
First Hop Redundancy Protocols Configuration Guide, Cisco ...

790 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
Redundancy Problem in Writing: FromHuman to Anthropomorphic Robot Arm
Veljko Potkonjak, Mirjana Popovic, Mihailo Lazarevic, and Jelena Sinanovic
Abstract—This paper presents the analysis of motion of a re-dundant anthropomorphic arm during the writing. The modelingis based on the separation of the prescribed movement into twomotions: smooth global, and fast local motion, called distributedpositioning (DP). The distribution of these motions to arm jointsis discussed. It is based on the inertial properties and actuationcapabilities of joints. The approach suggested allows uniquesolution of the inverse kinematics of redundant mechanisms suchas human arm and anthropomorphic robot arm. Distributedpositioning is an inherent property of biological systems. Humans,when writing, as shown in literature and in our earlier workcontrol their proximal joints, while the movement of distal jointsfollow them (synergy). To enhance capabilities of robots, newcontrol schema are necessary. We show that robot control can beimproved if it is biological analog. The major aim of this studyis to promote such a hypothesis by using anthropomorphic robotarm in writing as an example.
Index Terms—Degrees of freedom, distributed positioning, leg-ibility, redundancy, writing.
I. INTRODUCTION
T HE GROWING field of robot application requires verystable, fast, and accurate systems. Some complex indus-
trial and nonindustrial tasks induced a new approach to robotconfiguration. We may mention precise industrial assembling,high speed manipulation, home robotics, robotized surgery,etc. Such demanding tasks could efficiently be solved if robotwas configured as redundant. In early research, redundancywas seen as a possibility to avoid obstacles or singularpositions. Recent researches offer a new approach to redun-dant robots. In many tasks, kinematics can be solved withnonredundant robot configuration but difficulties arise withdynamic effects and accuracy. Redundancy may help to solvethese problems [1]–[10]. With such approach to redundantrobots, one faces the problem of control, specially on thekinematic level. The task does not determine joint motionsuniquely. Hence, different kinematic or dynamic optimizationcriteria could be introduced to achieve the unique solutionof the inverse kinematics. The other idea was to try toimitate human behavior. This is specially convenient for taskswhich are similar to those characteristic for humans (e.g.,assembling in industry, writing, different jobs at home and inhealth service). If we consider speed, accuracy, and stability
Manuscript received December 22, 1995; revised July 5, 1997 and Decem-ber 14, 1997.
V. Potkonjak, M. Popovic, and J. Sinanovic are with the Faculty ofElectrical Engineering, University of Belgrade, Belgrade, Yugoslavia.
M. Lazarevic is with the Faculty of Mechanical Engineering, University ofBelgrade, Belgrade, Yugoslavia.
Publisher Item Identifier S 1083-4419(98)09246-2.
of motion then the overall performance (taking into accountall three of parameters) with machines is still far behindhuman reaching and grasping. The control of arm movementin humans relies very much on distributed usage of differentjoints, and inherent optimization of muscles which are active.Analysis of multijoint coordination in humans is an importantsource of information for synthesis of dynamic patterns inmachines. Thus, it is necessary to examine the way humansperform complex motions, find the synergy, and apply it withrobot. In this paper we define some general methodology,then find an appropriate example and examine it in details.Writing is a good representative of task that is characteristicfor humans, but at the same time interesting for robots. It isfast and accordingly very demanding from the viewpoint ofdynamics (high accelerations produce high inertial loads).
We start with the analysis of human arm kinematics espe-cially in writing. The analysis of previous research in the fieldof human writing is needed since it gives the background to ouridea of robot moving as a biological analog. General researchesare reviewed, and the results which are more close to robotics(macro/micro systems and DP concept). Modifications of theoriginal concept are made and the task of writing is discussedin detail.
II. FROM PREVIOUS RESULTS TO NEW APPROACH
Studies of writing and drawing demonstrated relativelyindependent functioning of proximal and distal joints [11],which leads to reproducible trajectories of the working point(tip of the pen). Even wrist trajectory is more variable thanthat of the working point. Stability of the wrist is essential forproper functioning of the digital flexor and extensor musclesand wrist position affects the maximum ability of the fingersto flex and extend [12].
Different conceptual framework for theoretical and practicalconsiderations of writing concerns the relation between thespatial description of the trajectory and the time evaluationof the motion along the trajectory. With a goal to establishthe relationship between spatial and kinematic aspects ofmovements, [13] studied movements that involve reversal ofdirection and curvilinear trajectories. The authors showed thata strict relationship exists between the form of trajectory andthe (tangential) velocity at which it is executed in handwritingand other nonlearned movements such as drawing of simplegeometrical forms. In an analysis of the point-to-point handmovements in the forward direction [14] examined relation-ship between velocity and three-dimensional curvature. Theyshowed that velocity was related to radius of curvature by
1083–4419/98$10.00 1998 IEEE
POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 791
power law with an exponent of 0.59, different from the valueof 1/3 typically obtained in curvilinear drawing motions [15].
Many other studies of this subject have been mainly con-cerned with recording techniques [16]–[18] and with de-scription of the trajectories obtained by fitting the kinematicparameters with suitable functions [19]. Noticeable exceptionis Hollerbach’s oscillatory theory. Hollerbach [20] has sug-gested that writing can be analyzed as an interaction of twosine oscillators moving the working point along Cartesian axescoupled with a constant shift of the arm along the paper.
Edelman and Flash [21] have advanced a mathematicalmodel that considers writing as a combination of only a fewelementary units similar to those practiced by children beforethey actually start to write. Another approach to modelinghandwriting has been suggested by Plamondonet al. [22]based on interactions of curvilinear and angular velocity gen-erators postulated to control velocity profiles of the workingpoint. The majority of subjects studied display low correlationbetween pen-point kinematics and pen force [23].
We will first, address the problems of writing to arm re-dundancy. The Bernstein problem, or reformulated as pseudo-Bernstein problem by Lathash [24] is one of the most fre-quently addressed in robotics [20], as well as in studies ofhuman motor control [25], [26]. That is a problem of choice:how does the central nervous system (CNS) choose a certainpattern for executing a motor task from an infinite numberof possibilities? In language of performance: how to find asolution for a motor task when the number of mechanicaldegrees of freedom of the effectors () is higher than thenumber of parameters defining the task ()? The latter numberis frequently six, corresponding to the three-dimensional spaceand target orientation. In other words, the CNS is presentedwith equations that contain unknowns ( ). Tosolve such a system, we need to add ( ) equations or,equivalently, impose ( ) constraints upon the system tocompensate the redundancy.
There are two major approaches to solve this Bernsteinproblem. One is to impose certain mathematical constraints(equations) on changes in kinematic parameters. For example,Soechtinget al. [27] studied arm movements in conditionswhen the number of degrees of freedom in the joint anglespace was four (three for shoulder and one for elbow). Theauthors were searching for invariants that would suggest anadditional constraint necessary to solve the pseudo-Bernsteinproblem, that is, corresponding movements in the joint spaceto working point movements in the external Cartesian space.Soechtinget al. [27] have managed to detect a phase shiftbetween two of the angles, which was kept reasonably constantthroughout a range of motor tasks. On the contrary, Popovicand Popovi´c [28] concluded from similar experiments in point-to-point arm movements that ratio between shoulder and elbowangular velocities differs depending only on the position of thearm end points, respectively, to the shoulder. It was reportedthat this ratio was preserved in spinal cord injured subjectslacking ample shoulder and elbow movement control, and easyto relearn [29].
The other approach is based on introducing a “cost function”that is presumably optimized during voluntary movements.
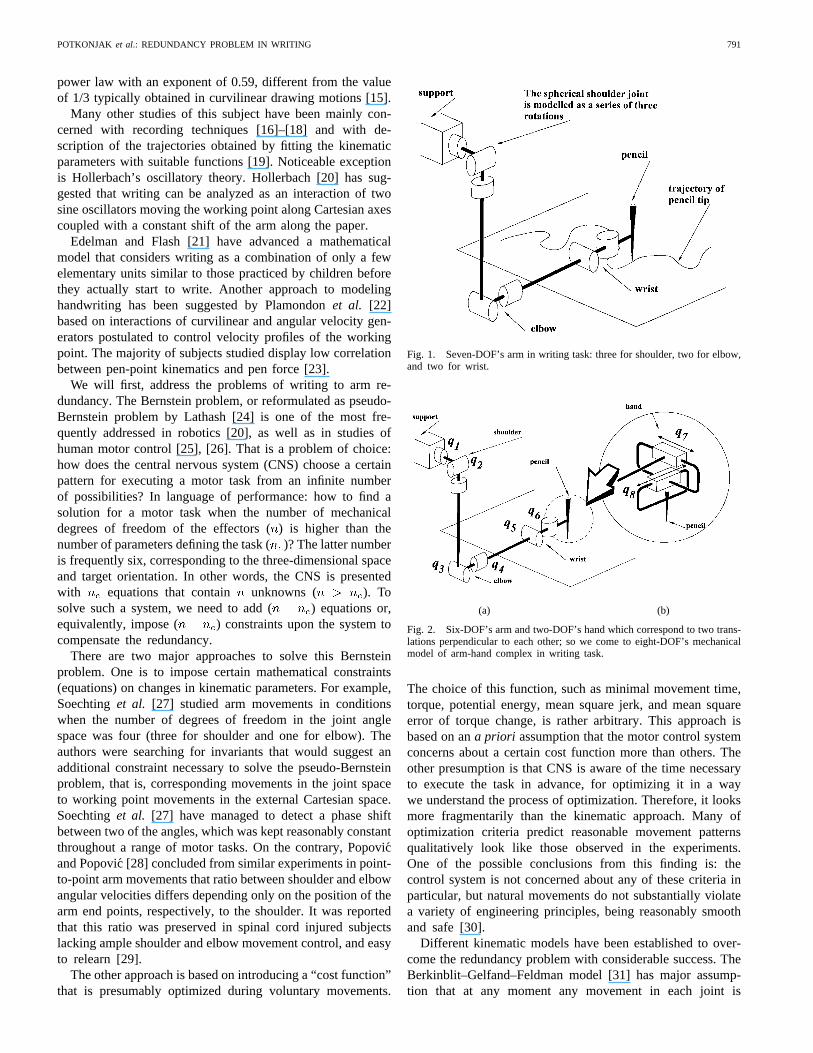
Fig. 1. Seven-DOF’s arm in writing task: three for shoulder, two for elbow,and two for wrist.
(a) (b)
Fig. 2. Six-DOF’s arm and two-DOF’s hand which correspond to two trans-lations perpendicular to each other; so we come to eight-DOF’s mechanicalmodel of arm-hand complex in writing task.
The choice of this function, such as minimal movement time,torque, potential energy, mean square jerk, and mean squareerror of torque change, is rather arbitrary. This approach isbased on ana priori assumption that the motor control systemconcerns about a certain cost function more than others. Theother presumption is that CNS is aware of the time necessaryto execute the task in advance, for optimizing it in a waywe understand the process of optimization. Therefore, it looksmore fragmentarily than the kinematic approach. Many ofoptimization criteria predict reasonable movement patternsqualitatively look like those observed in the experiments.One of the possible conclusions from this finding is: thecontrol system is not concerned about any of these criteria inparticular, but natural movements do not substantially violatea variety of engineering principles, being reasonably smoothand safe [30].
Different kinematic models have been established to over-come the redundancy problem with considerable success. TheBerkinblit–Gelfand–Feldman model [31] has major assump-tion that at any moment any movement in each joint is
792 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
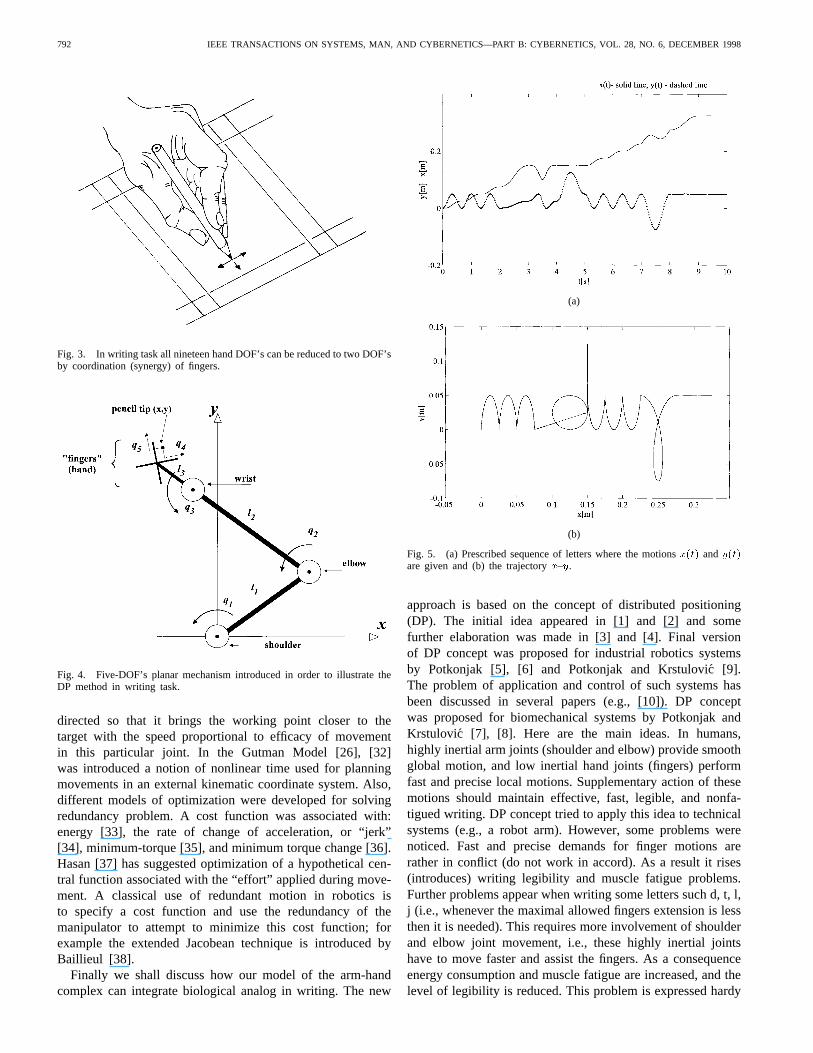
Fig. 3. In writing task all nineteen hand DOF’s can be reduced to two DOF’sby coordination (synergy) of fingers.
Fig. 4. Five-DOF’s planar mechanism introduced in order to illustrate theDP method in writing task.
directed so that it brings the working point closer to thetarget with the speed proportional to efficacy of movementin this particular joint. In the Gutman Model [26], [32]was introduced a notion of nonlinear time used for planningmovements in an external kinematic coordinate system. Also,different models of optimization were developed for solvingredundancy problem. A cost function was associated with:energy [33], the rate of change of acceleration, or “jerk”[34], minimum-torque [35], and minimum torque change [36].Hasan [37] has suggested optimization of a hypothetical cen-tral function associated with the “effort” applied during move-ment. A classical use of redundant motion in robotics isto specify a cost function and use the redundancy of themanipulator to attempt to minimize this cost function; forexample the extended Jacobean technique is introduced byBaillieul [38].
Finally we shall discuss how our model of the arm-handcomplex can integrate biological analog in writing. The new
(a)
(b)
Fig. 5. (a) Prescribed sequence of letters where the motionsx(t) andy(t)are given and (b) the trajectoryx–y.
approach is based on the concept of distributed positioning(DP). The initial idea appeared in [1] and [2] and somefurther elaboration was made in [3] and [4]. Final versionof DP concept was proposed for industrial robotics systemsby Potkonjak [5], [6] and Potkonjak and Krstulovi´c [9].The problem of application and control of such systems hasbeen discussed in several papers (e.g., [10]). DP conceptwas proposed for biomechanical systems by Potkonjak andKrstulovic [7], [8]. Here are the main ideas. In humans,highly inertial arm joints (shoulder and elbow) provide smoothglobal motion, and low inertial hand joints (fingers) performfast and precise local motions. Supplementary action of thesemotions should maintain effective, fast, legible, and nonfa-tigued writing. DP concept tried to apply this idea to technicalsystems (e.g., a robot arm). However, some problems werenoticed. Fast and precise demands for finger motions arerather in conflict (do not work in accord). As a result it rises(introduces) writing legibility and muscle fatigue problems.Further problems appear when writing some letters such d, t, l,j (i.e., whenever the maximal allowed fingers extension is lessthen it is needed). This requires more involvement of shoulderand elbow joint movement, i.e., these highly inertial jointshave to move faster and assist the fingers. As a consequenceenergy consumption and muscle fatigue are increased, and thelevel of legibility is reduced. This problem is expressed hardy

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 793
(a)
(b)
Fig. 6. Frequency spectrum for the motionsx(t) andy(t) proves the choiceof cutoff frequenciesfox = 0:75 Hz, foy = 1:4 Hz.
if a robot arm is considered. With humans, accelerated motionof the arm is not optimal but it is still workable. However, astandard design of robot arm usually adopts the motors whichare not strong enough to support these accelerations.
The aim of this study is to solve the problems mentionedfollowing the biological analog. We found that wrist is ofmain importance in the solution. As stated earlier the wristcan move fast and plays the main role in fast writing. Thus,the conflict task imposed to fingers (speed and precision) canbe avoided. In our solution the wrist is charged for speed andthe involvement of fingers is forced in precise motion.
With the second problem (letters such d, t, l, j) the wristcan serve to some extend. It should assist the fingers insteadof the shoulder and elbow. As it was shown the nature of thewrist allows it to help more effectively if the letters are italic(inclined, sloped). This means that vertically oriented writingrequires larger involvement of highly inertial arm, while thesloped writing reduces it by involving the low inertial wrist.As a consequence, the vertically oriented letters consume moreenergy and are more fatiguing. For some prescribed energyconsumption one may keep vertical orientation of writing butwith the reduced legibility or he can slope the letters andachieve better legibility. It is shown that the optimal inclinationcan be found. The approach is two-fold: we use behavioral
(a)
(b)
Fig. 7. Smoothing of the original motionx(t) and y(t) is performed bymeans of ideal digital filtering and as result, this figure presents the originaland the smoothed motions.
evidence and computational results to further develop andvalidate models of writing functions.
III. M ODEL OF THE ARM–HAND COMPLEX IN WRITING
In the previous section, it was stated that the completearm–hand complex has 26 DOF’s: seven for the arm plus 19for the hand. These are the internal DOF’s. The number ofexternal DOF’s depends on the task imposed and we nowdiscuss the task of writing. Writing requires the pencil tip tomove accordingly to some prescribed law, i.e., to follow aprescribed trajectory. In addition, the prescribed orientation ofpencil axis is required. This means that writing understands po-sitioning along with axis orientation and accordingly requiresfive external DOF’s.
One may conclude that the writing can be realized geomet-rically even without the involvement of the hand but using thearm only. The arm has seven DOF’s: three for shoulder, twofor elbow, and two for wrist (Fig. 1). Since writing requiresfive DOF’s, the redundancy is present.
This problem can be reduced by assuming that one shoulderDOF is not active in writing [7], [8] or by introducing thesynergy between the shoulder and the elbow [28]. Since this

794 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
(a)
(b)
(c)
Fig. 8. Motion of redundant jointsq3(t); q4(t); q5(t), i.e., the time historiesof redundant joints, Fig. 8(c) shows thatq5 exceeds the adopted range�5.
problem is not topic of this research we assume that themethods mentioned allow us to reduce the number of armDOF’s for one, i.e., to six [Fig. 2(a)]. We now add the handand find that in writing all 19 hand DOF’s can be reducedto two (Fig. 2(b) and Fig. 3) as suggested by Potkonjak andKrstulovic [7].
These two DOF’s correspond to two translations perpen-dicular to each other and both parallel to the writing surface.In this way we come to eight DOF’s mechanical model ofarm–hand complex in writing [Fig. 2(b)].
With this approach, motion that humans actually performin writing is a bit simplified. For instance, rolling motion ofthe pencil is not considered. The justification for this followsmain idea: the human kinematics applied to robot. Hence, weselect motions which are necessary and appropriate to it.
The position of the arm is defined by the vector of joint (in-ternal) coordinates of dimension .The position of the terminal device (pencil) is defined by thevector of external coordinates of dimension
, where define the tip position andangles define the pencil axis. The kinematic model ofthe arm–hand complex, i.e., the transformation of coordinates
Fig. 9. Inclined writing keeps the constant original height, i.e., writing isperformed between the two horizontal lines. Inclined writing is more suitablefor the involvement of the wrist.
(internal to external and vice versa) is nonlinear
(1)
where is the function . The direct kinematicproblem (calculation of for given ) has a unique solution(1). However, the inverse kinematics (calculation offor given
) has an infinite number of solutions since (1) represents a setof five equations with eight variables due to the redundancy.The dimension of redundancy is .
The kinematic model of the system can be written in theJacobian form of the first or of the second order
(2)
or
(3)
where is (i.e., ) Jacobian matrix and is(i.e., ) adjoint vector containing the derivative of
the Jacobian.We note that the solution of the inverse kinematics is of
main significance. In a writing task the external motion isprescribed by means of the text which should be written. Themotion of joints (internal coordinates) has to be found.

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 795
IV. DP CONCEPT FORREDUNDANT MECHANISM IN WRITING
The DP concept was originally developed for problemswhere massive robot was involved in fast manipulation [5],[6], [9]. Acceleration of massive segments leaded to driveoverload and required redundancy.
Consider a motion task given in terms of externalcoordinates and suppose that of these coordinatesare highly accelerated while other coordinates aresmooth. Let be the subvector containing the acceleratedmotions (dimension ), and be the subvector containingthe smooth motions (dimension ). Now
(4)
We assumed that a nonredundant robot (if ) cannotperform the task due to high inertial loads. The successfulsolution needs the robot mechanism with the number of DOF’s
. This means that the robot has to be redundantwith the dimension of redundancy which is provedlately.
The redundant robot ( DOF’s) is now separated intotwo subsystems. The subsystem with DOF’s with greatestinertia is calledthe basic configuration. The other subsystemis the redundancyhaving DOF’s. It holds that .The internal coordinates vector is now separated into twosubvectors
(5)
where -dimensional correspond to the basic configurationand -dimensional correspond to the redundancy.
The DP concept solves the inverse kinematics of a redundantrobot in two steps. At the first step the motion of basicconfiguration is calculated (), and at the second step themotion of redundancy ( ) is determined.
Step 1:Smoothing method [5] is used to separate the motioninto two addenda
(6)
where represents the smooth components and theaccelerated ones.
The nonlinear kinematic model has the form (1) and thelinearized Jacobian model has the form (2) or (3). Here, weuse the Jacobian model of the second order (3). If (4)–(6) areintroduced into the model (3), it follows that
(7)
or
(8)
where is called the basic external motion, and
.
(a)
(b)
(c)
Fig. 10. Time histories of redundant motions for different inclination angles:for greater inclination the involvement of the wristq3 grows thus reducing theinvolvement of the “fingers”q4 and q5. For the inclination of 37�, motionq5 falls into allowable range�5.
Since the basic external motion is smooth, we forcethe basic configuration to solve it without the help of redun-dancy, i.e., the redundancy is kept constant ( ). In thiscase, the model (8) becomes
(9)
which is calledthe basic kinematic model.If Jacobianis nonsingular the internal accelerations can be found
(10)The velocities and the motion are now solved by
numerical integration, that is, the first step of the inversekinematics is completed.
Step 2:The motion of basic joints , calculated in Step1., is now used to solve the motion of the redundancy. If(9) is introduced in the (8) it follows that
(11)

796 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
(a)
(b)
Fig. 11. The comparison shows that the sequences having equal value ofLe are not equally legible. CriterionLe does not express correctly ourfeeling of legibility.
Further elaboration of the DP concept requires the followingcondition to be satisfied: does not influence . Thiscondition could be satisfied for all possible or for thecalculated trajectory only. The condition implies
(12a)
(12b)
(12c)
and accordingly (11) reduces to
(13)
which is calledthe kinematic model of redundancy.We statedthat has dimension and has the dimension .With the original DP concept it is assumed thatand the accelerations of redundancy are obtained from
Fig. 12. The correction functionf was found after the poll so, in this waythe legibility criterionL is not purely analytical but takes care of our feelingof what is more or less legible.
(13) by inverting the Jacobian . However, withthe writing mechanism defined in Section III and shown in

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 797
Fig. 13. This figure presents several sequences having various inclination and different involvement of fingers and with equal legibilityL = 0:5. Itsupports our new definition of legibility levelL, i.e., modification ofLe.
Fig. 2(b), the equality does not hold, but . We nowapply the DP concept to the writing mechanism and makemodifications in Step 2 in order to enable solution of redundantmotion.
We consider the eight-DOF arm-hand complex shown inFig. 2(b). This mechanism has to perform writing in the
– plane. As stated in Section III, the writing task requirespositioning of the pencil tip along with the orientation ofthe pencil axis and accordingly it is defined by means of
external coordinates . The positionof joints is defined by means of internal coordinates:
. Analyzing the plane writing task onefinds that there are accelerated external motions:
and . The others are constant or smooth.According to the DP concept, we introduceand , and define the basic configuration as amechanism consisting of shoulder ( ), the elbow ( )and the first wrist joint ( ). Other joints, one wrist joint( ) and “fingers” ( ), form the redundancy of dimension
. Thus, defines the basic internalposition and defines the position of theredundancy. We now apply the DP concept.
Step 1: The accelerated motion is smoothed, i.e., and where
represent the smooth addenda and the accelerated ones.Now, represents the basicexternal motion and the basic kinematic model (9) is used tocalculate the internal motion .
Step 2: In this step the motion is substituted intokinematic model and the form (11) is obtained. It is nownecessary to discuss the condition (12) . For the task described,i.e., for the motion calculated, the redundancy doesnot influence . The motion of cannot change
or pencil vertical orientation. The relations (12) hold andthe model can be reduced to the form (13). As alreadystated the further calculation cannot follow the original DPconcept since . This means that after thecalculation of the problem is still redundant: three internalcoordinates ( ) are responsible for two acceleratedexternal motions ( ). This problem is solved by using thepseudo-inverse of the Jacobian . In this way, fromthe infinite number of solutions for we choose the onerepresenting minimal involvement of these joints. The pseudo-inverse should include the weighting factors in order to achieve

798 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
Fig. 14. Legibility (analytical criterionLe) depending on inclination, for different PFI.
the desired distribution of involvement among , and .The acceleration of redundancy is now calculated from themodel (13)
(14)
where is the pseudo-inverse of .
V. THE PLANAR WRITING MECHANISM
In order to illustrate the method we adopted a planarmechanism which demonstrates all the relevant properties ofthe spatial mechanism explained in the previous section. Byusing this example the calculation is simpler, the numericalresults are more evident and the generality is preserved. Themechanism is shown in Fig. 4.
The mechanism has DOF’s and accordingly theinternal position is defined by means of joint coordi-nates: . The external position understands
coordinates: . With the writing taskthere are accelerated motions: and .Hence, . Since there are no smoothexternal motions, the vector does not exist. The basic
configuration consists of the shoulder and the elbow joints.Other joints (wrist and “fingers”) form the redundancy ofdimension . Thus and .We now follow the steps of DP concept.
Step 1:The motion is smoothed: ,i.e., and leading to the kinematicmodel of the form (7) or (8). Here, for the planar system,it holds that: ; , anddo not exist and accordingly and . If weforce the basic configuration () to solve the basic externalmotion ( ) without the help of redundancy (i.e., ),the basic kinematic model (9) is obtained. The model enablesthe calculation of motion .
Step 2:If the motion calculated in Step 1 is introducedin the kinematic model (8), the form (11) is obtained. However,with the planar mechanism , and do not existand there is no need to introduce (12), but we come directly tothe form (13). This system represents the set ofequations which should be solved for unknowns ( ).Since , the problem is still redundant and pseudo-inversion has to be used.
The problem of writing will be demonstrated with theexample shown in Fig. 5. The motions and are givenin Fig. 5(a) and the trajectory– in Fig. 5(b).

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 799
Fig. 15. Relative finger involvement PFI depending on inclination, for different legibilityLe (analytical criterion).
For this example, the dimensions of the arm-hand complexare m m m, and motionsof “fingers” (translations ) are within the range
m and m.Smoothing of the original motion and is performed
by means of ideal digital filtering. The cutoff frequency isadopted: Hz for axis and Hz for
axis. Figs. 6 and 7 show the results of smoothing. Fig. 6presents the frequency spectrum for the motions and ,and Fig. 7 presents the original and the smoothed motions.
Some remarks on smoothing method should be given re-garding human and robot motions. Human arm providessmooth movement of the hand, and even though it is ableto generate high acceleration. This is due to the very largedynamic range of muscle forces and flexibility in using differ-ent muscles when executing movement. However, a machinereplica, robot, typically uses actuators which does not havereserve strength. Hence, the general idea is to release highaccelerations and thus high dynamic loads. So, robot mustsmooth the motion to the level that can be solved by thebasic configuration. To achieve the desired distinction ofinvolvement between the basic configuration and redundancy,the cutoff frequency, , is used. Smaller implies lessinvolvement of the basic configuration. In the present example
we have chosen close to the upper margin and thus engagedbasic configuration as much as possible. A more detaileddiscussion of smoothing and cutoff frequency can be foundin [8], [9].
At the first step of inverse kinematics calculation,andare solved so as to follow the smooth trajectory . Acceler-ated motions has to be distributed to three redundant joints
. The pseudo-inversion is used. In this distribution wewish the wrist to be involved as much as possible. For thisreason we divide with the factor 0.025 and thus force itslarger involvement. Fig. 8 presents the results of calculationin Step 2, i.e., the time histories of , and .
From Fig. 8(c) one finds that the calculated motion ofexceeds the adopted range m. This means thattranslation cannot perform such motion, i.e., too much isrequired from the “fingers.” This problem can be solved inseveral ways. First, it might be possible to move the arm(basic configuration) so as to assist the fingers. This wouldincrease dynamic loads imposed to arm drives. As we stated,with human arm this solution is possible since there is usuallysome reserve in muscle forces. With robots, however, it islikely that no reserve in driving torque exists. So, we assumethat the arm can not assist. In this case, one may decide tosimply reduce the involvement of fingers until falls into

800 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
Fig. 16. Legibility (modified criterionL) depending on inclination�, for different PFI.
allowable range . Since the involvement of other joints isnot augmented, the error in letter shape will appear and thelegibility will be reduced. But, the next discussion will showthat this can be avoided. It is possible to keep legibility withoutthe arm assistance. The approach starts with the conclusionthat the violation of the range is the consequence of thefact that with the vertically oriented letters the wrist cannothelp much since its action is inclined (see Fig. 4). For thisreason one may decide to incline all the letters. In this case therequired trajectory (Fig. 9) is more suitable for involvement ofthe wrist. The involvement of would grow thus reducing theinvolvement of . It is expected that for some inclinationthe motion will fall into allowable range . In such a case,the letters could be written ideally.
Fig. 10 supports these expectations. The inverse kinematicsis solved for vertically oriented writing and for several anglesof inclination. The results for redundant motions are shownin Fig. 10 (three angles of inclination: 0, 25 , and 37). Itis clear that with the inclination the involvement of the wrist
grows and the involvement of “finger” reduces. For theinclination of 37 the motion satisfies the range . Thismeans that for the inclination equal or greater then 37theletters could be written ideally but for inclination less then37 the bound results in reduction of legibility.
A thorough discussion on the problems mentioned requiresthe definition of a criterion of legibility and numerical analysiswhich should show the influence of inclination to the legibilitybased on distribution of involvement between the wrist andthe “fingers.”
VI. I NCLINATION AND LEGIBILITY
Inclination of writing is demonstrated in Fig. 9. It is as-sumed that the height of letters is not changed with theinclination. Writing should be performed between the twohorizontal lines (distance 0.05 m) regardless of inclinationexcept for letters such as which have their own constantheight.
It was shown in Section V that sometimes objective reasonsexist for reduced motion of fingers (e.g., violation of range
). This difference from the required motion introduces theerror in letter shapes and reduces the legibility. However,the reduction of finger motion may follow from subjectivedecision, if the writer is for some reason satisfied with thereduced legibility. This introduces the need for a criterionthat would express numerically the legibility of a hand-writtensequence. We call it the level of legibility. The criterion hasto be defined mathematically (in order to calculate it), and at

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 801
Fig. 17. Relative finger involvement PFI depending on inclination, for different legibilityL (modified criterion).
the same time it should agree with our feeling of what is moreor less legible.
As a basis for the definition of legibility criterion we usea mean square deviation of the trajectory considered from the“ideal” one. The ideal trajectory understands the shape givenin Fig. 5(b) or inclined for some angle (e.g., shapes fromFig. 9). This means that for each inclination there exists anideal sequence of letters. The mean square error is defined as
(15)
where are the coordinates of trajectory considered inthe time instant , and are the coordinates of idealtrajectory. The error should be normalized to the interval [0,1]. The normalized error is found as
(16)
The bounds and define the region that is foundas relevant in a particular problem. Since “ideal” letters are
always of interest, we adopt the lower bound as . Theupper bound represents the largest error that is still worthconsidering. Any error over this value would be completelyunacceptable. For the present example, a pool based on 80study-subjects gave the value . Obviously, thisbound depends on a concrete problem. In this way, errorisbounded to the interval [ ], and the normalized error
to the interval [0, 1].The level of legibility (criterion function) is now introduced
as
(17)
and is bounded by
(18)
The upper bound ( ) indicates an ideal sequencewhile the lower bound ( ) indicates a “zero legible”sequence, i.e., unacceptable writing. The criterionis purelymathematical since it is based on mean square error only.This might be an advantage since the criterion is objective,but a question arises about how the criterion agrees with ourfeeling of what is more or less legible. In order to answer

802 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
Fig. 18. Absolute finger involvement AFI depending on inclination, for different legibilityLe (analytical criterion). The request for smaller finger involvement(at some given legibility) leads to an optimal inclination.
the question, a poll was made that included 80 study-subjects.A general conclusion was that criterion did not expresslegibility in a correct way. This is illustrated by Fig. 11. Twopairs of sequences are shown. With the first pair [Fig. 11(a)],the legibility level calculated is , and inclinationangles are 0and 35. Although the criterion has equal valuesfor both sequences, one can hardly agree that they are equallylegible. The same conclusion holds for pair (b).
For the reason explained, it is necessary to modify thecriterion and make it agree with our feeling of what is moreor less legible. Modification is performed by multiplyingby a correction function
(19)
where is the inclination angle.The correction function was found after a poll. The
number of study-subjects was 80. To a subject, a series ofletter sequences was shown. He was asked to give a mark toeach sequence. A mark had to be a number from the interval[0, 1] and expressed the legibility of a sequence. This was
done for different inclinations and different values of. Thelength of the paper does not allow us to discuss more detailsabout the poll. The correction function is, thus, obtainedand it is shown in Fig. 12.
In this way, the new criterion of legibility is introduced.Criterion , defined by (19), should agree with our feeling oflegibility. In order to support the new criterion, we present foursequences having various inclinations and different involve-ment of fingers but with equal legibility (Fig. 13).
One point should be stressed out regarding the choice ofcriterion. If the idea is to discuss writing problem itself, thenit is justified to use the modified criterion. However, one mayconsider writing just as a good representative of nonuniformmotion (kinematically and dynamically requiring task). In suchcase the conclusions should apply to some other tasks besidewriting. The modified criterion would not be justified andone should return to purely analytical criterion . For thisreason, in the discussion that follows, both criteria will betreated equally.
Our intention was to investigate the relations among theinclination, legibility and finger involvement. The involvementof fingers is specially discussed since it seams to be “critical”

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 803
Fig. 19. Absolute finger involvement AFI depending on inclination, for different legibilityL (modified criterion). There is an optimal inclination regardingfinger involvement.
in a writing task. The bounded extension of fingers could causeproblems in writing some letters (such d, j) and also fingersare the first to feel fatigue. For these reasons the involvementof fingers should be minimized. This study is made on thekinematic level and accordingly the involvement of fingers isdescribed by its amplitude and speed. Hence, we may talkabout “kinematic fatigue” and try to reduce it. It was statedthat for any inclination there exists a sequence of idealletters representing ideally legible writing ( or ,depending on the choice of criterion). The involvement offingers required for such writing is calledthe full involvement.We remember our earlier conclusion that this full involvementreduces with the inclination. We also remember that fullinvolvement is not possible for inclinations due tobounded extension of fingers (range was critical).
Suppose that we do not require ideal legibility but weare satisfied with some prescribed level (or ). It isclear that the fingers involvement may now be reduced. Foreach inclination some percentage of full involvement (PFI)will satisfy. We try to find the inclination which requiresthe smallest PFI. Figs. 14 and 15 show the relations amonglegibility, inclination, and PFI if analytical criterion is used.Figs. 16 and 17 show the same but for modified criterion L.
These diagrams could be instructive but they still sufferfrom some inconveniences. First, if we use PFI to describefingers involvement it is not evident how to check the fingersextension against the bounds and . The next problemis even more serious: PFI can not be considered as a correctmeasure of “kinematic fatigue.” PFI represents the percentageof full involvement and the full involvement depends oninclination. This means that two motions with different incli-nation can have equal PFI but different amplitudes of fingersmotion. Hence, a new measure of fingers involvement has to bedefined. It should take care of the absolute motion of fingers(amplitude) thus being a good representative of “kinematicfatigue.” The amplitude is considered as a difference betweenthe neighboring maximum and minimum and summation ismade over the whole sequence. Normalization is then made to100. In this way the absolute fingers involvement is describedby means of factor AFI .
A new diagram is now calculated to show how AFI dependson inclination for different legibility. Fig. 18 shows this depen-dence in the case of analytical criterion and Fig. 19 in thecase of modified criterion . Such diagrams give a better in-sight into relations among inclination, legibility, and finger in-volvement then the previous diagrams (from Figs. 15 and 17).

804 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 28, NO. 6, DECEMBER 1998
An interesting conclusion follows from these diagrams.Each curve from Figs. 18 and 19 has a clear minimum. Thismeans that for a prescribed legibility an optimal inclinationproduce the minimal finger involvement. Reducing the legi-bility required, the optimal inclination moves toward smallerangles.
For example, if is required then Fig. 18 givesthe answer about the optimal inclination: . For
it would be . With the modified criterion,the request is followed by the optimal inclination
(see Fig. 19), and for the optimum is.
An additional discussion should be made regarding thepossibility of fingers to achieve some absolute involvement.The problem lies in the bounded finger motion. The boundsand introduced in Section V separate the (, AFI) spaceof Figs. 18 and 19 into an allowable region (white circles onthe curves) and a nonallowable region (black circles on thecurves).
VII. CONCLUSION
In the first part of this paper the review of investigationsin writing problem was given. This survey was needed inorder to support the new approach explained in the nextsections. The kinematics of writing was discussed consid-ering an eight-degrees-of-freedom spatial arm-hand complexand a five-degrees-of-freedom planar complex. The modifiedconcept of distributed positioning was used for the solutionof the inverse kinematics. It appeared to be a very suitableapproach. The distribution of motion among the arm, the wristand the fingers was specially discussed. The inclination ofwriting and the legibility level were considered in order toreduce involvement of fingers. The relation among legibility,inclination, and fingers involvement was found and graphicallyshown. It was concluded that for a prescribed level of legibilitythere existed an optimal inclination producing minimal fingersinvolvement.
REFERENCES
[1] J. K. Salisbury and Abramovitz, “Design and control of redundantmechanism for small motions,” inProc. IEEE Int. Conf. RoboticsAutomation,St. Louis, MO, 1985, pp. 323–328.
[2] O. Egeland, “Task-space tracking with redundant manipulators,”IEEEJ. Robot. Automat.,vol. RA-3, pp. 471–475, Oct. 1987.
[3] N. Hogan, A. Sharon, and E. D. Hardt, “High bandwidth force regulationand inertia reduction using a macro/micro manipulator system,” inProc.IEEE Int. Conf. Robotics Automation,1988, pp. 126–132.
[4] O. Khatib, “Reduced effective inertia in macro-mini manipulatorsystems,” inProc. Japan-USA Symp. Flexible Automation,1989, pp.329–334.
[5] V. Potkonjak, “Distributed positioning for redundant robotics systems,”Robotics. Cambridge, U.K.: Cambridge Univ. Press, 1990, vol. 8, no.1, pp. 61–67.
[6] , “New approach to the application of redundant robots,”Int. J.Robot. Comput.-Integr. Manufact.,vol. 8, no. 3, pp. 181–185, 1991.
[7] V. Potkonjak and A. Krstulovic, “Mathematical modeling of a redundantanthropomorphic arm (part I),”Robot. Autonom. Syst.,vol. 9, pp.165–170, 1992.
[8] , “Simulation of a redundant anthropomorphic arm (part II),”Robotics Autonom. Syst.,vol. 9, pp. 171–179, 1992.
[9] , “Contribution to the kinematics and dynamics of redundantrobots via distributed positioning,”J. Intell. Robot. Syst.,vol. 5, pp.229–239, 1992.
[10] V. Potkonjak, G. Djordjevic, C. Milosavljevic, D. Antic, and D. Popovic,“Variable structure systems for control of redundant robots,”J. Robot.Autonom. Syst.,vol. 13, pp. 13–24, 1994.
[11] J. F. Soechting, “Effect of target size on spatial and temporal charac-teristics of a pointing movement in man,”Exper. Brain Res.,vol. 54,pp. 121–132, 1984.
[12] M. Nordin and V. H. Frankel,Basic Biomechanics of the MusculoskeletalSystem. London, U.K.: Lea & Febiger, 1989.
[13] P. Viviani and C. Terzuolo, “Trajectory determines movement dynam-ics,” Neurosci.,vol. 7. no. 2, pp. 431–437, 1981.
[14] F. E. Pollick and G. Ishimura, “The three-dimensional curvature ofunrestrained straight-ahead movements,” inProc. 24th Annu. Meet.Abstr., Soc. Neuroscience,Miami Beach, FL, Nov. 13–18, 1994,p. 1409.
[15] P. Viviani and G. McCollum, “The relation between linear extend andvelocity in drowning movements,”Neurosci., vol. 10, pp. 211–218,1983.
[16] H. D. Crane and R. E. Savoire, “An on-line data entry system for handprinted characters,”Computer,vol. 3, pp. 43–50, 1977.
[17] N. M. Herbst and C. N. Liu, “Automatic signature verification based onaccelerometry,”IBM J. Res. Develop.,pp. 245–253, May 1977.
[18] J. S. McDonald, “Experimental studies in handwriting signals,”MITRLE Tech. Rep.,1996, p. 443.
[19] P. Marmelstein and M. Eden, “Experiments on computer recognitionof connected handwritten words,”Inf. Contr., vol. 7, pp. 255–270,1964.
[20] J. M. Holerbach and C. G. Atkeson, “Deducing planning variables fromexperimental arm trajectories: Pitfalls and possibilities,”Biol. Cybern.,vol. 56, pp. 279–292, 1987.
[21] S. Edelman and T. Flash, “A model of handwriting,”Biol. Cybern.,vol.57, pp. 25–36, 1987.
[22] R. Plamondon, G. E. Stelmach, and N. Teasdale, “Motor program codingrepresentation from a handwriting generator model: The production ofline responses,”Biol. Cybern.,vol. 63, pp. 443–451, 1990.
[23] L. R. B. Schomaker and R. Plamandon, “The relation between penforce and pen point kinematics in handwriting,”Biol. Cybern.,vol. 63,pp. 277–289, 1990.
[24] M. L. Lathash, Control of Human Movement.New York: HumanKinetics, 1994.
[25] B. M. Berkinblit and A. G. Feldman, “Some problems of motor control,”J. Motor Behav.,vol. 20, pp. 369–373, 1988.
[26] S. R. Gutman, G. L. Gottlieb, and D. M. Corcos, “Exponential model ofa reaching movement trajectory with nonlinear time,”Comments Theor.Biol., vol. 2, pp. 357–383, 1992.
[27] J. F. Soechting, F. Lacquaniti, and C. A. Terzuolo, “Coordination of armmovements in three-dimensional space—Sensorimotor mapping duringdrawing movement,”Neurosci.,vol. 17, pp. 295–311, 1986.
[28] M. Popovic, D. Popovic, and R. Tomovic, “Simpified arm control ingoal-directed movement,” inIEEE Proc. 12th Southern Biomedical Eng.Conf., New Orleans, LA, 1993, pp. 31–33.
[29] M. Popovic and D. Popovic, “A new approach to reaching control fortetraplgic subjects,”J. Electromyogr. Kinesiol.,vol. 4, pp. 242–253,1994.
[30] R. B. Stein, F. W. J. Cody, and C. Capaday, “The trajectory of humanwrist movements,”J. Neurophysiol.,vol. 59, pp. 1814–1830, 1988.
[31] B. M. Berkinblit, I. M. Gelfand, and A. G. Feldman, “A model forthe control of multijoint movements,”Biofizika, vol. 3, pp. 128–138,1986.
[32] S. R. Gutman and G. L. Gottlieb, “A solution for the problem ofmultijoint redundancy by minimizing joint angle increments,”Abstr.Soc. Neurosci.,vol. 15, p. 606, 1989.
[33] W. Nelson, “Physical principles for economies of skilled movements,”Biol. Cybern.,vol. 46, pp. 135–147, 1983.
[34] N. Hogan, “An organizational principle for a class of voluntary move-ments,” J. Neurosci.,vol. 4, pp. 2745–2754, 1984.
[35] Y. Uno, M. Kawato, and R. Suzuki, “Formation and control of optimaltrajectory in human multijoint arm movement,”Biol. Cybern.,vol. 61,pp. 89–101, 1989.
[36] M. Kawato, Y. Maeda, Y. Uno, and R. Suzuki, “Trajectory formationof arm movement by cascade neural network model based on minimumtorque-change criterion,”Biol. Cybern.,vol. 62, pp. 275–288, 1990.
[37] Z. Hasan, “Optimized movement trajectories and joint stiffness inunperturbed, initially loaded movements,”Biol. Cybern.,vol. 53, pp.373–382, 1986.
[38] J. Baillieul, “Kinematic programming alternatives for redundant manip-ulators,” in Proc. Int. Conf. Robotics Automation,1985, pp. 722–728.

POTKONJAK et al.: REDUNDANCY PROBLEM IN WRITING 805
Veljko Potkonjak was born in 1951 in Belgrade,Yugoslavia. He graduated from the Faculty of Elec-trical Engineering, Belgrade, in 1974. He receivedthe M.Sc. and Ph.D. degrees in 1978 and 1981,respectively.
He is a Professor at Belgrade University wherehe teaches robotics and biomechanics in the Facultyof Electrical Engineering. He is also a Professor atother universities in Yugoslavia. He is the author orcoauthor of two research monographs in English.One of them has been translated into Japanese
and Chinese. He is the author/coauthor of more than 70 scientific paperspublished in international journals or presented on scientific conferences. Hisbibliography includes four textbooks in the field of robotics and FMS. Hehas supervised a large number of research and commercial projects. Hisearly research interests concerned robot dynamics and CAD/CAM in robotics.Recently, he has been interested in the relationship between robotics andbiomechanics and especially the issues of redundancy. In the field of control,he investigates skill-based algorithms.
Mirjana Popovi c received the B.S. and Ph.D. de-grees in electrical engineering from the Facultyof Electrical Engineering, Belgrade, Yugoslavia, in1976 and 1995, respectively, and the M.S. degreein biomedical engineering from the Centre for Mul-tidisciplinary Studies, Belgrade, in 1985.
She is currently involved in biomedical researchat the Faculty of Electrical Engineering, Belgrade,Centre for Rehabilitation “Miroslav Zotovic,” Bel-grade, and Clinical Centre for Neurology, Belgrade.Her research interests include motor control and
rehabilitation engineering in spinal cord injury, particularly upper extremityneural prosthesis.
Dr. Popovic is a member of the Yugoslav Society for Biological and MedicalEngineering, Yugoslav Society for Electronics, Telecommunication, ComputerScience, and Automation (ETRAN), and International Functional ElectricalStimulation Society (IFESS).
Mihailo Lazarevi c was born in Belgrade, Yu-goslavia, in 1964. He received the B.S. degree inmechanical engineering (aerospace), the B.S. degreein electrical engineering, and the M.S. degree inmechanical engineering (automatic control), fromthe University of Belgrade, in 1990 and 1994,respectively.
He is currently an Assistant in the Department ofMechanics and Mechanical Engineering, Universityof Belgrade. His research interests include dynamicsand control theory with applications for robotics
manipulation systems.
Jelena Sinanovic was born in 1968 in Belgrade, Yu-goslavia. She received the B.Sc. and M.Sc. degreesin 1992 and 1995, respectively, from the Universityof Belgrade.
Her early research interest was in the field ofrobotics and biomechanics. Recent areas of inter-est in neural networks technologies-convergencesimprovements of backpropagation algorithms, ingeneral case. During the past several years, shehas been working with LAN/WAN software systemtechnologies in company Informatika, with a MCSE
(Microsoft Certified System Engineer) degree.
Copyright © 2022 FDOKUMEN




















