Micromorphic approach to crystal plasticity and phase transformation
68
Micromorphic approach to crystal plasticity and phase transformation Samuel Forest *† , Kais Ammar * , Benoˆ ıt Appolaire ** , Nicolas Cordero * , and Ana¨ ıs Gaubert *** , * MINES ParisTech, Centre des mat´ eriaux, CNRS UMR 7633, Evry, France ** Laboratoire d’´ etude des microstructures, CNRS/ONERA, Chˆatillon, France *** Dept. of Metallic Materials and Structures, ONERA, Chˆ atillon, France † Corresponding author: [email protected] Abstract Continuum crystal plasticity models are extended to in- corporate the effect of the dislocation density tensor on material hardening. The approach is based on generalized continuum me- chanics including strain gradient plasticity, Cosserat and micromor- phic media. The applications deal with the effect of precipitate size in two–phase single crystals and to the Hall-Petch grain size effect in polycrystals. Some links between the micromorphic ap- proach and phase field models are established. A coupling between phase field approach and elastoviscoplasticity constitutive equations is then presented and applied to the prediction of the influence of viscoplasticity on the kinetics of diffusive precipitate growth and morphology changes. 1 Introduction Continuum crystal plasticity is a special class of anisotropic elastoviscoplas- tic behaviour of materials. It relies on the precise knowledge of the kine- matics of plastic slip according to crystallographic slip systems and of the driving force for activation of plastic slip, namely the corresponding resolved shear stress. When the number of dislocations inside the material volume element is high enough, a continuum description of plastic deformation and hardening can be formulated as settled in (Mandel, 1965, 1971, 1973) and (Teodosiu and Sidoroff, 1976). The objectives of this contribution is first to establish the continuum mechanical framework for the formulation of constitutive equations for sin- gle crystals including the effect of the dislocation density tensor. We show then than this model class can be used to predict size effects in the re- sponse of polycrystals. The considered plastic deformation mechanism is J. Schröder, K. Hackl (Eds.), Plasticity and Beyond, CISM International Centre for Mechanical Sciences, DOI 10.1007/978-3-7091-1625-8_3, © CISM, Udine 2014
Transcript of Micromorphic approach to crystal plasticity and phase transformation

Micromorphic approach to crystal plasticityand phase transformation
Samuel Forest *†, Kais Ammar *, Benoıt Appolaire **, Nicolas Cordero *,and Anaıs Gaubert ***,
* MINES ParisTech, Centre des materiaux, CNRS UMR 7633, Evry, France** Laboratoire d’etude des microstructures, CNRS/ONERA, Chatillon, France
*** Dept. of Metallic Materials and Structures, ONERA, Chatillon, France† Corresponding author: [email protected]
Abstract Continuum crystal plasticity models are extended to in-corporate the e!ect of the dislocation density tensor on materialhardening. The approach is based on generalized continuum me-chanics including strain gradient plasticity, Cosserat and micromor-phic media. The applications deal with the e!ect of precipitatesize in two–phase single crystals and to the Hall-Petch grain sizee!ect in polycrystals. Some links between the micromorphic ap-proach and phase field models are established. A coupling betweenphase field approach and elastoviscoplasticity constitutive equationsis then presented and applied to the prediction of the influence ofviscoplasticity on the kinetics of di!usive precipitate growth andmorphology changes.
1 Introduction
Continuum crystal plasticity is a special class of anisotropic elastoviscoplas-tic behaviour of materials. It relies on the precise knowledge of the kine-matics of plastic slip according to crystallographic slip systems and of thedriving force for activation of plastic slip, namely the corresponding resolvedshear stress. When the number of dislocations inside the material volumeelement is high enough, a continuum description of plastic deformation andhardening can be formulated as settled in (Mandel, 1965, 1971, 1973) and(Teodosiu and Sidoro!, 1976).
The objectives of this contribution is first to establish the continuummechanical framework for the formulation of constitutive equations for sin-gle crystals including the e!ect of the dislocation density tensor. We showthen than this model class can be used to predict size e!ects in the re-sponse of polycrystals. The considered plastic deformation mechanism is
J. Schröder, K. Hackl (Eds.), Plasticity and Beyond, CISM International Centre for Mechanical Sciences, DOI 10.1007/978-3-7091-1625-8_3, © CISM, Udine 2014

132 S. Forest et al.
crystallographic slip but the formulation can serve as a basis for extensionsto climb or twinning since thermomechanical balances and most kinematicconsiderations are still valid.
There exists an extreme variety of possible constitutive equations for sin-gle crystals derived in the last 40 years but the thermomechanical foundationis quite unique and now clearly settled Estrin (1996). We will consider thisvariety of constitutive laws by introducing generic internal variables with-out making specific choices. Only generic examples of evolution laws forsuch internal variables are provided and the reader is referred to (Fivel andForest, 2004a), and references quoted therein, for a detailed discussion ofbest–suited constitutive laws for metal single crystals. Also the transitionfrom single to polycrystal behaviour is shortly addressed here but funda-mentals for modelling polycrystals can be found in (Fivel and Forest, 2004b;Besson et al., 2009).
The most relevant internal variables for describing the work–hardening ofsingle crystals are undoubtedly dislocation densities, !s, defined as the totallength of dislocations belonging to a slip system s divided by the volume ofthe material volume element. Evolution equations for dislocations densitiescan be found in (Fivel and Forest, 2004a). In the present contribution, weintroduce general isotropic and kinematic hardening variables accountingfor monotonic and cyclic responses of crystals. Dislocation densities aregenerally related to isotropic hardening through forest hardening but recentcontributions also aim at establishing dislocation based kinematic hardeningdislocation rules.
Another characterisation of the dislocation distribution is the dislocationdensity tensor introduced by (Nye, 1953). It is defined in section 2.3 andcontributes to many size e!ects observed in crystalline solids: grain size orHall–Petch e!ect, precipitate size e!ect, etc. The dislocation density ten-sor cannot be handled as a usual internal variable because it is related tothe gradient of the plastic deformation field. As a result, higher order par-tial di!erential equations arise when hardening laws involve the dislocationdensity tensor. The development of constitutive models involving the dislo-cation density tensor is the realm of strain gradient plasticity. Even for themuch too simple constitutive equations presented in this work, the modelshows that the dislocation density tensor is responsible for a size–dependentkinematic hardening component in the material behaviour.
The final part of this chapter draws a parallel between the micromor-phic approach which consists in introducing additional degrees of freedomin the mechanical framework, and the phase field approach dedicated to thesimulation of evolution of microstructures. The comparison enables us tocombine the elastoviscoplastic behaviour of constitutents and the phase field

Micromorphic Approach to Crystal Plasticity… 133
model in order to address the question of the influence of nonlinear deforma-tion on the kinetics and morphology evolution during phase transformation(Ammar et al., 2011).
Notations Vectors, second, third and fourth rank tensors are denoted bya ,a
!
,a!
,a"
, respectively. The initial and current positions of the material
point are denoted by X and x , respectively. Throughout this work, theinitial configuration of the body is V0 whereas V denotes the current one.The associated smooth boundaries are "V0 and "V with normal vector Nand n . The gradient operators with respect to initial and current coordi-nates are called !X and !x respectively. Similarily, the divergence andcurl operators are Div, div and Curl, curl whether they are computed withrespect to initial or current positions, respectively. Intrinsic notation is usedin general but it is sometimes complemented or replaced by the index no-tation for clarity. A Cartesian coordinate system is used throughout withrespect to the orthonormal basis (e 1, e 2, e 3). The notations for doublecontraction and gradient operations are:
A!
: B!
= AijBij , u !!X ="ui
"Xje i ! e j (1)
2 Crystal plasticity and the dislocation density tensor
2.1 Thermomechanics of single crystal behaviour
Balance equations. Mechanical equilibrium can be expressed in the formof the principle of virtual power
"
!
D
!!
: D!
! dv +
!
D
!(f " a ) · v ! dv +
!
!D
t · v ! ds = 0 (2)
for all virtual velocity fields and all subdomains, D, of the current config-uration " of the body. The Cauchy stress tensor is !
!
and D!
is the strainrate tensor. Volume and acceleration forces are denoted by f and a , re-spectively, whereas t is the traction vector. The principle of virtual powerimplies the following balance of momentum equation
div!!
+ !f = !a (3)
The energy balance is the purpose of the first principle of thermodynamics!
D
!e dv "
!
D
!(a " f ) · v dv =
!
!D
t · v ds+Q (4)

134 S. Forest et al.
or equivalently, after implementing the balance of momentum principle,!
D
!e dv =
!
D
!!
: D!
dv +Q (5)
where !e is the volume density of internal energy. The heat production rateis assumed to take the form
Q = "
!
!D
q · n ds (6)
The local form of the energy principle is then
!e = !!
: D!
" div q (7)
The second principle of thermodynamics stipulates that!
D
!# dv +
!
!D
q
T· n ds # 0 (8)
where # is the mass density of entropy and T the temperature field. Thevalidity of this principle with respect to all subdomain D leads to the localform of the entropy principle
!# + divq
T# 0 (9)
Introducing the free energy density # := e " T # and taking the balance ofenergy into account, we are lead to the Clausius inequality
!!
: D!
" !#" !#T " q ·!T
T# 0 (10)
Kinematics of single crystals. It is based on the multiplicative de-composition of the deformation gradient, F
!
, into an elastic part, E!
, and aplastic part, P
!
:
F!
(X ) = 1!
+"u
"X= 1!
+ u !!X , F!
(X ) = E!
(X ).P!
(X ) (11)
The initial coordinates of the material point in the reference configurationare denoted by X and !X denotes the gradient operator with respect toinitial coordinates. The current position of the material point in the currentconfiguration is x . The displacement vector is u = x "X . The multiplica-tive decomposition (11) is associated with the definition of an intermediate

Micromorphic Approach to Crystal Plasticity… 135
configuration for which elastic strain is unloaded, see figure 1. The inter-mediate released configuration is uniquely determined up to a rigid bodyrotation which is chosen such that the lattice orientation in the intermediateconfiguration is the same as the initial one. Mandel called it the isoclinicintermediate configuration. As a result, lattice rotation and distortion dur-ing elastoplastic deformation are contained in the elastic deformation partE!
, as examined at the end of this section.The multiplicative decomposition leads to the following partition of the
velocity gradient
v !! = F!
· F!
"1 = E!
·E!
"1 +E!
· P!
· P!
"1 ·E!
"1 (12)
We introduce the Cauchy–Green and Green–Lagrange elastic strain mea-sures
C!
e := E!
T ·E!
, E!
e =1
2(C!
e " 1!
) (13)
and note that
E!
e=
1
2(E!
T ·E!
+E!
T · E!
) =1
2C!
e
=1
2E!
T · (E!
"T · E!
T + E!
·E!
"1) ·E!
= E!
T ·"E!
e·E!
"1#sym
·E!
where sym operator takes the symmetric part of the quantity in brackets.The mass density of the material point with respect to the current (resp.intermediate) configuration is denoted by ! (resp. !e). The volume densityof internal forces with respect to the intermediate configuration is
Je!!
: D!
= Je!!
: (F!
· F!
"1) = Je!!
: (E!
·E!
"1) + Je!!
: (E!
· P!
· P!
"1 ·E!
"1)
= Je!!
: (E!
·E!
"1)sym + Je!!
: (E!
· P!
· P!
"1 ·E!
"1)
= !!
e : E!
e+M
!
: P!
.P!
"1 (14)
where Je = detE!
is the volume change from the intermediate to the currentconfiguration, !
!
e is the second Piola–Kirchho! stress tensor with respect tothe isoclinic intermediate configuration, and M
!
is the Mandel stress tensordefined as :
!!
e = JeE!
"1.!!
.E!
"T , M!
= JeE!
T .!!
.E!
"T = C!
e ·!!
e (15)
Plastic deformation is the result of slip processes according toN slip systemscharacterised by the slip direction, m s, and the normal to the slip plane,n s, in the intermediate configuration :
P!
.P!
"1 =N$
s=1
$sm s ! n s (16)

136 S. Forest et al.
Note that plastic deformation induced by dislocation glide is isochoric sothat
Jp = detP!
= 1, Je = J = detF!
(17)
Constitutive equations Constitutive equations for elastoviscoplastic ma-terials are based on the definition of two potential functions, namely the freeenergy density function and the dissipation potential. The specific energydensity, #(E
!
e, T,%), is a function of elastic strain, temperature and inter-nal variables accounting for hardening properties. Writing the Clausius–Duhem inequality (10) with respect to the intermediate isoclinic configura-tion amounts to multiplying (10) by !e/! = Je
Je!!
: D!
" !e#" !e#T "Q ·!XT
T# 0 (18)
where Q = JeF!
"T · q . Expanding the time derivative of the free energydensity, we obtain
%!!
e " !e"#
"E!
e
&: E!
e"!e(#+
"#
"T)T +M
!
: P!
·P!
"1"!e"#
"%%"Q ·
!X
"T# 0
(19)The following state laws provide the hyperelasticity relation and the entropydensity :
!!
e = !e"#
"E!
e = C"
: E!
e, # = ""#
"T, X = !e
"#
"%(20)
where a quadratic potential for elasticity has been proposed, thus introduc-ing the fourth rank tensor of elasticity moduli, C
"
. Such an assumption is
realistic for metals since elastic strain usually remains small, as discussed inthe next subsection. The thermodynamic forces associated with the internalvariables % are called X . The residual dissipation rate is
M!
: P!
· P!
"1 "X%"Q ·!XT
T# 0 (21)
The first term is the plastic power. Part of it is stored due to the secondcontribution whereas the third one denotes thermal dissipation.
At this stage, a dissipation potential "(M!
, X) is introduced from whichthe flow rule and the evolution equation for internal variables are derived
P!
.P!
"1 =""
"M!
, % = """
"X(22)

Micromorphic Approach to Crystal Plasticity… 137
Positivity of dissipation rate is ensured if the dissipation potential "(M!
, X)exhibits specific convexity properties with respect to its arguments (convexwith respect to M
!
and concave with respect to X) and if a Fourier type ofheat conduction is chosen
Q = "K!
·!X(logT ) (23)
The dissipation potential is assumed to depend onM!
and X via the Schmidyield function
f s(M!
, X) = |&s " xs|" &sc , with &s = M!
: m s ! n s (24)
where &sc is the critical resolved shear stress for slip system s, which mayevolve due to isotropic hardening. Kinematic hardening is accounted forby means of back-stress components xs attached to each slip system. Theresolved shear stress &s = m s.M
!
.n s on slip system s is the driving forcefor activation of slip. This corresponds to the specific choice of hardeningvariables: X = (&sc , x
s). So we consider a function
"(M!
, X) =N$
s=1
"s(f s(M!
, X)) (25)
It follows that
P!
.P!
"1 =""
"M!
=N$
s=1
""s
"f s
"f s
"M!
=N$
s=1
$sm s ! n s (26)
where the slip rate is computed as
$s =""s
"f ssign (&s " xs) (27)
Accordingly, the kinematics (16) is retrieved from the normality rule, show-ing that the crystal slip kinematics is associated with the Schmid law. Letus call (!s,%s) internal variables associated with the isotropic and kinematichardening variables (&sc , x
s). The hardening rules in (22) become
!s = """
"&sc=
""s
"f s= |$s|, %s = "
""
"xs=
""s
"f ssign (&s " xs) = $s (28)
It is worth computing the plastic power after taking the previous relationsinto account
M!
: P!
.P!
"1 =N$
s=1
&s$s (29)

138 S. Forest et al.
Specific hardening laws including evolution equations for dislocation densi-ties can be found for example in Fivel and Forest (2004a). As an example,we consider here a power law potential
$s =""
"&s=
'|&s " xs|" &c
K
(n
sign(&s) (30)
"(&s) =N$
s=1
K
n+ 1
'|&s " xs|" &c
K
(n+1
(31)
The brackets $x% denote the positive part of x. Viscosity parameters are Kand n in (31). They can be chosen such that plastic processes are almostrate–independent in a given range of applied strain rates. As an example,we give here simple nonlinear evolution rules for the isotropic and kinematicvariables that are used for practical computations
&sc = &c + qN$
r=1
hsr(1" exp("bvr)), %s = $s " dvs%s (32)
where q, b, d are material parameters. An interaction matrix hrs is necessaryto account for interaction between dislocations and is responsible for latenthardening Fivel and Forest (2004a).
Figure 1. Multiplicative decomposition of the deformation gradient intoelastic and plastic parts.
Lattice rotation. The previous continuum mechanical approach makesit possible to distinguish between the transformation of material and lattice

Micromorphic Approach to Crystal Plasticity… 139
directions. Material lines are made of material points that are subjectedto the motion u (X ). The tangent to a material line at X is a materialdirection d in the reference configuration that transforms into the mate-rial direction d # in the current configuration by means of the deformationgradient:
d #(X ) = F!
(X ) · d (X ) (33)
In contrast, lattice directions are not material insofar as they are not nec-essarily made of the same material points (atoms) in the initial and currentconfigurations due to the passing of dislocations, but keep the same crys-tallographic meaning. According to the concept of isoclinic configuration,lattice directions are unchanged from the initial to the intermediate con-figuration of figure 1. Glide of dislocations through, and thus leaving, thematerial volume element do not distort nor rotate the lattice, althoughmaterial lines are sheared. According to the continuum theory of disloca-tions, statistically stored dislocations accumulating in the material volumeelement a!ect material hardening but do not change the element shape.Accordingly, an initial lattice direction d " is transformed into d "# by meansof the elastic deformation:
d "#(X ) = E!
(X ).d "(X ) (34)
The kinematics of elastoplastic deformation recalled in section 2.1 can beexpanded in the case of small strains and small rotations, based on the polardecompositions of total, elastic and plastic deformations:
E!
= R!
e.U!
e & (1!
+ "!
e).(1!
+ #!
e) & 1!
+ #!
e + "!
e (35)
P!
= R!
p.U!
p & (1!
+ "!
p).(1!
+ #!
p) & 1!
+ #!
p + "!
p (36)
where R!
e,R!
p and U!
e,U!
p are rotations and symmetric stretch tensors, re-spectively. Accordingly, #
!
e,"!
e (resp. #!
p,"!
p) represent small elastic (resp.plastic) strain and rotation. The elastic rotation accounts for lattice rota-tion, as follows from the proposed kinematics of plastic slip. Similarly, thefollowing holds for the total deformation:
F!
= R!
.U!
= (1!
+ "!
).(1!
+ #!
) & 1!
+ #!
+ "!
(37)
so that#!
= #!
e + #!
p, "!
= "!
e + "!
p (38)
where all strain tensors are symmetric whereas all ' tensors are skew–symmetric.

140 S. Forest et al.
In metals, elastic strain remains small whereas lattice rotations can be-come very large. That is why the kinematics of crystallographic slip is veryoften approximated as
F!
& R!
e · P!
(39)
especially for the simulation of metal forming processes. Lattice rotation isthen directly given by R
!
e.Let us consider also rotation rates by introducing the material spin tensor
W!
which is the skew–symmetric part of the velocity gradient
F!
·F!
"1 = D!
+W!
= E!
·E!
"1+E!
·P!
·P!
"1 ·E!
"1 = D!
e+W!
e+D!
p+W!
p (40)
where the elastic and plastic contributions have been split into their sym-metric and skew–symmetric parts. The elastic spin tensor is therefore de-fined as
W!
e ="E!
·E!
"1#skew
="R!
e·R!
e"1 +R!
e · U!
e·U!
e ·R!
e"1#skew
(41)
& R!
e·R!
e"1 = R!
e·R!
eT (42)
where the exponent skew denotes the skew–symmetric part of the tensor inbrackets. The latter approximation is valid when elastic strain rates can beneglected compared to rotation rates, which is generally the case for metalsat su$ciently high total strains. Note that for any rotation Q
!
, the rotation
rate Q!
· Q!
"1 = Q!
· Q!
T is a skew–symmetric tensor due to the fact that a
rotation is an orthogonal tensor1. The plastic spin rate is
W!
p =
)
E!
·
)N$
s=1
$sm s ! n s
*
·E!
"1
*skew
&
)
R!
e ·
)N$
s=1
$sm s ! n s
*
·R!
eT
*skew
& R!
e ·
)N$
s=1
$s (m s ! n s)skew*
·R!
eT
In the case of small elastic strain and rotations, the expressions simplify
1meaning that Q
!
·Q!
T= Q!
T·Q!
= 1!

Micromorphic Approach to Crystal Plasticity… 141
and we obtain
D!
p & #!
p =N$
s=1
$s (m s ! n s)sym (43)
W!
p & "!
p =N$
s=1
$s (m s ! n s)skew (44)
D!
e & #!
e = #!
" #!
p, W!
e& "
!
e = "!
" "!
p (45)
2.2 Elements of tensor analysis
The Euclidean space is endowed with an arbitrary coordinate systemcharacterizing the points M(qi). The basis vectors are defined as
e i ="M
"qi(46)
The reciprocal basis (e i)i=1,3 of (e i)i=1,3 is the unique triad of vectors suchthat
e i · e j = (ij (47)
If a Cartesian orthonormal coordinate system is chosen, then both basescoincide.
The gradient operator for a tensor field T (X ) of arbitrary rank is thendefined as
gradT = T !! :="T
"qi! e i (48)
The gradient operation therefore increases the tensor rank by one.The divergence operator for a tensor field T (X ) of arbitrary rank is then
defined as
divT = T ·! :="T
"qi· e i (49)
The divergence operation therefore decreases the tensor rank by one.The curl operator2 for a tensor field T (X ) of arbitrary rank is then
defined as
curlT = T '! :="T
"qi' e i (50)
where the vector product is '. The curl operation therefore leaves the tensorrank unchanged. The vector product on an oriented Euclidean space is
a ' b = )ijkajbk e i = $!
: (a ! b ) (51)
2or rotational operator.

142 S. Forest et al.
The component )ijk of the third rank permutation tensor is the signatureof the permutation of (1, 2, 3).
With respect to a Cartesian orthonormal basis, the previous formulasimplify. We give the expressions for a second rank tensor T
!
gradT!
= Tij,k e i ! e j ! e k (52)
divT!
= Tij,j e i (53)
We consider then successively the curl of a vector field and of a second rankvector field, in a Cartesian orthonormal coordinate frame
curlu ="u
"Xj' e j = ui,j e i ' e j = )kijui,j e k (54)
curlA!
="A!
"xk' e k = Aij,ke i ! e j ' e k = )mjkAij,k e i ! em (55)
We also recall the Stokes formula for a vector field for a surface S with unitnormal vector n and oriented closed border line L:
+
L
u · dl = "
!
S
(curlu ) · n ds,
+
L
uidli = ")kij
!
S
ui,jnk ds (56)
Applying the previous formula to uj = Aij at fixed i leads to the Stokesformula for a tensor field of rank 2:
+
L
T!
· dl = "
!
S
(curlT!
) · n ds,
+
L
Aijdli = ")kij
!
S
Aij,knm ds (57)
2.3 Dislocation density tensor
In continuummechanics, the previous di!erential operators are used withrespect to the initial coordinates X or with respect to the current coordi-nates x of the material points. In the latter case, the notation !, grad, divand curl are used but in the former case we adopt !X ,Grad, Div and Curl.For instance,
F!
= 1!
+Gradu =( CurlF!
= 0 (58)
This result expresses the fact that the deformation gradient is a compatiblefield which derives from the displacement vector field. This is generally notthe case for elastic and plastic deformation:
CurlE!
)= 0, CurlP!
)= 0 (59)
Elastic and plastic deformations are generally incompatible tensor fields,even though the product F
!
= E!
· P!
is compatible. It may happen inci-dentally that elastic deformation be compatible for instance when plastic orelastic deformation is homogeneous.
Micromorphic Approach to Crystal Plasticity… 143
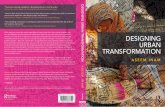
A consequence of the incompatibility of the elastic deformation is that,for an oriented surface S * " of the body, with border L, the vector Bbelonging to the intermediate isoclinic configuration
B =
+
L
E!
"1 · dl = "
!
S
(curlE!
"1) · n ds (60)
does not vanish in general. It can be interpreted as the continuum Burgersvector for the circuit L. It represents a generalization of the concept ofBurgers vector for dislocations. This geometric definition was introduced byBilby et al. (1957); Teodosiu (1970); Kroner and Teodosiu (1972) within thecontext of the continuum theory of dislocations. The previous calculationleads to the definition of the dislocation density tensor
%!
:= " curlE!
"1 = ")jklE"1ik,l e i ! e j (61)
which is used to compute the resulting Burgers vector for dislocations cross-ing the surface S:
B =
!
S
%!
· n ds (62)
The Burgers vector can also be computed by means of a closed circuitL0 * "0 convected from L * ":
B =
+
L
E!
"1 · dx =
+
L0
E!
"1 · F!
· dX =
+
L0
P!
· dX (63)
=
!
S0
(CurlP!
) · dS =
!
S
(CurlP!
) · F!
T ·dS
J(64)
Nanson’s formula3 has been used. We obtain the alternative definition ofthe dislocation density tensor
%!
= curlE!
"1 =1
J(CurlP
!
) · F!
T (65)
The present modern treatment of the dislocation density tensor was settledby Cermelli and Gurtin (2001); Svendsen (2002). A statistical mechanicsperspective of the dislocation density tensor can be found in Kroner (1969).
It can be noticed that the relation (65) implies
J(curlE!
"1) ·E!
"T = (CurlP!
) · P!
T (66)
which is a consequence of (58), curlF!
= curl(E!
· P!
) = 0.
3ds = JF
!
!T· dS

144 S. Forest et al.
Within the small perturbation framework, we introduce the notations
H!
= Gradu = H!
e +H!
p, with H!
e = #!
e + "!
e, H!
p = #!
p + "!
p (67)
We haveE!
"1 & 1!
"H!
e (68)
so that the dislocation density tensor can be computed as
%!
& CurlH!
e = "CurlH!
p (69)
since CurlH!
= 0 due to the compatibility of the deformation gradient.
2.4 Lattice curvature
Experimental techniques like EBSD provide the field of lattice orienta-tion and, consequently, of lattice rotation R
!
e during deformation. Since
%!
= " curlE!
"1 = " curl(U!
e"1 ·R!
eT ) (70)
the hypothesis of small elastic strain implies
%!
& " curlR!
eT (71)
If, in addition, elastic rotations are small, we have
%!
& " curl(1!
" "!
e) = curl"!
e (72)
The small rotation axial vector is defined as
!
" e = "1
2$!
: "!
e, "!
e = "$!
·!
" e (73)
or, in matrix notations,
["!
e] =
,
---.
0 'e12 "'e
31
"'e12 0 'e
23
'e31 "'e
23 0
/
0001=
,
--.
0 "$'e3
$'e2
$'e3 0 "
$'e1
"$'e2
$'e1 0
/
001 (74)
The gradient of the lattice rotation field delivers the lattice curvature tensor.In the small deformation context, the gradient of the rotation tensor isrepresented by the gradient of the axial vector:
&!
:=!
" e (75)
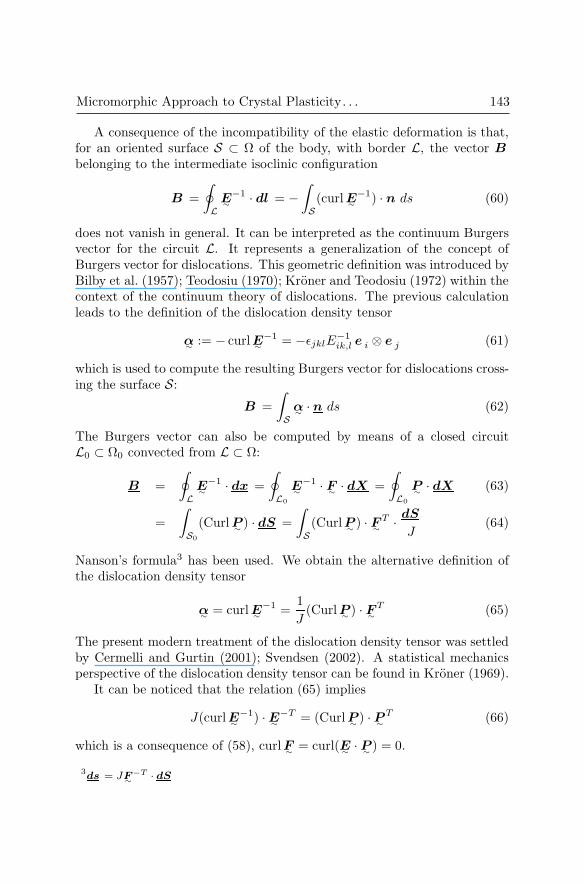
Micromorphic Approach to Crystal Plasticity… 145
One can establish a direct link between curl"!
e and the gradient of the axialvector associated with "
!
. For that purpose, the matrix form of curl"!
e isderived according to (55):
[curl"!
e] =
,
---.
'e12,3 + 'e
31,2 "'e31,1 "'e
12,1
"'e23,2 'e
12,3 + 'e23,1 "'e
12,2
"'e23,3 "'e
31,3 'e23,1 + 'e
31,2
/
0001(76)
or equivalently
[curl"!
e] =
,
---.
"$'e3,3 "
$'e2,2
$'e2,1
$'3,1
$'e1,2 "
$'e3,3 "
$'e1,1
$'e
3,2
$'e1,3
$'e2,3 "
$'e1,1 "
$'e2,2
/
0001(77)
from which it becomes apparent that
%!
= &!
T " (trace&!
)1!
, &!
= %!
T "1
2(trace%
!
)1!
(78)
This is a remarkable relation linking, with the context of small elasticstrains4 and rotations, the dislocation density tensor to lattice curvature.It is known as Nye’s formula Nye (1953).
3 Micromorphic crystal plasticity
The links between the micromorphic continuum and the plasticity of crys-talline materials has been recognized very early by Eringen himself (Clausand Eringen, 1969; Eringen and Claus, 1970). Lattice directions in a singlecrystal can be regarded as directors that rotate and deform as they do ina micromorphic continuum. The fact that lattice directions can be rotatedand stretched in a di!erent way than material lines connecting individualatoms, especially in the presence of static or moving dislocations, illustratesthe independence between directors and material lines in a micromorphiccontinuum, even though their deformations can be related at the constitu-tive level.
The identification of a micromorphic continuum from the discrete atomicsingle crystal model is possible based on proper averaging relations pro-posed in (Chen and Lee, 2003a,b). These works contain virial formula for
4and in fact of small gradient of elastic strain.

146 S. Forest et al.
the higher order stress tensors arising in the micromorphic theory. Thisatomistic–based approach can be used to predict phonon dispersion rela-tions (Chen and Lee, 2003c). Claus and Eringen (1971) also studied thedispersion of waves in a dislocated crystal.
Analytical solutions have been provided that give the generalized stressfields around individual screw or edge dislocations embedded in an elasticgeneralized continuum medium, like the micromorphic medium. The phys-ical meaning of such a calculation is the account of non–local elasticity atthe core of dislocations that may suppress or limit the singularity of thestress fields. For instance, non singular force and couple stress were deter-mined by (Lazar and Maugin, 2004) for a screw dislocation embedded ina gradient micropolar medium that combines the first strain gradient withindependent rotational degrees of freedom. The unphysical singularities atthe core of straight screw and edge dislocations are also removed when thesecond gradient of strain is introduced in the theory, while the first straingradient is not su$cient, see (Lazar et al., 2006). Other crystal defects in alarge range of microcontinua were analysed by Lazar and Maugin (2007).
The next step is to consider the collective behaviour of dislocations ina single crystal by means of the continuum theory of dislocations. Thematerial volume element is now assumed to contain a large enough num-ber of dislocations for the continuum theory of dislocation to be applicable.Non–homogeneous plastic deformations induce material and lattice incom-patibilities that are resolved by a suitable distribution of the dislocationdensity tensor field which is a second rank statistical mean for a populationof arbitrary dislocations inside a material volume element (Kroner, 1969;Cermelli and Gurtin, 2001). Nye’s fundamental relation linearly connectsthe dislocation density tensor to the lattice curvature field of the crystal.This fact has prompted many authors to treat a continuously dislocatedcrystal as a Cosserat continuum (Gunther, 1958; Kroner, 1963; Schafer,H.,1969; Forest et al., 2000). The Cosserat approach records only the latticecurvature of the crystal but neglects the e!ect of the rotational part of theelastic strain tensor, which is a part of the total dislocation density tensor(Cordero et al., 2010). Full account of plastic incompatibilities is taken instrain gradient plasticity theories, starting from the original work by Aifantis(1984) up to recent progress by Gurtin (2002). Formulation of crystal plas-ticity within the micromorphic framework is more recent and was suggestedby Clayton et al. (2005) for a large spectrum of crystal defects, includingpoint defects and disclinations. Limiting the discussion to dislocation den-sity tensor e!ects, also called geometrically necessary dislocation (GND)e!ects, Cordero et al. (2010) showed, within a small deformation setting,how the micromorphic model can be used to predict grain and precipitate

Micromorphic Approach to Crystal Plasticity… 147
size e!ects in laminate crystalline materials. In particular, the micromor-phic model is shown to deliver more general scaling laws than conventionalstrain gradient plasticity. These models represent extensions of the con-ventional crystal plasticity theory, see for instance (Teodosiu and Sidoro!,1976), that accounts for single crystal hardening and lattice rotation butdoes not incorporate the e!ect of the dislocation density tensor.
The objective of the present work is, first, to formulate a finite deforma-tion micromorphic extension of conventional crystal plasticity to accountfor GND e!ects in single crystals, and, second, to show that the micromor-phic approach can also be used to introduce cleavage induced damage in asingle crystal model. The first part, see Section 3, represents an extensionto finite deformation of the model proposed by Aslan et al. (2011). It alsoprovides new analytical predictions of size e!ects on the yield stength andkinematic hardening of laminate microstructures made of an elastic layerand an elastic–plastic single crystal layer undergoing single slip. The theoryis called the microcurl model because the evaluation of the curl of the mi-crodeformation, instead of its full gradient, is su$cient to account for thee!ect of the dislocation density tensor.
The models proposed in this work for single crystals fall in the classof anisotropic elastoviscoplastic micromorphic media for which constitutiveframeworks at finite deformations have been proposed in (Forest and Sievert,2003; Lee and Chen, 2003; Grammenoudis and Tsakmakis, 2009; Sansouret al., 2010; Regueiro, 2010). The introduction of damage variables wasperformed in (Grammenoudis et al., 2009). In fact, the micromorphic ap-proach can be applied not only to the total deformation by introducing themicro–deformation field, but can also be restricted to plastic deformation,for specific application to size e!ects in plasticity, or to damage variablesfor application to regularized simulation of crack propagation, as proposedin (Forest, 2009; Hirschberger and Steinmann, 2009).
3.1 Model formulation
Balance equations. The degrees of freedom of the proposed theory arethe displacement vector u and the microdeformation variable '
!
p, a gen-
erally non–symmetric second rank tensor. The field '!
p(X ) is generallynot compatible, meaning that it does not derive from a vector field. Theexponent p indicates, in advance, that this variable will eventually be con-stitutively related to plastic deformation occurring at the material point. Inparticular, the microdeformation '
!
p is treated as an invariant quantity withrespect to rigid body motion. The constitutive model will eventually ensurethis invariance property. This is in contrast to the general microdeforma-

148 S. Forest et al.
tion degrees of freedom of the original micromorphic theory. A first gradienttheory is considered with respect to the degrees of freedom. However, theinfluence of the microdeformation gradient is limited to its curl part becauseof the aimed relation to the dislocation density tensor associated with thecurl of plastic distortion. The following sets of degrees of freedom and oftheir gradients are therefore defined:
DOF = {u , '!
p}, GRAD = {F!
:= 1!
+u!!X , K!
:= Curl '!
p} (79)
The following definition of the Curl operator is adopted:
Curl '!
p :="'!
p
"Xk+ e k, Kij := )jkl
"*pik
"Xl(80)
where )ijk is the permutation tensor.The method of virtual power is used to derive the balance and boundaryconditions, following (Germain, 1973b). For that purpose, we define thepower density of internal forces as a linear form with respect to the velocityfields and their Eulerian gradients:
p(i) = !!
: (u !!x) + s!
: ˙'!
p+M
!
: curl ˙'!
p, ,x - V (81)
where the conjugate quantities are the Cauchy stress tensor !!
, which issymmetric for objectivity reasons, the microstress tensor, s
!
, and the gen-eralized couple stress tensor M
!
. The curl of the microdeformation rate isdefined as
curl ˙'!
p:= )jkl
" ˙*pik
"xle i ! e j = K
!
· F!
"1 (82)
The form of the power density of internal forces dictates the form of thepower density of contact forces:
p(c) = t · u +m!
: ˙'!
p, ,x - "V (83)
where t is the usual simple traction vector andm!
the double traction tensor.The principle of virtual power is stated in the static case and in the absenceof volume forces for the sake of brevity:
"
!
D
p(i) dV +
!
!D
p(c) dS = 0 (84)
for all virtual fields u , ˙'!
p, and any subdomain D * V . By application of
Gauss divergence theorem, assuming su$cient regularity of the fields, this

Micromorphic Approach to Crystal Plasticity… 149
statement expands into:!
V
"+ij
"xjui dV +
!
V
%)kjl
"Mik
"xl" sij
&˙*pij dV
+
!
!V
(ti " +ijnj) ui dS +
!
!V
(mik " )jklMijnl) ˙*pik dS = 0, ,ui, , ˙*p
ij
which leads to the two field equations of balance of momentum and gener-alized balance of moment of momentum:
div!!
= 0, curlM!
+ s!
= 0, ,x - V (85)
and two boundary conditions
t = !!
· n , m!
= M!
· $!
· n , ,x - "V (86)
the index notation of the latter relation being mij = Mik)kjlnl.
Constitutive equations. The deformation gradient is decomposed intoelastic and plastic parts in the form
F!
= F!
e · F!
p (87)
The isoclinic intermediate configuration is defined in a unique way by keep-ing the crystal orientation unchanged from the initial to the intermediateconfiguration following (Mandel, 1973). The plastic distortion F
!
p is invari-ant with respect to rigid body motions that are carried by F
!
e. The currentmass density is ! whereas the mass density of the material element in theintermediate configuration is !i, such that !i/! = Je := detF
!
e. The elasticstrain is defined as
E!
e :=1
2(F!
eT · F!
e " 1!
) (88)
The microdeformation is linked to the plastic deformation via the introduc-tion of a relative deformation measure defined as
e!
p := F!
p"1 · '!
p " 1!
(89)
It measures the departure of the microdeformation from the plastic defor-mation, which will be associated with a cost in the free energy potential.When e
!
p . 0, the microdeformation coincides with the plastic deforma-tion. The state variables are assumed to be the elastic strain, the relativedeformation, the curl of microdeformation and some internal variables, %:
STATE := {E!
e, e!
p, K!
, %} (90)

150 S. Forest et al.
The specific Helmholtz free energy density, ,, is assumed to be a function ofthis set of state variables. In particular, in this simple version of the model,the curl of microdeformation is assumed to contribute entirely to the storedenergy. In more sophisticated models, as proposed in (Forest and Sievert,2003, 2006; Forest, 2009; Gurtin and Anand, 2009), the relative deformation,the microdeformation and its gradient can be split into elastic plastic parts.This is not necessary for the size e!ects to be described in the present work.
When the internal constraint e!
p . 0 is enforced, the plastic microdefor-mation coincides with the plastic deformation so that the curl of the plasticmicrodformation is directly related to the dislocation density tensor:
K!
:= Curl '!
p . CurlP = J%!
· F!
"T (91)
The micromorphic model then reduces to strain gradient plasticity accordingto Gurtin (2002).
The dissipation rate density is the di!erence:
D := p(i) " !, # 0 (92)
which must be positive according to the second principle of thermodynam-ics. When the previous strain measures are introduced, the power densityof internal forces takes the following form:
p(i) = !!
: F!
e· F!
e"1 + !!
: F!
e · F!
p· F!
p"1 · F!
e"1
+ s!
: (F!
p · e!
p + F!
p· e!
p) +M!
: K!
· F!
"1
=!
!i!!
e : E!
e+
!
!i!!
M : F!
p· F!
p"1
+ s!
: (F!
p · e!
p + F!
p· e!
p) +M!
: K!
· F!
"1 (93)
where !!
e is the second Piola–Kirchho! stress tensor with respect to theintermediate configuration and !
!
M is the Mandel stress tensor:
!!
e := JeF!
e"1 ·!!
·F!
e"T , !!
M := JeF!
eT ·!!
·F!
e"T = F!
eT ·F!
e ·!!
e (94)
On the other hand,
!, = !",
"E!
e : E!
e+ !
",
"e!
p: e!
p + !",
"K!
: K!
+ !",
"%% (95)

Micromorphic Approach to Crystal Plasticity… 151
We compute
JeD = (!!
e " !i",
"E!
e ) : E!e+ (JeF
!
pT · s!
" !i",
"e!
p) : e
!
p
+ (JeM!
· F!
"T " !i",
"K!
) : K!
+ (!!
M + Jes!
· '!
pT ) : F!
p· F!
p"1 " !i",
"%% # 0 (96)
Assuming that the processes associated with E!
e, e!
p and K!
are non–dissipative,the state laws are obtained:
!!
e = !i",
"E!
e , s!
= J"1e F
!
p"T · !i",
"e!
p, M
!
= J"1e !i
",
"K!
· F!
T (97)
The residual dissipation rate is
JeD = (!!
M + Jes!
· '!
pT ) : F!
p·F!
p"1 "R% # 0, with R := !i",
"%(98)
At this stage, a dissipation potential, function of stress measures, "(S!
, R),is introduced in order to formulate the evolution equations for plastic flowand internal variables:
F!
p· F!
p"1 =""
"S!
, with S!
:= !!
M + Jes!
· '!
pT (99)
% = """
"R(100)
where R is the thermodynamic force associated with the internal variable%, and S
!
is the e!ective stress conjugate to plastic strain rate, the drivingforce for plastic flow.In the case of crystal plasticity, a generalized Schmid law is adopted for eachslip system s in the form:
f s(S!
, &sc ) = |S!
: P!
s|" &sc # 0, with P!
s = l s ! n s (101)
for activation of slip system s with slip direction, l s, and normal to theslip plane, n s. We call P
!
s the orientation tensor. The critical resolvedshear stress is &sc which may be a function of R in the presence of isotropichardening. The kinematics of plastic slip follows from the choice of a dis-sipation potential, "(f s), that depends on the stress variables through theyield function itself, fs:
F!
p· F!
p"1 =N$
s=1
""
"f s
"f s
"S!
=N$
s=1
$s P!
s, with $s =""
"f ssign(S
!
: P!
s)
(102)

152 S. Forest et al.
A possible viscoplastic potential is then:
"(f s) =K
n+ 1<
f s
K>n+1 (103)
where K,n are viscosity parameters associated with viscoplastic slip, andthe brackets stand for < · >= Max(0, ·). The generalized resolved shearstress can be decomposed into two contributions:
S!
: P!
s = &s"xs, with &s = !!
M : P!
s and xs = "s!
·'!
pT : P!
s (104)
The usual resolved shear stress is &s whereas xs can be interpreted as aninternal stress or back–stress leading to kinematic hardening. The fact thatthe introduction of the e!ect of the dislocation density tensor or, more gen-erally, of gradient of plastic strain tensor, leads to the existence of internalstresses induced by higher order stresses has already been noticed by (Stein-mann, 1996), see also (Forest, 2008). The back–stress component is inducedby the microstress s
!
or, equivalently, by the curl of the generalized couplestress tensor, M
!
, via the balance equation (85).When deformations and rotations remain su$ciently small, the previous
equations can be linearized as follows:
F!
= 1!
+H!
& 1!
+H!
e +H!
p, H!
e = #!
e + 'e, H!
p = #!
p + 'p (105)
where #!
e,"!
e (resp. #!
p,"!
p) are the symmetric and skew–symmetric partsof F
!
e " 1!
(resp. F!
p " 1!
). When microdeformation is small, the relativedeformation is linearized as
e!
p = (1!
+H!
p)"1 · (1!
+ '!
p)" 1!
& '!
p "H!
p, with '!
p = '!
p " 1!
(106)
When linearized, the state laws (97) become:
!!
= !",
"#!
e, s
!
= !",
"e!
p, M
!
= !",
"K!
(107)
The evolution equations read then:
#!
p =""
"(!!
+ s!
), % = "
""
"R(108)
We adopt the most simple case of a quadratic free energy potential:
!,(#!
e, e!
p,K!
) =1
2#!
e : C"
: #!
e +1
2H#e
!
p : e!
p +1
2AK!
: K!
(109)

Micromorphic Approach to Crystal Plasticity… 153
Figure 2. Single slip in a periodic two–phase single crystal laminate undersimple shear: the grey phase (h) displays a purely linear elastic behaviourwhereas the inelastic deformation of the white elasto–plastic phase (s) iscontrolled by a single slip system (n , l ).
The usual four–rank tensor of elastic moduli is denoted by C"
. The higher
order moduli have been limited to only two additional parameters: H# (unitMPa) and A (unit MPa.mm2). Their essential impact on the prediction ofsize e!ect will be analyzed in the next section. It follows that:
!!
= C"
: #!
e, s!
= H#e!
p, M!
= AK!
(110)
Large values of H# ensure that e!
p remains small so that '!
p remains close
to H!
p and K!
is close to the dislocation density tensor. The yield conditionfor each slip system becomes:
fs = |&s " xs|" &sc (111)
withxs = "s
!
: P!
s = (curlM!
) : P!
s = A(curl curl'!
p) : P!
s (112)
3.2 Size e"ects in a two-phase single crystal laminate
Let us consider a periodic two–phase single crystal laminate under simpleshear as in (Forest and Sedlacek, 2003), (Forest, 2008) and (Cordero et al.,2010). This microstructure is described in Fig. 2; it is composed of a hardelastic phase (h) and a soft elasto–plastic phase (s) where one slip systemwith slip direction normal to the interface between (h) and (s) is considered.A mean simple glide $ is applied in the crystal slip direction of the phase(s). We consider a displacement and microdeformation fields of the form:
u1 = $x2, u2(x1), u3 = 0, *p12(x1), *p
21(x1) (113)

154 S. Forest et al.
within the context of small deformation theory. It follows that
2H!
3=
,
.0 $ 0
u2,1 0 00 0 0
/
1
2H!
p3=
,
.0 $ 00 0 00 0 0
/
1 2H!
e3=
,
.0 $ " $ 0
u2,1 0 00 0 0
/
1
4'!
p5=
,
.0 *p
12(x1) 0*p21(x1) 0 00 0 0
/
14curl'
!
p5=
,
.0 0 "*p
12,1
0 0 00 0 0
/
1
The resulting stress tensors are:
2!!
3= µ
,
.0 $ " $ + u2,1 0
$ " $ + u2,1 0 00 0 0
/
1
2s!
3= "H#
,
.0 $ " *p
12 0"*p
21 0 00 0 0
/
1
2M!
3=
,
.0 0 "A*p
12,1
0 0 00 0 0
/
1 2curlM
!
3=
,
.0 "A*p
12,11 00 0 00 0 0
/
1
These forms of matrices are valid for both phases, except that $ . 0 in thehard elastic phase. Each phase possesses its own material parameters, H#
and A, the shear modulus, µ, being assumed for simplicity to be identicalin both phases. The balance equation, s
!
= " curlM!
, gives *p21 = 0 and the
plastic slip:
$ = *p12 "
A
H#*p12,11. (114)
In the soft phase, the plasticity criterion stipulates that
+12 + s12 = &c +H$cum, (115)
where H is a linear hardening modulus considered in this phase and $cumis the accumulated plastic slip as $cum = |$|. The following analyticalresolution is done for the first loading branch, under monotonic loading.The slip direction, l , has been chosen such that $ > 0 for this first loadingbranch, so that we have: $cum = $. Considering Eqs. (114) and (115),

Micromorphic Approach to Crystal Plasticity… 155
we obtain the second order di!erential equation for the microdeformationvariable in the soft phase, *ps
12,
1
's2*ps12,11 " *ps
12 =&c " +12
H, with 's =
6Hs
#H
As7Hs
# +H8 . (116)
where 1/'s is the characteristic length of the soft phase for this boundaryvalue problem. The force stress balance equation requires +12 to be uniform.It follows that the non–homogeneous part of the di!erential equation isconstant and then the hyperbolic profile of *ps
12 takes the form:
*ps12 = Cs cosh ('sx) +D, (117)
where Cs and D are constants to be determined. Symmetry conditions(*ps
12("s/2) = *ps12(s/2)) have been taken into account.
In the elastic phase, where the plastic slip vanishes, an hyperbolic profile ofthe microdeformation variable, *ph
12 , is also obtained:
*ph12 = Ch cosh
%'h
%x±
s+ h
2
&&, with 'h =
6Hh
#
Ah, (118)
where, again, Ch is a constant to be determined and symmetry conditionshave been taken into account. It is remarkable that the plastic microvari-able, *ph
12 , does not vanish in the elastic phase, close to the interfaces, al-though no plastic deformation takes place. This is due to the transmissionof double traction. Such a transmission has been shown in (Cordero et al.,2010) to be essential for size e!ects to occur. This point will be discussed insection 3.3. The meaning of the linear constitutive equation for the doublestress tensor in (110) can be interpreted, for the elastic phase, as non–localelasticity. That is why the corresponding characteristic length, 1/'h, willbe kept of the order of nanometer in the presented simulation.
Note that the same boundary value problem was handled in (Corderoet al., 2010) in the case of a perfectly plastic phase (s), i.e., without linearisotropic hardening. It showed that *ps
12 has a parabolic profile over (s), the
profile of *ph12 remaining hyperbolic in the hard phase (h). In the following
of this section we will show how the additional isotropic hardening a!ectsthe local and macroscopic behaviors while the main e!ects of the microcurlmodel as presented in (Cordero et al., 2010) remain.The coe$cients Cs, D and Ch can be identified using the interface andperiodicity conditions:

156 S. Forest et al.
• Continuity of *p12 at x = ±s/2:
Cs cosh"'s s
2
#+D = Ch cosh
%'hh
2
&. (119)
• Continuity of the double traction, as given in Eq. (86), m12 = "M13
at x = ±s/2:
As'sCs sinh"'s s
2
#= "Ah'hCh sinh
%'hh
2
&. (120)
• Periodicity of displacement component u2. We have the constantstress component
+12 = µ($ " $ + u2,1) (121)
whose value is obtained from the plasticity criterion in the soft phase(Eq. 115):
+12 = &c +H$cum "As*ps12,11. (122)
Still considering the first loading branch for which $cum = $, it followsthat
us2,1 =
+12
µ" $+ $ =
&cµ" $+
As's2Cs
Hcosh ('sx) +
H + µ
µD (123)
in the soft phase and
uh2,1 =
+12
µ" $ =
&cµ
" $ +H
µD (124)
in the hard phase. The average on the whole structure,
! (s+h)/2
"(s+h)/2u2,1 dx = 0, (125)
must vanish for periodicity reasons and gives%&cµ
" $
&(s+ h) +
2As'sCs
Hsinh
"'s s
2
#+
H (s+ h) + µs
µD = 0
(126)The resolution of Eqs. (119), (120) and (126) gives
Cs =
%&cµ
" $
&,
.As's sinh
"'s s
2
#
s+ h

Micromorphic Approach to Crystal Plasticity… 157
9
::;H (s+ h) + µs
µ
9
::;coth
"'s s
2
#
As's+
coth
%'hh
2
&
Ah'h
<
==>"
2
H
<
==>
/
001
"1
(127)
D = "As'sCs sinh"'s s
2
#9
::;coth
"'s s
2
#
As's+
coth
%'hh
2
&
Ah'h
<
==> (128)
Ch = "CsAs's sinh
"'s s
2
#
Ah'h sinh
%'h
h
2
& . (129)
Fig. 3 shows the profiles of plastic microdeformation and double tractionin the two–phase laminate for di!erent sets of material parameters and fora fraction of soft phase (s), fs = 0.7. These profiles clearly show the conti-nuity of *p
12 and m12 at the interfaces. The di!erent shapes presented areobtained for various values of the modulus As, the other material param-eters being fixed and given in Table 1. Varying As modifies the mismatchwith respect to the modulus Ah of the phase (h). Without mismatch theprofile of *p
12 is smooth at interfaces while stronger mismatches lead tosharper transitions between the phases. Varying As also changes the in-trinsic length scale 1/'s of the phase (s). When the intrinsic length scaleis small compared to the size of the microstructure, the microdeformationgradient can develop inside the phase (s) which leads to a rounded profileof the plastic microdeformation *ps
12 and to a double traction m12 localizedat the interfaces. When the intrinsic length scale increases, the value ofthe double traction also increases at the interfaces (or equivalently, whendecreasing the microstructure length scale, l = s + h, for a fixed intrin-sic length scale). When the intrinsic length scale becomes of the order ofthe size of the microstructure or even larger, the model starts to saturateso that *ps
12 becomes quasi–homogeneous (flat profile) and the double trac-tion is not localized anymore (linear profile). *ps
12 is a!ected by As in thesame way as in (Cordero et al., 2010) where the hardening modulus, H ,was not considered; in this latter case, the plastic microdeformation profilewas parabolic, so that m12, as a linear function of *ps
12,1, always displayed alinear evolution in the phase (s), even for very small intrinsic length scales.From Eq. (122) we derive the expression of the macroscopic stress tensorcomponent, %12, defined as the mean value of the stress component +12 over

158 S. Forest et al.
Table 1. Set of material parameters used in the simulations. The intrinsiclength scales, defined as 1/'h,s, induced by these parameters is of the orderof 10 nm for the elastic phase (h) and 500 nm for the plastic phase (s).
µ [MPa] &c [MPa] H [MPa] H# [MPa] A [MPa.mm2]Phase (s) 35000 40 5000 500000 1.10"3
Phase (h) 35000 - - 500000 5.10"5
the microstructure size, l = (s+ h):
%12 =< +12 >=1
l
! l2
" l2
+12 dx = &c +H
fs$$cum% "
As
fs$*ps
12,11%, (130)
where brackets <> denote the average values over the microstructure unitcell. We obtain the mean plastic slip for the first loading branch from Eq.(114):
$$% =
'*ps12 "
As
Hs#
*ps12,11
(=
2As'sCs sinh
%'s fsl
2
&
Hl+ fsD (131)
where fs is the fraction of soft phase. From this we obtain alternativeexpressions of Cs and D as functions of $$%,
Cs = "$$%
?As's sinh
%'s fsl
2
&
9
::;fs
9
::;
coth
%'s fsl
2
&
As's+
coth
%'h (1" fs) l
2
&
Ah'h
<
==>"2
Hl
<
==>
/
001
"1
(132)
D = $$%
,
---.fs "
2
Hl
9
::;
coth
%'s fsl
2
&
As's+
coth
%'h (1" fs) l
2
&
Ah'h
<
==>
"1/
0001
"1
(133)
which contain contributions from both the back–stress and the isotropichardening. The macroscopic stress takes the form:
%12 = &c +HD. (134)

Micromorphic Approach to Crystal Plasticity… 159
Figure 3. Profiles of (a) plastic microdeformation *p12 and (b) double
traction m12 in the two–phase microstructure with the microcurl modelat 0.2% overall plastic strain obtained with the set of material param-eters given in Table 1 and: (1) with no mismatch between the moduliof the two phases, Ah = As = 5.10"5 MPa.mm2, (2) with a strongermismatch, Ah = 5.10"5 MPa.mm2 and As = 1.10"3 MPa.mm2 and (3)Ah = 5.10"5 MPa.mm2 and As = 5.10"2 MPa.mm2. The associated intrin-sic length scales, 1/'s, are respectively: 100 nm, 449 nm and 3.2µm. In allthree cases, the fraction of soft phase fs = 0.7 and the microstructure sizeis fixed, l = 1 µm. The vertical lines indicate the position of interfaces.
(a)
(b)

160 S. Forest et al.
The hardening produced by the model is a combination of the kinematichardening arising from the higher order back–stress component and thelinear isotropic hardening introduced in (115). Its modulus, Htot, is size–dependent and is obtained using Eqs. (133) and (134):
Htot = H
,
---.fs "
2
Hl
9
::;
coth
%'s fsl
2
&
As's+
coth
%'h (1" fs) l
2
&
Ah'h
<
==>
"1/
0001
"1
(135)The macroscopic stress–strain curves shown in Fig. 4 illustrate the ad-ditional hardening predicted by the microcurl model in comparison to aconventional crystal plasticity theory. One cycle of deformation $ has beenconsidered to illustrate the kinematic hardening e!ects. The first loadingbranch is described by the previous analytical solution, whereas the remain-ing of the loop has been computed numerically. In the absence of gradiente!ects (classical case, dashed line), only isotropic hardening is visible. Themicrocurl model leads to an additional kinematic hardening component.When the size of the elasto-plastic phase (s) becomes large compared tothe intrinsic length scale 1/'s, strain gradient e!ect is small and the kine-matic hardening arising from the microcurl model tends to vanish. Thenthe model reduces to conventional crystal plasticity theory and the limit ofthe 0.2% macroscopic flow stress is:
liml%&
%12|0.2 = &c +H
fs$$cum%. (136)
In contrast, the maximum extra–stress,&%, predicted by the model at smallmicrostructure sizes can be computed as:
&% = liml%0
%12(< $ >)" liml%&
%12|0.2 =1" fsfs
H# $$% . (137)
Fig. 5 presents the predicted evolution of the macroscopic flow stress %12|0.2
at 0.2% plastic strain (obtained by setting $$% = 0.002) as a function of themicrostructure length scale l in a log–log diagram. This evolution is plottedusing the material parameters given in Table 1 and for various values of thecoupling modulus, Hs
# = Hh# = H#. The four lower curves are obtained for
finite values of the modulus H#, they exhibit a tanh–shape with saturationfor large (l > 10"2 mm) and small (l < 10"5 mm) values of l. Thesesaturations can be characterized by the limit given in Eq. (136) and themaximum extra–stress, &%, given in Eq. (137) respectively. A transition

Micromorphic Approach to Crystal Plasticity… 161
Figure 4. Macroscopic stress–strain response of the two–phase microstruc-ture under cyclic shear loading conditions: comparison between the be-haviour from a conventional crystal plasticity theory and the behaviour ac-cording to the microcurl model in which an additional kinematic hardeningis predicted. Results obtained by finite element simulations for: l = 1µm,fs = 0.7 and the material parameters given in Table 1.
domain with strong size dependence is observed between these two plateaus.The limits and the maximum extra–stress, the position of the transitionzone and the scaling law exponent in the size dependent domain (slope inthe log–log diagram) are directly related to the material parameters used inthe model. In fact, the position of the size dependent domain is controlledby the moduli Ah,s (not illustrated here) while the maximum extra–stressand the scaling law exponent are both controlled by the modulus H#, bothincreasing for higher values of H# as suggested by Fig. 5.When H# is very small, we can deduce from Eq. (137) that &% vanishesand consequently the scaling law exponent will tend to 0. The upper curveis obtained for H# / 0, it no longer exhibits a tanh–shape as no saturationoccurs for small values of l, the limit &% / 0 follows. This limit case will

162 S. Forest et al.
Figure 5. Evolution of the macroscopic flow stress %12|0.2 at 0.2% plasticstrain as a function of the microstructure length scale l, plotted for di!erentcoupling moduliH# (= Hs
# = Hh#). The other material parameters are given
in Table 1 and fs = 0.7.
be described in next subsection, it will be shown that in that case a scalinglaw exponent of "2 is reached. Finally the microcurl model can producescaling law exponents ranging from 0 to "2.
3.3 Strain gradient plasticity as a limit case
In the proposed microcurl model, the modulus H# introduces a couplingbetween micro and macro variables. A high value of H# forces the plasticmicrodeformation '
!
p to remain as close as possible to the macro plastic
deformation H!
p. Consequently, it enforces the condition that K!
coincideswith the dislocation density tensor. In this case, the microcurl model de-generates into the strain gradient plasticity model by (Gurtin, 2002). Whenapplied to the laminate microstructure, the strain gradient plasticity modelleads to the indeterminacy of the double traction vector at the interfaces,due to the fact that no strain gradient e!ect occurs in the elastic phase,see (Cordero et al., 2010). The microcurl model can then be used to derivethe missing interface condition to be applied at the interface, by means ofa limit process in the previous solution of the boundary value problem.The limit H# / 0 of the microcurl model can be used to determine the

Micromorphic Approach to Crystal Plasticity… 163
value of the double traction to be imposed at the interface.
limH!%&
m12(s/2) = limH!%&
As*ps12,1(s/2)
= limH!%&
As's sinh
%'s fsl
2
&Cs
= limH!%&
$$%
,
--.2
Hl" fs
9
::;
coth
%'s fsl
2
&
As's+
coth
%'h (1" fs) l
2
&
Ah'h
<
==>
/
001
"1
Since H# / 0, 1/'h / 0 and coth7'hh/2
8/ 1. Moreover, 's
& := 's /@H/As. Consequently,
limH!%&
m12(s/2) = $$%
,
--.2
Hl" fs
coth
%'s&
fsl
2
&
As's&
/
001
"1
(138)
Accordingly, the double traction is found to depend on the mean plastic slip.The characteristic length in the soft phase for the strain gradient plasticitymodel is found to be related to the ratio between the hardening modulusand the higher order modulus, As.The limiting process can also be used to predict the response of the straingradient plasticity model in the size e!ect zone. For that purpose, let usconsider the limit of %12|0.2, when H# goes to infinity. Indeed, when H#
tends to infinity, the expression of D in Eq. (133) can be simplified. Weconsider sizes of the microstructures in the size e!ect zone, i.e. intermediatevalues of l. Since H# is very high, the term tanh
7'h(1" fs)l/2
8tends to
1. Considering that l is small enough, the term l (tanh ('sfsl/2)) can beapproximated by its Taylor expansion at the order 2, which leads to D ofthe form:
D 1al+ b
cl2 + dl + e(139)
where
a =$$%fs2@H#
, b = $$%fsAh
%1 +
H
H#
&(140)
c = "f3sH
2Ah
12, d =
f2sH
2@H#
, e = "fs2AhH
H#(141)

164 S. Forest et al.
The terms a, d and e tend to 0 when H# / 0, so that
D 112As$$%
f3sHl2
(142)
and for the macroscopic stress:
%12 1 &c +12As$$%
f3s l
2(143)
This expression is the same as that found in the absence of isotropic hard-ening in (Cordero et al., 2010). It indicates a l"2 scaling law for the straingradient plasticity model. This scaling law di!ers from Hall–Petch relation,l"1/2, typical for grain size e!ects, and from Orowan’s law, l"1, valid forprecipitate size e!ects.
4 Continuum modelling of size e!ects in polycrystals
The model is now applied to simulate the response of polycrystals and thee!ects of grain size.
The interface conditions at grain boundaries play a major role in thesimulated size e!ects in the polycrystal behaviour. No special interface lawis considered in this work, although such physically motivated interface con-ditions exist in the literature, see (Gurtin and Anand, 2008). Instead weconsider the canonical interface conditions that arise from the formulationof the balance equations of the microcurl continuum model. These condi-tions are the continuity of displacement, u , and the continuity of plasticmicro–deformation, '
!
p. These conditions also include the continuity of the
simple and double tractions, t and M!
, described in Eq. (86). Continuityof displacement excludes grain boundary cracking and sliding. Continu-ity of plastic micro–deformation is reminiscent of the fact that dislocationsgenerally do not cross grain boundaries, especially for such random grainboundaries. Note that in the microcurl model, only the kinematic degreesof freedom '
!
p are continuous. This is not the case of the plastic deforma-
tion, H!
p, which is treated here as an internal variable. However, due tothe internal constraint discussed in section 3.1, H
!
p closely follows the plas-tic micro–deformation, so that it is quasi–continuous at grain boundarieswhen the penalty coe$cient, H#, is high enough. Conversely, lower valuesof H# may allow slightly discontinuous plastic deformation, which may betentatively interpreted as dislocation sinking inside grain boundaries. Thecontinuity of the associated tractions expresses the transmission of classi-cal and generalised internal forces from one grain to another through grain

Micromorphic Approach to Crystal Plasticity… 165
(a) (b)
(c)
Figure 6. Periodic meshes of the 2D periodic aggregates used in the finiteelement simulations: (a) 24 grains, (b) 52 gains. Two slip systems are takeninto account in each randomly oriented grain. Various mean grain sizes, d,ranging from tens of nanometers to hundreds of microns, are investigated.(c) Description of the two e!ective slip systems for 2D planar double slip.
boundaries. Such continuum models are then able to mimic in that waythe development of dislocation pile–ups at grain boundaries (Forest andSedlacek, 2003).
4.1 Boundary value problem for polycrystals
The size e!ects exhibited by the solution of the boundary value problemare linked to an intrinsic length scale, ls, introduced through the generalised

166 S. Forest et al.
moduli H# and A of Eq. (110) and defined as:
ls =
6A
H#. (144)
This intrinsic length scale has to be consistent with the fact that plasticitye!ects occur at scales ranging from hundreds of nanometers to a few microns.In addition, as stated in section 3.1, the coupling modulus, H#, has to bechosen high enough to ensure that '
!
p and H!
p are close. H# also determinesthe scaling law exponent. These requirements are guidelines for the choiceof relevant generalised moduli H# and A. The sets of material parametersused in this paper are chosen in that way.
The finite element simulations have been made on periodic 2D meshes ofperiodic polycrystalline aggregates generated by a method based on Voronoitessellations (Fig. 6(a)(b)). The integration order of elements is quadratic.The Voronoi polyhedra represent the grains, the random distribution of theircenters has been controlled so that their sizes are sensibly the same, thatis why we can reasonably assume that the mean grain size, d, is su$cientto characterise the microstructure of our aggregates. A random orientationis assigned to each grain and two slip systems are taken into account. In2D, the plastic behaviour of f.c.c. crystals can be simulated with 2D planardouble slip by considering two e!ective slip systems separated by an angleof 2- (Asaro, 1983; Bennett and McDowell, 2003). Figure 6(c) describes thegeometry. The slip system pair is oriented by the angle . which is the grainorientation randomly fixed for each grain. For a f.c.c. crystal - = 35.1',it corresponds to the orientation of the close–packed planes in the crystallattice of the grain.
Periodic homogenization for generalised continua is used to predict thee!ective response of the polycrystal. The displacement field is assumed tobe of the form
u (x) = E!
.x + v (x), (145)
with the fluctuation v periodic, meaning that it takes identical values athomologous points of the unit cell (Forest et al., 2001). The plastic micro–deformation field, '
!
p, is assumed to be periodic, meaning that no rotationalmacroscopic plastic deformation is imposed to the unit cell. Its componentsare equal at homologous opposite nodes. According to periodic homog-enization, the simple and double tractions t and m
!
are anti–periodic athomologous points of the unit cell.
Polycrystals are random materials so that the periodicity constraint maylead to a bias in the estimation of the e!ective properties. This boundary

Micromorphic Approach to Crystal Plasticity… 167
Figure 7. Macroscopic stress–strain response of the 24–grain aggregateunder cyclic simple shear loading conditions with a mean gain size d 10.2µm. The set of material parameters used is labelled (c) in Table 2.
e!ect can be alleviated by considering several realization of the microstruc-ture and performing ensemble averaging (Zeghadi et al., 2007).
4.2 Overall cyclic response of a polycrystalline aggregate
The finite element simulations of the boundary value problem presentedpreviously have been conducted under generalised plane strain conditionson aggregates with a relatively small number of grains. The aim here is notto obtain a representative response but to catch the grain size e!ects andto explore qualitatively the impact of di!erent sets of material parameters.In this section, a virtual material is considered with various intrinsic lengthscales. The macroscopic stress–strain curve shown in Fig. 7 is obtainedby applying a cyclic simple shear loading controlled by the average stresscomponent E12 on the aggregate of 24 grains with d = 0.2µm and the setof material parameters labelled (c) in Table 2. The mean stress component%12 is then computed:
%12 =1
V
!
V
+12 dV, E12 =1
V
!
V
/12 dV, (146)

168 S. Forest et al.
Table 2. Sets of material parameters used in the 24–grain aggregate case(Fig 6(a)). The intrinsic length scale, ls =
@A/H#, is given for each set.
Set µ [MPa] &c [MPa] H# [MPa] A [MPa mm2] ls [µm]
a 35000 40 3.0 106 1.0 10"2 5.8 10"2
b 35000 40 1.0 106 1.0 10"2 1.0 10"1
c 35000 40 3.5 105 1.0 10"2 1.7 10"1
d 35000 40 8.8 104 1.0 10"3 1.1 10"1
where V denotes each polycrystal unit cell. The simulated response il-lustrates the kinematic hardening produced by the microcurl model. Thestress–strain curves obtained in the next case (see Fig. 9) show that thiskinematic hardening is size dependent: it increases for smaller grains. Notethat the observed overall kinematic hardening has two distinct sources: theintragranular back–stress induced by plastic strain gradients, and the inter-granular internal stress that originate from the grain to grain plastic strainincompatibilities. The latter contribution is also predicted by classical crys-tal plasticity models.
Figure 8 presents the e!ect of the mean grain size, d, on the macroscopicflow stress at 1% plastic strain in the 24–grain aggregate in a log–log dia-gram for di!erent intrinsic length scales, ls, introduced through the sets ofmaterial parameters (labelled a, b, c and d) given in Table 2. The curvesexhibit two plateaus for large (d > 20µm) and small (d < 0.1µm) meangrain sizes with a transition domain in between. This tanh–shape indicatesthat when d is large compared to the intrinsic length scale, ls, strain gradi-ent e!ects are small and the kinematic hardening arising from the microcurlmodel vanishes. The model saturates when d is of the order of ls or smaller.The transition domain exhibits a strong size dependence, the polycrystallineaggregate becoming harder for decreasing grain sizes. The position of thetransition zone, the maximum extra–stress (the distance between the twoplateaus) and the scaling law exponent, m, in the size dependent domainare controlled by the material parameters used in the model. The two lattere!ects are controlled by the coupling modulus, H#, they both increase forhigher values of H# as shown in Fig. 8. The scaling exponent is definedas the slope in the log–log diagram in the inflection domain, reflecting thescaling law:
%12 3 dm. (147)
It is obtained with the sets of material parameters given in Table 2. Thefound values range from "0.26 to "0.64 including the well–known Hall–

Micromorphic Approach to Crystal Plasticity… 169
Figure 8. E!ect of the mean grain size, d, on the macroscopic flow stress,%12|1%, at 1% plastic strain. The results are obtained for the 24–grainaggregate using the di!erent sets of material parameters given in Table 2.The scaling law exponent, m, is identified in each case.
Petch exponent m = "0.5. In fact it was shown in (Cordero et al., 2010)that values of m ranging from 0 to "2 can be simulated with the microcurlmodel in the case of two–phase microstructures. In each case, these val-ues are obtained without classical isotropic hardening, meaning that thelinear kinematic hardening produced by the model is able to reproduce awide range of scaling laws. Note that conventional strain gradient plasticitymodels do not lead to tanh–shape curves but rather to unbounded stressincrease for vanishingly small microstructures (Cordero et al., 2010).
4.3 Grain size e"ects in idealised aluminium polycrystals
Similar finite element simulations have been performed on idealised alu-minium aggregates of 52 grains shown in Fig. 6(b). An additional isotropichardening component is added as in (Meric et al., 1991) to obtain a more re-alistic response of large aluminium grains. The size–independent hardening

170 S. Forest et al.
Figure 9. Macroscopic stress–strain response of the 52–grain aggregateunder simple shear for various mean grain sizes, d. The set of materialparameters used is labelled (g) in Table 3.
law reads:
R$ = &c +Qn$
%
h$%"1" exp
""b $%
cum
##, (148)
where n is the number of slip systems (here n = 2), Q and b are materialcoe$cients defining non–linear isotropic hardening, h$% is the interactionmatrix and $%
cum is the accumulated micro–plastic slip on the slip system0. Cumulative plastic slip results from the integration of the di!erentialequation $%
cum = |$% |. The material parameters used in these simulationsare given in Table 3. The macroscopic stress–strain curves presented in Fig.9 are obtained by applying a simple shear loading controlled by the averagestrain component E12 on the 52–grain aggregate with various mean grainsizes, d, taken in the size dependent domain. The chosen set of materialparameters has the label (g) in Table 3. These parameters are such thatan acceptable description of aluminium polycrystals is obtained for largegrains and that a Hall–Petch–like behaviour is found in a plausible rangeof grain sizes. However we did not attempt to calibrate the amplitude ofthe extra–hardening so that simulation predictions remain qualitative. The

Micromorphic Approach to Crystal Plasticity… 171
Table 3. Sets of material parameters used in the 52–grain aggregate case(Fig 6(b)).
Set µ [MPa] &c [MPa] Q [MPa] b h$$ h$%,$(=%
e 27000 0.75 7.9 10.2 1 4.4f 27000 0.75 7.9 10.2 1 4.4g 27000 0.75 7.9 10.2 1 4.4
Set H# [MPa] A [MPa mm2] ls [µm]
e 1.0 106 1.0 10"2 1.0 10"1
f 3.5 105 1.0 10"2 1.7 10"1
g 5.0 104 1.0 10"2 4.5 10"1
curves of Fig. 9 show again that the kinematic hardening produced by themodel is strongly size dependent. The evolution of the macroscopic flowstress at 1% plastic strain in the 52–grain aggregate is shown in Fig. 10 inthe same way as it was done in Fig. 8. The set of material parameters (g)of Table 3 gives the ideal Hall–Petch scaling law exponent m = "0.5.
An important output of the simulations is the dependence of the stressand strain fields in the grains of the polycrystal on grain size. Figures 11 and12 show the contour plots of the field of accumulated plastic slip, computedas
p =
A2
3#!
p : #!
p, (149)
where #!
p is the symmetric part of the plastic deformation, H!
p, and thecontour plots of the norm ' of the dislocation density tensor,
' =@
#!
: #!
, (150)
respectively. The considered grain sizes are taken in the size dependentdomain where the evolution of the fields is assumed to be physically rele-vant. The chosen set of material parameters has the label (g) in Table 3,it corresponds to an intrinsic length scale ls = 0.45µm and gives a scalinglaw exponent m = "0.5. The mean value of the accumulated plastic slipis the same in every case, only its distribution varies with the size of themicrostructure as shown in Fig. 11.
The first contour plot of each figure is obtained for d = 200µm 4 ls =0.45µm, at the very beginning of the size–dependent behaviour domain ac-cording to Fig. 10. At this size, the simulated fields show that p is quiteinhomogeneous and that some deformation bands appear; ' is localised at

172 S. Forest et al.
Figure 10. E!ect of the mean grain size, d, on the macroscopic flow stress,%12|1%, at 1% plastic strain. The results are obtained for the 52–grainaggregate using the di!erent sets of material parameters given in Table 3.The scaling law exponent, m, is identified in each case.
the grain boundaries and almost vanishes in the grain cores. The contourplots obtained for 2µm< d < 20µm show a significant evolution of bothfields. One observes the progressive building of a network of strain localiza-tion bands. These bands are slip bands as they are parallel to the slip planedirections represented on the 1µm contour plot of Fig. 11. They compensatethe larger blue zones where plastic strain cannot develop due to the higherenergy cost associated with its gradient. Plastic strain becomes strongerinside the localization bands. This is due to the fact that the contour plotsare given for fixed mean value of p, which implies that the applied totalstrain is higher for small grain sizes as suggested by Fig. 9. The field of thenorm of the dislocation density tensor is still high close to grain boundariesand spreads over the grain cores. The last contour plot of each figure isobtained for d = 1µm, a size close to ls. Here the model starts to saturate,which can be seen from the simulated fields. The field of p does not evolveanymore and ' decreases. In fact, as ls controls the strain gradient e!ects,strong strain gradients cannot develop because they become energeticallytoo expensive when the microstructure size is too small.

Micromorphic Approach to Crystal Plasticity… 173
d = 200µm d = 20µm d = 10µm
d = 4µm d = 2µm d = 1µm
Figure 11. Grain size e!ect on the accumulated plastic slip. These contourplots are obtained with the 52–grain aggregate for the same mean value ofp = 0.01. The set of material parameters (g) of Table 3 is used. The pairsof slip plane directions are represented for each grain on the 1µm contourplot.

174 S. Forest et al.
d = 200µm d = 20µm d = 10µm
d = 4µm d = 2µm d = 1µm
Figure 12. Grain size e!ect on the norm of the dislocation density tensor.These contour plots are obtained with the 52–grain aggregate for the samemean value of p = 0.01. The set of material parameters (g) of Table 3 isused. The pairs of slip plane directions are represented for each grain onthe 1µm contour plot.

Micromorphic Approach to Crystal Plasticity… 175
5 Micromorphic approach vs. phase field models
There are strong links between generalized continuum mechanics and phasefield models which are striving in modern field theories of materials. Mindlin’sand Casal’s second gradient model of mechanics and the Cahn–Hilliard dif-fusion theory were developed almost simultaneously. More generally, thenecessity of introducing additional degrees of freedom in continuum modelsarose in the 1960s in order to account for microstructure e!ects on the over-all material’s response. However, generalized continuum mechanics, withparadigms like Eringen’s micromorphic model and Aifantis strain gradientplasticity, developed along an independent track from phase field approachembodied by Khachaturyan’s views, for instance.
The links have been seen recently within the context of plasticity anddamage mechanics. The computational mechanics community aimed at in-troducing the evolution of microstructures into their simulations (Ubachset al., 2004; Ammar et al., 2009a) whereas physicists started introducingplasticity into the thermodynamical setting (Gaubert et al., 2008). Cooper-ation between these communities becomes necessary when tackling damagemechanics and crack propagation simulation (Aslan and Forest, 2009; Mieheet al., 2010a). First attempts to present a general constitutive frameworkencompassing classical enhanced mechanical and thermodynamical modelshave been proposed recently (Forest, 2009; Aslan and Forest, 2011; Miehe,2011). Such an approach is presented in this chapter and extended to so-phisticated descriptions of interactions between viscoplasticity and phasetransformations.
The micromorphic model originates from Eringen’s introduction of mi-crodeformation tensor at each material point that accounts for the changesof a triad of microstructure vectors. In the present chapter, the micro-morphic approach denotes an extension of this theory to other variablesthan total deformation, namely plastic strain, hardening variables, and eventemperature and concentration. The gist of the micromorphic model is toassociate a microstructure quantity (e.g. microdeformation) to an overallquantity (e.g. macroscopic deformation). The deviation of the microvariablefrom the macrovariable and the gradient of the microvariable are sources ofstored energy and dissipation. They are controlled by generalized stresseswhich contribute to the power of internal forces.
On the other hand, the phase field approach has proved to be an e$cientmethod to model the motion of interfaces and growth of precipitates basedon a sound thermodynamical formulation including non convex free energypotentials (Finel et al., 2010). The e!ect of microelasticity on the morpho-logical aspects and kinetics of phase transformation is classically studied but

176 S. Forest et al.
the occurrence of plasticity is recent (Ubachs et al., 2004; Gaubert et al.,2008, 2010). Beyond plasticity, damage and crack propagation are the sub-ject of both generalized continuum and phase field approaches (Fremondand Nedjar, 1996; Ubachs et al., 2007; Aslan and Forest, 2009; Miehe et al.,2010a,b). Phase field simulations usually rely on finite di!erences or fastFourier methods. More recently, the finite element method was also usedin order to tackle more general boundary conditions (Ammar et al., 2009a;Miehe et al., 2010a; Rajagopal et al., 2010).
The objective of the present chapter is to formulate a thermomechanicaltheory of continua with additional degrees of freedom. It is shown in a firstpart that the theory encompasses available generalized continuum theoriesand phase field models provided that well–suited free energy and dissipa-tion potentials are selected. The current strain gradient plasticity modelsare then extended to account simultaneously for plastic strain gradient andplastic strain rate gradient in order to address viscoplastic instabilities oc-curring in metal plasticity like dynamic strain ageing. The second part ofthe work exposes how the well–known elastoviscoplastic constitutive frame-work can be incorporated into the available phase field approach in order toinvestigate the coupling between viscoplasticity and phase transformation.An original approach is proposed that resorts to standard homogenizationtechniques used in the mechanics of heterogeneous materials.
5.1 Thermomechanics with additional degrees of freedom
General setting. The displacement variables of mechanics can be com-plemented by additional degrees of freedom (dof), -, that can be scalars aswell as tensor variables of given rank:
DOF = {u , -}, (151)
A first gradient theory is built on the basis of this set of degrees of freedom :
STRAIN = {#!
, -, !-} (152)
The strain tensor, #!
, is the symmetric part of the gradient of the displace-ment field. The main assumption of the proposed theory is that the gradientof the additional degrees of freedom contribute to the work of internal forcesin the energy equation, in contrast to internal variables and concentrationin di!usion theory. Depending on the invariance properties of the variable-, it can itself contribute to the work of internal forces together with itsgradient. It is not the case for the displacement itself which is not an ob-jective vector. The virtual power of internal forces is then extended to the

Micromorphic Approach to Crystal Plasticity… 177
virtual power done by the additional variable and its first gradient:
P(i)(u &, -&) = "
!
D
p(i)(u &, -&) dV
p(i)(u &, -&) = !!
: !u & + a-& + b .!-& (153)
where D is a subdomain of the current configuration " of the body. Starsdenote virtual fields. The Cauchy stress tensor is !
!
and a and b are gen-eralized stresses associated with the additional dof and its first gradient,respectively. Similarly, the power of contact forces must be extended asfollows:
P(c)(u &, -&) =
!
D
p(c)(u &, -&) dV, p(c)(u &, -&) = t .u & + ac -& (154)
where t is the traction vector and ac a generalized traction. In general, thepower of forces acting at a distance must also be extended in the form:
P(e)(u &, -&) =
!
D
p(e)(u &, -&) dV, p(e)(u &, -&) = !f .u &+ae-&+b e·!-&
(155)where !f accounts for given simple body forces and ae for generalized vol-ume forces. The power of inertial forces also requires, for the sake of gen-erality, the introduction of an inertia I associated with the acceleration ofthe additional degrees of freedom :
P(a)(u &, -&) =
!
D
p(a)(u &, -&) dV, p(a)(u &, -&) = "!u .u & " I- -&
(156)Following (Germain, 1973a), given body couples and double forces workingwith the gradient of the velocity field, could also be introduced in the theory.The generalized principle of virtual power with respect to the velocity andadditional dof, is formulated as
P(i)(u &, -&)+P(e)(u &, -&)+P(c)(u &, -&)+P(a)(u &, -&) = 0, ,D * ", ,u &, -(157)
The method of virtual power according to (Maugin, 1980) is used then toderive the standard local balance of momentum equation:
div!!
+ !f = !u , ,x - " (158)
and the generalized balance of micromorphic momentum equation:
div(b " b e)" a+ ae = I-, ,x - " (159)

178 S. Forest et al.
The method also delivers the associated boundary conditions for the simpleand generalized tractions:
t = !!
.n , ac = (b " b e).n , ,x - "D (160)
The local balance of energy is also enhanced by the generalized power al-ready included in the power of internal forces (153):
!) = p(i) " div q + !r (161)
where ) is the specific internal energy, q the heat flux vector and r denotesexternal heat sources. The entropy principle takes the usual local form:
"!(, + #T ) + p(i) "q
T.!T # 0 (162)
where it is assumed that the entropy production vector is still equal to theheat vector divided by temperature, as in classical thermomechanics. Again,the enhancement of the theory goes through the enriched power densityof internal forces (153). The entropy principle is exploited according toclassical continuum thermodynamics to derive the state laws. At this stageit is necessary to be more specific on the dependence of the state functions,, #,!
!
, a, b on state variables and to distinguish between dissipative andnon–dissipative mechanisms. The introduction of dissipative mechanismsmay require an increase in the number of state variables. These di!erentsituations are considered in the following subsections.
Micromorphic model as a special case. The micromorphic modelas initially proposed by Eringen (Eringen and Suhubi, 1964) and Mindlin(Mindlin, 1964) amounts to introducing a generally non compatible mi-crodeformation field:
- . '!
where '!
is a generally non–symmetric second order tensor defined at eachmaterial point. When the microdeformation reduces to its skew symmetricpart, the Cosserat model is retrieved (Ehlers and Volk, 1998; Forest andSievert, 2006). The microdeformation is to be compared to the deformationgradient:
e!
= u !!" '!
(163)
If the internal constraint e!
. 0 is enforced, the microdeformation coincideswith the deformation and the micromorphic model reduces to Mindlin’ssecond gradient theory. The free energy density depends of the followingstate variables:
STATE = {#!
, e!
, K!
:= '!
!!, T, %}

Micromorphic Approach to Crystal Plasticity… 179
where % denotes the set of internal variables required to represent dissipativemechanical phenomena. The Clausius–Duhem inequality (162) becomes, inthe isothermal case,
(!!
" !",
"#!
) : #!
+(a!
" !",
"e!
) : e!
+(b!
" !",
"K!
)...K!
" (!#+ !",
"T)T " !
",
"T% # 0
(164)where a
!
was taken as the stress conjugate to the relative deformation ratee!
in the power of internal forces, which corresponds to an alternative formfor (153). The state laws for micromorphic media are obtained by assumingthat the first four contribution are non–dissipative:
!!
= !",
"#!
, a!
= !",
"e!
, b!
= !",
"K!
, # = "",
"T(165)
Elastoviscoplastic micromorphic media are then obtained by a specific choiceof the internal variables % and their evolution rules (Forest and Sievert,2006).
Phase field model as a special case. Enhancing the mechanical powerin the energy balance is plausible in the presence of microstructure inducedmechanical phenomena, as proposed by Eringen. However, this is also pos-sible in other contexts, namely when the dof - has a more general meaningof an order parameter. Fried and Gurtin (Fried and Gurtin, 1993; Gurtin,1996) suggested to consider the following reduced state space:
STATE = {#!
, -, !-, T, %} (166)
and the following state laws
!!
= !",
"#!
, b = !",
"!-, # = "
",
"T(167)
so that, in the isothermal case, the dissipation rate reduces to
av-+X% # 0, with av = a" !",
"-, X = "!
",
"%(168)
The choice of a convex potential "(av, X) providing the evolution laws:
- =""
"av, % =
""
"X(169)
ensures the positivity of the dissipation rate.As an illustration, let us consider a quadratic contribution of av to the

180 S. Forest et al.
dissipation potential. We are lead to the following relationships
- =1
0av =
1
0(a" !
",
"-) (170)
where 0 is a material parameter. The latter equation can be combined withthe balance law (159), in the absence of volume or inertial forces, and thestate law (167) to derive
0- = div
%!
",
"!-
&" !
",
"-(171)
which corresponds to a general Ginzburg-Landau equation.The authors in (Ubachs et al., 2004) have combined the micromorphic ap-proach and the Cahn–Hilliard approach to di!usion in order to derive analternative equation to Cahn–Hilliard.
5.2 Constitutive framework for gradient and micromorphic vis-coplasticity
We now exploit the established general structure to propose a constitu-tive framework for elastoviscoplastic materials exhibiting plastic strain gra-dient. The attention is focused on an isotropic elastoviscoplastic mediumcharacterized by the cumulated plastic strain, p. The proposed formulationencompasses Aifantis–like strain gradient plasticity models and introducesadditional strain rate gradient e!ects. The total strain is split into its elasticand plastic parts: #
!
= #!
e+ #!
p. In this context, the additional dof - has themeaning of a microplastic strain (Forest and Aifantis, 2010) to be comparedwith p itself.
Two variants of the constitutive framework are considered which handlein a slightly di!erent way the dissipative contribution due to the generalizedstresses.
Introduction of viscous generalized stresses The free energy densityis assumed to depend on the following state variables:
STATE = {#!
e, e := -" p, p, K := !-} (172)
The isothermal Clausius–Duhem inequality take the form:
(!!
"!",
"#!
e) : #
!
e+(a"!",
"e) : e+(b "!
",
"K) ·K +!
!
: #!
p+ap"!",
"T% # 0
(173)

Micromorphic Approach to Crystal Plasticity… 181
The following state laws are adopted
!!
= !",
"#!
e, R = !
",
"p(174)
To ensure the positivity of the dissipation rate associated with the general-ized stress a and b , we adopt the viscoelastic constitutive equations
a = !",
"e+ 0e, b = !
",
"K+ 1K (175)
where 0 and 1 are generalized viscosity coe$cients. This viscoelastic for-mulation amounts to splitting the generalized stresses a and b into elastic(reversible) and viscous parts. Regarding viscoplastic deformation, a vis-coplastic potential "(!
!
, a"R) is chosen such that:
#!
p =""
"!!
, p =""
"a" R(176)
In order to evidence the kind of gradient elastoviscoplastic models we aimat, we illustrate the case of a quadratic free energy potential:
!, =1
2#!
e : C"
: #!
e +R0p+1
2Hp2 +
1
2H'e
2 +1
2AK ·K
!!
= C"
: #!
e, R = R0 +Hp, a = H'e + 0e, b = AK + 1K
The viscoplastic potential is based on the yield function that introduces theequivalent stress measure +eq and a threshold
"(!!
, a"R) =K
n+ 1
'+eq + a"R
K
(n+1
#!
p = p"+eq
"!!
, p =
'+eq + a"R
K
(n
where $·% denotes the positive part of the quantity in brackets, and K andn are usual viscosity parameters. The decomposition (175) and the gener-alized balance (159) become
a = H'(-" p) + 0(- " p) = div(AK + 1K ) (177)
We finally obtain the following linear partial di!erential equation, under thecondition of plastic loading, in the absence of volume and inertial forces:
H'-"A&- + 0-" 1&- = H'p+ 1p (178)

182 S. Forest et al.
where & is the Laplace operator. When the viscous parts are droppedin (175), the Helmholtz type equation used in strain gradient plasticityand damage (Peerlings et al., 2001; Engelen et al., 2003; Forest, 2009) isretrieved. It is classically used for the regularization of strain localizationphenomena. The rate dependent part in the previous equation is expectedto be useful in the simulation of strain rate localization phenomena whichoccur for instance in strain ageing materials (Maziere et al., 2010).
Under plastic loading, the equivalent stress can then be decomposed intothe following contributions:
+eq = R" a+Kp1/n = R0 +Hp"A&- " 1&-+Kp1/n (179)
If 1 = 0, the micromorphic model is retrieved. If, furthermore, the con-straint - . p is enforced, Aifantis well–known strain gradient plasticitymodel is recovered.
Decomposition of the generalized strain measures. It is proposednow to consider the decomposition of the additional dof and its gradientinto elastic and plastic parts:
- = -e + -p, K = K e +K p (180)
The decomposition of - itself is allowed only if it is an objective quantity.This would not apply for instance for - . R
!
, the Cosserat microrotation.But it is allowed for a strain variable (Forest and Sievert, 2006). Suchgeneralized kinematic decompositions were proposed in (Forest and Sievert,2006) for strain gradient, Cosserat and micromorphic media, also at finitedeformation. It is generalized here for more general dofs, possibly relatedto physically coupled phenomena.
The selected state variables then are
STATE = {#!
e, -e, K e, p} (181)
which leads to the following Clausius–Duhem inequality
(!!
"!",
"#!
e) : #
!
e+(a"!",
"-e)-e+(b"!
",
"K e )·Ke+!
!
: #!
p+a-p+b ·K p"Rp # 0
(182)The retained state laws are
!!
= !",
"#!
e, a = !
",
"-e, b = !
",
"K e (183)
The residual dissipation then is
!!
: #!
p + a-p + b · K p "Rp # 0 (184)

Micromorphic Approach to Crystal Plasticity… 183
A simple choice of dissipation potential is
"(!!
, R, a) =K
n+ 1
'+eq + a"R
K
(n+1
+Ka
ma + 1
%|a|
Ka
&ma+1
+Kb
mb + 1
%beqKb
&mb+1
where beq is a norm of b and from which the evolution rules are derived
#!
p = p"+eq
"!!
, p = """
"R=
'+eq + a"R
K
(n
, (185)
-p =""
"a= p+
%|a|
Ka
&ma
signa, K p =""
"b=
%beqKb
&mb "beq"b
(186)
The time variation of the additional dof therefore deviates from the cumu-lated plastic strain rate by a viscous term characterized by the materialparameters Ka and ma. The residual dissipation rate becomes
(+eq "R+ a)p+|a|ma+1
Kmaa
+
%beqKb
&mb "beq"b
· b # 0 (187)
which is indeed always positive.Let us illustrate the type of partial di!erential equation provided by
such a model. For that purpose, a simple quadratic free energy potential ischosen:
!, =1
2#!
e : C"
: #!
e +R0p+1
2Hp2 +
1
2H'-
e2 +1
2AK e ·K e (188)
As a result, the corresponding state laws can be combined with the extra–balance equation (159):
a = H'-e = div b = div(AK e) (189)
which leads to the following partial di!erential equation, under the conditionof material homogeneity:
H'(-" -p) = A&- "AdivK p (190)
If Ka = 0 (infinite viscosity), equation (186) shows that -p coincides withp. If, furthermore, Kb = 0, the plastic part of K vanishes. The equation(189) then reduces to the Helmholtz–type equation (178) where 0 and 1 areset to zero. An alternative expression of (189) can be worked out by takingthe viscous laws into account
a = Ka(-p " p) = div b = divKbK
p (191)

184 S. Forest et al.
which leads to the following partial di!erential equation
Ka(-p " p) = Kb div K
p (192)
When the elastic contributions -e and K e are neglected, the previous equa-tion reduces to
Ka(-" p) = Kb&- (193)
which is identical to (178) after taking A = H' = 0.
5.3 Phase field models for elastoviscoplastic materials
In this section, the additional degree of freedom is a phase field variable.We show how the constitutive framework for elastoviscoplastic materialscan be embedded in the existing phase field approach which combines di!u-sion and phase field equations to model the motion of boundaries betweenphases. The migration of interfaces and growth of precipitates are stronglyinfluenced by the mechanical behaviour of the phases.
One observes in current literature a strong endeavour to develop mi-crostructure evolution simulation schemes coupled with complex mechanicalmaterial behaviour ranging from heterogeneous elasticity to general elasto-viscoplasticity. The main di$culty of such a task lies in the tight couplingbetween the complex interface evolutions and the fields, common to manymoving boundary problems. The phase field approach has emerged as apowerful method for easily tackling the morphological evolutions involvedin phase transformations. Phase field models have incorporated elastic-ity quite early (Wang et al., 1993) and have succeeded in predicting somecomplex microstructure evolutions driven by the interplay of di!usion andelasticity. It is only very recently that some phase field models have beenenriched with nonlinear mechanical behaviour, extending the range of ap-plications and materials which can be handled by the phase field approach(Ubachs et al., 2004; Gaubert et al., 2008; Ammar et al., 2009b; Gaubertet al., 2010).
There are essentially two ways of introducing linear and nonlinear me-chanical constitutive equations into the standard phase field approach:
1. The material behaviour is described by a unified set of constitutiveequations including material parameters that explicitly depend on theconcentration or the phase variable. Each parameter is usually in-terpolated between the limit values known for each phase. This isthe formulation adopted in the finite element simulations of Cahn–Hilliard like equations coupled with viscoplasticity in (Ubachs et al.,2004, 2007) for tin–lead solders. The same methodology is used in(Gaubert et al., 2008, 2010) to simulate the role of viscoplasticity on

Micromorphic Approach to Crystal Plasticity… 185
rafting of $’ precipitates in single crystal nickel base superalloys underload.
2. One distinct set of constitutive equations is attributed to each indi-vidual phase k at any material point. Each phase at a material pointthen possesses its own stress/strain tensor !
!k, #!k
. The overall strainand stress quantities !
!
, #!
at this material point must then be aver-aged or interpolated from the values attributed to each phase. Thisis particularly important for points inside the smooth interface zone.At this stage, several mixture rules are available to perform this aver-aging or interpolation. This approach makes possible to mix di!erenttypes of constitutive equations for each phase, like hyperelastic non-linear behaviour for one phase and conventional elastic–plastic modelwith internal variables for the other one. No correspondence of ma-terial parameters is needed between the phase behaviour laws. Thisis the approach proposed in (Steinbach and Apel, 2006) for incorpo-rating elasticity in a multi–phase field model. For that purpose, theauthors resort to a well–known homogeneous stress hypothesis takenfrom homogenization theory in the mechanics of heterogeneous materi-als (Besson et al., 2009). In the present work, we propose to generalizethis procedure to nonlinear material behaviour and to other mixturerules also taken from homogenization theory.
It must be emphasized that the latter procedure is very similar to what hasalready been proposed for handling di!usion in phase field models by (Kimet al., 1999). Two concentration fields c$ and c% are indeed introduced, andthe real concentration field is obtained by a mixture rule together with aninternal constraint on the di!usion potentials. Introducing two concentra-tion fields gives an additional degree of freedom for controlling the energy ofthe interface with respect to its thickness. If this possibility is not obviouswhen mechanics is introduced, adding a degree of freedom for describingthe stresses/strains within a di!use interface could be valuable to get rid ofsome spurious e!ects due to unrealistic interface thickness.
Coupling with di"usion. In the context of mass di!usion and phasefield evolution, the local form of the energy principle is
e = !!
: #!
+ a-+ b ·!- (194)
The total strain is partitioned into the elastic strain #!
e, the eigenstrain #!
&
due to phase transformation and the plastic strain #!
p:
#!
= #!
e + #!
& + #!
p (195)

186 S. Forest et al.
According to the thermodynamics of irreversible processes, the second lawstates that the variation of entropy is always larger than or equal to therate of entropy flux induced by di!usion:
T # "!.(µJ ) ! 0 (196)
where J is the di!usion flux and µ is the chemical potential. The conser-vation law for mass di!usion is then
c = "!.J (197)
Accordingly, the fundamental inequality containing first and second princi-ples in the isothermal case is written as
"!, + !!
: #!!
+ a-+ b ·!-+ µc" J .!µ ! 0 (198)
Assuming that the free energy density depends on the order parameter -and its gradient, the concentration c, the elastic strain #
!
e and the set ofinternal variables Vk associated to material hardening5:
STATE = {-, !-, c, #!
e, Vk}
The Clausius-Duhem inequality now becomes:%a" !
",
"-
&-+
%b " !
",
"!-
&·!-+
%µ" !
",
"c
&c
+
%!!
"",
"#!
e
&: #
!!
e " J .!µ+ !!
: #!!
p " !",
"VkVk ! 0 (199)
The following reversible mechanisms and corresponding state laws are cho-sen:
b = !",
"!-, µ = !
",
"c, !
!
= !",
"#!
e, Ak := !
",
"Vk(200)
The residual dissipation then is%a" !
",
"-
&-" J .!µ+ !
!
: #!!
p "AkVk ! 0 (201)
Three contributions appear in the above residual dissipation rate. The firstis the phase field dissipation, associated with configuration changes of atomsand related to the evolution of the order parameter:
D' = av- with av = a" !",
"-(202)
5In this section, the notation for internal variables is changed to (Vk)k"{!,"} since ! is
now an index denoting one phase.

Micromorphic Approach to Crystal Plasticity… 187
where av is the chemical force associated with the dissipative processes(Gurtin, 1996). The second contribution is the chemical dissipation dueto di!usion, associated with mass transport. The last contribution is themechanical dissipation, as discussed earlier.
An e$cient way of defining the complementary laws related to the dis-sipative processes and ensuring the positivity of the dissipation for anythermodynamic process is to assume the existence of a dissipation potential"(av,!µ,!
!
, Ak), which is a convex function of its arguments:
- =""
"av, J = "
""
"!µ, Vk = "
""
"Ak, #
!!
p =""
"!!
(203)
These equations represent the evolution law for the order parameter, thedi!usion flux as well as the evolution laws for the internal variables.
Partition of free energy and dissipation potential. The total freeenergy is postulated to have the form of a Ginzburg-Landau free energyfunctional accounting for interfaces through the square of the order param-eter gradient. The free energy density , is then split into a chemical freeenergy density ,ch, a coherent mechanical energy density ,mech, and thesquare of the order parameter gradient:
!,(-,!-, c, #!
e, Vk) = !,ch(-, c) + !,mech(-, c, #!, Vk) +A
2!- ·!- (204)
The irreversible part of the behaviour is described by the dissipation poten-tial, which can be split into three parts related to the three contributionsin the residual dissipation in Eq.(201): the phase field part "'(-, c, av), the chemical part "c(-, c,!µ) and the mechanical dissipation potential"mech(-, c,!! , Ak):
"(av,!µ,-, c,!!
, Ak) = "'(c,-, av) + "c(c,-,!µ) + "mech(-, c,!! , Ak)
(205)The chemical free energy density ,ch of a binary alloy is a function of theorder parameter - and of the concentration field c. The coexistence of bothphases % and 0 discriminated by - is possible if ,ch is non–convex withrespect to -. Following (Kim et al., 1998), ,ch is built with the free energydensities of the two phases ,$ and ,% as follows:
,ch(-, c) = h(-),$(c) + (1" h(-)),%(c) +Wg(-) (206)
Here, the interpolating function h(-) is chosen as h(-) = -2(3 " 2-), andg(-) = -2(1"-)2 is the double well potential accounting for the free energy

188 S. Forest et al.
penalty of the interface. The height W of the potential barrier is relatedto the interfacial energy + and the interfacial thickness ( as W = 6(+/(.Assuming that the interface region ranges from . to 1"., then ( = log((1".)/.). In the present work . = 0.05 (Kim et al., 1998; Ammar et al., 2009a).
The densities ,$ and ,% are chosen to be quadratic functions of theconcentration only:
!,$(c) =k$2(c" a$)
2 and !,%(c) =k%2(c" a%)
2 (207)
where a$ and a% are the unstressed equilibrium concentrations of bothphases which correspond respectively to the minima of ,$ and ,% in thepresent model. k$ and k% are the curvatures of the free energies.
Quadratic expressions are chosen for the chemical dissipation, whichensures the positivity of the dissipation rate:
"'(av) =
1
2(1/0)av2 and "c(!µ) =
1
2L(-)!µ.!µ (208)
where av is given by Eq. (202), 0 is inversely proportional to the interfacemobility and L(-) is the Onsager coe$cient, related to the chemical di!u-sivities D$ and D% in both phases by means of the interpolation functionh(-) as:
L(-) = h(-)D$/k$ + (1" h(-))D%/k% (209)
The state laws and evolution equations for the phase field and chemicalcontributions can be derived as:
b = A!-, µ = !",ch"c
+ !",mech
"c(210)
- =1
0av =
1
0
%a" !
",ch"-
" !",mech
"-
&, J = "L(-)!µ (211)
Substituting the previous equations into the balance equations for general-ized stresses and mass concentration, the Ginzburg-Landau and usual dif-fusion equations are retrieved, which represent respectively the evolutionequations for order parameter and concentration:
div b " a = "0-+ div(A!-) " !",ch"-
" !",mech
"-= 0 (212)
c = "!.("L(-)!µ) = "!.
%"L(-)
%!
"!,ch"c
+!"!,mech
"c
&&(213)
Note the coupling of mechanics and di!usion and phase field evolutionthrough the partial derivatives of the mechanical free energy with respectto concentration and order parameter.

Micromorphic Approach to Crystal Plasticity… 189
Multiphase approach for the mechanical contribution. The sec-ond contribution to the free energy density is due to mechanical e!ects.Assuming that elastic behaviour and hardening are uncoupled, the mechan-ical part of the free energy density !,mech is decomposed into a coherentelastic energy density !,e and a plastic part !,p as:
!,mech(-, c, #!, Vk) = !,e(-, c, #!
) + !,p(-, c, Vk) (214)
Moreover, the irreversible mechanical behaviour, related to the dissipativeprocesses, is obtained by a plastic dissipation potential "mech(-, c,!! , Ak).It is assumed to be a function of order parameter, concentration, Cauchystress tensor as well as the set of thermodynamic force associated variablesAk in order to describe the hardening state in each phase.
In the di!use interface region where both phases coexist, we propose touse well-known results of homogenization theory to interpolate the local be-haviour. The homogenization procedure in the mechanics of heterogeneousmaterials consists in replacing an heterogeneous medium by an equivalenthomogeneous one, which is defined by an e!ective constitutive law relatingthe macroscopic variables, namely macroscopic stress !
!
and strain #!
tensors,which are obtained by averaging the corresponding non-uniform local stressand strain in each phase. Each material point within a di!use interface canbe seen as a local mixture of the two abutting phases % and 0 with propor-tions given by complementary functions of -. The strain and stress at eachmaterial point are then defined by the following mixture laws which wouldproceed from space averaging in a conventional homogenization problem,but which must be seen as arbitrary interpolations in the present case:
#!
= * #!$ + (1" *) #
!% and !
!
= *!!$ + (1 " *)!
!% (215)
where #!$, #
!% are local fictitious strains and !
!$, !
!% are local fictitious
stresses in % and 0 phases respectively and *(x , t) is a shape functionwhich must take the value 0 in the 0–phase and 1 in the %–phase. Thefollowing choice is made in the phase field context:
*(x , t) . -(x , t) (216)
The partition hypothesis, already used for the e!ective total strain tensorin Eq. (195), requires, in a similar way, a decomposition of the total strainin each phase into elastic, transformation and plastic parts:
#!$ = #
!
e$ + #
!
&$ + #
!
p$ and #
!% = #
!
e% + #
!
&% + #
!
p% (217)
where each point may depend on the local concentration c, but not onorder parameter -. In the proposed model, the elastoplastic and phase

190 S. Forest et al.
field behaviours of each phase are treated independently and the e!ectivebehaviour is obtained using homogenization relation (215). It is assumedthat the mechanical state of % and 0 phases at a given time are completelydescribed by a finite number of local state variables (#
!
ek, Vk) defined at each
material point. The set of internal variables Vk, of scalar or tensorial nature,represents the state of hardening of phase k: for instance, a scalar isotropichardening variable, and a tensorial kinematic hardening variable. Accordingto the homogenization theory, the e!ective elastic and plastic free energydensities are given by the rule of mixtures as follows:
!,e(-, c, #!
) = -!,e$(c, #!
e$) + (1 " -)!,e%(c, #
!
e%) (218)
!,p(-, c, Vk) = -!,p$(c, V$) + (1" -)!,p%(c, V%) (219)
Similarly, a mixture rule is used to mix the dissipation potentials of theindividual phases:
"mech(-, c,!! , Ak) = -"mech$(c,!!$, A$) + (1" -)"mech%(c,!
!% , A%)
(220)where the A$,% are the thermodynamic forces associated with the internalvariables attributed to each phase.
Knowing the free energy and dissipation potentials, the evolution of allvariables can be computed. The remaining questions is the way of estimat-ing the previously defined fictitious stress and strain tensors #
!$,%,!!$,%
fromthe knowledge of the stress and strain tensors #
!
and !!
. Several homoge-nization schemes exist in the literature that can be used to define thesenew fictitious variables. The most simple schemes are the Voigt/Taylor andReuss/Static models. We develop the Voigt/Taylor scenario in the sequel.
Voigt/Taylor model coupled phase field mechanical theory. Ac-cording to Voigt’s scheme, the fictitious strains are not distinguished fromthe local strain. The local stress is then computed in terms of the fictitiousstress tensors by averaging with respect to both phases weighted by thevolume fractions:
!!
= -!!$ + (1" -)!
!%, #
!
= #!$ = #
!% (221)
The stresses of both phases !!$ and !
!% are given by Hooke’s law for each
phase:
!!$ = C
"
$ : (#!$ " #
!
&$ " #
!
p$), !
!% = C
"
% : (#!% " #
!
&% " #
!
p%) (222)
where C"
$ and C"
% are respectively the tensor of elasticity moduli in % and0 phases. As a result,
!!
= -C"
$ : (#!$ " #
!
&$ " #
!
p$) + (1 " -)C
"
% : (#!% " #
!
&% " #
!
p%) (223)

Micromorphic Approach to Crystal Plasticity… 191
From the above relation, it follows that the strain-stress relationship inthe homogeneous e!ective medium obeys Hooke’s law with the followingequation:
!!
= C"e! : (#
!
" #!
p " #!
&)
where the e!ective elasticity tensor C"e! is obtained from the mixture rule
of the elasticity matrix for both phases:
C"e! = -C
"
$ + (1 " -)C"
% (224)
and the e!ective eigenstrain #!
& and plastic strain #!
p vary continuously be-tween their respective values in the bulk phases as follows:
#!
& = C"
"1
e! : (-C"
$ : #!
&$ + (1" -)C
"
% : #!
&%)
#!
p = C"
"1
e! : (-C"
$ : #!
p$ + (1 " -)C
"
% : #!
p%)
(225)
In the case of nonhomogeneous elasticity, it must be noted that #!
& and #!
p
are not the average of their respective values for each phase.The proposed approach di!ers from the one most commonly used in
phase field models, as popularized by Khachaturyan and co-workers, e.g.(Khachaturyan, 1983). The latter rely on mixture laws for all quantitieswithin the interface, including the elastic moduli, the transformation andplastic strain. The e!ect of these di!erent choices on the simulation ofmoving phase boundaries has been tested in (Ammar et al., 2009b) and(Ammar et al., 2011). In particular, the impact of plasticity on the kineticsof precipitate growth has been evidenced.
6 Summary and Outlook
The general thermomechanical setting for modeling size e!ects in the me-chanics and thermodynamics of materials is based on the main assumptionthat microstructure e!ects can be accounted for by the introduction of ad-ditional degrees of freedom in addition to displacement, temperature andconcentration. The additional dof and its gradient are expected to con-tribute to the power of internal forces of the medium and to arise in theenergy local balance equations and/or entropy inequality. They induce gen-eralized stresses that fulfill an additional balance equation with associatedextra boundary conditions. A clear separation between balance equationsand constitutive functionals is adopted in the formulation. Constitutiveequations derive from the definition of a specific free energy density anddissipation potential.
192 S. Forest et al.
The crossing of mechanical and physical approaches turns out to be fer-tile in providing motivated coupling between both kinds of phenomena. Asan example, we have shown that the mechanics of heterogeneous materialscan be useful to develop a sophisticated and flexible constitutive frameworkof coupled viscoplasticity and di!usion.
It was not possible to address applications that already exist in thiscontext. In particular, the presented models predict that viscoplasticitya!ects the morphology and kinetics of precipitate growth in metals or duringoxidation (Ammar et al., 2009a; Gaubert et al., 2010; Ammar et al., 2011).
Special attention must now be dedicated to more precise description ofcoherent vs. incoherent interfaces (Murdoch, 1978; Johnson and Alexander,1986; Appolaire et al., 2010), and the associated specific interface conditionsthat can be deduced from asymptotic analysis of phase field models. On theother hand, the targeted applications of strain gradient plasticity are crys-tal plasticity and grain boundary migration (Cordero et al., 2010; Mayeuret al., 2011; Abrivard, 2009), whereas strain rate gradients are thought tobe relevant for ageing materials (Maziere et al., 2010).
Bibliography
Guillaume Abrivard. A coupled crystal plasticity–phase field formulationto describe microstructural evolution in polycrystalline aggregates. PhD,Mines ParisTech, 2009.
E.C. Aifantis. On the microstructural origin of certain inelastic models.Journal of Engineering Materials and Technology, 106:326–330, 1984.
K. Ammar, B. Appolaire, G. Cailletaud, F. Feyel, and F. Forest. Finiteelement formulation of a phase field model based on the concept of gen-eralized stresses. Computational Materials Science, 45:800–805, 2009a.
K. Ammar, B. Appolaire, G. Cailletaud, and S. Forest. Combining phasefield approach and homogenization methods for modelling phase trans-formation in elastoplastic media. European Journal of ComputationalMechanics, 18:485–523, 2009b.
K. Ammar, B. Appolaire, G. Cailletaud, and S. Forest. Phase field modelingof elasto-plastic deformation induced by di!usion controlled growth of amisfitting spherical precipitate. Philosophical Magazine Letters, 91:164–172, 2011.
B. Appolaire, E. Aeby-Gautier, J. D. Teixeira, M. Dehmas, and S. Denis.Non-coherent interfaces in di!use interface models. Philosophical Maga-zine, 90:461–483, 2010.
R.J. Asaro. Crystal plasticity. J. Appl. Mech., 50:921–934, 1983.

Micromorphic Approach to Crystal Plasticity… 193
O. Aslan and S. Forest. Crack growth modelling in single crystals basedon higher order continua. Computational Materials Science, 45:756–761,2009.
O. Aslan and S. Forest. The micromorphic versus phase field approachto gradient plasticity and damage with application to cracking in metalsingle crystals. In R. de Borst and E. Ramm, editors, Multiscale Methodsin Computational Mechanics, pages 135–154. Lecture Notes in Appliedand Computational Mechanics 55, Springer, 2011.
O. Aslan, N. M. Cordero, A. Gaubert, and S. Forest. Micromorphic ap-proach to single crystal plasticity and damage. International Journal ofEngineering Science, 49:1311–1325, 2011.
V.P. Bennett and D.L. McDowell. Crack tip displacements of microstruc-turally small surface cracks in single phase ductile polycrystals. Engi-neering Fracture Mechanics, 70(2):185–207, 2003.
J. Besson, G. Cailletaud, J.-L. Chaboche, S. Forest, and M. Bletry. Non–Linear Mechanics of Materials. Series: Solid Mechanics and Its Appli-cations, Vol. 167, Springer, ISBN: 978-90-481-3355-0, 433 p., 2009.
B.A. Bilby, R. Bullough, L.R.T. Gardner, and E. Smith. Continuous distri-butions of dislocations iv: Single glide and plane strain. Proc. Roy. Soc.London, A236:538–557, 1957.
P. Cermelli and M.E. Gurtin. On the characterization of geometricallynecessary dislocations in finite plasticity. Journal of the Mechanics andPhysics of Solids, 49:1539–1568, 2001.
Y. Chen and J.D. Lee. Connecting molecular dynamics to micromorphictheory. (I) instantaneous and averaged mechanical variables. Physica A,322:359–376, 2003a.
Y. Chen and J.D. Lee. Connecting molecular dynamics to micromorphictheory. (II) balance laws. Physica A, 322:377–392, 2003b.
Y. Chen and J.D. Lee. Determining material constants in micromorphictheory through phonon dispersion relations. International Journal ofEngineering Science, 41:871–886, 2003c.
W.D. Claus and A.C. Eringen. Three dislocation concepts and micromor-phic mechanics. In Developments in Mechanics, Vol. 6. Proceedings ofthe 12th Midwestern Mechanics Conference, pages 349–358, 1969.
W.D. Claus and A.C. Eringen. Dislocation dispersion of elastic waves. In-ternational Journal of Engineering Science, 9:605–610, 1971.
J.D. Clayton, D.J. Bamman, and D.L. McDowell. A geometric frameworkfor the kinematics of crystals with defects. Philosophical Magazine, 85:3983–4010, 2005.
N.M. Cordero, A. Gaubert, S. Forest, E. Busso, F. Gallerneau, and S. Kruch.Size e!ects in generalised continuum crystal plasticity for two–phase lam-inates. Journal of the Mechanics and Physics of Solids, 58:1963–1994,2010.

194 S. Forest et al.
W. Ehlers and W. Volk. On theoretical and numerical methods in thetheory of porous media based on polar and non–polar elasto–plastic solidmaterials. Int. J. Solids Structures, 35:4597–4617, 1998.
R.A.B. Engelen, M.G.D. Geers, and F.P.T. Baaijens. Nonlocal implicitgradient-enhanced elasto-plasticity for the modelling of softening be-haviour. International Journal of Plasticity, 19:403–433, 2003.
A.C. Eringen and W.D. Claus. A micromorphic approach to dislocationtheory and its relation to several existing theories. In J.A. Simmons,R. de Wit, and R. Bullough, editors, Fundamental Aspects of DislocationTheory, pages 1023–1062. Nat. Bur. Stand. (US) Spec. Publ. 317, II,1970.
A.C. Eringen and E.S. Suhubi. Nonlinear theory of simple microelasticsolids. Int. J. Engng Sci., 2:189–203, 389–404, 1964.
Y. Estrin. Dislocation density related constitutive modelling. In Uni-fied Constitutive Laws of Plastic Deformation, pages 69–106. AcademicPress, 1996.
A. Finel, Y. Le Bouar, A. Gaubert, and U. Salman. Phase field methods:Microstructures, mechanical properties and complexity. Comptes RendusPhysique, 11:245–256, 2010.
M. Fivel and S. Forest. Plasticite cristalline et transition d’echelle : cas dumonocristal. Techniques de l’Ingenieur, M4016, 23 pages, 2004a.
M. Fivel and S. Forest. Plasticite cristalline et transition d’echelle : cas dupolycristal. Techniques de l’Ingenieur, M4017, 11 pages, 2004b.
S. Forest. The micromorphic approach for gradient elasticity, viscoplasticityand damage. ASCE Journal of Engineering Mechanics, 135:117–131,2009.
S. Forest. Some links between cosserat, strain gradient crystal plasticityand the statistical theory of dislocations. Philosophical Magazine, 88:3549–3563, 2008.
S. Forest and E. C. Aifantis. Some links between recent gradient thermo-elasto-plasticity theories and the thermomechanics of generalized con-tinua. International Journal of Solids and Structures, 47:3367–3376,2010.
S. Forest and R. Sedlacek. Plastic slip distribution in two–phase lami-nate microstructures: Dislocation–based vs. generalized–continuum ap-proaches. Philosophical Magazine A, 83:245–276, 2003.
S. Forest and R. Sievert. Elastoviscoplastic constitutive frameworks forgeneralized continua. Acta Mechanica, 160:71–111, 2003.
S. Forest and R. Sievert. Nonlinear microstrain theories. InternationalJournal of Solids and Structures, 43:7224–7245, 2006.

Micromorphic Approach to Crystal Plasticity… 195
S. Forest, F. Barbe, and G. Cailletaud. Cosserat modelling of size e!ectsin the mechanical behaviour of polycrystals and multiphase materials.International Journal of Solids and Structures, 37:7105–7126, 2000.
S. Forest, F. Pradel, and K. Sab. Asymptotic analysis of heterogeneousCosserat media. International Journal of Solids and Structures, 38:4585–4608, 2001.
M. Fremond and B. Nedjar. Damage, gradient of damage and principle ofvirtual power. Int. J. Solids Structures, 33:1083–1103, 1996.
E. Fried and M.E. Gurtin. Continuum theory of thermally induced phasetransitions based on an order parameter. Physica D, 68:326–343, 1993.
A. Gaubert, A. Finel, Y. Le Bouar, and G. Boussinot. Viscoplastic phasefield modellling of rafting in ni base superalloys. In Continuum Modelsand Discrete Systems CMDS11, pages 161–166. Mines Paris Les Presses,2008.
A. Gaubert, Y. Le Bouar, and A. Finel. Coupling phase field and viscoplas-ticity to study rafting in ni-based superalloys. Philosophical Magazine,90:375–404, 2010.
P. Germain. La methode des puissances virtuelles en mecanique des milieuxcontinus, premiere partie : theorie du second gradient. J. de Mecanique,12:235–274, 1973a.
P. Germain. The method of virtual power in continuum mechanics. part 2 :Microstructure. SIAM J. Appl. Math., 25:556–575, 1973b.
P. Grammenoudis and Ch. Tsakmakis. Micromorphic continuum Part I:Strain and stress tensors and their associated rates. International Journalof Non–Linear Mechanics, 44:943–956, 2009.
P. Grammenoudis, Ch. Tsakmakis, and D. Hofer. Micromorphic continuumPart II: Finite deformation plasticity coupled with damage. InternationalJournal of Non–Linear Mechanics, 44:957–974, 2009.
W. Gunther. Zur Statik und Kinematik des Cosseratschen Kontinuums.Abhandlungen der Braunschweig. Wiss. Ges., 10:195–213, 1958.
M.E. Gurtin. A gradient theory of single–crystal viscoplasticity that ac-counts for geometrically necessary dislocations. Journal of the Mechanicsand Physics of Solids, 50:5–32, 2002.
M.E. Gurtin. Generalized Ginzburg–Landau and Cahn–Hilliard equationsbased on a microforce balance. Physica D, 92:178–192, 1996.
M.E. Gurtin and L. Anand. Nanocrystalline grain boundaries that slip andseparate: A gradient theory that accounts for grain-boundary stress andconditions at a triple-junction. Journal of the Mechanics and Physics ofSolids, 56:184–199, 2008.
M.E. Gurtin and L. Anand. Thermodynamics applied to gradient theoriesinvolving the accumulated plastic strain: The theories of Aifantis andFleck & Hutchinson and their generalization. Journal of the Mechanicsand Physics of Solids, 57:405–421, 2009.
196 S. Forest et al.
C.B. Hirschberger and P. Steinmann. Classification of concepts in thermody-namically consistent generalized plasticity. ASCE Journal of EngineeringMechanics, 135:156–170, 2009.
William C. Johnson and J. Iwan D. Alexander. Interfacial conditions forthermomechanical equilibrium in two-phase crystals. Journal of AppliedPhysics, 9:2735–2746, 1986.
A.G. Khachaturyan. Theory of structural transformations in solids. JohnWiley & Sons, 1983.
S.G. Kim, W.T. Kim, and T Suzuki. Interfacial compositions of solid andliquid in a phase–field model with finite interface thickness for isothermalsolidification in binary alloys. Physical Review E, 58(3):3316–3323, 1998.
S.G. Kim, W.T. Kim, and T Suzuki. Phase–field model for binary alloys.Physical Review E, 60(6):7186–7197, 1999.
E. Kroner. On the physical reality of torque stresses in continuum mechan-ics. Int. J. Engng. Sci., 1:261–278, 1963.
E. Kroner. Initial studies of a plasticity theory based upon statistical me-chanics. In M.F. Kanninen, W.F. Adler, A.R. Rosenfield, and R.I. Ja!ee,editors, Inelastic Behaviour of Solids, pages 137–147.McGraw-Hill, 1969.
E. Kroner and C. Teodosiu. Lattice defect approach to plasticity and vis-coplasticity. In A. Sawczuk, editor, Problems of Plasticity, InternationalSymposium on Foundations of Plasticity, Warsaw. Noordho! Interna-tional Publishing Leyden, 1972.
M. Lazar and G.A. Maugin. Dislocations in gradient micropolar–I: screwdislocation. Journal of the Mechanics and Physics of Solids, 52:2263–2284, 2004.
M. Lazar and G.A. Maugin. On microcontinuum field theories: the eshelbystress tensor and incompatibility conditions. Philosophical Magazine, 87:3853–3870, 2007.
M. Lazar, G.A. Maugin, and E.C. Aifantis. Dislocations in second straingradient elasticity. International Journal of Solids and Structures, 43:1787–1817, 2006.
J.D. Lee and Y. Chen. Constitutive relations of micromorphic thermoplas-ticity. International Journal of Engineering Science, 41:387–399, 2003.
J. Mandel. Une generalisation de la theorie de la plasticite de W.T. Koiter.International Journal of Solids and Structures, 1:273–295, 1965.
J. Mandel. Plasticite classique et viscoplasticite. CISM Courses and LecturesNo. 97, Udine, Springer Verlag, Berlin, 1971.
J. Mandel. Equations constitutives et directeurs dans les milieux plastiqueset viscoplastiques. Int. J. Solids Structures, 9:725–740, 1973.
G.A. Maugin. The method of virtual power in continuum mechanics: Ap-plication to coupled fields. Acta Mechanica, 35:1–70, 1980.
Micromorphic Approach to Crystal Plasticity… 197
J.R. Mayeur, D.L. McDowell, and D.J. Bammann. Dislocation–based mi-cropolar single crystal plasticity: Comparison if multi– and single criste-rion theories. Journal of the Mechanics and Physics of Solids, 59:398–422, 2011.
M. Maziere, J. Besson, S. Forest, B. Tanguy, H. Chalons, and F. Vogel. Nu-merical aspects in the finite element simulation of the portevin-le chate-lier e!ect. Computer Methods in Applied Mechanics and Engineering,199:734–754, 2010.
L. Meric, P. Poubanne, and G. Cailletaud. Single crystal modeling forstructural calculations. Part 1: Model presentation. J. Engng. Mat.Technol., 113:162–170, 1991.
C. Miehe. A multifield incremental variational framework for gradient-type standard dissipative solids, in press. Journal of the Mechanics andPhysics of Solids, 2011.
C. Miehe, F. Welchinger, and M. Hofacker. Thermodynamically–consistentphase field models of fracture: Variational principles and multifield FEimplementations. International Journal for Numerical Methods in Engi-neering, 83:1273–1311, 2010a.
C. Miehe, F. Welchinger, and M. Hofacker. A phase field model of elec-tromechanical fracture. Journal of the Mechanics and Physics of Solids,58:1716–1740, 2010b.
R.D. Mindlin. Micro–structure in linear elasticity. Arch. Rat. Mech. Anal.,16:51–78, 1964.
A. I. Murdoch. A thermodynamical theory of elastic material interfaces. Q.J. Mech. appl. Math., 29:245–275, 1978.
J.F. Nye. Some geometrical relations in dislocated crystals. Acta Metall.,1:153–162, 1953.
R.H.J. Peerlings, M.G.D. Geers, R. de Borst, and W.A.M. Brekelmans.A critical comparison of nonlocal and gradient–enhanced softening con-tinua. Int. J. Solids Structures, 38:7723–7746, 2001.
A. Rajagopal, P. Fischer, E. Kuhl, and P. Steinmann. Natural element anal-ysis of the cahn-hilliard phase-field model. Computational Mechanics, 46:471–493, 2010.
R.A. Regueiro. On finite strain micromorphic elastoplasticity. InternationalJournal of Solids and Structures, 47:786–800, 2010.
C. Sansour, S. Skatulla, and H. Zbib. A formulation for the micromorphiccontinuum at finite inelastic strains. Int. J. Solids Structures, 47:1546–1554, 2010.
Schafer,H. Eine Feldtheorie der Versetzungen im Cosserat-Kontinuum.ZAMP, 20:891–899, 1969.
I. Steinbach and M. Apel. Multi phase field model for solid state transfor-mation with elastic strain. Physica D, 217:153–160, 2006.
198 S. Forest et al.
P. Steinmann. Views on multiplicative elastoplasticity and the continuumtheory of dislocations. International Journal of Engineering Science, 34:1717–1735, 1996.
B. Svendsen. Continuum thermodynamic models for crystal plasticity in-cluding the e!ects of geometrically-necessary dislocations. J. Mech. Phys.Solids, 50:1297–1329, 2002.
C. Teodosiu. A dynamic theory of dislocations and its applications to thetheory of the elastic-plastic continuum. In J.A. Simmons, R. de Wit, andR. Bullough, editors, Fundamental Aspects of Dislocation Theory, pages837–876. Nat. Bur. Stand. (US) Spec. Publ. 317, II, 1970.
C. Teodosiu and F. Sidoro!. A theory of finite elastoviscoplasticity of singlecrystals. Int. J. of Engng Science, 14:165–176, 1976.
R.L.J.M. Ubachs, P.J.G. Schreurs, and M.G.D. Geers. A nonlocal di!useinterface model for microstructure evolution of tin–lead solder. Journalof the Mechanics and Physics of Solids, 52:1763–1792, 2004.
R.L.J.M. Ubachs, P.J.G. Schreurs, and M.G.D. Geers. Elasto-viscoplasticnonlocal damage modelling of thermal fatigue in anisotropic lead-freesolder. Mechanics of Materials, 39:685–701, 2007.
Y. Wang, L.-Q. Chen, and A.G. Khachaturyan. Kinetics of strain-inducedmorphological transformation in cubic alloys with a miscibility gap. ActaMetallurgica et Materialia, 41:279–296, 1993.
A. Zeghadi, S. Forest, A.-F. Gourgues, and O. Bouaziz. Ensemble averagingstress–strain fields in polycrystalline aggregates with a constrained sur-face microstructure–Part 2: Crystal plasticity. Philosophical Magazine,87:1425–1446, 2007.