On anti-synchronization of chaotic systems via nonlinear control
10
On anti-synchronization of chaotic systems via nonlinear control M. Mossa Al-sawalha * , M.S.M. Noorani Center for Modelling & Data Analysis, School of Mathematical Sciences, Universiti Kebangsaan Malaysia, 43600 UKM Bangi, Selangor, Malaysia article info Article history: Accepted 12 November 2008 abstract Based on the nonlinear control and Lyapunov stability theory, the anti-synchronization between two identical and different chaotic systems is investigated, where the antisyn- chronization can be characterized by the vanishing of the sum of relevant variables in cha- otic systems, such that the Lü system is controlled to be the Lorenz system. Theoretical analysis and numerical simulations are shown to verify the results. Ó 2008 Elsevier Ltd. All rights reserved. 1. Introduction Since Pecora and Carroll [1] introduced a method to synchronize two identical chaotic systems with different initial con- ditions, chaos synchronization has attracted a great deal of attention from various fields. It has been intensively studied in the last few years since it has been widely explored in a variety of fields including physical, chemical and ecological system [2]. Hence various synchronization schemes, such as adaptive control [3–9], linear and nonlinear feedback synchronization methods [10–13], active control [14–16], and backstepping design technique [17] have been successfully applied to chaos synchronization. The concept of synchronization has been extended to the scope, such as generalized synchronization [18,19], phase synchronization [18], lag synchronization [20], and even anti phase synchronization (APS) [21,22]. APS can also be interpreted as anti-synchronization (AS), which is a phenomenon that the state vectors of the synchronized systems have the same amplitude but opposite signs as those of the driving system. Therefore, the sum of two signals are expected to converge to zero when either AS or APS appears. Recently, several control method has been applied to anti-synchronize cha- otic systems [23–27]. The objective of this paper is to achieve the anti-synchronization of two identical and different chaotic systems based on nonlinear control and Lyapunov stability theory, where the controllers are designed by using the sum of the relevant vari- ables in chaotic systems. Theoretical analysis and numerical simulations results are presented to justify the theoretical anal- ysis strategy in this paper. 2. Design of controller via nonlinear control method Consider the following system described by _ x ¼ Ax þ Bf ðxÞ; ð1Þ where x 2 R n is the state vector, A 2 R nn ; B 2 R n are metrices and vectors of system parameters, and f : R n ! R n is a nonlinear function. Eq. (1) is considered as a drive system. By introduce an additive control U 2 R n , then the controlled response system is given by _ y ¼ A 1 x þ B 1 gðxÞþ U; ð2Þ 0960-0779/$ - see front matter Ó 2008 Elsevier Ltd. All rights reserved. doi:10.1016/j.chaos.2008.11.011 * Corresponding author. Tel.: +60 174027145. E-mail address: [email protected] (M. Mossa Al-sawalha). Chaos, Solitons and Fractals 42 (2009) 170–179 Contents lists available at ScienceDirect Chaos, Solitons and Fractals journal homepage: www.elsevier.com/locate/chaos
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of On anti-synchronization of chaotic systems via nonlinear control

Chaos, Solitons and Fractals 42 (2009) 170–179
Contents lists available at ScienceDirect
Chaos, Solitons and Fractals
journal homepage: www.elsevier .com/locate /chaos
On anti-synchronization of chaotic systems via nonlinear control
M. Mossa Al-sawalha *, M.S.M. NooraniCenter for Modelling & Data Analysis, School of Mathematical Sciences, Universiti Kebangsaan Malaysia, 43600 UKM Bangi, Selangor, Malaysia
a r t i c l e i n f o
Article history:Accepted 12 November 2008
0960-0779/$ - see front matter � 2008 Elsevier Ltddoi:10.1016/j.chaos.2008.11.011
* Corresponding author. Tel.: +60 174027145.E-mail address: [email protected] (M. M
a b s t r a c t
Based on the nonlinear control and Lyapunov stability theory, the anti-synchronizationbetween two identical and different chaotic systems is investigated, where the antisyn-chronization can be characterized by the vanishing of the sum of relevant variables in cha-otic systems, such that the Lü system is controlled to be the Lorenz system. Theoreticalanalysis and numerical simulations are shown to verify the results.
� 2008 Elsevier Ltd. All rights reserved.
1. Introduction
Since Pecora and Carroll [1] introduced a method to synchronize two identical chaotic systems with different initial con-ditions, chaos synchronization has attracted a great deal of attention from various fields. It has been intensively studied inthe last few years since it has been widely explored in a variety of fields including physical, chemical and ecological system[2]. Hence various synchronization schemes, such as adaptive control [3–9], linear and nonlinear feedback synchronizationmethods [10–13], active control [14–16], and backstepping design technique [17] have been successfully applied to chaossynchronization. The concept of synchronization has been extended to the scope, such as generalized synchronization[18,19], phase synchronization [18], lag synchronization [20], and even anti phase synchronization (APS) [21,22]. APS canalso be interpreted as anti-synchronization (AS), which is a phenomenon that the state vectors of the synchronized systemshave the same amplitude but opposite signs as those of the driving system. Therefore, the sum of two signals are expected toconverge to zero when either AS or APS appears. Recently, several control method has been applied to anti-synchronize cha-otic systems [23–27].
The objective of this paper is to achieve the anti-synchronization of two identical and different chaotic systems based onnonlinear control and Lyapunov stability theory, where the controllers are designed by using the sum of the relevant vari-ables in chaotic systems. Theoretical analysis and numerical simulations results are presented to justify the theoretical anal-ysis strategy in this paper.
2. Design of controller via nonlinear control method
Consider the following system described by
_x ¼ Axþ Bf ðxÞ; ð1Þ
where x 2 Rn is the state vector, A 2 Rn�n;B 2 Rn are metrices and vectors of system parameters, and f : Rn ! Rn is a nonlinearfunction. Eq. (1) is considered as a drive system.
By introduce an additive control U 2 Rn, then the controlled response system is given by
_y ¼ A1xþ B1gðxÞ þ U; ð2Þ
. All rights reserved.
ossa Al-sawalha).
M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179 171
where y 2 Rn denotes the state vector of the response system, A1 2 Rn�n;B1 2 Rn are metrices and vectors of this controlledresponse system parameters, and g : Rn ! Rn is a nonlinear function. A ¼ A1;B ¼ B1, for two identical chaotic systems,A–A1;B–B1, for two different chaotic systems. The anti-synchronization problem is to design a controller U which anti-syn-chronizes the states of both the drive and response systems.
We add (2) to (1) and get
_e ¼ A1xþ B1gðxÞ þ Axþ Bf ðxÞ þ U; ð3Þ
where e ¼ xþ y, the aim of the anti-synchronization is to make
limt!1keðtÞk ¼ 0:
Then let Lyapunov error function be VðeÞ ¼ 12 eT e, where VðeÞ is a positive definite function. Assuming that the parameters of
the drive and response systems are known and the states of both systems are measurable, we may achieve the anti-synchro-nization by selecting the controller U to make the first derivative of VðeÞ; i:e:; _VðeÞ < 0. Then the states of response system anddrive system are anti-synchronized asymptotically globally.
3. Systems description
The Lorenz system [28] is given by
_x ¼ aðy� xÞ;_y ¼ cx� xz� y;_z ¼ xy� bz;
ð4Þ
where x; y and z are respectively proportional to the convective velocity, the temperature difference between descending andascending flows, and the mean convective heat flow, and a; b and the so-called bifurcation parameter c are real constants.Throughout this paper, we set a ¼ 10; b ¼ 8=3 and c ¼ 28 so the system exhibits chaotic behavior.
Lü attractor is a new chaotic attractor, which connects the Lorenz attractor [28] and Chen attractor [29] and representsthe transition from one to another. This new chaotic attractor was proposed and analyzed by Lü and Chen [30]. The Lü cha-otic system is described by the following system of differential equations:
_x ¼ aðy� xÞ;_y ¼ �xzþ cy;_z ¼ xy� bz;
ð5Þ
where a; b and c are positive system parameters. This system is dissipative for c < aþ b and has a chaotic attractor whena ¼ 36; b ¼ 3 and c ¼ 20 [30].
4. Anti-synchronization of two identical Lorenz systems
Now, we assume that we have two identical Lorenz systems where the master (drive) system with the subscript 1 and theslave (response) system having identical equations denoted by the subscript 2. The master and slave systems are
_x1 ¼ aðy1 � x1Þ;_y1 ¼ cx1 � x1z1 � y1;
_z1 ¼ x1y1 � bz1;
ð6Þ
and
_x2 ¼ aðy2 � x2Þ þ u1;_y2 ¼ cx2 � x2z2 � y2 þ u2;
_z2 ¼ x2y2 � bz2 þ u3;
ð7Þ
where the systems parameter are chosen such that both system (6) and (7) are in chaotic state when the control functionu ¼ ½u1;u2;u3�T ¼ 0. Our goal is to determine the control function to make the first derivative of VðeÞ, i.e., _VðeÞ < 0. Weadd Eqs. (7) to (6) and get the error equation as follows
_e1 ¼ aðe2 � e1Þ þ u1;
_e2 ¼ ce1 � x2z2 � x1z1 � e2 þ u2;
_e3 ¼ x2y2 þ x1y1 � be3 þ u3;
ð8Þ
where e1 ¼ x2 þ x1, e1 ¼ y2 þ y1, e3 ¼ z2 þ z1. In order to determine the controller, let
u2 ¼ u12 þ u22; where u22 ¼ x2z2 þ x1z1;
u3 ¼ u13 þ u23; where u23 ¼ �x2y2 � x1y1:
172 M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179
Then we rewrite system (8) in the following form
_e1 ¼ aðe2 � e1Þ þ u1;
_e2 ¼ ce1 � e2 þ u12;
_e3 ¼ �be3 þ u13:
ð9Þ
Based on Lyapunov stability theory, when controller satisfies the assumption with VðeÞ ¼ 12 eT e, a positive definite function
and the first derivative of VðeÞ; _VðeÞ < 0, the anti-synchronization of two identical lorenz systems from different initial con-ditions is achieved. Take a Lyapunov function for Eq. (9) into consideration
VðeÞ ¼ 12
eT e
we get the first derivative of VðeÞ:
_V ¼ e1½ae2 � ae1 þ u1� þ e2½ce1 � e2 þ u12� þ e3½�be3 þ u13�: ð10ÞTherefore, if we choose U as follows,
u1 ¼ �ce2;
u12 ¼ �ae1;
u13 ¼ 0;ð11Þ
then
_V ¼ �ae21 � e22 � be2
3: ð12Þ
_VðeÞ < 0 is satisfied. Since _VðeÞ is a negative-definite function, the error stateslimt!1keðtÞk ¼ 0:
Therefore, the states of controlled response system and drive system are globally anti-synchronized asymptotically.
4.1. Numerical simulation results
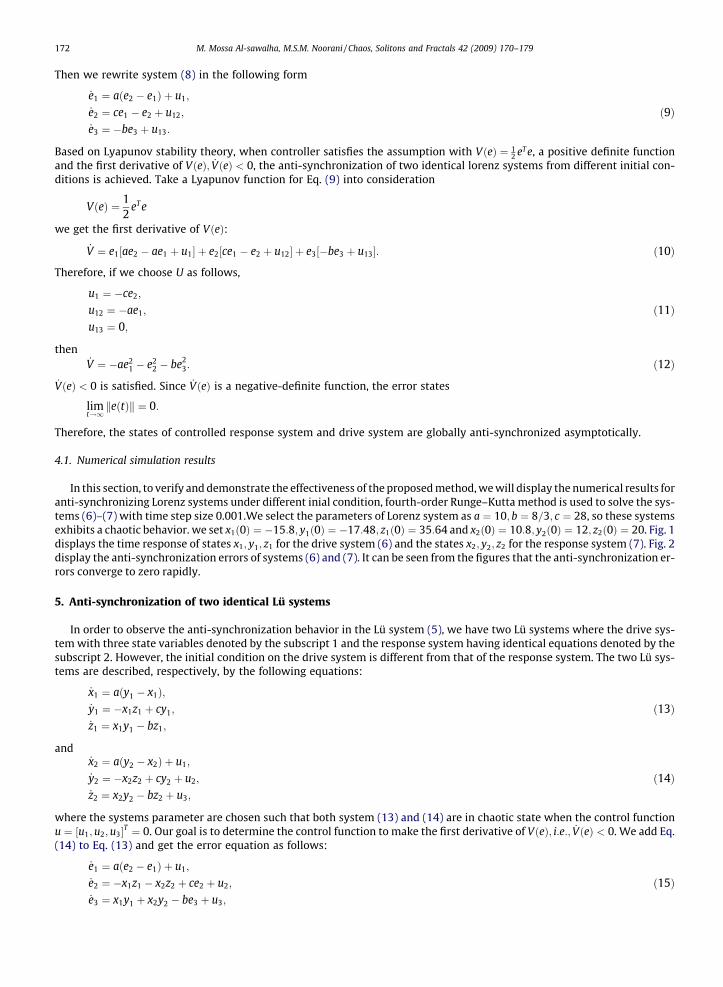
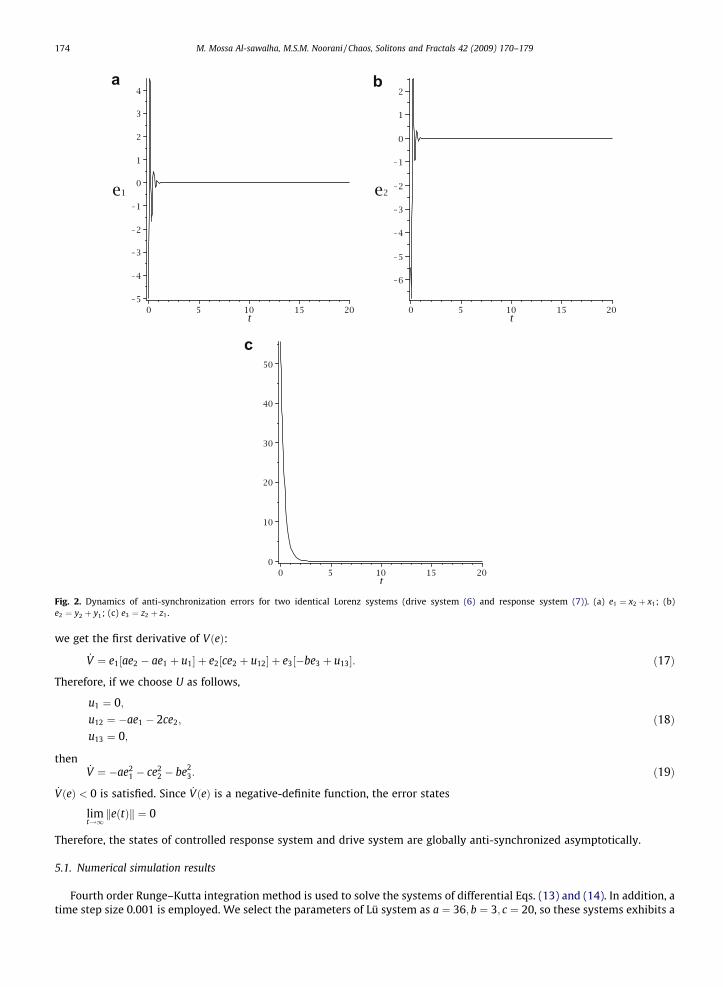
In this section, to verify and demonstrate the effectiveness of the proposed method, we will display the numerical results foranti-synchronizing Lorenz systems under different inial condition, fourth-order Runge–Kutta method is used to solve the sys-tems (6)–(7) with time step size 0.001.We select the parameters of Lorenz system as a ¼ 10; b ¼ 8=3; c ¼ 28, so these systemsexhibits a chaotic behavior. we set x1ð0Þ ¼ �15:8; y1ð0Þ ¼ �17:48; z1ð0Þ ¼ 35:64 and x2ð0Þ ¼ 10:8; y2ð0Þ ¼ 12; z2ð0Þ ¼ 20. Fig. 1displays the time response of states x1; y1; z1 for the drive system (6) and the states x2; y2; z2 for the response system (7). Fig. 2display the anti-synchronization errors of systems (6) and (7). It can be seen from the figures that the anti-synchronization er-rors converge to zero rapidly.
5. Anti-synchronization of two identical Lü systems
In order to observe the anti-synchronization behavior in the Lü system (5), we have two Lü systems where the drive sys-tem with three state variables denoted by the subscript 1 and the response system having identical equations denoted by thesubscript 2. However, the initial condition on the drive system is different from that of the response system. The two Lü sys-tems are described, respectively, by the following equations:
_x1 ¼ aðy1 � x1Þ;_y1 ¼ �x1z1 þ cy1;
_z1 ¼ x1y1 � bz1;
ð13Þ
and
_x2 ¼ aðy2 � x2Þ þ u1;_y2 ¼ �x2z2 þ cy2 þ u2;
_z2 ¼ x2y2 � bz2 þ u3;
ð14Þ
where the systems parameter are chosen such that both system (13) and (14) are in chaotic state when the control functionu ¼ ½u1;u2;u3�T ¼ 0. Our goal is to determine the control function to make the first derivative of VðeÞ; i:e:; _VðeÞ < 0. We add Eq.(14) to Eq. (13) and get the error equation as follows:
_e1 ¼ aðe2 � e1Þ þ u1;
_e2 ¼ �x1z1 � x2z2 þ ce2 þ u2;
_e3 ¼ x1y1 þ x2y2 � be3 þ u3;
ð15Þ

a
b
c
Fig. 1. The time response of states for drive system (6) and the response system (7) via nonlinear control (a) signals x1 and x2; (b) signals y1 and y2; (c)signals z1 and z2.
M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179 173
where e1 ¼ x2 þ x1, e1 ¼ y2 þ y1, e3 ¼ z2 þ z1. In order to determine the controller, let
u2 ¼ u12 þ u22; where u22 ¼ x2z2 þ x1z1;
u3 ¼ u13 þ u23; where u23 ¼ �x2y2 � x1y1:
Then we rewrite system (15) in the following form
_e1 ¼ aðe2 � e1Þ þ u1;
_e2 ¼ ce2 þ u12;
_e3 ¼ �be3 þ u13:
ð16Þ
Based on Lyapunov stability theory, when controller satisfies the assumption with VðeÞ ¼ 12 eT e, a positive definite function
and the first derivative of VðeÞ; _VðeÞ < 0, the anti-synchronization of two identical Lü systems from different initial condi-tions is achieved. Take a Lyapunov function for Eq. (16) into consideration
VðeÞ ¼ 12
eT e;
a b
c
Fig. 2. Dynamics of anti-synchronization errors for two identical Lorenz systems (drive system (6) and response system (7)). (a) e1 ¼ x2 þ x1; (b)e2 ¼ y2 þ y1; (c) e3 ¼ z2 þ z1.
174 M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179
we get the first derivative of VðeÞ:
_V ¼ e1½ae2 � ae1 þ u1� þ e2½ce2 þ u12� þ e3½�be3 þ u13�: ð17ÞTherefore, if we choose U as follows,
u1 ¼ 0;u12 ¼ �ae1 � 2ce2;
u13 ¼ 0;ð18Þ
then
_V ¼ �ae21 � ce22 � be2
3: ð19Þ
_VðeÞ < 0 is satisfied. Since _VðeÞ is a negative-definite function, the error stateslimt!1keðtÞk ¼ 0
Therefore, the states of controlled response system and drive system are globally anti-synchronized asymptotically.
5.1. Numerical simulation results
Fourth order Runge–Kutta integration method is used to solve the systems of differential Eqs. (13) and (14). In addition, atime step size 0.001 is employed. We select the parameters of Lü system as a ¼ 36; b ¼ 3; c ¼ 20, so these systems exhibits a
M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179 175
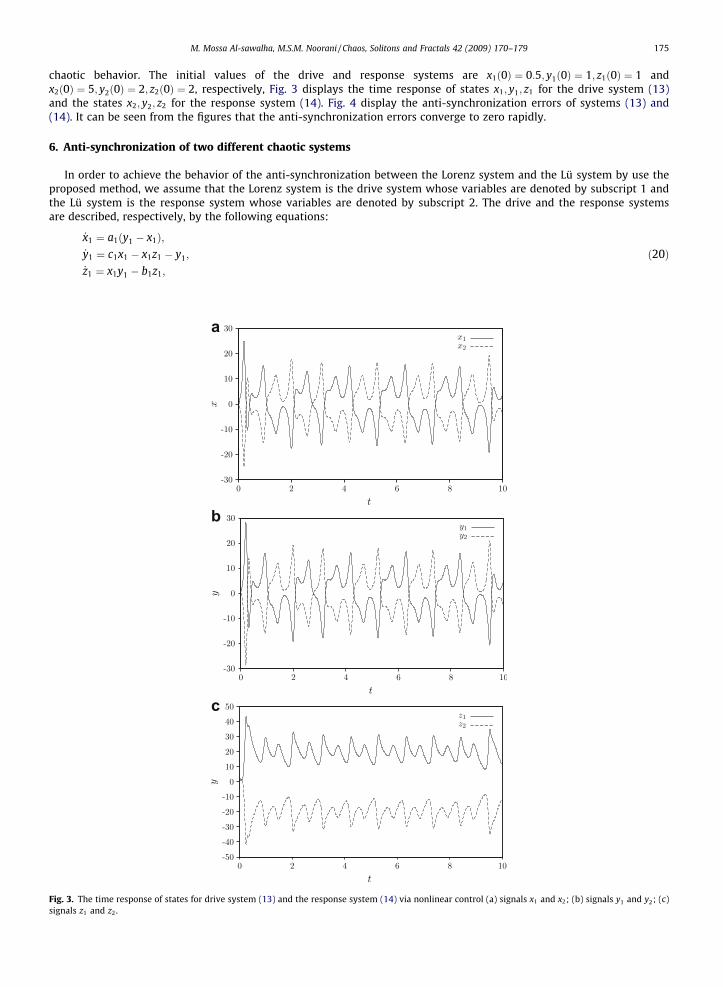
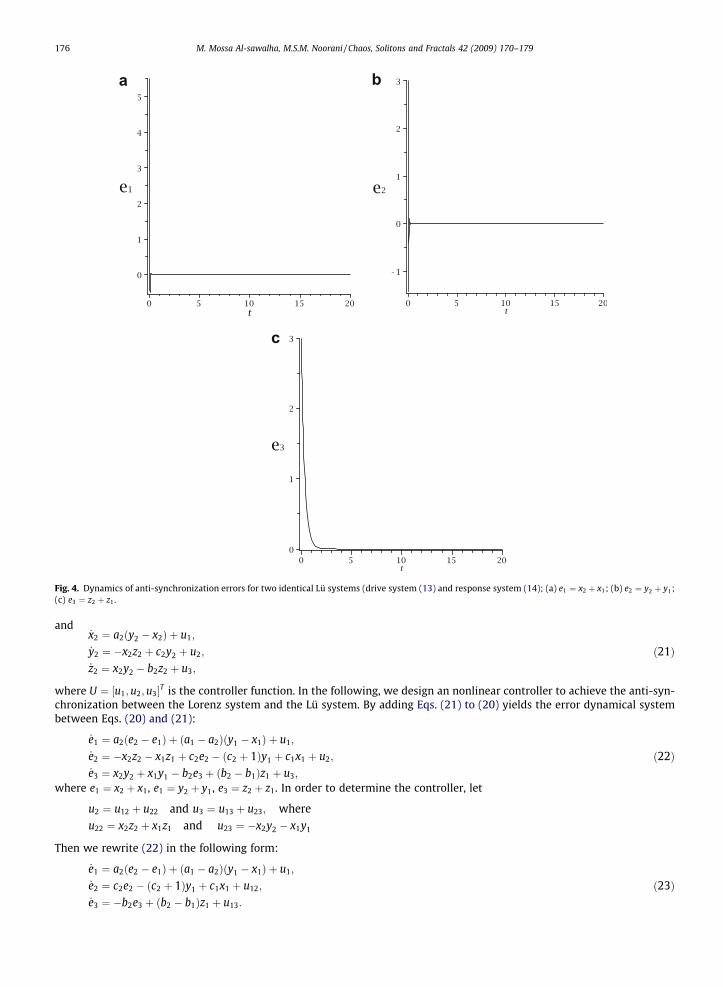
chaotic behavior. The initial values of the drive and response systems are x1ð0Þ ¼ 0:5; y1ð0Þ ¼ 1; z1ð0Þ ¼ 1 andx2ð0Þ ¼ 5; y2ð0Þ ¼ 2; z2ð0Þ ¼ 2, respectively, Fig. 3 displays the time response of states x1; y1; z1 for the drive system (13)and the states x2; y2; z2 for the response system (14). Fig. 4 display the anti-synchronization errors of systems (13) and(14). It can be seen from the figures that the anti-synchronization errors converge to zero rapidly.
6. Anti-synchronization of two different chaotic systems
In order to achieve the behavior of the anti-synchronization between the Lorenz system and the Lü system by use theproposed method, we assume that the Lorenz system is the drive system whose variables are denoted by subscript 1 andthe Lü system is the response system whose variables are denoted by subscript 2. The drive and the response systemsare described, respectively, by the following equations:
Fig. 3.signals
_x1 ¼ a1ðy1 � x1Þ;_y1 ¼ c1x1 � x1z1 � y1;
_z1 ¼ x1y1 � b1z1;
ð20Þ
a
b
c
The time response of states for drive system (13) and the response system (14) via nonlinear control (a) signals x1 and x2; (b) signals y1 and y2; (c)z1 and z2.
a b
c
Fig. 4. Dynamics of anti-synchronization errors for two identical Lü systems (drive system (13) and response system (14); (a) e1 ¼ x2 þ x1; (b) e2 ¼ y2 þ y1;(c) e3 ¼ z2 þ z1.
176 M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179
and
_x2 ¼ a2ðy2 � x2Þ þ u1;_y2 ¼ �x2z2 þ c2y2 þ u2;
_z2 ¼ x2y2 � b2z2 þ u3;
ð21Þ
where U ¼ ½u1;u2;u3�T is the controller function. In the following, we design an nonlinear controller to achieve the anti-syn-chronization between the Lorenz system and the Lü system. By adding Eqs. (21) to (20) yields the error dynamical systembetween Eqs. (20) and (21):
_e1 ¼ a2ðe2 � e1Þ þ ða1 � a2Þðy1 � x1Þ þ u1;
_e2 ¼ �x2z2 � x1z1 þ c2e2 � ðc2 þ 1Þy1 þ c1x1 þ u2;
_e3 ¼ x2y2 þ x1y1 � b2e3 þ ðb2 � b1Þz1 þ u3;
ð22Þ
where e1 ¼ x2 þ x1, e1 ¼ y2 þ y1, e3 ¼ z2 þ z1. In order to determine the controller, let
u2 ¼ u12 þ u22 and u3 ¼ u13 þ u23; whereu22 ¼ x2z2 þ x1z1 and u23 ¼ �x2y2 � x1y1
Then we rewrite (22) in the following form:
_e1 ¼ a2ðe2 � e1Þ þ ða1 � a2Þðy1 � x1Þ þ u1;
_e2 ¼ c2e2 � ðc2 þ 1Þy1 þ c1x1 þ u12;
_e3 ¼ �b2e3 þ ðb2 � b1Þz1 þ u13:
ð23Þ
M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179 177
Take a Lyapunov function for Eq. (23) into consideration
Fig. 5.signals
VðeÞ ¼ 12
eT e;
we get the first derivative of VðeÞ:
_V ¼ e1½a2e2 � a2e1 þ ða1 � a2Þðy1 � x1Þ þ u1� þ e2½c2e2 � ðc2 þ 1Þy1 þ c1x1 þ u12� þ e3½�b2e3 þ ðb2 � b1Þz1 þ u13� ð24ÞTherefore, if we choose U as follows:
u1 ¼ �ða1 � a2Þðy1 � x1Þ;u12 ¼ �2c2e2 � a2e1 þ ðc2 þ 1Þy1 � c1x1;
u13 ¼ �ðb2 � b1Þz1;
ð25Þ
then
_V ¼ �a2e21 � c2e2
2 � b2e23: ð26Þ
a
b
c
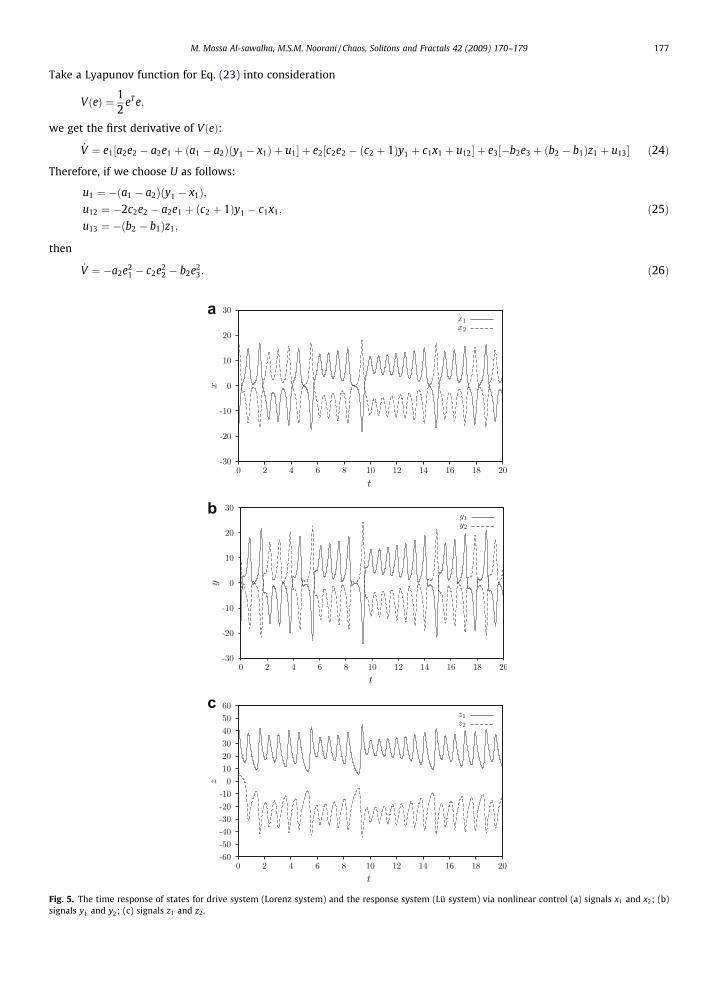
The time response of states for drive system (Lorenz system) and the response system (Lü system) via nonlinear control (a) signals x1 and x2; (b)y1 and y2; (c) signals z1 and z2.

a b
c
Fig. 6. Anti-synchronization error in Lorenz system and Lü system via nonlinear control (a) signals x1 and x2; (b) signals y1 and y2; (c) signals z1 and z2.
178 M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179
_VðeÞ < 0 is satisfied. Since _VðeÞ is a negative-definite function, the error states
limt!1keðtÞk ¼ 0
Therefore, this choice will lead the error states e1; e2; e3 to converge to zero as time t tends to infinity and hence the anti-synchronization of two different chaotic systems is achieved.
6.1. Numerical simulation results
Fourth order Runge–Kutta integration method is used to solve the systems of differential Eqs. (20) and (21). In addition, atime step size 0:001 is employed. We select the parameters of the Lü system as a ¼ 36; b ¼ 3; c ¼ 20, and for the Lorenz sys-tem as a ¼ 10; b ¼ 8=3; c ¼ 28, so these systems exhibits a chaotic behavior. The initial values of the drive and response sys-tems are x1ð0Þ ¼ �15:8; y1ð0Þ ¼ �17:48; z1ð0Þ ¼ 35:64 and x2ð0Þ ¼ �10:8; y2ð0Þ ¼ 12; z2ð0Þ ¼ 20, respectively. The diagram ofthe Lü system is controlled to be Lorenz system are shown in Figs. 5 and 6.
7. Conclusion
Based on Lyapunov stability theory, we propose a nonlinear control method to anti-synchronize two identical and twodifferent chaotic systems. The simulation results show that the states of two identical Lorenz and Lü systems are anti-syn-chronized asymptotically globally. For two different chaotic systems, the Lü system is controlled to trace the Lorenz system
M. Mossa Al-sawalha, M.S.M. Noorani / Chaos, Solitons and Fractals 42 (2009) 170–179 179
and the states of two systems become the same finally. This shows that the method proposed has strong robustness. Thesimulation results are presented to show the effectiveness of this approach.
Acknowledgement
This work is financially supported by the Malaysian Ministry of Science, Technology and Environment Sciencefund Grant:06-01-02-SF0177.
References
[1] Pecora LM, Carroll TL. Synchronization in chaotic systems. Phys Rev Lett 1990;64:821–4.[2] Chen G, Dong X. From chaos to order. Singapore: World Scientific; 1998.[3] Yassen MT. Adaptive control and synchronization of a modified Chuas circuit system. Appl Math Comput 2003;135:113–28.[4] Park JH. Adaptive synchronization of hyperchaotic Chen system with uncertain parameters. Chaos, Solitons & Fractals 2005;26:959–64.[5] Xian WY, Hongmin Z, Synchronization of two hyperchaotic systems via adaptive control. doi:10.1016/j.chaos.2007.06.100.[6] Shihua C, Lü J. Parameters identification and synchronization of chaotic systems based upon adaptive control. Phy Lett A 2002;299:353–8.[7] Lu J, Wu X, Han X, Lü J. Adaptive feedback synchronization of a unified chaotic system. Phy Lett A 2004;329:327–33.[8] Huang J. Chaos synchronization between two novel different hyperchaotic systems with unknown parameters. Nonlinear Anal 2007. doi:10.1016/
j.na.2007.10.045.[9] Chen S, Lü J. Synchronization of an uncertain unified chaotic system via adaptive control. Chaos, Solitons & Fractals 2002;14:643–7.
[10] Lü J, Lu J. Controlling uncertain Lü system using linear feedback. Chaos, Solitons & Fractals 2003;17:127–33.[11] Chen HK. Global chaos synchronization of new chaotic systems via nonlinear control. Chaos, Solitons & Fractals 2005;23:1245–51.[12] Zhang Q, Lu Jn. Chaos synchronization of a new chaotic system via nonlinear control. Chaos, Solitons & Fractals 2008;37:175–9.[13] Park JH. Chaos synchronization of a chaotic system via nonlinear control. Chaos, Solitons & Fractals 2005;25:579–84.[14] Bai EW, Lonngen KE. Synchronization of two Lorenz systems using active control. Chaos, Solitons & Fractals 1997;8:51–8.[15] Li GH, Zhou SP. Anti-synchronization in different chaotic systems. Chaos, Solitons & Fractals 2007;32:516–20.[16] Yassen MT. Chaos synchronization between two different chaotic systems using active control. Chaos, Solitons & Fractals 2005;23:131–40.[17] Wu X, Lu J. Parameter identification and backstepping control of uncertain Lü system. Chaos, Solitons & Fractals 2003;18:721–9.[18] Yang SS, Duan K. Generalized synchronization in chaotic systems. Chaos, Solitons & Fractals 1998;10:1703–7.[19] Rosenblum GM, Pikovsky SA, Kurths J. Phase synchronization of chaotic oscillators. Phys Rev Lett 1996;76:1804–7.[20] Taherion1 S, Lai YC. Observability of lag synchronization of coupled chaotic oscillators. Phys Rev E 1999;59:6247–50.[21] Zhang Y, Sun J. Chaotic synchronization and anti-synchronization based on suitable separation. Phys Lett A 2004;330:442–7.[22] Liu JB, Ye CF, Zhang SJ, Song WT. Anti-phase synchronization in coupled map lattices. Phys Lett A 2000;274:27–9.[23] Bai EW, Lonngsen KE. Synchronization of two Lorenz systems using active control. Chaos, Solitons & Fractals 1997;8:51–8.[24] Al-Sawalha MM, Noorani MSM. Chaos anti-synchronization between two novel different hyperchaotic systems. Chin Phys Lett 2008;25(8):2743–7.[25] Zhang H, Ma XK. Synchronization of uncertain chaotic systems with parameters perturbation via active control. Chaos Solitons & Fractals
2004;21:39–47.[26] Codreanu S. Synchronization of spatiotemporal nonlinear dynamical systems by an active control. Chaos, Solitons & Fractals 2003;15:507–10.[27] Vincent UE, Laoye JA. Synchronization, anti-synchronization and current transports in non-identical chaotic ratchets. Physica A 2007;384:230–40.[28] Lorenz EN. Deterministic nonperiodic flow. J Atmos Sci 1963;20(2):130–41.[29] Chen G, Ueta T. Yet another chaotic attractor. Int J Bifurcat Chaos 1999;9(7):1465–76.[30] Lü J, Chen G, Zhang S. A new chaotic attractor coined. Int J Bifurcat Chaos 2002;12:1001–15.