Music Information Retrieval Engenharia Informática e de ...
74
Music Information Retrieval Developing Tools for Musical Content Segmentation and Comparison Ricardo Jorge Sebastião dos Santos Dissertação para obtenção do Grau de Mestre em Engenharia Informática e de Computadores Júri Presidente: Orientador: Co-Orientador: Vogal: Prof. António Manuel Ferreira Rito da Silva Prof. David Manuel Martins de Matos Profª Isabel Maria Martins Trancoso Prof. António Joaquim dos Santos Romão Serralheiro Outubro 2010
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Music Information Retrieval Engenharia Informática e de ...

Music Information Retrieval
Developing Tools for Musical Content Segmentation and Comparison
Ricardo Jorge Sebastião dos Santos
Dissertação para obtenção do Grau de Mestre em
Engenharia Informática e de Computadores
Júri
Presidente:
Orientador:
Co-Orientador:
Vogal:
Prof. António Manuel Ferreira Rito da Silva
Prof. David Manuel Martins de Matos
Profª Isabel Maria Martins Trancoso
Prof. António Joaquim dos Santos Romão Serralheiro
Outubro 2010

Acknowledgements
I would like to express my gratitude to Miguel Miranda, who implemented the cutting search algorithm
used in the early attempts to tackle music structure (Section 2.2.2).
My gratitude also goes to Isabel Trancoso, who introduced me to speech processing, to Antonio
Serralheiro for the accurate observations and analysis of this work, and to David Matos for his end-
less enthusiasm, inspiration and guidance.
Above all, I owe the completion of this thesis to my family, from whom I had unconditional support,
and to my companion Sofia, for the continuous motivation.
ii

Resumo
A extracao de informacao em musica e uma disciplina recente que inclui ja multiplas tecnicas sufi-
cientemente maduras para a sua utilizacao no contexto de um conjunto de ferramentas que permita
a automacao de tarefas recorrentes desta disciplina. O objectivo deste trabalho foi a implementacao
de ferramentas em C++ para deteccao de fronteiras de segmentos de musica e repeticoes destes,
assim como para o calculo de medidas de distancia em musica, coerentes com a percepcao humana
de semelhanca entre pecas musicais. Uma consequencia disto foi a criacao de uma consideravel
base de codigo, que pode ser vista como um ponto de partida para futuros melhoramentos e con-
tributos.
Entre as implementacoes mais relevantes, consta a de um filtro de xadrez Gaussiano para a
deteccao de eventos e a de um segmentador com dois estagios de clustering K-Means que detecta
segmentos de uma musica que se repetem. O clustering foi tambem empregue na implementacao
de medidas de distancia entre musicas baseadas na distancia Earth Mover’s (EMD). Varias medidas
de distancia em musica baseadas em clustering foram desenvolvidas, incluindo uma implementacao
da divergencia de Kullback-Liebler para o calculo da distancia entre clusters, assumindo que cada
cluster pode ser aproximado por uma das duas funcoes de densidade de probabilidade implemen-
tadas.
Os resultados obtidos por esta implementacao para a deteccao de eventos em musica, sao
comparaveis aos documentados nos trabalhos usados como referencia, sendo o valor da medida
F obtido de 62%. Os resultados da segmentacao automatica demonstraram que cerca de 71%
dos segmentos identificados como semelhantes tem um valor de distancia efectivamente mais baixo
entre eles. Tambem para as medidas de distancia foram obtidos resultados positivos numa avaliacao
de pequena escala, ainda que mais experimentacao tenha de ser considerada para trabalho futuro.
Keywords
Extracao de Informacao em Musica, Segmentaccao de Musica, Medidas de Distancia em Musica,
Clustering, Divergencia de Kullback-Liebler, Distancia Earth Mover’s.
iii

Abstract
Music Information Retrieval (MIR) is now well established and comprises many techniques that have
matured enough to be used in a context of a toolkit that allows the automation of common tasks in this
discipline. The objective of this work was the implementation of tools in C++ to detect audio segment
borders and repetitions, as well as to determine music distance measures that are consistent with
human perceptions of music. A consequence of this process was the creation of a considerable code
base, which can leverage future improvements and additions.
Among the most relevant, an implementation was made of a Gaussian checker kernel filter for
music on-set detection and a two-stage K-Means clustering-based approach was used to identify
segments that repeat themselves in songs. A clustering-based approach to music distance calcu-
lation, that relies on the Earth Mover’s Distance (EMD), was also implemented. Several distance
measures were developed to compare clusters, including the Kullback-Liebler divergence of cluster
points modelled with one of two different probability density functions that were implemented.
The music on-set detection implementation obtained an F measure of 62% which is comparable to
the results obtained in reference works, and it was shown that the automatic segmentation retrieved
more than 71% of segments determined to be similar by one of the implemented distance measures.
Positive results where obtained for a small scale evaluation of the distance measures developed,
although more extensive experimenting with these tools should be considered in future work.
Keywords
Music Information Retrieval, Music Segmentation, Music Distance Measure, Clustering, Kullback-
Liebler divergence, Earth Mover’s Distance
iv

Contents
Acknowledgements ii
Resumo iii
Abstract iv
List of Figures vii
List of Tables ix
Acronyms and Abbreviations xii
1 Introduction and Objectives 1
1.1 Segmentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Distance Measure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Cross Segmentation and Distance Measure Evaluation . . . . . . . . . . . . . . . . . 3
1.4 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Strategies 5
2.1 Feature Extraction and Parametrization . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Segmentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Border Extraction from Autocorrelation Matrices . . . . . . . . . . . . . . . . . 7
2.2.2 Music Structure Analysis by Finding Repeated Parts . . . . . . . . . . . . . . . 9
2.3 Clustering-Based Segmentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Use of Clustering for L1 Label Extraction . . . . . . . . . . . . . . . . . . . . . 11
2.4 Distance Measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4.1 EMD as a Song Distance Metric . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4.2 Euclidean Distance of Clusters . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4.3 Cluster Covariance Distance Measure . . . . . . . . . . . . . . . . . . . . . . . 15
v

2.4.4 Kullback-Liebler Divergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4.5 PDFs for Cluster Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Architecture 17
3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Basic Data Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1 Use of the C++ Standard Template Library . . . . . . . . . . . . . . . . . . . . 19
3.3 Processing Chains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.4 Song Data Modelling and Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.5 External Dependencies and Contributions . . . . . . . . . . . . . . . . . . . . . . . . . 24
4 Evaluation 26
4.1 Corpora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Performance Measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.1 Matching Tolerance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2.2 Song Segment Distance Measure . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.3 Success Metric for Song Distance . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3 Gaussian Checker Kernel Filter Border Matching Evaluation . . . . . . . . . . . . . . . 34
4.4 Evaluation of the Cluster Based Automatic Segmentation . . . . . . . . . . . . . . . . 36
4.4.1 Border Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.4.2 Inter-Segment Distance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.4.3 Empirical Evaluation of the Cluster Based Segmentation Results . . . . . . . . 39
4.5 Evaluation of Distance Measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5 Conclusion 43
5.1 Result Summary and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.3 Objectives versus Challenges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
References 46
Appendix A A1
A Border Matching Results from Gaussian Checker Kernel Matrix and Clustering Based
Segmentation A1
Appendix B B7
vi

B Segment Similarity Results of the KL Divergence of a Single Gaussian per Feature Dis-
tance measure B7
Appendix C C11
C Small Scale Evaluation of Song Distance Measure Results C11
vii
List of Figures
2.1 Example distance matrix obtained from the song “Thank you” by Alannis Morriset . . . 8
2.2 Gaussian checker filter matrix representation with a side of 40 and a standard deviation
of 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Sequence of low level labels (hmm state assignements) per beat against a manual
segmentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Manual annotations and low level labels from the filtered cluster assignment of each
musical frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 Overview of the cluster based segmentation process . . . . . . . . . . . . . . . . . . . 12
2.6 Overview of the distance measure process flow . . . . . . . . . . . . . . . . . . . . . . 13
3.1 Overview of the tool chain used to produce results with Shkr. . . . . . . . . . . . . . . 18
3.2 Gaussian checker kernel processing chain UML class diagram . . . . . . . . . . . . . 20
3.3 Code listing of the Gaussian checker kernel segmentation chain . . . . . . . . . . . . 21
3.4 Cluster-based segmentation chain UML class diagram . . . . . . . . . . . . . . . . . . 22
3.5 Code listing for the creation of the clustering based segmentation chain . . . . . . . . 23
3.6 Overview of the song and cluster data modelling . . . . . . . . . . . . . . . . . . . . . 25
4.1 Example of an ambiguous border location between a verse and a bridge . . . . . . . . 30
4.2 Precision, recall and F measure of the Gaussian checker kernel filter . . . . . . . . . . 35
4.3 Border matching performance measures for cluster based approach . . . . . . . . . . 37
4.4 Self-similarity distance evaluation results for the automatic segmentations . . . . . . . 38
4.5 Average total labels and correct labels from GT and AS for the range of tested L2
clusters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.6 Segmentation view for “Wonder Wall” from Oasis, with the 3 L2 clusters . . . . . . . . 40
4.7 Segmentation view for “Wonder Wall” from Oasis, with the 5 L2 clusters . . . . . . . . 40
4.8 Segmentation view for “Wonder Wall” from Oasis, with the 7 L2 clusters . . . . . . . . 40
4.9 Segmentation view for “Wonder Wall” from Oasis, from ground truth annotations . . . 40
viii

4.10 Overview of the tested cluster distance measures versus the number of clusters used. 41
A.1 List songs with corresponding recall and precision, sorted by recall for the a Gaussian
matrix side of 20 and a Gaussian standard deviation of 12 . . . . . . . . . . . . . . . . A3
A.2 List songs with corresponding recall and precision, sorted by recall for the a Gaussian
matrix side of 30 and a Gaussian standard deviation of 12 . . . . . . . . . . . . . . . . A4
A.3 List songs with corresponding recall and precision, sorted by recall for the a Gaussian
matrix side of 40 and a Gaussian standard deviation of 24 . . . . . . . . . . . . . . . . A5
A.4 List songs with corresponding recall and precision, sorted by recall for the clustering
based segmentation using 5 clusters L2 and 80 clusters L1. . . . . . . . . . . . . . . . A6
C.1 Comparison of the tested cluster distance measures using 1 cluster. . . . . . . . . . . C12
C.2 Comparison of the tested cluster distance measures using 10 clusters. . . . . . . . . . C13
C.3 Comparison of the tested cluster distance measures using 20 clusters. . . . . . . . . . C14
ix

List of Tables
2.1 List of features used by several authors in related work with the corresponding tasks
in for which they were used. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Parametrization of the MFCC extraction. . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.1 Example of self segment similarity comparison for the ground truth segments . . . . . 31
4.2 Example of self segment similarity per label average distances for the ground truth
segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 Border matching performance measures of the Gaussian checker kernel filter . . . . . 34
4.4 Border matching performance measures for cluster based approach . . . . . . . . . . 36
4.5 Self-similarity distance evaluation results for the automatic segmentations . . . . . . . 38
4.6 Overview of the tested cluster distance measures versus the number of clusters used 41
A.1 Detailed border matching performance measures of the Gaussian checker kernel filter A1
A.2 Border matching performance measures for cluster based approach for the range of
tested L2 cluster values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A2
B.1 Segment self-similarity matrices used to validate empirically the KL divergence of the
single Gaussian per features distance measure . . . . . . . . . . . . . . . . . . . . . . B8
B.2 Self-similarity distance evaluation results for the segmentations obtained with the range
of tested L2 cluster values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B9
B.3 Segment self-similarity results for all songs in the corpus, for an automatic segmenta-
tion using 5 L2 clusters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B10
C.1 List of songs which compose the small scale evaluation corpus of distance measures. C11
C.2 Results of the different cluster distance measures for all of the corpus categories with
only 1 cluster in comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C12
C.3 Results of the different cluster distance measures for all of the corpus categories with
10 clusters clusters in comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C12
x

C.4 Results of the different cluster distance measures for all of the corpus categories with
20 clusters clusters in comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C13
xi

Acronyms and Abbreviations
AS Automatic SegmentationBPM Beats Per MinuteCQT Constant Q TransformCRS Content Recommendation SystemDOM Document Object ModelDTW Dynamic Time WarpingEMD Earth Mover’s DistanceGT Ground TruthHMM Hidden Markov ModelHPCP Harmonic Pitch Class ProfileISMIR International Society for Music Information RetrievalKL-divergence Kullback-Liebler divergenceL1 Level 1 (clusters)L2 Level 2 (clusters)LPC Linear Prediction CoefficientsMFCC Mel Frequency Cepstral CoefficientsMILP Mixed Integer Linear ProgrammingMIR Music Information RetrievalMIREX Music Information Retrieval Evaluation eXchangeMP3 MPEG Layer 3MPEG Moving Picture Experts GroupPCA Principal Component AnalysisPDF Probability Density FunctionPNM Portable Anymap FormatShkr ShakiraSTFT Short Time Fourier TransformSTL Standard Template LibrarySVM Support Vector Machines
xii

Chapter 1
Introduction and Objectives
Music in digital format is now widely spread, this being the consequence of more than two decades
passed over the audio CD introduction. Advances in audio encoding systems (e.g. MPEG layer 3), as
well as the widespread of high-capacity storage devices, allowed for the creation of the digital music
library concept. The high availability and demand for such content created new requirements about
its management, distribution and advertisement, that suggest a more direct analysis of the content
than that provided by simple human driven meta-data cataloguing of the music.
In addition, this large volume of information, combined with the processing power to analyse it,
allows for the posing of long standing questions, that formerly were only approachable by music
theoretical analysis, such as correlating ethnic music with the cultures where it spawns as mentioned
by Howes [1]:
There is thus a vast corpus of music material available for comparative study. It would be
fascinating to discover and work out a correlation between music and social phenomena
Frank Howes, 1948
In light of the new technological advances and possibilities, a new discipline of Information Re-
trieval gained traction, Music Information Retrieval (MIR), which uses music as its dataset. The
development of new computational methods and tools for pattern finding and comparison of musi-
cal content is currently a very active research area where different methods and applications are
constantly being developed. An example of this is the annual Music Information Retrieval Evaluation
eXchange (MIREX) [2] contest that is coupled to the International Society (and Conference) for Music
Information Retrieval (ISMIR) [3]. Evaluated tasks include Automatic Genre Identification, Query by
Humming, Chord Detection, Segmentation, Melody Extraction, to name a few.
This work describes a preliminary effort to develop a toolkit written in C++ for common tasks
in music retrieval, aiming at the integration of a music Content Recommendation System (CRS),
1

covering two common tasks in this field that have a broad range of applications. These are music
segmentation into humanly identifiable musical segments, and music similarity measures. Over the
next chapters, it will be referred to as the Shkr project.
Over the next sections of this chapter, the objectives and applications of the work developed in the
segmentation and similarity measures are presented. The strategies used for music segmentation
and similarity are developed in chapter 2, followed by a description of the implemented architecture in
chapter 3. The methods of evaluation and results for each solution are described in chapter 4. Notes
for future work, conclusions and general result discussion considerations are included in chapter 5.
1.1 Segmentation
Finding the boundaries of sections - time-spans - of audio that are different from each other is a
commonly used strategy to determine an underlying structure in music content. Since music can
be seen - and written - as a sequence of events, reliably determining the boundaries and duration
of such events is a prerequisite in many MIR-related tasks. Example musical events can be notes,
chords, groups of notes or chords, volume (signal energy) alterations, timbre alterations (e.g. different
instruments present, different octaves played), rhythm changes, singing to non-singing transitions, to
mention a few of the most relevant.
Segmentation is a direct consequence of musical composition and production. An example is
the interval between a dominant beat in a modern Pop song, usually characterised by the timespan
between a high energy, low frequency pulse, created by a percussion or bass instrument, which
is a property commonly used for sound loop extraction and processing in musical remixes. On a
different scale, a musical score can also be seen as a formalization of a desirable sequence of
events, with different durations and acoustic characteristics, during which, or in the interval of which,
a segmentation can emerge, e.g. predominant scales, key and other aspects of musical harmony.
The difference between these two examples of segmentation is therefore the granularity (scale) and
nature (features) of the events that define a musical segment.
In this work, focus was given to detecting the humanly perceivable portions of popular music
that are commonly mentioned as “choruses”, “verses”, “intros”, “bridges” or “breaks” and are usually
repeated (sometimes with variations). This specific segmentation task was approached by several
researchers (as further developed in Chapter 2 ), although the range of musical genres to which it is
applicable is reduced, since it does not typically occur in all of them. Only Pop and Rock music was
used in the segmentation evaluation corpus, in order to limit the scope of the evaluation to genres
where this type of segmentation is usually applicable.
2

Target applications of this type of segmentation are typically:
• “Jump to the next section” features in media players, which can allow a first time listener to
quickly browse a song by listening only to the portions of it that are significantly different.
• “Audio thumbnailing”, where segmentation can provide a list of candidate audio excerpts that
can be presented to a listener for fast musical identification or evaluation.
1.2 Distance Measure
Comparing and cataloguing musical content is a complex task that is usually the domain of a human
listener and, more recently, of meta-data driven CRS. In the scope of this work, music distance was
approached as a tool to produce a measure by which an ordered playlist of similar songs in a corpus
can be determined.
Typical applications of such a tools are:
• Suggestion of similar music to a listener, based on the musical signal instead of meta-data tags.
• Playlist generation/sorting (e.g. emphSchnitzer [4])
• Query by Humming (e.g. Midomi [5]).
• Identification of candidate segments for audio “thumbnailing” by cross-comparing audio seg-
ments.
In what concerns music distance measure, the tools produced by this work use documented
methods for comparing audio musical content. However gaps were left in what concerns feature
selection and evaluation, which although pertinent in the scope of the task at hand, would significantly
increase its complexity.
1.3 Cross Segmentation and Distance Measure Evaluation
Segmentation and distance measure can overlap in their evaluation, if the segments obtained from
a song repeat themselves in a musical piece. An assumption was made in the evaluation of the
tools produced, that the application of the distance measure to musical segments that are humanly
annotated as being similar should result in smaller distance values in relation to those that are not.
While human segmentation annotations are not always accurate, it was found that this is generally
the case for the proposed methods.
3
Having excerpts of audio that are humanly annotated as similar (e.g. a repeating chorus), but
belong to the same song, allowed to determine algorithm parametrizations, such as the number of
clusters to use in similarity finding.
1.4 Objectives
In summary, the objectives of this work were:
• To be able to detect humanly perceived musical events, such as the occurrence of choruses,
intros, verses, vocal and non-vocal segments, or even musical notes and chords.
• To be able to quantify similarity of musical content
• To compile a structured and documented toolkit with the necessary tools for fulfilling the objec-
tives above.
4

Chapter 2
Strategies
2.1 Feature Extraction and Parametrization
Features are data elements that characterise particular aspects of the signal. Almost any process
that is a function of the music audio signal and produces related data can be considered a feature
extractor. In MIR, most of the feature extractors are spectrum-centred, meaning that they rely in
short-time Fourier analysis (or other similar transform) to produce frequency domain data. These
methods are usually sensitive to parameters such as the analysis window length and the interval
between analysis windows.
Effort was focussed in the methods and implementations rather that the features being manipu-
lated, since feature selection and parametrization can easily escalate to a combination explosion of
possibilities and this presents challenges that were left outside the scope of this work. Future work
can encompass feature selection towards result optimization.
However, in order to validate the developed methods, it was necessary to employ features that
have been proven to provide results on the previous works in which the implemented solutions are
based on. Table 2.1 presents a compilation of features used by the main authors referenced in this
work.
From the works listed above, it is clear that MFCCs are ubiquitous and hold the potential to
generate good results in several tasks, from segmentation and structure finding to music similarity
measurement. They are expressed in the Mel-Scale, which tries to approximate the human non-
linear perception of pitch, and are processed using short-time analysis of the audio signal. Although
they are known by their applicability in speech recognition, in the context of MIR they are commonly
associated to the discrimination of timbre, which in itself is a combination of several acoustic proper-
ties to which music amply resorts to. An overview of the relations between music and timbre can be
found in the work of Erickson [17].
5

Work Tasks Features Used
Paulus et al. [6] Song segmenta-tion
Chromagram [7] with 36 bins reduced to 15 by PrincipalComponent Analysis (PCA), 13 Mel-Frequency CepstrumCoefficients (MFCCs) [8] including the zeroth coefficient,concatenated with their average and variance.
Levy et al. [9] Music structureidentification
Audio Spectrum Envelope Descriptors of MPEG-7 [10]space with bands space at (1/8)th of an octave.
Logan et al. [11] Music distancemeasure andplaylist generation
12,19 and 29 MFCCs excluding the zeroth coefficient.
Peiszer [12] Music segmenta-tion and structureidentification
40 MFCCs, Constance Q Transform (CQT).
Foote et al. [13] Music structureidentification
Short-Time Fourier Transform (STFT) coefficients andMFCCs.
Ong [14] Music segmen-tation and audio-thumbnailing
36th dimensional Harmonic Pitch Class Profile HPCP (an-other name for Chromagram), MFCCs, Linear PredictionCoefficients (LPC), signal Root Mean Square RMS energyand zero-crossings.
Foote [15] Music segmentboundary finding
STFT coefficients
Ellis et al. [16] Song classificationand artist identifi-cation
20 MFCCs
Schnitzer [4] Automatic genera-tion of playlists ofsimilar music
20 MFCCs obtained from interception of MP3 decoding,before resynthesis to PCM
Table 2.1: List of features used by several authors in related work with the corresponding tasks in for which theywere used.
Given these considerations, MFCCs are good candidate features to use when producing tools
for tasks concerning segmentation and distance measure in music. Therefore MFCCs where the
only feature used in the scope of this work. Although a few experiments were initially made with
Chromagram and LPCs, negative results led the author to use MFCCs to validate the implemented
tools. Table 2.2 contains the MFCC extraction parameters used. For feature extraction, the Hidden
Markov Model Toolkit (HTK) [18] was employed.
A window interval of 100 ms was used since it allows a good frequency domain resolution -
frequencies from 10 Hz are captured and the human hearing lower frequency threshold is around 20
Hz (as mentioned in Huang et al. [19]) - while still providing a time resolution of (1/20)th of a common
song tempo of 120 beats per minute (bpm) which is smaller than the duration of most musical notes
even if the musical piece contains (1/16)th (fast) notes.
Another aspect that may hold a considerable potential for improvement in future work is the use
6

Parameter value
Source Signal Bit Rate 48,000 HzNumber of Channels 1 (stereo colapsed)DC offset subtracted yesNormalization yesWindow Interval 100 msWindow Size 200 msWindow Type HanningNumber of MFCCs 41 - zeroth = 40Cepstrum Lifter Poles 80Pre-Emphasis Coefficient 0.97
Table 2.2: Parametrization of the MFCC extraction.
of automatically identified music temporal measures such as Beat and Meter. Since most feature
extraction processes rely on short-time audio analysis (dividing the audio into frames), meter infor-
mation is commonly used for establishing the analysis window length and step size of this short time
analysis for other feature extractors like in Levy et al. [9] and Paulus et al. [6]. Although beat and
meter techniques are commonly used to enhance the feature extraction process in music, they can
also be regarded as time domain features and be used in the same way as the above listed features,
to increase the available information about the musical content.
2.2 Segmentation
Over this Section, several approaches used for music segmentation are discussed. The term “seg-
ment border” is used when referring to points in a musical piece timeline where musical events and
changes (also referred to as on-sets) occur. “Segments” refer to spans of time in the music that are
encompassed between “borders” and “labels” are tags given to segments which allow the grouping
of similar or repeated “segments”.
2.2.1 Border Extraction from Autocorrelation Matrices
A widely used method to determine the boundaries of “events” in music was introduced by Foote [15].
It is a strategy for finding on-sets in audio where a significant change occurs. In the original work,
Short-Time Fourier Transform coefficients were used as features, although in other works such as
those of Ong [14] and Paulus et al. [6] MFCCs were used to produce the correlation matrices which
this process relies on.
An important step for this method is the calculus of a distance matrix, also referred to as a corre-
lation matrix. The calculus of a distance matrix takes a measure of vector distance, typically either
7

the cosine of the angle between feature vector parameters or the Euclidean distance (used in this
work), and applies it to each feature vector pair extracted, mapping its results in a two dimensional
matrix containing the distances between all vector combinations.
Time Sequence of the Features
Tim
e S
equence
of
the F
eatu
res
Figure 2.1: Example distance matrix obtained from the song “Thank you” by Alannis Morriset. Guide arrowswere included to point the time sequence of the feature vectors that were compared with an Euclidean distance.The transversal black diagonal confirms that the song is equal to itself, since the distance of the features alongthat line is zero, which is mapped to black in the image.
A distance matrix, such as that in Figure 2.1 has a typical checker pattern, and transitions between
checkers that can be mapped to audible musical events. The automatic identification of the visible
8

pattern transitions can be done by calculating the correlation of the distance matrix with a smaller
Gaussian checker kernel matrix, along the distance matrix’s diagonal as described in by Foote [15].
This process produces a vector, the maxima of which correspond to the the pattern transitions seen
on the distance matrix and therefore the musical events borders, though the resolution of the transi-
tions identified varies significantly depending on the system’s parametrization. Figure 2.2 presents
an example of a Gaussian checker with obtained from a Gaussian with a standard deviation of 24.
Figure 2.2: Gaussian checker filter matrix representation with a side of 40 and a standard deviation of 24 - Notethat, in the context of this work, these units should be seen in terms of frames of song audio.
Additionally, a moving average filter with a range of 40 frames is used on the retrieved borders, to
improve the accuracy of the results. The peaks of the resulting vector constitute the resulting set of
borders matched.
2.2.2 Music Structure Analysis by Finding Repeated Parts
In methods that rely on vector space onset detection, such as that presented in Section 2.2.1, where
there is an explicit segment border extraction step, it is not evident which of the identified boundaries
belong to each segment. In the scope of this thesis, we explored the method used by Paulus et al.
9

[6], in which segments are identified from a set of possible segment boundaries1.
This method uses a cutting search improved, brute force comparison of all possible combinations
of identified segment borders (with a method similar to that exposed in Section 2.2.1), and deter-
mines their similirity using a Dynamic Time Warping (DTW) algorithm (which was also implemented).
Each combination of two similar borders is considered a viable segment, and from all possible com-
binations of segments, similar non-overlapping ones are grouped together to form segment groups.
Finally, each combination of non-overlapping segment groups is given a score, and the structural
view of the music emerges from the highest scoring group combination, that is referred to as an
“explanation”.
While this early attempt to produce a viable implementation of a segmentation strategy was not
brought forward due to the challenges posed by finding a useful parametrization of the cutting search
algorithm, the effort invested in it added positive contributions, such as the implementation of the
Group and Segment data structures, still widely used in Shkr for evaluation tasks. Another contribution
was the implementation of DTW.
Dynamic time Warping [19] is a widely used dynamic programming algorithm for comparing audio
signals which might have a slight difference in duration or speed and is widely used in speech recog-
nition for this property. Its complexity is quadratic, but for comparing small segments of audio, this
does not usually pose a problem. It can be considered the first audio distance metric implemented in
the scope of this thesis, although it is not appropriate for the tasks approached by the other distance
measures implemented in this work.
2.3 Clustering-Based Segmentation
The cluster-based segmentation approach used in this work is based on the one proposed by Levy
et al. [9], of which the implementation used in the Segmentation plug-in freely available for Sonic
Vizualizer [21]. In that work, a hidden Markov model (HMM) with 40 states was trained with 21-
dimensional AudioSpectrumProjection [10] feature vectors extracted from the song. The features
are subsequently Viterbi-decoded using the trained model and the sequence of most likely state
assignments is retrieved for each beat of the song. This results in the sequence of “low-level” labels
which in this work will be referred to as L1 - Level 1 - labels (or clusters).
In Levy et al. [9] it is further shown that the “high-level” labels can be extracted by using histograms
of state assignments taken from a sliding window of beats, and then using K-Means clustering, with a
lower number of clusters (as much as the desired number of “high-level” labels), to group the resulting1This was thanks to the contribution of Miguel Miranda [20], who implemented the cutting search algorithm.
10

Figure 2.3: From Levy et al. [9] - Sequence of low level labels (hmm state assignements) per beat, shownagainst the manual annotation segments, which correspond to the regions of different colours. Equal coloursrepresent segments annotated as similar.
Figure 2.4: Manual annotations correspond to the colour regions, where equal colours represent segmentsannotated as similar. Low level labels result from the L1 cluster assignments of a 10 cluster K-Means, althoughthe depicted data points correspond to the mode of the cluster assignments for each 60 frame window (”modefilter”), with which the underlying repeated cluster assignment structures are more apparent. Note that similarsegments have similar cluster assignments for several of the song’s segments.
histograms. The “high-level” labels are referred to as L2 (Level 2) labels or clusters in this work. In
the work of Levy et al., further improvements are suggested to the L2 clustering process, which were
not used, but should be considered for future work.
2.3.1 Use of Clustering for L1 Label Extraction
The relation between Levy et al. and the method used in this work was established when, from
experimentation and prototyping, it was observed that a similar L1 sequence of cluster assignments
could emerge by using K-Means clustering directly on the features extracted from the music signal.
Looking at the cluster assignments of each frame as L1 labels patterns similar to those depicted
in 2.3 were observed as shown in 2.4. The remaining portion of the algorithm is therefore similar
to that of Levy et al.. Note that histograms of L1 cluster assignments obtained from fixed width (in
11

frames) sliding windows, ensure a time continuity of the segments obtained from the L2 clustering.
Good experimental results were determined for 80 L1 clusters and 3 to 10 L2 clusters. Similar to
what was found by Levy et al.. Changing the histogram window size, did not translate in significant
improvements. Figure 2.5 presents a high-level overview of this process.
Figure 2.5: Overview of the cluster-based segmentation process, including the stages of the cluster basedsegmentation.
2.4 Distance Measures
The ability to compute an audio similarity measure is a frequent task in MIR. A simple method for
calculating audio distance measure is DTW, which is documented to have good results when applied
to short audio sequences, as discussed in Section 2.2.2. However, to be able to compare entire
songs, and do so in a way in which playlists can be derived from ranking the distances between
songs suggests the use of a more sophisticated approach.
The concept for distance measure used in this work departed mainly from the work of Logan
et al. [11] and also in a smaller extent by Ellis et al. [16]. In both, classifiers (K-Means clustering
and Support Vector Machines (SVM), respectively) are used to reduce the dimensionality of the input
features and in both Probability Density Functions (PDF) are computed from the the resulting classes,
that can then be compared using measures such as the Kullback-Liebler Divergence [19].
• Ellis et al. [16] describes a technique aimed at artist identification, making use of SVMs for the
task of classifying each song as belonging to a specific artist. A mean vector and a covariance
matrix is determined from a set of 20 MFCC vectors per frame, extracted from each song. The
12

Kullback-Leibler divergence and the Mahalanobis [19] distance were used as distance mea-
sures in the SVM-based classification process. The work concludes that there is an advantage
in the use of SVM classification and the Kullback-Leibler divergence, when compared with other
song classification methods/distance measures.
• Logan et al. [11] song signatures are obtained from the k-means clustering (using 16 clus-
ters) of 12, 19 and 29 dimensional MFCC feature vectors. The Euclidean distance is used as
a distance measure for the clustering process. The signatures are composed of each clus-
ter’s mean, covariance, and weight. The song distance is measured using the EMD distance,
which is used to determine the minimum “work” of transforming one signature into another.
For comparison of a large corpora of music, the signatures for all songs in the corpora are
computed and the distance between signatures is determined. Subjective evaluation was used
for the song similarity with, concluding that for each set of top 5 similar songs retrieved by the
algorithm, 2.5 where considered similar to the original song by the human evaluators.
An high-level overview of the song distance calculation process sequence in Shkr is presented in
Figure 2.6.
Figure 2.6: Overview of the distance measure process flow. The Earth Mover’s distance is calculated for thecluster signatures (which include the cluster points, their standard deviation and centre) obtained from the twosongs A and B. Another distance measure, such as the Kullback-Liebler divergence, is used to compare eachpair combination of song A and song B clusters.
13

2.4.1 EMD as a Song Distance Metric
The Earth Mover’s distance [22] compares the “work” needed to transform a set of clusters P, where
pi ∈ P and pi = {µ, σ, X} is a cluster signature, into a set of clusters Q, with q j ∈ Q and q j = {µ, σ, X}.
The µ cluster signature parameter is the centre (average vector) of the cluster, σ is the standard
deviation of the cluster’s points, and X is the set of cluster points. As mentioned in Rubner et al. [22],
the objective is to find a flow F = [ fi j] that minimizes the work W:
W(P,Q, F) =m∑
i=1
n∑j=1
di j fi j (2.1)
Where di j is a distance value calculated between cluster signatures (using the KL divergence, for
example) pi ∈ P and q j ∈ Q. The total number of clusters in P and Q is represented by m and n,
respectively. The flow fi j, between cluster pi and cluster q j, reflects the cost of moving “probability
mass” from one cluster to another and it is subjected to a set of constraints:
• “Probability mass” can only be moved from a cluster in P to another in Q and not vice-versa.
• The “weight” of each cluster, which is bound to the number of points that belong to it, determines
the maximum amount of “probability mass” that can be taken from it, for clusters in P, or that
can be moved to it, for clusters in Q.
• The maximum quantity of “probability mass” must be moved from P to Q. If the cluster “weights”
are normalized by the number of data points in each song, then the total existing “probability
mass” is always moved (which is the case of the implementation to which this work refers to).
The earth mover’s distance is then obtained by normalizing the “work” with the total flow:
EMD(P,Q) =
∑mi=1∑n
j=1 di j fi j∑mi=1∑n
j=1 fi j(2.2)
Obtaining the maximum flow that is required for the EMD flux calculus is a dynamic programming
problem, that several algorithms can be used to resolve. The solution used was to formulate the
problem as the minimization of Equation 2.1, given a set of constraints for each cluster in P:
wi =
n∑j=1
fi j (2.3)
Where wi is the normalized “weight” of cluster pi. A similar set of constraints apply for each cluster
in Q:
w j =
m∑i=1
fi j (2.4)
14

Where w j is the normalized “weight” of cluster q j.
The resulting equation system can be efficiently solved by means of a linear equation solver, such
as lpsolve [23].
2.4.2 Euclidean Distance of Clusters
The Euclidean Distance distance d between data points P = (p1, p2, ..., pn) and Q = (q1, q2, ..., qn) is
given by:
d =√
(q1 − p1)2 + (q2 − p2)2 + ... + (qn − pn)2 (2.5)
In the context of cluster comparison, the euclidean distance was used to determine the distance
between the centres of the clusters in comparison.
2.4.3 Cluster Covariance Distance Measure
The Covariance between points P = (p1, p2, ..., pn) and Q = (q1, q2, ..., qn) with P the average of points
P and Q the average of Q is given by :
COV(P,Q) =
∑ni=1∑n
j=1(pi − P) · (q j − Q)
n2 (2.6)
2.4.4 Kullback-Liebler Divergence
The Kullback-Liebler [19] divergence measures the distance between two probability distribuitions
and is given by:
KL(p||q) =∫
p(x)logp(x)q(x)
dx (2.7)
Or, in its discrete form (as mentioned in Rubner et al. [22]), for two histograms h and k, where hi
and ki are respectively the ith ”bins“ of the histograms h and k:
KL(p||q) =∑
i
k(i)logk(i)h(i)
(2.8)
However, the KL divergence is not a symmetrical distance measure, which means that
KL(p||q) , KL(q||p) (2.9)
Therefore a symmetrical version of the discrete KL divergence DKL was used, following Ellis et
al.:
DKL(p, q) = KL(p||q) + KL(q||p) (2.10)
15

DKL(p, q) =∑
i
k(i)logk(i)h(i)+∑
i
h(i)logh(i)k(i)
(2.11)
2.4.5 PDFs for Cluster Comparison
Two different PDFs were used in conjunction with the KL divergence - described in Marques [24]. A
Gaussian or Normal Distribution:
p(x) =1√
2πσexp[
(x − µ)2
2σ2 ] (2.12)
Where x is an observation Gaussian distribution, p(x) is the probability of observation µ is the
average of the probability distribution and σ is its variance.
And a Multivariate Gaussian PDF, which was was to model multidimensional clusters features in
a single PDF:
p(x) =1
(2π)n/2|R|1/2exp[−
12
(x − µ)T R−1(x − µ)] (2.13)
Where x is a random variable in �n, µ and R are the average vector and the covariance matrix of
the random variable x.
16

Chapter 3
Architecture
3.1 Overview
Project Shkr is still in a developing stage, and therefore while all of the segmentation and distance
measure algorithms are part of the C++ implemented code base, several external tools are necessary
to provide functionalities such as configuration, audio conversion, and feature extraction. An overview
of these dependencies is presented in Figure 3.1.
From Figure 3.1 it is also visible that there are external dependencies. Audio conversion from
MP3, Ogg [25] or Flac [26] formats is peformed using Sox [27]. The MFCC extractor of the Hidden
Markov Model Toolkit [18] is used to produce the flat files containing the feature values that are used
by Shkr. Future improvements could include moving this part of the processing chain into the Shkr
binary, allowing it to automatically parametrize feature extraction, with information about the music
material analysed, such as beat to determine the size of the audio frame in the short time signal
analysis.
On the output end of the chain song distance measures, segmentation evaluation statistics and
other relevant information to the tasks performed are sent to the standard output of the terminal within
which Shkr must be run. Ground truth annotation is read from a SegmXML format as described in
Peiszer [12] and graphics output can be used to export the contents of a Matrix data structure into
Portable Anymap Format (PNM) of 8bit or 16bit, monochromatic or RGB (Red, Green, Blue) formats.
3.2 Basic Data Structures
The first algorithms and data structures developed in the scope of this thesis were conceived having
in mind simple tasks that were meant to be performed fast, an example being the generation of
correlation matrices from extracted MFCCs listings contained in a flat file. This was a stage where
17

Command line and configuration parsing(init.pl)
C++ Src Code Compilation(makefile/gcc)
SongFeatures
Action Dispatch(mir.sh)
Configuration(common-defs)
User commands
Run Algorithms(shkr binary)
Feature Extraction(Feature_analysis.sh)
Audio Format Conversion(sox)
Feature Extraction(HTK)
Song DistanceResults
WavesurferSegment Borders
and labels
Images andGraphics
Shkr binary
GroundTruth
Annotations
Figure 3.1: Overview of the tool chain used to produce results with Shkr.
the outcomes of the implemented algorithms were more important than their implementation in C++.
An example of this was the creation of the Signal class that encapsulates a vector of FeatureVector
objects which in turn contains an array of features extracted from a song frame, which can also mean
one dimensional sound samples extracted directly from the audio. The Signal data structure is a
dynamically growing structure, particularly useful when new features needed to be added, which
also makes sense in the context of real time audio recording where there is no prior knowledge of
18

the number of samples to store.
Several of the algorithms used were first prototyped in Matlab or Octave, and a considerable
amount of code written for those frameworks is also publicly available from other authors, for example
the MIRtoolbox [28]. In Matlab, matrix manipulation is seamless and therefore algorithm prototyping
for signal processing is fast and clear. From these observations, it was natural that a Matrix data
type, encapsulating a type independent bi-dimensional array of values, was desirable. Therefore the
Matrix class was created and coding matrix manipulation operations was greatly simplified, lever-
aged through the use of C++ operator overloading and templates. The Matrix data type currently
implemented has evolved to allow most of the common matrix calculus operations like matrix multipli-
cation, transposition, sum, among others, and has been partially integrated with Eigen [29] of which
it encapsulates functionality such as matrix inversion and determinant calculus. Yet another useful
matrix operation that it allows, is the creation of sub-matrices via the SubMatrix Class, through the
use of which it is possible to manipulate a smaller sub-set of the values of another matrix as if the
sub-set were also Matrix.
Both Signal and Matrix are elementary building blocks that were used in the implementation of
almost all of the algorithms experimented.
3.2.1 Use of the C++ Standard Template Library
It is noteworthy that almost all of the code base produced in the scope of this work is template driven,
with each class or method requiring at least one template argument. The initial objective of the use
of templates was to make the code type independent, in case it might in future be used in other
platforms like mobile devices, where for example, the use of floating point data types might be limited
or incur in an overhead. While this was easily accomplished using the GNU C++ implementation of
the Standard Template Library (STL) [30], a more ample consequence of the use of templates was
the opening of a wide spectrum of different software architecture possibilities. While a few inheritance
relationships exist in the code for the sake of code factoring or due to design choices, in general an
object A will manipulate object B of (possibly) a different type that is determined in compile time via
template argument. This approach is similar to that used in Eigen[29], which is a pure template
library.
3.3 Processing Chains
Most of the strategies used in this work require several stages of processing where different algo-
rithms manipulate and build on the output produced by previous stages. In audio editing and process-
19

ing, it is common to define processing chains, where each step either changes the data produced by
the previous one, or produces additional data. These ideas are developed in Tzanetakis [31], where
a new model for creating implicit connections between components that require them is presented
as it was applied in the Marsyas [32].
In Shkr processing chains were modelled using a decorator pattern as per Eckel [33], since it is
suitable for modelling chains of processing steps that modify or add to the data being decorated. A
purer example of this is the processing chain used for the Gaussian Checker kernel border matching,
mentioned in Figure 3.2.
Figure 3.2: Gaussian checker kernel processing chain UML class diagram. Note that a decorator patternemerges from the class diagram, where the Component is the abstract class ISegmentationProcess, the Dec-orator is the abstract class ISegmentationStep, the ConcreteComponent is the DistanceMatrixProcess, andthe remaining classes are ConcreteDecorators, with the exception of SegmentationData wich is the decoratedobject. All Classes are templates that receive SegmentationData as a template argument.
The code listing in Figure 3.3 contains the actual declaration of this processing chain in C++,
where each step in the processing chain will succeed in exactly the same order in which it appears
in the code.
This type of process chain modelling, while effective, does have a few limitations in what con-
cerns the input and the output of each step of the chain. Since each component process in the
chain is unaware of the previous process’ output, the result of each processing step must have a
20

ISegmentationProcess<SegmentationData<TYPE> > ∗ chain =new DistanceMatr ixProcess<Signal<TYPE, DEFAULT ORDER>,
SegmentationData<TYPE> >( s i g n a l ) ;
chain = new GaussianChekerFi l terStep<SegmentationData<TYPE> >(chain ,s i z e t ) (GAUSSIAN CHECKER SIZE / f r a m e i n t e r v a l ) ,( i n t ) (GAUSSIAN CHECKER STD DEV / f r a m e i n t e r v a l ) ) ;
chain = new MovingAverageFi l terStep<SegmentationData<TYPE> >(chain ) ;chain = new MaxPeakDetectStep<SegmentationData<TYPE> >(chain ) ;chain = new RawSegmentSelectionStep<SegmentationData<TYPE> >(chain ) ;
SegmentationData<TYPE> ∗ r e s u l t = chain−>process ( ) ;
Figure 3.3: Code listing of the Gaussian checker kernel segmentation chain
common format - in this case a Matrix object - that will be recognizable by the next processing
stage. This means that all processes in the chain must expect and use the same data types. Fur-
thermore, although it may seem desirable for chain component processes to be sufficiently generic
that their order can be changed, or that new processes can be added or removed randomly, that
is usually not the case, since even with a single data container type shared among all objects, the
contents of the data container (the decorated object) might only make sense when used by spe-
cific process components in the chain, for example, in the code listing of Figure 3.3, interchanging
GaussianChekerFilterStep with MaxPeakDetectStep would not produce meaningful results, since
although both processes operator on a Matrix object, GaussianChekerFilterStep expects a 2-
dimensional Matrix while MaxPeakDetectStep operates on single-dimension one.
Processing chains do have the benefit of enforcing the direction of the chain processing - of
which a parallel can be made with the Dataflow paradigm used by Tzanetakis [31] in Marsyas [32].
Given these considerations and inspired by the concept of patching (implicit and explicit) presented in
Tzanetakis [31], a richer approach on processing chains was used when implementing the clustering
based segmentation chain. Figure 3.4 shows the simplified UML class diagram used and Figure 3.5
presents the code listing of the creation of such a chain.
From the code listing in 3.5, it is apparent that all ConcreteDecorators like KMeansClusteringStep,
WindowedHistogramStep and SegmentationFromClusteringStep have a second string argument.
This is an identifier under which the results of the processing stages will be stored in a map data
structure contained in SegmentationData, regardless of the data type of the output of each stage.
A shared, non-tagged Matrix, containing data that needs to be passed on to the next stage in the
chain still exists and is used, but the results of each processing stage can always be retrieved at
any time during the chain execution or after the chain is concluded, by use of the identification tags
21

Figure 3.4: Cluster-based segmentation chain UML class diagram. While the decorator pattern is still used, tagsare now present in the arguments of the constructors of the ConcreteComponent class (SignalToMatrixprocess)and each ConcreteDecorator class (KMeansClusteringStep, MovingAverageFilterStep and SegmentationFrom-ClusteringStep). All Classes are templates that receive SegmentationData as a template argument.
passed onto each chain process. An example of this is the second argument that is passed to the
constructor of SegmentationFromClusteringStep: the string "feature_cluster_seg" which iden-
tifies the tag under which the data required by SegmentationFromClusteringStep, produced in a
previous KMeansClusteringStep processing stage is stored in the map data structure contained in
SegmentationData. The ability to connect processing stages regardless of their position in the chain
and the data types exchanged can therefore be seen as a form of patching similar to those described
by Tzanetakis [31].
3.4 Song Data Modelling and Comparison
The concept used for modelling song data in the context of song comparison was somewhat differ-
ent to that used in segmentation. The objective was to be able to perform song comparison with
22

ISegmentationProcess<SegmentationData<TYPE> > ∗ c l u s t e r c h a i n = newSignalToMatr ixProcess<Signal<TYPE, DEFAULT ORDER>,SegmentationData<TYPE> >( s i g n a l ) ;
c l u s t e r c h a i n = new KMeansClusteringStep<SegmentationData<TYPE>>( c l u s t e r c h a i n , ” f e a t u r e c l u s t e r r a w ” , L1 CLUSTERS, KMPP,CLUSTERING CONV RUNS, fa lse ) ;
c l u s t e r c h a i n = new WindowedHistogramStep<SegmentationData<TYPE>>( c l u s t e r c h a i n , ” c l us te r h i s t og ram ” ,CLUSTER HISTOGRAM WINDOW SIZE, 0 , L1 CLUSTERS − 1) ;
c l u s t e r c h a i n = new KMeansClusteringStep<SegmentationData<TYPE>>( c l u s t e r c h a i n , ” f e a t u r e c l u s t e r s e g ” , L2 CLUSTERS, KMPP,CLUSTERING CONV RUNS, fa lse ) ;
c l u s t e r c h a i n = newSegmentat ionFromClusteringStep<SegmentationData<TYPE>>( c l u s t e r c h a i n , ” segmen ta t i on f rom c lus te r i ng ” ,” f e a t u r e c l u s t e r s e g ” , CLUSTER HISTOGRAM WINDOW SIZE / 2) ;
SegmentationData<TYPE> ∗ c lus te red segmenta t ion =c l u s t e r c h a i n −>process ( ) ;
Figure 3.5: Code listing for the creation of the clustering based segmentation chain.
something as simple as:
distance = S ongA − S ongB (3.1)
Therefore, the operator used to compare Song object A should contain within itself the mech-
anisms to allow it to be compared with Song object B. The same principle was also adopted for
clusters: (ClusterData) objects containing the points of each cluster, its centre and statistic mea-
sures associated with it have also the mechanisms that allow them to determine the distance from
other clusters. Figure 3.6 is a simplified UML diagram that presents and overview of the modelling
behind the implementation.
Although this design showed to be flexible enough to accommodate the use of new strategies,
for example, in what concerns cluster distance calculus, it is the author’s opinion that it could be
further improved by merging the two levels of distance measure that are currently defined, which
are cluster distance and song distance, as shown in Figure 3.6. This would allow improved flexibility
when implementing new distance measures, that could be generic enough to be used in a broader
range of contexts, such as using the Earth Mover’s distance as a cluster distance measure.
23

3.5 External Dependencies and Contributions
Currently, four dependencies were introduced in Shkr from external libraries, or source code, all of
them being open source projects publicly available. Those are:
• The Xerces C++ XML parser [34] - Xerces is a set tools that allows parsing, building and
inspecting XML documents using a Documment Object Model (DOM). It was used to parse the
ground truth manual annotations of the segmentation corpus that are in SegmXML [12]
• The Eigen Linear Algebra Library [29] - Eigen is C++ template library that makes available a
wide range of high performance linear algebra tools and algorithms. It was integrated with the
Matrix data structure developed in Shkr to leverage functionality like matrix determinant and
inversion. Future work could include further integration with Eigen, to take advantage of other
optimized functionality leveraged by it, such as fast matrix multiplication.
• lpsolve [23] - lpsolve is a Mixed Integer Linear Programming (MILP) solver. It allows for the fast
resolution of linear programming problems such as those of minimization and maximization. It
was used to resolve the “transportation” problem implicit in the maximum flux, minimum cost
calculus required by the Earth Mover’s Distance.
• K-means++ [35] - This is a K-Means cluster algorithm implementation, with several improve-
ments made to cluster centre selection that were proven to increase the speed and probability
of convergence, over the standard K-Means algorithm. The publicly available source code for
the implementation as described in David [35] is used in all tasks that required clustering in
Shkr.
24

ISon
gDistanc
eMea
sure
+calcDistance(in A
:SongData,in B:SongData): basic_ty
pe
:SongData
EarthM
oversD
istanc
eMea
sure
+calcDistance(in A
:SongData,B:SongData): basic_type
:SongData
Song
Data
-_song_distance_me
asure: ISongDistanceMeasure
-_song_clusters: C
ontainer<SongData>
-_song_clusters: I
ClusterDistanceMeasure
+operator - (in ot
her:SongData): basic_type
+operator [](in in
dex:int): ClusterData
:basic_type
1
1Clus
terD
ata
-_cluster_points:
ClusterContainer
-_cluster_distance
_measure: IClusterDistanceMeasure
+operator - (in ot
her:ClusterData): basic_type
+operator[](index:
int): FeatureVector
:ClusterContainerT
ype
IClusterDistanc
eMea
sure
+calcDistance(A:Cl
usterData,B:ClusterData): basic_ty
pe
:ClusterData
10
Multiva
riateG
auss
ianP
DF
:cluster_container
_type
1
1
Sing
leGau
ssianP
DF
:basic_type
0..1
0
0..1
Clus
terEuc
lidea
nDistanc
e+CalcDistance(in A
:ClusterData,B:ClusterData): basic
_type
:basic_type
0
0..*
Clus
terK
ulleba
ckLieb
lerD
iverge
nce
+CalcDistance(in A
:ClusterData,in B:ClusterData): ba
sic_type
:basic_type
Clus
terC
ovarianc
e+CalcDistance(in A
:ClusterData,B:ClusterData): basic
_type
:basic_type
Figure 3.6: Overview of the song and cluster data modelling. A Strategy [33] design pattern is used to modelthe different ClusterData distance measures and the code base is also prepared to allow the same pattern tobe used for SongData although only the EarthMoversDistanceMeasure was implemented. This diagram is asimplification of the actual implementation, showing only details relevant for a design overview.
25

Chapter 4
Evaluation
Separate results were obtained for the segmentation and distance measure tasks. In the case of seg-
mentation, a distinction was made between the Gaussian checker kernel filter segmentation which
only provides border location information, and the cluster based automatic segmentation, that addi-
tionally provides information about repeated segments.
The number of parametrizations used for each evaluation step reflect the more significant subset
of the parametrizations derived from testing in a reduced test set of only five to seven songs that was
used to ascertain the boundaries of each parameter’s significance, outside of which the results do
not generally hold a useful interpretation.
Another aspect of this evaluation is that, since several distance measures were developed, a
cross-evaluation of the resulting segmentations obtained from the cluster-based segmentation could
be made using one particular distance measure developed, as described in Section 4.2.2, that pro-
duced valid results also for the cross comparison of manually annotated segments. This is different
to the methods used in the works of Paulus et al. [6] and Peiszer [12] as described in section 2.2,
where cross-label evaluation systems were used, i.e. manually annotated segments (ground truth
segments) were directly compared with automatically obtained ones using segment label mapping
strategies. The assumption behind the method used in this work, is that segments with the same
label should have smaller distance between them than other annotated or automatically retrieved
segments. Although border matching still applies, and is evaluated in terms of precision and recall,
determining if the segments identified as similar have a smaller distance measure, using the same
criteria that proved valid in the annotated segmentation also provides a measure of the quality of the
automatic segmentation process in respect to the features used.
For song distance, a small scale evaluation was performed comparing all possible song pairs in
a list comprised of orchestral, guitar, vocal, electronic/synthesised, and “Heavy Metal”, all songs in
each category belonging to the same album as discussed in 4.1. The objective was to determine
26

if the humanly recognizable timbre differences between these four categories are reflected by the
distance measures, in which case they could be used for the creation of a playlist.
4.1 Corpora
The corpus of 61 Pop and Rock songs used in this evaluation is a subset of the Paulus and Klapuri
annotated corpus [6], although the annotations used were obtained from the corpus converted by
Peiszer [12], which are available at the MIR website of the the Vienna University of Technology
[36]. These annotations are in SegmXML format and are enriched with meta-data as described in
3.5. In Appendix A a listing of all songs that constitute this corpus can be found, along with the
corresponding results for border matching. The criteria used for the manual annotations made in this
corpus, as described in Paulus et al. [6], can be summarised as follows:
• Annotations consist of a list of occurrences, containing start and end times of the annotated
structural elements (segments), as well as a descriptive label for those segments.
• Segment annotations were done manually, without the use of automatic tools.
• Only “clearly defined” structural elements were annotated - although a definition of what is a
“clear” structural element seems to be subjective in the reference text.
• Focus was set on the annotation of repeated segments, but single occurrences were also la-
belled (with lables such as “intro”, “bridge” or “solo”)
• Alternative labels were given to segments that could also be occurrences of other segments
(e.g. a “solo” could be very similar to a “verse”) and therefore both labels could be applied.
(These inter-label relationships are preserved in the SegmXML [36] annotations used in this
work.)
The corpus used for song similarity is a selection of 25 songs organized in 5 groups, each group
with 5 songs. The musical pieces within each group have the following properties:
• Same author(s), album, and genre.
• Same musical instruments predominant in all songs.
• Same post-production.
The idea behind this grouping was to ensure that songs within each group were as close as
possible in terms of timbre which several works document as the main discriminating attribute of
27
MFCCs in what concerns music. No considerations were made regarding other musical composition
centric properties such as harmony, tempo, or key.
Another aspect of this grouping was that an attempt was made to create groups as distinct as
possible among themselves in what concerns timbre for which the different musical instruments and
post-production are the determining factors. The five groups comprise:
• A - 5 songs of The Guitar Trio1 - An instrumental album, with only guitar and very seldom soft
percussion. It is often categorised as Flamenco, Jazz, or both.
• B - 5 songs of Simple Pleasures2 - This is a completely vocal album, where the singer mimics
several instruments such as bass, percussion and trumpet with is voice. It commonly cate-
gorised as Pop or Soft music.
• C - 5 songs of The Number of The Beast3 - This album has a predominance of distorted electric
guitar, bass, drums, and high pitched vocals. It is commonly categorised as Heavy Metal or
Classic Metal.
• D - 5 musical pieces from Six German Dances4 - This is an orchestral set of musical pieces (of
the six only five were included), usually categorized as Classic or Orchestral music.
• E - 5 songs of Transmissions5 - This is a mostly electronic and synthesised instrument album
with predominant electronic percussion beats, usually categorized as Psychedelic, Dance, or
Electronic music.
The idea is to obtain 5 categories of music that are as distinct as possible. For simplicity, these
will be mentioned as category A, B, C, D and E over the next sections.
4.2 Performance Measures
To interpret results and determine their validity, their recall and precision were calculated, where
possible. The presented precision is expressed has a percentage and were obtained with:
precision =correct
identi f ied· 100 (4.1)
1Al di Meola, Paco de Lucia, John McLaughlin, The Guitar Trio, Verve 19962Bobby McFerrin,Simple Pleasures, Capitol 19883Iron Maiden,The Number of The Beast, EMI 19824Wolfgang Amadeus Mozart,Six German Dances, performed by Academy of St Martin-in-the-Fields, composed 1756-17915Juno Reactor,Transmissions, Novamute 1993
28

Recall is obtained with:
recall =correcttruth
· 100 (4.2)
Where correct is the number of retrieved parameters (e.g. borders) that match the ground truth,
identi f ied is the total number of parameters retrieved and truth is the total number of parameters that
should have been retrieved if the retrieval process was completely successful.
Where results are expressed in term of precision and recall, the F measure (also know as the
F1 score) is used to quantify the combination of precision and recall. Since precision and recall
are expressed in terms of percentage, for coherence the F measure is expressed in the same way,
therefore:
Fmeasure =2 · precision · recallprecision + recall
· 100 (4.3)
4.2.1 Matching Tolerance
One of the implicit problems of song border matching is that the location of borders is not absolute
for human listeners and, therefore, a segmentation ground truth can be ambiguous in several ways:
• The playback latency of the sound card used when performing song annotation, typically rang-
ing from a few milliseconds to 1 second, might affect the perception of the location of the border
of both annotator and a user of the annotations. Ideally, annotations should be made with a low
latency sound system.
• Transitions between music song parts can be ambiguous due to short transitions or bridges,
that are commonly not annotated as such due to their short duration. See example in Figure
4.1. It was noticed that, in the corpus used for the evaluation of border matching (section 4.1),
this is frequently the case.
• The high-level structure of the song in terms of chorus, verse, bridge, intro, instrumental,
breaks, among others, may not be clearly defined or may be subjective from a listener per-
spective.
To minimize the impact of these factors in the evaluation, a border match tolerance interval was
used with the purpose of allowing the matching of borders that can refer to the same portion of the
song, although they may have a short distance from each other. By direct listening of the audio and
observation of the waveform and spectrogram against the annotations, an empirical distance interval
of 2 seconds was determined between the location of the ground truth borders and other possible
29

Figure 4.1: Example of an ambiguous border location between a verse and a bridge in the song “Anna Go toHim” from The Beatles due to an approximately 2 second transition where a percussion and voice crescendotakes place.
locations where a listener could also consider the borders to match the beginning of a song segment.
However, the direction of this displacement is not deterministic since the ground truth border might
be before or after the mentioned 2 seconds interval. Therefore, the total border matching tolerance
used was of 4 seconds.
Algorithm 4.1 Border matching evaluation algorithm including border matching toleranceRequire: groundTruthBorders , {}, autoBorders , {}, tolerance
1: matchedBorders← {}2: for gtBorder in groundTruthBorders do3: for autoBorder in autoBorders do4: if gtBorder − autoBorder ≤ tolerance or autoBorder − gtBorder ≤ tolerance then5: matchedBorders{gtBorder} ← autoBorder6: break { Proceed to the next gtBorder }7: end if8: end for9: end for
10: recall← |matchedBorders|/|groundTruthBorders|11: precision← |matchedBorders|/|autoBorders|12: return matchedBorders, precision, recall
As can be seen from algorithm 4.1, where tolerance is 2 seconds in this case, only one automati-
cally identified border can be matched to each ground truth border if it exists within a 2 second range
of the later. This excludes false positives due to multiple matches to the same ground truth border
and determines a total tolerance of 4 seconds. Similar tolerance measures have been employed in
other works such Ong [14] who used 3 seconds of total tolerance.
30

4.2.2 Song Segment Distance Measure
A different type of evaluation is necessary if we need to identify repeated segments within songs
rather that just their borders. Common methods for this rely on attempting to determine if automat-
ically identified segments, or contiguous sequences of these, can be mapped directly, or within a
certain tolerance range, to the ground truth segments, with the objective of determining a mapping
between the labels (or groups of labels) of automatic and ground truth segments. This was the
approach taken by Chai [37], Paulus et al. [6], and Levy et al. [9].
Taking into account the challenges highlighted in Section 4.2.1, concerning the possible ambiguity
of the song segmentation ground truth, and also that only a reduced set of features was used in this
work, instead of trying to tie automatic to ground truth segments directly, effort was focussed on trying
to determine if the retrieved segments that were tagged with the same label, and therefore should
be similar, had a smaller distance measure between them than those to which different labels were
assigned. For comparison, the same distance measure was applied to the ground truth segments.
Labels verse verse chorus chorus chorus chorus bridge bridge break final0 4.6 6.05 5.8 8.38 7.82 6.89 8.44 6.37 7.07 9.63 6.66 7.93 5.71
4.6 0 7.57 7.82 9.67 9.82 8.42 9.28 8.11 9.73 9.52 7.82 9.68 7.58verse 6.05 7.57 0 0.29 2.51 2.46 4.14 3.47 1.33 1.79 3.3 0.78 0.69 4.52verse 5.8 7.82 0.29 0 2.31 2.39 3.69 3.23 1.19 1.71 3.04 1.12 0.82 4.36chorus 8.38 9.67 2.51 2.31 0 0.54 1.73 0.61 1.83 2.94 3.25 3.07 2.46 2.46chorus 7.82 9.82 2.46 2.39 0.54 0 1.86 0.59 1.82 2.83 3.43 2.78 2.32 2.91chorus 6.89 8.42 4.14 3.69 1.73 1.86 0 1 2.55 3.55 4.23 4.76 4.44 1.06chorus 8.44 9.28 3.47 3.23 0.61 0.59 1 0 2.34 3.38 3.86 3.95 3.46 1.89bridge 6.37 8.11 1.33 1.19 1.83 1.82 2.55 2.34 0 0.76 2.88 1.14 1.03 3.28verse 7.07 9.73 1.79 1.71 2.94 2.83 3.55 3.38 0.76 0 4.53 1.32 1.1 4.37break 9.63 9.52 3.3 3.04 3.25 3.43 4.23 3.86 2.88 4.53 0 4.25 4.3 5.8
6.66 7.82 0.78 1.12 3.07 2.78 4.76 3.95 1.14 1.32 4.25 0 0.47 5.187.93 9.68 0.69 0.82 2.46 2.32 4.44 3.46 1.03 1.1 4.3 0.47 0 5.36
final 5.71 7.58 4.52 4.36 2.46 2.91 1.06 1.89 3.28 4.37 5.8 5.18 5.36 0
instr instr glocksp glockspinstrinstr
glockspglocksp
Table 4.1: Example of self segment similarity comparison for the ground truth segments of the song “It’s Oh SoQuiet” from Bjork. The segments are grouped together by label and coloured to emphasize the similarities.
For both ground truth and automatically identified segments, the average distance of segments
with the same label was computed and compared with the average distance of segments with a
different labels, as shown in Table 4.1. Whenever the inter-label average distance was lower that the
average distance of the segments to those of all other labels, a match was considered to be found.
Finally, the recall was obtained for both ground truth segments and automatically retrieved seg-
ments as shown in Table 4.2. The diagonal of the inter segment distance matrix was not taken into
account when calculating the averages since the distance between an audio segment to itself is al-
ways 0 with the used distance measure. Note that precision cannot be used in this case, since we
assume that the total number of labels for both the ground truth and automatic segment retrieval is
the “correct” set, and therefore only recall can be obtained with this method. Also since there are
31

Labels verse chorus bridge break final4.6 6.81 8.59 7.82 9.57 8.02 6.65
verse 6.81 0.29 3.03 1.5 3.17 0.85 4.44chorus 8.59 3.03 1.06 2.65 3.69 3.4 2.08bridge 7.82 1.5 2.65 0.76 3.7 1.15 3.83break 9.57 3.17 3.69 3.7 0 4.27 5.8
8.02 0.85 3.4 1.15 4.27 0.47 5.27final 6.65 4.44 2.08 3.83 5.8 5.27 0
instr glockspinstr
glocksp
Table 4.2: Example of self segment similarity per label average distances for the ground truth segments of thesong “It’s Oh So Quiet” from Bjork. The segments are grouped together by label and coloured to emphasize thesimilarities.
labels that only have one assigned segment in both ground truth and automatic segmentation, we
consider those to be correct in both cases, since the distance between the segment and itself is
always 0.
Algorithm 4.2 Algorithm for recall calculation from a segment average similarity matrixRequire: MatrixsegmentDistanceAverage , {}
1: correct ← 02: for row in segmentDistanceAverage do3: correct ← correct + 14: for column in segmentDistanceAverage do5: if segmentDistanceAverage[row, row] > segmentDistanceAverage[row, column] then6: correct ← correct − 17: break8: end if9: end for
10: end for11: total← segmentDistanceAverage.rows()12: recall← correct/total13: return recall
The distance measure used in this evaluation was mentioned in Section 2.4.4: an average of N
symmetric KL divergence distances between N Gaussian PDFs parametrized from the N-dimensional
feature vector belonging to a segment.
This particular measure was chosen due to the following considerations:
• The distance measure is not dependent on a classification process such as clustering, which
could otherwise introduce noise due to non-optimal convergence.
• The distance between an audio segment and itself is always 0, and the distance between
segment A and segment B is the same as the one calculated between B and A. This ensures
consistency between distance measures.
32

• Direct listening of segments with higher distance from the ones that have the same label than
from others that have a different label, was used on a small (5 songs) subset of the corpus. In
all cases, such occurrences were identified as a consequence of the inaccuracy of the segment
labelling in the ground truth. In Appendix B, Table B.1 includes the results and notes taken for
these observations.
Validating a segmentation using a measure of the distance between the segments is a way of
determining the relevance of the segmentation in terms of the repeated music segments that were
retrieved. Although it does not provide a guarantee that the identified segments match the actual
ground truth (other evaluation methods would be necessary for that purpose), it is sufficient to deter-
mine if segments with the same label are similar among themselves, which ideally should translate in
the perception that similar segments are similar by a human listener, although this is also dependent
on the features used and the granularity of the segmentation.
4.2.3 Success Metric for Song Distance
Given the characteristics of the corpus presented in Section 4.1, where an attempt was made to cre-
ate song groups as distinct as possible, a simple success metric for a given song distance measure,
might be its ability to discriminate songs in the same category as having a smaller distance value.
This approach raises several issues, specially in what concerns the criteria used to form each
musical category and also the generalization of such methods to the creation of playlists from a
larger and more heterogeneous corpus. These considerations are further developed in Logan et al.
[38], where possible solutions presented include the creation of a shared community driven corpus
that can be used for the evaluation of similarity algorithms and deriving similarity ground truth from
survey data or user generated music playlists. However, in the scope of validating the solutions
and algorithms implemented, a small scale evaluation seems pertinent, since getting a grasp of the
applicability of the algorithms, and being able to compare them, is a necessary first step.
In order to determine a success rate of each distance measure, for each song in the corpus,
the top 5 closest songs according to the distance measures are retrieved. Of those 5 songs, for
each that belongs to the category of the first song a score point is added. An overall score is then
calculated per category and for the full corpus, by dividing the sum of the partial scores from each
category by the number of maximum points possible per category (25) and by the maximum number
of points for the songs in the corpus (125), respectively. A prerequisite of this method is that for all
625 combinations of 2 songs in the corpus a distance measure must be calculated. The per category
scores and the total scores can also be expressed in percentage, for convenience. Algorithm 4.3 is
presented to clarify this evaluation process.
33

Algorithm 4.3 Evaluation of song distance measures by comparing the category of the closest songsRequire: songDistanceMeasures , {}, nbrS ongsPerCategory, nbrTotalS ongs
1: CategoryS cores[∗]← 0 {Initialize all categories in the array to 0}2: totalS core← 03: for songa in songDistanceMeasures do4: topClosestS ongs ← getS ortedTop(songDistanceMeasures, nbrS ongsPerCategory) { Get the top
nbrS ongsPerCategory closest song to songa}5: for songb in topClosestS ongs do6: if category(songa) = category(songb) then7: CategoryS cores[category(songa)]← CategoryS cores[category(songa)] + 18: totalS core← totalS core + 19: end if
10: end for11: end for12: CategoryS cores[∗] ← CategoryS cores[∗]/(nbrS ongsPerCategory ∗ nbrTotalS ongs) {normalize each
category’s score by the maximum score possible}13: totalS core ← totalS core/nbrTotalS ongs2 {normalize the total score by the maximum total score
possible}14: return totalS core,CategoryS cores
4.3 Gaussian Checker Kernel Filter Border Matching Evaluation
The main parameters involved in the Gaussian kernel filter border matching are the side of the
square Gaussian checker and the standard deviation of the Gaussian. The length of the checker
kernel matrix side determines the maximum distance from the main diagonal outside which ma-
trix entries are not considered in border detection. It does not directly influence the results, un-
less it is small enough not to fall back to near zero values on points near its sides. However, the
precision of border matching is reduced in the timespans [song start, song start + checker size/2[
and ]song end - checker size/2, song end] since it is not possible to completely apply the Gaussian
checker to the correlation matrix within the frames of these timepans. The standard deviation deter-
mines the radius of the Gaussian checker kernel and directly affects the granularity of filter’s results.
Gaussian standard Deviation 3 6 12 18 24 30 36Checker size 5 10 20 30 40 50 60
Average borders per song 13.80 13.80 13.80 13.80 13.80 13.80 13.80Average correct borders per song 9.84 10.80 10.23 9.11 8.18 7.56 6.95Average matched borders per song 26.21 24.49 20.05 16.26 14.05 12.61 11.78Average Precision % 39.41 45.56 53.45 57.78 59.93 60.71 59.98Average Recall % 72.82 79.09 76.08 67.67 60.57 56.25 52.23F measure % 51 57 62 62 60 58 55
Table 4.3: Border matching performance measures for the range of tested standard Deviation and Size of theGaussian checker kernel. A more detailed table of results can be found in Figure A.1 included in Appendix A
34

Figure 4.2: Precision versus recall percentage for all tested combinations of Gaussian checker kernel standarddeviation and size. Also depicted is the F measure percentage.
From table 4.3 and as depicted in Figure 4.2 we observe that precision increases with the the
standard deviation of the Gaussian checker matrix, and that recall decreases at a faster rate, which
means that the implicit segments between the detected borders are less, as a consequence of the
reduced Gaussian checker filter granularity.
We observe that the maximum F measure of 62 percent is achieve with a Gaussian checker
matrix with standard deviation of 12 and 18 although it is still relatively high (60%) for a standard
deviation of 24, which is close to the balance point of precision (59.93%) and recall (60.57%). Pre-
cision increases with the Gaussian checker standard deviation because, although the number of
correct borders matched decreases with a bigger standard deviation, the number of identified bor-
ders decreases at a faster rate. The correlation measures included indicate that in all parameter
combinations there is a significant relationship between the correlated parameters. The precision-
to-recall and identified-to-correct correlation measures are smaller for a Gaussian checker standard
deviation of 12, which is coherent with the also observed peak in the F measure. The standard de-
viation of precision and recall and the confidence interval remains relatively constant through all the
parameter combinations.
These results are comparable with the ones obtained by the works of Ong [14] and Peiszer [12],
the later of which also includes a detailed comparison of results obtained from different methods.
In these works, precision ranges from 50% to 60% and recall is usually between 70% and 80%,
while the F measure is also between 65% and 80%. While precision and recall values obtained in
35

this implementation are comparable, F value is lower than those works which was to be expected,
since no other improvements, such as feature selection, beat synchronised feature extraction or
border filtering were used. However, these results show that the algorithm produces positive results
although there is margin for improvement.
For a list of per song distance measures for the 3 best parameter combinations that were pre-
sented refer to Appedix A, Figures A.1, A.2 and A.3.
4.4 Evaluation of the Cluster Based Automatic Segmentation
For the evaluation of the cluster based automatic segmentation two approaches were taken: a bor-
der match evaluation was made with results in Section 4.4.1 and the inter-segment distance was
calculated and compared with the results obtained from the inter-segment distance of ground truth
segments in Section 4.4.2.
4.4.1 Border Matching
The main parameter that influences the results of border matching is the number of L2 clusters as
described in Section 2.3. The number of L1 clusters, as well as the cluster histogram size which could
also potentially influence results were determined empirically with a smaller subset of the corpus, as
good values. For simplicity, the values of these two parameters were fixed for this evaluation, where
80 L1 clusters and a 60 frame histogram window size of the cluster-assigned feature vectors was
used. It might be possible to further improve results by changing these values.
L2 clusters 3 4 5 6 7 10
Average borders per song 13.80 13.80 13.80 13.80 13.80 13.80Average correct borders per song 5.25 5.72 6.75 7.07 7.51 8.48Average matched borders per song 10.26 13.62 16.64 19.26 20.95 25.52Average precision % 53.49 45.16 43.84 39.61 37.61 34.32Average recall % 39.09 42.6 50.27 53.16 56.49 62.25F measure % 45 43 46 45 45 44
Table 4.4: Border matching performance measures for cluster based approach for the range of tested L2 clustervalues. Table A.2 in Appendix A contains a more complete set of results
From Table A.2 and as depicted in Figure 4.3, the F measure value is highest with an L2 cluster
number of 5. Precision and recall are closer for an L2 number of clusters of 4, but that also coincides
with the minimum value of the F measure. It can be observed that there is a smaller correlation
between annotated and identified borders than that which was observed with the Gaussian checker
36

Figure 4.3: Border matching performance measures for cluster based approach. Precision and recall percentagefor all tested values of L2 clusters are presented as well as the related F measure percentage.
border matching. This was to be expected since the number of L2 clusters also determines the
maximum amount of segment labels in the automatic segmentation. Although these results are
inferior to those obtained with the Gaussian checker kernel, we must take into consideration that
segment label information is also obtained from this process and the number of labels automatically
identified is bound to the number of L2 clusters which is strongly correlated to the number of identified
borders. A possible improvement would be to use X-means clustering [39] for the second step
clustering, which would allow to adapt the number of labels (L2 clusters) to the data. These results
are comparable to the border matching results presented by Levy et al. [9] where and F measure of
43.7% was obtained for border matching of K-means clustering, this being however the result of an
higher recall (80.9%) and a lower precision (31.1%), rather than the more balanced values obtained
in this work.
4.4.2 Inter-Segment Distance Evaluation
Table B.2 and Figures 4.4 and 4.5 present an overview of the results obtained from calculating the
distance between the same label segments over a varying number of L2 clusters.
While the recall of the automatic segmentation is higher for 3 and 4 L2 clusters, the standard
deviation is relatively high for those parameter values and consequently the 95% confidence interval
is also wider. With 5 L2 clusters there is a compromise between the standard deviation which is the
37

L2 clusters 3 4 5 6 7 10
Average correct labels GT 5.02 5.02 5.02 5.02 5.02 5.02Average correct labels AS 2.28 2.97 3.68 4.23 4.98 7.12Average existing labels GT 5.68 5.68 5.68 5.68 5.68 5.68Average existing labels AS 3 4 5 6 7 10Recall GT % 88.27 88.27 88.27 88.27 88.27 88.27Recall AS % 75.96 74.17 73.67 70.56 71.19 71.17Standard deviation recall GT % 12.97 12.97 12.97 12.97 12.97 12.97Standard deviation recall AS % 23.84 20.9 16.14 17.05 17.49 14.89Ratio recall AS to recall GT 0.86 0.84 0.83 0.8 0.81 0.81
Table 4.5: Self-similarity distance evaluation results for the segmentations obtained with the range of testedL2 cluster values. Note that GT (ground truth) values were included for comparison with the AS (automaticsegmentation) results. A more complete set of results can be found in Table B.2 in Appendix A
Figure 4.4: Recall percentage from the self-similarity distance evaluation, presented for the range of tested L2clusters.
lowest of the result set - 7.7% lower than for 3 L2 Clusters - while there is only an 2.29% decrease
in recall. From Figure 4.5, it is possible to conclude that with 5 L2 clusters the total number of
labels for the automatic segmentation is close to the average number of correct labels in the ground
truth segmentation. Although the average correct labels retrieved from the automatic segmentation
with 5 L2 clusters (3.68) is still lower than the corresponding average correct GT labels (5.02), from
these considerations and in light of the results in Section 4.4, which shows that the clustering based
border matching achieves better results with 5L2 clusters, the use of 5 L2 clusters for this type of
38

Figure 4.5: Average total labels and correct labels from GT and AS for the range of tested L2 clusters.
segmentation seems to be a balanced choice, given the nature of the evaluated corpus and of the
features used. A complete list of all the songs sorted by recall can be found in Appendix B, FigureB.3.
4.4.3 Empirical Evaluation of the Cluster Based Segmentation Results
Another important aspect of the evaluation is the actual empirical human perception of the results of
the segmentation. While from the previous Sections 4.4.1 and 4.4.2, a cluster based segmentation
using 5 L2 clusters would seem to be a balanced choice for the evaluated corpus, from listening
to the automatic segmentations, it would seem otherwise that better automatic segmentations are
those that have a closer number of labels to those present in the ground truth. Follows an example
for the song “Wonder Wall” from the musical band Oasis, also included in the corpus, where the
segmentations for different number of L2 clusters are presented as well as the ground truth, Figures
4.6, 4.7, 4.8 and 4.9.
39

Figure 4.6: Segmentation view for “Wonder Wall” from Oasis, with the 3 L2 clusters (Labels) retrieved. Thenumbers in the upper left corner of the segments are the label tags, and a timeline in minutes is also shown.
Figure 4.7: Segmentation view for “Wonder Wall” from Oasis, with the 5 L2 clusters (Labels) retrieved. Thenumbers in the upper left corner of the segments are the label tags, and a timeline in minutes is also shown.
Figure 4.8: Segmentation view for “Wonder Wall” from Oasis, with the 7 L2 clusters (Labels) retrieved. Thenumbers in the upper left corner of the segments are the label tags, and a timeline in minutes is also shown.
Figure 4.9: Segmentation view for “Wonder Wall” from Oasis using the ground truth segmentation.The numbersin the upper left corner of the segments are the label tags, and a time-line in minutes is also shown.
In these examples, 7 L2 clusters provide results that are more consistent to a listener. Visually,
it is also easier to identify correspondences between segments or groups of segments in the 7 L2
cluster segmentation and the ground truth, e.g. segment with label 2 in the ground truth segmentation
seems to be explained by segments labelled 4 and 2 of the 7 L2 cluster segmentation. Again, this
suggests that a variable L2 cluster segmentation such as X-means clustering [39] could be used to
improve results.
40

4.5 Evaluation of Distance Measures
Using the method described in Section 4.2.3 and the corpus formed as stated in Section 4.1 the four
cluster distance measures described in Section 2.4 were used with thee different numbers of clusters
to produce the overall results that can be found in tables 4.6 and figures 4.10. Mode detailed results,
contained the success scores per category can be found in Appendix C, Tables C.2, C.3 and C.4 and
Figures C.1, C.2 and C.3.
Number of Clusters 1 10 20
Cluster Covariance % 20 23.2 22.4Euclidean Distance % 97.6 78.4 84.8KL Multivariate Gaussian % 66.4 49.6 48.8Average KL Single Gaussian % 84 60 59.2
Table 4.6: Overview of the tested cluster distance measures versus the number of clusters used. The resultsare expressed in the score calculated as mentioned in Section 4.2.3 and expressed in terms of percentage.
Figure 4.10: Overview of the tested cluster distance measures versus the number of clusters used.
A relevant observation that can be made from this small scale evaluation was that the Euclidean
cluster distance obtained the highest score in all evaluations. This is in sharp contrast with the
covariance distance measure, and suggests that the location of the cluster centres has a much
41

higher discriminating capability that the variance of the point distribution within each cluster - Note
that the covariance cluster distance measure normalizes all the points in a cluster by their mean. The
Cluster KL based approaches, perform competitively to the euclidean distance but are not able to
match it in any evaluated category.
Also noteworthy is that an increased number of clusters will not necessarily result in a better
score. Again the Euclidean cluster distance measure, seems to counter this tendency since for 20
clusters the success score is 6.4% better that with 10 clusters, although not achieving the same result
obtained with just 1 cluster. From other small scale experiments, it was determined that good results
can be achieved with an Euclidean distance as a cluster distance measure of up to 80 clusters.
From other small scale evaluations, it was determined that while clustering of songs features can
produce viable classifications, the fact that these classification rely on a random component - the
“seeds” used to obtain the cluster centres - adds “noise” do the distance measures retrieved using
this type of classification. This means that two distinct comparisons of the same two songs might not
always return the same distance value, due to different clustering outcomes, which is not desirable
if the aim is to obtain a reproducible distance measure, specially in a larger corpus where several
songs might have very close distances from each other. This being the case, different approaches
using Support Vector Machines (SVM) such as Ellis et al. [16] or Hidden Markov Models (HMM) as
in Levy et al. [9], than do not rely on random components, should be considered for future work.
42

Chapter 5
Conclusion
5.1 Result Summary and Discussion
The segmentation results can be summarized as follows:
• The border matching using a Gaussian Checker Kernel resulted in a maximum F measure of
62%, which is within the range of the values obtained from previous works like Ong [14] and
Peiszer [12] using the same algorithm.
• The border matching using a clustering-based segmentation approach resulted in low values
of F measure of only 46%. However, this is still higher that the results reported in Levy et al. [9]
for experiments using similar algorithms.
• The evaluation of the segmentation through the use of a distance measure, was an attempt
to establish a utility measure of the automatic segmentation produced by the cluster-based
segmentation. With the criteria used, it was shown that while a manually annotated corpus
contains approximately 88% of similar segments that are annotated with the same label, the
cluster-based segmentation was able to identify segments that are between 71% and 76%
similar among those with the same label.
• Empirical listening of the music segmentations produced also proved that the results of the
automatic segmentation were positive, in particular when the number of L2 clusters used was
closer to the number of manually annotated labels in a song.
For the music distance measures, a result summary follows:
• The Euclidean distance between clusters was the most successful measure employed. This
indicates that the centre of feature space, defined by each category of songs evaluated, was
itself a discriminator of the category, which was more evident in the single cluster experiments.
43

• In the task of finding the 5 closest songs from the biased corpus, experiments with multiple
clusters obtained worse results than using just 1 cluster. This indicates that an increased
number of clusters will not necessarily hold better results. The Euclidean cluster distance
measure, seems to counter this tendency, since for 20 clusters the success score is 6.4%
better that with 10 clusters, although it is still lower than the score obtained with just 1 cluster.
• The covariance cluster distance measure obtained consistently bad results, since the average
(centre of the cluster) is subtracted in it’s calculus. This is coherent with the conclusions above.
• The average KL divergence of a single Gaussian PDF per feature distance measure, when
employed to evaluate similarity among segments supposedly similar according to manual an-
notations, proved to return consistent results both empirically, by identifying incorrectly manu-
ally annotated segments, and in the context of the evaluation of the automatic segmentation by
comparison with the ground truth segmentation.
• The KL divergence using a multivariate Gaussian as a PDF for modelling the clusters held
positive results, but worse than those obtained by modelling each feature as a Gaussian in-
dependently. This indicates that a combination of the later might be a more adequate PDF to
model the feature space.
• The Earth Mover’s distance measure implementation was validated since as show, with the
exception the covariance cluster distance measure, all others produced positive scores with
more that 1 cluster, and in the case of the Euclidean cluster distance, 20 clusters held better
results than 10 clusters, as expected.
• While the KL divergence based strategies had generally lower performance that the Euclidean
distance, it is not clear that this advantage will hold in a more heterogeneous corpus, and for
an higher number of clusters. However, it is clear that the Euclidean distance and KL based
methods held positive results.
5.2 Future Work
From the author’s experience, future work and improvements to Shkr should be concentrated in:
• Moving the feature extraction inside the code base of Shkr, or at least under the control of the
Shkr code base, to allow for the integration of beat and metric detection.
44

• Optimizing the available functionality by resorting to feature testing and selection, and possi-
bly include PCA among the available tools to reduce the dimensionality of the features (when
applicable).
• Playlist retrieval and optimization strategies are desirable, and will greatly improve the useful-
ness of the implemented distance measures, specially in the context of a content recommen-
dation system.
• Other Classifiers such as HMM or SVM should be included as well, since K-Means clustering
does not always converge, and results rely on random seeds, which can cause inconsistencies,
specially song distance measures. The use of other clustering types, such as X-Means [39],
could also hold improvements, specially for segmentation, where the most appropriate number
of clusters could be automatically determined.
5.3 Objectives versus Challenges
It is the author’s opinion that these results validate the implementations, show the applicability of the
strategies used, and therefore the objectives of this work were accomplished. Although there were
several tasks being approached and few task-specific optimizations were introduced, the results were
still comparable to those obtained from other authors. Shkr is still a developing project, and while
for segmentation tasks applicable results can already be obtained, for the distance measures more
research and testing is necessary, and hence the small scale of the test performed in the scope of
this thesis.
However, a considerable code base with numerous useful resources and a flexible design that
can support several tasks in MIR was built, and while the effort was not invested in highly desirable
improvements such as feature selection, or beat detection integration, foundations were laid that can
help leverage such functionality in future.
45

References
[1] Howes, F. Man Mind and Music. Marin Secker & Warbug LTD., 1948.
[2] Mirex. http://www.music-ir.org/mirex/wiki/MIREX_HOME (Visited on 2010/09/12).
[3] Ismir. http://www.ismir.net/ (Visited on 2010/09/12).
[4] Schnitzer, D. Mirage, high-performance music similarity computation and automatic playlist
generation. Master’s thesis, Vienna University of Technology, 2007.
[5] Midomi. http://www.midomi.com/ (Visited on 2010/09/12).
[6] Paulus, J., Klapuri, A. Music Structure Analysis by Finding Repeated Parts. proceedings of
AMCMM 06, pages 59–67, 2006.
[7] Lee, k. Automatic Chord Recognition Using Enhanced Pitch Class Profile. proceedings of
International Computer Music Conference, 2006.
[8] Childers D. G., Skinner D. P., Kemerait R. C. The Cepstrum, A guide to Processing. proceedings
of IEEE, 65(10):1428–1423, 1977.
[9] Levy, M., Sandler M. Structural Segmentation of Musical Audio by Constrained Clustering. IEEE
Ttransactions on Audio, Speech, and Language processing, 16(2), 2008.
[10] MPEG-7 Standard ISO/IEC 15938-4:2002. http://www.chiariglione.org/mpeg/standards/
mpeg-7/mpeg-7.htm (Visited on 2010/10/10).
[11] Logan, B., Salomon, A. A Music Similarity Function Based on Signal Analysis. Multimedia and
Expo, 2001. ICME 2001. IEEE International Conference, pages 745–748, 2001.
[12] Peiszer, E. Automatic Audio Segmentation: Segment Boundary and Structuzre Detection in
Popular Music. Master’s thesis, Institut fur Softwaretechnik und Interaktive Systeme, 2007.
[13] Foote, J., Cooper, M. Media segmentation using self-similarity decomposition. IEEE ICME,
2003.
46

[14] Ong, B. S. Towards Automatic Music Structural Analysis: Identifying Characteristic Within-Song
Excerpts in Popular Music. PhD thesis, Universitat Pompeu Fabra, 2005.
[15] Foote, J. Automatic Audio Segmentation using a measure of audio novelty. proceedings of
IEEE, 2000.
[16] Ellis, D.,Mandel, M. Song-level features and support vector machines for music classification.
In ISMIR 2005, pages 594–599, 2005.
[17] Erickson, R. Sound Structure in Music. University of California Press, 1975.
[18] Hidden Markov Model Toolkit. http://http://htk.eng.cam.ac.uk/ (Visited on 2010/09/03).
[19] Huang, X., Acero, A., Won, H. Spoken Language Processing. Prentice Hall, 2001.
[20] Miranda, M. Trabalho do Miguel. 2009.
[21] Sonic Visualiser. http://www.sonicvisualiser.org/ (Visited on 2008/09/28).
[22] Rubner, Y., Tomasi, C., Guibas, L. J. The Earth Mover’s Distance as a Metric for Image Retrieval.
International Journal of Computer Vision, 40(2), pages 99–121, 2000.
[23] lpsolve - Mixed Integer Linear Programming (MILP) solver. http://lpsolve.sourceforge.net/
5.5/ (Visited on 2010/09/03).
[24] Marques, J. S. Reconhecimento de Padroes: metodos estatısticos e neuronais. IST press,
1999.
[25] Vorbis.com. http://www.vorbis.com/ (Visited on 2010/09/28).
[26] FLAC - Free Lossless audio codec. http://flac.sourceforge.net/ (Visited on 2010/09/28).
[27] SoX - Sound eXange. http://sox.sourceforge.net/ (Visited on 2010/09/28).
[28] Department of Music from the University of Jyvaskyla . http://www.jyu.fi/hum/laitokset/
musiikki/en/research/coe/materials/mirtoolbox (Visited on 2010/10/08).
[29] Eigen Wiki. http://eigen.tuxfamily.org/index.php?title=Main_Page (Visited on
2010/09/12).
[30] The GNU C++ Library Documentation. http://gcc.gnu.org/onlinedocs/libstdc++ (Visited
on 2010/09/12).
47

[31] Tzanetakis, G., Bray, S. Implicit patching for dataflow-based audio analysis and synthesis. In
Proceedings of the 2005 International Computer Music Conference, 2005.
[32] Marsyas - Musical Analysis, Retrieval and Synthetisis for Audio Signals. http://marsyas.info/
(Visited on 2010/09/03).
[33] Eckel, B. Thinking in Patterns - Problem-Solving Techniques Using Java, Revision 0.9. Uni-
versity of California Press, 2003. Online publication at http://www.mindview.net/Books/
TIPatterns/ (Visited on 2010/09/03).
[34] Xerces C++ XML Parse. http://xerces.apache.org/xerces-c/ (Visited on 2010/09/03).
[35] David, A., Vassilvitskii, S. k-means++: The advantages of careful seeding. 2006.
[36] Vienna University of Technology - Music Information Retrieval. http://www.ifs.tuwien.ac.
at/mir/audiosegmentation.html (Visited on 2010/09/28).
[37] Chai, W. Structural Analysis of Musical Signals for Indexing and Thumbnailing. Proceedings of
the Joint Conference on Digital Libraries, pages 27–24, 2003.
[38] Logan, B., Ellis D.P.W., Barenzweig A. Toward evaluation techniques for music similarity. IEEE
ICME, 2003.
[39] Pelleg, D., Moore, A. X-means: Extending the K-means with Efficient Estimation of the Number
of Clusters. In Proceedings of the 17th International Conf. on Machine Learning, 2000.
48

Appendix A
Border Matching Results fromGaussian Checker Kernel Matrix andClustering Based Segmentation
Gaussian standard Deviation 3 6 12 18 24 30 36Checker size 5 10 20 30 40 50 60Total Number of songs 61 61 61 61 61 61 61Total annotated borders 842 842 842 842 842 842 842Total Correct Borders 600 659 624 556 449 461 424Total Identified Borders 1599 1494 1223 992 857 769 719Average borders per song 13.80 13.80 13.80 13.80 13.80 13.80 13.80Average correct borders per song 9.84 10.80 10.23 9.11 8.18 7.56 6.95Average matched borders per song 26.21 24.49 20.05 16.26 14.05 12.61 11.78Average Precision % 39.41 45.56 53.45 57.78 59.93 60.71 59.98Precision standard deviation % 14.61 16.42 18.66 20.83 21.29 19.98 19.59Precision 95.0% confidence interval 3.67 4.12 4.68 5.23 5.34 5.01 4.92Average Recall % 72.82 79.09 76.08 67.67 60.57 56.25 52.23Recall standard devitation % 17.61 17.21 15.03 15.98 16.16 16.33 15.83Recall 95.0% confidence interval 4.42 4.32 3.77 4.01 4.06 4.10 3.97Correlation precision and recall 0.58 0.51 0.39 0.40 0.46 0.45 0.48Correlation annotated and identified 0.56 0.54 0.46 0.43 0.42 0.45 0.46Correlation identified and correct 0.43 0.47 0.35 0.39 0.45 0.51 0.51F measure % 51 57 62 62 60 58 55
Table A.1: Border matching performance measures for the range of tested standard Deviation and Size of theGaussian checker kernel.
A1

L2 clusters 3 4 5 6 7 10L1 clusters 80 80 80 80 80 80Cluster histogram size 60 60 60 60 60 80Total number of songs 61 61 61 61 61 61Total annotated borders 842 842 842 842 842 842Total correct borders 320 349 412 431 458 517Total identified borders 626 831 1015 1175 1278 1557Average borders per song 13.80 13.80 13.80 13.80 13.80 13.80Average correct borders per song 5.25 5.72 6.75 7.07 7.51 8.48Average matched borders per song 10.26 13.62 16.64 19.26 20.95 25.52Average precision % 53.49 45.16 43.84 39.61 37.61 34.32Precision standard deviation % 18.28 18.11 16.01 15.69 13.35 12.59Precision 95.0% confidence interval 4.59 4.54 4.02 3.94 3.35 3.16Average recall % 39.09 42.6 50.27 53.16 56.49 62.25Recall standard deviation % 14.08 14.14 14.41 16.38 17.63 14.9Recall 95.0% confidence interval 3.53 3.55 3.62 4.11 4.43 3.74Correlation precision and recall 0.22 0.23 0.24 0.43 0.23 0.26Correlation annotated and identified 0.22 0.17 0.28 0.16 0.18 0.13Correlation identified and correct 0.45 0.39 0.4 0.16 0.34 0.2F measure % 45 43 46 45 45 44
Table A.2: Border matching performance measures for cluster based approach for the range of tested L2 clustervalues
A2

The_Clash_-_Should_I_Stay_or_Should_I_Go
Alanis_Morissette_-_Thank_You
Madonna-Like_a_virgin
The_Crystal_Method_-_Born_Too_Slow
The_Monkees_-_Words
Oasis_-_Wonderwall
Prince_-_Kiss
Seal_-_Crazy
Chumbawamba_-_Thubthumping
Simply_Red_-_Stars
Deus_-_suds_and_soda
Beatles_-_Dont_Bother_Me
Beatles_-_Till_There_Was_You
Spice_Girls_-_Wannabe
Beatles_-_I_saw_her_standing_there
Beatles_-_You_Really_Got_A_Hold_On_Me
Cranberries_-_Zombie
The_Beatles_-_Within_You_Without_You
Britney_Spears_-_Hit_Me_Baby_One_More_Time
Alanis_Morissette_-_08_-_Head_Over_Feet
The_Beatles_-_A_Day_In_The_Life
The_Beatles_-_Lucy_In_The_Sky_With_Diamonds
Beatles_-_Hold_Me_Tight
Beatles_-_Misery
Beatles_-_Not_A_Second_Time
Beatles_-_Roll_Over_Beethoven
The_Beatles_-_Getting_Better
Beatles_-_It_Wont_Be_Long
Bjork_-_Its_Oh_So_Quiet
Beastie_Boys_-_Intergalactic
REM_-_Drive
Nora_Jones_-_Lonestar
The_Beatles_-_Good_Morning_Good_Morning
Wise_Guys_-_Powerfrau
Chicago_-_Old_Days
Beatles_-_Little_Child
Beatles_Anna_go_to
Sinhead_O_Connor_-_Nothing_compares_to_you
The_Beatles_-_Shes_Leaving_Home
Beatles_-_Please_Mister_Postman
Black_Eyed_Peas_-_Cali_To_New_York
Nirvana_-_Smells_like_teen_spirit
The_Beatles_-_With_A_Little_Help_From_My_Friends
A-HA_-_Take_on_me
Portishead_-_Wandering_star
Beatles_-_All_My_Loving
The_Beatles_-_Being_For_The_Benefit_Of_Mr_Kite
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_Club_Band
Beatles_-_I_Wanna_Be_Your_Man
The_Beatles_-_Lovely_Rita
Beatles_-_Money
Nick_Drake_-_Northern_Sky
Radiohead_-_Radiohead_-_Creep_Original_Ve
Gloria_Gayner-I_Will_Survive
Wise_Guys_-_Kinder
Apollo_440_-_Stop_The_Rock
Beatles_-_All_Ive_Got_To_Do
Beatles_-_Devil_In_Her_Heart
The_Beatles_-_Fixing_A_Hole
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_reprise
The_Beatles_-_When_Im_Sixty-Four
0 10 20 30 40 50 60 70 80 90 100
Gaussian Checker Kernel Full Corpus Border Matching 20 frames side size, stdandard deviation of 12
RecallPrecision
Measure Percentage
Figure A.1: List songs with corresponding recall and precision, sorted by recall for the a Gaussian matrix side of20 and a Gaussian standard deviation of 12
A3

The_Clash_-_Should_I_Stay_or_Should_I_Go
Beatles_-_Dont_Bother_Me
Beatles_-_Till_There_Was_You
The_Monkees_-_Words
REM_-_Drive
Oasis_-_Wonderwall
Alanis_Morissette_-_Thank_You
Beatles_-_All_Ive_Got_To_Do
Beatles_-_You_Really_Got_A_Hold_On_Me
The_Crystal_Method_-_Born_Too_Slow
Chumbawamba_-_Thubthumping
Beatles_-_Roll_Over_Beethoven
Seal_-_Crazy
Deus_-_suds_and_soda
Spice_Girls_-_Wannabe
Beatles_-_Hold_Me_Tight
Beatles_-_Misery
Beatles_-_Not_A_Second_Time
Madonna-Like_a_virgin
Beatles_-_All_My_Loving
Bjork_-_Its_Oh_So_Quiet
Beatles_-_Devil_In_Her_Heart
Beatles_-_Little_Child
Beatles_Anna_go_to
Britney_Spears_-_Hit_Me_Baby_One_More_Time
Sinhead_O_Connor_-_Nothing_compares_to_you
Beatles_-_I_saw_her_standing_there
Prince_-_Kiss
Cranberries_-_Zombie
Beatles_-_It_Wont_Be_Long
The_Beatles_-_Within_You_Without_You
Wise_Guys_-_Powerfrau
A-HA_-_Take_on_me
Nick_Drake_-_Northern_Sky
Simply_Red_-_Stars
The_Beatles_-_A_Day_In_The_Life
The_Beatles_-_Lucy_In_The_Sky_With_Diamonds
Beatles_-_I_Wanna_Be_Your_Man
The_Beatles_-_Good_Morning_Good_Morning
Beastie_Boys_-_Intergalactic
Alanis_Morissette_-_08_-_Head_Over_Feet
Beatles_-_Please_Mister_Postman
The_Beatles_-_Being_For_The_Benefit_Of_Mr_Kite
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_Club_Band
Gloria_Gayner-I_Will_Survive
Nora_Jones_-_Lonestar
Chicago_-_Old_Days
Wise_Guys_-_Kinder
The_Beatles_-_Getting_Better
The_Beatles_-_Shes_Leaving_Home
Black_Eyed_Peas_-_Cali_To_New_York
Nirvana_-_Smells_like_teen_spirit
The_Beatles_-_With_A_Little_Help_From_My_Friends
Radiohead_-_Radiohead_-_Creep_Original_Ve
The_Beatles_-_When_Im_Sixty-Four
The_Beatles_-_Fixing_A_Hole
Beatles_-_Money
Apollo_440_-_Stop_The_Rock
Portishead_-_Wandering_star
The_Beatles_-_Lovely_Rita
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_reprise
0 10 20 30 40 50 60 70 80 90 100
Gaussian Checker Kernel Full Corpus Border Matching 30 frames side size, stdandard deviation of 18
RecallPrecision
Measure Percentage
Figure A.2: List songs with corresponding recall and precision, sorted by recall for the a Gaussian matrix side of30 and a Gaussian standard deviation of 12
A4

Beatles_-_Dont_Bother_Me
Madonna-Like_a_virgin
The_Monkees_-_Words
Beatles_-_Till_There_Was_You
Sinhead_O_Connor_-_Nothing_compares_to_you
Beatles_-_All_Ive_Got_To_Do
Chumbawamba_-_Thubthumping
REM_-_Drive
Beatles_-_It_Wont_Be_Long
Alanis_Morissette_-_Thank_You
Beatles_-_You_Really_Got_A_Hold_On_Me
The_Clash_-_Should_I_Stay_or_Should_I_Go
Beatles_Anna_go_to
Beatles_-_Misery
Bjork_-_Its_Oh_So_Quiet
Oasis_-_Wonderwall
Spice_Girls_-_Wannabe
The_Beatles_-_Being_For_The_Benefit_Of_Mr_Kite
The_Crystal_Method_-_Born_Too_Slow
Seal_-_Crazy
Beatles_-_Devil_In_Her_Heart
Beatles_-_Roll_Over_Beethoven
Deus_-_suds_and_soda
Wise_Guys_-_Kinder
Britney_Spears_-_Hit_Me_Baby_One_More_Time
Beatles_-_Hold_Me_Tight
Beatles_-_I_Wanna_Be_Your_Man
Beatles_-_Not_A_Second_Time
Gloria_Gayner-I_Will_Survive
The_Beatles_-_Good_Morning_Good_Morning
Wise_Guys_-_Powerfrau
Beastie_Boys_-_Intergalactic
Simply_Red_-_Stars
The_Beatles_-_A_Day_In_The_Life
Beatles_-_All_My_Loving
Beatles_-_Little_Child
The_Beatles_-_Shes_Leaving_Home
Beatles_-_I_saw_her_standing_there
Cranberries_-_Zombie
Beatles_-_Please_Mister_Postman
Nirvana_-_Smells_like_teen_spirit
A-HA_-_Take_on_me
Nick_Drake_-_Northern_Sky
The_Beatles_-_Lucy_In_The_Sky_With_Diamonds
Prince_-_Kiss
Alanis_Morissette_-_08_-_Head_Over_Feet
Black_Eyed_Peas_-_Cali_To_New_York
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_Club_Band
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_reprise
The_Beatles_-_When_Im_Sixty-Four
Beatles_-_Money
The_Beatles_-_Within_You_Without_You
Nora_Jones_-_Lonestar
The_Beatles_-_Fixing_A_Hole
Chicago_-_Old_Days
The_Beatles_-_Getting_Better
The_Beatles_-_With_A_Little_Help_From_My_Friends
Radiohead_-_Radiohead_-_Creep_Original_Ve
Portishead_-_Wandering_star
Apollo_440_-_Stop_The_Rock
The_Beatles_-_Lovely_Rita
0 10 20 30 40 50 60 70 80 90 100
Gaussian Checker Kernel Full Corpus Border Matching 40 frames side size, stdandard deviation of 24
RecallPrecision
Measure Percentage
Figure A.3: List songs with corresponding recall and precision, sorted by recall for the a Gaussian matrix side of40 and a Gaussian standard deviation of 24
A5

Beatles_-_Roll_Over_Beethoven
Deus_-_suds_and_soda
The_Beatles_-_Within_You_Without_You
Chumbawamba_-_Thubthumping
The_Beatles_-_With_A_Little_Help_From_My_Friends
Seal_-_Crazy
Apollo_440_-_Stop_The_Rock
Alanis_Morissette_-_Thank_You
Cranberries_-_Zombie
Prince_-_Kiss
Beatles_-_Till_There_Was_You
Britney_Spears_-_Hit_Me_Baby_One_More_Time
Sinhead_O_Connor_-_Nothing_compares_to_you
Alanis_Morissette_-_08_-_Head_Over_Feet
Bjork_-_Its_Oh_So_Quiet
Beatles_-_Misery
Madonna-Like_a_virgin
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_reprise
Gloria_Gayner-I_Will_Survive
The_Beatles_-_When_Im_Sixty-Four
The_Clash_-_Should_I_Stay_or_Should_I_Go
Beatles_Anna_go_to
The_Beatles_-_Fixing_A_Hole
The_Beatles_-_Lovely_Rita
A-HA_-_Take_on_me
Black_Eyed_Peas_-_Cali_To_New_York
Radiohead_-_Radiohead_-_Creep_Original_Ve
The_Beatles_-_Lucy_In_The_Sky_With_Diamonds
Wise_Guys_-_Powerfrau
Beastie_Boys_-_Intergalactic
REM_-_Drive
Beatles_-_I_Wanna_Be_Your_Man
Beatles_-_You_Really_Got_A_Hold_On_Me
Chicago_-_Old_Days
Spice_Girls_-_Wannabe
The_Beatles_-_A_Day_In_The_Life
The_Beatles_-_Shes_Leaving_Home
The_Crystal_Method_-_Born_Too_Slow
Beatles_-_Money
Beatles_-_Dont_Bother_Me
Beatles_-_Little_Child
Nirvana_-_Smells_like_teen_spirit
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_Club_Band
Beatles_-_I_saw_her_standing_there
Oasis_-_Wonderwall
Portishead_-_Wandering_star
Nick_Drake_-_Northern_Sky
Simply_Red_-_Stars
The_Beatles_-_Being_For_The_Benefit_Of_Mr_Kite
Wise_Guys_-_Kinder
Beatles_-_All_My_Loving
Beatles_-_It_Wont_Be_Long
Beatles_-_Please_Mister_Postman
Nora_Jones_-_Lonestar
The_Beatles_-_Getting_Better
The_Monkees_-_Words
Beatles_-_Hold_Me_Tight
The_Beatles_-_Good_Morning_Good_Morning
Beatles_-_Devil_In_Her_Heart
Beatles_-_All_Ive_Got_To_Do
Beatles_-_Not_A_Second_Time
0 10 20 30 40 50 60 70 80 90 100
Clustering Based Border Matching 5 cluster L2, 80 clusters L1
RecallPrecision
Measure Percentage
Figure A.4: List songs with corresponding recall and precision, sorted by recall for the clustering based segmen-tation using 5 clusters L2 and 80 clusters L1.
A6

Appendix B
Segment Similarity Results of the KLDivergence of a Single Gaussian perFeature Distance measure
B7
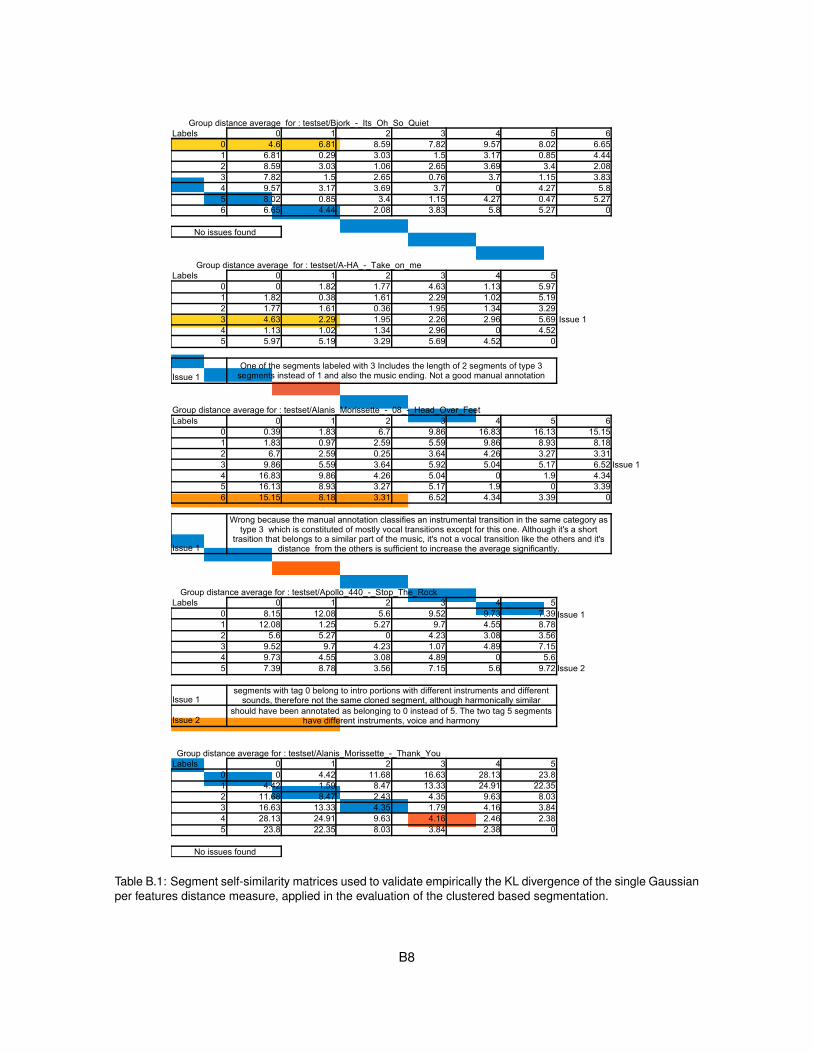
Labels 0 1 2 3 4 5 60 4.6 6.81 8.59 7.82 9.57 8.02 6.651 6.81 0.29 3.03 1.5 3.17 0.85 4.442 8.59 3.03 1.06 2.65 3.69 3.4 2.083 7.82 1.5 2.65 0.76 3.7 1.15 3.834 9.57 3.17 3.69 3.7 0 4.27 5.85 8.02 0.85 3.4 1.15 4.27 0.47 5.276 6.65 4.44 2.08 3.83 5.8 5.27 0
No issues found
Labels 0 1 2 3 4 50 0 1.82 1.77 4.63 1.13 5.971 1.82 0.38 1.61 2.29 1.02 5.192 1.77 1.61 0.36 1.95 1.34 3.293 4.63 2.29 1.95 2.26 2.96 5.69 Issue 14 1.13 1.02 1.34 2.96 0 4.525 5.97 5.19 3.29 5.69 4.52 0
Issue 1
Labels 0 1 2 3 4 5 60 0.39 1.83 6.7 9.86 16.83 16.13 15.151 1.83 0.97 2.59 5.59 9.86 8.93 8.182 6.7 2.59 0.25 3.64 4.26 3.27 3.313 9.86 5.59 3.64 5.92 5.04 5.17 6.52 Issue 14 16.83 9.86 4.26 5.04 0 1.9 4.345 16.13 8.93 3.27 5.17 1.9 0 3.396 15.15 8.18 3.31 6.52 4.34 3.39 0
Issue 1
Labels 0 1 2 3 4 5
Issue 10 8.15 12.08 5.6 9.52 9.73 7.391 12.08 1.25 5.27 9.7 4.55 8.782 5.6 5.27 0 4.23 3.08 3.563 9.52 9.7 4.23 1.07 4.89 7.154 9.73 4.55 3.08 4.89 0 5.65 7.39 8.78 3.56 7.15 5.6 9.72 Issue 2
Issue 1
Issue 2
Labels 0 1 2 3 4 50 0 4.42 11.68 16.63 28.13 23.81 4.42 1.59 8.47 13.33 24.91 22.352 11.68 8.47 2.43 4.35 9.63 8.033 16.63 13.33 4.35 1.79 4.16 3.844 28.13 24.91 9.63 4.16 2.46 2.385 23.8 22.35 8.03 3.84 2.38 0
No issues found
Group distance average for : testset/Bjork_-_Its_Oh_So_Quiet
Group distance average for : testset/A-HA_-_Take_on_me
One of the segments labeled with 3 Includes the length of 2 segments of type 3 segments instead of 1 and also the music ending. Not a good manual annotation
Group distance average for : testset/Alanis_Morissette_-_08_-_Head_Over_Feet
Wrong because the manual annotation classifies an instrumental transition in the same category as type 3 which is constituted of mostly vocal transitions except for this one. Although it's a short
trasition that belongs to a similar part of the music, it's not a vocal transition like the others and it's distance from the others is sufficient to increase the average significantly.
Group distance average for : testset/Apollo_440_-_Stop_The_Rock
segments with tag 0 belong to intro portions with different instruments and different sounds, therefore not the same cloned segment, although harmonically similar
should have been annotated as belonging to 0 instead of 5. The two tag 5 segments have different instruments, voice and harmony
Group distance average for : testset/Alanis_Morissette_-_Thank_You
Table B.1: Segment self-similarity matrices used to validate empirically the KL divergence of the single Gaussianper features distance measure, applied in the evaluation of the clustered based segmentation.
B8

L2 clusters 3 4 5 6 7 10L1 clusters 80 80 80 80 80 80Cluster histogram size 60 60 60 60 60 80Total number of songs 61 61 61 61 61 61Total correct labels GT 301 301 301 301 301 301Total correct labels AS 139 178 221 254 299 427Total existing lables GT 341 341 341 341 341 341Total existing lables AS 183 240 300 360 420 600Average correct labels GT 5.02 5.02 5.02 5.02 5.02 5.02Average correct labels AS 2.28 2.97 3.68 4.23 4.98 7.12Average existing labels GT 5.68 5.68 5.68 5.68 5.68 5.68Average existing labels AS 3 4 5 6 7 10Recall % GT 88.27 88.27 88.27 88.27 88.27 88.27Recall % AS 75.96 74.17 73.67 70.56 71.19 71.17Standard deviation recall % GT 12.97 12.97 12.97 12.97 12.97 12.97Standard deviation recall % AS 23.84 20.9 16.14 17.05 17.49 14.89Confidence interval recall 95% GT 3.26 3.26 3.26 3.26 3.26 3.26Confidence interval recall 95% AS 5.98 5.24 4.05 4.28 4.39 3.74Ratio recall AS to recall GT 0.86 0.84 0.83 0.8 0.81 0.81
Table B.2: Self-similarity distance evaluation results for the segmentations obtained with the range of testedL2 cluster values. Note that GT (ground truth) values were included for comparison with the AS (automaticsegmentation) results.
B9

Beatles_-_I_saw_her_standing_there
Nora_Jones_-_Lonestar
Prince_-_Kiss
The_Crystal_Method_-_Born_Too_Slow
Alanis_Morissette_-_Thank_You
Beastie_Boys_-_Intergalactic
Beatles_-_Devil_In_Her_Heart
Beatles_-_Dont_Bother_Me
Beatles_-_Misery
Beatles_-_Not_A_Second_Time
Beatles_-_Please_Mister_Postman
Bjork_-_Its_Oh_So_Quiet
Britney_Spears_-_Hit_Me_Baby_One_More_Time
Madonna-Like_a_virgin
Nick_Drake_-_Northern_Sky
REM_-_Drive
Seal_-_Crazy
Sinhead_O_Connor_-_Nothing_compares_to_you
Spice_Girls_-_Wannabe
The_Beatles_-_Good_Morning_Good_Morning
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_Club_Band
The_Beatles_-_Shes_Leaving_Home
The_Beatles_-_Within_You_Without_You
Wise_Guys_-_Kinder
A-HA_-_Take_on_me
Apollo_440_-_Stop_The_Rock
Beatles_-_All_Ive_Got_To_Do
Beatles_-_All_My_Loving
Beatles_-_I_Wanna_Be_Your_Man
Beatles_-_It_Wont_Be_Long
Beatles_-_Little_Child
Beatles_-_Money
Beatles_-_Roll_Over_Beethoven
Beatles_-_Till_There_Was_You
Beatles_-_You_Really_Got_A_Hold_On_Me
Chumbawamba_-_Thubthumping
Cranberries_-_Zombie
Deus_-_suds_and_soda
Nirvana_-_Smells_like_teen_spirit
Portishead_-_Wandering_star
Radiohead_-_Radiohead_-_Creep_Original_Ve
The_Beatles_-_A_Day_In_The_Life
The_Beatles_-_Being_For_The_Benefit_Of_Mr_Kite
The_Beatles_-_Fixing_A_Hole
The_Beatles_-_Getting_Better
The_Beatles_-_Lovely_Rita
The_Beatles_-_Sgt_Peppers_Lonely_Hearts_reprise
The_Beatles_-_When_Im_Sixty-Four
The_Beatles_-_With_A_Little_Help_From_My_Friends
The_Clash_-_Should_I_Stay_or_Should_I_Go
The_Monkees_-_Words
Wise_Guys_-_Powerfrau
Alanis_Morissette_-_08_-_Head_Over_Feet
Beatles_-_Hold_Me_Tight
Beatles_Anna_go_to
Black_Eyed_Peas_-_Cali_To_New_York
Chicago_-_Old_Days
Gloria_Gayner-I_Will_Survive
Oasis_-_Wonderwall
Simply_Red_-_Stars
The_Beatles_-_Lucy_In_The_Sky_With_Diamonds
0 10 20 30 40 50 60 70 80 90 100
Self Segment Similarity Matching GT vs AS with 5 Clusters L2 Recall ASRecall GT
Recall Percentage
Table B.3: Segment self-similarity results for all songs in the corpus, for an automatic segmentation using 5 L2clusters and sorted by the automatic segmentation’s recall. The inter-segment distance measure used was athe average of the KL divergence for each feature.
B10

Appendix C
Small Scale Evaluation of SongDistance Measure Results
Artist Album Song
Al Di Meola,Paco de Lucia,John McLaughlin The Guitar Trio La EstibaAl Di Meola,Paco de Lucia,John McLaughlin The Guitar Trio Beyond The MirageAl Di Meola,Paco de Lucia,John McLaughlin The Guitar Trio Midsummer NightAl Di Meola,Paco de Lucia,John McLaughlin The Guitar Trio Manha De CarnavalAl Di Meola,Paco de Lucia,John McLaughlin The Guitar Trio Letter From India
Bobby McFerrin Simple Pleasures Don’t Worry Be HappyBobby McFerrin Simple Pleasures All I WantBobby McFerrin Simple Pleasures Drive My CarBobby McFerrin Simple Pleasures Simple PleasuresBobby McFerrin Simple Pleasures Good Lovin
Iron Maiden The Number of the Beast The PrisonerIron Maiden The Number of the Beast 22 Acacia AvenueIron Maiden The Number of the Beast The Number Of The BeastIron Maiden The Number of the Beast InvadersIron Maiden The Number of the Beast Children Of The Damned
Mozart Six German Dances track 1Mozart Six German Dances track 2Mozart Six German Dances track 3Mozart Six German Dances track 4Mozart Six German Dances track 5
Transmissions Juno Reactor High Energy ProtonsTransmissions Juno Reactor The HeavensTransmissions Juno Reactor Luna-ticTransmissions Juno Reactor ContactTransmissions Juno Reactor Acid Moon
Table C.1: List of songs which compose the small scale evaluation corpus of distance measures.
C11

A B C D E Total
Cluster Covariance 16% 12% 28% 28% 16% 20%Euclidean Distance 96% 100% 100% 96% 96% 97.6%KL Multivariate Gaussian 68% 88% 64% 52% 60% 66.4%Avgerage KL of Gaussians 92% 72% 96% 84% 76% 84%
Table C.2: Results of the different cluster distance measures for all of the corpus categories with only 1 cluster incomparison which implies that the Earth Mover’s distance is not used. The results are expressed in percentageusing the the success score as mentioned in 4.2.3
Figure C.1: Comparison of the tested cluster distance measures using 1 cluster.
A B C D E Total
Cluster Covariance 28% 12% 24% 28% 24% 23.2%Euclidean Distance 76% 60% 100% 76% 80% 78.4%KL Multivariate Gaussian 28% 32% 88% 52% 48% 49.6%Avgerage KL of Gaussians 40% 52% 92% 56% 60% 60%
Table C.3: Results of the different cluster distance measures for all of the corpus categories with 10 clustersclusters in comparison. The results are expressed in percentage using the the success score as mentioned in4.2.3
C12

Figure C.2: Comparison of the tested cluster distance measures using 10 clusters.
A B C D E Total
Cluster Covariance 16% 24% 20% 20% 32% 22.4%Euclidean Distance 88% 64% 100% 80% 92% 84.8%KL Multivariate Gaussian 40% 40% 68% 44% 52% 48.8%Avgerage KL of Gaussians 52% 48% 76% 52% 68% 59.2%
Table C.4: Results of the different cluster distance measures for all of the corpus categories with 20 clustersclusters in comparison. The results are expressed in percentage using the the success score as mentioned in4.2.3
C13
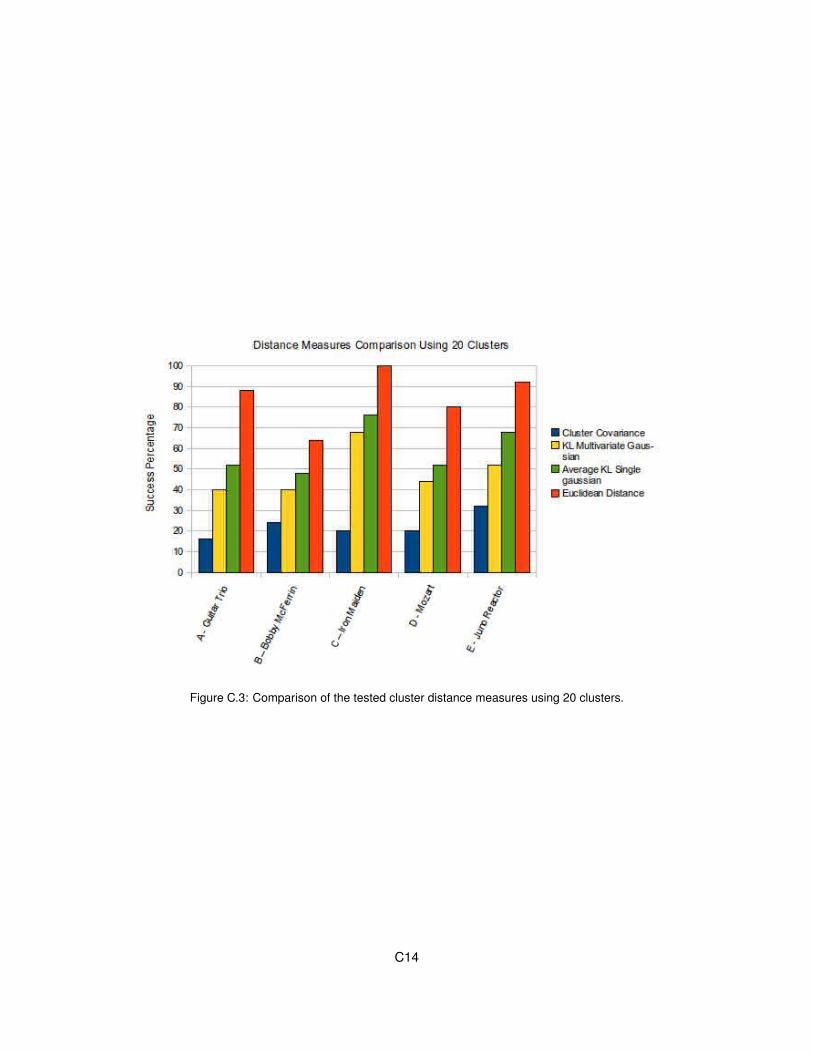
Figure C.3: Comparison of the tested cluster distance measures using 20 clusters.
C14