Phase diagram analysis based on a temporal-spatial queueing model
12
IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012 1705 Phase Diagram Analysis Based on a Temporal-Spatial Queueing Model Xiqun Chen, Student Member, IEEE, Li Li, Senior Member, IEEE, and Zhiheng Li, Member, IEEE Abstract—In this paper, we propose a simple temporal-spatial queueing model to quantitatively address some typical congestion patterns that were observed around on/off-ramps. In particular, we examine three prime factors that play important roles in ramp- ing traffic scenarios: the time τ in for a vehicle to join a jam queue, the time τ out for this vehicle to depart from this jam queue, and the time interval T for the ramping vehicle to merge into the main- line. Based on Newell’s simplified car-following model, we show how τ in changes with the main road flow rate q main . Meanwhile, T is the reciprocal of the ramping road flow rate q ramp . Thus, we analytically derive the macroscopic phase diagram plotted on the q main -versus-q ramp plane and τ in -versus-T plane based on the proposed model. Further study shows that the new queueing model not only reserves the merits of Newell’s model on the microscopic level but helps quantify the contributions of these parameters in characterizing macroscopic congestion patterns as well. Previous approaches distinguished phases merely through simulations, but our model could derive analytical boundaries for the phases. The phase transition conditions obtained by this model agree well with simulations and empirical observations. These findings help reveal the origins of some well-known phenomena during traffic congestion. Index Terms—Phase diagram, ramping, temporal-spatial queueing model, traffic flow. I. I NTRODUCTION C ONGESTION caused by on-ramp flow has been as an im- portant research topic during the last 50 years. To describe the formation, evolution, and dissipation of such congestion, various models had been proposed [1]–[18]. In particular, the “phase diagram” approach has received increasing interest in the last decade since it provided a tool to categorize the rich congestion patterns and explain the origins of some complex phenomena [11]–[18]. The term of “phase” is borrowed from thermodynamics into traffic flow theory to denote different temporal-spatial states (patterns) of traffic flows. Usually, we enumerate the possible conditions and plot all the observed traffic states onto one diagram, from which we can semiquantitatively determine the phase transition conditions. Manuscript received December 4, 2011; revised April 8, 2012; accepted May 21, 2012. Date of publication June 21, 2012; date of current version November 27, 2012. This work was supported in part by National Natural Science Foundation of China under Grant 51138003, by the National Basic Research Program of China (973 Project) under Grant 2012CB725405, by the Hi-Tech Research and Development Program of China (863 Project) under Grant 2011AA110301, and by the National Science and Technology Major Project 2012ZX03005016002. The Associate Editor for this paper was F.-Y. Wang. The authors are with Tsinghua University, Beijing 100084, China (Corre- sponding author: Li Li, e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TITS.2012.2203305 One application of phase diagram is to sketch the boundaries of different congestion patterns observed in ramping regions on freeways. If the ramping flow rate exceeds a certain limit, we observe two kinds of congestion, i.e., spatially localized and spatially extended congestions. In the first kind of congestion, the jam queue of vehicles will be restricted within a certain low-speed region whose length is roughly stable over time. Differently, in the second kind of congestion, the lengths and locations of low-speed regions may change over time. We can further classify these congestions into several categories, e.g., moving jam queues and stop-and-go waves (SGW), etc. By examining the conditions and boundaries of these traffic congestion patterns, we can gain more insights into traffic flow dynamics. To reproduce and then explain the empirical phase diagram observed in practice, some microscopic car-following and lane- changing models had been proposed and discussed in the last two decades [11]–[18]. However, many of these models incorporated some parameters that cannot be directly measured on raw traffic flow data. The resulting model calibration and validation problem hinders us from discovering the governing power that characterizes the mechanism of phase formation and transition. To solve this problem, we propose a temporal-spatial queue- ing model to depict traffic jams via the minimum number of parameters and rules. The new model applies a specialized Newell’s simplified model [19] to describe the trajectories of vehicles. As a result, we can link individual vehicle movements and the resulting congestion patterns. This helps reveal the factors that dominate the formations and transitions of different congestion patterns. To present a detailed discussion on these new findings, the rest of this paper is arranged as follows: Section II first reviews some backgrounds of our study, with special emphasis on Newell’s simplified model. Then, a new queueing model for traffic congestions is presented based on the extended Newell’s simplified model. Section III further discusses how to apply this queueing model to obtain the analytical phase diagram for a typical ramping region. Section IV provides simulation results to support the derivation in Section III. Finally, Section V concludes the paper. II. QUEUEING MODEL FOR JAM PROPAGATION A. Some Previous Models for Congestion Evolution To better present our model, let us recall Newell’s simplified model [19]–[25], which characterizes how a vehicle changes its speed according to its leading vehicle. When the vehicles 1524-9050/$31.00 © 2012 IEEE
Transcript of Phase diagram analysis based on a temporal-spatial queueing model

IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012 1705
Phase Diagram Analysis Based on aTemporal-Spatial Queueing Model
Xiqun Chen, Student Member, IEEE, Li Li, Senior Member, IEEE, and Zhiheng Li, Member, IEEE
Abstract—In this paper, we propose a simple temporal-spatialqueueing model to quantitatively address some typical congestionpatterns that were observed around on/off-ramps. In particular,we examine three prime factors that play important roles in ramp-ing traffic scenarios: the time τin for a vehicle to join a jam queue,the time τout for this vehicle to depart from this jam queue, andthe time interval T for the ramping vehicle to merge into the main-line. Based on Newell’s simplified car-following model, we showhow τin changes with the main road flow rate qmain. Meanwhile,T is the reciprocal of the ramping road flow rate qramp. Thus,we analytically derive the macroscopic phase diagram plotted onthe qmain-versus-qramp plane and τin-versus-T plane based onthe proposed model. Further study shows that the new queueingmodel not only reserves the merits of Newell’s model on themicroscopic level but helps quantify the contributions of theseparameters in characterizing macroscopic congestion patterns aswell. Previous approaches distinguished phases merely throughsimulations, but our model could derive analytical boundaries forthe phases. The phase transition conditions obtained by this modelagree well with simulations and empirical observations. Thesefindings help reveal the origins of some well-known phenomenaduring traffic congestion.
Index Terms—Phase diagram, ramping, temporal-spatialqueueing model, traffic flow.
I. INTRODUCTION
CONGESTION caused by on-ramp flow has been as an im-portant research topic during the last 50 years. To describe
the formation, evolution, and dissipation of such congestion,various models had been proposed [1]–[18]. In particular, the“phase diagram” approach has received increasing interest inthe last decade since it provided a tool to categorize the richcongestion patterns and explain the origins of some complexphenomena [11]–[18].
The term of “phase” is borrowed from thermodynamics intotraffic flow theory to denote different temporal-spatial states(patterns) of traffic flows. Usually, we enumerate the possibleconditions and plot all the observed traffic states onto onediagram, from which we can semiquantitatively determine thephase transition conditions.
Manuscript received December 4, 2011; revised April 8, 2012; acceptedMay 21, 2012. Date of publication June 21, 2012; date of current versionNovember 27, 2012. This work was supported in part by National NaturalScience Foundation of China under Grant 51138003, by the National BasicResearch Program of China (973 Project) under Grant 2012CB725405, bythe Hi-Tech Research and Development Program of China (863 Project)under Grant 2011AA110301, and by the National Science and TechnologyMajor Project 2012ZX03005016002. The Associate Editor for this paper wasF.-Y. Wang.
The authors are with Tsinghua University, Beijing 100084, China (Corre-sponding author: Li Li, e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TITS.2012.2203305
One application of phase diagram is to sketch the boundariesof different congestion patterns observed in ramping regions onfreeways. If the ramping flow rate exceeds a certain limit, weobserve two kinds of congestion, i.e., spatially localized andspatially extended congestions. In the first kind of congestion,the jam queue of vehicles will be restricted within a certainlow-speed region whose length is roughly stable over time.Differently, in the second kind of congestion, the lengths andlocations of low-speed regions may change over time. Wecan further classify these congestions into several categories,e.g., moving jam queues and stop-and-go waves (SGW), etc.By examining the conditions and boundaries of these trafficcongestion patterns, we can gain more insights into traffic flowdynamics.
To reproduce and then explain the empirical phase diagramobserved in practice, some microscopic car-following and lane-changing models had been proposed and discussed in thelast two decades [11]–[18]. However, many of these modelsincorporated some parameters that cannot be directly measuredon raw traffic flow data. The resulting model calibration andvalidation problem hinders us from discovering the governingpower that characterizes the mechanism of phase formation andtransition.
To solve this problem, we propose a temporal-spatial queue-ing model to depict traffic jams via the minimum number ofparameters and rules. The new model applies a specializedNewell’s simplified model [19] to describe the trajectories ofvehicles. As a result, we can link individual vehicle movementsand the resulting congestion patterns. This helps reveal thefactors that dominate the formations and transitions of differentcongestion patterns.
To present a detailed discussion on these new findings, therest of this paper is arranged as follows: Section II first reviewssome backgrounds of our study, with special emphasis onNewell’s simplified model. Then, a new queueing model fortraffic congestions is presented based on the extended Newell’ssimplified model. Section III further discusses how to apply thisqueueing model to obtain the analytical phase diagram for atypical ramping region. Section IV provides simulation resultsto support the derivation in Section III. Finally, Section Vconcludes the paper.
II. QUEUEING MODEL FOR JAM PROPAGATION
A. Some Previous Models for Congestion Evolution
To better present our model, let us recall Newell’s simplifiedmodel [19]–[25], which characterizes how a vehicle changesits speed according to its leading vehicle. When the vehicles
1524-9050/$31.00 © 2012 IEEE

1706 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
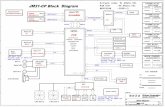
Fig. 1. Specialized Newell’s simplified model.
run on a homogeneous highway, this model assumes that thetime-space trajectory of the following vehicle is the same as theleading vehicle, except for a transformation in both space andtime.
Based on Newell’s simplified model, Kim and Zhang an-alyzed the growth and dissipation of jam queue caused byperturbations [21], [22]. It was shown that stochastic reactiontimes of drivers resulted in stochastic ac/deceleration wavespeeds and thus led to random growth/decay of disturbances.
Differently in [26]–[29], the temporal evolution, instead ofthe spatial evolution of a jam queue, was addressed. Theevolution is characterized by how a vehicle joins in and departsfrom it. Thus, we can depict the evolution dynamics of the jamqueue as a diffusion process as well.
Similarly, we can describe the jam queue as a first-in–first-out (FIFO) queue system and then depict its temporal evolutionin terms of queueing theory. However, if we want to simul-taneously describe the spatial evolving features of congestionpatterns, we need a new queueing model that also considers thespatial evolution of a jam queue.
B. Temporal-Spatial Queueing Model
In the following, let us consider a specialized Newell’s modelthat focuses on the scenario of congestion propagations. Forthe sake of simplicity, we assume that there exist only twokinds of vehicle speeds: free-flow (FF) speed vf and con-gested flow speed vc. Therefore, we only have two kinds ofslopes for all the piecewise-linear trajectories shown in Fig. 1.Obviously, the birth/death of a jam queue is controlled bythe rate of vehicles that join in/depart from it. If the joiningrate is, on average, larger than the departing rate, a smallperturbation will grow into a wide jam. Otherwise, the per-turbation will finally dissipate. As shown in Fig. 1, we definethe join time and departing time for the ith vehicle as τin,i andτout,i, respectively. As pointed out in some previous literatures,e.g., [32] and [33], the join time τin,i heavily depends onthe upstream vehicle flow rate. Based on this relationship,we could link the microscopic queueing model with macro-scopic traffic flow properties and finally show that the conges-
Fig. 2. Determination process of acceleration/deceleration points within a jamqueue.
tion patterns are indeed determined by τin,i and τout,i in animplicit way.
Moreover, we assume the propagation speed of upstreamshock front (congestion wave) is w, i.e., the slope of the dashedarrow in Fig. 1; when the leading (i− 1)th vehicle joins a jamqueue, the following ith vehicle will adjust its speed after aspatial displacement of
di = wτin,i. (1)
According to the geometric relationship shown in Fig. 1, thedevelopment of spacing between two vehicles can be written as⎧⎨
⎩sbefore = (vf + w)τin,iswithin = (vc + w)τin,isafter = (vc + w)τin,I + (vf − vc)τout
(2)
where sbefore is the spacing before the ith vehicle joining thejam queue, swithin is the spacing within the jam queue, andsafter is the spacing after the ith vehicle departing from the jamqueue.
Moreover, we can denote the corresponding headway as
hbefore = sbefore/vf = (vf + w)τin,i/vf . (3)
Therefore, the change of spacing through a jam queue is
safter − sbefore = (vf − vc)(τout − τin,i). (4)
If τin,i < τout, the spacing becomes larger after the jamqueue. If τin,i = τout, the spacing maintains constant, whichis the assumption in Newell’s simplified model [19]. If τin,i >τout, the spacing becomes smaller after the jam queue.
As shown in Fig. 2, to get the spatial evolution of a jamqueue, we only need to determine the speed-changing pointsof each vehicle and then link these points via a series oflines segments with known slopes. When the first vehicle isdetermined, we will take a two-step recursive method to getthe trajectories of the following vehicles: First, determine thetime axis of a speed-changing point, and then, get its associatedspatial axis via the following geometric assumptions.

CHEN et al.: PHASE DIAGRAM ANALYSIS BASED ON A TEMPORAL-SPATIAL QUEUEING MODEL 1707
In the first jam queue, suppose that the merging point of thefirst ramping vehicle is P
(1)0 (t
(1)0 , x
(1)0 ), where the superscript
“(1)” denotes the first jam queue and the subscript “0” repre-sents the merging vehicle. Denote the first deceleration point ofthe first influenced vehicle on the main road as P(1)
d,1(t(1)d,1, x
(1)d,1)
in the plot. If the deceleration wave of the first vehicle in-fluences the speed of its following vehicle, we can deter-mine the first deceleration point P(1)
d,2(t(1)d,2, x
(1)d,2) of the second
vehicle by {t(1)d,2 = t
(1)d,1 + τ
(1)in,2
x(1)d,2 = x
(1)d,1wτ
(1)in,2
(5)
where τ (1)in,2 is the join time of the second vehicle in the first jamqueue.
This determination process of deceleration points can beformulated as the following recursion:{
t(1)d,i = t
(1)d,i−1 + τ
(1)in,i
x(1)d,i = x
(1)d,i−1 − wτ
(1)in,i
, i = 2, . . . , n. (6)
Suppose that this propagation process in the first jam queueis denoted as P
(1)d,1 → P
(1)d,2. Similarly, we can sequentially
determine the deceleration points for the vehicles coming next,i.e., P(1)
d,i → P(1)a,i , i = 2, 3, . . ..
As suggested in [26]–[29], we assume a constant depart-ing time of τout for any vehicle. Thus, we can determinethe acceleration point P
(1)a,1(t
(1)a,1, x
(1)a,1) of the first influenced
vehicle as {t(1)a,1 = t
(1)d,1 + τout
x(1)a,1 = x
(1)d,1 + vcτout.
(7)
As shown in Fig. 2, the acceleration point P(1)a,2(t
(1)a,2, x
(1)a,2) of
the second vehicle should be⎧⎨⎩ t
(1)a,2 = t
(1)d,2 + 2τout − τ
(1)in,2
x(1)a,2 = x
(1)d,2 + vc
(2τout − τ
(1)in,2
) (8)
unless the acceleration wave collides with the accelerationwave.
Similarly, we could sequentially determine the accelerationpoints for the vehicles coming next, i.e., P(1)
d,i → P(1)a,i as⎧⎪⎪⎪⎨
⎪⎪⎪⎩t(1)a,i = t
(1)d,i + iτout −
i∑j=2
τ(1)in,j
x(1)a,i = x
(1)d,i + vc
(iτout −
i∑j=2
τ(1)in,j
) , i = 2, . . . , n.
(9)
On the other hand, we determine the deceleration/acceleration points of the ith trajectory based on the (i− 1)thtrajectory in the kth jam queue, i.e., P
(k)d,i−1 → P
(k)d,i and
P(k)a,i−1 → P
(k)a,i as
Y(k)i = Y
(k)i−1 + b
(k)i , i = 2, . . . , n (10)
Fig. 3. How to simulate two colliding jam queues. (a) Unrevised trajectoryfor the following vehicle. (b) Revised trajectory for the following vehicle.
where
Y(k)i =
⎡⎢⎢⎢⎢⎣t(k)d,i
x(k)d,i
t(k)a,i
x(k)a,i
⎤⎥⎥⎥⎥⎦
b(k)i =
⎡⎢⎢⎣
τ(k)in,i
−wτ(k)in,i
τoutvcτout(vc + w)τ
(k)in,i
⎤⎥⎥⎦ . (11)
Sometimes, two jam queues collide and finally merge intoone (see Fig. 3). Suppose that the ith vehicle in the first jamqueue is the same as the jth vehicle in the second jam queue.We have i > j, because the first jam queue occurs earlier thanthe second jam queue. Then, the merging condition of two jamqueues is
t(1)a,i ≥ t
(2)d,j or x(1)
a,i ≥ x(2)d,j . (12)
In case this happens, we let t(2)d,j = t(1)a,i and x
(2)d,j = x
(1)a,i to
avoid driving back or unreasonable trajectories [see Fig. 3(b)].Fig. 4 shows the trajectory of a vehicle that is influenced by
multiple jam queues. The join time of this vehicle in the kth jamqueue is denoted as τ (k)in . We can see that τ (k)in changes with thenumber of jam queues. Recalling (2), we have
{s(1)within = s
(1)before − (vf − vc)τ
(1)in
s(1)after = s
(2)before = s
(1)within + (vf − vc)τout.
(13)

1708 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
Fig. 4. Change of join times for one vehicle when it passes several jam queues.
If the vehicle joins another jam queue after departing fromthe previous jam queue, we can calculate the join time to thesecond jam queue by
τ(2)in =
s(1)after
vf+w=
(vc + w)τ(1)in + (vf − vc)τoutvf+w
. (14)
Extending the logic into a general situation, we have therecursion formula for the dynamic evolution of join time, i.e.,
τ(k+1)in =
(vc + w)τ(k)in + (vf − vc)τoutvf + w
= aτ(k)in + b, k = 1, 2, . . . (15)
where a = (vc + w)/(vf + w) < 1, and b = (1 − a)τout.Therefore, the recursive formula of τ (k)in is
τ(k)in = ak−1τ
(1)in + (1 − ak−1)τout, k = 1, 2, . . . . (16)
For a large k, the limit of τ (k)in is equal to τout, i.e.,
limk→+∞
τ(k)in = τout. (17)
We can also obtain the asymptotic properties of τ (k)in as⎧⎪⎨⎪⎩
τ(1)in < τout ⇒ τ
(k)in < τ
(k+1)in < τout
τ(1)in = τout ⇒ τ
(k)in = τ
(k+1)in = τout
τ(1)in > τout ⇒ τout < τ
(k+1)in < τ
(k)in
, k = 1, 2, . . . .
(18)
Fig. 5 shows an numerical example on the convergence ofτ(k)in with respect to different τ (1)in , where vf = 90 km/h, vc =
20 km/h, w = 18 km/h, and τout = 2 s, so that a = 0.352 andb = 1.296 s. τ
(k)in rapidly converges to τout when a vehicle
passes multiple jam queues no matter what an initial τ (1)in ischosen. The numerical convergence promises a stable spatial-temporal evolution.
Fig. 5. Asymptotic properties of τ (k)in → τout with respect to qmain, wherewe apply the relation of τin and qmain in (23).
C. Feasibility of the New Queueing Model
We can directly check the feasibility of the aforementionedqueueing model by examining whether it guarantees collisionfreedom along the space axis and convective instability alongthe time axis. Let us define the minimal critical spacing as thedistance between the front bumpers of two adjacent vehiclesunder maximal traffic flow rate and the maximal critical spacingas the decelerated perturbation of a leading vehicle having noimmediate impacts on its following vehicle, i.e.,
smin = vf/qmax smax = vfτout (19)
where qmax is, meanwhile, the main road capacity per lane,which corresponds to the minimal critical headway hmin =1/qmax.
On the other hand, to maintain a safe car-following behavior,we define the safety spacing as
ssafe = vcongτout. (20)
Clearly, we should have ssafe < smin < smax. Based on (18),we have⎧⎪⎨⎪⎩
τ(1)in < τout ⇒ s
(k)cong < s
(k)before < s
(k)after
τ(1)in = τout ⇒ s
(k)cong < s
(k)before = s
(k)after
τ(1)in > τout ⇒ s
(k)cong < s
(k)after < s
(k)before
, k = 1, 2, . . . .
(21)
As shown in (21), s(k)within is smaller than both s(k)before and
s(k)after. Thus, we only need to check whether s(k)within ≥ ssafe can
be held in the simulations.Based on (13) and (16), we can have
s(k)within = s
(1)within − (vf − vc)
k∑i=2
τ(i)in + (k − 1)(vf − vc)τout
= s(1)within − (vf − vc)
(τ(1)in − τout
) k∑i=2
ai−1 (22)
where k = 2, 3, . . ., and a = (vc + w)/(vf + w) < 1.

CHEN et al.: PHASE DIAGRAM ANALYSIS BASED ON A TEMPORAL-SPATIAL QUEUEING MODEL 1709
Fig. 6. Critical convective instability, where the acceleration wave speed iszero.
Clearly, we have the limit of s(k)within as
limk→+∞
s(k)within = s
(1)within − (vf − vc)
(τ(1)in − τout
) a
1 − a
= s(1)within − (vc + w)
(τ(1)in − τout
)=(vc + w)τout > ssafe. (23)
Based on (22), we see that the series of s(k)within is monotonous
with k and limk→+∞ s(k)within > ssafe. Thus, we only need to
check whether we have s(1)within > ssafe.
On the other hand, our model needs to preserve the convec-tive instability [30]. This means that small oscillations growdue to merging disturbances, but the range of growing ampli-tudes propagate only upstream. In the extreme case where theacceleration wave does not propagate upstream (see Fig. 6), thesituation satisfies the following relationship:
τinw = (τout − τin)vc. (24)
The condition that ensures convective instability is
τ(k)in
τout>
vcw + vc
, k = 1, 2, . . . . (25)
According to the asymptotic property of the join time de-noted in (18), we have three situations.
1) If τ(1)in < τout, then τ
(k)in < τ
(k+1)in < τout, and we need
to select τ (1)in > τoutvc(w + vc)−1.
2) If τ (1)in = τout, the left term of (25) is equal to 1, whereasthe right term is less than 1, and therefore, (25) can benaturally satisfied;
3) If τ (1)in > τout, the left term of (25) is larger than 1 and isalso larger than the right term, and therefore, (25) can alsobe naturally satisfied. Therefore, our model guaranteesthe convective instability if min{τ (k)in } > τoutvc(w +vc)
−1, k = 1, 2, . . ..
It should be pointed out that the proposed model implicitlyassume a bilinear fundamental diagram: for the FF state, thetraffic flow rate linearly increases with the density as q =vfρ, whereas, for the congested-flow state, the traffic flowrate linearly increases with the density as q = w(ρmax − ρ),where ρmax denotes the maximum density. This is becauseNewell’s simplified car-following model implicitly assumesthat a Greenshield-type fundamental diagram [31] holds on
stable platoons. The detailed explanation on Newell’s modelassumption can be found in [32].
III. ANALYTICAL SOLUTION FOR PHASE DIAGRAM
In this section, we will derive the analytical boundaries ofphases for the scenario of an on-ramp merging bottleneck basedon the proposed temporal-spatial queueing model.
A. Generated Jam Queues
Fig. 7 shows three kinds of jam queues that can be generatedvia the aforementioned new queueing model, due to periodicalramping vehicle disturbances.
1) When τin > τout, the jam queue width decreases. If thejam queue dissipates before the next ramping vehicleinserts into the main road, we may observe a localizedjam queue [see Fig. 7(a)].
2) When τin = τout, we can observe a moving localized jamqueue [see Fig. 7(b)].
3) When τin < τout, two jam queues will finally merge intoone. The jam queue width increases [see Fig. 7(c)].
B. Reproduced Congestion Patterns
According to [13]–[16], there are six possible congestionpatterns in this scenario: 1) free traffic (FT); 2) pinned localizedcluster (PLC); 3) moving localized cluster (MLC); 4) SGW;5) oscillatory congested traffic (OCT); and 6) homogeneouscongested traffic (HCT). In this section, we will derive theanalytical emerging conditions for these patterns based on theaforementioned queueing model.
Noticing that the proposed model gives prominence to threeindependent parameters, i.e., τin, τout, and T , assuming τout is aconstant, as suggested in [26]–[29], we can plot the congestionphase diagram in the widely adopted qramp versus qmain plot,due to the relations between τin and qmain, and between T andqramp.
First, as proven in [32] and [33], when a vehicle fromupstream meets the first jam queue, the join time τin with agiven inflow rate qmain should be
τin =vf
qmain(vf+w)=
vfhmain
vf+w(26)
where hmain = 1/qmain is the main road headway.Second, qramp is the reciprocal of T by the following
definition:
qramp = 1/T. (27)
Since ramping becomes impossible when T is too small, wewill only discuss the scenario of T ≥ 2τout in the rest of this pa-per. In the T -versus-τin phase diagram, we analytically classifythe traffic phases into the following four main categories:
Case 1—FF: In this paper, we define the FF state as thata jam queue dissipates within a very short time period (seeFig. 7(a) for an illustration). Clearly, only if τin � τout and Tis large enough do we get the FF traffic state.

1710 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
Fig. 7. Three typical jam queues from the viewpoint of queueing theory.(a) Jam queue dissipation. (b) Jam queue propagation. (c) Jam queue propa-gation and collision.
Fig. 8 shows the case in which the ramping vehicle affectsonly one main road vehicle. By applying (20), the critical inflowheadway in the FF case can be defined as
hfree = 2τout −ssafevf
=2vf − vc
vf· τout (28)
where hfree guarantees that the following mainline vehiclewill not be influenced, even in the worst case of a suddendeceleration of the leading mainline vehicle.
Fig. 8. One special scenario of FF.
Thus, as shown in Fig. 8, recalling (3), the phase conditionfor such an FF scenario is
τin ≥ vfhfree
vf + w. (29)
Case 2—FF, PLC, and SGW: If the dissipation time of ajam queue becomes larger, more vehicles will be disturbed bymore than one jam queues [see Fig. 7(a)]. According to theasymptotic property of τ
(k)in given by (17), for those vehicles
that encounter more than one jam queue, their join times de-crease as τ (k+1)
in < τ(k)in , with τ
(1)in = τin. This might make the
dissipation time of the second jam queue larger than that of thefirst jam queue. If the increase in the dissipation time convergesto a certain limit, we may observe a localized congestion.Otherwise, we will observe a sequence of jam queues whoseinfluenced road regions extend spatially from one to another.
According to Fig. 7(a), if the first jam queue dissipates afterjust p vehicles, where p = 2, . . . , n, we have{ τin > τout
(p− 1)τin < pτoutpτin ≥ (p+ 1)τout.
(30)
Then
τoutτin − τout
≤ p <τin
τin − τout. (31)
As shown in Fig. 9, we further assume that there are r vehi-cles influenced by only one or no jam queue when passing theramping region before the second ramping vehicle is insertedinto the mainline, and we have
T ≥ (r − 1)wτinvf
+ rτout + hmin (32)
where the first term on the right side of (32) corresponds to|CF| = tC − tF; tC and tF mean the time coordinates of pointsC and F, respectively; the second term represents tE − tA,and therefore, the first two terms denote tD − tA, which isapproximately the arrival time of the rth vehicle at the on-ramplocation; the third term of hmin guarantees the minimal head-way between the merging vehicle and the rth mainline vehicle.

CHEN et al.: PHASE DIAGRAM ANALYSIS BASED ON A TEMPORAL-SPATIAL QUEUEING MODEL 1711
Fig. 9. One special scenario of PLC/SGW.
Thus, (32) formulates the boundary condition that at least rvehicles pass the merging region with no influence from thesecond merging vehicle or, equivalently
r ≤ wτin + vf(T − hmin)
wτin + vfτout. (33)
Define the proportion of vehicles that are only influenced byone jam queue as
ϕ ≡ r
p. (34)
Substituting (34) into (31) and (33) and eliminating theintermediate variable r and p, we obtain the following conditionby neglecting the relatively small influence of hmin:
T ≥ −wτ2in + (ϕ+ 1)wτoutτin + ϕvfτ2out
vf(τin − τout)= f(ϕ, τin) (35)
where f(ϕ, τin) is the boundary function with respect to ϕand τin.
Clearly, when ϕ = 1, we get the FF phase with the boundary
T =−wτ2in + 2wτoutτin + vfτ
2out
vf(τin − τout)
= − w
vf(τin − τout) +
(vf + w)τ2outvf(τin − τout)
. (36)
When 0 < ϕ < 1, the rest of the p− r vehicles that departfrom the first jam will join the second jam queue with join timeτ(2)in , whereas the other vehicles join the second jam with join
time τ (1)in . We can then get the number of the vehicles influencedby the second jam queue as
τout + (p− r)(τin − τ
(2)in
)τin − τout
≤q<τin + (p− r)
(τin − τ
(2)in
)τin − τout
(37)
where the second jam queue dissipates after just q vehicles.Based on (15), we could have
τoutτin−τout
+(p−r)(1−a)≤q<τin
τin−τout+(p−r)(1−a)
Fig. 10. Approximate colliding point of the deceleration and accelerationwaves.
which indicates that, if (p− r)(1 − a) ≥ 1, we will have q > p.Similar deductions show that, when 0 < ϕ < 1, the number ofthe vehicles influenced by the (k + 1)th jam queue will alwaysbe larger than the number of vehicles influenced by the kth jamqueue. Further tests show that when ϕ < 0.8, the increase indissipation time will have no limits. For simplicity in this paper,we choose a threshold ϕPLC in (35) to distinguish PLC andSGW phases, satisfying
0 < ϕPLC < ϕFF = 1. (38)
Case 3—MLC: In this case, we define MLC as a singlemoving jam queue that propagates upstream with a constantsize. Based on the aforementioned discussion, we can easilyfind one condition for τin as
τin =vf
qmain(vf + w)= τout. (39)
This scenario is quite a special one, because τin keepsconstant and is the same as τout.
However, we have to set a relatively large T � τout toguarantee that the distance between two consecutive movingclusters is large enough; otherwise, the obtained congestionpattern might be recognized as oscillating jams.
Case 4—SGW, OCT, and HCT: The phases of SGW/OCT/HCT occur when τin < τout (see Fig. 10). More preciously,according to the convective instability and road capacity con-straint, we have
τin ≥ max
{vcτoutvc+w
,vf
qmax(vf + w)
}. (40)
To study their dividing boundaries, we would like to checkthe propagation difference of the acceleration wave. Recalling(9) and (10), we have
w′ =(xka,i−1 − xk
a,i
)/τout︸ ︷︷ ︸
∀k, i
= (vc + w)τinτout
− vc ≥ 0 (41)
where w′ is the acceleration wave speed (see Fig. 10).

1712 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
The propagation distance for the downstream front of theprevious jam queue before it collides with the upstream frontof the next jam queue can be estimated as
D ≈ wT [(vc + w)τin − vcτout]
(vc + w)(τout − τin)> 0. (42)
If D is relatively large, the small separate jam queues spendmore time merging into a larger jam queue. In addition, we cansee an SGW phase. If D becomes smaller, then the OCT phaseappears; if D becomes even smaller, the HCT phase emerges.
Let us define the following dimensionless scaling parameterto compare D with wτout as
θ =D
wτout. (43)
From (42), we have the following monotone decreasingrelationship between τout and T :
τin =
(1 − wT
(vc + w)(θτout + T )
)τout = g(θ, T )τout (44)
where g(θ, T ) is the substitution function with respect toθ and T .
Clearly, we have
limT→0+
τin = τout, limT→+∞
τin =vcτoutvc + w
. (45)
Choosing two thresholds θOCT and θHCT in (44) to distin-guish OCT and HCT phases
0 < θHCT < θOCT. (46)
We predict that when g(θHCT, T )τout < τin ≤ g(θOCT,T )τout, we get the OCT phase. When τin ≤ g(θHCT, T )τout,we get the HCT phase instead. Otherwise, we get the SGWphase.
In summary, Fig. 11(a) shows the congested traffic patternsdenoted by the merging time interval T and the join time τin.Furthermore, we transfer the T -versus-τin phase diagram intothe regular qramp-versus-qmain phase diagram [see Fig. 10(b)].As shown in Fig. 11, we formulate the six regions in theanalytical phase diagram: 1) FF; 2) PLC; 3) MLC; 4) SGW;5) OCT; and 6) HCT. The dashed curves indicate the boundariesof each region. We adopt two dimensionless scaling param-eters ϕ and θ to distinguish the phases of FF/PLC/SGW andSGW/OCT/HCT, respectively.
It should be pointed out that we have two kinds of SGWpatterns here. In the scenarios with the condition of τin > τout,the jam queues finally dissipate, but their lasting time periodswill become larger one by one. In the scenarios of τin < τout,the jam queues finally merge into a wide jam that will lastforever.
The aforementioned boundaries are not accurate since weonly discuss the evolution dynamics of the first few queues and,
Fig. 11. Analytical phase diagram of the temporal-spatial queueing model.(a) T versus τin. (b) qramp versus qmain.
meanwhile, employ several approximations. Thus, in the nextsection, we will use simulations to verify the accuracy of thepredicted phase transition boundaries.
IV. NUMERICAL EXAMPLE OF PHASE DIAGRAM
OBTAINED IN RAMPING REGION
A. Parameter Setting for the Ramping Scenario
To verify the aforementioned analytical derivation of phaseboundaries, we discuss a typical ramping scenario that had beenaddressed in literature [16], [18]. Fig. 12 shows the studiedramping region with a bottleneck at x = 7.5 km. Comparedwith the ramping region studied in [17], the geometric featureof the ramping road is neglected.
We assume that all the vehicles in the simulations are smallcars. As suggested in many previous papers [11]–[18], [22], weset vf = 90 km/h = 25 m/s, w ≈ 18 km/h = 5 m/s, and τout =2 s, as suggested in [26]–[29]. Table I gives the other parametersthat are used in the simulations.
Clearly, a queueing model can be determined by the firstsix parameters in Table I. The last four parameters in Table Iare used to distinguish the outcomes of the queueing model.

CHEN et al.: PHASE DIAGRAM ANALYSIS BASED ON A TEMPORAL-SPATIAL QUEUEING MODEL 1713
Fig. 12. Diagram of the studied ramping region, where the main road and theramping road have one lane, respectively.
TABLE ISPECIFIC PARAMETERS FOR NUMERICAL EXAMPLE
They should not be considered as part of the queueing modelitself.
We can hold the convective condition inequality (25), be-cause qmain ≤ qmax = 2/3 veh/s, τin ≥ vfq
−1max(vf + w)−1 =
1.25 s, and vcτout(w + vc)−1 = 0.95 s. Moreover, we can also
guarantee the collision-free condition s(1)within > ssafe, because
τ(1)in > vcτout/(vc + w) = 1.05 s, and inequality (23) holds,
respectively.
B. On-Ramp Merging Rule
We assume that the mainline vehicles have higher prioritythan the merging vehicles. If possible, one merging vehiclewill be inserted into the mainline, strictly according to timeperiod T . However, if doing this leads to an immediate col-lision between the merging vehicle and the mainline vehiclethat just leaves the ramping point, we will let the mergingvehicle wait for a while and then merge into the mainline. Wecall it intelligent on-ramp merging rule or minimal headwayrule.
In other words, the merging vehicle will wait until its head-way to the leading vehicle is larger than the minimal criticalheadway hmin = 1/qmax. This assumption is consistent withour driving experiences and has been adopted by many previoussimulation systems [34], [35]. The intelligent merging behaviorwill prevent generating unsafe spacings in simulations, but itwill certainly result in more complicated merging disturbances
and, thus, more complex congestions. It will finally influencethe simulated phase diagram, particularly for the FF, PLC, andMLC phases.
It should be pointed out that no lane-changing actions areconsidered in this paper, mainly because the model allows onlytwo kinds of vehicle speeds. Thus, the vehicle will not benefitfrom lane-changing actions.
It is worthy to point out that the spatial-temporal queueingmodel is highly suitable for a simulation approach because weonly consider the transition points and ignore the dynamicsbetween two adjacent points. This technique enables us to muchmore quickly reproduce the spatial-temporal evolution of trafficspeed.
C. Numerical Results
Fig. 13 shows the typical traffic patterns when we choosedifferent values of qramp and qmain. To get a uniform gridin the widely adopted qramp-versus-qmain phase diagram, weuniformly sampled the parameter space of (qramp), qmain,with a discretization level of 50 veh/h for qramp and anotherdiscretization level of 100 veh/h for qmain, respectively. Thus,the sampling grid in the T -versus-τin phase diagram is notuniform due to the reciprocal relationships.
Fig. 13 also presents the corresponding trajectory plots forfive representative congestion states. To make the plots moreclear, we only draw the trajectory of the first vehicle for everytwo consecutive vehicles; otherwise, the curves will be toodense to observe. The red lines, which start at the locationx = 7.5 km in the vehicle trajectory plots, denote the mergingon-ramp vehicles. The headway between two adjacent red linesrepresents the merging time interval.
Fig. 14 compares the predicted boundaries previously ob-tained and the simulated boundaries. Here, the dimension-less scaling parameters are chosen as ϕFF = 1, ϕPLC = 0.8,θOCT = 10, and θOCT = 5. Clearly, the boundaries of FF, PLC,MLC, SGW, OCT, and HCT phases fit dramatically well withthose estimated in Section III.
The MLC states only appear at (qramp, qmain) = (50,1500) veh/h and (qramp, qmain) = (100, 1500) veh/h, whichcorrespond to T = 72 s and T = 36 s, respectively. Becausethe maximum T is 18 s in Fig. 14(a), we cannot see the MLCpattern in this subfigure.
The locations of congestion patterns are similar to those thathave been obtained via different simulation models [11]–[16],[18], e.g., [14]. This shows the effectiveness of such a simpletemporal-spatial queueing model.
As revealed in the phase condition (40), any simulationmodel that can reproduce PLC patterns should be able togenerate a roughly equal jam queue join time τin and departingtime τout. Thus, we can directly analyze the mainline-rampingflow rate condition that allows τin ≈ τout.
It should be pointed out that the SGW (with τin < τout) andOCT congestion patterns that are generated in this paper do notstrictly reproduce the SGW and OCT congestion patterns thathave been observed in practice [11]–[16], [18]. In particular,in our model, the narrow jams in which vehicles move witha low speed cannot merge into a large jam where vehicles

1714 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
Fig. 13. Obtained phase diagram. Five states, i.e., PLC, MLC, SGW, OCT, and HCT, are reproduced. The selected conditions are given as follows:(a) (qramp, qmain) = (500, 1200) veh/h, (b) (qramp, qmain) = (50, 1500) veh/h, (c) (qramp, qmain) = (400, 1600) veh/h, (d) (qramp, qmain) =(450, 1800) veh/h, and (e) (qramp, qmain) = (300, 2100) veh/h.
Fig. 14. Comparison between theoretical and simulated phase diagrams. (a) T versus τin. (b) qramp versus qmain.
fully stop. This is mainly because our model allows only twokinds of vehicle speeds for simplicity. Indeed, the SGW/OCTtrajectories shown in Fig. 14 are similar to the trajectories
obtained via the optimal velocity model in [36]. This indicatesthe equivalence between Newell’s simplified model and theoptimal velocity model in terms of phase diagram.

CHEN et al.: PHASE DIAGRAM ANALYSIS BASED ON A TEMPORAL-SPATIAL QUEUEING MODEL 1715
V. CONCLUSION
In this paper, we have proposed an as-simple-as-possiblespatial-temporal queueing model to study the phase diagramaround ramping regions. The merits of this new model includebut are not limited to those given here.
1) This model adopts a small set of parameters and rules toanalytically formulate the traffic flow phase diagram. Allthe parameters have clear physical meanings. Therefore,it is easy to analyze.
Different from previous approaches, this model couldderive analytical boundaries for the phases. Surprisingly,although the evolution of SGW/OCT patterns still needsfurther discussions, FF/PLC/MLC/HCT patterns can bewell reproduced, even via such a simple model.
2) Due to its conciseness, this model reveals the basic factorsthat govern the instable nature of traffic flow in on-rampregions.
On the microscopic level, these factors are the following:time τin for a vehicle to join the jam queue and the merging timeinterval T . Noticing the tight relationship between τin and theheadway/spacing of a vehicle, we can see that the dominatingfactors of macroscopic traffic congestion patterns are the mi-croscopic headways/spacings adopted by drivers with respectto mainline inflow rate. Indeed, the proposed model givesa simplified yet equivalent description of the close trackingbehaviors that were depicted via many other stimulus-response-or optimal-velocity-type car-following models. However, theconciseness of the proposed method, which inherits fromNewell’s simplified car-following model, makes it distinct fromother approaches.
On the macroscopic level, the corresponding factors are themain road flow rate qmain and ramping road flow rate qramp.Based on this queueing model, we show how τin and qmain, aswell as T and qramp, depend on each other. As a result, we linkmicroscopic individual vehicle movements with macroscopiccongestion patterns.
However, this new model is not perfect. Three particularconditions hold.
1) This model does not consider the stochastic features ofτin and τout in reality. Thus, some stochastic propertiesof traffic flow cannot be reproduced via this model.However, as shown in [11]–[16], the average values ofqmain and qramp (or equivalently τin and T ) dominatetransitions among different phases. Thus, if we focus onthe phase diagram, the proposed model should be fine.
2) This model allows only two kinds of vehicle speeds andforbids lane change for simplicity. Although this simpli-fication helps emphasize the major driving force of con-gestion evolution, meanwhile, it prevents the appearanceof nonhomogeneous jam queues. In addition, the obtainedSGW and OCT phases are not exactly the same as thosereproduced by the Gas-Kinetic-based Traffic model andIntelligent Driver Model in [11]–[16]. We plan to modifythe model and solve this problem in our coming reports.
3) This model implicitly adopts the hypothesis that the speedand density satisfy a linear relationship in the congestedflows [31], [36]–[39]. Therefore, it cannot explain some
nonlinear effects in congestion formation. Although thecurrent model could explain the phases observed in theramping region, how to overcome this shortcoming andenhance its capability still needs further discussion.
In short, this new model provides a reasonable starting pointfor modeling more complex traffic phenomena. In addition, wewill discuss its modifications in the coming reports.
REFERENCES
[1] P. K. Munjal and L. A. Pipes, “Propagation of on-ramp density waveson uniform unidirectional multilane freeways,” Transp. Sci., vol. 5, no. 4,pp. 390–402, Nov. 1971.
[2] F.-Y. Wang, “Parallel control and management for intelligent transporta-tion systems: Concepts, architectures, and applications,” IEEE Trans.Intell. Transp. Syst., vol. 11, no. 3, pp. 630–638, Sep. 2010.
[3] H. M. Zhang and W. Shen, “Numerical investigation of stop-and-go trafficpatterns upstream of freeway lane drop,” Transp. Res. Rec., vol. 2124,pp. 3–17, 2009.
[4] A. Duret, J. Bouffier, and C. Buisson, “Onset of congestion from low-speed merging maneuvers within free-flow traffic stream,” Transp. Res.Rec., vol. 2188, pp. 96–107, 2010.
[5] S. Ahn, J. A. Laval, and M. J. Cassidy, “Effects of merging and divergingon freeway traffic oscillations,” Transp. Res. Rec., vol. 2188, pp. 1–8,2010.
[6] C. F. Daganzo, M. J. Cassidy, and R. L. Bertini, “Possible explanations ofphase transitions in highway traffic,” Transp. Res. Part A, Policy Pract.,vol. 33, no. 5, pp. 365–379, Jun. 1999.
[7] J. R. Windover and M. J. Cassidy, “Some observed details of freewaytraffic evolution,” Transp. Res. Part A, Policy Pract., vol. 35, no. 10,pp. 881–894, Dec. 2001.
[8] M. J. Cassidy, S. B. Anani, and J. M. Haigwood, “Study of freeway trafficnear an off-ramp,” Transp. Res. Part A, Policy Pract., vol. 36, no. 6,pp. 563–572, Jul. 2002.
[9] J. A. Laval and L. Leclercq, “A mechanism to describe the formationand propagation of stop-and-go waves in congested freeway traffic,” Phil.Trans. R. Soc. A, vol. 368, no. 1928, pp. 4519–4541, Oct. 2010.
[10] L. Leclercq, J. A. Laval, and N. Chiabaut, “Capacity drops at merges: Anendogenous model,” in Proc. Soc. Behav. Sci., 2011, vol. 7, pp. 12–26.
[11] B. S. Kerner, The Physics of Traffic: Empirical Freeway Pattern Features,Engineering Applications, and Theory. New York: Springer-Verlag,2004.
[12] B. S. Kerner, Introduction to Modern Traffic Flow Theory and Con-trol: The Long Road to Three-Phase Traffic Theory. Berlin, Germany:Springer-Verlag, 2009.
[13] M. Treiber, A. Hennecke, and D. Helbing, “Congested traffic states in em-pirical observations and microscopic simulations,” Phys. Rev. E, Statist.Nonlin. Soft Matter Phys., vol. 62, no. 2, pp. 1805–1824, Aug. 2000.
[14] M. Schönhof and D. Helbing, “Empirical features of congested trafficstates and their implications for traffic modeling,” Transp. Sci., vol. 41,no. 2, pp. 135–166, May 2007.
[15] D. Helbing, M. Treiber, A. Kesting, and M. Schönhof, “Theoretical vs.empirical classification and prediction of congested traffic states,” Eur.Phys. J. B, vol. 69, pp. 583–598, 2009.
[16] M. Treiber, A. Kesting, and D. Helbing, “Three-phase traffic theory andtwo-phase models with a fundamental diagram in the light of empiricalstylized facts,” Transp. Res. Part B, Methodological, vol. 44, no. 8/9,pp. 983–1000, Sep.–Nov. 2010.
[17] X. Q. Chen, L. Li, and Y. Zhang, “A Markov model for headway/gapdistribution of road traffic,” IEEE Trans. Intell. Transp. Syst., vol. 11,no. 4, pp. 773–785, Dec. 2010.
[18] L. Lu, Y. Su, T. Yun, D. Yao, and L. Li, “A comparison of phase transi-tions produced by PARAMICS, TransModeler and VISSIM,” IEEE Intell.Transp. Syst. Mag., vol. 2, no. 3, pp. 19–24, Dec. 2010.
[19] G. F. Newell, “A simplified car-following theory: A lower order model,”Transp. Res. Part B, Methodological, vol. 36, no. 3, pp. 195–205,Mar. 2002.
[20] S. Ahn, M. J. Cassidy, and J. Laval, “Verification of a simplified car-following theory,” Transp. Res. Part B, Methodological, vol. 38, no. 5,pp. 431–440, Jun. 2004.
[21] T. Kim and H. M. Zhang, “Gap time and stochastic wave propagation,” inProc. 7th Int. IEEE Conf. Intell. Transp. Syst., 2004, pp. 88–93.
[22] T. Kim and H. M. Zhang, “A stochastic wave propagation model,” Transp.Res. Part B, Methodological, vol. 42, no. 7/8, pp. 619–634, Aug. 2008.

1716 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
[23] B. Son, T. Kim, H. J. Kim, and S. Lee, “Probabilistic model of trafficbreakdown with random propagation of disturbance for ITS application,”Knowl.-Based Intell. Inf. Eng. Syst., vol. 3215, Lecture Notes in ComputerScience, pp. 45–51, 2004.
[24] H. Yeo, “Asymmetric microscopic driving behavior theory,” Ph.D. disser-tation, Univ. California, Berkeley, CA, 2008.
[25] H. Yeo and A. Skabardonis, “Understanding stop-and-go traffic in viewof asymmetric traffic theory,” in Proc. 18th Int. Symp. Traffic and Transp.Theory, W. Lam, S. C. Wong, and H. K. Lo, Eds., 2009, pp. 99–116.
[26] R. Mahnke and N. Pieret, “Stochastic master-equation approach to ag-gregation in freeway traffic,” Phys. Rev. E, Statist. Nonlinear Soft MatterPhys., vol. 56, no. 3, pp. 2666–2671, Sep. 1997.
[27] R. Mahnke and J. Kaupus, “Probabilistic description of traffic flow,” Netw.Spatial Econ., vol. 1, no. 1/2, pp. 103–136, Mar. 2001.
[28] R. Mahnke, J. Kaupus, and I. Lubashevsky, “Probabilistic description oftraffic flow,” Phys. Rep., vol. 408, no. 1/2, pp. 1–130, Jan. 2005.
[29] R. Mahnke and R. Kühne, “Probabilistic description of traffic break-down,” in Proc. Traffic Granular Flow, 2007, pp. 527–536.
[30] M. Treiber and A. Kesting, “Evidence of convective instability in con-gested traffic flow: A systematic empirical and theoretical investigation,”Transp. Res. Part B, Methodological, vol. 45, no. 9, pp. 1362–1377, 2011.
[31] B. D. Greenshields, “A study of traffic capacity,” in Proc. Highway Board,1934, vol. 14, pp. 448–477.
[32] N. Chiabaut, C. Buisson, and L. Leclercq, “Fundamental diagram esti-mation through passing rate measurements in congestion,” IEEE Trans.Intell. Transp. Syst., vol. 10, no. 2, pp. 355–359, Jun. 2009.
[33] N. Chiabaut, L. Leclercq, and C. Buisson, “From heterogeneous driversto macroscopic patterns in congestion,” Transp. Res. Part B, Methodolog-ical, vol. 44, no. 2, pp. 299–308, Feb. 2010.
[34] P. Hidas, “Modelling vehicle interactions in microscopic simulation ofmerging and weaving,” Transp. Res. Part C, Emerging Technol., vol. 13,no. 1, pp. 37–62, Feb. 2005.
[35] V. Milanés, J. Godoy, J. Villagrá, and J. Pérez, “Automated on-ramp merg-ing system for congested traffic situations,” IEEE Trans. Intell. Transp.Syst., vol. 12, no. 2, pp. 500–508, Jun. 2011.
[36] P. Wagner and K. Nagel, “Comparing traffic flow models with differ-ent number of ‘phases,”’ Eur. Phys. J. B, vol. 63, no. 3, pp. 315–320,Jun. 2008.
[37] M. J. Lighthill and G. B. Whitham, “On kinematic waves: I Flow move-ment in long rivers. II A theory of traffic flow on long crowded roads,”Proc. R. Soc. Lond. A, Math. Phys. Sci., vol. 229, no. 1178, pp. 281–345,May 1955.
[38] P. I. Richards, “Shockwaves on the highway,” Oper. Res., vol. 4, no. 1,pp. 42–51, Feb. 1956.
[39] C. F. Daganzo, “A variational formulation of kinematic waves: Solutionmethods,” Transp. Res. Part B, Methodological, vol. 39, no. 10, pp. 934–950, Dec. 2005.
Xiqun Chen (S’11) received the B.E. degree fromTsinghua University, Beijing, China, in 2008. He iscurrently working toward the Ph.D. degree with theDepartment of Civil Engineering, Tsinghua Univer-sity, and the Joint Training Ph.D. student program atCalifornia PATH, University of California, Berkeley,working on traffic flow theory and intelligent trans-portation systems.
Li Li (S’05–M’06–SM’11) received the Ph.D. de-gree in systems and industrial engineering from theUniversity of Arizona, Tucson, in 2005.
He is currently an Associate Professor with theDepartment of Automation, Tsinghua University,Beijing, China, working on complex and networkedsystems, intelligent control and sensing, intelligenttransportation systems, and intelligent vehicles.
Dr. Li serves as an Associate Editor for the IEEETRANSACTIONS ON INTELLIGENT TRANSPORTA-TION SYSTEMS. He received the 2010 Outstanding
Editorial Service Award.
Zhiheng Li (M’05) received the Ph.D. degree incontrol theory and applications from Tsinghua Uni-versity, Beijing, China, in 2009.
He is currently an Associate Professor with theDepartment of Automation, Tsinghua University,Beijing, China, working in the fields of trans-portation engineering and intelligent transportationsystems.
Dr. Li serves as an Associate Editor for the IEEETRANSACTIONS ON INTELLIGENT TRANSPORTA-TION SYSTEMS.