
Regional Jet Design
216
Transcript of Regional Jet Design
Politecnico di Torino
I facoltà di ingegneria
Anno Accademico 2013/2014
Progettazione di veicoli aerospaziali
Regional Jet
Prof. Giulio Romeo
Ing. Enrico Cestino
Alessandro Bacchini
Carlotta Mariani
Giovanni Francesco Pietrafesa
i
Indice
Indice 1
Elenco delle gure 5
Elenco delle tabelle 11
1 Speciche di progetto 13
2 Analisi di mercato 16
2.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Situazione economica generale . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Analisi del mercato per aree geograche . . . . . . . . . . . . . . . . . 20
2.3.1 Africa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3.2 America Latina . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.3 Medio Oriente . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3.4 Asia ed Oceania . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3.5 Cina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3.6 Europa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.7 America del Nord . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.3.8 Russia e CIS (Comunità Stati Indipendenti) . . . . . . . . . . 48
3 Velivoli di riferimento 52
3.1 Velivoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
1
INDICE
4 Analisi Statistica 64
4.1 Impennaggio Orizzontale . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.2 Impennaggio Verticale . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.3 Ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.4 Pesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.5 Prestazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5 Preliminary Design 80
5.1 introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.2 Stima preliminare dei pesi . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3 Stima delle principali grandezze aerodinamiche . . . . . . . . . . . . . 82
6 Dimensionamento preliminare fusoliera 85
6.1 Sezione trasversale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.2 Congurazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
6.2.1 Sedili e corridoio . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.2.2 Porte e sicurezza . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.2.3 Altro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.3 Dimensionamento nose e coda . . . . . . . . . . . . . . . . . . . . . . 91
7 Scelta motori 93
8 Analisi aerodinamica 100
8.1 Geometrie e Proli . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
8.1.1 Ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
8.1.2 Impennaggi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8.2 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
8.2.1 Ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
8.2.2 Impennaggio Orizzontale . . . . . . . . . . . . . . . . . . . . . 106
8.3 Resistenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
8.3.1 Resistenza Parassita . . . . . . . . . . . . . . . . . . . . . . . 110
8.3.2 Resistenza Indotta . . . . . . . . . . . . . . . . . . . . . . . . 111
8.3.3 Resistenza d'onda . . . . . . . . . . . . . . . . . . . . . . . . . 111
2

INDICE
8.3.4 Resistenza d'interferenza . . . . . . . . . . . . . . . . . . . . . 112
8.3.5 Resistenza Complessiva . . . . . . . . . . . . . . . . . . . . . . 112
8.3.6 Ottimizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . 112
8.4 Flaps e Slats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
9 Decollo e Atterraggio 122
9.1 Decollo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
9.1.1 Stima distanza di decollo - tutti i motori operativi . . . . . . . 123
9.1.2 Balanced Field Length . . . . . . . . . . . . . . . . . . . . . . 125
9.1.3 Salita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
9.2 Atterraggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
9.2.1 Stima distanza di atterraggio . . . . . . . . . . . . . . . . . . 131
10 Stima pesi 133
10.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
10.2 Metodo Jenkinson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
10.3 Metodo STANFORD . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
10.3.1 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
11 Stabilità statica longitudinale 148
11.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
11.2 Baricentro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
11.3 Fuoco ala isolata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
11.4 Spostamenti del fuoco dovuti ai corpi fusiformi . . . . . . . . . . . . . 150
11.5 Punto neutro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
11.6 Margine statico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
11.7 Curve caratteristiche . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
11.7.1 Cm − α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
11.7.2 CL − α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
11.7.3 Verica dell'impennaggio orizzontale . . . . . . . . . . . . . . 154
12 Stabilità dinamica longitudinale 156
12.1 Introduzione allo studio della dinamica longitudinale . . . . . . . . . 156
3

INDICE
12.2 Calcolo della matrici . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
12.3 Calcolo degli autovalori e autovettori del sistema . . . . . . . . . . . . 160
12.4 Calcolo delle caratteristiche della risposta . . . . . . . . . . . . . . . . 161
12.5 Analisi dei modi propri longitudinali . . . . . . . . . . . . . . . . . . 162
13 Catia 165
13.1 Cassone alare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
14 Analisi strutturale teorica 168
14.1 Diagramma di inviluppo di volo . . . . . . . . . . . . . . . . . . . . . 168
14.1.1 Diagramma di manovra . . . . . . . . . . . . . . . . . . . . . 169
14.1.2 Diagramma di raca . . . . . . . . . . . . . . . . . . . . . . . 172
14.1.3 Diagramma di inviluppo . . . . . . . . . . . . . . . . . . . . . 173
14.2 Analisi strutturale del cassone alare . . . . . . . . . . . . . . . . . . . 175
14.2.1 Diagrammi di sollecitazione . . . . . . . . . . . . . . . . . . . 175
14.2.2 Denizione dettagliata del cassone alare . . . . . . . . . . . . 179
14.2.3 Denizione degli spessori degli elementi del cassone . . . . . . 181
14.2.4 Calcolo e verica delle tensioni e delle deformazioni . . . . . . 182
14.2.5 Peso del cassone . . . . . . . . . . . . . . . . . . . . . . . . . . 184
14.2.6 Calcolo della deformata . . . . . . . . . . . . . . . . . . . . . 184
14.2.7 Torsione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
15 Analisi strutturale numerica 188
15.1 Patran: realizzazione della mesh . . . . . . . . . . . . . . . . . . . . . 188
15.2 Assegnazione delle proprietà . . . . . . . . . . . . . . . . . . . . . . . 189
15.3 Analisi della struttura . . . . . . . . . . . . . . . . . . . . . . . . . . 192
16 Analisi dei costi 194
16.1 Il metodo di Reymer . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
17 Impatto ambientale 203
17.1 Emissioni acustiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
4

Elenco delle gure
2.1 Drivers of air travel (Boeing) . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Growth rates (Boeing) . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Future units number (Boeing) . . . . . . . . . . . . . . . . . . . . . . 18
2.4 GDP growth (Boeing) . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Air trac growth (Boeing) . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6 Project Trac and Economic Growth (Embraer) . . . . . . . . . . . . 20
2.7 61 to 90-Seats Jet Segment (Embraer) . . . . . . . . . . . . . . . . . 21
2.8 Growth Map (Embraer) . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.9 Africa Economical Condition (Embraer) . . . . . . . . . . . . . . . . 22
2.10 Middle Class Expansion (Embraer) . . . . . . . . . . . . . . . . . . . 23
2.11 Africa Fleet in Service (Bombardier) . . . . . . . . . . . . . . . . . . 24
2.12 Intra-Africa Market Prole (Embraer) . . . . . . . . . . . . . . . . . . 25
2.13 Africa Projected New Deliveries (Embraer) . . . . . . . . . . . . . . . 26
2.14 Africa Fleet in Service (Embraer) . . . . . . . . . . . . . . . . . . . . 27
2.15 Latin America Economical Condition (Embraer) . . . . . . . . . . . . 28
2.16 Latin America Fleet in Service (Embraer) . . . . . . . . . . . . . . . 29
2.17 Latin America Projected New Deliveries (Embraer) . . . . . . . . . . 30
2.18 Latin America Fleet in Service (Embraer) . . . . . . . . . . . . . . . 30
2.19 Middle East Economical Condition (Embraer) . . . . . . . . . . . . . 31
2.20 Middle East Average Age (United Nations) . . . . . . . . . . . . . . . 32
2.21 Middle East Projected New Deliveries (Embraer) . . . . . . . . . . . 33
2.22 Middle East Fleet in Service (Embraer) . . . . . . . . . . . . . . . . . 33
2.23 Asia Economical Condition (Embraer) . . . . . . . . . . . . . . . . . 34
5

ELENCO DELLE FIGURE
2.24 Airport Congestion and Expansion Plan . . . . . . . . . . . . . . . . 35
2.25 Propensity to Travel (Embraer) . . . . . . . . . . . . . . . . . . . . . 35
2.26 Asia Projected New Deliveries (Embraer) . . . . . . . . . . . . . . . . 36
2.27 Asia Fleet in Service (Embraer) . . . . . . . . . . . . . . . . . . . . . 36
2.28 China Economical Condition (Embraer) . . . . . . . . . . . . . . . . 37
2.29 China Airports (Embraer) . . . . . . . . . . . . . . . . . . . . . . . . 38
2.30 China Airport Congestion and Expansion Plan (Embraer) . . . . . . 38
2.31 China Projected Deliveries (Embraer) . . . . . . . . . . . . . . . . . . 39
2.32 China Fleet in Service (Embraer) . . . . . . . . . . . . . . . . . . . . 39
2.33 Europe Economical Condition (Embraer) . . . . . . . . . . . . . . . . 40
2.34 Level of Accessibility to Aviation Services (Embraer) . . . . . . . . . 41
2.35 Connectivity in Europe (Embraer) . . . . . . . . . . . . . . . . . . . . 41
2.36 Market Density Prole (Embraer) . . . . . . . . . . . . . . . . . . . . 42
2.37 Intra Europe Frequency Prole (Embraer) . . . . . . . . . . . . . . . 43
2.38 Europe Fleet in Service (Bombardier) . . . . . . . . . . . . . . . . . . 44
2.39 Europe Projected New Deliveries (Embraer) . . . . . . . . . . . . . . 44
2.40 Europe Fleet in Service (Embraer) . . . . . . . . . . . . . . . . . . . 45
2.41 North America Economical Condition (Embraer) . . . . . . . . . . . 46
2.42 North America Fleet in Service (Embraer) . . . . . . . . . . . . . . . 47
2.43 North America Projected New Deliveries (Embraer) . . . . . . . . . . 48
2.44 North America Fleet in Service (Embraer) . . . . . . . . . . . . . . . 48
2.45 North America Economical Condition (Embraer) . . . . . . . . . . . 49
2.46 CSI Fleet and Backlog Prole (Embraer) . . . . . . . . . . . . . . . . 50
2.47 CSI Projected New Deliveries (Embraer) . . . . . . . . . . . . . . . . 51
2.48 CSI Fleet in Service (Embraer) . . . . . . . . . . . . . . . . . . . . . 51
3.1 Embraer E-Jets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2 Bombardier CRJ-700 . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3 Comac ARJ21 Xiangfeng . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.4 DC9-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.5 Antonov An-148-100 . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.6 AVRO RJ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6

ELENCO DELLE FIGURE
3.7 BAe 146 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.8 Fokker F28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.9 Fokker F70 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.10 Mitsubishi Regional Jet (MRJ) . . . . . . . . . . . . . . . . . . . . . 62
3.11 Tupolev Tu-134A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.1 Horizontal Empennage (Statistics) . . . . . . . . . . . . . . . . . . . . 67
4.2 Vertical Empennage (Statistics) . . . . . . . . . . . . . . . . . . . . . 70
4.3 Wing (Statistics) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.4 MTOW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.5 MEOW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.6 MEOW/MTOW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.7 Plane Performances (Statistics) . . . . . . . . . . . . . . . . . . . . . 77
4.8 Take o and Landing . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.9 Eciency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.1 Fuselage Cross-Section . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.2 Fuselage Congurations . . . . . . . . . . . . . . . . . . . . . . . . . 87
6.3 Standard Seat AMC 25.785(c) . . . . . . . . . . . . . . . . . . . . . . 88
6.4 Aisle CS-25.815 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.5 Emergency Door . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.6 Nose and Tailcone Fineness Ratio . . . . . . . . . . . . . . . . . . . . 91
6.7 Fuselage Sizing (70) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.8 Fuselage Sizing (82) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
7.1 General Electric CF34-10 . . . . . . . . . . . . . . . . . . . . . . . . 94
7.2 Aviadvigatel PD-14 . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.3 CFM International LEAP 1A/1B/1C . . . . . . . . . . . . . . . . . . 95
7.4 PowerJet SaM146 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.5 Pratt Whitney PW1000G . . . . . . . . . . . . . . . . . . . . . . . . 96
7.6 Rolls-Royce RB.183-2 Spey . . . . . . . . . . . . . . . . . . . . . . . 99
8.1 Preliminar Wing Geometry . . . . . . . . . . . . . . . . . . . . . . . . 101
7

ELENCO DELLE FIGURE
8.2 Stall Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
8.3 X-foil analysis exemple . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8.4 Horizontal and Vertical Tail . . . . . . . . . . . . . . . . . . . . . . . 104
8.5 Lift Distribution along Wing Span . . . . . . . . . . . . . . . . . . . . 105
8.6 Drag Distribution along Wing Span . . . . . . . . . . . . . . . . . . . 105
8.7 Aerodynamic Polar Curve . . . . . . . . . . . . . . . . . . . . . . . . 106
8.8 Lift-Drag Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
8.9 Lift Distribution along Horizontal Tail Span . . . . . . . . . . . . . . 107
8.10 Drag Distribution along Horizontal Tail Span . . . . . . . . . . . . . 107
8.11 Aerodynamic Polar Curve . . . . . . . . . . . . . . . . . . . . . . . . 108
8.12 Lift-Drag Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
8.13 Andamento ecienza . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
8.14 Denitive Wing Geometry . . . . . . . . . . . . . . . . . . . . . . . . 114
8.15 Parasitic Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
8.16 Induced Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
8.17 Interference Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
8.18 Total Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
8.19 X-foil exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
8.20 Polare aerodinamica al variare della deessione . . . . . . . . . . . . 120
8.21 Curva portanza-resistenza al variare della deessione . . . . . . . . . 120
8.22 Aumento Cl max al variare della deessione . . . . . . . . . . . . . . 121
8.23 Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
8.24 Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
9.1 Manovra di decollo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
9.2 Acc - Go . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
9.3 Acc - Stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
9.4 Balanced Field Length . . . . . . . . . . . . . . . . . . . . . . . . . . 127
9.5 Manovra di Atterraggio . . . . . . . . . . . . . . . . . . . . . . . . . . 130
10.1 Nacelle Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
10.2 Undercarriage Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
8

ELENCO DELLE FIGURE
10.3 Specic Engine Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
10.4 Distribuzione Pesi (Stanford) . . . . . . . . . . . . . . . . . . . . . . 147
11.1 Coordinate Masse Concentrate . . . . . . . . . . . . . . . . . . . . . . 149
11.2 Spostamento baricentro corpi fusiformi . . . . . . . . . . . . . . . . . 150
11.3 Curva Cm - alfa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
11.4 Curva Cm - alfa al variare del margine statico . . . . . . . . . . . . . 153
11.5 Curva CL - alfa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
12.1 Step response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
12.2 Step response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
12.3 Stabilità dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
12.4 Luogo radici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
13.1 Realizzazione centine . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
13.2 Realizzazione solette longheroni . . . . . . . . . . . . . . . . . . . . . 166
13.3 Cassone alare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
14.1 Generico diagramma di manovra . . . . . . . . . . . . . . . . . . . . 169
14.2 Dati Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
14.3 Diagramma di manovra . . . . . . . . . . . . . . . . . . . . . . . . . 171
14.4 Velocità Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
14.5 Diagramma di raca . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
14.6 Diagramma di inviluppo . . . . . . . . . . . . . . . . . . . . . . . . . 174
14.7 Distribuzione di portanza . . . . . . . . . . . . . . . . . . . . . . . . 176
14.8 Distribuzione di resistenza . . . . . . . . . . . . . . . . . . . . . . . . 177
14.9 Diagramma di carico . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
14.10Diagramma di taglio . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
14.11Diagramma di momento . . . . . . . . . . . . . . . . . . . . . . . . . 179
14.12Sezione cassone alare . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
14.13Spessori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
14.14Tensioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
14.15Deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
9

ELENCO DELLE FIGURE
14.16Deformata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
14.17Deformata al variare del fattore di carico . . . . . . . . . . . . . . . 185
14.18Schematizzazione semiguscio ideale . . . . . . . . . . . . . . . . . . . 186
14.19Rigidezza Torsionale . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
14.20Gradiente di torsione . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
14.21Torsione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
15.1 Realizzazione Mesh . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
15.2 Denizione condizioni di incastro alla radice . . . . . . . . . . . . . . 191
15.3 Denizione carichi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
15.4 Deformata della struttura . . . . . . . . . . . . . . . . . . . . . . . . 193
15.5 Confronto risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
16.1 Fuel Cost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
16.2 Ripartizione costi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
17.1 Contributi Emissioni Acustiche . . . . . . . . . . . . . . . . . . . . . 204
17.2 Suddivisione Emissioni Acustiche (fasi di volo) . . . . . . . . . . . . . 204
17.3 Sviluppo Rumorosità in fan e jet . . . . . . . . . . . . . . . . . . . . 205
17.4 Gas di scarico in uscita dal propulsore . . . . . . . . . . . . . . . . . 206
17.5 Superci forate fonoassorbenti . . . . . . . . . . . . . . . . . . . . . . 207
17.6 Particolare della presa d'aria di un propulsore . . . . . . . . . . . . . 207
17.7 Sagomatura della parte interna della presa d'aria . . . . . . . . . . . 208
17.8 Sagomatura opportuna dell'ugello di scarico . . . . . . . . . . . . . . 208
17.9 Emissioni sonore - BPR . . . . . . . . . . . . . . . . . . . . . . . . . 209
17.10Emissioni inquinanti . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
10
Elenco delle tabelle
3.1 Embraer E-Jets's features . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2 Bombardier CRJ's features . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3 Comac ARJ21 Xiangfeng's features . . . . . . . . . . . . . . . . . . . 55
3.4 DC9's features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.5 Antonov An-148-100's features . . . . . . . . . . . . . . . . . . . . . . 57
3.6 AVRO RJ's features . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.7 BAe 146's features . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.8 Fokker F28's features . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.9 Fokker F70's features . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.10 MRJ's features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.11 Tupolev Tu-134A's features . . . . . . . . . . . . . . . . . . . . . . . 63
4.1 Horizontal Empennage's features . . . . . . . . . . . . . . . . . . . . 67
4.2 Vertical Empennage's features . . . . . . . . . . . . . . . . . . . . . . 70
4.3 Wing's features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.4 Weight's features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.5 Performance's features . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.1 Cross-Section's features . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.2 Seat Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.3 Fuselage Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.4 Fuselage Lenght . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
7.1 Engine Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
11
ELENCO DELLE TABELLE
8.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
8.2 Ottimizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
8.3 Nuova Ottimizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . 113
8.4 Geometria denitiva ala . . . . . . . . . . . . . . . . . . . . . . . . . 114
8.5 Parasitic Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
8.6 Induced Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
8.7 Interference Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
8.8 Total Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
8.9 Ecienza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
9.1 Take O Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
9.2 rateo di salita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
9.3 Landing Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
10.1 Distribuzione pesi (Jetkinson) . . . . . . . . . . . . . . . . . . . . . . 141
12.1 Caratteristiche velivolo . . . . . . . . . . . . . . . . . . . . . . . . . . 159
12.2 Parametri sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
12
Capitolo 1
Speciche di progetto
In vista di aeromobili esistenti in questo segmento di mercato è stato deciso che il
modello di base debba avere una capacità di circa 80 passeggeri con il potenziale di
produrre una famiglia di aerei più grandi, basata soprattutto sul modello iniziale,con
particolare attenzione al risparmio di carburante n dall'inizio, in quanto vi è il
rischio che prezzo del carburante aumenti nel futuro attraverso le imposte ambientali.
Dal brief iniziale proposto per il progetto, la capacità dell'aeromobile è ssato a 70
passeggeri. Questo lascia diversi parametri chiave che devono essere determinati al
ne di completare la specica dell'aeromobile. Questi sono:
range
velocità di crociera
distanza di decollo/atterraggio
quota di crociera iniziale
La progettazione dell'aeromobile inuenzerà il peso totale e costo del aeromobile
nonché la essibilità operativa per l'aerea in cui operare. Ci sono diversi metodi
con cui può essere scelta la linea di design. Nel primo caso , può essere fatto un
confronto diretto con i velivoli regionali correnti, che fornisce le caratteristiche di
base di alcuni velivoli da trasporto jet regionale. Tuttavia, questi dati non danno
alcuna indicazione di come questi velivoli operino attualmente.
13

1 Speciche di progetto
Le rotte servite dagli aeromobili regionali correnti e il range possono essere iden-
ticati valutando la distanza tra l'aeroporto di partenza e quello di arrivo. Questo è
spesso un processo lungo. Per questo studio il numero di rotte e le distanze percorse
dagli aerei regionali sono state analizzate dai programmi europei e statunitensi. È
probabile che molti operatori scelgano di volare due volte o più prima del riforni-
mento. Questo tenderà a ridurre i tempi e permettere agli aerei di essere riforniti
nella base principale della compagnia aerea.
Dopo aver analizzato i dati , una linea di design di 1636 nm ha deciso per la
congurazione iniziale del modello di aeromobile . Più tardi, i derivati possono essere
sviluppati con intervalli più lunghi. Il normale numero di Mach di funzionamento
è di circa 0,05 inferiore al valore massimo. Così dai numeri il Mach di crociera si è
visto essere tra M 0.73 e M 0.78.
Nelle distanze relativamente brevi, le velocità più elevate orono poco vantag-
gio in termini di risparmio di tempo, ma fanno aumentare la quantità complessiva
di carburante bruciato, così si è deciso di adottare una velocità di crociera di M
0.75. Questa velocità relativamente bassa ha il vantaggio di ridurre lo sweep del-
l'ala richiesto che conseguentemente migliorerà le prestazioni di take-o/landing
dell'aeromobile.
L'altitudine di crociera varia tra i 25.000 e 36.000 ft, dove sono auspicabili al-
titudini di crociera più elevate per migliorare il rapporto L/D e ridurre il consumo
specico di carburante del motore.
La distanza di decollo/atterraggio è un requisito importante per la progetta-
zione. Se la questa è troppo breve il progetto potrà incorrere in sanzioni di costo
signicative, mentre se è troppo grande il velivolo sarà in grado di operare solo in
alcuni campi di aviazione riducendo il suo potenziale di mercato. l'analisi delle at-
tuali lunghezze delle piste per aeromobili regionali suggerisce che una distanza di
decollo/atterraggio ssata a 1.600 m potrebbe fornire beneci economici senza pe-
nalizzare eccessivamente la essibilità operativa del progetto. La specica completa
può ora essere riassunta :
capacità di 70 passeggeri
range 1.636 nm
14
1 Speciche di progetto
M 0,75
quota di crociera 36.000 ft
tempo di raggiungimento quota di crociera < 25 minuti
Ora che le speciche per l'aeromobile sono state ssate, può iniziare la fase
concettuale del progetto. Questa può essere suddivisa in tre aree:
stime iniziali
dimensionamento geometrico
ottimizzazione del progetto di base
15
Capitolo 2
Analisi di mercato
2.1 Introduzione
Il primo passaggio necessario per la progettazione di un nuovo velivolo, ancora prima
della fase di avamprogetto, é sicuramente l'analisi della situazione del mercato nella
quale esso si dovrà inserire. Per compiere questa ricerca, abbiamo fatto riferimento
ai Market Outlook presentati dalle varie compagnie aeree (Embraer, Boeing, Airbus)
che, basandosi su dati statistici, propongono delle previsioni di mercato utilizzabili
per creare un velivolo facilmente vendibile sulla maggior parte dei mercati, non solo
nell'immediato futuro, ma anche in anni più distanti. Occorre inoltre ricordare che,
pur presentando una panoramica generale delle condizioni economiche generale, nel
seguito si farà particolare riferimento soprattutto al mercato dei velivoli da trasporto
passeggeri di categoria regional, oggetto della relazione di progetto.
2.2 Situazione economica generale
La situazione economica in cui si trovano molte Nazioni in questi ultimi anni non
permette di progettare e di immettere sul mercato merce che non possa essere gradita
e quindi avere successo. E' quindi necessario approntare una metodologia in grado
di analizzare i principali fattori ambientali, economici e sociali, nalizzata ad avere
16
2 Analisi di mercato
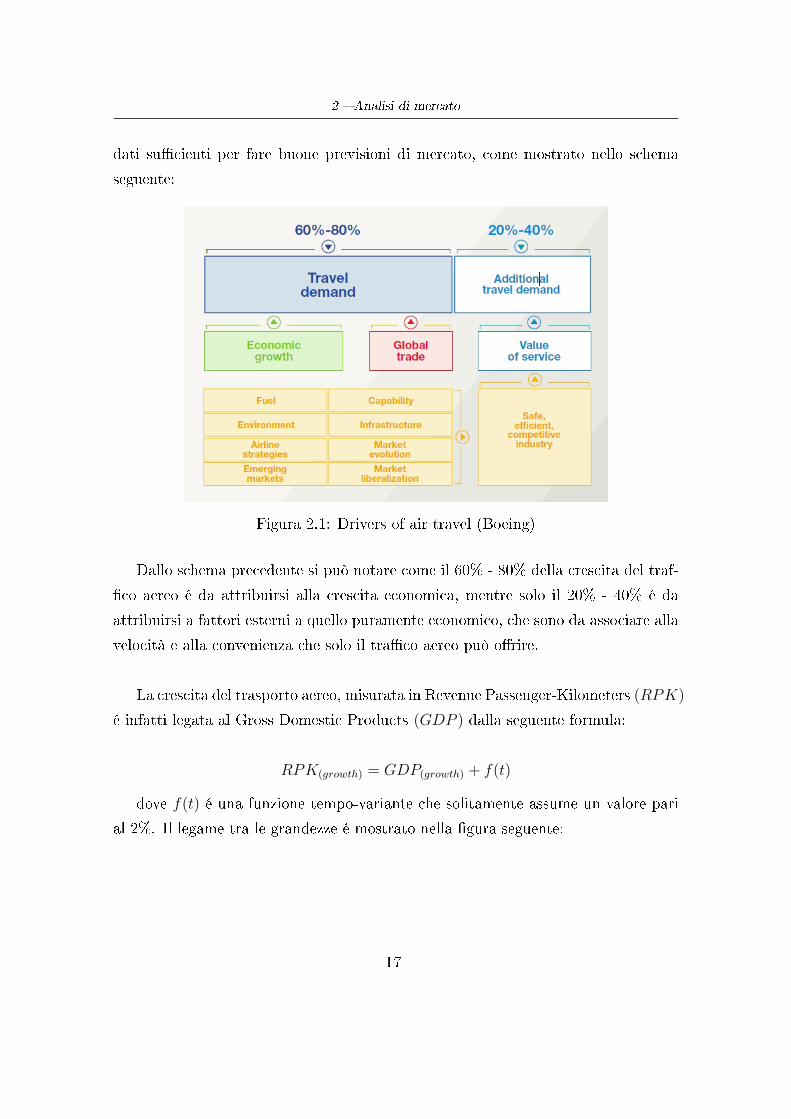
dati sucienti per fare buone previsioni di mercato, come mostrato nello schema
seguente:
Figura 2.1: Drivers of air travel (Boeing)
Dallo schema precedente si può notare come il 60% - 80% della crescita del traf-
co aereo é da attribuirsi alla crescita economica, mentre solo il 20% - 40% é da
attribuirsi a fattori esterni a quello puramente economico, che sono da associare alla
velocità e alla convenienza che solo il traco aereo può orire.
La crescita del trasporto aereo, misurata in Revenue Passenger-Kilometers (RPK)
é infatti legata al Gross Domestic Products (GDP ) dalla seguente formula:
RPK(growth) = GDP(growth) + f(t)
dove f(t) é una funzione tempo-variante che solitamente assume un valore pari
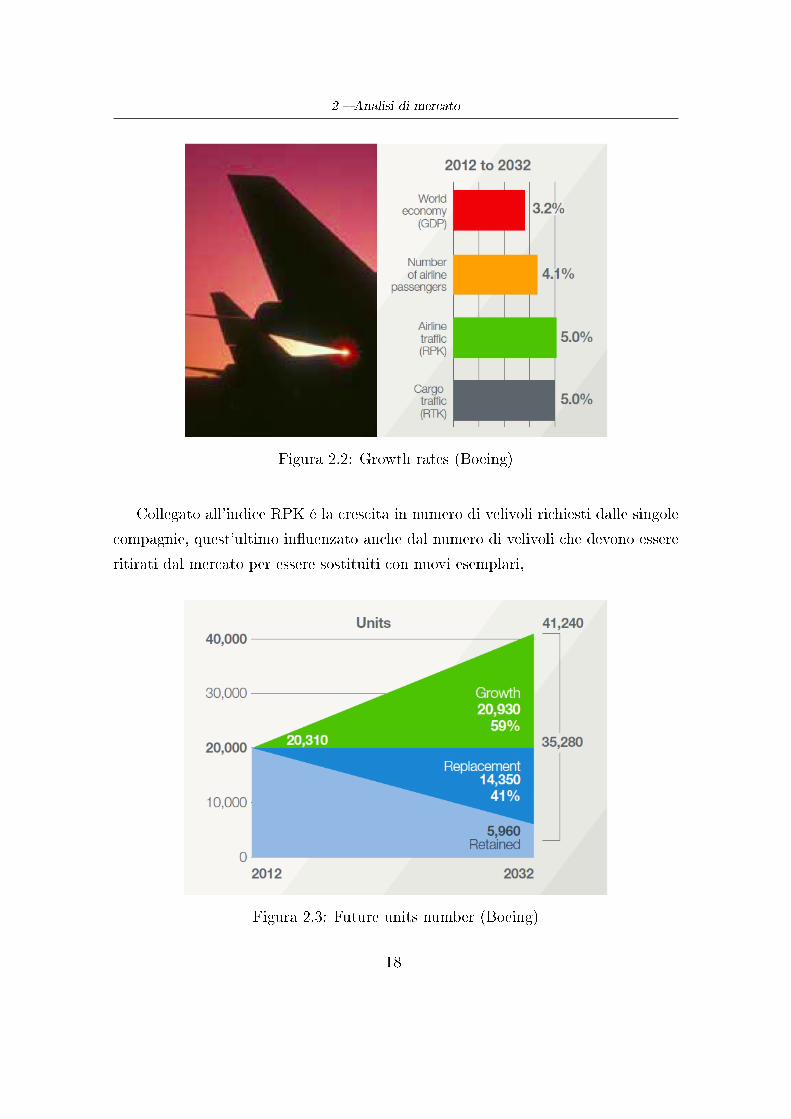
al 2%. Il legame tra le grandezze é mostrato nella gura seguente:
17
2 Analisi di mercato
Figura 2.2: Growth rates (Boeing)
Collegato all'indice RPK é la crescita in numero di velivoli richiesti dalle singole
compagnie, quest'ultimo inuenzato anche dal numero di velivoli che devono essere
ritirati dal mercato per essere sostituiti con nuovi esemplari,
Figura 2.3: Future units number (Boeing)
18
2 Analisi di mercato
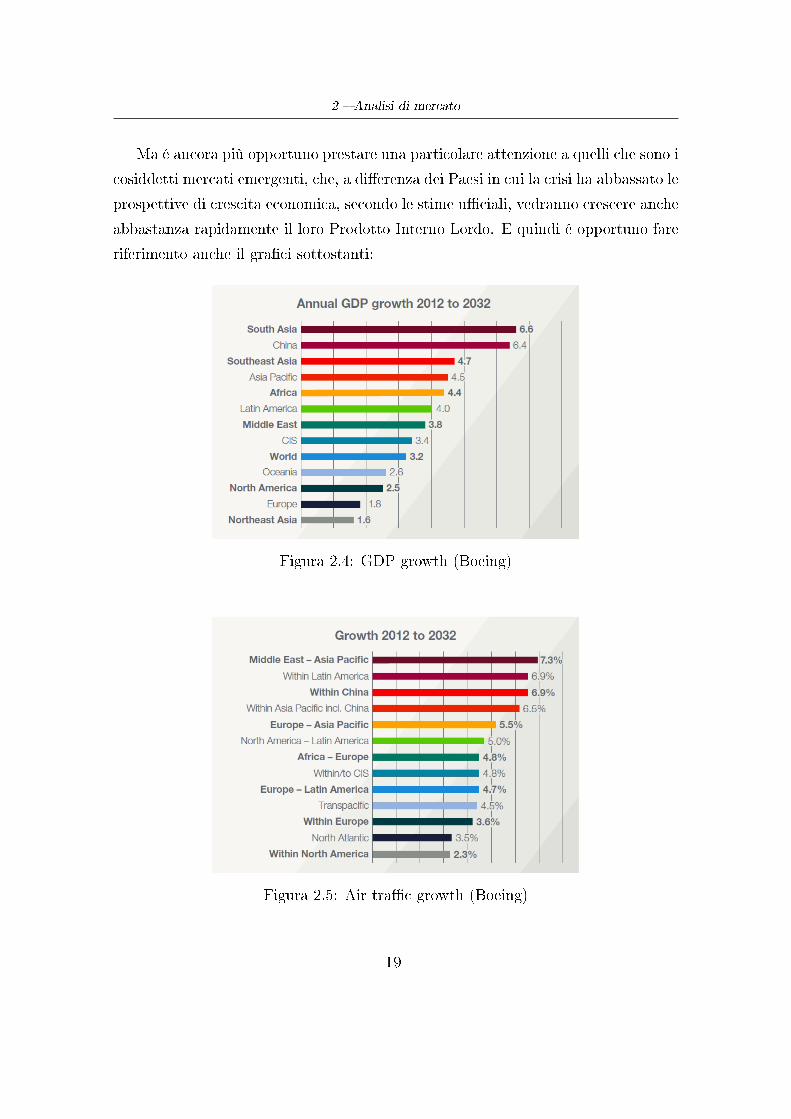
Ma é ancora più opportuno prestare una particolare attenzione a quelli che sono i
cosiddetti mercati emergenti, che, a dierenza dei Paesi in cui la crisi ha abbassato le
prospettive di crescita economica, secondo le stime uciali, vedranno crescere anche
abbastanza rapidamente il loro Prodotto Interno Lordo. E quindi é opportuno fare
riferimento anche il graci sottostanti:
Figura 2.4: GDP growth (Boeing)
Figura 2.5: Air trac growth (Boeing)
19
2 Analisi di mercato
2.3 Analisi del mercato per aree geograche
Visti i dierenti livelli di crescita attuali e previsti per ogni Nazione, abbiamo ritenu-
to opportuno suddividere la nostra analisi di mercato in grandi aree geograche per
permettere lo sviluppo di un modello che possa essere destinato al maggior numero
di mercati interni, essendo in grado si soddisfare anche le richieste più stringenti.
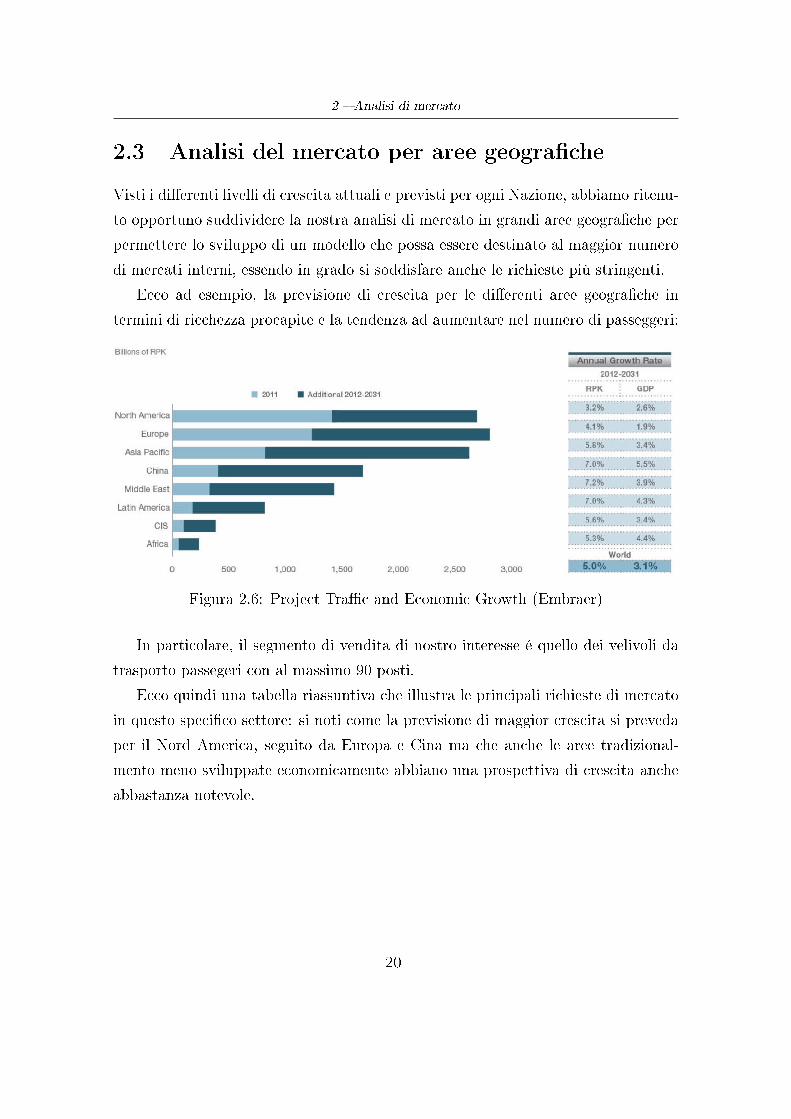
Ecco ad esempio, la previsione di crescita per le dierenti aree geograche in
termini di ricchezza procapite e la tendenza ad aumentare nel numero di passeggeri:
Figura 2.6: Project Trac and Economic Growth (Embraer)
In particolare, il segmento di vendita di nostro interesse é quello dei velivoli da
trasporto passegeri con al massimo 90 posti.
Ecco quindi una tabella riassuntiva che illustra le principali richieste di mercato
in questo specico settore: si noti come la previsione di maggior crescita si preveda
per il Nord America, seguito da Europa e Cina ma che anche le aree tradizional-
mento meno sviluppate economicamente abbiano una prospettiva di crescita anche
abbastanza notevole.
20

2 Analisi di mercato
Figura 2.7: 61 to 90-Seats Jet Segment (Embraer)
Figura 2.8: Growth Map (Embraer)
21

2 Analisi di mercato
2.3.1 Africa
L'economia africana è storicamente dipendente dalle risorse naturali che, come mo-
strano le analisi del 2010, sono il 67% delle esportazioni totali. Nonostante l'esporta-
zione dei prodotti manifatturieri sia in larga crescita, non vi è ricerca per promuovere
una più ampia esportazione basata su di essi.
I paesi della coste africane, come Kenya, Sud Africa e Costa d'Avorio hanno un
amplio portfolio di esportazione. Il Kenya è un buon esempio di economia diversi-
cata nella quale l'esportazione di prodotti manifatturieri ha avuto un incremento
del 16% annuo negli ultimi 5 anni.
Figura 2.9: Africa Economical Condition (Embraer)
Questa crescita è stata alimentata dall'esportazione ai paesi vicini, i quali hanno
incoraggiato i trasporti aerei. L'economia diversicata e la crescita si appoggiano
sull'aumento della classe borghese africana. Secondo l'African Developement Bank,
questa è arrivata a circa un terzo della popolazione, aumentando di 12 milioni di
persone l'anno nell'ultima decade.
L'aumento del potere d'acquisto ha un impatto rilevante sul trasporto aereo,
coinvolgendo nuovi viaggiatori nel sistema. Secondo il McKinsey Istitute, più della
metà delle famiglie africane avrà maggiori capacità di spesa per il 2020, raggiungendo
128 milioni di dollari.
22

2 Analisi di mercato
Figura 2.10: Middle Class Expansion (Embraer)
Con l'urbanizzazione e il conseguentemente l'aumento dei consumatori, ci sarà un
aumento del bisogno di trasporti aerei a servizio di queste città. Il potere della classe
media non solo porterà ad una diminuzione della povertà ma sarà anche l'opportu-
nità per creare una forte dipendenza dalle esigenze nazionali e dalle esportazioni.
Il commercio interno africano è cresciuto del 17% all'anno dal 2002, registrando 60
miliardi di dollari nel 2011, il 6% del totale delle esportazioni regionali. Negli ultimi
anni inoltre c'è stato un decentramento dei continenti partners, ovvero l'Europa
che rappresentava nel 2000 la metà di tutte le esportazioni, oggi è circa un terzo,
mentre la Cina ha triplicato la sua richiesta, che ad oggi rappresenta il 15% di quel-
la totale. Il decentramento del commercio con i partners si riette sul trasporto
aereo, con un aumento di traco aereo verso l'Asia la Cina. Nei prossimi vent'anni
si suppone che l'economia africana avrà un ruolo più inuente nel mondo, mentre
il GDP globale dovrebbe crescere del 3% all'anno, per il GDP africano è prevista
una crescita del 4%. Questa crescita sarà principalmente guidata dagli investimenti
stranieri e dalla diversicazione nel commercio. Il turismo ha avuto storicamente un
grosso impatto sul trasporto aereo, poiché gli arrivi del turismo internazionale nel
continente sono aumentati negli ultimi dieci anni del 6%. Questo è rimasto piatto
23
2 Analisi di mercato
nel 2011 per la crisi politica del nord africa, ma è previsto uno sblocco della situazio-
ne per il 2012 con un aumento del 4-6%, che porterà ad una situazione di pace per
il 2030, registrando arrivi di turisti internazionali per circa 125 milioni di persone,
un 7% della popolazione mondiale. Aspetti economici e sociali mostrano una serie
di cambiamenti nei collegamenti della nazione africana, che si aspetta un aumen-
to di domanda per il trasporto aereo, sia all'interno dell'Africa stessa, sia verso il
resto del mondo. I trasporti dall'Europa e dal medio oriente stanno aumentando i
loro servizi verso l'Africa perché hanno visto possibilità di rendita. Come risultato
di questo aumento di competizione i trasporti africani hanno iniziato a rinnovare
la loro otta per ridurre i costi del sistema operativo e soddisfare gli standards di
sicurezza internazionale.
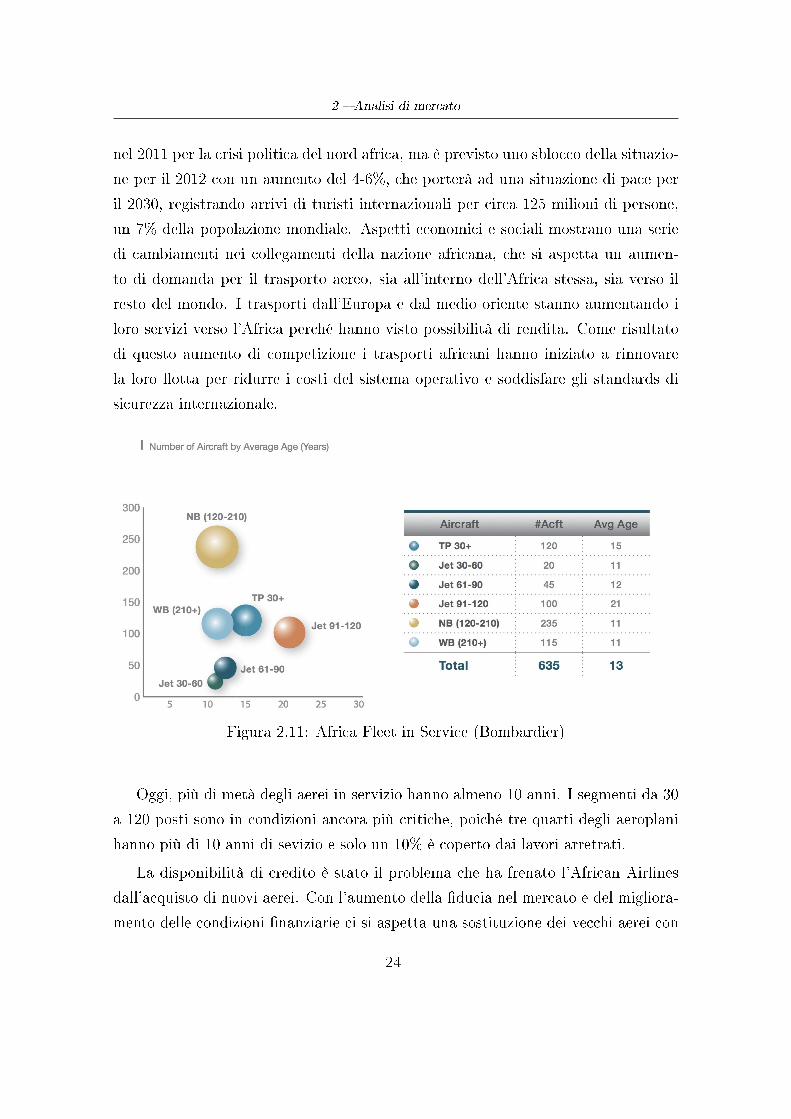
Figura 2.11: Africa Fleet in Service (Bombardier)
Oggi, più di metà degli aerei in servizio hanno almeno 10 anni. I segmenti da 30
a 120 posti sono in condizioni ancora più critiche, poiché tre quarti degli aeroplani
hanno più di 10 anni di sevizio e solo un 10% è coperto dai lavori arretrati.
La disponibilità di credito è stato il problema che ha frenato l'African Airlines
dall'acquisto di nuovi aerei. Con l'aumento della ducia nel mercato e del migliora-
mento delle condizioni nanziarie ci si aspetta una sostituzione dei vecchi aerei con
24
2 Analisi di mercato
nuovi velivoli più ecienti da cui saranno attratti un maggior numero di passeggeri
per la migliore qualità del servizio.
Un'altra impresa a cui si preparano i trasporti africani è lo sviluppo di migliori
sistemi di alimentazione del traco, aumentando le connessioni e coinvolgendo un
numero maggiore di passeggeri sulla rete. Con una rete più tta di trasporti inter-
regionali, ci si avvierà verso la strada del mercato internazionale. Anche il mercato
interno rappresenta una buona opportunità per estendere i servizi e aumentare le
entrate con i trasporti globali.
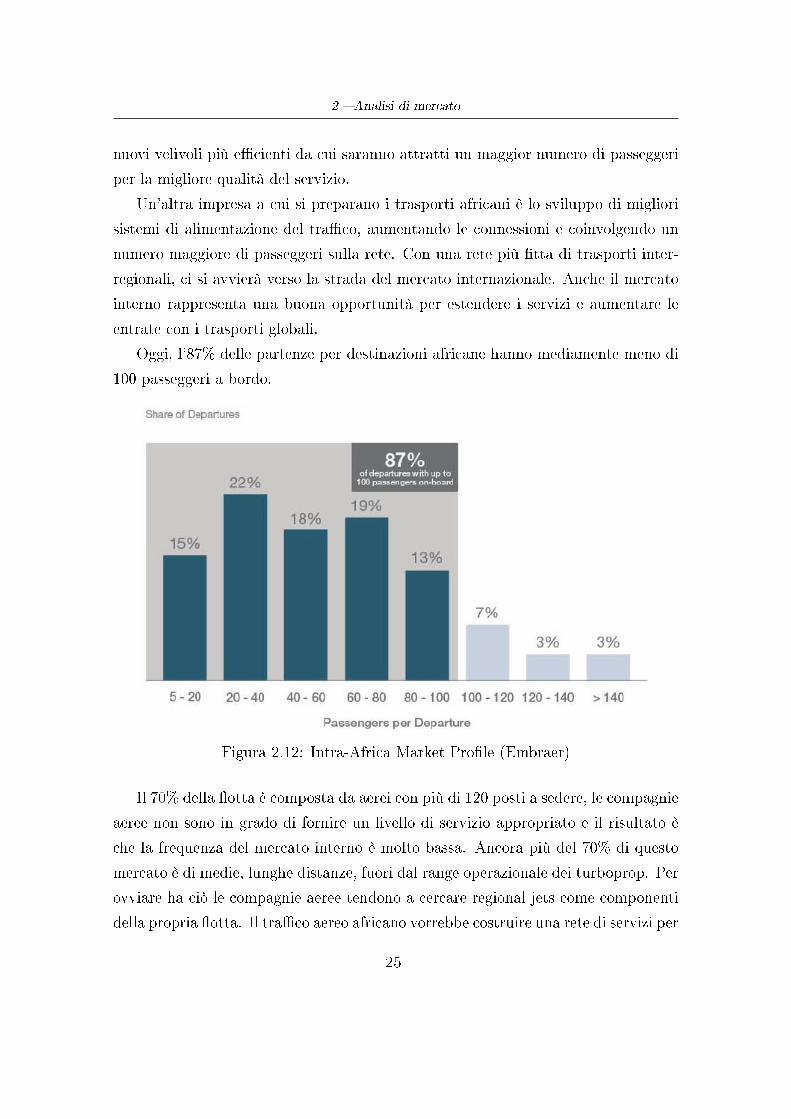
Oggi, l'87% delle partenze per destinazioni africane hanno mediamente meno di
100 passeggeri a bordo.
Figura 2.12: Intra-Africa Market Prole (Embraer)
Il 70% della otta è composta da aerei con più di 120 posti a sedere, le compagnie
aeree non sono in grado di fornire un livello di servizio appropriato e il risultato è
che la frequenza del mercato interno è molto bassa. Ancora più del 70% di questo
mercato è di medie, lunghe distanze, fuori dal range operazionale dei turboprop. Per
ovviare ha ciò le compagnie aeree tendono a cercare regional jets come componenti
della propria otta. Il traco aereo africano vorrebbe costruire una rete di servizi per
25
2 Analisi di mercato
diversi mercati con maggiori fattori di carico e elevata essibilità. Questo dovrebbe
portare ad un più amplio utilizzo dei nuovi mercati. I trasporti che hanno diversi
jets all'interno della otta hanno aumentato il numero delle destinazioni interne.
Oltremodo, il contributo di nuovi velivoli in servizio in Africa si è duplicato negli
ultimi 5 anni, registrando un 44% nel 2011, aggiungendo nuova tecnologia alla loro
otta hanno aumentato ecienza e produttività.
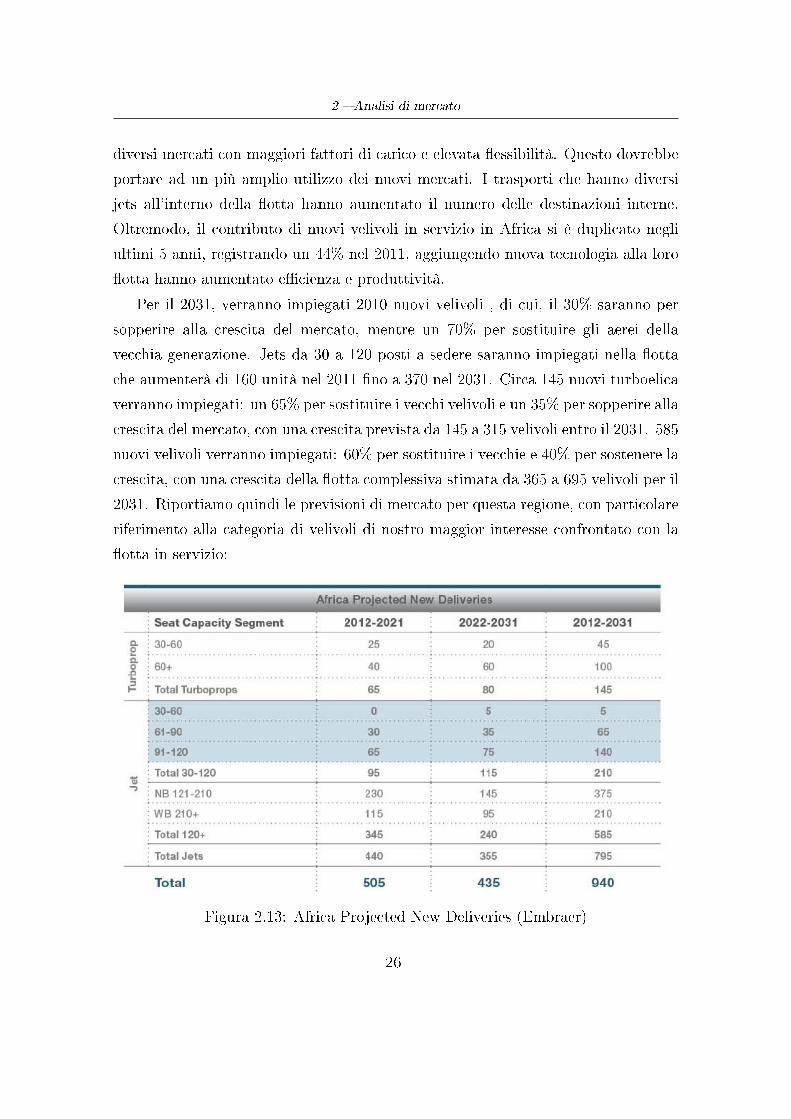
Per il 2031, verranno impiegati 2010 nuovi velivoli , di cui, il 30% saranno per
sopperire alla crescita del mercato, mentre un 70% per sostituire gli aerei della
vecchia generazione. Jets da 30 a 120 posti a sedere saranno impiegati nella otta
che aumenterà di 160 unità nel 2011 no a 370 nel 2031. Circa 145 nuovi turboelica
verranno impiegati: un 65% per sostituire i vecchi velivoli e un 35% per sopperire alla
crescita del mercato, con una crescita prevista da 145 a 315 velivoli entro il 2031. 585
nuovi velivoli verranno impiegati: 60% per sostituire i vecchie e 40% per sostenere la
crescita, con una crescita della otta complessiva stimata da 365 a 695 velivoli per il
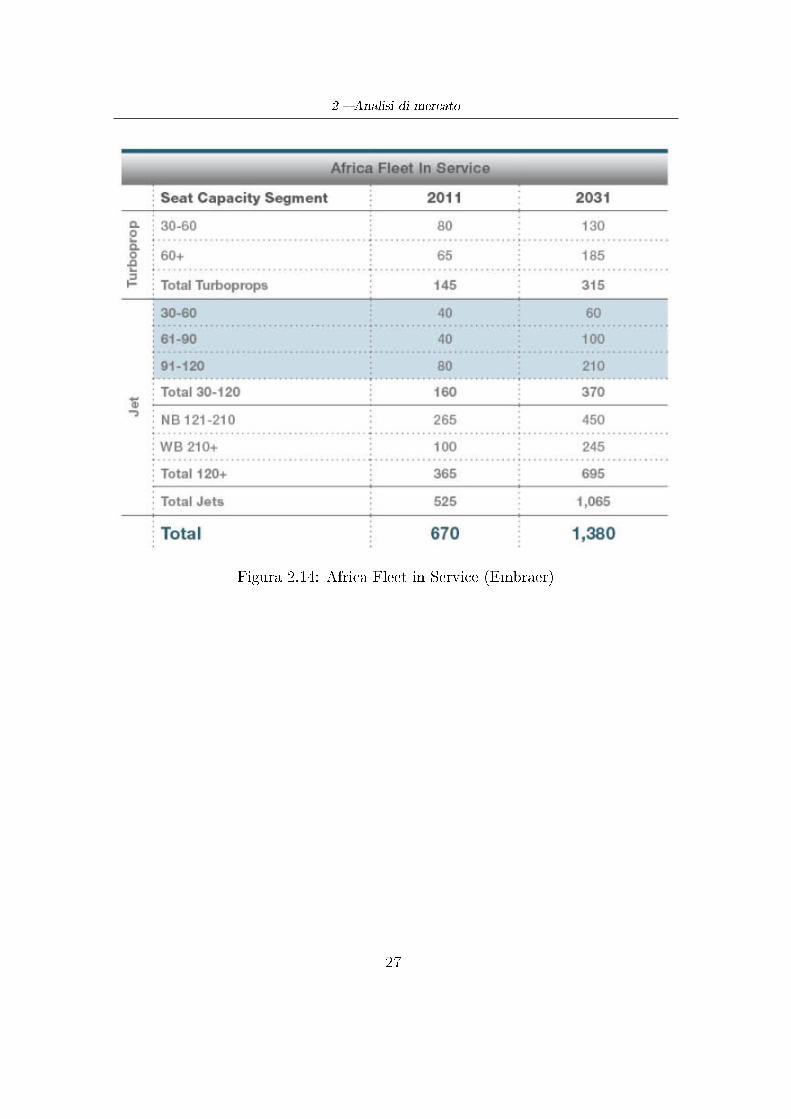
2031. Riportiamo quindi le previsioni di mercato per questa regione, con particolare
riferimento alla categoria di velivoli di nostro maggior interesse confrontato con la
otta in servizio:
Figura 2.13: Africa Projected New Deliveries (Embraer)
26
2 Analisi di mercato
Figura 2.14: Africa Fleet in Service (Embraer)
27

2 Analisi di mercato
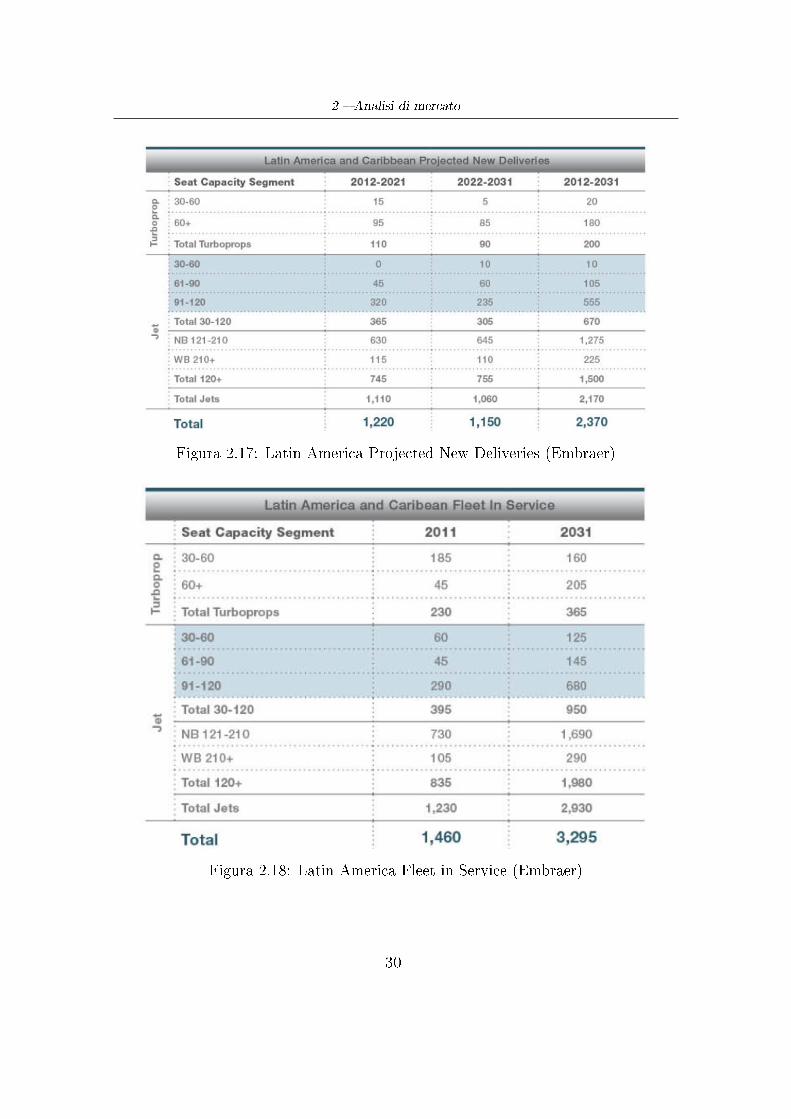
2.3.2 America Latina
Il continente americano è ovviamente trattato in due sezioni: fortemente dieren-
te è infatti la condizione economica del Nord America da quella dei Paesi latino
americani.
Figura 2.15: Latin America Economical Condition (Embraer)
Iniziando proprio da questi ultimi, si può aermare che, a dispetto della crisi
globale, le ultime stime tracciate sono migliori di quelle passate; bisogna infatti
ricordare come questa area geograca sia diventata polo attrattivo per numerosi
imprese soprattutto europee che trovano in questa zona delle politiche fortemente
improntate alla liberalizzazione e alla libera concorrenza, con grandi incentivi volti
ad attrarre il maggior numero possibile di investitori. Questa parte del continente,
presentando così grandi capacità di sviluppo soprattutto industriale, guidata da
Stati quali Colombia, Brasile, Costa Rica e Messico, rappresenta un'area con enormi
potenzialità soprattutto per il miglioramento e l'ampliamento della rete di trasporto
aereo. Da notare come la otta attualmete in servizio oltre ad essere molto vecchia,
con un buon numero di esemplari che superano i vent'anni di attività, deve essere
ripensata anche in termini di ottimizzazione del carico pagante in quanto nel 68% dei
casi, secondo Embraer, vengono sottosfruttati grandi velivoli, che potrebbero invece
28

2 Analisi di mercato
essere sostituiti da più piccoli regional, che potrebbero inoltre orire la possibilità
di aumentare la frequesnza o il numero di rotte interne.
Figura 2.16: Latin America Fleet in Service (Embraer)
Importanti da ricordare sono anche i patti bilateri contenuti all'interno di convenzio-
ni rmate dagli Stati di questo ocntinente, volti ad aumentare la collaborazione in-
terna e ad eliminare le barriere protezionistiche ancora presenti seppur in maniera
minore ri- spetto al passato. Tra i più importanti si possono citare Fortaleza Agree-
ment e Andean Pact. Inoltre, il Brasile, oltre ad essere la Nazione guida di questo
continente, avrà occasione di dimostrare il suo potenziale e di aumentare le sue in-
frastrutture poichè sarà il Paese ospitante dei Campionati del mondo di calcio nel
2014 e delle Olimpiadi nel 2016.
29
2 Analisi di mercato
Figura 2.17: Latin America Projected New Deliveries (Embraer)
Figura 2.18: Latin America Fleet in Service (Embraer)
30
2 Analisi di mercato
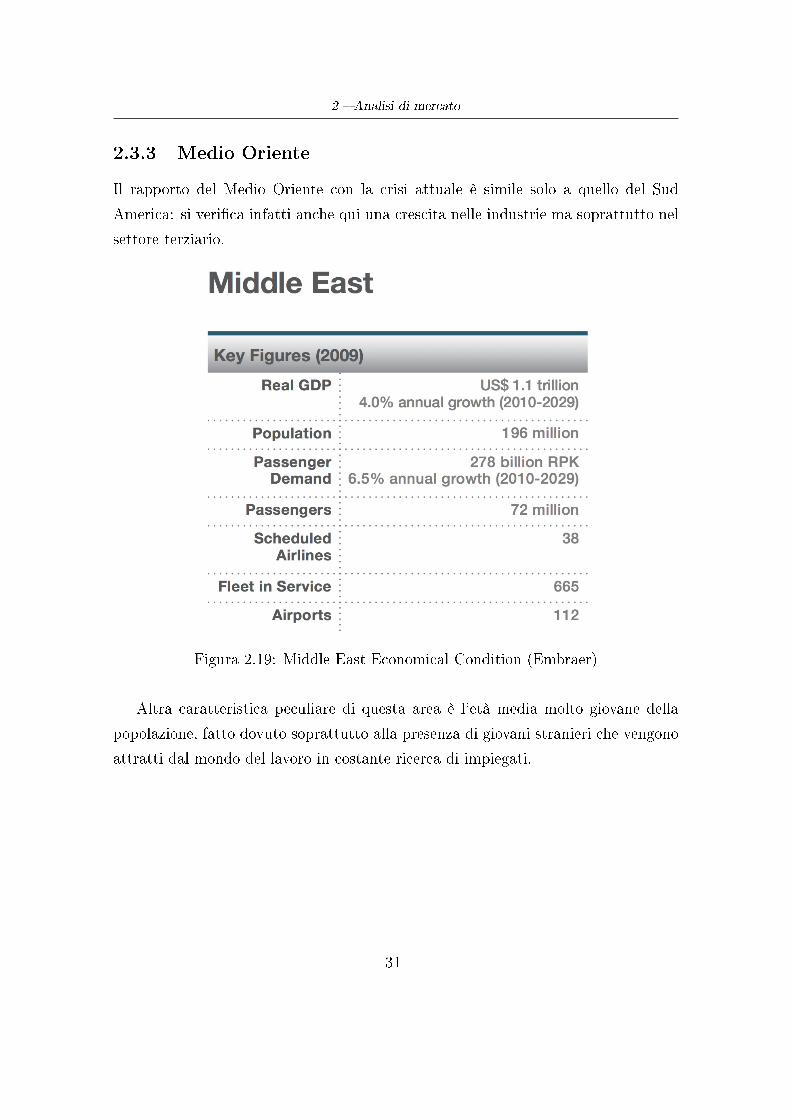
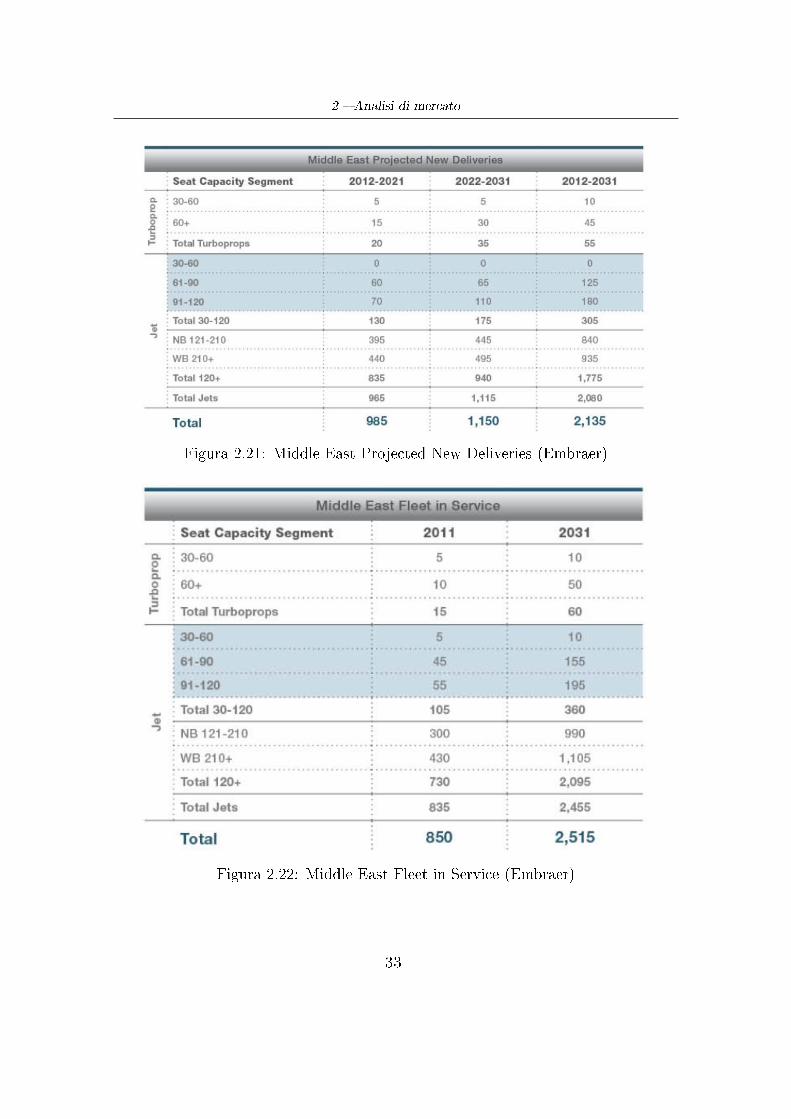
2.3.3 Medio Oriente
Il rapporto del Medio Oriente con la crisi attuale è simile solo a quello del Sud
America: si verica infatti anche qui una crescita nelle industrie ma soprattutto nel
settore terziario.
Figura 2.19: Middle East Economical Condition (Embraer)
Altra caratteristica peculiare di questa area è l'età media molto giovane della
popolazione, fatto dovuto soprattutto alla presenza di giovani stranieri che vengono
attratti dal mondo del lavoro in costante ricerca di impiegati.
31

2 Analisi di mercato
Figura 2.20: Middle East Average Age (United Nations)
L'importanza di questa regione geograca dal punto di vista aeroportuale nasce
soprattutto dalla presenza dei tre scali principali per rotte intercontinentali: Abu
Dhabi, Doha e Dubai. Queste tre cittadine hanno saputo sfruttare la favorevole
posizione geograca di connessione tra l'Europa e l'Asia in modo molto procuo.
Con un trend economico di questo genere, anche per l'industria aeronautica c'è la
possibilità di ampliare il mercato di vendita, soprattutto di settori particalari come
quelli che si occupano della produzione di jet privati super lussuosi ma anche di
middle range aircraft per permettere ai giovani che qui trovano lavoro, di far ritorno
a casa molto velocemente.
32
2 Analisi di mercato
Figura 2.21: Middle East Projected New Deliveries (Embraer)
Figura 2.22: Middle East Fleet in Service (Embraer)
33

2 Analisi di mercato
2.3.4 Asia ed Oceania
In questa sezione verrà analizzata la situazione economica asiatica, escludendo però
da questa trattazione la Cina, alla quale sarà riservata la sezione immediatamente
successiva.
Figura 2.23: Asia Economical Condition (Embraer)
L'Asia é una regione che, nonostante le grandi disparità fra le singole Nazioni, ha
una previsione di GDP che si colloca perfettamente nella media calcolata, attorno
al 3,4%. É già diusa da alcuni anni la tendenza a costruire scali internazionali
per rotte molte lunghe ma, grazie alla nascita e allo sviluppo di ceti borghesi, è
aumentata anche la necessità di costruire una rete di collegamenti aerei regionali e
da qui discende la previsione di un importante aumento nella richiesta di velivoli
con massimo 100 posti.
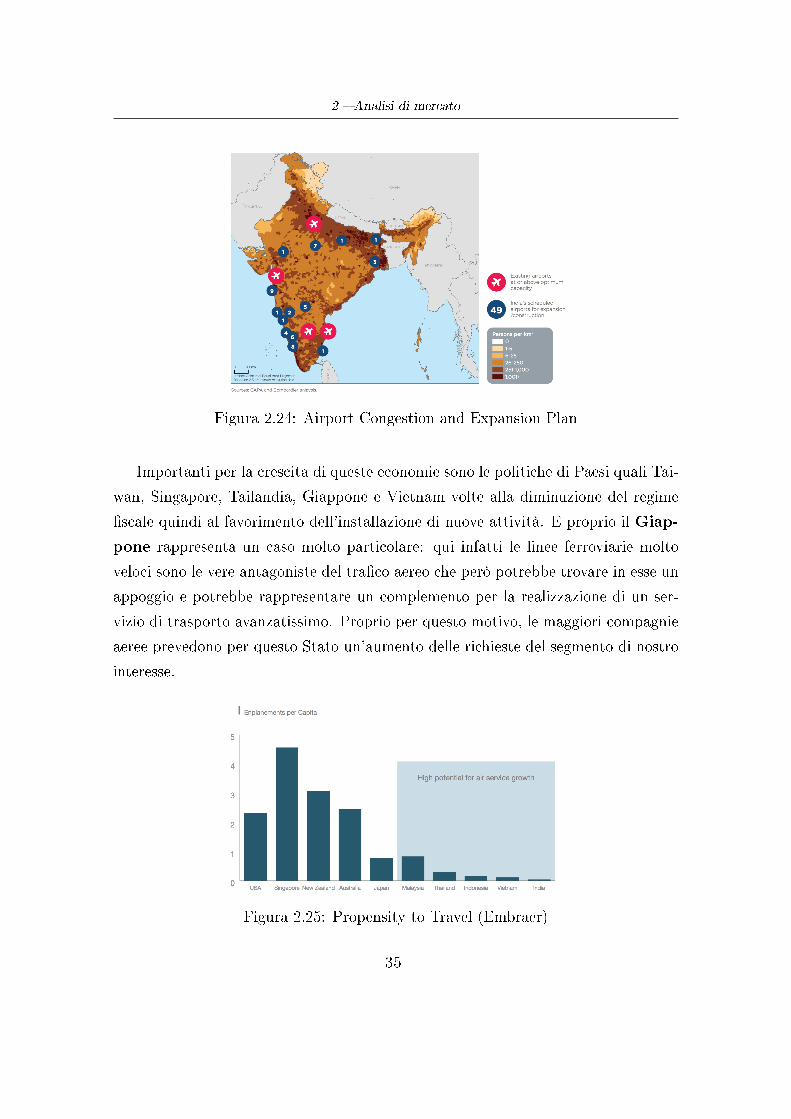
Motore dell'economia è l'India, dove la crisi mondiale non ha intaccato il settore
manifatturiero, che si sta invece sviluppando a ritmi piuttosto elevati e necessita
di rotte aeree di natura esclusivamente commerciale. Ecco nella gura seguente
la distribuzione degli aeroporti esistenti e di quelli per i quali sono già stati dati
importanti nanziamenti per la costruzione. Problema che invece potrebbe rilevarsi
degno di nota è l'assenza di una rete ferroviaria veloce in grado di collegare tra loro
le principali cittdine del Paese e gli scali costruiti o in via di progettazione.
34
2 Analisi di mercato
Figura 2.24: Airport Congestion and Expansion Plan
Importanti per la crescita di queste economie sono le politiche di Paesi quali Tai-
wan, Singapore, Tailandia, Giappone e Vietnam volte alla diminuzione del regime
scale quindi al favorimento dell'installazione di nuove attività. E proprio il Giap-
pone rappresenta un caso molto particolare: qui infatti le linee ferroviarie molto
veloci sono le vere antagoniste del traco aereo che però potrebbe trovare in esse un
appoggio e potrebbe rappresentare un complemento per la realizzazione di un ser-
vizio di trasporto avanzatissimo. Proprio per questo motivo, le maggiori compagnie
aeree prevedono per questo Stato un'aumento delle richieste del segmento di nostro
interesse.
Figura 2.25: Propensity to Travel (Embraer)
35
2 Analisi di mercato
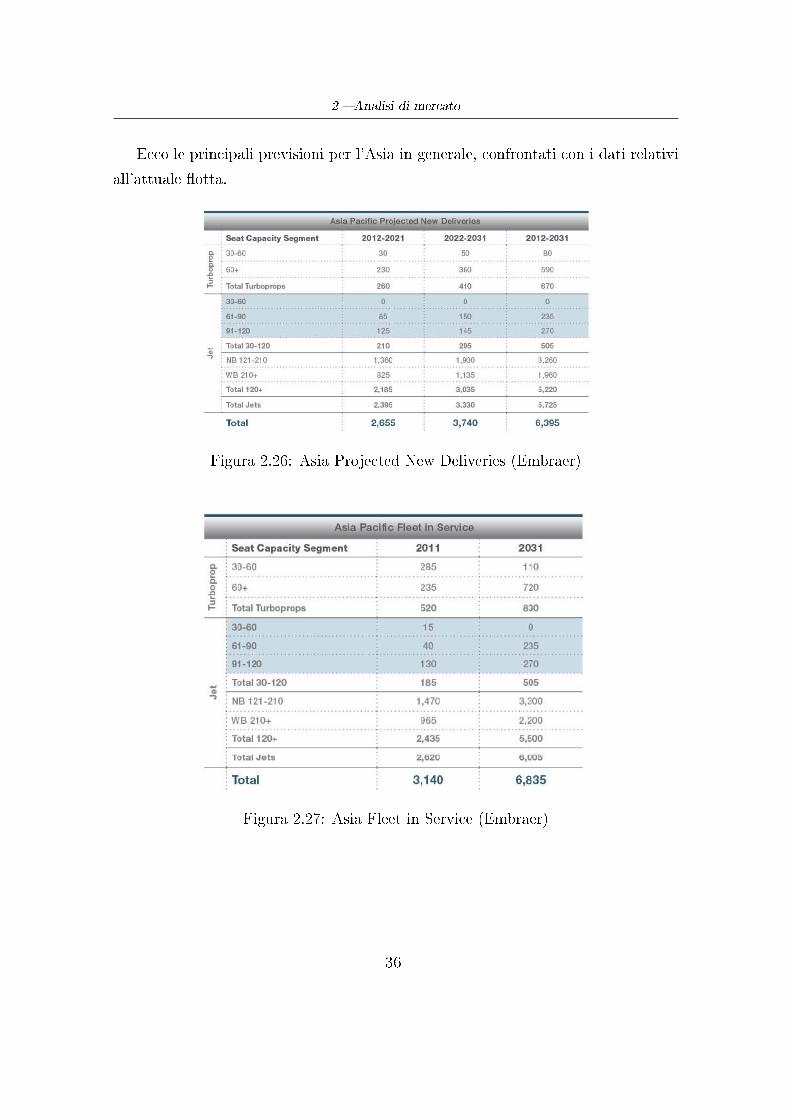
Ecco le principali previsioni per l'Asia in generale, confrontati con i dati relativi
all'attuale otta.
Figura 2.26: Asia Projected New Deliveries (Embraer)
Figura 2.27: Asia Fleet in Service (Embraer)
36

2 Analisi di mercato
2.3.5 Cina
La Cina è da trattarsi a parte sia perchè si tratta di un'area geograca molto ampia,
sia perchè le sue dinamiche economiche sono particolari e meritano attenzione.
Figura 2.28: China Economical Condition (Embraer)
Secondo le previsioni di Bombardier, la Cina ha una prospettiva di aumento
crescita nel settore aeronautico secondo solo al Nord America, con un incremento di
richieste calcolato attorno al 17%, di cui si stima che circa il 37% saranno velivoli
al di sotto dei 100 posti. La Cina, grazie alla grande disponibilità di liquidità, non
risulta gravemente aetta dalla crisi globale di questi tempi; inoltre anche le politiche
statali molto stimolanti hanno permesso la crescita a livello economico, puntando
molto soprattutto sugli investimenti infrastrutturali. Ad aumentare la domanda
interna anche nel settore aeronautico concorre la continua crescita di popolazione e
il trend positivo di aumento della classe medio borghese, vero motore nel campo dei
trasporti. Attualmente, visti tutti questi fattori, la domanda del mercato interno
cinese è rivolto verso aerei grandi e molto capienti per grandi distanze, ma proprio la
necessità di spostarsi anche internamente al Paese stesso, richiesta tipica della classe
borghese, potrebbe rappressentare un ottimo driver per l'ampliamento del segmento
regionale. Mostriamo quindi la distribuzione degli aeroporti sul territorio: questa
riette la densità di popolazione, dierente a seconda dell'area considerata.
37
2 Analisi di mercato
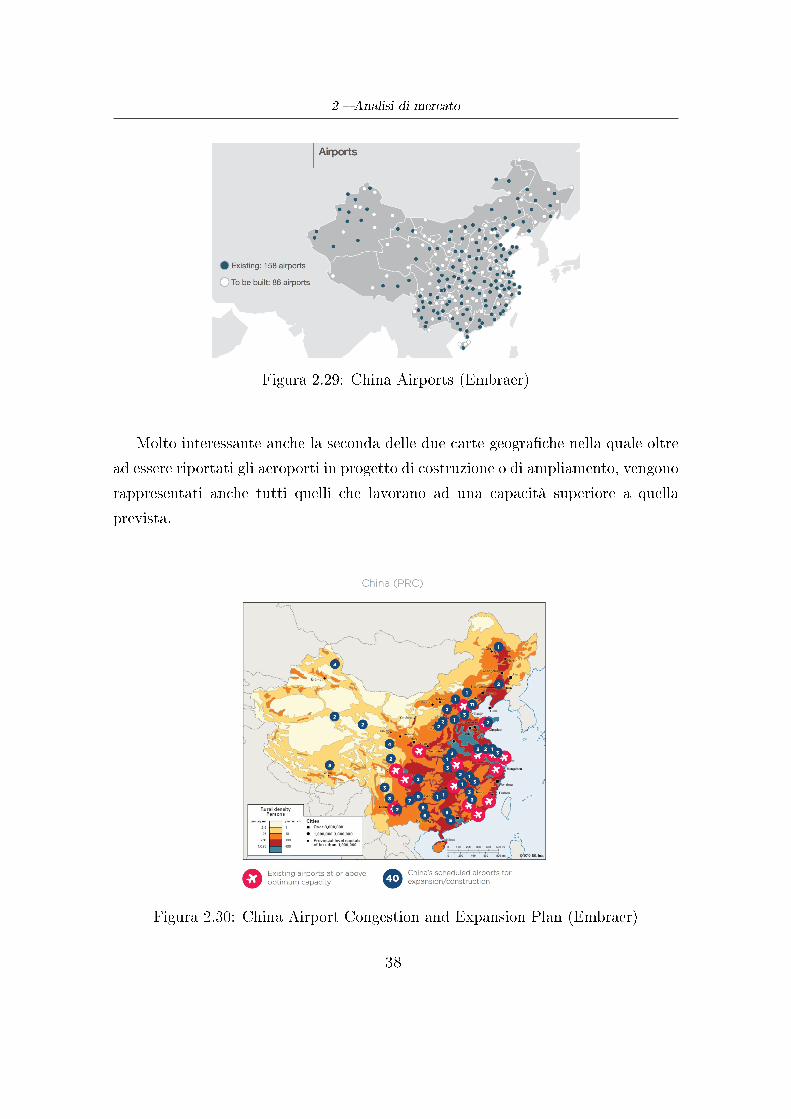
Figura 2.29: China Airports (Embraer)
Molto interessante anche la seconda delle due carte geograche nella quale oltre
ad essere riportati gli aeroporti in progetto di costruzione o di ampliamento, vengono
rappresentati anche tutti quelli che lavorano ad una capacità superiore a quella
prevista.
Figura 2.30: China Airport Congestion and Expansion Plan (Embraer)
38
2 Analisi di mercato
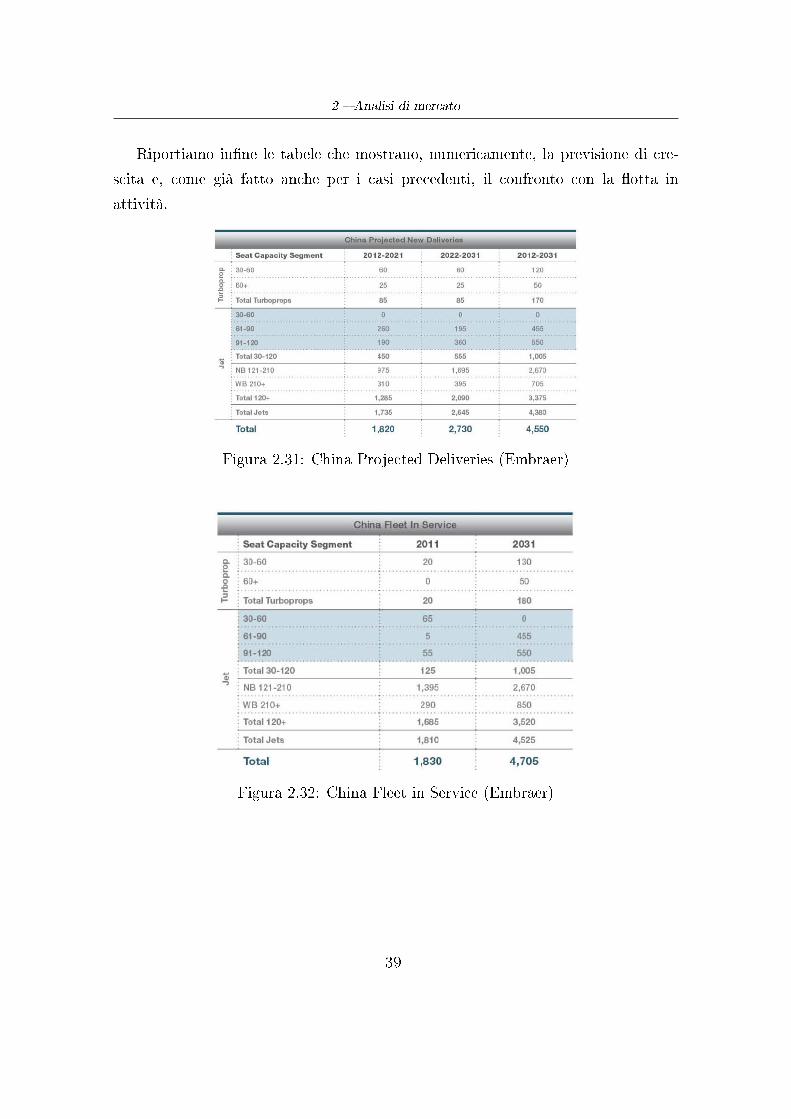
Riportiamo inne le tabele che mostrano, numericamente, la previsione di cre-
scita e, come già fatto anche per i casi precedenti, il confronto con la otta in
attività.
Figura 2.31: China Projected Deliveries (Embraer)
Figura 2.32: China Fleet in Service (Embraer)
39
2 Analisi di mercato
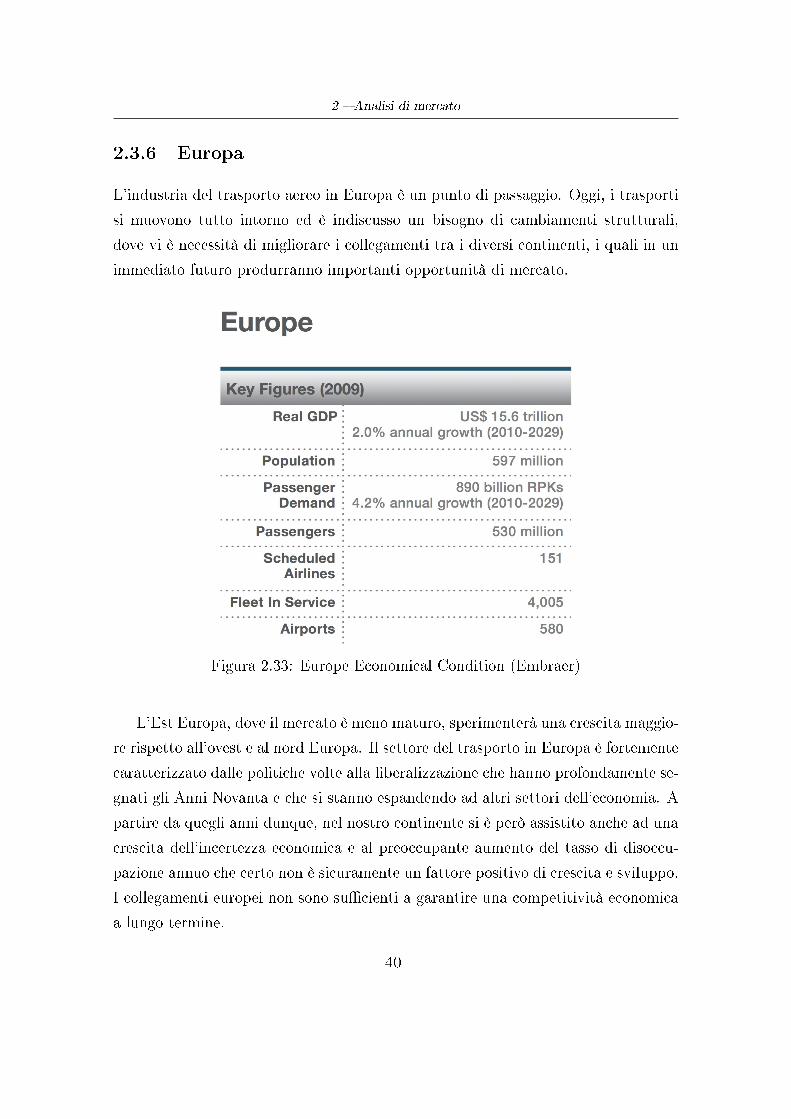
2.3.6 Europa
L'industria del trasporto aereo in Europa è un punto di passaggio. Oggi, i trasporti
si muovono tutto intorno ed è indiscusso un bisogno di cambiamenti strutturali,
dove vi è necessità di migliorare i collegamenti tra i diversi continenti, i quali in un
immediato futuro produrranno importanti opportunità di mercato.
Figura 2.33: Europe Economical Condition (Embraer)
L'Est Europa, dove il mercato è meno maturo, sperimenterà una crescita maggio-
re rispetto all'ovest e al nord Europa. Il settore del trasporto in Europa è fortemente
caratterizzato dalle politiche volte alla liberalizzazione che hanno profondamente se-
gnati gli Anni Novanta e che si stanno espandendo ad altri settori dell'economia. A
partire da quegli anni dunque, nel nostro continente si è però assistito anche ad una
crescita dell'incertezza economica e al preoccupante aumento del tasso di disoccu-
pazione annuo che certo non è sicuramente un fattore positivo di crescita e sviluppo.
I collegamenti europei non sono sucienti a garantire una competitività economica
a lungo termine.
40
2 Analisi di mercato
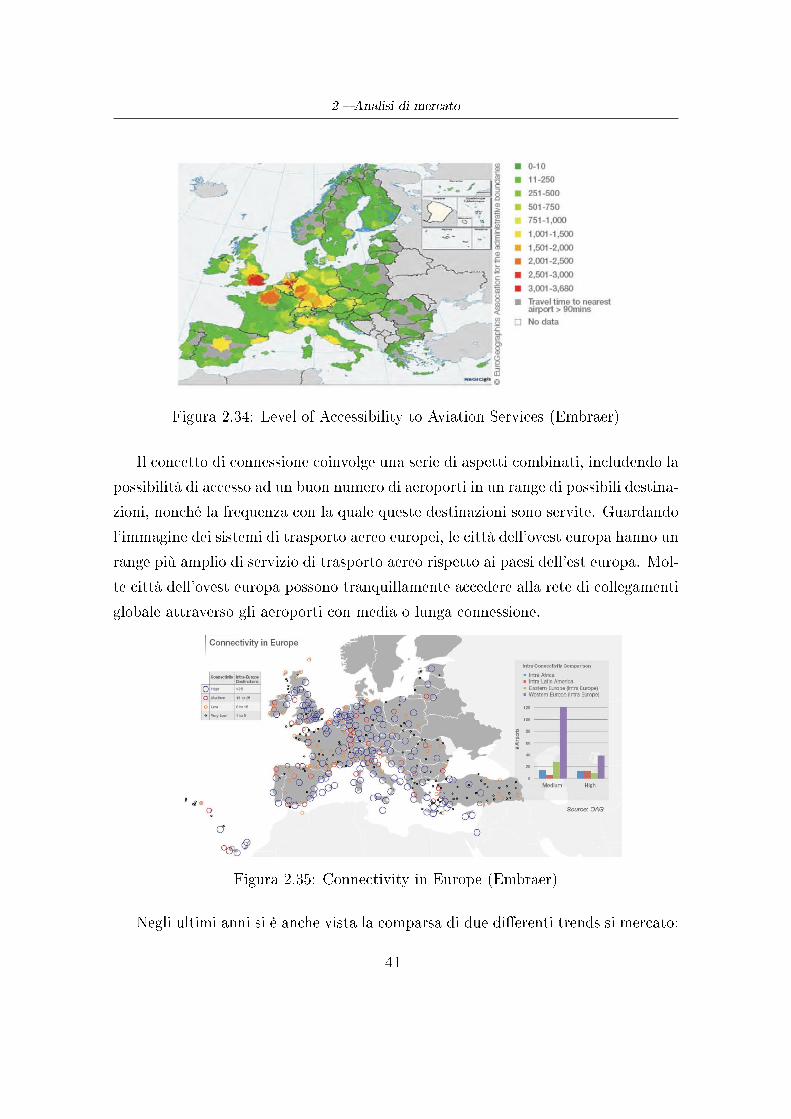
Figura 2.34: Level of Accessibility to Aviation Services (Embraer)
Il concetto di connessione coinvolge una serie di aspetti combinati, includendo la
possibilità di accesso ad un buon numero di aeroporti in un range di possibili destina-
zioni, nonché la frequenza con la quale queste destinazioni sono servite. Guardando
l'immagine dei sistemi di trasporto aereo europei, le città dell'ovest europa hanno un
range più amplio di servizio di trasporto aereo rispetto ai paesi dell'est europa. Mol-
te città dell'ovest europa possono tranquillamente accedere alla rete di collegamenti
globale attraverso gli aeroporti con media o lunga connessione.
Figura 2.35: Connectivity in Europe (Embraer)
Negli ultimi anni si è anche vista la comparsa di due dierenti trends si mercato:
41
2 Analisi di mercato
il primo, proprio delle grandi e consolidate compagnie aeree, che hanno diminuito
la frequenza dei voli regionali aumentando di gran numero le proposte per le rotte
intercontinentali, mentre dall'altra parte si sono aacciati su tutti i mercati le com-
pagnie low cost che puntano quasi esclusivamente sull'aumento delle frequenze per
i voli a breve e medio raggio, orendo prezzi altamente invitanti.
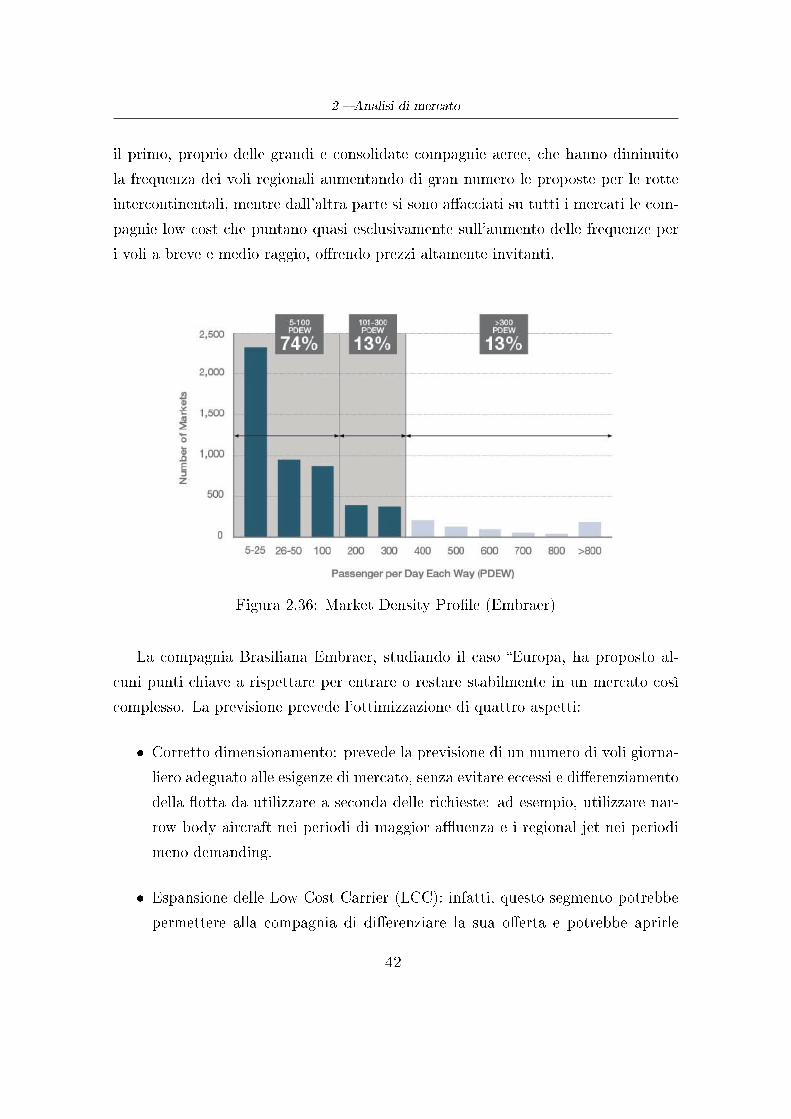
Figura 2.36: Market Density Prole (Embraer)
La compagnia Brasiliana Embraer, studiando il caso Europa, ha proposto al-
cuni punti chiave a rispettare per entrare o restare stabilmente in un mercato così
complesso. La previsione prevede l'ottimizzazione di quattro aspetti:
Corretto dimensionamento: prevede la previsione di un numero di voli giorna-
liero adeguato alle esigenze di mercato, senza evitare eccessi e dierenziamento
della otta da utilizzare a seconda delle richieste: ad esempio, utilizzare nar-
row body aircraft nei periodi di maggior auenza e i regional jet nei periodi
meno demanding.
Espansione delle Low Cost Carrier (LCC): infatti, questo segmento potrebbe
permettere alla compagnia di dierenziare la sua oerta e potrebbe aprirle
42
2 Analisi di mercato
nuovi scenari. Tale strategia porterebbe un aumento di richiesta di nuovi
velivoli soprattutto nel segmento 90-120 posti.
Sostituzione dei velivoli obsoleti: si tratta di sostituire i componenti della
otta che hanno più di una quindicina di anni. Questa tattica darebbe grande
impulso alle aziende aeronautica europea e permetterebbe alle compagnie di
avere a disposizione dei velivoli molto più ecienti sia a livello di prestazioni
che porterebbe ad una riduzione dei costi di mantenimento e manutenzione
ma anche del livello di emissioni. Soprattutto quest'ultimo punto deve essere
fortemente valutato, in particolare in Europa, dove le normative sulle emissioni
di sostane inquinante e sulla rumorosità diventano sempre più stringenti.
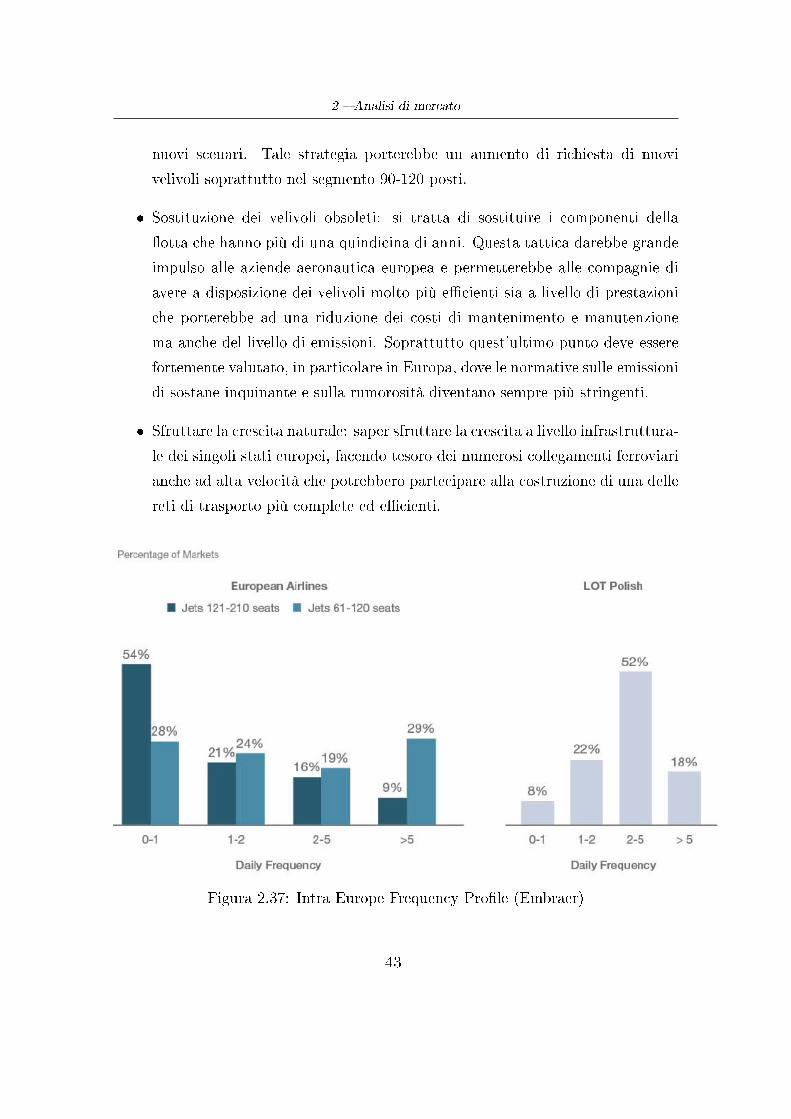
Sfruttare la crescita naturale: saper sfruttare la crescita a livello infrastruttura-
le dei singoli stati europei, facendo tesoro dei numerosi collegamenti ferroviari
anche ad alta velocità che potrebbero partecipare alla costruzione di una delle
reti di trasporto più complete ed ecienti.
Figura 2.37: Intra Europe Frequency Prole (Embraer)
43
2 Analisi di mercato
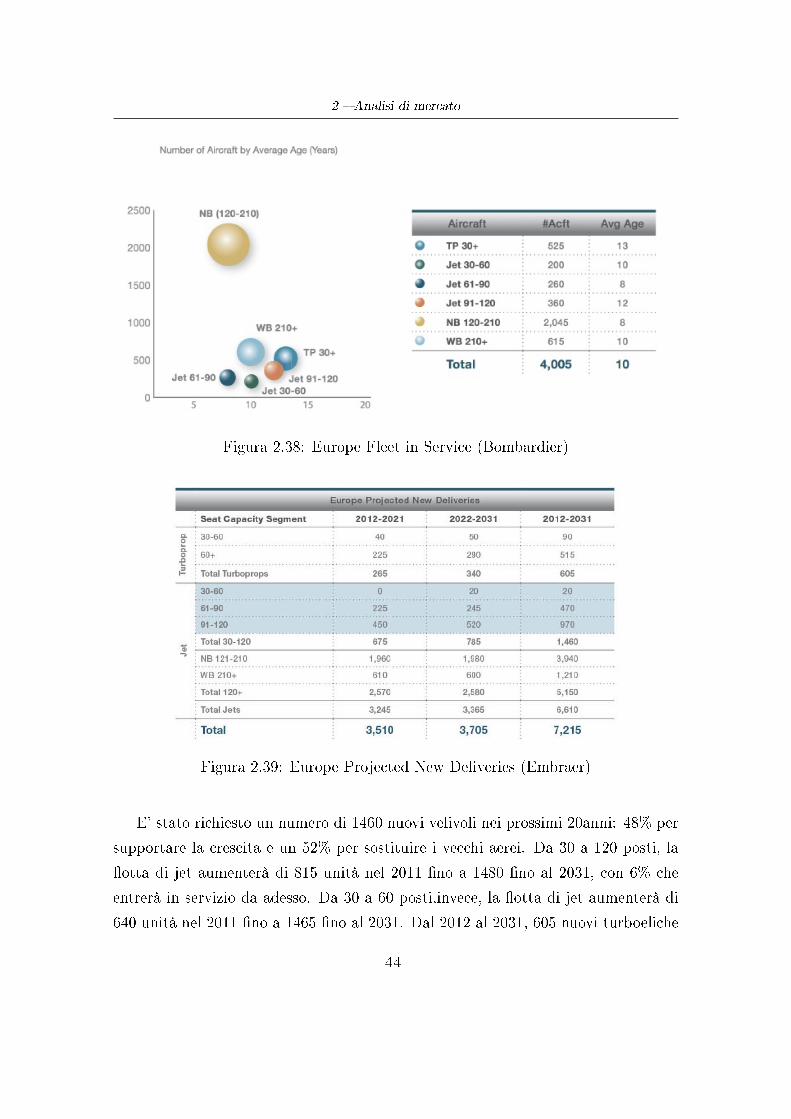
Figura 2.38: Europe Fleet in Service (Bombardier)
Figura 2.39: Europe Projected New Deliveries (Embraer)
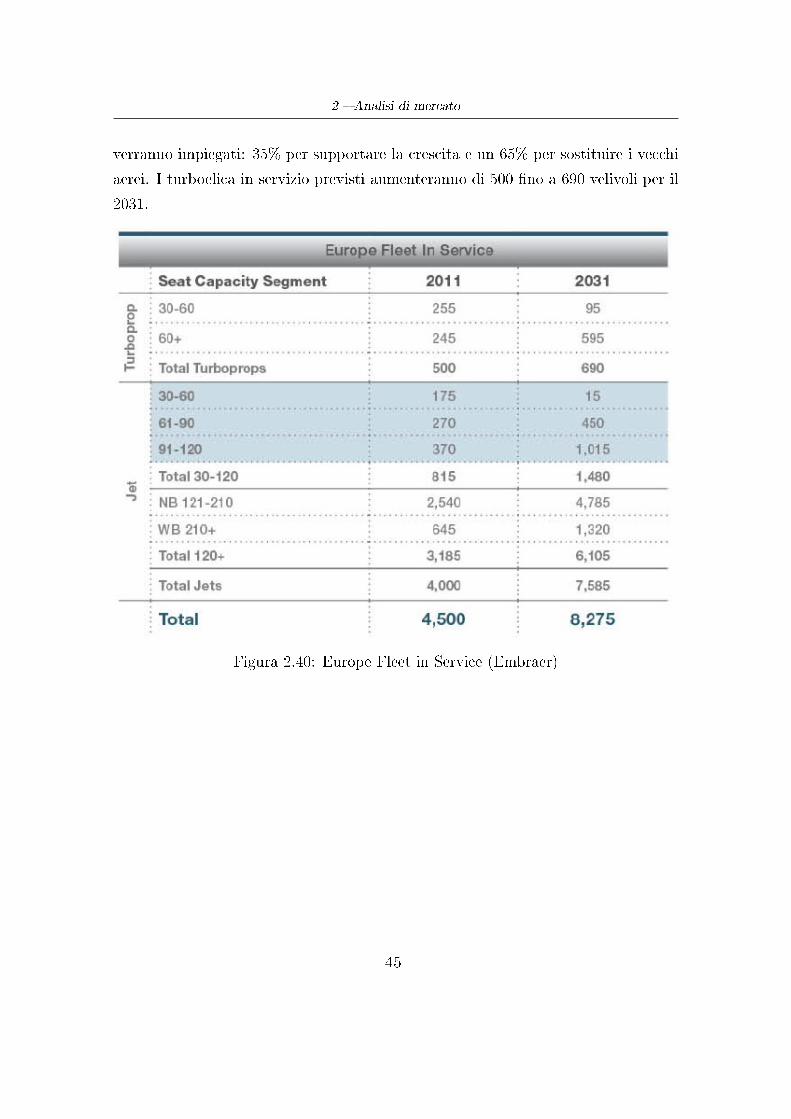
E' stato richiesto un numero di 1460 nuovi velivoli nei prossimi 20anni: 48% per
supportare la crescita e un 52% per sostituire i vecchi aerei. Da 30 a 120 posti, la
otta di jet aumenterà di 815 unità nel 2011 no a 1480 no al 2031, con 6% che
entrerà in servizio da adesso. Da 30 a 60 posti,invece, la otta di jet aumenterà di
640 unità nel 2011 no a 1465 no al 2031. Dal 2012 al 2031, 605 nuovi turboeliche
44
2 Analisi di mercato
verranno impiegati: 35% per supportare la crescita e un 65% per sostituire i vecchi
aerei. I turboelica in servizio previsti aumenteranno di 500 no a 690 velivoli per il
2031.
Figura 2.40: Europe Fleet in Service (Embraer)
45
2 Analisi di mercato
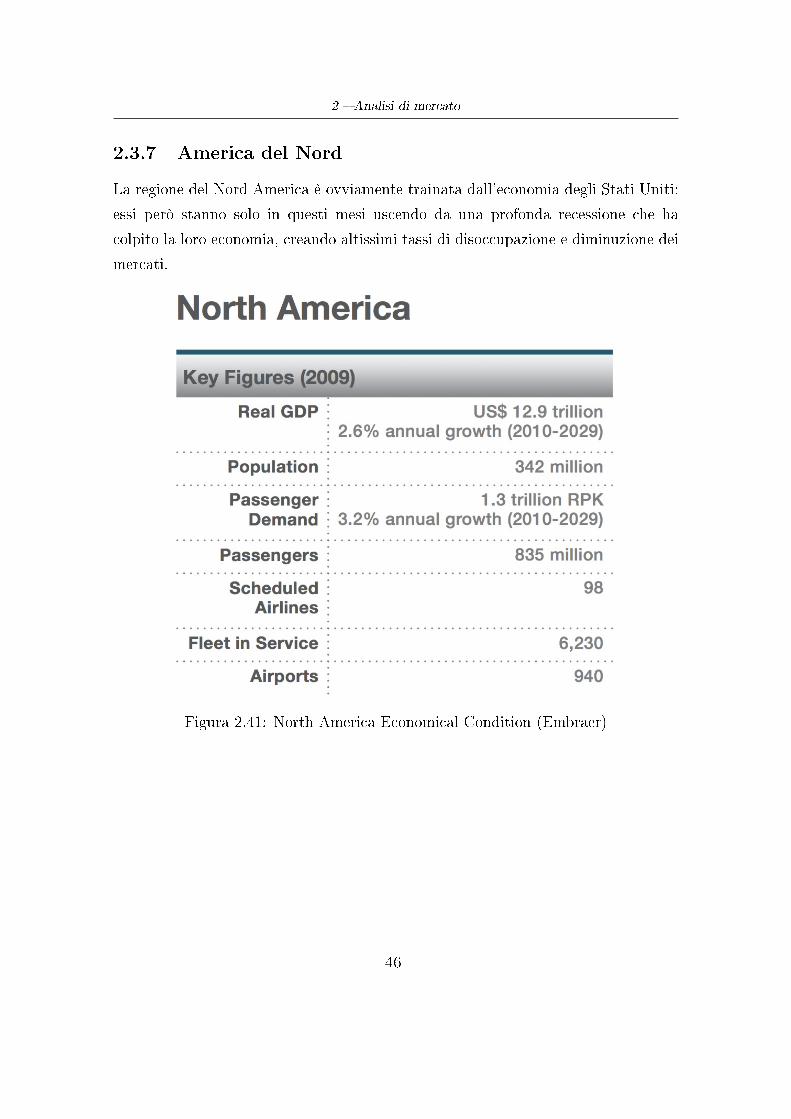
2.3.7 America del Nord
La regione del Nord America è ovviamente trainata dall'economia degli Stati Uniti:
essi però stanno solo in questi mesi uscendo da una profonda recessione che ha
colpito la loro economia, creando altissimi tassi di disoccupazione e diminuzione dei
mercati.
Figura 2.41: North America Economical Condition (Embraer)
46
2 Analisi di mercato
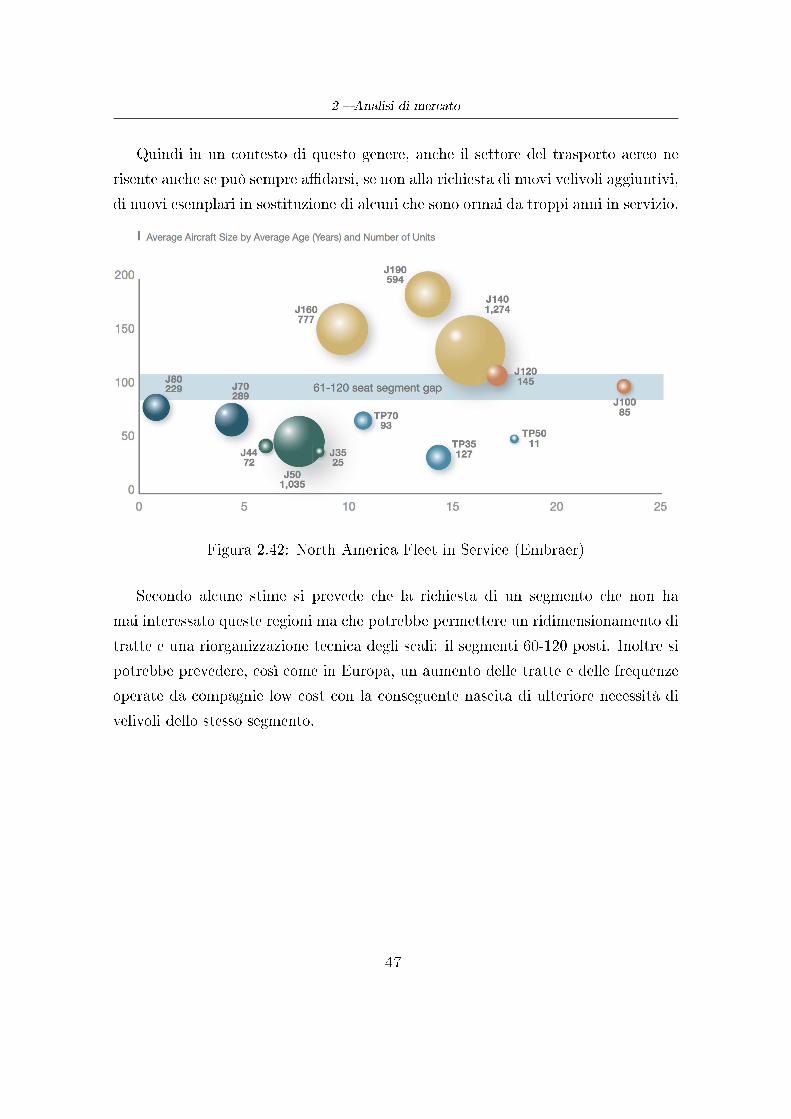
Quindi in un contesto di questo genere, anche il settore del trasporto aereo ne
risente anche se può sempre adarsi, se non alla richiesta di nuovi velivoli aggiuntivi,
di nuovi esemplari in sostituzione di alcuni che sono ormai da troppi anni in servizio.
Figura 2.42: North America Fleet in Service (Embraer)
Secondo alcune stime si prevede che la richiesta di un segmento che non ha
mai interessato queste regioni ma che potrebbe permettere un ridimensionamento di
tratte e una riorganizzazione tecnica degli scali: il segmenti 60-120 posti. Inoltre si
potrebbe prevedere, così come in Europa, un aumento delle tratte e delle frequenze
operate da compagnie low cost con la conseguente nascita di ulteriore necessità di
velivoli dello stesso segmento.
47
2 Analisi di mercato
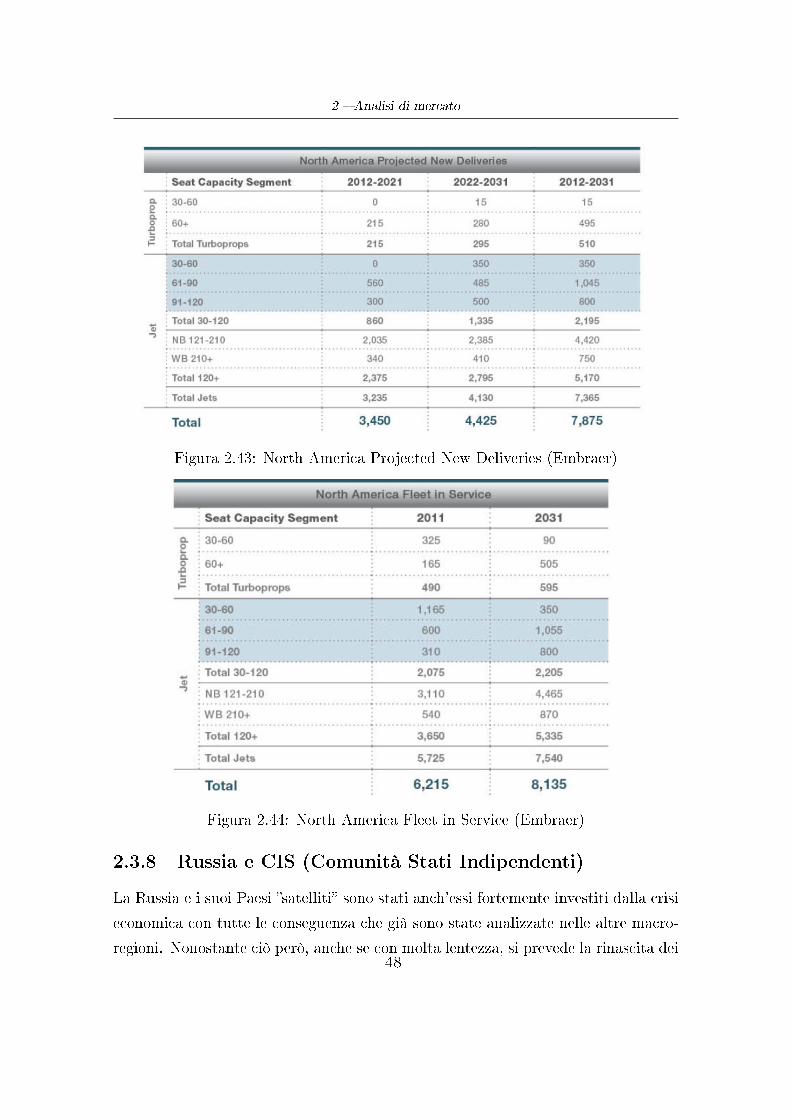
Figura 2.43: North America Projected New Deliveries (Embraer)
Figura 2.44: North America Fleet in Service (Embraer)
2.3.8 Russia e CIS (Comunità Stati Indipendenti)
La Russia e i suoi Paesi satelliti sono stati anch'essi fortemente investiti dalla crisi
economica con tutte le conseguenza che già sono state analizzate nelle altre macro-
regioni. Nonostante ciò però, anche se con molta lentezza, si prevede la rinascita dei48
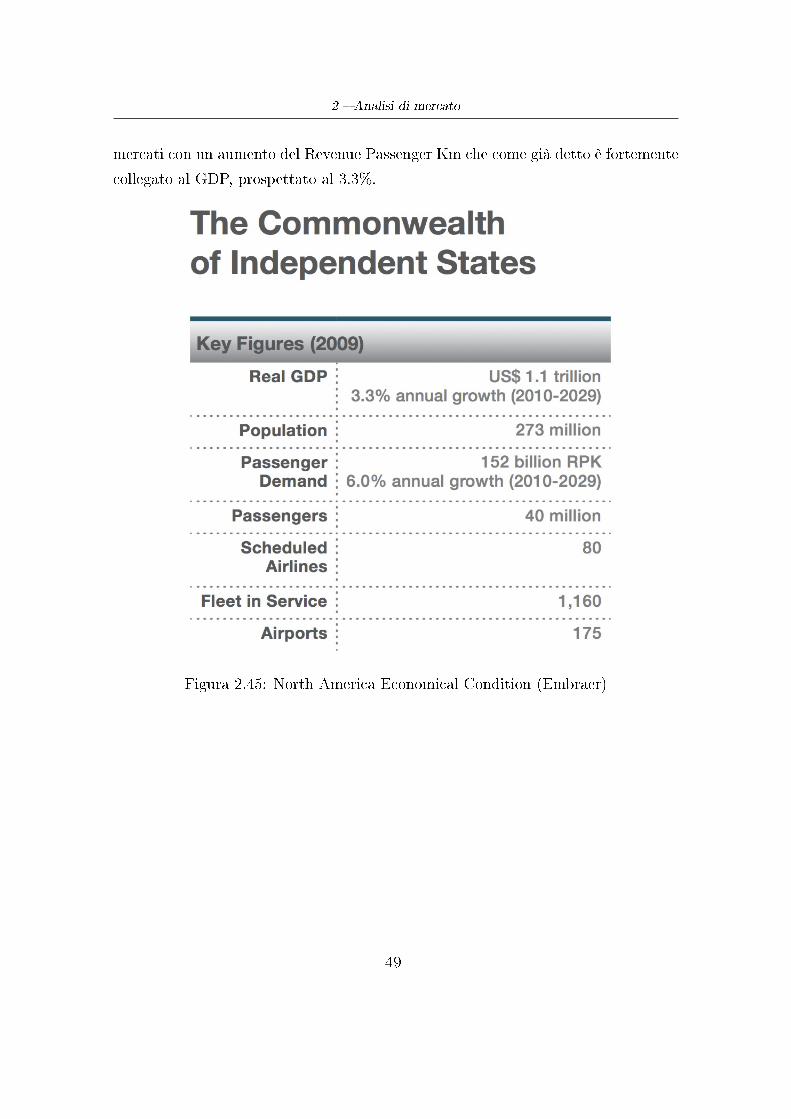
2 Analisi di mercato
mercati con un aumento del Revenue Passenger Km che come già detto è fortemente
collegato al GDP, prospettato al 3.3%.
Figura 2.45: North America Economical Condition (Embraer)
49
2 Analisi di mercato
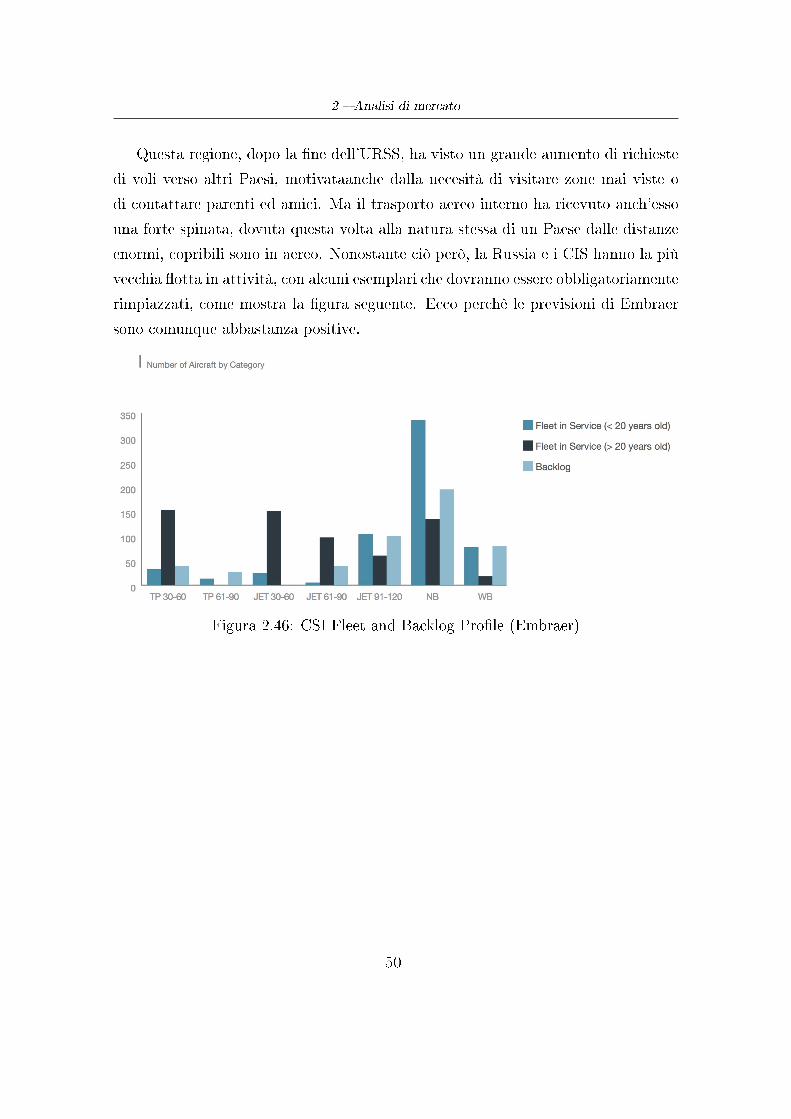
Questa regione, dopo la ne dell'URSS, ha visto un grande aumento di richieste
di voli verso altri Paesi, motivataanche dalla necesità di visitare zone mai viste o
di contattare parenti ed amici. Ma il trasporto aereo interno ha ricevuto anch'esso
una forte spinata, dovuta questa volta alla natura stessa di un Paese dalle distanze
enormi, copribili sono in aereo. Nonostante ciò però, la Russia e i CIS hanno la più
vecchia otta in attività, con alcuni esemplari che dovranno essere obbligatoriamente
rimpiazzati, come mostra la gura seguente. Ecco perchè le previsioni di Embraer
sono comunque abbastanza positive.
Figura 2.46: CSI Fleet and Backlog Prole (Embraer)
50
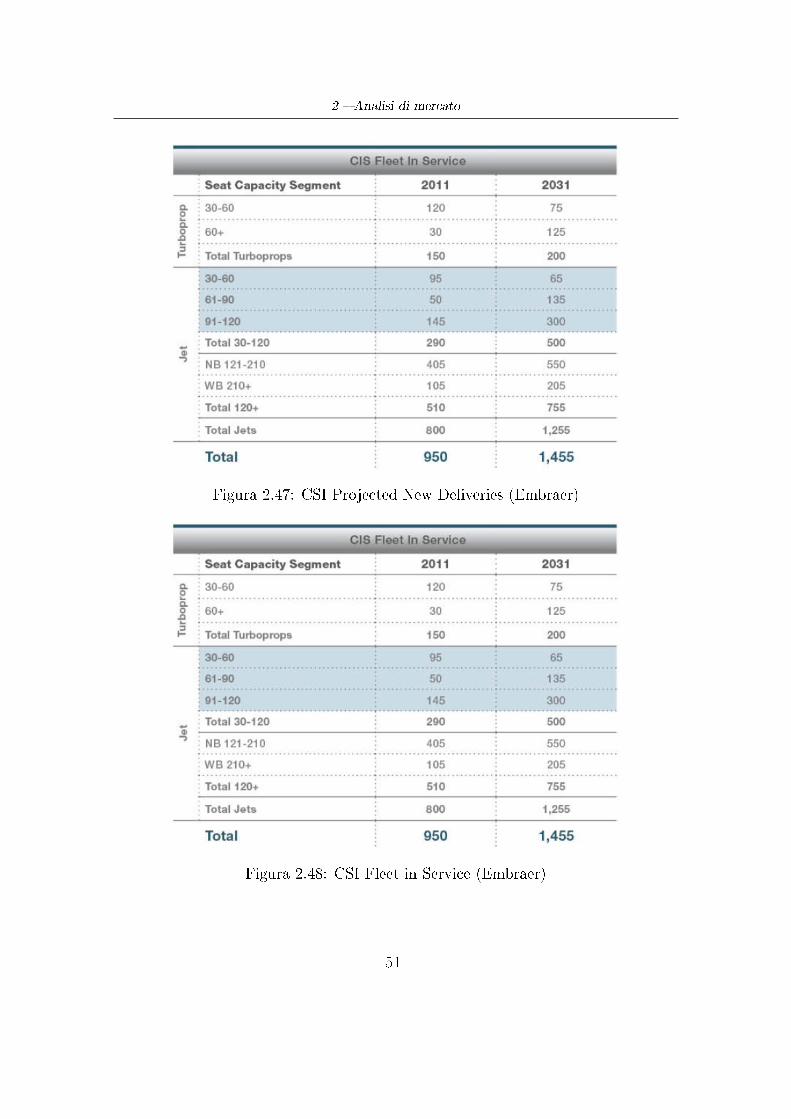
2 Analisi di mercato
Figura 2.47: CSI Projected New Deliveries (Embraer)
Figura 2.48: CSI Fleet in Service (Embraer)
51
Capitolo 3
Velivoli di riferimento
3.1 Velivoli
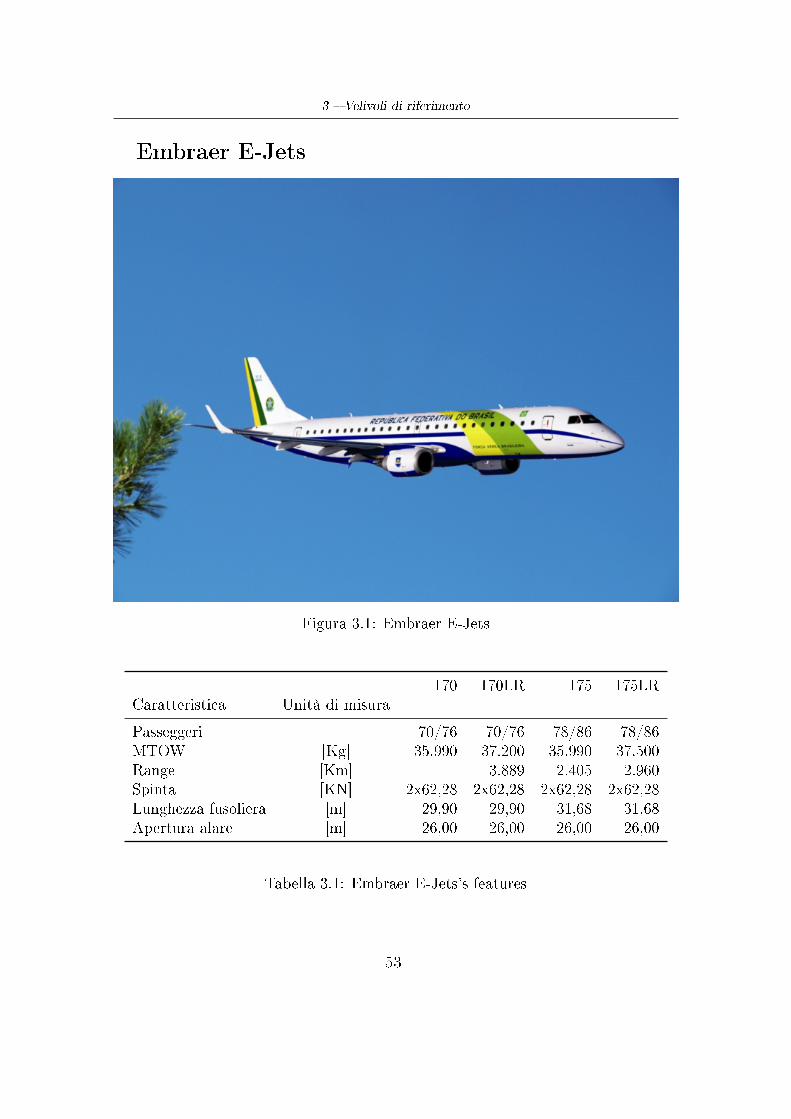
Vengono presentati di seguito i velivoli scelti come riferimento in questo progetto.
Alcuni di essi risultano avere caratteristiche dieerenti da quelle richieste, ma no-
nostante ciò possono essere utilizzati come base statistica adabile per un'analisi
preliminare. Per completezza, per ognuno viene riportata un'immagine rappresen-
tativa e una tabella indicante i principali valori forniti dalle case costruttrici.
52
3 Velivoli di riferimento
Embraer E-Jets
Figura 3.1: Embraer E-Jets
170 170LR 175 175LRCaratteristica Unità di misura
Passeggeri 70/76 70/76 78/86 78/86MTOW [Kg] 35.990 37.200 35.990 37.500Range [Km] 3.889 2.405 2.960Spinta [KN] 2x62,28 2x62,28 2x62,28 2x62,28Lunghezza fusoliera [m] 29,90 29,90 31,68 31,68Apertura alare [m] 26,00 26,00 26,00 26,00
Tabella 3.1: Embraer E-Jets's features
53
3 Velivoli di riferimento
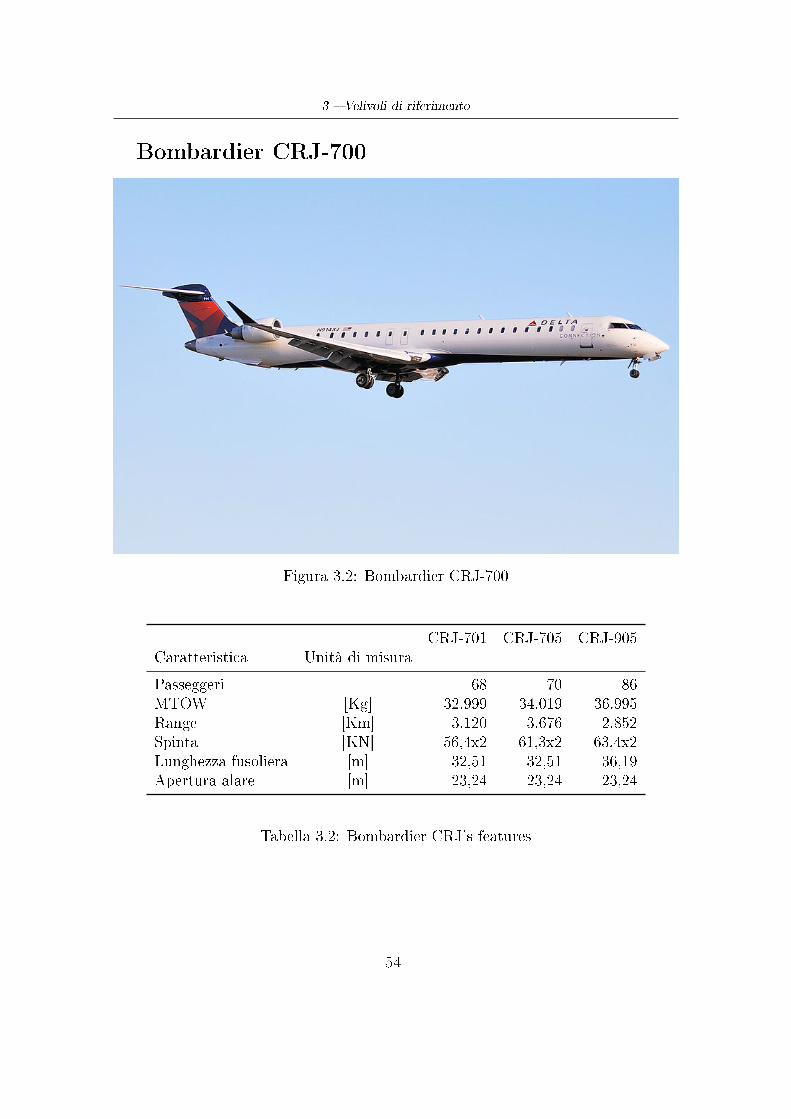
Bombardier CRJ-700
Figura 3.2: Bombardier CRJ-700
CRJ-701 CRJ-705 CRJ-905Caratteristica Unità di misura
Passeggeri 68 70 86MTOW [Kg] 32.999 34.019 36.995Range [Km] 3.120 3.676 2.852Spinta [KN] 56,4x2 61,3x2 63,4x2Lunghezza fusoliera [m] 32,51 32,51 36,19Apertura alare [m] 23,24 23,24 23,24
Tabella 3.2: Bombardier CRJ's features
54
3 Velivoli di riferimento
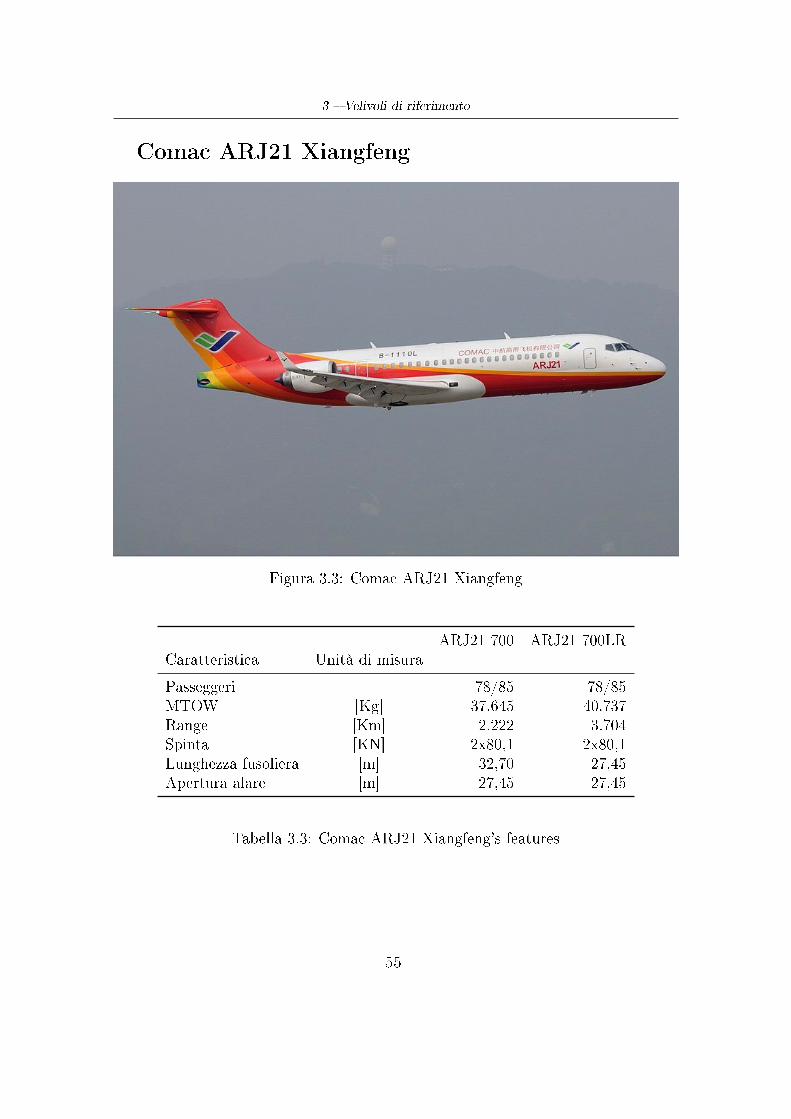
Comac ARJ21 Xiangfeng
Figura 3.3: Comac ARJ21 Xiangfeng
ARJ21-700 ARJ21-700LRCaratteristica Unità di misura
Passeggeri 78/85 78/85MTOW [Kg] 37.645 40.737Range [Km] 2.222 3.704Spinta [KN] 2x80,1 2x80,1Lunghezza fusoliera [m] 32,70 27,45Apertura alare [m] 27,45 27,45
Tabella 3.3: Comac ARJ21 Xiangfeng's features
55
3 Velivoli di riferimento
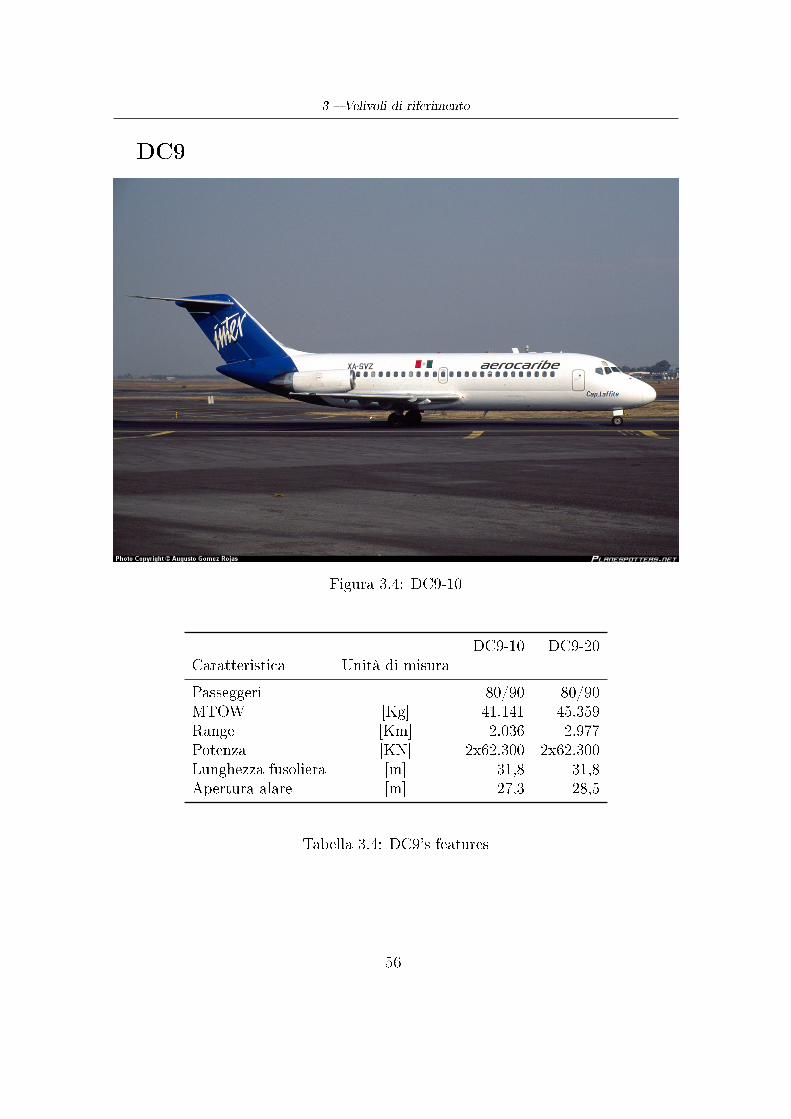
DC9
Figura 3.4: DC9-10
DC9-10 DC9-20Caratteristica Unità di misura
Passeggeri 80/90 80/90MTOW [Kg] 41.141 45.359Range [Km] 2.036 2.977Potenza [KN] 2x62.300 2x62.300Lunghezza fusoliera [m] 31,8 31,8Apertura alare [m] 27,3 28,5
Tabella 3.4: DC9's features
56
3 Velivoli di riferimento
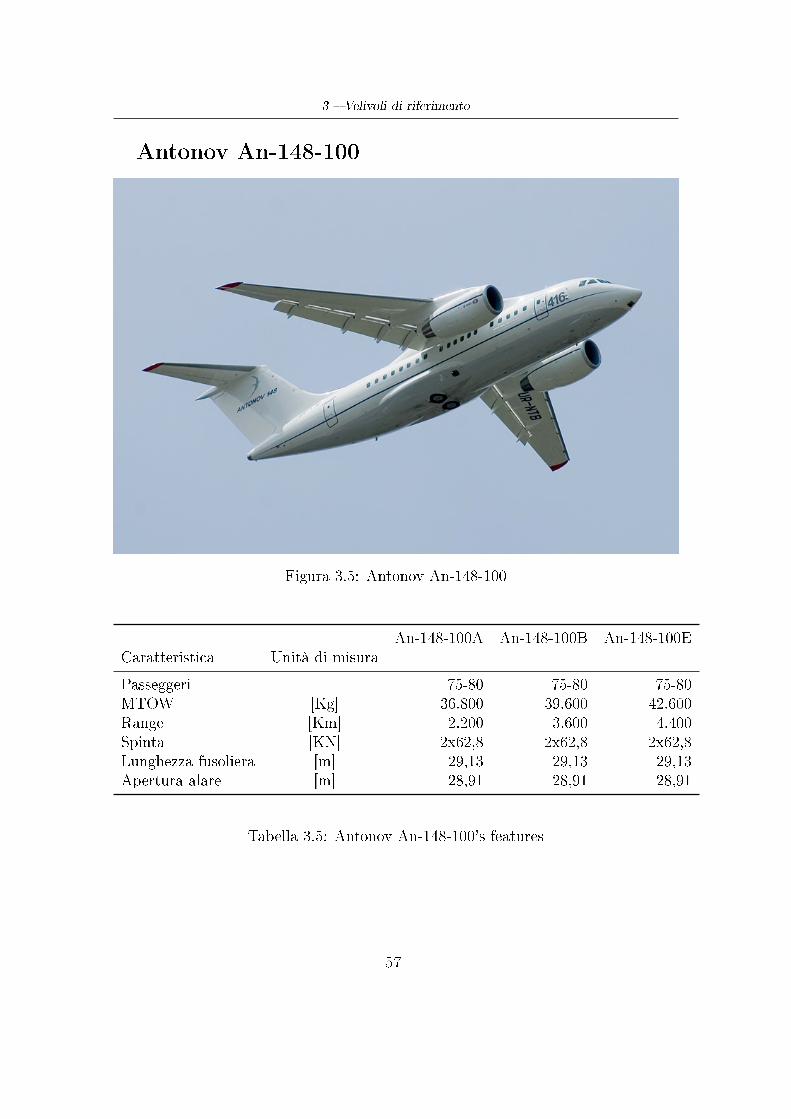
Antonov An-148-100
Figura 3.5: Antonov An-148-100
An-148-100A An-148-100B An-148-100ECaratteristica Unità di misura
Passeggeri 75-80 75-80 75-80MTOW [Kg] 36.800 39.600 42.600Range [Km] 2.200 3.600 4.400Spinta [KN] 2x62,8 2x62,8 2x62,8Lunghezza fusoliera [m] 29,13 29,13 29,13Apertura alare [m] 28,91 28,91 28,91
Tabella 3.5: Antonov An-148-100's features
57
3 Velivoli di riferimento
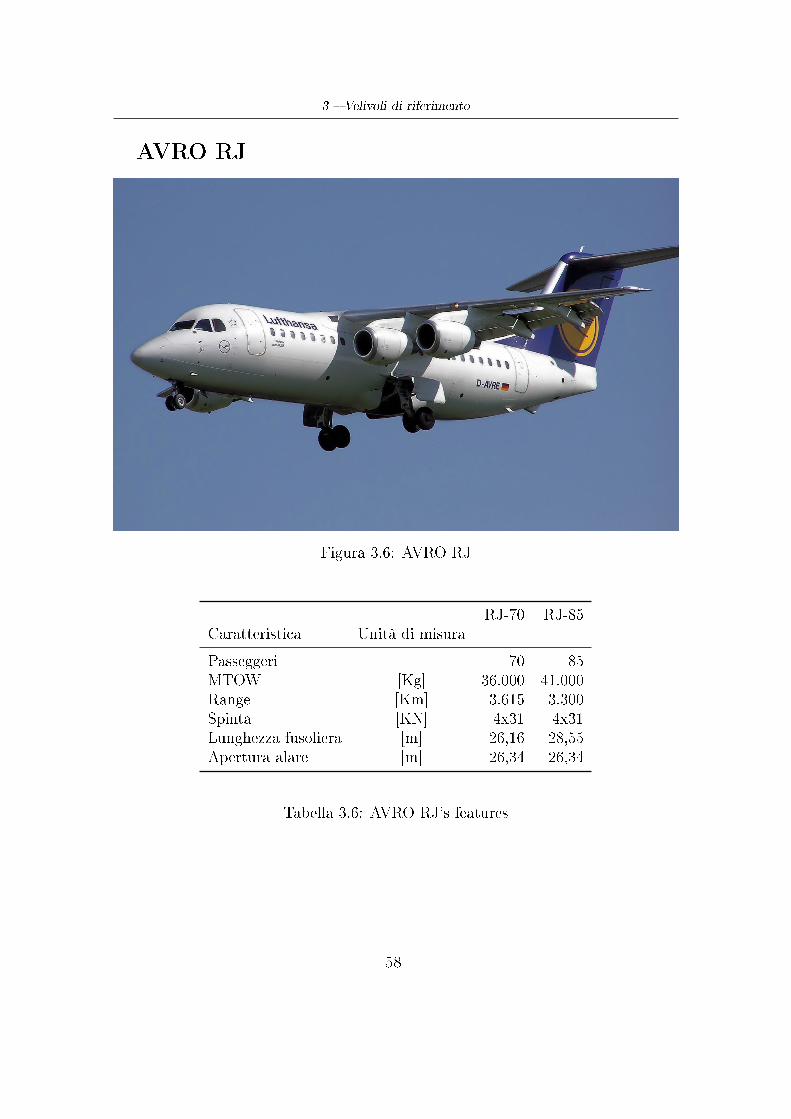
AVRO RJ
Figura 3.6: AVRO RJ
RJ-70 RJ-85Caratteristica Unità di misura
Passeggeri 70 85MTOW [Kg] 36.000 41.000Range [Km] 3.615 3.300Spinta [KN] 4x31 4x31Lunghezza fusoliera [m] 26,16 28,55Apertura alare [m] 26,34 26,34
Tabella 3.6: AVRO RJ's features
58
3 Velivoli di riferimento
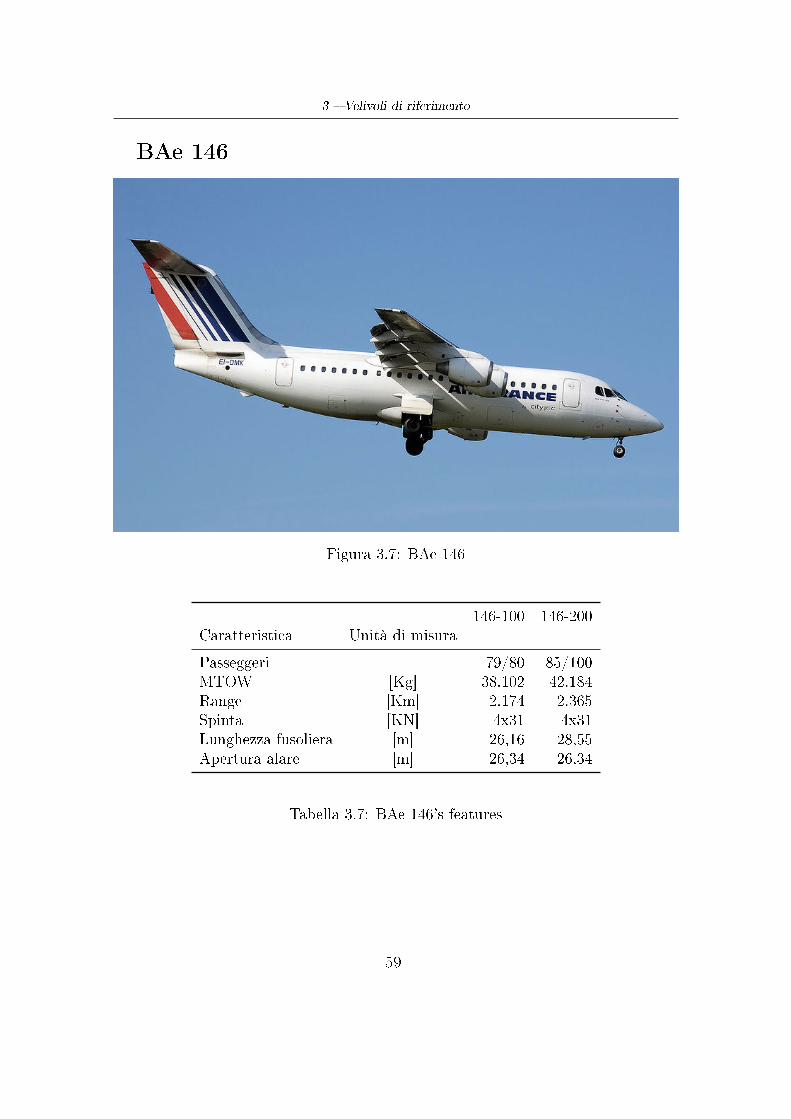
BAe 146
Figura 3.7: BAe 146
146-100 146-200Caratteristica Unità di misura
Passeggeri 79/80 85/100MTOW [Kg] 38.102 42.184Range [Km] 2.174 2.365Spinta [KN] 4x31 4x31Lunghezza fusoliera [m] 26,16 28,55Apertura alare [m] 26,34 26,34
Tabella 3.7: BAe 146's features
59
3 Velivoli di riferimento
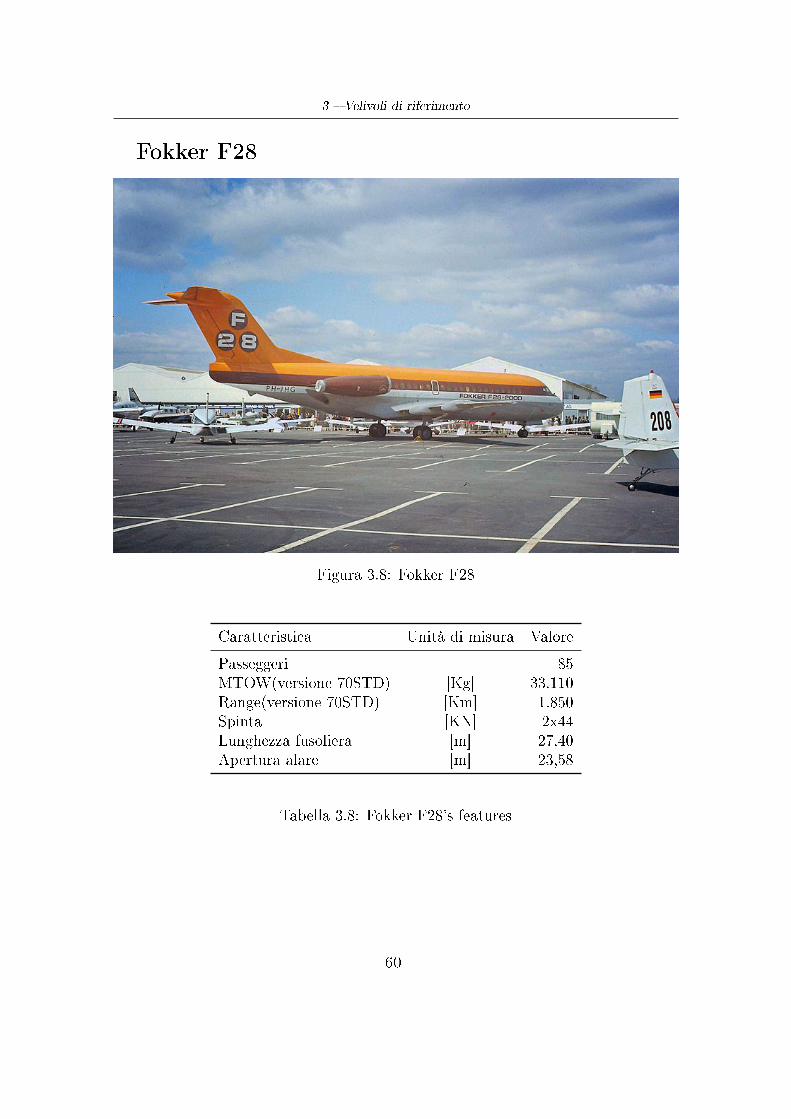
Fokker F28
Figura 3.8: Fokker F28
Caratteristica Unità di misura Valore
Passeggeri 85MTOW(versione 70STD) [Kg] 33.110Range(versione 70STD) [Km] 1.850Spinta [KN] 2x44Lunghezza fusoliera [m] 27,40Apertura alare [m] 23,58
Tabella 3.8: Fokker F28's features
60
3 Velivoli di riferimento
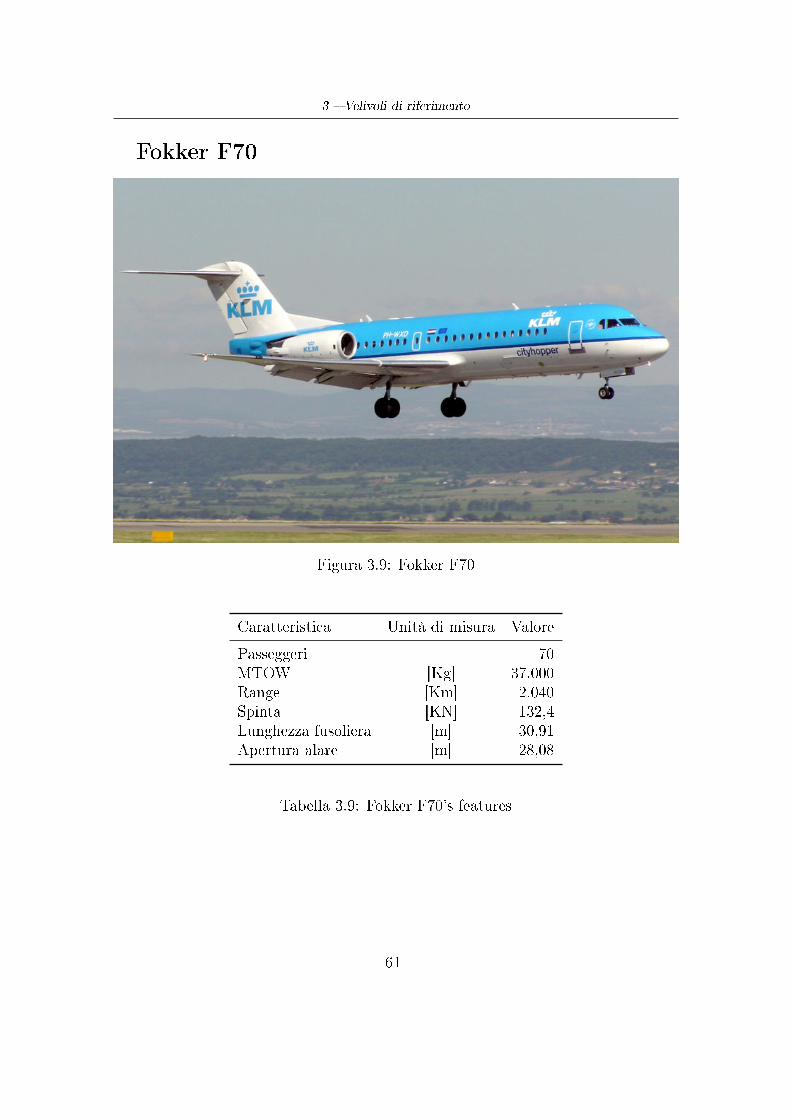
Fokker F70
Figura 3.9: Fokker F70
Caratteristica Unità di misura Valore
Passeggeri 70MTOW [Kg] 37.000Range [Km] 2.040Spinta [KN] 132,4Lunghezza fusoliera [m] 30,91Apertura alare [m] 28,08
Tabella 3.9: Fokker F70's features
61
3 Velivoli di riferimento
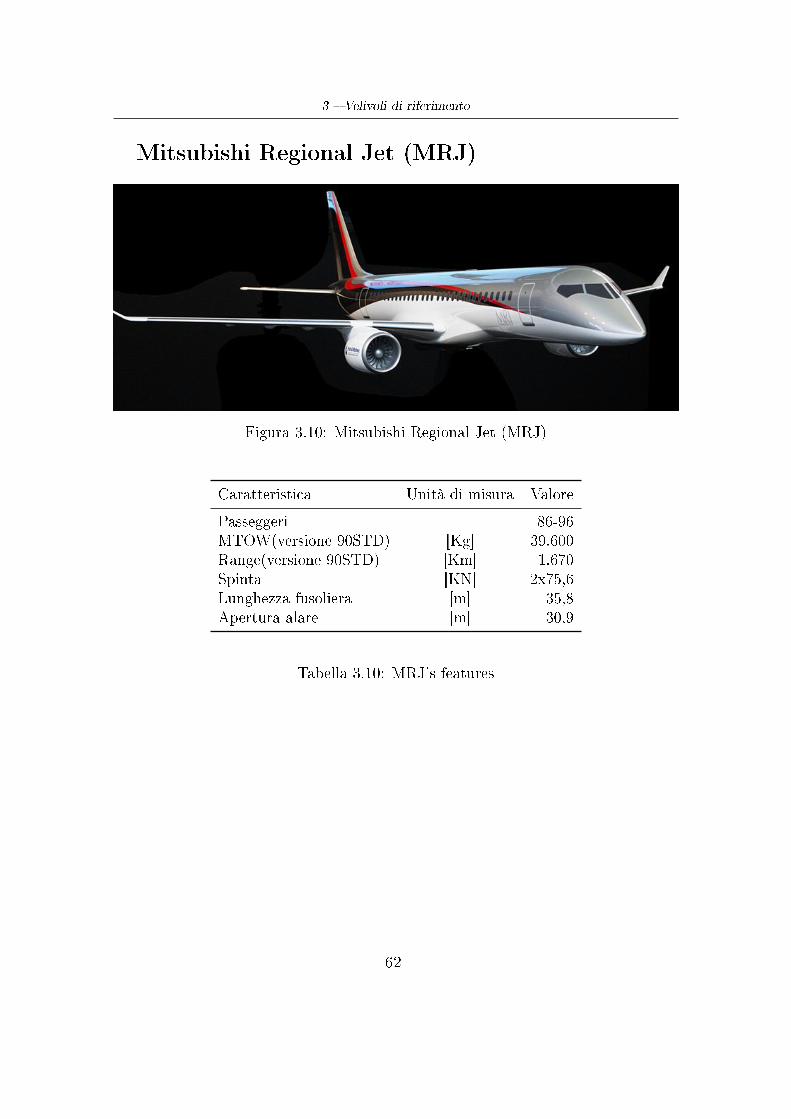
Mitsubishi Regional Jet (MRJ)
Figura 3.10: Mitsubishi Regional Jet (MRJ)
Caratteristica Unità di misura Valore
Passeggeri 86-96MTOW(versione 90STD) [Kg] 39.600Range(versione 90STD) [Km] 1.670Spinta [KN] 2x75,6Lunghezza fusoliera [m] 35,8Apertura alare [m] 30,9
Tabella 3.10: MRJ's features
62
3 Velivoli di riferimento
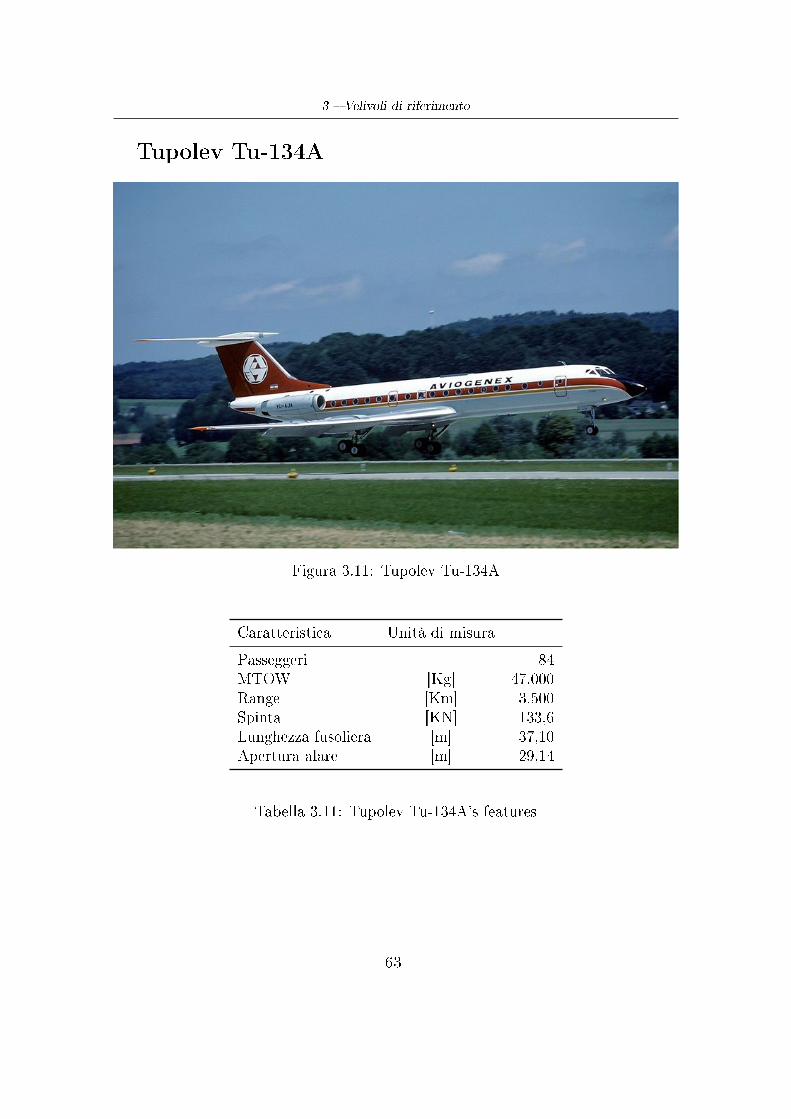
Tupolev Tu-134A
Figura 3.11: Tupolev Tu-134A
Caratteristica Unità di misura
Passeggeri 84MTOW [Kg] 47.000Range [Km] 3.500Spinta [KN] 133,6Lunghezza fusoliera [m] 37,10Apertura alare [m] 29,14
Tabella 3.11: Tupolev Tu-134A's features
63
Capitolo 4
Analisi Statistica
Nel capitolo precedente sono stati elencati i principali velivoli di riferimento per
il progetto di un velivolo regional con un numero di passeggeri dell'ordine dei
sessanta/novanta posti.
Per compiere le prime scelte progettuali è necessario conoscere i dati di lettera-
tura ed elaborare un'approfondita analisi statistica che permetta di ricavare i dati
principali da utilizzare come input nelle stime di prima approssimazione che verranno
calcolate nella fase immediatamente successiva, detta di preliminary design.
La ricerca dei dati per questa fase ha avuto come fonti sia libri di letteratura spe-
cialistica quali il Jane's Aircraft sia direttamente i siti della case costruttrici; essa
si è svolta parallelamente per dierenti categorie di grandezze, da quelle di dimensio-
namento geometrico, fondamentali dati d'ingresso per la trattazione aerodinamica,
a quelle relative alle prestazioni.
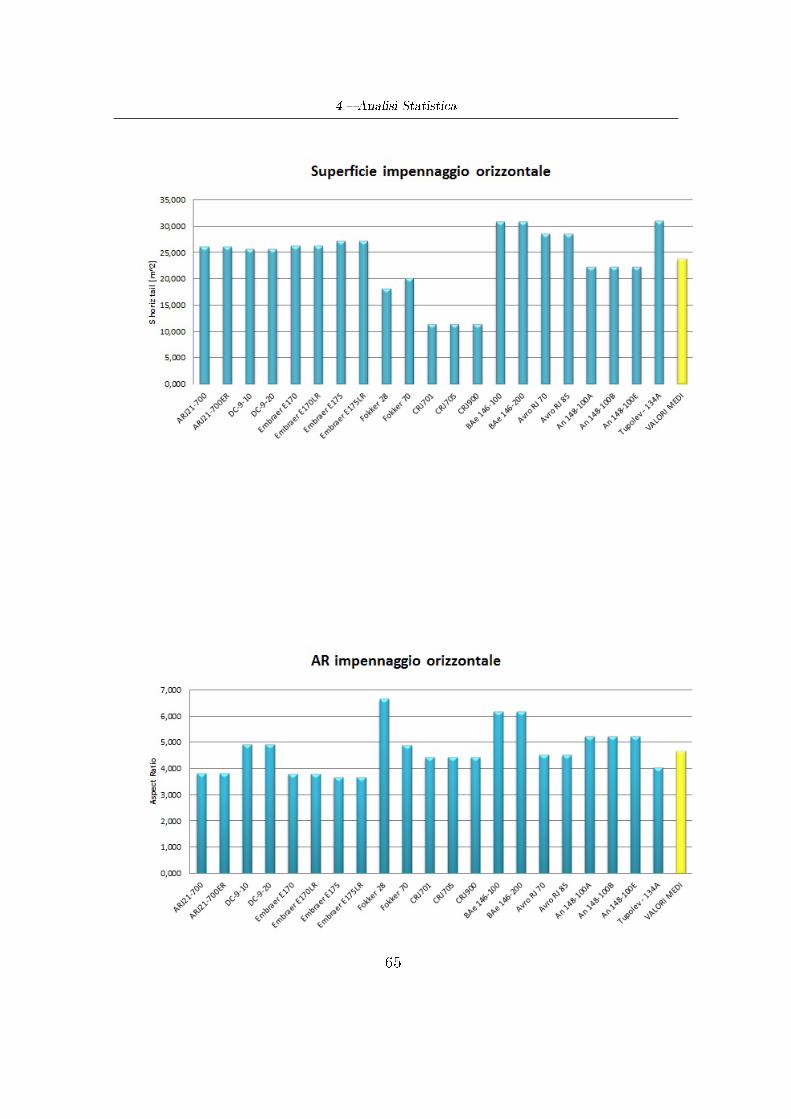
4.1 Impennaggio Orizzontale
Si è deciso di cominciare l'esposizione dei risultati ottenuti dall'analisi statistica,
dalle superci di coda, in particolare dal piano orizzontale. Poichè la loro dimensione
inuenzerà anche sui calcoli aerodinamici, questa fase è quanto mai importante.
Per ognuna delle grandezze analizzate si riporta un istogramma che mostra il
valore per ognuno dei velivoli di riferimento.
64
4 Analisi Statistica
65

4 Analisi Statistica
66
4 Analisi Statistica
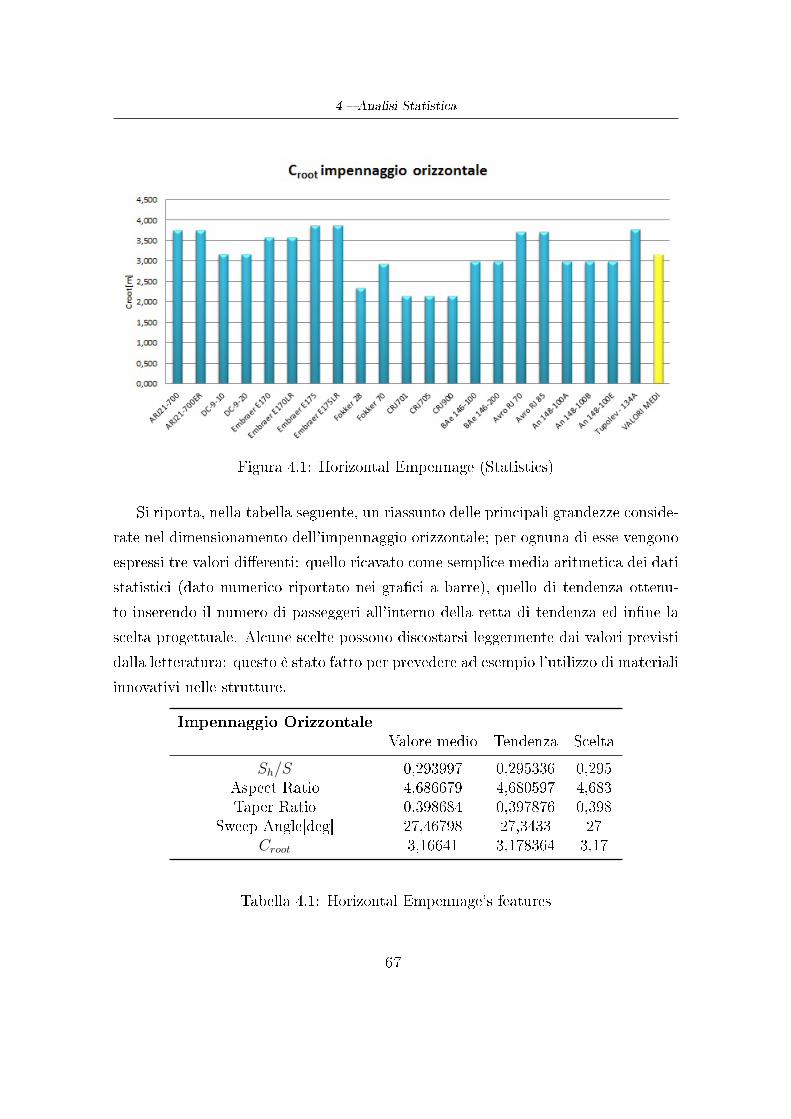
Figura 4.1: Horizontal Empennage (Statistics)
Si riporta, nella tabella seguente, un riassunto delle principali grandezze conside-
rate nel dimensionamento dell'impennaggio orizzontale; per ognuna di esse vengono
espressi tre valori dierenti: quello ricavato come semplice media aritmetica dei dati
statistici (dato numerico riportato nei graci a barre), quello di tendenza ottenu-
to inserendo il numero di passeggeri all'interno della retta di tendenza ed inne la
scelta progettuale. Alcune scelte possono discostarsi leggermente dai valori previsti
dalla letteratura: questo è stato fatto per prevedere ad esempio l'utilizzo di materiali
innovativi nelle strutture.
Impennaggio OrizzontaleValore medio Tendenza Scelta
Sh/S 0,293997 0,295336 0,295Aspect Ratio 4,686679 4,680597 4,683Taper Ratio 0,398684 0,397876 0,398
Sweep Angle[deg] 27,46798 27,3433 27Croot 3,16641 3,178364 3,17
Tabella 4.1: Horizontal Empennage's features
67
4 Analisi Statistica
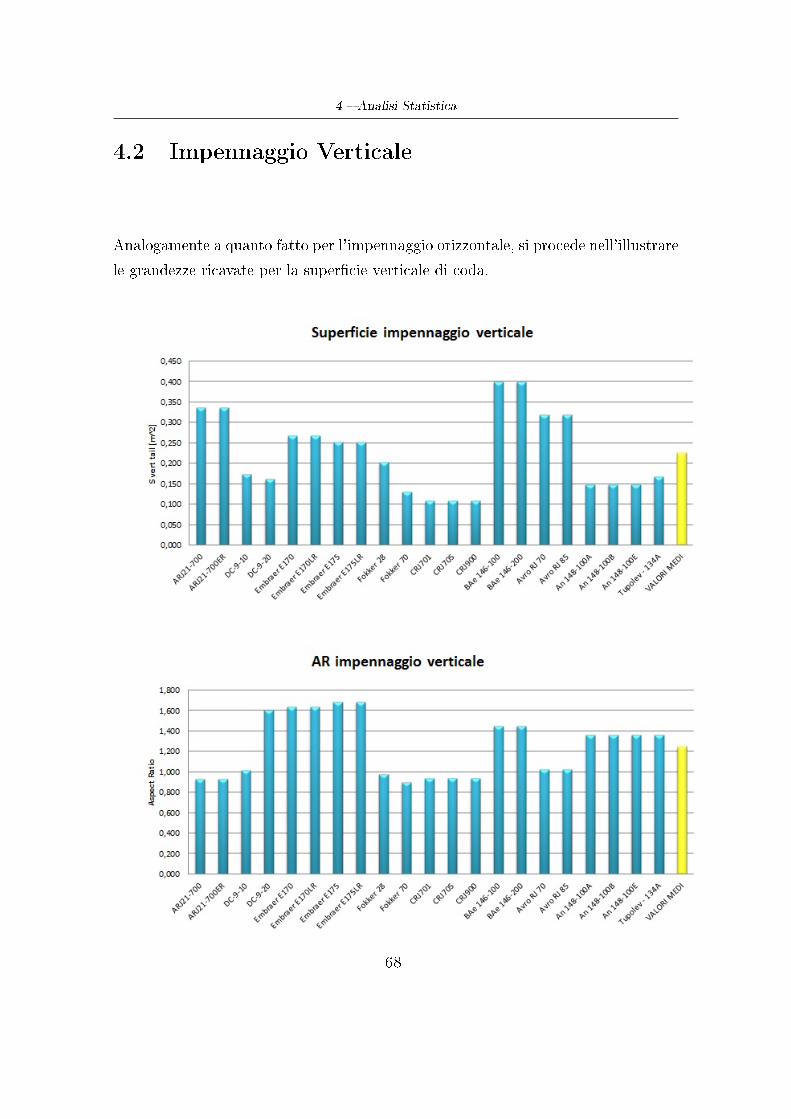
4.2 Impennaggio Verticale
Analogamente a quanto fatto per l'impennaggio orizzontale, si procede nell'illustrare
le grandezze ricavate per la supercie verticale di coda.
68

4 Analisi Statistica
69
4 Analisi Statistica
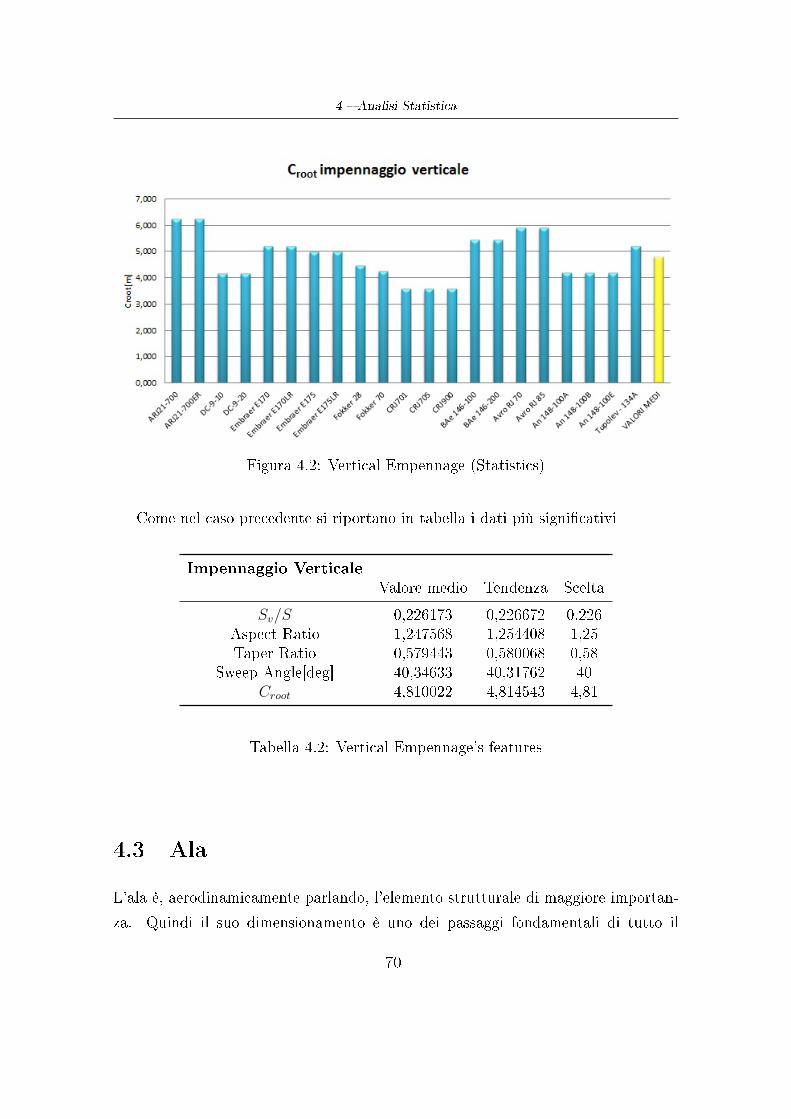
Figura 4.2: Vertical Empennage (Statistics)
Come nel caso precedente si riportano in tabella i dati più signicativi
Impennaggio VerticaleValore medio Tendenza Scelta
Sv/S 0,226173 0,226672 0,226Aspect Ratio 1,247568 1,254408 1,25Taper Ratio 0,579443 0,580068 0,58
Sweep Angle[deg] 40,34633 40,31762 40Croot 4,810022 4,814543 4,81
Tabella 4.2: Vertical Empennage's features
4.3 Ala
L'ala è, aerodinamicamente parlando, l'elemento strutturale di maggiore importan-
za. Quindi il suo dimensionamento è uno dei passaggi fondamentali di tutto il
70
4 Analisi Statistica
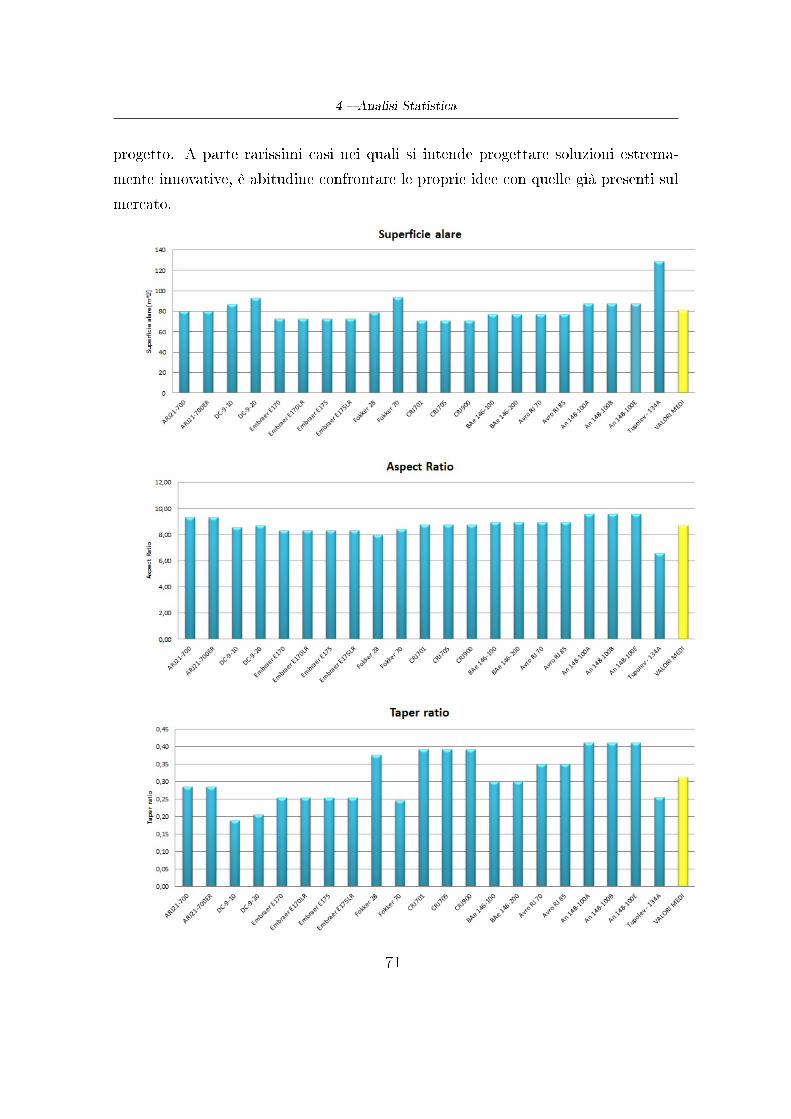
progetto. A parte rarissimi casi nei quali si intende progettare soluzioni estrema-
mente innovative, è abitudine confrontare le proprie idee con quelle già presenti sul
mercato.
71
4 Analisi Statistica
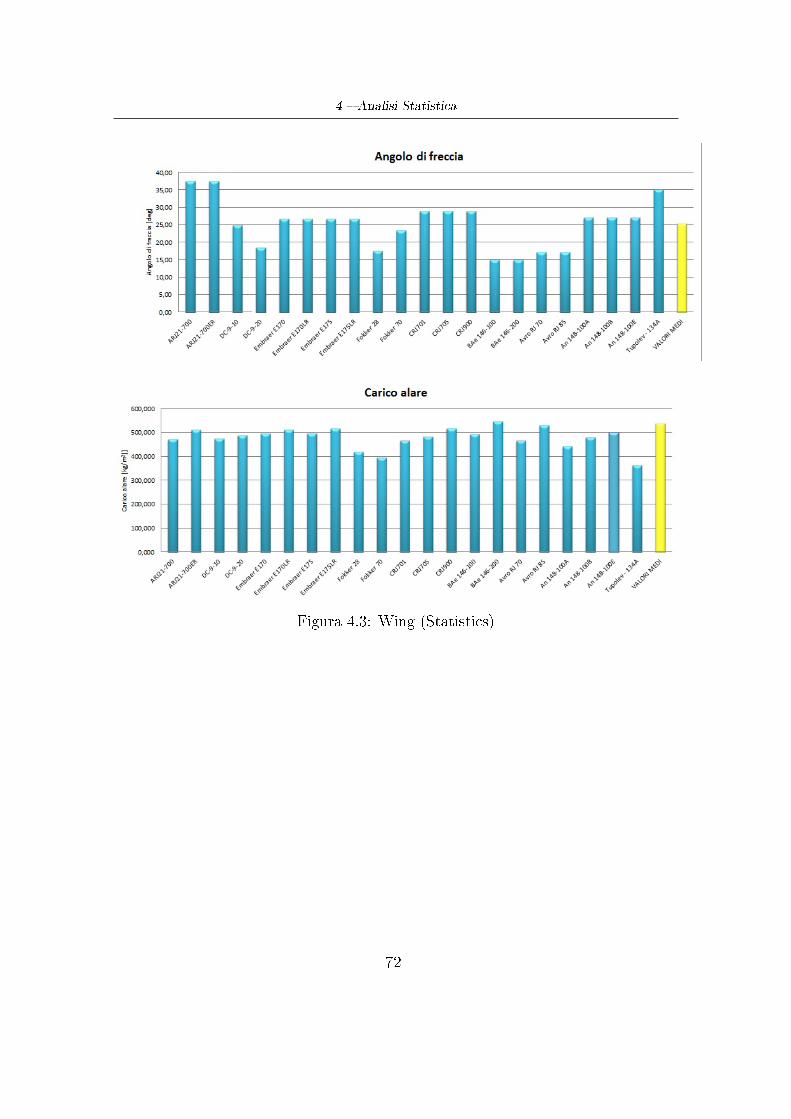
Figura 4.3: Wing (Statistics)
72
4 Analisi Statistica
Ecco nel seguito le grandezze principali analizzate e i valori scelti in questa fase
di progetto.
Impennaggio VerticaleValore medio Tendenza Scelta
Carico Alare [Kg/m2] 479,176 479,833 480Aspect Ratio 8,721053 8,70501 9Taper Ratio 0,312456 0,310144 0,27
Sweep Angle[deg] 25,41981 25,38961 25Croot 4,912 4,7244 5,2
Tabella 4.3: Wing's features
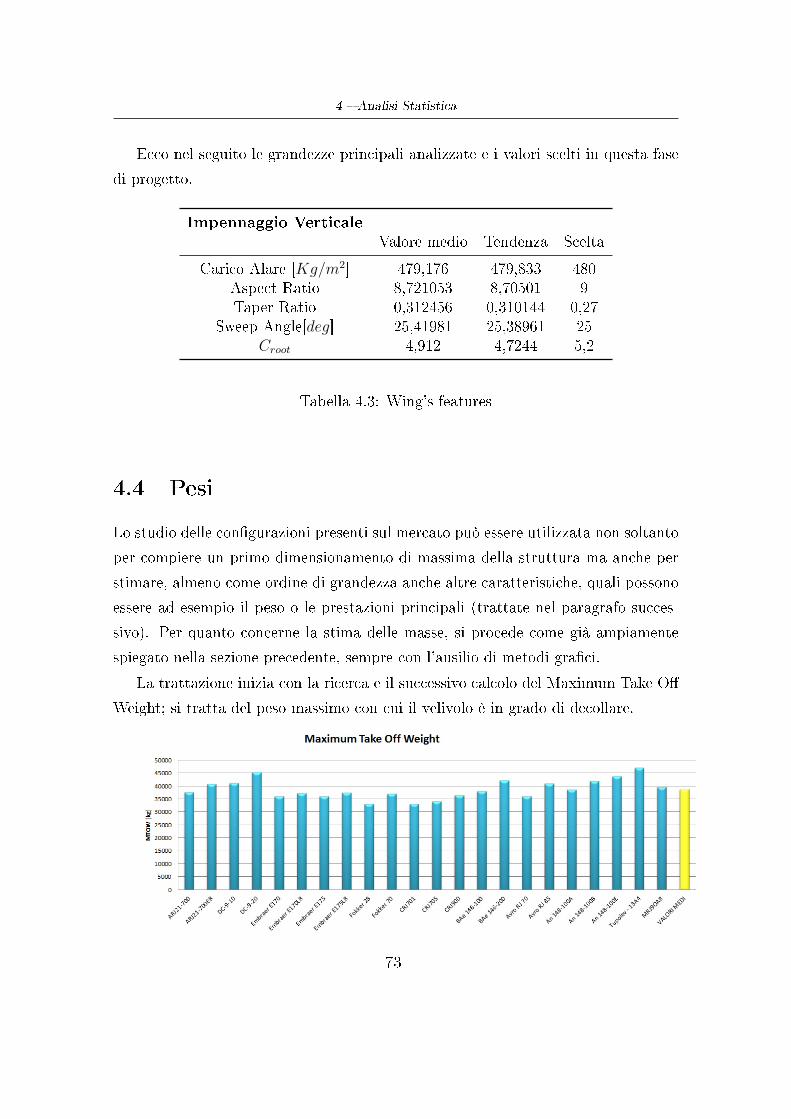
4.4 Pesi
Lo studio delle congurazioni presenti sul mercato può essere utilizzata non soltanto
per compiere un primo dimensionamento di massima della struttura ma anche per
stimare, almeno come ordine di grandezza anche altre caratteristiche, quali possono
essere ad esempio il peso o le prestazioni principali (trattate nel paragrafo succes-
sivo). Per quanto concerne la stima delle masse, si procede come già ampiamente
spiegato nella sezione precedente, sempre con l'ausilio di metodi graci.
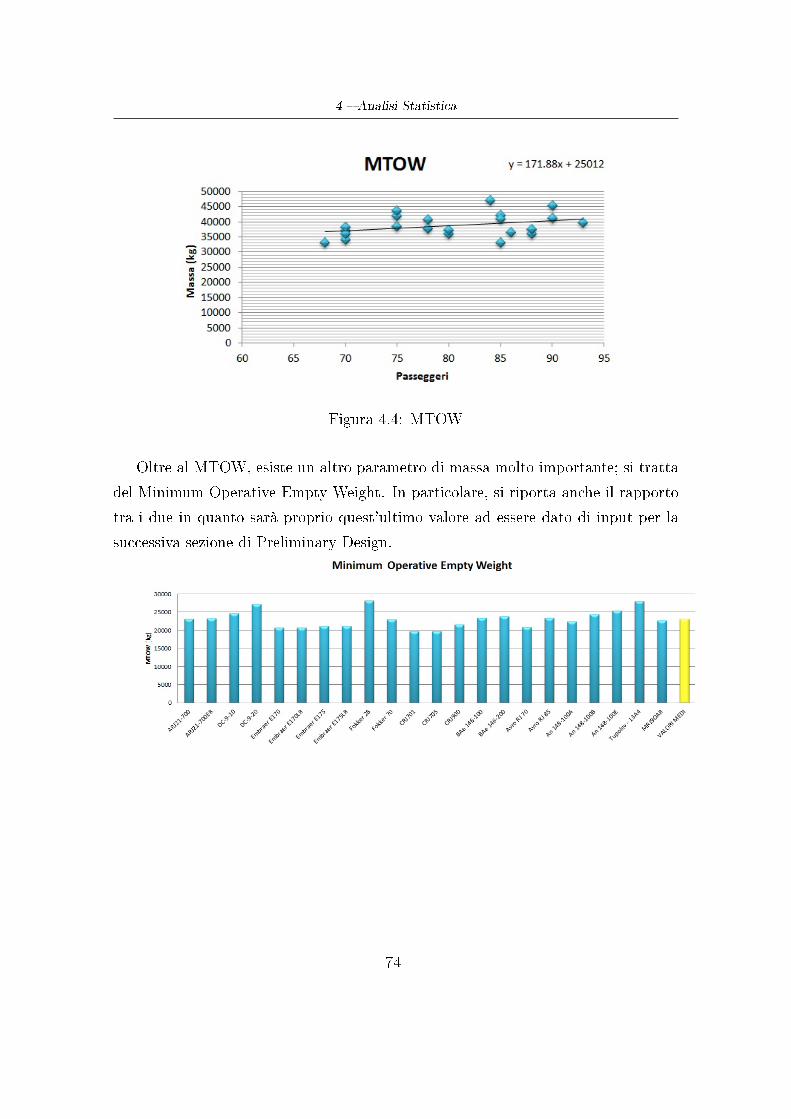
La trattazione inizia con la ricerca e il successivo calcolo del Maximum Take O
Weight; si tratta del peso massimo con cui il velivolo è in grado di decollare.
73
4 Analisi Statistica
Figura 4.4: MTOW
Oltre al MTOW, esiste un altro parametro di massa molto importante; si tratta
del Minimum Operative Empty Weight. In particolare, si riporta anche il rapporto
tra i due in quanto sarà proprio quest'ultimo valore ad essere dato di input per la
successiva sezione di Preliminary Design.
74
4 Analisi Statistica
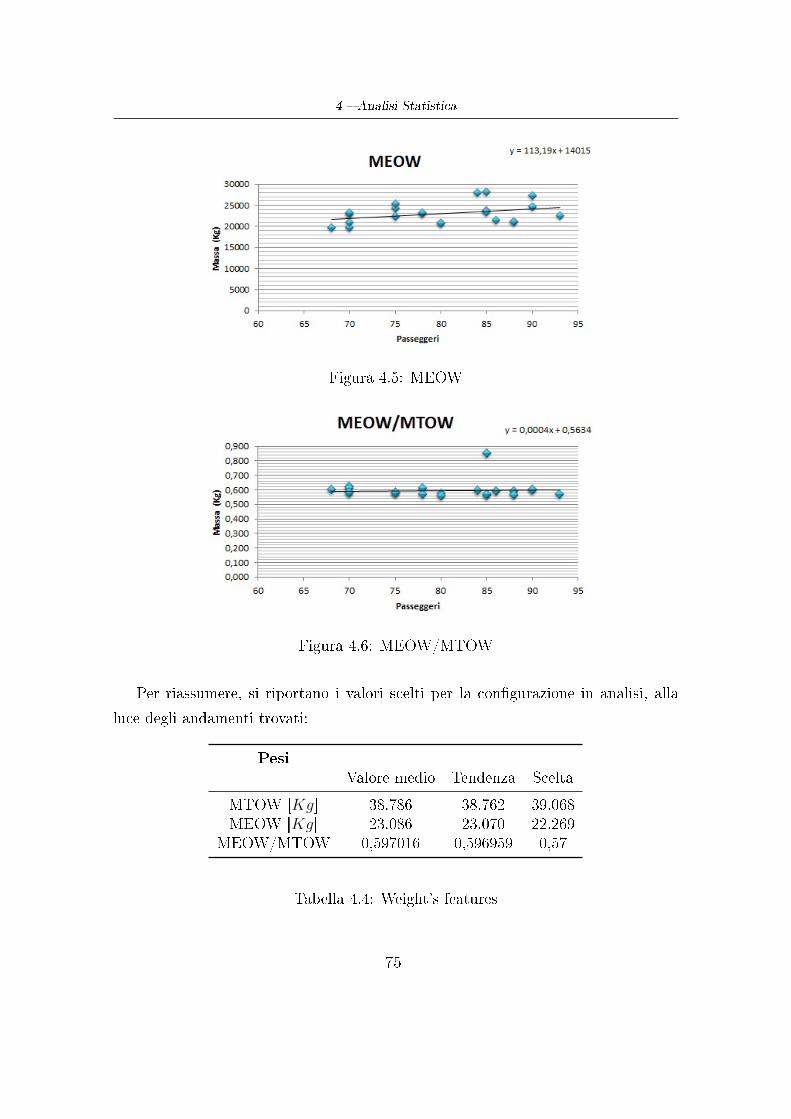
Figura 4.5: MEOW
Figura 4.6: MEOW/MTOW
Per riassumere, si riportano i valori scelti per la congurazione in analisi, alla
luce degli andamenti trovati:
PesiValore medio Tendenza Scelta
MTOW [Kg] 38.786 38.762 39.068MEOW [Kg] 23.086 23.070 22.269
MEOW/MTOW 0,597016 0,596959 0,57
Tabella 4.4: Weight's features
75
4 Analisi Statistica
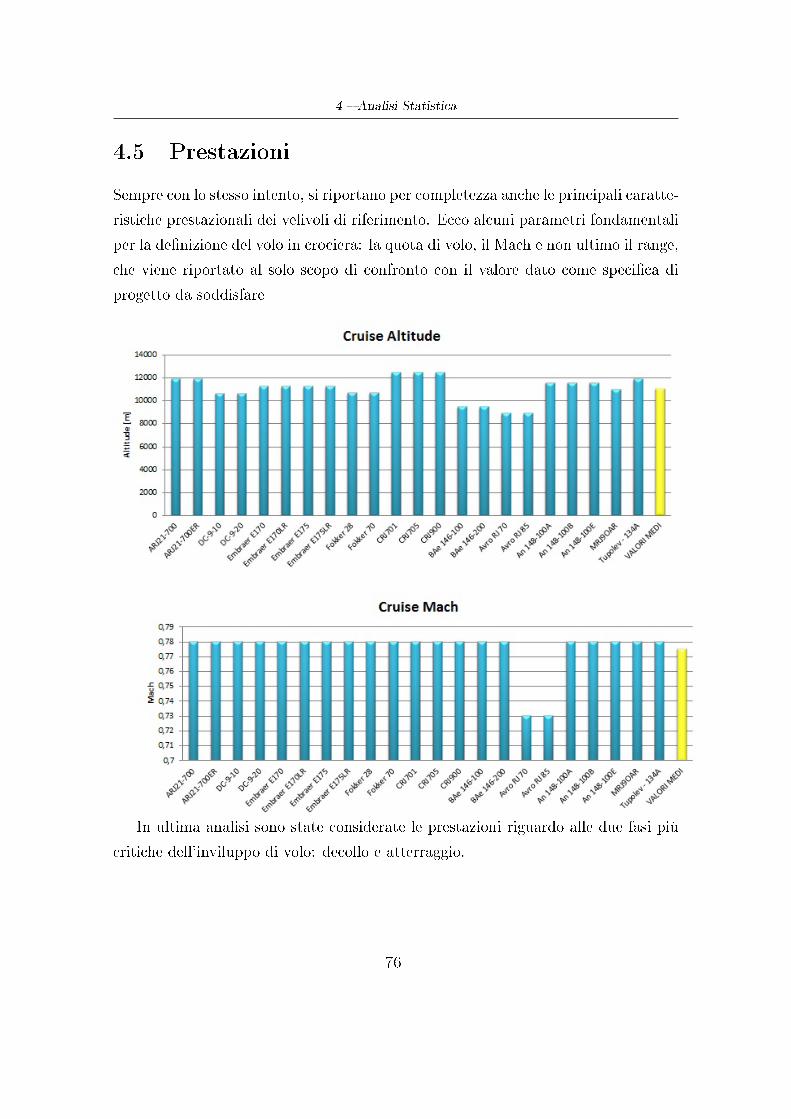
4.5 Prestazioni
Sempre con lo stesso intento, si riportano per completezza anche le principali caratte-
ristiche prestazionali dei velivoli di riferimento. Ecco alcuni parametri fondamentali
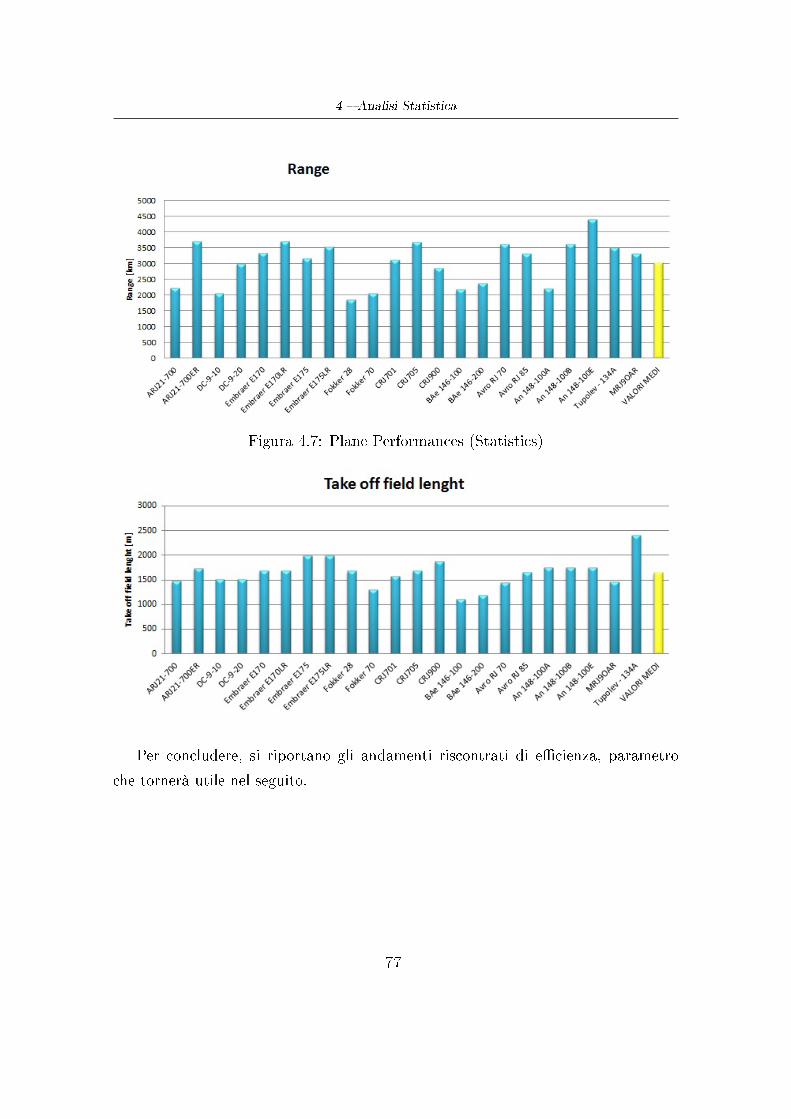
per la denizione del volo in crociera: la quota di volo, il Mach e non ultimo il range,
che viene riportato al solo scopo di confronto con il valore dato come specica di
progetto da soddisfare
In ultima analisi sono state considerate le prestazioni riguardo alle due fasi più
critiche dell'inviluppo di volo: decollo e atterraggio.
76
4 Analisi Statistica
Figura 4.7: Plane Performances (Statistics)
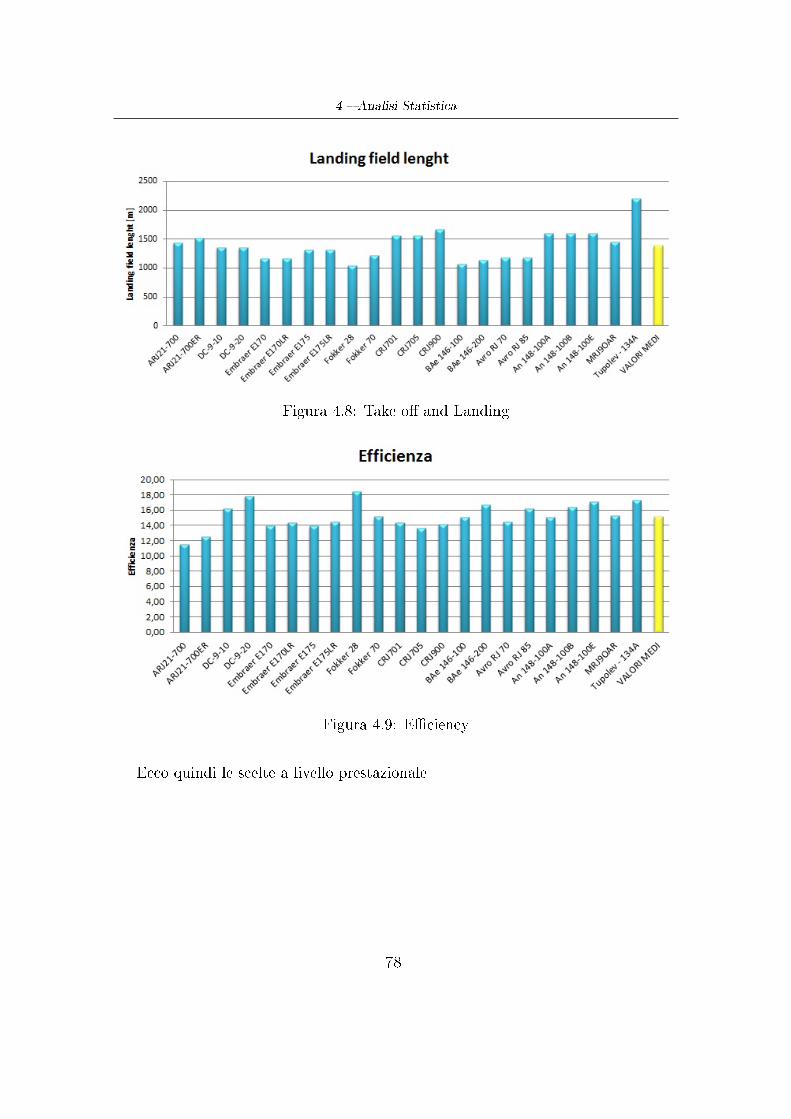
Per concludere, si riportano gli andamenti riscontrati di ecienza, parametro
che tornerà utile nel seguito.
77
4 Analisi Statistica
Figura 4.8: Take o and Landing
Figura 4.9: Eciency
Ecco quindi le scelte a livello prestazionale
78
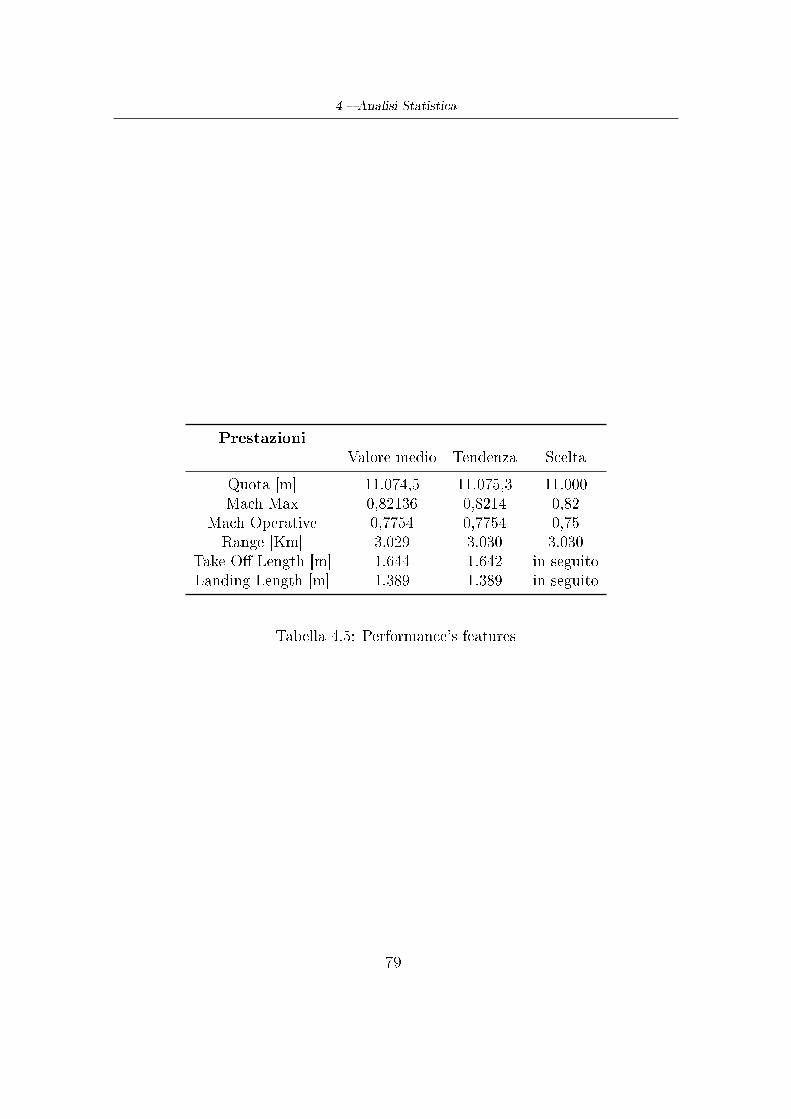
4 Analisi Statistica
PrestazioniValore medio Tendenza Scelta
Quota [m] 11.074,5 11.075,3 11.000Mach Max 0,82136 0,8214 0,82
Mach Operative 0,7754 0,7754 0,75Range [Km] 3.029 3.030 3.030
Take O Length [m] 1.644 1.642 in seguitoLanding Length [m] 1.389 1.389 in seguito
Tabella 4.5: Performance's features
79
Capitolo 5
Preliminary Design
5.1 introduzione
Il progetto preliminare è stato eettuato per avere un dimensionamento di massima
da utilizzare per le fasi successive, che prevederanno un'analisi più accurata. Preli-
minarmente, si è svolta un'attenta e approfondita analisi statistica di tutte le gran-
dezze necessarie, considerando alcuni velivoli disponibili oggi sul mercato; da ciò,
si sono ricavati i valori di autonomia chilometrica, mach, specic fuel consumption,
operative empty mass, carico alare, aspect ratio, tutti input necessari per ottenere
un analisi. Alcuni di questi valori sono stati corretti, considerando i miglioramenti
ottenuti in campo aeronautico negli ultimi anni. In particolare:
l'SFC è stato diminuito da 0,653 lb/h/lb a 0,37 lb/h/lb, aumentando il BPR
a 9; questi valori sono stati scelti considerando un motore di nuova generazione
della famiglia Pratt & Whitney
l'MOEW/MTOW è stato mantenuto pari a 0,597: nonostante l'alleggerimento
strutturale dovuto all'uso di materiali compositi, questo non può scendere a
causa della minore frazione di combustibile necessaria dovuta all'uso di nuovi
motori;
Il valore del carico alare è stato abbassato, passando da 470 kg/m2 a 445
kg/m2; è previsto infatti lo sviluppo di una versione con un maggior numero
80
5 Preliminary Design
di passeggeri per questo velivolo, e già in quel caso il carico alare risulterà
aumentato
l'AR è stato aumentato da 8,7 a 9,6 per avere una resistenza indotta inferiore:
essendo un velivolo di ultima generazione, si presuppone che possa resistere
alle sollecitazioni derivanti dall'aumento dell'allungamento alare;
Partendo da questi dati, si sono ottenuti i valori di Maximum Take O Mass,
supercie alare, coeciente di portanza, coeciente di resistenza, resistenza, spinta,
Thrust/Weight ratio, ecienza, supercie dell'impennaggio verticale e orizzontale.
All'interno delle formule che vengono illustrate nel seguito, viene richiesto il valore
di un particolare parametro, non ancora considerato, ma facilmente determinabile
con i dati in possesso: si tratta dell' ESAR, l'Equivalent Still Air Range, ricavato
tramite l'equazione
ESAR = 450 + 1,063 · range
il quale, calcolato per il nostro velivolo, porta al valore:
ESAR = 2.189nm = 4.054km
Si richiede anche la determinazione della velocità di volo in condizioni di crociera
(Vc) con il Mach,
Vc = M · c = 221,21m/s
dove c'è la velocità del suono alla quota di 11.000 m
c = 294,94m/s
5.2 Stima preliminare dei pesi
Fuel Mass Ratio Utilizzando i valori ricavati nel paragrafo precedente, è possibile
stimare il valore del Fuel Mass Ratio tramite l'equazione di Breguet: si tratta del
rapporto tra la massa di combustibile disponibile a bordo del velivolo (MF ) e la
massima massa con il quale il velivolo può decollare (MTO)
MF/MTO = 1− e[−SFC(D/L)(ESAR/Vc)] = 0,11
81

5 Preliminary Design
Payload Mass Il calcolo del Payload Mass è ottenuto come sommatoria dei
contributi della massa delle persone a bordo (n° di passeggeri, piloti e assistenti di
volo) considerato con un valore medio pro capite di 75 kg e del payload aggiunti-
vo (bagaglio) che, utilizzando i valori consigliati dalle normative, deve essere così
dierenziato:
30 Kg per i passeggeri,
30 Kg per i piloti,
30 Kg per gli assistenti di volo,
Nella sommatoria è stato ipotizzato l'inserimento di un carico aggiuntivo, con-
siderato per sfruttare al meglio la stiva del velivolo in quanto si è infatti osservato
che il volume della stessa risultava sovradimensionato per contenere solo le valigie
dei soli passeggeri e si è quindi pensato di poter dedicare una parte della stiva al
trasporto di merci. Si sono quindi ottenuti i seguenti risultati:
Mpasseggeri = (70 + 25) ·Npasseggeri = 7.350Kg
Mcrew = (30) ·Ncrew = 150Kg
Maximum Take O Mass Si tratta di una delle grandezze fondamentali in
un progetto e per questo viene stimata anche nel Preliminary Design. Applicando
la formula riportata di seguito si è ottenuto il primo valore per il velivolo di questo
progetto. Nel calcolo si richiede la conoscenza del rapporto MOEW/MTOW che è
assunto pari a 0,57 come ricavato dall'analisi statistica.
MTO = MPL/[1− (MF/MTO)− (MOEW/MTOW )] = 25.690Kg
5.3 Stima delle principali grandezze aerodinamiche
Supercie Alare Noto il MTOW è possibile ricavare gran parte delle grandezze
aerodinamiche principali, a partire da quelle di dimensionamento geometrico come
la stima della supercie alare necessaria:
S = MTO/(MTO/S)
82

5 Preliminary Design
dove il valore MTO/S proviene dall'analisi statistica. Assumendo un MTO/S =
445kg/m2, si ottiene:
S = 58m2
Coecienti di portanza e resistenza Nota la supercie alare, supercie di
riferimento per gran parte dei calcoli aerodinamici, si ricavano i valori di prima
approssimazione dei coecienti di portanza e resistenza, che vengono ricavati in
modo più preciso e aderente al vero nel capitolo dedicato all'analisi aerodinamica.
Per quanto riguarda il coeciente di portanza, è possibile stimarlo ipotizzando che
il velivolo si trovi in una condizione di volo rettilineo uniforme in cui la portanza
equilibra perfettamente il peso W = g ·MTO.
CL = 0.98 ·MTO · g/(0.5 · ρ · Vc2 · S) = 0.48
dove
g è l'accelerazione di gravità
ρ è la densità alla quota di crociera e si assume un consumo di combustibile
del 2% per arrivare alla quota di crociera.
A partire dal coeciente di portanza è possibile calcolare quello di resistenza,
sempre nelle condizioni di equilibrio, qualora siano note alcune caratteristiche geo-
metriche e il CD0; per quanto riguarda le prime, possono essere prese come valori
statistici, mentre il secondo è noto dato il prolo: Assumendo
AR = 9,6
e = 0.948
si calcola
k =1
π · AR · e= 0.03496
e scelto il CD0, assumendo il prolo parabolico della polare aerodinamica:
CD = CD0 + k · CL2 = 0,029
83
5 Preliminary Design
e da qui
D = 0.5 · ρ · Vc2 · S · CD = 14.953N
Prestazioni Fissato il valore di climb rate Vclimb, è possibile ricavare il climb
angle in crociera dalla relazione
γ = Vclimb/Vc = 0,00689rad
altra caratteristica che è importante stimare e fortemente dipendente dal peso
totale del velivolo è la spinta necessaria
Pn =T −D
(0,98 ·MTO · g)= 16.653N
Ulteriori utili informazioni, soprattutto per la scelta del propulsore, vengono
dall'Engine Lapse Rate e dal Thrust to Weight Ratio, così ottenibili, nell'ordine:
T/EL = 0,2
TSL/MTOW = 0,330
Noti i coecienti aerodinamici, si ha la stima dell'ecienza.
E = CL/CD = 16,5
Dimensionamento degli impennaggi Per il dimensionamento degli impen-
naggi, si è tenuto conto esclusivamente dell'indagine statistica andando a considerare
quali sono le dimensioni rispetto all'ala (presa come riferimento). Si ottengono:
SV = S/(SV /S) = 13,1m2
SH = S/(SH/S) = 17,11m2
84
Capitolo 6
Dimensionamento preliminare
fusoliera
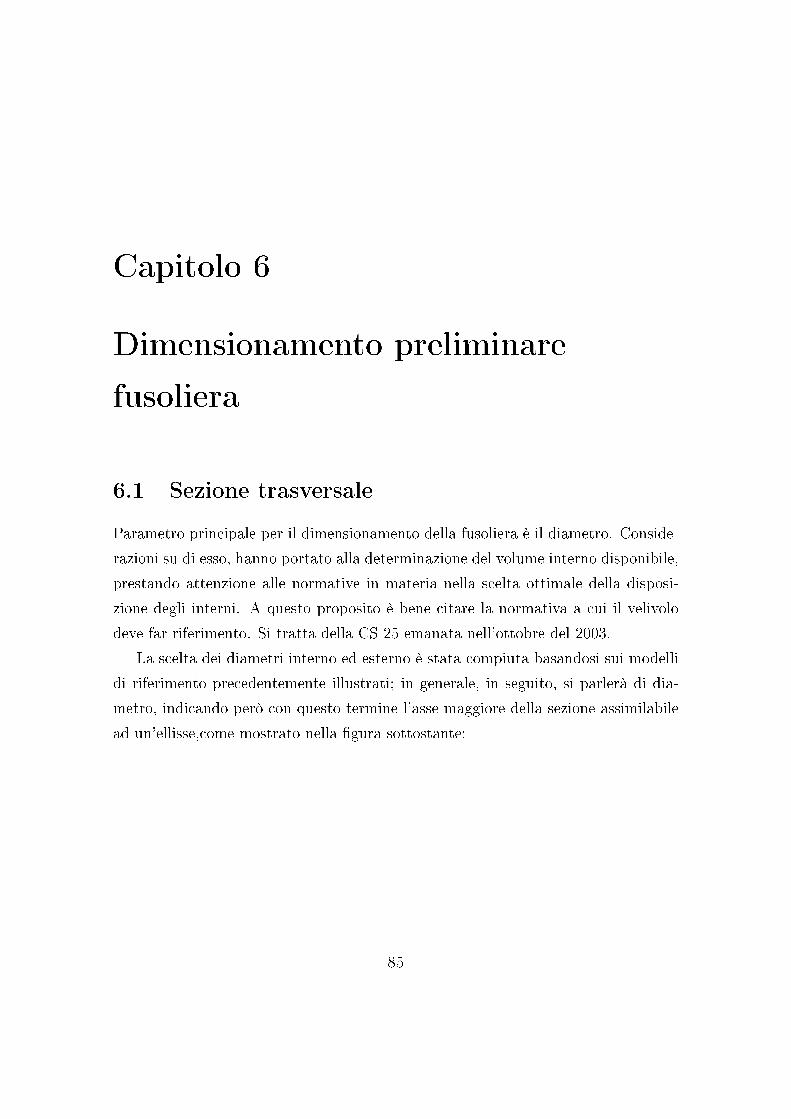
6.1 Sezione trasversale
Parametro principale per il dimensionamento della fusoliera è il diametro. Conside-
razioni su di esso, hanno portato alla determinazione del volume interno disponibile,
prestando attenzione alle normative in materia nella scelta ottimale della disposi-
zione degli interni. A questo proposito è bene citare la normativa a cui il velivolo
deve far riferimento. Si tratta della CS 25 emanata nell'ottobre del 2003.
La scelta dei diametri interno ed esterno è stata compiuta basandosi sui modelli
di riferimento precedentemente illustrati; in generale, in seguito, si parlerà di dia-
metro, indicando però con questo termine l'asse maggiore della sezione assimilabile
ad un'ellisse,come mostrato nella gura sottostante:
85
6 Dimensionamento preliminare fusoliera
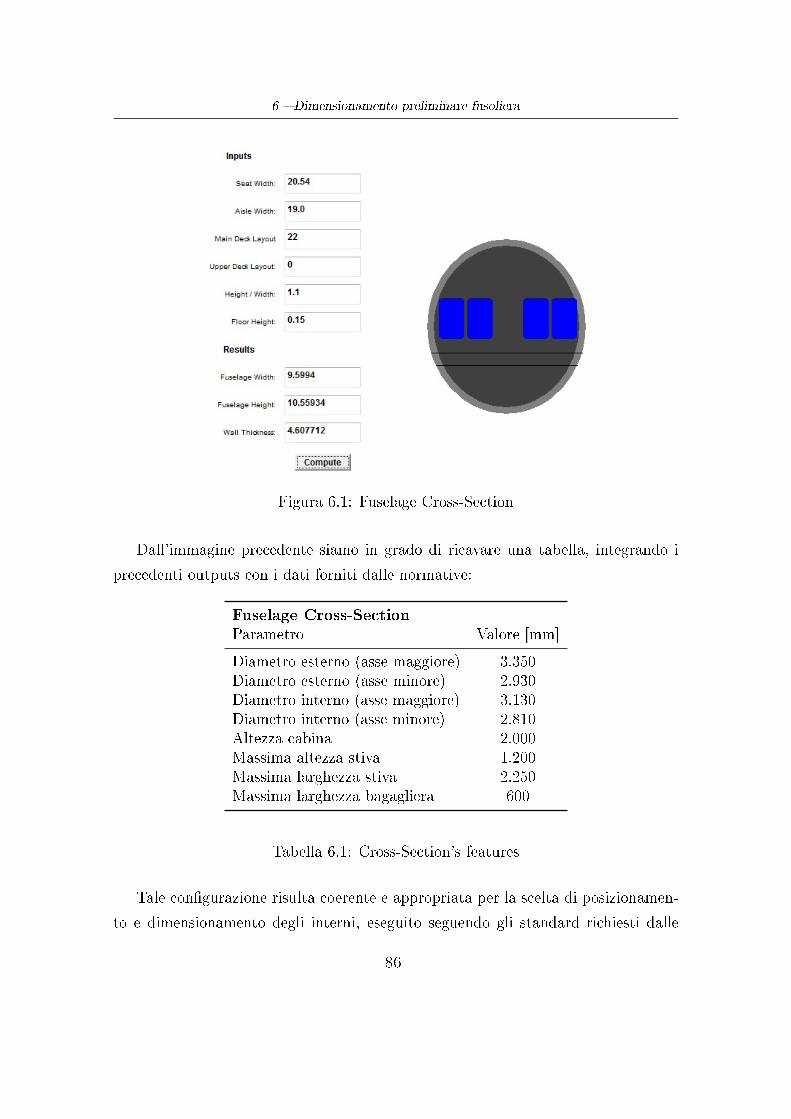
Figura 6.1: Fuselage Cross-Section
Dall'immagine precedente siamo in grado di ricavare una tabella, integrando i
precedenti outputs con i dati forniti dalle normative:
Fuselage Cross-SectionParametro Valore [mm]
Diametro esterno (asse maggiore) 3.350Diametro esterno (asse minore) 2.930Diametro interno (asse maggiore) 3.130Diametro interno (asse minore) 2.810Altezza cabina 2.000Massima altezza stiva 1.200Massima larghezza stiva 2.250Massima larghezza bagagliera 600
Tabella 6.1: Cross-Section's features
Tale congurazione risulta coerente e appropriata per la scelta di posizionamen-
to e dimensionamento degli interni, eseguito seguendo gli standard richiesti dalle
86
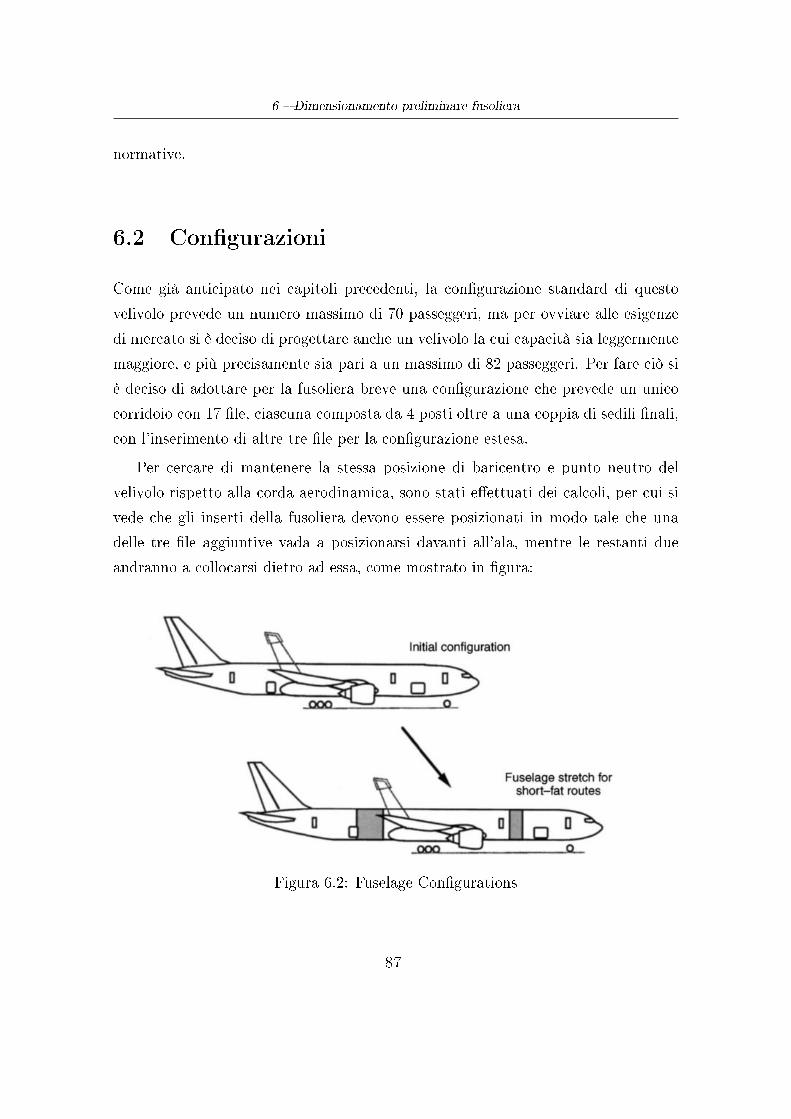
6 Dimensionamento preliminare fusoliera
normative.
6.2 Congurazioni
Come già anticipato nei capitoli precedenti, la congurazione standard di questo
velivolo prevede un numero massimo di 70 passeggeri, ma per ovviare alle esigenze
di mercato si è deciso di progettare anche un velivolo la cui capacità sia leggermente
maggiore, e più precisamente sia pari a un massimo di 82 passeggeri. Per fare ciò si
è deciso di adottare per la fusoliera breve una congurazione che prevede un unico
corridoio con 17 le, ciascuna composta da 4 posti oltre a una coppia di sedili nali,
con l'inserimento di altre tre le per la congurazione estesa.
Per cercare di mantenere la stessa posizione di baricentro e punto neutro del
velivolo rispetto alla corda aerodinamica, sono stati eettuati dei calcoli, per cui si
vede che gli inserti della fusoliera devono essere posizionati in modo tale che una
delle tre le aggiuntive vada a posizionarsi davanti all'ala, mentre le restanti due
andranno a collocarsi dietro ad essa, come mostrato in gura:
Figura 6.2: Fuselage Congurations
87

6 Dimensionamento preliminare fusoliera
6.2.1 Sedili e corridoio
Per dimensionare i singoli posti si è fatto riferimento agli standard delle varie
compagnie aeree.
versione le posti per la distanza tra le larghezza sedile
short 17 4 800 mm 600 mmextended 20 4 800 mm 600 mm
Tabella 6.2: Seat Sizing
Per completezza si riporta l'immagine di un generico sedile progettato secondo
la AMC 25.785(c).
Figura 6.3: Standard Seat AMC 25.785(c)
Per quanto riguarda invece le dimensioni trasversali del corridoio, è necessario
far riferimento ancora alle norme, in particolare al cap 25.815, di cui riportiamo un
estratto.
Rispetto a queste richieste, le scelte prima illustrate in tabella sono ampliamente
soddisfacenti. Per quanto riguarda l'ingombro longitudinale, dalle scelte eettuate
risulta essere di 3480 mm.
88

6 Dimensionamento preliminare fusoliera
Figura 6.4: Aisle CS-25.815
6.2.2 Porte e sicurezza
A completamento del reparto si è proceduto ad inserire gli ulteriori elementi ai quali
è necessario pensare già nella fase preliminare del progetto. Elementi caratteristici
e indispensabili sono le porte. Ecco le prescrizioni a riguardo:
Figura 6.5: Emergency Door
89

6 Dimensionamento preliminare fusoliera
Il portellone principale di ingresso di Type A è posizionato sul lato sinistro,
appena dietro la cabina di pilotaggio. Di fronte ad essa è posta la prima delle uscite
di emergenza, di Type I ad uso dei passeggeri ospitati nelle prime le.
Secondo le disposizioni della normativa citata in precedenza si è scelto dove
posizionare le uscite di emergenza nella parte nale e centrale della cabina: tutte e
4 sono Type 3 e sono messe l'una di fronte all'altra.
Un altro elemento fondamentale per combattere l'insorgenza di eventuali incendi
a bordo è la presenza di un adeguato numero di estintori. Nel rispetto della nor-
mativa, che oltre a prescrivere i minimi riportati in gura, richiede delle ulteriori
restrizioni riportate nel capitolo CS-25.851. In base ad esse si sono fatte le seguenti
scelte: . 1 estintore in cabina di pilotaggio
3 estintore, opportunamente dislocati lungo la fuloliera
1 o più estintori, a discrezione della compagnia, nella stiva, facilmente rag-
giungibile dall'equipaggio.
6.2.3 Altro
Nella congurazione di avanprogetto è stata inoltre considerata la necessaria pre-
senza di due bagni, di tre sedili ulteriori per gli assistenti di volo e di una Galley.
Sfruttando il Forward Extra Space, si sono potuti inserire un bagno e la Galley,
oltre a tre posti per gli assistenti di volo.
Sfruttando l'Aft Extra Space, trova posto invece il secondo bagno, posto in coda
sul lato destro; proprio per questo motivo l'ultima la non è potuta essere completa.
Segue una tabella riassuntiva sulle dimensioni longitudinali degli elementi im-
messi in questi 2 spazi della fusoliera.
90
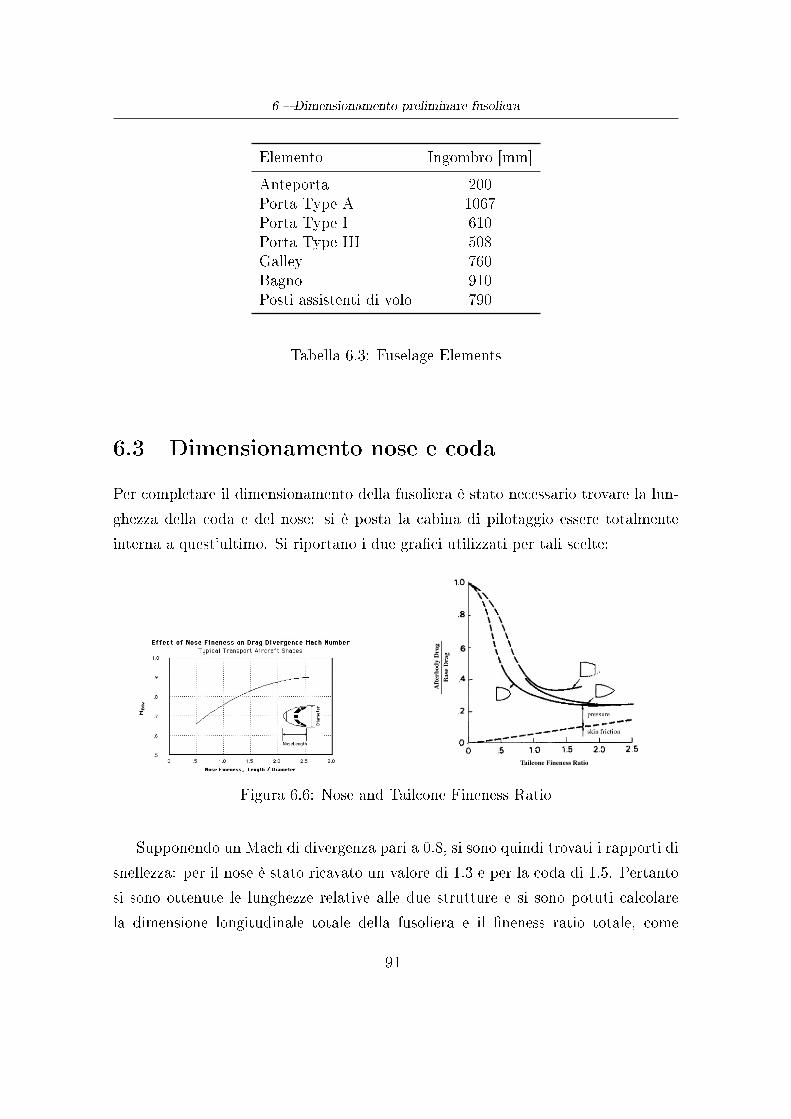
6 Dimensionamento preliminare fusoliera
Elemento Ingombro [mm]
Anteporta 200Porta Type A 1067Porta Type I 610Porta Type III 508Galley 760Bagno 910Posti assistenti di volo 790
Tabella 6.3: Fuselage Elements
6.3 Dimensionamento nose e coda
Per completare il dimensionamento della fusoliera è stato necessario trovare la lun-
ghezza della coda e del nose: si è posta la cabina di pilotaggio essere totalmente
interna a quest'ultimo. Si riportano i due graci utilizzati per tali scelte:
Figura 6.6: Nose and Tailcone Fineness Ratio
Supponendo un Mach di divergenza pari a 0.8, si sono quindi trovati i rapporti di
snellezza: per il nose è stato ricavato un valore di 1.3 e per la coda di 1.5. Pertanto
si sono ottenute le lunghezze relative alle due strutture e si sono potuti calcolare
la dimensione longitudinale totale della fusoliera e il neness ratio totale, come
91
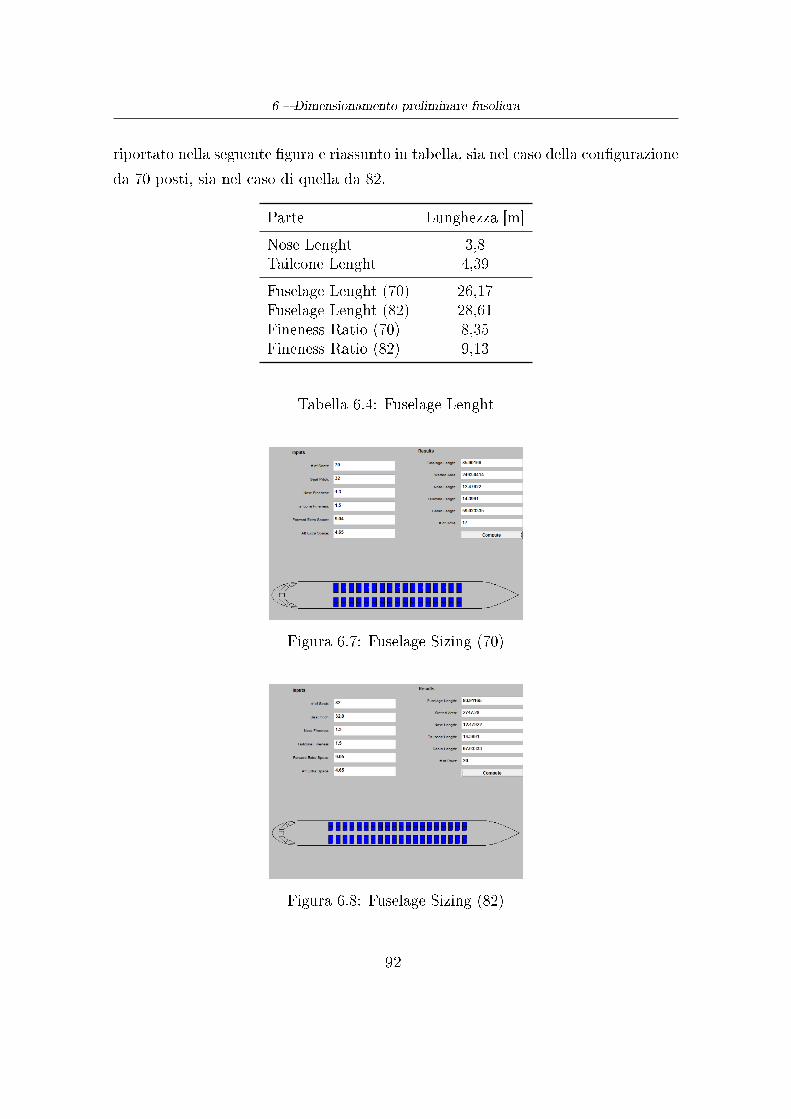
6 Dimensionamento preliminare fusoliera
riportato nella seguente gura e riassunto in tabella, sia nel caso della congurazione
da 70 posti, sia nel caso di quella da 82.
Parte Lunghezza [m]
Nose Lenght 3,8Tailcone Lenght 4,39
Fuselage Lenght (70) 26,17Fuselage Lenght (82) 28,61Fineness Ratio (70) 8,35Fineness Ratio (82) 9,13
Tabella 6.4: Fuselage Lenght
Figura 6.7: Fuselage Sizing (70)
Figura 6.8: Fuselage Sizing (82)
92
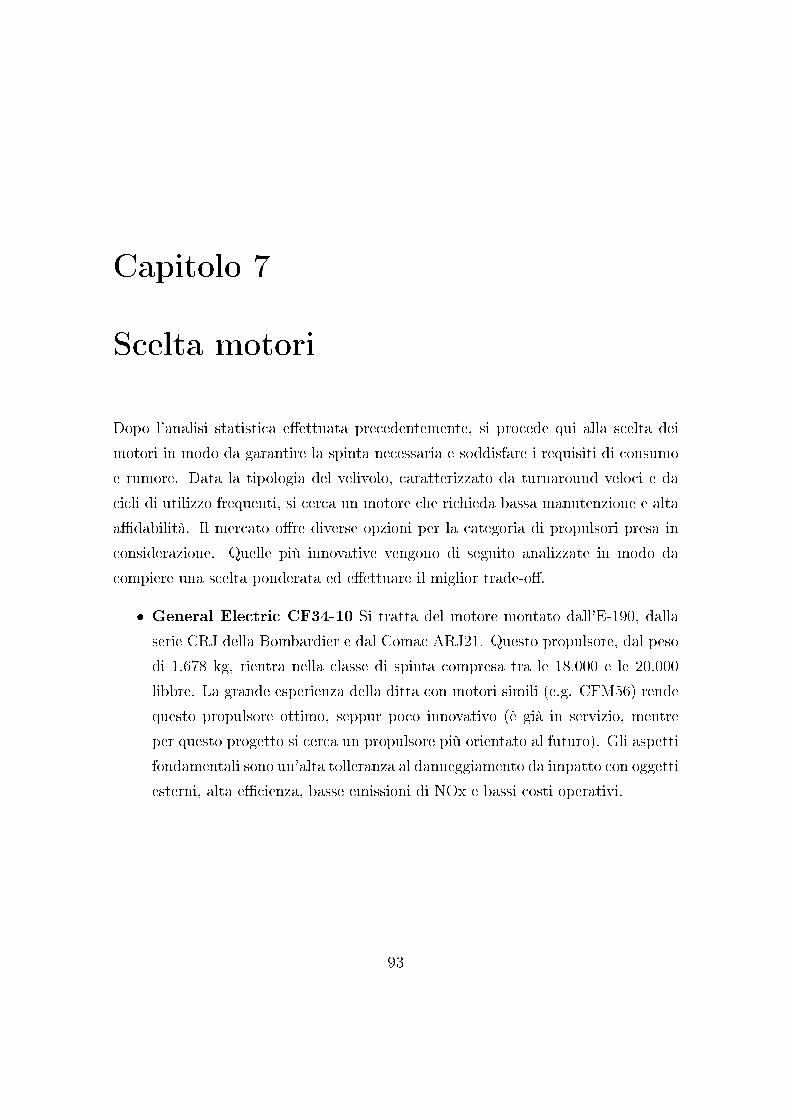
Capitolo 7
Scelta motori
Dopo l'analisi statistica eettuata precedentemente, si procede qui alla scelta dei
motori in modo da garantire la spinta necessaria e soddisfare i requisiti di consumo
e rumore. Data la tipologia del velivolo, caratterizzato da turnaround veloci e da
cicli di utilizzo frequenti, si cerca un motore che richieda bassa manutenzione e alta
adabilità. Il mercato ore diverse opzioni per la categoria di propulsori presa in
considerazione. Quelle più innovative vengono di seguito analizzate in modo da
compiere una scelta ponderata ed eettuare il miglior trade-o.
General Electric CF34-10 Si tratta del motore montato dall'E-190, dalla
serie CRJ della Bombardier e dal Comac ARJ21. Questo propulsore, dal peso
di 1.678 kg, rientra nella classe di spinta compresa tra le 18.000 e le 20.000
libbre. La grande esperienza della ditta con motori simili (e.g. CFM56) rende
questo propulsore ottimo, seppur poco innovativo (è già in servizio, mentre
per questo progetto si cerca un propulsore più orientato al futuro). Gli aspetti
fondamentali sono un'alta tolleranza al danneggiamento da impatto con oggetti
esterni, alta ecienza, basse emissioni di NOx e bassi costi operativi.
93
7 Scelta motori
Figura 7.1: General Electric CF34-10
Aviadvigatel PD-14 Questo motore viene utilizzato sull'Irkut MS-21-300 e
pesa 2.770 kg per una spinta di 30.000 libbre. Dotato di bassi consumi rispetto
a motori di categoria simile attualmente utilizzati, questo propulsore presenta
livelli di emissioni di NOx inferiori del 20% rispetto a quelli previsti dalle
normative e incontra i requisiti di rumore della normativa ICAO livello 4 ( si
riferisce ad aeromobili certicati dall'inizio del 2006: essi devono essere almeno
10 decibel più silenziosi rispetto agli standard precedenti).
Figura 7.2: Aviadvigatel PD-14
94
7 Scelta motori
CFM International LEAP 1A/1B/1C Questo propulsore presenta molte
somiglianze con il PD-14, soprattutto per quanto riguarda l'architettura in-
terna. Come il PD-14, il LEAP presenta bassi consumi rispetto ai suoi simili;
inoltre le emissioni di NOx vengono qui ridotte del 30% rispetto alle nor-
mative. La bassa richiesta di manutenzione dovuta al largo uso di materiali
compositi (Nota: Il fan è interamente in materiale composito) e l'alta a-
dabilità (99.98%) sono caratteristiche fondamentali per una scelta ponderata.
L'estrema validità di questo motore può essere confermata dal fatto che verrà
adottato dall'Airbus A320neo e dal Boeing 737 MAX.
Figura 7.3: CFM International LEAP 1A/1B/1C
PowerJet SaM146 Il PowerJet SaM146 è un turbofan prodotto da una joint
venture tra la Snecma e la NPO Saturn dal peso di 1.708 kg e che si attesta
sulle 17.000 libbre di spinta. Utilizzato dal Superjet 100, è indubbiamente un
motore valido dal punto di vista dei consumi e della manutenzione. Unica nota
stonata è la classe di spinta abbastanza bassa, che potrebbe non essere adatta
al caso in esame.
95
7 Scelta motori
Figura 7.4: PowerJet SaM146
Pratt Whitney PW1000G Sicuramente uno dei migliori in fase di sviluppo
(ingresso in servizio previsto intorno al 2015). Presenta forti riduzioni dei
consumi e delle emissioni, sia rumorose che di inquinanti. Caratterizzato da
elevati tempi di permanenza sotto l'ala, necessita di poca manutenzione ed il
sistema di assistenza oerto dalla PW garantisce un buon supporto tecnico.
Figura 7.5: Pratt Whitney PW1000G
Pratt Whitney JT8D Il JT8D è il diretto discendente del turbogetto Pratt
Whitney J52, sviluppato a partire dal 1954. Sulla base del J52 la Pratt Whit-
ney iniziò nel 1.959 lo sviluppo di un motore destinato al Boeing 727, ma
96

7 Scelta motori
impiegato successivamente su altri velivoli tra cui Douglas DC-9, Boeing 737-
100 e -200. Prodotto in 11.845 esemplari con spinte comprese tra 62 e 77 kN
(da 14.000 a 17.400 lb), entrò in servizio su un 727a febbraio del 1964. A par-
tire dagli anni settanta, la Pratt Whitney sviluppò una versione avanzata del
motore (la serie JT8D-200) per venire incontro alle normative più stringenti in
tema di inquinamento acustico e di impatto ambientale. Di questa versione ne
vennero prodotti 2.856 esemplari, portando così il totale a 14.701 e rendendolo
di fatto uno dei motori a turbina di maggior successo commerciale. Progettato
per essere più silenzioso, pulito e più potente dei modelli precedenti, la serie
-200 era caratterizzata da un maggiore rapporto di bypass (1,74:1) e spinta
compresa tra 82 e 97 kN (da 18.500 a 21.700 lb). Entrò in servizio nel 1980 su-
gli MD-80 di cui era l'esclusiva motorizzazione. In seguito all'entrata in vigore
di limiti più stringenti sulla rumorosità, furono studiate e certicate diverse
modiche per far rientrare nei limiti i velivoli con le motorizzazioni più data-
te. È prevista l'installazione di due motori derivati dal JT8D-200 sul nuovo
business jet supersonico Aerion SBJ attualmente in fase di progettazione. Le
prime versioni di JT8D erano dotate di un fan a doppio stadio ed un com-
pressore assiale di bassa pressione a sei stadi mossi da un albero collegato ai
tre stadi di turbina di bassa pressione, mentre i sette stadi del compressore di
alta pressione erano collegati da un secondo albero concentrico al primo ad un
singolo stadio di turbina di alta pressione. Le versioni -200 si dierenziano per
il fan di diametro maggiore (e relativo incremento del rapporto di diluizione)
a stadio singolo. La camera di combustione è di tipo tubo-anulare con nove
tubi di amma interconnessi. Il JT8D è un turboventola a ussi miscelati con
un diusore a lobi posto nell'ugello di scarico che contribuisce ad abbassare la
rumorosità. Nel 2006 è stato certicato un kit di modica (STC) per i motori
installabili sugli MD-80 che, oltre a prevedere nuovi materiali fonoassorbenti
per la presa d'aria e lo scarico, introduce un diusore di nuovo disegno a 16
lobi che consente di rientrare nei più stringenti limiti acustici.
Rolls-Royce RB.183-2 Spey la Rolls-Royce Spey (società che produce
97

7 Scelta motori
RB.163 e RB.168 e RB.183, l'ultimo utilizzato per il Fokker F28) è un moto-
re turbofan a basso bypass originariamente progettato e realizzato da Rolls-
Royce, che è stato in servizio capillare per oltre 40 anni. Previsto per il mercato
aereo jet civile quando veniva progettato alla ne del 1950, il concetto Spey
è stato utilizzato anche in vari motori militari, e poi come motore turboalbe-
ro per le navi conosciuta come la Spey Marine, e anche come base per una
nuova linea civile, la Rolls-Royce Tay. Le versioni Aviation del modello ba-
se hanno accumulato oltre 50 milioni di ore di volo. In linea con le pratiche
di denominazione Rolls-Royce, il motore prende il nome dal ume Spey. Nel
1954 Rolls-Royce ha introdotto il primo motore bypass commerciali, la Rolls-
Royce Conway, con 21.000 lbf (94 kN) di spinta. Questo era troppo grande
per gli aerei più piccoli come il Sud Caravelle, BAC One-Eleven o Hawker Sid-
deley Trident che erano allora in fase di progettazione. Rolls poi ha iniziato
a lavorare su un motori più piccoli altrimenti identici nel design, la RB.163,
utilizzando lo stesso sistema della turbina a due rocchetti e un abbastanza
piccolo ventilatore per fornire rapporti di bypass di circa 0.64:1. Le prime
versioni sono entrati in servizio nel 1964, alimentando sia il 1-11 e Trident.
Diverse versioni con potenze superiori sono stati consegnati attraverso il 1960,
ma lo sviluppo è stato chiuso in via di 1970 dovuti all'introduzione di motori
con rapporti di bypass molto più alti e, quindi, migliore economia di carbu-
rante. Aeromobili Spey-powered continuato in servizio capillare no al 1980,
quando le limitazioni del rumore negli aeroporti europei li hanno costretti alla
ritirata dal servizio. Le versioni inglesi del McDonnell Douglas F -4 Phantom
II F - 4K ( designato Phantom FG.Mk.1 ) hanno sostituito le 16.000 lb di
spinta turboreattori J79 con un paio di 12.250 lb di spinta a secco e 20.515
lb di spinta con postbruciatore RB.168 -15R Spey 201 turbofan. La zona di
aspirazione dell'aria è stata aumentata del venti per cento , mentre la fusoliera
a poppa sotto i motori doveva essere riprogettata.
98
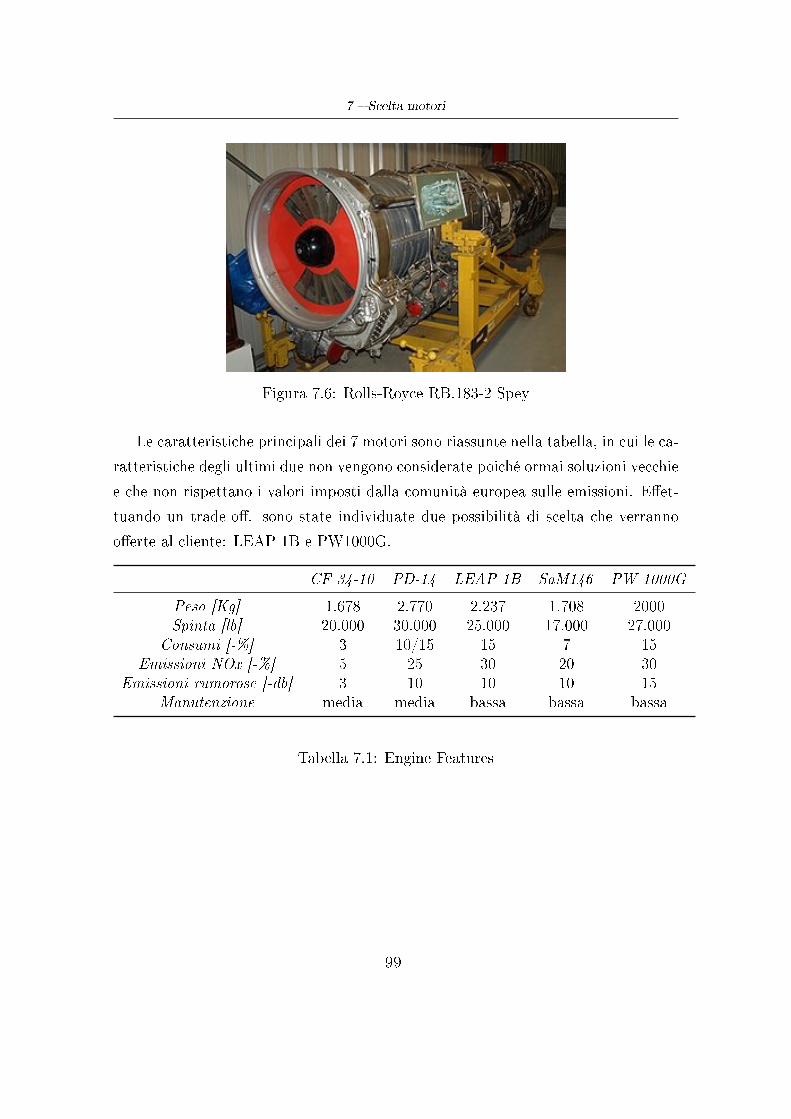
7 Scelta motori
Figura 7.6: Rolls-Royce RB.183-2 Spey
Le caratteristiche principali dei 7 motori sono riassunte nella tabella, in cui le ca-
ratteristiche degli ultimi due non vengono considerate poiché ormai soluzioni vecchie
e che non rispettano i valori imposti dalla comunità europea sulle emissioni. Eet-
tuando un trade-o. sono state individuate due possibilità di scelta che verranno
oerte al cliente: LEAP 1B e PW1000G.
CF 34-10 PD-14 LEAP 1B SaM146 PW 1000G
Peso [Kg] 1.678 2.770 2.237 1.708 2000Spinta [lb] 20.000 30.000 25.000 17.000 27.000
Consumi [-%] 3 10/15 15 7 15Emissioni NOx [-%] 5 25 30 20 30
Emissioni rumorose [-db] 3 10 10 10 15Manutenzione media media bassa bassa bassa
Tabella 7.1: Engine Features
99
Capitolo 8
Analisi aerodinamica
8.1 Geometrie e Proli
Sulla base dei dati ricavati dal design preliminare si sviluppa lo studio dell'aerodi-
namica del velivolo.
8.1.1 Ala
L'elemento principale su cui sviluppare quest'analisi è l'ala, e una prima geometria
iniziale della pianta alare è data dall'analisi preliminare svolta in precdenza, tenendo
conto di alcune considerazioni.
In un primo momento, imponendo carico alare, taper ratio, supercie alare,
freccia e svergolamento, si sono scelti opportuni valori di corda di radice e apertura
alare. É possibile avere un primo prospetto dell'ala grazie al programma Wing
geometry drawing di Ilan Kroo and Juan Alonso.
Prima di procedere con lo sviluppo però, si è voluta analizzare ulteriormente
la geometria dell'ala, in quanto il fattore di Ostwald risultava troppo basso e si
voleva raggiungere un valore di ecienza aerodinamica ancora più alto; attraverso
alcune prove, si è constatato che la soluzione a doppia freccia conferiva prestazioni
aerodinamiche migliori. Inoltre, studiando la possibile condizione di stallo dell'ala, ci
si è accorti che, nonostante il fenomeno avvenisse ad un'incidenza minore di alcuni
decimi di grado rispetto a quella della congurazione a freccia singola, questo si
100
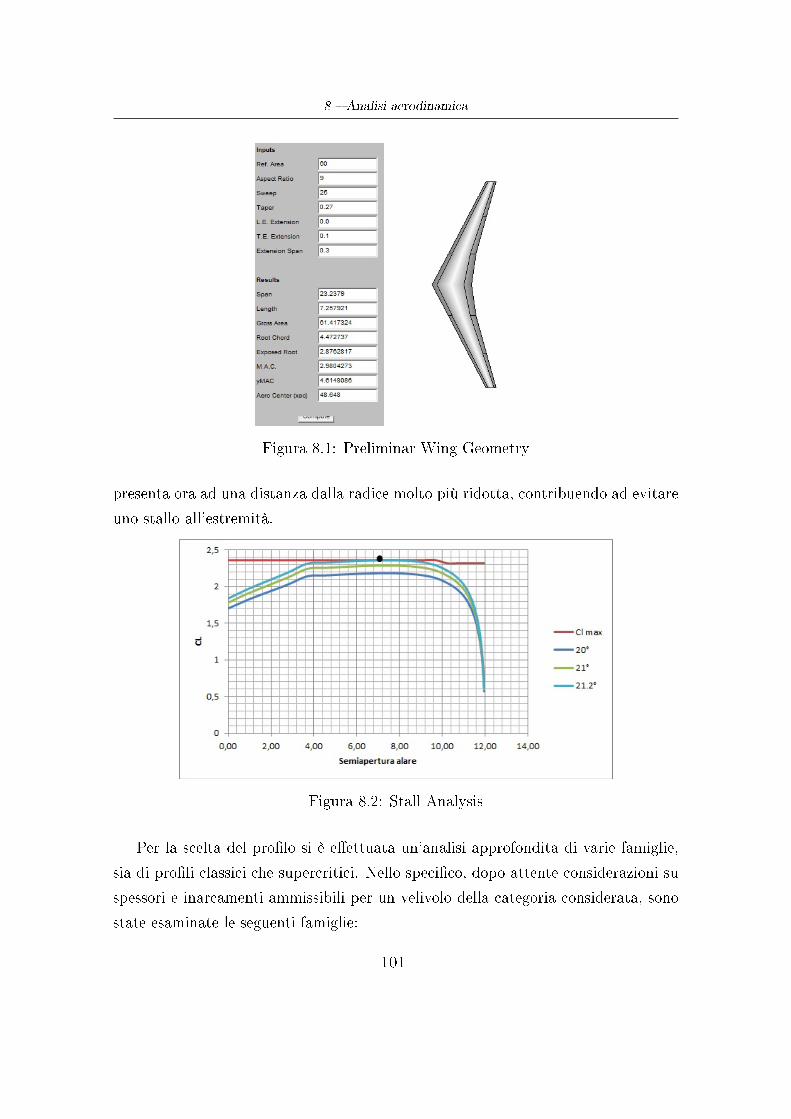
8 Analisi aerodinamica
Figura 8.1: Preliminar Wing Geometry
presenta ora ad una distanza dalla radice molto più ridotta, contribuendo ad evitare
uno stallo all'estremità.
Figura 8.2: Stall Analysis
Per la scelta del prolo si è eettuata un'analisi approfondita di varie famiglie,
sia di proli classici che supercritici. Nello specico, dopo attente considerazioni su
spessori e inarcamenti ammissibili per un velivolo della categoria considerata, sono
state esaminate le seguenti famiglie:
101

8 Analisi aerodinamica
NACA 36XX (15,14,13,12)
NACA 35XX (15,14,13,12)
NACA 26XX (15,14,13,12)
NACA 25XX (15,14,13,12)
SC 04XX (14,12)
SC 04XX (14,12)
Con l'ausilio del software X-foil, tali proli sono stati analizzati in regime viscoso
(per il calcolo del numero di Reynolds, fondamentale per questo tipo di analisi, si
sono utilizzati i valori di quota, velocità e dimensioni trovati nelle sezioni precedenti)
e incompressibile (successivamente i risultati sono stati riportati in regime compres-
sibile grazie alla correzione di Prandtl-Glauert) in 2D. I risultati dell'analisi 2D sono
riportati nell'allegato.
Considerando le esigenze strutturali e aerodinamiche, si è optato per una dimi-
nuzione dello spessore procedendo dalla radice all'estremità: 14% alla radice e 12%
all'estremità. Nel corso dell'analisi 3D è stato considerato inoltre un angolo di sver-
golamento distribuito sull'apertura alare in modo da ridurre il rischio di stallo di
estremità. La scelta dei proli, seppure già eettuabile, viene rimandata per poter
analizzare varie combinazioni nel corso dell'analisi 3D.
In questa fase vengono calcolate le principali caratteristiche aerodinamiche del-
l'ala nel suo complesso tenendo in considerazione gli eetti dovuti all'allungamento
nito e quindi ai vortici (ciò è possibile grazie alla teoria di Prandtl). L'implemen-
tazione della teoria di Prandtl avviene nell'allegato. Per una corretta implemen-
tazione si è realizzata una mesh aerodinamica spaziata lungo l'apertura in base al
paramentro φ = nπm+1
: in tal modo le estremità vengono meshate più densamente
permettendo uno studio sucientemente accurato dei fenomeni di estremità. Per
una scelta ponderata dei proli sono state eseguite diverse simulazioni, con varie
combinazioni.
Anchè le simulazioni non richiedessero un tempo eccessivo, si è dedicato molto
tempo alla parametrizzazione del modello e delle curve dei proli. Inoltre si è resa
l'interfaccia del foglio di calcolo user friendly, così da permettere la modica di po-
chissimi input per eettuare l'analisi. Per eettuare le simulazioni si è innanzitutto
102

8 Analisi aerodinamica
individuato il CLcruise
CL =2W/S
ρVc2 = 0.48
e in un secondo momento sono state inserite le varie combinazioni considerate. Per
ciascuna di esse vengono individuati ecienza, C ′L, CLmax e incidenza di crociera.
Quest'ultima è fondamentale per determinare il calettamento dall'ala rispetto alla
fusoliera.
Figura 8.3: X-foil analysis exemple
Dopo l'analisi di tutte le combinazioni, ne sono state individuate due che presen-
tano prestazioni migliori rispetto alle altre: la prima con proli classici, la seconda
con supercritici. Siccome il Mach di crociera è al di sopra del Mach critico, il che
implica una resistenza d'onda non trascurabile, si è deciso di adottare la famiglia
dei proli supercritici: in particolare la combinazione SC-0414 e SC-0412.
8.1.2 Impennaggi
Sono stati fatti ragionamenti simili per quanto riguarda le geometrie e i proli degli
impennaggi di coda, dove però si è scelto di utilizzare proli convenzionali, in quanto
più semplici da realizzare, e più precisamente si sono scelti un NACA 0010 per
l'impennaggio orizzontale e un NACA 0012 per l'impennaggio verticale.
103
8 Analisi aerodinamica
Figura 8.4: Horizontal and Vertical Tail
8.2 Risultati
Una volta denita la geometria e scelti i proli, si sono potute analizzare le curve
di portanza e resistenza dei singoli proli, illustrate in seguito; non compare l'im-
pennaggio verticale in quanto, data la simmetria del prolo e l'incidenza nulla, non
genera portanza.
8.2.1 Ala
Qui di seguito sono rappresentate le curve di portanza e resistenza sulla semiapertura
alare considerata all'incidenza di volo di crociera, pari a 2.95°:
104
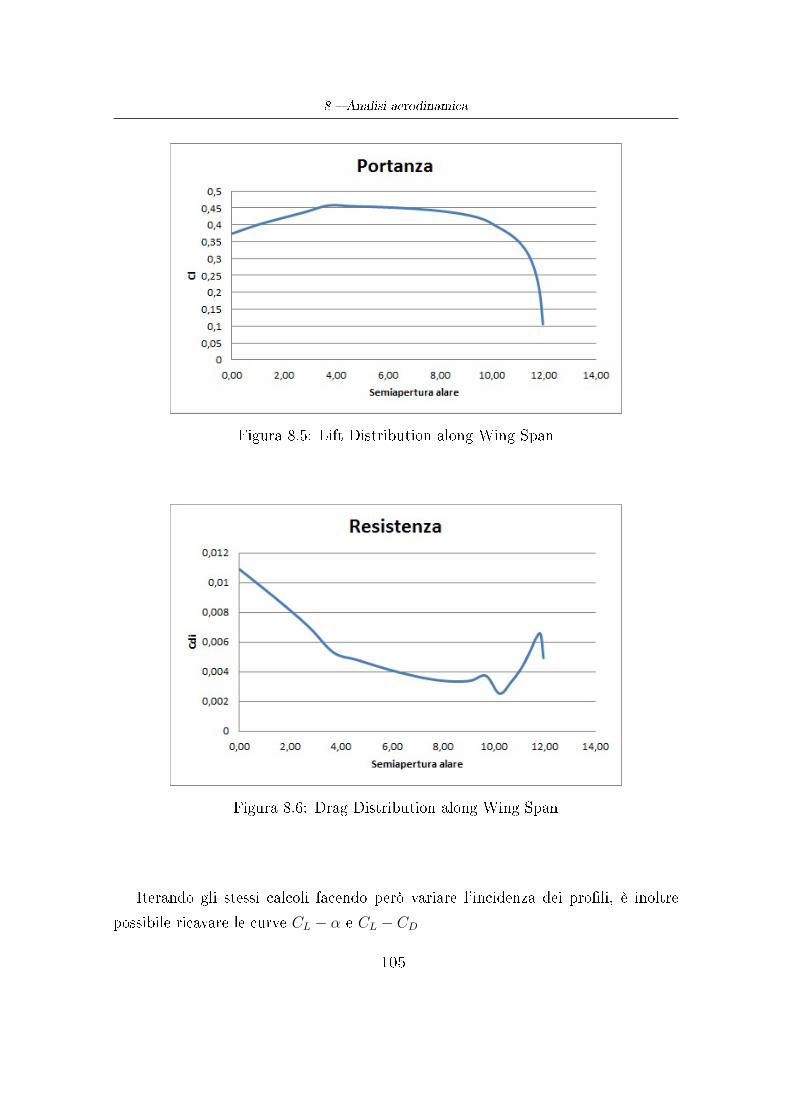
8 Analisi aerodinamica
Figura 8.5: Lift Distribution along Wing Span
Figura 8.6: Drag Distribution along Wing Span
Iterando gli stessi calcoli facendo però variare l'incidenza dei proli, è inoltre
possibile ricavare le curve CL − α e CL − CD
105
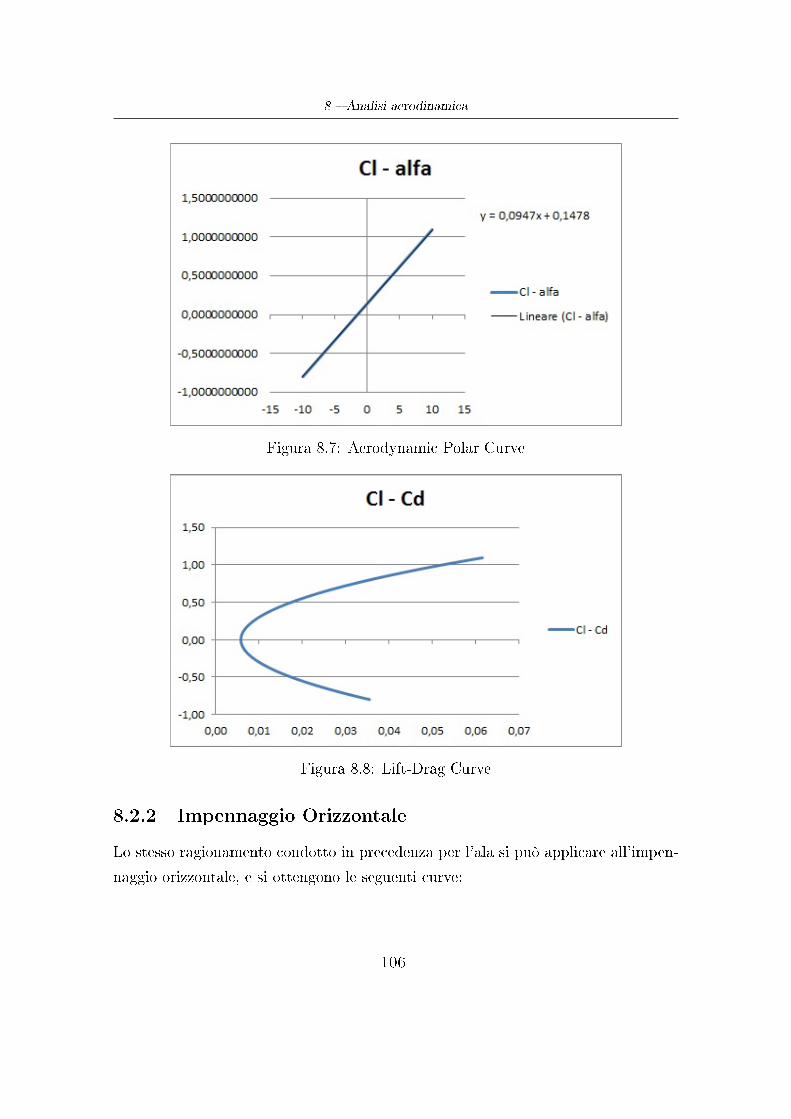
8 Analisi aerodinamica
Figura 8.7: Aerodynamic Polar Curve
Figura 8.8: Lift-Drag Curve
8.2.2 Impennaggio Orizzontale
Lo stesso ragionamento condotto in precedenza per l'ala si può applicare all'impen-
naggio orizzontale, e si ottengono le seguenti curve:
106
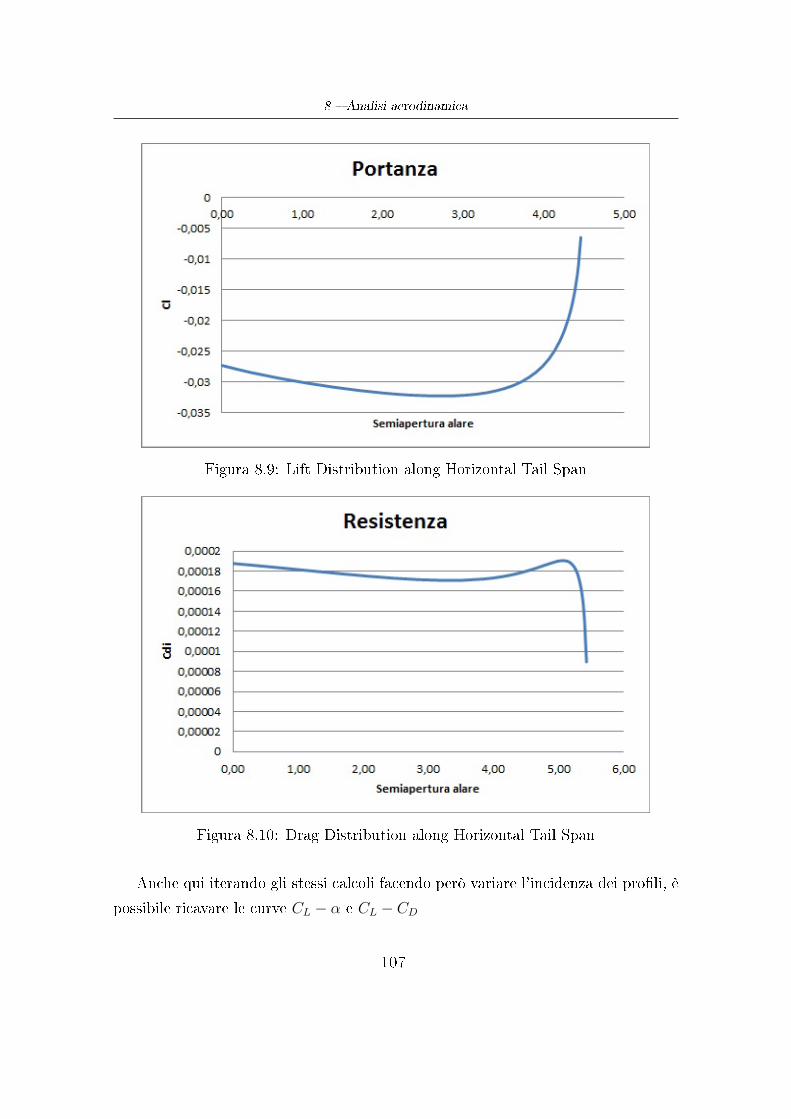
8 Analisi aerodinamica
Figura 8.9: Lift Distribution along Horizontal Tail Span
Figura 8.10: Drag Distribution along Horizontal Tail Span
Anche qui iterando gli stessi calcoli facendo però variare l'incidenza dei proli, è
possibile ricavare le curve CL − α e CL − CD
107
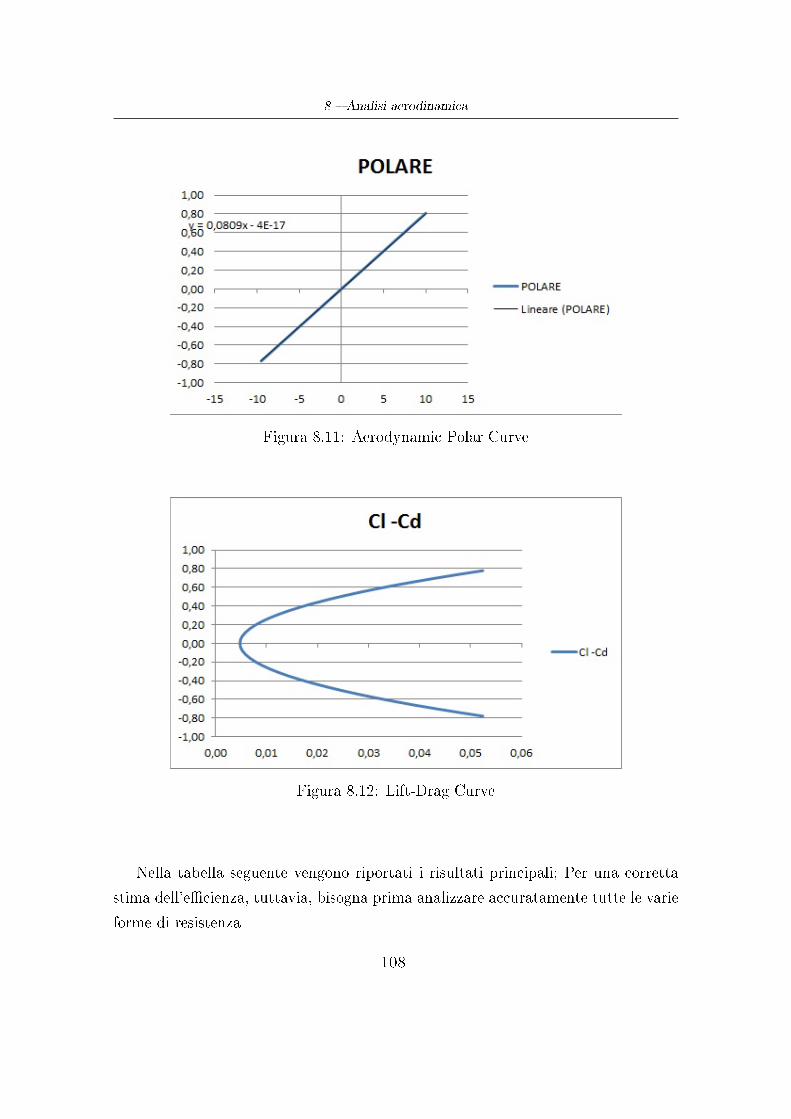
8 Analisi aerodinamica
Figura 8.11: Aerodynamic Polar Curve
Figura 8.12: Lift-Drag Curve
Nella tabella seguente vengono riportati i risultati principali; Per una corretta
stima dell'ecienza, tuttavia, bisogna prima analizzare accuratamente tutte le varie
forme di resistenza
108
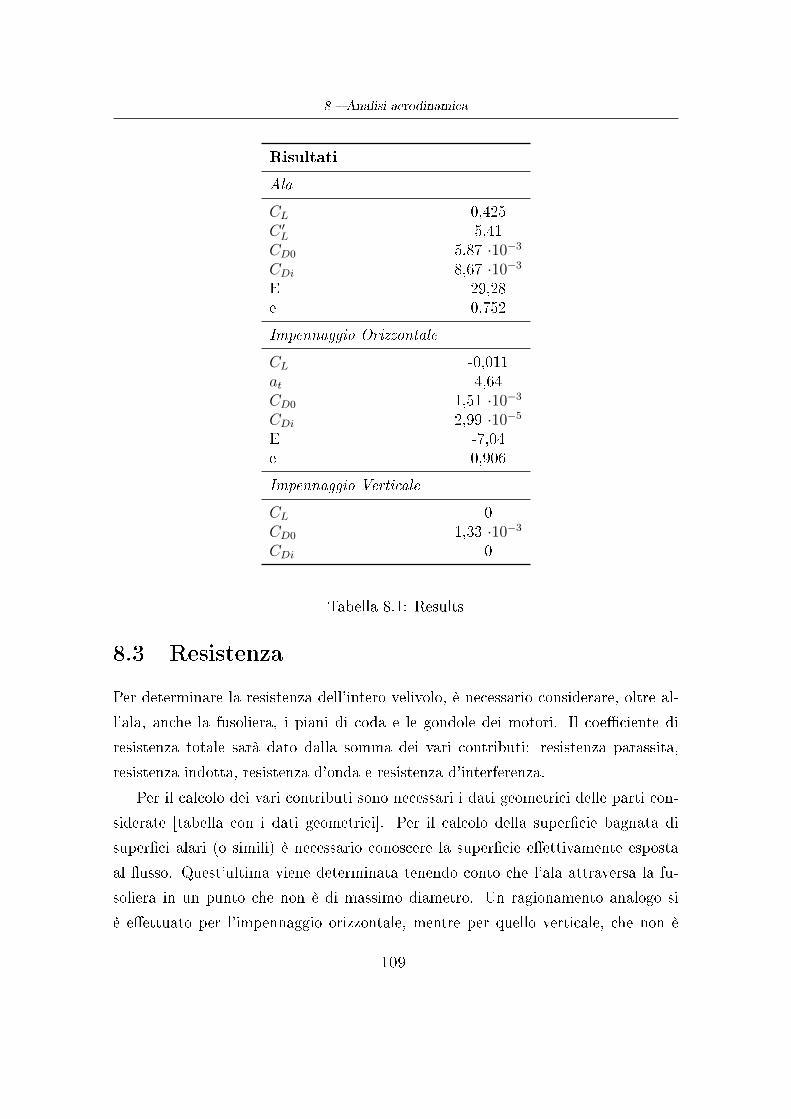
8 Analisi aerodinamica
Risultati
Ala
CL 0,425C ′L 5,41CD0 5,87 ·10−3
CDi 8,67 ·10−3
E 29,28e 0,752
Impennaggio Orizzontale
CL -0,011at 4,64CD0 1,51 ·10−3
CDi 2,99 ·10−5
E -7,04e 0,906
Impennaggio Verticale
CL 0CD0 1,33 ·10−3
CDi 0
Tabella 8.1: Results
8.3 Resistenza
Per determinare la resistenza dell'intero velivolo, è necessario considerare, oltre al-
l'ala, anche la fusoliera, i piani di coda e le gondole dei motori. Il coeciente di
resistenza totale sarà dato dalla somma dei vari contributi: resistenza parassita,
resistenza indotta, resistenza d'onda e resistenza d'interferenza.
Per il calcolo dei vari contributi sono necessari i dati geometrici delle parti con-
siderate [tabella con i dati geometrici]. Per il calcolo della supercie bagnata di
superci alari (o simili) è necessario conoscere la supercie eettivamente esposta
al usso. Quest'ultima viene determinata tenendo conto che l'ala attraversa la fu-
soliera in un punto che non è di massimo diametro. Un ragionamento analogo si
è eettuato per l'impennaggio orizzontale, mentre per quello verticale, che non è
109

8 Analisi aerodinamica
passante, si è considerata l'intera supercie in pianta. Le gondole sono state appros-
simate a cilindri, così come la parte centrale della fusoliera, mentre nose e tail sono
stati assimilati a coni.
E' ora possibile calcolare i vari contributi alla resistenza.
8.3.1 Resistenza Parassita
CD0 =∑
CfFQ(Swet/Srif ) = 0,1692
dove:
Cf è il coeciente di attrito
F il fattore di forma
Q il fattore di interferenza
Swet la supercie bagnata
Srif la supercie di riferimento
Il Cf , noto il Re elevato, viene calcolato in regime turbolento:
Cf =0,455
(logRec)2,58 · (1 + 0,144M2)0,65
I fattori di forma e di interferenza delle varie parti considerate vengono calcolati
nel seguente modo:
Ala
F ∗ = 1 + 3,33(t/c)− 0,008(t/c)2 + 27(t/c)3
F = (F ∗ − 1) · cos2 ∆0,5c + 1
Q = 1
Impennaggio Orizzontale
F ∗ = 1 + 3,52(t/c)
110

8 Analisi aerodinamica
F = (F ∗ − 1) · cos2 ∆0,5c + 1
Q = 1,2
Impennaggio Verticale
F ∗ = 1 + 3,52(t/c)
F = (F ∗ − 1) · cos2 ∆0,5c + 1
Q = 1,2
Fusoliera
F = 1 + 2,2(d/l)3/2 − 0,9(d/l)3
Gondole
FQ = 1,25
8.3.2 Resistenza Indotta
Questo contributo è già stato calcolato nell'analisi 3D dell'ala pertanto per comple-
tarlo sarà suciente ripetere lo studio anche per gli impennaggi.
8.3.3 Resistenza d'onda
Siccome il velivolo vola in regime transonico, il Mach di volo porta alla generazione
di onde d'urto e conseguentemente di resistenza. Dalle caratteristiche dell'ala è
possibile ricavare il mach critico.
Mdd = kacos Λ− (t/c)
cos2Λ− CL
10cos3Λ= 0,78
Mcrit = Mdd −(
0,180
)1,3= 0,67
Se il mach di volo è superiore a quello critico, allora sarà possibile calcolare il
coeciente di resistenza d'onda come,
CDwave = 0,243 ·(
1 + 0,2 ·M2cruise
Mcruise
)3
· (Mdd − 1)4 ·(
2−Mdd
Mdd · (1 + 0,2 ·M2dd)
)
111

8 Analisi aerodinamica
8.3.4 Resistenza d'interferenza
Questa componente di resistenza viene generata dai disturbi del usso in corrispon-
denza dei punti di contatto tra fusoliera e superci portanti. In generale è la più
dicile da calcolare analiticamente, pertanto si ricorre a formule sperimentali, che
quanticano la resistenza d'interferenza come pari al 3% per gli attacchi tra i piani
di coda per la congurazione scelta e al 2,4% per l'attacco ala-fusoliera.
8.3.5 Resistenza Complessiva
La resistenza totale è data dalla sommatoria dei singoli contributi, come facilmente
ipotizzabile.
8.3.6 Ottimizzazione
Una volta scelta la geometria iniziale dell'ala, si è deciso di far variare alcuni para-
metri in modo da poter garantire la massima ecienza aerodinamica possibile. In
particolare, al variare dell'angolo di freccia e della velocità, sono stati fatti variare
l'incidenza e lo svergolamento dell'ala, ed è stato possibile calcolare il valore del
calettamento dell'impennaggio orizzontale tale da garantire αnwb = αtrim.
Figura 8.13: Andamento ecienza
Dalla gura si può vedere che l'ecienza ha un andamento tale per cui si ha
valore massimo per i valori riportati in tabella:
112
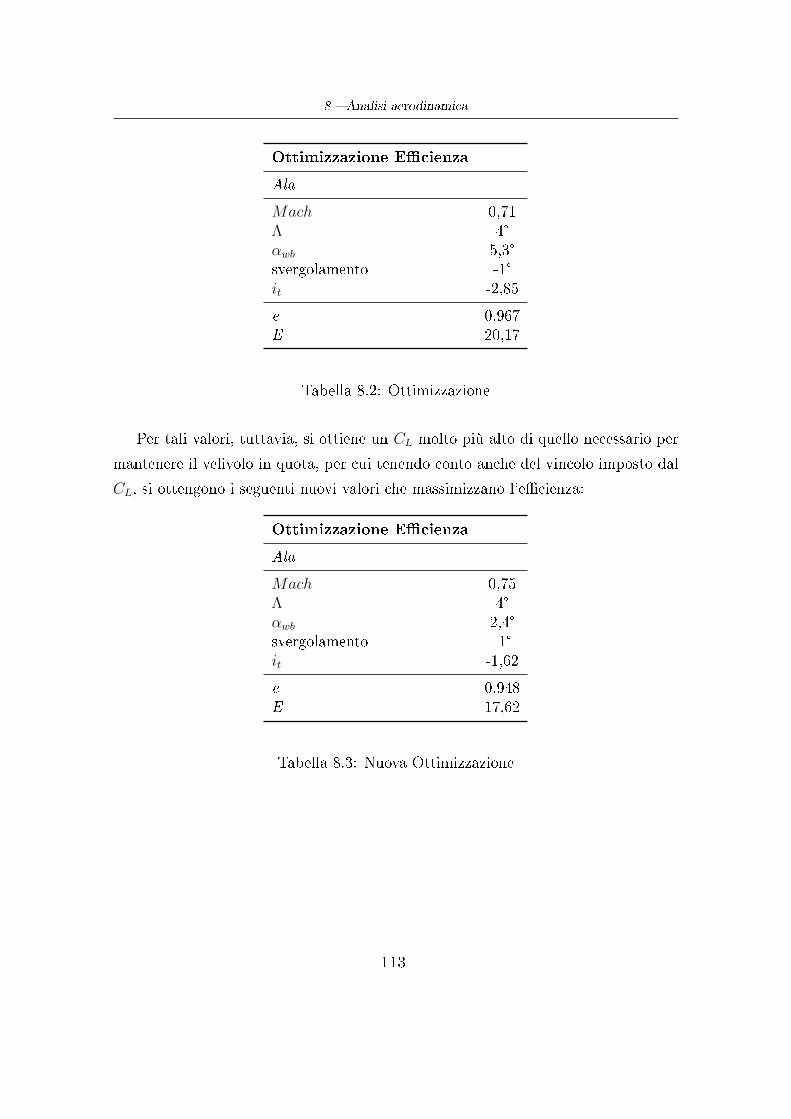
8 Analisi aerodinamica
Ottimizzazione Ecienza
Ala
Mach 0,71Λ 4°αwb 5,3°svergolamento -1°it -2,85
e 0,967E 20,17
Tabella 8.2: Ottimizzazione
Per tali valori, tuttavia, si ottiene un CL molto più alto di quello necessario per
mantenere il velivolo in quota, per cui tenendo conto anche del vincolo imposto dal
CL, si ottengono i seguenti nuovi valori che massimizzano l'ecienza:
Ottimizzazione Ecienza
Ala
Mach 0,75Λ 4°αwb 2,4°svergolamento -1°it -1,62
e 0,948E 17,62
Tabella 8.3: Nuova Ottimizzazione
113
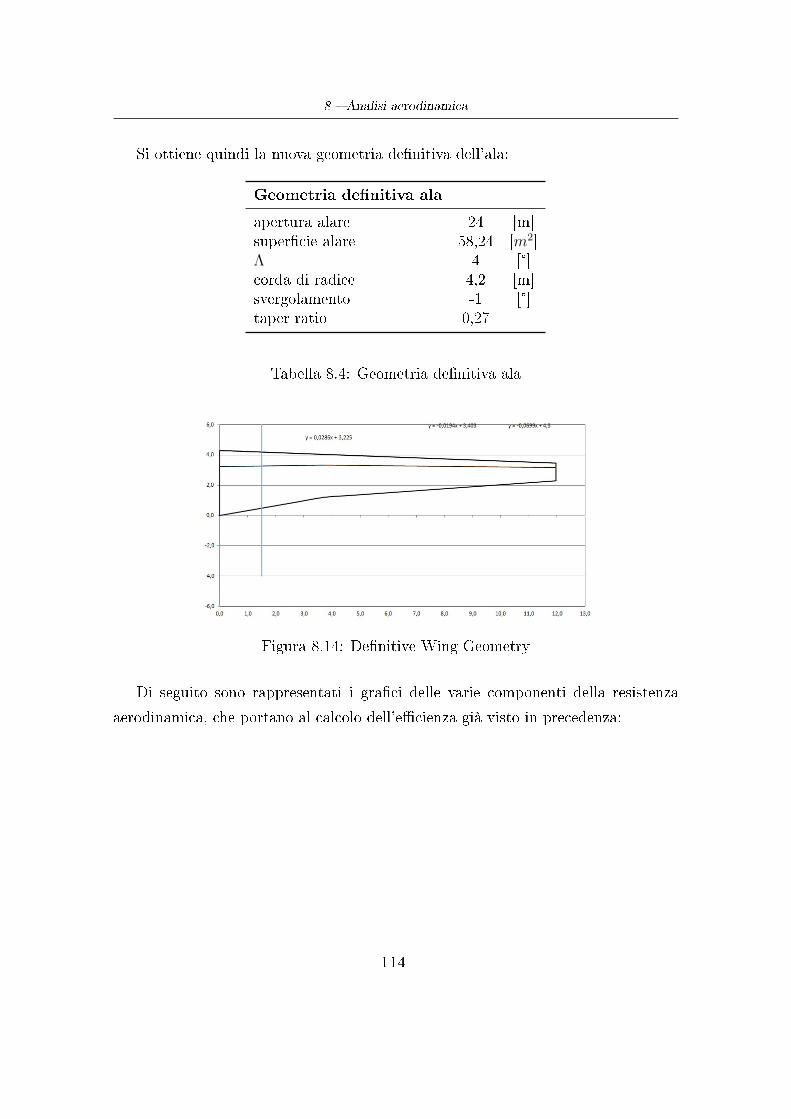
8 Analisi aerodinamica
Si ottiene quindi la nuova geometria denitiva dell'ala:
Geometria denitiva ala
apertura alare 24 [m]supercie alare 58,24 [m2]Λ 4 [°]corda di radice 4,2 [m]svergolamento -1 [°]taper ratio 0,27
Tabella 8.4: Geometria denitiva ala
Figura 8.14: Denitive Wing Geometry
Di seguito sono rappresentati i graci delle varie componenti della resistenza
aerodinamica, che portano al calcolo dell'ecienza già visto in precedenza:
114
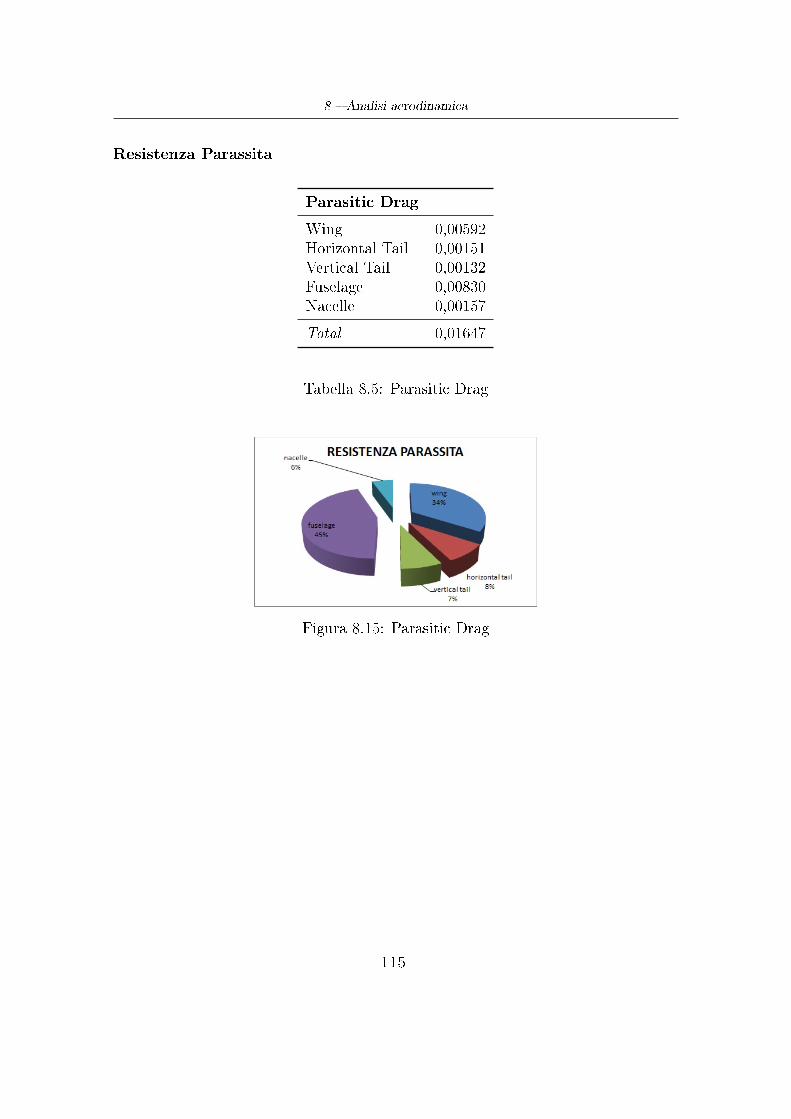
8 Analisi aerodinamica
Resistenza Parassita
Parasitic Drag
Wing 0,00592Horizontal Tail 0,00151Vertical Tail 0,00132Fuselage 0,00830Nacelle 0,00157
Total 0,01647
Tabella 8.5: Parasitic Drag
Figura 8.15: Parasitic Drag
115
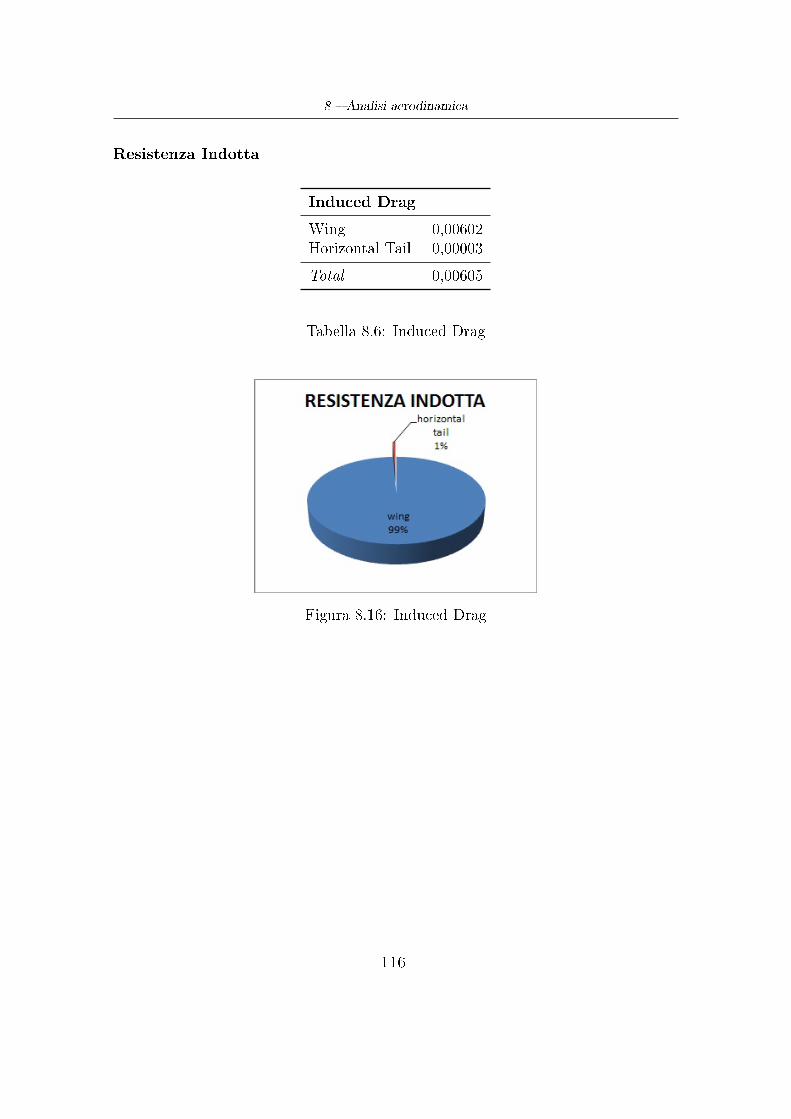
8 Analisi aerodinamica
Resistenza Indotta
Induced Drag
Wing 0,00602Horizontal Tail 0,00003
Total 0,00605
Tabella 8.6: Induced Drag
Figura 8.16: Induced Drag
116
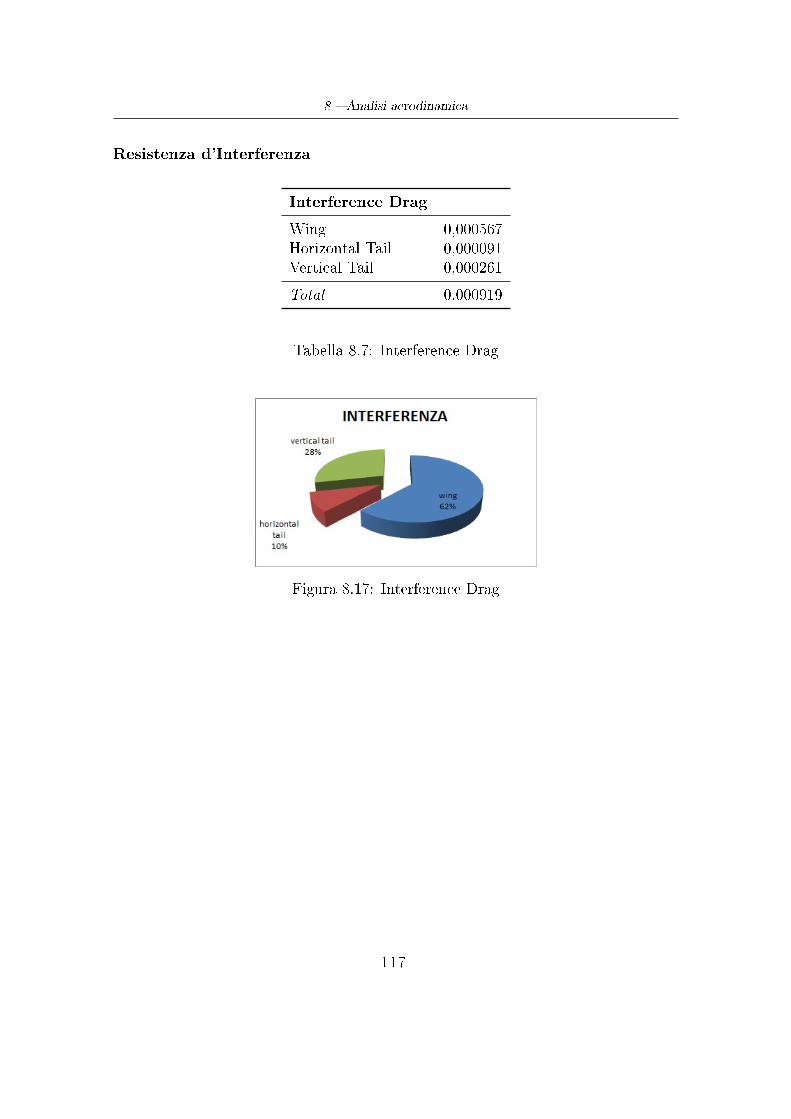
8 Analisi aerodinamica
Resistenza d'Interferenza
Interference Drag
Wing 0,000567Horizontal Tail 0,000091Vertical Tail 0,000261
Total 0,000919
Tabella 8.7: Interference Drag
Figura 8.17: Interference Drag
117
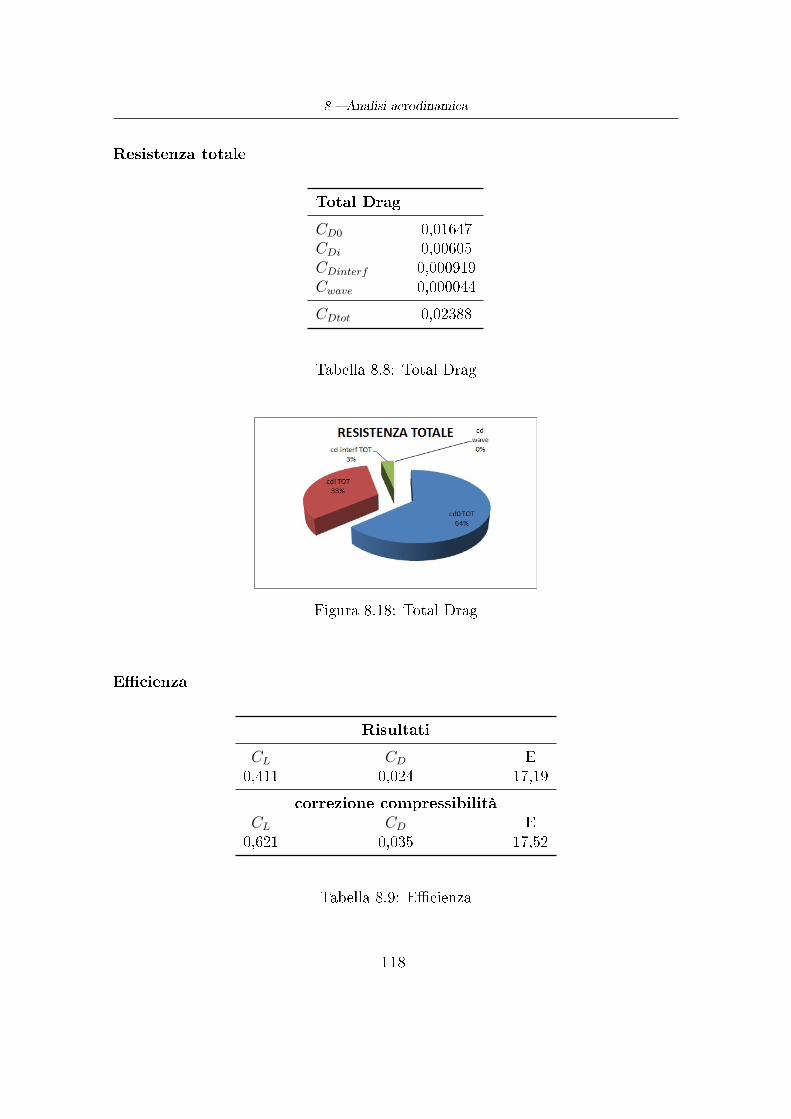
8 Analisi aerodinamica
Resistenza totale
Total Drag
CD0 0,01647CDi 0,00605CDinterf 0,000919Cwave 0,000044
CDtot 0,02388
Tabella 8.8: Total Drag
Figura 8.18: Total Drag
Ecienza
Risultati
CL CD E0,411 0,024 17,19
correzione compressibilitàCL CD E0,621 0,035 17,52
Tabella 8.9: Ecienza
118

8 Analisi aerodinamica
8.4 Flaps e Slats
Un ultimo aspetto aerodinamico da considerare è l'aumento del CL dovuto a Flap
e Slat, necessario per le fasi di decollo e atterraggio del velivolo. Il primo passaggio
è stato quello di ottenere il coeciente di massima portanza dell'ala 3D grazie alla
seguente relazione
CLmax3D = 0,9 · CLmax2D · cos Λ
dove il CLmax2D, già visto durante l'analisi dell'ala, è stato ricavato grazie a X-foil.
A questo punto è stato necessario scegliere che tipo di dispositivi di bordo d'at-
tacco e di fuga realizzare; per il velivolo in questione è stato deciso di adottare una
congurazione double-slotted fowler ap/full slats, che consente di ottenere notevoli
risultati in termini di aumento del CL senza gravare troppo in termini di complessità
strutturale.
Per le deessioni delle superci mobili, si è visto in letteratura come per quanto
riguarda il dispositivo sul bordo d'attacco la deessione massima ammessa è di circa
30°, mentre si è ricorso ad un'analisi con X-foil per capire quale deessione convenisse
scegliere per quanto riguarda i ap.
Figura 8.19: X-foil exemple
Le simulazioni sono state eettuate solamente per il prolo SC-0414, in quanto
è l'unico ad essere interessato dalla presenza di questi dispositivi. Di seguito sono
rappresentati i risultati al variare della deessione del ap:
119
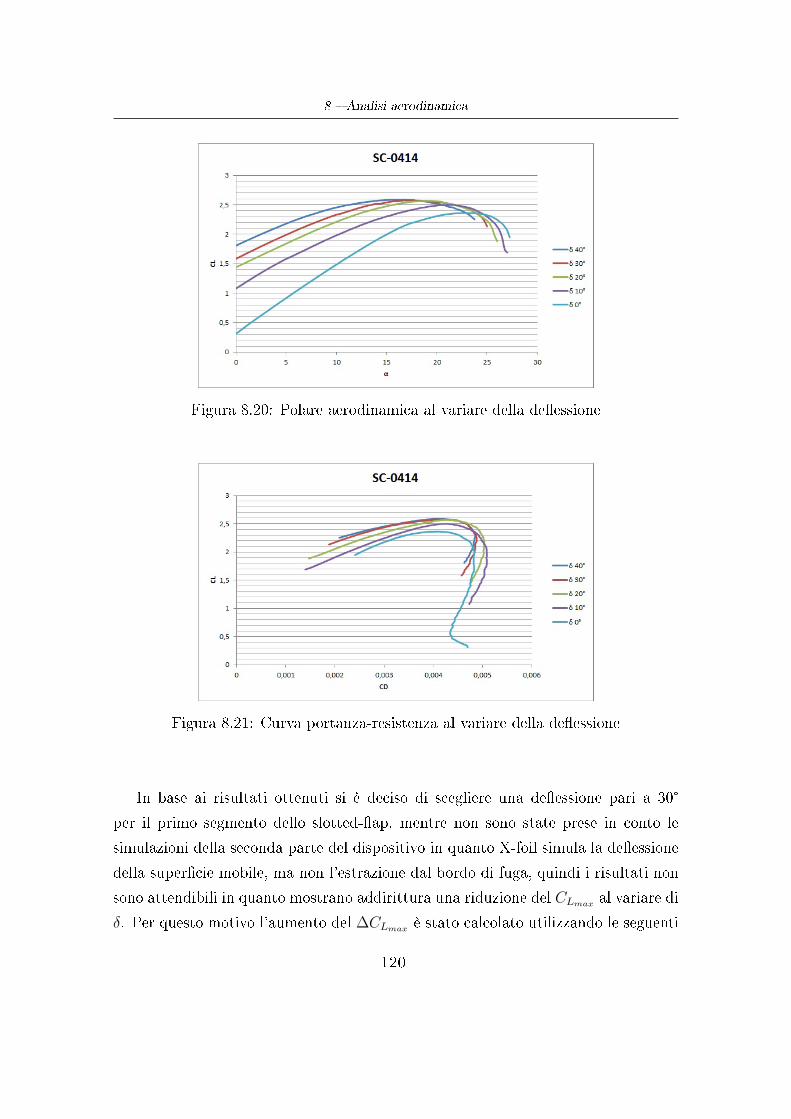
8 Analisi aerodinamica
Figura 8.20: Polare aerodinamica al variare della deessione
Figura 8.21: Curva portanza-resistenza al variare della deessione
In base ai risultati ottenuti si è deciso di scegliere una deessione pari a 30°
per il primo segmento dello slotted-ap, mentre non sono state prese in conto le
simulazioni della seconda parte del dispositivo in quanto X-foil simula la deessione
della supercie mobile, ma non l'estrazione dal bordo di fuga, quindi i risultati non
sono attendibili in quanto mostrano addirittura una riduzione del CLmax al variare di
δ. Per questo motivo l'aumento del ∆CLmax è stato calcolato utilizzando le seguenti
120
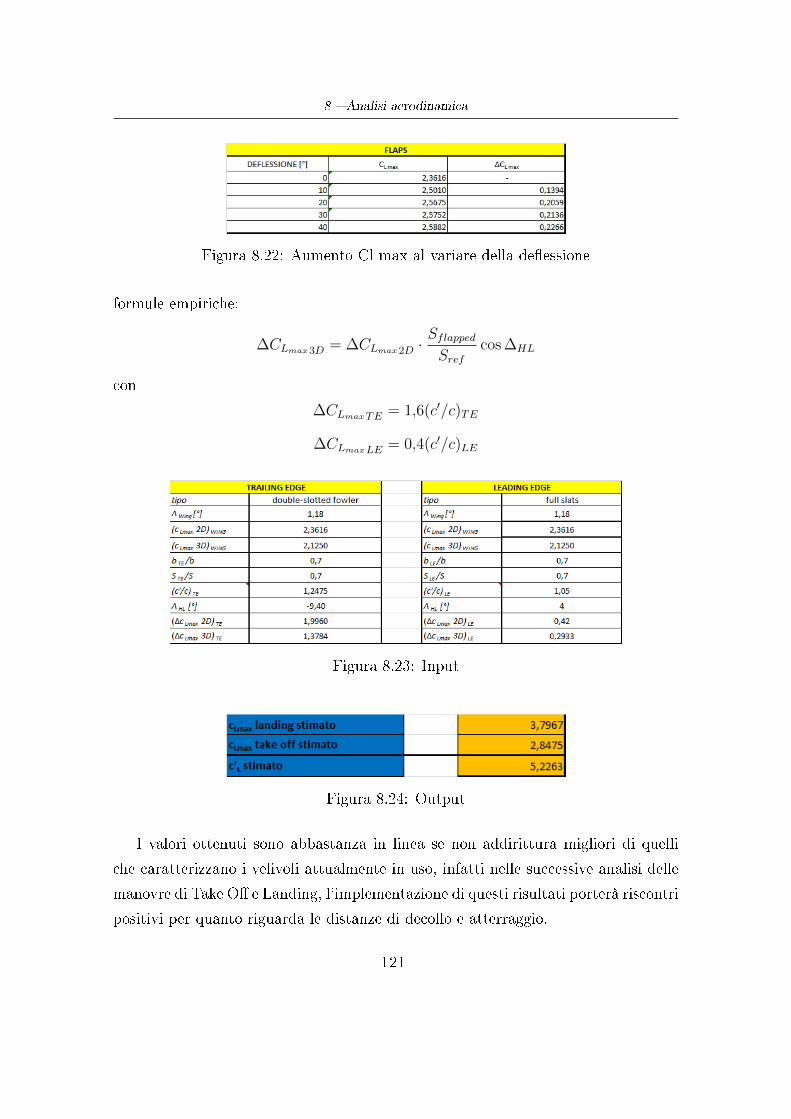
8 Analisi aerodinamica
Figura 8.22: Aumento Cl max al variare della deessione
formule empiriche:
∆CLmax3D = ∆CLmax2D ·SflappedSref
cos ∆HL
con
∆CLmaxTE = 1,6(c′/c)TE
∆CLmaxLE = 0,4(c′/c)LE
Figura 8.23: Input
Figura 8.24: Output
I valori ottenuti sono abbastanza in linea se non addirittura migliori di quelli
che caratterizzano i velivoli attualmente in uso, infatti nelle successive analisi delle
manovre di Take O e Landing, l'implementazione di questi risultati porterà riscontri
positivi per quanto riguarda le distanze di decollo e atterraggio.
121
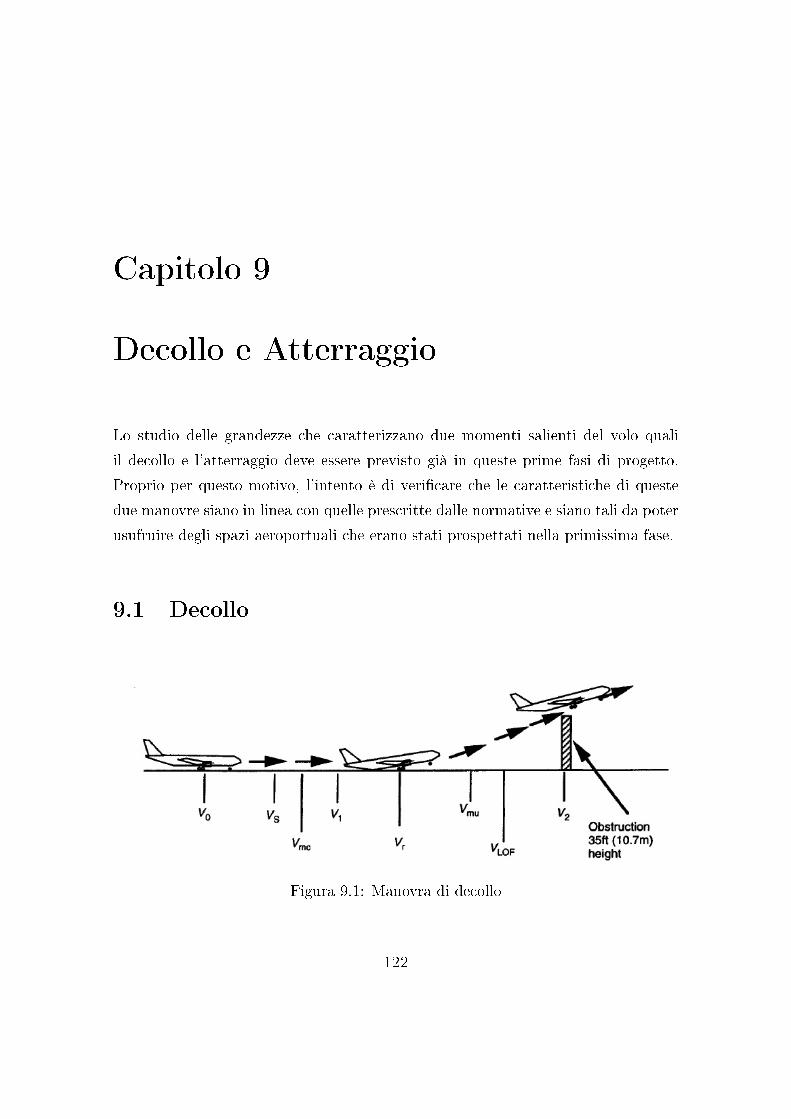
Capitolo 9
Decollo e Atterraggio
Lo studio delle grandezze che caratterizzano due momenti salienti del volo quali
il decollo e l'atterraggio deve essere previsto già in queste prime fasi di progetto.
Proprio per questo motivo, l'intento è di vericare che le caratteristiche di queste
due manovre siano in linea con quelle prescritte dalle normative e siano tali da poter
usufruire degli spazi aeroportuali che erano stati prospettati nella primissima fase.
9.1 Decollo
Figura 9.1: Manovra di decollo
122

9 Decollo e Atterraggio
9.1.1 Stima distanza di decollo - tutti i motori operativi
La manovra di decollo consiste in 3 parti:
Rullaggio
Transizione alla salita
Salita
Rullaggio
Partendo dalle equazioni del moto:
M(dV/dt) = T −D + µ(Mg − L)
dove
µ = coeciente di attrito
M = massa velivolo
(dV/dt) = accelerazione
Mg − L = reazione vincolare data dal carrello
g = accelerazione gravitazionale
è possibile ricavare la distanza di rullaggio, data dalla formula:
dr =1
2gKA
· ln[(KT +KA · VLOF 2)/KT ]
dove
KT = (T/W )− µ
KA = ρ(−CD0 − kCLTO
2 − µCLTO)
VLOF = 1,1 · VStalloTO
con
123

9 Decollo e Atterraggio
CLTO= 0,7·CLMAX
; per ragioni di sicurezza infatti il velivolo non può eettuare
la manovra ad un'incidenza troppo vicina a quella dello stallo, e il CL varia di
conseguenza,
VStalloTOcalcolata in base al CLTO
,
Transizione alla salita
Durante la transizione il velivolo accelera da VLOF alla velocità di decollo V2. La
velocità di transizione può essere stimata come:
VTRANS =VLOF + V2
2
Da questa è possibile ricavare il raggio di manovra, ipotizzando n = 1,19:
r =VTRANS
2
g(n− 1)
e di conseguenza la distanza e l'altezza di transizione, conoscendo il gradiente di
salita γ e l'altezza di screen height, un ostacolo immaginario alto 35 ft.
dt = r · γ
ht = r · θ · θ/2
Se al termine di questa fase ht > hs, allora la distanza di transizione viene calcolata
secondo la seguente formula:
ds = [(r + hs)2 − r2]0,5
altrimenti bisogna sommare un ulteriore distanza, calcolata in seguito, che permette
di oltrepassare l'ostacolo
Salita
La distanza residua da coprire per oltrepassare lo screen height è data da:
dc =screen height− ht
tan γc
La distanza di decollo totale è data dalla somma dei 3 contributi e poi molti-
plicata per un fattore di sicurezza dato dalla certicazione JAR/FAR, pari a 1,15.
124

9 Decollo e Atterraggio
Distanza [m]
Rullaggio 541,86Transizione 149,70Salita 113,66
Screen Height 237,89
Decollo 806,22Fattorizzata 927,16
Tabella 9.1: Take O Distance
9.1.2 Balanced Field Length
La normativa FAR 25 denisce due grandezze caratteristiche fondamentali che per-
mettono di eettuare la manovra di decollo in sicurezza in caso di piantata di uno
dei due motori.
la velocità di decisione V1: la velocità alla quale un'avaria al motore critico
comporta un impiego di pista identico sia nel caso in cui il pilota prosegua la
manovra di decollo (ACC& GO) sia nel caso in cui egli decida di arrestare il
velivolo (ACC& STOP). Essa discrimina la procedura a cui il pilota si deve
attenere in caso di avaria di uno dei motori. Infatti, se il guasto si verica
per VF < V1, la manovra di decollo deve essere interrotta. Al contrario, per
VF > V1, il decollo deve essere proseguito dato che lo spazio di arresto supera
quello necessario per completare la manovra con successo.
la lunghezza di pista corrispondente è detta lunghezza di pista bilanciata o
BFL viene determinata tramite un metodo graco, dall'intersezione di due
curve: ACC & GO e ACC & STOP diagrammate in funzione della velocità
VF per cui si manifesta l'avaria.
ACC & GO
La distanza dACC&GO viene calcolata come somma di 4 contributi:
distanza percorsa prima della piantata del motore critico dAEO;
125
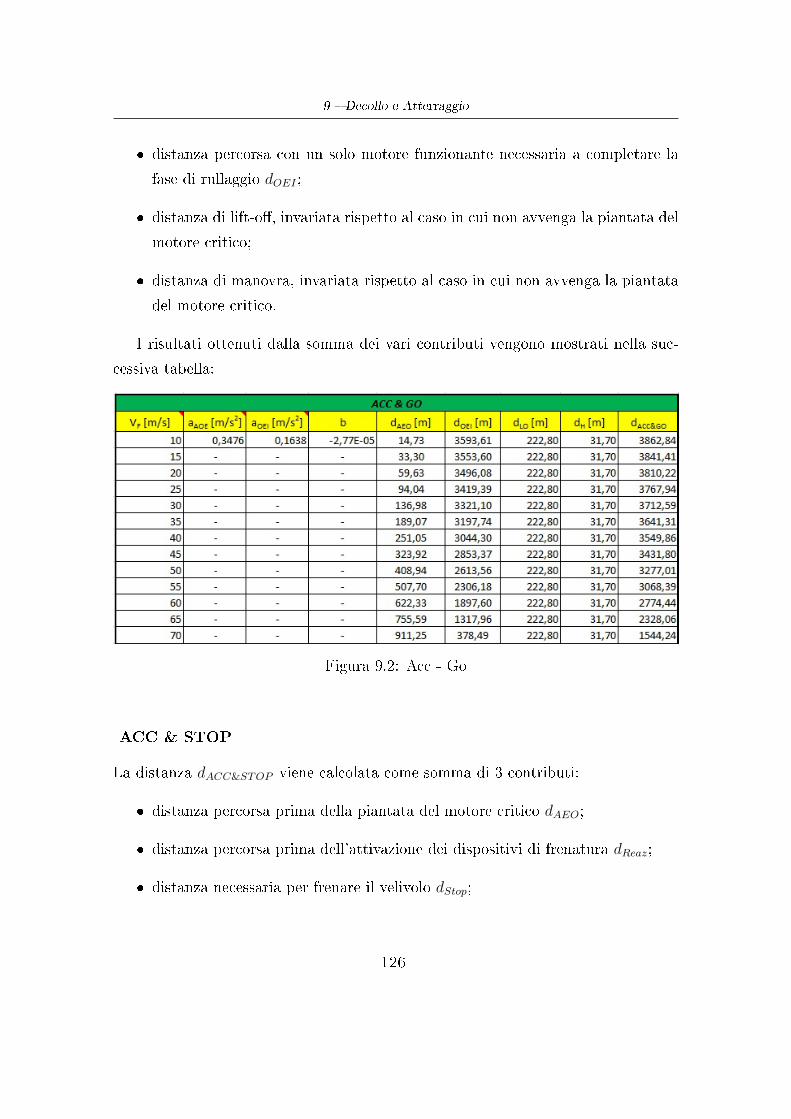
9 Decollo e Atterraggio
distanza percorsa con un solo motore funzionante necessaria a completare la
fase di rullaggio dOEI ;
distanza di lift-o, invariata rispetto al caso in cui non avvenga la piantata del
motore critico;
distanza di manovra, invariata rispetto al caso in cui non avvenga la piantata
del motore critico.
I risultati ottenuti dalla somma dei vari contributi vengono mostrati nella suc-
cessiva tabella:
Figura 9.2: Acc - Go
ACC & STOP
La distanza dACC&STOP viene calcolata come somma di 3 contributi:
distanza percorsa prima della piantata del motore critico dAEO;
distanza percorsa prima dell'attivazione dei dispositivi di frenatura dReaz;
distanza necessaria per frenare il velivolo dStop;
126
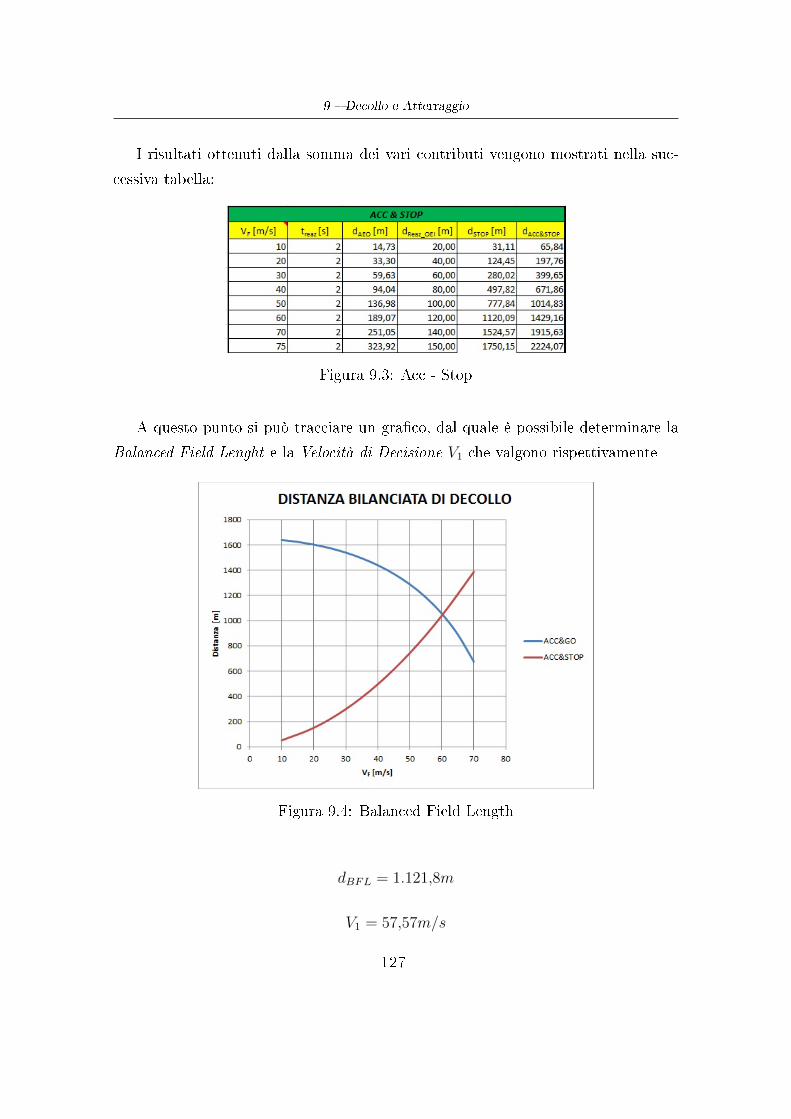
9 Decollo e Atterraggio
I risultati ottenuti dalla somma dei vari contributi vengono mostrati nella suc-
cessiva tabella:
Figura 9.3: Acc - Stop
A questo punto si può tracciare un graco, dal quale è possibile determinare la
Balanced Field Lenght e la Velocità di Decisione V1 che valgono rispettivamente
Figura 9.4: Balanced Field Length
dBFL = 1.121,8m
V1 = 57,57m/s
127
9 Decollo e Atterraggio
Analizzando la normativa emessa dall'ICAO, risulta che la lunghezza di pista
bilanciata deve essere aumentata di 60 m sia a inizio sia a ne della runaway per
ragioni di sicurezza; a questi, vanno aggiunti altri 90 m sia prima sia dopo la runway
per garantire un'area di sicurezza di ne pista. La lunghezza di pista bilanciata
risulta quindi aumentata di almeno 300 m per rispettare i requisiti minimi imposti
dell'ICAO; questo tratto di pista al di fuori della runway prende il nome di Runway
End Safety Area (RESA). La normativa consiglia inoltre di aumentare questa lun-
ghezza con un ulteriore margine di sicurezza pari ad altri 300 m. Come esempio, è
stato analizzato il caso degli USA. Sono stati considerati 1226 aeroporti e sono stati
studiati quattro dierenti casi:
è stata confrontata la lunghezza della pista dell'aeroporto e la lunghezza ne-
cessaria al decollo; ben il 98,04 % degli aeroporti considerati ha la lunghezza
di pista necessaria al decollo, sebbene questa condizione non sia applicabile
perchè non rispetta la normativa;
è stata confrontata la lunghezza della pista dell'aeroporto e la lunghezza di
pista bilanciata; in questo caso, il valore scende al 91,19 %, un valore di tutto
rispetto se si considera che corrisponde a ben 1118 aeroporti; questo valore è
accettabile se gli aeroporti considerati sono provvisti della RESA, oltre alla
runway stessa;
si è considerata la possibilità che la lunghezza della pista considerata non
comprenda la RESA; in questo caso bisogna allora incrementare la BFL dei
300 m già citati per rispettare la normativa minima emessa dall'ICAO e il
valore degli aeroporti accettabili scende al 86,62 %;
inne, volendo essere conservativi e rispettare la RESA consigliata incremen-
tandola di altri 300 m, si arriva a poter sfruttare l'80,18 %, che corrisponde a
983 aeroporti.
128

9 Decollo e Atterraggio
9.1.3 Salita
La fase di salita comincia al momento del lift-o e nisce a 1500 ft di altezza dalla
pista di decollo. Per ulteriori analisi il prolo di salita è diviso in 4 segmenti. I requi-
siti di aeronavigabilità richiedono che, con un motore inoperativo, siano mantenuti
determinati gradienti di salita in ogni segmento. Le performances al decollo degli
aerei civili sono solitamente denite sul gradiente del secondo step, che comincia nel
momento in cui viene ritratto il carrello e termina quando il velivolo si trova a 400
ft dal suolo. Durante questo segmento deve essere garantito un determinato rateo
di salita ipotizzando una velocità del velivolo pari al 15% in più della velocità di
stallo e un motore in avaria.
Il rateo è calcolato come segue:
γ =T −DW
ma, sotto le condizioni precedentemente descritte, durante il secondo segmento della
salita, la resistenza viene scomposta in 2 parti:
quella della congurazione base
quella asimmetrica dovuta al guasto di un motore
La resistenza della congurazione base si calcola con le formule applicate in
precedenza, con l'unica accortezza sulla velocità al momento del lift-o, che ne fa
variare il valore.
La resistenza dovuta al guasto del motore può invece essere quanticata dalla
seguente formula:
CDS = 0,3Af
dove Af e l'area della sezione del fan. A questa va aggiunta un'ulteriore resistenza
di trim, pari circa al 5% della resistenza della congurazione base.
Nella seguente tabella vengono riportati i valori delle grandezze necessarie a
quanticare il rateo di salita:
129
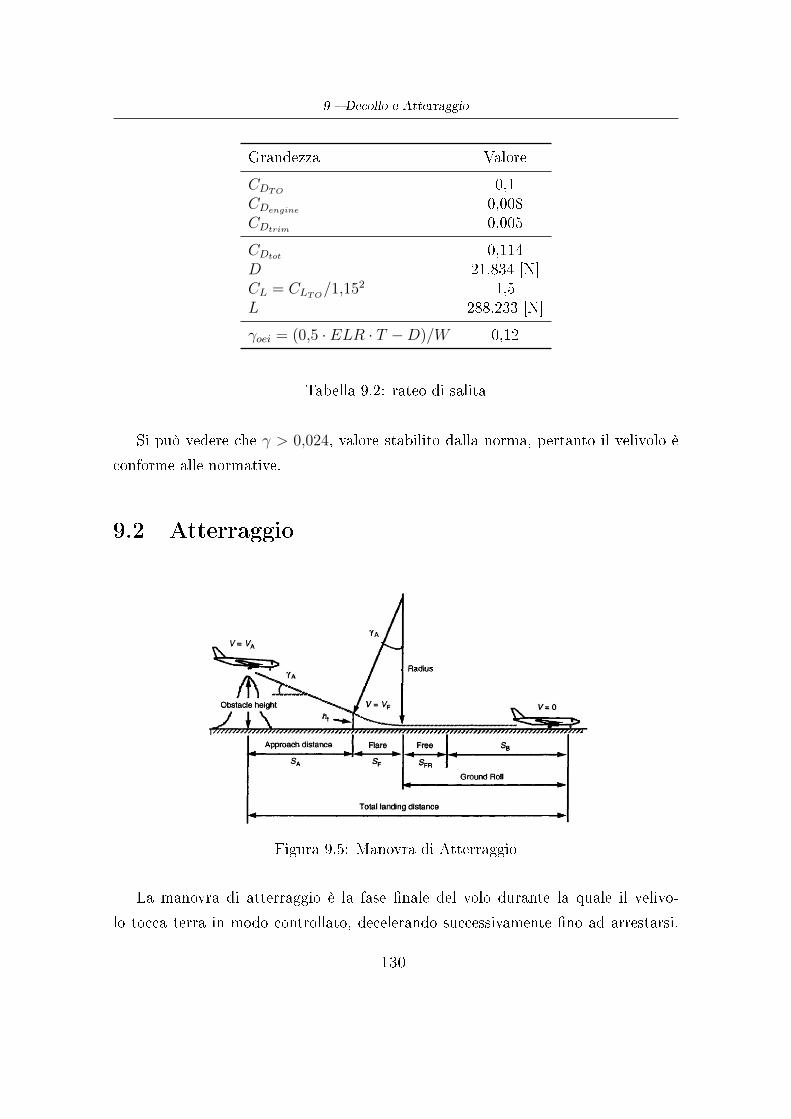
9 Decollo e Atterraggio
Grandezza Valore
CDTO0,1
CDengine0,008
CDtrim0,005
CDtot 0,114D 21.834 [N]CL = CLTO
/1,152 1,5L 288.233 [N]
γoei = (0,5 · ELR · T −D)/W 0,12
Tabella 9.2: rateo di salita
Si può vedere che γ > 0,024, valore stabilito dalla norma, pertanto il velivolo è
conforme alle normative.
9.2 Atterraggio
Figura 9.5: Manovra di Atterraggio
La manovra di atterraggio è la fase nale del volo durante la quale il velivo-
lo tocca terra in modo controllato, decelerando successivamente no ad arrestarsi.
130

9 Decollo e Atterraggio
Analoogamente a quanto fatto per la fase analoga di decollo, il calcolo dello spazio
di pista necessario all'atterraggio può essere schematizzato nelle seguenti 4 fasi:
Avvicinamento
Richiamata
Rullaggio
Stop
9.2.1 Stima distanza di atterraggio
Avvicinamento
Per gli aerei da trasporto civili l'angolo di avvicinamento è tipicamente di γ = 3°
rispetto all'orizzontale. Per le certicazioni JAR e FAR l'avvicinamento inizia ad
un'altezza da terra di 50 ft e nisce all'altezza di richiamata, data dalla formula
hF = r · γA · γA/2
La distanza di avvicinamento è quindi data da:
sc =obstacle height− hf
tan γA
Richiamata
Durante la manovra di richiamata, l'aereo decelera da una velocità di approccio
VA = 1,3VS no alla velocità di touch-down VTD = 1,15VS. La velocità media
durante la manovra è data da:
VF = (VA + VTD)/2
Il raggio della manovra di richiamata è dato (ipotizzando n = 1,2) da:
r = VF2/[g(n− 1)]
La distanza coperta durante la manovra sarà:
sF = r · γA
131

9 Decollo e Atterraggio
Rullaggio
Dopo il touch-down l'aereo rullerà sulla pista per pochi secondi prima che il pilota
operi la frenatura tramite freni e spoiler. La distanza coperta è chiamata free roll
distance ed è data approssimativamente da:
sFR = t · VTD
dove t è la durata del rullaggio.
Stop
La distanza di stop è data invece dalla formula
sB =1
2gKA
· ln[(KT +KA · VTD2)/KT ]
dove
KT = −µ
KA = −CD0ρ(2W/S)
La distanza totale è data dalla somma dei contributi e poi moltiplicata per un
fattore di sicurezza dato dalla certicazione JAR/FAR pari a 1,66.
Distanza [m]
Avvicinamento 221,77Richiamata 96,31Rullaggio 169,08Stop 320,13
Decollo 807,29Fattorizzata 1340,10
Tabella 9.3: Landing Distance
132
Capitolo 10
Stima pesi
10.1 Introduzione
La previsione del peso del velivolo e in particolare delle sue suddivisioni a livello di
sistemi è di fondamentale importanza sia per la stima delle principali caratteristi-
che di stabilità del sistema, ma anche per la determinazione delle sue prestazioni.
Proprio per l'importanza che questa fase riveste, durante l'intero progetto, essa vie-
ne ripetuta più volte, entrando sempre maggiormente nei dettagli della sommatoria
no a giungere al peso vero. Dal peso stimato in prima approssimazione a quello
ottenuto andando a sommare i pesi sici dei singoli componenti ormai determinati
e magari costruiti, la dierenza può essere anche notevole, ma è bene, per evitare
inutili ritardi o pericolosi errori nel dimensionamento, che i valori di tentativo siano
molto vicini a quelli veri.
Il primo valore che si tende ad assumere è quello ottenuto dall'analisi statistica;
successivamente, come è stato fatto anche in questo progetto, in base a dati già in
possesso, almeno sulle dimensioni geometriche principali del velivolo, si calcola un
valore, che viene utilizzato nella fase di Preliminary Design.
Il valore così ottenuto è quindi quello di partenza per la fase di stima pesi più
dettagliata, nella quale il peso totale verrà ricavato come sommatoria di pesi di
macroaree.
Per fare ciò la letteratura propone numerose teorie. Per questo progetto se ne
133

10 Stima pesi
sono applicate due dierenti, esposte in seguito. I valori ottenuti, verranno poi
confrontati e scelto quello più conservativo vista comunque la qualità ancora molto
approssimativa dei calcoli. Una volta deniti il progetto preliminare del velivolo, le
caratteristiche aerodinamiche e la geometria di ala, fusoliera ed impennaggi si può
passare ad eettuare una stima pesi dell'intera struttura; tale studio è di rilevante
importanza per i suoi risvolti sui costi di costruzione e sul consumo di combustibile.
Per sicurezza si sono utilizzati due metodi dierenti: il primo suggerito dal Civil
Jet Aircraft Design di Loyd Jenkinson e il secondo da uno studio dell'università di
Stanford.
10.2 Metodo Jenkinson
Per stimare il peso massimo a decollo del velivolo è utile determinarlo come la somma
dei principali componenti, riassunti nella formula:
MTOM = MW+MT+MB+MN+MUC+MSC+MPROP+MFE+MOP+MCR+MPAY +MF
dove:
MW = massa dell'ala (inclusi ap e superci di controllo)
MT = massa degli impennaggi
MB = massa della fusoliera, incluso l'attacco alare
MN = massa gondole
MUC = massa carrelli
MSC = massa superci di controllo
MPROP = massa del sistema propulsivo
MFE = massa dei sistemi ssi (elettrico, idraulico, ecc...)
MOP = massa dei sistemi non ssi
134
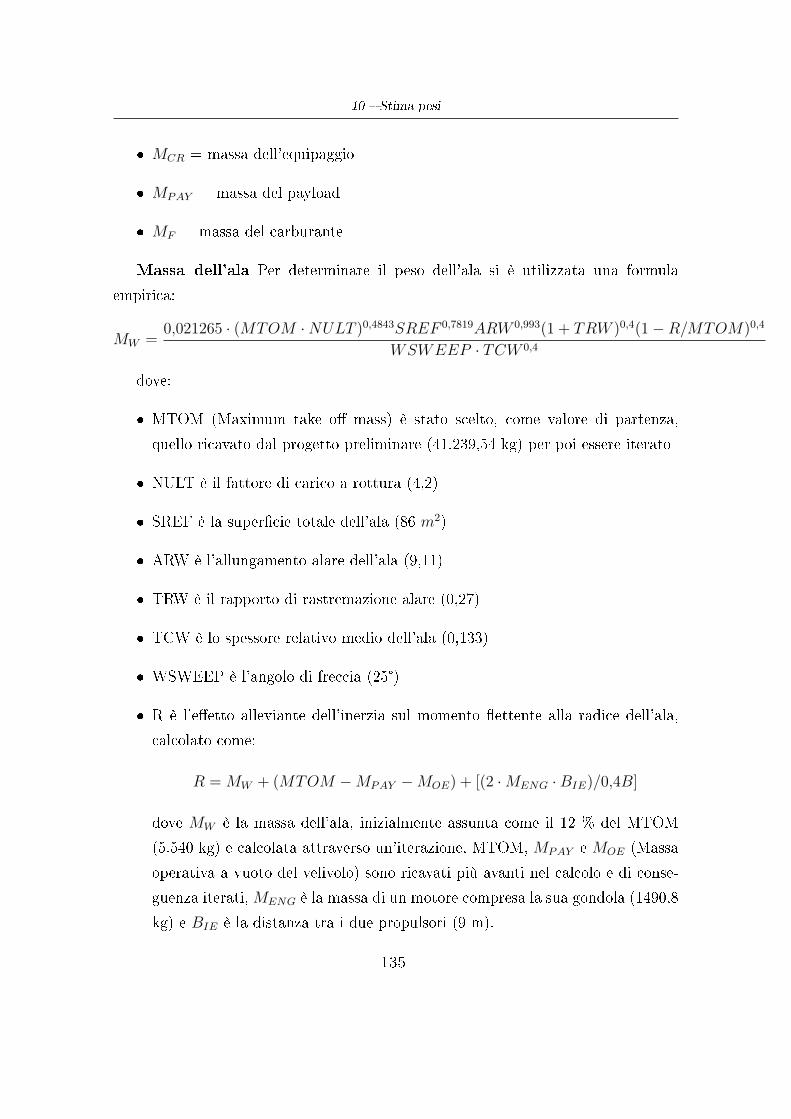
10 Stima pesi
MCR = massa dell'equipaggio
MPAY = massa del payload
MF = massa del carburante
Massa dell'ala Per determinare il peso dell'ala si è utilizzata una formula
empirica:
MW =0,021265 · (MTOM ·NULT )0,4843SREF 0,7819ARW 0,993(1 + TRW )0,4(1−R/MTOM)0,4
WSWEEP · TCW 0,4
dove:
MTOM (Maximum take o mass) è stato scelto, come valore di partenza,
quello ricavato dal progetto preliminare (41.239,54 kg) per poi essere iterato
NULT è il fattore di carico a rottura (4,2)
SREF è la supercie totale dell'ala (86 m2)
ARW è l'allungamento alare dell'ala (9,11)
TRW è il rapporto di rastremazione alare (0,27)
TCW è lo spessore relativo medio dell'ala (0,133)
WSWEEP è l'angolo di freccia (25°)
R è l'eetto alleviante dell'inerzia sul momento ettente alla radice dell'ala,
calcolato come:
R = MW + (MTOM −MPAY −MOE) + [(2 ·MENG ·BIE)/0,4B]
dove MW è la massa dell'ala, inizialmente assunta come il 12 % del MTOM
(5.540 kg) e calcolata attraverso un'iterazione, MTOM, MPAY e MOE (Massa
operativa a vuoto del velivolo) sono ricavati più avanti nel calcolo e di conse-
guenza iterati,MENG è la massa di un motore compresa la sua gondola (1490,8
kg) e BIE è la distanza tra i due propulsori (9 m).
135
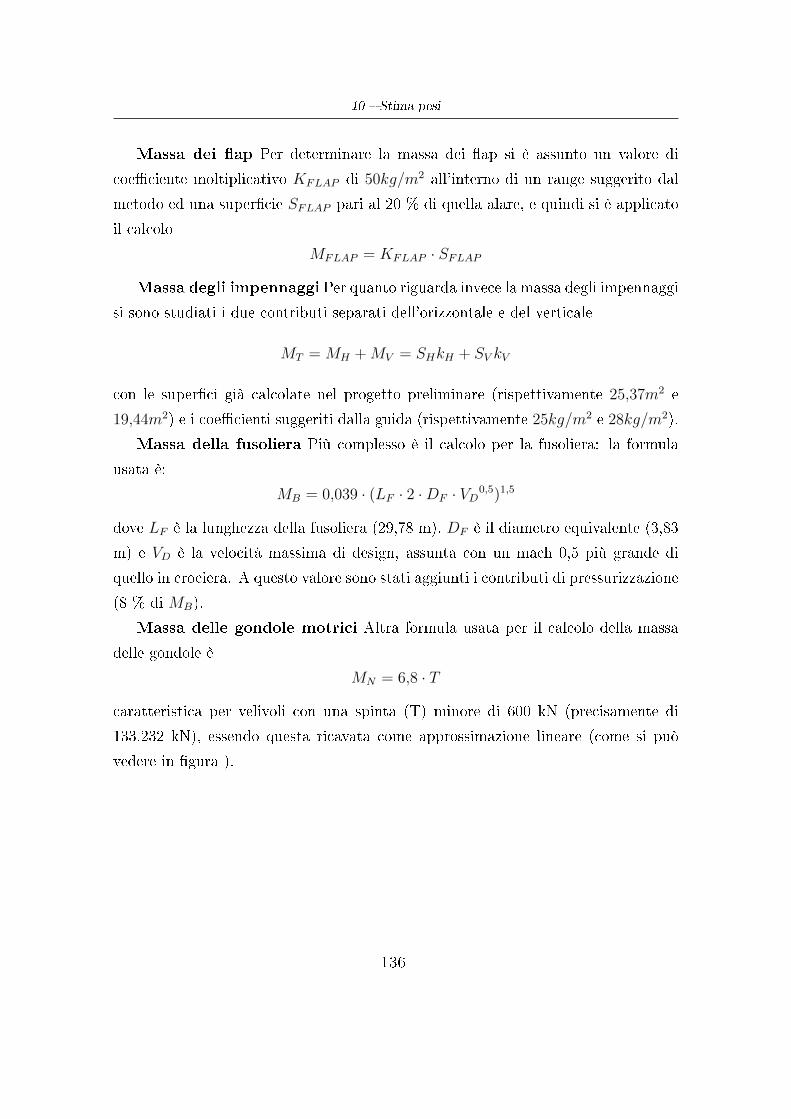
10 Stima pesi
Massa dei ap Per determinare la massa dei ap si è assunto un valore di
coeciente moltiplicativo KFLAP di 50kg/m2 all'interno di un range suggerito dal
metodo ed una supercie SFLAP pari al 20 % di quella alare, e quindi si è applicato
il calcolo
MFLAP = KFLAP · SFLAP
Massa degli impennaggi Per quanto riguarda invece la massa degli impennaggi
si sono studiati i due contributi separati dell'orizzontale e del verticale
MT = MH +MV = SHkH + SV kV
con le superci già calcolate nel progetto preliminare (rispettivamente 25,37m2 e
19,44m2) e i coecienti suggeriti dalla guida (rispettivamente 25kg/m2 e 28kg/m2).
Massa della fusoliera Più complesso è il calcolo per la fusoliera: la formula
usata è:
MB = 0,039 · (LF · 2 ·DF · VD0,5)1,5
dove LF è la lunghezza della fusoliera (29,78 m), DF è il diametro equivalente (3,83
m) e VD è la velocità massima di design, assunta con un mach 0,5 più grande di
quello in crociera. A questo valore sono stati aggiunti i contributi di pressurizzazione
(8 % di MB).
Massa delle gondole motrici Altra formula usata per il calcolo della massa
delle gondole è
MN = 6,8 · T
caratteristica per velivoli con una spinta (T) minore di 600 kN (precisamente di
133.232 kN), essendo questa ricavata come approssimazione lineare (come si può
vedere in gura ).
136
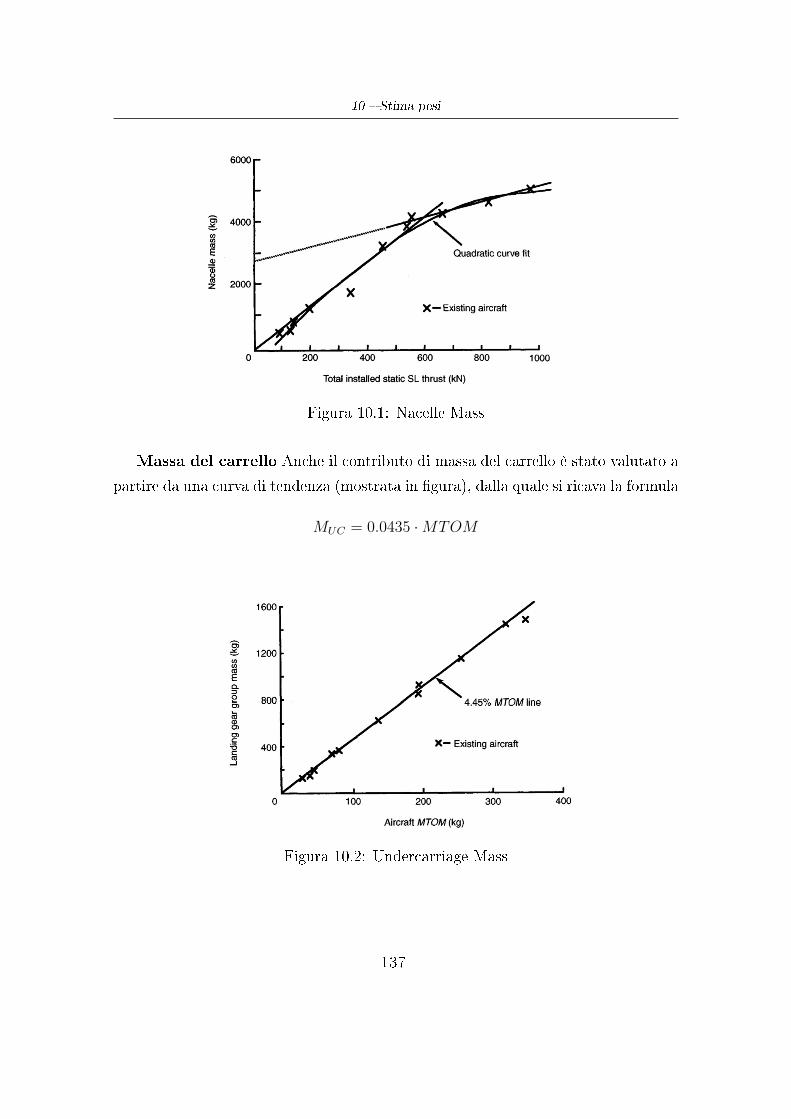
10 Stima pesi
Figura 10.1: Nacelle Mass
Massa del carrello Anche il contributo di massa del carrello è stato valutato a
partire da una curva di tendenza (mostrata in gura), dalla quale si ricava la formula
MUC = 0.0435 ·MTOM
Figura 10.2: Undercarriage Mass
137

10 Stima pesi
Massa delle superci di controllo Per la massa delle superci di controllo si
è usata invece la formula empirica
MSC = 0,4 ·MTOM · 0,684
Anche queste ultime due componenti troveranno il loro valore nale soltanto a con-
vergenza dell'iterazione. Un'ulteriore accorgimento è stato preso andando a dimi-
nuire il peso dell'ala, dei ap, degli impennaggi, della fusoliera, delle gondole e delle
superci di controllo di circa il 20 % , essendo questo studio condotto principalmente
su velivoli in alluminio e non in materiale composito, relativamente più leggero.
Massa strutturale
La somma delle componenti sopra elencate concorre nella determinazione della massa
strutturale
MSTR = MW +MFLAP +MT +MB +MN +MUC +MSC
Massa del sistema propulsivo Per calcolare la massa del sistema propulsivo
si è dapprima proceduto a calcolare la massa del motore in questo modo
Me = specific mass · T
dove la specic mass del motore è stata trovata valutandola nel graco in gura pari
a 22,38 kg/kN
138
10 Stima pesi
Figura 10.3: Specic Engine Mass
Quindi è stato possibile calcolare
MPROP = Me · 1,43
Massa del combustibile Essendo il velivolo a breve raggio, si è assunto poi un
valore di rapporto tra massa dei sistemi ssi e MTOM pari al 14 %, potendo così
calcolare
MFE = 0,14 ·MTOM
Massa a vuoto
Aggiungendo alla massa strutturale questi due nuovi contributi si ottiene la massa
a vuoto del velivolo
ME = MSTR +MPROP +MFE
Per quanto riguarda la MOP il discorso è più lungo, in quanto bisogna distinguere
vari contributi: per mappe e manuali per l'equipaggio si è scelta una riduzione del
20 % rispetto alla stima tradizionale (10 kg) grazie all'utilizzo di computer e dati
elettronici, sono stati considerati solo snack per i passeggeri ( e quindi si è preso
un coeciente di 2.27 kg a persona) ed una scorta d'acqua per voli di breve durata
(coeciente pari a 1.36 a persona), supponendo tali voli eettuabili non solo sopra
139
10 Stima pesi
la terraferma si è scelto un coeciente di 0.9 kg a persona per gli equipaggiamenti
di sicurezza e inne si è calcolata la massa di residui di carburante e oli in questo
modo
MR = 0,15 · V 2/3
dove V è la capacità in litri del serbatoio (13215 l), valutata sul CAD dell'ala
disegnato su CATIA.
Assumendo inne 93 kg per ogni membro dell'equipaggio e 63 kg per ogni hostess
si è calcolata la massa dell'equipaggio la quale aggiunta insieme allaMOP alla massa
a vuoto del velivolo concorre a determinare la massa operativa a vuoto
MOE = ME +MOP +MCR
Sommando a questa massa quella del Payload
MPAY = (mp+mb) ∗ numero passeggeri
dove sono stati assunti la massa di una persona (mp) pari a 80 kg, la massa di un
bagaglio (mb) pari a 30 kg, si ottiene la massa a zero carburante
MZF = MOE +MPAY
Inne assumendo la densità del combustibile (ρc) pari a 0,8 kg/l e conoscendo la
capacità del serbatoio (C) si è calcolata la massa di combustibile da imbarcare
MF = C · ρc
e quindi la MTOM del velivolo. Portando il calcolo a convergenza si sono trovati i
seguenti risultati:
140
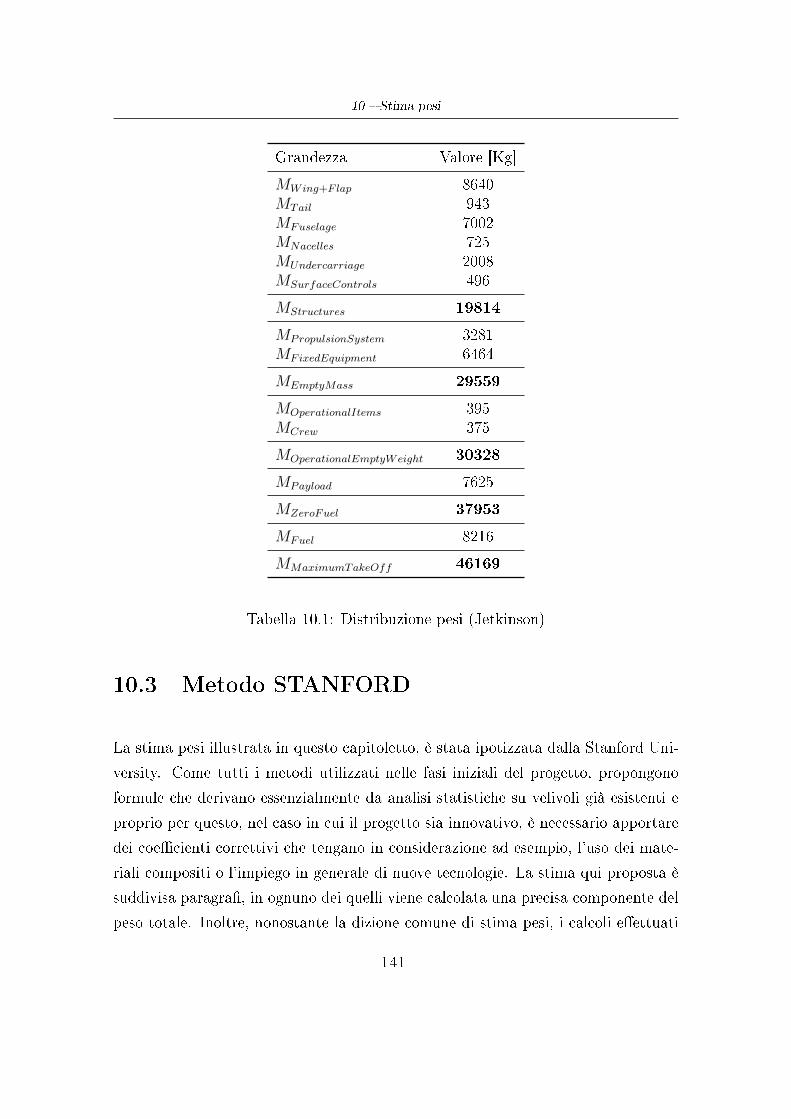
10 Stima pesi
Grandezza Valore [Kg]
MWing+Flap 8640MTail 943MFuselage 7002MNacelles 725MUndercarriage 2008MSurfaceControls 496
MStructures 19814
MPropulsionSystem 3281MFixedEquipment 6464
MEmptyMass 29559
MOperationalItems 395MCrew 375
MOperationalEmptyWeight 30328
MPayload 7625
MZeroFuel 37953
MFuel 8216
MMaximumTakeOff 46169
Tabella 10.1: Distribuzione pesi (Jetkinson)
10.3 Metodo STANFORD
La stima pesi illustrata in questo capitoletto, è stata ipotizzata dalla Stanford Uni-
versity. Come tutti i metodi utilizzati nelle fasi iniziali del progetto, propongono
formule che derivano essenzialmente da analisi statistiche su velivoli già esistenti e
proprio per questo, nel caso in cui il progetto sia innovativo, è necessario apportare
dei coecienti correttivi che tengano in considerazione ad esempio, l'uso dei mate-
riali compositi o l'impiego in generale di nuove tecnologie. La stima qui proposta è
suddivisa paragra, in ognuno dei quelli viene calcolata una precisa componente del
peso totale. Inoltre, nonostante la dizione comune di stima pesi, i calcoli eettuati
141

10 Stima pesi
permettono il calcolo della massa totale; inoltre è opportuno porre grande atten-
zione alle unità di misura da utilizzare nelle formule in quanto, purtroppo, nella
maggioranza dei casi, compaiono coecienti dimensionati.
Massa dell'ala La stima di massa dell'ala è basata su un'indagine statistica di
un campione di 15 esemplari, dei quali si misura in particolare il momento ettente
del cassone alare. Per questo, oltre a indicazioni riguardanti la geometria dell'ala, è
richiesto l'inserimento del ultimate load factor (Nult)
Mwing = 4,22 · Swg + 1,642 · 10−6 · Nultb3√MTOM · ZFM(1 + 2λ)
(t/c)avg cos2 Λ · Swg cot(1 + λ)
dove
Mwing =massa ala [lb]
Swg =supercie alare [ft2]
Nult =ultimate load factor
b = apertura alare [ft]
MTOM= Maximum Take O Mass
ZFM =Zero Fuel Mass
(t/c)avg =spessore percentuale
Λ= angolo di freccia
λ=wing taper ratio
Il valore ottenuto da questa formula è di:
Mwing = 8.708,18lb = 3.950,00kg
Massa dell'impennaggio orizzontale La stima della massa dell'impennaggio
orizzontale include la massa dell'equilibratore all'interno del calcolo, richiedendo
142

10 Stima pesi
l'inserimento dell'estensione della supercie mobile. Si assume che essa occupi circa
il 25% dell'area dell'impennaggio considerato.
MH = 5,25 · SH + 0,8 · 10−6 · Nultb3 ·MTOM ·MACw
√SH
(t/c)avg cos2 Λ · lH · SH1,5 cot
dove SH =estensione supercie mobile dell'impennaggio orizzontale [ft2]
MH = 396,69lb = 179,94kg
Massa dell'impennaggio verticale Diversamente da quanto fatto per la su-
percie di coda orizzontale, per quella verticale si procede andando a determinare
prima la supercie dell'impennaggio verticale senza supercie mobile, andando poi
ad aggiungere il peso di questo componente.
MV = 2,62 · SV + 1,5 · 10−5 ·NultbV
3 ·(
8 + 0,44MTOMSwg
)(t/c)avg cos2 Λ
dove SV =estensione impennaggio verticale [ft2] Come contributo per la massa della
supercie mobile, si considera un peso aggiuntivo di circa il 60%.
MRudder = 259,65lb = 117,78kg
Si perviene quindi ad una massa complessiva di
MI = MH +MV = 1.305,45lb = 592,15kg
Massa della fusoliera Per la determinazione della massa della fusoliera si pro-
pone di calcolare due indici che tengano in considerazione i due maggiori contributi
delle sollecitazioni a cui essa è soggetta: carichi dovuti alla pressurizzazione e quelli
dovuti al momento ettente.
Determinazione dell'indice di pressione
IP = 1,5 · 10−3 · P ·B = 22,41
dove P= pressione dierenziale che agisce sulla fusoliera (lb/ft2) =1.187,62
B= larghezza della fusoliera (ft) NB: il valore di P è stato determinato come
dierenza tra la pressione atmosferica agente sulla fusoliera alla quota di cro-
ciera di 11.000 m e quella dovuta alla pressurizzazione interna, che si ricorda
essere un valore di normativa.
143

10 Stima pesi
Determinazione dell'indice di momento ettente
IB = 1,91 · 10−4 ·W · L · 1
H2= 18,04
dove
W = M0F −Mwing −Mprop
Mprop =massa dell'impianto propulsivo L =lunghezza della fusoliera H =al-
tezza della fusoliera
Determinazione dell'indice di momento ettente
Ifus =IP
2 + Ib2
2Ib
Calcolati questi indici è stato possibile ricavare il valore corrispondente alla massa
della fusoliera con la seguente formula:
Mfus = (1,051 + 0,102 · Ifus) · Sfus = 4.401,43Kg
Massa del carrello di atterraggio Si stima che la massa del carrello di atter-
raggio sia all'incirca il 4% della massima massa al decollo. Questo valore include un
contributo della struttura del sistema di attuazione e sterzatura.
Mgear = 0,04 ·MTOM = 1.522,52kg
Massa delle superci di controllo Si tratta del contributo dovuto ai sistemi
di attuazione necessari alla movimentazione delle superci mobili di coda; si assume
che questo valore sia essenzialmente proporzionale alla supercie degli impennaggi.
Msc = 3,5 · (SH + SV ) = 765,68kg
dove il coeciente di proporzionalità è stato scelto ipotizzando un sistema comple-
tamente potenziato.
Massa del sistema propulsivo La massa del sistema propulsivo è circa del
60% superiore a quella del motore.
Mprop = 1,6 ·Mdryengine = 4.770,79kg
144

10 Stima pesi
Massa del Auxiliary Power Unit La massa dell'APU è stimata assumendo
un peso aggiuntivo per ciascun passeggero.
MAPU = 7 ·Npax = 260,34kg
Massa della strumentazione ssa e degli apparati di navigazione In
questo caso la stima viene fatta su base statistica, attribuendo un peso arbitrario
a seconda della categoria e quindi della complessità del velivolo. Per un regional è
plausibile scegliere un valore di 800 libbre.
Minst = 362,88kg
Massa dei sistemi idraulico e pneumatico La massa complessiva di que-
sti sistemi è assunta proporzionale alla supercie di riferimento, che solitamente è
quella alare. Il coeciente adottato, derivante da analisi puramente statistica è di
0,65lb/ft2.
Mhyd = 0,65 · Sref = 272,93kg
Massa del sistema elettrico ed elettronico Per questi due sottosistemi, tra
i più importanti su un velivolo di nuova generazione, esistono due metodi dierenti;
per la massa dell'impianto elettrico viene proposta una correlazione a base statistica
che prevede una massa aggiuntiva di 13 libbre per ogni passeggero. In realtà, per
aerei di nuova concezione , tale sistema può essere ampliato, ma grazie all'utilizzo
di valori di tensione molto alta e di motori elettrici di nuova generazione, sarebbe
addirittura possibile assumere dei coecienti più bassi. Per essere conservativi, si
assume valida la formula proposta:
Melettrico = 13 ·Npax = 483,53kg
Per quanto concerne il sistema elettronico, si assume un valore stanard per classe di
velivolo:
Melettronico = 408,24kg
Massa arredamento Dalla letteratura si ottiene la seguente correlazione:
Marredamento = (43,7− 0,037 ·Npax) ·Npax+ 46 ·Npax = 3223,54kg
145
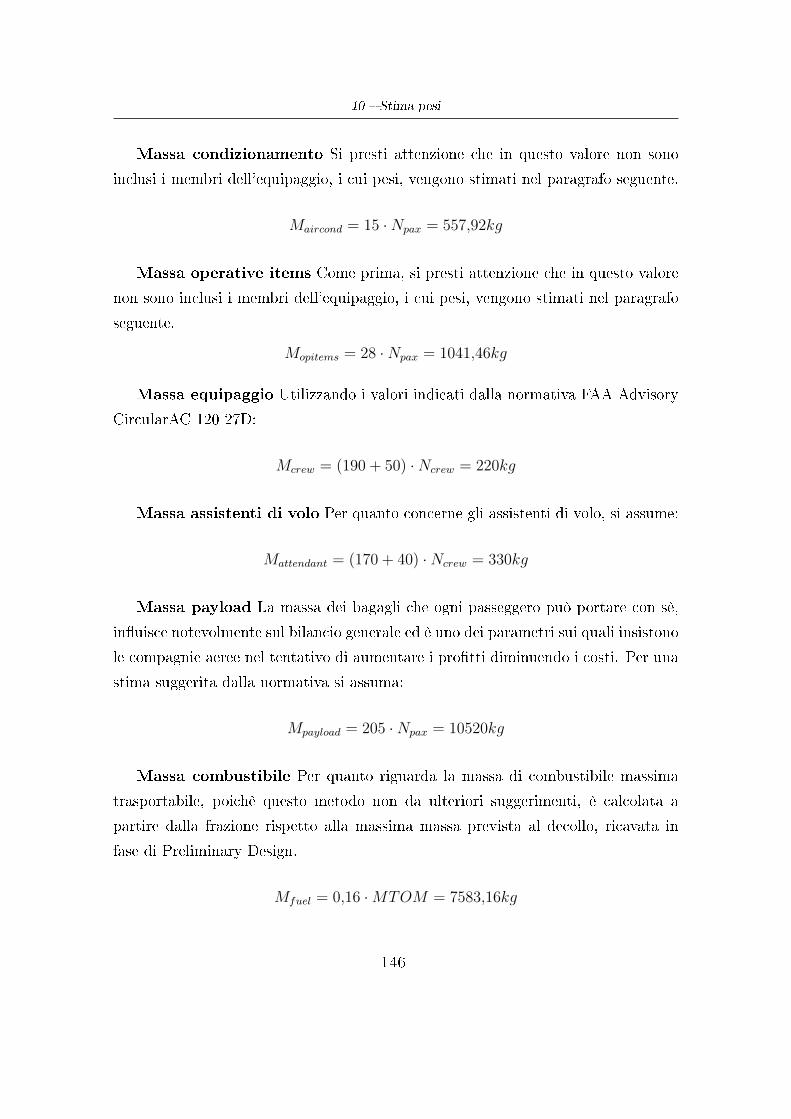
10 Stima pesi
Massa condizionamento Si presti attenzione che in questo valore non sono
inclusi i membri dell'equipaggio, i cui pesi, vengono stimati nel paragrafo seguente.
Maircond = 15 ·Npax = 557,92kg
Massa operative items Come prima, si presti attenzione che in questo valore
non sono inclusi i membri dell'equipaggio, i cui pesi, vengono stimati nel paragrafo
seguente.
Mopitems = 28 ·Npax = 1041,46kg
Massa equipaggio Utilizzando i valori indicati dalla normativa FAA Advisory
CircularAC 120-27D:
Mcrew = (190 + 50) ·Ncrew = 220kg
Massa assistenti di volo Per quanto concerne gli assistenti di volo, si assume:
Mattendant = (170 + 40) ·Ncrew = 330kg
Massa payload La massa dei bagagli che ogni passeggero può portare con sè,
inuisce notevolmente sul bilancio generale ed è uno dei parametri sui quali insistono
le compagnie aeree nel tentativo di aumentare i protti diminuendo i costi. Per una
stima suggerita dalla normativa si assuma:
Mpayload = 205 ·Npax = 10520kg
Massa combustibile Per quanto riguarda la massa di combustibile massima
trasportabile, poichè questo metodo non da ulteriori suggerimenti, è calcolata a
partire dalla frazione rispetto alla massima massa prevista al decollo, ricavata in
fase di Preliminary Design.
Mfuel = 0,16 ·MTOM = 7583,16kg
146
10 Stima pesi
Figura 10.4: Distribuzione Pesi (Stanford)
10.3.1 Conclusioni
Andando a sommare tutti questi contributi si ottiene il cosiddetto Maximum Take
O Mass. Come si può osservare attentamente, il valore totale è però utilizzato
all'interno di numerose formule nel metodo. Al ne di trovare un valore adeguato,
è necessario prevedere un ciclo che, dato un valore di tentativo di partenza, porti a
convergenza il calcolo, andando a sostituire, ad ogni iterazione, il valore di tentativo
con quello calcolato al passo precedente. Il tutto è stato implementato all'interno
del programma Excel allegato. Il primo valore di input inserito è quello ricavato
dalla stima del Preliminary Design.
MTOMpreliminary= 41239kg
MTOMstanford= 41266kg
147

Capitolo 11
Stabilità statica longitudinale
11.1 Introduzione
In questo capitolo viene analizzata la capacità del velivolo di rispondere ad una per-
turbazione di incidenza generando un momento di beccheggio in grado riportarlo in
condizioni di equilibrio. Verranno determinate per il velivolo le posizioni del bari-
centro e del punto neutro considerando l'inuenza sia delle superci portanti che
dei corpi fusiformi. Inne si tracceranno le curve fondamentali del velivolo completo
(CL − α) e (Cm − α). Per eettuare questo studio sono necessari i risultati otte-
nuti dallo studio aerodinamico, la stima pesi appena eettuata e le caratteristiche
geometriche calcolate nel preliminary design.
11.2 Baricentro
Da un disegno preliminare è stato possibile ottenere le coordinate approssimate del
baricentro di ogni componente. Grazie a esse e ai pesi calcolati durante la stima, è
148
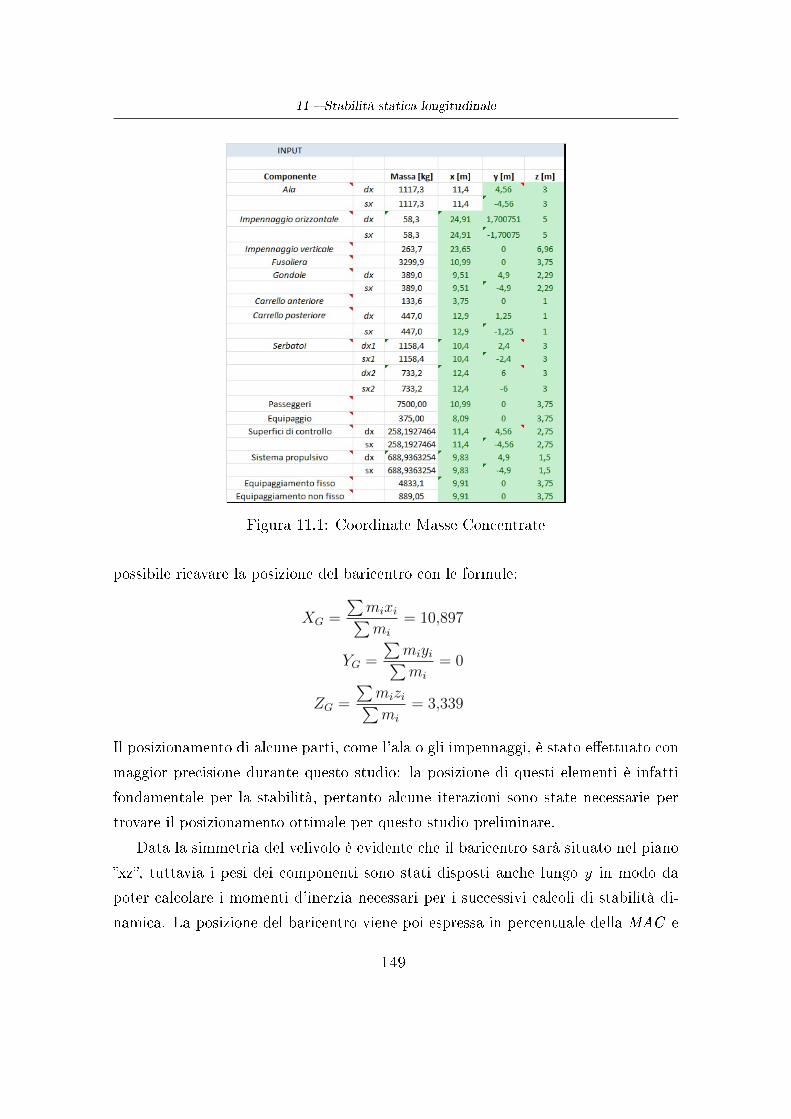
11 Stabilità statica longitudinale
Figura 11.1: Coordinate Masse Concentrate
possibile ricavare la posizione del baricentro con le formule:
XG =
∑mixi∑mi
= 10,897
YG =
∑miyi∑mi
= 0
ZG =
∑mizi∑mi
= 3,339
Il posizionamento di alcune parti, come l'ala o gli impennaggi, è stato eettuato con
maggior precisione durante questo studio: la posizione di questi elementi è infatti
fondamentale per la stabilità, pertanto alcune iterazioni sono state necessarie per
trovare il posizionamento ottimale per questo studio preliminare.
Data la simmetria del velivolo è evidente che il baricentro sarà situato nel piano
xz, tuttavia i pesi dei componenti sono stati disposti anche lungo y in modo da
poter calcolare i momenti d'inerzia necessari per i successivi calcoli di stabilità di-
namica. La posizione del baricentro viene poi espressa in percentuale della MAC e
149

11 Stabilità statica longitudinale
indicata come h:
h = 0,234
11.3 Fuoco ala isolata
Il fuoco dell'ala coincide con il punto neutro dell'ala isolata (sui quarti anteriori) e
costituisce il punto iniziale per il calcolo del punto neutro del velivolo completo.
hnw = 0,25
11.4 Spostamenti del fuoco dovuti ai corpi fusiformi
L'aggiunta di corpi fusiformi (fusoliera e gondole) causa lo spostamento (∆hn) del
fuoco dell'ala isolata: esso arretra, avvicinandosi al bordo di attacco. Per valutare
questi contributi si è utilizzato il seguente diagramma
Figura 11.2: Spostamento baricentro corpi fusiformi
150

11 Stabilità statica longitudinale
Fusoliera
c/l = 0,107
−∆h
(Sc
wfcr2
)= 1,4
∆hfus = −0,159
Gondole
c/l = 0,542
−∆h
(Sc
wfcr2
)= 0,35
∆hfus = −0,018
Totale
Complessivamente si avrà:
∆htot = ∆hfus + 2∆hnac = −0,198
quindi per il complesso ala-fusoliera:
hnwb = 0,055
11.5 Punto neutro
Considerando l'equilibrio del velivolo è possibile ricavare il punto neutro come:
hn = hnwb + VhatCLα
(1− δε
δα
)= 0,657
151

11 Stabilità statica longitudinale
11.6 Margine statico
Il margine di escursione che il baricentro può avere mantenendo in sicurezza il
velivolo è denito margine statico e vale:
h− hn = −0,422
Il fatto che sia negativo (punto neutro dietro il baricentro) conferma il buon posi-
zionamento dell'ala durante il progetto.
11.7 Curve caratteristiche
11.7.1 Cm − α
Per vericare l'eettiva stabilità del velivolo sul piano longitudinale è necessario che
siano vericate tre condizioni:
Cm0 > 0 per assicurare equilibrabilità;
Cmα < 0 per assicurare stabilità statica;
h < hn cioè baricentro davanti al punto neutro.
L'ultima è già stata vericata, mentre per le prime due è necessario calcolare
esplicitamente
Cm0 = Cm0wb − Vhat(it − ε0)
[1− at
CLα
StS
(1− δε
δα
)]= 0,079
Cmα = CLα(h− hn) = −2,331
Ora è possibile tracciare la curva Cm − α ricordando che
Cm = Cm0 + Cmαα
Il punto per cui Cm = 0 individua la condizione di equilibrio. Si vuole che questa
condizione coincida con l'incidenza di volo così da non necessitare di trim in crocie-
ra: per far sì che ciò accada è necessario calettare opportunamente l'impennaggio
152
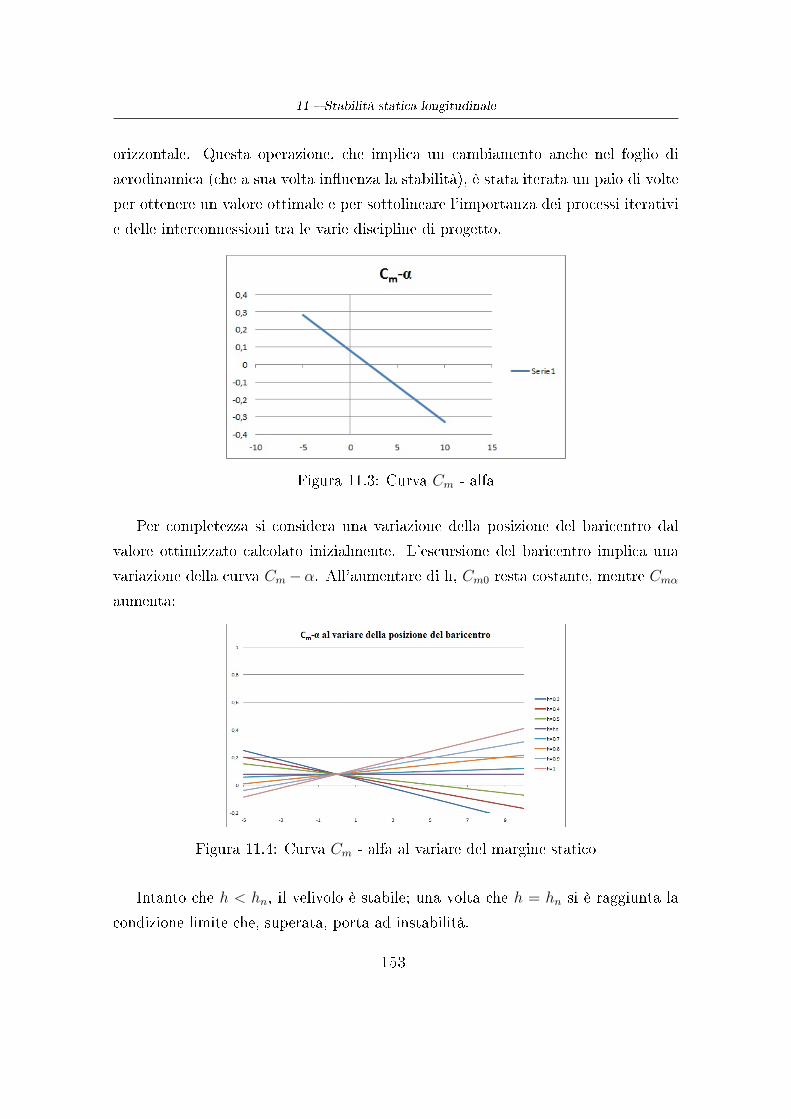
11 Stabilità statica longitudinale
orizzontale. Questa operazione, che implica un cambiamento anche nel foglio di
aerodinamica (che a sua volta inuenza la stabilità), è stata iterata un paio di volte
per ottenere un valore ottimale e per sottolineare l'importanza dei processi iterativi
e delle interconnessioni tra le varie discipline di progetto.
Figura 11.3: Curva Cm - alfa
Per completezza si considera una variazione della posizione del baricentro dal
valore ottimizzato calcolato inizialmente. L'escursione del baricentro implica una
variazione della curva Cm−α. All'aumentare di h, Cm0 resta costante, mentre Cmα
aumenta:
Figura 11.4: Curva Cm - alfa al variare del margine statico
Intanto che h < hn, il velivolo è stabile; una volta che h = hn si è raggiunta la
condizione limite che, superata, porta ad instabilità.
153

11 Stabilità statica longitudinale
11.7.2 CL − α
Questa curva viene modicata in seguito all'aggiunta di fusoliera ed impennaggi, che
variano il coeciente angolare di portanza. Partendo dalla curva per l'ala isolata, è
possibile ricavare la curva totale:
(CLα)tot = (1− F )CLαw
dove
F =atabw
StS
(1− δε
δα
)quindi
CLαw = 6,203
Figura 11.5: Curva CL - alfa
11.7.3 Verica dell'impennaggio orizzontale
Per vericare che la supercie dell'impennaggio equilibri il velivolo si procede con-
siderando le forze e i momenti agenti nel piano longitudinale. Dalla meccanica del
volo, eettuando alcune semplicazioni, si ricava
Lt = M0wb + nzW (h− hnbw)c
lt
Inoltre si sa che
Lt =1
2ρStVt
2CLt
154

11 Stabilità statica longitudinale
Perciò è immediato ricavare St che nel caso in esame vale circa 16 Questo valore
è minore di quanto calcolato nel design preliminare: l'impennaggio orizzontale è
suciente ad equilibrare il velivolo in crociera. Per una verica completa è necessario
considerare anche la rotazione al decollo, cosa che è stata fatta precedentemente.
155
Capitolo 12
Stabilità dinamica longitudinale
12.1 Introduzione allo studio della dinamica longi-
tudinale
L'aver vericato che il velivolo sia staticamente stabile, non è suciente a dichiarare
che il velivolo sia tale anche dinamicamente. Bisogna quindi assicurarsi che, dopo un
qualche disturbo, di qualunque natura, il velivolo torni, entro un certo tempo e con
una certa modalità, alla condizione di equilibrio che gli compete. Al ne di valutare
le caratteristiche della risposta del sistema, è necessario andare a valutare alcune
grandezze fondamentali, quali pulsazione propria, smorzamento e tempi di risposta
(periodi e tempi di dimezzamento) In particolare, in questo capitolo, verrà trattata la
stabilità dinamica longitudinale: per fare ciò è necessario scrivere il modello creato
andando a scrivere le equazioni dierenziali che descrivono il comportamento del
velivolo nel piano longitudinale. Tale sistema sarà così composto:
equazione di equilibrio alla traslazione lungo l'asse x
equazione di equilibrio alla traslazione lungo l'asse z
relazione cinematica che lega la variazione dell'angolo α alla velocità di bec-
cheggio q
equazione di equilibrio attorno all'asse y
156

12 Stabilità dinamica longitudinale
Il sistema di equazioni può poi essere scritto in vari modi, ognuno dei quali
più o meno conveniente, a seconda dell'uso che se ne deve fare. In particolare, in
questo caso, si utilizza la scrittura del sistema adimensionale, in cui le grandezze
che compaiono sono state adimensionalizzate secondo i canoni tipici della meccanica
del volo. In funzione di questa scelta, le grandezze che compariranno, saranno tutte
adimensionate. Ecco il sistema:
dV
dt=
1
2µ
[(CTV cosαT − CDV ) ∆V + (CLeq − CDα) ∆α− CWeqθ
]
dα
dt= −CTV sinαT − CLV + 2CWeq
2µ+ CLα∆V − CLα + Cdeq
2µ+ CLα∆α +
2µ− CLq2µ+ CLα
q
dθ
dt= q
dq
dt=
1
Jy
[(CMV −
CMα (CTV sinαT + CLV + 2CWeq)
2µ+ CLα
)∆V +
(CMα −
CMα (CLα + Cdeq)
2µ+ CLα
)∆α
]+
(CMq +
CMα (2µ− CLq)2µ+ CLα
)q
Il sistema così scritto vede già raccolti i coecienti relativi alle singole incognite.
E' quindi possibile passare ad una notazione più eciente: la forma matriciale; essa
ha il vantaggio di condurre rapidamente alla soluzione del sistema e al tempo stesso
di poter implementare tale sistema su un programma come Simulink o anche in
ambiente Matlab in modo da poter vedere agevolmente la risposta di tale sistema
ad un determinato input. Ecco il sistema proposto.
X = AX +BU
dove
X =[∆V∆αθq
]= vettoredistato
A =matrice di stato B = matrice di controllo U = vettore di comando In tale sistema
STATE-SPACE, compaiono delle grandezze, che per ora verranno considerate nulle
157

12 Stabilità dinamica longitudinale
perchè sono i parametri che competono al caso di risposta ad un comando. In questo
caso si è interessati a valutare la dinamica longitudinale con le condizioni di moto
libero, senza forzante.
X = AX
Trattandosi di equazioni dierenziali, è possibile supporre soluzioni di tipo esponen-
ziale.
X = [E]eλt
Il problema diventa quindi un problema agli autovalori; essi possono essere rica-
vati dalla soluzione del determinante proprio della matrice A. Facendo ciò, si ottiene
un' equazione algebrica di quarto grado; si ricavano quindi 4 dierenti autovalori: è
possibile dimostrare che il velivolo è stabile se e solo se gli autovalori hanno parte
reale negativa. Fatte queste considerazioni preliminari, andando ad inserire all'inter-
no di un le Matlab i dati relativi al velivolo preso in considarazione, si è provveduto
per prima cosa a calcolare tutte le grandezze che ancora non erano note, quali alcune
derivate aerodinamiche; successivamente, scritte le componenti della matrice A, si
sono calcolati gli autovalori e gli autovettori corrispondenti a tali soluzioni.
12.2 Calcolo della matrici
Per calcolare la matrice A contenente i coecienti del sistema dierenziale, è neces-
sario disporre delle grandezze esposte di seguito:
158
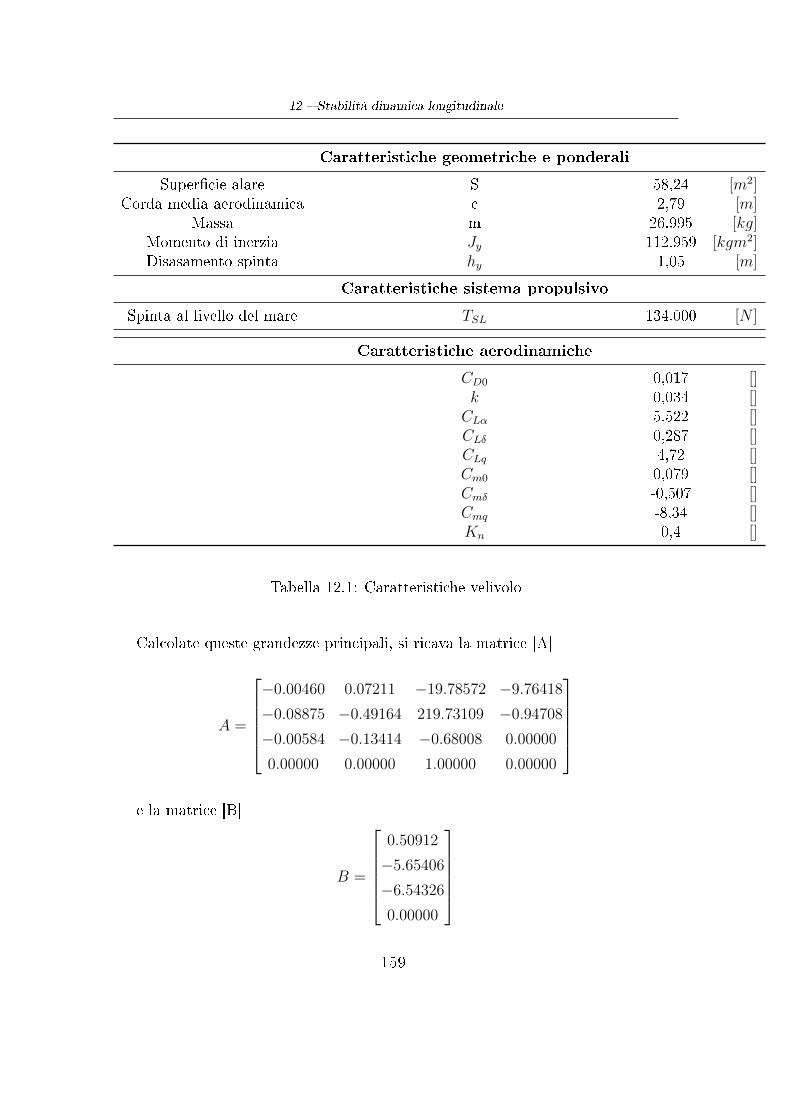
12 Stabilità dinamica longitudinale
Caratteristiche geometriche e ponderali
Supercie alare S 58,24 [m2]Corda media aerodinamica c 2,79 [m]
Massa m 26.995 [kg]Momento di inerzia Jy 112.959 [kgm2]Disasamento spinta hy 1,05 [m]
Caratteristiche sistema propulsivo
Spinta al livello del mare TSL 134.000 [N ]
Caratteristiche aerodinamiche
CD0 0,017 []k 0,034 []CLα 5,522 []CLδ 0,287 []CLq 4,72 []Cm0 0,079 []Cmδ -0,507 []Cmq -8,34 []Kn 0,4 []
Tabella 12.1: Caratteristiche velivolo
Calcolate queste grandezze principali, si ricava la matrice [A]
A =
−0.00460 0.07211 −19.78572 −9.76418
−0.08875 −0.49164 219.73109 −0.94708
−0.00584 −0.13414 −0.68008 0.00000
0.00000 0.00000 1.00000 0.00000
e la matrice [B]
B =
0.50912
−5.65406
−6.54326
0.00000
159

12 Stabilità dinamica longitudinale
12.3 Calcolo degli autovalori e autovettori del siste-
ma
Nota la matrice di sistema, come già ribadito, è suciente calcolare, per quali valori
del parametro α, il suo determinante si annulla. Ciò può essere fatto con il comando
eig(A) in ambiente Matlab. Data la matrice esplicitata nella sezione precedente, si
ricavano i seguenti autovalori, smorzamenti e pulsazioni proprie. Ecco i risultati:
λ1 = n1 + iω1
λ2 = n1 − iω1
λ3 = n2 + iω2
λ4 = n2 − iω2
Autovalori Smorzamenti Pulsazioni proprie
-0.5492 +5.44264i 0.10505 5.47292-0.57492 -5.44264i 0.10505 5.47292-0.00379 +0.05785i 0.0685 0.05799-0.00379 -0.05785i 0.0685 0.05799
Tabella 12.2: Parametri sistema
Calcolando il periodo fornito dalle coppie di autovalori coniugati è possibile
distinguere il modo di corto periodo e il modo fugoide.
Tcp =2π
ωcp= 1,1481s
Tlp =2π
ωlp= 108,34s
160

12 Stabilità dinamica longitudinale
12.4 Calcolo delle caratteristiche della risposta
Calcolate queste caratteristiche, è possibile vericarle anche attraverso un semplice
graco, che mostra l'andamento del sistema entro un certo tempo. Da porre atten-
zione come l'asse dei tempi che è rappresentato è in realtà quello adimensionale, per
cui, per trovare quello vero, è necessario calcolare il tempo vero. Inoltre, dall'analisi
dei periodi caratteristici e delle caratteristiche di dimezzamento, si nota come uno
sia di un ordine di grandezza superiore. Si tratta di quello relativo al fugoide ed è
l'unico visibile. Il graco è stato ottenuto costruendo un time model con la matri-
ce e il vettore di stato, azzerando la parte corrispondente al controllo, per notare
l'evoluzione temporale ad un gradino.
Figura 12.1: Step response
Come si può notare, la risposta che viene visualizzata, è suddivisa in tre plot
dierenti: rappresentano gli andamenti delle variabili: ∆V , θ,α. Il fugoide, come
prevedibile, presenta delle variazioni molto evidenti, nelle variabili velocità e θ, men-
tre il parametro α, rimane pressocchè costante, oscillando poco attorno alla propria
posizione di equilibrio. Osservando attentamente questi graci, si nota come in pros-
simità dell'origine dell'asse dei tempi, si osserva un andamento dierente. Si tratta
del modo di corto periodo, che mostra la propria inuenza solo nei primissimi istanti
del moto, quando il fugoide, ancora, non è completamente sviluppato. Per vedere
161
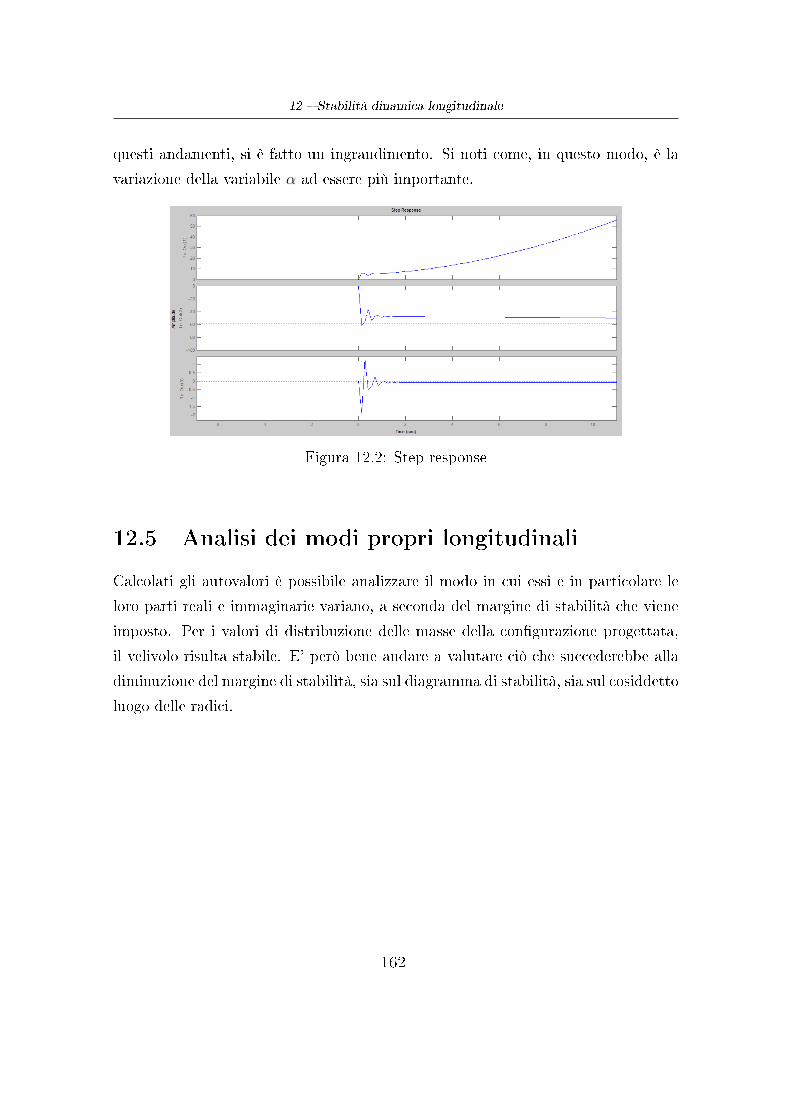
12 Stabilità dinamica longitudinale
questi andamenti, si è fatto un ingrandimento. Si noti come, in questo modo, è la
variazione della variabile α ad essere più importante.
Figura 12.2: Step response
12.5 Analisi dei modi propri longitudinali
Calcolati gli autovalori è possibile analizzare il modo in cui essi e in particolare le
loro parti reali e immaginarie variano, a seconda del margine di stabilità che viene
imposto. Per i valori di distribuzione delle masse della congurazione progettata,
il velivolo risulta stabile. E' però bene andare a valutare ciò che succederebbe alla
diminuzione del margine di stabilità, sia sul diagramma di stabilità, sia sul cosiddetto
luogo delle radici.
162
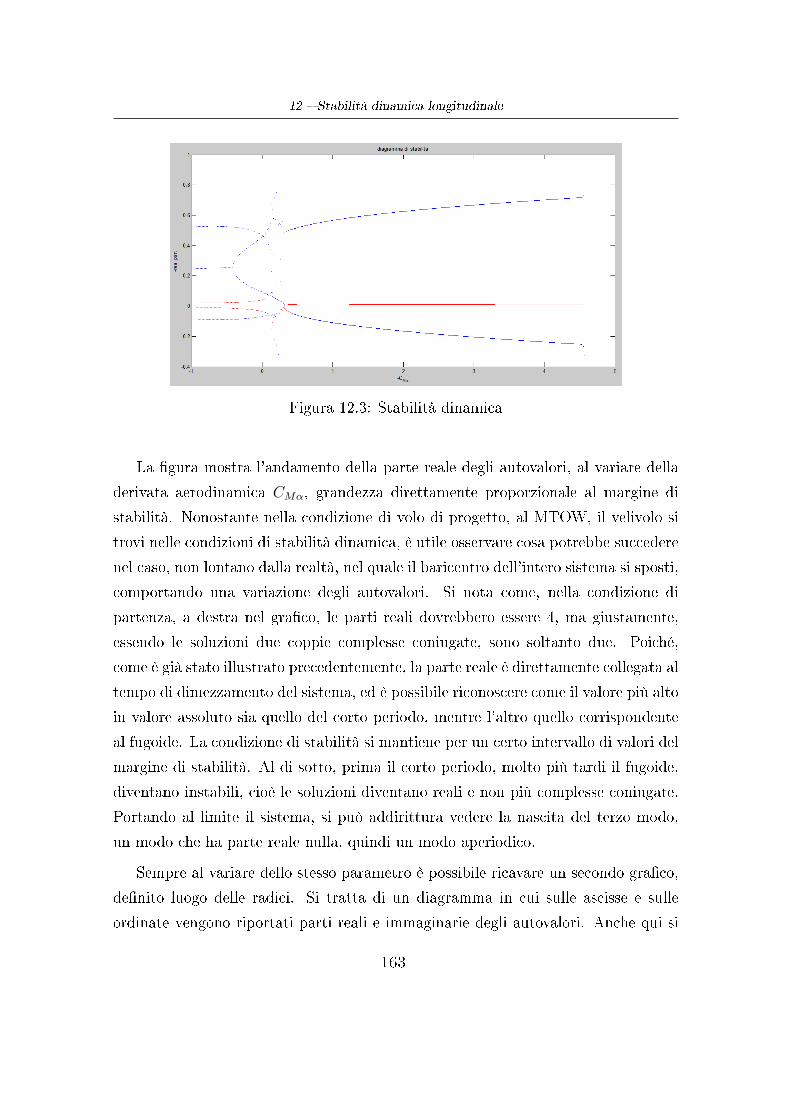
12 Stabilità dinamica longitudinale
Figura 12.3: Stabilità dinamica
La gura mostra l'andamento della parte reale degli autovalori, al variare della
derivata aerodinamica CMα, grandezza direttamente proporzionale al margine di
stabilità. Nonostante nella condizione di volo di progetto, al MTOW, il velivolo si
trovi nelle condizioni di stabilità dinamica, è utile osservare cosa potrebbe succedere
nel caso, non lontano dalla realtà, nel quale il baricentro dell'intero sistema si sposti,
comportando una variazione degli autovalori. Si nota come, nella condizione di
partenza, a destra nel graco, le parti reali dovrebbero essere 4, ma giustamente,
essendo le soluzioni due coppie complesse coniugate, sono soltanto due. Poiché,
come è già stato illustrato precedentemente, la parte reale è direttamente collegata al
tempo di dimezzamento del sistema, ed è possibile riconoscere come il valore più alto
in valore assoluto sia quello del corto periodo, mentre l'altro quello corrispondente
al fugoide. La condizione di stabilità si mantiene per un certo intervallo di valori del
margine di stabilità. Al di sotto, prima il corto periodo, molto più tardi il fugoide,
diventano instabili, cioè le soluzioni diventano reali e non più complesse coniugate.
Portando al limite il sistema, si può addirittura vedere la nascita del terzo modo,
un modo che ha parte reale nulla, quindi un modo aperiodico.
Sempre al variare dello stesso parametro è possibile ricavare un secondo graco,
denito luogo delle radici. Si tratta di un diagramma in cui sulle ascisse e sulle
ordinate vengono riportati parti reali e immaginarie degli autovalori. Anche qui si
163
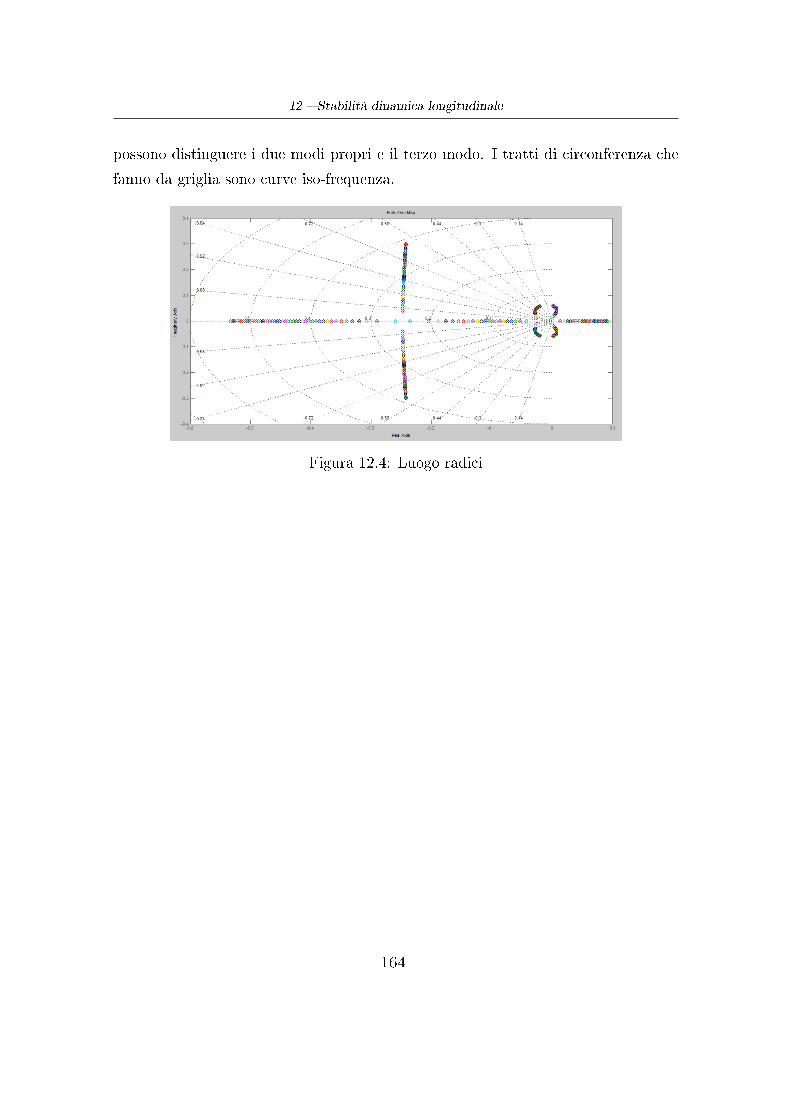
12 Stabilità dinamica longitudinale
possono distinguere i due modi propri e il terzo modo. I tratti di circonferenza che
fanno da griglia sono curve iso-frequenza.
Figura 12.4: Luogo radici
164
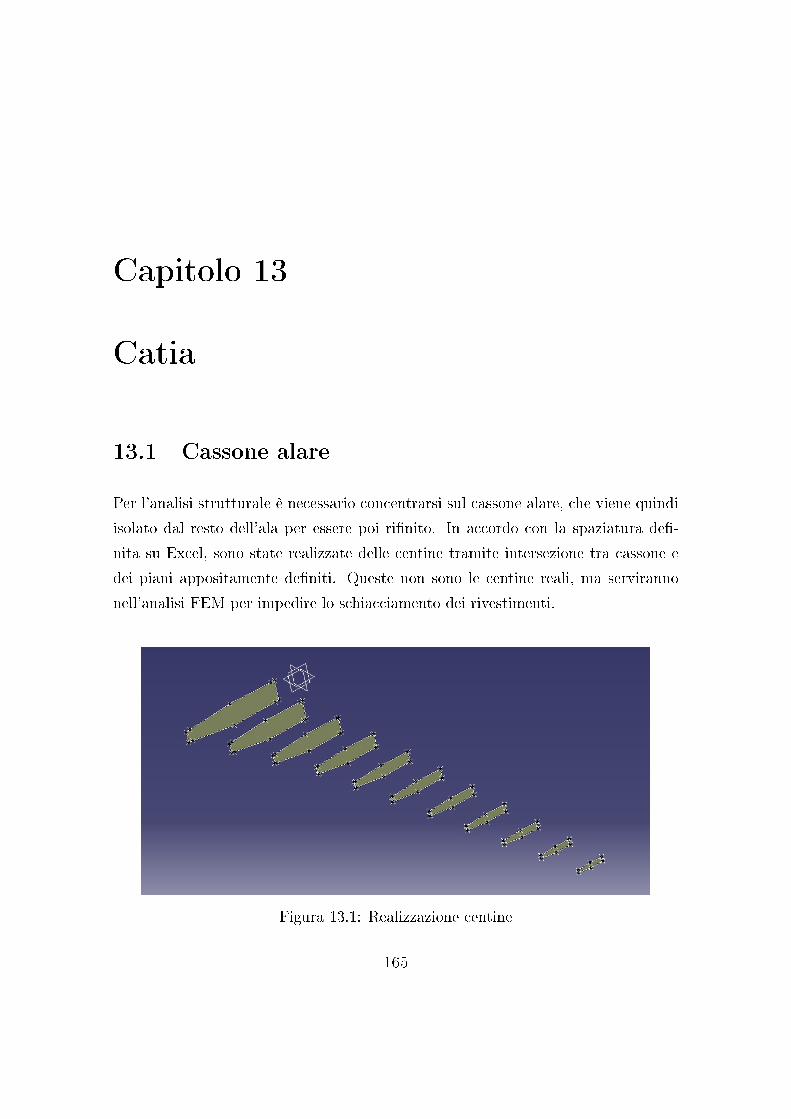
Capitolo 13
Catia
13.1 Cassone alare
Per l'analisi strutturale è necessario concentrarsi sul cassone alare, che viene quindi
isolato dal resto dell'ala per essere poi rinito. In accordo con la spaziatura de-
nita su Excel, sono state realizzate delle centine tramite intersezione tra cassone e
dei piani appositamente deniti. Queste non sono le centine reali, ma serviranno
nell'analisi FEM per impedire lo schiacciamento dei rivestimenti.
Figura 13.1: Realizzazione centine
165
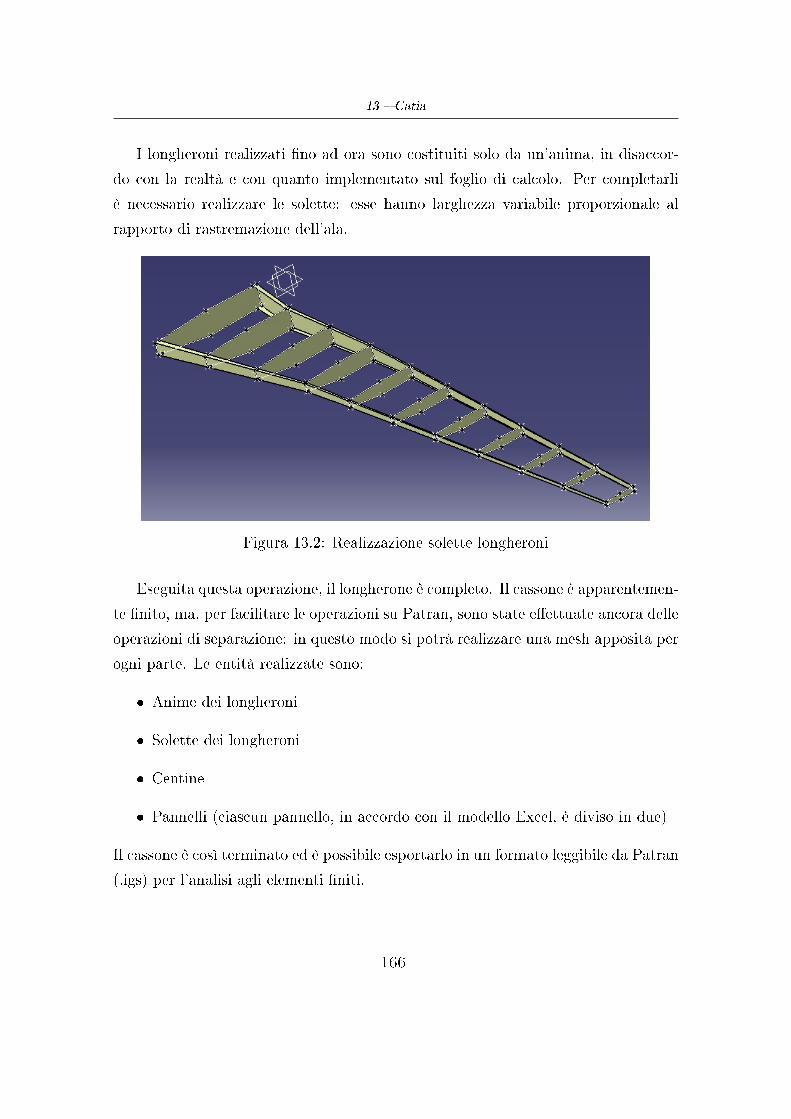
13 Catia
I longheroni realizzati no ad ora sono costituiti solo da un'anima, in disaccor-
do con la realtà e con quanto implementato sul foglio di calcolo. Per completarli
è necessario realizzare le solette: esse hanno larghezza variabile proporzionale al
rapporto di rastremazione dell'ala.
Figura 13.2: Realizzazione solette longheroni
Eseguita questa operazione, il longherone è completo. Il cassone è apparentemen-
te nito, ma, per facilitare le operazioni su Patran, sono state eettuate ancora delle
operazioni di separazione: in questo modo si potrà realizzare una mesh apposita per
ogni parte. Le entità realizzate sono:
Anime dei longheroni
Solette dei longheroni
Centine
Pannelli (ciascun pannello, in accordo con il modello Excel, è diviso in due)
Il cassone è così terminato ed è possibile esportarlo in un formato leggibile da Patran
(.igs) per l'analisi agli elementi niti.
166
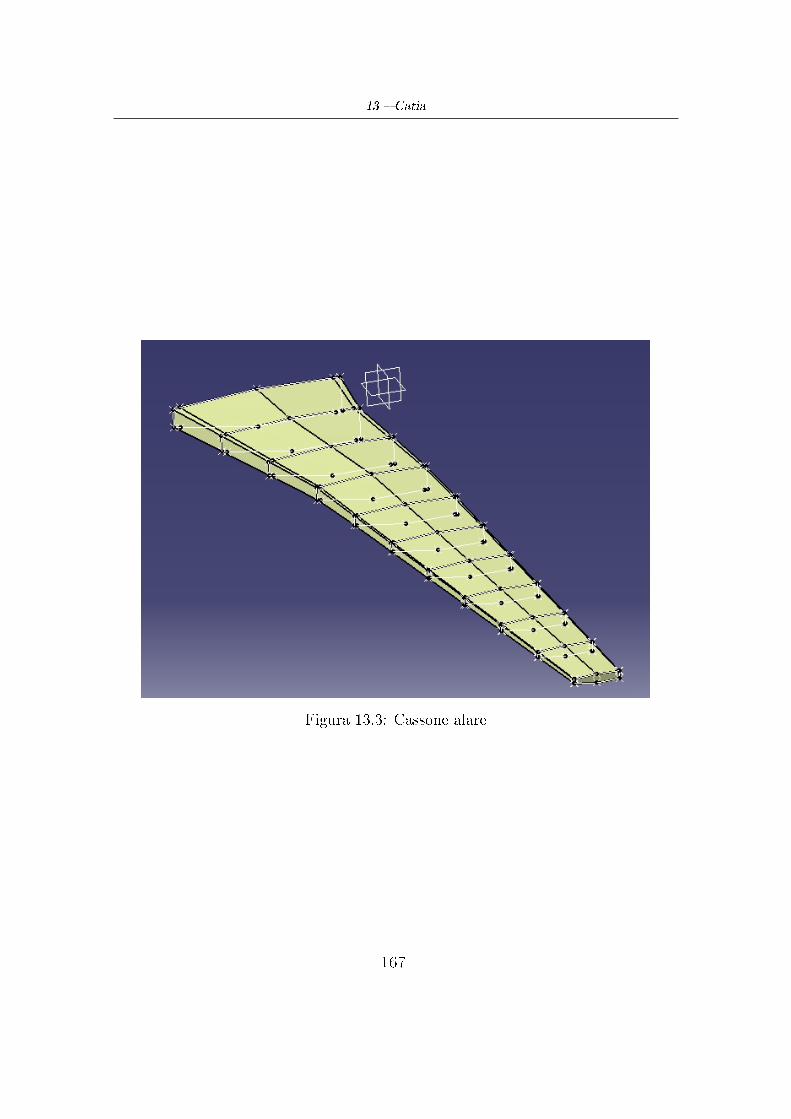
13 Catia
Figura 13.3: Cassone alare
167
Capitolo 14
Analisi strutturale teorica
L'analisi strutturale del velivolo in progetto si concentra esclusivamente su uno dei
componenti maggiormente sollecitati: il cassone alare. Si conoscono infatti tutti i
carichi agenti su di esso e le forze aerodinamiche generate dall'ala, in quanto già cal-
colate nell'analisi aerodinamica. Prima di compiere una qualsiasi verica di questo
tipo, è necessario conoscere i fattori di carico ai quali il sistema è sottoposto nelle
varie fasi volo.
Proprio per questa ragione, il primo passo è tracciare i diagrammi di manovra
e raca, per determinare il valore massimo di carico a contingenza da utilizzarsi,
opportunamente moltiplicato per i coecienti di sicurezza, nella verica strutturale.
Si è quindi passati alla denizione della geometria e delle caratteristiche meccaniche
del cassone alare e alla determinazione dei carichi. Noti tutti questi parametri è
stato possibile ricavare i valori di tensione e deformazioni e vericarli con quelli
prescritti dalla normativa.
14.1 Diagramma di inviluppo di volo
L'inviluppo di volo è il diagramma che si ottiene dalla sovrapposizione di due dif-
ferenti graci: il diagramma di manovra e quello di raca. Il velivolo deve essere
progettato per resistere alle sollecitazioni massime previste, e durante la sua vita
168
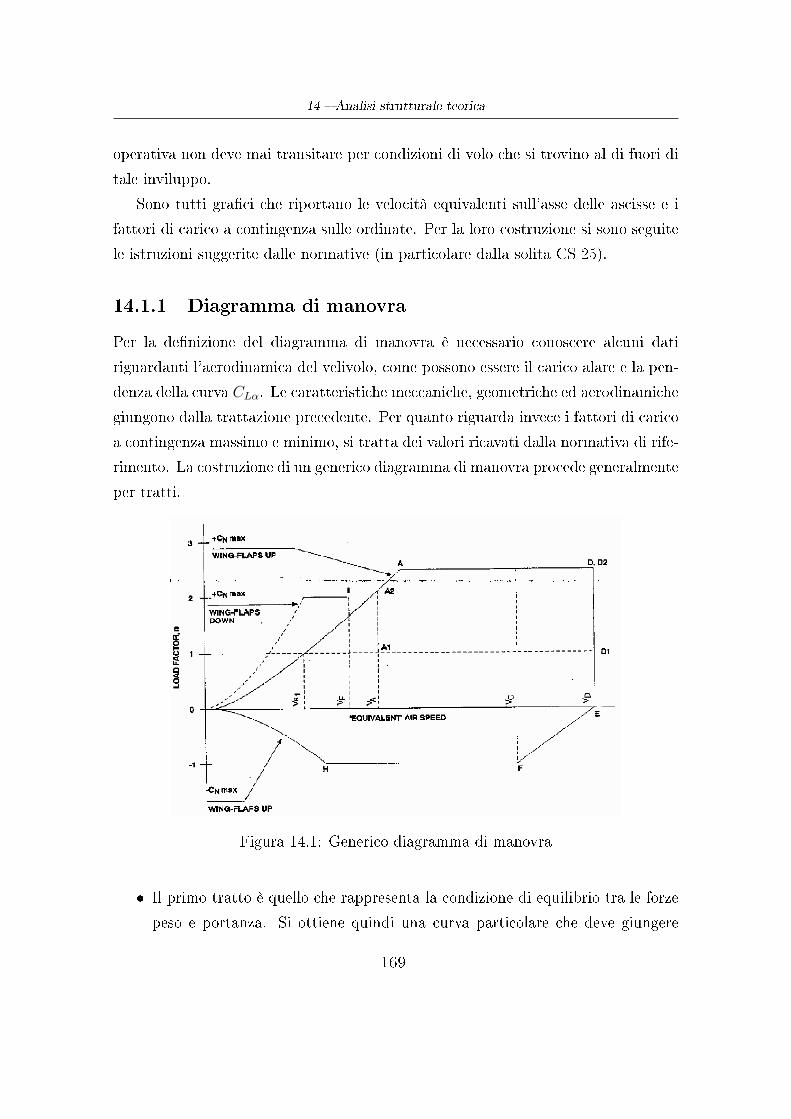
14 Analisi strutturale teorica
operativa non deve mai transitare per condizioni di volo che si trovino al di fuori di
tale inviluppo.
Sono tutti graci che riportano le velocità equivalenti sull'asse delle ascisse e i
fattori di carico a contingenza sulle ordinate. Per la loro costruzione si sono seguite
le istruzioni suggerite dalle normative (in particolare dalla solita CS 25).
14.1.1 Diagramma di manovra
Per la denizione del diagramma di manovra è necessario conoscere alcuni dati
riguardanti l'aerodinamica del velivolo, come possono essere il carico alare e la pen-
denza della curva CLα. Le caratteristiche meccaniche, geometriche ed aerodinamiche
giungono dalla trattazione precedente. Per quanto riguarda invece i fattori di carico
a contingenza massimo e minimo, si tratta dei valori ricavati dalla normativa di rife-
rimento. La costruzione di un generico diagramma di manovra procede generalmente
per tratti.
Figura 14.1: Generico diagramma di manovra
Il primo tratto è quello che rappresenta la condizione di equilibrio tra le forze
peso e portanza. Si ottiene quindi una curva particolare che deve giungere
169
14 Analisi strutturale teorica
no alla velocità VA. Essa è identicata dall'intersezione di tale curva, con
la retta di fattore di contingenza massimo. Solitamente, si è soliti tracciare
questo diagramma per due dierenti condizioni: con ap estratti o retratti.
Al variare della congurazione infatti, varia ilCLαMAX : tale valore è ricavato
sempre dall'analisi del prolo e tramite il programma X FOIL. Le due curve,
oltre a permettere la determinazione di due dierenti velocità VA, mostrano
due diverse velocità di stallo del velivolo, ricavabili come valore di velocità per
il quale, attraverso un assetto di portanza massima, il sistema raggiunge il
fattore di contingenza unitario.
Il secondo tratto è lineare e raccorda la VA con la VD, massima velocità rag-
giungibile dal velivolo in aondata, calcolate, come indicato da normativa,
attraverso la VC ; valore di velocità di crociera. Viene prescritto che quest'ulti-
ma non sia inferiore a 0.8VD. A questo tratto, limite superiore del diagramma
di manovra, compete il fattore di carico a contingenza massimo.
Analogamente a quanto illustrato al punto 1, si può ottenere la curva con
CLmin. Essa dovrà arrestarsi al valore di fattore di carico a contingenza
minimo.
Anche per il tratto lineare, limite inferiore, si procede in accordo a quan-
to illustrato al punto 2, con l'accortezza di giungere no alla velocità di
crociera,mantenendo n = nmin.
La normativa prevede di congiungere il tratto inferiore appena tracciato con
la VD a n=0, con una legge lineare.
Il diagramma si chiude con la congiunzione con un segmento a V costante e
pari alla VD.
Di seguito sono riportati i dati utilizzati per la costruzione del diagramma di
manovra, all'interno del quale è stata anche inserita la curva corrispondente al-
la congurazione con i ap abbassati e la cui velocità limite VF è denita dalle
mormative:
170
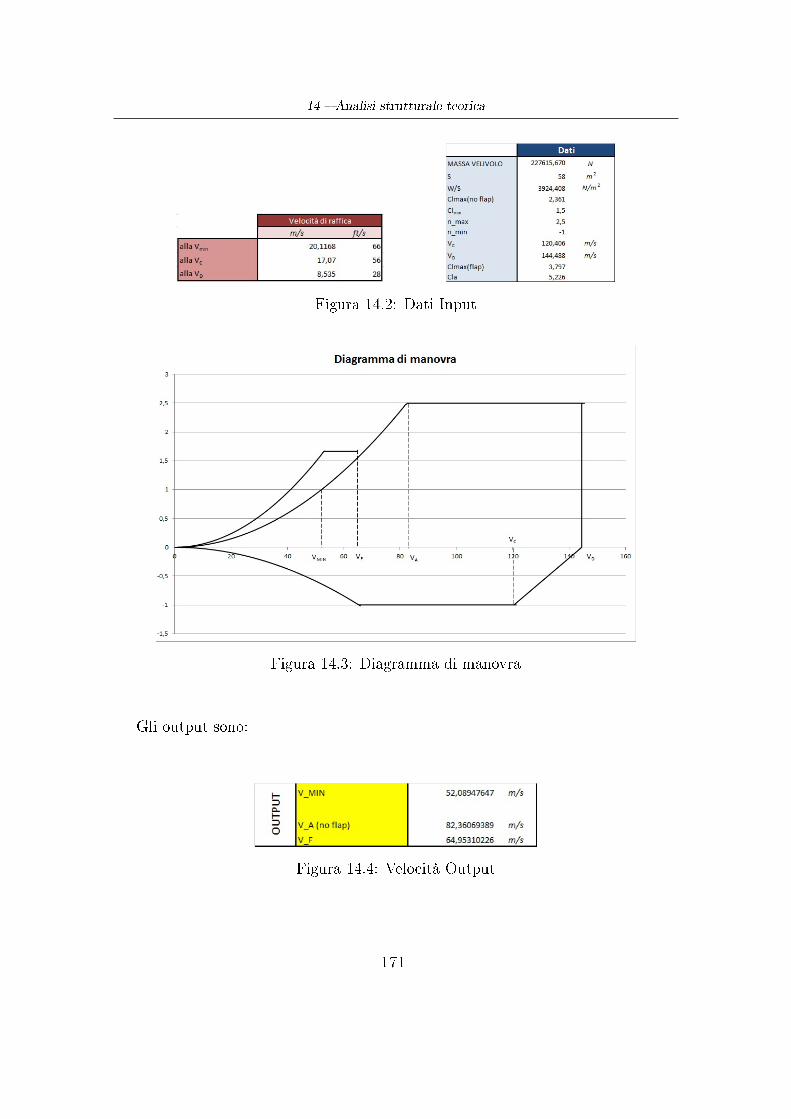
14 Analisi strutturale teorica
Figura 14.2: Dati Input
Figura 14.3: Diagramma di manovra
Gli output sono:
Figura 14.4: Velocità Output
171

14 Analisi strutturale teorica
14.1.2 Diagramma di raca
Il diagramma di raca, invece, riporta delle rette che permettono, note le velocità
caratteristiche, di determinare i fattori di carico dovuti alla raca. La normativa im-
pone di utilizzare 3 dierenti velocità di raca, classicate come bassa, media ed alta
intensità: quelle utilizzate per i nostri diagrammi sono riportate precedentemente.
Note le velocità di raca e le caratteristiche principali già utilizzate nella fase
precedente o da essa ricavate, come le velocità caratteristiche, è possibile tracciare
il fascio di rette con origine nel fattore di contingenza unitario e velocità nulla, con
la relazione:
n = 1± [KUV ρ]
2W/S
dove
Kg = gust alleviation factor
U = velocità di raca
V = velocità di volo equivalente
ρ = densità dell'aria
Note le velocità caratteristiche è possibile tracciare il diagramma completo an-
dando ad individuare i punti caratteristici dall'intersezione di tali rette con le velocità
ed unendoli successivamente con tratti di spezzata.
172
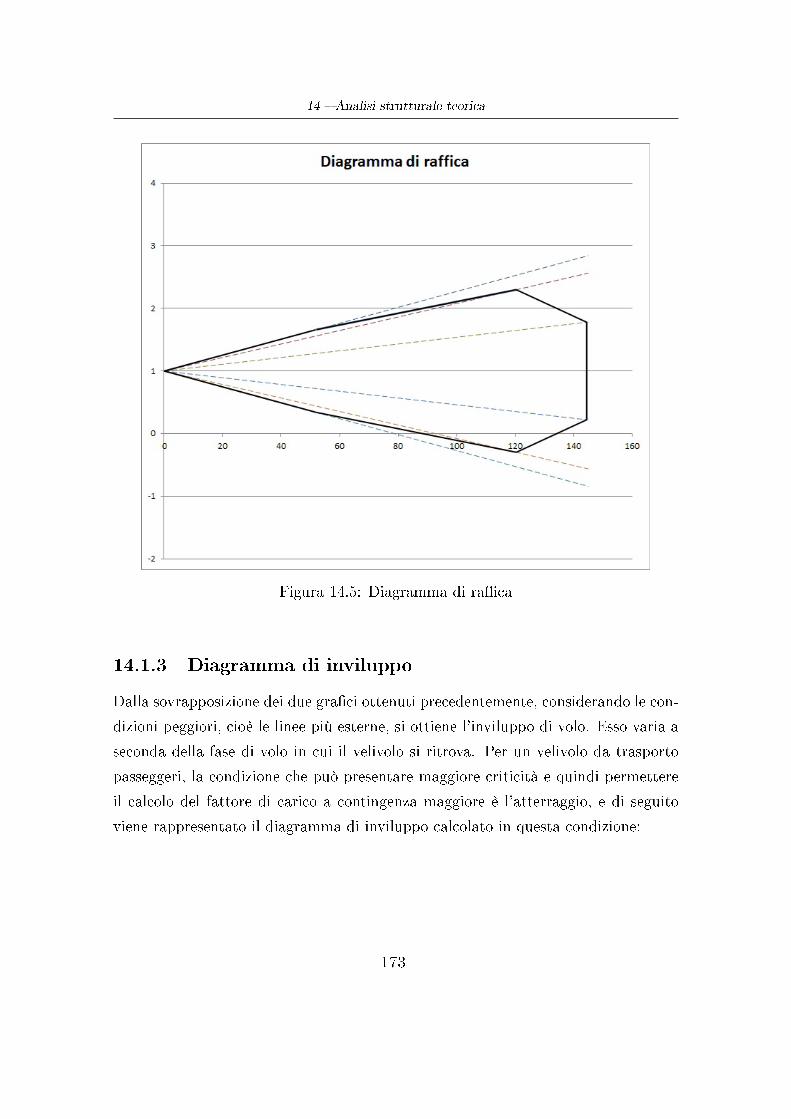
14 Analisi strutturale teorica
Figura 14.5: Diagramma di raca
14.1.3 Diagramma di inviluppo
Dalla sovrapposizione dei due graci ottenuti precedentemente, considerando le con-
dizioni peggiori, cioè le linee più esterne, si ottiene l'inviluppo di volo. Esso varia a
seconda della fase di volo in cui il velivolo si ritrova. Per un velivolo da trasporto
passeggeri, la condizione che può presentare maggiore criticità e quindi permettere
il calcolo del fattore di carico a contingenza maggiore è l'atterraggio, e di seguito
viene rappresentato il diagramma di inviluppo calcolato in questa condizione:
173
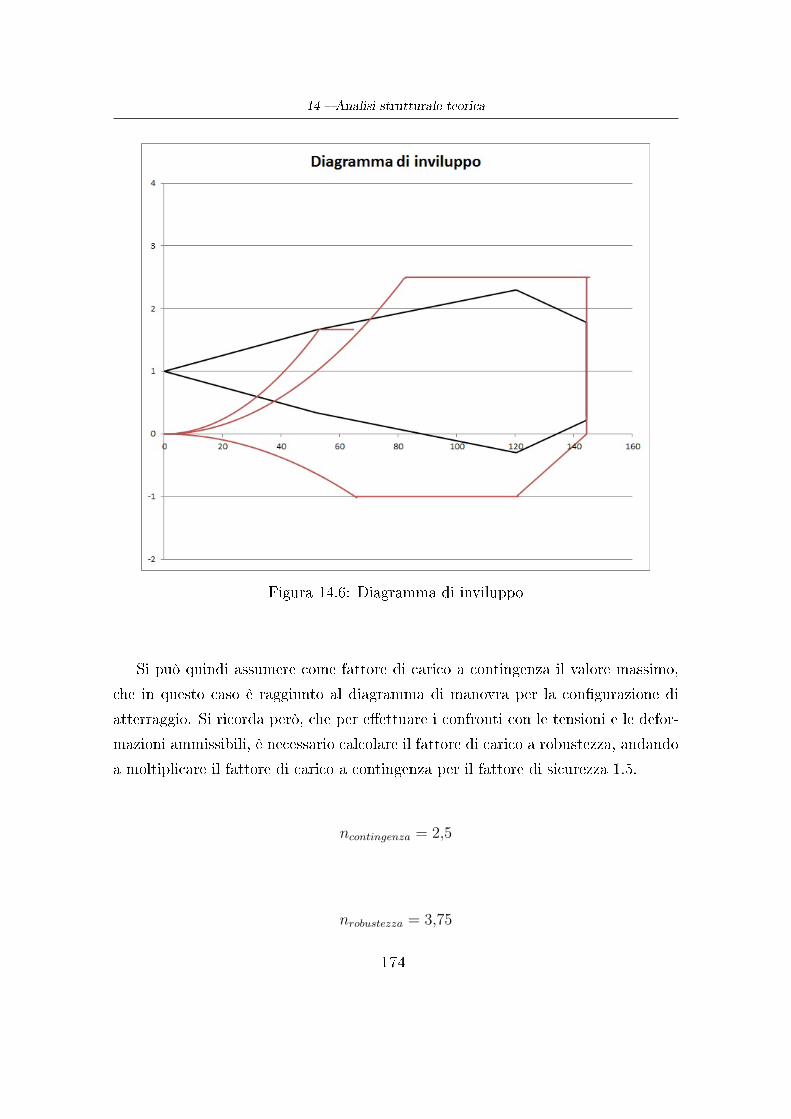
14 Analisi strutturale teorica
Figura 14.6: Diagramma di inviluppo
Si può quindi assumere come fattore di carico a contingenza il valore massimo,
che in questo caso è raggiunto al diagramma di manovra per la congurazione di
atterraggio. Si ricorda però, che per eettuare i confronti con le tensioni e le defor-
mazioni ammissibili, è necessario calcolare il fattore di carico a robustezza, andando
a moltiplicare il fattore di carico a contingenza per il fattore di sicurezza 1.5.
ncontingenza = 2,5
nrobustezza = 3,75
174

14 Analisi strutturale teorica
14.2 Analisi strutturale del cassone alare
14.2.1 Diagrammi di sollecitazione
Preparati i diagrammi di manovra ed individuati i carichi a contingenza e a robu-
stezza ai quali la struttura dovrà resistere, è possibile iniziare ad analizzare il cassone
alare allo scopo di tracciarne i diagrammi di sollecitazione e vericare se le tensioni e
le deformazioni che si sviluppano su di essa sono compatibili con le massime tensioni
ammissibili. Tutti i calcoli sono riportati nella cartella Excel Structural Analysi,
dove il primo foglio contiene i dati di input che derivano dalle scelte preliminari e da
quelle successive, suggerite dall'analisi aerodinamica, mentre la geometria del cas-
sone semi alare deriva direttamente dalla realizzazione CAD, illustrata nel capitolo
precedente. Tale struttura, della lunghezza massima di 14,5 m, era già stata suddi-
visa in 20 tronchetti, per l'analisi aerodinamica; per una di tipo strutturale, però,
si preferisce una discretizzazione equispaziata, quindi il primo passo è stato ricalco-
lare la distribuzione di portanza e resistenza con una nuova mesh di passo 725 mm.
Prima di eettuare qualsiasi calcolo, è necessario denire le caratteristiche meccani-
che del materiale utilizzato nella costruzione della struttura e le caratteristiche del
campo di moto, necessario al calcolo delle principali grandezze aerodinamiche. In
questo caso si è scelto di utilizzare un materiale isotropo come l'alluminio, con le
seguenti caratteristiche
E = modulo elastico longitudinale = 73000 N/mm2
G = modulo elastico trasversale = 28000 N/mm2
Ni = modulo di Poisson = 0,3
ρ= densità del materiale = 2,81 · 106kg/mm3
Successivamente è stato necessario calcolare i carichi agenti su ogni singola
sezione: nel caso in esame si sono considerati
carico dovuto al peso di combustibile
carico dovuto ai motori
175
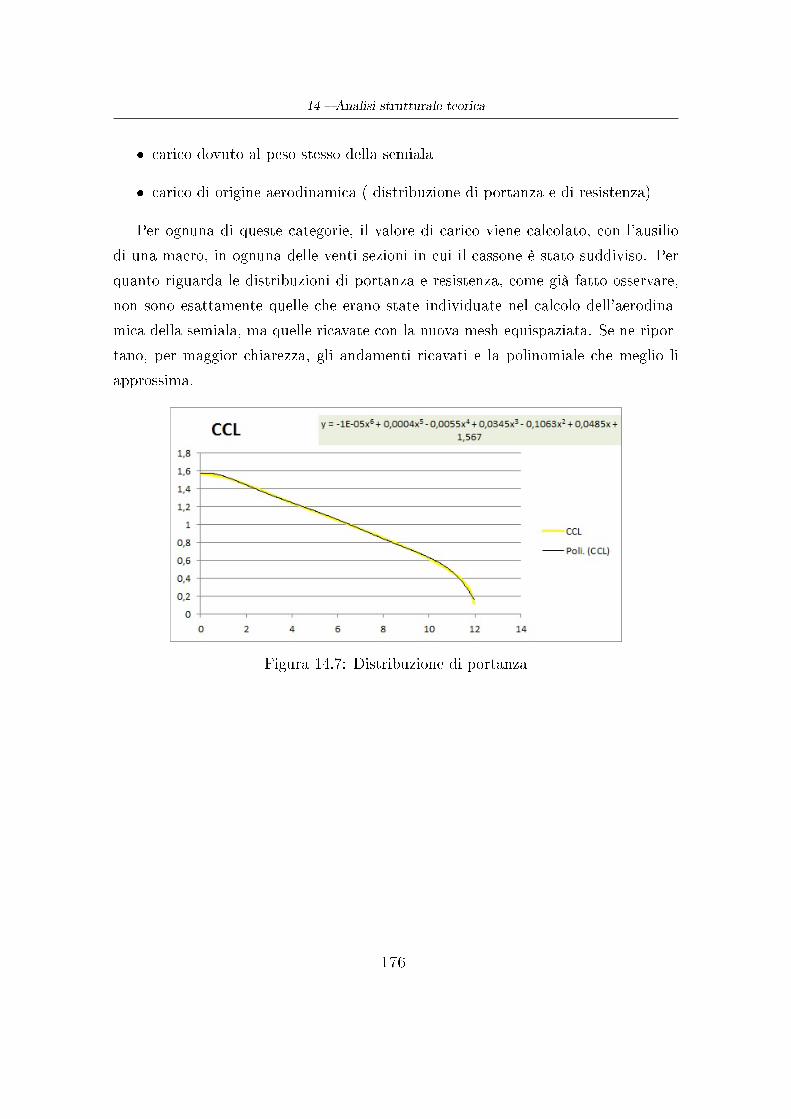
14 Analisi strutturale teorica
carico dovuto al peso stesso della semiala
carico di origine aerodinamica ( distribuzione di portanza e di resistenza)
Per ognuna di queste categorie, il valore di carico viene calcolato, con l'ausilio
di una macro, in ognuna delle venti sezioni in cui il cassone è stato suddiviso. Per
quanto riguarda le distribuzioni di portanza e resistenza, come già fatto osservare,
non sono esattamente quelle che erano state individuate nel calcolo dell'aerodina-
mica della semiala, ma quelle ricavate con la nuova mesh equispaziata. Se ne ripor-
tano, per maggior chiarezza, gli andamenti ricavati e la polinomiale che meglio li
approssima.
Figura 14.7: Distribuzione di portanza
176
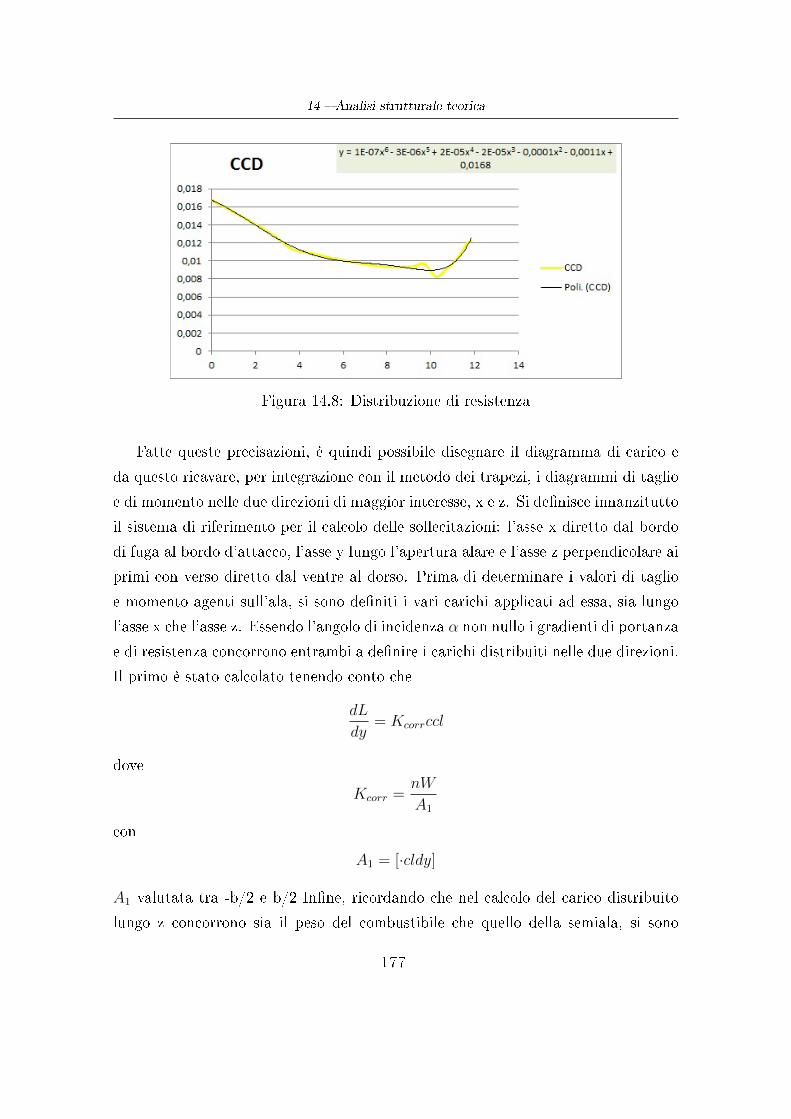
14 Analisi strutturale teorica
Figura 14.8: Distribuzione di resistenza
Fatte queste precisazioni, è quindi possibile disegnare il diagramma di carico e
da questo ricavare, per integrazione con il metodo dei trapezi, i diagrammi di taglio
e di momento nelle due direzioni di maggior interesse, x e z. Si denisce innanzitutto
il sistema di riferimento per il calcolo delle sollecitazioni: l'asse x diretto dal bordo
di fuga al bordo d'attacco, l'asse y lungo l'apertura alare e l'asse z perpendicolare ai
primi con verso diretto dal ventre al dorso. Prima di determinare i valori di taglio
e momento agenti sull'ala, si sono deniti i vari carichi applicati ad essa, sia lungo
l'asse x che l'asse z. Essendo l'angolo di incidenza α non nullo i gradienti di portanza
e di resistenza concorrono entrambi a denire i carichi distribuiti nelle due direzioni.
Il primo è stato calcolato tenendo conto che
dL
dy= Kcorrccl
dove
Kcorr =nW
A1
con
A1 = [·cldy]
A1 valutata tra -b/2 e b/2 Inne, ricordando che nel calcolo del carico distribuito
lungo z concorrono sia il peso del combustibile che quello della semiala, si sono
177
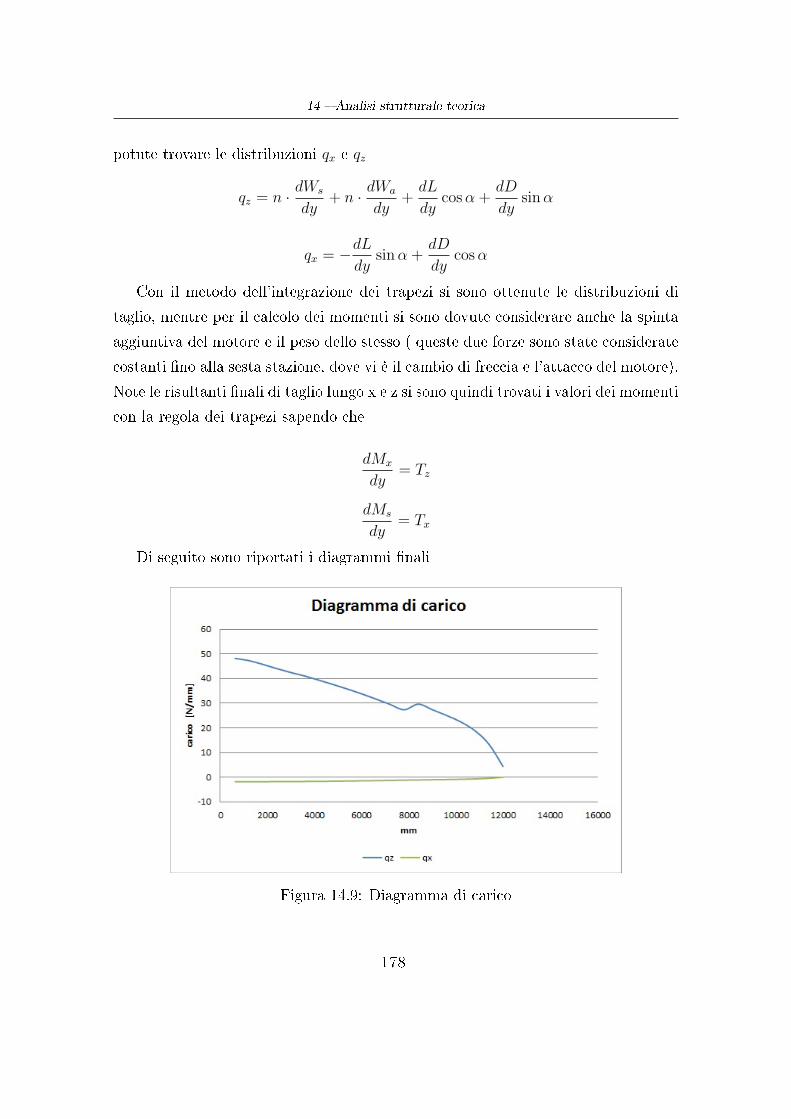
14 Analisi strutturale teorica
potute trovare le distribuzioni qx e qz
qz = n · dWs
dy+ n · dWa
dy+dL
dycosα +
dD
dysinα
qx = −dLdy
sinα +dD
dycosα
Con il metodo dell'integrazione dei trapezi si sono ottenute le distribuzioni di
taglio, mentre per il calcolo dei momenti si sono dovute considerare anche la spinta
aggiuntiva del motore e il peso dello stesso ( queste due forze sono state considerate
costanti no alla sesta stazione, dove vi è il cambio di freccia e l'attacco del motore).
Note le risultanti nali di taglio lungo x e z si sono quindi trovati i valori dei momenti
con la regola dei trapezi sapendo che
dMx
dy= Tz
dMs
dy= Tx
Di seguito sono riportati i diagrammi nali
Figura 14.9: Diagramma di carico
178
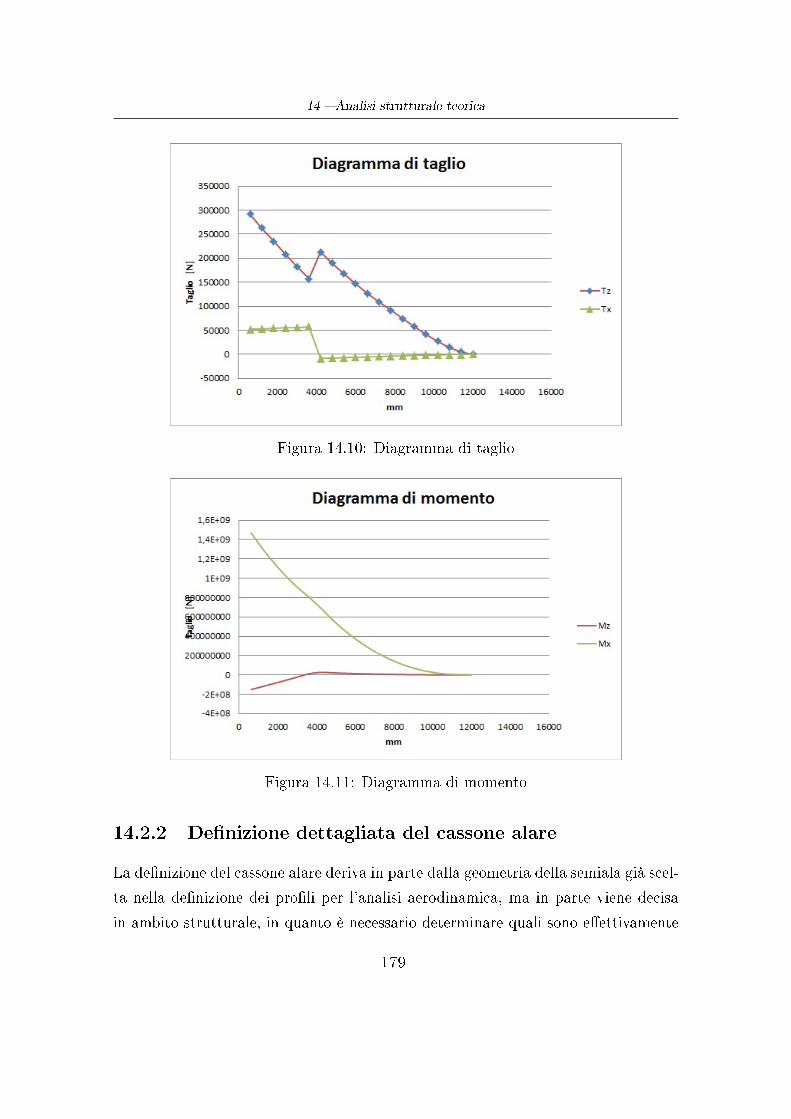
14 Analisi strutturale teorica
Figura 14.10: Diagramma di taglio
Figura 14.11: Diagramma di momento
14.2.2 Denizione dettagliata del cassone alare
La denizione del cassone alare deriva in parte dalla geometria della semiala già scel-
ta nella denizione dei proli per l'analisi aerodinamica, ma in parte viene decisa
in ambito strutturale, in quanto è necessario determinare quali sono eettivamente
179

14 Analisi strutturale teorica
le aree resistenti. Vista la trattazione già eettuata nel capitolo dedicato, non ci si
soerma ulteriormente sulla scelta scelta dei proli adottati ma si ricorda semplice-
mente che la semiala e quindi di conseguenza anche il cassone, ha tre dierenti proli
lungo la sua apertura. In realtà questo non complica ulteriormente le cose in quan-
to, per ognuno dei tronchetti derivanti dalla suddivisione, il programma si calcola
autonomamente tutte le caratteristiche, andando a prendere come input, proprio
quelli della sezione corrispondente, che quindi possono essere totalmente dierenti
da quelle adiacenti. Ipotizzando di concentrare l'attenzione su una singola sezione
trasversale di cassone, in essa si possono individuare più elementi:
2 panelli dorsali ( denominati nel le B e C)
2 panneli ventrali (G e H)
2 solette del longherone anteriore (A e D)
2 solette del longherone posteriore (F e I)
2 anime dei longheroni (E e L)
Per ognuno di questi elementi, devono essere deniti il materiale e quindi le
caratteristiche meccaniche e le dimensioni caratteristiche (altezza, larghezza e spes-
sore). Dati questi valori di input, sezione per sezione, il programma calcola le
caratteristiche del sistema ad aree concentrate determinando i momenti di inerzia
caratteristici e il peso delle singole sezioni. E' importante sottolineare come ad ogni
interazione vengano aggiornate le posizioni di baricentro e centroide, dati necessari
alla determinazione delle caratteristiche inerziali della sezione. Si ricorda che
xcentroide =
∑NK=1EiAixi∑NK=1 EiAi
zcentroide =
∑NK=1EiAizi∑NK=1EiAi
xbaricentro =
∑NK=1 miAixi∑NK=1miAi
180

14 Analisi strutturale teorica
zbaricentro =
∑NK=1 miAizi∑NK=1miAi
Ecco il prospetto di una sezione del cassone in analisi:
Figura 14.12: Sezione cassone alare
14.2.3 Denizione degli spessori degli elementi del cassone
Uno dei punti più importanti della sezione precedente, era l'inserimento delle ca-
ratteristiche geometriche delle varie componenti della sezione di un longherone. In
realtà, denite le larghezze e le altezze dei vari elementi, l'unico vero parametro di
progetto che deve essere scelto con accuratezza è lo spessore. Ad esso quindi, si
è dedicato un apposito foglio di calcolo nel quale inserire i valori di input che si
ritengono opportuni. Il criterio di scelta, oltre ad essere basato sugli esempi della
letteratura, deve essere tale da soddisfare i criteri di verica strutture a robustez-
za. Gli spessori quindi, devono essere scelti in modo tale che le deformazioni e le
sollecitazioni (il cui calcolo è approfondito nella sezione seguente) siano inferiori a
quelle massime ammissibili. Dopo svariati tentativi, per riuscire a minimizzare gli
spessori si è optato per una soluzione classica che prevede un'aumento delle aree
resistenti nelle sezioni prossime all'incastro tra la semiala e la fusoliera, zona più
fortemente sollecitata, imponendo anche che non solo gli spessori di ciascuna delle
parti diminuissero verso l'estremità, ma che ciò accadesse anche per la larghezza
delle solette dei due longheroni che, partendo da una dimensione di 100 mm ala
radice diminuiscono proporzionalmente al rapporto di rastremazione.
181
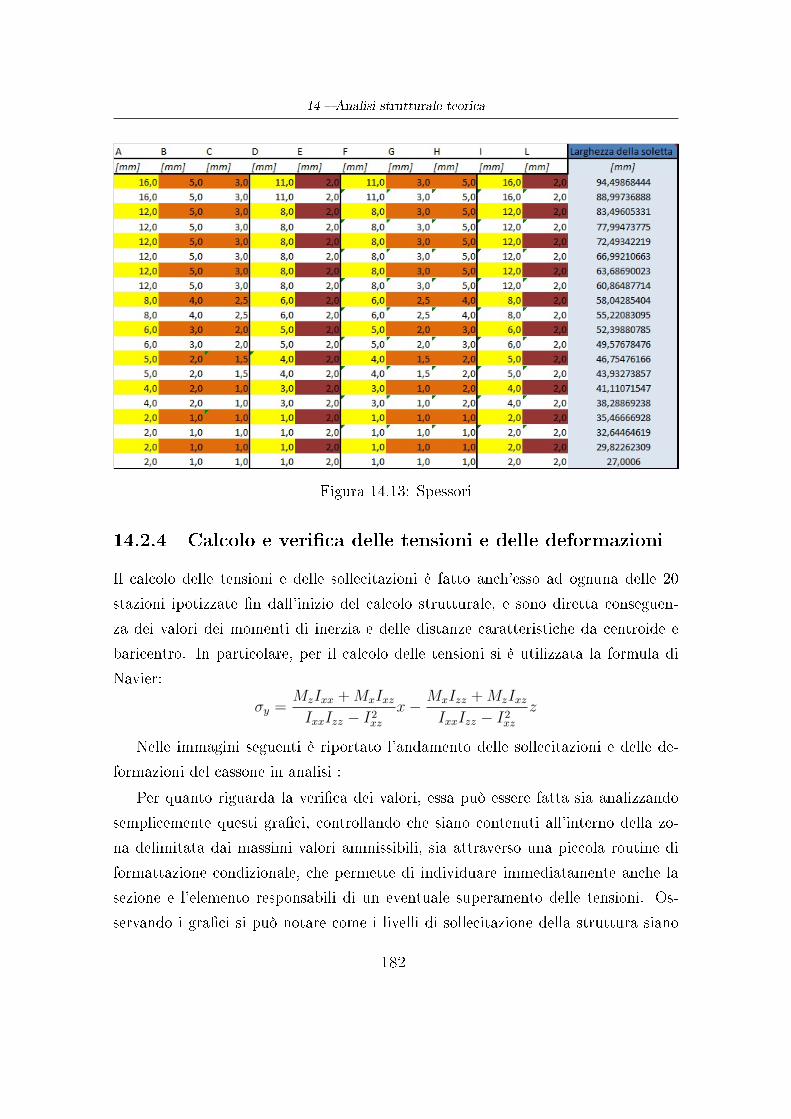
14 Analisi strutturale teorica
Figura 14.13: Spessori
14.2.4 Calcolo e verica delle tensioni e delle deformazioni
Il calcolo delle tensioni e delle sollecitazioni è fatto anch'esso ad ognuna delle 20
stazioni ipotizzate n dall'inizio del calcolo strutturale, e sono diretta conseguen-
za dei valori dei momenti di inerzia e delle distanze caratteristiche da centroide e
baricentro. In particolare, per il calcolo delle tensioni si è utilizzata la formula di
Navier:
σy =MzIxx +MxIxzIxxIzz − I2
xz
x− MxIzz +MzIxzIxxIzz − I2
xz
z
Nelle immagini seguenti è riportato l'andamento delle sollecitazioni e delle de-
formazioni del cassone in analisi :
Per quanto riguarda la verica dei valori, essa può essere fatta sia analizzando
semplicemente questi graci, controllando che siano contenuti all'interno della zo-
na delimitata dai massimi valori ammissibili, sia attraverso una piccola routine di
formattazione condizionale, che permette di individuare immediatamente anche la
sezione e l'elemento responsabili di un eventuale superamento delle tensioni. Os-
servando i graci si può notare come i livelli di sollecitazione della struttura siano
182
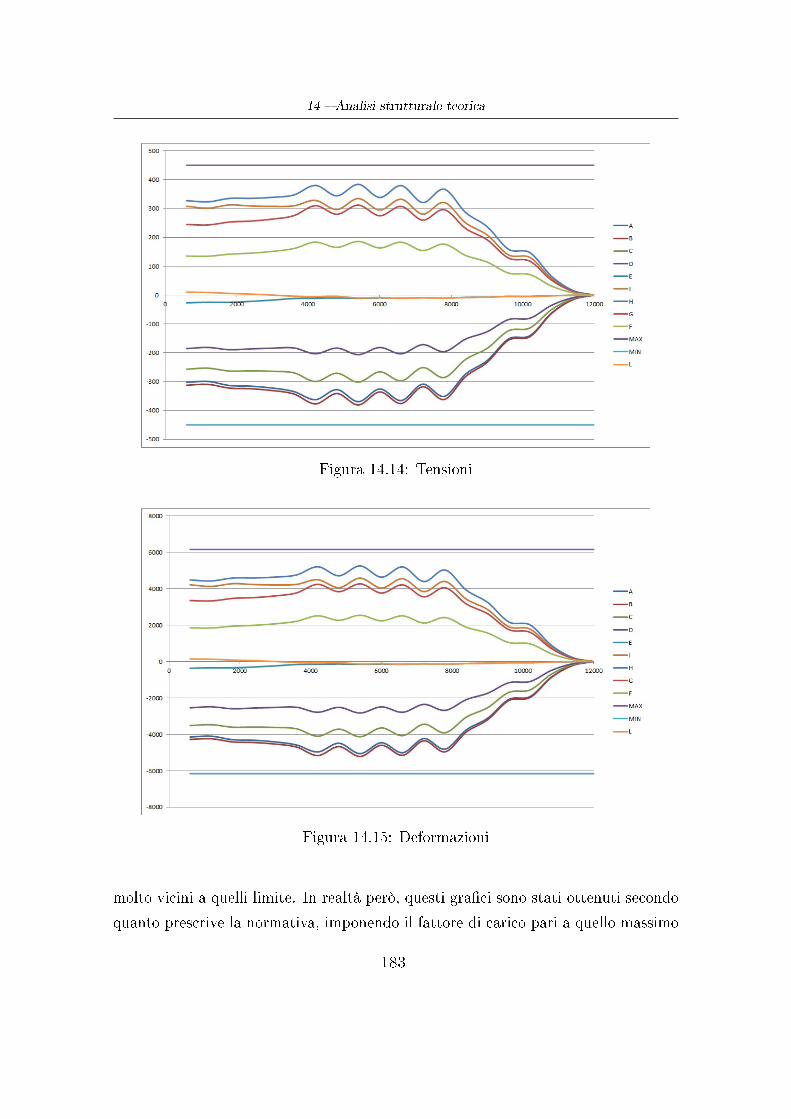
14 Analisi strutturale teorica
Figura 14.14: Tensioni
Figura 14.15: Deformazioni
molto vicini a quelli limite. In realtà però, questi graci sono stati ottenuti secondo
quanto prescrive la normativa, imponendo il fattore di carico pari a quello massimo
183

14 Analisi strutturale teorica
a robustezza; nelle condizioni di volo normale, in crociera, quando il fattore di ca-
rico a contingenza è unitario, e quindi quello a robustezza è pari a 1.5, i graci si
presentano invece molto distanti dalle curve limite.
14.2.5 Peso del cassone
Il calcolo del peso della struttura del cassone alare è anch'esso diretta conseguenza
della scelta degli spessori dei singoli elementi. Per ognuno di essi infatti, viene
calcolata la massa, noto il materiale, e la sommatoria dei valori dei componenti di
ogni sezione viene aggiornata e riportata in un apposito foglio di calcolo nel quale,
oltre a denirne il valore complessivo, si apportano dei coecienti correttivi che
tengono in considerazione sia il fatto che in un'analisi così semplicata ci possono
essere errori di approssimazione non trascurabili, sia la presenza di elementi non
calcolati, quali incollaggi, rivestimenti, rivettature, irrigidimenti. Per questo, il peso
del cassone è stato moltiplicato per un fattore correttivo n = 1,5, ottenendo un
valore che rappresenta il 50 % del peso dell'intera semiala. Pcassone = 5492,7 N
14.2.6 Calcolo della deformata
Per il calcolo della deformata della semiala si utilizza il principio dei lavori virtuali. Si
considera dapprima uno stato di tensioni interne σc in equilibrio col sistema di carichi
applicati, poi, per la stessa struttura un sistema di spostamenti ηc, compatibile con
i vincoli imposti al sistema, a cui è associato il sistema di deformazioni piccole e
congruenti εc. Il PLV stabilisce che in condizioni di equilibrio sussiste la seguente
uguaglianza:
Lexec = Liec
Per implementare il metodo, si sceglie come sistema equilibrato di forze, un carico
esploratore ttizio:
1e · ηc =
(M e
z
Izx+
M ex
Ixz
)·(M c
z
EIzx+
M cx
EIxz
)dy
dove tutte le Mz = M∗z ,Mx = M∗
x ed inoltre i termini con l'apice 'e' sono quelli
del sistema ttizio di esplorazione, mentre quelli con l'apice 'c' sono riferiti al sistema
184
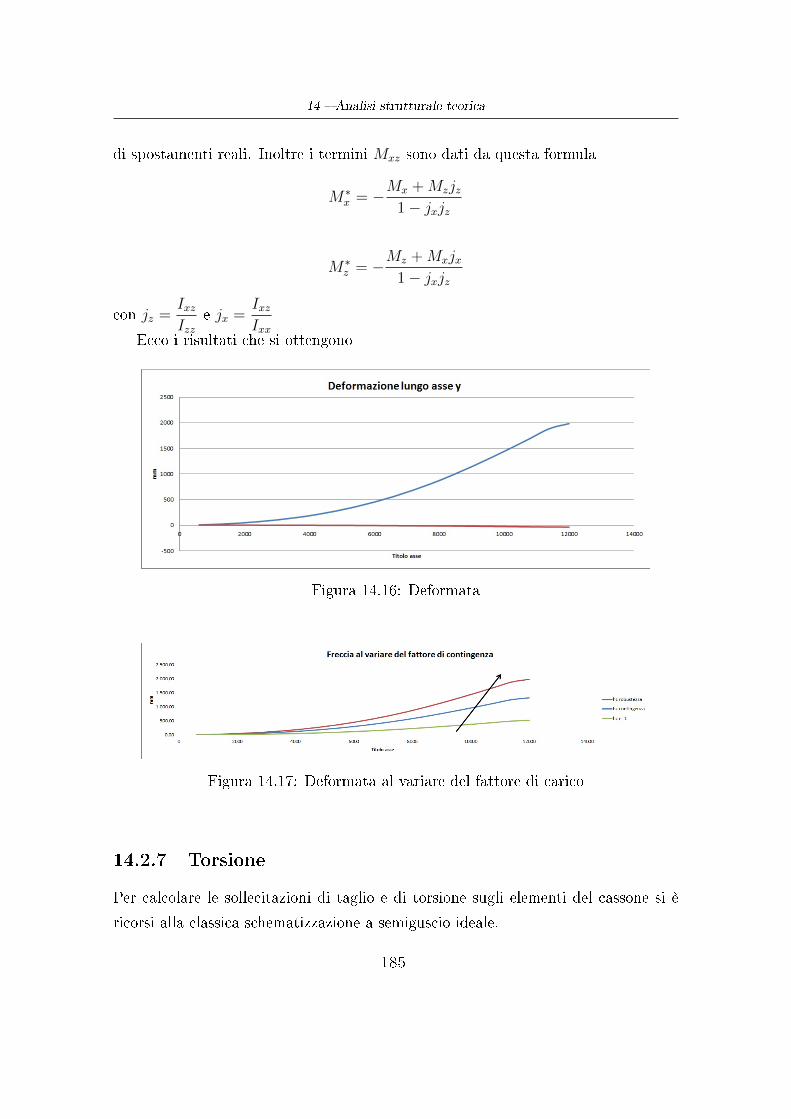
14 Analisi strutturale teorica
di spostamenti reali. Inoltre i termini Mxz sono dati da questa formula
M∗x = −Mx +Mzjz
1− jxjz
M∗z = −Mz +Mxjx
1− jxjz
con jz =IxzIzz
e jx =IxzIxx
Ecco i risultati che si ottengono
Figura 14.16: Deformata
Figura 14.17: Deformata al variare del fattore di carico
14.2.7 Torsione
Per calcolare le sollecitazioni di taglio e di torsione sugli elementi del cassone si è
ricorsi alla classica schematizzazione a semiguscio ideale.
185
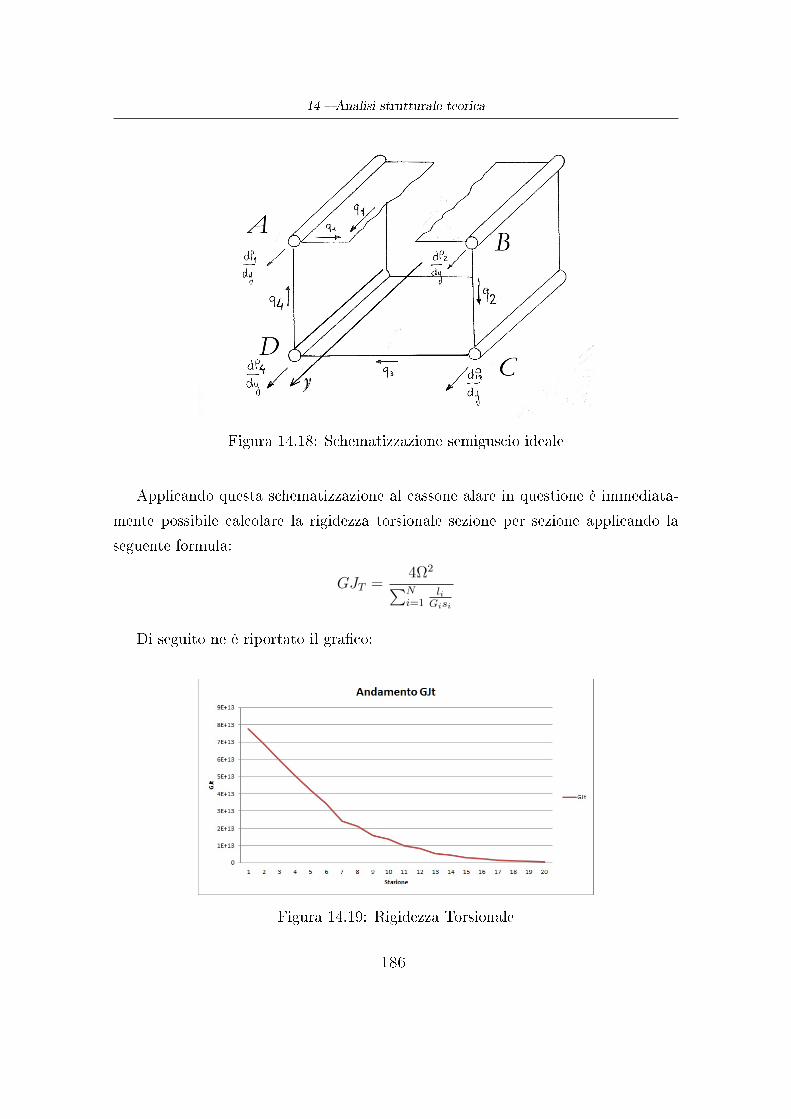
14 Analisi strutturale teorica
Figura 14.18: Schematizzazione semiguscio ideale
Applicando questa schematizzazione al cassone alare in questione è immediata-
mente possibile calcolare la rigidezza torsionale sezione per sezione applicando la
seguente formula:
GJT =4Ω2∑Ni=1
liGisi
Di seguito ne è riportato il graco:
Figura 14.19: Rigidezza Torsionale
186
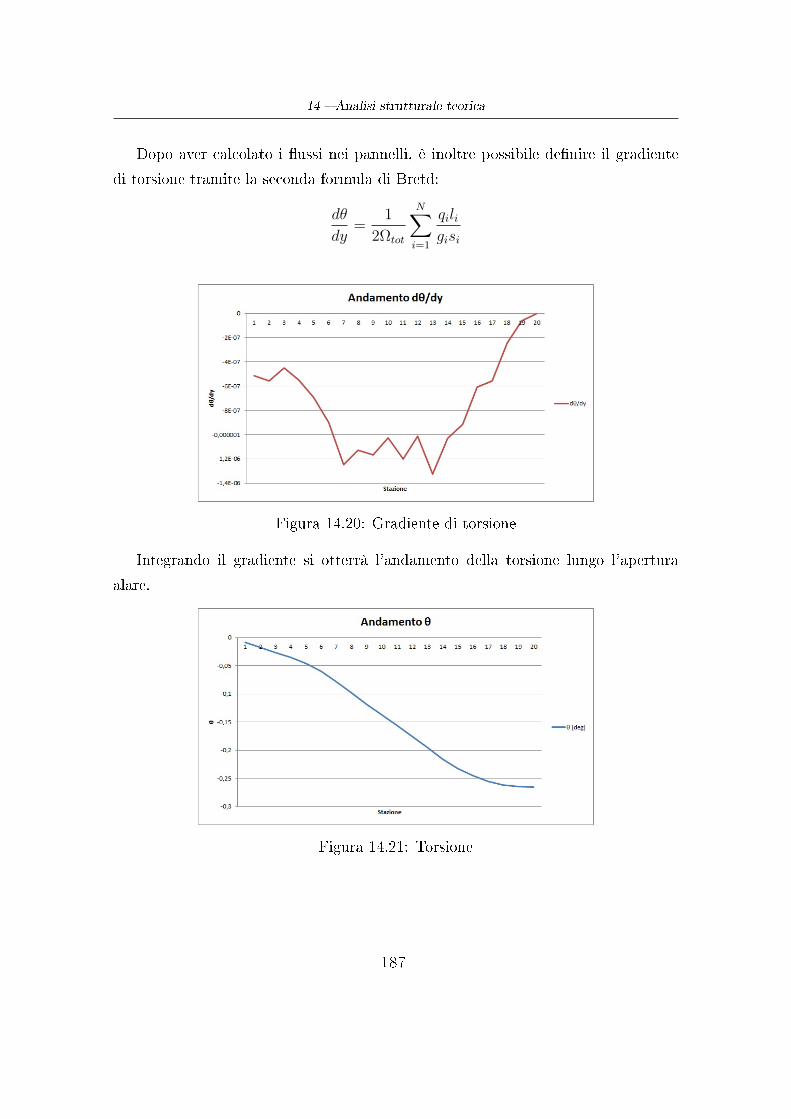
14 Analisi strutturale teorica
Dopo aver calcolato i ussi nei pannelli, è inoltre possibile denire il gradiente
di torsione tramite la seconda formula di Bretd:
dθ
dy=
1
2Ωtot
N∑i=1
qiligisi
Figura 14.20: Gradiente di torsione
Integrando il gradiente si otterrà l'andamento della torsione lungo l'apertura
alare.
Figura 14.21: Torsione
187
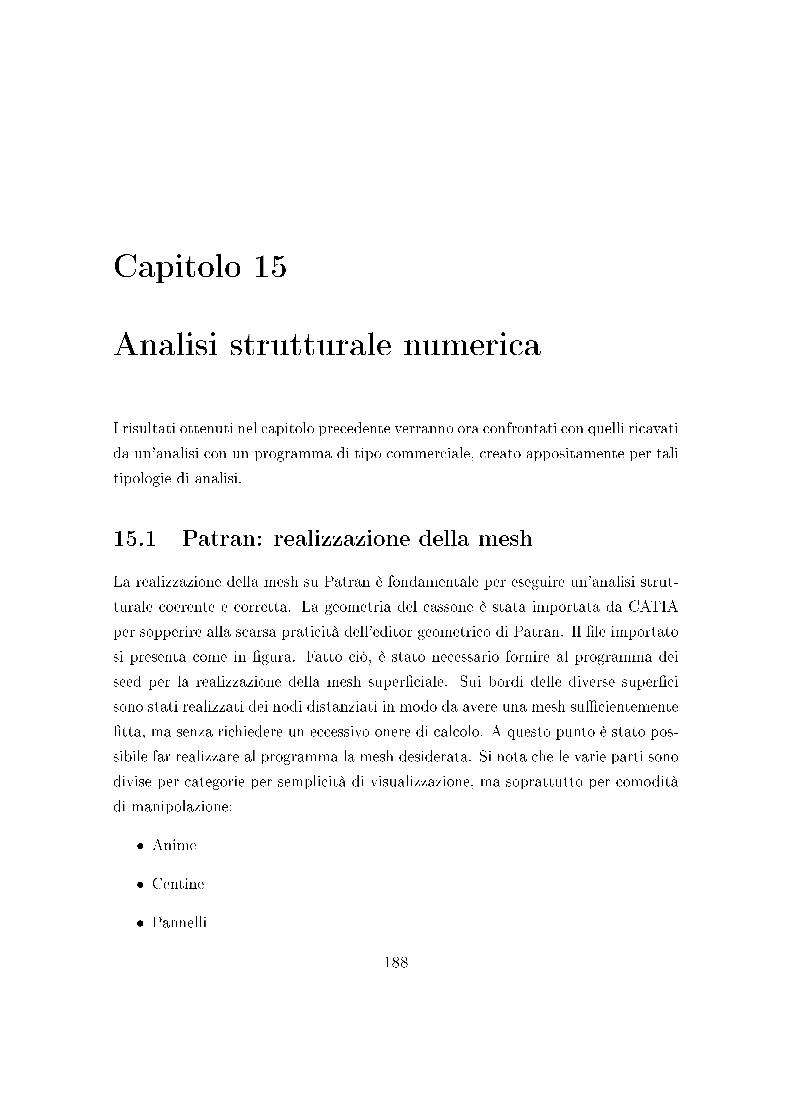
Capitolo 15
Analisi strutturale numerica
I risultati ottenuti nel capitolo precedente verranno ora confrontati con quelli ricavati
da un'analisi con un programma di tipo commerciale, creato appositamente per tali
tipologie di analisi.
15.1 Patran: realizzazione della mesh
La realizzazione della mesh su Patran è fondamentale per eseguire un'analisi strut-
turale coerente e corretta. La geometria del cassone è stata importata da CATIA
per sopperire alla scarsa praticità dell'editor geometrico di Patran. Il le importato
si presenta come in gura. Fatto ciò, è stato necessario fornire al programma dei
seed per la realizzazione della mesh superciale. Sui bordi delle diverse superci
sono stati realizzati dei nodi distanziati in modo da avere una mesh sucientemente
tta, ma senza richiedere un eccessivo onere di calcolo. A questo punto è stato pos-
sibile far realizzare al programma la mesh desiderata. Si nota che le varie parti sono
divise per categorie per semplicità di visualizzazione, ma soprattutto per comodità
di manipolazione:
Anime
Centine
Pannelli
188
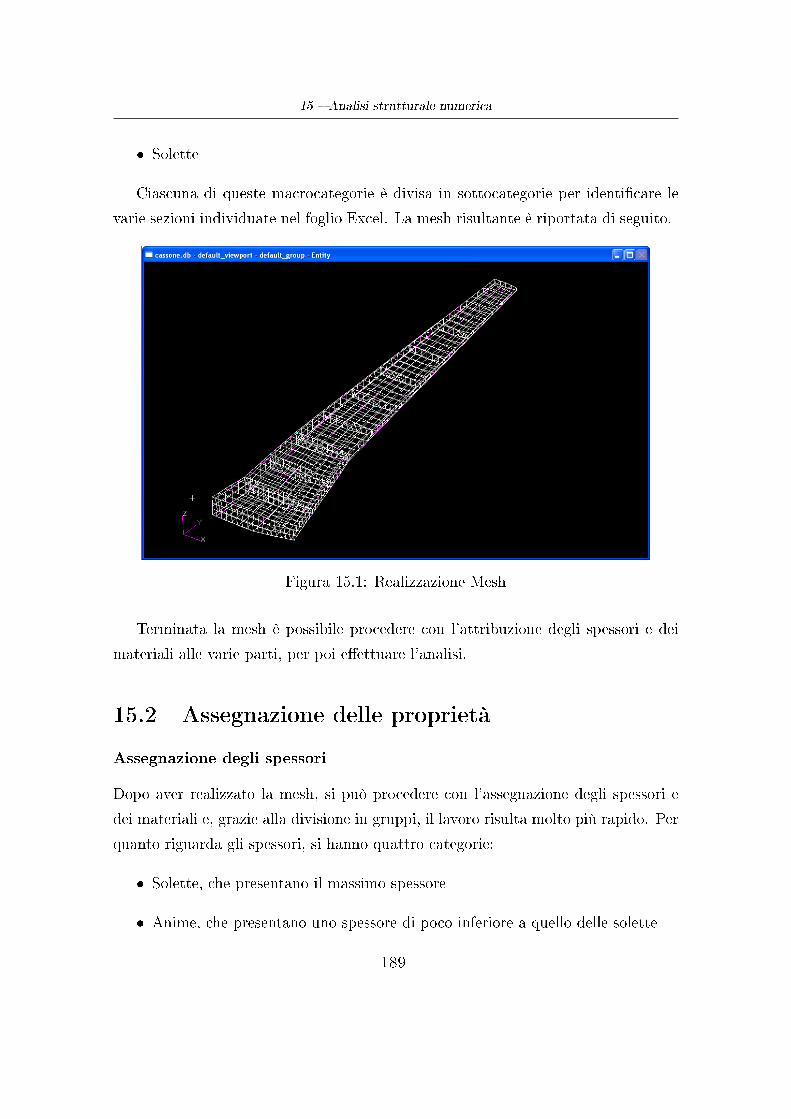
15 Analisi strutturale numerica
Solette
Ciascuna di queste macrocategorie è divisa in sottocategorie per identicare le
varie sezioni individuate nel foglio Excel. La mesh risultante è riportata di seguito.
Figura 15.1: Realizzazione Mesh
Terminata la mesh è possibile procedere con l'attribuzione degli spessori e dei
materiali alle varie parti, per poi eettuare l'analisi.
15.2 Assegnazione delle proprietà
Assegnazione degli spessori
Dopo aver realizzato la mesh, si può procedere con l'assegnazione degli spessori e
dei materiali e, grazie alla divisione in gruppi, il lavoro risulta molto più rapido. Per
quanto riguarda gli spessori, si hanno quattro categorie:
Solette, che presentano il massimo spessore
Anime, che presentano uno spessore di poco inferiore a quello delle solette
189
15 Analisi strutturale numerica
Pannelli, con uno spessore quasi dimezzato rispetto a quello delle solette
Centine, con spessore ttizio pari a 5 mm
Si è scelto inoltre di farli diminuire gradatamente andando dalla sezione di radice
alla sezione di estremità e di assegnare uno spessore maggiore alle componenti più
vicine al bordo d'attacco rispetto a quelle del bordo di fuga, a causa della diversa
intensità delle forze aerodinamiche agenti nei 2 punti.
Assegnazione delle proprietà meccaniche dei materiali
Per quanto riguarda i materiali, invece, ne sono stati utilizzati solamente due:
Alluminio per solette, anime e pannelli
Un materiale ttizio innitamente rigido per le centine, realizzato moltiplican-
do per 100 il modulo elastico dell'alluminio
Di seguito vengono riportate le immagini dei vari componenti dopo che sono state
assegnate le suddette proprietà meccaniche
Assegnazione delle condizioni al contorno
Dopo aver denito le proprietà meccaniche dell'intero cassone, si può procedere con
l'assegnazione delle condizioni al contorno:
La sezione di radice è stata incastrata, in modo da impedirne la rotazione e la
traslazione
La sezione di estremità è considerata scarica
Le stazioni intermedie sono state caricate con il salto del taglio lungo x e lungo
z a cavallo dei due cassoni successivi
Di seguito vengono riportate le immagini delle condizioni al contorno imposte.
190

15 Analisi strutturale numerica
Figura 15.2: Denizione condizioni di incastro alla radice
Assegnazione dei carichi
A questo livello la struttura è completamente denita ed è possibile procedere al-
l'assegnazione dei carichi che agiscono su di essa per simulare la deessione statica.
In particolare per rimanere nell'ottica della realizzazione progettuale si sono inseriti
i carichi massimi ai quali si suppone la struttura debba resistere e per tali condizioni
andrà quindi progettata. I valori che vengono inseriti si riferiscono quelli individuati
nel capitolo precedente tramite il programma creato appositamente per dimensio-
namento preliminare del cassone alare. In particolare, dei graci di sollecitazione
ottenuti è utile porre l'attenzione su quello riportante l'andamento del taglio: al
ne di ricavare le forze complessive che agiscono su ogni singola sezione è necessario
considerare i salti di tale graco, perché sono proprio questi i valori che dovranno
essere applicati al modello Patran. Operativamente si sono suddivise tali forze a
metà e ognuna di esse è stata applicata nella sezione corrispondente, sul longhero-
ne. In realtà questa procedura, anche se molto approssimata, produce degli eetti
qualitativamente accettabili.
191
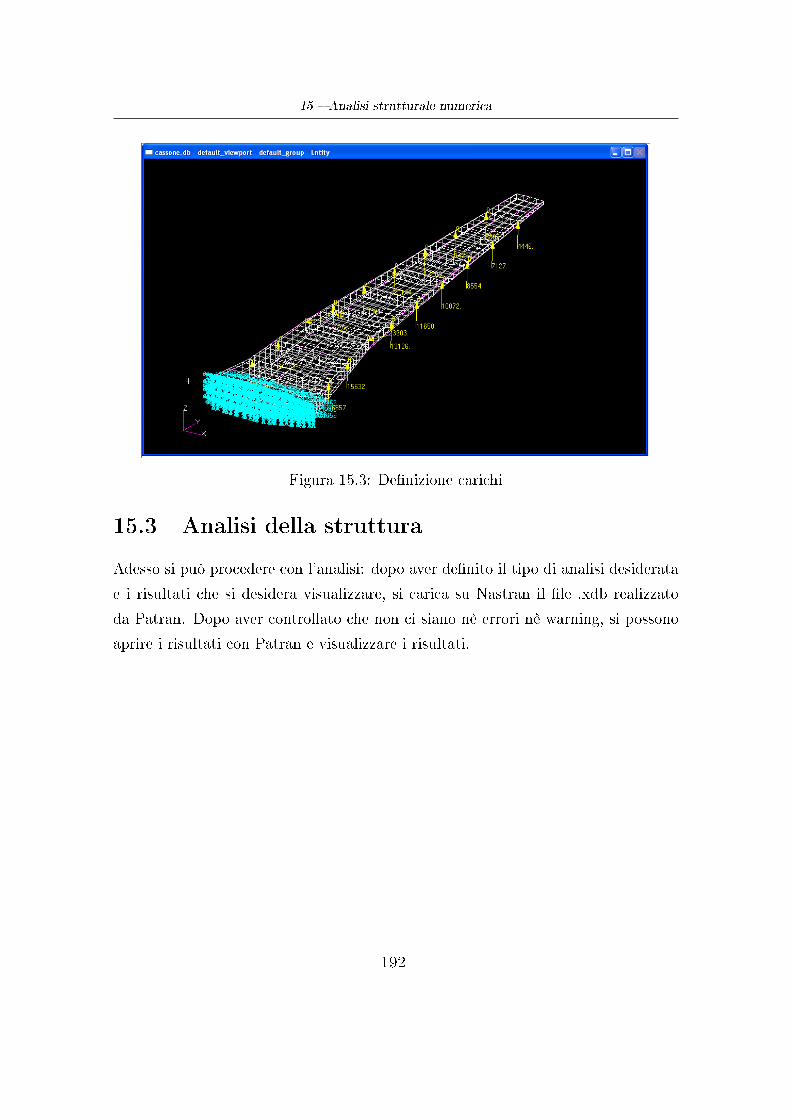
15 Analisi strutturale numerica
Figura 15.3: Denizione carichi
15.3 Analisi della struttura
Adesso si può procedere con l'analisi: dopo aver denito il tipo di analisi desiderata
e i risultati che si desidera visualizzare, si carica su Nastran il le .xdb realizzato
da Patran. Dopo aver controllato che non ci siano nè errori nè warning, si possono
aprire i risultati con Patran e visualizzare i risultati.
192
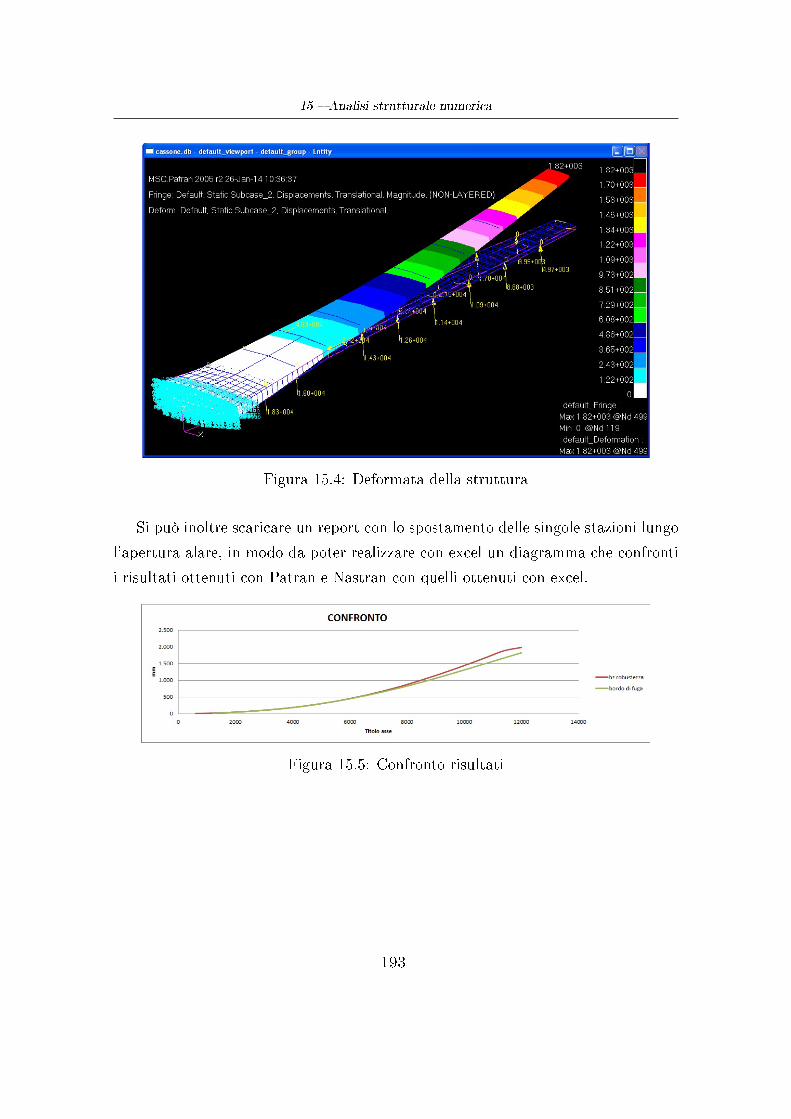
15 Analisi strutturale numerica
Figura 15.4: Deformata della struttura
Si può inoltre scaricare un report con lo spostamento delle singole stazioni lungo
l'apertura alare, in modo da poter realizzare con excel un diagramma che confronti
i risultati ottenuti con Patran e Nastran con quelli ottenuti con excel.
Figura 15.5: Confronto risultati
193
Capitolo 16
Analisi dei costi
Un aspetto fondamentale nella progettazione di un velivolo è il prezzo di vendita
e i costi di esercizio previsti durante il suo servizio. Infatti, un velivolo progetta-
to perfettamente ma con un costo esorbitante o dei consumi improponibili sarebbe
impossibile da proporre sul mercato, perchè verrebbe surclassato da velivoli con
prestazioni meno elevate ma più economici. Bisogna quindi prestare massima atten-
zione all'analisi accurata di tutte le spese previste, dal costo del combustibile agli
stipendi dell'equipaggio, dalla manutenzione alle tasse aeroportuali.
Una prima classicazione dei costi si può eettuare dividendoli in costi diretti,
come quelli di manutenzione, di operatività, del combustibile, di ammortamento,
di inazione, e costi indiretti, come le tasse aeroportuali e di navigazione. Biso-
gna inoltre tener in debita considerazione il numero di esemplari prodotti, poichè
esiste una particolare categoria di costi, i costi ssi, come i costi di progettazione
e validazione, che non dipendono dal numero di esemplari prodotti mentre i costi
denibili come variabili, quali ad esempio l'acquisto di materie prime, possono avere
andamenti molto dierenti nel tempo e dipendono molto fortemente dal numero di
unità prodotte. Ovviamente, maggiore sarà il numero di velivoli prodotti, più i costi
ssi saranno relativamente bassi, poichè verranno condivisi tra più velivoli.
194
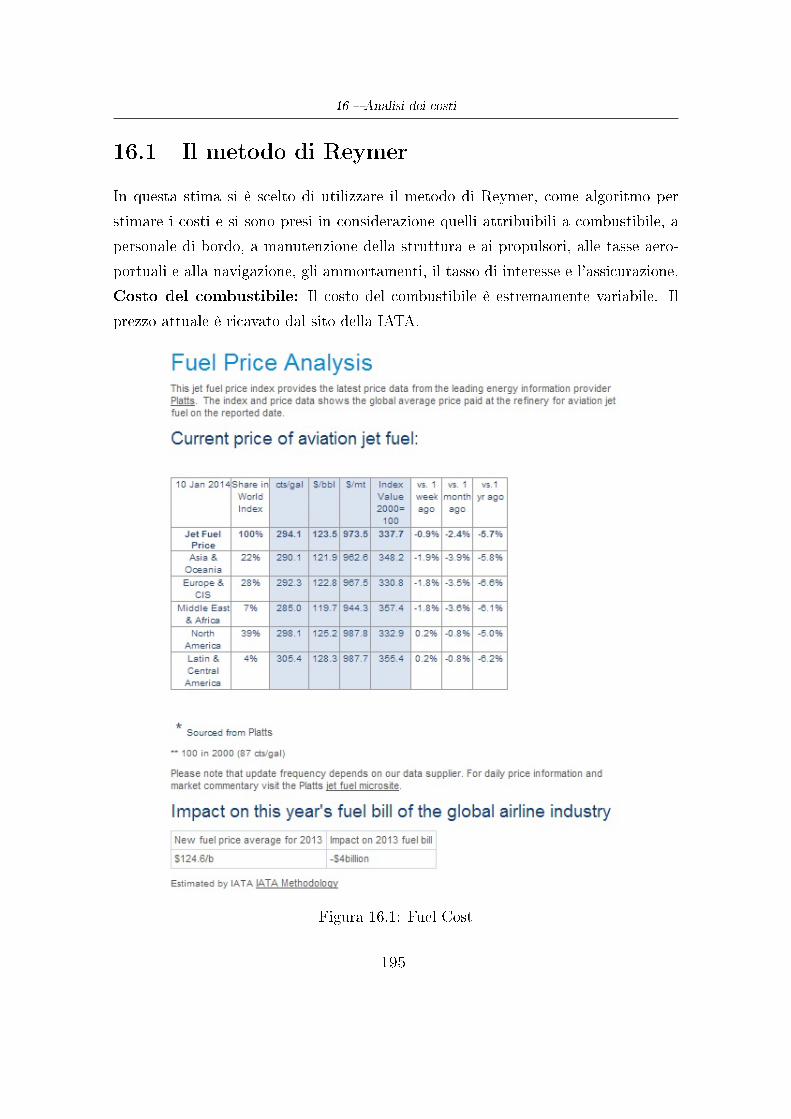
16 Analisi dei costi
16.1 Il metodo di Reymer
In questa stima si è scelto di utilizzare il metodo di Reymer, come algoritmo per
stimare i costi e si sono presi in considerazione quelli attribuibili a combustibile, a
personale di bordo, a manutenzione della struttura e ai propulsori, alle tasse aero-
portuali e alla navigazione, gli ammortamenti, il tasso di interesse e l'assicurazione.
Costo del combustibile: Il costo del combustibile è estremamente variabile. Il
prezzo attuale è ricavato dal sito della IATA.
Figura 16.1: Fuel Cost
195
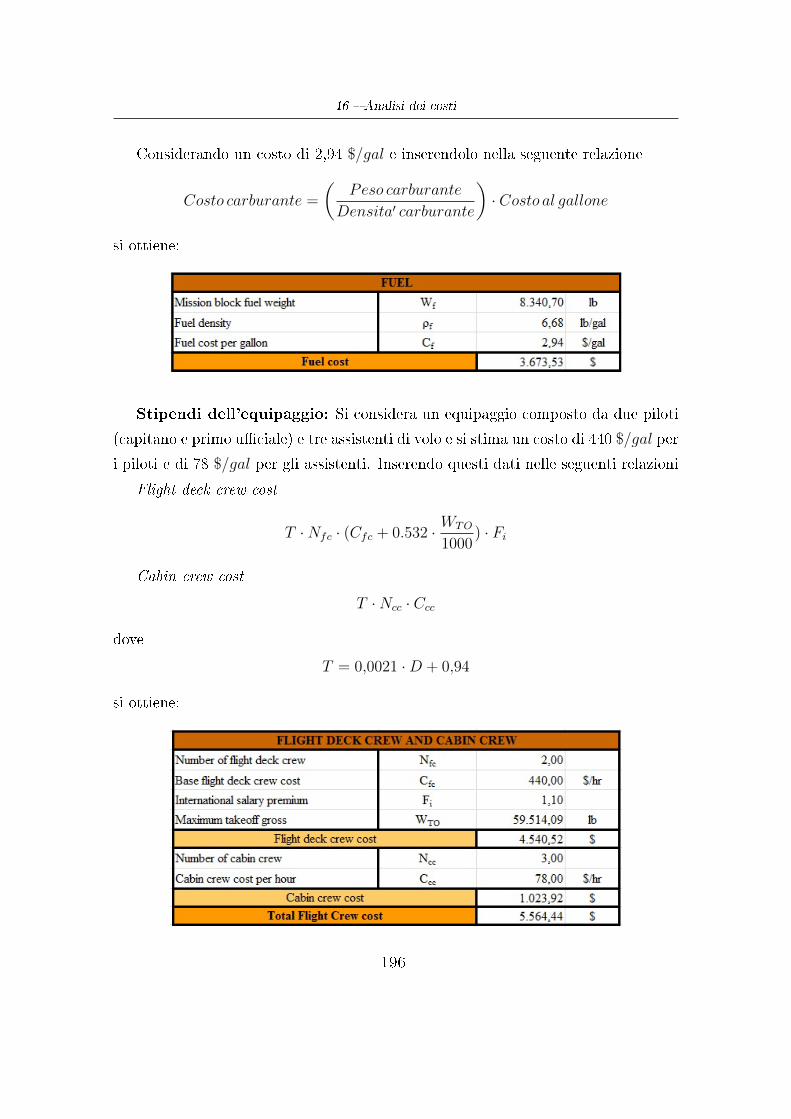
16 Analisi dei costi
Considerando un costo di 2,94 $/gal e inserendolo nella seguente relazione
Costo carburante =
(Peso carburante
Densita′ carburante
)· Costo al gallone
si ottiene:
Stipendi dell'equipaggio: Si considera un equipaggio composto da due piloti
(capitano e primo uciale) e tre assistenti di volo e si stima un costo di 440 $/gal per
i piloti e di 78 $/gal per gli assistenti. Inserendo questi dati nelle seguenti relazioni
Flight deck crew cost
T ·Nfc · (Cfc + 0.532 · WTO
1000) · Fi
Cabin crew cost
T ·Ncc · Ccc
dove
T = 0,0021 ·D + 0,94
si ottiene:
196
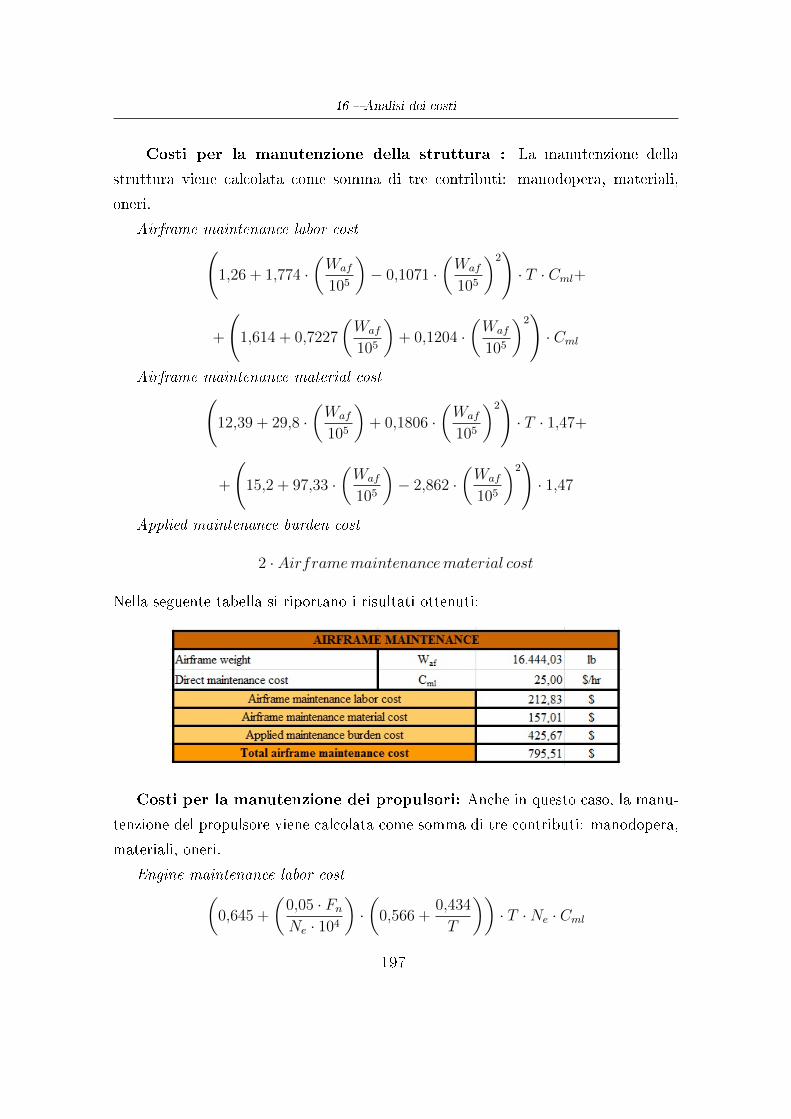
16 Analisi dei costi
Costi per la manutenzione della struttura : La manutenzione della
struttura viene calcolata come somma di tre contributi: manodopera, materiali,
oneri.
Airframe maintenance labor cost(1,26 + 1,774 ·
(Waf
105
)− 0,1071 ·
(Waf
105
)2)· T · Cml+
+
(1,614 + 0,7227
(Waf
105
)+ 0,1204 ·
(Waf
105
)2)· Cml
Airframe maintenance material cost(12,39 + 29,8 ·
(Waf
105
)+ 0,1806 ·
(Waf
105
)2)· T · 1,47+
+
(15,2 + 97,33 ·
(Waf
105
)− 2,862 ·
(Waf
105
)2)· 1,47
Applied maintenance burden cost
2 · Airframemaintenancematerial cost
Nella seguente tabella si riportano i risultati ottenuti:
Costi per la manutenzione dei propulsori: Anche in questo caso, la manu-
tenzione del propulsore viene calcolata come somma di tre contributi: manodopera,
materiali, oneri.
Engine maintenance labor cost(0,645 +
(0,05 · FnNe · 104
)·(
0,566 +0,434
T
))· T ·Ne · Cml
197
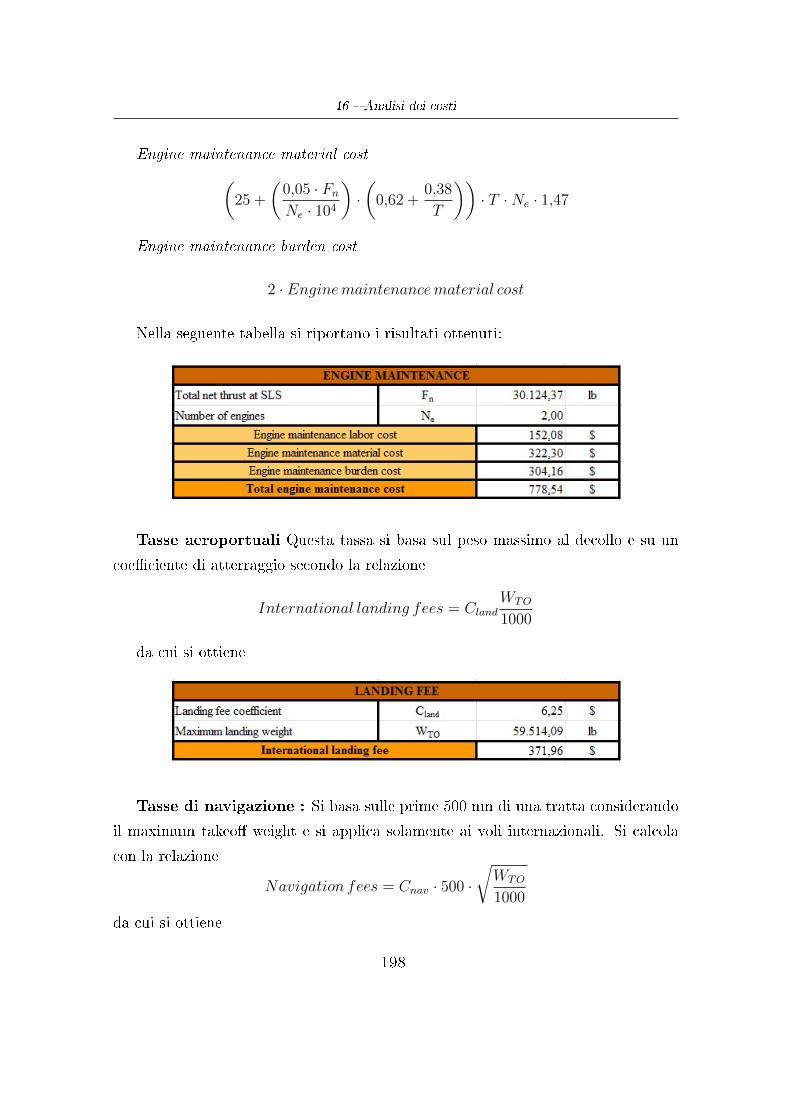
16 Analisi dei costi
Engine maintenance material cost(25 +
(0,05 · FnNe · 104
)·(
0,62 +0,38
T
))· T ·Ne · 1,47
Engine maintenance burden cost
2 · Enginemaintenancematerial cost
Nella seguente tabella si riportano i risultati ottenuti:
Tasse aeroportuali Questa tassa si basa sul peso massimo al decollo e su un
coeciente di atterraggio secondo la relazione
International landing fees = ClandWTO
1000
da cui si ottiene
Tasse di navigazione : Si basa sulle prime 500 nm di una tratta considerando
il maximum takeo weight e si applica solamente ai voli internazionali. Si calcola
con la relazione
Navigation fees = Cnav · 500 ·√WTO
1000
da cui si ottiene
198
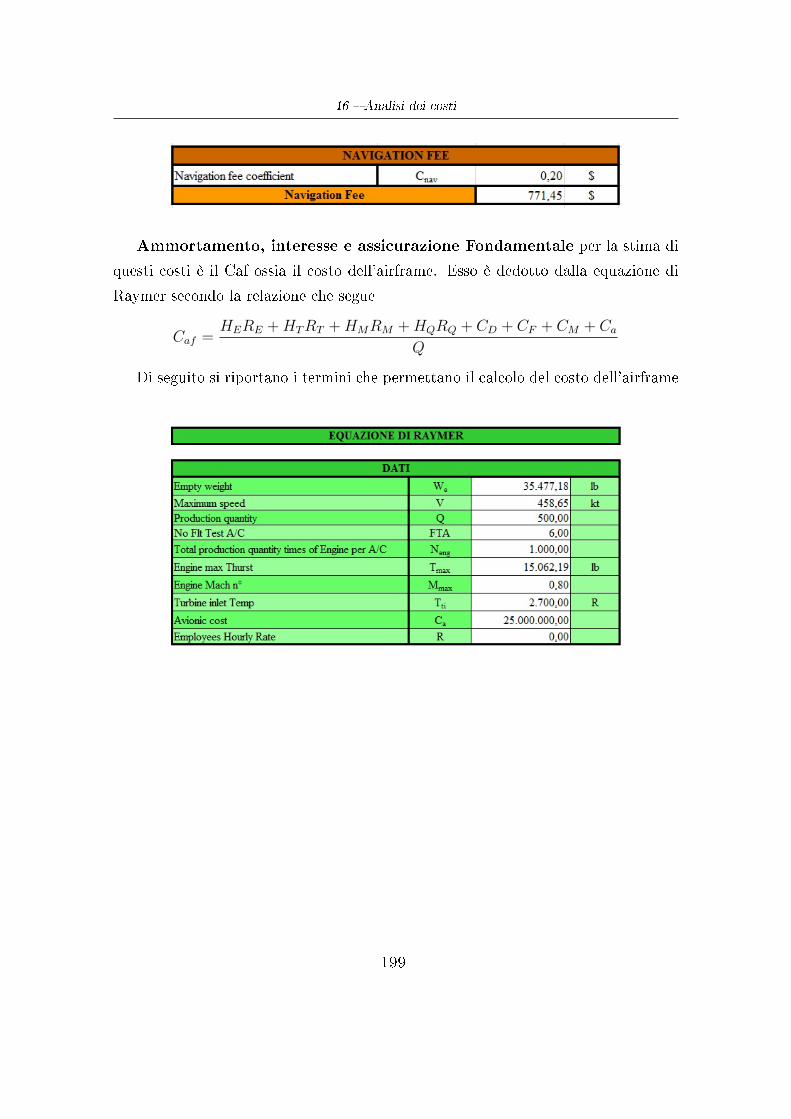
16 Analisi dei costi
Ammortamento, interesse e assicurazione Fondamentale per la stima di
questi costi è il Caf ossia il costo dell'airframe. Esso è dedotto dalla equazione di
Raymer secondo la relazione che segue
Caf =HERE +HTRT +HMRM +HQRQ + CD + CF + CM + Ca
Q
Di seguito si riportano i termini che permettano il calcolo del costo dell'airframe
199
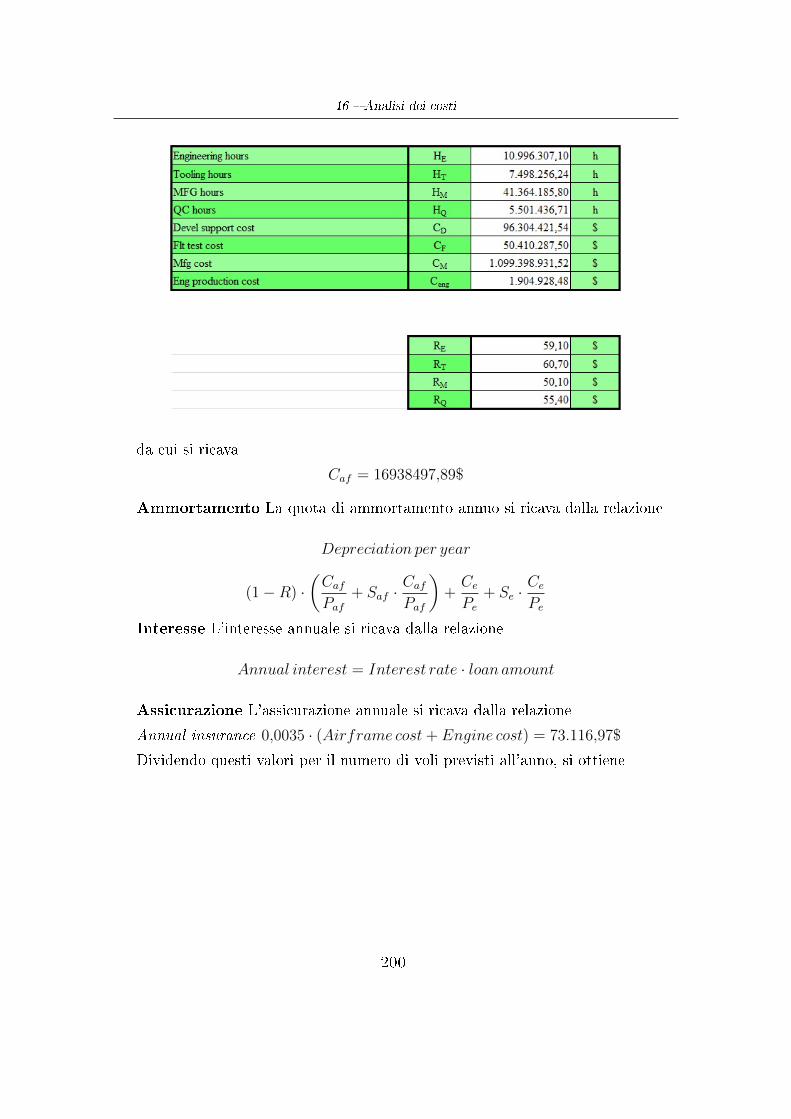
16 Analisi dei costi
da cui si ricava
Caf = 16938497,89$
Ammortamento La quota di ammortamento annuo si ricava dalla relazione
Depreciation per year
(1−R) ·(CafPaf
+ Saf ·CafPaf
)+CePe
+ Se ·CePe
Interesse L'interesse annuale si ricava dalla relazione
Annual interest = Interest rate · loan amount
Assicurazione L'assicurazione annuale si ricava dalla relazione
Annual insurance 0,0035 · (Airframe cost+ Engine cost) = 73.116,97$
Dividendo questi valori per il numero di voli previsti all'anno, si ottiene
200
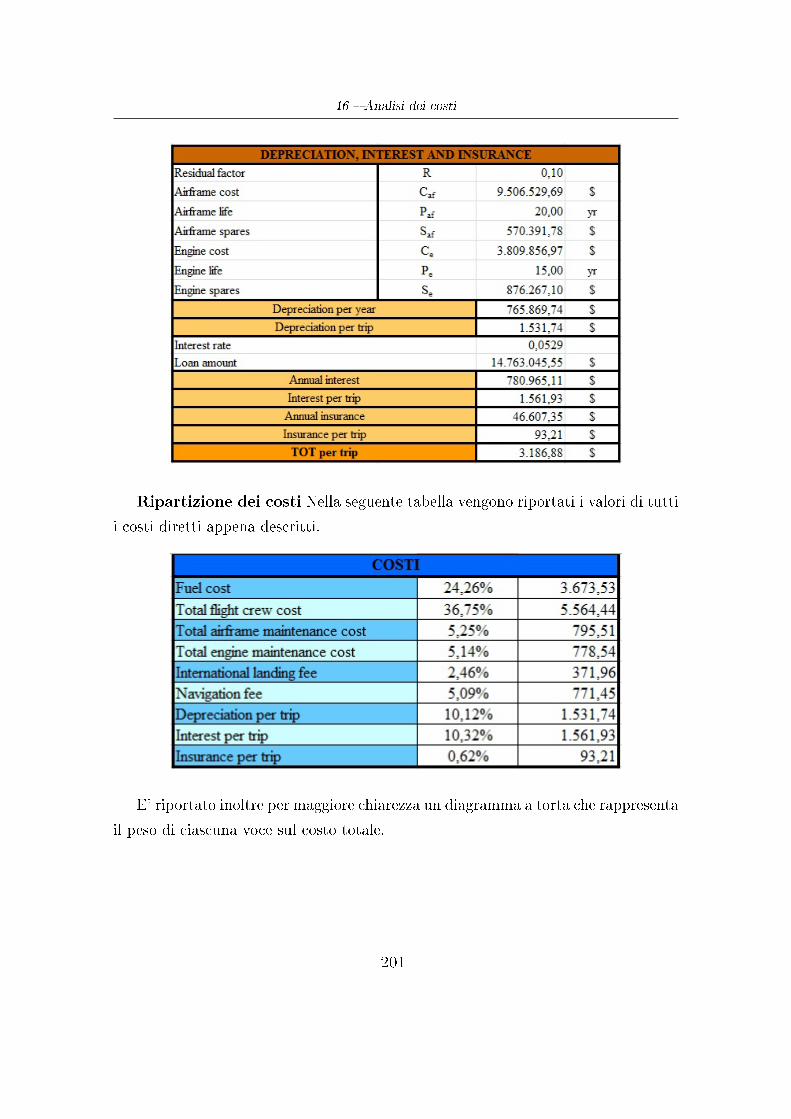
16 Analisi dei costi
Ripartizione dei costi Nella seguente tabella vengono riportati i valori di tutti
i costi diretti appena descritti.
E' riportato inoltre per maggiore chiarezza un diagramma a torta che rappresenta
il peso di ciascuna voce sul costo totale.
201
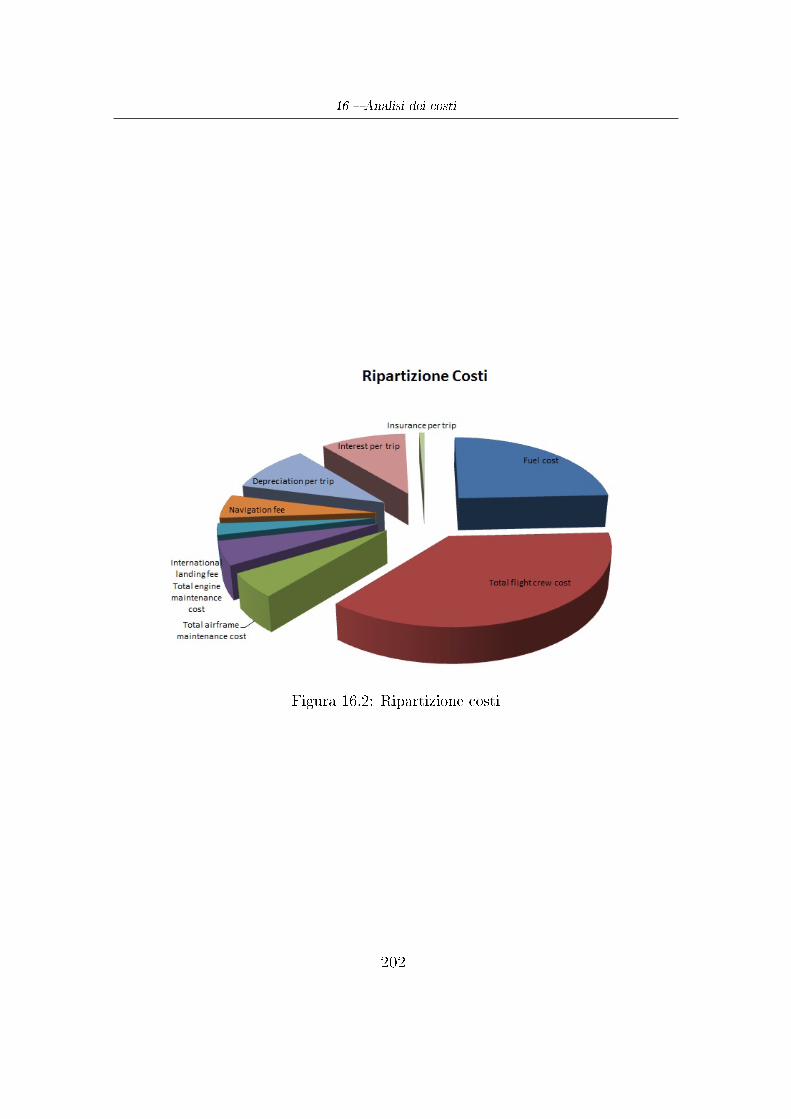
16 Analisi dei costi
Figura 16.2: Ripartizione costi
202
Capitolo 17
Impatto ambientale
L'impatto del velivolo sull'ambiente è diventato un aspetto fondamentale nella rea-
lizzazione di nuovi aeromobili, soprattutto in termini di emissioni acustiche e agen-
ti inquinanti. Diventa quindi di primaria importanza osservare qual è la real-
tà quotidiana dei velivoli in circolazione e come si può agire per migliorare tale
situazione.
17.1 Emissioni acustiche
Per quanto riguarda il problema delle emissioni acustiche, si è visto che l'analisi
viene eettuata considerando tre condizioni di volo: decollo, manovra, atterraggio.
Di seguito si riportano i valori trovati in letteratura e la ripartizione tra i vari
componenti del propulsore che inducono questi livelli acustici.
203
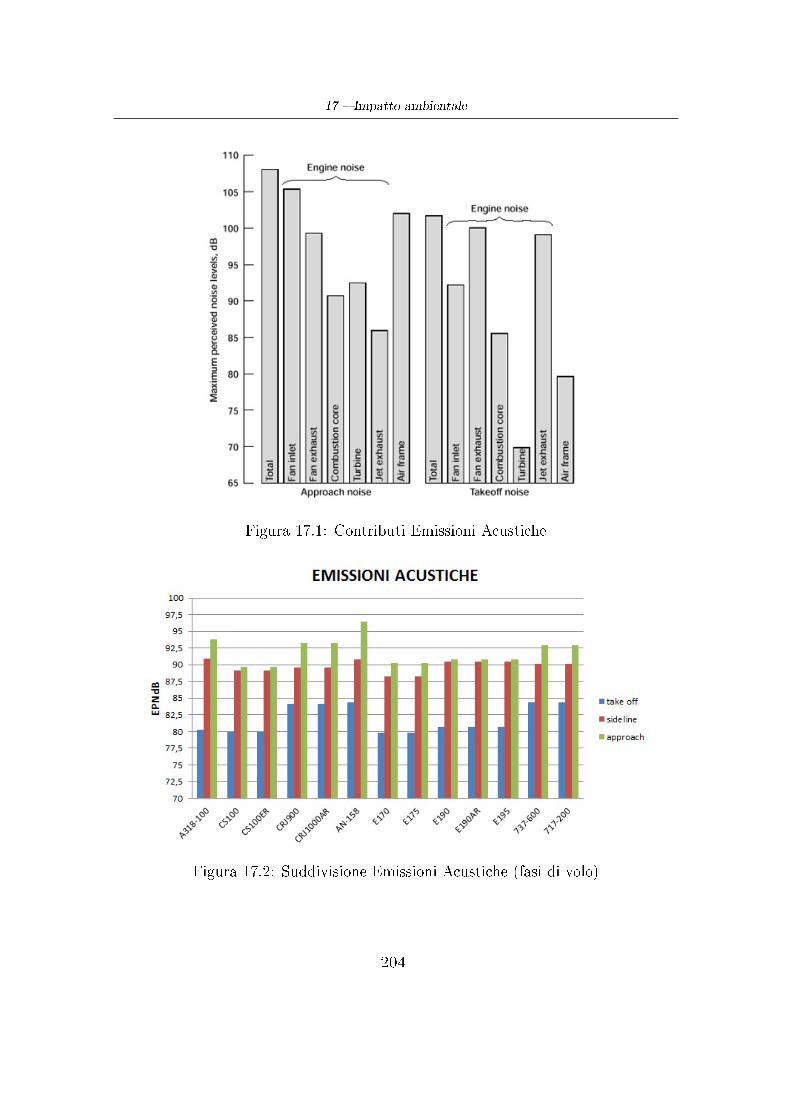
17 Impatto ambientale
Figura 17.1: Contributi Emissioni Acustiche
Figura 17.2: Suddivisione Emissioni Acustiche (fasi di volo)
204
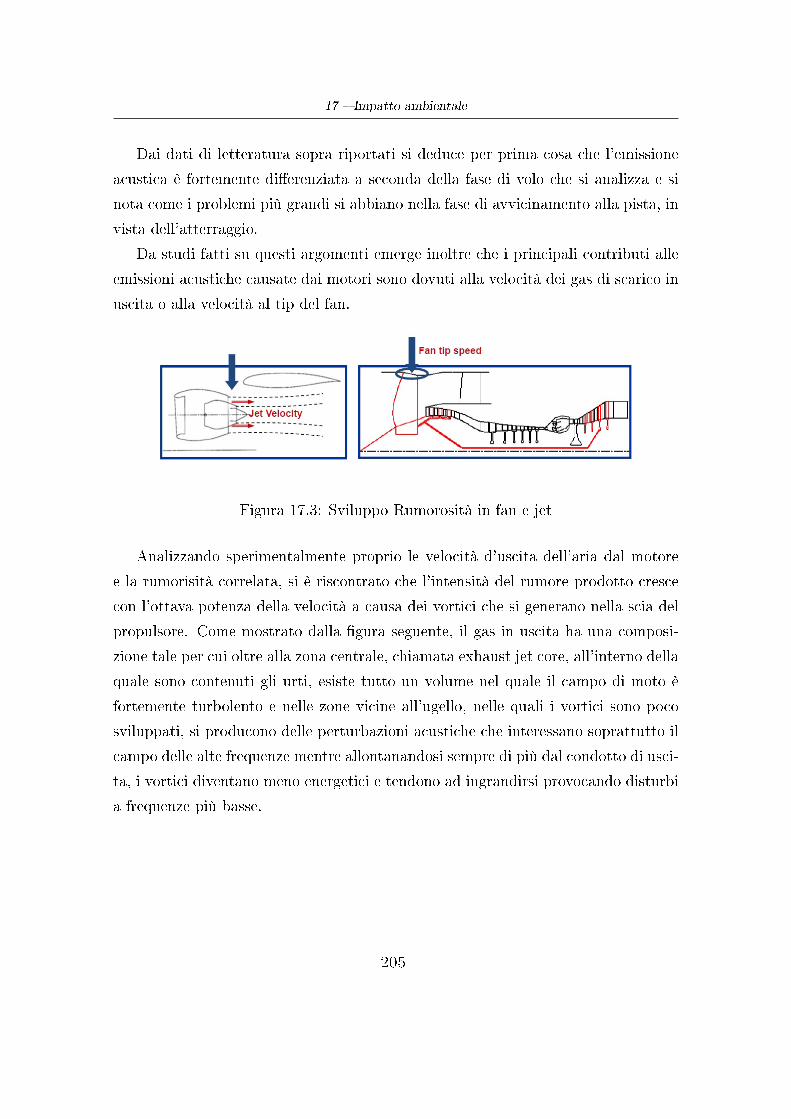
17 Impatto ambientale
Dai dati di letteratura sopra riportati si deduce per prima cosa che l'emissione
acustica è fortemente dierenziata a seconda della fase di volo che si analizza e si
nota come i problemi più grandi si abbiano nella fase di avvicinamento alla pista, in
vista dell'atterraggio.
Da studi fatti su questi argomenti emerge inoltre che i principali contributi alle
emissioni acustiche causate dai motori sono dovuti alla velocità dei gas di scarico in
uscita o alla velocità al tip del fan.
Figura 17.3: Sviluppo Rumorosità in fan e jet
Analizzando sperimentalmente proprio le velocità d'uscita dell'aria dal motore
e la rumorisità correlata, si è riscontrato che l'intensità del rumore prodotto cresce
con l'ottava potenza della velocità a causa dei vortici che si generano nella scia del
propulsore. Come mostrato dalla gura seguente, il gas in uscita ha una composi-
zione tale per cui oltre alla zona centrale, chiamata exhaust jet core, all'interno della
quale sono contenuti gli urti, esiste tutto un volume nel quale il campo di moto è
fortemente turbolento e nelle zone vicine all'ugello, nelle quali i vortici sono poco
sviluppati, si producono delle perturbazioni acustiche che interessano soprattutto il
campo delle alte frequenze mentre allontanandosi sempre di più dal condotto di usci-
ta, i vortici diventano meno energetici e tendono ad ingrandirsi provocando disturbi
a frequenze più basse.
205
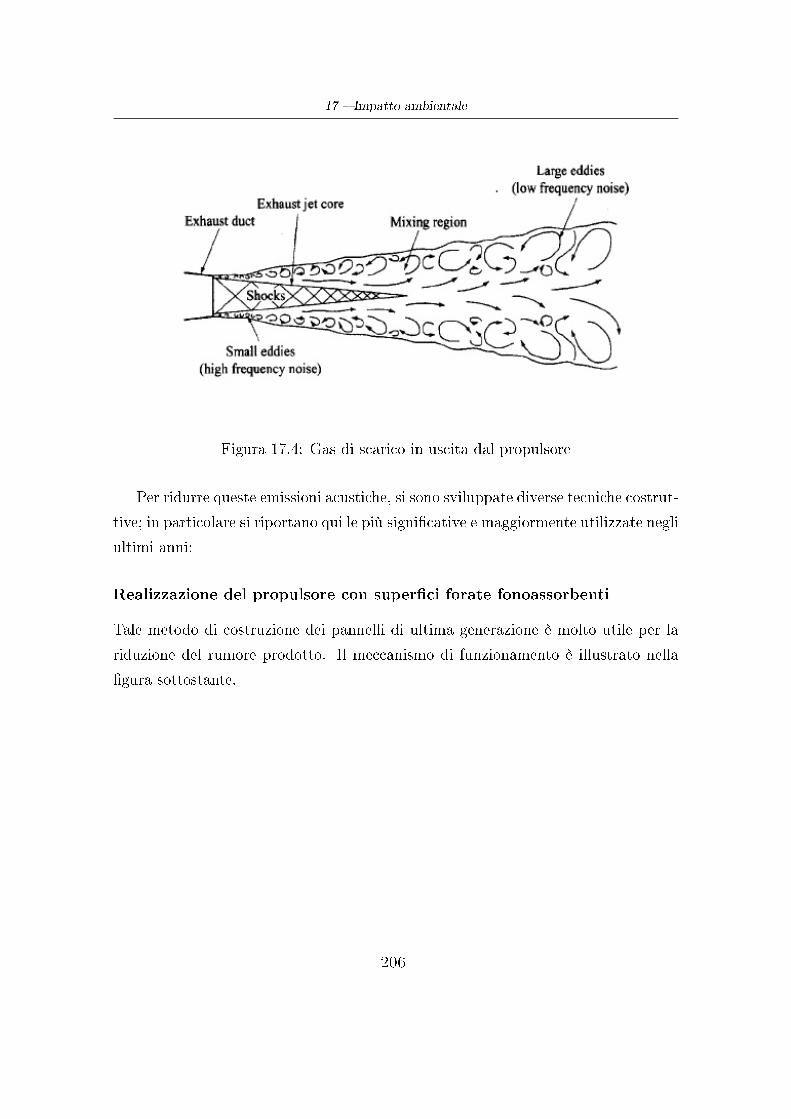
17 Impatto ambientale
Figura 17.4: Gas di scarico in uscita dal propulsore
Per ridurre queste emissioni acustiche, si sono sviluppate diverse tecniche costrut-
tive; in particolare si riportano qui le più signicative e maggiormente utilizzate negli
ultimi anni:
Realizzazione del propulsore con superci forate fonoassorbenti
Tale metodo di costruzione dei pannelli di ultima generazione è molto utile per la
riduzione del rumore prodotto. Il meccanismo di funzionamento è illustrato nella
gura sottostante.
206
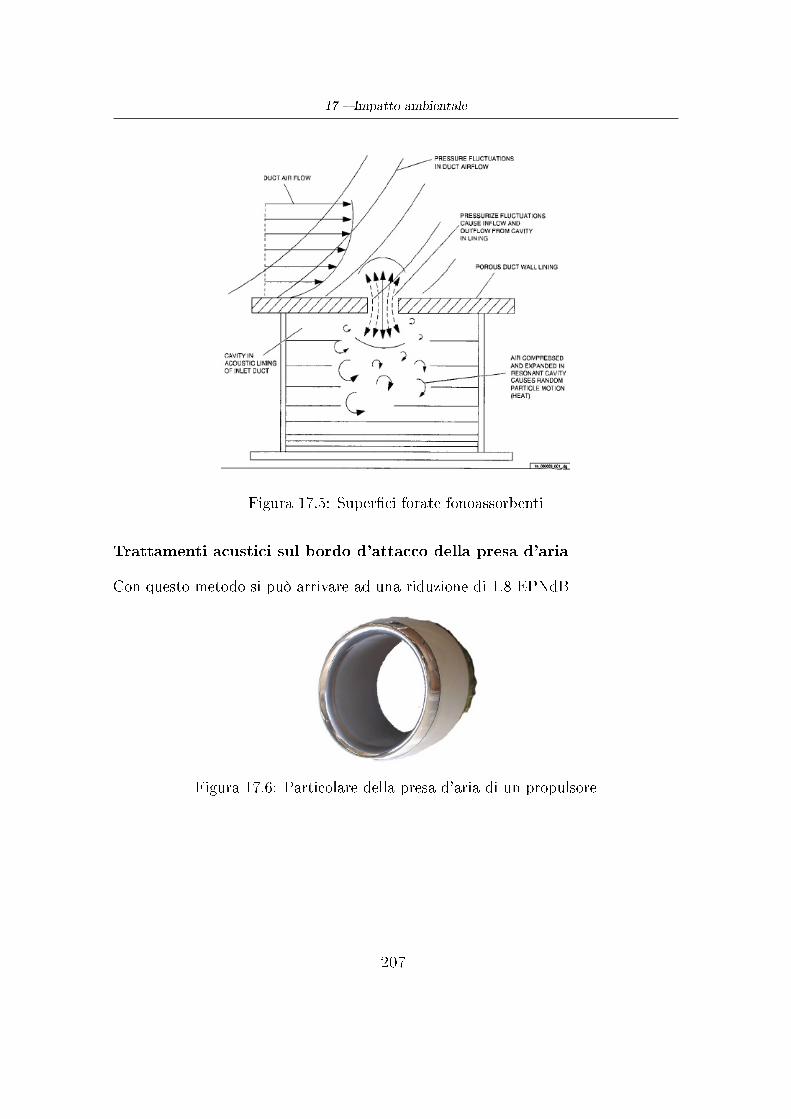
17 Impatto ambientale
Figura 17.5: Superci forate fonoassorbenti
Trattamenti acustici sul bordo d'attacco della presa d'aria
Con questo metodo si può arrivare ad una riduzione di 1.8 EPNdB
Figura 17.6: Particolare della presa d'aria di un propulsore
207
17 Impatto ambientale
Sagomatura opportuna dell'interno della presa d'aria
Questo particolare progetto serve a creare delle superci che abbiano angoli oppor-
tuni, tali da riettere le emissioni acustiche verso il cielo; è possibile giungere ad una
riduzione di 0.5 EPNdB.
Figura 17.7: Sagomatura della parte interna della presa d'aria
Ugello di scarico a geometria variabile
Sempre con lo scopo di realizzare delle forme che guidino, attraverso il gioco delle
riessioni delle onde d'urto, è possibile sagomare nel modo più opportuno anche
l'ugello, in particolare facendo sì che la forma sia quella ottimale al variare delle
condizioni del uido in ingresso e quindi delle dierenti fasi di volo, no ad ottenere
una riduzione di 1.0 EPNdB.
Sagomatura opportuna dell'ugello di scarico
Anche la sola sagomatura particolare che permette all'aria in uscita di essere meno
rumorosa può essere un buon rimedio, aggiungendo una diminuzione di 0.5 EPNdB.
Figura 17.8: Sagomatura opportuna dell'ugello di scarico
208
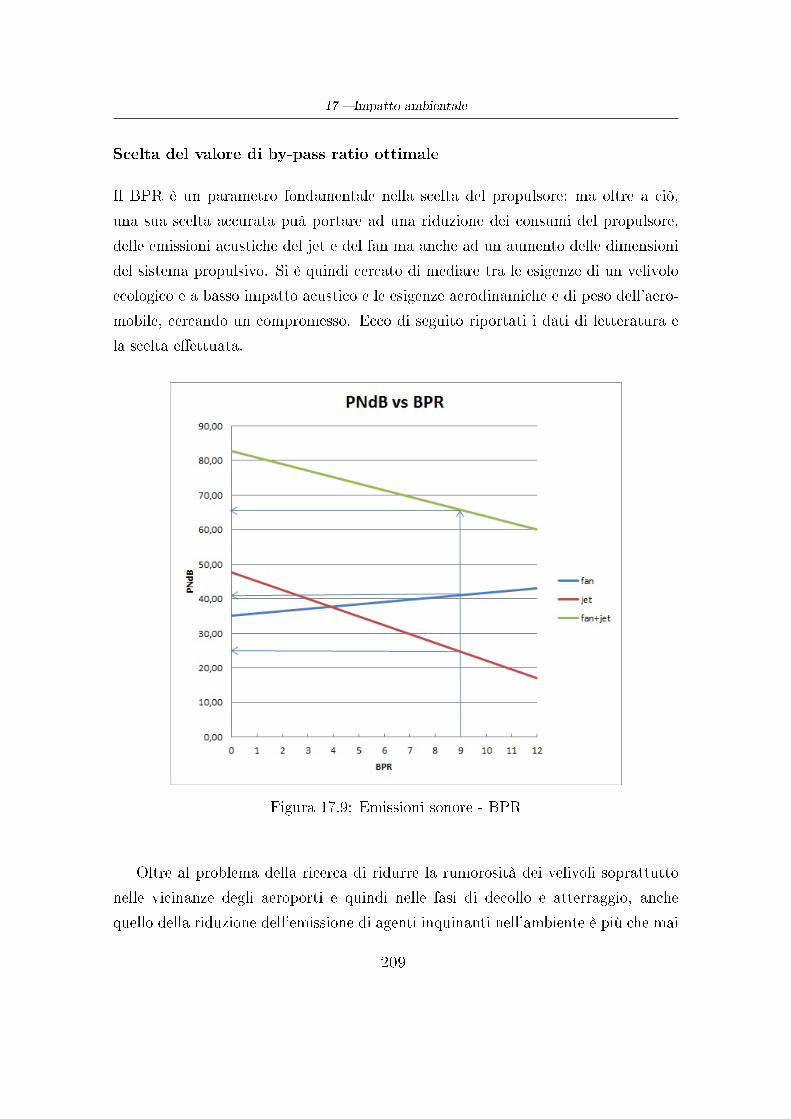
17 Impatto ambientale
Scelta del valore di by-pass ratio ottimale
Il BPR è un parametro fondamentale nella scelta del propulsore; ma oltre a ciò,
una sua scelta accurata puà portare ad una riduzione dei consumi del propulsore,
delle emissioni acustiche del jet e del fan ma anche ad un aumento delle dimensioni
del sistema propulsivo. Si è quindi cercato di mediare tra le esigenze di un velivolo
ecologico e a basso impatto acustico e le esigenze aerodinamiche e di peso dell'aero-
mobile, cercando un compromesso. Ecco di seguito riportati i dati di letteratura e
la scelta eettuata.
Figura 17.9: Emissioni sonore - BPR
Oltre al problema della ricerca di ridurre la rumorosità dei velivoli soprattutto
nelle vicinanze degli aeroporti e quindi nelle fasi di decollo e atterraggio, anche
quello della riduzione dell'emissione di agenti inquinanti nell'ambiente è più che mai
209
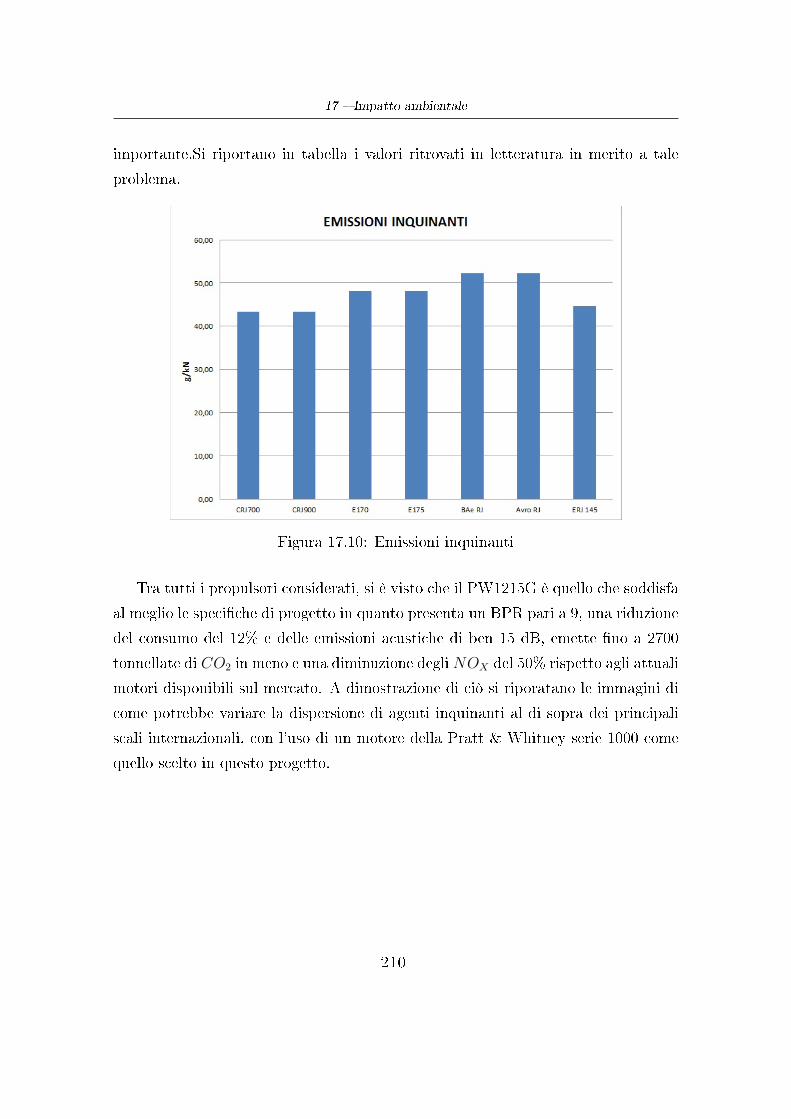
17 Impatto ambientale
importante.Si riportano in tabella i valori ritrovati in letteratura in merito a tale
problema.
Figura 17.10: Emissioni inquinanti
Tra tutti i propulsori considerati, si è visto che il PW1215G è quello che soddisfa
al meglio le speciche di progetto in quanto presenta un BPR pari a 9, una riduzione
del consumo del 12% e delle emissioni acustiche di ben 15 dB, emette no a 2700
tonnellate di CO2 in meno e una diminuzione degli NOX del 50% rispetto agli attuali
motori disponibili sul mercato. A dimostrazione di ciò si riporatano le immagini di
come potrebbe variare la dispersione di agenti inquinanti al di sopra dei principali
scali internazionali, con l'uso di un motore della Pratt & Whitney serie 1000 come
quello scelto in questo progetto.
210
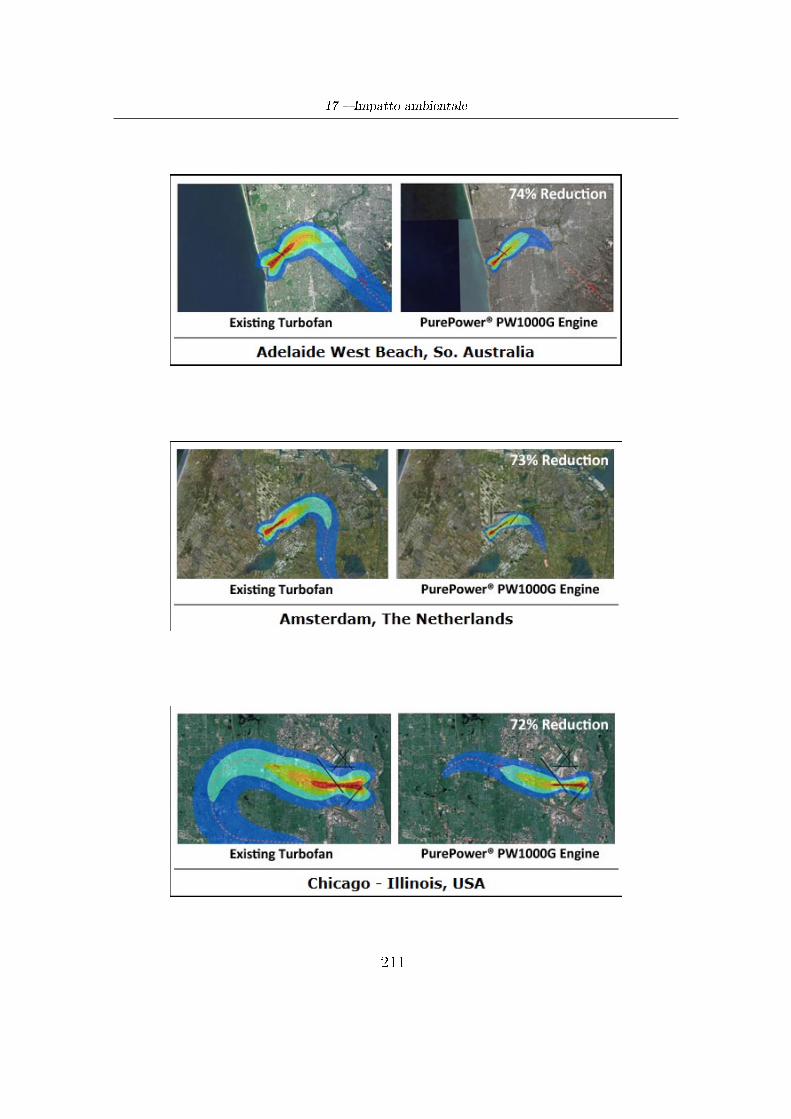
17 Impatto ambientale
211
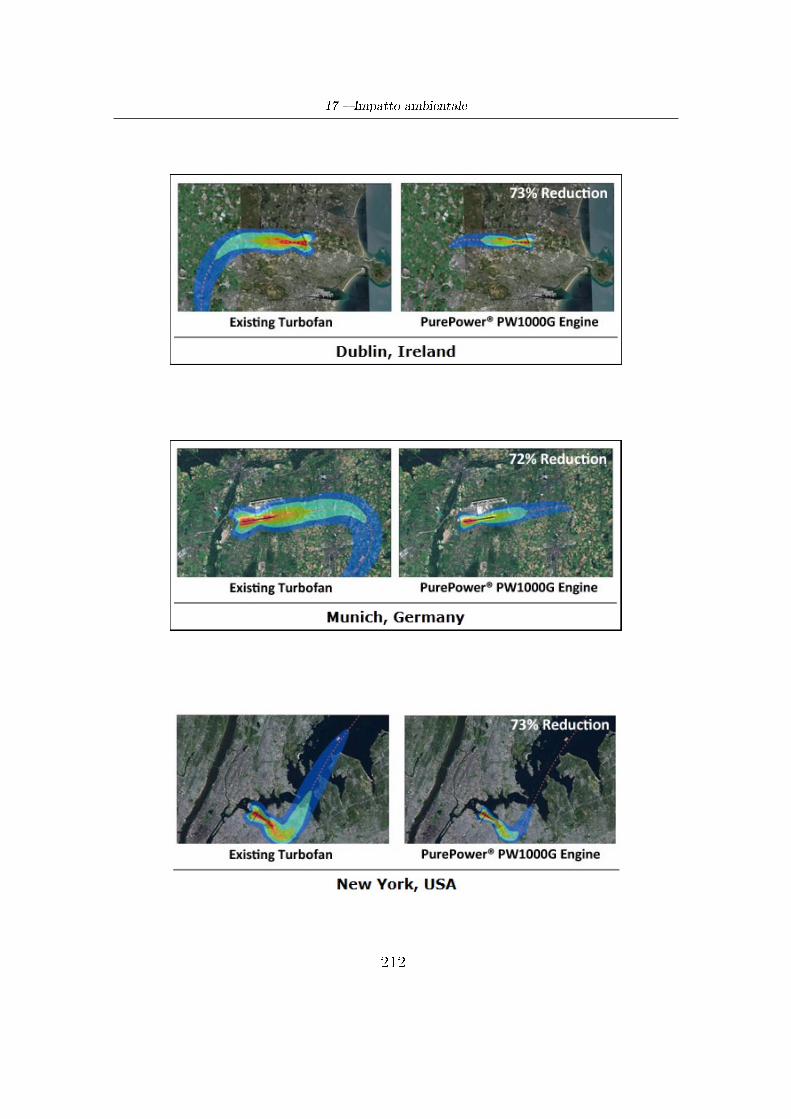
17 Impatto ambientale
212
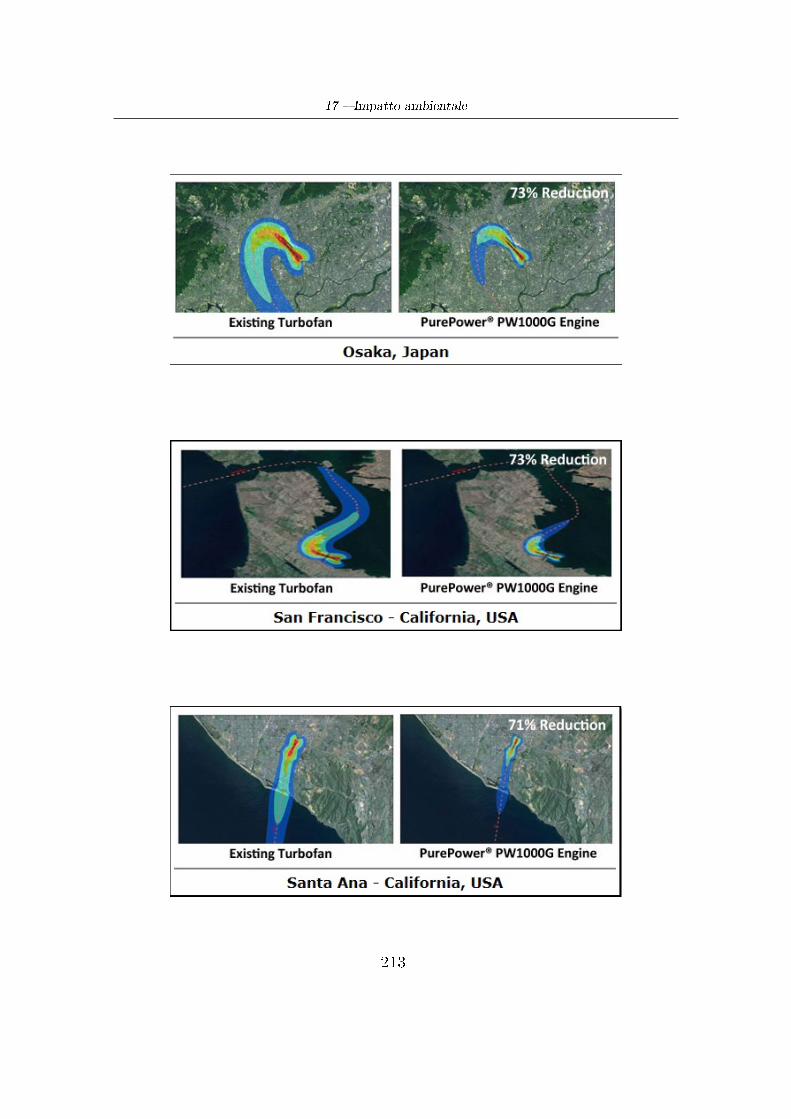
17 Impatto ambientale
213
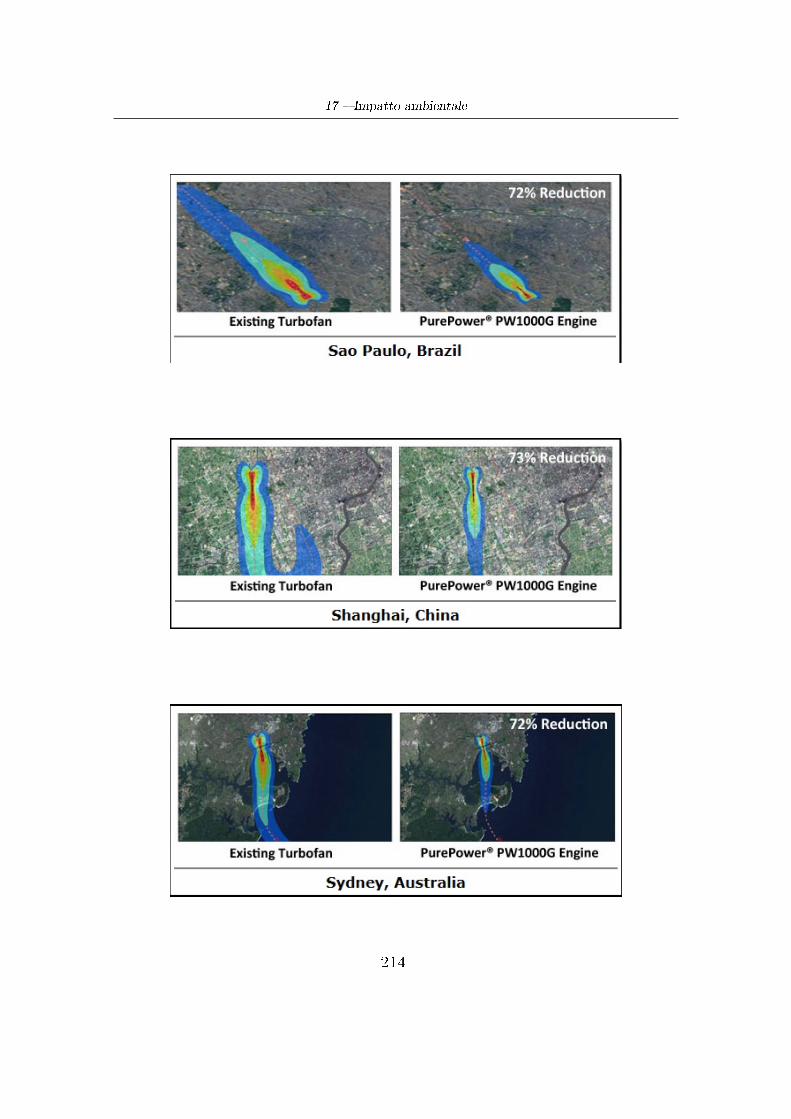
17 Impatto ambientale
214
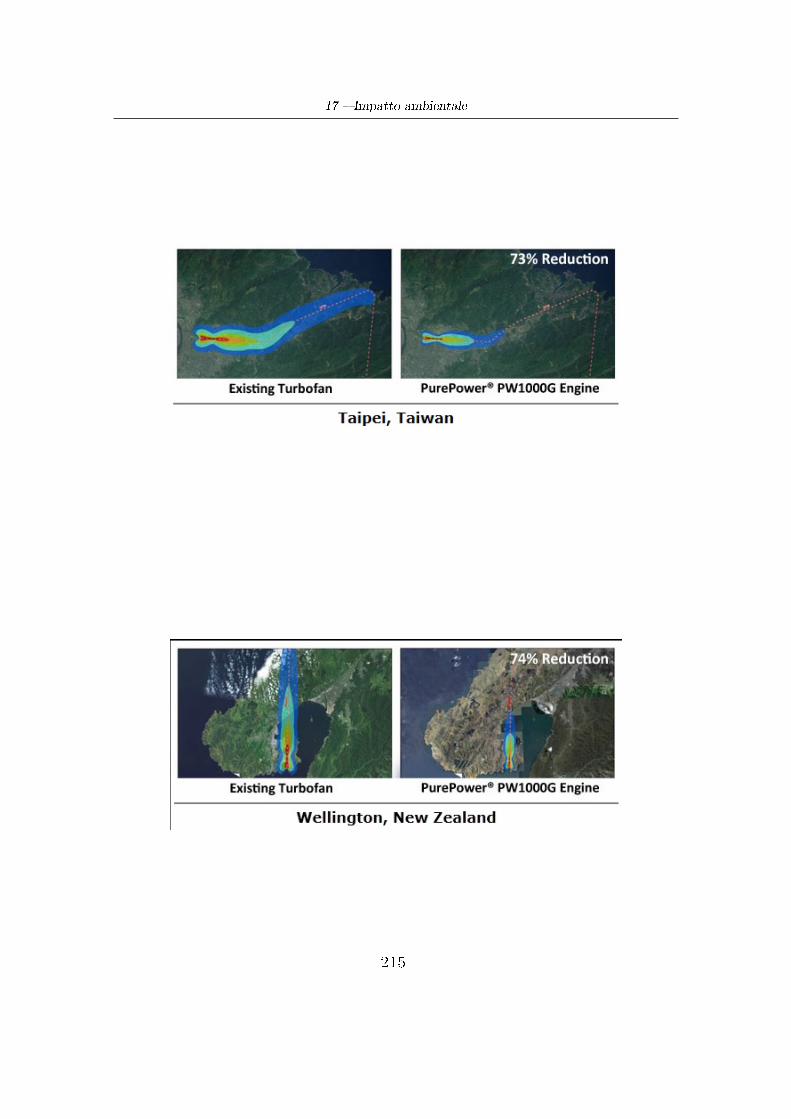
17 Impatto ambientale
215











![Jet [Novela] Biblioteca](https://static.fdokumen.com/doc/165x107/6321c71564690856e108db2b/jet-novela-biblioteca.jpg)






