Model free force/position robot control with prescribed performance
6
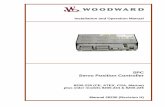
Model Free Force/Position Robot Control with Prescribed Performance Charalampos Bechlioulis, Zoe Doulgeri and George Rovithakis Department of Electrical & Computer Engineering Aristotle University of Thessaloniki 54124, Thessaloniki, Greece emails:{[email protected]; [email protected]; [email protected]} Abstract—In this paper, we consider the force/position track- ing problem for a robot in compliant contact with a kinemati- cally known planar surface. We propose a novel controller that achieves predeſned performance indices regarding the transient and steady state response of the robot force/position tracking errors and ensures no loss of contact of the robot-end effector. The proposed controller is model free in the sense that it does not incorporate any information regarding either the robot dynamic model or the force deformation model. Moreover, the controller gains are easily selected since the only concern is to adjust them to yield reasonable input torques. Simulation results on a 3-DOF robot conſrm the theoretical ſndings. I. I NTRODUCTION The force/position tracking problem for a robot in com- pliant contact with its environment is a problem that has been extensively studied in the past few decades. However, an extensive literature review is beyond the scope of this work; some indicative results can be found in [1]–[6]. The related works study the aforementioned problem under different types of uncertainties in both the robot dynamic model and the force deformation model. The problem has been solved for the case of parametric uncertainties while model uncertainties have been dealt via approximation-based techniques (neuro/fuzzy adaptive control) which are however of complex structure and lead to local results (i.e., inside the set where the approximation is satisfactory) without any a priori guarantees for their validity. Another impor- tant issue concerns tracking error performance and contact maintenance. The related works, in their majority, solve the problem in the sense of asymptotic tracking under the assumption of contact maintenance. Guarantees concerning contact maintenance and performance bounds on transient behavior, such as overshoot and convergence rate, are not given. Recently, prescribed performance controllers have been proposed in [7], [8] for speciſc classes of nonlinear systems (i.e., feedback linearizable and strict feedback) and those results have been extended by the authors in [9], [10] to address the force/position tracking problem with guaranteed prescribed performance and contact maintenance utilizing information concerning the robot dynamic model as well as the force deformation model in the presence of parametric uncertainties. In this work, we propose a novel controller that: a) incor- porates no information concerning either the robot dynamic model or the force deformation model; b) achieves position as well as force tracking with guaranteed prescribed transient as well as steady state performance and c) guarantees no loss of contact. Moreover, the selection of the controller gains has been simpliſed since the only concern is to adopt those values that lead to reasonable input torques. II. PRESCRIBED PERFORMANCE PRELIMINARIES Consider a generic tracking error e (t) ∈. As it was originally stated in [7], prescribed performance is achieved if the tracking error e (t) evolves strictly within a predeſned region that is bounded by a decaying function of time. The mathematical expression of prescribed performance is given, ∀t ≥ 0, by the following inequalities: −Mρ (t) <e (t) <ρ (t) in case e (0) ≥ 0 −ρ (t) <e (t) <Mρ (t) in case e (0) ≤ 0 (1) where 0 ≤ M ≤ 1 and ρ(t) is a bounded, smooth, strictly positive and decreasing function satisfying lim t→∞ ρ (t)= ρ ∞ > 0, called performance function [7]. As (1) im- plies, only one set of the performance bounds is employed and speciſcally the one associated with the sign of e (0). The aforementioned statements are clearly illustrated in Fig. 1, for an exponential performance function ρ (t) = (ρ 0 − ρ ∞ ) exp (−lt)+ ρ ∞ with ρ 0 , ρ ∞ , l appropriately chosen strictly positive constants. The constant ρ 0 = ρ(0) is selected such that (1) is satisſed at t =0 (i.e., ρ (0) >e (0) in case e (0) ≥ 0 or ρ (0) > −e (0) in case e (0) ≤ 0). The constant ρ ∞ = lim t→∞ ρ (t) represents the maximum allowable size of e (t) at the steady state and can be set arbitrarily small to a value reƀecting the resolution of the measurement device, thus achieving practical convergence of e (t) to zero. Furthermore, the decreasing rate of ρ (t), which is related to the constant l in this case, introduces a lower bound on the required speed of convergence of e (t). Moreover, the maximum overshoot is prescribed less than Mρ (0), which may even become zero by setting M =0. Thus, the appropriate selection of the performance function ρ (t) as well as of the constant M imposes performance characteristics for the tracking error e (t).
Transcript of Model free force/position robot control with prescribed performance

Model Free Force/Position Robot Control withPrescribed Performance
Charalampos Bechlioulis, Zoe Doulgeri and George RovithakisDepartment of Electrical & Computer Engineering
Aristotle University of Thessaloniki54124, Thessaloniki, Greece
emails:{[email protected]; [email protected]; [email protected]}
Abstract—In this paper, we consider the force/position track-ing problem for a robot in compliant contact with a kinemati-cally known planar surface. We propose a novel controller thatachieves prede ned performance indices regarding the transientand steady state response of the robot force/position trackingerrors and ensures no loss of contact of the robot-end effector.The proposed controller is model free in the sense that it doesnot incorporate any information regarding either the robotdynamic model or the force deformation model. Moreover, thecontroller gains are easily selected since the only concern isto adjust them to yield reasonable input torques. Simulationresults on a 3-DOF robot con rm the theoretical ndings.
I. INTRODUCTION
The force/position tracking problem for a robot in com-pliant contact with its environment is a problem that hasbeen extensively studied in the past few decades. However,an extensive literature review is beyond the scope of thiswork; some indicative results can be found in [1]–[6].The related works study the aforementioned problem underdifferent types of uncertainties in both the robot dynamicmodel and the force deformation model. The problem hasbeen solved for the case of parametric uncertainties whilemodel uncertainties have been dealt via approximation-basedtechniques (neuro/fuzzy adaptive control) which are howeverof complex structure and lead to local results (i.e., insidethe set where the approximation is satisfactory) withoutany a priori guarantees for their validity. Another impor-tant issue concerns tracking error performance and contactmaintenance. The related works, in their majority, solvethe problem in the sense of asymptotic tracking under theassumption of contact maintenance. Guarantees concerningcontact maintenance and performance bounds on transientbehavior, such as overshoot and convergence rate, are notgiven. Recently, prescribed performance controllers havebeen proposed in [7], [8] for speci c classes of nonlinearsystems (i.e., feedback linearizable and strict feedback) andthose results have been extended by the authors in [9], [10] toaddress the force/position tracking problem with guaranteedprescribed performance and contact maintenance utilizinginformation concerning the robot dynamic model as well asthe force deformation model in the presence of parametricuncertainties.
In this work, we propose a novel controller that: a) incor-porates no information concerning either the robot dynamicmodel or the force deformation model; b) achieves position aswell as force tracking with guaranteed prescribed transient aswell as steady state performance and c) guarantees no lossof contact. Moreover, the selection of the controller gainshas been simpli ed since the only concern is to adopt thosevalues that lead to reasonable input torques.
II. PRESCRIBED PERFORMANCE PRELIMINARIES
Consider a generic tracking error e (t) ∈ �. As it wasoriginally stated in [7], prescribed performance is achievedif the tracking error e (t) evolves strictly within a prede nedregion that is bounded by a decaying function of time. Themathematical expression of prescribed performance is given,∀t ≥ 0, by the following inequalities:
−Mρ (t) < e (t) < ρ (t) in case e (0) ≥ 0−ρ (t) < e (t) < Mρ (t) in case e (0) ≤ 0 (1)
where 0 ≤ M ≤ 1 and ρ(t) is a bounded, smooth, strictlypositive and decreasing function satisfying limt→∞ ρ (t) =ρ∞ > 0, called performance function [7]. As (1) im-plies, only one set of the performance bounds is employedand speci cally the one associated with the sign of e (0).The aforementioned statements are clearly illustrated inFig. 1, for an exponential performance function ρ (t) =(ρ0 − ρ∞) exp (−lt) + ρ∞ with ρ0, ρ∞, l appropriatelychosen strictly positive constants. The constant ρ0 = ρ(0) isselected such that (1) is satis ed at t = 0 (i.e., ρ (0) > e (0)in case e (0) ≥ 0 or ρ (0) > −e (0) in case e (0) ≤ 0).The constant ρ∞ = limt→∞ ρ (t) represents the maximumallowable size of e (t) at the steady state and can be setarbitrarily small to a value re ecting the resolution of themeasurement device, thus achieving practical convergenceof e (t) to zero. Furthermore, the decreasing rate of ρ (t),which is related to the constant l in this case, introduces alower bound on the required speed of convergence of e (t).Moreover, the maximum overshoot is prescribed less thanMρ (0), which may even become zero by setting M = 0.Thus, the appropriate selection of the performance functionρ (t) as well as of the constant M imposes performancecharacteristics for the tracking error e (t).
978-1-4244-8092-0/10/$26.00 ©2010 IEEE 377

0
0
e(0) ≥ 0
0
0
Time
e(0) ≤ 0
ρ(t)
−ρ(t)
Mρ(t)
−Mρ(t)
e(t)
e(t)
ρ∞
−ρ∞
Fig. 1. Graphical illustration of the prescribed performance de nition (1).
To achieve prescribed performance, an error transforma-tion, originally proposed in [7], is incorporated modulatingthe tracking error e (t) with respect to the required perfor-mance bounds imposed by the performance function ρ (t).More speci cally, we de ne:
ε (t) = T
(e (t)ρ (t)
)(2)
where ε (t) is the transformed error and T (·) is a smooth,strictly increasing function de ning an onto mapping:
T : (−M, 1) → (−∞,∞) in case e (0) ≥ 0T : (−1, M) → (−∞,∞) in case e (0) ≤ 0 (3)
For example, in case e (0) ≥ 0, a candidate transformation
function could be T(
e(t)ρ(t)
)= ln
(M+
e(t)ρ(t)
1− e(t)ρ(t)
). Otherwise, in
case e (0) ≤ 0, we could select T(
e(t)ρ(t)
)= ln
(1+ e(t)
ρ(t)
M− e(t)ρ(t)
). A
graphical illustration of the transformation function for bothcases is provided in Fig. 2. Moreover, as (3) implies and theaforementioned example clari es, the choice of the mappingT (·) depends only on the sign of e (0). Notice also that sinceρ (0) is selected such that (1) is satis ed at t = 0 (that isρ (0) > e (0) in case e (0) ≥ 0 or ρ (0) > −e (0) in casee (0) ≤ 0), the initial condition for the transformed error ε (0)is nite owing to (3).Furthermore, the case e (0) = 0 clearlysatis es (1) at t = 0 with the choice M = 0, since otherwise(i.e., M = 0) ε (0) becomes in nite. Thus, in such casethe transformation function can be selected to satisfy eitherT : (−M, 1) → (−∞,∞) or T : (−1, M) → (−∞,∞).
Differentiating (2) with respect to time, we obtain:
ε (t) = ϑT
(e (t) − ρ (t)
ρ (t)e (t)
)(4)
where ϑT ≡ ∂T
∂( e(t)ρ(t) )
1ρ(t) > 0 by construction. To proceed,
the following theorem provides us with a suf cient conditionfor the satisfaction of prescribed performance tracking asindicated by (1).
Theorem 1: [8] Suppose that ρ (0) is selected such that(1) is satis ed at t = 0. The uniform boundedness of the
0 1 M
0
e/ρ
ε e(0) ≥ 0
1 0 M
0
e/ρ
ε e(0) ≤ 0
Fig. 2. Graphical illustration of a transformation function.
solution of (4) (i.e., ε (t) ∈ L∞), is suf cient to guaranteethe satisfaction of (1) for all t > 0.
Remark 1: Notice that the bound of ε (t) does not affectthe evolution of e (t) which is solely prescribed by (1) andthus by the selection of the performance function ρ (t) aswell as the constant M .
Remark 2: In case e (t) is a vector, that is e (t) ≡[e1 (t) · · · en (t)]T , the mathematical expression of pre-scribed performance (1) is de ned element-wise as:
−Miρi (t) < ei (t) < ρi (t) in case ei (0) ≥ 0−ρi (t) < ei (t) < Miρi (t) in case ei (0) ≤ 0
for i = 1, . . . , n where Mi and ρi (t) imposethe performance bounds for the corresponding track-ing error ei (t). In this respect, (2) is de ned as
ε (t) =[T1
(e1(t)ρ1(t)
)· · · Tn
(en(t)ρn(t)
)]T
where Ti (·),i = 1, . . . , n satisfy (3). Finally, in (4), ϑT is adiagonal positive de nite matrix de ned as ϑT =
diag
(∂T1
∂(
e1(t)ρ1(t)
) 1ρ1(t) · · · ∂Tn
∂( en(t)ρn(t) )
1ρn(t)
)and ρ(t)
ρ(t)e (t) ≡[
ρ1(t)ρ1(t)e1 (t) · · · ρn(t)
ρn(t)en (t)]T
.
III. PROBLEM DESCRIPTION
Consider a nq degrees of freedom robot. Let q ∈ Rnq
be the vector of the generalized joint variables and {B} theinertia frame attached at the robot base. Consider also theframe {t} attached at the end effector and described by aposition vector pt ∈ R
3 and an orientation matrix Rt that canbe parameterized by three rotation angles around the axes ofthe inertia frame, denoted by φt ∈ R
3. Let the generalizedposition be p =
[pT
t φTt
]T ∈ R6. The generalized velocity
p =[pT
t ωTt
]Tis related to the joint velocity q through the
robot Jacobian J =[JT
v JTω
]T ∈ R6×nq as follows:
p = J(q)q (5)
We also assume that the joint positions and velocities aremeasured and that the robot Jacobian J (q) is known; hence,pt, pt, Rt, ωt can be calculated using the robot forwardkinematics.
378

Fig. 3. Robot tips in compliant contact with a planar surface.
Assume further that the robot has initially establishedcompliant contact with a planar surface. Let the surface frame{s} be attached at some point on the surface; its position isdenoted by a vector ps ∈ R
3 and its orientation by a matrixRs = [ns os as] such that ns ∈ R
3 is the unit vectornormal to the contact surface pointing inwards. Moreover,assume that the position and orientation of the surface isknown and hence ns and the generalized normal vectorn =
[nT
s 0T3
]Tcan be used to calculate projection matrices
Qs = I3 − nsnTs , Q = I6 − nnT to the position/orientation
subspace, where IN is the identity matrix of dimension N .The contact compliance may arise either from the surface sideor the robot end effector or both. For example, Fig. 3 showsthe cases of a robot with a soft hemispherical tip in contactwith a rigid surface (a) and a robot with a rigid tip of smallcurvature in contact with a compliant surface (b). As the robotinteracts with the surface, an interaction force F ∈ R
6 arisesat the contact, that is measured by a force/torque sensor. Thisforce includes both normal with respect to the surface nfand tangential QF forces and torques owing to tangentialdeformations as well as dynamic and static friction terms.We assume that the normal force magnitude f is a positivestrictly increasing and continuously differentiable nonlinearfunction of the deformation χ:
f = f (χ) , ∀χ > 0 (6)
This general formulation includes several force models pre-sented in the current literature such as the Hertz model [11](f (χ) = kχ3/2, k > 0) or the χ2 model [12] (f (χ) = kχ2,k > 0). Notice further that ∂f (χ) ≡ ∂f(χ)
∂χ is strictly positivefor χ > 0. Thus, for any compact set Ωχ that does not includeχ = 0, there exist positive constants ∂f , ∂f such that:
0 < ∂f ≤ ∂f (χ) ≤ ∂f , ∀χ ∈ Ωχ (7)
Apparently, in view of χ = nT p, the normal force derivativeis given by:
f = ∂f (χ)nT p (8)
The dynamic model of the robot in compliant contact witha planar surface can be written in terms of coordinates q, as
follows:
M (q) q+(C (q, q) + B) q+g (q)+JT nf+JT QF = u (9)
where M(q) ∈ Rnq×nq is the positive de nite robot inertia
matrix, C(q, q)q is the centripetal and Coriolis force vector,B is the diagonal matrix of the dumping coef cients, g(q) ∈R
nq is the gravity vector and u ∈ Rnq denotes the applied
torques at the joints. Moreover, the following inequalitieshold for some positive constants m, m, c, g, F :
m ≤ ‖M (q)‖ ≤ m (10)
‖C (q, q)‖ ≤ c ‖q‖ (11)
‖g (q)‖ ≤ g (12)
‖QF‖ ≤ F (13)
The problem treated in this work reads as follows:Problem (Model-Free Prescribed Performance Robot Con-
trol (MFPPRC)): Consider a robot that has established com-pliant contact with a kinematically known planar surface.Consider also that the joint positions and velocities as well asthe interaction force are measured and the forward kinematicrelationships are known. It is desired to design a controllersuch that: a) no information regarding either the robot dy-namic model or the force deformation model is incorporated;b) prescribed performance tracking of a generalized position
trajectory pd (t) =[(Qsptd (t))T
φTtd (t)
]T
where Qsptd (t)is the desired position trajectory on the surface and φtd (t)is the desired orientation trajectory is achieved; c) prescribedperformance tracking of a desired force trajectory nfd (t)normal to the surface is achieved; d) contact with the surfaceis maintained and additionally e) all signals in the closedloop remain bounded.
IV. CONTROL DESIGN
Consider the position error ep = Q (p − pd) and the forceerror ef = f−fd. In view of (8), the position and force errorequations become:
ep = Qp − Qpd (14)
ef = ∂f (χ)nT p − fd (15)
Consider also the following performance functions ρp (t),ρf (t) as well as constant parameters Mp, Mf that a)prescribe the required performance characteristics concerningthe tracking errors ep, ef respectively and b) satisfy (1) att = 0, as mentioned in Section II. Moreover, Mf , ρf (t) areselected to further satisfy: A) Mfρf (t) < fd (t), ∀t ≥ 0in case ef (0) ≥ 0 or B) ρf (t) < fd (t), ∀t ≥ 0 incase ef (0) ≤ 0. In this spirit, prescribed performance forcetracking (i.e., the satisfaction of (1) for ef (t)) guaranteesthat the robot will never escape the contact surface (i.e.,f (t) > 0, ∀t ≥ 0). More speci cally, in case A according tothe left hand side of (1) fd (t) − Mfρf (t) < f (t). Thus, ifwe select Mf , ρf (t) such that Mfρf (t) < fd (t), ∀t ≥ 0,then we guarantee f (t) > 0, ∀t ≥ 0. Alternatively, in case Baccording to the left hand side of (1) fd (t)− ρf (t) < f (t).
379

Hence, if we select ρf (t) to satisfy ρf (t) < fd (t), ∀t ≥ 0then f (t) > 0, ∀t ≥ 0.
Let us now propose the following reference velocity vectorpr in the robot tip operational space:
pr (p, f, t) = Qpm (p, t) + npf (f, t) (16)
with
pm (p, t) = pd (t) +ρp (t)ρp (t)
ep − αϑT−1p εp (t) (17)
pf (f, t) = −ζfϑTf f2r (f, t) εf (t) (18)
fr (f, t) = fd (t) +ρf (t)ρf (t)
ef − βϑT−1f εf (t) (19)
where α, β, ζf are positive design constants. In the sequel, wewill drop the arguments of the aforementioned expressionsfor the compactness of presentation. Adding and subtractingQpr in (14), ∂f (χ)nT pr in (15) and de ning the velocityerror (sp) as sp = p − pr, we obtain:
ep = Qsp + Qpm − Qpd (20)
ef = ∂f (χ)nT sp + ∂f (χ) pf − fd (21)
Substituting (17)-(19) in (20), (21) and in view of (4) theposition and force transformed error equations can be writtenas:
εp =ϑTpQsp − αεp (22)
εf =ϑTf∂f (χ)nT sp − βεf
− ζf∂f (χ)ϑT 2f f2
r εf − ϑTf fr (23)
We further de ne the reference velocity in the joint spaceqr and the corresponding velocity error sq utilizing theinverse Jacobian of the robot in the non-redundant case orthe Jacobian pseudo-inverse otherwise:
qr = J−1pr (24)
sq = q − qr = J−1sp (25)
Moreover, the reference joint acceleration vector is given by:
qr = qrk+ J−1n
∂pf
∂f∂f (χ) χ (26)
where
qrk= −J−1JJ−1pr+J−1
(Q
(∂pm
∂pp +
∂pm
∂t
)+ n
∂pf
∂t
)
can be calculated.
To proceed, we propose the following model free controllaw:
u = −JT QϑTpεp + JT nfd − Dsq + ur (27)
where D is a positive de nite matrix and ur is the following
robustifying term:
ur = − ζr
(∥∥JT nϑTfεf
∥∥2+ ‖qrk
‖2
+∥∥∥∥J−1n
∂pf
∂fχ
∥∥∥∥2
+ ‖q‖2(‖qr‖2 + 1
)
+(∥∥JT n
∥∥ ρf (0))2
+ ‖J‖2 + 1)
sq (28)
with ζr > 0. Notice that neither the reference velocityvector (16)-(19) nor the controller (27), (28) incorporates anyinformation concerning either the robot dynamic model or theforce deformation model.
Consider now the following Lyapunov-like candidate func-tion:
V =12‖εp‖2 +
12ε2
f +12sT
q M (q) sq (29)
Differentiating (29) with respect to time, substituting (22),(23), (25), (26) as well as the control law (27) and invokingthe skew symmetry of M − 2C, we obtain:
V = − α ‖εp‖2 − βε2f − sT
q Dsq − ζf∂f (χ)ϑT 2f f2
r ε2f
− ϑTf frεf + sTq
(JT nϑTf∂f (χ) εf − Mqrk
− MJ−1n∂pf
∂f∂f (χ) χ − Cqr − Bq − g
−JT nef − JT QF + ur
)(30)
Consider now the set:
Ωχ ={χ ∈ R : f−1
(f�
)< χ < f−1
(f
�)}
(31)
where
f� = inf (−Mfρf (t) + fd (t)) , f�
= sup (ρf (t) + fd (t))in case ef (0) ≥ 0
or
f� = inf (−ρf (t) + fd (t)) , f�
= sup (Mfρf (t) + fd (t))in case ef (0) ≤ 0
In the aforementioned expressions, f−1 (·) is the inverse ofthe normal force function (6), while the performance functionρf (t) as well as the parameter Mf have been selected suchthat ef (0) satis es (1) at t = 0 and moreover either case Aor B is satis ed for all t ≥ 0. Therefore, Ωχ does not includeχ = 0 from which we conclude that it exists even though itis unknown. Moreover, χ (0) ∈ Ωχ since ef (0) satis es (1).Now, assume that χ ∈ Ωχ for all t > 0. Hence, (7) holds forsome unknown constants ∂f , ∂f and moreover |ef (t)| <ρf (0). In view of (7), (10)-(13), (28) and completing thesquares in (30), we nally arrive at:
V ≤ −α ‖εp‖2 − βε2f − sT
q Dsq + d (32)
where the constant d is de ned as d � 14ζf ∂f +
∂f2+m2
(1+∂f
2)+c2+‖B‖2+g2+F
2+1
4ζr> 0. Hence, we con-
clude that V ≤ 0 when ‖εp‖ ≥ √d/a, |εf | ≥ √
d/β,‖sq‖ ≥ √
d/λmin (D) where λmin (D) denotes the min-imum eigenvalue of matrix D. Thus, εp, εf , sq are uni-formly ultimately bounded with respect to the sets Ep =
380

{εp : ‖εp‖ <
√d/a
}, Ef =
{εf : |εf | <
√d/β
}, Sq ={
sq : ‖sq‖ <√
d/λmin (D)}
. Therefore, all signals in theclosed loop remain bounded. Consequently, the boundednessof εp, εf guarantees prescribed performance for the trackingerrors, while the appropriate selection of the performancefunction ρf (t) and the design constant Mf allows us furtherto maintain contact with the surface for all t ≥ 0.
The aforementioned results hold under the assumption χ ∈Ωχ, ∀t > 0, for a compact set Ωχ ⊂ R in which (7) holds.Therefore, we need to establish that the proposed controllaw does not force χ to escape Ωχ at any point in timet > 0. Inside Ωχ, the proposed controller guarantees theboundedness of εf . However, the bound of εf , which dependson the unknown constant d does not affect the evolution ofthe actual force error ef which is solely prescribed by (1).As an immediate result, f� < f (t) < f
�thus, establishing
that χ will be con ned within Ωχ.We can now state the following theorem that summarizes
the main results of this section.Theorem 2: Consider the robotic system in compliant
contact with a kinematically known planar surface. Assumethat the robot joint positions and velocities as well as theinteraction force between the robot end effector and thesurface are measured and the forward kinematic relationshipsare known. The controller (27), (28), that incorporates noinformation concerning either the robot dynamic model orthe force deformation model, achieves position as well asforce tracking with guaranteed prescribed performance, noloss of contact and boundedness of all signals in the closedloop, thus solving the MFPPRC Problem.
Remark 3: In this work, we only seek for the stabilizationof (9), (22) and (23). Thus, there is no need of renderingthe UUB sets Ep, Ef , Sq arbitrarily small, by residing toextreme values of the control design parameters α, β, ζf , ζr,D to achieve the control objective. As the performance of theforce/position tracking as well as the contact maintenance aredetermined by the appropriate selection of the performancefunctions ρp (t), ρf (t) and the design constants Mp, Mf , theprocess of choosing the control parameters α, β, ζf , ζr, D issigni cantly simpli ed. Our only concern is to adjust themto avoid high input torques.
V. SIMULATION RESULTS
To demonstrate the proposed adaptive control design pro-cedure, we consider a spatial 3-DOF robotic manipulatorwith revolute joints with a soft hemispherical ngertip ofradius r = 0.05 m, in contact with the horizontal plane.The robot has link lengths l2 = 0.8 m, l3 = 0.8 m, massesm2 = 0.5 kg, m3 = 0.5 kg and inertias Iz1 = Iz2 = Iz3 =10−3 kgm2, Ix2 = Iy2 = Ix3 = Iy3 = 5 × 10−2 kgm.The normal force model is given by f (χ) = 5000χ3/2 N,while the tangential force involves Coulomb friction withfriction coef cient 0.5. The robot is initially at rest (i.e.,q (0) = [0 0 0]T rad/sec) with the following con gurationq (0) =
[π4 0.7849 π
2
]Trad. Thus, the initial force and
position on the horizontal plane are f (0) = 3 N and
0 0.5 1 1.5 2 2.5 3 3.5 4
0.6
0.7
0.8
0.9
1
x(t
),x
d(t
)(m
)
0 0.5 1 1.5 2 2.5 3 3.5 4
0.6
0.7
0.8
0.9
1
y(t
),y
d(t
)(m
)
0 0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
4
5
t(sec)
f(t
),f
d(t
)(N
)
Fig. 4. The position and force tracking. The solid lines indicate the positionand force response x (t), y (t), f (t) and the dashed lines indicate thedesired trajectories xd (t), yd (t), fd (t).
x (0) = y (0) = 0.8 m respectively. The control target isto exert a normal force with amplitude fd (t) = 3− 2 cos (t)N and follow a circular path on the contact surface de nedby xd(t) = 0.8 + 0.2 cos (2πt + π/4) m and yd(t) =0.8 + 0.2 sin (2πt + π/4) m. For the position and forcetracking errors ex (t) = x (t)−xd (t), ey (t) = y (t)− yd (t),ef (t) = f (t) − fd (t) we require steady state errorsof no more than 10−6 (m), 10−6 (m), 10−3 (N), mini-mum speed of convergence as obtained by the exponentiale−5t and no overshoot. The aforementioned transient andsteady state error bounds are prescribed via the followingperformance functions ρx (t) =
(ρx (0) − 10−6
)e−5t +
10−6, ρy (t) =(ρy (0) − 10−6
)e−5t + 10−6, ρf (t) =(
ρf (0) − 10−3)e−5t + 10−3 as well as the parameters
Mx = My = Mf = 0. Moreover, since ex (0) =x (0) − xd (0) = −0.1
√2 < 0, ey (0) = y (0) − yd (0) =
−0.1√
2 < 0, ef (0) = f (0) − fd (0) = 2 > 0 we selectρx (0) = 0.2
√2 > −ex (0), ρy (0) = 0.2
√2 > −ey (0),
ρf (0) = 4 > ef (0) as well as Tx
(ex
ρx
)= 0.1 ln
(− 1+ ex
ρxexρx
),
Ty
(ey
ρy
)= 0.1 ln
(− 1+
eyρy
eyρy
), Tf
(ef
ρf
)= 0.1 ln
( efρf
1− efρf
)
hence, following case A in Section IV, contact maintenance isa priori guaranteed. Thus, the transformed position and forceerrors are given by εx (t) = Tx
(ex(t)ρx(t)
), εy (t) = Ty
(ey(t)ρy(t)
),
εf (t) = Tf
(ef (t)ρf (t)
). Finally, we design the reference veloc-
ity vector as in (16)-(19) with α = β = 5, ζf = 0.5 and thecontrol input as in (27), (28) with D = 5I3 and ζr = 1.
The proposed MFPPRC is applied to the robot system.The position and force tracking is shown in Fig. 4 alongwith the desired trajectories. The evolution of the trackingerrors ex (t), ey (t), ef (t) is given in Fig. 5 along with theircorresponding performance bounds. Fig. 6 shows the trace
381

0 0.5 1 1.5 2 2.5 3 3.5 4
0.25
0.2
0.15
0.1
0.05
0e
x(t
)(m
)
0 0.5 1 1.5 2 2.5 3 3.5 4
0.25
0.2
0.15
0.1
0.05
0
ey(t
)(m
)
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
t(sec)
ef(t
)(N
)
0 0.5 1 1.5 2 2.5 3 3.5 4
0
5
10x 10
3
0 0.5 1 1.5 2 2.5 3 3.5 41
0.5
0
0.5
1x 10
5
0 0.5 1 1.5 2 2.5 3 3.5 41
0.5
0
0.5
1x 10
5
Fig. 5. Position and force error response. The solid lines indicate theposition and force errors ex (t), ey (t), ef (t) and the dashed lines indicatethe performance bounds. The subplots give details at the steady state.
of the robot end effector on the horizontal plane with respectto the desired one. Finally, the input torques are picturedin Fig. 7. Obviously, prescribed performance force/positiontracking and contact maintenance are achieved with boundedand continuous control signals, without incorporating anyinformation concerning either the robot dynamic model orthe force deformation model.
VI. CONCLUSIONS
We have proposed a novel controller that achievesforce/position tracking with prescribed performance, as wellas contact maintenance, without requiring any informationconcerning either the robot dynamic model or the forcedeformation model. The prescribed performance guaranteessigni cantly simplify the selection of the controller parame-ters, whose tuning is constrained only by the achievement ofreasonable input torque values.
ACKNOWLEDGEMENT
This work was supported in part by the Alexander S.Onassis Public Bene t Foundation under Grant G ZD 045/ 2007-2008.
REFERENCES
[1] R. Careli, R. Kelly, and R. Ortega, “Adaptive force control of robotmanipulators,” Int. J. Control, vol. 52, no. 1, pp. 37–54, 1990.
[2] B. Yao, S. Chan, and D. Wang, “Variable structure adaptive motionand force control of robotic manipulators,” Automatica, vol. 30, no. 9,pp. 1473–1477, 1994.
[3] S. Chiaverini, B. Siciliano, and L. Villani, “Force and position tracking:Parallel control with stiffness adaptation,” IEEE Control SystemsMagazine, vol. 18, no. 1, pp. 27–33, 1998.
[4] L. Villani, C. C. de Wit, and B. Brogliato, “An exponentially stableadaptive control for force and position tracking of robotic manipu-lators,” IEEE Transactions on Automatic Control, vol. 44, no. 4, pp.798–802, 1999.
0.6 0.7 0.8 0.9 10.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
x(t) (m)
y(t)
(m)
Fig. 6. The trace on the horizontal plane. The solid line indicates thetrace of the robot end effector on the horizontal plane and the dashed lineindicates the desired one.
[5] Y. Karayiannidis, G. Rovithakis, and Z. Doulgeri, “Force/Positiontracking for a robotic manipulator in compliant contact with a surfaceusing neuro-adaptive control,” Automatica, vol. 43, no. 7, pp. 1281–1288, 2007.
[6] Z. Doulgeri and Y. Karayiannidis, “Force/Position tracking of a robotin compliant contact with unknown stiffness and surface kinematics,”in IEEE 2007 International Conference on Robotics and Automation,2007, pp. 4190–4195.
[7] C. P. Bechlioulis and G. A. Rovithakis, “Robust adaptive controlof feedback linearizable MIMO nonlinear systems with prescribedperformance,” IEEE Transactions on Automatic Control, vol. 53, no. 9,pp. 2090–2099, 2008.
[8] ——, “Adaptive control with guaranteed transient and steady statetracking error bounds for strict feedback systems,” Automatica, vol. 45,no. 2, pp. 532–538, 2009.
[9] C. Bechlioulis, Z. Doulgeri, and G. Rovithakis, “Robot force/positiontracking with guaranteed prescribed performance,” in IEEE Interna-tional Conference on Robotics and Automation, 2009, pp. 3688 – 3693.
[10] ——, “Prescribed performance adaptive control for robotforce/position tracking,” in IEEE Multi-Conference on Systemsand Control, 2009, pp. 920 – 925.
[11] K. L. Johnson, Contact Mechanics. Cambridge University Press, 1985.[12] S. Arimoto, P. T. A. Nguyen, H. Y. Han, and Z. Doulgeri, “Dynamics
and control of a set of dual nger with soft tips,” Robotica, vol. 15,no. 1, pp. 71–80, 2000.
0 0.5 1 1.5 2 2.5 3 3.5 420
15
10
5
0
5
10
15
t(sec)
Inpu
tTo
rque
s(N
m)
u1(t)
u2(t)
u3(t)
Fig. 7. The input torques.
382