Review of Passive Electromagnetic Devices for Vibration ...
16
Review Article Review of Passive Electromagnetic Devices for Vibration Damping and Isolation Efren Diez-Jimenez , 1 Rocco Rizzo, 2 Maria-Jesus G´ omez-Garc´ ıa, 3 and Eduardo Corral-Abad 3 1 Mechanical Engineering Area, Signal eory and Communications Department Universidad de Alcal´ a, Ctra. Madrid-Barcelona, Km 33,66, Alcal´ a de Henares 28805, Spain 2 Department of Energy and Systems Engineering, University of Pisa, Largo Lucio Lazzarino, 56122 Pisa, Italy 3 Department of Mechanical Engineering, Universidad Carlos III de Madrid, Legan´ es, Spain Correspondence should be addressed to Efren Diez-Jimenez; [email protected] Received 29 May 2019; Revised 1 August 2019; Accepted 4 August 2019; Published 20 August 2019 Academic Editor: Mahmoud Bayat Copyright © 2019 Efren Diez-Jimenez et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Passive electromagnetic devices for vibration damping and isolation are becoming a real alternative to traditional mechanical vibration and isolation methods. ese types of devices present good damping capacity, lower cost, null power consumption, and higher reliability. In this work, a state-of-the-art review has been done highlighting advantages and drawbacks, application fields, and technology readiness level of most recent developments. In addition, a general introductory section relates presents key considerations that any engineer, electrical or mechanical, needs to know for a deep comprehension and correct design of these types of devices. 1. Introduction Vibrations generate significant problems and issues in mechanical systems such as fatigue, fracture, and energy loss [1, 2]. erefore, it is essential to damp the vibrations for overall performance and durability of machines and mechanisms. Performance of new magnetic materials in combination with optimization tools allows the develop- ment of efficient and tuneable vibration damping and/or isolation techniques. Moreover, electromagnetic damping and isolation can be clean and environmentally friendly since there is no need of using fluids (except in magneto- rheological dampers). us, they can be applied in clean, harsh, and/or extreme temperature environments such as space, aerospace, electric vehicles, or microfabrication in- dustries. As they provide damping through contactless magnetic forces, most friction and wear issues of conven- tional dampers also disappear, increasing their reliability. Nevertheless, there are still critical issues to be solved like design optimization, performance, cost, device ageing, reduction of external electromagnetic interferences, or frequency tuning. In this paper, two different types of electromagnetic damping devices can be found: active and passive. Active devices are those devices that measure vibrations in real time and react accordingly under an active control system de- cision. ose devices present an outstanding customized performance. However, they require control systems, elec- tric power systems, and sensors that increase the total complexity, price, and energy consumption while decreasing the reliability of the device. On the other hand, passive devices are designed and manufactured to respond in a certain manner against vibration without the need of active feedback and control. ey are flexible and can be tuned in design or during assembly, but not during operation. ese types of devices have a lower cost and higher reliability at the expense of lower performance under certain vibration variations. In this article, we focus on passive electromag- netic devices for vibration, damping, and isolation (PEDVDI) because of their larger applicability. Main Hindawi Shock and Vibration Volume 2019, Article ID 1250707, 16 pages https://doi.org/10.1155/2019/1250707
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Review of Passive Electromagnetic Devices for Vibration ...

Review ArticleReview of Passive Electromagnetic Devices for VibrationDamping and Isolation
Efren Diez-Jimenez 1 Rocco Rizzo2 Maria-Jesus Gomez-Garcıa3
and Eduardo Corral-Abad3
1Mechanical Engineering Area Signal eory and Communications Department Universidad de AlcalaCtra Madrid-Barcelona Km 3366 Alcala de Henares 28805 Spain
2Department of Energy and Systems Engineering University of Pisa Largo Lucio Lazzarino 56122 Pisa Italy3Department of Mechanical Engineering Universidad Carlos III de Madrid Leganes Spain
Correspondence should be addressed to Efren Diez-Jimenez efrendiezuahes
Received 29 May 2019 Revised 1 August 2019 Accepted 4 August 2019 Published 20 August 2019
Academic Editor Mahmoud Bayat
Copyright copy 2019 Efren Diez-Jimenez et al )is is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
Passive electromagnetic devices for vibration damping and isolation are becoming a real alternative to traditional mechanicalvibration and isolation methods )ese types of devices present good damping capacity lower cost null power consumption andhigher reliability In this work a state-of-the-art review has been done highlighting advantages and drawbacks application fieldsand technology readiness level of most recent developments In addition a general introductory section relates presents keyconsiderations that any engineer electrical or mechanical needs to know for a deep comprehension and correct design of thesetypes of devices
1 Introduction
Vibrations generate significant problems and issues inmechanical systems such as fatigue fracture and energy loss[1 2] )erefore it is essential to damp the vibrations foroverall performance and durability of machines andmechanisms Performance of new magnetic materials incombination with optimization tools allows the develop-ment of efficient and tuneable vibration damping andorisolation techniques Moreover electromagnetic dampingand isolation can be clean and environmentally friendlysince there is no need of using fluids (except in magneto-rheological dampers) )us they can be applied in cleanharsh andor extreme temperature environments such asspace aerospace electric vehicles or microfabrication in-dustries As they provide damping through contactlessmagnetic forces most friction and wear issues of conven-tional dampers also disappear increasing their reliabilityNevertheless there are still critical issues to be solved likedesign optimization performance cost device ageing
reduction of external electromagnetic interferences orfrequency tuning
In this paper two different types of electromagneticdamping devices can be found active and passive Activedevices are those devices that measure vibrations in real timeand react accordingly under an active control system de-cision )ose devices present an outstanding customizedperformance However they require control systems elec-tric power systems and sensors that increase the totalcomplexity price and energy consumption while decreasingthe reliability of the device On the other hand passivedevices are designed and manufactured to respond in acertain manner against vibration without the need of activefeedback and control )ey are flexible and can be tuned indesign or during assembly but not during operation )esetypes of devices have a lower cost and higher reliability at theexpense of lower performance under certain vibrationvariations In this article we focus on passive electromag-netic devices for vibration damping and isolation(PEDVDI) because of their larger applicability Main
HindawiShock and VibrationVolume 2019 Article ID 1250707 16 pageshttpsdoiorg10115520191250707
challenges of PEDVDI are to provide at least the samedamping capacity in terms of damping coefficients andstiffness within the same mass lifetime and reliability ofconventional mechanical dampers and of course with acompetitive price
Applications of electromagnetic devices require gath-ering different engineering disciplines )ey are typicallydesigned and manufactured by electrical engineers Elec-trical engineers test the devices and provide performance ofthe device in some general known variables However thefinal applications of the devices which sometimes needspecific performance values are typically developed andselected by mechanical engineers It is thus important to linkproperly these two fields in order to obtain more efficientand optimized devices
One of the main objectives of this article is to summarizeand show general information of all types of passive elec-tromagnetic devices applied in vibration damping and vi-bration isolation PEDVDI have been categorized as followseddy current dampers (ECD) electromagnetic shuntdampers (EMSD) magnetic negative-stiffness dampers(MNSD) and passive magnetorheological dampers(PMRD) )is provides a wide view of the existing tech-nologies for a proper application selection A second aim ofthis article is to collect and present recent and outstandingresearch articles on passive electromagnetic devices for vi-bration damping and isolation in civil and mechanical en-gineering and space applications A comparison of theperformance and application field is given highlighting itsmain differences pros and cons
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance )erefore the article may be used as a designguide for specific applications Moreover as it describes thegeneral design for each technology it can be used as startingpoint for new designs
)is paper is organized as follows Section 2 relates togeneral design considerations of PEDVDI Section 3 de-scribes the review of the different technologies exploredECD in Section 31 Section 32 is the review for EMSD andSection 33 shows the review of MNSD )e papers end withthe review of PMRD described in section 34 Finally generalconclusions are listed in Section 4
2 General Design Considerations ofElectromagnetic Dampers and Isolators
When designing PEDVDI three types of materials aremainly used paramagnetic soft ferromagnetic and hardferromagnetic Paramagnetic materials are weakly affectedby external static magnetic fields Common paramagneticmaterials used in designs are aluminium copper titaniumor polymers However when selecting paramagnetic ma-terials their electrical conductivity must be carefully con-sidered as we will describe later Even if they are inert tostatic external magnetic fields they can severely react toalternant magnetic fields if they are good conductors If a
paramagnetic material is inside a static magnetizing field Hits magnetic polarization M is negligible acting as if theywere air or vacuum
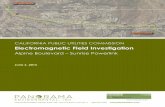
On the contrary ferromagnetic materials do reactagainst external magnetic fields H If an external magneticfield is applied to a ferromagnetic material it gets magne-tized increasing significantly its volumetric magnetizationM and thus the total magnetic flux density B ie moremagnetic field accumulated within the same volumeMagnetic behaviour of the ferromagnetic materials is notlinear but it follows a hysteresis curve (Figure 1)
Based on the value of remanence BR and coercivity HCwe can determine whether the sample under study is a hardor a soft magnetic material )ose materials with largeremanence and large coercive field are called hard magneticmaterials because they are hard to demagnetize Inverselysoft magnetic materials have very low remanence and lowcoercive field and thus they are easily demagnetizable
Softmagneticmaterials have a thin hysteresis curve so theyare typically applied in applications where polarities changevery often such as in transformers and motor windings Softmagnetic materials can sustain relatively small electrical losses)e hysteresis loop width tells much about the losses Hardmagnetic materials have a very wide hysteresis curve whichmakes them practical in applications where they exert theirmagnetic field on soft magnetic materials )eir slope of de-magnetization at the zero line is very shallow and does notsteepen until it goes far to the left of the zero line If hardmagnetic materials changed polarity very often the hysteresislosses would be huge Hysteresis losses can be used inmagneticdampers as a mechanism to transform and dissipate kineticenergy as shown in Section 34
General values of electromagnetic properties for dif-ferent engineering materials are listed in Table 1
In mechanical engineering applications we used mag-netic materials to exert forces between themselves to providean output torque like in motors or damping forces as inPEDVDI Magnetic forces between two magnetic elementsdepend on the strength and orientation of the magnetic fieldthat element 1 applies on element 2 and on the strength anddirection of the magnetization of element 2 [3ndash6] )e forcethat element 1 exerts on 2 depends on the gradient of itsvolumetric magnetization M and on the magnetic fieldgenerated by the element 2
F12rarr
nabla m2rarr
middot Bapplied by 1rarr
1113874 1113875 nabla M2rarr
middot Vol2 middot μ0 middotHapplied by 1rarr
1113874 1113875
(1)
)us the larger is its magnetization the larger will be theforces acting on it Materials with very large magnetizationvalues suffer larger forces under the same external magneticfield Inside up materials with very large magnetizationgenerate larger external magnetic fields )erefore in firstterm the larger is the magnetization of the elements thelarger will be the forces ofon the device Moreover themagnetic field strength that a certain element generates in itssurroundings is inversely proportional to the cube of dis-tance Hence it is very important to approximate magneticelements as much as possible in order to increase magnetic
2 Shock and Vibration
forces Air gaps between moving elements must be alwaysminimized
)ere are two main methods to achieve large magne-tizations inside a certain volume nonpermanent magneti-zation of soft ferromagnetic materials and permanentmagnetization of hard ferromagnetic materials Non-permanent magnetization is generally obtained throughmagnetizing fields generated by currents circulating throughcoils or windings in the device )is option is not affected byother phenomena provided that the current is maintainedso it is a reliable method Its major issue is that it requires acontinuous power consumption and current control
Permanent magnetization of hard ferromagnetic mate-rials has a main advantage which is that it does not requirecontinuous currents flowing since magnetization is doneonce in factory However other problems must be con-sidered For example as the magnetization is permanent
forces between magnets will always appear even in non-desired orientations so it is important to analyse themagnetic forces at each of the motion positions Permanentmagnetizations usually have lower flux density on thematerials in comparison with fully saturated soft ferro-magnetic materials Permanent magnets if once fullymagnetized retains magnetism permanently but its in-tensity does not remain constant and normally decreasesgradually with elapse of time )is change is known aspermanent magnet ageing which is caused either naturallyor by external disturbance )e external disturbance men-tioned before can be classified into the following four typesaccording to characteristics magnetic circuit reluctancechange external field application mechanical shock andtemperature change [7]
For extreme applications like in space or in cryogenicenvironments other aspects also affect significantly to
Table 1 Magnetic properties of different engineering materials
Material type Coercivity bHc (kAm) Remanence Br (T) Relative permeability Saturation bsat (T)Ferrite magnet 150ndash250 035ndash04 12ndash19 035ndash04Alnico magnet 30ndash151 07ndash111 12ndash19 07ndash12Neodymium-iron magnet 675ndash1090 087ndash15 105 087ndash15Samarium-cobalt magnet 493ndash790 083ndash115 105 3000Iron 0006ndash0080 001ndash006 150ndash2000 16ndash215Nickel 0056ndash201 001ndash015 100ndash600 04ndash06Cobalt 080ndash7162 002ndash02 70ndash250 07ndash09Co-Fe alloy (49 Co) 007ndash009 01ndash03 8000ndash15000 22ndash24Ni-Fe alloy (75 Ni) 0001ndash0002 005ndash02 60000ndash250000 06ndash08Ni-Fe alloy (50 Ni) 0005ndash0010 003ndash015 7000ndash100000 15Electrical steel 0032ndash0072 05ndash08 3000ndash4000 16ndash2Stainless steel 304316 1ndash3 0001ndash0002 1003ndash1012 0025ndash003Stainless steel 430 05 08 750 14Copper OFCH mdash mdash 099 mdashAluminium 7075 mdash mdash 1004 mdashTitanium grade 5 mdash mdash 10001 mdashPTFE Teflon mdash mdash 1 mdashPolyimide mdash mdash 1 mdashNylon mdash mdash 1 mdash
BSAT
BSATBR
BR
HC
H
B
Hard
Soft
HC
Figure 1 Diagram of BndashH hysteresis curve for a hard and a soft ferromagnetic material
Shock and Vibration 3
permanent magnetizations Radiation as found in space ap-plications can permanently demagnetize magnets [8] )ere-fore special cares as correct selection of materials even if theyhave lower remanence or radiation shielding must be con-sidered Temperature also plays a main role when analysingpermanent magnetization For all permanent magnets in-creasing temperature means to lose their magnetization Somematerials like SmCo may resist higher temperatures thanothers but high temperatures always imply permanent mag-netization issues In contrast lower temperatures usually in-crease permanent magnetizations for most of the materials[9 10] Nevertheless at lower temperatures permanent mag-nets get more brittle so applications with very large magneticforces may need wall reinforcement of magnetic pieces
As stated magnetic forces are generated by applyingexternal magnetic fields to magnetized volumes )is surelyimplies that volumetric magnetization changes according tothe material hysteresis curve When having permanentmagnets in a device they should be checked for possibledemagnetisation caused by external magnetic fields Nor-mally only a simple check is needed at the end of the analysis)e check is made accordingly to find the highest possibletemperature inside a magnet and to find the lowest possiblefield value inside a magnet given by a finite element method(FEM) model )is lowest parametric model values should betreated as average values inside a magnet )en by using theBH-curve of the used magnet material check that the point ofthe lowest field value is above the knee point (point wheremagnetizations changes are significant and irreversible) [11]
Another main point to analyse in electromagnetic de-vices is the eddy current generation and its associated issuesandor benefits When magnets move through the innerconductor the moving magnetic field induces an eddycurrent in the conductor )e flow of electrons in theconductor immediately creates an opposing magnetic fieldgenerating Lorentz forces which result in damping of themagnet motion and produces heat inside the conductor )eamount of energy transferred to the conductor in the form ofheat is equal to change in kinetic energy lost by the magnets
Power loss due to eddy currents in a conductive sheet perunit of mass can be calculated as
P π2σB2
pd2
6Dmiddotf
2 (2)
where P is the power lost per unit mass (Wkg) Bp is themoving magnetic field peak (T) d is the sheet thickness (m)σ is the electric conductivity of the conductive sheet (Sm) Dis the conductive sheet density (kgm3) and f is the oscil-lation frequency (Hz) or variation of the applied magneticfield )us power losses depend directly on material con-ductivity quadratically with the applied magnetic field onthe conductive element and on geometrical dimensions )ecomponent of the magnetic field that affects for the eddycurrent generation is the one perpendicular to the sheet)ismust be considered when designing towards eddy currentmotion damping
Equation (3) is valid only under the so-called quasistaticconditions where magnet motion frequency is not fast
enough to generate the skin effect ie the electromagneticwave fully penetrates into the material In relation to veryfast-changing fields the magnetic field does not penetratecompletely into the material However increased frequencyof the same field value will always increase eddy currentseven with nonuniform field penetration )e skin depth orpenetration depth δ is defined as the depth where thecurrent density is just 1e (about 37) with respect to thevalue at the surface Penetration depth for a good conductorcan be calculated from the following equation [12]
δ 1πfμσ1113968 (3)
where δ is the penetration depth (m) f is the frequency (Hz)μ is the material magnetic permeability (Hm) and σ is thematerial electrical conductivity (Sm) Penetration depthsfor different materials are plotted on Figure 2 As designcriteria penetration depth at a certain frequency must be inthe same order than the characteristic geometric value of theconductive elements )is allows to maximize eddy currentgeneration and so the damping forces
Eddy current generation can be linked with mechanicaldamping In a viscous damper mechanical power losses canbe expressed as
P FD middot v (4)
where FD is the damping force and v is the moving massspeed By linking eddy current power losses and mechanicalpower losses we can state that
π2σB2pd
2
6Dmiddotf
2 FD middot v
(5)
An oscillatory linear motion frequency is directly pro-portional to linear speed amplitude as v A middot 2 middot π middot f whereA is the displacement amplitude )us we can determinethat the damping force-speed ratio is a constant c dependingon the eddy current electromagnetic behaviour as
ced FDv
σB2pd
2
24D middot A2(6)
)erefore in order to maximize damping coefficientseveral parameters must be optimized If the magnetic fieldapplied is larger damping coefficient will increase qua-dratically As already stated maximizing a generatedmagnetic field can be done by selecting a material with largemagnetization and by reducing distances between magneticfield generator magnet and conductive element By reducingmotion amplitude damping coefficient can also be largerOpposite considerations must be taken when trying not todamp motion but to allow it smoothly
Magnetic forces are volumetric forces that depend on themagnetization and magnetic field directions and orienta-tions Some designs may require forces in radial tangent orlongitudinal directions in order to damp or to transmitforces However for most of the cases only one direction ofthe forces is required while other two directions must beconstraint or locked If they are not locked undesiredmotions can appear Earnshawrsquos theorem states that a
4 Shock and Vibration
collection of permanent magnets cannot be maintained in astable stationary equilibrium configuration by themselvesthus mechanical constraints must be included in any device)ese mechanical constrains or kinematic pairs generateundesired frictions )erefore in order to minimize theloads on these kinematic pairs symmetrical magneticconfigurations and balanced assemblies are highly recom-mended )is means to include pairs of magnets instead ofodd number of magnets with counter directions and sym-metrical magnetic mass configurations
We can summarize some key considerations when de-signing electromagnetic dampers and isolators as
(i) )e larger the magnetization of the elements thelarger will be the forces
(ii) Air gaps between moving elements must be alwaysminimized
(iii) Permanent magnets must be analysed in all theirmotion positions
(iv) Remanence of permanent magnets is affected bymechanical shocks and external fields
(v) Temperature is also a critical aspect for permanentmagnet remanence
(vi) Demagnetization of permanent magnet pair has tobe analysed and prevented
(vii) Eddy current damping depends quadratically onapplied magnetic field
(viii) Penetration depth at a certain frequency must beanalysed in eddy current damping
(ix) Magnetic assemblies have to be symmetric andmagnetically balanced if possible
(x) Simple and standard magnet shapes like cylindersring or blocks on prototypes must be selected
Along next sections we will overview different types ofPEDVDI analysing their characteristics and constructiveproperties and also their application fields and performance
3 Passive Electromagnetic Technologies forVibration Damping and Isolation
31 Eddy Current Dampers Eddy current dampers (ECDs)are based on the interaction between a nonmagnetic con-ductive material and a time varying magnetic field in theirrelative motion Eddy currents are generated either bymovement of the conductive material through a stationarymagnet or by strength or position change of the magneticfield source )is induces a magnetic field with oppositepolarity to the applied field and a repulsive electromotiveforce (EMF) which is dependent on the applied field changerate as shown in Section 2 Due to the conductive materialinternal resistance induced currents are dissipated into heatand the energy transformed from the system is removed[14]
General design of an ECD is depicted in Figure 3 Itconsists of a set of permanent magnets typically made ofNdFeB or SmCo because of their large magnetic qualitywhich are aligned in front of conductive elements made inaluminium or copper (preferred as its conductivity is thelargest) Design and device optimization are currently donethrough numerical simulations on the magnetic field dis-tribution and eddy current generally FEM based
)ere are three main points to consider during designphase in order to enhance the damping coefficient of anECD First is to properly orient permanent magnets poles inrespect to the conductive elements Magnetic field vectorcomponents must be perpendicular to the conductive planeas much as possible because eddy currents are generated bythose components However there are cases where magnetpolarization capacity prevents an optimal magnets layoutfor example radial magnetizations could be an optimalchoice for cylindrical devices but radial polarized magnetsare not as strong as axial polarized ones yet Second point isto maximize the magnetic field variation ie to maximizethe peak-to-peak value of the applied magnetic field )ismaximization can be done by combining reduced air gapslong displacement variations large magnetic quality ofpermanent magnets and large magnet sizes An alternativeto large magnets could be to assemble more magnets butwith reduced sizes In this way eddy currents generated permagnet will be smaller but multiplied by the number ofmagnets From a certain point increasing the size of themagnets does not increase the applied magnetic fieldtherefore there is an optimized size wherein it is worthier to
δ (m
m)
100
10
1
01
001
000110000001 001 01 1 10
f (kHz)100
Mn-ZnAlCU
Steel 410Fe-SiFe-Ni
Figure 2 Skin depth vs frequency for some materials at roomtemperature red vertical line denotes 50Hz frequency [13]
Shock and Vibration 5
add other magnets with alternative polarizations instead ofincreasing the own magnet size
)ird method and most relevant to enhance dampingcoefficient is to increase cinematically the motion of thepermanent magnets towards faster ie larger variation fre-quency magnet motions We consider this method as themost relevant because there are multiple mechanical optionsto enhance or multiply magnetrsquos motion towards a maxi-mization of the variation of the magnetic field A commonmethod is to couple a mechanical speed multiplication stagebetween vibration source and magnets frame Mechanicalspeed multiplication selection will depend on the vibrationsource type of displacement It has been typically done byusing track-pinion elements or lever arms [15] for linearvibration oscillations and planetary speed multipliers forrotational vibrations )is last type of devices is profuselycommercialized in aerospace applications [16 17] )esecommercial elements operate at temperature ranging fromminus 40 to + 70degC having a significant variation in dampingdepending on the operational temperature )e variation ofdamping coefficient with respect to temperature is typicallyminus 05degC )e main disadvantage of using mechanicalmultipliers is that this part may need maintenance lubrica-tion and of course contact limiting those advantages pro-vided by the eddy current dampers In addition mechanicalissues like large hysteretic forces or gear backlash prevent theiruse in low-amplitude vibration damping applications like formicrovibrations [18 19] To solve those issues an outstandingand unique eddy current magnetic damper with mechanicalmultiplication has been proposed and successfully tested [20])is commercialized device includes an innovative multi-plication stage made through linear magnetic gearing insteadof mechanical that prevents almost all issues appearing inconventional mechanical multiplication stages while pro-viding excellent results both at room and high temperatureenvironments with a damping coefficient of 35000Nsm for a19 kg device [21] )is eddy current damper has one of thebest specific damping coefficients ever demonstrated1842Nsmmiddotkg making it very adequate for cars or aircraftsDamper tested in [20] has an operational temperature rangefrom minus 40 to + 250degC with a very low complexity of its movingparts )e major con is that magnetic parts generates mag-netic contamination in its surroundings
)ere are multiple research articles related to ECDs Ahn[22] presents a design procedure of an ECD for a linear
motor motion stage )is device overcomes the disadvan-tages of the spring type mechanism such as resonance andassembly difficulties due to the spring However the designis simple and constraint to the specific linear motor stage In[23] the eddy current damping is applied in a passive tunedmass damper using a Halbach array of magnets against acopper plate )ey demonstrated that plate thickness se-verely affects the damping coefficient passing from 25Nsmfor a 4mm plate thickness to more than 35Nsm if the plateis 20mm for a constant speed Berardengo et al [24] pre-sented a new type of adaptive tuned mass damper based onshape memory alloys and eddy current damping)e formerelement is used to adapt the Eigen frequency of the devicewhile the latter to tune the damping Again damping co-efficient is highly affected by geometrical parameters andlayouts )is can be an advantage during the design processsince it gives flexibility to the designers but it can lead tonondesired performance if some geometric values aremodified during assembly or operation
Besides the studies conducted in the previous referencesother applications like in civil engineering rotors applica-tions precision instrumentation robotics or automotivecan also be found For example Jo et al [25] proposed toinclude ECD in an air-bearing precision stage to improve thevibration isolation characteristics A Halbach magnet arraywas devised to increase the density of the magnetic flux ofthe ECD because a stronger magnetic field generates agreater damping force In this case vibrations lower than100Hz are damped however vibrations above are notdamped efficiently )is is explained because ECD dampingcoefficient decreases with frequency as also found in pre-vious references ECD can also be found working in-dependently or in combination with tuned mass dampers(TMD) [26 27] or magnetorheological dampers [28] In anycase references [22ndash28] are far from a product-orienteddesign and they remained just as interesting proof-of-concept prototypes
)e main commercial application field for eddy currentdampers is aerospace mechanism where cleanness and re-liability are critical requirements Since it is rather difficult toimplement maintenance and the operational environment issevere in aerospace the damping device should be advancedin long function fatigue life high reliability and good ap-plicability in vacuum and heat transformation conditionsEddy current dampers with instinct natures such as
Cu
vN
S
(a)
Cu
vN
S
S
N
N
S
S
N
N
S
(b)
Figure 3 ECD common configurations (a) Single magnet against conductive element (b) Multipole magnets against conductive element
6 Shock and Vibration
noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

challenges of PEDVDI are to provide at least the samedamping capacity in terms of damping coefficients andstiffness within the same mass lifetime and reliability ofconventional mechanical dampers and of course with acompetitive price
Applications of electromagnetic devices require gath-ering different engineering disciplines )ey are typicallydesigned and manufactured by electrical engineers Elec-trical engineers test the devices and provide performance ofthe device in some general known variables However thefinal applications of the devices which sometimes needspecific performance values are typically developed andselected by mechanical engineers It is thus important to linkproperly these two fields in order to obtain more efficientand optimized devices
One of the main objectives of this article is to summarizeand show general information of all types of passive elec-tromagnetic devices applied in vibration damping and vi-bration isolation PEDVDI have been categorized as followseddy current dampers (ECD) electromagnetic shuntdampers (EMSD) magnetic negative-stiffness dampers(MNSD) and passive magnetorheological dampers(PMRD) )is provides a wide view of the existing tech-nologies for a proper application selection A second aim ofthis article is to collect and present recent and outstandingresearch articles on passive electromagnetic devices for vi-bration damping and isolation in civil and mechanical en-gineering and space applications A comparison of theperformance and application field is given highlighting itsmain differences pros and cons
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance )erefore the article may be used as a designguide for specific applications Moreover as it describes thegeneral design for each technology it can be used as startingpoint for new designs
)is paper is organized as follows Section 2 relates togeneral design considerations of PEDVDI Section 3 de-scribes the review of the different technologies exploredECD in Section 31 Section 32 is the review for EMSD andSection 33 shows the review of MNSD )e papers end withthe review of PMRD described in section 34 Finally generalconclusions are listed in Section 4
2 General Design Considerations ofElectromagnetic Dampers and Isolators
When designing PEDVDI three types of materials aremainly used paramagnetic soft ferromagnetic and hardferromagnetic Paramagnetic materials are weakly affectedby external static magnetic fields Common paramagneticmaterials used in designs are aluminium copper titaniumor polymers However when selecting paramagnetic ma-terials their electrical conductivity must be carefully con-sidered as we will describe later Even if they are inert tostatic external magnetic fields they can severely react toalternant magnetic fields if they are good conductors If a
paramagnetic material is inside a static magnetizing field Hits magnetic polarization M is negligible acting as if theywere air or vacuum
On the contrary ferromagnetic materials do reactagainst external magnetic fields H If an external magneticfield is applied to a ferromagnetic material it gets magne-tized increasing significantly its volumetric magnetizationM and thus the total magnetic flux density B ie moremagnetic field accumulated within the same volumeMagnetic behaviour of the ferromagnetic materials is notlinear but it follows a hysteresis curve (Figure 1)
Based on the value of remanence BR and coercivity HCwe can determine whether the sample under study is a hardor a soft magnetic material )ose materials with largeremanence and large coercive field are called hard magneticmaterials because they are hard to demagnetize Inverselysoft magnetic materials have very low remanence and lowcoercive field and thus they are easily demagnetizable
Softmagneticmaterials have a thin hysteresis curve so theyare typically applied in applications where polarities changevery often such as in transformers and motor windings Softmagnetic materials can sustain relatively small electrical losses)e hysteresis loop width tells much about the losses Hardmagnetic materials have a very wide hysteresis curve whichmakes them practical in applications where they exert theirmagnetic field on soft magnetic materials )eir slope of de-magnetization at the zero line is very shallow and does notsteepen until it goes far to the left of the zero line If hardmagnetic materials changed polarity very often the hysteresislosses would be huge Hysteresis losses can be used inmagneticdampers as a mechanism to transform and dissipate kineticenergy as shown in Section 34
General values of electromagnetic properties for dif-ferent engineering materials are listed in Table 1
In mechanical engineering applications we used mag-netic materials to exert forces between themselves to providean output torque like in motors or damping forces as inPEDVDI Magnetic forces between two magnetic elementsdepend on the strength and orientation of the magnetic fieldthat element 1 applies on element 2 and on the strength anddirection of the magnetization of element 2 [3ndash6] )e forcethat element 1 exerts on 2 depends on the gradient of itsvolumetric magnetization M and on the magnetic fieldgenerated by the element 2
F12rarr
nabla m2rarr
middot Bapplied by 1rarr
1113874 1113875 nabla M2rarr
middot Vol2 middot μ0 middotHapplied by 1rarr
1113874 1113875
(1)
)us the larger is its magnetization the larger will be theforces acting on it Materials with very large magnetizationvalues suffer larger forces under the same external magneticfield Inside up materials with very large magnetizationgenerate larger external magnetic fields )erefore in firstterm the larger is the magnetization of the elements thelarger will be the forces ofon the device Moreover themagnetic field strength that a certain element generates in itssurroundings is inversely proportional to the cube of dis-tance Hence it is very important to approximate magneticelements as much as possible in order to increase magnetic
2 Shock and Vibration
forces Air gaps between moving elements must be alwaysminimized
)ere are two main methods to achieve large magne-tizations inside a certain volume nonpermanent magneti-zation of soft ferromagnetic materials and permanentmagnetization of hard ferromagnetic materials Non-permanent magnetization is generally obtained throughmagnetizing fields generated by currents circulating throughcoils or windings in the device )is option is not affected byother phenomena provided that the current is maintainedso it is a reliable method Its major issue is that it requires acontinuous power consumption and current control
Permanent magnetization of hard ferromagnetic mate-rials has a main advantage which is that it does not requirecontinuous currents flowing since magnetization is doneonce in factory However other problems must be con-sidered For example as the magnetization is permanent
forces between magnets will always appear even in non-desired orientations so it is important to analyse themagnetic forces at each of the motion positions Permanentmagnetizations usually have lower flux density on thematerials in comparison with fully saturated soft ferro-magnetic materials Permanent magnets if once fullymagnetized retains magnetism permanently but its in-tensity does not remain constant and normally decreasesgradually with elapse of time )is change is known aspermanent magnet ageing which is caused either naturallyor by external disturbance )e external disturbance men-tioned before can be classified into the following four typesaccording to characteristics magnetic circuit reluctancechange external field application mechanical shock andtemperature change [7]
For extreme applications like in space or in cryogenicenvironments other aspects also affect significantly to
Table 1 Magnetic properties of different engineering materials
Material type Coercivity bHc (kAm) Remanence Br (T) Relative permeability Saturation bsat (T)Ferrite magnet 150ndash250 035ndash04 12ndash19 035ndash04Alnico magnet 30ndash151 07ndash111 12ndash19 07ndash12Neodymium-iron magnet 675ndash1090 087ndash15 105 087ndash15Samarium-cobalt magnet 493ndash790 083ndash115 105 3000Iron 0006ndash0080 001ndash006 150ndash2000 16ndash215Nickel 0056ndash201 001ndash015 100ndash600 04ndash06Cobalt 080ndash7162 002ndash02 70ndash250 07ndash09Co-Fe alloy (49 Co) 007ndash009 01ndash03 8000ndash15000 22ndash24Ni-Fe alloy (75 Ni) 0001ndash0002 005ndash02 60000ndash250000 06ndash08Ni-Fe alloy (50 Ni) 0005ndash0010 003ndash015 7000ndash100000 15Electrical steel 0032ndash0072 05ndash08 3000ndash4000 16ndash2Stainless steel 304316 1ndash3 0001ndash0002 1003ndash1012 0025ndash003Stainless steel 430 05 08 750 14Copper OFCH mdash mdash 099 mdashAluminium 7075 mdash mdash 1004 mdashTitanium grade 5 mdash mdash 10001 mdashPTFE Teflon mdash mdash 1 mdashPolyimide mdash mdash 1 mdashNylon mdash mdash 1 mdash
BSAT
BSATBR
BR
HC
H
B
Hard
Soft
HC
Figure 1 Diagram of BndashH hysteresis curve for a hard and a soft ferromagnetic material
Shock and Vibration 3
permanent magnetizations Radiation as found in space ap-plications can permanently demagnetize magnets [8] )ere-fore special cares as correct selection of materials even if theyhave lower remanence or radiation shielding must be con-sidered Temperature also plays a main role when analysingpermanent magnetization For all permanent magnets in-creasing temperature means to lose their magnetization Somematerials like SmCo may resist higher temperatures thanothers but high temperatures always imply permanent mag-netization issues In contrast lower temperatures usually in-crease permanent magnetizations for most of the materials[9 10] Nevertheless at lower temperatures permanent mag-nets get more brittle so applications with very large magneticforces may need wall reinforcement of magnetic pieces
As stated magnetic forces are generated by applyingexternal magnetic fields to magnetized volumes )is surelyimplies that volumetric magnetization changes according tothe material hysteresis curve When having permanentmagnets in a device they should be checked for possibledemagnetisation caused by external magnetic fields Nor-mally only a simple check is needed at the end of the analysis)e check is made accordingly to find the highest possibletemperature inside a magnet and to find the lowest possiblefield value inside a magnet given by a finite element method(FEM) model )is lowest parametric model values should betreated as average values inside a magnet )en by using theBH-curve of the used magnet material check that the point ofthe lowest field value is above the knee point (point wheremagnetizations changes are significant and irreversible) [11]
Another main point to analyse in electromagnetic de-vices is the eddy current generation and its associated issuesandor benefits When magnets move through the innerconductor the moving magnetic field induces an eddycurrent in the conductor )e flow of electrons in theconductor immediately creates an opposing magnetic fieldgenerating Lorentz forces which result in damping of themagnet motion and produces heat inside the conductor )eamount of energy transferred to the conductor in the form ofheat is equal to change in kinetic energy lost by the magnets
Power loss due to eddy currents in a conductive sheet perunit of mass can be calculated as
P π2σB2
pd2
6Dmiddotf
2 (2)
where P is the power lost per unit mass (Wkg) Bp is themoving magnetic field peak (T) d is the sheet thickness (m)σ is the electric conductivity of the conductive sheet (Sm) Dis the conductive sheet density (kgm3) and f is the oscil-lation frequency (Hz) or variation of the applied magneticfield )us power losses depend directly on material con-ductivity quadratically with the applied magnetic field onthe conductive element and on geometrical dimensions )ecomponent of the magnetic field that affects for the eddycurrent generation is the one perpendicular to the sheet)ismust be considered when designing towards eddy currentmotion damping
Equation (3) is valid only under the so-called quasistaticconditions where magnet motion frequency is not fast
enough to generate the skin effect ie the electromagneticwave fully penetrates into the material In relation to veryfast-changing fields the magnetic field does not penetratecompletely into the material However increased frequencyof the same field value will always increase eddy currentseven with nonuniform field penetration )e skin depth orpenetration depth δ is defined as the depth where thecurrent density is just 1e (about 37) with respect to thevalue at the surface Penetration depth for a good conductorcan be calculated from the following equation [12]
δ 1πfμσ1113968 (3)
where δ is the penetration depth (m) f is the frequency (Hz)μ is the material magnetic permeability (Hm) and σ is thematerial electrical conductivity (Sm) Penetration depthsfor different materials are plotted on Figure 2 As designcriteria penetration depth at a certain frequency must be inthe same order than the characteristic geometric value of theconductive elements )is allows to maximize eddy currentgeneration and so the damping forces
Eddy current generation can be linked with mechanicaldamping In a viscous damper mechanical power losses canbe expressed as
P FD middot v (4)
where FD is the damping force and v is the moving massspeed By linking eddy current power losses and mechanicalpower losses we can state that
π2σB2pd
2
6Dmiddotf
2 FD middot v
(5)
An oscillatory linear motion frequency is directly pro-portional to linear speed amplitude as v A middot 2 middot π middot f whereA is the displacement amplitude )us we can determinethat the damping force-speed ratio is a constant c dependingon the eddy current electromagnetic behaviour as
ced FDv
σB2pd
2
24D middot A2(6)
)erefore in order to maximize damping coefficientseveral parameters must be optimized If the magnetic fieldapplied is larger damping coefficient will increase qua-dratically As already stated maximizing a generatedmagnetic field can be done by selecting a material with largemagnetization and by reducing distances between magneticfield generator magnet and conductive element By reducingmotion amplitude damping coefficient can also be largerOpposite considerations must be taken when trying not todamp motion but to allow it smoothly
Magnetic forces are volumetric forces that depend on themagnetization and magnetic field directions and orienta-tions Some designs may require forces in radial tangent orlongitudinal directions in order to damp or to transmitforces However for most of the cases only one direction ofthe forces is required while other two directions must beconstraint or locked If they are not locked undesiredmotions can appear Earnshawrsquos theorem states that a
4 Shock and Vibration
collection of permanent magnets cannot be maintained in astable stationary equilibrium configuration by themselvesthus mechanical constraints must be included in any device)ese mechanical constrains or kinematic pairs generateundesired frictions )erefore in order to minimize theloads on these kinematic pairs symmetrical magneticconfigurations and balanced assemblies are highly recom-mended )is means to include pairs of magnets instead ofodd number of magnets with counter directions and sym-metrical magnetic mass configurations
We can summarize some key considerations when de-signing electromagnetic dampers and isolators as
(i) )e larger the magnetization of the elements thelarger will be the forces
(ii) Air gaps between moving elements must be alwaysminimized
(iii) Permanent magnets must be analysed in all theirmotion positions
(iv) Remanence of permanent magnets is affected bymechanical shocks and external fields
(v) Temperature is also a critical aspect for permanentmagnet remanence
(vi) Demagnetization of permanent magnet pair has tobe analysed and prevented
(vii) Eddy current damping depends quadratically onapplied magnetic field
(viii) Penetration depth at a certain frequency must beanalysed in eddy current damping
(ix) Magnetic assemblies have to be symmetric andmagnetically balanced if possible
(x) Simple and standard magnet shapes like cylindersring or blocks on prototypes must be selected
Along next sections we will overview different types ofPEDVDI analysing their characteristics and constructiveproperties and also their application fields and performance
3 Passive Electromagnetic Technologies forVibration Damping and Isolation
31 Eddy Current Dampers Eddy current dampers (ECDs)are based on the interaction between a nonmagnetic con-ductive material and a time varying magnetic field in theirrelative motion Eddy currents are generated either bymovement of the conductive material through a stationarymagnet or by strength or position change of the magneticfield source )is induces a magnetic field with oppositepolarity to the applied field and a repulsive electromotiveforce (EMF) which is dependent on the applied field changerate as shown in Section 2 Due to the conductive materialinternal resistance induced currents are dissipated into heatand the energy transformed from the system is removed[14]
General design of an ECD is depicted in Figure 3 Itconsists of a set of permanent magnets typically made ofNdFeB or SmCo because of their large magnetic qualitywhich are aligned in front of conductive elements made inaluminium or copper (preferred as its conductivity is thelargest) Design and device optimization are currently donethrough numerical simulations on the magnetic field dis-tribution and eddy current generally FEM based
)ere are three main points to consider during designphase in order to enhance the damping coefficient of anECD First is to properly orient permanent magnets poles inrespect to the conductive elements Magnetic field vectorcomponents must be perpendicular to the conductive planeas much as possible because eddy currents are generated bythose components However there are cases where magnetpolarization capacity prevents an optimal magnets layoutfor example radial magnetizations could be an optimalchoice for cylindrical devices but radial polarized magnetsare not as strong as axial polarized ones yet Second point isto maximize the magnetic field variation ie to maximizethe peak-to-peak value of the applied magnetic field )ismaximization can be done by combining reduced air gapslong displacement variations large magnetic quality ofpermanent magnets and large magnet sizes An alternativeto large magnets could be to assemble more magnets butwith reduced sizes In this way eddy currents generated permagnet will be smaller but multiplied by the number ofmagnets From a certain point increasing the size of themagnets does not increase the applied magnetic fieldtherefore there is an optimized size wherein it is worthier to
δ (m
m)
100
10
1
01
001
000110000001 001 01 1 10
f (kHz)100
Mn-ZnAlCU
Steel 410Fe-SiFe-Ni
Figure 2 Skin depth vs frequency for some materials at roomtemperature red vertical line denotes 50Hz frequency [13]
Shock and Vibration 5
add other magnets with alternative polarizations instead ofincreasing the own magnet size
)ird method and most relevant to enhance dampingcoefficient is to increase cinematically the motion of thepermanent magnets towards faster ie larger variation fre-quency magnet motions We consider this method as themost relevant because there are multiple mechanical optionsto enhance or multiply magnetrsquos motion towards a maxi-mization of the variation of the magnetic field A commonmethod is to couple a mechanical speed multiplication stagebetween vibration source and magnets frame Mechanicalspeed multiplication selection will depend on the vibrationsource type of displacement It has been typically done byusing track-pinion elements or lever arms [15] for linearvibration oscillations and planetary speed multipliers forrotational vibrations )is last type of devices is profuselycommercialized in aerospace applications [16 17] )esecommercial elements operate at temperature ranging fromminus 40 to + 70degC having a significant variation in dampingdepending on the operational temperature )e variation ofdamping coefficient with respect to temperature is typicallyminus 05degC )e main disadvantage of using mechanicalmultipliers is that this part may need maintenance lubrica-tion and of course contact limiting those advantages pro-vided by the eddy current dampers In addition mechanicalissues like large hysteretic forces or gear backlash prevent theiruse in low-amplitude vibration damping applications like formicrovibrations [18 19] To solve those issues an outstandingand unique eddy current magnetic damper with mechanicalmultiplication has been proposed and successfully tested [20])is commercialized device includes an innovative multi-plication stage made through linear magnetic gearing insteadof mechanical that prevents almost all issues appearing inconventional mechanical multiplication stages while pro-viding excellent results both at room and high temperatureenvironments with a damping coefficient of 35000Nsm for a19 kg device [21] )is eddy current damper has one of thebest specific damping coefficients ever demonstrated1842Nsmmiddotkg making it very adequate for cars or aircraftsDamper tested in [20] has an operational temperature rangefrom minus 40 to + 250degC with a very low complexity of its movingparts )e major con is that magnetic parts generates mag-netic contamination in its surroundings
)ere are multiple research articles related to ECDs Ahn[22] presents a design procedure of an ECD for a linear
motor motion stage )is device overcomes the disadvan-tages of the spring type mechanism such as resonance andassembly difficulties due to the spring However the designis simple and constraint to the specific linear motor stage In[23] the eddy current damping is applied in a passive tunedmass damper using a Halbach array of magnets against acopper plate )ey demonstrated that plate thickness se-verely affects the damping coefficient passing from 25Nsmfor a 4mm plate thickness to more than 35Nsm if the plateis 20mm for a constant speed Berardengo et al [24] pre-sented a new type of adaptive tuned mass damper based onshape memory alloys and eddy current damping)e formerelement is used to adapt the Eigen frequency of the devicewhile the latter to tune the damping Again damping co-efficient is highly affected by geometrical parameters andlayouts )is can be an advantage during the design processsince it gives flexibility to the designers but it can lead tonondesired performance if some geometric values aremodified during assembly or operation
Besides the studies conducted in the previous referencesother applications like in civil engineering rotors applica-tions precision instrumentation robotics or automotivecan also be found For example Jo et al [25] proposed toinclude ECD in an air-bearing precision stage to improve thevibration isolation characteristics A Halbach magnet arraywas devised to increase the density of the magnetic flux ofthe ECD because a stronger magnetic field generates agreater damping force In this case vibrations lower than100Hz are damped however vibrations above are notdamped efficiently )is is explained because ECD dampingcoefficient decreases with frequency as also found in pre-vious references ECD can also be found working in-dependently or in combination with tuned mass dampers(TMD) [26 27] or magnetorheological dampers [28] In anycase references [22ndash28] are far from a product-orienteddesign and they remained just as interesting proof-of-concept prototypes
)e main commercial application field for eddy currentdampers is aerospace mechanism where cleanness and re-liability are critical requirements Since it is rather difficult toimplement maintenance and the operational environment issevere in aerospace the damping device should be advancedin long function fatigue life high reliability and good ap-plicability in vacuum and heat transformation conditionsEddy current dampers with instinct natures such as
Cu
vN
S
(a)
Cu
vN
S
S
N
N
S
S
N
N
S
(b)
Figure 3 ECD common configurations (a) Single magnet against conductive element (b) Multipole magnets against conductive element
6 Shock and Vibration
noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

forces Air gaps between moving elements must be alwaysminimized
)ere are two main methods to achieve large magne-tizations inside a certain volume nonpermanent magneti-zation of soft ferromagnetic materials and permanentmagnetization of hard ferromagnetic materials Non-permanent magnetization is generally obtained throughmagnetizing fields generated by currents circulating throughcoils or windings in the device )is option is not affected byother phenomena provided that the current is maintainedso it is a reliable method Its major issue is that it requires acontinuous power consumption and current control
Permanent magnetization of hard ferromagnetic mate-rials has a main advantage which is that it does not requirecontinuous currents flowing since magnetization is doneonce in factory However other problems must be con-sidered For example as the magnetization is permanent
forces between magnets will always appear even in non-desired orientations so it is important to analyse themagnetic forces at each of the motion positions Permanentmagnetizations usually have lower flux density on thematerials in comparison with fully saturated soft ferro-magnetic materials Permanent magnets if once fullymagnetized retains magnetism permanently but its in-tensity does not remain constant and normally decreasesgradually with elapse of time )is change is known aspermanent magnet ageing which is caused either naturallyor by external disturbance )e external disturbance men-tioned before can be classified into the following four typesaccording to characteristics magnetic circuit reluctancechange external field application mechanical shock andtemperature change [7]
For extreme applications like in space or in cryogenicenvironments other aspects also affect significantly to
Table 1 Magnetic properties of different engineering materials
Material type Coercivity bHc (kAm) Remanence Br (T) Relative permeability Saturation bsat (T)Ferrite magnet 150ndash250 035ndash04 12ndash19 035ndash04Alnico magnet 30ndash151 07ndash111 12ndash19 07ndash12Neodymium-iron magnet 675ndash1090 087ndash15 105 087ndash15Samarium-cobalt magnet 493ndash790 083ndash115 105 3000Iron 0006ndash0080 001ndash006 150ndash2000 16ndash215Nickel 0056ndash201 001ndash015 100ndash600 04ndash06Cobalt 080ndash7162 002ndash02 70ndash250 07ndash09Co-Fe alloy (49 Co) 007ndash009 01ndash03 8000ndash15000 22ndash24Ni-Fe alloy (75 Ni) 0001ndash0002 005ndash02 60000ndash250000 06ndash08Ni-Fe alloy (50 Ni) 0005ndash0010 003ndash015 7000ndash100000 15Electrical steel 0032ndash0072 05ndash08 3000ndash4000 16ndash2Stainless steel 304316 1ndash3 0001ndash0002 1003ndash1012 0025ndash003Stainless steel 430 05 08 750 14Copper OFCH mdash mdash 099 mdashAluminium 7075 mdash mdash 1004 mdashTitanium grade 5 mdash mdash 10001 mdashPTFE Teflon mdash mdash 1 mdashPolyimide mdash mdash 1 mdashNylon mdash mdash 1 mdash
BSAT
BSATBR
BR
HC
H
B
Hard
Soft
HC
Figure 1 Diagram of BndashH hysteresis curve for a hard and a soft ferromagnetic material
Shock and Vibration 3
permanent magnetizations Radiation as found in space ap-plications can permanently demagnetize magnets [8] )ere-fore special cares as correct selection of materials even if theyhave lower remanence or radiation shielding must be con-sidered Temperature also plays a main role when analysingpermanent magnetization For all permanent magnets in-creasing temperature means to lose their magnetization Somematerials like SmCo may resist higher temperatures thanothers but high temperatures always imply permanent mag-netization issues In contrast lower temperatures usually in-crease permanent magnetizations for most of the materials[9 10] Nevertheless at lower temperatures permanent mag-nets get more brittle so applications with very large magneticforces may need wall reinforcement of magnetic pieces
As stated magnetic forces are generated by applyingexternal magnetic fields to magnetized volumes )is surelyimplies that volumetric magnetization changes according tothe material hysteresis curve When having permanentmagnets in a device they should be checked for possibledemagnetisation caused by external magnetic fields Nor-mally only a simple check is needed at the end of the analysis)e check is made accordingly to find the highest possibletemperature inside a magnet and to find the lowest possiblefield value inside a magnet given by a finite element method(FEM) model )is lowest parametric model values should betreated as average values inside a magnet )en by using theBH-curve of the used magnet material check that the point ofthe lowest field value is above the knee point (point wheremagnetizations changes are significant and irreversible) [11]
Another main point to analyse in electromagnetic de-vices is the eddy current generation and its associated issuesandor benefits When magnets move through the innerconductor the moving magnetic field induces an eddycurrent in the conductor )e flow of electrons in theconductor immediately creates an opposing magnetic fieldgenerating Lorentz forces which result in damping of themagnet motion and produces heat inside the conductor )eamount of energy transferred to the conductor in the form ofheat is equal to change in kinetic energy lost by the magnets
Power loss due to eddy currents in a conductive sheet perunit of mass can be calculated as
P π2σB2
pd2
6Dmiddotf
2 (2)
where P is the power lost per unit mass (Wkg) Bp is themoving magnetic field peak (T) d is the sheet thickness (m)σ is the electric conductivity of the conductive sheet (Sm) Dis the conductive sheet density (kgm3) and f is the oscil-lation frequency (Hz) or variation of the applied magneticfield )us power losses depend directly on material con-ductivity quadratically with the applied magnetic field onthe conductive element and on geometrical dimensions )ecomponent of the magnetic field that affects for the eddycurrent generation is the one perpendicular to the sheet)ismust be considered when designing towards eddy currentmotion damping
Equation (3) is valid only under the so-called quasistaticconditions where magnet motion frequency is not fast
enough to generate the skin effect ie the electromagneticwave fully penetrates into the material In relation to veryfast-changing fields the magnetic field does not penetratecompletely into the material However increased frequencyof the same field value will always increase eddy currentseven with nonuniform field penetration )e skin depth orpenetration depth δ is defined as the depth where thecurrent density is just 1e (about 37) with respect to thevalue at the surface Penetration depth for a good conductorcan be calculated from the following equation [12]
δ 1πfμσ1113968 (3)
where δ is the penetration depth (m) f is the frequency (Hz)μ is the material magnetic permeability (Hm) and σ is thematerial electrical conductivity (Sm) Penetration depthsfor different materials are plotted on Figure 2 As designcriteria penetration depth at a certain frequency must be inthe same order than the characteristic geometric value of theconductive elements )is allows to maximize eddy currentgeneration and so the damping forces
Eddy current generation can be linked with mechanicaldamping In a viscous damper mechanical power losses canbe expressed as
P FD middot v (4)
where FD is the damping force and v is the moving massspeed By linking eddy current power losses and mechanicalpower losses we can state that
π2σB2pd
2
6Dmiddotf
2 FD middot v
(5)
An oscillatory linear motion frequency is directly pro-portional to linear speed amplitude as v A middot 2 middot π middot f whereA is the displacement amplitude )us we can determinethat the damping force-speed ratio is a constant c dependingon the eddy current electromagnetic behaviour as
ced FDv
σB2pd
2
24D middot A2(6)
)erefore in order to maximize damping coefficientseveral parameters must be optimized If the magnetic fieldapplied is larger damping coefficient will increase qua-dratically As already stated maximizing a generatedmagnetic field can be done by selecting a material with largemagnetization and by reducing distances between magneticfield generator magnet and conductive element By reducingmotion amplitude damping coefficient can also be largerOpposite considerations must be taken when trying not todamp motion but to allow it smoothly
Magnetic forces are volumetric forces that depend on themagnetization and magnetic field directions and orienta-tions Some designs may require forces in radial tangent orlongitudinal directions in order to damp or to transmitforces However for most of the cases only one direction ofthe forces is required while other two directions must beconstraint or locked If they are not locked undesiredmotions can appear Earnshawrsquos theorem states that a
4 Shock and Vibration
collection of permanent magnets cannot be maintained in astable stationary equilibrium configuration by themselvesthus mechanical constraints must be included in any device)ese mechanical constrains or kinematic pairs generateundesired frictions )erefore in order to minimize theloads on these kinematic pairs symmetrical magneticconfigurations and balanced assemblies are highly recom-mended )is means to include pairs of magnets instead ofodd number of magnets with counter directions and sym-metrical magnetic mass configurations
We can summarize some key considerations when de-signing electromagnetic dampers and isolators as
(i) )e larger the magnetization of the elements thelarger will be the forces
(ii) Air gaps between moving elements must be alwaysminimized
(iii) Permanent magnets must be analysed in all theirmotion positions
(iv) Remanence of permanent magnets is affected bymechanical shocks and external fields
(v) Temperature is also a critical aspect for permanentmagnet remanence
(vi) Demagnetization of permanent magnet pair has tobe analysed and prevented
(vii) Eddy current damping depends quadratically onapplied magnetic field
(viii) Penetration depth at a certain frequency must beanalysed in eddy current damping
(ix) Magnetic assemblies have to be symmetric andmagnetically balanced if possible
(x) Simple and standard magnet shapes like cylindersring or blocks on prototypes must be selected
Along next sections we will overview different types ofPEDVDI analysing their characteristics and constructiveproperties and also their application fields and performance
3 Passive Electromagnetic Technologies forVibration Damping and Isolation
31 Eddy Current Dampers Eddy current dampers (ECDs)are based on the interaction between a nonmagnetic con-ductive material and a time varying magnetic field in theirrelative motion Eddy currents are generated either bymovement of the conductive material through a stationarymagnet or by strength or position change of the magneticfield source )is induces a magnetic field with oppositepolarity to the applied field and a repulsive electromotiveforce (EMF) which is dependent on the applied field changerate as shown in Section 2 Due to the conductive materialinternal resistance induced currents are dissipated into heatand the energy transformed from the system is removed[14]
General design of an ECD is depicted in Figure 3 Itconsists of a set of permanent magnets typically made ofNdFeB or SmCo because of their large magnetic qualitywhich are aligned in front of conductive elements made inaluminium or copper (preferred as its conductivity is thelargest) Design and device optimization are currently donethrough numerical simulations on the magnetic field dis-tribution and eddy current generally FEM based
)ere are three main points to consider during designphase in order to enhance the damping coefficient of anECD First is to properly orient permanent magnets poles inrespect to the conductive elements Magnetic field vectorcomponents must be perpendicular to the conductive planeas much as possible because eddy currents are generated bythose components However there are cases where magnetpolarization capacity prevents an optimal magnets layoutfor example radial magnetizations could be an optimalchoice for cylindrical devices but radial polarized magnetsare not as strong as axial polarized ones yet Second point isto maximize the magnetic field variation ie to maximizethe peak-to-peak value of the applied magnetic field )ismaximization can be done by combining reduced air gapslong displacement variations large magnetic quality ofpermanent magnets and large magnet sizes An alternativeto large magnets could be to assemble more magnets butwith reduced sizes In this way eddy currents generated permagnet will be smaller but multiplied by the number ofmagnets From a certain point increasing the size of themagnets does not increase the applied magnetic fieldtherefore there is an optimized size wherein it is worthier to
δ (m
m)
100
10
1
01
001
000110000001 001 01 1 10
f (kHz)100
Mn-ZnAlCU
Steel 410Fe-SiFe-Ni
Figure 2 Skin depth vs frequency for some materials at roomtemperature red vertical line denotes 50Hz frequency [13]
Shock and Vibration 5
add other magnets with alternative polarizations instead ofincreasing the own magnet size
)ird method and most relevant to enhance dampingcoefficient is to increase cinematically the motion of thepermanent magnets towards faster ie larger variation fre-quency magnet motions We consider this method as themost relevant because there are multiple mechanical optionsto enhance or multiply magnetrsquos motion towards a maxi-mization of the variation of the magnetic field A commonmethod is to couple a mechanical speed multiplication stagebetween vibration source and magnets frame Mechanicalspeed multiplication selection will depend on the vibrationsource type of displacement It has been typically done byusing track-pinion elements or lever arms [15] for linearvibration oscillations and planetary speed multipliers forrotational vibrations )is last type of devices is profuselycommercialized in aerospace applications [16 17] )esecommercial elements operate at temperature ranging fromminus 40 to + 70degC having a significant variation in dampingdepending on the operational temperature )e variation ofdamping coefficient with respect to temperature is typicallyminus 05degC )e main disadvantage of using mechanicalmultipliers is that this part may need maintenance lubrica-tion and of course contact limiting those advantages pro-vided by the eddy current dampers In addition mechanicalissues like large hysteretic forces or gear backlash prevent theiruse in low-amplitude vibration damping applications like formicrovibrations [18 19] To solve those issues an outstandingand unique eddy current magnetic damper with mechanicalmultiplication has been proposed and successfully tested [20])is commercialized device includes an innovative multi-plication stage made through linear magnetic gearing insteadof mechanical that prevents almost all issues appearing inconventional mechanical multiplication stages while pro-viding excellent results both at room and high temperatureenvironments with a damping coefficient of 35000Nsm for a19 kg device [21] )is eddy current damper has one of thebest specific damping coefficients ever demonstrated1842Nsmmiddotkg making it very adequate for cars or aircraftsDamper tested in [20] has an operational temperature rangefrom minus 40 to + 250degC with a very low complexity of its movingparts )e major con is that magnetic parts generates mag-netic contamination in its surroundings
)ere are multiple research articles related to ECDs Ahn[22] presents a design procedure of an ECD for a linear
motor motion stage )is device overcomes the disadvan-tages of the spring type mechanism such as resonance andassembly difficulties due to the spring However the designis simple and constraint to the specific linear motor stage In[23] the eddy current damping is applied in a passive tunedmass damper using a Halbach array of magnets against acopper plate )ey demonstrated that plate thickness se-verely affects the damping coefficient passing from 25Nsmfor a 4mm plate thickness to more than 35Nsm if the plateis 20mm for a constant speed Berardengo et al [24] pre-sented a new type of adaptive tuned mass damper based onshape memory alloys and eddy current damping)e formerelement is used to adapt the Eigen frequency of the devicewhile the latter to tune the damping Again damping co-efficient is highly affected by geometrical parameters andlayouts )is can be an advantage during the design processsince it gives flexibility to the designers but it can lead tonondesired performance if some geometric values aremodified during assembly or operation
Besides the studies conducted in the previous referencesother applications like in civil engineering rotors applica-tions precision instrumentation robotics or automotivecan also be found For example Jo et al [25] proposed toinclude ECD in an air-bearing precision stage to improve thevibration isolation characteristics A Halbach magnet arraywas devised to increase the density of the magnetic flux ofthe ECD because a stronger magnetic field generates agreater damping force In this case vibrations lower than100Hz are damped however vibrations above are notdamped efficiently )is is explained because ECD dampingcoefficient decreases with frequency as also found in pre-vious references ECD can also be found working in-dependently or in combination with tuned mass dampers(TMD) [26 27] or magnetorheological dampers [28] In anycase references [22ndash28] are far from a product-orienteddesign and they remained just as interesting proof-of-concept prototypes
)e main commercial application field for eddy currentdampers is aerospace mechanism where cleanness and re-liability are critical requirements Since it is rather difficult toimplement maintenance and the operational environment issevere in aerospace the damping device should be advancedin long function fatigue life high reliability and good ap-plicability in vacuum and heat transformation conditionsEddy current dampers with instinct natures such as
Cu
vN
S
(a)
Cu
vN
S
S
N
N
S
S
N
N
S
(b)
Figure 3 ECD common configurations (a) Single magnet against conductive element (b) Multipole magnets against conductive element
6 Shock and Vibration
noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

permanent magnetizations Radiation as found in space ap-plications can permanently demagnetize magnets [8] )ere-fore special cares as correct selection of materials even if theyhave lower remanence or radiation shielding must be con-sidered Temperature also plays a main role when analysingpermanent magnetization For all permanent magnets in-creasing temperature means to lose their magnetization Somematerials like SmCo may resist higher temperatures thanothers but high temperatures always imply permanent mag-netization issues In contrast lower temperatures usually in-crease permanent magnetizations for most of the materials[9 10] Nevertheless at lower temperatures permanent mag-nets get more brittle so applications with very large magneticforces may need wall reinforcement of magnetic pieces
As stated magnetic forces are generated by applyingexternal magnetic fields to magnetized volumes )is surelyimplies that volumetric magnetization changes according tothe material hysteresis curve When having permanentmagnets in a device they should be checked for possibledemagnetisation caused by external magnetic fields Nor-mally only a simple check is needed at the end of the analysis)e check is made accordingly to find the highest possibletemperature inside a magnet and to find the lowest possiblefield value inside a magnet given by a finite element method(FEM) model )is lowest parametric model values should betreated as average values inside a magnet )en by using theBH-curve of the used magnet material check that the point ofthe lowest field value is above the knee point (point wheremagnetizations changes are significant and irreversible) [11]
Another main point to analyse in electromagnetic de-vices is the eddy current generation and its associated issuesandor benefits When magnets move through the innerconductor the moving magnetic field induces an eddycurrent in the conductor )e flow of electrons in theconductor immediately creates an opposing magnetic fieldgenerating Lorentz forces which result in damping of themagnet motion and produces heat inside the conductor )eamount of energy transferred to the conductor in the form ofheat is equal to change in kinetic energy lost by the magnets
Power loss due to eddy currents in a conductive sheet perunit of mass can be calculated as
P π2σB2
pd2
6Dmiddotf
2 (2)
where P is the power lost per unit mass (Wkg) Bp is themoving magnetic field peak (T) d is the sheet thickness (m)σ is the electric conductivity of the conductive sheet (Sm) Dis the conductive sheet density (kgm3) and f is the oscil-lation frequency (Hz) or variation of the applied magneticfield )us power losses depend directly on material con-ductivity quadratically with the applied magnetic field onthe conductive element and on geometrical dimensions )ecomponent of the magnetic field that affects for the eddycurrent generation is the one perpendicular to the sheet)ismust be considered when designing towards eddy currentmotion damping
Equation (3) is valid only under the so-called quasistaticconditions where magnet motion frequency is not fast
enough to generate the skin effect ie the electromagneticwave fully penetrates into the material In relation to veryfast-changing fields the magnetic field does not penetratecompletely into the material However increased frequencyof the same field value will always increase eddy currentseven with nonuniform field penetration )e skin depth orpenetration depth δ is defined as the depth where thecurrent density is just 1e (about 37) with respect to thevalue at the surface Penetration depth for a good conductorcan be calculated from the following equation [12]
δ 1πfμσ1113968 (3)
where δ is the penetration depth (m) f is the frequency (Hz)μ is the material magnetic permeability (Hm) and σ is thematerial electrical conductivity (Sm) Penetration depthsfor different materials are plotted on Figure 2 As designcriteria penetration depth at a certain frequency must be inthe same order than the characteristic geometric value of theconductive elements )is allows to maximize eddy currentgeneration and so the damping forces
Eddy current generation can be linked with mechanicaldamping In a viscous damper mechanical power losses canbe expressed as
P FD middot v (4)
where FD is the damping force and v is the moving massspeed By linking eddy current power losses and mechanicalpower losses we can state that
π2σB2pd
2
6Dmiddotf
2 FD middot v
(5)
An oscillatory linear motion frequency is directly pro-portional to linear speed amplitude as v A middot 2 middot π middot f whereA is the displacement amplitude )us we can determinethat the damping force-speed ratio is a constant c dependingon the eddy current electromagnetic behaviour as
ced FDv
σB2pd
2
24D middot A2(6)
)erefore in order to maximize damping coefficientseveral parameters must be optimized If the magnetic fieldapplied is larger damping coefficient will increase qua-dratically As already stated maximizing a generatedmagnetic field can be done by selecting a material with largemagnetization and by reducing distances between magneticfield generator magnet and conductive element By reducingmotion amplitude damping coefficient can also be largerOpposite considerations must be taken when trying not todamp motion but to allow it smoothly
Magnetic forces are volumetric forces that depend on themagnetization and magnetic field directions and orienta-tions Some designs may require forces in radial tangent orlongitudinal directions in order to damp or to transmitforces However for most of the cases only one direction ofthe forces is required while other two directions must beconstraint or locked If they are not locked undesiredmotions can appear Earnshawrsquos theorem states that a
4 Shock and Vibration
collection of permanent magnets cannot be maintained in astable stationary equilibrium configuration by themselvesthus mechanical constraints must be included in any device)ese mechanical constrains or kinematic pairs generateundesired frictions )erefore in order to minimize theloads on these kinematic pairs symmetrical magneticconfigurations and balanced assemblies are highly recom-mended )is means to include pairs of magnets instead ofodd number of magnets with counter directions and sym-metrical magnetic mass configurations
We can summarize some key considerations when de-signing electromagnetic dampers and isolators as
(i) )e larger the magnetization of the elements thelarger will be the forces
(ii) Air gaps between moving elements must be alwaysminimized
(iii) Permanent magnets must be analysed in all theirmotion positions
(iv) Remanence of permanent magnets is affected bymechanical shocks and external fields
(v) Temperature is also a critical aspect for permanentmagnet remanence
(vi) Demagnetization of permanent magnet pair has tobe analysed and prevented
(vii) Eddy current damping depends quadratically onapplied magnetic field
(viii) Penetration depth at a certain frequency must beanalysed in eddy current damping
(ix) Magnetic assemblies have to be symmetric andmagnetically balanced if possible
(x) Simple and standard magnet shapes like cylindersring or blocks on prototypes must be selected
Along next sections we will overview different types ofPEDVDI analysing their characteristics and constructiveproperties and also their application fields and performance
3 Passive Electromagnetic Technologies forVibration Damping and Isolation
31 Eddy Current Dampers Eddy current dampers (ECDs)are based on the interaction between a nonmagnetic con-ductive material and a time varying magnetic field in theirrelative motion Eddy currents are generated either bymovement of the conductive material through a stationarymagnet or by strength or position change of the magneticfield source )is induces a magnetic field with oppositepolarity to the applied field and a repulsive electromotiveforce (EMF) which is dependent on the applied field changerate as shown in Section 2 Due to the conductive materialinternal resistance induced currents are dissipated into heatand the energy transformed from the system is removed[14]
General design of an ECD is depicted in Figure 3 Itconsists of a set of permanent magnets typically made ofNdFeB or SmCo because of their large magnetic qualitywhich are aligned in front of conductive elements made inaluminium or copper (preferred as its conductivity is thelargest) Design and device optimization are currently donethrough numerical simulations on the magnetic field dis-tribution and eddy current generally FEM based
)ere are three main points to consider during designphase in order to enhance the damping coefficient of anECD First is to properly orient permanent magnets poles inrespect to the conductive elements Magnetic field vectorcomponents must be perpendicular to the conductive planeas much as possible because eddy currents are generated bythose components However there are cases where magnetpolarization capacity prevents an optimal magnets layoutfor example radial magnetizations could be an optimalchoice for cylindrical devices but radial polarized magnetsare not as strong as axial polarized ones yet Second point isto maximize the magnetic field variation ie to maximizethe peak-to-peak value of the applied magnetic field )ismaximization can be done by combining reduced air gapslong displacement variations large magnetic quality ofpermanent magnets and large magnet sizes An alternativeto large magnets could be to assemble more magnets butwith reduced sizes In this way eddy currents generated permagnet will be smaller but multiplied by the number ofmagnets From a certain point increasing the size of themagnets does not increase the applied magnetic fieldtherefore there is an optimized size wherein it is worthier to
δ (m
m)
100
10
1
01
001
000110000001 001 01 1 10
f (kHz)100
Mn-ZnAlCU
Steel 410Fe-SiFe-Ni
Figure 2 Skin depth vs frequency for some materials at roomtemperature red vertical line denotes 50Hz frequency [13]
Shock and Vibration 5
add other magnets with alternative polarizations instead ofincreasing the own magnet size
)ird method and most relevant to enhance dampingcoefficient is to increase cinematically the motion of thepermanent magnets towards faster ie larger variation fre-quency magnet motions We consider this method as themost relevant because there are multiple mechanical optionsto enhance or multiply magnetrsquos motion towards a maxi-mization of the variation of the magnetic field A commonmethod is to couple a mechanical speed multiplication stagebetween vibration source and magnets frame Mechanicalspeed multiplication selection will depend on the vibrationsource type of displacement It has been typically done byusing track-pinion elements or lever arms [15] for linearvibration oscillations and planetary speed multipliers forrotational vibrations )is last type of devices is profuselycommercialized in aerospace applications [16 17] )esecommercial elements operate at temperature ranging fromminus 40 to + 70degC having a significant variation in dampingdepending on the operational temperature )e variation ofdamping coefficient with respect to temperature is typicallyminus 05degC )e main disadvantage of using mechanicalmultipliers is that this part may need maintenance lubrica-tion and of course contact limiting those advantages pro-vided by the eddy current dampers In addition mechanicalissues like large hysteretic forces or gear backlash prevent theiruse in low-amplitude vibration damping applications like formicrovibrations [18 19] To solve those issues an outstandingand unique eddy current magnetic damper with mechanicalmultiplication has been proposed and successfully tested [20])is commercialized device includes an innovative multi-plication stage made through linear magnetic gearing insteadof mechanical that prevents almost all issues appearing inconventional mechanical multiplication stages while pro-viding excellent results both at room and high temperatureenvironments with a damping coefficient of 35000Nsm for a19 kg device [21] )is eddy current damper has one of thebest specific damping coefficients ever demonstrated1842Nsmmiddotkg making it very adequate for cars or aircraftsDamper tested in [20] has an operational temperature rangefrom minus 40 to + 250degC with a very low complexity of its movingparts )e major con is that magnetic parts generates mag-netic contamination in its surroundings
)ere are multiple research articles related to ECDs Ahn[22] presents a design procedure of an ECD for a linear
motor motion stage )is device overcomes the disadvan-tages of the spring type mechanism such as resonance andassembly difficulties due to the spring However the designis simple and constraint to the specific linear motor stage In[23] the eddy current damping is applied in a passive tunedmass damper using a Halbach array of magnets against acopper plate )ey demonstrated that plate thickness se-verely affects the damping coefficient passing from 25Nsmfor a 4mm plate thickness to more than 35Nsm if the plateis 20mm for a constant speed Berardengo et al [24] pre-sented a new type of adaptive tuned mass damper based onshape memory alloys and eddy current damping)e formerelement is used to adapt the Eigen frequency of the devicewhile the latter to tune the damping Again damping co-efficient is highly affected by geometrical parameters andlayouts )is can be an advantage during the design processsince it gives flexibility to the designers but it can lead tonondesired performance if some geometric values aremodified during assembly or operation
Besides the studies conducted in the previous referencesother applications like in civil engineering rotors applica-tions precision instrumentation robotics or automotivecan also be found For example Jo et al [25] proposed toinclude ECD in an air-bearing precision stage to improve thevibration isolation characteristics A Halbach magnet arraywas devised to increase the density of the magnetic flux ofthe ECD because a stronger magnetic field generates agreater damping force In this case vibrations lower than100Hz are damped however vibrations above are notdamped efficiently )is is explained because ECD dampingcoefficient decreases with frequency as also found in pre-vious references ECD can also be found working in-dependently or in combination with tuned mass dampers(TMD) [26 27] or magnetorheological dampers [28] In anycase references [22ndash28] are far from a product-orienteddesign and they remained just as interesting proof-of-concept prototypes
)e main commercial application field for eddy currentdampers is aerospace mechanism where cleanness and re-liability are critical requirements Since it is rather difficult toimplement maintenance and the operational environment issevere in aerospace the damping device should be advancedin long function fatigue life high reliability and good ap-plicability in vacuum and heat transformation conditionsEddy current dampers with instinct natures such as
Cu
vN
S
(a)
Cu
vN
S
S
N
N
S
S
N
N
S
(b)
Figure 3 ECD common configurations (a) Single magnet against conductive element (b) Multipole magnets against conductive element
6 Shock and Vibration
noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

collection of permanent magnets cannot be maintained in astable stationary equilibrium configuration by themselvesthus mechanical constraints must be included in any device)ese mechanical constrains or kinematic pairs generateundesired frictions )erefore in order to minimize theloads on these kinematic pairs symmetrical magneticconfigurations and balanced assemblies are highly recom-mended )is means to include pairs of magnets instead ofodd number of magnets with counter directions and sym-metrical magnetic mass configurations
We can summarize some key considerations when de-signing electromagnetic dampers and isolators as
(i) )e larger the magnetization of the elements thelarger will be the forces
(ii) Air gaps between moving elements must be alwaysminimized
(iii) Permanent magnets must be analysed in all theirmotion positions
(iv) Remanence of permanent magnets is affected bymechanical shocks and external fields
(v) Temperature is also a critical aspect for permanentmagnet remanence
(vi) Demagnetization of permanent magnet pair has tobe analysed and prevented
(vii) Eddy current damping depends quadratically onapplied magnetic field
(viii) Penetration depth at a certain frequency must beanalysed in eddy current damping
(ix) Magnetic assemblies have to be symmetric andmagnetically balanced if possible
(x) Simple and standard magnet shapes like cylindersring or blocks on prototypes must be selected
Along next sections we will overview different types ofPEDVDI analysing their characteristics and constructiveproperties and also their application fields and performance
3 Passive Electromagnetic Technologies forVibration Damping and Isolation
31 Eddy Current Dampers Eddy current dampers (ECDs)are based on the interaction between a nonmagnetic con-ductive material and a time varying magnetic field in theirrelative motion Eddy currents are generated either bymovement of the conductive material through a stationarymagnet or by strength or position change of the magneticfield source )is induces a magnetic field with oppositepolarity to the applied field and a repulsive electromotiveforce (EMF) which is dependent on the applied field changerate as shown in Section 2 Due to the conductive materialinternal resistance induced currents are dissipated into heatand the energy transformed from the system is removed[14]
General design of an ECD is depicted in Figure 3 Itconsists of a set of permanent magnets typically made ofNdFeB or SmCo because of their large magnetic qualitywhich are aligned in front of conductive elements made inaluminium or copper (preferred as its conductivity is thelargest) Design and device optimization are currently donethrough numerical simulations on the magnetic field dis-tribution and eddy current generally FEM based
)ere are three main points to consider during designphase in order to enhance the damping coefficient of anECD First is to properly orient permanent magnets poles inrespect to the conductive elements Magnetic field vectorcomponents must be perpendicular to the conductive planeas much as possible because eddy currents are generated bythose components However there are cases where magnetpolarization capacity prevents an optimal magnets layoutfor example radial magnetizations could be an optimalchoice for cylindrical devices but radial polarized magnetsare not as strong as axial polarized ones yet Second point isto maximize the magnetic field variation ie to maximizethe peak-to-peak value of the applied magnetic field )ismaximization can be done by combining reduced air gapslong displacement variations large magnetic quality ofpermanent magnets and large magnet sizes An alternativeto large magnets could be to assemble more magnets butwith reduced sizes In this way eddy currents generated permagnet will be smaller but multiplied by the number ofmagnets From a certain point increasing the size of themagnets does not increase the applied magnetic fieldtherefore there is an optimized size wherein it is worthier to
δ (m
m)
100
10
1
01
001
000110000001 001 01 1 10
f (kHz)100
Mn-ZnAlCU
Steel 410Fe-SiFe-Ni
Figure 2 Skin depth vs frequency for some materials at roomtemperature red vertical line denotes 50Hz frequency [13]
Shock and Vibration 5
add other magnets with alternative polarizations instead ofincreasing the own magnet size
)ird method and most relevant to enhance dampingcoefficient is to increase cinematically the motion of thepermanent magnets towards faster ie larger variation fre-quency magnet motions We consider this method as themost relevant because there are multiple mechanical optionsto enhance or multiply magnetrsquos motion towards a maxi-mization of the variation of the magnetic field A commonmethod is to couple a mechanical speed multiplication stagebetween vibration source and magnets frame Mechanicalspeed multiplication selection will depend on the vibrationsource type of displacement It has been typically done byusing track-pinion elements or lever arms [15] for linearvibration oscillations and planetary speed multipliers forrotational vibrations )is last type of devices is profuselycommercialized in aerospace applications [16 17] )esecommercial elements operate at temperature ranging fromminus 40 to + 70degC having a significant variation in dampingdepending on the operational temperature )e variation ofdamping coefficient with respect to temperature is typicallyminus 05degC )e main disadvantage of using mechanicalmultipliers is that this part may need maintenance lubrica-tion and of course contact limiting those advantages pro-vided by the eddy current dampers In addition mechanicalissues like large hysteretic forces or gear backlash prevent theiruse in low-amplitude vibration damping applications like formicrovibrations [18 19] To solve those issues an outstandingand unique eddy current magnetic damper with mechanicalmultiplication has been proposed and successfully tested [20])is commercialized device includes an innovative multi-plication stage made through linear magnetic gearing insteadof mechanical that prevents almost all issues appearing inconventional mechanical multiplication stages while pro-viding excellent results both at room and high temperatureenvironments with a damping coefficient of 35000Nsm for a19 kg device [21] )is eddy current damper has one of thebest specific damping coefficients ever demonstrated1842Nsmmiddotkg making it very adequate for cars or aircraftsDamper tested in [20] has an operational temperature rangefrom minus 40 to + 250degC with a very low complexity of its movingparts )e major con is that magnetic parts generates mag-netic contamination in its surroundings
)ere are multiple research articles related to ECDs Ahn[22] presents a design procedure of an ECD for a linear
motor motion stage )is device overcomes the disadvan-tages of the spring type mechanism such as resonance andassembly difficulties due to the spring However the designis simple and constraint to the specific linear motor stage In[23] the eddy current damping is applied in a passive tunedmass damper using a Halbach array of magnets against acopper plate )ey demonstrated that plate thickness se-verely affects the damping coefficient passing from 25Nsmfor a 4mm plate thickness to more than 35Nsm if the plateis 20mm for a constant speed Berardengo et al [24] pre-sented a new type of adaptive tuned mass damper based onshape memory alloys and eddy current damping)e formerelement is used to adapt the Eigen frequency of the devicewhile the latter to tune the damping Again damping co-efficient is highly affected by geometrical parameters andlayouts )is can be an advantage during the design processsince it gives flexibility to the designers but it can lead tonondesired performance if some geometric values aremodified during assembly or operation
Besides the studies conducted in the previous referencesother applications like in civil engineering rotors applica-tions precision instrumentation robotics or automotivecan also be found For example Jo et al [25] proposed toinclude ECD in an air-bearing precision stage to improve thevibration isolation characteristics A Halbach magnet arraywas devised to increase the density of the magnetic flux ofthe ECD because a stronger magnetic field generates agreater damping force In this case vibrations lower than100Hz are damped however vibrations above are notdamped efficiently )is is explained because ECD dampingcoefficient decreases with frequency as also found in pre-vious references ECD can also be found working in-dependently or in combination with tuned mass dampers(TMD) [26 27] or magnetorheological dampers [28] In anycase references [22ndash28] are far from a product-orienteddesign and they remained just as interesting proof-of-concept prototypes
)e main commercial application field for eddy currentdampers is aerospace mechanism where cleanness and re-liability are critical requirements Since it is rather difficult toimplement maintenance and the operational environment issevere in aerospace the damping device should be advancedin long function fatigue life high reliability and good ap-plicability in vacuum and heat transformation conditionsEddy current dampers with instinct natures such as
Cu
vN
S
(a)
Cu
vN
S
S
N
N
S
S
N
N
S
(b)
Figure 3 ECD common configurations (a) Single magnet against conductive element (b) Multipole magnets against conductive element
6 Shock and Vibration
noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

add other magnets with alternative polarizations instead ofincreasing the own magnet size
)ird method and most relevant to enhance dampingcoefficient is to increase cinematically the motion of thepermanent magnets towards faster ie larger variation fre-quency magnet motions We consider this method as themost relevant because there are multiple mechanical optionsto enhance or multiply magnetrsquos motion towards a maxi-mization of the variation of the magnetic field A commonmethod is to couple a mechanical speed multiplication stagebetween vibration source and magnets frame Mechanicalspeed multiplication selection will depend on the vibrationsource type of displacement It has been typically done byusing track-pinion elements or lever arms [15] for linearvibration oscillations and planetary speed multipliers forrotational vibrations )is last type of devices is profuselycommercialized in aerospace applications [16 17] )esecommercial elements operate at temperature ranging fromminus 40 to + 70degC having a significant variation in dampingdepending on the operational temperature )e variation ofdamping coefficient with respect to temperature is typicallyminus 05degC )e main disadvantage of using mechanicalmultipliers is that this part may need maintenance lubrica-tion and of course contact limiting those advantages pro-vided by the eddy current dampers In addition mechanicalissues like large hysteretic forces or gear backlash prevent theiruse in low-amplitude vibration damping applications like formicrovibrations [18 19] To solve those issues an outstandingand unique eddy current magnetic damper with mechanicalmultiplication has been proposed and successfully tested [20])is commercialized device includes an innovative multi-plication stage made through linear magnetic gearing insteadof mechanical that prevents almost all issues appearing inconventional mechanical multiplication stages while pro-viding excellent results both at room and high temperatureenvironments with a damping coefficient of 35000Nsm for a19 kg device [21] )is eddy current damper has one of thebest specific damping coefficients ever demonstrated1842Nsmmiddotkg making it very adequate for cars or aircraftsDamper tested in [20] has an operational temperature rangefrom minus 40 to + 250degC with a very low complexity of its movingparts )e major con is that magnetic parts generates mag-netic contamination in its surroundings
)ere are multiple research articles related to ECDs Ahn[22] presents a design procedure of an ECD for a linear
motor motion stage )is device overcomes the disadvan-tages of the spring type mechanism such as resonance andassembly difficulties due to the spring However the designis simple and constraint to the specific linear motor stage In[23] the eddy current damping is applied in a passive tunedmass damper using a Halbach array of magnets against acopper plate )ey demonstrated that plate thickness se-verely affects the damping coefficient passing from 25Nsmfor a 4mm plate thickness to more than 35Nsm if the plateis 20mm for a constant speed Berardengo et al [24] pre-sented a new type of adaptive tuned mass damper based onshape memory alloys and eddy current damping)e formerelement is used to adapt the Eigen frequency of the devicewhile the latter to tune the damping Again damping co-efficient is highly affected by geometrical parameters andlayouts )is can be an advantage during the design processsince it gives flexibility to the designers but it can lead tonondesired performance if some geometric values aremodified during assembly or operation
Besides the studies conducted in the previous referencesother applications like in civil engineering rotors applica-tions precision instrumentation robotics or automotivecan also be found For example Jo et al [25] proposed toinclude ECD in an air-bearing precision stage to improve thevibration isolation characteristics A Halbach magnet arraywas devised to increase the density of the magnetic flux ofthe ECD because a stronger magnetic field generates agreater damping force In this case vibrations lower than100Hz are damped however vibrations above are notdamped efficiently )is is explained because ECD dampingcoefficient decreases with frequency as also found in pre-vious references ECD can also be found working in-dependently or in combination with tuned mass dampers(TMD) [26 27] or magnetorheological dampers [28] In anycase references [22ndash28] are far from a product-orienteddesign and they remained just as interesting proof-of-concept prototypes
)e main commercial application field for eddy currentdampers is aerospace mechanism where cleanness and re-liability are critical requirements Since it is rather difficult toimplement maintenance and the operational environment issevere in aerospace the damping device should be advancedin long function fatigue life high reliability and good ap-plicability in vacuum and heat transformation conditionsEddy current dampers with instinct natures such as
Cu
vN
S
(a)
Cu
vN
S
S
N
N
S
S
N
N
S
(b)
Figure 3 ECD common configurations (a) Single magnet against conductive element (b) Multipole magnets against conductive element
6 Shock and Vibration
noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

noncontact nonleakage and easy implementation become acandidate to suppress vibrations of in the aerospace appli-cation system )ere are different constructions and designsfor ECD depending on the manufacturer While the designand ldquotemperature factorsrdquo may vary from manufacturer tomanufacturer the basic principle of using a high-speedmagnetic damper and a gearbox to increase the damping rateand torque capacity is almost universal [29 30] Previousstudies report rotational eddy current dampers demon-strating damping coefficients ranging between 24 and1000Nmsrad )e specific damping coefficient of thesedevices ranges between 1000 and 2000Nsmmiddotkg Dampingcoefficient varies with frequency decaying significantly forgreater than 50Hz frequencies )erefore they are adequatefor low-frequency damping but not very performant abovethose frequencies )ey both use a single magnet against acopper plate and both they calculate equivalent viscousdamping coefficient from hysteresis force-displacementcurve
Other product-oriented applications can also be foundFor high-resolution and precision instruments such asscanning tunnelling microscopy (STM) and atomic forcemicroscopes (AFM) the effective isolation of environmentalvibrations plays a key role Different types of eddy currentdampers have been presented and analysed in the literatureA comparison of one- and two-stage spring-suspendedsystems with magnetic eddy current damping showed ac-ceptable vibration isolation levels [31] )e advantage ofusing eddy current dampers is avoiding the use of grease-lubricated elements near the probe which may damage theinstrumentation Most of the recent STM and AFM usemagnetic eddy current damping for low-frequency vibrationisolation [32 33] Typical values of damping coefficient foreddy current dampers applied in instrumentations vary from025Nsm to 5Nsm For scientific on-ground in-strumentation specific damping coefficient is not relevantECD in [33] was used in the pressure ranges between 10minus 7 Paand 10minus 9 Pa showing a significant vibration displacementattenuation going from 50 nm at 16Hz in the input to just50 pm at 16Hz after using ECD Major pitfall of ECDs inSTM and AFM is the magnetic contamination that ECDsmay induce in the system and in the samples
Moreover active electromagnetic dampers used in au-tomotive vehicle suspension systems have also drawn somuch attention in recent years due to the developments inpower electronics permanent magnet materials and mi-croelectronic systems One of the main drawbacks of theseelectromagnetic dampers is that they are not fail-safe in caseof power failure A passive damping element can make theactive electromagnetic dampers fail-safe ECD has the po-tential to be used in electromagnetic dampers providingpassive damping for a fail-safe hybrid electromagneticdamper ECD for automotive applications has demonstrateda damping coefficient 1880Nsm for a weight of 325 kg [34]which leads to a specific damping density of 578NsmmiddotkgHowever a comparison of the ECD presented in [34] withthe off-the-shelf passive dampers reveals that the size andcost of the ECD are higher than those of passive oil dampersMoreover the ECD cost is more than twice of a commercial
passive damper due to the high cost of rare earth magnets)is is why it is essential to optimize the selection of shapesand sizes also for decreasing cost and not only to increaseperformance as recommended in Section 2
On the contrary ECD has not been widely used for civilengineering applications because its performance remainsrather limited due to its low density of energy dissipationECD can offer advantages in building vibration dampingcompared with other damping devices such as frictiondamping and viscous fluid damping A notable advantage isthat the eddy current dampers may operate in outdoorunder severe temperature conditions Additionally there isno fluid inside the damper and the damping generation isindependent of friction potentially increasing eddy currentdamper longevity and lowering maintenance requirements[35 36] In those studies it was demonstrated that thelinear damping assumption in the analytical model is onlyvalid for a limited range of low velocity and this velocity Itis important thus to determine the aimed frequency rangewhen designing ECD because for high frequencies theyare not so performant However for large-scale massivestructures the required damping will be of several orders ofmagnitude larger than that for eddy current dampers ap-plied in mechanisms It is therefore more practical andeconomical to apply eddy current dampers as a dampingelement for a resonant-type absorber or tuned massdamper )e auxiliary mass weights of a TMD are just asmall fraction (commonly 05ndash2) of the controlled modalmass of the primary structure and the damping required tomitigate the vibration of the auxiliary mass of a TMD isgreatly reduced A ECD optimized for TMD has demon-strated damping coefficients of 32134Nsm with a mass of2 kg
Last but not least EDC can be found in manufacturingapplications [37] specifically in robotic milling )is type ofmachining has become a new choice for machining of largecomplex structure parts However due to its serial structurethe industrial robot has several limitations such as lowstiffness that causes a low accuracy in the machining due tochatter vibrations In order to mitigate these chatter vi-brations a novel ECD has been designed for vibrationsuppression in the robotic milling process [38] )e ECDproposed is a multipole set of magnets against a cooper plateoriented to damp two vibrations directions )e dampingcoefficient measured in this element is 1656Nsm with06 kg mass which leads to a specific damping coefficient of276Nsmmiddotkg )e results showed that the peaks of the tooltip FRFs caused by the milling tool modes were damped by221 and 124 respectively in the vertical axis whichincrease the precision of the milling process and increase thereliability of the tool
As a conclusion ECDs can increase the dampingproperty of the structures they are attached to in a broaderfrequency range over the classic tuned mass dampers Alsothey are clean and temperature resistant and they are notquite sensitive to the change of structural modal frequenciesthus having good robustness Moreover ECDs are passivedampers and do not require complex control laws andtherefore they are easy to be implemented )ese advantages
Shock and Vibration 7
make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

make ECDs a good choice for vibration attenuation inmechanical systems
32 Electromagnetic Shunt Dampers An electromagneticshunt damper (EMSD) is essentially an electromagneticmotorgenerator that is connected to a shunt circuit(Figure 4) in which the electromagnetic motor convertsmechanical oscillation into electrical energy whereas theshunt circuit design controls the characteristic behaviour ofEMSDs [39 40] )e main features of EMSDs are as followseasy design passive control energy harvesting and motionmultiplication
Analogy between mechanical and electrical systems al-lows flexible EMSD designs by adjusting the external electricshunt circuit which is generally compact in size and allowsan easy element replacement When EMSDs are combinedwith gear components as in [41] EMSDs can transformlinear motion to rotary motion and provide a great damperforce with a small sizeweight In addition unlike conven-tional dampers that dissipate kinetic energy into heat EMSDconverts kinetic to electrical energy through the electro-mechanical coupling effect where electrical energy can bepotentially harvested and reused for other functions ifnecessary However the optimal performance of EMSD isinevitably constrained by the inherent resistance of motorcoils and circuit elements (such as inductors and capacitors)in practical applications
)ere are two main practical advantages of this passivedamper system First is that the vibration energy is notmerely dissipated but it can be reutilized In [42] researchersdemonstrated that by using EMSDs vibrations were at-tenuated while energy is transferred to an electric circuit forits use Secondly vibration energy transferred to the dampercan be transported easily through wires )is permits tolocate the dissipation in other places far from the vibrationorigin For example in [43] an EMSD showed that it iscapable of isolating the first-order and the third-order vi-brations (larger than 80Hz) far away from the vibrationsource In applications where on-place thermal generation isa critical issue like cryogenic or space applications havingthe possibility to select the most adequate dissipation lo-cation is an interesting feature On the other hand EMSDspresent several limitations for example the presence ofinherent resistance considerably caps the maximumdamping and causes the divergence of the damper perfor-mance from the design Moreover power generation per-formance of a EMSD working as an energy harvester islimited by resonance excitation as shown in [44] thereforeother methods as multigenerator methods or multi-resonance modes have to be applied Marinkovic and Koser[45] showed wide bandwidth energy harvested from vi-brations by using multigenerator method however itsdamping capacity at frequencies lower than 20Hz is muchreduced acting as a bandwidth pass filter Multiresonancemode method was used in [46] showing a device with 2degrees of freedom that has two resonant peaks which maybe tuned independently maintaining fairly uniform poweroutput over a frequency range
Main application fields for EMSDs are microvibration[47] low-frequency energy harvesting [48ndash52] mostly formicroelectronics applications and regenerative shock ab-sorbers mostly for vehicle applications [53ndash57] Other ap-plications like human motion energy harvesting orcombined with tuned mass absorbers [58ndash60] can be alsofound In any case all the developments found are limited tothe laboratory demonstrator or applications and far from itsextensive commercialization
Recent studies for EMSDs applied as microelectronicsenergy harvesting are divided into three groups according totheir objectives and approaches )e main point is to reducethe harvester resonant frequency in order to collect low-frequency vibration energy from the environment Alsobroadening current technology harvester bandwidth to in-crease the utilization of the random vibration energy issought [61] It is impossible to make a perfect harvester withlow resonant frequency wide frequency band and goodoutput performances at the same time
In [62] power harvesting is simply achieved from rel-ative oscillation between a permanent magnet allowed tomove freely inside a tube-carrying electrical coil with two-end stoppers and directly connected to the vibration source)e proposed harvester with freeimpact motion shows anonresonant behaviour in which the output power con-tinuously increases with the input frequency andor am-plitude In addition the allowable free motion permitssignificant power harvesting at low frequencies Henceproposed harvester is well suited for applications involved invariable large amplitude-low-frequency vibrations such ashuman-powered devices Another example of nonresonantmagnetomechanical low-frequency vibration energy har-vester can be found in [63] In this article energy harvesterconverts vibrations into electric charge using a guidedlevitated magnet oscillating inside a multiturn coil that isfixed around energy harvesters exterior In this case thefabricated energy harvester is hand-held and the prototypegenerates a normalized power density of approximately0133mWcm3 g2 at 155Hz
Shuntcircuit
Magnet
Coil
N
RC
RL
S
Figure 4 EMSD common configuration a permanent magnetoscillates along a coil generating electricity from the vibrationdamping)is electricity is then reoriented to a load resistance to bedissipated externally or to be used or accumulated for otherapplications
8 Shock and Vibration
Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

Regenerative shock absorbers are based on electro-magnetic rotary or linear motors connected to a shuntresistance operating as generators Motors are linked tothe vibration source directly or through a mechanicalmultiplication stage as for eddy current dampers )reedrive modes of the regenerative shock absorber systemscan be found direct drive mode indirect drive mode andhybrid drive mode [64] )e direct drive system hasattracted substantial amount of interests due to itscompact design and simple manufacturing )e directdrive mode directly connects vibration source to magnetstator to generate electricity Direct drive regenerativeshock absorbers provide damping coefficient between1500 and 2000 Nsm
Microvibration on board a spacecraft is an importantissue that affects payloads requiring high pointing accuracyAlthough isolators have been extensively studied andimplemented to tackle this issue their application is far frombeing ideal due to the several drawbacks that they have suchas limited low-frequency attenuation for passive systems orhigh power consumption and reliability issues for activesystems In [65] a novel 2-collinear-DoF strut with em-bedded electromagnetic shunt dampers (EMSD) is modeledand analysed and the concept is physically tested )ecombination of high-inductance components and negative-resistance circuits is used in the two shunt circuits to im-prove EMSD microvibration mitigation and to achieve anoverall strut damping performance that is characterised bythe elimination of the resonance peaks EMSD operateswithout requiring any control algorithm and can be com-fortably integrated on a satellite due to the low power re-quired the simplified electronics and the small mass
EMSDs demonstrate a unique feature when handling thedamped vibration energy because it can be transported andor stored as electrical energy )is makes EMSDs a veryinteresting type of dampers for microelectronics and vehicleapplications However their wide implementation in in-dustry has been limited by their low specific damping ca-pacity as well as by the fact the performance is highlydependent on the vibration frequency
33 Magnetic Negative-Stiffness Dampers Negative-stiffnesselements have been identified as unique mechanisms forenhancing acoustical and vibrational damping Examples ofnegative-stiffness mechanisms include mechanical systemswith negative spring constants and materials with negativemoduli [66ndash69] Negative-stiffness elements contribute todamping behaviour because they tend to assist rather thanresist deformation as a result of internally stored energy [70]Negative-stiffness isolators employ a unique and completelynew mechanical concept in low-frequency vibration iso-lation Vertical-motion isolation is provided by a stiff springthat supports a weight load combined with a negative-stiffness structure )e net vertical stiffness is made very lowwithout affecting the static load-supporting capability of thespring Reducing the net vertical stiffness implies that res-onant frequency is highly reduced since resonant frequencyis proportional to the root square of the stiffness
Generally negative-stiffness spring is made by two barshinged at the centre supported at their outer ends on pivotsand loaded in compression by compressive forces[69 71ndash73] Both bars are brought to almost buckling op-eration point)e equilibrium positions of the buckled beamcorrespond to local minimum and maximum of the strainenergy curve Since the beam stiffness corresponds to thespatial derivative of its strain energy the buckled beamexhibits negative stiffness over a certain interval [74]
Permanent magnets are an easy and reliable way ofobtaining negative-stiffness springs By using magnetspoles it is possible to tune operation range where thestiffness becomes negative [75] A common setup is tolocate magnets in unstable equilibrium point by facingequal poles north against north and south against south asshown in Figure 5(a) In this way magnet repulsion will actwith negative stiffness for displacements above and belowthe preload equilibrium point compensating coil springpositive stiffness of the and thus minimizing effectivestiffness in the operation point (Figure 5(b)) By mini-mizing dynamic stiffness the resonance frequency is lowerand therefore vibration damping capacity in higher fre-quencies is enhanced
)e main advantage of negative-stiffness dampers isthat the resonance frequency is lower therefore it is verysuitable not only for low-frequency vibration damping butalso to enhance damping in higher frequencies signifi-cantly By using magnetic negative springs the system canbe more reliable and long-lasting since one of the mainproblems of mechanical negative springs is the fatigue ofthe structures Magnets will not suffer from fatigue orpermanent plastic deformation therefore creating nega-tive springs through magnetic forces is worthwhile Ap-plication fields for magnetic negative-stiffness dampers(MNSD) are the same as those for negative-stiffnessdampers made with structural elements precisionmanufacturing optical and scientific instrumentationvehicles seat and rotary machinery
Among the most interesting developments we found amagnetic vibration isolator with the feature of high-static-low-dynamic stiffness which is developed in [76 77] )edevice was constructed by combining a magnetic negative-stiffness spring with a spiral flexure spring for static loadsupport )e magnetic spring comprised three magneticrings configured in attraction and it was used to reduce theresonant frequency of the isolator Experimental resultsdemonstrated that the magnetic negative-stiffness spring canreduce the resonant frequency in more than a half while itcan expand the isolation frequency band
Two novel designs of negative-stiffness dampers basedonmagnetism were designed optimized manufactured andtested in [78 79] )e two designs from those studies canefficiently integrate negative stiffness and eddy currentdamping in a simple and compact design )e proof-of-concept experiments were conducted through the scaledprototypes cyclic loading on a vibration machine Non-linearity in negative stiffness was observed in both config-urations Nonlinear problems in the vibratory system arehard to solve analytically and many efforts have been
Shock and Vibration 9
devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

devoted to its solution [80ndash82] Designs in [78 79] exhibitedthe hardening and softening patterns of negative stiffnessrespectively with increasing displacement Compared withthe existing designs of negative-stiffness systems uniquefeatures of the proposed designs include symmetrical neg-ative-stiffness behaviour integrated damping characteristicand a compact design that can be installed in any directionProposed designs have a great potential to replace semiactiveor active dampers in diverse vibration suppression or iso-lation applications
To suppress rotor systems vibration a vibration ab-sorber combining together negative stiffness and positivestiffness is proposed in [83] Firstly the magnetic negative-stiffness producing mechanism using ring-type permanentmagnets is presented and negative-stiffness characteristicsare analysed )en absorber-rotor system principles and
nonlinear dynamic characteristics are studied numericallyExperiments are carried out to verify the numerical con-clusions )e results show that the proposed vibrationabsorber is effective in order to suppress the rotor systemvibration the negative-stiffness nonlinearity affects thevibration suppression effect and the negative stiffness canbroaden the effective vibration control frequency range ofthe absorber
A special application of magnetic negative-stiffnessdampers has been found to isolate low-frequency seismicnoise from the ground in the fields such as gravitationalwave detecting [84 85] )e ultra-low-frequency isolator ismade by a magnetic spring composed of a pair of ringmagnets in parallel with the conventional pendulum )emagnetic spring can produce magnetic torque to cancel thegravitational torque of the pendulum and hence to reduce
m
X
Magnetic negativestiffness spring
S SN S NN
Load mass
Coil spring
(a)
1 +1
ndash1
Preload
1
0
0X displacement
ndash1
ndash1
1 0X displacement
ndash1 ndash1 0X displacement
1 ndash1 0X displacement
1
ndash1 0X displacement
1 ndash1 0X displacement
1
Forc
e mag
nets
1
0
ndash1
Stiff
ness
mag
nets
1
0
ndash1
Stiff
ness
sprin
g
+1
0
ndash1
Tota
l stif
fnes
s
Forc
e spr
ing
+1
ndash1
Preload
Tota
l for
ce
(b)
Figure 5 (a) Magnetic negative-stiffness spring configuration with coil spring for static forces (b) Normalized forces and stiffness againstnormalized displacements for magnetic spring coil spring and its addition
10 Shock and Vibration
the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

the resonance frequency In this case resonance frequencycan be up to ten times lower hence multiplying low-fre-quency vibration damping capacity
MNSD can significantly decrease the resonance fre-quency while keeping the same static load capacity thereforeenhancing vibration damping capacity in higher frequencies
34 Permanent Magnet-Based Magnetorheological DampersSimilar to passive hydraulic dampers a magnetorheological(MR) damper consists of a fluid that moves between dif-ferent chambers via small orifices in the piston convertingldquoshockrdquo energy into heat However in an MR damper anelectrical circuit is introduced in the piston assembly Aselectrical current is supplied to the damper a coil inside thepiston creates a magnetic field and instantaneously changesthe properties of the MR fluid in the piston annular orificeConsequently the dampers resistance can be continuouslychanged in real time by modulating the electrical current tothe damper Magnetorheological dampers are typically ac-tive elements since they need current circulating through thecoils in order to generate the magnetic field [86ndash90] )isgoes against passive devices benefits promoted in this articleso in this section we will only focus on a passive special typeof MR damper which is the permanent magnet-based MRdampers (PMRD)
Electromagnetic coils to generate the magnetic fieldintensity from the input current activate most of the pro-posed or developed MR dampers So to obtain the desireddamping force various control-related devices such ascurrent amplifiers signal converters and signal processorsare absolutely required Furthermore coil and wire modulesof the current make the damper structure more complicatedand difficult to assemble In order to improve the com-mercial feasibility self-powered MR dampers have beendeveloped featuring energy harvesting by piston movement
However they are not convincing powerless options In thissense in PMRD damping force is tuned by a permanentmagnet instead of electromagnetic coil circuits typically usedto drive MR dampers [91] PMRD consists of a ferromag-netic piston that is magnetically activated through a per-manent magnet external motion (Figure 6) Damping forcevariation of PMRD is realized by the magnetization area ormagnet flux dispersion variation not by the input currentmagnitude )us the PMRD input variable is totally dif-ferent from the conventional MR damper
)e major advantage of PMRD is the specific dampingcoefficient magnitude since they can reach values as high asoil viscous dampers while keeping a tuning capacity of theirperformance In comparison with active MR dampers thereduced power consumption is the second main benefitwhen PMRD was chosen for certain applications )e maindrawback for this kind of devices is that most of them needmagnetorheological fluid for its operation eliminating allthe benefits associated to oil-free devices for examplecleanness maintenance free and reliability In fact PMRDare hybrid devices between oil dampers and PEDVDI )efields of application for this type of device are mainly au-tomotive elements like dampers [92] clutches [93 94] orbrakes [95] and also prosthetic mechanical systems How-ever most of studies found in the literature are still labo-ratory prototypes and as far as we are concerned there is nocommercialized device based on this technology
A novel type of tunable magnetorheological PMRDdamper based only on the location of a permanent magnetincorporated into the piston was designed built and testedin [96] It was observed that the damping force reached up to390N according to the piston location )e maximumdamping coefficient is 21428Nsm for an estimated mass of1 kg To reduce the nonlinearity of on the magnet location amodified structure of the sidebar was utilized in the piston It
Bearing and sealAnnularorifice
MR fluid
Diaphragm
Accumulator
N S N S
(a)
Bearing and seal
AnnularorificeMR fluid
Coil
Diaphragm
Accumulator
(b)
Figure 6 Permanent magnet-based magnetorheological damper (a) compared with active magnetorheological damper (b)
Shock and Vibration 11
Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

Tabl
e2
Summaryan
dmainco
nclusio
nsof
PEDVDIreview
Type
Fields
ofap
plication
Adv
antages
Drawba
cks
ECD
Aerospa
cec
ivilen
gine
ering
precision
instrumen
tatio
nrobo
tics
andau
tomotive
Con
tactless
damping
bests
pecific
damping
coeffi
cien
tcleann
ess
tempe
rature
resis
tant
Magne
ticco
ntam
inationan
dhe
atgene
ratio
n
EMSD
Microvibrationan
dlow-frequ
ency
energy
harvestin
gDiss
ipationtran
sportablean
den
ergy
harvestin
gPe
rforman
cerestricted
toresona
ncefreq
uenc
y
MNSD
Precision
man
ufacturing
optical
andscientific
instrumen
tatio
nvehicles
seata
ndrotary
machine
ry
Redu
cedresona
ncefreq
uenc
yen
hanc
emen
tof
damping
athigh
erfreq
uenc
ies
andeasy
man
ufactoryr
eliability
Nodirect
damping
capa
city
PMRD
Autom
otiveelem
ents
likeda
mpe
rsc
lutche
sor
brak
esHighspecificda
mping
coeffi
cien
tOilco
ntam
ination
Type
Cha
racterist
icpa
rameters
Develop
men
tlevel
ECD
Dam
ping
coeffi
cien
tfrom
1to
3500
0Nsms
pecific
damping
coeffi
cien
tbetween10
00an
d20
00Nsmmiddotkg
Com
mercialized
prod
ucts
EMSD
Dam
ping
coeffi
cien
tfrom
1to
1000
0Nsme
nergy
harvestin
gde
nsity
from
01to
10mW
cm
3La
boratory
demon
strator
MNSD
Redu
cedresona
ncefreq
uenc
yup
totentim
esLa
boratory
demon
strator
PMRD
Dam
ping
coeffi
cien
tfrom
1to
5000
0Nsms
pecific
damping
coeffi
cien
tbe
tween10
000an
d20
000Nsmmiddotkg
Labo
ratory
demon
strator
12 Shock and Vibration
was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

was experimentally shown that a linear variation of thedamping force can be obtained based on the sidebars curvedshape It was also reported in a previous study on thisdamper that its response time is relatively slow comparedwith a conventional MR damper using an electromagneticcoil [97] It should be remarked that the damping force candecrease a lot perhaps due to the slow response time of themagnet when the excitation frequency is increased
Sato [98] presents a power-saving magnetizing device formagnetorheological fluids )is device encompasses a per-manent magnet for magnetizing the device instead of anelectromagnet that consumes electric power)e permanentmagnet applies a magnetic field to the device through aspecially designed magnetic yoke )e field intensity can becontrolled by moving the magnet When the magnetic fieldis controlled by a permanent magnet thrust that attracts themagnet into the yoke normally acts on the magnet andconsumes the power holding and moving the magnet
As stated PMRD has also been oriented for its appli-cations in prosthetics )e development presented in [99] isa special damper mechanism proposed to make a prostheticleg which can derive from on mode to off by using per-manent magnet only )e mechanism design is undertakenand the damping force is analysed in order to validate theeffectiveness of the proposed damper system for the patientrsquosmotion without the control device )e system can provideup to 1500Nsm when it is ldquoonrdquo while the ldquooffrdquo dampingcoefficient is not larger than 55Nsm demonstrating a veryhigh variation capacity given by the permanent-basedactuation
PRMDs are hybrid devices combining the high specificdamping capacity of oil dampers with the electromagneticdamping modulation capacity )e main drawback for thistype of devices is that they need magnetorheological fluid forits operation eliminating all the benefits associated to oil-free devices for example cleanness maintenance free andreliability
4 Conclusion
Passive electromagnetic devices for vibration damping andisolation are becoming a real alternative to traditionalmechanical vibration and isolation methods Passive devicesare designed and manufactured to respond in a certainmanner against vibration without the need of active feed-back and control )ese types of devices present gooddamping capacity lower cost null power consumption andhigher reliability
We have presented e a general description of all types ofpassive electromagnetic devices applied in vibrationdamping and vibration isolation )ose devices have beencategorized as follows eddy current damper (ECD) elec-tromagnetic shunt damper (EMSD) magnetic negative-stiffness damper (MNSD) and passive magnetorheologicaldamper (PMRD) We have analysed their topologies andpros and cons in the fields of applications and we have givensome characteristic parameter values All this informationhas been summarized in Table 2 (advantages and drawbacksare described comparatively with other types of PEDVDI)
In addition to the technology review part itself a generalintroductory section relates main considerations and designkey parameters that any engineer electrical or mechanicalneeds to know for a deep comprehension of any PEDVDIperformance
)erefore the article may be also used as a design guidefor specific applications Moreover as it describes thegeneral design for each technology it can be used as astarting point for new designs A practical list of key con-siderations when designing electromagnetic dampers andisolators is given in the general design considerations ofelectromagnetic dampers and isolator section
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Acknowledgments
)e authors would like to recognize the work of AlbaMartınez Perez in the preparation of figures
References
[1] R Palomera-Arias Passive Electromagnetic Damping Devicefor Motion Control of Building Structures MassachusettsInstitute of Technology Cambridge MA USA 2005
[2] N Z Meymian N Clark J Subramanian et al Quantificationof Windage and Vibrational Losses in Flexure Springs of a OneKw Two-Stroke Free Piston Linear Engine Alternator SAETechnical Paper Series PA USA 2019
[3] I Valiente-Blanco E Diez-Jimenez and J-L Perez-DıazldquoAlignment effect between a magnet over a superconductorcylinder in the Meissner staterdquo Journal of Applied Physicsvol 109 no 7 article 07E704 2011
[4] E Diez-Jimenez J-L Perez-Diaz and J C Garcia-PradaldquoLocal model for magnetndashsuperconductor mechanical in-teraction experimental verificationrdquo Journal of AppliedPhysics vol 109 no 6 article 063901 2011
[5] E Diez-Jimenez J L Perez-Diaz and J C Garcia-PradaldquoMechanical method for experimental determination of thefirst penetration field in high-temperature superconductorsrdquoIEEE Transactions on Applied Superconductivity vol 22 no 5article 9003106 2011
[6] J-L Perez-Dıaz J C Garcıa-Prada E Dıez-Jimenez et alldquoNon-contact linear slider for cryogenic environmentrdquoMechanism and Machine eory vol 49 no 7 pp 308ndash3142012
[7] N Makino and M Mishima ldquoAgeing of permanent magnetrdquoJournal of the Instrument Technology vol 7 no 1 pp 22ndash271957
[8] A Samin M Kurth and L R Cao ldquoAn analysis of radiationeffects on NdFeB permanent magnetsrdquo Nuclear Instrumentsand Methods in Physics Research Section B Beam Interactionswith Materials and Atoms vol 342 pp 200ndash205 2015
[9] E Diez-Jimenez J L Perez-Diaz C Ferdeghini et alldquoMagnetic and morphological characterization of Nd2Fe14Bmagnets with different quality grades at low temperature5ndash300Krdquo Journal of Magnetism and Magnetic Materialsvol 451 pp 549ndash553 2018
[10] E Diez-Jimenez J L Perez-Diaz F Canepa andC Ferdeghini ldquoInvariance of the magnetization axis underspin reorientation transitions in polycrystalline magnets of
Shock and Vibration 13
Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

Nd2Fe14Brdquo Journal of Applied Physics vol 112 no 6 article063918 2012
[11] S Ruoho Demagnetisation of Permanent Magnets in ElectricalMachines Helsinki University of Technology Espoo Finland2006
[12] R Wangsness Electromagnetic Fields Wiley Hoboken NJUSA 2007
[13] Zureks ldquoSkin effectrdquo Wikipedia 2019[14] J-S Bae J-H Hwang J-S Park and D-G Kwag ldquoModeling
and experiments on eddy current damping caused by apermanent magnet in a conductive tuberdquo Journal of Me-chanical Science and Technology vol 23 no 11 pp 3024ndash3035 2010
[15] C Yilmaz and N Kikuchi ldquoAnalysis and design of passiveband-stop filter-type vibration isolators for low-frequencyapplicationsrdquo Journal of Sound and Vibration vol 291no 3ndash5 pp 1004ndash1028 2006
[16] Avior Control Technologies Inc Durango Eddy CurrentDamper Product Catalog Avior Control Technologies IncLongmont CO USA 2019
[17] CDA-InterCorp Eddy Current Damper Application DataCatalog CDA-InterCorp MA USA 2019
[18] J L Perez-Dıaz I Valiente-Blanco C Cristache and E Dıez-Jimenez Enhanced Magnetic Vibration Damper with Me-chanical Impedance Matching WIPO Geneva Switzerland2015
[19] J Perez-Dıaz I Valiente-Blanco and C Cristache ldquoZ-Damper a new paradigm for attenuation of vibrationsrdquoMachines vol 4 no 2 p 12 2016
[20] I Valiente-Blanco C Cristache J Sanchez-Garcia-Casarru-bios F Rodriguez-Celis and J-L Perez-Diaz ldquoMechanicalimpedance matching using a magnetic linear gearrdquo Shock andVibration vol 2017 Article ID 7679390 9 pages 2017
[21] J L Perez-Diaz I Valiente-Blanco C Cristache et al ldquoAnovel high temperature eddy current damper with enhancedperformance by means of impedance matchingrdquo SmartMaterials and Structures vol 28 no 2 article 025034 2019
[22] H-J Ahn ldquoEddy current damper type reaction force com-pensation mechanism for linear motor motion stagerdquo In-ternational Journal of Precision Engineering andManufacturing-Green Technology vol 3 no 1 pp 67ndash742016
[23] T van Beek H Jansen K Pluk and E Lomonova ldquoOpti-misation and measurement of eddy current damping in apassive tuned mass damperrdquo IET Electric Power Applicationsvol 10 no 7 pp 641ndash648 2016
[24] M Berardengo A Cigada F Guanziroli and S ManzonildquoModelling and control of an adaptive tuned mass damperbased on shape memory alloys and eddy currentsrdquo Journal ofSound and Vibration vol 349 pp 18ndash38 2015
[25] J-H Jo C-H Seo H-Y Kim Y-H Jeon and M-G LeeldquoDesign and application of an eddy-current damper forimproving stability in positioning systemsrdquo Journal of theKorean Society of Manufacturing Technology Engineersvol 27 no 3 pp 194ndash202 2018
[26] WWang D Dalton X Hua X Wang Z Chen and G SongldquoExperimental study on vibration control of a submergedpipeline model by eddy current tuned mass damperrdquo AppliedSciences vol 7 no 10 p 987 2017
[27] W Shi L Wang Z Lu and H Gao ldquoStudy on adaptive-passive and semi-active eddy current tuned mass damper withvariable dampingrdquo Sustainability vol 10 no 2 p 99 2018
[28] A Asghar Maddah Y Hojjat M Reza Karafi and M RezaAshory ldquoReduction of magneto rheological dampers stiffness
by incorporating of an eddy current damperrdquo Journal ofSound and Vibration vol 396 pp 51ndash68 2017
[29] Q Pan T He D Xiao and X Liu ldquoDesign and dampinganalysis of a new eddy current damper for aerospace appli-cationsrdquo Latin American Journal of Solids and Structuresvol 13 no 11 pp 1997ndash2011 2016
[30] S Starin and J Neumeister ldquoEddy current damper simulationand modelingrdquo in Proceedings of the 14th European SpaceMechanisms amp Tribology Symposium Konstanz GermanySeptember 2011
[31] M Schmid and P Varga ldquoAnalysis of vibration-isolatingsystems for scanning tunneling microscopesrdquo Ultra-microscopy vol 42ndash44 pp 1610ndash1615 1992
[32] Omicron Nanotechnology GmbH Catalog 2019[33] S B Chikkamaranahalli R R Vallance B N Damazo and
R M Silver ldquoDamping mechanisms for precision applica-tions in UHV environmentrdquo American Society for PrecisionEngineering vol 1-2 2006
[34] B Ebrahimi M B Khamesee and F Golnaraghi ldquoEddycurrent damper feasibility in automobile suspension mod-eling simulation and testingrdquo Smart Materials and Structuresvol 18 no 1 article 015017 2008
[35] L Zuo X Chen and S Nayfeh ldquoDesign and analysis of a newtype of electromagnetic damper with increased energy den-sityrdquo Journal of Vibration and Acoustics vol 133 no 4 article041006 2011
[36] Z W Huang X G Hua Z Q Chen and H W NiuldquoModeling testing and validation of an eddy current damperfor structural vibration controlrdquo Journal of Aerospace Engi-neering vol 31 no 5 article 04018063 2018
[37] J-S Bae J-S Park J-H Hwang J-H Roh B-d Pyeon andJ-H Kim ldquoVibration suppression of a cantilever plate usingmagnetically multimode tuned mass dampersrdquo Shock andVibration vol 2018 Article ID 3463528 13 pages 2018
[38] F Chen and H Zhao ldquoDesign of eddy current dampers forvibration suppression in robotic millingrdquo Advances in Me-chanical Engineering vol 10 no 11 article 1687814018814072018
[39] Y Luo H Sun XWang L Zuo and N Chen ldquoWind inducedvibration control and energy harvesting of electromagneticresonant shunt tuned mass-damper-inerter for buildingstructuresrdquo Shock and Vibration vol 2017 Article ID4180134 13 pages 2017
[40] J-Y Li and S Zhu ldquoVersatile behaviors of electromagneticshunt damper with a negative impedance converterrdquo IEEEASME Transactions on Mechatronics vol 23 no 3pp 1415ndash1424 2018
[41] M C Smith ldquoSynthesis of mechanical networks the inerterrdquoIEEE Transactions on Automatic Control vol 47 no 10pp 1648ndash1662 2002
[42] P Wang and X Zhang ldquoDamper based on electromagneticshunt damping methodrdquo International Journal of AppliedElectromagnetics and Mechanics vol 33 no 3-4 pp 1425ndash1430 2010
[43] B Yan X Zhang and H Niu ldquoVibration isolation of a beamvia negative resistance electromagnetic shunt dampersrdquoJournal of Intelligent Material Systems and Structures vol 23no 6 pp 665ndash673 2012
[44] C Wei and X Jing ldquoA comprehensive review on vibrationenergy harvesting modelling and realizationrdquo Renewable andSustainable Energy Review vol 74 pp 1ndash18 2017
[45] B Marinkovic and H Koser ldquoDemonstration of widebandwidth energy harvesting from vibrationsrdquo Smart Ma-terials and Structures vol 21 no 6 article 065006 2012
14 Shock and Vibration
[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

[46] S-J Jang E Rustighi M J Brennan Y P Lee and H-J JungldquoDesign of a 2DOF vibrational energy harvesting devicerdquoJournal of Intelligent Material Systems and Structures vol 22no 5 pp 443ndash448 2011
[47] A Stabile G S Aglietti G Richardson and G Smet ldquoDesignand verification of a negative resistance electromagnetic shuntdamper for spacecraft micro-vibrationrdquo Journal of Sound andVibration vol 386 pp 38ndash49 2017
[48] K J Kim F Cottone S Goyal and J Punch ldquoEnergy scav-enging for energy efficiency in networks and applicationsrdquo BellLabs Technical Journal vol 15 no 2 pp 7ndash29 2010
[49] C B Williams C Shearwood M A Harradine P H MellorT S Birch and R B Yates ldquoDevelopment of an electro-magnetic micro-generatorrdquo IEE Proceedings-Circuits Devicesand Systems vol 148 no 6 p 337 2002
[50] P GlynneJones M J Tudor S P Beeby and N M WhiteldquoAn electromagnetic vibration-powered generator for in-telligent sensor systemsrdquo Sensors and Actuators A Physicalvol 110 no 1ndash3 pp 344ndash349 2004
[51] C R Saha T OrsquoDonnell H Loder S Beeby and J TudorldquoOptimization of an electromagnetic energy harvesting de-vicerdquo IEEE Transactions on Magnetics vol 42 no 10pp 3509ndash3511 2006
[52] R Torah P Glynne-Jones M Tudor T OrsquoDonnell S Royand S Beeby ldquoSelf-powered autonomous wireless sensor nodeusing vibration energy harvestingrdquo Measurement Science andTechnology vol 19 no 12 article 125202 2008
[53] E Asadi R Ribeiro M B Khamesee and A KhajepourldquoAnalysis prototyping and experimental characterization ofan adaptive hybrid electromagnetic damper for automotivesuspension systemsrdquo IEEE Transactions on Vehicular Tech-nology vol 66 no 5 pp 3703ndash3713 2017
[54] R Wang R Ding and L Chen ldquoApplication of hybridelectromagnetic suspension in vibration energy regenerationand active controlrdquo Journal of Vibration and Control vol 24no 1 pp 223ndash233 2018
[55] Z Zhang X Zhang W Chen et al ldquoA high-efficiency energyregenerative shock absorber using supercapacitors for re-newable energy applications in range extended electric ve-hiclerdquo Applied Energy vol 178 pp 177ndash188 2016
[56] S Guo Y Liu L Xu X Guo and L Zuo ldquoPerformanceevaluation and parameter sensitivity of energy-harvestingshock absorbers on different vehiclesrdquo Vehicle System Dy-namics vol 54 no 7 pp 918ndash942 2016
[57] Y Fukumori R Hayashi R Matsumi Y Suda andK Nakano ldquoStudy on independent tuning damping char-acteristic by coupling of electromagnetic dampers for auto-mobilesrdquo in Proceedings of the SAE Technical Paper Seriespp 0148ndash7191 Detroit MI USA March 2015
[58] J-J Bae and N Kang ldquoDevelopment of a five-degree-of-freedom seated human model and parametric studies for itsvibrational characteristicsrdquo Shock and Vibration vol 2018Article ID 1649180 15 pages 2018
[59] T Inoue Y Ishida and M Sumi ldquoVibration suppressionusing electromagnetic resonant shunt damperrdquo Journal ofVibration and Acoustics vol 130 no 4 article 041003 2008
[60] H Sun Y Luo X Wang and L Zuo ldquoSeismic control of aSDOF structure through electromagnetic resonant shunttuned mass-damper-inerter and the exact H2 optimal solu-tionsrdquo Journal of Vibroengineering vol 19 no 3 pp 2063ndash2079 2017
[61] Y Tan Y Dong and X Wang ldquoReview of MEMS electro-magnetic vibration energy harvesterrdquo Journal of Micro-electromechanical Systems vol 26 no 1 pp 1ndash16 2017
[62] A Haroun I Yamada and S Warisawa ldquoMicro electro-magnetic vibration energy harvester based on freeimpactmotion for low frequency-large amplitude operationrdquo Sensorsand Actuators A Physical vol 224 pp 87ndash98 2015
[63] A Nammari L Caskey J Negrete and H Bardaweel ldquoFab-rication and characterization of non-resonant magneto-me-chanical low-frequency vibration energy harvesterrdquo MechanicalSystems and Signal Processing vol 102 pp 298ndash311 2018
[64] R Zhang X Wang and S John ldquoA comprehensive review ofthe techniques on regenerative shock absorber systemsrdquoEnergies vol 11 no 5 2018
[65] A Stabile G S Aglietti G Richardson and G Smet ldquoConceptassessment for a 2-collinear-DOF strut prototype with em-bedded electromagnetic shunt dampersrdquo in Proceedings of theEsmats 2017 pp 20ndash22 Hatfield UK September 2017
[66] C Han X Liu M Wu and W Liang ldquoA new approach toachieve variable negative stiffness by using an electromagneticasymmetric tooth structurerdquo Shock Vibration vol 2018Article ID 7476387 11 pages 2018
[67] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[68] L Meng J Sun and W Wu ldquo)eoretical design and char-acteristics analysis of a quasi-zero stiffness isolator using adisk spring as negative stiffness elementrdquo Shock and Vibra-tion vol 2015 Article ID 813763 19 pages 2015
[69] Y Shen X Wang S Yang and H Xing ldquoParameters opti-mization for a kind of dynamic vibration absorber withnegative stiffnessrdquo Mathematical Problems in Engineeringvol 2016 Article ID 9624325 10 pages 2016
[70] L Kashdan C Seepersad M Haberman and P S WilsonldquoDesign fabrication and evaluation of negative stiffness ele-mentsrdquo in Proceedings of the 20th Annual International SolidFreeform Fabrication Symposium SFF Austin TX USAAugust 2009
[71] H Junshu M Lingshuai and S Jinggong ldquoDesign andcharacteristics analysis of a nonlinear isolator using a curved-mount-spring-roller mechanism as negative stiffness ele-mentrdquo Mathematical Problems in Engineering vol 2018Article ID 1359461 15 pages 2018
[72] R Li C Du F Guo G Yu and X Lin ldquoPerformance ofvariable negative stiffness MRE vibration isolation systemrdquoAdvances in Materials Science and Engineering vol 2015Article ID 837657 8 pages 2015
[73] D Huang W Li G Yang M He and H Dang ldquoVibrationanalysis of a piecewise-smooth system with negative stiffnessunder delayed feedback controlrdquo Shock and Vibrationvol 2017 Article ID 3502475 14 pages 2017
[74] C-M Lee V N Goverdovskiy and A I Temnikov ldquoDesignof springs with ldquonegativerdquo stiffness to improve vehicle drivervibration isolationrdquo Journal of Sound and Vibration vol 302no 4-5 pp 865ndash874 2007
[75] W Wu X Chen and Y Shan ldquoAnalysis and experiment of avibration isolator using a novel magnetic spring with negativestiffnessrdquo Journal of Sound and Vibration vol 333 no 13pp 2958ndash2970 2014
[76] G Dong X Zhang S Xie B Yan and Y Luo ldquoSimulated andexperimental studies on a high-static-low-dynamic stiffnessisolator using magnetic negative stiffness springrdquo MechanicalSystems and Signal Processing vol 86 pp 188ndash203 2017
[77] Y Zheng X Zhang Y Luo B Yan and C Ma ldquoDesign andexperiment of a high-static-low-dynamic stiffness isolatorusing a negative stiffness magnetic springrdquo Journal of Soundand Vibration vol 360 pp 31ndash52 2016
Shock and Vibration 15
[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration

[78] X Shi and S Zhu ldquoSimulation and optimization of magneticnegative stiffness dampersrdquo Sensors and Actuators A Physicalvol 259 pp 14ndash33 2017
[79] X Shi and S Zhu ldquoMagnetic negative stiffness dampersrdquoSmart Materials and Structures vol 24 no 7 article 0720022015
[80] I Pakar and M Bayat ldquoAnalytical study on the non-linearvibration of Euler-Bernoulli beamsrdquo Journal of Vibroengin-eering vol 14 no 1 pp 216ndash224 2012
[81] M Bayat M Shahidi A Barari and G Domairry ldquo)eapproximate analysis of nonlinear behavior of structure underharmonic loadingrdquo International Journal of Physical Sciencesvol 5 no 7 2010
[82] S C Some V Gaudefroy and D Delaunay ldquoEstimation ofbonding quality between bitumen and aggregate under as-phalt mixture manufacturing condition by thermal contactresistance measurementrdquo International Journal of Heat andMass Transfer vol 55 no 23-24 pp 6854ndash6863 2012
[83] H Yao Z Chen and B Wen ldquoDynamic vibration absorberwith negative stiffness for rotor systemrdquo Shock and Vibrationvol 2016 Article ID 5231704 13 pages 2016
[84] Y Zheng X Zhang CMa Z Zhang and S Zhang ldquoAn ultra-low frequency pendulum isolator using a negative stiffnessmagnetic springrdquo International Journal of Applied Electro-magnetics and Mechanics vol 52 no 3-4 pp 1313ndash13202016
[85] M Wang X Chen and X Li ldquoAn ultra-low frequency twoDOFsrsquo vibration isolator using positive and negative stiffnessin parallelrdquo Mathematical Problems in Engineering vol 2016Article ID 3728397 15 pages 2016
[86] K S Arsava and Y Kim ldquoModeling of magnetorheologicaldampers under various impact loadsrdquo Shock and Vibrationvol 2015 Article ID 905186 20 pages 2015
[87] G Hu F Liu Z Xie and M Xu ldquoDesign analysis andexperimental evaluation of a double coil magnetorheologicalfluid damperrdquo Shock and Vibration vol 2016 Article ID4184726 12 pages 2016
[88] J Ding X Sun L Zhang and J Xie ldquoOptimization of fuzzycontrol for magnetorheological damping structuresrdquo Shockand Vibration vol 2017 Article ID 4341025 14 pages 2017
[89] X Yuan T Tian H Ling T Qiu and H He ldquoA review onstructural development of magnetorheological fluid damperrdquoShock and Vibration vol 2019 Article ID 1498962 33 pages2019
[90] S Zhu L Tang J Liu X Tang and X Liu ldquoA novel design ofmagnetorheological damper with annular radial channelrdquoShock and Vibration vol 2016 Article ID 8086504 7 pages2016
[91] W H Kim J H Park S Kaluvan Y-S Lee and S-B ChoildquoA novel type of tunable magnetorheological dampers op-erated by permanent magnetsrdquo Sensors and Actuators APhysical vol 255 pp 104ndash117 2017
[92] P Xiao Q Wang L Niu and H Gao ldquoResearch on sus-pension system with embedded-permanent-magnet magne-torheological damper based on V-modelrdquo Proceedings of theInstitution of Mechanical Engineers Part C Journal of Me-chanical Engineering Science vol 230 no 10 pp 1602ndash16142016
[93] R Rizzo A Musolino and H C Lai ldquoAn electrodynamicmagnetorheological clutch powered by permanent magnetsrdquoIEEE Transactions on Magnetics vol 53 no 2 pp 1ndash7 2017
[94] R Rizzo A Musolino F Bucchi P Forte and F Frendo ldquoAmulti-gap magnetorheological clutch with permanent
magnetrdquo Smart Materials and Structures vol 24 no 7 article075012 2015
[95] E Diez-Jimenez A Musolino M Raugi R Rizzo and L SanildquoA magneto-rheological brake excited by permanent mag-netsrdquo Applied Computational Electromagnetics Societyvol 34 no 1 pp 186ndash191 2019
[96] T H Lee C Han and S B Choi ldquoDesign and damping forcecharacterization of a new magnetorheological damper acti-vated by permanent magnet flux dispersionrdquo Smart Materialsand Structures vol 27 no 1 article 015013 2018
[97] T-H Lee and S-B Choi ldquoOn the response time of a newpermanent magnet based magnetorheological damper ex-perimental investigationrdquo Smart Materials and Structuresvol 28 no 1 article 014001 2019
[98] Y Sato ldquoPower-saving magnetizing device for magneto-rheological fluid control using permanent magnetrdquo IEEETransactions on Magnetics vol 50 no 11 pp 1ndash4 2014
[99] S-B Choi A-R Cha J-Y Yoon and T-H Lee ldquoDesign ofnew prosthetic leg damper for above knee amputees using amagnetorheological damper activated permanent magnetonlyrdquo in Proceedings of the Active And Passive Smart Struc-tures And Integrated Systems XII p 107 Denver CO USAMarch 2018
16 Shock and Vibration








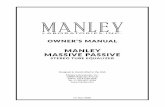


![Passive design[1]](https://static.fdokumen.com/doc/165x107/63215c9580403fa2920cb59b/passive-design1.jpg)