ASPEK TEKNIK BUDIDAYAASPEK TEKNIK BUDIDAYAASPEK TEKNIK BUDIDAYA
Modul 10Penerapan Simulink Untuk Simulasi
Disusun oleh :
Muhamar Kadaffi,MT
PROGRAM STUDI TEKNIK ELEKTROFAKULTAS TEKNIK INDUSTRIUNIVERSITAS MERCU BUANA
J A K A R T A2011

ABSTRAK
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 ii

Sistem adalah kumpulan obyek yang saling
berinteraksi dan bekerja sama untuk mencapai tujuan logis
dalam suatu lingkungan yang kompleks. Obyek yang menjadi
komponen dari sistem dapat berupa obyek terkecil dan bisa
juga berupa sub-sistem atau sistem yang lebih kecil lagi.
Dalam definisi ini disertakan elemen lingkungan karena
lingkungan sistem memberikan peran yang sangat penting
terhadap perilaku sistem itu. Bagaimana komponen-komponen
sistem itu berinteraksi, hal itu adalah dalam rangka
mengantisipasi lingkungan. Mengamati sistem bukan hanya
mendefinisikan komponen-komponen pendukung sistem, tetapi
lebih dari dari itu harus pula mengetahui perilaku dan
variabel-variabel yang ada di dalamnya. Paling tidak
analisis terhadap sistem harus dapat membuat konsepsi
tentang sistem itu. Ada beberapa cara untuk dapat
merancang, menganalisis dan mengoperasikan suatu sistem.
Salah satunya adalah dengan melakukan pemodelan, membuat
model dari sistem tersebut.
Model adalah alat yang sangat berguna untuk
menganalisis maupun merancang sistem. Sebagai alat
komunikasi yang sangat efisien, model dapat menunjukkan
bagaimana suatu operasi bekerja dan mampu merangsang
untuk berpikir bagaimana meningkatkan atau
memperbaikinya.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 iii

Model didefinisikan sebagai suatu deskripsi logis
tentang bagaimana sistem bekerja atau komponen-komponen
berinteraksi. Dengan membuat model dari suatu sistem maka
diharapkan dapat lebih mudah untuk melakukan analisis.
Hal ini merupakan prinsip pemodelan, yaitu bahwa
pemodelan bertujuan untuk mempermudah analisis dan
pengembangannya. Melakukan pemodelan adalah suatu cara
untuk mempelajari sistem dan model itu sendiri dan juga
bermacam-macam perbedaan perilakunya.
Simulasi merupakan suatu teknik meniru operasi-
operasi atau proses- proses yang terjadi dalam suatu
sistem dengan bantuan perangkat komputer dan dilandasi
oleh beberapa asumsi tertentu sehingga sistem tersebut
bisa dipelajari secara ilmiah (Law and Kelton, 1991).
Dalam simulasi digunakan komputer untuk mempelajari
sistem secara numerik, dimana dilakukan pengumpulan data
untuk melakukan estimasi statistik untuk mendapatkan
karakteristik asli dari sistem. Simulasi merupakan alat
yang tepat untuk digunakan terutama jika diharuskan untuk
melakukan eksperimen dalam rangka mencari komentar
terbaik dari komponen-
komponen sistem. Hal ini dikarenakan sangat mahal dan
memerlukan waktu yang lama jika eksperimen dicoba secara
riil. Dengan melakukan studi simulasi maka dalam waktu
singkat dapat ditentukan keputusan yang tepat serta
dengan biaya yang tidak terlalu besar karena semuanya
cukup dilakukan dengan komputer. Pendekatan simulasi
diawali dengan pembangunan model sistem nyata. Model
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 iv

tersebut harus dapat menunjukkan bagaimana berbagai
komponen dalam sistem saling berinteraksi sehingga benar-
benar menggambarkan perilaku sistem. Setelah model dibuat
maka model tersebut ditransformasikan ke dalam program
komputer. Penerapan simulasi dalam program komputer
disebut sebagai Simulink.
Simulink adalah salah satu bagian dari MatLab
(Matriks Laboratory) Program. Simulink dapat digunakan
untuk mensimulasi sistem, dalam artinya mengamati dan
menganalisa perilaku dari tiruan sistem. Tiruan sistem
diharapkan mempunyai perilaku yang sangat mirip dengan
sistem fisik. Jika digunakan dengan benar, simulasi akan
membantu proses analisis dan desain sistem.
Kata Kunci : Pemodelan, Simulasi dan Simulink
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 v

DAFTAR ISI
ABSTRAK.....................................................ii
DAFTAR ISI..................................................iv
KATA PENGANTAR...............................................5
1. PENDAHULUAN.............................................6
1.1 PEMODELAN DAN SIMULASI.................................6
1.2 TAHAPAN DALAM PEMODELAN...............................11
1.3 IMPLEMENTASI KOMPUTER.................................11
1.4 BAHASA SIMULASI.......................................12
1.5 STRUKTUR BAHASA SIMULASI..............................13
1.6 KARAKTERISTIK BAHASA SIMULASI.......................14
1.7 PEMILIHAN BAHASA SIMULASI.............................16
1.8 SEKILAS TENTANG MATLAB................................16
2. PENERAPAN SIMULINK PADA PENGENDALI PID.................18
2.1 PERUMUSAN MASALAH....................................18
2.2 AKSI KENDALI PROPORSIONAL (P).........................19
2.3 AKSI KENDALI PROPORSIONAL DAN DERIVATIVE (PD).........21
2.4 AKSI KENDALI PROPORSIONAL DAN INTEGRAL (PI)...........22
2.5 AKSI KENDALI PROPORSIONAL, INTEGRAL DAN DERIVATIVE (PID)
24
KESIMPULAN..................................................28
DAFTAR PUSTAKA..............................................30
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 vi

Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 vii

KATA PENGANTAR
Puji syukur selalu Penyusun panjatkan kehadirat
Allah SWT, Tuhan semua alam semesta yang selalu
memberikan rahmat dan kesehatan kepada semua mahluk
ciptaan-Nya termasuk kepada Penyusun sampai dengan saat
ini. Sehingga Penyusun dapat menyelesaikan tugas
pembuatan makalah Mata Kuliah Simulasi dan Pemodelan
dengan thema Penerapan Simulink untuk Simulasi ini tepat
waktu dan dengan sebaik-baiknya sesuai kemampuan yang
dimiliki oleh Penyusun.
Meskipun hasil dari tugas ini jauh dari kata
sempurna, Penyusun berharap makalah ini dapat bermanfaat
bagi semua pihak, terutama Penyusun sendiri didalam
mempelajari mata kuliah Pemodelan dan Simulasi terutama
dalam kaitannya dengan pengertian dan penggunaan Simulink
untuk simulasi seperti tercantum dalam thema makalah ini.
Terima kasih yang sebesar-besarnya Penyusun ucapkan
kepada Bapak Muhammar Kadaffi ST, MT. yang telah
membimbing Penyusun dalam melakukan berbagai macam
kegiatan perkuliahan terutama dalam mata kuliah Pemodelan
dan Simulasi, serta kepada teman-teman kuliah dan semua
pihak yang telah ikut membantu Penyusun dalam menulis dan
menyusun makalah ini sehingga dapat terselesaikan tepat
waktu dan sebaik-baiknya sesuai dengan kemampuan yang
ada.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 8

Jakarta, 30
Desember 2011 Penyusun

1.PENDAHULUAN
1.1PEMODELAN DAN SIMULASI
Sistem adalah kumpulan obyek yang saling
berinteraksi dan bekerja sama untuk mencapai tujuan logis
dalam suatu lingkungan yang kompleks. Obyek yang menjadi
komponen dari sistem dapat berupa obyek terkecil dan bisa
juga berupa sub-sistem atau sistem yang lebih kecil lagi.
Dalam definisi ini disertakan elemen lingkungan karena
lingkungan sistem memberikan peran yang sangat penting
terhadap perilaku sistem itu. Bagaimana komponen-komponen
sistem itu berinteraksi, hal itu adalah dalam rangka
mengantisipasi lingkungan.
Mengamati sistem bukan hanya mendefinisikan
komponen-komponen pendukung sistem, tetapi lebih dari
dari itu harus pula mengetahui perilaku dan variabel-
variabel yang ada di dalamnya. Paling tidak analisis
terhadap sistem harus dapat membuat konsepsi tentang
sistem itu. Ada beberapa cara untuk dapat merancang,
menganalisis dan mengoperasikan suatu sistem. Obyek
penelitian biasanya merupakan suatu sistem dengan
kerumitan-kerumitan yang sangat kompleks sehingga
memerlukan pengabstraksian. Salah satunya adalah dengan
melakukan pemodelan, membuat model dari sistem tersebut.
Istilah pemodelan adalah terjemahan bebas dari
istilah modelling. Untuk menghindari berbagai pengertian
atau penafsiran yang berbeda-beda, maka istilah pemodelan
dapat diartikan sebagai suatu rangkaian aktivitas
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 10
pembuatan model. Sebagai landasan untuk lebih memahami
pengertian pemodelan maka diperlukan suatu penelaahan
tentang model secara spesifik ditinjau dari pendekatan
sistem.
Dalam konteks terminologi penelitian operasional
(operation research), secara umum model didefinisikan
sebagai suatu perwakilan atau abstraksi dari suatu obyek
atau situasi aktual. Model melukiskan hubungan-hubungan
langsung dan tidak langsung serta kaitan timbal-balik
dalam terminologi sebab akibat. Oleh karena suatu model
adalah abstraksi dari realita, maka pada wujudnya lebih
sederhana dibandingkan dengan realita yang diwakilinya.
Model dapat disebut lengkap apabila dapat mewakili
berbagai aspek dari realita yang sedang dikaji. Model
adalah alat yang sangat berguna untuk menganalisis maupun
merancang sistem. Sebagai alat komunikasi yang sangat
efisien, model dapat menunjukkan bagaimana suatu operasi
bekerja dan mampu merangsang untuk berpikir bagaimana
meningkatkan atau memperbaikinya. Model didefinisikan
sebagai suatu deskripsi logis tentang bagaimana sistem
bekerja atau komponen-komponen berinteraksi.
Salah satu syarat pokok untuk mengembangkan model
adalah menemukan peubah-peubah apa yang penting dan
tepat. Penemuan peubah-peubah ini sangat erat
hubungannya dengan pengkajian hubungan-hubungan yang
terdapat di antara peubah-peubah. Teknik kuantitatif
seperti persamaan regresi dan simulasi digunakan untuk
mempelajari keterkaitan antar peubah dalam sebuah model.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 11

Memang dimungkinkan untuk dapat merancang-bangun
dengan baik berbagai model sistem tanpa matematik, dan
/atau mengetahui matematika tanpa analisis sistem. Namun
demikian, perumusan matematika yang terpilih dapat
mempermudah pengkajian sistem, yang pada umumnya
merupakan suatu kompleksitas. Sifat universalitas dari
matematik dan notasi-notasinya akan memperlancar
komunikasi dan transfer metode yang dikembangkan di suatu
negara atau bidang ilmu tertentu ke bidang lainnya.
Kebanyakan para pengguna analisis sistem menjumpai
kesukaran untuk mengimplementasikan notasi-notasi
matematika ke dalam format konsepsi disiplin ilmunya.
Mereka kemudian memilih alternatif pembuatan model
konsepsi (conceptual model) yang sifatnya informal karena
terasa lebih mudah. Bagaimanapun juga, para ahli sistem
berpendapat bahwa keuntungan lebih besar dibandingkan
dengan biaya yang diperlukan dalam mengkaji permasalahan
penelitian secara matematis. Hal ini disebabkan adanya
daya guna yang berlipat ganda pada proses rancang bangun
dan analisis dalam bentuk bahasa matematika yang sangat
penting dalam teori ekonomi, keteknikan, ilmu alam hingga
ilmu-ilmu sosial. Meskipun teknik-tekniknya sangat
beragam dan filosofinya masih dipandang kontraversi namun
ide dasarnya adalah sederhana yaitu menjabarkan
keterkaitan-keterkaitan yang ada dalam dunia nyata
menjadi operasi-operasi matematis.
Dengan membuat model dari suatu sistem maka
diharapkan dapat lebih mudah untuk melakukan analisis.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 12

Hal ini merupakan prinsip pemodelan, yaitu bahwa
pemodelan bertujuan untuk mempermudah analisis dan
pengembangannya. Melakukan pemodelan adalah suatu cara
untuk mempelajari sistem dan model itu sendiri dan juga
bermacam-macam perbedaan perilakunya.
Ada beberapa langkah di dalam mempelajari sebuah
sistem. Secara lengkap digambarkan dengan diagram /
gambaran seperti dibawah ini :
Gambaran Dari Aneka Cara Mempelajari Sebuah Sistem :
Jika suatu sistem secara fisik memungkinkan dan
tidak memakan biaya yang besar untuk dioperasikan sesuai
dengan kondisi (scenario) yang kita inginkan maka cara ini
merupakan cara yang terbaik karena hasil dari eksperimen
ini benar-benar sesuai dengan sistem yang dikaji. Namun
sistem seperti itu jarang sekali ada dan penghentian
operasi sistem untuk keperluan eksperimen akan memakan
biaya yang sangat besar. Selain itu untuk sistem yang
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 13
belum ada atau sistem yang masih dalam rancangan maka
eksperimen dengan sistem aktual jelas tidak bisa
dilakukan sehingga satu-satunya cara adalah dengan
menggunakan model sebagi representasi dari sistem aktual.
Model fisik atau ikonik pada hakekatnya merupakan
perwakilan fisik dari beberapa hal, baik dalam bentuk
ideal maupun dalam skala yang berbeda. Model ikonik ini
mempunyai karakteristik yang sama dengan hal yang
diwakilinya, dan terutama amat sesuai untuk menerangkan
kejadian pada waktu yang spesifik. Model ikonik dapat
berdimensi dua (foto, peta, cetak-biru) atau tiga dimensi
(prototipe mesin, alat, dan lainnya). Apabila model
berdimensi lebih dari tiga tidak mungkin lagi
dikonstruksi secara fisik sehingga diperlukan kategori
model simbolik.
Model fisik mengambil dari sebagian sifat fisik dari
hal-hal yang diwakilinya, sehingga menyerupai sistem yang
sebenarnya namun dalam skala yang berbeda. Walaupun
jarang dipakai, model ini cukup berguna dalam rekayasa
sistem.
Pada hakekatnya, ilmu sistem memusatkan perhatian
pada model matematis atau model simbolik sebagai
perwakilan dari realita yang dikaji. Format model
simbolik dapat berupa bentuk angka, simbol dan rumus.
Jenis model simbolik yang umum dipakai adalah suatu
persamaan (equation).
Bentuk persamaan adalah tepat, singkat dan mudah
dimengerti. Simbol persamaan tidak saja mudah
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 14
dimanipulasi dibandingkan dengan kata-kata, namun juga
lebih cepat dapat ditanggap maksudnya. Suatu persamaan
adalah bahasa yang universal pada penelitian operasional
dan ilmu sistem, dimana di dalamnya digunakan suatu
logika simbolis.
Dalam mempelajari ilmu sistem diperlukan suatu
pengertian yang mendasar tentang simbol-simbol
matematika; karena kalau tidak demikian akan menambah
kompleksitas dari konsep pengkajian itu sendiri.
Bagaimanapun juga sebagaimana mempelajari suatu hal maka
kunci dari kelancaran dan pemahamannya adalah frekuensi
latihan aplikasinya. Dengan demikian diharapkan para
pengguna dapat secara efisien menangkap arti dari setiap
notasi matematis yang disajikan. Misalnya , notasi ai
dapat diartikan faktor peubah a, dan Aij dapat
digambarkan sebagai Tabel matriks peubah A dengan baris i
dan kolom j.
Dalam penelitian, model matematis lebih sering
dipakai jika dibandingkan dengan model fisik. Pada model
matematis, sistem direpresentasikan sebagai hubungan
logika dan hubungan kuantitatif untuk kemudian
dimanipulasi supaya dapat dilihat bagaimana sistem
bereaksi.
Setelah model matematis berhasil dirumuskan, model
tersebut dipelajari kembali apakah model yang telah
dikembangkan dapat menjawab pertanyaan yang berkaitan
dengan tujuan mempelajari sistem. Jika model yang
dibentuk cukup sederhana, maka relasi-relasi matematisnya
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 15

dapat digunakan untuk mencari solusi analitis. Jika
solusi analitis bisa diperoleh dengan cukup mudah dan
efisien, maka sebaiknya diigunakan solusi analitis karena
metode ini mampu memberikan solusi yang optimal terhadap
masalah yang dihadapi. Tetapi seringkali model terlalu
kompleks sehingga sangat sulit untuk diselesaikan dengan
metoda-metoda analitis, maka model tersebut dapat
dipelajari dengan simulasi. Simulasi tidak menjamin
memberikan hasil yang optimal melainkan dijamin bahwa
hasilnya mendekati optimal.
Pada dasarnya model simulasi dikelompokkan dalam
tiga dimensi yaitu [Law and Kelton, 1991] :
a) Model Simulasi Statis dengan Model Simulasi Dinamis.
Model simulasi statis digunakan untuk
mempresentasikan sistem pada saat tertentu atau
sistem yang tidak terpengaruh oleh perubahan waktu.
Sedangkan model simulasi dinamis digunakan jika
sistem yang dikaji dipengaruhi oleh perubahan waktu.
b) Model Simulasi Deterministik dengan Model Simulasi
Stokastik.
Jika model simulasi yang akan dibentuk tidak
mengandung variabel yang bersifat random, maka model
simulasi tersebut dikatakan sebagi simulasi
deterministik. Pada umumnya sistem yang dimodelkan
dalam simulasi mengandung beberapa input yang
bersifat random, maka pada sistem seperti ini model
simulasi yang dibangun disebut model simulasi
stokastik.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 16

c) Model simulasi Kontinu dengan Model Simulasi
Diskret.
Untuk mengelompokkan suatu model simulasi apakah
diskret atau kontinyu, sangat ditentukan oleh sistem
yang dikaji. Suatu sistem dikatakan diskret jika
variabel sistem yang mencerminkan status sistem
berubah pada titik waktu tertentu, sedangkan sistem
dikatakan kontinyu jika perubahan variabel sistem
berlangsung secara berkelanjutan seiring dengan
perubahan waktu.
Simulasi merupakan suatu teknik meniru operasi-
operasi atau proses- proses yang terjadi dalam suatu
sistem dengan bantuan perangkat komputer dan dilandasi
oleh beberapa asumsi tertentu sehingga sistem tersebut
bisa dipelajari secara ilmiah (Law and Kelton, 1991).
Dalam simulasi digunakan komputer untuk mempelajari
sistem secara numerik, dimana dilakukan pengumpulan data
untuk melakukan estimasi statistik untuk mendapatkan
karakteristik asli dari sistem. Simulasi merupakan alat
yang tepat untuk digunakan terutama jika diharuskan untuk
melakukan eksperimen dalam rangka mencari komentar
terbaik dari komponen-komponen sistem. Hal ini
dikarenakan sangat mahal dan memerlukan waktu yang lama
jika eksperimen dicoba secara riil.
Dengan melakukan studi simulasi maka dalam waktu
singkat dapat ditentukan keputusan yang tepat serta
dengan biaya yang tidak terlalu besar karena semuanya
cukup dilakukan dengan komputer. Pendekatan simulasi
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 17

diawali dengan pembangunan model sistem nyata. Model
tersebut harus dapat menunjukkan bagaimana berbagai
komponen dalam sistem saling berinteraksi sehingga benar-
benar menggambarkan perilaku sistem. Setelah model dibuat
maka model tersebut ditransformasikan ke dalam program
komputer.
Penerapan simulasi dalam program komputer disebut
sebagai Simulink. Simulink adalah salah satu bagian dari
MatLab (Matriks Laboratory) Program. Simulink dapat
digunakan untuk mensimulasi sistem artinya mengamati dan
menganalisa perilaku dari tiruan sistem. Tiruan sistem
diharapkan mempunyai perilaku yang sangat mirip dengan
sistem fisik. Jika digunakan dengan benar, simulasi akan
membantu proses analisis dan desain sistem.
1.2TAHAPAN DALAM PEMODELAN
Para ahli penelitian operasional dan ilmu sistem
telah memberikan konsepsi dan teknik pemodelan sistem.
Para ahli ini menyarankan untuk mengawali pemodelan
dengan penguraian seluruh komponen yang akan mempengaruhi
efektivitas dari operasi sistem. Setelah daftar komponen
tersebut lengkap, langkah selanjutnya adalah penyaringan
komponen mana yang akan dipakai dalam pengkajian
tersebut. Hal ini umumnya sulit karena adanya interaksi
antar peubah yang seringkali menyulitkan isolasi suatu
peubah. Peubah yang dipandang tidak penting ternyata
bisa saja mempengaruhi hasil studi setelah proses
pengkajian selesai. Untuk menghindarkan hal ini,
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 18

diperlukan percobaan pengujian data guna memilih
komponen-komponen yang kritis. Setelah itu dibentuk
gugus persamaan yang dapat dievaluasi dengan merubah-
rubah komponen tertentu dalam batas-batas yang
diperkenankan. Salah satu contoh pemodelan seperti ini
adalah Program Linear (Linear Programming) dan Program
Dinamik (Dynamic Programming).
Dalam konteks pendekatan sistem, tahap-tahap
pemodelannya lebih kompleks namun relatif terlalu
beragam, baik ditinjau dari jenis sistem ataupun tingkat
kecanggihan model. Manetsch dan Park (1984)
mengembangkan tahap pemodelan abstrak ini sebagai bagian
dari pendekatan sistem.
Pemodelan abstrak menerima input berupa alternatif
sistem yang layak. Proses ini membentuk dan
mengimplementasikan model-model matematika yang
dimanfaatkan untuk merancang program terpilih yang akan
dipraktekkan di dunia nyata pada tahap berikutnya.
Output utama dari tahap ini adalah deskripsi terinci dari
keputusan yang diambil berupa perencanaan, pengendalian
atau kebijakan lainnya.
1.3IMPLEMENTASI KOMPUTER
Pemakaian komputer sebagai pengolah data, penyimpan
data dan komunikasi informasi tidak dapat diabaikan dalam
pendekatan system, model abstrak diwujudkan dalam
berbagai bentuk persamaan, diagram alir dan diagram blok.
Tahap ini seolah-olah membentuk model dari suatu model,
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 19

yaitu tingkat abstraksi lain yang ditarik dari dunia
nyata. Hal yang penting di sini adalah memilih teknik
dan bahasa komputer yang digunakan untuk implementasi
model. Masalah ini akan mempengaruhi :
1. Ketelitian dari hasil komputasi
2. Biaya operasi model
3. Kesesuaian dengan komputer yang tersedia
4. Efektifitas dari proses pengambilan keputusan yang
akan menggunakan hasil pemodelan tersebut.
Setelah program komputer dibuat dan format input
/output telah dirancang secara memadai, maka sampailah
pada tahap pembuktian (verifikasi) bahwa model komputer
tersebut mampu melakukan simulasi dari model abstrak yang
dikaji. Pengujian ini mungkin berbeda dengan uji
validitas model itu sendiri.
1.4BAHASA SIMULASI
Pemrograman model simulasi, seperti yang disebutkan
sebelumnya, dapat dilakukan menggunakan bahasa umum
komputer (general purposes language) atau menggunakan
bahasa simulasi. Ada beberapa bahasa simulasi, sehingga
kita harus dapat melihat dan memahami kelebihan dan
kekurangan dari masing-masingnya, sehingga kita melakukan
pemilihan yang tepat saat kita perlu menggunakan bahasa
simulasi.
Satu bahasa simulasi tidak dapat menjadi alat yang
tepat untuk semua kasus permodelan simulasi. Kesuksesan
analisis simulasi merupakan teknik campuran yang sangat
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 20

tergantung pada keahlian dan keahlian analis. Elemen dan
struktur bahasa komputer umum seperti Pascal atau
FORTRAN, source codenya tidak dengan mudah dapat
digunakan untuk memodelkan simulasi sistem. Msialnya,
bahasa itu tidak menyediakan struktur data yang enak
digunakan untuk pemrosesan kejadian, sementara hal ini
merupakan elemen logis yang sangat penting dalam
permodelan simulasi. Tidak ada perintah dalam FORTRAN
misalnya yang dengan jelas menambah atau mengurangi
antrian nasabah atau objek lainnya. Tidak ada perintah
dalam FORTRAN yang mengakumulasikan jumlah objek dalam
antrian dan menghitung rata-rata untuk menyediakan output
statistik penting. Variabel waktu lanjut, yang penting
dalam penjalanan model simulasi, juga tidak dapat
ditemukan pada FORTRAN dan bahasa pemrograman umum
lainnya.
Untuk memenuhi fungsi-fungsi di atas dan hal-hal
penting lainnya dalam struktur model program komputer,
kode pemrograman yang ekstensif, kompleks dan sulit
didebug harus dibuat. Motivasi mengembangkan dan
menggunakan bahasa simulasi berasal dari keinginan untuk
mempersingkat waktu yagn dibutuhkan untuk mengembangkan
mdoel valid yang relatif mudah didebug dan yang
menyediakan output statistik yang dibutuhkan dalam
pengambilan keputusan.
1.5STRUKTUR BAHASA SIMULASI
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 21

Kiviat mendefinisikan struktur statis bahasa
simulasi terdiri dari 3, yaitu identifikasi objek dan
karakteristik objek, relasa antara objek dan penurunan
objek. Struktur dinamisnya didefinisikan sebagai metode
penambahan waktu simulasi.
Objek adalah komponen model dan sistem yang menjadi
perhatian utama analisis, misalnya nasabah bank, komponen
dalam lini perakitan, pengguna dalam sistem jaringan,
dll. Bahasa yang berbeda memberikan definisi yang
berbeda pada objek, misalnya dalam SIMAN disebut
entities, dalam GPSS disebut transactions. Masing-masing
objek dalam sistem yang sama mempunyai karakteristik yang
berbeda. Nasabah bank misalnya, ada yang ingin melakukan
penarikan, ada yang ingin melakukan setoran, dll.
Pendefinisian karakteristik dalam bahasa yang berbeda
juga berbeda. Karakteristik dalam SIMAN dan SIMSCRIPT
misalnya didefinisikan sebagai attributes sedangkan dalam
GPSS didefinisikan sebagai parameters, dan ada juga yang
menggunakan definisi properties, dll.
Meskipun objek mempunyai karakteristik unik, untuk
tujuan pemrosesan dalam model, ada baiknya karakteristik
itu dikelompokkan. Setiap bahasa mempunyai mekanisme
berbeda dalam melakukan pengelompokan ini. Bahkan dalam
kasus sistem yang relatif kecil, mempertahankan semua
objek dalam model selama penjalanan simulasi bisa tidak
memungkinkan karena keterbatasan memori komputer.
Akibatnya, alat untuk menurunkan objek ketika dibutuhkan
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 22

dan menghapusnya jika sudah tidak dibutuhkan harus
disediakan.
Cara setiap bahasa simulasi memfasilitasi ini sangat
berbeda. Dalam beberapa kasus, mekanisme digunakan untuk
menelusuri karakteristik akar bahasa kompiler darimana
bahasa simulasi dikembangkan. Bahasa simulasi yang
kurang dekat dengan konvensi struktur data dari kompiler
tertentu menurunkan objek yagn sangat mirip dengan sudut
pandang dunia bahasa. Sejalan dengan perbaikan kemampuan
bahasa komputer umum (general purposes), bahasa simulasi
khusus pada umumnya telah dikodean kembali seperti
assembly, bahasa bebas mesin seperti C. Tetapi struktur
awal penurunan objek tetap dalam bahasa simulasi.
Struktur statis bahasa simulasi menempatkan objek
dalam ruangan model, yaitu dimana objek secara fisik
ditempatkan dalam sistem. Struktur dinamis dibutuhkan
untuk menempatkan objek dalam waktu dan memungkinkan
keberlanjutan dari satu titik waktu ke titik lainnya.
Seperti yang sudah dijelaskan dalam topik sebelumnya, ada
dua pendekatan dasar yang digunakan dalam struktur
dinamis, yaitu fixed-time step dan event-tracking.
Pendekatan fixed-time memeriksa sistem pada interval
waktu tetap untuk menentukan apakah statusnya sudah
berubah atau belum. Jika status masih sama, variabel
waktu akan ditambahkan sebesar interval waktu-tetap.
Meskipuns ecara logika pendekatan ini cukup sederhana,
tapi metodenya sangat tidak efisien. Mungkin ada
beberapa titik waktu dimana sistem tidak berubah
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 23
statusnya, dan karenanya akan ada banyak pemeriksaan
sistem yang tidak perlu. Akibatnya, tidak ada bahasa
simulasi kejadian diskrit yang menggunakan pendekatan ini
ke struktur dinamis.
Pendekatan event-tracking memeriksa sistem hanya
jika ada perubahan status. Logika diamsukkan dalam model
untuk menentukan kapan kejadian atau status sistem
berubah, dan variabel waktu ditambahkan dengan tepat
sampai titik sebelum sistem diperiksa. Logika yang
dibutuhkan untuk melakukan ini lebih kompleks
dibandingkan dengan langkah waktu-tetap, tetapi akan
mengehmat waktu eksekusi model secara signifikan.
1.6KARAKTERISTIK BAHASA SIMULASI
Struktur dinamis dan statis bahasa simulasi
menyediakan kebutuhan jelas untuk mengeksekusi mode
simulasi. Beberapa sifat bahasa simulasi lainnya
dibutuhkan atau sangat diinginkan untuk penggunaan
efektif analisis simulasi sebagai teknik pembantu
pengambilan keputusan.
Pengembangan kode model. Kebanyakan bahasa simulasi
masih membutuhkan pemasukan pernyataan kode untuk
menciptakan kode model, tetapi kemampuan grafik
mikrokomputer telah memungkinkan input grafik. Cara
ini paling sesuai untuk bahasa yang fokus pada
aliran objek melalui elemen atau blok model.
Debugging model. Begitu mode simulasi sudah
dikodekan menggunakan bahasa simulasi yang dipilih,
langkah selanjutnya adalah debugging kode sehingga
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 24

model simulasi berjalan ke penghentian normal.
Syntax errors (kesalahan sintaks) adalah
permasalahan pertama dalam proses, dan analisis
untuk mendeteksi ini sudah ditanam dalam bahasa
simulasi umumnya. Kesulitan berikutnya yang
dihadapi adalah perbaikan kesalahan selama eksekusi
kode. Analisis bahasa simulasi umumnya tidak sesuai
secara total dengan permasalahan ini. Setelah
menemukan kesalahan seperti ini, program berhenti
dan tidak memberikan alasan dalam bentuk logika
model kenapa program berhenti.
Penurunan variabel acak. Untuk kebanyakan simulasi
probabilistik, kemampuan mengekstrak sampel acak
dari distribusi probabilitas tertentu sangat
penting. Bahasa simulasi melakukannya dengan mudah.
Pengumpulan statistik. Penjalanan model simulasi
tanpa mengumpulkan data ukuran kinerja sistem sama
saja dengan tidak melakukan pengamatan pada sistem
dunia nyata yang sedang berlangsung. Pengamat ada
selama operasi sistem dunia nyata tetapi tidak
mengamati dan mencatat apa yang terjadi. Bahasa
simulasi harus memungkinkan pengguna dengan mudah
menspesifikasikan beragam statistik yang dikumpulkan
selama eksekusi model. Juga untuk membantu
interpretasi output simulasi, kemampuan penggambaran
grafik dan inferensi statistik diperlukan.
Disain percobaan. Karena analisis simulasi bersifat
deskriptif, kesuksesan aplikasinya tergantung pada
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 25

percobaan model. Rancangan percobaan efektif dan
efisien benar-benar meningkatkan kualitas solusi
yang didapatkan dari model simulasi.
Animasi grafis dan output dinamis. Kemampuan
menggunakan bahasa simulasi pada mikrokomputer
memungkinkan kemampuan grafis mesin ini untuk
mengilustrasikan penjalanan mode simulasi atau
outputnya. Ilustrasi objek yang mengalir melalui
elemen model disebut sebagai animasi. Animasi
biasanya menggunakan monitor berwarna dan dengan
mudah mengenali simbol objek dan elemen model.
Dengan mengamati aliran seperti itu, analisis dapat
memperhatikan penyebaba permasalahan operasi dan
dapat memperbaikinya. Animasi model akan
memperlambat eksekusi model. Oleh akrena itu,
animasi biasanya hanya dilakukan pada mikrokomputer
cepat dengan memori besar.
1.7PEMILIHAN BAHASA SIMULASI
Beberapa hal yang perlu diperhatikan dalam pemilihan
bahasa simulasi adalah kemudahan untuk dipelajari,
kemudahan menjelaskan pada orang yang bukan teknik,
biaya, kode standar untuk semua komputer dan cakupan
permasalahan yang dapat ditangani oleh bahasa. Pada
umumnya, semakin mirip elemen bahasa simulasi dengan
elemen dunia nyata, semakin mudah elemen itu dipelajari.
Kemudahan menjelaskan fungsi bahasa simulasi ke manajer
yang mengeluarkan dana untuk pembelian perangkat lunak
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 26
dan yang tidak memahami secara teknis juga digunakan
dalam memilih bahasa simulasi.
Di dalam makalah ini penyusun akan memberikan contoh
penerapan simulasi dengan menggunakan Simulink atau
Matlab, yaitu bahasa utama untuk perhitungan teknis, DSP,
disain kotnrol, dst. Simulink menyediakan interface
grafis ke beberapa fungsi Matlab, sehingga memungkinkan
pemakai mendisain model dan mengkontrol sistem secara
grafis.
Simulink adalah salah satu bagian dari MatLab.
Simulink dapat digunakan untuk mensimulasi sistem artinya
mengamati dan menganalisa perilaku dari tiruan sistem.
Tiruan sistem diharapkan mempunyai perilaku yang sangat
mirip dengan sistem fisik. Jika digunakan dengan benar,
simulasi akan membantu proses analisis dan desain sistem.
Simulink mendukung simulasi sistem linier, sistem
kontrol, sistem yang menggunakan logika kabur, jaringan
syaraf tiruan, komunikasi, dan lain-lain.
1.8SEKILAS TENTANG MATLAB
MATLAB (Matrix Laboratory) adalah sebuah program
untuk analisis dan komputasi numerik dan merupakan suatu
bahasa pemrograman matematika lanjutan yang dibentuk
dengan dasar pemikiran menggunakan sifat dan bentuk
matriks. Pada awalnya, program ini merupakan interface
untuk koleksi rutin-rutin numerik dari proyek
LINPACK dan EISPACK, dan dikembangkan menggunakan bahasa
FORTRAN namun sekarang merupakan produk komersial dari
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 27

perusahaan Mathworks, Inc. yang dalam perkembangan
selanjutnya dikembangkan menggunakan bahasa C++ dan
assembler (utamanya untuk fungsi-fungsi dasar MATLAB).
MATLAB telah berkembang menjadi sebuah environment
pemrograman yang canggih yang berisi fungsi-fungsi built-in
untuk melakukan tugas pengolahan sinyal, aljabar linier
dan kalkulasi matematis lainnya. MATLAB juga berisi toolbox
yang berisi fungsi-fungsi tambahan untuk aplikasi
khusus . MATLAB bersifat extensible, dalam arti bahwa
seorang pengguna dapat menulis fungsi baru untuk
ditambahkan pada library ketika fungsi-fungsi built-in yang
tersedia tidak dapat melakukan tugas tertentu.
MATLAB (Matrix Laboratory) yang merupakan bahasa
pemrograman tingkat tinggi berbasis pada matriks sering
digunakan untuk teknik komputasi numerik, yang digunakan
untuk menyelesaikan masalah-masalah yang melibatkan
operasi matematika elemen, matrik, optimasi, aproksimasi
dll. Sehingga Matlab banyak digunakan pada :
Matematika dan Komputansi
Pengembangan dan Algoritma
Pemrograman Modeling, Simulasi, dan Pembuatan
Prototipe
Analisa Data , Eksplorasi dan Visualisasi
Analisis Numerik dan Statistik
Pengembangan Aplikasi Teknik
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 28

2.PENERAPAN SIMULINK PADA PENGENDALI PID
2.1PERUMUSAN MASALAH
Sebuah sistem kontrol digambarkan memiliki transfer
fungsi / fungsi alih sebagai berikut :
Persamaan fungsi alih tersebut digambarkan dengan sebuah
model di dalam Program Matlab dengan Simulink seperti
pada rangkaian gambar dibawah ini :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 29

Gambar Respon Awal Sistem
Persamaan tersebut digambarkan pada Program MatLab
sebagai berikut :ps=[1]
qs=[1 15 30]
step(ps,qs)
Dengan hasil respon sistemnya seperti tergambar pada
grafik dibawah ini :
Grafik di atas menunjukkan bahwa sistem memiliki
kesalahan yang tinggi, hal ini dapat dilihat pada
tanggapan sistem menuju ke nilai amplitude. Dari Gambar
grafik diatas, dapat juga diketahui bahwa sistem memiliki
waktu naik yang lama (hampir mencapai 2 detik). Untuk
menghasilkan sistem kontrol yang baik, diperlukan sistem
loop tertutup (close loop).
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 30

Grafik Respon Awal Sistem
Berdasarkan penggunaan pengendali P, PD, PI dan PID, maka
didalam model sistem tersebut dilakukan simulasi untuk
mendapatkan aksi pengendali terbaik bagi sistem yang akan
diterapkan berdasarkan penggunaan aplikasi yang sesuai
didalam proses yang sebenarnya.
2.2 AKSI KENDALI PROPORSIONAL (P)
Sesuai dengan dasar pengontrolan, maka aksi kendali
Proporsional didapatkan dengan penambahan gain/penguatan
sebesar konstanta Proporsional (Kp) sehingga
persamaan menjadi :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 31

Dengan menambahkan sebuah konstanta Kp (Proposional)
sebesar 300, maka model simulink dapat digambarkan
sebagai berikut :
Gambar Respon Aksi Proporsional
Maka pada Program Matlab dituliskan persamaan-persamaan
sebagai berikut :Kp=300
ps=[Kp]
qs=[1 15 30+Kp]
t=0:0.01:2;
step(ps,qs)
Dengan hasil respon sistemnya seperti tergambar pada
grafik dibawah ini :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 32

Gambar Respon Aksi Proporsional
Penambahan aksi pengendali Proporsional (P)
mempunyai pengaruh mengurangi waktu naik dan kesalahan,
tetapi konsekuensinya overshoot naik cukup besar. Kenaikan
overshoot ini sebanding dengan kenaikan nilai parameter
Kp. Waktu turun juga menunjukkan kecenderungan yang
membesar.
2.3AKSI KENDALI PROPORSIONAL DAN DERIVATIVE (PD)
Dengan penambahan konstanta Kp (Proposional) dan Kd
(Derivative), maka persamaan alih fungsi diatas menjadi :
Apabila dalam sistem diterapkan konstanta Kp sebesar 300
dan konstanta Kd sebesar 10, maka rangkaian gambar di
simulink tampak seperti pada gambar berikut :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 33
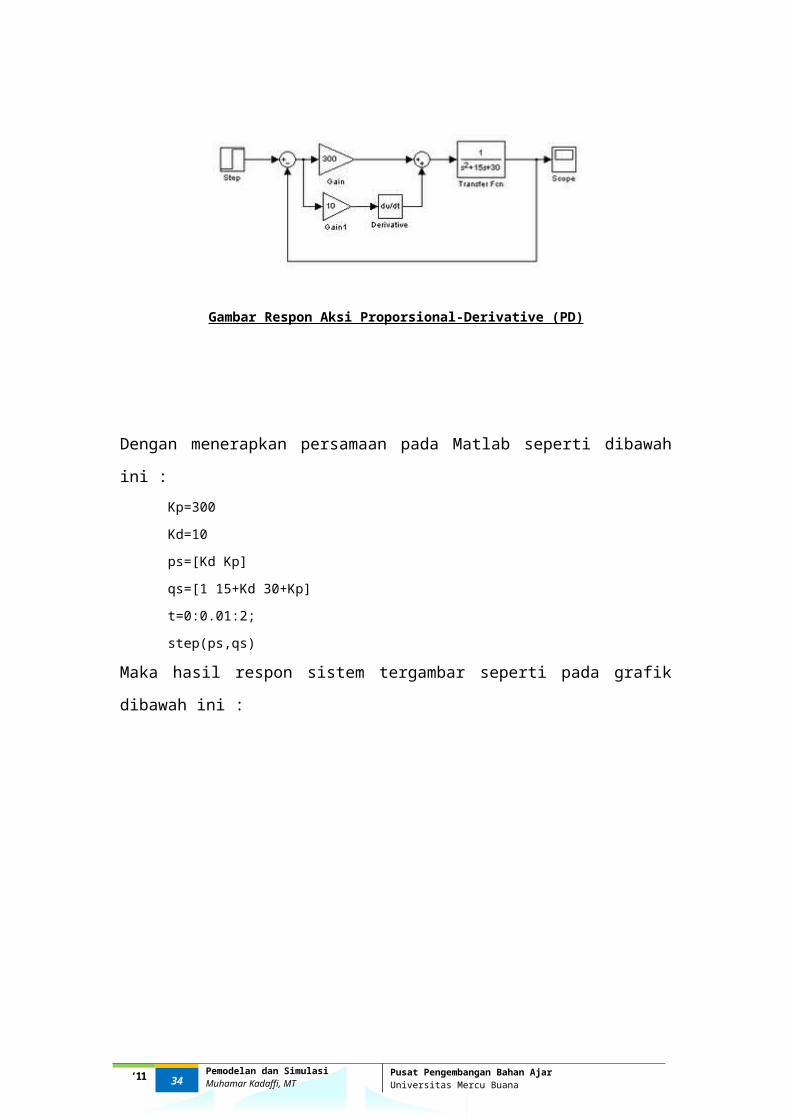
Gambar Respon Aksi Proporsional-Derivative (PD)
Dengan menerapkan persamaan pada Matlab seperti dibawah
ini :Kp=300
Kd=10
ps=[Kd Kp]
qs=[1 15+Kd 30+Kp]
t=0:0.01:2;
step(ps,qs)
Maka hasil respon sistem tergambar seperti pada grafik
dibawah ini :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 34

Grafik Respon Aksi Proporsional-Derivative (PD)
Pada grafik di atas terlihat bahwa penggunaan kontrol
Proposional Derivative (PD) dapat mengurangi overshoot dan
waktu turun, tetapi kesalahan tidak mengalami perubahan
yang berarti.
2.4AKSI KENDALI PROPORSIONAL DAN INTEGRAL (PI)
Dengan penambahan konstanta Kp (Proposional) dan Ki
(Integral) pada sistem, maka persamaan alih fungsi diatas
menjadi :
Apabila dalam sistem diterapkan konstanta Kp sebesar 40
dan konstanta Ki sebesar 100, maka rangkaian gambar
simulink tampak seperti pada gambar berikut :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 35

Gambar Respon Aksi Proporsional-Integral (PI)
Dengan menerapkan persamaan pada Matlab seperti dibawah
ini :Kp = 40
Ki = 100
ps = [Kp Ki]
qs = [1 15 30+Kp Ki]
t = 0:0.01:2;
step(ps,qs)
Maka hasil respon sistem tergambar seperti pada grafik
dibawah ini :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 36

Grafik Respon Aksi Proporsional-Integral (PI)
Aksi kontrol P dan I memiliki karakteristik yang sama
dalam waktu naik dan overshoot. Oleh karena itu, nilai Kp
harus dikurangi untuk menghindari overshoot yang
berlebihan.
Dari grafik gambar di atas terlihat bahwa waktu naik
sistem menurun, dengan overshoot yang kecil, serta
kesalahan dapat diminimalkan. Tanggapan sistem memberikan
hasil yang lebih baik daripada aksi kontrol sebelumnya
tetapi masih mempunyai waktu naik yang lambat.
2.5AKSI KENDALI PROPORSIONAL, INTEGRAL DAN DERIVATIVE
(PID)
Dengan penambahan konstanta gabungan ketiga elemen
pengaturan : Kp (Proposional), Ki (Integral) dan Kd
(Derivative) pada sistem, maka persamaan alih fungsi
diatas menjadi :
Apabila dalam sistem diterapkan konstanta Kp sebesar 350,
konstanta Ki sebesar 300 dan konstanta Kd sebesar 50,
maka rangkaian gambar simulink tampak seperti pada gambar
rangkaian berikut :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 37
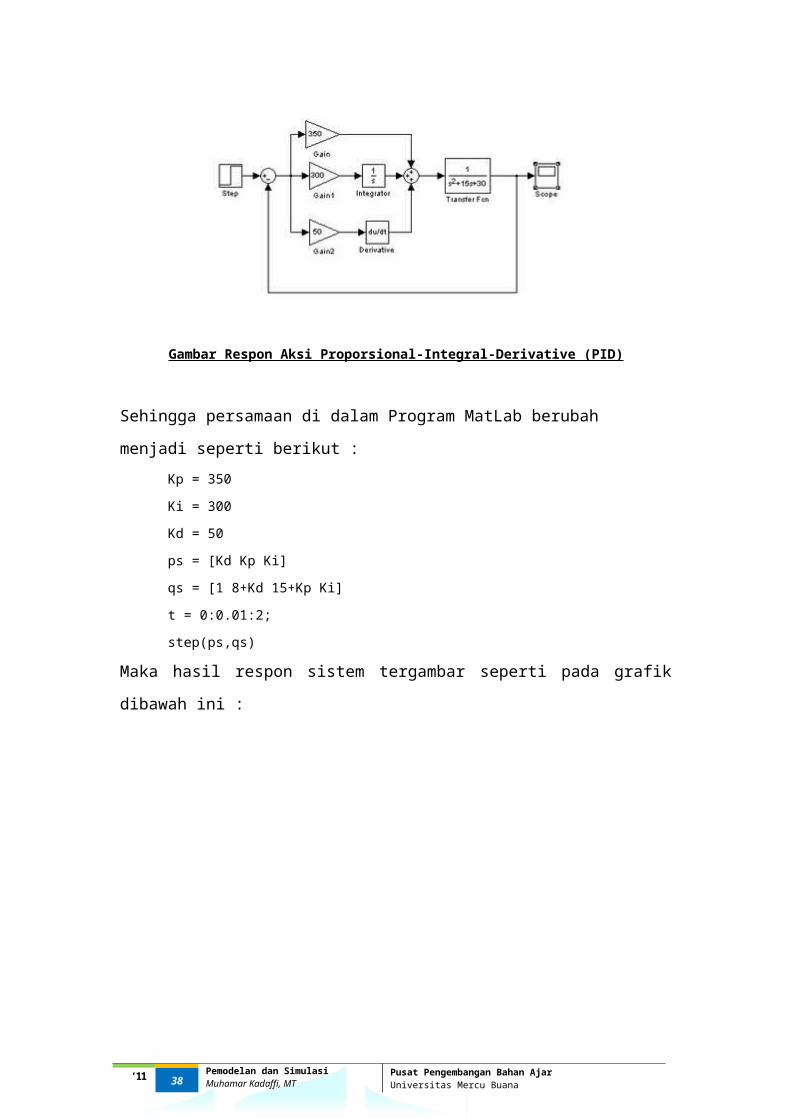
Gambar Respon Aksi Proporsional-Integral-Derivative (PID)
Sehingga persamaan di dalam Program MatLab berubah
menjadi seperti berikut :Kp = 350
Ki = 300
Kd = 50
ps = [Kd Kp Ki]
qs = [1 8+Kd 15+Kp Ki]
t = 0:0.01:2;
step(ps,qs)
Maka hasil respon sistem tergambar seperti pada grafik
dibawah ini :
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 38
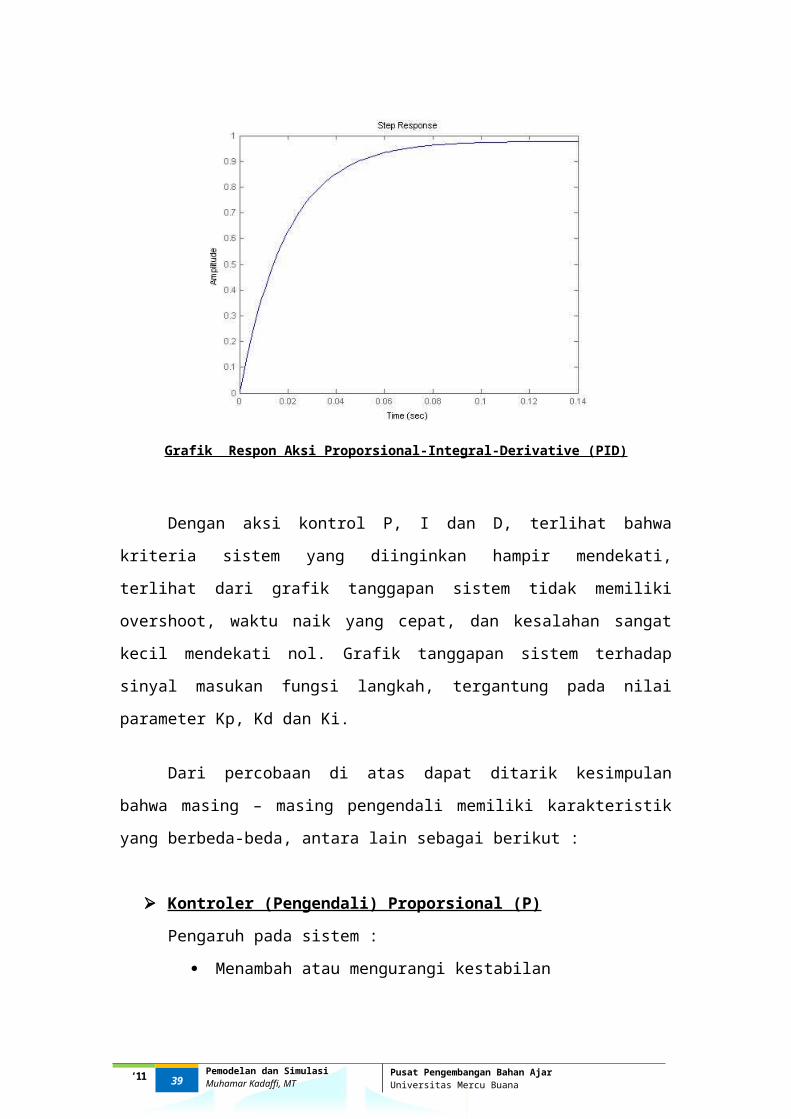
Grafik Respon Aksi Proporsional-Integral-Derivative (PID)
Dengan aksi kontrol P, I dan D, terlihat bahwa
kriteria sistem yang diinginkan hampir mendekati,
terlihat dari grafik tanggapan sistem tidak memiliki
overshoot, waktu naik yang cepat, dan kesalahan sangat
kecil mendekati nol. Grafik tanggapan sistem terhadap
sinyal masukan fungsi langkah, tergantung pada nilai
parameter Kp, Kd dan Ki.
Dari percobaan di atas dapat ditarik kesimpulan
bahwa masing – masing pengendali memiliki karakteristik
yang berbeda-beda, antara lain sebagai berikut :
Kontroler (Pengendali) Proporsional (P)
Pengaruh pada sistem :
Menambah atau mengurangi kestabilan
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 39

Dapat memperbaiki respon transien khususnya :
rise time, settling time
Mengurangi waktu naik, tidak menghilangkan
Error Steady State
Untuk menghilangkan Error Steady State, dibutuhkan
nilai Kp besar, yang akan membuat sistem lebih tidak
stabil.
Kontroler (Pengendali) Integral (I)
Pengaruh pada sistem :
Menghilangkan Error Steady State
Respon lebih lambat (dibandingkan dengan P)
Dapat menimbulkan ketidakstabilan (karena
menambah orde sistem)
Kontroler (Pengendali) Derivatif (D)
Pengaruh pada sistem :
Memberikan efek redaman pada sistem yang
berosilasi sehingga bisa memperbesar pemberian
nilai Kp
Memperbaiki respon transien, karena memberikan
aksi saat ada perubahan error.
D hanya berubah saat ada perubahan error,
sehingga saat ada error statis D tidak beraksi
Sehingga D tidak boleh digunakan sendiri.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 40

Kontroler (Pengendali) Proporsional Integral
Derivatif (PID)
Pengendali PID merupakan pengendali yang didasarkan
oleh gabungan unsur dari pengendali Proposional (P),
Integral (I) dan Derivative (D) yang masing-masing
memiliki perilaku yang khas. Setiap kekurangan dan
kelebihan dari masing-masing kontroler P, I dan D
dapat saling menutupi dengan menggabungkan ketiganya
secara paralel menjadi kontroler PID. Elemen-elemen
kontroler PID masing-masing secara keseluruhan
bertujuan untuk mempercepat reaksi sebuah sistem,
menghilangkan offset dan menghasilkan perubahan awal
yang besar.
Dengan melihat hasil kesimpulan dari percobaan yang
dilakukan, maka dapat dipilih sebuah kontroler
(pengendali) yang tepat untuk diterapkan pada sebuah
sistem sesuai dengan kondisi proses yang ada.
Disinilah pentingnya sebuah penerapan Simulink untuk
melakukan simulasi pada sebuah model sistem dilakukan.
Dengan menganalisa hasil respon yang terjadi pada setiap
model sistem, dapat diambil sebuah kesimpulan yang
akhirnya akan diterapkan pada sistem yang sesungguhnya
sesuai dengan keinginan yang akan dicapai.
KESIMPULAN
Sistem adalah kumpulan obyek yang saling
berinteraksi dan bekerja sama untuk mencapai tujuan logis
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 41

dalam suatu lingkungan yang kompleks. Obyek yang menjadi
komponen dari sistem dapat berupa obyek terkecil dan bisa
juga berupa sub-sistem atau sistem yang lebih kecil lagi.
Ada beberapa cara untuk dapat merancang,
menganalisis dan mengoperasikan suatu sistem. Salah
satunya adalah dengan melakukan pemodelan, membuat model
dari sistem tersebut.
Model adalah alat yang sangat berguna untuk
menganalisis maupun merancang sistem. Sebagai alat
komunikasi yang sangat efisien, model dapat menunjukkan
bagaimana suatu operasi bekerja dan mampu merangsang
untuk berpikir bagaimana meningkatkan atau
memperbaikinya.
Simulasi merupakan suatu teknik meniru operasi-
operasi atau proses- proses yang terjadi dalam suatu
sistem dengan bantuan perangkat komputer dan dilandasi
oleh beberapa asumsi tertentu sehingga sistem tersebut
bisa dipelajari secara ilmiah (Law and Kelton, 1991).
Dalam simulasi digunakan komputer untuk mempelajari
sistem secara numerik, dimana dilakukan pengumpulan data
untuk melakukan estimasi statistik untuk mendapatkan
karakteristik asli dari sistem. Simulasi merupakan alat
yang tepat untuk digunakan terutama jika diharuskan untuk
melakukan eksperimen dalam rangka mencari komentar
terbaik dari komponen-komponen sistem. Hal ini
dikarenakan sangat mahal dan memerlukan waktu yang lama
jika eksperimen dicoba secara riil. Dengan melakukan
studi simulasi maka dalam waktu singkat dapat ditentukan
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 42

keputusan yang tepat serta dengan biaya yang tidak
terlalu besar karena semuanya cukup dilakukan dengan
komputer. Pendekatan simulasi diawali dengan pembangunan
model sistem nyata. Model tersebut harus dapat
menunjukkan bagaimana berbagai komponen dalam sistem
saling berinteraksi sehingga benar-benar menggambarkan
perilaku sistem. Setelah model dibuat maka model tersebut
ditransformasikan ke dalam program komputer. Penerapan
simulasi dalam program komputer disebut sebagai Simulink.
Dengan melakukan studi simulasi maka dalam waktu
singkat dapat ditentukan keputusan yang tepat serta
dengan biaya yang tidak terlalu besar karena semuanya
cukup dilakukan dengan komputer. Pendekatan simulasi
diawali dengan pembangunan model sistem nyata. Model
tersebut harus dapat menunjukkan bagaimana berbagai
komponen dalam sistem saling berinteraksi sehingga benar-
benar menggambarkan perilaku sistem. Setelah model dibuat
maka model tersebut ditransformasikan ke dalam program
komputer.
Penerapan simulasi dalam program komputer disebut
sebagai Simulink. Simulink adalah salah satu bagian dari
MatLab (Matriks Laboratory) Program. Simulink dapat
digunakan untuk mensimulasi sistem artinya mengamati dan
menganalisa perilaku dari tiruan sistem. Tiruan sistem
diharapkan mempunyai perilaku yang sangat mirip dengan
sistem fisik. Jika digunakan dengan benar, simulasi akan
membantu proses analisis dan desain sistem.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 43

Sebuah identifikasi masalah selalu dilakukan sebagai
tahap awal di dalam sebuah penelitian dan merupakan
bagian dari tahap perencanaan (plan). Identifikasi Sistem
(Plant) ditujukan untuk mendapatkan sebuah model matematis
berupa fungsi alih yang digunakan untuk proses
perancangan kontroler nantinya. Sebagai contohnya adalah
dalam penerapan Pengendali PID dengan Simulink.
Penggambaran rangkaian awal dengan Simulink sangat
diperlukan untuk mempermudah mengamati dan menganalisa
perilaku sistem yang telah dimodelkan dalam bentuk model
matematis dengan transfer fungsi / fungsi alih. Hingga
pada akhirnya hasil akhir dari proses analisa simulasi
dengan Simulink tersebutlah yang menjadi bahan dasar dari
penerapan ke sistem yang sebenarnya sehingga hasil akhir
yang diinginkan dapat terpenuhi dengan baik.
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 44

DAFTAR PUSTAKA
Gunterus, Frans. Falsafah Dasar: Sistem Pengendalian Proses.
PT.Elex Media Komputindo. Jakarta : 1994
Toray Engineering, Co, Ltd. Multipoint Temperature Controller TNS
801A Instruction Manual Japan : 1993
Muhammad Ali. Makalah : Pembelajaran Perancangan Sistem Kontrol PID
Dengan Software MatLab. Universitas Negeri Yogyakarta :
2004
Artikel Internet http://meriwardana.blogspot.com/,
Pengendalian PID Dengan Simulink MathLab, Jakarta : 2010
Ahmad Fajar Firdaus, ST. Pengenalan Matlab, Design Laboratory
LAPI ITB Bandung : 2009
Pemodelan dan Simulasi Muhamar Kadaffi, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘11 45
Copyright © 2022 FDOKUMEN