No-wait two stage hybrid flow shop scheduling with genetic and adaptive imperialist competitive...
20
This article was downloaded by: [nazanin moradi nasab] On: 08 May 2012, At: 10:22 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK Journal of Experimental & Theoretical Artificial Intelligence Publication details, including instructions for authors and subscription information: http://www.tandfonline.com/loi/teta20 No-wait two stage hybrid flow shop scheduling with genetic and adaptive imperialist competitive algorithms Nazanin Moradinasab a , Rasoul Shafaei a , Meysam Rabiee a & Pezhman Ramezani a a Department of Industrial Engineering, Khajeh Nasir Toosi University of Technology, Tehran, Iran Available online: 08 May 2012 To cite this article: Nazanin Moradinasab, Rasoul Shafaei, Meysam Rabiee & Pezhman Ramezani (2012): No-wait two stage hybrid flow shop scheduling with genetic and adaptive imperialist competitive algorithms, Journal of Experimental & Theoretical Artificial Intelligence, DOI:10.1080/0952813X.2012.682752 To link to this article: http://dx.doi.org/10.1080/0952813X.2012.682752 PLEASE SCROLL DOWN FOR ARTICLE Full terms and conditions of use: http://www.tandfonline.com/page/terms-and- conditions This article may be used for research, teaching, and private study purposes. Any substantial or systematic reproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form to anyone is expressly forbidden. The publisher does not give any warranty express or implied or make any representation that the contents will be complete or accurate or up to date. The accuracy of any instructions, formulae, and drug doses should be independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings, demand, or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of No-wait two stage hybrid flow shop scheduling with genetic and adaptive imperialist competitive...

This article was downloaded by: [nazanin moradi nasab]On: 08 May 2012, At: 10:22Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registeredoffice: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Journal of Experimental & TheoreticalArtificial IntelligencePublication details, including instructions for authors andsubscription information:http://www.tandfonline.com/loi/teta20
No-wait two stage hybrid flow shopscheduling with genetic and adaptiveimperialist competitive algorithmsNazanin Moradinasab a , Rasoul Shafaei a , Meysam Rabiee a &Pezhman Ramezani aa Department of Industrial Engineering, Khajeh Nasir ToosiUniversity of Technology, Tehran, Iran
Available online: 08 May 2012
To cite this article: Nazanin Moradinasab, Rasoul Shafaei, Meysam Rabiee & PezhmanRamezani (2012): No-wait two stage hybrid flow shop scheduling with genetic and adaptiveimperialist competitive algorithms, Journal of Experimental & Theoretical Artificial Intelligence,DOI:10.1080/0952813X.2012.682752
To link to this article: http://dx.doi.org/10.1080/0952813X.2012.682752
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.tandfonline.com/page/terms-and-conditions
This article may be used for research, teaching, and private study purposes. Anysubstantial or systematic reproduction, redistribution, reselling, loan, sub-licensing,systematic supply, or distribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representationthat the contents will be complete or accurate or up to date. The accuracy of anyinstructions, formulae, and drug doses should be independently verified with primarysources. The publisher shall not be liable for any loss, actions, claims, proceedings,demand, or costs or damages whatsoever or howsoever caused arising directly orindirectly in connection with or arising out of the use of this material.

Journal of Experimental & Theoretical Artificial Intelligence2012, 1–19, iFirst
No-wait two stage hybrid flow shop scheduling with genetic
and adaptive imperialist competitive algorithms
Nazanin Moradinasab*, Rasoul Shafaei, Meysam Rabieey and Pezhman Ramezani
Department of Industrial Engineering, Khajeh NasirToosi University of Technology, Tehran, Iran
(Received 8 May 2011; final version received 25 March 2012)
This article studies a no-wait two-stage flexible flow shop scheduling problemwith setup times aiming to minimize the total completion time. The problem issolved using an adaptive imperialist competitive algorithm (AICA) and geneticalgorithm (GA). To test the performance of the proposed AICA and GA,the algorithms are compared with ant colony optimisation, known as aneffective algorithm in the literature. The performance of the algorithms areevaluated by solving both small and large-scale problems. Their performance isevaluated in terms of relative percentage deviation. Finally the results of the studyare discussed and conclusions and potential areas for further study arehighlighted.
Keywords: no-wait; hybrid flow shop; ICA; GA; setup time
1. Introduction
An important class of scheduling problem is characterised by a no-wait productionenvironment, in which there is no storage between the machines in which jobs may wait.Thus, jobs are processed from start to finish, without any interruption in between.Consequently, the processing of a job on the initial machine may need to be delayed toguarantee that no waiting occurs on any subsequent machine. There are two main reasonsfor a no-wait environment: (i) the type of process and (ii) a lack of storage betweenintermediate machines (work stations).
Among the scheduling problems studied in the literature, the hybrid flow shopscheduling problem has been paid significant attention (Jayamohan and Rajendran 2000;Santos, Hunsucker, and Deal 2001). The problem studied in this article is no-wait two-stage hybrid flow shop scheduling, as it has a variety of practical applications in both theproduction industry and service companies. For example, in steel factories, the heatedmetal goes through a continuous sequence of operations before it is allowed to be cooled.This prevents defects in the mechanical properties of the steel. In addition, in the plasticproduct industry it is required that a series of processes are performed, one immediatelyafter another, in order to prevent degradation. Another example occurs in the chem-ical industry, if a delay is permitted between each stage, a change in the material property
*Corresponding author. Email: [email protected] of Industrial Engineering, Tuyserkan’s Engineering Faculty, Bu-Alisina University,Hamadan, Iran
ISSN 0952–813X print/ISSN 1362–3079 online
� 2012 Taylor & Francis
http://dx.doi.org/10.1080/0952813X.2012.682752
http://www.tandfonline.com
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
may transpire (e.g. degradation of the polymer) (Shafaei, Rabiee, and Mirzaeyan2011). Similar situations also arise in the pharmaceutical industry (Ruiz andAllahverdi 2007).
The no-wait flow shop scheduling problem has been studied in the past several decadesand the no-wait flow shop scheduling problem with a single objective has been proved tobe strongly NP-hard when the number of machines is more than two (Rock 1984).
In some studies, the no-wait flow shop scheduling problem has been formulated as atravelling salesman problem (TSP). In this formulation, the waiting time in everyoperation interval is converted into the distance matrix format of the TSP, whereby the no-wait flow shop scheduling problem can be solved using the TSP technique. The originalwork conducted in this area refers to the research carried out by Gilmore and Gomory(1964). They studied a two-stage single-processor no-wait flow shop problem using TSPtechniques. The results of the investigation revealed that a TSP-based branch and boundalgorithm obtained optimal solutions. In addition, in a two-stage no-wait flow shop withmakespan performance, Reddi and Ramamurty (1972) and Wismer (1972) formulated theproblem as an asymmetric travel-salesman problem. King and Spachis (1980) and Bonneyand Gundry (1976) developed heuristic algorithms to minimise the makespan. Rajendranand Chaudhuri (1990) also proposed a tighter lower bound on the total flow time. Inaddition, they proposed two efficient heuristic algorithms to minimise the total flow time.Rajendran (1994) investigated the no-wait flow-shop-scheduling problem with makespanperformance. He proposed a heuristic algorithm based on a preference relation and jobinsertion. The results revealed that the proposed algorithm outperforms the other heuristicmethods studied.
Recently, Haouari, Hidri, and Gharbi (2006) developed a branch and bound methodto minimise makespan in a two-stage flow shop problem with parallel and identicalmachines. Wang, Xing, and Bai (2005) considered no-wait flexible flow shop schedulingwith minimal makespan and no-idle machines and solved the problem using a proposedheuristic algorithm.
The no-wait flow shop scheduling problem, with the objective of minimising totalcompletion time, was first studied by Van Deman and Baker (1974). Huang, Yang, andHuang (2009) also considered a no-wait two-stage flexible flow shop with setup times anda minimum total completion-time performance measure. They proposed an integer-programming model and ant colony optimisation (ACO) heuristic approach. The resultsrevealed that the efficiency of the proposed algorithm is superior to that of the integer-programming model. A mixed-integer linear programming model was also developedby Jolai, Sheikh, Rabbani, and Karimi (2009) with the objective of maximising the totalprofit gained from scheduled jobs. Furthermore, since the problem studied was NP-hard,they presented an efficient GA as the solution procedure. Computational results showedthat the presented approach outperforms the others in terms of both quality of solutionsand CPU times.
The latest research, conducted by Shafaei et al. (2011), presented an intelligent systemcalled ANFIS for makespan estimation in a no-wait two-stage multiprocessor flow shopenvironment. Multiple linear regression was compared with their proposed method andthe results of their study indicated that ANFIS is very efficient in makespan estimationin the addressed problem.
Review of the literature reveals that most research in this area has concentrated on themakespan performance measure and, in the majority of studies, setup times are consideredas sequence independent. In a real manufacturing environment, simultaneous
2 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
considerations of no-wait and setup times need to be taken into account (Allahverdi andAldowaisan 2001).
The problem studied in this research is a no-wait hybrid flow shop scheduling problem(NWHFSSP) with parallel and identical machines. The performance measure considered istotal completion time. For this purpose a couple of meta-heuristic algorithms are proposedand their performances are compared with that of ACO.
The remainder of this article is organised as follows. In Section 2, a problemdescription is given in detail followed by further description, using an illustrative example.In Section 3, the frameworks of the proposed algorithms are explained. Numericalexperiments developed to solve the problems are explained in Section 4, which is followedby presentation of the simulation results. Finally, Section 5 presents a summary of theresearch’s conclusions and recommendations for further research.
2. Problem definition
The NWHFSSP can be described as follows: given the processing time t (i, j) of stage i onJob j and setup time St (i, j) of stage i on job j, each of n jobs will be sequentially processedin stages 1 and 2, respectively. At each stage, there are mi machines. In addition, at anygiven time, each machine can process at the most one job. Similarly, each operation of ajob can only be processed on one machine. Once the sequence of jobs at the first stage isdefined, the same sequence is applied for the second stage. To satisfy the no-waitrestrictions, the completion time of a job on a given machine will be equal to the startingtime of the job on the next machine. In other words, there must be no waiting time betweenthe processing of any consecutive operations of each job. The problem is to find a sequencewhere the total completion time is minimised. The problem is shown byF2ðm1,m2Þjno� wait, unit setupj
Pnj¼1 Cj.
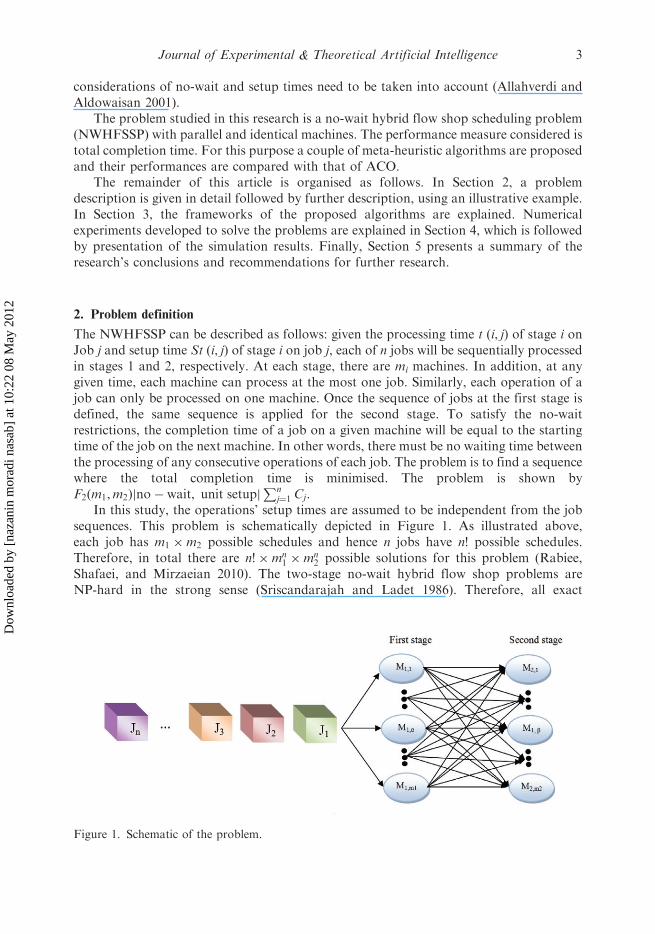
In this study, the operations’ setup times are assumed to be independent from the jobsequences. This problem is schematically depicted in Figure 1. As illustrated above,each job has m1 �m2 possible schedules and hence n jobs have n! possible schedules.Therefore, in total there are n!�mn
1 �mn2 possible solutions for this problem (Rabiee,
Shafaei, and Mirzaeian 2010). The two-stage no-wait hybrid flow shop problems areNP-hard in the strong sense (Sriscandarajah and Ladet 1986). Therefore, all exact
Figure 1. Schematic of the problem.
Journal of Experimental & Theoretical Artificial Intelligence 3
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012

algorithms for even a simple flow shop and simple parallel machines will most likelyhave running times that increase exponentially with the size of the problem. In this article,we propose two meta-heuristic algorithms for the problem described above. Theframeworks of the algorithms are explained in the next section.
3. Proposed algorithms
3.1. Adaptive imperialist competitive algorithm
Atashpaz-Gargari and Lucas (2007) illustrated the imperialist competitive algorithm(ICA). ICA has been widely applied for many non-polynomial hard optimisationproblems, such as flow shop and job shop scheduling. Shokrollahpour, Zandieh, andDorri (2011) applied this method for solving the two-stage assembly flow shop schedulingproblem with minimisation of weighted sum of makespan and mean completion time asthe objective. They calibrated the parameters of this algorithm using the Taguchi method.The results showed a satisfactory performance of the proposed algorithm.
ICA, similarly to other evolutionary algorithms, starts with an initial population inwhich every individual is named as a country. Countries are divided into two groups:imperialists and colonies. Some of the best countries (countries with the least costs) arechosen to be the imperialist countries and the rest, known as colonies, are divided amongthe imperialists based on their power. The power of each country is calculated based on theobjective function. A set of one imperialist and their colonies forms one empire. The totalpower of an empire is equal to the power of the imperialist country plus a percentageof mean power of its colonies. After forming initial empires, the competition starts; thecolonies in each empire starts moving toward their imperialist country, and the imperialistsattempt to achieve more colonies. Hence, during the competition, the weak imperialist willcollapse. At the end, just one imperialist will remain. The framework of the proposedadapted ICA (AICA) is described as follows.
3.1.1. Generating initial empires
Each solution in AICA is in a form of an array. Each array consists of variable values tobe optimised. In GA terminology, this array is called a ‘chromosome’, but here, the term‘country’ is used. In an N dimensional optimisation problem, a country is a 1�N array.This array is defined below:
country ¼ ½ p1, p2, p3, . . . , pN�, ð1Þ
where Pi is the variable to be optimised, each variable in a country denotes a socio-politicalcharacteristic of a country. From this point of view, the algorithm searches for the bestcountry, that is the country with the best combination of socio-political characteristicssuch as culture, language and economical policy (Atashpaz-Gargari and Lucas 2007).
In AICA, each solution (country) is a 1 � N array of integer variables, where Nrepresents the number of jobs. The array of the country represents a sequence of jobs to beassigned to the earliest available machines in both stages. The structure of one solutionfor a problem with seven jobs is shown in Figure 2.
The cost of a country is calculated using a cost function f with the variablesðP1,P2, . . . ,PNÞ as follows:
ci ¼ f ðcountryiÞ ¼ f ð pi1, pi2, . . . , piNÞ: ð2Þ
4 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012

The algorithm starts with the initial countries, which are generated randomly by anumber of population size (PopSize), and the most powerful countries (countries withminimum cost) are selected as the imperialists with a number of Nimp. The remainingcountries are colonies, each of which belongs to an empire. The colonies are distributedamong the imperialists based on each imperialist’s power. To calculate the imperialist’spower, the normalised cost of an imperialist is applied using the following definition:
Cn ¼ maxi
ci � cn, ð3Þ
where cn is the cost of the n-th imperialist and Cn is its normalised cost, which is equalto the deviation of the maximum total completion time from the n-th imperialist cost.The imperialist probability is calculated according to the following equation.
IPn ¼Cn
PNimp
i¼1 Ci
�����
�����: ð4Þ
Having obtained the imperialist power, the colonies are distributed among theimperialists accordingly. In addition, the initial number of colonies of an imperialist iscalculated as follows:
NCn ¼ round IPn:Ncolf g, ð5Þ
where NCn is the initial number of colonies of the n-th imperialist and Ncol is the totalnumber of colonies. NCn is randomly selected and designated to the n-th imperialist. Theimperialist with the biggest power has the greatest number of colonies whilst an imperialistwith a weaker power has less value.
3.1.2. Moving the colonies of an empire toward the imperialist (assimilating)
Since imperialists are the best solutions, the colonies intend to obtain some of theproperties of the related imperialist. In other words, an imperialist shares information withits colonies. For this purpose, the following procedure, adapted from the crossover stage ofGA, has been developed.
As shown in Figure 3, an array with the cell values equal to one or zero are randomlygenerated. According to this figure, cell numbers 2 and 3 are equal to 1. From theimperialist array, Figure 4, the jobs are located in the positions with the value of 1,i.e. job numbers 5 and 7 are copied to the same positions in the assimilated colony(Figure 5). In this case, PAS, the percentage of jobs with a value equal to 1, is equal to28.5% (i.e. two out of seven cells from the new array). The jobs which are copied to theassimilated colony are deleted from the colony array (job numbers 5 and 7).
0 1 1 0 0 0 0
Figure 3. New array.
6 5 7 2 1 3 4
Figure 2. The structure of one solution for a problem with seven jobs using AICA.
Journal of Experimental & Theoretical Artificial Intelligence 5
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012

From the colony array, the remaining jobs are categorised into two groups: the right-hand side and left-hand side of the last deleted job, i.e. job number 2 and job numbers 4, 3,1 and 6, in Figure 6, respectively. First, the job/s placed on the right-hand side is/aremoved to the earliest empty position/s of the assimilated colony (job number 2 in the firstposition in Figure 3). Similarly, the job/s located on the left hand side group is/are copiedin the remaining empty position/s (job numbers 4, 3, 1 and 6 in Figure 5). Then theassimilated colony is considered as a new country.
3.1.3. Exchanging positions of the imperialist and a colony
A colony might reach a position with lower costs than the imperialist when it movestoward the imperialist. In these situations, the position of the imperialist and the colony isexchanged as shown in Figure 7(a). Afterward, the algorithm will continue and thecolonies will be moved toward an imperialist in its new position. The resulting empire,after exchanging the position of the imperialist and the colony, is depicted in Figure 7(b).
3.1.4. Total power of an empire
The total power of an empire is mainly affected by the power of the imperialist country,but the power of the colonies of an empire has an indigent effect on the total power of thatempire. Therefore, the equation of the total cost is defined as follows:
TCn ¼ cos tðimperialistnÞ þ �meanfcostðcolonies of empirenÞg, ð6Þ
Figure 7. Exchanging positions of the imperialist and a colony.
2 5 7 4 3 1 6
Figure 5. Assimilated colony.
4 3 1 6 7 5 2 Colony
Figure 6. Colony array.
6 5 7 2 1 3 4 Imperialist
Figure 4. Imperialist array.
6 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
where TCn is the total cost of the n-th empire and xi (�) is a positive number considered tobe less than 1. The total power of the empire is determined by the imperialist, when thevalue of � is very small. The role of the colonies, which determines the total power of anempire, becomes more important as the value of � increases.
3.1.5. Imperialistic competition
All empires attempt to take possession of and control colonies of other empires. In theimperialistic competition, the power of weaker empires will gradually reduce and thepower of more powerful ones will rise. In other words, picking some (usually one) ofthe weakest colonies of the weakest empire and making a competition among all empiresto possess these colonies is the imperialistic competition. In this competition, the mostpowerful empires will most likely possess these colonies, but this is not definite. Thiscompetition is modelled by picking one of the weakest colonies from the weakest empire.In order to calculate the possession probability of each empire, first the normalised totalcost is calculated as follows:
NTCn ¼ max TCif g � TCn, ð7Þ
where NTCn is the normalised total cost of the n-th empire and TCn is the total cost of then-th empire. Having normalised the total cost, each empire’s probability is calculated asbelow:
EPn ¼NTCn
PNimp
i¼1 NTCi
�����
�����: ð8Þ
The roulette wheel method is used for assigning the mentioned colony to the empires.
3.1.6. Revolution
In each iteration, for every imperialist, two positions of the imperialist’s array are chosenand these positions are swapped and the new imperialist is replaced with the weakestimperialist colony. These processes are repeated by a percentage of jobs for eachimperialist, PIR. Furthermore, some of the colonies are selected and then two positions ofthe colony’s array are chosen and these positions are swapped. These processes arerepeated for a percentage of jobs for each colony, PCR. The replacement ratio is identifiedas the revolution rate, PR.
3.1.7. Eliminating the powerless empires
Powerless empires will collapse and their colonies will be distributed among other empiresin the imperialistic competition. In this article, when an empire loses all of its colonies,we consider it to be a collapsed empire.
3.1.8. Global war
One of the problems in the original ICA is the possibility of sticking in local optimalsolutions, which leads to a premature convergence. In this article, in order to solve thisproblem, a new concept called ‘global’ war has been developed. This is described as follows.
First, the value of two parameters, DGW and NGW, are determined. DGW and NGW areconsidered as the duration between two subsequent global wars and the total number ofglobal wars, respectively.
Journal of Experimental & Theoretical Artificial Intelligence 7
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
At the event of each global war, K countries, which are equal to the initial population,are randomly generated. This is considered as a new population.
The new and old populations are merged and sorted in ascending order in terms of thefitness function and the K best countries are selected accordingly. This is considered as anew population to be used for the next decade.
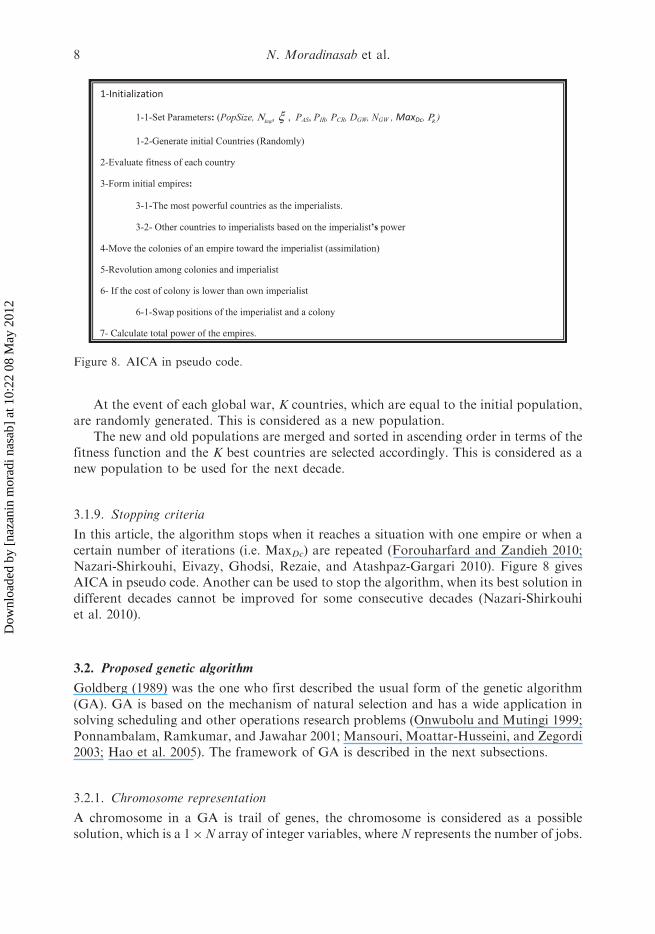
3.1.9. Stopping criteria
In this article, the algorithm stops when it reaches a situation with one empire or when acertain number of iterations (i.e. MaxDc) are repeated (Forouharfard and Zandieh 2010;Nazari-Shirkouhi, Eivazy, Ghodsi, Rezaie, and Atashpaz-Gargari 2010). Figure 8 givesAICA in pseudo code. Another can be used to stop the algorithm, when its best solution indifferent decades cannot be improved for some consecutive decades (Nazari-Shirkouhiet al. 2010).
3.2. Proposed genetic algorithm
Goldberg (1989) was the one who first described the usual form of the genetic algorithm(GA). GA is based on the mechanism of natural selection and has a wide application insolving scheduling and other operations research problems (Onwubolu and Mutingi 1999;Ponnambalam, Ramkumar, and Jawahar 2001; Mansouri, Moattar-Husseini, and Zegordi2003; Hao et al. 2005). The framework of GA is described in the next subsections.
3.2.1. Chromosome representation
A chromosome in a GA is trail of genes, the chromosome is considered as a possiblesolution, which is a 1�N array of integer variables, whereN represents the number of jobs.
Figure 8. AICA in pseudo code.
8 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
Chromosome representation is similar to country representation in AICA, shownin Figure 2.
3.2.2. Initial population
GA requires a population of individuals which is the potential solution of a given problem.The initial population of individuals is randomly generated by a number of population size(PopSize).
3.2.3. Fitness evaluation
In this method, a fitness function value is assigned to the chromosome as soon as it isgenerated. In optimisation problems, the fitness function is the value of the objectivefunction. In this study, the fitness function for a chromosome is defined as minimising thetotal completion time.
3.2.4. Selection
Selections of chromosomes in GA are performed for the crossover procedure. Themomentous purpose of this operator is to choose the better chromosomes among theindividuals in an iteration, in order to reach better results. For this purpose, chromosomesamong the individuals are chosen to create the offspring in the crossover procedure. Thereare many approaches in this procedure selection such as roulette wheel selection,tournament selection and elitism. In this article, the tournament selection procedure isapplied to select the chromosome of the crossover. In this procedure, first M numbers ofpopulation size are selected and then corresponding fitness functions are calculated.Afterward, the chromosomes with the minimum cost among M members are chosen.
3.2.5. Crossover
The crossover operation is used to share the information among the selected chromosomes(i.e. parents). The percentage of population that is carried out in the crossover is shownby PC. First, two chromosomes with tournament selection are chosen (Figure 9). Then anew binary mask varying in a range between 0 and 1 with the size of job numberis randomly generated (Figure 3). For each new chromosome with a position valueequal to 1 the same position value in chromosome 1 (chromosome 2) is moved to child 1(child 2). Then, the other jobs not assigned to child 1 (child 2) in the same order inchromosome 2 (chromosome 1) are chosen to be assigned to child 1 (child 2). Thesechildren are shown in Figures 10 and 11, respectively.
3.2.6. Mutation operator
A mutation procedure in GA is performed to maintain the diversity in the population andpreservation to stick with local optimal solutions. Mutation is carried out on a percentage
6 5 7 2 1 3 4
4 3 1 6 7 5 2
Chromosome 1
Chromosome 2
Figure 9. Chromosomes 1 and 2.
Journal of Experimental & Theoretical Artificial Intelligence 9
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
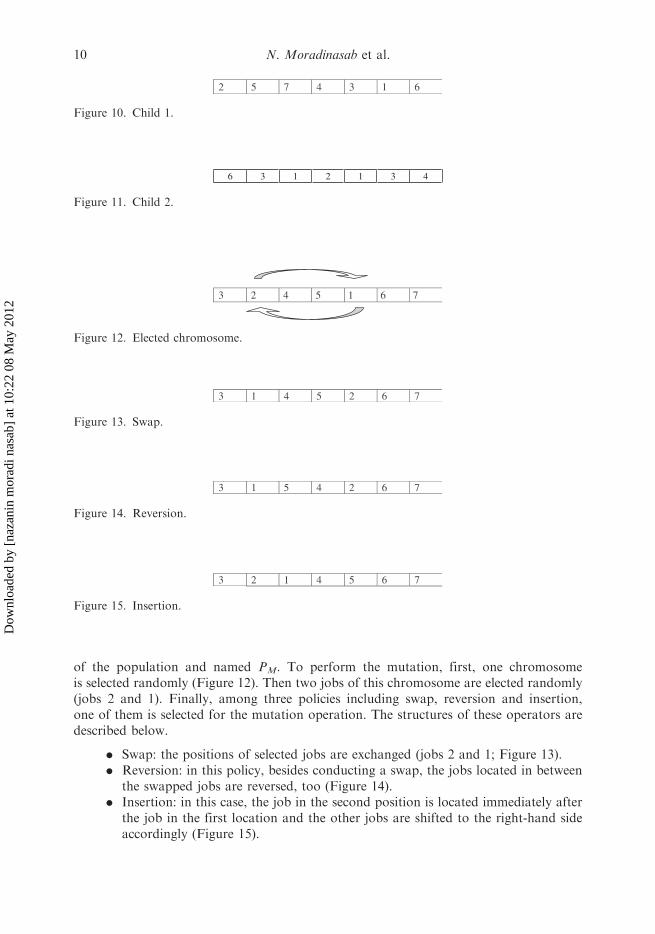
of the population and named PM. To perform the mutation, first, one chromosomeis selected randomly (Figure 12). Then two jobs of this chromosome are elected randomly(jobs 2 and 1). Finally, among three policies including swap, reversion and insertion,one of them is selected for the mutation operation. The structures of these operators aredescribed below.
. Swap: the positions of selected jobs are exchanged (jobs 2 and 1; Figure 13).
. Reversion: in this policy, besides conducting a swap, the jobs located in betweenthe swapped jobs are reversed, too (Figure 14).
. Insertion: in this case, the job in the second position is located immediately afterthe job in the first location and the other jobs are shifted to the right-hand sideaccordingly (Figure 15).
3 2 4 5 1 6 7
Figure 12. Elected chromosome.
6 3 1 2 1 3 4
Figure 11. Child 2.
2 5 7 4 3 1 6
Figure 10. Child 1.
3 2 1 4 5 6 7
Figure 15. Insertion.
3 1 5 4 2 6 7
Figure 14. Reversion.
3 1 4 5 2 6 7
Figure 13. Swap.
10 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
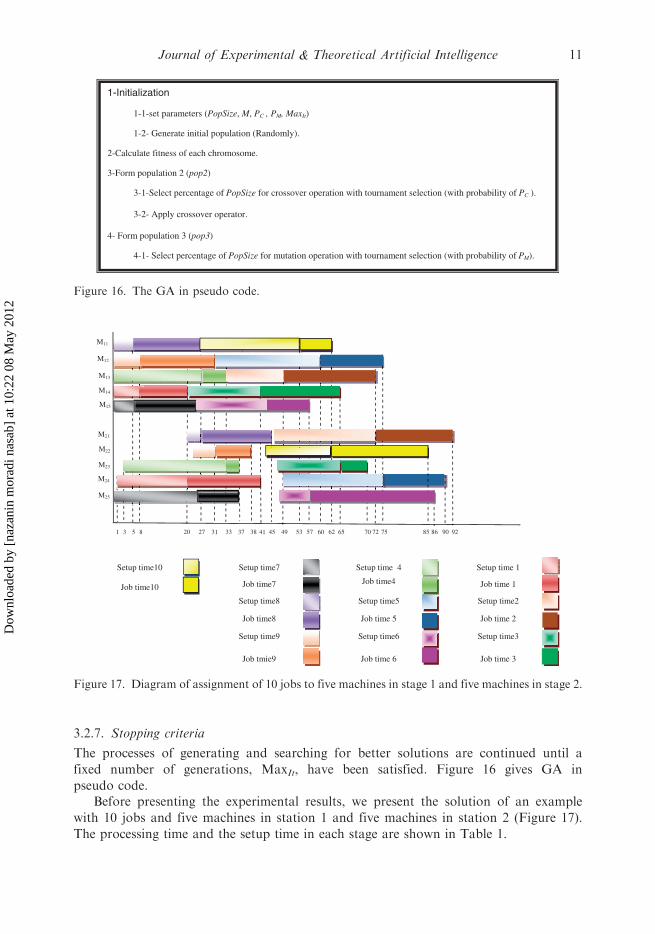
3.2.7. Stopping criteria
The processes of generating and searching for better solutions are continued until a
fixed number of generations, MaxIt, have been satisfied. Figure 16 gives GA in
pseudo code.Before presenting the experimental results, we present the solution of an example
with 10 jobs and five machines in station 1 and five machines in station 2 (Figure 17).
The processing time and the setup time in each stage are shown in Table 1.
Figure 17. Diagram of assignment of 10 jobs to five machines in stage 1 and five machines in stage 2.
1-Initialization
1-1-set parameters (PopSize, M, PC , PM, MaxIt)
1-2- Generate initial population (Randomly).
2-Calculate fitness of each chromosome.
3-Form population 2 (pop2)
3-1-Select percentage of PopSize for crossover operation with tournament selection (with probability of PC ).
3-2- Apply crossover operator.
4- Form population 3 (pop3)
4-1- Select percentage of PopSize for mutation operation with tournament selection (with probability of PM).
Figure 16. The GA in pseudo code.
Journal of Experimental & Theoretical Artificial Intelligence 11
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
4. Computational experiments
4.1. Parameter setting
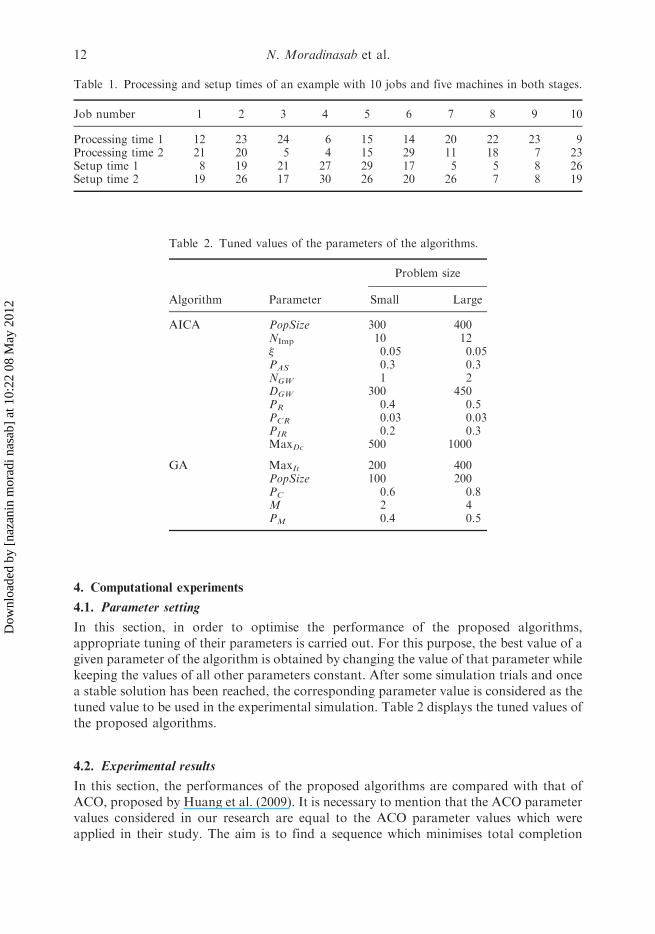
In this section, in order to optimise the performance of the proposed algorithms,appropriate tuning of their parameters is carried out. For this purpose, the best value of agiven parameter of the algorithm is obtained by changing the value of that parameter whilekeeping the values of all other parameters constant. After some simulation trials and oncea stable solution has been reached, the corresponding parameter value is considered as thetuned value to be used in the experimental simulation. Table 2 displays the tuned values ofthe proposed algorithms.
4.2. Experimental results
In this section, the performances of the proposed algorithms are compared with that ofACO, proposed by Huang et al. (2009). It is necessary to mention that the ACO parametervalues considered in our research are equal to the ACO parameter values which wereapplied in their study. The aim is to find a sequence which minimises total completion
Table 2. Tuned values of the parameters of the algorithms.
Problem size
Algorithm Parameter Small Large
AICA PopSize 300 400NImp 10 12� 0.05 0.05PAS 0.3 0.3NGW 1 2DGW 300 450PR 0.4 0.5PCR 0.03 0.03PIR 0.2 0.3MaxDc 500 1000
GA MaxIt 200 400PopSize 100 200PC 0.6 0.8M 2 4PM 0.4 0.5
Table 1. Processing and setup times of an example with 10 jobs and five machines in both stages.
Job number 1 2 3 4 5 6 7 8 9 10
Processing time 1 12 23 24 6 15 14 20 22 23 9Processing time 2 21 20 5 4 15 29 11 18 7 23Setup time 1 8 19 21 27 29 17 5 5 8 26Setup time 2 19 26 17 30 26 20 26 7 8 19
12 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
time. All algorithms studied were coded using MATLAB 2009b and run on a personal
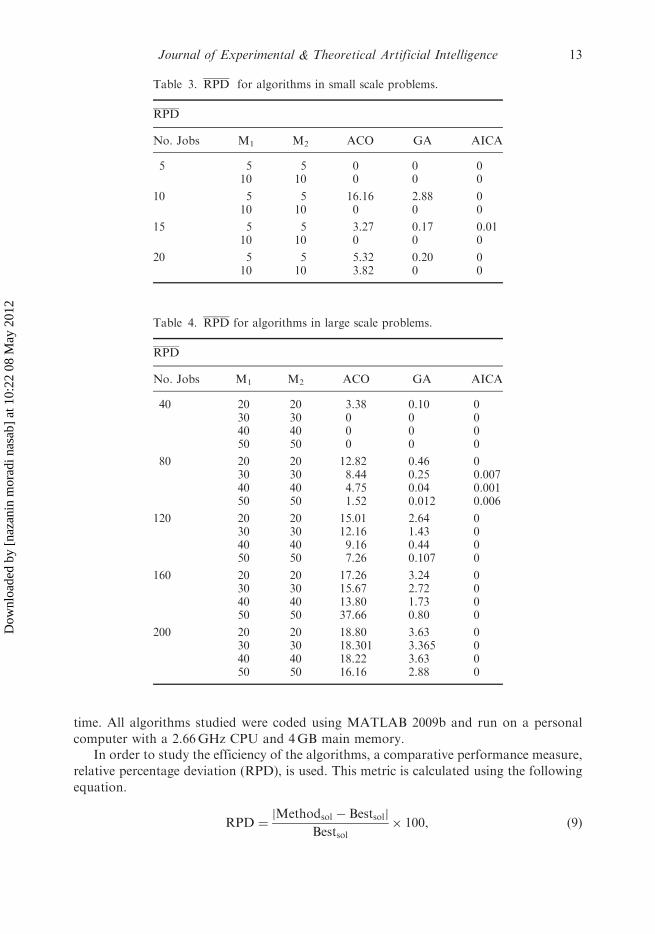
computer with a 2.66GHz CPU and 4GB main memory.In order to study the efficiency of the algorithms, a comparative performance measure,
relative percentage deviation (RPD), is used. This metric is calculated using the following
equation.
RPD ¼Methodsol � Bestsolj j
Bestsol� 100, ð9Þ
Table 4. RPD for algorithms in large scale problems.
RPD
No. Jobs M1 M2 ACO GA AICA
40 20 20 3.38 0.10 030 30 0 0 040 40 0 0 050 50 0 0 0
80 20 20 12.82 0.46 030 30 8.44 0.25 0.00740 40 4.75 0.04 0.00150 50 1.52 0.012 0.006
120 20 20 15.01 2.64 030 30 12.16 1.43 040 40 9.16 0.44 050 50 7.26 0.107 0
160 20 20 17.26 3.24 030 30 15.67 2.72 040 40 13.80 1.73 050 50 37.66 0.80 0
200 20 20 18.80 3.63 030 30 18.301 3.365 040 40 18.22 3.63 050 50 16.16 2.88 0
Table 3. RPD for algorithms in small scale problems.
RPD
No. Jobs M1 M2 ACO GA AICA
5 5 5 0 0 010 10 0 0 0
10 5 5 16.16 2.88 010 10 0 0 0
15 5 5 3.27 0.17 0.0110 10 0 0 0
20 5 5 5.32 0.20 010 10 3.82 0 0
Journal of Experimental & Theoretical Artificial Intelligence 13
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
Table
5.Detailed
simulationresultsforsm
all-sizeproblems.
No.
jobs
M1
M2
ACO
GA
AIC
A
Best_Sol
Worst_Sol
Stdev_Sol
Mean_Sol
Best_Sol
Worst_Sol
Stdev_Sol
Mean_Sol
Best_Sol
Worst_Sol
Stdev_Sol
Mean_Sol
55
5240
240
0240
240
240
0240
240
240
0240
10
10
240
240
0240
240
240
0240
240
240
0240
10
55
622
630
2.780
625.833
621
621
0621
621
621
0621
10
10
484
484
0484
484
484
0484
484
484
0484
15
55
1174
1184
3.892817
1181.467
1144
1147
0.844863
1146.1
1144
1146
0.610257
1144.2
10
10
855
855
0855
855
855
0855
855
855
0855
20
55
1741
1768
12.94551
1750
1664
1666
0.691492
1664.93
1661
1664
1.220514
1661.6
10
10
1150
1166
7.636
1157.633
1115
1115
01115
1115
1115
01115
14 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
Table
6.Detailed
simulationresultsforlarge-size
problems.
ACO
GA
AIC
A
No.
joubs
M1
M2
Best_Sol
Worst_Sol
Stdev_Sol
Mean_Sol
Best_Sol
Worst_Sol
Stdev_Sol
Mean_Sol
Best_Sol
Worst_Sol
Stdev_Sol
Mean_Sol
40
20
20
2434
2457
9.50
2448.16
2368
2372
1.65
2370.4
2368
2368
02368
30
30
2071
2071
02071
2071
2071
02071
2071
2071
02071
40
40
1886
1886
01886
1886
1886
01886
1886
1886
01886
50
50
1886
1886
01886
1886
1886
01886
1886
1886
01886
80
20
20
7236
7399
50.49
7346.03
6539
6544
1.79
6540.76
6505
6519
5.87
6511.06
30
30
5641
5661
8.92
5649.66
5220
5225
2.30
5222.73
5205
5224
7.68
5210.27
40
40
4706
4875
73.36
4784.73
4569
4570
0.51
4569.53
4567
4571
1.073
4567.77
50
50
4329
4344
5.30
4333.27
4268
4269
0.5
4268.6
4268
4269
0.48
4268.34
120
20
20
14995
15071
35.15
15032.73
13412
13425
3.451
13415.57
13062
13078
5.26
13070.17
30
30
11012
11075
31.76
11047.7
9930
10029
40.70
9990.73
9848
9854
2.39
9850.17
40
40
9043
9108
27.88
9070.86
8338
8358
8.76
8346.17
8305
8318
4.20
8309.24
50
50
7925
7969
20.03
7948.56
7416
7420
1.53
7418.067
7408
7414
2.15
7410.1
160
20
20
27768
27914
58.49
27835.67
24419
24709
125.05
24505.97
23705
23809
37.55
23737.1
30
30
20014
20077
28.01
20048.83
17725
17870
67.10
17805.13
17323
17349
7.82
17333.07
40
40
16130
16230
49.83
16190
14451
14494
16.84
14473.77
14218
14494
6.15
14226.47
50
50
13886
13944
24.25
13909.73
12516
12538
8.86
12527.8
12426
12432
2.22
12428.03
200
20
20
41382
41646
111.7134
41467.1
36082
36289
92.26106
36171.03
34876
34930
18.47151
34903.9
30
30
29271
29615
112.7999
29379.63
25560
25753
80.4386
25670.33
24824
24848
10.65
24834.43
40
40
23473
23762
94.36647
23604.07
20638
20721
36.15001
20692.07
19953
20006
15.21
19966.77
50
50
19794
19930
55.67526
19841.3
17544
17586
15.25
17572.83
17057
17113
21.38
17080.47
Journal of Experimental & Theoretical Artificial Intelligence 15
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
where Methodsol is the value of a method and Bestsol is the best value obtained among
the algorithms. Also, RPD is defined according to the following equation:
RPD ¼
P30i¼1 RPD
30: ð10Þ
The performance of the algorithms was testified by solving 28 different problems in
two scales (eight problems in small scale and 20 problems in large scale). These problems
AICAGAACO
2.0
1.5
1.0
0.5
0.0
Algorithms
RPD
Interval Plot of ACO, GA, AICA
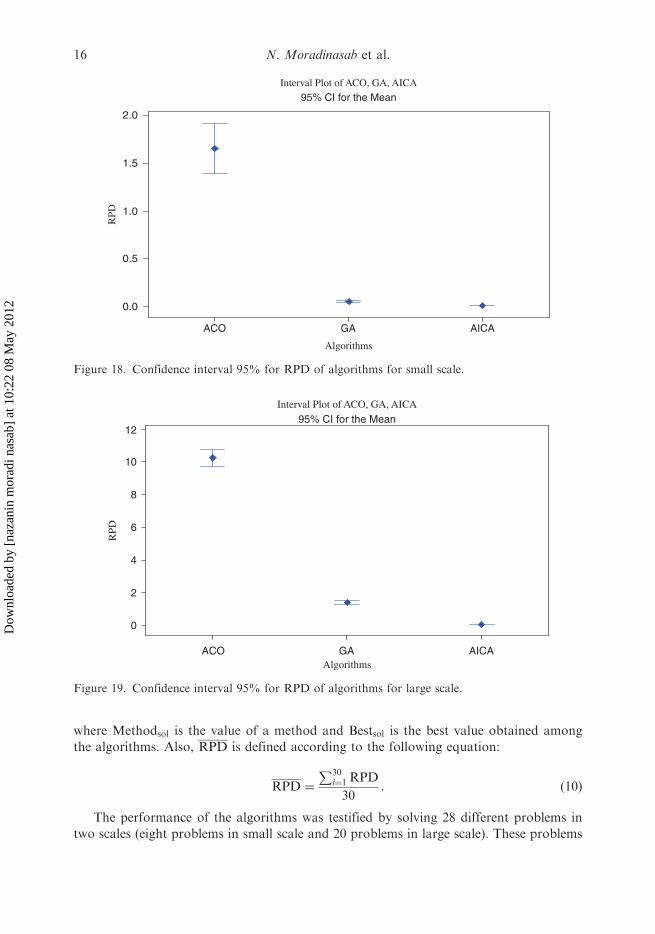
95% CI for the Mean
Figure 18. Confidence interval 95% for RPD of algorithms for small scale.
AICAGAACO
12
10
8
6
4
2
0
Algorithms
RPD
Interval Plot of ACO, GA, AICA
95% CI for the Mean
Figure 19. Confidence interval 95% for RPD of algorithms for large scale.
16 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012

are those used by Huang et al. (2009). Tables 3 and 4 show the comparative results in termsof RPD (for total completion time) of the proposed algorithms and ACO for small andlarge scale, respectively. The results presented in Table 3 show that in small-scale problemsthe AICA algorithm outperformed the other algorithms. This is followed by GA, which isalso superior to ACO. In addition, the results presented in Table 4 indicate that, similarlyto the small scale problems, for large scale problems, AICA and GA are superior to ACOwhile AICA obtained the best performance.
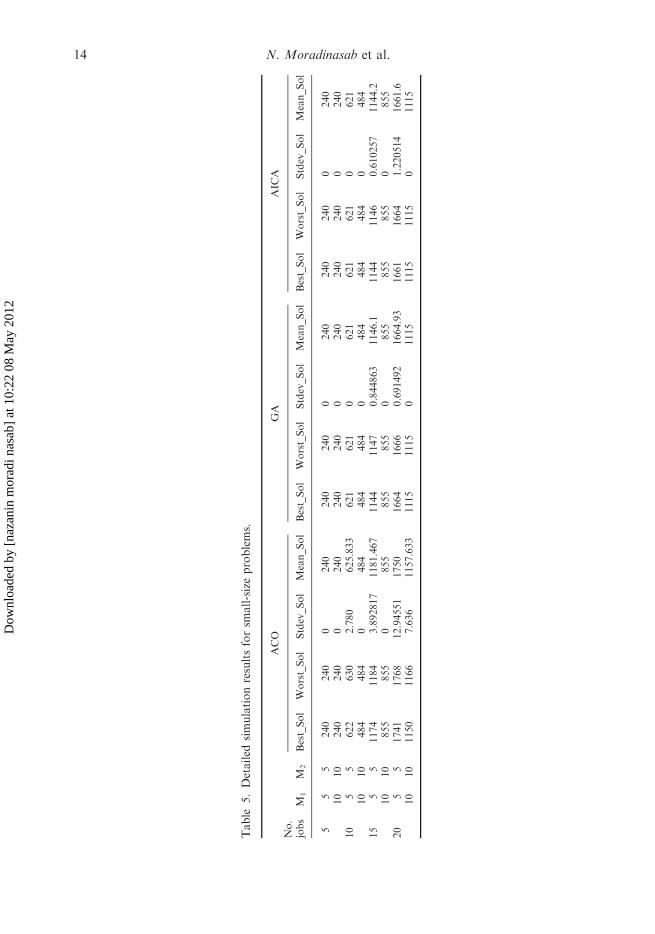
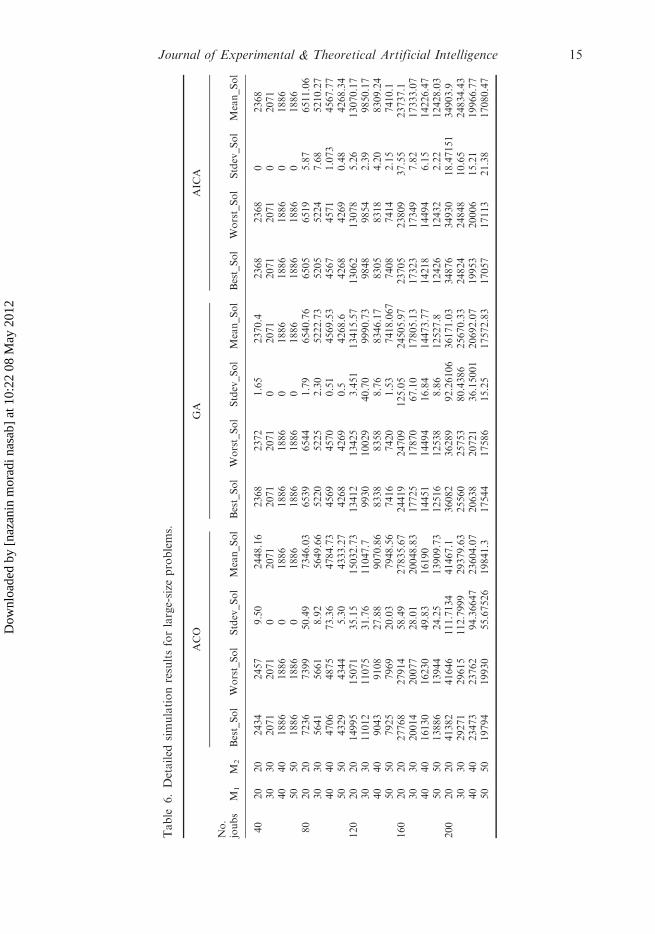
Tables 5 and 6 show the detailed results in terms of best solution, worst solution, meanof solutions and standard deviation of the solutions for small- and large-scale problems.The results reveal that AICA has a higher efficiency than that of GA and ACO.
In order to evaluate the significance of the results presented earlier, a statisticalevaluation in terms of RPD with 95% confidence interval was conducted. The results arepresented in Figures 18 and 19. The results indicate that for both scale problems, AICAstatistically outperforms the other algorithms followed by GA, which outperforms ACO.Therefore, it can be concluded that the proposed algorithms in both scales have a superiorperformance to that of ACO.
Figure 20 shows the performance of the algorithms with respect to the number of jobs.This shows that the performance of ACO and GA deteriorate as the number of jobsincreases. However, AICA has constant superiority for all of the problems.
5. Conclusion
This paper focuses on solving the problem of a no-wait two-stage hybrid flow shopwith unit setup times. For this purpose, two efficient meta-heuristic algorithms, AICA andGA, are proposed. The performance measure considered is the minimum total completiontime. In order to assess the performance of the proposed algorithms, comparativeanalogies among the algorithms are applied in terms of relative percentage deviation.
Figure 20. Means plot and Tukey intervals 95% for the interaction between the type of algorithmand number of jobs.
Journal of Experimental & Theoretical Artificial Intelligence 17
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012

The results of the simulation study indicate that AICA significantly outperforms GA andACO. Furthermore, GA obtained a superior performance than ACO. The results also
show that the performance of ACO and GA deteriorate as the number of jobs increases.However, AICA obtained constantly superior performance in solving the problemsin different sizes. As a further study, it is proposed to consider job release time and reworktime in the problem studied. In addition, it is worthwhile studying the performance of theproposed algorithm in terms of other performance measures such as mean flow time and
mean tardiness.
Acknowledgements
The authors are grateful for the valuable comments and suggestions from the respected reviewers.We believe that their valuable comments and suggestions have enhanced the strength andsignificance of this article.
References
Allahverdi, A., and Aldowaisan, T. (2001), ‘Minimizing Total Completion Time in a No-wait
Flowshop with Sequence-dependent Additive Changeover Times’, Journal of the Operational
Research Society, 52, 449–462.Atashpaz-Gargari, and Lucas, E.C. (2007), ‘Imperialist Competitive Algorithm: An Algorithm
for Optimization Inspired by Imperialist Competitive’, in IEEE Congress on Evolutionary
computation, Singapore, pp. 4661–4666.Bonney, M.C., and Gundry, S.W. (1976), ‘Solutions to the Constrained Flow Shop Sequencing
Problem’, Operational Research Quarterly, 24, 869–883.
Forouharfard, S., and Zandieh, M. (2010), ‘An Imperialist Competitive Algorithm to Schedule of
Receiving and Shipping Trucks in Cross-docking Systems’, International Journal of Advanced
Manufacturing Technology, 51, 1179–1193.Gilmore, P.C., and Gomory, E. (1964), ‘Sequencing a One State-variable Machine: A Solvable Case
of the Traveling Salesman Problem’, Operations Research, 12, 655–679.Goldberg, D.E. (1989), Genetic Algorithms in Search, Optimization and Machine Learning, Reading,
MA: Addison-Wesley.Hao, G., Gong, D., Shi, Y., and Wang, L. (2005), ‘Interactive Genetic Algorithm Based on
Landscape of Satisfaction and Taboos’, Journal of China University of Mining & Technology,
34(2), 204–208.Haouari, M., Hidri, L., and Gharbi, A. (2006), ‘Optimal Scheduling of a Two-stage Hybrid Flow
Shop’, Mathematical Methods Operations Research, 64, 107–124.
Huang, R.H., Yang, C.L., and Huang, Y.C. (2009), ‘No-wait Two-stage Multiprocessor Flow
Shop Scheduling with Unit Setup’, Internationl Journal of Advanced Manufacturing
Technology, 44, 921–927.Jayamohan, M.S., and Rajendran, C. (2000), ‘A Comparative Analysis of Two Different
Approaches to Scheduling in Flexible Flow Shops’, Production Planning & Control, 11,
572–580.Jolai, F., Sheikh, S., Rabbani, M., and Karimi, B. (2009), ‘A Genetic Algorithm for Solving No-wait
Flexible Flow Lines with Due Window and Job Rejection’, The International Journal of
Advanced Manufacturing Technology, 42, 523–532.
King, J.R., and Spachis, A.S. (1980), ‘Heuristics for Flows Hop Scheduling’, International Journal of
Production Research, 18, 343–357.
18 N. Moradinasab et al.
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012
Mansouri, S.A., Moattar-Husseini, S.M., and Zegordi, S.H. (2003), ‘A Genetic Algorithm forMultiple Objective Dealing with Exceptional Elements in Cellular Manufacturing’, ProductionPlanning & Control, 14, 437–446.
Nazari-Shirkouhi, S., Eivazy, H., Ghodsi, R., Rezaie, K., and Atashpaz-Gargari, E. (2010), ‘Solving
the Integrated Product Mix-outsourcing Problem Using the Imperialist CompetitiveAlgorithm’, Expert Systems with Applications, 37, 7615–7626.
Onwubolu, G.C., and Mutingi, M. (1999), ‘Genetic Algorithm for Minimizing Tardiness in
Flow-shop Scheduling’, Production Planning & Control, 10, 462–471.Ponnambalam, S.G., Ramkumar, V., and Jawahar, N. (2001), ‘A Multiobjective Genetic Algorithm
for Job Shop Scheduling’, Production Planning & Control, 12, 764–774.
Rabiee, M., Shafaei, R., and Mirzaeian, M. (2010), ‘Generating an Efficient Schedule in a No-waitTwo Stage Flexible Flow Shops with Maximizing Utilization’, in The InternationalConference on Industrial Engineering and Business Management (ICIEBM) Jakarta,
Indonesia, pp. 555–561.Rajendran, C. (1994), ‘A No-wait Flow Shop Scheduling Heuristic for Minimizing Makespan’,
Journal of the Operational Research Society, 45, 472–478.Rajendran, C., and Chaudhuri, D. (1990), ‘Heuristic Algorithms for Continuous Flow Shop
Problem’, Naval Research Logistics, 37, 695–705.Reddi, S.S., and Ramamoorthy, C.V. (1972), ‘On the Flow Shop Sequencing Problem with No-wait
in Process’, Operational Research Quarterly, 23, 323–331.
Rock, H. (1984), ‘The Three-machine No-wait Flow Shop Problem is NP-complete’, Journal ofAssociate Computer Machinery, 31, 336–345.
Ruiz, R., and Allahverdi, A. (2007), ‘No-wait Flowshop with Separate Setup Times to Minimize
Maximum Lateness’, The International Journal of Advanced Manufacturing Technology, 35,551–565.
Santos, D.L., Hunsucker, J.L., and Deal, D.E. (2001), ‘On Makespan Improvement in Flow Shopswith Multiple Processors’, Production Planning & Control, 12, 283–295.
Shafaei, R., Rabiee, M., and Mirzaeyan, M. (2011), ‘An Adaptive Neuro Fuzzy Inference System forMakespan Estimation in Multiprocessor No-wait Two Stage Flow Shop’, InternationalJournal of Computer Integrated Manufacturing, 24(10), 888–899.
Shokrollahpour, E., Zandieh, M., and Dorri, B. (2011), ‘A Novel Imperialist Competitive Algorithmfor Bi-criteria Scheduling of the Assembly Flowshop Problem’, International Journal ofProduction Research, 49, 3087–3103.
Sriscandarajah, C., and Ladet, P. (1986), ‘Some No-wait Shops Scheduling Problems: ComplexityAspects’, European Journal of Operational Research, 24, 424–445.
Van Deman, J.M., and Baker, K.R. (1974), ‘Minimizing Flowtime in the Flow Shop with no
Intermediate Queues’, IIE Transactions, 6, 28–34.Wang, Z., Xing, W., and Bai, F. (2005), ‘No-wait Flexible Flow Shop Scheduling with No-idle
Machines’, Operations Research Letters, 33, 609–614.Wismer, D.A. (1972), ‘Solution of the Flow Shop Sequencing Problem with no Intermediate
Queues’, Operations Research, 20, 689–697.
Journal of Experimental & Theoretical Artificial Intelligence 19
Dow
nloa
ded
by [
naza
nin
mor
adi n
asab
] at
10:
22 0
8 M
ay 2
012