Notas de Matemáticas aplicadas a la Ingeniería Química
195
Notas de Matem´ aticas aplicadas a la Ingenier´ ıa Qu´ ımica Juan Paulo Garc´ ıa Sandoval 1 de febrero de 2011
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Notas de Matemáticas aplicadas a la Ingeniería Química

Notas de Matematicas aplicadas a la Ingenierıa Quımica
Juan Paulo Garcıa Sandoval
1 de febrero de 2011

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ii

Indice general
1. Ecuaciones diferenciales de la fısica-matematica 11.1. Definicion y clasificacion de las ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Ecuaciones diferenciales ordinarias (EDO) . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.2. Ecuaciones diferenciales ordinarias de primer orden . . . . . . . . . . . . . . . . . . . . 2
Ecuaciones de variables separables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Ecuaciones de reducibles a variables separables . . . . . . . . . . . . . . . . . . . . . . 4Ecuaciones lineales de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Ecuaciones de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Ecuaciones homogeneas de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . 8Ecuaciones reducibles a homogeneas de primer orden . . . . . . . . . . . . . . . . . . . 10Ecuaciones exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Ecuaciones reducibles a exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Ecuaciones de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Ecuaciones de primer orden no resueltas con respecto a la derivada . . . . . . . . . . . 18
Ecuaciones de la forma f (y, y′) = 0 . . . . . . . . . . . . . . . . . . . . . . . . . 18Ecuaciones de la forma f (x, y′) = 0 . . . . . . . . . . . . . . . . . . . . . . . . . 19Ecuaciones de primer orden no resueltas con respecto a la derivada de grado n 20Ecuaciones de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Ecuaciones de Clairaut . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.1.3. Ecuaciones diferenciales ordinarias de segundo orden y orden superior . . . . . . . . . 23Metodos de reduccion de orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Metodo 1: Ecuaciones de la forma y(n) = f (x) . . . . . . . . . . . . . . . . . . 23Metodo 2: Ecuaciones de la forma f
(x, y(k), y(k+1), . . . , y(n)
)= 0 . . . . . . . . 23
Metodo 3: Ecuaciones de la forma f(y, y′, y′′, . . . , y(n)
)= 0 . . . . . . . . . . . 24
Metodo 4: Ecuaciones homogeneas con respecto a y y sus derivadas . . . . . . . 25Metodo 5: Ecuaciones homogeneas con respecto a x, y y sus diferenciales . . . . 26
Ecuaciones diferenciales lineales de orden n . . . . . . . . . . . . . . . . . . . . . . . . 30EDO lineales de orden n con coeficientes constantes homogeneas . . . . . . . . 31EDO lineales de orden n con coeficientes variables homogeneas . . . . . . . . . 32
Ecuaciones de Cauchy-Euler . . . . . . . . . . . . . . . . . . . . . . . . . . 33Metodos de solucion mediante series . . . . . . . . . . . . . . . . . . . . . . . . 35
Metodo de Frobenius: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41EDO lineales de orden n no homogeneas: Metodo de coeficientes indeterminados 46EDO lineales de orden n no homogeneas: Metodo de variacion de parametros . 50
1.1.4. Solucion de sistemas en EDO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 571.1.5. Ecuaciones diferenciales parciales (EDP) . . . . . . . . . . . . . . . . . . . . . . . . . . 60
EDP de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Solucion de EDP cuasi-lineales con dos variables independientes . . . . . . . . . 62
EDP de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
iii

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Metodo de las caracterısticas para la solucion de EDP de segundo orden condos variables independien
Formas canonicas para EDP de segundo orden . . . . . . . . . . . . . . . . . . . . . . 66
Ecuaciones del tipo hiperbolico . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Ecuaciones del tipo parabolico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Ecuaciones del tipo elıptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
1.2. Modelado de fenomenos de la fısica-matematica . . . . . . . . . . . . . . . . . . . . . . . . . . 70
1.2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
1.2.2. Consideraciones de modelado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
1.2.3. Principio de conservacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Balances de masa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Balance de masa total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Balance de masa para componentes . . . . . . . . . . . . . . . . . . . . . . . . . 75
Balances de energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Balances de cantidad de movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
1.2.4. Modelado de fenomenos fısicos mediante ecuaciones diferenciales ordinarias (EDO) . . 78
1.2.5. Modelado de fenomenos fısicos mediante ecuaciones diferenciales parciales (EDP) . . . 78
1.3. Condiciones para las ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
1.3.1. Condiciones desde el punto de vista matematico . . . . . . . . . . . . . . . . . . . . . 79
1.3.2. Condiciones iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
1.3.3. Condiciones frontera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
1.3.4. Condiciones de continuidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
1.4. Cambio de coordenadas para las ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . 82
1.4.1. Coordenadas cilındricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
1.4.2. Coordenadas esfericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
2. Solucion de problemas de la fısica-matematica en ecuaciones diferenciales ordinarias 85
2.1. Problemas descritos por ecuaciones de primer orden . . . . . . . . . . . . . . . . . . . . . . . 85
2.2. Problemas descritos por ecuaciones de segundo orden . . . . . . . . . . . . . . . . . . . . . . . 95
3. Transformadas de Laplace 103
3.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
3.2. Definicion de la transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.3. Condiciones suficientes y necesarias para la existencia de la integral de transformacion . . . . 105
3.3.1. Funciones seccionalmente continuas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Funcion escalon unitario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
3.3.2. Funciones de orden exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
3.4. Transformadas de derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
3.5. Transformada inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
3.6. Teorema de sustitucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
3.7. Solucion de EDO simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
3.8. Teorema de traslacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
3.9. Funcion impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
3.10. Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3.11. Solucion de ecuaciones diferenciales, integrales e integro-diferenciales . . . . . . . . . . . . . . 118
3.12. Derivadas de transformadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
3.12.1. Solucion de ED con coeficientes variables . . . . . . . . . . . . . . . . . . . . . . . . . 120
3.13. Integracion de transformadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
iv

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
4. Solucion de ecuaciones diferenciales parciales de la fısica-matematicapor transformadas de Laplace1234.1. Transformacion de Laplace para derivadas parciales . . . . . . . . . . . . . . . . . . . . . . . . 1234.2. Solucion de problemas de la fısica-matematica . . . . . . . . . . . . . . . . . . . . . . . . . . . 1244.3. Solucion de modelos matematicos propios de la Ingenierıa Quımica . . . . . . . . . . . . . . . 127
4.3.1. Teorıa de la penetracion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1274.3.2. Reactor tubular con difusion despreciable . . . . . . . . . . . . . . . . . . . . . . . . . 1294.3.3. Reactor tubular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1304.3.4. Intercambiador de calor de tubos concentricos a contracorriente . . . . . . . . . . . . . 1324.3.5. Conduccion de calor en una placa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5. Metodo de Fourier para la solucion de ecuaciones diferenciales parcialesde la fısica-matematica1415.1. Etapas generales del metodo de separacion de variables . . . . . . . . . . . . . . . . . . . . . 141
5.1.1. Problema homogeneo que genera una serie de Fourier de senos . . . . . . . . . . . . . 1425.1.2. Problema homogeneo que genera una serie de Fourier de cosenos . . . . . . . . . . . . 147
5.2. Problema de Sturm-Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1515.2.1. Ortogonalidad, norma, ortonormalidad y series generalizadas . . . . . . . . . . . . . . 154
5.3. Apliacion del metodo de separacion de variables en coordenadas cartesianas . . . . . . . . . . 1555.3.1. Problemas homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Cuerda vibrante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155Placa en estado estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
5.3.2. Problemas no homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162Teorıa combinada de la renovacion de la superficie de la pelıcula . . . . . . . . . . . . 163Aleta extendida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
5.3.3. Problemas con mas de dos variables independientes . . . . . . . . . . . . . . . . . . . . 1705.3.4. Temperatura en una placa en estado no estacionario . . . . . . . . . . . . . . . . . . . 170
5.4. Problemas en coordenadas esfericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1725.4.1. Problemas simetricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Partıculas de un reactor nuclear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1745.5. Problemas en coordenadas cilındricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
5.5.1. Funciones de Bessel y sus propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . 1785.5.2. Ortogonalidad y norma de las funciones de Bessel . . . . . . . . . . . . . . . . . . . . 1805.5.3. Solucion de problemas que generan series de Fourier-Bessel . . . . . . . . . . . . . . . 1815.5.4. Solucion de problemas que involucren la ecuacion de Euler-Cauchyque generan una serie de Fourier185
v

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
vi

Prefacio
Un ingeniero que no sabe matematicas es como un escritor analfabeto, desde luego puede ser un escritorpero necesitara de alguien que lea y escriba por el.
Esta obra se enfoca en el planteamiento y solucion de problemas de ingenierıa descritos por ecua-ciones diferenciales ordinarias o parciales y ecuaciones en diferencias, se considera que el estudiante yatiene conocimientos suficientes en algebra y calculo.
vii

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
viii

Capıtulo 1
Ecuaciones diferenciales de lafısica-matematica
1.1. Definicion y clasificacion de las ecuaciones diferenciales
Una ecuacion diferencial de orden n es aquella que contiene una variable dependiente, y, que puededepender de una (x) o varias variables independientes (x1, x2, . . . , xm), ası como sus derivadas con respectoa la(s) variable(s) independiente(s) hasta el orden n.
Si se tiene una sola variable independiente, entonces la ecuacion diferencial es ordinaria (EDO), mientrasque si tiene dos o mas variables independientes entonces es una ecuacion diferencial parcial (EDP). Tambiense pueden tener sistemas de ecuaciones diferenciales en los cuales se un conjunto de ecuaciones diferencialeslas cuales contienen a varias variables independientes.
Las Ecuaciones Diferenciales (ED) se pueden clasificar de diversas formas:
Por el numero de variables independientes
• Ordinarias (una variable independiente)
• Parciales (dos o mas variables independientes)
Por el orden de la maxima derivada
• Primer orden (n = 1)
• Segundo orden y orden superior (n ≥ 2)
Por la posibilidad de despejar la derivada de orden mayor
• Resuelta con respecto a la derivada (si se puede despejar la derivada de mayor orden)
• No resuelta con respecto a la derivada (no se puede despejar la derivada de mayor orden)
Por su propiedad de linealidad
• Lineal
• No lineal
1

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
1.1.1. Ecuaciones diferenciales ordinarias (EDO)
La forma mas general de una EDO de orden n es
F(x, y, y′, y′′, . . . , y(n)
)= 0 (1.1)
si en esta EDO se puede despejar la derivada de orden mayor, es decir
y(n) = f(x, y, y′, y′′, . . . , y(n−1)
)(1.2)
a esta ecuacion se le denomina resuelta con respecto a la derivada, mientras que si en la EDO (1.1) no sepuede despejar y(n), entonces es una ecuacion no resuleta con respecto a la derivada.
La ecuacion (1.2) es lineal si tiene la forma general
an (x) y(n) + an−1 (x) y
(n−1) + · · ·+ a1 (x) y′ + a0 (x) y = f (x) (1.3)
donde los coeficientes an, an−1, . . . , a1, a0 pueden ser constantes o funciones de la variable independiente, x,mas no de la variable dependiente.
Se dice que la ecuacion (1.3) es homogenea si todos los terminos contienen a la variable dependiente o asus derivadas, es decir, si f (x) = 0. Por otro lado, si f (x) �= 0, entonces la ecuacion es no homogenea.
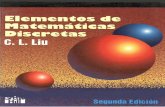
En la figura se presenta una clasificacion de las ecuaciones diferenciales ordinarias.
1.1.2. Ecuaciones diferenciales ordinarias de primer orden
La forma general de una EDO de primer orden se obtiene a partir de la ecuacion (1.1)
F (x, y, y′) = 0 (1.4)
y si en ella se puede despejar la primera derivada entonces esta resuelta con respecto a la derivada, es decir
y′ = f (x, y)
Dentro de este tipo de ecuaciones existen diferentes clasificaciones.
Ecuaciones de variables separables
La forma general de las ecuaciones de variables separables es
y′ =φ (x)
ψ (y)
o de manera equivalenteψ (y) dy = φ (x) dx
en donde ya se han separado las variables y se puede integrar la ecuacion para obtener∫ψ (y)dy =
∫φ (x) dx+ C
en otros casos se tiene ecuaciones de la forma
ψ1 (y)φ2 (x) dy = ψ2 (y)φ1 (x) dx
y para separar variables entonces se divide por φ2 (x)ψ2 (y) y se integra∫ψ1 (y)
ψ2 (y)dy =
∫φ1 (x)
φ2 (x)dx+ C
2

Apuntes
decla
seIQ
204
2011A
JuanPaulo
Garcıa
Sandova
l
Métodos de solución
Métodos de solución
particular
Ecuaciones diferenciales
Ecuaciones diferenciales
ordinarias (EDO)
Ecuaciones diferenciales
parciales (EDP)
Resueltas con respecto a la
derivada
Primer ordenSegundo orden u orden
superior
No resueltas con respecto a
la derivada
Lineal No lineal
Bernoulli
Homogénea
Variables
separables
Exacta
Reducible a
homogénea
Reducible a
exacta
Riccati
EDO de primer
orden de grado n
EDO de la forma
f(y,y’) = 0
EDO de la forma
f(x,y’) = 0
Otras EDO
de 1er orden
y = g(y’)
x = g(y’)
EDO de Larange
EDO de
Clairaut
Resueltas con respecto a la
derivada
No resueltas con respecto a
la derivada
No linealLineal
Métodos de
reducción de
orden
Coeficientes
constantesCoeficientes
variables
HomogéneasNo
homogéneas
Método del
operador
diferencial
Coeficientes
indeterminados
Variación de
parámetros
Método
operacional
Transformadas
de Laplace
No
homogéneasHomogéneas
Otras EDO
Ecuaciones de
Cauchy-Euler
Ecuaciones de
Bessel
Ecuaciones de
Legendre
Ecuaciones de
Hermit
..
.
Método de
solución por
series y series
generalizadas
(Método de
Frobenius para
2° orden)
y(n)
= f(x)
f(x,y(k)
,y(k+1)
,...,y(n)
) = 0
f(y,y’,y”,...,y(n)
) = 0
Homogénea respecto
a y,y’,y”,...,y(n)
Homogénea respecto
a x, y, dx, dy, dx2,
dy2, etc.
Ver la página
siguiente
¿Orden?
3

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 1 Resolver (y2 + xy2
)y′ + x2 − yx2 = 0
en esta ecuacion se pueden factorizar algunos terminos:
(1 + x) y2y′ + (1− y)x2 = 0
para obtener una EDO de variables separables. Al dividir por (1 + x) (1− y) y multiplicar por dx se obtiene
y2
1− ydy +
x2
1 + xdx = 0
que se puede integrar ∫y2
1− ydy +
∫x2
1 + xdx = 0
De tablas se tiene que∫y2
1−ydy = −y − ln (1− y)− 12y
2∫x2
1+xdx = ln (x+ 1)− x+ 12x
2
ası que la solucion es
−y − ln (1− y)− 1
2y2 + ln (x+ 1)− x+
1
2x2 = C
efectuando algebra (1
2x− 1
)x− y
(1
2y + 1
)+ ln
(1 + x
1− y
)= C
Ecuaciones de reducibles a variables separables
Si se tiene una ecuacion de la forma
dy
dx= y′ = f (ax+ by + c) (1.5)
no se pueden separar las variables, sin embargo al definir el cambio de variables
z = ax+ by + c
se ve que su derivada con respecto a x esdz
dx= a+ by′
y al sustituir el valor de y′ de la ecuacion (1.5) se obtiene
dz
dx= a+ by′ = a+ bf (ax+ by + c)
y al remplazar z, se llega a la ecuacion de variables separables
dz
dx= a+ bf (z)
cuya solucion es ∫dz
a+ bf (z)= x+ C
y por lo tanto la solucion final se obtiene sustituyendo el valor de z, es decir∫z→ax+by+c
dz
a+ bf (z)= x+ C
4

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 2 Resolvery′ = sen (x− y)
Se define que z = x− y y su derivada con respecto a x es z′ = 1− y′, ası que al sustituir y′ se obtiene
z′ = 1− sen (x− y) = 1− sen (z)
de donde se pueden separar las variables e integrar∫dz
1− sen (z)=
∫dx
para obtener
tan(π4+z
2
)= x+ C
si se remplaza el valor de z,
z = x− y = 2 tan−1 (x+ C)− π
2
es posible despejar y para obtener la solucion final
y =π
2+ x− 2 tan−1 (x+ C)
Ecuaciones lineales de primer orden
Las EDO lineales de primer orden de acuerdo a la ecuacion (1.3) tienen la forma general
a1 (x) y′ + a0 (x) y = f (x)
y al definir p (x) = a0 (x) /a1 (x) y q (x) = f (x) /a1 (x) se obtiene la forma habitual
y′ + p (x) y = q (x) (1.6)
para resolver esta ecuacion se multiplica por un factor integrante, v (x), el cual tiene la propiedad de volveruna derivada total el lado izquierdo de (1.6). Ası al multiplicar por este factor integrante se tiene que
v (x) y′ + v (x) p (x) y = v (x) q (x)
como se asume que el lado izquierdo es una derivada total entonces
d
dx(vy) = vy′ + v′y
al comparar estas dos ecuaciones se concluye que
v′ = p (x) v
a esta ecuacion se le denomina ecuacion adjunta y sirve para determinar el factor integrante. Esta ecuaciones de variables separables
dv
v= p (x) dx
por lo que al integrar se obtiene la solucion ∫dv
v=
∫p (x) dx
ln (v)− ln (c) =
∫p (x) dx
v = ce∫p(x)dx
5

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Generalmente, se elige c = 1, ası que dicho factor integrante es
v (x) = e∫p(x)dx
entonces al multiplicar la EDO (1.6) por este factor, e.i.
e∫p(x)dxy′ + e
∫p(x)dxp (x) y = e
∫p(x)dxq (x)
se obtiene una derivada total en el lado izquierdo
d
dx
(ye
∫p(x)dx
)= q (x) e
∫p(x)dx
Ahora se puede integrar esta expresion∫d(ye
∫p(x)dx
)=
∫q (x) e
∫p(x)dxdx
ye∫p(x)dx = C +
∫q (x) e
∫p(x)dxdx
y despejando y
y =
[C +
∫q (x) e
∫p(x)dxdx
]e−
∫p(x)dx (1.7)
que tambien se puede escribir como sigue:
y =C +
∫q (x) v (x) dx
v (x)
v (x) = e∫p(x)dx
Ejemplo 3 Resolver la EDOx ln (x) y′ − y = x3 (3 ln (x)− 1)
Al dividir por x ln (x) se obtiene
y′ − 1
x ln (x)y =
x2 (3 ln (x)− 1)
ln (x)
que es una EDO lineal de primer orden que comparando con (1.6) se ve que
p (x) = − 1
x ln (x)y q (x) =
x2 (3 ln (x) − 1)
ln (x)
Por lo tanto, el factor integrante es:
v (x) = exp
[−∫
dx
x ln (x)
]= exp
[−∫d ln (x)
ln (x)
]= exp {− ln [ln (x)]}
= exp
{ln
[1
ln (x)
]}=
1
ln (x)
donde se ha utilizado la identidad d [ln (u)] = du/u. Al multiplicar la EDO lineal por este factor integrante
1
ln (x)y′ − 1
x ln2 (x)y =
x2 (3 ln (x)− 1)
ln2 (x)
d
dx
[1
ln (x)y
]=
x2 (3 ln (x)− 1)
ln2 (x)
6

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ademas el termino del lado derecho es igual a
d
dx
[x3
ln (x)
]=
3x2
ln (x)− x3
x ln2 (x)= x2
[3 ln (x) − 1]
ln2 (x)
ası que la EDO lineal es equivalente a
d
dx
[1
ln (x)y
]=
d
dx
[x3
ln (x)
]integrando ∫
d
[1
ln (x)y
]=
∫d
[x3
ln (x)
]1
ln (x)y = C +
x3
ln (x)
despejando y se obtieney = C ln (x) + x3
Ecuaciones de Bernoulli
Las ecuaciones de Bernoulli tienen la forma general
y′ + p (x) y = q (x) yn (1.8)
es decir que es una EDO de primer orden no lineal debido a que aparece el termino yn. Aquı q (x) �= 0 yp (x) �= 0, porque si q (x) = 0 o si p (x) = 0 la ecuacion es de variables separables. Para resolver esta EDO seutiliza el cambio de variables
z = y1−n
ası de tener una EDO que depende de (x, y) → (x, z) se obtiene una EDO lineal en termino de z. Paraobservar esto se calcula la deriva de z con respecto a x
dz
dx= (1− n) y−n dy
dxo
[z′ = (1− n) y−ny′
]y ahora se multiplica (1.8) por (1− n) y−n
(1− n) y−ny′ + (1− n) p (x) y1−n = (1− n) q (x)
el primer termino es z′ y el segundo contiene a z, ası se puede escribir la EDO de la siguiente manera:
z′ + (1− n) p (x) z = (1− n) q (x) (1.9)
Esta ya es una EDO lıneal cuya solucion es entonces:
Factor integrante : v (x) = e(1−n)∫p(x)dx
Solucion : z (x) =C + (1− n)
∫q (x) v (x) dx
v (x)
y remplazando el valor de z se obtiene la solucion
y =
[C + (1− n)
∫q (x) v (x) dx
v (x)
]1/(1−n)
7

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 4 Resolver la EDO
y′ =3x2
x3 + y + 1
si se calcula la inversa:dx
dy=x3 + y + 1
3x2=x
3+y + 1
3x2
y reacomodandodx
dy− 1
3x =
(1 + y)
3x−2
se obtiene una EDO de Bernoulli con n = −2, p = −1/3, y q = (1 + y) /3. Al multiplicar la ecuacion anteriorpor x2 se obtiene
x2dx
dy− 1
3x3 =
(1 + y)
3
al definir z = x3 se tiene dz/dy = 3x2 (dx/dy), y la ecuacion anterior multiplicada por 3 produce la EDOlineal:
dz
dy− z = (1 + y)
El factor integrante de esta EDO esv = e−
∫dy = e−y
ası que al multiplicar por este factor se obtiene
e−y dz
dy− ze−y = (1 + y) e−y
d
dy
(ze−y
)= (1 + y) e−y
que puede integrarse ∫d(ze−y
)=
∫(1 + y) e−ydy
de tablas ∫xeaxdx =
1
a
(x− 1
a
)eax
ası queze−y = C − e−y − (y + 1) e−y
y despejando zz = Cey − (2 + y)
Como z = x3, entonces
x = [Cey − (2 + y)]1/3
Ecuaciones homogeneas de primer orden
La palabra ”homogeneas”tiene diferentes significados en diferentes contextos, en este caso una EDOhomogenea de primer orden es aquella que tiene la forma
y′ = f (x, y) (1.10)
en donde f (x, y) es una funcion homogenea de grado cero. Una funcion F (x, y) se dice que es homogeneade grado n si cumple con la identidad
F (tx, ty) = tnF (x, y)
8

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
por ejemplo, F (x, y) = x2 + 3xy + y2 es una funcion homogenea de grado n = 2, ya que
F (tx, ty) = (tx)2 + 3 (tx) (ty) + (ty)2 = t2(x2 + 3xy + y2
),
ası una EDO de la forma (1.10) es homogenea si
f (tx, ty) = f (x, y)
por ejemplo si f (x, y) = x2−y2
x2+xy entonces,
f (tx, ty) =(tx)2 − (ty)2
(tx)2+ (tx) (ty)
=t2
t2x2 − y2
x2 + xy=x2 − y2
x2 + xy
se observa que es homogenea. Un caso particular de la EDO (1.10) es cuando f (x, y) = ψ (x, y) /φ (x, y), endonde ψ (x, y) y φ (x, y) son funciones homogeneas del mismo grado, es decir
f (tx, ty) =ψ (tx, ty)
φ (tx, ty)=tnψ (x, y)
tnφ (x, y)= f (x, y)
que con esto se cumple que f (x, y) es homogenea de grado cero, y en este caso la EDO tambien se puedeescribir como sigue
φ (x, y) dy = ψ (x, y) dx.
Siempre que se tiene una funcion homogenea se podra escribir como sigue:
f (x, y) = g( yx
)por lo tanto, las EDO homogeneas de primer orden tambien se pueden representar como:
y′ = g(yx
)por lo tanto, si se define el cambio de variables
v =y
x, (x, y) → (x, v)
entonces la diferencial de y con respecto a x es
y′ = v + xv′
pero como y′ = g (v), entonces se obtiene la EDO de variables separables
v + xv′ = g (v)
cuya solucion es ∫dv
g (v)− v=
∫dx
x
e integrando:
ln (Cx) =
∫v→y/x
dv
g (v)− v
en donde se debe remplazar v por y/x una vez integrado el termino del lado derecho.
9

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 5 Resolver
xy′ = y +√y2 − x2
esta ecuacion es equivalente a xdy =[y +
√y2 − x2
]dx, en donde se observa que los terminos que multi-
plican a dx y dy son homogeneos de grado uno, por lo tanto la EDO es homogenea. Ası la EDO se puedeescribir como sigue
y′ =y
x+
√(yx
)2− 1 = g
( yx
)entonces al definir el cambio de variable v = y/x, se tiene que
v + xv′ = v +√v2 − 1,
efectuando algebradv√v2 − 1
=dx
x
e integrando (de tablas∫
dx√x2−a2
= ln(x+
√x2 − a2
)), la solucion es
ln(v +
√v2 − 1
)= ln (Cx) .
Esta ecuacion se puede simplificar efectuando algebra:
Elevar a la e :y
x+
√(yx
)2− 1 = Cx
Multiplicar por x : y +√y2 − x2 = Cx2
Elevando al cuadrado : y2 − x2 = C2x4 − 2yCx2 + y2
Se despeja y : y =C2x2 + 1
2C
ası la solucion es
y =C
2x2 +
1
2C.
Ecuaciones reducibles a homogeneas de primer orden
Cuando se tiene una ecuacion de la forma
y′ = f
(a1x+ b1y + c1a2x+ b2y + c2
)(1.11)
en donde (a1b2 − a2b1) �= 0, se puede reducir a una EDO homogenea si se define el cambio de variable
ξ = x− x0 (1.12a)
ζ = y − y0 (1.12b)
donde (x0, y0) es la solucion del sistema algebraico
a1x0 + b1y0 + c1 = 0 (1.13a)
a2x0 + b2y0 + c2 = 0 (1.13b)
o en forma matricial: (a1 b1a2 b2
)(x0y0
)= −
(c1c2
)10

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
cuya solucion es (x0y0
)= −
(a1 b1a2 b2
)−1(c1c2
)y existe siempre y cuando (a1b2 − a2b1) �= 0. Ası al sustituir este cambio de variables en el cociente de f seobtiene
a1x+ b1y + c1a2x+ b2y + c2
=a1 (ξ + x0) + b1 (ζ + y0) + c1a2 (ξ + x0) + b2 (ζ + y0) + c2
=a1ξ + b1ζ
a2ξ + b2ζ=a1 + b1
ζξ
a2 + b2ζξ
que es un termino homogeneo de grado cero. Por otro lado, como x0 y y0 son constantes, entonces dξ = dxy dζ = dy, ası que la ecuacion (1.11) es equivalente a
dζ
dξ= f
(a1 + b1
ζξ
a2 + b2ζξ
)que es una ecuacion homogenea y puede resolverse como se explica en la seccion anterior haciendo v = ζ/ξ.
La condicion (a1b2 − a2b1) �= 0 es necesaria para que el sistema de ecuaciones (1.13) tenga una solucionvalida. Para el caso en que a1b2 − a2b1 = 0, entonces el sistema (1.13) es linealmente dependiente y significaque el termino a2x+ b2y + c2 es equivalente a
a2x+ b2y + c2 =b2b1
(a1x+ b1y) + c2
y ası la EDO (1.11) es rescrita como sigue:
y′ = f
(a1x+ b1y + c1
b2b1
(a1x+ b1y) + c2
)= g (a1x+ b1y)
y esta ecuacion es un caso especial de la EDO (1.5) que es reducible a variables separables mediante el cambioz = a1x+ b1y.
Ejemplo 6 Resolver la EDO
(x+ y − 2) dx+ (x− y + 4)dy = 0
(dy
dx= −x+ y − 2
x− y + 4
)
y′ = f
(a1x+ b1y + c1a2x+ b2y + c2
)Esta ecuacion se puede reducir a homogenea si se hace el cambio de variables (1.12) en donde x0 y y0 sonla solucion del sistema
x0 + y0 − 2 = 0
x0 − y0 + 4 = 0
al sumar ambas ecuaciones se tiene que 2x0 + 2 = 0, por lo tanto x0 = −1 y y0 = 3, ası que el cambio devariables es
ξ = x+ 1 → dξ = dx
ζ = y − 3 → dζ = dy
y la EDO original se reduce a
((ξ − 1) + (ζ + 3)− 2)dξ + ((ξ − 1)− (ζ + 3) + 4) dζ = 0
(ξ + ζ) dξ + (ξ − ζ) dζ = 0
(dζ
dξ=ξ + ζ
ζ − ξ=
1 + ζξ
ζξ − 1
)
11

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
esta es una EDO homogenea de primer orden, ası que se define v = ζ/ξ, por lo tanto dζ = vdξ + ξdv, y laEDO se transforma a:
(ξ + vξ) dξ + (ξ − vξ) (vdξ + ξdv) = 0
(1 + v) dξ + (1− v) (vdξ + ξdv) = 0
reacomodando (1 + 2v − v2
)dξ + (1− v) ξdv = 0
por lo que se pueden separar variables
dξ
ξ+
1− v
1 + 2v − v2dv = 0
el termino 1−v1+2v−v2 es igual a
1− v
1 + 2v − v2=
v − 1
v2 − 2v − 1=
v − 1
(v − 1)2 − 2
ası que al definir w = v − 1, entonces se tiene que∫dξ
ξ+
∫w
w2 − 2dw = 0
de tablas,∫
xdxx2−a2 = 1
2 ln(x2 − a2
)ası que la solucion es
ln (Cξ) +1
2ln[(v − 1)
2 − 2]= 0
aplicando leyes de logaritmos
Cξ
√(v − 1)
2 − 2 = 1
remplazando ahora v
C
√(ζ − ξ)
2 − 2ξ2 = 1
al igual que ξ y ζ:
C
√(y − x− 4)
2 − 2 (x+ 1)2= 1
Ecuaciones exactas
Cuando se tiene la ecuacion
Ψ (x, y) = Φ (x, y) + f (x) + g (y) = C
donde C es una constante, su derivada total sera
dΨ(x, y) =∂Ψ(x, y)
∂xdx+
∂Ψ(x, y)
∂ydy = 0 (1.14)
donde
∂Ψ(x, y)
∂x=
∂Φ (x, y)
∂x+df (x)
dx∂Ψ(x, y)
∂y=
∂Φ (x, y)
∂y+dg (y)
dy
12

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ası, cuando se tiene una EDO de primer orden con la forma
M (x, y) dx+N (x, y) dy = 0 (1.15)
se dice que es exacta si satisface la identidad
∂M (x, y)
∂y≡ ∂N (x, y)
∂x(1.16)
ya que la EDO se obtiene a partir de una derivada total. Para ver esto se puede comparar (1.14) y (1.15)para concluir que
M (x, y) =∂Ψ(x, y)
∂x=∂Φ (x, y)
∂x+df (x)
dx
N (x, y) =∂Ψ(x, y)
∂y=∂Φ (x, y)
∂y+dg (y)
dy
y del calculo se tiene que ∂2Ψ(x,y)∂y∂x = ∂2Ψ(x,y)
∂x∂y (es decir que no importa el orden en que se apliquen las
derivadas) por lo tanto se deduce directamente (1.16).La integral de M (x, y) con respecto a x, mateniendo y constante da∫
y=ctte
M (x, y) dx =
∫y=ctte
[∂Φ (x, y)
∂x+df (x)
dx
]dx
= Φ(x, y) + f (x)
por otro lado, la integral de N (x, y) con respecto a y, manteniendo x constante da∫x=ctte
N (x, y) dy =
∫x=ctte
[∂Φ (x, y)
∂y+dg (y)
dy
]dy
= Φ(x, y) + g (y)
como se observa, en ambas integrales se obtiene Φ (x, y), para no repetir en la solucion dos veces Φ (x, y)entonces se puede hacer cualquiera de los procedimientos siguientes:
1. Se integra M (x, y) con respecto a x manteniendo y constante (con esto se esta obteniendo Φ (x, y) +f (x)) y a esto se le suma la integral con respecto y de los terminos de N (x, y) que no contiene a x(con esto se esta obteniendo g (y)); esta suma debe ser igual a una constante. Es decir∫y=ctte
M (x, y) dx+
∫N (x, y) dy︸ ︷︷ ︸
Eliminando los terminosque dependen de x
= C
2. Se integran con respecto a x los terminos de M (x, y) que no depende de y (con esto se esta obteniendof (x)) y a esto se le suma la integral N (x, y) con respecto y manteniendo x constante (con esto seesta obteniendo Φ (x, y) + g (y)); esta suma debe ser igual a una constante. Es decir∫
M (x, y) dx︸ ︷︷ ︸Eliminando los terminos
que dependen de y
+∫x=ctte
N (x, y) dy = C
Ejemplo 7 Resolver
x(2x2 + y2
)+ y
(x2 + 2y2
)y′ = 0
13

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Se define que M (x, y) = x(2x2 + y2
)y N (x, y) = y
(x2 + 2y2
), con esto se tiene una ecuacion de la forma
M (x, y) dx+N (x, y) dy = 0. Para ver si es exacta se calcula ∂M∂y = 2xy y ∂N
∂x = 2yx, por lo que se concluyeque esta EDO si es exacta. Ası su solucion es∫
y=ctte
x(2x2 + y2
)dx +
∫y(x2 + 2y2
)dy︸ ︷︷ ︸
Eliminando los terminosque dependen de x
=
∫y=ctte
x(2x2 + y2
)dx+
∫2y3dy = C
x4
2+x2y2
2+y4
2=C′
2
ası la solucion esx4 + x2y2 + y4 = C′
Ecuaciones reducibles a exactas
Cualquier EDO de primer orden resuelta con respecto a la derivada se puede reducir a exacta. Si se tienela EDO
M (x, y) dx+N (x, y) dy = 0 (1.17)
no es exacta si ∂M(x,y)∂y �= ∂N(x,y)
∂x , pero se puede volver exacta al multiplicar por un factor integrante de la
forma μ (x, y), es decir, que al multiplicar la EDO anterior por este factor se tiene que
μ (x, y)M (x, y) dx+ μ (x, y)N (x, y) dy = 0
y ademas se cumple que∂
∂y[μ (x, y)M (x, y)] ≡ ∂
∂x[μ (x, y)N (x, y)]
si se desarrolla esta expresion se tiene:
μ∂M
∂y+M
∂μ
∂y= μ
∂N
∂x+N
∂μ
∂x
reacomodando∂M
∂y− ∂N
∂x=
1
μ
(N∂μ
∂x−M
∂μ
∂y
)y como ∂ [ln (μ)] = ∂μ/μ, entonces se llega a la ecuacion
∂M
∂y− ∂N
∂x= N
∂ ln (μ)
∂x−M
∂ ln (μ)
∂y(1.18)
Esta EDP debe ser resuelta para encontrar el valor de μ (x, y).En general resulta mas complejo resolver la ecuacion (1.18) que resolver mediante otro metodo la ecuacion
(1.17), sin embargo existen algunos caso en los que se puede resolver.
Caso 1: μ es una funcion exclusiva de x. En este caso la ecuacion (1.18) se simplifica a
d ln (μ)
dx=
∂M∂y − ∂N
∂x
N.
Para que exista esta funcion, μ (x), se requiere que(
∂M∂y − ∂N
∂x
)/N sea una funcion exclusiva de x. Si
se cumple esto entonces la solucion es:
μ (x) = exp
[∫ (∂M∂y − ∂N
∂x
N
)dx
]
14

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Caso 2: μ es una funcion exclusiva de y. En este caso (1.18) se simplifica a
d ln (μ)
dy=
∂N∂x − ∂M
∂y
M,
pero para que exista esta funcion, μ (y), se requiere que(
∂N∂x − ∂M
∂y
)/M sea una funcion exclusiva de
y. Si se cumple esto entonces la solucion es:
μ (y) = exp
[∫ (∂N∂x − ∂M
∂y
M
)dy
]
Caso 3: μ es funcion de x y de y, pero se puede representar como sigue:
μ (x, y) = μ (φ (x, y))
donde la estructura de φ (x, y) es conocida. Se puede definir la funcion z = φ (x, y), en este caso laecuacion (1.18) se simplifica a:
∂M
∂y− ∂N
∂x=
(N∂z
∂x−M
∂z
∂y
)d ln (μ)
dz
de aquı se obtiene:
d ln (μ)
dz=
∂M∂y − ∂N
∂x
N ∂z∂x −M ∂z
∂y
en este caso existe la μ que es funcion de z si y solo si el termino(
∂M∂y − ∂N
∂x
)/(N ∂z
∂x −M ∂z∂y
)se puede
escribir como una funcion exclusiva de z. Si si se cumple esta condicion entonces el factor integranteserıa
μ (z) = exp
[∫ (∂M∂y − ∂N
∂x
N ∂z∂x −M ∂z
∂y
)dz
]
Ejemplo 8 Resolver la ecuacion (x+ y2
)dx− 2yxdy = 0
Se define M =(x+ y2
)y N = −2yx. Las derivadas cruzadas son ∂M
∂y = 2y y ∂N∂x = −2y, por lo tanto se
concluye que no es una ecuacion exacta.Ahora se probara si existe un factor integrante del tipo μ (x), para lo cual se calcula el termino
∂M∂y − ∂N
∂x
N=
2y − (−2y)
−2yx= − 2
x
como este termino es una funcion exclusiva de x, entonces si existe la funcion μ (x) que es igual a
μ (x) = exp
(−∫
2
xdx
)=
1
x2
y ası al multiplicar la ecuacion diferencial original por este factor integrante se obtiene(1
x+(yx
)2)dx− 2
y
xdy = 0
15

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
en este caso se puede ver que si es una EDO exacta ya que ∂∂y
(1x +
(yx
)2)= ∂
∂x
(−2 yx
)= 2y/x2. Entonces
la solucion sera ∫ (1
x+(yx
)2)dx︸ ︷︷ ︸
Eliminando los terminosque dependen de y
− 2
∫x=ctte
y
xdy =
∫dx
x− 2
∫x=ctte
y
xdy = C
integrando,
ln (x)− y
x
2= C
efectuando algebra:y = ±
√x [ln (x)− C]
Ejemplo 9 Resolver la ecuacion (x2 + y2 + 1
)dx− 2xydy = 0
Se define M =(x2 + y2 + 1
)y N = −2yx. Las derivadas cruzadas son ∂M
∂y = 2y y ∂N∂x = −2y, por lo tanto
se concluye que no es una ecuacion exacta.Ahora se prueba si existe un factor integrante que es funcion solamente de x, para lo cual se calcula eltermino
∂M∂y − ∂N
∂x
N=
2y − (−2y)
−2yx= − 2
x
por lo que si existe el factor integrante μ (x) que es similar al del ejemplo anterior μ (x) = 1/x2, y ası laEDO original es (
1 +(yx
)2+
1
x2
)dx − 2
y
xdy = 0
esta ya es una EDO exacta cuya solucion es∫ (1 +
(yx
)2+
1
x2
)dx︸ ︷︷ ︸
Eliminando los terminosque dependen de y
− 2
∫x=ctte
y
xdy =
∫ (1 +
1
x2
)dx− 2
∫x=ctte
y
xdy = C
o integrando,
x− 1
x− y2
x= C
Tambien existe un factor integrante de la forma μ(x2 − y2
), ası que al definir z = x2 − y2, cuyas derivadas
cruzadas son ∂z∂x = 2x, ∂z
∂y = −2y, entonces el termino
∂M∂y − ∂N
∂x
N ∂z∂x −M ∂z
∂y
=2y − (−2y)
(−2yx) (2x)− (x2 + y2 + 1) (−2y)=
2
1− x2 + y2=
2
1− z
es una funcion exclusiva de z y por lo tanto el factor integrante es
μ (z) = exp
[∫2
1− zdz
]= exp [−2 ln (1− z)] =
1
(1− z)2
o de manera equivalente, en funcion de x y y es
μ (x, y) =1
(1− x2 + y2)2
16

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
al multiplicar la EDO original por este factor integrante se tiene que(x2 + y2 + 1
)(1− x2 + y2)
2 dx− 2xy
(1− x2 + y2)2 dy = 0
la cual es una EDO exacta, cuya solucion es∫ (x2 + y2 + 1
)(1− x2 + y2)2
dx︸ ︷︷ ︸Eliminando los termino
que dependen de y
− 2
∫x=ctte
xy
(1− x2 + y2)2dy = −2
∫x=ctte
xy
(1− x2 + y2)2dy = C
integrando, se obtienex
1− x2 + y2= C
Ecuaciones de Riccati
La EDO de Riccati es una EDO no lineal con la forma general
dy
dx= p (x) y2 + q (x) y + r (x) (1.19)
su solucion se obtiene utilizando el cambio de variable
y = − 1
p (x) v
dv
dx(x, y) → (x, v)
la derivada de este cambio de variable es
dy
dx= − d
dx
[1
p (x) v
dv
dx
]= − 1
p (x) v
d
dx
[dv
dx
]− dv
dx
d
dx
[1
p (x) v
]= − 1
p (x) v
d
dx
[dv
dx
]− dv
dx
[1
p
d
dx
[1
v
]+
1
v
d
dx
[1
p (x)
]]= − 1
p (x) v
d
dx
[dv
dx
]− dv
dx
[− 1
pv2dv
dx− 1
p2v
dp
dx
]= − 1
p (x) v
d2v
dx2+
1
p2 (x) v
dp
dx
dv
dx+
1
p (x) v2
(dv
dx
)2
ası que al sustituir esta derivada y la definicion de y en la ecuacion de Riccati se obtiene
− 1
p (x) v
d2v
dx2+
1
p2 (x) v
dp
dx
dv
dx+
1
p (x) v2
(dv
dx
)2
=1
p (x) v2
(dv
dx
)2
− q (x)
p (x) v
dv
dx+ r (x)
reacomodandod2v
dx2−(
1
p (x)
dp
dx+ q (x)
)dv
dx+ p (x) r (x) v = 0
esta es una EDO de segundo orden lineal que puede ser de coeficientes constantes o variables dependiendode los valores de p (x), q (x) y r (x).
17

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ecuaciones de primer orden no resueltas con respecto a la derivada
Ecuaciones de la forma f (y, y′) = 0 Si en la EDO de la forma f (y, y′) = 0 no se puede despejar y′ perosi se puede depejar y, es decir
y = φ (y′) (1.20)
entonces la solucion se puede buscar de manera parametrica definiendo p (x) = y′, donde se considera que pes una funcion de x. En este caso, la ecuacion (1.20) es igual a
y = φ (p)
para encontrar x en funcion del parametro, se deriva con respecto a x la expresion anterior
dy
dx=
d
dx[φ (p)] =
dφ
dp
dp
dx
Como y′ = p y utilizando la nomenclatura φ′ = dφ/dp se obtiene la EDO
p = φ′ (p)dp
dx,
que es de variables separables cuya solucion es
dx =φ′ (p)p
dp
x = C +
∫φ′ (p)p
dp
por lo tanto la solucion parametrica es {y = φ (p)
x = C +∫ φ′(p)
p dp(1.21)
Ejemplo 10 Resolver la EDO
y′ = e(y′/y)
aquı no se puede despejar y′, pero si y,
y =y′
ln (y′)
ası que la solucion se puede encontrar de manera parametrica, definiendo p (x) = y′, por lo que la EDO sereduce a
y =p
ln (p)
y derivando con respecto a x,dy
dx=
(1
ln (p)− 1
ln2 (p)
)dp
dx= p
se obtiene la EDO de variables separables(1
ln (p)− 1
ln2 (p)
)dp
p= dx
que es equivalente a (1
ln (p)− 1
ln2 (p)
)d ln (p) = dx
18

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
integrando
x = C + ln [ln (p)] +1
ln (p)
la solucion es entonces {y = p
ln(p)
x = C + ln [ln (p)] + 1ln(p)
Ecuaciones de la forma f (x, y′) = 0 Cuando se tiene una EDO de la forma f (x, y′) = 0 en donde no sepuede despejar y′, pero si se puede despejar x, es decir
x = ψ (y′) , (1.22)
entonces se puede buscar una solucion de manera parametrica, utilizando el parametro p (x) = y′, que al sersustituido en (1.22) produce la ecuacion
x = ψ (p)
y cuya derivada con respecto a x es
1 =d
dx[ψ (p)] =
dψ
dp
dp
dx
Ahora se divide por p = dy/dx para obtener
1
p= ψ′ (p)
dp
dy,
que es una ecuacion de variables separables con solucion
dy = pψ′ (p) dp
y = C +
∫pψ′ (p) dp
por lo tanto la solucion total es igual a {y = C +
∫pψ′ (p) dp
x = ψ (p)(1.23)
Ejemplo 11 Resolver la EDO
x = (y′)2 − 2y′ + 2
Se define que p = y′ = dy/dx, entonces la EDO se transforma a
x = p2 − 2p+ 2
la derivada con respecto a x es
1 = 2 (p− 1)dp
dx
como dx = dy/p, entonces se tiene la ecuacion
dy = 2p (p− 1)dp
ası la solucion para y se obtiene integrando la expresion anterior
y = C +2
3p3 − p2
mientras que la solucion total es {y = C + 2
3p3 − p2
x = p2 − 2p+ 2
19

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ecuaciones de primer orden no resueltas con respecto a la derivada de grado n Las EDO de laforma
an (x, y) (y′)n + an−1 (x, y) (y
′)n−1+ · · ·+ a1 (x, y) y
′ + a0 (x, y) = 0 (1.24)
se pueden ver como un polinomio para y′ con coeficientes ai (x, y), i = 0, 1, . . . , n. Este tipo de EDO puedentener mas de una solucion. Si las raıces reales1 del polinomio de orden n
an (x, y) zn + an−1 (x, y) z
n−1 + · · ·+ a1 (x, y) z + a0 (x, y) = 0,
que tiene los mismos coeficientes que (1.24), son
z = φ1 (x, y) , z = φ2 (x, y) , . . . , z = φm (x, y) , m ≤ n
entonces la EDO (1.24) se puede dividir en m EDO de primer orden resueltas con respecto a la derivada
y′ = φ1 (x, y)
y′ = φ2 (x, y)
... =...
y′ = φm (x, y)
que pueden resolverse para obtener m diferentes soluciones que satisfacen (1.24).
Ejemplo 12 Resolver la EDO
(y′)3 − y (y′)2 − x2y′ + x2y = 0
El polinomio asociado a esta EDO es
z3 − yz2 − x2z + x2y = 0
factorizando la expresion anterior se tiene
z2 (z − y)− x2 (z − y) = 0(z2 − x2
)(z − y) = 0
(z − x) (z + x) (z − y) = 0
por lo tanto las raıces son z = {x,−x, y} y las EDO resueltas con respecto a la derivada asociadas a la EDOoriginal son
1 : y′ = x → dy = xdx
2 : y′ = −x → dy = −xdx3 : y′ = y → dy
y= dx
por lo tanto las posibles soluciones para y son
1 : y =x2
2+ C1
2 : y = −x2
2+ C2
3 : y = C3ex
1El numero total de raıces para este polinomio son n, pero se supone que x, y y y′ son numero reales, entonces se consideransolamente las raıces reales (que se supondra son en total m raıces).
20

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ecuaciones de Lagrange Una EDO de primer orden de Lagrange tiene la forma general
y = φ (y′)x+ ψ (y′) (1.25)
para obtener la solucion de esta ecuacion se utiliza el parametro p (x) = y′, que al se sustituido en (1.25)produce la ecuacion
y = φ (p)x+ ψ (p)
si ahora se aplica la derivada con respecto a x se obtiene
dy
dx=
d
dx[φ (p)x+ ψ (p)] = φ′ (p)x
dp
dx+ φ (p) + ψ′ (p)
dp
dx
en donde se ha utilizado la nomenclatura φ′ = dφ/dp y ψ′ = dψ/dp. Al remplazar y′ por p y multiplicar pordx/dp se obtiene la EDO
pdx
dp=[φ′ (p)x+ ψ′ (p)
]+ φ (p)
dx
dp(1.26)
considerando que φ (p) �= p, esta ecuacion se puede reacomodar como sigue:
dx
dp+
φ′ (p)φ (p)− p
x =ψ′ (p)
p− φ (p)(1.27)
que como se observa es una EDO lineal de primer orden cuya solucion tendra la forma
x = Φ(p, C)
en donde C es la constante de integracion. Ası ya se tiene el valor de y y x de manera parametrica{y = φ (p)Φ (p, C) + ψ (p)x = Φ(p, C)
(1.28)
Ejemplo 13 Resolver la EDO
y = x (y′)2 − 1
y′
Se define que p = y′ = dy/dx y se remplaza en la EDO
y = p2x− 1
p
al aplicar la derivada con respecto a x se obtiene que
y′ = 2pdp
dxx+ p2 +
1
p2dp
dx= p
de aquı se obtiene la EDO (2px+
1
p2
)dp
dx= p− p2
y reacomodando se llega a la EDO lineal
dx
dp+
2
p− 1x =
1
p3 (1− p)
cuyo factor integrante es exp(2∫
dpp−1
)= (p− 1)
2, es decir que al multiplicar por este factor se obtiene
(p− 1)2 dx
dp+ 2 (p− 1)x =
1− p
p3
d
dp
[(p− 1)
2x]
=1
p3− 1
p2
21

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
integrando ∫d[(p− 1)
2x]
=
∫ (1
p3− 1
p2
)dp
(p− 1)2 x = C − 1
2p2+
1
p
ası que x es igual a
x =C
(p− 1)2 +
2p− 1
2p2 (p− 1)2
por lo que la solucion total se obtiene al sustituir x en la ecuacion para y{y = Cp2
(p−1)2+ 2p−1
2(p−1)2− 1
p
x = 2p2C+2p−12p2(p−1)2
Ecuaciones de Clairaut La EDO de Clairaut es un caso particular de la EDO de Lagrange (1.25) endonde φ (y′) = y′, es decir
y = y′x+ ψ (y′) (1.29)
La solucion se obtiene utilizando el mismo procedimiento descrito en la seccion anterior, sin embargo, eneste caso al llegar a la ecuacion (1.26) no se puede dividir por el termino p − φ (p) ya que en este caso seestarıa dividiendo por cero.
Para encontrar la solucion entoces se define p = y′ y se sustituye en (1.29)
y = px+ ψ (p)
al aplicar la derivada con respecto a x se tiene que
dy
dx= p+ x
dp
dx+ ψ′ (p)
dp
dx= p
de aquı se llega a la expresion [x+ ψ′ (p)
] dpdx
= 0.
En esta ecuacion se tienen dos casos
dp
dx= 0 o x = −ψ′ (p)
si p′ = 0 entonces p debe ser igual a una constante, digamos p = C, por lo tanto y′ es igual a dicha constantey la solucion es
y = Cx+ ψ (C) (1.30)
La otra solucion, para el caso en que x = −ψ′ (p) se denomina solucion singular y es igual a{y = −pψ′ (p) + ψ (p)x = −ψ′ (p) (1.31)
Ejemplo 14 Resolver la EDO
y = xy′ +a
y′
Su solucion esy = Cx +
a
C
22

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
pero tambien existe una solucion singular que sera:Comparando la EDO del ejemplo con (1.29) se ve que
ψ (y′) = a/y′
por lo tanto ψ (p) = a/p, ψ′ (p) = −a/p2 y sustituyendo esto en (1.31){y = 2a
p
x = ap2
aquı se puede eliminar la dependencia de p = ±√a/x,
y = ±2√ax
1.1.3. Ecuaciones diferenciales ordinarias de segundo orden y orden superior
Las EDO de segundo orden u orden superior tiene la forma general presentada en la ecuacion (1.1)
F(x, y, y′, y′′, . . . , y(n)
)= 0
dependiendo de la estructura de esta EDO se pueden utilizar diversos metodos, entre ellos los metodos dereduccion de orden que se ven a continuacion.
Metodos de reduccion de orden
Metodo 1: Ecuaciones de la forma y(n) = f (x) Cuando se tiene una EDO de orden n con la formaparticular
y(n) = f (x) (1.32)
entonces su solucion se obtiene integrando n veces es decir:
Primera integral :d
dx
[y(n−1)
]= f (x) →
∫d[y(n−1)
]=
∫f (x) dx =⇒ y(n−1) =
∫f (x) dx+ C ′
1
Segunda integral :d
dx
[y(n−2)
]=
∫f (x) dx+ C1 =⇒ y(n−2) =
∫ ∫f (x) dxdx + C ′
1x+ C ′2
...
n-esima Integral : y =
∫· · ·
∫︸ ︷︷ ︸n veces
f (x) dx · · · dx︸ ︷︷ ︸n veces
+ C1xn−1 + C2x
n−2 + · · ·+ Cn−1x+ Cn
por lo tanto la solucion tiene la forma
y =
∫· · ·
∫︸ ︷︷ ︸n veces
f (x) dx · · · dx︸ ︷︷ ︸n veces
+ C1xn−1 + C2x
n−2 + · · ·+ Cn−1x+ Cn (1.33)
Metodo 2: Ecuaciones de la forma f(x, y(k), y(k+1), . . . , y(n)
)= 0 Cuando se tiene una EDO de la
formaf(x, y(k), y(k+1), . . . , y(n)
)= 0 (1.34)
en donde k ≥ 1, entonces se puede reducir el orden k veces si se define p (x) = y(k), donde p se ha supuestoque es una funcion de x. Entonces se tiene que
p′ = y(k+1), p′′ = y(k+2), . . . , p(n−k) = y(n) (x, y) → (x, p)
23

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
y al sustituir en la EDO original se obtiene la EDO
f(x, p, p′, . . . , p(n−k)
)= 0 (1.35)
es decir que de tener una EDO de grado n con las variables (x, y) ahora se tiene una EDO de grado n−k con lasvariables (x, p). La solucion general de la EDO (1.35) puede ser implıcita, es decir Φ (x, p, C1, C2, . . . , Cn−k) =0, o bien explıcita, es decir, p = φ (x,C1, C2, . . . , Cn−k). Para el caso particular en que la solucion es explıcita,por la definicion de p se tiene que
y(k) = φ (x,C1, C2, . . . , Cn−k)
y esta es una EDO de orden k similar a (1.32), que puede ser resuelta utilizando el metodo 1.
y =
∫· · ·∫
︸ ︷︷ ︸k veces
φ (x,C1, C2, . . . , Cn−k) dx · · · dx︸ ︷︷ ︸k veces
+ Cn−k+1xk−1 + Cn−k+2x
k−2 + · · ·+ Cn−1x+ Cn
Metodo 3: Ecuaciones de la forma f(y, y′, y′′, . . . , y(n)
)= 0 Cuando se tienen ecuaciones diferenciales
de orden n en donde no se encuentra de manera explıcita la variable independiente, x, pero si se encuentrala variable dependiente, y, es decir
f(y, y′, y′′, . . . , y(n)
)= 0 (1.36)
se puede reducir en una unidad el orden mediante el cambio de variable p (y) = y′, en donde se ha supuestoque p es una funcion de y (no de x). En este caso se tienen las siguientes derivadas
y′ =dy
dx= p (y)
y′′ =d
dx[y′] =
dy
dx
d
dy[p] = pp′
y′′′ =d
dx[y′′] =
dy
dx
d
dy[pp′] = p
(pp′′ + (p′)2
)yIV =
d
dx[y′′′] =
dy
dx
d
dy
[p2p′′ + p (p′)2
]= p
(p2p′′′ + 4pp′p′′ + (p′)3
)...
en donde p′ = dp/dy, p′′ = d2p/dy2, . . . En este caso en la EDO (1.36) se pueden remplazar
y′ → p (y) (x, y) → (y, p)
y′′ → pdp
dy
y′′′ → p2d2p
dy2+ p
(dp
dy
)2
(1.37)
yIV → p3d3p
dy3+ 4p2
dp
dy
d2p
dy2+ p
(dp
dy
)3
...
para cambiar el problema original en (x, y) a un problema que depende de (y, p), con la forma
g(y, p, p′, . . . , p(n−1)
)= 0 (1.38)
24

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
en donde ahora se supone que la variable independiente es y y la variable dependiente es p. Si se puederesolver la EDO (1.38) se obtendra una solucion con la forma general
Φ (y, p, C1, C2, . . . , Cn−1) = 0,
que es equivalente aΦ (y, y′, C1, C2, . . . , Cn−1) = 0,
es decir, una EDO de primer orden que puede ser resuelta o no resuelta con respecto a la derivada.
Metodo 4: Ecuaciones homogeneas con respecto a y y sus derivadas Cuando se tiene una EDOde la forma
F(x, y, y′, y′′, . . . , y(n)
)= 0 (1.39)
en donde la funcion F es homogenea de grado k con respecto a y y todas sus derivadas, es decir que satisfacela ecuacion
F(x, yt, y′t, y′′t, . . . , y(n)t
)= tkF
(x, y, y′, y′′, . . . , y(n)
)(1.40)
entonces se puede reducir el orden en una unidad mediante el cambio de variable
y = e∫zdx (1.41)
en donde z es la nueva variable dependiente. Las derivadas de y son entonces
y′ =d
dx
[e∫zdx]= ze
∫zdx = zy
y′′ =d
dx[y′] =
d
dx[zy] = zy′ + z′y =
(z2 + z′
)y
y′′′ =d
dx[y′′] =
d
dx
[(z2 + z′
)y]= (2zz′ + z′′) y +
(z2 + z′
)y′ =
(z3 + 3zz′ + z′′
)y
yIV =d
dx[y′′′] =
d
dx
[(z3 + 3zz′ + z′′
)y]=(z4 + 6z2z′ + 3 (z′)2 + 4zz′′ + z′′′
)y
...
por lo tanto se pueden remplazar en la EDO (1.39)
y → e∫zdx
y′ → zy
y′′ → (z2 + z′
)y
y′′′ → (z3 + 3zz′ + z′′
)y
yIV →(z4 + 6z2z′ + 3 (z′)2 + 4zz′′ + z′′′
)y
...
para obtener la EDO
F(x, y, zy,
(z2 + z′
)y, . . . , φ
(z, z′, . . . , z(n−1)
)y)= 0
en donde φ es una funcion que depende del orden maximo de la derivada. Como se cumple (1.40), entoncesse puede factorizar y y eliminar para llegar a al EDO de orden n− 1
F(x, y, z,
(z2 + z′
), . . . , φ
(z, z′, . . . , z(n−1)
))= 0
25

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que al ser resuelta debe producir una solucion del tipo
Φ (x, z, C1, C2, . . . , Cn−1) = 0
y si se puede despejar zz = φ (x,C1, C2, . . . , Cn−1)
de acuerdo a (1.41) la solucion final es
y = Cne∫φ(x,C1,C2,...,Cn−1)dx
Metodo 5: Ecuaciones homogeneas con respecto a x, y y sus diferenciales Considere una EDOde orden n
F(x, y, y′, y′′, . . . , y(n)
)= 0 (1.42)
que satisface la propiedad:
F(tx, tmy, tm−1y′, tm−2y′′, . . . , tm−ny(n)
)= tkF
(x, y, y′, y′′, . . . , y(n)
)= 0 (1.43)
donde m es una constante a determinar y k otra constante arbitraria, es decir que al asignar grado 1 a xy grado m,m − 1,m − 2, . . . ,m − n a y y sus derivadas hasta el orden n, se obtiene que F es una funcionhomogenea de orden k. En este caso, es posible reducir el orden al utilizar los cambios de variables
x = et, y = uemt, (x, y) → (t, u)
Si se utiliza este cambio de variable, entonces las derivadas de y con respecto a x toman la forma:
y′ =dy
dx=
dydtdxdt
=(u′ +mu) emt
et= (u′ +mu) e(m−1)t,
y′′ =d (y′)dx
=ddt (y
′)dxdt
= [u′′ + (2m− 1)u′ + (m− 1)mu] e(m−2)t,
y′′′ =d (y′′)dx
=ddt (y
′′)dxdt
=[u′′′ + 3 (m− 1)u′′ +
(3m2 − 6m+ 2
)u′ + (m− 2) (m− 1)mu
]e(m−3)t,
...
donde u′ = dudt , u
′′ = d2udt2 , . . . , u
(n) = dnudtn , ası que al sustituir estas derivadas en la ecuacion (1.42), gracias a
la propiedad (1.43) se tiene que
F(x, y, y′, y′′, . . . , y(n)
)= F
(et, uemt, (u′ +mu) e(m−1)t, . . . , φ
(u, u′, . . . , u(n)
)e(m−n)t
)= ektF
(1, u, (u′ +mu) , . . . , φ
(u, u′, . . . , u(n)
))= 0
donde φ es una funcion que depende del orden maximo de la EDO. Por lo tanto, como la ecuacion es validapara cualquier valor de t, entonces se llega a una EDO con la forma
G(u, u′, . . . , u(n)
)= 0, (1.44)
es decir que no se ha reducido el orden en la ecuacion (1.44), sin embargo, esta EDO tiene la forma de laecuacion (1.36) y por lo tanto se puede aplicar el metodo 3 para reducir el orden en una unidad y en el casoen que u no esta presente en al EDO (1.44), incluso se puede aplicar el metodo 2.
26

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
En resumen, cuando es posible aplicar algun metodo de reduccion de orden, la clave consiste en indentificarcual de los metodos es el adecuado y por lo tanto se deben buscar las estructuras caracterısticas para cadametodo, es decir:
Metodo 1 : y(n) = f (x) ,
Metodo 2 : F(x, y(k), y(k+1), . . . , y(n)
)= 0,
Metodo 3 : F(y, y′, y′′, . . . , y(n)
)= 0,
Metodo 4 : F(x, y, y′, y′′, . . . , y(n)
)= 0, F es homogenea para y y sus derivadas
Metodo 5 : F(x, y, y′, y′′, . . . , y(n)
)= 0, F es homogenea para x, y y sus derivadas de grado m
Ejemplo 15 Resolver la siguiente EDO
(y′′)2 − y′y′′′ =(y′
x
)2
esta EDO tiene la forma F (x, y′, y′′, y′′′) = 0, y se puede reducir el orden en una unidad si se utiliza elmetodo 2, para lo cual se define p (x) = y′, por lo tanto la EDO es equivalente a
y′ → p, y′′ → p′, y′′′ → p′′
(p′)2 − pp′′ −(px
)2= 0
esta nueva EDO de segundo orden tiene la forma G (x, p, p′, p′′) = 0. Esta EDO es homogenea para y y susderivadas ya que G (x, pt, p′t, p′′t) = t2G (x, p, p′, p′′), por lo tanto se puede aplicar el metodo 4 de reduccionde orden, ası que se define
p = e∫zdx, p′ → zp, p′′ → (
z2 + z′)p
por lo tanto, la EDO se reescribe como sigue:
0 = (zp)2 − (
z2 + z′)p2 −
( px
)2= 0
Reacomodando : p2[−z′ − 1
x2
]= 0
como esta ecuacion es valida para cualquier valor de p, entonces se llega a la EDO
z′ +1
x2= 0
esta es una EDO de primer orden de variables separables con solucion
dz = −dxx2
z =1
x+ C1
y como p = exp(∫zdx
), entonces
p = exp
[∫ (1
x+ C1
)dx
]= exp [ln (x) + C1x+ ln (C2)]
27

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
p = C2xeC1x
pero p = y′, ası que se obtiene la EDO
y′ = C2xeC1x
que es de primer orden y de variables separables con solucion
y = C2
∫xeC1xdx + C3
de tablas,∫xeaxdx = 1
a
(x− 1
a
)eax, por lo tanto,
y =C2
C1
(x− 1
C1
)eC1x + C3
o bien
y = C ′2 (C1x− 1) eC1x + C3
donde C ′2 = C2/C
21 .
Ejemplo 16 Resolver la EDO
y′′y3 = 1
esta EDO tiene la forma: F (y, y′′) = 0, por lo que se puede resolver utilizando el metodo 3. Para lo cual sedefine que
y′ = p (y) , y′′ = pdp
dy
ası se obtiene la EDO de primer orden
pdp
dyy3 = 1
que es de variables separables con solucion∫pdp =
∫dy
y3
p2
2= − 1
2y2+C1
2
o bien al despejar p = y′,
y′ = ±√C1y2 − 1
y
esta es una EDO de primer orden de variables separables con solucion∫ydy√C1y2 − 1
= ±∫dx
1
C1
√C1y2 − 1 =
C2
C1± x
de donde se puede despejar y
y2 =1 + (C2 ± C1x)
2
C1
28

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 17 Resolver la EDO
y′′ =√1 + (y′)2
esta es una EDO con la forma F (y′, y′′) = 0. Por lo que se puede reducir el orden aplicando el metodo 2 aldefinir y′ = p (x) y y′′ = p′ para obtener la EDO
p′ =√1 + p2
que es de variables separables con solucion∫dp√1 + p2
=
∫dx
sinh−1 (p) = x+ C1
de aquı se puede despejar p = y′,y′ = sinh (x+ C1)
e integrando
y =
∫sinh (x+ C1) dx+ C2
se llega a la soluciony = cosh (x+ C1) + C2
Ejemplo 18 Resolver la EDO
x3y′′ = (y − xy′)2
esta EDO tiene la forma F (x, y, y′, y′′) = 0. Se le asigna a y un exponente m a y′ el exponente m − 1 y ay′′ el exponente m− 2, por lo tanto la suma de los exponentes de cada lado de la EDO son
3 +m− 2 = 2m
por lo tanto el valor adecuado para m es uno. Es decir que el cambio de variables adecuado es
x = et,dx
dt= et
y = uet,dy
dt=
(u+
du
dt
)et
por lo tanto la primera y segunda derivada para y son
dy
dx=
dydtdxdt
= u+du
dt
d2y
dx2=
ddt
(u+ du
dt
)dxdt
= e−t
(du
dt+d2u
dt2
)ası al remplazar en la EDO
e3te−t
(du
dt+d2u
dt2
)=
(uet − et
(u+
du
dt
))2
du
dt+d2u
dt2=
(du
dt
)2
29

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Esta EDO tiene la forma G (u′, u′′) = 0, por lo tanto se puede aplicar el metodo 2 o el metodo 3 de reduccionde orden para resolverla. Si se aplica el metodo 3, se define que u′ = p (u) y por lo tanto u′′ = pp′ resultando
p+ pp′ = p2
reacomodando
p′ − p = −1
esta es una EDO lineal de primer orden con solucion:
Factor integrante : e−u
Multiplicando por el factor integrante : e−up′ − e−up = −e−u
Se llega a la derivada total :d
du
(e−up
)= −e−u
e integrando : e−up = C1 + e−u
ası p es : p = u′ = C1eu + 1
como u′ = du/dt, entonces se ha obtenido una EDO de primer orden de variables separables∫du
C1eu + 1=
∫dt
integrando se obtiene
t+ ln (C2) = −∫ −e−udu
C1 + e−u
t+ ln (C2) = − ln(C1 + e−u
)ahora se despeja u,
u = − ln
(e−t
C2− C1
)como x = et y y = uet entonces se tiene que
y
x= − ln
(1
C2x− C1
)y la solucion final es entonces
y = x ln
(C2x
1− C1C2x
)
Ecuaciones diferenciales lineales de orden n
Las EDO lineales de orden n tienen la forma descrita en la ecuacion (1.3)
an (x) y(n) + an−1 (x) y
(n−1) + · · ·+ a1 (x) y′ + a0 (x) y = f (x)
donde los coeficientes an, an−1, . . . , a1, a0 pueden ser constantes o funciones de la variable independendiente,x, mas no de la variable dependiente. A continuacion se analizan los metodos para la solucion de EDO linealesde coeficientes constantes y posteriormente se estudiaran los metodos para las de coeficientes variables.
30

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
EDO lineales de orden n con coeficientes constantes homogeneas La solucion de una EDO linealde orden n de coeficientes constantes y homogenea
any(n) + an−1y
(n−1) + · · ·+ a1y′ + a0y = 0 (1.45)
se obtiene utilizando el metodo del operador en el cual se remplaza la diferencial por el operador diferecial,es decir m = d
dx , que aplicado a las derivadas resulta en
my =dy
dx, m2y =
d2y
dx2, . . . , mny =
dny
dxn,
y por lo tanto la EDO (1.45) es
anmny + an−1m
n−1y + · · ·+ a1my + a0y =(anm
n + an−1mn−1 + · · ·+ a1m+ a0
)y = 0
ası se obtiene el operador diferencial
anmn + an−1m
n−1 + · · ·+ a1m+ a0 = 0, o
(an
dn
dxn+ an−1
dn−1
dxn−1+ · · ·+ a1
d
dx+ a0 = 0
)que se puede ver como un polinomio de orden n para la variable m y cuyas raıces pueden ser:
Reales no repetidas,
Reales repetidas,
Complejas conjugadas no repetidas y
Complejas conjugadas repetidas.
Por lo tanto si las raıces son {r1, r2, r3, . . . , rn} entonces el polinomio caracterıstico es igual a
an (m− r1) (m− r2) · · · (m− rn) = 0, o
[an
(d
dx− r1
)(d
dx− r2
)· · ·(d
dx− rn
)= 0
]y la EDO (1.45) se puede escribir como
an
(d
dx− r1
)(d
dx− r2
)· · ·
(d
dx− rn
)y = 0.
Por ejemplo si se tiene la EDOy′′ + 3y′ + 2y = 0
entonces el polinomio caracterıstico es m2 + 3m+ 2 = (m+ 1) (m+ 2) = 0, y su solucion es m = {−1,−2}y por lo tanto la EDO se puede escribir como sigue:(
d
dx+ 1
)(d
dx+ 2
)y = 0
por lo tanto se pueden obtener dos EDO de primer orden
dy
dx+ y = 0 ,
dy
dx+ 2y = 0
la solucion de estas EDO son∫dyy +
∫dx = 0 ,
∫dyy + 2
∫dx = 0
ln (y) = −x+ ln (C1) , ln (y) = −2x+ ln (C2)y = C1e
−x , y = C2e−2x
31

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
y la solucion total es la suma de todas las posibles soluciones, por lo tanto
y = C1e−x + C2e
−2x
Ası, dependiendo de el numero de raıces y de su multiplicidad, se puede obtener la solucion total de laEDO (1.45):
Cuando se tiene raıces reales no repetidas {r1, r2, . . . , rk}, a la solucion total se le deben agregar losterminos
C1er1x + C2e
r2x + · · ·+ Ckerkx.
Cuando se tiene raıces reales repetidas {r con multiplicidad s}, entonces a la solucion total se le debeagregar
C1erx + C2xe
rx + · · ·+ Cs+1xserx.
Cuando se tiene raıces complejas conjugadas no repetidas {α1 ± β1i, α2 ± β2i, . . . , αk ± βki, }, entoncesa la solucion total se le debe agregar
[C1 cos (β1x) + C2 sen (β1x)] eα1x + [C3 cos (β2x) + C4 sen (β2x)] e
α2x + · · ·+ [C2k−1 cos (βkx) + C2k sen (βkx)] e
αkx
Cuando se tiene raıces complejas conjugadas repetidas {α± βi con multiplicidad s}, entonces a lasolucion total se le debe agregar
[(C1 + C2x+ · · ·+ Cs+1xs) cos (βx) + (Cs+2 + Cs+3x+ · · ·+ C2s+2x
s) sen (βx)] eαx
Ejemplo 19 Resolver la EDO y′′ − y = 0El polinomio caracterıstico es m2 − 1 = (m− 1) (m+ 1) = 0, cuyas raıces son m = {1,−1} ası que lasolucion es
y = C1ex + C2e
−x.
Ejemplo 20 Resolver la EDO y′′ + 2y′ + y = 0El polinomio caracterıstico es m2 + 2m+ 1 = (m+ 1)2 = 0, cuyas raıces son m = {−1,−1}, es decir que setiene una raız con multiplicidad uno, ası que la solucion es
y = C1e−x + C2xe
−x.
Ejemplo 21 Resolver la EDO yIV − y = 0El polinomio caracterıstico es m4−1 =
(m2 + 1
) (m2 − 1
)= 0, cuyas raıces son m = {1,−1,+i,−i} ası que
la solucion es
y = C1ex + C2e
−x + C3 cos (x) + C4 sen (x) .
Ejemplo 22 Resolver la EDO yV I + 2yV + yIV = 0El polinomio caracterıstico es m6 + 2m5 +m4 = m4 (m+ 1)
2= 0, cuyas raıces son m = {0, 0, 0, 0,−1,−1},
ası que la solucion es
y = C1 + C2x+ C3x2 + C4x
3 + C5e−x + C6xe
−x.
EDO lineales de orden n con coeficientes variables homogeneas Cuando los coeficientes an,an−1, . . .,a1,a0, de la ecuacion (1.3) son funciones de x, entonces el metodo del operador ya no se puede aplicary en este caso dependiendo de la estructura particular de la EDO se pueden aplicar diversos metodos, comopor ejemplo el metodo Cauchy-Euler, el metodo de series o el metodo de series generalizadas.
32

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ecuaciones de Cauchy-Euler Una EDO de Cauchy-Euler de orden n tiene la forma general
bnxny(n) + bn−1x
n−1y(n−1) + · · ·+ b1xy′ + b0y = f (x) (1.46)
si f (x) = 0, entonces la EDO es homogenea. La solucion de la EDO (1.46) cuando es homogena se puedeobtener por dos metodos:
Metodo 1: En este metodo se hace el cambio de variable
x = et, (x, y) → (t, y)
por lo tanto las derivadas de y seran
dy
dx=
dydtdxdt
= e−t dy
dt
d2y
dx2=
ddt
(dydx
)dxdt
= e−2t
(d2y
dt2− dy
dt
)d3y
dx3=
ddt
(d2ydx2
)dxdt
= e−3t
(d3y
dt3− 3
d2y
dt2+ 2
dy
dt
)...
y cada termino de la EDO (1.46) es entonces
xdy
dx=
dy
dt
x2d2y
dx2=
d2y
dt2− dy
dt
x3d3y
dx3=
d3y
dt3− 3
d2y
dt2+ 2
dy
dt...
y con esto se reducira a una EDO de coeficientes constantes que se puede resolver como se explican enla seccion anterior.
Metodo 2: En este metodo se propone una solucion de la forma
y = xm
y ası el problema se reduce a encontrar los valores adecuados para m, ya que las derivadas de y son
y′ = mxm−1
y′′ = m (m− 1)xm−2
y′′′ = m (m− 1) (m− 2)xm−3
...
Ası cada termino de la EDO (1.46) sera
xy′ = mxm
x2y′′ = m (m− 1)xm
x3y′′′ = m (m− 1) (m− 2)xm
...
y entonces la EDO original se reduce a un polinomio de orden n para la constante m a determinar.
33

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 23 Resolver la EDOx2y′′ + xy′ − y = 0
Metodo 1: Se define que x = et y por lo tanto la EDO es igual a:
d2y
dt2− dy
dt+dy
dt− y = 0 → d2y
dt2− y = 0
cuyo polinomio caracterıstico es(m2 − 1 = 0
), por lo tanto las raıces son m = {−1, 1} y la solucion para
y (t)y (t) = C1e
−t + C2et
y como x = et, entonces la solucion para y (x) es
y (x) =C1
x+ C2x.
Metodo 2: Se propone la solucion de la forma y = xm, por lo tanto la EDO es igual a:
m (m− 1)xm +mxm − xm =[m2 −m+m− 1
]xm =
(m2 − 1
)xm = 0
la ecuacion caracterıstica es m2−1 = 0, ası que las raıces son identicas a las del metodo anterior m = {−1, 1}y la solucion es
y =C1
x+ C2x
Ejemplo 24 Resolver la EDO x2y′′ + 2xy′ + 6y = 0Si se emplea el metodo 2, se define que y = xm, y por lo tanto la EDO se reduce a
m (m− 1) + 2m+ 6 = m2 +m+ 6 = 0
las raıces para m son m = − 12 ±
√14 − 6 = − 1
2 ±√232 i. La solucion es entonces
y = C1x− 1
2+√
232 i + C2x
− 12−
√232 i
=(C1x
√232 i + C2x
−√
232 i)x−1/2
como xθi = eln(xθi) = eiθ ln(x), y ademas eai = cos (a) + i sen (a), entonces
x√
232 i = ei
√232 ln(x) = cos
(√23
2ln (x)
)+ i sen
(√23
2ln (x)
)
x−√
232 i = e−i
√232 ln(x) = cos
(√23
2ln (x)
)− i sen
(√23
2ln (x)
)y la solucion es igual a
y =
(C1 cos
(√23
2ln (x)
)+ iC1 sen
(√23
2ln (x)
))x−1/2
+
(C2 cos
(√23
2ln (x)
)− iC2 sen
(√23
2ln (x)
))x−1/2
= (C1 + C2)x−1/2 cos
(√23
2ln (x)
)+ i (C1 − C2)x
−1/2 sen
(√23
2ln (x)
)
34

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
al definir c1 = C1 + C2 y c2 = i (C1 − C2) se llega a la solucion
y = c1x−1/2 cos
(√23
2ln (x)
)+ c2x
−1/2 sen
(√23
2ln (x)
)
Por otro lado, mediante el metodo 1, al definir x = et se llega a la EDO
d2y
dt2+dy
dt+ 6y = 0
cuya solucion
y (t) = c1e− 1
2 t cos
(√23
2t
)+ c2e
− 12 t sen
(√23
2t
)como x = et, entonces t = ln (x) y la solucion es entonces
y (x) = c1x− 1
2 cos
(√23
2ln (x)
)+ c2x
− 12 sen
(√23
2ln (x)
)
Ejemplo 25 Resolver la EDO x2y′′′ = 2y′
Esta EDO tiene la forma F (x, y′, y′′′) = 0, por lo tanto se puede aplicar el metodo 2 de reduccion de ordenal definir p (x) = y′, por lo que se obtiene la EDO
x2p′′ − 2p = 0
esta es una EDO de Cauchy-Euler ası que se utiliza el metodo 2 para resolverla se propone que p = xm, porlo tanto
m (m− 1)− 2 = 0
ası que la ecuacion caracterıstica es m2 −m− 2 = 0 cuyas raıces son m = {−1, 2}, por lo tanto la soluciones
p = C1x−1 + 3C2x
2 = y′
para encontrar y se integra una vezy = C1 ln (x) + C2x
3 + C3.
Metodos de solucion mediante series El metodo de solucion por series se aplica a algunas ecuacionesdiferenciales lineales de coeficientes variables con la forma (1.3) y consiste en proponer la solucion
y = c0 + c1x+ c2x2 + c3x
3 + · · · =∞∑k=0
ckxk (1.47)
Esta solucion es una serie polinomial infinita y con ella, el problema se reduce a determinar el valor adecuadode todas las constantes, c0, c1, c2, . . ., de tal forma que la solucion propuesta (1.47) satisface la EDO (1.3).
Ejemplo 26 EDO simple antes de Euler:Antes de que se definiera la funcion exponencial y logarıtmica, la solucion de la EDO dy
dx = ay era todo un
reto, ya que no se sabıa que∫
dyy = ln (y) (obviamente porque no se conocıa la definicion de los logaritmos).
Esta solucion se obtenıa a partir del metodo de solucion por series, es decir que la solucion propuesta es
y = c0 + c1x+ c2x2 + c3x
3 + · · · =∞∑k=0
ckxk
35

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ası que su derivada es
y′ = c1 + 2c2x+ 3c3x2 + · · · =
∞∑k=0
kckxk−1
por lo tanto al sustituir en la EDO original y′ − ay = 0 se obtiene
0 =(c1 + 2c2x+ 3c3x
2 + · · · )− a(c0 + c1x+ c2x
2 + c3x3 + · · · )
o de forma compacta
0 =
∞∑k=0
kckxk−1 − a
∞∑k=0
ckxk
factorizando los termino con la misma potencia para x se obtiene
0 = (c1 − ac0) + (2c2 − ac1)x+ (3c3 − ac2)x2 + (4c4 − ac3)x
3 + · · ·o de forma compacta
0 =
∞∑k=1
(kck − ack−1) xk−1
para que se cumpla la EDO original con cualquier valor de x entonces se define que
c1 − ac0 = 0
2c2 − ac1 = 0
3c3 − ac2 = 0
4c4 − ac3 = 0
...
kck − ack−1 = 0, k = 1, 2, 3, . . .
de aquı se pueden calcular el valor de las constantes
c1 = ac0
c2 =a
2c1 =
a2
2c0
c3 =a
3c2 =
a3
3 · 2c0
c4 =a
4c3 =
a4
4 · 3 · 2c0...
ck =a
kck−1 =
ak
k!c0, k = 1, 2, 3, . . .
Estos valores se sustituyen en la solucion propuesta
y = c0
(1 + ax+
a2
2x2 +
a3
3 · 2x3 + · · ·
)= c0
∞∑k=0
(ax)k
k!
Como la definicion de la funcion exponencial es
ex =
∞∑k=0
xk
k!
entonces se llega a la siguiente la soluciony = c0e
ax
36

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
En el metodo de solucion por series generalizadas se supone que la solucion de la EDO (1.3) se puederepresentar mediante una serie infinita de la forma
y = xs(c0 + c1x+ c2x
2 + c3x3 + · · · ) = ∞∑
k=0
ckxk+s (1.48)
donde s, c0, c1, c2, . . . , son constantes desconocidas a determinar. Aquı ya no se tiene una serie polinomial,ya que s puede ser cualquier numero, ya sea entero (positivo o negativo), racional o no racional. Como seobserva, la solucion (1.47) es un caso particular de (1.48), en donde s = 0. Para determinar las constantes yası obtener la solucion se deben sustituir y y sus derivadas en la EDO original, es decir que se remplaza
y →∞∑k=0
ckxk+s
y′ →∞∑k=0
(s+ k) ckxk−1+s
y′′ →∞∑k=0
(s+ k) (s+ k − 1) ckxk−2+s
...
y con esto se llega a una ecuacion en donde se pueden factorizar los terminos con las mismas potencias dex, para ası, por cuadratura, encontrar los valores de s, c0, c1, c2, . . .
Ejemplo 27 Ecuacion de Bessel: Utilizando el metodo de series generalizadas, resolver la ecuacion
x2y′′ + xy′ +(x2 − p2
)y = 0 (1.49)
donde p es un numero diferente a cero y no entero.Se propone la solucion
y =
∞∑k=0
ckxk+s
cuyas derivadas son
y′ =
∞∑k=0
(k + s) ckxk+s−1
y′′ =∞∑k=0
(k + s) (k + s− 1) ckxk+s−2
ası que la ecuacion diferencial es igual a
0 = x2
[ ∞∑k=0
(k + s) (k + s− 1) ckxk+s−2
]+ x
[ ∞∑k=0
(k + s) ckxk+s−1
]+(x2 − p2
) [ ∞∑k=0
ckxk+s
]
reacomodando
0 =
[ ∞∑k=0
(k + s) (k + s− 1) ckxk+s
]+
[ ∞∑k=0
(k + s) ckxk+s
]− p2
[ ∞∑k=0
ckxk+s
]+
[ ∞∑k=0
ckxk+s+2
]
37

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
en esta ecuacion se pueden factorizar las tres primeras sumatorias
0 =
∞∑k=0
[(k + s) (k + s− 1) ck + (k + s) ck − p2ck
]xk+s +
[ ∞∑k=0
ckxk+s+2
]
0 =
[ ∞∑k=0
[(k + s)2 − p2
]ckx
k+s
]+
[ ∞∑k=2
ck−2xk+s
]ahora se sacan los dos primeros terminos de la primera sumatoria
0 =(s2 − p2
)c0x
s +[(1 + s)
2 − p2]c1x
s+1 +
[ ∞∑k=2
[(k + s)
2 − p2]ckx
k+s
]+
[ ∞∑k=2
ck−2xk+s
]para poder factorizar ambas sumatorias
0 =(s2 − p2
)c0x
s +[(1 + s)
2 − p2]c1x
s+1 +
∞∑k=2
{[(k + s)
2 − p2]ck + ck−2
}xk+s
para que se cumpla esta ecuacion con cualquier valor de x se define que(s2 − p2
)c0 = 0, (1.50a)[
(1 + s)2 − p2]c1 = 0, (1.50b)[
(k + s)2 − p2
]ck + ck−2 = 0, k = 2, 3, 4, . . . (1.50c)
si se define que c0 �= 0, entonces a partir de (1.50a) se concluye que s2 − p2 = 0 y por lo tanto la solucionpara s es
s = ±p (1.51)
al sustituir el valor de s en la ecuacion (1.50b) se obtiene que c1 = 0, mientras que de la ecuacion (1.50c)se despeja ck
ck = − ck−2
(k + s)2 − p2
, k = 2, 3, 4, . . . (1.52)
Si se elige el valor s = p (posteriormente se utilizara el valor s = −p) entonces (k + s)2 − p2 = (k + 2p)k y
ck = − ck−2
k (k + 2p), k = 2, 3, 4, . . .
ası para cada una de las constantes
k = 2 : c2 = − c022 (1 + p)
k = 3 : c3 = − c13 (3 + 2p)
= 0
k = 4 : c4 = − c223 (2 + p)
=c0
2 · 24 (2 + p) (1 + p)
k = 5 : c5 = 0
k = 6 : c6 = − c43 · 22 (3 + p)
= − c0(3 · 2) · 26 (3 + p) (2 + p) (1 + p)
k = 7 : c7 = 0
k = 8 : c8 = − c624 (4 + p)
=c0
(4 · 3 · 2) · 28 (4 + p) (3 + p) (2 + p) (1 + p)
...
38

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que al sustituir en la solucion propuesta produce:
y = c0xp + c1x
p+1 + c2xp+2 + c3x
p+3 + c4xp+4 + c5x
p+5 + c6xp+6 + c7x
p+7 + c8xp+8 + · · ·
y = c0xp − c0x
p+2
22 (1 + p)+
c0xp+4
24 · 2! (2 + p) (1 + p)
− c0xp+6
26 · 3! (3 + p) (2 + p) (1 + p)+
c0xp+8
28 · 4! (4 + p) (3 + p) (2 + p) (1 + p)+ · · ·
o de manera compacta:
y = c0p∞∑n=0
Anx2n+p
donde
A0 =1
p
A1 = − 1
22 (1 + p) p
A2 =1
24 · 2! (2 + p) (1 + p) p
A3 = − 1
26 · 3! (3 + p) (2 + p) (1 + p) p
A4 =1
28 · 4! (4 + p) (3 + p) (2 + p) (1 + p) p
...
de aquı se puede inferir la formula general
An =(−1)
n
22n (n!) p (1 + p) (2 + p) · · · (n+ p), n = 0, 1, 2, . . .
El termino p (1 + p) (2 + p) · · · (n+ p) no es un factorial, ya que p no es un numero entero, sin embargo sepuede simplificar utilizando la funcion Gamma definida como
Γ (v) =
∫ ∞
0
tv−1e−tdt (1.53)
donde v puede ser cualquier numero. Esta funcion tiene la siguiente propiedad
Γ (v + 1) = vΓ (v) , (1.54)
que en particular para un numero entero se puede utilizar de manera recursiva para obtener
Γ (n+ 1) = nΓ (n)
= n (n− 1)Γ (n− 1)
= n (n− 1) (n− 2)Γ (n− 2)
...
= n!
39

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
por lo tanto, esta funcion es una generalizacion del factorial para numero no enteros. Ası para nuestroejemplo utilizando (1.54) se tiene que
Γ (n+ p+ 1) = (n+ p) Γ (n+ p)
= (n+ p) (n+ p− 1) Γ (n+ p− 1)
= (n+ p) (n+ p− 1) (n+ p− 2) Γ (n+ p− 2)
...
= (n+ p) (n+ p− 1) · · · (2 + p) (1 + p) pΓ (p)
es decir que se puede remplazar
(n+ p) (n+ p− 1) · · · (2 + p) (1 + p) p =Γ (n+ p+ 1)
Γ (p)
es decir que
An =(−1)
nΓ (p)
22n (n!) Γ (n+ p+ 1), n = 0, 1, 2, . . .
y la solucion es
y = c0p
∞∑n=0
(−1)nΓ (p)
22n (n!) Γ (n+ p+ 1)xp+2n
= 2pc0pΓ (p)∞∑
n=0
(−1)n
(n!) Γ (n+ p+ 1)
(x2
)p+2n
o de manera compactay = C0Jp (x)
donde C0 = 2pc0pΓ (p) y Jp (x) se conoce como la funcion de Bessel de primera especie de orden p definidacomo
Jp (x) =
∞∑n=0
(−1)n
(n!) Γ (n+ p+ 1)
(x2
)2n+p
. (1.55)
Como se observa, la solucion solo tiene una constante de integracion, C0, pero la EDO es de segundo orden,ası que falta otro termino, el cual se obtiene al considerar ahora el caso en que s = −p. Por lo tanto,haciendo el mismo procedimiento a partir de la ecuacion (1.52) son s = −p se obtendra que la solucion parala ecuacion (1.49) denominada ecuacion de Bessel de orden p es
y = C0Jp (x) + C1J−p (x) , p �= 0, 1, 2, 3, . . . (1.56)
donde J−p (x) es la misma funcion (1.55) en donde se debe remplazar p por −p, es decir
J−p (x) =∞∑n=0
(−1)n
(n!) Γ (n− p+ 1)
(x2
)2n−p
Como se ven en el ejemplo 27, la solucion (1.56) es valida para p no entero ni cero. En el caso en quep = 0, es evidente que J0 (x) = J−0 (x) mientras que para p = m = 1, 2, 3, . . . las funciones Jm (x) y J−m (x)cumplen la relacion J−m (x) = (−1)
mJm (x) por lo tanto se concluye que para m igual a numeros enteros
o cero las soluciones Jm (x) y J−m (x) son linealmente dependientes. En este caso, la solucion (1.56) yano esta completa y se debe buscar otra solucion. A continuacion se presenta la metodologıa general paradeterminar soluciones linealmente independientes en EDO lineales de segundo orden.
40

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Metodo de Frobenius: Cuando se tiene una EDO lineal de segundo orden de la forma
y′′ + p (x) y′ + q (x) y = 0 (1.57)
donde p (x) y q (x) son funciones con la forma
p (x) =
∑∞k=0 akx
k
x, q (x) =
∑∞k=0 bkx
k
x2
donde las series son convergentes en el dominio de x. Dependiendo de las raıces s1 y s2 del polinomio
s (s− 1) + a0s+ b0 = 0 (1.58)
donde a0 = lımx→0 [xp (x)] y b0 = lımx→0
[x2q (x)
]se tiene lo siguiente:
1. Si la diferencia s1 − s2 no es un numero entero o cero, la solucion de (1.57) es
y = C1y1 + C2y2
donde y1 y y2 son las series
y1 =
∞∑k=0
Akxk+s1 y y2 =
∞∑k=0
Bkxk+s2 (1.59)
y se puede aplicar el metodo de solucion por series generalizadas para obtener el valor de las constantesAk y Bk.
2. Si la diferencia s1 − s2 es igual a cero o a un numero entero, entonces la solucion es
y = C1y1 + C2y2
donde y1 se obtiene mediante la serie
y1 =
∞∑k=0
Akxk+s1 (1.60)
que es similar al caso anterior, mientras que y2 se puede obtener mediante la expresion
y2 = By1 ln (x) +
∞∑k=0
Bkxk+s2 (1.61)
es decir que ahora y2 contiene un termino complementario de la forma By1 ln (x), donde y1 esta dadopor (1.60).
Ejemplo 28 Ecuacion de Bessel 2: Como se vio en le ejemplo 27 la ecuacion de Bessel es
x2y′′ + xy′ +(x2 − p2
)y = 0
que al dividir por x2 se puede reescribir como
y′′ +1
xy′ +
(1−
( px
)2)y = 0
y en este caso se observa que tiene la forma de la ecuacion (1.57) con p (x) = 1/x y q (x) = 1− (p/x)2. Por
lo tanto se tiene que a0 = lımx→0 [xp (x)] = 1 y b0 = lımx→0
[x2q (x)
]= −p2 y el polinomio (1.58) es
s2 − p2 = 0
41

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que es identico al que se obtuvo de la ecuacion (1.50a), por lo que las raıces son s1,2 = ±p, que son identicosa los obtenidos en la ecuacion (1.51). De esta forma, la resta de s1 − s2 = p− (−p) = 2p es un numero noentero ni igual a cero si y solo si p no es un numero entero ni igual a cero, y en este caso la solucion tienela forma y = C1y1 + C2y2 con y1 y y2 dados por (1.59). Prescisamente esta solucion fue la obtenida en elejemplo 27 por lo que la ecuacion (1.56) es valida. Por otro lado, si p es igual a cero o un numero entero,entonces la resta s1 − s2 tambien es cero o un numero entero y entonces la solucion debe ser
y = C1Jp (x) + C2Yp (x) (1.62)
donde Yp (x) se denomina Funcion de Bessel de segunda especie de orden p y tiene la forma descrita por laecuacion (1.61), es decir
Yp (x) = BJp (x) ln (x) +
∞∑k=0
Bkxk−p (1.63)
en donde los coeficientes B,B1, B2, B3, . . . se pueden calcular sustituyendo esta solucion en la ecuacion deBessel. Otra forma de definir a Yp (x) es mediante la funcion de Weber
Yp (x) = lımn→p
Jn (x) cos (nπ)− J−n (x)
sen (nπ)
en particular para p = m = 0, 1, 2, 3, . . . se tiene que
Ym (x) =2
π
[ln(x2
)− γ
]Jm (x)− 1
π
m−1∑k=0
(m− k − 1)!(x2
)2k−m
(1.64)
− 1
π
∞∑k=0
(−1)k[Φ (k) + Φ (m+ k)]
k! (m+ k)!
(x2
)2k+m
donde γ = 0,5772156 . . . es la constante de Euler y
Φ (k) = 1 +1
2+
1
3+ · · ·+ 1
k, Φ (0) = 0.
Como se observa, la funcion (1.64) tiene la misma estructura que (1.63). Ası por ejemplo, para m = 0 setiene que
Y0 (x) =2
π
[ln(x2
)− γ
]J0 (x)− 2
π
[x2
22− x4
2242
(1 +
1
2
)+
x6
224262
(1 +
1
2+
1
3
)+ · · ·
].
En la Figura 1.1 se muestran las graficas de las funciones de Bessel Jm (x) y Ym (x) para m = 0, 1, 2, 3.
Ejemplo 29 Resolver la EDOy′′ + xy′ + y = 0
Se propone la solucion
y =∞∑n=0
cnxn+s
cuyas derivadas son
y′ =∞∑
n=0
(n+ s) cnxn+s−1
y′′ =
∞∑n=0
(n+ s) (n+ s− 1) cnxn+s−2
42

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
1 2 3 4 5 6 7 8 9 10
-1.0
-0.5
0.0
0.5
1.0
x
m=0 m=1 m=2 m=3
1 2 3 4 5 6 7 8 9 10
-1.0
-0.5
0.0
0.5
1.0
x
m=0
m=1m=2 m=3
Figura 1.1: Funciones de Bessel de primera y segunda especie, Jm (x) y Ym (x).
al sustituir en la EDO[ ∞∑n=0
(n+ s) (n+ s− 1) cnxn+s−2
]︸ ︷︷ ︸
y′′
+ x
[ ∞∑n=0
(n+ s) cnxn+s−1
]︸ ︷︷ ︸
xy′
+
[ ∞∑n=0
cnxn+s
]︸ ︷︷ ︸
y
= 0
esto es equivalente a
∞∑n=0
(n+ s) (n+ s− 1) cnxn+s−2 +
∞∑n=0
(n+ s+ 1) cnxn+s = 0
en donde se han agrupado las dos ultimas sumatorias. En la segunda sumatoria se remplaza n→ n− 2 y enla primera se sacan los dos primeros terminos
s (s− 1) c0xs−2 + (1 + s) sc1x
s−1 +
∞∑n=2
(n+ s) (n+ s− 1) cnxn+s−2 +
∞∑n=2
(n+ s− 1) cn−2xn+s−2 = 0
y ahora se agrupan ambas sumatorias
s (s− 1) c0xs−2 + (1 + s) sc1x
s−1 +∞∑n=2
(n+ s− 1) [(n+ s) cn + cn−2]xn+s−2 = 0
para que la ecuacion sea valida con cualquier valor de x entonces se define que
s (s− 1) c0 = 0,
(1 + s) sc1 = 0,
(n+ s− 1) [(n+ s) cn + cn−2] = 0, n = 2, 3, 4, . . .
si se define que s = 0 entonces las dos primeras ecuaciones se cumplen y se tiene que
ncn + cn−2 = 0
por lo tanto la solucion para cn es
cn = −cn−2
n, n = 2, 3, 4, . . .
43

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
para los diferentes valores de n :
n = 2 : c2 = −c02
n = 3 : c3 = −c13
n = 4 : c4 = −c24
=c0222!
n = 5 : c5 = −c35
=c15 · 3
n = 6 : c6 = −c46
= − c0233!
n = 7 : c7 = −c57
= − c17 · 5 · 3
...
por lo tanto la solucion es
y = c0 + c1x+ c2x2 + c3x
3 + c4x4 + c5x
5 + c6x6 + c7x
7 + · · ·= c0 + c1x− c0
2x2 − c1
3x3 +
c0222!
x4 +c15 · 3x
5 − c0233!
x6 − c17 · 5 · 3x
7 + · · ·
= c0
[1− 1
2x2 +
1
222!x4 − 1
233!x6 + · · ·
]+ c1
[x− 1
3x3 +
1
5 · 3x5 − 1
7 · 5 · 3x7 + · · ·
]ademas
∞∑k=0
(−1)kx2k
2k (k!)= 1− 1
2x2 +
1
222!x4 − 1
233!x6 + · · ·
∞∑k=0
2k (k!) (−1)kx2k+1
(2k + 1)!= x− 1
3x3 +
1
5 · 3x5 − 1
7 · 5 · 3x7 + · · ·
por lo tanto la solucion de manera compacta es
y = c0
[ ∞∑k=0
(−1)kx2k
2k (k!)
]+ c1
[ ∞∑k=0
2k (k!) (−1)kx2k+1
(2k + 1)!
]
Ejemplo 30 Resolver la EDO
x2y′′ + 2xy′ + λ2x2y = 0
donde λ es una constante. Por el hecho de que el segundo termino es 2xy′, esta ecuacion no es de Besselası que se propone la solucion
y =
∞∑n=0
cnxn+s
cuyas derivadas son
y′ =∞∑
n=0
(n+ s) cnxn+s−1
y′′ =
∞∑n=0
(n+ s) (n+ s− 1) cnxn+s−2
44

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
al sustituir en la EDO
x2
[ ∞∑n=0
(n+ s) (n+ s− 1) cnxn+s−2
]︸ ︷︷ ︸
y′′
+ 2x
[ ∞∑n=0
(n+ s) cnxn+s−1
]︸ ︷︷ ︸
xy′
+ λ2x2
[ ∞∑n=0
cnxn+s
]︸ ︷︷ ︸
y
= 0
esto es equivalente a∞∑
n=0
(n+ s) (n+ s+ 1) cnxn+s + λ2
∞∑n=0
cnxn+s+2 = 0
en donde se han agrupado las dos primeras sumatorias. En la segunda sumatoria se remplaza n → n− 2 yen la primera se sacan los dos primeros terminos
s (s+ 1) c0xs + (s+ 1) (s+ 2) c1x
s+1 +
∞∑n=2
(n+ s) (n+ s+ 1) cnxn+s + λ2
∞∑n=2
cn−2xn+s = 0
y ahora se agrupan ambas sumatorias
s (s+ 1) c0xs + (s+ 1) (s+ 2) c1x
s+1 +∞∑n=2
[(n+ s) (n+ s+ 1) cn + λ2cn−2
]xn+s = 0
para que la ecuacion sea valida con cualquier valor de x entonces se define que
s (s+ 1) c0 = 0,
(s+ 1) (s+ 2) c1 = 0,
(n+ s) (n+ s+ 1) cn + λ2cn−2 = 0, n = 2, 3, 4, . . .
si se define que s = −1 entonces las dos primeras ecuaciones se cumplen y de la tercera ecuacion se obtiene
n (n− 1) cn + λ2cn−2 = 0
por lo tanto la solucion para cn es
cn = − λ2cn−2
n (n− 1), n = 2, 3, 4, . . .
para los diferentes valores de n :
n = 2 : c2 = −λ2c02 · 1
n = 3 : c3 = −λ2c13 · 2
n = 4 : c4 = −λ2c24 · 3 =
λ4c04 · 3 · 2 · 1
n = 5 : c5 = −λ2c35 · 4 =
λ4c15 · 4 · 3 · 2
n = 6 : c6 = −λ2c46 · 5 = − λ6c0
6 · 5 · 4 · 3 · 2 · 1n = 7 : c7 = −λ
2c57 · 6 = − λ6c1
7 · 6 · 5 · 4 · 3 · 2 · 1...
45

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
por lo tanto la solucion es
y = x−1(c0 + c1x+ c2x
2 + c3x3 + c4x
4 + c5x5 + c6x
6 + c7x7 + · · · )
= x−1(c0 + c1x− c0
2!(λx)
2 − c13!λ2x3 +
c04!
(λx)4+c15!λ4x5 − c0
6!(λx)
6 − c17!λ6x7 + · · ·
)= c0x
−1
[1− (λx)
2
2!+
(λx)4
4!− (λx)
6
6!+ · · ·
]+c1λx−1
[λx− (λx)
3
3!+
(λx)5
5!− (λx)
7
7!+ · · ·
]
de acuerdo a las definiciones de las funciones trigonometricas seno y coseno
cos (u) = 1− 1
2!u2 +
1
4!u4 − 1
6!u6 + · · ·
sin (u) = u− 1
3!u3 +
1
5!u5 − 1
7!u7 + · · ·
la solucion es equivalente a
y =C1 cos (λx) + C2 sen (λx)
x
donde C1 = c0 y C2 = c1/λ.
EDO lineales de orden n no homogeneas: Metodo de coeficientes indeterminados Cuando enuna EDO lineal de coeficientes constantes de orden n2
any(n) + an−1y
(n−1) + · · ·+ a1y′ + a0y = f (x)
el termino f (x) �= 0 entonces la solucion total es la suma de una solucion homogenea la cual se obtiene alresolver la EDO
any(n)H + an−1y
(n−1)H + · · ·+ a1y
′H + a0yH = 0
y una solucion particular, yP , es deciry = yH + yP .
En particular cuando la funcion f (x) tiene la forma
f (x) = eαx [Pn (x) cos (βx) +Qm (x) sen (βx)] (1.65)
se puede aplicar el metodo de coeficientes indeterminados, que consiste en proponer una solucion particularde la forma
yP = xseαx[Pk (x) cos (βx) + Qk (x) sen (βx)
]donde Pk (x) y Qk (x) son dos polinomios de orden k = max (n,m) de coeficientes desconocidos, mientrasque s es el numero de veces que se repite la raız α±βi en el polinomio caracterıstico de la EDO homogenea.
Una vez propuesta esta solucion se debe sustituir en la EDO no homogenea junto con sus derivadas paradeterminar el valor de los coeficientes de los polinomios Pk (x) y Qk (x).
Tambien se puede tener el caso de funciones f (x) que sean una combinacion lineal de funciones del tipo(1.65), es decir
f (x) = f1 (x) + f2 (x) + · · ·+ fr (x) =
r∑i=1
fi (x)
donde cada una de estas funciones tiene la forma
fi (x) = eαix [Pi,n (x) cos (βix) +Qi,m (x) sen (βix)] , i = 1, 2, . . . , r
2El metodo de coeficientes indeterminados como se ve a continuacion solo se puede aplicar a ecuaciones lineales decoeficientes constantes.
46

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
entonces la solucion particular propuesta debe ser
yP =
r∑i=1
xsieαix[Pi,k (x) cos (βix) + Qi,k (x) sen (βix)
]que es la suma de las soluciones particulares para cada termino fi (x), i = 1, 2, . . . , r.
Ejemplo 31 Resolver la EDOy′′ − h2y = B
donde h y B son constantes diferentes a cero.La ecuacion homogenea es y′′H − h2yH = 0, ası que la solucion homogenea es
yH = c1ehx + c2e
−hx
como ,f (x) = B es decir una constante, {α = 0, β = 0, Pn (x) = B}, por lo tanto la solucion particular debeser:
yP = A1
ası que al sustituir esta solucion en la EDO no homogenea se tiene que
y′′p︸︷︷︸y′′p=0
− h2yp︸︷︷︸h2A1
= B
0− h2A1 = B
ası que A1 = −B/h2 y la solucion total es
y = yH + yP = c1ehx + c2e
−hx −B/h2
Ejemplo 32 Resolver la EDO y′′′ − y′′ = 12x2 + 6x.La solucion de la EDO homogenea y′′′H − y′′H = 0 es
m2 (m− 1) = 0 → yH = c1 + c2x+ c3ex
como f (x) = 12x2 + 6x entonces se tiene una forma polinomial {α = 0, β = 0, Pn (x) = 12x2 + 6x}, por lotanto la solucion particular propuesta debe ser
yP = x2(A1x
2 + A2x+A3
)cuyas derivadas son
y′P = 4A1x3 + 3A2x
2 + 2A3x
y′′P = 12A1x2 + 6A2x+ 2A3
y′′′P = 24A1x+ 6A2
ası que al sustituir en la EDO no homogenea se tiene
24A1x+ 6A2 −(12A1x
2 + 6A2x+ 2A3
)= 12x2 + 6x,
−12A1x2 + (24A1 − 6A2)x+ 6A2 − 2A3 = 12x2 + 6x.
Para que se cumpla esta ecuacion sin importar el valor de x se define que
−12A1 = 12
24A1 − 6A2 = 6
6A2 − 2A3 = 0
47

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
de aquı se obtiene que {A1, A2, A3} = {−1,−5,−15} y la solucion particular es entonces
yP = − (x2 + 5x+ 15)x2
mientras que solucion total es
y = c1 + c2x+ c3ex − (
x2 + 5x+ 15)x2.
Ejemplo 33 Resolver la EDO y′′ + y = 2x sen (x).La solucion de la EDO homogenea y′′H + yH = 0 es
m2 + 1 = 0, {m = ±i} → yH = c1 cos (x) + c2 sen (x) ,
ademas como f (x) = 2x sen (x), {α = 0, β = 1, Pn (x) = 0, Qm (x) = 2x}, y la raız α±βi = ±i se repite unavez entonces la solucion particular debe tener la forma
yP = x [(A1x+A2) cos (x) + (A3x+A4) sen (x)]
y sus derivadas son
y′P =[A3x
2 + (2A1 +A4) x+A2
]cos (x) +
[(2A3 −A2)x+A4 −A1x
2]sen (x)
y′′P =[2 (A1 +A4) + (4A3 −A2)x−A1x
2]cos (x) +
[2 (A3 −A2)− (4A1 +A4)x−A3x
2]sen (x)
ası que al sustituir en la EDO no homogenea se tiene
2x sen (x) =[2 (A1 +A4) + (4A3 −A2) x−A1x
2]cos (x)
+[2 (A3 −A2)− (4A1 +A4)x−A3x
2]sen (x)
+(A1x
2 +A2x)cos (x) +
(A3x
2 +A4x)sen (x)
reacomodando
2x sen (x) = [2 (A1 +A4) + 4A3x] cos (x) + [2 (A3 −A2)− 4A1x] sen (x) .
Para se cumpla esta ecuacion con cualquier valor de x se requiere que
2 = −4A1
0 = 2 (A1 +A4)
0 = 4A3
0 = 2 (A3 −A2)
por lo tanto la solucion es {A1, A2, A3, A4} ={− 1
2 , 0, 0,12
}y ası la solucion particular es
yP =1
2x sen (x)− 1
2x2 cos (x)
y la solucion total es
yH = c1 cos (x) + c2 sen (x) +1
2x sen (x)− 1
2x2 cos (x) .
Ejemplo 34 Resolver la EDO y′′ + 3y′ = ex.Para la EDO homogenea y′′H + 3y′H = 0 se tiene la solucion
m2 + 3m = 0, {m = 0,−3} , yH = c1 + c2e−3x
48

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
como f (x) = ex, {α = 1, β = 0, Pn (x) = 1}, y la raız α ± βi = 1 no se encuentra en la EDO homogeneaentonces la solucion particular debe tener la forma
yP = A1ex
y sus derivadas son y′p = y′′p = yp = A1ex, por lo tanto al sustituir en la EDO no homogenea se tiene que
A1ex + 3A1e
x = ex
4A1 = 1
por lo tanto yP = 14e
x y la solucion total es
y = c1 + c2e−3x +
1
4ex
Ejemplo 35 Resolver la EDO y′′ + 7y′ = e−7x.Para la EDO homogenea y′′H + 7y′H = 0 se tiene la solucion
m2 + 7m = 0, {m = 0,−7} , yH = c1 + c2e−7x
como f (x) = e−7x, {α = −7, β = 0, Pn (x) = 1}, y la raız α ± βi = −7 se encuentra una vez en la EDOhomogenea entonces la solucion particular debe tener la forma
yP = A1xe−7x
cuyas derivadas sony′P = A1 (1− 7x) e−7x , y′′P = A1 (49x− 14) e−7x
que al ser sustituidas en la EDO no homogenea
e−7x = A1 (49x− 14) e−7x + 7A1 (1− 7x) e−7x = −7A1e−7x
indican que A1 = −1/7. De esta manera la solucion total es
y = c1 +
(c2 − 1
7x
)e−7x.
Ejemplo 36 Resolver la EDO y′′ + 4y = sen (x) sen (2x).Para la EDO homogenea y′′H + 4yH = 0 se tiene la solucion
m2 + 4 = 0, {m = ±2i} , yH = c1 cos (2x) + c2 sen (2x)
como f (x) = sen (x) sen (2x), utilizando propiedades trigonometricas
sen (A) sen (B) =1
2cos (A−B)− 1
2cos (A+B)
entonces f (x) = 12 cos (x) − 1
2 cos (3x), {α1 = 0, β1 = 1, P1,n (x) = 12 , Q1,m (x) = 0, α2 = 0, β2 = 3,
P2,n (x) = − 12 , Q2,m (x) = 0}, como no se repiten la raıces en la solucion homogenea, entonces la solucion
particular debe tener la forma
yP = A1 cos (x) +A2 sen (x) +A3 cos (3x) +A4 sen (3x)
al calcular las derivadas y sustituirlas en la EDO no homogenea se obtiene que {A1, A2, A3, A4} = { 16 , 0,
110 , 0},
ası que la solucion total es
y = c1 cos (2x) + c2 sen (2x) +1
6cos (x) +
1
10cos (3x) .
49

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
EDO lineales de orden n no homogeneas: Metodo de variacion de parametros El metodo devariacion de parametros se puede aplicar a cualquier EDO lineal no homogenea ya sea de coeficientes con-stantes o variables. Cuando la solucion homogenea de la ecuacion (1.3)
an (x) y(n) + an−1 (x) y
(n−1) + · · ·+ a1 (x) y′ + a0 (x) y = f (x)
es
yH = C1y1 (x) + C2y2 (x) + · · ·+ Cnyn (x) =
n∑i=1
Ciyi (x)
donde C1, C2, . . . , Cn son constantes, mientras que y1, y2 . . . , yn son funciones que satisfacen la ecuacion
an (x) y(n)i + an−1 (x) y
(n−1)i + · · ·+ a1 (x) y
′i + a0 (x) yi =
n∑k=0
ak (x) y(k)i = 0, i = 1, 2, . . . , n, (1.66)
el metodo de variacion de parametros consiste en proponer que la solucion total es igual a
y = c1 (x) y1 (x) + c2 (x) y2 (x) + · · ·+ cn (x) yn (x) =
n∑i=1
ci (x) yi (x) (1.67)
donde se han remplazado las constantes C1, C2, . . . , Cn por las funciones c1 (x) , c2 (x) , . . . , cn (x) que sedeben determinar mediante el metodo de cuadratura, de tal forma que la solucion (1.67) satisface la EDO(1.3).
La primera derivada de (1.67) es
y′ = c′1y1 + c1y′1 + c′2y2 + c2y
′2 + · · ·+ c′nyn + cny
′n =
n∑i=1
c′iyi +n∑
i=1
ciy′i
pero si se define que
c′1y1 + c′2y2 + · · ·+ c′nyn =n∑
i=1
c′iyi = 0, (1.68)
entonces la primera derivada es
y′ = c1y′1 + c2y
′2 + · · ·+ cny
′n =
n∑i=1
ciy′i (1.69)
Si se vuelve a derivar esta ecuacion, entonces la segunda derivada de y es
y′′ = c′1y′1 + c1y
′′1 + c′2y
′2 + c2y
′′2 + · · ·+ c′ny
′n + cny
′′n
=
n∑i=1
c′iy′i +
n∑i=1
ciy′′i
de manera similar al caso de la primera derivada se define que
c′1y′1 + c′2y
′2 + · · ·+ c′ny
′n =
n∑i=1
c′iy′i = 0, (1.70)
por lo tanto, la segunda derivada es
y′′ = c1y′′1 + c2y
′′2 + · · ·+ cny
′′n =
n∑i=1
ciy′′i (1.71)
50

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Siguiendo este procedimiento para las derivadas hasta n− 1 se obtienen las ecuaciones
c′1y(k−1)1 + c′2y
(k−1)2 + · · ·+ c′ny
(k−1)n =
n∑i=1
c′iy(k−1)i = 0, k = 1, 2, . . . , n− 1, (1.72)
mientras que la derivadas son
y(k) = c1y(k)1 + c2y
(k)2 + · · ·+ cny
(k)n =
n∑i=1
ciy(k)i , k = 1, 2, . . . , n− 1, (1.73)
Si ahora se vuelve a derivar la derivada y(n−1) se tiene que
y(n) = c′1y(n−1)1 + c′2y
(n−1)2 + · · ·+ c′ny
(n−1)n
+c1y(n)1 + c2y
(n)2 + · · ·+ cny
(n)n (1.74)
=
n∑i=1
c′iy(n−1)i +
n∑i=1
ciy(n)i
Al sustituir y y sus derivadas, descritas por las ecuaciones (1.67), (1.73) y (1.74), en la EDO (1.3) setiene que
an (x)
[n∑
i=1
c′iy(n−1)i +
n∑i=1
ciy(n)i
]+an−1 (x)
[n∑
i=1
ciy(n−1)i
]+ · · ·+a1 (x)
[n∑
i=1
ciy′i
]+a0 (x)
[n∑
i=1
ciyi
]= f (x)
o de manera compacta
an (x)
[n∑
i=1
c′iy(n−1)i
]+
n∑k=0
ak (x)
[n∑
i=1
ciy(k)i
]= f (x)
o invirtiendo las sumatorias del segundo termino
an (x)
[n∑
i=1
c′iy(n−1)i
]+
n∑i=1
ci
n∑k=0
ak (x) y(k)i = f (x) .
Como las soluciones yi, i = 1, 2, . . . , n satisfacen la solucion homogenea (1.66), entonces todos los terminosde la segunda sumatoria son cero y por lo tanto la ecuacion anterior se reduce a
n∑i=1
c′iy(n−1)i =
f (x)
an (x).
Las ecuaciones (1.72) junto con la expresion anterior forma un sistema lineal de n ecuaciones con n incognitasc′i, i = 1, 2, . . . , n, es decir
n∑i=1
c′iy(k−1)i = 0, k = 1, 2, . . . , n− 1,
n∑i=1
c′iy(n−1)i =
f (x)
an (x)
51

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que en forma expandida es
c′1y1 + c′2y2 + · · ·+ c′nyn = 0
c′1y′1 + c′2y
′2 + · · ·+ c′ny
′n = 0
......
... =...
c′1y(n−2)1 + c′2y
(n−2)2 + · · ·+ c′ny
(n−2)n = 0
c′1y(n−1)1 + c′2y
(n−1)2 + · · ·+ c′ny
(n−1)n =
f (x)
an (x)
o en forma matricial ⎛⎜⎜⎜⎜⎜⎝y1 y2 · · · yn−1 yny′1 y′2 · · · y′n−1 y′n...
.... . .
......
y(n−2)1 y
(n−2)2 · · · y
(n−2)n−1 y
(n−2)n
y(n−1)1 y
(n−1)2 · · · y
(n−1)n−1 y
(n−1)n
⎞⎟⎟⎟⎟⎟⎠
⎛⎜⎜⎜⎜⎜⎝c′1c′2...
c′n−1
c′n
⎞⎟⎟⎟⎟⎟⎠ =
⎛⎜⎜⎜⎜⎜⎝00...0
f(x)an(x)
⎞⎟⎟⎟⎟⎟⎠ (1.75)
Como las soluciones yi, i = 1, 2, . . . , n, son linealmente independientes entonces el determinante de la matrizanterior
W (y1, y2, . . . , yn) =
∣∣∣∣∣∣∣∣∣∣∣
y1 y2 · · · yn−1 yny′1 y′2 · · · y′n−1 y′n...
.... . .
......
y(n−2)1 y
(n−2)2 · · · y
(n−2)n−1 y
(n−2)n
y(n−1)1 y
(n−1)2 · · · y
(n−1)n−1 y
(n−1)n
∣∣∣∣∣∣∣∣∣∣∣�= 0
definido como el Wroskiano es diferente a cero y por lo tanto el sistema (1.75) siempre tiene una solucion,ası que es posible determinar el valor c′i = φi (x), i = 1, 2, . . . , n, como unas funciones de x que se puedenintegrar
ci (x) =
∫φi (x) dx+ ci, i = 1, 2, . . . , n,
donde ci son las constantes de integracion; y sustituir en la solucion propuesta (1.67) para obtener la solucion
y =
n∑i=1
ciyi (x)︸ ︷︷ ︸yH
+
n∑i=1
yi (x)
∫φi (x) dx︸ ︷︷ ︸
yP
.
Por ejemplo, cuando la ecuacion (1.3) es una EDO de segundo orden,
a2 (x) y′′ + a1 (x) y
′ + a0 (x) y = f (x) (1.76)
cuya solucion homogenea esyH = C1y1 (x) + C2y2 (x)
la solucion propuesta debe sery = c1 (x) y1 (x) + c2 (x) y2 (x)
y el sistema de ecuaciones (1.75) para determinar c′1 y c′2 es(y1 y2y′1 y′2
)(c′1c′2
)=
(0
f(x)an(x)
)
52

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
de donde se obtiene que
c′1 = − y2f (x)
a2 (x)W (y1, y2)
c′2 =y1f (x)
a2 (x)W (y1, y2)
con
W (y1, y2) =
∣∣∣∣y1 y2y′1 y′2
∣∣∣∣ = y1y′2 − y2y
′1
por lo tanto el valor de los parametros es
c1 (x) = c1 −∫
y2f (x)
a2 (x)W (y1, y2)dx
c2 (x) = c2 +
∫y1f (x)
a2 (x)W (y1, y2)dx
y la solucion completa es
y = c1y1 (x) + c2y2 (x)− y1 (x)
∫y2 (x) f (x)
a2 (x)W (y1, y2)dx+ y2 (x)
∫y1 (x) f (x)
a2 (x)W (y1, y2)dx (1.77)
Ejemplo 37 Resolver la EDO y′′ − y = ln (x).La solucion de la EDO homogenea y′′H − yH = 0, es
m2 − 1 = 0, {m = ±1} , yH = c1ex + c2e
−x
por lo tanto la solucion total, utilizando el metodo de variacion de parametros debe ser
y = c1 (x) ex + c2 (x) e
−x,
es decir que para este caso particular y1 = ex, y2 = e−x y f (x) = ln (x). El Wroskiano es
W (y1, y2) =
∣∣∣∣ex e−x
ex −e−x
∣∣∣∣ = −2
por lo tanto c′1 (x) y c′2 (x) son
c′1 =e−x ln (x)
2
c′2 = −ex ln (x)
2
y sus integrales son
c1 (x) = c1 +1
2
∫e−x ln (x) dx,
c2 (x) = c2 − 1
2
∫ex ln (x) dx.
De tablas se tiene la integral∫eax ln (x) dx = eax ln(x)
a − 1a
∫eax
x dx, ası que
c1 (x) = c1 − 1
2e−x ln (x) +
1
2
∫e−x
xdx
c2 (x) = c2 − 1
2ex ln (x) +
1
2
∫ex
xdx
53

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
por lo tanto la solucion total es
y = c1ex + c2e
−x − ln (x) +1
2
[ex∫e−x
xdx+ e−x
∫ex
xdx
].
Ejemplo 38 Resolver la EDO x2y′′ + 2xy′ + y = x.Esta es una EDO de Cauchy-Euler cuya solucion homogenea es
m (m− 1) + 2m+ 1 = 0,
{m =
−1±√3i
2
},
yH =C1 cos
[√32 ln (x)
]+ C2 sen
[√32 ln (x)
]√x
por lo tanto su solucion total aplicando el metodo de variacion de parametros es
y =c1 (x) cos
[√32 ln (x)
]+ c2 (x) sen
[√32 ln (x)
]√x
es decir que y1 = x−1/2 cos[√
32 ln (x)
], y2 = x−1/2 sen
[√32 ln (x)
], f (x) = x, a2 (x) = x2, por lo tanto el
Wroskiano es
W (y1, y2) =
∣∣∣∣∣∣x−1/2 cos
[√3 ln(x)2
]x−1/2 sen
[√3 ln(x)2
]− 1
2x−3/2
(√3 sen
[√3 ln(x)2
]+ cos
[√3 ln(x)2
])12x
−3/2(√
3 cos[√
3 ln(x)2
]− sen
[√3 ln(x)2
])∣∣∣∣∣∣=
1
2x2cos
[√3 ln (x)
2
](− sen
[√3 ln (x)
2
]+√3 cos
[√3 ln (x)
2
])
− 1
2x2sen
[√3 ln (x)
2
](√3 sen
[√3 ln (x)
2
]+ cos
[√3 ln (x)
2
])
=
√3
2x2
y las las derivadas de c′1 y c′2 son
c′1 = −x−1/2 sen
[√32 ln (x)
]x
x2√3
2x2
= −2
√x
3sen
[√3
2ln (x)
],
c′2 =x−1/2 cos
[√32 ln (x)
]x
x2√3
2x2
= 2
√x
3cos
[√3
2ln (x)
],
ası que al integrar se tiene
c1 (x) = c1 − 2√3
∫ √x sen
[√3
2ln (x)
]dx
= c1 − 2√3
∫e3/2u sen
(√3
2u
)du, u = ln (x)
= c1 − 1
3
{√3 sen
[√3
2ln (x)
]− cos
[√3
2ln (x)
]}x3/2
54

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
c2 (x) = c2 +2√3
∫ √x cos
[√3
2ln (x)
]dx
= c2 +2√3
∫e3/2u cos
(√3
2u
)du, u = ln (x)
= c2 +1
3
{sen
[√3
2ln (x)
]+√3 cos
[√3
2ln (x)
]}x3/2
y la solucion total despues de efectuar algebra es
y =c1 cos
[√32 ln (x)
]+ c2 sen
[√32 ln (x)
]√x
+1
3x
Ejemplo 39 Resolver la EDO x2y′′ + xy′ + y = 1x .
Esta es una ecuacion de Cauchy-Euler. La solucion de la EDO homogenea, x2y′′H + xy′H + yH = 0, es
m (m− 1) +m+ 1 = 0(m2 + 1 = 0
) → m = ±iyH = C1 sen [ln (x)] + C2 cos [ln (x)]
y de acuerdo al metodo de variacion del parametros {y1 = sen [ln (x)] , y2 = cos [ln (x)] , f (x) = 1/x, a2 (x) =x2} la solucion total es
y = c1 (x) sen [ln (x)] + c2 (x) cos [ln (x)]
donde c1 (x) y c2 (x) se obtiene a partir de las ecuaciones
c′1 = − cos [ln (x)] 1x
x2W (y1, y2)
c′2 =sen [ln (x)] 1
x
x2W (y1, y2)
donde
W (sen [ln (x)] , cos [ln (x)]) =
∣∣∣∣sen [ln (x)] cos [ln (x)]cos[ln(x)]
x − sen[ln(x)]x
∣∣∣∣ = − sen2 [ln (x)]
x− cos2 [ln (x)]
x= − 1
x
por lo tanto c1 y c2 son
c1 = c1 +
∫cos [ln (x)]
x2dx = c1 +
∫e−u cos (u)du, u = ln (x)
= c1 − 1
2e−u [cos (u)− sen (u)] = c1 − 1
2
cos [ln (x)]− sen [ln (x)]
x
c2 = c2 −∫
sen [ln (x)]
x2dx = c2 −
∫e−u sen (u) du
= c2 +1
2e−u [cos (u) + sen (u)] = c2 +
1
2
cos [ln (x)] + sen [ln (x)]
x
ası la solucion total es
y = c1 sen [ln (x)]+ c2 cos [ln (x)]− 1
2
cos [ln (x)]− sen [ln (x)]
xsen [ln (x)]+
1
2
cos [ln (x)] + sen [ln (x)]
xcos [ln (x)]
o simplificando
y = c1 sen [ln (x)] + c2 cos [ln (x)] +1
2x
55

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 40 Resolver la EDO y′′′ − y′′ = 1x .
Este problema tiene una solucion homogenea
y′′′H − y′′H = 0, m3 −m2 = 0 → (m = 0, 0, 1)
yH = C1 + C2x+ C3ex
por lo tanto, utilizando el metodo de variacion de parametros, la solucion total tiene la forma
y = c1 (x) + c2 (x) x+ c3 (x) ex
donde c1, c2 y c3 se obtiene resolviendo el sistema de ecuaciones descrito por (1.75) para n = 3, es decir⎛⎝y1 y2 y3y′1 y′2 y′3y′′1 y′′2 y′′3
⎞⎠⎛⎝c′1c′2c′3
⎞⎠ =
⎛⎝ 00
f(x)a3(x)
⎞⎠por comparacion con (1.3) y con su solucion {y1 = 1, y2 = x, y3 = ex, f (x) = x−1, a3 (x) = 1} ası que elsistema de ecuaciones para los parametros es⎛⎝1 x ex
0 1 ex
0 0 ex
⎞⎠⎛⎝c′1c′2c′3
⎞⎠ =
⎛⎝001x
⎞⎠cuya solucion es
c′3 =e−x
x
c′2 = − 1
x
c′1 = 1− 1
x
por lo tanto al integrar se obtiene que
c1 = c1 +
∫ (1− 1
x
)dx = c1 + x− ln (x)
c2 = c2 −∫
1
xdx = c2 − ln (x)
c3 = c3 +
∫e−x
xdx
y la solucion total es entonces
y = c1 + x− ln (x) + [c2 − ln (x)]x+
[c3 +
∫e−x
xdx
]ex
o simplificando
y = c1 + c2x+ c3ex − (1 + x) ln (x) + ex
∫e−x
xdx
donde c2 = 1 + c2.
56

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 41 Resolver la EDO x2y′′ + xy′ + x2y = 1.Esta es una EDO de Bessel de orden cero cuya solucion homogenea es
x2y′′H + xy′H + x2yH = 0
yH = C1J0 (x) + C2Y0 (x)
por lo tanto la solucion total, empleando el metodo de variacion de parametros {y1 = J0 (x) , y2 = Y0 (x) , f(x) = 1, a2 (x) = x2} es
y = c1 (x) J0 (x) + c2 (x)Y0 (x) ,
donde c1 y c2 se obtiene al integrar
c′1 = − Y0 (x)
x2W (J0 (x) , Y0 (x))
c′2 =J0 (x)
x2W (J0 (x) , Y0 (x))
con
W (y1, y2) =
∣∣∣∣ J0 (x) Y0 (x)−J1 (x) −Y1 (x)
∣∣∣∣ = J1 (x)Y0 (x)− J0 (x) Y1 (x)
donde se a utilizado la expresion xJ ′n (x) = nJn (x) − xJn+1 (x), que se encuentra en el manual de tablas.
Estas integrales son
c1 (x) = c1 −∫
Y0 (x)
x2 [J1 (x) Y0 (x)− J0 (x) Y1 (x)]dx,
c2 (x) = c2 +
∫J0 (x)
x2 [J1 (x) Y0 (x)− J0 (x) Y1 (x)]dx.
En le manual de tablas matematicas se tiene que
Jn+1 (x) Yn (x) − Jn (x) Yn+1 (x) =1
x
por lo tanto las integrales anteriores son
c1 (x) = c1 −∫Y0 (x)
xdx
c2 (x) = c2 +
∫J0 (x)
xdx
mientras que la solucion total es
y = c1J0 (x) + c2Y0 (x)− J0 (x)
∫Y0 (x)
xdx+ Y0 (x)
∫J0 (x)
xdx.
1.1.4. Solucion de sistemas en EDO
Cuando se tiene un conjunto de r EDO con r variables dependientes, y1, y2, . . . , yr, de la forma
F1
(x, y1, y
′1, . . . , y
(n1)1 , y2, y
′2, . . . , y
(n2)2 , . . . , yr, y
′r, . . . , y
(nn)r
)= 0
F2
(x, y1, y
′1, . . . , y
(n1)1 , y2, y
′2, . . . , y
(n2)2 , . . . , yr, y
′r, . . . , y
(nn)r
)= 0 (1.78)
......
......
... =...
Fr
(x, y1, y
′1, . . . , y
(n1)1 , y2, y
′2, . . . , y
(n2)2 , . . . , yr, y
′r, . . . , y
(nn)r
)= 0
57

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
en donde el orden maximo para cada variable dependiente, yi, es ni, i = 1, 2, . . . , n, se dice que se tiene unsistema de EDO. Un metodo de solucion para este tipo de sistemas consiste en reducir el sistema (1.78) auna EDO de orden n ≤ n1 + n2 + · · · + nn que es funcion solamente de una variable independiente. Porejemplo, si se tiene el sistema
(y′1)2+ y21 + 4y′2 = 0
y′′2 + y1y′1 = 0
Al derivar la primera ecuacion se tiene que
2y′1y′′1 + 2y1y
′1 + 4y′′2 = 0,
ası que al sustituir la segunda ecuacion se llega a la expresion
2y′1y′′1 − 2y1y
′1 = 0.
Esta es una EDO de segundo orden que solamente depende de y1 por lo que se puede buscar su solucion. Siy′1 �= 0, entonces la ecuacion es equivalente a
y′′1 − y1 = 0,
por lo que la solucion para y1 es
y1 = C1ex + C2e
−x,
(sinh (x) =
ex − e−x
2, cosh (x) =
ex + e−x
2
)= c1 senh (x) + c2 cosh (x) ,
(C1 =
c2 + c12
, C2 =c2 − c1
2
)y por lo tanto al derivar esta ecuacion se tiene que
y′1 = c1 cosh (x) + c2 senh (x) ,
ası que al sustituir y′1 y y1 en la primera EDO se obtiene que
y′2 = −(y12
)2−(y′12
)2
y′2 = −[c1 cosh (x) + c2 senh (x)
2
]2−[c1 senh (x) + c2 cosh (x)
2
]2= −
(c21 + c22
)cosh2 (x) +
(c21 + c22
)senh2 (x) + 4c1c2 senh (x) cosh (x)
4
= −(c21 + c22
)4
cosh (2x)− c1c22
senh (2x) ,
y al integrar se llega a la expresion
y2 = c3 −(c21 + c22
)8
senh (2x)− c1c24
cosh (2x) .
De esta forma la solucion del sistema es
y1 = c1 senh (x) + c2 cosh (x) ,
y2 = c3 −(c21 + c22
)8
senh (2x)− c1c24
cosh (2x) .
58

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Por otro lado, si y′1 = 0 entonces y1 debe ser igual a una constante y el sistema se reduce a
y′2 = −(y12
)2y′′2 = 0
que se puede resolver para llega a la solucion
y1 = c1,
y2 = c2 −(c12
)2x.
Ejemplo 42 Resolver el sistema
y′′1 + y1 − y2 = 0,
y′′2 + y′1 − y1 = 0.
De la primera ecuacion se puede despejar y2
y2 = y′′1 + y1
cuyas derivadas son
y′2 = y′′′1 + y′1y′′2 = y
(IV )1 + y′′1
por lo tanto la segunda EDO es igual a
y(IV )1 + y′′1 + y′1 − y1 = 0
cuyo polinomio caracterıstico es
m4 +m2 +m− 1 = (m+ 1)(m3 −m2 + 2m− 1
)= (m+ 1) (m− a)
((m− b)2 + c2
)= 0
donde α = 0,56984, β = 0,21508 y γ = 1,3071, ası se tiene dos raıces reales y dos complejas conjugadas, porlo que la solucion para y1 es
y1 = c1e−x + c2e
αx + eβx [c3 cos (γx) + c4 sen (γx)]
y sus derivadas son:
y′1 = −c1e−x + αc2eax + βebx [c3 cos (γx) + c4 sen (γx)]
+eβx [−c3γ sen (γx) + c4γ cos (γx)]
y′′1 = c1e−x + α2c2e
ax + β2ebx [c3 cos (γx) + c4 sen (γx)] + 2βγeγx [−c3 sen (γx) + c4 cos (γx)]
−γ2eβx [c3 cos (γx) + c4 sen (γx)]
De acuerdo a la primera EDO, y2 = y′′1 + y1, ası que al sustituir y′′1 y y1 se obtiene que
y2 = 2c1e−x +
(γ2 + 1
)c2e
ax + β2eβx [c3 cos (γx) + c4 sen (γx)] + 2βγeβx [−c3 sen (γx) + c4 cos (γx)]
+(1− γ2
)eβx [c3 cos (γx) + c4 sen (γx)]
ası la solucion final es
y1 = c1e−x + c2e
αx + c3eβx cos (γx) + c4e
βx sen (γx)
y2 = 2c1e−x +
(1 + α2
)c2e
αx +[(1− γ2 + β2
)c3 + 2βγc4
]eβx cos (γx)
+[(1− γ2 + β2
)c4 − 2βγc3
]eβx sen (γx)
59

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
1.1.5. Ecuaciones diferenciales parciales (EDP)
Las ecuaciones diferenciales parciales se pueden clasificar por el numero de variables independientes, lascuales debe ser dos o mas. Para problemas de la fısica-matematica las variables independientes mas comunesson las espaciales y la temporal, es decir {x, y, z, t} para coordenadas cartesianas, {r, θ, z, t} para coordenadascilındricas, {ρ, θ, φ, t} para coordenadas esfericas, etc. Las EDP tambien se pueden clasificar por el ordenmaximo de las derivadas en EDP de primer orden y EDP de segundo orden (ver figura en la siguiente pagina).
EDP de primer orden
La forma general de una EDP de primer orden con dos variables independientes es
F (ux, uy, u, x, y) = 0 (1.79)
en donde (x, y) son las variables independientes, u (x, y) es la variable dependiente, mientras que ux y uyson las derivadas parciales de u con respecto a x y y. Algunas formas particulares de la ecuacion (1.79) sonlas siguientes:
Ecuaciones cuasi-lineales: Este tipo de ecuaciones tiene la forma
P (x, y, u)ux +Q (x, y, u)uy = R (x, y, u) (1.80)
es decir que tiene una estructura lineal para las derivadas parciales de u, mientras que los parametrosP , Q y R son funciones de x, y y u.
Ecuaciones semi-lineales: Este tipo de ecuaciones tienen la forma
P (x, y) ux +Q (x, y)uy = R (x, y, u) (1.81)
en donde P y Q no depende de u pero si pueden depender de (x, y), mientras que R es una funcion nolineal de u.
Ecuaciones lineales: Las ecuaciones lineales tiene la forma
P (x, y)ux +Q (x, y)uy = R (x, y) + S (x, y)u (1.82)
es decir que se tiene una estructura lineal tanto para u como para sus derivadas parciales, por lo tantoP , Q, R y S son funciones exclusivas de las variables independientes.
Ecuaciones estrictamente lineales: Este tipo de ecuaciones tiene la forma
P (x, y)ux +Q (x, y) uy = R (x, y) (1.83)
en donde P , Q y R solo pueden ser funcion de las variables independientes.
Ecuaciones no lineales: Todas las EDP de primer orden que no tienen la forma de las ecuaciones(1.80), (1.81), (1.82), o (1.83) se llaman no lineales y su estructura es similar a la ecuacion (1.79).
Cuando se tiene mas de dos variables independientes, x1, x2, . . . , xn, las EDP de primer orden tiene laforma general
F (ux1 , ux2, . . . , uxn , u, x1, x2, . . . , xn) = 0.
60

Apuntes
decla
seIQ
204
2011A
JuanPaulo
Garcıa
Sandova
l
Ecuaciones diferenciales
Ecuaciones diferenciales
ordinarias (EDO)
Ecuaciones diferenciales
parciales (EDP)
Primer orden Segundo orden
Ver la página
anterior
Número de variables
independiente
Dos variables
independientes
Más de dos
variables
independientes
Estrictamente
lineales
Lineales
Semilineales
Cuasilineales
No lineales
Estrictamente
lineales
Lineales
Semilineales
Cuasilineales
No lineales
61

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Solucion de EDP cuasi-lineales con dos variables independientes El metodo utilizado para resolvereste tipo de ecuaciones diferenciales se denomina metodo de las caracterısticas y consiste en integrar la EDPa lo largo de curvas denominadas ”caracterısticas” que permiten transformar la EDP (1.80) en dos o tresEDO que se resuelven a lo largo de las trayectorias caracterısticas.
Generalmente la ecuacion (1.80) esta acompanado de condiciones del tipo
u (x0, y0) = u0
en donde cada punto (x0, y0) pretenece a una curva de condiciones, C. En algunos casos estas condicionesse separan en dos dominios de la forma
u (x, y0) = u0,x (x)
u (x0, y) = u0,y (y)
en donde x0 y y0 son valores constantes.Una interpretacion geometrica del metodo de las caracterısticas consiste en escirbir la ecuacion (1.80)
como un producto vectorial: [P Q R
] ⎡⎣uxuy−1
⎤⎦ = 0.
Como las variables independientes son (x, y), se puede representar la solucion de la ecuacion (1.80) en unagrafica de tres dimensiones en donde la solucion describe una superficie (ver la Figura 1.2). Ası para un puntoparticular B descrito por las coordenadas {x, y, u}, que se encuentra sobre la superficie de la solucion, el
vectorN =[ux uy −1
]Tdescribe el vector normal a la superficie, mientras que el vector V =
[P Q R
]Tdescribe un vector tangente a la superficie (esto se debe a que el producto V TN = 0) y la direccion en laque apunte este vector se denomina lınea caracterıstica. A lo largo de esta lınea se cumple que
dx
P=dy
Q=du
R(1.84)
por lo tanto se pueden obtener las EDO
dy
dx=
Q
P, cuando x = x0, y = y0 (1.85)
du
dx=
R
P, cuando x = x0, u = u0 (1.86)
en donde (x0, y0, u0) describe la condiciones asociadas al problema. Este es un sistema de dos ecuaciones condos incognitas (y, u) en donde se supone que la variable independiente es x. Al resolver de manera simultaneaambas EDO se obtiene de manera general la solucion
φ (u0, x0, x, u) = 0
ϕ (y0, x0, x, y) = 0
de donde se puede obtener la superficie de solucion al ir cambiando los valores de (x0, y0). Otra forma equiv-alente de las ecuaciones (1.85) y (1.86) consiste en reacomodar (1.84) para obtener el sistema de ecuaciones
dx
dy=
P
Q, cuando y = y0, x = x0
du
dy=
R
Qcuando y = y0, u = u0
62

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
B
N u u= ( , ,-1)x y
Superficie de solución
u
y
x
Vector normal
C
^
Línea característica(en el plano )( , )x y
Línea característica(En la superficie de la solución)
Datos iniciales
V P Q -R= ( , , )
Vector tangente
( , , )x y u
( , , )x y u0 0 0
Figura 1.2: Representacion grafica del metodo de las caracterısticas.
63

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 43 Resolver la EDP
Tt (x, t) + vTx (x, t) = H [T (x, t)− Ts (x)]
en donde T (x, t) es la variable dependiente y Ts (x) es una funcion que depende de x. Esta es una EDP deprimer orden lineal que se puede escribir como
[v 1 −H (T − Ts (x))
]⎡⎣TxTt−1
⎤⎦ = 0,
por lo tanto de acuerdo a la ecuacion (1.84) se debe cumplir que
dx
v=dt
1=
dT
H (Ts (x)− T )
y de aquı se obtiene el sistema de ecuaciones
dx
dt= v
dT
dt= −H (T − Ts (x))
cuya solucion al integrar desde t0 hasta t es
x = x0 + v (t− t0) ,
T = T0e−H(t−t0) +H
∫ t
t0
Ts (x0 + v (τ − t0)) e−H(t−τ)dτ .
Si se dispone de condiciones para la EDP entonces se pueden determinar los valores de T0 en funcion de x0y t0 para ası completar la solucion.
Cuando la EDP de primer orden es lineal, entonces se puede utilizar la transformada de Laplace pararesolverla; esto se estudia en unidades posteriores.
EDP de segundo orden
Se llama ecuacion diferencial en derivadas parciales de segundo orden con dos variables independientes,x y y, a una relacion entre la funcion incognita u (x, y) y sus derivadas parciales hasta de segundo ordeninclusive, es decir:
F (uxx, uxy, uyy, ux, uy, u, x, y) = 0, (1.87)
en donde u (x, y) es la variable dependiente de (x, y), ademas, ux, uxx uy y uyy describen las primeras ysegundas derivadas de u con respecto a x y y, respectivamente, mientras que uxy es la derivada cruzada. Aligual que las EDP de primer orden, las ecuaciones del tipo (1.87) tiene diferentes casos particulares:
Ecuaciones cuasi-lineales: Este tipo de ecuaciones tiene la forma
a11 (x, y, u, ux, uy)uxx + 2a12 (x, y, u, ux, uy)uxy + a22 (x, y, u, ux, uy)uyy + F1 (x, y, u, ux, uy) = 0(1.88)
es decir que los coeficientes a11, a12 y a22, pueden ser funciones de x, y, u, ux, y uy, pero no de lassegundas derivadas de u.
64

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ecuaciones lineales con respecto a las derivadas de segundo orden: Este tipo de ecuacionestienen la forma
a11 (x, y)uxx + 2a12 (x, y)uxy + a22 (x, y)uyy + F1 (x, y, u, ux, uy) = 0 (1.89)
donde a11, a12, a22, son funciones de x y y. mientras que F1 puede ser una funcion de x, y, u, ux, yuy. Este tipo de ecuaciones tambien se llaman semi-lineales.
Ecuaciones lineales: La ecuacion se llama lineal si esta tiene la forma
a11uxx + 2a12uxy + a22uyy + b1ux + b2uy + cu+ f = 0 (1.90)
donde a11, a12, a22, b1, b2, c y f son solo funciones de x y y. Ademas la ecuacion es llamada homogenea, sif (x, y) = 0. Ademas, si los coeficientes no dependen de x y y, se tiene una ecuacion lineal de coeficientesconstantes.
Existen diversos metodos de solucion para la EDP de segundo orden entre los que se pueden mencionar:
Para ecuaciones lineales con respecto a las derivas de segundo orden (Eq. 1.89): Metodo de las carac-terısticas.
Para ecuaciones lineales (Eq. 1.90): Metodo de transformadas de Laplace, metodo de Fourier o deseparacion de variables, metodos de transformaciones integrales lineales, entre otros.
A continuacion se describe el metodo de las caracterısticas y en unidades posteriores se ven los metodosde transformadas de Laplace y de Fourier.
Metodo de las caracterısticas para la solucion de EDP de segundo orden condos variables independientesConsidere la ecuacion diferencial parcial semi-lineal (1.89) en donde a11, a12 y a22 son funciones de (x, y)
que tienen derivadas continuas, hasta el segundo orden inclusive. Se dice que la EDP (1.89) es
1. Hiperbolica, si en el puto M (x, y) se cumple que a212 − a11a22 > 0,
2. Parabolica, si en el puto M (x, y) se cumple que a212 − a11a22 = 0, y
3. Elıptica, si en el puto M (x, y) se cumple que a212 − a11a22 < 0.
Para reducir la ecuacion (1.89) a una forma canonica, es necesario generar la ecuacion caracterıstica
a11dy2 − 2a12dxdy + a22dx
2 = 0 (1.91)
que se descompone en dos ecuaciones
a11dy −(a12 +
√a212 − a11a22
)dx = 0 (1.92a)
a11dy −(a12 −
√a212 − a11a22
)dx = 0 (1.92b)
Dependiendo del valor para el coeficiente(a212 − a11a22
), las ecuaciones (1.92) tienen diferentes soluciones
denominadas integrales generales.� a212−a11a22> 0 : En este caso las ecuaciones (1.92a) y (1.92b) son dos ecuaciones linealmente inde-
pendientes con coeficientes reales, por lo que su solucion esta dada por dos integrales generales
ϕ (x, y) = c1, (1.93a)
ψ (x, y) = c2, (1.93b)
65

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que son reales y diferentes. En donde la primera ecuacion de (1.93) es la solucion de la ecuacion (1.92a),mientras que la segunda solucion de (1.93) es la solucion de la ecuacion (1.92b), respectivamente.
� a212−a11a22= 0 : En este caso particular, se tiene una sola curva caracterıstica
ϕ (x, y) = c, (1.94)
ya que la ecuacion (1.92a) y la ecuacion (1.92b) son identicas.� a212−a11a22< 0 : Finalmente, si el coeficiente
(a212 − a11a22
)es negativo, dado que en las ecuaciones
(1.92a) y (1.92b) esta dentro de una raız cuadrada, entonces las ecuaciones (1.92a) y (1.92b) represen-tas dos ecuaciones complejas conjugadas, con una parte real (a11dy − a12dx) y una parte imaginarias±i√a11a22 − a212dx. En este caso, las integrales generales son complejas conjugadas por lo que se puedesuponer que su forma general es
ϕ (x, y) + iϕ (x, y) = C (1.95)
donde ϕ (x, y) y ϕ (x, y) son funciones reales y C es la constante de integracion.
Formas canonicas para EDP de segundo orden
Ahoras se consideran algunos cambios de variables que permiten simplificar las ecuaciones diferenciales.
Ecuaciones del tipo hiperbolicoPara este tipo de ecuaciones se tiene dos soluciones, (1.93a) y (1.93b), que determinan dos familias distintas
de caracterısticas reales, entonces se puede introducir en lugar de (x, y) las nuevas variables (ξ, η) con la forma
ξ = ϕ (x, y) y η = ϕ (x, y) ,
para reducir la ecuacion (1.89) a la forma
∂2u
∂ξ∂η= F1
(ξ, η, u,
∂u
∂ξ,∂u
∂η
), (1.96)
que se llama forma canonica de las ecuaciones del tipo hiperbolico.
Ecuaciones del tipo parabolicoDado que para este tipo de ecuaciones se encontro que solo existe una curva caracterıstica descrita por
(1.94), entonces en este caso se hace el cambio de variables
ξ = ϕ (x, y) y η = ϕ (x, y) ,
donde η = η (x, y) es una funcion tal que D(ξ,η)D(x,y) �= 0 en el dominio considerado. Es decir que se tiene un poco
de libertad para elegir la funcion η siempre y cuando sea independiente de ϕ. Con esto se reduce la ecuacion(1.89) a la forma
∂2u
∂η2= F2
(ξ, η, u,
∂u
∂ξ,∂u
∂η
), (1.97)
que se llama forma canonica de las ecuaciones del tipo parabolico.
Ecuaciones del tipo elıpticoComo las integrales generales de (1.92a) y (1.92b) son complejas conjugadas, entonces las caracterısticas
son imaginarias. Ası que al definir el cambio de variables
ξ = ϕ (x, y) y η = ϕ (x, y) ,
66

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
donde ϕ y η son las funciones descritas en (1.95), se reduce la ecuacion (1.89) a la forma
∂2u
∂ξ2+∂2u
∂η2= F3
(ξ, η, u,
∂u
∂ξ,∂u
∂η
), (1.98)
que se llama forma canonica de las ecuaciones del tipo elıptico.Para todos los casos anteriores, las derivadas parciales con respecto a las variables originales (x, y) se
expresan, con la ayuda de la regla de la cadena, a traves de las derivadas de las nuevas variables (ξ, η)mediante las ecuaciones
∂u
∂x=
∂u
∂ξ
∂ξ
∂x+∂u
∂η
∂η
∂x(1.99a)
∂u
∂y=
∂u
∂ξ
∂ξ
∂y+∂u
∂η
∂η
∂y(1.99b)
∂2u
∂x2=
∂2u
∂ξ2
(∂ξ
∂x
)2
+ 2∂2u
∂ξ∂η
∂ξ
∂x
∂η
∂x+∂2u
∂η2
(∂η
∂x
)2
+∂u
∂ξ
∂2ξ
∂x2+∂u
∂η
∂2η
∂x2(1.99c)
∂2u
∂y2=
∂2u
∂ξ2
(∂ξ
∂y
)2
+ 2∂2u
∂ξ∂η
∂ξ
∂y
∂η
∂y+∂2u
∂η2
(∂η
∂y
)2
+∂u
∂ξ
∂2ξ
∂y2+∂u
∂η
∂2η
∂y2(1.99d)
∂2u
∂x∂y=
∂2u
∂ξ2∂ξ
∂x
∂ξ
∂y+
∂2u
∂ξ∂η
(∂ξ
∂x
∂η
∂y+∂ξ
∂y
∂η
∂x
)+∂2u
∂η2∂η
∂x
∂η
∂y+∂u
∂ξ
∂2ξ
∂x∂y+∂u
∂η
∂2η
∂x∂y(1.99e)
Al observar estas expresiones se ve que es necesario el calculo de las derivadas parciales para cada cambiode variable,
∂ξ
∂x,∂η
∂x,∂ξ
∂y,∂η
∂y,∂2ξ
∂x2,∂2η
∂x2,∂2ξ
∂y2,∂2η
∂y2,∂2ξ
∂x∂y,∂2η
∂x∂y.
A continuacion se muestran algunos ejemplos.
Ejemplo 44 Examine y determine la solucion de la ecuacion
x2∂2u
∂x2− y2
∂2u
∂y2= 0 (x �= 0, y �= 0) .
Esta ecuacion es del tipo hiperbolico, ya que
{a11, a12, a22} ={x2, 0,−y2} → a212 − a11a22 = x2y2 > 0.
De acuerdo con la teorıa general, se puede formar la ecuacion caracterıstica (1.91) que para este caso par-ticular es
x2dy2 − y2dx2 = 0
o bien,xdy + ydx = 0 , xdy − ydx = 0,
integrando estas ecuaciones se obtiene que
xy = c1 ,y
x= c2.
Ası que al definir las nuevas variables
ξ = xy
η =y
x
67

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Entonces, para sustituir ∂2u∂x2 y ∂2u
∂y2 en la ecuacion original se utilizan las formulas (1.99), para las que serequiere calcular
∂ξ
∂x= y ,
∂η
∂x= − y
x2
∂ξ
∂y= x ,
∂η
∂y=
1
x
∂2ξ
∂x2= 0 ,
∂2ξ
∂y2= 0
∂2η
∂x2= 2
y
x3,
∂2η
∂y2= 0
∂2u
∂x2= y2
∂2u
∂ξ2− 2
y2
x2∂2u
∂ξ∂η+y2
x4∂2u
∂η2+ 2
y
x3∂u
∂η
∂2u
∂y2= x2
∂2u
∂ξ2+ 2
∂2u
∂ξ∂η+
1
x2∂2u
∂η2
Al sustituir estas expresiones en la ecuacion diferencial original se tiene que
∂2u
∂ξ∂η− 1
2ξ
∂u
∂η= 0
Esta ecuacion tiene la forma (1.96), con F1 = − 12ξ
∂u∂η . Esta ecuacion se puede escribir como
∂
∂η
(∂u
∂ξ− 1
2ξu
)= 0
por lo que al integrar con respecto a η manteniendo ξ constante se tiene que
∂u
∂ξ− 1
2ξu = f (ξ) ,
donde f (ξ) es una funcion arbitraria que solo depende de ξ. La ecuacion resultante es una ecuacion linealde primer orden con respecto a ξ, cuyo factor integrante es 1/
√ξ, ası que al multiplicar toda la ecuacion por
este factor se tiene que1√ξ
∂u
∂ξ− 1
2ξ√ξu =
∂
∂ξ
(u√ξ
)=
1√ξf (ξ) ,
Esta ecuacion se puede integrar para obtener
u√ξ= g (η) +
∫1√ξf (ξ) ∂ξ,
donde g (η) es una funcion arbitraria que solo depende de η. De esta forma la solucion general para laecuacion diferencial es
u (ξ, η) =√ξ
[g (η) +
∫1√ξf (ξ) ∂ξ
]o en terminos de las variables originales (x, y),
u (x, y) =√xy
[g( yx
)+
∫ξ=xy
1√ξf (ξ) ∂ξ
]68

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Esta solucion es equivalente a
u (x, y) =√xyg
(yx
)+ h (xy) ,
donde
h (xy) =√xy
∫ξ=xy
1√ξf (ξ) ∂ξ.
Ejemplo 45 Resolver la EDP
x2∂2u
∂x2− 2xy
∂2u
∂x∂y+ y2
∂2u
∂y2+ x
∂u
∂x+ y
∂u
∂y= 0.
Primero se determina que tipo de ecuacion es. Para tal fin se calcula
{a11, a12, a22} ={x2,−xy, y2} → a212 − a11a22 = (xy)
2 − x2y2 = 0.
De aquı se concluye que la ecuacion es parabolica. Por lo tanto, se genera la ecuacion caracterıstica
x2dy2 + 2xydxdy + y2dx2 = 0,
o bienx2dy + xydx = 0.
La solucion de esta ecuacion esxy = c,
por lo que se define el cambio de variables
ξ = xy , η = g (y)
donde g es una funcion por determinar que, por simplicidad, se supone que solamente depende de y. Lasderivadas necesarias en la ecuacion se calculan a partir de las formulas (1.99), para las que se requierecalcular
∂ξ
∂x= y ,
∂η
∂x= 0
∂ξ
∂y= x ,
∂η
∂y=dg
dy
∂2ξ
∂x2= 0 ,
∂2ξ
∂y2= 0
∂2η
∂x2= 0 ,
∂2η
∂y2=d2g
dy2
∂2ξ
∂x∂y= 1 ,
∂2η
∂x∂y= 0
al sustituir esto en las formulas (1.99) se tiene que
∂u
∂x= y
∂u
∂ξ
∂u
∂y= x
∂u
∂ξ+dg
dy
∂u
∂η
∂2u
∂x2= y2
∂2u
∂ξ2
∂2u
∂y2= x2
∂2u
∂ξ2+ 2x
dg
dy
∂2u
∂ξ∂η+
(dg
dy
)2∂2u
∂η2+d2g
dy2∂u
∂η
∂2u
∂x∂y= xy
∂2u
∂ξ2+ y
dg
dy
∂2u
∂ξ∂η+∂u
∂ξ
69

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
al sustituir cada uno de estos terminos en la EDP se obtiene que
y2(dg
dy
)2∂2u
∂η2+
(y2d2g
dy2+ y
dg
dy
)∂u
∂η= 0
Si se selecciona que la funcion g es tal, que se cumpla la ecuacion diferencial
y2d2g
dy2+ y
dg
dy= 0,
entonces la ecuacion diferencial parcial en forma canonica se transforma en
y2(dg
dy
)2∂2u
∂η2= 0.
La solucion general de la EDO para g se obtiene al reescribir esta ecuacion como
yd
dy
(ydg
dy
)= 0,
que al integrar dos veces esta ecuacion se tiene que
ydg
dy= c1,
g (y) = c1 ln (y) + c2.
Ası que se propone la transformacionη = ln (y) ,
es decir que se elige c1 = 1 y c2 = 0. De esta forma la ecuacion diferencial parcial canonica se convierte en
∂2u
∂η2= 0.
Al integrar dos veces esta ecuacion se obtiene que la solucion general es
u (ξ, η) = γ (ξ) η + δ (ξ) ,
donde γ y δ son funciones que dependen solo de ξ. Por lo tanto la solucion en terminos de x e y es
u (x, y) = γ (xy) ln (y) + δ (xy) .
1.2. Modelado de fenomenos de la fısica-matematica
1.2.1. Introduccion
El modelado matematico es una herramienta que permite convertir la imagen de un sistema a un lenguajesimbolico, generalmente matematico, con la finalidad de conocer, predecir e incluso controlar su compor-tamiento. El uso de balances de fuerza, masa, energıa y cantidad de momentum involucra la concatenacionde informacion fısica, quımica, leyes de conservacion, leyes de transporte o expresiones cineticas que losbalances requieren, permite modelar el comportamiento de un sistema de interes mediante ecuaciones (difer-enciales ordinarias, diferenciales parciales, en diferencias, integrales o inclusive una combinacion de estas) ysus soluciones.
La principal dificultad que se presenta al momento de modelar es lograr una descripcion exacta de unsistema ya que en la vida cotidiana existe un numero muy grande de variables que pueden influir en su
70

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
comportamiento. Un modelo puede llegar a ser bastante exacto debido a que para su construccion se haconsiderado un enorme numero de variables. Sin embargo, su estructura sera demasiado compleja y porconsecuencia sera difıcil obtener su solucion. Una forma de superar este obstaculo de modelado, es idealizarel problema. Es decir, habrıa que ignorar todas aquellas variables que no tienen mayor influencia sobre elsistema en estudio y considerar unicamente las variables de impacto que pueden ser determinadas bajo laoptica de un conocimiento profundo del sistema en cuestion. De esta forma, disminuirıa la complejidad delmodelo matematico y serıa mas sencillo obtener su solucion aunque la prediccion del modelo apenas serıasatisfactoria. En conclusion, el modelo mas adecuado para determinado sistema, es aquel que no es ni tancomplejo como para dificultar la busqueda de su solucion ni tan sencillo como para perder precision en laprediccion del comportamiento del sistema.
1.2.2. Consideraciones de modelado
Antes de senalar las diversas consideraciones que se deben de realizar al momento de modelar un sistemaes conveniente introducir algunas definiciones. Un sistema se puede concebir como cualquier cosa que sequiera estudiar. Ası, un sistema puede ser tan sencillo como una moneda o tan complejo como un volcanen erupcion. Los sistemas pueden clasificarse en tres. Los sistemas cerrados, son aquellos que contienenuna cantidad constante de materia, es decir, no existe transferencia de masa a traves de su frontera. Otronombre que reciben este tipo de sistemas es el de masa de control. Un tipo especial de sistema cerradoes el denominado sistema aislado el cual, no interacciona en ninguna forma con el entorno. Finalmente,los sistemas abiertos o volumenes de control se pueden definir como regiones del espacio a traves de lascuales puede fluir masa. Las caracterısticas de un sistema tambien se conocen como propiedades. Algunosejemplos de estas propiedades son: masa, volumen, energıa, temperatura, etc. La palabra estado, expresa lacondicion de un sistema definida por el conjunto de sus propiedades. Cuando cualquiera de las propiedadesde un sistema cambia, su estado cambia y se dice que el sistema ha sufrido un proceso o que ha ocurrido unfenomeno dentro del sistema. Para modelar un sistema es preciso conocer perfectamente:
Los objetivos del modelado, ¿que se desea modelar y para que?,
Los fenomenos implıcitos en el proceso (fısicos, quımicos, financieros, etc.),
Las propiedades o variables que afectan al sistema (dependientes e independientes) y la importanciade sus efectos,
Las limitantes fısicas de estas variables (por ejemplo, la temperatura de un sistema no pude ser menora 0 grados Kelvin),
La forma de agrupar toda esta informacion para desarrollar el modelo (tipo de balances aplicados)
1.2.3. Principio de conservacion
El principio de conservacion o balance general que se aplica sobre una region de interes o control (volumen,area, etc.) puede representarse en forma de ecuacion como
Acumulacion = entrada− salida+ generacion (1.100)
Generalmente, se consideran expresiones auxiliares de origen experimental, empıricas o semi-empıricas talescomo las expresiones cineticas, relaciones de equilibrio, expresiones de transferencia, etc., para complementarel balance general descrito anteriormente.
Para construir un modelo de un sistema determinado, es necesario aplicar la ecuacion (1.100) a lascantidades fundamentales o caracterısticas
Masa,
71

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Energıa (calorıfica, electrica, etc.),
Cantidad de movimiento o momentum,
Poblacion (numero),
Recursos economicos, etc.
Es importante senalar que las cantidades fundamentales se correlacionan con propiedades dependientesque son aquellas que describen el estado o trayectoria del proceso en funcion de otras propiedades. Porejemplo, cuando se realiza un balance de energıa calorıfica, por lo general la variable fısica que se utiliza es latemperatura, que es una medida de dicha energıa, o cuando se efectua un balance de cantidad de movimiento,la variable fısica usada es generalmente la velocidad. Otras propiedades dependientes comunmente utilizadasen los balances son: densidad, concentracion, volumen, presion, potencial electrico, numero de individuos,dinero, etc. Por otro lado, las propiedades independientes son aquellas que influyen, inciden o afectan a laspropiedades dependientes. El tiempo y la posicion usualmente son consideradas propiedades independientes.Ademas, existen variables externas que afectan a los sistemas, por ejemplo, en un balance de energıa puedehaber flujos de entrada y salida, los cuales afectan el contenido energetico del sistema. Tambien se encuentranen los modelos ciertas cantidades conocidas como parametros que se mantienen o se suponen constantes (parasimplificar el modelo), y que usualmente son: masas, m, densidades, ρ, coeficientes de transferencia termica,kT , masica, DA−B, entalpıas, ΔH
oR, capacidades calorıficas, Cp, capacitancias C, resistencias, R, aceleracion
de la gravedad, g, etc.
El termino de acumulacion de la ecuacion (1.100) tiene la forma ∂CF
∂t , donde CF es la cantidad fundamentala la que se le esta aplicando el balance, por lo tanto este termino indica el cambio de la cantidad fundamentalcon respecto al tiempo. Por otro lado, los terminos de entradas y salidas describen el transporte o intercambiode la cantidad fundamental con los alrededores. Este transporte puede tener diversos mecanismos:
Tipo de trasporte
⎧⎨⎩Molecular (difusivo)ConvectivoDe radiacion (solo para energıa)
Experimentalmente se ha demostrado que el transporte molecular de ciertas cantidades fısicas se norma poruna ley general de transporte, que enuncia lo siguiente:
El flujo de una cantidad fısica transportada (masa, energıa, fluido o electricidad), en unaunidad de tiempo, a traves de una unidad de superficie perpendicular al flujo, es proporcional algradiente de una propiedad fısica (masa, temperatura, presion o potencial electrico), es decir
−→J = −K−→∇ψ
en donde−→J es el flujo por unidad de area (flux), K es una constante de proporcionalidad, y
−→∇es el gradiente de la propiedad ψ, que en coordenadas cartesianas se define como
−→∇ =−→i∂
∂x+−→j∂
∂y+−→k∂
∂z.
Ası algunos ejemplos particulares de esta ley son los siguientes:
72

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
� Transporte de momentum: −→τ x = −μρ∇ (ρvx)
(Ley de Newton) Caso particular: τy,x = −μρ∂(ρvx)
∂y = −μ∂vx∂y︸ ︷︷ ︸
Si ρ=ctte
� Transporte de Energıa calorıfica: −→q /A = − kρC∇ (ρCT )
(Ley de Fourier) Caso particular: qx/A = − kρC
∂(ρCT )∂x = −k∂T
∂x︸ ︷︷ ︸Si ρC=ctte
� Transporte de Masa (moles):−→J A = −DAB∇cA
(Ley de Fick) Caso particular: JAz = −DAB∂cA∂z
� Trasporte de energıa electrica:−→I /A = −kE∇V
(Ley de Ohm) Caso particular: Jz = −kE ∂V∂z
� Trasporte de fluidos:−→J = −c∇P
(Ley de Poiseuville) Caso particular: Jz = −c∂P∂zen donde τy,x es el esfuerzo cortante en direccion y, μ es la viscosidad, ρ es la densidad, vx es la velocidaden direccion x, qx es el flujo de calor en direccion x, A es el area transversal, k es la conductividad termica,C la capacidad calorıfica, T la temperatura, JAz es el flux molar en direccion z, DAB es la difusividad del
compuesto A en el compuesto B y cA es la concentracion molar de A,−→I es la corriente electrica, kE es la
conductividad electrica, V es el potencial o voltaje y P la presion. Hay que notar que el signo negativo indicaque el flujo va de una zona de mayor gradiente a otra de menor.
Por otro lado, para el transporte convectivo se tiene las siguientes ecuaciones para el flux� Transporte de momentum: −→v ρ−→v� Transporte de Energıa calorıfica: −→v ρCT� Transporte de Masa (moles): −→v cA
en donde −→v es el vector de velocidad de flujo.Por otro lado, cuando se tiene contacto entre interfases, ya sean solido-lıquido, solido-gas, gas-lıquido o
lıquido-lıquido, por tener fases fluidas se tendra conveccion, sin embargo, cerca de la interfase tambien setiene difusion, por lo tanto la transferencia en la interfase representa un proceso complejo por lo que se suelenutilizar expresiones aproximadas para describir el flux en la fases fluidas con la forma
Ninterfase = K (ψ − ψi) (1.101)
en donde Ninterfase representa el flux de salida de la fase fluida, K es una constante de transporte, mientrasque ψ y ψi son las propiedades en el seno del fluido (lejos de la interfase) y en la interfase, respectivamente.Por ejemplo, para el transporte de energıa termica en una interfase se tiene la expresion
q
A= h (Tbulk − Ti) (1.102)
en donde q/A es el flux de calor, h es la constante de enfriamiento de Newton, Ti es la temperatura en lainterfase y Tbulk es la temperatura en el seno del fluido. Por otro lado, para el transporte de masa a travesde interfases se utiliza la expresion
NA = kC (cA − cA,i) (1.103)
en donde NA es el flux del compuesto A, kC es el coeficiente de transferencia, mientras que cA y cA,i sonlas concentraciones de A en el seno del fluido y en la interfase, respectivamente. Hay que notar que tanto laecuacion (1.102) como la ecuacion (1.103) tiene la estructura de la ecuacion (1.101).
73

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
CF
F1
e
F2
e
Fn
e
P1
e
P2
e
Pn
e
,
,
,
F1
s
F2
s
Fm
s
P1
s
P2
s
Pm
s
,
,
,
N
R
Sistema
......
Figura 1.3: Diagrama de un sistema al cual se le aplican un balance de cantidades fundamentales.
Considerando ambos tipos de trasporte, la ecuacion (1.100) puede ser escrita para determinadas canti-dades fundamentales en forma diferencial como
∂CF
∂t︸ ︷︷ ︸Acumulacion
=
n∑i=1
F enti P ent
i︸ ︷︷ ︸Entradas por flujo
−m∑j=1
F salj P sal
j︸ ︷︷ ︸Salidas por flujo︸ ︷︷ ︸
Transporte convectivo
± N︸︷︷︸Entradas o salidas difusivas
(Transporte molecular
y transporte en interfases)
± R︸︷︷︸Generaciono consumo
(1.104)
donde
CF es una cantidad fundamental. Por ejemplo si el balance (1.104) es de masa la cantidad fundamental esla masa.
F enti P ent
i (i = 1, 2, . . . , n) , F salj P sal
j (j = 1, 2, . . . ,m) son los flujos de la cantidad fundamental en la corrientei-esima de entrada (n en total) y en la corriente j-esima de salida (m en total), respectivamente, dondeF es la velocidad de flujo volumetrico y P es una propiedad que se correlaciona con la cantidadfundamental, (generalmente la cantidad fundamental especıfica). Por ejemplo, para un balance demasa, F serıa un flujo volumetrico, y P la concentracion que tiene este flujo, ası el producto FP es lamasa por unidad de tiempo que entra o sale del sistema.
N es la velocidad de transporte molecular y en las interfases.
R es la velocidad de generacion o consumo de la cantidad fundamental dentro del sistema.
Es necesario resaltar que al efectuar un balance general sobre un sistema, se debe cuidar que cadauno de los terminos de dicho balance sean consistentes dimensionalmente (que cada uno tenga las mismasunidades); esto a su vez ayuda a verificar que el balance sea correcto. A continuacion se presentan balancesde las cantidades fundamentales mas usadas en Ingenierıa quımica.
Balances de masa
Los balances de masa en un sistema se pueden efectuar sobre la masa total o sobre una especie enparticular.
74

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Balance de masa totalLos balances de masa total adquieren la forma
∂mT
∂t=
n∑i=1
F enti ρenti −
m∑j=1
F salj ρsalj (1.105)
En este balance, F enti y F sal
j son los flujos volumetricos de entrada y salida (unidades: volumen/tiempo)respectivamente, mientras que ρi y ρj son las densidades de cada uno de los flujos (unidades: masa/volumen).Las unidades del termino dmT /dt son de masa/tiempo, mientras que el producto de Fρ es masa/tiempo,siendo consistentes las unidades. Notese que el termino de generacion o consumo presentado en la ecuacion(1.104), no aparece en (1.105) ya que es imposible crear o destruir materia (a menos de que exista en elsistema una reaccion nuclear, que transforma la masa en energıa o viceversa). Es importante senalar que nopueden existir gradientes difusivos cuando se realiza un balance de masa total y por tal razon el terminodifusivo de (1.104) no aparece en (1.105).
Balance de masa para componentesEl numero de balances de masa para r componentes es igual a r− 1, ya que si se hace un balance de masa
total, el valor de uno de los componentes queda determinado. La forma del balance molar general para laespecie k es
∂ηk∂t
=
n∑i=1
F enti Cent
k,i −m∑j=1
F salj Csal
k,j ±Nk +Rk,rxn, k = 1, 2, . . . , r. (1.106)
en donde ηk representa los moles del especie k. Es importante senalar que en este balance se empleanconcentraciones, Ck, en lugar de densidades. Por otro lado, el balance de masa del compoente k es
∂mk
∂t=
n∑i=1
F enti ρentk,i −
m∑j=1
F salj ρsalk,j ±MkNk +MkRk,rxn, k = 1, 2, . . . , r (1.107)
en donde ρk =MkCk es la densidad masica de la especie k dada por el producto de la masa molecular, Mk,y la concentracion molar. Ademas se debe cumplir que
mT =
r∑k=1
Mkηk (1.108)
donde Mk es la masa molecular de la especie k. Al derivar la ecuacion (1.108) con respecto al tiempo yutilizar (1.105) se concluye que
0 =r∑
k=1
Mk (Rk,rxn ±Nk)
y por el principio de conservacion de masa entonces∑r
k=1MkRk,rxn y∑r
k=1MkNk = 0.
Balances de energıa
El balance de energıa total se puede escribir como
∂ET
∂t= Eentradas − Esalidas ± Etransporte (1.109)
donde ET es la energıa total del sistema. Cabe resaltar que no se ha agregado el termino de generacionya que para sistemas que se pueden describir mediante la mecanica clasica, en donde no existen reacionesnucleares, la energıa no se crea ni se destruye, simplemente se transforma.
75

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
La energıa total del sistema es la suma de la energıa potencial, la energıa cinetica, la energıa magnetica,el trabajo, la energıa interna y otras energıas que afectan al sistema, es decir
ET = Ppotencial +Kcinetica + Emagnetica +Wtrabajo + Uinterna + . . .
En la mayorıa de los sistemas estudiados en ingenierıa, el cambio de energıa potencial, cinetica y magneticaes despreciable y si se considera ademas que en el sistema no existe trabajo, entonces la energıa total delsistema es ET
∼= Uinterna. Ademas, la energıa interna se define como U = H +PV , donde H es la entalpıa yPV es el producto de la presion-volumen. Ası, para sistemas en donde el producto PV es aproximadamenteconstante,
ET∼= H =
r∑k=1
mkHk =
r∑k=1
mk
(Hk,0 +
∫ T
Tref
Cp,kdT
),
en donde Cp,k y mk son la capacidad calorıfica masica y la masa de la especie k del sistema, T y Tref son latemperatura del sistema y de referencia, respectivamente, mientras queHk,0 es la entalpıa por unidad de masade la especie k a la temperatura de referencia. En particular si la capacidad calorıfica es aproximadamenteconstante, entonces ET
∼= H =∑r
k=1mk [Hk,0 + Cp,k (T − Tref )] y si ademas se tiene nada mas un solocomponente entonces ET
∼= H = mT [H0 + Cp (T − Tref )]. Por otro lado, las entradas y salidas de energıatotal al sistema se pueden escribir como las sumas de las estalpıas que aporta cada especie en cada corrientede entrada o salida, esto es
Eentrada =
n∑i=1
r∑k=1
F enti Hent
i,k =
n∑i=1
r∑k=1
F enti MkC
entk,i
(Hk,0 +
∫ T enti
Tref
Cp,kdT
),
Esalida =
m∑j=1
r∑k=1
F salj Hsal
j,k =
m∑j=1
r∑k=1
F salj MkC
salk,j
(Hk,0 +
∫ T salj
Tref
Cp,kdT
),
siendo Centk,i y Csal
k,j las concentraciones molares de la especie k en la corriente de entrada i y la corriente desalida j, respectivamente.
Si existe intercambio de calor con los alrededores sin involucrar flujo masico (es decir intercambio en in-terfases), entonces Etransporte = Q. Este intercambio de calor generalmente se da mediante intercambiadores,chaquetas o condesadores y puede representarse respectivamente por
Q = UAΔT Transferencia por intercambiador
Q = mλ Transferencia por condensado
Con base en las consideraciones anteriormente realizadas el balance de energıa total adquiere la forma
∂
∂t
[r∑
k=1
mk
(Hk,0 +
∫ T
Tref
Cp,kdT
)]=
n∑i=1
r∑k=1
F enti MkC
entk,i
(Hk,0 +
∫ T enti
Tref
Cp,kdT
)
−m∑j=1
r∑k=1
F salj MkC
salk,j
(Hk,0 +
∫ T salj
Tref
Cp,kdT
)+ Q(1.110)
En el lado izquierdo se tienen las derivadas de productos ası que es igual a
∂
∂t
[r∑
k=1
mk
(Hk,0 +
∫ T
Tref
Cp,kdT
)]=
(r∑
k=1
mkCp,k
)∂T
∂t+
r∑k=1
(Hk,0 +
∫ T
Tref
Cp,kdT
)∂mk
∂t,
76

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ası que al reemplazar la ecuacion (1.107), la ecuacion (1.110) es equivalente a
Acumulacion de energıa︷ ︸︸ ︷(r∑
k=1
mkCp,k
)∂T
∂t=
Entradas debidas a flujoconvectivo de masa︷ ︸︸ ︷
n∑i=1
r∑k=1
F enti MkC
entk,i
∫ T enti
T
Cp,kdT −
Salidas debidas a flujoconvectivo de masa︷ ︸︸ ︷
m∑j=1
r∑k=1
F salj MkC
salk,j
(Hk,0 +
∫ T salj
T
Cp,kdT
)
−r∑
k=1
(Hk,0 +
∫ T
Tref
Cp,kdT
)MkRk,rxn︸ ︷︷ ︸
Entalpıa de reaccion
∓r∑
k=1
(Hk,0 +
∫ T
Tref
Cp,kdT
)MkNk︸ ︷︷ ︸
Transporte debido
a difusion de masa
+ Q︸︷︷︸Transporte convectivo
a traves de interfases
Balances de cantidad de movimiento
La cantidad de movimiento o momento lineal de una partıcula−→P , se define como el producto de su masa
m por su velocidad −→v , es decir−→P = m−→v . (1.111)
Luego, al utilizar la ecuacion (1.104) considerando a−→P como cantidad fundamental, se obtiene
∂−→P
∂t=
n∑i=1
P enti −
m∑j=1
P salj +
m∑j=1
−→F j
donde P enti y P sal
j son los flujos de de entrada y salida de momentum respectivamente, mientras que el tercertermino representa la suma de las fuerzas externas que actuan sobre el sistema en estudio. Cuando no haycantidad de movimiento entrando o saliendo del sistema, la expresion anterior se puede reducir a
∂−→P
∂t=∂(m−→v )∂t
=
m∑j=1
−→F j (1.112)
y cuando la masa del sistema en estudio es constante, la ecuacion anterior se reduce al muy conocido balancede fuerzas o segunda ley de Newton
m−→a =
m∑j=1
−→F j
en donde −→a = ∂−→v∂t es la aceleracion.
Como ya se describio anteriormente, los balances para modelar algun proceso o fenomeno se debenaplicar a una masa o volumen de control. Usualmente, en estos balances las variables independientes sonespaciales, s, y/o el temporales ,t, donde las variables espaciales pueden ser hasta tres, es decir s = {x, y, z}para coordenadas cartesianas, s = {r, θ, z} para coordenadas cilındridas, s = {ρ, θ, φ} para coordenadasesfericas, etc., mientras que la variable temporal, t, es unica; por lo tanto se tienen de una a cuatro variablesindependientes, lo que implica a su vez que el balance puede estar descrito por ecuaciones diferencialesordinarias o parciales.
Si para hacer el (los) balance(s) sobre el sistema se considera que se tiene una dependencia espacial,entonces el balances se debe efectuar sobre una region infinitesimal del sistema, mientras que si se consideraque no se tiene una dependencia espacial, entonces el balance se aplica sobre todo el sistema, considerandoque sus propiedades son las mismas en todos partes del sistema (ver Figura 1.4).
77

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
CF
F1
e
F2
e
Fn
e
P1
e
P2
e
Pn
e
,
,
,
F1
s
F2
s
Fm
s
P1
s
P2
s
Pm
s
,
,
,
N
R
Sistema
......
CF
F1
e
F2
e
Fn
e
P1
e
P2
e
Pn
e
,
,
,
F1
s
F2
s
Fm
s
P1
s
P2
s
Pm
s
,
,
,
N
R
Sistema
......
Sistema sin variación espacial(a)
Sistema con variación espacial(b)
El balance se aplica a todo el sistema El balance se aplica a una regióninfinitesimal del sistema
Figura 1.4: Balances infinitesimales vs balances de todo el sistema.
1.2.4. Modelado de fenomenos fısicos mediante ecuaciones diferenciales ordi-narias (EDO)
Se obtienen modelos en ecuaciones diferenciales ordinarias cuando se tiene solamente una variable inde-pendiente y esto ocurre en los siguientes casos:
1. Sistemas variantes en el tiempo pero sin variacion espacial: Si no se considera variacion espacialentonces la unica variable independiente en la ecuacion (1.104) es el tiempo, por lo tanto el terminode acumulacion se puede escribir como una derivada ordinaria, dCF
dt , y el balance se debe aplicar sobretodo el sistema como se muestra en la Figura 1.4a.
2. Sistemas en estado estacionario con variacion espacial unidireccional: Cuando se consideraestado estacionario la variable tiempo no afecta al sistema y el termino de acumulacion en la ecuacion(1.104) es igual a cero, ademas si se considera que la variacion espacial ocurre solamente en unadireccion, entonces de las tres variables espaciales se tiene nada mas una.Para obtener el modelo de este tipo de sistemas se debe realizar un balance infinitesimal en una pequenaregion del sistema para ası considerar variaciones espaciales (ver Figura 1.4b).
1.2.5. Modelado de fenomenos fısicos mediante ecuaciones diferenciales par-ciales (EDP)
Se obtienen modelos en ecuaciones diferenciales parciales cuando se tienen dos o mas variables indepen-dientes y esto ocurre en los siguientes casos:
1. Sistemas en estado estacionario con variacion espacial en dos o tres direcciones: Cuando seconsidera estado estacionario entonces el termino de acumulacion de la ecuacion (1.104) es cero se deberealizar un balances en una region infinitesimal del sistema (ver Figura 1.4b). Dependiendo del numerode coordenadas espaciales involucradas se obtendran EDP con dos o tres variables independientes.
2. Sistemas en estado transitorio y variacion espacial: En este caso, al tener variaciones espacialesse deben efectuar balances en una region infinitesimal del sistema y ademas el termino de acumulaciones diferente a cero. Si el sistema depende solamente de una direccion espacial entonces se tiene dosvariables independientes (incluyendo el tiempo), mientras que si se consideran variaciones en dos o trescoordenadas espaciales entonces se tendran tres o cuatro variables independientes, lo que implica tenerEDP.
78

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
1.3. Condiciones para las ecuaciones diferenciales
Un problema de la fısica matematica se integra por un conjunto de EDO o EDP y sus condicionescorrespondientes. Estas condiciones permiten determinar de manera completa (y en la mayorıa de los casosunica) el comportamiento del sistema. Para EDO el numero de condiciones necesarias es igual al orden de laEDO, mientras que para EDP el numero de condiciones necesarias es igual a la suma de los ordenes maximosde las derivadas parciales con respecto a cada variable independiente. Ası por ejemplo, para la EDO
dT (t)
dt= −H [T (t)− Ta]
se requiere una condicion ya que se tiene solamente una derivada de primer orden, mientras que para la EDO
Dd2C (x)
dx2− v
dC (x)
dx− kC (x) = 0
se requieren dos condiciones ya que es una EDO de segundo orden.Por otro lado, para la EDP
∂T (z, t)
∂t= −v ∂T (z, t)
∂z−H [T (z, t)− Ta (x)]
se necesitan dos condiciones, una para t y otra para z, ya que el orden maximo de las derivadas parcialescon respecto a t y con respecto a z son uno y uno, resepctivamente. Finalmente, para la EDP
∂T (r, t)
∂t= α
[∂2T (r, t)
∂r2+
1
r
∂T (r, t)
∂r
]+
Q
ρCp
se requieren tres condiciones, una para t y dos para r, ya que el orden maximo de la derivada parcial conrespecto a t es uno y el orden maximo de la derivada parcial con respecto a r es dos.
Las condiciones para una ecuacion diferencial se pueden clasificar desde dos puntos de vista:
Punto de vista matematico: En este caso se considera la estructura matematica de la condicion.Por lo general se definen tres tipos para EDO y EDP de segundo orden.
Punto de vista fısico: En este caso se considera el significado fısico de la condicion, la cual puedeser temporal o espacial.
1.3.1. Condiciones desde el punto de vista matematico
Las condiciones son ecuaciones en donde estan involucradas la variable dependiente y/o sus derivadas(hasta un orden menor a la derivada maxima) evaluadas en algun valor especıfico de una de las variablesindependientes. Estas ecuaciones pueden ser lineales o no lineales. Por ejemplo, si se tiene la EDO
F (x, y (x) , y′ (x) , y′′ (x)) = 0
se requieren dos condiciones, las cuales pueden incluir a y y/o a y′ evaluadas en algun valor especıfico de x.Algunos ejemplos de condiciones validas son:
1 : y′ (a) + 2y (a) = 5
2 : y (b) = 0
3 : y′ (a) = y′ (b)4 : y (b) + sen [y (b)] = π
5 : y (a) y′ (a) = y2 (b)
79

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Tipo de EDO y (x) EDP φ (x, t)condicion Homogenea No homogenea Homogenea No homogenea
Primer tipo y (a) = 0 y (b) = B φ (a, t) = 0 φ (b, t) = f (t)
Segundo tipo y′ (a) = 0 y′ (b) = B ∂φ(a,t)∂x = 0 ∂φ(x,0)
∂t = g (x)
Tercer tipo y′ (a) +Hy (a) = 0 y′ (b) +Hy (b) = B ∂φ(a,t)∂x +Hφ (a, t) = 0 ∂φ(b,t)
∂x +Hφ (b, t) = h (t)
Cuadro 1.1: Ejemplos de condiciones de primero, segundo y tercer tipo.
Las condiciones 1, 2 y 3 son lineales ya que aparecen y y y′ acomodados como una combinacion lineal.Las condiciones 1 y 2 estan evaluadas en un solo punto, x = a y x = b, respectivamente, mientras que en lacondicion 3 se tiene a y′ evaluada en dos puntos distintos. Finalmente, las condiciones 4 y 5 son no linealesya que y y su derivada estan en forma no lineal. En este curso consideraremos solamente condiciones fronteralineales.
Desde el punto de vista matematico, cuando la ecuacion diferencial es de segundo orden se tienen lossiguientes tipos de condiciones lineales:
Condiciones de primer tipo:
• En estas condiciones se conoce la variable dependiente en un punto especıfico.
Condiciones de segundo tipo:
• En estas condiciones se conoce la derivada de la variable dependiente en un punto especıfico.
Condiciones de tercer tipo:
• En estas condiciones se conoce una combinacion lineal de la variable dependiente y su derivadaen un punto especıfico.
Cada uno de estas condiciones pueden ser homogeneas o no homogeneas. En la Tabla 1.1 se presentanejemplos de cada tipo de condiciones.
1.3.2. Condiciones iniciales
Las condiciones iniciales involucran a la variable temporal y se utilizan para describir el estado inicial deun proceso o fenomeno fısico, su forma mas comun es:
Cuando la ecuacion diferencial es de primer orden con respecto al tiempo, es decir que se tiene laderivada
∂ψ (s, t)
∂t
donde t es la variable tiempo y s es un vector de posicion espacial, es necesaria una condicion para eltiempo, con la forma
ψ (s, t0) = f (s)
donde t0 es el tiempo inicial. Desde el punto de vista matematico esta es una condicion de primer tipo.
Cuando la ecuacion diferencial es de segundo orden con respecto al tiempo, es decir que se tiene laderivada
∂2ψ (s, t)
∂t2
80

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Una sola coordenada:Dos fronteras
(a)
Dos coordenadas:Cuatro fronteras
(b)
Tres coordenadas:Seis fronteras
(c)
x a= x b=
x a= x b=x a= x b=
y c=
y d=
z e=
z f=
y c=
y d=
(,
)a
y
(,
)b
y
( , )x d
( , )x c
( , )x y ( , )x y,z(
,)
ay,z
(,
)
by,z
( ,y )x ,e
( , )x d,z
( ,y )x ,f
( , )x c,z
Figura 1.5: Numero de fronteras en funcion del numero de coordenadas (Ejemplo: coordenadas cartesianas).
Fi
entPi
entFi
entPi
ent
Fj
salPj
salFj
salPj
sal
Nalrededores Nsistema
Frontera
Alrededores Sistema
Figura 1.6: Esquema del balance de una cantidad fundamental en una frontera.
son necesarias dos condiciones para el tiempo de la forma
ψ (s, t0) = f (s)
∂ψ (s, t0)
∂t= g (s)
en donde ambas estan evaluadas en el tiempo inicial, t0. Desde el punto de vista matematico, la primeracondicion es de primer tipo, mientras que las segunda condicion es de segundo tipo.
A este tipo de condiciones tambien se les denomina condiciones de Cauchy.
Desde el punto de vista fısico, la condicion de primer tipo implica que se conoce el estado de la variableψ al inicio del proceso, mientras que la condicion de segundo tipo implica que se conoce la velocidad inicialde ψ.
1.3.3. Condiciones frontera
Las condiciones frontera son aquellas que describen el comportamiento del sistema en alguna de susfronteras con los alrededores y se obtiene a partir de balances en dichas fronteras. El numero total defronteras depende del numero de coordenadas consideradas en el balance (ver Figura 1.5). Desde el puntode vista matematico, las condiciones frontera pueden ser de primero, segundo o tercer tipo; las condicionesde primer tipo tambien se donominan condiciones de Dirichlet, mientras que las condiciones de segundotipo tambien son denominadas condiciones de Neumann. El significado fısico de cada condicion depende delsistema en particular.
81

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
El balance general de una cantidad fundamental en alguna frontera tiene la forma:
salidas− entradas︸ ︷︷ ︸Por flujo en los alrededores
+ salidas− entradas︸ ︷︷ ︸Por transporte en los
alrededores (convectivo y difusiva)
= entradas− salidas︸ ︷︷ ︸Por flujo en el sistema
+ entradas− salidas︸ ︷︷ ︸Por transporte en el
sistema (convectivo y difusiva)
en donde no se han considerando los terminos de acumulacion y generacion, ya que en la frontera no existenestos fenomenos (ver Figura 1.6). Por lo tanto, utilizando la misma nomenclatura que la utilizada en elbalance 1.104 se tiene que
n∑i=1
F enti P ent
i︸ ︷︷ ︸Salidas
−m∑j=1
F salj P sal
j︸ ︷︷ ︸Entradas︸ ︷︷ ︸
Por flujo en los alrededores
± NAlrededores︸ ︷︷ ︸Flujo por transporte
en los alrededores(convectivo y difusiva)
=
n∑i=1
F enti P ent
i︸ ︷︷ ︸Entradas
−m∑j=1
F salj P sal
j︸ ︷︷ ︸Salidas︸ ︷︷ ︸
Por flujo en el sistema
± Nsistema︸ ︷︷ ︸Flujo por transporte
en el sistema(convectivo y difusiva)
pero como las salidas por flujo de los alrededores son las entradas por flujo en el sistema, mientras quelas entradas por flujo de los alrededores son las salidas por flujo en el sistema, entonces las condiciones sereducen a
NAlrededores︸ ︷︷ ︸Por transporte en los
alrededores(convectivo y difusiva)
= Nsistema︸ ︷︷ ︸Por transporte en el
sistema (convectivo
y difusiva)
1.3.4. Condiciones de continuidad
Las condiciones de continuidad, por lo general, describen el comportamiento del sistema en “fronterasficticias”, o en sistemas acoplados. Como se muestra en la Figura 1.7a existen sistemas en los que las fronterasson ficticias ya que el punto θ = 0 es el mismo punto θ = 2π por lo tanto se deben cumplir las condiciones
ψ (r, 0) = ψ (r, 2π) ,
∂ψ (r, 0)
∂r=
∂ψ (r, 2π)
∂r.
Por otro lado, en la Figura 1.7b se muestran dos sistemas acoplados cuyas fronteras se encuentran unidas,por lo tanto se deben cumplir condiciones del tipo
ψ(0−, y
)= αψ
(0+, y
)∂ψ (0−, y)
∂x= β
∂ψ (0+, y)
∂x
donde α y β son dos constantes, mientras que 0− y 0+ representan los valores de la variable ψ en el ladoizquierdo y derecho de la frontera, respectivamente.
1.4. Cambio de coordenadas para las ecuaciones diferenciales
Del analisis vectorial se sabe que el laplaciano en coordenadas curvilineas ortogonales {u1, u2, u3} estadado
∇2 =1
h1h2h3
[∂
∂u1
(h2h3h1
∂
∂u1
)+
∂
∂u2
(h1h3h2
∂
∂u2
)+
∂
∂u3
(h1h2h3
∂
∂u3
)]en donde los coeficientes
hi =
∣∣∣∣∣∂−→R
∂ui
∣∣∣∣∣ , i = 1, 2, 3,
82

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
2�
0
x = 0
(a) (b)
��� �( , )
��� �( , )
Figura 1.7: Condiciones de continuidad: (a) Frontera ficticia. (b) Frontera de sistemas acoplados.
son llamados factores de escala y−→R = x
−→i + y
−→j + z
−→k es el vector posicion, mientras que
∣∣∣∂−→R∂ui
∣∣∣ es la norma3
del vector ∂−→R
∂ui.
1.4.1. Coordenadas cilındricas
Las funciones para las coordenadas son
x = r cos (θ) , y = r sen (θ) , z = z
en estas coordenadas el vector posicion es
−→R = r cos (θ)
−→i + r sen (θ)
−→j + z
−→k
por lo que los factores de escala son:
hr =
∣∣∣∣∣∂−→R
∂r
∣∣∣∣∣ =√cos2 (θ) + sen2 (θ) = 1
hθ =
∣∣∣∣∣∂−→R
∂θ
∣∣∣∣∣ =√r2 sen2 (θ) + r2 cos2 (θ) = r
hz =
∣∣∣∣∣∂−→R
∂z
∣∣∣∣∣ = 1
por lo que el Laplaciano en estas coordenadas es
∇2 =1
r
[∂
∂r
(r∂
∂r
)+
∂
∂θ
(1
r
∂
∂θ
)+
∂
∂z
(r∂
∂z
)]que tambien se puede escribir como
∇2 =∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂θ2+
∂2
∂z2.
1.4.2. Coordenadas esfericas
3Para le vector v = {v1, v2, v3} su norma se define como |v| =√
v21 + v22 + v23 .
83

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Coordenadas Laplaciano
Cartesianas ∇2 = ∂2
∂x2 + ∂2
∂y2 + ∂2
∂z2
Cilındricas ∇2 = 1r
∂∂r
(r ∂∂r
)+ 1
r2∂2
∂θ2 + ∂2
∂z2 o
∇2 = ∂2
∂r2 + 1r
∂∂r + 1
r2∂2
∂θ2 + ∂2
∂z2
Esfericas ∇2 = 1ρ2
∂∂ρ
(ρ2 ∂
∂ρ
)+ 1
ρ2 sen2(φ)∂2
∂θ2+ 1
ρ2 sen(φ)∂∂φ
(sen (φ) ∂
∂φ
)o
∇2 = ∂2
∂ρ2 + 2ρ
∂∂ρ + 1
ρ2 sen2(φ)∂2
∂θ2 + 1ρ2
∂2
∂φ2 + cot(φ)ρ2
∂∂φ
Cuadro 1.2: Laplaciano en diversas coordenadas
�
�
�
�
Las funciones para las coordenadas son
x = ρ cos (θ) sen (φ) , y = ρ sen (θ) sen (φ) , z = ρ cos (φ)
en estas coordenadas el vector posicion es
−→R = ρ cos (θ) sen (φ)
−→i + ρ sen (θ) sen (φ)
−→j + ρ cos (φ)
−→k
por lo que los factores de escala son:
hr =
∣∣∣∣∣∂−→R
∂ρ
∣∣∣∣∣ =√cos2 (θ) sen2 (φ) + sen2 (θ) sen2 (φ) + cos2 (φ) = 1
hθ =
∣∣∣∣∣∂−→R
∂θ
∣∣∣∣∣ =√ρ2 sen2 (θ) sen2 (φ) + ρ2 cos2 (θ) sen2 (φ) = ρ sen (φ)
hφ =
∣∣∣∣∣∂−→R
∂z
∣∣∣∣∣ =√ρ2 sen2 (θ) cos2 (φ) + ρ2 cos2 (θ) cos2 (φ) + ρ2 sen2 (φ) = ρ
por lo que el Laplaciano en estas coordenadas es
∇2 =1
ρ2 sen (φ)
[∂
∂ρ
(ρ2 sen (φ)
∂
∂ρ
)+
∂
∂θ
(1
sen (φ)
∂
∂θ
)+
∂
∂φ
(sen (φ)
∂
∂φ
)]
que es equivalente a
∇2 =∂2
∂ρ2+
2
ρ
∂
∂ρ+
1
ρ2 sen2 (φ)
∂2
∂θ2+
1
ρ2∂2
∂φ2+
cot (φ)
ρ2∂
∂φ.
En la tabla 1.2 se presentan los Laplacianos en coordenadas cartesianas, cilındricas y esfericas.
84

Capıtulo 2
Solucion de problemas de lafısica-matematica en ecuacionesdiferenciales ordinarias
2.1. Problemas descritos por ecuaciones de primer orden
Ejemplo 46 Determine la concentracion de un reactor por lotes isotermico en donde ocurre la reaccion
Ak→ B
si se considera que al inicio se tiene una concentracion CA,0 y se tiene una cinetica de primer orden.Para obtener el modelo de este sistema se debe hacer una balance de moles de A y de masa total.
Solucion: Consideraciones: (1) No existe variacion espacial, solamente temporal. (2) El lıquido es pocovolatil. (3) La velocidad especıfica de consumo de A es rA = kCA, donde CA es la concentracion de A. (4)Se considera volumen constante.Balance de masa total:
dmT
dt= 0
por lo tanto mT = ctte.Balance de moles de A y B:
dnA
dt= −V kCA ,
dnB
dt= V kCA
Los moles de A y de B en terminos de concentraciones son nA = CAV , nB = CBV , por lo tanto
d (CAV )
dt= −V kCA ,
d (CBV )
dt= V kCA
como el volumen es constante entonces se obtiene el modelo
dCA
dt= −kCA ,
dCB
dt= kCA
Estas EDO son de primer orden de variables separables con solucion∫ CA
CA,0
dCA
CA= −k
∫ t
0
dt
ln
(CA
CA,0
)= −kt
CA = CA,0e−kt
85

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Si se considera que la concentracion inicial de B es CB,0 al dividir ambas EDO se obtiene que
dCB
dCA= −1
que al integrar produce ∫ CB
CB,0
dCB = −∫ CA
CA,0
dCA
CB − CB,0 = CA,0 − CA
ası la solucion total es
CA = CA,0e−kt,
CB = CB,0 + CA,0
(1− e−kt
).
Ejemplo 47 Considerar un reactor por lotes isotermico en donde ocurren las reacciones
Ak1→ B
2Ak2→ C
las cineticas son elementales.
Solucion: Como las cineticas son elementales, las velocidades de consumo de A para la primera y segundareaccion son
Reaccion 1 : rA,1 = k1CAmoles
(volmen) (tiempo)
Reaccion 2 : rA,2 = k2C2A
moles
(volmen) (tiempo)
por lo tanto la velocidad total de consumo de A es
rA = rA,1 + rA,2 = k1CA + k2C2A.
Por otro lado, las velocidades de generacion de B y C son respectivamente
rB = rA,1 = k1CA
rC =1
2rA,2 =
1
2k2C
2A
en donde el valor 12 se debe a que por cada mol cosumido de A solamente se produce medio mol de C.
El sistema esta cerrado por lo que la masa total no cambia ademas como es isotermico, entonces solo esnecesario realizar los balances de moles de las especies participantes. Estos balances son
dnA
dt= −V rA,
(moles
tiempo
)dnB
dt= V rB ,
(moles
tiempo
)dnC
dt= V rC ,
(moles
tiempo
)86

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
en donde los moles de A, B y C son iguales a nA = CA/V , nB = CB/V y nC = CC/V , y como el volumenes constante, las EDO resultantes son
dCA
dt= −k1CA − k2C
2A,
(moles
tiempo
)dCB
dt= k1CA,
(moles
tiempo
)dCC
dt=
1
2k2C
2A,
(moles
tiempo
)La primera EDO es una ecuacion de Bernoulli
dCA
dt+ k1CA = −k2C2
A , − 1
C2A
dCA
dt− k1
1
CA= k2
por lo que al definir z = 1/CA se obtiene la EDO
dz
dt= k1z + k2
cuya solucion es ∫ 1/CA
1/CA,0
dz
k1z + k2=
∫ t
0
dt
1
k1ln
(k1/CA + k2k1/CA,0 + k2
)= t
de donde se puede despejar la concentracion de A
CA (t) =CA,0e
−k1t
1 + CA,0k2
k1(1− e−k1t)
Al susituir esta concentracion en la EDO para CB se tiene la ecuacion de variables separables
dCB
dt=
k1CA,0e−k1t
1 + CA,0k2
k1(1− e−k1t)
, →∫ CB
CB,0
dCB =
∫ t
0
k1CA,0e−k1t
1 + CA,0k2
k1(1− e−k1t)
dt
si se define u = 1 + CA,0k2
k1
(1− e−k1t
), entonces du = CA,0k2e
−k1tdt ası que la integral del lado derecho es
CB (t) = CB,0 +k1k2
∫ 1+CA,0k2k1(1−e−k1t)
1
du
u= CB,0 +
k1k2
ln
[1 + CA,0
k2k1
(1− e−k1t
)]en donde los lımites de integracion tambien se han remplazado. Por otro lado, la EDO para CC es
dCC
dt=
1
2k2
[CA,0e
−k1t
1 + CA,0k2
k1(1− e−k1t)
]2ası que utilizando la misma definicion para u se tiene que e−k1t = 1+ k1
CA,0k2(1− u), y al separar las variables
se tiene que∫ CC
CC,0
dCC =1
2k2C
2A,0
∫ t
0
e−k1t · e−k1t[1 + CA,0
k2
k1(1− e−k1t)
]2 dt = 1
2CA,0
∫ 1+CA,0k2k1(1−e−k1t)
1
1 + k1
CA,0k2(1− u)
u2du
=1
2
(CA,0 +
k1k2
)∫ 1+CA,0k2k1(1−e−k1t)
1
du
u2− 1
2
k1k2
∫ 1+CA,0k2k1(1−e−k1t)
1
du
u
87

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ası que al integrar se llega a la solucion
CC (t) = CC,0 +1
2
(CA,0 +
k1k2
)(1− 1
1 + CA,0k2
k1(1− e−k1t)
)− 1
2
k1k2
ln
[1 + CA,0
k2k1
(1− e−k1t
)]
= CC,0 +1
2
(CA,0 +
k1k2
)CA,0
k2
k1
(1− e−k1t
)1 + CA,0
k2
k1(1− e−k1t)
− 1
2
k1k2
ln
[1 + CA,0
k2k1
(1− e−k1t
)]En resumen, las concentraciones son
CA (t) =CA,0e
−k1t
1 + CA,0k2
k1(1− e−k1t)
CB (t) = CB,0 +k1k2
ln
[1 + CA,0
k2k1
(1− e−k1t
)]CC (t) =
1
2
(1 + CA,0
k2k1
)(ek1t − 1
)CA (t)− 1
2[CB (t)− CB,0]
Ejemplo 48 Destilacion diferencialUn lote de una mezcla lıquida binaria (A,B) se carga en un matraz. Esta carga hierve lentamente y losvapores se descargan en un refrigerante tan pronto como se forman, condensandose ahı. Si un componentees mas volatil que otro (A mas volatil que B), lo que ocurre al efectuar la destilacion es que conforme avanzala misma, la fraccion molar de A en el matraz va disminuyendo, mientras que en el destilado aumenta. Ası,se logra una cierta separacion de la mezcla original, obteniendose en el matraz una muestra enriquecidaen B y en la destilada una mezcla enriquecida en A. Si al inicio se tienen L0 moles de lıquido con unafraccion molar xA,0 del componente mas volatil A, encuentre una ecuacion que relacione los moles de lıquidoresiduales I con la fraccion del componente mas volatil xA, conforme avanza la destilacion, suponiendo quela volatilidad relativa de A, es constante.
Solucion: Para resolver este problema se define que L son los moles de lıquido dentro del matraz y Dson los moles del destilado que se ha acumulado afuera. El balance de moles totales en el lıquido dentro delmatraz es igual
dL
dt= −Fv, L (0) = L0
donde Fv es el flujo de vapor de salida, que depende de la velocidad con que se agrege calor y del tipo deequilibrio vapor-lıquido para el sistema en particular.Por otro lado, el balance de los moles del destilado son
dD
dt= Fv, D (0) = 0
el balance de moles de A dentro del matraz es igual a
dnA
dt= −Fvy
∗A
donde y∗A es la composicion de las gotas que se estan evaporando. Ademas, los moles de A en el lıquido sonnA = LxA por lo tanto
d (LxA)
dt= L
dxAdt
+ xAdL
dt= −Fvy
∗A
y al sustituir dL/dt se tiene que
LdxAdt
= Fv (xA − y∗A)
88

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Como Fv es un termino muy complejo de estimar entonces se puede remplazar como
dL = −dD,LdxA = (xA − y∗A) dD = (y∗A − xA) dL,
Al integrar la primera ecuacion∫ L
L0
dL = −∫ D
0
dD, → L = L0 −D
mientras que la segunda EDO es ∫ xA
xA,0
dxAy∗A − xA
=
∫ L
L0
dL
L
Si se supone que el lıquido y el vapor en las gotas que se estan formando estan en equilibrio y que esteequilibrio tiene una volatilidad relativa constante, entonces se llega a la expresion
α =
(Moles de A en el gas
Moles de A en el lıquido
)(
Moles de B en el gasMoles de B en el lıquido
) =
y∗A
xA
y∗B
xB
=
y∗A
xA
1−y∗A
1−xA
=y∗A (1− xA)
xA (1− y∗A)
Se puede despejar y∗Ay∗A =
αxA1 + (α− 1)xA
por lo que la integral es igual a
ln
(L
L0
)=
∫ xA
xA,0
dxAαxA
1+(α−1)xA− xA
=
∫ xA
xA,0
[1 + (α− 1)xA] dxA(α− 1)xA (1− xA)
utilizando fracciones parciales1 + (α− 1)xA
(α− 1)xA (1− xA)=
A
xA+
B
xA − 1
Multiplicando por xA y evaluando en xA = 0 :1
α− 1= A
Multiplicando por xA − 1 y evaluando en xA = 1 : − α
α− 1= B
se obtiene que1 + (α− 1)xA
(α− 1)xA (1− xA)=
1
α− 1
(1
xA− α
xA − 1
)ası que la integral es
(α− 1) ln
(L
L0
)=
∫ xA
xA,0
(1
xA− α
xA − 1
)dxA = ln
(xAxA,0
)− α ln
(xA − 1
xA,0 − 1
)o reacomodando se llega a la solucion:(
L
L0
)α−1
=xAxA,0
(xA,0 − 1
xA − 1
)α
89

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 49 Transferencia de calorSegun la ley de Newton, la velocidad de enfriamiento de un cuerpo en el aire es proporcional a la diferenciaentre la temperatura del cuerpo T y la temperatura Ta del aire. Suponiendo que se tiene un cuerpo en contactocon el medio ambiente, y que la temperatura de este medio ambiente esta cambiando con el tiempo, es decirTa = Ta (t). Encuentre una funcion que relacione la temperatura del cuerpo con respecto al tiempo, si alinicio, la temperatura del cuerpo es igual a T0, para:(a) La temperatura ambiente cambia de manera lineal: Ta = Ta0 +ΔTat y la velocidad del aire es constante.(b) La temperatura ambiente cambia de manera lineal: Ta = Ta0 + ΔTat y la velocidad del aire cambiaprovocando cambios en la ”constante” de enfriamiento de tal forma que h = h0
at+b .Solucion: Para este sistema se debe hacer un balance de energıa
dE
dt= −Ah (T − Ta)
donde E es la energıa total del solido, A es el area de transferencia de calor, h es la constante de enfriamientode Newton, T es la temperatura del solido y Ta la temperatura del ambiente. Aquı se ha supuesto que el solidotiene una temperatura homogenea. La energıa total del solido es
E = U = mCp (T − Tref)
por lo tantodE
dt= mCp
dT
dt
donde se ha supuesto que m y Cp son constantes. Ası el modelo es
dT (t)
dt= − Ah
mCp[T (t)− Ta (t)]
Para el primer caso, Ta (t) = Ta0 +ΔTat la EDO es
dT (t)
dt= − Ah
mCp[T (t)− Ta0 −ΔTat]
esta es una EDO lineal pero tambien se puede reducir a variables separables si se define que
z = T (t)− Ta0 −ΔTatdz
dt=dT (t)
dt−ΔTa
por lo tanto la EDO es equivalente a
dz
dt= −
(Ah
mCpz +ΔTa
)ası que separando variables ∫ T (t)−Ta0−ΔTat
T (0)−Ta0
dzAhmCp
z +ΔTa= −
∫ t
0
dt
mCp
Ahln
(AhmCp
(T (t)− Ta0 −ΔTat) + ΔTaAhmCp
(T (0)− Ta0) + ΔTa
)= −t
y despejando T (t) se llega a la solucion
T (t) = Ta0 +ΔTat+mCp
AhΔTa
(e− Ah
mCpt − 1
)+ (T (0)− Ta0) e
− AhmCp
t
90

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Para el segundo caso la EDO es
dT (t)
dt= − A
mCp
h0at+ b
[T (t)− Ta0 −ΔTat]
que es una EDO linealdT (t)
dt+
A
mCp
h0at+ b
T (t) =A
mCp
h0 (Ta0 +ΔTat)
at+ b
Ejemplo 50 Reaccion enzimatica con desactivacionDentro de un reactor por lotes, el sustrato S, sufre una reaccion enzimatica que sigue una cinetica tipoMichaelis-Menten
− rS =υmaxS
Km + S(2.1)
donde S es la concentracion molar del sustrato, υmax se conoce como la velocidad maxima de reaccion yKm es llamada la constante de Michaelis. Esta reaccion enzimatica sufre una desactivacion, la cual afectatanto a la velocidad maxima como a la constante de Michaelis, por lo que estas ”constantes” deben expresarsecomo υmax = aυmax0
y Km = aKm0 donde υmax0y Km0 son sus valores cuando no existe desactivacion,
mientras que a cuantifica la desactivacion mediante la siguiente ley de decaimiento
a = e−βt. (2.2)
Derivar una expresion que describa la concentracion del sustrato dentro del reactor a lo largo del tiempo, sial inicio, la concentracion de sustrato es igual a S0.Para un reactor por lotes en el que el volumen es constante, se tiene la siguiente ecuacion
dS
dt= rS . (2.3)
Si se sustituyen las ecuaciones (2.1) y (2.2) en (2.3) se obtiene la EDO
dS
dt= − aυmax0
S
aKm0 + S(2.4)
si se diferencıa la ecuacion (2.2) se obtiene que
da = −βe−βtdt = −βadt;sustituyendo la diferencial del tiempo en la ecuacion (2.4) se obtiene la ecuacion
βdS
da=
υmax0S
aKm0 + S. (2.5)
Esta EDO es homogenea, por lo que definiendo u = Sa , se tiene
adu
da+ u =
υmax0u
β (Km0 + u). (2.6)
separando variablesβ (Km0 + u) du
u [υmax0− β (Km0 + u)]
=da
a, (2.7)
expandiendo mediante fracciones parciales se tiene
β
γ
(Km0
u− υmax0
βu− γ
)=da
a
91

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
donde γ = υmax0 − βKm0 . Integrando
βKm0 ln (u)− υmax0ln (βu− γ) = γ ln (a) + C ′.
Esta ecuacion se puede simplificar, para obtener
uβKm0
(βu− γ)υmax0
=C
βe−γβt (2.8)
donde C = βeC′por lo que sustituyendo el valor de u
SβKm0
(βS − γa)υmax0
=C
β(2.9)
si se considera la condicion inicial S |t=0= S0 se obtiene la constante
C =βS
βKm00
(βS0 − γ)υmax0
.
Ası, sustituyendo C en la ecuacion (2.9) se llega a la solucion
(βS − γa
βS0 − γ
)=
(S
S0
) βKm0υmax0
. (2.10)
En la Figura 1-5.1 se muestra como varıa la concentracion con respecto al tiempo para diferentes valoresde β. Como se observa, entre mayor sea el valor de esta constante, la enzima se desactiva mas rapido y lareaccion se detiene.
Ejemplo 51 Reacciones quımicas:Considere las reaciones
Ak1−→ B
k2↗ C↘k3
D
las cuales se llevan a cabo en un reactor por lotes. Las cineticas de transformacion de A en B y de B a Dson de primer orden, mientras que la de B a C sigue una cinetica de segundo orden. Formule las ecuacionesque describen el consumo tanto de A como de B a traves del tiempo, si al inicio el reactor solo contiene Acon una concentracion igual a CA0.Las expresiones cineticas que describen las reacciones son las siguientes
Velocidad de desaparicion de A para producir B: rA = −k1CA
Velocidad de aparicion de B: rB1 = k1CA
Velocidad de desaparicion de B para producir C: rB2 = −k2C2B
Velocidad de desaparicion de B para producir D: rB3 = −k3CB
Velocidad total de reaccion de B:rB = rB1 + rB2 + rB3
= k1CA − k2C2B − k3CB
Si se efectua un balance de materia para el componente A y para B, se tiene que la acumulacion es igual alo que reacciona,
dCA
dt= rA (2.11)
dCB
dt= rB (2.12)
92

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Al sustituir las expresiones cineticas en las ecuaciones (2.11) y (2.12) se obtienen las ecuaciones
dCA
dt+ k1CA = 0
dCB
dt= k1CA − k2C
2B − k3CB
La primera ecuacion, que describe como cambia la concentracion de A, es una ecuacion diferencial de vari-ables separables, cuya solucion esta dada por
CA = CA0e−k1t,
ası que al sustituir el valor de la concentracion de A en el balance para el compuesto B, se llega a unaecuacion que tiene forma de la ecuacion de Riccati,
dCB
dt= −k2C2
B − k3CB + k1CA0e−k1t, (2.13)
en donde x = t, y = CB, p (t) = −k2, q (t) = −k3 y r (t) = k1CA0e−k1t, ası que se define el cambio de
variable CA = 1k2v
dvdt , para transformar la ecuacion (2.13) en
d2v
dt2+ k3
dv
dt− k1k2CA0e
−k1tv = 0.
Esta ecuacion es una ecuacion lineal de segundo orden de coeficiente no constantes. Por el momento no sehan estudiado este tipo de ecuaciones, por lo que este problema se retoma posteriormente, pero se ha logradoconvertir una ecuacion diferencial no lineal de primer orden (2.11) en una ecuacion diferencial lineal desegundo orden.
Ejemplo 52 TSUNAMIUn modelo sencillo de la forma de un tsunami o maremoto es
1
2
(dW
dx
)2
= 2W 2 −W 3 (2.14)
en donde W (x) es la altura de la ola en funcion de su posicion relativa a un punto determinado en alta mar.Encuentre todas las soluciones que satisfagan la siguiente condicion inicial: W (0) = 2.La ecuacion (2.14) puede transformase en(
dW
dx
)2
=W 2(4− 2W ) (2.15)
Ası, las soluciones de la ecuacion anterior son
dW
dx= W
√(4− 2W ) (2.16)
dW
dx= −W
√(4− 2W ) (2.17)
La ecuacion (2.16), por ejemplo, es una ecuacion con variables separables y que tiene como solucion
1
2ln
(√4− 2W − 2√4− 2W + 2
)= x+ C (2.18)
De donde se puede despejar para W
W = 2
(1− (C1e
2x + 1)2
(1− C1e2x)2
)(2.19)
93

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Asi, si se aplica la condicion inicial general W (0) =W0, se tiene
W0 = 2
(1− (C1 + 1)2
(1− C1)2
)(2.20)
Como se puede apreciar, se llega a una expresion cuadratica para C1
W0
2C2
1 + (4 −W0)C1 +W0
2= 0 (2.21)
la cual, tiene solucion C1 = −1;C1 = −1, para el caso especial en que W0 = 2.Ası, la solucion (2.19)adquiere la forma
W = 2
(1− (1 − e2x)2
(1 + e2x)2
)(2.22)
Hay que recordar, que esta es una solucion se obtuvo de (2.16), la solucion para (2.17) es
W = 2
(1− (1 − e2x)2
(−1− e2x)2
)(2.23)
que es identica a (2.22). Y en donde la constante de integracion, como se puede demostrar, se obtiene tambiende (2.21).
Ejemplo 53 En 1958 Sisko1 propuso el siguiente modelo para el estudio del flujo de grasas no newtonianasen tubos circulares
τ rz = a
(−dvzdr
)+ b
(−dvzdr
)n
(2.24)
donde τ rz es el esfuerzo de corte dentro del fluido y vz es la velocidad del fluido a traves de la direccion zen el tubo. Notese que si b = 0 o n = 1, esta ecuacion se convierte en la ecuacion del esfuerzo de corte parafluidos newtonianos. mientras que si a = 0, se convierte en la conocida ley de la potencia. Encontrar el perfilde velocidad en funcion del radio.Para resolver este problema, primero se debe encontrar el valor que tiene el esfuerzo de corte, τ rz. Se puededemostrar que para el flujo de fluidos incompresibles, a partir de un balance diferencial de una envoltura dellıquido se obtiene la relacion
τ rzr
=p0 − pL − ρg (z0 − zL)
2L= ctte
donde p0, z0, pL y zL son las presiones y las alturas al inicio del tubo y a una distancia L a lo largo deltubo, respectivamente. Esta relacion es constante por lo que se puede decir que
τ rzr
=τRR
donde τR es el esfuerzo de corte evaluado en r = R, el cual es constante a lo largo de la direccion z, porlo que se obtiene que el esfuerzo es proporcional al radio del tubo, es decir, τrz = τRr/R, y ası la ecuaciondiferencial (2.24) toma la forma
r =R
τR
[a
(−dvzdr
)+ b
(−dvzdr
)n].
Este ecuacion no contiene de manera explıcita a vz, por lo que se define el parametro
p = −dvzdr
,
1A. W. Sisko, Ind. Eng. Chem., 50, 1789-1792 (1958).
94

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
con lo que se obtiene la expresion
r =R
τR(ap+ bpn) = ϕ (p) ,
que al ser derivada produce
dr = −dvzp
=R
τR
(a+ nbpn−1
)dp = ϕ′ (p) dp.
Al separar variables e integrar se obtiene
vz = C −∫
R
τR(ap+ nbpn) dp
= C − R
τR
(a
2p2 +
nb
n+ 1pn+1
).
En las paredes del tubo, la velocidad es igual a cero, por lo que con esta condicion se puede evaluar laconstante de integracion, esto se logra despejando p cuando r = R, ası, si se dice que pR es una de las raıcesde la ecuacion
bpn + ap− τR = 0,
entonces,
C =Rp2RτR
(a
2p2R +
nb
n+ 1pn+1R
)y la solucion total esta dada de manera parametrica⎧⎨⎩
rR = 1
τR(ap+ bpn)
vz =p2RR2τR
{a
[1−
(ppR
)2]+
2nbpn−1R
n+1
[1−
(ppR
)n+1]}
2.2. Problemas descritos por ecuaciones de segundo orden
Catalizador
z z + �z
S NS|z NS|z + �z
Balance en
un poro
Reacción
de S en la
superficie
Reacción
de S
.
Ejemplo 54 Reaccion enzimatica en un poroEn un reactor se tiene una enzima inmovilizada dentro de unamatriz porosa. Dentro de los poros se lleva a cabo la reaccion enz-imatica S → B, la sigue una cinetica del tipo Michaelis-Menten,es decir
−rS =vmaxS
Km + S
donde rS es la velocidad de reaccion superficial, S es la concen-tracion de sustrato, vmax es la velocidad superficial maxima dereaccion y Km es la constantes de Michaelis-Menten. Encontraruna expresion que indique como cambia la concentracion del Sus-
trato S, a lo largo del poro, si se considera que la reaccion ocurre en la superficie del poro y que la difusionradial es despreciable.Para obtener el modelo del reactor se supone que dentro del poro el sustrato fluye por difusion y la reaccionocurre en la superficie, ademas, se despreciara la difusion en direccion radial, por lo que si se hace un balancede una seccion del poro se tiene que
Entrada en z − Salida en (z +Δz) = reaccion
(AtNS)|z − (AtNS)|z+Δz = −Asrs
95

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
En este caso At es el area transversal del poro, que si se considera como un cilindro se tiene que es iguala (πR2), mientras As es el area superficial donde ocurre la reaccion, dada por (2πRΔz). NS es el flujo delsustrato por unidad de superficie. Al sustituir esto se obtiene
R
[NS|z+Δz − NS|z
Δz
]= 2rs
Si se toma el lımite cuando Δz tiende a cero, se llega a la ecuacion diferencial
dNs
dz− 2
Rrs = 0. (2.25)
Por otro lado, si se supone que el flujo del sustrato esta dado por la ley de Fick de la difusion,
NS = −DSdS
dz,
la ecuacion (2.25), junto con la ley cinetica para rs conduce a la ecuacion diferencial
d2S
dz2−K
S
Km + S= 0 (2.26)
donde K = 2vmax
RDS. Al observar la ecuacion (2.26), se nota que la variable independiente z, no esta presente
de una manera explıcita, de esta forma el problema cae en el caso tres de reduccion de orden, por lo que sepuede definir
p =dS
dz,
donde se asume que p es una funcion de S, ası que la segunda derivada de S con respecto a z es igual a
d2S
dz2= p
dp
dS,
con lo que la ecuacion diferencial (2.26) queda como
pdp
dS−K
S
Km + S= 0.
Esta es una ecuacion de variables separables que al ser integrada produce la solucion
1
2p2 −K [S −Km ln (Km + S)] = C.
Debido a que los poros pueden ser muy largos, se puede suponer que se consume el sustrato totalmente cuandoz → ∞, lo cual implica que el flujo del sustrato tambien tienda a cero, por lo que p = dS
dz → 0 cuando S → 0,a partir de donde se obtiene que C = KKm ln (Km), y ası p debe ser
p =dS
dz= ±
√2K
[S −Km ln
(Km + S
Km
)]
En esta ecuacion, se debe escoger el signo de la derivada, y como la concentracion del sustrato S disminuyeconforme avanza z, entonces la derivada debe ser siempre negativa, por lo que
dS
dz= −
√2K
[S −Km ln
(Km + S
Km
)]96

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Esta ecuacion multiplicada por la difusividad representa el flux del sustrato. Separando de nuevo las variablese integrado, sabiendo que en z = 0 la concentracion del sustrato es igual a S0 se obtiene que
z
α=
S0/Km∫S/Km
dx√x− ln (1 + x)
donde α =√
Km
2K . La integral no se puede resolver analıticamente, pero esta ecuacion se puede utilizar para
calcular la posicion para diferentes concentraciones de sustrato
Ejemplo 55 Cinetica de reaccion.Se ha encontrado que la cinetica de la reaccion A + B → C, tiene la forma rA = −k (T )CACB , donde laconstante de reaccion, k (T ), que es funcion de la temperatura sigue la ecuacion diferencial
d2k
dT 2+
2
T
dk
dT− 1
k
(dk
dT
)2
= 0 (2.27)
encontrar como cambia dicha constante con respecto a la temperatura.Lo primero que se debe hacer es comprobar que la ecuacion homogenea, para lo cual se analiza cada terminode la ecuacion diferencial (2.27). El primer termino es k” es de grado uno, mientras que el segundo termino,2k′/T contiene a k′ elevado a la primera potencia, por lo que el grado es uno tambien. Finalmente, el tercer
termino (k′)2 /k contiene a k′ elevado a la segunda potencia, y a k elevado a la menos uno, ası que la sumade estos exponentes es 2− 1 = 1, por lo que los tres terminos son de grado uno y la ecuacion es homogenea.Ası se propone el cambio de variable:
k (T ) = e∫z(T )dT , (2.28)
Ası, la primera y segunda derivada de k (T ) son
dk
dT= kz ,
d2k
dT 2= k
(dz
dT+ z2
),
Al sustituir esto en la ecuacion (2.27), se simplifica a
dz
dT+
2
Tz = 0
Esta ecuacion diferencial es de variables separables por lo que separando e integrando se llega a
ln (z) = −2 ln (T ) + ln (C1) o bien z =C1
T 2
ahora se debe introducir el valor de z en la ecuacion (2.28),
k (T ) = e∫z(T )dT = eC1
∫dTT2 = e−
C1T +C′
2
ası, la constante de velocidad de reaccion esta dada por
k (T ) = C2e−C1
T
donde C ′2 = ln (C2). Esta ecuacion tiene la forma de la ecuacion de Arrhenius.
Ejemplo 56 Deduccion de los perfiles radiales de temperatura para flujo turbulento con densi-dad de flujo calorıfico de pared constante2
2R.B. Bird, W.E. Stewart, E.N. Lightfoot, Fenomenos de Transporte, Reverte, 1998.
97

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Se puede demostrar que para el flujo de un fluido en una tuberıa cilındrica con regimen turbulento, la trans-ferencia de calor sigue la ecuacion
T − Tparedq0R2/k
= Aζ +Ψ(ξ) ,
donde T es la temperatura que depende del radio y de z, Tpared y q0 son la temperatura y la densidad de flujode calor en la pared del tubo, R es el radio de la tuberıa, k es la conductividad termica, A es una constante,ζ = z/R y ξ = r/R son las coordenadas axial y radial adimensionalizadas, respectivamente, mientras queΨ(ξ) es la distribucion radial de la temperatura que satisface la ecuacion diferencial
(1− ξ)1/7 A =1
ξ
d
dξ
(ξ2 (1− ξ)6/7
dΨ
dξ
)con las condiciones [
dΨ
dξ
]ξ=1
= −343
120A y Ψ(1) = 0
Demostrar que la solucion de la ecuacion diferencial es
Ψ = −343
120A
(β +
1
4β8 − 5
21β9 +
1
5β15 − 11
56β16 + · · ·
)en la que β = (1− ξ)
1/7.
Para este problema, como β = (1− ξ)1/7, entonces se puede despejar ξ
ξ = 1− β7
cuya derivada esdξ
dβ= −7β6
Por lo que empleando la regla de la cadena,
d
dξ=dβ
dξ
d
dβ= −β
−6
7
d
dβ
Ası el modelo se puede escribir como
7(1− β7
)β7A =
d
dβ
(1
7
(1− β7
)2 dΨdβ
)o desarrollando las derivadas y reacomodar se obtiene la EDO
(1− β7
) d2Ψdβ2 − 14β6 dΨ
dβ= 49Aβ7.
Se propone una solucion del tipo
Ψ =
∞∑k=0
Ckβk,
que es una serie polinomial y cuyas derivadas son
dΨ
dβ=
∞∑k=0
kCkβk−1,
d2Ψ
dβ2 =
∞∑k=0
k (k − 1)Ckβk−2,
98

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ası al introducirlo a la ecuacion diferencial se tiene
(1− β7
) ∞∑k=0
k (k − 1)Ckβk−2 − 14β6
∞∑k=0
kCkβk−1 = 49Aβ7
o reacomodando ∞∑k=0
k (k − 1)Ckβk−2 −
∞∑k=0
k (k + 13)Ckβk+5
︸ ︷︷ ︸k→k−7
= 49Aβ7
En la primera sumatoria se sacan los primeros 7 terminos, mientras que en la segunda se realiza un corrim-iento de k → k − 7 para obtener
∞∑k=7
(k − 7) (k + 6)Ckβk+5
6∑k=0
k (k − 1)Ckβk−2 +
∞∑k=7
k (k − 1)Ckβk−2 −
∞∑k=7
(k − 7) (k + 6)Ck−7βk−2 = 49Aβ7
al agrupar las sumatorias se tiene que
6∑k=0
k (k − 1)Ckβk−2 +
∞∑k=7
[k (k − 1)Ck − (k − 7) (k + 6)Ck−7]βk−2 = 49Aβ7
Como se desea que esta ecuacion se cumpla para todos los valores de β se debe cumplir que
β0 : 2C2 = 0 β5 : 7 · 6C7 = 0
β1 : 3 · 2C3 = 0 β6 : 8 · 7C8 − 14C1 = 0
β2 : 4 · 3C4 = 0 β7 : 9 · 8C9 − 2 · 15C2 = 49A
β3 : 5 · 4C5 = 0 βk : k (k − 1)Ck − (k − 7) (k + 6)Ck−7 = 0
β4 : 6 · 5C6 = 0 k = 10, 11, 12, . . .
De aquı se obtiene que
C2 = C3 = C4 = C5 = C6 = C7 = 0, C8 =1
4C1,
C9 =49
72A, Ck =
(k − 7) (k + 6)
k (k − 1)Ck−7, k = 10, 11, 12, . . .
ası que la solucion es
Ψ(β) = C0 + C1β +1
4C1β
8 +49
72Aβ9 +
1
5C1β
15 +539
960Aβ16 + · · ·
En ξ = 1 (es decir en β = 0) se tiene queΨ = C0 = 0
por lo tanto la solucion es equivalente a
Ψ(β) = C1
(β +
1
4β8 +
1
C1
49
72Aβ9 +
1
5β15 +
1
C1
539
960Aβ16 + · · ·
)mientras que su derivada es
Ψ′ (β) = C1
(1 + 2β7 +
1
C1
49
8Aβ8 + 3β14 +
1
C1
539
60Aβ15 + · · ·
)99

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
y en ξ = 1 (es decir en β = 0) se tiene que
Ψ′ = C1 = −343
120A
por lo tanto la solucion es
Ψ(β) = −343
120A
(β +
1
4β8 − 5
21β9 +
1
5β15 − 11
56β16 + · · ·
),
concluyendose ası el problema.
Ejemplo 57 Reactor tubular.Se tiene un reactor tubular con un flujo volumetrico igual a F y un area transversal constante igual a A, enel que ocurre una reaccion con velocidad especıfica rA.
El balance de los moles de A en el volumen de control es
∂nA
∂t= [FCA]z − [FCA]z+Δz +
[−AD∂CA
∂z
]z
−[−AD∂CA
∂z
]z+Δz
+ V rA,
pero como el volumen es V = AΔz y el area transversal es constante, entonces se tiene que
∂CA
∂t= − 1
A
[FCA]z+Δz − [FCA]zΔz
+D
[∂CA
∂z
]z+Δz
− [∂CA
∂z
]z
Δz+ rA,
ası que en el lımite cuando Δz → 0 se obtiene
∂CA
∂t= − 1
A
∂
∂z[FCA] +D
∂2CA
∂z2+ rA.
Si no existe un incremento en le volumen al llevarse a cabo la reaccion, entonces el flujo volumetrico sera elmismo y por lo tanto se puede considerar constante. Ası el modelo resultante es
∂CA
∂t= D
∂2CA
∂z2− v
∂CA
∂z− rA
en donde se v = F/A es la velocidad lineal del fluido.Si se considera estado estacionario entonces la EDP anterior se reduce a la EDO
0 = Dd2CA
dz2− v
dCA
dz− rA
ya que CA solamente depende de z. Esta ecuacion debe estar acompanada de dos condiciones frontera, parala primera se puede suponer que la concentracion a la entrada del reactor es conocida e igual a CA,0, es decirque
[CA]z=0 = CA,0
por otro lado la concentracion a la salida aun es desconocida por lo que se debe hacer un balance de masaen esta frontera. En esta balance se tiene que
−entradas︸ ︷︷ ︸Por flujo en los alrededores
= −salidas︸ ︷︷ ︸Por flujo en el sistema
+ −salidas︸ ︷︷ ︸Por transporte difusivo
en el sistema
− [FCA]z=L = − [FCA]z=L +D
[dCA
dz
]z=L
100

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
por lo tanto se llega a la condicion [dCA
dz
]z=L
= 0
Para el caso en que se tiene una cinetica de primer orden, es decir rA = kCA entonces el modelo es
0 = Dd2CA
dz2− v
dCA
dz− kCA
[CA]z=0 = CA,0[dCA
dz
]z=L
= 0
esta es una EDO de segundo orden homogenea de coeficientes constantes con solucion
0 = Dm2 − vm− k , m1,2 =v
2D±√( v
2D
)2+k
D
CA (z) = A1em1z +A2e
m2z ,dCA
dz= m1A1e
m1z +m2A2em2z
con las condiciones:
[CA]z=0 = A1 +A2 = CA,0[dCA
dz
]z=L
= m1A1em1L +m2A2e
m2L = 0
resolviendo de manera simultanea se obtiene que
A2 = −m1
m2A1e
(m1−m2)L = − m1CA,0em1L
m2em2L −m1em1L
A1 =m2CA,0e
m2L
m2em2L −m1em1L
ası que la solucion total es
CA (z) =m2CA,0e
(m1z+m2L) −m1CA,0e(m1L+m2z)
m2em2L −m1em1L
m1 =v
2D+
√( v
2D
)2+k
D,m2 =
v
2D−√( v
2D
)2+k
D
101

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
102

Capıtulo 3
Transformadas de Laplace
3.1. Introduccion
Las transformadas integrales lineales de Laplace, Fourier, Hankel, etc., presentan una propiedad opera-cional basica que proporciona una imagen algebraica de las expresiones diferenciales. Aplicando las transfor-madas integrales a problemas con valores iniciales y problemas con valores en la frontera, es posible obtenerecuaciones imagen, que en general son mas simples de resolver que las originales. Si la transformacion inversade la solucion imagen es posible se obtiene la solucion buscada.
Los precursores del calculo operacional y las transformadas integrales fueron:
Laplace (1749-1827)
Cauchy (1789-1875)
Heaviside (1850-1925)
La transformacion T {F (t)} es lineal si para cada par de funciones F (t) y G (t) existen dos constantesdiferentes de cero C1 y C2, tal que
T {C1F (t) + C2G (t)} = T {C1F (t)}+ T {C2G (t)} = C1T {F (t)}+ C2T {G (t)} (3.1)
en donde, a T se le conoce como operador lineal.
Ejemplos conocidos de transformaciones lineales son:
1. La derivada
D {F (t)} = F ′ (t) ,
en donde D es el operador diferencial, y F (t) y F ′ (t) son llamadas funciones objeto e imagen, respec-tivamente. Por ejemplo, la funcion 4t3 es la imagen de t4.
2. La integracion
I {F (t)} =
x∫0
F (t) dt = f (x) ,
en donde I es el operador integral y f (x) es la imagen de F (t).
3. La multiplicacion por una funcion.
103

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Las transformaciones anteriores tienen transformacion inversa, es decir, si se conoce la funcion imagenes posible determinar la funcion objeto. Todas las transformaciones se restringen a algun tipo de funcion.La transformacion D {F (t)} se aplica a funciones diferenciables, y la transformacion I {F (t)} se aplica afunciones integrables.
Una transformacion integral lineal tiene la forma general
T {F (t)} =
b∫a
F (t)K (t, λ) dt = f (λ) , (3.2)
en donde K (t, λ) es una funcion prescrita de la variable t y de un parametro λ y es llamada nucleo detransformacion o kernel. Una transformada integral lineal especıfica, se define por la particularizacion delnucleo de transformacion y de los lımites de integracion, mientras que la funcion objeto F (t), debe de cumplircon varios requisitos para la existencia de la integral.
3.2. Definicion de la transformada de Laplace
Si F (t) esta definida para todos los valores de t ≥ 0, el nucleo de transformacion es K (t, s) = e−st
(λ = s), a = 0 y b = ∞, la transformacion (3.2) es la transformacion de Laplace, que es
L{F (t)} =
∞∫0
F (t) e−stdt = f (s) . (3.3)
La nueva funcion f (s) es llamada la transformada de Laplace de F (t), o imagen de la funcion objeto.En adelante y en lo posible, las funciones objeto se escriben con letras mayusculas y las funciones imagencon letras minusculas.
Ejemplos de transformadas de Laplace de algunas funciones.
Si, F (t) = 1, con la definicion de la trasformada de Laplace (3.3) se tiene que
L{1} =
∞∫0
e−stdt =
[−e
−st
s
]∞0
,
por lo tanto, cuando s > 0, el valor de la integral converge y es
L{1} =1
s, s > 0.
Si F (t) = ekt, cuando t > 0 y en donde k es una constante, a partir de (3.3) ,
L{ekt} =
∞∫0
ekte−stdt =
[−e
−(s−k)t
s− k
]∞0
,
por lo que, para que esta transformacion sea convergente es necesario que s > k y ası,
L{ekt} =1
s− k, s > k.
Con la ayuda de metodos de integracion se pueden obtener transformadas de otras muchas funciones,por instancia
L{t} =1
s2, L{t2} =
2
s3, L{sen kt} =
k
s2 + k2, L{coshkt} =
s
s2 − k2.
104

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
t
U tk( )
0
1
0 k
Figura 3.1: Escalon unitario, Uk (t).
cuando s > 0, para los dos primeros casos y s > |k| para el resto. Aunque hay otras formas mas simplesde obtener la imagen de funciones objeto, por ejemplo, la propiedad de linealidad de las transformadas deLaplace puede ser util para obtener la transformacion de algunas funciones,
L{cos kt} = L{eikt + e−ikt
2
}=
1
2
[1
s− ik+
1
s+ ik
]=
2s
2 (s2 − i2k2)
cuando s > k y cuando s < k, se llega a
L{cos kt} =s
s2 + k2s > |k| .
la cual tambien es obtenible a partir de la definicion.Hay que notar la necesidad de definir el dominio de s, para que la integral de transformacion de Laplace,
la cual es una integral impropia, sea convergente.
3.3. Condiciones suficientes y necesarias para la existencia de la
integral de transformacion
Para poder aplicar la transformada de Laplace a una funcion F (t) es suficiente que dicha funcion seaseccionalmente continua y de orden exponencial. Con esto se garantiza que existe la trasformada del Laplacey es unica, sin embargo existen algunas excepciones.
3.3.1. Funciones seccionalmente continuas
Una funcion F (t) es seccionalmente continua sobre un intervalo limitado a < t < b, si tal intervalo puedeser dividido en un numero finito de subintervalos, al interior de cada uno de los cuales F es continua ytiene limite finito conforme t se aproxime desde el interior a alguno de los puntos finales del subintervalo.La transformada de cada funcion de esta clase sobre el intervalo (a, b), existe; y es la suma de las integralesde las funciones continuas sobre los subintervalos. A continuacion se muestra el ejemplo de una funcionseccionalmente continua.
Funcion escalon unitario
La funcion escalon es muy practica para modelar una gran variedad de fenomenos y procesos fısicos, surepresentacion se muestra en la Figura 3.1. La representacion matematica se escribe como
Uk (t) =
{0 t < k1 t ≥ k
105

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
ası que su transformada de Laplace es
L{Uk (t)} =
∞∫0
Uk (t) e−stdt =
k∫0
Uk (t)︸ ︷︷ ︸=0
e−stdt+
∞∫k
Uk (t)︸ ︷︷ ︸=1
e−stdt =
∞∫k
e−stdt =
[−e
−st
s
]∞k
,
por lo tanto, cuando s > 0, la transformada de la funcion escalon unitario es
L{Uk (t)} =e−ks
s.
Como se observa, a pesar de que es una funcion seccionalmente continua en el tiempo, su funcion imagen esuna funcion continua.
3.3.2. Funciones de orden exponencial
Una funcion F (t) es de orden exponencial conforme t tiende a infinito, si existen algunas constantesfinitas M y α tales que el producto
e−αt |F (t)| < M o |F (t)| < Meαt
esta acotada para todo t mas grande que algun numero finito T . Por lo tanto, |F (t)| no debe crecer masrapido que Meαt, donde M es alguna constante. Lo anterior se expresa diciendo que F (t) es de ordenexponencial, o que F (t) es de O (eαt). Si F (t) es seccionalmente continua y de orden exponencial se asegurala convergencia absoluta de la integral de Laplace cuando s > α. Esta es una condicion suficiente mas nonecesaria, por ejemplo, una funcion que no cumple lo anterior es F (t) = 1/
√t, ya que esta tiende a infinito
cuando t −→ 0, pero su transformada existe y se obtiene como sigue,
L{
1√t
}=
∞∫0
1√te−stdt =
1√s
∞∫0
x−1/2e−xdx,
en donde se ha remplazado x = st. De acuerdo a la definicion de la funcion gamma
Γ (v) =
∞∫0
xv−1e−xdx
se tiene que
L{
1√t
}=
Γ(12
)√s,
y como Γ (1/2) =√π, se llega a la transformada
L{
1√t
}=
√π
s.
3.4. Transformadas de derivadas
Las transformadas de laplace son muy utiles para resolver problemas diferenciales, esto gracias a que latransformada de Laplace tiene la propiedad de que la transformada de una derivada es una funcion algebraicalineal de la transformada de la propia funcion. Esta propiedad se presenta en el siguiente teorema.
106

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Teorema 58 Sea F (t) una funcion continua de orden exponencial (eαt) conforme t −→ ∞, con primeraderivada F ′ (t) seccionalmente continua sobre cada intervalo finito 0 ≤ t ≤ T . Entonces, cuando s > α, latransformada de F ′ (t) existe, y es
L{F ′ (t)} = sf (s)− F (0) , s > α, (3.4)
en donde f (s) = L{F (t)}.Prueba. Por medio del metodo de integracion por partes, formalmente se tiene que
L{F ′ (t)} =
∞∫0
F ′ (t) e−stdt =[F (t) e−st
]∞0
+ s
∞∫0
F (t) e−stdt,
luego, si F (t) es de orden exponencial y siempre que s > α, se tiene que lımt−→∞ F (t) e−st = 0, y de estamanera la expresion anterior es
L{F ′ (t)} = −F (0) + sL{F (t)} ,que es similar a (3.4).
La formula (3.4) define la propiedad operacional fundamental o basica de la transformacion de Laplace.A partir de esta se pueden obtener las transformadas de derivadas de orden superior; Para obtener latransformada de la derivada de segundo orden se puede aplicar la ecuacion (3.4), aumentado en uno el ordende la derivada en toda la ecuacion,
L{F” (t)} = sL{F ′ (t)} − F ′ (0) ,
luego, sustituyendo (3.4) en la anterior se obtiene
L{F” (t)} = s [sf (s)− F (0)]− F ′ (0) ,
con lo cual se tiene la transformacion
L{F” (t)} = s2f (s)− sF (0)− F ′ (0) . (3.5)
Para encontrar la transformada de una tercera derivada se puede tomar (3.4) y aumentar en dos elorden de la derivada, y a esta sustituir (3.5). Ası siguiendo el mismo procedimiento, se puede encontrar latransformada de la derivada n-esima de F (t), la cual se presenta en el siguiente teorema.
Teorema 59 Sea F (t) y cada una de sus derivadas hasta el orden n − 1 funciones continuas con t ≥ 0 yde O (eαt); tambien sea F (n) (t) seccionalmente continua sobre cada intervalo limitado 0 ≤ t ≤ T . Entonces,la transformada de la derivda F (n) (t) existe cuando s > α, y es
L{F (n) (t)
}= snf (s)− sn−1F (0)− · · · − sF (n−2) (0)− F (n−1) (0) . (3.6)
La prueba se puede obtener siguiendo el procedimiento descrito anteriormente, el cual se deja al lector.Como se observa, (3.6) representa una funcion polinomial para s y una funcion lineal para f (s), propiedadque no solo es util en la resolucion de ecuaciones diferenciales sino que gracias a ella se pueden obtener mastransformadas. A continuacion se presentan algunos ejemplos de su utilizacion.
Ejemplo 60 Calculo de L{t}La funcion F (t) y su derivada F ′ (t) son continuas, y F (t) es de O (eαt) para alguna α positiva, ademas
F (0) = 0. Por lo tanto, aplicando la ecuacion ( 3.4) se tiene que
L{1} = sL{t} .Debido a que L{1} = 1
s , despejando L{t} se obtiene
L{t} =1
s2, s > α.
107

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 61 Calculo de L{sen (kt)}la funcion F (t) = sen (kt) y sus derivadas son continuas y limitadas, por lo que son de orden exponencial
con α = 0. Por lo tanto, aplicando (3.5), se tiene la ecuacion
−k2L{sen (kt)} = s2L{sen (kt)} − s sen (0)− k cos (0) ,
de donde puede despejarse la transformada buscada,
L{sen (kt)} =k
s2 + k2s > 0.
Ejemplo 62 Encuentre la transformada de G (t) =
t∫0
F (τ ) dτ , donde F (t) es seccionalmente continua y de
orden exponencial.Si F (t) es seccionalmente continua y de orden exponencial, entonces G (t) es continua. En este caso se puedever que G (0) = 0, y G′ (t) = F (t), excepto para aquellos valores de t para los cuales F (t) es discontinua,por lo que G′ (t) es seccionalmente continua sobre cada intervalo finito. Si la funcion tambien es de ordenexponencial, aplicando (3.4), se tiene que
L{F (t)} = sL{G (t)} ,de donde, la transformada de una integral esta dada por
L⎧⎨⎩
t∫0
F (τ ) dτ
⎫⎬⎭ =1
sL{F (t)} .
Ejemplo 63 Calculo de L{tm}, en donde m es un entero positivo.La funcion F (t) = tm satisface todas las condiciones del teorema 59, para alguna α positiva. a partir de
esta funcion se puede ver que
F (0) = F ′ (0) = · · · = F (m−1) (0) = 0,
F (m) (t) = m!, F (m+1) (t) = 0.
Al aplicar la formula (3.6) cuando n = m+ 1, se encuentra que
L{F (m+1) (t)
}= sm+1L{F (t)} −m!,
y por lo tanto,
L{tm} =m!
sm+1.
Esta expresion es solo es valida cuando m es un numero natural, ası que si se considera el caso en el queel exponente no es entero, se puede recurrir a la definicion de la transformada de Laplace (3.3),
L{tk} =
∞∫0
tke−stdt
︸ ︷︷ ︸t→x/s
=1
sk+1
∞∫0
xke−xdx, s > 0.
La integral del lado derecho representa la funcion gamma, o funcion factorial, con un argumento k + 1.Por lo tanto,
L{tk} =Γ (k + 1)
sk+1k > −1, s > 0.
108

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
3.5. Transformada inversa
Si se tiene una funcion f (s), que es la imagen de F (t), entonces existe un operador que permite encontrarF (t) a partir de f (s), este operador es L−1, y define la transformada inversa de Laplace, que es L−1 {f (s)} =F (t). Como L es un operador lineal, su correspondiente operador inverso L−1, cumple con la condicion
L−1 {Af (s) +Bg (s)} = AL−1 {f (s)}+BL−1 {g (s)} = AF (t) +BG (t) ,
es decir, que L−1 tambien es una transformada lineal y existe una relacion unıvoca entre ambos operadores.
3.6. Teorema de sustitucion
El teorema de sustitucion es util en la obtencion de diversas transformadas de Laplace, este teoremaenuncia:
Teorema 64 La sustitucion de s por s − a en la transformada de Laplace de una funcion F (t) de ordenexponencial, se corresponde a la multiplicacion de la funcion objeto F (t) por la funcion eat, es decir,
L{eatF (t)}= f (s− a) , s > α+ a. (3.7)
Prueba. La prueba es muy simple, y consiste en sustiuir en la definicion (3.3) s por s− a, es decir,
f (s− a) =
∞∫0
F (t) e−(s−a)tdt =
∞∫0
[eatF (t)
]e−stdt,
que cuando s− a > α es equivalente a
f (s− a) = L{eatF (t)}
con lo que queda demostrado el teorema.
3.7. Solucion de EDO simples
Gracias a la propiedad fundamental o basica es posibles resolver EDO utilizando la transformada deLaplace. Esta EDO deben ser lineales ya que la transformada de Laplace es un operador lineal. El proced-imiento consiste en aplicar la transfomada a la EDO y si esta es una EDO lineal de coeficientes constantes,entonces se obtendra una expresion algebraica para la(s) variable(s) incognita(s) que se puede resolver y unavez despejada dicha variable en funcion del parametro s se le puede aplicar la transformada inversa.
Ejemplo 65 Resolver la EDO Y ′′ (t) + 2kY ′ (t) + k2Y (t) = 0.A la EDO se le aplica la transformada de Laplace
L{Y ′′ (t) + 2kY ′ (t) + k2Y (t)}
= L{0}L {Y ′′ (t)}+ 2kL{Y ′ (t)}+ k2L{Y (t)} = 0
de la propiedad fundamental o basica de la trasformada de laplace se tiene que[s2L{Y (t)} − sY (0)− Y ′ (0)
]+ 2k [sL{Y (t)} − Y (0)] + k2L{Y (t)} = 0
y al definir L{Y (t)} = y (s) se llega a la ecuacion algebraica
s2y (s)− sY ′ (0)− Y (0) + 2ksy (s)− 2kY (0) + k2y (s) = 0
109

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
de donde se puede despejar y (s)(s2 + 2ks+ k2
)y (s) = sY ′ (0) + (1 + 2k)Y (0)
y (s) =sY ′ (0) + (1 + 2k)Y (0)
(s+ k)2 =
Y ′ (0)s+ k
+(1 + 2k)Y (0)− kY ′ (0)
(s+ k)2
de tablas
L−1
{1
s+ k
}= e−kt
L−1
{1
(s+ k)2
}= te−kt
por lo tanto la solucion es
L−1 {y (s)} = L−1
{Y ′ (0)s+ k
}+ L−1
{(1 + 2k)Y (0)− kY ′ (0)
(s+ k)2
}Y (t) = Y ′ (0) e−kt + [(1 + 2k)Y (0)− kY ′ (0)] te−kt,
como las condiciones iniciales no se especifican entonces
Y (t) = c1e−kt + c2te
−kt.
Ejemplo 66 Resolver la siguiente EDO
Y ′′ (t) + Y (t) = t
Se define que L{Y (t)} = y (s), ası que al aplicar la transformada de Laplace a la EDO se obtiene que
L{Y ′′ (t)}+ L{Y (t)} = L{t}s2y (s)− sY (0)− Y ′ (0) + y (s) =
1
s2
por lo que al despejar y (s) se obtiene que
y (s) =1
s2 (s2 + 1)+
s
s2 + 1Y (0) +
1
s2 + 1Y ′ (0)
el primer termino es equivalente a
1
s2 (s2 + 1)=
1 + s2 − s2
s2 (s2 + 1)=
1
s2− 1
s2 + 1
por lo tanto se tiene que
y (s) =1
s2+
s
s2 + 1Y (0) +
1
s2 + 1[Y ′ (0)− 1]
y utilizando las transformadas inversas
L−1
{1
s2
}= t, L−1
{s
s2 + 1
}= cos (t) , L−1
{1
s2 + 1
}= sen (t) ,
se obtiene la solucionY (t) = t+ Y (0) cos (t) + [Y ′ (0)− 1] sen (t) .
110

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 67 Resolver el siguiente sistema de EDO
Y ′ (t)− Z (t) = 1
Z ′′ (t) + Y (t) = 0
con las condiciones iniciales
Y (0) = 0, Z (0) = 1, Z ′ (0) = 0.
Se define que L{Y (t)} = y (s) y L{Z (t)} = z (s) ası que al aplicar la transformada a ambas EDO se tieneque
L{Y ′ (t)} − L{Z (t)} = L{1} → sy (s)− Y (0)− z (s) =1
s
L{Z ′′ (t)}+ L{Y (t)} = L{0} → s2z (s)− sZ (0)− Z ′ (0) + y (s) = 0
ası que al sustituir las condiciones se tienen dos ecuaciones con dos incognitas
sy (s)− z (s) =1
s
s2z (s) + y (s) = s
que al resolver de manera simultanea producen la solucion
y (s) =2s
s3 + 1
z (s) =s3 − 1
s (s3 + 1)=
1
s− 2
s (s3 + 1)
el polinomio del denominador es equivalente a s3 +1 = (s+ 1)(s2 − s+ 1
), ası que se pueden escribir como
sigue
y (s) =2s
(s+ 1)[(s− 1
2
)2+ 3
4
]z (s) =
1
s− 2
s (s+ 1)[(s− 1
2
)2+ 3
4
]Mediante fracciones parciales se tiene que
y (s) = − 2
3 (s+ 1)+
23
(s− 1
2
)+ 1(
s− 12
)2+ 3
4
z (s) = −1
s+
2
3 (s+ 1)+
4
3
(s− 1
2
)(s− 1
2
)2+ 3
4
por lo tanto sus trasformadas inversas son
L−1 {y (s)} = −2
3L−1
{1
s+ 1
}+
2
3L−1
{ (s− 1
2
)(s− 1
2
)2+ 3
4
}+ L−1
{1(
s− 12
)2+ 3
4
}
L−1 {z (s)} = −L−1
{1
s
}+
2
3L−1
{1
s+ 1
}+
4
3L−1
{ (s− 1
2
)(s− 1
2
)2+ 3
4
}
111

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
o bien
Y (t) = −2
3e−t +
2
3et/2 cos
(t
√3
2
)+
2√3et/2 sen
(t
√3
2
)
Z (t) = −1 +2
3e−t +
4
3et/2 cos
(t
√3
2
)Ejemplo 68 Resolver la siguiente ecuacion
aY ′ (t) + Y (t) = k
∫ t
0
Y (τ) dτ
Se define que L{Y (t)} = y (s) por lo tanto
aL{Y ′ (t)}+ L{Y (t)} = kL{∫ t
0
Y (τ ) dτ
}a [sy (s)− Y (0)] + y (s) =
k
sy (s)
de donde se puede despejar
y (s) =s
s2 + 1as− k
a
Y (0)
Las raıces del polinomio del denominador son s = − 12a ±
√1
4a2 + ka , por lo que y (s) es equivalente a
y (s) =s+ 1
2a(s+ 1
2a
)2 − (1
4a2 + ka
)Y (0)−12a(
s+ 12a
)2 − (1
4a2 + ka
)Y (0) .
Dependiendo de los signos y valores de k y a estas raıces pueden ser reales no repetidas si 14a2 +
ka > 0, raıces
reales repetidas si 14a2 + k
a = 0 y raıces complejas conjugadas si 14a2 + k
a < 0. Por lo tanto se tiene que
Si1
4a2+k
a> 0 : y (s) =
s+ 12a(
s+ 12a
)2 − ∣∣ 14a2 + k
a
∣∣Y (0)−12a(
s+ 12a
)2 − ∣∣ 14a2 + k
a
∣∣Y (0)
Si1
4a2+k
a= 0 : y (s) =
1
s+ 12a
Y (0)−12a(
s+ 12a
)2Y (0)
Si1
4a2+k
a< 0 : y (s) =
s+ 12a(
s+ 12a
)2+∣∣ 14a2 + k
a
∣∣Y (0)−12a(
s+ 12a
)2+∣∣ 14a2 + k
a
∣∣Y (0)
por lo tanto al aplicar las transformadas inversas de cada uno de los casos se obtienen las expresiones
Si1
4a2+k
a> 0 : Y (t) = Y (0)
⎡⎢⎢⎣√1 + 4ak cosh
(t√
14a2 + k
a
)− senh
(t√
14a2 + k
a
)√1 + 4ak
⎤⎥⎥⎦ e− t2a
Si1
4a2+k
a= 0 : Y (t) = Y (0)
(1− 1
2at
)e−
t2a
Si1
4a2+k
a< 0 : Y (t) = Y (0)
⎡⎢⎢⎣√|1 + 4ak| cos
(t√∣∣ 1
4a2 + ka
∣∣)− sen
(t√∣∣ 1
4a2 + ka
∣∣)√|1 + 4ak|
⎤⎥⎥⎦ e− t2a
112

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
t
F(t)
t
Fb(t)
O O (b,0)
Figura 3.2: Traslacion de F (t).
3.8. Teorema de traslacion
El teorema de traslacion es una version analoga al teorema 64, de acuerdo al cual, la multiplicacion de unafuncion objeto por una funcion exponencial corresponde a una sustitucion lineal para s en la transformada.Ahora se analizara la correspondecia que surge al multiplicar la funcion imagen por una funcion exponencial.
Teorema 69 Si f (s) = L{F (t)}, entonces para cualquier constante positiva b,
e−bsf (s) = L{Fb (t)} , (3.8)
donde Fb (t) es una funcion discontinua definida como
Fb (t) =
{0 cuando 0 < t < bF (t− b) cuando t > b
. (3.9)
Prueba. De acuerdo a la definicion de la transformada de Laplace (3.3),
f (s) =
∞∫0
F (t) e−stdt,
entonces al multiplicar por e−bs se tiene que
f (s) e−bs =
∞∫0
F (t) e−s(t+b)dt,
Al sustituir t+ b = τ , la integral anterior puede escribirse como
f (s) e−bs =
∞∫b
F (τ − b) e−sτdτ,
de esta manera si se define una funcion Fb (t) como en (3.9), se puede ver que la integral anterior es equivalentea
f (s) e−bs =
∞∫b
Fb (τ) e−sτdτ ,
que describe la transformada de Laplace de Fb (τ ).La funcion Fb (t) representa la traslacion de F (t) hacia la derecha en una distancia igual a b unidades
como se muestra en la Figura 3.2.La funcion Fb (t) tambien puede escribirse utilizando la definicion de la funcion escalon unitario, como
Fb (t) = Ub (t)F (t− b).
113

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
3.9. Funcion impulso
Es muy comun que en los sistemas fısicos actuen fuerzas externas de gran magnitud solo durante un lapsode tiempo muy corto (caıda de un rayo, golpes violentos, descargas electricas). Ası, la funcion:
Hh(t− b) =
⎧⎨⎩0 0 ≤ t < b1h b ≤ t < b+ h0 t ≥ b+ h
(3.10)
cuando h > 0, b > 0 puede servir como modelo matematico de este tipo de fuerzas. Por ejemplos para valoresmuy pequenos de h, Hh(t−b), es una funcion constante y de gran magnitud que es valida solo en un instantey se encuentra alrededor de b. La funcion descrita por la ecuacion (3.10) se llama pulso unitario, porque tienela propiedad de integracion:
∞∫0
Hh(t− b)dt = 1 (3.11)
Empleando la funcion escalon unitario esta funcion tambien se puede escribir como
Hh (t− b) =Ub (t)− Ub+h (t)
h
por lo que su transformada de Laplace es
L{Hh (t− b)} =L{Ub (t)} − L{Ub+h (t)}
h=
(1− e−hs
hs
)e−bs.
En la practica resulta mas conveniente trabajar con otro tipo de funcion impulso unitario conocido comofuncion delta de Dirac, δ (t− b), (que no es en sı una funcion) que aproxima Hh (t− b) mediante el lımite:
δ (t− b) = lımh→0
Hh (t− b) (3.12)
y que cumple con las siguientes propiedades:
δ (t− b) =
{ ∞ t = b0 t �= b
y
∞∫0
δ (t− b) dt = 1
De acuerdo a lo anterior, es posible entonces obtener la transformada de Laplace de la funcion delta deDirac con la hipotesis formal de que :
L{δ (t− b)} = lımh→0
L{Hh (t− b)} = lımh→0
[1− e−hs
hse−bs
]y como
lımh→0
1− e−hs
hs= lım
h→0
1−[1− hs+ (hs)2
2! − (hs)3
3! + · · ·]
hs= lım
h→0
[1− hs
2!+
(hs)2
3!− · · ·
]= 1
entonces la transformada de la funcion impulso unitario es
L{δ (t− b)} = e−sb. (3.13)
114

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ejemplo 70 Determinar la trayectoria de un proyectil al cual inicialmente se le aplica una fuerza igual aF0 en un instante muy pequeno, si inicialmente su posicion es X0 y su velocidad es cero.El modelo de este sistema se obtiene mediante un balance de fuerzas
maX =∑i
Fi
Donde m es la masa, aX la aceleracion en direccion X y Fi son las fuerzas aplicadas. Si se considera lafuerza inicial aplicada y la fuerza de friccion, entonces el balance es equivalente a:
md2X (t)
dt2= −μdX (t)
dt+ F0δ (t)
La solucion de esta EDO se puede obtener utilizando la transformada de Laplace, para lo cual se define queL{X (t)} = x (s), por lo tanto
mL{d2X (t)
dt2
}= −μL
{dX (t)
dt
}+ F0L{δ (t)}
m
[s2x (s)− sX (0)− dX (0)
dt
]= −μ [sx (s)−X (0)] + F0
como la posicion y velocidad inicial son cero, entonces se obtiene la ecuacion
ms2x (s) = −μsx (s) + F0
de donde se puede despejar x (s)
x (s) =F0/m
s (s+ μ)=
F0
mμ
(1
s− 1
s+ μ
).
De tablas se tiene las transformadas inversas L−1 {1/s} = 1, L−1 {1/ (s+ μ)} = e−μt, por lo tanto latransformada inversa de x (s) es
X (t) =F0
mμ
(1− e−μt
).
3.10. Convolucion
La convolucion es una operacion entre dos funciones de t que se corresponde con la multiplicacion entre susdos transformadas. La convolucion es de gran importancia en las matematicas operacionales ya que graciasa ella se pueden encontrar de manera directa la transformada inversa del producto de dos transformadas.En el siguiente teorema se presenta la convolucion.
Teorema 71 Si f (s) y g (s) son las transformadas de dos funciones F (t) y G (t) que son seccionalmentecontinuas en cada intervalo 0 ≤ t ≤ T y de orden exponencial O (eαt) conforme t tiende a infinito, entoncesla transformada de la convolucion, denotada como F (t) ∗G (t), exite cuando s > α y es igual a f (s) g (s).Ası la transformada inversa del producto f (s) g (s) esta dada por la formula
L−1 {f (s) g (s)} = F (t) ∗G (t) =
t∫0
F (τ)G (t− τ ) dτ (3.14)
Prueba. Sean F (t) y G (t) dos funciones seccionalmente continuas en cada intervalo finito 0 ≤ t ≤ T , y deorden exponencial. Sus transformadas estan dada por
f (s) = L{F (t)} , g (s) = L{G (t)} ,
115

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
donde se eligen que G (t) es igual a cero para toda t < 0, resultando que la funcion trasladada (ecuacion(3.9)) Gτ (t) = G (t− τ ), De acuerdo al teorema 69, dada una τ (τ ≥ 0),
e−sτg (s) = L{G (t− τ )} =
∞∫0
G (t− τ ) e−stdt,
por lo tanto, si se considera el producto de transformadas f (s) g (s), de acuerdo a la definicion de transfor-madas (3.3),
f (s) g (s) =
⎡⎣ ∞∫0
F (τ ) e−sτdτ
⎤⎦ g (s) = ∞∫0
F (τ )[e−sτg (s)
]dτ
=
∞∫0
F (τ )
∞∫0
G (t− τ) e−stdtdτ =
∞∫0
∞∫0
F (τ)G (t− τ ) e−stdtdτ .
En esta ultima se puede invertir el orden de integracion, y sacar e−st de la integral interior ya que nodepende de τ ,
f (s) g (s) =
∞∫0
∞∫0
F (τ)G (t− τ ) e−stdτdt
=
∞∫0
e−st
∞∫0
F (τ )G (t− τ) dτdt.
La integral interior puede reducirse a
∞∫0
F (τ)G (t− τ ) dτ =
t∫0
F (τ )G (t− τ) dτ ,
debido a que G (t) es igual a cero para toda t < 0, se cumple que G (t− τ) = 0 para toda t < τ , y∫∞τF (τ)G (t− τ ) dτ = 0. Ası el producto de las funciones imagen es
f (s) g (s) =
∞∫0
e−st
⎡⎣ t∫0
F (τ )G (t− τ) dτ
⎤⎦ dt,de donde se obtiene la definicion de la convolucion,
L−1 {f (s) g (s)} =
t∫0
F (τ)G (t− τ ) dτ
Algunos ejemplos de aplicacion de la convolucion se muestran enseguida.La convolucion tiene las siguientes propiedades:
Propiedad conmutativa,
F (t) ∗G (t) = G (t) ∗ F (t) =
t∫0
F (t− τ)G (τ ) dτ
116

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Propiedad distributiva,
F (t) ∗ [G (t) +H (t)] = F (t) ∗G (t) + F (t) ∗H (t)
Propiedad asociativa,F (t) ∗ [G (t) ∗H (t)] = [F (t) ∗G (t)] ∗H (t)
Estas propiedades se obtiene directamente de la manipulacion de la transformada (3.14).Las funciones F (t) = 1 y G (t) = eat, por ejemplo, satisfacen las condiciones del Teorema 71. Conse-
cuentemente,
L−1
{1
s21
s− a
}= t ∗ eat =
t∫0
τea(t−τ)dτ
= eatt∫
0
τe−aτdτ = eat[
1
−a(τ +
1
a
)e−aτ
]t0
=1
a2(eat − 1
)− 1
at
Mediante expansion en fracciones parciales se puede llegar al mismo resultado.Por otro lado, para la transformada 1
s51
(s+2)2se puede definir que f (s) = 1
s5 y g (s) = 1(s+2)2
por lo tanto
su transformada inversa se puede obtener mediante la convolucion
L−1
{1
s51
(s+ 2)2
}=
t4
4!∗ te−2t =
∫ t
0
τ4
4!(t− τ ) e−2(t−τ)dτ
=te−2t
4!
∫ t
0
τ4e2τdτ − e−2t
4!
∫ t
0
τ5e2τdτ
= − 1
192
(6te−2t + 15e−2t − 15 + 24t− 18t2 + 8t3 − 2t4
)Ademas existen ciertos casos en los que la convolucion es la unica alternativa, por ejemplo, para la
transformada e−a√
s
s se puede definir que f (s) = e−a√s y g (s) = 1
s por lo que de tablas se tiene que
F (t) = a
2√πt3e−a2/4t y G (t) = 1, ası que la convolucion de estas funciones es
L−1
{1
se−a
√s
}=
a
2√πt3
e−a2/4t ∗ 1 =
∫ t
0
a
2√πτ3
e−a2/4τdτ
para resolver esta integral se define la variable v = a2√τcuya diferencial es dv = − a
4√τ3dτ por lo que se tiene
L−1
{1
se−a
√s
}=
2√π
∫ ∞
a2√
t
e−v2
dv
Si se utiliza la definicion de la funcion error y la funcion complementaria de error
Funcion error : fer (x) =2√π
∫ x
0
e−v2
dv
Funcion complementaria de error : fcer (x) =2√π
∫ ∞
x
e−v2
dv = 1− fer (x)
entonces la transformada inversa es
L−1
{1
se−a
√s
}= fcer
(a
2√t
)
117

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
3.11. Solucion de ecuaciones diferenciales, integrales e integro-diferenciales
Gracias a la convolucion, las ecuaciones diferenciales lineales no homogeneas pueden resolverse mediantetransformadas de Laplace, y aun mas, las ecuaciones integro-diferenciales tambien pueden resolverse medianteeste metodo. A continuacion se muestra un ejemplo.
Ejemplo 72 Encontrar la solucion general de la ecuacion diferencial
Y ′′ (t) + k2Y (t) = F (t) ,
donde k es una constante.
Si se asume que F (t) al igual que Y (t) y Y ” (t) son seccionalmente continuas y de orden exponencial,
entonces al definir que L{Y (t)} = y (s) y L{F (t)} = f (s), y transformar la ecuacion diferencial se tieneque
s2y (s)− sY (0)− Y ′ (0) + k2y (s) = f (s) .
De esta manera se puede despejar y (s),
y (s) =f (s)
s2 + k2+
s
s2 + k2Y (0) +
1
s2 + k2Y ′ (0) ,
por lo tanto su transformada inversa es
Y (t) =1
kF (t) ∗ sen (kt) + Y (0) cos (kt) +
Y ′ (0)k
sen (kt) ,
ası la solucion general a esta ecuacion es
Y (t) = C1 cos (kt) + C2 sen (kt) +1
k
t∫0
sen [k (t− τ )]F (τ ) dτ ,
= C1 cos (kt) + C2 sen (kt) +1
k
t∫0
sen (kτ)F (t− τ ) dτ ,
donde C1 y C2 son constantes arbitrarias.Una ecuacion en la cual la funcion desconocida aparece dentro de una integral se llama ecuacion integral,
y si en dicha ecuacion aparecen derivadas de la misma variable desconocida, entonces se llama ecuacionintegro-diferencial. En ciertas aplicaciones, este tipo de integrales se pueden representar como convoluciones,de tal manera que mediante transformacion de Laplace se llega a ecuaciones algebraicas.
Ejemplo 73 Resuelva la ecuacion integral
Y (t) = a sen (t)− 2t∫0
Y (τ) cos (t− τ ) dτ
Si se asume que Y (t) es de orden exponencial, la ecuacion anterior puede escribirse como
Y (t) = a sen (t)− 2Y (t) ∗ cos (t) ,cuya transformada de Laplace es
y (s) =a
s2 + 1− 2s
s2 + 1y (s) ,
118

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
de donde se puede despejar y (s),
y (s) =a
(s+ 1)2 .
La transformada inversa de la expresion anterior es
Y (t) = ate−t.
Esta solucion puede validarse al ser sustituida en la ecuacion integral.
Ejemplo 74 Resolver para Y (t),
t∫0
Y (τ ) dτ − Y ′ (t) = t, Y (0) = 2.
La integral de esta ecuacion se puede ver como una convolucion, es decir,
1 ∗ Y (t)− Y ′ (t) = t,
por lo que su transformada de Laplace es
L{1 ∗ Y (t)} − L{Y ′ (t)} = L{t} ,1
sy (s)− [sy (s)− Y (0)] =
1
s2
que al sustituir la condicion inicial y despejar y (s) conduce a
y (s) =2s2 − 1
s (s2 − 1),
La expancion en fracciones parciales de la transformada anterior es
y (s) =2s2 − 1
s (s2 − 1)=
s2 − 1
s (s2 − 1)+
s2
s (s2 − 1)=
1
s+
s
s2 − 1,
por lo que su transformada inversa esY (t) = 1 + cosh (t) .
3.12. Derivadas de transformadas
Cuando la transformada de Laplace (3.3) se deriva con respecto del parametro s, se tiene que
df (s)
ds=
d
ds
⎡⎣ ∞∫0
F (t) e−stdt
⎤⎦=
∞∫0
F (t)d
ds
[e−st
]dt
=
∞∫0
− tF (t) e−stdt
en este caso se puede apreciar que f ′ (s) = −L{tF (t)}. Por otro lado, se puede apreciar en la definicion (3.3)que cuando s −→ ∞, f (s) −→ 0. Si se aplica este mismo procedimiento para obtener la segunda derivadade f (s) se tiene que
119

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
d2f (s)
ds2=
∞∫0
t2F (t) e−stdt = L{t2F (t)}.
Mientras que cuando s −→ ∞, f ′ (s) −→ 0. Se puede seguir aplicando este procedimiento, con lo cual seobtiene que la diferenciacion de la transformada de una funcion corresponce a la multiplicacion de la funcionpor −t, y de manera general, la derivada de orden n de f (s) es
dnf (s)
dsn= f (n) (s) = (−1)
n L{tnF (t)} , n = 1, 2, 3, . . . , (3.15)
teniendose ademas la condicion, f (n) (s) −→ 0 conforme s −→ ∞. Esta propiedad es valida siempre y cuandoF (t) sea seccionalmente continua y de orden exponencial.
3.12.1. Solucion de ED con coeficientes variables
La transformada (3.15) es muy util en la solucion de ecuaciondes diferenciales con coeficientes variables,a partir de ella se pueden obtener las transformadas de terminos diferenciales multiplicados por tn. Porejemplo
L{tY ′ (t)} = − d
ds[L{Y ′ (t)}] = − d
ds[sy (s)− Y (0)] = −sy′ (s)− y (s)
L{t2Y ′ (t)}=
d2
ds2[L{Y ′ (t)}] = d2
ds2[sy (s)− Y (0)] = sy′′ (s) + 2y′ (s)
L{tY ′′ (t)} = − d
ds[L{Y ′′ (t)}] = − d
ds
[s2y (s)− sY (0)− Y ′ (0)
]= −s2y′ (s)− 2sy (s) + Y (0)
Con esto se puede resolver EDO lineales de coeficientes variables.
Ejemplo 75 Resolver la EDO
tY ′′ (t)− Y ′ (t) + Y (t) = t2, Y (0) = 0
Se define que L{Y (t)} = y (s), ası que al aplicar la transformada de Laplace a la EDO se tiene
L{tY ′′ (t)} − L{Y ′ (t)}+ L{Y (t)} = L{t2} ,[−s2dy (s)
ds− 2sy (s) + Y (0)
]− [sy (s)− Y (0)] + y (s) =
2
s3
al remplazar la condicion inicial se llega a la ecuacion
dy (s)
ds+
(3
s− 1
s2
)y (s) = − 2
s5
que es una EDO lineal de primer orden con solucion
Factor integrante : e∫( 3
s− 1s2)ds = eln(s
3)+ 1s = s3e1/s
s3e1/sdy (s)
ds+(3s2 − s
)e1/sy (s) = − 2
s2e1/s
d
ds
[s3e1/sy (s)
]= − 2
s2e1/s
s3e1/sy (s) = C1 − 2
∫e1/s
ds
s2
120

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
la integral es equivalente a∫e1/s ds
s2 = − ∫ evdv ası que y (s) es igual a
y (s) =C1
s3e−1/s +
2
s3
Por la definicion de la trasformada de Laplace se tiene la condicion
lıms→∞ y (s) = 0
por lo tanto
lıms→∞ y (s) = lım
s→∞
[C1
s3e−1/s +
2
s3
]= 0
Para encontrar Y (t) solo falta aplicar la transformada inversa
L−1 {y (s)} = C1L−1
{1
s3e−1/s
}+ L−1
{2
s3
}de tablas L−1
{2s3
}= t2 y L−1
{e−a/s
sn+1
}=(ta
)n/2Jn(2√at)por lo tanto la transformada inversa es
Y (t) = tC1J2
(2√t)+ t2
Ejemplo 76 Resolver la EDOtY ′′ (t) + Y ′ (t) + tY (t) = 0
Se define que L{Y (t)} = y (s). De acuerdo a la definicion de derivadas de transformadas:
L{tY (t)} = − d
dsL{Y (t)} = −dy (s)
ds
L{tY ′′ (t)} = − d
dsL{Y ′′ (t)} = − d
ds
[s2y (s)− sY (0)− Y ′ (0)
]= −s2 dy (s)
ds− 2sy (s) + Y (0)
por lo tanto al transformar la EDO se tiene que
L{tY ′′ (t)}+ L{Y ′ (t)}+ L{tY (t)} = 0[−s2 dy (s)
ds− 2sy (s) + Y (0)
]+ [sy (s)− Y (0)] +
[−dy (s)
ds
]= 0
y reacomodando se llega a la EDO de primer orden
dy (s)
ds+
s
s2 + 1y (s) = 0
que es de variables separables cuya solucion es∫dy
y+
1
2
∫2s
s2 + 1ds = 0
ln [y (s)] +1
2ln(s2 + 1
)= ln (C1)
y (s) =C1√s2 + 1
De tablas
L{
1√s2 + a2
}= J0 (at)
por lo tanto la solucion esY (t) = C1J0 (t) .
121

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
3.13. Integracion de transformadas
De acuerdo a la definicion de una tranformada de Laplace (3.3) la integral de f (s) = L{F (t)} debe ser:
∫ ∞
s
f (s) ds =
∫ ∞
s
⎡⎣ ∞∫0
F (t) e−stdt
⎤⎦ ds = ∞∫0
F (t)
[∫ ∞
s
e−stds
]dt
=
∞∫0
F (t)
te−stdt
por lo tanto se llega a la expresion
L{F (t)
t
}=
∫ ∞
s
f (s) ds
efectuando este procedimiento de forma consecutiva se obtiene la expresion
L{F (t)
tn
}=
∫ ∞
s
· · ·∫ ∞
s︸ ︷︷ ︸n
f (s) ds · · · ds︸ ︷︷ ︸n
Ası por ejemplo, la transformada de sen(at)t debe ser igual a
L{sen (at)
t
}=
∫ ∞
s
a
s2 + a2ds =
[tan−1
( sa
)]∞s
= tan−1 (∞)− tan−1( sa
)=
π
2− tan−1
( sa
)
122

Capıtulo 4
Solucion de ecuaciones diferencialesparciales de la fısica-matematicapor transformadas de Laplace
Cuando se aplica la transformada de Laplace a EDP con n variables independientes es posible disminuirel numero de dichas variables independientes. Por ejemplo, si se tiene un problema con una EDP de dosvaribles independientes, (x, t), al aplicar la transformada de Laplace con respecto a la variable t es posiblereducir el problema a una EDO con variable independiente x.
4.1. Transformacion de Laplace para derivadas parciales
Cuando se tiene una derivada parcial su transformada de Laplace dependera de la variable independientecon respecto a la cual se este derivado y con respecto a la cual se este transformando. Por ejemplo, cuandose tiene la variable Y (x, t) y se define su transformada de Laplace con respecto a t
L{Y (x, t)} =
∫ ∞
0
Y (x, t) e−stdt = y (x, s)
entonces la variable x no se ve afectada por la transformacion. Por lo tanto x puede tener cualquier valor yel procedimiento de transformacion no se ve afectado, por ejemplo:
L{Y (0, t)} =
∫ ∞
0
Y (0, t) e−stdt = y (0, s) .
Para las derivadas con respecto a la(s) variable(s) no transformada(s) se tiene que
L{∂nY (x, t)
∂xn
}=
∫ ∞
0
∂nY (x, t)
∂xne−stdt =
∂n
∂xn
[∫ ∞
0
Y (x, t) e−stdt
]en donde se puede sacar la derivada parcial ya que es con respecto a la variable que no se esta transformandoy por lo tanto se puede invertir el orden de derivacion e integracion. Ası se obtiene la transformada
L{∂nY (x, t)
∂xn
}=dny (x, s)
dxn
en donde se ha sustituido la derivada parcial por una derivada ordinaria ya que la variable t se ha eliminadoy s es solamente un parametro. Por otro lado, para las derivadas con respecto a la variable transformada
L{∂nY (x, t)
∂tn
}=
∫ ∞
0
∂nY (x, t)
∂tne−stdt
123

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
no es posible invertir el orden de derivacion e integracion ya que la derivada es con respecto a la mismavariable que se esta integrando y por lo tanto se utiliza la formula de transformadas de derivadas (3.6),
L{∂nY (x, t)
∂tn
}= sny (x, s)− sn−1Y (x, 0)− · · · − s
∂n−2Y (x, 0)
∂tn−2− ∂n−1Y (x, 0)
∂tn−1(4.1)
sin embargo, en este caso la variable x no se altera y las derivadas deben ser parciales. Finalmente, cuando
se tiene derivadas cruzadas, como por ejemplo ∂2Y (x,t)∂t∂x , entonces su transformada debe ser
L{∂2Y (x, t)
∂t∂x
}=
∫ ∞
0
∂2Y (x, t)
∂x∂te−stdt =
∂
∂x
∫ ∞
0
∂Y (x, t)
∂te−stdt
=∂
∂x[sy (x, s)− Y (x, 0)] = s
dy (x, s)
dx− dY (x, 0)
dx.
en donde es posible invertir el orden de derivacion e integracion solamente en la variable x y por lo tanto seha utilizado la formula de transformacion para la primer derivada con respecto a t.
4.2. Solucion de problemas de la fısica-matematica
Como se observa en la transformada (4.1), al aplicar la transformada de Laplace a derivadas parciales
con respecto a la variable transformada se requieren conocer las condiciones Y (x, 0) , ∂Y (x,0)∂t , . . . , ∂
n−1Y (x,0)∂tn−1 ,
es decir condiciones tipo Cauchy. Por este motivo, en problemas de la Fısica-Matematica la transformadade Laplace generalmente se aplica a la variable temporal, ya que son necesarias las condiciones iniciales. Acontinuacion se presentan algunos ejemplos.
Ejemplo 77 Se tiene una cuerda semi-infinita, en donde uno de sus extremos se pone en movimiento.Determine el comportamiento de la cuerda.Solucion: El modelo para este sistema es la ecuacion de onda unidireccional
∂2Y (x, t)
∂t2= a2
∂2Y (x, t)
∂x2,
(t > 0x > 0
)(4.2)
con las condiciones:
Iniciales : Y (x, 0) = 0,∂Y (x, 0)
∂t= 0, x > 0 (4.3)
Frontera : Y (0, t) = F (t) , lımx→∞Y (x, t) = 0 t > 0 (4.4)
Para resolver este problema se propone utilizar la transformada de Laplace, ası que se define L{Y (x, t)} =y (x, s) por lo que al transformar la EDP (4.2) se tiene que
L{∂2Y (x, t)
∂t2
}= L
{a2∂2Y (x, t)
∂x2
}s2y (x, s)− sY (x, 0)− ∂Y (x, 0)
∂t= a2
d2y (x, s)
dx2
al sustituir las condiciones iniciales (4.3) se llega a la EDO
d2y (x, s)
dx2− s2
a2y (x, s) = 0, m2 −
( sa
)2= 0
esta es una EDO lineal de 2o orden homogenea de coeficientes constantes cuya solucion es
y (x, s) = C1e− s
ax + C2esax (4.5)
124

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
para evaluar C1 y C2 se deben transformar las condiciones frontera (4.4)
L{Y (0, t)} = L{F (t)} , =⇒ y (0, s) = f (s) ,
L{lımx→∞Y (x, t)
}= L{0} , =⇒ lım
x→∞ y (x, s) = 0.
Ası, al considerar el lımite cuando x tiene a ∞ en la solucion (4.5) se tiene que
lımx→∞ y (x, s) = 0 = lım
x→∞[C1e
− sax + C2e
sax]= C1 (0) + C2 (∞)
y para que se cumpla esta condicion entonces C2 debe ser cero. Mientras que en x = 0, de acuerdo a lasolucion (4.5) y la otra condicion frontera se tiene que
y (0, s) = C1e0 = f (s) =⇒ C1 = f (s) .
De esta manera la solucion imagen esy (x, s) = f (s) e−
sax.
Para obtener la solucion final se aplica la transformada inversa a y (x, s). Por la propiedad de traslacion setiene que
L−1{f (s) e−bs
}= Ub (t)F (t− b) =
{0 Si t < bF (t− b) Si t ≥ b
por lo tanto al definir b = x/a, la solucion es
Y (x, t) = Ux/a (t)F(t− x
a
)=
{0 Si x > atF(t− x
a
)Si x ≤ at
.
En esta solucion se tiene una translacion a lo largo de x de la onda que se impone en x = 0, es decir que laonda se propaga con velocidad a.
Ejemplo 78 Se tiene una cuerda estirada y en reposo que esta sujeta en el extremo x = 0. A tiempo cerola cuerda se suelta en el extremo contrario, por lo que la cuerda comienza a caer debido a la gravedad.Determinar la posicion de la cuerda en funcion del tiempo y del espacio.Solucion: El modelo para este sistema es:
∂2Y (x, t)
∂t2= a2
∂2Y (x, t)
∂x2− g ,
(t > 0x > 0
)con las condiciones
Iniciales : Y (x, 0) = 0,∂Y (x, 0)
∂t= 0, x > 0
Frontera : Y (0, t) = 0, lımx→∞
∂Y (x, t)
∂x= 0, t > 0
Para resolver este problema se define que L{Y (x, t)} = y (x, s), por lo tanto la transformada de Laplace dela EDP es
L{∂2Y (x, t)
∂t2
}= L
{a2∂2Y (x, t)
∂x2
}− L{g}
s2y (x, s)− sY (x, 0)− ∂Y (x, 0)
∂t= a2
d2y (x, s)
dx2− g
s
mientras que al sustituir las condiciones iniciales se llega a la EDO
d2y (x, s)
dx2− s2
a2y (x, s) =
g
a2s
125

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que de segundo orden lineal no homogenea de coeficientes constantes, cuya solucion es
Solucion total : y (x, s) = yH (x, s) + yP (x, s)
Ec. caracterıstica de la parte homogenea : m2 − (s/a)2= 0 → m = ±s/a
Solucion homogenea : yH (x, s) = C1e− s
ax + C2esax
Solucion particular : yP (x, s) = A, → 0− s2
a2A =
g
a2s→ A = − g
s3
y (x, s) = C1e− s
ax + C2esax − g
s3
Para evaluar C1 y C2 se deben transformar las condiciones frontera:
L{Y (0, t)} = L{0} =⇒ y (0, s) = 0
L{
lımx→∞
∂Y (x, t)
∂x
}= L{0} =⇒ lım
x→∞dy (x, s)
dx= 0
Para evaluar la condiciones del lımite se requiere derivar y (x, s)
dy (x, s)
dx= − s
aC1e
− sax +
s
aC2e
sax
y en el lımite cuando x→ ∞ se tiene entonces
lımx→∞
dy (x, s)
dx= lım
x→∞
[− saC1e
− sax +
s
aC2e
sax]= − s
aC1 (0) +
s
aC2 (∞) = 0
y por lo tanto C2 = 0. Por otro lado, en x = 0 y es
y (0, s) = C1e0 − g
s3= 0 =⇒ C1 =
g
s3,
ası la solucion imagen es
y (x, s) =g
s3e−
sax − g
s3.
Finalmente, la solucion buscada se obtiene aplicando transformada inversa a la expresion anterior, para locual se utilizan las siguientes transformadas inversas:
L−1
{1
s3
}=
t2
2
L−1{f (s) e−bs
}= Ub (t)F (t− b) =
{0 Si t < bF (t− b) Si t ≥ b
Utilizando de manera conjunta estas dos transformadas inversas y definiendo que f (s) = 1/s3 (F (t) = t2/2)se puede determinar que
L−1
{1
s3e−bs
}= Ub (t)
(t− b)2
2=
{0 Si t < b(t−b)2
2 Si t ≥ b
por lo tanto al aplicar la transformada inversa de la solucion imagen
L−1 {y (x, s)} = gL−1
{1
s3e−
sax
}− gL−1
{1
s3
},
Y (x, t) = gUx/a (t)
(t− x
a
)22
− gt2
2
126

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Figura 4.1: Transferencia de masa en una interfase.
y al sustituir la definicion de la funcion escalon se llega a la expresion
Y (x, t) =
{−g t2
2 Si at < x
g(t−x
a )2
2 − g t2
2 Si at ≥ x
o de forma equivalente
Y (x, t) =
{−g t2
2 Si x > at−g (t− x
2a
)xa Si x ≤ at
En este caso, tambien se tiene una solucion que se divide en dos partes, la primera parte es valida cuandox > at y representa una caıda libre, mientras que la segunda parte es cuando x ≤ at y describe una funciontipo catenaria que se forma cerca del origen, ya que la cuerda esta fija en Y = 0 para x = 0.
4.3. Solucion de modelos matematicos propios de la IngenierıaQuımica
4.3.1. Teorıa de la penetracion
En muchos casos el tiempo de exposicion de un fluido a la transferencia de masa es pequeno, y que, porende, no llega a desarrollarse el gradiente de concentracion caracterıstico del estado estacionario.
Una aplicacion a los casos en los cuales el lıquido este en movimiento turbulento muestra un remolinob que asciende desde las profundidades turbulentas del lıquido y que permanece expuesto un tiempo θ a laaccion del gas (ver Figura 4.1).
Al principio, la concentracion del gas disuelto en el remolino es CA,0 invariablemente y se considera queinternamente el remolino esta estancado. Cuando el remolino se expone al gas en la superficie, la concentracionen el lıquido en la interfase gas-lıquido es CA,i, la cual puede tomarse como la solubilidad en el equilibrio delgas en el lıquido. Durante el tiempo θ, la partıcula lıquida esta sujeta a difusion en estado no estacionario openetracion del soluto en la direccion z; Cuando hay tiempos cortos de exposicion y una difusion lenta enel lıquido, las moleculas de soluto en solucion nunca pueden alcanzar la profundidad, zb, correspondiente alespesor del remolino; por ello, desde el punto de vista del soluto la longitud de transferencia es basicamenteinfinito. Entonces, el modelo es
∂CA (z, t)
∂t= D
∂2CA (z, t)
∂z2,
(t > 0z > 0
)(4.6)
con las condiciones
Inicial : CA (z, 0) = CA,0, z > 0 (4.7)
Frontera : CA (0, t) = CA,i, lımz→∞CA (z, t) = CA,0, t > 0 (4.8)
127

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Para resolver este problema se define que L{CA (z, t)} =W (z, s), ası que al aplicar la trasformada a la EDP(4.6) se tiene que
L{∂CA (z, t)
∂t
}= L
{D∂2CA (z, t)
∂z2
}sW (z, s)− CA (z, 0) = D
d2W (z, s)
dz2
por lo que al sustituir la condicion inicial (4.7) se llega a la EDO
d2W (z, s)
dz2− s
DW (z, s) = −CA,0
D
que es lineal de segundo orden, no homogenea de coeficientes constantes con solucion
Polinomio caracterıstico : m2 − s
D= 0 , m = ±
√s/D
Solucion total : W (z, s) = B1e−z
√s/D +B2e
z√
s/D +CA,0
s
Las transformadas de las condiciones frontera (4.8) son:
L{CA (0, t)} = L{CA,i} =⇒ W (0, s) =CA,i
s
L{lımz→∞CA (z, t)
}= L{CA,0} =⇒ lım
z→∞W (z, s) =CA,0
s
En z = ∞, de acuerdo a la condicion del lımite se tiene que
lımz→∞W (z, s) = lım
z→∞
[B1e
−z√
s/D +B2ez√
s/D +CA,0
s
]= B1 (0) +B2 (∞) +
CA,0
s=CA,0
s
por lo tanto B2 = 0. Mientras que en z = 0, se tiene que
W (0, s) = B1e0 +
CA,0
s=CA,i
s=⇒ B1 =
CA,i − CA,0
s.
Ası, la solucion imagen es
W (z, s) = (CA,i − CA,0)e−z
√s/D
s+CA,0
s.
De tablas se tiene que
L−1
{1
s
}= 1
L−1
{e−a
√s
s
}= fcer
(a
2√t
)por lo tanto la solucion a este problema es
CA (z, t) = CA,0 + (CA,i − CA,0) fcer
(z
2√Dt
).
Este es el cambio de concentracion dentro del remolino. El flux en la interfase es entonces1
JA (0, t) =
[−D∂CA
∂z
]z=0
= (CA,0 − CA,i)
√D
πt,
1De acuerdo a la definicion de la funcion complementaria de error se tiene que CA (z, t) = CA,0 +(CA,i − CA,0
)2√π
∫∞z
2√
Dt
e−x2dx por lo que su derivada parcial con respecto a z es
∂CA(z,t)∂z
=(CA,i−CA,0)√
Dπtexp
(− z2
4Dt
),
mientras que en z = 0 se tiene que∂CA(0,t)
∂z=
(CA,i − CA,0
)/√Dπt.
128

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
mientras que el flux promedio durante el tiempo de contacto es
NA,prom =
∫ θ
0JA (0, t)dt
θ= kc,prom (CA,0 − CA,i) ,
donde kc,prom = 2√
Dπθ es el coeficiente local promedio de transferencia de masa.
4.3.2. Reactor tubular con difusion despreciable
Si se considera un reactor tubular en donde se lleva a cabo una reaccion de primer orden y ademas sepuede suponer que la difusion es despreciable, entonces un modelo adecuado es:
∂CA (z, t)
∂t= −v ∂CA (z, t)
∂z− kCA (z, t)
con las condiciones:
Inicial : CA (z, 0) = CA,i, z > 0
Frontera : CA (0, t) = CA,0, t > 0
Para determinar la distribucion de concentraciones se define L{CA (z, t)} = R (z, s), por lo que al aplicar latransformada de Laplace a la EDP se obtiene la expresion
L{∂CA (z, t)
∂t
}= −vL
{∂CA (z, t)
∂z
}− kL{CA (z, t)}
sR (z, s)− CA (z, 0) = −v dR (z, s)
dz− kR (z, s)
Si se sustituye la condicion inicial se tiene que
dR (z, s)
dz+s+ k
vR (z, s) =
CA,i
v.
Esta es una EDO lineal de primer orden con solucion
R (z, s) = B1e−( s+k
v )z +CA,i
s+ k.
La transformada de la condicion frontera es
L{CA (0, t)} = L{CA,0} , R (0, s) =CA,0
s
por lo que de acuerdo a la solucion imagen en z = 0 se tiene que
R (0, s) = B1e0 +
CA,i
s+ k=CA,0
s=⇒ B1 =
CA,0
s− CA,i
s+ k
De esta forma la solucion imagen es
R (z, s) =
(CA,0
s− CA,i
s+ k
)e−(
s+kv )z +
CA,i
s+ k,
= CA,0e−(
s+kv )z
s+ CA,i
1− e−(s+kv )z
s+ k.
129

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
La transfomada inversa de R (z, s) es
L−1 {R (z, s)} = CA,0e−k
v zL−1
{e−
zv s
s
}+ CA,iL−1
{1
s+ k
}− CA,iL−1
{e−
zv (s+k)
s+ k
},
De tablas se tienen las transformadas
1 : L−1
{1
se−bs
}= Ub (t)
2 : L−1
{1
s− a
}= eat
3 : L−1 {f (s− a)} = F (t) eat
al combinar la transformada 1 y 3 se tiene que
L−1
{1
s− ae−b(s−a)
}= Ub (t) e
at,
L−1
{e−
zv (s+k)
s+ k
}= Uz/v (t) e
−kt
por lo que la concentracion es
CA (z, t) = CA,0e−k
v zUz/v (t) + CA,ie−kt − CA,iUz/v (t) e
−kt,
CA (z, t) = CA,0e−k
v zUz/v (t) + CA,ie−kt − CA,iUz/v (t) e
−kt,
y al sustituir la funcion escalon unitario se llega a la solucion
CA (z, t) =
{CA,ie
−kt Si z > vt
CA,0e−k
v z Si z ≤ vt
4.3.3. Reactor tubular
Ahora se considera un reactor tubular en donde se lleva a cabo una reaccion de primer orden descritopor el modelo:
∂CA (z, t)
∂t= D
∂2CA (z, t)
∂z2− v
∂CA (z, t)
∂z− kCA (z, t)
con las condiciones:
Inicial : CA (z, 0) = CA,i, z > 0
Frontera : CA (0, t) = CA,0, lımz→∞
∂CA (z, t)
∂z= 0, t > 0
Para resolver este problema se define que L{CA (z, t)} = R (z, s), por lo que al aplicar la transformadade Laplace a la EDP se obtiene la expresion
L{∂CA (z, t)
∂t
}= DL
{∂2CA (z, t)
∂z2
}− vL
{∂CA (z, t)
∂z
}− kL{CA (z, t)}
sR (z, s)− CA (z, 0) = Dd2R (z, s)
dz2− v
dR (z, s)
dz− kR (z, s)
y al sustituye la condicion inicial se tiene que
d2R (z, s)
dz2− v
D
dR (z, s)
dz− s+ k
DR (z, s) = −CA,i
D
130

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Esta es una EDO lineal de segundo orden con solucion
m2 − v
Dm− s+ k
D= 0 ,
⎧⎨⎩ m1 = v2D +
√s+k+v2/2D
D
m2 = v2D −
√s+k+v2/2D
D
Como D, v y k son constantes positivas entonces m1 es una raız es positiva y m2 es una raız negativa ası queR (z, s) es
R (z, s) = (B1em1z +B2e
m2z) +CA,i
s+ k.
La derivada de R con respecto a z es
dR (z, s)
dz= m1B1e
m1z +m2B2em2z
Las transformadas de las condiciones frontera son:
L{CA (0, t)} = L{CA,0} =⇒ R (0, s) =CA,0
s
L{
lımz→∞
∂CA (z, t)
∂z
}= L{0} =⇒ lım
z→∞dR (z, s)
dz= 0
por lo tanto, al evaluar en el lımite cuando z → ∞
lımz→∞
dR (z, s)
dz= lım
z→∞ [m1B1em1z +m2B2e
m2z] = m1B1 (∞) +m2B2 (0) = 0
se concluye que B1 = 0, mientras que en z = 0,
R (0, s) = B2e0 +
CA,i
s+ k=CA,0
s=⇒ B2 =
CA,0
s− CA,i
s+ k
ası que la solucion es
R (z, s) = ev
2D z
(CA,0
s− CA,i
s+ k
)e− z√
D
√s+k+v2/2D
+CA,i
s+ k
y al aplicar la transformada inversa a la funcion imagen
L−1 {R (z, s)} = CA,0ev
2D zL−1
⎧⎨⎩e− z√
D
√s+k+v2/2D
s
⎫⎬⎭−CA,iev
2D zL−1
⎧⎨⎩e− z√
D
√s+k+v2/2D
s+ k
⎫⎬⎭+L−1
{CA,i
s+ k
}.
Para llegar a la solucion se requieren las transformadas inversas de
L−1
{e−b
√s−a
s
}, L−1
{1
s− c
}, L−1
{e−b
√s−a
s− c
}
en donde b = z/√D, c = −k y a = −
(k + v2
2D
).
De tablas se tiene que
L−1{e−b
√s}=
b
2√πt3
e−b2/4t y L−1 {f (s− a)} = F (t) eat,
por lo que al combinar ambas expresiones se llega a
L−1{e−b
√s−a
}=
b
2√πt3
exp
(at− b2
4t
).
131

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Por otro lado, si se utiliza la propiedad de convolucion L−1 {f (s) g (s)} = F (t)∗G (t) =∫ t
0 F (λ)G (t− λ) dλ,se tiene que
L−1
{1
s· e−b
√s−a
}= 1 ∗ 2√
πt3exp
(at− b2
4t
)=
2√π
∫ t
0
exp(aτ − b2
4τ
)√τ3
dτ
y
L−1
{1
s− c· e−b
√s−a
}= ect ∗ 2√
πt3exp
(at− b2
4t
)=
∫ t
0
2√πτ3
exp
(aτ − b2
4τ
)ec(t−τ)dτ
=2ect√π
∫ t
0
exp[(a− c) τ − b2
4τ
]√τ3
dτ .
Por lo tanto, la transformada inversa es
CA (z, t) =2CA,0e
v2D z
√π
∫ t
0
exp(−(k + v2
2D
)τ − z2
4Dτ
)√τ3
dτ
+CA,ie−kt
⎛⎝1− 2ev
2D z
√π
∫ t
0
exp[− v2
4Dτ
(2τ2 + (z/v)2
)]√τ3
dτ
⎞⎠ .
4.3.4. Intercambiador de calor de tubos concentricos a contracorriente
Se tiene un intercambiador de calor de tubos concentricos a contracorriente en donde la temperatura deentrada del fluido frıo es Tf y la de entrada del fluido caliente es Tc. Se puede suponer que la densidad deambos fluidos es constante; las velocidades de cada fluido son v1 = F1/A1 y v2 = F2/A2, respectivamente,donde Fi y Ai, i = 1, 2, son los flujos volumetricos y areas transversales al flujo de cada fluido.
Si se efectua un balance de energıa en cada fluido para una seccion infinitesimal del intercambiador setiene que
Fluido caliente :∂E1
∂t=[F1E1 + q1
]z− [
F1E1 + q1]z+Δz
− qc
Fluido Frıo :∂E2
∂t=[−F2E2 + q2
]z− [−F2E2 + q2
]z+Δz
+ qc
En donde Ei = (AiΔz) ρici (Ti − Tref), es la energıa total del fluido i, Ei = ρici (Ti − Tref ) es la energıaespecıfica del fluido i, qi = −Aiki
∂Ti
∂z es el flujo conductivo del fluido i y qc = pΔzU (T1 − T2), es eltermino de flujo convectivo entre los fluidos. Ademas, ρi, ci y ki son la densidad, la capacidad calorıfica, yla conductividad termica del fluido i. Finalmente, p es el perımetro de transferencia y U el coeficiente globalde transferencia. Por lo tanto los balances son
Fluido caliente :∂T1∂t
= −F1
A1
[T1]z+Δz − [T1]zΔz
+k1ρ1c1
[∂T1
∂z
]z+Δz
− [∂T1
∂z
]z
Δz− pU
A1ρ1c1(T1 − T2)
Fluido Frıo :∂T2∂t
=F2
A2
[T2]z+Δz − [T2]zΔz
+k2ρ2c2
[∂T2
∂z
]z+Δz
− [∂T2
∂z
]z
Δz+
pU
A2ρ2c2(T1 − T2)
En el lımite cuando Δz → 0 se obtiene las EDP
Fluido caliente :∂T1∂t
= −v1 ∂T1∂z
+ α1∂2T1∂z2
−H1 (T1 − T2)
Fluido Frıo :∂T2∂t
= v2∂T2∂z
+ α2∂2T2∂z2
+H2 (T1 − T2)
132

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
donde αi = ki/ρici y Hi = pU/ (Aiρici), i = 1, 2.Si se considera que el flujo es turbulento y que la conduccion termica es despreciable, entonces el modelo
del intercambiador se simplifica a
Fluido caliente :∂T1 (z, t)
∂t= −v1 ∂T1 (z, t)
∂z−H1 [T1 (z, t)− T2 (z, t)]
Fluido Frıo :∂T2 (z, t)
∂t= v2
∂T2 (z, t)
∂z+H2 [T1 (z, t)− T2 (z, t)]
Ademas se consideran las condiciones
Iniciales : T1 (z, 0) = T1,i , T2 (z, 0) = T2,i
Frontera : T1 (0, t) = Tc , T2 (L, t) = Tf
Tarea: Resolver el problema haciendo las siguientes suposiciones:
H1 = H2 = H
v1 = v2 = v
T1,i = T2,i = Tc = 0
Nota: Pueden utilizarse las siguientes identidades
senh (x) = x
(1 +
x2
π2
)(1 +
x2
4π2
)(1 +
x2
9π2
)· · ·
= x+x3
3!+x5
5!+x7
7!+ · · ·
cosh (x) =
(1 +
4x2
π2
)(1 +
4x2
9π2
)(1 +
4x2
25π2
)· · ·
= 1 +x2
2!+x4
4!+x6
6!+ · · ·
Para resolver este problema se definen las transformadas L{T1 (z, t)} = W1 (z, s) y L{T2 (z, t)} =W2 (z, s), por lo tanto al aplicar la transformada de Laplace a las dos EDP se tiene
Fluido caliente : L{∂T1 (z, t)
∂t
}= −v1L
{∂T1 (z, t)
∂z
}−H1 [L{T1 (z, t)} − L{T2 (z, t)}]
Fluido Frıo : L{∂T2 (z, t)
∂t
}= v2L
{∂T2 (z, t)
∂z
}+H2 [L{T1 (z, t)} − L{T2 (z, t)}]
es decir
Fluido caliente : sW1 (z, s)− T1 (z, 0) = −v1 dW1 (z, s)
dz−H1W1 (z, s) +H1W2 (z, s)
Fluido Frıo : sW2 (z, s)− T2 (z, 0) = v2dW2 (z, s)
dz+H2W1 (z, s)−H2W2 (z, s)
y al sustituir las condiciones iniciales se llega al sistema de EDO lineales de coefientes constantes:
dW1 (z, s)
dz+s+H1
v1W1 (z, s)− H1
v1W2 (z, s) =
T1,iv1
dW2 (z, s)
dz+H2
v2W1 (z, s)− s+H2
v2W2 (z, s) = −T2,i
v2
133

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Una forma de resolver este sistema consiste en escribirlo en terminos de una sola variable, para lo cual sedespeja W2 (z, s) en la primera ecuacion
W2 (z, s) =1
H1
[v1dW1 (z, s)
dz+ (s+H1)W1 (z, s)− T1,i
]y deriva con respecto a z
dW2 (z, s)
dz=
v1H1
d2W1 (z, s)
dz2+s+H1
H1
dW1 (z, s)
dz
En esta ecuacion se puede sustituir la segunda ecuacion
s+H2
v2W2 (z, s)− H2
v2W1 (z, s)− T2,i
v2=
v1H1
d2W1 (z, s)
dz2+s+H1
H1
dW1 (z, s)
dz
y al remplazar W2 (z, s) se llega a la EDO de segundo orden lineal de coeficientes constantes no homogeneapara W1 (z, s)
d2W1 (z, s)
dz2+
(s+H1
v1− s+H2
v2
)dW1 (z, s)
dz− (s+H1) (s+H2)−H1H2
v1v2W1 (z, s) = −H1T2,i + (s+H2)T1,i
v1v2
La solucion de esta ecuacion es
Ecuacion caracterıstica : m2 + a (s)m− b (s) = 0 , m1,2 = −a (s)2
±√a2 (s)
4+ b (s)
donde a (s) = s+H1
v1− s+H2
v2y b (s) = (s+H1)(s+H2)−H1H2
v1v2. Por lo tanto la solucion homogenea es
W1,H (z, s) = c1em1z + c1e
m2z
mientras que la solucion particular debe ser una constante igual aH1T2,i+(s+H2)T1,i
(s+H1)(s+H2)−H1H2y por lo tanto la
solucion total es
W1 (z, s) = c1em1z + c2e
m2z +H1T2,i + T1,i (s+H2)
(s+H2) (s+H1)−H1H2
o si se define β (s) =√
a2(s)4 + b (s) entonces la solucion tambien es equivalente a
W1 (z, s) = e−a(s)2 z [c1 cosh (β (s) z) + c2 senh (β (s) z)] +
H1T2,i + T1,i (s+H2)
(s+H2) (s+H1)−H1H2
donde c1 = c1 + c2 y c2 = c1 − c2.Si se define que T1,i = T2,i = Tc = 0 y H1 = H2 = H , v1 = v2 = v entonces las constantes a (s), b (s),
β (s) y las raıces del polinomio caracterıstico son
a (s) = 0 , b (s) =(s+H)2 −H2
v2=
(s+ 2H) s
v2,
β (s) =1
v
√(s+ 2H) s , m1,2 = ±1
v
√(s+ 2H) s
mientras que la solucion se reduce a
W1 (z, s) = c1eβ(s)z + c2e
−β(s)z
oW1 (z, s) = c1 cosh (β (s) z) + c2 senh (β (s) z) .
134

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Si se transforman las condiciones frontera
L{T1 (0, t)} = L{0} =⇒ W1 (0, s) = 0,
L{T2 (L, t)} = L{Tf} =⇒ W2 (L, s) =Tfs,
en z = 0,W1 (0, s) = c1 cosh (0) + c2 senh (0) = c1 = 0.
Por otro lado, al evaluar en z = L para W2
W2 (L, s) =1
H
[vdW1 (L, s)
dz+ (s+H)W1 (L, s)
]=Tfs
se llega a una condicion de tercer tipo para W1,
dW1 (L, s)
dz+s+H
vW1 (L, s) =
HTfv
1
s,
y como
W1 (z, s) = c2 senh (β (s) z)
dW1 (z, s)
dz= β (s) c2 cosh (β (s) z)
entonces en z = L la condicion frontera es
β (s) c2 cosh (β (s)L) +s+H
vc2 senh (β (s)L) =
HTfv
1
s
de donde se puede despejar la constante c2
c2 =HTf
s [vβ (s) cosh (β (s)L) + (s+H) senh (β (s)L)],
por lo tanto la solucion para W1 (z, s) es
W1 (z, s) =HTf senh (β (s) z)
s [vβ (s) cosh (β (s)L) + (s+H) senh (β (s)L)],
mientras que W2 (z, s) es igual a
W2 (z, s) = Tfvβ (s) cosh (β (s) z) + (s+H) senh (β (s) z)
s [vβ (s) cosh (β (s)L) + (s+H) senh (β (s)L)].
Si se utiliza la identidad trigonometrica
cosh (x± y) = cosh (x) cosh (y)± senh (x) senh (y)
entonces al definir que A = cosh (y) y B = senh (y), como tanh (y) = B/A se cumple que
cosh
[x± tanh−1
(B
A
)]= A cosh (x)±B senh (x) ,
ası que el denominador de W1 (z, s) y W2 (z, s), que es el mismo, es equivalente a
svβ (s) cosh
[β (s)L+ tanh−1
(s+H
vβ (s)
)].
135

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ademas, de acuerdo a las definiciones de las funciones hiperbolicas:
senh (β (s) z) = β (s) z
∞∏n=1
[1 +
(β (s) z
nπ
)2],
senh (β (s)L) = β (s)L
∞∏n=1
[1 +
(β (s)L
nπ
)2],
cosh (β (s)L) =∞∏n=1
[1 +
(2β (s)L
(2n− 1)π
)2],
entonces se tiene que
cosh
[β (s)L+ tanh−1
(s+H
vβ (s)
)]=
∞∏n=1
[1 +
(2γ (s)L
(2n− 1)π
)2]
donde
γ (s) = β (s) +1
Ltanh−1
(s+H
vβ (s)
),
y la solucion para W1 (z, s) y W2 (z, s) es equivalente a
W1 (z, s) =HTfv
senh (β (s) z)
sβ (s) cosh (γ (s)L)
=HTfv
z∞∏n=1
[1 +
(β(s)znπ
)2]s
∞∏n=1
[1 +
(2γ(s)L(2n−1)π
)2] ,
W2 (z, s) = Tfcosh [γ (s) z]
s cosh [γ (s)L]
= Tf
∞∏n=1
[1 +
(2γ(s)z
(2n−1)π
)2]s
∞∏n=1
[1 +
(2γ(s)L(2n−1)π
)2] .
Es decir que las raıces para el denominador de ambas expresiones son s = 0 y s = rn, n = 1, 2, 3, . . ., dondern es la solucion de la ecuacion
1 +
(2γ (s)L
(2n− 1)π
)2
= 0, n = 1, 2, 3, . . .
Por lo tanto, si se aplican fracciones parciales las soluciones tienen la forma
W1 (z, s) =A0 (z, L)
s+
∞∑n=1
An (z, L)
s− rn
W2 (z, s) =B0 (z, L)
s+
∞∑n=1
Bn (z, L)
s− rn
136

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
donde los coeficientes An (z, L) y Bn (z, L) son coeficientes que se obtiene mediante fracciones parciales,entonces la transformada inversa para W1 (z, s) y W2 (z, s) son
T1 (z, t) = A0 (z, L) +∞∑n=1
An (z, L) ernt
T1 (z, t) = B0 (z, L) +
∞∑n=1
Bn (z, L) ernt
4.3.5. Conduccion de calor en una placa
Se tiene una placa de longitud L inicialmente a temperatura constante T0 y cuyos extremos se mantienea cero grados centrıgrados mientras que sus fronteras laterales estan aisladas. Por lo tanto ocurre unatransferencia de calor debido a la conduccion. El modelo que describe este sistema es
∂T (x, t)
∂t= α
∂2T (x, t)
∂x2,
(t > 0
0 < x < L
)con las condiciones
Inicial : T (x, 0) = T0, 0 < x < L
Frontera : T (0, t) = 0, T (L, t) = 0, t > 0
Se define la transformada de Laplace L{T (x, t)} = T (x, s), entonces la transformada de la EDP es
L{∂T (x, t)
∂t
}= αL
{∂2T (x, t)
∂x2
}sT (x, s)− T (x, 0) = α
d2T (x, s)
dx2
y al sustituir la condicion inicial se llega a la EDO lineal no homogenea de coeficientes constantes
d2T (x, s)
dx2− s
αT (x, s) = −T0
α
cuya solucion es
T (x, s) = c1e−x
√s/α + c2e
x√
s/α +T0s
o
= c1 senh
(x
√s
α
)+ c2 cosh
(x
√s
α
)+T0s
Las transformadas de las condiciones frontera son
L{T (0, t)} = L{0} =⇒ T (0, s) = 0
L{T (L, t)} = L{0} =⇒ T (L, s) = 0
ası que en x = 0 y en x = L se tiene que
T (0, s) = c1 + c2 +T0s
= 0
T (L, s) = c1e−L
√s/α + c2e
L√
s/α +T0s
= 0
137

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
o
T (0, s) = c1 senh (0) + c2 cosh (0) +T0s
= 0
T (L, s) = c1 senh
(L
√s
α
)+ c2 cosh
(L
√s
α
)+T0s
= 0
por lo tanto la solucion para c1 y c2 es(1 1
e−L√
s/α eL√
s/α
)(c1c2
)=
(−T0
s
−T0
s
)
c1 =
∣∣∣∣∣−T0
s 1
−T0
s eL√
s/α
∣∣∣∣∣∣∣∣∣∣ 1 1
e−L√
s/α eL√
s/α
∣∣∣∣∣=
T0
s
(1− eL
√s/α
)eL
√s/α − e−L
√s/α
, c2 =
∣∣∣∣∣ 1 −T0
s
e−L√
s/α −T0
s
∣∣∣∣∣∣∣∣∣∣ 1 1
e−L√
s/α eL√
s/α
∣∣∣∣∣=
−T0
s
(1− e−L
√s/α
)eL
√s/α − e−L
√s/α
mientras que para c1 y c2
c2 = −T0s
c1 =T0s
cosh(L√
sα
)− 1
senh(L√
sα
)Ası que al sustituir estas constantes se obtiene
T (x, s) =
T0
s
(1− eL
√s/α
)eL
√s/α − e−L
√s/α
e−x√
s/α +−T0
s
(1− e−L
√s/α
)eL
√s/α − e−L
√s/α
ex√
s/α +T0s
=T0s
cosh(L√
sα
)− 1
senh(L√
sα
) senh
(x
√s
α
)− T0
scosh
(x
√s
α
)+T0s
o reacomodando
T (x, s) =T0s
e(x−L)√
s/α − e−(x−L)√
s/α
eL√
s/α − e−L√
s/α− T0
s
ex√
s/α − e−x√
s/α
eL√
s/α − e−L√
s/α+T0s
=T0s
senh[(x− L)
√s/α
]senh
(L√s/α
) − T0s
senh(x√s/α
)senh
(L√s/α
) +T0s
en donde se ha utilizada la identidad senh (x± y) = senh (x) cosh (y)± cosh (x) senh (y). De tablas
L−1
{1
s
}= 1
L−1
{senh (z
√s)
s senh (a√s)
}=
z
a+
2
π
∞∑n=1
(−1)n
nsen
(nπza
)e−(nπ/a)2t,
ası que aplicando estas formulas la solucion es
T (x, t) = T0
[x− L
L+
2
π
∞∑n=1
(−1)n
nsen
(nπL
(x− L))e−α(nπ/L)2t
]
−T0[x
L+
2
π
∞∑n=1
(−1)n
nsen
(nπLx)e−α(nπ/L)2t
]+ T0
138

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
o reacomodando
T (x, t) =2
πT0
∞∑n=1
(−1)n
n
[sen
(nπLx− nπ
)− sen
(nπLx)]e−α(nπ/L)2t.
Ahora se utilizando la identidad trigonometrica
sen(nπLx− nπ
)= sen
(nπLx)cos (nπ)− sen (nπ) cos
(nπLx)
= (−1)nsen
(nπLx)
ası que la solucion es
T (x, t) =2
πT0
∞∑n=1
1− (−1)n
nsen
(nπLx)e−α(nπ/L)2t
139

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
140

Capıtulo 5
Metodo de Fourier para la solucion deecuaciones diferenciales parcialesde la fısica-matematica
El metodo de separacion de variables es una herramienta poderosa para encontrar la solucion de problemaslineales de la fısica-matematica, en su proceso se obtienen varias ecuaciones diferenciales ordinarias a partirde la ecuacion diferencial parcial, con lo cual, se simplifica la solucion del problema.
5.1. Etapas generales del metodo de separacion de variables
El metodo de Fourier o metodo de separacion de variables (MSV) se puede utilizar para resolver problemasde la fısica-matematica homogeneos lineales, es decir, problemas descritos por
Una ecuacion diferencial parcial homogenea lineal de segundo orden sin derivadas cruzadas,
Si se tiene dos variables independientes, dos condiciones homogeneas para la misma variable, evaluadasen dos puntos distintos.
Al cumplirse estas condiciones es posible generar un problema de Sturm-Liouville que es la base funda-mental del metodo.
Algunos ejemplos en donde se puede o no aplicar este metodo se muestran a continuacion:
Considere el siguiente sistema que describe el comportamiento de una cuerda bajo la accion de la gravedad:
∂2Y (x, t)
∂t2= a2
∂2Y (x, t)
∂x2− g
(t > 0
0 < x < L
)no es una EDP homogenea
Y (x, 0) = 0 Condicion homogenea
∂Y (x, 0)
∂t= 0 Condicion homogenea
Y (0, t) = 1 condicion no homogenea
Y (L, t) = 0 condicion homogenea
este problema no es homogeneo ya que la EDP no es homogenea y ademas, a pesar de que se tiene doscondiciones homogeneas para el tiempo, ambas estan evaluadas a t = 0 por lo que no se tiene dos condiciones
141

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
homogeneas para la misma variable evaluadas en dos puntos distintos. Por otro lado, el problema
∂2Y (x, t)
∂t2= a2
∂2Y (x, t)
∂x2
(t > 0
0 < x < L
)EDP homogenea
Y (x, 0) = f (x) Condicion no homogenea
∂Y (x, 0)
∂t= 0 Condicion homogenea
Y (0, t) = 0 condicion homogenea
Y (L, t) = 0 condicion homogenea
que describe las vibracion de una cuerda sin gravedad si es homogeneo al igual que el siguiente problema:
∂T (x, t)
∂t= α
∂2T (x, t)
∂x2−HT (x, t) EDP homogenea
T (x, 0) = f (x) Condicion no homogenea
T (0, t) = 0 Condicion homogenea
∂T (L, t)
∂x= −HT (L, t) Condicion homogenea
Cuando se tiene un problema no homogeneo no es posible aplicar el MSV, sin embargo, se pueden proponercambios de varaibles para transformarlo en un problema homogeneo como se estudiara en la seccion 5.3.2.
Si se tiene mas de dos variables independientes, entonces tambien se puede aplicar el metodo como severa mas adelante en la seccion 5.3.3.
El metodo de separacion de variable consiste en proponer que la variable incognita, dependiente de nvariables independientes, es igual al producto de n funciones, cada una de las cuales solamente depende deuna variable independiente diferente entre sı. Por ejemplo si la variable dependiente es T (x, y, z, t) entoncesse debe proponer que
T (x, y, z, t) = ξ (x) η (y) ζ (z) θ (t)
Al utilizar esta definicion en el problema homogeneo se obtendran n ecuaciones diferenciales ordianariashomogeneas que se pueden resolver de menera independiente.
5.1.1. Problema homogeneo que genera una serie de Fourier de senos
Supongamos que se tiene una barra idealmente aislada para llevar a cabo transferencia de calor solamenteen direccion x, dentro de la cual inicialmente existe una distribucion de temperatura que se puede expresarcomo una funcion de la posicion. En el instante t = 0, los extremos x = 0 y x = L se colocan a temperaturacero y son mantenidos a esa temperatura, con lo cual se tendra una disipacion del calor hacia los extremos.Se desea evaluar la distribucion de temperatura como una funcion de la posicion y del tiempo, T (x, t).
Este proceso lo gobierna la ecuacion de calor
∂T (x, t)
∂t= α
∂2T (x, t)
∂x2, 0 < x < L, t > 0, (5.1)
la condicion inicialT (x, 0) = f (x) , 0 < x < L, (5.2)
y condiciones frontera
T (0, t) = 0, t > 0, (5.3)
T (L, t) = 0, t > 0. (5.4)
El problema anterior consta de una ecuacion diferencial parcial de segundo orden homogenea, una condi-cion inicial no homogenea y dos condiciones frontera homogeneas. Este tipo de problemas son llamados
142

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
homogeneos. Hay que notar que la ecuacion diferencial parcial contiene tres derivadas y tres condicionescon lo cual se dice que el problema esta totalmente determinado. El metodo de separacion de variables esespecıfico para este tipo de problemas.
La suposicion fundamental del MSV es que la variable dependiente se considera igual a un producto defunciones, en donde cada una de estas, depende solo de una variable independiente. En este caso
T (x, t) = ξ (x) η (t) , (5.5)
esta solucion propuesta debe satisfacer la ecuacion diferencial parcial (5.1) y las condiciones frontera (5.3) y(5.4).
Por lo tanto, al sustituir la ecuacion (5.5) en (5.1) se obtiene
∂
∂t[ξ (x) η (t)] = α
∂2
∂x2[ξ (x) η (t)] , 0 < x < L, t > 0,
ξ (x)dη (t)
dt= αη (t)
d2ξ (x)
dx2, 0 < x < L, t > 0,
la cual al ser dividida por αξ (x) η (t) es
1
αη (t)
dη (t)
dt=
1
ξ (x)
d2ξ (x)
dx2
Cada lado es independiente del otro ya que x y t son variables independientes entre sı, por lo tanto cadalado debe ser constante es decir
1
αη (t)
dη (t)
dt= μ =
1
ξ (x)
d2ξ (x)
dx2
donde μ es la constante de separacion cuyos valores por el momento son desconocidos. Por lo tanto se obtienedos EDO homogeneas
dη (t)
dt= αμη (t) (5.6)
d2ξ (x)
dx2− μξ (x) = 0 (5.7)
De la misma forma, al sustituir la definicion (5.5) en las condiciones homogeneas (5.3) y (5.4) se obtiene lascondiciones
T (0, t) = ξ (0) η (t) = 0,
T (L, t) = ξ (L) η (t) = 0,
como se requiere que η (t) �= 0 para que la solucion propuesta (5.5) no sea trivial, entonces se concluye que
ξ (0) = 0 (5.8)
ξ (L) = 0 (5.9)
La EDO (5.7) junto con sus condiciones (5.8) y (5.9) forma un problema homogeneo denominado problemacaracterıstico cuya solucion depende del valor de la constante de separacion (ver Tabla 5.1). La unica solucionno trivial a este problema es
ξ (x) = c1 sen (λx)
denominada funcion caracterıstica, donde λ se conoce como valor caracterıstico y se obtiene al resolver laecuacion
sen (λL) = 0
143

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Caso μ = λ2> 0 μ = 0 μ = −λ2< 0d2ξ(x)dx2 − λ2ξ (x) = 0 d2ξ(x)
dx2 = 0 d2ξ(x)dx2 + λ2ξ (x) = 0
EDO m2 − λ2 = 0 m2 = 0 m2 + λ2 = 0=⇒ m = ±λ =⇒ m = 0, 0 =⇒ m = ±λi
Solucion general ξ (x) = c1eλx + c2e
−λx ξ (x) = c1x+ c2 ξ (x) = c1 sen (λx) + c2 cos (λx)
Evaluacion de ξ (0) = 0 = c1 + c2 ξ (0) = 0 = c2 ξ (0) = 0 = c2la condicion ∴ c2 = −c1 ∴ c2 = 0 ∴ c2 = 0(5.8) ξ (x) = c1
(eλx − e−λx
)ξ (x) = c1x ξ (x) = c1 sen (λx)
Evaluacion de ξ (L) = 0 = c1(eλL − e−λL
)ξ (L) = 0 = c1L ξ (L) = 0 = c1 sen (λL)
la condicion como eλL > e−λL como L > 0 Para que c1 �= 0 sen (λL) = 0(5.9) entonces c1 = 0 entonces c1 = 0 =⇒ λL = nπ, n = 1, 2, 3, . . .
Solucion ξ (x) = 0, trivial ξ (x) = 0, trivial ξ (x) = c1 sen(nπL x
)Cuadro 5.1: Solucin al problema caracterstico de la serie de Fourier de senos.
conocida como ecuacion caracterıstica. Los posibles valores son
μ = −λ2 = −(nπL
)2, n = 1, 2, 3, . . .
Por otro lado la solucion para η (t) es∫dη (t)
η (t)= αμ
∫dt −→ ln (η (t)) = ln (c3) + αμt ∴ η (t) = c3e
αμt.
En resumen la solucion para ξ (x) y η (t) no es unica, sino que se tiene un numero infinito de soluciones
ξn (x) = c1 sen(nπL x
)ηn (t) = c3e
−α(nπL )2t
}n = 1, 2, 3, . . .
que de acuerdo a la solucion propuesta (5.5) se tiene que
T (x, t) = ξn (x) ηn (t) = sen(nπLx)e−α(nπ
L )2t, n = 1, 2, 3, . . .
El principio de superposicion establece que la solucion de una ecuacion diferencial es la combinacion linealde soluciones linealmente independientes, por lo tanto la solucion total es
T (x, t) = A1 sen(πLx)e−α( π
L )2t +A2 sen
(2π
Lx
)e−α( 2π
L )2t +A3 sen
(3π
Lx
)e−α( 3π
L )2t + · · ·
o en forma compacta
T (x, t) =
∞∑n=1
An sen(nπLx)e−α(nπ
L )2t, (5.10)
donde las An, n = 1, 2, 3, . . ., son llamadas constantes de combinacion lineal. La determinacion de estasconstantes se efectua aplicando la condicion inicial (la condicion no homogenea), por lo tanto, aplicando(5.2) en (5.10) se tiene
T (x, 0) = f (x) =
∞∑n=1
An sen(nπLx). (5.11)
144

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
La ecuacion anterior indica que puede f (x) ser expresada como una serie de Fourier de senos y quelos valores de las An, n = 1, 2, 3, . . ., deben satisfacer dicha igualdad. Para determinar dichos valores seaplica la propiedad de ortogonalidad de funciones (similar a la ortogonalidad de vectores). El proposito de laortogonalizacion consiste en utilizar un procedimiento en el cual se eliminen todos los termino de la sumatoriamenos uno, para ası poder despejar su An correspondiente.
f (x) = A1 sen(πLx)+A2 sen
(2π
Lx
)+A3 sen
(3π
Lx
)+ · · ·
En este caso en particular, la ortogonalizacion se efectua multiplicando toda la ecuacion (5.11), por lamisma funcion caracterıstica, con un valor caracterıstico dado e integrar en el dominio (0 < x < L), es decir,∫ L
0
f (x) sen(πLx)dx = A1
∫ L
0
sen2(πLx)dx+A2
∫ L
0
sen(πLx)sen
(2π
Lx
)dx
+A3
∫ L
0
sen(πLx)sen
(3π
Lx
)dx+ · · ·
de tablas ∫sen2 (ax) dx =
x
2− sen (2ax)
4a∫sen (ax) sen (bx) dx =
sen [(b− a)x]
2 (b − a)− sen [(b+ a)x]
2 (b + a)
por lo tanto
∫ L
0
sen2(nπLx)dx =
[x
2− sen
(2nπ
L x)
4nπL
]L0
=L
2(5.12a)
∫ L
0
sen(nπLx)sen
(mπLx)dx =
[sen
[πL (m− n)x
]2 πL (m− n)
− sen[πL (m+ n)x
]2 πL (m+ n)
]L0
= 0 (5.12b)
y en la sumatoria se eliminan todos los terminos menos el primero, es decir∫ L
0
f (x) sen(πLx)dx = A1
L
2+A2 (0) +A3 (0) + · · ·
por lo que es posible despejar A1
A1 =2
L
∫ L
0
f (x) sen(πLx)dx.
Siguiente este procedimiento, de manera general se tiene que∫ L
0
f (x) sen(mπLx)dx =
∞∑n=1
An
∫ L
0
sen(nπLx)sen
(mπLx)dx m = 1, 2, 3, . . .
Hay que notar, que en la ecuacion anterior se define un vector de ecuaciones, una ecuacion para cadavalor de m. De acuerdo a (5.12) la integral del lado derecho de la ecuacion (??) es igual a cero si m �= n eigual a L/2 si m = n, por lo tanto, todos los terminos de la sumatoria exceptuando uno son cero, en cadaecuacion ∫ L
0
f (x) sen(mπLx)dx = Am
∫ L
0
sen2(mπLx)= Am
L
2.
145

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
n An n An n An n An
1 127.3240 11 14.1471 21 7.48964 201 0.6334533 42.4413 13 11.5749 25 6.70126 501 0.2541405 25.4648 15 9.79415 51 2.49655 801 0.1589569 18.1891 17 8.48826 101 1.26063
Cuadro 5.2: Valores de An.
De esta manera al remplazar m por n se puede despejar para An y obtener
An =2
L
L∫0
f (x) sen(nπLx)dx, n = 1, 2, 3, . . . (5.13)
Al sustituir los valores de las constante An de la serie de Fourier de senos en la solucion(5.10) se tiene lasolucion completamente determinada para el problema planteado
T (x, t) =2
L
∞∑n=1
⎡⎣ L∫0
f (z) sen(nπLz)dz
⎤⎦ sen(nπLx)e−α(nπ
L )2t, (5.14)
Esta serie es convergente por lo que se puede truncar la sumatoria hasta un valor determinado de n,dependiendo de la precision deseada.
Como caso particular se considera una barra de hierro de 10 cm de longitud y difusividad termica α = 0,15cgs, sujeta a una temperatura inicial dada por la ecuacion
T (x, 0) = 100, 0 < x < L.
Sustituyendo el perfil termico anterior en la ecuacion (5.13) se obtiene que
An =200
L
L∫0
sen(nπLx)dx =
200
nπ
[− cos
(nπLx)]L
0= 200
1− (−1)n
nπ,
ası que de acuerdo a (5.11)
f (x) = 100 = 200
∞∑n=1
1− (−1)n
nπsen
(nπLx)
La expresion anterior indica calcular la sumatoria desde n = 1 hasta n = ∞, pero esto ademas deimposible, es innecesario, debido a que la serie es convergente, es decir, que conforme aumenta el valor de n,los valores de An son mas pequenos, hasta que se pueden despreciar. En la Tabla 5.2 se muestran algunosvalores de An.
La temperatura es entonces
T (x, t) =200
π
∞∑n=1
1− (−1)n
nsen
(nπLx)e−α(nπ
L )2t,
En la Figura 5.1 se grafica la temperatura inicial a partir de la funcion propuesta y de la serie de Fourier,truncando dicha serie en diferentes valores de n. Como se observa, entre mayor es el numero de terminos enla serie, mas precisa es la representacion de f (x).
Hay que notar, que la serie escrita en esta ecuacion converge mas rapidamente que la constante decombinacion lineal, a causa de que el factor exponencial dependiente del tiempo es negativo y contiene n2,el cual se incrementa en valor rapidamente dentro de la serie, por ejemplo, para t = 10 s, se tiene que
T (x, 10) = 109,80 sen (0,314x) + 11,20 sen (0,3942x) + 0,63 sen (1,571x) + 0,01 sen (2,199x) +
+8,8× 10−5 sen (2,827x) + 1,9× 10−7 sen (3,456x) + 1,3× 10−10 sen (4,084x) + · · ·
146

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
0 2 4 6 8 100
20
40
60
80
100
120
x, cm
T(x
,0),
ºC
N = 10N = 50N = 200
Figura 5.1: Temperatura inicial, T (x, 0) para diferentes valores de truncamiento.
en este caso, el 5o termino de la serie ya es despreciable a pesar que A5 es aproximadamente seis veces menorque A1 . En particular para x = 5 cm, el calculo de la temperatura conduce a la serie:
T (5, 10) = 109,80−11,1979+0,628886−0,128638+8,766×10−5−1,922×10−7+1,334×10−10−· · · ≈ 99,2215
En la Figura 5.2, se muestra el comportamiento de la temperatura en la barra a lo largo de tiempo, comose observa, al inicio se tiene el perfil de temperatura constante, f (x).
5.1.2. Problema homogeneo que genera una serie de Fourier de cosenos
Una sustancia disuelta con concentracion inicial constante CA,0 se difunde desde su solucion encerradaentre los planos x = 0 y x = H , en un solvente encerrado entre los planos x = H y x = L. Determinar ladistribucion de concentraciones suponiendo que las paredes x = 0 y x = L son impermeables a la sustancia.
El modelo para este sistema esta descrito por la EDP
∂CA (x, t)
∂t= D
∂2CA (x, t)
∂x2,
(t > 0
0 < x < L
)(5.15)
y las condiciones
Inicial : CA (x, 0) = CA,0 [1− UH (x)] =
{CA,0 0 < x < H0 H < x < L
(5.16)
Frontera :∂CA (0, t)
∂x= 0 ,
∂CA (L, t)
∂x= 0, t > 0 (5.17)
Este problema es homogeneo por lo que se puede resolver con el MSV definiendo que
CA (x, t) = X (x)Θ (t) (5.18)
147

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Figura 5.2: Temperatura T (x, t), serie truncada en n = 1000.
al susituir este cambio de variable en la EDP
∂
∂t[X (x) Θ (t)] = D
∂2
∂x2[X (x) Θ (t)]
X (x)dΘ(t)
dt= DΘ(t)
d2X (x)
dx2
Para separar variables se devide por DX (x)Θ (t)
1
DΘ(t)
dΘ(t)
dt= μ =
1
X (x)
d2X (x)
dx2
en donde se ha considerado que cada es independiente por lo que debe ser constante. De aquı se obtiene dosEDO
dΘ(t)
dt= μDΘ(t) , (5.19)
d2X (x)
dx2− μX (x) = 0. (5.20)
Por otro lado, como∂CA (x, t)
∂x=
∂
∂x[X (x) Θ (t)] = Θ (t)
dX (x)
dx
entonces las condiciones homogeneas son equivalentes
∂CA (0, t)
∂x= Θ(t)
dX (0)
dx= 0 =⇒ dX (0)
dx= 0 (5.21)
∂CA (L, t)
∂x= Θ(t)
dX (L)
dx= 0 =⇒ dX (L)
dx= 0 (5.22)
148

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Caso μ = λ2> 0 μ = 0 μ = −λ2< 0d2X(x)dx2 − λ2X (x) = 0 d2X(x)
dx2 = 0 d2X(x)dx2 + λ2X (x) = 0
EDO m2 − λ2 = 0 m2 = 0 m2 + λ2 = 0=⇒ m = ±λ =⇒ m = 0, 0 =⇒ m = ±λi
X (x) = c1eλx + c2e
−λx X (x) = c1x+ c2 X (x) = c1 sen (λx)Solucion +c2 cos (λx)
general dX(x)dx = λc1e
λx dX(x)dx = c1
dX(x)dx = λc1 cos (λx)
−λc2e−λx −λc2 sen (λx)Evaluacion de dX(0)
dx = 0 = λ (c1 − c2)dX(0)dx = 0 = c1 como λ �= 0
la condicion como λ �= 0 ∴ c1 = c2 ∴ c1 = 0 ∴ c1 = 0(5.21) X (x) = c1
(eλx + e−λx
)X (x) = c2 X (x) = c2 cos (λx)
Evaluacion de dX(L)dx = 0 = λc1
(eλL − e−λL
) dX(L)dx = 0 = c1L Para que c2 �= 0
la condicion como eλL > e−λL como c1 = 0 ∴ λ sen (λL) = 0 ∴(5.9) entonces c1 = 0 c2 queda ideterminado λL = nπ, n = 1, 2, 3, . . .
Solucion X (x) = 0, trivial X (x) = c2 X (x) = c2 cos(nπL x
)Cuadro 5.3: Solucin al problema caracterstico de la serie de Fourier de cosenos.
Estas dos condiciones junto con la EDO (5.20) forman un problema caracterıstico cuyas posibles soluciones,mostradas en la Tabla 5.3, son:
para μ = 0 : X0 (x) = c2,
para μ < 0 : Xn (x) = c2 cos(nπLx), n = 1, 2, 3, . . .
Por otro lado, las posibles soluciones de la EDO (5.19) son
para μ = 0 : Θ0 (t) = c3,
para μ < 0 : Θn (t) = c3e−D(nπ
L )2t, n = 1, 2, 3, . . .
Como CA (x, t) = X (x) Θ (t) entonces de acuerdo a las posibles soluciones para X (x) y Θ (t)
para μ = 0 : CA (x, t) = X0 (x) Θ0 (t) = c2c3,
para μ < 0 : CA (x, t) = Xn (x) Θn (t) = c2c3 cos(nπLx)e−D(nπ
L )2t, n = 1, 2, 3, . . .
y como es un numero infinito de posibles soluciones, entonces la solucion total utilizando el principio desuperposicion lineal de soluciones es
CA (x, t) = B0 +B1 cos(πLx)e−D( π
L )2t +B2 cos
(2π
Lx
)e−D( 2π
L )2t +B3 cos
(3π
Lx
)e−D( 3π
L )2t + · · ·
o de manera compacta
CA (x, t) = B0 +
∞∑n=1
Bn cos(nπLx)e−D(nπ
L )2t (5.23)
A tiempo igual a cero, de acuerdo a la condicion inicial (5.16)
CA (x, 0) = B0 +
∞∑n=1
Bn cos(nπLx)= CA,0 [1− UH (x)] (5.24)
149

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Para evaluar las constantes de combinacion lineal B1, B2, B3, . . ., se debe ortogonalizar con la funcioncaracterıstica cos
(mπL x
), por lo tanto se mutiplica la ecuacion (5.24) por la funcion cos
(mπL x
)y se integra
en el dominio, es decir
B0
∫ L
0
cos(mπLx)dx+
∞∑n=1
Bn
∫ L
0
cos(nπLx)cos
(mπLx)dx = CA,0
∫ L
0
[1− UH (x)] cos(mπLx)dx.
De tablas se tiene las integrales∫cos (ax) dx =
sen (ax)
a∫cos2 (ax) dx =
x
2+
sen (2ax)
4a∫cos (ax) cos (bx) dx =
sen [(b− a)x]
2 (b− a)+
sen [(b+ a)x]
2 (b+ a)
por lo tanto cada integral es∫ L
0
cos(mπLx)dx =
[sen
(mπL x
)mπL
]L0
= 0
∫ L
0
cos2(mπLx)dx =
[x
2+
sen(2mπ
L x)
4mπL
]L0
=L
2∫ L
0
cos(nπLx)cos
(mπLx)dx =
[sen
[πL (m− n)x
]2 πL (m− n)
+sen
[πL (m+ n)x
]2 πL (m+ n)
]L0
= 0
∫ L
0
[1− UH (x)] cos(mπLx)dx =
∫ H
0
cos(mπLx)dx =
[sen
(mπL x
)mπL
]H0
=L
mπsen
(mπ
H
L
)y al sustituirlas se llega a la expresion
BmL
2= CA,0
L
mπsen
(mπ
H
L
), m = 1, 2, 3, . . .
ası que
Bn =2CA,0
nπsen
(nπ
H
L
), n = 1, 2, 3, . . .
Por otro lado, para evaluar B0 tambien se hace el procedimiento de ortogonalizacion sin embargo lafuncion caracterıstica asociada es 1 ası que simplemente se integra CA (x, 0), es decir
B0
∫ L
0
dx+
∞∑n=1
Bn
∫ L
0
cos(nπLx)dx = CA,0
∫ L
0
[1− UH (x)] dx
B0 [x]L0 = CA,0 [x]
H0
y al despejar se obtiene que B0 = CA,0H/L por lo que la solucion total es
CA (x, t) = CA,0H
L+
2CA,0
π
∞∑n=1
sen(nπH
L
)n
cos(nπLx)e−D(nπ
L )2t (5.25)
Para tiempos muy grandes,
lımt→∞CA (x, t) = CA,0
H
L
150

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
Posición, x/L
Con
cent
raci
ón, C
A(x
,t)/C
0
tiempo
t5
↓
↑t0
← t1
← t2
← t3
← t1
t0
↓
↓ t6
↑ t∞
← t2
← t3
← t4 ↑
t5
↑ t6
t∞
↓tiempo
t4
↓
Figura 5.3: Concentracion cA (z, τ), serie truncada en n = 1000.
que es la concentracion que se alcanza en el estado estacionario y que es las misma para todos los valores dex.
Si se definen las variables adimensionales z = x/L, τ = Dt/L2, cA = CA/CA,0 y σ = H/L, entonces lasolucion adimensional es
cA (z, τ) = σ +2
π
∞∑n=1
sen (σnπ)
ncos (nπz) e−n2π2τ .
En la Figura 5.3 se muestra el comportamiento de la concentracion adimensional contra la posicion paradiferentes tiempo considerando que σ = 0,35.
5.2. Problema de Sturm-Liouville
El metodo de separacion de variables es el indicado para resolver analıticamente los problemas de lafısica - matematica homogeneos. Como ya se vio en los ejemplos anteriores, el objetivo de este metodoes la generacion de varias ecuaciones diferenciales ordinarias a partir de la ecuacion diferencial parcial, yla obtencion de condiciones para cada ecuacion diferencial ordinaria, a partir de las condiciones fronterahomogeneas. Para que el metodo de separacion de variables pueda aplicarse, al menos una de las ecuacionesdiferenciales ordinarias obtenidas y sus condiciones deben formar un problema de Sturm-Liouville. Lo cualasegura la existencia de funciones ortogonales y la posibilidad de determinar las constantes de combinacionlineal.
El problema de Sturm-Liouville esta definido por la ecuacion diferencial lineal de segundo orden
d
dx
[r (x)
dy (x)
dx
]+[q (x) + λ2p (x)
]y (x) = 0, a < x < b (5.26)
donde y (x) es la variable dependiente de x, p (x) �= 0 es la funcion de peso que al igual que r (x) �= 0 yq (x) son funciones conocidas de x, mientras que λ es un parametro a determinar. Ademas, se tienen dos
151

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
condiciones homogeneas
A1y (a) +A2dy (a)
dx= 0, (5.27)
B1y (b) +B2dy (b)
dx= 0. (5.28)
Dependiendo del valor particular de las constantes A1, A2, B1 yB2, estas condiciones homogeneas puedenser de primero, segundo o tercer tipo. LogicamenteA1 y A2 no pueden ser ambas cero porque si no la condicion(5.27) no existe, mientra que B1 y B2 tampoco pueden ser ambas cero porque la condicion (5.28) no existirıa.
En los dos problemas que se han resuelto se ha llegado a dos problemas de Sturm-Liouville. En el primercaso, si se define que y (x) → ξ (x), r (x) → 1, q (x) = 0, p (x) = 1, a = 0, b = L, A1 = 1, A2 = 0, B1 = 1 yB2 = 0 la ecuacion (5.26) y las condiciones (5.27) y (5.28) se reducen a la ecuacion (5.7) y las condiciones(5.8) y (5.9), mientras que para el segundo caso, si se define que y (x) → X (x), r (x) → 1, q (x) = 0, p (x) = 1,a = 0, b = L, A1 = 0, A2 = 1, B1 = 0 y B2 = 1 la ecuacion (5.26) y las condiciones (5.27) y (5.28) se reducena la ecuacion (5.20) y las condiciones (5.21) y (5.22).
El problema de Sturm-Liouville (5.26)-(5.28) tiene soluciones no triviales solamente para ciertos valoresde λ a los cuales se les denomina valores caracterısticos y las soluciones ası obtenidas son llamadas funcionescaracterısticas. Generalmente se tiene un numero infinito de posibles valores caracterısticos por lo que lasolucion se suele escribir como yn (x), n = 1, 2, 3, . . . Ası por ejemplo, para el problema descrito por las ecua-ciones (5.7), (5.8) y (5.9) los valores caracterısticos son λn = nπ/L, mientras que las funciones caracterısticasson ξn (x) = sen
(nπL x
), con n = 1, 2, 3, . . . Por otro lado, para el problema descrito por las ecuaciones (5.20),
(5.21) y (5.22) los valores caracterısticos son λ0 = 0 y λn = nπ/L, mientras que las funciones caracterısticasson X0 (x) = 1 y Xn (x) = cos
(nπL x
)para n = 1, 2, 3, . . .
En la tabla 5.4 se presentan todas las soluciones de problemas caracterısticos con ecuacion diferencialX ′′ (x)+λ2X (x) = 0 que usualmente se obtiene en problemas en coordendas cartesinas, mientras que la tabla5.5 y 5.6 presentan la solucion de problemas caracterısticos para ecuaciones de Bessel y de Cauchy-Euler,respectivamente, que usualmente se obtiene en problemas con coordenadas cilındricas.
En general, las soluciones particulares al problema de Sturm-Liouville, yn (x) y ym (x), con n �= m sonortogonales entre sı como se muestra en el siguiente Teorema y gracias a ello es posible llevar a cabo elprocedimiento de ortogonalizacion.
Teorema 79 Sean yn (x) y ym (x) dos funciones caracterısticas que se corresponden a dos valores carac-terısticos λn y λm y que satisfacen al problema de Sturm Liouville descrito por la ecuacion (5.26) y lascondiciones (5.27) y (5.28). Entonces yn (x) y ym (x) son ortogonales entre sı. Es decir que para λn �= λm,la integral
b∫a
p (x) yn (x) ym (x) dx = 0 si n �= m (5.29)
es igual a cero.
Prueba. Como ambas soluciones yn (x) y ym (x) satisfacen el problema de Strum-Liouville entonces debencumplirse las ecuaciones
ddx [r (x) y′n (x)] +
[q (x) + λ2np (x)
]yn (x) = 0, d
dx [r (x) y′m (x)] +[q (x) + λ2mp (x)
]ym (x) = 0,
A1yn (a) +A2y′n (a) = 0, A1ym (a) +A2y
′m (a) = 0,
B1yn (b) +B2y′n (b) = 0. B1ym (b) +B2y
′m (b) = 0.
Al multiplicar la EDO para yn (x) por ym (x), la EDO para ym (x) por yn (x) y restarlas entre sı se obtiene
ym (x)d
dx[r (x) y′n (x)]− yn (x)
d
dx[r (x) y′m (x)] +
(λ2n − λ2m
)p (x) yn (x) ym (x) = 0.
152

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Ahora se integra la ecuacion anterior en el dominio (a < x < b),
(λ2n − λ2m
) b∫a
p (x) yn (x) ym (x) dx =
b∫a
yn (x) d [r (x) y′m (x)]−
b∫a
ym (x) d [r (x) y′n (x)]
Los terminos del lado derecho se pueden integrar por partes, por ejemplo para el primer termino
u=yn(x) =⇒ du=y′n(x)dx
dv=d[[r(x)y′m(x)] =⇒ v=r(x)y′
m(x):
b∫a
yn (x) d [r (x) y′m (x)] dx = [r (x) yn (x) y
′m (x)]
ba −
b∫a
r (x) y′m (x) y′n (x) dx
mientras que el segundo tiene la misma estructura, solamente que con los subındices n y m invertidos. Porlo tanto se tiene que
(λ2n − λ2m
) b∫a
p (x) yn (x) ym (x) dx = [r (x) yn (x) y′m (x)]
ba −
b∫a
r (x) y′m (x) y′n (x) dx
− [r (x) ym (x) y′n (x)]ba +
b∫a
r (x) y′n (x) y′m (x) dx
= [r (x) (yn (x) y′m (x)− ym (x) y′n (x))]
ba =
[r (x)
∣∣∣∣yn (x) y′n (x)ym (x) y′m (x)
∣∣∣∣]ba
por lo que se cancelan las integrales del lado derecho y el resultado se puede agrupar en un determinantepara obtener la expresion
(λ2n − λ2m
) b∫a
p (x) yn (x) ym (x) dx = r (b)
∣∣∣∣yn (b) y′n (b)ym (b) y′m (b)
∣∣∣∣ − r (a)
∣∣∣∣yn (a) y′n (a)ym (a) y′m (a)
∣∣∣∣ . (5.30)
Como las funciones caracterısticas yn y ym tambien deben satisfacer las condiciones (5.27) y (5.28), seconcluye que
A1yn (a) +A2y′n (a) = 0
A1ym (a) + A2y′m (a) = 0
}equivalente a
{(yn (a) y′n (a)ym (a) y′m (a)
)(A1
A2
)=
(00
), =⇒
∣∣∣∣yn (b) y′n (b)ym (b) y′m (b)
∣∣∣∣ = 0,
B1yn (b) +B2y′n (b) = 0
B1ym (b) +B2y′m (b) = 0
}equivalente a
{(yn (b) y′n (b)ym (b) y′m (b)
)(B1
B2
)=
(00
), =⇒
∣∣∣∣yn (a) y′n (a)ym (a) y′m (a)
∣∣∣∣ = 0,
porque si no A1 y A2 ası como B1 y B2 tendrıan que ser cero, esto se explican a causa de que un sistemade ecuaciones lineales homogeneo tiene solucion no trivial sı y solo sı su determinante es igual a cero. Por lotanto, la ecuacion (5.30) se reduce a
(λ2n − λ2m
) b∫a
p (x) yn (x) ym (x) dx = 0,
que para λn �= λm indica que
b∫a
p (x) yn (x) ym (x) dx = 0, λn �= λm.
Con esto se demuestra la validez de la ecuacion (5.29), concluyendose ası la prueba.A la ecuacion (5.29) se le conoce como integral de ortogonalidad con funcion de peso, p (x).
153

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
5.2.1. Ortogonalidad, norma, ortonormalidad y series generalizadas
La ecuacion (5.29) es una herramienta muy importante cuando se desea representar una funcion medianteuna serie generalizada de Fourier, ya que permite determinar los valores de todas y cada una de las constantesde combinacion lineal. Ası por ejemplo considerar la expansion de una funcion seccionalmente continua, f (x),en una serie de generalizada de Fourier
f (x) =∞∑
n=1
Anφn (x) , (5.31)
donde φn (x), n = 1, 2, 3, . . ., son el conjunto infinito de funciones caracterısticas obtenidas a partir de unproblema de Sturm Liouville con funcion de peso p (x) y propiedad de ortogonalidad∫ b
a
p (x)φn (x)φm (x) dx = 0 n �= m.
Las constantes de combinacion lineal, An, se pueden encontrar multiplicando por la funcion de peso y lafuncion caracterıstica con otro valor caracterıstico, φm (x), para luego integrar en el dominio (a < x < b), esdecir ∫ b
a
p (x) f (x)φm (x) dx =∞∑
n=1
An
∫ b
a
p (x)φn (x)φm (x) dx,
que de acuero a la propiedad de ortogonalidad, todoas las integrales del lado derecho son cero, a excepcionde una, cuando m = n, por lo tanto, la constante de combinacion lineal es
An =
∫ b
a p (x) f (x)φn (x) dx
‖φn (x)‖2, n = 1, 2, 3, . . . , (5.32)
en donde ‖φn (x)‖, es la magnitud o norma de la funcion caracterıstica, φn (x),definida como
‖φn (x)‖ =
√∫ b
a
p (x)φ2n (x) dx, n = 1, 2, 3, . . . (5.33)
Hay que notar la semejanza entre la norma definida en la ecuacion (5.33) y la norma para un conjunto de
vectores n-dimensional con componentes vk, dada por ‖v‖ =
√√√√ n∑k=1
v2k.
Al sustituir los valores de An en la ecuacion (5.31) se tiene que
f (x) =
∞∑n=1
∫ b
ap (x) f (x)φn (x) dx
‖φn (x)‖φn (x)
‖φn (x)‖.
Si ahora se define la funcion
ψn (x) =φn (x)
‖φn (x)‖,
que por construccion tiene una norma igual a uno, es decir
√∫ b
a p (x)ψ2n (x) dx = 1, entonces, al sustituir los
valores de An, la ecuacion (5.31) tambien es equivalente a
f (x) =
∞∑n=1
[∫ b
a
p (x) f (x)ψn (x) dx
]ψn (x) ,
en donde las funciones ψn (x), n = 1, 2, 3, . . ., son denominadas funciones ortonormales, ya que son ortogo-nales entre sı, pero ademas estan normalizadas.
154

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
5.3. Apliacion del metodo de separacion de variables en coorde-nadas cartesianas
Cuando se tiene problemas de la Fısica-Matematica homogeneos en coordenadas cartesianas siempre esposible llegar a problemas de Strum-Liouville descritos por una ecuacion diferencial de la forma
X ′′ (x) + λ2X (x) = 0
cuya solucion es
X (x) = c1 sen (λx) + c2 cos (λx)
que dependiendo de las condiciones homogeneas tiene diferentes valores para c1, c2 y λ. En la tabla 5.4se presenta un resumen de estas soluciones para las diferentes condiciones frontera. Hay que notar que enalgunos casos existe solamente un tipo de funcion caracterıstica mientras que en otros puede haber dos ohasta tres funciones caracterısticas de naturaleza distinta.
5.3.1. Problemas homogeneos
Cuerda vibrante
Suponga que se tiene una cuerda de longitud L cuyos extremos se encuentra fijos en y = 0. Ademas, enel instante t = 0 se tiene una posicion inicial que depende de x y una velocidad inicial igual a cero. Tambiense considera que puede haber una fuerza de friccion no muy grande. Determinar el comportamiento de lacuerda.
A este sistema lo gobierna la ecuacion de onda con friccion
∂2y (x, t)
∂t2= a2
∂2y (x, t)
∂x2− 2v
∂y (x, t)
∂t, 0 < x < L, t > 0, (5.34)
con 0 ≤ v < aπ/L, ademas se tienen las condiciones iniciales
y (x, 0) = f (x) , 0 < x < L, (5.35)
∂y (x, 0)
∂t= 0, 0 < x < L, (5.36)
mientras que las condiciones frontera son
y (0, t) = 0, t > 0, (5.37)
y (L, t) = 0, t > 0. (5.38)
El problema consta de una ecuacion diferencial parcial de segundo orden homogenea, dos condiciones ini-ciales (una homogenea y otra no homogenea) y dos condiciones frontera homogeneas. Este tipo de problemasson llamados homogeneos.
La suposicion fundamental del MSV es que la variable dependiente se considera igual a un producto defunciones, en donde cada una de estas, depende solo de una variable independiente. En este caso
y (x, t) = X (x)Θ (t) , (5.39)
esta solucion propuesta debe satisfacer la ecuacion diferencial parcial (5.34) y las condiciones frontera (5.37)y (5.38).
Por lo tanto, al sustituir la ecuacion (5.39) en (5.34) se obtiene
X (x) Θ′′ (t) = a2Θ(t)X ′′ (x)− 2vX (x) Θ′ (t)
155

Apuntes de clase IQ204 2011A Juan Paulo Garcıa SandovalPro
blemacara
cterıstic
o1
Solucion
cara
cterıstic
aEcu
acio
ndiferen
cial
Valores
X′′(x
)+λ2X
(x)=
0Ecu
acio
ncaracterıstico
sFuncio
n(es)
Norm
acuadrada
Condicio
nfro
ntera
caraterıstica
n=
1,2,3,...
caracterıstica
(s)‖X
(x)‖
2
x=
0x=c
X(c)
=0
sen(λ
nc)
=0
λn=
nπc
X(x)=
sen(λ
nx)
c/2
X(0)=
0X
′(c)=
0λncos(λ
nc)
=0
λn=
(2n−
1)π
2c
X(x)=
sen(λ
nx)
c/2
X′(c)
βtan(λ
nc)
=−λn
Meto
do
X(x)=
sen(λ
nx)
β(1
+cβ)+
cλ2n
2(β
2+λ2n)
+βX
(c)=
0grafico
X(x)=x
solo
siβ=
−1/c
c3/3
X(c)
=0
cos(λ
nc)
=0
λn=
(2n−
1)π
2c
X(x)=
cos(λ
nx)
c/2
X′(0
)=
0X
′(c)=
0λnsen
(λnc)
=0
λ0=
0,
X(x)=
1c
λn=
nπc
X(x)=
cos(λ
nx)
c/2
X′(c)
λntan(λ
nc)
=β
Meto
do
X(x)=
cos(λ
nx)
β(1
+cβ)+
cλ2n
2(β
2+λ2n)
+βX
(c)=
0grafico
X(c)
=0
αtan(λ
nc)
=λn
Meto
do
X(x)=
sen(λ
nx)−
λn
αcos(λ
nx)
α(cα−
1)+
cλ2n
2(α
2+λ2n)
grafico
X(x)=
1−αxsolo
siα=
1/c
c3
X′(0
)X
′(c)=
0λntan(λ
nc)
=−α
Meto
do
X(x)=
sen(λ
nx)−
λn
αcos(λ
nx)
α(cα−
1)+
cλ2n
2(α
2+λ2n)
+αX
(0)=
0grafico
=sen (λ
nx−
tan −
1 (λn
α ))X
′(c)tan(λ
nc)
=λn
β−α
αβ+λ2n
Meto
do
X(x)=
sen(λ
nx)−
λn
αcos(λ
nx)
12 (c+
ββ2+λ2n −
αα
2+λ2n )
+βX
(c)=
0grafico
X(x)=
1−αxsolo
siβ=
α1−
αc
β3−
α3
3αβ3
X(x)=
1c
X(0)=X
(c),
X′(0
)=X
′(c),
sen(λ
nc)
=0
λn=
nπc
X(x)=
sen(λ
nx)
c/2
X(x)=
cos(λ
nx)
c/2
Cuadro
5.4:Problem
ascaracterıstico
spara
coorden
adascartesia
nasconecu
acio
ndiferen
cialX
′′(x)+λ2X
(x)=
0,funcio
ndepeso
p(x)=
1.
Sise
tienela
ecuacio
ndiferen
cial
ddx [
x2dR(x
)
dx
]+
λ2x2R(x
)=
0o
x2d2R(x
)
dx2
+2xdR(x
)
dx
+λ2x2R(x
)=
0
quees
comun
enproblem
assim
etricosco
ord
enadasesferica
s,hacien
doX
(x)=
xR(x
)la
ecuacio
ndiferen
cialse
vuelv
esim
ilarala
dela
tabla,mien
trasquelas
condicio
nes
quetien
enla
form
aaR
′(e)
+bR
(e)=
0se
transfo
rman
enea
X′(e)
+(eb−
a)X
(e)=
0.Ası
quese
pued
enutiliza
rlosresu
ltadosdela
tabla,pero
la
funcio
nofuncio
nes
caracterıstica
sen
estecaso
soniguales
aR(x
)=
X(x
)x
,mien
trasquela
funcio
ndepeso
esp(x
)=
x2.
156

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
de donde se pueden separar las variables
Θ′′ (t) + 2vΘ′ (t)a2Θ(t)
= −λ2 =X ′′ (x)X (x)
y la igualdad a −λ2 (constante de separacion por determinar) se justifica por la independencia de cada unode los terminos en la ecuacion, ya que el lado izquierdo de la ecuacion es independiente de x y el derecho esindependiente de t.
La ecuacion anterior proporciona dos ecuaciones diferenciales ordinarias,
Θ′′ (t) + 2vΘ′ (t) + a2λ2Θ(t) = 0, (5.40)
X ′′ (x) + λ2X (x) = 0. (5.41)
Las soluciones de las ecuaciones (5.40) y (5.41) son
Θ (t) = e−vt[C1 cos
(t√a2λ2 − v2
)+ C2 sen
(t√a2λ2 − v2
)]si aλ > v, (5.42)
Θ (t) = e−vt[C1 cosh
(t√v2 − a2λ2
)+ C2 senh
(t√v2 − a2λ2
)]si aλ < v,
X (x) = C3 cos (λx) + C4 sen (λx) . (5.43)
Para encontrar el valor de las constantes de integracion y de separacion, es necesario obtener condicionespara cada una de las funciones. Esto se hace mediante la sustitucion de (5.39) en las condiciones homogeneas,(5.35), (5.37) y (5.38),
∂y (x, 0)
∂t= X (x) Θ′ (0) = 0, =⇒ Θ′ (0) = 0, (5.44)
y (0, t) = X (0)Θ (t) = 0, =⇒ X (0) = 0, (5.45)
y (L, t) = X (L)Θ (t) = 0, =⇒ X (L) = 0, (5.46)
La obtencion de (5.45) y (5.46) se justifica a causa de que Θ (t) debe ser diferente de cero, ya que formaparte, en producto, de la solucion propuesta y si este fuera igual a cero para cualquier t, entonces toda lasolucion serıa cero, lleganda a una solucion trivial. De la misma forma se justifica la obtencion de (5.44), yaque X (x) no puede ser cero para todos los valores de x.
Aplicando la condicion (5.45) en (5.43) se obtiene
X (0) = 0 = C3 cos (0) + C4 sen (0)
de donde se determina que C3 = 0 y por lo tanto la solucion para (5.43) queda solo
X (x) = C4 sen (λx) . (5.47)
Ahora, aplicando la condicion (5.46) en la ecuacion (5.47) se tiene
X (L) = 0 = C4 sen (λl) ,
como C4 no puede ser igual a cero debido a que X (x) serıa igual a cero y en consecuencia la solucion buscadatambien serıa igual a cero, entonces se tiene que
sen (λL) = 0.
La ecuacion anterior es llamada ecuacion caracterıstica y se cumple cuando el producto λL es multiplode π, o sea
λL = nπ, n = 1, 2, 3, . . .
157

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
por lo tanto se pueden determinar los valores de λ,
λn =nπ
L, n = 1, 2, 3, . . .
Los valores de λ son llamados valores caracterısticos y siempre se obtienen como las raıces positivas dela ecuacion caracterıstica.
Por otro lado, como v < aπ/L entonces la solucion para Θ (t) debe tener la forma
Θ (t) = e−vt [C1 cos (βnt) + C2 sen (βnt)] donde βn =
√a2(nπL
)2− v2, n = 1, 2, 3, . . . ,
y para evaluar (5.44) se debe derivar
Θ′ (t) = −ve−vt [C1 cos (βnt) + C2 sen (βnt)] + βne−vt [−C1 sen (βnt) + C2 cos (βnt)]
ası que en t = 0,
Θ′ (0) = 0 = −vC1 + βnC2 ⇒ C2 =v
βn
C1.
Con lo anterior las soluciones (5.42) y (5.47) para Θ (t) y X (x) son:
Θ (t) = C1e−vt
[cos (βnt) +
v
βn
sen (βnt)
], n = 1, 2, 3, . . .
X (x) = C4 sen(nπLx), n = 1, 2, 3, . . .
que de acuerdo a la solucion propuesta (5.39) se tiene
y (x, t) = C1C4 sen(nπLx) [
cos (βnt) +v
βn
sen (βnt)
]e−vt, n = 1, 2, 3, . . .
El principio de superposicion establece que la solucion de una ecuacion diferencial es la combinacion linealde soluciones linealmente independientes, por lo tanto la solucion es
y (x, t) =
∞∑n=1
An sen(nπLx) [
cos (βnt) +v
βn
sen (βnt)
]e−vt, (5.48)
donde las An, n = 1, 2, 3, . . ., son llamadas constantes de combinacion lineal. La determinacion de estasconstantes se efectua aplicando la condicion inicial (la condicion no homogenea), por lo tanto, aplicando(5.35) en (5.48) se tiene
y (x, 0) = f (x) =
∞∑n=1
An sen(nπLx). (5.49)
La ecuacion anterior indica que f (x) puede ser expresada como una serie de Fourier de senos y quelos valores de las An, n = 1, 2, 3, . . ., deben satisfacer dicha igualdad. Para determinar dichos valores seaplica la propiedad de ortogonalidad de funciones (similar a la ortogonalidad de vectores). El proposito de laortogonalizacion consiste en utilizar un procedimiento en el cual se eliminen todos los termino de la sumatoriamenos uno, para ası poder despejar su An correspondiente.
En este caso en particular, la ortogonalizacion se efectua multiplicando toda la ecuacion (5.49), por lamisma funcion caracterıstica, con diferente valor caracterıstico e integrar en el dominio (0 < x < L), es decir,que para m = 1, 2, 3, . . .∫ L
0
f (x) sen(mπLx)dx =
∞∑n=1
An
∫ L
0
sen(nπLx)sen
(mπLx)dx, (5.50)
158

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Hay que notar, que en la ecuacion anterior se define un vector de ecuaciones, una ecuacion para cadavalor de m. Se puede mostrar por integracion directa, que la integral del lado derecho de la ecuacion (5.50)es igual a cero si m �= n e igual a L/2 si m = n, por lo tanto, todos los terminos de la sumatoria exceptuandouno son cero, en cada ecuacion. De esta manera se puede despejar para An y obtener
An =2
L
∫ L
0
f (x) sen(nπLx)dx, n = 1, 2, 3, . . . (5.51)
Al sustituir los valores de las constante An de la serie de Fourier de senos en la solucion (5.48) se tienela solucion completamente determinada para el problema planteado
T (x, t) =2
L
∞∑n=1
[∫ L
0
f (z) sen(nπLz)dz
]sen
(nπLx) [
cos (βnt) +v
βn
sen (βnt)
]e−vt.
Si no existe friccion (v = 0), entonces la solucion se simplifica a
T (x, t) =2
L
∞∑n=1
[∫ L
0
f (z) sen(nπLz)dz
]sen
(nπLx)cos
(nπLt).
Placa en estado estacionario
Suponga que se tiene una placa de ancho igual a L y alto igual a H . En cuyos extremos horizontales semantiene una temperatura igual a cero grados centıgrados, mientras que en la parte inferior se encuentraaislado y en la superior la temperatura es igual a Th. Considere que ya se ha alcanzado el estado estacionario.Determinar la distribucion de temperatura en cada punto de la placa.
A fenomeno se describe por la ecuacion de calor en estado estacionario, es decir
∂2T (x, y)
∂x2+∂2T (x, y)
∂y2= 0, 0 < x < L, 0 < y < H, (5.52)
las condiciones frontera son
T (0, y) = 0, 0 < y < H, (5.53)
∂T (L, y)
∂x= 0, 0 < y < H, (5.54)
∂T (x, 0)
∂y= 0, 0 < x < L, (5.55)
T (x,H) = TH , 0 < x < L. (5.56)
El problema consta de una ecuacion diferencial parcial de segundo orden homogenea, cuatro condicionesfrontera una de las cuales es no homogenea.
Para separar variables se define que
T (x, y) = X (x)Y (y) , (5.57)
esta solucion propuesta debe satisfacer la ecuacion diferencial parcial (5.52) y las condiciones frontera (5.53)-(5.56).
Por lo tanto, al sustituir la ecuacion (5.57) en (5.52) se obtiene
X (x)d2Y (y)
dy2+ Y (y)
d2X (x)
dx2= 0
159

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
la cual al ser dividida por a2X (x)Y (y) es
1
a2Y (y)
d2Y (y)
dy2= λ2 = − 1
X (x)
d2X (x)
dx2
en donde la igualdad a λ2 (constante de separacion por determinar) se justifica por la independencia de cadauno de los terminos en la ecuacion, ya que el lado izquierdo de la ecuacion es independiente de x y el derechoes independiente de y. El signo de λ2 se escoge de tal forma que se genere un problema de Strurm-Liouvillepara x, que es la variable que tiene dos condiciones frontera homogeneas.
La ecuacion anterior proporciona dos ecuaciones diferenciales ordinarias,
d2Y (y)
dy2− λ2Y (y) = 0, (5.58)
d2X (x)
dx2+ λ2X (x) = 0. (5.59)
Las soluciones de las ecuaciones (5.58) y (5.59) son
Y (y) = C1 senh (λy) + C2 cosh (λy) = C1eλy + C2e
−λy, (5.60)
X (x) = C3 cos (λx) + C4 sen (λx) . (5.61)
Para encontrar el valor de las constantes de integracion y de separacion, es necesario obtener condicionespara cada una de las funciones. Esto se hace mediante la sustitucion de (5.57) en las condiciones homogeneas,(5.53), (5.38) y (5.55),
T (0, y) = X (0)Y (y) = 0, =⇒ X (0) = 0, (5.62)
∂T (L, y)
∂x= X ′ (L)Y (y) = 0, =⇒ X ′ (L) = 0, (5.63)
∂T (x, 0)
∂y= X (x)
dY (0)
dy= 0, =⇒ dY (0)
dy= 0, (5.64)
La obtencion de (5.62) y (5.63) se justifica a causa de que Y (y) debe ser diferente de cero, ya que formaparte, en producto, de la solucion propuesta y si este fuera igual a cero para cualquier t, entonces toda lasolucion serıa cero, lleganda a una solucion trivial. De la misma forma se justifica la obtencion de (5.64), yaque X (x) no puede ser cero para todos los valores de x.
Para evaluar (5.64) se debe derivar (5.60)
dY (t)
dy= λC1 cosh (λy) + λC2 senh (λy) ,
ası que en t = 0,dY (0)
dy= λC1 cosh (0) + λC2 senh (0) = λC1 = 0
Como λ no puede ser cero, entonces C1 = 0.Por otro lado, aplicando la condicion (5.62) en (5.61) se obtiene
X (0) = 0 = C3 cos (0) + C4 sen (0)
de donde se determina que C3 = 0 y por lo tanto la solucion para (5.61) queda solo
X (x) = C4 sen (λx) . (5.65)
mientras que su derivada es X ′ (x) = λC4 sen (λx). Ahora, aplicando la condicion (5.63) en esta derivada setiene
X ′ (L) = 0 = λC4 cos (λL) ,
160

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
como C4 no puede ser igual a cero debido a que X (x) serıa igual a cero y en consecuencia la solucion buscadatambien serıa igual a cero, entonces se tiene que
cos (λL) = 0.
La ecuacion anterior es llamada ecuacion caracterıstica y se cumple cuando el producto λL toma losvalores π
2 ,3π2 ,
5π2 , . . ., o sea
λL =(2n− 1)
2π, n = 1, 2, 3, . . .
por lo tanto se pueden determinar los valores de λ,
λn =(2n− 1)π
2L, n = 1, 2, 3, . . .
Los valores de λ son llamados valores caracterısticos y siempre se obtienen como las raıces positivas dela ecuacion caracterıstica (comparar el resultado con la Tabla 5.4).
Con lo anterior las soluciones (5.60) y (5.65) para Y (y) y X (x) son:
Y (y) = C1 cosh
[(2n− 1)π
2Ly
], n = 1, 2, 3, . . .
X (x) = C4 sen
[(2n− 1)π
2Lx
], n = 1, 2, 3, . . .
que de acuerdo a la solucion propuesta (5.57) se tiene
T (x, t) = C1C4 sen
[(2n− 1)π
2Lx
]cosh
[(2n− 1)π
2Ly
], n = 1, 2, 3, . . .
El principio de superposicion establece que la solucion de una ecuacion diferencial es la combinacion linealde soluciones linealmente independientes, por lo tanto la solucion es
T (x, y) =
∞∑n=1
An sen
[(2n− 1)π
2Lx
]cosh
[(2n− 1)π
2Ly
], (5.66)
donde las An, n = 1, 2, 3, . . ., son llamadas constantes de combinacion lineal. La determinacion de estasconstantes se efectua aplicando la condicion inicial (la condicion no homogenea), por lo tanto, aplicando(5.56) en (5.66) se tiene
T (x,H) = TH =∞∑n=1
An sen
[(2n− 1)π
2Lx
]cosh
[(2n− 1)π
2LH
]. (5.67)
La ecuacion anterior indica que TH puede ser expresada como una serie de Fourier de senos y quelos valores de las An, n = 1, 2, 3, . . ., deben satisfacer dicha igualdad. Para determinar dichos valores seaplica la propiedad de ortogonalidad de funciones (similar a la ortogonalidad de vectores). El proposito de laortogonalizacion consiste en utilizar un procedimiento en el cual se eliminen todos los termino de la sumatoriamenos uno, para ası poder despejar su An correspondiente.
En este caso en particular, la ortogonalizacion se efectua multiplicando toda la ecuacion (5.67), por lamisma funcion caracterıstica, con diferente valor caracterıstico e integrar en el dominio (0 < x < L), es decir,
L∫0
TH sen
[(2m− 1)π
2Lx
]dx =
161

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
∞∑n=1
An cosh
[(2n− 1)π
2LH
] L∫0
sen
[(2m− 1)π
2Lx
]sen
[(2n− 1)π
2Lx
]dx, m = 1, 2, 3, . . . (5.68)
Hay que notar, que en la ecuacion anterior se define un vector de ecuaciones, una ecuacion para cadavalor de m. Se puede mostrar por integracion directa, que la integral del lado derecho de la ecuacion (5.68)es igual a cero si m �= n e igual a L/2 si m = n, por lo tanto, todos los terminos de la sumatoria exceptuandouno son cero, en cada ecuacion. Ademas la integral del lado izquierdo es igual a
TH
L∫0
sen
[(2m− 1)π
2Lx
]dx = TH
⎡⎣− cos[(2m−1)π
2L x]
(2m−1)π2L
⎤⎦L
0
=2LTH
(2m− 1)π
De esta manera se puede despejar para An y obtener
An =4TH
(2n− 1)π cosh[(2n−1)π
2L H] , n = 1, 2, 3, . . . (5.69)
Al sustituir los valores de las constante An de la serie de Fourier de senos en la solucion (5.66) se tienela solucion completamente determinada para el problema planteado
T (x, y) =4THπ
∞∑n=1
sen[(2n−1)π
2L x]
(2n− 1)
cosh[(2n−1)π
2L y]
cosh[(2n−1)π
2L H] .
Para valores muy grandes de n el argumento de la funcion cosh tiende a infinito, por lo tanto, para evitarproblemas numericos mediante la definicion del cosh una solucion alternativa es
T (x, y) =4THπ
∞∑n=1
sen[(2n−1)π
2L x]
(2n− 1)
exp[− (2n−1)π
2L (H − y)]+ exp
[− (2n−1)π
2L (H + y)]
1 + exp[− (2n−1)π
L H] .
En la Figura 5.4 se muestra la temperatura en estado estacionario para esta placa.
5.3.2. Problemas no homogeneos
Cuando se tiene problemas de la Fısica-Matematica no homogeneos no es posible aplicar el Metodo deSeparacion de Variables ya que los terminos no homogeneos no permiten la separacion. Sin embargo, aligual que en las EDO se puede dividir el problema en dos problemas por separado, uno de los cuales sedefinira como homogeneo y otro como no homogeneo. Por ejemplo, si se tiene la variable ψ (x, t) en unproblema no homogeneo se puede definir que
ψ (x, t) = ψH (x, t) + ψP (x, t)
donde ψH (x, t) debera definir un problema homogeneo. En algunos casos, dependiendo de la estructura delproblema es posible proponer cambios de variable de la forma
ψ (x, t) = ψH (x, t) + ψP (x)
en donde ψH (x, t) forma un problema homogeneo en derivadas parciales, mientras que ψP (x) pertenece aun problema no homogeneo en derivadas ordinarias. En el siguiente ejemplo se muestra un caso como este.
162

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Figura 5.4: Temperatura en estado estacionario para una placa, serie truncada en n = 200.
Teorıa combinada de la renovacion de la superficie de la pelıcula
En la seccion 4.3.1 se presenta la teorıa de la penetracion para el transporte de masa en interfases. Otrateorıa que se ha planteado es la combinada de la renovacion de la superficie de la pelıcula en la cual se suponeque los remolinos son pequenos y la difusion si puede alcanzar el otro extremo del remolino por lo tanto elmodelo para esta teorıa tiene la forma
∂CA (z, t)
∂t= D
∂2CA (z, t)
∂z2,
t > 00 < z < b
(5.70)
Inicial : CA (z, 0) = CA,0, 0 < z < b (5.71)
Frontera : CA (0, t) = CA,i, CA (b, t) = CA,0, t > 0 (5.72)
Que a diferencia de la EDP (4.6) la variable z es finita mientras que la condicion inicial (4.7) y la primeracondicion frontera de (4.8) quedan iguales y en la segunda condicion frontera se remplaza el lımite.
Como se observa, este modelo no es homogeneo ya que, a pesar de que la EDP (5.70) es homogenea, lascondiciones frontera (5.72) no son nomogeneas. Para resolver este problema se propone la solucion
CA (z, t) = CA (z, t) + CA (z) , (5.73)
donde se desea que CA (z, t) este descrita por un problema homogeneo, mientra que se ha supuesto que lasolucion particular CA (z) solamente depende de z. En el problema original solamente se tiene una incognita,
CA (z, t), y al definir la ecuacion (5.73) ahora se tiene dos incognitas, CA (z, t) y CA (z); esto nos da ungrado de libertad adicional que nos permite definir la estructura del problema para CA (z) de tal forma que
el problema para CA (z, t) sea homogeneo. Para lograr esto ahora se remplaza el cambio de variable (5.73)
163

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
en el problema (5.70)-(5.72)
∂CA (z, t)
∂t= D
[∂2CA (z, t)
∂z2+d2CA (z)
dz2
],
t > 00 < z < b
(5.74a)
CA (z, 0) = CA (z, 0) + CA (z) = CA,0, 0 < z < b, (5.74b)
CA (0, t) = CA (0, t) + CA (0) = CA,i, t > 0, (5.74c)
CA (b, t) = CA (b, t) + CA (b) = CA,0, t > 0. (5.74d)
Como se desea que CA (z, t) forme un problema homogeneo, se requiere que la EDP para CA (z, t) solamente
contenga terminos que dependen de CA, ası que al analizar la ecuacion (5.74a) el termino no homogeneo
D d2CA(z)dz2 se definira igual a cero, es decir
d2CA (z)
dz2= 0. (5.75)
Ademas, tambien se necesita tener dos condiciones homogenas para la misma variable independiente evalu-adas en dos puntos distintos, las cuales se pueden obtener a partir de las ecuaciones (5.74c) y (5.74d) si sedefine que
CA (0) = CA,i, (5.76)
CA (b) = CA,0. (5.77)
La EDO (5.75) y las condiciones (5.76) y (5.77) forman un problema completo para CA (z). De hecho, lasolucion para la EDO (5.75) es
CA (z) = A1z +A2
y en z = 0 y z = b de acuerdo a las condiciones (5.76) y (5.77)
CA (0) = A2 = CA,i
CA (b) = A1b+A2 = CA,0=⇒ A1 = (CA,0 − CA,i) /b
A2 = CA,i
se llega a la solucion
CA (z) = CA,i + (CA,0 − CA,i)z
b(5.78)
que al ser sustituida en las ecuaciones (5.74) produce el problema homogeneo
∂CA (z, t)
∂t= D
∂2CA (z, t)
∂z2,
t > 00 < z < b
(5.79a)
CA (z, 0) = (CA,0 − CA,i)(1− z
b
), 0 < z < b (5.79b)
CA (0, t) = 0, t > 0 (5.79c)
CA (b, t) = 0, t > 0 (5.79d)
Hay que notar que en la ecuacion (5.74b) solamente se despeja CA (z, 0) ya que no es posible definir nadaadicional para CA (z) porque la EDO (5.75) y las condiciones (5.76) y (5.77) ya dejan bien definida laestructura para CA (z).
Hay que notar que el problema para CA (z, t) tiene la misma estructura que el problema presentado en la
seccion 5.1.1, es decir que si en las ecuaciones (5.1), (5.2), (5.3) y (5.4) se remplaza T → CA, x→ z, L→ b,α → D y f (x) → (CA,0 − CA,i) (1− z/b) se obtiene el problema (5.79), por lo que su solucion utilizando laecuacion (5.10) es
CA (z, t) =
∞∑n=1
An sen(nπbz)e−D(nπ
b )2t,
164

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
donde los valores de An se obtienen con la ecuacion (5.13)
An =2
b(CA,0 − CA,i)
∫ b
0
(1− z
b
)sen
(nπbz)dz =
2
πn(CA,0 − CA,i) .
De esta forma la solucion completa para CA (z, t) es
CA (z, t) = CA,i + (CA,0 − CA,i)z
b+ 2
(CA,0 − CA,i)
π
∞∑n=1
sen(nπb z)
ne−D(nπ
b )2t (5.80)
o de forma equivalente
CA (z, t) = CA,0 +2
π(CA,i − CA,0)
∞∑n=1
sen(nπb x
)n
(1− e−D(nπ
b )2t),
t > 00 < z < b
. (5.81)
De acuerdo a (5.80) el flux molar es igual a
JA (z, t) = −D∂CA (z, t)
∂z=D
b(CA,i − CA,0)
[1 + 2
∞∑n=1
cos(nπbz)e−D(nπ
b )2t
]ası que los moles que entra por la interfase por unidad de tiempo y superficie son
JA (0, t) =D
b(CA,i − CA,0)
[1 + 2
∞∑n=1
e−D(nπb )
2t
]y el flujo promedio en un tiempo θ es
NA,prom =1
θ
∫ θ
0
JA (0, t) dt = kC,prom (CA,i − CA,0)
donde
kC,prom =D
b+
2b
π2θ
∞∑n=1
1− e−D(nπb )
2θ
n2
es el coeficiente local promedio de transferencia de masa. Dependiendo de los valores para θ y b se obtieneun relacion kC,prom ∝ Dm donde 0,5 < m < 1.
Aleta extendida
Ahora se considera la transferencia de calor en estado no estacionario en una aleta de enfriamiento encuyo extremo x = 0 se tiene un flujo de calor constante mientras que en el otro extremo, al igual que a todolo largo de la aleta ocurre un enfriamiento con el aire circundante que tiene una temperatura constante iguala Ta. Se considera que la temperatura inicial de la aleta es Ta y puede suponer que la transferencia ocurresolamente en la direccion x (ver Figura 5.5).
La EDP que describen la transferencia de calor en la aleta es
∂T (x, t)
∂t= α
∂2T (x, t)
∂x2− U [T (x, t) − Ta] ,
0 < x < Lt > 0
, (5.82)
donde α = k/ρcp y U = hp/Aρcp, k como la conductividad termica, h el coeficiente de transferencia de caloren la interfase solido-gas, p el perımetro de la aleta, A el area transversal al flujo y ρ y cp la densidad ycapacidad calorıfica del material de la aleta. Ademas, las condiciones son
Inicial : T (x, 0) = Ta, 0 < x < L (5.83)
Frontera :∂T (0, t)
∂x= − q
k,
∂T (L, t)
∂x−H [T (L, t)− Ta] = 0, t > 0 (5.84)
165

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
x = 0 x L=
q
TA
T x( , )t
Figura 5.5: Aleta extendida con transferencia de calor.
donde H = h/k. Este es un problema no homogeneo por lo que se define el cambio de variable:
T (x, t) = TH (x, t) + TP (x) (5.85)
en donde se desea que TH (x, t) este descrito por un problema homogeneo, mientras que TP (x) es la solucionparticular que se supone es una funcion exclusiva de x. Al sustituir la ecuacion (5.85) en la EDP (5.82) y lascondiciones (5.83) y (5.84) se obtiene el problema:
∂TH (x, t)
∂t= α
[∂2TH (x, t)
∂x2+d2TP (x)
dx2
]− U [TH (x, t) + TP (x)− Ta] ,
0 < x < Lt > 0
, (5.86)
T (x, 0) = TH (x, 0) + TP (x) = Ta, 0 < x < L (5.87)
∂TH (0, t)
∂x+dTP (0)
dx= − q
k, t > 0 (5.88)
∂TH (L, t)
∂x+dTP (L)
dx−H [TH (L, t) + TP (L)− Ta] = 0, t > 0 (5.89)
Como se desea tener un problema homogeneo para TH (x, t), para que la EDP para TH (x, t) sea homogeneay se tengas dos condiciones homogeneas para la misma variable evaluadas en dos puntos se define que
0 = αd2TP (x)
dx2− UTP (x) + UTa (5.90)
dTP (0)
dx= − q
k(5.91)
0 =dTP (L)
dx−H [TP (L)− Ta] (5.92)
La EDO (5.90) y las dos condiciones (5.91) y (5.92) definen completamente el comportamiento de Tp (x),por lo que al reemplazarlas en las ecuaciones (5.86)-(5.89) se llega al problema homogeneo
∂TH (x, t)
∂t= α
∂2TH (x, t)
∂x2− UTH (x, t) ,
0 < x < Lt > 0
, (5.93)
166

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Inicial : TH (x, 0) = Ta − Tp (x) , 0 < x < L (5.94)
Frontera :∂TH (0, t)
∂x= 0,
∂TH (L, t)
∂x−HTH (L, t) = 0, t > 0 (5.95)
La solucion de la EDO (5.90) es
TP (x) = b1eβx + b2e
−βx + Ta (5.96)
donde β =√U/α =
√hp/kA; mientras que su deriva es T ′
P (x) = β(b1e
βx − b2e−βx
), ası que de acuerdo a
las condiciones frontera (5.91) y (5.92)
T ′P (0) = − q
k= β (b1 − b2)
T ′P (L)−HTP (L) = −HTa = β
(b1e
βL − b2e−βL
)−H(b1e
βL + b2e−βL + Ta
)se llega al sistema lineal de ecuaciones(
1 −1(β −H) eβL − (β +H) e−βL
)(b1b2
)=
(− qkβ
0
)de donde se pueden determinar los valores para b1 y b2
b1 =q
kβ
(β +H) e−βL
(β −H) eβL − (β +H) e−βL, b2 =
q
kβ
(β −H) eβL
(β −H) eβL − (β +H) e−βL
que al reemplazar en (5.96) produce
TP (x) = Ta +q
kβ
[(β +H) eβ(x−L) + (β −H) e−β(x−L)
(β −H) eβL − (β +H) e−βL
], 0 < x < L.
Si se utilizan las funciones hiperbolicas y sus propiedades se obtiene la solucion
TP (x) = Ta +β cosh [β (x− L)] +H senh [β (x− L)]
β senh (βL)−H cosh (βL)= Ta +
q senh [β (x− δ)]
kβ senh (γ), 0 < x < L (5.97)
donde
δ = L− 1
βtanh−1
(β
H
)y γ = βL− tanh−1
(H
β
).
Por otro lado, para resolver mediante el metodos de separacion de variables el problema para TH (x, t),descrito por las ecuaciones (5.93)-(5.95), se define que
TH (x, t) = ξ (x) η (t) (5.98)
que al sustituir en la (5.93) produce la ecuacion
ξ (x) η′ (t) + Uξ (x) η (t) = αη (t) ξ′′ (x)
que se puede reacomodar comoη′ (t) + Uη (t)
αη (t)= −λ2 =
ξ′′ (x)ξ (x)
y de donde se obtienen las EDO
η′ (t) +(U + αλ2
)η (t) = 0 (5.99)
ξ′′ (x) + λ2ξ (x) = 0 (5.100)
167

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Si se reemplaza (5.98) en las condiciones homogeneas (5.95) se tiene que
∂T (0,t)∂x = ξ′ (0) η (t) = 0 =⇒ ξ′ (0) = 0
∂T (L,t)∂x −HT (L, t) = ξ′ (L) η (t)−Hξ (L) η (t) = 0 =⇒ ξ′ (L)−Hξ (L) = 0
(5.101)
La EDO (5.100) y las condiciones homogeneas (5.101) forman un problema de Sturm-Liouville cuya soluciones la siguiente:
La solucion de ξ (x) es ξ (x) : ξ (x) = c1 sen (λx) + c2 cos (λx), mientras que su derivada es ξ′ (x) =λc1 cos (λx) − λc2 sen (λx), ası que al evaluar la primera condicion de (5.101) se tiene que ξ′ (0) = 0 =λc1 =⇒ c1 = 0, mientras que la segunda condicion es
ξ′ (L)−Hξ (L) = 0 = −λc2 sen (λL)−Hc2 cos (λL)
Para que c2 sea diferente a cero se define que λ sen (λL) +H cos (λL) = 0 o reacomodando:
μ tan (μ) = −HL (5.102)
donde Bi = HL = hL/k es el numero de Biot y μ = λL. Esta ecuacion es la ecuacion caracterıstica de dondese pueden obtener los valores caracterısticos. Sin embargo, la solucion no es analıtica ya que en la ecuacion(5.102) no se puede despejar μ. En la Figura 5.6 se muestra una manera de obtener una solucion grafica;para tal fin se definen las funciones φ (μ) = tan (μ) y ψ (μ) = −Bi /μ, por lo que los puntos de cruce de estasfunciones, es decir φ (μn) = ψ (μn), n = 1, 2, 3, . . ., describen los valores caracterısticos μn, n = 1, 2, 3, . . .Ası la solucion para ξ (x) es
ξn (x) = c2 cos(μn
x
L
), n = 1, 2, 3, . . .
Por otro lado, la solucion para η (t) es
ηn (t) = c3e−(U+αμ2
n/L2)t, n = 1, 2, 3, . . .
y la solucion completa para la parte homogenea, de acuerdo a (5.98) es
TH (x, t) = e−Ht∞∑n=1
An cos(μn
x
L
)e−α(μn/L)2t
Ademas, de acuerdo a (5.85) la solucion total
T (x, t) = Ta +q senh [β (x− δ)]
kβ senh (γ)+ e−Ut
∞∑n=1
An cos(μn
x
L
)e−α(μn/L)2t (5.103)
Ahora se considera la condicion inicial (5.83) en (5.103)
T (x, 0) = Ta = Ta +q senh [β (x− δ)]
kβ senh (γ)+
∞∑n=1
An cos(μn
x
L
)que se puede reacomodar como
−q senh [β (x− δ)]
kβ senh (γ)= − q
kβ
[(β +H) eβ(x−L) + (β −H) e−β(x−L)
(β −H) eβL − (β +H) e−βL
]=
∞∑n=1
An cos(μn
x
L
)y aplicando el procedimiento de ortogonalizacion
− q
kβ senh (γ)
∫ L
0
senh [β (x− δ)] cos(μm
x
L
)dx =
∞∑n=1
An
∫ L
0
cos(μn
x
L
)cos
(μm
x
L
)dx (5.104)
168

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
0 π/2 π 3π/2 2π 5π/2 3π 7π/2 4π 9π/2 5π 11π/2
0
← μ1
← μ2
← μ3
← μ4
← μ5
←
μ = λ/L
φ(μ)
y ψ
(μ)
φ(μ)ψ(μ)
Figura 5.6: Valores caracterısticos para la ecuacion caracterısticas μn tan (μn) = −LH , con μn = λnL.
La integral del lado derecho es
− q
kβ senh (γ)
∫ L
0
senh [β (x− δ)] cos(μm
x
L
)dx = − L2q
k(β2L2 + μ2
m
) ,mientras que la integral del lado izquierdo, de acuerdo a sus propiedades de ortogonalidad es igual a cero sin �= m, mientras que cuando n = m es la norma cuadrada que para este caso particular es
∫ L
0
cos2(μm
x
L
)dx =
[x
2+
sen(2μm
xL
)4μm
L
]L0
=L
2
(1 +
sen (2μm)
2μm
).
Si ahora se utiliza la propiedad trigonometrica sen (2A) = 2 sen (A) cos (A) y ademas se considera la ecuacion
caracterıstica (5.102) de donde se puede inferir que sen (μm) = −Bi /√μ2m +Bi2 y cos (μm) = μm/
√μ2m +Bi2,
entonces se cumple que
sen (2μm) = 2 sen (μm) cos (μm) = − 2μm Bi
μ2m +Bi2
,
y por lo tanto la norma cuadrada es equivalente a∫ L
0
cos2(μm
x
L
)dx =
L
2
(1− Bi
μ2m +Bi2
)=L
2
μ2m − Bi (1− Bi)
μ2m +Bi2
.
Al sustituir las integrales en la ecuacion (5.104) es posible despejar Am
Am = − 2L(μ2m +Bi2
)q
k(β2L2 + μ2
m
)[μ2
m − Bi (1− Bi)]
169

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
y ası lo solucion total es
T (x, t) = Ta +q senh [β (x− δ)]
kβ senh (γ)− 2qL
ke−Ht
∞∑n=1
(μ2n +Bi2
)cos
(μn
xL
)e−α(μn/L)2t(
β2L2 + μ2m
)[μ2
n − Bi (1− Bi)].
Hay que notar que conforme se incrementa el tiempo el termino TH (x, t) tiende a cero, por lo que la solucionparticular TP (x) describe la temperatura que se alcanza en el estado estacionario.
5.3.3. Problemas con mas de dos variables independientes
El metodo de separacion de variables puede ser aplicado a ecuaciones diferenciales que contiene masde dos variables independientes. En este tipo de problemas se generan dos o mas problemas de Sturm -Louville, ası cuando se tiene n variables independientes, para aplicar el MSV es necesario poder generarn− 1 problemas de Sturm-Liouville por lo que se requiere que la EDP sea homogenea y ademas tener n− 1pares de condiciones homogeneas en donde cada par esta evaluado en dos puntos distintos de la mismavariable. A continuacion se presenta un ejemplo que ilustra la manera de resolver este tipo de problemas.
5.3.4. Temperatura en una placa en estado no estacionario
Se desea encontrar la distribucion de temperatura de una placa, T (x, y, t), de dimensiones L×H , dondetodos sus lados se encuentra a temperatura igual a cero, y que inicialmente tiene una distribucion de tem-peratura que se puede expresar como una funcion de la posicion (x, y).
El perfil de temperatura es funcion de la posicion x, y, y del tiempo, t, ası que la ecuacion que describeeste fenomeno es la ecuacion de calor en dos dimensiones
∂T (x, y, t)
∂t= α
[∂2T (x, y, t)
∂x2+∂2T (x, y, t)
∂y2
],
0 < x < L0 < y < Ht > 0
(5.105)
Las condiciones frontera para este problema son:
Frontera (x = 0) : T (0, y, t) = 0, (0 < y < H, t > 0) (5.106)
Frontera (x = L) : T (L, y, t) = 0, (0 < y < H, t > 0) (5.107)
Frontera (y = 0) : T (x, 0, t) = 0, (0 < x < L, t > 0) (5.108)
Frontera (y = H) : T (x,H, t) = 0, (0 < x < L, t > 0) (5.109)
Condicion inicial : T (x, y, 0) = f (x, y) , (0 < x < L, 0 < y < H) (5.110)
Como se puede apreciar, este problema es homogeneo, ası que su solucion se puede obtener mediante elmetodo de separacion de variables, en el cual se supone que la temperatura, T (x, y, t), es el producto de tresfunciones independientes entre si
T (x, y, t) = ξ (x) ζ (y) θ (t) , (0 < x < L, 0 < y < H, t > 0) (5.111)
Al sustituir esta definicion en la ecuacion EDP (5.105) se tiene
ξ (x) ζ (y) θ′ (t) = α[ξ′′ (x) ζ (y) θ (t) + ξ (x) ζ ′′ (y) θ (t)
],
0 < x < L0 < y < Ht > 0
Dividiendo la anterior por αξ (x) ζ (y) θ (t), y despejando el termino que contiene x se logra la primeraseparacion
θ′ (t)αθ (t)
− ζ′′ (y)ζ (y)
= −λ2 =ξ′′ (x)ξ (x)
170

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
En este caso, como el termino del lado derecho solo depende de x y el del lado izquierdo no, ambos ladosson independientes, por lo que se pueden igualar a una constante de separacion
(−λ2), por lo que a partirde esta ecuacion se obtiene una ecuacion diferencial ordinaria para ξ (x), y otra ecuacion que depende de yy de t:
ξ′′ (x) + λ2ξ (x) = 0, 0 < x < L (5.112)
θ′ (t)αθ (t)
+ λ2 =ζ ′′ (y)ζ (y)
,0 < y < Ht > 0
(5.113)
Como se observa, el lado izquierdo de la ecuacion (5.113) solo depende de t, mientras que el lado derechosolo depende de y, ası que ambos lados son independientes y se pueden igualar a una constante de separacion(-μ2), es decir
θ′ (t)αθ (t)
+ λ2 = −μ2 =ζ ′′ (y)ζ (y)
con lo cual se obtienen otras dos ecuaciones diferenciales ordinarias:
ζ′′ (y) + μ2ζ (y) = 0 (5.114)
θ′ (t) + α(λ2 + μ2
)θ (t) = 0 (5.115)
Aquı cabe resaltar que λ y μ son dos constantes de separacion independiente entre sı. Si ahora se sustituyela solucion propuesta (5.111) en las condiciones homogeneas (5.106)-(5.109), se tiene que
T (0, y, t) = ξ (0) ζ (y) θ (t) = 0 =⇒ ξ (0) = 0 (5.116)
T (L, y, t) = ξ (L) ζ (y) θ (t) = 0 =⇒ ξ (L) = 0 (5.117)
T (x, 0, t) = ξ (x) ζ (0) θ (t) = 0 =⇒ ζ (0) = 0 (5.118)
T (x,H, t) = ξ (x) ζ (H) θ (t) = 0 =⇒ ζ (H) = 0 (5.119)
las anteriores son definidas a causa de que las funciones ξ (x), ζ (y) y θ (t) deben ser diferentes de cero paraque la solucion propuesta tambien lo sea.
Las condiciones (5.116) y (5.117) junto con la ecuacion diferencial (5.112), al igual que las condiciones(5.118) y (5.119) junto con la ecuacion diferencial (5.114) forman dos problemas de Sturm Louville cuyasfunciones y valores caracterısticos se obtuvieron en el problema de la seccion 5.1.1. Funciones y valorescaracterısticos que tambien pueden ser obtenidos de la tabla 5.4. Los valores caracterısticos para cada casoson
λn =nπ
L, n = 1, 2, 3, . . . y μm =
mπ
H, m = 1, 2, 3, . . .
donde n y m son independientes entre sı, mientras que las funciones caracterısticas o soluciones para ξ (x) yζ (y) son respectivamente
ξ (x) = c1 sen(nπLx), 0 < x < L, n = 1, 2, 3, . . . (5.120)
ζ (y) = c3 sen(mπH
y), 0 < y < H, m = 1, 2, 3, . . . (5.121)
Por otro lado, la solucion de la EDO (5.115) es
θ (t) = c5e−α
[(nπ
L )2+(mπ
H )2]t, t > 0,
n = 1, 2, 3, . . .m = 1, 2, 3, . . .
(5.122)
Sustituyendo las ecuaciones (5.120), (5.121) y (5.122) en la solucion propuesta (5.111), se tiene
T (x, y, t) = c1c3c5 sen(nπLx)sen
(mπH
y)e−α
[(nπ
L )2+(mπ
H )2]t,
0 < x < L0 < y < Ht > 0
,n = 1, 2, 3, . . .m = 1, 2, 3, . . .
171

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Para tener una solucion unica, se utiliza el principio de superposicion de soluciones, y debido a que tanto ncomo m inician de uno hasta infinito, es necesario realizar dos sumatorias, una para cada contador, es decir,
T (x, y, t) =
∞∑n=1
∞∑m=1
Anm sen(nπLx)sen
(mπH
y)e−α
[(nπ
L )2+(mπ
H )2]t,
0 < x < L0 < y < Ht > 0
(5.123)
en donde, los coeficientes de combinacion lineal, Anm, dependen de los valores de n y m se obtiene su valorcon la aplicacion de la condicion no homogenea (5.110)
T (x, y, 0) = f (x, y) =∞∑
n=1
∞∑m=1
Anm sen(nπLx)sen
(mπH
y),
0 < x < L0 < y < H
Debido a que se cuenta con una doble sumatoria, se debe ortogonalizar dos veces, una para x y otra paray, por lo tanto es necesario multiplicar por las dos funciones caracterısticas con otro valor caracterıstico, eintegrar dos veces, una en el dominio de x y otra en el dominio de y, es decir∫ H
0
∫ L
0
f (x, y) sen(pπLx)sen
(qπHy)dxdy =
=
∞∑n=1
∞∑m=1
Anm
∫ L
0
sen(nπLx)sen
(pπLx)dx
∫ H
0
sen(mπH
y)sen
(qπHy)dy
La primera integral del lado derecho es igual a cero cuando n �= p, mientras que sı n = p, es igual a L/2. Deigual manera, la segunda integral del lado derecho es igual a cero cuando m �= q, mientras que sı m = q, esigual a H/2. Ası que se eliminan todos los terminos de la sumatoria menos uno, para despejar ası el valorde Anm
Anm =4
HL
∫ H
0
∫ L
0
f (x, y) sen(pπLx)sen
(qπHy)dxdy
y ası la solucion del problema resulta en
T (x, y, t) =4
HL
∞∑n=1
∞∑m=1
[∫ H
0
∫ L
0
f (w, v) sen(pπLw)sen
(qπHv)dwdv
]·
· sen(nπLx)sen
(mπH
y)e−α
[(nπ
L )2+(mπ
H )2]t,
en donde w y v son variables mudas de integracion.
5.4. Problemas en coordenadas esfericas
Como se analiza en la seccion 1.4.2 el Laplaciano en coordenadas esfericas es
∇2 =1
ρ2∂
∂ρ
(ρ2
∂
∂ρ
)+
1
ρ2 sen2 (φ)
∂2
∂θ2+
1
ρ2 sen (φ)
∂
∂φ
(sen (φ)
∂
∂φ
)=
∂2
∂ρ2+
2
ρ
∂
∂ρ+
1
ρ2 sen2 (φ)
∂2
∂θ2+
1
ρ2∂2
∂φ2 +cot (φ)
ρ2∂
∂φ.
En esta seccion se presentan el metodo de separacion de variables para problemas de la fısica matematicaque contienen este tipo de Laplacianos.
172

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
5.4.1. Problemas simetricos
Un problema simetrico en coordenadas esfericas es aquel que no depende de las coordenadas angulares,por lo tanto si el problema es lineal debe tener la forma general
A∂2ψ (ρ, t)
∂t2+B
∂ψ (ρ, t)
∂t+ Cψ (ρ, t) +D = E
[∂2ψ (ρ, t)
∂ρ2+
2
ρ
∂ψ (ρ, t)
∂ρ
]+ F
∂ψ (ρ, t)
∂ρ(5.124)
donde el termino en corchetes representa el Laplaciano simetrico.Este tipo de problemas se puden simplificar si se emplea el cambio de variable
V (ρ, t) = ρψ (ρ, t) o ψ (ρ, t) =V (ρ, t)
ρ. (5.125)
Las derivadas parciales con respecto a t de este cambio de variables son
∂ψ (ρ, t)
∂t=
1
ρ
∂V (ρ, t)
∂t,
∂2ψ (ρ, t)
∂t2=
1
ρ
∂2V (ρ, t)
∂t2,
mientras que las derivadas parciales con respecto a ρ son
∂ψ (ρ, t)
∂ρ=
∂
∂ρ
[V (ρ, t)
ρ
]=
1
ρ
∂V (ρ, t)
∂ρ− 1
ρ2V (ρ, t)
∂2ψ (ρ, t)
∂t2=
∂
∂ρ
[1
ρ
∂V (ρ, t)
∂ρ− 1
ρ2V (ρ, t)
]=
1
ρ
∂2V (ρ, t)
∂ρ2− 2
ρ2∂V (ρ, t)
∂ρ+
2
ρ3V (ρ, t)
por lo tanto el Laplaciano simetrico es equivalente a
∇2ψ =
[1
ρ
∂2V (ρ, t)
∂ρ2− 2
ρ2∂V (ρ, t)
∂ρ+
2
ρ3V (ρ, t)
]+
2
ρ
[1
ρ
∂V (ρ, t)
∂ρ− 1
ρ2V (ρ, t)
]=
1
ρ
∂2V (ρ, t)
∂ρ2
que se parece al Laplaciano cartesiano que depende solamente de una variable y de esta manera la EDP seconvierte en la ecuacion
A
ρ
∂2V (ρ, t)
∂t2+B
ρ
∂V (ρ, t)
∂t+ C
V (ρ, t)
ρ+D =
E
ρ
∂2V (ρ, t)
∂ρ2+ F
[1
ρ
∂V (ρ, t)
∂ρ− 1
ρ2V (ρ, t)
]que al ser multiplicada por ρ produce una EDP lineal en coordenas cartesianas para la variable V :
A∂2V (ρ, t)
∂t2+B
∂V (ρ, t)
∂t+
(C +
F
ρ
)V (ρ, t) +Dρ = E
∂2V (ρ, t)
∂ρ2+ F
∂V (ρ, t)
∂ρ
De la misma manera, cuando se tiene condiciones frontera del tipo
a∂ψ (c, t)
∂ρ+ bψ (c, t) = d (5.126)
donde solamente una de las constantes a o b podrıan ser iguales a cero. Al sustituir el cambio de variable(5.125) la condicion (5.126) se obtiene la expresion
ac∂V (c, t)
∂ρ+ (cb− a)V (c, t) = c2d. (5.127)
Es decir que el cambio de variable (5.125) permite transformar los problemas simetricos en coordenadasesfericas a problemas equivalentes en coordenadas cartesianas y por lo tanto los problemas de Sturm-Liouvilleque se obtienen tambien deben ser similares a los obtenidos en coordenadas cartesianas.
173

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Por otro lado, cuando se tiene problemas simetricos en coordenadas esfericas en donde el centro de laesfera forma parte del dominio de ρ, es decir 0 < ρ < R entonces el problema debe estar acompanado de unacondicion de simetrıa para el centro de la esfera que generalmente tiene la forma
∂ψ (0, t)
∂ρ= 0.
A continuacion se muestra un ejemplo de un problema simetrico.
Partıculas de un reactor nuclear
Unas esferas de uranio de reciente formacion, en las que ocurren reacciones nucleares, generan calor, Q,con densidad constante. Estas esferas son enfriadas por medio de un fluido con coeficiente de transferenciade calor h, de manera que el balance de calor para una sola partıcula es
∂T (ρ, t)
∂t= α
1
ρ2∂
∂ρ
(ρ2∂T (ρ, t)
∂ρ
)+Q
cp,
0 < ρ < Rt > 0
(5.128)
donde cp es la capacidad calorıfica especıfica, es decir por unidad de volumen, mientras que α = k/cp.Ademas se tiene las condiciones:
T (ρ, 0) = T0, 0 < ρ < R (5.129)
−k∂T (R, t)
∂ρ= h [T (R, t)− Tf ] , t > 0 (5.130)
con Tf como la temperatura del fluido enfriante y T0 la temperatura inicial de la partıcula. Adicionalmente,es necesaria una condicion de simetrıa, que siempre surge en problemas que involucran difusion en direccionradial que incluyan el origen, tanto en coordenadas esfericas como en coordenadas cilındricas, dicha condicionpuede escribirse como
∂T (0, t)
∂ρ= 0, (5.131)
que es equivalente a|T (ρ, t)| ≤M. (5.132)
Fısicamente la condicion frontera (5.131) indica que no hay transporte en el origen, mientras que la condicion(5.132) senala la imposibilidad de que la temperatura sea infinita en el origen.
El problema es no homogeneo a causa que la EDP (5.128) y la condicion frontera (5.130) son no ho-mogeneas. Por lo que para resolver este problema por el MSV se propone solucion
T (ρ, t) = TP (ρ) + TH (ρ, t) (5.133)
en donde TP (ρ) es la temperatura (estacionaria) alcanzada despues de transcurrir un tiempo muy grande yTH (ρ, t) es la solucion transitoria que desaparece a tiempo infinito.
Al sustituir en la EDP (5.128) y las condiciones frontera se tiene
∂TH (ρ, t)
∂t= α
1
ρ2∂
∂ρ
(ρ2d2TP (ρ)
dρ2+ ρ2
∂TH (ρ, t)
∂ρ
)+Q
cp,
−k[dTP (R)
dρ+∂TH (R, t)
∂ρ
]= h [TP (R) + TH (R, t)− Tf ]
dTP (0)
dρ+∂TH (0, t)
∂ρ= 0
174

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Para tener un problema homogeneo para TH (ρ, t) se define que
0 = α1
ρ2∂
∂ρ
(ρ2d2TP (ρ)
dρ2
)+Q
cp(5.134)
0 =dTP (0)
dρ(5.135)
0 =dTP (R)
dρ+H [TP (R)− Tf ] (5.136)
donde H = h/k.Al integrar una vez la EDO (5.134) se tiene que
ρ2d2TP (ρ)
dρ2= − Q
3kρ3 + C1
ası que al evaluar en ρ = 0, de acuerdo a (5.135), se obtiene que C1 = 0, e integrando nuevamente,
TP (ρ) = − Q
6kρ2 + C2
y de acuerdo a la condicion (5.136)
dTP (R)
dρ+H [TP (R)− Tf ] = − Q
3kR+H
[− Q
6kR2 + C2 − Tf
]= 0 =⇒ C2 = Tf +
QR
6
(2
h+R
k
)se llega a la solucion en estado estacionario
TP (ρ) = Tf +QR
3h+Q
6k
(R2 − ρ2
). (5.137)
Fısicamente, el termino de generacion de calor existe aun en el estado estacionario, lo que implica supresencia en la ecuacion para TP (ρ). Por otra parte, matematicamente, es justificable dejar el termino nohomogeneo en la EDO, haciendo homogenea la EDP. Ası se obtiene el problema homogeneo
∂TH (ρ, t)
∂t= α
1
ρ2∂
∂ρ
(ρ2∂TH (ρ, t)
∂ρ
), (5.138)
∂TH (0, t)
∂ρ= 0 (5.139)
∂TH (R, t)
∂ρ+HTH (R, t) = 0 (5.140)
TH (ρ, 0) = T0 − Tf − QR
3h− Q
6k
(R2 − ρ2
)(5.141)
Si ahora de acuerdo a la ecuacion (5.125) se define el cambio de variable
TH (ρ, t) =V (ρ, t)
ρ, (5.142)
de acuerdo a lo explicado al inicio de esta seccion la EDP (5.138) se transforman en
∂V (ρ, t)
∂t= α
∂2V (ρ, t)
∂ρ2(5.143)
175

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
mientas que de acuerdo a (5.126) y (5.127) las condiciones frontera son
V (0, t) = 0, (5.144)
∂V (R, t)
∂ρ+
(Bi−1
R
)V (R, t) = 0 (5.145)
donde Bi = hR/k es el numero de Biot (que es adimensional). Ademas, la condicion inicial es
V (ρ, 0) = ρ
[T0 − Tf − QR
3h− Q
6k
(R2 − ρ2
)](5.146)
Ahora se define que
V (ρ, t) = ξ (ρ) η (t)
por lo tanto al susitituir en la EDP (5.143) y separar variables se obtiene dos EDO
ξ′′ (ρ) + λ2ξ (ρ) = 0 (5.147)
η′ (t) + αλ2η (t) = 0 (5.148)
mientras que las condiciones homogeneas (5.144) y (5.145) producen
V (0, t) = ξ (0) η (t) = 0 =⇒ ξ (0) = 0∂V (R,t)
∂ρ + 1R (Bi−1)V (R, t) = ξ′ (R) η (t) + 1
R (Bi−1) ξ (R) η (t) = 0 =⇒ ξ′ (R) + 1R (Bi−1) ξ (R) = 0
(5.149)La EDO (5.147) y las condiciones (5.149) forman un problema de Sturm-Liouville (ver Tabla 5.4). La solucionde (5.147) es ξ (ρ) = c1 sen (λρ)+ c2 cos (λρ) ası que al aplicar la primera condicion de (5.149) se obtiene queξ (0) = c2 = 0, y la derivada de ξ es ξ′ (ρ) = λc1 cos (λρ), por lo tanto, de acuerdo a la segunda condicion de(5.149) se tiene que
ξ′ (R) +1
R(Bi−1) ξ (R) = λc1 cos (λR) +
1
R(Bi−1) c1 sen (λR) = 0 =⇒ tan (λR) =
λR
1− Bi
es decir que al definir μ = λR la ecuacion caracterıstica es (1− Bi) tan (μ) = μ, que no tiene una solucionanalıtica. En la Figura ?? se grafican las funciones φ (μ) = tan (μ) y ψ (μ) = μ/ (1− Bi) y los puntos de crucerepresentan los valores caracterısticos que logicamente dependiendo del valor de Bi. Para el caso particularen que Bi = 1 la ecuacion caracterıstica se reduce a μn cos (μn) = 0 y por lo tanto si existe una solucionanalıtica para los valores caracterısticos μn = (n− 1/2)π.
Como se observa se tiene un numero infinito de puntos de cruce y por ende un numero infinito de valorescaracterısticos λn = μn/R, n = 1, 2, 3, . . ., ası que la solucion para ξ es
ξ (ρ) = c1 sen(μn
ρ
R
), n = 1, 2, 3, . . .
Por otro lado, la solucion de (5.148) es η (t) = c3e−αλ2
nt, n = 1, 2, 3, . . ., y por lo tanto la solucion totalpara V (x, t) es
V (ρ, t) =
∞∑n=1
An sen(μn
ρ
R
)e−αλ2
nt,
ademas, de acuerdo a la condicion inicial (5.146)
V (ρ, 0) = ρ
[T0 − Tf − QR
3h− Q
6k
(R2 − ρ2
)]=
∞∑n=1
An sen(μn
ρ
R
).
176

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
0 π/2 π 3π/2 2π 5π/2 3π 7π/2 4π 9π/2 5π 11π/2
0 ← μ1
← μ1
← μ2
← μ2
← μ3
← μ3
← μ4
← μ4
← μ5
← μ5
μ = λ/L
φ(μ)
y ψ
(μ)
φ(μ)ψ(μ)
Bi < 1
Bi > 1
Figura 5.7: Valores caracterısticos con Bi = 0,5 y Bi = 2 para la ecuacion caracterıstica (1− Bi) tan (μn) =μn, con μn = λnL.
Para determinar los valores de las constantes An, n = 1, 2, 3, . . ., se utiliza el procedimiento de ortogonal-izacion, es decir que se multiplica la ecuacion anterior por la funcion caracterıstica con un valor caracterısticodado sen
(μm
ρR
), por la funcion de peso (que para ξ (ρ) es uno) y se integra en el dominio, es decir
∫ R
0
ρ
[T0 − Tf − QR
3h− Q
6k
(R2 − ρ2
)]sen
(μm
ρ
R
)dρ =
∞∑n=1
An
∫ R
0
sen(μn
ρ
R
)sen
(μm
ρ
R
)dρ (5.150)
Para el caso en que m �= n de acuerdo al problema de Sturm-Louville, la integral del lado derecho se vuelvecero, mientras que cuando n = m, esta integral toma la forma
∫ R
0
sen2(μn
ρ
R
)dρ =
[ρ
2− sen
(2μn
ρR
)4μn
R
]R0
=R
2
[1− sen (2μn)
2μn
]
de nueva cuenta, al utilizar la propiedad trigonometrica sen (2A) = 2 sen (A) cos (A) y la ecuacion caracterısti-
ca μn = (1− Bi) tan (μn) se concluye que sen (μn) = μn/
√μ2n + (1− Bi)2 y cos (μn) = (1− Bi) /
√μ2n + (1− Bi)2,
por lo tanto la integral anterior es∫ R
0
sen2(μn
ρ
R
)dρ =
R
2
μ2n − Bi (1− Bi)
μ2n + (1− Bi)
2 ,
mientras que la integral del lado izquierdo de (5.150) al ser evaluada resulta en
∫ R
0
ρ
[T0 − Tf − QR
3h− Q
6k
(R2 − ρ2
)]sen
(μn
ρ
R
)dρ = R2Bi
(T0 − Tf)μ2n − QR2
k
μn
√μ2n + (1− Bi)2
177

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
y ası, An resulta ser igual a
An = 2RBi
√μ2n + (1− Bi)
2[(T0 − Tf )μ
2n − QR2
k
]μn [μ
2n − Bi (1− Bi)]
.
Ahora, de acuerdo a (5.142) y al valor de V (ρ, t) obtenido TH (ρ, t) es igual a
TH (ρ, t) = 2RBi
∞∑n=1
√μ2n + (1− Bi)
2[(T0 − Tf)μ
2n − QR2
k
]μn [μ
2n − Bi (1− Bi)]
sen(μn
ρR
)ρ
e−αλ2nt,
mientras que la solucion final de acuerdo a (5.133) es
T (ρ, t) = T0 − Tf − QR
3h− Q
6k
(R2 − ρ2
)+2RBi
∞∑n=1
√μ2n + (1− Bi)
2[(T0 − Tf )μ
2n − QR2
k
]μn [μ2
n − Bi (1− Bi)]
sen(μn
ρR
)ρ
e−αλ2nt,
que tambien es equivalente a
T (ρ, t) = T0 − 2RBi∞∑n=1
√μ2n + (1− Bi)
2[(T0 − Tf)μ
2n − QR2
k
]μn [μ
2n − Bi (1− Bi)]
sen(μn
ρR
)ρ
(1− e−αλ2
nt).
5.5. Problemas en coordenadas cilındricas
Como se analiza en la seccion 1.4.1 el Laplaciano en coordenadas cilındricas es
∇2 =1
r
∂
∂r
(r∂
∂r
)+
1
r2∂2
∂θ2+
∂2
∂z2
=∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂θ2+
∂2
∂z2.
En esta seccion se presentan el metodo de separacion de variables para problemas de la fısica matematicaque contienen este tipo de Laplacianos.
5.5.1. Funciones de Bessel y sus propiedades
Para el modelado de sistemas en Ingenierıa Quımica son de gran utilidad las coordenadas cilındricas, yaque a traves de ellas se pueden describir de una manera adecuada una gran cantidad de procesos, esto debidoa que esta geometrıa se encuentra en tuberıas, reactores, intercambiadores de calor, y muchos mas equipos deIngenierıa Quımica. En esta seccion se estudiara estas coordenadas y los problemas de la fısica-matematicaque producen. En primer lugar se estudiaran los problemas que involucran el radio y que por simetrıa nodependen del angulo θ, para los cuales es necesario estudiar la ecuacion de Bessel.
La aplicacion del proceso de separacion de variables, en problemas con valores en la frontera que contienenel laplaciano, ∇2u, expresado en coordenadas cilındricas, a menudo produce una ecuacion de la forma
r2d2y
dr2+ r
dy
dr+(λ2r2 − p2
)y = 0 (5.151)
en donde y es una funcion de la coordenada r, mientras que λ es la constante de separacion y la determinacionde su(s) valor(es) esta(n) asociado(s) con la ecuacion (5.151) y p puede ser cualquier numero entero o real.Si se define la variable x = λr esta ecuacion toma la forma
x2d2y
dx2+ x
dy
dx+(x2 − p2
)y = 0, (5.152)
178

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que como se ha presentado en los ejemplos 27 y 28 es la ecuacion de Bessel de orden p. En particular, cuandop no es un numero entero la solucion, dada en la ecuacion (1.56) y que se obtuvo en el ejemplo 27, es
y (x) = c1Jp (x) + c2J−p (x)
en donde Jp (x) es la funcion de Bessel de primera especie de orden p definida en la ecuacion (1.55) por laserie
Jp (x) =
∞∑n=0
(−1)n
(n!) Γ (n+ p+ 1)
(x2
)2n+p
.
Hay que notar que Jp (−x) = (−1)pJp (x), lo cual significa que Jp (x) es una funcion par si p = 0, 2, 4, . . . y
non si n = 1, 3, 5, . . .
En particular, la serie que representa la funcion de Bessel de Primera clase y orden cero y uno son
J0 (x) = 1− x2
22+
x4
2242− x6
224262+ · · ·
J1 (x) =x
2− x3
224+
x5
22426− x7
2242628+ · · ·
aquı hay que notar que ddx [J0 (x)] = −J1 (x) que es una particularizacion de la ecuacion
d
dx
[x−nJn (x)
]= −x−nJn+1 (x)
Ademas, J0 (x) y J1 (x) recuerdan las series de las funciones coseno y seno, las cuales son
cos (x) = 1− x2
2!+x4
4!− x6
6!+ · · · , −∞ < x <∞
sen (x) = x− x3
3!+x5
5!− x7
7!+ · · · , −∞ < x <∞
siendo cos (x) y J0 (x) funciones pares y sen (x) y J1 (x) funciones non.
Por otro lado, para p entero o real la solucion general, dada en la ecuacion (1.62) y que se obtuvo en elejemplo 28, es
y (x) = c1Jp (x) + c2Yp (x) ,
donde Yp (x) es la funcion de Bessel de segunda especie de orden p que para numeros enteros, p = m =0, 1, 2, . . ., esta definida en la ecuacion (1.64) por la serie
Ym (x) =2
π
[ln(x2
)− γ
]Jm (x)− 1
π
m−1∑k=0
(m− k − 1)!(x2
)2k−m
− 1
π
∞∑k=0
(−1)k[Φ (k) + Φ (m+ k)]
k! (m+ k)!
(x2
)2k+m
El comportamiento de las funciones de Bessel de primera y segunda especie de orden 0, 1, 2 y 3 semuestran en la Figura 1.1. Es importante notar que si x→ 0 entonces Ym (x) → −∞.
De esta manera la solucion de la ecuacion (5.151) debe ser
y (r) = c1Jp (λr) + c2Yp (λr) .
179

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
5.5.2. Ortogonalidad y norma de las funciones de Bessel
Considerar que yp (λnr) es una solucion de la ecuacion de Bessel, que se corresponde a λn
r2d2yp (λnr)
dr2+ r
dyp (λnr)
dr+(λ2nr
2 − p2)yp (λnr) = 0 , a ≤ r ≤ b
Al dividir esta ecuacion por r, se obtiene
rd2yp (λnr)
dr2+dyp (λnr)
dr+
(λ2nr −
p2
r
)yp (λnr) = 0 , a ≤ r ≤ b
que puede escribirse como
d
dr
[rdyp (λnr)
dr
]+
(λ2nr −
p2
r
)yp (λnr) = 0 , a ≤ r ≤ b (5.153)
que si se compara con la ecuacion del problema de Sturm-Liouville (5.26)
d
dx
[r (x)
dy (x)
dx
]+[q (x) + λ2p (x)
]y (x) = 0, a < x < b
se observa que tiene la misma forma y se determina que la funcion de peso es p (r) = r. Ası, la integral deortogonalidad para la funcion de Bessel esta dada por:∫ b
a
ryp (λnr) yp (λmr) dr = 0 si λm �= λn. (5.154)
Dicho de otra manera, para ortogonalizar se requiere de multiplicar por r, que es la funcion de peso paralas funciones de Bessel. Sin embargo tambien es necesario conocer el valor de la integral (5.154) cuandoλm = λn, es decir, que es necesario encontrar la norma de las funciones de Bessel, ‖yp (λnr)‖, dada por laintegral
‖yp (λnr)‖2 =
∫ b
a
ry2p (λnr) dr. (5.155)
Para encontrar el valor de esta integral se toma la ecuacion (5.153) y se multiplica por 2ry′p (λnr)
2rdyp (λnr)
dr
d
dr
[rdyp (λnr)
dr
]+ 2
(λ2nr
2 − p2)yp (λnr)
dyp (λnr)
dr= 0 , a ≤ r ≤ b
Esta ecuacion se puede reescribir como
d
dr
[rdyp (λnr)
dr
]2+(λ2nr
2 − p2) d
dr
[y2p (λnr)
]= 0 , a ≤ r ≤ b
e integrar en el dominio ∫ b
a
d
[rdyp (λnr)
dr
]2+
∫ b
a
(λ2nr
2 − p2)d[y2p (λnr)
]= 0.
La segunda integral se puede resolver por parte, definiendo
u = λ2nr2 − p2 =⇒ du = 2λ2nrdr
dv = d[y2p (λnr)
]=⇒ v = y2p (λnr)
180

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
se llega a [rdyp (λnr)
dr
]2∣∣∣∣∣b
a
+[(λ2nr
2 − p2)y2p (λnr)
]ba− 2λ2n
∫ b
a
ry2p (λnr) dr = 0. (5.156)
al sustituir los lımites y despejar se obtiene la norma o magnitud de las funciones de Bessel
‖yp (λnr)‖2 =b2
2λ2n
[dyp (λnb)
dr
]2− a2
2λ2n
[dyp (λna)
dr
]2+b2y2p (λnb)− a2y2p (λna)
2− p2
2λ2n
[y2p (λnb)− y2p (λna)
](5.157)
Esta expresion es valida para cualquier solucion particular de la ecuacion de Bessel. Sin embargo, otraforma de representar esta ecuacion consiste en considerar la propiedad recursiva que satisfacen todas lasfunciones de Bessel
xdyp (x)
dx= pyp (x)− xyp+1 (x)
por lo que se debe cumplir que
rdyp (λnr)
dr= pyp (λnr)− λnryp+1 (λnr)
que al ser introducida en la ecuacion (5.156)∫ b
a
ry2p (λnr) dr =1
2λ2n
[[pyp (λnr)− λnryp+1 (λnr)]
2+(λ2nr
2 − p2)y2p (λnr)
]ba
y evaluar los lımite conduce a la norma cuadrada
‖yp (λnr)‖2 =b2
2
[y2p+1 (λnb) + y2p (λnb)
]− a2
2
[y2p+1 (λna) + y2p (λna)
]−p
[byp (λnb) yp+1 (λnb)− ayp (λna) yp+1 (λna)
λn
](5.158)
La solucion de diversos problemas de Sturm-Liouville para la ecuacion de Bessel de orden cero se muestranen la Tabla 5.5.
5.5.3. Solucion de problemas que generan series de Fourier-Bessel
Se desea encontrar la distribucion de temperatura en el interior de un cilindro circular de longitud infinitay radio R bajo la condicion de que su temperatura inicial es a
T = T0
(1− r2
R2
)si su superficie lateral se mantiene a una temperatura igual a cero.El modelo que puede escribir este sistema es la ecuacion de calor en coordenadas cilındricas dependiente
del radio y del tiempo
∂T (r, t)
∂t= α
[∂2T (r, t)
∂r2+
1
r
∂T (r, t)
∂r
],
0 < r < Rt > 0
(5.159)
acompanada con las condiciones
T (r, 0) = T0
(1− r2
R2
), 0 < r < R (5.160)
lımr→0
|T (r, t)| < M, t > 0 (5.161)
T (R, t) = 0, t > 0 (5.162)
181

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Pro
blemacara
cterıstic
oSolucion
cara
cterıstic
aEcu
acio
ndiferen
cial
x2X
′′(x)+xX
′(x)+λ2x
2X(x)=
0Ecu
acio
nFuncio
n(es)
Norm
acuadrada
Condicio
nfro
ntera
caraterıstica
caracterıstica
(s)‖X
(x)‖
2
x=
0x=c
X(c)
=0
J0(λ
nc)
=0
X(x)=J0(λ
nx)
c2J
21(λ
nc)/2
lımx→
0 |X(x)|≤
MX
′(c)=
0λnJ1(λ
nc)
=0
X(x)=J0(λ
nx)
c2J
20(λ
nc)/2
X′(0
)=
0X
(x)=
1c2/2
X′(c)
βJ0(λ
nc)
=λnJ1(λ
nc)
X(x)=J0(λ
nx)
c2(
β2+λ2n )
J21(λ
nc)
2β2
+βX
(c)=
0Condicio
nfro
ntera
Ecu
acio
nFuncio
n(es)
x=
1x=c
caracterıstica
caracterıstica
(s) †
[βY0(λ
n)−
λnαY1(λ
n)][bJ
0(λ
nc)−
aλnJ1(λ
nc)]
=X
(x)=
[βY0(λ
n)−
λnαY1(λ
n)]J
0(λ
nx)
αX
′(1)
aX
′(c)−[βJ0(λ
n)−
λnαJ1(λ
n)][bY
0(λ
nc)−
aλnY1(λ
nc)]
−[βJ0(λ
n)−
λnαJ1(λ
n)]Y
0(λ
nx)
+βX
(1)=
0+bX
(c)=
0X
(x)=βln(x)−
αα�=
0oβ�=
0a�=
0ob�=
0λn=
0Esta
solucio
nexiste
solo
siaβ=cb
[α−βln(c)]
†Lanorm
acu
adradase
puedecalcu
larutiliza
ndodirecta
mente
lasform
ulas(5.157)
o(5.158).
Cuadro
5.5:Problem
ascaracterıstico
spara
coorden
adascilın
drica
sconecu
acio
ndiferen
cialx2X
′′(x)+xX
′(x)+λ2x
2X(x)=
0,funcio
nde
peso
p(x)=x.
182

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
El problema es homogeneo, por lo cual es aplicable el metodo de separacion de variables. Sea
T (r, t) = P (r) θ (t) (5.163)
Al sustituir (5.163) en (5.159) se obtiene
P (r) θ′ (t) = αθ (t)
[P ′′ (r) +
1
rP ′ (r)
]de donde es posible separar las variables
1
α
θ′ (t)θ (t)
=P ′′ (r) + 1
rP′ (r)
P (r)= −λ2
para obtener las EDO
θ′ (t) = −αλ2θ (t) (5.164)
P ′′ (r) +1
rP ′ (r) + λ2P (r) = 0 (5.165)
Las soluciones de las ecuaciones (5.164) y (5.165) son
θ (t) = C1e−αλ2t
P (r) = C2J0 (λr) + C3Y0 (λr)
Para que se mantenga finita la temperatura cuando r → 0 (condicion frontera (5.161)) es necesario queC3 = 0 ya que Y0 (0) = −∞, por lo que P (r) es igual a
P (r) = C2J0 (λr)
ademas, al aplicar (5.163) en la condicion frontera (5.162)
T (R, t) = P (R) θ (t) = 0 =⇒ P (R) = 0,
ası que al sustituir la solucion para P (r) se tiene que
P (R) = C2J0 (λR) = 0
y para C2 �= 0 se obtiene la ecuacion caracterıstica
J0 (μ) = 0 (5.166)
donde μ = λR. A partir de esta ecuacion se pueden determinar los valores caracterısticos en los cuales lafuncion de Bessel de primera especie es igual a cero (ver Figura 5.8):
μ1 = 2,4048, μ2 = 5,5201, μ3 = 8,6537, μ4 = 11,7915,
μ5 = 14,9309, μ6 = 18,0711, μn ≈ μn−1 + π, n = 7, 8, 9, . . .
Por lo tanto las soluciones para θ (t) y P (r) son
θ (t) = C1e−α(μn/R)2t, n = 1, 2, 3, . . .
P (r) = C2J0
(μn
r
R
), n = 1, 2, 3, . . .
Luego, de acuerdo a la solucion (5.163) y aplicando el principio de superposicion se obtiene
T (r, t) =
∞∑n=1
AnJ0
(μn
r
R
)e−α(μn/R)2t (5.167)
183

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
0 5 10 15 20 25−1
−0.5
0
0.5
1
← μ
1 = 2.4048
← μ
2 = 5.5201
← μ
3 = 8.6537
← μ
4 = 11.7915
← μ
5 = 14.9309
← μ
6 = 18.0711
← μ
7 = 21.2116
← μ
8 = 24.3525
μ = λ/R
J0(μ)
Figura 5.8: Valores caracterısticos de la ecuacion caracterıstica J0 (μn) = 0, con μn = λnL.
y aplicando la condicion inicial se tiene
T0
(1− r2
R2
)=
∞∑n=1
AnJ0
(μn
r
R
)Esta ecuacion puede ortogonalizarse con la funcion caracterıstica J0 (μmr/R) y la funcion de peso r,
T0
∫ R
0
r
(1− r2
R2
)J0
(μm
r
R
)dr =
∞∑n=1
An
∫ R
0
rJ0
(μn
r
R
)J0
(μm
r
R
)dr, m = 1, 2, 3, . . . (5.168)
De acuerdo a tablas de integrales de funciones de Bessel∫xJ0 (x) dx = xJ1 (x)∫x3J0 (x) dx = x3J1 (x) + 2x2J0 (x)− 4xJ1 (x)
por lo tanto, al definir x = μmr/R, las integrales del lado izquierdo son∫ R
0
rJ0
(μn
r
R
)dr =
[Rr
μm
J1
(μn
r
R
)]R0
=R2
μm
J1 (μm)
∫ R
0
r3J0
(μn
r
R
)dr =
[μ2mRr
3J1(μn
rR
)+ 2μmR
2r2J0(μn
rR
)− 4R3rJ1(μn
rR
)μ3m
]R0
=R4
(μ2m − 4
)J1 (μn)
μ3m
ultimo resultado se obtiene ya que se cumple la ecuacion caracterıstica (5.166). Para la integral de la derechade acuerdo a la ortogonalidad de las funciones de Bessel se tiene que∫ R
0
rJ0
(μn
r
R
)J0
(μm
r
R
)dr, si n �= m
184

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Figura 5.9: Temperatura para el enfriamiento de un cilındro descrita por la ecuacion (5.169).
y si n = m, de acuerdo a (5.158) con p = 0, a = 0, b = R y yp (λnr) = J0(μn
rR
)se tiene que∫ R
0
rJ20
(μm
r
R
)dr =
R2
2
[J21 (μm) + J2
0 (μm)]=R2
2J21 (μm)
Ası que al sustituir todas las integrales de (5.168) se llega a
T0
[R2
μm
J1 (μm)− R2(μ2m − 4
)J1 (μn)
μ3m
]= Am
R2
2J21 (μm) , m = 1, 2, 3, . . .
de donde se obtiene que
An =8T0
μ3nJ1 (μn)
, n = 1, 2, 3, . . .
Al sustituir la anterior en (5.167) se llega a la solucion final
T (r, t) = 8T0
∞∑n=1
J0(μn
rR
)μ3nJ1 (μn)
e−α(μn/R)2t. (5.169)
En la Figura 5.9 se muestra el comportamiento de la temperatura.
5.5.4. Solucion de problemas que involucren la ecuacion de Euler-Cauchyque generan una serie de Fourier
Cuando se tiene problemas no simetricos en coordenadas cilındricas en donde las condiciones homogeneasson para el radio generalmente se obtienen problemas de Sturm-Liouville con la ecuacion diferencial
r2X ′′ (r) + rX ′ (r) + λ2X (r) = 0 (5.170)
185

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
que es una ecuacion de Cauchy-Euler con solucion
X (r) = c1 sen [λ ln (r)] + c2 cos [λ ln (r)] ,
y que dependiendo de las condiciones frontera tiene diversos valores para c1, c2 y λ. En la Tabla 5.6 sepresentan las soluciones de diversos problemas de Sturm-Liouville de este tipo.
Hay que notar que la ecuacion (5.170) se puede reacomodar como
d
dr
[rdX (r)
dr
]+λ2
rX (r) = 0,
por lo tanto la funcion de peso para estas ecuaciones es 1/r.
186

Apuntes de clase IQ204 2011A Juan Paulo Garcıa Sandoval
Pro
blemacara
cterıstico
Solucion
cara
cterıstica
Ecu
aciondiferen
cial
Valores
x2X
′′(x)+xX
′ (x)+λ2X
(x)=
0Ecu
acion
caracterısticos
Funcion(es)
Norm
acuadrada
Condicionfrontera
caraterıstica
n=
1,2,3,...
caracterıstica(s)
‖X(x)‖
2
x=
1x=c
X(c)=
0sen[λ
nln(c)]=
0λn=
nπ
ln(c)
X(x)=
sen[λ
nln(x)]
ln(c)/2
X(1)=
0X
′ (c)
=0
λncos[λ
nln(c)]=
0λn=
(2n−1)π
2ln(c)
X(x)=
sen[λ
nln(x)]
ln(c)/2
X′ (c)
βtan[λ
nln(c)]
Metodo
X(x)=
sen[λ
nln(x)]
cβ(1
+ln(c)cβ)+
ln(c)λ
2 n
2(c
2β2+λ2 n)
+βX
(c)=
0=
−λn/c
grafico
X(x)=
ln(x)solo
siβ=
−1
cln(c)
ln(c)3/3
X(c)=
0cos[λ
nln(c)]=
0λn=
(2n−1)π
2c
X(x)=
cos[λ
nln(x)]
ln(c)/2
X′ (1)=
0X
′ (c)
=0
λnsen[λ
nln(c)]=
0λ0=
0,
X(x)=
1c
λn=
nπ c
X(x)=
cos[λ
nln(x)]
c/2
X′ (c)
λntan[λ
nln(c)]=cβ
Metodo
X(x)=
cos[λ
nln(x)]
β(1
+cβ)+
cλ2 n
2(β
2+λ2 n)
+βX
(c)=
0grafico
X(c)=
0λn
Metodo
X(x)=
sen[λ
nln(x)]
α[ln(c)α
−1]+
ln(c)λ
2 n
2(α
2+λ2 n)
−λn
αccos[λ
nln(x)]
=αctan[λ
nln(c)]
grafico
X(x)=
1−αxsolo
siα=
1 cc 3
X′ (1)
X′ (c)
=0
−αc
Metodo
X(x)=
sen[λ
nln(x)]
α[ln(c)α
−1]+
ln(c)λ
2 n
2(α
2+λ2 n)
+αX
(1)=
0=λntan[λ
nln(c)]
grafico
−λn
αccos[λ
nln(x)]
X′ (c)
λnc(β
−α)
λ2 n+αβc2
Metodo
X(x)=
sen[λ
nln(x)]
1 2
[ ln(c)+
ββ2+λ2 n−
αα
2+λ2 n
]−
λn
αccos[λ
nln(x)]
+βX
(c)=
0=
tan[λ
nln(c)]
grafico
X(x)=
1−αln(x)
β3−α
3
3αβ3
solo
sicβ
=α
1−αln(c)
Cuadro
5.6:Problemascaracterısticospara
coorden
adascilındricasconecuaciondiferen
cialx2X
′′(x)+xX
′ (x)+λ2X
(x)=
0,funcionde
pesop(x)=
1/x.
187