
PIC 17F877
75
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MENSTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE Université Larbi Ben M’hidi Oum El Bouaghi Faculté Des Sciences et de la Technologie Département des Sciences et Technologie Filière : Electronique Option Informatique Industrielle Mémoire De Fin D’étude En Vue De L’obtention Du Diplôme De Master En « Informatique Industrielle » Présenter par : Encadre par : Archouche Adel Dr: Djouambi Abd elbaki Boussid sihem Etude et réalisation d’une Commande automatique de l’éclairage publique à base de microcontrôleur pic16f877 Promotion 2010_2011
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of PIC 17F877

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MENSTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE
SCIENTIFIQUE
Université Larbi Ben M’hidi Oum El Bouaghi
Faculté Des Sciences et de la Technologie
Département des Sciences et Technologie
Filière : Electronique
Option Informatique Industrielle
Mémoire De Fin D’étude En Vue De L’obtention Du Diplôme De Master En
« Informatique Industrielle »
Présenter par : Encadre par :
Archouche Adel Dr: Djouambi Abd elbaki
Boussid sihem
Etude et réalisation d’une Commande automatique
de l’éclairage publique
à base de microcontrôleur pic16f877
PIC 17F877
Promotion
2010_2011
Avant tout, je tien à remercies le bon dieu, et l’unique qui m’offre le courage Et la volonté nécessaire pour affronter les différentes de la vie, Je dédie ce modeste travail : A Ma Jolie Mère Symbole De Sacrifice Et Qui Est Tout Pour Moi, Pour Sa Tendresse Profonde. A Mon Père Qui Ne Cesse Pas De M’encouragé, Et Qui Ma Toujours Soutenu. A mes frères : Riad .Salah A mes sœur : Zohra .Djihad .Aya . A mon frère Lotfi Aggoun A mes amis et mes collègues de la promotion 2011 «Informatique industrielle »
ADEL

Nous adressons Tout nos remerciements tous d’abord à tout puissant
ALLAH, qui nous a éclairé le bon chemin du savoir.
Nos Meilleurs gratitudes et Remerciements à notre encadreur Dr djoumbi.A pour
son aide et ses conseils appréciables et ses encouragements à travers son attention, sa
patience.
Et je remercié aussi Le Responsable de La Laboratoire Des Sciences et Technologies
Ain El Beida, spécialement Mde Souad Zaamta.
Enfin, que toutes les personnes qui ont participées de prés ou de loin à la réalisation
de ce travail trouvant ici ainsi l’expression de nos sincères remerciements.

Liste des figures
Figure (I.1) : Différent source d’éclairage……………………………………………....... 06
Figure (II.1) : Configuration du pic……………………………………………..………… 13
Figure (II.2) : Boitier de pic 16F877…………………………………….……………….. 14
Figure (II.3) : Structure interne du pic 16F877………………………………………..…. 15
Figure (II.4) : Organisation des mémoires………………………………....……………... 18
Figure (II.5) : Convertisseur analogique/numérique……………………………….…….. 26
Figure (III.1) : Schéma synoptique de la carte …………………………………………..
28
Figure (III.2) : Compilateur de MICRO C……………………………………………….. 30
Figure (III.3) : ISIS (PORTEUS)………………………………………………………… 30
Figure (III.4) : Configuration hardware ……... ………………………………………… 31
Figure (III.5) : Configuration software……………………………………………………
31
Figure (III.6) : Sélectionnez le type du composant……………………………………….. 32
Figure (III.7) : Vérifiez la configuration…………………………………………………. 32
Figure (III.8) : Lire ou écrire le composant……………………………………………….. 33
Figure (III.9) : Lancez la programmation du pic ………………………………………...
33
Figure (III.10) : Vérifiez la programmation……………………………………………… 34
Figure (III.11) : schéma de programmateur ICPROG universel ………………………...
34
Figure (III.12) : L’organigramme de fonctionnement…………………………………….. 35
Figure (III.13) : schéma synoptique de la carte …………………………………………... 36
Figure (III-14) : schéma de bloc d’alimentation………………………………………….. 37
Figure (III-15) : schéma de contrôleur et de traitement (pic 16f877A) .............................. 38
Figure (III.16) : schéma de connexion de RESET ………………………........................ 39

Figure (III. 17) : Schéma synoptique Fonctionnement LDR …………………………… 40
Figure (III.18) : bloc capteur basé sur le circuit intégré LM358N………………………..
Figure (III.19) : bloc de la puissance………………………………………………………
40
41
Figure (III. 20) : Schéma de relais………………………………………………………… 41
Figure (III.21) : Schéma d’état repos de relai …………………………………………… 42
Figure (III. 22) : Schéma d’état commande de relai ……………………………………... 42
Figure (III.23) : Schéma électronique de notre projet……………………………………. 43
Figure (III. 24) : Réalisation pratique sur la plaque d’essai…………………………….. 44
Figure (III.25) : Typon de carte de la commande………………………………………… 45
Figure (III.26) : Typon de carte de la puissance………………………………………….. 45
Figure (III.27) : plaque photosensible……………………………………………………. 46
Figure (III.28) : l'insoleuse……………………………………………………………….. 46
Figure (III.29) : Poudre du Révélateur…………………………………………………… 47
Figure (III.30) : Schéma de la carte dans le révélateur………………………………….. 47
Figure (III.31) : machine de gravure avec perchlorure de fer……………………………. 48
Figure (III.32) : perchlorure de fer sous forme granule………………………………….. 48
Figure (III.33) : Schéma de la carte après le Perchlorure de fer……………………….... 49
Figure (III.34) : perceuse ………………………………………………………………… 49 50 Figure (III.35) : carte de notre projet…………………………………………………….

composent référence Quantité valeur descriptions
Circuit intégré
PIC16F877A 1 / U1
LM 358N 1 / U2 Condensateur céramique 2 22pF C1, C2
chimique 1 2200µF C3 Resistance
/ 1 270Ω R1
/ 2 330Ω R2, R3 / 4 10KΩ R4, R5, R6, R7
Régulateur 7812 1 / U3
7805 1 / U4 Mosfet IRF840 3 N-P-N TR1, TR2, TR3
Botton poussoir / 2 / B1, B2
Relais / 3 / Re1, Re2, Re3
Les pines / / P1,p2,p3,p4,p5,p6,p7,p8,p9,p10,p11,p12,p13,p14,p16,p17,p18,p19
Pont de redresseur
/ 1 / U5
Quartz / 1 20MHz CRY1
Capteur de la lumière
LDR 1 / R8
Les Lampes / 2 / L1, L2, L3
Liste de composant :

Table des matières
Table des matières
INTRODUCTION GENERALE………………………………………………………….. 01
Chapitre I: description sur l’éclairage I.1. Introduction……………………………..……………………………………………... 02
I.3. Domaine utilisation d’éclairage ……………………………………………………… 02
I.3.1. Usage Industriel………………………………………………………………….. 02
I.3.2. Usage du secteur tertiaire……………………………………………………….. 02
I.3.3.Usage Médical et hospitalier …………………………………………………… 03
I.3.4. Éclairage de sécurité…………………………………………………………….. 03
I.3.5. Agriculture …………………………………………………………………….... 03
I.3.6. Musées et galeries d'art ……………………………………………………….... 03
I.4. Type d’éclairage ……………………………………………………………………….. 04
I.4.1. Eclairage intérieurs ……………………………………………………………… 04
I.4.2. Eclairage extérieures……………………………………………………….......... 04
I.5. Différentes sources d’éclairage ……………………………………………………… 04
I.5.1. Les lampes à in condescende …………………………………………………….. 04
I.5.2. Les lampes à décharge …………………………………………………………... 05
I.5.3. Diodes électroluminescentes(les leds) ………………………………………….. 06
I.6. Commande automatique d’éclairage publique………………………………………. 07
I.6.1. Description ……………………………………………………………………….. 07
I.6.2. Types de commandes d’éclairage et applications ……………………………… 07
I.7. Gestion de système de la lumière …………………………………………………… 09
I.7.1. Systèmes manuels de gestion de la lumière……………………………………. 09
I.7.2. Systèmes automatiques de gestion de la lumière …………………….………. 10
I.8.Conclusion …………………………………………………………………………….. 10

Table des matières
Chapitre II : Description de Pic 16F877
II.1. Introduction ………………………….…………....…..……………………………… 11
II.2. Definition ……………………………..……………..………………………………… 11
II.3. Les différentes familles des Pics……..……….…....……….………………………… 11
II.4. Les avantage du microcontrôleur…..……….…..…...………………………………. 12
II.5. Choix d’un microcontrôleur ……..……….….…..…………..……………………… 12
II.6. Identification d’un Pic ……..…………….……..…………..……………………….. 13
14 II.6. Présentation de Pic 16f87…………………..………………..………………………..
II.7. Architecture interne………………………………………………………………...... 15
II.8. Les caractéristiques principales du PIC 16F877 ….……………………………….. 16
II.9. Les mémoires du PIC 16F877 …………………….…………………………………
II.9.1. Mémoire vive RAM ………..….………………………………………………
II .9.2. Mémoire Programme……..…..……………………………………………….
16
16
17
17
II.9.3. Mémoire EEPROM…………….……………………………………………… 17
II.10. Registre ……………………………..……………………………………………….. 18
II.10.1. STATUS (Registre d’état)……..…………………..………………………….. 18
II.10.2. Le registre INTCON (interrupt contrôle)…………………………………… 20
II.10.3. Le registre w ………………………………………………………………………. 20
II.11. L’horloge ……………………………………………………………………………. 21
II.12. Ports d’entrées /sorties………………………………………………………………. 21
II.12.1. Le port A ………………………………………………………………………. 22
II.12.2. Le port B ………………………………………………………………………. 22
II.12.3. Le port C……………………………………………………………………….. 22
II.12.4. Le port D……………………………………………………………………….. 23
II.12.5. Le port E……………………………………………………………………….. 23
II.13.Types d’instructions…………………………………………………………………… 23
II .14. Interruptions…………………………………………………………………………. 24
II.14.1. Définition ……………………………………………………………………… 24
II.14.2. Les sources d’interruption …………………………………………………… 24
II.14.3. Le déroulement d’interruption …………………………………………........ 25
II.15. Convertisseur analogique numérique ……………………………………………… 25

Table des matières
II.15.1. Définition ……………………………………………………………………… 25
II -15-2 Description de la procédure de la conversion ……….…………………….. 26
II.16. Timers…………………………………………………………………………………. 26
II.16.1. TIMER 0 ……………………………………………………………………… 27
II.16.2. TIMER1………………………………………………………………………. 27
II.16.3. TIMER2 ……………………………………………………………………… 27
II.16.4. TIMER Chien de Garde………………………….. ………………………… 27
II.17.Conclusion ……………………………………………………………………………. 27
Chapitre III: La réalisation pratique de la carte
III.1. Introduction ………………………………………………………………………….. 28
III .2. Principe de fonctionnement de la carte ……………………………………………………..
28
III .3. Etapes de la réalisation………………………………………………………………. 29
III .4. Outils de programmation …………………………………………………………… 29
III .4.2. Compilateur C ″ MICRO C ″ pour pic ……………………………………. 29
III .4 .3. Simulation avec ISIS (Proteus)……………………………………………… 30
III .4.4. Notice de programmation d’un pic avec le logiciel Win pic 800, et le
programmateur ……………………………………………………………………………...
31
III.5.Organigramme ………………………………………………………………………… 35
III .6. Etude et Conception du la carte……………………………………………………... 36
III .6.1. Introduction …………………………………………………………………... 36
III .6.2. Description du système………………………………………………………. 36
III .6.2.1. Bloc d’alimentation ………………………………………………………… 37
III .6.2.2. Bloc de commande ………………………………………………………….. 38
III .6.2.3. Bloc de la puissance ……………………………………………………………... 41
III .7 .Schema électronique ………………………………………………………………... 43

Table des matières
III.8. Réalisation pratique sur la plaque d’essai ………………………………………….. 44
III.9. Réalisation pratique de la carte………………………………………………………. 45
III.9.1. Le typon …………………………………………………………………………… 45
III.9.2. Insolation………………………………………………………………………….. 46
III.9.3. Révélateur………………………………………………………………………….
47
III.9. 4.Gravure……………………………………………………………………………. 48
III.9.5. Perçage ……………………………………………………………………………. 49
III.9.6. Soudure……………………………………………………………………………. 50
III .10 .Conclusion……………………………………………………………………………
51
Conclusion Generale……………………………………………………………………….. 52

Introduction générale

Introduction générale
1
Introduction générale :
L’éclairage public est en pleine mutation depuis quelques années grâce aux
développements de la vie urbaine et sa fonction de base, permettant aux utilisateurs de
vivre dans de bonnes conditions de confort. Malgré sa, l’éclairage a un grand problème tel
que l’abus de l’énergie électrique et sa mauvaise gestion.
Notre projet consiste en l’étude et la réalisation d’une carte à base d’un
microcontrôleur PIC16F877 permettant la commande automatique de l’éclairage publique
pour assurée une commande optimale de l’éclairage et de l’énergie électrique.
Ce mémoire est divisé en deux partie une partie théorique qui contient deux
chapitre et un chapitre pratique.
Dans le chapitre I nous avons présenté une description générale de l’éclairage
publique et sa commande.
Dans le chapitre II nous avons présenté la description de l’architecture du
microcontrôleur PIC 16F877 qui est le noyau de cette application.
Dans Chapitre III est composé de deux parties : la première partie présente les
outils de programmation de notre projet (cote SOFTWARE) et la deuxième partie c’est
l’étude et la conception de notre projet (cote HARDWARE).
Nous terminons notre travail par une conclusion générale mettant en œuvre les
différents résultats trouvés ainsi que les perspectives qui peuvent être envisagé.
Et enfin référence bibliographique pour enrichir notre mémoire ainsi que les annexes
utilisées.

Chapitre I
Description de l’éclairage
publique

Chapitre I Description de l’éclairage
2
Description de l’éclairage :
I.1. Introduction :
L’éclairage publique est obtenu en utilisant des dispositifs qui convertissent
l’énergie électrique en lumière pour satisfaire le besoin de l’éclairage dans de nombreux
sites tel que : éclairage dans salle, amphithéâtre et éclairage du la route.
I.3. Domaine d’utilisation d’éclairage :
I.3.1. Usage Industriel :
D’origine fonctionnelle, l'éclairage industriel doit répondre aux normes
concernant l'éclairage des postes de travail. Ce type d'éclairage est spécialement adapté
aux locaux où il est installé, où les contraintes de volumes, d'empoussièrement et de
maintenance sont particulières. Dans les industries où sont effectuées des tâches de
mécanique fine et de précision, ainsi que les secteurs de l'électronique, des renforts
d'éclairage sur les postes de travail sont installés. [WS05]
L'éclairage utilisé dans les locaux industriels est généralement de conception
simple avec une recherche d'efficacité et de facilité d'emploi, munis de source peu
consommatrice en énergie, Certains secteurs industriels (chimique notamment)
nécessitent l'emploi d'appareils protégés. Les industries où le rendu des couleurs est
important (imprimerie) nécessitent l'emploi de lampes adaptées.
I.3.2. Usage du secteur tertiaire :
Les lampes fluorescentes sont majoritairement employées dans les luminaires
tertiaires de bureau. Décrites à tort comme froides, les lampes fluorescentes permettent
de bien disposées une excellente uniformité d'éclairement. Apparent, suspendu ou
encastré, l'éclairage de bureau est souvent complété par des lampes d'appoint pour
répondre au besoin de personnaliser. [WS05]

Chapitre I Description de l’éclairage
3
I.3.3. Usage Médical et hospitalier :
L’éclairage des locaux est essentiellement utilitaire.
L’éclairage des salles d’opération, de certaines salles d’examens et de soins, ainsi
que les salles de soins des cabinets dentaires et des prothésistes dentaires utilise des
appareils d’éclairage adaptés (forts niveaux d’éclairements, contrôle des
luminances, spectre des températures de couleur, bon IRC, etc.).
I.3.4. Éclairage de sécurité :
Dans les lieux de travail ou accueillant du public, (magasin, hôtel, bureau, atelier),
un éclairage dit de sécurité, ou de secours, est requis par la plupart des réglementations.
Ces luminaires spécifiques se mettent automatiquement en fonction, lors des coupures
de courant électrique ou dans les situations d'urgences (incendie, évacuation). Ils
émettent une lumière relativement faible, mais suffisante; placés aux endroits
stratégiques (changement de direction, porte, escalier, porte de sortie), ils balisent le ou
les itinéraires vers la ou les sorties de secours. [WS05]
I.3.5. Agriculture :
Certains pays se sont fait une spécialité de la culture sous serre avec température
et éclairage contrôlés afin d'accélérer le processus de maturation des plantes. Cette
culture utilise des lampes émettant dans des longueurs d'ondes spécifiques aux plantes.
De même, l'élevage intensif en batterie de la volaille utilise l'éclairage pour accélérer la
croissance en raccourcissant le cycle diurne/nocturne. [WS05]
I.3.6. Musées et galeries d'art :
Depuis les années 1990, la fibre optique est utilisée pour véhiculer la lumière sur
un trajet de quelques dizaines de centimètres depuis une source vers l'objet à mettre en
valeur, permettant d'obtenir des éclairages ponctuels et discrets, pouvant être
élégamment intégrés à une vitrine de présentation, et offrant l'avantage de rayonner très
peu d'infrarouge, limitant ainsi le risque d'élévation de température à l'intérieur de la
vitrine, néfaste aux œuvres d'art.

Chapitre I Description de l’éclairage
4
I.4. Type d’éclairage :
I.4.1. Eclairage intérieurs :
Les options pour l’éclairage intérieur se regroupent en deux catégories : les
commandes manuelles et les commandes automatiques. Les commandes manuelles sont
souvent les plus rentables, mais elles requièrent l’intervention humaine. Par exemple,
éteindre manuellement l’éclairage en fin de journée selon une routine quotidienne peut
constituer la solution la plus efficace pour commander l’éclairage dans les bâtiments
industriels où il y a des heures fixes de travail. D’un autre côté, dans les immeubles de
bureaux équipés en groupes d’interrupteurs à proximité des ascenseurs, les employés
qui quittent les lieux laissent en principe l’éclairage en fonction, car ils ne savent pas
exactement quel interrupteur commande quel secteur du bâtiment; la tâche est donc
laissée aux soins du personnel d’entretien ou de sécurité.. [OMG], [WS05].
I.4.2. Eclairage extérieures :
Généralement commandée par des détecteurs (cellule photoélectrique) permet
d’assurer éclairage seulement la nuit, ce type peut aussi commandée par commande
automatique ou commande par capteur, des systèmes de commande d’éclairage
informatisée ou le système de commande mécanique, Par exemple commande
d’éclairage publique [OMG], [WS05].
I.5. Différentes sources d’éclairage :
I.5.1. Les lampes à incondescende :
La lumière est due à l’élévation de température d’un filament sous l’effet d’un
courant électrique. [MC51] [AP]
Puissance de 5 à 500 Watts
Duré de vie 1500 heures
Faible coût et destiné à l’éclairage domestique

Chapitre I Description de l’éclairage
5
I.5.2. Les lampes à décharge :
La lumière est due à mélange gazeux sous pression qui devient conducteur par
ionisation. [MC51] [AP]
Puissance de 18 à 2000 Watts
durée de vie 6000 heurs
nécessité d’un temps d’amorçage et de réamorçage ; destiné à la l’éclairage
publique
Contiennent de nombreux types parmi eux :
I.5.2.1. Les lampes fluorescentes :
La lumière est produite par ionisation d’un gaz qui devient conducteur sous
l’effet d’une surtension.la lumière n’est visible que par le biais d’une poudre
fluorescente que l’on place à l’intérieur du tube. [MC51] [AP]
puissance de 18 à 56 Watts
durée de vie de 200 heurs
I.5.2.2. Les lampes fluo compactes :
Une lampe traditionnelle (le classique « ampoule » produit un peu de lumière
(5%)…et beaucoup de chaleur (95%).
Les lampes fluo compactes «basse consommation » sont 5 fois plus économes et
durent 10à 12 fois plus long temps. [MC51]
Les premières lampes fluo compactes ont été produites après la crise du pétrole
dans les années 70.
A l’origine ces lampes étaient volumineuses, assez lourdes, et donnaient une
lumière un peu « papillonnante ». [AP]
En une vingtaine d’années elles ont fait des progrès considérables et fournissent
maintenant une lumière douce, identique aux ampoules classiques à incandescence,
avec des performances nettement supérieures.

Chapitre I Description de l’éclairage
6
Une seul lampe basse consommation fluo compacte de 7 W fournit autant de
lumière qu’une ampoule classique de 45 W, jusqu’à 12 fois plus longtemps, dégage
80% de chaleur en moins, et économise prés de 1000 KWH électrique pendent sa durée
de vie. [MC51]
I.5.3. Diodes électroluminescentes(les LEDs) :
Ce composant électronique est en train de faire sa place les sources d’éclairage.
Elles sont utilisées que dans un nombre restreint de domaines. [AP]
éclairage des téléphones portables, blocs autonomes de sécurité, borne de
balisage routier.
En production de lumière blanche.
En trichromie, les fabricants trouvent des solutions compactes de linéaires ou
petits projecteurs à changement de couleur.
Figure (I.1) : différent source d’éclairage
Source de lumière
Lampes Composant
électrique
A décharge Incandescente Diode
électroluminescent
es

Chapitre I Description de l’éclairage
7
I.6. Commande automatique d’éclairage publique
I.6.1. description :
L’un des moyens les plus simples d’économiser l’énergie consiste à éteindre les
appareils d’éclairage situés dans des zones non occupées. Cependant, cette tâche
représente parfois une définition. La commande de l’éclairage publique peut s’effectuer
de différentes façons, soit au moyen de simples interrupteurs locaux, de détecteurs de
mouvement de cellules photoélectriques, d’horloges programmables, ou encore à l’aide
de systèmes de commande d’éclairage informatisés plus complexes pouvant être
intégrés aux systèmes de contrôle automatique reliés aux installations mécaniques et de
sécurité du bâtiment. [OMG]
I.6.2. Types de commandes d’éclairage et applications :
I.6.2.1. Commandes par disjoncteur :
Les lampes restent allumées 24 heures sur 24 ou sont commandées par des
disjoncteurs [WB07] [OMG]
I.6.3.2. Interrupteurs à tension de secteur :
Offrent une commande manuelle locale. Application la plus courante, coût
d’installation le plus bas. Chaque interrupteur commande un circuit d’éclairage.
[WB07] [OMG]
I.6.3.3. Interrupteurs à basse tension :
Initialement installés pour servir de commandes d’éclairage à tension plus haute,
notamment les éclairages; semblables aux interrupteurs de tension de secteur standard.
Un interrupteur peut commander de nombreux circuits d’éclairage. [WB07] [OMG]
I.6.3.4. Interrupteurs centraux à basse tension :
Interrupteurs à basse tension installés à un emplacement central, en général à la
sortie, par exemple près de l’ascenseur. Ces interrupteurs sont en général utilisés
seulement par le personnel d’entretien et l’éclairage fonctionne pendant de nombreuses
heures. [WB07] [OMG]

Chapitre I Description de l’éclairage
8
I.6.3.5. Systèmes de commande informatique ou à minuteur :
Commandés par circuit, soit automatiquement par une horloge ou un logiciel PC.
Ils peuvent permettre une utilisation minimale s’ils sont programmés régulièrement.
Appropriés pour les locaux à bureaux où les heures d’occupation sont préétablies.
[WB07] [OMG]
I.6.3.6. Détecteurs de commande d’éclairage à infrarouge :
Permettent une commande automatique de l’éclairage. Détectent l’énergie,
notamment les corps humains et les mouvements. Offrent une commande d’extinction
ou d’allumage aux fins de contrôle plus précis. Appropriés pour les endroits tels que les
bureaux fermés et les pièces fermées. [WB07] [OMG]
I.6.3.7. Détecteurs de commande à ultra sons :
Utilisent les ondes sonores à ultrasons. Le mouvement change le retour de l’onde
sonore, ce qui a pour effet d’allumer l’éclairage. Appropriés pour les bureaux à aire
ouverte, les toilettes et les grandes pièces. [WB07] [OMG]
I.6.3.8. Détecteurs de commande à double technologie :
Combinent les technologies des détecteurs à infrarouge et à ultrasons. Ils sont en
général utilisés dans les zones difficiles à commander avec tout autre équipement
standard. Parmi les applications les mieux adaptées, citons les salles d’ordinateurs, les
salles de conférence et les salles de classe. [WB07] [OMG]
I.6.3.9. Systèmes de commande activés par lecteur de cartes :
Cette méthode est généralement utilisée conjointement avec un système
commandé par un logiciel PC. Le lecteur de cartes remplace le système de commutation
local à basse tension. Ces systèmes fournissent des indications à la direction s’ils sont
combinés à un système de contrôle d’accès par carte. Ils peuvent être programmés pour
commander l’éclairage là où les Employés sont autorisés à travailler. [WB07] [OMG]

Chapitre I Description de l’éclairage
9
I. 6.3.10. Gradateurs d’éclairage :
L’utilisation des gradateurs d’éclairage est en général limitée aux salles de
conférence, etc. Les systèmes actuels peuvent commander l’éclairage fluorescent de
façon individuelle au moyen de gradateurs manuels, de détecteurs d’éclairage ou de
commandes à distance. Utilisés dans des espaces ouverts, par exemple les bureaux à aire
ouverte, ils peuvent générer des économies d’énergie supplémentaires. Ces systèmes,
dont le coût est plus élevé, permettent aux utilisateurs de régler les niveaux d’éclairage
selon leurs besoins particuliers. [WB07] [OMG]
I.7. Gestion des systèmes de l’éclairage :
I.7.1. Systèmes manuels de gestion de l’éclairage:
I.7.1.1. Potentiomètres gradateurs variateurs et boutons poussoirs :
Permettent à l'utilisateur d’éteindre, d’allumer et de faire varier l’intensité de
l’éclairage.
Dans le cas d’une gestion automatique, il est nécessaire de laisser une plage de
liberté à l’utilisateur en lui permettant d’ajuster l’éclairage à ses besoins spécifiques.
D’où l’intérêt de conserver des interrupteurs accessibles. [AP]
I.7.1.2 Télécommandes sans fil ou murales :
Ces télécommandes sans fil manuelles ou murales permettent de programmer des
ambiances lumineuses, de les mémoriser et de les activer Ce système est économique à
l’installation, ne nécessitant aucun câblage. Le système détecteurs de présence cellules
photoélectriques doublés par une commande manuelle permettent d’économiser jusqu’à
60 % d’énergie. [AP]
I.7.2. Systèmes automatiques de gestion de l’éclairage:
I.7.2.1. Détecteurs de présence :
Détecteurs infrarouge permettant d’éclairer les zones de travail ou les
circulations seulement lorsqu’elles sont occupées. Ils peuvent être intégrés au luminaire
ou bien être installés isolément au mur ou au plafond. Bien étudier leur implantation,
Chapitre I Description de l’éclairage
10
leur angle de détection ainsi que leur temporisation. Utilisation : Locaux à occupation
intermittente, toilettes. [AP]
I.7.2.2. Cellules photosensibles :
Détecteurs permettant d’allumer, d’éteindre voire d’adapter l’éclairement
produit par un ou plusieurs luminaires en fonction de la lumière ambiante. Ils peuvent
être intégrés au luminaire ou bien être installés isolément au mur ou au plafond.
Utilisation : Dans tout local bénéficiant de l’éclairage naturel. [AP]
.
I.7.2 .3. Multi-capteurs :
Ils peuvent être intégrés aux luminaires ou séparés de ceux-ci. Ils permettent de
remplacer plusieurs détecteurs comme la cellule photosensible et le détecteur de
présence, mais intégrer également un récepteur de commande infrarouge (commande à
distance). [AP]
I.7.2.4. Gestion centralisée de l’éclairage :
La gestion centralisée permet le contrôle, la commande et la gestion horaire et
calendaire de la gestion d’éclairage. Elle permet aussi de connaître l’état et les
consommations de l’installation d’éclairage. [AP]
Ce système présente l’avantage de pouvoir modifier les allumages des bureaux
en fonction des aménagements successifs par programmation, donc sans toucher au
câblage électrique et sans ouvrir de faux plafonds.
I.8.Conclusion :
Dans ce chapitre nous avons présenté une description générale sur l’éclairage
publique et sa commande ainsi que les domaines utilisation de l’éclairage publique.

Chapitre II
Description du pic 16f877

Chapitre II description du pic 16f877
11
DESCRIPTION DU PIC 16F877 :
II.1. Introduction :
Les microcontrôleurs se retrouvent de plus en plus dans les matériels que nous
utilisons quotidiennement, machine à laver, mulot, ordinateur, téléviseur.
Dotés d’une logique programmée ils sont capables de régir à l’environnement un
peu à la manière d’automates programmable .ainsi leurs propriétés ne se limitent pas à
offrir un certain nombre d’entrées /sorties logique .ils sont parfois dotés de fonctions
supplémentaires telle que convertisseur analogique numérique, horloge, temps réel,
comptage rapide etc.
Plusieurs fondeurs se partagent ce marché , citons INTEL , MOTORALA,
AMTEL , ZILOG ,PHILIPS et enfin MICROCHIP qui nous intéresse ici. [AB10]
II.2. Définition :
Un PIC est un microcontrôleur, c’est a dire une unité de traitement de l’information
de type microprocesseur a laquelle on a ajoute des périphériques internes permettant de
réaliser des montages sans nécessiter l’ajoute des composants externes.les Pics sont des
composant dits RISC (Reduced Instructions Set Computer), ou encore (composant a jeu
d’instruction réduit).
II.3. Les différentes familles des pics :
Il y a trois grandes familles des Pics :
La famille Base Line, qui utilise des mots d’instructions de 12 bits.
La famille Mid-Range, qui utilise des mots de 14 bits (et dont font partie la
16F84 et 16F876 et 16f877).
La famille High-End, qui utilise des mots de 16 bits.

Chapitre II description du pic 16f877
12
Toutes les PICs Mid-Range ont un jeu de 35 instructions, stockent chaque
instruction dans un seul mot de programme, et exécutent chaque instruction (sauf les
sauts) en un cycle. [AB10]
On atteint donc des très grandes vitesses, et les instructions sont de plus très
rapidement assimilées.
II.4. Les avantage du microcontrôleur :
L’utilisation des microcontrôleurs pour les circuits programmables à plusieurs points
forts et bien réels. Il suffit pour s’en persuader, d’examiner la spectaculaire évolution de
l’offre des fabricants de circuits intégrés en ce domaine depuis quelques années.
Nous allons voir que le nombre d’entre eux découle du simple sens. [MC].
Tout d’abord, un microcontrôleur intègre dans un seul et même boîtier ce qui,
avant nécessitait une dizaine d’éléments séparés. Il résulte donc une diminution
évidente de l’encombrement de matériel et de circuit imprimé.
Cette ration a aussi comme conséquence immédiate de simplifier le tracé du
circuit imprimé puisqu’il n’est plus nécessaire de véhiculer des bus d’adresses et
de donnée d’un composant à un autre.
L’augmentation de la fiabilité du système puisque, le nombre des composants
diminuant, le nombre des connexions composants/supports ou
composants/circuits imprimer diminue.
Le microcontrôleur contribue à réduire les coûts à plusieurs niveaux.
Moins cher que les autres composants qu’il remplace.
Diminuer les coûts de main d’œuvre.
Réalisation des applications non réalisables avec d’autres composants.
II.5. Choix d’un microcontrôleur :
Il existe plusieurs microcontrôleurs fabriqués par INTEL, MOTOROLA, HITACHI,
NEC TEXAS instrument etc.… [AB10]
Le choix d’un microcontrôleur dépend de plusieurs critères de sélection dont le
développeur doit tenir compte comme :
Nombre d’entrées/sorties.
Liaison d’entrées/sorties.

Chapitre II description du pic 16f877
13
Conversion analogique numérique et numérique analogique.
Entrées/sorties rapides, sorties spéciales (M.L.I, horodaté etc…).
Mémoire RAM, ROM, EPROM interne ou externe, sa taille.
Vitesse de l’horloge, temps d’exécution d’une multiplication, d’une division.
Bus de données 8bits /16bits.
Les logiciels de programmation (assembleur, c, micro c etc…).
Les émulateurs pour la mise au point des applications.
Les évolutions prévisibles du composant, son prix, les sources.
II.6. Identification d’un pic :
Pour identifier un PIC, on utilise simplement son numéro :
16 : indique la catégorie du PIC, c’est un Mid-range.
L : indique qu’il fonctionne avec une plage de tension beaucoup plus tolérante.
C : indique que la mémoire programme est un EPROM ou une EEPROM.
CR ou F : indique le type de mémoire ; CR(ROM) ou F (FLASH).
XX : représente la fréquence d’horloge maximale que le PIC peut recevoir.
Une dernière indication qu’on le trouve est le type de boitier. [AB10]
Exemple :
Un 16f877est un PIC MID-RANGE(16) et mémoire programme de Type FLASH
(F) et réinscriptible de type 877 et capable d ‘accepter une fréquence D’horloge de 20MHz,
Figure (II.1) représenté description de la configuration du PIC 16F877.
Figure (II.1) : configuration du PIC 16F877

Chapitre II description du pic 16f877
14
II.7. Présentation de pic 16f877 :
Le PIC 16F877 comprend 40 pins : 33 pins d’entrées/sorties, 4 pins pour
l’alimentation, 2 pins pour l’oscillateur et un pin pour le reset (MCLR). Les broches VDD
(broches 11 et 32) et VSS (broches 12 et 31) servent à alimenter le PIC. Les broches OSC1
et OSC2 ou CLKIN et CLOUT permettent de faire fonctionner l’oscillateur interne du PIC
qui peut être un quartz, un résonateur céramique, un oscillateur externe ou un réseau RC
dont le rôle est de créer des impulsions de fréquences élevées, la figure (II- 2 ) représenté
le boîtier de pic16f877. [BM10]
Figure (II.2) : le boîtier de pic16f877

Chapitre II description du pic 16f877
15
II.8. Architecture interne :
L’architecture interne de PIC16F877, commune à la majorité des microcontrôleurs
Mid-range. Le microcontrôleur PIC16F877 répond tout à fait à nos demandes. Il dispose de
40 broches, d’une mémoire programme de 8Kmots, d’une RAM de 368 octets, ne prend
que très peu de place et il dispose de nombreux modules périphériques internes. ) La figure
(II. 3) représenté structure interne de pic16f877. [BM10]
Figure (II. 3) : Structure interne du PIC16F877.

Chapitre II description du pic 16f877
16
II.9. Les caractéristiques principales du pic 16f877 :
Le PIC 16F877 est caractérise par : [ZS09].
Une Fréquence de fonctionnement élevée, jusqu’a 20 MHz.
Une mémoire vive de 368 octets.
Une mémoire EEPROM pour sauver des paramètres de 256 octets.
Une mémoire morte de type FLASH de 8 K mots (1mot = 14 bits), elle est
Réinscriptible à volonté.
Chien de garde WDT.
33 Entrées et sorties.
Chaque sortie peut sortir un courant maximum de 25 mA.
3 Temporisateurs : TIMER0 (8 bits avec prediviseur), TIMER1 (16 bits)
Avec prediviseur avec possibilité d’utiliser une horloge externe réseau RC
ou QUARTZ) et TIMER2 (8 bits avec prediviseur et post diviseur).
2 entrées de captures et de comparaison avec PWM (Modulation de
largeur d’impulsions).
Convertisseur analogique numérique 10 bits avec 8 entrées multiplexées
Maximum.
Une interface de communication série asynchrone et synchrone.
(USART/SCI).
Une interface de communication série synchrone (SSP/SPI et I2 C).
Une tension d'alimentation entre 2 et 5.5 V.
II.10 Les mémoires du pic 16f877 :
II.10.1. Mémoire vive RAM :
C’est de la mémoire d’accès rapide, mais labile (c'est-a-dire qu’elle s’efface
Lorsqu’elle n’est plus sous tension); cette mémoire contient les registres de
Configuration du PIC ainsi que les différents registres de données. Elle contient Également
les variables utilisées par le programme. [BB03]
Cette mémoire RAM disponible sur le 16F877 est de 368 octets, elle est repartie de
la Manière suivante:
80octets en banque 0, adresses 0x20 à 0x6F.
80 octets en banque 1, adresses 0xA0 à 0xEF.

Chapitre II description du pic 16f877
17
96 octets en banque 2, adresses 0x110 à 0x16F.
96 octets en banque 3, adresses 0x190 à 0x1EF.
16 octets communs aux 4 banques, soit 0x70 à 0x7F = 0xF0 à 0xFF 0x170 à
0x17F = 0x1F0 à 0x1FF.
II. 10.2. Mémoire Programme :
La mémoire programme (flash) est constituée de 8k mots de 14 bits et chaque
instruction est codée sur 1 mot, Cette mémoire est celle dans laquelle le programmateur
écrit les instructions du programme. Dans cet espace mémoire, les cinq premières adresses
(000, 001,002, 003, et 004) sont réservées au microcontrôleur. Certaines d’entre elles sont
particulièrement remarquables [BB03] :
a) l’adresse 000 correspond au vecteur de Reset.
b) l’adresse 004 correspond au vecteur d’interruption.
II.10.3. Mémoire EEPROM :
La mémoire EEPROM (Electrical Erasable Programmable Read Only Memory), est
constituée de 256 octets disponibles en lecture et écriture depuis le programme. Ces octets
sont conservés après une coupure de courant. [BB03] auxquels on accède uniquement par
l’intermédiaire de quatre registres spéciaux:
EEADR (EEprom ADRess) pour ce qui concerne les adresses
EEDATA (Eprom DATA) pour ce qui concerne les données
EECON1 (EEprom Control) permettant de définir le
EECON2 mode de fonctionnement de cette mémoire.
Et enfin une toute petite mémoire EEPROM, contenant seulement 8 cases, de
l’adresse 2000 à l’adresse 2007, réservées au microcontrôleur. Les adresses 2000, 2001,
2002 et 2003 correspondent aux emplacements dans lesquels l’utilisateur peut stocker un
code d’identification (en n’utilisant que les quatre bits de poids faible de chacun de ces
mots à14 bits).L’adresse2007correspond au registre de configuration du microcontrôleur.
Lui aussi mot de 14 bits, dont les cinq premiers seulement sont utilisables, la figure (II.3)
représente la configuration des registres et leurs position dans la RAM [BB03].

Chapitre II description du pic 16f877
18
Figure (II.3) : configuration des registres dans la RAM
II.11. Registre :
II .11.1. STATUS (Registre d’état) :
Les cinq premiers bits de ce registre (bits 0 à 4) correspondent à des flags que le
programmeur peut interroger pour obtenir des informations lui permettant d’écrire
correctement la suite des instructions de son programme ; tandis que les bits 5, 6 et 7 (RP0,
RP1, IRP), d’après la façon dont on les programme, pourraient sélectionner 8 pages de
registres internes (chacune de 128 octets). Le tableau suivant représenté Registre d’état.
[CT02], [BM10].
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
IRP RP1 RP0 TO PD Z DC C
Tableau 2.1

Chapitre II description du pic 16f877
19
Bit 0 : C (Carry)
Flag indiquant si une retenue a eu lieu dans un octet lors d’une addition ou d’une
soustraction.
Si une retenue a été générée, ce bit passe à 1.
Bit 1 : DC (Digit Carry)
Flag fonctionnant comme le bit de Carry, sauf qu’ici la surveillance de la retenue s’exerce
non pas sur l’octet entier, mais sur le premier demi-octet.Ce flag se positionne à 1 si une
retenue est générée du bit 3 (bit de poids fort du quartet inférieur) vers le bit 0 du quartet
supérieur.
Il est utile pour corriger le résultat d’opérations effectuées en code BCD.
Bit 2 : Z (Zéro)
Ce flag passe à 1 si le résultat d’une opération (arithmétique ou logique) est 0.
Bit 3 : PD (Power Down)
Mise en veilleuse de l’alimentation, effectuée par l’instruction SLEEP. Passe à 1 lorsqu’on
utilise l’instruction CLWDT, ou à la mise sous tension.
Bit 4 : TO (Time Out)
Dépassement de délai. Passe à 0 si le timer du Watch-Dog (chien de garde) déborde. Et mis
à 1 par les instructions CLWDT et SLEEP, ainsi qu’à la mise sous tension.
Bit 5 : RP0 (Registre Page zéro)
Sert à sélectionner l’une des deux pages de registres (Page 0 ou Page 1).
0 = sélectionne la page mémoire 0 (adresses de 00 à 7F).
1 = sélectionne la page mémoire 1 (adresses de 80 à FF).
RP0 et RP1 (bit de sélectionne de bancs) : Ces bits servent à sélectionner les pages de
mémoire du programme.
RP1 RP1 PAGE ADRESSE
0 0 0 00 à 7F
0 1 1 80 à FF
1 0 2 100 à 17F
1 1 3
180 à 1FF
Tableau 2.2

Chapitre II description du pic 16f877
20
Bit7 : IRP: registre de sélection de Bank (utilise pour l’adressage indirect)
1 = Bank 2, 3 (100h - 1FFh).
0 = Bank 0, 1 (00h - FFh) .
II .11.2. Le registre INTCON (interrupt contrôle) :
L’interruption au niveau du PIC16F877 est gérée par plusieurs registres: Le plus
important est le registre INTCON (INTerrupt CONtrol) qui se situe à l’adresse 0x0B.
C’est un registre de 8 bits, dont chaque bit a une fonction particulière. Viennent ensuite les
registres PIEx et PIRx .Les PIEx contiennent les bits individuels de validation des
interruptions en provenance des diverses ressources internes. [CT02]
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
GIE PEIE T0IE INTE RBIE T0IF INTF RBIF
Tableau 2.3
Toutes les interruptions peuvent être validées/interdites par le bit INTCON.
GIE.
Toutes les interruptions périphériques peuvent être validées/interdites par le bit
INTCON.PEIE.
Chaque interruption peut être validée/interdite par son bit de validation individuel.
En résumé, pour valider une interruption périphérique (par exemple), il faut positionner
3 bits, GIE, PEIE et le bit individuel de l’interruption.
II .11.3. Le registre w :
La plupart des instructions opèrent en utilisant le registre de travail W (Working
register) comparable à l’accumulateur des anciens microprocesseurs, et soit un registre soit
une valeur immédiate codée sur 8 bits appelée littéral.
Le résultat des opérations peut être envoyé soit dans le registre W (accumulateur)
soit dans le registre sollicité (soit dans les deux, avec certaines instructions).
Dans les opérations à deux opérandes, un opérande dans le registre de travail, l’autre
est une constante ou est contenu dans un autre registre. Dans les opérations à un opérande,
l’opérande est soit dans W, soit dans autre registre.

Chapitre II description du pic 16f877
21
La valeur des bits C, DC et Z du registre d ‘état sont affectées selon l’opération
effectuée par l’UAL. [CT02] [BM10]
II.12. L’horloge :
L'horloge peut être soit interne soit externe. L'horloge interne est constituée d'un
oscillateur à quartz ou d'un oscillateur RC.
Avec l'oscillateur à Quartz, on peut avoir des fréquences allant jusqu'a 20 MHz
selon le type de μC. Le filtre passe bas (Rs, C1, C2) limite les harmoniques dus à
l’écrêtage et réduit l’amplitude de l’oscillation, il n'est pas obligatoire Avec un
oscillateur RC, la fréquence de l'oscillation est fixée par Vdd, Rext et Cext. Elle peut
varier légèrement d'un circuit à l'autre.
Dans certains cas, une horloge externe au microcontrôleur peut être utilisée pour
synchroniser le PIC sur un processus particulier.
Quelque soit l'oscillateur utilisé, l'horloge système dite aussi horloge instruction est
obtenue en divisant la fréquence par 4. Dans la suite de ce travail on utilisera le terme
Fosc/4 pour désigner l'horloge système. Avec un quartz de 4 MHz, on obtient une horloge
instruction de 1 MHz, soit le temps pour exécuter une instruction de 1μs.
II.13. Ports d’entrées/sorties :
Le pic 16f877 contient les 5 ports suivants :
Port A : 6 pins I/O numérotées de RA0 a RA5.
Port B: 8 pins I/O numérotées de RB0 a RB7.
Port C: 8 pins I/O numérotées de RC0 a RC7.
Port D : 8 pins I/O numérotées de RD0 a RD7.
Port E: 3 pins I/O numérotées de RE0 a RE2.
Tous ces ports se trouvent dans la banque 0, mais tous leurs registres se trouvent dans la
banque1, pour déterminer les modes des ports (I/O), il faut sélectionner leurs registres
TRISX :
le positionnement d’un bit à ≪ 1 ≫ place la pin en entrée.
Le positionnement de ce bit à ≪ 0 ≫ place la pin en sortie.
Notez, comme pour tous les ports, que la mise sous tension du PIC, et tout autre
reset, force tous les bits utiles de Tris a 1, ce qui place toutes les pins en entrée. En plus

Chapitre II description du pic 16f877
22
pour configurer TRISX avec notre compilateur il faut agir sur la valeur set_tris_x 0 .
Exemple : Set_tris_x (valeur). [BB03]
II .13.1. Le port A :
Le port A est constitué six entrées/sorties numérotées de RA0 a RA5 qui peuvent
être utilise comme des entrées pour le convertisseur analogique numérique ou pour le
TIMER 0, dans ce dernier cas le pin RA4 sera utilise comme entrée Pour configurer
TOCKI est de type drain ouvert. [BB03], [BNF].
On peut utiliser ce port, soit pour la conversion analogique /numérique, soit en mode
(I/O), dans notre projet on a utilise RA0 comme entrée pour le CAN.
Remarque : RA4 qui est toujours en collecteur ouvert (mise à 0) c’est a dire mise en
Sortie.
II.13.2. Le port B :
Le port B est constitué huit pins d'entrée/sortie classique numérotées de RB0 a RB7.
On note que le pin RB0 qui, en configuration d’entrée, est de type (trigger de Schmitt)
quand elle est utilisée en mode interruption ≪ INT ≫. La lecture simple de RB0 se fait, de
façon tout à fait classique, en entrée de type TTL. [BB03]
II.13.3. Le port C :
Le port C est constitué huit pins d'entrée/sortie numérotées de RC0 à RC7 toujours
au niveau de son utilisation classique, quelque soit les caractéristiques.
Il y a un registre TRISC localisé dans la banque1, qui permet de décider quelle sont
les entrées et qu’elles sont les sorties. Le fonctionnement est identique celui des antres
TRIS, sachant que le positionnement d’un bit à « 1 » place le pin en entrée, et que le
positionnement de ce bit à « 0 » place le pin en sortie. [BB03] ,[BNF].
La mise sous tension du microcontrôleur PIC, ou reset, force tous les bits utiles de
TRISx à 1, ce qui place toutes les pins en entrée.
II.13.4. Le port D:
Le port D est constitué huit pins d'entrée/sortie numérotées deRD0 àRD, sont de
type « trigger de Schmitt ».le fonctionnement de ce port dépend de la valeur placée dans
TRISE, qui concerne, a première vue, le portE. Mais au moment de mise sous tension, la
valeur placée dans TRISE configure le PORTD en port I/O de type général. [BNF]

Chapitre II description du pic 16f877
23
II.13.5. Le port E :
Le port E est constitué trio d'entrée/sortie numérotées pines, RE0, RE1 et RE2
contrairement aux autres ports, les bits non concernés de TRISE sont implémentées pour
d’autres fonctions. [BB03] [BNF].
On remarque que les pins REx peuvent être utilisés comme pins d’entrées
analogiques. C’est le registre ADCON1 qui détermine si ce port sera utilisé comme port
I/O ou comme port analogique.
Au niveau électronique, les REx utilisées en entrée seront, une fois de plus, du type
« trigger de Schmitt ».
II.14. Types d’instructions :
Tous les Pics Mid-Range ont un jeu de 35 instructions, Chaque instruction est codée
sur un mot de 14 bits qui contient le code opération (OC) ainsi que l'opérande.
Toutes les instructions sont exécutées en un cycle d'horloge, à part les instructions de
saut qui sont exécutées en 2 cycles d’horloge. Sachant que l’horloge système est égale à
fosc/4, si on utilise un quartz de 4MHz, on obtient une horloge fosc/4 = 1000000
cycles/seconde, cela nous donne une puissance de l’ordre de 1MIPS (1 Million
d’Instructions Par Seconde). Avec un quartz de 20MHz, on obtient une vitesse de
traitement de 5 MIPS. [BM10]
Il y a 4 types d’instructions:
Les instructions " orientées octet " : Ce sont des instructions qui manipulent
les données sous forme d'octets.
Les instructions " orientées bits" : Ce sont des instructions destinées à
manipuler directement des bits d'un registre particulier.
Les instructions générales : Ce sont les instructions qui manipulent des
données qui sont codées dans l'instruction directement.
Les sauts et appels de sous-programmes : Ce sont les instructions qui
provoquent une rupture dans la séquence de déroulement du programme.

Chapitre II description du pic 16f877
24
II .15. Interruptions :
II.15.1 Définition :
Une interruption est une action, déclenchée par un événement précis, qui va arrêter le
programme principal, s'exécuter, puis reprendre le programme principal à l'endroit où il
s'étai. Arrêté les interruptions peuvent être déclenchées par: [BM10]
Les timers.
Les pins interruptibles (ex : RB0).
Les interfaces de communication.
Le convertisseur analogique-numérique.
II.15.2. Les sources d’interruption :
Le microcontrôleur 16f877 dispose de plusieurs sources d’interruptions [BM10].
Une interruption externe, action sur la broche INT/RB0.
Débordement du TIMER0.
Changement d’état logique sur une des broches du PORTB (RB4 à RB7).
Une interruption d’un des périphériques (PEIE).
Fin de programmation d’une case mémoire de l’EEPROM.
Changement d’état sur le PORTD (PSPIE).
Fin de conversion analogique numérique (ADIE).
Réception d’une information sur la liaison série (RCIE).
Fin d’émission d’une information sur la liaison série (TXIE).
Interruption SPI ou I2C du module MSSP (SSPIE).
Interruption du registre de capture et/ou de comparaison 1 (CCPI1E).
Interruption du registre de capture et/ou de comparaison 2 (CCPI2E).
Débordement du TIMER1 (TMR1E).
Débordement du TIMER2 (TMR2E).
Collision de BUS (BCLIE).

Chapitre II description du pic 16f877
25
II.15.3. Le déroulement d’interruption :
L'exécution des interruptions se fait à partir de l'adresse programme 0x04. En effet,
lorsqu’une interruption se produit, le programme principal s'arrête et exécute l'instruction à
l'adresse 0x04. La routine d'interruption est structurée de la façon suivante:
Sauvegarder les registres.
Identifier la source de l'interruption.
Effectuer l'action associée à cette interruption.
Restaurer les registres.
Revenir au programme principal.
II.16. Convertisseur analogique numérique :
II .16.1. Définition :
Le signal électrique est une tension analogique continue qui doit être discrétisé pour
pouvoir être stocké. Cette discrétisation ou numérisation est réalisée par un module appelé
Convertisseur Analogique/Numérique (CAN). Il est utilisé pour échantillonner le signal
électrique d’entrée, c’est-à-dire mesurer le plus souvent à des intervalles réguliers la valeur
de ce signal électrique et ainsi produire une suite de valeurs binaires qui constituent le
signal discrétisé ou signal numérique. [BM10], [ZS09].
Donc la fonction conversion analogique numérique consiste a transforme une
grandeur électrique en une grandeur numérique exprimée sur N bits. Cette grandeur de
sortie représente, dans le système de codage qui lui est affecté, un nombre proportionnel à
la grandeur analogique d’entrée. Le CAN intégré dans le 16F877 a une résolution de 10
bits qui permet d’attribuer 1024 valeurs numériques à notre signal d’entrée. Il donne une
précision en 5V de 5Mv environ, ce qui est une précision tout à fait intéressante.
II .16.2. Description de la procédure de la conversion :
Jusqu’à 8 signaux différents sur les pins AN0 à AN7. Les pins AN0 à AN4 sont les
dénominations analogiques des pins RA0 à RA3 et RA5, tandis que les pins AN5 à AN7
sont les dénominations analogiques des pins RE0 à RE2. L’acquisition de la donnée
analogique au niveau du PIC se fait de la manière suivante :

Chapitre II description du pic 16f877
26
Le PIC connecte la pin sur laquelle se trouve la tension à numériser à un
condensateur interne, qui va se charger via une résistance interne jusque la tension
appliquée.
La pin est déconnecté du condensateur, et ce dernier est connecté sur le convertisseur
analogique/numérique interne.
Le PIC procède à la conversion.
Le temps d’acquisition pour le PIC est sous une tension égale à 5V est égale à :
Tacq sous 5V = 2μs + 16,46μs + 1,25μs = 19,71μs. Mais avant il faut procéder d’abord à
la configuration du module CAN et du Timer0. Ensuite, attendre le débordement du
Timer0 pour commencer la conversion de la donnée analogique présente sur le canal RA0
et recommencer depuis le début. La figure (II.5) représenté schéma convertisse
analogique/numérique. [ZS09].
Figure (II.5) : schéma convertisse analogique/numérique
II.17. Timers :
Le microcontrôleur pic16f877comporte trois timers (0, 1,2) chacun d’eux peut
générer une interruption, ils peuvent aussi être associés a des modules fonctionnels CCP1et
CCP0et PWM. Qui permettent de réaliser la capture de donne en entrée, la comparaison de
donne en sortie et la modulation de largeur d’impulsion. [ZS09]

Chapitre II description du pic 16f877
27
II .17.1. Timer0 :
Timer0 est le plus simple des trois, il est capable de générer une interruption qui se
produit lorsque le timer0 déborde de FFh à 00h.
II .17.2. Timer1 :
Le timer 1 est constitue essentiellement d’un registre de 16 bits divise en deux
registre de 8bits :TMR1L pour les bits de poids faible et TMR1H pour les bits de poids
fort.il peuvent être tous deux lus et écrit a leur adresse ,le TMR1 fonctionne au moyen du
registre T1CON il peut utilise trois source d’horloges déférents en mode timer il utilise
l’horloge instruction en mode compteur il peut utilise un signal externe applique a la
patteT1OSO1 ,ou bien le signal d’un oscillateur qui est lui propre réalise en connectant un
quartz entre les pattes T1OSO1 et T1OSOI.
II .17.3 . Timer2 :
Le timer 2 est compose d’un registre de 8 bits appelé TMR2 associe a un prédiviseur
et un post-diviseur ainsi qu’a un registre dit de période appelé PR2 dont le contenu
augmente a partir de 00 au rythme de l’horloge du pic divise par quatre.
II .17.4. Timer chien de Garde :
Le timer chien de garde ou Watch dog timer est une fonction utilisée pour se
prémunir des erreurs de certains logiciels ou de blocages peuvent se produire dans certains
situation il est généralement constitue d’un compteur incrémenté au rythme d’un horloge
programme au reset lors du débordement du compteur .le compteur se met régulent à zéro
si pour un raison ou un autre ,il reste en attente dans une position quelconque (boucle infini
par exemple),le tomer WDT se charge de mettre fin a cette situation grâce a un reset
génère par son débordement, le compteur compte en permanence et le fait de déborder
c'est-à-dire d’arriver a FF lui fait généré un reset au microcontrôleur.
II.18. Conclusion :
Dans ce deuxième chapitre nous avons donné une description générale du
microcontrôleur pic16f877 de son brochage de ses périphériques, ce qui nous facilitera son
utilisation lors de la réalisation de notre montage.

Chapitre III
Etude et réalisation pratique
d’une carte

Chapitre III Etude et réalisation pratique d’une carte
28
Etude et réalisation pratique d’une carte
III.1. Introduction :
Dans ce chapitre ; nous allons développer les étapes nécessaires pour aboutir à notre
objectif et faciliter la réalisation de notre projet « commande automatique d’éclairage
publique a base de microcontrôleur pic 16f877 » ainsi que les Outils de programmation
(MIkRO C et PROTEUS, WINN PIC 800).
III.2. Principe de fonctionnement:
Le principe de fonctionnement de notre projet c’est la commande de l’allumage
automatique des lampes à partir de la tension fourni par un pont diviseur résistif
proportionnel à la lumière reçue. Cette carte est compose quatre bloc nécessaire pour faire
cette application. Comme la figure ci-dessus :
Figure(III.1) : schéma synoptique de la carte
Figure(III.13) : schéma synoptique de la carte
Alimentation
Bloc de
commande
Bloc de la
puissance
Mode
opérative

Chapitre III Etude et réalisation pratique d’une carte
29
III.3. Etapes de la réalisation :
La réalisation de notre dispositif a connu cinq étapes:
1-ère
étape : C’est l’étape la plus difficile car elle consiste la recherche des
informations bibliographiques et techniques à utiliser pour aboutir à l’objectif.
2-eme
étape : choix et dimensionnement des composants électroniques allant avec le
cahier de charge, d’abord par une simulation des différentes parties du montage par
le logiciel « ISIS » pour fixer les valeurs des composants, puis par quelques tests
préliminaires sur une plaque d’essai pour confirmer leur choix.
3-eme
étape : simulation de l’algorithme établi en temps réel sur le
Microcontrôleur dans l’environnement de « MIKRO C » puis programmation du
PIC16F877A par le code hex obtenu après compilation du programme écrit.
4-eme
étape : réalisation du montage complet, d’abord sur une plaque d’essai puis
sur une plaque imprimée. Le masque du circuit imprimé est développé à l’aide du
logiciel « ARES ».
5-eme
étape : interprétation des résultats.
III .4. Outils de programmations :
Le pic 16f877A peut être programmé par divers langages et pour chaque langage il
ya plusieurs compilateurs, nous avons choisi le langage C et on utilise le compilateur
MIkRO C.
III .5.2. Compilateur C « MIKRO C » pour pic :
Conçu par la société MICROELECTRONIKA, le compilateur C nouvelle génération
“MICRO C “ pour microcontrôleur pic bénéficie d’une prise en main très intuitive et
d’une ergonomie sans faille .ces très nombreux outils intégrés (mode simulateur, terminal
de communication ; gestionnaire7segment, analyseur statique, correcteur d’erreur,
explorateur de code …..) associe à sa capacité à pouvoir gérer la plupart des périphérique
rencontrés dans l’industrie (Bus I2CTM.
1WireTM
. SPITM
.RS485.BUS.CANTM
.cartes
compact flash, signaux PWM, afficheurs LCD et 7 segment………)[MIKRO C 8.2]

Chapitre III Etude et réalisation pratique d’une carte
30
Figure (III.2) : Compilateur de MIKRO C
III .5 .3. Simulation avec ISIS (Proteus):
Isis est un éditeur de schéma qui intégré un simulateur analogique, logique ou
mixte. Toutes les opérations se passent dans cet environnement, aussi bien la
configuration des différentes sources et les tracés des courbes. [ISIS 7.4]
Figure (III.3) : ISIS (PORTEUS)
Code Editor
Type de pic
Horologe
Error Window
Code
Explore
Bibliogra
phie
Zone du
dessin
LISTE Des
composants
Chapitre III Etude et réalisation pratique d’une carte
31
III .4.4. Notice de programmation d’un pic avec le logiciel Win pic 800, et le
programmateur : [WP800]
Les étapes de programmation d’un pic avec logiciel Win pic 800 :
a) lancez le programme Win pic 800.exe.
b) branchez la Carte de programmateur ICPROG universel.
c) Vérifiez que la configuration suivant :
-Configuration hardware .
Figure (III.4)
-Configuration software.
Figure(III.5)

Chapitre III Etude et réalisation pratique d’une carte
32
-Sélectionnez le type du composant devant être programmé, dans notre travail
utilisé le pic 16f877A comme la figure ce –dessous.
Figure (III.6)
-Vérifiez la configuration oscillateur ce le mode HS (Hight speed).
Figure (III.7)

Chapitre III Etude et réalisation pratique d’une carte
33
-Lire ou écrire le composant (pic 16f877)
- Lecture :
Menu : commande tout lire
-Ecriture :
Il faut en tout premier lieu charger le fichier contenant les informations
binaires codes en hexadécimale .ces informations sont la traduction de programme
en langage machine.
Menu : fichier ouvrir fichier.
Le contenu de ce fichier est chargé en mémoire et apparait à l’écran ; comme la
figure ci-dessus :
Figure (III.8)
Lancez la programmation du pic
Menu : commande tout programmer
Figure (III.9)

Chapitre III Etude et réalisation pratique d’une carte
34
Vérifiez la programmation terminé ou non.
Menu : commande tout Vérifier
Figure (III.10)
Carte de programmateur ICPROG universel
Figure (III.11) : schéma de programmateur ICPROG universel
Le port COM : la lésion entre le PC et le programmateur
Le support du différant type de microcontrôleur.
- le LED pour détecté le fonctionnement de la programmation
d) mettre le pic de son montage et tester.
1
1 2
3

Chapitre III Etude et réalisation pratique d’une carte
35
III.5. Organigramme :
L’organigramme suivant représente le fonctionnement général de notre système.
m:valeur de CAN
T : temps
Figure (III.12) : organigramme de fonctionnement
Configuration de CAN
Déclaration des variables
Configuration les ports
Boucle
Début
m>4600
m<=4500et
m>=4200
T1=3s
Allumer les lampes 1.2.3
Allumer les lampes 1et 2
Allumer lampe 1
m>=1644
T2=3s Éteindre les lampes
m>=3900et
m<=4200
et
Lire les valeurs de CAN
NON OUI
Chapitre III Etude et réalisation pratique d’une carte
36
III.6. Etude et la conception du la carte :
III.6.1. Introduction :
Dans cette partie nous allons présenter l’étude et la conception d’un système de
commande automatique de l’éclairage publique à base de microcontrôleur Pic16f877A.
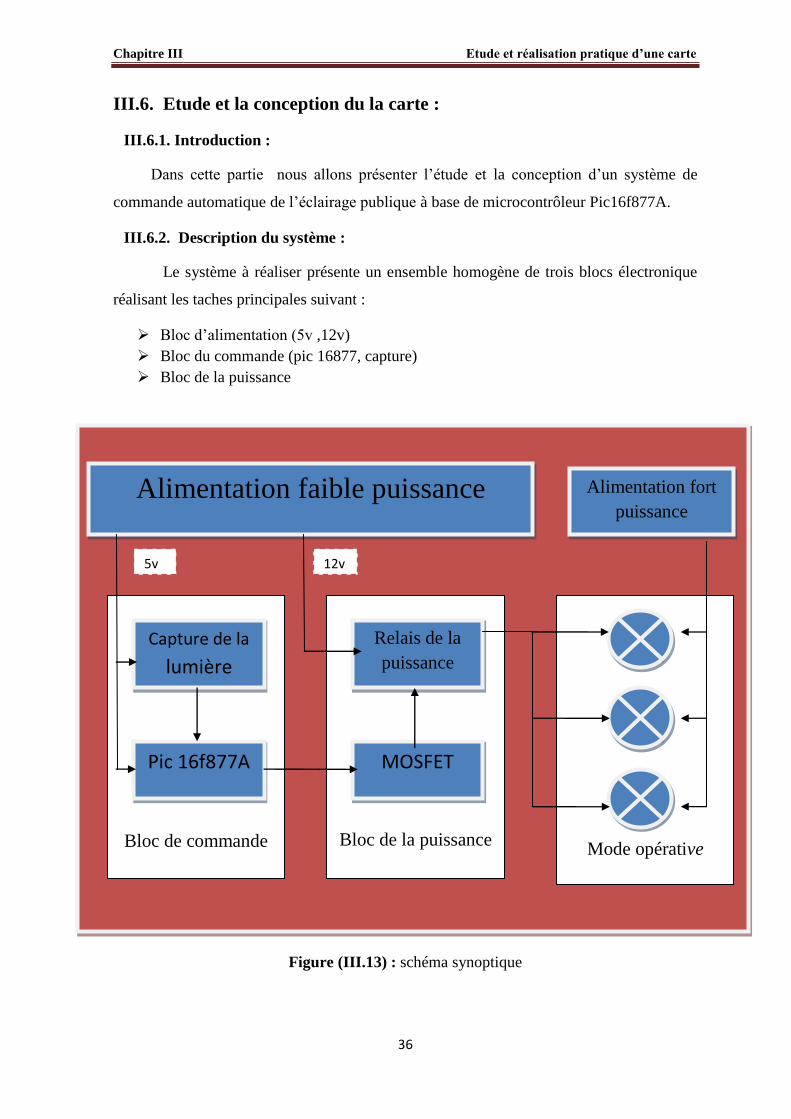
III.6.2. Description du système :
Le système à réaliser présente un ensemble homogène de trois blocs électronique
réalisant les taches principales suivant :
Bloc d’alimentation (5v ,12v)
Bloc du commande (pic 16877, capture)
Bloc de la puissance
Figure (III.13) : schéma synoptique
Bloc de commande
Alimentation faible puissance
Mode opérative
Bloc de la puissance
Capture de la
lumière
MOSFET
Relais de la
puissance
Pic 16f877A
Alimentation fort
puissance
12v 5v

Chapitre III Etude et réalisation pratique d’une carte
37
III.6.2.1. Bloc d’alimentation
La grande majorité de l’équipement électrique ont besoin d’une source de courant
continu. Le rôle d’une alimentation continu est de fournir la tension et le courant
nécessaire au fonctionnement du circuit électronique
Un transformateur nous fourni une tension de 5v et de 12v qui est redressée par le
pont de diodes et filtrée par le condensateur de C1. Cette tension est ensuite régulée à 5v
par U1 et 12v par U2, la capacité C1 servent à filtrer les bruits, leurs valeurs étant données
par le constructeur du régulateur
On obtient :
la sortie du régulateur une tension de 5 v assez stable pour ne pas perturber le circuit
de commande.
la sortie du régulateur une tension de 12 v assez stable pour le relais.
Figure (III.14) : schéma de bloc d’alimentation
TR1TRSAT2P2S
BR1
2W10G
VI1
VO3
GN
D2
U17805
VI1
VO3
GN
D2
U27812
C12200u
5v
GND
12V
GND

Chapitre III Etude et réalisation pratique d’une carte
38
III.6.2.2. Bloc de commande :
Le bloc de commande est composé deux parties :
La première Partie : partie de contrôleur et de traitement (pic 16f877A)
La deuxième Partie : partie de capteur de la lumière.
Partie de contrôleur et de traitement (pic 16f877A) :
a) Description :
La commande de processus nécessite un circuit intégré à pour rôle le traitement,
rapide information et de prix moins chère notre choix c’est le PIC 16F 877A de
MICROCHIP, à 8 k et une horloge de 20MHz et CAN, PWM….etc. , le PIC constitue le
cœur de notre réalisation. Il contient le programme nécessaire à la génération des
commandes d’éclairage publique.
Figure (III.15) : schéma de contrôleur et de traitement (pic 16f877A)

Chapitre III Etude et réalisation pratique d’une carte
39
b) Reset :
Le RESET est relier au pin MCLR du PIC c’est un Entrée de remise à zéro, lorsque
cette entrée est mise à l’état bas, le microcontrôleur est réinitialisé : il va exécuter
l’instruction se trouvant à l’adresse00 H .Mais aussi lorsque le microcontrôleur est mis
sous tension il est préférable que RESET soit à l’état logique 0 pendant un temps très
court.
Figure (III.16) : schéma de connexion de RESET
Partie de capteur de la lumière :
a) Définition :
Les capteurs de lumière sont des composants qui réalisent la conversion d'un signal
lumineux en signal électrique PHOTORESISTANCE OU LDR.
b) Principe Fonctionnement :
Une photorésistance est un composant électronique dont la résistivité varie (souvent
une diminution) en fonction de l'augmentation de lumière qui l'atteint. On peut également
le nommer résistance photo-dépendante (light-dépendent résistor (LDR) ou
photoconducteur. Une photorésistance est composée d'un semi-conducteur à haute
résistivité. Si la lumière incidente est de fréquence suffisamment élevée, les photons
absorbés par le semi-conducteur donneront aux électrons liés assez d'énergie pour sauter
dans la bande de conduction, les électrons libres (avec leurs trous d'électron) ainsi produits
abaissant la résistance de l'ensemble.

Chapitre III Etude et réalisation pratique d’une carte
40
Figure (III.17) : schéma synoptique Fonctionnement LDR
Le principe de ce montage est très simple. Une LDR (cellule photorésistante LDR1)
est associée à une résistance (R3) pour former un pont diviseur résistif fournissant une
tension dont la valeur est fonction de l'éclairement de LDR pilote via de une amplificateur
opérationnel pour isolation effet de bloc de capteur par rapport des autres bloc comme la
figure si dessus :
Figure (III.18) : Bloc capteur basé sur le circuit intégré LM358N

Chapitre III Etude et réalisation pratique d’une carte
41
III.6.2.3. Bloc de la puissance :
Dans cette bloc nous avons utilisé un relais piloté via un MOSFET de commande, est
montée aux bornes du relais pour la protection du relais. Une résistance lié à la gâchette du
MOSFET pour le protéger contre le sur intensité les relais pilote via le mode opérative
(les lampes comme la figure ci-dessous.
Figure (III.19) : bloc de la puissance
a) Les Relais :
Les relais sont disponibles dans une vaste gamme de dimensions et s’utilisent dans les
applications nécessitant l’isolation électrique d’un circuit de commande d’un circuit de
puissance.
Figure (III. 20) : schéma de relais

Chapitre III Etude et réalisation pratique d’une carte
42
Description :
Le relais est en fait composé de deux parties bien distinctes. Ces deux parties sont
normalement alimentées par deux circuits électriques indépendants (partie de la commande
et partie de la puissance).
les bornes sont numérotés dans la figure précédent correspondent toujours à:
Borne 30 Alimentation en circuit puissance
Borne 87 Sortie relais vers consommateur "final" COUPEE au repos
Borne 87a Sortie relais vers consommateur "final" ALIMENTEE au repos
Borne 86 Alimentation en circuit Commande
Borne 85 sortie - commande
Principe de fonctionnement
État repos :
L’interrupteur est ouvert, aucun courant de puissance ne circule entre
Les bornes 3 et 5. Mais un courant de puissance peut circuler entre les bornes
Figure (III.21) : schéma d’état repos de relai
Etat commandé :
Un courant de commande alimente la bobine (bornes 1 et 2) qui génère un champ
D’attraction électromagnétique provocant la fermeture de l’interrupteur. Le courant de
Puissance circule entre les bornes 3 et 5 vers le consommateur
Figure (III.22) : schéma d’état de commande de relai
Chapitre III Etude et réalisation pratique d’une carte
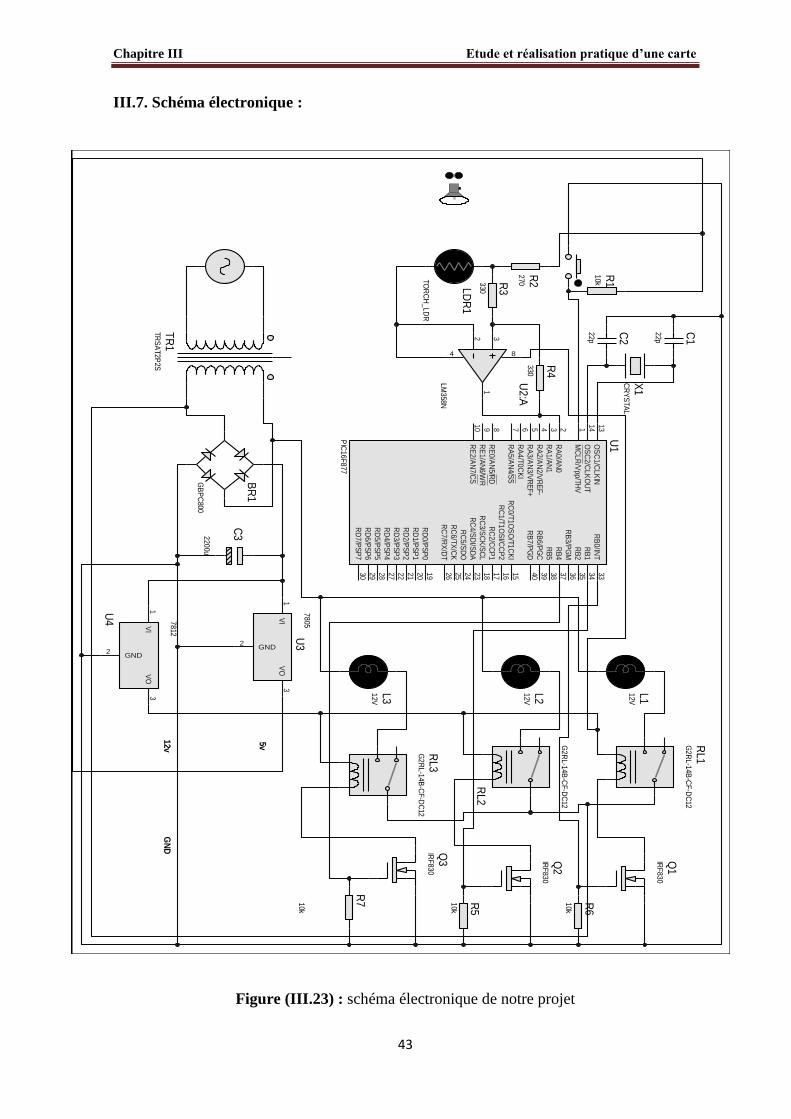
43
III.7. Schéma électronique :
Figure (III.23) : schéma électronique de notre projet
RA
0/A
N0
2
RA
1/A
N1
3
RA
2/A
N2
/VR
EF
-4
RA
4/T
0C
KI
6
RA
5/A
N4/S
S7
RE
0/A
N5/R
D8
RE
1/A
N6/W
R9
RE
2/A
N7/C
S10
OS
C1
/CL
KIN
13
OS
C2
/CL
KO
UT
14
RC
1/T
1O
SI/C
CP
216
RC
2/C
CP
117
RC
3/S
CK
/SC
L18
RD
0/P
SP
019
RD
1/P
SP
120
RB
7/P
GD
40R
B6
/PG
C39
RB
538
RB
437
RB
3/P
GM
36R
B2
35R
B1
34R
B0
/INT
33
RD
7/P
SP
730
RD
6/P
SP
629
RD
5/P
SP
528
RD
4/P
SP
427
RD
3/P
SP
322
RD
2/P
SP
221
RC
7/R
X/D
T26
RC
6/T
X/C
K25
RC
5/S
DO
24R
C4
/SD
I/SD
A23
RA
3/A
N3
/VR
EF
+5
RC
0/T
1O
SO
/T1
CK
I15
MC
LR
/Vp
p/TH
V1
U1
PIC
16
F8
77
X1
CR
YS
TA
L
C1
22p
C2
22p
R1
10k
LD
R1
TO
RC
H_
LD
R
R2
270
32
1
84
U2
:A
LM
358N
R3
330
R4
330
TR
1T
RS
AT
2P
2S
BR
1
GB
PC
800
C32
20
0u
VI
1V
O3
GND2
U3
78
05VI
1V
O3
GND2
U4 7
812
RL1
G2
RL
-14
B-C
F-D
C12
RL2
G2
RL
-14
B-C
F-D
C12
RL3
G2
RL
-14
B-C
F-D
C12
L112V
L212V
L312V
5v
12v
GN
D
Q1
IRF
83
0
Q2
IRF
83
0
Q3
IRF
83
0
R5
10k
R6
10k
R71
0k

Chapitre III Etude et réalisation pratique d’une carte
44
III.8. Réalisation pratique sur la plaque d’essai :
La réalisation du notre projet eu lieu aux laboratoires d’électrotechnique du
Université Labri Ben M’HIDI Oum – El-BOUAGHI Cette Réalisation est constitué un
bloc de commande à base d’un PIC16F877A et le Bloc d’alimentation et led pour le test.
Figure (III.24) : Réalisation pratique sur la plaque d’essai

Chapitre III Etude et réalisation pratique d’une carte
45
III.9. Réalisation pratique de la carte :
III.9.1. Le typon :
Pour préparé le typon on choisie le logiciel ARES de produit par la société
LABCENTER ELECTRONICS. Le logiciel ARES est un complémentaire de logiciel de
la simulation ISIS.
Un typon est une image du circuit imprimé. Les pistes sont en noir et le reste doit
être transparent à la lumière.et imprimer notre typon sur un papier transparent spécial jet
d'encre avec une imprimante. Il faut régler l'impression sur 'option optimal ' pour avoir un
maximum d'encre sur le papier.
Figure (III.25) : typon de carte de la commande
Figure (III.26) : typon de carte de la puissance

Chapitre III Etude et réalisation pratique d’une carte
46
III.9.2. Insolation:
Une insoleuse est un appareil fort simple, doté de très peu de composants, Ce
type d'appareil est doté de 1 à 4 tubes rayonnant des UV, et est destiné à insoler des
plaques de circuit imprimé pré sensibilisées (sous-entendu sensible aux UV). Il est aussi
possible d'utiliser une ampoule spéciale, mais les temps d'insolation sont bien plus longs et
la régularité de l'insolation n'est pas excellente, surtout pour les grands circuits. Les étapes
à suivre pour réaliser cette opération on suit la démarche ci-dessous :
Découper la plaque d'époxy à la taille du typon en laissant une petite marge.
Retirer la pellicule protectrice de la plaque
Positionner le typon dans le bon sens sur la vitre de l'insoleuse. (vue coté
composant)
Poser cette plaque avec le coté vert sur le typon dans l'insoleuse et fermer le
capot.
Remarque : Le temps d’insolation entre 1 à 5 minutes.
Figure (III.27) : plaque photosensible
Figure (III.28) : l'insoleuse

Chapitre III Etude et réalisation pratique d’une carte
47
III.9.3. Révélateur:
Le Révélateur est un produit chimique danger. Il se trouve sous forme liquide prêt
à l'emploi ou sous forme de poudre à diluer avec de l'eau, dans notre carte on utiliser la
poudre à diluer avec de l'eau
Figure (III.29) : Poudre du Révélateur
Cette étape va dissoudre la résine qui à été exposé aux UV. Ce qui mettra le
cuivre à nu et les pistes resteront protégé par la résine.
Utilisation du révélateur:
Verser votre révélateur dans une cuvette
Plonger la plaque qui vient d'être insolé.
Rincer soigneusement la plaque sous le robinet en frottant avec les doigts jusqu'à ce
qu'elle ne soit plus 'grasse' au toucher.
Figure (III.30) : Schéma de la carte dans la révélateur

Chapitre III Etude et réalisation pratique d’une carte
48
III.9. 4.Gravure:
Machine à graver :
Les machines à graver sont des récipients contenant le produit attaquant le cuivre
(perchlorure de fer ou persulfate d'ammonium), dans notre carte perchlorure de fer .
Figure (III.31) : machine de gravure avec perchlorure de fer
Utilisation du perchlorure de fer :
On trouve le perchlorure de fer sous forme liquide ou en granules. dans notre carte on
utilisera le perchlorure de fer sous forme granules
Figure (III.32) : le perchlorure de fer sous forme granule

Chapitre III Etude et réalisation pratique d’une carte
49
Utilisation de graver:
Plonger la plaque d'époxy dans la machine a graver. Temps : 5 à 30min suivant la
graveuse...
Utilisé à une température minimale de 40°C
Figure (III.33) : Schéma de la carte après le Perchlorure de fer
III.9.5. Perçage :
L'opération de perçage est l'ultime étape dans la réalisation d'un circuit imprimé, si
l'on fait abstraction de la mise en place des composants et du soudage. Pour le perçage on
utilisera une perceuse montée sur bâti, avec des forets de 1 mm.
Figure (III.34) : perceuse

Chapitre III Etude et réalisation pratique d’une carte
50
III.9.6. Soudure:
L’opération de soudure est faite à l’aide d’un fer à souder et l’étain. On commencera par:
Des composants neutres: supports de C.Intégrés, connectiques...
Passifs:
Résistances. Utiliser un Gabarit de pliage et donner vous un sens de lecture des
résistances. Les bandes de couleurs se lisant de la Droite vers la Gauche et de Haut
en Bas.
Condensateurs. Pour les plastiques ou non polarisé, donnez vous aussi un sens de
lecture.
Actifs: Diodes, transistors, circuits intégrés si vous ne mettez pas de support
Figure (III.35) : carte de notre projet

Chapitre III Etude et réalisation pratique d’une carte
51
III.10. Conclusion :
Ce dernier chapitre a été entamé par une réalisation pratique en exploitant une
méthodologie d’analyse hiérarchique. Cette analyse a été suivie d’une explication détaillée
des différentes étapes qu’il faut suivre pour la réalisation. Nous avons également présenté
l’organigramme général du programme élaboré pour la gestion du système.
Enfin, le tout a été couronné par la réalisation pratique d'un dispositif automatique de
commande de l’éclairage public avec un PIC 16F877 A

Conclusion générale

Conclusion générale
1
Conclusion générale :
Les applications de la commande des systèmes par circuit programmables est très
large dans les domaines de la technologie moderne, cette commande est généralement
basé sur les microcontrôleurs.
Dans notre projet plusieurs notions théoriques et pratiques on été présentes ; les
systèmes de commande et de contrôles et la chaine d’acquisition ont été mis en évidence.
On utilisant dans la patrie pratique plusieurs logiciels de programmation comme le
compilateur µC qui nous a permis de réduire le volume de notre travail ainsi réalisé. En
effet un µC peut remplacer plusieurs circuits logiques. Nous avons utilisé comme outil de
simulation le logiciel ISIS et pour la réalisation du typon de circuit imprime nous avons
utilise le logiciel ARES.
La fonction principale de la carte réalisée est la commande automatique dans
l’éclairage publique. Cependant cette carte peut être utilisé dans autres applications
comme : allumage automatique dans véhicule, commande et gestion de salle ou
amphithéâtre a partir de niveau de la lumière.

Références Bibliographiques

Référence Bibliographies
Référence Bibliographies:
[WS05] : William Sanial« Traité d’éclairage » Cépadués éditions2005 .Nédition :
673.
[MC51] : M-Merry-Cohu « L’éclairage électrique moderne »Dundo Paris, seconde
édition refondue et complétée 1951.
[BB03] : Bermard Béghyn « Les microcontrôleurs pic » Lavoisier 2003.
[CT02] Christian Tavernier « Les microcontrôleurs pic description et mise en œuvre
2eme
édition.
[ZS09] : Zàamta, S. (2009) : Réalisation d’un régulateur solaire à base de
microcontrôleur pour le contrôle de l’état de charge et la protection des accumulateurs,
Thèse pour le magister en électrotechnique, Université Larbi Ben M’hidi Oum El
Bouaghi.
[BM10] : Briza, T.Masoudi, A (2010) : Réalisation d’un système intelligent détecteur
de type d’obstacle en base de microcontrôleur pic 16F877, mémoire de fin d’étude
pour d’ingénieur d’état en électrotechnique, Université Larbi Ben M’hidi Oum El
Bouaghi.
[AB10 ] :A, Lotfi, Adel (2010) : Réalisation d’une carte à base de pic 16F877 pour la
commande des moteur a courant continue et pas a pas , mémoire de fin d’étude pour
d’ingénieur d’état en électrotechnique, Université Khenchela.
[WB07] : Walid Benlahcene (2007) : Un éclairage redondant, mémoire de fin d’étude
pour d’ingénieur d’état en instrumentation, Université Batna.
[ISIS 7.4] : Logiciel ISIS, labcenter Electronics, version (7.4).
[MIKRO C 8.2] : Logiciel mikro C, micro Electronika C compiler for Microchip PIC
microcontrôleur version :(8.2.0).
[WP800]: Logical win pic 800 version (8.0).
[BNF]: www.bignoff.com.
[ABC] : www.abc electronique.com.
[MC] : www.microchip.com.
[TP] : www.technologuepro.com.
[EEP] : www.cite de l’énergie .ch.-page éclairage publique.
[OMG] : http : //oee.rncan.gc.ca/iie.

Annexe
























