REGULACIÓN DE VOLTAJE
7
REGULACIÓN DE VOLTAJE La regulación de voltaje de un generador síncrono se define como la razón de cambio en el voltaje en las terminales desde el voltaje sin carga hasta plena carga. Como E a es el voltaje sin carga y V a es el voltaje en las terminales plena carga, la regulación porcentual de voltaje es: RV = E a − V a V a ∗100 % (a) Circuito equivalente por fase de un generador síncrono con reacción de la armadura y los diagramas fasoriales correspondientes para factor de potencia de cargas (b) en atraso, (c) unitario y (d) en adelanto.
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of REGULACIÓN DE VOLTAJE
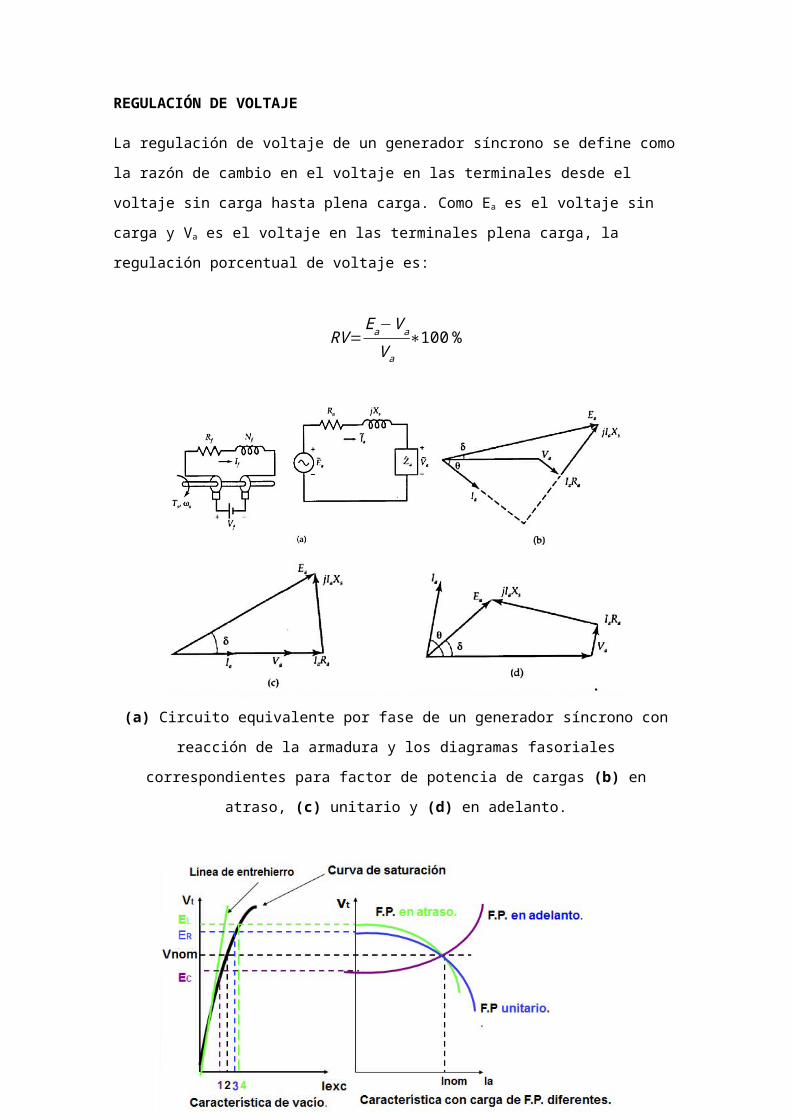
REGULACIÓN DE VOLTAJE
La regulación de voltaje de un generador síncrono se define como
la razón de cambio en el voltaje en las terminales desde el
voltaje sin carga hasta plena carga. Como Ea es el voltaje sin
carga y Va es el voltaje en las terminales plena carga, la
regulación porcentual de voltaje es:
RV=Ea−Va
Va∗100 %
(a) Circuito equivalente por fase de un generador síncrono con
reacción de la armadura y los diagramas fasoriales
correspondientes para factor de potencia de cargas (b) en
atraso, (c) unitario y (d) en adelanto.
EFICIENCIA DEL GENERADOR SÍNCRONO
Define la calidad de la máquina
η=Psalida
Pentrada∗100
η=Psalida
Psalida+Weléctricas+Wmagneticas+Wmecánicas+Wind.∗100
Psalida=3VfaseIfaseCosΦW eléctricas = mI²faseRfase
m= No. de fases
Ifase = corriente que demanda la carga
Rfase del estator = resistencia efectiva a la temperatura
de trabajo.
“Las pérdidas magnéticas y mecánicas se determinan con el método del motor
separado.”
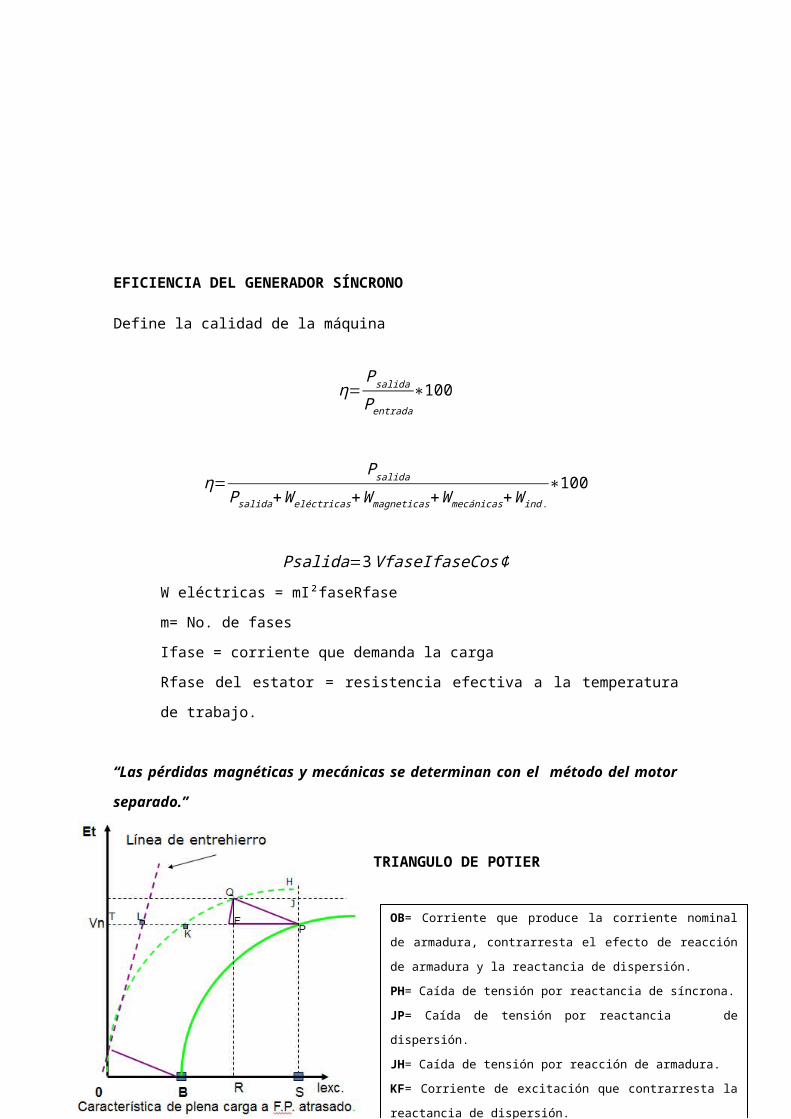
TRIANGULO DE POTIER
OB= Corriente que produce la corriente nominal
de armadura, contrarresta el efecto de reacción
de armadura y la reactancia de dispersión.
PH= Caída de tensión por reactancia de síncrona.
JP= Caída de tensión por reactancia de
dispersión.
JH= Caída de tensión por reacción de armadura.
KF= Corriente de excitación que contrarresta la
reactancia de dispersión.
REACTANCIA DE PETERSON
La Bobina Peterson es una reactancia variable que se conecta
entre el neutro del transformador de potencia de una subestación
y la malla de puesta a tierra. También se le define como un
medio o sistema de puesta a tierra resonante.
Su característica más importante es que durante las fallas a
tierra, la corriente inductiva de la reactancia cancela la
corriente de falla capacitiva aportada por la red, de forma que
la intensidad que circula por el punto de falla se reduce a una
pequeña corriente resistiva. De esta forma su comportamiento es
como una limitadora de la corriente de falla a tierra.
Su principal ventaja es ante la ocurrencia de fallas monofásicas
en las líneas de distribución de energía eléctrica, que forman
la gran mayoría de las redes eléctricas. La bobina Petersen
posibilita la explotación de la red durante largo tiempo en
estas condiciones de falla, permite reducir drásticamente los
disparos transitorios de las protecciones, con la consiguiente
OB= Corriente que produce la corriente nominal
de armadura, contrarresta el efecto de reacción
de armadura y la reactancia de dispersión.
PH= Caída de tensión por reactancia de síncrona.
JP= Caída de tensión por reactancia de
dispersión.
JH= Caída de tensión por reacción de armadura.
KF= Corriente de excitación que contrarresta la
reactancia de dispersión.
mejora del servicio e incluso reducción del mantenimiento de los
respectivos interruptores.
Para el buen funcionamiento de las bobinas Peterson, éstas han
de estar sintonizadas correctamente, de manera que la Reactancia
Capacitiva de la red pueda ser compensada por la Reactancia
Inductiva de la bobina.
Como las redes de distribución son intrínsecamente cambiantes,
los sistemas de puesta a tierra resonantes necesitan un sistema
de sintonización y de control que los reconfigure dinámicamente,
que se adapten o se ajusten a la par con los cambios que se
realicen en la red eléctrica.
CURVAS DE CAPABILIDAD
La curva de capabilidad de un generador se deriva de manera
simplificada sin tomar en cuenta el efecto de saturación y
despreciando la resistencia y capacitancia en los devanados.
Cuando la máquina síncrona opera en sus valores nominales, es
decir; valores a los cuales los devanados y el núcleo alcanza la
temperatura de régimen de diseño, se obtienen las fronteras de
TURBOGENERADOR
la región de operación dentro de la cual la máquina no sufre
daño ni envejecimiento prematuro.
Es muy útil que el operador conozca las características de
comportamiento en estado estable (Capabilidad) de su máquina, ya
que éstas marcan las condiciones límites de operación, además el
operador puede conocer cómo influyen los parámetros de la unidad
en su operación y no dependen de que los instrumentos de
medición tengan indicados los límites.
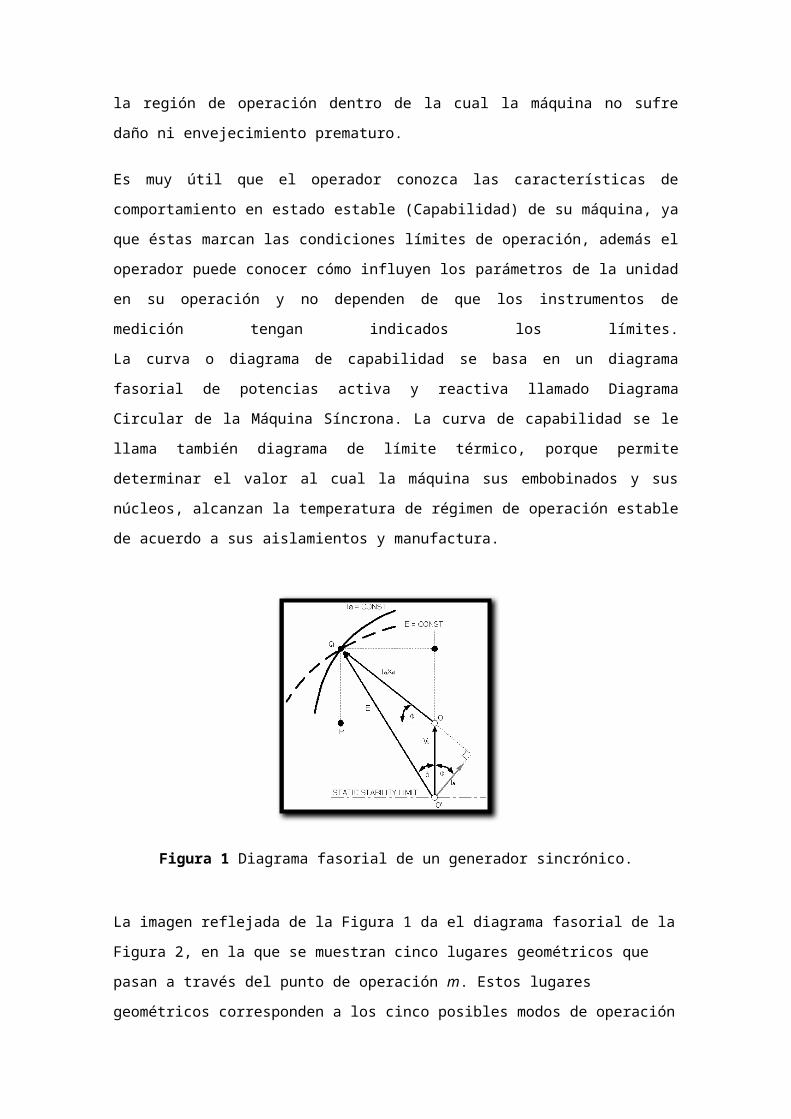
La curva o diagrama de capabilidad se basa en un diagrama
fasorial de potencias activa y reactiva llamado Diagrama
Circular de la Máquina Síncrona. La curva de capabilidad se le
llama también diagrama de límite térmico, porque permite
determinar el valor al cual la máquina sus embobinados y sus
núcleos, alcanzan la temperatura de régimen de operación estable
de acuerdo a sus aislamientos y manufactura.
Figura 1 Diagrama fasorial de un generador sincrónico.
La imagen reflejada de la Figura 1 da el diagrama fasorial de la
Figura 2, en la que se muestran cinco lugares geométricos que
pasan a través del punto de operación m. Estos lugares
geométricos corresponden a los cinco posibles modos de operación
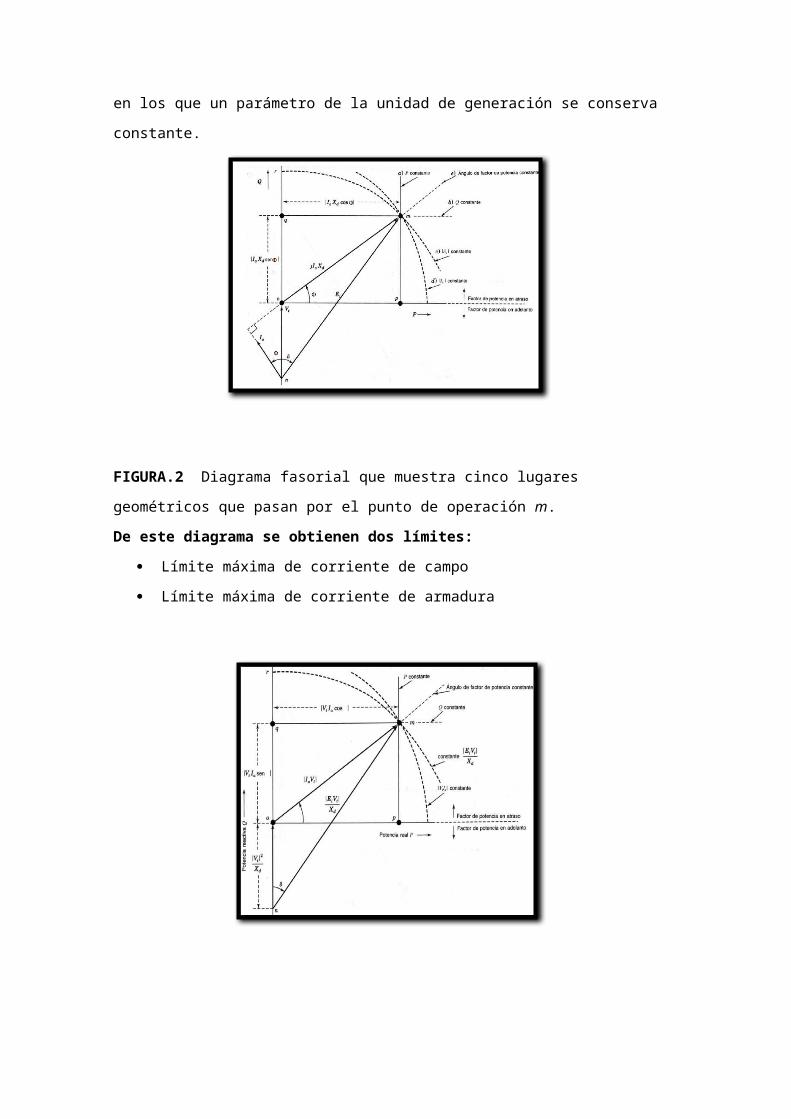
en los que un parámetro de la unidad de generación se conserva
constante.
FIGURA.2 Diagrama fasorial que muestra cinco lugares
geométricos que pasan por el punto de operación m.
De este diagrama se obtienen dos límites:
Límite máxima de corriente de campo
Límite máxima de corriente de armadura
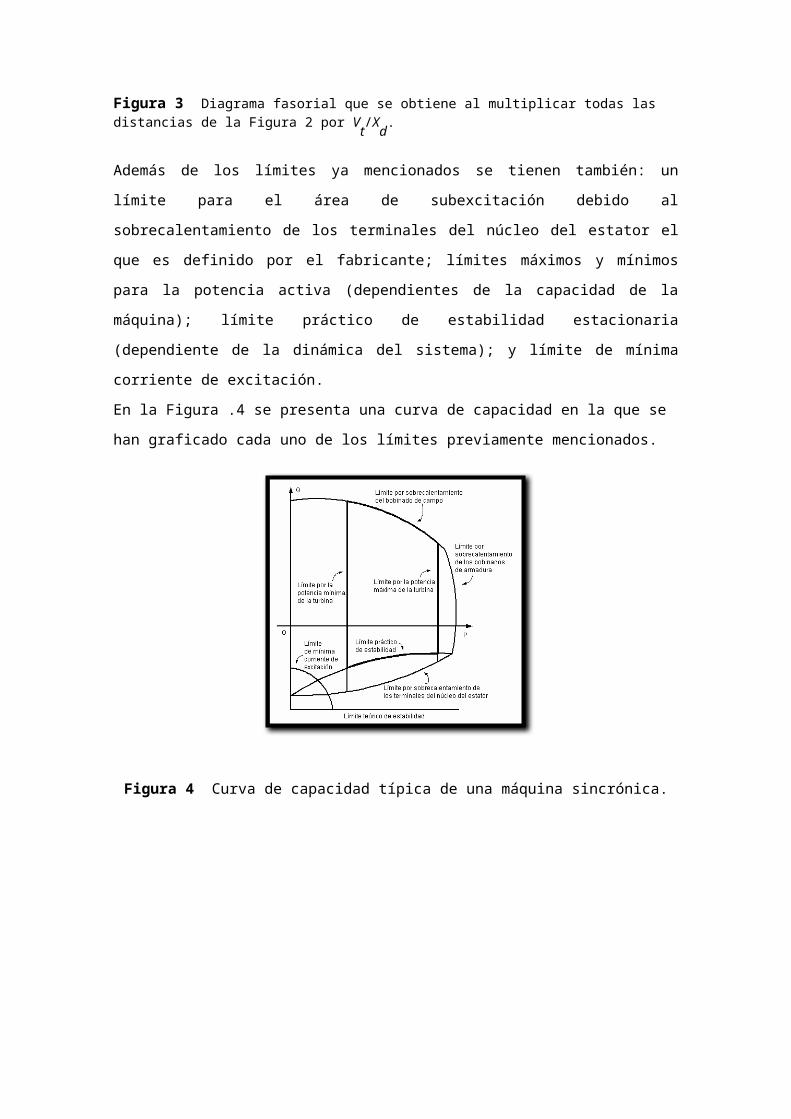
Figura 3 Diagrama fasorial que se obtiene al multiplicar todas las distancias de la Figura 2 por Vt/Xd.
Además de los límites ya mencionados se tienen también: un
límite para el área de subexcitación debido al
sobrecalentamiento de los terminales del núcleo del estator el
que es definido por el fabricante; límites máximos y mínimos
para la potencia activa (dependientes de la capacidad de la
máquina); límite práctico de estabilidad estacionaria
(dependiente de la dinámica del sistema); y límite de mínima
corriente de excitación.
En la Figura .4 se presenta una curva de capacidad en la que se
han graficado cada uno de los límites previamente mencionados.
Figura 4 Curva de capacidad típica de una máquina sincrónica.