Optimal tilt lifting of beams as a min-max problem
9
Industrial applications and design case study DOI 10.1007/s00158-003-0312-9 Struct Multidisc Optim 26, 160–168 (2004) Optimal tilt lifting of beams as a min-max problem F. Tin-Loi and Z. Lee Abstract This paper considers the problem of finding the optimal pickup points for a beam that is to be tilt lifted by a system of slings attached to a crane. Under the assumptions of a rigid beam and inextensible ca- bles, this task is formulated as a min-max optimization problem. As for its numerical solution, we propose an efficient and robust algorithm involving smoothing and an appropriate discretization of the objective function. A typical numerical example is provided to illustrate the approach. Key words tilt-up panel, beam, optimal lifting, min- max, smoothing 1 Introduction Tilt-up is a construction method that involves the ho- rizontal casting of large concrete panels and their sub- sequent tilting into place by cranes to form structural walls or other building elements. The system is used ex- tensively in many countries, with USA, for instance, cur- rently producing some 10 000 tilt-up buildings per year in this multi-billion dollar industry. Under favorable con- ditions, such as large plan areas, extensive wall surface and low rise building requirements, tilt-up offers numer- ous advantages including economy, speed of construction, durability, fire resistance, low maintenance costs, archi- tectural attractiveness, low insulation costs and expand- ability. For details, the interested reader is referred to Received: 25 October 2002 Revised manuscript received: 14 May 2003 Published online: 10 September 2003 Springer-Verlag 2003 F. Tin-Loi ✉ and Z. Lee School of Civil and Environmental Engineering, University of New South Wales, Sydney 2052, Australia e-mail: [email protected] Dedicated to the memory of Noel Murray (1928–2001). the authoritative and comprehensive reference manual of Brooks (2000) covering all phases of planning, engineer- ing and construction of tilt-up buildings. A crucial aspect of the construction of such build- ings is the ability to design for an economical and ef- fective tilt lift of any panel from its initial horizontal position to a vertical position. The basic aim is to mini- mize the bending moments developed during the tilt lift process by a proper specification of the positions of the lifting points. Using a (reasonable) rigid beam idealiza- tion, the tilt-up system manual produced by the well- known company Meadow Burke (2000) indicates that it may be possible to “balance” negative and positive bend- ing moments between lifting points by carefully locating the lifting points. It goes on to present some graphical charts for cases of uniform loading and specific sling sys- tems. In practice, however, most design engineers still use manual trial and error methods to estimate an “appro- priate” lifting system. Such methods, unfortunately, are time consuming, prone to error, and rely heavily on engin- eering judgment and experience. A general approach to obtain the optimal lifting point locations is still an open problem – hence the motivation of the present paper. Our aim is to propose an efficient and robust numerical scheme for solving this task. Using a rigid beam model, we study the common case of a sin- gle crane with bridle slings (rigging) that are fastened to the beam at several points, various instances of which are shown in Fig. 1. In particular, we formulate the problem as a con- strained (non-smooth) min-max optimization problem, and propose an efficient and simple algorithm involving suitable smoothing of the objective function. The min- max approach arises as we wish to minimize the max- imum absolute value of the bending moment along the beam. It is important to note that the governing equa- tions related to the key state problem (i.e. finding a bend- ing moment field for given lifting points and a specified beam inclination) are developed in analytical form. Inter- estingly, the ubiquitous finite element approach would be far more complex to implement in view of the changing (unknown) sling lengths during the lifting process. The paper is organized as follows. In the next section, we briefly describe the state problem for one typical rig-
Transcript of Optimal tilt lifting of beams as a min-max problem

Industrial applications and design case studyDOI 10.1007/s00158-003-0312-9Struct Multidisc Optim 26, 160–168 (2004)
Optimal tilt lifting of beams as a min-max problem�
F. Tin-Loi and Z. Lee
Abstract This paper considers the problem of findingthe optimal pickup points for a beam that is to be tiltlifted by a system of slings attached to a crane. Underthe assumptions of a rigid beam and inextensible ca-bles, this task is formulated as a min-max optimizationproblem. As for its numerical solution, we propose anefficient and robust algorithm involving smoothing andan appropriate discretization of the objective function.A typical numerical example is provided to illustrate theapproach.
Key words tilt-up panel, beam, optimal lifting, min-max, smoothing
1Introduction
Tilt-up is a construction method that involves the ho-rizontal casting of large concrete panels and their sub-sequent tilting into place by cranes to form structuralwalls or other building elements. The system is used ex-tensively in many countries, with USA, for instance, cur-rently producing some 10000 tilt-up buildings per yearin this multi-billion dollar industry. Under favorable con-ditions, such as large plan areas, extensive wall surfaceand low rise building requirements, tilt-up offers numer-ous advantages including economy, speed of construction,durability, fire resistance, low maintenance costs, archi-tectural attractiveness, low insulation costs and expand-ability. For details, the interested reader is referred to
Received: 25 October 2002Revised manuscript received: 14 May 2003Published online: 10 September 2003 Springer-Verlag 2003
F. Tin-Loi� and Z. Lee
School of Civil and Environmental Engineering, University ofNew SouthWales, Sydney 2052, Australiae-mail: [email protected]
� Dedicated to the memory of Noel Murray (1928–2001).
the authoritative and comprehensive reference manual ofBrooks (2000) covering all phases of planning, engineer-ing and construction of tilt-up buildings.A crucial aspect of the construction of such build-
ings is the ability to design for an economical and ef-fective tilt lift of any panel from its initial horizontalposition to a vertical position. The basic aim is to mini-mize the bending moments developed during the tilt liftprocess by a proper specification of the positions of thelifting points. Using a (reasonable) rigid beam idealiza-tion, the tilt-up system manual produced by the well-known company Meadow Burke (2000) indicates that itmay be possible to “balance” negative and positive bend-ing moments between lifting points by carefully locatingthe lifting points. It goes on to present some graphicalcharts for cases of uniform loading and specific sling sys-tems. In practice, however, most design engineers still usemanual trial and error methods to estimate an “appro-priate” lifting system. Such methods, unfortunately, aretime consuming, prone to error, and rely heavily on engin-eering judgment and experience.A general approach to obtain the optimal lifting point
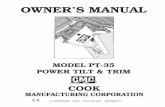
locations is still an open problem – hence the motivationof the present paper. Our aim is to propose an efficientand robust numerical scheme for solving this task. Usinga rigid beam model, we study the common case of a sin-gle crane with bridle slings (rigging) that are fastened tothe beam at several points, various instances of which areshown in Fig. 1.In particular, we formulate the problem as a con-
strained (non-smooth) min-max optimization problem,and propose an efficient and simple algorithm involvingsuitable smoothing of the objective function. The min-max approach arises as we wish to minimize the max-imum absolute value of the bending moment along thebeam. It is important to note that the governing equa-tions related to the key state problem (i.e. finding a bend-ing moment field for given lifting points and a specifiedbeam inclination) are developed in analytical form. Inter-estingly, the ubiquitous finite element approach would befar more complex to implement in view of the changing(unknown) sling lengths during the lifting process.The paper is organized as follows. In the next section,
we briefly describe the state problem for one typical rig-

161
Fig. 1 Various lifting systems
ging, namely the four-point lift case. In Sect. 3, we formu-late the desired min-max optimization problem of mini-mizing the absolute value of the maximum bending mo-ment in the beam. We then present (Sect. 4) an algorithminvolving appropriate smoothing of the non-smooth ob-jective function and its associated discretization. Fi-nally, we report, in Sect. 5, some numerical results tohighlight application of our approach, before concludingin Sect. 6.
2State problem
Consider, without undue loss of generality, the four-point(or four-high, as it is also known) tilt lift case; the one-,two- and three-point instances can be obtained by appro-priate specifications of various cable lengths. For a genericangle of inclination θ with insert locations x1, x2, x3 andx4 (measured fromO along the beam), Fig. 2 provides de-tails of the geometry of the system in equilibrium.The state problem consists of finding the geometric
configuration, cable tensions and bending moment fieldfor given θ, x1−4 and load q(s), with s defined along thebeam. Moreover, for optimization purposes, it is desirableto obtain these required quantities as functions of s, θand x1−4.In the following, we provide essential details of how
this is achieved. Basically, we obtain (a) the rigging geom-etry by solving a nonlinear equation in α (half of the main
Fig. 2 Four-point lift: definition of geometry
sling angle, see Fig. 2), and (b) the cable tensions throughsimple equilibrium considerations.We make two key assumptions, that the beam is rigid
and the cables are inextensible.
2.1Rigging geometry
With reference to Fig. 2, we define, for brevity, the fol-lowing quantities: � BAC = 2α, � DBF = 2β, � GCI =2γ, � AJK = � AKJ = δ, � BEF = α1, � CHG = α2,� BDF = β1, � BFD = β2, � CGI = γ1, � CIG = γ2,BAC = �1, AB = �11, AC = �12, DBF = �2, BD = �21,BF = �22, GCI = �3, CG = �31, CI = �32, BE = e21,EF = e22, CH = e31 andHG= e32.We first note that simple equilibrium conditions
require that the line of action of an upper cable bi-sects the angle made by the lower sling portions. Thus,� BAL= � CAL= α, � DBJ = � FBJ = β and � GCK =� ICK = γ. We now proceed as follows.From�ALJ , it is easy to see that
δ =π
2−α
(0≤ α≤
π
2
), (1)
and
α1 =π
2−α− θ, α2 =
π
2−α+ θ . (2)
From�DBF and�ICG, respectively, we can obtain
β = arcsin
(x2−x1�2
cos(θ+α)
),
γ = arcsin
(x4−x3�3
cos(θ−α)
), (3)
by using the fact that the sum of sling portions is known(e.g. �21+ �22 = �2).

162
We can now use (2), (3) and some simple geometricproperties to obtain
β1 =π
2−α− θ−arcsin
(x2−x1�2
cos(θ+α)
),
β2 =π
2+α+ θ−arcsin
(x2−x1�2
cos(θ+α)
),
γ1 =π
2+α− θ−arcsin
(x4−x3�3
cos(θ−α)
),
γ2 =π
2−α+ θ−arcsin
(x4−x3�3
cos(θ−α)
). (4)
Further, a direct application of the sine rule to the ap-propriate triangles provides the following:
�22 = (x2−x1)sinβ1sin 2β
, �21 = �2− �22 ,
�31 = (x4−x3)sinγ2sin 2γ
, �32 = �3− �31 , (5)
and
e21 = �22sinβ2sinα1
, e22 = �22sinβ
sinα1,
e31 = �31sinγ1sinα2
, e32 = �31sin γ
sinα2. (6)
Consideration of�AEH then gives
�11 = (x3−x2+ e22+ e32)sinα2sin 2α
− e21 ,
�12 = (x3−x2+ e22+ e32)sinα1sin 2α
− e31 . (7)
The final stage is to use �1 = �11+ �12 and the aboveexpressions to obtain α as a smooth implicit function ofx1−4 and θ. Obviously, for given x1−4 and θ, this equationcan be solved numerically (e.g. by bisection) for α, whichcan then be used to calculate values for α1−2, β, β1−2, γ,γ1−2, δ, �ij (i= 1, 2, 3, j = 1, 2), e21, e22, e31, and e32.
2.2Cable forces
Once the geometry has been established, it is not diffi-cult to obtain, as outlined in the following, all cable forcesand hence the appropriate bending moment distribution,again (implicitly) in terms of x1−4, s and θ.In the first instance, the total weight wt of the beam
(of length �b) and its corresponding line of action st aregiven, respectively, by
wt =
�b∫
0
q(s)ds, st =1
wt
�b∫
0
sq(s)ds . (8)
The line of action of the top cable, at �α horizontally fromthe rotation point O, can be expressed as
�α = (x2− e22) cos θ+(e21+ �11) sinα≥ st cos θ (9)
in which the indicated constraint on �α needs to be satis-fied for all θ, if the beam is not to flip over during lifting.Application of simple equilibrium conditions now pro-
vides the required cable forces, namely P , the tension inthe topmost cable, and T1−3, the forces in the remaininglower level cables. These are given by
P =st
�αwt cos θ , T1 =
P
2 cosα,
T2 =T1
2 cosβ, T3 =
T1
2 cos γ, (10)
from which the components normal to the beam Tnj(j = 1, . . . , 4) at each corresponding insert location x1−4can be obtained. Also, the reaction component Tn0 nor-mal to the beam at O can also be found.Finally, the bending moment distribution along the
beam follows directly from the forces acting on it.
3Optimal lifting problem
The aim of an optimal tilt lift is to find the best insert lo-cations x1−4 so as to minimize the maximum bending mo-ment along the beam when it is raised from a horizontalto its final vertical position. This can be expressed asthe following min-max optimization problem in variablesxT = (x1, x2, x3, x4) and y
T = (s, θ):
minx∈R4+
maxy∈R2+
f(x,y)
subject to xl ≤ x≤ xu ,
x2−x1 ≥ a , x3−x2 ≥ b , x4−x3 ≥ c ,
0≤ θ ≤π
2,
0≤ s≤ �b ,
�α ≥ st cos θ , (11)
where the objective function, representing the norm ofthe bending moment at s, is given by
f(x,y) =
∣∣∣∣∣∣sTn0−
s∫
0
(s− �)q(�) cos θd�+4∑j=1
Tnj(s−xj)+
∣∣∣∣∣∣,
(12)
with |·| representing an absolute value or 1-norm and (·)+denoting the plus function (Chen and Mangasarian 1996)defined as (ξ)+ =max{ξ, 0} for a real number ξ. As indi-cated in (11), various obvious constraints apply. In par-ticular, x is subjected to lower,xl, and upper, xu, bounds,the insert spacings are limited through given values a,

163
b, and c by so-called “technological” constraints, obviousranges for θ and s are imposed, and the no flip over condi-tion included. We should also note at this stage that, forpractical reasons (such as to avoid the costs of a riggingchange), the cables lengths �1−3 are fixed.Min-max problems often arise in various engineering
applications and, moreover, still represent a challengingarea of study by the mathematical programming com-munity, primarily because of their non-smoothness. Foran overview of min-max problems and of various appli-cations, the interested reader is referred to the excellentmonographs by Demyanov and Molozemov (1974), Duand Pardalos (1995) and Polak (1997).As indicated above and as is well-known, a min-max
optimization problem, such as the one given by (11), isnon-smooth, even if f(x,y) were continuously differen-tiable – which is not so in the present case. In our prob-lem, f(x,y) is non-smooth because of the presence of the1-norm and of the plus functions; either, it must be noted,is sufficient to cause non-smoothness.Further, at variance with classical min-max problems,
which deal with functions of the type gi(x), i= 1, . . . , r,and hence a discrete number of points for given x, prob-lem (11) involves f(x,y), y ∈R2+, which represents a con-tinuous (non-smooth) surface for given x.The following section deals with the reformulation of
the min-max problem (11) into a smooth, albeit noncon-vex, nonlinear programming (NLP) problem, and pro-poses an efficient and robust algorithm for its solution.Key ideas underpinning the algorithm are smoothing andconversion of the smoothed approximation of f(x,y), y ∈R2+ into a set of discrete points. In effect, these schemesaim at first transforming our problem into a standardconstrained min-max form before using appropriate tech-niques, such as smoothing, for its solution. We should re-mark that smoothing methods for solving various classesof mathematical programming problems have been thesubject of extensive research by mathematicians (e.g.Chen 2000; Qi and Sun 2002). Moreover, smoothing hasalso been used very effectively by various engineers (e.g.Rozvany and Sobieszczanski-Sobieski 1992; Tin-Loi 1999)to solve structural optimization problems.
4Optimization algorithm
As mentioned in the previous section, the algorithm pro-posed rests on the following key sequential steps: (a)smoothing of the plus function; (b) smoothing of the1-norm function; (c) discretization of the smoothed ver-sion of f(x,y), y ∈ R2+ to give gi(x), i = 1, . . . , r; (d)reformulation of the resulting non-smooth max gi(x),i= 1, . . . , r, function using yet another smoothing tech-nique; and (e) application of an inexact line search-,steepest descent-based technique to solve the resultingNLP problem. We provide some essential details on eachof these aspects in the following.
Smoothing of the plus function (ξ)+ can be accuratelyapproximated by the popular Chen–Harker–Kanzow–Smale smooth plus function p(ξ, µ) (Smale 1987; Kanzow1994; Chen and Mangasarian 1996; Chen and Harker1993) defined as
p(ξ, µ) =ξ+√ξ2+µ2
2, µ > 0 . (13)
It is easy to verify that as the parameter µ approacheszero, the smooth plus function approaches the non-smooth plus function. This type of parametric smoothingis quite common in solution techniques developed forcomplementarity problems (see e.g. Chen and Mangasar-ian 1996) that typically involve driving µ down to somesmall number to satisfy complementarity. However, in ourwork, primarily motivated by the need to obtain a “rea-sonable” solution to a practical problem in as short a timeas possible, we adopt a fixed parameter µ = 10−3; thatis, without attempting to decrease µ through successiveiterations.As for the 1-norm, we use a simple and familiar
smoothing function in which |ξ| is replaced by the func-tion t(ξ, ρ) given by
t(ξ, ρ) =√ξ2+ρ2, ρ > 0 . (14)
Similar to the previous smoothing, we again propose theuse of a fixed parameter ρ= 10−3, instead of a decreasingsequence.Let us denote by F (x,y) the resulting smoothed coun-
terpart of f(x,y), obtained after application of the previ-ous two smoothing techniques.The final step in converting (11) into a standard
constrained min-max problem is to discretize F (x,y),y ∈R2+, to yield a discrete representation of the functionsgi(x), i= 1, . . . , r. This is achieved by simply represent-ing the feasible region of y, namely the box [0, �b]× [0,
π2 ],
by r points, at which the objective function can be cal-culated for given x. To generate these points we simplysubdivide the (s, θ) feasible region into a regular grid ofm×n nodes. Obviously, the larger the number of pointsused, the better the approximation becomes. We typic-ally subdivide s into 1-mm and θ into 5◦ intervals. Thus,for a typical 6-m-long beam, 6001×19 points would beused and, as our tests indicate, are sufficient to provide anaccurate solution in an acceptable time.We are now ready to solve the reformulated con-
strained min-max problem, namely,
minx∈R4+
maxi∈{1,... ,r}
gi(x)
subject to xl ≤ x≤ xu ,
x2−x1 ≥ a , x3−x2 ≥ b , x4−x3 ≥ c ,
�α ≥ st cos θ . (15)
The main difficulty in solving problem (15) lies in thenon-smoothness of the function max gi(x), i = 1, . . . , r.Various techniques have been proposed in the literature

164
to handle this (e.g. Osborne andWatson 1969; Charalam-bous 1978; Murray and Overton 1980). Our approach,similar to the scheme of Xu (2001) for solving uncon-strained min-max problems, rests on simply convertingthe problem into an NLP formulation through appropri-ate smoothing. In particular, the smoothing function (Qiand Sun 2002)
G(x, ε) = ε lnr∑i=1
exp
(gi(x)
ε
), ε > 0 , (16)
is used to approximate max gi(x), i = 1, . . . , r. Func-tion G(x, ε), sometimes referred to as the exponentialpenalty function (Bertsekas 1977), provides a good ap-proximation in the sense that, for gi(x), i = 1, . . . , r,twice continuously differentiable, the maximum error isε ln r (Xu 2001). In our implementation, we choose toadopt a fixed ε= 10−6 for simplicity. However, in order toavoid an overflow in the exponent evaluation, an alterna-tive (equivalent) form is adopted as follows:
G(x, ε) = g(x)+ ε lnr∑i=1
exp
(gi(x)−g(x)
ε
), ε > 0
(17)
where g(x) is defined as max(g1(x), . . . , gr(x)), withvalues gi(x) evaluated at the nodes of the chosen discretegrid.We use a penalty technique, similar to that described
by Fletcher (1987, p. 286), to handle the nonlinear con-straint. This involves representing the constraint asa smoothed plus function (13), with fixed µ = 10−3, andpenalizing it in the objective function.The resulting NLP problem is thus
minx∈R4+
H(x)≡G(x, ε)+σp (st cos θ− �α, µ)
subject to xl ≤ x≤ xu ,
x2−x1 ≥ a , x3−x2 ≥ b , x4−x3 ≥ c ,(18)
where σ is a penalty parameter, assumed to be 106. Thisvalue is based on the fact that, for the units used in ourpractically motivated optimizations, it is expected thatthe bending moments G(x, ε) would be less than 103.The algorithm we propose for solving (18) consists es-
sentially of a steepest descent gradient search techniquecoupled with an inexact line search. It comprises the fol-lowing steps.
Step 0 (Initialization)Set i= 0, an initial step size∆ (e.g. 1000), a line searchparameter η (e.g. 12 ), and a termination tolerance ε(e.g. 10−6).Choose an initial feasible point xi and calculateH(xi).
Step 1 (Direction generation)Find the search direction di at xi.If |di|< 10−6, stop (solution found).
Step 2 (Step size determination)Set ωi =∆/ |di|.Calculate the maximum step size for a “sufficient”decrease in H(x) by finding the smallest integerk = 0, 1, . . . such that H
(xi+(η)
kωidi)< H(xi)−
(η)k+1ωi |di|2.
If k > 20, stop (failure).Step 3 (Feasibility check)If xi+(η)
kωidi satisfies the constraints of (18), setxi+1 = xi+(η)
kωidi.Else, solve a quadratic programming subproblem tofind a feasible point xi+1.
Step 4 (Termination check)If |xi+1−xi| ≤ ε, stop (solution found).Else, set i= i+1 and return to Step 1.
The following additional remarks will help clarify thealgorithm.
(a) The indicated maximum step size of 1000 at Step 0represents a physical one-metre step, which is suit-able for standard size tilt-up panels. Theoretically(Dennis and Schnabel 1996), one should use a fullquasi-Newton step first but our computational ex-periments showed that the adopted, physically basedvalue performs far more efficiently and robustly.
(b) We use steepest descent (Fletcher 1987) as the searchdirection. However, due to the implicit nature ofH(x), we adopt a central-difference formula to es-timate d for a given spacing δx (typically 10−3) asfollows:
d=−∂H(x)
∂x≈−H(x+ δx)−H(x− δx)
2δx. (19)
Compared with a forward difference approximation,(19) provides better accuracy. However, it doublesthe expense of function evaluations. We should notethat a steepest descent scheme is usually not asgood as using a quasi-Newton direction (Dennis andSchnabel 1996). However, in our case, explicit ex-pressions for the gradient and hence the Hessian arenot available. In fact, our tests with an approxi-mate quasi-Newton direction approach conclusivelyshowed the superiority of the adopted steepest de-scent scheme.
(c) The step size determination at Step 2, it must benoted, does not seek a minimum value along thesearch direction. It simply attempts to find a stepsize (by successive halving through parameter η = 12 )such that the objective function decreases “suffi-ciently”, as determined from a stopping rule thatis essentially the same as used in a classical Armijoline search (Dennis and Schnabel 1996). The limit of20 on k guards against too small a step being cal-culated; exceeding this limit results in failure of thealgorithm.
(d) Once a candidate point has been generated at Step 2,it needs to be checked for feasibility before being

165
accepted. This is done at Step 3. If the point is in-feasible, then a quadratic programming subproblemis solved to find a feasible point. In essence, solvingthis subproblem simply projects the infeasible pointx into the feasible region of (18) and obtains a feas-ible point x from the optimal solution. This simpleoptimization subproblem is
minx∈R4+
(x− x)2
subject to xl ≤ x≤ xu ,
x2−x1 ≥ a , x3−x2 ≥ b , x4−x3 ≥ c .(20)
(e) Finally, we need to reiterate the fact that prob-lem (15) is nonconvex, and hence the algorithm canonly guarantee a stationary point solution. Never-theless, we have found that its application to nu-merous practical instances of tilt-lifting does indi-cate improved (if not optimal) lifting setups can beachieved.
5Illustrative examples
In this section, we report on some numerical results con-cerning a typical four-point lift. The basic model dataare: a beam of length �b = 6m, total weight wt = 86.4 kN(uniformly distributed along the beam), centre of gravitylocation st = 3m, upper sling length �1 = 6m and lowerslings lengths �2 = �3 = 3m. We used 6001×19 points todiscretize the bending moment field.Three cases were studied as follows: (a) Case 1 – the
state problem for given lifting point locations x; (b)Case 2 – the optimal lift problem for no technological con-straints on x; and (c) Case 3 – the optimal lift problemwith technological constraints on x.
5.1Case 1: state problem
We assumed that xT = (1.332, 2.664, 3.996, 5.328)m.A summary of the results obtained is shown in
Figs. 3–5.Figure 3 shows the bending moment contour with re-
spect to section location s along the beam and the beaminclination θ. The dotted contours (obtained using onlya coarse grid of 61×19 points) refer to negative (sagging)moments, while the solid line contours to positive (hog-ging) moments. The maximum bending moment is about−9.96 kNm.Figure 4 shows the bending moment envelope along
the beam as it is lifted from θ =0◦ to 90◦; for clarity,values at 0.1-m intervals are plotted. As expected, thebeam is subjected to both positive and negative momentsduring the lift.
Fig. 3 Case 1: bending moment contours
Fig. 4 Case 1: bending moment envelope as a function ofdistance s
Fig. 5 Case 1: bending moment envelope as a function ofangle θ

166
Figure 5 shows the bending moment envelope withvariation of angle of lift θ. As can be seen, the beam is sub-jected to the largest moment magnitude at about θ =45◦.
5.2Case 2: unconstrained optimal problem
In this run, no technological constraints are set on x.The lifting solution xT = (1.514, 2.440, 4.213, 5.127)
was obtained by solving the optimization problem. Themaximum bending moment is now −6.85 kNm (a reduc-tion of some 31% compared with that obtained in case 1for the pre-assigned lifting point locations).As for the state problem, we summarize the results in
analogous Figs. 6–8.Comparisons of the corresponding figures related to
the state problem and the optimal problem clearly in-dicate the beneficial effects of an optimal lifting systemin reducing bending moment values. Figure 7 also shows
Fig. 6 Case 2: bending moment contours
Fig. 7 Case 2: bending moment envelope as a function ofdistance s
Fig. 8 Case 2: bending moment envelope as a function ofangle θ
that an optimal lift tends to equalize the peaks of thenegative bending moment distribution. The maximumbending moment, as shown in Fig. 8, still occurs at aboutθ =45◦.We also tried to vary the initial lifting locations to find
whether the nonconvexity of the problem would providedifferent local optima. It is interesting to note that, forthe five different initial points we chose, the same optimalsolution as reported above was obtained.
5.3Case 3: constrained optimal problem
For this particular case, we included the following tech-nological constraints in the optimization process: 2.5≤ x2≤ 2.8, 3≤ x3 ≤ 4, and a= b= c= 0.6.
Fig. 9 Case 3: bending moment contours

167
Fig. 10 Case 3: bending moment envelope as a function ofdistance s
Fig. 11 Case 3: bending moment envelope as a function ofangle θ
The optimal lifting solution obtained is xT = (1.378,2.592, 4.000, 5.234). The maximum bending moment isnow −8.36 kNm (expectably higher than the uncon-strained Case 2, but still about 16% better than thepre-assumed lifting Case 1).The results shown in Figs. 9–11 indicate the same
qualitative results as for the state problem with, however,a better distribution of bending moments during the en-tire lift process. The peak moment now occurs at aboutθ =50◦.
6Conclusions
This paper was primarily motivated by the need for a ro-bust, yet efficient, approach to a practical and importantproblem, namely tilt-lifting panels. For this purpose, we
propose an optimization algorithm aimed at finding theoptimal pickup points for a beam lifted through a systemof slings and pulleys.The technique we use is to formulate the optimiza-
tion as an instance of the familiar, yet challenging, classof min-max problems. We apply a series of smoothingtechniques and discretization of some implicit functionsin order to finally solve it as a (nonconvex) NLP usinga classical steepest descent technique in concert with aninexact Armijo-type line search.Extensive (unreported) results, a large number of
which relate to actual lifting of panels in various construc-tion projects, have shown that significant savings can beachieved. Moreover, the optimization process is fast (typ-ically less than about a minute on a 550MHz Pentium IIIPC), which makes it possible to provide quick solutionsto lift operators, who often handle panels of differentgeometries.Interesting possible extensions of this work include
incorporating the effects of beam and cable elasticities,accounting for dynamic effects, and catering for large dis-placements, as would be necessary in the lifting of flexiblebars.
References
Bertsekas, D.P. 1977: Approximation procedures based on themethod of multipliers. J. Optim. Theory Appl. 23, 487–510
Brooks, H. 2000: Tilt-up design and construction manual,5th edn. Iowa: Tilt-Up Concrete Association
Charalambous, C; Conn, A.R. 1978: An efficient method tosolve the minimax problem directly. SIAM J. Numer. Anal.15, 162–187
Chen, B.; Harker, P.T. 1993: A non-interior point continua-tion method for linear complementarity problems. SIAM J.Matrix Anal. Appl. 14, 1168–1190
Chen, C.; Mangasarian, O.L. 1996: A class of smoothing func-tions for nonlinear and mixed complementarity problems.Comput. Optim. Appl. 5, 97–138
Chen, X. 2000: Smoothing methods for complementarityproblems and their applications: a survey. J. Oper. Res. Soc.Jpn. 43, 32–47
Demyanov, V.F.; Molozemov, V.N. 1974: Introduction tominimax. New York: Wiley
Dennis, J.E., Jr.; Schnabel, R.B. 1996: Numerical methods forunconstrained optimization and nonlinear equations. Philadel-phia: SIAM
Du, D.Z.; Pardalos, P.M. (eds.) 1995: Minimax and applica-tions. Dordrecht: Kluwer
Fletcher, R. 1997: Practical methods of optimization. NewYork: John Wiley & Sons

168
Kanzow, C. 1994: Some tools allowing interior-point methodsto become noninterior. Technical Report, Institute of AppliedMathematics, University of Hamburg, Germany
Meadow Burke 2000: Meadow Burke on tilt-up: the completetilt-up system manual. California: Division of MMI Products,Inc.
Murray, W.; Overton, M.L. 1980: A projected Lagrangian al-gorithm for nonlinear minimax optimization. SIAM J. Sci.Stat. Comput. 1, 345–370
Osborne, M.R.; Watson, G.A. 1969: An algorithm for mini-max approximation in the non-linear case. Comput. J. 12,63–68
Polak, E. 1997: Optimization: algorithms and consistent ap-proximations. New York: Springer Verlag
Qi, L.; Sun, D. 2002: Smoothing functions and smoothingNewton method for complementarity and variational inequal-ity problems. J. Optim. Theory Appl. 113, 121–147
Rozvany, G.I.N.; Sobieszczanski-Sobieski, J. 1992: New opti-mality criteria methods: forcing uniqueness of adjoint strainsby corner-rounding at constraint intersections. Struct. Optim.4, 244–246
Smale, S. 1987: Algorithms for solving equations. In: Proc.Int. Congr. Mathematicians, pp. 172–195. Providence: Amer-ican Mathematical Society
Tin-Loi, F. 1999: A smoothing scheme for a minimum weightproblem in structural plasticity. Struct. Optim. 17, 279–285
Xu, S. 2001: Smoothing method for minimax problems. Com-put. Optim. Appl. 20, 267–279