Auditory motion affects visual motion perception in a speeded discrimination task
Upload
independentCategory
view
0download
0
LAPORAN PROYEK AKHIR
PERANCANGAN SISTEM DIGITAL
“MOTION DETECTOR CAMERA BERBASIS PROGRAMMABLE
LOGIC DEVICES “
DISUSUN OLEHNAMA : DEKY MULYANA
NIM : J3D113046
KELAS : TEK B/P2
PROGRAM KEAHLIAN TEKNIK KOMPUTER

PROGRAM DIPLOMA
INSTITUT PERTANIAN BOGOR
2014
2

LEMBAR PENGESAHAN
“MOTION DETECTOR CAMERA BERBASIS PROGRAMMABLE
LOGIC DEVICES “
Disusun Oleh
NAMA : DEKY MULYANA
NIM : J3D113046
KELAS : TEK B/P2
i
ASISTEN DOSEN
DOSEN
ASEP SUHERI, ST, MT.

KATA PENGANTAR
Kita panjatkan puji dan syukur kehadirat ALLAH Yang
Maha Esa, karena berkat rahmatnya penulis bisa
menyelesaikan proposal ini, serta mudah-mudahan hasil
dari pembuatan proposal ini dapat bermanfaat khususnya
bagi penulis, dan umumnya kepada teman-teman, dan
mahasiswa yang membutuhkan materi yang terdapat pada
proposal ini.
Tujuan dari pembuatan proposal ini untuk memenuhi
tugas serta melengkapi proyek pembuatan rangkaian, pada
Praktikum Perancangan Sistem Digital dan judul proyek
penulis yaitu “MOTION DETECTOR CAMERA BERBASIS
PROGRAMMABLE LOGIC DEVICES “Penulis ucapkan terima kasih kepada segenap pihak
yang telah membantu penyelesaian proposal ini
khususnya dosen dan asisten mata kuliah Perancangan
Sistem Digital yang memberikan sedikit banyak ilmu yang
penulis butuhkan untuk proposal ini, serta pihak-pihak
yang telah membantu dalam penyelesaian proposal ini.
Penulis sadar akan segala kekurangan dari penulisan
ini. oleh karena itu, kritik dan saran yang membangun
ii

penulis harapkan dari pembaca, khususnya dosen dan
asisten mata kuliah Perancangan Sistem Digital serta
pihak-pihak yang telah membantu penyelesaian proyek dan
makalah ini, demi sempurnanya pembuatan makalah dan
proyek yang akan datang.
Bogor,
September 2014
Penulis
DAFTAR ISI
LEMBAR PENGESAHAN.....................................i
KATA PENGANTAR.......................................ii
DAFTAR ISI..........................................iii
BAB I.................................................1
PENDAHULUAN...........................................1
Latar Belakang Masalah..............................1
iii
Tujuan Kegiatan.....................................1
Metode Penulisan....................................2
Sistematika Penulisan...............................2
BAB II LANDASAN TEORI................................3
Sensor Motion Detector..............................3
Sensor PIR..........................................3
Motor DC............................................3
Driver L293D........................................4
Programmable Logic Device...........................4
PAL (Programmable Array Logic)......................5
GAL (Generic Array Logic)...........................5
BAB III MOTION DETECTOR CAMERA BERBASIS PROGRAMMABLE
LOGIC DEVICES..........................................7
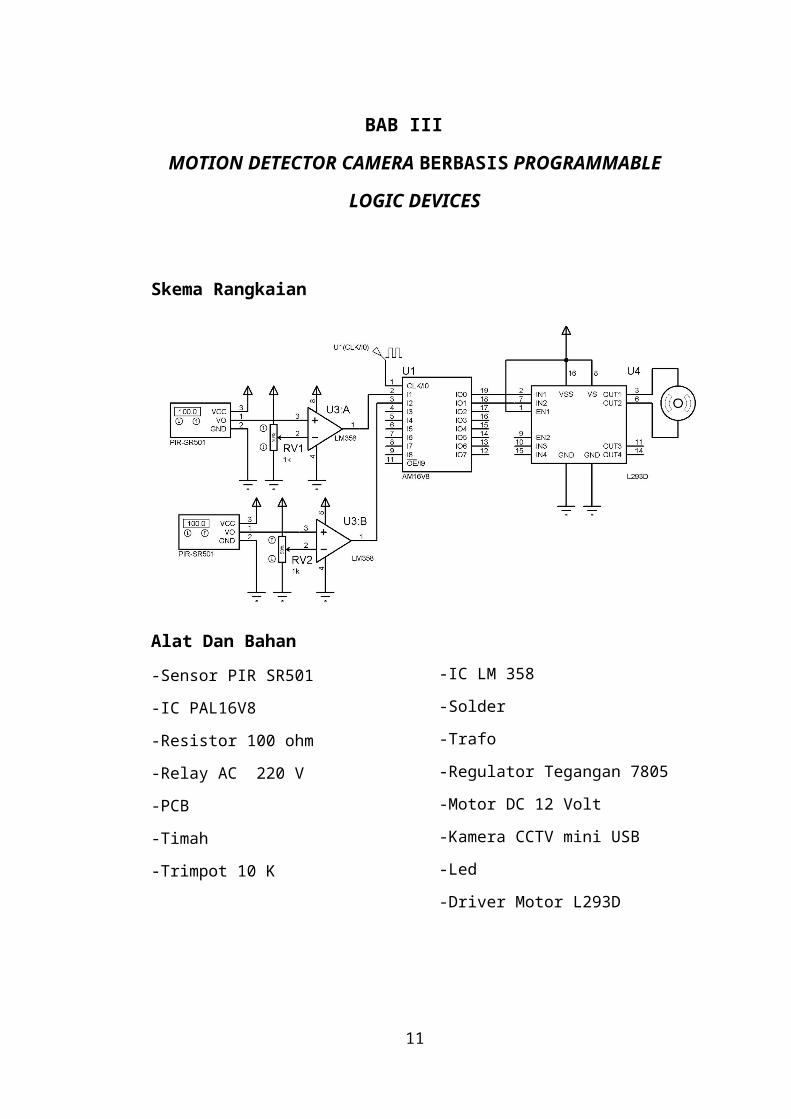
Skema Rangkaian.....................................7
Alat Dan Bahan......................................7
Blok Rangkaian......................................8
State Diagram......................................10
State Table........................................11
Code Program Dengan Cupl...........................11
Cara Kerja Rangkaian...............................12
Blok Rangkaian.....................................12
BAB IV...............................................13
HASIL DAN BAHASAN....................................13
iv

Hasil Rancangan....................................13
Hasil Pengukuran...................................13
BAB V................................................14
PENUTUP..............................................14
Kesimpulan.........................................14
Saran..............................................14
LAMPIRAN............................................v
v

BAB I
PENDAHULUAN
Latar Belakang MasalahKamera merupakan alat elektronik yang bekerja
secara visual, yaitu menampilkan ke dalam bentuk citra
digital apa yang alat tersebut lihat. Dalam kehidupan
nyata, kamera difungsikan dalam bidang hiburan
(multimedia), bidang penelitian dan riset (sebagai
media yang menampilkan objek yang terlalu kecil), dalam
bidang keamanan (sebagai media pengawas dan merekam
berbagai kejadian ).
Dalam bidang keamanan, posisi kamera menjadi
masalah dalam pengambilan citra digital, karena kamera
yang digunakan merupakan kamera yang tidak bergerak
(static), yang hanya mendapatkan satu titik citra
digital, sehingga sulit dalam pemantauan beberapa titik
citra digital sekaligus yang hanya menggunakan satu
buah kamera saja . Pemantauan gerakan juga menjadi
masalah pada kamera static, karena kamera static tidak
dilengkapi dengan modul pendeteksi gerakan, sehingga
kamera static, terasa kurang lengkap dalam bidang
keamanan.
Rumusan Masalah1. Bagaimana membuat kamera static menjadi sebuah kamera
dynamic ?
1

2. Bagaimana menghubungkan pendeteksi gerakan menjadi
objek yang dideteksi penggerak kamera dynamic
tersebut?
3. Bagaimana menggerakkan suatu kamera dinamic melalui
suatu perancangan?
Tujuan KegiatanTujuan yang ingin dicapai pada pemuatan proyek ini
adalah :
1. Memperoleh pemahaman mengenai mata kuliah
Perancangan Sistem Digital, khususnya materi
Programable Logic Device.
2. Menyelesaikan proyek akhir mata kuliah Perancangan
Sistem Digital.
3. Mengimplementasikan materi yang di dapatkan di
mata kuliah Perancangan Sistem Digital, di
kehidupan kita sehari-hari.
Metode PenulisanDalam penyusunan proposal ini data-data diperoleh
dari percobaan oleh penulis, data sheet, dan referensi
baik dari internet maupun buku.
Sistematika PenulisanSistematika penulisan dalam proposal ini terdiri
dari 4 bab yang terdiri dari:
BAB I Pendahuluan
2

Pada bab ini, berisi tentang latar belakang
masalah mengenai proyek ini , tujuan pembuatan
proyek ini, serta metode penulisan dalam proposal
ini.
BAB II Landasan Teori
Pada bab ini berisi tentang sekilas berbagai macam
teori terkait pembuatan proyek Peracangan sistem
digital ini, mulai dari teori sensor pir,
motorstepper, hingga integrated circuit programmable logic
devices.
BAB III Motion Detector Kamera
Pada bab ini berisi tentang alat dan bahan
rangkaian motion detector kamera, diagram blok
rangkaian motion detector kamera, skema rankaian
motion detector kamera, state diagram, state table,
penyederhanaan peta karnaugh, dan listing kode
cupl rangkaian motion detector.
BAB IV Hasil Dan Bahasan
Pada bab ini berisi hasil dari pembuatan proyek
rangkaian motion detector kamera, hasil pengukuran
rangkaian sensor moton detector dan analis
rangkaian.
BAB V Penutup
3

Pada bab ini berisi kesimpulan mengenai hasil
akhir dari rangkaian motion detektor, saran untuk
para pembaca, saran untuk dosen dan asisten
pengajar.
4

BAB II
LANDASAN TEORI
Sensor Motion DetectorSensor motion detector adalah kumpulan perangkat
yang berisi sensor elektronik yang mendeteksi perubahan
kondisi berdasarkan pergerakan di dalam bidang pandang.
Pada dasarnya ada tiga jenis sensor sebagai mata
yaitu :
Sensor infra merah pasif (mendeteksi panas tubuh).
Sensor ultrasonic (mengirimkan gelombang dan
menangkap gelombang pantul untuk mendeteksi adanya
gerakan)
Sensor mikrowave (mengirimkan sinyal microwave dan
menangkap pantulannya dari obyek bergerak)
Sensor PIRPIR (Passive Infrared Receiver) merupakan sebuah sensor
berbasiskan infrared. Akan tetapi, tidak seperti sensor
infrared kebanyakan yang terdiri dari IR LED dan
fototransistor. PIR tidak memancarkan apapun seperti IR
LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya
merespon energi dari pancaran sinar inframerah pasif
yang dimiliki oleh setiap benda yang terdeteksi
olehnya. Benda yang bisa dideteksi oleh sensor ini
biasanya adalah tubuh manusia.
5

Motor DCMotor DC memerlukan suplai tegangan yang searah
pada kumparan medan untuk diubah menjadi energi
mekanik. Bagian utama motor DC adalah stator dan rotor
dimana kumparan medan pada motor dc disebut stator
(bagian yang tidak berputar) dan kumparan jangkar
disebut rotor (bagian yang berputar).
Bentuk motor paling sederhana memiliki kumparan
satu lilitan yang bias berputar bebas di antara kutub-
kutub magnet permanen. Catutegangan dc dari baterai
menuju ke lilitan melalui sikat yang menyentuh
komutator, dua segmen yang terhubung dengan dua ujung
lilitan.
Driver L293DIC L293D adalah IC yang di desain khusus sebagai
driver motor DC dan dapat dikendalikan dengan rangkaian
TTL maupun mikrokontroler. Motor DC yang dikontrol
dengan driver IC L293D dapat dihubungkan ke ground
maupun ke sumber tegangan positif karena di dalam
driver L293D sistem driver yang digunakan adalah totem
pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah
driver motor DC yang berdiri sendiri sendiri dengan
kemampuan
6

mengalirkan arus 1 Ampere tiap drivernya. Sehingga
dapat digunakan untuk membuat driver H-bridge untuk 2
buah motor DC. Konstruksi pin driver motor DC IC l293D
adalah sebagai berikut. Konstruksi Pin Driver Motor DC
IC L293D
Pin Driver IC L293D
Programmable Logic DevicePembagian komponen elektronika berdasarkan
sifatnya dapat dibedakan menjadi dua, yaitu : non
programmabel dan programmabel. Komponen non programmabel,
adalah komponen elektronika yang fungsinya tetap :
pasif (R, L, C, Dioda, IC) dan aktif (Transistor,
IC).Komponen Programmabel, adalah komponen yang
fungsinya tergantung pada program yang diberikan.
Jenis-jenis bentuk fisik rangkaian komponen programabel
diantaranya :
- PLD (Program Logic Device) -> Tidak dapat dipprogram
ulang
7

- PAL (Pragrammble Array Logic) -> Dapat diprogram
ulang
- GAL (Generic Array Logic) -> Dapat diprogram ulang
- FPGA (Field Programabel Gate Array) -> Dapat
deprogram ulang
PAL (Programmable Array Logic)Sifat pemprograman : dapat diprogram secara manual
atau menggunakan bantuan computer. Program PALASM +
EPROM (Erasable Programabel Read Only Memory)
Porgrammer. Sifat program memutus fuse. Dengan program
pada PAL dapat : read/write dan menyimpan intern maupun
ekstern (dari ke disket, CD, Hardisk, dll).
GAL (Generic Array Logic)Sifat pemrograman : termasuk EEPLD (Electrically
Erasable PLD). Memiliki Register, Clock, dan Alamat.
Dapat diprogram dengan bantuan komputer, untuk
menghapus program dapat digunakan universal programmer.
Arsitektur GAL(Generic PAL) diperkenalkan oleh
Lattice pada awal tahun 1980-an. GAL berisi beberapa
pengembangan penting dari rancangan PAL yang pertama
kali, yaitu:
1. Adanya tambahan berupa sel output (dinamakan
Macrocell) yang berisi flip-flop, beberapa gerbang
8

logika dasar dan multiplekser. Macrocell sendiri
bersifat programmable sehingga bisa dioperasikan
dengan beberapa cara.
2. Adanya sebuah sinyal feedback dari Macrocell ke
susunan yang bersifat programmable. Hal ini
menyebabkan kemampuan sirkuit lebih beraneka ragam.
3. Adanya EEPROM yang lebih baik daripada sekedar PROM
atau EPROM. Sebuah penanda elektronik untuk
identifikasi juga merupakan salah satu pengembangan
chip dari PAL ke GAL.
Pada perkembangan awal, GAL hanya berupa
SPLD(Simple PLD) yang masih dihasilkan dalam paket
terpisah. Selanjutnya, GAL kemudian dilengkapi dengan
berkas dasar yang terdapatsecara umum pada
CPLDs(kecuali pada CPLD Cool Runner dimana masih
menggunakan standar PLA).
FPGA (Field Programmable Gate Array)
Merupakan komponen programabel yang sudah komplek
bentuk fisik rangkaian dan cara pemrogrammannya. FPGA
mempunyai beberapa keluarga diantara adalah LCA (Logic
Cell Array). Dalam amplikasinya, LCA dapat digabungkan
dengan komponen mikrokontroler, dan bertindak sebagai
alat bantu untuk meningkatkan kinerja mikrokontroler.
9

FPGA (Field Programmable Gate Array) mengandung
makna, yaitu Field Programmable yaitu rangkaian yang dapat
diprogram ulang. Sedangkan, Gate Array dapat dikatakan
sebagai rangkaian logika yang memiliki interkoneksi
sehingga dapat dikonfigurasi antara yang satu dengan
yang lain.
Sehingga didapatkan definisi FPGA (Field
Programmable Gate Array) yaitu rangkaian digital yang
dapat diprogram ulang yang terdiri dari gerbang logika
yang memiliki interkoneksi, sehingga dapat
dikonfigurasi antara yang satu dengan yang lain.
10
BAB III
MOTION DETECTOR CAMERA BERBASIS PROGRAMMABLE
LOGIC DEVICES
Skema Rangkaian
Alat Dan Bahan-Sensor PIR SR501
-IC PAL16V8
-Resistor 100 ohm
-Relay AC 220 V
-PCB
-Timah
-Trimpot 10 K
-IC LM 358
-Solder
-Trafo
-Regulator Tegangan 7805
-Motor DC 12 Volt
-Kamera CCTV mini USB
-Led
-Driver Motor L293D
11

Blok Rangkaian
A. Blok Sensor Fungsi dari blok rangkaian
adalah membaca pergerakan dari
luar, kemudian sensor akan
mengubah ke dalam bentuk digital
(logika 0 dan logika 1) yang
dihubungkan dengan port input pada
blok selanjutnya. Ketika sensor
mendeteksi suatu pergerakan maka
sensor akan mengeluarkan output
berlogika high (logika 1).
Penggunaan dua buah sensor mengacu pada
pergerakan kamera, ketika sensor 1
mendeteksi pergerakan, maka kamera akan
mengarah ke posisi dimana sensor 1
berada, begitupun jika sensor 2
mendeteksi adanya suatu pergerakan maka
kamera akan mengarah ke posisi sensor 2.
B. Blok IC PAL16V8
Blok ini merupakan inti
dari rangkaian detector
motion kamera, melalui blok
12
ini, logika dari rangkaian sensor motion detector dapat
berjalan, karena ic ini dibangun berdasarkan program
menggunakan bahasa CUPL, sehingga sebuah output dapat
diatur sesuai dengan keaadaan input yang dihubungkan.
Adapun fungsi dari pin ic in antara lain :
A. PIN 1 : CLOCK // Untuk menghubungkan ic dengan
detak/clock, agar siklus waktu state diagram dapat
berjalan kontinyu.
B. PIN 2-9 : INPUT 1-9 //Untuk menghubungkan ic dengan
alat masukan elektronik, seperti Sensor ataupun
kendali dari rangkaian lain.
C. PIN 10 : GND //Untuk menghubungkan ic dengan sumber
tegangan ground.
D. PIN 11 : OE //Untuk mengaktifkan kendali input
terhadap output, untuk mengaktifkannya cukup
dihubungkan dengan logika 0 atau GND.
E. PIN 12-19 : OUTPUT 0-7 //Untuk memberikan hasil
logika dari pemprosesan logika. Output bisa
dihubungkan dengan driver (pengendali) atau beban
(led, motor, atau relay).
F. PIN 20 : VCC //Untuk Untuk menghubungkan ic dengan
sumber tegangan vcc. Yaitu sebesar +5
volt.
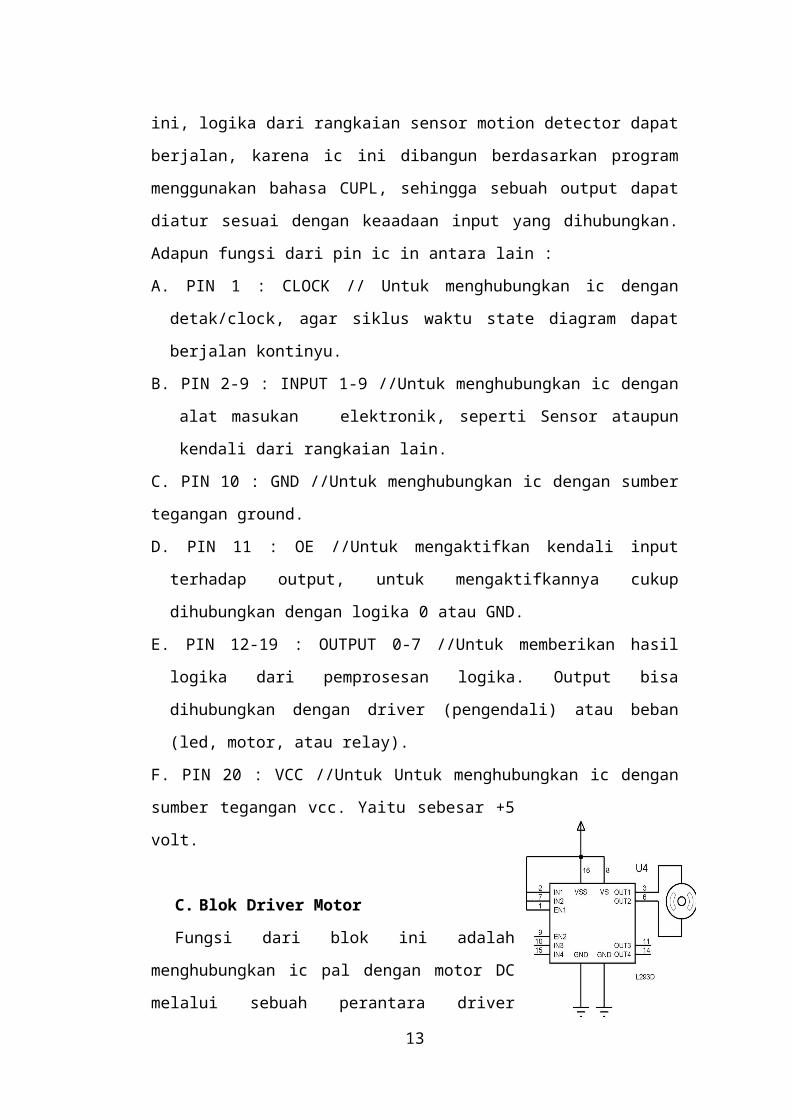
C. Blok Driver Motor
Fungsi dari blok ini adalah
menghubungkan ic pal dengan motor DC
melalui sebuah perantara driver
13

sebagai cara untuk memberikan tegangan besar dengan
kendali input yang hanya memerlukan tegangan kecil.
Driver motor stepper bisa menggunakan ic l293D atau
dengan 2 buah transistor.
D. Blok Power Supply
Fungsi dari rangkaian ini
adalah menyediakan tegangan
masukan sebesar +12volt untuk
tegangan driver motor stepper
dan driver relay, dan +5 volt
untuk tegangan pal16v8 dan sensor pir sr501.
State Diagram
14
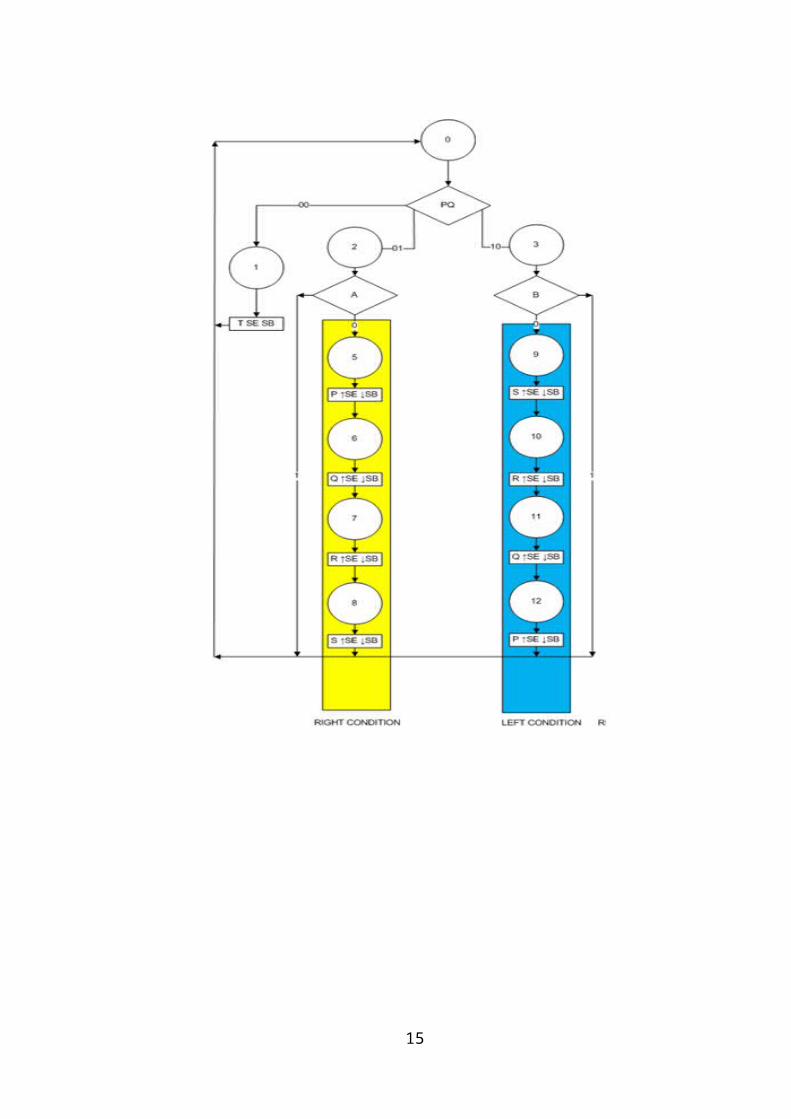
15

State Table
16

Code Program Dengan Cupl
Cara Kerja RangkaianKetika sensor 1 mendeteksi adanya pergerakan maka
sensor 1 akan memberikan input ke pld, kemudian pld
akan menggerakkan motor DC ke a rah kanan , agar tidak
terjadi pergerakan yang tidak diinnginkan maka setelah
motor mencapai ujung yang telah ditetapkan maka motor
stepper akan mengaktifkan limit switch 1, sehingga motor
DC berhenti pada posisi yang telah ditetapkan. Ketika
sensor 2 mendeteksi adanya pergerakan maka motor
17

stepper bergerak ke arah kiri, motor akan berhenti
setelah motorDC menyentuh limit switch 2,.
Blok Rangkaian
18

BAB IV
HASIL DAN BAHASAN
Hasil Rancangan
Hasil PengukuranKeadaan Motor + Motor - Keterangan
Sesnor pir 1
mendeteksi
ON OFF Kamera
berputar ke
kananSensor pir 2
mendeteksi
OFF ON Kamera
berputar ke
kiriKedua Sensor N/A N/A Keadaan yang
19

Mendeteksi dilarangSesnor tidak
mendeteksi
apapun
N/A N/A Keadaan yang
dilarang
20

BAB V
PENUTUP
KesimpulanIc PLD berguna untuk pemasangan logika dan
pengendali rangkaian, dengan ic ini bisa digunakan
untuk berbagai macam rangkaian yang menggunakan satu
atau beberapa logika yang output nya dapat diatur
sesuai kebutuhan.
Saran
Pada proyek psd hanya dapat digunakan beberapa
logika keluaran input dan output. Sehingga untuk
logika yang lebih dan kompleks pld tidak bisa
menjangkaunya.
Pada proyek psd, ic pld tidak dapat digunakan
untuk keluaran LCD.
Pada proyek psd, tidak terdapat memori, sehingga
kita harus memakai memori tambahan.
Kemampuan alat dalam mengukur ditentukan juga oleh
kemampuan sensor dalam mendeteksi sebuah
pergerakan.
Kemampuan pergerakan arah kamera sangat terbatas
21

22

LAMPIRAN
v

vi

vii

viii

ix
Copyright © 2022 FDOKUMEN