Metastatic duodenal GIST: role of surgery combined with imatinib mesylate
Upload
khangminh22Category
view
7download
0
LoadsRenewable energy and microgrid
School of Integrated Technology, GIST
Prof. Yun-Su Kim

PAGE 2
Load models
• Currently used in industry
Source: A. Arif et al., “Load modeling–A review”, IEEE TSG vol. 9, no. 6, Nov. 2018
[For steady-state analysis] [For dynamic studies – active power] [For dynamic studies – reactive power]

PAGE 3
Static load models
• Expresses the characteristics of the load at any instant of time as
algebraic functions of bus voltage magnitude and frequency
• Exponential model
• With 𝑎𝑎 and 𝑏𝑏 = 0, 1, or 2 : constant power, constant current, or constant impedance
• For composite system loads,
• 𝑎𝑎 ranges between 0.5–1.8 and 𝑏𝑏 ranges between 1.5–6
Source: P. Kundur, “Power system stability and control”
𝑃𝑃 = 𝑃𝑃0 �𝑉𝑉 𝑎𝑎 𝑄𝑄 = 𝑄𝑄0 �𝑉𝑉 𝑏𝑏
Where �𝑉𝑉 = 𝑉𝑉𝑉𝑉0
and the subscript 0 represents the initial operating condition

PAGE 4
Static load models
• Polynomial (ZIP) model
• Widely used model
• Frequency dependency
• Represented by multiplying the exponential model or the ZIP model by a factor as:
• Typically 𝐾𝐾𝑝𝑝𝑝𝑝 ranges between 0–3.0 and 𝐾𝐾𝑞𝑞𝑝𝑝 ranges between -2.0–0
Source: P. Kundur, “Power system stability and control”
𝑃𝑃 = 𝑃𝑃0 𝑝𝑝1 �𝑉𝑉2 + 𝑝𝑝2 �𝑉𝑉 + 𝑝𝑝3 𝑄𝑄 = 𝑄𝑄0 𝑞𝑞1 �𝑉𝑉2 + 𝑞𝑞2 �𝑉𝑉 + 𝑞𝑞3
𝑃𝑃 = 𝑃𝑃0 �𝑉𝑉 𝑎𝑎 1 + 𝐾𝐾𝑝𝑝𝑝𝑝∆𝑓𝑓 𝑄𝑄 = 𝑄𝑄0 �𝑉𝑉 𝑏𝑏 1 + 𝐾𝐾𝑞𝑞𝑝𝑝∆𝑓𝑓
𝑃𝑃 = 𝑃𝑃0 𝑝𝑝1 �𝑉𝑉2 + 𝑝𝑝2 �𝑉𝑉 + 𝑝𝑝3 1 + 𝐾𝐾𝑝𝑝𝑝𝑝∆𝑓𝑓 𝑄𝑄 = 𝑄𝑄0 𝑞𝑞1 �𝑉𝑉2 + 𝑞𝑞2 �𝑉𝑉 + 𝑞𝑞3 1 + 𝐾𝐾𝑞𝑞𝑝𝑝∆𝑓𝑓
Where ∆𝑓𝑓 = 𝑓𝑓 − 𝑓𝑓0

PAGE 5
Dynamic load models
• Thermostatically controlled loads
Source: P. Kundur, “Power system stability and control”
Where
𝐾𝐾𝑃𝑃 : Proportional gain𝐾𝐾𝐼𝐼 : Integral gain𝐾𝐾𝑙𝑙 : Gain associated with load
model𝑇𝑇𝐶𝐶 , 𝑇𝑇𝑙𝑙 : Time constants𝜏𝜏𝑟𝑟𝑟𝑟𝑝𝑝 : Reference temperature𝜏𝜏𝐴𝐴 : Ambient temperature𝐺𝐺0 : Initial value of 𝐺𝐺𝐺𝐺𝑀𝑀𝐴𝐴𝑀𝑀 : Maximum value of 𝐺𝐺

PAGE 6
Dynamic load models
• Thermostatically controlled loads
• Dynamic equation of a heating device may be written as:
Source: P. Kundur, “Power system stability and control”
𝐾𝐾𝑑𝑑𝜏𝜏𝐻𝐻𝑑𝑑𝑑𝑑
= 𝑃𝑃𝐻𝐻 − 𝑃𝑃𝐿𝐿
Where
𝑃𝑃𝐻𝐻 = 𝐾𝐾𝐻𝐻𝐺𝐺𝑉𝑉2 : Power from the heater𝑃𝑃𝐿𝐿 = 𝐾𝐾𝐴𝐴 𝜏𝜏𝐻𝐻 − 𝜏𝜏𝐴𝐴 : Heat loss by escape to ambient area𝜏𝜏𝐻𝐻 : Temperature of heated area𝜏𝜏𝐴𝐴 : Ambient temperature𝐺𝐺 : Load conductance

PAGE 7
Dynamic load models
• Discharge lighting loads
• Include mercury vapour, sodium vapour, and fluorescent lamps
• Non-linear function of 𝑉𝑉
Source: P. Kundur, “Power system stability and control”

PAGE 8
Dynamic load models
• Induction motor
• ZIP + Induction motor
Source: A. Arif et al., “Load modeling–A review”, IEEE TSG vol. 9, no. 6, Nov. 2018

PAGE 9
Dynamic load models
• Composite loads – Complex load model
• Adopted by the Siemens PTI PSS/E program
Source: A. Arif et al., “Load modeling–A review”, IEEE TSG vol. 9, no. 6, Nov. 2018
PAGE 10
Dynamic load models
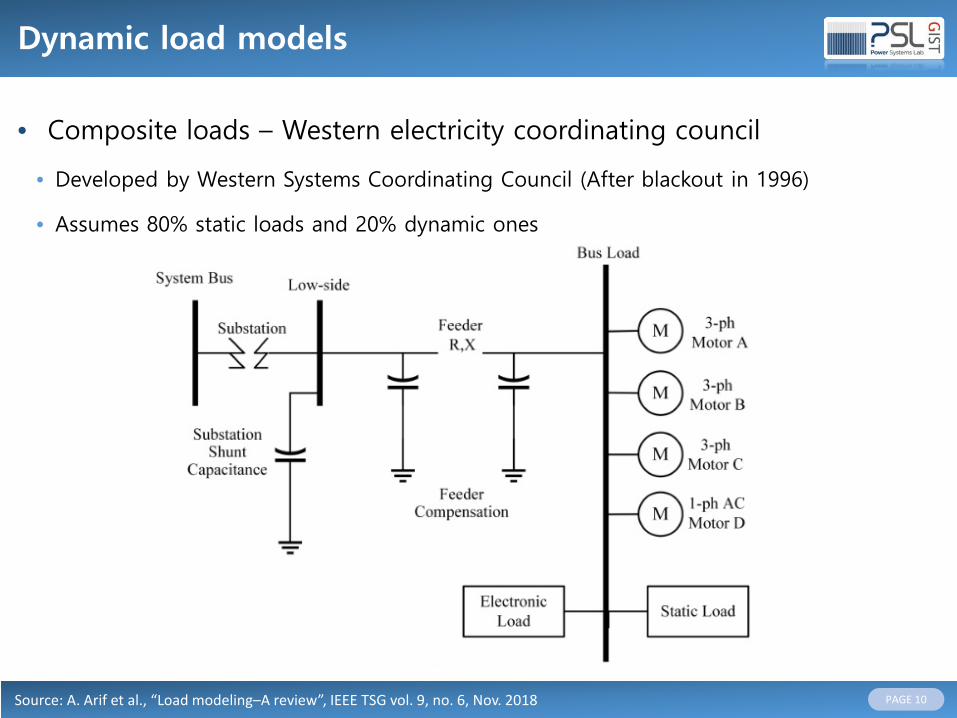
• Composite loads – Western electricity coordinating council
• Developed by Western Systems Coordinating Council (After blackout in 1996)
• Assumes 80% static loads and 20% dynamic ones
Source: A. Arif et al., “Load modeling–A review”, IEEE TSG vol. 9, no. 6, Nov. 2018

PAGE 11
Motors
• Consumes 60 – 70% of the total energy supplied by a power system
• Induction motors
• Synchronous motors
• Exactly same as the generators
Refer to- “Electric machinery” class

PAGE 12
Motors
• Induction machine
• Stator field rotating speed (at synchronous speed)
• Slip
𝑛𝑛𝑠𝑠 =120𝑓𝑓𝑠𝑠𝑝𝑝𝑝𝑝
[rpm]
Where 𝑝𝑝𝑝𝑝 : Number of poles (2 per 3-phase winding set)𝑓𝑓𝑠𝑠 : Frequency of 3-phase current
𝑠𝑠 =𝑛𝑛𝑠𝑠 − 𝑛𝑛𝑟𝑟𝑛𝑛𝑠𝑠
[per unit]
Where 𝑛𝑛𝑟𝑟 : Rotor speed

PAGE 13
Motors
• Induction machine
• Angle (see the figure) :
• Stator voltage equations:
• Rotor voltage equations:
𝜃𝜃 = 𝜔𝜔𝑟𝑟𝑑𝑑 [rad/s]
= 1 − 𝑠𝑠 𝜔𝜔𝑠𝑠𝑑𝑑 [rad/s]
𝑣𝑣𝑎𝑎 = 𝑝𝑝𝜓𝜓𝑎𝑎 + 𝑅𝑅𝑠𝑠𝑖𝑖𝑎𝑎𝑣𝑣𝑏𝑏 = 𝑝𝑝𝜓𝜓𝑏𝑏 + 𝑅𝑅𝑠𝑠𝑖𝑖𝑏𝑏𝑣𝑣𝑐𝑐 = 𝑝𝑝𝜓𝜓𝑐𝑐 + 𝑅𝑅𝑠𝑠𝑖𝑖𝑐𝑐
𝑣𝑣𝐴𝐴 = 𝑝𝑝𝜓𝜓𝐴𝐴 + 𝑅𝑅𝑟𝑟𝑖𝑖𝐴𝐴𝑣𝑣𝐵𝐵 = 𝑝𝑝𝜓𝜓𝐵𝐵 + 𝑅𝑅𝑠𝑠𝑖𝑖𝐵𝐵𝑣𝑣𝐶𝐶 = 𝑝𝑝𝜓𝜓𝐶𝐶 + 𝑅𝑅𝑠𝑠𝑖𝑖𝐶𝐶
Source: P. Kundur, “Power system stability and control”

PAGE 14
Motors
• Induction machine
• Flux linkages for stator phase a and rotor phase A: (similar to the other phases)
Let
With 𝑑𝑑𝑞𝑞 transformation: (where 𝐿𝐿𝑚𝑚 = 𝐿𝐿𝑎𝑎𝐴𝐴 × 3/2)
𝜓𝜓𝑎𝑎 = 𝐿𝐿𝑎𝑎𝑎𝑎𝑖𝑖𝑎𝑎 + 𝐿𝐿𝑎𝑎𝑏𝑏 𝑖𝑖𝑏𝑏 + 𝑖𝑖𝑐𝑐 + 𝐿𝐿𝑎𝑎𝐴𝐴 𝑖𝑖𝐴𝐴 cos𝜃𝜃 + 𝑖𝑖𝐵𝐵cos(𝜃𝜃 + 120°) + 𝑖𝑖𝐶𝐶cos(𝜃𝜃 − 120°)
𝐿𝐿𝑠𝑠𝑠𝑠 = 𝐿𝐿𝑎𝑎𝑎𝑎 − 𝐿𝐿𝑎𝑎𝑏𝑏
𝜓𝜓𝐴𝐴 = 𝐿𝐿𝐴𝐴𝐴𝐴𝑖𝑖𝐴𝐴 + 𝐿𝐿𝐴𝐴𝐵𝐵 𝑖𝑖𝐵𝐵 + 𝑖𝑖𝐶𝐶 + 𝐿𝐿𝑎𝑎𝐴𝐴 𝑖𝑖𝑎𝑎 cos𝜃𝜃 + 𝑖𝑖𝑏𝑏cos(𝜃𝜃 − 120°) + 𝑖𝑖𝑐𝑐cos(𝜃𝜃 + 120°)
𝐿𝐿𝑟𝑟𝑟𝑟 = 𝐿𝐿𝐴𝐴𝐴𝐴 − 𝐿𝐿𝐴𝐴𝐵𝐵
𝜓𝜓𝑎𝑎 = 𝐿𝐿𝑠𝑠𝑠𝑠𝑖𝑖𝑎𝑎 + 𝐿𝐿𝑎𝑎𝐴𝐴 𝑖𝑖𝐴𝐴 cos𝜃𝜃 + 𝑖𝑖𝐵𝐵cos(𝜃𝜃 + 120°) + 𝑖𝑖𝐶𝐶cos(𝜃𝜃 − 120°)
𝜓𝜓𝐴𝐴 = 𝐿𝐿𝑟𝑟𝑟𝑟𝑖𝑖𝐴𝐴 + 𝐿𝐿𝑎𝑎𝐴𝐴 𝑖𝑖𝑎𝑎 cos𝜃𝜃 + 𝑖𝑖𝑏𝑏cos(𝜃𝜃 − 120°) + 𝑖𝑖𝑐𝑐cos(𝜃𝜃 + 120°)
𝜓𝜓𝑑𝑑𝑠𝑠 = 𝐿𝐿𝑠𝑠𝑠𝑠𝑖𝑖𝑑𝑑𝑠𝑠 + 𝐿𝐿𝑚𝑚𝑖𝑖𝑑𝑑𝑟𝑟𝜓𝜓𝑞𝑞𝑠𝑠 = 𝐿𝐿𝑠𝑠𝑠𝑠𝑖𝑖𝑞𝑞𝑠𝑠 + 𝐿𝐿𝑚𝑚𝑖𝑖𝑞𝑞𝑟𝑟
𝜓𝜓𝑑𝑑𝑟𝑟 = 𝐿𝐿𝑟𝑟𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 + 𝐿𝐿𝑚𝑚𝑖𝑖𝑑𝑑𝑠𝑠𝜓𝜓𝑞𝑞𝑟𝑟 = 𝐿𝐿𝑟𝑟𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟 + 𝐿𝐿𝑚𝑚𝑖𝑖𝑞𝑞𝑠𝑠
Source: P. Kundur, “Power system stability and control”

PAGE 15
Motors
• Induction machine
• Stator and rotor voltages: (where 𝑝𝑝𝜃𝜃𝑟𝑟 = 𝑠𝑠𝜔𝜔𝑠𝑠)
• Electrical power and torque:
𝑝𝑝𝑠𝑠𝑝𝑝𝑟𝑟𝑟𝑟𝑑𝑑 dividing by − 𝑝𝑝𝜃𝜃𝑟𝑟 2/𝑝𝑝𝑝𝑝 , which is the rotor speed w.r.t. 𝑑𝑑𝑞𝑞 axes, gives:
𝑣𝑣𝑑𝑑𝑠𝑠 = 𝑅𝑅𝑠𝑠𝑖𝑖𝑑𝑑𝑠𝑠 − 𝜔𝜔𝑠𝑠𝜓𝜓𝑞𝑞𝑠𝑠 + 𝑝𝑝𝜓𝜓𝑑𝑑𝑠𝑠
𝑣𝑣𝑞𝑞𝑠𝑠 = 𝑅𝑅𝑠𝑠𝑖𝑖𝑞𝑞𝑠𝑠 + 𝜔𝜔𝑠𝑠𝜓𝜓𝑑𝑑𝑠𝑠 + 𝑝𝑝𝜓𝜓𝑞𝑞𝑠𝑠
𝑣𝑣𝑑𝑑𝑟𝑟 = 𝑅𝑅𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 − 𝑝𝑝𝜃𝜃𝑟𝑟 𝜓𝜓𝑞𝑞𝑟𝑟 + 𝑝𝑝𝜓𝜓𝑑𝑑𝑟𝑟
𝑣𝑣𝑞𝑞𝑟𝑟 = 𝑅𝑅𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟 + 𝑝𝑝𝜃𝜃𝑟𝑟 𝜓𝜓𝑑𝑑𝑟𝑟 + 𝑝𝑝𝜓𝜓𝑞𝑞𝑟𝑟
𝑝𝑝𝑠𝑠 =32 𝑣𝑣𝑑𝑑𝑠𝑠𝑖𝑖𝑑𝑑𝑠𝑠 + 𝑣𝑣𝑞𝑞𝑠𝑠𝑖𝑖𝑞𝑞𝑠𝑠 𝑝𝑝𝑟𝑟 =
32 𝑣𝑣𝑑𝑑𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 + 𝑣𝑣𝑞𝑞𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟
𝑝𝑝𝑠𝑠𝑝𝑝𝑟𝑟𝑟𝑟𝑑𝑑 =32 𝜓𝜓𝑑𝑑𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟 − 𝜓𝜓𝑞𝑞𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 𝑝𝑝𝜃𝜃𝑟𝑟 : Power associated with the speed voltage (𝑝𝑝𝜃𝜃𝑟𝑟)
𝑇𝑇𝑟𝑟 =32 𝜓𝜓𝑞𝑞𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 − 𝜓𝜓𝑑𝑑𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟
𝑝𝑝𝑝𝑝2
Source: P. Kundur, “Power system stability and control”

PAGE 16
Motors
• Induction machine
• Acceleration equation
• Steady-state characteristics
• Under steady-state, 𝑝𝑝𝜓𝜓 terms disappear, and by using previous equations:
𝑇𝑇𝑟𝑟 − 𝑇𝑇𝑚𝑚 = 𝐽𝐽𝑑𝑑𝜔𝜔𝑚𝑚𝑑𝑑𝑑𝑑
= 𝐽𝐽𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
Where 𝐽𝐽 : the moment of inertia of the rotor and the connected load𝜔𝜔𝑚𝑚 : Angular velocity or rotor [rad/s]
�𝑉𝑉𝑠𝑠 = 𝑅𝑅𝑠𝑠𝐼𝐼𝑠𝑠 + 𝑗𝑗𝜔𝜔𝑠𝑠𝐿𝐿𝑠𝑠𝑠𝑠𝐼𝐼𝑠𝑠 + 𝑗𝑗𝜔𝜔𝑠𝑠𝐿𝐿𝑚𝑚𝐼𝐼𝑟𝑟= 𝑅𝑅𝑠𝑠𝐼𝐼𝑠𝑠 + 𝑗𝑗𝜔𝜔𝑠𝑠 𝐿𝐿𝑠𝑠𝑠𝑠 − 𝐿𝐿𝑚𝑚 𝐼𝐼𝑠𝑠 + 𝑗𝑗𝜔𝜔𝑠𝑠𝐿𝐿𝑚𝑚 𝐼𝐼𝑠𝑠 + 𝐼𝐼𝑟𝑟= 𝑅𝑅𝑠𝑠𝐼𝐼𝑠𝑠 + 𝑗𝑗𝑋𝑋𝑠𝑠𝐼𝐼𝑠𝑠 + 𝑗𝑗𝑋𝑋𝑚𝑚 𝐼𝐼𝑠𝑠 + 𝐼𝐼𝑟𝑟
where �𝑉𝑉𝑠𝑠 = 𝑣𝑣𝑑𝑑𝑠𝑠 + 𝑗𝑗𝑣𝑣𝑞𝑞𝑠𝑠 / 2
Where 𝑋𝑋𝑠𝑠 = 𝜔𝜔𝑠𝑠(𝐿𝐿𝑠𝑠𝑠𝑠 − 𝐿𝐿𝑚𝑚) : stator leakage reactance𝑋𝑋𝑚𝑚 = 𝜔𝜔𝑠𝑠𝐿𝐿𝑚𝑚 : magnetizing reactance
Source: P. Kundur, “Power system stability and control”

PAGE 17
Motors
• Induction machine
• Steady-state characteristics (Cont’d)
• With the rotor circuits shorted, 𝑣𝑣𝑑𝑑𝑟𝑟 = 𝑣𝑣𝑞𝑞𝑟𝑟 = 0 :
• In phasor notation:
�𝑉𝑉𝑟𝑟 =𝑅𝑅𝑟𝑟𝑠𝑠𝐼𝐼𝑟𝑟 + 𝑗𝑗𝜔𝜔𝑠𝑠𝐿𝐿𝑟𝑟𝑟𝑟𝐼𝐼𝑟𝑟 + 𝑗𝑗𝜔𝜔𝑠𝑠𝐿𝐿𝑚𝑚𝐼𝐼𝑠𝑠
=𝑅𝑅𝑟𝑟𝑠𝑠𝐼𝐼𝑟𝑟 + 𝑗𝑗𝑋𝑋𝑟𝑟𝐼𝐼𝑟𝑟 + 𝑗𝑗𝑋𝑋𝑚𝑚(𝐼𝐼𝑠𝑠 + 𝐼𝐼𝑟𝑟)
Where 𝑋𝑋𝑟𝑟 = 𝜔𝜔𝑠𝑠(𝐿𝐿𝑟𝑟𝑟𝑟 − 𝐿𝐿𝑚𝑚) : rotor leakage reactance
𝑣𝑣𝑑𝑑𝑟𝑟 = 0 = 𝑅𝑅𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 − 𝑠𝑠𝜔𝜔𝑠𝑠(𝐿𝐿𝑟𝑟𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟 + 𝐿𝐿𝑚𝑚𝑖𝑖𝑞𝑞𝑠𝑠)
𝑣𝑣𝑞𝑞𝑟𝑟 = 0 = 𝑅𝑅𝑟𝑟𝑖𝑖𝑞𝑞𝑟𝑟 + 𝑠𝑠𝜔𝜔𝑠𝑠(𝐿𝐿𝑟𝑟𝑟𝑟𝑖𝑖𝑑𝑑𝑟𝑟 + 𝐿𝐿𝑚𝑚𝑖𝑖𝑑𝑑𝑠𝑠)
Source: P. Kundur, “Power system stability and control”

PAGE 18
Motors
• Induction machine
• Equivalent circuit (Single phase, Referred to the stator side)
• Can be derived from the phasor equations
Power transferred across the air-gap : 𝑃𝑃𝑎𝑎𝑎𝑎 = 𝑅𝑅𝑟𝑟𝑠𝑠𝐼𝐼𝑟𝑟2
Rotor resistance loss : 𝑃𝑃𝑙𝑙𝑟𝑟 = 𝑅𝑅𝑟𝑟𝐼𝐼𝑟𝑟2
Mechanical power transferred to the shaft : 𝑃𝑃𝑠𝑠𝑠 = 𝑃𝑃𝑎𝑎𝑎𝑎 − 𝑃𝑃𝑙𝑙𝑟𝑟
Source: P. Kundur, “Power system stability and control”

PAGE 19
Load characteristics
• ZIP coefficients for electrical appliances
Source: A. Arif et al., “Load modeling–A review”, IEEE TSG vol. 9, no. 6, Nov. 2018
𝑝𝑝1 𝑝𝑝2 𝑝𝑝3 𝑞𝑞1 𝑞𝑞2 𝑞𝑞3
[R1]
[R2]
[R3]
[R1] L. G. Swan and V. I. Ugursal, “Modeling of end-use energy consumption in the residential sector: A review of modeling techniques,” Renew. Sustain. Energy Rev., vol. 13, no. 8, pp. 1819–1835, 2009.
[R2] A. Bokhari et al., “Experimental determination of the ZIP coefficients for modern residential, commercial, and industrial loads,” IEEE Trans. Power Del., vol. 29, no. 3, pp. 1372–1381, Jun. 2013.
[R3] L. M. Hajagos and B. Danai, “Laboratory measurements and models of modern loads and their effect on voltage stability studies,” IEEE Trans. Power Syst., vol. 13, no. 2, pp. 584–592, May 1998.

PAGE 20
Load characteristics
• Component static characteristics
Source: P. Kundur, “Power system stability and control”

PAGE 21
Load characteristics
• Load class static characteristics
Source: P. Kundur, “Power system stability and control”

PAGE 22
Load characteristics
• Dynamic characteristics
• Induction motor
(i) The composite dynamic characteristics of a feeder supplying predominantly a
commercial load:
(ii) A large industrial motor:
(iii) A small industrial motor:
Source: P. Kundur, “Power system stability and control”
where m is the load torque exponent that affects slip-dependent rotor parameters: 𝑅𝑅𝑟𝑟 and 𝑋𝑋𝑟𝑟

PAGE 23
Modeling approach
Source: P. Kundur, “Power system stability and control”
Copyright © 2022 FDOKUMEN