ROBOTICS documentation
29
Robotics Introduction to Robots "We don't remember a world without robots. For us, a robot is a robot. Gears and metal, electricity And positrons, Mind and iron! Human-made! If necessary, human destroyed! But we haven't worked with Them, so we don't know them. They're a cleaner better breed than we are. Who am I? The word "robot' was coined by Karel Capek who Wrote a play entitled "R.U.R." or "Rossum's Universal Robots" back in 1921. The base for this Word comes from the Czech word 'robotnik' Which Means 'worker'. But even before that the Greeks made movable Statues that were the beginnings of what we would call robots. For the most part, the word "Robot" today means any man-made Machine that can perform work or other actions normally Performed by Humans. DEPT OF ECE, BRIL Page 1
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of ROBOTICS documentation
Robotics
Introduction toRobots
"We don't remember a world without robots. For us, a robot is
a robot. Gears and metal, electricity
And positrons, Mind and iron! Human-made! If necessary, human
destroyed! But we haven't worked with
Them, so we don't know them. They're a cleaner better breed than we
are.
Who am I?
The word "robot' was coined by Karel Capek who Wrote a play
entitled "R.U.R." or
"Rossum's
Universal Robots" back in 1921. The base for this Word comes from the
Czech word 'robotnik'
Which Means 'worker'.
But even before that the Greeks made movable
Statues that were the beginnings of what we would call robots.
For the most part, the word "Robot" today means any man-made
Machine that can perform work or other actions normally
Performed by Humans.
DEPT OF ECE, BRIL Page 1
Robotics
A robot is a machine that imitates the actions or appearance of an
intelligent creature- usually a human &
gathers information about its environment (senses) and uses that
information (thinks) to follow
instructions to do work (acts) to qualify as a robot, a machine has to
be able to do two things:
1) Get information from its surroundings
2) Do something physical–such as move or manipulate objects
This is the working definition of robots that Robotics exhibit
developers used for this exhibit. Today
Technology is changing at incredible rates making the identification
of a robot somewhat difficult. Things
That we use every day incorporate features beyond those of early
robots.
Robots are ideal for jobs that require repetitive, precise movements. Human workers
need a safe
Working environment, salaries, breaks, food and sleep. Robots don’t. Human workers get
bored doing
DEPT OF ECE, BRIL Page 2

Robotics
The same thing over and over, which can lead to fatigue and costly mistakes. Robots
don’t get bored.
What are Robots Made Of?Robots have 3 main components:
1) Brain - usually a computer
2) Actuators and mechanical parts - motors, pistons, grippers,wheels, gears
3) Sensors - vision, sound, temperature, motion, light, touch, etc. With these three components, robots can interact and affect their
environment to
become useful.
What Do Robots Do?
Most robots today are used in factories to build products such as cars
and electronics. Others are used to
explore underwater and even on other planets.
Laws of Robotics
# A robot must not injure a human being or, through inaction, allow a
human being to Come to harm.
# A robot must always obey orders given to it by a human being, except
where it Would conflict with the
DEPT OF ECE, BRIL Page 3
Robotics
first law.
# A robot must protect its own existence, except where it would
conflict with the first or second law.
Later, this "Zeroth Law" is added:
# A robot must not injure a humanity or, through inaction, allow a
humanity to come to harm.
Once the robots are used to fight wars, they turn on their human
owners and take
over the world.
SIXTH SENSE:
ROBOT SENSING:
The use of external sensing mechanisms allows a robot to interact with
its environment in a flexible
Manner. This is in contrast to pre-programmed operations in which a
robot is “taught” to perform
repetitive tasks via a set of pre-programmed functions.
The use of sensing technology to endow machines with a greater degree
of intelligence in dealing with
their environment is indeed an active topic of research and
development in the robotics field.
The function of robot sensors may be divided into two principal
categories:
1. Internal state.
2. External State.
DEPT OF ECE, BRIL Page 4

Robotics
Internal state sensors deal with the detection of variables such as
arm joint position, which are used for
robot control.
External state sensors, on the other hand, deal with the detection of
variables such as range, proximity and
touch.
External sensing is used for robot guidance as well as for object
identification and handling. Although
proximity,, touch, vision is recognized as the most powerful of robot
sensory capabilities, Robot vision
may be defined as the process of extraction, characterizing, and
interpreting information from images of a
three-dimensional world. The process, also commonly referred to as
machine or computer
vision, may be subdivided into six principal areas:
1. Sensing.
2. Pre-processing.
3. Segmentation.
4. Description.
5. Recognition.
6. Interpretation.It is convenient to group these various areas of vision according to
the sophistication involved in their
implementation. We consider three levels of processing: low, medium
and high level vision.
DEPT OF ECE, BRIL Page 5
Robotics
Here, we shall treat sensing and pre-processing as low-level vision
functions. This will take us from the
image formation process itself to compensations such as noise
reduction, and finally to the extraction of
primitive image features such as intensity discontinuities.
By 2050 robot "brains" based on computers that execute 100 trillion
instructions per second will start rivalling human intelligence
In terms of our six subdivisions, we will treat segmentation,
description, and recognition of individual
objects as medium-level vision functions. High-level visions refer to
processes that attempt to emulate
cognition.
Artificial Intelligence Sensing
Learn about human and robotic vision systems, explore three modes of
robotic sensing, and apply a
robotic sensory mode to a specific task.
Thinking
Human thinking (heuristic) and robotic thinking (algorithmic) will be
explored as you gain an
understanding of why a robot needs specific
DEPT OF ECE, BRIL Page 6

Robotics
Rise of the Robots
If we accept that computers will eventually be come powerful enough
to simulate the mind, the question
that naturally arises is: What processing rate will be necessary to
yield performance on a parallel with the
human brain?
By comparing how fast the neural circuits in the retina perform image-
processing operations with how
many instructions per second it
takes a computer to accomplish similar work, believe it is possible to
at least coarsely estimate the
information-processing power of nervous tissue and by extrapolation,
that of the entire human nervous
system.
Motion detection in retina, if performed by efficient software,
requires the execution of at least 100
DEPT OF ECE, BRIL Page 7

Robotics
computer instructions. Thus, to accomplish the retina's 10 million
detections per second would require at
least 1,000 MIPS.
The entire human brain is about 75,000 times heavier than the 0.02
gram of processing circuitry in the
retina, which implies that it would take, in round numbers, 100
million MIPS (100 trillion instructions per
second) to emulate the 1,500-gram human brain. Personal computers in
1999 beat certain insects but lose
to the human retina and even to the 0.1-gram brain of a goldfish. A
typical PC would have to be at least a
million times more powerful to perform like a human brain.
Certain dangerous jobs are best done by robots. Guided
remotely using
video cameras, the Mini-Andros can investigate–and defuse–
bombs.
A Sense of Space Robots that chart their own routes emerged from
laboratories worldwide in the mid
1990s, as microprocessors reached 100 MIPS. Most build two-dimensional
maps from sonar or laser
rangefinder scans to locate and route themselves, and the best seem
able to navigate office hallways for
days before becoming disoriented.
Too often different locations in the coarse maps resemble one another.
Conversely, the same location,
DEPT OF ECE, BRIL Page 8

Robotics
scanned at different heights, looks different, or small obstacles or
awkward protrusions are overlooked.
But sensors, computers and techniques are improving, and success is in
sight
Fast Replay Income and experience from spatially aware industrial
robots would set the stage for smarter
yet cheaper ($1,000 rather than $10,000) consumer products, starting
probably with small robot vacuum
cleaners that automatically learn their way around a home, explore
unoccupied rooms and clean
whenever needed.
Commercial success will provoke competition and accelerate investment
in manufacturing, engineering
and research.
Vacuuming robots ought to beget smarter cleaning robots with dusting,
scrubbing and picking-up arms,
followed by larger multifunction utility robots with stronger, more
dexterous arms and better sensors.
Programs will be written to make such machines pick up clutter, store,
retrieve and deliver things, take
inventory, guard homes, open doors, mow lawns, play games and so on.
New applications will expand the market and spur further advances when
robots fall short in acuity,
precision, strength, reach, dexterity, skill or processing power.
Capability, numbers sold, engineering and
manufacturing quality, and cost-effectiveness will increase in a
mutually reinforcing spiral.
DEPT OF ECE, BRIL Page 9
Robotics
Perhaps by 2010 the process will have produced the first broadly
competent "universal robots," as big as
people but with lizard like 5,000-MIPS minds that can be programmed
for almost any simple chore.
Robots also can go into dangerously polluted environments, like
chemical spills or
radioactive "hot zones" in nuclear power plants.
A first-generation universal robots will handle only contingencies explicitly covered in their application
programs. Unable to adapt to
changing circumstances, they will often perform inefficiently or not
at all. Still, so much physical work
awaits them in businesses, streets, fields and homes that robotics
could begin to overtake pure information
technology commercially.
A second generation of universal robot with a mouse like 100,000 MIPS will adapt as the first generation
does not and will even be trainable.
Besides application programs, such robots would host a suite of
software "conditioning modules" that
would generate positive and negative reinforcement signals in
predefined circumstances.
DEPT OF ECE, BRIL Page 10

Robotics
For example, doing jobs fast and keeping its batteries charged will be
positive; hitting or breaking
something will be negative. There will be other ways to accomplish
each stage of an application program,
from the minutely specific (grasp the handle underhand or overhand) to
the broadly general (work indoors
or outdoors). As jobs are repeated, alternatives that result in
positive reinforcement will be favored, those
with negative outcomes shunned. Slowly but surely, second-generation
robots will work increasingly
well.
A third generation of robots To learn very quickly from mental rehearsals in simulations that model
physical, cultural and
psychological factors. Physical properties include shape, weight,
strength, texture and appearance of
things, and how to handle them. Cultural aspects include a thing's
name, value, proper location and
purpose.
Psychological factors, applied to humans and robots alike include
goals, beliefs, feelings and preferences.
Developing the simulators will be a huge undertaking involving
thousands of programmers and
experience gathering robots.
DEPT OF ECE, BRIL Page 11
Robotics
The simulation would track external events and tune its models to keep
them faithful to reality. It would
let a robot learn a skill by imitation and afford a kind of
consciousness. Asked why there are candles on
the table, a third-generation robot might consult its simulation of
house, owner and self to reply that it put
them there because its owner likes candlelit dinners and it likes to
please its owner. Further queries would
elicit more details about a simple inner mental life concerned only
with concrete situations and people in
its work area.
Fourth-generation universal robots with a humanlike 100 million MIPS will be able to abstract and
generalize. They will result from melding
powerful reasoning programs to third-generation machines.
These reasoning programs will be the far more sophisticated
descendants of today's theorem proves and
expert systems, which mimic human reasoning to make medical diagnoses,
schedule routes, make
financial decisions, configure computer systems, and analyse seismic
data to locate oil deposits and so on.
Properly educated, the resulting robots will become quite formidable.
In fact, I am sure they will
outperform us in any conceivable area of endeavor, intellectual or
physical.
DEPT OF ECE, BRIL Page 12
Robotics
Inevitably, such a development will lead to a fundamental
restructuring of our society.
Entire corporations will exist without any human employees or
investors at all.
Humans will play a pivotal role in formulating the intricate complex
of laws that will govern corporate
behavior. Ultimately, though, it is likely that our descendants will
cease to work in the sense that we do
now. They will probably occupy their days with a variety of social,
recreational and artistic pursuits, not
unlike today's comfortable retirees or the wealthy leisure classes.
Robot Systems
Robots are comprised of several systems working together as a whole.
The type of job the robot does dictates what system elements it
needs. The general categories of robot
systems are:
1) Controller
2) Body
3) Mobility
4) Power
5) Sensors
6) Tools
DEPT OF ECE, BRIL Page 13
Robotics
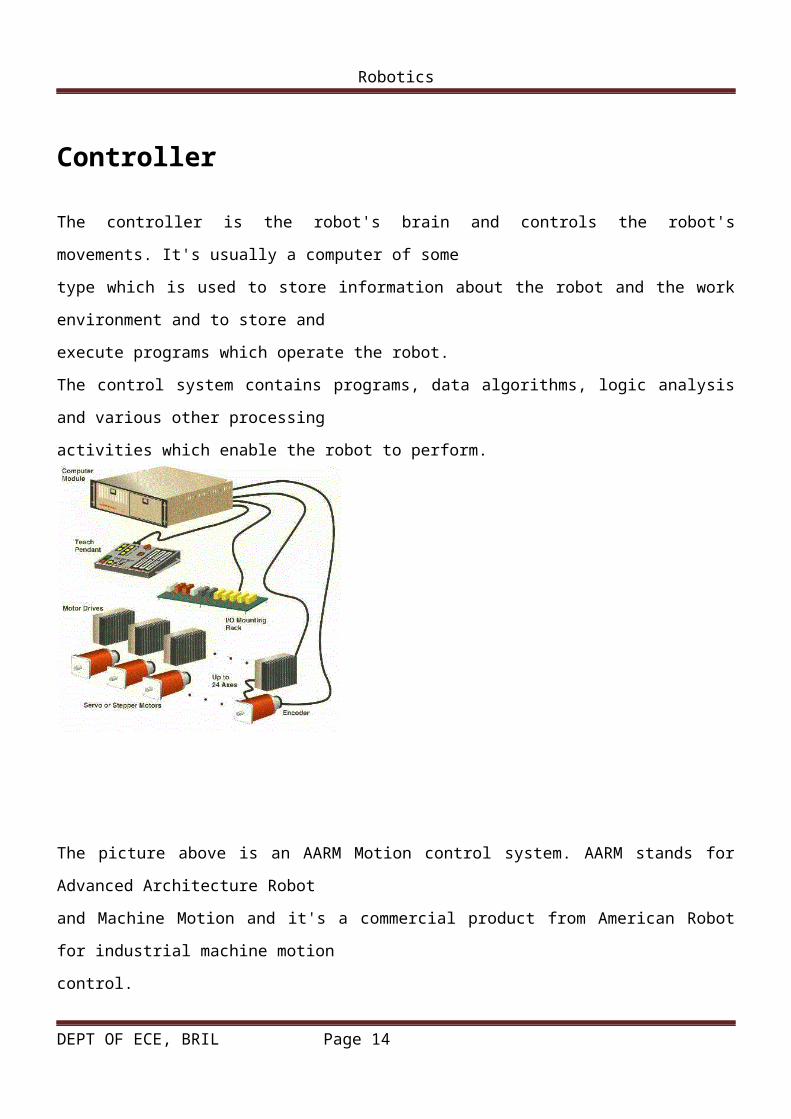
Controller
The controller is the robot's brain and controls the robot's
movements. It's usually a computer of some
type which is used to store information about the robot and the work
environment and to store and
execute programs which operate the robot.
The control system contains programs, data algorithms, logic analysis
and various other processing
activities which enable the robot to perform.
The picture above is an AARM Motion control system. AARM stands for
Advanced Architecture Robot
and Machine Motion and it's a commercial product from American Robot
for industrial machine motion
control.
DEPT OF ECE, BRIL Page 14
Robotics
Industrial controllers are either non-servos, point-to-point servos orcontinuous path servos.
A non-servo robot usually moves parts from one area to another and iscalled a "pick and place" robot.
The non-servo robot motion is started by the controller and stopped by
a mechanical stop switch. The stop
switch sends a signal back to the controller which starts the next
motion.
A point-to-point servo moves to exact points so only the stops in the
path are programmed.
A continuous path servo is appropriate when a robot must proceed on a
specified path in a smooth,
constant motion.
Mobile robots can operate by remote control or autonomously. A remote
control robot receives
instructions from a human operator. In a direct remote control
situation, the robot relays information to
the operator about the remote environment and the operator then sends
the robot instructions based on the
information received. This sequence can occur immediately (real-time)
or with a time delay.
Autonomous robots are programmed to understand their environment and
take independent action based
on the knowledge they possess.
Some autonomous robots are able to "learn" from their past encounters.
This means they can identify a
DEPT OF ECE, BRIL Page 15

Robotics
situation, process actions which have produced successful/unsuccessful
results and modify their
behaviour
to optimize success. This activity takes place in the robot
controller.
BodyThe body of a robot is related to the job it must perform.
Industrial robots often take the shape of a body less arm since its
job requires it to remain stationary
relative to its task. Space robots have many different body shapes
such as a sphere, a platform with
wheels or legs, or a balloon, depending on it's job.
The free-flying rover, Sprint Area is a sphere to minimize damage if
it were to bump into the shuttle or
an astronaut. Some planetary rovers have solar platforms driven by
wheels to traverse terrestrial
environments. Aerobat bodies are balloons that will float through the
atmosphere of other worlds
collecting data. When evaluating what body type is right for a robot,
remember that form follows
function.
DEPT OF ECE, BRIL Page 16

Robotics
Mobility
How do robots move? It all depends on the job they have to do and the
environment they operate in.
In the Water: Conventional unmanned, submersible robots are used inscience and industry throughout
the oceans of the world. You probably saw the Jason AUV at work when
pictures of the Titanic discovery
were broadcast.
To get around, automated underwater vehicles (AUV's) use propellers
and rudders to control their
direction of travel.
One area of research suggests that an underwater robot like RoboTuna
could propel itself as a fish does using its
natural adulatory motion. It's thought that robot that move like fish
would be quieter, more manoeuvrable and
more energy efficient.
On Land: Land based rovers can move around on legs, tracks or wheels.Dante II is a frame walking
robot that is able to descend into volcano craters by repelling down
the crater. Dante has eight legs; four
legs on each of two frames. The frames are separated by a track along
which the frames slide relative to
each other. In most cases Dante II has at least one frame (four legs)
touching the ground.
An example of a track driven robot is Pioneer, a robot developed to
clear rubble, make maps and acquire
DEPT OF ECE, BRIL Page 17

Robotics
samples at the Chernobyl Nuclear Reactor site. Pioneer is track-driven
like a small bulldozer which
makes it suitable for driving over and through rubble. The wide track
footprint gives good stability and
platform capacity to deploy payloads.
Many robots use wheels for locomotion.
In the Air/Space:Robots that operate in the air use engines and thrusters to get
around.
One example is the Cassini, an orbiter on its way to Saturn. Movement
and positioning is accomplished
"reaction wheels." The thrusters and reaction wheels orient the
spacecraft in three axes which are
maintained with great precision.
TRANSFORMATION ‘MATRIX’:
Robot arm kinematics deals with the analytical study of the geometry
of motion of a robot arm with
respect to the fixed reference coordinate system without regard to the
forces/moments that cause the
motion.
Thus, kinematics deals with the analytical description of the spatial
displacement of the robot as a
function of time, in particular the relations between the joint
variable space and the position and
DEPT OF ECE, BRIL Page 18
Robotics
orientation of the end-effector of a robot arm. There are two
fundamental problems in robot arm
kinematics. The first problem is usually referred to as the direct
(or forward) kinematics problem, Second
problem is the inverse kinematics (or arm solution) problem. Since the
independent variables in a robot
arm are the joint variables, and a task is usually stated in terms of
the reference coordinate frame, the
inverse kinematics problem is used more frequently. Denavit and
Hartenberg [1955] proposed a
systematic and generalized approach of utilizing matrix algebra to
describe and represent the spatial
geometry of the links of a robot arm with respect to a fixed reference
frame. This method uses a 4*4
homogeneous transformation matrix to describe the spatial relationship
between two adjacent right
mechanical links and reduces the direct kinematics problem to finding
an equivalent 4*4 homogeneous
transformation matrix that relates the spatial displacement of the
hand coordinate frame to the reference
coordinate frame
PowerPower for industrial robots can be electric, pneumatic or hydraulic.
Electric motors are efficient, require
little maintenance, and aren't very noisy. Pneumatic robots use
compressed air and come in a wide variety
of sizes.
DEPT OF ECE, BRIL Page 19

Robotics
A pneumatic robot requires another source of energy such as
electricity, propane or
gasoline to provide the compressed air.
Hydraulic robots use oil under pressure and generally
perform heavy duty jobs. This power type is noisy, large and heavier
than the other power sources.
A hydraulic robot also needs another source of energy to move the
fluids through its components.
Pneumatic and hydraulic robots require maintenance of the tubes,
fittings and hoses that connect the
components and distribute the energy. Two important sources of
electric power for mobile
robots are solar cells and batteries.
Sensors
Sensors are the perceptual system of a robot and measure physical
quantities like contact, distance, light,
sound, strain, rotation, magnetism, smell, temperature, inclination,
pressure, or altitude.
Sensors provide the raw information or signals that must be processed
through the robot's computer brain
to provide meaningful information.
DEPT OF ECE, BRIL Page 20

Robotics
Robots are equipped with sensors so they can have an understanding of
their surrounding environment
and make changes in their behaviour based on the information they have
gathered.
Sensors can permit a robot to have an adequate field of view, a range
of detection and the ability to detect
objects while operating in real or near real time within its power and
size limits. Additionally, a robot
might have an acoustic sensor to detect sound, motion or location,
infrared sensors to detect heat sources,
contact sensors, tactile sensors to give a sense of touch, or
optical/vision sensors. For most any
environmental situation, a robot can be equipped with an appropriate
sensor. A robot can also monitor
itself with sensors.
Tools
As working machines, robots have defined job duties and carry all the
tools they need to accomplish their
tasks on board their bodies. Many robots carry their tools at the end
of a manipulator.
The manipulator contains a series of segments, jointed or sliding
relative to one another for the purpose of
moving objects.
The manipulator includes the arm, wrist and end-effector. An end-
effector is a tool or gripping
mechanism attached to the end of a robot arm to accomplish some task.
DEPT OF ECE, BRIL Page 21
Robotics
It often encompasses a motor or a driven mechanical device.
An end-effector can be a sensor, a gripping device, a paint gun, a
drill, an arc welding device, etc. There
are many examples of robot tools that you will discover as you
examine the literature associated with this
site. To get you going, two good examples are listed below.
Tools are unique to the task the robot must perform.
Advantages of Robotics
The advantages are obvious - robots can do things we humans just don't
want to do, and usually do it
cheaper.
Robots can do things more precise than humans and allow progress in
medical science and other useful
Advances
Educational Goals
Robotics was designed to introduce the science behind the design and
operation of robots, and after
interacting with the exhibit, you will be able to:
DEPT OF ECE, BRIL Page 22

Robotics
1. Define a robot as a machine that gathers information about its
environment (senses) and uses that
information (thinks) to follow instructions to do work (acts).
2. Recognize the advantages and limitations of robots by comparing
how robots and humans sense,
think, and act and by exploring uses of robots in manufacturing,
research, and everyday settings.
3. Understand your connection with technology and create an
excitement about science and math
that will prepare you for a workplace in which computer,
robotics, and automation are common
and essential.
Each major thematic area of the exhibit has specific educational goals
accomplished using hands-on
activities that compare how human and robotic systems sense, think,
and act.
The Impact of Robotics on SocietyRobotics and Sensors in Crop Production
DEPT OF ECE, BRIL Page 23
Robotics
Goals: To develop robotic systems for selective harvesting of field crops.
To develop sensors for locating fruit by robotic harvesters.
To develop sensors for determining fruit ripeness and for predicting
shelf-life non-destructively, and
To develop sensors for site-specifically application of chemicals
onto individual plants.
Statement of Problem:
Intelligent machines must be capable of sensing the environment and
properties of the bio-materials
which it is handling.
Robotic harvesting requires sensors to detect and precisely locate all
the fruit. In many cases the robot
must also determine ripeness in order to selectively harvest only the
fruit ready for market.
Research at Purdue University and the Agricultural Research
Organization (Volcani Center) in Israel has
developed the robotic manipulators, machine vision and image
processing technologies necessary to
harvest musk melons. The VIPROMPER (Volcani Institute - Purdue
University Robotic Melon Picker)
traveling at 2 cm/sec with a manipulator speed of 75 cm/sec was able
to detect over 93% of the fruit, and
successfully picked more than 85% of the melons.
Current Activities:
DEPT OF ECE, BRIL Page 24
Robotics
Visible features of plants enable humans to distinguish weeds from
crops, and to see individual parts of
plants.
A machine vision and image processing system capable of extracting
and classifying these same features
could be used to initiate a spot sprayer or other control technology.
The general objective of this research is to develop sensor
technologies which permit chemicals to be
applied site-specifically on plants in a manner which minimizes the
quantity required to control crop
pests.
The specific objectives are:
1. Develop machine vision hardware and image processing software to
locate small seedlings,
distinguish weeds from the cultivated crop, and measure
parameters which affect the quantity and
location of chemical to be applied;
2. Develop image processing and pattern recognition algorithms which
can interpret the sensed data
in real-time, and;
3. Develop artificial intelligence algorithms (expert systems,
neural networks, etc.) capable of
making real-time decisions concerning when and how much chemical
to apply, based on
perceived conditions.
The first step to complete these objectives is to create a database of
multispectral, digital, images of plants
DEPT OF ECE, BRIL Page 25
Robotics
which contain the desired features. This database of plant images is
currently being created, and will
become accessible to co-operators over the World Wide Web to test and
evaluate the performance of
image processing and pattern recognition algorithms.
Today’s Robotics:Today, robots are enjoying resurgence. Faster and cheaper computer
processors make robots smarter and
less expensive. Meanwhile, researchers are working on ways to make
robots move and "think" more
efficiently. Although most robots in use today are designed for
specific tasks, the goal is to make
universal robots, robots flexible enough to do just about anything a
human can do.
Problems with Robotics
As with any machine, robots can break and even cause
disaster.
They are powerful machines that we allow to control certain
things.
When something goes wrong, terrible things can happen.
DEPT OF ECE, BRIL Page 26
Robotics
Luckily, this is rare because robotic systems are designed with many
safety features that limit the harm
they can do.
There's also the problem of evil people using robots for evil
purposes. This is true today with other forms
of technology such as weapons and biological material.
Of course, robots could be used in future wars. This could be good or
bad. If humans perform their
aggressive acts by sending machines out to fight other machines, that
would be better than sending
humans out to fight other humans.
Steams of robots could be used to defend a country against attacks
while limiting Human casualties.
Either way, human nature is the flawed component that's here to stay
DEPT OF ECE, BRIL Page 27
Robotics
APPLCIATONS:
Robots have many applications.
Industrial robots have long been used for welding and painting.
Laboratory robots are used for many repetitive tasks in chemistry,
biology and clinical chemistry labs.
Medical robots are being designed for Computer Assisted Surgery.
In space, robots are being used for unmanned missions to planets,
comets and asteroids.
CONCLUSIONROBOT – ‘THE TERMINATOR’:
DEPT OF ECE, BRIL Page 28
Robotics
The ROBOT which terminates every job within a shortest period has no
termination.
Human brain has boundaries up to which it thinks, but for Computers no
limitations .That is we have to
use the brain up to the capacity of neurons in our brain.
But there is no limit to computer memory.
REFERENCE:
Chalker , Jack L. ; Mark Owings (1998). The Science-Fantasy Publishers: A
Bibliographic History, 1923–1998. Westminster, MD and Baltimore: Mirage
Press, Ltd. p. 299.
DEPT OF ECE, BRIL Page 29




















