unfortunately, this control approach suffers from its sensitiv- ity to the motor parameter variations. When the motor param- eters change with temperature and magnetic saturation, the performance of the system will deteriorate. There are two ways to solve this problem. The first is to perform an on- line identification of the motor parameters and accordingly update the values used in the controller. The other solution
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Robust sliding mode control and flux observer for induction motor using singular perturbation

Electrical Engineering (2007) 89:193–203DOI 10.1007/s00202-005-0331-1
ORIGINAL PAPER
A. Mezouar · M. K. Fellah · S. Hadjeri
Robust sliding mode control and flux observer for induction motorusing singular perturbation
Received: 18 July 2005 / Accepted: 20 September 2005 / Published online: 24 February 2006© Springer-Verlag 2006
Abstract This paper proposes a sequential methodology fordesigning a robust adaptive sliding mode observer for aninduction motor drive using a two-time-scale approach. Thisapproach is based on the singular perturbation theory. Thetwo-time-scale decomposition of the original system of theobserver error dynamics into separate slow and fast subsys-tems permits a simple design and sequential determinationof the observer gains. In the proposed method, the stator cur-rents and rotor flux are observed on the stationary referenceframe using the sliding mode concept. The control algorithmis based on the indirect field oriented sliding mode controlwith an on-line adaptation of the rotor resistance to keep themachine field oriented. The control–observer scheme seeksto provide an asymptotic tracking of speed and rotor fluxin spite of the presence of an uncertain load torque and anunknown value of rotor resistance. The validity for practicalimplementation has been verified through computer simula-tions.
Keywords Induction motor drives · Singular perturbationtheory · Sliding mode control · Sliding mode observer
List of Symbolsω, ω∗ Electrical rotor and reference speedsvsd, vsq Stator voltages in the synchronously rotating
reference frameisd, isq Stator currents in the synchronously
rotating reference frameφrd, φrq Rotor fluxes in the synchronously rotating
reference frame
A. Mezouar (B) · M. K. Fellah · S. HadjeriIntelligent Control and Electrical Power Systems Laboratory,Department of Electrical Engineering,Faculty of Sciences Engineering,Djillali Liabes University,22 000 Sidi Bel Abbes, AlgeriaTel.: +213-72-320609Fax: +213-48-474262E-mail: a [email protected]: [email protected]: [email protected]
vsα, vsβ Stator voltages in the stationaryreference frame
isα, isβ Stator currents in thestationary reference frame
φrα, φrβ Rotor fluxes in thestationary reference frame
ωs, ωsl Synchronous frequency,slip frequency ωsl = ωs − ω
Ls, Lr Stator and rotor inductancesRs, Rr Stator and rotor resistancesTs, Tr Stator and rotor time-constantsαr Rotor inverse time-constant αr = Rr/LrM, σ Mutual inductance and leakage factorJ, p Moment of inertia of the rotor and numbers
of pole pairsf Coefficient of viscous frictionTe, TL Electromagnetic and load torquesSc Control sliding surfaceS Observer sliding surface∧(.), (.)∗ Estimated and reference value of (.)•
(.) t time-derivative of (.) (d(.)/dt)
1 Introduction
The control of the induction motor has attracted much atten-tion in the past few decades. One of the most significantdevelopments in this area was the field oriented control. Theorientation of the flux made it possible to act independentlyon the rotor flux and the electromagnetic torque through theintermediary of the components of the stator voltage [1,2].Unfortunately, this control approach suffers from its sensitiv-ity to the motor parameter variations. When the motor param-eters change with temperature and magnetic saturation, theperformance of the system will deteriorate. There are twoways to solve this problem. The first is to perform an on-line identification of the motor parameters and accordinglyupdate the values used in the controller. The other solution
Used Distiller 5.0.x Job Options
This report was created automatically with help of the Adobe Acrobat Distiller addition "Distiller Secrets v1.0.5" from IMPRESSED GmbH. You can download this startup file for Distiller versions 4.0.5 and 5.0.x for free from http://www.impressed.de. GENERAL ---------------------------------------- File Options: Compatibility: PDF 1.2 Optimize For Fast Web View: No Embed Thumbnails: No Auto-Rotate Pages: No Distill From Page: 1 Distill To Page: All Pages Binding: Left Resolution: [ 600 600 ] dpi Paper Size: [ 595 842 ] Point COMPRESSION ---------------------------------------- Color Images: Downsampling: Yes Downsample Type: Bicubic Downsampling Downsample Resolution: 150 dpi Downsampling For Images Above: 225 dpi Compression: Yes Automatic Selection of Compression Type: Yes JPEG Quality: Medium Bits Per Pixel: As Original Bit Grayscale Images: Downsampling: Yes Downsample Type: Bicubic Downsampling Downsample Resolution: 150 dpi Downsampling For Images Above: 225 dpi Compression: Yes Automatic Selection of Compression Type: Yes JPEG Quality: Medium Bits Per Pixel: As Original Bit Monochrome Images: Downsampling: Yes Downsample Type: Bicubic Downsampling Downsample Resolution: 600 dpi Downsampling For Images Above: 900 dpi Compression: Yes Compression Type: CCITT CCITT Group: 4 Anti-Alias To Gray: No Compress Text and Line Art: Yes FONTS ---------------------------------------- Embed All Fonts: Yes Subset Embedded Fonts: No When Embedding Fails: Warn and Continue Embedding: Always Embed: [ ] Never Embed: [ ] COLOR ---------------------------------------- Color Management Policies: Color Conversion Strategy: Convert All Colors to sRGB Intent: Default Working Spaces: Grayscale ICC Profile: RGB ICC Profile: sRGB IEC61966-2.1 CMYK ICC Profile: U.S. Web Coated (SWOP) v2 Device-Dependent Data: Preserve Overprint Settings: Yes Preserve Under Color Removal and Black Generation: Yes Transfer Functions: Apply Preserve Halftone Information: Yes ADVANCED ---------------------------------------- Options: Use Prologue.ps and Epilogue.ps: No Allow PostScript File To Override Job Options: Yes Preserve Level 2 copypage Semantics: Yes Save Portable Job Ticket Inside PDF File: No Illustrator Overprint Mode: Yes Convert Gradients To Smooth Shades: No ASCII Format: No Document Structuring Conventions (DSC): Process DSC Comments: No OTHERS ---------------------------------------- Distiller Core Version: 5000 Use ZIP Compression: Yes Deactivate Optimization: No Image Memory: 524288 Byte Anti-Alias Color Images: No Anti-Alias Grayscale Images: No Convert Images (< 257 Colors) To Indexed Color Space: Yes sRGB ICC Profile: sRGB IEC61966-2.1 END OF REPORT ---------------------------------------- IMPRESSED GmbH Bahrenfelder Chaussee 49 22761 Hamburg, Germany Tel. +49 40 897189-0 Fax +49 40 897189-71 Email: [email protected] Web: www.impressed.de
Adobe Acrobat Distiller 5.0.x Job Option File
<< /ColorSettingsFile () /AntiAliasMonoImages false /CannotEmbedFontPolicy /Warning /ParseDSCComments false /DoThumbnails false /CompressPages true /CalRGBProfile (sRGB IEC61966-2.1) /MaxSubsetPct 100 /EncodeColorImages true /GrayImageFilter /DCTEncode /Optimize false /ParseDSCCommentsForDocInfo false /EmitDSCWarnings false /CalGrayProfile () /NeverEmbed [ ] /GrayImageDownsampleThreshold 1.5 /UsePrologue false /GrayImageDict << /QFactor 0.9 /Blend 1 /HSamples [ 2 1 1 2 ] /VSamples [ 2 1 1 2 ] >> /AutoFilterColorImages true /sRGBProfile (sRGB IEC61966-2.1) /ColorImageDepth -1 /PreserveOverprintSettings true /AutoRotatePages /None /UCRandBGInfo /Preserve /EmbedAllFonts true /CompatibilityLevel 1.2 /StartPage 1 /AntiAliasColorImages false /CreateJobTicket false /ConvertImagesToIndexed true /ColorImageDownsampleType /Bicubic /ColorImageDownsampleThreshold 1.5 /MonoImageDownsampleType /Bicubic /DetectBlends false /GrayImageDownsampleType /Bicubic /PreserveEPSInfo false /GrayACSImageDict << /VSamples [ 2 1 1 2 ] /QFactor 0.76 /Blend 1 /HSamples [ 2 1 1 2 ] /ColorTransform 1 >> /ColorACSImageDict << /VSamples [ 2 1 1 2 ] /QFactor 0.76 /Blend 1 /HSamples [ 2 1 1 2 ] /ColorTransform 1 >> /PreserveCopyPage true /EncodeMonoImages true /ColorConversionStrategy /sRGB /PreserveOPIComments false /AntiAliasGrayImages false /GrayImageDepth -1 /ColorImageResolution 150 /EndPage -1 /AutoPositionEPSFiles false /MonoImageDepth -1 /TransferFunctionInfo /Apply /EncodeGrayImages true /DownsampleGrayImages true /DownsampleMonoImages true /DownsampleColorImages true /MonoImageDownsampleThreshold 1.5 /MonoImageDict << /K -1 >> /Binding /Left /CalCMYKProfile (U.S. Web Coated (SWOP) v2) /MonoImageResolution 600 /AutoFilterGrayImages true /AlwaysEmbed [ ] /ImageMemory 524288 /SubsetFonts false /DefaultRenderingIntent /Default /OPM 1 /MonoImageFilter /CCITTFaxEncode /GrayImageResolution 150 /ColorImageFilter /DCTEncode /PreserveHalftoneInfo true /ColorImageDict << /QFactor 0.9 /Blend 1 /HSamples [ 2 1 1 2 ] /VSamples [ 2 1 1 2 ] >> /ASCII85EncodePages false /LockDistillerParams false >> setdistillerparams << /PageSize [ 576.0 792.0 ] /HWResolution [ 600 600 ] >> setpagedevice

194 A. Mezouar et al.
is to use a robust control algorithm (i.e., insensitive to themotor parameter variations).
In the last years, the sliding mode technique has beenwidely studied and developed for the control and state esti-mation problems since the studies of Utkin [3]. This con-trol technique allows a good steady state and good dynamicbehavior in the presence of system parameters’ variation anddisturbances [4–6]. Several methods of applying the slidingmode control to induction motor drives have been presented[4–7]. All of these methods have a common feature: the anal-ysis and design of the sliding mode controller are based onthe mathematical model of the induction motor as used inindirect vector control.
Most control schemes for the induction motor requireaccurate information on state variables and parameters.There-fore, fluxes are usually estimated with measured stator cur-rents, stator voltages, and motor speed by using the currentmodel for rotor flux or voltage model for stator flux [8,9].However, since the estimated fluxes are basically dependenton the motor model, a variation in the parameters inevitablypropagates to the flux estimated error.
Among these parameters, rotor resistance varies mainlydepending on the temperature. One of the solutions to reducethe estimation error is to design an adaptive observer compen-sating for the variation. To overcome this problem, numerouson-line identification schemes dealing with rotor resistancehave been proposed. Some researches have proposed var-ious induction motor drives with rotor resistance or rotortime-constant identification [10–16] to produce better con-trol performance, such as a model reference adaptive system,Luenberger observer, and the extended kalman filter.
On the other hand, the singular perturbation theory pro-vides the mean to decompose two-time-scale systems intoslow and fast subsystems of lower order described in separatetime-scales, which greatly simplify their structural analysisand any subsequent control design. Then, the control (and/orobserver) design may be carried out for each lower order sub-system, and the combined results yield a composite control(and/or observer) for the original system [17–19].
So, the idea of combining the singular perturbation theoryand the sliding mode technique constitutes a good possibilityto achieve classical control objectives for systems having un-modeled or parasitic dynamics and parametric uncertainties[20–22].
In this paper, an adaptive sliding mode observer is devel-oped for the simultaneous estimation of the rotor flux com-ponents and of the rotor resistance for an induction motorunder the assumption that only the stator currents and themotor speed are available for measurement. Singular per-turbation theory is used for having a sequential and simpledesign of this observer. In addition, an adaptive law based onthe Lyapunov stability theory estimates the rotor resistance.
This paper is organized as follows: the main results of thetwo-time-scales approach and the design of the general two-time-scales sliding mode observer are presented in Sects. 2and 3, respectively. In Sect. 4, we briefly review the indirectfield oriented sliding mode control of the induction motors.
The design of a two-time-scale sliding mode observer forthe induction motor model is presented in Sect. 5. In thatsection, a study of the stability analysis of this observer ismade via the singular perturbation method with the slidingmode concept and the Lyapunov stability theory. In Sect. 6,and through simulation, the studied observer is associated tothe indirect field oriented sliding mode control where rotorfluxes and rotor resistance are replaced by those delivered bythe observer. Finally, in Sect. 7, we provide some commentsand conclusions.
2 Two-time-scale approach
The two-time-scale approach, based on the singular pertur-bation theory, can be applied to systems where the state vari-ables can be split into two sets, one having “fast” dynamics,and the other having “slow” dynamics. The difference be-tween the two sets of dynamics can be distinguished by theuse of a small multiplying scalar ε. Generally, the scalingparameter ε is the speed ratio of the slow versus fast phe-nomena.
If the slow states are expressed in the t time-scale, then,the fast ones will be in the τ time-scale defined byτ = (t − t0)/ε, (1)where t0 is the initial time.
The reader is referred to [17] and [18] for the generaltheory on singular perturbation.
2.1 Nonlinear singularly perturbed systems
Let us consider the following class of nonlinear singularlyperturbed systems described by the so-called standard singu-larly perturbed form:d
dtx = fx(x, z, u, t, ε), x(t0) = x0,
εd
dtz = fz(x, z, u, t, ε), z(t0) = z0, (2)
where x ∈ �n is the slow state, z ∈ �m is the fast state,u ∈ �p is the control input and ε is a small positive parame-ter such that ε ∈ [0, 1]. fx and fz are assumed to be boundedand analytic real vector fields, and we consider a vector ofmeasurement that is linearly related to the fast state vector asy = z, y ∈ �m. (3)
2.2 Slow reduced subsystem
In the limiting case, as ε → 0 in (2), the asymptotically stablefast transient decays ‘instantaneously’, leaving the reduced-order model in the t time-scale defined by the quasi-steadystates xs(t) and zs(t):d
dtxs = fx(xs, zs, us, t, 0), (4)
0 = fz(xs, zs, us, t, 0), (5)and the substitution of a root of (5)

Robust sliding mode control and flux observer for induction motor using singular perturbation 195
zs = h(xs, us, t), (6)
into (4) yields a reduced model
d
dtxs = fx(xs, h(xs, us, t), us, t, 0), xs(t0) = x0, (7)
where the index (s) indicates that the associated quantitybelongs to the system without ε.
2.3 Fast reduced subsystem
The fast dynamic subsystem (also known as the boundarylayer system) denoted by zf , which represents the derivationof zs from z, is obtained by transforming the slow time-scalet to the fast time-scale τ = (t − t0)/ε. System of Eq. (2)becomes
d
dτx = ε fx(x, z, u, ετ + t0),
d
dτz = fz(x, z, u, ετ + t0). (8)
Introducing the derivation of zs from z, i.e., zf = z − zs ,and again examining the limit as ε → 0, it yields
d
dτzf = fz
(x0, zs(0) + zf (τ ), uf (τ ), t0
), (9)
with
zf (0) = z0 − zs(0),
where uf = u − us is the fast part of the input control.
2.4 Two-time-scale states approximation
Fast and slow variables given by (7) and (9) can be com-bined into a composite structure in order to approximate theoriginal states of (2) as given in [17]:
x = xs(t) + O(ε),
z = zs(t) + zf (τ ) + O(ε). (10)
3 Two-time-scale sliding mode observer
Consider the above continuous nonlinear singularly perturbedsystem of Eq. (2) which is given by{
x = fx (x, z, u, ε)
ε z = fz (x, z, u, ε).(11)
In addition, it is assumed that the above system is observ-able. Consequently, the observer design may be consideredfor the state observation of slow variables from the measure-ment of fast variables [20–22].
3.1 Sliding mode observer design
By structure, an observer based on the sliding mode approachis very similar to the standard full order observer with replace-ment of the linear corrective terms by a discontinuous func-tion [5–7].
The corresponding sliding mode observer for the systemof (11) can be written as a replica of the system with anadditional nonlinear auxiliary input term as follows:{ ˙x = fx(x, z, u, ε) + Gx�s
ε ˙x = fz(x, z, u, ε) + Gz�s,(12)
where �s = sign(S(y, y)
)is the switching function, and Gx
and Gz are the observer gains with (n × m) and (m × m)dimensions, respectively, to be determined.
The sliding surface function S can be chosen as a linearfunction of (y − y) as given in [7], so
S(y, y) = (y − y), (13)
where (y− y)T = [ (y1 − y1) (y2 − y2) · · · (ym − ym)]
and is a (n × m) gain matrix to be specified.
The error dynamics is calculated by subtracting (12) from(11):{
ex = fx(x, z, u, ε) − fx(x, z, u, ε) − Gx�s
ε ez = fz(x, z, u, ε) − fz(x, z, u, ε) − Gz�s,(14)
or{
ex = fx − Gx�s
ε ez = fz − Gz�s,(15)
where
ex = x − x,
ez = z − z,
fx = fx(x, z, u, ε) − fx(x, z, u, ε),
fz = fz(x, z, u, ε) − fz(x, z, u, ε).
The observer gains design can be based on the sequentialapplication of the resulted subsystems of (15) by applying thesingular perturbation methodology. We first need to analyzethe fast variables tracking properly using the so-called reach-ing condition (based on measurable state variables), and,thereafter, the slow variables’ asymptotic-convergence (forinaccessible state variables).
3.2 Stability analysis in the fast time-scale
For the fast error dynamic subsystem, the associated time-scale is defined by τ = (t − t0)/ε; then (15) can be trans-formed into
dex
dτ= ε(fx − Gx�s)
dez
dτ= fz − Gz�s.
(16)

196 A. Mezouar et al.
Setting ε = 0 in (16), it yields
dez
dτ= fz − Gz�s, (17)
with
dex
dτ= 0.
In this time-scale, the stability analysis involves the deter-mination of the observer gain Gz so that in this time-scale(τ ), the surface S(τ) = 0 is attractive.
It can be shown that when the sliding mode occurs onS(τ), the equivalent value of the discontinuous observer aux-iliary input is found by solving Eq. (17) for Gz�s after insur-ing a value of zero for dez
/dτ such as
Gz�s = fz,
and the equivalent switching vector is obtained as
�s = G−1z fz. (18)
3.3 Stability analysis in the slow time-scale
The slow error dynamic subsystem can be found by consid-ering ε = 0 in (15); so
dex
dt= fx − Gx�s, (19)
0 = fz − Gz�s. (20)
From (20), the equivalent switching vector can be re-found as
�s = G−1z fz.
Therefore, by an appropriate choice of Gx , the desiredrate of convergence ex → 0 can be obtained.
4 Sliding mode control review of the induction motor
Assuming that the induction motor model system is control-lable and observable, the sliding mode control consists of twophases [4,5]:
• designing an equilibrium surface, called the sliding surface,such that any state trajectory of the plant restricted to thesliding surface is characterized by the desired behavior;and
• designing a discontinuous control law to force the systemto move on the sliding surface in a finite time.
4.1 Dynamic model of induction machine
Under the assumptions of linearity of the magnetic circuitand neglecting iron losses, the state space model of the three-
phase induction motor expressed in the synchronously rotat-ing reference frame (d − q) is
d
dtisd = − Rλ
σLsisd + ωsisq + µ
σLs
1
Trφrd + µ
σLsωφrq + 1
σLsvsd
d
dtisq = −ωsisd − Rλ
σLsisq − µ
σLsωφrd + µ
σLs
1
Trφrq + 1
σLsvsq
d
dtφrd = M
Trisd − 1
Trφrd + ωslφrq
d
dtφrq = M
Trisq − ωslφrd − 1
Trφrq
dω
dt= p
J(Te − TL) − f
Jω,
(21)
with the constants defined as follows:
Rλ = Rs + M2
L2r
Rr, σ = 1 − M2
LsLr,
µ = M
Lr,
where the state variables are the stator currents (isd, isq), therotor fluxes (φrd, φrq) and the rotor speed ω, and the statorvoltages (vsd, vsq) and slip frequency ωsl are the control vari-ables. The electromagnetic torque expressed in terms of thestate variables is
Te = pM
Lr(φrd isq − φrqisd). (22)
4.2 Rotor field oriented induction motor model
Among the various sliding mode control solutions for theinduction motor proposed in the literature, the one based onindirect field orientation can be regarded as the simplest one.Its purpose is to directly control the inverter switching by theuse of two switching surfaces.
The induction motor equations in the synchronously rotat-ing reference frame (d − q), oriented in such a way that therotor flux vector points into d-axis direction, are the follow-ing:
d
dtω = f1
d
dtφrd = f2
d
dtisd = f3 + 1
σLsvsd
d
dtisq = f4 + 1
σLsvsq
(23)
with
ωsl = M
Tr
isq
φrd, (24)
where
f1 = kcφrd isq − p
JTL − f
Jω
f2 = MTr
isd − 1Tr
φrd
f3 = − Rλ
σLsisd + ωsisq + µ
σLs
1Tr
φrd
f4 = −ωsisd − Rλ
σLsisq − µ
σLsωφrd,
(25)

Robust sliding mode control and flux observer for induction motor using singular perturbation 197
and
kc = p2M
JLr.
4.3 Speed and flux sliding mode controller
Using the reduced nonlinear induction motor model ofEq. (23), it is possible to design both a speed and a fluxsliding mode controller. Let us define the sliding surfaces
Sc1 = Sc1(ω) = λω(ω∗ − ω) + d
dt(ω∗ − ω)
Sc2 = Sc2(φr) = λφ(φ∗r − φdr) + d
dt(φ∗
r − φdr),
(26)
where λω > 0, λφ > 0, ω∗ and φ∗r are the reference speed
and the reference rotor flux, respectively.To determine the control law that leads the sliding func-
tions (26) to zero in finite time, one has to consider the dynam-ics of Sc = (Sc1, Sc2)
T, described by
Sc = F + D VS, (27)
where
F =
(ω∗+λωω∗+ f
JTL
)+(−λω + f
J
)f1−kc(isqf2 + φrdf4)
(φ∗r + λφφ∗
r ) +(−λφ + 1
Tr
)f2 − M
Trf3
,
D = 1
σLs
kcφrd 0
0 M/Tr
, VS =[
vsq
vsd
]
.
If the Lyapunov theory of stability is used to ensure thatSc is attractive and invariant, the following condition has tobe satisfied
STc · Sc < 0. (28)
So, it is possible to choose the switching control law forstator voltages as follows:
vsq
vsd
= −D−1F − D−1
Kω 0
0 Kφ
[
sign(Sc1)
sign(Sc2)
]
, (29)
where
Kω > 0, Kφ > 0. (30)
Proof 1 see AppendixThe sliding mode causes drastic changes in the control
variables introducing high frequency disturbances. To reducethe chattering phenomenon, a saturation function sat(Sc) in-stead of the switching one sign(Sc) has been introduced
sat(Sc i ) ={
Sc i
δiif |(Sc i )| ≤ δi
sign(Sc i ) if |(Sc i )| > δi,(31)
where δi > 0 and i = 1, 2. ��
Remark 1
• From the above control law of Eq. (29), it can be seenthat the implementation of these algorithms requires loadtorque and rotor flux estimations since stator currents, sta-tor voltages and rotor speed are available by measures.In the next section, we focus on by a robust estimationof rotor flux. The estimated load torque can be easilyobtained by using the mechanical equation of the motormodel with estimated rotor fluxes and measured statorcurrents.
• In the following, we assume to operate with constant ref-erence speed, constant reference rotor flux and constantload torque, so that ω∗ = 0, φ∗
r = 0 and TL = 0.
5 Two-time-scale sliding mode observer design for theinduction motor
Consider only the first four equations of the induction motormodel of Eq. (21) in which the speed motor will be con-sidered as a time-varying parameter. The objective of thestudied observer is to estimate the unmeasured rotor fluxes.The sliding mode observer design procedure comprises ofthe following two steps [7]:
• designing an equilibrium surface such that the estimationerror trajectories restricted to this surface have the desiredstable dynamics; and
• determining the observer gains to drive the estimationerror trajectories to the sliding surface and maintain it onthe set.
5.1 Dynamic model of the induction motor
Using the model of Eq. (21), the state space model of theinduction motor, without mechanical equation, expressed inthe fixed stator reference frame (α, β) is
d
dtisα = − Rλ
σLsisα+ µ
σLs
1
Trφrα+ µ
σLsωφrβ + 1
σLsvsα
d
dtisβ = − Rλ
σLsisβ − µ
σLsωφrα+ µ
σLs
1
Trφrβ + 1
σLsvsβ
d
dtφrα = M
Trisα − 1
Trφrα − ωφrβ
d
dtφrβ = M
Trisβ + ωφrα − 1
Trφrβ.
(32)
Voltage, current and flux transformation from the syn-chronous to the stationary reference frame and vice versa ismade as [1,2]:(
xα
xβ
)
=(
cos(θs) − sin(θs)
sin(θs) cos(θs)
)(xd
xq
)
, (33)
and(
xd
xq
)=(
cos(θs) sin(θs)− sin(θs) cos(θs)
)(xα
xβ
), (34)

198 A. Mezouar et al.
where x = v, i, φ, and θs is the angular displacement of thesynchronously rotating reference frame.
5.2 Singularly perturbed induction motor model
Based on the well-known of the induction machine modeldynamics [20,21], the slow variables are (φrα, φrβ) and thefast variables are (isα, isβ). Therefore, the corresponding stan-dard singularly perturbed form with ε = σ Ls,x = (φrα, φrβ)T
and z = (isα, isβ)T is
εz1 = −Rλz1 + µαrx1 + µωx2 + vsα
εz2 = −Rλz2 − µωx1 + µαrx2 + vsβ
x1 = Mαrz1 − αrx1 − ωx2
x2 = Mαrz2 + ωx1 − αrx2,
(35)
where
αr = 1
Tr= Rr
Lr, Rλ = Rs + M µ αr.
Remark 2
• All parameters of the induction motor will be consideredas constant except for the rotor resistance. The rotor resis-tance Rr will be treated as an uncertain parameter with Rrnas its nominal value. An additional assumption is that Rrvaries slowly (practical assumption), so that Rr ≈ 0.
• The motor speed will be treated as a bounded time-varyingvariable.
5.3 Singularly perturbed sliding mode observer
From Sect. 3, the observer equations of the above modelbased on the sliding mode concept are the following
ε ˙z1 = −Rλz1 + µαrx1 + µωx2 + vsα + Gz1�s
ε ˙z2 = −Rλz2 − µωx1 + µαrx2 + vsβ + Gz2�s
˙x1 = Mαrz1 − αrx1 − ωx2 + Gx2�s
˙x2 = Mαrz2 + ωx1 − αrx2 + Gx2�s,
(36)
where αr = αr + αr and Rλ = Rs + M µ αr, in which
αr = Rr
Lr= Rr
Lr+ Rr
Lr, (37)
where xi and zj are the estimation of xi and zj for i ∈ {1, 2}and j ∈ {1, 2} and Gx1, Gx2, Gz1 and Gz2 are the observergains.
The switching vector �s is chosen as
�s =[
sign (s1)sign (s2)
], (38)
with
S =[
s1s2
]=[
z1 − z1z2 − z2
]=[
ez1
ez2
]. (39)
Setting exi= xi − xi and ezj
= zj − zj for i ∈ {1, 2} andj ∈ {1, 2}, and using Eqs. (35) and (36), the estimation errordynamics are
ε ez1 =µ⌊(+αrex1 +ωex2)+αr(Mz1−x1)
⌋−Gz1�s
ε ez2 =µ[(−ωex1 +αrex2)+αr(Mz2−x2)
]−Gz2�s
ex1 =−[(+αrex1 +ωex2)+αr(Mz1 − x1)]− Gx2�s
ex2 =−[(−ωex1 + αrex2) + αr(Mz2−x2)]− Gx2�s.
(40)
Equation (40) can be expressed in a matrix form as
ε ez = µ[(αrI − ωJ)ex + αr(Mz − x)
]− Gz�s
ex = −[(αrI − ωJ)ex + αr(Mz − x)]− Gx�s,
(41)
where I is the (2 × 2) identity matrix and J is the (2 × 2)skew symmetric matrix defined by
J =[
0 −1
1 0
]
.
Exploiting the time-properties of the multi-time-scalessystem of Eqs. (35) and (36), ez = (ez1, ez2)
T are the fastvariables and ex = (ex1, ex2)
T are the slow variables. There-fore, the stability analysis of the above system involves thedetermination of Gz1 and Gz2 to ensure the attractiveness ofthe sliding surface S(τ) = 0 in the fast time-scale. Thereaf-ter Gx1 and Gx2 are determined, such that the reduced-ordersystem obtained when S(τ) ∼= S(τ ) ∼= 0 is locally stable.
5.4 Fast reduced-order error dynamics
From the singular perturbation theory, the fast reduced-ordersystem of the observation errors can be obtained by introduc-ing the fast time-scale τ = (t − t0)/ε. The system of Eq. (41)gives
d
dτez =µ
[(αrI − ωJ)ex +αr(Mz − x)
]− Gz�s
d
dτex =−ε
[(αrI −ωJ)ex +αr(Mz − x)
]−ε Gx�s.
(42)
Considering ε = 0 in the above system, it yields
d
dτez = µ
[(αrI − ωJ)ex + αr(Mz − x)
]− Gz�s, (43)
d
dτex = 0. (44)
By an appropriate choice of the observer gain terms Gz1
and Gz2 , sliding mode occurs in (43) along the manifoldez = 0.

Robust sliding mode control and flux observer for induction motor using singular perturbation 199
Proposition 1 Assume that ex1 and ex2 are bounded in thistime (practical assumption) and that ω varies slowly, andconsider the system of (43) with the following observer gainsmatrix
Gz =[
η1 0
0 η2
]
. (45)
The attractivity condition of the sliding surface S(τ) = 0 isgiven by
ST
(dS
dτ
)< 0. (46)
In this time-scale dx/dτ = 0 and dex/dτ = 0. So,
ST d
dτS =ST
[µ[(αrI −ωJ)ex +αr(Mz − x)
]− Gz�s
],
(47)
or
ST d
dτS = −s1
[η1sign(s1)
−µ[αrex1 + ωex2 + αr(Mz1 − x1)
] ]
−s2[η2sign(s2)
−µ[αrex2 − ωex1 + αr(Mz2 − x2)
] ]. (48)
Taking into account that all states and parameters of theinduction motor are bounded, there exists sufficiently largepositive numbers η1 and η1 such that
ST
(dS
dτ
)< 0.
Thus, (46) is verified with the set defined by the followinginequalities
η1 >∣∣ µ[αrex1 + ωex2 + αr(Mz1 − x1)
] ∣∣
η2 >∣∣ µ[αrex2 − ωex1 + αr(Mz2 − x2)
] ∣∣. (49)
Once the trajectory reaches the sliding surface S = ez =0, the system in the sliding mode behaves as if Gz�s is re-placed by its equivalent value (Gz�s)eq, which can be calcu-lated from the subsystem (43) assuming ez = 0 and ez = 0.
5.5 Slow reduced-order error dynamics
For slow error dynamics (when S ≡ 0), we use the system(41) and set ε = 0. So, we can write
0 = µ[(αrI − ωJ)ex + αr(Mz − x)
]− Gz�s, (50)
ex = −[(αrI − ωJ)ex + αr(Mz − x)]− Gx�s. (51)
From Eq. (50), we can obtain the equivalent switchingvector �s as
�s = µ G−1z
[(αrI − ωJ)ex + αr(Mz − x)
]. (52)
In this time-scale, we can replace �s by �s in Eq. (51).Hence, subsystem (51) can be written as the following system
ex = −K[(αrI − ωJ)ex + αr(Mz − x)
], (53)
with
K = (I + µ Gx G−1z ) (54)
in which we assume that Gx is a diagonal matrix such that
K = diag(k, k). (55)
5.6 Stability analysis of the slow reduced-order errordynamics
We chose the positive-definite candidate Lyapunov functionas follows
W = 1
2
{(ex)
Tex + 1
q(αr)
2
}, (56)
where q > 0.The t time-derivative of W can be expressed as
W = −kαr(ex)Tex
+αr
{1
q
d
dtαr + k(ex)
T (Mz − x)
}. (57)
The condition for (57) to be negative-definite will be sat-isfied if
k > 0 (58)
and1
q
d
dtαr + k(ex)
T(Mz − x) = 0. (59)
With the assumption of Eq. (59), it yieldsd
dtαr = −q k (ex)
T(Mz − x). (60)
Equation (60) provides an adaptive law to estimate the valueof the rotor resistance. Unfortunately, the flux errors (ex) arenot available. So, by defining the function
E = ε ez + µ ex, (61)
and by using Eq. (41), we obtain
E = −(Gz + µ Gx)�s. (62)
It is possible to reconstruct the estimated fluxes error as
ex = 1
µ(E − ε ez). (63)
Using the fluxes error estimation of Eq. (63), the adaptivelaw of Eq. (60) becomes feasible:d
dtαr = − q
µk (E − ε ez)
T (Mz − x). (64)
Table 1 Nominal parameters of the induction motor
1.5 kW 220/380V 3.68/6.31A
N = 1420 rpm Rs = 4.85 � Rr = 3.805 �Ls = 0.274 H Lr = 0.274 H M = 0.258 Hp = 2 J = 0.031 Kg m2 f = 0.00113 N m s/rd

200 A. Mezouar et al.
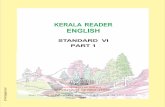
Fig. 1 Sensitivity of the system performance to changes on the rotor resistance: first by 50% and next by 100% with φ∗rd = 1.0 Wb. a Reference
signals of rotor resistance (solid) and load torque (dotted), b reference (dotted) and actual (solid) speed, c rotor fluxes estimation: φrd (solid)and φrq (dotted), d rotor fluxes error: eφrd (solid) and eφrq (dotted), e reference (dotted) and estimated (solid) rotor resistance, f estimated loadtorque
6 Simulation results
The proposed estimation algorithm has been simulated for theinduction motor whose data are given in Table 1.As a control-ler, the indirect field oriented sliding mode control is used. Itis assumed that the load torque is unknown and that all theparameters are known and constant except for the rotor resis-
tance which will change during the operating motor. For thisclosed loop system, the rotor flux feedback signal and rotorresistance are replaced with the estimated corresponding val-ues of Eqs. (36) and (64), respectively. With the assump-tion that all states including rotor flux and all parameters areknown, the rotor flux and rotor resistance estimated by theproposed method are compared to their actual values.

Robust sliding mode control and flux observer for induction motor using singular perturbation 201
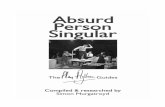
Fig. 2 Sensitivity of the system performance to change in the external load with Rr = 1.25Rrn and φ∗rd = 1.0 Wb. a Real (dotted) and estimated
(solid) load torque, b reference (dotted) and actual (solid) speed, c load torque (dotted) and motor torque (solid), d reference (dotted) and estimated(solid) rotor resistance, e rotor fluxes estimation: φrd (solid) and φrq (dotted), f rotor fluxes error: eφrd (solid) and eφrq (dotted)
The sliding mode control and observer parameters werechosen as
λω = 120, λφ = 120, Kω = 80, Kφ = 80,
δ1 = δω = 0.5, δ2 = δφ = 0.5,
Gz = diag(50, 50), Gx = diag(5, 5) and q = 700.
The results are summarized in this section.
6.1 Rotor resistance variation effect
This test involves in increasing the rotor resistance.As shownin Fig. 1a, the motor is started with its nominal rotor resis-tance value Rrn = 3.805 �. Then, the rotor resistance ofthe motor model is suddenly set to 1.5Rrn at t = 1 s, andto 2Rrn at t = 2 s. The reference speed and reference rotorflux are maintained at 1400 rpm and 1.0 Wb, respectively.

202 A. Mezouar et al.
Fig. 3 Sensitivity of the system performance to change in the reference speed with Rr = 1.25Rrn and φ∗rd = 1.0 Wb. a Reference (dotted) and
actual (solid) speed, b reference (dotted) and estimated (solid) rotor resistance, c estimated rotor fluxes: φrd (solid) and φrq (dotted), d rotor fluxeserror: eφrd (solid) and eφrq (dotted)
Figure 1b shows the speed response of the motor; a very goodspeed regulation is obtained. Fig. 1c, d shows the estimatedrotor fluxes and the error between them and the actual val-ues. High flux tracking and good rotor flux orientation can beobserved. Figure 1e compares the estimated and actual rotorresistance.After a short convergence time, the estimated rotorresistance reaches the actual value. Figure 1f shows the esti-mated load torque. These results show that the sliding modecontrol with the proposed observer can track the referencecommand accurately and quickly. It is important to noticethat the q-axis rotor flux error is greater than the d-axis rotorflux error in the transient state. This report is very clear sincethe rotor resistance estimation error (in transient state) prop-agates on the slip frequency which directly affects the rotorfield orientation [see Eq. (24)].
6.2 Performance under external load disturbances
The sensitivity of the observer to external load disturbancesis also investigated in this study. The objective is to followthe speed and rotor flux references in spite of disturbancesin the load torque with a constant error (of +25%) in therotor resistance value. This practical error is made to test theefficacy of the adaptive law of Eq. (64). Figure 2a shows theactual and the estimated applied load torque. Due to the rotor
inertia, the estimated load torque presents negative values inthe start-up motor and later follows exactly the actual signal.Figure 2b presents a very good performance for speed regu-lation. Figure 2c shows the motor and the real load torque.Figure 2d presents the actual and estimated rotor resistance.Figure 2e, 2f show that the completely decoupled control ofrotor flux and torque is obtained and that the observer is veryrobust to external load disturbances.
6.3 Performance over wide speed range
In this case, we consider the speed tracking performancesfor a wide variation range of reference speed. The rotor fluxreference is kept at its rated value of 1.0 Wb and the motoroperates without external load disturbances. The observerperformance for speed tracking is presented in Fig. 3a. Theactual and the estimated rotor resistances are shown in Fig. 3b.At very low speed, the rotor resistance error is in the orderof 0.7%. On the other hand, the rotor resistance estimation isvery good at a high speed. Figure 3d, 3c show the estimationof the rotor fluxes and the error between the estimated rotorfluxes and the actual rotor fluxes, respectively. These resultsprove that the speed tracking is quite good and that the rotorfield is always well-oriented.

Robust sliding mode control and flux observer for induction motor using singular perturbation 203
7 Conclusion
A robust sliding mode rotor flux observer with an on-lineadaptation of the rotor resistance for a 1.5 kW induction mo-tor has been derived using the singular perturbation theory.Following the procedure presented in this paper, the con-ditions for convergence are established through Lyapunov’stheory. The accurate rotor flux obtained by this algorithm hasbeen applied to indirect field oriented sliding mode control.The efficiency of the control–observer structure scheme withthe rotor resistance estimation has been successfully verifiedby simulation. The proposed sliding mode observer-basedcontrol demonstrated very good performance, especially; itis robust under rotor resistance variation, external load distur-bances and speed tracking. In this paper, it has been shownthat the use of a sliding mode observer with slow and fastparts, based on the singular perturbation approach, and slid-ing mode control, is effective for solving the control problemof induction motors. Future work is oriented at experimentalvalidation.
Appendix (Proof 1)
Let consider the Lyapunov function
V = 1
2ST
c Sc. (65)
Its time-derivative is
V = STc Sc. (66)
Using equations (27) and (29), we can rewrite (66) as
V = STc
F + D
−D−1F − D−1
Kω 0
0 Kφ
sign(Sc)
or
V = −STc
Kω 0
0 Kφ
sign(Sc)
. (67)
Then, the manifold Sc is attractive if V < 0, i. e.,{
Kω > 0
Kφ > 0.
References
1. Leonhard W (1996) Control of electrical drives. Springer, BerlinHeidelberg Newyork
2. Vas P (1990) Vector control of AC machines. Oxford UniversityPress, London, UK
3. Utkin VI (1977) Variable structure systems with sliding modes.IEEE Trans Automat Contr AC-22:212–222
4. Sabanovic A, Bilalovic F (1989) Sliding-mode control of ac drives.IEEE Trans Ind Appl IA-25:70–75
5. Utkin VI (1993) Sliding mode control design: principles and appli-cations to electric drives. IEEE Trans Ind Electron 40:23–36
6. Chan CC, Wang HQ (1996) New scheme of sliding mode con-trol for high performance induction motor drives. IEE Proc ElectrPower Appl 43:177–185
7. Benchaib A, Rachid A, Audrezet E, Tadjine M (1999) Real-timesliding-mode observer and control of an induction motor. IEEETrans Ind Electron 46:128–138
8. Verghese GC, Sanders SR (1988) Observers for flux estimation ininduction machines. IEEE Trans Ind Electron 35:85–94
9. Santisteban JA, Stephan RM (2001) Vector control methods forinduction machines: an overview. IEEE Trans Educ 44:170–175
10. Toliyat HA, Levi E, Raina M (2003) A review of RFO inductionmotor parameter estimation techniques. IEEE Trans Energy Con-version 18:271–283
11. Jansen PL, Lorenz RD, Novotny DW (1994) Observer-based directfield orientation: analysis and comparison of alternative methods.IEEE Trans Ind Appl 30:945–953
12. Wade S, Dunnigan MW, Williams BW (1997) Modeling and sim-ulation of induction machine vector control with rotor resistanceidentification. IEEE Trans Power Electron 12:495–505
13. Seok HJ, Kwang KO, Jin YC (2002) Flux observer with onlinetuning of stator and rotor resistances for induction motors. IEEETrans Ind Electron 49:653–664
14. Hasegawa M, Furutani S, Doki S, Okuma S (2003) Robust vectorcontrol of induction motors using full-order observer in consider-ation of core loss. IEEE Trans Ind Electron 50:912–919
15. Hinkkanen M, Luomi J (2003) Parameter sensitivity of full-order flux observers for induction motors. IEEE Trans Ind Appl39(4):1127–1135
16. Hinkkanen M (2004)Analysis and design of full-order flux observ-ers for sensorless induction motors. IEEE Trans Ind Electron51:1033–1040
17. Kokotovic PV, Khalil H, O‘Reilly J (1986) Singular perturbationmethods in control: analysis and design. Academic, New York
18. Kokotovic PV, O‘Mailley J, Sannuti P (1976) Singular perturba-tion and order reduction in control theory: an overview.Automatica12:123–132
19. Hofmann H, Sanders SR (1998) Speed sensorless vector controlof induction machines using two-time-scale approach. IEEE TransInd Appl 34:169–177
20. Djemai M, Hernandez J, Barbot JP (1993) Non-linear contol withflux observer for a singularly perturbed induction motor. In: Pro-ceedings of the 32nd IEEE CDC, USA, pp 3391–3396
21. De-Leon J, Alvares JM, Castro R (1995) Sliding mode control andstate estimation for non-linear singularly perturbed systems: appli-cation to an induction electric machine. In: proceedings of the 34thIEEE conf Control App, New York, pp 998–1003
22. De-Leon J, Castro R, Alvares JM (1996) Two-time sliding modecontrol and state estimation for non-linear systems. In: proceedingsof the 13th triennial world cong, IFAC, San Francisco, USA, pp265–270