Plaques Copy
11
Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 1 CHAPITRE 6 – ELEMENTS FINIS DE CONTRAINTES PLANES Nous nous intéressons au cas des structures continues planes, chargées dans leur plan, donc se déformant en restant planes. Nous pouvons parler de cas de contraintes planes quand ces structures, qui sont en fait des plaques de contour quelconque, possèdent une épaisseur faible devant les deux autres dimensions (voir figure 1). Cette propriété permet de considérer que les contraintes dans la direction normale au plan sont négligeables. Les problèmes où il existe un chargement susceptible de générer de la flexion transversale ne sont donc pas des problèmes à contraintes planes (pour ces problèmes, il faudra utiliser des éléments de la famille plaque ou coque). Dans ce chapitre, nous définissons la matrice de rigidité de l’élément de contrainte plane le plus simple, l’élément triangulaire à 3 nœuds, et nous donnons quelques informations sur les autres éléments existants. Plaque percée Ame d’une poutre Figure 1 – Exemples de structures sollicitées en contraintes planes 1 – RAPPEL DES PROPRIETES EN CONTRAINTES PLANES Nous utiliserons le plan (Oxy) comme plan moyen de la plaque. Nous rappelons que les hypothèses mises en place dans le cas des contraintes planes conduisent à considérer que : 0 σ σ σ zy zx zz = = = , soit encore : 0 ε ε zy zx = = . La composante zz ε n’est pas nulle mais peut se déduire des autres termes par : ( ) ( ) yy xx yy xx zz ε ε ν - 1 ν σ σ E ν ε + − = + − = . Au cours de la déformation, une fibre transversale (prise dans la direction z), subit : - une translation u dans la direction x - une translation v dans la direction y - une dilatation zz ε dans la direction z. Dans le cadre d’une formulation matricielle, nous avons : [ ] xy yy xx T σ σ σ σ = [ ] xy yy xx T ε 2 ε ε ε = , zz ε se déduisant des autres termes
-
Upload
independent -
Category
Documents
-
view
6 -
download
0
Transcript of Plaques Copy

Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 1
CHAPITRE 6 – ELEMENTS FINIS DE CONTRAINTES PLANES Nous nous intéressons au cas des structures continues planes, chargées dans leur plan, donc se déformant en restant planes. Nous pouvons parler de cas de contraintes planes quand ces structures, qui sont en fait des plaques de contour quelconque, possèdent une épaisseur faible devant les deux autres dimensions (voir figure 1). Cette propriété permet de considérer que les contraintes dans la direction normale au plan sont négligeables. Les problèmes où il existe un chargement susceptible de générer de la flexion transversale ne sont donc pas des problèmes à contraintes planes (pour ces problèmes, il faudra utiliser des éléments de la famille plaque ou coque). Dans ce chapitre, nous définissons la matrice de rigidité de l’élément de contrainte plane le plus simple, l’élément triangulaire à 3 nœuds, et nous donnons quelques informations sur les autres éléments existants.
Plaque percée Ame d’une poutre
Figure 1 – Exemples de structures sollicitées en contraintes planes 1 – RAPPEL DES PROPRIETES EN CONTRAINTES PLANES Nous utiliserons le plan (Oxy) comme plan moyen de la plaque. Nous rappelons que les hypothèses mises en place dans le cas des contraintes planes conduisent à considérer que :
0σσσ zyzxzz === , soit encore : 0εε zyzx == . La composante zzε n’est pas nulle mais peut se
déduire des autres termes par : ( ) ( )yyxxyyxxzz εεν-1νσσ
Eνε +−=+−= .
Au cours de la déformation, une fibre transversale (prise dans la direction z), subit : - une translation u dans la direction x - une translation v dans la direction y - une dilatation zzε dans la direction z. Dans le cadre d’une formulation matricielle, nous avons :
[ ]xyyyxxT σσσσ =
[ ]xyyyxxT ε2εεε = , zzε se déduisant des autres termes
Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 2
[ ]vuUT =
∂∂∂∂∂∂
∂∂=
xyy0
0xC et
( )
−−
=2ν100
01ν0ν1
ν1ED 2
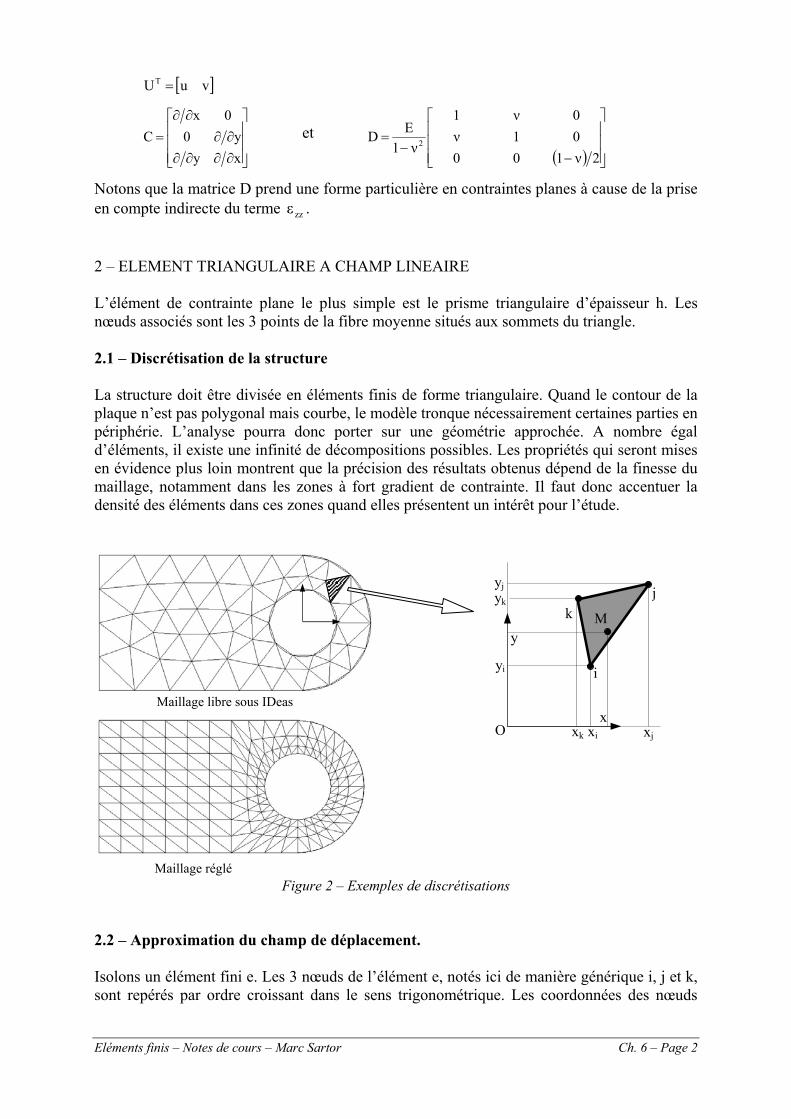
Notons que la matrice D prend une forme particulière en contraintes planes à cause de la prise en compte indirecte du terme zzε . 2 – ELEMENT TRIANGULAIRE A CHAMP LINEAIRE L’élément de contrainte plane le plus simple est le prisme triangulaire d’épaisseur h. Les nœuds associés sont les 3 points de la fibre moyenne situés aux sommets du triangle. 2.1 – Discrétisation de la structure La structure doit être divisée en éléments finis de forme triangulaire. Quand le contour de la plaque n’est pas polygonal mais courbe, le modèle tronque nécessairement certaines parties en périphérie. L’analyse pourra donc porter sur une géométrie approchée. A nombre égal d’éléments, il existe une infinité de décompositions possibles. Les propriétés qui seront mises en évidence plus loin montrent que la précision des résultats obtenus dépend de la finesse du maillage, notamment dans les zones à fort gradient de contrainte. Il faut donc accentuer la densité des éléments dans ces zones quand elles présentent un intérêt pour l’étude.
Figure 2 – Exemples de discrétisations 2.2 – Approximation du champ de déplacement. Isolons un élément fini e. Les 3 nœuds de l’élément e, notés ici de manière générique i, j et k, sont repérés par ordre croissant dans le sens trigonométrique. Les coordonnées des nœuds
Maillage libre sous IDeas
Maillage réglé
O
i
jk M
xi xj
yi
yj
y
xk
yk
x

Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 3
dans le repère global sont notées : (xi , yi) pour le nœud i, (xj , yj) pour le nœud j et (xk , yk) pour le nœud k. Nous utilisons ici directement le repère global de la structure et non un repère local de l’élément.
i
jk
M
ui
y, v
vk
u
uj uk
v
vj
vi
x, u Figure 3 – Déplacements
Le point courant M, de coordonnées (x , y) dans le repère global subit un déplacement U de composantes (u , v). Le vecteur des déplacements nodaux de l’élément est :
[ ]kkjjiieT vuvuvuq =
Pour établir une relation entre U et qe, nous devons, à ce stade, définir une approximation du champ des déplacements à l’intérieur de l’élément e. La solution la plus simple est celle qui s’appuie sur deux polynômes du premier degré :
( )( )
++=++=
yaxaayx,vyaxaayx,u
543
210 (1)
Nous avons introduit autant de coefficients inconnus ah qu’il y a de déplacements nodaux, il est donc possible d’établir leurs expressions. Les relations de départ sont :
++=++=++=++=++=++=
k5k43k
k2k10k
j5j43j
j2j10j
i5i43i
i2i10i
yaxaavyaxaauyaxaavyaxaauyaxaavyaxaau
La résolution de ce système linéaire et la substitution des coefficients ah dans l’équation (1) conduit à la relation suivante, de la forme U = A qe :
=
k
k
j
j
i
i
vuvuvu
N30N20N100N30N20N1
vu
où N1, N2 et N3 sont trois fonctions d’interpolation définies par :

Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 4
( ) ( ) ( )[ ]( ) ( ) ( )[ ]( ) ( ) ( )[ ]
−+−+−=−+−+−=−+−+−=
∆yxxxyyyxyxy,xN3∆yxxxyyyxyxy,xN2∆yxxxyyyxyxy,xN1
ijjiijji
kiikkiik
jkkjjkkj
et ( ) ( ) ( )ijjikiikjkkj yxyxyxyxyxyx −+−−−=∆ . ∆ représente l’aire du triangle i-j-k. Remarque. Il faut noter que le champ des déplacements que nous obtiendrons sur l’ensemble de la structure sera continu au passage de la frontière entre deux éléments, et cela quelles que soient les valeurs prises par les déplacements nodaux. En effet, si on considère un point M appartenant à une frontière, on peut montrer à partir des résultats ci-avant que les déplacements u et v de M dépendent des déplacements de seulement deux nœuds, ceux qui bornent cette frontière. Par exemple, si M est pris sur le coté i-j, alors u et v dépendent seulement de ui, vi, uj et vj (et pas de uk et vk car N3 = 0). Cette propriété est également vérifiée dans l’élément adjacent, d’où la continuité du champ. 2.3 – Déformations et contraintes. La relation déformations-déplacements ε = C U s’écrit dans ce cas :
∂∂∂∂∂∂
∂∂=
∂∂∂∂∂∂
∂∂=
k
k
j
j
i
i
xy
yy
xx
vuvuvu
N30N20N100N30N20N1
xyy0
0x
vu
xyy0
0x
ε2εε
d’où la relation suivante, de la forme ε = B qe :
=
k
k
j
j
i
i
x,y,x,y,x,y,
y,y,y,
x,x,x,
xy
yy
xx
vuvuvu
N3N3N2N2N1N1N30N20N10
0N30N20N1
ε2εε
−−−−−−−−−
−−−
∆=
k
k
j
j
i
i
jiijikkikjjk
ijkijk
jiikkj
xy
yy
xx
vuvuvu
yyxxyyxxyyxxxx0xx0xx0
0yy0yy0yy1
ε2εε
Notons que les termes de la matrice B ne dépendent plus ni de x, ni de y. La loi de Hooke σ = D ε s’écrit :
( )
−−
=
xy
yy
xx
2
xy
yy
xx
ε2εε
2ν10001ν0ν1
ν1E
σσσ

Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 5
d’où la relation suivante, de la forme σ = D B qe :
( ) ( )
−−−−−−−−−
−−−
−∆−
=
k
k
j
j
i
i
jiijikkikjjk
ijkijk
jiikkj
2
xy
yy
xx
vuvuvu
yyxxyyxxyyxxxx0xx0xx0
0yy0yy0yy
2ν10001ν0ν1
ν1E
σσσ
Remarque. N1, N2 et N3 étant des fonctions linéaires de x et de y, les termes N1,x, N1,y… et N3,y ne dépendent plus de x et de y. En conséquence, les déformations et les contraintes obtenues par cette approche seront uniformes dans tout l’élément. Contrairement aux déplacements, les déformations et les contraintes ne seront pas continues au passage de la frontière entre deux éléments. 2.4 – Matrice de rigidité de l’élément. Rappelons que la matrice de rigidité Ke de l’élément e est définie par la relation :
eeTe
V
Te qKq21dvεσ
21W == ∫ (2)
où We est l’énergie de déformation de l’élément. Sachant que σT = qeT BT D et ε = B qe , la relation (2) induit, de manière générique, que :
( )∫∫∫=V
Te dvBDBK
Dans notre cas, les termes de B et D étant indépendants de x et y, nous avons :
( ) ( )BDB∆hdydxhBDBK T
∆
Te == ∫∫
Tous calculs faits, la matrice de rigidité élémentaire peut être mise sous la forme suivante : eC
eN
e KKK += où e
NK représente la rigidité due aux contraintes normales et eCK celle due au cisaillement :
( )
( )( )( ) ( )( )( ) ( )( ) ( )( )( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( )( ) ( )( ) ( )( ) ( )
−−−−−−−−−−−−−−−−−−−−
−−−−−−−−−−−−
−−−−
−=
2ijijkiijjkijjiijikijkj
2kikijkkijikiikkikj
2jkjkjijkikjkkj
2jijiikjikj
2ikikkj
2kj
2eN
xxxxxxxxxxxxyyνxxyyνxxyyνxxxxxxxxyyνxxyyνxxyyν
xxxxyyνxxyyνxxyyνyyyyyyyyyy
yyyyyySYMyy
ν1∆4hEK
( )
( )( )( ) ( )( )( ) ( )( ) ( )( )( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( )( ) ( )( ) ( )( ) ( )
−−−−−−−−−−−−−−−−−−−−
−−−−−−−−−−−−
−−−−
+=
2jijiikjikjjiijjikijijk
2ikikkjikijikkiikjk
2kjkjijkjkikjjk
2ijijkiijjk
2kikijk
2jk
eC
yyyyyyyyyyyyxxyyxxyyxxyyyyyyyyxxyyxxyyxx
yyyyxxyyxxyyxxxxxxxxxxxx
xxxxxxSYMxx
ν1∆8hEK
Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 6
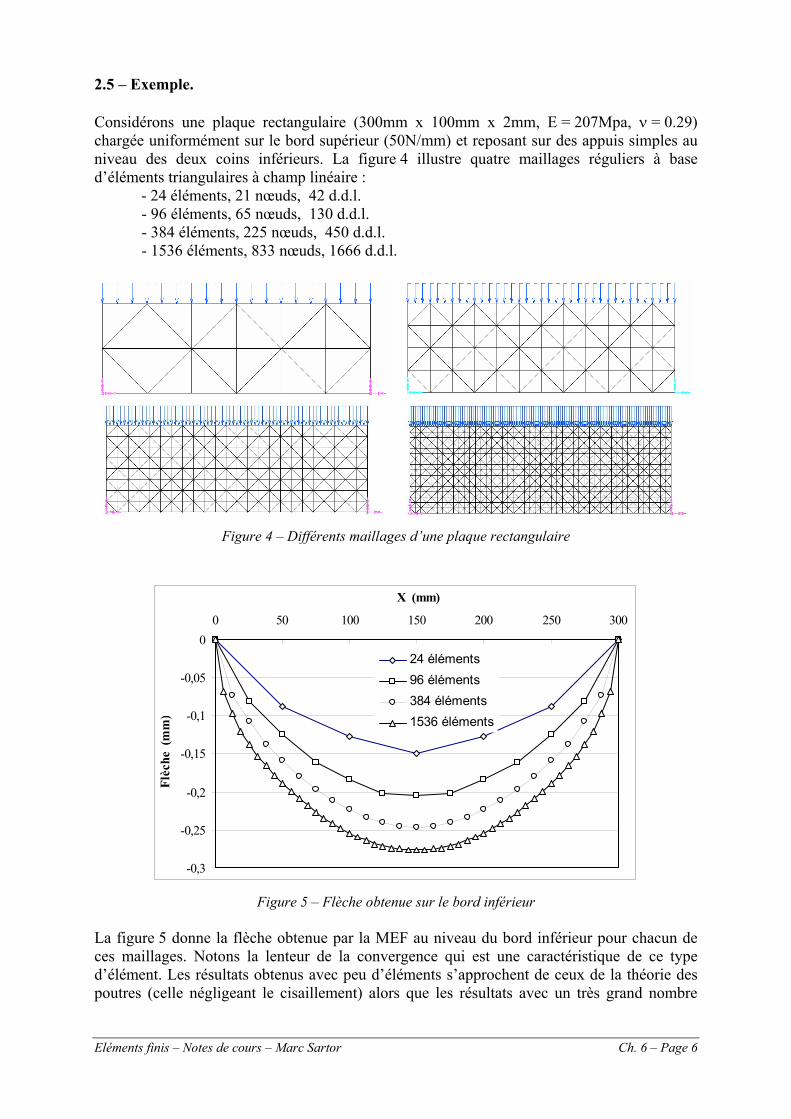
2.5 – Exemple. Considérons une plaque rectangulaire (300mm x 100mm x 2mm, E = 207Mpa, ν = 0.29) chargée uniformément sur le bord supérieur (50N/mm) et reposant sur des appuis simples au niveau des deux coins inférieurs. La figure 4 illustre quatre maillages réguliers à base d’éléments triangulaires à champ linéaire :
- 24 éléments, 21 nœuds, 42 d.d.l. - 96 éléments, 65 nœuds, 130 d.d.l. - 384 éléments, 225 nœuds, 450 d.d.l. - 1536 éléments, 833 nœuds, 1666 d.d.l.
Figure 4 – Différents maillages d’une plaque rectangulaire
-0,3
-0,25
-0,2
-0,15
-0,1
-0,05
00 50 100 150 200 250 300
X (mm)
Flèc
he (
mm
)
24 éléments96 éléments384 éléments1536 éléments
Figure 5 – Flèche obtenue sur le bord inférieur
La figure 5 donne la flèche obtenue par la MEF au niveau du bord inférieur pour chacun de ces maillages. Notons la lenteur de la convergence qui est une caractéristique de ce type d’élément. Les résultats obtenus avec peu d’éléments s’approchent de ceux de la théorie des poutres (celle négligeant le cisaillement) alors que les résultats avec un très grand nombre

Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 7
d’éléments tendent vers ceux obtenus par la théorie de l’élasticité. Remarquons que les déplacements augmentent quand le maillage s’affine. Nous pouvons en conclure que plus le maillage est grossier, plus la MEF sous-estime les déplacements. 3 – ELEMENT TRIANGULAIRE A CHAMP QUADRATIQUE Nous présentons brièvement un élément triangulaire de contrainte plane un peu plus sophistiqué. Celui-ci possède 6 nœuds : 3 situés aux sommets du triangle, les 3 autres aux milieux des trois côtés.
i
j
k
M
y, v v
x, u
u
l m
n
Figure 6 – Elément triangulaire à champ quadratique
Comme dans le cas précédent, le point courant M subit un déplacement U de composantes (u , v). Le vecteur des déplacements nodaux de l’élément est :
[ ]nnmmllkkjjiieT vuvuvuvuvuvuq =
Nous pouvons dans ce cas utiliser une interpolation quadratique des déplacements à l’intérieur de l’élément :
( )( )
+++++=+++++=
21110
29876
254
23210
yayxaxayaxaayx,vyayxaxayaxaayx,u
(1)
Les douze coefficients inconnus ah s’expriment de façon unique en fonction des douze déplacements nodaux. Nous pouvons mettre en place la relation U = A qe où la matrice d’interpolation A est de la forme :
=
N60N50N40N30N20N100N60N50N40N30N20N1
A
Les six fonctions d’interpolation N1, N2… N6 sont dans ce cas des fonctions quadratiques (second degré) de x et y. Leur nature fait que la continuité du champ U des déplacements au passage de la frontière entre deux éléments adjacents est obtenue. ε, σ et D sont de la même nature que dans le cas précédent. Par contre, la matrice B = D C s’écrit ici :
=
x,y,x,y,x,y,x,y,x,y,x,y,
y,y,y,y,y,y,
x,x,x,x,x,x,
N6N6N5N5N4N4N3N3N2N2N1N1N60N50N40N30N20N10
0N60N50N40N30N20N1B
Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 8
Les coefficients de cette matrice sont des fonctions linéaires de x et y. Les déformations et les contraintes obtenues par cette formulation varient donc linéairement à l’intérieur de chaque élément. De ce fait, les termes de la matrice ( ) dydxhBDBK
∆
Te ∫∫= ont des expressions
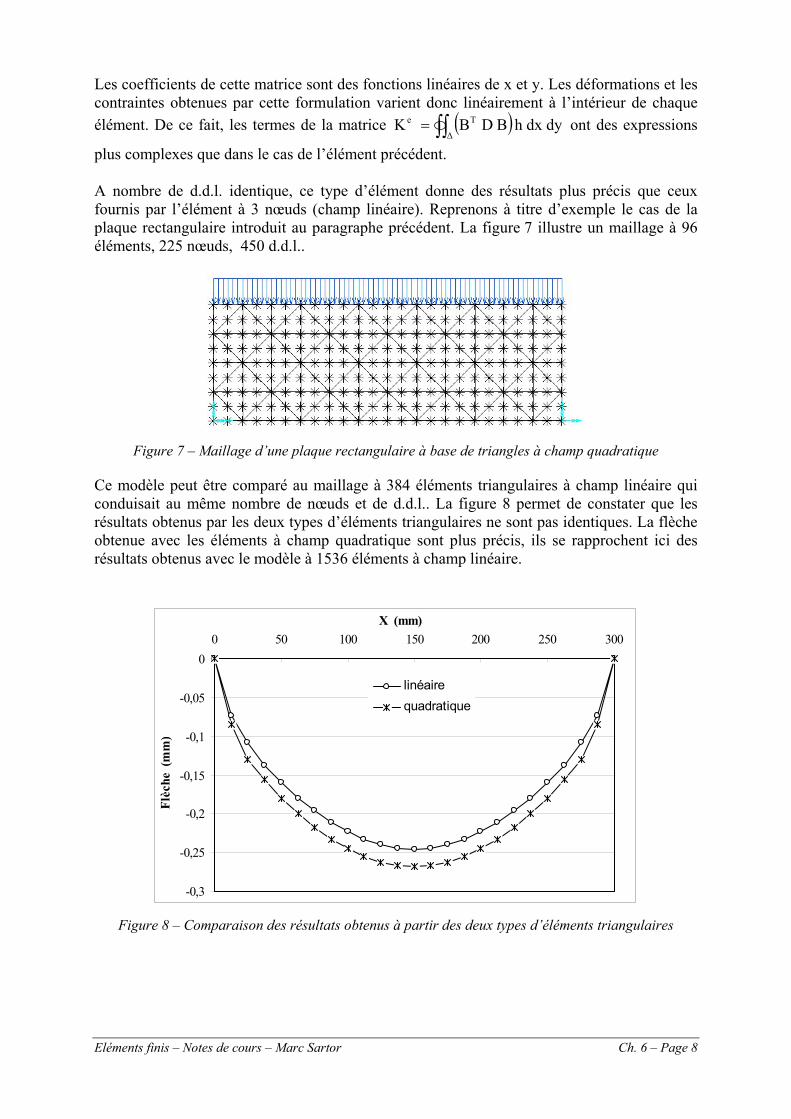
plus complexes que dans le cas de l’élément précédent. A nombre de d.d.l. identique, ce type d’élément donne des résultats plus précis que ceux fournis par l’élément à 3 nœuds (champ linéaire). Reprenons à titre d’exemple le cas de la plaque rectangulaire introduit au paragraphe précédent. La figure 7 illustre un maillage à 96 éléments, 225 nœuds, 450 d.d.l..
Figure 7 – Maillage d’une plaque rectangulaire à base de triangles à champ quadratique
Ce modèle peut être comparé au maillage à 384 éléments triangulaires à champ linéaire qui conduisait au même nombre de nœuds et de d.d.l.. La figure 8 permet de constater que les résultats obtenus par les deux types d’éléments triangulaires ne sont pas identiques. La flèche obtenue avec les éléments à champ quadratique sont plus précis, ils se rapprochent ici des résultats obtenus avec le modèle à 1536 éléments à champ linéaire.
-0,3
-0,25
-0,2
-0,15
-0,1
-0,05
00 50 100 150 200 250 300
X (mm)
Flèc
he (
mm
)
linéairequadratique
Figure 8 – Comparaison des résultats obtenus à partir des deux types d’éléments triangulaires
Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 9
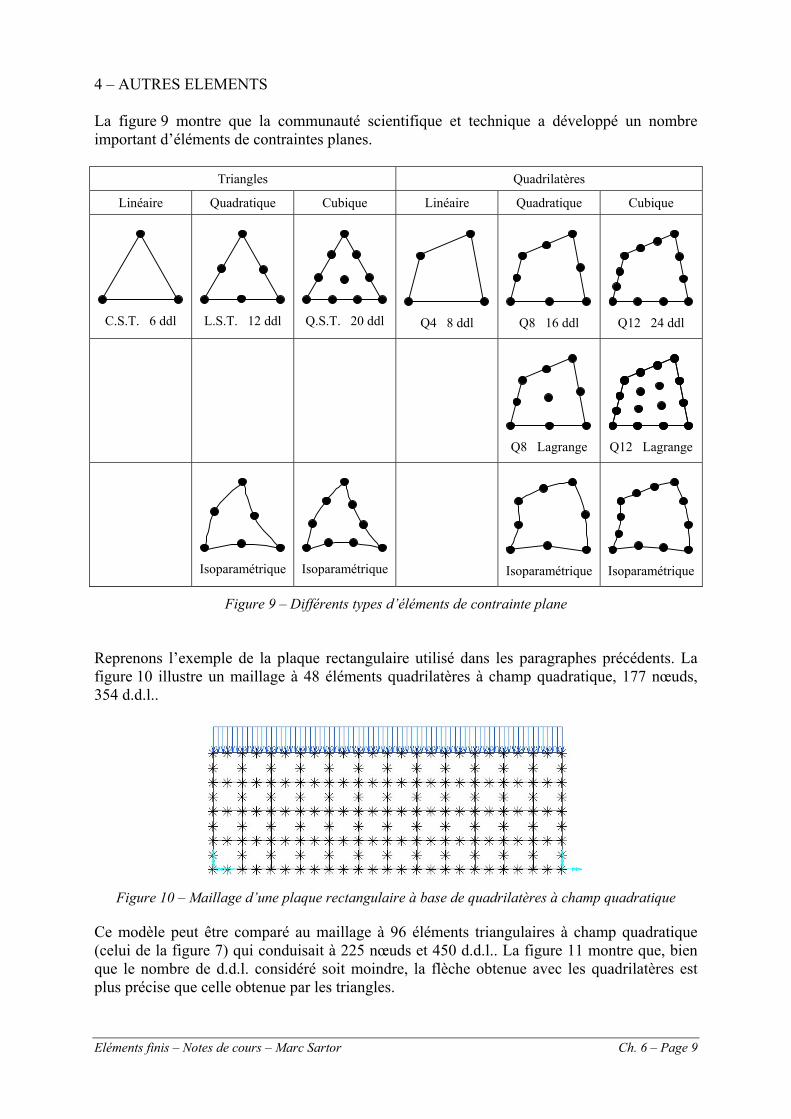
4 – AUTRES ELEMENTS La figure 9 montre que la communauté scientifique et technique a développé un nombre important d’éléments de contraintes planes.
Triangles Quadrilatères
Linéaire Quadratique Cubique Linéaire Quadratique Cubique
C.S.T. 6 ddl
L.S.T. 12 ddl
Q.S.T. 20 ddl
Q4 8 ddl
Q8 16 ddl
Q12 24 ddl
Q8 Lagrange
Q12 Lagrange
Isoparamétrique
Isoparamétrique
Isoparamétrique
Isoparamétrique
Figure 9 – Différents types d’éléments de contrainte plane Reprenons l’exemple de la plaque rectangulaire utilisé dans les paragraphes précédents. La figure 10 illustre un maillage à 48 éléments quadrilatères à champ quadratique, 177 nœuds, 354 d.d.l..
Figure 10 – Maillage d’une plaque rectangulaire à base de quadrilatères à champ quadratique
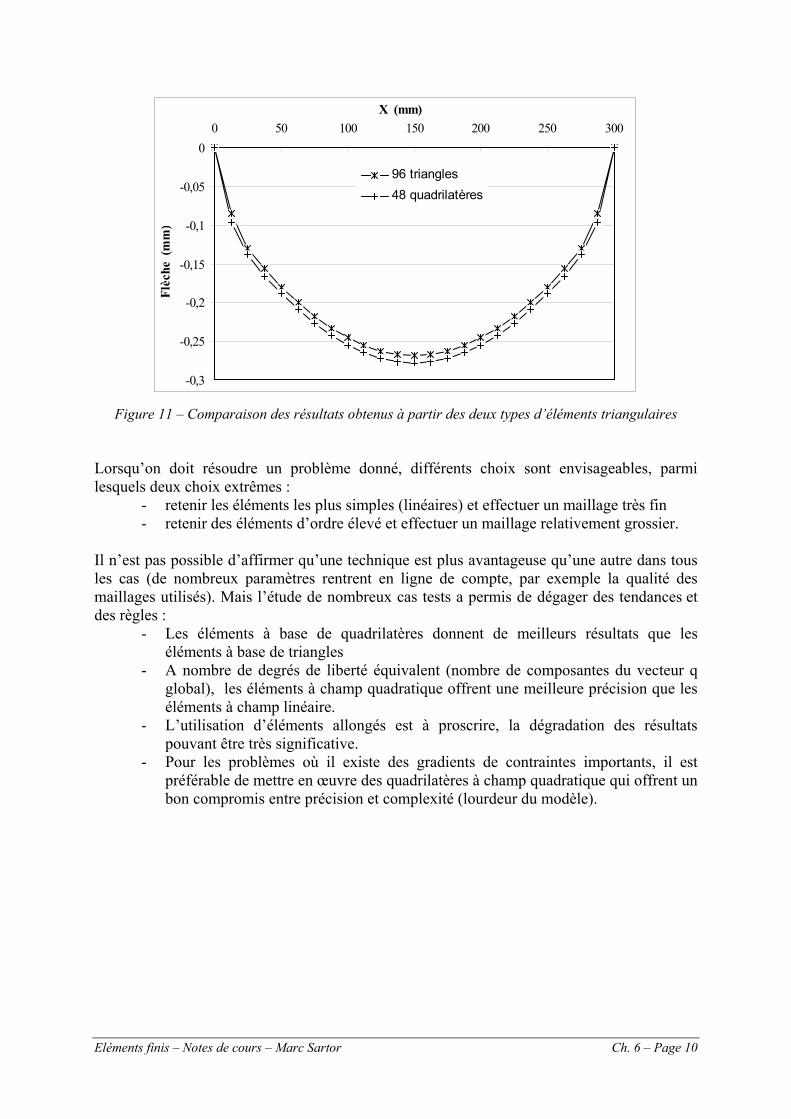
Ce modèle peut être comparé au maillage à 96 éléments triangulaires à champ quadratique (celui de la figure 7) qui conduisait à 225 nœuds et 450 d.d.l.. La figure 11 montre que, bien que le nombre de d.d.l. considéré soit moindre, la flèche obtenue avec les quadrilatères est plus précise que celle obtenue par les triangles.
Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 10
-0,3
-0,25
-0,2
-0,15
-0,1
-0,05
00 50 100 150 200 250 300
X (mm)
Flèc
he (
mm
)96 triangles48 quadrilatères
Figure 11 – Comparaison des résultats obtenus à partir des deux types d’éléments triangulaires
Lorsqu’on doit résoudre un problème donné, différents choix sont envisageables, parmi lesquels deux choix extrêmes :
- retenir les éléments les plus simples (linéaires) et effectuer un maillage très fin - retenir des éléments d’ordre élevé et effectuer un maillage relativement grossier.
Il n’est pas possible d’affirmer qu’une technique est plus avantageuse qu’une autre dans tous les cas (de nombreux paramètres rentrent en ligne de compte, par exemple la qualité des maillages utilisés). Mais l’étude de nombreux cas tests a permis de dégager des tendances et des règles :
- Les éléments à base de quadrilatères donnent de meilleurs résultats que les éléments à base de triangles
- A nombre de degrés de liberté équivalent (nombre de composantes du vecteur q global), les éléments à champ quadratique offrent une meilleure précision que les éléments à champ linéaire.
- L’utilisation d’éléments allongés est à proscrire, la dégradation des résultats pouvant être très significative.
- Pour les problèmes où il existe des gradients de contraintes importants, il est préférable de mettre en œuvre des quadrilatères à champ quadratique qui offrent un bon compromis entre précision et complexité (lourdeur du modèle).

Eléments finis – Notes de cours – Marc Sartor Ch. 6 – Page 11
5 - EXERCICES Exercice 6.1 –