Моделирование АСР разрежения ТГМП-314
45
1 Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Ивановский государственный энергетический университет имени В.И. Ленина» Кафедра: систем управления Пояснительная записка К курсовому проекту по дисциплине «Локальные системы управления» «Разработка ЛСУ разрежения в топке котла ТГМП-314 Костромской ГРЭС» Иваново 2013 Выполнил: Студент группы 5-43 хх Курмашев Е.А. Руководил: к.т.н. доц. Захарова Е.В.
Transcript of Моделирование АСР разрежения ТГМП-314

1
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Ивановский государственный энергетический университет имени В.И. Ленина»
Кафедра: систем управления
Пояснительная записка К курсовому проекту по дисциплине «Локальные системы
управления»
«Разработка ЛСУ разрежения в топке котла ТГМП-314 Костромской ГРЭС»
Иваново 2013
Выполнил:
Студент группы 5-43 хх
Курмашев Е.А.
Руководил:
к.т.н. доц. Захарова Е.В.

2
Оглавление
ИСПОЛЬЗУЕМЫЕ СОКРАЩЕНИЯ ...................................................................................................................3
РЕФЕРАТ ..........................................................................................................................................................4
ВВЕДЕНИЕ .......................................................................................................................................................5
ОБЩИЕ СВЕДЕНИЯ О КОСТРОМСКОЙ ГРЭС .............................................................................................5
1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ И АНАЛИЗ ОСОБЕННОСТЕЙ ОБЪЕКТА УПРАВЛЕНИЯ ...........................6
1.1. ХАРАКТЕРИСТИКА КОТЛОАГРЕГАТА ТГМП-314 ................................................................................6
1.2. ГАЗОВОЗДУШНЫЙ ТРАКТ ................................................................................................................ 10
1.3. РЕЖИМНЫЕ ХАРАКТЕРИСТИКИ ...................................................................................................... 12
2. ТЕХНОЛОГИЧЕСКАЯ ЗАДАЧА УПРАВЛЕНИЯ .......................................................................................... 13
2.1. ОПИСАНИЕ СХЕМЫ РЕГУЛИРОВАНИЯ ............................................................................................ 13
2.2. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К КАЧЕСТВУ РЕГУЛИРОВАНИЯ ........................................................ 15
2.3. РАЗРАБОТКА P&I -ДИАГРАММЫ ..................................................................................................... 15
2.4. ПЕРЕЧНИ ТОЧЕК КОНТРОЛЯ, УСТАВОК СИГНАЛИЗАЦИИ, ЗАЩИТ, И ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ .............................................................................................................................................. 16
2.5. РАЗРАБОТКА СКВОЗНОЙ ИНФОРМАЦИОННО-ФУНКЦИОНАЛЬНОЙ СТРУКТУРЫ ЛСУ ............... 19
2.6. РЕЗУЛЬТАТЫ ПАТЕНТНО-ИНФОРМАЦИОННОГО ИССЛЕДОВАНИЯ .............................................. 20
3. ИДЕНТИФИКАЦИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПО КАНАЛАМ ОБЪЕКТА РЕГУЛИРОВАНИЯ . 22
3.1. ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ .................................................................................................... 22
3.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ «ВХОД-ВЫХОД» ............................................................................. 23
3.3. ОЦЕНКА АДЕКВАТНОСТИ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ............................................................ 26
4. АЛГОРИТМИЧЕСКИЙ СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ И ИХ СРАВНИТЕЛЬНЫЙ АНАЛИЗ ................... 28
4.1. РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ ПИ - РЕГУЛЯТОРА .................................................................. 28
4.2. РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ УСТРОЙСТВА КОМПЕНСАЦИИ ............................................. 31
4.3. БАЗОВЫЙ ВАРИАНТ СХЕМЫ РЕГУЛИРОВАНИЯ .............................................................................. 34
4.4. АЛЬТЕРНАТИВНЫЙ ВАРИАНТ СХЕМЫ РЕГУЛИРОВАНИЯ .............................................................. 37
4.5. СРАВНЕНИЕ ВАРИАНТОВ АСР .......................................................................................................... 40
ВЫВОД ......................................................................................................................................................... 42
Список литературы ..................................................................................................................................... 43
3
ИСПОЛЬЗУЕМЫЕ СОКРАЩЕНИЯ
АСР – автоматизированная система регулирования
АСУТП – автоматизированная система управления технологическим процессом
ДВ – дутьевой вентилятор
ДС – дымосос
ДРГ – дымосос рециркуляции газов
ИГЭУ – Ивановский государственный энергетический университет
ПД – пропорционально-дифференцирующее звено
ПИ – пропорционально-интегрирующее звено
ИКК – интегральный квадратичный критерий
ЛИК – линейный интегральный критерий
ИФС – информационно-функциональная структура
КЧХ – комплексная частотная характеристика
АЧХ – амплитудно-частотная характеристика
РР – регулятор разрежения
РОВ – регулятор общего воздуха
НА – направляющий аппарат
ЛСУ – локальная система управления
МАЧХ – максимум амплитудно-частотной характеристики
ПМК – программно-методический комплекс
КГРЭС – Костромская государственная районная электрическая станция (ГРЭС)
KKS – Kraftwerk Kennzeichen System
P&I – Process & Instrumentation – диаграмма

4
РЕФЕРАТ
В данном курсовом проекте разработана ЛСУ газовоздушного тракта котла ТГМП-314
Костромской ГРЭС. Проведено изучение технологического объекта и составлены: P&I диаграмма,
сквозная информационно-функциональная структура ЛСУ, составлена пояснительная записка.
В части алгоритмического синтеза проведен сравнительный анализ двух вариантов
реализации разрежения: одноконтурная АСР с компенсацией внешнего возмущения в
стабилизирующем контуре и альтернативного варианта – одноконтурной схемы с включением
блока коррекции до ПИ-регулятора [3,13].
В результате анализа выявлена предпочтительность использования одноконтурной
схемы с включением блока коррекции [6]. Конкретизированы задачи на предстоящие
исследования в ходе преддипломной практики и разработки дипломного проекта.
В результате выполнения данного курсового проекта был сформирован системный подход в
части решения задач алгоритмического обеспечения базового контроллерного уровня АСУТП,
путём интеграции и использования знаний по общепрофессиональным и специальным
инженерным дисциплинам для обоснования выбора наиболее эффективного варианта локальной
системы управления в общей структуре АСУТП сложного технического объекта – энергоблока №8
Костромской ГРЭС [2].
5
ВВЕДЕНИЕ
Основная цель данного курсового проекта – формирование системного подхода в части
решения задач алгоритмического обеспечения базового контроллерного уровня АСУТП путём
интеграции и использования знаний по общепрофессиональным и специальным инженерным
дисциплинам для обоснования выбора наиболее эффективного варианта локальной системы
управления (ЛСУ) в общей структуре АСУТП сложного технического объекта (в данном случае –
энергоблока №8 Костромской ГРЭС) [2].
ОБЩИЕ СВЕДЕНИЯ О КОСТРОМСКОЙ ГРЭС
История Костромской ГРЭС отсчитывается от даты пуска первого энергоблока 300 MBт – 11
июня 1969 года. Именно в этот день в 9 часов 47 минут был зажжён факел на первом котле, а 28
июня 1969 года в 5 часов 57 минут был включён в сеть блок №1 .
Сегодня Костромская ГРЭС – одна из наиболее крупных и экономичных тепловых электростанций
России, по праву являющаяся флагманом отечественной энергетики. Её установленная мощность –
3600 МВт.
Выбор места строительства Костромской ГРЭС на правом берегу Волги, в самом центре
Европейской части России, в 60-е годы определился тремя особенностями: дефицитом
электрической мощности в ближайших экономических регионах, обеспеченностью водой
(Горьковское водохранилище на Волге), наличием удобных подъездных путей.
Строительство ГРЭС осуществлялось в три очереди. Ввод в эксплуатацию I очереди, состоящей из
четырёх дубль-блоков мощностью по 300 МВт с двухкорпусными газомазутными котлами типа
ТГМП-114 паропроизводительностью 950 т/час, продолжался с июня 1969 года по декабрь 1970
года.
С ноября 1971 года по июнь 1973 года были введены в эксплуатацию четыре моноблока по 300
МВт с однокорпусными газомазутными котлами ТГМП- 314 паропроизводительностью 950 т/час
II очередь.
В составе всех блоков I и II очередей работают паровые турбины типа К-300-240 ЛМЗ.
В 1980 году был осуществлён ввод в эксплуатацию III очереди КГРЭС, состоящей из уникального
энергоблока мощностью 1200 МВт с однокорпусным прямоточным газоплотным подвесным
газомазутным котлом ТГМП-1202 паропроизводительностью 3950 т/час, паровой одновальной
турбиной типа К-1200-240-3 ЛМЗ. Турбина до сегодняшнего дня является самой мощной в
отечественной энергетике, а с учетом её перегрузки до 1380 МВт и самой мощной в мире турбиной
данного класса.
Главный корпус Костромской ГРЭС представляет собой совмещенный вариант котельного и
машинного отделений с деаэраторной этажеркой между ними и выполнен в сборном
железобетоне из элементов колонн и ригелей со стеновым заполнением из трехслойных
офактуренных керамзитобетонных панелей с шагом колонн в продольном направлении 12 м.

6
В машинном зале в поперечном направлении расположены 8 турбоагрегатов К-300-240-1
Ленинградского Металлического завода с генераторами ТВВ-320-2 объединения
«Электросила».
Техническая вода на ГРЭС поступает из реки Волги через глубинный водозабор по
подводящему каналу, проложенному параллельно главному корпусу на территории
пристанционного узла. Максимальный расход охлаждающей воды в летний период составляет
288000 м3/час.
Схема водоснабжения прямоточная, блочная. На берегу подводящего канала сооружены
две блочные береговые насосные станции I и II очередей ГРЭС. На каждый блок установлено по
два циркуляционных насоса (ЦЭН) типа ОП-5-110, которые по металлическим водоводам 1800
мм подают воду в конденсатор турбины.
Основным топливом Костромской ГРЭС является природный газ, а также мазут марок М-100 и М-
40, поступающий с содержанием серы от 1,5 до 3,5% железнодорожным, а в летнее время и
водным путем с нефтеперегонных заводов Ярославля, Уфы, Нижнего Новгорода. В настоящее
время мазутохозяйство имеет 8 по 10000 м3 и 6 по 20000 м3 основных (расходных) резервуаров.
1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ И АНАЛИЗ ОСОБЕННОСТЕЙ
ОБЪЕКТА УПРАВЛЕНИЯ
1.1. ХАРАКТЕРИСТИКА КОТЛОАГРЕГАТА ТГМП-314
Прямоточный котел типа ТГМП-314 спроектирован и изготовлен Таганрогским котельным
заводом, рассчитан на сжигание мазута и природного газа и предназначен для работы в блоке с
паровой турбиной К-300-240 ЛМЗ мощностью 300 МВТ. Котлоагрегат выполнен однокорпусным в
П-образной компоновке с вынесенными из-под котла РВП, размещенными вне здания главного
корпуса. Основные данные по котлоагрегата ТГМП-314 приведены в таблице 1.

7
Таблица 1
Паропроизводительность 1000 т/час
Давление острого пара 255 кгс/см²
Температура острого пара 545 ºС
Расход вторичного пара 780 т/час
Давление вторичного пара на входе в КПП НД 41.5 кгс/см²
Давление вторичного пара на выходе из КПП НД 9 кгс/см²
Температура вторичного пара на входе в КПП НД 310 ºС
Температура вторичного пара на выходе из КПП НД 545 ºС
Температура питательной воды 270 ºС
Температура горячего воздуха 300 ºС
Часовой расход топлива: мазута 69900 кг/час
газа 76100 нм³/час
Расчетный КПД при работе на: мазуте 93.71%
газе 94.03%
Тепловое напряжение топочного объема при сжигании:
мазута 167х10 ккал/час х м³
газа 163000 ккал/час х м³
Ширина котла по осям колонн 18600 мм
Глубина котла по осям колонн 23600 мм
Высота котла по каркасу 42000 мм
Размер топки в плане 17370 х 8660 мм
8
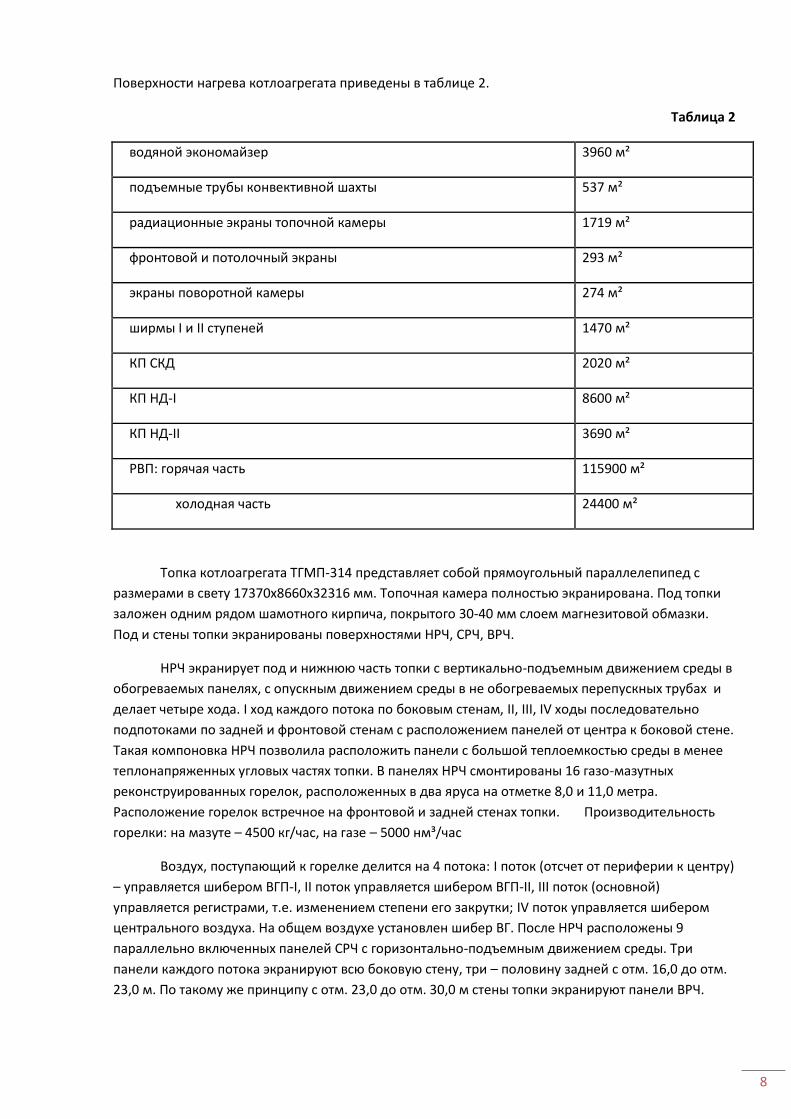
Поверхности нагрева котлоагрегата приведены в таблице 2.
Таблица 2
водяной экономайзер 3960 м²
подъемные трубы конвективной шахты 537 м²
радиационные экраны топочной камеры 1719 м²
фронтовой и потолочный экраны 293 м²
экраны поворотной камеры 274 м²
ширмы I и II ступеней 1470 м²
КП СКД 2020 м²
КП НД-I 8600 м²
КП НД-II 3690 м²
РВП: горячая часть 115900 м²
холодная часть 24400 м²
Топка котлоагрегата ТГМП-314 представляет собой прямоугольный параллелепипед с
размерами в свету 17370х8660х32316 мм. Топочная камера полностью экранирована. Под топки
заложен одним рядом шамотного кирпича, покрытого 30-40 мм слоем магнезитовой обмазки.
Под и стены топки экранированы поверхностями НРЧ, СРЧ, ВРЧ.
НРЧ экранирует под и нижнюю часть топки с вертикально-подъемным движением среды в
обогреваемых панелях, с опускным движением среды в не обогреваемых перепускных трубах и
делает четыре хода. I ход каждого потока по боковым стенам, II, III, IV ходы последовательно
подпотоками по задней и фронтовой стенам с расположением панелей от центра к боковой стене.
Такая компоновка НРЧ позволила расположить панели с большой теплоемкостью среды в менее
теплонапряженных угловых частях топки. В панелях НРЧ смонтированы 16 газо-мазутных
реконструированных горелок, расположенных в два яруса на отметке 8,0 и 11,0 метра.
Расположение горелок встречное на фронтовой и задней стенах топки. Производительность
горелки: на мазуте – 4500 кг/час, на газе – 5000 нм³/час
Воздух, поступающий к горелке делится на 4 потока: I поток (отсчет от периферии к центру)
– управляется шибером ВГП-I, II поток управляется шибером ВГП-II, III поток (основной)
управляется регистрами, т.е. изменением степени его закрутки; IV поток управляется шибером
центрального воздуха. На общем воздухе установлен шибер ВГ. После НРЧ расположены 9
параллельно включенных панелей СРЧ с горизонтально-подъемным движением среды. Три
панели каждого потока экранируют всю боковую стену, три – половину задней с отм. 16,0 до отм.
23,0 м. По такому же принципу с отм. 23,0 до отм. 30,0 м стены топки экранируют панели ВРЧ.

9
Вверху топки на котлоагрегатах №7,8 ширмы I и II ходов подвешены в два ряда в
вертикальном положении по 10 ширм на один поток в каждом ходе и крепятся к каркасу котла
посредством входных и выходных камер. Часть фронтовой стены, потолок топки и поворотной
камеры экранируются трубами фронтового и потолочного экранов, а стены поворотной камеры
экранируют шесть панелей экранов поворотной камеры. Первой поверхностью нагрева в
опускной шахте по ходу газов расположены пакеты КП СКД, включенные по схеме прямотока.
Пакеты крепятся на подвесной системе конвективной шахты, включенной в тракт котла.
Ниже расположены пакеты КПП НД-II, которые тоже крепятся на подвесной системе
конвективной шахты. Входные и выходные камеры КП СКД и КПП НД-II расположены в
необогреваемых камерах на боковых стенах шахты. Еще ниже расположены пакеты двух ходов
КПП НД-1, которые опираются на два ряда опорных балок (по 6 балок в ряду на всю ширину
шахты). Опорные балки охлаждаются воздухом, который забирается из цеха, проходит по сечению
балок и сбрасывается на всас дутьевых вентиляторов.
Последней поверхностью конвективной шахты является водяной экономайзер,
опирающийся на собственные входные и выходные камеры. Контроль за перемещением камер и
трубопроводов котлоагрегата при пусках и остановах энергоблоков осуществляется по реперам.
Регулирование температуры острого пара производится впрыском питательной воды в I и
II пароохладители, а при пусках энергоблоков – III впрыскивающим пароохладителем.
Регулирование температуры вторичного пара производится байпасированием части
холодного пара помимо КПП НД-I, количеством рециркуляции дымовых газов, отбираемых за ВЗ и
подаваемых ДРГ во внешние каналы горелок котлоагрегата 6 или в воздуховоды горячего воздуха
котлоагрегатов 5, 7, 8, а также аварийными впрысками питательной воды от промступеней
питательных насосов.
При пусках энергоблоков – байпасированием холодного пара помимо КПП НД-I, II в
паропроводы перед ЦСД турбоагрегата.
Котлоагрегат ТГМП-314 оборудован:
- двумя дымососами типа ДО-31,5-ГМ с принудительной смазкой подшипников от
маслостанции;
- двумя дутьевыми вентиляторами ВД-28,6;
- двумя дымососами рециркуляции газов типа ГД-20-500У-Т;
- двумя выносными РВП типа РВВ-98 с принудительной смазкой нижних опор от
маслостанции;
- калориферной установкой для подогрева воздуха перед РВП до 80 ˚С;
- дробеочисткой поверхностей нагрева конвективной шахты;
- установкой термоволновой очистки РВП.

10
1.2. ГАЗОВОЗДУШНЫЙ ТРАКТ
Дымосос ДО-31.5
На котлоагрегате ТГМП-314 КГРЭС установлены осевые дымососы ДО-31.5 ГМ-Ш Барнаульского
котельного завода с электродвигателями ДАЗО-1910-12. Дымососы предназначены для удаления
дымовых газов из топок котлоагрегатов и представляют собой двухступенчатую осевую машину,
состоящую из следующих основных узлов:
- всасывающего кармана
- корпуса со спрямляющим аппаратом
- двух направляющих аппаратов с общим приводом
- ходовой части
- двух рабочих колес
- диффузора
- опор
Техническая характеристика дымососа (табл.3)
Таблица 3
Наименование Размерность Величина
производительность м3/час 900000
полный напор при тем-ре среды 100 0С кгс/см2 377
КПД при расчетном режиме % 72
Макс. КПД при среднеэксплуатационном режиме % 84
Скорость вращения об/мин 496
Мощность электродвигателя кВт 1700
Допустимая температура перед дымососом 0С 200
Диаметр рабочего колеса мм 3176
Габаритные размеры дымососа длина ширина высота
мм
11507
Всасывающий карман состоит из нижней и верхней половин, соединенных между собой
болтами. Нижняя половина имеет две фундаментальные опоры и люк. Карман снабжен воронкой
с постоянным радиусом кривизны для обеспечения плавного входа поток газов в дымосос.
Корпус дымососа состоит из 3-х частей и кока, соединенных между собой болтами по фланцам. В
первой части размещены направляющий аппарат и рабочее колесо 1 ступени, во второй части –
направляющий аппарат и рабочее колесо II ступени, в третьей части – спрямляющий аппарат.
Направляющие аппараты I и II ступеней служат для регулирования производительности дымососа
и состоят из неподвижных частей лопаток и поворотных закрылков.
11
Закрылки отклоняются в обе стороны от среднего (нулевого) положения и закручивают
поток газов как по ходу колеса, так и против хода, соответственно повышая или понижая
производительность дымососа. Все закрылки имеют общий привод, обеспечивающий
синхронность регулирования обоих ступеней.
Ходовая часть дымососа состоит из кованного вала, четвертого опорного и третьего
опорно-упорного подшипников, тормоза с ручным приводом и двухвенечной зубчатой муфты,
соединяющей валы машины и электродвигателя.
Смазка подшипников принудительная, циркуляционная от одной маслостанции на два
дымососа, что обеспечивает охлаждение подшипников при работе и их прогрев при пуске в
зимнее время.
Температура подшипников измеряется термометрами сопротивления. Прибор для
регистрации температур установлен на БЩУ ТГМП-314.
Торможение ротора дымососа при аварийном останове и его фиксации при проведении
ремонтных работ или отключении маслостанции производится колодочным тормозом с ручным
приводом.
Осевой дымосос имеет ряд недостатков: низкий напор отдельных ступеней, наличие
неустойчивой зоны характеристики и возможности попадания в помпажный режим,
относительная конструктивная сложность, большие габаритные размеры и значительный шум при
работе.
Корпус дымососа и газоходы покрыты теплозвуковой изоляцией, состоящей из:
- минеральной ваты толщиной 100 мм
- металлической сетки
- асбоцементной штукатурки толщиной 15 мм.
Привод дымососа осуществляется электродвигателем типа ДАЗО-1910-12 – напряжением 6 кВ, Jном
= 216 А, мощностью 1700 кВт.

12
Дутьевые вентиляторы
Котлоагрегат ТГМП-314 – двумя вентиляторами типа ВД-28,6. ВД предназначены для подачи
воздуха через калориферы и РВП в горелки котлоагрегата.
Техническая характеристика вентиляторов (табл.4)
Таблица 4
Наименование Размерность Величина
ВД-28,6
Производительность I/II скор м3/час 380000/480000
Напор на I/II скорости мм.в.ст. 360/565
КПД % 85
Скорость вращения на I/II скорости об/мин 598/748
Мощность электродвигателя кВт 625/1100
Напряжение электродвигателя В 6000
Ток эл. Двигателя I/II скор А 92/160
1.3. РЕЖИМНЫЕ ХАРАКТЕРИСТИКИ
Режимная карта котла при работе на газообразном топливе в однокорпусном режиме
приведена в таблице 5:
Таблица 5

13
2. ТЕХНОЛОГИЧЕСКАЯ ЗАДАЧА УПРАВЛЕНИЯ
2.1. ОПИСАНИЕ СХЕМЫ РЕГУЛИРОВАНИЯ
Объект регулирования по разряжению представляет собой последовательно
расположенные топку (камеру сгорания) и газоходы до всасывающих патрубков дымососа.
Наличие небольшого разряжения2-3 мм.вод.ст. (20-30 Па) в верхней части топочного пространства
необходимо для устойчивости факела в зоне горения, предотвращения выбивания продуктов
горения из котла и косвенно характеризует материальный баланс между воздухом-
окислителем топлива и отходящими газами-продуктами горения. Входное регулирующее
воздействие-расход отсасываемых дымовых газов, определяемый производительностью
дымососа. Внешнее возмущающее воздействие-изменение расхода воздуха, подаваемого в
топку при изменении тепловой нагрузки котельного агрегата. Внутренние возмущения-
нарушения газовоздушного режима [3].
Рост Sт вызванный увеличением отсоса дымовых газов, может привести к срыву факела и
останову котла (срабатывает защита по погасанию факела).
Уменьшение может привести к выбиванию продуктов сгорания из топки котла в
производственные помещения (например, за счет увеличения расхода воздуха выше допустимого
значения при неизменном отводе газов и котла).
Благодаря своей простоте и надёжности, наибольшее распространение получила схема
регулирования разрежения с одноимпульсным ПИ-регулятором, реализующим принцип
регулирования по отклонению (рис. 1). Требуемое значение разрежения устанавливается с
помощью задатчика ручного управления (ЗРУ). Регулятор разрежения (РР) воздействует на
производительность дымососов, изменяя положение НА и, соответственно, количество
отсасываемых дымовых газов Dг.
Рис.1. Структурная схема АСР разрежения в топке
ЗРУ – задатчик ручного управления; РР – регулятор разряжения; УДС – устройство
динамической связи; РОВ – регулятор общего воздуха; НА – направляющий аппарат.

14
При работе котла в регулирующем режиме происходят частые изменения тепловой нагрузки и
связанные с ними изменения расхода воздуха. Изменение расхода воздуха, нагнетаемого в топку,
приводит к нарушению газо-воздушного режима и изменению величины. Для предупреждения
этого изменения и улучшения качества переходного процесса через устройство динамической
связи (УДС) на РР подают дополнительный сигнал от РОВ [14].
Информационная часть
РР
Sт ЗРУ Сигнал от РВ
на ДС
Алгоритмическая часть
Исполнительная часть
Рис.1. Информационная схема регулирования разряжения
Wр-р
Wк(p)
W1(p)
W2(p)
X(t)μ(t)
λ(t)Gвозд
ε(t)
на ДС
SтSзад
Рис.3. Расчетная схема одноконтурной АСР разрежения с каналом компенсации внешнего возмущения в
стабилизирующем контуре
Регулирующий орган X(t) – Производительность ДС (т/ч).
Внешнее возмущение Z(t) – Производительность ДВ (т/ч).
Регулируемый параметр Y(t) – Разрежение в топке Sт (Па).
Представим перечень параметров газовоздушного тракта, подлежащих контролю, в таблице 6.

15
Таблица 6.
Наименование параметра
Номинальное значение
Предельное значение погрешности
датчика канала измерения
Разрежение в топке 30 Па Расход дымовых газов 30,5
Расход воздуха 25
2.2. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К КАЧЕСТВУ РЕГУЛИРОВАНИЯ
Автоматическое регулирование представляет собой непрерывный процесс, и
предназначенный для стабилизации технологических параметров на заданном уровне,
обеспечении установленной мощности, надежной и экономичной работы котла.
Согласно [1], нормой поддержания разрежения в верхней части топки котла в
стационарном режиме нагрузок является допустимое отклонение при скачкообразном
изменении нагрузки на 10% допускается отклонение [2].
2.3. РАЗРАБОТКА P&I -ДИАГРАММЫ
P&I-диаграмма газовоздушного тракта котла ТГМП-314 разработана согласно [4] по
системе кодирования KKS и приведена в приложении 1. Расшифровка обозначений приведена в
таблице 2.1.
Таблица 2.1. Расшифровка кодов KKS P&I-диаграммы
Код Расшифровка
18 Котел 1 энергоблок 8
HHG Распределение и редукция газа от отвода из основного топливопровода
HHL HLA
Подача воздуха для горения от ответвления системы воздуховодов (HLA) до потребителя
HHA Основная топка от входов топлива и воздуха в горелку
HNF Система рециркуляции дымовых газов от главного газохода до входа в следующую систему, включая вентиляторы
HNA Система газоходов от выхода из котла или от выхода из другой системы до дымовой трубы, исключая воздухоподогреватели, пылеочистку, дымососы, скруббер, химичческую обработку газов
HLD Подогрев воздуха (дымовыми газами) от входа в подогреватель до выхода из подогревателя
HLB Воздуходувки, вентиляторы первичного воздуха от входа до выхода
HNC Дымососы от входа в систему до выхода из системы
AA Арматура, включая привод, так же и ручной
AE Поворачивающие, вращающие, грузоподъемные, транспортные механизмы (так же - манипуляторы)
AN Компрессоры, вентиляторы
CT Температура
CP Давление

16
CF Расход, массовый расход
CE Электрические величины (например, ток, напряжение, мощность, частота электрического тока)
CQ Показатели качества (анализы, свойства веществ, кроме «CD», «CM», «CV»)
XAV Снабжение смазочными средами от маслоблока смазки или от общего бака масла для смазки и регулирования или от отвода из системы снабжения смазочными средами до потребителя и от потребителя
EY Технологические защиты, локальные защиты оборудования (условия срабатывания)
QHN Система отвода продуктов горения паровых и водогрейных котлов ПРК
2.4. ПЕРЕЧНИ ТОЧЕК КОНТРОЛЯ, УСТАВОК СИГНАЛИЗАЦИИ, ЗАЩИТ, И
ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
Таблица 2.2. Перечень запорно-регулирующей арматуры и механизмов собственных нужд
№ Код(KKS) Наименование арматуры
1 18HLA10AA801 Направляющий аппарат ДВ-А
2 18HLA50AA801 Направляющий аппарат ДВ-Б
3 18HNA10AA801 Направляющий аппарат Д-А
4 18HNA50AA801 Направляющий аппарат Д-Б
5 18HNF10AA801 Направляющий аппарат ДРГ-А
6 18HNF50AA801 Направляющий аппарат ДРГ-Б
7 18HHG01AA001 ПЗК-1 горелки №1(2-8)
8 18HHG01AA002 ПЗК-2 горелки №1(2-8)
9 18HHG01AA801 Заслонка регулирующая газовая горелки №1(2-8)
10 18HLA20AA001 Клапан плотный на воздуховоде гор.воздуха за РВП-А
11 18HLA60AA001 Клапан плотный на воздуховоде гор.воздуха за РВП-Б
12 18HNA10AA001 Клапан плотный на газоходе к РВП-А
13 18HNA50AA001 Клапан плотный на газоходе к РВП-Б
14 18HNC10AN001 Дымосос н.А
15 18HNC50AN001 Дымосос н.Б
16 18HNF10AN001 Дымосос рециркуляции дымовых газов н.А
17 18HNF50AN001 Дымосос рециркуляции дымовых газов н.Б
18 18HLB10AN101 Дутьевой вентилятор н.А
19 18HLB50AN101 Дутьевой вентилятор н.Б
20 18HLD10AE001 Регенеративный воздухоподогреватель н.А
21 18HLD50AE001 Регенеративный воздухоподогреватель н.Б
22 18HHL01AA801 Шибер воздушной горелки №1(2-8)
23 18HLA21AA801 Клапан плотный на рециркуляции гор.воздуха к ДВ-А
24 18HLA61AA801 Клапан плотный на рециркуляции гор.воздуха к ДВ-Б
25 18HNF10AA001 Клапан плотный на всасе ДРГ-А
26 18HNF10AA002 Клапан плотный на нагн.коробе рецирк.дым.газов н.А
27 18HNF10AA003 Клапан плотный на нагн.коробе рецирк.дым.газов н.А
28 18HNF50AA001 Клапан плотный на всасе ДРГ-Б
29 18HNF50AA002 Клапан плотный на нагн.коробе рецирк.дым.газов н.Б
30 18HNF50AA003 Клапан плотный на нагн.коробе рецирк.дым.газов н.Б
31 18HNF10AA004 Клапан плотный на гор.воздухе к тракту рецирк.дым.газов н.А
32 18HNF50AA004 Клапан плотный на гор.воздухе к тракту рецирк.дым.газов н.Б

17
Таблица 2.3. Перечень точек контроля
№
Точка контроля Форма представления
информации
Авт
ом
ати
ческ
ое
рег
ули
ро
ван
ие
Контур Измеряемый
параметр
Измеряе-мая
среда Место точки контроля
Номинальное значение
параметра
Функцио нальное Обозна чение
На БЩУ
По
мес
ту
Изм
ерен
ие
Рег
ист
рац
ия
Си
гнал
иза
ци
я
Уча
сти
е в
защ
ите
1 18HHG00CT001 Температура Газ За ГР-1 - TIRA + + ↑ ↑ 2 18HHG00CF001 Расход Газ За ГР-1 77000 м3/ч FIRSAC + + ↑ ↑ + + 3 18HHG00CP001 Давление Газ За ГР-1 0,2 кгс/см2 PDIA + + ↓ ↓ + 4 18HLA10CT001 Температура Воздух Холодный в-х. нитка А 25 TIR + +
5 18HLA50CT001 Температура Воздух Холодный в-х. нитка Б 25 TIR + +
6 18HLB10CE002 Мощность - ДВ-А(Б) 1100 кВт EIRA + + ↑↓ 7 18HNF10AN001 Мощность - ДРГ-А(Б) 800 кВт EIRA + + ↑↓
8 18HNC10CE002 Мощность - ДC-А(Б) 1700 кВт EIRA + + ↑↓
9 18HLA10CT003 Температура Воздух За ДВ-А(Б) 30 TIR + +
10 18HLA10CP001 Давление Воздух За ДВ-А(Б) 140 кгс/м2 PIRA + + ↑↓
11 18HNA10CT008 Температура Ух. газы Перед РПВ-А(Б) 350 TIR + +
12 18HNA10CP002 Давление Ух. газы Перед РПВ-А(Б) 350 PIR + + +
13 18HLD10CP001 Расход Воздух за РВП-А(Б) 100 PDIR + + 14 18HLA90CP001 Давление Воздух В общем коробе 120 PIRSA + + ↑↓ ↑ + 15 18HHA00CP001 Разрежение Дым.газы Вверху топки справа(слева) 30 Па PIRA + + ↑↓ 16 18HLA10AA801 Положение - н.а. ДВ-А(Б) - GINCZA + +
17 18HNF10AA801 Положение - н.а. ДРГ-А(Б) - GINCZA + +
18 18HNA10AA801 Положение - н.а. ДC-А(Б) - GINCZA + +
19 18HNA10CQ002 Концентрация В дымовых газах 0.2-0.3 % QAIRS + ↓ 20 18HNA10CT009 Температура Ух. газы за РВП-А(Б) 190 TIR + +
21 18HNA10CP003 Давление Ух. газы за РВП-А(Б) 285 кгс/см2 PIR + + +
22 02HHA04CT Температура Ух. газы В конвективной шахте - TIR + +
23 18HNA10CT010 Температура Ух. газы Перед дымовой трубой 145 TIR + +

18
Таблица 2.4. Перечень уставок сигнализации и технологических защит
№ п/п
Наименование защиты, сигнализации, блокировки
П р и б о р Выполняемая операция
У с т а в к а
Тип, шкала позиция По
параметр
у
По
времеии
1. 2. 3. 4. 5. 6. 7.
1. Понижение давления в топке Метран 100ДИВ -20÷0÷+20 мм.вод.ст
18QHN01СР018
Сигнализация < 1
2. Повышение давления в топке Метран 100ДИВ -20÷0÷+20 мм.вод.ст
18QHN01СР018
Сигнализация > 9
3. Погасание факела в топке котла Факел-2 18HHA00EY001 Отключение котла 9 сек. при сжигании мазута, газа без выд. вр.
4. Повышение вибрации подшипников ДС-А,Б
ИВ-Д-ПФ-11 0÷200мкм
18QHN01СQ001 18QHN01СQ002
Сигнализация 100 мкм
5. Повышение вибрации подшипников ДС-А,Б
ИВ-Д-ПФ-11 0÷200мкм
18QHN01СQ001 18QHN01СQ002
Отключение ДС-А,Б 150 мкм 5 сек.
6. Понижение давления масла перед подшипником ДС-А,Б
ЭКМ 0-4кгс/см²
18XAV00EY001 Отключение ДС-А,Б 0,3 1 мин.

19
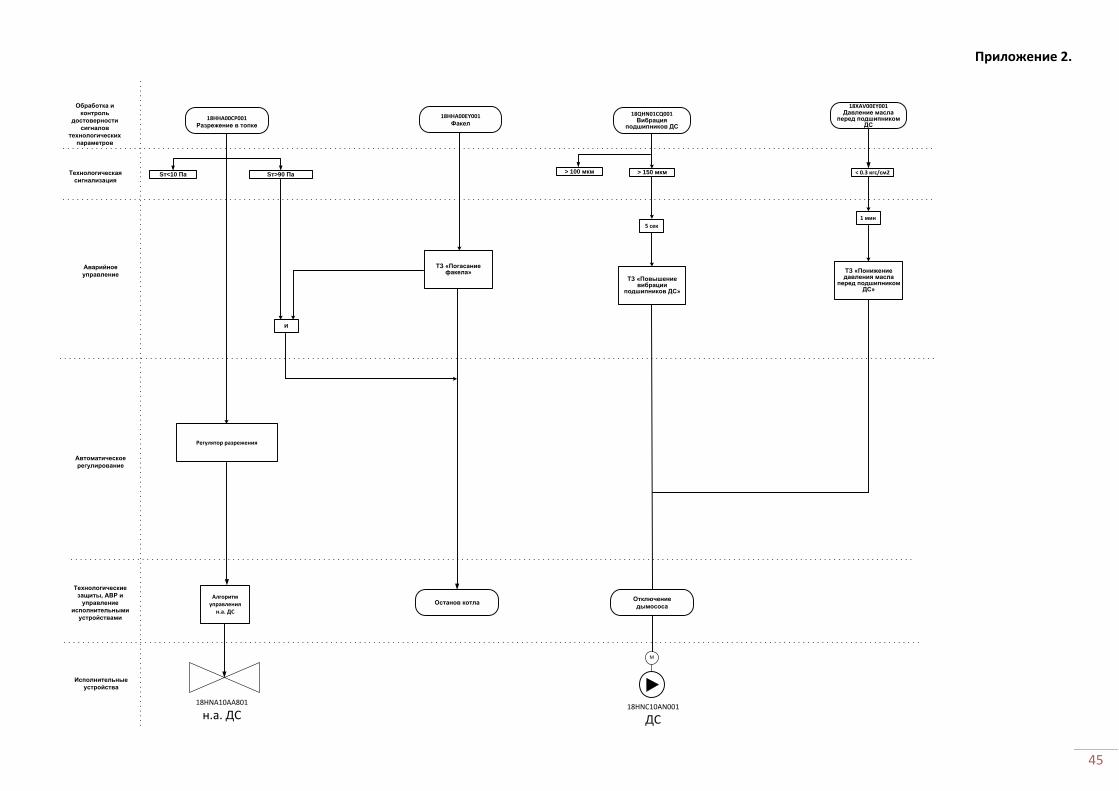
2.5. РАЗРАБОТКА СКВОЗНОЙ ИНФОРМАЦИОННО-ФУНКЦИОНАЛЬНОЙ
СТРУКТУРЫ ЛСУ
Информационно-функциональная (сквозная) структура системы управления разработана в
соответствии с [1] и P&I-диаграммой и представлена на 2-м листе чертежа.
При разработке ИФС множество выполняемых системой управления функций было объединено в
5 подсистем решаемых задач:
1) обработка и контроль достоверности сигналов технологических параметров;
2) технологическая сигнализация;
3) аварийное управление (технологические защиты в части формирования командных
сигналов);
4) автоматическое регулирование и логическое управление;
5) автоматические блокировки, АВР и управление исполнительными устройствами.
Для полноты схемы на ней также показаны блоки исполнительных устройств (см. приложение 2.).

20
2.6. РЕЗУЛЬТАТЫ ПАТЕНТНО-ИНФОРМАЦИОННОГО ИССЛЕДОВАНИЯ
Проведённый патентный поиск по изобретениям и полезным моделям в открытом реестре
изобретений (www.findpatent.ru) выявил альтернативный вариант способа регулирования
разрежения в топке, предложенной в [6].
ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ
Модель регулирования газовоздушного режима котлоагрегата с дутьевым вентилятором и
дымососом, содержащая регулятор разрежения с задатчиком, датчиком мощности двигателя
дымососа и корректирующим регулятором разрежения, связанным с датчиком разрежения.
Sт зд.
Сигнал от РВ
Блок коррекции
РР
На ДС
Sт
Рис.6. Информационная схема регулирования разряжения
Wр-р
Wк(p)
W1(p)
W2(p)
X(t)μ(t)
λ(t)
Gвозд
ε(t)
на ДС
SтSтзад Блок
Корр.
Рис.7. Расчетная схема регулирования разряжения
В результате использования такой структуры САУ устраняется статическая ошибка
регулирования разрежения, снижается динамическая ошибка регулирования разрежения при

21
отработке управляющего воздействия и при действии внешнего возмущения по расходу
воздуха, повышается быстродействие при регулирования разрежения. Техническим результатом
от использования полезной модели является улучшение качества регулирования разрежения в
топке котла, что выражается в повышении надёжности работы котла
Указанный технический результат достигается тем, что в известную САР разрежения в топке котла
введён корректирующий блок, включённый между выходом датчика разрежения и входом
регулятора разрежения и имеющий передаточную функцию пропорционально-
дифференцирующего звена (ПД):
( ) ( )
где, – оператор Лапласа; – коэффициент усиления корректирующего блока; – постоянная
времени демпфирования корректирующего блока.
По своей сути, предложенная схема являет собой одноимпульсную схему с ПИ-регулятором
и отличается лишь наличием ПД-звена, позволяющего производить точную подстройку качества
регулирования.
22
3. ИДЕНТИФИКАЦИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПО
КАНАЛАМ ОБЪЕКТА РЕГУЛИРОВАНИЯ
По результатам проведения экспериментов были сняты переходные процессы в
контуре при возмущении по каналу действия внутреннего и внешнего возмущения.
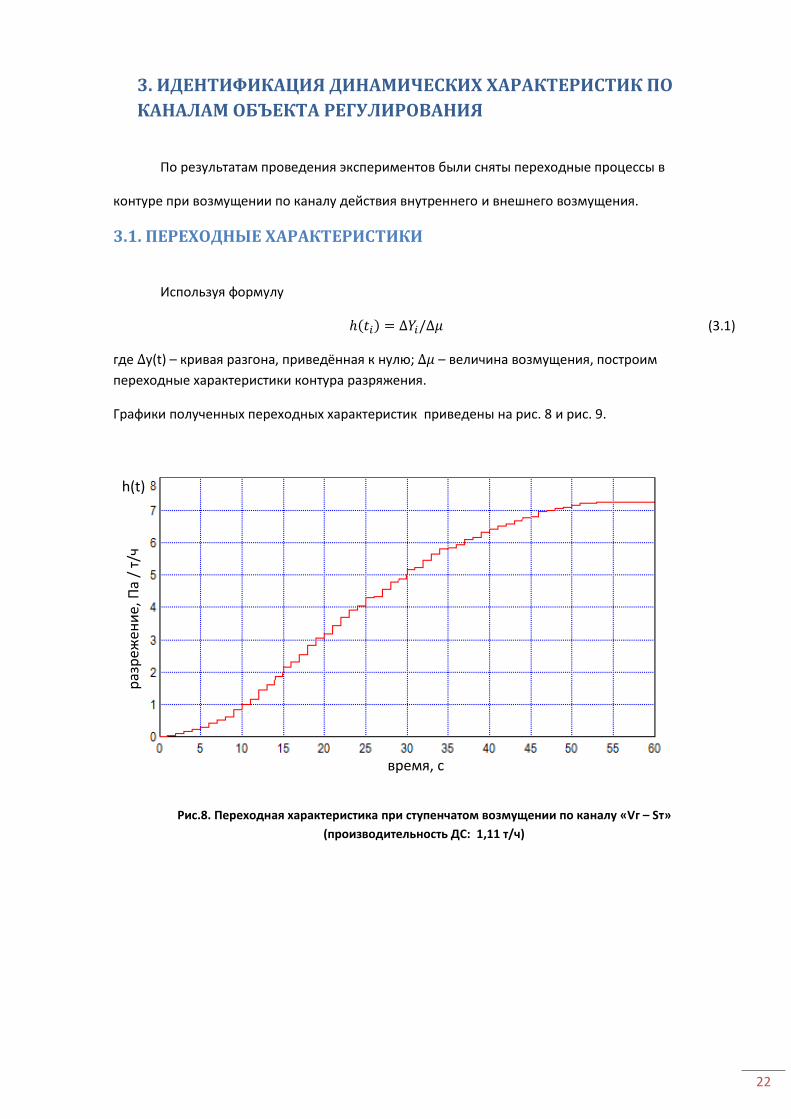
3.1. ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
Используя формулу
( ) (3.1)
где y(t) – кривая разгона, приведённая к нулю; – величина возмущения, построим
переходные характеристики контура разряжения.
Графики полученных переходных характеристик приведены на рис. 8 и рис. 9.
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
Рис.8. Переходная характеристика при ступенчатом возмущении по каналу «Vг – Sт»
(производительность ДС: 1,11 т/ч)

23
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
Рис.9. Переходная характеристика при ступенчатом возмущении по каналу «Vв – Sт»
(производительность ДВ: 1,11 т/ч)
3.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ «ВХОД-ВЫХОД»
Основные цели математического моделирования следующие:
определение оптимальных параметров настройки регуляторов для заданного запаса
устойчивости;
оценка качества регулирования переходных процессов.
Определение передаточной функции ТОУ непосредственно по переходной характеристике (во
временной области) представляется нежелательным по следующим причинам. Во-первых, по
виду переходной характеристики трудно определить структуру математической модели, т.е.
порядки полиномов числителя и знаменателя аппроксимирующей передаточной функции. Во-
вторых, критерии аппроксимации основаны на степени близости исходных и аппроксимирующих
переходных характеристик, а согласно теореме единственности операционного исчисления
близость двух функций во временной области не гарантирует их близости в частотной области (с
другой стороны, близость двух функций в частотной области гарантирует их близость во
временной). В-третьих, имеющийся опыт практического применения методов и алгоритмов
аппроксимации переходных характеристик показал, что даже наиболее строго обоснованный
среди этой группы методов метод «площадей» М. П. Симою часто не обеспечивает
удовлетворительного совпадения исходной и аппроксимирующей КЧХ в наиболее важном с точки
зрения синтеза САУ третьем квадранте комплексной плоскости [10].
Расчет КЧХ (Рис. 10, 11) по экспериментальной переходной характеристике (алгоритм
( ) ( ) производим в программно-методическом комплексе 'ТЕМП», предварительно
произведя ввод значений переходной характеристики в файл “f11.dat”.

24
Im, р
азр
ежен
ие,
Па/
т/ч
Re, разрежение, Па / т/ч
Рис.10. КЧХ по каналу возмущения регулирующим органом (Р, ДС) Vг – Sт
Im, р
азр
ежен
ие,
Па/
т/ч
Re, разрежение, Па / т/ч
Рис.11. КЧХ по каналу внешнего возмущения (Р, ДВ) Vв – Sт

25
Определяем структуру (порядки полиномов n, m) аппроксимирующей передаточной
функции
n
i
i
i
m
i
i
i
pa
pb
pWa
0
0)(*
(3.2)
по графическому изображению КЧХ (Рис. 10, 11), построенной в ПМК «ТЕМП».
По каналу Vг – Sт: m=0, n=3.
По каналу Vг – Sв: m=0, n=3.
Точную аппроксимацию в частотной области проводим путем уточнения коэффициентов
передаточной функции с помощью алгоритма ЧАП (частотной аппроксимации) в ПМК «ТЕМП»
(Рис. 12, 13).
Im, р
азр
ежен
ие,
Па/
т/ч
Re, разрежение, Па / т/ч
2 0 2 4 6
6
4
2
2
Рис.12. Аппроксимация с помощью алгоритма ЧАП передаточной функции по каналу возмущения
регулирующим органом (Р, ДС) Vг – Sт

26
Im, р
азр
ежен
ие,
Па/
т/ч
Re, разрежение, Па / т/ч
0 10 20
10
5
Рис.13. Аппроксимация с помощью алгоритма ЧАП передаточной функции по каналу внешнего
возмущения (Р, ДВ) Vв – Sт
Передаточная функция каналу возмущения регулирующим органом (Р, ДС) Vг – Sт:
[ ⁄ ] ( )
Передаточная функция по каналу внешнего возмущения (Р, ДВ) Vв – Sт:
[ ⁄ ] ( )
3.3. ОЦЕНКА АДЕКВАТНОСТИ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
Качественную оценку адекватности модели во временной области проводим путем
сравнения переходных характеристик – исходной ( ) с аппроксимирующей ( ). Построение
( ) и ( ) [7]. Во временной области проводим в программном средстве имитационного
моделирования VisSim (Рис.14,15).

27
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
ha(t) - апроксимирующая
h^(t) – экспериментальная
Рис.14.Аппроксимирующая и экспериментальная переходные характеристики по каналу возмущения
регулирующим органом (Р, ДС) Vг – Sт
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
ha(t) - апроксимирующая
h^(t) – экспериментальная
Рис.15. Аппроксимирующая и экспериментальная переходные характеристики по каналу внешнего
возмущения (Р, ДВ) Vв – Sт
Сравнивая переходные характеристики исходные ˆ( )h t с аппроксимирующими ( )ah t по
всем каналам можно сделать вывод, что полученные модели адекватны реальным объектам.

28
4. АЛГОРИТМИЧЕСКИЙ СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ И ИХ
СРАВНИТЕЛЬНЫЙ АНАЛИЗ
Необходимое условие технологической работоспособности ЛСУ определяется тремя
требованиями [1]:
система должна быть устойчивой;
система должна обладать требуемым запасом устойчивости (задается из технологических
соображений);
качество регулирования должно быть наилучшем в смысле выбранного критерия;
4.1. РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ ПИ - РЕГУЛЯТОРА
Качество процесса регулирования обычно оценивают по переходной характеристике h(t)
реакции замкнутой системы на единичное ступенчатое воздействие по каналу задания.
Основными показателями качества являются: время регулирования tp, перерегулирование
h(t)макс, колебательность и установившаяся ошибка ст.
Показатели качества регулирования определяются непосредственно по кривой
переходного процесса, которую можно получить экспериментально или решением
дифференциального уравнения системы. Решение дифференциального уравнения является
трудоемкой задачей, в связи с этим в практике находят широкое применение косвенные оценки
качества регулирования. Косвенными оценками называют некоторые величины, в той или иной
мере характеризующие отдельные особенности переходного процесса.
Одной из косвенных оценок качества регулирования является степень удаленности корней
характеристического уравнения замкнутой системы от мнимой оси. Расстояние ближайшего
корня от мнимой оси характеризует запас устойчивости системы и называется степенью
устойчивости. Наибольший из углов , образованный отрицательной вещественной полуосью и
лучами, проведенными из начала координат через корни, характеризует колебательность
системы. Котангенс этого угла m = ctg называется степенью колебательности. Для оценки
колебательности в ряде случаев удобно также пользоваться понятием степени затухания:
1( ) ( ) / ( )макс максh t h t h t (4.1)
Степень колебательности и степень затухания связаны между собой соотношением:
21 me (4.2)
На основе математических моделей каналов АСР производится расчет по методу
максимума амплитудно-частотной характеристики (МАЧХ) [10].

29
Рис.16. Поведение годографа КЧХ разомкнутой системы
Достижение «касания» годографом КЧХ разомкнутой системы границы области в
окрестности «опасной» точки ( ) при некотором значении коэффициента регулятора
эквивалентного выполнению следующего условия:
, , (4.3)
где определяется из условия пересечения годографом КЧХ фрагмента LN окружности с
центром в точке Р, то есть
| ( )|
[ ( ( ) ) √ ( ( ) )
], (4.4)
где ( ) ( )
( ) – рассчитана в предположении (4.5)
, ( ) ,
√
. (4.6)
Дальнейшие поиски оптимальных параметров настройки регулятора сводятся к нахождению
оптимальных параметров настройки регулятора на границе области заданной степени
колебательности С0-С1. Оптимизация проводится по минимаксным критериям вида:
1) 1 ( ) minI t dt - линейный интегральный критерий (ЛИК); (4.7)
2) 2
2 ( ) minI t dt - интегральный квадратичный критерий (ИКК). (4.8)

30
Wр-р
Wк(p)
W1(p)
W2(p)
X(t)μ(t)
λ(t)Gвозд
ε(t)
на ДС
SтSзад
Рис.17. Расчетная схема одноконтурной АСР разрежения с каналом компенсации внешнего
возмущения в стабилизирующем контуре
Для данной одноконтурной системы на основе передаточной функции W1 (p) объекта
управления по методу МАЧХ (М=1.29) в ПМК ТЕМП производим построение области Сo-C1 (см.
Рис.18) параметров настройки регулятора для заданного запаса устойчивости. В соответствии с
ИКК на области Сo-C1 находим оптимальные параметры настройки регулятора KР и TИ.
С1=Кр, Па / т/ч
Со=K
р/Т
и, П
а /
(т/ч
*с)
I2min
Рис.18. Линия заданного запаса устойчивости и оптимальные параметры настройки ПИ регулятора
Таким образом оптимальные настройки ПИ-регулятора будут:
0.204 ;/
30 .
р
u
ПаК
Т ч
Т c
Передаточая функция ПИ регулятора:
(
) [
⁄ ] ( )

31
4.2. РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ УСТРОЙСТВА КОМПЕНСАЦИИ
Компенсатор предназначен для возможности изменения внешнего (по отношению к
подсистеме регулирования разрежения в топке) сигнала в широком диапазоне значений [8].
Расчет параметров настройки данного устройства, структурно входящего в систему
регулирования разрежения в топке, будем вести из условия инвариантности подсистемы
регулирования разрежения в топке к внешнему по отношению к ней возмущению – Vв.
Исходя из изображенной на рис.17. , мы можем записать условие инвариантности:
( )
( )
( )
( ) ( )
( )
[ ⁄ ] ( )
( )
[ ⁄ ] ( )
( )
[ ⁄ ] ( )
Поскольку устройство компенсации, реализующее указанную передаточную функцию
технически невыполнимо, то условие инвариантности придется выполнить с некоторым
приближением.
Было принято решение реализовать динамический преобразователь в виде реально –
дифференцирующего звена c передаточной функцией:
( )
Для этого найдем рабочую частоту контура, которая определяется частотой максимального
значения амплитуды АЧХ по каналу внешнего возмущения (расчет проводится в ПМК
MathCAD)
- диапазон расчетных частот (рад/с)
Передаточная функция по каналу
внутреннего возмущения [ ⁄ ]
Передаточная функция по каналу
внешнего возмущения [ ⁄ ]
Передаточная функция регулятора РР [ ⁄ ]
0.0001 0.0002 10
Wo ( )7.246
360.823 i( )3
225.352 i( )2
23.023 i 1
W ( )16.174
59.998 i( )3
49.412 i( )2
12.637 i 1
Wp ( ) 0.204 11
30 i
Wid ( )1
Wp ( )
W ( )
Wo ( )
.*1
**)(
pТ
рTkрW
д
дукук

32
Амплитудно частотная характеристика по каналу
внешнего возмущения
Рис.19. АЧХ по каналу внешнего возмущения внешнего возмущения (Р, ДВ) Vв – Sт
Таким образом
Построим КЧХ идеального компенсатора в программе Matchad в диапазоне частот от 0 до 10
рад/с (Рис. 20) и отметим на ней рабочую частоту контура.
Im, р
азр
ежен
ие,
Па/
т/ч
Re, разрежение, Па / т/ч
ω=0.1 рад/с
Рис.20. КЧХ идеального компенсатора и рабочая частота
ω , рад/с
раз
реж
ени
е, П
а20
15
10
50.1 0.15 0.25 0.35 0.45
A ( ) Re W ( )( )2
Im W ( )( )2

33
Подберем реальное устройство компенсации так, чтобы КЧХ реального и идеального УК
пересекались при двух частотах ω=0 и ω=ωр . В качестве передаточной функции реального
компенсатора выберем РД – звено (4.14).
Построим совмещенные КЧХ идеального и реального компенсатора в программе Matchad
в диапазоне частот от 0 до 10 рад/с (рис.21) и отметим на ней рабочую частоту контура.
Im, р
азр
ежен
ие,
Па/
т/ч
Re, разрежение, Па / т/ч
ω=0.1 рад/с
1
2
Рис.21. Совмещенные КЧХ 1-идеального и 2-реального устройства компенсации внешнего возмущения
Таким образом передаточная функция реального компенсатора представлена в виде
( )
[ ⁄ ] ( )
Wk ( )Kp Tu i
1 Tu i
[рад/с]
[c]
[Па/(т/ч)]
p 0.100
Wid p( ) 5.039818 17.667757i
Wk p Kp Tu( ) simplifyKp Tu Tu 10.0i( )
Tu2
100.0
Tu5.086613 1.009e7
1.018081e6 17.849042 Tu 2.824
Kp5.086613 1.018081e6 Tu
2 1.0e8
1.018081e6 Tu2
Kp 67.719312

34
4.3. БАЗОВЫЙ ВАРИАНТ СХЕМЫ РЕГУЛИРОВАНИЯ
Метод расчёта АСР – метод максимума амплитудно-частотной характеристики (МАЧХ).
Ограничение на частотный показатель колебательности: M=1.290.
Критерий оптимизации при расчёте регулятора – интегральный квадратичный
критерий (ИКК). Тип регулятора – пропорционально-интегральный (ПИ).
Для оценки поведения системы при разных возмущениях построим согласно схеме
изображенной на рис.3. имитационную модель одноконтурной АСР разрежения с компенсацией
внешнего возмущения в стабилизирующем контуре в ПМК «VisSim» (рис. 22.).
Рис.22. Имитационная модель базовой АСР разрежения
С помощью ПМК «VisSim» нанесем единичное ступенчатое возмущение по каналу задания
и получим график переходного процесса (рис.23.).
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
tп=36.9 c tp=94 c
ΔHA1
Рис.23. График переходной характеристики базовой АСР при единичном ступенчатом возмущении по
каналу задания

35
С помощью программы «VisSim» нанесем единичное ступенчатое возмущение РО и
получим график переходного процесса (рис.24).
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
tп=28.49 ctp=199 c
A1
Рис.24. График переходной характеристики базовой АСР при единичном ступенчатом внутреннем
возмущении РО
С помощью программы «VisSim» нанесем единичное ступенчатое внешнее возмущение и
получим график переходного процесса (рис.25).
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
tп=50.84 c
tp=229 c ΔH
A1
Рис.25. График переходной характеристики базовой АСР при единичном ступенчатом внешнем
возмущении
36
По переходным характеристикам системы определим прямые показатели качества [10] с
помощью программы «VisSim» (табл.7):
Статическая ошибка ст разность между требуемым и фактическим установившимся
значением регулируемой координаты:
Статическая ошибка определяется по формуле:
.
Динамическая ошибка максимальное по модулю отклонение регулируемой
координаты от установившегося значения за период наблюдения процесса:
Динамическая ошибка определяется по формуле:
| ( ) | .
Степень затухания переходного процесса характеризует запас устойчивости системы и
интенсивность затухания колебательного процесса:
Степень затухания определяется по формуле:
,
где и – модули значений первого и третьего отклонений регулируемой координаты от
установившегося значения соответственно.
Время регулирования характеризует быстродействие системы в аспекте длительности
отработки ей поступившего возмущения:
Время регулирования определяется из условия:
: ( ) ;2
p устt y t y
pt t ,
приняли (зона чувствительности регулируемой координаты).
Время полувыбега характеризует быстродействие системы в аспекте скорости реакции
на поступившее возмущение.

37
Таблица 7
Наименование показателя качества
регулирования
Значение
Возмущение заданием Внутреннее возмущение
Внешнее возмущение
Статическая ошибка
ст , Па 0.00023 0.0031 0.0041
Динамическая ошибка , Па
0.13 3.237 1.873
Степень затухания переходного процесса
0.89 0.83 -
Время регулирования , с
94 199 229
Время полувыбега , с
36.9 28.49 50.84
Линейный интегральный
критерий , Па 279.714 146.931 136.47
Интегральный квадратичный
критерий
272.107 281.187 164.970
4.4. АЛЬТЕРНАТИВНЫЙ ВАРИАНТ СХЕМЫ РЕГУЛИРОВАНИЯ
В качестве альтернативного варианта рассмотрим предложенную в п. 2.6 одноконтурную
АСР с блоком коррекции по заданию, включенным до регулятора. Соберём имитационную
модель в VisSim (рис. 26)
Рис.26. Имитационная модель альтернативной АСР разрежения
Т.к. в заявке на изобретение не содержится никаких указаний по настройке
корректирующего блока, то параметры настройки (на схеме , ) были подобраны

38
опытным путём так, чтобы качество регулирования было визуально сопоставимо с результатами
п.4.3.:
С помощью ПМК «VisSim» нанесем единичное ступенчатое возмущение по каналу задания
и получим график переходного процесса (рис.27.).
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
tп=28.48 c tp=84.17 c
ΔH
A1
Рис.27. График переходной характеристики альтернативной АСР при единичном ступенчатом
возмущении по каналу задания
С помощью программы «VisSim» нанесем единичное ступенчатое возмущение РО и
получим график переходного процесса (рис.28).
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
tп=21.77 c
tp=170 c
ΔH
A1
Рис.28. График переходной характеристики альтернативной АСР при единичном ступенчатом внутреннем
возмущении РО

39
С помощью программы «VisSim» нанесем единичное ступенчатое внешнее возмущение и
получим график переходного процесса (рис.29).
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
tп=13.71 c tp=187.9 c
ΔH
A1
Рис.29. График переходной характеристики альтернативной АСР при единичном ступенчатом внешнем
возмущении
По переходным характеристикам системы определим прямые показатели качества с помощью
программы «VisSim» (табл.8):
Таблица 8
Наименование показателя качества
регулирования
Значение
Возмущение заданием Внутреннее возмущение
Внешнее возмущение
Статическая ошибка
ст , Па 0.00005 0.0006 0.0008
Динамическая ошибка , Па
0.068 1.579 0.759
Степень затухания переходного процесса
0.99 0.99 -
Время регулирования , с
84.17 170 187.9
Время полувыбега , с
28.48 21.77 13.71
Линейный интегральный
критерий , Па 284.623 70.006 65.039
Интегральный квадратичный
критерий
278.558 63.539 39.279

40
4.5. СРАВНЕНИЕ ВАРИАНТОВ АСР
Совмещённые графики переходных характеристик при внутреннем возмущении,
возмущении по каналу задания и внешнем возмущении приведены на рис. 30-33. Как видно
из графиков, одноимпульсная схема с блоком коррекции имеет заметно лучшие показатели
качества, чем базовая схема с ПИ-регулятором.
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
Альтернативная АСР
Базовая АСР
Рис.30. Совмещенные графики переходных характеристик базовой и альтернативной АСР при единичном
ступенчатом возмущении по каналу задания
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
Альтернативная АСР
Базовая АСР
Рис.31. Совмещенные графики переходных характеристик базовой и альтернативной АСР при единичном
ступенчатом внутреннем возмущении РО

41
время, с
раз
реж
ени
е, П
а /
т/ч
h(t)
Альтернативная АСР
Базовая АСР
Рис.32. Совмещенные графики переходных характеристик базовой и альтернативной АСР при единичном
ступенчатом внешнем возмущении
Сопоставим значения показателей качества в таблице 9:
Таблица 9
Наименование показателя качества
регулирования
Значение
Возмущение заданием Внутреннее возмущение Внешнее возмущение
Базовая АСР
Альтерна- тивная
АСР
Базовая АСР
Альтерна- тивная
АСР
Базовая АСР
Альтерна- тивная
АСР
Статическая ошибка , Па
0.00023 0.00005 0.0031 0.0006 0.0041 0.0008
Динамическая ошибка , Па
0.13 0.068 3.237 1.579 1.873 0.759
Степень затухания переходного процесса
0.89 0.99 0.83 0.99 - -
Время регулирования , с
94 84.17 199 170 229 187.9
Время полувыбега , с
36.9 28.48 28.49 21.77 50.84 13.71
Линейный интегральный
критерий , Па 279.714 284.623 146.931 70.006 136.47 65.039
Интегральный квадратичный
критерий
272.107 278.558 281.187 63.539 164.970 39.279
Как видно из графиков, одноимпульсная схема с блоком коррекции имеет заметно
лучшие показатели качества, чем базовая схема с ПИ-регулятором.

42
ВЫВОД
В данном курсовом проекте была разработана локальная система управления
газовоздушного тракта котла ТГМП-314 и проведён алгоритмический синтез АСР разрежения в
топке котла. Анализ качества переходных процессов показал, что расчет схемы был проведен
корректно. Реакции системы на все подаваемые возмущения, были адекватны, средства
регулирования схемы должным образом отрабатывали их, выводя систему на заданные
установившиеся значения.
Таким образом, в результате имитационного моделирования мы получили, что:
- система была устойчивой при всех подаваемых возмущениях;
- система обладала требуемым запасом устойчивости;
- качество регулирования переходных процессов удовлетворяло требованиям,
заложенных выше.

43
Список литературы
1. Тверской Ю.С. Локальные системы управления: Учеб.-метод. пособие / ФГБОУВПО
«Ивановский государственный энергетический университет им. В.И. Ленина». – Иваново,
2011. – 128 с.
2. Инструкция по эксплуатации энергоблока 300 мВт Костромская ГРЭС / Министерство
энергетики и электрификации «ЕЭС России» ОАО «Костромская ГРЭС», г. Волгореченск
2000 г. – 108 с.
3. Автоматизация технологических процессов и производств в теплоэнергетике: учебник
для студентов вузов / Г.П. Плетнёв. – 3-е изд., перераб. и доп. – Москва: Издательство
МЭИ, 2005. – 352 с., ил.
4. РД 153-34.1-35.144-2002. Рекомендации по применению современной универсальной
системы кодирования оборудования и АСУТП ТЭС.
5. СО 34.35.101-2003. Методические указания по объему технологических измерений,
сигнализации и автоматического регулирования на тепловых электростанциях: утв.
Департаментом научно-технической политики и развития РАО «ЕЭС России» 23.10.2003;
разраб. ОАО «Фирма ОРГРЭС».– М.: ЦНТИ ОРГРЭС, 2004. – 119 с.
6. SU 1176145 A. Патент: Система автоматического регулирования газовоздушного режима
котлоагрегата / Авторы: Н.И. Давыдов, И.Х.Л. Рабовицер, В.В. Тропин, Ф.П. Пюпа, А.С.
Землянский, Н.Е. Мельченко; патентообладатель: Уральский теплотехнический научно-
исследовательский институт им. Ф.Э. Дзержинского и Подольский машиностроительный
завод им. Серго Орджоникидзе.
7. Тверской Ю.С. Методические указания к выполнению лабораторных работ по курсу
«Локальные системы управления»: учеб.-метод. разработка / Ю.С. Тверской, С.А.
Таламанов, А.В. Голубев. – Иван. гос. энерг. ун-т. – Иваново, 2002. – 40 с.
8. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами:
Учебник для вузов. – М.: Энергоатомиздат, 1985. – 296 с., ил.
9. Клюев А.С., Товарнов А.Г. Наладка систем автоматического регулирования котлоагрегатов
/ М.: Энергия, 1970. – 280 с. с илл.
10. Таламанов С.А. Практикум по идентификации, параметрической оптимизации и
имитационному моделированию систем автоматического управления: учеб. пособие /
С.А. Таламанов, Ю.С. Тверской; Иван. гос. энерг. ун-т. – Иваново, 2000. – 96 с.
11. Управление и информатика в технических системах. Квалификационная работа: учеб.
пособие / под ред. Ю.С. Тверского; ГОУВПО «Ивановский государственный энергетический
университет имени В.И. Ленина». – Иваново, 2008. – 148 с.
12. Журнал «Вестник УГАТУ»., Регулирование разряжения в топке котла – современный
подход / Ю. А. Тверской // Известия Академии наук. Энергетика. 2003. №1.
13. Кузьменко Д.Я., Регулирование и автоматизация паровых котлов: учебник для
машиностроительных техникумов. Изд. 2-е, перераб. и доп. М.: Энергия, 1978 – 160 с., ил.
14. Конспект лекций по курсу «Локальные системы управления»; Тверской Ю.С.

44
Приложение 1.
ТОП
ОЧ
НА
Я К
АМ
ЕРА
ТРУБА
ДВ-А
ДС-А
ДС-Б
ДВ-Б
КОРОБОБЩЕГО ВОЗДУХА
EI18HLD50CE022
TIR02HHA04CT
м
м
ШР-Б
РВ
П-Б
м
ШВ-2Б
м
на-БДРГ-БШРГ-2Б
мм
мм
ШРГ-1Б
м
ШРГ-3Б
ШГВ-Б
ГР-1ПЗК-2ПЗК-1
ВШ-2м
на-АДРГ-АШРГ-2А
мм
мм
ШРГ-1А
м
ШРГ-3А
ШГВ-А
ГР-1ПЗК-2ПЗК-1
ВШ-1м
ШВ-2А
м
м
ШР-А
м
РВ
П-A
м
ШГ-1А
м
ШГ-1Б
м
н.а.ДС
м
н.а.ДС м
кон
вективн
ая шахта
нар
ужн
ый
во
здух
возд
ух и
з ко
тел
ьно
й
11
1
1
1
1
1
11
11
11
1
1
1
1
1
1 1
1 1
1
11
11
1
111
11
1
111
3
3 3
3 3
3 3 3 3 3
3 3 3 3
3333333333
111
11
1
1
1 1
1
33
33
3333
33
3 3 3 3
33
33
3
44
44
44
4 4 4
555
5 5 5
газ на котел
газ на котел
1 1
2 2
3 3
4 4
5 5
воздух
пар
уходящие газы
смесь уходящих газов и воздуха
топливо (попутный газ)
EIRA18HNF10AN001
GINCZA18HNF10AA801
PIA18HHL01CP001
PDIA18HHG00CP001
FIRAC18HHG00CF001
TIRA18HHG00CT001
TIRA18HHG00CT001
PDIA18HHG00CP001
FIRAC18HHG00CF001
PIA18HHL50CP001
PIRA18HHA00CP002
PIRA18HHA00CP001
EIRA18HNF50AN001
GINCZA18HNF50AA801
PIR18HNA50CP002
TIR18HNA50CT008
QAIRS18HNA10CQ002
PIRSA18HLA90CP001
PIR18HNA10CP002
TIR18HNA10CT008
PDIR18HLD10CP001
EI18HLD10CE022
PDIR18HLD50CP001
TIR18HLA50CT003
PIRA18HLA50CP001
EIRA18HLB50CE002
TIR18HLA50CT002
TIR18HLA50CT001
GINCZA18HLA50AA801
TIR18HNA50CT010
QAIRS18HNA50CQ002
PIR18HNA50CP003
GINCZA18HNA50AA801
TIR18HNA50CT009 EIRA
18HNC50CE002
TIR18HNA10CT010
QAIRS18HNA10CQ002
EIRA18HNC10CE002
GINCZA18HNA10AA801
PIRA18HNA10CP003
TIR18HNA10CT009
PIRA18HLA10CP001 TIR
18HLA10CT002 TIR18HLA10CT001
GINCZA18HLA10AA801 EIR
18HLB10CE002
TIR18HLA10CT003
EI18HNC10AN001
EI18HNC50AN001
GIHAN18HHG01AA801
GIHAN18HHG01AA002
GIHAN18HHG01AA001
GIHAN18HHG01AA801
GIHAN18HHG01AA002
GIHAN18HHG01AA001
GIHAN18HLA20AA001
GIHAN18HLA60AA001
GIHAN18HNA10AA001
GIHAN18HNA50AA001
GIHAN18HNF10AN001
GIHAN18HNF50AN001
GIHAN18HLB50AN101
GIHAN18HLB10AN101
GIHAN18HLD50AE101
GIHAN18HLD10AE101
GIHAN18HHL01AA801
GIHAN18HHL01AA801
GIHAN18HNF50AA001
GIHAN18HNF10AA001
GIHAN18HNF10AA003
GIHAN18HNF10AA002
GIHAN18HNF10AA004
GIHAN18HNF50AA002 GIHAN
18HNF50AA004
GIHAN18HNF50AA003
GIHAN18HLA21AA801
GIHAN18HLA61AA801
45
Приложение 2.
Технологическая
сигнализация
Технологические
защиты, АВР и
управление
исполнительными
устройствами
Обработка и
контроль
достоверности
сигналов
технологических
параметров
Исполнительные
устройства
18HHA00EY001Факел
< 0.3 кгс/см2
Регулятор разрежения
5 сек
Останов котла
18HHA00CP001Разрежение в топке
Автоматическое
регулирование
18QHN01CQ001Вибрация
подшипников ДС
18XAV00EY001Давление масла
перед подшипником ДС
Алгоритм управления
н.а. ДС
Sт<10 Па Sт>90 Па
ТЗ «Погасание факела»
И
ТЗ «Повышение вибрации
подшипников ДС»
> 150 мкм
1 мин
ТЗ «Понижение давления масла
перед подшипником ДС»
Аварийное
управление
> 100 мкм
Отключение
дымососа
18HNC10AN001
ДС
М
18HNA10AA801
н.а. ДС