PROYECTO FIN DE CARRERA - Universidad de Málaga
211
ESCUELA T ´ ECNICA SUPERIOR DE INGENIER ´ IA INDUSTRIAL Departamento de Ingenier´ ıa de Sistemas y Autom´ atica PROYECTO FIN DE CARRERA Puesta en marcha y documentaci´ on del robot m´ ovil para exteriores And´ abata Autora: Olga Cordero Morales Directores: Dr. Jorge Luis Mart´ ınez Rodr´ ıguez Dr. Javier Ser´ on Barba Titulaci´on: Ingeniero Industrial M´ alaga, junio de 2016
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of PROYECTO FIN DE CARRERA - Universidad de Málaga

ESCUELA TECNICA SUPERIOR DE INGENIERIA
INDUSTRIAL
Departamento de Ingenierıa de Sistemas y
Automatica
PROYECTO FIN DE CARRERA
Puesta en marcha y documentacion del robot movil
para exteriores Andabata
Autora: Olga Cordero Morales
Directores: Dr. Jorge Luis Martınez Rodrıguez
Dr. Javier Seron Barba
Titulacion: Ingeniero Industrial
Malaga, junio de 2016


Dedicado a mis padres, hermanos y abuelos, a Daniel ((Yomo)), Tita Toni, Paka,
Mari Carmen y todas aquellas personas que me han ayudado a cumplir este objeti-
vo. Especialmente a Justo que es mi abuelo adoptivo y ahora es el unico que esta
conmigo.
Todos ellos han creıdo en mı, en que podıa hacerlo y toda esa fe me ha moti-
vado muchas veces. No han dudado en decirme en cada momento lo que debıa oır
aunque no fuera lo deseado en ese momento y no me han dejado tirar la toalla. Es
maravilloso ver que una persona confıa en ti (casi) mas que tu misma.
Infinitas gracias


Agradecimientos
A los Doctores Jorge Martınez y Javier Seron por su gran paciencia y su inestimable
ayuda.
A Jose Polaino y Emilio Fernandez por su ayuda, amabilidad y por todas las veces
que han tenido que bajar a abrirme la puerta.
A Javier Valbuena, Manolo Zafra y Antonio Guerrero por ser tan buenos companeros
de Proyecto Fin de Carrera.


Indice general
Indice general I
Acronimos VII
Lista de figuras IX
Lista de tablas XIII
1. Introduccion 1
1.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. El robot movil Andabata . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4. Plan de trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.5. Estructura de la memoria . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Sistema mecanico y motriz 7
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2. Estructura de soporte . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3. Sistema de locomocion . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.1. Ruedas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.2. Motores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
I

II INDICE GENERAL
2.3.3. Codificadores (Encoders) . . . . . . . . . . . . . . . . . . . . . 13
2.3.4. Reductora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4. Sistema de suspension . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5. Modelo cinematico aproximado . . . . . . . . . . . . . . . . . . . . . 17
2.5.1. Coeficiente lineal µ . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5.2. Coeficiente rotacional xCIR
. . . . . . . . . . . . . . . . . . . . 20
3. Sistema electrico y electronico 23
3.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2. Sistema electrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.1. Baterıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.2. Fuente de alimentacion . . . . . . . . . . . . . . . . . . . . . . 26
3.2.3. Interruptor general . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3. Sistema electronico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.1. Sabertooth 2x32 . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.2. Kangaroo x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4. Sistema de control de motores . . . . . . . . . . . . . . . . . . . . . . 38
3.4.1. Comandos disponibles . . . . . . . . . . . . . . . . . . . . . . 38
3.4.2. Codigos de error . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4.3. Velocidad maxima . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4.4. Giro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4. Sistema informatico y sensorial 45
4.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.2. PC de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.2.1. Placa base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
INDICE GENERAL III
4.2.2. Microprocesador . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2.3. Memoria RAM . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2.4. Disco duro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.3. Router . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.4. Telemetro laser 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.5. Telefono inteligente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.6. Tableta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5. Software de Andabata 57
5.1. Sistema operativo Ubuntu . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2. Entorno ROS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2.1. Caracterısticas . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2.2. Sistema de archivos . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2.3. Grafos de computacion . . . . . . . . . . . . . . . . . . . . . . 60
5.3. Modificacion de nodos de Andabata . . . . . . . . . . . . . . . . . . . 61
5.4. Puesta en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.5. Teleoperacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6. Conclusiones 67
6.1. Control de bajo nivel original . . . . . . . . . . . . . . . . . . . . . . 67
6.2. Recapitulacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3. Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
A. Planos 71

IV INDICE GENERAL
B. Documentacion tecnica 91
B.1. Especificaciones tecnicas de producto . . . . . . . . . . . . . . . . . . 91
B.1.1. Motor Maxon RE 40 . . . . . . . . . . . . . . . . . . . . . . . 92
B.1.2. Encoder MR Tipo L 500ppv . . . . . . . . . . . . . . . . . . . 94
B.1.3. Guıas lineales Hiwin serie HG . . . . . . . . . . . . . . . . . . 96
B.1.4. Fuente de alimentacion Sunpower SDX . . . . . . . . . . . . . 98
B.1.5. Controladora de motor Sabertooth dual 32A . . . . . . . . . . 101
B.1.6. Controladora de movimiento Kangaroo x2 . . . . . . . . . . . 105
B.1.7. Cable USB-TTL serial . . . . . . . . . . . . . . . . . . . . . . 107
B.1.8. Placa base ASRock Extreme . . . . . . . . . . . . . . . . . . . 111
B.1.9. Microprocesador Intel Core . . . . . . . . . . . . . . . . . . . 115
B.1.10.Memoria RAM Kingston HyperX . . . . . . . . . . . . . . . . 120
B.1.11.Disco duro Samsung . . . . . . . . . . . . . . . . . . . . . . . 123
B.1.12.Router TP-Link . . . . . . . . . . . . . . . . . . . . . . . . . . 128
B.1.13. Laser Hokuyo . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
B.1.14.Telefono inteligente LG Nexus 4 . . . . . . . . . . . . . . . . . 135
B.1.15.Tableta Samsung . . . . . . . . . . . . . . . . . . . . . . . . . 138
B.2. Guıas y manuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
B.2.1. ASRock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
B.2.2. Dimension Engineering . . . . . . . . . . . . . . . . . . . . . . 141
B.2.3. FTDI Chip . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
B.2.4. Hiwin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
B.2.5. LG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
B.2.6. Maxon Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
B.2.7. Samsung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
B.2.8. TP-Link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144

INDICE GENERAL V
C. Esquemas de conexiones 145
D. Codigo de los programas modificados 157
E. Presupuesto 185
Referencias 189


Acronimos
2D 2 Dimensiones
3D 3 Dimensiones
3G Tercera generacion de transmision de voz y datos mediante UMTS
ASCII American Standard Code for Information Interchange
ATX Advanced Technology Extended
Bit Binary digit
BSD Berkeley Software Distribution
CAD Computer-aided design
CC Corriente continua
CD Compact Disk
CIR Centro Instantaneo de Rotacion
CPU Central processing unit
DC Direct current
DDNS Dynamic Domain Name System
DDR Double Data Rate
DIP Dual In-line Package
GNOME GNU Network Object Model Environment
GNU GNU is Not Unix
GPS Global Positioning System
HD High Definition
HDD Hard Disk Drive
IMU Inertial Measurement Unit
IP Internet Protocol
IP Indice de proteccion
LAN Local Area Network
LED Light-emitting diode
LTS Long Term Support
VII

VIII INDICE GENERAL
MAC Media Access Control
MP Megapixel
NFC Near field communication
PC Personal Computer
PFC Proyecto Fin de Carrera
PPPoE Point-to-Point Protocol over Ethernet
ppv Pulsos por vuelta
RAM Random Access Memory
R/C Radio/Control
ROS Robot Operating System
RPC Remote Procedure Call
rpm Revoluciones por minuto
RX Recepcion
SSD Solid State Disk
TTL Transistor-transistor logic
TX Transmision
UMTS Universal Mobile Telecommunications System
UPnP Universal Plug and Play
URL Uniform Resource Locator
USB Universal Serial Bus
VPN Virtual Private Network
WAN Wide Area Network
WPA Wi-Fi Protected Access
WiFi Wireless Fidelity

Indice de figuras
1.1. El robot movil Andabata . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1. La estructura de soporte del robot movil Andabata . . . . . . . . . . 8
2.2. Vistas generales del robot movil Andabata . . . . . . . . . . . . . . . 9
2.3. Fotografıa de una rueda desmontada del robot Andabata . . . . . . . 11
2.4. Logotipo del robot movil Andabata . . . . . . . . . . . . . . . . . . . 11
2.5. Motor RE40 de corriente continua con escobillas . . . . . . . . . . . . 13
2.6. Encoder MR tipo L montado en el motor . . . . . . . . . . . . . . . . 14
2.7. Vista explosionada de la reductora . . . . . . . . . . . . . . . . . . . 15
2.8. El sistema de suspension del robot movil acoplado a la rueda . . . . . 16
2.9. Guıa lineal y patines . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.10. Sistema de suspension acoplado al chasis tubular del robot movil . . . 17
2.11. Equivalencias entre skid-steer y la traccion diferencial . . . . . . . . . 18
3.1. Diagrama de bloques del sistema electrico . . . . . . . . . . . . . . . 24
3.2. Baterıa: (a) Vista exterior (b) Celdas . . . . . . . . . . . . . . . . . . 25
3.3. Ubicacion de la baterıa en el robot Andabata . . . . . . . . . . . . . 25
3.4. Cargador de la baterıa del robot movil Andabata . . . . . . . . . . . 26
3.5. Fuente de alimentacion Sunpower SDX-425-G24 . . . . . . . . . . . . 27
3.6. Fuente de alimentacion sobre el nivel intermedio del robot movil . . . 28
IX

X INDICE DE FIGURAS
3.7. Interruptor de puesta en marcha: (a) Sobre el robot (b) Detalle . . . 29
3.8. Diagrama de bloques de la electronica de control de motores . . . . . 29
3.9. Ubicacion de la caja para la electronica en el robot movil . . . . . . . 30
3.10. Fotografıa del circuito electronico del robot movil . . . . . . . . . . . 30
3.11. Sabertooth 2x32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.12. Conexiones de la placa Sabertooth 2x32 . . . . . . . . . . . . . . . . 33
3.13. Interruptores DIP para el modo Serie en Sabertooth 2x32 . . . . . . . 34
3.14. Interruptor de parada de emergencia: (a) Sobre el robot (b) Detalle . 34
3.15. Kangaroo x2: (a) Separada de la Sabertooth (b) Conectada . . . . . . 35
3.16. Diagrama de la placa Kangaroo x2 . . . . . . . . . . . . . . . . . . . 36
3.17. Opciones de operacion mediante interruptores DIP . . . . . . . . . . 37
3.18. Resultados del autoajuste del PID . . . . . . . . . . . . . . . . . . . . 37
4.1. Esquema de conexiones de comunicacion . . . . . . . . . . . . . . . . 46
4.2. Situacion de la caja del PC en el robot movil . . . . . . . . . . . . . . 46
4.3. Placa base ASRock Z87M Extreme 4 . . . . . . . . . . . . . . . . . . 48
4.4. Procesador Intel Core i7-4771 . . . . . . . . . . . . . . . . . . . . . . 48
4.5. Memoria Kingston HyperX Fury 16 GB DDR3 1600 MHz CL10 . . . 49
4.6. Samsung SSD 840 EVO . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.7. Router Gigabit Inalambrico G TL-WR1042ND . . . . . . . . . . . . . 51
4.8. Situacion del telemetro Laser 3D en Andabata . . . . . . . . . . . . . 52
4.9. Elementos del telemetro laser 3D UNOmotion . . . . . . . . . . . . . 53
4.10. Zona ciega del sensor laser 3D UNOmotion . . . . . . . . . . . . . . . 54
4.11. Telefono LG Nexus 4 E960 . . . . . . . . . . . . . . . . . . . . . . . . 55
4.12. Tableta Samsung Galaxy Tab 3 . . . . . . . . . . . . . . . . . . . . . 56
5.1. Logotipo de la version del entorno ROS instalada en el PC . . . . . . 59

INDICE DE FIGURAS XI
5.2. La aplicacion ROS Sensor Driver en el movil . . . . . . . . . . . . . 62
5.3. Detalle de colocacion del telefono movil en el robot Andabata . . . . 63
5.4. Las aplicaciones ROS Sensor Driver, Juice y Andabata en la tableta 63
5.5. La aplicacion Andabata en el movil . . . . . . . . . . . . . . . . . . . 64
5.6. Captura de pantalla de la aplicacion Andabata en funcionamiento. . . 65
5.7. Posicion de reposo y ejes de giro para el control del robot Andabata
mediante la IMU de la tableta . . . . . . . . . . . . . . . . . . . . . . 66
6.1. Motor de conmutacion electronica sin escobillas de 100W . . . . . . . 68
6.2. Circuito electronico: (a) Placa Double control con dos DEC Module
50/5 (b) Placa MultiProp . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3. Vista explosionada de la reductora epicicloidal fabricada por Inge-
nierıa Uno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
C.1. Asignacion de pin del codificador MR tipo L de 500ppv . . . . . . . . 152
C.2. Asignacion de terminales de la controladora de motor Sabertooth 2x32153
C.3. Asignacion de terminales de la controladora de movimiento Kangaroo
x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156


Indice de tablas
2.1. Experimento sobre terreno natural para obtener µ . . . . . . . . . . . 19
2.2. Experimento sobre terreno artificial para obtener µ . . . . . . . . . . 20
2.3. Experimento sobre terreno natural para obtener xCIR
. . . . . . . . . 21
2.4. Experimento sobre terreno artificial para obtener xCIR
. . . . . . . . 21
3.1. Nomenclatura de los canales . . . . . . . . . . . . . . . . . . . . . . . 39
3.2. Comandos de inicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3. Comandos de movimiento . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4. Comandos de peticion . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5. Codigos de error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
XIII


Capıtulo 1
Introduccion
1.1. Antecedentes
Documentar adecuadamente un robot movil y, por ende, cualquier dispositivo
artificial, es muy importante para futuras referencias y para poder realizar cambios
o actualizaciones. Este trabajo es especialmente relevante si la construccion de la
maquina la realiza, en buena parte, una empresa ajena a la universidad.
En este caso se ha encargado la construccion del vehıculo a Ingenierıa UNO
[11]. Esta empresa esta dedicada al diseno, fabricacion e implantacion de sistemas
automatizados para la produccion. A lo largo de los anos, se ha especializado en la
fabricacion de maquinas de control numerico por computador.
1.2. El robot movil Andabata
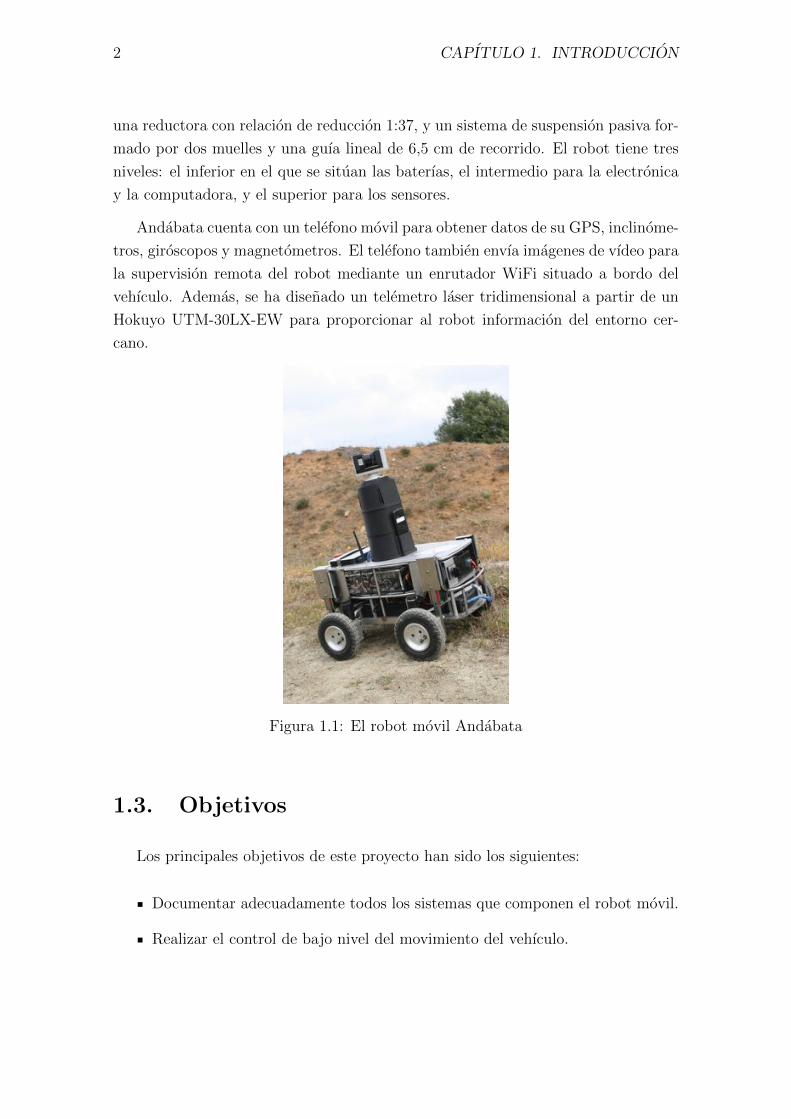
Andabata es un robot movil 4x4 de pequenas dimensiones (ver Figura 1.1) para
la navegacion autonoma en entornos naturales equipado con un telemetro laser 3D.
La construccion de este robot esta financiada con cargo a los fondos del Proyecto de
Investigacion de Excelencia de la Junta de Andalucıa P10-TEP-6101-R [18].
Andabata consiste en un vehıculo alimentado por baterıas que se desplaza me-
diante traccion por deslizamiento (skid-steering) que le proporcionan sus cuatro
ruedas de 20 cm de diametro. Cada rueda posee su propio motor con codificador,
1
2 CAPITULO 1. INTRODUCCION
una reductora con relacion de reduccion 1:37, y un sistema de suspension pasiva for-
mado por dos muelles y una guıa lineal de 6,5 cm de recorrido. El robot tiene tres
niveles: el inferior en el que se situan las baterıas, el intermedio para la electronica
y la computadora, y el superior para los sensores.
Andabata cuenta con un telefono movil para obtener datos de su GPS, inclinome-
tros, giroscopos y magnetometros. El telefono tambien envıa imagenes de vıdeo para
la supervision remota del robot mediante un enrutador WiFi situado a bordo del
vehıculo. Ademas, se ha disenado un telemetro laser tridimensional a partir de un
Hokuyo UTM-30LX-EW para proporcionar al robot informacion del entorno cer-
cano.
Figura 1.1: El robot movil Andabata
1.3. Objetivos
Los principales objetivos de este proyecto han sido los siguientes:
Documentar adecuadamente todos los sistemas que componen el robot movil.
Realizar el control de bajo nivel del movimiento del vehıculo.

1.4. PLAN DE TRABAJO 3
Conseguir la puesta en marcha de Andabata.
Durante los dos anos de duracion de este PFC, la alumna ha contribuido activa-
mente a la consecucion de estos objetivos y ha sido testigo de los distintos cambios
realizados en ese periodo de tiempo.
1.4. Plan de trabajo
Las fases de trabajo para realizar este proyecto han sido:
1. Generar planos del sistema mecanico y de locomocion.
2. Montaje de baterıas y fuentes de alimentacion.
3. Documentar el sistema electrico y de alimentacion.
4. Instalar y describir el sistema de control de motores.
5. Incorporar una computadora al robot con el sistema operativo Ubuntu [26] y
el entorno para el desarrollo de software para robots ROS [21].
6. Integracion del control de bajo nivel en el entorno ROS.
7. Puesta en marcha del robot.
8. Elaboracion de la memoria del proyecto.
9. Preparar la presentacion ante el tribunal examinador.
1.5. Estructura de la memoria
El presente documento se compone de seis capıtulos y de cinco anexos. A conti-
nuacion se expone una descripcion de cada uno de los capıtulos y anexos que compo-
nen esta memoria, exceptuando este primer capıtulo introductorio y las referencias
utilizadas que aparecen al final de la memoria.

4 CAPITULO 1. INTRODUCCION
Capıtulo 2 Sistema mecanico y motriz
Se describe la estructura de soporte fısico y el sistema de locomocion del robot.
Capıtulo 3 Sistema electrico y electronico
En este capıtulo se detallan la alimentacion, las conexiones electricas y el sistema
electronico de control de motores.
Capıtulo 4 Sistema informatico y sensorial
Se describe el computador utilizado para el control del robot y los distintos
sensores que permiten su interaccion con el entorno.
Capıtulo 5 Software de Andabata
Se presenta el software instalado en el PC de control incluyendo su sistema
operativo, las modificaciones realizadas en dicho software, los pasos necesarios para
encender y apagar correctamente el robot movil y una breve descripcion del manejo
del mismo.
Capıtulo 6 Conclusiones
En este capıtulo se resenan las conclusiones obtenidas y los trabajos futuros que
podrıan introducir mejoras en el robot.
Anexo A Planos
Contiene los planos del robot movil.
Anexo B Documentacion tecnica
Este anexo contiene la especificaciones tecnicas proporcionadas por los fabrican-
tes de los productos que incorpora Andabata y se aporta la URL de cada documento.

1.5. ESTRUCTURA DE LA MEMORIA 5
Anexo C Esquemas de conexiones
En este anexo estan descritas las conexiones del sistema electrico y electronico.
Anexo D Codigo de los programas modificados
Incluye los nodos que ha sido necesario modificar del software de control del robot
movil respecto del presentado en el proyecto ((Construccion de mapas de exteriores
mediante octrees para un robot movil equipado con un telemetro laser 3D ))[8].
Anexo E Presupuesto
Al final del documento se detallan los costes asociados a la construccion del robot
movil desglosado en varias partidas.


Capıtulo 2
Sistema mecanico y motriz
2.1. Introduccion
Este capıtulo contiene la descripcion de la estructura fısica de soporte de Andaba-
ta, su sistema de locomocion, la suspension del vehıculo y un modelo cinematico
aproximado.
2.2. Estructura de soporte
El robot movil Andabata esta formado por una estructura tubular de acero con
tres niveles, tal y como se aprecia en la Figura 2.1. Sobre la base del nivel inferior esta
soldado el sistema de tubos que conforma la estructura del robot. El conjunto que
forma la base inferior y el sistema de tubos es la estructura principal del robot movil
que sirve de soporte a los demas elementos como las bases intermedia y superior o
las guıas de suspension.
Las bases, que estan fabricadas en acero y tienen forma rectangular con bordes
redondeados, delimitan los niveles del robot movil Andabata:
Nivel inferior. En este nivel esta colocada la baterıa que proporciona
la alimentacion al robot movil (ver Apartado 3.2.1).
Nivel intermedio. En la base de este nivel se han fijado elementos por
ambas caras:
7

8 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
Figura 2.1: La estructura de soporte del robot movil Andabata
1. En la cara que queda enfrentada a las baterıas se ha atornillado
una caja de aluminio con forma rectangular de 26204, 5 cm
donde se aloja el circuito electronico que permite el control de
los cuatro motores de los que dispone Andabata.
2. Sobre la cara superior estan colocados el boton general de pues-
ta en marcha, la fuente de alimentacion y la computadora. To-
dos estos elementos tambien estan fijados mediante tornillos
para evitar desplazamientos indeseados.
Nivel superior. En este nivel estan instalados el boton de parada de
emergencia, el router, el telemetro laser tridimensional y el telefono
movil.
En la actualidad, la masa y las dimensiones generales del robot movil Andabata
son:
Masa: 41 Kg.
Longitud maxima: 0,67 m.
Anchura maxima: 0,54 m.
Altura maxima (con telemetro laser): 0,81 m.
En la Figura 2.2 se muestran unas vistas generales del robot obtenidas mediante
el software de CAD en 3D SolidWorks [22].

2.3. SISTEMA DE LOCOMOCION 9
Figura 2.2: Vistas generales del robot movil Andabata
2.3. Sistema de locomocion
Andabata se desplaza mediante traccion por deslizamiento (skid-steering) de
cuatro ruedas, equipada cada una de ellas con un motor de corriente continua de
alta eficiencia energetica y su correspondiente codificador, una reductora de 1:37 y
una suspension pasiva con dos guıas lineales de 6,5 cm de recorrido.
En la configuracion skid-steer, el direccionamiento se basa en controlar las velo-
cidades relativas de las ruedas situadas a ambos lados del robot, de forma similar a
los vehıculos con traccion diferencial. Como todas las ruedas estan alineadas con el
eje longitudinal del vehıculo, el giro implica el deslizamiento de las ruedas sobre el
suelo [14] [20]. Las ruedas del robot movil son fijas, por lo que el cambio de direc-
cion se produce por la diferencia de velocidad de las ruedas de cada lado, es decir,
si las ruedas del lado derecho giran mas rapido que las del lado izquierdo, entonces

10 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
el robot girara hacia la izquierda.
La configuracion skid-steer presenta las siguientes ventajas sobre otras configu-
raciones alternativas con ruedas:
En terminos mecanicos es simple y robusta.
No hay ruedas directrices por lo que no es necesario ningun mecanismo es-
pecıfico.
Presenta una gran traccion en terrenos irregulares.
Como las ruedas de cada lado giran a la vez en el mismo sentido y velocidad,
solo requieren dos motores para dirigir el robot.
A diferencia de la configuracion diferencial, no requiere la existencia de ruedas
castor o pivotantes, por lo que se eliminan los problemas que estas causan.
Proporciona una mejor maniobrabilidad, incluyendo el giro de radio cero usan-
do solo con los componentes necesarios para el movimiento en lınea recta.
Algunos de los inconvenientes que presenta son:
El deslizamiento incrementa el desgaste de las ruedas y el gasto energetico.
Presenta especial dificultad en cuanto a la odometrıa. El deslizamiento de
las ruedas en los cambios de direccion implica que los sensores de posicion no
puedan medir con exactitud el giro del vehıculo.
2.3.1. Ruedas
Las ruedas del robot Andabata tienen un diametro de 20 cm y cuentan con
camara de aire y llanta de aluminio (ver Figura 2.3). La presion de inflado maxima
para estas camaras es de 30 psi (2,1 bar). Las cubiertas utilizadas estan provistas
de pequenos tacos que le proporcionan una mejor traccion en terrenos naturales.
Las llantas cuentan con el logotipo del robot, que es un casco sin apertura para
los ojos (ver Figura 2.4).

2.3. SISTEMA DE LOCOMOCION 11
Figura 2.3: Fotografıa de una rueda desmontada del robot Andabata
Figura 2.4: Logotipo del robot movil Andabata
2.3.2. Motores
Los motores incorporados al vehıculo deben ser capaces de desarrollar una po-
tencia suficiente para hacer frente a las irregularidades del terreno y para realizar
giros sobre sı mismo.
Andabata cuenta con traccion en las cuatro ruedas. Con esto se consigue una
traccion independiente y mejor que la que se obtendrıa utilizando solo dos motores.
En concreto cada una de las ruedas de Andabata cuenta con su propio motor y su
codificador correspondiente.
Un motor de corriente continua convierte la energıa electrica en energıa mecanica
debido a la accion de un campo magnetico. Los motores de corriente continua mas
comunes son los motores con escobillas. Las ventajas de este tipo de motores son:
Al tener solo dos cables el control es sencillo.

12 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
Son motores muy extendidos, por lo que su coste es bajo.
Si las escobillas son sustituibles, su vida util es extensa.
Como necesitan pocos componentes externos, se comporta de forma fiable en
ambientes difıciles.
Los inconvenientes mas relevantes son:
Requiere un mantenimiento periodico. Las escobillas deben ser limpiadas o
sustituidas para una operacion continua.
A altas velocidades la friccion de las escobillas se incrementa, lo que reduce el
par util.
El arco electrico de las escobillas puede producir interferencias electromagneti-
cas.
Baja capacidad de disipacion del calor.
El tipo de motor que incorpora el robot Andabata es un motor de corriente con-
tinua en el que el inductor esta formado por imanes permanentes. Estos motores se
utilizan en maquinaria industrial, accionamientos, domotica, servomotores, etc. Los
avances en tecnologıa de materiales han permitido la creacion de imanes permanen-
tes de alta intensidad, lo que ha posibilitado el desarrollo de motores compactos y
de alta potencia. Las ventajas de estos motores frente a los motores de corriente
continua tradicionales (con el estator bobinado) son las siguientes:
Mejor rendimiento.
Menor tamano y peso, es decir, la relacion potencia-volumen es mejor.
Mayor eficiencia y fiabilidad.
Los motores que permiten el desplazamiento del robot son cuatro motores RE40
de Maxon [16], de 40mm con escobillas de grafito y con potentes imanes permanentes.
El motor seleccionado es ligero y compacto, cuenta con una potencia de 150 W y
gracias a su baja inercia, goza de una elevada aceleracion (ver Figura 2.5).
Las especificaciones tecnicas mas importantes de este motor se relacionan a con-
tinuacion [17]:

2.3. SISTEMA DE LOCOMOCION 13
Figura 2.5: Motor RE40 de corriente continua con escobillas
Valores a tension nominal
Tension maxima: 48 V
Maxima corriente en continua: 1,4 A
Velocidad nominal: 2710 rpm (revoluciones por minuto)
Maximo par en continua: 189 mNm
Maximo rendimiento: 89%
Momento de inercia del rotor: 121 gcm
2
Relacion velocidad-par motor: 3,29 rpm/mNm.
2.3.3. Codificadores (Encoders)
Cada uno de los motores del robot viene equipado con un sensor integrado di-
rectamente en dicho motor. El encoder transmite senales de onda cuadrada que se
pueden utilizar para calcular la posicion angular o la velocidad de giro.
El modelo seleccionado es el encoder MR tipo L [16] (ver Figura 2.6) que cuenta
con dos canales y line driver (senales inversas). Es un sensor de principio magneto-
rresistivo que detecta las modificaciones en el flujo magnetico y las transmite como
senales A y B. Este tipo de sensor tiene la ventaja de ser muy compacto y resistente
a la accion del polvo, los aceites y la suciedad.

14 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
Figura 2.6: Encoder MR tipo L montado en el motor
A continuacion se detallan algunas caracterısticas de este sensor [17]:
Senal de posicion relativa apta para posicionamiento.
Reconocimiento del sentido de giro.
Informacion de la velocidad por la frecuencia de pulsos.
Canales de onda cuadrada A, B e I (index).
El line driver genera las senales complementarias de los canales que permiten
eliminar las interferencias que se producen en cables largos y mejoran la calidad
de la transmision.
Resolucion: 500 ppv (pulsos por vuelta)
Velocidad maxima admitida: 24000 rpm
2.3.4. Reductora
Cada rueda del robot Andabata lleva incorporada una reductora con una rela-
cion de transmision de 1:37 formada por un tornillo sin fin y un engranaje de ejes
cruzados.
Esta reductora permite obtener una reduccion de velocidad elevada ocupando
poco espacio. Esta construida en acero y tiene la ventaja de actuar en un solo

2.4. SISTEMA DE SUSPENSION 15
sentido (desde el motor hacia la rueda y no al reves), por lo tanto, funciona como
un freno de la rueda en caso de que el motor no este alimentado. Esta caracterıstica
resulta muy util con pendientes en caso de perder alimentacion.
La reductora esta formada principalmente por un tornillo sin fin acoplado al
motor y una rueda dentada cuyo eje se acopla a la llanta del robot (ver Figura 2.7).
Todo ello encerrado en una carcasa cerrada rellena de grasa.
Figura 2.7: Vista explosionada de la reductora
2.4. Sistema de suspension
La suspension de un vehıculo es el conjunto de elementos elasticos que se colocan
entre las partes en contacto con el terreno y las partes que no lo estan. Su funcion
principal es absorber los impactos que se producen en las ruedas evitando que se
transmitan, en la medida de lo posible, al resto de elementos del vehıculo. Tambien
permiten asegurar el contacto de las ruedas con el suelo.
Cada rueda del robot cuenta con una guıa independiente de 6,5 cm de recorrido,
tensada mediante dos muelles, para que se adapte mejor a las irregularidades del
terreno. La Figura 2.8 muestra el sistema de suspension del robot movil acoplado a
la rueda.

16 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
Figura 2.8: El sistema de suspension del robot movil acoplado a la rueda
Las guıas seleccionadas son de la serie HGR15R de Hiwin [9] especıfica para
cargas muy pesadas (ver Figura 2.9), ya que son el unico elemento que une las
ruedas con el chasis. Las guıas se fijan mediante tornillos a un soporte que a su vez
esta soldado al chasis tubular del robot movil (ver Figura 2.10). Las caracterısticas
mas importante de estas guıas lineales son:
Soportan cargas en las direcciones radial, radial inversa y lateral.
Son autoalineantes y presentan un movimiento suave.
Admiten precarga para dotarlas de mayor rigidez.
El modelo de patın seleccionado ha sido HWG15ccc precarga Z0 que ejerce una
cierta friccion al movimiento. Los patines incorporados al robot movil se fijan a un
soporte de acero mediante tornillos y este soporte se encuentra a su vez unido al
chasis mediante soldadura.
La suspension cuenta ademas con dos lımites mecanicos: uno en la parte superior
y otro en la parte inferior. Segun se estudio en el proyecto ((Modelado e identificacion

2.5. MODELO CINEMATICO APROXIMADO 17
Figura 2.9: Guıa lineal y patines
Figura 2.10: Sistema de suspension acoplado al chasis tubular del robot movil
del sistema de suspension pasiva del robot movil Andabata))[1], la constante de los
muelles vale k = 3976, 6 N/m y el coeficiente de friccion es b = 75, 7581 N · s/maproximadamente.
2.5. Modelo cinematico aproximado
Dada la similitud en el direccionamiento de la configuracion skid-steer con la
traccion diferencial [14], se pueden establecer relaciones geometricas que permiten
obtener un modelo cinematico aproximado de esta configuracion.
Se asume que el sistema de referencia del robot tiene su origen en el centro del
area definida por el contacto de las ruedas con el suelo. El eje Y esta alineado con
la direccion del movimiento, tal y como muestra la Figura 2.11.
Los vehıculos con la configuracion skid-steer se controlan mediante dos senales
de entrada: la velocidad lineal de las ruedas del lado izquierdo y derecho respecto

18 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
Figura 2.11: Equivalencias entre skid-steer y la traccion diferencial
al sistema de referencia del robot (Vd
, V
i
). La cinematica directa sobre el plano se
puede establecer de la siguiente forma:
0
B@v
x
v
y
!
z
1
CA = A · V
i
V
d
!(2.1)
donde v = (vx
, v
y
) es la velocidad de traslacion del vehıculo expresada en el sistema
de referencia del robot, !z
es la velocidad angular respecto al eje Z (perpendicular
al plano definido por los ejes X e Y y con sentido positivo hacia arriba) y A es una
matriz que solo depende del Centro Instantaneo de Rotacion (CIR) y de factores de
correccion.
En el caso de un modelo cinematico ideal simetrico la matriz A toma la siguiente
forma:
A =µ
2xCIR
0
B@0 0
x
CIR
x
CIR
1 1
1
CA (2.2)
donde para obtener los parametros xCIR
y µ se realizan dos experimentos.

2.5. MODELO CINEMATICO APROXIMADO 19
La expresion 2.2 tambien representa la cinematica de un vehıculo con traccion
diferencial con las ruedas colocadas a una distancia x
CIR
del centro (ver Figura
2.11).
2.5.1. Coeficiente lineal µ
En este caso, el experimento consiste en dar la misma velocidad a todas las
ruedas para que se mueva en lınea recta, hacia delante y hacia atras, durante 5
segundos. Se ha considerado el valor del coeficiente obtenido sobre terreno natural
pero el experimento tambien se ha realizado sobre terreno artificial.
La ecuacion aplicada es:
µ 2 · dRV
d
dt+RV
i
dt(2.3)
donde d es la distancia recorrida por el robot movil.
En realidad no se han integrado velocidades sino que se ha obtenido la distancia
recorrida por las ruedas mediante las controladoras de movimiento instaladas en el
robot movil (ver Apartado 3.4).
Los coeficientes obtenidos para cada velocidad y sentido de la marcha de la Tabla
2.1 se promedian para obtener el valor del coeficiente lineal:
µ = 0, 97728 (2.4)
Velocidad(lineas/s)
Sentido marcha Distancia (mm) d (mm) µ (m)
Izda. Dcha.
RV
d
dt+RV
i
dt
27025 7025 Delante 1174,10 1170 0,99651-7025 -7025 Atras 1175,29 1150 0,9784914051 14051 Delante 2367,48 2300 0,97150-14051 -14051 Atras 2368,51 2280 0,96263
Promedio 0,97728
Tabla 2.1: Experimento sobre terreno natural para obtener µ

20 CAPITULO 2. SISTEMA MECANICO Y MOTRIZ
Los resultados del experimento en terreno artificial se muestran en la Tabla 2.2,
siendo muy parecidos a los obtenidos en terreno natural.
Velocidad(lineas/s)
Sentido marcha Distancia (mm) d (mm) µ (m)
Izda. Dcha.
RV
d
dt+RV
i
dt
27025 7025 Delante 1178,27 1170 0,99298-7025 -7025 Atras 1180,19 1160 0,9828914051 14051 Delante 2376,03 2290 0,96379-14051 -14051 Atras 2370,05 2270 0,95779
Promedio 0,97436
Tabla 2.2: Experimento sobre terreno artificial para obtener µ
2.5.2. Coeficiente rotacional xCIR
El experimento consiste en hacer girar el robot sobre sı mismo, dando a las ruedas
izquierda y derecha la misma velocidad pero distinto sentido. La ecuacion que se
aplica es:
x
CIR
RV
d
dtRV
i
dt
2 · (2.5)
donde es el angulo girado.
Aunque el valor de este coeficiente se toma del experimento realizado sobre tierra
aplanada y compacta, este tambien se ha realizado en una zona pavimentada. En
ambos casos se ha realizado de la misma forma: a dos velocidades diferentes y para
ambos sentidos de giro, con una duracion de 5 segundos en cada giro.
El valor final del coeficiente rotacional es el promedio de los coeficientes obtenidos
para cada velocidad y sentido de giro en el experimento realizado en terreno natural
(ver Tabla 2.3) siendo dicho valor:
x
CIR
= 0, 38638m (2.6)

2.5. MODELO CINEMATICO APROXIMADO 21
Velocidad(lineas/s)
Giro Distancia (mm) (rad) x
CIR
(m)
Izda. Dcha.
RV
d
dtRV
i
dt
27025 -7025 Dextrogiro 1170,7278 3,0737 0,38088-7025 7025 Levogiro 1166,2045 2,9590 0,3941214051 -14051 Dextrogiro 2358,7001 6,1712 0,38221-14051 14051 Levogiro 2357,4102 6,0710 0,38830
Promedio 0,38638
Tabla 2.3: Experimento sobre terreno natural para obtener xCIR
Los datos del experimento en terreno artificial que se muestran de la Tabla 2.4
son muy parecidos a los datos obtenidos en terreno natural.
Velocidad(lineas/s)
Giro Distancia (mm) (rad) x
CIR
(m)
Izda. Dcha.
RV
d
dtRV
i
dt
27025 -7025 Dextrogiro 1174,9201 3,0369 0,38688-7025 7025 Levogiro 1172,7645 2,87979 0,4072414051 -14051 Dextrogiro 2362,0777 6,0912 0,38779-14051 14051 Levogiro 2361,2291 5,9167 0,38908
Promedio 0,39525
Tabla 2.4: Experimento sobre terreno artificial para obtener xCIR

Capıtulo 3
Sistema electrico y electronico
3.1. Introduccion
En este capıtulo se describen los sistemas que proporcionan la energıa (sistema
electrico) y el control del movimiento de bajo nivel (sistema electronico) a Andabata.
3.2. Sistema electrico
El sistema electrico del robot movil Andabata es relativamente sencillo. Esta
formado por una baterıa y una fuente de alimentacion para a la computadora, el
router y el sensor laser. Tambien se dispone de un interruptor general de puesta en
marcha y de un cargador de baterıas externo. La Figura 3.1 muestra un diagrama
de bloques del sistema electrico.
3.2.1. Baterıa
Una baterıa es un conjunto de celdas electroquımicas que convierte la energıa
quımica en energıa electrica mediante una reaccion quımica reversible. El cierre del
circuito externo inicia el proceso de descarga induciendose una corriente electrica
aprovechable para producir trabajo. Durante el proceso de carga, un aporte de
energıa electrica externa permite revertir las reacciones quımicas ocurridas durante
el proceso de descarga.
23

24 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
Figura 3.1: Diagrama de bloques del sistema electrico
A la hora de escoger una baterıa hay que analizar y comparar los tipos disponibles
y ver cual es el que se adapta mejor a las necesidades y requerimientos. Habra que
tener en cuenta parametros como la tension, la capacidad, la potencia, la durabilidad
o los costes.
Los tipos de baterıas mas usados actualmente son las de plomo-acido, de niquel-
metal y de ion-litio. La baterıa de plomo-acido fue la primera baterıa recargable
utilizada para uso comercial y es la mas usada actualmente. Entre sus ventajas esta
el bajo coste de fabricacion, la robustez y una buena potencia especıfica (W/Kg).
Los inconvenientes principales son una baja energıa especıfica (cantidad de energıa
por kilogramo que puede almacenar una baterıa), carga lenta y un ciclo de vida
limitado.
Las baterıas de nıquel-metal tienen una energıa especıfica mejor que las anteriores
pero adolecen del “efecto memoria”, que implica que la capacidad se vea reducida
si no se realizan ciclos completos de carga y descarga. Respeto a las de plomo-acido
tienen una mayor tasa de autodescarga cuando no se usan, una carga mas rapida,
un ciclo de vida alto y son mas respetuosas con el medio ambiente.
Las baterıas de ion de litio son actualmente las que mejores caracterısticas ofrecen

3.2. SISTEMA ELECTRICO 25
y, por ello, se usan tanto en la electronica de consumo (portatiles, moviles, etc.)
como en vehıculos electricos. Dan una energıa especıfica muy alta, casi el doble que
las de nıquel-metal, los ciclos de vida son elevados y el tiempo de carga es bueno.
Ademas tienen un ındice de descarga mucho menor que las anteriores, no requiere
mantenimiento y no presentan el “efecto memoria” de las baterıas de nıquel-metal.
El inconveniente principal es que requiere un circuito de proteccion que limite la
tension y la intensidad que entregan.
La baterıa instalada en el robot movil Andabata procede de un monopatın electri-
co (ver Figura 3.2). La baterıa es de ion de litio de 8 celdas cuya capacidad total es
de 7, 2 Ah, con una tension maxima de 29, 6 V . Cada celda contiene dos baterıas
montadas en paralelo, con unos valores nominales por celda de 3, 7 V y 0, 9 Ah. El
peso de la baterıa es de 7 Kg y sus medidas son 59 16 9 cm habiendo colocado
una celda por encima de las demas para reducir su longitud. Como se aprecia en la
Figura 3.3, la baterıa esta ubicada en el nivel inferior del chasis de Andabata.
(a)
(b)
Figura 3.2: Baterıa: (a) Vista exterior (b) Celdas
Figura 3.3: Ubicacion de la baterıa en el robot Andabata

26 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
El robot movil tambien cuenta con una baterıa de repuesto (no alojada en el
vehıculo) de las mismas caracterısticas y un cargador externo para dichas baterıas.
El cargador realiza la conversion desde 220 V CA a 29, 2 V CC (Ver Figura 3.4).
Presenta dos pilotos led de estado: uno de ellos siempre esta en color rojo si esta
conectado a la red electrica y el otro permanece en color rojo mientras se realiza la
carga y cambia a verde cuando se ha completado la misma.
Figura 3.4: Cargador de la baterıa del robot movil Andabata
La baterıa dispone de dos conectores: uno con cubierta azul para el cargador
externo y el otro con cubierta negra para alimentar al robot (ver Figura 3.2a). Cada
conector consta, a su vez, de dos terminales identificados por colores, el terminal de
color rojo corresponde a la tension positiva y el terminal de color negro a la tension
negativa.
3.2.2. Fuente de alimentacion
Una fuente de alimentacion es un dispositivo capaz de transformar la corriente
electrica en otra adecuada a los dispositivos que se desea alimentar.
Andabata dispone de una fuente de alimentacion para el PC que tambien ali-
menta al router y al telemetro laser 3D. El aspecto principal a la hora de elegir una
fuente de alimentacion es que tenga la capacidad suficiente para alimentar todos los
dispositivos que van a ser conectados a ella, pero tambien deben tenerse en cuenta
caracterısticas como la estabilidad de las tensiones de salida o las corrientes que
suministra para cada tension.
La fuente de alimentacion incorporada al robot movil es del modelo SDX-425-
G24 fabricado por Sunpower [23] (ver Figura 3.5) que se alimenta directamente desde

3.2. SISTEMA ELECTRICO 27
la baterıa del robot movil (ver Figura 3.1). Es una fuente de alimentacion CC-CC
para sistemas ATX de 425W de potencia que presenta las siguientes caracterısticas:
La tension de alimentacion debe estar en un rango de 19V a 36V.
La eficiencia es del 72%.
Dispone de seis salidas, correspondientes a +3, 3 V , ±5 V , ±12 V y +5 V sb,
siendo la ultima la tension de stand by, de forma que la fuente permanece a la
espera del encendido del PC para sacar el resto de las salidas.
Funcion de arranque suave para reducir los picos de corriente al inicio.
Proteccion contra sobretension, sobrecarga y cortocircuito.
Aislamiento en la entrada y la salida de potencia.
Figura 3.5: Fuente de alimentacion Sunpower SDX-425-G24
La fuente de alimentacion debe tener siempre el interruptor de encendido en la
posicion ON (situado en la parte trasera de la fuente). Sin embargo, solo se pone
en funcionamiento con el pulsador de encendido del PC. La Figura 3.6 muestra la
situacion de la fuente en el robot Andabata, la cual esta ubicada sobre el nivel
intermedio, en la parte delantera del robot movil.
La computadora utiliza las seis salidas de tension para alimentar sus componen-
tes. El router y el sensor laser 3D se alimentan a una tension de 12 V CC. El telefono
inteligente utiliza los recursos de esta fuente aunque no este conectado directamente,
ya que se carga a traves del puerto USB del PC.

28 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
Figura 3.6: Fuente de alimentacion sobre el nivel intermedio del robot movil
3.2.3. Interruptor general
Se ha incorporado un interruptor de corte para facilitar el encendido y apagado
de todo el robot (ver Figura 3.1).
El interruptor de puesta en marcha esta instalado entre la baterıa y los elemen-
tos conectados a ella. Se encuentra situado en el frontal del robot movil, en el nivel
intermedio, junto a la fuente de alimentacion del PC (ver Figura 3.7). Es un inte-
rruptor industrial de Siemens capaz de hacer conmutaciones de corrientes de alta
intensidad.
3.3. Sistema electronico
El sistema electronico del robot movil (ver Figura 3.8) se compone dos ampli-
ficadores de potencia digitales y dos placas de control que se encargan de manejar
los cuatro motores presentados en la Seccion 2.3.2. Los amplificadores de potencia
corresponden al modelo Sabertooth 2x32 de la empresa Dimension Engineering [5] y
los modulos de control corresponden al modelo Kangaroo x2 de esta misma empresa.
Como se aprecia en la Figura 3.8, los motores delanteros se conectan a una
Sabertooth y los traseros a la otra. Cada Sabertooth esta conectada a una Kangaroo
y estas a su vez, a un puerto USB del PC.

3.3. SISTEMA ELECTRONICO 29
(a) (b)
Figura 3.7: Interruptor de puesta en marcha: (a) Sobre el robot (b) Detalle
Figura 3.8: Diagrama de bloques de la electronica de control de motores

30 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
Este circuito electronico se encuentra alojado en una caja realizada en aluminio
situada entre las baterıas y la chapa del nivel intermedio, estando atornillada a esta
ultima (ver Figura 3.9).
Figura 3.9: Ubicacion de la caja para la electronica en el robot movil
Las Sabertooth se alimentan directamente de la baterıa (ver Figura 3.1), mientras
que las Kangaroo lo hacen desde los 5 V CC que les proporciona la Sabertooth.
En la Figura 3.10 se muestra una fotografıa del circuito electronico instalado en
el robot movil. Los motores delanteros estan conectados al conjunto amplificador-
controladora situado en el extremo de la caja que aloja al circuito, mientras que los
traseros estan conectados al conjunto situado en el centro de dicha caja.
Figura 3.10: Fotografıa del circuito electronico del robot movil

3.3. SISTEMA ELECTRONICO 31
3.3.1. Sabertooth 2x32
La controladora de motor Sabertooth 2x32 de Dimension Engineering [5] mostra-
da en la Figura 3.11 es un pequeno amplificador de dos canales capaz de suministrar
32 amperios a dos motores con picos de hasta 64 amperios por motor. Puede ser
operado mediante radio control, senales analogicas, protocolo TTL serial y USB.
Las caracterısticas mas importantes de este amplificador son:
Admite un rango de tensiones de alimentacion de 6V a 30V. La tension maxima
es 33,6V.
Frecuencia de conmutacion de 30KHz.
Proteccion termica y contra sobrecargas.
Posee un modo de proteccion de baterıas.
Permite el control y la monitorizacion mediante USB.
El lımite de corriente es configurable.
Tiene cuatro modos de operacion, ademas de un modo de usuario personali-
zable.
Figura 3.11: Sabertooth 2x32
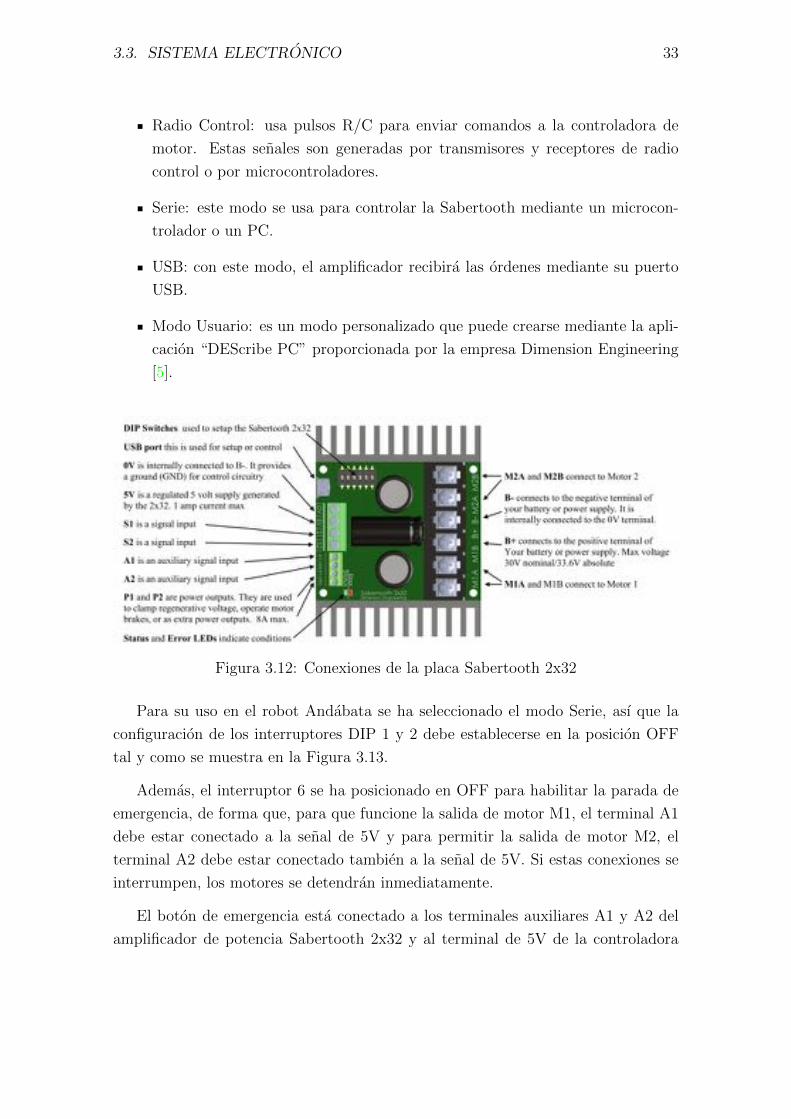
En la Figura 3.12 se muestra un diagrama de la controladora de motor Saber-
tooth. Las conexiones son las siguientes:

32 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
M1A y M1B: se conectan al motor 1.
M2A y M2B: se conectan al motor 2.
B+: se conecta al terminal positivo de la baterıa.
B-: se conecta al terminal negativo de la baterıa. Esta conectado internamente
con el terminal 0V.
DIP Switches: se usan para configurar la Sabertooth.
USB port: se utiliza para configurar o controlar.
0V: esta internamente conectado a B-. Proporciona la tierra (GND) para el
circuito de control.
5V: es una tension de salida regulada que genera la Sabertooth 2x32. La
intensidad maxima es de 1A.
S1 y S2: son senales de entrada.
A1 y A2: son senales de entrada auxiliares.
P1 y P2: son salidas de potencia. Se usan para limitar tensiones, accionar
frenos de motor o como salidas de potencia adicionales. La intensidad maxima
es de 8A.
LED de estado y LED de error: indican diferentes situaciones de funcio-
namiento.
Los modos de operacion de la Sabertooth se seleccionan mediante seis interrup-
tores DIP. Las diferentes combinaciones de posicion de los interruptores 1 y 2 selec-
cionan el modo de control y los interruptores 4, 5 y 6 establecen diferentes opciones
en cada modo de control. La funcion del interruptor 3 se limita a la configuracion
de la alimentacion del sistema. Los modos de operacion disponibles son:
Analogico: en este modo se utilizan tensiones analogicas para controlar el
amplificador. Es el control mas sencillo, siendo el rango de tensiones de 0V a
5V.
3.3. SISTEMA ELECTRONICO 33
Radio Control: usa pulsos R/C para enviar comandos a la controladora de
motor. Estas senales son generadas por transmisores y receptores de radio
control o por microcontroladores.
Serie: este modo se usa para controlar la Sabertooth mediante un microcon-
trolador o un PC.
USB: con este modo, el amplificador recibira las ordenes mediante su puerto
USB.
Modo Usuario: es un modo personalizado que puede crearse mediante la apli-
cacion “DEScribe PC” proporcionada por la empresa Dimension Engineering
[5].
Figura 3.12: Conexiones de la placa Sabertooth 2x32
Para su uso en el robot Andabata se ha seleccionado el modo Serie, ası que la
configuracion de los interruptores DIP 1 y 2 debe establecerse en la posicion OFF
tal y como se muestra en la Figura 3.13.
Ademas, el interruptor 6 se ha posicionado en OFF para habilitar la parada de
emergencia, de forma que, para que funcione la salida de motor M1, el terminal A1
debe estar conectado a la senal de 5V y para permitir la salida de motor M2, el
terminal A2 debe estar conectado tambien a la senal de 5V. Si estas conexiones se
interrumpen, los motores se detendran inmediatamente.
El boton de emergencia esta conectado a los terminales auxiliares A1 y A2 del
amplificador de potencia Sabertooth 2x32 y al terminal de 5V de la controladora

34 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
Figura 3.13: Interruptores DIP para el modo Serie en Sabertooth 2x32
Kangaroo x2; si este boton se pulsa, se interrumpe la conexion entre los terminales
auxiliares y el terminal 5V, lo cual implica la detencion inmediata de los cuatro
motores.
El boton de emergencia se encuentra en la parte trasera del robot, sobre el
nivel superior (ver Figura 3.14). Este mecanismo de emergencia es un interruptor
que se abre al presionarlo provocando que se deshabiliten las controladoras de los
motores “Sabertooth 2x32”. Cuando se acciona el interruptor se queda en la posicion
activa, es decir, no retrocede despues de pulsarlo y las controladoras permanecen
deshabilitadas. Para desactivarlo, hay que girar el pulsador en sentido contrario a
las agujas del reloj.
(a) (b)
Figura 3.14: Interruptor de parada de emergencia: (a) Sobre el robot (b) Detalle

3.3. SISTEMA ELECTRONICO 35
3.3.2. Kangaroo x2
La controladora de movimiento Kangaroo x2 de Dimension Engineering [5], de
la que se cuenta con dos unidades, se utiliza para realizar el control en bucle cerrado
de la velocidad de las ruedas. Cada uno de los modulos de control se conecta a los
amplificadores de potencia Sabertooth tal y como se muestra en la Figura 3.15.
(a) (b)
Figura 3.15: Kangaroo x2: (a) Separada de la Sabertooth (b) Conectada
Kangaroo es un controlador de movimiento que posee la capacidad de autoajus-
tar el control PID. Las ordenes pueden venir dadas mediante radio control, senales
analogicas, microcontroladores o computadoras. En el caso del robot Andabata,
las ordenes de velocidad se enviaran a traves del puerto USB de la computadora,
mediante un cable USB-TTL serial [7]. El modulo Kangaroo se encargara de inter-
pretar esta informacion junto con la que recibe de los encoders y enviara las ordenes
a la controladora de motor Sabertooth mediante conexion serie.
Algunas especificaciones de este modulo son:
Controlador PID autoajustable de dos canales.
El control puede realizarse sobre posicion o velocidad.
Acepta realimentacion mediante encoders o potenciometros.
Soporta configuraciones con interruptores lımite y paradas mecanicas.
Las entradas pueden ser analogicas, de radio control o serie.

36 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
En la Figura 3.16 se muestran las entradas y conexiones disponibles de la con-
troladora de movimiento. Las conexiones para los codificadores de los motores estan
dispuestas en los laterales de la Kangaroo (Gnd, I, A, B, 5V), ası como las de los
posibles interruptores lımite (L1, L2). En el centro se encuentran los interruptores
DIP, los potenciometros de cada canal y el boton de autoajuste (Autotune). Por
ultimo, las conexiones para la comunicacion con el sistema de control estan en los
extremos delantero y trasero (0V, 5V, S1, S2).
Figura 3.16: Diagrama de la placa Kangaroo x2
El modo de operacion de Kangaroo x2 se selecciona mediante cuatro interrup-
tores DIP (ver Figura 3.17), aunque tambien es posible realizar la configuracion
mediante el software “DEScribe PC” proporcionado por Dimension Engineering [5].
La configuracion seleccionada para el control del robot movil es la siguiente:
Senales de entrada digitales (DIP 1 - ON). Para control mediante comandos
serie se conectara el puerto TX del cable USB-TTL serial al terminal S1 de la
Kangaroo y el puerto RX cable USB-TTL serial al terminal S2 de la Kangaroo.
Realimentacion mediante codificador (DIP 2 - ON).
Control de velocidad (DIP 3 - OFF): hara que el motor se mueva a una veloci-
dad determinada, si este encuentra alguna resistencia, la controladora aplicara
mas potencia.
Modo independiente (DIP 4 - ON): las senales de salida de los motores son
independientes.

3.3. SISTEMA ELECTRONICO 37
Figura 3.17: Opciones de operacion mediante interruptores DIP
Al instalar las controladoras por primera vez es necesario realizar el autoajuste
del PID. En el manual proporcionado por el fabricante se explica el proceso a seguir
para realizar este ajuste (ver Figura 3.18). Si la Kangaroo esta configurada para el
control de la velocidad, durante el ajuste, esta determina la velocidad maxima del
sistema. Esta velocidad maxima puede limitarse mediante un potenciometro incor-
porado en dicha controladora. Por defecto, las Kangaroos estan limitadas al 75% de
la velocidad maxima del sistema con el objetivo de proporcionar un cierto margen
de potencia para mantener la velocidad deseada cuando se superan obstaculos o
pendientes.
(a)
Figura 3.18: Resultados del autoajuste del PID

38 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
3.4. Sistema de control de motores
Para enviar las ordenes a las controladoras de movimiento se utiliza la comunica-
cion serie, lo que permite al computador obtener un nivel de control mas preciso en
comparacion con los otros modos de control que acepta la controladora Kangaroo.
La controladora viene configurada por defecto con los parametros de comunicacion
relacionados a continuacion:
Velocidad de transmision: 9600 baudios.
Bits de transmision: 8 bits.
Paridad: sin paridad.
Bit de parada: 1 bit.
Control de flujo: sin control de flujo.
Para que esta comunicacion sea efectiva el puerto de comunicaciones del compu-
tador debe configurarse de la misma forma. Estos parametros de comunicacion pue-
den modificarse en la controladora Kangaroo x2 mediante la aplicacion DEScribe
PC.
3.4.1. Comandos disponibles
Todos los comandos o telegramas son enviados y recibidos en codigo ASCII. El
formato de las ordenes es siempre el mismo y esta formado por el numero de canal,
una coma, la orden y nueva lınea. La orden puede estar compuesta por caracteres
de texto unicamente o por una combinacion de caracteres de texto y numericos. Los
espacios son ignorados y pueden anadirse para facilitar la lectura:
((n de canal)), ((orden))((\n))
Numero de canal
Indica que motor es el que recibira la orden (ver Tabla 3.1).

3.4. SISTEMA DE CONTROL DE MOTORES 39
Numero de canal Modo de operacion Resultado1 Independiente Motor 12 Independiente Motor 2D Mixto Canal de traccion de ambos mo-
tores.T Mixto Canal de giro de ambos motores.
Tabla 3.1: Nomenclatura de los canales
Comandos de inicio
Se usan para definir e inicializar el entorno de movimiento. Deben enviarse
cada vez que se active la alimentacion de la controladora Kangaroo y no devuelven
ninguna respuesta (ver Tabla 3.2).
Comando Resultado Ejemplostart Inicia el canal. Debe ser enviado antes que cual-
quier otro comando. Los comandos enviados antesde start seran ignorados o devolveran error.
2,start
units Se usa para cambiar la entrada desde las unidadesde la maquina (milivoltios o lıneas de encoder) a unsistema de unidades definido por el usuario. Estoscomandos solo aceptan enteros por lo que debenusarse las unidades apropiadas para evitar grandeserrores. Despues del comando, el primer valor es launidad definida por el usuario, despues se escribeel signo igual seguido del valor de la unidad de lamaquina y nueva lınea. El sistema solo atiende losnumeros, ası que detras de los valores numericosse pueden escribir cadenas de texto para dotar ala orden de una mayor claridad.
1,units 628mm = 18500lines
home Se usa en el inicio para mover el sistema a su po-sicion de partida (si el modo lo requiere). Cuandose usa un encoder con un interruptor lımite o unlımite de choque ajustado, solo se aceptaran co-mandos de tipo incremental hasta que el canal esteposicionado. No tiene ningun significado en modomixto.
1,home
Tabla 3.2: Comandos de inicio
40 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
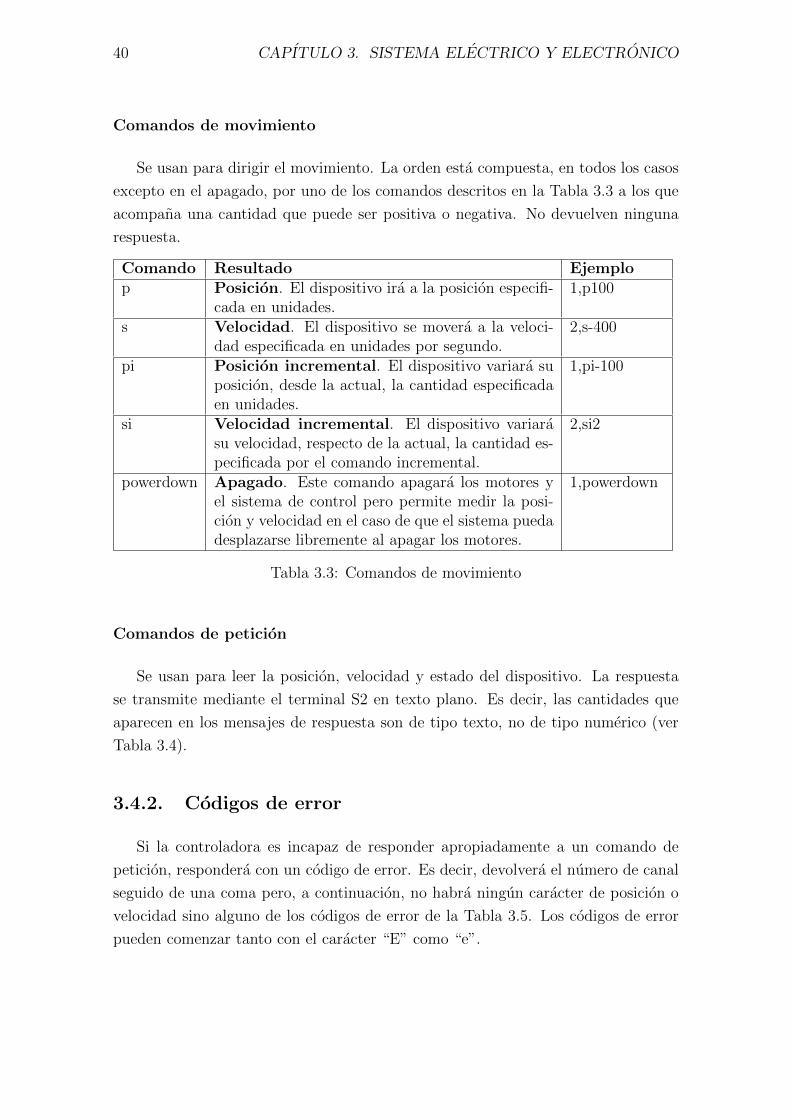
Comandos de movimiento
Se usan para dirigir el movimiento. La orden esta compuesta, en todos los casos
excepto en el apagado, por uno de los comandos descritos en la Tabla 3.3 a los que
acompana una cantidad que puede ser positiva o negativa. No devuelven ninguna
respuesta.
Comando Resultado Ejemplop Posicion. El dispositivo ira a la posicion especifi-
cada en unidades.1,p100
s Velocidad. El dispositivo se movera a la veloci-dad especificada en unidades por segundo.
2,s-400
pi Posicion incremental. El dispositivo variara suposicion, desde la actual, la cantidad especificadaen unidades.
1,pi-100
si Velocidad incremental. El dispositivo variarasu velocidad, respecto de la actual, la cantidad es-pecificada por el comando incremental.
2,si2
powerdown Apagado. Este comando apagara los motores yel sistema de control pero permite medir la posi-cion y velocidad en el caso de que el sistema puedadesplazarse libremente al apagar los motores.
1,powerdown
Tabla 3.3: Comandos de movimiento
Comandos de peticion
Se usan para leer la posicion, velocidad y estado del dispositivo. La respuesta
se transmite mediante el terminal S2 en texto plano. Es decir, las cantidades que
aparecen en los mensajes de respuesta son de tipo texto, no de tipo numerico (ver
Tabla 3.4).
3.4.2. Codigos de error
Si la controladora es incapaz de responder apropiadamente a un comando de
peticion, respondera con un codigo de error. Es decir, devolvera el numero de canal
seguido de una coma pero, a continuacion, no habra ningun caracter de posicion o
velocidad sino alguno de los codigos de error de la Tabla 3.5. Los codigos de error
pueden comenzar tanto con el caracter “E” como “e”.

3.4. SISTEMA DE CONTROL DE MOTORES 41
Comando Resultado Ejemplogetp Obtener posicion. Devuelve el numero de ca-
nal seguido de una coma, el caracter “P” si elmovimiento se ha completado o “p” si aun estarealizandose, la posicion en unidades, retorno decarro y nueva lınea.
1,getp
gets Obtener velocidad. Devuelve el numero de ca-nal seguido de una coma, el caracter “S” si el dis-positivo ha alcanzado la velocidad o “s” si aun estaacelerando, la velocidad en unidades por segundo,retorno de carro y nueva lınea.
2,gets
getpi Obtener posicion incremental. Devuelve elnumero de canal seguido de una coma, el caracter“P” o “p”, la posicion en unidades relativa a laposicion del dispositivo cuando recibio la ultimaorden, retorno de carro y nueva lınea.
2,getpi
getsi Obtener velocidad incremental. Devuelve elnumero de canal seguido de una coma, el caracter“S” o “s”, la velocidad en unidades por segundo re-lativa a la velocidad del dispositivo cuando recibiola ultima orden, retorno de carro y nueva lınea.
1,getsi
Tabla 3.4: Comandos de peticion
3.4.3. Velocidad maxima
Durante el autoajuste de la Kangaroo, se determina la velocidad maxima a la
que los motores pueden girar. Esta velocidad puede consultarse mediante el software
DEScribe PC y viene dada en lıneas de encoder por segundo. Con este valor se puede
obtener la velocidad maxima en m/s a la que ira el vehıculo en lınea recta de la
siguiente forma:
v
max
= v
max,motor
2R
p
(3.1)
donde:
v
max,motor
= 20198 es el 75% de la velocidad maxima del motor en lıneas de
encoder por segundo.
p = 500 es la precision del encoder en pulsos por vuelta (ppv).
42 CAPITULO 3. SISTEMA ELECTRICO Y ELECTRONICO
= 37 es la relacion de transmision de la reductora.
R = 0, 1m es el radio de la rueda del vehıculo.
Por lo tanto, la velocidad maxima del vehıculo queda establecida en:
v
max
= 0, 685m/s (3.2)
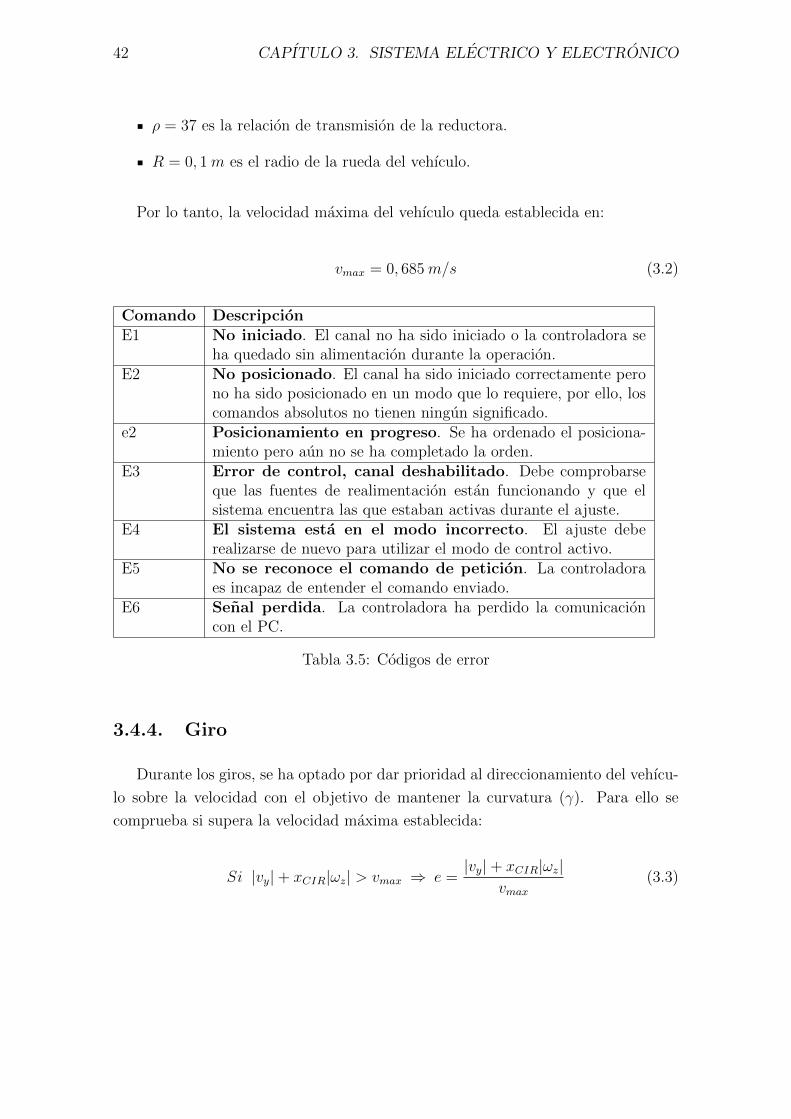
Comando DescripcionE1 No iniciado. El canal no ha sido iniciado o la controladora se
ha quedado sin alimentacion durante la operacion.E2 No posicionado. El canal ha sido iniciado correctamente pero
no ha sido posicionado en un modo que lo requiere, por ello, loscomandos absolutos no tienen ningun significado.
e2 Posicionamiento en progreso. Se ha ordenado el posiciona-miento pero aun no se ha completado la orden.
E3 Error de control, canal deshabilitado. Debe comprobarseque las fuentes de realimentacion estan funcionando y que elsistema encuentra las que estaban activas durante el ajuste.
E4 El sistema esta en el modo incorrecto. El ajuste deberealizarse de nuevo para utilizar el modo de control activo.
E5 No se reconoce el comando de peticion. La controladoraes incapaz de entender el comando enviado.
E6 Senal perdida. La controladora ha perdido la comunicacioncon el PC.
Tabla 3.5: Codigos de error
3.4.4. Giro
Durante los giros, se ha optado por dar prioridad al direccionamiento del vehıcu-
lo sobre la velocidad con el objetivo de mantener la curvatura (). Para ello se
comprueba si supera la velocidad maxima establecida:
Si |vy
|+ x
CIR
|!z
| > v
max
) e =|v
y
|+ x
CIR
|!z
|v
max
(3.3)

3.4. SISTEMA DE CONTROL DE MOTORES 43
Cuando se da la condicion de la Ecuacion 3.3 se limita la velocidad lineal y de
rotacion de la siguiente forma:
!
e
=!
z
e
v
e
=v
y
e
(3.4)
Con lo cual, la curvatura se mantiene:
=w
v
=w
e
v
e
(3.5)


Capıtulo 4
Sistema informatico y sensorial
4.1. Introduccion
Este capıtulo describe los diferentes elementos que componen el sistema in-
formatico y sensorial de Andabata.
El sistema informatico se compone de un potente PC y de un router inalambrico,
ademas cuenta con una tableta que actua como estacion de teleoperacion. El router
es el encargado de establecer comunicacion entre todos los dispositivos con los que
cuenta el robot. El PC realizara el control y el procesado de datos de los sensores.
El sistema sensorial esta formado por un telemetro laser 3D y un telefono in-
teligente. El esquema de la Figura 4.1 presenta como estan conectados todos los
elementos de estos dos sistemas.
4.2. PC de control
El computador seleccionado tiene que ser capaz de gestionar toda la informacion
que recibe a traves de todos los dispositivos conectados a el y realizar la funcion de
control eficazmente.
El PC esta situado sobre el nivel intermedio del robot movil y se aloja en una
caja realizada exprofeso debido a la restriccion en cuanto a dimensiones (ver Figura
45

46 CAPITULO 4. SISTEMA INFORMATICO Y SENSORIAL
Figura 4.1: Esquema de conexiones de comunicacion
4.2). El material de la caja es metacrilato transparente con unos orificios para la
ventilacion de los componentes del ordenador.
Figura 4.2: Situacion de la caja del PC en el robot movil
El equipo instalado presenta las siguientes caracterısticas:
Placa base ASRock Z87M Extreme 4.
Microprocesador Intel Core i7-4771 de 4 nucleos y 3,5 GHz.

4.2. PC DE CONTROL 47
16 GB de memoria RAM DDR3 de 1600 MHz de la marca Kingston.
Disco duro de estado solido Samsung Evo Basic SSD SATA de 250 GB de
capacidad.
4.2.1. Placa base
La placa base es uno de los elementos mas importantes de un PC, ya que los
demas componentes que se instalen estaran condicionados por el modelo elegido. Es
importante tambien que la placa base permita realizar futuras ampliaciones en el
equipo.
La placa base del sistema es el modelo Z87M Extreme 4 de la marca ASRock [3]
(ver Figura 4.3) y presenta las siguientes caracterısticas:
Soporta procesadores de cuarta generacion Intel Core i7/i5/i3 (Socket 1150).
Tecnologıa de memoria Dual Channel DDR3/DDR3L.
Maxima capacidad de memoria de 32 GB.
Formato micro ATX.
Tarjeta grafica integrada. Tamano maximo de memoria 1792 MB.
Fabricada con una fibra de vidrio de alta densidad que reduce la posibilidad
de cortocircuitos electricos provocados por la humedad.
Dispone de la tecnologıa Fast Boot disenada por ASRock para un arranque
mas rapido.
4.2.2. Microprocesador
El procesador es otro de los elementos basicos en un PC y debe elegirse cuidado-
samente. Es importante observar la compatibilidad con la placa base seleccionada
en la Seccion 4.2.1.
El microprocesador que se incorpora al PC de control es un Intel Core i7-4771
[12] (ver Figura 4.4) cuyas caracterısticas mas importantes son [2]:

48 CAPITULO 4. SISTEMA INFORMATICO Y SENSORIAL
Figura 4.3: Placa base ASRock Z87M Extreme 4
4 nucleos que permiten procesar hasta 8 subprocesos simultaneamente.
Frecuencia base de 3,5 GHz y maxima de 3,90 GHz.
Tamano maximo de memoria de 32 GB tipo DDR3 1333/1600.
Arquitectura de 64 bits.
Memoria de cache de CPU de 8 MB.
Figura 4.4: Procesador Intel Core i7-4771
4.2.3. Memoria RAM
La memoria RAM es una memoria de trabajo de lectura y escritura rapida donde
se cargan los datos e instrucciones del procesador. Por tanto, es un elemento que

4.2. PC DE CONTROL 49
debe elegirse teniendo en cuenta las prestaciones del microprocesador para obtener
el maximo rendimiento.
El robot movil Andabata incorpora dos modulos de memoria de 8 GB de capa-
cidad cada uno, siendo la capacidad total de 16 GB. El producto instalado es del
tipo DDR3 con una frecuencia de 1600 MHz de la marca Kingston [10] (ver Figura
4.5).
Figura 4.5: Memoria Kingston HyperX Fury 16 GB DDR3 1600 MHz CL10
4.2.4. Disco duro
Al ser el disco duro un dispositivo de almacenamiento de datos, la capacidad sera
una de las caracterısticas principales a la hora de valorar un dispositivo. Otra de
las funciones del disco duro es servir como extension de la memoria RAM mediante
la memoria virtual.
Actualmente en el mercado existen dos tipos de discos duros: rıgidos y solidos.
Los discos duros rıgidos son los que mas tiempo llevan en el mercado y los mas
comunes actualmente. Se componen de uno o varios discos y un cabezal de lectu-
ra/escritura. En cambio, los discos duros solidos no tienen partes moviles porque
utilizan una memoria similar a la de las memorias flash.
Los discos duros solidos o SSD (Solid State Disk) son mas resistentes ante golpes
y vibraciones que los discos duros rıgidos (Hard Disk Drive, HDD). Otras ventajas de
los SSD es que el acceso a los datos es mas rapido en comparacion con los HDD y son
muy silenciosos. El inconveniente principal de los discos duros solidos es el precio,
aunque los costes han ido disminuyendo a medida que se ha ido popularizando su
uso.

50 CAPITULO 4. SISTEMA INFORMATICO Y SENSORIAL
Como Andabata es un robot movil para el uso en terrenos naturales, la mejor
opcion para este computador es utilizar un disco SSD y el producto elegido es un
Samsung SSD 840 EVO de 250 GB de capacidad (ver Figura 4.6). El disco duro
esta colocado dentro de la caja de metacrilato en la parte superior.
Figura 4.6: Samsung SSD 840 EVO
4.3. Router
El router o enrutador se encarga de establecer la red para conectar diversos
dispositivos del robot movil que proporcionan informacion al PC de control y para
comunicar el robot con la tableta. De esta forma, no es necesario que el robot se
encuentre en una zona con conexion WiFi, como va a ocurrir en campo abierto.
Andabata no depende de ninguna conexion externa al robot.
El modelo seleccionado es el Router Gigabit Inalambrico G de 300Mbps de la
Figura 4.7, fabricado por TP-Link y sus caracterısticas principales son [25]:
Puertos completos WAN/LAN gigabit y velocidades inalambricas de 300 Mbps.
El boton inalambrico WiFi de Encendido/apagado (On/O↵) permite que los
usuarios enciendan / apaguen facilmente la radio inalambrica.
Soporte para IPv6, preparado para nueva generacion de Internet.
Soporta varios tipos de conexion: IP dinamico, IP estatico y PPPoE.
Soporta UPnP, DDNS, enrutado estatico, puerto de transferencia VPN, y
envıo de datos.

4.4. TELEMETRO LASER 3D 51
Cuenta con las caracterısticas de firewall (cortafuegos) integrado, IP, MAC, y
filtracion URL para asegurar una conexion segura a la red.
Soporta encriptaciones WPA/WPA2, WPA-PSK/WPA2-PSK y 64/128/152-
bit WEP.
El control de banda ancha basado en IP permite que los administradores de-
terminen cuanta banda ancha debe estar asignada a cada PC.
Figura 4.7: Router Gigabit Inalambrico G TL-WR1042ND
Para que la comunicacion Ethernet sea posible, el router, la computadora y el
telemetro laser deben estar en la misma red local, es decir, que sus IP solo pueden
variar en el ultimo numero. Las direcciones IP preasignadas en Andabata son las
siguientes:
Enrutador - 192.168.0.1
Computadora - 192.168.0.2
Telemetro laser - 192.168.0.10
4.4. Telemetro laser 3D
El telemetro laser que incorpora el robot movil Andabata es el escaner laser
UNOmotion que esta colocado en el centro del nivel superior del robot sobre una
base de 20 cm de alto (ver Figura 4.8). El telemetro laser 3D esta basado en hacer
girar un telemetro laser 2D Hokuyo UTM-30LX-EW alrededor de su centro optico
[15]. Las caracterısticas mas importantes del laser de Hokuyo son:

52 CAPITULO 4. SISTEMA INFORMATICO Y SENSORIAL
Tension de alimentacion: 12 V de corriente continua.
Intensidad nominal: 0,7 A.
Rango de medida: de 0,1 m a 30 m (15m con luz solar directa).
Campo de vision: 270
Velocidad de toma de barridos 2D: 25 ms.
Interfaz mediante Ethernet.
Funcion multieco.
El grado de proteccion de la cubierta es IP67.
Figura 4.8: Situacion del telemetro Laser 3D en Andabata
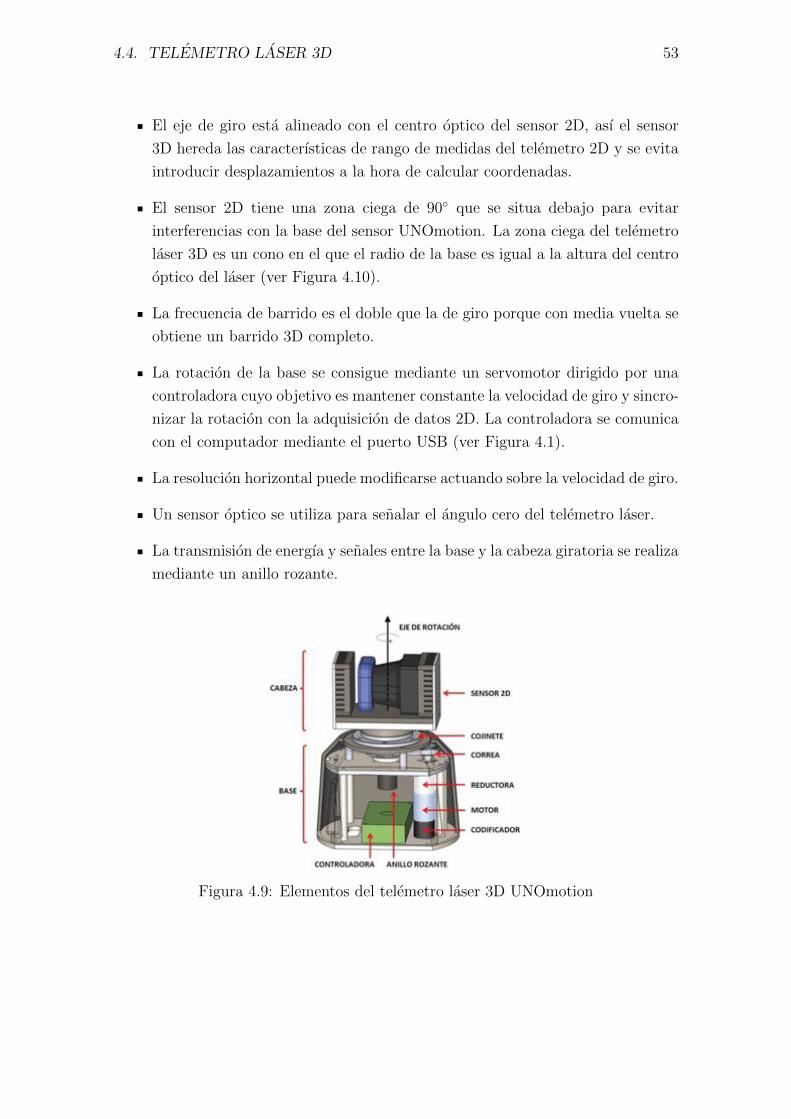
El telemetro laser UNOmotion (ver Figura 4.9) ha sido fabricado por la empresa
Ingenierıa UNO [11], pesa 1.9 kg y sus dimensiones son 125 170 122 mm. Las
principales partes de este sensor laser son la cabeza giratoria, donde se ubica el
telemetro laser 2D y la base que proporciona el giro adicional. Las caracterısticas
mas relevantes del sensor son:
4.4. TELEMETRO LASER 3D 53
El eje de giro esta alineado con el centro optico del sensor 2D, ası el sensor
3D hereda las caracterısticas de rango de medidas del telemetro 2D y se evita
introducir desplazamientos a la hora de calcular coordenadas.
El sensor 2D tiene una zona ciega de 90 que se situa debajo para evitar
interferencias con la base del sensor UNOmotion. La zona ciega del telemetro
laser 3D es un cono en el que el radio de la base es igual a la altura del centro
optico del laser (ver Figura 4.10).
La frecuencia de barrido es el doble que la de giro porque con media vuelta se
obtiene un barrido 3D completo.
La rotacion de la base se consigue mediante un servomotor dirigido por una
controladora cuyo objetivo es mantener constante la velocidad de giro y sincro-
nizar la rotacion con la adquisicion de datos 2D. La controladora se comunica
con el computador mediante el puerto USB (ver Figura 4.1).
La resolucion horizontal puede modificarse actuando sobre la velocidad de giro.
Un sensor optico se utiliza para senalar el angulo cero del telemetro laser.
La transmision de energıa y senales entre la base y la cabeza giratoria se realiza
mediante un anillo rozante.
Figura 4.9: Elementos del telemetro laser 3D UNOmotion
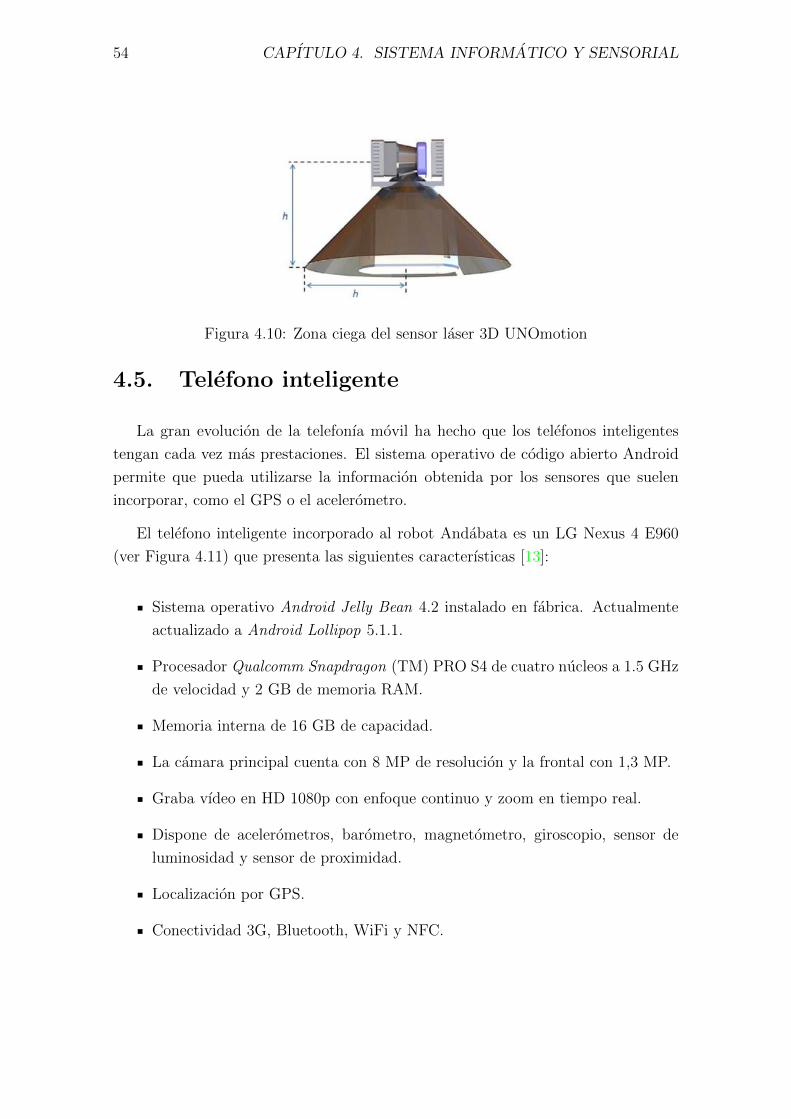
54 CAPITULO 4. SISTEMA INFORMATICO Y SENSORIAL
Figura 4.10: Zona ciega del sensor laser 3D UNOmotion
4.5. Telefono inteligente
La gran evolucion de la telefonıa movil ha hecho que los telefonos inteligentes
tengan cada vez mas prestaciones. El sistema operativo de codigo abierto Android
permite que pueda utilizarse la informacion obtenida por los sensores que suelen
incorporar, como el GPS o el acelerometro.
El telefono inteligente incorporado al robot Andabata es un LG Nexus 4 E960
(ver Figura 4.11) que presenta las siguientes caracterısticas [13]:
Sistema operativo Android Jelly Bean 4.2 instalado en fabrica. Actualmente
actualizado a Android Lollipop 5.1.1.
Procesador Qualcomm Snapdragon (TM) PRO S4 de cuatro nucleos a 1.5 GHz
de velocidad y 2 GB de memoria RAM.
Memoria interna de 16 GB de capacidad.
La camara principal cuenta con 8 MP de resolucion y la frontal con 1,3 MP.
Graba vıdeo en HD 1080p con enfoque continuo y zoom en tiempo real.
Dispone de acelerometros, barometro, magnetometro, giroscopio, sensor de
luminosidad y sensor de proximidad.
Localizacion por GPS.
Conectividad 3G, Bluetooth, WiFi y NFC.

4.6. TABLETA 55
Sus dimensiones son 133, 968, 79, 1 mm y su masa 139 g incluıda la baterıa.
Figura 4.11: Telefono LG Nexus 4 E960
El robot movil utilizara los datos de los sensores proporcionados por el telefono
inteligente. Estos datos, junto con las imagenes de vıdeo de la camara, se envıan a
la tableta mediante la red WiFi establecida por el router para supervisar de forma
remota el desplazamiento del robot. Ademas, se conecta vıa USB a la computadora
como interfaz de la aplicacion Andabata con la tableta.
4.6. Tableta
Se ha incorporado una tableta que funciona como estacion de teleoperacion del
robot movil. Como ya se vio en la Figura 4.1, esta se comunica con los demas
dispositivos del robot movil Andabata mediante la red WiFi creada por el enrutador
incorporado al vehıculo.
La tableta instalada es del modelo Samsung Galaxy Tab 3 GT-P5200 (ver Figura
4.12), cuyas caracterısticas mas relevantes son:
Sistema operativo Android Jelly Bean 4.2 instalado en fabrica y actualmente
actualizado a Android KitKat 4.4.2
Procesador Dual Core (doble nucleo) de 1,6 GHz y 1 GB de memoria RAM.
Memoria interna de 16 GB de capacidad.
Posee conectividad mediante 3G, Wi-Fi y Bluetooth.
La masa es 510 g y las dimensiones son 243,1 176,1 8 mm.

56 CAPITULO 4. SISTEMA INFORMATICO Y SENSORIAL
Figura 4.12: Tableta Samsung Galaxy Tab 3

Capıtulo 5
Software de Andabata
A continuacion se describe el software instalado en el PC de control a bordo del
robot. Se ha optado por instalar la version 14.04 del sistema operativo Ubuntu de
distribucion libre y codigo abierto. La plataforma de software para robots elegida ha
sido ROS que, al igual que el sistema operativo, es de distribucion libre y se ajusta
a los terminos de licencia BSD (Berkeley Software Distribution), siendo la version
instalada una version LTS (Long Term Support) llamada ROS Indigo Igloo dirigida
a la version de Ubuntu instalada.
5.1. Sistema operativo Ubuntu
Ubuntu [26] es un sistema operativo basado en GNU/Linux que se distribuye
como software libre. Esta enfocado a proporcionar facilidad de uso y a mejorar
la experiencia del usuario. El primer lanzamiento del sistema operativo Ubuntu,
denominado Warty Warthog (Jabalı Verrugoso), fue el 20 de octubre de 2004. La
version mas reciente se denomina 16.04 Xenial Xerus.
Una de las razones por las que se popularizo su uso frente a otras distribuciones
Linux fue el Live CD, que ofrecıa a los usuarios la posibilidad de probar el sistema sin
necesidad de instalarlo. Actualmente, Ubuntu es la distribucion con mayor presencia
entre las distribuciones Linux.
Cada seis meses se publica una version nueva de Ubuntu que recibe soporte
durante nueve meses. Existen tambien versiones LTS (Long Term Support) que
57

58 CAPITULO 5. SOFTWARE DE ANDABATA
ofrecen soporte tecnico durante 5 anos desde la fecha de lanzamiento. Desde el ano
2011 incluye su propia interfaz de usuario para el entorno de escritorio GNOME
denomindada Unity.
La version que se ha instalado en el PC de Andabata es la ultima version con
soporte tecnico extendido disponible en el momento de la puesta en marcha, 14.04
LTS Trusty Tahr. La principal razon para instalar Ubuntu como sistema operativo
es que es el sistema soportado por el entorno ROS. Otra de las razones que hacen
que Ubuntu sea un sistema operativo interesante es que es de codigo abierto y cuenta
con una comunidad de desarrolladores que mejoran continuamente este sistema.
5.2. Entorno ROS
El entorno ROS [28] [19] (Robot Operating System) es un conjunto de librerıas
y herramientas que permiten crear aplicaciones para robots. ROS no es un sistema
operativo en sı pero provee de los servicios estandar de este tales como abstraccion
de hardware, control de dispositivos de bajo nivel, implementacion de funcionali-
dades usadas habitualmente, paso de mensajes entre procesos y mantenimiento de
paquetes. Tambien ofrece herramientas y librerıas para escribir y ejecutar codigo
mediante multiples computadoras.
ROS engloba una red peer-to-peer (entre iguales) de nodos, que pueden estar
distribuidos entre varias computadoras y que se comunican libremente usando la
infraestructura de comunicaciones de ROS. La comunicacion puede realizarse de
diferentes formas, incluyendo comunicacion sıncrona tipo RPC (peticion/respuesta)
cuando se utilizan servicios, transmision asıncrona de datos en los Topics (temas) y
almacenar datos en un servidor de parametros (utilizado por los Nodos para guardar
y recuperar datos en tiempo de ejecucion).
La version de ROS instalada actualmente en el PC del robot movil se denomina
Jade Turtle (ver Figura 5.1).
5.2.1. Caracterısticas
El objetivo principal de ROS es apoyar la reutilizacion de codigo utilizado en
la investigacion y desarrollo de robots. Es un sistema distribuido de procesos lla-

5.2. ENTORNO ROS 59
Figura 5.1: Logotipo de la version del entorno ROS instalada en el PC
mados Nodos que pueden ejecutarse, disenarse individualmente y emparejarse en
tiempo real. Estos procesos se pueden agrupar en Paquetes y Pilas para ser distri-
buidos. ROS tambien cuenta con un sistema de repositorios para facilitar la tarea
de distribucion.
Otras caracterısticas que hacen que ROS sea una plataforma interesante son:
Simplicidad. Esta disenado para ser lo mas sencillo posible, por eso el codigo
escrito por ROS puede usarse en otros entornos de software para robots.
Independencia del lenguaje. Esta implementado en Phyton, C++ o Lisp y
existen librerıas experimentales en Java y Lua.
Facil de probar gracias al entorno de pruebas “rostest”.
5.2.2. Sistema de archivos
Los componentes del sistema de archivos que abarcan la mayorıa de los recursos
de ROS son los siguientes:
Paquetes: es la unidad de organizacion de software del codigo ROS. Cada
paquete puede contener librerıas, scripts, ejecutables y otras herramientas.
Metapaquetes: son paquetes especiales que sirven para representar a un
grupo de paquetes relacionados.

60 CAPITULO 5. SOFTWARE DE ANDABATA
Manifiesto de paquete: es la descripcion de un paquete. Su proposito es
definir las dependencias entre paquetes y guardar informacion sobre el paquete
tal como version, licencia, mantenedor, etc.
Repositorios: es una coleccion de paquetes que comparten un sistema comun
de control de versiones y pueden actualizarse mediante una herramienta que
proporciona el entorno ROS.
Tipos de mensaje: son descripciones de mensaje y definen la estructura de
datos para los mensajes enviados en ROS.
Tipos de servicio: son descripciones de servicio y definen la estructura de
datos para las peticiones y respuestas de los servicios en ROS.
5.2.3. Grafos de computacion
Un grafo de computacion es una red entre iguales de procesos ROS que computan
datos conjuntamente. Los componentes basicos de esta red proporcionan datos a
los grafos de diferente forma:
Nodo (Node): es un ejecutable que usa ROS para comunicarse con otros
Nodos. ROS esta disenado para ser modular por lo que un sistema de control
robotico tendra normalmente varios nodos.
Maestro (Master): asigna nombres a todos los elementos que componen
el sistema de control del robot. Sin el, los Nodos no podrıan “encontrarse”,
intercambiar mensajes o llamar a un Servicio.
Servidor de parametros (Parameter Server): permite guardar y recu-
perar datos en una unica ubicacion.
Mensaje (Message): es la forma de comunicacion entre Nodos. Es una
estructura de datos que contiene tipos de campo determinados (entero, logico,
coma flotante,...).
Tema (Topic): los mensajes entre Nodos se realizan mediante una semantica
de publicacion/suscripcion. Un Nodo envıa un mensaje publicando en un
Tema determinado, siendo el Tema un nombre que se utiliza para identificar

5.3. MODIFICACION DE NODOS DE ANDABATA 61
el contenido del mensaje. Puede haber multiples publicadores y suscriptores
asociados a un Tema y un Nodo puede publicar y/o suscribirse a varios Temas.
Servicio (Service): se utiliza para interacciones de peticion/respuesta. Un
Nodo ofrece un Servicio bajo un nombre y otro Nodo (cliente) puede utilizar
el Servicio enviando una peticion y esperando la respuesta.
Bolsa (Bag): es un formato para guardar y reproducir datos de mensaje de
ROS. Es un mecanismo muy importante para registrar los datos de un sensor.
De utilidad para el desarrollo y las pruebas de algoritmos.
5.3. Modificacion de nodos de Andabata
Andabata cuenta con un software de control realizado mediante ROS[8]. La
incorporacion de nuevas placas de control de motores (ver Apartado 6.1), implica la
actualizacion del nodo que traduce las ordenes dadas mediante la tableta y el PC
a la forma precisada por la controladora de movimiento instalada y del nodo que
representa el modelo cinematico del robot movil.
Los nodos que se han modificado se describen a continuacion brevemente:
control wheels: es el encargado del control de bajo nivel de los motores.
El nodo recibe las ordenes de velocidad y las comunica a la controladora de
movimiento que realiza el control necesario para que las ruedas vayan a la
velocidad especificada. Tambien lee la velocidad de los motores, que elabora
la Kangaroo a partir de los encoders, a una frecuencia de 30 Hz y publica las
velocidades para que esten disponibles para otros nodos. La velocidad que se
publica se basa en el valor medio de las lecturas de las velocidades del mismo
lado.
andabata model: contiene el modelo cinematico del robot y transforma
velocidades lineales y angulares en velocidades de lado izquierdo y derecho y
al reves (ver Apartado 2.5). En este nodo estan los parametros del modelo
cinematico aproximado y la limitacion de la velocidad maxima en los giros.
joystick imu y joystick slider: estos nodos se encargan de enviar ordenes
de velocidad en funcion del modo de operacion de la tableta. En ambos casos.

62 CAPITULO 5. SOFTWARE DE ANDABATA
El unico parametro que se ha modificado es la velocidad maxima del robot
movil.
5.4. Puesta en marcha
Para comenzar a utilizar el robot, y que todo funcione correctamente, hay que
seguir una serie de pasos que se describen a continuacion:
1. Desactivar el boton de emergencia.
2. Poner el interruptor general en la posicion “ON ” (ver Figura 3.7).
3. Conectar el movil a la computadora mediante el conector micro USB.
4. Encender la computadora del robot, el movil y la tableta.
5. Comprobar que todos los dispositivos estan conectados a la red wifi andabata.
6. Iniciar ROS. Para ello hay que lanzar un terminal nuevo y escribir la orden
roscore (mediante un terminal remoto a la computadora, por ejemplo). La
computadora de Andabata esta preparada para arrancar sin pantalla ni teclado
[8].
7. En el movil, iniciar la app ROS Sensor Driver y pulsar el boton Connect (ver
Figura 5.2).
Figura 5.2: La aplicacion ROS Sensor Driver en el movil
8. Una vez lanzada la aplicacion, colocar el telefono tal y como se muestra en
la Figura 5.3. Con la camara apuntando hacia delante y la pantalla contra el
soporte del sensor 3D.

5.4. PUESTA EN MARCHA 63
Figura 5.3: Detalle de colocacion del telefono movil en el robot Andabata
9. En la tableta, iniciar la app ROS Sensor Driver y pulsar el boton Connect
(ver Figura 5.4).
Figura 5.4: Las aplicaciones ROS Sensor Driver, Juice y Andabata en la tableta
10. Comprobar que movil y tableta estan enviando datos para ello hay que lanzar
un nuevo terminal remoto en la computadora del robot y escribir la orden:
rostopic echo /androidPhone/imu
11. Si va a usarse el GPS, hay que esperar a que se fije un numero suficiente de
satelites en el telefono.
12. Lanzar el archivo de extension .launch que corresponda:
a) Teleoperacion y seguimiento de trayectorias. La orden a escribir en un
terminal nuevo es:
roslaunch andabata teleoperation movement.launch

64 CAPITULO 5. SOFTWARE DE ANDABATA
b) Solo movimiento. Escribir en un terminal nuevo:
roslaunch andabata move move.launch
13. Comprobar que se lanza la app Andabata en el movil (ver Figura 5.5).
Figura 5.5: La aplicacion Andabata en el movil
14. Lanzar la app Andabata en la tableta, pulsar el boton menu de la tableta y
seleccionar la opcion Connect (ver Figura 5.4).
15. En la ventana emergente llamada Connect to Server pulsar el boton Connect.
16. Comprobar que se actualiza el horizonte artificial y las imagenes de la camara
en la tableta.
17. La primera vez que se pulsa un boton de la app Andabata de la tableta se
inician los publicadores correspondientes y el boton no realiza ninguna accion.
Para apagar el robot movil Andabata, primero hay que apagar el computador
pulsando el boton de encendido del mismo, que esta configurado para que apague
el sistema de forma segura, y despues hay que poner el interruptor general en la
posicion “OFF”. Despues, el telefono movil y la tableta se pueden apagar de forma
normal.
5.5. Teleoperacion
Andabata puede teleoperarse de dos formas: una es mediante las barras desli-
zantes de la aplicacion Andabata y la otra es mediante el movimiento de la propia

5.5. TELEOPERACION 65
tableta.
La aplicacion Andabata cuenta con dos barras deslizantes para el control del
robot movil, una para el lado izquierdo y otra para el lado derecho, situadas en los
laterales de la ventana de dicha aplicacion (ver Figura 5.6). Para cambiar de mando
de control solo hay que pulsar el boton “Joystick” en la tableta. La parte central de
la ventana, entre las dos barras deslizantes, se encuentra dividida en dos zonas: en
el lado derecho se muestra el vıdeo transmitido por el telefono movil de Andabata
y en el lado izquierdo esta el horizonte artificial, botones de control e informacion
diversa sobre el estado del robot movil.
Figura 5.6: Captura de pantalla de la aplicacion Andabata en funcionamiento.
El manejo mediante la IMU (Inertial Measurement Unit) de la tableta es muy
intuitivo, como se observa en la Figura 5.7. Se definen dos ejes de giro: uno para
controlar el avance del robot y otro para el direccionamiento. La posicion de reposo
forma 45 respecto a la horizontal en el eje de avance y 0 en el de giro.
Para que el robot se mueva hacia delante, la tableta debe girarse en sentido
negativo del eje “avance”, y en sentido positivo del eje para que se mueva hacia
atras.
Los cambios de direccion se realizan girando la tableta alrededor del eje giro.
Para realizar un giro a la izquierda se debe de girar la tableta en el sentido positivo
del eje “giro”, es decir, en sentido contrario a las agujas del reloj y lo opuesto para
los giros a la derecha (ver Figura 5.7).
La aplicacion Andabata tiene una zona muerta alrededor de los valores de reposo
para evitar el movimiento del robot movil si se producen pequenos giros de la tableta.

66 CAPITULO 5. SOFTWARE DE ANDABATA
Figura 5.7: Posicion de reposo y ejes de giro para el control del robot Andabatamediante la IMU de la tableta

Capıtulo 6
Conclusiones
6.1. Control de bajo nivel original
Inicialmente la electronica del robot movil estaba colocada sobre la base del
nivel inferior y las baterıas se encontraban suspendidas sobre el circuito electronico
sujetas, a la base del nivel intermedio.
Considerando el pequeno tamano del robot, el espacio disponible debe aprove-
charse al maximo, por lo que la separacion entre elementos es bastante reducida. En
la disposicion inicial, al extraer la baterıa podrıa ocurrir que esta golpeara acciden-
talmente el circuito electronico provocando desperfectos o un mal funcionamiento del
robot movil. Se decidio cambiar la disposicion por la actual debido a las siguientes
razones:
El centro de gravedad esta ahora mas cercano al nivel del suelo debido al peso
de las baterıas. Esto hace que el robot movil tenga una estabilidad mayor
frente a posibles inclinaciones del terreno.
En futuras operaciones de mantenimiento del robot Andabata, resulta mas
facil extraer la baterıa y se elimina la posibilidad de danar la electronica de
control de los motores del robot movil al extraer la baterıa.
Merece la pena destacar que, al principio, Andabata tenıa instalados motores, re-
ductoras y controladoras diferentes a las descritas en esta memoria, pero los motores
se estropeaban facilmente por lo que hubo que descartarlos y sustituirlos.
67
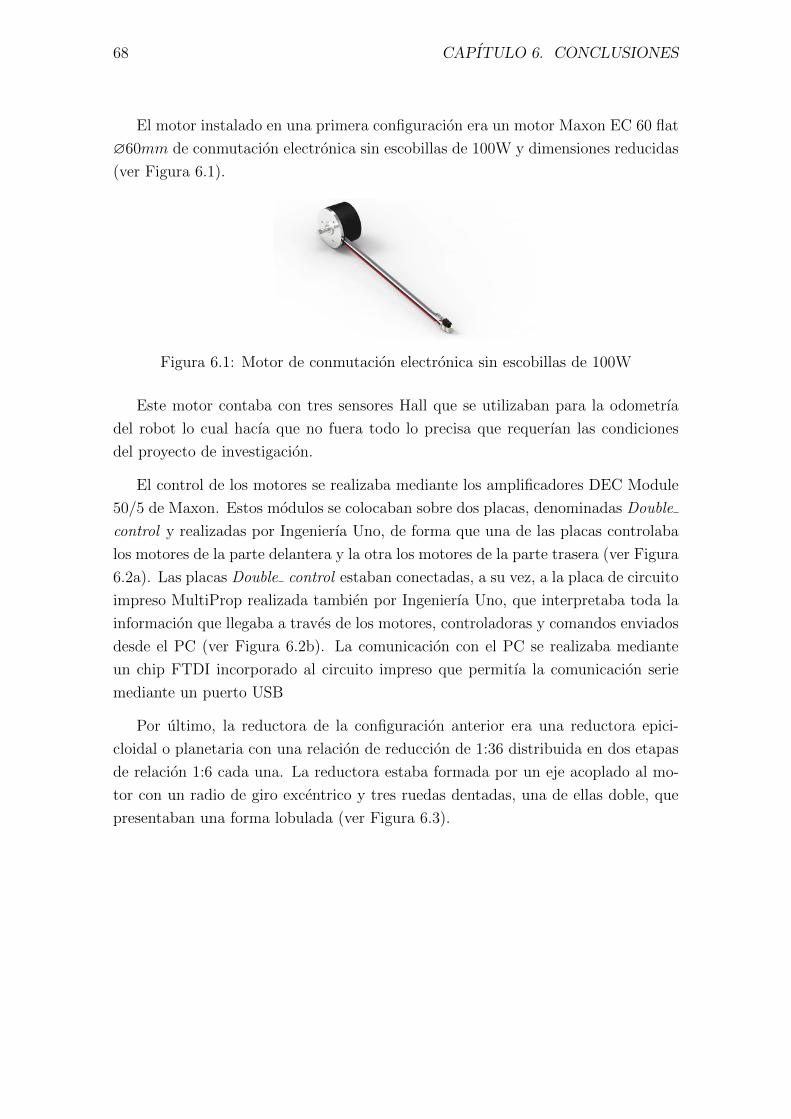
68 CAPITULO 6. CONCLUSIONES
El motor instalado en una primera configuracion era un motor Maxon EC 60 flat
?60mm de conmutacion electronica sin escobillas de 100W y dimensiones reducidas
(ver Figura 6.1).
Figura 6.1: Motor de conmutacion electronica sin escobillas de 100W
Este motor contaba con tres sensores Hall que se utilizaban para la odometrıa
del robot lo cual hacıa que no fuera todo lo precisa que requerıan las condiciones
del proyecto de investigacion.
El control de los motores se realizaba mediante los amplificadores DEC Module
50/5 de Maxon. Estos modulos se colocaban sobre dos placas, denominadas Double
control y realizadas por Ingenierıa Uno, de forma que una de las placas controlaba
los motores de la parte delantera y la otra los motores de la parte trasera (ver Figura
6.2a). Las placas Double control estaban conectadas, a su vez, a la placa de circuito
impreso MultiProp realizada tambien por Ingenierıa Uno, que interpretaba toda la
informacion que llegaba a traves de los motores, controladoras y comandos enviados
desde el PC (ver Figura 6.2b). La comunicacion con el PC se realizaba mediante
un chip FTDI incorporado al circuito impreso que permitıa la comunicacion serie
mediante un puerto USB
Por ultimo, la reductora de la configuracion anterior era una reductora epici-
cloidal o planetaria con una relacion de reduccion de 1:36 distribuida en dos etapas
de relacion 1:6 cada una. La reductora estaba formada por un eje acoplado al mo-
tor con un radio de giro excentrico y tres ruedas dentadas, una de ellas doble, que
presentaban una forma lobulada (ver Figura 6.3).

6.2. RECAPITULACION 69
(a) (b)
Figura 6.2: Circuito electronico: (a) Placa Double control con dos DEC Module50/5 (b) Placa MultiProp
Figura 6.3: Vista explosionada de la reductora epicicloidal fabricada por IngenierıaUno
6.2. Recapitulacion
Se han cumplido satisfactoriamente los dos objetivos principales del proyecto:
se ha colaborado para la puesta en marcha del robot movil y se han documentado
todos los sistemas de Andabata. Mas concretamente se han alcanzado los siguientes
objetivos especıficos.
Se han generado planos del robot movil y cada una de las piezas que lo com-
ponen a partir del modelado 3D por computadora.
Se han instalado las placas amplificadoras de potencia y de control y se ha
realizado el conexionado correspondiente.
Se han comprobado y revisado todas las conexiones del sistema electrico y
electronico. Se ha realizado un esquema detallado de las conexiones anteriores.
Se ha incorporado un interruptor de encendido y un boton de parada de emer-
gencia como elementos de seguridad.

70 CAPITULO 6. CONCLUSIONES
Se ha mejorado la disposicion de los elementos para que sea mas estable y su
desmontaje sea mas sencillo.
Se ha probado la interfaz con los motores y contribuido en su puesta en fun-
cionamiento.
6.3. Trabajos futuros
Algunas de los trabajos de mejora para Andabata que se proponen son:
Buscar soluciones para que la tarea de desmontar el robot sea menos laboriosa.
Incorporar una carcasa exterior para aislar el robot del entorno.
Implementar en ROS el control de errores de la placa de control Kangaroo x2.
Implementar el control de bajo nivel utilizando el protocolo Packet Serial en
vez del protocolo Simplified Serial. El protocolo Packet Serial esta disenado
para una alta fiabilidad, incluso en senales con ruido. Permite asegurar la
recepcion de cada comando y emparejarlo con una respuesta. Por otro lado,
es mas difıcil de implementar correctamente que el protocolo Simplified Serial.
Mejorar la funcion de joystick de forma que el estado de reposo del robot
coincida con la tableta en posicion horizontal.
Mejorar la aplicacion en Android de teleoperacion Andabata para optimizar
los flujos de informacion.

Anexo A
Planos
71

1
5
7
8
9
11
12
1314
4
2
3 10
MARCA DENOMINACIÓN DESCRIPCIÓN CANTIDAD
14 Caja computadora 1
13 Fuente de alimentación 1
12 Conjunto batería Batería y bridas de sujeción 1
11 Suplemento láser 1
10 Uno Láser Telémetro láser 3D 1
9 Caja de electrónica Caja para alojar el circuito electrónico 1
8 Conjunto motriz B Suspensión, motor, reductora y rueda 2
7 Conjunto motriz A Suspensión, motor, reductora y rueda 2
6 ISO 4762 M4 x 10 --- 10N 16
5 Separador chapasSeparador de las chapas de nivel
inferior e intermedio8
4 Chasis tubularUnido a la chapa inferior mediante
soldadura1
3 Chapa superior 12 Chapa intermedia 11 Chapa inferior 1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:10 HOJA 1 DE 1
A3
PESO:
1
Cordero ene-16 Vista general
41 kg

23
3
160
8 X 7
81
289
1
04
83
83
4 X R47
71
167
53
8 98
23
4 X R3
93
97
123
140
123
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
2
Cordero ene-16 1-Chapa inferior

49
4 X R32
8 X 7
37
113
127
1
69
120
4 X R102
4 X R62
7
231
159
4
3
10
140
398
3
0
580
629
2
2
325
3PESO:
A3
HOJA 1 DE 1ESCALA:1:5
N.º DE DIBUJO
TÍTULO:
REVISIÓNNO CAMBIE LA ESCALA
MATERIAL:
FECHAFIRMANOMBRE
REBARBAR Y ROMPER ARISTAS VIVAS
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
2-Chapa intermediaCordero ene-16
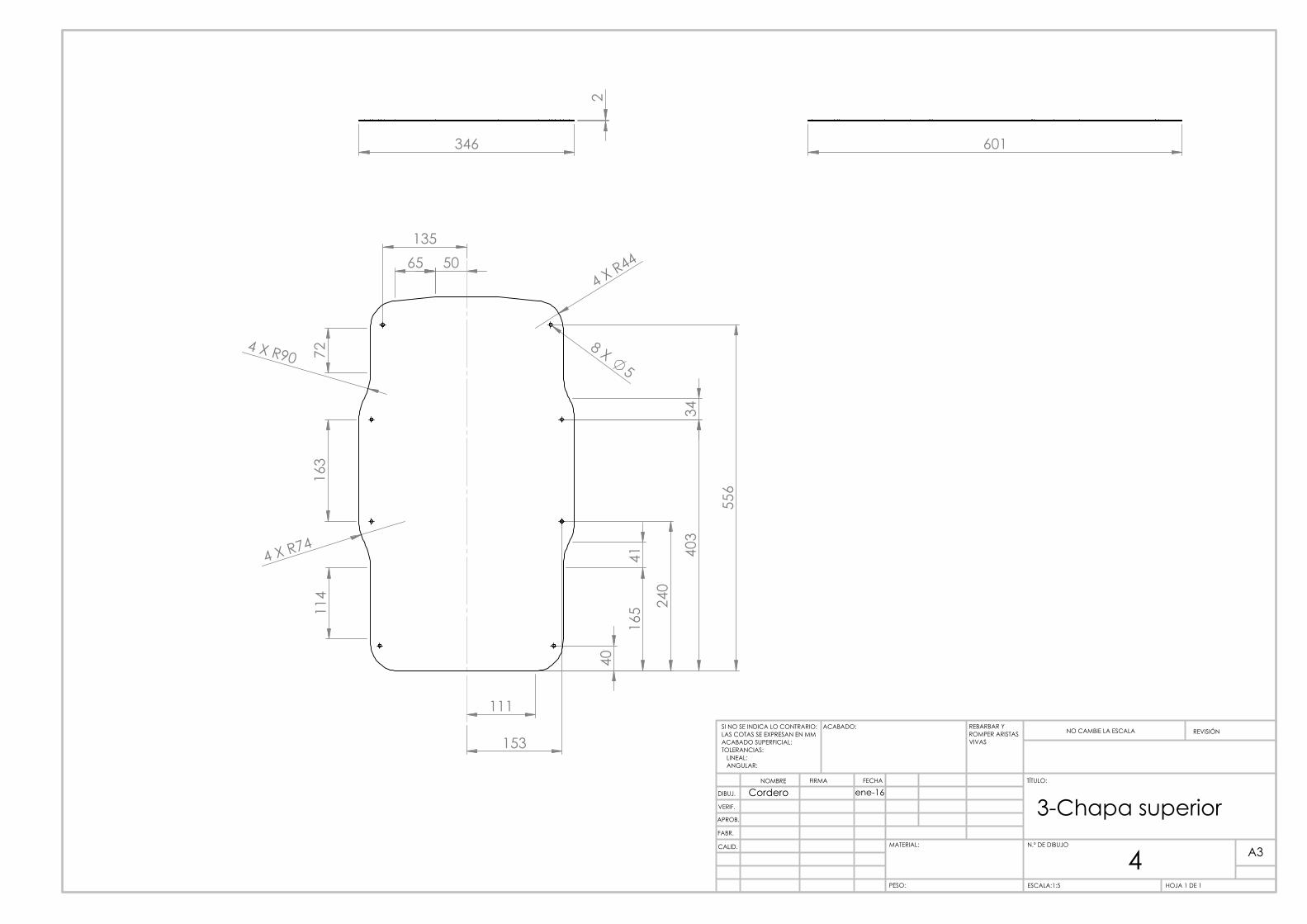
2
346
65
40
165
4
1
240
403
3
4
556
4 X R44
8 X 5
72
163
1
14
4 X R90
4 X R74
111
50
153
135
601
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
4
3-Chapa superiorCordero ene-16

15
17
16 MARCA DENOMINACIÓN DESCRIPCIÓN CANTIDAD
18 Hexagon Nut ISO - 4032 - M4 - W - N 4
17 ISO 4762 M4 x 10 --- 10N 4
16 Soporte Unido por soldadura a la estructura tubular 4
15 Estructura tubular 1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:10 HOJA 1 DE 1
A3
PESO:
5
Cordero ene-16 4-Chasis tubular
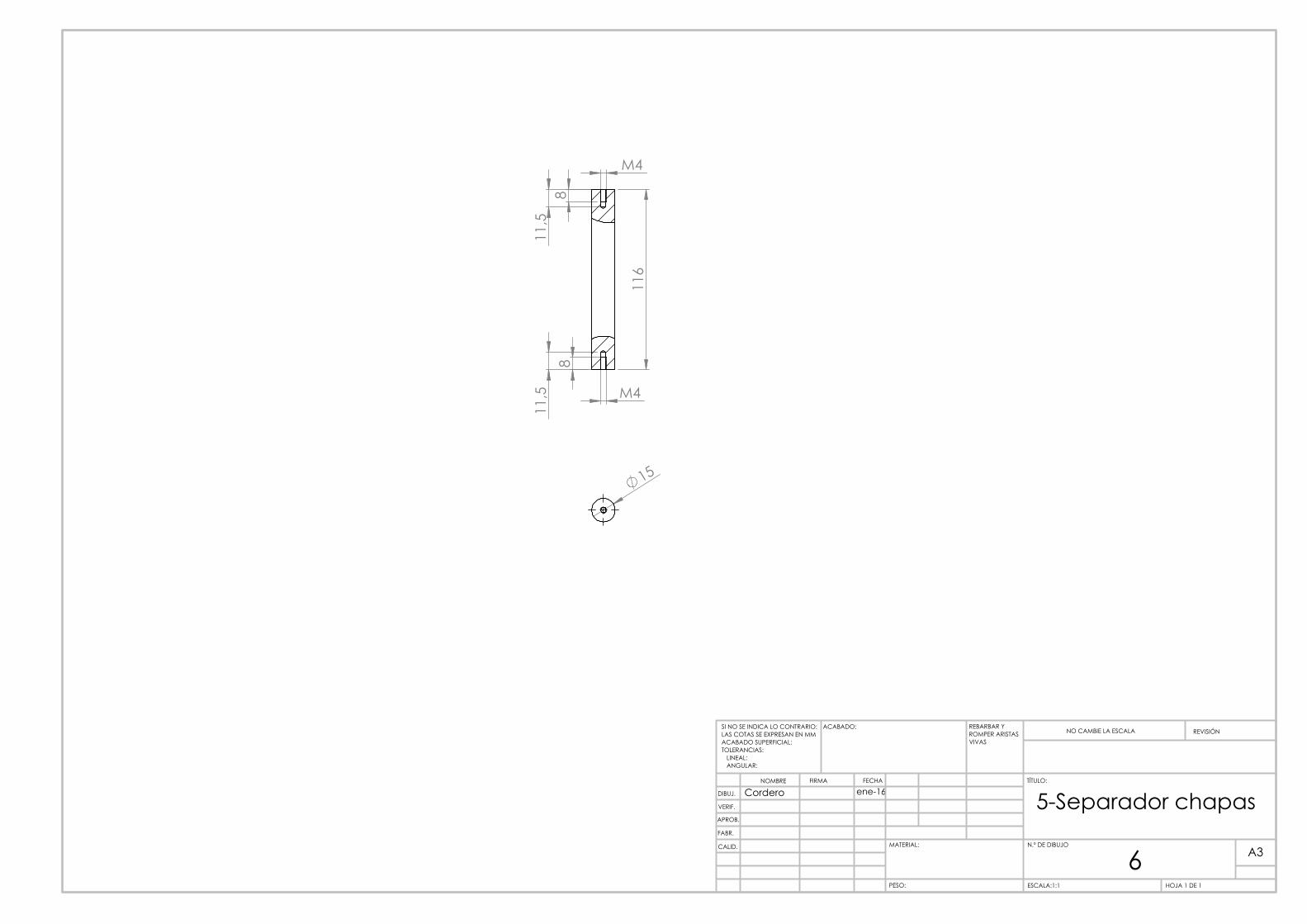
116
8
11,
5
M4
M4
8
11,
5
15
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:1 HOJA 1 DE 1
A3
PESO:
6
Cordero ene-16 5-Separador chapas

19
20
2223
30
2124
28
27
29
MARCA DENOMINACIÓN DESCRIPCIÓN CANTIDAD
30 Tope 1
29 Conjunto motor-reductora A 1
28 Rueda 127 Llanta 1
26 ISO 4762 M4 x 10 --- 10N 8
25 Hexagon Nut ISO - 4032 - M4 - W - N 10
24 ISO 4762 M4 x 16 --- 16N 2
23 Muelle 222 Soporte muelles B 121 Soporte muelles A 120 Guía HG 119 Patín HGW-CC 2
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
7
Cordero ene-16 7-Conjunto motriz A

31
32
3435
42
3336
39
40
41
MARCA DENOMINACIÓN DESCRIPCIÓN CANTIDAD
42 Tope 1
41 Conjunto motor-reductora B 1
40 Llanta 1
39 Rueda 1
38 ISO 4762 M4 x 10 --- 10N 8
37 Hexagon Nut ISO - 4032 - M4 - W - N 10
36 ISO 4762 M4 x 16 --- 16N 2
35 Muelle 234 Soporte muelles C 1
33 Soporte muelles A 1
32 Guía HG 1
31 Patín HGW-CC 2
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
8
Cordero ene-16 8-Conjunto motriz B

2
34 33
218
5x4
15
6 8
83
62
68
90
130
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
9
Cordero ene-16 9-Caja electrónica

101
18
200
134
165
84
179
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
10
Cordero ene-16 11-Suplemento láser
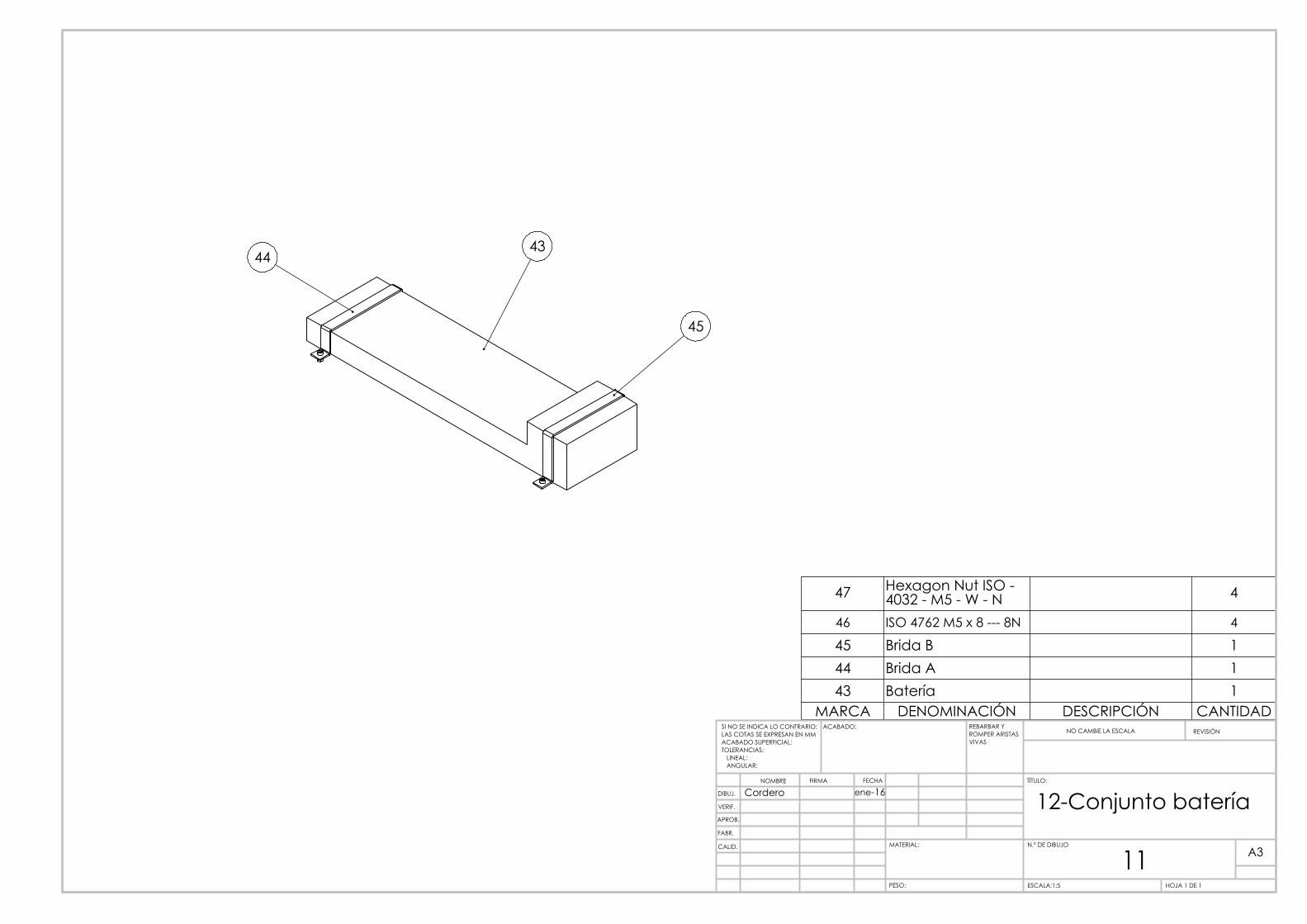
43
45
44
MARCA DENOMINACIÓN DESCRIPCIÓN CANTIDAD
47 Hexagon Nut ISO - 4032 - M5 - W - N 4
46 ISO 4762 M5 x 8 --- 8N 4
45 Brida B 144 Brida A 143 Batería 1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
11
Cordero ene-16 12-Conjunto batería

91
245
245
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:5 HOJA 1 DE 1
A3
PESO:
12
Cordero ene-16 14-Caja computadora

228
359
113
103
176
665
8 X R51 221 49
172
2
47 4
10
485
5
57
604
116
8 X R83
8 X R80
10
10
8 X 10
609
105
327
10 20
17 3
0
5 PO
R TO
DO
FIGURA 15FIGURA 16ESCALA 1:1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:10 HOJA 1 DE 1
A3
PESO:
13
Cordero ene-16 15-Estructura tubular16-Soporte

60 R5
12
122
1,5
R3
6
39 4
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:2 HOJA 1 DE 1
A3
PESO:
14
Cordero ene-16 21/33-Soporte muelles A
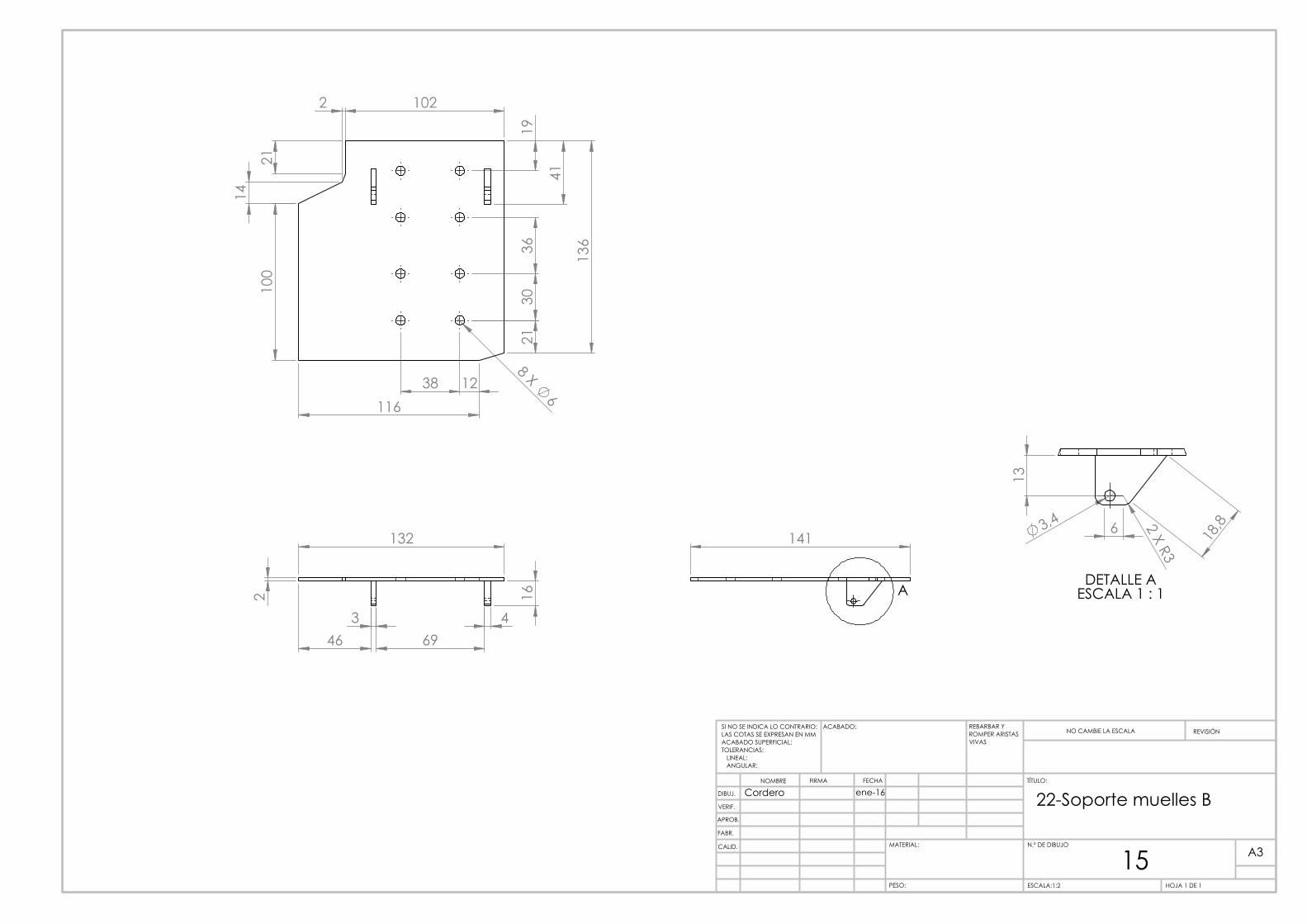
2
132
3 69
4 46
16
141
A
21
30
36
136
12 38 116
102
100
14
21
2
8 X 6
41
19
3,4
13
2 X R3
6
18,8
DETALLE AESCALA 1 : 1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:2 HOJA 1 DE 1
A3
PESO:
15
Cordero ene-16 22-Soporte muelles B

1
5
50
200
100
60 91 94 98 102
15
12
R24
17 18
11 8
19
6
61
71
80
84
3 X 6 POR TODO
3
R2
A
A
5
50
2 1
0 1
2 16
0,8
1
8 2
1 3
7
SECCIÓN A-AESCALA 1 : 2
FIGURA 23ESCALA 1:1
FIGURA 27ESCALA 1:5
FIGURA 28ESCALA 1:2
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA HOJA 1 DE 1
A3
PESO:
16
Cordero ene-1623/35-Muelle27/39-Rueda28/40-Llanta

2
3 69
132
46 4
16
38
136
2 102
116
12
7 X
6
21
30
36
19
41
100
1
4 2
1
141
A
13
6 18,8
3,4
2 X
R3
DETALLE AESCALA 1 : 1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA:1:2 HOJA 1 DE 1
A3
PESO:
17
Cordero ene-16 34-Soporte muelles C

590
90
90
45
160
158
210 3
40
10
10,5
2 X
6
20
158
85
3
210
20
10,5
10
2 X
6
FIGURA 43ESCALA 1:5
FIGURA 44ESCALA 1:2
FIGURA 45ESCALA 1:2
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO: REBARBAR Y ROMPER ARISTAS VIVAS
NOMBRE FIRMA FECHA
MATERIAL:
NO CAMBIE LA ESCALA REVISIÓN
TÍTULO:
N.º DE DIBUJO
ESCALA: HOJA 1 DE 1
A3
PESO:
18
Cordero jun-15 43-Batería44-Brida A45-Brida B


Anexo B
Documentacion tecnica
B.1. Especificaciones tecnicas de producto
En el presente anexo se incluyen las especificaciones tecnicas de los dispositi-
vos incorporados al robot movil Andabata. Los documentos incorporados han sido
obtenidos de los sitios web de cada fabricante.
En los casos en los que el fabricante no ofrece un archivo de descarga con la
documentacion tecnica se ha optado por imprimir la informacion en formato PDF
(Portable Document Format) o por copiar la informacion de la pagina.
91

92 ANEXO B. DOCUMENTACION TECNICA
B.1.1. Motor Maxon RE 40
Numero de producto: 218010
URL: http://www.maxonmotor.es/medias/sys_master/root/8819166543902/
15-142-EN-nov.pdf

142
max
on D
C m
otor
M 1:2
148866 148867 148877 218008 218009 218010 218011 218012 218013 218014
4.7 K/W 1.9 K/W 41.5 s 809 s -30…+100°C +155°C
0.05 - 0.15 mm 0.025 mm 5.6 N 110 N
1200 N 28 N
1 13 480 g
ESCON Mod. 50/5 379ESCON 50/5 380ESCON 70/10 380EPOS2 24/5 387EPOS2 50/5 387EPOS2 70/10 387EPOS2 P 24/5 390EPOS3 70/10 EtherCAT 393MAXPOS 50/5 396
12 24 48 48 48 48 48 48 48 486920 7580 7590 6420 5560 3330 2690 2130 1720 1420241 137 68.6 53.7 43.7 21.9 16.6 12.5 9.66 7.76
6380 6940 7000 5810 4930 2710 2060 1510 1080 78194.9 177 187 186 180 189 190 192 192 190
6 6 3.17 2.66 2.23 1.4 1.13 0.909 0.73 0.61720 2420 2560 2040 1620 1020 814 655 523 424105 80.2 42.4 28.6 19.7 7.43 4.79 3.06 1.97 1.3288 91 92 91 91 89 89 88 86 85
0.115 0.299 1.13 1.68 2.44 6.46 10 15.7 24.4 36.30.024 0.082 0.33 0.46 0.613 1.7 2.62 4.14 6.41 9.3216.4 30.2 60.3 71.3 82.2 137 170 214 266 321581 317 158 134 116 69.7 56.2 44.7 35.9 29.84.05 3.14 2.97 3.16 3.45 3.29 3.31 3.27 3.29 3.375.89 4.67 4.28 4.2 4.19 4.16 4.15 4.15 4.15 4.16139 142 137 127 116 121 120 121 120 118
Stock programStandard programSpecial program (on request)
Specifi cations Operating Range Commentsn [rpm] Continuous operation
In observation of above listed thermal resistance (lines 17 and 18) the maximum permissible winding temperature will be reached during continuous op-eration at 25°C ambient.= Thermal limit.
Short term operationThe motor may be briefl y overloaded (recurring).
Assigned power rating
maxon Modular System Overview on page 20–25
Part Numbers
maxon DC motor November 2015 edition / subject to change
RE 40 ∅40 mm, Graphite Brushes, 150 Watt
Values at nominal voltage1 Nominal voltage V2 No load speed rpm3 No load current mA4 Nominal speed rpm5 Nominal torque (max. continuous torque) mNm6 Nominal current (max. continuous current) A7 Stall torque mNm8 Stall current A9 Max. effi ciency %
Characteristics10 Terminal resistance Ω11 Terminal inductance mH12 Torque constant mNm/A13 Speed constant rpm/V14 Speed / torque gradient rpm/mNm15 Mechanical time constant ms16 Rotor inertia gcm2
Motor Data
Thermal data17 Thermal resistance housing-ambient 18 Thermal resistance winding-housing 19 Thermal time constant winding 20 Thermal time constant motor 21 Ambient temperature 22 Max. winding temperature
Mechanical data (ball bearings)23 Max. speed 12 000 rpm24 Axial play 25 Radial play 26 Max. axial load (dynamic) 27 Max. force for press fi ts (static)
(static, shaft supported) 28 Max. radial load, 5 mm from fl ange
Other specifi cations29 Number of pole pairs 30 Number of commutator segments 31 Weight of motor
Values listed in the table are nominal. Explanation of the fi gures on page 107.
Option Preloaded ball bearings
Planetary Gearhead∅42 mm3 - 15 NmPage 314
Recommended Electronics:Notes Page 22
Planetary Gearhead∅52 mm4 - 30 NmPage 318
Brake AB 2824 VDC0.4 NmPage 408
Encoder MR256 - 1024 CPT, 3 channelsPage 356Encoder HED_ 5540500 CPT, 3 channelsPage 362/365
Industrial VersionEncoder HEDL 9140Page 368Brake AB 28Page 409End capPage 413
1506_DC_motor.indd 142 26.11.15 08:23

94 ANEXO B. DOCUMENTACION TECNICA
B.1.2. Encoder MR Tipo L 500ppv
Numero de producto: 228452
URL: http://www.maxonmotor.es/medias/sys_master/root/8816813572126/
15-356-EN.pdf

max
on s
enso
r
356
RE 30, 15 W 138 79.4 79.4 79.4 79.4 79.4RE 30, 15 W 138 GP 32, 0.75 - 4.5 Nm 305 • • • • •RE 30, 60 W 139 79.4 79.4 79.4 79.4 79.4RE 30, 60 W 139 GP 32, 0.75 - 4.5 Nm 303 • • • • •RE 30, 60 W 139 GP 32, 0.75 - 6.0 Nm 305-309 • • • • •RE 30, 60 W 139 GP 32 S 334-336 • • • • •RE 35, 90 W 140 82.4 82.4 82.4 82.4 82.4RE 35, 90 W 140 GP 32, 0.75 - 4.5 Nm 303 • • • • •RE 35, 90 W 140 GP 32, 0.75 - 6.0 Nm 305-309 • • • • •RE 35, 90 W 140 GP 32, 4.0 - 8.0 Nm 310 • • • • •RE 35, 90 W 140 GP 42, 3 - 15 Nm 314 • • • • •RE 35, 90 W 140 GP 32 S 334-336 • • • • •RE 40, 25 W 141 82.4 82.4 82.4 82.4 82.4RE 40, 150 W 142 82.4 82.4 82.4 82.4 82.4RE 40, 150 W 142 GP 42, 3 - 15 Nm 314 • • • • •RE 40, 150 W 142 GP 52, 4 - 30 Nm 318 • • • • •A-max 32 170/172 72.7 72.7 72.7 72.7 72.7A-max 32 170/172 GP 32, 0.75 - 6.0 Nm 305-308 • • • • •A-max 32 170/172 GS 38, 0.1 - 0.6 Nm 313 • • • • •A-max 32 170/172 GP 32 S 334-336 • • • • •EC-max 40, 70 W 228 73.9 73.9 73.9 73.9 73.9EC-max 40, 70 W 228 GP 42, 3 - 15 Nm 315 • • • • •EC-max 40, 120 W 229 103.9 103.9 103.9 103.9 103.9EC-max 40, 120 W 229 GP 52, 4 - 30 Nm 319 • • • • •
225783 228452 225785 228456 225787
256 500 512 1000 10243 3 3 3 380 200 160 200 320
18 750 24 000 18 750 12 000 18 750
1
9
2
10506 ±10
maxon sensor April 2015 edition / subject to change
Stock programStandard programSpecial program (on request)
Encoder MR Type L, 256–1024 CPT, 3 Channels, with Line Driver
maxon Modular System+ Motor Page + Gearhead Page + Brake Page Overall length [mm] / • see Gearhead
Part Numbers
TypeCounts per turnNumber of channelsMax. operating frequency (kHz)Max. speed (rpm)
Direction of rotation cw (defi nition cw p. 106)
Technical Data Pin Allocation Connection exampleSupply voltage VCC 5 V ± 5%Output signal TTL compatiblePhase shift Φ 90°e ± 45°eIndex pulse width 90°e ± 45°eOperating temperature range -25…+85 °CMoment of inertia of code wheel ≤ 1.7 gcm2
Output current per channel max. 5 mA
The index signal Ι is synchronized with channel A or B. Opt. terminal resistance R > 1 kΩ
1 N.C. 2 VCC 3 GND 4 N.C. 5 Channel A 6 Channel A 7 Channel B 8 Channel B 9 Channel I (Index)10 Channel I (Index)
DIN Connector 41651/EN 60603-13fl at band cable AWG 28
s∆ 45°e<s2 s = 90°e1..4s1s4s3
U
U
U
U
U
U
High
High
High
Low
Low
Low
90°e
Channel A
Channel B
Channel I
Cycle C = 360°ePulse P = 180°e
Phase shift
overall length overall length
R
R
R
Line receiverRecommended IC's:- MC 3486- SN 75175- AM 26 LS 32
Channel B
Channel B
Channel A
Channel A
Channel I
Channel I
GNDVCC
Enco
der,
Line
Driv
er
1510_Sensor.indd 356 23.04.15 08:48

96 ANEXO B. DOCUMENTACION TECNICA
B.1.3. Guıas lineales Hiwin serie HG
Modelo: HGW15CCZ0C
URL: http://www.hiwin.com/html/extras/hgw-cc_hgw-hc.html


98 ANEXO B. DOCUMENTACION TECNICA
B.1.4. Fuente de alimentacion Sunpower SDX
Modelo: SDX-425-G24
URL: http://www.sunpower.com.tw/Frameset-min.asp?sn=231

SUNPOWER TECHNOLOGY CORP. 16F.-1, No.150, Jian 1st Rd., Zhonghe Dist., New Taipei City 235, Taiwan (R.O.C.).TEL: 886-2-8226-3100 FAX: 886-2-8226-3111 http://www.sunpower.com.tw E-mail: [email protected]
SDX-425-G24
Copy Right Sunpower Technology Corp. 2009, All Rights Reserved. SDX-425-G24 Rev 0.8 Specifications subject to change without notice. RS-110043 JUN-16-2014 QR0405-1 Rev,:1.0
Features: * Input and output isolation * High efficiency and reliability * Soft start function, low inrush current * Input reverse polarity protection * 3.3V & 5V VRM design * Over voltage, over load & short circuit protection * With power good signal & PS-ON signal output * 100% full load burn-in test * Meet Intel ATX 2.01 / ATX 2.31 / ATX 12V * UL, cUL, TUV ,CB, CE standard * 3 years warranty
Specification: Voltage 19V ~ 36V DC (Typical 24V) Current <28.6A @ 23V DC input, INPUT Protection Ceramic Fuse 30A/250V Voltage 5V 3.3V 12V1 12V2 -5V -12V 5Vsb Min Load 0A 0A 1A 0A 0A 0A 0A Max Load 23A 20A 16A 16A 0.5A 1A 19V~23V : 1.4A 23V~36V : 1.7AOutput Tolerance 2 ±3% ±5% ±3% ±3% ±5% ±10% ±5% Ripple Noise MAX. 3 70mV 70mV 150mV 150mV 100mV 150mV 70mV Efficiency (TYP.) 72%
OUTPUT
Output MAX. 3.3V & 5V max 125W, -5V & -12V max 12W, total output max 425W
Over Voltage 5.7V~6.5V 3.7V~4.1V 13.1V~14.5V ---- ---- ---- Shutdown, it needs re-power on to recover Over current (MAX) 30A 30A 20A 20A ---- ---- ---- PROTECTION
Over Load & Short Circuit When power supply over 105%~ 150% max load or short circuit acted, power supply will be shutdown and latch off, recover after re-start up.
Rise time <20mS ELEC. CHAR.
Power good signal Power ON within 100---500ms, high level TTL Signal release. Temperature 4 Operating: -10 ~ 70 ; De -rating: 45 ~ 70 : 2.5%/ ; Storage: -20~+85
ENVIRONMENT Humidity Operating: 20% ~ 90% (non condensing) RH; Storage: 10% ~ 95% RH (non condensing)
SAFETY Withstand voltage I/P-O/P:3.0KVAC, I/P-FG:1.5KVAC, 1minute Isolation resistance I/P-O/P, I/P-FG, >100MΩ/500VDC at 25/ 70% RH EMC EMI EN 55022 CLASS B、FCC CFR 47 PART 15 CLASS B、CNS 13438 CLASS B. EMS EN 55024:EN 61000-4-2,3,4,5,6,8
Cooling Forced airflow cooling with DC fan M.T.B.F. 106 K hours Dimension 150 x 140 x 86 mm (L*W*H) OTHERS
Packing N.W.: 2.1 Kg / 1pc; 6 pcs/ 2.03 CUFT / 1 CTN 1 All measurements which not mentioned are based on 24VDC input, output Max at ambient 25 / 70%RH. 2 Output tolerance included set up voltage, line regulation and load regulation. NOTE The regulation is measured between 20%-100% max load of each output, Total output t must under output Max. 3 Ripple & noise are measured at 10〜50 condition and 20MHz of bandwidth by using a 10〞〜15〞twisted pair-wire terminated with a 0.1uF & a 10uF parallel capacitor. 4 The operating temperature shall follow the de-rating curve in spec 5 The power supply is considered a component of end-equipment. The end-equipment must be re-confirmed whether comply with EMC directives.
425W, Six Output 150 x 140 x 86 mm5.90 x 5.51 x 3.39 inch
DC-DC for ATX System

SUNPOWER TECHNOLOGY CORP. 16F.-1, No.150, Jian 1st Rd., Zhonghe Dist., New Taipei City 235, Taiwan (R.O.C.).TEL: 886-2-8226-3100 FAX: 886-2-8226-3111 http://www.sunpower.com.tw E-mail: [email protected]
SDX-425-G24
Copy Right Sunpower Technology Corp. 2009, All Rights Reserved. SDX-425-G24 Rev 0.8 Specifications subject to change without notice. RS-110043 JUN-16-2014 QR0405-1 Rev,:1.0
De-rating Curve: Output De-rating Vs Input Voltage
10 20 30 50 60 70
20
40
60
80
100
AMBIENT TEMPERATURE( )
LOAD
(%)
-10 0 40 (HORIZONTAL)
40
60
80
100
INPUT VOLTAGE (VDC)
LOA
D(%
)
19
50
70
90
23 36
Dimension: (Unit: mm)
FULL LOAD
FULL LOAD

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 101
B.1.5. Controladora de motor Sabertooth dual 32A
Modelo: Sabertooth 2x32
URL:
http://www.dimensionengineering.com/datasheets/Sabertooth2x32.pdf




B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 105
B.1.6. Controladora de movimiento Kangaroo x2
Modelo: Kangaroo x2
URL: http://www.dimensionengineering.com/products/kangaroo

MOTOR DRIVERS
SyRen 10SyRen 25SyRen 50Sabertooth 2X5Sabertooth 2X5 R/CSabertooth 2X12Sabertooth 2X12 R/CSabertooth 2X25Sabertooth 2X32Sabertooth 2X60
RADIO CONTROL
BattleSwitchCellShieldDoubleSwitchLipoShieldPicoSwitchServo PigtailsSmartBECSportBECVHVBEC
R/C LIGHTING
DELight Starter KitDELight ControllerDELinkDELight Single LEDsDELight Strip LEDsEasyLightsSinewinder Lights
DC TO DC
3.3V Switching Regulator5.0V Switching Regulator1A Adjustable SwitchingRegulator3A Adjustable SwitchingRegulatorHV Adjustable SwitchingRegulatorAnyVolt 3AnyVolt MicroLVBoostNegatronBreakout Boards
SENSORS
Buffered 2g AccelerometerBuffered 6g AccelerometerBuffered 3D Accelerometer
MOTION CONTROL
Kangaroo x2
ABOUT
The CompanyWarranty InformationTerms of UsageOur DealersShipping FAQAccelerometer GuideSwitching Regulator GuideBEC FAQ
LEGACY PRODUCTS
Legacy Products
Kangaroo x2 motion controllerPrice: $23.99
Weight: 7.0g / 0.25oz
International Shipping: $2.00
Lead Time~2 weeks
Product Description
Kangaroo x2 adds selftuning feedback motion control to yourSabertooth or SyRen motor driver. It can be used withquadrature encoders or potentiometers to provide position orspeed control. It supports one or two feedback channels.
Feedback control has always been highly desirable formechanical systems. Being able to tell your device to move anexact amount, at a specific speed or to a certain position, andhave it reliably and repeatably do so, regardless of the load ordisturbances, has obvious benefits. However, PID and othercontrollers have to be carefully tuned to get acceptable results.Feedback tuning is difficult, time consuming and requiresadvanced math and physics knowledge.
Kangaroo x2 is the first selftuning controller in its class. Insteadof requiring you to measure, model and calculate the system,the controller itself will figure everything out after a few switchsettings and button presses. In the time it takes to get a tastysnack, you can come back to a perfectly tuned system ready toaccept your commands.
Instead of requiring you to use a microcontroller to do closedloop control, Kangaroo x2 works from analog and radio controlsources as well as microcontrollers and computers. You can, forexample, use it to build that two horsepower R/C servo you’vealways needed as the final piece of your doomsday device. Justremember who helped when the vaporizing starts.
During operation, you can command speeds, positions orcombined commands like “move to 37 inches at a speed of 4inches per second.” You can also have the Kangaroo x2 reportback speeds and positions while it is running. A mixed modeallows for unstoppable mobile robots with differential drive ortank style steering.
If you need to get your product under control, Kangaroo x2 isthe best way to do it.
Product Specs
Model: Kangaroo x2
Specifications: 2 channel selftuning PID controllerPosition or speed controlQuadrature encoder feedback orpotentiometer feedbackSupport for limit switches and mechanicalstopsAnalog, R/C and serial inputs
Compatibility: Sabertooth 2x10Sabertooth 2x12Sabertooth 2x25Sabertooth 2x25 V2Sabertooth 2x50HVSabertooth 2x60SyRen 10SyRen 25SyRen 50
Documentation: Kangaroo ManualKangaroo PackIn InstructionsEncoder CalculatorArduino Library Reference.NET (C#, VB) Library ReferencePacket Serial ReferenceDEScribe Manual
Software: Arduino Library.NET (C#, VB) LibraryDEScribe PC Software
Videos: Teach Tune Mode 1Drive Mode Tune for Position ControlDrive Mode Tune for Speed ControlKangaroo Speed Control vs. Sabertooth RCTravel Range for Speed Control Tune
Customerprojects:
Show us yours!
Products > Kangaroo x2
About Us | Contact | Dealer Inquiry
© Dimension Engineering LLC. All Rights Reserved.

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 107
B.1.7. Cable USB-TTL serial
Modelo: TTL-232R-5V
URL: http://www.ftdichip.com/Support/Documents/DataSheets/Cables/DS_
TTL-232R_CABLES.pdf

Copyright © 2010 Future Technology Devices International Limited 7

Copyright © 2010 Future Technology Devices International Limited 10
GND
CTS#
VCC
TXD
RXD
RTS#
1
2
3
4
5
6
CABLE 1.8m
VCC
1
2
3
4
5
6
6 pin header0.1in pitch
BLACK
BROWN
RED
ORANGE
YELLOW
GREEN
A B
C
D
Pin 1
E
Dimensions (mm)
2.54 +/- 0.05A
12.70 +/- 0.2B
C
14.0 +/- 0.2D
2.54 +/- 0.05E
15.24 +/- 0.2

Copyright © 2010 Future Technology Devices International Limited 11

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 111
B.1.8. Placa base ASRock Extreme
Modelo: Z87M Extreme 4
URL: http://www.asrock.com/mb/Intel/Z87M%20Extreme4/index.es.asp?
cat=Specifications

27/6/2015 ASRock > Z87M Extreme4
data:text/html;charset=utf8,%3Cdiv%20style%3D%22margin%3A%200px%20auto%3B%20padding%3A%200px%3B%20fontsize%3A%2014px%3B%20… 1/3
Z87M Extreme4
Especificaciones del Producto
Generales
AStyle Home Cloud Purity Sound™
CPU
Soporta Procesadores de Nueva 4ª y 4ª Generación Intel® Core™ i7/i5/i3/Xeon®/ Pentium®/
Celeron®(Socket 1150) Digi Power Design Diseño de fase de alimentación 8
Soporta tecnología Intel® Turbo Boost 2.0
Soporta Intel® KSeries desbloqueo CPU Soporta ASRock BCLK gama completa Overclocking
Chipset Intel® Z87
Memoria
Tecnología de memoria Dual Channel DDR3/DDR3L 4 x DDR3/DDR3L ranuras DIMM Soporta memoria DDR3/DDR3L 2800+(OC)/2400(OC)/2133(OC)/1866(OC)/1600/1333/1066 nonECC, unbuffered Máxima capacidad de memoria del sistema: 32GB*
Soporta Intel® Extreme Memory Profile (XMP) 1.3 / 1.2
*Debido a la limitación del sistema operativo, el tamaño de la memoria actual puede ser menos que 4GB para la
reserva del uso del sistema bajo operativo Windows® 32bit. Para Windows® 64bit con CPU de 64bit no hay tallimitación.
BIOS
64Mb AMI UEFI Legal BIOS con soporte GUI Multilingüe ACPI 1.1 conforme Wake Up Events Soporta SMBIOS 2.3.1 CPU, DRAM, PCH 1.05V, PCH 1.5V multiajuste de voltaje
Audio, Video y Conectividad
Gráficos
Soporta Intel® HD Graphics Builtin Visuals : Intel® Quick Sync Video con AVC, MVC (S3D) y MPEG2
Full HW Encode1, Intel® InTru™ 3D, Intel® Clear Video HD Technology, Intel® Insider™, Intel® HDGraphics 4600 Pixel Shader 5.0, DirectX 11.1 Tamaño máximo memoria 1792MB Múltiples opciones de salida gráficos: DSub, DVID y HDMI Soporta Triple Monitor Soporta tecnología HDMI con maxima resolución hasta 4K x 2K (4096x2304) @ 24Hz Soporta DVID con maxima resolución hasta 1920x1200 @ 60Hz Soporta DSub con maxima resolución hasta 1920x1200 @ 60Hz Soporta Auto Lip Sync, Deep Color (12bpc), xvYCC y HBR (High Bit Rate Audio) con HDMI (Senecesita compatibilidad con monitor HDMI) Soporta función HDCP con puertos DVID y HDMI Soporta Bluray (BD) Full HD 1080p con puertos DVID y HDMI
*Intel® HD Graphics integrada visuales y las salidas de VGA puede ser compatible sólo con los procesadores quetienen GPU integrada.
**Debido a la limitación del chipset, el reproductor Bluray de Intel® HD Graphics solo es soportado bajo Windows® 8 /8 64bit / 7 / 7 64bit / Vista™ / Vista™ 64bit.
***Intel® InTru™ 3D solo es soportado bajo Windows® 8 / 8 64bit / 7 / 7 64bit.
Audio
Audio 7.1 CH HD con protección de contenido (Realtek ALC1150 Audio Codec) Soporta audio Premium Bluray Soporta Purity Sound™ Amplificador 115dB SNR DAC con diferencial
Amplificador de Auriculares Premium TI® NE5532 (soporta auriculares de hasta 600 Ohms) Tecnología Direct Drive Cubierta con blindaje EMI PCB blindada de aislamiento
Compatibilidad DTS Connect
LAN
Gigabit LAN 10/100/1000 Mb/s
Giga PHY Intel® I217V
Tecnología Encendido Intel® Remote Soporta WakeOnLAN Soporta Ethernet 802.3az eficiente energéticamente Soporta PXE

27/6/2015 ASRock > Z87M Extreme4
data:text/html;charset=utf8,%3Cdiv%20style%3D%22margin%3A%200px%20auto%3B%20padding%3A%200px%3B%20fontsize%3A%2014px%3B%20… 2/3
Expansión / Conectividad
Ranuras de
expansión
2 x ranuras PCI Express 3.0 x16 (PCIE1/PCIE3: una a x16 (PCIE1); dos a x8 (PCIE1) / x8 (PCIE3)) 1 x ranura PCI Express 2.0 x16 (PCIE4: modo x4) 1 x ranura PCI Express 2.0 x1 Soporta AMD Quad CrossFireX™, 3Way CrossFireX™ y CrossFireX™
Soporta NVIDIA® Quad SLI™ y SLI™
Almacenaje
6 x conectores SATA3 de 6.0 Gb/s, Soporta RAID (RAID 0, RAID 1, RAID 5, RAID 10, Tecnología
Intel® Rapid Storage 12 y Tecnología Intel® Smart Response), NCQ, AHCI y Hot Plug (el conectorSATA3_1 es compartido con el puerto eSATA) 1 x Conector eSATA, Soporta NCQ, AHCI, Hot Plug
Conectores
1 x cabezal IR 1 x puerto COM Header 1 x cabezal LED encendido 1 x Cabezal Intrusión caja 1 x cabecera TPM 2 x conectores ventilador Procesador (1 x 4pin, 1 x 3pin) 2 x conectores ventilador caja (1 x 4pin, 1 x 3pin) 1 x conector ventilador alimentación (3pin) 1 x conector alimentación 24 pin ATX 1 x conector alimentación 8 pin 12V 1 x Conector panel frontal audio 2 x cabezales USB 2.0 (soporta 4 puertos USB 2.0) 1 x cabezal USB 3.0 (soporta 2 puertos USB 3.0)
Panel trasero
Entrada/salida
Panel Entrada/Salida 1 x Puerto PS/2 Teclado/Ratón 1 x puerto DSub 1 x puerto DVID 1 x puerto HDMI 1 x Puerto de salida Óptico SPDIF 1 x Conector eSATA 4 x puertos USB 2.0 4 x puertos USB 3.0 1 x Puerto con LED LAN RJ45 (LEDs de Activación/conexión y velocidad) Enchufe HD Audio: Altavoz posterior / Central / Bajo / entrada de línea / Altavoz Delantero / Micrófono
Otras Características / Varios
Características
especiales
ASRock APP Shop ASRock ATuning ASRock Instant Flash ASRock APP Charger ASRock XFast USB ASRock XFast LAN ASRock XFast RAM ASRock Crashless BIOS ASRock OMG (Online Management Guard) ASRock Internet Flash ASRock Sistema Navegador UEFI ASRock UEFI Tech Service ASRock Deshumidificador ASRock Fácil instalación de RAID ASRock Easy Driver Installer ASRock Interactive UEFI ASRock Fast Boot ASRock Restart to UEFI ASRock USB Key ASRock FANTastic Tuning Hybrid Booster: Control de Frecuencia del Procesador ASRock UCOP Boot Failure Guard (B.F.G.)
LED nocturno
CD de Soporte Drivers, Utilidades, Software Antivirus (Versión de prueba), Prueba CyberLink MediaEspresso 6.5,Google Chrome Browser y Toolbar, Start8 (30 días de prueba), MeshCentral, Splashtop Streamer
Accesorios
1 x Tarjeta SLI_Bridge Guía de instalación rápida, CD de Soporte, Placa entrada/salida 4 x cables de datos SATA
Monitorización
del hardware
Sensor temperatura CPU / Chasis Sensor de velocidad del ventilador del Procesador / Chasis / Alimentación Ventilador silencioso Procesador/ Chasis (Permite que el ventilador del chasis autoajuste la velocidadpor temperatura de la CPU) Control de ventilador multivelocidad Procesador/ Chasis Detección Caja abierta

27/6/2015 ASRock > Z87M Extreme4
data:text/html;charset=utf8,%3Cdiv%20style%3D%22margin%3A%200px%20auto%3B%20padding%3A%200px%3B%20fontsize%3A%2014px%3B%20… 3/3
Monitorización del Voltaje: +12V, +5V, +3.3V, CPU Vcore
Formato
Formato Micro ATX Diseño Capacitador Premium Gold (Capacitadores 100% fabricados en Japón con polímerosconductivos de alta calidad)
Sistema
Operativo Compatible con Microsoft Windows® 8.1 32bit / 8.1 64bit / 8 32bit / 8 64bit / 7 32bit / 7 64bit
Certificaciones FCC, CE, WHQL Calificada para ErP/EuP (ErP/EuP se necesita fuente de alimentación preparada)
Precaución:
Por favor, tenga en cuenta que hay cierto riesgo implicado con el overclocking, incluyendo el ajuste de la configuración de la BIOS o usandolas herramientas de overclocking de terceras partes. El overclocking puede afectar a la estabilidad del sistema, o incluso provocar daños enlos componentes y dispositivos de su sistema. Debe hacerse bajo su propio riesgo y coste. No somos responsables por los posibles dañoscausados por realizar overclocking.
La especificación está sujeta a cambios sin previo aviso. Los nombres de marcas y productos son marcas registradas por sus respectivas compañías.Cualquier otra configuración diferente a la especificación original no está garantizada.

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 115
B.1.9. Microprocesador Intel Core
Modelo: i7-4771
URL: http://ark.intel.com/es-es/products/77656/
Intel-Core-i7-4771-Processor-8M-Cache-up-to-3_90-GHz

27/6/2015 ARK | Intel® Core™ i74771 Processor (8M Cache, up to 3.90 GHz)
http://ark.intel.com/eses/products/77656/IntelCorei74771Processor8MCacheupto3_90GHz 1/4
Intel® Core™ i7-4771 Processor (8M Cache, up to 3.90 GHz)
Especificaciones
‐ Puntos fundamentales
Estado Launched
Fecha de lanzamiento Q3'13
Número de procesador i7-4771
Intel® Smart Cache 8 MB
DMI2 5 GT/s
Nº de enlaces QPI 0
Conjunto de instrucciones 64-bit
Extensiones del conjunto de instrucciones SSE4.1/4.2, AVX 2.0
Opciones de integrados disponibles No
Litografía 22 nm
Escalabilidad 1S Only
Especificación de solución térmica PCG 2013D
Precio de cliente recomendadoBOX : $320.00TRAY: $314.00
Libre de conflictos Yes
Hoja de datos técnicos Link
‐ Desempeño
Núcleos 4
Nº de subprocesos 8
Frecuencia base del procesador 3.5 GHz
Frecuencia turbo máxima 3.9 GHz
TDP 84 W
‐ Especificaciones de memoria
Tamaño de memoria máx. (depende del tipo de memoria) 32 GB
Tipos de memoria DDR3 1333/1600
N.º máximo de canales de memoria 2
Ancho de banda máximo de memoria 25,6 GB/s
Memoria ECC compatible ‡ No
‐ Especificaciones de gráficos
Gráficos de procesador ‡ Intel® HD Graphics 4600
Frecuencia base de los gráficos 350 MHz
Frecuencia dinámica máxima de los gráficos 1.2 GHz
Memoria máxima de vídeo de los gráficos 1.7 GB
Salida para gráficos eDP/DP/HDMI/VGA
Unidades de ejecución 20

27/6/2015 ARK | Intel® Core™ i74771 Processor (8M Cache, up to 3.90 GHz)
http://ark.intel.com/eses/products/77656/IntelCorei74771Processor8MCacheupto3_90GHz 2/4
Resolución máxima (HDMI) 3840x2160@60Hz
Resolución máxima (DP) 3840x2160@60Hz
Compatibilidad con DirectX* 11.2
Compatibilidad con OpenGL* 4.3
Intel® Quick Sync Video Yes
Tecnología Intel® InTru™ 3D Yes
Intel® Insider™ Yes
Intel® Wireless Display Yes
Interfaz de pantalla flexible Intel® (Intel® FDI) Yes
Tecnología Intel® CVT HD Yes
Nº de pantallas admitidas ‡ 3
ID del dispositivo 412
‐ Opciones de expansión
Revisión de PCI Express 3.0
Configuraciones de PCI Express ‡ Up to 1x16, 2x8, 1x8/2x4
Nº máximo de buses PCI Express 16
‐ Especificaciones de paquete
Configuración máxima de CPU 1
TCASE 72°C
Tamaño del paquete 37.5mm x 37.5mm
Litografía de la IMC y de los gráficos 22nm
Zócalos compatibles FCLGA1150
Opciones de concentración baja de halógenos disponible Ver MDDS
‐ Tecnologías avanzadas
Tecnología Intel® Turbo Boost ‡ 2.0
Tecnología Intel® vPro ‡ Yes
Tecnología Intel® Hyper-Threading ‡ Yes
Tecnología Intel® de virtualización ‡ Yes
Tecnología Intel® de virtualización para E/S dirigida ‡ Yes
Intel® VT-x con tablas de páginas extendidas (EPT) ‡ Yes
Intel® TSX-NI No
Intel® 64 ‡ Yes
Tecnología Intel® My WiFi Yes
Estados inactivos Yes
Tecnología Intel SpeedStep® mejorada Yes
Tecnologías de monitorización térmica Yes
Tecnología Intel® de protección de la identidad ‡ Yes
Programa Intel® Stable Image para la estabilidad de plataformas Yes
‐ Tecnología de protección de datos Intel®
Nuevas instrucciones AES Yes

27/6/2015 ARK | Intel® Core™ i74771 Processor (8M Cache, up to 3.90 GHz)
http://ark.intel.com/eses/products/77656/IntelCorei74771Processor8MCacheupto3_90GHz 3/4
Toda la información proporcionada está sujeta a cambios en cualquier momento, sin previo aviso. Intel puede realizar cambios en el ciclo de vida de fabricación, especificaciones y descripciones deproductos en cualquier momento, sin previo aviso. La información incluida aquí se proporciona "como está" e Intel no representa ni ofrece garantías de ningún tipo relativas a la exactitud de la
Secure Key Yes
‐ Tecnología de protección de plataforma Intel®
OS Guard Yes
Tecnología de ejecución de confianza ‡ Yes
Bit de desactivación de ejecución ‡ Yes
Tecnología antirrobo Yes
Productos compatibles
Busque boards para PC compatibles >
‐ Chipsets
Comparar
Comparar todos+Nombre del producto Estado Opciones de integrados disponibles TDP Precio de cliente recomendado
Intel® Z97 Chipset (Intel® DH82Z97 PCH)
Launched No 4,1 W N/A
Intel® H97 Chipset (Intel® DH82H97 PCH)
Launched No 4,1 W N/A
Intel® Z87 Chipset (Intel® DH82Z87 PCH)
Launched No 4,1 W N/A
Intel® Q87 Chipset (Intel® DH82Q87 PCH)
Launched Yes 4,1 W T&R : $47.00
Intel® H87 Chipset (Intel® DH82H87 PCH)
Launched No 4,1 W T&R : $32.00
Intel® B85 Chipset (Intel® DH82B85 PCH)
Launched No 4,1 W T&R : $28.00
Intel® Q85 Chipset (Intel® DH82Q85 PCH)
Launched No 4,1 W N/A
Intel® H81 Chipset (Intel® DH82H81 PCH)
Launched Yes 4,1 W T&R : $26.00
Información sobre especificaciones y pedidos
Información de cumplimiento comercial
ECCN CCATS US HTS
5A992C G077159 8542310000-HYBRD
Información sobre especificaciones y pedidos
Spec Code Ordering Code Step RCP VT-x
Boxed Intel® Core™ i7-4771 Processor (8M Cache, up to 3.90 GHz) FC-LGA12C
SR1BW BX80646I74771 C0 $320,00
Boxed Intel® Core™ i7-4771 Processor (8M Cache, up to 3.90 GHz) FC-LGA12C, for China
SR1BW BXC80646I74771 C0 N/A
Intel® Core™ i7-4771 Processor (8M Cache, up to 3.90 GHz) FC-LGA12C, Tray
SR1BW CM8064601464302 C0 $314,00 Yes

27/6/2015 ARK | Intel® Core™ i74771 Processor (8M Cache, up to 3.90 GHz)
http://ark.intel.com/eses/products/77656/IntelCorei74771Processor8MCacheupto3_90GHz 4/4
información, ni sobre las características de los productos, disponibilidad, funcionalidad o compatibilidad de los productos incluidos en la lista. Póngase en contacto con el proveedor del sistema paraobtener más información sobre productos o sistemas específicos.
Las "clasificaciones de Intel" consisten en números ECCN (números de clasificación para control de exportación) y números HTS (nomenclatura arancelaria armonizada). Intel no se responsabiliza deluso que se haga de sus clasificaciones. No se ofrece ninguna garantía con respecto a la corrección de los números ECCN o HTS. Es posible que su empresa actúe como exportadora de registro y, comotal, será responsable de determinar la correcta clasificación de cualquier elemento en el momento de la exportación.
Consulte la hoja de datos para obtener definiciones formales de las características y propiedades del producto.
Las SKU “anunciadas” no están aún disponibles. Consulte la fecha de lanzamiento para saber cuándo estará disponible en el mercado.
Algunos productos pueden admitir instrucciones nuevas de AES con una actualización de la configuración del procesador, en particular, i7-2630QM/i7-2635QM, i7-2670QM/i7-2675QM, i5-2430M/i5-2435M, i5-2410M/i5-2415M. Póngase en contacto con el fabricante del BIOS que incluye la actualización del procesador más reciente de configuración.
‡ Puede que esta función no esté disponible en todos los sistemas informáticos. Póngase en contacto con su proveedor de sistemas para saber si su sistema ofrece esta función o consulte lasespecificaciones del sistema (placa base, procesador, chipset, fuente de alimentación, disco duro, controladora de gráficos, memoria, BIOS, controladores, monitor de máquina virtual (VMM), softwarede plataforma y/o sistema operativo) para comprobar la compatibilidad con la función. La funcionalidad, el rendimiento y otras ventajas de esta función pueden variar según la configuración delsistema.
"Libre de conflictos" significa "libre de conflictos de RDC", definición utilizada por la normativa de la Comisión de Valores y Bolsa de EE. UU. para referirse a los productos que no contienen mineralesconflictivos (estaño, tántalo, tungsteno y/u oro) que directa o indirectamente financian o lucran a grupos armados en la República Democrática del Congo (RDC) o países vecinos. Intel utiliza también eltérmino "libre de conflictos" en un sentido más amplio para hacer referencia a proveedores, cadenas de suministro, fundiciones y refinadoras cuyas fuentes de minerales conflictivos no financianconflictos en la RDC o en países limítrofes. Los procesadores Intel fabricados antes del 1 de enero de 2013 no tienen la designación de producto libre de conflictos. La designación "libre de conflictos"únicamente se refiere a los productos fabricados a partir de esa fecha. Para los procesadores Intel en caja, la designación "libre de conflictos" se refiere solo al procesador, no a los accesoriosadicionales incluidos, como disipadores de calor o refrigeradores.
Consulte http://www.intel.com/content/www/es/es/architecture-and-technology/hyper-threading/hyper-threading-technology.html?wapkw=hyper+threading para obtener más informaciónincluyendo detalles sobre los procesadores compatibles con la tecnología Intel® HT.
La frecuencia máxima de turbo hace referencia a la frecuencia máxima de un procesador de un solo núcleo que se puede conseguir con la tecnología Intel® Turbo Boost. Consultewww.intel.com/technology/turboboost/ para obtener más información.
Para los productos Intel, se recomienda consultar la guía sobre precios de venta al público recomendados. Los precios son orientativos y están pensados para clientes directos de Intel, además deestar sujetos a cambio sin previo aviso. Los impuestos, gastos de envío, etc. no están incluidos. Los precios pueden variar para otros tipos de embalaje y cantidades de envío y pueden aplicarsepromociones especiales. Este material es meramente orientativo y no constituye ningún tipo de oferta formal por parte de Intel. Póngase en contacto con el representante de Intel concreto paraobtener toda la información precisa sobre presupuestos y precios.
TDP máximo y de sistema se basa en el peor de los escenarios. El TDP real puede ser menor si no se utilizan todas las E/S para los chipsets.
Baja concentración de halógenos: Sólo se aplica a los retardantes de llama bromados y clorados (BFR/CFR) y PVC en el producto final. Los componentes de Intel así como los que se puedan adquirirpara el ensamblaje final cumplen con la normativa JS-709 y la placa de circuito impreso/sustrato, con la IEC 61249-2-21. El uso de retardantes de llama halógenos o de PVC no es beneficioso para elmedio ambiente.
Para ver los datos del análisis de rendimiento, consulte http://www.intel.es/content/www/es/es/benchmarks/intel-product-performance.html
Los números de procesador Intel no son una medida del rendimiento. Los números de procesador diferencian características dentro de cada familia de procesadores, pero no a través de las diferentesfamilias de procesadores. Consulte www.intel.com/content/www/es/es/processors/processor-numbers.html para obtener más detalles.
Los procesadores que admiten computación de 64 bits en la arquitectura Intel® necesitan una BIOS preparada para la arquitectura Intel 64.
¡Envíenos sus comentarios!

120 ANEXO B. DOCUMENTACION TECNICA
B.1.10. Memoria RAM Kingston HyperX
Modelo: HX316C10FBK2/16
URL: http://www.kingston.com/datasheets/HX316C10FBK2_16.pdf

DESCRIPTIONHyperX HX316C10FBK2/16 is a kit of two 1G x 64-bit (8GB)DDR3-1600 CL10 SDRAM (Synchronous DRAM) 2Rx8 memorymodules, based on sixteen 512M x 8-bit DDR3 FBGA compo-nents per module. Total kit capacity is 16GB. Each module kithas been tested to run at DDR3-1600 at a low latency timing of10-10-10 at 1.5V. Additional timing parameters are shown inthe PnP Timing Parameters section below. The JEDEC stan-dard electrical and mechanical specifications are as follows:
Document No. 4807008-001.B00 04/23/15 Page 1
SPECIFICATIONSselcyc 01)DDI(LC
Row Cycle Time (tRCmin) 48.125ns (min.)Refresh to Active/Refresh 260ns (min.)Command Time (tRFCmin)
Row Active Time (tRASmin) 37.5ns (min.)
Maximum Operating Power TBD W* (per module)0 - V 49gnitaR LU
Operating Temperature 0o C to 85o CStorage Temperature -55o C to +100o C
*Power will vary depending on the SDRAM used.
FEATURES• JEDEC standard 1.5V (1.425V ~1.575V) Power Supply
• VDDQ = 1.5V (1.425V ~ 1.575V)
• 800MHz fCK for 1600Mb/sec/pin
• 8 independent internal bank
• Programmable CAS Latency: 11, 10, 9, 8, 7, 6
• Programmable Additive Latency: 0, CL - 2, or CL - 1 clock
• 8-bit pre-fetch
• Burst Length: 8 (Interleave without any limit, sequential withstarting address “000” only), 4 with tCCD = 4 which does notallow seamless read or write [either on the fly using A12 orMRS]
• Bi-directional Differential Data Strobe
• Internal(self) calibration : Internal self calibration through ZQpin (RZQ : 240 ohm ± 1%)
• On Die Termination using ODT pin
• Average Refresh Period 7.8us at lower than TCASE 85°C,3.9us at 85°C < TCASE < 95°C
• Asynchronous Reset
• Height 1.291” (32.80mm) w/heatsink, double sided component
HX316C10FBK2/1616GB (8GB 1G x 64-Bit x 2 pcs.)DDR3-1600 CL10 240-Pin DIMM Kit
Continued >>
kingston.com/hyperx
PnP JEDEC TIMING PARAMETERS:• DDR3-1600 CL10-10-10 @1.5V• DDR3-1333 CL9-9-9 @1.5V• DDR3-1066 CL7-7-7 @1.5V
Note: The PnP feature offers a range of speed and timing options to supportthe widest variety of processors and chipsets. Your maximum speed willbe determined by your BIOS.

Document No. 4807008-001.B00 Page 2
continued HyperX
All Kingston products are tested to meet our published specifications. Some motherboards or system configurations may not operate atthe published HyperX memory speeds and timing settings. Kingston does not recommend that any user attempt to run their computersfaster than the published speed. Overclocking or modifying your system timing may result in damage to computer components.
FOR MORE INFORMATION, GO TO WWW.KINGSTON.COM/HYPERX
kingston.com/hyperx
7.08 mm133.35 mm
32.8
mm
MODULE DIMENSIONS
MODULE WITH HEAT SPREADER

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 123
B.1.11. Disco duro Samsung
Modelo: SSD 840 EVO
URL: http://www.samsung.com/global/business/semiconductor/minisite/
SSD/global/html/ssd840evo/specifications.html

1 DATA SHEET Rev. 1.1, August, 2013
Summary - 2.5” SATA 6Gb/s SSD for Desktop & Laptop PC - Samsung 3-core MEX controller - Samsung 1x nm Toggle DDR 2.0 NAND Flash
memory - Up to 1GB Samsung Low Power DDR2 SDRAM
cache memory - Samsung Magician 4.2 Software for SSD
management - Samsung Data Migration 2.0 Software - 7mm profile
The must-have solution for your PC upgrade
The evolution of the SSD has arrived as the Samsung SSD 840 EVO with more speed, more reliability and much easier upgrade tools. Combining the best SSD technology from Samsung, 840 EVO delivers a superior computing experience.
Faster performance for everyday use The market-leading 840 Series SSD was significantly improved upon in the 840 EVO. Samsung’s new TurboWrite technology delivers dramatically faster sequential write performance. And, with upgrades to NAND, a new controller and firmware, the 840 EVO has superfast responsiveness under everyday workloads. Proven quality and trusted reliability Samsung’s unparalleled end-to-end integration allows us to deliver a reliable, high-performance 2nd generation 3-bit MLC SSD. The upgraded firmware and advanced signal processing guarantees the same level of endurance and reliability as our previous generation, while improving performance. The 840EVO’s ultra-low power consumption helps extend laptop battery life longer than before. In addition, Samsung’s “Dynamic Thermal Guard” algorithm in 840 EVO maintains optimal operating temperature for the drive. Samsung 840 EVO is backed by the same 3-year limited warranty as the previous generation.
Samsung SSD 840 EVO Data Sheet, Rev. 1.1 (August, 2013)

2 DATA SHEET Rev. 1.1, August, 2013
Easier-than-ever upgrade tools As SSDs become more main stream, it is important to make the installation process as smooth and simple as possible. Samsung’s One-stop Installation Navigator is a comprehensive guide for software setup, data migration process and hardware installation. The Samsung Data Migration software is simple to use - yet provides a very powerful “Custom Cloning” feature that makes migration work even when source data is greater than the SSD’s capacity. In addition, SATA to USB 3.0 connector makes data migration up to three times faster than USB 2.0 for laptop upgrades*. Together, it is now easier than ever to get setup and running with Samsung SSDs. (*SATA to USB 3.0 connector is bundled only with Laptop Upgrade package)
Samsung Magician Software Magician eliminates the confusion and uncertainties of SSD management, making it simple for users to maximize the performance and lifetime of their Samsung SSD. In addition to its performance optimization features, Magician (from the version 4.2) also provides 840 EVO users the option to enable RAPID mode (Real-time Accelerated Processing of Input-output Data) – an innovative performance enhancement that processes data on a system level by using free DRAM memory as a cache. Once enabled in Magician, RAPID mode provides an overall PC performance boost.
More Powerful Data Security Solutions The Samsung SSD 840 EVO introduces two important features for data security: hardware-based AES 256bit Full Disk Encryption (FDE) and PSID. Hardware-based AES Encryption helps safeguard data against attack by encrypting all information on the disk at the hardware level, which means there is no detrimental effect on performance. When you forget your SSD security password, PSID protects your data on the drive by executing a cryptographic erase which returns the drive to its factory status, preventing any unauthorized access to your data.
A complete, user-friendly solution With a wide range of capacities from 120GB to the spacious 1TB, the 840 EVO will help you find the perfect SSD for your PC upgrade. And, Samsung’s 1TB drive is a real 1,000GB of user-addressable capacity. The Samsung SSD 840 EVO is available in three packaging configurations: Basic (Drive only), Laptop Upgrade and Desktop Upgrade kit. The Laptop Upgrade kit comes with a SATA to USB 3.0 connector and a mounting spacer. The Desktop Upgrade kit includes a SATA to USB 2.0 connector, a SATA data cable, screws, a 2.5” to 3.5” adapter bracket.

3 DATA SHEET Rev. 1.1, August, 2013
Technical Specifications
Samsung SSD 840 EVO
Usage Application Client PCs*
Capacity 120GB, 250GB, 500GB,750GB,1TB
Dimensions (LxWxH) 100 x 69.85 x 6.8 (mm)
Interface SATA 6Gb/s (compatible with SATA 3Gb/s and SATA 1.5Gb/s)
Form Factor 2.5-inch
Controller Samsung 3-core MEX Controller
NAND Flash Memory 1x nm Samsung Toggle DDR 2.0 NAND Flash Memory (400Mbps)
DRAM Cache Memory 256MB (120GB) or 512MB(250GB&500GB) or 1GB (750&1TB) LPDDR2
Performance**
Sequential Read: Max. 540 MB/s
Sequential Write***: Max. 520 MB/s (250GB/500GB/750GB/1TB) Max. 410 MB/s (120GB)
4KB Random Read (QD1): Max. 10,000 IOPS
4KB Random Write(QD1): Max. 33,000 IOPS
4KB Random Read(QD32): Max. 98,000 IOPS (500GB/750GB/1TB) Max. 97,000 IOPS (250GB) Max. 94,000 IOPS (120GB)
4KB Random Write(QD32): Max. 90,000 IOPS (500GB/750GB/1TB) Max. 66,000 IOPS (250GB) Max. 35,000 IOPS (120GB)
TRIM Support Yes (Requires OS Support)
Garbage Collection Yes
S.M.A.R.T Yes
Security AES 256-bit Full Disk Encryption (FDE)
Weight Max. 53g (1TB)
Reliability MTBF: 1.5 million hours
Power Consumption Average : 0.1W **** (Typical) Idle : 0.045W (Typical, DIPM ON)
Temperature Operating: Non-Operating:
0°C to 70°C -55°C to 95°C
Humidity 5% to 95%, non-condensing
Vibration Non-Operating: 20~2000Hz, 20G
Shock Non-Operating: 1500G , duration 0.5m sec, 3 axis
Etc. Worldwide Name (WWN), LED Indicator support
Warranty 3 years limited
System Configuration : Intel Core i7-3770 @ 3.4GHz, 4GB DDR3 SDRAM (2GBx2) 1333Mbps; Asus motherboard with Intel 7 Series Z77 Chipset; Windows 7 Ultimate x64 SP1; IRST 11.2, MS performance guide pre-condition.
* 840 EVO is not validated for data center usage. ** Sequential performance measurements based on CrystalDiskMark v.3.0.1. Random performance measurements based on Iometer 2010. Performance may vary based on SSD’s firmware version, system hardware & configuration *** Sequential Write performance measurements reflect TurboWrite operation. **** Power consumption measured with MobileMark 2007 in Windows 7. Values calculated using laptop computer and represent system-level power consumption.

4 DATA SHEET Rev. 1.1, August, 2013
Product Lineup
Density Model Name Box Contents Model Code
120 GB MZ-7TE120 Basic (SSD Only) MZ-7TE120BW Desktop Upgrade Kit MZ-7TE120KW
250 GB MZ-7TE250
Basic (SSD Only) MZ-7TE250BW Laptop Upgrade Kit MZ-7TE250LW Desktop Upgrade Kit MZ-7TE250KW
500 GB MZ-7TE500 Basic (SSD Only) MZ-7TE500BW Laptop Upgrade Kit MZ-7TE500LW
750 GB MZ-7TE750 Basic (SSD Only) MZ-7TE750BW
1TB MZ-7TE1T0 Basic (SSD Only) MZ-7TE1T0BW
Contents
Contents Basic Laptop upgrade Desktop Upgrade
3.5” bracket with screws X X Yes
SATA data cable X X Yes
Mounting spacer X Yes X
SATA to USB connector X Yes
(USB 3.0) Yes
(USB 2.0)
SSD Installation Guide(Printed) Yes Yes Yes
SSD Warranty Summary(Printed) Yes Yes Yes
Samsung software & manual CD Yes Yes Yes
Samsung Activation Sticker Yes Yes Yes
For more information, please visit www.samsung.com/ssd. To download the latest software & manuals, please visit www.samsung.com/samsungssd
DISCLAIMER SAMSUNG ELECTRONICS RESERVES THE RIGHT TO CHANGE PRODUCTS, INFORMATION AND SPECIFICATIONS WITHOUT NOTICE. Products and specifications discussed herein are for reference purposes only. All information discussed herein may change without notice and is provided on an “AS IS” basis, without warranties of any kind. This document and all information discussed herein remain the sole and exclusive property of Samsung Electronics. No license of any patent, copyright, mask work, trademark or any other intellectual property right is granted by one party to the other party under this document, by implication, estoppels or otherwise. Samsung products are not intended for use in life support, critical care, medical, safety equipment, or similar applications where product failure could result in loss of life or personal or physical harm, or any military or defense application, or any governmental procurement to which special terms or provisions may apply. For
updates or additional information about Samsung products, contact your nearest Samsung office. COPYRIGHT © 2013 This material is copyrighted by Samsung Electronics. Any unauthorized reproductions, use or disclosure of this material, or any part thereof, is strictly prohibited and is a violation under copyright law. TRADEMARKS & SERVICE MARKS The Samsung Logo is the trademark of Samsung Electronics. Adobe is a trademark and Adobe Acrobat is a registered trademark of Adobe Systems Incorporated. All other company and product names may be trademarks of the respective companies with which they are associated.

128 ANEXO B. DOCUMENTACION TECNICA
B.1.12. Router TP-Link
Modelo: TL-WR1042ND
URL: http://www.tp-link.es/products/details/?model=TL-WR1042ND#spec



B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 131
B.1.13. Laser Hokuyo
Modelo: UTM-30LX-EW
URL: http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx_ew.html#

27/6/2015 Scanning range finder UTM30LXEW | Photo sensor | PRODUCTS | HOKUYO AUTOMATIC CO.,LTD.
data:text/html;charset=utf8,%3Ctable%20width%3D%22577%22%20border%3D%220%22%20cellspacing%3D%220%22%20cellpadding%3D%220%22… 1/3
UTM-30LX-EW SOKUIKI sensor for intelligent robots
Feature
Supply voltage 12V
Measurement distance 30m
Field of view 270°
Interface Ethernet
Multi-echo
IP67
Specifications
Model UTM-30LX-EW
Light Source Laser Semiconductor λ = 905nm Laser Class 1
Power Source 12VDC ± 10%
Supply Current MAX : 1A, Normal : 0.7A
Power Consumption Less than 8W
Detection Range and
Detection Object
Guaranteed Range:0.1 to 30m(White Kent Sheet)*2
Maximum Range:0.1 to 60m
Minimum detectable width at 10m : 130mm(Vary with distance)
Accuracy
0.1 to 10m : ±30mm,10 to 30m : ±50mm(White Kent Sheet)*2
Under 3000lx : White Kent Sheet : ±30mm*1(0.1 to 10m)
Under 100000lx : White Kent Sheet : ±50mm*1(0.1 to 10m)
Measurement
Resolution and
Repeated Accuracy
1mm
0.1 to 10m : σ<10mm,10 to 30m : σ<30mm(White Kent Sheet)*2
Under 3000lx : σ=10mm*1(White Kent Sheet up to 10m)
Under 100000lx : σ=30*1(White Kent Sheet up to 10m)
Scan Angle 270°

27/6/2015 Scanning range finder UTM30LXEW | Photo sensor | PRODUCTS | HOKUYO AUTOMATIC CO.,LTD.
data:text/html;charset=utf8,%3Ctable%20width%3D%22577%22%20border%3D%220%22%20cellspacing%3D%220%22%20cellpadding%3D%220%22… 2/3
Angular Resolution 0.25°(360°/1440)
Scan Speed 25ms(Motor speed : 2400rpm)
Interface Ethernet 100BASE-TX(Auto-negotiation)
Output Synchronous Output 1-Point
LED DisplayGreen : Power supply.
Red : Normal Operation(Continuous),Malfunction(Blink)
Ambient Condition
(Temperature,Humidity)
-10 to +50 degrees C
Less than 85%RH(Without Dew,Frost)
Storage Temperature -25 to +75 degrees C
Environmental EffectMeasured distance will be shorter than the actual distance under rain, snow and
direct sunlight*2.
Vibration Resistance10 to 55Hz Double amplitude 1.5mm in each X, Y, Z axis for 2hrs.
55 to 200Hz 98m/s2 sweep of 2min in each X, Y, Z axis for 1hrs.
Impact Resistance 196m/s2 In each X, Y, Z axis 10 times.
Protective Structure Optics: IP67(Except Ethernet connector)
Insulation Resistance 10MΩ DC500V Megger
Weight 210g (Without cable)
Case Polycarbonate
External Dimension
(W×D×H)62mm×62mm×87.5mm
*1 Under Standard Test Condition (Accuracy can not be guaranteed under direct sunlight.)
*2 Indoor environment with less than 1000lx.
Please perform necessary tests with the actual device in the working environment.
Use data filtering techniques to reduce the effect of water droplets when detecting objects under the rain.
External dimension

27/6/2015 Scanning range finder UTM30LXEW | Photo sensor | PRODUCTS | HOKUYO AUTOMATIC CO.,LTD.
data:text/html;charset=utf8,%3Ctable%20width%3D%22577%22%20border%3D%220%22%20cellspacing%3D%220%22%20cellpadding%3D%220%22… 3/3

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 135
B.1.14. Telefono inteligente LG Nexus 4
Modelo: E960
URL: http:
//www.lg.com/us/support/products/documents/Nexus4_One_sheeter.pdf

The new smartphone from Google.With cutting edge hardware, your favorite Google Apps, and the latest version of Android – Nexus 4 puts the best of Google in the palm of your hand.
Learn More: google.com/nexus/4
30 s
econ
ds60
sec
onds
Photo Sphere CameraUp, down and all around you, it’s like no camera you’ve ever seen. With Nexus 4, take pictures in every direction and see them stitched together into incredible, immersive photo spheres that put you right inside the scene.
Google NowGet just the right information at just the right time with Google Now. It shows you how much traffic to expect before you leave for work, or when the next train will arrive as you’re standing on the platform.
Learn More: google.com/now
Demo: Open the Camera app and choose Photo Sphere mode . Adjust the camera position so that the blue dot is at the center of the target. Move the camera to the side, up and down and align the blue dot to fill in the scene. Touch the Shutter button to capture the Photo Sphere.
Google MapsGet to the places you care about quickly and easily.
Demo: Swipe up from the bottom of the screen. Google Now will display a few cards relevant to the current time and location. Touch Menu > Sample cards to see more examples.
Demo: •Turn-by-turn GPS navigation•Directions - Driving, transit, walking & biking.•Indoor Maps - Find an indoor maps location like the
Mall of American and zoom in.•Street View - Touch & hold a location on a street and tap
the info window. Touch the Street View icon and turn on Compass mode in the menu. Double-tap to move.
Learn More: google.com/mobile/maps

Instant Upload
3 m
inut
es
8MP675,000 Apps& Games on Google Play
Screen • 4.7” 1280x768 (320ppi)• WXGA True HD IPS+• Gapless unibody
construction• Corning® Gorilla®
Glass 2Size• 133.9 x 68.7 x 9.1
Weight• 139g
Cameras• 8 MP (main)• 1.3 MP (front)
CPU• Qualcomm
Snapdragon™ S4 Pro 1.5GHz
RAM• 2GB
Sensors• Accelerometer• Compass• Ambient light• Proximity• Gyroscope• Pressure• GPS
Network• Unlocked GSM/UMTS/
HSPA+• GSM/EDGE/GPRS (850,
900, 1800, 1900 MHz)• 3G (850, 900, 1700,
1900, 2100 MHz)• HSPA+
Wireless• Wireless charging
compatible• Wi-Fi (802.11 b/g/n)• SlimPort• NFC (Android Beam)• Bluetooth
Memory• 8GB or 16GB (actual
formatted capacity will be less)
Battery• 2,100 mAh • Up to10 hours of talk
time• Up to 250 hours of
standbyOS• Android 4.2
(Jelly Bean)
Tech
Spe
cs
Voice Search & Voice Actions
Demo: Press the microphone icon on the Home screen. Examples:• When is the next Giants game?• What do lion cubs look like?• Remind me to walk the dog in 2
hours. • Do a barrel roll.
Gesture Typing
Demo: Open Messenger and type by gliding your finger over the letters.
Vibrant 320ppi screen with curved glass edges. Protected by scratch resistant Corning® Gorilla® Glass 2.
Crisp 4.7” display
Demo: Open the Camera app and choose video mode. While recording, tap the screen to take still photos.
Shoot video in full 1080p with continuous focus, real-time zoom, and time lapse mode.
Record HD video
High-performance 8MP camera that takes stunning Photo Sphere images.
Explore Google Play
Browse through the millions of songs available for purchase, or upload your existing music library (including iTunes) to Google Play. Once your music is imported it automatically becomes available on Nexus 4, on the web at play.google.com and any other Android phone or tablet. * up to 20,000 songs. Cannot include DRM protected songs.
Your music on Google Play
Get all the apps and games you love on Google Play.
If you’ve signed up for Google+, you can enable Instant Upload and photos taken with your phone are automatically uploaded to a private album on the web so you’ll never lose a shot.
Movies & TV Books Magazines
Demo: Touch the Play Store icon and browse available entertainment. Explore preloaded content by finding the Play Books, Play Magazines, and Play Movies & TV icons.
Nexus 4 comes with Android Beam so you can quickly share photos, videos, contacts, apps and more with a tap. Made in partnership with LG, Nexus 4
comes with a cutting-edge Qualcomm Snapdragon™ S4 Pro processor. With 2GB of RAM and the fastest version of Android ever, Nexus 4 is our snappiest smartphone yet.
Built for Speed
Android Beam
Demo: Find a YouTube video on Nexus 4 and unlock another NFC-enabled Android device. Place the devices back-to-back, then tap the screen to beam the video.

138 ANEXO B. DOCUMENTACION TECNICA
B.1.15. Tableta Samsung
Modelo: GT-P5200
URL: http://www.samsung.com/us/support/owners/product/GT-P5210ZWYXAR

B.1. ESPECIFICACIONES TECNICAS DE PRODUCTO 139
Full Specifications
Category
Type Tablet
Carrier
Type Wi-Fi
Form Factor
Form Factor Touchscreen
Color
Color White
OS
OS Android 4.2, Jelly Bean
Size
Weight 508 g
Product Dimensions (Milimeters) 243.1 x 176.1 x 8
Camera
Camera Resolution (Front) 1.3 MP
Camera Resolution (Rear) 3.0 MP
Features
GPS tagging
HD Playback
HD Recording
Online Image Uploading (Share Via)
Photo Editing
TV/Video-Out
Video
Video Editing
Sharing Capabilities: Buddy Photo
Share, ChatOn Photo Share
Shot Modes: Auto, Beauty Face, Night,
Panorama, Sound & Shot, Sport

140 ANEXO B. DOCUMENTACION TECNICA
Battery
Battery, Usage Up to 8 Hours
Memory
Internal Memory (User Memory Is Less
Than The Total Memory Due To Stora-
ge Of The Operating System And Softwa-
re Used To Operate The Phones Features.
Actual User MemoryWill Vary Depending
On The Mobile Phone Operator And May
Change After Software Upgrades Are Per-
formed.)
1GB RAM; 16GB ROM
External Memory/MicroSD Capacity microSD (Up to 64GB)
CPU
Processor Speed, Type 1.6GHz Dual Core; Intel Atom Pro-
cessor Z2560
Display
Main Display Resolution 1280 x 800 Pixel
Main Display Size 10.1”
Main Display Technology WXGA TFT

B.2. GUIAS Y MANUALES 141
B.2. Guıas y manuales
A continuacion se muestra una lista de archivos con documentacion tecnica adi-
cional ofrecida por algunos fabricantes de los dispositivos incorporados al robot movil
Andabata.
B.2.1. ASRock
Manual de usuario. Z87M Extreme 4
URL: ftp:
//europe.asrock.com/manual/Z87M%20Extreme4.pdf
Documento: User Manual (Ingles)
Guıa de instalacion rapida. Z87 Extreme 4
URL: ftp://europe.asrock.com/manual/qig/Z87M%
20Extreme4_multiQIG.pdf
Documento: Quick Installation Guide (Varios idiomas)
B.2.2. Dimension Engineering
Manual de usuario. Sabertooth 2x32
URL: https://www.dimensionengineering.com/datasheets/
Sabertooth2x32.pdf
Documento: Sabertooth 2x32 (Ingles)
Guıa de inicio rapido. Sabertooth 2x32
URL: https://www.dimensionengineering.com/datasheets/
Sabertooth2x32QuickStart.pdf
Documento: Sabertooth 2x32 Quick Start Guide (Ingles)

142 ANEXO B. DOCUMENTACION TECNICA
Manual de usuario. Kangaroo x2
URL: https://www.dimensionengineering.com/datasheets/
KangarooManual.pdf
Documento: Sabertooth 2x32 Quick Start Guide (Ingles)
Guıa de instalacion. Kangaroo x2
URL: https://www.dimensionengineering.com/datasheets/
KangarooPackInInstructions.pdf
Documento: Kangaroo x2 Install Guide (Ingles)
Manual de la aplicacion DEScribe
URL: https://www.dimensionengineering.com/software/
DEScribe/html/ (Ingles)
B.2.3. FTDI Chip
Informacion tecnica
URL: http://www.ftdichip.com/Support/Documents/
DataSheets/Cables/DS_TTL-232R_CABLES.pdf
Documento: TTL to USB Serial Converter Range of Cables Datasheet (Ingles)
B.2.4. Hiwin
Informacion tecnica de las guıas lineales
URL: http://www.hiwin.com/pdf/lg/0809/Hiwin%20Linear%
20Guideway%20Catalog_G99TE13-0809.pdf
Documento: Linear Guideway. Technical information (Ingles)

B.2. GUIAS Y MANUALES 143
B.2.5. LG
Manual de usuario de Nexus 4
URL: http:
//www.lg.com/us/support-mobile/lg-LGE960#manuals
Documento: Nexus 4 Guidebook (Ingles)
B.2.6. Maxon Motor
Explicacion de los datos de los motores
URL: http://www.maxonmotor.es/medias/sys_master/root/
8804419469342/
DC-Das-wichtigste-ueber-maxonmotoren-11-DE-EN-ES-036-1.
pdf?attachment=true
Documento: Informacion clave sobre Maxon DC motor y EC motor (Aleman,
ingles y espanol)
Explicacion de los datos de los sensores
URL: http://www.maxonmotor.es/medias/sys_master/root/
8804422615070/
SENSOREN-Das-wichtigste-ueber-SENSOREN-11-DE-EN-ES-030-031.
pdf?attachment=true
Documento: Tecnologıa Maxon sensor (Aleman, ingles y espanol)
B.2.7. Samsung
Guıa de instalacion de Samsung SSD 840 EVO
URL: http:
//www.samsung.com/global/business/semiconductor/
minisite/SSD/downloads/document/Samsung_SSD_
Self-Install_Photo_Guide_for_Desktop_EN.pdf

144 ANEXO B. DOCUMENTACION TECNICA
Documento: Samsung SSD Self-Install Photo Guide for desktop computers
(Ingles)
Manual de usuario de Samsung Galaxy Tab3
URL: http://downloadcenter.samsung.com/content/UM/
201401/20140116044958454/GEN_GT-P5210_Galaxy_
Tab_3_English_JB_User_Manual_MFA_F4.pdf
Documento: Samsung Galaxy Tab3 Android Tablet User Manual (Ingles)
B.2.8. TP-Link
Guıa de usuario de TL-WR1042ND
URL: http://www.tp-link.es/resources/document/
TL-WR1042ND_V1_User_Guide_1910010928.pdf
Documento: User guide TL-WR1042ND (Ingles)

Anexo C
Esquemas de conexiones
Este anexo contiene un esquema detallado de conexiones del robot Andabata
donde se han dispuesto los elementos de forma que se pueda presentar la informacion
lo mas clara posible. Se han registrado de forma detallada todas las conexiones y el
color de cada cable representado en el esquema coincide con el real en el circuito.
En las tablas que aparecen a continuacion de los esquemas, se relacionan las
conexiones realizadas entre los motores, los codificadores y las controladoras y su
descripcion. Los nombres de los dispositivos aparecen codificados en las tablas de
la siguiente forma:
BAT Baterıa
BE Boton de emergencia
EDD Encoder delantero derecho
EDI Encoder delantero izquierdo
ETD Encoder trasero derecho
ETI Encoder trasero izquierdo
FA Fuente de alimentacion
IG Interruptor general de corte
KD Kangaroo x2 delantera
KT Kangaroo x2 trasera
MDD Motor delantero derecho
MDI Motor delantero izquierdo
MTD Motor trasero derecho
MTI Motor trasero izquierdo
145

146 ANEXO C. ESQUEMAS DE CONEXIONES
CSD Cable serie delantero TTL-232R
CST Cable serie trasero TTL-232R
SD Sabertooth 2x32 delantera
ST Sabertooth 2x32 trasera

Conjunto motor-encoder delantero derecho
BATERÍA
Interruptor general
F. Alimentac.V+V-
LÁSERMÓVIL
TRANSFORMADOR
Conjunto motor-encoder delantero izquierdo Conjunto motor-encoder trasero derecho Conjunto motor-encoder trasero izquierdo
1
1
2
2BOTÓN DE
EMERGENCIA
10 1 10 110 1 101
TTL-232R TTL-232R
ENCODER MOTOR ENCODER MOTORENCODERMOTOR ENCODERMOTOR
COMPUTADORA
Router

Sabertooth 2x32 Quick Start GuideCongratulations on your purchase of a Sabertooth 2x32 regenerative dual motor driver.
Sabertooth 2x32 is a highly flexible and configurable motor driver that supports a number
of operating modes. Basic configuration is done with the DIP switches. Advanced setup
is done using the Sabertooth 2x32’s USB port and a no cost PC program called DEScribe.
For the full product manual and DEScribe PC software www.dimensionengineering.com/products/sabertooth2x32
USB port this is used for setup or control
0V is internally connected to B-. It provides
a ground (GND) for control circuitry
5V is a regulated 5 volt supply generated
by the 2x32. 1 amp current max
S1 is a signal input
S2 is a signal input
A1 is an auxiliary signal input
A2 is an auxiliary signal input
P1 and P2 are power outputs. They are used
to clamp regenerative voltage, operate motor
brakes, or as extra power outputs. 8A max.
DIP Switches used to setup the Sabertooth 2x32
Status and Error LEDs indicate conditions
M2A and M2B connect to Motor 2
B- connects to the negative terminal of
your battery or power supply. It is
internally connected to the 0V terminal.
B+ connects to the positive terminal of
Your battery or power supply. Max voltage
30V nominal/33.6V absolute
M1A and M1B connect to Motor 1
Sabertooth 2x32 Operating Mode ReferenceOperating modes are selected with the DIP switches. More options are available using the DEScribe software
Analog Control Radio Control Serial Control USB Control
A complete description of each mode can be found in the manual
www.dimensionengineering.com/products/sabertooth2x32

Motor 1
with encoder
Limit
Switch
Normally
Closed
Motor 2
with encoder
Ground
Index
A
5 Volts
B
Ground
Index
A
5 Volts
B
|0V
|5V
|S1
|S2
|
M1A
|M1B
| B+
| B- |
M2A
|M2B
1 2 3 4 5 6
ON
Sabertooth
or SyRen
R/C
Re
ce
ive
r
Limit
Switch
Normally
Closed
Limit
Switch
Normally
Closed
Limit
Switch
Normally
Closed
Kangaroo x2 Sample Wiring Diagram
1 OFF: Analog Input.
Connect 0-5V analog signals to
the S1 and S2 inputs.
1 ON: Digital Input
R/C to S1 and S2 or connect
serial TX to S1 and RX to S2
2 OFF: Analog Feedback
Connect a 0-5V signal to
Feedback Input A
2 ON: Quadrature Feedback
Connect an encoder to Feedback
Inputs A and B
3 OFF: Velocity Control
Motor speed and direction are
controlled by the input signal
3 ON: Position Control
Motor position is controlled by
the input signal
4 OFF: Mixed Mode
The outputs are mixed together
for differential drive
4 on: Independent mode
The outputs are independent. S1
controls motor 1 and S2 motor 2
Operating mode DIP switch settingsC
H1
CH
2
For the full manual, example videos, libraries, serial protocols and
other documentation, please visit
www.dimensionengineering.com/kangaroo
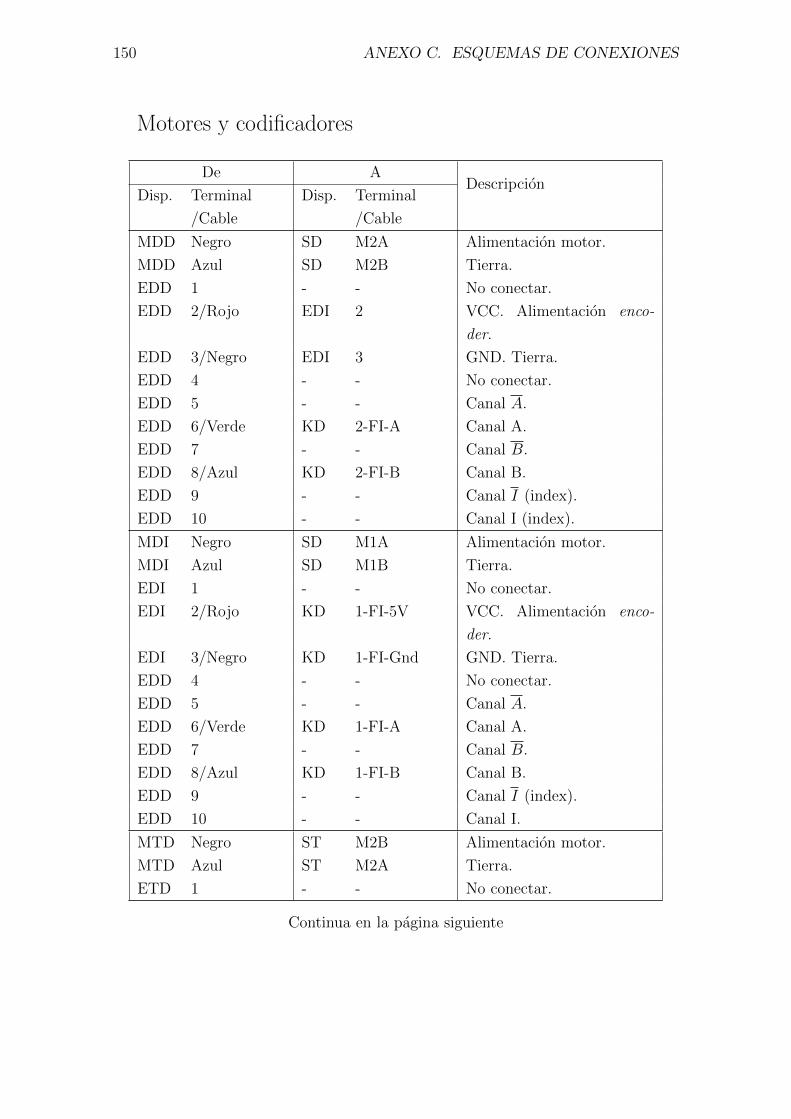
150 ANEXO C. ESQUEMAS DE CONEXIONES
Motores y codificadores
De ADescripcion
Disp. Terminal
/Cable
Disp. Terminal
/Cable
MDD Negro SD M2A Alimentacion motor.
MDD Azul SD M2B Tierra.
EDD 1 - - No conectar.
EDD 2/Rojo EDI 2 VCC. Alimentacion enco-
der.
EDD 3/Negro EDI 3 GND. Tierra.
EDD 4 - - No conectar.
EDD 5 - - Canal A.
EDD 6/Verde KD 2-FI-A Canal A.
EDD 7 - - Canal B.
EDD 8/Azul KD 2-FI-B Canal B.
EDD 9 - - Canal I (index).
EDD 10 - - Canal I (index).
MDI Negro SD M1A Alimentacion motor.
MDI Azul SD M1B Tierra.
EDI 1 - - No conectar.
EDI 2/Rojo KD 1-FI-5V VCC. Alimentacion enco-
der.
EDI 3/Negro KD 1-FI-Gnd GND. Tierra.
EDD 4 - - No conectar.
EDD 5 - - Canal A.
EDD 6/Verde KD 1-FI-A Canal A.
EDD 7 - - Canal B.
EDD 8/Azul KD 1-FI-B Canal B.
EDD 9 - - Canal I (index).
EDD 10 - - Canal I.
MTD Negro ST M2B Alimentacion motor.
MTD Azul ST M2A Tierra.
ETD 1 - - No conectar.
Continua en la pagina siguiente

151
De ADescripcion
Disp. Terminal
/Cable
Disp. Terminal
/Cable
ETD 2/Rojo ETI 2 VCC. Alimentacion enco-
der.
ETD 3/Negro ETI 3 GND. Tierra.
ETD 4 - - No conectar.
ETD 5 - - Canal A.
ETD 6/Verde KT 2-FI-A Canal A.
ETD 7 - - Canal B.
ETD 8/Azul KT 2-FI-B Canal B.
ETD 9 - - Canal I (index).
ETD 10 - - Canal I.
MTI Negro ST M1B Alimentacion motor.
MTI Azul ST M1A Tierra.
ETI 1 - - No conectar
ETI 2/Rojo KT 1-FI-5V VCC. Alimentacion enco-
der.
ETI 3/Negro KT 1-FI-Gnd GND. Tierra.
ETD 4 - - No conectar.
ETD 5 - - Canal A.
ETD 6/Verde KT 1-FI-A Canal A.
ETD 7 - - Canal B.
ETD 8/Azul KT 1-FI-B Canal B.
ETD 9 - - Canal I (index).
ETD 10 - - Canal I (index).
FI = Feedback Input
Ver Figura C.1

152 ANEXO C. ESQUEMAS DE CONEXIONES
Figura C.1: Asignacion de pin del codificador MR tipo L de 500ppv
Controladoras de motor
De ADescripcion
Disp. Terminal
/Cable
Disp. Terminal
/Cable
SD M1A MDI Negro Alimentacion motor.
SD M1B MDI Azul Tierra.
SD B+ IG-
BAT
Rojo Alimentacion motor.
SD B- BAT Gris Tierra.
SD M2A MDD Negro Alimentacion motor.
SD M2B MDD Azul Tierra.
SD µUSB - - Puerto micro USB
SD 0V KD s.c. Tierra.
SD 5V KD s.c. Alimentacion. Tension re-
gulada de 5V.
SD S1 KD s.c. Senal. RX en modo serie.
SD S2 KD s.c. Senal. TX en modo serie.
SD A1/Amarillo SD A2 Senal auxiliar.
SD A2/Amarillo BE 2 Senal auxiliar.
SD P1 - - Salida de potencia.
SD P2 - - Salida de potencia.
Continua en la pagina siguiente
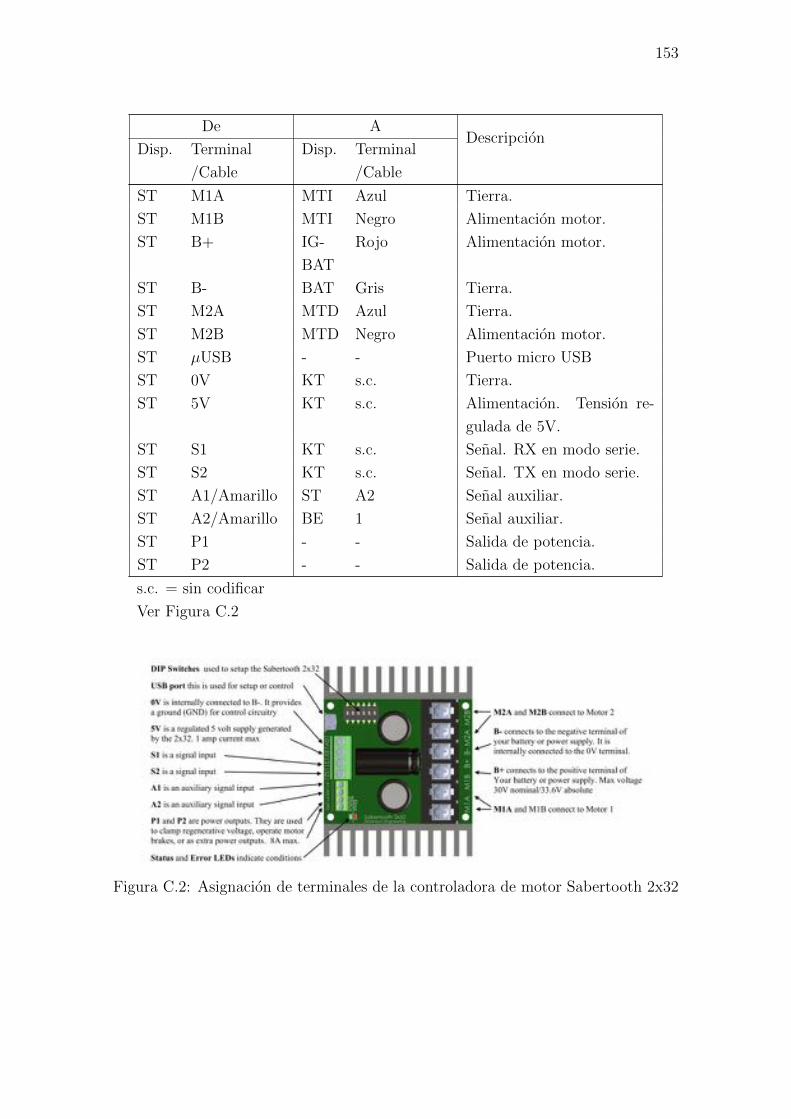
153
De ADescripcion
Disp. Terminal
/Cable
Disp. Terminal
/Cable
ST M1A MTI Azul Tierra.
ST M1B MTI Negro Alimentacion motor.
ST B+ IG-
BAT
Rojo Alimentacion motor.
ST B- BAT Gris Tierra.
ST M2A MTD Azul Tierra.
ST M2B MTD Negro Alimentacion motor.
ST µUSB - - Puerto micro USB
ST 0V KT s.c. Tierra.
ST 5V KT s.c. Alimentacion. Tension re-
gulada de 5V.
ST S1 KT s.c. Senal. RX en modo serie.
ST S2 KT s.c. Senal. TX en modo serie.
ST A1/Amarillo ST A2 Senal auxiliar.
ST A2/Amarillo BE 1 Senal auxiliar.
ST P1 - - Salida de potencia.
ST P2 - - Salida de potencia.
s.c. = sin codificar
Ver Figura C.2
Figura C.2: Asignacion de terminales de la controladora de motor Sabertooth 2x32

154 ANEXO C. ESQUEMAS DE CONEXIONES
Controladoras de movimiento
De ADescripcion
Disp. Terminal
/Cable
Disp. Terminal
/Cable
KD 0V CSD 1/Negro Tierra.
KD 5V BE 1/Gris Alimentacion. Tension re-
gulada de 5V.
KD S1 CSD 4/Naranja RX.
KD S2 CSD 5/Amarillo TX.
KD 1-FI-Gnd EDI 3/Negro Tierra.
KD 1-FI-I - - Canal I (index).
KD 1-FI-A EDI 6/Verde Canal A.
KD 1-FI-5V EDI 2/Rojo Alimentacion. Tension re-
gulada de 5V.
KD 1-FI-B EDI 8/Azul Canal B.
KD 1-L1 - - Terminal para interruptores
lımite.
KD 1-L2 - - Terminal para interruptores
lımite.
KD 2-FI-Gnd - - Tierra.
KD 2-FI-I - - Canal I (index).
KD 2-FI-A EDD 6/Verde Canal A.
KD 2-FI-5V - - Alimentacion. Tension re-
gulada de 5V
KD 2-FI-B EDD 8/Azul Canal B.
KD 2-L1 - - Terminal para interruptores
lımite.
KD 2-L2 - - Terminal para interruptores
lımite.
KT 0V CST 1/Negro Tierra.
KT 5V BE 2/Gris Alimentacion. Tension re-
gulada de 5V.
KT S1 CST 4/Naranja RX.
Continua en la pagina siguiente

155
De ADescripcion
Disp. Terminal
/Cable
Disp. Terminal
/Cable
KT S2 CST 5/Amarillo TX.
KT 1-FI-Gnd ETI 3/Negro Tierra.
KT 1-FI-I - - Canal I (index).
KT 1-FI-A ETI 6/Verde Canal A.
KT 1-FI-5V ETI 2/Rojo Alimentacion. Tension re-
gulada de 5V
KT 1-FI-B ETI 8/Azul Canal B.
KT 1-L1 - - Terminal para interruptores
lımite.
KT 1-L2 - - Terminal para interruptores
lımite.
KT 2-FI-Gnd - - Tierra.
KT 2-FI-I - - Canal I (index).
KT 2-FI-A ETD 6/Verde Canal A.
KT 2-FI-5V - - Alimentacion. Tension re-
gulada de 5V
KT 2-FI-B ETD 8/Azul Canal B.
KT 2-L1 - - Terminal para interruptores
lımite.
KT 2-L2 - - Terminal para interruptores
lımite.
FI = Feedback Input
Ver figura C.3

156 ANEXO C. ESQUEMAS DE CONEXIONES
Figura C.3: Asignacion de terminales de la controladora de movimiento Kangaroox2

Anexo D
Codigo de los programas
modificados
En este anexo se incluye el codigo de los programas que han sido modificados
para que el software de control de Andabata funcione correctamente.
control wheels
./codigo/control wheels.cpp
// Modificacion de control_wheels para adaptarlo a la
nueva controladora Kangaroo x2. La version anterior
del programa que funcionaba con la controladora de
Ingenieria Uno ahora se llama control_wheels (another
copy).cpp
// Se han incluido dos controladoras Kangaroo x2 , una
para las ruedas delanteras y otra para las traseras.
// Este nodo contiene el control final de las ruedas.
Recibe consignas de velocidades de las ruedas y aplica
un control proporcional (o no) a las ruedas. El nodo
lee los encoders a una frecuencia determinada y las
publica en un tema especifico. Tambien esta suscrito
a un tema donde se publican velocidades de forma que ,
157

158 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
cuando llega un nuevo mensaje a ese tema , ros lo
procesa y el nodo recibe esa velocidad.
// El modo de control es independiente , hay que darle
consignas a cada canal , siendo 1 el canal izquierdo y
2 el canal derecho. En total se tienen cuatro canales
, dos delanteros y dos traseros. Las ordenes de los
canales traseros llevan el sufijo t.
#include <ros/ros.h>
#include "serial/serial.h"
#include <boost/thread.hpp >
#include <andabata_msgs/WheelsRad.h>
#include <andabata_msgs/VelTelegram.h>
#include <iostream >
#include <sstream >
using std:: string;
using namespace std;
// ***** La clase HW contiene la declaracion de todas las
funciones que se van a necesitar para leer los
encoders y asignarles las ordenes de velocidad a la
controladora.
class HW
public:
HW(ros:: NodeHandle n);
~HW();
void change_velocity(const andabata_msgs ::
VelTelegram msg);
//std:: string translate_vel(int num);

159
void read_encoders(void);
//void read_encoders(const ros:: WallTimerEvent&
event);
void run();
bool mensaje_valido(std:: string mensaje);
int conv_mensaje(std:: string mensaje);
private:
ros:: NodeHandle n_ , np_ , np2_;
ros:: Subscriber sub_vel_;
ros:: Publisher pub_pulses_;
ros::Time last_measure_;
int pulse_turn_ , gear_gain_ , enc_lines;
int frec_enc_;
//El objeto serial que envia comandos a las ruedas
traseras tiene el sufijo t. El que no lleva
sufijo envia los comandos a las ruedas
delanteras.
serial :: Serial wheels_ , wheels_t;
boost :: mutex mtx_;
// andabata_msgs :: WheelsRad last_; // Contiene la
ultima medida de encoders , se usa este tipo por no
hacer una estructura o algo de eso.
;
// *****
// ***** Destructor de la clase , detiene el robot y
cierra la comunicacion con el puerto serie. Los

160 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
objetos con el sufijo t envian las ordenes a la
controladora trasera.
HW::~HW()
wheels_.write("1,powerdown\n"); // Apaga el motor y el
sistema de control. Permite leer posicion y
velocidad.
wheels_.write("2,powerdown\n");
wheels_t.write("1,powerdown\n");
wheels_t.write("2,powerdown\n");
wheels_.close ();
wheels_t.close ();
// ***** Fin del destructor de clase
// ***** Inicia el control de las ruedas. Este nodo se
suscribe a wheels_speed que contiene la velocidad de
las ruedas y utiliza el valor recibido del tema (topic
) para enviar un comando a la controladora y modificar
la velocidad de las ruedas. Tambien publica los
pulsos por segundo que obtiene al leer los encoders en
el tema wheels_angle.
HW::HW(ros:: NodeHandle n):
n_(n),
np_("~"),
np2_("~"),
pulse_turn_ (74000) ,
gear_gain_ (37),
enc_lines (500) ,
frec_enc_ (30)

161
sub_vel_ = n_.subscribe("/move/wheels_speed", 1, &HW::
change_velocity , this);
pub_pulses_ = n_.advertise <andabata_msgs ::WheelsRad >("
/move/wheels_angle", 50);
// Capturamos los parametros , si no se encuentran en
el parameter server se utilizan los valores
predefinidos.
int baudrate;
std:string device , device_t;
np_.param("/andabata_model/baudrate", baudrate , 9600);
np_.param <std::string >("/andabata_model/id", device ,"/
dev/control_ruedas");
np2_.param("/andabata_model/baudrate", baudrate , 9600)
;
np2_.param <std::string >("/andabata_model/id", device_t
,"/dev/control_ruedas_t");
cout << "Configuracion de la comunicacion serial y
apertura del puerto" << endl;
// Configuracion de la comunicacion serie. Se
inicializa la comunicacion serie: se establece el
puerto , la tasa de baudios , el tiempo muerto , el
resto de los parametros de la comunicacion serial y
se abre el puerto. Se hace para ambas
controladoras.
serial :: Timeout to=serial :: Timeout :: simpleTimeout
(1000);
wheels_.setPort(device);
wheels_.setBaudrate(baudrate);
wheels_.setTimeout(to);

162 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
wheels_.setParity(serial :: parity_none);
wheels_.setStopbits(serial :: stopbits_one);
wheels_.setBytesize(serial :: eightbits);
wheels_.setFlowcontrol(serial :: flowcontrol_none);
wheels_.open();
wheels_t.setPort(device_t);
wheels_t.setBaudrate(baudrate);
wheels_t.setTimeout(to);
wheels_t.setParity(serial :: parity_none);
wheels_t.setStopbits(serial :: stopbits_one);
wheels_t.setBytesize(serial :: eightbits);
wheels_t.setFlowcontrol(serial :: flowcontrol_none);
wheels_t.open();
// Se habilitan los canales de cada controladora.
wheels_.write("1,start\n");
wheels_.write("2,start\n");
wheels_t.write("1,start\n");
wheels_t.write("2,start\n");
// Para las pruebas se pone una velocidad al inicio.
En el nodo final estas lineas deben estar
comentadas , si no lo estan el robot se movera nada
mas iniciarse el nodo.
//std:: string as = "1,start\n";
//ros:: Duration (2).sleep ();
//as = "1,s4000\n";
// wheels_.write(as);
// wheels_.write ("2, s2000\n");
// wheels_t.write(as);
// wheels_t.write ("2, s2000\n");
last_measure_ = ros::Time::now();
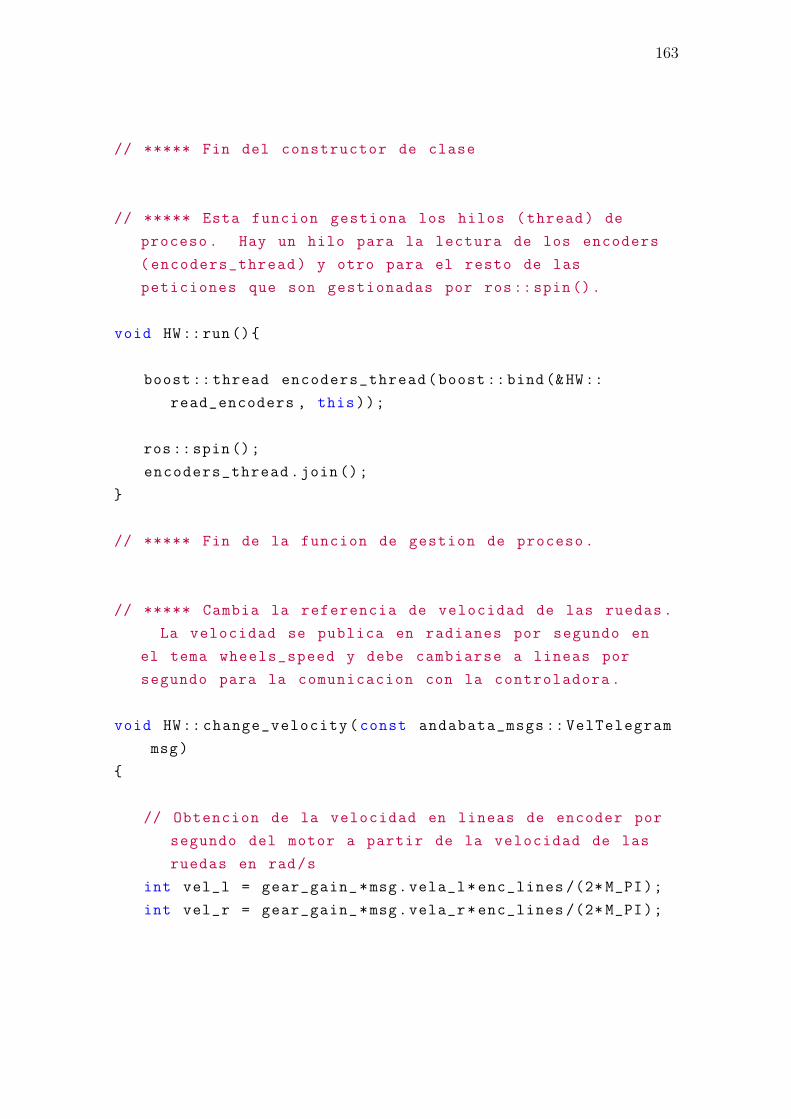
163
// ***** Fin del constructor de clase
// ***** Esta funcion gestiona los hilos (thread) de
proceso. Hay un hilo para la lectura de los encoders
(encoders_thread) y otro para el resto de las
peticiones que son gestionadas por ros::spin().
void HW::run()
boost :: thread encoders_thread(boost ::bind(&HW::
read_encoders , this));
ros::spin();
encoders_thread.join();
// ***** Fin de la funcion de gestion de proceso.
// ***** Cambia la referencia de velocidad de las ruedas.
La velocidad se publica en radianes por segundo en
el tema wheels_speed y debe cambiarse a lineas por
segundo para la comunicacion con la controladora.
void HW:: change_velocity(const andabata_msgs :: VelTelegram
msg)
// Obtencion de la velocidad en lineas de encoder por
segundo del motor a partir de la velocidad de las
ruedas en rad/s
int vel_l = gear_gain_*msg.vela_l*enc_lines /(2* M_PI);
int vel_r = gear_gain_*msg.vela_r*enc_lines /(2* M_PI);

164 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
try
std:: string order_l = "1,s";
std:: string order_r = "2,s";
std:: stringstream ss_l , ss_r;
ss_l << vel_l;
ss_r << vel_r;
order_l += ss_l.str();
order_r += ss_r.str();
order_l += "\n";
order_r += "\n";
//cout << "Orden izda.: " << order_l << endl;
//cout << "Orden dcha.: " << order_r << endl;
wheels_.write(order_l);
wheels_.write(order_r);
wheels_t.write(order_l);
wheels_t.write(order_r);
catch (exception &e)
printf("Unhandled Exception: %s", e.what());
// ***** Fin de la funcion de cambio de referencia de
velocidad.
// ***** Comprueba que todos los caracteres de un string
son numeros

165
//bool is_num(std:: string str , int ini = 0)
// bool correct = true;
// for (int i=ini; i<str.size(); i++)
// if (! isdigit(str[i]))
// correct = false;
//
// return correct;
//
// ***** Fin de la funcion de comprobacion
// ***** Validacion del mensaje leido mediante el puerto
serie. El mensaje que lee del puerto serie es de la
forma [numcanal],[letra ][ numero ][/r][/n][/r]. Como
leemos velocidades sera algo como 1,s2000 [/r][/n][/r].
Al final del mensaje siempre hay 3 caracteres no
imprimibles. Cuando hay algun tipo de error de la
controladora , la [letra] sera igual a E y [numero]
estara entre 1 y 6
bool HW:: mensaje_valido(std:: string mensaje)
bool valido = true;
int tam_mens = mensaje.size();
if (( tam_mens >= 6) and (mensaje.substr (2,1) != "E"))
for (int i=3; i<=tam_mens -3; i++)
if (! isdigit(mensaje[i])) valido = true;
else valido = false;
return valido;
// ***** Fin de la funcion de validacion

166 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
// ***** Conversion del mensaje a entero
int HW:: conv_mensaje(std:: string mensaje)
int lineas;
int tam_mens = mensaje.size();
std:: string lin_cad = mensaje.substr(3,tam_mens -5);
lineas = atoi(lin_cad.c_str ());
return lineas;
// ***** Fin de la conversion
// ***** Lectura de los encoders a una tasa frec_enc_
declarada en el constructor de clase
void HW:: read_encoders(void)
ros::Rate r(frec_enc_);
andabata_msgs :: WheelsRad msg;
// Limpia el buffer de lectura y escritura de los
puertos serie.
wheels_.flush ();
wheels_t.flush ();
while(ros::ok())
// Peticion de la velocidad del canal 1 delantero y
trasero
mtx_.lock();
wheels_.write("\n");
wheels_t.write("\n");
wheels_.write("1,gets\n");

167
wheels_t.write("1,gets\n");
// Lectura de una linea para cada puerto , hasta el
final de carro , correspondiente al canal 1
delantero y trasero , que contendra la velocidad
en lineas de encoder por segundo.
std:: string message1 = wheels_.readline (200,"\n");
std:: string message1_t = wheels_t.readline (200,"\n"
);
mtx_.unlock ();
// Peticion de la velocidad del canal 2 delantero y
trasero
mtx_.lock();
wheels_.write("\n");
wheels_t.write("\n");
wheels_.write("2,gets\n");
wheels_t.write("2,gets\n");
// Lectura de las lineas de cada puerto
std:: string message2 = wheels_.readline (200,"\n");
std:: string message2_t = wheels_t.readline (200,"\n"
);
mtx_.unlock ();
int pulses_l;
int pulses_r;
// Validacion y conversion del mensaje tipo texto
en un entero. Si el mensaje es correcto y se
realiza la conversion , el resultado es la
velocidad media del lado izquierdo y la
velocidad media del lado derecho.

168 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
if (mensaje_valido(message1) and mensaje_valido(
message1_t))
pulses_l = (conv_mensaje(message1)+conv_mensaje(
message1_t))/2;
if (mensaje_valido(message2) and mensaje_valido(
message2_t))
pulses_r = (conv_mensaje(message2)+conv_mensaje(
message2_t))/2;
// Convierte la velocidad en lineas por segundo a
radianes por segundo para publicarlas en el nodo
.
msg.ros_time = ros::Time::now();
int w_lines = gear_gain_*enc_lines;
msg.angle_r = pulses_r *2* M_PI/w_lines;
msg.angle_l = pulses_l *2* M_PI/w_lines;
pub_pulses_.publish(msg);
r.sleep ();
// ***** Fin de la funcion de lectura de los encoders.
int main(int argc , char** argv)

169
ros::init(argc , argv , "ruedas_test");
ros:: NodeHandle nh_teleop;
HW my(nh_teleop);
//El temporizador hace que se lean los encoders cada
0.3 segundos
//ros:: WallTimer timer_encoders=nh_teleop.
createWallTimer(ros:: WallDuration (0.3) , &HW::
read_encoders , &my);
//ros:: MultiThreadedSpinner spinner (0);
// spinner.spin();
// ros::spin();
my.run();

170 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
andabata model
./codigo/andabata model.cpp
// Contiene el modelo cinematico directo e inverso.
Transforma velocidades lineales y angulares en
velocidades de ruedas izquierda y derecha y al reves
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <andabata_msgs/WheelsRad.h>
#include <andabata_msgs/VelTelegram.h>
#include <geometry_msgs/Twist.h>
#include <iostream >
using std:: string;
using namespace std;
class HW
public:
HW(ros:: NodeHandle n);
~HW();
void run();
double limit(float num);
void change_velocity(const geometry_msgs :: Twist&
msg);
void odometry(const andabata_msgs :: WheelsRad& msg);
private:
ros:: NodeHandle n_;
ros:: Subscriber sub_vel_;
ros:: Subscriber sub_dist_;

171
ros:: Publisher pub_odom_;
ros:: Publisher pub_vel_;
andabata_msgs :: WheelsRad last_measure_;
double xIRC_ , alpha_ , motors_gain_ , wheel_radious_ ,
pulse_turn_;
double x_ , y_ , th_;
double v_max_;
;
HW::~HW()
HW::HW(ros:: NodeHandle n):
n_(n),
xIRC_ (0.449) ,
alpha_ (0.934) ,
wheel_radious_ (0.1) ,
x_ (0.0) ,
y_ (0.0) ,
th_ (0.0) ,
v_max_ (0.685) // 0.685 m/s o 6.85 rad/s de las ruedas
// Cambio de la velocidad maxima de las ruedas de 0.5 a
0.685
sub_vel_ = n_.subscribe("/move/velocity", 20, &HW::
change_velocity , this);
sub_dist_ = n_.subscribe("/move/wheels_angle", 20, &HW
::odometry , this);

172 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
pub_odom_ = n_.advertise <nav_msgs ::Odometry >("/
odometry/wheels", 50);
pub_vel_ = n_.advertise <andabata_msgs :: VelTelegram >("/
move/wheels_speed", 50);
void HW::run()
ros::spin();
// Para que no haya sobresaturacion
double HW:: limit(float num)
if (num > v_max_)
return v_max_;
else if (num < -v_max_)
return -v_max_;
else
return num;
// calcula y envia las velocidades de las ruedas para una
determinada velocidad lineal y angular
void HW:: change_velocity(const geometry_msgs :: Twist& msg)
double vx = msg.linear.x;
double wz = msg.angular.z;
cout << "vx: " << vx << "\twz: " << wz << endl;
// para que siga la trayectoria deseada , aunque sea
mas lento (curvatura constante)
if ((vx + xIRC_*wz) > v_max_) // me supongo alpha_ =
1 para ser conservador
float coef = (vx + xIRC_*wz)/v_max_;
cout << "coef: " << coef << endl;

173
vx = vx / coef;
wz = wz / coef;
cout << "vx: " << vx << "\twz: " << wz << endl;
double vel_l , vel_r;
double lineal = vx/alpha_;
double angular = wz*xIRC_/alpha_;
double diff = 0.0;
// Calculamos las velocidades de cada rueda para
que el robot mantenga la velocidad lineal y gire
la velocidad angular. El giro se hace de forma
diferencial , sumando a unas ruedas y restando a
las otras
if ((abs(lineal) + abs(angular)) > v_max_)
diff = abs(lineal) + abs(angular) - v_max_;
printf("lineal: %f \tangular: %f \tdiff. %f\n",
lineal , angular , diff);
if (lineal > 0) // adelante
printf("adelante - ");
if (angular > 0) // izquierda
printf("izquierda\n");
vel_l = lineal - abs(angular) - diff;
vel_r = limit(lineal + abs(angular));
else // derecha
printf("derecha\n");
vel_l = limit(lineal + abs(angular));
vel_r = lineal - abs(angular) - diff;
else // atras
printf("atras - ");
if (angular > 0) // izquierda
printf("izquierda\n");
vel_l = limit(lineal - abs(angular));
vel_r = lineal + abs(angular) + diff;

174 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
else // derecha
printf("derecha\n");
vel_l = lineal + abs(angular) + diff;
vel_r = limit(lineal - abs(angular));
andabata_msgs :: VelTelegram message;
// pasar de m/s a rad/s depende de las dimensiones de
la rueda
message.vela_l = vel_l/wheel_radious_;
message.vela_r = vel_r/wheel_radious_;
pub_vel_.publish(message);
// recibe los pulsos por cada rueda y calcula la
velocidad del robot
void HW:: odometry(const andabata_msgs :: WheelsRad& msg)
//La controladora antigua solo informaba de pulsos
pero las nuevas informan de pulsos por segundo (
velocidad) por lo que no haria falta calcular la
velocidad.
// double dt = (msg.ros_time - last_measure_.ros_time).
toSec ();
// last_measure_ = msg;
//La velocidad seria sencillamente este calculo.
double dist_r = msg.angle_r*wheel_radious_;
double dist_l = msg.angle_l*wheel_radious_;
double vel_l_actual = dist_l;
double vel_r_actual = dist_r;
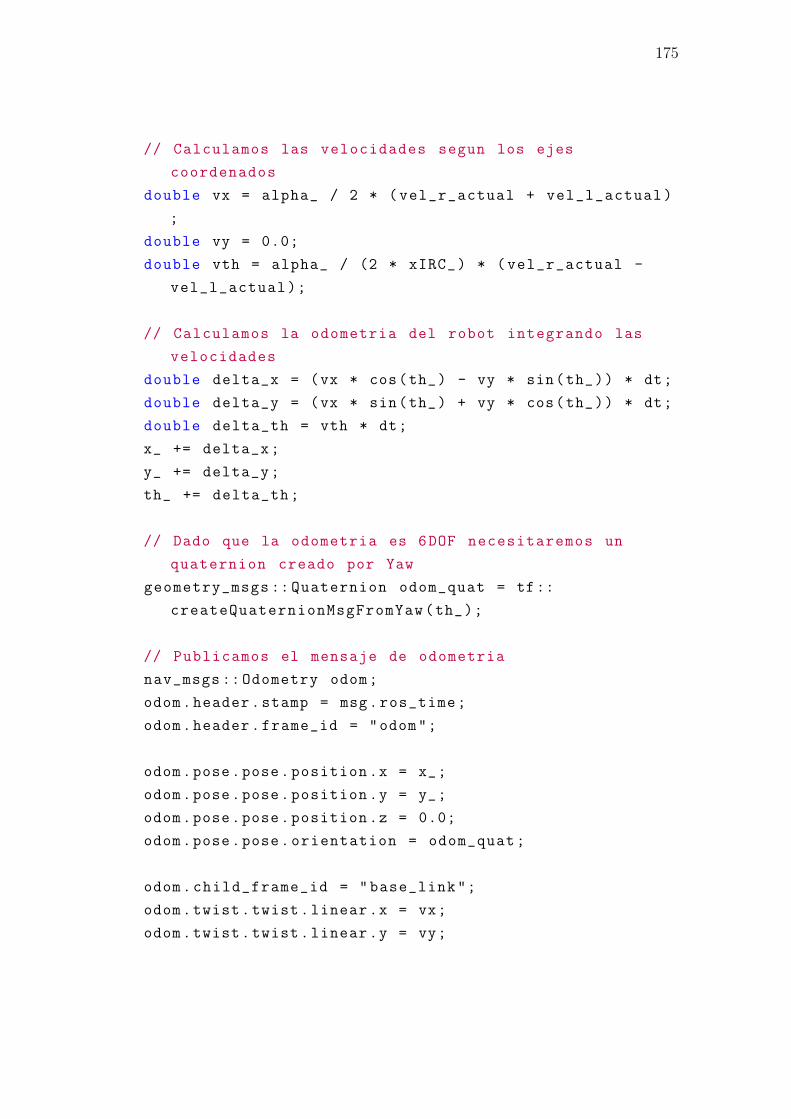
175
// Calculamos las velocidades segun los ejes
coordenados
double vx = alpha_ / 2 * (vel_r_actual + vel_l_actual)
;
double vy = 0.0;
double vth = alpha_ / (2 * xIRC_) * (vel_r_actual -
vel_l_actual);
// Calculamos la odometria del robot integrando las
velocidades
double delta_x = (vx * cos(th_) - vy * sin(th_)) * dt;
double delta_y = (vx * sin(th_) + vy * cos(th_)) * dt;
double delta_th = vth * dt;
x_ += delta_x;
y_ += delta_y;
th_ += delta_th;
// Dado que la odometria es 6DOF necesitaremos un
quaternion creado por Yaw
geometry_msgs :: Quaternion odom_quat = tf::
createQuaternionMsgFromYaw(th_);
// Publicamos el mensaje de odometria
nav_msgs :: Odometry odom;
odom.header.stamp = msg.ros_time;
odom.header.frame_id = "odom";
odom.pose.pose.position.x = x_;
odom.pose.pose.position.y = y_;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;

176 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
odom.twist.twist.angular.z = vth;
pub_odom_.publish(odom);
int main(int argc , char** argv)
ros::init(argc , argv , "andabata_model");
ros:: NodeHandle nh_teleop;
HW my(nh_teleop);
my.run();

177
joystick imu
./codigo/joystick imu.cpp
// decide , segun la posicion de la tableta , las
velocidades de las ruedas , utilizando los datos del
sensor imu.
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include "andabata_msgs/TwistID.h"
#include <math.h>
#include <ros/callback_queue.h>
#define joystick_n 2 // id del joystick en el sistema
#define dead_zone 10 // Zona muesta del sensor , tanto
en giro como en desplazamiento lineal
// Los comandos de velocidad se envian en porcentaje , por
lo tanto no se puede superar el 100
int limit(int num)
if (num > 100)
return 100;
else if (num < -100)
return -100;
else
return num;
// Esta funcion adapta el valor recibido al nuevo rango
creado por la zona muerta
int adapt_range(int num)
if (abs(num) < dead_zone)
return 0;
else
178 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
return (int)round ((num -dead_zone) * 100.0 / (100.0 -
dead_zone));
void vel(const sensor_msgs ::Imu msg)
static ros:: NodeHandle nh_teleop;
static ros:: Publisher pub_vel = nh_teleop.advertise <
andabata_msgs ::TwistID >("/move/joysticks", 10);
// Se guardan 10 valores para hacer un filtro mediante
la media
static int pos [3][10]=0,0,0,0,0,0,0,0,0,0,
70,70,70,70,70 ,70,70,70 ,70,70,
70 ,70 ,70 ,70 ,70 ,70 ,70 ,70 ,70 ,70;
static int i=0;
int sumx =0;
int sumy =0;
int sumz =0;
int vel_r , vel_l , diff;
// Adaptamos las medidas al rango de 0-100 y
eliminamos los decimales
int x = (int)round(msg.linear_acceleration.x * 10);
int y = (int)round(msg.linear_acceleration.y * 10);
int z = (int)round(msg.linear_acceleration.z * 10);
x = limit(x);
y = limit(y);
z = limit(z);
printf("
------------------------------------------------\n"
);

179
// Actualizamos el estado de los filtros
pos [0][i] = x;
pos [1][i] = y;
pos [2][i] = z;
for(int j=0; j<10; j++)
sumx+=pos [0][j];
sumy+=pos [1][j];
sumz+=pos [2][j];
// printf ("x: %i \ty: %i \tz: %i\n", x, y, z);
// printf ("sumx: %i \tsumy: %i \tsumz: %i\n", sumx ,
sumy , sumz);
i++;
if(i >=10)
i = 0;
// El avance y el giro estan desacoplados. El avance
lineal depende de los ejes z e y y el giro del eje
x
int lineal = (sumz - sumy)/10;
int angular = abs(sumx)/10;
// creamos la zona muerta
lineal = adapt_range(lineal);
angular = adapt_range(angular);
// Calculamos las velocidades de cada rueda para que
el robot mantenga la velocidad lineal y gire la
velocidad angular. El giro se hace de forma
diferencial , sumando a unas ruedas y restando a las
otras
if ((abs(lineal) + angular) > 100)
diff = abs(lineal) + angular -100;

180 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
else
diff = 0;
// printf (" lineal: %i \tangular: %i \tdiff. %i\n",
lineal , angular , diff);
if (lineal > 0) // adelante
// printf (" adelante - ");
if (sumx > 0) // izquierda
// printf (" izquierda\n");
vel_l = lineal - angular - diff;
vel_r = limit(lineal + angular);
else // derecha
// printf (" derecha\n");
vel_l = limit(lineal + angular);
vel_r = lineal - angular - diff;
else // atras
// printf (" atras - ");
if (sumx > 0) // izquierda
// printf (" izquierda\n");
vel_l = lineal + angular + diff;
vel_r = limit(lineal - angular);
else // derecha
// printf (" derecha\n");
vel_l = limit(lineal - angular);
vel_r = lineal + angular + diff;
// printf (" vel_i: %i\tvel_d: %i\n", vel_l , vel_r);
// la velocidad maxima tambien se utiliza en message.vel.
linear.x y message.vel.angular.z asi que se actualiza
su valor de 0.5 a 0.685
andabata_msgs :: TwistID message;
message.id = joystick_n;

181
message.vel.linear.x = 0.934/2*( vel_l + vel_r) *
0.685/100;
message.vel.angular.z = 0.934/2/0.449*( - vel_l + vel_r)
* 0.685/100;
printf("vx: %f \twz: %f\n", message.vel.linear.x,
message.vel.angular.z);
pub_vel.publish(message);
int main(int argc , char **argv)
ros::init(argc , argv , "joystick_imu");
ros:: NodeHandle nh_teleop;
ros:: Subscriber sub_sel = nh_teleop.subscribe("/
androidTablet/imu", 1, vel);
ros::Rate r(20);
while(ros::ok())
ros:: getGlobalCallbackQueue ()->callAvailable(ros::
WallDuration (0.01));
r.sleep ();
return 0;

182 ANEXO D. CODIGO DE LOS PROGRAMAS MODIFICADOS
joystick slider
./codigo/joystick slider.cpp
// Convierte la informacion que llega de los sliders de
la tableta en mensajes entendibles por el sistema
#include "ros/ros.h"
#include "std_msgs/Int16.h"
#include "andabata_msgs/WheelSpeed.h"
#include "andabata_msgs/TwistID.h"
#define joystick_n 1
// Necesitamos almacenar las velocidades de las ruedas ,
ya que solo recibimos los cambios y estos se
produciraan en una sola de las ruedas. El mensaje debe
de tener la velocidad deseada para ambas ruedas
int vel_l=0, vel_r =0;
void change_speed(const andabata_msgs :: WheelSpeed msg)
static ros:: NodeHandle nh_teleop;
static ros:: Publisher pub_vel = nh_teleop.advertise <
andabata_msgs ::TwistID >("/move/joysticks", 1);
if(!msg.wheel) // Rueda izquierda
vel_l = msg.speed; // Actualiza la
velocidad de la rueda
else // Rueda derecha
vel_r = msg.speed;
andabata_msgs :: TwistID message;
message.id = joystick_n;
// modelo * (conversion del rango [0 -100] a [0 -0.5]

183
// la velocidad maxima ha cambiado a por lo que el
rango es ahora de 0 a 0.685 , se cambia message.vel.
linear.x y message.vel.angular.z
message.vel.linear.x = 0.934/2*( vel_l + vel_r) *
0.685/100;
message.vel.angular.z = 0.934/2/0.449*( - vel_l + vel_r)
* 0.685/100;
printf("vx: %f \twz: %f\n", message.vel.linear.x,
message.vel.angular.z);
pub_vel.publish(message);
int main(int argc , char **argv)
ros::init(argc , argv , "joystick_slider");
ros:: NodeHandle nh_teleop;
ros:: Subscriber sub_vel = nh_teleop.subscribe("/
teleoperation/speed_slider", 1, change_speed);
ros::spin();
return 0;


Anexo E
Presupuesto
El presente presupuesto hace referencia a la construccion del robot movil Andaba-
ta. Este proyecto ha sido financiado con cargo a los fondos del Proyecto de Investi-
gacion de Excelencia de la Junta de Andalucıa P10-TEP-601-R [18].
No se han contabilizado las horas dedicadas por la alumna ni directores al desa-
rrollo del robot.
Elementos mecanicos
Bajo el concepto “Chasis tubular soldado en acero inoxidable” se incluyen las
ruedas, las bases de acero y la caja donde se ubica la electronica del robot movil
Andabata.
CONCEPTO CANTIDAD
PRECIO
UNITARIO
( )
PRECIO
TOTAL ( )
Patın HGW15ccc precarga Z0 8 39,11 312,88
Guıa rectificada HGR15R 4 33,57 134,28
Chasis tubular soldado en acero
inoxidable 3041 450,00 450,00
Importe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 897,16
I.V.A. (21%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188,40
Total construccion mecanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085,56
185

186 ANEXO E. PRESUPUESTO
Sistema motriz
En este apartado se engloban los elementos que hacen posible el movimiento del
robot Andabata.
CONCEPTO CANTIDAD
PRECIO
UNITARIO
( )
PRECIO
TOTAL ( )
Motor RE 150W+ Encoder MR
tipo L de Maxon4 448,64 2243,20
Sabertooth 2x32 2 108,84 217,68
Kangaroo x2 2 20,89 41,78
Reductora 37:1 5 425,00 2125,00
Importe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4627,66
I.V.A. (21%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 971,81
Total sistema motriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5599,47
Electronica y alimentacion
En este apartado del presupuesto se incluyen las baterıas del robot movil Andaba-
ta y la fuente de alimentacion del PC.
CONCEPTO CANTIDAD
PRECIO
UNITARIO
( )
PRECIO
TOTAL ( )
Electronica Andabata y
baterıas1 965,00 965,00
Fuente de alimentacion Sunpo-
wer SDX-425-G241 239,00 239,00
Importe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1204,00
I.V.A. (21%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252,84
Total electronica y alimentacion . . . . . . . . . . . . . . . . . . . . . . . . . 1456,84

187
Sistema informatico
Los conceptos considerados en este apartado son un telefono inteligente, una
tableta como estacion de teleoperacion, la computadora de abordo y el router.
CONCEPTO CANTIDAD
PRECIO
UNITARIO
( )
PRECIO
TOTAL ( )
PC y router D-Link 1 702,60 702,60
Smartphone LG 1 199 199
Tableta Samsung 1 397,60 397,60
Importe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1299,20
I.V.A. (21%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272,83
Total control y comunicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . 1572,03
Telemetro laser 3D
En este apartado se reflejan los gastos realizados para la compra del laser y su
posterior adaptacion para obtener un sensor tridimensional. Tambien se incluye en
esta seccion la construccion de la base donde se ubica.
CONCEPTO CANTIDAD
PRECIO
UNITARIO
( )
PRECIO
TOTAL ( )
Sensor laser 2D Hokuyo 1 3835,00 3835,00
Motorizacion y base para el sen-
sor1 4150,00 4150,00
Importe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7985,00
I.V.A. (21%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1676,85
Total laser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9661,85

188 ANEXO E. PRESUPUESTO
Totales
Por ultimo en esta seccion se resumen todos los conceptos y se presenta el importe
total del presupuesto empleado en la construccion y puesta en marcha del robot
movil Andabata.
CONCEPTO
IMPORTE
( )
I.V.A. (21%)
( ) TOTAL ( )
Elementos mecanicos 897,16 188,40 1085,56
Sistema motriz 4627,66 971,81 5599,47
Electronica y alimentacion 1204,00 252,84 1456,84
Sistema informatico 1299,20 272,83 1572,03
Telemetro laser 7985,00 1676,85 9661,85
Total presupuesto . . . . . . . . . . 16013,02 3362,73 19375,75

Referencias
[1] Antonio Javier Guerrero Angulo. ((Modelado e identificacion del sistema de
suspension pasiva del robot movil Andabata)). Proyecto Fin de Carrera. Es-
cuela Tecnica Superior de Ingenierıa Industrial. Universidad de Malaga, 2015.
[2] ARK Intel. Especificaciones de producto. 2015. url: http://ark.intel.
com/es-es/products/77656/Intel-Core-i7-4771-Processor-8M-Cache-
up-to-3_90-GHz (visitado 16-06-2015).
[3] ASRock. 2015. url: http://www.asrock.com/index.es.asp (visitado
09-06-2015).
[4] Isidor Buchmann. Battery University. 2015. url: http://batteryuniversi
ty.com/ (visitado 27-05-2015).
[5] Dimension Engineering. Robotics, radio control y power electronics. 2016.
url: https://www.dimensionengineering.com/ (visitado 18-01-2016).
[6] Foro Coches Electricos. Especial baterıas parte I: El ABC de las baterıas. 2015.
url: http://forococheselectricos.com/2013/02/especial-baterias-
parte-i-el-abc-de-las.html (visitado 31-05-2015).
[7] FTDI Chip. 2014. url: http://www.ftdichip.com/index.html (visitado
18-06-2014).
[8] Manuel Zafra Granados. ((Construccion de mapas de exteriores mediante oc-
trees para un robot movil equipado con un telemetro laser 3D)). Proyecto Fin
de Carrera. Escuela Tecnica Superior de Ingenierıa Industrial. Universidad de
Malaga, 2015.
[9] Hiwin. Motion control & Sistem technology. 2015. url: http://www.hiwin.
com/index.html (visitado 18-06-2015).
[10] HyperX. Kingston Technology. 2015. url: http://www.kingston.com/es/
hyperx/memory/fury (visitado 16-06-2015).
189

190 REFERENCIAS
[11] Ingenierıa UNO. 2015. url: www.ingenieriauno.com (visitado 14-05-2015).
[12] Intel. 2015. url: http://www.intel.es/content/www/es/es/homepage.
html (visitado 16-06-2015).
[13] LG. 2016. url: http://www.lg.com/us/cell-phones/lg-LGE960-nexus-4
(visitado 17-02-2016).
[14] Anthony Mandow, Jorge L. Martınez, Jesus Morales, Jose L. Blanco, Alfonso
Garcıa-Cerezo y Javier Gonzalez. ((Experimental kinematics for wheeled skid-
steer mobile robots)). En: Proc. of the IEEE/RSJ International Conference on
Intelligent Robots and Systems. San Diego, CA, 2007, pags. 1222-1227.
[15] Jorge L. Martınez, Jesus Morales, Antonio J. Reina, Anthony Mandow, Alejan-
dro Pequeno-Boter y Alfonso Garcıa-Cerezo. ((Construction and Calibration of
a Low-Cost 3D Laser Scanner with 360 Field of View for Mobile Robots)). En:
Proc. of the IEEE International Conference on Industrial Technology. Sevilla,
Espana, 2015, pags. 149-154.
[16] Maxon motor. 2014. url: http://www.maxonmotor.es (visitado 06-05-2014).
[17] Maxon motor. Tienda electronica. Especifıcaciones tecnicas de producto. 2015.
url: http://www.maxonmotor.es/maxon/view/catalog.
[18] P10-TEP-6101-R Navegacion autonoma de un robot movil 4x4 en entornos
naturales mediante GPS diferencial y telemetro laser tridimensional. Depar-
tamento de Ingenierıa de Sistemas y Automatica, Universidad de Malaga.
2014. url: http://www.uma.es/cms/base/ver/section/document/73618/
navegacion-autonoma-de-un-robot-movil-4x4/ (visitado 21-04-2014).
[19] Morgan Quigley, Brian Gerkey, Ken Conley, Josh Faust, Tully Foote, Jeremy
Leibs y col. ((ROS: an open-source Robot Operating System)). En: Proc.
Open-Source Software workshop of the International Conference on Robotics
and Automation (ICRA). 2009.
[20] Robot Platform. Wheel control theory. 2015. url: http://www.robotplatfo
rm.com/knowledge/Classification_of_Robots/wheel_control_theory.
html (visitado 19-05-2015).
[21] ROS - Robot Operating System. 2014. url: http://www.ros.org/ (visitado
21-04-2014).
[22] Solidworks. 2015. url: http://www.solidworks.es/ (visitado 20-05-2015).

REFERENCIAS 191
[23] Sunpower. 2015. url: http://www.sunpower.com.tw/index.asp (visitado
25-05-2015).
[24] ThermoAnalytics, total thermal solutions. HEV Vehicle Battery Types. 2015.
url: http://www.thermoanalytics.com/support/publications/battery
typesdoc.html.
[25] TP-Link. Productos LAN inalambrica. 2015. url: http://www.tp-link.es/
products/details/?model=TL-WR1042ND#fea (visitado 17-06-2015).
[26] Ubuntu. 2014. url: http://www.ubuntu.com/ (visitado 06-05-2014).
[27] Javier Valbuena Alonso. ((Remodelacion de los sistemas de alimentacion y
control en el robot Auriga-↵)). Proyecto Fin de Carrera. Escuela Tecnica
Superior de Ingenierıa Industrial. Universidad de Malaga, 2014.
[28] Wiki ROS. 2014. url: http://wiki.ros.org/ (visitado 18-01-2016).