Robotics@MiddleSchool - Guida A.S. 2016/17
18
Guida A.S. 2016/17 Jacopo Sini ROBOTICS@MIDDLESCHOOL v.2 - Torino, 02/09/2016
Transcript of Robotics@MiddleSchool - Guida A.S. 2016/17

Guida A.S. 2016/17
Jacopo Sini
ROBOTICS@MIDDLESCHOOL
v.2 - Torino, 02/09/2016

In queste diapositive vedremo:
• Moduli corso
• Struttura corso
ROBOTICS@MIDDLESCHOOL G.2Jacopo Sini
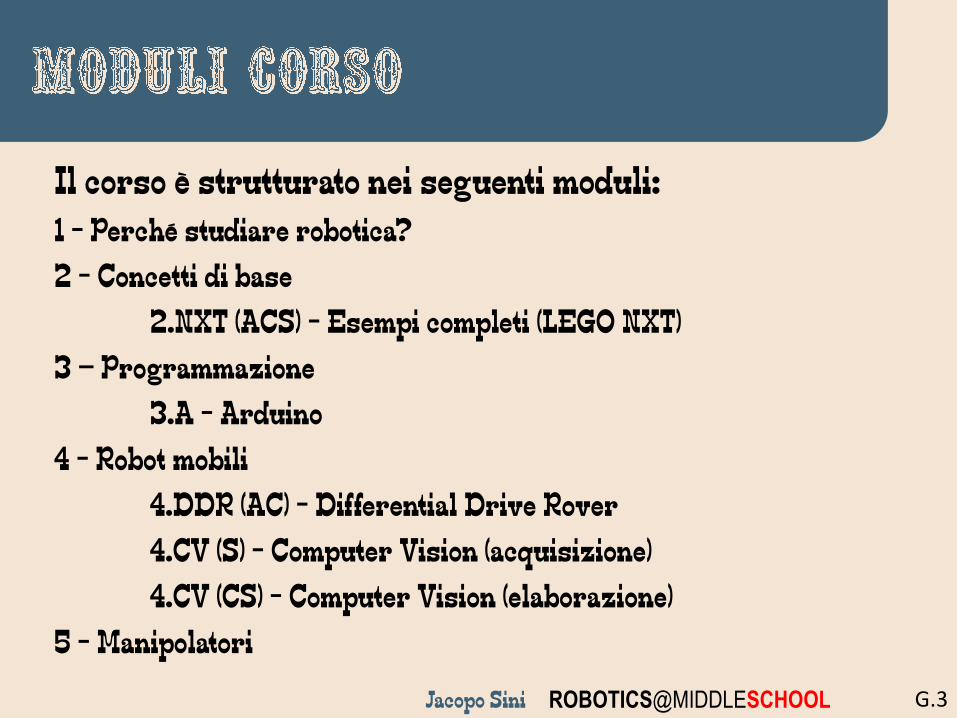
Il corso è strutturato nei seguenti moduli:1 - Perché studiare robotica?
2 - Concetti di base
2.NXT (ACS) - Esempi completi (LEGO NXT)
3 – Programmazione
3.A - Arduino
4 - Robot mobili
4.DDR (AC) - Differential Drive Rover
4.CV (S) - Computer Vision (acquisizione)
4.CV (CS) - Computer Vision (elaborazione)
5 - Manipolatori
ROBOTICS@MIDDLESCHOOL G.3Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.4
Riflessione sui correnti sviluppi dell’industria.
Breve introduzione alla Maker Revolution epresentazione dei concetti di:
• Internet delle cose (Internet of Things)
• Hardware open-source (Arduino)
• Stampa 3D
• Big data
• Cloud computing
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.5
Presentazione di:
• Meccatronica
• Cibernetica (Norbert Wiener)
• Sistemi automatici
• Robotica– Manipolatori industriali
• Bracci e giunti
• Catena cinematica (solo tramite figure)
– Robot di servizio (mobili)• Programmazione della traiettoria
• Localizzazione del veicolo nello spazio
• Computer Vision
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.6
Introduzione ai problemi di base che si presentanodurante la programmazione di un robot.
Concetto di interazione fra mondo reale e sistema dicontrollo, tramite analisi di problemi che richiedonomisure nel mondo reale e quindi l’uso di sensori.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.7
Introduzione ai robot fissi ad uso industriale
Concetti di:
• Area di lavoro
• Ridondanza
• Singolarità cinematica
Spiegare in pratica quali compiti sia o non sia possibilesvolgere tramite manipolatori.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.8
• Navigazione e determinazione della posizione neiveicoli, velivoli, natanti.– GPS
– Inertial Measurement Unit
– Altri sensori eterocettivi
• Computer vision, con introduzione allacattura e all’elaborazione elettronica delleimmagini
• Rilevazione degli ostacoli (Collisionavoidance)
• Pianificazione di semplici rotteJacopo Sini

ROBOTICS@MIDDLESCHOOL G.9
• Applicazione, in semplici casi pratici, dellenozioni teoriche presentate.– Controllo di un semplice robot mobile realizzato
su piattaforma LEGO NXT
– Esperienze pratiche sulla computer vision
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.10Jacopo Sini
2.NXTLego NXT
4CVeComputer Vision
Elaborazione
4CVComputer Vision
Acquisizione4DDR
Robot mobili
1Perché studiare
robotica?
2Concetti di base
3AArduino
4Robot mobili
3Programmazione

ROBOTICS@MIDDLESCHOOL G.11
I capitoli 1 e 2 contengono argomenti essenzialidunque dovrebbero essere letti, nell’ordine, e primadei capitoli successivi.
La lettura del plico 2.NXT è fortemente consigliata.
I capitoli 3 e 4 possono essere studiati nell’ordinepreferito, ma rispettandone l’ordine relativo (adesempio non può essere studiato proficuamente ilplico 4.2.2 prima di aver letto il 4.2.1) e così via.
I file .pdf sono numerati in modo tale da indicarel’ordine di lettura consigliato.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.12Jacopo Sini
Controllore CompitoObiettivo Attuatori
Sensori
+-

ROBOTICS@MIDDLESCHOOL G.13
Ogni modulo contiene le iniziali degliingredienti presenti:
• A=attuatori
• C=controllori
• S=sensori
Chiaramente compiti e obiettivi, essendotrasversali e trattati in tutti i plichi, nonverranno evidenziati.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.14
Per maggiore chiarezza all’interno di ogniplico sarà presente una slide con evidenziatiil/gli ingredienti trattati.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.15
All’inizio di ogni plico (che non sia anchel’inizio di un capitolo è presente una slide comela seguente, in cui verranno evidenziati qualidegli ingredienti del sistema di controlloverranno trattati.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL G.16
In queste slide verranno trattati:
• Attuatori
• Controllori
• Sensori
Controllore CompitoObiettivo Attuatori
Sensori
+-
Jacopo Sini
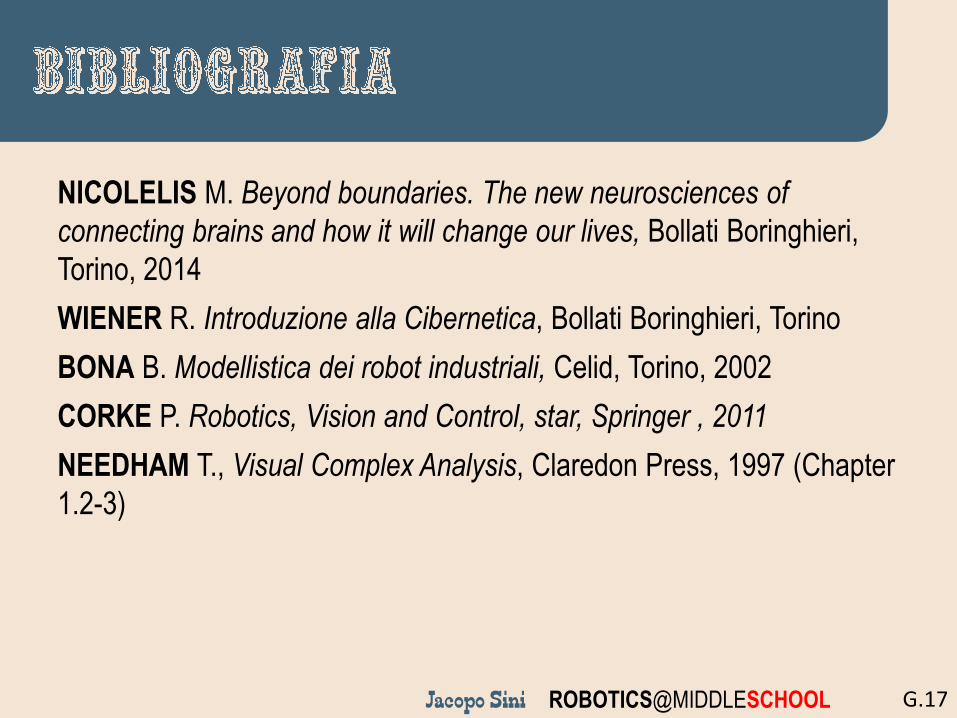
NICOLELIS M. Beyond boundaries. The new neurosciences of
connecting brains and how it will change our lives, Bollati Boringhieri,
Torino, 2014
WIENER R. Introduzione alla Cibernetica, Bollati Boringhieri, Torino
BONA B. Modellistica dei robot industriali, Celid, Torino, 2002
CORKE P. Robotics, Vision and Control, star, Springer , 2011
NEEDHAM T., Visual Complex Analysis, Claredon Press, 1997 (Chapter
1.2-3)
ROBOTICS@MIDDLESCHOOL G.17Jacopo Sini

Quest'opera è distribuita con Licenza
Creative Commons Attribuzione - Non commerciale - Condividi allo stesso modo 4.0 Internazionale.
http://creativecommons.org/licenses/by-nc-sa/4.0/
ROBOTICS@MIDDLESCHOOL G.18Jacopo Sini
Per ottenere in versione digitale questo file egli altri della serie
polito.academia.edu/JacopoSini
http://www.roboticsMS.altervista.org/