
Multiagent Decision Trees, Competitive Models, and Goal Satisfiability
31
DICTAP- Ostrava, Czech Republic Multiagent Decision Trees, Competitive Models, and Goal Satisfiability Cyrus F Nourani and Oliver Schulte Akdmkrd.tripod.com DE and SFU, Burnaby, Canada July 2013
Transcript of Multiagent Decision Trees, Competitive Models, and Goal Satisfiability

DICTAP- Ostrava, Czech Republic
Multiagent Decision Trees, Competitive Models, and Goal Satisfiability Cyrus F Nourani and Oliver Schulte Akdmkrd.tripod.com DE and SFU, Burnaby, Canada July 2013

Cyrus F.Nourani and Oliver Schutlte
Open Loop Control and Business Planning- A Preliminary

Description ! Modeling, objectives and reaching goals based on incremental
decisions are examined based on an agent tree modeling. A basis to model discovery and prediction planning is stated. The new agent computing theories the authors defined overe a decader are applied to present precise decision strategies on multiplayer games based on incremental desicion with only perfect information between agent pairs. Agent game trees are applied to cometitive models based on a novel competitive learning with agent multiplayer game tree planning. Compatibility ordering on agent game trees are presented. Model diagram embeddings form a basis for compatibility criteria on von Neumann, Morgenstern, Kuhn game trees. KEYWORDS Agent Decision Trees Competitive Models Economic Game Models Game Tree Degrees Plan Discovery
http://Akdmkrd.tripod.com and Oschulte.cs.sfu.ca FOR MORE INFO...
Project Goals
! Game Tree Competitive Business Model Planning ! Incremental Decision Trees ! Effective Game Tree Computation Models ! ERP with Predictive Game Models
! Predictive business modeling ! Agent decision tree applications to forecasting and predictive
risk analysis.
! Discovery Analytics ! Intelligent trees and intelligent game tree applications to
business cooperative computations. !

Technology
! New technology being used – Multiplayter Game Trees, Competitive Game Model Business
Planning, Game Tree Prediction, AI, ERPGame Trees benefits
!
! Predictive business modeling ! Agent decision tree applications to forecasting and predictive risk analysis.
Incremetal Decisions ! Multiplayer game tree modeling and planning ! Applications to business cooperative computations

Goals, Competitive Models, and Splitting Decision Trees
Agent game plan competitive model computing with splitting agent decision trees is the basis for novel sequential decision computing models. Aagent game trees and agent intelligent languages are presented with description computing logic models. A basis to model discovery and prediction planning is stated. .

Incremental Tree Plan Discovery
We start with incremental tree plan discovery deploying plan goal statisfiability for accomplishing goal driven decisions. Predictive diagrams from the first authors decade reaches to new decision procedures on game trees. Competive models are presented to realize goal satisfiability on decision trees.

Predictive Model Diagrams and Decisions
Predictive diagrams from the first authors 1994 decade starting at TU Berlin, reaches to new decision procedures on game trees. Competitive models are presented to realize goal satisfiability on decision trees. Section three presents agent And/Or game trees towards model comaptibaility based decision tree computing. Compatibility is encoded on description logic diagrams where generic model diagrams encode situation descriptions.
Compatibility Models ! Compatibility is encoded on description logic
diagrams where generic model diagrams encode situation descriptions. Compatibitlity ordering on game trees model sequential and incremental decisions. Planning is based on goal satisfaction at models. Multiagent planning is modeled as a competitive learning problem where the agents compete on game trees as candidates to satisfy goals hence realizing specific models where the plan goals are satisfied.

The Minimal Prediction Logic – Minimal prediction is an artificial intelligence technique defined
since (Nourani 1996-99, e.g. BSL)�s model-theoretic planning project . It is a cumulative nonmontonic approximation attained with completing model diagrams on what might be true in a model or knowledge base. A predictive diagram for a theory T is a diagram D (M), where M is a model for T, and for any formula q in M, either the function f: q → {0,1} is defined, or there exists a formula p in D(M), such that T U {p} proves q; or that T proves q by minimal prediction.
– The predictive diagram could be minimally represented by a set of functions {f1,...,fn} that inductively define the model. The trees we had defined by the notion of provability implied by the definition, could apply the selector functions on the figure above. The f terms and g terms, tree congruences, and predictive diagrams then characterize partial deduction with free trees. The predictive diagrams are applied to discover models to the intelligent game trees.

Minimal Prediction, Discovery, and Uncertainty
! The predictive diagrams are applied to discover models to the intelligent game trees. Prediction is applied to plan goal satisfiablity and can be combined with probabilities, and fuzzy logic to obtain, for example, confidence intervals.
! (Nourani 1999) has applied minimal prediction to simply encode knowledge with model diagrams to carry on automated deduction. Modeling with virtual tree planning is applied where uncertainty, including effector and sensor uncertainty, are relegated to agents, where competitive learning determines a confidence interval. Data discovery from KR on diagrams might be viewed as satisfying a goal by getting at relevant data which instaniates a goal.

KR, KB, and Model Discovery
– Model diagrams allow us to characterize incomplete KR. To key into the incomplete knowledge base we apply generalized predictive diagrams whereby specified diagram functions a search engine can select onto localized data fields. The predictive model diagrams (Nourani 1995-1999) could be minimally represented by the set of functions {f1,...,fn} that inductively define the model.

! Games play an important role as a basis to economic theories. Here the import is brought forth onto decision tree planning with agents. Intelligent tree computing theories defined since 1994 are applied to present precise strategies and prove theorems on multiplayer games. Game tree degree with respect to models is defined and applied to prove soundness and completeness.
Model discovery with Predictive logic

Data Discovery Competitive Analytics
! Data discovery from KR on diagrams might be viewed as satisfying a goal by getting at relevant data which instaniates a goal. The goal formula states what relevant data is sought. The first author has presented techniques which can be applied to planning with diagrams to implement discovery planning. In planning with generic diagrams that part of the plan that involves free Skolemized trees is carried along with the proof tree for a plan goal. Computing with diagram functions allows us to key to active visual databases with agents.
There are several systems designed for decisions and risk analysis, but the agent decision tree models and predictive models here are not carried on and are not comparable.

Business Object Computing Models
When it comes to Intelligent Interfaces business systems the basic applications for agent game trees is in managing to acquire and complete a critical business cooperative transaction. Intelligent game tree strategies are not always based on ordinary game principles. "!Intelligent business objects are applied to carry on cooperative computing and applied, for example, with the transactional business models.!!!!!!!

Competitive Game Models • An intelligent AND/OR tree is and AND/OR tree where the tree branches are
intelligent trees. The branches compute a Boolean function via agents. The Boolean function is what might satisfy a goal formula on the tree. An intelligent AND/OR tree is solved iff the corresponding Boolean functions solve the AND/OR trees named by intelligent functions on the trees. Thus node m might be f(a1,a2,a3) & g(b1,b2), where f and g are Boolean functions of three and two variables, respectively, and ai's and bi's are Boolean valued agents satisfying goal formulas for f and g.!
• g is on OR agent!• / | \!• |!• b1 | b2!• f f is an AND agent!• /__|__\!• / | \!• a1 a2 a3!
Example Competitive Models

Game Tree Competitive Models ! The computing model is based on a novel competitive learning with agent
multiplayer game tree planning. Specific agents are assigned to transform the models to reach goal plans where goals are satisfied based on competitive game tree learning. The planning applications include OR- Operations Research as goal satsfibility and micro-managing decision support with means-end analysis.
Modeling, objectives, and planning issues are examined with agent planning and competitive models.
! Model discovery and prediction is applied to compare models and get specific
confidence intervals to supply to goal formulas. Competitive model learning is presented based on the new agent computing theories we have defined since 1994. The foundations are applied to present precise decision strategies on multiplayer games with only perfect information between agent pairs. The game tree model is applied to train models.
Minimal Prediction, Discovery, and Uncertainty
! (Nourani 1999) has applied minimal prediction to simply encode knowledge with model diagrams to carry on automated deduction. Modeling with virtual tree planning is applied where uncertainty, including effector and sensor uncertainty, are relegated to agents, where competitive learning determines a confidence interval.
! Data discovery from KR on diagrams might be viewed as satisfying a goal by getting at relevant data which instaniates a goal.

Prediction involves constructing hypotheses,where each hypothesis is a set of atomicliterals ƒi; such that when some particulartheory T is augmented with ƒi, it entails theset of goal literals G, i.e. T U ƒi |= G. ƒimust be a subset of a set of ground atomicpredctibles A. It addition we must ensure TU ƒi is consistent. The set of all possiblehypotheses is ƒ= {ƒi}. Prediciton is minimalwhen the ƒi are the minimal such sets.

Multiplayer Economic Games – Games play an important role as a basis to economic
theories and can be applied to ERP as a basis to EM prototypes.
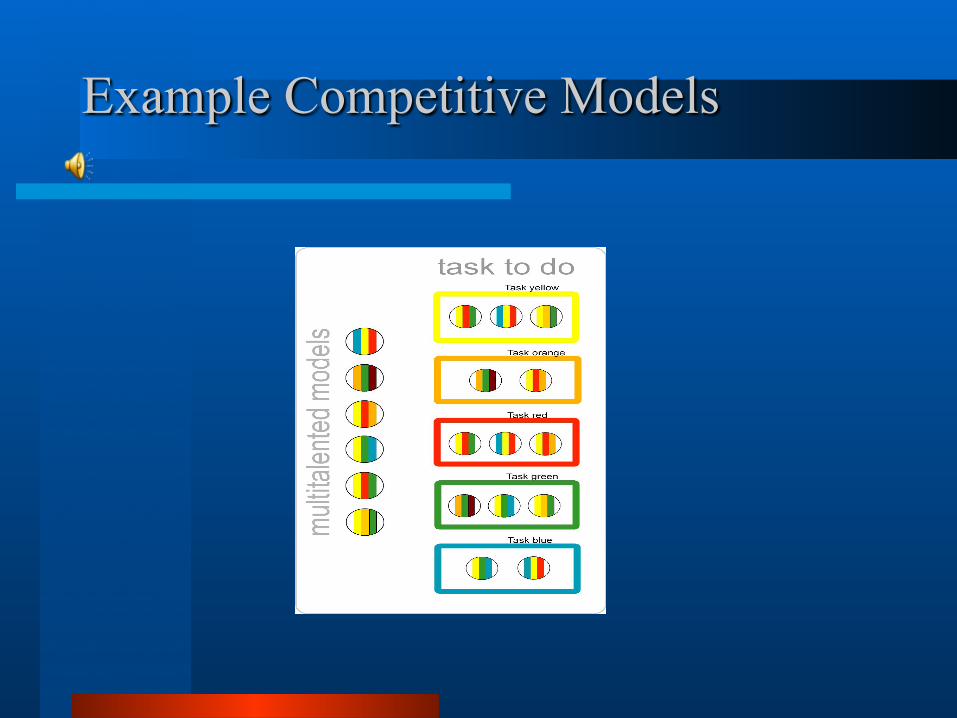
– Basic Example: A business manager has 6 multitalented players, designed with personality codes indicated with codes on the following balls. The plan is to accomplish 5 tasks with persons with matching personality codes to the task, constituting a team. Team competitive models can be generated with comparing teams on specific assignments based on the task area strength. The optimality principle might be to accomplish the goal with as few a team grouping as possible, thereby minimizing costs.

Cross Organizational Business Agent Models ! Time-space dynamics, short vs long term,
and soft indicators are crucial to competitive modeling.
! With dynamic modeling, 'live' competitive real life situations can be developed and different scenarios can be tested with specifc assumptions and the results can be quantitatively assessed.
! Our modeling techniques are applicable to where management teams 'practice' hypotheses on game plans and learn from experimentation and error.

Optimal Games? ! The following team coding example might be applied as an
example to plan optimal games where a project is managed with 5 tasks/color code. Only the players with the specific matching striped code can be assigned to a task. The goal is to accomplish the 5 tasks where the goal task is the rectangle with only two balls.
!
! The competitive optimality principle is to achieve the goals minimizing costs with the specific player code rule.
COMPATIBILITY ORDERINGS ! Agent game tree generic diagram satisfiability based on the above compatibility criteria on game tree nodes implies the following. Proposition 4.1 A game tree node generic diagram player at an agent game tree node is satisfiable if the Subtree agent game trees situations have a compatible generic diagram to the node.
! Proposition 4.2 Agent game tree generic diagrams encode compatibiliy satisfying the von Neumann, Morgenstern, Kuhn game tree criteria for the node player.

Model Diagrams and Compatibility Computations
! Definition 3.3 A Generic diagram for a structure M is a diagram D<A,G>, such that the G in definition 3.2 has a proper definition by specific function symbols.
! Remark: The functions above are those by which a standard model could be defined by inductive definitions. To decide compatibility of two situations we compare their generalized diagrams. Thus we have the following Theorem (Nourani 1994).
! Theorem 3 Two situations are compatible iff their corresponding generalized diagrams are compatible with respect to the Boolean structure of the set to which formulas are mapped (by the function h above, defining situations).

Model Embeddings
! D<A,G>[M] is the set of basic [atomic and negated atomic] sentences of the language L on the structrure A,L [A], true in M. Let us start from certain model-theoretic premises with propositions 3.1 and 3.2 known form basic model theory.
! Proposition 3.1 Let R and B be models for L. Then R is isomorphically embedded in B iff B can be expanded to a model of the diagram of R.
! Proposition 3.2 Let R and B be models for L. Then R is homomrphically embedded in B iff B can be expanded to a model of the positive diagram of R.

Agent Computing Models
! Definition 5.3 A function f is accesible by an agent iff either f or the agent function symbol are defined as proper language signature terms. A subtree t has access to an agent g iff there is a function symbol on t accessible by g.
! Definition 5.1 The tree intelligence degree, TID, is defined by induction on tree structures: (0) a constant function symbol f has TID f;
! (i) for a string function f, and tree f(t1,...,tn) the TID is defined by
! U TID (ti::f) , where (ti::f) refers to a subtree of ti with access to f via an agent function symbols on ti; (ii) for a splurge function f, TID is defined by U TID (f:ti), where f:ti is the updated tree ti since a single access to ti from f.

Agent Decision Tree Models ! . ! Definition* 5.2 Let us say that a logical theory T on intelligent
syntax is an intelligent theory iff for every proof step preserves TID. We state T<IST> |- φ when T is an Intelligent Syntax theory. At equational logic φ is an equational formula.
*e.g. MFCS, Opava,1998 pp. 281- 287. The following theorem is from Nourani 1996, European AI journal. Theorem 5 Let T be a ISL theory. Then T is (a) A Sound logical theory iff every axiom or proof rule in T is TID preserving; (b) A Complete logical theory iff there is a generic diagram G where the assignment of constants to M is a pair <A,G>, where A is an infinite set of constant symbols and G: A → M, such that {G[a]: a in A} the set of generators for M with G definable with the generic diagram, where M is a structure for the intelligent syntax language on which T is defined.

VMK Games ! On a forthcoming publication Nourani,-Schulte
[23] presents a mathematics glimpse, with a brief published at AMS, March 2012. The authors explore agent game plan competitive model computing. agent game The computing model is based on a novel competitive learning with agent multiplayer game tree planning above. The techniques are developed on a descriptive game logic where model compatibility is characterized on von Neumann, Morgenstern, Kuhn, abbreviated VMK, game descriptions model embeddings and game goal satisfiability.
More on solving Game Trees
! Among the newer accomplishmenst is the following theorem on VMK games.
! Theorem 4 A game tree is solved at a node iff there is an elementry embedding on the generic diagrams, sequentially upward to the node, corresponding to VMK played at the node.

Current Status ! High-level overview of progress
– On-track on the new technology areas
– Game Tree Competitive Business Model Planning ! VMK with Predictive Game Models
! Predictive modeling ! Agent decision business tree applications to forecasting and predictive risk analysis.
! Game tree applications to business and cooperative computations.
! Open Loop Control Business Planning Algorithm Designed
– Behind in specific systems building and deployment. Venture funding is being sought.




















