Reshetov LA Detecting pipe changes via acoustic matched field processing
8
Detecting pipe changes via acoustic matched field processing A. Tolstoy a,1 , K.V. Horoshenkov b, * , M.T. Bin Ali b a ATolstoy Sciences, 1538 Hampton Hill Circle, McLean, VA 22101, USA b School of Engineering, Design, and Technology, University of Bradford, Richmond Road, Bradford, West Yorkshire BD71DP, UK article info Article history: Received 5 September 2007 Received in revised form 17 August 2008 Accepted 25 August 2008 Available online 16 October 2008 Keywords: Acoustics Pipe Matched field processing abstract Detecting pipe irregularities such as intrusions can be challenging. However, subtle changes can be iden- tified in the complex acoustic fields measured over a range of frequencies and over a time interval given an ‘‘array” of receivers. In particular, for two receivers one can coherently process the signals via matched field processing (MFP) to infer whether or not there have been changes such as new intrusions relative to undisturbed fields measured earlier. There is no acoustic modelling of the fields required, only the simple linear processor is applied, and only test data (five scenarios) are used in this demonstration. A key advantage to using MFP plus two (or more) microphones is that absolute sound levels need not be care- fully measured. Ó 2008 Elsevier Ltd. All rights reserved. 1. Introduction Acoustic methods for the inspection of pipes to locate blockages and damage have been used extensively [1–4] with primary appli- cations related to the quality control of pipes used in chemical engineering, the oil and gas industries, the water industry, and in the manufacturing of musical instruments. Unlike many other inspection methods, acoustic methods can be fast and non- invasive. Many acoustic methods are based on pulse reflectometry. Such an approach injects a sound pulse into a pipe and examines the resultant reflections. Modeling is usually involved which requires constraints on the nature of the pipe or its defects. The approach of pulse reflectometry plus modeling may detect pipe leaks and cross-sectional changes after analysis of the reflections plus imped- ance modelling of the pipe with and without a defect [1]. This ap- proach can also be used to determine eigenvalue shifts [2,3] to detect finite duct blockages for one or two sets of termination con- ditions. Another application has been to model a pipe ‘‘notch” and its effects on low and high frequencies via finite element modelling of the duct and its defect [4]. The results for pulse reflectometry plus modelling are usually validated by comparison with test data and usually involve the assumption of idealized acoustic condi- tions. Additionally, such an approach typically utilises only one microphone and thus, requires vital system calibration or some way to remove offsets in the data [1]. In practical applications to underground pipe management it is often desirable to determine the degree of change which a long sec- tion of a pipe has experienced over time. Such operational and structural changes are often not localised and occur gradually along the whole length resulting from the development of longitudinal cracks and continuous sedimentation. At some critical instant a small change can result in a service failure (which may then con- tribute to a flood event caused by a blockage or a structural pipe col- lapse). A small change in pipe conditions is notoriously hard to detect directly, particularly when the pipe consists of several, poorly joined sections. Thus, the pipe is not simple or ‘‘ideal”. If the acoustic measurement is taken from an open end of the pipe connected to an inspection cavity of complex geometry, then it can be extremely difficult to separate the effects of the cavity from that of the pipe via the acoustic response. Thus, the impedance conditions can be difficult to model. This paper presents a novel application of the so-called matched field processing (MFP) method [5] which is able to detect changes in a continuous or non-continu- ous air-filled pipe and which is immune to the effect of the cavity. The concept to be applied here is simple: compare the (new) acoustic field (measured on microphones) present in a pipe which has an unknown condition with that of a previously measured (old) field where the pipe condition was known. This comparison is done via MFP over a range of frequencies and times. MFP is a signal pro- cessing technique which derives from matched filters and which has been in use in acoustical oceanography for several decades [5–18]. In this paper we present the application of MPF to detect pipe changes using two acoustic receivers. We note that if only one receiver were used, then system calibration would be required. We note that without calibration, it is impossible to simply ‘‘sub- tract” one field from another in order to detect differences. 0003-682X/$ - see front matter Ó 2008 Elsevier Ltd. All rights reserved. doi:10.1016/j.apacoust.2008.08.007 * Corresponding author. Tel.: +44 1274 233867; fax: +44 01274 233888. E-mail addresses: [email protected] (A. Tolstoy), [email protected] (K.V. Horoshenkov). 1 Tel.: +1 703 760 0881. Applied Acoustics 70 (2009) 695–702 Contents lists available at ScienceDirect Applied Acoustics journal homepage: www.elsevier.com/locate/apacoust
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Reshetov LA Detecting pipe changes via acoustic matched field processing

Applied Acoustics 70 (2009) 695–702
Contents lists available at ScienceDirect
Applied Acoustics
journal homepage: www.elsevier .com/locate /apacoust
Detecting pipe changes via acoustic matched field processing
A. Tolstoy a,1, K.V. Horoshenkov b,*, M.T. Bin Ali b
a ATolstoy Sciences, 1538 Hampton Hill Circle, McLean, VA 22101, USAb School of Engineering, Design, and Technology, University of Bradford, Richmond Road, Bradford, West Yorkshire BD71DP, UK
a r t i c l e i n f o
Article history:Received 5 September 2007Received in revised form 17 August 2008Accepted 25 August 2008Available online 16 October 2008
Keywords:AcousticsPipeMatched field processing
0003-682X/$ - see front matter � 2008 Elsevier Ltd. Adoi:10.1016/j.apacoust.2008.08.007
* Corresponding author. Tel.: +44 1274 233867; faxE-mail addresses: [email protected] (A. Tolstoy), k
(K.V. Horoshenkov).1 Tel.: +1 703 760 0881.
a b s t r a c t
Detecting pipe irregularities such as intrusions can be challenging. However, subtle changes can be iden-tified in the complex acoustic fields measured over a range of frequencies and over a time interval givenan ‘‘array” of receivers. In particular, for two receivers one can coherently process the signals via matchedfield processing (MFP) to infer whether or not there have been changes such as new intrusions relative toundisturbed fields measured earlier. There is no acoustic modelling of the fields required, only the simplelinear processor is applied, and only test data (five scenarios) are used in this demonstration. A keyadvantage to using MFP plus two (or more) microphones is that absolute sound levels need not be care-fully measured.
� 2008 Elsevier Ltd. All rights reserved.
1. Introduction
Acoustic methods for the inspection of pipes to locate blockagesand damage have been used extensively [1–4] with primary appli-cations related to the quality control of pipes used in chemicalengineering, the oil and gas industries, the water industry, and inthe manufacturing of musical instruments. Unlike many otherinspection methods, acoustic methods can be fast and non-invasive.
Many acoustic methods are based on pulse reflectometry. Suchan approach injects a sound pulse into a pipe and examines theresultant reflections. Modeling is usually involved which requiresconstraints on the nature of the pipe or its defects. The approachof pulse reflectometry plus modeling may detect pipe leaks andcross-sectional changes after analysis of the reflections plus imped-ance modelling of the pipe with and without a defect [1]. This ap-proach can also be used to determine eigenvalue shifts [2,3] todetect finite duct blockages for one or two sets of termination con-ditions. Another application has been to model a pipe ‘‘notch” andits effects on low and high frequencies via finite element modellingof the duct and its defect [4]. The results for pulse reflectometryplus modelling are usually validated by comparison with test dataand usually involve the assumption of idealized acoustic condi-tions. Additionally, such an approach typically utilises only onemicrophone and thus, requires vital system calibration or someway to remove offsets in the data [1].
ll rights reserved.
: +44 01274 [email protected]
In practical applications to underground pipe management it isoften desirable to determine the degree of change which a long sec-tion of a pipe has experienced over time. Such operational andstructural changes are often not localised and occur gradually alongthe whole length resulting from the development of longitudinalcracks and continuous sedimentation. At some critical instant asmall change can result in a service failure (which may then con-tribute to a flood event caused by a blockage or a structural pipe col-lapse). A small change in pipe conditions is notoriously hard todetect directly, particularly when the pipe consists of several,poorly joined sections. Thus, the pipe is not simple or ‘‘ideal”. Ifthe acoustic measurement is taken from an open end of the pipeconnected to an inspection cavity of complex geometry, then itcan be extremely difficult to separate the effects of the cavity fromthat of the pipe via the acoustic response. Thus, the impedanceconditions can be difficult to model. This paper presents a novelapplication of the so-called matched field processing (MFP) method[5] which is able to detect changes in a continuous or non-continu-ous air-filled pipe and which is immune to the effect of the cavity.
The concept to be applied here is simple: compare the (new)acoustic field (measured on microphones) present in a pipe whichhas an unknown condition with that of a previously measured (old)field where the pipe condition was known. This comparison is donevia MFP over a range of frequencies and times. MFP is a signal pro-cessing technique which derives from matched filters and whichhas been in use in acoustical oceanography for several decades[5–18]. In this paper we present the application of MPF to detectpipe changes using two acoustic receivers. We note that if onlyone receiver were used, then system calibration would be required.We note that without calibration, it is impossible to simply ‘‘sub-tract” one field from another in order to detect differences.

696 A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702
MFP is used in the frequency domain and is known to be sensi-tive to changes in the (complex) acoustic fields. This sensitivity canbe a function of: frequency, range to the source, nature of the envi-ronment, array of receivers, and other characteristics [5]. Usually,MFP is applied to data vs a model prediction for the field. Thisallows the exact nature of the difference to be quantified via mod-elling. However, such an approach also assumes that the model isextremely accurate and that it is able to account for detailed andcomplicated modal structures in a broad frequency range and inrange-dependent scenarios. Both these assumptions can be veryrestrictive. The approach which the authors propose herein in-volves no modelling – only a comparison of data with data. This ap-proach was first suggested and successfully applied to dolphinacoustic signals for the detection and discrimination of buriedmines in an ocean environment [19].
The next section (experimental measurements) will discuss theexperimental methodology and the obtained acoustic data. Follow-ing that section, we will discuss generic MFP. Finally, we will pres-ent the results with detailed discussion of our new MFP applicationfollowed by a brief conclusions and future work section.
2. Experimental measurements
Two types of experiments were conducted in order to illustratethe versatility and general application of the proposed analysismethod. For the first test, the pipe diameter is larger than theother, and the ends were terminated with inspection cavities. Forthe second test, the pipe is narrower and the ends are free. Thesetwo tests indicate the method usefulness for different impulseresponses and different boundary conditions at the pipe ends.Moreover, the various diameter pipes will show changing empha-ses on the lower or higher order modes.
One type of experiment (Test 1, 2 scenarios) was on a 20 m longsection of a concrete pipe with a 600 mm diameter. The concretepipe was terminated with two plywood manholes at either of itsends (see Fig. 1a). This pipe was not continuous but was composedof eight 2.5 m long concrete sections which were joined togetherwhere the joints were connected with rubber seals. An approxi-mately 100 mm change in the internal pipe diameter was observedat each of the seven joints. These diameter changes extended
Fig. 1. The total view of the 600 mm concrete pipe: (a) orientation of the loudspeakerintensity probe and the loudspeaker in the 150 mm PVC pipe.
approximately 50-100 mm in the longitudinal direction. We notethat the observed changes in the pipe diameter at the joints werecomparable with the transverse dimension of the artificial block-age which was introduced in the concrete pipe in the experiment.
The other type of experiment (Test 2, 3 scenarios) was on a8.8 m long section of a PVC pipe with a 150 mm diameter. ThisPVC pipe was continuous and did not have any joints which mighthave caused acoustic reflections. It was placed on the laboratoryfloor and its ends were open to the atmosphere.
The sources of sound for the tests were: (i) a 75 mm baffledloudspeaker positioned on the right near wall of the 600 mm con-crete pipe; (ii) a 50 mm baffled loudspeaker positioned in the mid-dle of the 150 mm PVC pipe. For both tests the speaker wasconnected to Rotel power amplifier, controlled by a high qualityMarc-8 audio card, and it was able to emit acoustic energy in thefrequency range of 50–18,000 Hz. The stimulus was a 14-ordermaximum length pseudo-random sequence generated by WinMLSsoftware [20] using the sampling frequency of 44,100 Hz.
The receiver for Test1 (concrete pipe) was a two-microphoneprobe with the 27 mm spacing between the microphones. The re-ceiver for Test 2 (PCV pipe) was a two-microphone probe withthe 12.5 mm spacing between the microphones (see Fig. 1b).Microphone 2 corresponds to the microphone closest to the pipeedge. The probe was inserted in each pipe and secured at the pipesoffit immediately near one of the pipe ends as shown in Fig. 2. Thereceived audio signals were digitized with a Marc-8 audio card anddeconvolved using WinMLS software so that the impulse responseof the pipe could be determined.
In total five scenarios were examined: (i) clean 600 mm con-crete pipe; (ii) 600 mm concrete pipe with a 13% brick blockage(12.8 cm high, 20.6 cm long) placed on the bottom starting at4.83 m distance from the center of the acoustic probe (4.7 m fromthe first microphone); (iii) clean 150 mm PVC pipe; (iv) 150 mmPVC pipe with a 25% heap of medium stone gravel at 5.5 m fromthe sensor; (v) 150 mm PVC pipe with a 25% heap of coarse stonegravel at 5.5 m from the sensor.
Sample deconvolved impulse responses for the both audiochannels from these five experiments are presented in Figs. 3and 4. We note in Fig. 3 that the data sets for the clean 600 mmpipe and for the pipe with a blockage are remarkably similar so
and intensity probe in the 600 mm concrete pipe; and (b) the orientation of the

PC with WinMLS
Blockage
Nexus conditioning preamplifier
2-microphone probe
Rotel power amplifier
Marc-8 sound card
Air-filled pipe
speaker
Fig. 2. Schematic diagram of the acoustic experiment in the pipe.
A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702 697
that it does not appear feasible to detect visually the blockage fromthe impulse response data. The long and more complicated tail inthe impulse response data for the concrete pipe is due to the longrange of propagation, wide range of frequencies, and sustainedmultiple reflections. We note that there was very little noise inthe impulse response data because of the very high signal-to-noiseratio (ca. 84 dB) provided by the 14-order MLS sequence algorithmadopted for this work [20]. Again, we note that consideration of thedifferent types of blockages and of the different types of pipes willindicate the method versatility.
0 0.02 0.04 0.06 0.08 0.time (sec)
−0.025
−0.05
−0.075
−0.1
−0.025
−0.05
−0.075
−0.1
0
0.025
0.05
ampl
itud
e
Concrete Pipe data (new)
Empty1
0 0.02 0.04 0.06 0.08 0time (sec)
0
0.025
0.05
ampl
itud
e
Concrete Pipe data (new)
Near1
phone 1
Clean600mmpipe
pipewithBlockage
Fig. 3. An example of time domain data (2048 points = 0.046417 s) as seen on two receivno blockage while the lower portion shows the data for a pipe with a 9% blockage. The
2.1. MFP
MFP is a coherent signal processing technique [5] which can beapplied to an array of data at individual frequencies. This techniquecan use many different processors which have been developed overthe years [5], but linear MFP is the simplest and most widely usedprocessor. It is basically defined as the cross-correlation betweendata and model fields resulting in a scalar output indicating theagreement between data and model.
1
−0.025
−0.05
−0.075
−0.1
−0.025
−0.05
−0.075
−0.10 0.02 0.04 0.06 0.08 0.1
time (sec)
0
0.025
0.05
ampl
itud
e
Concrete Pipe data (new)
Empty1
.1 0 0.02 0.04 0.06 0.08 0.1time (sec)
0
0.025
0.05
ampl
itud
e
Concrete Pipe data (new)
Near1
phone 2
ers. The upper portion of the figure corresponds to data run for a 600 mm pipe witheffect of the blockage is not visible in these data.

0 0.01 0.02 0.03 0.04 0.05time (sec)
−0.75
−0.65
−0.55
−0.45
−0.35
−0.25
−0.15
0.05
−0.05
−0.75
−0.65
−0.55
−0.45
−0.35
−0.25
−0.15
−0.05
−0.75
−0.65
−0.55
−0.45
−0.35
−0.25
−0.15
−0.05
−0.75
−0.65
−0.55
−0.45
−0.35
−0.25
−0.15
−0.05
−0.75
−0.65
−0.55
−0.45
−0.35
−0.25
−0.15
−0.05
−0.75
−0.65
−0.55
−0.45
−0.35
−0.25
−0.15
−0.05
0.15
0.25
0.35am
plit
ude
Pipe data (set 2)
0 0.01 0.02 0.03 0.04 0.05time (sec)
0.05
0.15
0.25
0.35
ampl
itud
e
Pipe data (set 2)
0 0.01 0.02 0.03 0.04 0.05time (sec)
0.05
0.15
0.25
0.35
ampl
itud
e
Pipe data (set 2)
0 0.01 0.02 0.03 0.04 0.05time (sec)
0.05
0.15
0.25
0.35
ampl
itud
e
Pipe data (set 2)
0 0.01 0.02 0.03 0.04 0.05time (sec)
0.05
0.15
0.25
0.35
ampl
itud
e
Pipe data (set 2)
0 0.01 0.02 0.03 0.04 0.05time (sec)
0.05
0.15
0.25
0.35
ampl
itud
e
Pipe data (set 2)
phone 1
Clean(150mmpipe)
Obst_1
Obst_2
phone 2
Fig. 4. An example of time domain data (2048 points = 0.046417 s) as seen on two receivers. The upper portion of the figure corresponds to data run for a 150 mm pipe withno obstruction while the mid and lower portions show the data for that pipe with two different obstructions. While the effect of each obstruction is visible, the differencesbetween obstructions are only very slightly visible.
698 A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702
To apply standard MFP one can begin with two time domainfields fmðtÞ and gmðtÞ recorded on receivers m where 2 6 m andover time t where 0 6 t 6 tmax for some tmax. We will assume thatthe number of time domain points, K, is a multiple of 2 (this willmake Fourier transforms straightforward). Typically, fm will corre-spond to test data while gm will correspond to simulated (model)data. In vector form we have f ¼ ðf1; f2; . . .Þ, g ¼ ðg1; g2; . . .Þ.
Next, these time domain fields are Fourier transformed into thefrequency domain, F ¼Fðf Þ;G ¼FðgÞ, to obtain complex fieldsFðxÞ ¼ ðF1ðxÞ; F2ðxÞ; . . .Þ and GðxÞ ¼ ðG1ðxÞ;G2ðxÞ; . . .Þ at fre-quency x. Additionally, the fields are normalized so that we have
jjFjj ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffijjF1jj2 þ jjF2jj2 þ . . .
q¼ 1:00, jjGjj ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffijjG1jj2 þ jjG2jj2 þ . . .
q¼
1:00. Finally, for the simple linear processor these complex fields

A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702 699
are cross-correlated to obtain a scalar estimate Plin of their similar-ity: a value of 0.00 indicates no similarity while a value of 1.00indicates that the fields are identical. In particular,
Plin ¼ jFþ � Gj2 ¼XN
m;n¼1
F�mFnGmG�n; ð1Þ
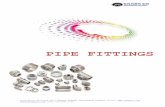
where * indicates complex conjugate, þ indicates the conjugatetranspose, and N is the number of receivers. Typically, ambiguitysurfaces (AMSs) are computed and plotted as a function of twoparameter values (such as source depth or range or water depth,etc.) and graphically illustrate those parameter values for whichagreement is high or low. An example of a scalar estimate (1) is seenin Fig. 5 for a variation of Plin with two arbitrary parameters P1; P2
(these parameters are simply variables of interest such as sourcerange or depth from a vertical line array) where the light pixelsshow strong correlation (true) values while the darkest pixels showlow (false) values. This example assumed a single frequency ofsound x and modelled values of F and G. Key advantages of MFPare:
1. The independence from absolute amplitude and phase levels:only the changes in levels along the array are important. Thus,we do not require knowledge of scaling or receiver calibrationsas we would for single microphone data.
2. The processing is spatially coherent between receivers: changesin phase along the array are important. Single microphone dataprocessing would require source spectral information for fre-quency coherence.
Disadvantages for MFP are usually considered to be:
1. A necessity for high quality modelling of the expected fields –this is not required here where we will be using only experi-mental data.
2. Sensitivity to change/error (typically data fields are comparedto modelled fields looking for parameter behavior) – this sensi-tivity is now an advantage for us since we will be looking forchanges between measured fields.
For the data considered here our array will consist of tworeceivers (microphones). We note that the minimum of two or
Fig. 5. An example of an AMS showing variation in Plin values as a function ofparameters P1; P2. The high correlation (true) values are shown by the white pixelswhile the low (false) values are shown by the darker pixels.
more microphones is needed in order to avoid calibration issuesand to take advantage of the nature of MFP, i.e., to emphasize onlyrelative field changes down the ‘‘array”. Next, the data will be Fou-rier transformed (via the FFT algorithm used in [21]) to be con-verted from the original time domain signals into a variety offrequency components from 0 to 22.05 kHz. In practice, the upperfrequency in the acoustic response of the loudspeakers used in thiswork was lower than the Nyquist frequency (22.05 kHz). However,the pipe itself was acting as an acoustical filter so that the energyin the impulse response spectrum was confined largely to below:4 kHz in the case of the concrete pipe and 18 kHz in the case ofthe PVC pipe. If we perform a standard Fourier transform usingall (2048) points of the impulse response determined in the caseof the concrete pipe of 600 mm diameter (Test 1) we arrive atFig. 6 which suggests: (i) the dominance of the low frequency com-ponents in the signal spectrum, i.e. the dominance of the first fewcross-sectional modes; and (ii) the nearly identical behavior ofthese Fourier spectra. Thus, a simple FFT of the Test 1 data doesnot reveal any obvious differences for a clean pipe vs one withblockages. Similar conclusions can be made for Test 2 in the caseof the impulse response spectra for the smaller PVC pipe withthe 150 mm diameter.
3. Results
It is a difficult task to accurately predict, i.e., model, the soundfield in a open section of a pipe with arbitrary boundary conditionsat the ends (such as inspection manholes of complex geometry andwith wet sediment). Modelling for such conditions would requireaccurately describing high and low order acoustic modes in thepipe for a very difficult and range-dependent environment (theblockage and pipe itself can be non-uniform with range). With thisMFP based method we can avoid modelling altogether.
Additionally, using all (2048) time domain points at one timereduces our sensitivity to change and negates potential abilitiesto localize obstructions. Therefore, we will generate AMSs usingshorter FFTs and sliding through the time domain until all of the2048 points have been considered. For this purpose we have exper-imented with a variety of 2N ¼ K FFT sizes and find that the choiceof N ¼ 9 (K ¼ 512 points) seems to result in an AMS with suffi-ciently good time and frequency resolution. That is, we computeFK (a vector with m components for m microphones and whereeach component is complex) given by
FK ¼ FKðx; tjÞ ¼ ðF1;Kðx; tjÞ; F2;Kðx; tjÞÞ;for t�½tj; tj þ KDt�; j ¼ 0;1;2; . . . ð2Þ
where
Fm;Kðx; tjÞ ¼FKðfmðtjÞÞ; ð3Þ
or
Fm;Kðx; tjÞ ¼Z tjþKDt
tj
fmðtÞe�ixtdt; m ¼ 1;2: ð4Þ
Here, tj ¼ jDt is an instant on the sliding time scale and Dt is thesampling interval, e.g., 2:27� 10�5 for our examples. Using the sug-gested value of K ¼ 512 and j 6 1536, we arrive at ”sonograms” ofthe data (sliding FFTs as a function of time and frequency) as inFig. 7 for a normalized Fm;Kðx; tjÞ where m denotes the microphonenumber). In the case of our impulse response data the last initialtime will be at 0.03483 s which corresponds to the 1536th impulseresponse point. We note that the lower frequencies for the 600 mmpipe dominate the FFTs particularly at the early times.
Next, we consider the associated ambiguity surfaces AMSðx; tj)for the fields FK;GK (normalized) given by

0 0.5 1 1.5 2 2.5x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Freq (Hz)
FFT
Signal
0 0.5 1 1.5 2 2.5x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Freq (Hz)
FFT
Signal
0 0.5 1 1.5 2 2.5x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Freq (Hz)
FFT
Signal
0 0.5 1 1.5 2 2.5x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Freq (Hz)
FFT
Signal
phone 1
Clean(600mmpipe)
withBlockage
phone 2
Fig. 6. Time domain data of Fig. 3 after standard Fourier transform processing (all 2048 points were used). Frequencies range from 0 to 22.05 kHz.
Fig. 7. Sonogram using 512 time points at a time (reduced Fourier transformprocessing) of previous data (clean 600 mm pipe) for microphone 1 (Fig. 3, top left).Frequencies shown range from 0 to over 20 kHz.
700 A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702
AMSðx; tjÞ ¼ jFþK � GKj2; ð5Þ
Ambiguity surface (5) can be used as a scalar estimate, like theearlier Plin, of the similarity between the signals received on amicrophone array in two different experiments.
Fig. 8 presents an AMS using the sonograms, Fm;K and Gm;K ,obtained for the acoustical signals received on the two-micro-phones in the concrete pipe of 600 mm diameter (Test 1). Here,we compare similar situations such as a pipe with no blockage withanother data set for the pipe with no blockage. In this example, wehave compared the upper subfigures of Fig. 3 with another runboth for a clean pipe situation (not shown here). We notice thatthere are some minor differences between the data runs at somefrequencies and times, but there is a relatively small number ofpixels displaying low values of AMS (see the indicated scale2).The number of all pixels is 256� 1537 ¼ 393472 with 53 pointswith an AMS 6 0:25. Thus, the proportion of strong disagreementis well less than 0.0%. If we compare dissimilar situations such as aclean pipe situation (top subfigures in Fig. 3) with a blockage situa-
2 We recall that low values of AMS correspond to a lack of correlation between datasets.

Fig. 8. Ambiguity surface (AMS) (512 points for each Fourier transform) comparinga clean pipe (P600
1 ) situation with another clean pipe (P6002 ) situation. We note that
there are not many low values (Plin 6 0:25, i.e., dark pixels).
Table 1Table of results for the 600 mm diameter pipe to show number (npts) of low AMSvalues ðAMS < 0:25Þ for two types of data (the 600 mm clean pipe and a brickblockage)
(1) Clean 600 mm pipe vs 600 mm clean pipe NPTSðAMS 6 0:25Þ
AverageMFP
P6001 vs: P600
2 53 1.00P600
1 vs: P6003 63 1.00
P6002 vs: P600
3 84 1.00
(2) Blockage in 600 mm pipe vs blockage in600 mm pipe
Bloc1 vs: Bloc2 214 0.98Bloc1 vs: Bloc3 314 0.97Bloc2 vs: Bloc3 169 0.98
(3) Clean 600 mm pipe vs blockage in 600 mmpipe
P6001 vs: Bloc1 12304 0.86
P6001 vs: Bloc2 12865 0.85
P6001 vs: Bloc3 14154 0.85
P6002 vs: Bloc1 12978 0.85
P6002 vs: Bloc2 13528 0.85
P6002 vs: Bloc3 14868 0.85
P6003 vs: Bloc1 14331 0.85
P6003 vs: Bloc2 14987 0.845
P6003 vs: Bloc3 16161 0.84
We note that similar situations (top two categories, 6 entries) have AMSs that showgreat agreement, i.e., few low values (npts less than 500) while the dissimilar sit-uations have more low AMS values (npts greater than 10,000) The total number ofpixels is approximately 400 K. We note that this is for a time window oft 2 ½0:0;0:035� s. If the window had been moved to t 2 ½0:030; 0:065� s, then theresults would have been even more dramatic since this later window would containscattering from the brick obstruction throughout the window.
Table 2Table of results for the 150 mm diameter pipe to show number (npts) of low AMSvalues ðAMS < 0:25Þ for three types of data (clean 150 mm pipe, obstruction 1, and
A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702 701
tion (bottom subfigures in Fig. 3) we obtain the result which is pre-sented in Fig. 9 showing significantly more low values of AMS (moreregions of strong disagreement). In particular, for the figure shownwe now have 12,304 low values (more than 3% strongdisagreement).
If we compare multiple runs of Test 1 data (600 mm pipe, threerepeat runs of a clean pipe situation, three of a blockage situation)we can summarize the results for the 600 mm diameter pipe inTable 1 showing the number of low value AMS pixels (npts) foreach combination and the average MFP value for the indicated timewindow (2048 points). In particular, the clean pipe situation is rep-resented by P600
j where j ¼ 1; . . . ;3 corresponds to a data run, theblockage situation by Blocj where j ¼ 1; . . . ;3 again correspondsto a data run. We clearly note a pattern of discrimination wherefor dissimilar situations (blockage vs clean pipe) give many lowMFP values, e.g., npts P 10000 and the average MFP 6 0:90, whilesimilar situations (blockage vs blockage – or clean pipe vs cleanpipe) give few low AMS values, e.g., npts 6 500 (npts) and the aver-age MFP P 0:95. We note that this is for a time window oft 2 ½0:0;0:035� sec. If the window had been moved tot 2 ½0:030;0:065� sec, then the results would have been even more
Fig. 9. Ambiguity surface (AMS) using sonograms (512 points for each Fouriertransform) comparing a clean pipe situation (P600
1 ) with a blockage situation (Bloc1).We note that there are more low values (Plin 6 0:25, i.e., dark pixels) than for theearlier situation of Fig. 8.
dramatic since this later window would contain scattering fromthe brick obstruction throughout the window. In any case, we seemable to distinguish between changing situations by examining thenumber of low AMS values (npts) and average MFP values for sce-narios where the concrete pipe is clean vs when a small brickblockage is present in the same pipe.
obstruction 2)
(1) Same vs same NPTSðAMS 6 0:25Þ
AverageMFP
P1501 vs: P150
2 359 0.99Obs11 vs: Obs12 196 0.99Obs21 vs: Obs22 70 0.99(2) Obstruction 1 vs obstruction 2Obs11 vs: Obs21 26809 0.80Obs11 vs: Obs22 26768 0.80Obs12 vs: Obs21 26777 0.80Obs12 vs: Obs22 26803 0.80(3) Clean 150 mm pipe vs 150 mm pipe with
obstructionsP150
1 vs: Obs11 31416 0.76P150
1 vs: Obs12 32040 0.76P150
1 vs: Obs21 33963 0.78P150
1 vs: Obs22 33964 0.78P150
2 vs: Obs11 31579 0.76P150
2 vs: Obs12 32240 0.76P150
2 vs: Obs21 33811 0.78P150
2 vs: Obs22 33845 0.79
We note that similar situations (top category, 3 entries) have AMSs that show veryfew low values. In particular, npts is less than 500. On the other hand, dissimilarsituations (middle and bottom rows) show considerable disagreement, i.e., highnumber of low AMS values. In particular, we see that the number of low AMS valuesfor dissimilar situations is greater than 25,000. The total number of pixels isapproximately 400 K. We note that this is for a time window of t 2 ½0:0;0:035� s.

702 A. Tolstoy et al. / Applied Acoustics 70 (2009) 695–702
Similarly, for Test 2 (150 mm pipe) if we again compare multiplesets of data (two of a non-obstruction situation, two of one obstruc-tion situation, two of another obstruction) we can summarize theresults in Table 2 showing the number of low value AMS pixels foreach combination. In particular, the non-obstruction situation isrepresented by P150
j , j ¼ 1;2 corresponding to a data set (see thetop subfigure in Fig. 4), the first obstruction situation by Obs1j,j ¼ 1;2 for each data set (see the middle subfigure in Fig. 4), andthe second obstruction situation by Obs2j, j ¼ 1;2 for each data set(see the bottom subfigure in Fig. 4). We again note a pattern of dis-crimination where similar situations (clear pipe) give few low MFPvalues, e.g., npts 6 500 and average MFP P 0:95, while dissimilar sit-uations (empty vs. obstructions 1 and 2, obstruction 1 vs obstruction2) give more low value pixels, i.e., npts P 25000 and averageMFP 6 0:80. We note that this is for a time window oft 2 ½0:0;0:035� sec. We again seem able to distinguish betweenchanging situations, particularly between the types of obstructionswhich generated time domain fields which looked nearly identicalto the eye (see middle and bottom subfigures in Fig. 4).
4. Conclusions and future work
We conclude that a new matched field approach can be used todiscriminate between changing pipe conditions such as: (i) a cleanpipe vs the pipe with a blockage; and (ii) between different types ofpipe blockage. This method has been demonstrated on a collectionof data sets (each using two receivers) and does not involve anymodelling of the scenarios or of the associated propagation andscattering.
We note that the ability of this method to sense blockages isvery dependent on:
� the location of the blockage (a blockage close to the sourceresults in stronger effects and more scattering);
� the size and nature of the blockage (large, dense blockages resultin stronger effects and more scattering);
� the diameter, material, and nature of the pipe (backgroundbackscatter will vary depending on the pipe);
� the time interval of the data selected for processing (if blockageeffects are NOT in the processed window, MFP computationswill not be affected).
Future investigations of this method may show capabilities todetermine the degree of change, its extent and location. Thismay be achieved by varying the start time for the processingof the acoustic signals and the resolution of the FFT to determinewhere the low values cluster in the ambiguity surface data. Wemay also improve sensitivity of the method by selecting laterstart time segments of the data and increasing the number of
the microphone channels. Finally, it may be possible to pre-com-pute templates (characteristic AMS features) for the defect itselfin order to discriminate between types of defects, if these de-fects are repeatable.
Acknowledgements
The authors are grateful to the Engineering and Physical Sci-ences Research Council (UK), Grant No. EP/D058589/1, for the sup-port of this work and to Mr. Antony J.F. Daron for the constructionof the experimental facility in the Hydraulics Laboratory in theUniversity of Bradford.
References
[1] Sharp DB, Campbell DM. Leak detection in pipes using acoustic pulsereflectometry. Acustica 1997;83(3):560–6.
[2] De Salis MHF, Oldham DJ. Determination of the blockage area function of afinite duct from a single pressure response measurement. J Sound Vib1999;221(1):180–6.
[3] De Salis MHF, Oldham DJ. A rapid technique to determine the internal areafunction of finite-length ducts using maximum length sequence analysis. JAcoust Soc Am 2000;108(1):44–52.
[4] Cawley P, Lowe MJS, Simonetti F, Chevalier C, Roosenbrand AG. The variation ofthe reflection coefficient of extensional guided waves in pipes from defects as afunction of defect depth, axial extent, circumferential extent and frequency.Proc Inst Mech Eng Part C: J Mech Eng Sci 2002;216(11):1131–43.
[5] Tolstoy A. Matched field processing for underwater acoustics. Singapore: WorldScientific Publishing; 1993.
[6] Turin GL. An introduction to matched filters. IREIT-6 1960:311–29.[7] Parvulescu A. Signal detection in a multipath medium by M.E.S.S. processing. J
Acoust Soc Am 1961;33:1674.[8] Middleton D. Topics in communication theory. New York: McGraw-Hill; 1965.[9] Van Trees HL. Detection, estimation, and modulation theory. New York: John
Wiley and Sons; 1968.[10] Capon J. High-resolution frequency-wavenumber spectrum analysis. Proc IEEE
57 1969:1408–18.[11] Clay CS, Hinich MJ. Use of a two-dimensional array to receive an unknown
signal in a dispersive waveguide. J Acoust Soc Am 1969;47:435–40.[12] Cox H. Spatial correlation in arbitrary noise fields, with application to ambient
sea noise. J Acoust Soc Am 1973;54:1289.[13] Hinich MJ. Maximum-likelihood signal processing for a vertical array. J Acoust
Soc Am 1973;54:499–503.[14] Bucker HP. Use of calculated sound fields and matched-field detection to
locate sound sources in shallow water. J Acoust Soc Am 1976;59:368–73.[15] Klemm R, Ing D. Use of generalized resolution methods to locate sources in
random dispersive media. IEEE Proc 1980;127:34–40.[16] Bienvenue G, Kopp L. Optimality of high resolution array processing using the
eigensystem approach. IEEE Trans ASSP 1983;31:1235–47.[17] Brillinger DR. A maximum-likelihood approach to frequency-wavenumber
analysis. IEEE Trans Acoust, Speech Sig Proc 1985;33:1076–86.[18] Baggeroer AB, Kuperman WA, Schmidt H. Matched field processing: source
localization in correlated noise as an optimum parameter estimation problem.J Acoust Soc Am 1988;83:571–87.
[19] Tolstoy A, Au W. The matched field processing of binaural dolphin-like signalsfor the detection and identification of buried targets. J Comput Acoust2003;11(4):521–34.
[20] Morset Sound Development, WinMLS; 2007. <www.winmls.com>.[21] Press WH, Flannery BP, Teukolsky SA, Vettering WT. Numerical
recipes. Massachusetts: Cambridge University Press; 1986.