
Nodes Localization in 3D Wireless Sensor Networks Based on Multidimensional Scaling Algorithm
11
Research Article Nodes Localization in 3D Wireless Sensor Networks Based on Multidimensional Scaling Algorithm Biljana Risteska Stojkoska Faculty of Computer Science and Engineering, Saints Cyril and Methodius University, 1000 Skopje, Macedonia Correspondence should be addressed to Biljana Risteska Stojkoska; biljana.stojkoska@finki.ukim.mk Received 5 March 2014; Revised 18 June 2014; Accepted 20 June 2014; Published 7 October 2014 Academic Editor: Yonghuai Liu Copyright © 2014 Biljana Risteska Stojkoska. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In the recent years, there has been a huge advancement in wireless sensor computing technology. Today, wireless sensor network (WSN) has become a key technology for different types of smart environment. Nodes localization in WSN has arisen as a very challenging problem in the research community. Most of the applications for WSN are not useful without a priory known nodes positions. Adding GPS receivers to each node is an expensive solution and inapplicable for indoor environments. In this paper, we implemented and evaluated an algorithm based on multidimensional scaling (MDS) technique for three-dimensional (3D) nodes localization in WSN using improved heuristic method for distance calculation. Using extensive simulations we investigated our approach regarding various network parameters. We compared the results from the simulations with other approaches for 3D- WSN localization and showed that our approach outperforms other techniques in terms of accuracy. 1. Introduction Wireless sensor network (WSN) represents a collection of wireless sensor nodes that coordinate with each other in order to perform a particular task. Sensor node is low-cost and low- power device that consists of three components: a sensing subsystem for data acquisition, a processing subsystem for local data processing, and a wireless communication subsys- tem for data transmission [1, 2]. Data are transferred from sensor nodes to the sink node (base station) through a multi- hop communication paradigm. Each sensor sends data to its closest neighbor responsible for retransmitting the packets. Following the latest developments in computer and communication technologies, everyday objects are becoming smarter, as ubiquitous connectivity and modern sensors allow them to communicate with each other. e deployment of sensors and actuators everywhere around us adds a new dimension to the world of information and communication [3], which enables the creation of new and enriched services widely applied in different industrial and civilian application areas, including industrial process monitoring and control, machine health monitoring, environment and habitat mon- itoring, healthcare applications, and traffic control [4, 5]. A fundamental problem in wireless sensor networks is localization, that is, the determination of the geographical locations of sensors. e most straightforward solution to the localization problem is to apply global positioning system (GPS) to each node. But it is not an attractive solution because of cost, size, and power constraints [6–8]. us, an effective localization algorithm should employ all the available infor- mation from the nodes to compute the positions. Localization is a challenge when dealing with wireless sensor nodes and a problem which has been studied for many years. Many different techniques have been proposed for solving this problem, but most of them consider only two- dimensional (2D) network. Hence, localization issue in three dimensions remains a challenging problem in the research community. In this paper, we analyze the well-known MDS-MAP algorithm for nodes localization in three-dimensional WSN. Since MDS-MAP is one of the algorithms that produce the best results and is considered as referent algorithm by many researchers for localization in two-dimensional net- works, we were motivated to implement it and investigate its performances in three-dimensional networks. Additionally, we propose a new algorithm based on MDS, which uses a Hindawi Publishing Corporation International Scholarly Research Notices Volume 2014, Article ID 845027, 10 pages http://dx.doi.org/10.1155/2014/845027
Transcript of Nodes Localization in 3D Wireless Sensor Networks Based on Multidimensional Scaling Algorithm
Research ArticleNodes Localization in 3D Wireless Sensor Networks Based onMultidimensional Scaling Algorithm
Biljana Risteska Stojkoska
Faculty of Computer Science and Engineering Saints Cyril and Methodius University 1000 Skopje Macedonia
Correspondence should be addressed to Biljana Risteska Stojkoska biljanastojkoskafinkiukimmk
Received 5 March 2014 Revised 18 June 2014 Accepted 20 June 2014 Published 7 October 2014
Academic Editor Yonghuai Liu
Copyright copy 2014 Biljana Risteska Stojkoska This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
In the recent years there has been a huge advancement in wireless sensor computing technology Today wireless sensor network(WSN) has become a key technology for different types of smart environment Nodes localization in WSN has arisen as a verychallenging problem in the research community Most of the applications for WSN are not useful without a priory known nodespositions Adding GPS receivers to each node is an expensive solution and inapplicable for indoor environments In this paper weimplemented and evaluated an algorithm based on multidimensional scaling (MDS) technique for three-dimensional (3D) nodeslocalization in WSN using improved heuristic method for distance calculation Using extensive simulations we investigated ourapproach regarding various network parameters We compared the results from the simulations with other approaches for 3D-WSN localization and showed that our approach outperforms other techniques in terms of accuracy
1 Introduction
Wireless sensor network (WSN) represents a collection ofwireless sensor nodes that coordinatewith each other in orderto perform a particular task Sensor node is low-cost and low-power device that consists of three components a sensingsubsystem for data acquisition a processing subsystem forlocal data processing and a wireless communication subsys-tem for data transmission [1 2] Data are transferred fromsensor nodes to the sink node (base station) through a multi-hop communication paradigm Each sensor sends data to itsclosest neighbor responsible for retransmitting the packets
Following the latest developments in computer andcommunication technologies everyday objects are becomingsmarter as ubiquitous connectivity and modern sensorsallow them to communicate with each otherThe deploymentof sensors and actuators everywhere around us adds a newdimension to the world of information and communication[3] which enables the creation of new and enriched serviceswidely applied in different industrial and civilian applicationareas including industrial process monitoring and controlmachine health monitoring environment and habitat mon-itoring healthcare applications and traffic control [4 5]
A fundamental problem in wireless sensor networks islocalization that is the determination of the geographicallocations of sensors The most straightforward solution tothe localization problem is to apply global positioning system(GPS) to each node But it is not an attractive solution becauseof cost size and power constraints [6ndash8] Thus an effectivelocalization algorithm should employ all the available infor-mation from the nodes to compute the positions
Localization is a challenge when dealing with wirelesssensor nodes and a problem which has been studied formany years Many different techniques have been proposedfor solving this problem butmost of them consider only two-dimensional (2D) network Hence localization issue in threedimensions remains a challenging problem in the researchcommunity
In this paper we analyze the well-known MDS-MAPalgorithm for nodes localization in three-dimensional WSNSince MDS-MAP is one of the algorithms that producethe best results and is considered as referent algorithm bymany researchers for localization in two-dimensional net-works we were motivated to implement it and investigate itsperformances in three-dimensional networks Additionallywe propose a new algorithm based on MDS which uses a
Hindawi Publishing CorporationInternational Scholarly Research NoticesVolume 2014 Article ID 845027 10 pageshttpdxdoiorg1011552014845027
2 International Scholarly Research Notices
heuristic approach for distance matrix calculation thus weimproved the accuracy of MDS-MAP Henceforth we wouldrefer to our algorithm as IMDS
The rest of this paper is organized as follows In thesecond section the relevant work related to the present 3Dlocalization techniques is discussed The third section referstomultidimensional scaling as a technique for nodes localiza-tion in three-dimensional WSN and covers its mathematicalbackground The fourth section elaborates our IMDS thatuses a heuristic approach for distance matrix calculationSection five and section six present the results provided fromthe simulations for 3D network and for 3D surface networksrespectively Finally we conclude this paper in section seven
2 Related Work
Techniques for WSN localization can be basically dividedinto two categories range-based and range-free methodsThe range-based techniques are considered more accurateand most of the algorithms for localization belong to thiscategory [6 9] They use the distance between the nodes inthe network [10 11] RSSI (receive signal strength indicator)is the most common technique used for distance estimationRSSI utilizes small resources without the need for extrahardware RSSI measures the power of the received radiosignal to calculate the distance between two nodes that arein transmission range of each other [12] Other techniques(time of arrival ToA time difference of arrival TDoA etc)for distance measurement translate propagation time intodistance [11] This can be done if signal propagation speedis known in advance These techniques can be used withacoustic infrared and ultrasound signals
Many research groups have investigated different tech-niques for nodes localization in WSN but most of theproposed techniques consider only two-dimensional WSNlocalization A few researchers within the last years have triedto focus on three-dimensional localization
One of the first proposed techniques for 3D localizationis Landscape-3D [13] In the first phase location-unawarenodes measure a set of distances to mobile location assistants(LAs) using RSSI In the next phase nodes use unscentedKalman filter to estimate their own position Very similarapproach is proposed in [14] RSSI is used for distance mea-surements while particle filter is used for nodes positioning
Although these methods are independent of networksdensity and networks topology the major drawback is itsdependence on mobile devices that might not be availableunder some deployments (eg hostile environments)
In [15] the authors propose cluster-based approachnamed CBLALS In each cluster the intercluster rangemeasurement errors are corrected using triangle principleThe evaluation of CBLALS with respect to other approachesshows that CBLALS has much better positioning accuracy
A novel centroid localization method that significantlyimproves the basic centroid localization algorithm is pre-sented in [16] Each unknown node randomly selects fouranchor nodes (nodes whose coordinates are known inadvance) in range to form a series of tetrahedrons used tocalculate its own position using novel centroid method
3 Multidimensional Scaling forLocalization in 3D-WSN
Multidimensional scaling (MDS) is a set of techniques usedfor reducing the dimensionality of the data (objects) MDSvisualizes the results in order to show hidden structures inthe data [17]MDS algorithm uses the distances between eachpair of object as an input and generates 2D-points or 3D-points as an output
In WSN MDS has an ability to reconstruct the relativemap of the network even without anchor nodes [18 19] Thefirst andmost explored isMDS-MAP [19] which is very accu-rate for density networks More computationally dependentapproaches are introduced in [20] MDS-MAP(P) [20] asa modification of MDS-MAP computes local maps at eachnode in the network and then integrates them into a globalmap Different approaches based on MDS-MAP are intro-duced in [21 22] In cluster-based MDS [22] the network isdivided into clusters responsible for partial localization usingMDS-MAP This approach evaluated for irregular networktopologies shows better performances than MDS-MAP interms of accuracy and better performances than MDS-MAP(P) in terms of computational complexity There aredozens of algorithms in the literature based onMDS butmostof them are developed and investigated for 2D WSN In ourprevious work MDS-MAP was implemented and evaluatedfor 3D WSN [23] In this paper we extended our workfrom [23] and propose a modification of MDS that shouldimprove the accuracy In this part we will explain in-depthmultidimensional scaling algorithm for three-dimensionalnetworks
31 Mathematical Background of MDS-MAP inThree Dimen-sional Space Consider a WSN with n nodes in a threedimensional space Let 119878
119899times3be an unknown matrix where
each row represents the coordinates of 119894-th point (node) alongthree dimensions Let Δ
(2)
(119878) or Δ(2) represents the matrix
of squared Euclidean distances between nodes 119894 and 119895 (119894 =
1 119899 119895 = 1 119899) The Δ(2)matrix can be calculated since we
assume that nodes have mechanisms to estimate the distancebetween each other
Δ(2)
(119878) = Δ(2)
=[[[
[
0 Δ(2)
12Δ(2)
13sdot sdot sdot Δ
(2)
1119899
Δ(2)
210 Δ
(2)
23sdot sdot sdot Δ
(2)
2119899
sdot sdot sdot
Δ(2)
1198991Δ(2)
1198992Δ(2)
1198993sdot sdot sdot 0
]]]
]
(1)
where
Δ(2)
119894119895(119878) = Δ
(2)
119894119895=
3
sum
119886=1
(119904119894119886
minus 119904119895119886
)2
(2)
It can be rewritten as
Δ(2)
119894119895=
3
sum
119886=1
(119904119894119886
2
+ 119904119895119886
2
minus 2119904119894119886119904119895119886
) (3)
International Scholarly Research Notices 3
or
Δ(2)
= 11988811015840
+ 11198881015840
minus 21198781198781015840
(4)
where 1 is an 119899 times 1 vector of ones and 119888 is a vector consistingthe diagonal elements of the scalar product matrix that is119888 = sum
3
119886=1119904119894119886
2Multiplying both sides of (4) by centering matrix 119879
119879 = 119868 minus 119899minus1
111015840
(5)
where 119868 is the identity matrix we get
119879Δ(2)
119879 = 119879 (11988811015840
+ 11198881015840
minus 21198781198781015840
) 119879
119879Δ(2)
119879 = 11987911988811015840
119879 + 11987911198881015840
119879 minus 11987921198781198781015840
119879
119879Δ(2)
119879 = 11987911988811015840
119879 + 11987911198881015840
119879 minus 119879 (2119861) 119879
119879Δ(2)
119879 = minus119879 (2119861) 119879
119861 = minus1
2119879Δ(2)
119879
(6)
Since 119861 is symmetric it can be decomposed
119861 = 119876Λ1198761015840
= (119876Λ12
) (119876Λ12
)1015840
= 1198781198781015840
(7)
where 119876 is orthonormal and Λ is a diagonal matrix
997904rArr 119878 = 119876Λ12
(8)
The recovered matrix 119878 obtained from (8) represents arelative map and has to be rotated as it has a differentcoordinate system
MDS-MAP for 3DWSN consists of 3 steps as follows
(1) Calculate the shortest distances between every pairof nodes (using either Dijkstrarsquos or Floydrsquos all pairsshortest path algorithm) This is the distance matrixthat serves as an input to themultidimensional scalingin step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Transform the relative map into absolute map usingsufficient number of anchor nodes (at least 4) Thisprocess usually includes translation rotation andreflection
32 Finding Optimal Rotation and Translation between Cor-responding 3D Nodes Generating an absolute map (step 3)of the WSN requires anchor nodes At least four sensorsrsquophysical positions are needed in order to identify the physicalpositions of the remaining nodes
Let 119875 = 1199011 1199012 119901
119873 and 119876 = 119902
1 1199022 119902
119873 be
two sets of corresponding nodes where 119873 is the number ofanchor nodes in the WSN We need to find a transformationthat optimally aligns the two sets in terms of least square
errors that is to minimize the sum of squares of the errorsbetween estimated positions of the anchors from MDS mapand their true positions We seek a rotation matrix 119877 and atranslation vector 119905 such that
(119877 119905) = arg min119877119905
119873
sum
119894=1
1003817100381710038171003817(119877119901119894+ 119905) minus 119902
119894
1003817100381710038171003817
2
(9)
This transformation is also known as Euclidean or rigidtransformation because it preserves the shape and the size
There are many algorithms proposed in the literature thatcompute a rigid 3D transformation Among them the mostexplored are those based on
(i) singular value decomposition (SVD)
(ii) unit quaternion (UQ)
(iii) dual quaternion (DQ)
(iv) orthonormal matrices (OM)
A comparison of these fourmethods can be found in [24]It is shown in [25] that the results of all these methods aresimilar in most cases and the difference in accuracy is almostinsignificant but the SVD is the most stable
Finding the optimal rigid transformation with SVD canbe broken down into the following steps
(i) Compute the weighted centroids of both point sets
119901 =1
119873
119873
sum
119894=1
119901119894 119902 =
1
119873
119873
sum
119894=1
119902119894 (10)
(ii) Compute the centered vectors
119901119894
1015840
= 119901119894minus 119901 119902
119894
1015840
= 119902119894minus 119902 119894 = 1 119873 (11)
(iii) Compute the 3 times 3 covariance matrix
119867 = 1198751015840
1198761015840119879
(12)
where 1198751015840 and 119876
1015840 are the 3 times 119873 matrices that have 119901119894
1015840
and 119902119894
1015840 as their columns respectively
(iv) Compute the singular value decomposition
119867 = 119880Σ119881119879
(13)
The rotation we are looking for is
119877 = 119881119880119879
(14)
(v) Compute the optimal translation as
119905 = 119902 minus 119877119901 (15)
4 International Scholarly Research Notices
33 Time Complexity of MDS-MAP for 3D-WSN In step 1distance matrix construction using Dijkstrarsquos or Floydrsquos algo-rithm requires 119874(119899
3
) where 119899 is the number of nodes in thenetwork [26] In step 2 applying MDS to the distance matrixhas complexity of119874(119899
3
) due to singular value decompositionIn step 3 the relative map is transformed through lineartransformations Computing the rigid transformation takes119874(119873) time for computing 119875 and 119876 while computing SVDtakes only 119874(3
3
) time (since the covariance matrix H hasdimension 3 times 3) Applying the transformation (rotation andtranslation) to the whole relative map takes 119874(119899 minus 119873) timewhere N is the number of anchors (119873 ≪ 119899)
4 MDS-Based Algorithm withHeuristic Approach for DistanceMatrix Calculation (IMDS)
The main drawback of MDS-MAP is the way it calculatesthe distance matrix Using Dijkstra (or Floydrsquos) all pairsshortest path algorithm to estimate the distances betweennonneighboring nodes in the network gives incorrect dis-tance matrix Dijkstra distance between two nodes usuallycorrelates with the Euclidean distance but always calculatesthe longest possible distance
To reduce the error present in distance matrix weintroduce a heuristic approach (HA) to estimate the distancesbetween nonneighboring nodes
In this section we will explain in detail our algorithmbased onmultidimensional scaling algorithm for nodes local-ization in WSN that uses HA for distance matrix calculation(IMDS)
41 Dijkstra Algorithm for DistanceMatrix Calculation MDSis very accurate technique for dimensionality reduction Ifthe correct distance matrix is given as input MDS algorithmwill reconstruct the map of the network without error Butcalculating distancematrix for networkswhere only distancesbetween neighboring nodes are known is not a trivial taskThis problem in MDS-MAP is solved by applying Dijkstrarsquos(or Floydrsquos) all pairs shortest path algorithm Dijkstrarsquos algo-rithm is a graph search algorithm that solves the single-sourcethe shortest path problem In WSN localization problem thesensor network is represented as a graph with nonnegativeedge path costs while the real Eucledian distance betweentwo nonneighboring nodes is replaced with the distancecalculated using Dijkstra algorithm But the assumption thatDijkstra distance between two nodes correlates with theirEuclidean distance is hardly true This approximation pro-duces an error that is the positions obtained as MDS outputusually differ from the correct positions The differencebetween the real and the predicted positions is known asestimation error The error is bigger when the nodes are inmultihop communication range which is a common case inobstructed environments It is usually caused by the presenceof obstacles or terrain irregularities that can obstruct the lineof sight between nodes or cause signal reflections Figure 1shows two examples when Dijkstra algorithm will calculatemuch larger distance between nonneighboring nodes Left
A
BA
B
a
b
c
d
Figure 1 Distance calculation using Dijkstra algorithm
side of the picture shows an example of two nodes A and Bthat are far from each other The distance between 119860 and 119861
will be calculated as119860119861 = 119886+ 119887+ 119888+119889 which is much longerthen the real Euclidian distanceThis scenario is presentwhenthe network is deployed on vast regionswhere the radio rangeof the nodes is short compared with the length of the regionOn the right side of Figure 1 there is an example where twonodes (119860 and 119861) cannot communicate directly although theyare very close to each otherThe reason for this is the presenceof obstacle that obstructs the line of sight In this scenarioDijkstra algorithm is completely inapplicable as it calculatesa few times longer distance
42 Heuristic Approach for DistanceMatrix Calculation (HA)As it can be seen from the two examples presented inFigure 1 the distance calculated using Dijkstra algorithmalways increases the real distance In order to reduce thisdistance in this paper we propose an alternative heuristicapproach By reducing the distance matrix error we intendto reduce the overall estimation error
Consider there are three nodes in a network A B andC (Figure 2) with known distances between nodes A and B(1198891
= 119860119861) and between nodes B and C (1198892
= 119861119862) Sincedistance matrix requires the distances between every pair ofnodes in the network the distance between nodes A and Chas to be obtained We will refer to this distance as a
If maximum radio range of the nodes in the network is Rthen we know for sure that node C can lay anywhere on thecurve C1C2 If Dijkstrarsquos algorithm is used for this purposeit will calculate the distance a as 119886 = 119860119861 + 119861119862 which isthe longest possible theoretical distance between nodesA andC More precisely C will lay exactly on C2 On the otherhand if we calculate the shortest possible theoretical distancebetween nodes A and C it will be very close to R We canconclude that
119877 lt 119886 le 1198891+ 1198892 (16)
To minimize the possible error we purpose a heuristicsolution that assumes that the node C lies exactly in the
International Scholarly Research Notices 5
C2
d2
d2
d2
C
a
B
d1
R
C1
A
Figure 2 Distance calculation using Heuristic Approach (HA)
middle of the curve C1C2 Hence the distance 119886 = 119860119862 canbe calculated using cosine formula as
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862) (17)
In order to calculate the distance a first we need to findthe angle using cosine formula
∢119860119861119862 = ∢1198601198611198621+ ∢1198621119861119862 (18)
The angle ∢1198601198611198621can be calculated again with the cosine
formula
∢1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (19)
Since∢1198621119861119862 = ∢119862119861119862
2
∢1198621119861119862 =
1
2∢11986211198611198622
∢1198621119861119862 =
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 = ∢1198601198611198621+
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 =120587
2+
1
2∢119860119861119862
1
(20)
Finally
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862)
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (
120587
2+
1
2∢119860119861119862
1)
= 1198891
2
+ 1198892
2
+ 2 sdot 1198891sdot 1198892sdot sin (
1
2∢119860119861119862
1)
(21)
where
1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (22)
43 Comparison of HA and Dijkstra In order to evaluateour heuristic approach (HA) for distance matrix calculationwe perform a simulation We randomly placed 100 nodesin a square and calculated the distances between the nodesusing both HA and Dijkstra algorithm Then we comparedthe differences between the real distances and the distancesobtained using the above-mentioned algorithms The differ-ence is normalized with radio range R The results from thesimulation are presented in Figure 3
As can be seen from the figure HA performs better thanDijkstra for all connectivity levels This is expected knowingthat Dijkstra calculates the longest possible distance whileHA tends to shorten this distance
HA performs much better than Dijkstra especially forlarge range error er This is rather important characteristic ofHA since rangemeasurement in the real applications is proneto error
When RSSI is used for distance signalization the rangeerror measurement is at least 10 R The results presentedin [27] show average range error measurement between 5R and 30 R for longer radio range R Similar researchconducted in [28 29] that investigate RSSI reported averagemeasurement error around 20 R
44 IMDS Algorithm IMDS for 3D WSN consists of thefollowing 3 steps
(1) Calculate the shortest distances between every pair ofnodes using heuristic approach This is the distancematrix that serves as an input to themultidimensionalscaling in step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Find the optimal rigid transformation with SVD andtransform the relative map into absolute map usingsufficient number of anchor nodes (at least 4)
IMDS preserves the time complexity of MDS-MAP algo-rithm
5 Results and Discussion
Weassume a typical sensor network composed of hundreds ofsensor nodes deployed uniformly across a three-dimensionalmonitored area Each sensor is equipped with an omni-directional antenna and only nodes within certain radiorange R can communicate with each other We made thefollowing assumptions
(i) Nodes are static and unaware of their location(ii) There is a path between every pair of nodes(iii) Nodes deployed in close proximity to each other
exchange messages(iv) Each node uses RSSI (or any other) method for
distance estimation
6 International Scholarly Research Notices
468
10121416
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 10
DijkstraHA
Erro
r (R
)
4
9
14
19
24
29
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 25
DjkstraHA
Erro
r (R
)
Figure 3 Distance error for HA and Dijkstra
We simulated both IMDS and MDS-MAP on randomnetwork topology with Matlab 100 nodes were uniformlyplaced in a cubic area (100 r times 100 r times 100 r where r is a unitlength distance) Our work was mainly focused on networkproperties like number of anchors average connectivity andrange error We consider the following
(i) Different network topologies
(a) random deployment for 3D-WSN (100 nodes)(b) grid deployment for 3D-WSN (125 nodes)
(ii) Different number of anchors (4 6 10 and 15) forabsolute map construction In our experiments weuse SVD method for 3D rigid transformation In oursimulation the anchors were selected randomly
(iii) Different radio ranges (R) which lead to differentaverage connectivity (average number of neighbors)
(iv) Different radio range error er (from 0 to 30 ofRwithstep 5 of R)
Thus 280 different networks were simulated (2 times 4 times 5 times
7) and each node location was discovered with both MDS-MAP and IMDS technique The connectivity parameter andthe estimation error for each scenario represent an averageover 30 trials The average estimation error is normalized bythe radio range R
Error =
sum(119899minus119873)
119894=1distance (pos(estimated)
119894 pos(true)119894
)
(119899 minus 119873) sdot 119877sdot 100
(23)
where n is the number of nodes in the network N isthe number of anchor nodes pos(estimated)
119894is the estimated
location and pos(true)119894
is the true location of the 119894-th node
51 Comparison of MDS-MAP and IMDS for 3D WSNFigure 4 shows an example of typical 3D network with 100nodes randomly deployed (119877 = 35 r and an average connec-tivity of 116) Blue lines represent the distance between the
absolute and the estimated position when using IMDS andMDS-MAP algorithm respectively The estimation error islarger if the lines are longer The absolute map is achievedusing 10 anchors (red circles) As can be seen from the figureIMDS performs better than MDS-MAP
Figure 5 shows the results of MDS-MAP and IMDS forrandom topology with range error 10 of R and 15 of Rwhenusing 10 anchors As can be seen from the figure in bothcases IMDS performs smaller estimation error than MDS-MAP for all connectivity levels
We must note that range error er has great impact onestimation accuracy When range error er is small MDS-MAP and IMDS perform almost the same with IMDSbeing slightly better As er increases MDS-MAP rapidlydeteriorates while IMDS is pretty much stable Consideringthe fact that range error is inevitable phenomena in WSNwe can conclude that IMDS is better option when choosinglocalization algorithm for 3D environments
As expected using more anchor nodes gives slightlysmaller estimation error Number of anchors affects theresults when the connectivity level is low For high connec-tivity levels there is no evident improvement (Figure 6)
52 Comparison of MDS-MAP and IMDS with OtherApproaches for 3D Localization To evaluate IMDS moreconvincingly the simulation experiments were conducted forCBLALS method [15] and for the novel centroid algorithm[16] The comparison with [15] shows that both IMDS andMDS-MAP perform better than CBLALS in terms of local-ization accuracy (Figure 7(a)) It is assumed that the densityof the anchors is 10 and the connectivity of the networks is10 sim 15 As can be seen from the results MDS-MAP is muchmore robust to range error than CBLALS especially for largerange errors The result from the comparison of IMDS andMAP-MAPwith the novel centroid algorithm [16] is shown in(Figure 7(b)) For all different radio range R both IMDS andMDS-MAP perform better than novel centroid algorithmHere the density of the anchors is 20The radio range errorfor this simulation is 119890
119903= 0 119877
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

2 International Scholarly Research Notices
heuristic approach for distance matrix calculation thus weimproved the accuracy of MDS-MAP Henceforth we wouldrefer to our algorithm as IMDS
The rest of this paper is organized as follows In thesecond section the relevant work related to the present 3Dlocalization techniques is discussed The third section referstomultidimensional scaling as a technique for nodes localiza-tion in three-dimensional WSN and covers its mathematicalbackground The fourth section elaborates our IMDS thatuses a heuristic approach for distance matrix calculationSection five and section six present the results provided fromthe simulations for 3D network and for 3D surface networksrespectively Finally we conclude this paper in section seven
2 Related Work
Techniques for WSN localization can be basically dividedinto two categories range-based and range-free methodsThe range-based techniques are considered more accurateand most of the algorithms for localization belong to thiscategory [6 9] They use the distance between the nodes inthe network [10 11] RSSI (receive signal strength indicator)is the most common technique used for distance estimationRSSI utilizes small resources without the need for extrahardware RSSI measures the power of the received radiosignal to calculate the distance between two nodes that arein transmission range of each other [12] Other techniques(time of arrival ToA time difference of arrival TDoA etc)for distance measurement translate propagation time intodistance [11] This can be done if signal propagation speedis known in advance These techniques can be used withacoustic infrared and ultrasound signals
Many research groups have investigated different tech-niques for nodes localization in WSN but most of theproposed techniques consider only two-dimensional WSNlocalization A few researchers within the last years have triedto focus on three-dimensional localization
One of the first proposed techniques for 3D localizationis Landscape-3D [13] In the first phase location-unawarenodes measure a set of distances to mobile location assistants(LAs) using RSSI In the next phase nodes use unscentedKalman filter to estimate their own position Very similarapproach is proposed in [14] RSSI is used for distance mea-surements while particle filter is used for nodes positioning
Although these methods are independent of networksdensity and networks topology the major drawback is itsdependence on mobile devices that might not be availableunder some deployments (eg hostile environments)
In [15] the authors propose cluster-based approachnamed CBLALS In each cluster the intercluster rangemeasurement errors are corrected using triangle principleThe evaluation of CBLALS with respect to other approachesshows that CBLALS has much better positioning accuracy
A novel centroid localization method that significantlyimproves the basic centroid localization algorithm is pre-sented in [16] Each unknown node randomly selects fouranchor nodes (nodes whose coordinates are known inadvance) in range to form a series of tetrahedrons used tocalculate its own position using novel centroid method
3 Multidimensional Scaling forLocalization in 3D-WSN
Multidimensional scaling (MDS) is a set of techniques usedfor reducing the dimensionality of the data (objects) MDSvisualizes the results in order to show hidden structures inthe data [17]MDS algorithm uses the distances between eachpair of object as an input and generates 2D-points or 3D-points as an output
In WSN MDS has an ability to reconstruct the relativemap of the network even without anchor nodes [18 19] Thefirst andmost explored isMDS-MAP [19] which is very accu-rate for density networks More computationally dependentapproaches are introduced in [20] MDS-MAP(P) [20] asa modification of MDS-MAP computes local maps at eachnode in the network and then integrates them into a globalmap Different approaches based on MDS-MAP are intro-duced in [21 22] In cluster-based MDS [22] the network isdivided into clusters responsible for partial localization usingMDS-MAP This approach evaluated for irregular networktopologies shows better performances than MDS-MAP interms of accuracy and better performances than MDS-MAP(P) in terms of computational complexity There aredozens of algorithms in the literature based onMDS butmostof them are developed and investigated for 2D WSN In ourprevious work MDS-MAP was implemented and evaluatedfor 3D WSN [23] In this paper we extended our workfrom [23] and propose a modification of MDS that shouldimprove the accuracy In this part we will explain in-depthmultidimensional scaling algorithm for three-dimensionalnetworks
31 Mathematical Background of MDS-MAP inThree Dimen-sional Space Consider a WSN with n nodes in a threedimensional space Let 119878
119899times3be an unknown matrix where
each row represents the coordinates of 119894-th point (node) alongthree dimensions Let Δ
(2)
(119878) or Δ(2) represents the matrix
of squared Euclidean distances between nodes 119894 and 119895 (119894 =
1 119899 119895 = 1 119899) The Δ(2)matrix can be calculated since we
assume that nodes have mechanisms to estimate the distancebetween each other
Δ(2)
(119878) = Δ(2)
=[[[
[
0 Δ(2)
12Δ(2)
13sdot sdot sdot Δ
(2)
1119899
Δ(2)
210 Δ
(2)
23sdot sdot sdot Δ
(2)
2119899
sdot sdot sdot
Δ(2)
1198991Δ(2)
1198992Δ(2)
1198993sdot sdot sdot 0
]]]
]
(1)
where
Δ(2)
119894119895(119878) = Δ
(2)
119894119895=
3
sum
119886=1
(119904119894119886
minus 119904119895119886
)2
(2)
It can be rewritten as
Δ(2)
119894119895=
3
sum
119886=1
(119904119894119886
2
+ 119904119895119886
2
minus 2119904119894119886119904119895119886
) (3)
International Scholarly Research Notices 3
or
Δ(2)
= 11988811015840
+ 11198881015840
minus 21198781198781015840
(4)
where 1 is an 119899 times 1 vector of ones and 119888 is a vector consistingthe diagonal elements of the scalar product matrix that is119888 = sum
3
119886=1119904119894119886
2Multiplying both sides of (4) by centering matrix 119879
119879 = 119868 minus 119899minus1
111015840
(5)
where 119868 is the identity matrix we get
119879Δ(2)
119879 = 119879 (11988811015840
+ 11198881015840
minus 21198781198781015840
) 119879
119879Δ(2)
119879 = 11987911988811015840
119879 + 11987911198881015840
119879 minus 11987921198781198781015840
119879
119879Δ(2)
119879 = 11987911988811015840
119879 + 11987911198881015840
119879 minus 119879 (2119861) 119879
119879Δ(2)
119879 = minus119879 (2119861) 119879
119861 = minus1
2119879Δ(2)
119879
(6)
Since 119861 is symmetric it can be decomposed
119861 = 119876Λ1198761015840
= (119876Λ12
) (119876Λ12
)1015840
= 1198781198781015840
(7)
where 119876 is orthonormal and Λ is a diagonal matrix
997904rArr 119878 = 119876Λ12
(8)
The recovered matrix 119878 obtained from (8) represents arelative map and has to be rotated as it has a differentcoordinate system
MDS-MAP for 3DWSN consists of 3 steps as follows
(1) Calculate the shortest distances between every pairof nodes (using either Dijkstrarsquos or Floydrsquos all pairsshortest path algorithm) This is the distance matrixthat serves as an input to themultidimensional scalingin step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Transform the relative map into absolute map usingsufficient number of anchor nodes (at least 4) Thisprocess usually includes translation rotation andreflection
32 Finding Optimal Rotation and Translation between Cor-responding 3D Nodes Generating an absolute map (step 3)of the WSN requires anchor nodes At least four sensorsrsquophysical positions are needed in order to identify the physicalpositions of the remaining nodes
Let 119875 = 1199011 1199012 119901
119873 and 119876 = 119902
1 1199022 119902
119873 be
two sets of corresponding nodes where 119873 is the number ofanchor nodes in the WSN We need to find a transformationthat optimally aligns the two sets in terms of least square
errors that is to minimize the sum of squares of the errorsbetween estimated positions of the anchors from MDS mapand their true positions We seek a rotation matrix 119877 and atranslation vector 119905 such that
(119877 119905) = arg min119877119905
119873
sum
119894=1
1003817100381710038171003817(119877119901119894+ 119905) minus 119902
119894
1003817100381710038171003817
2
(9)
This transformation is also known as Euclidean or rigidtransformation because it preserves the shape and the size
There are many algorithms proposed in the literature thatcompute a rigid 3D transformation Among them the mostexplored are those based on
(i) singular value decomposition (SVD)
(ii) unit quaternion (UQ)
(iii) dual quaternion (DQ)
(iv) orthonormal matrices (OM)
A comparison of these fourmethods can be found in [24]It is shown in [25] that the results of all these methods aresimilar in most cases and the difference in accuracy is almostinsignificant but the SVD is the most stable
Finding the optimal rigid transformation with SVD canbe broken down into the following steps
(i) Compute the weighted centroids of both point sets
119901 =1
119873
119873
sum
119894=1
119901119894 119902 =
1
119873
119873
sum
119894=1
119902119894 (10)
(ii) Compute the centered vectors
119901119894
1015840
= 119901119894minus 119901 119902
119894
1015840
= 119902119894minus 119902 119894 = 1 119873 (11)
(iii) Compute the 3 times 3 covariance matrix
119867 = 1198751015840
1198761015840119879
(12)
where 1198751015840 and 119876
1015840 are the 3 times 119873 matrices that have 119901119894
1015840
and 119902119894
1015840 as their columns respectively
(iv) Compute the singular value decomposition
119867 = 119880Σ119881119879
(13)
The rotation we are looking for is
119877 = 119881119880119879
(14)
(v) Compute the optimal translation as
119905 = 119902 minus 119877119901 (15)
4 International Scholarly Research Notices
33 Time Complexity of MDS-MAP for 3D-WSN In step 1distance matrix construction using Dijkstrarsquos or Floydrsquos algo-rithm requires 119874(119899
3
) where 119899 is the number of nodes in thenetwork [26] In step 2 applying MDS to the distance matrixhas complexity of119874(119899
3
) due to singular value decompositionIn step 3 the relative map is transformed through lineartransformations Computing the rigid transformation takes119874(119873) time for computing 119875 and 119876 while computing SVDtakes only 119874(3
3
) time (since the covariance matrix H hasdimension 3 times 3) Applying the transformation (rotation andtranslation) to the whole relative map takes 119874(119899 minus 119873) timewhere N is the number of anchors (119873 ≪ 119899)
4 MDS-Based Algorithm withHeuristic Approach for DistanceMatrix Calculation (IMDS)
The main drawback of MDS-MAP is the way it calculatesthe distance matrix Using Dijkstra (or Floydrsquos) all pairsshortest path algorithm to estimate the distances betweennonneighboring nodes in the network gives incorrect dis-tance matrix Dijkstra distance between two nodes usuallycorrelates with the Euclidean distance but always calculatesthe longest possible distance
To reduce the error present in distance matrix weintroduce a heuristic approach (HA) to estimate the distancesbetween nonneighboring nodes
In this section we will explain in detail our algorithmbased onmultidimensional scaling algorithm for nodes local-ization in WSN that uses HA for distance matrix calculation(IMDS)
41 Dijkstra Algorithm for DistanceMatrix Calculation MDSis very accurate technique for dimensionality reduction Ifthe correct distance matrix is given as input MDS algorithmwill reconstruct the map of the network without error Butcalculating distancematrix for networkswhere only distancesbetween neighboring nodes are known is not a trivial taskThis problem in MDS-MAP is solved by applying Dijkstrarsquos(or Floydrsquos) all pairs shortest path algorithm Dijkstrarsquos algo-rithm is a graph search algorithm that solves the single-sourcethe shortest path problem In WSN localization problem thesensor network is represented as a graph with nonnegativeedge path costs while the real Eucledian distance betweentwo nonneighboring nodes is replaced with the distancecalculated using Dijkstra algorithm But the assumption thatDijkstra distance between two nodes correlates with theirEuclidean distance is hardly true This approximation pro-duces an error that is the positions obtained as MDS outputusually differ from the correct positions The differencebetween the real and the predicted positions is known asestimation error The error is bigger when the nodes are inmultihop communication range which is a common case inobstructed environments It is usually caused by the presenceof obstacles or terrain irregularities that can obstruct the lineof sight between nodes or cause signal reflections Figure 1shows two examples when Dijkstra algorithm will calculatemuch larger distance between nonneighboring nodes Left
A
BA
B
a
b
c
d
Figure 1 Distance calculation using Dijkstra algorithm
side of the picture shows an example of two nodes A and Bthat are far from each other The distance between 119860 and 119861
will be calculated as119860119861 = 119886+ 119887+ 119888+119889 which is much longerthen the real Euclidian distanceThis scenario is presentwhenthe network is deployed on vast regionswhere the radio rangeof the nodes is short compared with the length of the regionOn the right side of Figure 1 there is an example where twonodes (119860 and 119861) cannot communicate directly although theyare very close to each otherThe reason for this is the presenceof obstacle that obstructs the line of sight In this scenarioDijkstra algorithm is completely inapplicable as it calculatesa few times longer distance
42 Heuristic Approach for DistanceMatrix Calculation (HA)As it can be seen from the two examples presented inFigure 1 the distance calculated using Dijkstra algorithmalways increases the real distance In order to reduce thisdistance in this paper we propose an alternative heuristicapproach By reducing the distance matrix error we intendto reduce the overall estimation error
Consider there are three nodes in a network A B andC (Figure 2) with known distances between nodes A and B(1198891
= 119860119861) and between nodes B and C (1198892
= 119861119862) Sincedistance matrix requires the distances between every pair ofnodes in the network the distance between nodes A and Chas to be obtained We will refer to this distance as a
If maximum radio range of the nodes in the network is Rthen we know for sure that node C can lay anywhere on thecurve C1C2 If Dijkstrarsquos algorithm is used for this purposeit will calculate the distance a as 119886 = 119860119861 + 119861119862 which isthe longest possible theoretical distance between nodesA andC More precisely C will lay exactly on C2 On the otherhand if we calculate the shortest possible theoretical distancebetween nodes A and C it will be very close to R We canconclude that
119877 lt 119886 le 1198891+ 1198892 (16)
To minimize the possible error we purpose a heuristicsolution that assumes that the node C lies exactly in the
International Scholarly Research Notices 5
C2
d2
d2
d2
C
a
B
d1
R
C1
A
Figure 2 Distance calculation using Heuristic Approach (HA)
middle of the curve C1C2 Hence the distance 119886 = 119860119862 canbe calculated using cosine formula as
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862) (17)
In order to calculate the distance a first we need to findthe angle using cosine formula
∢119860119861119862 = ∢1198601198611198621+ ∢1198621119861119862 (18)
The angle ∢1198601198611198621can be calculated again with the cosine
formula
∢1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (19)
Since∢1198621119861119862 = ∢119862119861119862
2
∢1198621119861119862 =
1
2∢11986211198611198622
∢1198621119861119862 =
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 = ∢1198601198611198621+
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 =120587
2+
1
2∢119860119861119862
1
(20)
Finally
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862)
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (
120587
2+
1
2∢119860119861119862
1)
= 1198891
2
+ 1198892
2
+ 2 sdot 1198891sdot 1198892sdot sin (
1
2∢119860119861119862
1)
(21)
where
1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (22)
43 Comparison of HA and Dijkstra In order to evaluateour heuristic approach (HA) for distance matrix calculationwe perform a simulation We randomly placed 100 nodesin a square and calculated the distances between the nodesusing both HA and Dijkstra algorithm Then we comparedthe differences between the real distances and the distancesobtained using the above-mentioned algorithms The differ-ence is normalized with radio range R The results from thesimulation are presented in Figure 3
As can be seen from the figure HA performs better thanDijkstra for all connectivity levels This is expected knowingthat Dijkstra calculates the longest possible distance whileHA tends to shorten this distance
HA performs much better than Dijkstra especially forlarge range error er This is rather important characteristic ofHA since rangemeasurement in the real applications is proneto error
When RSSI is used for distance signalization the rangeerror measurement is at least 10 R The results presentedin [27] show average range error measurement between 5R and 30 R for longer radio range R Similar researchconducted in [28 29] that investigate RSSI reported averagemeasurement error around 20 R
44 IMDS Algorithm IMDS for 3D WSN consists of thefollowing 3 steps
(1) Calculate the shortest distances between every pair ofnodes using heuristic approach This is the distancematrix that serves as an input to themultidimensionalscaling in step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Find the optimal rigid transformation with SVD andtransform the relative map into absolute map usingsufficient number of anchor nodes (at least 4)
IMDS preserves the time complexity of MDS-MAP algo-rithm
5 Results and Discussion
Weassume a typical sensor network composed of hundreds ofsensor nodes deployed uniformly across a three-dimensionalmonitored area Each sensor is equipped with an omni-directional antenna and only nodes within certain radiorange R can communicate with each other We made thefollowing assumptions
(i) Nodes are static and unaware of their location(ii) There is a path between every pair of nodes(iii) Nodes deployed in close proximity to each other
exchange messages(iv) Each node uses RSSI (or any other) method for
distance estimation
6 International Scholarly Research Notices
468
10121416
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 10
DijkstraHA
Erro
r (R
)
4
9
14
19
24
29
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 25
DjkstraHA
Erro
r (R
)
Figure 3 Distance error for HA and Dijkstra
We simulated both IMDS and MDS-MAP on randomnetwork topology with Matlab 100 nodes were uniformlyplaced in a cubic area (100 r times 100 r times 100 r where r is a unitlength distance) Our work was mainly focused on networkproperties like number of anchors average connectivity andrange error We consider the following
(i) Different network topologies
(a) random deployment for 3D-WSN (100 nodes)(b) grid deployment for 3D-WSN (125 nodes)
(ii) Different number of anchors (4 6 10 and 15) forabsolute map construction In our experiments weuse SVD method for 3D rigid transformation In oursimulation the anchors were selected randomly
(iii) Different radio ranges (R) which lead to differentaverage connectivity (average number of neighbors)
(iv) Different radio range error er (from 0 to 30 ofRwithstep 5 of R)
Thus 280 different networks were simulated (2 times 4 times 5 times
7) and each node location was discovered with both MDS-MAP and IMDS technique The connectivity parameter andthe estimation error for each scenario represent an averageover 30 trials The average estimation error is normalized bythe radio range R
Error =
sum(119899minus119873)
119894=1distance (pos(estimated)
119894 pos(true)119894
)
(119899 minus 119873) sdot 119877sdot 100
(23)
where n is the number of nodes in the network N isthe number of anchor nodes pos(estimated)
119894is the estimated
location and pos(true)119894
is the true location of the 119894-th node
51 Comparison of MDS-MAP and IMDS for 3D WSNFigure 4 shows an example of typical 3D network with 100nodes randomly deployed (119877 = 35 r and an average connec-tivity of 116) Blue lines represent the distance between the
absolute and the estimated position when using IMDS andMDS-MAP algorithm respectively The estimation error islarger if the lines are longer The absolute map is achievedusing 10 anchors (red circles) As can be seen from the figureIMDS performs better than MDS-MAP
Figure 5 shows the results of MDS-MAP and IMDS forrandom topology with range error 10 of R and 15 of Rwhenusing 10 anchors As can be seen from the figure in bothcases IMDS performs smaller estimation error than MDS-MAP for all connectivity levels
We must note that range error er has great impact onestimation accuracy When range error er is small MDS-MAP and IMDS perform almost the same with IMDSbeing slightly better As er increases MDS-MAP rapidlydeteriorates while IMDS is pretty much stable Consideringthe fact that range error is inevitable phenomena in WSNwe can conclude that IMDS is better option when choosinglocalization algorithm for 3D environments
As expected using more anchor nodes gives slightlysmaller estimation error Number of anchors affects theresults when the connectivity level is low For high connec-tivity levels there is no evident improvement (Figure 6)
52 Comparison of MDS-MAP and IMDS with OtherApproaches for 3D Localization To evaluate IMDS moreconvincingly the simulation experiments were conducted forCBLALS method [15] and for the novel centroid algorithm[16] The comparison with [15] shows that both IMDS andMDS-MAP perform better than CBLALS in terms of local-ization accuracy (Figure 7(a)) It is assumed that the densityof the anchors is 10 and the connectivity of the networks is10 sim 15 As can be seen from the results MDS-MAP is muchmore robust to range error than CBLALS especially for largerange errors The result from the comparison of IMDS andMAP-MAPwith the novel centroid algorithm [16] is shown in(Figure 7(b)) For all different radio range R both IMDS andMDS-MAP perform better than novel centroid algorithmHere the density of the anchors is 20The radio range errorfor this simulation is 119890
119903= 0 119877
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

International Scholarly Research Notices 3
or
Δ(2)
= 11988811015840
+ 11198881015840
minus 21198781198781015840
(4)
where 1 is an 119899 times 1 vector of ones and 119888 is a vector consistingthe diagonal elements of the scalar product matrix that is119888 = sum
3
119886=1119904119894119886
2Multiplying both sides of (4) by centering matrix 119879
119879 = 119868 minus 119899minus1
111015840
(5)
where 119868 is the identity matrix we get
119879Δ(2)
119879 = 119879 (11988811015840
+ 11198881015840
minus 21198781198781015840
) 119879
119879Δ(2)
119879 = 11987911988811015840
119879 + 11987911198881015840
119879 minus 11987921198781198781015840
119879
119879Δ(2)
119879 = 11987911988811015840
119879 + 11987911198881015840
119879 minus 119879 (2119861) 119879
119879Δ(2)
119879 = minus119879 (2119861) 119879
119861 = minus1
2119879Δ(2)
119879
(6)
Since 119861 is symmetric it can be decomposed
119861 = 119876Λ1198761015840
= (119876Λ12
) (119876Λ12
)1015840
= 1198781198781015840
(7)
where 119876 is orthonormal and Λ is a diagonal matrix
997904rArr 119878 = 119876Λ12
(8)
The recovered matrix 119878 obtained from (8) represents arelative map and has to be rotated as it has a differentcoordinate system
MDS-MAP for 3DWSN consists of 3 steps as follows
(1) Calculate the shortest distances between every pairof nodes (using either Dijkstrarsquos or Floydrsquos all pairsshortest path algorithm) This is the distance matrixthat serves as an input to themultidimensional scalingin step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Transform the relative map into absolute map usingsufficient number of anchor nodes (at least 4) Thisprocess usually includes translation rotation andreflection
32 Finding Optimal Rotation and Translation between Cor-responding 3D Nodes Generating an absolute map (step 3)of the WSN requires anchor nodes At least four sensorsrsquophysical positions are needed in order to identify the physicalpositions of the remaining nodes
Let 119875 = 1199011 1199012 119901
119873 and 119876 = 119902
1 1199022 119902
119873 be
two sets of corresponding nodes where 119873 is the number ofanchor nodes in the WSN We need to find a transformationthat optimally aligns the two sets in terms of least square
errors that is to minimize the sum of squares of the errorsbetween estimated positions of the anchors from MDS mapand their true positions We seek a rotation matrix 119877 and atranslation vector 119905 such that
(119877 119905) = arg min119877119905
119873
sum
119894=1
1003817100381710038171003817(119877119901119894+ 119905) minus 119902
119894
1003817100381710038171003817
2
(9)
This transformation is also known as Euclidean or rigidtransformation because it preserves the shape and the size
There are many algorithms proposed in the literature thatcompute a rigid 3D transformation Among them the mostexplored are those based on
(i) singular value decomposition (SVD)
(ii) unit quaternion (UQ)
(iii) dual quaternion (DQ)
(iv) orthonormal matrices (OM)
A comparison of these fourmethods can be found in [24]It is shown in [25] that the results of all these methods aresimilar in most cases and the difference in accuracy is almostinsignificant but the SVD is the most stable
Finding the optimal rigid transformation with SVD canbe broken down into the following steps
(i) Compute the weighted centroids of both point sets
119901 =1
119873
119873
sum
119894=1
119901119894 119902 =
1
119873
119873
sum
119894=1
119902119894 (10)
(ii) Compute the centered vectors
119901119894
1015840
= 119901119894minus 119901 119902
119894
1015840
= 119902119894minus 119902 119894 = 1 119873 (11)
(iii) Compute the 3 times 3 covariance matrix
119867 = 1198751015840
1198761015840119879
(12)
where 1198751015840 and 119876
1015840 are the 3 times 119873 matrices that have 119901119894
1015840
and 119902119894
1015840 as their columns respectively
(iv) Compute the singular value decomposition
119867 = 119880Σ119881119879
(13)
The rotation we are looking for is
119877 = 119881119880119879
(14)
(v) Compute the optimal translation as
119905 = 119902 minus 119877119901 (15)
4 International Scholarly Research Notices
33 Time Complexity of MDS-MAP for 3D-WSN In step 1distance matrix construction using Dijkstrarsquos or Floydrsquos algo-rithm requires 119874(119899
3
) where 119899 is the number of nodes in thenetwork [26] In step 2 applying MDS to the distance matrixhas complexity of119874(119899
3
) due to singular value decompositionIn step 3 the relative map is transformed through lineartransformations Computing the rigid transformation takes119874(119873) time for computing 119875 and 119876 while computing SVDtakes only 119874(3
3
) time (since the covariance matrix H hasdimension 3 times 3) Applying the transformation (rotation andtranslation) to the whole relative map takes 119874(119899 minus 119873) timewhere N is the number of anchors (119873 ≪ 119899)
4 MDS-Based Algorithm withHeuristic Approach for DistanceMatrix Calculation (IMDS)
The main drawback of MDS-MAP is the way it calculatesthe distance matrix Using Dijkstra (or Floydrsquos) all pairsshortest path algorithm to estimate the distances betweennonneighboring nodes in the network gives incorrect dis-tance matrix Dijkstra distance between two nodes usuallycorrelates with the Euclidean distance but always calculatesthe longest possible distance
To reduce the error present in distance matrix weintroduce a heuristic approach (HA) to estimate the distancesbetween nonneighboring nodes
In this section we will explain in detail our algorithmbased onmultidimensional scaling algorithm for nodes local-ization in WSN that uses HA for distance matrix calculation(IMDS)
41 Dijkstra Algorithm for DistanceMatrix Calculation MDSis very accurate technique for dimensionality reduction Ifthe correct distance matrix is given as input MDS algorithmwill reconstruct the map of the network without error Butcalculating distancematrix for networkswhere only distancesbetween neighboring nodes are known is not a trivial taskThis problem in MDS-MAP is solved by applying Dijkstrarsquos(or Floydrsquos) all pairs shortest path algorithm Dijkstrarsquos algo-rithm is a graph search algorithm that solves the single-sourcethe shortest path problem In WSN localization problem thesensor network is represented as a graph with nonnegativeedge path costs while the real Eucledian distance betweentwo nonneighboring nodes is replaced with the distancecalculated using Dijkstra algorithm But the assumption thatDijkstra distance between two nodes correlates with theirEuclidean distance is hardly true This approximation pro-duces an error that is the positions obtained as MDS outputusually differ from the correct positions The differencebetween the real and the predicted positions is known asestimation error The error is bigger when the nodes are inmultihop communication range which is a common case inobstructed environments It is usually caused by the presenceof obstacles or terrain irregularities that can obstruct the lineof sight between nodes or cause signal reflections Figure 1shows two examples when Dijkstra algorithm will calculatemuch larger distance between nonneighboring nodes Left
A
BA
B
a
b
c
d
Figure 1 Distance calculation using Dijkstra algorithm
side of the picture shows an example of two nodes A and Bthat are far from each other The distance between 119860 and 119861
will be calculated as119860119861 = 119886+ 119887+ 119888+119889 which is much longerthen the real Euclidian distanceThis scenario is presentwhenthe network is deployed on vast regionswhere the radio rangeof the nodes is short compared with the length of the regionOn the right side of Figure 1 there is an example where twonodes (119860 and 119861) cannot communicate directly although theyare very close to each otherThe reason for this is the presenceof obstacle that obstructs the line of sight In this scenarioDijkstra algorithm is completely inapplicable as it calculatesa few times longer distance
42 Heuristic Approach for DistanceMatrix Calculation (HA)As it can be seen from the two examples presented inFigure 1 the distance calculated using Dijkstra algorithmalways increases the real distance In order to reduce thisdistance in this paper we propose an alternative heuristicapproach By reducing the distance matrix error we intendto reduce the overall estimation error
Consider there are three nodes in a network A B andC (Figure 2) with known distances between nodes A and B(1198891
= 119860119861) and between nodes B and C (1198892
= 119861119862) Sincedistance matrix requires the distances between every pair ofnodes in the network the distance between nodes A and Chas to be obtained We will refer to this distance as a
If maximum radio range of the nodes in the network is Rthen we know for sure that node C can lay anywhere on thecurve C1C2 If Dijkstrarsquos algorithm is used for this purposeit will calculate the distance a as 119886 = 119860119861 + 119861119862 which isthe longest possible theoretical distance between nodesA andC More precisely C will lay exactly on C2 On the otherhand if we calculate the shortest possible theoretical distancebetween nodes A and C it will be very close to R We canconclude that
119877 lt 119886 le 1198891+ 1198892 (16)
To minimize the possible error we purpose a heuristicsolution that assumes that the node C lies exactly in the
International Scholarly Research Notices 5
C2
d2
d2
d2
C
a
B
d1
R
C1
A
Figure 2 Distance calculation using Heuristic Approach (HA)
middle of the curve C1C2 Hence the distance 119886 = 119860119862 canbe calculated using cosine formula as
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862) (17)
In order to calculate the distance a first we need to findthe angle using cosine formula
∢119860119861119862 = ∢1198601198611198621+ ∢1198621119861119862 (18)
The angle ∢1198601198611198621can be calculated again with the cosine
formula
∢1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (19)
Since∢1198621119861119862 = ∢119862119861119862
2
∢1198621119861119862 =
1
2∢11986211198611198622
∢1198621119861119862 =
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 = ∢1198601198611198621+
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 =120587
2+
1
2∢119860119861119862
1
(20)
Finally
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862)
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (
120587
2+
1
2∢119860119861119862
1)
= 1198891
2
+ 1198892
2
+ 2 sdot 1198891sdot 1198892sdot sin (
1
2∢119860119861119862
1)
(21)
where
1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (22)
43 Comparison of HA and Dijkstra In order to evaluateour heuristic approach (HA) for distance matrix calculationwe perform a simulation We randomly placed 100 nodesin a square and calculated the distances between the nodesusing both HA and Dijkstra algorithm Then we comparedthe differences between the real distances and the distancesobtained using the above-mentioned algorithms The differ-ence is normalized with radio range R The results from thesimulation are presented in Figure 3
As can be seen from the figure HA performs better thanDijkstra for all connectivity levels This is expected knowingthat Dijkstra calculates the longest possible distance whileHA tends to shorten this distance
HA performs much better than Dijkstra especially forlarge range error er This is rather important characteristic ofHA since rangemeasurement in the real applications is proneto error
When RSSI is used for distance signalization the rangeerror measurement is at least 10 R The results presentedin [27] show average range error measurement between 5R and 30 R for longer radio range R Similar researchconducted in [28 29] that investigate RSSI reported averagemeasurement error around 20 R
44 IMDS Algorithm IMDS for 3D WSN consists of thefollowing 3 steps
(1) Calculate the shortest distances between every pair ofnodes using heuristic approach This is the distancematrix that serves as an input to themultidimensionalscaling in step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Find the optimal rigid transformation with SVD andtransform the relative map into absolute map usingsufficient number of anchor nodes (at least 4)
IMDS preserves the time complexity of MDS-MAP algo-rithm
5 Results and Discussion
Weassume a typical sensor network composed of hundreds ofsensor nodes deployed uniformly across a three-dimensionalmonitored area Each sensor is equipped with an omni-directional antenna and only nodes within certain radiorange R can communicate with each other We made thefollowing assumptions
(i) Nodes are static and unaware of their location(ii) There is a path between every pair of nodes(iii) Nodes deployed in close proximity to each other
exchange messages(iv) Each node uses RSSI (or any other) method for
distance estimation
6 International Scholarly Research Notices
468
10121416
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 10
DijkstraHA
Erro
r (R
)
4
9
14
19
24
29
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 25
DjkstraHA
Erro
r (R
)
Figure 3 Distance error for HA and Dijkstra
We simulated both IMDS and MDS-MAP on randomnetwork topology with Matlab 100 nodes were uniformlyplaced in a cubic area (100 r times 100 r times 100 r where r is a unitlength distance) Our work was mainly focused on networkproperties like number of anchors average connectivity andrange error We consider the following
(i) Different network topologies
(a) random deployment for 3D-WSN (100 nodes)(b) grid deployment for 3D-WSN (125 nodes)
(ii) Different number of anchors (4 6 10 and 15) forabsolute map construction In our experiments weuse SVD method for 3D rigid transformation In oursimulation the anchors were selected randomly
(iii) Different radio ranges (R) which lead to differentaverage connectivity (average number of neighbors)
(iv) Different radio range error er (from 0 to 30 ofRwithstep 5 of R)
Thus 280 different networks were simulated (2 times 4 times 5 times
7) and each node location was discovered with both MDS-MAP and IMDS technique The connectivity parameter andthe estimation error for each scenario represent an averageover 30 trials The average estimation error is normalized bythe radio range R
Error =
sum(119899minus119873)
119894=1distance (pos(estimated)
119894 pos(true)119894
)
(119899 minus 119873) sdot 119877sdot 100
(23)
where n is the number of nodes in the network N isthe number of anchor nodes pos(estimated)
119894is the estimated
location and pos(true)119894
is the true location of the 119894-th node
51 Comparison of MDS-MAP and IMDS for 3D WSNFigure 4 shows an example of typical 3D network with 100nodes randomly deployed (119877 = 35 r and an average connec-tivity of 116) Blue lines represent the distance between the
absolute and the estimated position when using IMDS andMDS-MAP algorithm respectively The estimation error islarger if the lines are longer The absolute map is achievedusing 10 anchors (red circles) As can be seen from the figureIMDS performs better than MDS-MAP
Figure 5 shows the results of MDS-MAP and IMDS forrandom topology with range error 10 of R and 15 of Rwhenusing 10 anchors As can be seen from the figure in bothcases IMDS performs smaller estimation error than MDS-MAP for all connectivity levels
We must note that range error er has great impact onestimation accuracy When range error er is small MDS-MAP and IMDS perform almost the same with IMDSbeing slightly better As er increases MDS-MAP rapidlydeteriorates while IMDS is pretty much stable Consideringthe fact that range error is inevitable phenomena in WSNwe can conclude that IMDS is better option when choosinglocalization algorithm for 3D environments
As expected using more anchor nodes gives slightlysmaller estimation error Number of anchors affects theresults when the connectivity level is low For high connec-tivity levels there is no evident improvement (Figure 6)
52 Comparison of MDS-MAP and IMDS with OtherApproaches for 3D Localization To evaluate IMDS moreconvincingly the simulation experiments were conducted forCBLALS method [15] and for the novel centroid algorithm[16] The comparison with [15] shows that both IMDS andMDS-MAP perform better than CBLALS in terms of local-ization accuracy (Figure 7(a)) It is assumed that the densityof the anchors is 10 and the connectivity of the networks is10 sim 15 As can be seen from the results MDS-MAP is muchmore robust to range error than CBLALS especially for largerange errors The result from the comparison of IMDS andMAP-MAPwith the novel centroid algorithm [16] is shown in(Figure 7(b)) For all different radio range R both IMDS andMDS-MAP perform better than novel centroid algorithmHere the density of the anchors is 20The radio range errorfor this simulation is 119890
119903= 0 119877
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

4 International Scholarly Research Notices
33 Time Complexity of MDS-MAP for 3D-WSN In step 1distance matrix construction using Dijkstrarsquos or Floydrsquos algo-rithm requires 119874(119899
3
) where 119899 is the number of nodes in thenetwork [26] In step 2 applying MDS to the distance matrixhas complexity of119874(119899
3
) due to singular value decompositionIn step 3 the relative map is transformed through lineartransformations Computing the rigid transformation takes119874(119873) time for computing 119875 and 119876 while computing SVDtakes only 119874(3
3
) time (since the covariance matrix H hasdimension 3 times 3) Applying the transformation (rotation andtranslation) to the whole relative map takes 119874(119899 minus 119873) timewhere N is the number of anchors (119873 ≪ 119899)
4 MDS-Based Algorithm withHeuristic Approach for DistanceMatrix Calculation (IMDS)
The main drawback of MDS-MAP is the way it calculatesthe distance matrix Using Dijkstra (or Floydrsquos) all pairsshortest path algorithm to estimate the distances betweennonneighboring nodes in the network gives incorrect dis-tance matrix Dijkstra distance between two nodes usuallycorrelates with the Euclidean distance but always calculatesthe longest possible distance
To reduce the error present in distance matrix weintroduce a heuristic approach (HA) to estimate the distancesbetween nonneighboring nodes
In this section we will explain in detail our algorithmbased onmultidimensional scaling algorithm for nodes local-ization in WSN that uses HA for distance matrix calculation(IMDS)
41 Dijkstra Algorithm for DistanceMatrix Calculation MDSis very accurate technique for dimensionality reduction Ifthe correct distance matrix is given as input MDS algorithmwill reconstruct the map of the network without error Butcalculating distancematrix for networkswhere only distancesbetween neighboring nodes are known is not a trivial taskThis problem in MDS-MAP is solved by applying Dijkstrarsquos(or Floydrsquos) all pairs shortest path algorithm Dijkstrarsquos algo-rithm is a graph search algorithm that solves the single-sourcethe shortest path problem In WSN localization problem thesensor network is represented as a graph with nonnegativeedge path costs while the real Eucledian distance betweentwo nonneighboring nodes is replaced with the distancecalculated using Dijkstra algorithm But the assumption thatDijkstra distance between two nodes correlates with theirEuclidean distance is hardly true This approximation pro-duces an error that is the positions obtained as MDS outputusually differ from the correct positions The differencebetween the real and the predicted positions is known asestimation error The error is bigger when the nodes are inmultihop communication range which is a common case inobstructed environments It is usually caused by the presenceof obstacles or terrain irregularities that can obstruct the lineof sight between nodes or cause signal reflections Figure 1shows two examples when Dijkstra algorithm will calculatemuch larger distance between nonneighboring nodes Left
A
BA
B
a
b
c
d
Figure 1 Distance calculation using Dijkstra algorithm
side of the picture shows an example of two nodes A and Bthat are far from each other The distance between 119860 and 119861
will be calculated as119860119861 = 119886+ 119887+ 119888+119889 which is much longerthen the real Euclidian distanceThis scenario is presentwhenthe network is deployed on vast regionswhere the radio rangeof the nodes is short compared with the length of the regionOn the right side of Figure 1 there is an example where twonodes (119860 and 119861) cannot communicate directly although theyare very close to each otherThe reason for this is the presenceof obstacle that obstructs the line of sight In this scenarioDijkstra algorithm is completely inapplicable as it calculatesa few times longer distance
42 Heuristic Approach for DistanceMatrix Calculation (HA)As it can be seen from the two examples presented inFigure 1 the distance calculated using Dijkstra algorithmalways increases the real distance In order to reduce thisdistance in this paper we propose an alternative heuristicapproach By reducing the distance matrix error we intendto reduce the overall estimation error
Consider there are three nodes in a network A B andC (Figure 2) with known distances between nodes A and B(1198891
= 119860119861) and between nodes B and C (1198892
= 119861119862) Sincedistance matrix requires the distances between every pair ofnodes in the network the distance between nodes A and Chas to be obtained We will refer to this distance as a
If maximum radio range of the nodes in the network is Rthen we know for sure that node C can lay anywhere on thecurve C1C2 If Dijkstrarsquos algorithm is used for this purposeit will calculate the distance a as 119886 = 119860119861 + 119861119862 which isthe longest possible theoretical distance between nodesA andC More precisely C will lay exactly on C2 On the otherhand if we calculate the shortest possible theoretical distancebetween nodes A and C it will be very close to R We canconclude that
119877 lt 119886 le 1198891+ 1198892 (16)
To minimize the possible error we purpose a heuristicsolution that assumes that the node C lies exactly in the
International Scholarly Research Notices 5
C2
d2
d2
d2
C
a
B
d1
R
C1
A
Figure 2 Distance calculation using Heuristic Approach (HA)
middle of the curve C1C2 Hence the distance 119886 = 119860119862 canbe calculated using cosine formula as
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862) (17)
In order to calculate the distance a first we need to findthe angle using cosine formula
∢119860119861119862 = ∢1198601198611198621+ ∢1198621119861119862 (18)
The angle ∢1198601198611198621can be calculated again with the cosine
formula
∢1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (19)
Since∢1198621119861119862 = ∢119862119861119862
2
∢1198621119861119862 =
1
2∢11986211198611198622
∢1198621119861119862 =
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 = ∢1198601198611198621+
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 =120587
2+
1
2∢119860119861119862
1
(20)
Finally
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862)
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (
120587
2+
1
2∢119860119861119862
1)
= 1198891
2
+ 1198892
2
+ 2 sdot 1198891sdot 1198892sdot sin (
1
2∢119860119861119862
1)
(21)
where
1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (22)
43 Comparison of HA and Dijkstra In order to evaluateour heuristic approach (HA) for distance matrix calculationwe perform a simulation We randomly placed 100 nodesin a square and calculated the distances between the nodesusing both HA and Dijkstra algorithm Then we comparedthe differences between the real distances and the distancesobtained using the above-mentioned algorithms The differ-ence is normalized with radio range R The results from thesimulation are presented in Figure 3
As can be seen from the figure HA performs better thanDijkstra for all connectivity levels This is expected knowingthat Dijkstra calculates the longest possible distance whileHA tends to shorten this distance
HA performs much better than Dijkstra especially forlarge range error er This is rather important characteristic ofHA since rangemeasurement in the real applications is proneto error
When RSSI is used for distance signalization the rangeerror measurement is at least 10 R The results presentedin [27] show average range error measurement between 5R and 30 R for longer radio range R Similar researchconducted in [28 29] that investigate RSSI reported averagemeasurement error around 20 R
44 IMDS Algorithm IMDS for 3D WSN consists of thefollowing 3 steps
(1) Calculate the shortest distances between every pair ofnodes using heuristic approach This is the distancematrix that serves as an input to themultidimensionalscaling in step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Find the optimal rigid transformation with SVD andtransform the relative map into absolute map usingsufficient number of anchor nodes (at least 4)
IMDS preserves the time complexity of MDS-MAP algo-rithm
5 Results and Discussion
Weassume a typical sensor network composed of hundreds ofsensor nodes deployed uniformly across a three-dimensionalmonitored area Each sensor is equipped with an omni-directional antenna and only nodes within certain radiorange R can communicate with each other We made thefollowing assumptions
(i) Nodes are static and unaware of their location(ii) There is a path between every pair of nodes(iii) Nodes deployed in close proximity to each other
exchange messages(iv) Each node uses RSSI (or any other) method for
distance estimation
6 International Scholarly Research Notices
468
10121416
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 10
DijkstraHA
Erro
r (R
)
4
9
14
19
24
29
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 25
DjkstraHA
Erro
r (R
)
Figure 3 Distance error for HA and Dijkstra
We simulated both IMDS and MDS-MAP on randomnetwork topology with Matlab 100 nodes were uniformlyplaced in a cubic area (100 r times 100 r times 100 r where r is a unitlength distance) Our work was mainly focused on networkproperties like number of anchors average connectivity andrange error We consider the following
(i) Different network topologies
(a) random deployment for 3D-WSN (100 nodes)(b) grid deployment for 3D-WSN (125 nodes)
(ii) Different number of anchors (4 6 10 and 15) forabsolute map construction In our experiments weuse SVD method for 3D rigid transformation In oursimulation the anchors were selected randomly
(iii) Different radio ranges (R) which lead to differentaverage connectivity (average number of neighbors)
(iv) Different radio range error er (from 0 to 30 ofRwithstep 5 of R)
Thus 280 different networks were simulated (2 times 4 times 5 times
7) and each node location was discovered with both MDS-MAP and IMDS technique The connectivity parameter andthe estimation error for each scenario represent an averageover 30 trials The average estimation error is normalized bythe radio range R
Error =
sum(119899minus119873)
119894=1distance (pos(estimated)
119894 pos(true)119894
)
(119899 minus 119873) sdot 119877sdot 100
(23)
where n is the number of nodes in the network N isthe number of anchor nodes pos(estimated)
119894is the estimated
location and pos(true)119894
is the true location of the 119894-th node
51 Comparison of MDS-MAP and IMDS for 3D WSNFigure 4 shows an example of typical 3D network with 100nodes randomly deployed (119877 = 35 r and an average connec-tivity of 116) Blue lines represent the distance between the
absolute and the estimated position when using IMDS andMDS-MAP algorithm respectively The estimation error islarger if the lines are longer The absolute map is achievedusing 10 anchors (red circles) As can be seen from the figureIMDS performs better than MDS-MAP
Figure 5 shows the results of MDS-MAP and IMDS forrandom topology with range error 10 of R and 15 of Rwhenusing 10 anchors As can be seen from the figure in bothcases IMDS performs smaller estimation error than MDS-MAP for all connectivity levels
We must note that range error er has great impact onestimation accuracy When range error er is small MDS-MAP and IMDS perform almost the same with IMDSbeing slightly better As er increases MDS-MAP rapidlydeteriorates while IMDS is pretty much stable Consideringthe fact that range error is inevitable phenomena in WSNwe can conclude that IMDS is better option when choosinglocalization algorithm for 3D environments
As expected using more anchor nodes gives slightlysmaller estimation error Number of anchors affects theresults when the connectivity level is low For high connec-tivity levels there is no evident improvement (Figure 6)
52 Comparison of MDS-MAP and IMDS with OtherApproaches for 3D Localization To evaluate IMDS moreconvincingly the simulation experiments were conducted forCBLALS method [15] and for the novel centroid algorithm[16] The comparison with [15] shows that both IMDS andMDS-MAP perform better than CBLALS in terms of local-ization accuracy (Figure 7(a)) It is assumed that the densityof the anchors is 10 and the connectivity of the networks is10 sim 15 As can be seen from the results MDS-MAP is muchmore robust to range error than CBLALS especially for largerange errors The result from the comparison of IMDS andMAP-MAPwith the novel centroid algorithm [16] is shown in(Figure 7(b)) For all different radio range R both IMDS andMDS-MAP perform better than novel centroid algorithmHere the density of the anchors is 20The radio range errorfor this simulation is 119890
119903= 0 119877
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

International Scholarly Research Notices 5
C2
d2
d2
d2
C
a
B
d1
R
C1
A
Figure 2 Distance calculation using Heuristic Approach (HA)
middle of the curve C1C2 Hence the distance 119886 = 119860119862 canbe calculated using cosine formula as
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862) (17)
In order to calculate the distance a first we need to findthe angle using cosine formula
∢119860119861119862 = ∢1198601198611198621+ ∢1198621119861119862 (18)
The angle ∢1198601198611198621can be calculated again with the cosine
formula
∢1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (19)
Since∢1198621119861119862 = ∢119862119861119862
2
∢1198621119861119862 =
1
2∢11986211198611198622
∢1198621119861119862 =
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 = ∢1198601198611198621+
1
2(120587 minus ∢119860119861119862
1)
∢119860119861119862 =120587
2+
1
2∢119860119861119862
1
(20)
Finally
1198862
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (∢119860119861119862)
= 1198891
2
+ 1198892
2
minus 2 sdot 1198891sdot 1198892sdot cos (
120587
2+
1
2∢119860119861119862
1)
= 1198891
2
+ 1198892
2
+ 2 sdot 1198891sdot 1198892sdot sin (
1
2∢119860119861119862
1)
(21)
where
1198601198611198621= arccos(119889
1
2
+ 1198892
2
minus 1198772
2 sdot 1198891sdot 1198892
) (22)
43 Comparison of HA and Dijkstra In order to evaluateour heuristic approach (HA) for distance matrix calculationwe perform a simulation We randomly placed 100 nodesin a square and calculated the distances between the nodesusing both HA and Dijkstra algorithm Then we comparedthe differences between the real distances and the distancesobtained using the above-mentioned algorithms The differ-ence is normalized with radio range R The results from thesimulation are presented in Figure 3
As can be seen from the figure HA performs better thanDijkstra for all connectivity levels This is expected knowingthat Dijkstra calculates the longest possible distance whileHA tends to shorten this distance
HA performs much better than Dijkstra especially forlarge range error er This is rather important characteristic ofHA since rangemeasurement in the real applications is proneto error
When RSSI is used for distance signalization the rangeerror measurement is at least 10 R The results presentedin [27] show average range error measurement between 5R and 30 R for longer radio range R Similar researchconducted in [28 29] that investigate RSSI reported averagemeasurement error around 20 R
44 IMDS Algorithm IMDS for 3D WSN consists of thefollowing 3 steps
(1) Calculate the shortest distances between every pair ofnodes using heuristic approach This is the distancematrix that serves as an input to themultidimensionalscaling in step 2
(2) Apply classical multidimensional scaling to the dis-tance matrix The first 3 largest eigenvalues andeigenvectors give a relative map with relative locationfor each node
(3) Find the optimal rigid transformation with SVD andtransform the relative map into absolute map usingsufficient number of anchor nodes (at least 4)
IMDS preserves the time complexity of MDS-MAP algo-rithm
5 Results and Discussion
Weassume a typical sensor network composed of hundreds ofsensor nodes deployed uniformly across a three-dimensionalmonitored area Each sensor is equipped with an omni-directional antenna and only nodes within certain radiorange R can communicate with each other We made thefollowing assumptions
(i) Nodes are static and unaware of their location(ii) There is a path between every pair of nodes(iii) Nodes deployed in close proximity to each other
exchange messages(iv) Each node uses RSSI (or any other) method for
distance estimation
6 International Scholarly Research Notices
468
10121416
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 10
DijkstraHA
Erro
r (R
)
4
9
14
19
24
29
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 25
DjkstraHA
Erro
r (R
)
Figure 3 Distance error for HA and Dijkstra
We simulated both IMDS and MDS-MAP on randomnetwork topology with Matlab 100 nodes were uniformlyplaced in a cubic area (100 r times 100 r times 100 r where r is a unitlength distance) Our work was mainly focused on networkproperties like number of anchors average connectivity andrange error We consider the following
(i) Different network topologies
(a) random deployment for 3D-WSN (100 nodes)(b) grid deployment for 3D-WSN (125 nodes)
(ii) Different number of anchors (4 6 10 and 15) forabsolute map construction In our experiments weuse SVD method for 3D rigid transformation In oursimulation the anchors were selected randomly
(iii) Different radio ranges (R) which lead to differentaverage connectivity (average number of neighbors)
(iv) Different radio range error er (from 0 to 30 ofRwithstep 5 of R)
Thus 280 different networks were simulated (2 times 4 times 5 times
7) and each node location was discovered with both MDS-MAP and IMDS technique The connectivity parameter andthe estimation error for each scenario represent an averageover 30 trials The average estimation error is normalized bythe radio range R
Error =
sum(119899minus119873)
119894=1distance (pos(estimated)
119894 pos(true)119894
)
(119899 minus 119873) sdot 119877sdot 100
(23)
where n is the number of nodes in the network N isthe number of anchor nodes pos(estimated)
119894is the estimated
location and pos(true)119894
is the true location of the 119894-th node
51 Comparison of MDS-MAP and IMDS for 3D WSNFigure 4 shows an example of typical 3D network with 100nodes randomly deployed (119877 = 35 r and an average connec-tivity of 116) Blue lines represent the distance between the
absolute and the estimated position when using IMDS andMDS-MAP algorithm respectively The estimation error islarger if the lines are longer The absolute map is achievedusing 10 anchors (red circles) As can be seen from the figureIMDS performs better than MDS-MAP
Figure 5 shows the results of MDS-MAP and IMDS forrandom topology with range error 10 of R and 15 of Rwhenusing 10 anchors As can be seen from the figure in bothcases IMDS performs smaller estimation error than MDS-MAP for all connectivity levels
We must note that range error er has great impact onestimation accuracy When range error er is small MDS-MAP and IMDS perform almost the same with IMDSbeing slightly better As er increases MDS-MAP rapidlydeteriorates while IMDS is pretty much stable Consideringthe fact that range error is inevitable phenomena in WSNwe can conclude that IMDS is better option when choosinglocalization algorithm for 3D environments
As expected using more anchor nodes gives slightlysmaller estimation error Number of anchors affects theresults when the connectivity level is low For high connec-tivity levels there is no evident improvement (Figure 6)
52 Comparison of MDS-MAP and IMDS with OtherApproaches for 3D Localization To evaluate IMDS moreconvincingly the simulation experiments were conducted forCBLALS method [15] and for the novel centroid algorithm[16] The comparison with [15] shows that both IMDS andMDS-MAP perform better than CBLALS in terms of local-ization accuracy (Figure 7(a)) It is assumed that the densityof the anchors is 10 and the connectivity of the networks is10 sim 15 As can be seen from the results MDS-MAP is muchmore robust to range error than CBLALS especially for largerange errors The result from the comparison of IMDS andMAP-MAPwith the novel centroid algorithm [16] is shown in(Figure 7(b)) For all different radio range R both IMDS andMDS-MAP perform better than novel centroid algorithmHere the density of the anchors is 20The radio range errorfor this simulation is 119890
119903= 0 119877
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
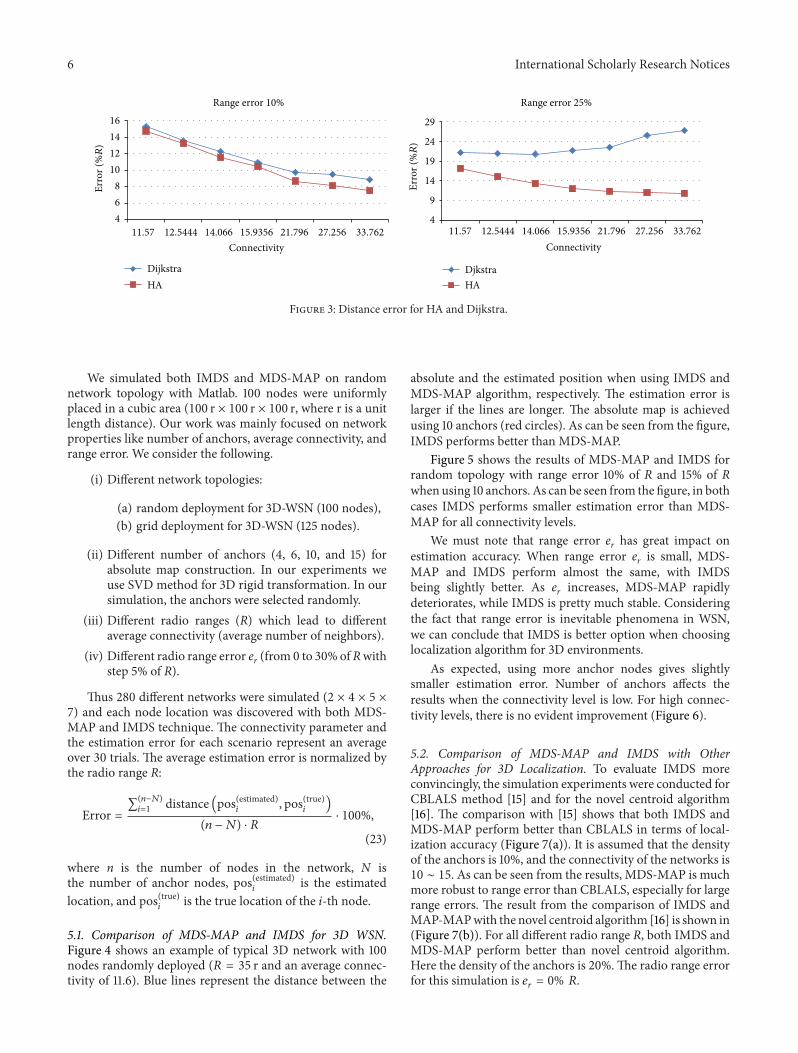
6 International Scholarly Research Notices
468
10121416
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 10
DijkstraHA
Erro
r (R
)
4
9
14
19
24
29
1157 125444 14066 159356 21796 27256 33762Connectivity
Range error 25
DjkstraHA
Erro
r (R
)
Figure 3 Distance error for HA and Dijkstra
We simulated both IMDS and MDS-MAP on randomnetwork topology with Matlab 100 nodes were uniformlyplaced in a cubic area (100 r times 100 r times 100 r where r is a unitlength distance) Our work was mainly focused on networkproperties like number of anchors average connectivity andrange error We consider the following
(i) Different network topologies
(a) random deployment for 3D-WSN (100 nodes)(b) grid deployment for 3D-WSN (125 nodes)
(ii) Different number of anchors (4 6 10 and 15) forabsolute map construction In our experiments weuse SVD method for 3D rigid transformation In oursimulation the anchors were selected randomly
(iii) Different radio ranges (R) which lead to differentaverage connectivity (average number of neighbors)
(iv) Different radio range error er (from 0 to 30 ofRwithstep 5 of R)
Thus 280 different networks were simulated (2 times 4 times 5 times
7) and each node location was discovered with both MDS-MAP and IMDS technique The connectivity parameter andthe estimation error for each scenario represent an averageover 30 trials The average estimation error is normalized bythe radio range R
Error =
sum(119899minus119873)
119894=1distance (pos(estimated)
119894 pos(true)119894
)
(119899 minus 119873) sdot 119877sdot 100
(23)
where n is the number of nodes in the network N isthe number of anchor nodes pos(estimated)
119894is the estimated
location and pos(true)119894
is the true location of the 119894-th node
51 Comparison of MDS-MAP and IMDS for 3D WSNFigure 4 shows an example of typical 3D network with 100nodes randomly deployed (119877 = 35 r and an average connec-tivity of 116) Blue lines represent the distance between the
absolute and the estimated position when using IMDS andMDS-MAP algorithm respectively The estimation error islarger if the lines are longer The absolute map is achievedusing 10 anchors (red circles) As can be seen from the figureIMDS performs better than MDS-MAP
Figure 5 shows the results of MDS-MAP and IMDS forrandom topology with range error 10 of R and 15 of Rwhenusing 10 anchors As can be seen from the figure in bothcases IMDS performs smaller estimation error than MDS-MAP for all connectivity levels
We must note that range error er has great impact onestimation accuracy When range error er is small MDS-MAP and IMDS perform almost the same with IMDSbeing slightly better As er increases MDS-MAP rapidlydeteriorates while IMDS is pretty much stable Consideringthe fact that range error is inevitable phenomena in WSNwe can conclude that IMDS is better option when choosinglocalization algorithm for 3D environments
As expected using more anchor nodes gives slightlysmaller estimation error Number of anchors affects theresults when the connectivity level is low For high connec-tivity levels there is no evident improvement (Figure 6)
52 Comparison of MDS-MAP and IMDS with OtherApproaches for 3D Localization To evaluate IMDS moreconvincingly the simulation experiments were conducted forCBLALS method [15] and for the novel centroid algorithm[16] The comparison with [15] shows that both IMDS andMDS-MAP perform better than CBLALS in terms of local-ization accuracy (Figure 7(a)) It is assumed that the densityof the anchors is 10 and the connectivity of the networks is10 sim 15 As can be seen from the results MDS-MAP is muchmore robust to range error than CBLALS especially for largerange errors The result from the comparison of IMDS andMAP-MAPwith the novel centroid algorithm [16] is shown in(Figure 7(b)) For all different radio range R both IMDS andMDS-MAP perform better than novel centroid algorithmHere the density of the anchors is 20The radio range errorfor this simulation is 119890
119903= 0 119877
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
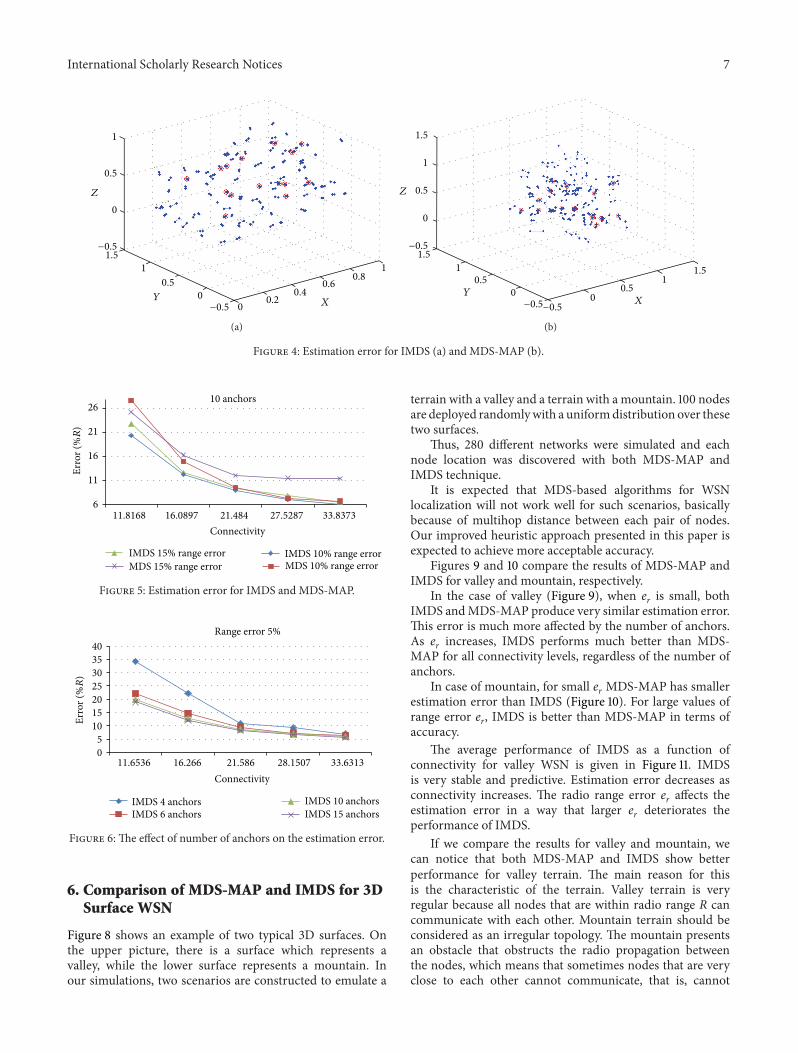
International Scholarly Research Notices 7
1
05
0
minus0515
1
05
0
minus05 002
0406
081
XY
Z
(a)
15
15
1
1
05
05
0
0
minus05
minus05
151
050
minus05X
Y
Z
(b)
Figure 4 Estimation error for IMDS (a) and MDS-MAP (b)
6
11
16
21
26
118168 160897 21484 275287 338373Connectivity
10 anchors
IMDS 15 range errorMDS 15 range error
IMDS 10 range errorMDS 10 range error
Erro
r (R
)
Figure 5 Estimation error for IMDS and MDS-MAP
05
10152025303540
116536 16266 21586 281507 336313Connectivity
Range error 5
IMDS 4 anchorsIMDS 6 anchors
IMDS 10 anchorsIMDS 15 anchors
Erro
r (R
)
Figure 6 The effect of number of anchors on the estimation error
6 Comparison of MDS-MAP and IMDS for 3DSurface WSN
Figure 8 shows an example of two typical 3D surfaces Onthe upper picture there is a surface which represents avalley while the lower surface represents a mountain Inour simulations two scenarios are constructed to emulate a
terrain with a valley and a terrain with a mountain 100 nodesare deployed randomlywith a uniformdistribution over thesetwo surfaces
Thus 280 different networks were simulated and eachnode location was discovered with both MDS-MAP andIMDS technique
It is expected that MDS-based algorithms for WSNlocalization will not work well for such scenarios basicallybecause of multihop distance between each pair of nodesOur improved heuristic approach presented in this paper isexpected to achieve more acceptable accuracy
Figures 9 and 10 compare the results of MDS-MAP andIMDS for valley and mountain respectively
In the case of valley (Figure 9) when er is small bothIMDS andMDS-MAP produce very similar estimation errorThis error is much more affected by the number of anchorsAs er increases IMDS performs much better than MDS-MAP for all connectivity levels regardless of the number ofanchors
In case of mountain for small er MDS-MAP has smallerestimation error than IMDS (Figure 10) For large values ofrange error er IMDS is better than MDS-MAP in terms ofaccuracy
The average performance of IMDS as a function ofconnectivity for valley WSN is given in Figure 11 IMDSis very stable and predictive Estimation error decreases asconnectivity increases The radio range error er affects theestimation error in a way that larger er deteriorates theperformance of IMDS
If we compare the results for valley and mountain wecan notice that both MDS-MAP and IMDS show betterperformance for valley terrain The main reason for thisis the characteristic of the terrain Valley terrain is veryregular because all nodes that are within radio range R cancommunicate with each other Mountain terrain should beconsidered as an irregular topology The mountain presentsan obstacle that obstructs the radio propagation betweenthe nodes which means that sometimes nodes that are veryclose to each other cannot communicate that is cannot
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
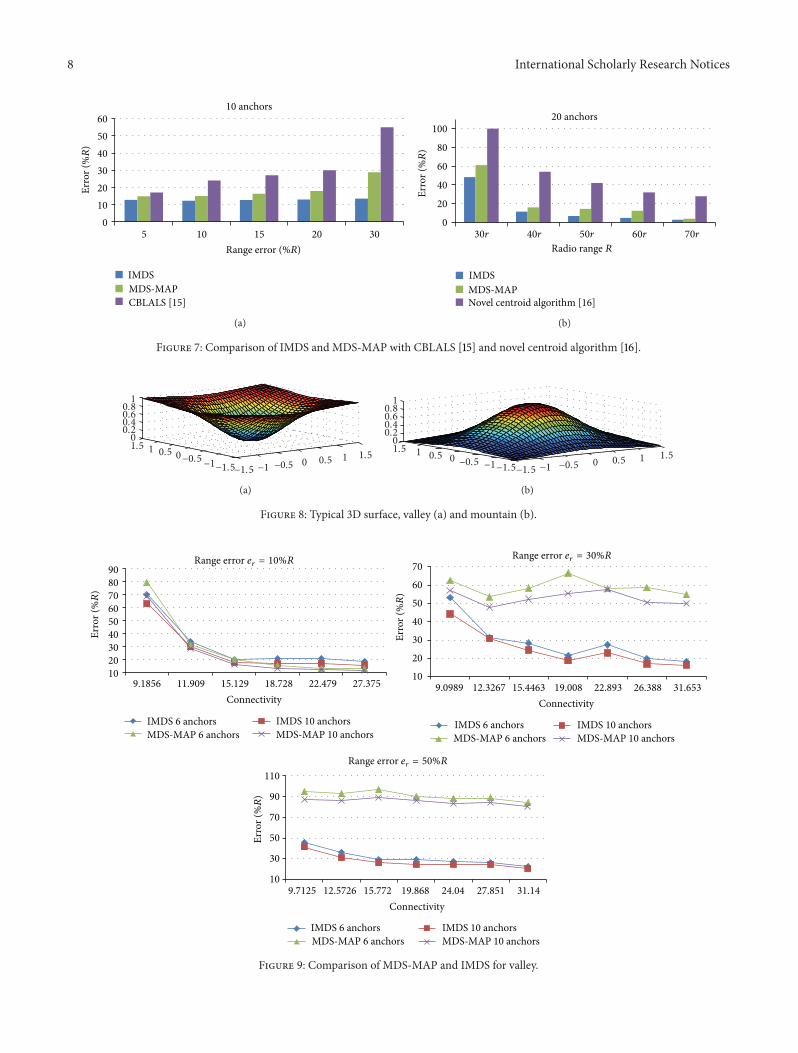
8 International Scholarly Research Notices
0102030405060
5 10 15 20 30
10 anchors
IMDSMDS-MAPCBLALS [15]
Range error (R)
Erro
r (R
)
(a)
0
20
40
60
80
10020 anchors
IMDSMDS-MAPNovel centroid algorithm [16]
Erro
r (R
)
Radio range R30r 40r 50r 60r 70r
(b)
Figure 7 Comparison of IMDS and MDS-MAP with CBLALS [15] and novel centroid algorithm [16]
minus15minus1minus05005115
minus15 minus1 minus05 0 05 1 150
02040608
1
(a)
minus15 minus1 minus05 0 05 1 15minus15minus1minus05005115
002040608
1
(b)
Figure 8 Typical 3D surface valley (a) and mountain (b)
10
30
50
70
90
110
97125 125726 15772 19868 2404 27851 3114Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
Range error er = 50R
102030405060708090
91856 11909 15129 18728 22479 27375Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Erro
r (R
)
10
20
30
40
50
60
70
90989 123267 154463 19008 22893 26388 31653Connectivity
IMDS 6 anchors IMDS 10 anchorsMDS-MAP 6 anchors MDS-MAP 10 anchors
Range error er = 30R
Erro
r (R
)
Range error er = 10R
Figure 9 Comparison of MDS-MAP and IMDS for valley
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
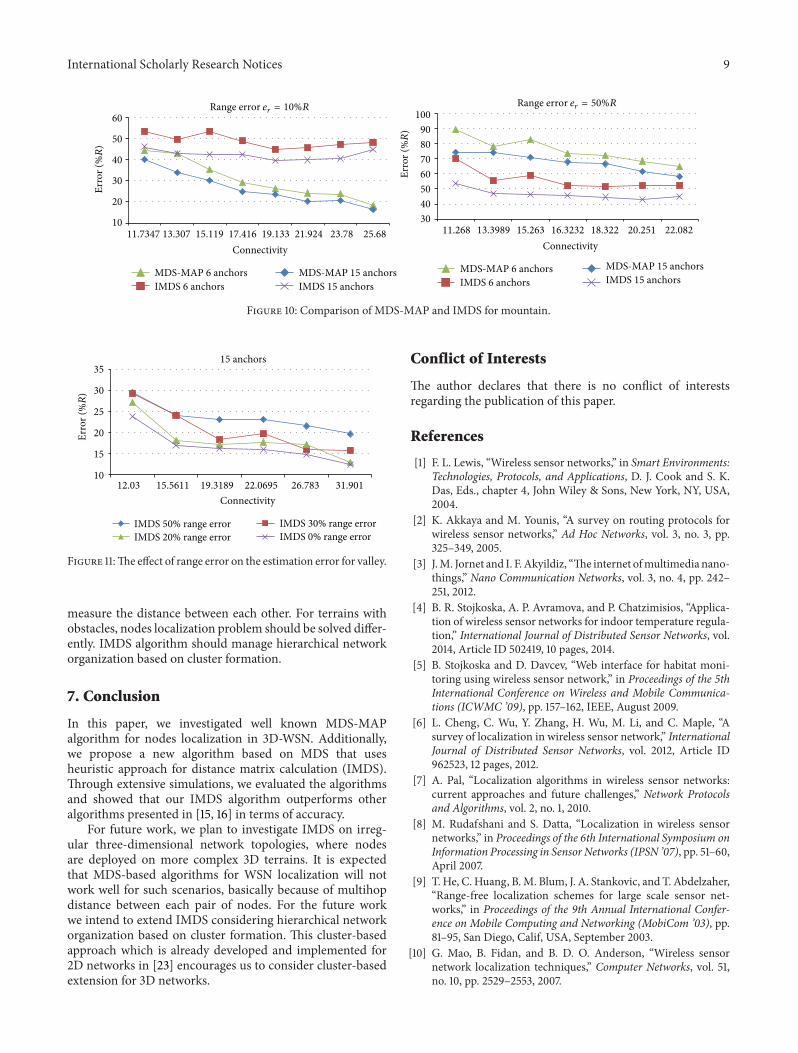
International Scholarly Research Notices 9
10
20
30
40
50
60
117347 13307 15119 17416 19133 21924 2378 2568Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
30405060708090
100
11268 133989 15263 163232 18322 20251 22082Connectivity
MDS-MAP 6 anchors MDS-MAP 15 anchorsIMDS 6 anchors IMDS 15 anchors
Erro
r (R
)
Range error er = 50RRange error er = 10R
Figure 10 Comparison of MDS-MAP and IMDS for mountain
10
15
20
25
30
35
1203 155611 193189 220695 26783 31901Connectivity
15 anchors
IMDS 50 range error IMDS 30 range errorIMDS 20 range error IMDS 0 range error
Erro
r (R
)
Figure 11The effect of range error on the estimation error for valley
measure the distance between each other For terrains withobstacles nodes localization problem should be solved differ-ently IMDS algorithm should manage hierarchical networkorganization based on cluster formation
7 Conclusion
In this paper we investigated well known MDS-MAPalgorithm for nodes localization in 3D-WSN Additionallywe propose a new algorithm based on MDS that usesheuristic approach for distance matrix calculation (IMDS)Through extensive simulations we evaluated the algorithmsand showed that our IMDS algorithm outperforms otheralgorithms presented in [15 16] in terms of accuracy
For future work we plan to investigate IMDS on irreg-ular three-dimensional network topologies where nodesare deployed on more complex 3D terrains It is expectedthat MDS-based algorithms for WSN localization will notwork well for such scenarios basically because of multihopdistance between each pair of nodes For the future workwe intend to extend IMDS considering hierarchical networkorganization based on cluster formation This cluster-basedapproach which is already developed and implemented for2D networks in [23] encourages us to consider cluster-basedextension for 3D networks
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F L Lewis ldquoWireless sensor networksrdquo in Smart EnvironmentsTechnologies Protocols and Applications D J Cook and S KDas Eds chapter 4 John Wiley amp Sons New York NY USA2004
[2] K Akkaya and M Younis ldquoA survey on routing protocols forwireless sensor networksrdquo Ad Hoc Networks vol 3 no 3 pp325ndash349 2005
[3] JM Jornet and I FAkyildiz ldquoThe internet ofmultimedia nano-thingsrdquo Nano Communication Networks vol 3 no 4 pp 242ndash251 2012
[4] B R Stojkoska A P Avramova and P Chatzimisios ldquoApplica-tion of wireless sensor networks for indoor temperature regula-tionrdquo International Journal of Distributed Sensor Networks vol2014 Article ID 502419 10 pages 2014
[5] B Stojkoska and D Davcev ldquoWeb interface for habitat moni-toring using wireless sensor networkrdquo in Proceedings of the 5thInternational Conference on Wireless and Mobile Communica-tions (ICWMC rsquo09) pp 157ndash162 IEEE August 2009
[6] L Cheng C Wu Y Zhang H Wu M Li and C Maple ldquoAsurvey of localization in wireless sensor networkrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID962523 12 pages 2012
[7] A Pal ldquoLocalization algorithms in wireless sensor networkscurrent approaches and future challengesrdquo Network Protocolsand Algorithms vol 2 no 1 2010
[8] M Rudafshani and S Datta ldquoLocalization in wireless sensornetworksrdquo in Proceedings of the 6th International Symposium onInformation Processing in Sensor Networks (IPSN rsquo07) pp 51ndash60April 2007
[9] T He C Huang BM Blum J A Stankovic and T AbdelzaherldquoRange-free localization schemes for large scale sensor net-worksrdquo in Proceedings of the 9th Annual International Confer-ence on Mobile Computing and Networking (MobiCom rsquo03) pp81ndash95 San Diego Calif USA September 2003
[10] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
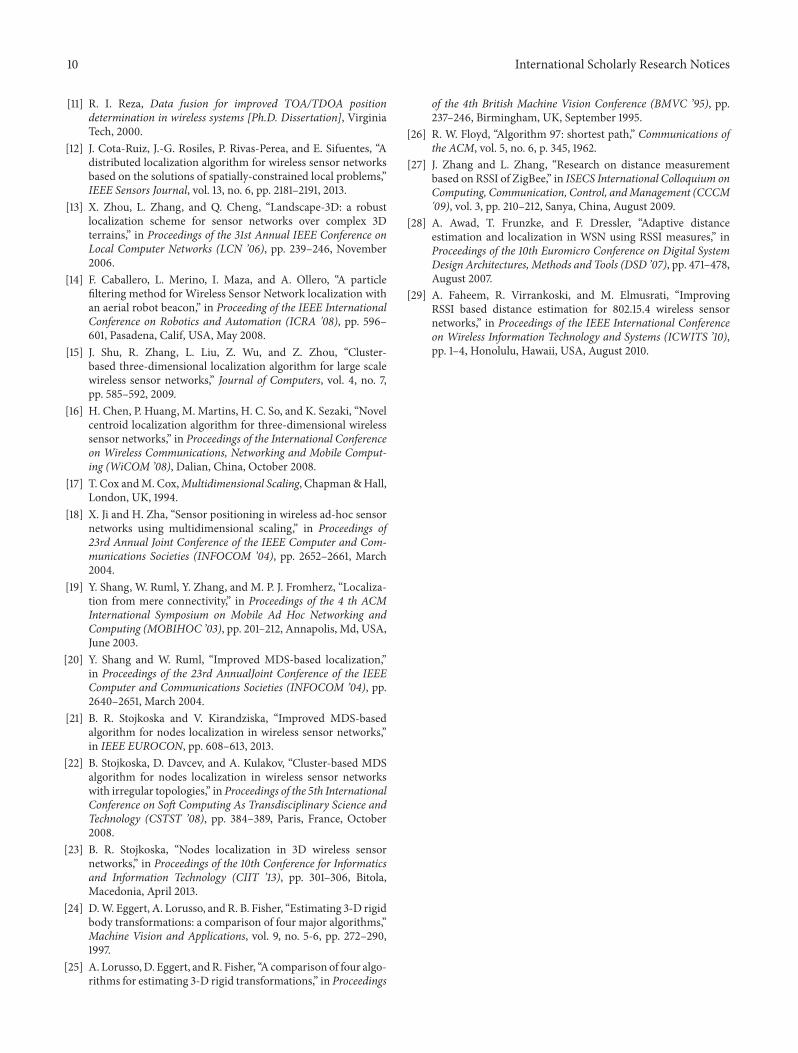
10 International Scholarly Research Notices
[11] R I Reza Data fusion for improved TOATDOA positiondetermination in wireless systems [PhD Dissertation] VirginiaTech 2000
[12] J Cota-Ruiz J-G Rosiles P Rivas-Perea and E Sifuentes ldquoAdistributed localization algorithm for wireless sensor networksbased on the solutions of spatially-constrained local problemsrdquoIEEE Sensors Journal vol 13 no 6 pp 2181ndash2191 2013
[13] X Zhou L Zhang and Q Cheng ldquoLandscape-3D a robustlocalization scheme for sensor networks over complex 3Dterrainsrdquo in Proceedings of the 31st Annual IEEE Conference onLocal Computer Networks (LCN rsquo06) pp 239ndash246 November2006
[14] F Caballero L Merino I Maza and A Ollero ldquoA particlefiltering method for Wireless Sensor Network localization withan aerial robot beaconrdquo in Proceeding of the IEEE InternationalConference on Robotics and Automation (ICRA 08) pp 596ndash601 Pasadena Calif USA May 2008
[15] J Shu R Zhang L Liu Z Wu and Z Zhou ldquoCluster-based three-dimensional localization algorithm for large scalewireless sensor networksrdquo Journal of Computers vol 4 no 7pp 585ndash592 2009
[16] H Chen P Huang M Martins H C So and K Sezaki ldquoNovelcentroid localization algorithm for three-dimensional wirelesssensor networksrdquo in Proceedings of the International Conferenceon Wireless Communications Networking and Mobile Comput-ing (WiCOM rsquo08) Dalian China October 2008
[17] T Cox andM CoxMultidimensional Scaling ChapmanampHallLondon UK 1994
[18] X Ji and H Zha ldquoSensor positioning in wireless ad-hoc sensornetworks using multidimensional scalingrdquo in Proceedings of23rd Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM rsquo04) pp 2652ndash2661 March2004
[19] Y Shang W Ruml Y Zhang and M P J Fromherz ldquoLocaliza-tion from mere connectivityrdquo in Proceedings of the 4 th ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MOBIHOC rsquo03) pp 201ndash212 Annapolis Md USAJune 2003
[20] Y Shang and W Ruml ldquoImproved MDS-based localizationrdquoin Proceedings of the 23rd AnnualJoint Conference of the IEEEComputer and Communications Societies (INFOCOM rsquo04) pp2640ndash2651 March 2004
[21] B R Stojkoska and V Kirandziska ldquoImproved MDS-basedalgorithm for nodes localization in wireless sensor networksrdquoin IEEE EUROCON pp 608ndash613 2013
[22] B Stojkoska D Davcev and A Kulakov ldquoCluster-based MDSalgorithm for nodes localization in wireless sensor networkswith irregular topologiesrdquo in Proceedings of the 5th InternationalConference on Soft Computing As Transdisciplinary Science andTechnology (CSTST rsquo08) pp 384ndash389 Paris France October2008
[23] B R Stojkoska ldquoNodes localization in 3D wireless sensornetworksrdquo in Proceedings of the 10th Conference for Informaticsand Information Technology (CIIT rsquo13) pp 301ndash306 BitolaMacedonia April 2013
[24] DW Eggert A Lorusso and R B Fisher ldquoEstimating 3-D rigidbody transformations a comparison of four major algorithmsrdquoMachine Vision and Applications vol 9 no 5-6 pp 272ndash2901997
[25] A LorussoD Eggert andR Fisher ldquoA comparison of four algo-rithms for estimating 3-D rigid transformationsrdquo in Proceedings
of the 4th British Machine Vision Conference (BMVC rsquo95) pp237ndash246 Birmingham UK September 1995
[26] R W Floyd ldquoAlgorithm 97 shortest pathrdquo Communications ofthe ACM vol 5 no 6 p 345 1962
[27] J Zhang and L Zhang ldquoResearch on distance measurementbased on RSSI of ZigBeerdquo in ISECS International Colloquium onComputing Communication Control andManagement (CCCM09) vol 3 pp 210ndash212 Sanya China August 2009
[28] A Awad T Frunzke and F Dressler ldquoAdaptive distanceestimation and localization in WSN using RSSI measuresrdquo inProceedings of the 10th Euromicro Conference on Digital SystemDesign Architectures Methods and Tools (DSD rsquo07) pp 471ndash478August 2007
[29] A Faheem R Virrankoski and M Elmusrati ldquoImprovingRSSI based distance estimation for 802154 wireless sensornetworksrdquo in Proceedings of the IEEE International Conferenceon Wireless Information Technology and Systems (ICWITS rsquo10)pp 1ndash4 Honolulu Hawaii USA August 2010
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014




















